Embed Size (px)
Citation preview
Valérie1 et Pierre2 Collet 1 Professeur agrégé de Mathématiques 2 Professeur des Universités
Laboratoire des Sciences de l’Image, de l’Informatique et de la Télédétection Chef de l'Equipe Fouille de Données et Bioinformatique Théorique
ALINÉA Algèbre Linéaire Appliquée pour les
nuls informaticiens
L2S4 Informatique
Pierre Collet : Algèbre Linéaire Appliquée 2
Plan du cours
Rappel sur les espaces vectoriels et les matrices Matrices en informatique Comatrices, déterminants, systèmes linéaires Polynôme caractéristique, valeurs propres, ss-espace
propre Diagonalisation Matrices de covariance ? ...
Pierre Collet : Algèbre Linéaire Appliquée 3
Notion de Corps (nécessaire pour un e.v.)
Un corps commutatif est un ensemble avec 2 lois internes (appelées addition et multiplication).
L'addition est associative, commutative, a un élément neutre, et tout élement doit avoir un symétrique.
La multiplication doit aussi être associative, commutative (car c'est un corps commutatif), avec un élément neutre, et tout élément doit avoir un symétrique (sauf 0, car 1/0 n'est pas défini).
La multiplication doit être distributive par rapport à l'addition.
Exemples de corps : Q, R ou C,... N est-il un corps ?
N n'est pas un corps car un entier n'a pas d'inverse.
Pierre Collet : Algèbre Linéaire Appliquée 4
Rappel sur les Espaces Vectoriels
Un Espace Vectoriel (e.v.) est un ensemble avec 2 lois : 1 loi interne 1 loi externe faisant intervenir un élément d'un corps
commutatif « à nombres » appelé « scalaire ». Un vecteur est un élément d'un espace vectoriel.
Pierre Collet : Algèbre Linéaire Appliquée 5
Loi interne (notée +)
(la loi est « interne » car un vecteur de l'e.v. + un autre vecteur de l'e.v. donne un vecteur de l'e.v.)
La loi interne d'un e.v. doit être :
Associative : (v+u)+w = v+(u+w)
Commutative : v+u = u+v
Elt neutre (noté 0 du fait que la loi est notée +).
Tout elt a un symétrique (ici appelé « opposé » du fait que la loi est « + »).
Pierre Collet : Algèbre Linéaire Appliquée 6
Loi externe (notée *)
(la loi est externe, car elle fait intervenir un élement extérieur à l'e.v. (appelé scalaire) qui doit appartenir à un corps contenant des nombres (cf. 1er transparent)).
Loi externe : scalaire * vecteur donne vecteur. Le scalaire doit être un réel, un rationnel ou un
complexe, car le scalaire doit être dans un corps qui contient des nombres.
La loi externe doit : posséder un élement neutre (noté 1 du fait que la
loi est notée *), être associative, être distributive par rapport à la loi interne +.
Pierre Collet : Algèbre Linéaire Appliquée 7
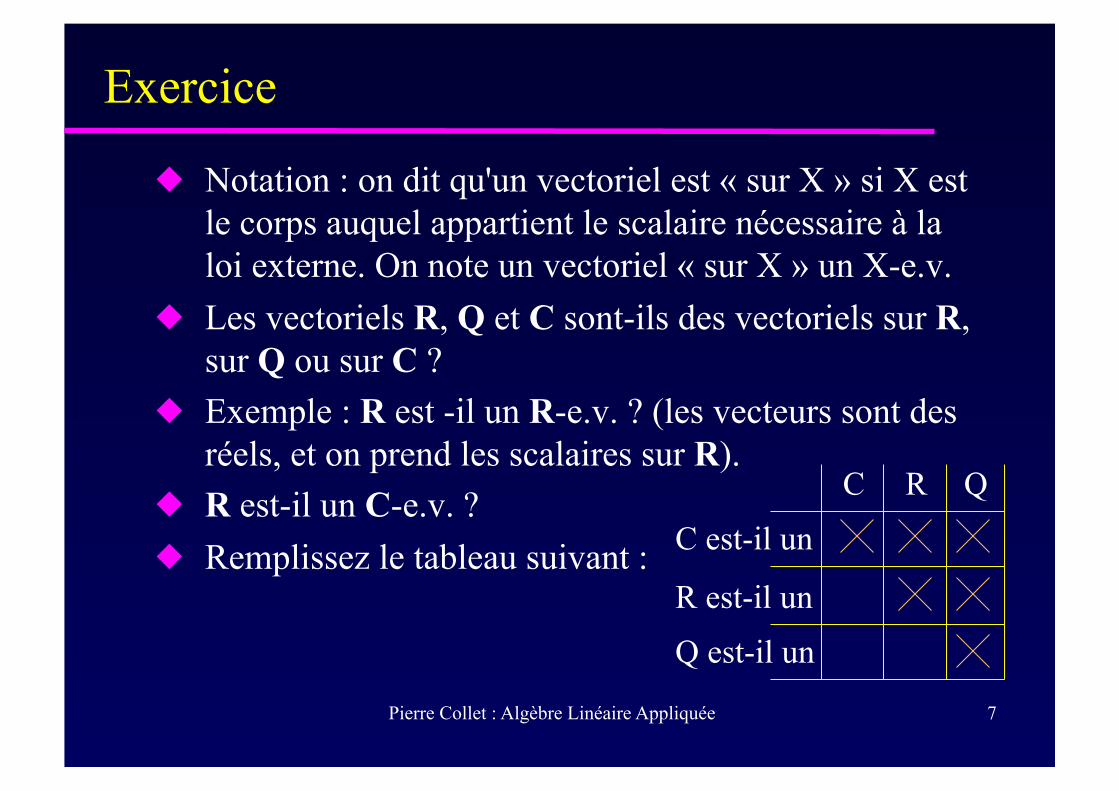
Exercice
Notation : on dit qu'un vectoriel est « sur X » si X est le corps auquel appartient le scalaire nécessaire à la loi externe. On note un vectoriel « sur X » un X-e.v.
Les vectoriels R, Q et C sont-ils des vectoriels sur R, sur Q ou sur C ?
Exemple : R est -il un R-e.v. ? (les vecteurs sont des réels, et on prend les scalaires sur R).
R est-il un C-e.v. ? Remplissez le tableau suivant :
C R Q
C est-il un
R est-il un
Q est-il un
Pierre Collet : Algèbre Linéaire Appliquée 8
Exemples d'e.v. de base (autres que C R Q)
Ensemble des suites (qu'on n'utilisera pas). Ensemble des fonctions F(R,R) est-il un R-e.v. ? Ensemble des matrices (donc une matrice est un
vecteur ! car l'ensemble des matrices est un espace vectoriel, et on appelle vecteur tout élément d'un espace vectoriel).
Ensemble des n-uplets (Rn). Ensemble des polynômes. ...
Pierre Collet : Algèbre Linéaire Appliquée 9
Espace et sous-espace vectoriel
Un s.e.v. est un e.v. inclus dans un autre e.v. Un s.e.v. doit être « stable » pour les deux lois :
Ex : Dans R3, une droite (passant par 0) est un s.e.v. : Un vecteur de cette droite est un vecteur directeur de la
droite. Un s.e.v. est « stable » par les deux lois : la somme de
2 vecteurs directeurs est un vecteur directeur, et la multiplication d'un vecteur directeur par un scalaire est un vecteur directeur.
Pierre Collet : Algèbre Linéaire Appliquée 10
Rappel sur les matrices
Tableau de nombres, décomposé en lignes et colonnes Les matheux notent les matrices par une majuscule A,
dont les coefficients sont notés avec des minuscules (ai,j, avec i ligne, j colonne).
Une matrice carrée a autant de lignes que de colonnes, donc il suffit de donner un seul des 2 nombres : matrice de taille 3 = matrice carrée 3x3
Une matrice diagonale a des 0 partout sauf sur sa diagonale
Attention : dans une matrice de mathématicien, il n'y a qu'une seule diagonale !!!
Pierre Collet : Algèbre Linéaire Appliquée 11
Rappel sur les matrices (2)
Une matrice triangulaire a des 0 partout dans un des triangles de la matrice (diagonale non incluse). On parle de matrice triangulaire inférieure ou supérieure.
La matrice nulle est une matrice ne contenant que des 0 (c'est l'élement neutre pour l'addition).
La transposée d'une matrice est une autre matrice dont les lignes sont les colonnes de la matrice d'origine, et les colonnes sont les lignes de la matrice d'origine.
A = 1 2 3 4 5 6
TA = 1 4 2 5 3 6
Pierre Collet : Algèbre Linéaire Appliquée 12
Rappel sur les matrices (3)
Attention : pour les matrices, le mot « symétrique » a deux sens : Le symétrique d'une matrice est la matrice inverse de
cette matrice (au sens où la matrice multipliée par son inverse = la matrice identité). On verra ça plus tard.
On parle aussi de matrice symétrique, lorsque les coefficients sont identiques de part et d'autre de la diagonale.
On parle aussi de matrice antisymétrique, lorsque les coefficients de part et d'autre de la diagonale sont opposés. Une conséquence est que tous les coefficients de la diagonale d'une matrice antisymétrique sont ... nuls.
Pierre Collet : Algèbre Linéaire Appliquée 13
Somme de deux matrices
La somme C de deux matrices A et B est une troisième matrice dont les coefficients sont la somme des coefficients des matrices A et B.
ci,j = ai,j + bi,j Conséquence : la somme de 2 matrices n'est définie
que si les deux matrices sont de même dimensions (même nombre de lignes et de colonnes).
Calculer la somme de :
A = 1 2 3 4 5 6 B = 1 3 5
2 4 6 et
Pierre Collet : Algèbre Linéaire Appliquée 14
Multiplication d'une matrice par un réel
Le réel multiplie chaque coefficient de la matrice.
1 2 7 3 4 8 5 6 9
2x =
Pierre Collet : Algèbre Linéaire Appliquée 15
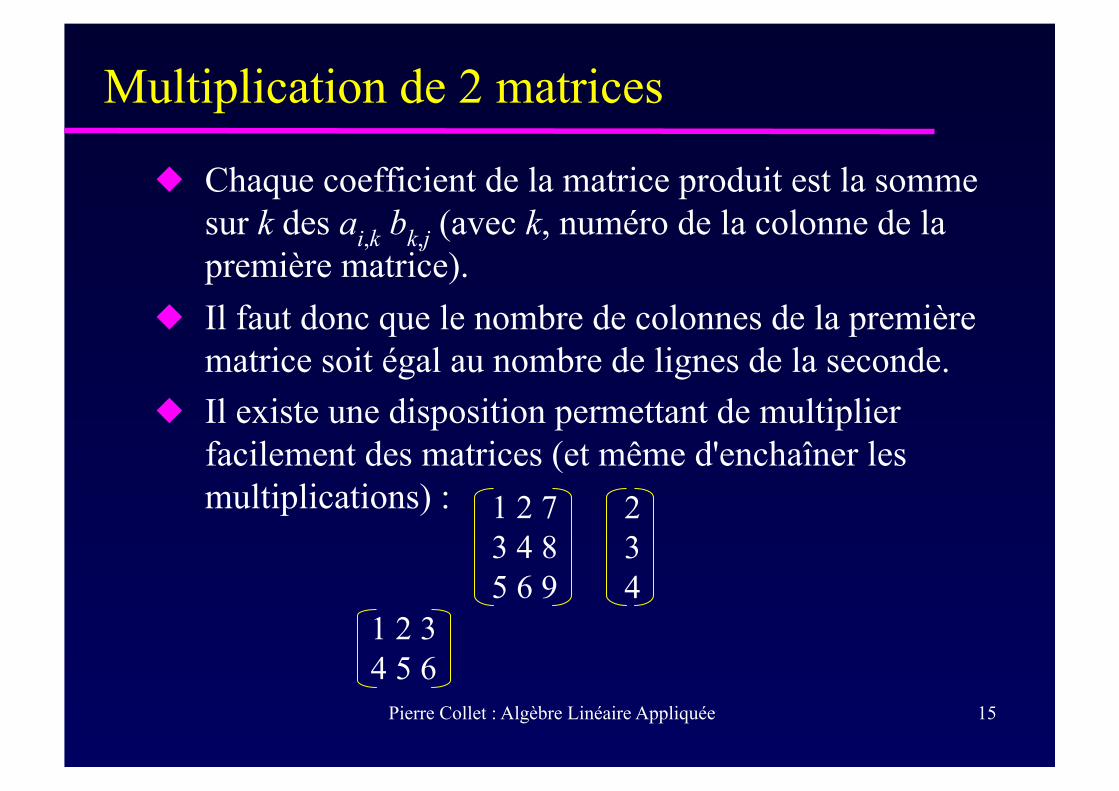
Multiplication de 2 matrices
Chaque coefficient de la matrice produit est la somme sur k des ai,k bk,j (avec k, numéro de la colonne de la première matrice).
Il faut donc que le nombre de colonnes de la première matrice soit égal au nombre de lignes de la seconde.
Il existe une disposition permettant de multiplier facilement des matrices (et même d'enchaîner les multiplications) :
1 2 3 4 5 6
1 2 7 3 4 8 5 6 9
2 3 4
Pierre Collet : Algèbre Linéaire Appliquée 16
Matrice identité et matrice inverse
La matrice identité est l'élément neutre de la multiplication entre deux matrices. Il s'agit d'une matrice diagonale dont les coefficients valent tous 1 :
La matrice inverse A-1 est celle qui, multipliée par A, donne la matrice identité. Pour que A ait un inverse, A doit être carrée.
