Embed Size (px)
Citation preview

5/16/2018 Activités M1 - Analyses Fonctionnelles et Technologiques - slidepdf.com
http://slidepdf.com/reader/full/activites-m1-analyses-fonctionnelles-et-technologiques 1/9
Al@Dyn Analyses Fonctionnelles et Technologique Activités Élèves
STI Génie Électronique Page 1 sur 9 Épreuve de construction
5/16/2018 Activités M1 - Analyses Fonctionnelles et Technologiques - slidepdf.com
http://slidepdf.com/reader/full/activites-m1-analyses-fonctionnelles-et-technologiques 2/9
Al@Dyn Analyses Fonctionnelles et Technologique Activités Élèves
STI Génie Électronique Page 2 sur 9 Épreuve de construction
SOMMAIRE
Le cahier des charges fonctionnel ............................................................................................................... ................................... 3
La frontière de l’étude ................................................................................................................................................................ 3
Analyse fonctionnelle externe ........................................................... ................................................................. ........................ 4
Réglementation sur les dispositifs de surveillance ........................................................ ......................................................... 4
La couverture de surveillance ................................................................................................................................................ 4
Analyse fonctionnelle interne .................................................................................................................................................... 5
Qualité d’image ...................................................................................................................................................................... 5
Elévation du champ de la caméra ...................................................................... ............................................................... ..... 6
Connectique I2C ............................................................................................................................................................................. 7
Problématique ................................................................ .............................................................. .............................................. 7
Découverte des fichiers ........................................................................................... .............................................................. ..... 7
Modèle 3D des plaques de prototypage. ...................................................................... ......................................................... 7
Modèle 3D des connecteurs .......................................................... ................................................................. ........................ 8
Modèle 3D des boîtiers de processeurs ................................................................................... .............................................. 8
Conception d’un portique I2C .................................................................................................................................................... 8
