Embed Size (px)
Citation preview
République Algérienne Démocratique et Populaire
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
UNIVERSITE 20 AOUT 55 DE SKIKDA
FACULTE DES SCIENCES DE L’INGENIEUR
DEPARTEMENT d’INFORMATIQUE
Mémoire
Pour l’Obtention du Diplôme de Magistère
en Informatique de l’Ecole Doctorale de l’Est (EDIE)(EDIE)(EDIE)(EDIE)
OptionOptionOptionOption: Intelligence Artificielle
Présenté Par: BOUDJAADAR Amina
Devant le Jury:
Pr. BOUFAIDA Mahmoud. PRESIDENT
Dr. MAAMRI Ramdane, Rapporteur
Dr. REDJIMI Mohammed, Examinateur
Dr. MAZOUZI Smaine, Examinateur
Année Universitaire: 2009/2010
Plateforme Basée Agents Pour l’Aide à la Conception et la Simulation des
Réseaux de Capteurs Sans Fil
Encadreur: Pr. SAHNOUN Zaidi
Rapporteur: Dr. MAAMRI Ramdane
DédicaceDédicaceDédicaceDédicace JJJJe remercier Dieu de m’avoir donné le courage pour accomplir ce modeste
travail que je dédie :
AAAA mes très chers parents qui sont la bougie qui illumine ma vie
AAAA mon mari Samir
AAAA ma fille loudjaine
AAAA mon frére Hamza
AAAA mes sœurs Oumeima, Nousseiba, Safa
AAAA toute ma grande famille, à tous mes amis et à tous mes enseignants
EEEEt à tout ceux que j’aime et qui m’aiment
BBBBOUDJAADAR OUDJAADAR OUDJAADAR OUDJAADAR AAAAMINAMINAMINAMINA
Remerciements TTTTout d’abord, je présente mes remerciements les plus sincères aux initiateurs de ce travail ; Le ProfesseurLe ProfesseurLe ProfesseurLe Professeur Sahnoun Zaidi Sahnoun Zaidi Sahnoun Zaidi Sahnoun Zaidi et Le ProfesseurLe ProfesseurLe ProfesseurLe Professeur Maamri Maamri Maamri Maamri Ramdane.Ramdane.Ramdane.Ramdane.
Je tiens à remercier Le Professeur Le Professeur Le Professeur Le Professeur Sahnoun ZaidiSahnoun ZaidiSahnoun ZaidiSahnoun Zaidi pour son encadrement et
pour l’encouragement et l’intérêt qu’il m’a apporté pour l’accomplissement de ce travail et surtout pour son grande aide et ses qualités humaines.
JJJJe tiens à remercier vivement Le DocteurLe DocteurLe DocteurLe Docteur Maamri RamdaneMaamri RamdaneMaamri RamdaneMaamri Ramdane pour son implication totale et son aide importante pendant la rédaction de cette thèse.
MMMMes remerciements s’adressent aussi au ProfesseurProfesseurProfesseurProfesseur BoufaidaBoufaidaBoufaidaBoufaida MahmoudMahmoudMahmoudMahmoud
qui a accepté de présider le jury de soutenance.
Je remercie également messieurs Le docteur Maazouzi smailLe docteur Maazouzi smailLe docteur Maazouzi smailLe docteur Maazouzi smail et Le docteur Le docteur Le docteur Le docteur
Redjimi MohamedRedjimi MohamedRedjimi MohamedRedjimi Mohamed qui ont eu un impact majeur sur ma formation d’ingénieur et qui m’honorent aujourd’hui par leurs présences en qualité de membres du jury pour apprécier ce travail.
Table des matières
I. Introduction générale…………………………………………………………………… 1 II. Introduction sur les réseaux de capteurs sans fil ……………………………………. 3 II.1 Introduction…………………………………………………………………………..3 II.2 Les domaines d’application des WSNs …………………………………………….3 II.2.1 Applications militaires…………………………………………… ……………3 II.2.2 Applications environnementales…………………………………………… . .5 II.2.3 Applications de santé……………………………………………………… …..6 II.2.4 Applications à la maison……………………………………………… ……….7 II.2.5 D'autres applications commerciales………………………………………… ..7 II.3 Taxonomie des réseaux sans fil…………………………………………………… .8 II.3.1 Selon la zone de couverture…………………………………………………… 8 II.3.1.1 Réseaux personnels sans fil (WPAN)……………………………… …… .8 II.3.1.2 Réseaux locaux sans fil (WLAN)…………………………………………..13 II.3.1.3 Les réseaux métropolitains sans fil (WMAN)…………………………….14 II.3.1.4 Les réseaux sans fil étendus (WWAN)…………………………………….14 II.3.2 Selon l’infrastructure………………………………………………………….16 II.3.2.1 Réseaux cellulaire (avec infrastructure…………………………………...16 II.3.2.2 Réseaux ad hoc (sans infrastructure)……………………………………...18 II.4 Les réseaux de capteurs sans fil……………………………………………………19 II.4.1 Définition de capteur…………………………………………………………..19 II.4.2 Architecture physique d’un capteur………………………………………......19 II.4.3 Définition d’un réseau de capteur sans fil ……………………………………22 II.4.4 Caractéristiques requises des WSNs………………………………………….22 II.4.5 Mécanismes utilisés pour atteindre les caractéristiques requises des WSNs.23 II.4.6 Architecture d’un réseau de capteurs…………………………………………24 II.4.6.1 Réseau étoile (point-à-multipoint)…………………………………………24 II.4.6.2 Réseau maillé………………………………………………………………..25 II.4.7 Architecture de communication………………………………………………..26 II.4.7.1. Couche physique……………………………………………………………27 II.4.7.2. Couche liaison de données…………………………………………………28
II.4.7.3. Couche réseau………………………………………………………………30 II.4.7.4. Couche de transport………………………………………………………..30 II.4.7.5. Couche application…………………………………………………………30 II.4.7.6. Gestion d’énergie…………………………………………………………...31 II.4.7.7. Gestion de mobilité…………………………………………………………31 II.4.7.8. gestion des tâches…………………………………………………………...31
II.5 Réseaux de capteurs vs réseaux ad hoc…………………………………………….32 II.6Conclusion ……………………………………………………………………………33 III. Les systèmes multi-agents……………………………………………………………..34 III.1 Introduction………………………………………………………………………... .34 III.2 Les systèmes complexes…………………………………………………………….34 III.2.1 Définition………………………………………………………………………..34 III.2.2 Caractéristiques d’un système complexe ouvert……………………….…….34 III.3 L’origine du paradigme multi-agent…………………… …………………………35 III.4 Les agents…………………………………………………………………………..36 III.4.1 Définitions……………………………………………………………………...36 III.4.2 Les caractéristiques multidimensionnelles d’un agent……………………..37 III.4.3 Taxonomie des agents…………………………………………………………38 III.4.3.1 Agents a capacités cognitives ou réactives………………………………38 III.4.3.2 Agents communicants ou situés………………………………………….39
Table des matières
III.4.3.3 Classification basée sur la structure de l’agent…………………………39 III.5 Les systèmes multi-agents…………………………………………………………40 III.5.1 Définition ………………………………………………………………………40 III.5.2 Taxonomie des systèmes multi-agents ………………………………………41 III.5.2.1 Système multi-agents ouvert ou fermé…………………………………..41 III.5.2.2 Système multi-agents homogène/hétérogène……………………………41 III.5.3 Les constituants d’un système muti-agents………………………………….41 III.5.3.1 Les agents (A)……………………………………………………………..41 III.5.3.2 L’environnement (E)……………………………………………………...41 III.5.3.3 Les interactions (I)………………………………………………………..42 III.5.3.4 L’organisation (O)………………………………………………………..43 III.5.4 Plateformes pour les systèmes multi agents…………………………………43 III.5.4.1 AgentTool…………………………………………………………………43 III.5.4.2 AgentBuilder……………………………………………………………...43 III.5.4.3 Jack………………………………………………………………………..43 III.5.4.4 DECAF……………………………………………………………………44 III.5.4.5 Jade……………………………………………………………………….44 III.5.4.6 JAFMAS et JiVE………………………………………………………...44 III.5.4.7 Zeus……………………………………………………………………….44 III.5.4.8 Madkit……………………………………………………………………45 III.6 Conclusion…………………………………………………………………………45 V. La simulation des réseaux de capteurs……………………………………………………….46 V.1 introduction………………………………………………………………………...46 V.2 Différentes approches de test……………………………………………………...46 V.2.1 Le test en environnement réel………………………………………………...46 V.2.2 La simulation…………………………………………………………………..46 V.2.3 L'émulation……………………………………………………………………47 V.3 Les simulateurs Actuellement disponibles……………………………………….47 V.4 conclusion…………………………………………………………………………..50 VI. Les protocoles de communication utilisés dans les WSNs………………………...51 VI.1 Introduction……………………………………………………………………….51 VI.2 Les protocoles de la couche MAC……………………………………………….51 VI.2.1 Les raisons de la perte d’énergie……………………………………………51 VI.2.2 Les modèles de communication dans un WSN…………………………….52 VI.2.3 Les attributs d’un bon protocole MAC…………………………………….52 VI.3 Les protocoles de routage………………………………………………………..58 VI.3.1 Les protocoles basés sur la structure du réseau…………………………...59 VI.3.1.1 Le routage plat………………………………………………………….60 VI.3.1.2 Le routage hiérarchique……………………………………………….65 VI.3.1.3 Le routage basé sur la localisation…………………………………….70 VI.3.2 Les protocoles de routage en fonction de leurs modes opératoires………74 VI.3.2.1 Protocoles de routage multichemins…………………………………..74 VI.3.2.2 Le routage basé sur les requêtes………………………………………75 VI.3.2.3 Routage basé sur la négociation……………………………………….76 VI.3.2.4 Routage basé sur la qualité de service………………………………...77 VI.3.2.5 Processus cohérents et non cohérents…………………………………78 VI.4 Les perspectives du routage dans les WSNs……………………………………79 VI.5 Conclusion………………………………………………………………………...80 VII. Conception et réalisation…………………………………………………………...81 VII.1 Introduction……………………………………………………………………...8 1
Table des matières
VII.2 Description générale de l’approche proposée…………………………………81 VII.3 Les services fournis par la plateforme de simulation…………………………81 VII.4 Description détaillée de l’approche proposée………………………………...82 VII.5 Conception de la plateforme a base d’agent…………………………………...87 VII.5.1 Description d’un agent……………………………………………………88 VII.5.2 Description des agents de la plateforme………………………………….89 VII.5.2.1 Agent objet cible……………………………………………………..89 VII.5.2.2 Agent capteur………………………………………………………...92 VII.5.2.3. Agent station de base………………………………………………106 VII.6 Implémentation………………………………………………………………...107 VII.6.1 Environnement de développement………………………………………107 VII.6.2 Construction des agents de la plateforme de simulation……………….109 VII.6.2.1 Les classes implémenté……………………………………………..109 VII.6.2.2 Caractéristiques et méthodes de chaque classe…………………...110 VII.6.2.3 Les méthodes principales qui constituent un agent dans la plateforme MadKit…………………………………………………………………………………..114 VII.6.2.4.Les agents construits………………………………………………..114 VII.6.3 L’exécution de la simulation et l’affichage des statistiques……………117 VII.7 Quelques interfaces de la plateforme…………………………………………118 VII.8 Conclusion………………………………………………………………………120 VIII. Conclusion générale………………………………………………………………121
Liste des figures
Figure II.1 : Classification des réseaux sans fil……………………………………………8 Figure II.2 : Topologie point à point de Bluetooth………………………………………...9 Figure II.3 : Topologie Piconet de Bluetooth…………………………………………….10 Figure II.4 : Topologie Scatternet de Bluetooth………………………………………….10 Figure II.5 : topologies étoile et peer to peer des réseaux IEEE 802.15.4………………13 Figure II.6 : Le modèle des réseaux mobiles avec infrastructure………………………17 Figure II.7 : Le principe de réutilisation de fréquence………………………………….18 Figure II.8 : Architecture physique d’un capteur……………………………………….20 Figure II.10 : la topologie étoile des réseaux……………………………………………..25 Figure II.11 : la topologie maillée des réseaux…………………………………………...26 Figure II.12 : architecture de communication…………………………………………...27 Figure II.13 : Energie consommée par les sous-systèmes d’un capteur………………...31 Figure III-1 : illustration graphique simplifiée des systèmes qui relèvent de laComplexité…35 Figure III-2 : Fonctionnement d’un agent………………………………………………..36 Figure III-3 : Les agents dans un SMA ...………………………………………………...40 Figure VI.1 : Scénario de transmission de messages pour S-MAC……………………..54 Figure VI.2 : le concept du protocole WiseMAC………………………………………...56 Figure VI.3 : Arbre de rassemblement de données et schéma de réveil………………..57 Figure VI.4 : Taxonomie des protocoles de routage……………………………………..60 Figure VI.5 : la différence entre le routage AC et DC…………………………………...61 Figure VI.6 : Exemple pour les zones fixe pour le routage VGAR …………………….69 Figure VI.7 : Un exemple de découpage en zone dans un réseau de capteurs………….72 Figure VI.8: Transmission géographique récursive dans GEAR……………………….74 Figure VII.1 : architecture d’un réseau de capteur sans fil……………………………..83 Figure VII.2 : architecture d’un nœud capteur…………………………………………..84 Figure VII.3 : architecture d’un nœud puits ou station de base………………………...85 Figure VII.4 : architecture d’un nœud cible……………………………………………...85 Figure VII.5 : Description d’un agent…………………………………………………….88 Figure VII.6 : architecture de l’agent objet cible………………………………………..90 Figure VII.7: architecture de l’agent capteur……………………………………………93 Figure VII.8 : Etats de transition de l’unité de capture…………………………………94 Figure VII. 9 : Exemple d'une demande……………………………………………………...95 Figure VII.10 : Exemple d'une réponse par une source……………………………………..95 Figure VII.11 : Propagation des intérêts……………………………………………………...96 Figure VII.12 : Exemple montrant le backoff et le defering…………………………...101 Figure VII.13 : état de transition de l’unité de traitement (CPU)……………………..103 Figure VII.14 : état de transition de la radio……………………………………………104 Figure VII.15 : synthèse des tâches et des données de l’agent capteur………………..106 Figure VII.16 : architecture de l’agent station de base………………………………...107 Figure VII.17 : Modèle Aalaadin………………………………………………………...109 Figure VII.18 : shema général de l’agent capteur………………………………………115 Figure VI-19 : La fenêtre principale……………………………………………………..118 Figure VI-20 : consommation d’énergie d’un nœud après la simulation……………..119 Figure VI-21 : Evolution de la réserve de batterie des quatre nœuds………………...119

Liste des figures

Liste des tableaux
Tableau II.1 : Réseaux de capteurs vs réseaux ad hoc…………………………………32 Tableau III.1 : Types d’interactions d’après…………………………………………...42 Tableau V.1 : plateformes de simulation des réseaux………………………………….49 Tableau V.2 : plateformes spécialisées dans la simulation des réseaux de capteurs sans fil.50 Tableau VII.1 : les Paramètres de simulation de MAC 802.11……………………….101
Introduction générale
1
Ce mémoire est dédié à la réalisation d’une plateforme d’aide à la conception et à la
simulation des réseaux de capteurs sans fil à base d’agents. Il est constitué de cinq chapitres.
Le premier chapitre est une introduction aux réseaux de capteurs. Il met l’accent sur
les domaines d’applications de ces réseaux et établit une typologie, notamment la sous
catégorie des réseaux sans fils. Nous décrivons, aussi, dans ce chapitre l’architecture détaillée
d’un capteur, les caractéristiques requises d’un réseau sans fils ainsi que les mécanismes en
vigueur pour réaliser ces caractéristiques. Ce chapitre se termine par une taxonomie des
réseaux de capteurs, les différentes architectures utilisées et l’architecture de communication
en usage.
Le second chapitre aborde les systèmes multi-agents. En premier lieu, nous présentons
les spécifications inhérentes à un système complexe, pour mieux justifier dans notre travail
l’approche par le paradigme agent, en illustrant, au passage, les caractéristiques
multidimensionnelles de l’entité fondamentale d’un SMA et en procédant à une taxonomie
multicritères et détaillée des agents et des SMA, ainsi que les constituants d’un SMA et les
plateformes célèbres destinées à les concevoir et à les réaliser.
Le troisième chapitre traite les aspects relatifs à la simulation des réseaux de capteurs.
Il met en évidence les différentes approches pour tester le fonctionnement d’un réseau. On
montre, dans ce chapitre, l’importance cruciale de passer par une phase de simulation lors de
la conception des réseaux sans fils et on y expose les différents simulateurs, leurs
fonctionnalités et les tâches qu’ils peuvent réaliser.
