-
TechnicalPublications
2165118100Revision 4
MPH 50 V2 - MPH 65 V2 - MPH 80 V2asmAdvanced Service Manual
do not duplicate
Advanced Service DocumentationProperty of GEFor GE Service
Personnel OnlyNo Rights Licensed Do Not Use or CopyDisclosure to
Third Parties Prohibited
Copyright 1999, 2002 by General Electric Co.
-
ATTENTIONLES APPAREILS RAYONS X SONT DANGEREUX LA FOIS POUR LE
PATIENT ET POUR LE MANIPULATEUR
SI LES MESURES DE PROTECTION NE SONT PAS STRICTEMENT
APPLIQUEESBien que cet appareil soit construit selon les normes de
scurit les plus svres, la source de rayonnement X reprsente un
dangerlorsque le manipulateur est non qualifi ou non averti. Une
exposition excessive au rayonnement X entrane des dommages
lorganisme.Par consquent, toutes les prcautions doivent tre prises
pour viter que les personnes non autorises ou non qualifies
utilisent cetappareil crant ainsi un danger pour les autres et pour
ellesmmes.Avant chaque manipulation, les personnes qualifies et
autorises se servir de cet appareil doivent se renseigner sur les
mesures deprotection tablies par la Commission Internationale de la
Protection Radiologique, Annales 26 : Recommandations de la
CommissionInternationale sur la Protection Radiologique et les
normes nationales en vigueur.
WARNINGXRAY EQUIPMENT IS DANGEROUS TO BOTH PATIENT AND
OPERATOR
UNLESS MEASURES OF PROTECTION ARE STRICTLY OBSERVEDThough this
equipment is built to the highest standards of electrical and
mechanical safety, the useful xray beam becomes a source ofdanger
in the hands of the unauthorized or unqualified operator. Excessive
exposure to xradiation causes damage to human tissue.Therefore,
adequate precautions must be taken to prevent unauthorized or
unqualified persons from operating this equipment or
exposingthemselves or others to its radiation.Before operation,
persons qualified and authorized to operate this equipment should
be familiar with the Recommendations of the Interna-tional
Commission on Radiological Protection, contained in Annals Number
26 of the ICRP, and with applicable national standards.
ATENCIONLOS APARATOS DE RAYOS X SON PELIGROSOS PARA EL PACIENTE
Y EL MANIPULADOR
CUANDO LAS NORMAS DE PROTECCION NO ESTAN OBSERVADASAunque este
aparato est construido segn las normas de seguridad ms estrictas,
la radiacin X constituye un peligro al ser manipuladopor personas
no autorizadas o incompetentes. Una exposicin excesiva a la
radiacin X puede causar daos al organismo.Por consiguiente, se
debern tomar todas las precauciones necesarias para evitar que las
personas incompetentes o no autorizadasutilicen este aparato, lo
que sera un peligro para los dems y para s mismas.Antes de efectuar
las manipulaciones, las personas habilitadas y competentes en el
uso de este aparato, debern informarse sobre lasnormas de proteccin
fijadas por la Comisin Internacional de la Proteccin Radiolgica,
Anales No 26: Recomendacines de la Comi-sin Internacional sobre la
Proteccin Radiolgica y normas nacionales.
ACHTUNGRNTGENAPPARATE SIND EINE GEFAHR FR PATIENTEN SOWIE
BEDIENUNGSPERSONAL,WENN DIE GELTENDEN SICHERHEITSVORKEHRUNGEN NICHT
GENAU BEACHTET WERDEN
Dieser Apparat entspricht in seiner Bauweise strengsten
elektrischen und mechanischen Sichereitsnormen, doch in den Hnden
unbe-fugter oder unqualifizierter Personen wird er zu einer
Gefahrenquelle. bermige Rntgenbestrahlung ist fr den menschlichen
Orga-nismus schdlich.Deswegen sind hinreichende Vorsichtsmanahmen
erforderlich, um zu verhindern, daunbefugte oder unqualifizierte
Personen solcheGerte bedienen oder sich selbst und andere Personen
deren Bestrahlung aussetzen knnen.Vor Inbetriebnahme dieses
Apparats sollte sich das qualifizierte und befugte
Bedienungspersonal mit den geltenden Kriterien fr den ge-fahrlosen
Strahleneinsatz durch sorgfltiges Studium des Hefts Nr. 26 der
Internationalen Kommission fr Strahlenschutz (ICRP) vertrautmachen:
Empfehlungen der Internationalen Kommission fr Strahlenschutz und
anderer nationaler Normenbehrden.
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
i
THIS SERVICE MANUAL IS AVAILABLE IN ENGLISH ONLY.
IF A CUSTOMERS SERVICE PROVIDER REQUIRES A LANGUAGE OTHER
THANENGLISH, IT IS THE CUSTOMERS RESPONSIBILITY TO PROVIDE
TRANSLATIONSERVICES.
DO NOT ATTEMPT TO SERVICE THE EQUIPMENT UNLESS THIS
SERVICEMANUAL HAS BEEN CONSULTED AND IS UNDERSTOOD.
FAILURE TO HEED THIS WARNING MAY RESULT IN INJURY TO THE
SERVICEPROVIDER, OPERATOR OR PATIENT FROM ELECTRIC SHOCK,
MECHANICALOR OTHER HAZARDS.
CE MANUEL DE MAINTENANCE NEST DISPONIBLE QUEN ANGLAIS. SI LE
TECHNICIEN DU CLIENT A BESOIN DE CE MANUEL DANS UNE AUTRE
LANGUE QUE LANGLAIS, CEST AU CLIENT QUIL INCOMBE DE LE
FAIRETRADUIRE.
NE PAS TENTER DINTERVENTION SUR LES QUIPEMENTS TANT QUE LEMANUEL
SERVICE NA PAS T CONSULT ET COMPRIS.
LE NON-RESPECT DE CET AVERTISSEMENT PEUT ENTRANER CHEZ
LETECHNICIEN, LOPRATEUR OU LE PATIENT DES BLESSURES DUES DESDANGERS
LECTRIQUES, MCANIQUES OU AUTRES.
DIESES KUNDENDIENSTHANDBUCH EXISTIERT NUR INENGLISCHER
SPRACHE.
FALLS EIN FREMDER KUNDENDIENST EINE ANDERE SPRACHE BENTIGT,
ISTES AUFGABE DES KUNDEN FR EINE ENTSPRECHENDE BERSETZUNG
ZUSORGEN.
VERSUCHEN SIE NICHT, DAS GERT ZU REPARIEREN, BEVOR
DIESESKUNDENDIENSTHANDBUCH NICHT ZU RATE GEZOGEN UND
VERSTANDENWURDE.
WIRD DIESE WARNUNG NICHT BEACHTET, SO KANN ES ZU VERLETZUNGENDES
KUNDENDIENSTTECHNIKERS, DES BEDIENERS ODER DES PATIENTENDURCH
ELEKTRISCHE SCHLGE, MECHANISCHE ODER SONSTIGE GEFAHRENKOMMEN.
ESTE MANUAL DE SERVICIO SLO EXISTE EN INGLS. SI ALGN PROVEEDOR
DE SERVICIOS AJENO A GEMS SOLICITA UN IDIOMA
QUE NO SEA EL INGLS, ES RESPONSABILIDAD DEL CLIENTE OFRECER
UNSERVICIO DE TRADUCCIN.
NO SE DEBER DAR SERVICIO TCNICO AL EQUIPO, SIN HABER CONSULTADO
YCOMPRENDIDO ESTE MANUAL DE SERVICIO.
LA NO OBSERVANCIA DEL PRESENTE AVISO PUEDE DAR LUGAR A QUE
ELPROVEEDOR DE SERVICIOS, EL OPERADOR O EL PACIENTE SUFRAN
LESIONESPROVOCADAS POR CAUSAS ELCTRICAS, MECNICAS O DE
OTRANATURALEZA.
WARNING
AVERTISSEMENT
WARNUNG
AVISO
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
ii
ESTE MANUAL DE ASSISTNCIA TCNICA S SE ENCONTRADISPONVEL EM
INGLS.
SE QUALQUER OUTRO SERVIO DE ASSISTNCIA TCNICA, QUE NO A
GEMS,SOLICITAR ESTES MANUAIS NOUTRO IDIOMA, DA RESPONSABILIDADE
DOCLIENTE FORNECER OS SERVIOS DE TRADUO.
NO TENTE REPARAR O EQUIPAMENTO SEM TER CONSULTADO ECOMPREENDIDO
ESTE MANUAL DE ASSISTNCIA TCNICA.
O NO CUMPRIMENTO DESTE AVISO PODE POR EM PERIGO A SEGURANA
DOTCNICO, OPERADOR OU PACIENTE DEVIDO A CHOQUES ELTRICOS,MECNICOS
OU OUTROS.
IL PRESENTE MANUALE DI MANUTENZIONE DISPONIBILESOLTANTO IN
INGLESE.