Détrompeur ......................................................... .............................................................. ......................................................... 9
Astuces pour la constitution de portiques complexes ................................ ................................................................ ............... 9
5/16/2018 Activités M1 - Analyses Fonctionnelles et Technologiques - slidepdf.com
http://slidepdf.com/reader/full/activites-m1-analyses-fonctionnelles-et-technologiques 3/9
Al@Dyn Analyses Fonctionnelles et Technologique Activités Élèves
STI Génie Électronique Page 3 sur 9 Épreuve de construction
LE CAHIER DES CHARGES FONCTIONNEL
LA FRONTIERE DE L’ETUDE
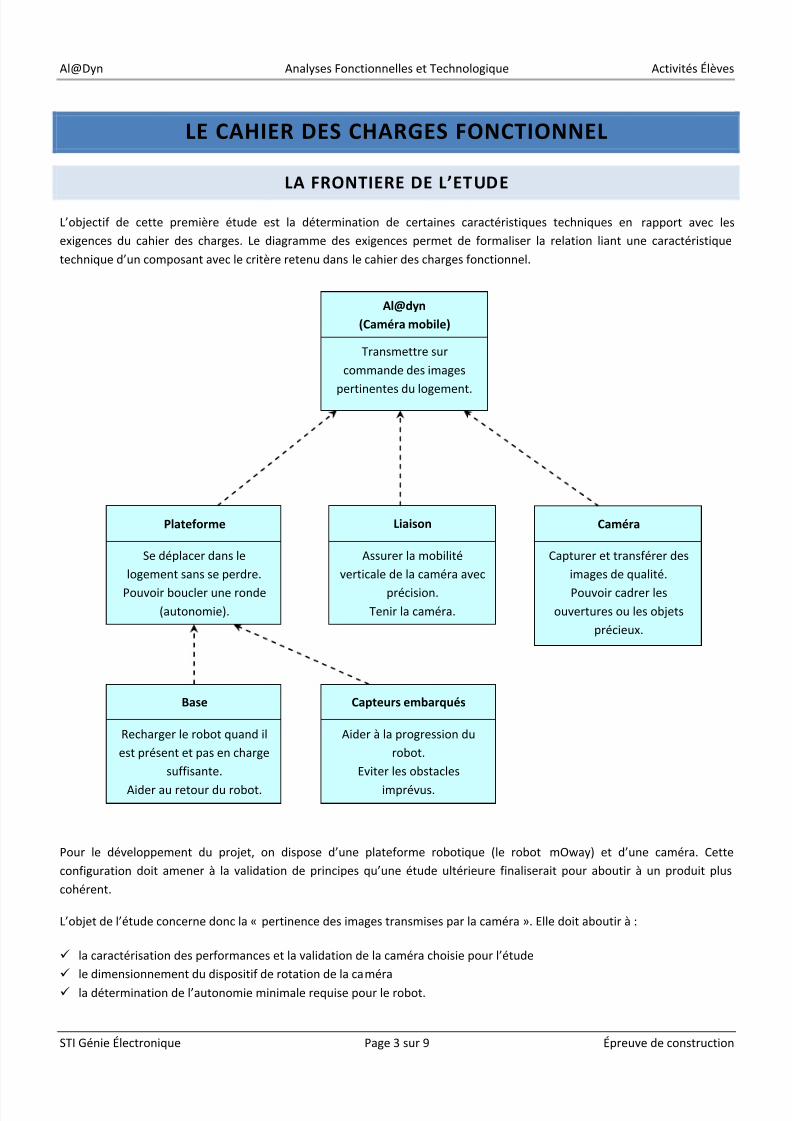
L’objectif de cette première étude est la détermination de certaines caractéristiques techniques en rapport avec les
exigences du cahier des charges. Le diagramme des exigences permet de formaliser la relation liant une caractéristique
technique d’un composant avec le critère retenu dans le cahier des charges fonctionnel.
Pour le développement du projet, on dispose d’une plateforme robotique (le robot mOway) et d’une caméra. Cette
configuration doit amener à la validation de principes qu’une étude ultérieure finaliserait pour aboutir à un produit plus
cohérent.
L’objet de l’étude concerne donc la « pertinence des images transmises par la caméra ». Elle doit aboutir à :
la caractérisation des performances et la validation de la caméra choisie pour l’étude
le dimensionnement du dispositif de rotation de la caméra
la détermination de l’autonomie minimale requise pour le robot.
Al@dyn
(Caméra mobile)
Transmettre sur
commande des images
pertinentes du logement.
Plateforme
Se déplacer dans le
logement sans se perdre.
Pouvoir boucler une ronde
(autonomie).
Caméra
Capturer et transférer des
images de qualité.
Pouvoir cadrer les
ouvertures ou les objets
précieux.
Liaison
Assurer la mobilité
verticale de la caméra avec
précision.
Tenir la caméra.
Base
Recharger le robot quand il
est présent et pas en charge
suffisante.
Aider au retour du robot.
Capteurs embarqués
Aider à la progression du
robot.
Eviter les obstacles
imprévus.
5/16/2018 Activités M1 - Analyses Fonctionnelles et Technologiques - slidepdf.com
http://slidepdf.com/reader/full/activites-m1-analyses-fonctionnelles-et-technologiques 4/9
Al@Dyn Analyses Fonctionnelles et Technologique Activités Élèves
STI Génie Électronique Page 4 sur 9 Épreuve de construction
ANALYSE FONCTIONNELLE EXTERNE
Pour cette activité vous aurez besoin :
Matériel
D’un poste informatique avec
connexion internet
Documents
Plans de logements
Logiciel
Excel ou autre tableur
Quelques pistes internet :
http://www.dailymotion.com/video/x1k1qd_wwwventealarmescom-alarme-diagral
http://www.dailymotion.com/video/xexa5e_systeme-dalarme-et-de-videosurveill_lifestyle
http://www.dailymotion.com/video/xb1ryr_myfox-emission-telematin-france-2-0_tech#rel-page-1
REGLEMENTATION SUR LES DISPOSITIFS DE SURVEILLANCE
La surveillance d’un logement est un acte dissuasif dont l’objectif est la protection des biens contre le vol et la dégradation.
Elle peut aussi s’étendre aux risques accidentels tel un incendie ou une inondation. Lorsque le résident n’est pas sur place,
l’alerte donnée aux forces d’intervention (police ou secours) doit être justifiée par une « levée de doute ». Les conditions de
cette procédure (levée de doute) sont codifiées par un texte de loi.