Le quatrième chapitre s’intéresse aux différents protocoles utilisés, en vue de faire
communiquer les capteurs dans un réseau sans fils, qu’il s’agisse de la couche MAC ou de la
couche réseau. On y fait aussi une étude comparative entre protocoles.
Le cinquième chapitre décrit le travail de conception et de réalisation de la plateforme.
L’évaluation des performances d’un réseau de capteurs sans fils et sa capacité à adopter le
meilleur comportement pour répondre de façon idoine aux différentes situations, se fait sur la
base d’une simulation, avant tout déploiement dans l’univers réel. L’approche, par le
paradigme muti-agents, s’est révélé un choix incontournable pour modéliser les réseaux
complexes, en l’occurrence, les réseaux sans fils et ceci grâce à leur caractère distribué et
dynamique. Notre contribution consiste à implémenter une plate forme d’aide à la conception
et à la simulation des WSN basée agents. Les objectifs assignés à cette plateforme sont la
modélisation des différents nœuds du réseau, les architectures et les tests des différents
protocoles de communication.
Introduction générale
2
Dans notre approche, le réseau de capteurs sans fils est constitué de trois types de
nœuds : Objet cible, capteur et station de base. Chacun de ces trois types possède ses propres
caractéristiques et son propre comportement. Ces nœuds interagissent entre eux par le biais
d’émissions de messages. L’agent objet cible émet des messages de type « stimulus ». A la
réception de ces stimulus, les agents capteurs adopte une démarche collaborative par un
routage multi-sauts pour réaliser un objectif commun, celui de la collecte des données
pertinentes au niveau des agents stations de base, avec le souci de minimiser l’énergie
consommée pour allonger au maximum la durée de vie du réseau. Cette plateforme a été
écrite en langage Java en utilisant la plateforme MadKit pour modéliser les agents.
L’exécution de la simulation se fait par étapes :
- On initialise les paramètres des nœuds en faisant renseigner par l’utilisateur les
champs relatifs au choix du modèle de propagation du signal capté :
acoustique/sismique, le modèle de propagation sans fil, les positions des nœuds, etc..
- On fixe la durée de la simulation.
- On invoque la méthode « activate » qui opérationnalise les agents.
A l’invocation de cette méthode, l’interaction entre agents est déclenchée par l’envoi
de messages. Au terme de la période de simulation, des vecteurs sont générés par chaque
nœud. Ils contiennent les informations nécessaires à l’analyse des performances du réseau,
entre autres, le nombre de paquets transmis/reçus par nœud, l’énergie consommée par chaque
nœud et le nombre de paquets capturés. A titre d’exemple, si on constate une surcharge de
certains nœuds (un grand nœud de paquets reçus/transmis), entraînant une grande
consommation d’énergie, on procède à un changement d’architecture ou à un redéploiement
des nœuds pour pallier à cette surcharge et maximiser de la sorte la durée de vie du réseau.
Les vecteurs susmentionnés sont consignés dans des fichiers et représentés ensuite
graphiquement sous forme d’histogrammes et de courbes pour mieux analyser les
performances. Pour notre plateforme, on a choisi d’enregistrer deux paramètres pour
permettre aux utilisateurs de mieux analyser les performances de leurs réseaux :
- La densité ou nombre moyen de voisins : Ce paramètre permet d’apprécier l’influence de
la densité du réseau sur la consommation énergétique.
- Le nombre de nœuds du réseau : ce paramètre est cruciale pour tester l’évolution des
performances en fonction du nombre de nœuds formant le réseau. C’est la propriété dite
de scalabilité. Notons enfin, que pour notre plateforme, l’évaluation d’un protocole ou
d’une architecture est basée sur l’estimation de l’énergie moyenne consommée par chaque
nœud et qui permet alors de prédire la durée de vie du réseau.
Introduction sur les réseaux de capteurs sans fil
3
II.1 Introduction
Les avancées récentes en technologie des systèmes micro-électro-mécanique
(MEMS), des communications sans fil, et de l’électronique numérique ont permis le
développement de nœuds capteurs peu coûteux, multifonctionnels et de basse puissance.
Ces capteurs sont petits par la taille et communiquent sur des courtes distances. Ces
noeuds capteurs minuscules, sont constitués de composants de capture, de traitement de
données et de communications. Ils ont influencé l'idée des réseaux de capteurs basés sur
la collaboration d'un grand nombre de noeuds. Les réseaux de capteurs représentent une
amélioration significative par rapport aux capteurs traditionnels. L’étendue des
applications des réseaux de capteurs est vaste, on les retrouve dans le domaine de la santé,
de la sécurité et dans le secteur militaire. Les réseaux de capteurs permettent à l’utilisateur
une meilleure compréhension de l’environnement. De nos jours, les réseaux de capteurs
sans fils font partie intégrante de notre vie. La réalisation des applications mettant en
œuvre les réseaux de capteurs sans fil nécessitent l’utilisation des techniques ad-hoc. Dans
ce chapitre, on va présenter en premier lieu les domaines d’application des réseaux de
capteurs, ce qu’est un réseau sans fils et les différents types de réseaux. Nous aborderons
ensuite l’architecture physique d’un capteur ainsi que les couches utilisées dans
l’architecture de communication d’un réseau de capteurs sans fil.
II.2 Les domaines d’application des WSNs
Les réseaux de capteurs peuvent inclure différents types de capteurs selon la
nature des signaux, à titre d’exemples, taux séismique, thermique, visuel, infrarouge,
acoustique et radar, qui peuvent surveiller une grande variété de conditions ambiantes
incluant : la température, l’humidité, le mouvement véhiculaire, l’état de foudre, la
pression, les niveaux de bruit, la présence ou l'absence de certains genres d'objets, les
caractéristiques courantes d’un objet, telles que la vitesse, la direction et la taille.
Les noeuds capteurs peuvent être employés pour la capture continue, la détection
d'événements, l'identification d'événements et la commande locale des déclencheurs. Le
raccordement sans fils des nœuds de micro-capteur permet un large éventail
d’applications, essentiellement dans le domaine militaire et environnemental.
II.2.1 Les applications militaires
Dans les armées modernes, les réseaux de capteurs sans fil constituent une partie
intégrante des dispositifs de commande, de contrôle, de communication, de calcul,
d’intelligence, de surveillance et de ciblage.
Introduction sur les réseaux de capteurs sans fil
4
Le déploiement rapide, l'auto-organisation et la tolérance aux fautes sont les
caractéristiques majeurs qui font des réseaux de capteurs sans fils une technique vitale
pour les aspects militaires désignés par l’acronyme C4ISRT (Military Command, Control,
Communications, Computing, Intelligence, Surveillance, Reconnaissance and Targeting
systems). Puisque les réseaux de capteurs sont basés sur le déploiement dense et peu
coûteux de nœuds de capteurs jetables, la destruction de quelques noeuds par des actions
hostiles n'affectera en rien une opération militaire autant que la destruction d'un capteur
traditionnel. De ce fait le concept de réseau de capteurs est la meilleure approche pour les
champs de bataille. Certaines des applications militaires des réseaux de capteurs sont
destinées à la surveillance des forces amicales, de leurs équipements et munitions ;
d’autres à la surveillance du champ de bataille, à la reconnaissance des forces et du terrain
d'opposition ; enfin d’autres sont destinées à l’évaluation des dommages, à la détection et
à la reconnaissance des attaques par des armes de destruction massives.
� Surveillance des forces amicales, des équipements et des
munitions : Les chefs surveillent constamment le statut des troupes amicales,
l'état et la disponibilité de l'équipement et des munitions dans un champ de bataille
par l'utilisation des réseaux de capteurs. Les équipements et munitions critiques
véhiculés par une troupe peuvent être attachés à des capteurs qui rapportent leurs
statuts. Ces rapports sont collectés dans des noeuds puits et envoyés aux chefs des
troupes. Les données peuvent également être envoyées aux niveaux supérieurs de
la hiérarchie de commande tout en étant agrégé avec les données à partir d'autres
unités à chaque niveau.
� Surveillance du champ de bataille : les terrains, les itinéraires
d'approche, les chemins et les détroits critiques peuvent être rapidement couverts
par un réseau de capteurs et être étroitement observés quand aux activités des
forces hostiles. Pendant que les opérations évoluent et que de nouveaux plans
opérationnels sont préparés, de nouveaux réseaux de capteurs peuvent être
déployés à tout moment pour la surveillance du champ de bataille.
� Reconnaissance des forces et du théâtre d'opérations : les
réseaux de capteurs peuvent être déployés dans des terrains critiques, ce qui
permettra la récolte des renseignements précieux et détaillés concernant les forces
hostiles sur le terrain en si peu de temps.
� Optimisation : les réseaux de capteurs peuvent être incorporés aux
systèmes de guidage des munitions intelligentes.
Introduction sur les réseaux de capteurs sans fil
5
� Évaluation de dommages de la bataille : Juste avant ou après des
attaques, des réseaux de capteurs peuvent être déployés dans la zone cible pour
collecter les données d'évaluation des dommages de la bataille.
� Détection et reconnaissance d'attaques nucléaires, biologiques
et chimiques : Dans la guerre chimique et biologique, être près du point d’impact
est important pour la détection opportune et précise des agents chimiques. Les
réseaux de capteurs déployés dans la région amicale sont utilisés comme un
système d'alerte chimique ou biologique permettant de fournir aux forces amicales
un temps de réaction critique, leurs évitant des dommages. On peut avoir
également recours à l’emploi des réseaux de capteurs pour la reconnaissance
détaillée après qu'une attaque NBC (Nucléaire, Biologique ou chimique) soit
détectée. Par exemple, on peut avoir une reconnaissance nucléaire sans exposer
une équipe à la radiation nucléaire.
II.2.2 Applications environnementales
Les applications environnementales des réseaux de capteurs incluent :
� l’observation des mouvements des oiseaux, des petits animaux et
des insectes.
� la surveillance des conditions environnementales qui affectent les
récoltes, le bétail et l’irrigation.
� Les macro-instruments pour la surveillance à grande échelle de la
terre et l'exploration planétaire : comprenant la détection chimique/biologique, le
contrôle biologique, la surveillance de l'environnement dans les contextes : marin,
terrestre et atmosphérique.
� La détection des feux de forêts : en déployant un réseau avec la
bonne densité, il devient possible de localiser l’origine exacte du foyer et préparer
la riposte pendant que le feu est encore contrôlable.
� la recherche météorologique ou géophysique et l’étude de la
pollution [1,2,3, 4,5,6,7,8,9,10,11, 12, 13, 14, 11,12,13,14,15].
� La détection et la prévention des inondations [16] : Un exemple de
détection d'inondation est le système ALERT [17] déployé aux Etats-Unis.
Plusieurs types de capteurs déployés dans le système ALERT mesurent les
précipitations, le niveau d'eau dans les nappes phréatiques et fournit ces
Introduction sur les réseaux de capteurs sans fil
6
informations au système centralisé de base de données permettant de réaliser des
prédictions quand à l’éventualité d’une inondation.
� L’Agriculture de précision : L’avantage qu’apporte les réseaux de
capteurs est lié à la capacité de surveiller, en temps réel, le niveau des pesticides,
le niveau de l'eau potable, le niveau de l'érosion des sols et le niveau de la
pollution atmosphérique en temps réel.
II.2.3 Applications dans le domaine santé :
Les applications dans le domaine de la santé sont nombreuses, elles concernent :
� Les interfaces pour les personnes handicapées, la surveillance
intégrée des patients, l’automatisation du diagnostic et la surveillance des
mouvements.[3,11, 18,19, 14].
� La télé-surveillance des données physiologiques humaines : Les
données physiologiques rassemblées par les réseaux de capteurs peuvent être
stockées pendant une longue période [20], et peuvent être employées pour
l'exploration médicale [21]. Les réseaux de capteurs installés peuvent également
surveiller et détecter le comportement des vieilles personnes. Ces petits noeuds
capteurs permettent au sujet une plus grande liberté de circulation et permettent à
des médecins d'identifier très tôt des symptômes prédéfinis [22]. Le ''Health
Smart Home » a été conçu à la faculté de médecine de Grenoble en France pour
valider la faisabilité d'un tel système [18].
� L’Observation et la surveillance des médecins et des patients à
l'intérieur d'un hôpital : Chaque patient a de petits et légers noeuds de capteurs qui
lui sont attachés. Chaque noeud de capteur a sa tâche spécifique. Par exemple, un
noeud de capteur peut détecter la fréquence cardiaque tandis qu'un autre détecte la
tension artérielle. Les médecins peuvent également porter un noeud de capteur,
qui permet à d'autres médecins de les localiser dans l'hôpital.
� Administration de drogue dans les hôpitaux : Si des noeuds capteurs
peuvent être attachés aux médicaments, la chance d'obtenir et de prescrire le faux
médicament aux patients peut être réduite au minimum. Puisque, les patients
auront des noeuds capteurs qui identifient leurs allergies et les médicaments
exigés. Les systèmes automatisés comme décrit dans [23] ont prouvé qu'ils
peuvent aider à réduire au minimum des événements défavorables à l’utilisation
des drogues.
Introduction sur les réseaux de capteurs sans fil
7
II.2.4 Les applications ménagères :
� Automatisation à la maison : Les avancées technologiques ont
permis d’incruster des nœuds capteurs intelligents et des déclencheurs dans des
appareils électroménagers, tels les aspirateurs, les fours à micro-ondes et les
réfrigérateurs [24]. Ces noeuds capteurs à l'intérieur des dispositifs domestiques
peuvent agir l'un sur l'autre et l'un avec l'autre et avec le réseau externe par
Internet ou satellite. Ils permettent à des utilisateurs de contrôler les dispositifs à la
maison, localement et/ou à distance, plus facilement.
II.2.5 Les applications commerciales
Certaines des applications commerciales réalisent :
� La surveillance de la fatigue du matériel et le contrôle de la qualité
des produits.
� La commande et le guidage des robots dans les environnements de
fabrication automatique ainsi que les jouets interactifs, le contrôle des processus et
l’automatisation des cycles d'usinage.
� La surveillance des secteurs où des désastres ont pu se produire, le
diagnostic des machines
� Le contrôle de l'environnement dans des bâtiments de bureau : La
climatisation et la chaleur de la plupart des bâtiments sont centralement
commandées. Par conséquent, la température à l'intérieur d'une salle peut changer
par peu de degrés ; une force latérale soit plus chaude que l'autre parce qu'il y a
seulement une commande dans la chambre et la circulation d'air du système
central n'est pas également distribuée. Un réseau réparti de capteurs sans fil, peut
être installé pour commander la circulation d'air et la température dans différentes
parties de la salle.
� Détection et surveillance des vols de voiture : Des noeuds de
capteurs sont déployés pour détecter et identifier des menaces dans une région
géographique et pour rapporter ces menaces aux utilisateurs à distance par
l'Internet pour l'analyse [25].
� Vérification de l'inventaire de gestion : A chaque article dans un
entrepôt peut être joint un noeud capteur. Les utilisateurs peuvent découvrir
l'endroit exact de l'article et connaître le nombre d'articles dans la même catégorie.
Introduction sur les réseaux de capteurs sans fil
8
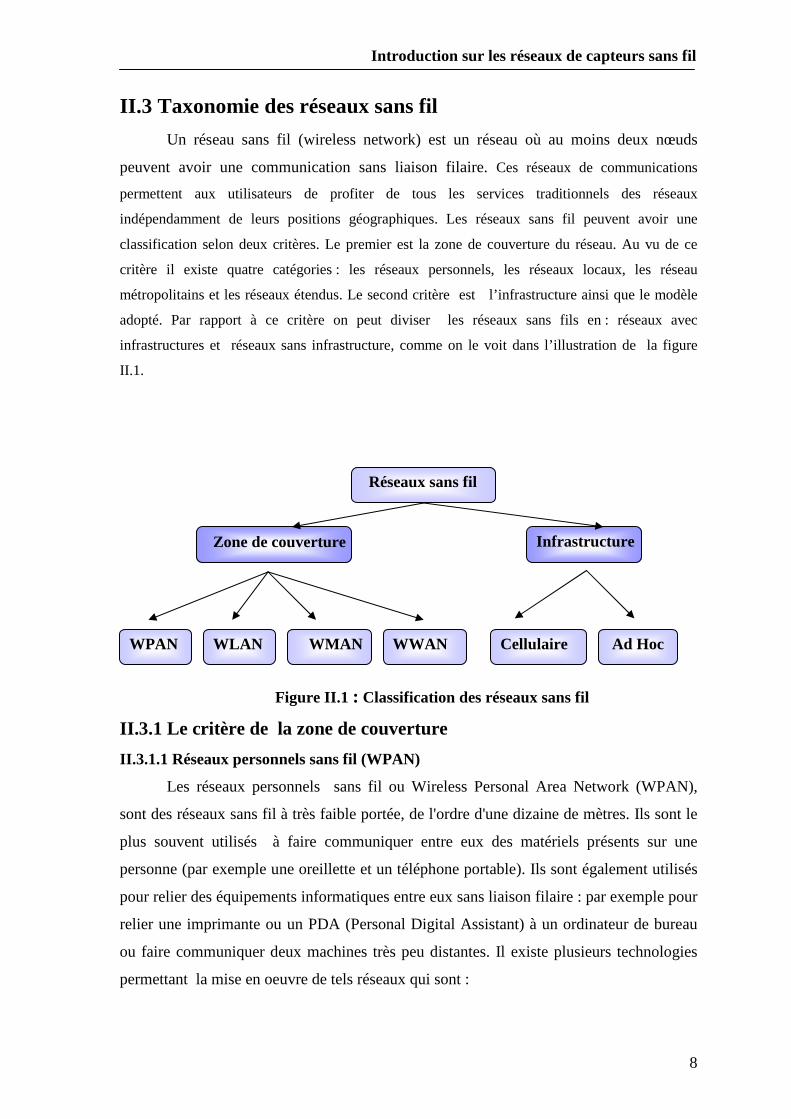
II.3 Taxonomie des réseaux sans fil
Un réseau sans fil (wireless network) est un réseau où au moins deux nœuds
peuvent avoir une communication sans liaison filaire. Ces réseaux de communications
permettent aux utilisateurs de profiter de tous les services traditionnels des réseaux
indépendamment de leurs positions géographiques. Les réseaux sans fil peuvent avoir une
classification selon deux critères. Le premier est la zone de couverture du réseau. Au vu de ce
critère il existe quatre catégories : les réseaux personnels, les réseaux locaux, les réseau
métropolitains et les réseaux étendus. Le second critère est l’infrastructure ainsi que le modèle
adopté. Par rapport à ce critère on peut diviser les réseaux sans fils en : réseaux avec
infrastructures et réseaux sans infrastructure, comme on le voit dans l’illustration de la figure
II.1.
