-
Mmoire de fin dtudes
Pour lobtention du diplme dIngnieur dEtat en Informatique
Option : Systmes Informatiques
Thme :
Systme de navigation automobile par GPS
Organisme daccueil : Eurequat-Algrie
Ralis par : Encadreur :
- ATTIG Asma - Mer
Souici Boualem
- BAKIRI kamelia Promoteur :
- Mer
Kazi Malik
Soutenu le 04/10/2012
Devant le jury compos de :
- Mer
AIT AOUDIA
-Mme MEZIANI
Promotion 2011/2012
-
Systme de navigation automobile par GPS
ii
Remerciement
Nous prsentons nos remerciements les plus sincres nos deux
Encadreurs
Monsieur Souici Brahim et Monsieur Kazi Malik, pour leur
disponibilit et leur
encadrement, ainsi que pour leur soutien et leurs patiences tout
au long de lanne.
Cest grce eux que nous avons pu mener bien ce travail.
Nous prsentons nos gratitudes aux membres du jury qui ont bien
voulu
examiner et valuer notre travail et qui nous font lhonneur de
participer la
soutenance.
Un grand MERCI tous les enseignants de lEcole nationale
Suprieure
dInformatique ESI qui nous ont forms durant ces cinq dernires
annes.
Nos remerciements vont aussi tous ceux qui ont contribu de prs
ou de loin
la concrtisation de ce travail.
Merci tous
-
Systme de navigation automobile par GPS
iii
Ddicace A mes chers parents,
A ma sur Yasmine,
A mon adorable frre Idir,
A ma chre cousine Nadia pour son soutien et son
encouragement,
A toute ma famille,
A mon binme et amie Asma ,
A tous mes amis,
A tous ceux qui ont pu contribuer dune manire ou dune autre la
ralisation
de ce modeste travail
Je vous le ddie .
Camlia
-
Systme de navigation automobile par GPS
iv
Ddicace
Je remercie Dieu tout puissant de nous avoir permis dachever ce
travail que je
ddie
Aux personnes les plus chres mon cur,
Les plus importantes dans ma vie,
Aux personnes qui mont faites ce que je suis,
Mes parents,
Mes surs et mes nices,
Mon cher binme Cami,
Mes amis.
Asma
-
Systme de navigation automobile par GPS
v
Rsum ctuellement, nous vivons un trs grand progrs des nouvelles
technologies et plus
prcisment les technologies de la communication qui connaissent
un formidable
essor. Ces diffrents progrs ont conduit la cration du systme GPS
Global
Positioning System qui est un systme servant dtecter tout moment
la position
en latitude et longitude dun mobile se trouvant sur la surface
de la terre et ce avec
une trs bonne prcision. Depuis sa cration le GPS a connu
diffrentes applications
telles la scurit, la navigation maritime, laviation et la
navigation routire (automobile).
Cette dernire se trouve tre son application la plus connue du
grand public.
Les systmes de navigations automobiles sont des systmes axs sur
la localisation de
lemplacement gographique dun mobile et la planification
ditinraires allant de cette
position une destination prcise tout en indiquant lutilisateur
les instructions suivre pour
atteindre sa destination. Litinraire propos doit tre optimal
i.e. il doit reprsenter le chemin
le plus court ou le plus rapide existant entre les deux points.
En outre, la navigation GPS en
temps rel est la solution pour naviguer dun point A un point B
en prenant un chemin
optimis, qui est calcul grce aux cartes numriques.
Le prsent travail consiste en la conception et la ralisation dun
systme de navigation
automobile temps rel pour appareils mobiles utilisant un
algorithme amlior pour la
planification de litinraire optimal.
En utilisant la technologie GPS pour le positionnement et les
cartes numriques fournies par
lorganisation OpenStreetMap (OSM), nous avons ralis un systme
qui permet de naviguer
entre deux points se trouvant sur la surface de la terre. De
plus, notre solution est
spcialement conue pour convenir la navigation en Algrie et
offrir une bonne exprience
lutilisateur en retournant des rsultats exacts tout en ayant un
temps de rponse acceptable.
Mots cls : GPS, Navigation routire, planification ditinraires,
cartographie numrique,
OSM (OpenStreetMap), Windows mobile.
A
-
Systme de navigation automobile par GPS
vi
Abstract
urrently, we live in a great progress of new technologies and
more specifically
communication technology. These advances have led to the
creation of GPS "Global
Positioning System" which is a system for detecting the position
at any time (latitude,
longitude) of a mobile on the surface of the earth and with a
good accuracy. Since its
inception, the GPS has undergone various applications such as
security, maritime, aviation
and road navigation (automobile). The latter happens to be his
best-known application of the
general public.
Car navigation systems are based on the geographic location of a
mobile route planning from
this position to a specified destination while indicating to the
user instructions on how to
reach its destination. The proposed route should be optimal (it
must represent the shortest path
or the fastest between the two points). In addition, real-time
GPS navigation solution is to
navigate from point A to point B by taking an optimized path,
which is calculated using
digital maps.
This work involves the design and construction of a car
navigation system for mobile real-
time using an improved algorithm for optimal route planning.
Using GPS technology for positioning and digital maps provided
by the organization
OpenStreetMap (OSM), we developed a system that allows you to
navigate between two
points on the surface of the earth. In addition, our solution is
specifically designed to suit the
navigation Algeria and provide a good user experience by
returning accurate results while
having an acceptable response time.
Keywords: GPS, Navigation Road, route planning, digital mapping,
OSM (OpenStreetMap),
Windows Mobile.
C
-
SPG rap elibomotua noitagivan ed emtsyS
iiv
.
) ( " " SPG
.
( .
SPG )
.
.
)MSO( SPG
.
.
) MSO ( SPG :
.
-
Systme de navigation automobile par GPS
viii
Table des matires Table des matires
...........................................................................................
vi
Liste des figures
............................................................................................
xiii
Liste des tableaux
...........................................................................................
xv
Introduction gnrale
.......................................................................................
1
Chapitre I:Gnralits sur les systmes de navigation automobile
I.1-Introduction
................................................................................................
5
I.1.1-Dfinition de la navigation
.............................................................................................
5
I.1.2-Dfinition des systmes de navigation
...........................................................................
5
I.2-Dfinition dun systme de navigation automobile
..................................... 6
I.3-Historique
...................................................................................................
6
I.4-Navigation automobile en Algrie
..............................................................
6
I.4.1-Organisation OSM (Open Street Map)
..........................................................................
7
I.5-Types de systmes de navigation automobile
............................................. 7
I.5.1-Systme de navigation inertielle
....................................................................................
7
I.5.2- Systme de navigation radio
.........................................................................................
7
I.6-Fonctions et services
.................................................................................
10
1-Rapports de trafic en temps rel
........................................................................................
10
2-Les points dintrts (POI)
................................................................................................
10
3-Waypoints
..........................................................................................................................
10
I.7-Les composantes cls dun systme de navigation
automobile.................. 11
I.7.1-Positionnement
.............................................................................................................
11
I.7.2-Planification d'itinraires
.............................................................................................
13
I.7.3-La base de donnes
......................................................................................................
14
I.7.4-Interface utilisateur
......................................................................................................
14
I.8-Evaluation des performances dun systme de navigation
automobile ...... 14
1-La prcision (exactitude)
...................................................................................................
14
2-L'intgrit
..........................................................................................................................
14
3-Disponibilit
......................................................................................................................
14
4-Continuit de service
.........................................................................................................
14
I.9-Conclusion
................................................................................................
15
Chapitre II: Gnralits sur les techniques de positionnement et le
GPS
II.1-Introduction
.............................................................................................
17
-
Systme de navigation automobile par GPS
ix
II.2-Gnralits sur la golocalisation
........................................................... 17
II.2.1-Dfinition de la golocalisation
..................................................................................
17
II.2.2-Les composantes dun systme de golocalisation
..................................................... 17
II.2.3-Techniques de positionnement
...................................................................................
17
II.3-Prsentation du systme GPS
..................................................................
18
II.3.2-Structure physique
......................................................................................................
18
a. Le segment espace
.........................................................................................................
19
b. Le segment de contrle
.................................................................................................
19
c. Le segment utilisateur
...................................................................................................
20
II.3.3-Les applications du GPS
.............................................................................................
20
a. Usages militaires
........................................................................................................
20
b. Usages civils
................................................................................................................
20
II.3.4-Dtermination d'une position par GPS
.......................................................................
21
a. Systme godsique
...................................................................................................
21
b. Les coordonnes gographiques
................................................................................
21
c. La projection
..............................................................................................................
22
d. La triangulation
..........................................................................................................
23
e. La mesure de la distance
...........................................................................................
24
f. Le positionnement des satellites
................................................................................
25
g. Les erreurs de positionnement
...................................................................................
25
II.3.5-Les rcepteurs GPS
....................................................................................................
25
II.4.1-Le DGPS
.....................................................................................................................