1 0 0 0 1 0 0 0 1
Pierre Collet : Algèbre Linéaire Appliquée 17
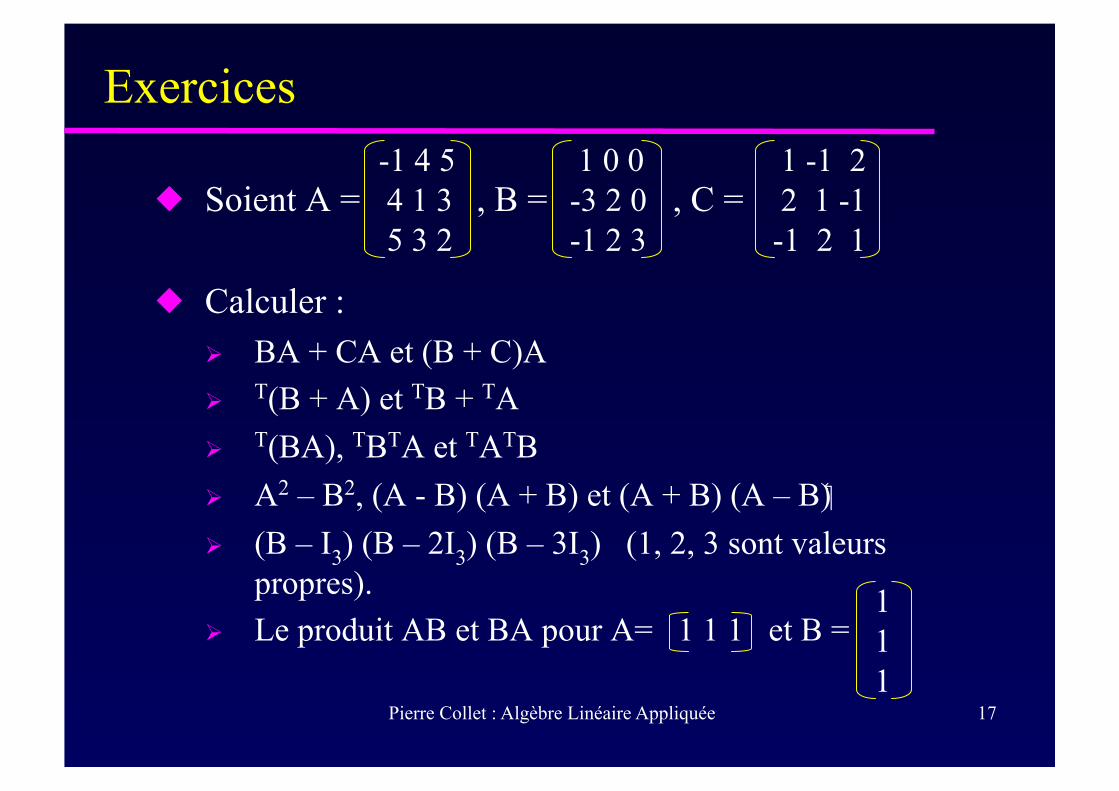
Exercices
Soient A = , B = , C =
Calculer : BA + CA et (B + C)A T(B + A) et TB + TA T(BA), TBTA et TATB A2 – B2, (A - B) (A + B) et (A + B) (A – B) (B – I3) (B – 2I3) (B – 3I3) (1, 2, 3 sont valeurs
propres). Le produit AB et BA pour A= 1 1 1 et B =
-1 4 5 4 1 3 5 3 2
1 0 0 -3 2 0 -1 2 3
1 -1 2 2 1 -1 -1 2 1
1 1 1
Pierre Collet : Algèbre Linéaire Appliquée 18
Implémentation informatique
Implémentation d'une matrice en mémoire (différence C et Fortran).
Ecrire un programme effectuant : La somme de 2 matrices La transposée d'une matrice La multiplication de deux matrices La multiplication de deux matrices est-elle
parallélisable ? http://carbon.cudenver.edu/csprojects/CSC5809S01/Simd/parmult.html
Pierre Collet : Algèbre Linéaire Appliquée 19
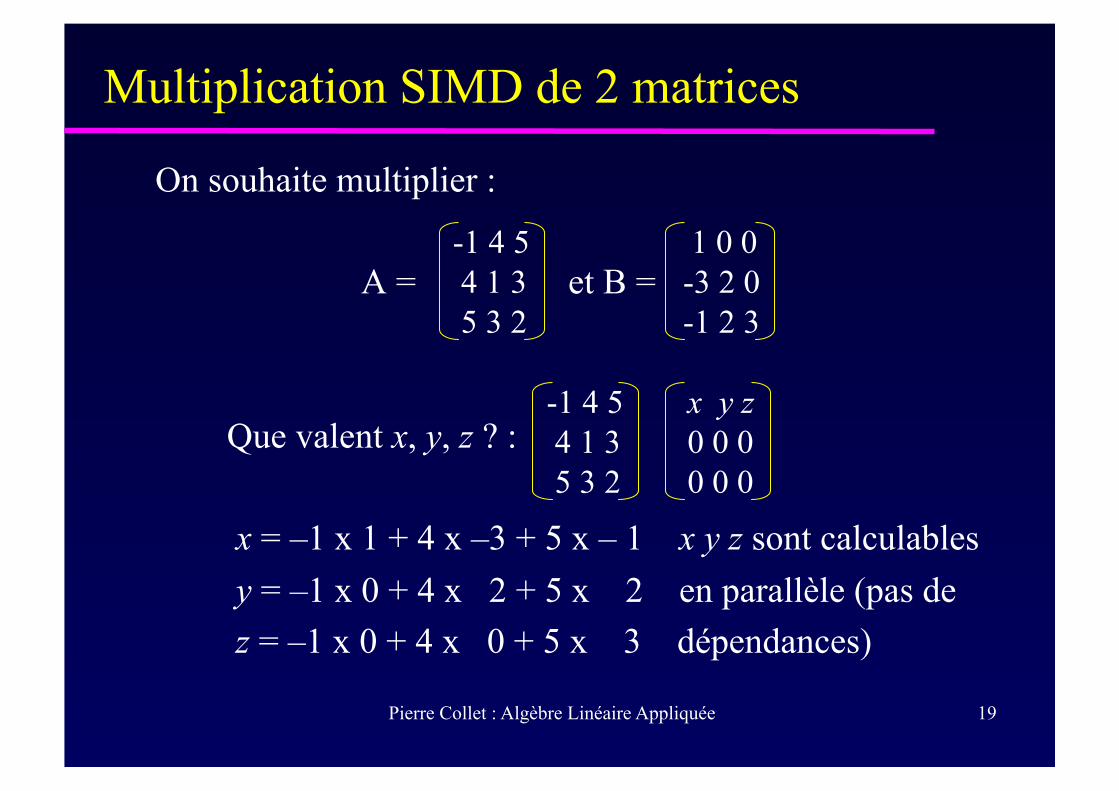
Multiplication SIMD de 2 matrices
On souhaite multiplier :
A = et B =
Que valent x, y, z ? :
x = –1 x 1 + 4 x –3 + 5 x – 1 x y z sont calculables y = –1 x 0 + 4 x 2 + 5 x 2 en parallèle (pas de z = –1 x 0 + 4 x 0 + 5 x 3 dépendances)
-1 4 5 4 1 3 5 3 2
1 0 0 -3 2 0 -1 2 3
-1 4 5 4 1 3 5 3 2
x y z 0 0 0 0 0 0
Pierre Collet : Algèbre Linéaire Appliquée 20
Algorithme parallèle pour C = AxB Si l'on dispose de j ALUs capables d'effectuer une opération identique
sur des valeurs différentes (processeur parallèle SIMD) Pour i:= 0 jusqu'à n-1 // calcul de la iè ligne de C C[i,j] := 0; // en parallèle sur j processeurs (0<=j<=n-1) pour k:= 0 jusqu'à n-1 C[i,j]:= C[i,j] + A[i,k] * B[k,j]; // en parallèle sur j processeurs
Pierre Collet : Algèbre Linéaire Appliquée 21
Bases
Une combinaison linéaire est une somme de vecteurs ei multipliés par des scalaires λi : Σλiei.
Un ensemble de vecteurs (appelé « famille ») est dit libre s'il est impossible d'exprimer un des vecteurs de la famille en fonction de l'autre. Dans le cas contraire, la famille est dite « liée ».
Une famille engendre un ev si tout vecteur de l'ev peut s'écrire comme une combinaison linéaire de cette famille. Cette famille est dite « génératrice » de l'ev.
Si v = Σλiei, les scalaires λi sont appelés les coordonnées de v dans la base (e1, e2, ...).
Une Base d'un ev est une famille libre et génératrice de cet ev.
Pierre Collet : Algèbre Linéaire Appliquée 22
Exemples de bases
Le vecteur directeur d'une droite est la base de cette droite. Deux vecteurs non colinéaires d'un plan forment une base de
ce plan. Trois vecteurs non colinéaires d'un plan forment une famille
génératrice du plan (mais pas une base car ils ne sont pas libres).
Trois vecteurs non coplanaires forment une base de l'espace (souvent notée i, j, k).
Deux vecteurs non colinéaires forment une famille libre de R3. Quatre vecteurs de R3 sont forcément liés.
Pierre Collet : Algèbre Linéaire Appliquée 23
Dimension d'un ev
Dans un ev, toutes les bases ont le même nombre de vecteurs, qui s'appelle la dimension de l'ev.
L'espace Rn est de dimension n. Certains espaces sont de dimension infinie, comme les
espaces de fonctions (toute fonction n'est pas exprimable comme une somme finie d'autres fonctions). Toute fonction pourra éventuellement être définie comme une somme infinie d'exponentielles.
Pierre Collet : Algèbre Linéaire Appliquée 24
Base canonique
Dans les ev « génériques » de dimension finie, on défnit la base canonique (implicite) dont les vecteurs sont notés ei.
Pour chaque vecteur ei, une seule coordonnée n'est pas nulle et vaut 1. Le i représente la position du 1 dans les coordonnées du vecteur.
Les vecteurs e1, e2, e3 de la base canonique de R3. valent respectivement (1,0,0), (0,1,0) et (0,0,1).
Lorsqu'on ne précise pas la base, on utilise la base canonique.
Pierre Collet : Algèbre Linéaire Appliquée 25
Polynômes
Quelle est le degré de ax2+bx+c (avec a non nul) ? Quelle est la base de l'ev des polynômes de degré ≤ 2
(de degré 2, de degré 1, de degré 0 et 0)* ? Quelle est la dimension de l'ev des polynômes de
degré ≤ n ? L'ensemble des polynômes de degré 2 est-il un ev ?
ax2+bx+c est un polynôme de degré 2. Quelles sont ses coordonnées dans la base canonique de l'ev des polynômes de degré <=2 ?
*(attention : par convention, pour certaines démonstrations, les polynômes constants sont de degré 0, et le polynôme nul est de degré -∞).
(x2,x,1)
n+1
Non, car 0 n'est pas dedans, ou (x2+x) + (-x2)
Pierre Collet : Algèbre Linéaire Appliquée 26
Matrices
Quelle est la dimension de l'ensemble des matrices 2x3 ? Quelle est la base canonique de l'ensemble des matrices 2x3 ?
(pour simplifier, on parlera de vecteur Ei,j pour la matrice où le 1 est sur la ième ligne et jème colonne)
Quelle est la dimension de l'ensemble des matrices diagonales de taille 5 ?
Quelle est la dimension de l'ensemble des matrices triangulaires de taille 5 ?
Pierre Collet : Algèbre Linéaire Appliquée 27
Matrices antisymétriques de taille 3
Elles forment un sev des matrices 3x3. Quelle est la dimension de cet espace ? Quelle est la base de l'ev des matrices antisymétriques de taille 3
Quelles sont les coordonnées de cette première matrice dans la base canonique des matrices 3x3 ?
0 1 0 -1 0 0 0 0 0
...
0 1 0 -1 0 0 0 0 0
= 0 E11 + 1 E12 + 0 E13 - 1 E21 + 0 E22 + ...
Pierre Collet : Algèbre Linéaire Appliquée 28
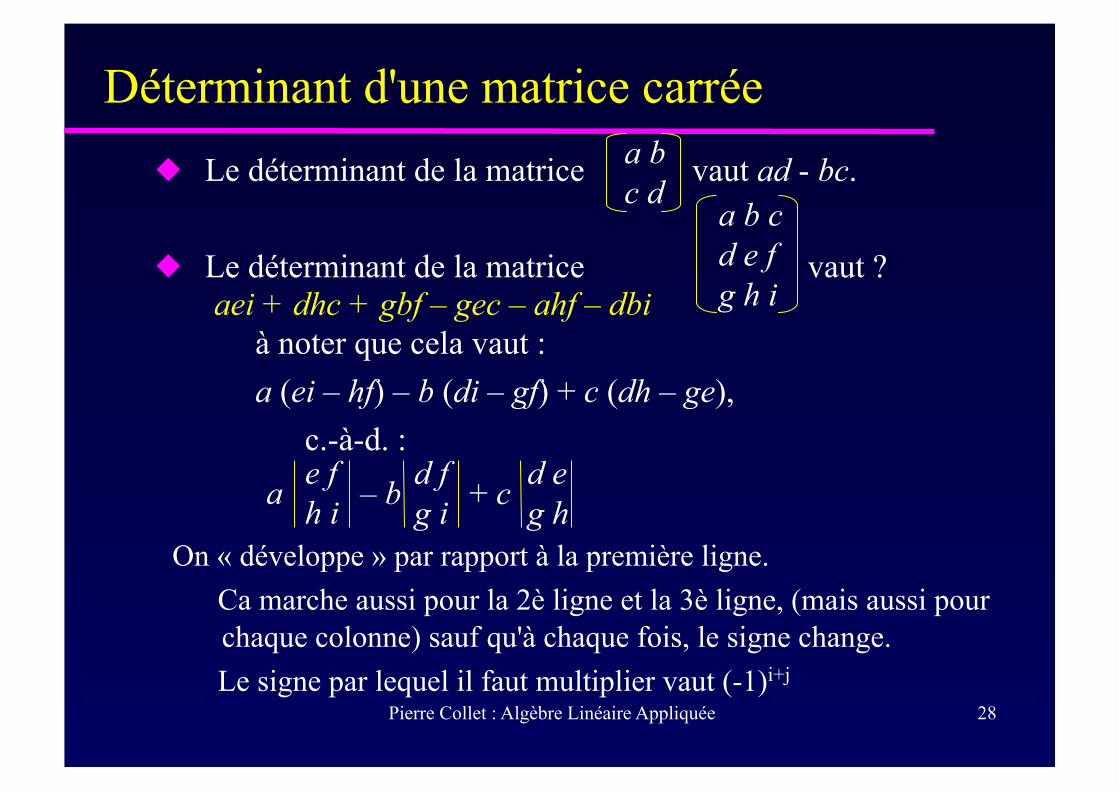
Déterminant d'une matrice carrée Le déterminant de la matrice vaut ad - bc.