Figure II.1 : Classification des réseaux sans fil
II.3.1 Le critère de la zone de couverture
II.3.1.1 Réseaux personnels sans fil (WPAN)
Les réseaux personnels sans fil ou Wireless Personal Area Network (WPAN),
sont des réseaux sans fil à très faible portée, de l'ordre d'une dizaine de mètres. Ils sont le
plus souvent utilisés à faire communiquer entre eux des matériels présents sur une
personne (par exemple une oreillette et un téléphone portable). Ils sont également utilisés
pour relier des équipements informatiques entre eux sans liaison filaire : par exemple pour
relier une imprimante ou un PDA (Personal Digital Assistant) à un ordinateur de bureau
ou faire communiquer deux machines très peu distantes. Il existe plusieurs technologies
permettant la mise en oeuvre de tels réseaux qui sont :
Réseaux sans fil
Zone de couverture Infrastructure
WPAN WLAN WMAN WWAN Cellulaire Ad Hoc
Introduction sur les réseaux de capteurs sans fil
9
� Bluetooth
La principale technologie est IEEE 802.15.1 [26] ou
Bluetooth. Elle fut proposée par Ericsson en 1994 et fournit un taux
de transmission radio théorique de 1 Mbit/s, pour une portée de 10
mètres (jusqu’à 100 m avec amplificateur). Cette technologie utilise
une communication radio, elle propose une pile protocolaire
complète, de la couche physique à la couche application de la pile
OSI. Bluetooth utilise la bande de fréquences ISM (industrial,
scientific and medical) des 2,4 GHz (2,402 GHz à 2,480 GHz) en
divisant cette bande en 79 canaux de largeur 1 MHz et met en oeuvre
une modulation de type GFSK (Gaussian Frequency Shift Keying) en
FHSS. Le débit en bande de base est de 1 Mbits/s et la fréquence
nominale des sauts FHSS est de 1600 Hz, soit une période de 625
µs. Du fait de l’utilisation des sauts de fréquence, Bluetooth impose
un fonctionnement en maître/esclave pour le partage du médium
radio. Les topologies existantes d’un réseau Bluetooth sont : le
« point à point » qui relie un maître à un esclave, comme illustré
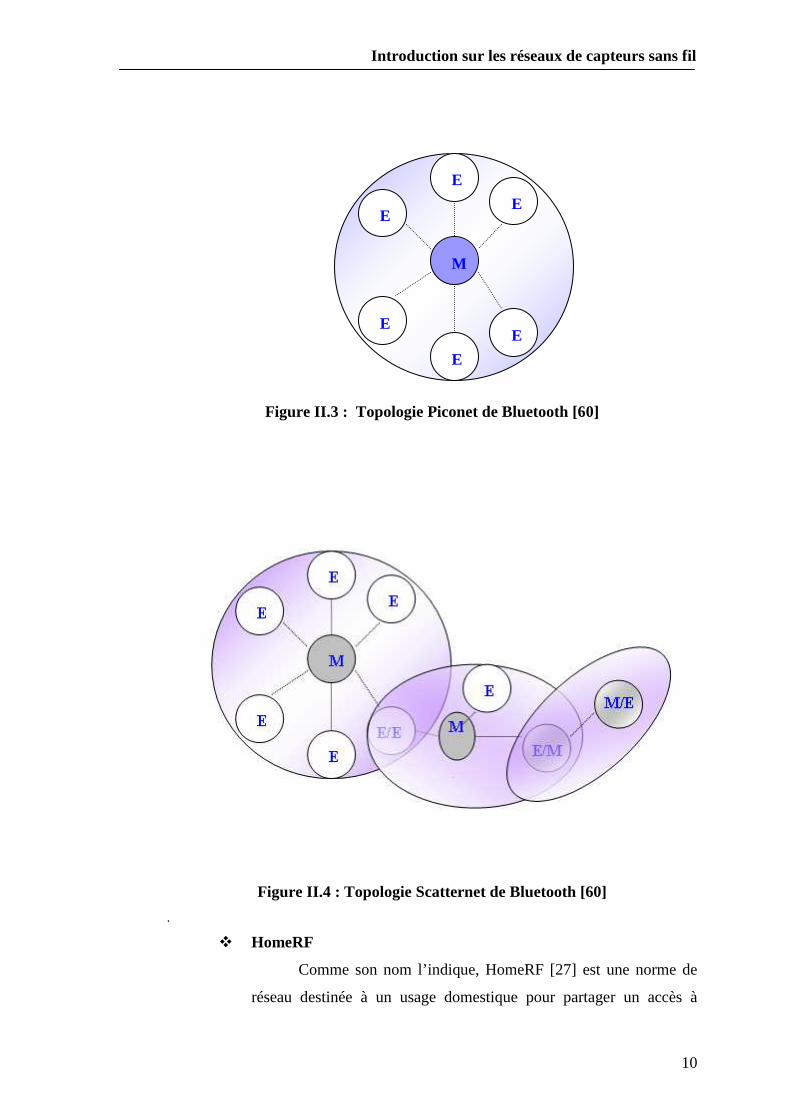
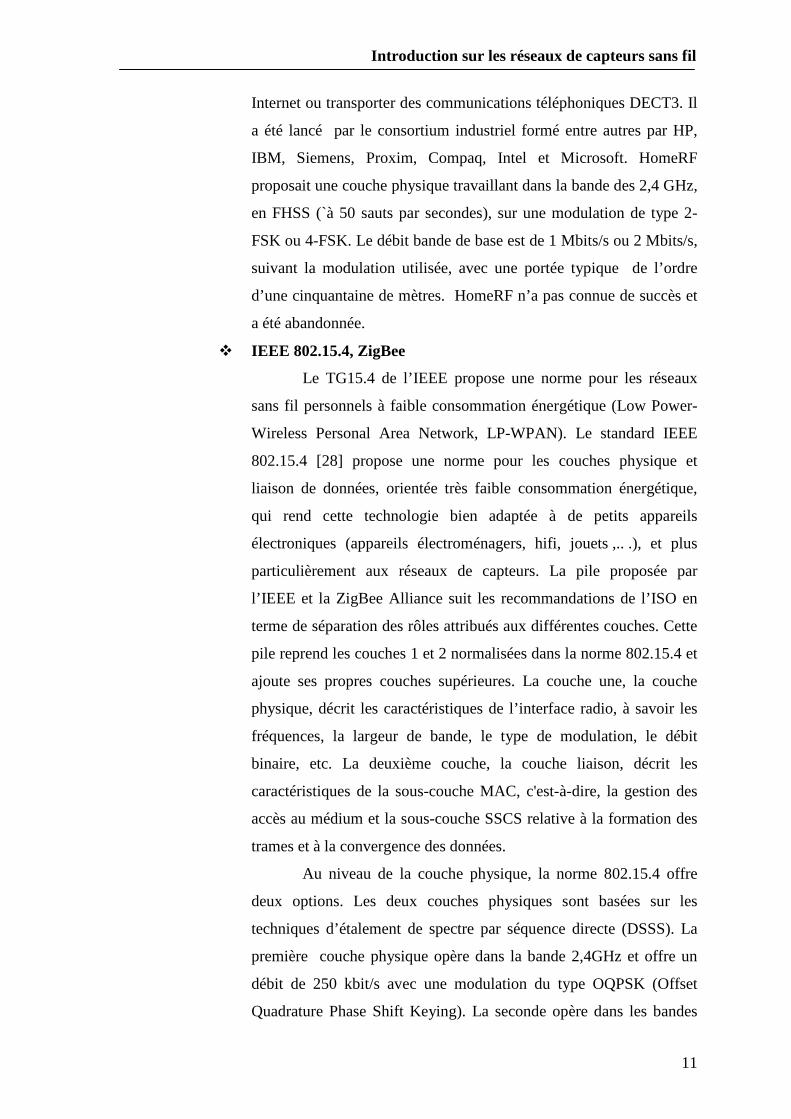
dans la figure II.2, Piconet qui relie un maître à deux (jusqu’a sept)
esclaves actifs, comme illustré dans la figure II.3 ou Scatternet qui
relie jusqu’à 10 piconets comme illustré dans la figure II.4. Quelque
soit la topologie choisie, toutes les communications de station esclave
à station esclave passent par la station maître. Cette norme possède
l’avantage d’être très peu gourmande en énergie, ce qui la rend
particulièrement intéressante pour être intégrée dans des petits
équipements autonomes comme les PDA.
Figure II.2 : Topologie point à point de Bluetooth [60]
E M
Introduction sur les réseaux de capteurs sans fil
10
Figure II.3 : Topologie Piconet de Bluetooth [60]
Figure II.4 : Topologie Scatternet de Bluetooth [60]
.
� HomeRF
Comme son nom l’indique, HomeRF [27] est une norme de
réseau destinée à un usage domestique pour partager un accès à
E
E
E
E
E
E
M
Introduction sur les réseaux de capteurs sans fil
11
Internet ou transporter des communications téléphoniques DECT3. Il
a été lancé par le consortium industriel formé entre autres par HP,
IBM, Siemens, Proxim, Compaq, Intel et Microsoft. HomeRF
proposait une couche physique travaillant dans la bande des 2,4 GHz,
en FHSS (`à 50 sauts par secondes), sur une modulation de type 2-
FSK ou 4-FSK. Le débit bande de base est de 1 Mbits/s ou 2 Mbits/s,
suivant la modulation utilisée, avec une portée typique de l’ordre
d’une cinquantaine de mètres. HomeRF n’a pas connue de succès et
a été abandonnée.
� IEEE 802.15.4, ZigBee
Le TG15.4 de l’IEEE propose une norme pour les réseaux
sans fil personnels à faible consommation énergétique (Low Power-
Wireless Personal Area Network, LP-WPAN). Le standard IEEE
802.15.4 [28] propose une norme pour les couches physique et
liaison de données, orientée très faible consommation énergétique,
qui rend cette technologie bien adaptée à de petits appareils
électroniques (appareils électroménagers, hifi, jouets ,.. .), et plus
particulièrement aux réseaux de capteurs. La pile proposée par
l’IEEE et la ZigBee Alliance suit les recommandations de l’ISO en
terme de séparation des rôles attribués aux différentes couches. Cette
pile reprend les couches 1 et 2 normalisées dans la norme 802.15.4 et
ajoute ses propres couches supérieures. La couche une, la couche
physique, décrit les caractéristiques de l’interface radio, à savoir les
fréquences, la largeur de bande, le type de modulation, le débit
binaire, etc. La deuxième couche, la couche liaison, décrit les
caractéristiques de la sous-couche MAC, c'est-à-dire, la gestion des
accès au médium et la sous-couche SSCS relative à la formation des
trames et à la convergence des données.
Au niveau de la couche physique, la norme 802.15.4 offre
deux options. Les deux couches physiques sont basées sur les
techniques d’étalement de spectre par séquence directe (DSSS). La
première couche physique opère dans la bande 2,4GHz et offre un
débit de 250 kbit/s avec une modulation du type OQPSK (Offset
Quadrature Phase Shift Keying). La seconde opère dans les bandes
Introduction sur les réseaux de capteurs sans fil
12
868/915 MHz et offre un débit de 20 kbit/s pour la bande 868 MHz et
40 kbit/s pour la bande 915 MHz, la modulation utilisée ici est la
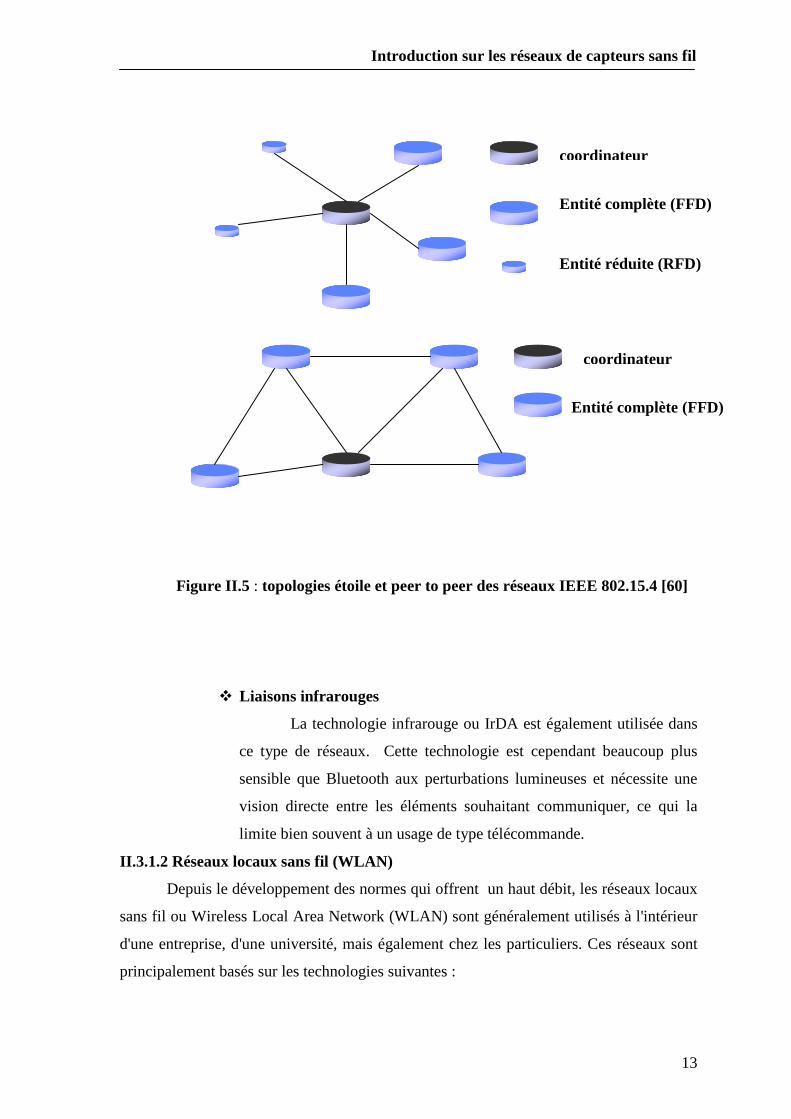
BPSK (Binary Phase Shift Key). Selon les besoins de l’application, la
norme IEEE 802.15.4 prévoit deux topologies : étoile ou point à
point (peer to peer ), qui sont illustrées dans la figureII.5. Dans la
topologie « étoile », les entités RFD sont connectées à un noeud FFD
central appelé coordinateur; tous les messages sont relayés par le
coordinateur, comme dans un Piconet Bluetooth avec le maître. Les
communications directes entre des entités RFD sont impossibles.
Notons que le rôle central du coordinateur implique de plus fortes
dépenses énergétiques ; un coordinateur devra donc généralement
prévoir une source d’alimentation sans contrainte [29]. Dans la
topologie point à point (peer-to-peer ), un FFD peut communiquer
directement avec tout autre FFD, si ils sont à portée radio l’un de
l’autre. Dans cette topologie, on retrouve un coordinateur unique
comme dans la topologie étoile. Son rôle est de tenir à jour une liste
des participants au réseau et de distribuer les adresses courtes.