26
a. Dfinition du GPS diffrentiel
..................................................................................
26
b. Fonctionnement du DGPS
.........................................................................................
26
II.5-Les inconvnients de la navigation GPS
.................................................. 26
II.6-Approches
...............................................................................................
27
II.7-Conclusion
..............................................................................................
28
Chapitre III : Etude sur les systmes de guidance
III.1-Introduction............................................................................................
30
III.2-Formulation du problme
.......................................................................
30
III.3-Modlisation du problme
......................................................................
31
III.3.1-Reprsentation graphique du rseau routier
..............................................................
31
a. Modle indpendant du temps
...................................................................................
31
-
Systme de navigation automobile par GPS
x
b. Modle dpendant du temps
......................................................................................
33
III.4-Approches et solutions
...........................................................................
33
III.4.1-Les diffrentes tudes menes cet effet
..................................................................
34
III.4.2-Algorithme de Dijkstra
..............................................................................................
35
a. Concept de lalgorithme de Dijkstra
..........................................................................
35
b. Description de lalgorithme
......................................................................................
35
c. Complexit de lalgorithme (valuation)
...................................................................
36
III.4.3-Algorithme A*
...........................................................................................................
36
a. Concept de lalgorithme
............................................................................................
36
b. Description de lalgorithme
......................................................................................
37
c. Complexit de lalgorithme
.......................................................................................
38
III.4.4-Algorithmes Gntiques
............................................................................................
38
a. Dfinition
...................................................................................................................
38
b. Concept de lalgorithme
............................................................................................
38
c. Algorithme itratif utilisant un GA
...........................................................................
39
III.4.5-Algorithmes de planificateur d'itinraire standard
.................................................... 39
a. Concept de lalgorithme
............................................................................................
39
III.6-Comparaison
..........................................................................................
40
III.7-Amlioration
..........................................................................................
41
III.7.1-Variantes de Dijkstra
.................................................................................................
41
a. Algorithme de recherche restreinte
............................................................................
41
b. Utilisation des tas de Fibonacci
.................................................................................
43
c. Algorithme de Dijkstra bidirectionnel
.......................................................................
45
III.7.2-Techniques dacclration
.........................................................................................
45
a. Les hirarchies des routes
..........................................................................................
45
b. Le partitionnement
.....................................................................................................
47
III.8-Choix dune technique
...........................................................................
48
III.9-Conclusion
.............................................................................................
50
chapitre IV: Conception et modlisation
IV.1-Introduction
...........................................................................................
52
IV.2-Architecture de lapplication
..................................................................
53
IV.2.1-Architecture gnrale
................................................................................................
53
a. Partie Desktop
............................................................................................................
54
-
Systme de navigation automobile par GPS
xi
b. Partie mobile
..............................................................................................................
55
c. Utilit des prtraitements pour la partie mobile
........................................................ 55
IV.2.2-Architecture applicative
............................................................................................
56
IV.3-Conception des modules
........................................................................
60
IV.3.1- Module de Prtraitements
........................................................................................
60
a. Format des donnes
...................................................................................................
60
b. Carte
...........................................................................................................................
62
c. Graphe de routage
......................................................................................................
62
d. Rendu des tuiles
.........................................................................................................
63
IV.3.2 -Module de Positionnement
.......................................................................................
65
IV.3.3-Module de Routage
...................................................................................................
66
a. Calcul du chemin optimum
........................................................................................
66
b. Instructions de routage
...............................................................................................
67
c. Calcul de la distance
..................................................................................................
67
IV.3.4 -Module de Rendu graphique
....................................................................................
68
IV.3.5 -Module de Recherche
dadresse...............................................................................
69
IV.4-Modlisation UML
................................................................................
69
IV.4.1-Diagramme des cas dutilisation
...............................................................................
69
a. Description textuelle
..................................................................................................
70
IV.4.2-Le diagramme des squences
....................................................................................
72
IV.5-Conclusion
.............................................................................................
76
Chapitre V:Ralisation
V.1-Introduction
.............................................................................................
78
V.2-Choix des technologies de dveloppement
.............................................. 79
V.2.1-Partie Prtraitement (Module de prtraitement)
......................................................... 79
1. Environnement de dveloppement (Visual Studio 2010)
............................................. 79
2. Langage de programmation (C# 2010)
.........................................................................
80
V.2.2-Partie Mobile
..............................................................................................................
80
V.3-Base de Donnes
.....................................................................................
82
V.4-Prsentation de linterface et mode de fonctionnement
............................ 86
V.4.1 Prtraitement
...............................................................................................................
86
1. Authentification
............................................................................................................
86
2. Gnration de la base de donnes
.................................................................................
86
-
Systme de navigation automobile par GPS
xii
3. Mis jour
......................................................................................................................
87
4. Gnration des tuiles
.....................................................................................................
88
V.4.2 Mobile client
...............................................................................................................
88
1. Navigation
.....................................................................................................................
89
2. Edition des POI
.............................................................................................................
91
V.5-Conclusion
..............................................................................................
93
Conclusion gnrale
.......................................................................................
94
Perspectives
...................................................................................................
96
Annexes
..........................................................................................................
97
Bibliographies
..............................................................................................
106
Webographies
..............................................................................................
110
-
Systme de navigation automobile par GPS
xiii
Liste des figures Chapitre I: Gnralits sur les systmes de
navigation automobile
Figure nI.1 : Systme de navigation automobile hybride
........................................................ 8
Figure nI.2 : Systmes de navigation automobiles (PNA, PDA,
Smartphone) ....................... 9
Figure nI.4 : Rseau routier dcrit par le modle planaire
.................................................... 12
Figure n I.5: Zone de recherche du map-matching
...............................................................
13
Chapitre II: Gnralits sur les techniques de positionnement et le
GPS
Figure nII.1: la constellation GPS
.........................................................................................
18
Figure nII.2: Les trois segments du systme GPS
.................................................................
18
Figure nII.3 : Segment spatial
................................................................................................
19
Figure n II.4: Rseau de contrle
...........................................................................................
20
Figure nII.5 : Coordonnes gographique
.............................................................................
21
Figure nII.6: Principales surfaces de projection, cne, cylindre,
plan ................................... 23
Figure n II. 7: Diagramme de sphre
.....................................................................................
23
Figure nII.8: intersection de deux sphres
.............................................................................
23
Figure nII.9 : la triangulation
.................................................................................................
24
Chapitre III : Etude sur les systmes de guidance
Figure n III.1 : Exemple de multi-graphe orient
...................................................................
32
Figure nIII.2 : Exemple de zones de recherche utilises par le
RP-algorithme ..................... 40
Figure nIII.3 : Zone de recherche de lalgorithme restreint
................................................... 42
Figure nIII.4 : Zone de recherche restreinte laide dun hexagone
dynamique ................... 43
Figure n III.5 : Tas de Fibonacci 5 arbres (Tas) et 14 nuds
.............................................. 44
Figure nIII.6: Reprsentation des zones de recherche du
bidirectionnel algorithme ............. 45
Figure nIII.7: Recherche dans un rseau utilisant la technique de
hirarchisation 47
Figure nIII.8 : Graphe dun rseau routier
.............................................................................
47
Figure nIII.9 : Sur la gauche une reprsentation du rseau routier
partitionn en cellule et sur
la droite la connexion de ces cellules
......................................................................................
48
Chapitre IV : Conception et modlisation
Figure n IV.1: ARCHITECTURE GENERALES DE ALGPS
...................................................... 54
Figure nIV.2 : Schma illustratif de lutilit de chaque
prtraitement pour les modules
mobiles
.....................................................................................................................................
55
Figure nIV.3 Schma simplifi dune application mobile .net
multicouches . ....................... 57
Figure nIV.4 : Architecture applicative de ALGps
.......................................................... 59
Figure nIV.5: OpenStreetMap Node
......................................................................................
60
Figure nIV.6: Open Street Map way
......................................................................................
61
Figure nIV.7 : OPEN STREET MAP RELATIONS
.........................................................................
61
Figure nIV.8 : Utilisation de Mapnik
.....................................................................................
64
Figure nIV.9 : Gnration des tuiles pour diffrents niveaux de
zoom .................................. 65
Figure nIV.10 : Exemple du graphe de routage
......................................................................
67
Figure nIV.11 : Diagramme des cas dutilisation
...................................................................
70
Figure nIV.12: Diagramme des squences de ldition des prfrences
................................ 73
Figure nIV.13 : Diagramme des squences de ldition des POIs
......................................... 74
Figure nIV.14 : Diagramme des squences de la navigation
.................................................. 75
-
Systme de navigation automobile par GPS
xiv
Chapitre V : Ralisation
Figure nV.1 : Logo de Visual Studio 2010
.............................................................................
79
Figure n V.2 : Logo de Microsoft Expression Blend 4
........................................................... 80
Figure n V.3 : Le Motorola MC65
.........................................................................................