1. Retrouvez ce texte de loi. Après analyse, justifiez de l’emploi d’une caméra de surveillance.
LA COUVERTURE DE SURVEILLANCE
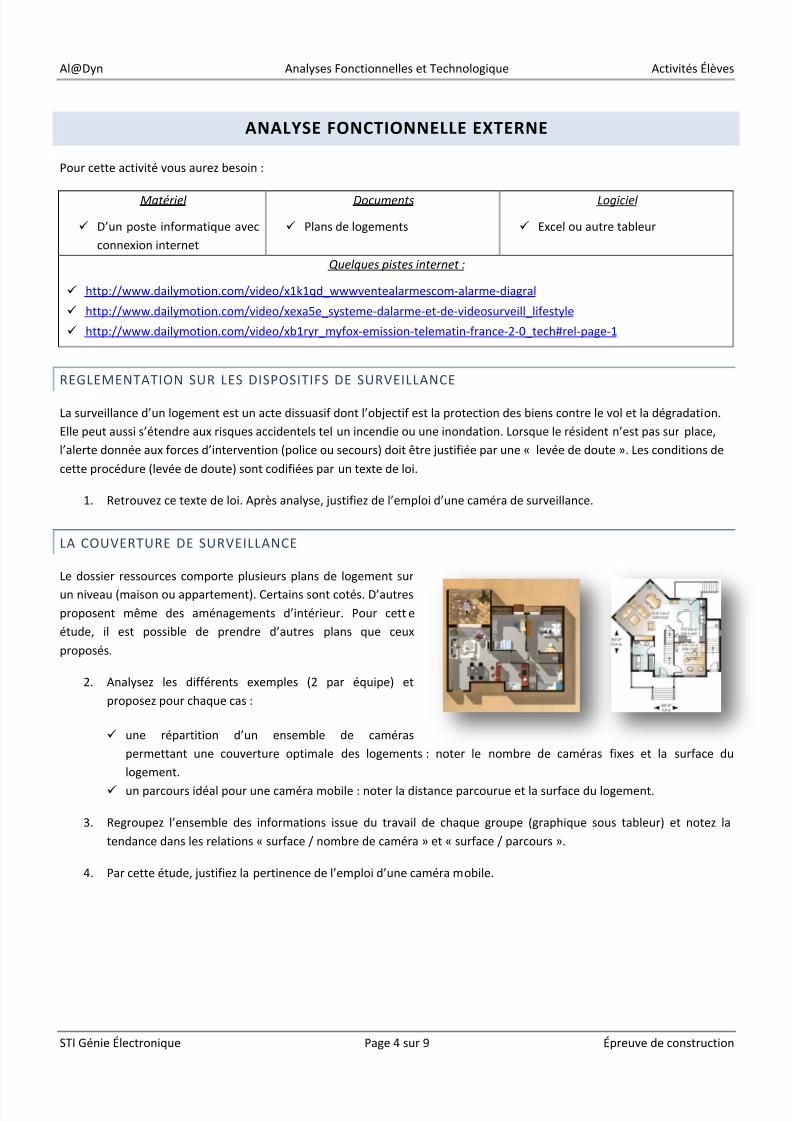
Le dossier ressources comporte plusieurs plans de logement sur
un niveau (maison ou appartement). Certains sont cotés. D’autres
proposent même des aménagements d’intérieur. Pour cette
étude, il est possible de prendre d’autres plans que ceux
proposés.
2. Analysez les différents exemples (2 par équipe) et
proposez pour chaque cas :
une répartition d’un ensemble de caméras
permettant une couverture optimale des logements : noter le nombre de caméras fixes et la surface du
logement.
un parcours idéal pour une caméra mobile : noter la distance parcourue et la surface du logement.
3. Regroupez l’ensemble des informations issue du travail de chaque groupe (graphique sous tableur) et notez la
tendance dans les relations « surface / nombre de caméra » et « surface / parcours ».
