Embed Size (px)
Citation preview

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
78
5. Comportement de l’interface pendant le glissement global de la fibre
5.1 Introduction5.2 Résultats expérimentaux : Description et Analyse5.2.1 Comportement sous premier chargement5.2.2 Caractéristiques d’une saccade5.2.3 Origines du glissement saccadé
5.2.3.1 Conditions du glissement saccadé5.2.3.2 Instabilité due à la rupture du contact : système SCS-6/Pyrex5.2.3.3 Instabilité due à la microgéométrie du
contact : système Sigma/Pyrex5.2.4 Crochet de repositionnement
5.2.4.1 Caractéristiques5.2.4.2 Relation avec les instabilités
5.2.5 Influence du glissement saccadé sur le glissement stationnaire subséquent5.2.6 Dégradation de l’interface sous glissement saccadé et stationnaire
5.2.6.1 Cas de la fibre SCS-65.2.6.2 Cas de la fibre Sigma
5.2.7 Cas du système SiC Sigma/PMMA5.2.8 Cas du système SiC SCS-2/Al 60615.3 Conclusion
5.1 IntroductionIl est actuellement admis que le déplacement relatif de la fibre par rapport à la
matrice, se ramène aux interactions mécaniques et physico-chimiques des micro-géométriesdes surfaces. Ces dernières sont créées par le passage de la fissure de décohésion à l’interface.Comme il a été déjà évoqué auparavant, le frottement de la fibre représente la deuxièmecontribution directe à la dissipation de l’énergie de fissuration de la matrice, après ladécohésion de l’interface. Le frottement, dans un cadre global, est un phénomène physiqueimportant. Il régit le contact des matériaux subissants des mouvements relatifs. Le frottementest une propriété typique du système considéré comprenant les différents corps et la naturedes sollicitations. Il dépend des propriétés intrinsèques des matériaux, des caractéristiquesmorphologiques des contrefaces, des sollicitations mécaniques et de la présence d’untroisième corps. Les systèmes composites considérés dans cette étude (Chapitre 4) sont denature fragile et leurs propriétés mécaniques sont issues du choix des combinaisonsfibre/matrice. Ce choix est lui-même dicté, en premier lieu, par la condition de déviation defissures à l’interface rapportée dans le Chapitre 3 et, en second lieu, pour des raisons deconduite et d’analyse des essais micromécaniques énumérées dans le Chapitre 4.
Dans le cas général et pour la plupart des processus de formation de surface (parexemple, rupture des solides, solidification des liquides), la rugosité résiduelle persiste surplusieurs échelles de longueur. Cela conduit à une géométrie de contact entre ces surfaces trèscomplexe (Majumdar et al. (1991),Warren et Krajcinovic (1995)).

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
79
Le système monofilamentaire présente deux particularités, du point de vue du frottement, quijustifient une approche du contact à l’échelle de l’ancrage des aspérités :
- Les deux surfaces (fibre et matrice) sont ″miroir″ l’une de l’autre, du fait du procédéd’élaboration en phase visqueuse qui fait que la matrice épouse la forme de la fibre. Commece sera détaillé par la suite, cette particularité de géométrie initiale de contact sera à l’originede la mise en évidence d’un phénomène de repositionnement de surfaces lors des essais deréimpression (Jero et Kerans (1990)).- Du fait de la géométrie du système composite, la condition limite à l’interface n’est pas unepression constante comme c’est le cas pour la plupart des essais de frottement classiques, maisune distance constante des deux massifs que constituent la fibre et la matrice.
On considère tout d’abord les aspects importants tirés de la formulation des lois dufrottement sec de deux solides (Figure 5.1). Les lois de Coulomb, introduites ci-après, sontdûment restées empiriques. Elles sont basées sur le contact apparent des solides. Ces lois ontété interprétées, par la suite, par un modèle d’adhésion de Bowden et Tabor (1950). Cemodèle est basé sur le contact effectif (réel) de ces solides. Ce dernier est une faible fractiondu contact apparent, à cause des rugosités des surfaces à l’échelle microscopique.
Loi de CoulombLa Figure 5.1 représente le contact entre deux blocs solides, pressés l’un contre
l’autre avec une force normale PN et RN étant sa réaction. L’effort tangentiel PT est parallèle
à l’interface des deux solides. Il est équilibré par la force de frottement PF qui résiste au
mouvement relatif des solides 1 et 2 via leur contact.
PN
RNPF
PTSolide 1
Solide 2
Figure 5.1 Equilibre des forces entre deux solides (1 et 2) soumis à un effort normal PN et un effort
tangentiel PT .
Initialement l’effort tangentiel PT croit avec le temps jusqu’à ce qu’une valeur
maximale de l’effort de frottement PTmax sera atteinte, (Figure 5.2a). Pendant cette période, la
vitesse relative V des deux solides est nulle (ou très faible). Ce phénomène est nommé
″frottement statique″. Lorsque PT croit encore, l’effort de frottement excède PFmax. Dans ce
cas, la vitesse relative au niveau du contact croit de zéro (ou une valeur très faible) jusqu’à

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
80
une valeur qui correspond à la phase du glissement constant. Ceci s’effectue pendant unecourte phase d’accélération. Pendant ce temps, l’effort tangentiel chute à une valeur constante
PTdyn. Ce phénomène est connu sous le nom du ″frottement dynamique″.
temps temps
PT
PTmax
PTdyn
t1 t2 t1 t2
V
Phased'accélération
(a) (b)
Figure 5.2 Evolution de l’effort tangentiel (a) et de la vitesse relative (b) en fonction du temps.
Les expériences de Coulomb ont prouvé que l’effort maximal du frottement statique,au moment du mouvement, est directement proportionnel (en première approximation) àl’effort normal agissant sur le contact, mais qu’il ne dépend pas des dimensions de l’aire du
contact. Ainsi, le coefficient du frottement µs peut être défini comme :
µsT
N
P
P=
max
(5.1)
Le contact entre les deux solides reste adhérent (″stick″) tant que la condition P PT s N< µ est
vérifiée. Dans le cas du glissement, un effort de frottement constant agit à l’encontre del’effort tangentiel appliqué. Sa valeur est aussi directement proportionnelle à l’effort normalappliqué, indépendamment de l’aire de contact. Cependant le coefficient de frottement
dynamique, µd , peut être défini par :
µdTdyn
N
P
P= (5.2)
Pendant la phase de glissement, l’effort tangentiel appliqué doit être remplacé par µd NP .
Souvent µ µd s< , car cette phase de glissement intervient après la fin de la phase
d’adhérence, suite à des événements qui interviennent au niveau du contact des deux solides.Ils peuvent être à l’origine : de rupture des aspérités, de fluage et de plastification des zonesd’adhérence ou à des interactions physico-chimiques (Heslot et al. (1994), Dieterich etKilgore (1994), Berman (1996)).

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
81
Au cours des sollicitations mécaniques sur la fibre, on s’attachera à distinguer lesfaibles glissements de la fibre (inférieurs à la demi-période caractéristique des aspérités à
l’interface (λ/2)). Par analogie à la configuration de la Figure 5.1, ceci équivaut à la phased’adhérence caractérisée par le coefficient de frottement statique. C’est typiquement le casdans l’essai d’impression (Figure 3.1b) qui sera traité dans le Chapitre 6.
Le cas des glissements sur de plus grandes distances sera caractérisé par ledéplacement global de la fibre, au cours des sollicitations d’impression. Cela est analogue à laphase de glissement des solides (1 et 2) dans la Figure 5.1.
Dans la suite, les principales caractéristiques du comportement de l’interface, lorsquela fibre glisse globalement par rapport à la matrice, seront présentées en fonction : dessystèmes composites sollicités, de la rigidité du dispositif d’essai et des sollicitationsmécaniques appliquées.
5.2 Résultats expérimentaux : Description et AnalyseLes résultats, analysés ici, sont typiquement relatifs à des essais effectués sur des
éprouvettes dans lesquelles la fibre glisse dans sa totalité (expression ou push-out). Lorsquel’épaisseur de l’éprouvette est omise, ceci sous-entend qu’elle est de l’ordre du millimètre.Cette épaisseur est optimisée par rapport aux contraintes rencontrées lors de l’usinaged’éprouvettes plus minces et à la distance optimale d’enfoncement du poussoir pendant lesessais.
5.2.1 Comportement sous premier chargementLa Figure 5.3a représente les courbes d’expression dans le cas du système SCS-
6/Pyrex pour des épaisseurs voisines (≈ 1 mm). De haut en bas, la raideur du système estaugmentée de la valeur Kréel = 32 N/mm jusqu'à 725 N/mm. Toutes les courbes représentées,présentent une première phase, étendue sur une distance < 20 µm où l’effort d’impressionaugmente graduellement avec des irrégularités douces et une concavité vers le haut. Cetteconcavité est dûe à la mise en place progressive de l’échantillon sur son support. Pendantcette phase, la décohésion de la fibre progresse à mesure que l’effort d’impression s’accroît.En fait, au moment où la fibre est complètement désolidarisée de la matrice, cet effort chutebrutalement. Cette chute est accompagnée d’un accroissement du déplacement du poussoir(cf. Crochet sur la courbe, Figure 5.4), puis, à nouveau l’effort continue de croître. Celaprovient du fait, que lorsque les liaisons à l’interface sont rompues, les aspérités commencentà s’interpénétrer. Cela explique l’augmentation de force observée après ce crochet.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
82
0
4
8
12
16
0 40 80 120 160
H = 3,13 mmK(réel) = 94N/mm
(b)
0
1
2
0 20 40 60 80
Effort (N) H = 0,64 mmK(réel) = 94N/mm
0
1
2
3
4
0 20 40 60 80
H = 1 mmK(réel) = 94N/mm
0
1
23
4
5
0 20 40 60 80
H = 1,21 mmK(réel) = 94N/mm
0
2
4
6
0 20 40 60 80 100
H = 1,48 mmK(réel) = 94N/mm
0
2
4
6
8
0 20 40 60 80 100 120 140
H = 2,08 mmK(réel) = 94N/mm
Déplacement (µm)
0
1
2
3
4
0 20 40 60 80
H = 0,95 mmK(réel) = 725 N/mm
0
1
2
3
4
0 20 40 60 80
H = 0,94 mmK(réel) = 290N/mm
0
1
2
3
4
0 20 40 60 80
H = 1 mmK(réel) = 94N/mm
(a)
0
1
2
3
4
0 20 40 60 80
H = 0,99 mmK(réel) = 480N/mm
0
1
2
3
4
0 20 40 60 80
H = 0,95 mmK(réel) = 590N/mm
0
1
2
3
4
0 20 40 60 80 100 120
Effort (N) H = 1,07 mmK(réel) = 32N/mm
Déplacement (µm)
Figure 5.3 Essais d’expression sur des systèmes SiC SCS-6/Pyrex, la valeur exacte de l’épaisseur dechaque éprouvette est rapportée sur chaque courbe : (a) la raideur du dispositif est augmentée du hautvers le bas, elle est également rapportée sur chaque courbe ; (b) l’épaisseur de l’éprouvette estaugmentée du haut vers le bas, et la raideur Kréel = 94 N/mm est la même pour chaque essai.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
83
Les observations vidéos de l’interface fibre/matrice, pendant l’essai d’expression,révèlent la formation d’un liseré à l’interface qui témoigne de la progression de la décohésionle long de la fibre. On signale, toutefois, que le crochet de décohésion totale de la fibre n’estpas systématiquement observé dans tous les essais. Cela est probablement dû à la variation dela cinétique de décohésion à l’interface, qui peut provenir des éprouvettes elles-mêmes ou desconditions d’essais (différentes raideurs).
La phase, qui suit le crochet de décohésion, est caractérisée par l’accroissement de l’effortsuivi d’une décroissance progressive (Figure 5.4). Cette phase s’apparente à la situationmontrée sur la Figure 5.2 (phase d’adhérence), dans laquelle c’est le frottement statique quirégit le contact entre les deux surfaces.
2
2,5
3
3,5
4
10 12 14 16 18 20
Déplacement (µm)
Effo
rt (
N)
H = 0,95 mmK(réel) = 725 N/mm
Figure 5.4 Représentation agrandie du crochet correspondant à la décohésion totale de la fibre pendantles premiers instants de l’essais d’expression. Cette courbe est représentée en entier sur la Figure 5.3a(dernière courbe en bas).
L’effort maximal, visible sur toutes les courbes d’expression, correspond au début duglissement global de la fibre. Cependant, le profil de ce glissement diffère d’une courbe àl’autre.
Notons tout d’abord l’aspect saccadé de ce profil. Une saccade correspond à la chute brutalede l’effort suivi d’une remise en charge de la fibre ; c’est une succession de phases statiques etdynamiques. Pour mieux décrire une saccade, la Figure 5.5 représente une courbe de l’effortd’expression en fonction du temps (représentation temporelle). Du fait que la chute est rapide(de l’ordre de 0,1 s) pendant les phases dynamiques (ou phases d’instabilités), celles-cicorrespondent aux positions des discontinuités sur cette courbe. Les phases d’adhérences,représentées par des segments de droite, ont la même pente mais une hauteur qui diminue enfonction de l’accroissement du glissement global de la fibre. Ces phases seront caractérisées
par un temps statique ∆tstick et une largeur statique correspondante ∆δstick.
Crochet de décohésiontotale de la fibre