SE UN ADDETTO ALLA MANUTENZIONE ESTERNO ALLA GEMS RICHIEDE
ILMANUALE IN UNA LINGUA DIVERSA, IL CLIENTE TENUTO A
PROVVEDEREDIRETTAMENTE ALLA TRADUZIONE.
SI PROCEDA ALLA MANUTENZIONE DELLAPPARECCHIATURA SOLO DOPO
AVERCONSULTATO IL PRESENTE MANUALE ED AVERNE COMPRESO IL
CONTENUTO.
NON TENERE CONTO DELLA PRESENTE AVVERTENZA POTREBBE FARCOMPIERE
OPERAZIONI DA CUI DERIVINO LESIONI ALLADDETTO ALLAMANUTENZIONE,
ALLUTILIZZATORE ED AL PAZIENTE PER FOLGORAZIONEELETTRICA, PER URTI
MECCANICI OD ALTRI RISCHI.
ATENO
AVVERTENZA
-
&&&
Revision 4
".2&-*"+1 +,1 -/,-"/)6 20"! *6 20" &+2/6 ,/!&+$)6
1%" &+01/2 1&,+0 %"/"&+ ,+1&+"! 0%,2)! "1%,/,2$%)6
/"! +! 2+!"/01,,! "#,/" 6,2 11"*-1 1, -) " 1%&0 ".2&-*"+1
&+ ,-"/1&,+ %" "+"/) )" 1/& ,*-+6 "!& ) 601"*0 /,2-
4&)) " $)! 1, 00&01 +! ,,-"/1" &+ -) &+$ 1%&0
".2&-*"+1 &+ 20"
)1%,2$% 1%&0 --/120 &+ ,/-,/1"0 %&$% !"$/"" ,# -/,1"
1&,+ $&+01 5/!&1&,+ ,1%"/ 1%+ 1%" 20"#2) "*, -/
1& ) !"0&$+ ,# ".2&-*"+1 + -/,3&!" ,*-)"1" -/,1"
1&,+ ,/ + +6 -/ 1& ) !"0&$+ ,*-") 1%" ,-"/81,/ 1, 1("
!".21" -/" 21&,+0 1, -/"3"+1 1%" -,00&&)&16 ,# +6
-"/0,+0 /")"00)6 2+4&0")6 ,/ 2+(+,4&+$)6 "5-,08&+$
1%"*0")3"0 ,/ ,1%"/0 1, /!&1&,+
1 &0 &*-,/1+1 1%1 "3"/6,+" %3&+$ +61%&+$ 1, !,
4&1% 5/!&1&,+ " -/,-"/)6 1/&+"! +! #2))6
.2&+1"! 4&1%1%" /" ,**"+!1&,+0 ,# 1%" 1&,+) ,2+
&) ,+ !&1&,+ /,1" 1&,+ +! "02/"*"+10 0 -2)&0%"!
&+ "-,/10 3&))" #/,* 2)& 1&,+0 ,,!*,+1 3"+2" ,,*
"1%"0! /6)+! +! ,#1%" +1"/+1&,+) ,**&00&,+ ,+
!&1&,+ /,1" 1&,+ +! 1(" !".21" 01"-0 1, &+02/"
-/,1" 1&,+ $&+01 &+2/6
)) -"/0,+0 21%,/&7"! 1, 20" 1%" ".2&-*"+1 *201 "
,$+&7+1 ,# 1%" !+$"/ ,# "5 "00&3" "5-,02/" 1,
5/!&1&,++! 1%" ".2&-*"+1 &0 0,)! 4&1% 1%"
2+!"/01+!&+$ 1%1 1%" "+"/) )" 1/& ,*-+6 "!& ) 601"*0
/,2- &10$"+10 +! /"-/"0"+11&3"0 %3" +,
/"0-,+0&&)&16 #,/ &+2/6 ,/ !*$" 4%& % *6 /"02)1
#/,* "5-,02/" 1, 5/!&81&,+
/&,20 -/,1" 1&3" *1"/&) +! !"3& "0 /" 3&))"
1 &0 2/$"! 1%1 02 % *1"/&)0 ,/ !"3& "0 " 20"!
-
Blank page.
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
v
TABLE OF CONTENTS
CHAPTER TITLE PAGE
WARNING i. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . IMPORTANT XRAY PROTECTION iii. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
REVISION HISTORY xiii. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. LIST OF EFFECTIVE PAGES xiii. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 THEORY OF OPERATION 11. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SECTION 1 INTRODUCTION 11. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Applications 11. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Functions 11. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13 Component Assemblies 12. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131 Power
Unit 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Extension Rack 13. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Console 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
SECTION 2 SOFTWARE ARCHITECTURE 15. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 21 Background 15. . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 22 Organization 15. . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . .
SECTION 3 OVERVIEW 16. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
CPU Communication 16. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . 32 Error
handling 16. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SECTION 4 POWER ON/RESET DIAGNOSTICS 18. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 41 PRD Test Sequence 19. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 42 Firmware Initialization 19. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . .
SECTION 5 INITIALIZATION 111. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
ON/OFF Function 111. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
On/Off sequencing: Command 1 control 111. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 521 Standby mode - 3
Phase control 111. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 522 Power ON sequence 112. . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 523 Power OFF sequence 113. . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 53 Main Power Supply Contactors and Power
Control 116. . . . . . . . . . . . . . . . . . . . . . . . . . . .
531 LV Power Supplies DC supply 116. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 532
Contactors power on 116. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533 AC
power control 116. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534 DC
power control 117. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
vi
TABLE OF CONTENTS (CONT.)
CHAPTER TITLE PAGE
54 DC Power Supply generation 120. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55 Power
Supply-related Error Codes 120. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
SECTION 6 ROTOR CONTROLLER FUNCTION 123. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 61 Introduction 123. . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 62 Rotor Function
Sequencing 123. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 63 Rotor Controller Command
127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 631 Rotor controller: Command 2 EPLD
127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 632 IGBT command drivers 127. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 633 Phase measurements and maximum current detection 127. . . .
. . . . . . . . . . . . . . . . . . . . . . 634 High Speed
capacitors selection 128. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 64 Rotor Controller Power
Inverter 130. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 641 Rotor controller inverter 130. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 642 Current measurements 130. . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 643 High Speed capacitors 130. . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 644 Tube housing cooling 131. . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 65 Rotor Controller Error Handling 131. . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66 Rotor Controller Thermal Protection 132. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .
SECTION 7 HEATER FUNCTION 134. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Introduction 134. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72 Heater Function Sequencing 134. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73 Heater
Command 137. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 731 Heater
control: Command 2 EPLD 137. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 732 IGBT command drivers
137. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 733 RMS heater current measure
regulation 137. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 734 Heater inverters protection 138. . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 735 Filament protection 138. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 74 Heater Power inverter and HV Tank heater
transformers 140. . . . . . . . . . . . . . . . . . . . . . . . 741
Heater inverters 140. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 742
High Voltage Tank heater transformers 141. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 75 Heater Error
Handling 141. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . .
SECTION 8 KV GENERATION FUNCTION 144. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 81 Introduction 144.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 82 Exposure
Sequencing 144. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 83 kV Command And
Control 147. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . .
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
vii
TABLE OF CONTENTS (CONT.)
CHAPTER TITLE PAGE
831 Inverter command, kV regulation and safeties: Command 1
EPLDs 147. . . . . . . . . . . . . . . 832 Inverter command:
COMMAND EPLD 147. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 833 kV regulation: REGULATION EPLD 148. . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
834 kV function safeties: SAFETY EPLD 148. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 835 Main inverter
drivers 149. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 836 kV measure and
kV rise waveform 149. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 837 Inverter current measure 149.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 84 kV Power Inverter and HV Tank 151. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 841 kV main inverter 151. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 842 HV Tank transformer 153. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 85 kV Function Error Handling 155. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86 kV
Inverter Thermal Protection 155. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . .
SECTION 9 MA FUNCTION 157. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Introduction 157. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
92 mA Measurement Circuit 157. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93 mA
Regulation 158. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94 mA
Error Handling 158. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
SECTION 10 TUBE SELECTION FUNCTION 160. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 101 Introduction 160.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 102 Tube Selection
Sequencing 162. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 103 Tube Selection Error
Handling 162. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
SECTION 11 R/RF INTERFACE 163. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Description 163. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1111 Tubes 163. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 1112 Tomography 163. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 1113 Buckies 163. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 1114 Collimators 163. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 1115 Arterio 163. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 112 Composition 166. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 1121 RF/One Tube 167. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 1122 RF/Two Tubes 167. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 1123 RAD/One or Two Tubes 167. . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 113 Operation 167. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 1131 Wall Bucky Board MPH A6 A4 167. . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
viii
TABLE OF CONTENTS (CONT.)
CHAPTER TITLE PAGE
1132 Table Interface Board MPH A6 A2 168. . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 1133 Table
Tomo Collimator Interface Board MPH A6 A5 168. . . . . . . . . . .