81
Figure n V.5 : Logo de Visual Studio 2008
............................................................................
82
Figure n V.6 : Extrait dun nouveau chemin
..........................................................................
83
Figure n V.7 : Reprsentation dune wilaya
..........................................................................
84
Figure n V.8 : Reprsentation dune ville
...............................................................................
84
Figure n V. 9 : Reprsentation dun village
..........................................................................
84
Figure n V.10 : Reprsentation dune srie de rue
................................................................
84
Figure n V.11 : exemple de point dintrt [extrait de notre base
de donnes ....................... 85
Figure n V.12 : Tuiles composant une carte de lAlgrie de zoom 12
................................. 85
Figure n V.13 : Tuiles composant une carte de lAlgrie de zoom 8
.................................... 85
Figure n V.14 : authentification utilisateur
.............................................................................
86
Figure n V.15 : Interface gnration base de donnes
............................................................ 87
Figure n V.16 : Interface graphique de la mise jour
............................................................ 87
Figure n V.17 : Interface graphique du tlchargement des tuiles
......................................... 88
Figure n V.18 : Interface graphique de la page daccueil dAlGps
........................................ 89
Figure nV.19 : Recherche graphique de la recherche par POI
............................................... 90
Figure nV.20 : Recherche de POI dans la catgorie Restauration
.......................................... 90
Figure nV.21 : Interface graphique de la recherche dadresse
............................................... 91
Figure n V.22 : Interface graphique de ldition dun POI
..................................................... 92
Figure n V.23 : Interface graphique de lajout dun POI
........................................................ 92
-
Systme de navigation automobile par GPS
xv
Liste des tableaux
Chapitre III : Etude sur les systmes de guidance
Tableau nIII.1 : Tableau reprsentant la complexit des oprations
................ 44
Chapitre IV : Conception et modlisation
Tableau nIV.1: Tableau rsumant les balises importantes ainsi que
leurs
significations....71
-
Systme de navigation automobile par GPS
Introduction gnrale
epuis sa venue sur terre, ltre humain a toujours cherch un moyen
de se situer sur
sa plante. Au dbut il utilisa les astres pour se guider sur mer
et sur terre. Ensuite
vinrent les progrs gographiques et mathmatiques qui ont apport
le
dveloppement de cartes terrestres de plus en plus prcises.
Si on revenait dix ans en arrire, la cartographie routire et les
itinraires imprims
dinternet semblaient tre notre seule solution, puis vint le
temps des systmes de navigation
automobile souvent plus connus sous le nom de GPS, ce fut une
norme rvolution dans le
domaine de la navigation. En grande partie cette rvolution est
due aux normes progrs
quont connus les technologies de communications avec la cration
du systme GPS et la
cartographie numrique. Depuis les systmes de navigation sont
devenus des gadgets banals
quon utilise au quotidien grce la multitude davantage offerts
par ces systmes tels le gain
de temps et dargent ainsi que lamlioration de la scurit et la
gestion des situations
durgence.
Aujourdhui, la technologie GPS a rvolutionn plusieurs domaines
grce la trs bonne
prcision quelle apporte lors de la dtermination de la position
gographique dun mobile.
Daprs Jean-Luc Cosandier [COS 03], la prcision atteinte par
cette technologie varie
dune centaine de mtres quelques mtres et cela dans 95% des cas.
Ainsi elle permet de
go-localiser tout mobile se trouvant sur la surface de la terre
et cela quelques soient le
moment et lendroit o il se trouve.
En quelques mots, les systmes de navigation automobile sont des
systmes intelligents
permettant de localiser un vhicule avec une prcision phnomnale,
en utilisant les
diffrentes techniques de localisation et de proposer litinraire
le plus court ou le plus rapide
pour se rendre une destination prcise ainsi que diffrentes
informations utiles la
navigation et cela en offrant une navigation en temps rel et une
interface graphique
conviviale.
En dautres termes, les systmes de navigation automobile sont une
combinaison entre
diffrents domaines allant de la go-localisation, la cartographie
numrique et la
communication la recherche oprationnelle.
Notre projet consiste en la conception et le dveloppement dun
systme de navigation routier
par GPS qui se prsente comme une application mobile destine tre
dploye sur un PDA.
Notre application doit apporter une solution qui permet de
naviguer dun point A un point B,
en indiquant le chemin optimal tout en effectuant un suivi en
temps rel et continu du chemin
emprunt.
Notre systme se doit dtre performant et de garantir des rsultats
exacts. En fait, le
dveloppement dapplications mobiles de ce type est confront
plusieurs contraintes qui
sont relies la limitation de la vitesse de calcul de lappareil
mobile et de la mmoire.
D
-
Systme de navigation automobile par GPS
2
Gnralement, dans la plus part des systmes commercialiss ces
contraintes sont pallis en
apportant des modifications lalgorithme utilis dans la
planification ditinraire. Cependant
ces modifications ne garantissent pas un rsultat exacte ce pour
quoi dans notre travail nous
allons prendre le soin de choisir le meilleur algorithme de
calcul tout en amliorant sa vitesse
de calcul sans affecter lexactitude des rsultats.
En outre, le dveloppement de notre application est ax sur les
points suivants :
Gestion des points dintrt (POI) par catgorie : Tous les points
dintrts utiliss par
notre application doivent tre classs et stocks dans notre base
de donnes selon leur
type.
Recherche dadresses, de point dintrts (POI) : Notre application
doit mettre la
disposition de ses utilisateurs un outil qui permet deffectuer
une recherche dadresse
ou de POI afin que celui-ci puisse indiquer sa destination sans
avoir recours
introduire les coordonnes de sa destination.
Recherche du chemin le plus court, le plus rapide : le chemin
qui sera indiqu
lutilisateur doit tre un chemin optimal.
Navigation en temps rel : Effectuer un suivi temps rel des
positions prises par le
mobile et indiquer lutilisateur la prochaine manuvre suivre tout
en lui donnant une
vision graphique de la position et de la trajectoire du vhicule
et cela chaque
changement de position.
Recalcule du chemin en cas de dviation du chemin prdfini :
Effectuer un suivi en
temps rel de la trajectoire du mobile et dtecter si le
conducteur sest dvi du chemin
prdfini et ainsi recalculer le nouveau chemin qui doit tre pris
par lutilisateur.
Nous avons divis notre mmoire en deux parties, une partie tat de
lart qui est constitue de
trois chapitres et une partie conception et ralisation constitue
de deux chapitres.
La Partie tat de lArt
Comme cit prcdemment cette partie est compose de trois chapitres
et consiste en
une tude bibliographique sur les systmes de navigation en gnral.
Le premier
chapitre stalera sur les gnralits relatives aux systmes de
navigation automobile,
le deuxime portera sur la technique de positionnement savoir le
GPS, le troisime
chapitre est une tude sur les systmes de guidance et au cours de
celui-ci nous allons
dtailler les algorithmes de calcul du chemin optimal.
La Partie Ralisation et Conception
Au cours de cette partie nous allons aborder laspect technique
de notre projet. Pour
dbuter nous prsenterons la conception de la solution que nous
avons adopte pour le
dveloppement de notre application ainsi que sa modlisation en
utilisant le modle
UML. Puis, nous prsenterons les diffrents outils choisis pour la
ralisation de notre
-
Systme de navigation automobile par GPS
3
projet et nous finirons par une conclusion gnrale des
perspectives o nous
aborderons les objectifs atteints et les diffrentes amliorations
possibles de notre
solution.
-
Gnralits sur les systmes de navigation automobile
Chapitre I
Gnralits sur les systmes de navigation automobile
-
Gnralits sur les systmes de navigation automobile
5
I.1-Introduction ctuellement, un nombre croissant de
consommateurs a suscit un rel intrt pour les
quipements de navigation automobile. Effectivement les systmes
de navigation
automobile se taillent une place importante sur le march et ne
sont plus des gadgets
de luxe rservs pour les riches [FLI 04]. Daprs le centre de
recherche japonais
Yano Reaserch Ltd en janvier 2011, La taille du march mondial
des systmes de
navigation automobile tait de 9,8 million dunits, et devrait
crotre de faon
constante de 2010 2015 avec une croissance annuelle dun taux de
10,7 %, pour atteindre
16.32 millions dunits en 2015 .
Tout cet intrt pour les systmes de navigations routiers est d
leurs efficacits et aux
diffrents avantages quils apportent tels que le gain de temps et
lconomie dargent. La suite
de ce chapitre est une introduction au domaine de la navigation
automobile car il sera
consacr aux gnralits des notions de ce domaine.
Avant dentamer les gnralits sur les systmes de navigation
automobile (Routiers) nous
expliquerons ce que lon veut dire par le mot navigation et cest
quoi un systme de
navigation ? Afin de mieux introduire le sujet.