Introduction sur les réseaux de capteurs sans fil
13
Figure II.5 : topologies étoile et peer to peer des réseaux IEEE 802.15.4 [60]
� Liaisons infrarouges
La technologie infrarouge ou IrDA est également utilisée dans
ce type de réseaux. Cette technologie est cependant beaucoup plus
sensible que Bluetooth aux perturbations lumineuses et nécessite une
vision directe entre les éléments souhaitant communiquer, ce qui la
limite bien souvent à un usage de type télécommande.
II.3.1.2 Réseaux locaux sans fil (WLAN)
Depuis le développement des normes qui offrent un haut débit, les réseaux locaux
sans fil ou Wireless Local Area Network (WLAN) sont généralement utilisés à l'intérieur
d'une entreprise, d'une université, mais également chez les particuliers. Ces réseaux sont
principalement basés sur les technologies suivantes :
coordinateur
Entité complète (FFD)
Entité réduite (RFD)
coordinateur
Entité complète (FFD)
Introduction sur les réseaux de capteurs sans fil
14
� IEEE 802.11, WiFi (Wireless Fidelity)
IEEE 802.11 [30] est un standard de réseau sans fil local
proposé par l’organisme de standardisation Américain IEEE. La
technologie 802.11 est généralement considérée comme la version sans
fil de 802.3 (Ethernet). La technologie 802.11 a connu beaucoup
d’évolutions, notamment la 802.11.a et la 802.11b qui proposent une
amélioration de la norme initiale en introduisant la modulation CCK
(Complementary Code Keying) dans la bande des 2,4 GHz. Deux
nouveaux débits sont alors disponibles, 5,5 Mbits/s et 11 Mbits/s sur
une portée de quelques dizaines de mètres environ. Le 802.11b est
l’amendement de 802.11 qui a donné sa popularité au WiFi. Bien que
802.11b soit encore largement utilisé, il est maintenant supplanté par
802.11g. Ce dernier constitue une amélioration directe de 802.11b avec
un débit bande de base de 54 Mbits/s sur la bande des 2,4 GHz.
� Hiperlan 1 & 2
Élaboré par l’ETSI (European Telecommunications Standards
Institut), Hiperlan est exclusivement une norme européenne. La
technologie de Hiperlan exploite la bande de fréquence de 5Ghz et les
débits changent selon la version, ainsi : Hiperlan1 apporte un débit de
20 Mbit/s et Hiperlan2 offre un débit de 54 Mbit/s sur une portée
d'action semblable dans celui de la Wi-Fi (100 mètres).
II.3.1.3 Les réseaux métropolitains sans fil (WMAN)
Les réseaux métropolitains sans fil ou Wireless Metropolitan Area Network
(WMAN) sont aussi connus sous l’appellation de boucle locale radio (BLR). Les réseaux
basés sur la technologie IEEE 802.16 ont une portée de l'ordre de quelques dizaines de
kilomètres (50km de portée théorique annoncée) et un taux de transmission radio
théorique pouvant atteindre 74 Mbit/s pour IEEE 802.16-2004 [31], plus connu sous le
nom commercial de WiMAX.
II.3.1.4 Les réseaux sans fil étendus (WWAN)
Les réseaux sans fil (WWAN pour Wireless Wide Area Network) Cette catégorie
possède assez peu de technologies à l’heure actuelle. Les seules technologies de WWAN
disponibles sont des technologies utilisant les satellites géostationnaires ou en orbite basse
Introduction sur les réseaux de capteurs sans fil
15
pour relayer l’information entre plusieurs points du globe. Les principales technologies
sont les suivantes :
� GSM
GSM est l'abréviation de (Global System for Mobile
Communication), c’est une norme établie en commun par les
opérateurs européens depuis 1982, ayant pour objectif le
développement d’un système de téléphonie mobile permettant des
communications outre-mer. La communication a lieu par un paquet
d’onde ayant deux fréquences : 900 MHz et 1800 MHz. Le GSM se
distingue par plusieurs spécificités, la première est l'aspect numérique
du réseau, qui offre une qualité supérieure grâce à sa résistance aux
interférences. La deuxième spécificité du réseau de GSM réside dans sa
configuration cellulaire. Le territoire est subdivisé en petites cellules
attachées les unes aux autres. Chaque cellule se voit assigner un certain
nombre de canaux permettant les communications.
� GPRS
Le GPRS (General Packet Radio Services) est une technologie
de radiocommunication par commutation de paquets pour les réseaux
de GSM. Les connexions des services de GPRS sont toujours ouvertes
afin d'offrir aux utilisateurs des terminaux mobiles une disponibilité de
réseau identique à celle qu'ils pourraient atteindre par des réseaux
d'entreprise. Le GPRS offre une connectivité d'IP de bout en bout, du
terminal GPRS jusqu'à n'importe quel réseau IP.
Les terminaux peuvent être intégrés efficacement aux réseaux Internet.
La vitesse "utile" sera d'environ 40 Kb/s (vitesse maximum : 171
Kb/s), l'un ou l'autre est quatre fois supérieure à celle du GSM.
� UMTS
UMTS L'abréviation de « Universal Mobile
Telecommunications System », l'UMTS désigne une nouvelle norme
de téléphonie mobile. Le principe de l'UMTS consiste à exploiter une
Introduction sur les réseaux de capteurs sans fil
16
bande de fréquences plus grande pour faire transmettre plus des
données et donc obtenir un débit plus important. En théorie, il peut
atteindre 2 Mb/s.
La norme d'UMTS exploite de nouvelles bandes de fréquences
situées entre 1900 et 2200 MHz. Cette technologie permet de faire
passer des données simultanément et offre alors des débits nettement
supérieurs à ceux atteints par le GSM et le GPRS.
II.3.2 Selon l’infrastructure
Les environnements mobiles sont des systèmes composés de sites mobiles et qui
permettent à leurs utilisateurs d'accéder à l'information indépendamment de leurs
positions géographiques. Les réseaux mobiles ou sans fil, peuvent être classés en deux
classes : les réseaux avec infrastructure et les réseaux sans infrastructure.
II.3.2.1 Réseaux cellulaires (avec infrastructure)
Ce type de réseaux se compose des éléments suivants [61] :
1- Les "sites fixes" du réseau filaire..
2- Les "sites mobiles", réseaux sans fils.
Certains sites fixes, appelés stations de base (SB) sont munis d'une interface de
communication sans fil pour la communication directe avec les sites mobiles localisés
dans une zone géographique limitée, appelée cellule comme le montre la figure suivante:
Introduction sur les réseaux de capteurs sans fil
17
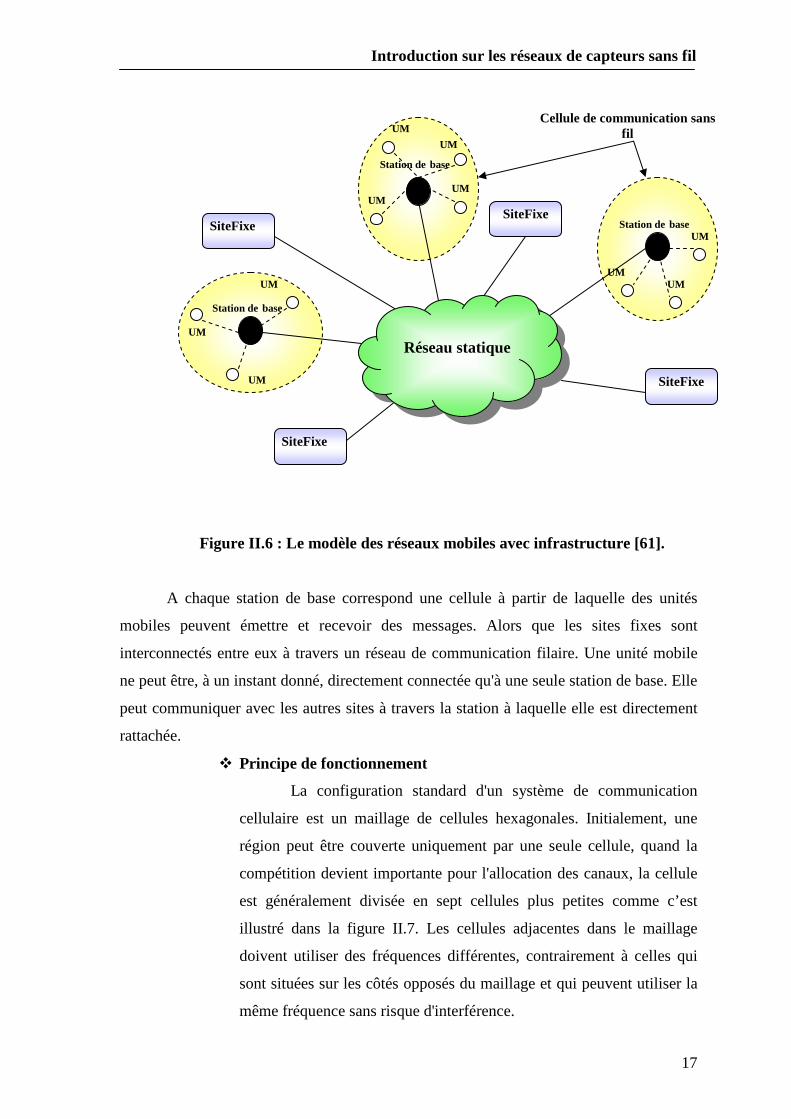
Figure II.6 : Le modèle des réseaux mobiles avec infrastructure [61].
A chaque station de base correspond une cellule à partir de laquelle des unités
mobiles peuvent émettre et recevoir des messages. Alors que les sites fixes sont
interconnectés entre eux à travers un réseau de communication filaire. Une unité mobile
ne peut être, à un instant donné, directement connectée qu'à une seule station de base. Elle
peut communiquer avec les autres sites à travers la station à laquelle elle est directement
rattachée.
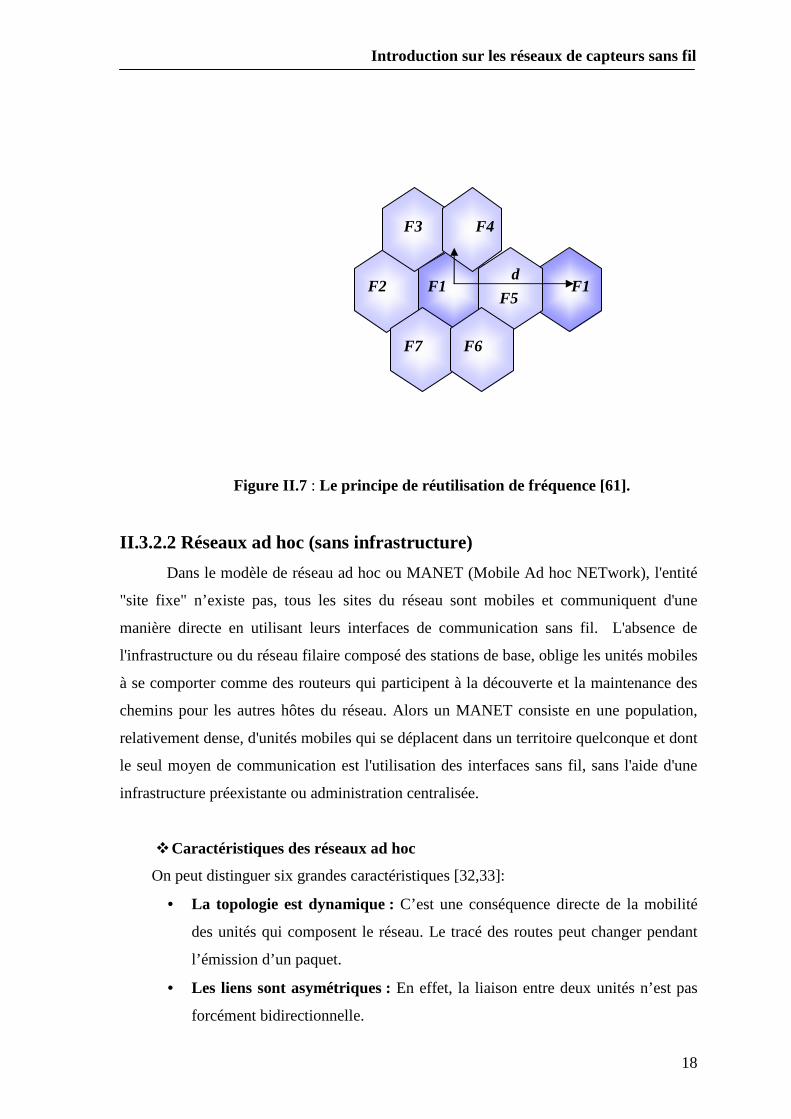
� Principe de fonctionnement
La configuration standard d'un système de communication
cellulaire est un maillage de cellules hexagonales. Initialement, une
région peut être couverte uniquement par une seule cellule, quand la
compétition devient importante pour l'allocation des canaux, la cellule
est généralement divisée en sept cellules plus petites comme c’est
illustré dans la figure II.7. Les cellules adjacentes dans le maillage
doivent utiliser des fréquences différentes, contrairement à celles qui
sont situées sur les côtés opposés du maillage et qui peuvent utiliser la
même fréquence sans risque d'interférence.
Station de base
UM
UM
UM UM
Station de base
UM UM
UM
Station de base
UM
UM
UM
SiteFixe
SiteFixe
SiteFixe
SiteFixe
Cellule de communication sans fil
Réseau statique
Introduction sur les réseaux de capteurs sans fil
18
Figure II.7 : Le principe de réutilisation de fréquence [61].
II.3.2.2 Réseaux ad hoc (sans infrastructure)
Dans le modèle de réseau ad hoc ou MANET (Mobile Ad hoc NETwork), l'entité
"site fixe" n’existe pas, tous les sites du réseau sont mobiles et communiquent d'une
manière directe en utilisant leurs interfaces de communication sans fil. L'absence de
l'infrastructure ou du réseau filaire composé des stations de base, oblige les unités mobiles
à se comporter comme des routeurs qui participent à la découverte et la maintenance des
chemins pour les autres hôtes du réseau. Alors un MANET consiste en une population,
relativement dense, d'unités mobiles qui se déplacent dans un territoire quelconque et dont
le seul moyen de communication est l'utilisation des interfaces sans fil, sans l'aide d'une
infrastructure préexistante ou administration centralisée.
� Caractéristiques des réseaux ad hoc
On peut distinguer six grandes caractéristiques [32,33]:
• La topologie est dynamique : C’est une conséquence directe de la mobilité
des unités qui composent le réseau. Le tracé des routes peut changer pendant
l’émission d’un paquet.
• Les liens sont asymétriques : En effet, la liaison entre deux unités n’est pas
forcément bidirectionnelle.
F2
F3
F7
F1
F6
F5
F4
F1 d
Introduction sur les réseaux de capteurs sans fil
19
• La bande passante est limitée : car les communications par voies hertziennes
imposent un partage du médium de communication entre les différents hôtes.
On appelle ce phénomène réutilisation spatiale. Ce phénomène est dû à
l’atténuation des signaux avec la distance qui fait que même si un médium
peut être utilisé simultanément par plusieurs hôtes, il peut y avoir des
collisions et donc la nécessité de procéder à des réémissions.
• Fortes contraintes énergétiques : Cela est dû au fait que chacune des unités
doit bien souvent embarquer une alimentation autonome.
• Absence d’infrastructure et de contrôle centralisé : En effet, les hôtes sont
mobiles et c’est a eux qu’il incombe de maintenir les connexions.
• Les interférences : Il y a de nombreuses interférences entre les hôtes du
réseau ou encore d’une onde avec elle-même (cas d’une réflexion d’onde).
Elles accroissent le nombre d’erreurs sur la transmission et imposent un
amoindrissement des performances.
II.4 Les réseaux de capteurs sans fil
Les réseaux de capteurs sans fil ou WSN (Wireless Sensor Networks) constituent
une catégorie particulière de réseaux ad hoc. Ces derniers sont conçus pour répondre à des
problématiques de communications où l’homme est souvent un acteur principal (accès à
un réseau global comme Internet, téléphonie, télécommande. . .). les WSN offrent des
moyens de communication très souvent spontanés entre objets autonomes, généralement
sans aucune intervention humaine. Il existe des différences considérables entre les réseaux
de capteurs et les réseaux ad hoc, donc dans la plus part des cas on ne pourra pas utiliser
les mêmes protocoles. Un WSN est quasiment dédié à une unique application.
II.4.1 Définition d’un capteur
C’est un dispositif réagissant à un stimulus comme la chaleur, l’humidité ou la
lumière, et générant un signal qui peut être mesuré ou interprété.