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
84
0
1
2
3
4
0 20 40 60 80
Temps (s)
Effo
rt (
N)
H = 0,94 mmK(réel) = 290N/mm
∆tstick
Figure 5.5 Représentation temporelle de l’effort d’expression. La même courbe est représentée enfonction du déplacement du poussoir sur la Figure 5.3a (troisième courbe).
Pendant la phase d’instabilité, le déplacement de la fibre est important. Il estproportionnel à la raideur réelle du dispositif. Ce déplacement est bien visible, sur les courbesreprésentées en fonction du déplacement du poussoir (voir Figure 5.3a), comparé à celuimesuré en phase d’adhésion qui est très faible. Ce déplacement est nommé distance
dynamique (ou instable) ∆δslip de la saccade. On définit, cependant, la largeur d’une saccade
∆δsaccade comme étant la somme des distances statique et dynamique.
Sur la Figure 5.3, cette largeur ∆δsaccade diminue au fur et à mesure que la raideur dusystème augmente. Le glissement saccadé tend à disparaître pour devenir stationnaire lorsquela raideur dépasse une valeur critique, dans ce cas 725 N/mm.Dans le cas d’une faible raideur, pour laquelle le glissement est saccadé, on constate que ledéplacement instable est d’autant plus grand que l’épaisseur de l’éprouvette est grande. Larelation entre ces deux grandeurs est sensiblement linéaire.Dans le cas d’une plus forte raideur, une éprouvette de faible épaisseur donne un glissementstationnaire, alors qu’une éprouvette plus épaisse donne un glissement saccadé.Rausch et al. (1992) ont rapporté un résultat identique, obtenu sur deux éprouvettesd’épaisseurs respectivement 0,42 et 1,16 µm, (Figure 5.6). Le comportement au glissement del’interface présente la même tendance, c’est-à-dire il tend a être saccadé lorsque l’épaisseuraugmente.
Déplacement du poussoir (µm) Déplacement du poussoir (µm)
Eff
ort
(N
)
Eff
ort
(N
)
(a) (b)
Figure 5.6 Essais d’expression (d’après Rausch et al. (1992)) sur des systèmes SiC SCS-6/Pyrex : (a)épaisseur 0,42 mm, (b) épaisseur 1,16 mm.5.2.2 Caractéristiques d’une saccade

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
85
Indépendamment des conditions d’apparition de l’instabilité, l’aire hachurée sur laFigure 5.7a représente la variation de l’énergie totale associée au système ; suite au passagede l’effort d’une position extrême maximale (a), à une position extrême minimale (b).
0
1
2
3
4
5
0 20 40 60 80
H = 1,21 mmK(réel) = 94 N/mm
Wélast.
a
b
c
Déplacement (µm)
Effo
rt (
N)
∆δslip ∆δstick
(a)
0
0,5
1
1,5
2
2,5
0 10 20 30
∆δ slip (µm)
P (
N)
H = 950 mmK (réel) = 94 N/mmPente = 92,4 N/mm (∆P/∆δ slip )
(b)
Figure 5.7 (a) Essais d’expression sur le système SiC SCS-6/Pyrex. L’aire sous la courbe représentel’énergie élastique libérée pendant une saccade. ∆δslip et ∆δstick représentent respectivement lesdistances de la phase d’instabilité et de la phase d’adhérence d’une saccade. (b) Evolution de ladifférence entre la valeur maximale et minimale de l’effort d’impression en fonction de la distance desphases instables ∆δslip pendant un essai d'impression. L’essai est effectué sur un système SiC SCS-6/Pyrex avec Kréel = 94 N/mm.
L’énergie libérée W W Wé last é lasta
é lastb
. . .= − provient de celle emmagasinée dans les
éléments élastiques du système (cf. Figure 4.11c). Pour s’assurer de l’origine de cette énergie
dans nos essais, on détermine la valeur du rapport ∆ ∆δPa b slip, pour toutes les saccades dans
un essai d’expression (∆Pa b, est la différence entre les efforts aux points a et b sur la Figure
5.7a). La pente de la courbe, représentée sur la Figure 5.7b, donne en principe la valeur de cerapport. Dans ce cas d’essai, effectué sous une raideur Kréel = 94 N/mm, elle est de l’ordre de92,4 N/mm. On constate bien, que ces deux valeurs sont très proches. L’énergie mise en jeuprovient bien de la relaxation du système élastique qui agit sur la fibre. Cela veut dire que lafibre glisse librement et que le système en force-déplacement est uniquement contrôlé par la
force motrice imposée par le ″ressort″ de raideur Kréel (cf. Figure 5.10).
En termes d’efforts d’expression, l’énergie élastique peut aussi s’écrire alors sous la formesuivante, Targ (1966) :

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
86
WP P
Kélasta b
réel. =
−2 2
2(5.3)
où Pa et Pb sont les efforts maximal et minimal, pendant la phase d’instabilité, représentés
sur la Figure 5.7a à la position a et b respectivement. Cette énergie est proportionnelle à ladifférence des carrés des efforts extrêmes de la saccade et inversement proportionnelle à laraideur Kréel du dispositif. Cette dernière remarque confirme la diminution de l’aire (liée à laphase instable) des saccades, dans la Figure 5.3a, lorsque la raideur du dispositif estaugmentée.L’effort d’expression dans le cas du système SCS-6/Pyrex, dépend de façon exponentielle del’épaisseur des éprouvettes, (voir Chapitre 4, Figure 4.8). Dans l’équation (3.26), l’expressionanalytique de cet effort est donnée en fonction de l’épaisseur h de l’éprouvette ; la différence
( )P Pa b2 2− peut donc être remplacée ici par :
[ ][ ]P P P e e e e e ea bh ha b a b2 2 2− = − + −− − − − −*2 ζδ ζδ ζδ ζδ ζ ζ (5.4)
On remarque que cette différence dépend de façon exponentielle de l’épaisseur de
l’éprouvette, d’une part, et des déplacements extrêmes δa et δb de la fibre pendant la saccade
d’une autre part. Ces deux remarques suggèrent que la variation de l’énergie élastique, liée ausystème, est proportionnelle : (1) à l’épaisseur des éprouvettes, ce qui expliquel’augmentation de l’aire liée à la phase instable (∆δslip) dans la Figure 5.3b, et (2) à la positionrespective de la fibre par rapport à la matrice, ce qui est confirmé par la diminution de cetteaire des saccades sur le même profil d’expression dans tous les essais. En effet, pendantl’expression la longueur de la fibre en contact diminue.
La Figure 5.8 représente l’évolution des efforts maximal Pa et minimal Pb , de la phase
d’instabilité d’une saccade, en fonction de l’épaisseur des éprouvettes. Les contraintes defrottement associées à ces efforts, sont calculées par identification des donnéesexpérimentales (Figure 5.8) par le modèle de glissement donné par l’équation (3.26)1. Enpremière approximation, il apparaît que le glissement saccadé peut-être décrit par deux
cisaillements effectifs extrêmes : (i) τa qui est associé à un glissement lent qui opère pendant
le chargement qui précède l’instabilité, et (ii) τb qui est lié plus ou moins directement auglissement rapide (de l’ordre de quelques centaine de µm/s).
1 La procédure de calcul est la même que celle utilisée pour la mesure de la contrainte de frottement dans lessystèmes SCS-6/SC et SCS-6/Pyrex (voir section 4.4.4).

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
87
0
5
10
15
20
25
0 1 2 3 4Epaisseur des éprouvettes (mm)
Effo
rt d
e gl
isse
men
t (N
)
Pb
Pa
K = 94 N/mmSCS-6/Pyrex
τb = 2,94 MPaτa = 7,45 MPa
Figure 5.8 Evolution de l’effort maximal Pa et de l’effort minimal Pb (qui délimitent la phased’instabilité d’une saccade, Figure 5.7a) en fonction de l’épaisseur des éprouvettes. Les essais sonteffectués sous une raideur réelle de 94 N/mm.
5.2.3 Origines du glissement saccadéDans le cas général, le glissement saccadé d’un corps par rapport à un autre est plus
connu sous la dénomination de ″stick-slip″. L’expérience montre que ce type de glissementpeut avoir un aspect régulier (répétitif ou périodique) ou un aspect irrégulier (erratique ouintermittent). En terme de force de frottement, qui agit entre ces solides, la conditionsuffisante qui cause le glissement saccadé se présente lorsque : l’effort maximal dans la phase
statique, nécessaire pour amorcer le glissement (PTmax dans l’équation 5.1), est plus grand que
l’effort dans la phase dynamique (PTdyn dans l’équation 5.2).
De part son importance technologique, le phénomène de ″stick-slip″ est depuislongtemps sujet de nombreux travaux (Rabinowicz (1965), Person et al. (1996), Gao et al.(1994) et Heslot et al. (1994)). Berman et al. (1996) ont passé en revue les différentsparamètres physiques qui sont pris en compte dans la modélisation de ce phénomène. Ils ontinsisté sur le fait que, l’influence de tels ou tels paramètres reste spécifique à la classe desmatériaux en interaction.
Du point de vue de la propagation de fissure et de glissement relatif à l’interfacefibre/matrice, le phénomène du stick-slip peut avoir lieu même pendant la phase dedécohésion progressive de la fibre (correspondant à la phase d’adhésion). Ceci a été mis enévidence, par Mumm et Faber (1995), dans les essais de déchaussement sur les systèmescomposites monofilamentaires SCS-6/Pyrex et SCS-9A/Pyrex.
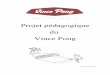
La Figure 5.9 représente le profil de l’effort de déchaussement de la fibre en fonctionde l’ouverture de la fissure matricielle. L’éprouvette, en composite SCS-6/Pyrex, a la formeindiquée sur la Figure 3.1a2 (Chapitre 3). Dans cet essai, la décohésion de la fibre estprogressive. On constate la présence de saccades (décrochements) sur les profils dechargement et de déchargement, qui sont représentés en fonction de l’ouverture de la fissurematricielle (COD). Il est à noter que, dans ce cas, la longueur de fibre décollée est de l’ordre