Le déterminant de la matrice vaut ?
a b c d
a b c d e f g h i aei + dhc + gbf – gec – ahf – dbi
e f h i
d f g i
d e g h a – b + c
à noter que cela vaut : a (ei – hf) – b (di – gf) + c (dh – ge), c.-à-d. :
On « développe » par rapport à la première ligne. Ca marche aussi pour la 2è ligne et la 3è ligne, (mais aussi pour
chaque colonne) sauf qu'à chaque fois, le signe change. Le signe par lequel il faut multiplier vaut (-1)i+j
Pierre Collet : Algèbre Linéaire Appliquée 29
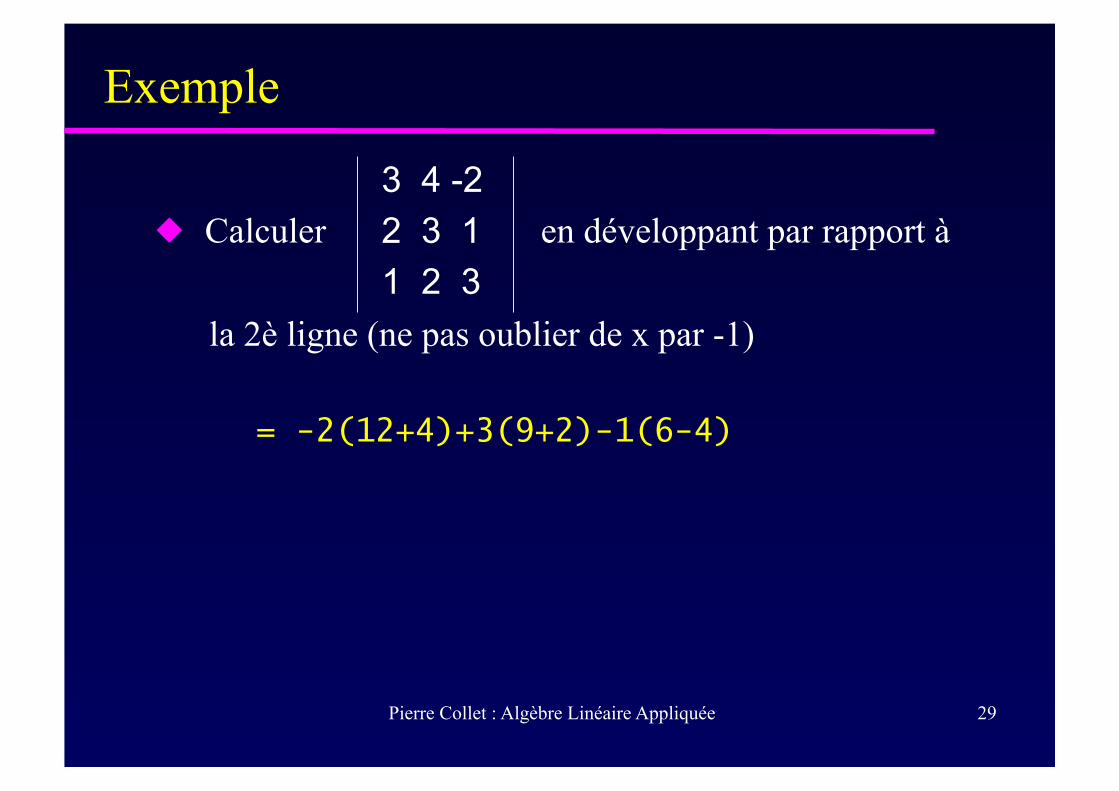
Exemple
Calculer en développant par rapport à
la 2è ligne (ne pas oublier de x par -1)
3 4 -2 2 3 1 1 2 3
= -2(12+4)+3(9+2)-1(6-4)
Pierre Collet : Algèbre Linéaire Appliquée 30
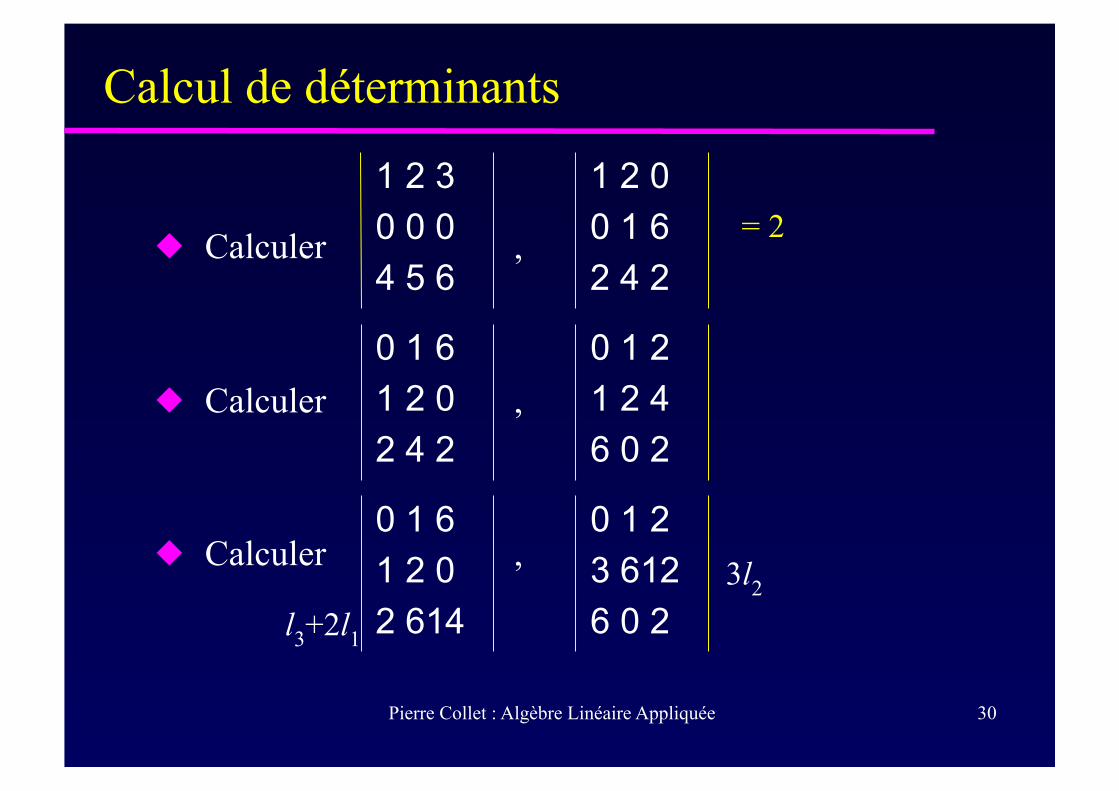
Calcul de déterminants
Calculer ,
Calculer ,
Calculer ,
1 2 3 0 0 0 4 5 6
1 2 0 0 1 6 2 4 2
= 2
0 1 6 1 2 0 2 4 2
0 1 2 1 2 4 6 0 2
0 1 6 1 2 0 2 614 l3+2l1
0 1 2 3 612 6 0 2
3l2
Pierre Collet : Algèbre Linéaire Appliquée 31
Quelques propriétés des déterminants
1) Si une ligne (ou une colonne) ne contient que des zéros, le déterminant est nul.
2) Si l’on permute 2 lignes (ou 2 colonnes), on multiplie le déterminant par – 1.
3) La matrice et sa transposée ont le même déterminant (donc tout ce qui est valable sur les lignes est valable sur les colonnes).
4) A une ligne, on peut ajouter une combinaison linéaire des autres lignes sans changer le déterminant.
5) Si l’on multiplie une ligne par un réel, on multiplie le déterminant par ce réel (et si l’on multiplie la matrice par un réel, on multiplie le déterminant par le réel^taille de la matrice)
Pierre Collet : Algèbre Linéaire Appliquée 32
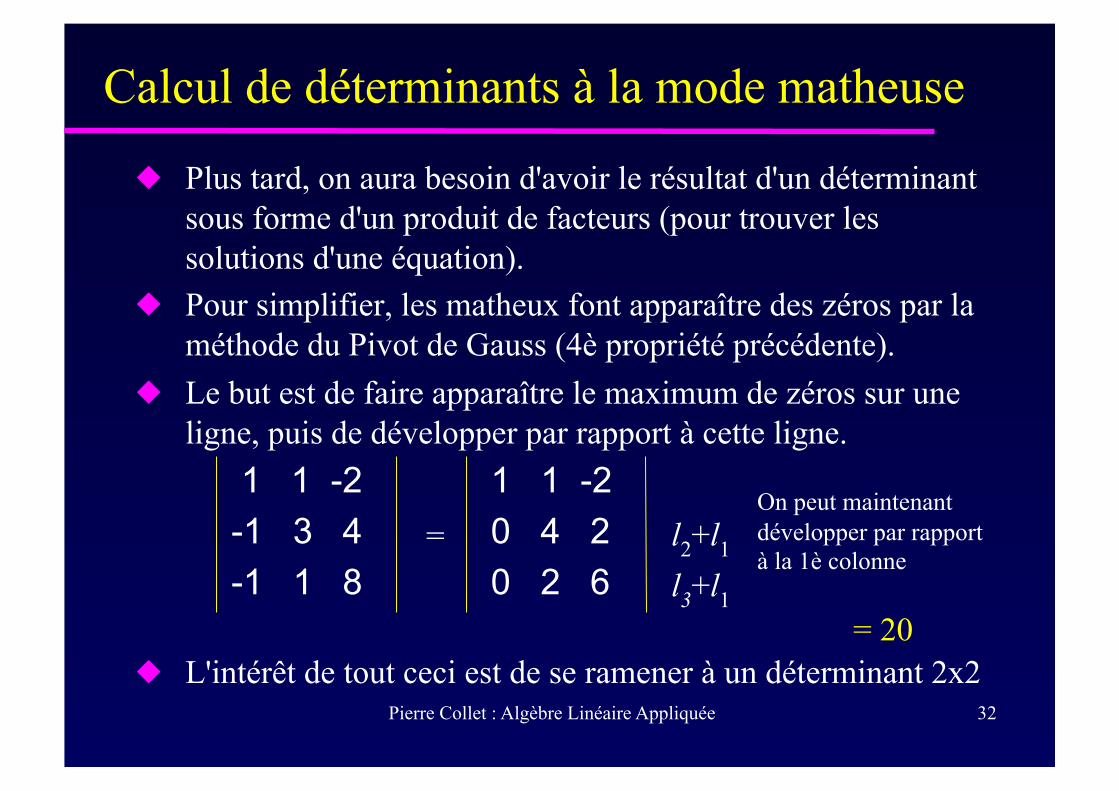
Calcul de déterminants à la mode matheuse
Plus tard, on aura besoin d'avoir le résultat d'un déterminant sous forme d'un produit de facteurs (pour trouver les solutions d'une équation).
Pour simplifier, les matheux font apparaître des zéros par la méthode du Pivot de Gauss (4è propriété précédente).
Le but est de faire apparaître le maximum de zéros sur une ligne, puis de développer par rapport à cette ligne.
L'intérêt de tout ceci est de se ramener à un déterminant 2x2
1 1 -2 -1 3 4 -1 1 8
= 20
1 1 -2 0 4 2 0 2 6
= l2+l1
l3+l1
On peut maintenant développer par rapport à la 1è colonne
Pierre Collet : Algèbre Linéaire Appliquée 33
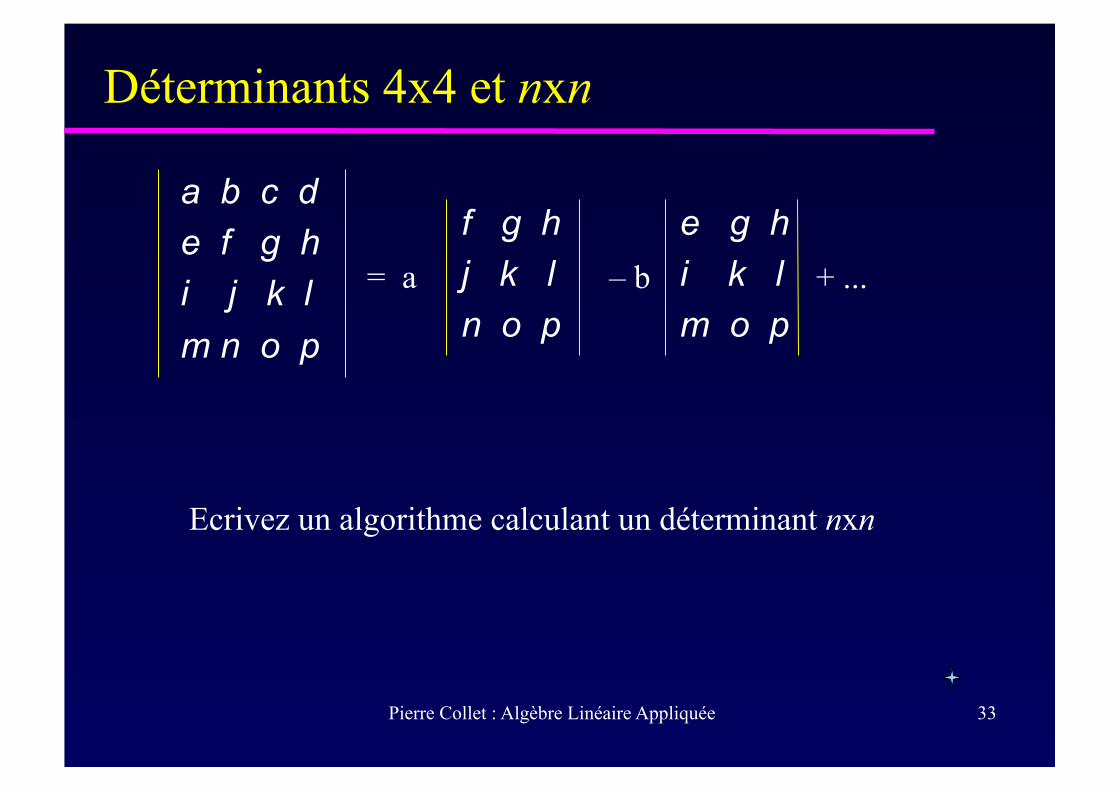
Déterminants 4x4 et nxn
a b c d e f g h i j k l m n o p
= a f g h j k l n o p
– b e g h i k l m o p
+ ...