I.1.1-Dfinition de la navigation Naviguer consiste, au sens
originel, se dplacer ou voyager sur l'eau. Par extension
logique, ce terme qualifie galement l'art et la science de
conduire un navire. Ultrieurement,
la notion de navigation s'est tendue aux domaines arien,
terrestre et spatial [1].
I.1.2-Dfinition des systmes de navigation En gnral, un systme de
navigation est lensemble des techniques permettant de localiser
la
position dun mobile par rapport un systme de rfrence et de
fournir toute information
ncessaire au contrle et loptimisation des dplacements et du
chemin du navigateur quil
soit arien, maritime ou terrestre ce qui nous amne distinguer
trois systmes de
navigation [16]:
1) Arien : Ce premier est un systme destin au domaine de
laviation autrement dit il
est spcialement conu pour fonctionner sur les avions,
hlicoptres, aroplanes, et il
peut tre autonome et automatique.
2) Maritime : lune des premires utilisations des systmes de
navigation tait bord des
bateaux. Cela tait d la complexit du processus dapprentissage et
de lecture des
cartes marines.
Aujourdhui les systmes de navigation maritime sont devenus
communs aux bateaux
de toutes tailles et sont utiliss mme par les pcheurs amateurs
et professionnels.
3) Automobile (Routier) : Cest le systme de navigation le plus
connu aux yeux du
public. La plupart des cas il est destin une utilisation dans
lautomobile cependant
il peut aussi tre utilis pour la navigation pdestre dans le cas
de systme mobile.
A
-
Gnralits sur les systmes de navigation automobile
6
I.2-Dfinition dun systme de navigation automobile Selon Myron
Kayton : Un systme de navigation automobile est un systme capable
de
dterminer la position et la vitesse du centre de masse d'un
vhicule et doffrir une certaine
orientation au conducteur (pilote) .
En gnral, il utilise un utilitaire de localisation et une base
de donnes contenant les cartes
numriques pour fournir des informations utiles la navigation
[4].
Lutilitaire de localisation sert acqurir diffrentes informations
concernant la
position de l'utilisateur sur le rseau routier.
la base de donnes contient diverses cartes numriques reprsentant
le rseau routier
ainsi que les informations ncessaires la navigation.
Il offre aux conducteurs des itinraires en temps rel, et des
annuaires des restaurants,
hpitaux, services de voitures, et autres points d'intrt (POI),
et des alertes Vocales qui
aident le conducteur maintenir son attention sur la route. Cela
est diffrent du tracking qui
est un processus destin au contrle (vitesse, trajectoire,..) et
suivi des vhicules via un
terminal [NEB 06].
I.3-Historique Les systmes de navigation automobile ont fait
l'objet d'exprimentation tendue y compris
des efforts pour atteindre des marchs grand public.
Selon la propre chronologie historique de la socit (chronologie
historique alpin 1981),
Alpin rclame avoir cr en collaboration avec HONDA le premier
systme de navigation
pour voiture en 1983 [10].
Avec le dveloppement des technologies de la tlcommunication
plusieurs systmes ont vu
le jour comme le systme cr par Steven Lobbezoo base de
navigation par satellite en
1986, les systmes de navigation par GPS qui sont conus par
Mitsubishi Electric et Pioneer
en 1990 et ceux conus par Oldsmobile et Magellan en 1995
[17].
Cependant, il fallait attendre jusqu'en 2000 pour que les
Etats-Unis ddient un signal GPS
pour des fins uniquement civiles ce qui a contribu en les
expansions du domaine de la
navigation et la cration de diffrents utilitaires ddis cet
usage. En effet, de nos jours,
pratiquement tous les constructeurs automobiles proposent un
systme de navigation comme
option sur leurs vhicules. Nanmoins ce domaine n'est plus
exclusif aux constructeurs
automobiles car plusieurs socits spcialises dans les systmes de
navigation par GPS
mobiles ont vu le jour comme Garmin en 1998, TomTom en 2001
etc.
I.4-Navigation automobile en Algrie A notre connaissance,
jusquau moment de la rdaction de ces lignes les systmes de
navigation routier restent quasiment inexistants en Algrie, cela
est d plusieurs facteurs
cependant l'Absence d'une carte dtaille du territoire national
est lun des problmes majeurs.
-
Gnralits sur les systmes de navigation automobile
7
En effet, les seules cartes disponibles sont dtenues par l'INC
(Institut National de la
Cartographie) et ne sont utilises que dans le domaine de la
golocalisation. Mais avec la
venue de l'organisation OSM (Open street MAP) la cartographie ne
devrait plus poser de
problmes car cette dernire met la disposition des utilisateurs
des cartes numriques
utilisation libre. Ce qui devait tre une trs bonne opportunit
pour les ralisateurs des
systmes de navigation car l'Algrie reprsente un grand march (vu
le nombre de
consommateur) et sans oublier l'absence de la concurrence qui
est un facteur trs important.
I.4.1-Organisation OSM (Open Street Map) OpenStreetMap est une
organisation internationale qui cre et fournit des donnes
gographiques libres et sous une licence libre, telles que des
cartes routires ou cyclables,
toute personne qui en aura besoin. Cet outil est initi en
juillet 2004 par Steve Coast au
College University de Londres dans le but de rendre la
cartographie accessible tout le
monde car la plupart des cartes ont des restrictions lgales ou
techniques qui empchent de
les utiliser de faon crative, productive ou innovante [15].
Note : Pour plus dinformation sur lorganisation OpenStreetMap
consultez rfrence [15].
I.5-Types de systmes de navigation automobile Les systmes de
navigation automobile peuvent tre classifis selon la technologie
utilise
lors de la localisation du vhicule. Daprs Myron Kayton
(Navigation systems, 2001) les
systmes peuvent tre classs comme suit :
I.5.1-Systme de navigation inertielle Les systmes de navigation
inertielle sont les systmes les plus prcis utilisant le principe
du
Dead-rocking. Ils ont t dvelopps pour une large gamme de
vhicules et sont les
premiers systmes commercialiss dans le domaine de la navigation
automobile [MYR 01].
a. Dead-rocking
C'est le calcul de la position gographique du vhicule partir des
informations du
capteur talonn, et cela en prenant une srie continue de mesures
commenant avec
une valeur initiale connue. Ces systmes doivent tre rinitialiss
quand les erreurs
s'accumulent et si il y a eu une perte dnergie [MYR 01].
b. Les mesures inertielles
Dans la navigation inertielle un acclromtre est utilis pour
mesurer les
acclrations du vhicule tandis quun gyroscope mesure lorientation
des
acclromtres ; ensuite un ordinateur de bord utilise ces donnes
dans ses calculs
afin de dterminer la position et la vitesse du vhicule [MYR
01].
I.5.2- Systme de navigation radio Un systme radio est constitu
dun rseau dmetteurs (parfois aussi des rcepteurs) sur le
sol ou dans les satellites. Gnralement les GNSS (Global
Navigation Satellite System) sont
les plus utiliss dans ce type de navigation, en particulier le
systme Amricain GPS Navstar
[MYR 01].
-
Gnralits sur les systmes de navigation automobile
8
Un vhicule dtecte la transmission radio et calcule sa position
par rapport aux positions
connues des stations mettrices. La vitesse est calcule partir du
dcalage Doppler de la
transmission ou dune squence de positions. Le dcalage Doppler
est la diffrence entre la
frquence du signal reu et celle du signal mis et cela lorsque le
rcepteur et lmetteur sont
en mouvement lun par rapport lautre [22].
Contrairement aux systmes de navigation inertielle, les systmes
radio peuvent tre intgrs
dans le tableau de bord du vhicule ou mobile grce aux PDA et
Smartphone.
a. Systmes intgrs (embarqus)
Rservs quelques privilgis il y a de cela quelques annes en effet
daprs J. D.
Power en 2002 la moyenne du taux d'adoption des systmes de
navigation
embarqus, sur le march amricain, est simplement rest moins de 2%
et cela
est d en premier lieu aux cots onreux de celui-ci. Dsormais les
systmes de
navigation font partie des plus importantes options intgres un
vhicule.
Gnralement constitus dun cran LCD et dun microprocesseur
assez
performant afin deffectuer les diffrents calculs, ces derniers
sont intgrs au
tableau de bord du vhicule et utilisent aussi le systme radio du
vhicule pour la
lecture des cartes numriques stockes sur CD ou DVD ainsi que des
rcepteurs
radios [FLI 04].
Un avantage cl des systmes de navigation embarqus, cest leur
capacit relier
plusieurs services diffrents ainsi que la possibilit dintgr les
techniques de
navigation inertielle et en faire un seul systme hybride (radio
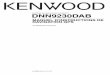
et inertiel) la figure
nI.1 donne un aperu des principaux lments d'un systme de ce
type. Sur la
gauche on a les capteurs (gyroscope et tachymtre) et un
satellite GPS pour la
dtermination de la position. Un cran LCD pour laffichage, Un
lecteur de CD ou
de DVD. Sur la droite, une connexion GSM et diffusions de
RDS-TMC utilises
pour les informations concernant le trafic.