4. Par cette étude, justifiez la pertinence de l’emploi d’une caméra mobile.
5/16/2018 Activités M1 - Analyses Fonctionnelles et Technologiques - slidepdf.com
http://slidepdf.com/reader/full/activites-m1-analyses-fonctionnelles-et-technologiques 5/9
Al@Dyn Analyses Fonctionnelles et Technologique Activités Élèves
STI Génie Électronique Page 5 sur 9 Épreuve de construction
ANALYSE FONCTIONNELLE INTERNE
Pour cette activité vous aurez besoin :
Matériel
D’un mOway muni de sa caméra
D’un module de réception vidéo
D’un poste informatique
Documents
Documentation du capteur de la caméra
du mOway
Notice Camera Moway et Yawcam
Logiciels
Moway GUI
YawCam
SolidWorks + Fichiers dans
« Modèle 3D »
Quelques pistes internet
http://www.louis-armand-mulhouse.eu/btsse/acrobat-cours/image.pdf
http://www.dailymotion.com/video/x68cdn_la-profondeur-de-champ_shortfilms
QUALITE D’IMAGE
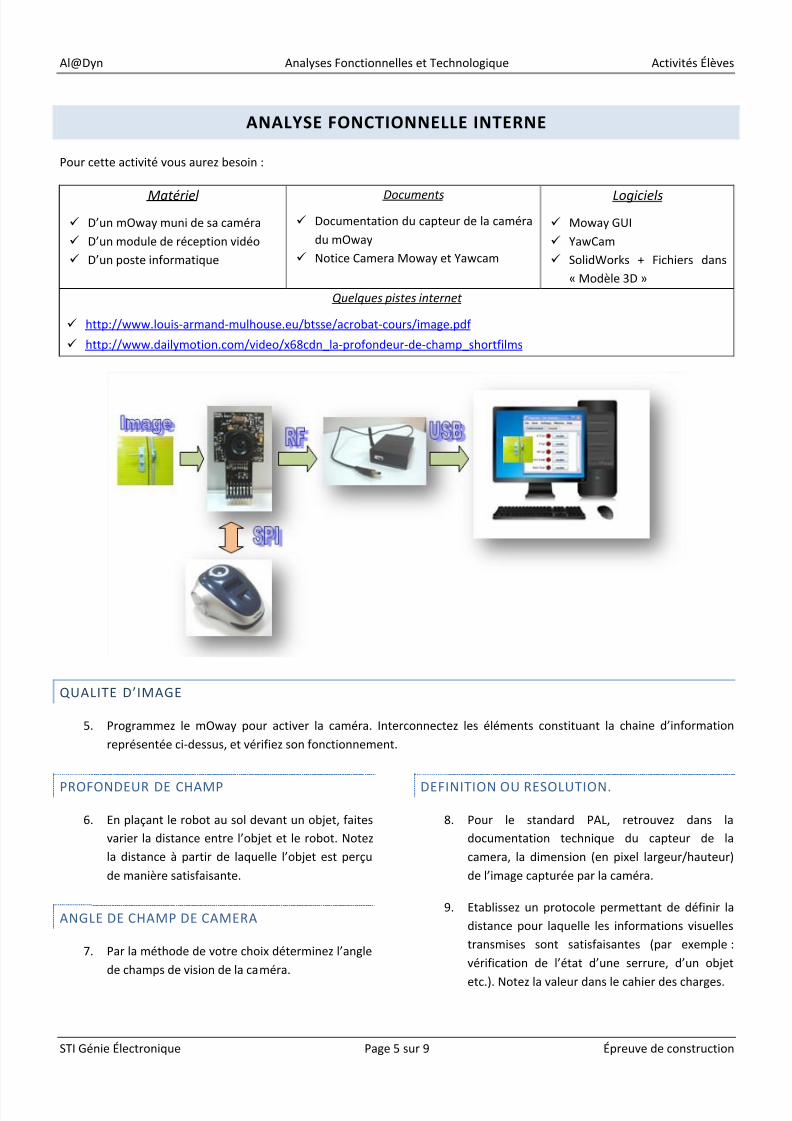
5. Programmez le mOway pour activer la caméra. Interconnectez les éléments constituant la chaine d’information
représentée ci-dessus, et vérifiez son fonctionnement.
PROFONDEUR DE CHAMP
6. En plaçant le robot au sol devant un objet, faites
varier la distance entre l’objet et le robot. Notez
la distance à partir de laquelle l’objet est perçu
de manière satisfaisante.
ANGLE DE CHAMP DE CAMERA
7. Par la méthode de votre choix déterminez l’angle
de champs de vision de la caméra.
DEFINITION OU RESOLUTION.
8. Pour le standard PAL, retrouvez dans la
documentation technique du capteur de la
camera, la dimension (en pixel largeur/hauteur)
de l’image capturée par la caméra.