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
88
de 5 mm. Les profils représentés en bas de la Figure 5.9, sont des agrandissements des zones(a), (b), (c) et (d) du profil principal. On constate clairement que l’amplitude des saccades(profils a et d) croit avec l’augmentation de l’ouverture de la fissure matricielle (donc de lalongueur de décohésion de la fibre). Cette situation est analogue au comportement de notresystème dans les essais d’expression en fonction de l’épaisseur h des éprouvettes (cf. Figure5.3b et 5.8). Pendant l’essai de déchaussement, la raideur du dispositif étant contrôlée par laréponse élastique de la longueur de fibre décollée de la matrice. Nous observons, également,lors de la décharge (profil b), des points de décrochement vers le haut. Cela confirme laprésence de deux contraintes de cisaillement interfacial extrêmes (Figure 5.8).
Figure 5.9 Essai de déchaussement (d’après Mumm et Faber (1995)) sur le système SiC SCS-6/Pyrex(l’éprouvette ayant une forme semblable à celle représentée sur la Figure 3.1a2) : le chargementmonotone conduisant à la décohésion progressive à l’interface, ainsi que deux cycles chargement-déchargement, sont représentés sur la figure principale (en haut) en fonction de l’ouverture de lafissure matricielle (COD). Les quatre figures (en bas), représentent un agrandissement des zones (a)(b) (c) et (d) sur la courbe principale.
Sur le profil (c), l’amplitude des décrochements est réduite considérablement. Cette situationest liée à une dégradation à l’interface, qui sera analysée dans la partie 5.2.3.2.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
89
5.2.3.1 Conditions du glissement saccadéLe glissement saccadé, ou phénomène du stick-slip, peut être analysé par plusieurs
modèles. Ces derniers font intervenir plusieurs paramètres physiques : la dimension desaspérités, la vitesse relative des deux contrefaces, les différents temps de relaxation etd’autres. Berman et al. (1996) ont discuté des trois types de modèles du stick-slip les pluscommuns : (i) modèle basé sur un déplacement caractéristique Dc, (ii) modèle basé sur latopologie (morphologie) des surfaces en contact et (iii) modèle basé sur la vitesse.Parmi ces modèles, les deux premiers illustrent bien le cas du glissement global de la fibredans les essais d’expression. Cela à cause, d’une part, des variables physiques définissant cesmodèles qui sont compatibles avec celles de nos systèmes composites, et d’autre part, desévidences expérimentales qui seront illustrées par la suite.
Le premier modèle, décrit à l’origine par Rabinowicz (1958), prends en compte untemps caractéristique et une distance caractéristique. Cette distance de glissement Dc estnécessaire pour passer d’un état de contact à un autre, par exemple par des sauts de vitesse(Dieterich et Kilgore (1994)). On peut aussi considérer que Dc est la distance de glissementnécessaire pour rompre le contact. Sur cette base, Baumberger et al. (1994) et Heslot et al.(1994) ont analysé davantage ce phénomène du stick-slip, dans le cas du frottement de deuxsubstrats en papier (Bristol). Ces matériaux ont été choisis, car ils présentent uncomportement reproductible sous faible charge qui permet, essentiellement, d’analyser lesphases dynamiques du glissement saccadé.
Le second modèle basé sur la topologie des surfaces en contact, prévoit l’instabilité duglissement relatif de deux corps, lorsque l’intensité des interactions mécaniques, entre lesaspérités de ces surfaces, décroît brutalement pendant le glissement. Cela est lié à ladécroissance de la génératrice moyenne de contact entre les aspérités, (Rabinowicz (1965)).
Afin de pouvoir analyser les caractéristiques du glissement global de la fibre,indépendamment des mécanismes physiques, décrits dans les deux modèles présentés ci-dessus, nous introduisons tout d’abord une analyse plus générale. L’identification desmécanismes, qui sont propres à chaque système composite, permet de se situer par rapportaux phénomènes de rupture des contacts et des interactions basées sur la topographie dessurfaces pris en compte dans les deux modèles.
L’analyse suivante est basée sur le jeu d’influence entre la variation de la résistance, àl’interface du système sollicité, et de la rigidité du dispositif. Ceci est schématisé sur la Figure5.10.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
90
Kréel (x - x0 )
Pa
ττ
x0x
x
ττ ττ
Fibre Matrice
Figure 5.10 Modèle simplifié de l’essai d’expression et équilibre des forces sur la fibre et la matrice.
Cette analyse repose sur celle développée par Tománek et al. (1991). Elle traduit lesconditions du glissement d’une pointe d’un microscope à force atomique sur une surface. Lepotentiel d’interaction entre la pointe et la surface, est remplacé ici par un potentiel mécaniquequi intervient au niveau de l’interface fibre/matrice.
L’énergie totale du système Wtotale est la somme de l’énergie potentielle dans
l’éprouvette, à la position x, et l’énergie emmagasinée dans les éléments élastiques.
W P dx K x xtotale ax
x
ré el= + −∫0
1
2 02( ) (5.5)
Pa est l’effort d’expression sur la fibre (après décohésion totale) ; Il est transmis à la matrice
via la contrainte à l’interface. Il faut noter que cet effort Pa , est défini sur la Figure 5.10
comme étant l’effort intrinsèque au comportement du système frottant. Il ne doit pas êtreconfondu avec celui mesuré dans les essais.Pour un déplacement donnée du poussoir, une position d’équilibre de la fibre est obtenue parminimisation de l’énergie totale du système par rapport à la position x de l’extrémité de lafibre.
dW
dxP x K x xtotale
a réel= + − =( ) ( )0 0 (5.6)
ou encore :
K x x P xréel a( ) ( )− = −0 (5.7)
A cause de la faible vitesse d’essai, le système ci-dessus reste en équilibre de forcesentre l’effort d’expression (la résistance au glissement confinée dans l’éprouvette) et laréaction dans les éléments élastiques (la force motrice). La résolution graphique de l’équation
(5.7), consiste à confronter le profil de force P xa ( ) avec une droite de pente (-Kréel) sur une

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
91
distance (x-x0) (voir Figure 5.11). Si pour une position x et une raideur données, l’équation(5.7) admet une seule solution (correspondant à un point d’intersection entre les deuxcourbes), ceci se traduit physiquement par une position d’équilibre du système. Si par contreplusieurs solutions sont admises (correspondant à plusieurs points d’intersection), le systèmepeut passer d’une position d’équilibre à une autre ; c’est l’instabilité.
Notons, dans ces deux cas, que c’est l’évolution de la forme du profil P xa ( ) qui est
concernée. Ceci revient à comparer les entités suivantes en chaque position x :
• la chute de résistance donnée par −dP
dxa
• la raideur du ressort donnant la force motrice donnée par Kréel
La condition de transition entre la stabilité et l’instabilité de notre système peut être donnée
par une raideur critique Kcrit qui vérifie la condition suivante, pour la stabilité :
K KdP
dxréel crita≥ = − (5.8)
Cette raideur représente une limite inférieure pour laquelle le glissement de la fibre est stable(stationnaire) pendant l’essai. Cependant, s’il existe une position x pour laquelle la conditionsuivante est vérifiée, le système est instable :
KdP
dxré ela< − (5.9)
A partir des équations (5.8) et (5.9), on peut noter que le degré de stabilité du système,
dépend fortement de la discontinuité du rapport dP dxa (ou sévérité de la variation de la
contrainte de frottement τ).
Profil intrinsèque (résistance)
Kréel < Kcrit La force dans le "ressort"domine (instable)
Kcrit
Kréel > Kcrit La résistance domine(stable)
Pa(x)
(x-x0)
Figure 5.11 Résolution graphique de l’équation (5.7). Si Kréel < Kcrit (pente moins raide) il y a plusd’un point d’intersection entre Kréel et Pa(x), le système est instable. Si Kréel > Kcrit (pente plus raide) ily a qu’un seul point d’intersection entre Kréel et Pa(x), le système est stable.
Nous verrons plus loin, que cette variation de τ, est liée aux différentes évolutions del’interface dans les essais d’expression.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
92
Les origines physiques du glissement saccadé, pour chaque système compositemodèle, SCS-6/Pyrex et Sigma/Pyrex, seront discutées ci-après avec l’appui des constatationsexpérimentales qui ont été faites.Pa peut varier (dPa /dx) du fait d’effets géométriques sur l’interaction des aspérités, d’effets defluage ou de rupture des aspérités. Nous détaillons ces aspects pour les deux systèmes étudiés.
5.2.3.2 Instabilité due à la rupture du contact : système SCS-6/PyrexD’après les courbes d’expression présentées sur la Figure 5.3a, la raideur critique Kcrit
pendant l’essai d’expression, sur le système SiC SCS-6/Pyrex, se situe à environ 600 N/mm.Les Figures 5.12a et 5.12b montrent des exemples typiques de courbes force-déplacementobtenues lors de successions de cycles PO-PB.
Les deux séries de courbes sont relatives à une faible raideur (94 N/mm) et une forte
raideur (1150 N/mm) respectivement par rapport à Kcrit discutée ci-dessus. On constate un
glissement saccadé dans le premier cas, alors que le glissement est stationnaire dans le secondcas.
Le niveau de l’effort de glissement diminue graduellement à mesure que le glissementcumulé de la fibre augmente. Ceci constitue une première indication d’un processus dedégradation à l’interface. Sous la faible raideur, le glissement saccadé tend à disparaître pourdevenir stationnaire, ceci constitue une indication supplémentaire de la dégradation àl’interface.Enfin, on observe l’apparition d’un crochet de repositionnement au moment où la fibrereprend sa position d’origine (correspondant à l’origine du déplacement sur les courbes). Cephénomène sera analysé dans la section 5.3.4.
Pendant les interactions des aspérités à l’interface fibre/matrice, la rupture d’uncontact intervient, lorsque la contrainte du contact local approche la résistance à la rupture dumatériau. Dans le cas du système SiC SCS-6/Pyrex il semble que la rupture des contactsdégrade les aspérités de la matrice (voir section 5.3.6).
Du fait de cette dégradation interfaciale, la raideur critique de ce système varie. Celaest illustré expérimentalement par le passage d’un glissement saccadé à un glissementstationnaire, au fur et à mesure que le déplacement cumulé de la fibre2 augmente. La raideurinitiale K = 94 N/mm, dans le cas des essais représentés sur la Figure 5.12, devient une valeurcritique au bout du quatrième cycle PB4, correspondant à un état dégradé donné del’interface. Rappelons que pour l’état initial de cette interface, la raideur critique est estimée à600 N/mm. L’évolution de l’interface diminue la raideur critique du système.
Dans le but d’étudier davantage l’effet de la dégradation à l’interface sur la raideurcritique du système, des essais similaires à ceux représentés sur la Figure 5.12 ont étéeffectués. On constate sur la Figure 5.13a les étapes suivantes :
2 Le déplacement cumulé est simplement la somme arithmétique des déplacement en PO et en PB. On distingueplus le sens des déplacements.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
93
• plusieurs cycles PO-PB ont été effectués sous une raideur de 94 N/mm. Le glissementsaccadé observé au début (PO1) devient stationnaire (PO9) à cause de la dégradationinterfaciale.
• les essais suivants, PB9 et PO10, ont été effectués sous une raideur de 32 N/mm, plus faiblequ’avant. Nous constatons sur ces courbes la réapparition des saccades.
• la même éprouvette est testée (en PB10) sous la même raideur initiale (94 N/mm). Leglissement dans ce cas est à nouveau stationnaire.
Les mêmes constatations ont été effectuées sur des essais similaires représentés sur laFigures 5.13b. C’est-à-dire, les premiers essais PO1 et PB1 sont menés sous une très forteraideur (1150 N/mm), le glissement observé est stationnaire. Le cycle suivant PO2 et PB2 esteffectué sous la raideur faible (32 N/mm). Là encore le glissement devient saccadé. Lorsquela raideur est élevée à sa valeur initiale (1150 N/mm), le glissement est à nouveaustationnaire.Ces résultats montrent que les variations des raideurs sont réversibles vis-à-vis de l’existencedu glissement saccadé, mais la raideur critique dépend de l’état de la dégradation.
Notons que dans ce cas, le comportement du système à fibre SiC SCS-6 et matricePyrex, peut être décrit par le premier modèle (plus exactement l’analyse de Heslot et al.(1994)), présenté précédemment. Ce modèle est basé sur l’augmentation progressive de lavitesse relative de glissement par fluage, conduisant à une diminution progressive de larésistance. dPa/dx est ici dû à un effet de vitesse de fluage. Dans le cas d’une configuration dedeux solides frottants, représentée sur la Figure 5.1, ces auteurs introduisent la raideur critiquecomme suit :
KMg
D
d
d V
r h
D
d
d Vcritc
N
c
* ( )
(ln )
( )
(ln )= − = −
µ π σ µ2(5.10)
où d(µ)/d(lnV) définit la sensibilité du coefficient de frottement à la vitesse de glissement(négatif); Mg est la force normale appliquée sur le mobile correspondant à l’effort PN sur legraphique (5.1); Dc est la distance nécessaire pour rompre un contact (considéréehabituellement de l’ordre du micron). Dans le cas de la configuration de notre systèmefibre/matrice (interface cylindre), l'effort normal (Mg) sera remplacé par l’expression
2πrhσN, où σN est la contrainte radiale de compression3.
3 La surface de contact est en toute rigueur proportionnelle à (h-δa), mais généralement δa est petit devant h.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
94
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PB1
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PO1
Effort (N)
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PO4
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PB4
Déplacement (µm)
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PB1
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PO1
Effort (N)
Déplacement (µm)
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PO2
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PB2
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PO3
(a) (b)
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PO3
Figure 5.12 Systèmes SiC SCS-6/Pyrex (a) Exemples de cycles PO-PB (tous les cycles ne sont pasreprésentés). Kréel = 94 N/mm et H = 1 mm. (b) Exemples de cycles PO-PB (seuls les premiers cyclessont représentés). Kréel = 1150 N/mm et H = 0,96 mm.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
95
0
1
2
3
4
-60 -40 -20 0 20 40 60 80
PO9
0
1
2
3
4
-60 -40 -20 0 20 40 60 80
PO1
Effort (N)
Déplacement (µm)
0
1
2
3
4
-60 -40 -20 0 20 40 60 80
PB9
0
1
2
3
4
-60 -40 -20 0 20 40 60 80
PO10
0
1
2
3
4
-60 -40 -20 0 20 40 60 80
PB10
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PB1
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PO1
Effort (N)
Déplacement (µm)
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PO2
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PB2
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80
PO3
(a) (b)
Figure 5.13 Systèmes SiC SCS-6/Pyrex (a) Les cycles PO1 jusqu'à PO9 ainsi que PB10 sont effectuéssous la raideur Kréel = 94 N/mm. PB9 et PO10 sont effectués sous une plus faible raideur Kréel = 32N/mm (tous les cycles ne sont pas représentés) et H = 1 mm. (b) Les cycles PO1, PB1 ainsi que PO3sont réalisés sous la raideur Kréel = 1150 N/mm. PO2 et PB2 sont réalisés sous une plus faible raideurKréel = 32 N/mm et H = 0,97 mm.
On remarque toutefois que la sensibilité de l’équation (5.10) aux différents paramètres
(h et σrad), traduit les observations faites sur le comportement du système SCS-6/Pyrex,