Figure nI.1 : Systme de navigation automobile hybride [FLI
04]
b. Systmes mobiles
Daprs le TCS (Tourning Club Suisse) Les systmes de navigation
mobiles sont
aussi fiables que les systmes embarqus et sont dune utilisation
moins complexe.
En effet, le TCS affirme que les systmes mobiles sont faciles
utiliser grce au
-
Gnralits sur les systmes de navigation automobile
9
fait quils runissent dans le mme botier le logiciel de
navigation, le matriel
cartographique numris et enregistr sur un priphrique de stockage
ainsi que le
rcepteur GPS. Si les systmes mobiles ont autant progress cest
bien grce aux
nouvelles crations comme les PNA (Personnel Navigation
Assistant) dvelopps
par les socits spcialises dans la navigation ainsi que les PDA
et Smartphones
[TCS05].
Figure nI.2 : Systmes de navigation automobiles (PNA, PDA,
Smartphone) [TCS 09]
i. La navigation avec les PNA Les PNA sont les premiers systmes
de navigation mobiles qui ont t
commercialiss. Leur invention a permis dtendre lexploitation des
navigateurs GPS
au grand public. Ces navigateurs sont aussi performants que les
navigateurs
embarqus, faciles et simple manier [TCS 09].
ii. La navigation avec PDA Ce type de navigation consiste
utiliser un ordinateur de poche type PDA (Personal
Digital Assistent).Ces appareils peuvent tre quips peu de frais
dun rcepteur
radio (GNSS) et dun logiciel de navigation. Lutilisateur doit
cependant avoir
quelques connaissances en informatique pour faire fonctionner le
systme de
navigation [TCS 05].
Logiciel de navigation: Le logiciel de navigation contient des
algorithmes et
les donnes qui traitent les mesures effectues par chaque capteur
(p. ex., par
inertie ou les donnes de l'air). Il contient les constantes
dtalonnage,
squences d'initialisation, algorithmes autotest et algorithmes
de rechange pour
priodes lorsque les capteurs n'ont pas ou ne reoivent pas
d'information
[MYR 01].
-
Gnralits sur les systmes de navigation automobile
10
iii. Smartphone
Les tlphones portables se transforment aussi en systmes de
navigation condition
quils soient quips de Bluetooth et de GPRS afin de pouvoir
rcuprer les cartes
numriques se trouvant sur un serveur distant .Cependant ce type
de navigation parfois
peut gnrer des frais de connexion [TCS 10].
I.6-Fonctions et services La fonction la plus fondamentale d'un
systme de navigation routier est de donner la meilleure
route possible vers une destination particulire. Il doit tre
capable de recalculer votre
itinraire si vous manquez une instruction ou un itinraire
particulier.
La plupart des systmes de navigation routire remplissent trois
fonctions fondamentales: le
positionnement, la recherche dadresse et la cration de routes et
de suivi. Comme ils
permettent aussi de choisir les prfrences de routage, y compris
la plus courte distance, le
temps le plus rapide, ou mme les routes sans page. Cependant les
nouveaux systmes
proposent dautres services supplmentaires destins apporter plus
daide au conducteur et
minimiser le temps et les frais de transport, cela est dune
grande importance pour lconomie
de nimporte quel pays [FLI 04] [16]. Ces options diffrent dun
systme un autre mais les
plus importantes sont :
1-Rapports de trafic en temps rel
Certains logiciels de navigation ont la capacit de recevoir des
informations concernant le
trafic et ainsi viter les retards dus aux embouteillages.
Cependant ces informations ne sont
disponibles que dans certains pays.
2-Les points dintrts (POI)
Cette fonction est une base de donnes de tous les sites et
services susceptibles dintresser les
utilisateurs comme les htels, gares et stations-services
etc.
3-Waypoints
Les waypoints sont des emplacements gographiques, dcrits par la
longitude et la latitude,
que lon enregistre dans le systme. Les waypoints sont rarement
utiliss avec les systmes
automobiles embarqus, mais ils sont essentiels pour les modles
portables (mobiles).
-
Gnralits sur les systmes de navigation automobile
11
I.7-Les composantes cls dun systme de
navigation automobile
Figure nI.3 : Les composantes cls dun systme de navigation
automobile [FLI 04]
Comme reprsent dans la figure nI.3 les composantes principales
d'un systme de
navigation automobile sont la base de donnes contenant la
feuille de route (La carte)
numrique ainsi que des informations sur chaque destination
possible ,le positionnement
c'est- dire la dtermination de la position actuelle du vhicule
sur le rseau routier,
proposition d'itinraire et orientation c'est--dire la
planification d'un itinraire allant de la
position actuelle du mobile jusqu' la destination choisie tout
en orientant le conducteur, en
lui donnant des instructions audio ou visuelles, et une
interface utilisateur pour faire
fonctionner le systme. Les travaux respectifs de Schlott [SCH
97] et zhao [ZHA 97] en
1997 nous donnent plus de dtail et dfinissent ces composantes
comme suit :
I.7.1-Positionnement
Afin de dterminer la position actuelle du vhicule le systme doit
d'abord dterminer la
position gographique (golocaliser le vhicule), comme on la cit
prcdemment cela se
fait en gnral par dead-rocking ou en utilisant les GNSS,
ensuite, cette position est utilise
pour dterminer la position sur le rseau routier disponible et
cela se fait en utilisant le
processus du map-matching (correspondance de carte).
a. Le map-matching
Le map-matching est une mthode qui peut tre utilise pour
amliorer la prcision
lors de l'affichage de la position du vhicule sur une carte
lectronique. Le principe de
cette mthode est La correspondance entre la sortie du systme de
navigation et le
rseau routier reprsent sur la carte numrique afin de s'assurer
que la position est
cass ou correspond la plus proche rue [SKO et HAN 08].
Gnralement la
correspondance se fait en trois tapes:
Lors de la premire tape un ensemble d'arcs candidats ou segments
sont
slectionns.
-
Gnralits sur les systmes de navigation automobile
12
Deuximement la probabilit d'arcs candidats / segments est
value
l'aide d'informations gomtriques et topologiques.
Enfin, l'emplacement du vhicule sur le segment de route le plus
probable
est dtermin.
Informations gomtriques
Les informations gomtriques incluent des mesures comme la
proximit entre la
position value et la route la plus proche dans la carte.
Informations topologiques
Le critre topologique de l'information dtermine la connectivit
des routes
candidates (Des arcs), par exemple, le vhicule ne peut pas
soudainement se
dplacer d'un segment de route un autre s'il n'y a aucun point
d'intersection au
milieu des segments.
Si aucune rue ne satisfait aux conditions de recherche, on peut
conclure que le
vhicule est l'extrieur de la rue donc il n'est pas ncessaire de
correspondre la
position du vhicule cette rue.
Cette correspondance est ralise grce au modle planaire.
b. Le modle planaire
Figure nI.4 : Rseau routier dcrit par le modle planaire [SKO et
HAN 08]
Gnralement le rseau routier est reprsent dans les cartes
numriques sous forme
d'une planaire ou le systme des rues est reprsent par un
ensemble d'arcs (c'est
dire, des courbes dans R2). Chaque arc reprsente une route dans
le rseau et est
suppos tre linaire par morceaux, de sorte qu'elle puisse tre
dcrite par un ensemble
de points. Les derniers points dans l'ensemble sont appels nuds
et le reste comme
point de forme.
-
Gnralits sur les systmes de navigation automobile
13
Les nuds dcrivent le commencement, ou la fin d'un arc indiquant
un dbut, une
impasse ou une intersection (i.e. le point de passage d'un arc
un autre).
c. Algorithme
Toutefois, un rseau routier peut tre assez compliqu surtout
quand il ya plusieurs
croises de chemins (carrefours, intersections) par consquent la
dtermination de la
rue correcte n'est pas entirement claire. Afin de facilit ce
procd plusieurs
algorithmes et approches ont t proposs tel que lalgorithme
propos par Yi et al en
1998 [YI et al 98].
Figure n I.5: Zone de recherche du map-matching [YI et al
98]
La figure n I.5 prsente une section d'un rseau et un point (P(X,
Y)) reprsentant la
position gographique du vhicule. Pour trouver quelle rue
correspond la position
sur le rseau routier, un cercle de rayon de rechercher est
dessin. Par exprience, une
valeur approprie pour r sera utilise. Dans ce domaine,
l'objectif est de trouver toutes
les rues qui satisfont les conditions suivantes :
Distance (D) entre la rue et le point P est plus courte que r.
Ils existent deux cas
possibles :
Si le vhicule est statique, slectionnez la rue dont d est la
plus courte ;
Si le vhicule est en mouvement, choisissez la rue qui a le plus
petit
angle avec la direction du mouvement du vhicule.