II.4.2 Architecture physique d’un capteur
L'implémentation et le développement du nœud capteur sans fil doivent avoir une
conception, après une très bonne analyse de l’application. Ceci est obligatoire pour
spécifier et définir le profil des éléments (hardware) aussi bien que les caractéristiques et
les méthodes (logiciel et modèle de programmation). Ceci offre une meilleure flexibilité
et efficacité pendant le fonctionnement. En outre, il doit prendre en compte le fait que les
noeuds dans un WSN doivent être petits, énergétiquement efficaces, équipé de capteur(s)
Introduction sur les réseaux de capteurs sans fil
20
ayant de bonnes performances de calculs et de stockages et des équipements de
communication appropriés.
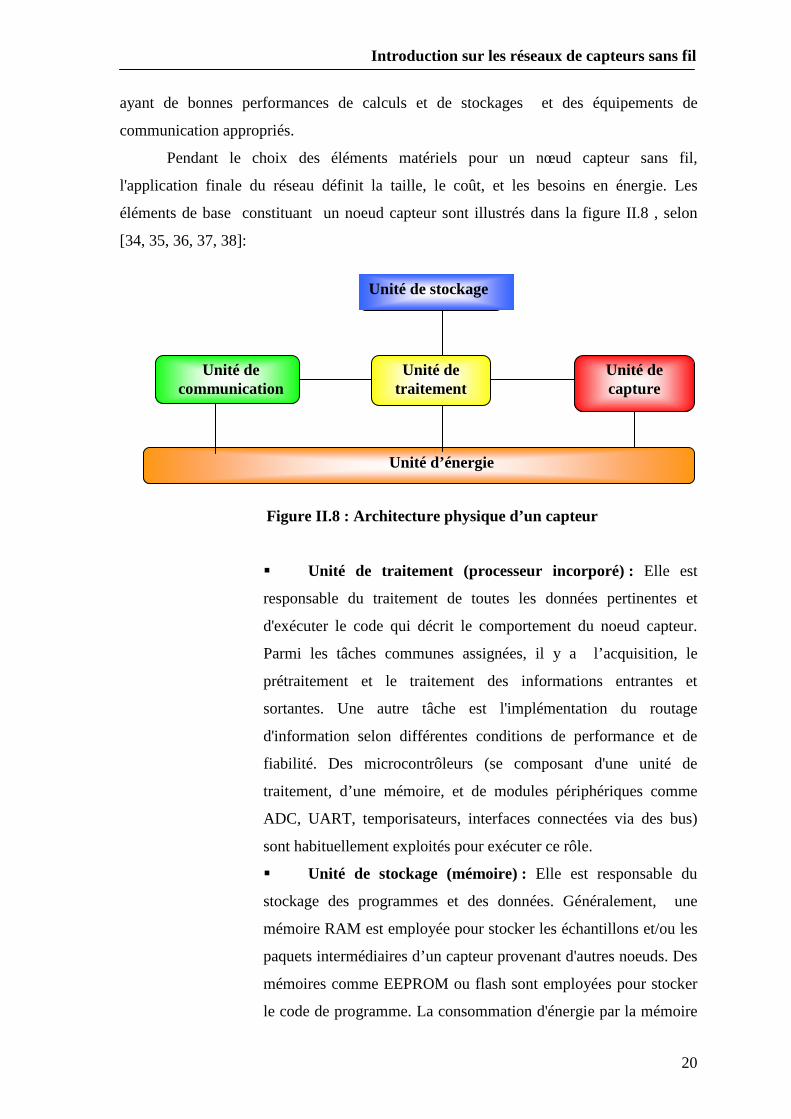
Pendant le choix des éléments matériels pour un nœud capteur sans fil,
l'application finale du réseau définit la taille, le coût, et les besoins en énergie. Les
éléments de base constituant un noeud capteur sont illustrés dans la figure II.8 , selon
[34, 35, 36, 37, 38]:
Figure II.8 : Architecture physique d’un capteur
� Unité de traitement (processeur incorporé) : Elle est
responsable du traitement de toutes les données pertinentes et
d'exécuter le code qui décrit le comportement du noeud capteur.
Parmi les tâches communes assignées, il y a l’acquisition, le
prétraitement et le traitement des informations entrantes et
sortantes. Une autre tâche est l'implémentation du routage
d'information selon différentes conditions de performance et de
fiabilité. Des microcontrôleurs (se composant d'une unité de
traitement, d’une mémoire, et de modules périphériques comme
ADC, UART, temporisateurs, interfaces connectées via des bus)
sont habituellement exploités pour exécuter ce rôle.
� Unité de stockage (mémoire) : Elle est responsable du
stockage des programmes et des données. Généralement, une
mémoire RAM est employée pour stocker les échantillons et/ou les
paquets intermédiaires d’un capteur provenant d'autres noeuds. Des
mémoires comme EEPROM ou flash sont employées pour stocker
le code de programme. La consommation d'énergie par la mémoire
Unité de stockage
Unité de communication
Unité de traitement
Unité de capture
Unité d’énergie
Introduction sur les réseaux de capteurs sans fil
21
est un facteur important pour la conception appropriée du nœud
capteur sans fil.
� Unité de capture (capteurs) : C’est l'interface au monde
physique. Il y a une grande variété de capteurs en service, mais le
choix doit être fait en considérant la taille et la consommation
d'énergie exigée pour son fonctionnement. Une catégorisation
commune des capteurs est illustrée comme ce suit :
� Capteurs passifs, omni directionnels: peut mesurer une
quantité physique sans affecter réellement l'environnement. Les
exemples de ce genre de capteurs sont les thermomètres, les
accéléromètres, les microphones, les capteurs d’humidité et de
pression.
� Capteurs passifs, narrow-beam : La mesure réalisée par ce
type de capteurs dépend de la direction. Les exemples de ces
capteurs sont les capteurs ultrasoniques ou les caméras. Ces
capteurs exigent une orientation définie afin de mesurer une
grandeur du milieu.
� capteurs actifs : prennent sans interruption des échantillons
de l'environnement ; les exemples sont les sonars, les radars et les
capteurs séismiques.
� unité de communication (émission/réception) : C’est la
partie du matériel qui accomplit les fonctions de gestion du réseau
de nœuds de capteurs. Quelques moyens habituels pour la
communication sont les fréquences radio, la communication
optique, les ultrasons et les ondes électromagnétiques (seulement
pour des applications très spécifiques). Les fréquences radio (RF)
sont généralement employées parce qu'elles fournissent un large
intervalle de transmission et de réception à des débits élevés et avec
un taux d'erreur acceptable pour l'énergie nécessaire.
� unité d'énergie : Il existe une variété d'options pour
l’alimentation en énergie pour un noeud de capteur. L'option la plus
commune est l'utilisation des batteries ; d'autres options sont
l’énergie de balayage de l'environnement où le noeud de capteur est
exposé. L'exemple le plus populaire est: les piles solaires.
Introduction sur les réseaux de capteurs sans fil
22
� Certaines applications ont besoin de connaitre l’emplacement du
capteur. Pour cette raison, le capteur doit avoir un système de localisation tels
qu’un GPS (Global Positioning System). Pour les réseaux de capteurs mobiles,
des noeuds doivent se déplacer, donc un élément dédié à cette mobilité doit
exister parmi les composants du capteur [39].
II.4.3 Définition d’un réseau de capteurs sans fil
Un réseau de capteurs sans fil ou WSN (Wireless Sensor Network) est un réseau
composé d'un grand nombre de noeuds capteurs, avec une communication sans fil entre
ces nœuds. Ces noeuds capteurs sont dispersés dans l’environnement (à surveiller) situé
loin de l'utilisateur. Les entités principales qui constituent un réseau de capteurs sont :
� Les noeuds capteurs qui forment le réseau.
� La station de base qui communique avec l'utilisateur par
l'intermédiaire d'Internet ou par une communication par satellite.
� Le phénomène faisant l’objet des mesures présentant de l’intérêt
pour l’utilisateur.
II.4.4 Caractéristiques requises des WSNs
Un ensemble de caractéristiques sont importantes pour l’accomplissement des
tâches assignées aux applications. Les plus importants sont :
� Le Type de service : on s'attend à ce que le WSN offre à
l'utilisateur, des informations significatives sur l'objet d'intérêt.
� La Qualité de service (QoS) : C’est une métrique de la qualité de
service qui va être offerte par un WSN à ses utilisateurs/applications. Le niveau de
QoS est défini par un ensemble d'attributs comme le temps d’attente, la largeur de
bande, et la perte de paquets qu’on relie directement avec le type de service du
réseau. Dans QoS pour les WSNs, la quantité et la qualité d'information extraites à
partir des puits deviennent appropriées.
� Tolérance aux fautes : il est important que le WSN soit capable de
traiter l'échec des noeuds capteurs. Une manière reconnue de satisfaire cette
contrainte est de réaliser un déploiement redondant des noeuds capteurs.
� La durée de vie : C’est la durée pendant laquelle le réseau reste
opérationnel. On s'attend à ce que le WSN puisse fonctionner au moins pendant le
temps requis pour accomplir la tâche donnée. Néanmoins, la définition de la durée
Introduction sur les réseaux de capteurs sans fil
23
de vie dépend de l'application du WSN et elle est en relation directe avec le
fonctionnement efficace du réseau.
� Scalabilité : Cette caractéristique traduit la capacité de maintenir la
performance indépendamment de la taille du réseau. Comme un grand nombre de
noeuds de capteur peuvent être employés dans les applications de WSN, les
architectures et les protocoles doivent fournir le support approprié pour maintenir
efficacement les services fournis par le réseau.
� Maintenance : les changements dans l'environnement du réseau,
par exemple, l’apparition de noeuds de capteurs avec des batteries épuisées,
exigent une solution permettant l’adaptation et le maintien des services du WSN.
� Programmation flexible : C’est la capacité des noeuds de capteur
à modifier les options de traitement des données acquises et à effectuer des
changements et des ajustements de leurs tâches.
II.4.5 Mécanismes utilisés pour atteindre les caractéristiques requises
des WSNs :
Afin de réaliser les caractéristiques précédentes, des nouveaux mécanismes de
communications, d’architectures et de protocoles doivent être développés. Les
mécanismes typiques considérés dans les WSNs sont :
� Communication multi-sauts :
Pour les communications à longue distance, l’utilisation des noeuds
intermédiaires pour transmettre les paquets, peut induire une réduction de
l’énergie exigée.
� Utilisation efficace d’énergie : C’est là un mécanisme clé pour
offrir et soutenir sur une durée longue l’opérationnalité du réseau.
� Auto-configuration : ce mécanisme est employé dans différents
aspects des WSNs. Le noeud capteur devrait être capable d’adapter ses paramètres
de service pour tenir compte des défaillances des autres noeuds, des obstacles et
de l’ajout de noeuds au réseau.
� Collaboration et traitement dans le réseau :
Selon l’application, il est parfois exigé qu’un groupe de noeuds de capteurs
interagissent afin de détecter un événement ou faire un traitement plus complet
d’informations. La considération des approches des offres de traitement dans le
Introduction sur les réseaux de capteurs sans fil
24
réseau comme l’agrégation de données, qui réduisent la quantité de données
transmises et par conséquent améliore l’efficacité énergétique du réseau.
� Data-centric : dans des applications communes, les noeuds de
capteurs sont déployés d’une manière redondante, pour protéger le réseau contre
des défaillances de noeuds. Dans une approche « data-centric », l’identité d’un
noeud particulier fournissant des données devient non pertinente. Le plus
important, ce sont les réponses générales que le WSN offre à l’utilisateur.
II.4.6 Architecture d’un réseau de capteurs [59]
Les principales topologies de réseau qui s'appliquent aux réseaux de capteurs sans
fil sont décrites dans cette section.
II.4.6.1 Réseau étoile (Point-à-Multipoint )
Un réseau en étoile, comme illustré dans la figure II.10 est une topologie de
communications où une station de base peut envoyer et/ou recevoir un message à un
certain nombre de noeuds distants. Les noeuds distants peuvent seulement envoyer ou
recevoir un message de la station de base, ils ne sont pas autorisés à envoyer des
messages entre eux. L'avantage de ce type de réseau pour les réseaux de capteurs sans fil
est sa simplicité ainsi que la capacité des nœuds capteurs de maintenir une consommation
minimale d’énergie. Cette topologie assure également une basse latence de
communication entre le noeud capteur et la station de base. L'inconvénient d'un tel réseau
est que la station de base doit être dans la portée de transmission par radio de tous les
différents nœuds. Ce qui, malheureusement, diminue la robustesse en raison de la
dépendance du réseau à un noeud simple pour contrôler l’ensemble.

Introduction sur les réseaux de capteurs sans fil
25
Figure II.10 : la topologie étoile des réseaux [59]
II.4.6.2 Le réseau maillé :
Un réseau maillé comme il est montré dans la figure II.11 est un réseau ou
n'importe quel noeud peut transmettre à n'importe quel autre à condition qu’il se situe
dans sa portée de transmission par radio. Ceci nous conduit aux communications multi
sauts, c'est-à-dire, que si un noeud veut envoyer un message à un autre hors de sa portée
de communication par radio, il peut utiliser des noeuds intermédiaires pour expédier ce
message au noeud désiré. Cette topologie de réseau a l'avantage de la redondance et de la
scalabilité. Si un noeud est détruit, un noeud peut encore communiquer à n'importe quel
autre noeud dans sa portée, ce dernier qui peut expédier le message à l'endroit désiré.
L'inconvénient de ce type de réseau réside dans sa grande consommation d'énergie
essentiellement par les noeuds qui implémentent la communication multi sauts par apport
aux nœuds qui n’ont pas cette possibilité et qui limite souvent la durée de vie des
batteries. Un autre inconvénient est l’augmentation du temps de réponse.
Introduction sur les réseaux de capteurs sans fil
26
Figure II.11 : la topologie maillée des réseaux [59]
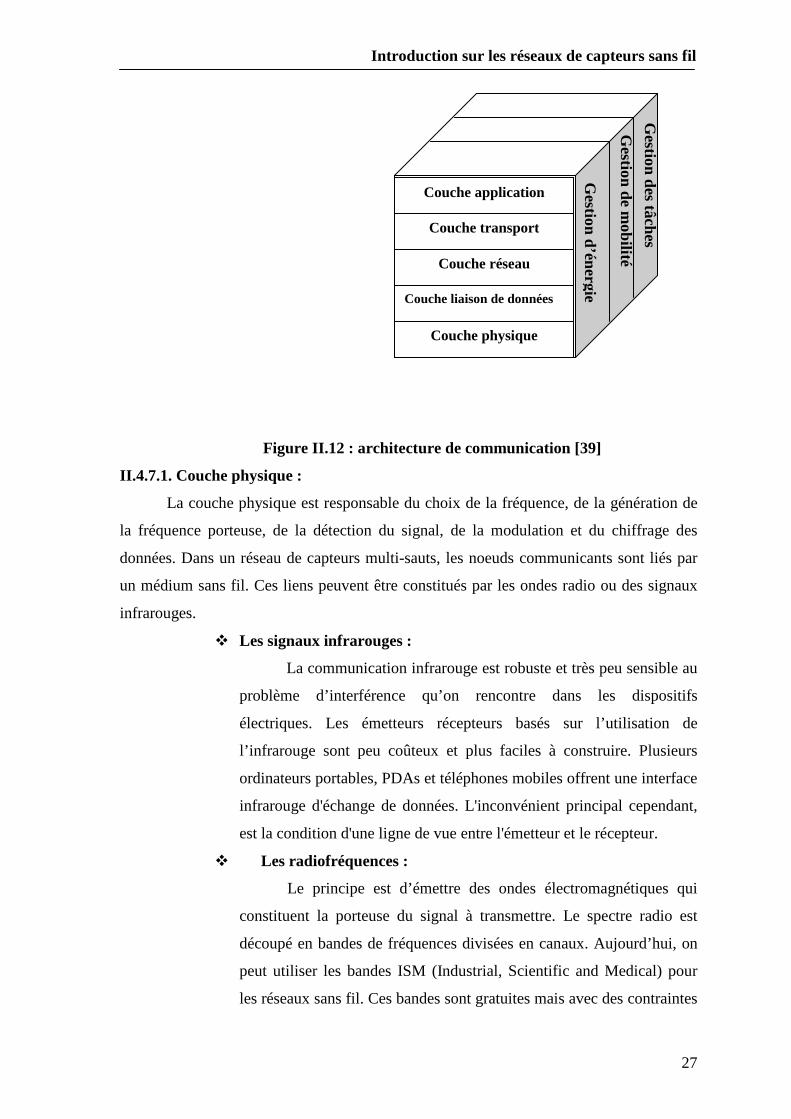
II.4.7 Architecture de communication
Comme tout les types de réseaux, les WSNs utilisent une architecture de
communication en couches, ce sont les cinq premières couches du modèle OSI ; la couche
physique, la couche liaison de données, la couche réseau, la couche transport et la couche
application. Chaque couche a son propre rôle et ses propres protocoles pour atteindre son
objectif. Nonobstant le fait que l’objectif d’un WSN n’est pas la communication elle-
même, qu’il est soumis à de fortes contraintes énergétiques, par voie de conséquence,
d’autres unités doivent lui être ajouter afin de gérer la consommation d’énergie, la
mobilité des nœuds et l’ordonnancement des tâches comme c’est illustré par la figure
II.12.