Ecrivez un algorithme calculant un déterminant nxn
Pierre Collet : Algèbre Linéaire Appliquée 34
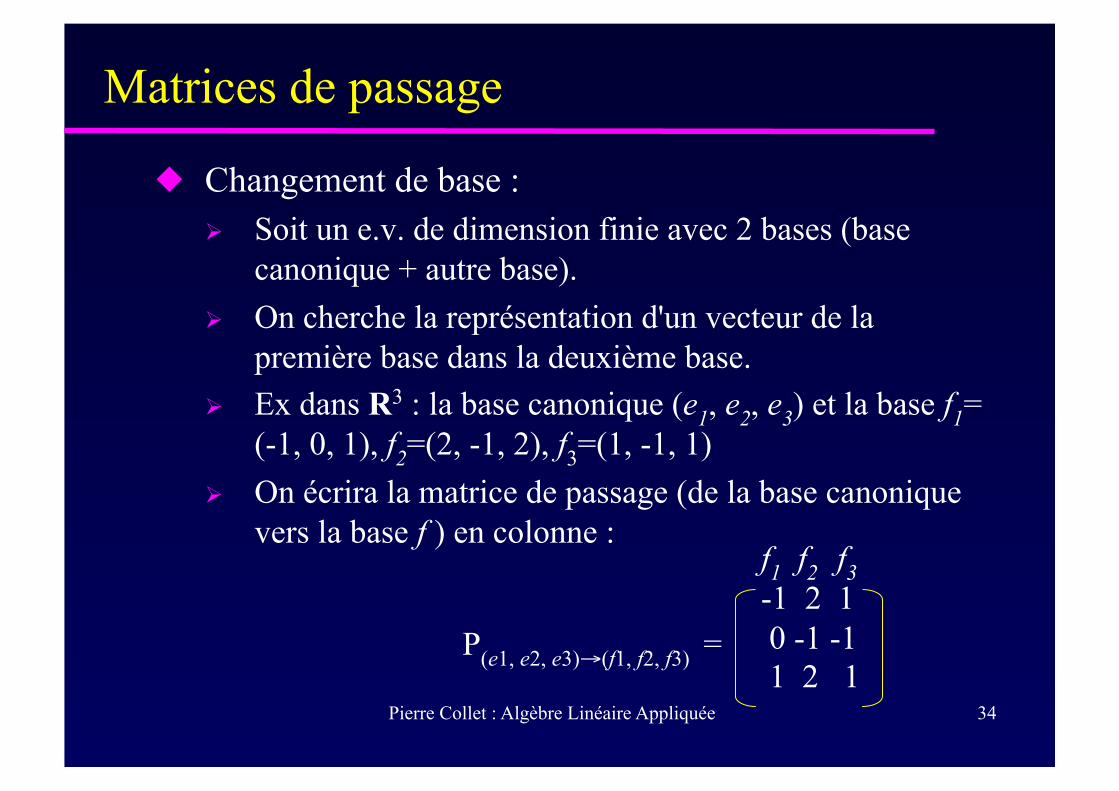
Matrices de passage
Changement de base : Soit un e.v. de dimension finie avec 2 bases (base
canonique + autre base). On cherche la représentation d'un vecteur de la
première base dans la deuxième base. Ex dans R3 : la base canonique (e1, e2, e3) et la base f1=
(-1, 0, 1), f2=(2, -1, 2), f3=(1, -1, 1) On écrira la matrice de passage (de la base canonique
vers la base f ) en colonne : f1 f2 f3 -1 2 1 0 -1 -1 1 2 1
P(e1, e2, e3)→(f1, f2, f3) =
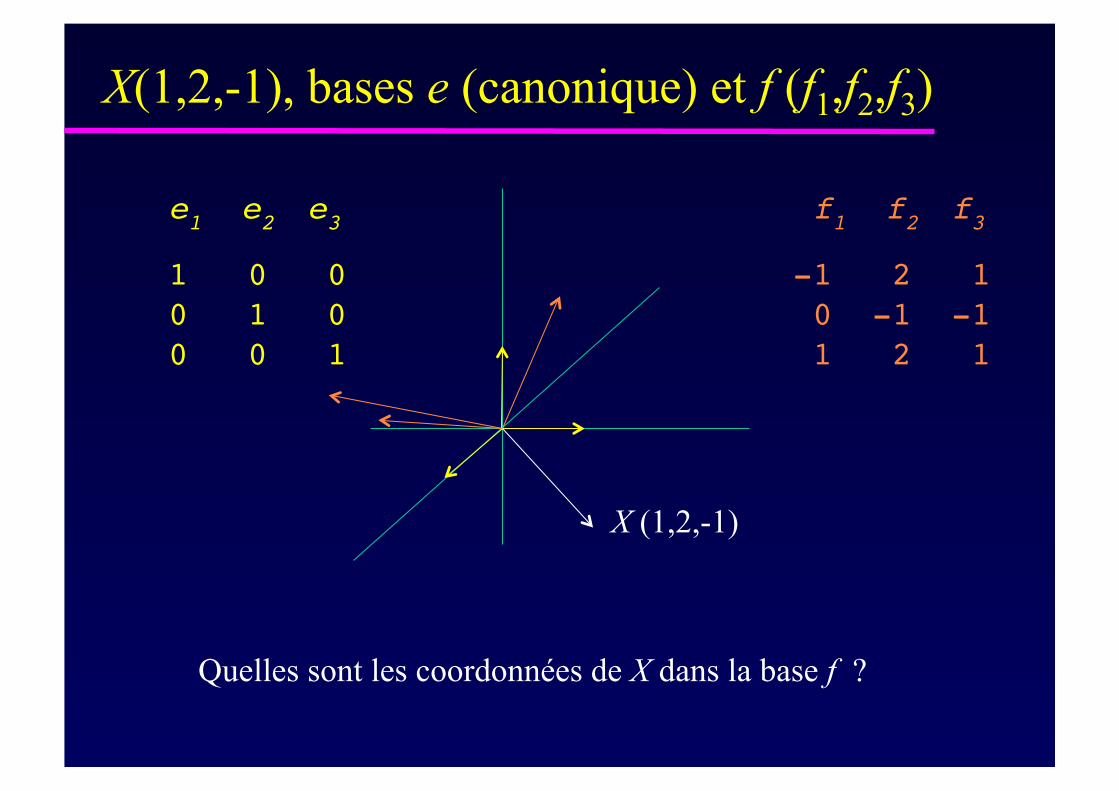
X(1,2,-1), bases e (canonique) et f (f1,f2,f3)
f1 f2 f3!
-1 2 1! 0 -1 -1! 1 2 1!
X (1,2,-1)
e1 e2 e3!
1 0 0! 0 1 0! 0 0 1!
Quelles sont les coordonnées de X dans la base f ?
Pierre Collet : Algèbre Linéaire Appliquée 36
Utilisation de la matrice de passage
Soit un vecteur de coordonnées (x1, x2, x3). Ses coordonnées dans la base B ' seront (x'1, x'2, x'3).
Attention : la matrice de passage fonctionne... « à l'envers ». On aura :
X = P X' ou encore : (x1, x2, x3) = P (x'1, x'2, x'3) Le problème, c'est qu'on veut X' en fonction de X, et
pas X en fonction de X'. Il nous faut donc l'inverse de la matrice pour écrire :
X' = P-1 X
Pierre Collet : Algèbre Linéaire Appliquée 37
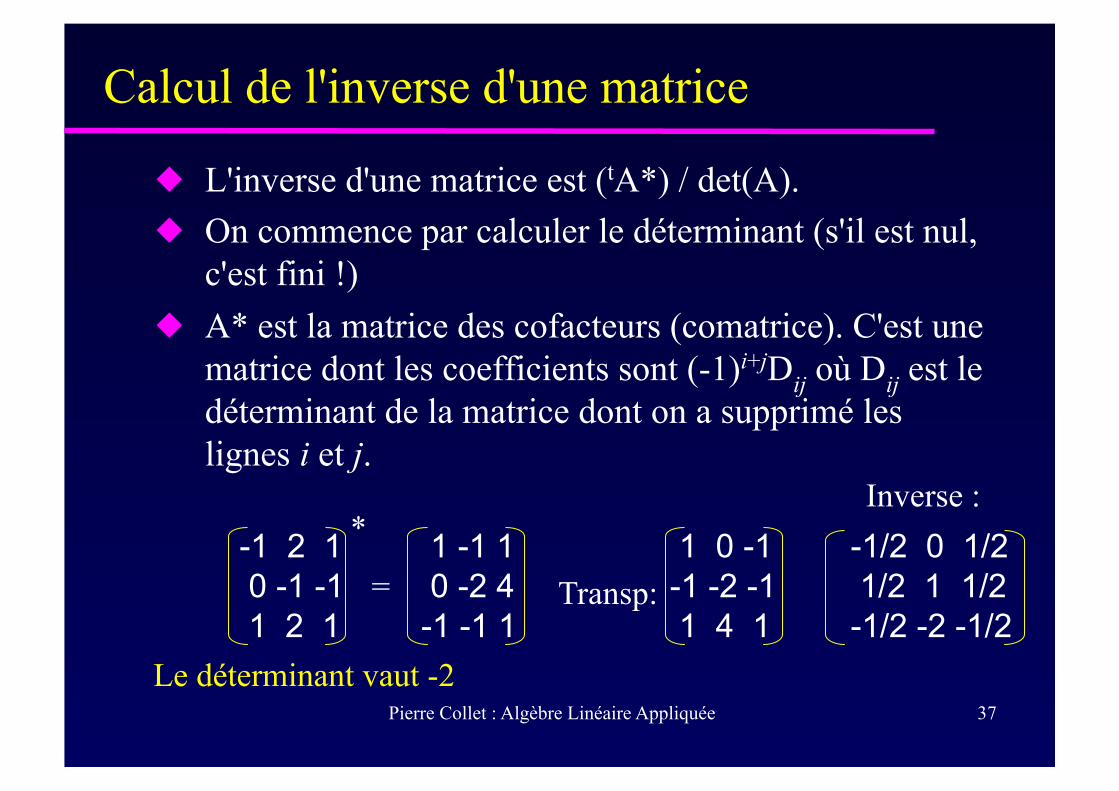
Calcul de l'inverse d'une matrice
L'inverse d'une matrice est (tA*) / det(A). On commence par calculer le déterminant (s'il est nul,
c'est fini !) A* est la matrice des cofacteurs (comatrice). C'est une
matrice dont les coefficients sont (-1)i+jDij où Dij est le déterminant de la matrice dont on a supprimé les lignes i et j.
-1 2 1 0 -1 -1 1 2 1
1 -1 1 0 -2 4 -1 -1 1
=
*
Le déterminant vaut -2
1 0 -1 -1 -2 -1 1 4 1
Transp: -1/2 0 1/2 1/2 1 1/2 -1/2 -2 -1/2
Inverse :
Pierre Collet : Algèbre Linéaire Appliquée 38
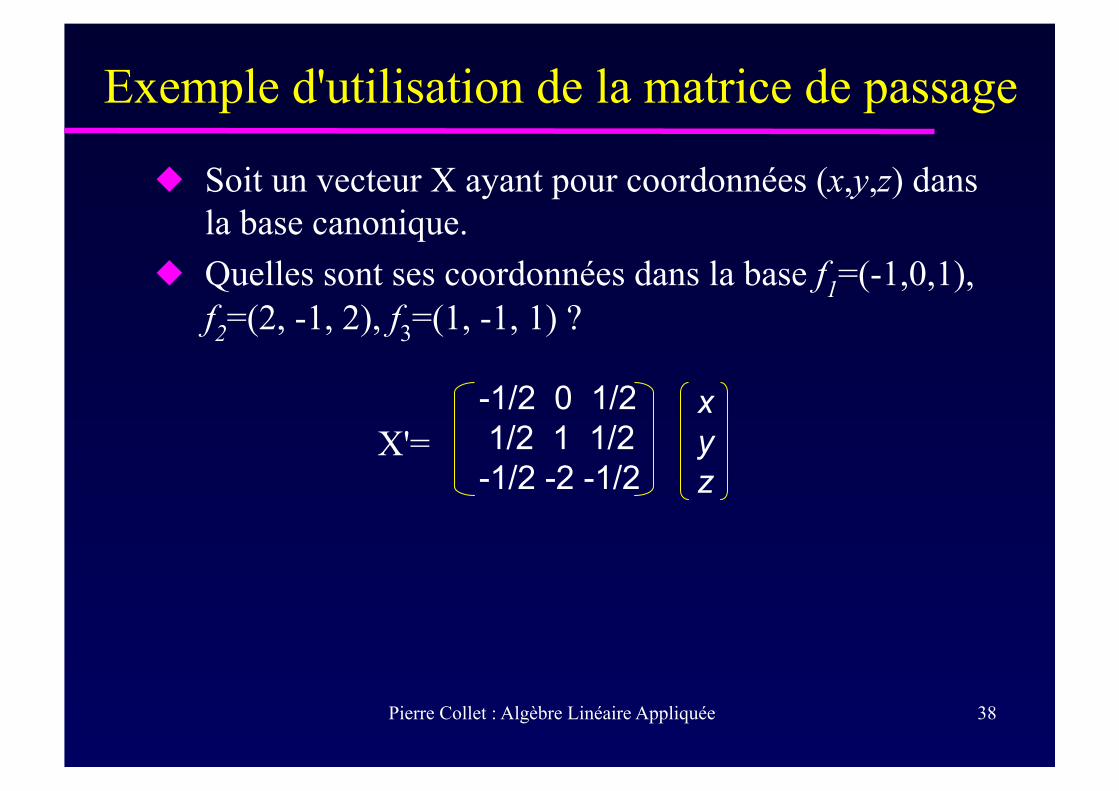
Exemple d'utilisation de la matrice de passage
Soit un vecteur X ayant pour coordonnées (x,y,z) dans la base canonique.
Quelles sont ses coordonnées dans la base f1=(-1,0,1), f2=(2, -1, 2), f3=(1, -1, 1) ?
-1/2 0 1/2 1/2 1 1/2 -1/2 -2 -1/2
X'= x y z
Pierre Collet : Algèbre Linéaire Appliquée 39
Ecrire une fonction inversant une matrice
Pierre Collet : Algèbre Linéaire Appliquée 40
Passage de B à B' et de B' à B
A noter que si, pour calculer X' sachant X = P X', on a inversé l'équation en X' = P-1 X, cela signifie que si P permet de passer de B à B', alors, P-1 permet de passer de B' à B.
Pierre Collet : Algèbre Linéaire Appliquée 41
Application linéaire
Une application K-linéaire est une application d'un K-e.v. E dans un autre F qui « transmet » les deux lois :
∀ x,y ∈E, f(x +E y) = f(x) +F f(y) (l'image de la somme est la somme des images).
∀ x,y ∈E, f (λ*Ex) = λ*Ff(x) (l'image du produit par un scalaire est le produit de l'image).
f de R4 dans R3 tq f(x1,x2,x3,x4) = (2x1-5x3, 3x2,4x3-5x4) est-elle une application linéaire ?
g, de R dans R tq g(x) = x+1 est-elle une application linéaire ? h, de R dans R tq h(x) = x2 est-elle une application linéaire ?
Pierre Collet : Algèbre Linéaire Appliquée 42
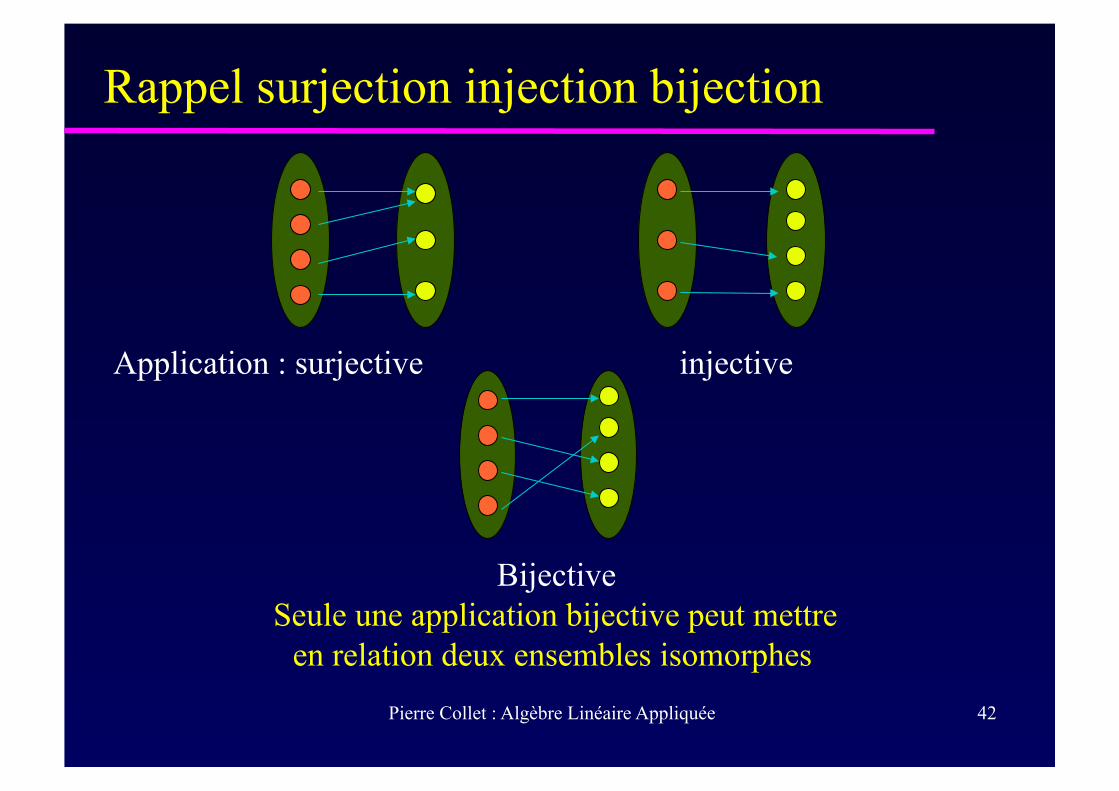
Rappel surjection injection bijection
Application : surjective injective
Bijective Seule une application bijective peut mettre
en relation deux ensembles isomorphes
Pierre Collet : Algèbre Linéaire Appliquée 43
Isomorphismes
Application linéaire bijective, impliquant que les e.v. de départ et d'arrivée ont la même structure.