. . . . . . . . . . . . . . . 1134 ROOM IF CPU Board MPH A6 A1 168.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 114 Workstation Decoding Principle 169. . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
115 How can the user trigger an x-ray exposure in a RF Remote
system? 194. . . . . . . . . . . . . .
SECTION 12 AEC/AET FUNCTION 195. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . SECTION 13 II
SENSOR FUNCTION 197. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 131 Description 197. . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 1311 Function 197. . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
SECTION 14 CONTROL CONSOLE FUNCTION 1100. . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 141 Purpose 1100. . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 142 Console Makeup
1100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 143 Operation 1100. . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 1431 Console
Control Board (MPH A3 A2) 1100. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 1432 Switchon Tests 1103. . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . 1433 Console Service Test 1103.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 1434 Multiplexed Readout 1104. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 1435 Communicating with the
Generator 1105. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . .
SECTION 15 PROGRAM-X FUNCTION 1107. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 151 Purpose of
PROGRAM-X 1107. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 152 PROGRAM-X Composition
1107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 153 PROGRAM-X Control Board (MPH A8 A1)
1107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
154 Switches, jumpers, LEDs and test points 1111. . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .
SECTION 16 PRINT-X FUNCTION 1112. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
Purpose of PRINT-X 1112. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
PRINT-X Composition 1112. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 163 PRINT-X
1112. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1631
Function equivalence chart 1113. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SECTION 17 0-POINT MODE 1115. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Presentation 1115. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1711 Definition 1115. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 1712 Purpose 1115. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 1713 Requirements 1115. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . .
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
ix
TABLE OF CONTENTS (CONT.)
CHAPTER TITLE PAGE
1714 Sequence of Operations 1115. . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1715 Constraints 1116. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 172 Ergonomics 1116. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 1721 Access 1116. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 1722 Exposure-Factor Display on Control Console 1116. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1723
Focal Spots 1116. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1724 Automatic operations 1116. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1725 kV Override 1117. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 1726 CVN 1117. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 1727 Preprogrammed Examinations 1117. . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1728 Sequence in 0-Point Mode 1117. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Determining Rad kV Values: Rad LUT (p, kV) 1118. . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 174 Technical Limitations
of Image Quality and of Physician 1118. . . . . . . . . . . . . . .
. . . . . . . . 1741 Limits 1118. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 1742 Priority 1119. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 175 Using the LUTs 1120. . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 176 Parameter Modification 1120. . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 177 Prestored LUT content 1120. . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . .
APPENDIX 1 FUNCTIONAL DESCRIPTION A11. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . SECTION 1 SECTION 1
INTRODUCTION A11. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 11 Introduction A11. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . .
APPENDIX 2 USER INTERFACE A21. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . SECTION 1
INTRODUCTION A21. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . SECTION 2
USER/MACHINE INTERACTIONS A21. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 21 Service Terminal, GPX Console, or
Console A21. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 22 Program-X A22. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . .
SECTION 3 PROGRAM OUTPUTS FOR USER INFORMATION A22. . . . . . .
. . . . . . . . . . . . .
2 BLOCKS DIAGRAMS 21. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SECTION 1 INTRODUCTION 21. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
x
TABLE OF CONTENTS (CONT.)
CHAPTER TITLE PAGE
3 DISASSEMBLY/REASSEMBLY 3I. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . SECTION 1
LIST OF JOB CARDS 31. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . Job Card DR 001
Disassembly/Reassembly within the MPH Cabinet 33. . . . . . . . . .
. . . . . . . . . Job Card DR 002 MPH A4 A1 CMD1 board replacement
35. . . . . . . . . . . . . . . . . . . . . . . . . . . . Job Card
DR 003 MPH A4 A2 CMD2 board replacement 37. . . . . . . . . . . . .
. . . . . . . . . . . . . . . Job Card DR 004 MPH A4 A3 CPU board
replacement 39. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . Job Card DR 005 MPH A3 A1 DC Filter Board replacement 313. .
. . . . . . . . . . . . . . . . . . . . . . . . Job Card DR 006 MPH
A3 A2 Main Power Supply Board replacement 317. . . . . . . . . . .
. . . . . . . Job Card DR 007 MPH A3 FL1 EMC Filter assembly
replacement 321. . . . . . . . . . . . . . . . . . . . . Job Card
DR 008 MPH A3 A3 Inverter replacement 323. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . Job Card DR 009 MPH A2 HV
TANK replacement 327. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . Job Card DR 010 MPH A2 A2 HV tank SWITCH Motor
replacement 329. . . . . . . . . . . . . . . . . . Job Card DR 011
MPH A5 A1 Heather Board replacement 331. . . . . . . . . . . . . .
. . . . . . . . . . . . . Job Card DR 012 MPH A5 A2 Rotor
Controller Board replacement 333. . . . . . . . . . . . . . . . . .
. . Job Card DR 013 MPH A5 A3 Option Chiller Board replacement 337.
. . . . . . . . . . . . . . . . . . . . . Job Card DR 014 MPH A5 PS
1, PS 2 Power Supply replacement 339. . . . . . . . . . . . . . . .
. . . . . . Job Card DR 015 MPH A6 A1 room I/F CPU Board
replacement 341. . . . . . . . . . . . . . . . . . . . . . Job Card
DR 016 MPH A6 A2 Table interface board replacement 345. . . . . . .
. . . . . . . . . . . . . . . Job Card DR 017 MPH A6 A3
distribution board replacement 347. . . . . . . . . . . . . . . . .
. . . . . . . . Job Card DR 018 MPH A6 A4 Wall Bucky Board
replacement 349. . . . . . . . . . . . . . . . . . . . . . . . Job
Card DR 019 MPH A6 A5 Table Tomo collimator board replacement 351.
. . . . . . . . . . . . . . . Job Card DR 020 MPH A6 A6 II Sensor
Board replacement 353. . . . . . . . . . . . . . . . . . . . . . .
. . . Job Card DR 021 MPH A6 PS1/ PS2 Power Supplies replacement
355. . . . . . . . . . . . . . . . . . . . . Job Card DR 022
Replacement of programX components 357. . . . . . . . . . . . . . .
. . . . . . . . . . . . . Job Card DR 023 Replacement of Xray tube
and Exposure counter recording 365. . . . . . . . . . . . Job Card
DR 024 Replacement of printX components 369. . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . Job Card DR 025 kV/mA
measurement calibration 373. . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . .
4 DIAGNOSTICS 41. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . SECTION 1 INTRODUCTION 41. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Overview 41. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12 Block convention 42. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
xi
TABLE OF CONTENTS (CONT.)
CHAPTER TITLE PAGE
SECTION 2 PRD DESCRIPTION 43. . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Functional Overview 43. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
Functional requirements for PRD 43. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 22 User/Operator
Interface 46. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 221 MPH Power on / Reset
Diagnostics. Summary Of Switches And LEDS Utilization 46. . .
SECTION 3 SLD 418. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 31 Here to use 418. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 311 TAV Tests Operator Interface 418. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
Functional requirements for MPH SLD 424. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 313 MPH functions
424. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 314 MPH FRUs 424. .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 315 SLD design
description 425. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . .
SECTION 4 APPLICATION ERROR CODES 426. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 41 Software
Processing 426. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . 411 Class I Error
Treatment 426. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 412 Class II Error
Treatment 426. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 413 Class III Error
Treatment 426. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 414 Class IV Error
Treatment 426. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 415 Error transmission
Mechanism 426. . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . 42 Diagnostic error list 439. . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . 43 Diagnostic error code
description 443. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
SECTION 5 OPTIONS TROUBLESHOOTING 4215. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . Job Card VF 001
Console display fault 4217. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . Job Card VF 002
Troubleshooting on program-X 4219. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . Job Card VF 003 Troubleshooting
of print-X 4225. . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . Job Card VF 004 Diagnostichelp tests 4229.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . Job Card VF005 Diagnostichelp tests ON/OFF and
power supplies 4237. . . . . . . . . . . . . . . . . . . . Job Card
VF006 Diagnostichelp tests DC bus voltage fault 4243. . . . . . . .
. . . . . . . . . . . . . . . . . . Job Card VF007 Diagnostichelp
tests serial links fault 4247. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . Job Card VF008 Troubleshooting 0-point mode
4251. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . Job Card VF009 Diagnostichelp tests interface rad and
fluoro 4263. . . . . . . . . . . . . . . . . . . . . . . .
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
xii
Blank page.
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
xiii
REVISION HISTORY
REV DATE REASON FOR CHANGE
% %$ " !#'#"& %&' &
( Level M4 Prestige VH with Integrated Console. New RF Table
Interface Board: pages 1-64, 176, 177, 181 and 194 modified.
$ M4-AM milestone.
3
DR012 updated.
4 ( Updated as per BUCge60859.