9. Etablissez un protocole permettant de définir la
distance pour laquelle les informations visuelles
transmises sont satisfaisantes (par exemple :
vérification de l’état d’une serrure, d’un objet
etc.). Notez la valeur dans le cahier des charges.
5/16/2018 Activités M1 - Analyses Fonctionnelles et Technologiques - slidepdf.com
http://slidepdf.com/reader/full/activites-m1-analyses-fonctionnelles-et-technologiques 6/9
Al@Dyn Analyses Fonctionnelles et Technologique Activités Élèves
STI Génie Électronique Page 6 sur 9 Épreuve de construction
ELEVATION DU CHAMP DE LA CAMERA
10. Posez le robot sur le sol. Justifiez, en observant
l’image obtenue, la nécessité de lever le champ
de vision de la caméra.
11. Le fichier d’assemblage 3D « Mesure champ »
permet par simulation de déterminer l’angle
d’élévation du champ de vision. Le fichier
propose la situation suivante. Le robot est placé
devant une ouverture (ici une porte ou une
fenêtre suivant la configuration adoptée pour la
« pièce ») dont les dimensions sont courantes.
Auparavant, le modèle proposé demande certains
réglages en rapport avec les manipulations précédentes :
profondeur de champs : sur la fonction « champ » la
cote « fin de champ » est à modifier. Sur la fonction
« début champ » la cote de même nom est à modifier.
format de l’image (rapport hauteur/largeur) : dans la
fonction « champ » les cotes « largeur » et « hauteur »
sont à modifier. Attention, on optera pour des cotes
aux dimensions voisines de celles actuelles (environ15 mm de large) en respectant toutefois le rapport
entre elles.
angle de champs : sur la fonction « champ » l’angle
donne la moitié de l’angle de champ.
distance d’observation : Dans les contraintes
d’assemblage, la contrainte « distance d’observation »
est paramétrée par une cote à modifier afin de placer
le robot à la distance requise.
12. Réglez les différents paramètres selon les valeurs
définies par les études précédentes.
13. Déplacez le champ de vision afin de couvrir la
partie supérieure de l’ouverture. Mesurez à l’aide
des outils logiciel l’angle d’élévation de la
caméra.
14. Une bonne restitution de l’information visuelle
nécessite de déplacer le champ de caméra de
« proche en proche » pour opérer un balayage
vertical. A partir des études précédentes,
déterminez l’angle maximal de rotation
permettant la couverture de la moitié de l’image
après chaque déplacement élémentaire. En
déduire le nombre minimal de position de
caméra à adopter. Ces valeurs seront à prendre
en compte dans la conception du dispositif
d’animation de la caméra.
5/16/2018 Activités M1 - Analyses Fonctionnelles et Technologiques - slidepdf.com
http://slidepdf.com/reader/full/activites-m1-analyses-fonctionnelles-et-technologiques 7/9
Al@Dyn Analyses Fonctionnelles et Technologique Activités Élèves
STI Génie Électronique Page 7 sur 9 Épreuve de construction
CONNECTIQUE I2C
PROBLEMATIQUE
La plateforme robotisée mOway utilise un port (I2C ou SPI) pour communiquer avec l’extérieur. En plus de son aspect
purement électrique, l’espace disponible étant restreint, sa constitution mécaniqu e implique des études préalables.