Pour information, il existe un isomorphisme entre tout espace vectoriel de dimension n et Rn, donc on peut toujours travailler sur Rn.
L'isomorphisme est la transformation (de représentation) qui permet de passer d'un espace à un autre.
Ex : R4 est isomorphe à l'e.v. des matrices 2x2 de réels.
Pierre Collet : Algèbre Linéaire Appliquée 44
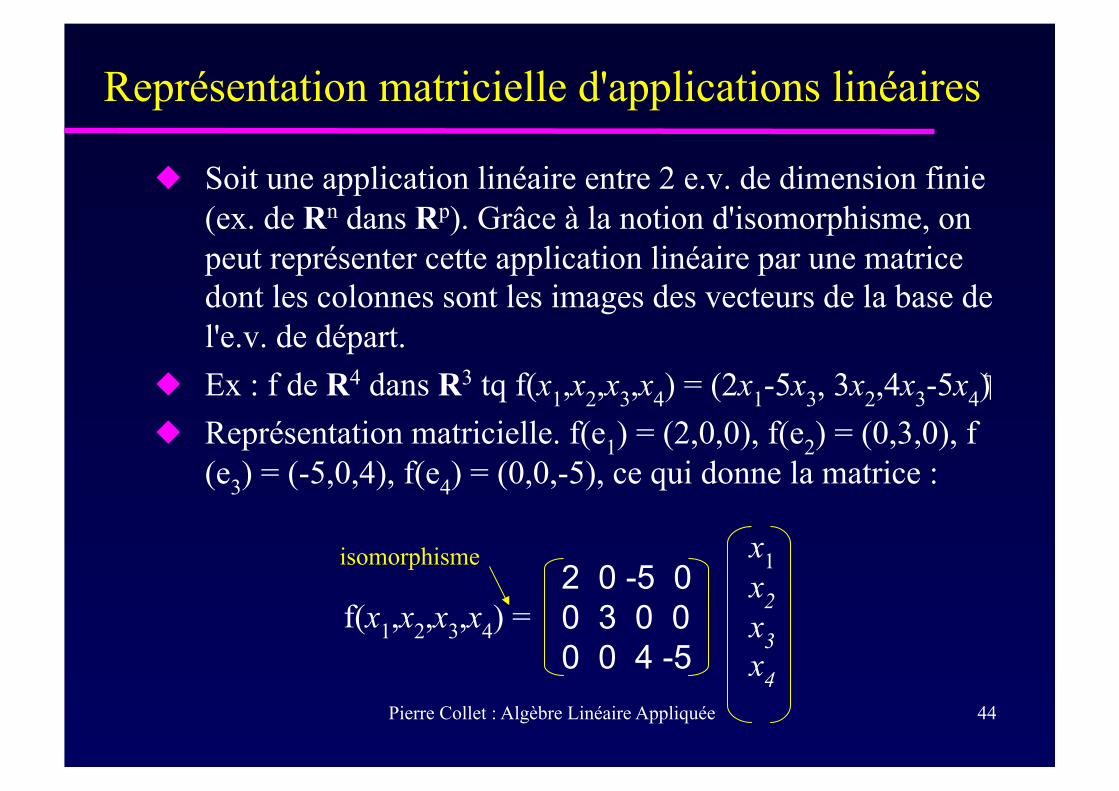
Représentation matricielle d'applications linéaires
Soit une application linéaire entre 2 e.v. de dimension finie (ex. de Rn dans Rp). Grâce à la notion d'isomorphisme, on peut représenter cette application linéaire par une matrice dont les colonnes sont les images des vecteurs de la base de l'e.v. de départ.
Ex : f de R4 dans R3 tq f(x1,x2,x3,x4) = (2x1-5x3, 3x2,4x3-5x4) Représentation matricielle. f(e1) = (2,0,0), f(e2) = (0,3,0), f
(e3) = (-5,0,4), f(e4) = (0,0,-5), ce qui donne la matrice :
2 0 -5 0 0 3 0 0 0 0 4 -5
f(x1,x2,x3,x4) =
x1 x2 x3 x4
isomorphisme
Pierre Collet : Algèbre Linéaire Appliquée 45
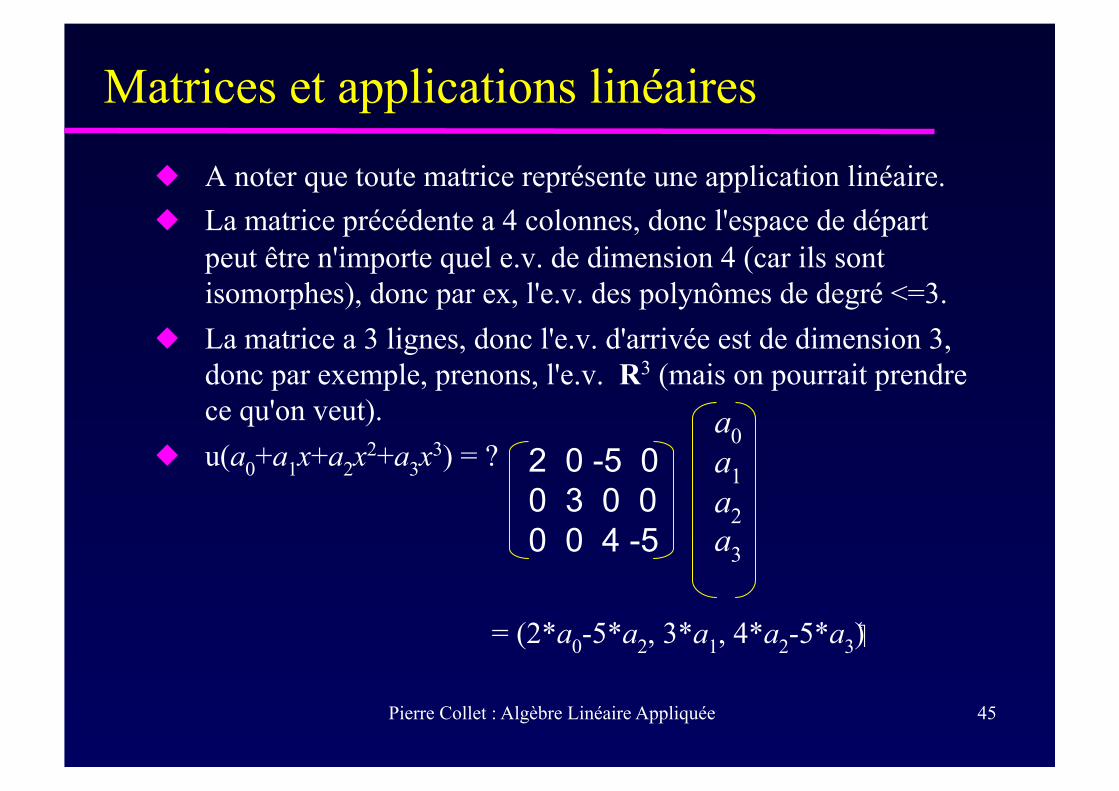
Matrices et applications linéaires
A noter que toute matrice représente une application linéaire. La matrice précédente a 4 colonnes, donc l'espace de départ
peut être n'importe quel e.v. de dimension 4 (car ils sont isomorphes), donc par ex, l'e.v. des polynômes de degré <=3.
La matrice a 3 lignes, donc l'e.v. d'arrivée est de dimension 3, donc par exemple, prenons, l'e.v. R3 (mais on pourrait prendre ce qu'on veut).
u(a0+a1x+a2x2+a3x3) = ? 2 0 -5 0 0 3 0 0 0 0 4 -5
a0 a1 a2 a3
= (2*a0-5*a2, 3*a1, 4*a2-5*a3)
Pierre Collet : Algèbre Linéaire Appliquée 46
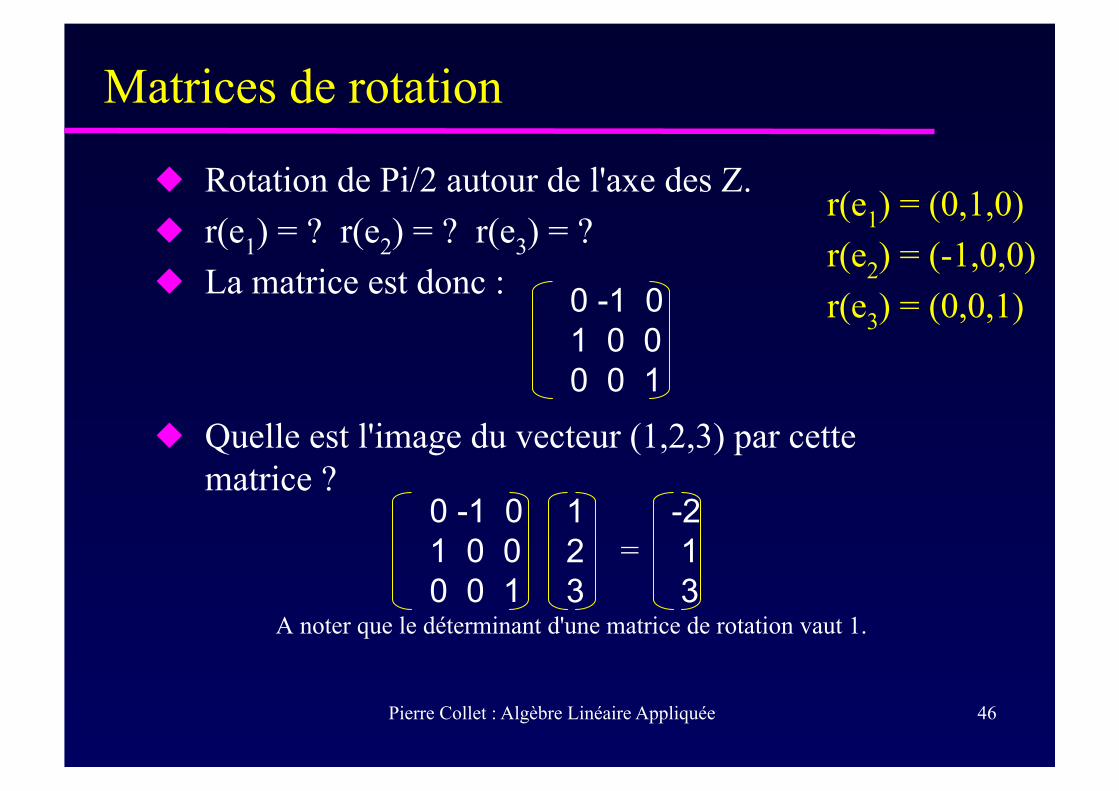
Matrices de rotation
Rotation de Pi/2 autour de l'axe des Z. r(e1) = ? r(e2) = ? r(e3) = ? La matrice est donc :
Quelle est l'image du vecteur (1,2,3) par cette matrice ?
A noter que le déterminant d'une matrice de rotation vaut 1.
0 -1 0 1 0 0 0 0 1
0 -1 0 1 0 0 0 0 1
1 2 3
= -2 1 3
r(e1) = (0,1,0) r(e2) = (-1,0,0) r(e3) = (0,0,1)
Pierre Collet : Algèbre Linéaire Appliquée 47
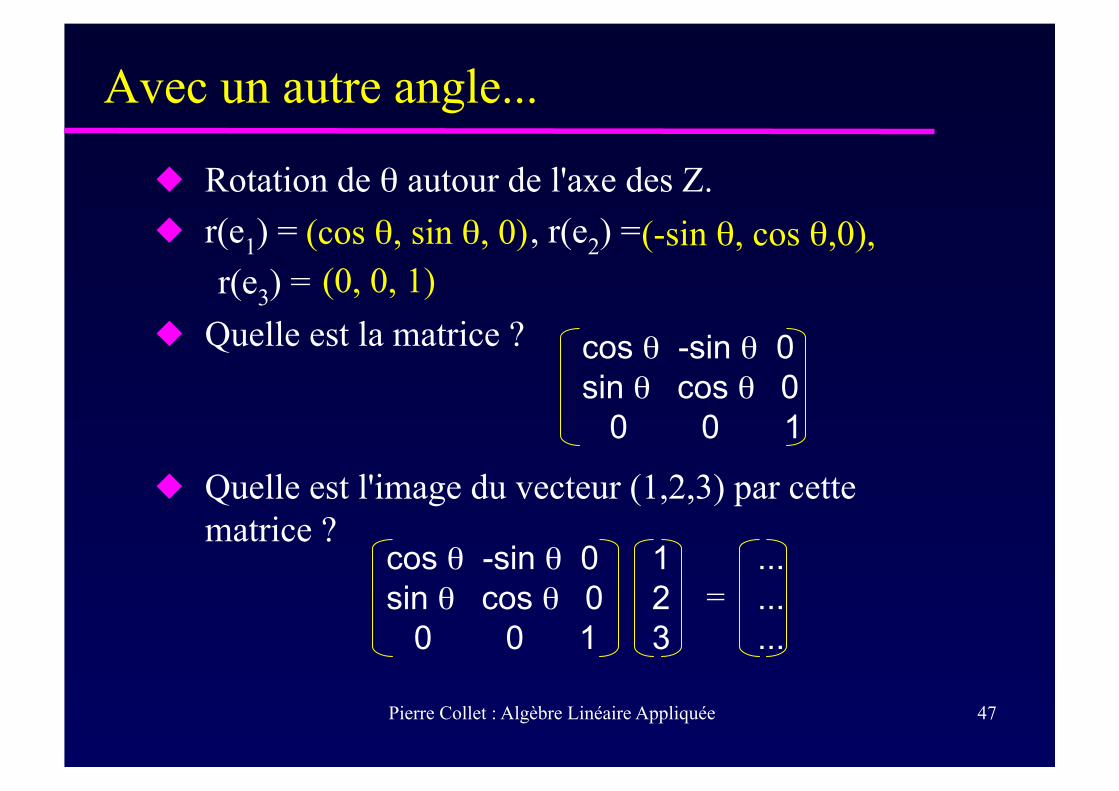
Avec un autre angle...
Rotation de θ autour de l'axe des Z. r(e1) = , r(e2) = r(e3) = Quelle est la matrice ?
Quelle est l'image du vecteur (1,2,3) par cette matrice ?
cos θ -sin θ 0 sin θ cos θ 0 0 0 1
1 2 3
= ... ... ...
cos θ -sin θ 0 sin θ cos θ 0 0 0 1
(cos θ, sin θ, 0) (-sin θ, cos θ,0), (0, 0, 1)
Pierre Collet : Algèbre Linéaire Appliquée 48
Composition de matrices
Soit u,v 2 applications linéaires ayant pour matrices respectives U et V,
uov a pour matrice UxV. On peut donc faire des rotations autour de plusieurs
axes en composant des rotations autour d'un seul axe.