LIST OF EFFECTIVE PAGES
PAGENUMBER
REVISIONNUMBER
PAGENUMBER
REVISIONNUMBER
PAGENUMBER
REVISIONNUMBER
Title pageSafety Instruction
44
i thru xiv 4
11 thru 1120 4
A11 thru A12 4
A21 thru A22 4
21 thru 254 4
31 thru 380 4
41 thru 4276 4
-
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
xiv
Blank page.
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
11
CHAPTER 1 THEORY OF OPERATION
SECTION 1INTRODUCTION
This document describes the operation of the MPH Generators (50,
65 or 80 kW).The MPH make up a line of generators which serve the
following systems:
Radiographic systems.
RF Remote systems.
RF Cassettless systems.
11 Applications
The MPH can be used in systems with one or two tubes,
radiography or fluoroscopy systems,or in combination of these
system types. The following restrictions apply:
Only one tube may be used for fluoroscopy.
Bias tubes cannot be used.
Grid tubes cannot be used.
12 Functions
The main functions handled by the central unit in Application
Mode are:
a. Power Unit start-up.
b. Operator Mode. Parameter selection.
c. Estimation of exposure parameters.
d. Management of tube thermal status.
e. Management of x-ray tube housing thermal status.
f. Automatic control of tube current in Radiography Mode and
Fluoroscopy Mode.
g. Automatic control of Chamber Reset by kV in AET Mode.
h. Automatic Brightness Control (ABC) by kV in Fluoroscopy
Mode.i. Automatic Quality Control (AQC) in Fluoroscopy Mode .j.
Correction of film non-reciprocity effect in AEC Mode.k.
Calculation of filament temperature.
l. Filament ageing compensation.
m. Control and monitoring of rotor Control Module.
n. Management of thermal status of rotor and kV converters.
o. Control and monitoring of Heater Module.
p. X-ray exposure control.
q. Change of tube selection.
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
12
r. Room interface management.
s. Console management.
t. Program-X management.
u. Printer management.
v. Management of debugging console.
w. Error handling.
The main functions handled in Setup Mode are (see Service
Manual) are:a. Management of the Service Terminal menus (one
Application Menu and six Setup
Menus).b. Diagnostic menus (Menu 1 and Menu 2).c. Room
configuration input (Menu 3).d. Tube parameter input (Menu 3).e. kV
scale parameter input (Menu 3).f. Setup parameter input (Menu 3).g.
Selection of data to be printed (Menu 3).h. Heating current
calibration (Menu 4).i. Fluoroscopy calibration (Menu 4).j. AEC
calibration for Ionix chamber (Menu 4).k. Selection of Zero-Point
Mode, and ionization chamber calibration (Menu 4).l. RAM checksum
update (Menu 5).
m. Post-display enable (Menu 5).n. Calibration of kV and mA
chain (Menu 6).o. Calibration of kV divider frequency response
(Menu 6).p. Calibration of dose in Radiography Mode (Menu 6).q.
Diagnostic.
13 Component Assemblies
The MPH System Cabinet includes the following
sub-assemblies:
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
13
131 Power Unit
Sub-Assembly Designator Function
Room Distribution Panel MPH A1 Power supply for Positionner, II,
Extension rack
HV Tank MPH A2 High Voltage Transformer 80 kW
DC Filter Board MPH A3 A1 AC rectifier to DC
Main Power Supply Board MPH A3 A2 3-Phase control, on/off
drivers, dc detection
Inverter Board MPH A3 A3 Main High Frequency Inverter 80 kW
EMC Filter MPH A3 FL1 Line input filter
CPU Board MPH A4 A3 Exposure control
Command 1 Board MPH A4 A1 ON/OFF control, kV control, mA
measure
Command 2 Board MPH A4 A2 Rotor controller command, filament
control
Rotor Controller Board MPH A5 A2 Stator power supply
Heater Board MPH A5 A1 Filament power supply
LV2 Power Supply 24 V MPH A5 PS2 Low voltage power supply (24
V)LV1 Power Supply 15 V MPH A5 PS1 Low voltage power supply (15 V,
5 V)Chiller Interface MPH A5 A3 Optional control of Chiller or
Local Water-Tap
132 Extension Rack
Sub-Assembly Designator Function
Room IF CPU Board MPH A6 A1 Dialog with Room and AEC Control
Table interface MHP A6 A2 Interface with Remote positionner and
I. F.
Distribution Board MHP A6 A3 Power supply and
interconnections
Wall Bucky Board MHP A6 A4 Interface with wall bucky and Room
Door
Table Tomo Colimator MHP A6 A5 Interface with Rad Table with
Tomo and automaticcollimator
I. I. Sensor Board MHP A6 A6 Supply for Photomultiplier and
measure current ofphotomultiplier in I. I.
Power Supply MHP A6 PS1 Power supply 15 V, + 5 V for Room
IF/CPU
Power Supply MHP A6 PS2 Power supply 15 V RF for Interface
Board
Transformer MHP A6 A7 Various AC supply for AEC, Bucky, control
con-sole, etc.
Plug Panel MHP A6 A8 Plug Panel for SAS connectors
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
14
133 Console
Madrid Console MPH A7 Control Console
Program-X MPH A8 Anatomic Programs
Print-X MPH A9 Printer for Radiography parameters
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
15
SECTION 2SOFTWARE ARCHITECTURE
21 Background
The MPH software, which is run on the PU_CTRL_CPU Board, is a
combination of theMPG100 and SCPU software packages.The MPG100
software, formerly in Pascal, has been re-written in C. The entire
softwarepackage is used, regardless of equipment, i.e., user
interface and start-up.The SCPU software is included for exposure
management, fault processing, and diagnosis.The SCPU and MPH
generators have identical power controls.The software segment which
is specific to the 68360 microprocessor has been re-written,based
on the VRTX Spectra real-time nucleus. This segment concerns task
management,series links, timers, mAs, and AEC cutoffs.
22 Organization
The software that run on the PU_CTRL_CPU board manages MPH power
functions.Power management is broken down into several jobs.A
number is assigned to each job to indicate its priority level. A
small number indicates highpriority.Jobs communicate with each
other via messages sent to message queues or mailboxes.Management
of the various jobs is performed by the VRTX-SA software
component.When a job receives a message, VRTX-SA authorizes
execution if the job has higher prioritythan the current job. If
not, it waits for completion of the current job before executing
theother.When there is no current job, VRTX-SA activates the IDLE
background job.The software run on the ROOM_IF_CPU Board manages
room inputs and outputs.The two programs communicate via an
HDLC-type link.
Error Code Name Cause
502 ERR_RAM Checksum RAM (PU parameters) corrupted.504
ERR_COD_TAB_FAIL
ERR_COD_TAB_FULLERR_FLOATVRTX_ERR
Error code table corrupted.Error code table full.Error detected
in floating point calculation.Error detected in VRTX operation.
505 WATCHDOG_ERR Reset due to watchdog.
515 CONNECTIC_FAULT Connection error between PU_CTRL_CPU Board
andCMD1 and CMD2 Boards (checked every 10 ms).
516 ADC_FAIL A/D conversion incomplete or reread of kV and ICH
setpoints, too far from transmitted value.
550 XILINX_CONF_ERR XILINX configuration fault.
501 ERR_PILE The battery for non volatile RAM reack its maximum
timeof use (3 years).RAM concerned on PU_CTRL_CPU and ProgramX
ifpresent.
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
16
SECTION 3OVERVIEW
31 CPU Communication
The PU_CTRL and ROOM_IF_CPU Boards communicate via an HDLC-type
link, ensuringthe room interface.The ROOM_IF_CPU Board software
reads the status of signals coming from the other Roommodules, and
transmits these signals to the PU_CTRL_CPU Board. Tomography
information received from positioner (tomography time,
tomography
selected). DSA information (Linear Mode) received from DRS.
Cassette size information received from positioner. Divided
exposure information received from positioner. Slice information
received from Image Module. Station information from Room. Exposure
commands: Rad Prep, Exposure, and fluoro footswitch, received
from
positioner. Video brightness, received from Image Module.
Ionization chamber reset, received from positioner. Positioner
transmission, DRS, and generator commands.The ROOM_IF_CPU Board
software receives commands from the PU_CTRL_CPU Boardsoftware, and
transmits them to the other modules, as follows: From workstations
to the various room components (selection of these components).
Selection of pick-up fields to DRS or to positioner (AEC).
Selection of ionization chamber to positioner. Photomultiplier
voltage to the image module. Generator authorization: Rad Prep
finished, ready for radiography, ready for
fluoroscopy. X-ray emission.
32 Error handling
Error Code Name Cause
521 HDLC_ERROR Communication error with ROOM_IF_CPU
526 TST_COM_ERR Communication test with ROOM_IF_CPU
Board(performed every 10 s) failed.