Introduction sur les réseaux de capteurs sans fil
27
Figure II.12 : architecture de communication [39]
II.4.7.1. Couche physique :
La couche physique est responsable du choix de la fréquence, de la génération de
la fréquence porteuse, de la détection du signal, de la modulation et du chiffrage des
données. Dans un réseau de capteurs multi-sauts, les noeuds communicants sont liés par
un médium sans fil. Ces liens peuvent être constitués par les ondes radio ou des signaux
infrarouges.
� Les signaux infrarouges :
La communication infrarouge est robuste et très peu sensible au
problème d’interférence qu’on rencontre dans les dispositifs
électriques. Les émetteurs récepteurs basés sur l’utilisation de
l’infrarouge sont peu coûteux et plus faciles à construire. Plusieurs
ordinateurs portables, PDAs et téléphones mobiles offrent une interface
infrarouge d'échange de données. L'inconvénient principal cependant,
est la condition d'une ligne de vue entre l'émetteur et le récepteur.
� Les radiofréquences :
Le principe est d’émettre des ondes électromagnétiques qui
constituent la porteuse du signal à transmettre. Le spectre radio est
découpé en bandes de fréquences divisées en canaux. Aujourd’hui, on
peut utiliser les bandes ISM (Industrial, Scientific and Medical) pour
les réseaux sans fil. Ces bandes sont gratuites mais avec des contraintes
Couche physique
Couche liaison de données
Couche réseau
Couche transport
Couche application G
estion d’énergie
Gestion de m
obilité
Gestion d
es tâches
Introduction sur les réseaux de capteurs sans fil
28
sur le taux d’utilisation (rapport entre le temps d’émission et le temps
total) et en puissance d’émission. Afin de limiter la puissance
d’émission tout en ayant un débit efficace, des techniques d’étalement
de spectre sont obligatoires dans certaines bandes.
II.4.7.2. Couche liaison de données
Beaucoup de recherches dans le domaine des réseaux de capteurs entrent dans le
cadre de l’optimisation de la couche de liaison. Elle manipule toutes les issues de
communication entre les noeuds voisins. Dans les réseaux sans fil, l'accès au médium
commun (la fréquence) doit être contrôlé. Ceci est appelé le contrôle d'accès au Medium
(MAC : Medium Access Control). La tâche principale de cette couche est d’interdire
l’accès simultané au canal dans la même marge de fréquence radio. Si un récepteur reçoit
deux signaux simultanément, c’est malheureusement une collision qui détruit toute
l'information reçue par le récepteur. La plupart des protocoles MAC de la couche liaison
tentent d’éliminer entièrement les collisions ou de réduire au minimum la capacité de
canal qu'ils exigent. Il n'est cependant pas évident que cette stratégie soit la meilleure
parce que la procédure responsable de l’élimination des collisions exige également un
certain genre de négociation qui consomme une partie de la capacité du canal.
La différence principale entre les réseaux sans fil traditionnels et les réseaux de
capteurs est le souci concernant la consommation d'énergie d'un noeud. À la différence de
la couche physique, la couche de liaison empaquette souvent des bytes de données. Ces
paquets contiennent une information sur le nombre de données qui permet au récepteur de
détecter des erreurs de transmission.
Dans ce qui suit on présente les stratégies d'accès au médium pour les réseaux de
capteurs, et quelques modes de contrôle d’erreur.
� Sous couche MAC (Medium Access Control)
On peut diviser les méthodes d’accès au médium de la couche MAC en
deux catégories.
� Accès centralisé : il existe trois méthodes centralisées.
� Frequency Division Multiple Access (FDMA)
Les différents noeuds ont différentes fréquences
porteuses. Puisque les ressources en fréquences sont
divisées, ceci aura comme effet de diminuer la largeur de
bande disponible pour chaque noeud. FDMA exige
Introduction sur les réseaux de capteurs sans fil
29
également du matériel additionnel et la surveillance au
niveau de chaque noeud.
� Code Division Multiple Access (CDMA)
Un code unique est employé par chaque noeud pour
coder ses messages. Ceci augmente la complexité de
l'émetteur et du récepteur.
� Time Division Multiple Access (TDMA)
Le lien RF est divisé sur un axe de temps, A
chaque nœud, est attribué un intervalle du temps
prédéterminé qu'il peut employer pour la communication.
Un avantage important est que TDMA peut être mis en
œuvre au niveau du logiciel. Toutefois, TDMA exige pour
tout les noeuds des horloges précises et synchronisées.
� Accès distribué : il existe deux méthodes dans cette classe.
� CSMA/CD (Carrier Sense Multiple Acces with Collision
Detection).
C’est une méthode d’accès partagé par écoute de la
porteuse et détection des collisions. Son principe est simple:
attendre que le support soit libre pour transmettre et détecter
les collisions.
• ALOHA
Est une technique d’accès très simple, son principe
est le suivant: les stations émettent de façon inconditionnelle
des paquets dès qu’ils sont en leur possession. Il n’y a pas
d’écoute du support avant la transmission. Dans le cas d’une
collision, la station va retransmettre les paquets après un délai
aléatoire.
� Le contrôle d’erreurs :
Une autre fonction importante de la couche liaison de données
est le contrôle d'erreurs des données transmises. Il y a deux importants
modes de contrôle d'erreur dans les réseaux de transmission, qui sont :
FEC (Forward Error Correction) et ARQ (Automatic Repeat reQuest).
L'utilité d'ARQ dans des applications de réseau de capteurs est limitée
Introduction sur les réseaux de capteurs sans fil
30
par le coût additionnel de re-transmission. D'autre part, la complexité
du décodage est plus grande dans FEC, car les possibilités de
corrections d'erreurs doivent être intégrées. Des codes de contrôle
d'erreurs simples avec moins de complexité de codage/décodage
pourraient présenter de meilleures solutions pour des réseaux de
capteurs.
II.4.7.3. Couche réseau
Les noeuds capteurs sont disséminés, avec une grande densité dans un
domaine se situant au voisinage ou à l'intérieur de la région spatiale où se produit le
phénomène à observer. Des protocoles spéciaux multi-sauts de routage entre les noeuds
capteurs et le noeud puit sont nécessaires. Les techniques de routage ad-hoc ne se
conforment pas habituellement aux contraintes des réseaux de capteurs. La couche réseau
en ce qui concerne les réseaux de capteurs est habituellement conçue selon les principes
suivants :
• L'efficacité d’énergie est toujours une considération importante.
• Les réseaux de capteurs sont la plupart du temps data-centric.
• L'agrégation de données (le clustering) est une fonctionnalité majeure.
II.4.7.4. La couche transport
La couche transport fournit un service de communication de bout en bout, fiable
pour l'application. Elle manipule la segmentation des grands paquets. Elle effectue le
contrôle des flots de données de bout en bout afin d’éviter la surcharge du récepteur ou du
réseau. Dans les réseaux sans fil, le contrôle du flot ne fonctionne pas comme dans les
réseaux câblés parce que les paquets retardés ne doivent en aucun cas congestionner le
réseau. Aujourd'hui, la plupart des applications qui ont été suggérées pour des réseaux de
capteurs essayent de maintenir des paquets très petits et de les envoyer peu abondamment.
C'est pourquoi la couche transport n'a pas la même importance dans les réseaux de
capteurs comparativement à l'Internet.
II.4.7.5. La couche application
Selon les tâches de capture, il existe différents types de logiciels qui peuvent être
installés et employés pour la couche application.
Introduction sur les réseaux de capteurs sans fil
31
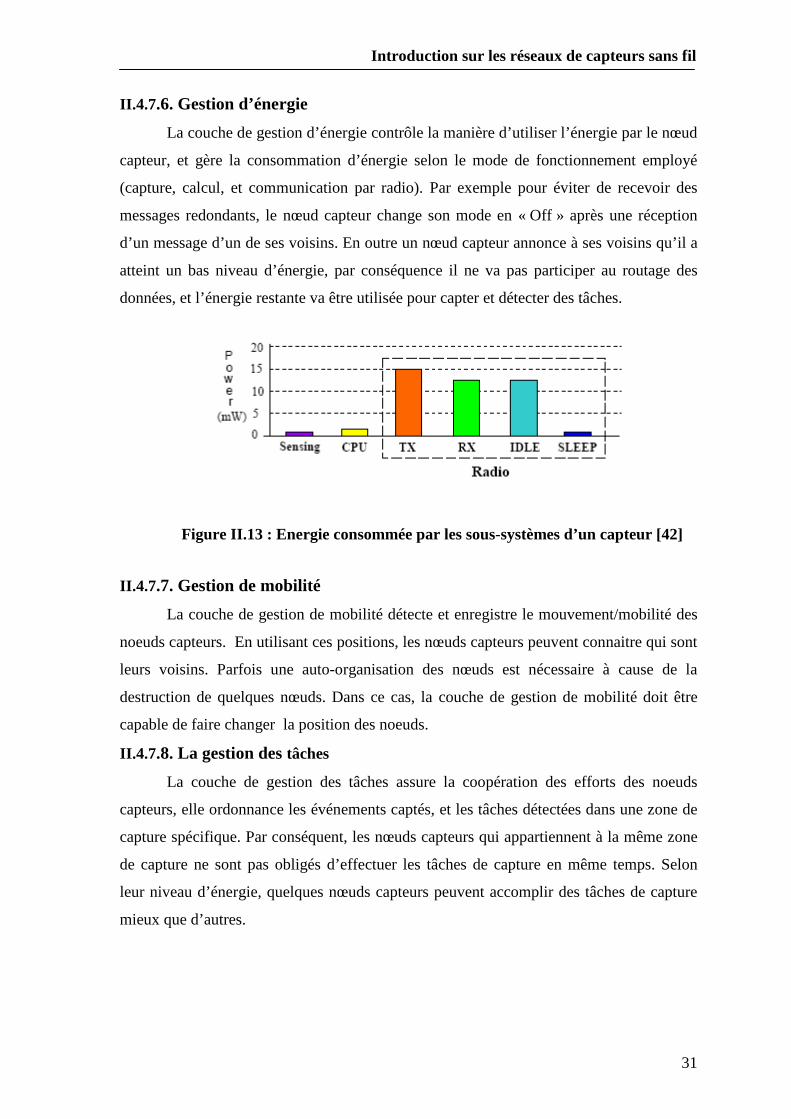
II.4.7.6. Gestion d’énergie
La couche de gestion d’énergie contrôle la manière d’utiliser l’énergie par le nœud
capteur, et gère la consommation d’énergie selon le mode de fonctionnement employé
(capture, calcul, et communication par radio). Par exemple pour éviter de recevoir des
messages redondants, le nœud capteur change son mode en « Off » après une réception
d’un message d’un de ses voisins. En outre un nœud capteur annonce à ses voisins qu’il a
atteint un bas niveau d’énergie, par conséquence il ne va pas participer au routage des
données, et l’énergie restante va être utilisée pour capter et détecter des tâches.
Figure II.13 : Energie consommée par les sous-systèmes d’un capteur [42]
II.4.7.7. Gestion de mobilité
La couche de gestion de mobilité détecte et enregistre le mouvement/mobilité des
noeuds capteurs. En utilisant ces positions, les nœuds capteurs peuvent connaitre qui sont
leurs voisins. Parfois une auto-organisation des nœuds est nécessaire à cause de la
destruction de quelques nœuds. Dans ce cas, la couche de gestion de mobilité doit être
capable de faire changer la position des noeuds.
II.4.7.8. La gestion des tâches
La couche de gestion des tâches assure la coopération des efforts des noeuds
capteurs, elle ordonnance les événements captés, et les tâches détectées dans une zone de
capture spécifique. Par conséquent, les nœuds capteurs qui appartiennent à la même zone
de capture ne sont pas obligés d’effectuer les tâches de capture en même temps. Selon
leur niveau d’énergie, quelques nœuds capteurs peuvent accomplir des tâches de capture
mieux que d’autres.
Introduction sur les réseaux de capteurs sans fil
32
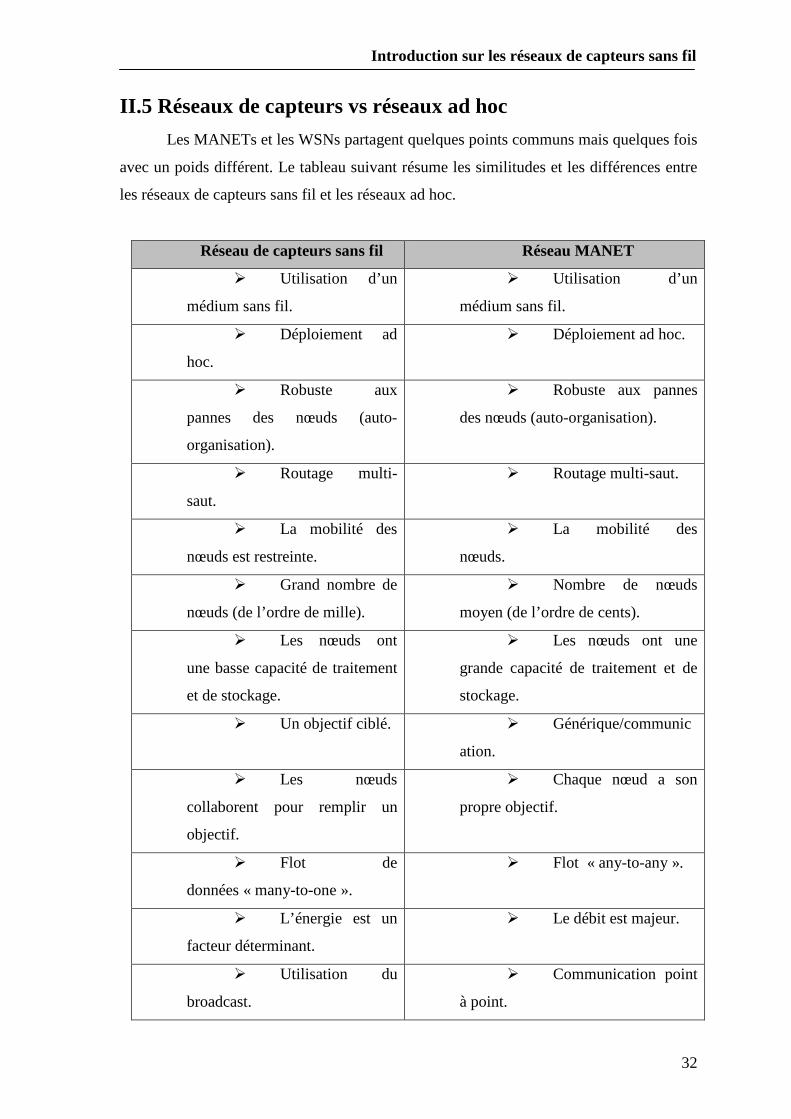
II.5 Réseaux de capteurs vs réseaux ad hoc
Les MANETs et les WSNs partagent quelques points communs mais quelques fois
avec un poids différent. Le tableau suivant résume les similitudes et les différences entre
les réseaux de capteurs sans fil et les réseaux ad hoc.
Réseau de capteurs sans fil Réseau MANET
� Utilisation d’un
médium sans fil.
� Utilisation d’un
médium sans fil.
� Déploiement ad
hoc.
� Déploiement ad hoc.
� Robuste aux
pannes des nœuds (auto-
organisation).
� Robuste aux pannes
des nœuds (auto-organisation).
� Routage multi-
saut.
� Routage multi-saut.
� La mobilité des
nœuds est restreinte.
� La mobilité des
nœuds.
� Grand nombre de
nœuds (de l’ordre de mille).
� Nombre de nœuds
moyen (de l’ordre de cents).
� Les nœuds ont
une basse capacité de traitement
et de stockage.
� Les nœuds ont une
grande capacité de traitement et de
stockage.
� Un objectif ciblé. � Générique/communic
ation.
� Les nœuds
collaborent pour remplir un
objectif.
� Chaque nœud a son
propre objectif.
� Flot de
données « many-to-one ».
� Flot « any-to-any ».
� L’énergie est un
facteur déterminant.
� Le débit est majeur.
� Utilisation du
broadcast.
� Communication point
à point.