Pierre Collet : Algèbre Linéaire Appliquée 49
Changement de base pour une a.l.
Soit une application linéaire u entre 2 e.v. E et F ayant chacun 2 bases : D et D' dans l'espace de départ E et A et A' dans l'espace d'arrivée F (D et A sont canoniques).
Si la matrice U entre les 2 bases canoniques D et A des 2 espaces est notée M(u,D,A), quelle sera cette matrice expression si on change la base d'arrivée, M(u,D,A') ? Rappel : X' = P-1 X
Si l'on note PA→A' la mat de passage de A à A', et PA'→A la matrice de passage de A' à A, alors, on peut écrire :
X' = P-1A→A'
X, mais aussi X' = PA'→A X car on a vu
précédemment que PA'→A est la matrice inverse de PA→A'
Pierre Collet : Algèbre Linéaire Appliquée 50
M(u,D,A) → M(u,D,A’)
Soit X l'image du vecteur (x1,x2,x3,x4) par u. Dans les bases canoniques D et A de E et F, on note U: M(u,D,A).
Or, X'=M(u,D,A') donc tout comme on avait X'=P-1X,
on a : M(u,D,A') = P-1A→A'M(u,D,A) = PA'→AM(u,D,A)
x1 x2 x3 x4
X= U X' = P-1A→A' U = PA'→AM(u,D,A)
x1 x2 x3 x4
x1 x2 x3 x4
x1 x2 x3 x4
Pierre Collet : Algèbre Linéaire Appliquée 51
M(u,D,A) → M(u,D',A), M(u,D,A)→ M(u,D',A')
De même : M(u,D',A) = M(u,D,A) PD→D'
et lorsqu'on change les 2 bases en même temps : M(u,D',A') = PA'→Α M(u,D,A) PD→D'
Cas particulier : lorsque la matrice est carrée, et que les e.v. de départ et d'arrivée sont identiques, alors, les bases canoniques sont les mêmes (D = A) et les nouvelles bases sont les mêmes (D' = A').
La formule devient : M(u,D',D') = P-1 M(u,D,D) P ou : M' = P-1 M P (à retenir pour la diagonalisation des matrices)
Pierre Collet : Algèbre Linéaire Appliquée 52
Pivot de Gauss
Soit un système de n équations à n inconnues dont on veut trouver les solutions :
Si le système n'est pas triangulaire, le « trigonaliser »:
x +y+z = 1 3y+z = 2 2z = 8
x+2y+z = 2 2x+y+z = -1 x-3y+2z = -1
Pierre Collet : Algèbre Linéaire Appliquée 53
Cas particuliers
1 ligne disparaît (les autres variables s'expriment en fonction de z).
0z = 4 : il n'y a pas de solutions.
x - y+2z = 1 2x-3y+ z = 4 x -3y- 4z = 5
2x - y+3z = 1 x +y - z = 2 x -2y+4z = 1
Pierre Collet : Algèbre Linéaire Appliquée 54
Programmer un Pivot de Gauss
Pierre Collet : Algèbre Linéaire Appliquée 55
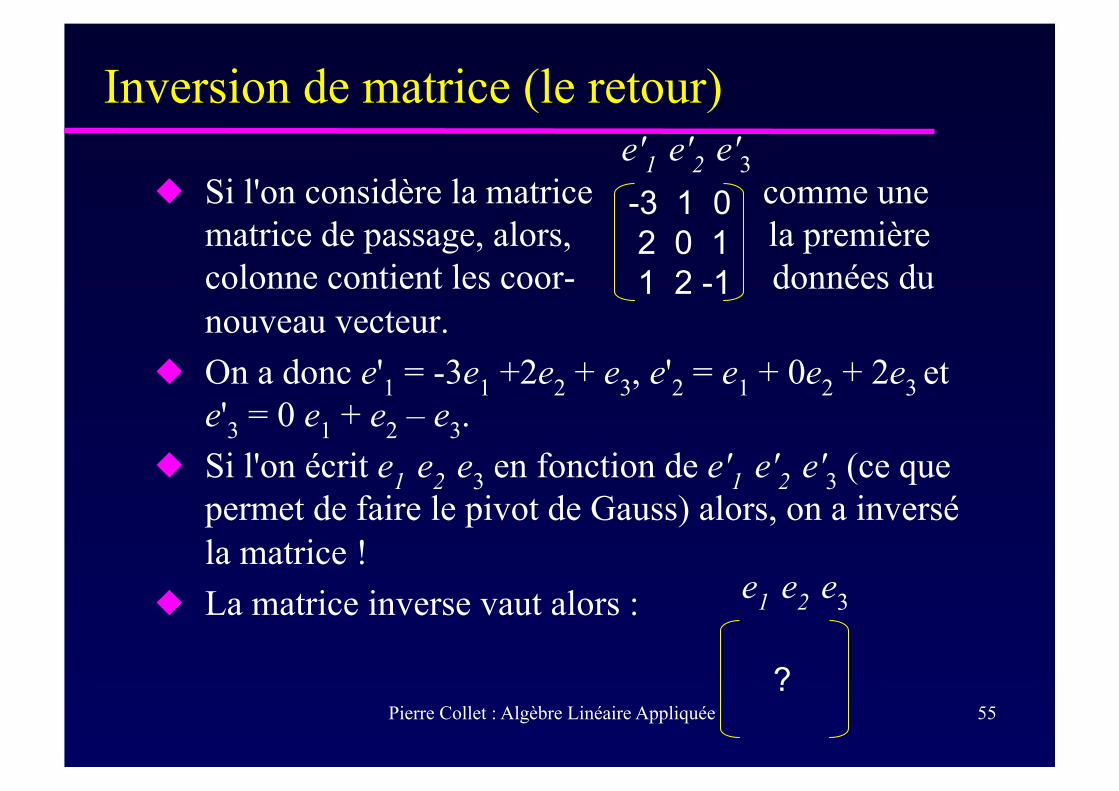
Inversion de matrice (le retour)
Si l'on considère la matrice comme une matrice de passage, alors, la première colonne contient les coor- données du nouveau vecteur.
On a donc e'1 = -3e1 +2e2 + e3, e'2 = e1 + 0e2 + 2e3 et e'3 = 0 e1 + e2 – e3.
Si l'on écrit e1 e2 e3 en fonction de e'1 e'2 e'3 (ce que permet de faire le pivot de Gauss) alors, on a inversé la matrice !
La matrice inverse vaut alors :
-3 1 0 2 0 1 1 2 -1
e'1 e'2 e'3
?
e1 e2 e3
Pierre Collet : Algèbre Linéaire Appliquée 56
Inversion de matrice par pivot de Gauss
Pierre Collet : Algèbre Linéaire Appliquée 57
Notion de valeurs propres
Soit (e1, e2, e3) la base canonique de R3. Soit la projection orthogonale sur le plan (e1, e2). La matrice de cette projection est :
Une valeur propre représente un facteur multiplicatif le long d'un vecteur appelé vecteur propre.
Ici, A va multiplier x par 1, y par 1 et z par 0.
Les valeurs propres 1 donnent une isométrie sur le plan (e1, e2). La valeur propre 0 donne une projection le long de la droite
engendrée par (e3)
1 0 0 0 1 0 0 0 0
A =
x y z
Pierre Collet : Algèbre Linéaire Appliquée 58
Valeurs propres d'autres transformations
Soit une matrice de transformation (rotation, symétrie, homothétie, projection...). On peut détecter si, dans la transformation, il y a symétrie ou homothétie par rapport à un point ou un axe en déterminant les valeurs propres λ.
Une valeur propre de 2 représente un grossissement x2. Une valeur propre de -1/2 représente une symétrie avec homothétie d'un facteur 1/2.
Pierre Collet : Algèbre Linéaire Appliquée 59
Détermination d'une valeur propre
On dit que λ est valeur propre si on peut trouver des vecteurs tels que :
Si les vecteurs sont invariants, la valeur propre est 1. Si les vecteurs se transforment en leur opposé
(symétrie), on a une valeur propre de -1.
x y z
A x y z
= λ
Pierre Collet : Algèbre Linéaire Appliquée 60
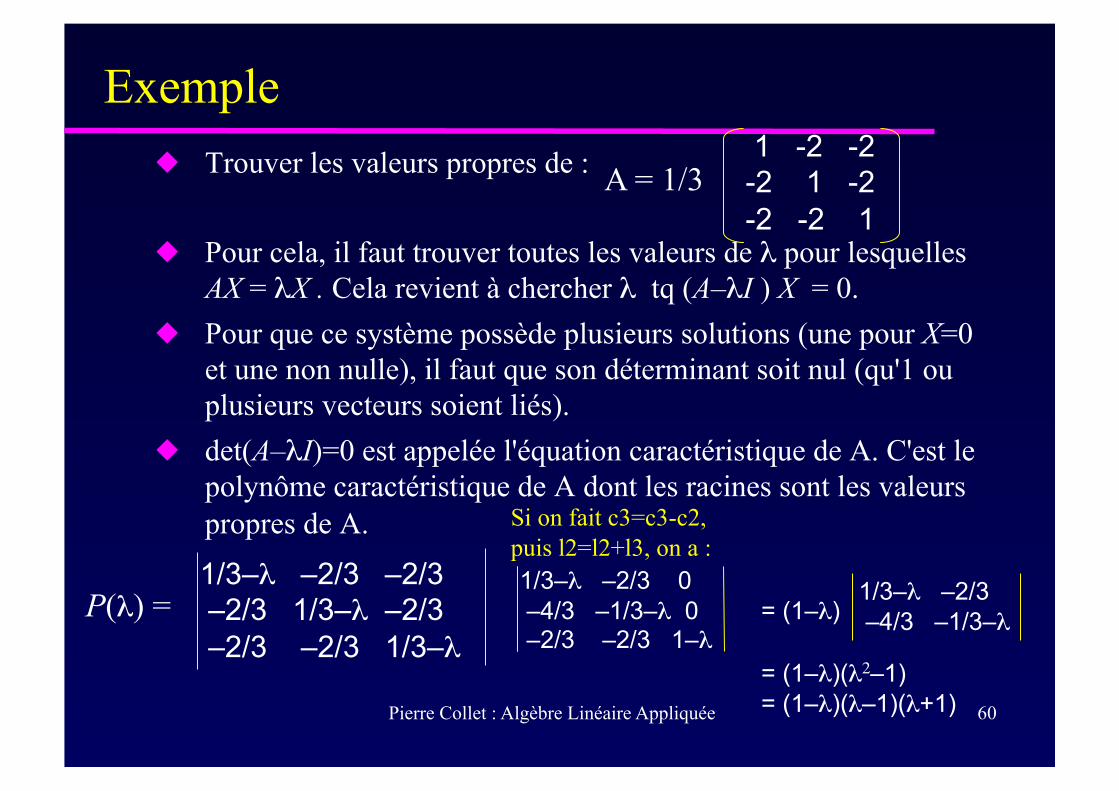
Exemple Trouver les valeurs propres de :
Pour cela, il faut trouver toutes les valeurs de λ pour lesquelles AX = λX . Cela revient à chercher λ tq (A–λI ) X = 0.
Pour que ce système possède plusieurs solutions (une pour X=0 et une non nulle), il faut que son déterminant soit nul (qu'1 ou plusieurs vecteurs soient liés).
det(A–λI)=0 est appelée l'équation caractéristique de A. C'est le polynôme caractéristique de A dont les racines sont les valeurs propres de A.
1 -2 -2 -2 1 -2 -2 -2 1
A = 1/3
1/3–λ –2/3 –2/3 –2/3 1/3–λ –2/3 –2/3 –2/3 1/3–λ
P(λ) =
Si on fait c3=c3-c2, puis l2=l2+l3, on a :
1/3–λ –2/3 –4/3 –1/3–λ
1/3–λ –2/3 0 –4/3 –1/3–λ 0 –2/3 –2/3 1–λ
= (1–λ)
= (1–λ)(λ2–1) = (1–λ)(λ–1)(λ+1)
Pierre Collet : Algèbre Linéaire Appliquée 61
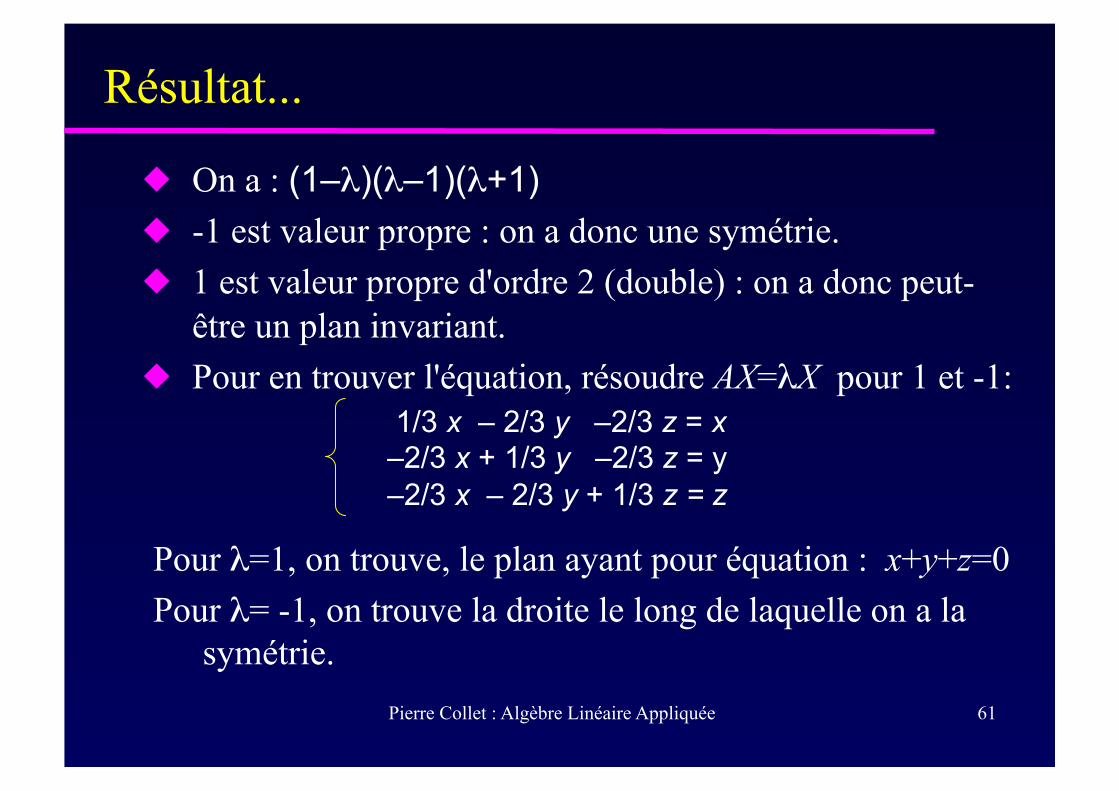
Résultat...