522 SCC3_ERROR Communication error with TAV/GPX
523 SCC4_ERROR Communication error with Control Console
MADRID
524 SMCI_ERROR Communication error with APR
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
17
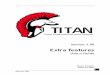
ILLUSTRATION 11JOBS AND INTERRUPTION HANDLING
CLOCKS
CHASE
VRTX JOBS
ROTOR
INTERRUPTIONHANDLING
CONTROLCONSOLE KEYS
SERVICE TERMINALKEYS
PROGRAM_XRECEPTION
CONTROLCONSOLE DISPLAY
SERVICE TERMINALDISPLAY
PROGRAM_XTRANSMISSION
APPLI_MPGMAINTENANCE &
SET-UP
THERMAL
APPLI_SCPU
ROOM I/OTRANSMISSION
ROOM I/ORECEPTION
KEYBOARD
SCREEN
HEATER
ROOMIF CPU
OTHER PROGRAMS
CONTROLCONSOLE(MADRID)
PRGX
TAVGPXTJRADIOGRAPHY &FLUOROSCOPY
flashingLED sequence
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
18
SECTION 4POWER ON/RESET DIAGNOSTICS
The MPH PRD high frequency generator Power ON/Reset sequence is
initiated by one of thefollowing conditions:
Power applied to MPH PU_CTRL_CPU and ROOM_IF_CPU Boards.
Reset signal generated by board resident manual reset
switch.
Either of these signals will reset the CPU Boards.
The purpose of this group of tests is to check operation of
those functions on the MPH CPUBoards that are required to establish
reliable communications. These diagnostic tests establishoperator
confidence in the test execution sequence.
The primary functions of the Board are tested and, if these
functions are within test limits, theyare used to test other Board
functions.
If the primary functions are not testable, the test sequence is
aborted.
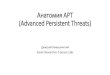
The block diagram below shows the functions checked during the
PU_CTRL_CPU andROOM_IF_CPU PRD sequence. Diagnosis is to a Field
Replaceable Unit level (CPU Boardsfor PRD).Board functions should
be tested in the sequence specified in the following paragraph.
Likethe PU_CTRL_CPU Board, the ROOM_IF_CPU Board can execute PRD
sequencesindependently. This is the reason why communication
between both Boards is the lastPU_CTRL_CPU (Master Board) PRD
sequence which cannot be ended, because theROOM_IF_CPU PRD
sequences are not finished.
PRD Leds
PRD switches
PRD Leds
PRD switches68360
68302
TAV
ROOM_IF_CPU Board
PU_CTRL_CPU Board
SCC4
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
19
41 PRD Test Sequence
The following tests are executed, in the order given:
1. CPU alive test: check minimum CPU functions.
2. EPROM checksum test: check the CPU Boards, flash EPROM
checksum.
3. RAM test: check RAM used by the CPUs as a data and stack
area.
This test can be run in three different modes: short, extended,
and long. The short test isrun in normal operation; the extended or
long test is run if requested by the on-boardswitch setting.
Microprocessor tests: set of tests to check Multiprocessors
68306 (PU_CTRL) and 68302(ROOM_IF) functions: Processor test: check
any instructions not previously tested.
Watchdog test: check that the reset sequence following a
watchdog timeout operatescorrectly.
Internal Timers: check operation of the 68302 (ROOM_IF_CPU)
internal timers.These timers are used for AEC clock and time
measurement.
Check operation of the 68360 (PU_CTRL_CPU) internal timers.
These timers areused for time, mAs, bright exposure, and VRTX
clock.
DMA and serial communication test: check operation of channel of
(ROOM_IF) 68302,(PU_CTRL) 68360 (used to send and receive messages
over the HDLC link).
42 Firmware Initialization
After completion of the PRD, Microcontroller 68302 registers
(ROOM_IF_CPU), 68360registers (PU_CTRL_CPU) are initialized. Next,
the real time monitor, VRTX, is initialized,and the first firmware
initialization task, which initiates all the others, is
started.
The MPH then sends the first message to the other CPU to start
communication, and waits forconsole (GPX or Control Console MADRID)
commands.
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
110
ILLUSTRATION 12ON/OFF FUNCTION
#
!
"
"
"
"
$
$$
$!$
"
"
"
"
"
"
"
#
"
"
"
"
"
"
"
$!$
$
$!
$!
"
"
"
"
"
"
"
%
"
"
%
!
$#$
"
!
"
"
"
$
!
#
"
"
!
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
111
SECTION 5INITIALIZATION
51 ON/OFF Function
Refer to Illustration 12 (ON/OFF Function).The MPH ON/OFF
function affects almost all the components of the generator:
380/480 V ac is fed to the MPH through the EMC Filter Board, which
reduces noise
passing from the generator to the line during x-ray exposures.
The DC Filter Board consists mainly of a rectifier and a filter.
The dc output voltage
depends on the ac input: from 400 V dc to 760 V. The Main Power
Supply Board includes several functions: 3-phase control (to insure
the
right level of the 3-phase AC voltage), on/off relays to drive
the room distribution (CT1)and generator (CT2) contactors, isolated
220 V ac rectifier (to supply the low voltagepower supplies), dc
level measure (measures the dc level from the DC Filter Board
andcodes it in three bits).Power is applied to the Extension Rack
as soon as the Room distribution is energized.
The Command 1 Board includes: on/off logic (to enable and
sequence Power On/Off,according to the _SYS_ON command, the DC
level 3-phase control and thermoswitchof room power supply
autotransformer), on/off relays to feed low voltage supplies (15V,
+5 V, +24 V) to other boards.
The Command 2 Board includes control of low voltage supplies
from the LV1 and LV2Power Supplies (15 V, +5 V, +24 V).
Other boards which use the low voltage power supplies: Inverter
Board, Heater Board,Rotor Controller Board.
In standby mode, only the Main Power Supply Board, the15 V, +5V,
and +24 V powersupplies LV1 and LV2, and a part of the Command 1
Board, are alive.In application mode, all boards are powered
on.
52 On/Off sequencing: Command 1 control
521 Standby mode - 3 Phase control
Part of the Command 1 Board is alive in standby mode. It checks
the presence of the 3-phaseline input, and provides 24 V to supply
the ON/OFF switch on the Control console. This partof the board is
fed by the low voltage power supplies through four fuses (F2, F3,
F4, F5).When the generator is in standby, eight LEDs are lit (DS19,
DS20, DS21, DS22, DS11, DS12,DS13 and DS14) if there is no fuse
fault; DS15 is lit if there is no phase missing.The 24 V to supply
the Control console switch is created from the -15 V and +15 V
supplies,using a regulator which makes -15 V and +9 V.The three
phases from the line input are measured on the Main Power Supply
Board. Theresult signal _PH_ON is acquired on the Command 1 for
treatment. If one single phase stays atzero volt during more than
two cycles (32 ms for 60 Hz operation and 40 ms for 50
Hzoperation), then there are two consequences: If the system is
OFF, it is not possible to power on the generator (DS15 is off). If
the system is ON, the _MAIN_DROP signal is set to shut down the
power inverters
(Rotor Controller, Heater, Main Inverter), and to reset the CPU
before the Low VoltagePower Supply disappears (this is maintained
for 75 ms from the Main Power Supply).
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
112
522 Power ON sequence
The aim of the power On/Off circuit is to sequence properly the
power On and Off of the MPHsub-assemblies, so as to avoid any
hazard on the power boards due to abnormal commands.
The On/Off circuit is driven by the following signals:
SYS_ON: return contact of the Control Console Switch. It
initiates the On sequence andcommands directly the room
distribution contactor CT1.
_POW_ON_PU_CTRL: CPU control signal of the generator contactor
CT2 fordiagnostic purposes.
Hardware Command 1 Switch (IN1): shuts off the generator
contactor from the frontpanel (for service use).
The On/Off circuit is controlled by the following signals:
_ON_ENABLE: this signal indicates that the DC voltage is less
than 30 V. The ONsequence is enabled only if the DC level is under
30 V.
_PH_OK1: indicates that the 3-phase input voltage is
correct.
_PH_OK: indicates that the Room Transformer is in normal
condition (T < 125C) or(T < 257F).
The On/Off circuit drives the following signals:
_GEN_ON: commands the Main Power Supply relay which supplies the
generatorcontactor CT2 coil.
PUMP_ON: commands the Main Power Supply relay which supplies 115
V ac to the tubehousing cooling systems.
PRE_ON: commands the PRE_ON relay to apply low voltage power
supplies to otherboards through current resistors.
LV_ON: commands the ON relay to apply low voltage power supplies
directly to theother boards.
Note 1: A thermal switch is built into the Room Distribution
Transformer to remove power fromthe generator in the event of an
overload. The thermostat is triggered if the transformertemperature
reaches 125C.
Note 2: A console presence signal prevents application of power
if the console plug is notconnected.
Note 3: An ON/OFF button, located on Distribution Board MPH
A6A3, can be used by the FieldEngineer.
The ON sequence is as follows (refer to Illustration 13, MPH On
Sequence): Supply the Room Distribution Panel (CT1 contactor
command _SYS_ON). Power applied through current limiting resistors
(R280, R281, R282, R283) to electronic
boards (PRE_ON signal). Power applied directly to electronic
boards (BT_ON signal and X6 relay) and to the tube
housing cooling systems (_PUMP_ON signal). Drive the main
generator contactor CT1 on (_GEN_ON signal).