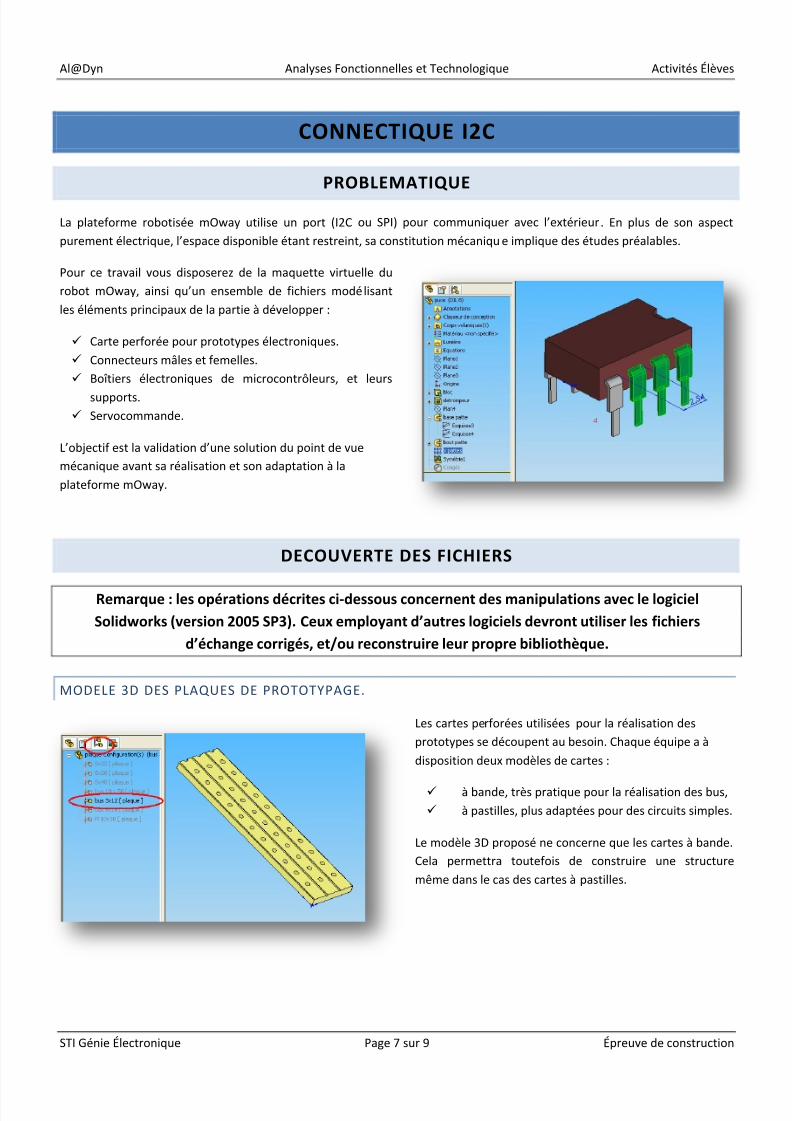
Pour ce travail vous disposerez de la maquette virtuelle du
robot mOway, ainsi qu’un ensemble de fichiers modélisant
les éléments principaux de la partie à développer :
Carte perforée pour prototypes électroniques.
Connecteurs mâles et femelles.
Boîtiers électroniques de microcontrôleurs, et leurs
supports.
Servocommande.
L’objectif est la validation d’une solution du point de vue
mécanique avant sa réalisation et son adaptation à la
plateforme mOway.
DECOUVERTE DES FICHIERS
Remarque : les opérations décrites ci-dessous concernent des manipulations avec le logiciel
Solidworks (version 2005 SP3). Ceux employant d’autres logiciels devront utiliser les fichiers
d’échange corrigés, et/ou reconstruire leur propre bibliothèque.
MODELE 3D DES PLAQUES DE PROTOTYPAGE.
Les cartes perforées utilisées pour la réalisation des
prototypes se découpent au besoin. Chaque équipe a à
disposition deux modèles de cartes :
à bande, très pratique pour la réalisation des bus,
à pastilles, plus adaptées pour des circuits simples.
Le modèle 3D proposé ne concerne que les cartes à bande.
Cela permettra toutefois de construire une structure
même dans le cas des cartes à pastilles.