Introduction sur les réseaux de capteurs sans fil
33
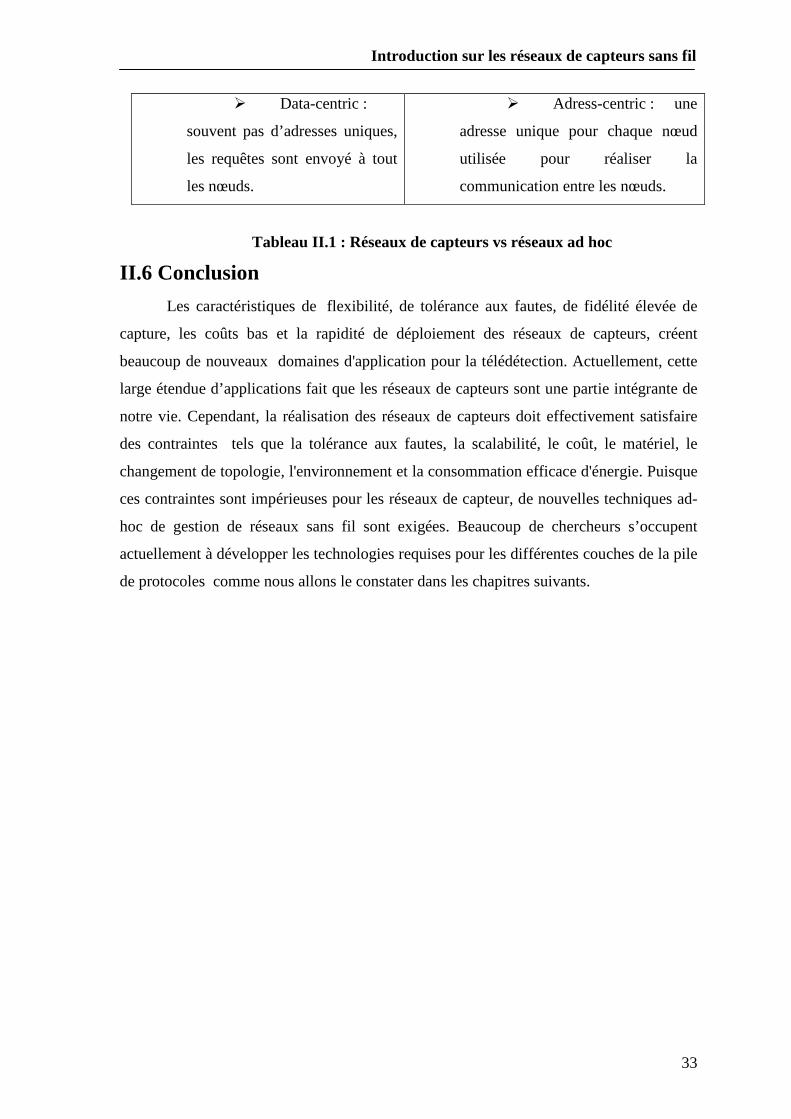
� Data-centric :
souvent pas d’adresses uniques,
les requêtes sont envoyé à tout
les nœuds.
� Adress-centric : une
adresse unique pour chaque nœud
utilisée pour réaliser la
communication entre les nœuds.
Tableau II.1 : Réseaux de capteurs vs réseaux ad hoc
II.6 Conclusion
Les caractéristiques de flexibilité, de tolérance aux fautes, de fidélité élevée de
capture, les coûts bas et la rapidité de déploiement des réseaux de capteurs, créent
beaucoup de nouveaux domaines d'application pour la télédétection. Actuellement, cette
large étendue d’applications fait que les réseaux de capteurs sont une partie intégrante de
notre vie. Cependant, la réalisation des réseaux de capteurs doit effectivement satisfaire
des contraintes tels que la tolérance aux fautes, la scalabilité, le coût, le matériel, le
changement de topologie, l'environnement et la consommation efficace d'énergie. Puisque
ces contraintes sont impérieuses pour les réseaux de capteur, de nouvelles techniques ad-
hoc de gestion de réseaux sans fil sont exigées. Beaucoup de chercheurs s’occupent
actuellement à développer les technologies requises pour les différentes couches de la pile
de protocoles comme nous allons le constater dans les chapitres suivants.
Les systèmes multi-agents
34
III.1 Introduction
Les systèmes multi-agents ont connu un grand essor et un grand nombre
d’application dans différents domaines comme : la simulation de la vie artificielle, la
robotique, la recherche d’information, le traitement d’image…etc. Grâce à son caractère
décentralisé, le paradigme multi-agents présente un moyen incontournable pour la
modélisation et l’implémentation des systèmes complexes.
III.2 Les systèmes complexes
III.2.1 Définition
Les systèmes complexes [43, 44] font l’objet d’études actives dans bien des
domaines : la physique, la biologie, les sciences humaines et sociales, et enfin les sciences
cognitives. Il s’agit donc d’un domaine d’études pluridisciplinaire. Les mathématiciens, les
physiciens théoriciens mais aussi les informaticiens ont permis la création de méthodes, de
formalismes et d’outils de modélisation. D’un point de vue terminologique, le terme
"complexe" vient du latin complexus qui signifie embrasser et englober. Un problème est
qualifié de complexe lorsqu’on éprouve de la difficulté à le rendre intelligible. Cette
difficulté peut provenir d’un manque de connaissance, de méthode, de modèle ou de temps.
A l’origine de la complexité serait donc l’interaction et la globalité. Le système serait donc
complexe parla diversité et la multitude des interactions. La figure III.1 est une illustration
graphique simplifiée des systèmes complexes.
III.2.2 Caractéristiques d’un système complexe ouvert
Un système complexe ouvert est un système [43, 44] :
• qui contient un grand nombre (variable) d’entités logicielles/matérielles.
• qui met en oeuvre de nombreuses interactions logiques/physiques.
• dont l’environnement est dynamique et ouvert.
• qui possède des objectifs globaux.
• dont le contrôle centralisé est impossible.
• et qui, pour toutes ces raisons, n’est pas entièrement spécifiable.
Les systèmes multi-agents
35
Figure III-1 : illustration graphique simplifiée de s systèmes qui relèvent de la
complexité.
III.3 L’origine du paradigme multi-agent
Les systèmes multi agents sont une approche de modélisation et d’implémentation
qui est issue de la rencontre de divers domaines qui sont :
• l'intelligence artificielle pour les aspects prise de décision de l'agent.
• l'intelligence artificielle distribuée pour la distribution de l'exécution et la
résolution des problèmes de nature distribuée.
• les systèmes distribués pour les interactions.
• le génie logiciel pour l'approche agents et l'évolution vers des composants
logiciels de plus en plus autonomes.
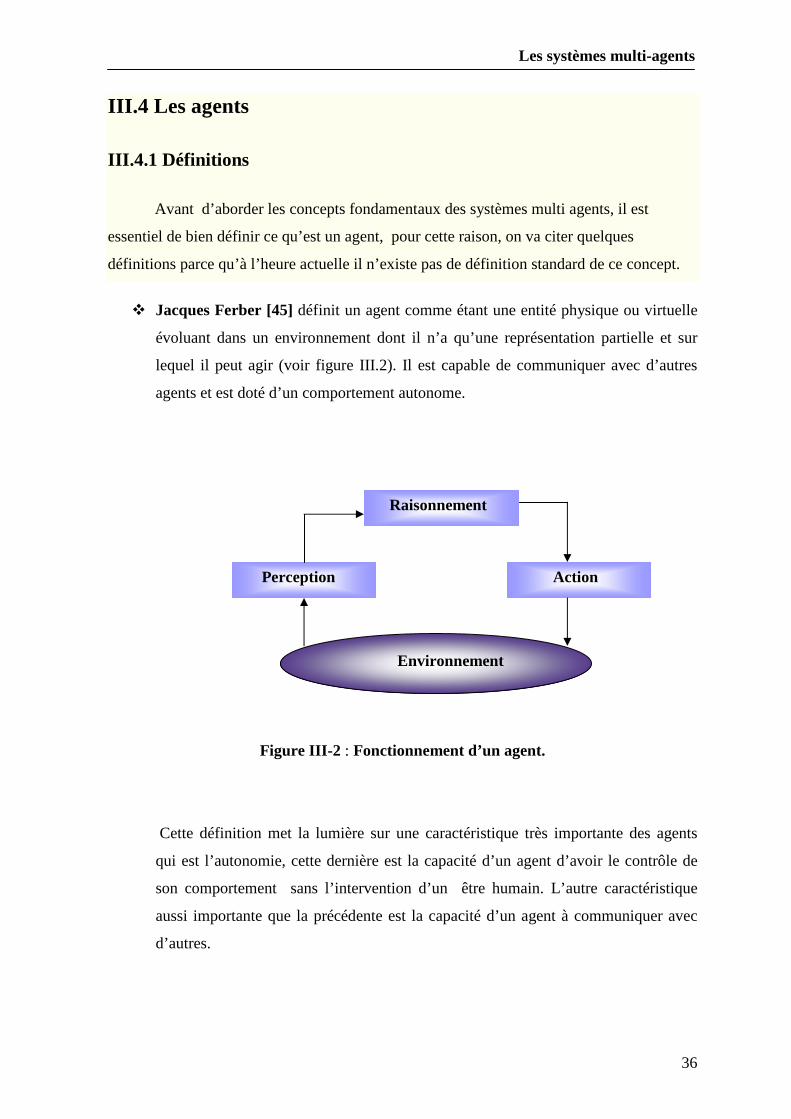
Les systèmes multi-agents
36
III.4 Les agents
III.4.1 Définitions
Avant d’aborder les concepts fondamentaux des systèmes multi agents, il est
essentiel de bien définir ce qu’est un agent, pour cette raison, on va citer quelques
définitions parce qu’à l’heure actuelle il n’existe pas de définition standard de ce concept.
� Jacques Ferber [45] définit un agent comme étant une entité physique ou virtuelle
évoluant dans un environnement dont il n’a qu’une représentation partielle et sur
lequel il peut agir (voir figure III.2). Il est capable de communiquer avec d’autres
agents et est doté d’un comportement autonome.
Figure III-2 : Fonctionnement d’un agent.
Cette définition met la lumière sur une caractéristique très importante des agents
qui est l’autonomie, cette dernière est la capacité d’un agent d’avoir le contrôle de
son comportement sans l’intervention d’un être humain. L’autre caractéristique
aussi importante que la précédente est la capacité d’un agent à communiquer avec
d’autres.
Raisonnement
Perception Action
Environnement
Les systèmes multi-agents
37
� Selon Yves Demazeau [46], un agent est une entité réelle ou virtuelle dont le
comportement est autonome, évoluant dans un environnement qu’il est capable de
percevoir et sur lequel il est capable d’agir, et d’interagir avec les autres agents.
Cette définition introduit la notion d’interaction, qui indique la capacité d’un agent
de communiquer avec les autres agents.
� Pour Mickael Wooldridge [47], un agent est un système informatique capable
d’agir de manière autonome et flexible dans un environnement.
Par flexibilité on entend :
• Réactivité : un système réactif maintient un lien constant avec son
environnement et répond aux changements qui y surviennent.
• Pro-activité : un système pro-actif (aussi appelé téléonomique) génère et
satisfait des buts. Son comportement n’est donc pas uniquement dirigé par
des événements.
• Capacités sociales : un système social est capable d’interagir ou coopérer
avec d’autres systèmes.
III.4.2 Les caractéristiques multidimensionnelles d’un agent
� La nature : agents physiques ou virtuels.
� L’autonomie : l’agent est plus ou moins indépendant de l’utilisateur, des autres
agents, et des ressources ( UC, mémoire, etc.…)
� L’environnement : c’est l’espace dans lequel l’agent va agir ; celui-ci peut se
réduire au réseau constitué par l’ensemble des agents.
� La capacité représentationnelle : l’agent peut avoir une vision très locale de son
environnement, mais il peut aussi avoir une représentation plus large de cet
environnement et notamment des agents qui l’entourent (accointances).
� L’objectif (dimension téléonomique) : l’agent peut poursuivre le but global du
système, peut satisfaire des objectifs propres ou même se comporter dans la
perspective de s’absoudre une fonction de survie.
� La perception : de l’environnement par l’agent.
� La communication : l’agent aura plus ou moins de capacités à communiquer avec
les autres agents.
� Le raisonnement : l’agent peut être lié à un système expert ou à d’autres
mécanismes de raisonnements plus ou moins complexes.
Les systèmes multi-agents
38
� La quantité de ses congénères : le système peut contenir de quelques-uns à
plusieurs milliers d’agents.
� Le contrôle : il peut être totalement distribué entre les agents mais peut être voué à
une certaine classe d’agents comme les agents « facilitateurs ».
� L’anticipation : l’agent peut plus ou moins avoir les capacités d’anticiper les
événements futurs.
� La granularité ou complexité : l’agent peut être très simple comme un neurone
mais aussi plus complexe.
� La contribution : l’agent participe plus ou moins à la résolution du problème ou à
l’activité globale du système.
� L’efficacité : l’agent et sa rapidité d’exécution, d’intervention.
� La bienveillance : l’agent a plus ou moins le devoir d’aider ses congénères plutôt
que de s'opposer à eux.
� Intentionnalité : un agent intentionnel est un agent guidé par ses buts.
� Rationalité : les agents rationnels disposent des critères d’évaluation de leurs
actions, et sélectionnent selon ces critères les meilleures actions pour atteindre le
but.
� Adaptabilité : un agent adaptable est un agent capable de contrôler ses aptitudes
(communicationnelles, comportementales, etc.) selon l'environnement.
� Engagement : La notion d’engagement est l’une des qualités essentielles des agents
coopératifs. Un agent coopératif planifie ses actions par coordination et négociation
avec les autres agents. En construisant un plan pour atteindre un but, l’agent se
donne les moyens d’y parvenir et donc s’engage à accomplir les actions qui satisfont
ce but ; l’agent croit qu’il a élaboré, ce qui le conduit à agir en conséquence.
� Intelligence : On appelle agent intelligent un agent cognitif, rationnel, proactif et
adaptatif.
III.4.3 Taxonomie des agents
III.4.3.1 Agents à capacités cognitives ou réactives
� Agent cognitif. Les agents à capacités cognitives proviennent d’une métaphore du
modèle humain. Ces agents possèdent une représentation explicite de leur
environnement, des autres agents et d’eux-mêmes. Ils sont aussi dotés de capacités
de raisonnement et de planification ainsi que de communication. Ces agents sont
structurés en société où il règne donc une véritable organisation sociale. Le travail le
Les systèmes multi-agents
39
plus représentatif de cette famille d’agent porte sur le modèle BDI (Believe Desir
Intention) [48].
� Agent réactif. Les agents à capacités réactives ne possèdent pas de moyen de
mémorisation et n’ont pas de représentation explicite de leur environnement : ils
fonctionnent selon un modèle stimuli/réponse. En effet, dès qu’ils perçoivent une
modification de leur environnement, ils répondent par une action programmée.
L’exemple le plus célèbre est celui de la fourmilière étudié par Alexis Drogoul [49].
� Agent hybride. Les agents hybrides sont des agents ayant des capacités cognitives
et réactives. Ils conjuguent en effet la rapidité de réponse des agents réactifs ainsi
que les capacités de raisonnement des agents cognitifs. Cette famille regroupe donc
des agents dont le modèle est un compromis autonomie/coopération et
efficacité/complexité.
III.4.3.2 Agents communicants ou situés
� Un agent purement communicant : est un système ouvert qui détient ses propres
ressources. Il est conduit par l’ensemble de ses propres objectifs, et il peut
communiquer avec d’autres agents. Son comportement est lié aux communications
qu’il reçoit [50].
� Un agent purement situé : ne communique pas directement avec d’autres agents.
Les interactions se font via l’environnement. Sa position dans l’environnement est
celle qui détermine son comportement. Il peut se déplacer et se reproduire.
III.4.3.3 Classification basée sur la structure de l’agent
D’après [51] chaque agent est décomposé en architecture et programme. Selon cette
structure on peut distinguer les types suivants :
� Agent à réflexe simple (simple reflex agent) : caractérisé par l’utilisation des
régles condition-action : if (condition) then action.
� Agent à réflexe basé sur un modèle d’état (model-based reflex agent) : l’agent
combine entre les perceptions courantes et l’historique des états internes (dit modèle
interne) afin de construire une description de l’état courant.
� Agent basé sur le but (Goal-based agent) : l’agent utilise les connaissances sur
l’état courant et des informations décriant la situation désirable afin d’agir sur
l’environnement.
Les systèmes multi-agents
40
� Agent basé sur l’utilité (utility-based agent) : durant le chemin vers le but final
on peut assigner à chaque état d’une configuration particulière de l’environnement
une valeur d’utilité afin d’aboutir à un comportement de bonne qualité.
� Agent d’apprentissage (learning agent): afin d’améliorer la décision de l’agent,
on lui donne le pouvoir d’apprendre au fur et à mesure ce dont il a besoin.