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
113
ILLUSTRATION 13MPH ON SEQUENCE
When the generator is ON, the following front panel green LEDs
are lit:
On Command 1 Board:
DS19, DS20, DS21, DS22, DS11, DS12, DS13 and DS14 indicate
correct operationof the low voltage power supplies and fuses.
DS15 indicates a normal 3-phase condition.
DS16, DS17, and DS18 indicate low voltage supply to other
boards.
On Command 2 Board:
DS6, DS7, DS8 and DS9 indicate low voltage supplies on the
Command 2 Board.
DS2 indicates that the 15 V, +5 V, +24 V levels are correct.
On PU_CTRL_CPU Board:
DP5 V, DP15 V, DM15 V, DS8, DS9, and DS10 indicate low voltage
supply of thePU_CTRL_CPU Board.
On ROOM_IF_CPU Board:
DS3, DS5, and DS4 indicate low voltage supply of the ROOM_IF_CPU
Board.
523 Power OFF sequence
The OFF sequence is as follows (refer to Illustration 14, MPH
Off Sequence): Switch off the room distribution (_SYS_ON signal),
the tube housing cooling system
(_PUMP_ON signal). Switch off direct dc supply to the electronic
boards (LV_ON signal). This stops power
inverter commands without causing problems with the logic
circuits.
Switch off the current-limited dc supply to the electronic
boards (PRE_ON signal). Switch off Contactor CT2.
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
114
ILLUSTRATION 14OFF SEQUENCE
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
115
ILLUSTRATION 15MAIN POWER SUPPLY BOARD: CONTACTORS, POWER-ON,
AND AC-DC CONTROL
!
!
$#$
#
$ $
$$
!
!'%&
#
!
!
!
$$
$$
$$$
$$
$$
!
$$$
!'%&
"
"
"
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
116
53 Main Power Supply Contactors and Power Control
Refer to Illustration 15 (Main Power Supply Board: Contactors,
Power-on, and AC-DCControl).
531 LV Power Supplies DC supply
In standby mode, the Low Voltage Power Supplies are alive, so as
to power part of theCommand 1 Board, and the Main Power Supply
Board. When there is a line voltage drop, theMPH must react in
order to shut off properly inverters; this requires the Low Voltage
PowerSupplies to be maintained for at least 75 ms. This is done by
the circuit described here:
The generator auto-transformer features an isolated 220 V
winding. This voltage is rectifiedand filtered on the Main Power
Supply Board by a diode bridge and aluminum capacitors. TheLow
Voltage Power Supplies are fed directly by this 310 V dc
voltage.
When the MPH is in standby mode, this circuit is running. The
310 V dc is present on the MainPower Supply Board, indicated by
DS12 warning neon.
When the MPH is driven OFF, the maintain capacitors are
discharged through resistor R85.Disappearance of the DS12 light
indicates full discharge.
532 Contactors power on
The MPH includes two contactors, one in the Room Distribution
Panel, the other on theCabinet Rear Panel. These contactors are
driven by 220 V (for 50 Hz operation) or 240 V (for60 Hz
operation), controlled by 12 V or 24 V relays on the Main Power
Supply Board. Thepresence of the 220/240 V is indicated by DS10
neon.
Three relays on the Main Power Supply Board are driven during
the ON/OFF sequence:
X1 is energized by _SYS_ON signal from the Command 1 Board. It
drives the openingor the closure of CT1, the room distribution
contactor.
X2 is energized by _GEN_ON signal from the Command 1 Board. It
drives the openingor the closure of CT2, the generator
contactor.
X3 is energized by _PUMP_ON signal from the Command 1 Board. It
supplies theselected tube housing cooling system with 115 V ac.
This 115 V ac is indicated by DS5neon.
When these relays are energized, DS6, DS11, and DS12 yellow LEDs
are lit.
533 AC power control
The check of the three phases is shared between the Command 1
Board and the Main PowerSupply Board. On this last board, the three
phases are measured two by two, this measure isisolated by two
transformers. The obtained voltages are then rectified and compared
to areference level, in order to detect phase loss. See
Illustration 16 (Phase Loss Detection). Theinformation is sent to
the Command 1 Board for processing.
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
117
ILLUSTRATION 16PHASE LOSS DETECTION
534 DC power control
The dc power supply is generated on the DC Filter Board. This dc
level is measured on theboard by a resistive bridge, and compared
to different levels on the Main Power Supply Board.
The dc measurement circuit on the Main Power Supply Board
includes:
Five comparators which define seven dc ranges.
An encoder.
An optic coupler on each of the output signals.
Note: Since this circuit is at line potential, it is supplied
through an isolated DC/DC converter(U2). When the MPH is in standby
mode, it is supplied by an isolated 15 V supply,indicated by green
LEDs DS3 and DS4. When the generator contactor is switched on,
thedc level rises to its nominal value (between 480 V and 750 V),
and green LEDs DS1 andDS2 are lit. The optic couplers allow
isolation between the line potential level andCommand 1 ground
level.
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
118
The seven DC ranges are defined as follows:
Range/Signal _ON_ENABLE MEAS_DC_BUS1 MEAS_DC_BUS0 _OK_DC_BUS
E < 30 V 0 0 0 1
30 V < E < 400 V 1 0 0 1
400 V < E < 480 V 1 0 0 0
480 V < E < 557 V 1 0 1 0
557 V < E < 646 V 1 1 0 0
646 V < E < 762 V 1 1 1 0
762 V < E 1 1 1 1
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
119
ILLUSTRATION 17DC POWER SUPPLY
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
120
54 DC Power Supply generation
Refer to Illustration 17 (DC Power Supply).The dc supply for the
three MPH DC/AC inverters (kV Rotor and Heater) is generated by
theDC Filter Board. The ac line voltage supplies this board through
three 100 A fuses (F1, F2,F3). It is rectified by a diode bridge
underneath the board and filtered by capacitors.The outputs are fed
to:
The main MPH 80 kW inverter, through the air inductances.
Rotor Control Board, through a 15 Amps fuse (F4). Heater Board,
through a 3 Amps fuse (F5).The DC level is measured by a resistive
divider at the far end of the power line (after the fuses)so as to
ensure the right diagnosis if the fuse blows.
The filter discharge is made by a 2.7 k resistor, which is
applied to the capacitors when thegenerator contactor is commanded
OFF, by the auxiliary contact of CT2.
The presence of the DC level is indicated on the DC Filter Board
by neon DS1.
55 Power Supply-related Error Codes
Power supply signals status are tested each 10 ms. If an error
is detected, the correspondingerror code (see below) is sent to the
APPLICATION task.
Error Code Name Cause
420 MAIN_DROP MAIN_DROP signal reset detection
410 DC_BUS_ERROR DC_BUS_FAULT (DC_BUS < 400V) signal status
error411 FPS_ERROR FPS_FAULT signal; status error
412 LV_SUPPLY_ERROR LV_ENABLE (low voltage status) signal;
status error
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
121
Blank page.
-
THEORY OF OPERATIONG
E Medical System
sM
PH 50 V2 - M
PH 65 V2 - MPH 80 V2
REV 4
asm
2165118100
122
ILLUSTRATIO
N 18
RO
TOR
CO
NTR
OLLER
FUN
CTIO
N
""
"
$
$$
$!
$$
$
$
$
$$$
$
$!
$ $
"
$$
$$
$$ $
!
%
##
$$
"
"#
$
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
123
SECTION 6ROTOR CONTROLLER FUNCTION
61 Introduction
Refer to Illustration 18 (Rotor Controller Function).The MPH
Rotor Controller function involves the following sub-assemblies:
PUCTRL Board: ROOM_IF_CPU in Extension Rack command interface and
rotor
sequence control.
Command 2 Board: Rotor Controller Inverter command and control,
inverter protection. Rotor Control Board: Rotor Controller Inverter
power board and stator selection. Stators, Tube #1 and Tube #2.The
main features of the MPH Rotor Control function are:
Low Speed 60 Hz (3600 rpm) and High Speed 180 Hz (10800 rpm)
commands. For GeTube or 50 Hz or 150 Mz for CGR Tube.
No TIRC. The Rotor Controller is a PWB assembly. Two tubes with
23/23 (Ge) stator or two tubes with 50/110 (CGR) stator. The two
stator
types cannot be mixed. Current check through the stator
connection to insure rotor rotation. Inverter maximum current
protection against short circuit.
Firmware thermal protection of the MPH Rotor Controller
inverter. Extensive Diagnostics of Rotor Controller function. All
InSite compatible.
62 Rotor Function Sequencing
At the system level, the sequence is as follows:
ROOM_IF_CPU sends an exposure sequence start signal to
PU_CTRL_CPU, which setsrotor speed and rotation commands.