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
96
pendant le glissement global de la fibre. Tout d’abord, lorsque l’épaisseur de l’éprouvette est
plus grande, l’équation (5.10) montre que Kcrit* augmente, ce qui conduit à une tendance au
stick-slip plus grande (cf. Figure 5.6 et 5.8). Si l’effet de l’évolution de l’interface peut être
simplement traduit par la diminution de la pression radiale4 σrad, entre le filament et la
matrice, la raideur Kcrit* décroît et la propension au glissement saccadé diminue (Figure
5.13a).Notons que l’analyse, faite par Heslot et al. (1994), a été basée sur des expériences defrottement papier Bristol sur papier Bristol sous faible charge et sans dégradation. Ce systèmemontre une grande sensibilité du coefficient de frottement à la vitesse, décrite par le terme(d(µ)/d(lnV)) dans l’Equation (5.10). Dans le cas de notre système composite SCS-6/Pyrex,nous n’avons pas observé d’effet de vitesse significatif, du moins pour les 3 décades devitesses du poussoir explorées (0,1 ; 1 et 10 µm/s).
Dans le système SiC SCS-6/Pyrex, la dégradation interfaciale conduit à des effetsobservables importants. Dans ce cas, le terme dPa/dx qui entre dans la condition destabilité/instabilité, pourrait être dû à la rupture de contacts (d’un contact ou de plusieurs enséquence). Nous verrons plus loin, dans les sections 5.2.5 et 5.2.6, que cette rupture decontacts est à l’origine de la dégradation.
On suppose que ce phénomène de rupture (local) conduit à une diminution δτ ducisaillement interfacial (global sur la fibre). La diminution de force de glissement intrinsèque
est donc δPa = 2πrhδτ.On suppose aussi que le glissement qui accompagne la rupture des contacts est Dc. Il
vient donc :
δδ
πδτP
xrh
Da
c
= 2
Si on considère une expression simplifiée du cisaillement interfacial5 τ = -µσN, on peutfinalement écrire :
δδ
πδ µ σP
xK rh
Da
crit
N
c
= =*( )
2 (5.11)
Le terme δ(µσN) décrit l’effet de la dégradation interfaciale sur la raideur critique et ellepermet aussi d’expliquer les constations expérimentales. Cette expression ne contient pasd’effet de vitesse.
5.2.3.3 Instabilité due à la microgéométrie du contact : système Sigma/Pyrex 4 On suppose que l’effet de l’évolution de l’interface ne modifie pas le terme d(µ)/d(lnV), ou que ce dernier variede façon négligeable devant la diminution de la pression radiale pour les vitesses d’essais utilisées.5 Cette expression peut être déduite de l’Equation (3.7) en supposant un effet de Poisson nul. La contraintenormale σN englobe aussi l’effet des aspérités à l’interface, elle est donnée par l’Equation (3.17).

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
97
Le déplacement relatif entre deux surfaces peut être accommodé sans détachement departicules, si les aspérités possèdent une résistance mécanique suffisante pour pouvoirsupporter un champ de contraintes local induit, par exemple, par un contournement desaspérités. Ce dernier est d’autant élevé que la contrainte normale appliquée au contact estélevée. Les déformations élastiques des aspérités en interaction ont une grande influence sur
la contrainte tangentielle développée PF (Figure 5.1). L’évolution de cet effort tangentiel
avec le déplacement relatif de ces aspérités dépend aussi de leur morphologie.
Les cycles PO-PB effectués sur le système à fibre SiC Sigma et matrice Pyrex, sontreprésentés sur la Figure 5.14. Les deux raideurs de départ (94 et 1150 N/mm) sont utilisées.On constate que le glissement reste stationnaire dans les deux cas. L’effet des cycles PO-PBsur ces courbes, se manifeste par une chute rapide de la force tangentielle dès les premierscycles pour atteindre un niveau qui ensuite n’évolue plus.Dans ce qui suit, nous discutons d’abord de ce dernier régime, la chute de force au début estdiscutée dans la partie 5.2.6.2.
Sur la Figure 5.15a, les courbes d’expression (PB1-PB4) sont superposées. Onconstate que, indépendamment du niveau absolu de ces courbes, celles-ci présentent de faiblesondulations dont l’amplitude est d’environ 0,1 N et la période voisine de 6 µm. Cesondulations, sont reproductibles et parfaitement superposables d’un cycle à l’autre malgré unnombre total de quatre cycles PO-PB.
La période des ondulations, constatées sur tous les essais d’expression sur le systèmeSigma/Pyrex, est très voisine de la pseudo-périodicité des rugosités de la fibre Sigma (Figure4.4b). Cela résulte du fait que les deux surfaces (fibre et matrice) sont miroirs l’une de l’autre,et qu’elles n’évoluent pratiquement plus dans ces conditions de glissement. La dégradationinterfaciale constatée pour le système SCS-6/Pyrex est ici non significative. La formecylindrique de l’interface, joue aussi un rôle qui permet à la fibre de glisser pratiquement aumême endroit pendant les cycles PO-PB.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
98
0
1
2
3
4
5
-80 -60 -40 -20 0 20 40 60
PB1
0
1
2
3
4
5
-80 -60 -40 -20 0 20 40 60
PO1
Effort (N)
0
1
2
3
4
5
-80 -60 -40 -20 0 20 40 60
PB2
Déplacement (µm)
0
1
2
3
4
5
-80 -60 -40 -20 0 20 40 60
PO5
0
1
2
3
4
5
-80 -60 -40 -20 0 20 40 60
PO2
0
1
2
3
4
5
-40 -30 -20 -10 0 10 20 30 40
PB1
0
1
2
3
4
5
-40 -30 -20 -10 0 10 20 30 40
PO1
Effort (N)
Déplacement (µm)
0
1
2
3
4
5
-40 -30 -20 -10 0 10 20 30 40
PO2
0
1
2
3
4
5
-40 -30 -20 -10 0 10 20 30 40
PPB2
0
1
2
3
4
5
-40 -30 -20 -10 0 10 20 30 40
PO3
(a) (b)
Figure 5.14 Systèmes SiC Sigma/Pyrex (a) Exemples de cycles PO-PB (tous les cycles ne sont pasreprésentés) Kréel = 94 N/mm et H = 1 mm. (b) Exemples de cycles PO-PB (seuls les premiers cyclessont représentés). Kréel = 1150 N/mm et H = 1,08 mm.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
99
-2
-1
0
1
2
3
4
5
10 20 30 40 50 60 70 80 90
Déplacement relatif (µm)
Effo
rt d
e gl
isse
men
t (N
)
H = 0,98 mmK(réel) = 1150 N/mm (PB1/PB2/PB3/PB4)K(réel) = 40 N/mm (PB5)
PB5
PB5
PB2/3/4
PB1
glissement
S1 S2
Forte raideur
Faible raideur
Profil intrinsèque de l 'effort
Profil avec la faible raideur
Profi l avec la forte raideur
(A)
(B)
(C)
(a)
(b)
Figure 5.15 (a) Système SiC Sigma/Pyrex, H = 0,98 mm (seuls les essais de réimpression sontreprésentés). Les cycles PB1 jusqu'à PB4 sont réalisés sous la raideur élevée Kréel = 1150 N/mm,l’essai PB5 par contre est effectué sous une raideur faible Kréel = 45 N/mm (la même courbe PB5 estreprésentée, au bas du graphique, en trait pointillé). (b) Représentations hypothétiques de Rabinowicz(1965) de la courbe effort-déplacement décrivant le phénomène du stick-slip qui, dans ce cas, n’est paspériodique.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
100
Les profils de l’effort de glissement, dans ces cas, représentent une situation originalequi permet d’apprécier le degré de validité des inéquations (5.8) et (5.9) et de mettre enévidence la pertinence du modèle de Rabinowicz (1965) pour ce système.En effet, les courbes PB2, PB3 et PB4 dans la Figure 5.15a suivent la même loi intrinsèque
P xa ( ) de glissement de la fibre. Rappelons que cette expression intrinsèque signifie que le
comportement de la fibre, par rapport à la matrice, n’est pas influencé par le dispositif d’essai.Cela suppose une raideur supérieur à Kcrit, et aussi que l’interface n’évolue pas pendant lesglissements relatifs sous cette raideur. On conçoit aisément qu’une loi intrinsèque (due à deseffets géométriques ou à une rhéologie d’un troisième corps à l’interface) est impossible àreproduire expérimentalement dans le cas du système SCS-6/Pyrex, du fait del’endommagement continue à l’interface, notamment sous une forte raideur.
A partir de la courbe PB4 et par identification à l’équation (5.9), on peut prévoir uneraideur du dispositif qui conduit à un glissement saccadé de la fibre. Ceci revient à déterminerla pente maximale d’une droite qui, lorsqu’elle est tangente au profil de l’effort de glissementPB4, présente plus d’un point d’intersection avec celui-ci. Dans notre cas, une raideur de 45N/mm, correspondant à un peu moins que la pente maximale des ondulations, était suffisantepour amorcer le glissement saccadé en trois endroits (voir Figure 5.15a). La raideur critiquedans ce cas est de l’ordre de 50 N/mm.
Ce comportement de l’interface met en évidence la pertinence du modèle deRabinowicz (1965). Ce dernier étant un modèle phénoménologique, montre que les facteursqui contrôlent ce type de glissement saccadé (ou stick-slip), sont : l’amplitude et la périodedes ondulations des contrefaces et, notamment, les propriétés élastiques des deux surfaces.Avec l’augmentation de la rigidité et de la dureté des deux surfaces, les déformationsplastiques sont réduites pendant le glissement. La forme finale du profil du glissementapproche le contour des surfaces (cf. Profil A sur la Figure 5.15b). Avec une faible raideur dusystème, l’équilibre élastique sera déplacé à chaque fois que l’accroissement de l’effort estfaible devant une telle rigidité. Cela se traduit par un déplacement rapide instable du solide.Le profil de l’effort de frottement évolue selon la droite de pente égale à la raideur du système(droite en pointillés, cf. Profil B et C sur la Figure 5.15b). Le glissement reprend saconfiguration initiale lorsque l’aire S2 (énergie disponible) égale l’aire S1 (énergieconsommée par le frottement) (cf. Profil A sur la Figure 5.15b).
Les essais PO-PB, représentés sur les Figures 5.12, 5.13 et 5.14, montrent un importantcrochet de repositionnement lorsque la fibre reprend sa position initiale. Avec la fibre Sigma,ce crochet est particulièrement bien marqué.
Nous verrons, dans le paragraphe suivant, que ce phénomène de repositionnement peut aussiêtre décrit en termes d’instabilité, dans les deux systèmes composites à matrice verre.
5.2.4 Crochet de repositionnement