I.7.2-Planification d'itinraires
Une fois la position de la voiture sur le rseau routier
dtermine, une route peut tre planifie
de cette position-l. Cet itinraire est prvu l'aide des routes
disponibles sur le rseau et puis
parmi ces itinraires le systme choisit le plus rapide ou le plus
court selon le choix du
conducteur l'aide des algorithmes utiliss pour la dtermination
d'itinraire optimis (voir
chapitre III), puis des instructions sont donnes au
conducteur.
Cependant ces instructions doivent tre donnes temps au
conducteur afin qu'il puisse en
prendre compte. Si la voiture n'est pas positionne sur
litinraire courant pour un certain laps
-
Gnralits sur les systmes de navigation automobile
14
de temps, alors le systme conclut que le conducteur a dvi de sa
route, et une nouvelle route
doit tre prvue partir de la nouvelle position de la voiture [FLI
04].
I.7.3-La base de donnes
La base de donnes est stocke sur un support disque. Elle
contient la carte numrique utilise
pour la planification d'itinraire, positionnement ainsi que des
informations sur toutes les
destinations possibles [FLI 04].
I.7.4-Interface utilisateur
En gnral, l'interface est constitue de la carte montrant la
position actuelle du vhicule et le
Rseau routier environnant est affich avec la prochaine manuvre.
Le pilote normalement
reoit un avertissement sonore qui le prpare pour la prochaine
manuvre, par exemple
chang de voie ou ralentir. Une fois l'emplacement de la manuvre
atteint, le conseil actuel
est donn [FLI 04].
I.8-Evaluation des performances dun systme de
navigation automobile
De nos jours il existe plusieurs critres d'valuation des
performances d'un systme de
navigation automobile mais seulement quatre d'entre eux, sont
les plus significatifs; cependant
il faut se rappeler que la prcision est considr comme le critre
le plus caractrisant des
performances d'un systme de navigation [SKO et HAN 08].
1-La prcision (exactitude)
C'est le degr de conformit des informations fournies par le
systme des valeurs relles
concernant la position, vitesse, etc.
2-L'intgrit
C'est la mesure de la confiance qui peut tre mise dans les
informations provenant du systme
de navigation en d'autres termes c'est la probabilit des
dfaillances non dtectes dans la
prcision spcifie prcdemment.
3-Disponibilit
C'est la mesure du pourcentage de couverture de la zone destine
et dans laquelle le systme
de navigation fonctionne.
4-Continuit de service
C'est la probabilit que le systme fournit continuellement des
informations sans interruption
en dehors des services rguliers pendant la priode de travail
prvue.
-
Gnralits sur les systmes de navigation automobile
15
I.9-Conclusion
u cours de ce chapitre, nous avons tudi les diffrents systmes de
navigation
par GPS. Allant de leurs proprits et les services proposs aux
critres
dvaluation. De plus, nous avons introduit les diffrentes notions
relies au
domaine de la navigation, ncessaires et utiles la suite de notre
tude.
Etant donn que le positionnement est une partie importante dans
la conception
des systmes de navigation, alors dans le chapitre suivant nous
aborderons les
techniques de positionnement ainsi que les systmes de
coordonnes.
A
-
Gnralits sur les techniques de positionnement et le GPS
Chapitre II
Gnralits sur les techniques de positionnement et le GPS
-
Gnralits sur les techniques de positionnement et le GPS
17
II.1-Introduction omme on a pu le constater prcdemment une
partie importante du fonctionnement
dun systme de navigation automobile repose principalement sur la
localisation de la
position du vhicule, ce qui est ralis laide de diverse
techniques de
positionnement et ces dernires relvent du domaine de la
golocalisation, alors pour
tre plus explicatif dans ce chapitre on introduira quelques
notions cls de ce domaine
ainsi que la technologie GPS.
II.2-Gnralits sur la golocalisation [FAL 04]
II.2.1-Dfinition de la golocalisation La localisation dune
personne ou dun mobile (vhicules, tlphones,) la surface de la
terre est dite : go-positionnement. Pour obtenir des
informations plus prcises sur un
positionnement, la localisation trouve est mise en corrlation
avec des systmes
dinformation.
Le go-positionnement est un rel besoin dans le monde de mobilit
o nous vivons.
II.2.2-Les composantes dun systme de golocalisation Un systme de
go localisation est compos de quatre composantes principales :
a. Terminal communicant : C'est llment qui reoit les coordonnes
gographiques
de lobjet.
b. Logiciel de localisation : Toutes les informations relatives
une golocalisation sont
stockes, analyses et affiches grce aux outils et fonctions
offerts par le logiciel.
Le stockage et lanalyse se font par des serveurs informatiques
qui hbergent
l'infrastructure et qui reoivent et traitent les donnes envoyes
par les terminaux.
Et pour faciliter lusage lutilisateur on ajoute une interface
graphique.
c. Donnes : les donnes reprsentent la partie la plus importante
car elle constitue une
Liaison entre les autres composantes. Pour tre plus explicatif,
la donne gnre par
un terminal qui se trouve sur le terrain doit tre transmise une
plateforme logicielle
qui va la traiter, la prsenter graphiquement l'utilisateur et
l'associer d'autres
donnes afin d'enrichir les informations relatives l'tat du
terminal ou de la flotte de
terminaux.
d. Les utilisateurs : Un systme de golocalisation tant avant
tout un outil, c'est son
utilisation (ou ses utilisateurs) qui permet d'en exploiter
toutes ses fonctionnalits.
II.2.3-Techniques de positionnement Pour effectuer une
localisation on peut utiliser plusieurs techniques dont : les
systmes de
positionnement par satellites tels le GPS et GONASS, le
positionnement cellulaire (GSM,
WIFI), le RFID et la localisation par adresse IP (Voir annexe
A).
C
-
Gnralits sur les techniques de positionnement et le GPS
18
Le GPS est le systme le plus utilis dans le domaine de la
navigation automobile vu la
prcision et la simplicit quil apporte. Dans la suite de ce
chapitre on stalera sur ses
diffrents aspects.
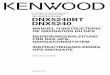
II.3-Prsentation du systme GPS
Figure nII.1: la constellation GPS [10]
Le GPS est une constellation de 24 satellites, il permet de
calculer la position gographique
(les coordonns) de n'importe quel point situ sur la surface du
globe, en mesurant la distance
entre un rcepteur et les satellites qu'il capte. Sa prcision
peut atteindre 1 mtre [ELR 04].
II.3.2-Structure physique [ELR 04] Le systme est compos de trois
parties fondamentales :
Figure nII.2: Les trois segments du systme GPS [10]
-
Gnralits sur les techniques de positionnement et le GPS
19
a. Le segment espace [ELR 04]
Le segment spatial est le cur du systme, il est compos denviron
24 satellites rpartis
sur six orbites (quatre satellites par orbite) pour assurer une
couverture mondiale continue.
Ces orbites sont quasi-circulaires, avec une inclinaison de 55
par rapport l'quateur et
une altitude denviron 11.000 miles pour viter les problmes
associs aux systmes
terrestre. Ce qui leur permet galement de faire le tour de la
terre toutes les 12 heures.
Ainsi o que ce soit sur la terre, 4 10 satellites sont visibles
simultanment (en
considrant une lvation suprieure 10).
Figure nII.3 : Segment spatial [11]
Frquences de communication : Chaque satellite met des signaux
radio
uniques dans la bande UHF, il existe deux frquences :
la premire destine l'usage civil est dsigne par "signal L1"
et
sa valeur est de 1575,42 MHz.
la deuxime destine lusage militaire dsigne par "signal L2"
et sa la valeur est de 1227 MHz.
Ce signal est constitu de 3 messages : le code protg (code P),
le code d'acquisition
(C/A pour Coarse/Acquisition) et un message de navigation.
b. Le segment de contrle
Dans le Monde, il existe cinq stations de contrle au sol qui
sont situes tout autour de la terre
(Hawaii, Colorado Springs, le de l'Ascension, Diego Garcia et
Kwajalein).
Dont quatre stations automatiques de surveillance et une seule
station principale de
contrle Colorado Springs . Les stations automatiques reoivent
constamment des donnes
provenant des satellites et renvoient ces informations la
station principale de contrle. Cette
dernire corrige et met jour (phmrides, paramtres dhorloge..) les
donnes reues puis
renvoie les informations aux satellites via deux antennes situes
sur deux autres sites
diffrents [ELR 04].
-
Gnralits sur les techniques de positionnement et le GPS
20
Figure n II.4: Rseau de contrle [ELR 04]
c. Le segment utilisateur
Compos des rcepteurs GPS, appareils qui permet de calculer la
position, la vitesse et
l'heure d'un observateur, partout et tout moment sur Terre et
dans ses environs,
quelles que soient les conditions climatiques.
Le segment utilisateur regroupe les utilisateurs militaires
(marine, arme de terre et
arme de lair), la police ou la gendarmerie dans le domaine
civil, il regroupe les
navigateurs maritimes, les pilotes, les chasseurs, pcheurs,
randonneurs, les sportifs,
les conducteurs dengin etc... [ELR 04].