5/16/2018 Activités M1 - Analyses Fonctionnelles et Technologiques - slidepdf.com
http://slidepdf.com/reader/full/activites-m1-analyses-fonctionnelles-et-technologiques 8/9
Al@Dyn Analyses Fonctionnelles et Technologique Activités Élèves
STI Génie Électronique Page 8 sur 9 Épreuve de construction
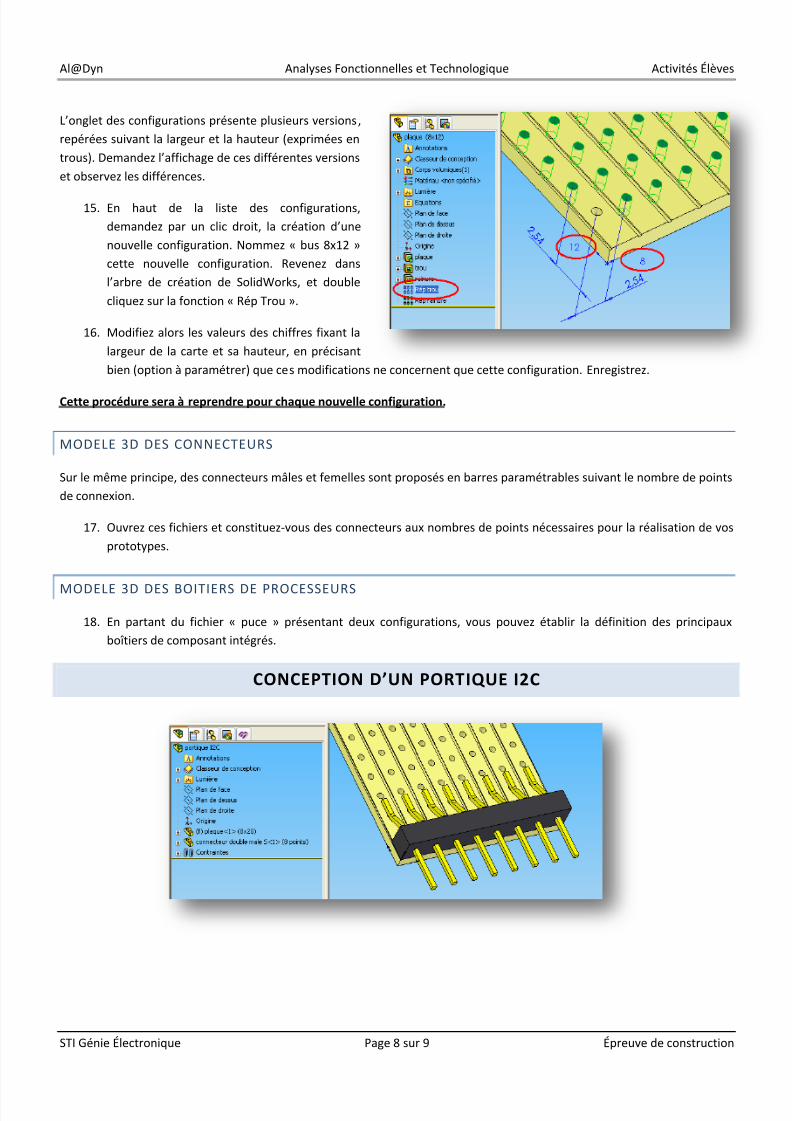
L’onglet des configurations présente plusieurs versions,
repérées suivant la largeur et la hauteur (exprimées en
trous). Demandez l’affichage de ces différentes versions
et observez les différences.
15. En haut de la liste des configurations,
demandez par un clic droit, la création d’une
nouvelle configuration. Nommez « bus 8x12 »
cette nouvelle configuration. Revenez dans
l’arbre de création de SolidWorks, et double
cliquez sur la fonction « Rép Trou ».
16. Modifiez alors les valeurs des chiffres fixant la
largeur de la carte et sa hauteur, en précisant
bien (option à paramétrer) que ces modifications ne concernent que cette configuration. Enregistrez.
Cette procédure sera à reprendre pour chaque nouvelle configuration.
MODELE 3D DES CONNECTEURS
Sur le même principe, des connecteurs mâles et femelles sont proposés en barres paramétrables suivant le nombre de points
de connexion.
17. Ouvrez ces fichiers et constituez-vous des connecteurs aux nombres de points nécessaires pour la réalisation de vos
prototypes.
MODELE 3D DES BOITIERS DE PROCESSEURS
18. En partant du fichier « puce » présentant deux configurations, vous pouvez établir la définition des principaux
boîtiers de composant intégrés.
CONCEPTION D’UN PORTIQUE I2C
5/16/2018 Activités M1 - Analyses Fonctionnelles et Technologiques - slidepdf.com
http://slidepdf.com/reader/full/activites-m1-analyses-fonctionnelles-et-technologiques 9/9
Al@Dyn Analyses Fonctionnelles et Technologique Activités Élèves
STI Génie Électronique Page 9 sur 9 Épreuve de construction
19. Dans un assemblage, insérez une carte perforée et un connecteur mâle.
Réglez ces deux éléments à huit points de connexion en choisissant une
carte assez longue (clic droit dans l’arbre de création puis édition des
propriétés du composant).