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
101
Pendant les cycles d’expression et réimpression (PB1, PO2, PB2, etc.), une chutebrutale de l’effort de glissement intervient, à une position qui correspond au retour de la fibreà sa position initiale. Ce phénomène, décrit pour la première fois par Jero et al. (1990), estconnu sous la nomination de seating-drop. Ce dernier a été aussi observé lors d’essais dedéchaussement par Carter et al. (1991). Ce crochet de repositionnement est une manifestationdirecte de l’effet de la morphologie des surfaces en interaction sur le glissement de la fibre.
L’élaboration des systèmes composites, discutée dans le Chapitre 4, s’effectue à latempérature de ramollissement du verre. A cette température, la viscosité est telle que le verreépouse quasi-parfaitement la rugosité de la fibre.
Pour étudier la géométrie de l’interface, les surfaces de la fibre et de la matrice ont étépréparées par ouverture du contact fibre/matrice en rompant radialement la matrice, à partird’une éprouvette vierge. Cependant, il faut souligner la difficulté de la technique utilisée, pouraboutir à une préparation correcte de ces surfaces, notamment, lorsqu’il s’agit de l’étuded’une interface endommagée. Cette technique doit être appliquée sans modification oualtération des caractéristiques des surfaces préparées, par rapport à leur état d’avant ouverture.Cette tâche est rendue délicate par la faible dimension des éprouvettes. La technique utiliséepar Jero et al. (1992), qui consiste à extraire la fibre de son logement après polissage prolongéde la matrice jusqu’au coeur du composite, a été appliquée dans notre cas. Les résultatsobtenus ne sont pas satisfaisants à cause des incohérences observées sur l’état des surfacespréparées. La présence du produit de polissage et les sollicitations appliquées pendant cetteopération en sont les principales causes. La technique optimisée, consiste à rompre la matriceradialement après plusieurs indentations fissurantes très soignées de celle-ci (Figure 5.16).
Fibre
Matrice rompue
Figure 5.16 Méthode de l’ouverture de l’interface par rupture de la matrice.
Les profils des rugosités, de la fibre et de la matrice, d’un composite vierge ont étéétablis par microscope à force atomique MFA6 et représentés sur la Figure 5.17. Il fautsignaler, toutefois, que les deux régions sondées (de la fibre et de la matrice) ne sont pasforcément celles qui étaient exactement en regard avant ouverture du contact. La formeconcave de la surface de la matrice à sonder ainsi que la hauteur élevée des irrégularités de la
6 Les essais ont été effectués avec l’aide de P.E. Mazeran et J.-L. Loubet, sur le microscope à force atomique,AutoProbe, de l’Ecole Centrale de Lyon.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
102
surface rompue, sont les principales contraintes rencontrées lors de l’application de cettetechnique de MFA.
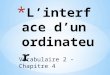
Les surfaces de la fibre et de la matrice ont été sondées à plusieurs résolutions. LesFigures 5.17a et 5.17b, montrent une représentation tridimensionnelle de ces surfaces (de lafibre et de la matrice respectivement) à une résolution de 5x5 µm. Sur ces images, l’amplitudedes aspérités est multipliée par 5, afin de mettre en évidence les détails de celles-ci. Il découled’une telle analyse visuelle, que la morphologie de la surface de la matrice a gardé unestructure aussi fine que celle de la surface de la fibre.
(a) (b)
Figure 5.17 Images par MFA à la résolution 5x5 µm des surfaces (a) fibre et (b) empreinte matrice,d’un composite vierge. Dans les deux cas, l’amplitude des rugosités est agrandie d’un facteur 5. (lesdeux surfaces sont disponibles après rupture de la matrice, cf. Figure 5.16).
Le tableau 5.1 englobe les valeurs de quelques paramètres statistiques de l’amplitudedes deux surfaces sondées (5x5 µm). La définition de ces paramètres est donnée en annexeIV. La comparaison de ces valeurs montre que, pour chaque paramètre, les valeurs mesuréessont du même ordre de grandeur. Les différences peuvent être attribuées au fait que lessurfaces sondées n’étaient pas exactement en regard avant l’ouverture du contact et que lenombre de mesures réalisées ne permet pas de donner des caractéristiques moyennes dessurfaces globales.
Tableau 5.1
Surfaces Rp-v Rrms Rave Hauteur médiane Hauteur principale
Fibre 0,131 µm 158 Å 124 Å 717 Å 714 Å
Matrice 0,146 µm 198 Å 157 Å 620 Å 617 Å
Partant de ce résultat, le mécanisme, par lequel le phénomène de repositionnement dessurfaces s’établit principalement, est explicité ci-après.
Pendant la réimpression de la fibre, loin de la position initiale, les aspérités en regarddes deux contrefaces se présentent de manière aléatoire en contact, (en 1 sur la Figure 5.18b).Au moment où la fibre atteint sa position de départ (en 2), ces aspérités retrouvent leurposition initiale et relaxent par l’occasion l’expansion radiale, qui avait été développée avant

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
103
par la disposition non-conforme des deux surfaces. Ce phénomène de repositionnement a étévisualisé in-situ, dans le cas du système Sigma/Pyrex où il est le plus marqué. Ceci semanifeste par la fermeture des fissures radiales de la matrice (voir Figure 5.18a et la section5.2.6.2 pour plus de détails), et par la disparition brutale du contraste, lié à la présence de cesfissures. Ces dernières s’ouvrent de nouveau, une fois que la fibre s’est déplacée d’une
certaine distance λ/2, correspondant à la demi-période caractéristique de ses rugosités (phase3). Dans cette position, l’interaction entre les aspérités des contrefaces est à nouveau aléatoire,mais maximale en termes d’expansion (dilatance) radiale.
M
F
M
F
M
F(1)
(2) (3)
(1) (2) (3)
Système Sigma/Pyrex
(a)
(b)
Figure 5.18 (a) Comportement des fissures radiales dans le système Sigma/Pyrex en fonction dudéplacement longitudinal de la fibre par rapport à la matrice (vue transversale). (b) Schéma de ladisposition des surfaces de la fibre et de son logement matrice selon leurs positions relatives (vuelatérale). (1) entrée en coïncidence ; (2) coïncidence et repositionnement ; (3) sortie de coïncidence.
5.2.4.1 Caractéristiques du crochet de repositionnementLa position du crochet de repositionnement dans toutes les courbes de réimpression,
représentées ci-dessus, correspond quasiment à l’origine du repère force-déplacement. Dansces courbes (Figures 5.12 et 5.14), la forme de ce crochet varie suivant la nature du système etles conditions d’essai, en particulier la raideur.
Lorsque le glissement de la fibre est fortement saccadé, comme dans le cas du systèmeSCS-6/Pyrex, le crochet de repositionnement est moins visible (cf. Courbe PB1 sur la Figure5.12a). Il peut être distingué, du reste des saccades, par la position globale de la fibre parrapport à la matrice avant l’essai. En général, pour ces systèmes, le crochet derepositionnement est toujours plus profond que les saccades. Lorsque le glissement eststationnaire, le crochet de repositionnement est d’autant plus marqué que la raideur est élevée(cf. Figure 5.12b).
Lorsque le nombre de cycles PO-PB augmente sous la même raideur (cf. Figure5.12a), le crochet de repositionnement devient visible. Dans ce cas, il faut noter que son allurea les mêmes caractéristiques qu’une saccade (définies dans la section 5.2.2) : une phaseinstable correspondant à l’entrée en coïncidence et une phase d’adhérence correspondant à la

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
104
sortie de coïncidence. Lorsque la raideur est élevée, cette phase d’adhérence s’accompagned’un léger pic de sortie avant d’atteindre à nouveau le glissement stationnaire.
Pour le système Sigma/Pyrex, le crochet de repositionnement est bien visible mêmelorsque la raideur est faible (cf. Figure 5.14a). Il est caractérisé par deux phases instables : (i)au moment de l’entrée en coïncidence et (ii) après le pic de sortie de coïncidence, etégalement par une phase d’adhérence qui les sépare. Aux plus fortes raideurs, ce crochet estbien marqué (cf. Figure 5.14b). On constate aussi un léger pic qui se manifeste avant l’entréeen coïncidence.
5.2.4.2 Relation avec les instabilitésLes effets de la raideur, sur la forme du crochet de repositionnement, peuvent être
analysés en termes de cinétique avec laquelle les séquences de repositionnement,schématisées sur la Figure 5.18b, se déroulent.
Quand la raideur est faible, l’énergie élastique emmagasinée est suffisammentimportante pour que le système puisse glisser, pendant la phase instable (entrée encoïncidence), au delà de la position de repositionnement. Dans ce cas, la séquence (2) sur laFigure 5.18b, n’est pas distinguée. La phase instable est contrôlée par la raideur du dispositif.A la fin de cette phase, la disposition des deux contrefaces est de nouveau aléatoire, mais trèsproche de la position d’origine. Ce qui permet au crochet de repositionnement d’êtredistingué, lorsque la raideur est faible.
Aux plus fortes raideurs, l’entrée en coïncidence s’effectue de manière plus douce, carl’énergie élastique en excès est assez faible. Dans ce cas, on assiste aux trois phases derepositionnement de la fibre, indiquées sur la Figure 5.18b. A l’intérieur de la zone decoïncidence, la majorité des aspérités retrouvent leur position initiale, ce qui rend d’autantplus difficile la sortie de coïncidence. Cela se manifeste par un pic plus haut à la sortie.
Pour illustrer d’avantage ce mécanisme de repositionnement, la Figure 5.19 montre desexemples de crochets de repositionnement obtenus avec une plus grande résolution en
déplacement sur la même éprouvette à fibre Sigma. La raideur Kréel du dispositif étant
augmentée à chaque retournement de l’éprouvette.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
105
0
1
2
3
4
5
-30 -20 -10 0 10 20 30
Déplacement relatif (µm)
Effo
rt d
e gl
ilsse
men
t (N
)
PO2 : 182PO3 : 341PO4 : 480PO5 : 1038(raideurs en N/mm)
glissement
(b)
0
1
2
3
4
5
-30 -20 -10 0 10 20 30
Déplacement relatif (µm)
Effo
rt d
e gl
isse
men
t (N
)
PB1 : 108PB2 : 247PB3 : 372PB4 : 721(raideurs en N/mm)
glissement
(a)
Figure 5.19 Système SiC Sigma/Pyrex. Crochets de repositionnement obtenus sur le mêmeéchantillon pendant le glissement (a) PO et (b) PB ; la raideur (spécifiée sur le graphique) estaugmentée à chaque retournement. L’ajustement des courbes est effectué par un positionnement despics d’entrée à 4,4 µm par rapport à l’origine du déplacement mesuré.
Les courbes PO et PB sont rassemblées sur deux graphiques distincts. L’ajustement deces courbes par rapport à l’origine des déplacements, s’effectue par positionnement des pics