II.3.3-Les applications du GPS
a. Usages militaires
Bien que le systme GPS a t achev seulement en 1994, il a dj
prouv tre
dune aide prcieuse pour les forces militaires amricaines. Il est
principalement
utilis pour le guidage des missiles de croisire ou des munitions
tactiques (bombes
et roquettes) [12].
b. Usages civils
Un signal a t ddi uniquement pour lusage civil depuis 2000. Grce
sa prcision
et son faible cot, le positionnement par GPS a trouv de
nombreuses applications.
Parmi ces applications on distingue les suivantes : Cartographie
et reprage de
points dintrt (POI), gestion des ressources naturelles
(Agriculture), op
gnie civil, Gophysique, Cartographie arienne et navigation
routire.
Cette dernire est l'application du GPS la plus connue du grand
public et le sujet de
notre tude. Effectivement, l'utilisation du systme de navigation
GPS et trs rpandu
et quipe maintenant un bon nombre de vhicules [ELR 04].
-
Gnralits sur les techniques de positionnement et le GPS
21
II.3.4-Dtermination d'une position par GPS
a. Systme godsique [ELR 04]
Afin de localiser mathmatiquement un point sur la terre dune
faon univoque, il
faut dfinir un rfrentiel godsique.
Dfinition
Cest la ralisation concrte et numrique dun repre tridimensionnel
dont le centre
est proche du centre de masse de la terre, ses deux premiers
axes sont dans le plan
de lquateur et le troisime est proche de laxe de rotation des
ples.
Un systme godsique est la combinaison d'un ellipsode qui prcise
les
dimensions et la forme de la terre et d'un point de base partir
duquel on dtermine
les coordonnes gographiques. Gnralement dans un ellipsode normal
les trois
axes ont des longueurs diffrentes, mais dans cette modlisation
ils ont des
longueurs gales, ce qui donne une sphre aplatie.
Il existe des centaines de systmes godsiques utiliss dans le
monde. Mais avec
l'avnement du GPS, un systme valable mondialement a t mis au
point : Cest
l'ellipsode WGS 84 (World Geodesic System of 1984).
b. Les coordonnes gographiques [ELR 04]
La position dun point M est reprsente par trois paramtres qui
sont :
LONGITUDE, LATITUDE et ALTITUDE. Ces trois valeurs constituent
les
coordonnes gographiques de ce point.
Figure nII.5 : Coordonnes gographique [ELR 04]
-
Gnralits sur les techniques de positionnement et le GPS
22
La longitude : angle orient entre le plan mridien origine et le
plan mridien
contenant le point M. Le mridien dorigine est celui de
Greenwich. La longitude est
gnralement exprime en degrs (marqus d') allant de 0 au mridien
de
Greenwich 180 Est et l'Ouest
La latitude : angle orient entre le plan de l'quateur et la
normale l'ellipsode
passant par le point M.Elle est gnralement exprime en degrs
(marqus d') allant
de 0 l' quateur 90 aux ples Nord et Sud.
La hauteur h : distance algbrique entre le point M et
l'ellipsode.
Ces coordonnes nont aucun sens si elles ne sont pas accompagnes
avec les informations
concernant leur systme godsique. Sans information on pourrait
obtenir des diffrences de
plusieurs dizaines de mtres, une fois celles-ci projetes [LAV
04].
c. La projection
Le GPS est utilis en association avec une carte pour se reprer
et se positionner
i. La cartographie : Daprs le comit Franais de cartographie Cest
lArt de dresser les
cartes gographiques. Une reprsentation gomtrique
conventionnelle, gnralement
plane, en positions relatives, de phnomnes concrets ou
abstraits, localisables dans
lespace ; cest aussi un document portant cette reprsentation ou
une partie de cette
reprsentation sous forme dune figure manuscrite, imprime ou
ralise par tout autre
moyen [13].
ii. La carte
La carte est toute reprsentation partielle ou complte
mathmatiquement prcise de la
surface terrestre sur un plan montrant la situation, la
distribution et les rapports de
divers phnomnes naturels et sociaux, choisis et dfinis en
fonction du but de chaque
carte.
Les cartes gographiques servent reprsenter des phnomnes
gographiques, c'est-
-dire des phnomnes dont la configuration spatiale produit du
sens .Elles mettent en
valeur l'tendue dun espace, sa localisation relative par rapport
aux espaces voisins,
ainsi que la localisation des lments qu'il contient [13].
iii. La projection cartographique [ELR 04]
Pour reprsenter la surface du globe sur une carte plane, et pour
avoir des positions en
fonction de coordonnes plus simples utiliser que les donnes
angulaires
(latitude/longitude) il faut passer par une projection. Une
carte est donc toujours une
prsentation dforme de la ralit car la carte ainsi obtenue
reprsente la surface de la
Terre dans une grille rectangulaire, les coordonnes sont appele
easting (x) et
northing (y). Cette transformation n'est pas triviale puisque la
sphre n'est pas une
surface dveloppable. En d'autres termes on ne peut pas
transformer une surface
sphrique en un plan sans tirer et/ou contracter certaines
rgions.
Il existe de trs nombreuses projections, que l'on peut classer
en trois catgories (voir
-
Gnralits sur les techniques de positionnement et le GPS
23
annexe B) :
Projection conique.
Projection cylindrique.
Projection plane
Figure nII.6: Principales surfaces de projection, cne, cylindre,
plan [20]
d. La triangulation [MEJ et VAN 10]
Son principe repose sur la mesure de la distance entre le
satellite et le rcepteur. Sachant
que le satellite a une position bien dfinie dans un espace trois
dimensions, lensemble
des points possibles o pourrait se situer lutilisateur du GPS
est la sphre imaginaire
avec un rayon gal la distance du rayon de satellites.
Figure n II. 7: Diagramme de sphre [14]
Lintervention dun deuxime satellite qui connait la distance qui
le spare du rcepteur
GPS cre un cercle qui reprsente lintersection des deux sphres et
regroupe toutes les
positions que peut avoir le rcepteur GPS.
Figure nII.8: intersection de deux sphres [14]
-
Gnralits sur les techniques de positionnement et le GPS
24
Deux satellites ne suffisent pas pour obtenir une bonne
prcision, alors on se sert dun
troisime. Lintersection des trois sphres dfinit deux points
possibles. Dans le cas o
lutilisateur se situe sur la surface de la Terre seul un des
deux points est cohrent.
L'un deux se dplace trs rapidement donc il est limin au profit
du second qui est li
la vitesse de dplacement du rcepteur. Ainsi on peut dduire sa
position exacte.
Figure nII.9 : la triangulation [14]
Donc : en thorie trois satellites suffisent pour connatre la
position exacte dun point sur
Terre. Pourtant, nous verrons quen pratique il en faut quatre,
ce quatrime servira pour
lobtention dune meilleure prcision du temps.
e. La mesure de la distance
Connaitre exactement la distance sparant le satellite du
rcepteur est l'hypothse sur
laquelle reposait toute la dmonstration prcdente, son calcul se
fait grce la
formule suivante :
Distance = vitesse * temps
i. Calcul du temps [MEJ et VAN 10]
Cela ncessite une manipulation : le satellite et le rcepteur
mettent tous deux au
mme instant le code pseudo alatoire. Le rcepteur retarde le dbut
de son
mission jusqu' ce que son signal soit en phase avec celui
provenant du satellite.
La valeur de ce retard est ainsi le temps mis par le signal pour
se propager du
satellite jusqu' l'utilisateur.
ii. Calcul de la vitesse [MEJ et VAN 10]
La vitesse de la transmission du signal est proche de la vitesse
de la lumire, ce qui
est de 300 000 km / s.
Nous avons, le temps et la vitesse, donc on peut calculer la
distance avec la formule
prcdente.
-
Gnralits sur les techniques de positionnement et le GPS
25
f. Le positionnement des satellites [MEJ et VAN 10]
Pour calculer prcisment la distance sparant un satellite du
point dterminer, il faut que
ce dernier connaisse parfaitement sa position dans lespace. Donc
afin dobtenir un
positionnement exact et parfait, il faut rgler ce dtail (la
position des satellites). Ce
rglage est pris en charge par les stations de contrle. En effet,
le satellite renvoie sa
position thorique la station qui calcule alors lerreur de
positionnement commise par ce
dernier et la lui renvoie pour quil la prenne en compte lors de
ses calculs.
g. Les erreurs de positionnement [ELR 04]
Lun des facteurs importants quon doit prendre en compte lors du
choix dune
technique de positionnement est la prcision qui peut tre
atteinte par celle-ci.
Certes le GPS nous donne une trs bonne prcision qui peut aller
jusqu un mtre.
Cependant, des erreurs peuvent introduire des inexactitudes dans
la position finale.