PU_CTRL_CPU reads the acceleration or braking time for selected
tube from thedatabase, according to tube rotor type. Timing for an
MX100 x-ray tube is as follows:
ACCELERATION BRAKING
0 to LS 0 to HS LS to HS HS to LS HS to 0 LS to 0
0.8 sec 1.2 sec 0.8 sec 0.85 sec 6.0 sec 2.0 sec
For other tubes, see Service Manual.
The ROTOR task updates the rotor state machine and sets rotor
command signals. It setsappropriate time delays to accelerate or
brake the rotor and to wait for rotor signal statussignals.
The sequence at generator level is described below. Refer to
Illustration 19 (Rotor ControllerSequences Timing for a Stator
23/23).
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
124
The various signals involved in the rotor function are shared by
the PU_CTRL_CPU Boardand the Command 2 Board. The PU_CTRL_CPU
controls the sequence with transitions onthe command signals
(RUN_ROTOR, HI_SPEED, ACCEL and BRAKE), and checks thatthe returns
are correct (CUR_START_ON, _LS_RTN). These signals are: RUN_ROTOR:
When active (high), it commands the start of the rotor controller.
HI_SPEED: When active (high), the rotor controller is driven in
High Speed mode, when
not active (low), the Low Speed mode is selected. ACCEL: When
active (high), the rotor controller is driven in Acceleration mode,
when
Low, the running mode is selected.
BRAKE: When active (high), the rotor controller is driven in
Brake mode. CUR_START_ON: Return from the Command 2 Board. When
active (high), indicates
that there is some current flowing through the stator winding.
It is checked by the CPUat different times during the sequence (see
illustration).
_LS_RTN: Return from Rotor Control Board. When active (low),
indicates that theCommand 2 Board has selected Low Speed. When not
active (high), indicates that HighSpeed is selected. It is checked
by the PU_CTRL_CPU at different times during thesequence (see
illustration).
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
125
ILLUSTRATION 19ROTOR CONTROLLER SEQUENCES
&
&
& &
&
&
& &
$ "% !# $ "% !#
-
THEORY OF OPERATIONG
E Medical System
sM
PH 50 V2 - M
PH 65 V2 - MPH 80 V2
REV 4
asm
2165118100
126
ILLUSTRATIO
N 110
CO
MM
AN
D 2 BO
AR
D BLO
CK
DIA
GR
AM
RO
TOR
CO
NTR
OLLER
!
$
"
#
#
!
#
$
#
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
127
63 Rotor Controller Command
Refer to Illustration 110 (Command 2 Board Block Diagram Rotor
Controller).The principle of the Rotor Controller Inverter function
stems from the Pulse WidthModulation (PWM) of the IGBT commands. In
contrast to the other MPH inverters, there isno regulation loop in
the Rotor Controller function. This means that there is no
measurementfeedback to adapt the command to a reference. Most
functions are supported by an EPLDwhich manages the PWM and
inverter safety checks.The PWM command allows a choice of rotor
speed, by driving the Rotor Controller with asine wave current at
60 Hz or 50 Hz in low speed mode (3600 rpm), or at 180 Hz or 150 Hz
inhigh speed mode (10800 rpm). The Brake mode is obtained with a
high frequency commandof the rotor controller inverter (at 1.4 kHz)
which generates a DC current in the stator windings(no brake for
CGR Tube).
631 Rotor controller: Command 2 EPLD
The Command 2 Rotor controller EPLD has several functions:
Receive commands from the CPU. There are four commands: RUN_ROTOR
(start
commands), ACCEL (Acceleration mode selection), BRAKE (Brake
mode selection),HI_SPEED (High or Low speed selection).
Receive dc measurements from the Command 1 Board. The dc range
specified byBUS_DC_MEAS0 and BUS_DC_MEAS1 conditions the pulse
width of the IGBTcommands. The greater the DC level, the shorter
the pulses.
Receive safety signals to protect the Rotor Controller Inverter:
Maximum currentdetection in the inverter protects it against short
circuits (START_CUR_MONIT_A/B),minimum and maximum dc level check
(_DC_BUS_EN).
Receive type of stator to drive (2323 or 50110 ohms) by STATOR
2323 signal of CPUBoard. A choise of IGBT commands and the maximum
current level safety is made forthe two types of stator.
Generate IGBT commands. These commands are driven by two state
machines whichtakes into account the CPU commands, the DC level and
the safety signals.
Drive the HIGH_SPEED selection relay, as a function of the speed
selection mode. Inform the CPU of rotor controller status: the
running mode is described by the
_CUR_START_ON signal, the safety mode is described by the
_START_OVL signal.632 IGBT command drivers
There are twelve IGBT drivers; six ON commands, six OFF
commands. All these commandsare driven by the EPLD and controlled
by the LV_ENABLE signal. This control disables thecommands when the
low voltage supplies drop under certain limits, with a complete
hardwarecheck after the EPLD and the buffers. This system insures
that even if the EPLD program failsdue to a low voltage fault,
there should be no possibility of damaging the Rotor
Controllerinverter because of a short circuit command.
633 Phase measurements and maximum current detection
In order to be sure that the tube rotor is rotating, two phases
of the stator current are measuredon the Rotor Control Board. The
third phase is rebuilt on the Command 2 Board, by assumingthat the
sum of the phase currents is equal to zero. Each phase current is
filtered and comparedto a reference current corresponding to 0.2
Amps. This result is read by the EPLD which usesit to generate the
_CUR_START_ON signal, indicating that there is some current
flowingthrough the selected stator. This status is indicated by
yellow LED DS4.
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
128
The dc current flow from the Rotor Control Board to the DC
Filter Board is also measured, todetect inverter short circuits and
protect the IGBTs. This measurement, made on the RotorControl
Board, is compared to a reference value on the Command 2 Board, to
generate a safetysignal (START_OVL) corresponding to 50 A in the
inverter. When this condition appears, asignal is set to inform the
CPU and a red LED (DS3) is lit.
634 High Speed capacitors selection
The MPH Rotor Controller requires a phase shift depending on the
60 Hz/180 Hz or50/150 Hz command. This is done on the Rotor Control
Board by a relay which connectscapacitors between the inverter and
the stator on the auxiliary and main phases. The commandsignal for
this relay is indicated on the Command 2 Board by yellow LED DS5.
When thisLED is lit, this means that the Rotor Controller is in Low
Speed mode. One contact of the relayprovides a signal which is
returned directly to the CPU to acknowledge the command of theRotor
Controller High Speed or Low Speed Mode. (Different capacitors are
used for the23/23 (GE) and 50/110 (CGR) stators.)
-
THEORY OF OPERATION
GE M
edical Systems
MPH
50 V2 - MPH 65 V2 - M
PH 80 V2R
EV 4asm
2165118100
129
ILLUSTRATIO
N 111
RO
TOR
CO
NTR
OLLER
BOA
RD
BLOC
K D
IAG
RA
M
115 Vac
HS RELAY CMDHS RELAY RETURN
IGBT CMDS
TUBE SELECTION
TUBE SEL RETURN
ROTOR CONTROLLER
INVERTER
WITH 6 IGBTS
2 PHASEMEASUREMENT
OVER CURRENTCOMMON MEASURE
COOLING CMD
OIL PUMP OR BLOWER
HIGH SPEEDRELAY AND
CAPACITORS
TUBE
SELECTION
MAINPS
DC_PS
CMD2
CMD2
CMD2
CMD2
CMD2
CMD2
CASING
CASINGNb 2
Nb 1
240 Vdc 370 Vdc Q1Q2Q3Q4Q5Q6
X5
X2
X1
T7T8 T9
T1T2T3T4T5T6
CHILLER BOARDSTARTCOOLING
WATER CIRCULATION
PU_CTRL_ CPU Tube safeties (70 C C)/40
TO CHILLER
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
130
64 Rotor Controller Power Inverter
Refer to Illustration 111 (Rotor Control Board Block
Diagram).The last item in the MPH rotor controller function is the
Rotor Control Board. This is a powerboard driven by the Command 2
Board, and consists mainly of an inverter and related
currentmeasurement circuits.
641 Rotor controller inverter
Since the tube stator is a bi-phase type, the ROTCTL inverter is
a three-leg inverter with sixIGBTs. Each of the six IGBT drivers
consists of an impulse transformer (three windings1:3:3) and zener
diodes. There is no floating power supply to generate the IGBT
commands.The inverter itself is fed by the dc supply from the DC
Filter Board, between 400 V dc to680 V dc nominal values. The
presence of this voltage on Rotor Control Board is indicated byneon
DS1. The dc voltage is changed to ac voltages between the three
phases by the PWMcommands from the Command 2 Board. The main and
auxiliary phases pass through the highspeed selection relay and the
tube selection relay before reaching the stator. The commonphase is
directly connected to the stators permanently.
642 Current measurements
Three currents are measured on Rotor Control Board:
Main and Auxiliary currents are measured by two current
transformers (ratio 150:1) inorder to identify whether there is any
current flowing though the stator (the commonphase is calculated on
the Command 2 Board from the two phases already measured).