On a : (1–λ)(λ–1)(λ+1) -1 est valeur propre : on a donc une symétrie. 1 est valeur propre d'ordre 2 (double) : on a donc peut-
être un plan invariant. Pour en trouver l'équation, résoudre AX=λX pour 1 et -1:
1/3 x – 2/3 y –2/3 z = x –2/3 x + 1/3 y –2/3 z = y –2/3 x – 2/3 y + 1/3 z = z
Pour λ=1, on trouve, le plan ayant pour équation : x+y+z=0 Pour λ= -1, on trouve la droite le long de laquelle on a la
symétrie.
Pierre Collet : Algèbre Linéaire Appliquée 62
Exercice
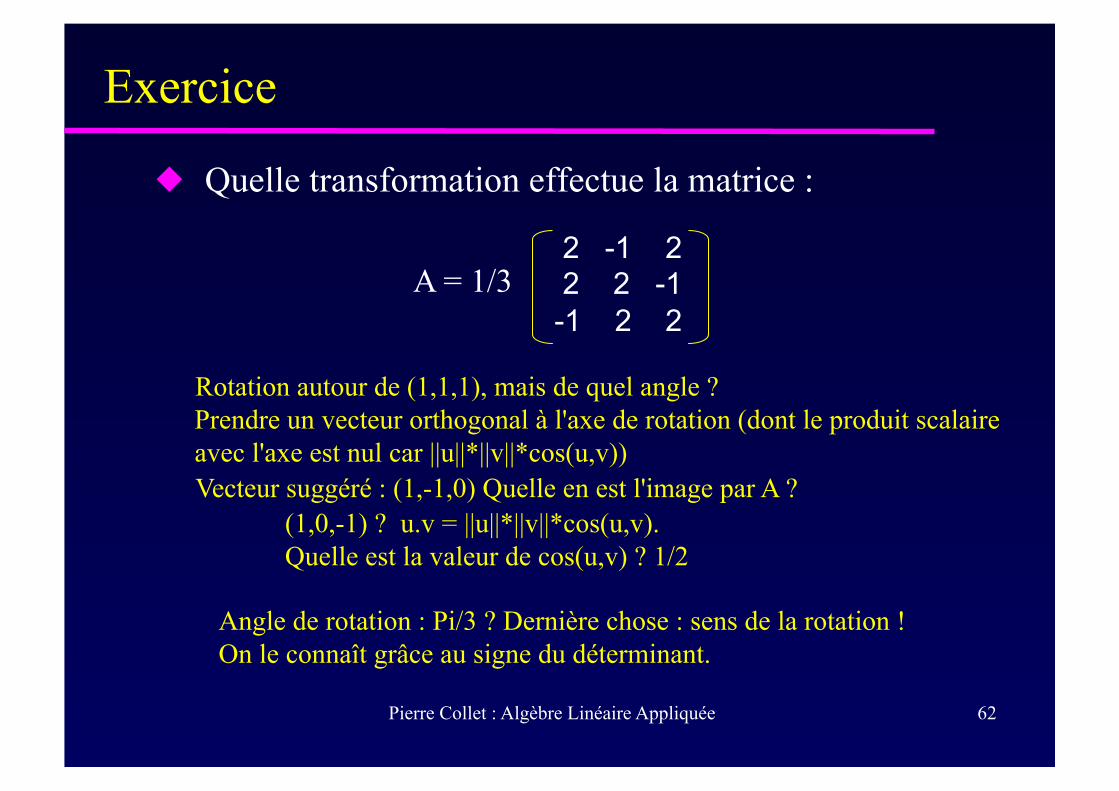
Quelle transformation effectue la matrice :
2 -1 2 2 2 -1 -1 2 2
A = 1/3
Rotation autour de (1,1,1), mais de quel angle ? Prendre un vecteur orthogonal à l'axe de rotation (dont le produit scalaire avec l'axe est nul car ||u||*||v||*cos(u,v)) Vecteur suggéré : (1,-1,0) Quelle en est l'image par A ?
(1,0,-1) ? u.v = ||u||*||v||*cos(u,v). Quelle est la valeur de cos(u,v) ? 1/2
Angle de rotation : Pi/3 ? Dernière chose : sens de la rotation ! On le connaît grâce au signe du déterminant.
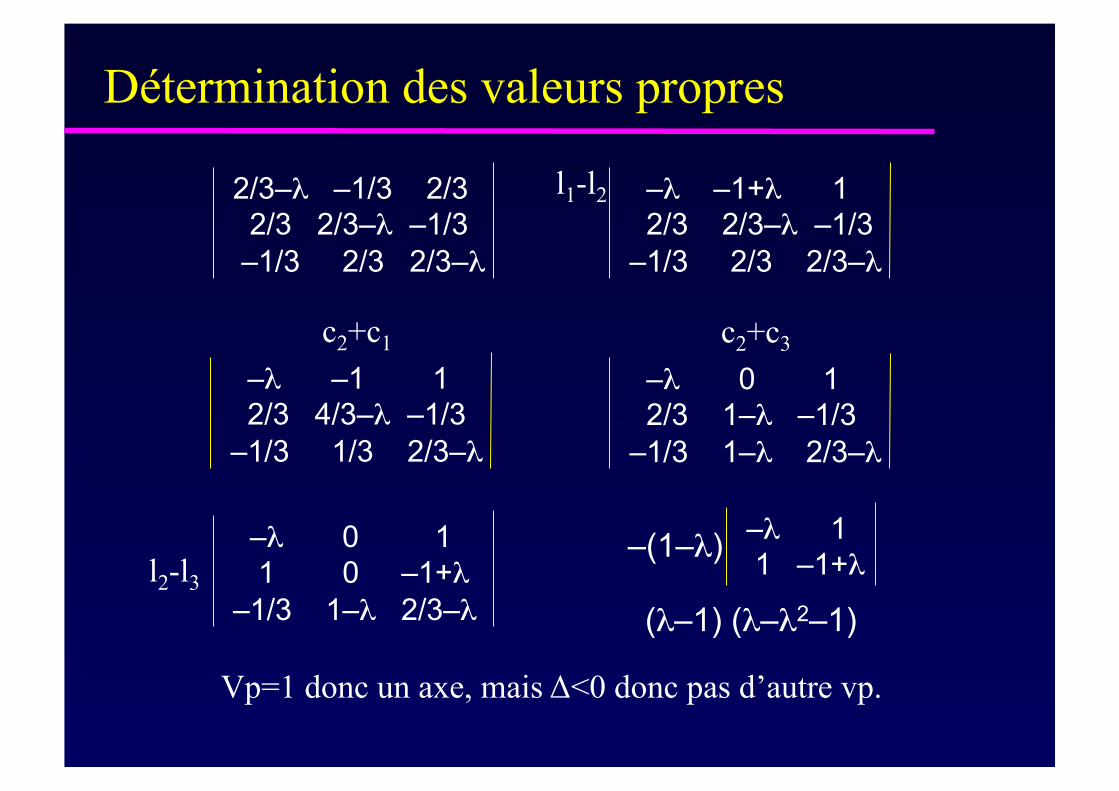
Détermination des valeurs propres
2/3–λ –1/3 2/3 2/3 2/3–λ –1/3 –1/3 2/3 2/3–λ
–λ –1+λ 1 2/3 2/3–λ –1/3 –1/3 2/3 2/3–λ
l1-l2
–λ –1 1 2/3 4/3–λ –1/3 –1/3 1/3 2/3–λ
c2+c1
–λ 0 1 2/3 1–λ –1/3 –1/3 1–λ 2/3–λ
c2+c3
–λ 0 1 1 0 –1+λ –1/3 1–λ 2/3–λ
l2-l3 –(1–λ) –λ 1
1 –1+λ
(λ–1) (λ–λ2–1)
Vp=1 donc un axe, mais Δ<0 donc pas d’autre vp.
Pierre Collet : Algèbre Linéaire Appliquée 64
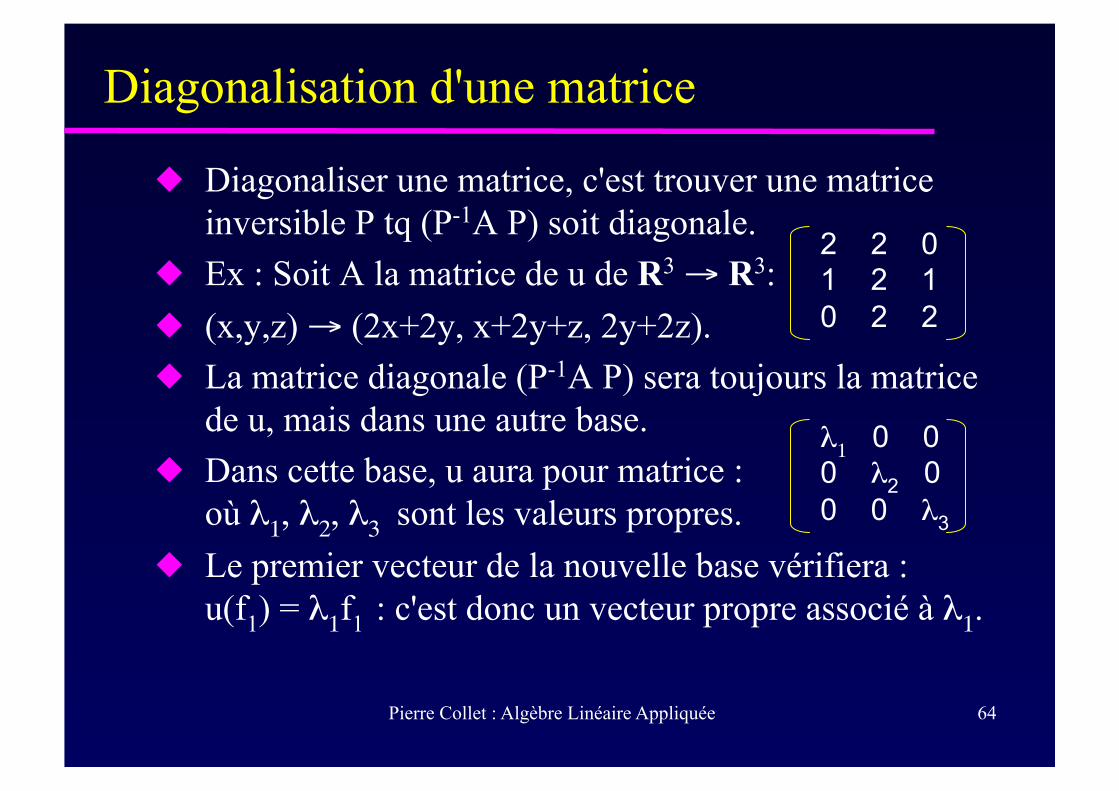
Diagonalisation d'une matrice
Diagonaliser une matrice, c'est trouver une matrice inversible P tq (P-1A P) soit diagonale.
Ex : Soit A la matrice de u de R3 → R3: (x,y,z) → (2x+2y, x+2y+z, 2y+2z). La matrice diagonale (P-1A P) sera toujours la matrice
de u, mais dans une autre base. Dans cette base, u aura pour matrice :
où λ1, λ2, λ3 sont les valeurs propres. Le premier vecteur de la nouvelle base vérifiera :
u(f1) = λ1f1 : c'est donc un vecteur propre associé à λ1.
2 2 0 1 2 1 0 2 2
λ1 0 0 0 λ2 0 0 0 λ3
Pierre Collet : Algèbre Linéaire Appliquée 65
Diagonalisation : 2 étapes
Pour diagonaliser une matrice, il faut donc : Trouver les valeurs propres, qui seront les valeurs de la
matrice diagonale. Trouver les vecteurs propres dont les coordonnées
seront les coefficients des colonnes de P. Attention : toutes les matrices ne sont pas
diagonalisables. Toute matrice symétrique est diagonalisable (mais
l'inverse n'est pas vrai).
Revenons à l'exemple
Matrice A = Quelles en sont les vp ?
L'équation caractéristique est det(A–λI)=0.
2 2 0 1 2 1 0 2 2
Valeurs propres de A
Pierre Collet : Algèbre Linéaire Appliquée 67
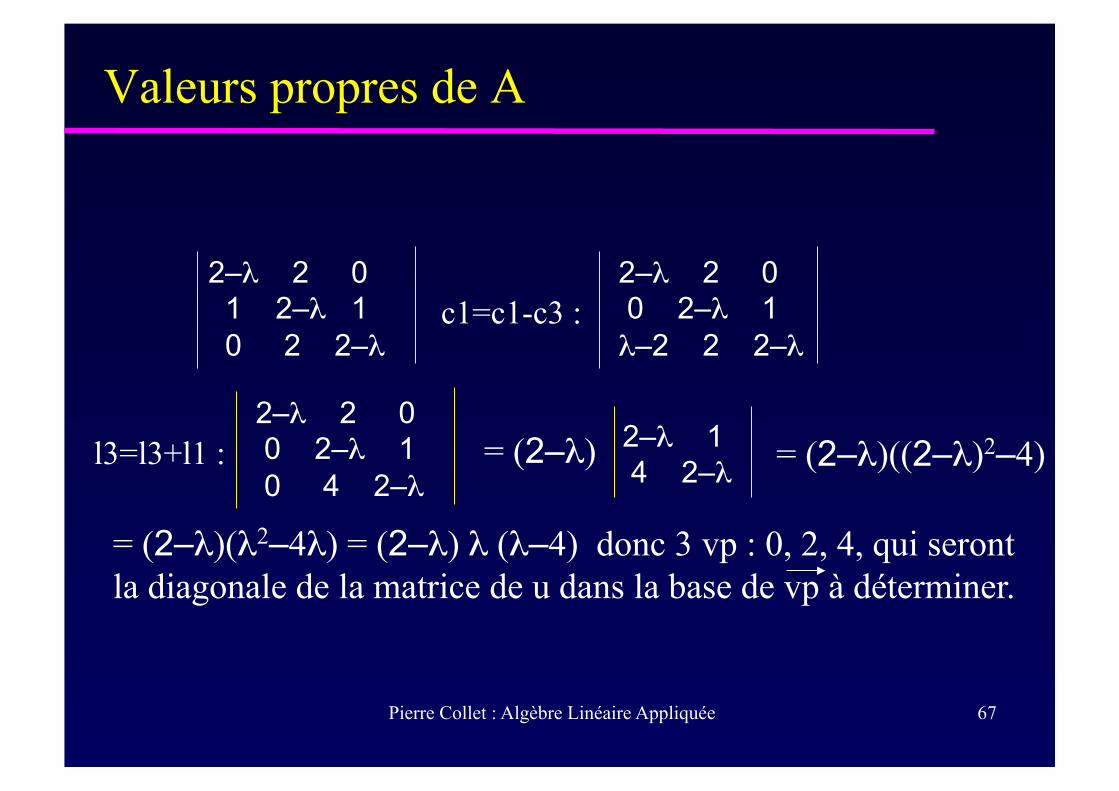
2–λ 2 0 1 2–λ 1 0 2 2–λ
2–λ 2 0 0 2–λ 1 λ–2 2 2–λ
c1=c1-c3 :
2–λ 2 0 0 2–λ 1 0 4 2–λ
l3=l3+l1 : = (2–λ) 2–λ 1 4 2–λ = (2–λ)((2–λ)2–4)
= (2–λ)(λ2–4λ) = (2–λ) λ (λ–4) donc 3 vp : 0, 2, 4, qui seront la diagonale de la matrice de u dans la base de vp à déterminer.