20. Assemblez ces éléments (trois contraintes). Enregistrez ce fichier sous le
nom « portique I2C ».
21. Ouvrir un nouvel assemblage. Enregistrez sous le nom « prototype n°1 ».
Insérez en premier lieu l’assemblage du MOway, puis votre « portique
I2C ». Assemblez ces deux éléments (trois contraintes).
DETROMPEUR
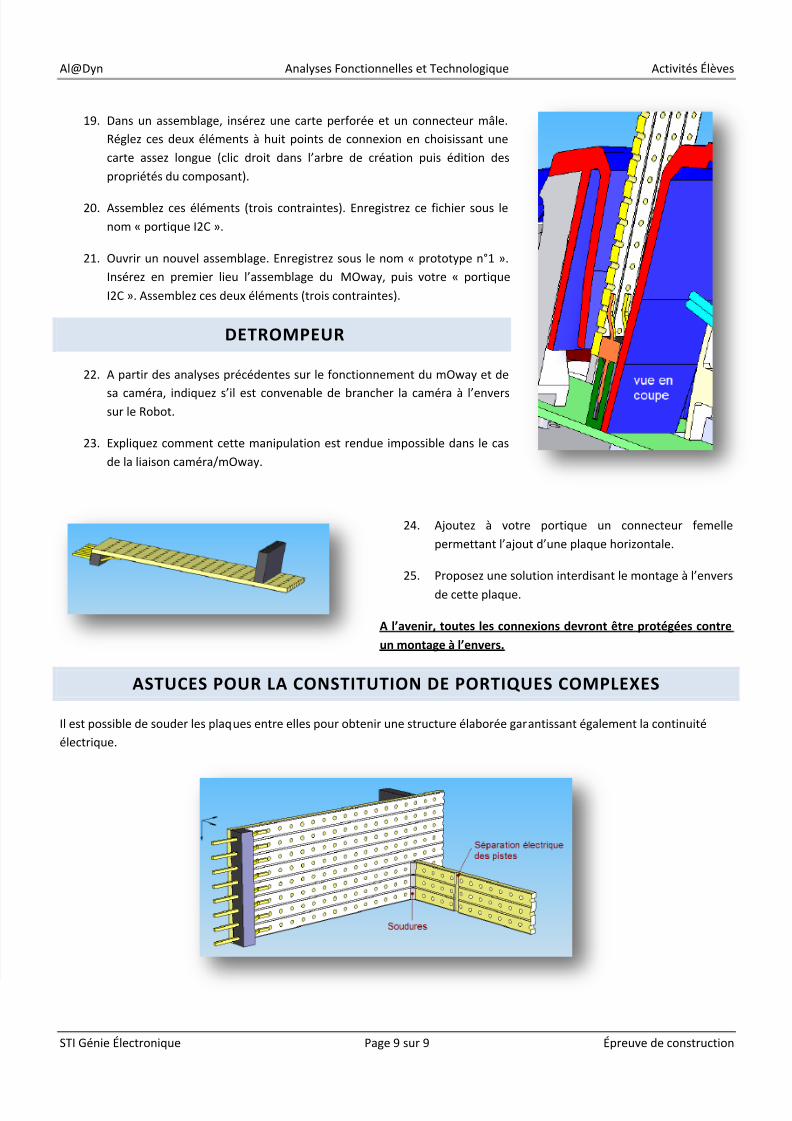
22. A partir des analyses précédentes sur le fonctionnement du mOway et de
sa caméra, indiquez s’il est convenable de brancher la caméra à l’envers
sur le Robot.
23. Expliquez comment cette manipulation est rendue impossible dans le cas
de la liaison caméra/mOway.
24. Ajoutez à votre portique un connecteur femelle
permettant l’ajout d’une plaque horizontale.
25. Proposez une solution interdisant le montage à l’envers
de cette plaque.
A l’avenir, toutes les connexions devront être protégées contre
un montage à l’envers.
ASTUCES POUR LA CONSTITUTION DE PORTIQUES COMPLEXES
Il est possible de souder les plaques entre elles pour obtenir une structure élaborée garantissant également la continuité
électrique.





