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
106
d’entrée à une distance de 4,4 µm. Cette dernière correspond à la longueur pour laquelle lerepositionnement de la fibre s’effectue sous la plus forte raideur (1038 N/mm).Rappelons que pour le système à fibre Sigma, la raideur critique est de l’ordre de 50 N/mm(voir Figure 5.15a). Cette raideur est suffisante pour aboutir à un profil intrinsèque duglissement stationnaire de la fibre. Il est important de noter, que cette même raideur n’est passuffisante pour aboutir au comportement intrinsèque du repositionnement des deux surfaces,puisque l’entrée et la sortie de coïncidence dépendent de la raideur utilisée (Figure 5.19). Cecisuggère que le profil de l’effort de repositionnement dépend fortement de détails dans lamorphologie des aspérités. La même remarque peut être faite dans le cas du système SCS-6/Pyrex, si on examine son comportement sous forte raideur (cf. Figure 5.12b). On constateque le crochet de repositionnement reste bien marqué, malgré la forte dégradation à l’interfacedans ce cas.
Indépendamment de la nature du système, la force minimale au fond du crochet derepositionnement n’est pas nulle. Cela est dû probablement aux frettages, radial etlongitudinal, qui résultent des incompatibilités thermiques entre la fibre et la matrice.L’endommagement et son résidu (3ème corps) ainsi que la vitesse d’essai, influent aussi sur leniveau de cet effort minimal. Jero et al (1991) supposent, en plus, un effet de rotation (ou detorsion) de la fibre sur le niveau de l’effort minimal au fond du crochet de repositionnement.
La distance qui sépare les séquences d’entrée et de sortie de coïncidence (position (1)et (3) sur la Figure 5.18b), correspondant à la largeur du crochet de repositionnement, est
différente de la période caractéristique des rugosités de la fibre (λ = 5 µm, cf. Tableau 4.2).Les valeurs mesurées de cette largeur, essentiellement pour le système Sigma/Pyrex (Figure
14b), sont supérieures à celle-ci (6 ± 0,1 µm). La différence dépend du déplacementsupplémentaire qui provient de l’élasticité du montage (raideur réelle), notamment du fait quela sortie de coïncidence ne s’effectue pas de manière purement rigide. En effet, toutes lesaspérités à l’interface ne se déplacent pas rigoureusement en même temps pendant cettephase, car la contrainte longitudinale dans la fibre (et donc le déplacement associé) varie de
Pa /πr2 à zéro.La sortie du crochet de repositionnement et le premier chargement du système
fibre/matrice sont donc contrôlés par le même mécanisme. Celui-ci constitue la base dumodèle de glissement de la fibre sur une faible distance, qui sera décrit et analysé au Chapitre6.
Le phénomène de repositionnement doit être considéré d’un point de vue énergétique.Il correspond à un état d’interaction minimale entre deux surfaces subissant une histoired’endommagement.
5.2.5 Influence du glissement saccadé sur le glissement stationnaire subséquentPour mieux illustrer l’effet des saccades sur l’évolution de l’interface, dans le cas du
système SCS6/Pyrex, nous décrivons ci-après des expériences originales qui permettent demieux appréhender les mécanismes élémentaires de dégradation.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
107
L’idée est de faire subir à l’interface, un glissement saccadé à l’aller suivi d’un glissementstationnaire au retour. Pour aboutir à l’effet recherché à travers ces essais (très sensibles),certaines précautions doivent être prises : (i) Les éprouvettes testées doivent appartenir aumême lot (produit brut d’élaboration, cf. Figure 4.9a). (ii) La fréquence d’acquisition desdonnées, de l’effort et du déplacement, doit être suffisamment élevée (de l’ordre de 100 Hz).(iii) Minimiser le bruit de fond.
Les courbes relatives à deux cas différents, sont représentées sur la Figure 5.20. Dansle premier cas, une éprouvette a d’abord subi un cycle PO-PB, sous une raideur du dispositif
faibleKréel = 94 N/mm. Le glissement saccadé résultant est représenté sur la courbe (a1).
L’éprouvette est ensuite retournée et subit un essai d’expression sous une raideur élevée de1150 N/mm. Le glissement stationnaire attendu est observé, mais on constate en plus laprésence de petits décrochements.Un grossissement de cette zone, cf. Figure 5.20(a3), révèle la présence d’un nombre dedécrochements qui correspond à celui des saccades, enregistrées sur la partie gauche de lacourbe (a1). Cela signifie qu’une étroite relation existe entre le glissement saccadé et laprésence de ces décrochements. Pour s’assurer de la reproductibilité de ce phénomène, unsecond cas a été vérifié. La largeur des saccades a été intentionnellement diminuée, enaugmentant la raideur tout en gardant le glissement saccadé. L’essai confirme la présence dedécrochements à la même position que celle des saccades précédentes.
On constate que la position des petits décrochements, dans chaque cas, coïncide avecla phase d’adhérence (phase stick), sur la courbe de glissement saccadé précédente. La Figure5.22a représente le profil agrandi de deux décrochements. Il est intéressant de remarquer laprésence d’un effort minimal au fond du décrochement, ce qui est évident, mais aussi un pic àla sortie. Cette allure s’apparente à celle du crochet de repositionnement, analysée dans lapartie précédente.Il faut noter, toutefois, que l’amplitude de ces décrochements tend à diminuer au fur et àmesure que le glissement progresse, probablement parce que la dégradation induite par leglissement stationnaire moyenne petit à petit ces particularités morphologiques. Lorsque laposition de coïncidence des deux surfaces est dépassée, les décrochements ne sont plusvisibles.
La présence de ces décrochements est une conséquence de l’endommagement
″localisé″ de l’interface. L’effet de ce dernier n’est visible que lorsque le retour des surfacesest effectué sous une raideur élevée, donc un glissement stationnaire. Le mécanisme le plusprobable qui est à l’origine de ce phénomène est explicité sur la Figure 5.23.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
108
0
1
2
3
4
5
-80 -60 -40 -20 0 20 40 60 80 100
Déplacement (µm)
PO1K = 480 N/mm
Effort (N)
(a2)
0
1
2
3
4
5
-80 -60 -40 -20 0 20 40 60 80 100
Déplacement (µm)
PB1K = 1150 N/mm
(b2)
Effort (N)
2.9
3.1
3.3
3.5
0 20 40 60 80
PB1K = 1150 N/mm
((c2)
Effort (N)
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80 100
Déplacement (µm)
PO2K = 1150 N/mm
Effort (N)
(b1)
2.5
2.7
2.9
3.1
-60 -40 -20 0
PO2K = 1150 N/mm
(c1)
Effort (N)
0
1
2
3
4
-80 -60 -40 -20 0 20 40 60 80 100
Déplacement (µm)
PB1K = 94 N/mm
Effort (N)
(a1)
Déplacement (µm)Déplacement (µm)
Figure 5.20 Système SiC SCS-6/Pyrex. (a) Le glissement PB1 est effectué sous une raideur Kréel = 94N/mm, épaisseur de l’éprouvette H = 1,07 mm. Dans PO2, la raideur réelle est de 1150 N/mm, cettemême courbe est agrandie pour présenter l’ensemble des décrochements. (b) Le glissement PO1 estréalisé sous une raideur Kréel = 480 N/mm, épaisseur H = 1,18 mm. La raideur est élevée (1150 N/mm)dans l’essai PB1 et l’ensemble des décrochements est agrandi dans le dernier graphique.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
109
Pendant la phase d’adhérence, le contact à l’interface fibre/matrice s’établit via unnombre fini de zones, selon la séquence (a) sur la Figure 5.23, (chaque zone est représentéepar un carré sur la surface de la fibre, et une croix sur la surface de la matrice). A la fin de laphase d’adhérence, l’instabilité est amorcée par rupture de ces zones de contact7. Dans ce cas,la fibre glisse rapidement avant d’atteindre une nouvelle phase d’adhérence, et crée denouvelles zones de contact, séquence (b), la séquence (c) représente la phase d’adhérencesuivante, etc..
Pendant le glissement inversé sous une forte raideur (séquence (d)), les zones à l’interface,dernièrement rompues, sont les premières en regard pendant la séquence (e) (cf. carrés entraits interrompus avec une croix à l’intérieur). Dans ce cas, l’effort de glissement décroît unpeu. La dernière séquence (f) correspond au repositionnement des zones qui étaient rompuesjuste avant, etc..On voit donc qu’il est possible d’utiliser les surfaces elles-mêmes comme une sonde dedégradation.8
5.2.6 Dégradation de l’interface sous glissement saccadé et stationnaireLa dégradation de l’interface, dans le cas des essais d’expression, est une
conséquence inévitable pendant le glissement de la fibre. La cinétique de la dégradation peutvarier suivant les conditions d’essai.
5.2.6.1 Cas de la fibre SCS-6Pour le système SiC SCS-6/Pyrex, cette cinétique est associée à la rupture des
contacts. Elle dépend du fait que le glissement est saccadé ou non.
Les données représentées sur la Figure 5.21 montrent l’évolution de l’effort de glissement enfonction du déplacement cumulé par la fibre (dans les deux directions PO et PB). L’effort estmesuré à la position correspondant au début du glissement global pour l’essai PO1, et justeaprès le pic de sortie de coïncidence pour les essais suivants (PB1, PO2, etc.). On constate quela réduction de l’effort est plus lente dans le cas du glissement saccadé et que celui-cidisparaît pour un effort de glissement de 2,3 N.
7 La rupture se fait probablement en séquence en commençant par les contacts les plus faibles.8 Les zones dégradées donnent un effet périodique (à cause des saccades initiales) mais elles ne sont pas visiblespar MEB ou MFA car situées aléatoirement et finalement peu différentes de la topographie non endommagée.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
110
2
2,5
3
3,5
4
0 500 1000 1500 2000
Déplacement cumulé (µm)
For
ce d
e gl
isse
men
t (N
)
H = 1,05 mm, K = 94 N/mm
H = 1,04 mm, K = 94 N/mmH = 1,1 mm, K = 94 N/mm
H = 1,04 mm, K = 1150 N/mm
SiC SCS-6/Pyrex
Figure 5.21 Evolution de l’effort de glissement en fonction du déplacement cumulé (PO + PB) dans lecas du système SCS-6/Pyrex. L’épaisseur de l’éprouvette et la raideur réelle du dispositif, utiliséesdans chaque essai, sont données sur le graphique.
Pour atteindre un niveau de réduction de l’effort de glissement de 31 %, soit 2,5 N sur laFigure 5.21, il faut que la fibre se déplace de 160 µm en régime stationnaire et près de 600 µmen régime saccadé. Cela montre que la cinétique de l’endommagement à l’interface est plusprononcée dans le cas du glissement stationnaire. Il est clair que la plus grande partie dudéplacement cumulé, sous glissement saccadé, a lieu en phase d’instabilité. Ce qui signifieque le glissement rapide (phase instable) dégrade moins les surfaces que le glissement
stationnaire. Si on fait l’hypothèse que le glissement stationnaire est une succession de ″fins
de phases d’adhérence″, et si on considère que ces dernières sont dues à la rupture d’uncontact (ou plusieurs en séquence) donnant la dégradation, on peut avoir une estimation d’unedistance caractéristique comparable à Dc. En effet 160 µm en stationnaire correspond à 50
séquences de ″fins de phases d’adhérence″ ; la distance de glissement nécessaire pour rompreles contacts et avoir l’instabilité est donnée par 160/50 = 3 µm. C’est un ordre de grandeur deDc.Cependant, nous présentons ci-après une autre façon d’estimer la distance critique Dc. Elle estbasée sur de nouvelles données expérimentales, concernant les petits décrochements décritsdans la section précédente (5.2.5).
En effet, un ensemble d’expériences, faites avec des raideurs initiales différentes surdes éprouvettes les plus reproductibles possibles a permis d’estimer l’effet de la raideur dudispositif sur la largeur des crochets. Chaque point, sur le graphique (voir Figure 5.22b),représente une moyenne des largeurs des trois premiers décrochements, à cause de ladispersion qui augmente avec la longueur de la réimpression sous une forte raideur.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
111
0
0.2
0.4
0.6
0.8
1
1.2
0 100 200 300 400 500
Raideur réelle (N/mm)
Larg
eur
du d
écro
chem
ent
LsD
(µ
m)
H = 0,92 mm
H = 0,97 mm
H = 0,98 mm
H = 0,99 mm
(b)
2.98
3
3.02
3.04
3.06
30 31 32 33 34 35 36 37
Déplacement (µm)
Effo
rt (
N)
PB1H = 1,18 mmK = 1150 N/mm
LsD
(a)
Figure 5.22 Système SiC SCS-6/Pyrex. (a) Représentation agrandie de deux petits crochets derepositionnement (cf. Figure 5.20). (b) Evolution de la largeur des petits décrochements avec la raideurdu dispositif.
Il faut noter que ces essais ont été effectués avec les mêmes précautions citéesprécédemment, à savoir : toutes les éprouvettes appartiennent au même lot d’élaboration et