Effectivement, la mesure de la distances entre le rcepteur et
les satellites est entache
d'erreurs (systmatiques et alatoires), leur origine est de trois
types : erreurs dues aux
satellites (trajectoire, horloge) erreurs dues au rcepteur
(horloge, bruit lectronique,
chemins multiples, variation du centre de phase de l'antenne) et
finalement les erreurs
engendres par la transmission du signal (ionosphre, troposphre).
Un certain nombre
de ces erreurs peut tre compens ou modlis afin de les corriger,
ceci dpend du type
de rcepteur et du mode de mesure.
II.3.5-Les rcepteurs GPS [21] Un rcepteur GPS doit dtecter et
convertir en mesures utiles les signaux transmis de tous les
satellites. Pendant la propagation des signaux, une perte dans
la force de signal se produit et
c'est pour cette raison que les proprits de spectre et de
corrlation de diffusion des signaux
sont exiges.
Les rcepteurs GPS peuvent, selon leur architecture, tre sous
diviss en trois catgories
(voir annexe C) :
Les rcepteurs multicanaux.
Les rcepteurs squentiels.
Les rcepteurs multiplex.
Les rcepteurs multiplex et les rcepteurs squentiels tlchargent
le message de navigation
dune manire asynchrone pour chaque satellite. Cest pourquoi le
calcul de position demande
plus de temps.
-
Gnralits sur les techniques de positionnement et le GPS
26
II.4-Prcision On peut accrotre la prcision du GPS, en faisant
intervenir les techniques damlioration :
CARRIER PHASE, WAAS (Wide Area Augmentation System) et DGPS
cette dernire est la
plus utilise.
II.4.1-Le DGPS [ELR 04]
a. Dfinition du GPS diffrentiel
Le GPS diffrentiel en anglais Differential Global Positioning
System : DGPS
permet damliorer considrablement la prcision des positions
quobtiennent les
exploitants de petits btiments partir de leurs rcepteurs GPS. Sa
prcision peut
atteindre les 10 mtres en nutilisant que les signaux du service
de positionnement
standard.
b. Fonctionnement du DGPS
Le rcepteur GPS de la station de rfrence DGPS mesure les signaux
de tous les
satellites en vue. Comme cette dernire est installe le long dune
voie navigable
ctire dans une position fixe dont on connat avec prcision les
coordonnes, elle est
capable de rsoudre lquation du temps de parcours rel et du temps
de parcours
thorique de chaque signal des satellites. Alors elle peut
dterminer nimporte quelle
erreur temporelle puis elle transmet les corrections effectuer
tous les satellites en
vue. Le rcepteur embarqu ne prend en compte que les corrections
applicables aux
satellites quil utilise pour la solution de navigation
II.5-Les inconvnients de la navigation GPS Il y'a beaucoup de
facteurs qui limiteront et influenceront les rsultats d'un systme
de
navigation automobile bas seulement sur la technologie GPS, les
plus importants sont :
En raison des difices et des gratte-ciel denses, rues btisses se
trouvant dans le
centre-ville, font en sorte que les signaux du GPS deviennent si
faibles ce qui
gnre des erreurs lors du calcul de la position trop grandes pour
tre tolres.
Les effets multi-trajet des signaux GPS sont trs graves dans les
zones urbaines
cites ci-dessus, et peuvent provoquer une erreur computative
lors du
positionnement parfois, ces erreurs peuvent tre extrmement
large.
Sur les carrefours, les tunnels et passages souterrains, les
signaux GPS sont trop
faibles pour tre reus ou mme aucun signal ne peut tre reu.
Les facteurs ci-dessus rendent le systme GPS du vhicule
incapable de fournir en continu
des informations de positionnement [Qin et al 04].
-
Gnralits sur les techniques de positionnement et le GPS
27
II.6-Approches Afin de mettre fin la mauvaise rception GPS en
milieu urbain plusieurs approches ont t
proposes et voici les plus pertinentes [Qin et al 04] :
Le GPS peut tre amlior en augmentant le nombre de satellites
visibles. Pour
se faire le Russe Global Navigation Satellite System (GLONASS)
est utilis en
offrant plus de satellites en vue et donc, augmenter la
disponibilit des satellites.
Ceci est ralisable grce aux rcepteurs GPS avance qui peuvent
recevoir plus
de 8 satellites diffrents au mme temps et ainsi amliorer la
rception GPS en
milieu urbain.
En trouvant une solution limite (contrainte). Par exemple dans
la navigation
automobile l'altitude change lentement donc elle est considre
comme tant
une constante et est suppose tre connue.
En intgrant le GPS avec des capteurs (utilisation du
dead-rocking) tels que les
systmes de navigation inertielle (INS) et des codeurs qui
peuvent fournir des
informations en continu mais cela nest possible que dans le cas
o le systme
de navigation est embarqu.
L'utilisation du filtre de Kalman apporte aussi une solution ce
problme
l'aide de la modlisation dynamique du systme. En effet
l'utilisation du filtre
exige une mise jour continue dans le temps et permis ainsi de
dterminer la
position du vhicule mme si aucune mesure de pseudo-position
n'est
disponible. (Voir annexe D)
Une nouvelle approche a t ajoute par Youjing Cui et Shuzhi Sam
dans leurs
travaux en 2003 [SHU et CUI 03]. Cette approche est une autre
solution
restreinte. Plus prcisment elle propose de modliser
approximativement le
chemin du vhicule en des pices de courbes comme des lignes
droites, des
arcs, polynmes et ainsi de suite. comme le vhicule se dplace
dans un milieu
urbain, son chemin est toujours limit un certain segment de la
route.
En modlisant approximativement le chemin du vhicule en une
ligne
ressemblant la route connue par consquent moins de satellites
GPS sont
ncessaires pour obtenir les informations concernant le
positionnement. En
effet, le nombre minimum de satellites ncessaires diminue deux
au lieu de
quatre.
-
Gnralits sur les techniques de positionnement et le GPS
28
II.7-Conclusion
travers ce chapitre, on a tent de comprendre les diffrentes
techniques utilises dans
le positionnement et plus prcisment le GPS qui daprs notre tude
se trouve tre la
technique la plus approprie pour un systme de navigation routier
mobile.
Comme nous avons abord aussi les diffrentes notions relies au
positionnement
telle que les systmes de coordonnes, les erreurs de
positionnement et les approches
utilise pour lamlioration des ces erreurs etc.
Aprs le positionnement vient la deuxime composante principale
dun systme de
navigation routier par GPS, et qui est la guidance en dautre
termes la planification
ditinraires et celle-ci sera tudie en dtail dans le chapitre qui
suit.
A
-
Etude sur les systmes de guidance
Chapitre III
Etude sur les systmes de guidance
-
Etude sur les systmes de guidance
30
III.1-Introduction prs avoir dtermin la position du vhicule sur
le rseau routier, reste la
dtermination de litinraire le plus optimis et lorientation du
conducteur. En
gnral, ces tches sont remplies par le systme de guidance. Ce
dernier est lune des
composantes les plus importantes dun systme de navigation [FLI
04], On lui
consacrera la suite de notre tude.
Dans la suite de ce chapitre nous nous concentrerons sur la
fonction de base des systmes de
guidance savoir la planification ditinraire et le calcul du
chemin optimal. Effectivement,
ce chapitre portera sur la modlisation du problme et la
recherche du chemin optimal, le
critre doptimisation est dtermin selon le choix de
lutilisateur.
En gnral, les systmes de navigation automobile fournissent la
possibilit de choisir parmi
diffrents critres d'optimisation ou diffrentes fonctions de cot.
En effet, le conducteur peut
choisir entre la planification de litinraire le plus rapide ou
le plus court, litinraire le plus
rapide en donnant la prfrence aux autoroutes et litinraire le
plus rapide en ngligeant les
autoroutes. De plus, des options pour viter les routes page ou
les ferries peuvent tre
disponibles. Un autre aspect de la vie relle qui influence la
qualit d'un itinraire prvu, est la
prsence de bouchons de circulation sur l'itinraire prsent. Les
informations du trafic,
savoir sur les embouteillages, travaux routiers et les
conditions routires par exemple, sont
reus par RDS-TMC (Radio Data System - Traffic Message Channel),
ou par un tlphone
GSM connect.
III.2-Formulation du problme Un systme de navigation automobile
utilise des cartes contenant des milliers de rseaux
routiers (une reprsentation graphique ventuellement tiquete
pondre de toutes les rues et
passages). Cela signifie quun systme de navigation automobile
doit tre capable de planifier
des itinraires sur les rseaux routiers qui contiennent des
millions de segments de route et
cette planification ne doit prendre que quelques secondes.
Une fois que le conducteur a introduit sa destination et le
systme a dtermin la position de
la voiture, un itinraire est planifi de cette position-l la
destination souhaite. Lors de la
planification de cette route, des donnes doivent tre rcupres de
la base de donnes
plusieurs reprises, en raison de la capacit limite de la mmoire
interne, qui est