The current flow from the DC Supply Board is measured by a
current transformer(ratio 1:1) in order to identify an inverter
short circuit. If this occurs, the stator currentsare shorted by
the inverter short circuit and it is not possible to measure them
using themain and auxiliary current transformers.
643 High Speed capacitors
In High Speed mode, two capacitors are connected between the
inverter and the stator, in orderto modify the angle between the
phase voltages. The selection is made by a relay driven by
theCommand 2 Board rotor EPLD. A contact of this relay is used to
give an acknowledgementstatus signal, which is returned to the CPU.
When the rotor is driven in Low Speed mode, therelay is energized,
and yellow LED DS2 is lit. The position of the capacitors between
theinverter and the tube is shown in Illustration 112 (High Speed
Capacitors for stator GE(23/23)).
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
131
ILLUSTRATION 112HIGH SPEED CAPACITORS FOR STATOR GE (23/23)
644 Tube housing cooling
The tube housing cooling ac power supply is generated in the MPH
by the generatorauto-transformer, and connected to the casings
through the Main Power Supply Board andRotor Control Board. This
voltage is 115 V ac; its presence is signalled on the Rotor
ControlBoard by neon DS6. It is switched to one tube or the other
by the same tube selection relay asthe rotor controller inverter
outputs.
In the case of a water-cooled tube, the Chiller Board (option)
is installed on the generator doorbeside the low-voltage power
supplies. The Board controls the power supply to an externalchiller
which initiates tube cooling. During chiller operation, the DS1 or
DS2 indicator lampon the Chiller Board is lit, and water
circulation information is sent to the CPU via the Rotorand Command
2 Chiller Boards.
65 Rotor Controller Error Handling
When no exposure is in progress, rotor status signals are tested
every 10 ms. If an error isdetected, the corresponding error
signal, HE_ROTOR, is generated to the APPLICATIONtask.
During an exposure, status signals that must change are not
tested for 200 ms after a newcommand. All other status signals are
tested every 10 ms. If an error is detected, thecorresponding error
code is sent to the APPLICATION task. The error code depends on
thesignal and on the state of the rotor when the error was
generated.
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
132
Error Code Name Cause
720 CUR_ST_HS_ACC CUR_START_ON (current in rotor controller
circuit) signal;status error while accelerating to high speed.
721 CUR_ST_HS_RUN CUR_START_ON (current in rotor controller
circuit) signal;status error while rotor running in high speed.
722 CUR_ST_HS_BR CUR_START_ON (current in rotor controller
circuit) signal;status error while braking from high speed.
723 CUR_ST_LS_ACC CUR_START_ON (current in rotor controller
circuit) signal;status error while accelerating to low speed.
724 CUR_ST_LS_RUN CUR_START_ON (current in rotor controller
circuit) signal;status error while rotor running in low speed.
725 CUR_ST_LS_BR CUR_START_ON (current in rotor controller
circuit) signal;status error while braking from low speed.
710 ST_OVL_HS_ACC START_OVL (over current in rotor controller
circuit) signal;status error while accelerating to high speed
711 ST_OVL_HS_RUN START_OVL (over current in rotor controller
circuit) signal;status error while rotor running in high speed.
712 ST_OVL_HS_BR START_OVL (over current in rotor controller
circuit) signal;status error while braking from high speed.
713 ST_OVL_LS_ACC START_OVL (over current in rotor controller
circuit) signal;status error while accelerating to low speed.
714 ST_OVL_LS_RUN START_OVL (over current in rotor controller
circuit) signal;status error while rotor running in low speed.
717 ST_OVL_LS_BR START_OVL (over current in rotor controller
circuit) signal;status error while braking from low speed.
718 LS_RTN_ERR LS_RTN (low speed selection status) status signal
error.726 HE_ROTOR Rotor status signal error while rotor not
activated
507 ROT_CMD_TUB_CH New rotor command while tube changing
719 THERM_ROT Maximum rotor thermal value reached
66 Rotor Controller Thermal Protection
Rotor inverter thermal status is calculated every 10 ms. If the
maximum value is reached, anerror message is sent to the
display.
After a reset, the last recorded values of rotor thermal status
are updated with elapsed time.
When Rad preparation is requested by the user, the rotor margin
(capacity of rotor inverter toexecute the next rotor acceleration
and brake sequence) is calculated.If the next sequence cannot be
executed because of a thermal error, the rotor command isdelayed,
and the green Prep lamp on Control Console flashes.
-
THEO
RY O
F O
PERA
TIO
N
GE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
133
ILLUSTRATION 113HEATER FUNCTION
$
$
$
& &$
& &$$
"&$$
! &$$
&&$$
!
$
&& !
&&
& &$
&&$
$
&$&
&$&
&&$
&$&
&$&
&&$
$
$
$
$
$
"
$
$
!
&&$
!
#
!$
!%
!%
$
&&!&
$
$
"
$
"
&$
&$
&$
&$
!
&&!
$!
-
THEO
RY O
F O
PERA
TIO
NGE Medical Systems MPH 50 V2 - MPH 65 V2 - MPH 80 V2REV 4 asm
2165118100
134
SECTION 7HEATER FUNCTION
71 Introduction
Refer to Illustration 113 (Heater Function).The MPH Heater
function involves the following sub-assemblies: ROOM_IF_CPU: Sends
radiography and fluoroscopy preparation commands. PU_CTRL_CPU
Board: Heater sequence control. Command 2 Board: Heater Inverters
(XS and XL) command and control, inverter
protection. Heater Board: Heater inverters and tube selection
relays. HV Tank: Heater transformers
(XS Tube1, XL Tube 1, XS Tube 2, XL Tube 2). Tube #1 and Tube #2
filaments.The main features of the MPH Heater function are: Two
independent inverters: One for Small Focus XS, one for Large Focus
XL. Maximum Current up to 10 A in Boost Mode. RMS filament current
value instantaneous regulation. Filament protection against maximum
currents. Open filament detection. Heater inverters protection
against maximum currents. Extensive diagnostics of the Heater
function. All InSite compatible.
72 Heater Function Sequencing
Sequencing of the Heater function is controlled by the CPU.
Depending on the required mA,CPU drive the heater current
reference. The sequence of the commands between CPU and theCommand
2 Boards is shown in Illustration 114 (Heater Sequence).
ROOM_IF_CPU sends an exposure start signal to PU_CTRL_CPU which
sets heater
commands: OFF, pre-heat, acquisition, boost. The APPLICATION
task sends commands to the HEATER task. This updates the heater
state machine for the corresponding focus, and sets the heater
command signals.The definition of the signals is: RUN_HEAT_XS (or
XL): instructs the Command 2 Board to drive the Heater inverter
XS (or XL). SET_HEATER_XS (or XL): analog reference value for
the XS (or XL) heater current. _PRE_HEAT: sets the selected focus
to pre-heat mode. BOOST: sets the selected focus to Boost mode. XS:
selects the focus (XS or XL). _PRESENCE_XS (resp XL): indicates to
the CPU that the corresponding focus is
normally driven.
-
THEORY OF OPERATION
GE M
edical Systems
MPH
50 V2 - MPH 65 V2 - M
PH 80 V2R
EV 4asm
2165118100
135
ILLUSTRATIO
N 114
HEATER
SEQUENCE
%&&%$)'
&%$)'
%&&%$)'
&%$)'
!#&''!
+#%!%( '#"
*$#&(%)'!%( '#"
#'&
-
THEORY OF OPERATIONG
E Medical System
sM
PH 50 V2 - M
PH 65 V2 - MPH 80 V2
REV 4
asm
2165118100
136
ILLUSTRATIO
N 115
CO
MM
AN
D 2 BO
AR
D BLO
CK
DIA
GR
AM
HEATER
CO
NTR
OL
HEATER
REFERENCE
MODE SEL
NETWORKLEVEL
ROTCTL CLOCKS
RUN XLMODE SEL
HEATERXL CURRENTREFERENCE
LV POWERSUPPLY
EPLD
COMMANDS
AND
SAFETIES
DETECTION
FUNCTION CURRENTMEASURE
MINIMUM
DETECTION
ZERO
DETECTION
MAXIMUMCURRENT
LEVEL
LV_EN
CONTROLXL IGBT CMDS
LV_ENABLE
MINIMUMXL CURRENTDETECTION
ZEROXL CURRENTDETECTION
XL SHORT CCTDETECTION
XL SQUAREFUNCTION
HEATER XLCURRENTMEASURE
24 V
CMD1
CMD1
CMD2STARTER
HEATER
HEATER
HEATER
HEATER
HEATER
CMD2STARTER
+
+
+
+
HEATER STATE
U23
U36U38
U36U38
U31
U29
U1U32
U2U34
U22
U20
U1U6
U2
U8
U34
U32
U41>U45 Q5
U21 U6U21
U23 U8U23
U1
U2
SELECTION
LV_ENABLE
XS CURRENT
XS SQUARE HEATER XS
RUN XS
XS SHORT CCT
XS CURRENT