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
112
elles sont portées à l’étuve (à 60°C pour éliminer l’eau) avant les essais. Cela est nécessairepour éviter la dispersion dans le comportement au glissement de la fibre, qui donne unedistribution irrégulière des valeurs des largeurs des petits décrochements (LsD). Cettedispersion, par contre, n’influe pas sur nos précédentes analyses, car son effet est du secondordre devant la pertinence de l’effet de la raideur du dispositif.
Nous constatons que malgré les incertitudes (inévitables ici) que les petits crochetssont d’autant plus larges que la raideur est élevée. Leur largeur étant de l’ordre de 1µm.Cela pose le problème de la signification de la largeur des petits crochets.Il faut noter que la présence de ces décrochements est, essentiellement, due à unendommagement continu à l’interface. Ils sont le résultat de la réimpression sous un régimestationnaire (plus dégradant), qui précède un endommagement périodique à l’interface. End’autres termes, ce phénomène décrit une situation pour laquelle le retour des deux surfacesadmet un minimum d’interaction (d’endommagement). Du point de vue énergétique, cettesituation de décrochement s’apparente au phénomène de crochet de repositionnement,seating-drop, dans la mesure où elle présente les mêmes caractéristiques (l’allure de son profilet le fait qu’elle dépend du retour des surfaces (PB)).
La largeur de ces petits décrochements (ou small-drops sD), de l’ordre dumicromètre, caractérise la largeur individuelle des zones d’ancrages, au même titre que lapseudo-périodicité des rugosités de la fibre. Elle peut être comparée a Dc la distancenécessaire pour rompre un contact (déjà estimée ci-dessus).
Cependant, nous n’avons pas d’explication sur l’effet de Kréel sur Dc. Par contre, nouspouvons exploiter les résultats, représentés sur les Figures 5.21 et 5.22, pour tenterd’expliquer les observations effectuées sur le comportement du système SCS-6/Pyrex, et deles relier à des mécanismes physiques.On introduit, ci-après (points a, b et c), une analyse basée sur la densité et la taille des zonesd’ancrage des aspérités à l’interface (voir Figure 5.23). La cinétique de l’endommagement,sera traduite par la cinétique de réduction de ces zones.
(a) Pendant la phase d’adhérence, les zones de contact (jonctions) sont distribuées demanière aléatoire à l’interface. La densité et la taille de ces zones déterminent la capacité del’interface à transférer l’effort d’expression aux éléments élastiques (caractérisés par laraideur Kréel). Cette capacité de l’interface est assujettie à des affaiblissements (ouévénements), tels que : défauts sujets à propagation sous-critique ou ruptures probables decontacts locaux. Il existe plusieurs facteurs qui peuvent accroître ces événements :l’environnement ambiant ou la présence d’un fluide dans le contact.
(b) L’instabilité du glissement s’amorce, lorsque l’intensité de ces événements atteintun niveau critique. Ce dernier correspond à une chute de l’effort de frottement qui estinférieur à la raideur du dispositif (cf. Equation 5.9). Cela suppose que ces événements

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
113
deviennent d’autant plus critiques que la raideur du dispositif est élevée9. Par conséquent, leszones rompues à l’interface (caractérisées par LsD) sont celles formées avant l’instabilité, etdépendent donc de la raideur du dispositif.10 La densité de ces zones peut être qualitativementdéterminée, a posteriori, en considérant les longueurs cumulées nécessaires pour atteindre leglissement stationnaire, sous les différentes raideurs (voir Figure 5.21 et Tableau 5.2).Nous constatons que, pour aboutir à un glissement stationnaire, les distances cumuléestendent à diminuer avec l’augmentation de la raideur.
Tableau 5.2
Epaisseur(mm)
Raideur(N/mm)
Distancecumulée (µm)
1,05 19201,04 94 9601,1 850
1,06 1401,03 480 800,97 95
0,99 1150 15
Finalement, la taille et la quantité de zones d’ancrages, pendant la phase d’adhérence, sontproportionnelles à la raideur du dispositif.
(c) En tenant compte des deux points précédents (a et b), le degré d’endommagementà l’interface sera simplement traduit par la capacité des contrefaces à établir des zonesd’ancrage, au fur et à mesure que le glissement de la fibre progresse. Cela permet dedistinguer la différence fondamentale qui existe entre les mécanismes physiques qui induisentdes glissements stationnaires, dans les différents essais sur le système SCS-6/Pyrex. Celaconcerne la raideur critique, nécessaire pour aboutir à un glissement stationnaire dès lepremier essai PO1 (Figure 5.3a), et la raideur critique obtenue après plusieurs cycles PO-PB(Figure 5.12a). La première raideur critique est choisie assez élevée pour augmenter laprobabilité des événements (affaiblissements) à l’interface, et pour assurer unendommagement continu. La deuxième raideur critique est une conséquence de la réductiondes zones d’ancrage à l’interface. Ce dernier cas, explique fort bien le fait que lorsque laraideur initiale est diminuée, après disparition des saccades au bout de plusieurs cycles PO-PB, le glissement et à nouveau saccadé (Figure 5.13a). En effet, la diminution de la raideursignifie que les zones, pouvant être formées avant l’instabilité, sont de taille et de densitéréduites (respectivement au point (b)). Cela favorise, pendant le glissement de la fibre sous
9 Cela peut être expliqué par un mécanisme physico-chimique de corrosion sous-contrainte des zones d’ancrages(sièges de concentrations de contraintes élevées). Ce mécanisme est considéré macroscopiquement comme étantcontinu dans le temps et qui ne dépend que du niveau de contrainte appliqué (Reynaud 1992).10 Sous forte raideur, le nombre d’événements continue de croître tant que la diminution de l’effort de glissementassociée n’est pas ″détectée″ par la raideur Kréel (Equation 5.9).

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
114
une plus faible raideur, la présence des zones d’adhérence parmi celles qui ne sont pas encoreendommagées par les précédents cycles. Ces phases d'adhérence conduisent, à nouveau, à unglissement saccadé à l'interface.
Dans les conditions particulières, du frottement de la fibre dans la matrice, la raideurdu dispositif joue le rôle d’une sonde de l’état d’évolution de l’interface.
L’étude de l’endommagement, par l’évolution de l’effort d’impression, a étécomplétée par des observations au microscope électronique à balayage (MEB) et parprofilomètrie. L’analyse de ces résultats a été limitée par des difficultés liées à la nature dessurfaces sondées (mauvaise conductivité des électrons) et à la nature de l’endommagement deces surfaces (génératrice cylindrique des surfaces). Il faut noter que la seule observation auMEB, des surfaces en question, ne permet pas d’acquérir des informations. D’une part, àcause des difficultés de mise au point d’une image nette, et d’autre part par le choix d’uneéchelle par rapport à la rugosité irrégulière de cette surface courbe.
Faible raideur, régime saccadé Forte raideur, régime stationnaire
Zone de contact Zone endommagée sur la fibre
Zone endommagée sur la matrice
Zones endommagées en coïncidence
Retour
Figure 5.23 Mécanisme de repositionnement des zones endommagées à l’interface qui ont été créespar les saccades.
Les profilomètres mécanique et optique, sont également utilisés pour déterminer lesparamètres de rugosité de ces surfaces. Les sensibilités limitées de ces deux techniques, nepermettent pas d’accéder aux informations les plus fines de la morphologie des deuxcontrefaces, en particulier sur la dégradation. L’utilisation d’un microscope à force atomique(MFA) est plus que nécessaire dans ce cas.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
115
Le profilomètre optique permet, à l’opposé du MFA, de sonder les surfaces sur delongues distances. Cette particularité a été utilisée dans le but de détecter une éventuellepériodicité à l’interface, qui serait liée au glissement saccadé (Figure 5.20). Les profils desrugosités mesurées sur les deux contrefaces, en plusieurs endroits, n’ont pas révélé unequelconque périodicité.
Les dimensions réduites de la surface courbe du logement matrice et les irrégularitésde son contour rendent difficile l’application de la MFA et limitent les zones à sonder. Cettetechnique a été utilisée, auparavant, pour rendre compte de la similitude des rugosités de lafibre et de la matrice d’un composite brut d’élaboration (Figure 5.17).Dans cette même optique, ces rugosités ont été analysées dans le cas d’une éprouvette qui asubi un seul essai d’expression, sous une raideur de 94 N/mm (voir la deuxième courbe sur laFigure 5.3). Sur une large zone sondée (200x200 µm), les rugosités de la fibre et de la matricene semblent pas être affectées par le glissement saccadé à l’interface. Cette zone est largementsupérieure à la largeur des petits crochets de repositionnement (LsD).Un deuxième cas a été analysé, il s’agit d’une interface suivant laquelle la fibre a subi unglissement stationnaire cumulé de l’ordre de 700 µm, sous une raideur de 1150 N/mm. Lesreprésentations, en trois dimensions, de la surface de la fibre et de son logement matrice sontreprésentées pour trois différentes résolutions sur la Figure 5.24. Ces images montrentclairement l’endommagement important de la matrice. A l’opposé, la morphologie de la fibrene semble pas être affectée par cet endommagement.
On note que la surface de la matrice, est incrustée de particules de forme globulaire.Il s’agit probablement de particules de 3ème corps.
Ces dernières ont un diamètre maximal de l’ordre de 250 nm environ. Elles seprésentent logées dans des calottes et en dehors de celles-ci, notamment dans le prolongementdes sillons (Figure 5.25a). La même zone de la surface de la matrice a été sondée (Figure5.25b), suivant une direction faisant un angle de 15° par rapport à celle du cas précédent. Celaconfirme la présence de ces sillons qui sont provoqués par le glissement relatif à l’interface, etqui sont orientés suivant la direction du glissement de la fibre. A cause des faibles dimensionsdes surfaces sondées, nous n’avons pas d’informations sur la continuité de ces sillons ni surleurs longueurs. Dans tous les cas, ces derniers sont supérieurs à 10 µm et leurs épaisseurssont de l’ordre du diamètre des particules globulaires.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
116
(a) (b)
Figure 5.24 Images par MFA aux résolutions 10x10 µm, 5x5 µm et 1x1 µm (a) fibre SCS-6 et (b)matrice Pyrex. L’interface a subi un glissement relatif cumulé ≈ 700 µm sous Kréel = 1150 N/mm. Danstous les cas, l’amplitude des rugosités est agrandie d’un facteur 5.
Il existe, certainement, une relation très étroite entre la présence de cesnanoparticules et le glissement de type stationnaire de la fibre SCS-6. Cela nous amène à

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
117
proposer que la formation de ces particules est liée à la rupture des jonctions à l’interface quicontrôlent la phase d’adhérence. Leur forme globulaire facilite le glissement de la fibre, etamorce une phase instable limitant la phase d’adhérence. Le débit de formation de cesparticules est proportionnel à la densité des zones d’ancrages (jonctions). Sous une forteraideur, ce débit est élevé, assurant un glissement stationnaire dès le début du glissement de lafibre.
(a) (b)
Figure 5.25 Images par MFA à la résolution 5x5 µm du logement matrice correspondant à la Figure5.24b. (a) la direction de mesure est parallèle à l’axe du logement (du haut vers le bas de la figure), (b)la direction de mesure est déviée de 15° par rapport à la première direction.
La nature et la composition de ces nanoparticules sont à présent inconnues. Leurcontraste observé sur la Figures 5.25, suggère que ces dernières sont de nature différente decelle de la matrice. Du fait que la surface a été sondée avec le même effort normal sur lapointe du MFA, il est possible de distinguer les phases présentes à partir des caractéristiquesmécaniques de chacune d’elles. Une étude plus approfondie s’avère nécessaire pour tenter derépondre à ces questions.
5.2.6.2 Cas de la fibre SigmaDans le cas du système SiC Sigma/Pyrex la situation est tout à fait différente. Le
principal mécanisme de dégradation à l’interface est la fissuration radiale de la matrice.Comme on peut le constater sur la Figure 5.26, l’effort d’expression chute rapidement lors despremiers cycles (PO et PB) et reste ensuite stable. La conservation du profil de glissementpendant tous les cycles (voir les courbes superposées PB2/3/4 sur la Figure 5.15a), indiqueque les phénomènes de rupture de contact avec abrasion sont très réduits, par rapport ausystème SCS-6/Pyrex. Il s’agit plutôt ici de mécanismes locaux de contournement(mouvement dans le sens circonférentiel) ou de surpassement (mouvement radial, voirChapitre 3).