Pierre Collet : Algèbre Linéaire Appliquée 68
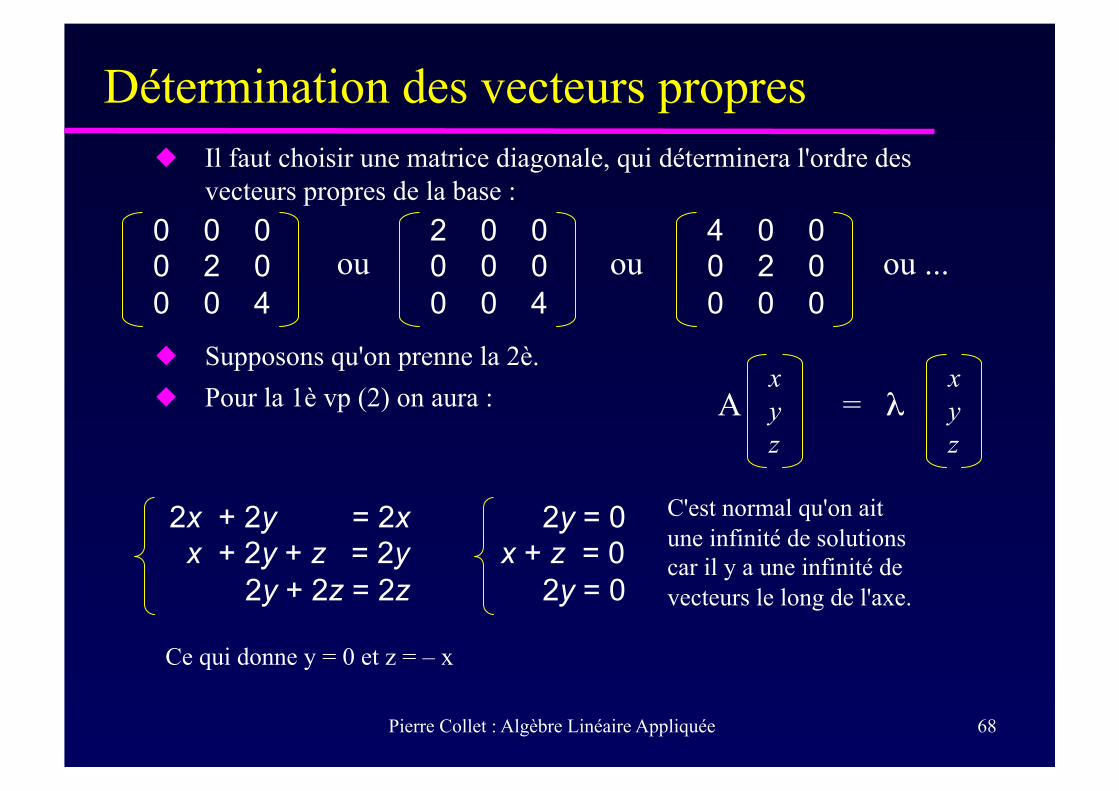
Détermination des vecteurs propres Il faut choisir une matrice diagonale, qui déterminera l'ordre des
vecteurs propres de la base :
Supposons qu'on prenne la 2è. Pour la 1è vp (2) on aura :
4 0 0 0 2 0 0 0 0
0 0 0 0 2 0 0 0 4
2 0 0 0 0 0 0 0 4
ou ou ou ...
x y z
A x y z
= λ
2x + 2y = 2x x + 2y + z = 2y 2y + 2z = 2z
2y = 0 x + z = 0 2y = 0
C'est normal qu'on ait une infinité de solutions car il y a une infinité de vecteurs le long de l'axe.
Ce qui donne y = 0 et z = – x
Pierre Collet : Algèbre Linéaire Appliquée 69
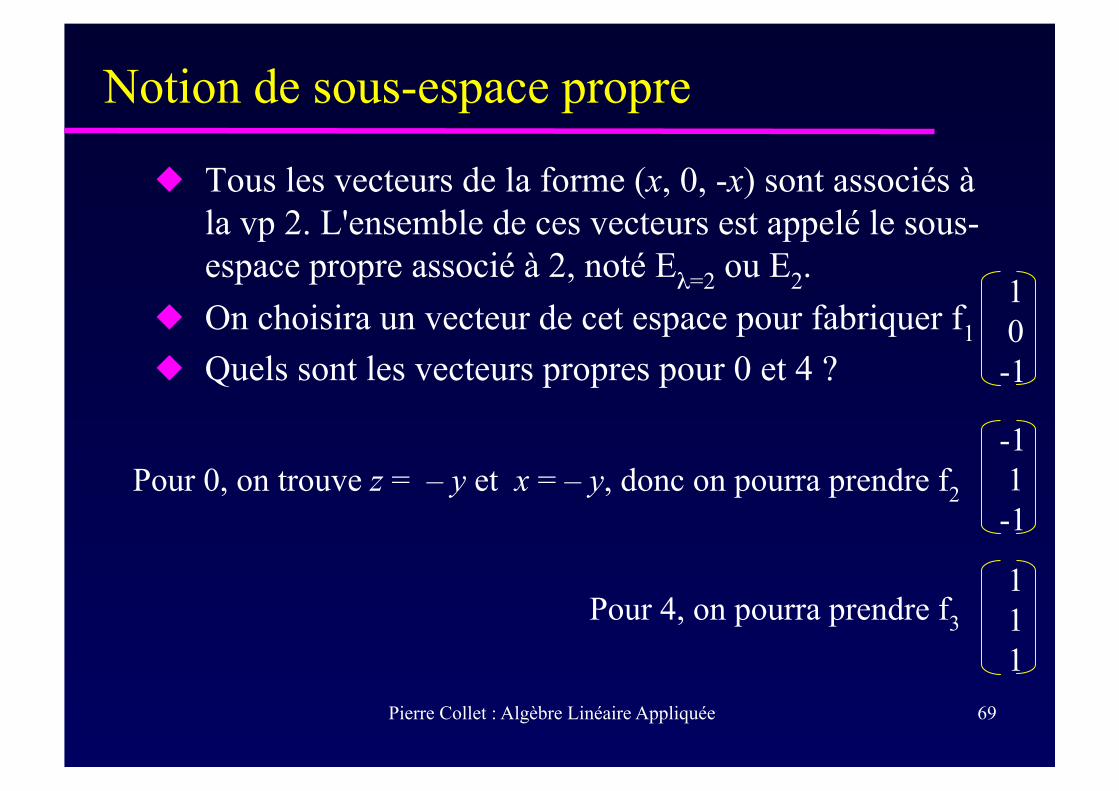
Notion de sous-espace propre
Tous les vecteurs de la forme (x, 0, -x) sont associés à la vp 2. L'ensemble de ces vecteurs est appelé le sous-espace propre associé à 2, noté Eλ=2 ou E2.
On choisira un vecteur de cet espace pour fabriquer f1 Quels sont les vecteurs propres pour 0 et 4 ?
1 0 -1
Pour 0, on trouve z = – y et x = – y, donc on pourra prendre f2
-1 1 -1
Pour 4, on pourra prendre f3 1 1 1
Pierre Collet : Algèbre Linéaire Appliquée 70
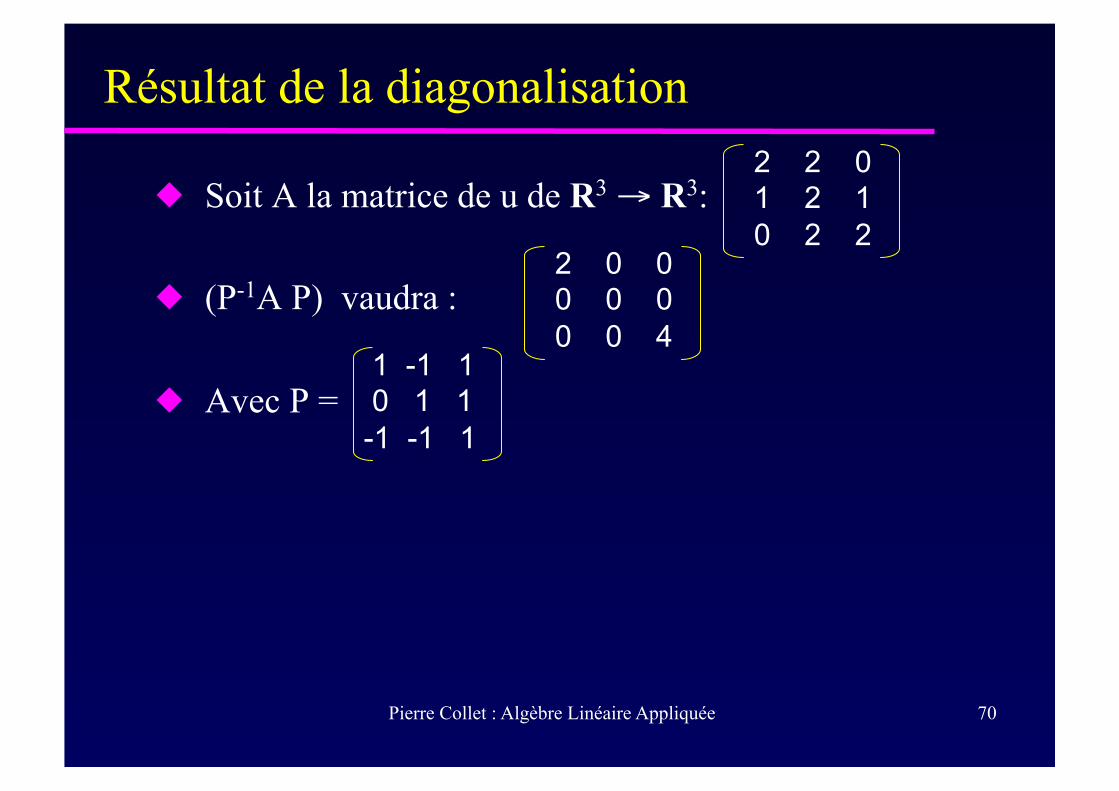
Résultat de la diagonalisation
Soit A la matrice de u de R3 → R3:
(P-1A P) vaudra :
Avec P =
2 2 0 1 2 1 0 2 2
2 0 0 0 0 0 0 0 4
1 -1 1 0 1 1 -1 -1 1
Pierre Collet : Algèbre Linéaire Appliquée 71
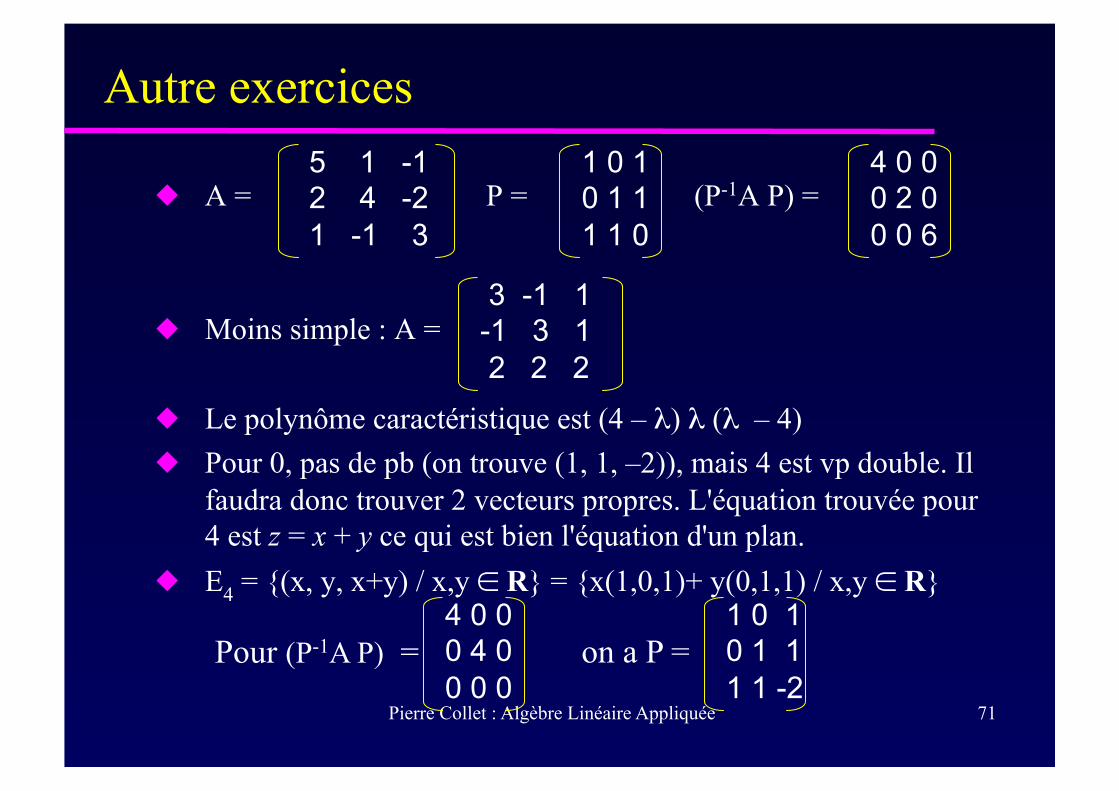
Autre exercices
A = P = (P-1A P) =
Moins simple : A =
Le polynôme caractéristique est (4 – λ) λ (λ – 4) Pour 0, pas de pb (on trouve (1, 1, –2)), mais 4 est vp double. Il
faudra donc trouver 2 vecteurs propres. L'équation trouvée pour 4 est z = x + y ce qui est bien l'équation d'un plan.
E4 = {(x, y, x+y) / x,y ∈ R} = {x(1,0,1)+ y(0,1,1) / x,y ∈ R}
5 1 -1 2 4 -2 1 -1 3
1 0 1 0 1 1 1 1 0
4 0 0 0 2 0 0 0 6
3 -1 1 -1 3 1 2 2 2
1 0 1 0 1 1 1 1 -2
on a P = 4 0 0 0 4 0 0 0 0
Pour (P-1A P) =
Pierre Collet : Algèbre Linéaire Appliquée 72
Cas où cela ne fonctionne pas...
A = les vp sont 3 et – 1 qui est double
Pour –1, on trouve E–1 = {(z, 2z, z) / z ∈ R} Ce n'est que de dimension 1, alors que comme –1 est
valeur propre double, on aurait dû trouver un plan... Pas de base possible, donc la matrice n'est pas
diagonalisable.
1 -3 4 4 -7 8 6 -7 7
Pierre Collet : Algèbre Linéaire Appliquée 73
Projet à rendre pour le ?? décembre
Programme qui effectue : Transposée d’une matrice Somme de 2 matrices Multiplication de 2 matrices de tailles différentes. Résolution d’un système par pivot de Gauss Déterminant d'une matrice de taille quelconque. Inversion d’une matrice :
– Par la comatrice – Par pivot de Gauss
Calcul des valeurs propres d’une matrice (détermination de l’équation caractéristique = det (A – λI) puis résolution par pivot.
N'oubliez pas de m'envoyer un petit rapport sous LaTeX expliquant comment fonctionnent vos programmes.