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
118
2
2,5
3
3,5
4
0 500 1000 1500 2000
Déplacement cumulé (µm)
For
ce d
e gl
isse
men
t (N
) H = 0,91 mm, K = 94 N/mm
SiC Sigma/Pyrex
Figure 5.26 Evolution de l’effort de glissement en fonction du déplacement cumulé (PO + PB) dans lecas du système Sigma/Pyrex. L’épaisseur de l’éprouvette et la raideur réelle du dispositif sont donnéessur le graphique.
L’amorçage et la propagation des fissures ont été observés in-situ, par transmission àtravers la matrice. Elles se propagent et deviennent stables lorsqu’elles atteignent une certainelongueur. Dans la plupart des essais, la taille de chaque fissure est d’environ deux fois lerayon de la fibre. Elles ne sont pas toujours diamétralement opposées (comme il est le cas surla Figure 5.18a). Une analyse simple aux éléments finis, présentée en annexe III, montre quecette configuration est compatible avec la réduction de la force observée. En effet, pour uneprofondeur a = 2r de deux fissures matricielles (Figure 5.18a), la contrainte radiale àl’interface sera réduite à 80 % de sa valeur initiale.Cette contrainte radiale initiale à l’interface (avant fissuration de la matrice) est de 400 MPaenviron. Elle est du même ordre de grandeur que la valeur calculée (370 MPa) à partir del’expression (3.16).
5.2.7 Cas du système SiC Sigma/PMMALe glissement des fibres céramiques, utilisées précédemment, dans une matrice
viscoélastique (et une autre ductile, voir ci-dessous), présente des comportements différentspar rapport à la matrice Pyrex fragile.
La Figure 5.27a représente le résultat des cycles PO-PB, effectués sur une éprouvetteSiC Sigma/PMMA d’épaisseur 1,12 mm. On note que pour la forte raideur utilisée (1150N/mm), le glissement de la fibre est stationnaire pour les courbes PO et saccadé pour lescourbes PB. Cela indique qu’une direction privilégiée a été créée dès le premier cycle deglissement de la fibre.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
119
0
1
2
3
-80 -60 -40 -20 0 20 40 60 80
PO1Effort (N)
0
1
2
3
-80 -60 -40 -20 0 20 40 60 80
PB1
Déplacement (µm)
0
1
2
3
-80 -60 -40 -20 0 20 40 60 80
PO2
0
1
2
3
-80 -60 -40 -20 0 20 40 60 80
PB2
0
1
2
3
-80 -60 -40 -20 0 20 40 60 80
PO3
(a)
0
0.5
1
1.5
2
2.5
3
0 20 40 60 80 100 120 140
Effort (N)PB1
- 54°C
0
0.5
1
1.5
2
2.5
3
0 20 40 60 80 100 120 140
PO2+ 54°C
0
0.5
1
1.5
2
2.5
3
0 20 40 60 80 100 120 140
PB2+ 54°C
0
0.5
1
1.5
2
2.5
3
0 20 40 60 80 100 120 140
PO3- 45°C
Déplacement (µm)
(b)
Figure 5.27 SiC Sigma/PMMA (a) Exemples de cycles PO-PB sur le système. Kréel = 1150 N/mm et H= 1,12 mm. (b) Exemples de cycles PO-PB effectués à différentes températures moyennes. La raideurréelle du dispositif est de 1150 N/mm et l’épaisseur de l’éprouvette est d’environ 1 mm.
L’allure, des saccades observées, est différente de celles déjà analysées dans lasection (5.3.2). Indépendamment de l’allure déformée du profil de repositionnement, sa

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
120
présence signifie que les surfaces en contact ont gardé une certaine symétrie. Pour la mêmefibre, Sigma, nous avons assisté à l’amorçage et à la propagation de fissures dans la matricePyrex. Cela est le résultat des fortes concentrations de contraintes qui, dans le cas de lamatrice PMMA, induisent probablement des déformations viscoplastiques qui modifient lamorphologie individuelle des aspérités. L’analyse de l’ouverture du contact fibre/matrice,relève de l’exploit. L’observation et le suivi de l’évolution de l’interface, pendant les essais,n’ont pas révélé des traces notables du moins à l’échelle à laquelle l’observation a été
effectuée (360x).
On remarque que les deux aspects d’instabilités, discutés ci-dessus, se réunissent sous lesmêmes conditions matérielles d’essai. Le cas du système à matrice organique apparaît donccomplexe et demande une approche particulière.
La Figure 5.27b représente le résultat des essais successifs PO-PB effectués, sur untel système, à différentes températures (respectivement -54, +54, +54 et -45°C). On constateque ce système réagit différemment selon les températures extrémales utilisées, et présenteune succession de comportements qui sont difficiles à interpréter. En particulier vis-à-vis de laprésence ou pas du phénomène du stick-slip. En effet, on remarque que l’amplitude et lalargeur des saccades augmentent avec l’élévation de la température, à laquelle les essais sonteffectués, mais ils disparaissent complètement lorsque cette température est à nouveaudiminuée. Il est fort probable que les effets de températures d’essai sont fortement influencéespar les effets de dégradation (ou de déformations viscoplastiques) à l’interface.
5.2.8 Cas du système SiC SCS-2/Al 6061Le cas du système SiC SCS-2/Al est encore plus complexe. La Figure 5.28
représente le résultat des cycles PO-PB. Sur la première courbe PO1, on constate que lacontrainte de décohésion est intense pour une épaisseur de l’éprouvette de 0,28 mm. Cettevaleur est justifiée, du fait que c’est une liaison forte qui est désirée dans ce type decomposite. L’effet des cycles semble favoriser un glissement stationnaire de la fibre, avec unedirection privilégiée. Le repositionnement des surfaces ne se manifeste pas mais peut êtredistingué par le changement de la pente de l’effort à la position correspondant à l’origine desdéplacements. La décohésion de la fibre a probablement dévié dans la matrice. Cela ajoute undegré de liberté au problème d’analyse de l’évolution de la morphologie des surfaces eninteractions.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
121
0
1
2
-100 -80 -60 -40 -20 0 20 40 60 80
PB1
0
1
2
-100 -80 -60 -40 -20 0 20 40 60 80
PO2
0
1
2
-100 -80 -60 -40 -20 0 20 40 60 80
PB2
01234567
-100 -80 -60 -40 -20 0 20 40 60 80
Effort (N)PO1
Déplacement (µm)
Figure 5.28 Exemples de cycles PO-PB sur le système SiC SCS-2/Aluminium 6061. Kréel = 1150N/mm et H = 0,28 mm.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
122
Cependant on peut donner quelques tentatives d’explication de ce comportement.Pendant le premier essai d’expression PO1 (Figure 5.29), il y a cisaillement plastique de lamatrice tout près de l’interface, conduisant à un effort intense au départ et diminue au fur et àmesure que la fibre glisse en entier. On suppose que le plan de cisaillement de la matrice n’estpas forcément cylindrique mais légèrement conique. Cette supposition est fort probable, car ils’agit ici d’un cisaillement plastique de la matrice métallique contrairement à une décohésionconfinée à l’interface dans les systèmes à matrice verre.Au moment de la réimpression PB1 (à la position de coïncidence des surfaces), l’épaisseurnon-uniforme, de matière accrochée à la fibre, induit une expansion radiale dans le volume dela matrice, ce qui augmente l’effort de réimpression de la fibre.Ce phénomène est macroscopique, il n’est pas lié à la rugosité interfaciale. Il est doncindispensable d’étudier le comportement de l’interface, dans ce type de système, sous faibledéplacement de la fibre avant cisaillement de la matrice (à l’aide des essais d’impression).
F F
M M
(a) (b)
Figure 5.29 Matrice ductile. (a) essai d’expression PO1, (b) essai de réimpression PB1.
On conçoit aisément que l’étude et l’analyse de l’interface, dans les systèmes SiCSigma/PMMA et SiC SCS-2/Al, nécessitent des études supplémentaires et approfondies. Ladémarche effectuée ici, pour étudier les systèmes à matrice verre, peut être appliquée dans lescas de ces derniers systèmes. Les essais d’expression (d’impression également) et deréimpression apparaissent comme un moyen efficace qui mérite une adaptation pour cessystèmes.
5.3 ConclusionsDans ce chapitre, le déplacement global de la fibre dans les essais d’impression et
d’expression a été analysé. Le comportement de la fibre dépend du système composite utiliséet des conditions d’essai (la raideur du dispositif essentiellement). Dans le cas du système SiCSCS-6/Pyrex, le glissement est saccadé lorsque la raideur du dispositif est faible et devientstationnaire lorsque celle-ci est forte. L’allure des saccades rend compte de la raideur utilisée,de l’épaisseur de l’éprouvette testée et de la longueur totale cumulée pendant le glissement dela fibre.
Les mêmes observations, concernant la présence ou pas d’un glissement saccadé, ontété réalisées dans le cas du système SiC Sigma/Pyrex, à différents niveaux de la raideur du

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
123
dispositif. La différence fondamentale, qui existe entre le comportement de la fibre dans lesdeux systèmes, réside dans l’origine du glissement saccadé.
Les fibres SCS-6 et Sigma interagissent différemment avec la même matrice Pyrex, àcause de la morphologie et la nature de leurs aspérités.
Une condition générale, basée sur l’équilibre énergétique entre le glissement de lafibre et la raideur du dispositif, est établie pour décrire l’apparition du glissement saccadé.Cette condition, en terme de raideur critique, est utile car elle permet d’analyser ce type deglissement indépendamment des causes physiques qui sont à l’origine.
Un second niveau d’analyse, du glissement saccadé, a été réalisé à partir de deuxmodèles. Le premier modèle (basé sur la distance caractéristique Dc) propose une expressionanalytique de la raideur critique, qui traduit la tendance au glissement saccadé de la fibreSCS-6. Cela a été effectué en relation avec l’épaisseur de l’éprouvette et la raideur dudispositif. Ce modèle prévoit un effet de vitesse sur le frottement du mobile. Cet effet n’a pasété détecté pour la gamme des vitesses utilisées dans nos essais. Cet effet est probablementfaible devant l’effet de rupture des aspérités à l’interface.
La tendance au glissement saccadé, de la fibre Sigma, a été analysée par un autremodèle qui est basé sur l’interaction mécanique des aspérités. Le cas particulier ducomportement de la fibre Sigma, met en évidence la pertinence de ce modèle qui est dûmenthypothétique. Ce dernier explique parfaitement l’évolution du phénomène derepositionnement des surfaces, en fonction de la raideur du dispositif, et montre qu’un telphénomène dépend fortement des interactions des aspérités à plusieurs échelles. Cettedépendance a été vérifiée pour les deux systèmes composites, notamment le système SCS-6/Pyrex, qui présente un endommagement excessif des aspérités à l’interface.
La réduction de l’effort de glissement de la fibre, a été attribuée à l’endommagementde l’interface par : (i) la rupture des aspérités, principalement dans le système SCS-6/Pyrex,(ii) la fissuration de la matrice qui relaxe les contraintes dues aux fortes amplitudes desaspérités dans le système Sigma/Pyrex.
Dans le premier cas (fibre SCS-6), l’histoire de l’endommagement à l’interface rendcompte de la raideur du dispositif utilisée. Il a été noté, que le glissement saccadé retardel’endommagement de l’interface, par rapport à un glissement stationnaire. L’utilisationconsécutive de ces cinétiques de dégradation, pendant un cycle PO-PB, donne desinformations précises sur l’histoire de l’endommagement à l’interface. Ce comportement aconduit à proposer une description de la dégradation, en termes de réduction de zonesd’ancrages à l’interface.
Les mesures des rugosités, de la fibre et de la matrice par (MFA), montrent unendommagement excessif de la matrice. L’utilisation de cette technique, met en évidence laprésence des particules (3ème corps) générées par le frottement à l’interface. La présence deces particules (leurs formes notamment), ont complété les hypothèses décrivant la dégradationà l’interface, proposées précédemment.
Des essais d’expression et d’impression (PO-PB), ont été utilisés pour caractériser leglissement de fibres céramiques, dans des matrices PMMA et alliage d’aluminium. Lecomportement de la fibre dans ces systèmes est très différent de celui dans la matrice verre.

CHAPITRE 5. COMPORTEMENT DE L’INTERFACE PENDANT LE GLISSEMENT GLOBAL DE LA FIBRE
124
Les caractéristiques mécaniques, de ces deux matrices, impliquent évidemment desmécanismes d’endommagement différents, et certainement plus complexes. Cependant, noussignalons l’intérêt d’utiliser la matrice PMMA pour aborder, d’une autre façon, le phénomènedu glissement saccadé.