III.5 Les systèmes multi-agents
III.5.1 Définition
« Un système multi-agent est un système distribué composé d’un ensemble d’agents
… les SMA sont conçus et implantés idéalement comme un ensemble d’agents interagissant,
le plus souvent, selon des modes de coopération, de concurrence ou de coexistence » [52]
De manière générale, le système multi-agent est considéré comme un système
distribué composé d’un certain nombre d’entités autonomes (les agents), qui travaillent
selon des modes complexes d'interaction, pour réaliser leurs propres buts et par-là même
atteindre l'objectif global désiré. Les agents peuvent interagir en communiquant directement
entre eux ou par l’intermédiaire d’un autre agent ou en agissant sur leur environnement. La
figure III.3 va illustrer des agent dans un SMA.
Figure III-3 : Les agents dans un SMA [53]
Agent
SMA
Environnement du SMA
Les systèmes multi-agents
41
III.5.2 Taxonomie des systèmes multi-agents
III.5.2.1 Système multi-agents ouvert ou fermé
Un système multi-agents ouvert [54] partage les caractéristiques des systèmes
ouverts. Pour ce qui concerne les entités élémentaires du système que sont les agents, ils
n’ont pas la possibilité d’avoir une représentation complète de l’environnement. Pour ce qui
est du système dans sa globalité, il doit être modulaire et extensible. La modularité concerne
le fait que les systèmes multi-agents sont composés de plusieurs sous-systèmes mis en
relation. Ces sous-systèmes ont chacun leur propre mode de fonctionnement. L’extensibilité
se traduit par le fait que le système multi-agents supporte l’ajout et le retrait dynamique
d’éléments.
A l’inverse, le qualificatif fermé signifie que l’ensemble des agents qui compose le
système reste le même.
III.5.2.2 Système multi-agents homogène/hétérogène
Un système multi-agents homogène est composé d’agents homogènes. Deux agents
ont cette particularité s’ils sont identiques du point de vue de leur modèle et de leur
architecture. Le qualificatif hétérogène est utilisé pour préciser que le système multi-agents
est composé d’agents différents du point de vue de leurs modèles et de leurs architectures.
III.5.3 Les constituants d’un système muti-agents
D’après Yves demazeau un SMA peut être décomposé en quatre axes : un axe
Agent, un axe Environnement, des Interactions et une structure Organisationnelle explicite
ou non.
SMA = Agent + Environnement + Interaction + Organisation
De plus l’intelligence d’un système multi-agents est supérieure à la somme des
intelligences individuelles des agents qui le composent. Ce phénomène est appelé
l’intelligence émergente.
Fonction (SMA) = Σ fonction(Agent)+fonction collective
III.5.3.1 Les agents (A)
Ce concept est déjà défini précédemment.
III.5.3.2 L’environnement (E)
Dans un système multi-agents, on appelle environnement l’espace commun aux
agents du système. Un environnement peut être [55, 56]:
� Accessible : si un agent peut, à l’aide des primitives de perception, déterminer l’état
de l’environnement et ainsi procéder, par exemple, à une action. Si l’environnement
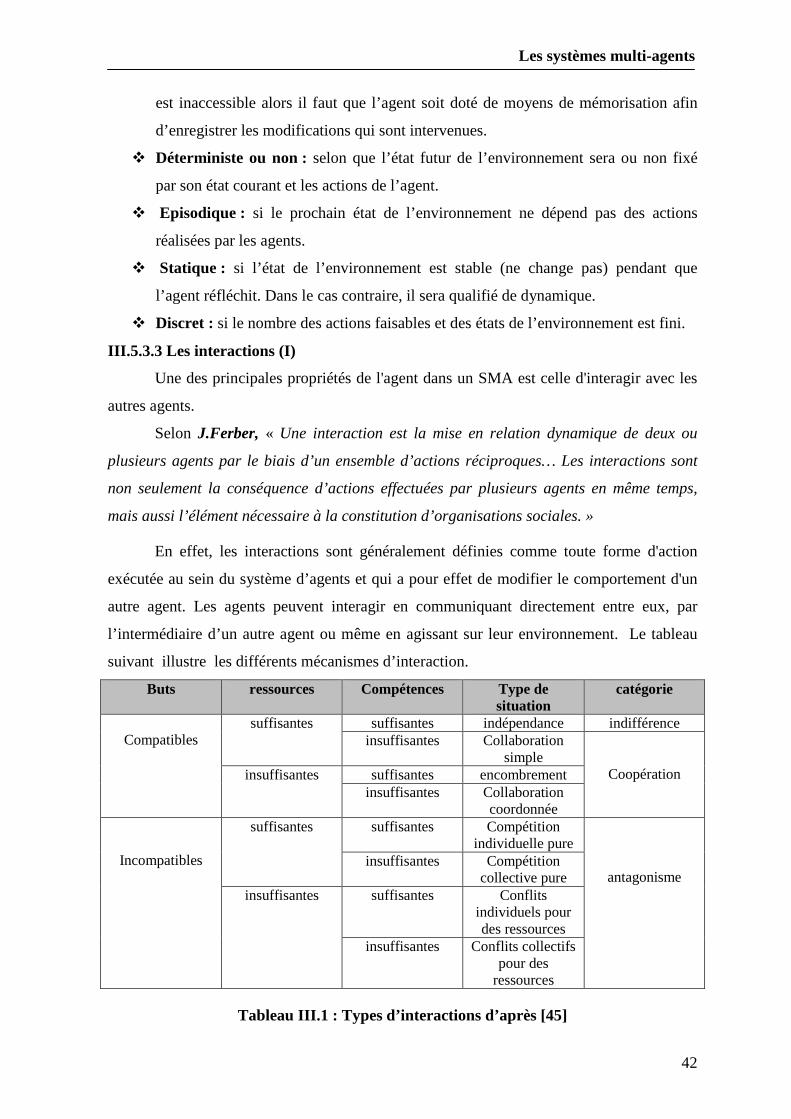
Les systèmes multi-agents
42
est inaccessible alors il faut que l’agent soit doté de moyens de mémorisation afin
d’enregistrer les modifications qui sont intervenues.
� Déterministe ou non : selon que l’état futur de l’environnement sera ou non fixé
par son état courant et les actions de l’agent.
� Episodique : si le prochain état de l’environnement ne dépend pas des actions
réalisées par les agents.
� Statique : si l’état de l’environnement est stable (ne change pas) pendant que
l’agent réfléchit. Dans le cas contraire, il sera qualifié de dynamique.
� Discret : si le nombre des actions faisables et des états de l’environnement est fini.
III.5.3.3 Les interactions (I)
Une des principales propriétés de l'agent dans un SMA est celle d'interagir avec les
autres agents.
Selon J.Ferber, « Une interaction est la mise en relation dynamique de deux ou
plusieurs agents par le biais d’un ensemble d’actions réciproques… Les interactions sont
non seulement la conséquence d’actions effectuées par plusieurs agents en même temps,
mais aussi l’élément nécessaire à la constitution d’organisations sociales. »
En effet, les interactions sont généralement définies comme toute forme d'action
exécutée au sein du système d’agents et qui a pour effet de modifier le comportement d'un
autre agent. Les agents peuvent interagir en communiquant directement entre eux, par
l’intermédiaire d’un autre agent ou même en agissant sur leur environnement. Le tableau
suivant illustre les différents mécanismes d’interaction.
Buts ressources Compétences Type de situation
catégorie
Compatibles
suffisantes suffisantes indépendance indifférence insuffisantes Collaboration
simple
Coopération insuffisantes suffisantes encombrement insuffisantes Collaboration
coordonnée
Incompatibles
suffisantes suffisantes Compétition individuelle pure
antagonisme insuffisantes Compétition
collective pure insuffisantes suffisantes Conflits
individuels pour des ressources
insuffisantes Conflits collectifs pour des
ressources
Tableau III.1 : Types d’interactions d’après [45]
Les systèmes multi-agents
43
III.5.3.4 L’organisation (O) :
On peut la définir comme étant une structure décrivant les interactions et autres
relations qui existent (dans le but d'attendrir un objectif commun) entre les membres de la
dite organisation.
III.5.4 Plateformes pour les systèmes multi agents
Pour qu’un outil soit considéré comme un environnement de développement des
systèmes multi agents, il doit répondre aux exigences suivantes :
• Accélérer le développement et diminuer l’effort de programmation.
• Abstraire les mécanismes de communication, d’interaction et de coordination.
• Permettre l’implémentation de systèmes relativement complexes.
• Permettre une bonne extensibilité du code.
• Fournir un support pour le déploiement (et l’exécution) des systèmes.
III.5.4.1 AgentTool
C’est un outil et une méthodologie qui mettent l’accent sur les premières phases du
développement (analyse et développement). Il utilise la méthodologie MaSE (extension au
modèle OO a 7 phases) : Trouver les buts, appliquer les cas d’utilisation, raffiner les rôles,
créer les classes d’agents, construire les conversations, assembler les classes d’agents et
l’implémentation.
C’est un outil qui permet la validation des conversations. Il génère le code des
conversations en Java.
III.5.4.2 AgentBuilder
C’est un environnement de développement complet. Il utilise la méthodologie OMT
à laquelle il ajoute une partie ontologie, les agents sont construits à partir d’un modèle BDI
et de AGENT-0, le langage de communication entre les agents est KQML, l’exécution se
fait à partir de l’engin d’AgentBuilder, qui a la possibilité de générer des fichiers « .class »
et d’exécuter les systèmes sur une JVM standard.
III.5.4.3 Jack
C’est un gestionnaire de projet, qui a un éditeur de textes où se fait l’implémentation
du système, la compilation et un passage de JAL à Java, puis l’exécution du système. Le
langage JAL (Jack Agent Language) est une extension du langage Java. Il est développé par
Agent Oriented Software Pty. Ltd., une société australienne. Les agents sont basés sur un
modèle BDI (une évolution du modèle BDI de dMars). Jack Agent Kernel est la librairie de
classes permettant l’exécution des agents.
Les systèmes multi-agents
44
III.5.4.4 DECAF
C’est un environnement de développement de plans. Cet outil fournit des utilitaires
pour l’élaboration de plans et pour la coordination des tâches. Il est doté d’un planificateur
qui applique des heuristiques pour trouver un ordonnancement aux tâches et d’un éditeur
d’agent très utile pour le débogage.
III.5.4.5 Jade
C’est un outil répondant aux normes FIPA. Les trois modules principaux
(nécessaires aux normes FIPA): le DF « directory facilitator » fourni un service de pages
jaunes à la plate-forme, le ACC « agent communication chanel » gère la communication
entre les agents, le AMS « agent management system » supervise l’enregistrement des
agents, leur authentification, leur accès et l’utilisation du système. Le langage de
communication entre les agents est FIPA ACL. Jade possède aussi un éditeur pour
l’enregistrement et la gestion des agents.
III.5.4.6 JAFMAS et JiVE
JAFMAS met l’accent sur les protocoles de communication, l’interaction entre les
agents, la coordination et la cohérence à l’intérieur du système. Une méthodologie en cinq
phases : identifier les agents, les conversations, les règles de conversation, analyser le
modèle des conversations et l’implémentation. Il utilise les réseaux de Pétri. JiVE est le
support graphique pour le développement avec JAFMAS.
III.5.4.7 Zeus
C’est un environnement de développement complet développé par l’Agent Research
Program du British Telecom Intelligent System Research Laboratory, il utilise une approche
« role modeling ».
Les agents possèdent trois couches :
• La définition : l’agent est perçu comme une entité autonome capable de raisonner
grâce à ses croyances, ses ressources et ses préférences.
• L’organisation : relations entre les agents.
• La coordination : modes de communication entre les agents, protocoles,
coordination et autres mécanismes d’interaction.
Les systèmes multi-agents
45
III.5.4.8 Madkit
MadKit (Mutlti-agents Developpement Kit) est un environnement écrit en Java basé
sur la méthodologie Aalaadin ou AGR (agent/ groupe / rôle). Un agent joue des rôles à
l’intérieur du groupe. MadKit a été développé en1996 par Olivier GUTKNECHT et Michel
FERBER au laboratoire d’Informatique, de Robotique et de Microélectronique de
Montpellier (LIRMM) de l’université Montpellier II. L’outil fournit un éditeur permettant
le déploiement et la gestion des SMA (G-box). Il offre aussi un utilitaire pour effectuer des
simulations à grande échelle.
III.6 Conclusion
La complexité qui caractérise les systèmes informatiques d’aujourd’hui, et le
contrôle centralisé extrêmement difficile de ces derniers, voire impossible, la plupart du
temps, a conduit à introduire le paradigme multi-agents qui est issu de l’IAD (intelligence
artificielle distribuée) et qui est basé sur des techniques de décentralisation des traitements
et des contrôles pour améliorer les performances et assurer un fonctionnement cohérent
des systèmes informatiques.
La simulation des réseaux de capteurs
46
V.1 introduction
Puisque la simulation d’un réseau de capteurs avant son déploiement réel représente
une alternative moins coûteuse et moins lourde que son expérimentation en environnement
réel, On va présenter dans ce chapitre les raisons d’implémenter une plate-forme de
simulation des réseaux de capteurs et on va citer quelques simulateurs de réseaux de capteurs
qui sont actuellement disponibles.
V.2 Différentes approches de test
V.2.1 Le test en environnement réel
La première approche pour tester un protocole ou une application consiste à mettre
réellement en oeuvre le réseau capteur sans fil qu’on doit tester. Cette solution est à priori la
meilleure dans la mesure où l'on utilise vraiment le système opérationnel ainsi que
l'implémentation finale du protocole. Cependant, cette solution peut être assez difficile à
mettre en oeuvre et peut être très coûteuse dans certains cas. Un autre point négatif de cette
solution est l'impossibilité d'évaluer le protocole aux conditions limites de propagation
(pendant une tempête par exemple) ou de mobilité (par exemple avec des vitesses de
déplacement très importantes). De même, il est très difficile de réussir à mettre en oeuvre des
cas rares. Enfin, cette solution n'autorise pas au développeur l'exacte reproduction des
conditions d'une expérience à l'autre, ce qui peut être très gênant pour réussir à mettre au point
son protocole.
V.2.2 La simulation
La deuxième solution est la simulation. C’est souvent ce choix qui est fait par la
communauté scientifique. Elle possède en effet l'avantage de reposer sur des modèles validés
ou au moins reconnus. Il existe plusieurs simulateurs à événements discrets permettant de
mettre en oeuvre un réseau sans fil tels que NS-2, Opnet, QualNet et GloMoSim. Un
simulateur à événements discrets se caractérise par le fait que les changements d'états dans le
réseau simulé (événements) se produisent à des instants (sans durée) répartis de manière
discrète sur l'axe des temps. La simulation demande une modélisation complète, allant des
applications au réseau physique, ce qui peut se révéler à la fois complexe et coûteux en terme
de temps d'exécution et d'utilisation mémoire dans le cas des réseaux de tailles importantes.
Ainsi, tous les simulateurs que nous avons cités précédemment simulent complètement les
piles protocolaires ainsi que le trafic. Ainsi, le processus de simulation oblige l'utilisateur à
faire un double développement de son système et ceci sans lui assurer la cohérence du modèle
de simulation et de l'implémentation.
La simulation des réseaux de capteurs
47
V.2.3 L'émulation
L'émulation peut être vue comme un compromis entre les deux solutions précédentes
dans la mesure où elle va permettre de tester l'implémentation réelle du protocole/application
sur un réseau simulé en temps réel. Le but de l'émulation sera donc de reproduire le
comportement d'un réseau jusqu'au niveau d'une couche donnée en simulant en temps réel les
effets des couches sous-jacentes du réseau cible. L'émulation permet d'avoir un contrôle
équivalent à celui de la simulation sur les paramètres du réseau mais permet en plus d'utiliser
des implémentations réelles à tester. Ainsi, elle permet de tester un protocole aux conditions
limites, ce qui est très difficile à faire dans un réseau réel. On parlera alors d'évaluation d'un
protocole sur des cas rares. De plus, comme l'environnement simulé est entièrement
contrôlable, il est possible de comparer ce protocole avec d'autres protocoles existants en
reproduisant plusieurs fois de suite la même expérience. Le fait de pouvoir reproduire
précisément une expérience va également permettre, comme pour la simulation, de bien
paramétrer son protocole.
Bien que l’émulation parait plus intéressante et porte plus d’avantages, elle impose
cependant certaines contraintes. Comme l’émulation travaille en temps réel, les modèles
utilisés pour simuler les couches basses ne peuvent pas être trop complexes ce qui implique
un impact négatif sur le réalisme de l’émulation rendue. A cet effet, l’approche de simulation
détient toujours sa place comme solution pour le test et la validation de protocoles et
d’applications.
V.3 Les simulateurs Actuellement disponibles
� Ns-2
Ns-2 est un simulateur à événements discrets bien détaillé dans [62], il fournit
un support étendu pour simuler les protocoles TCP/IP, de routage et multi sauts pour
les réseaux câblés et sans fil [63]. Le modèle de propagation radio est basé sur la
réflexion de deux rayons d'approximation et de média partagé modélisé dans la couche
physique, le protocole MAC IEEE 802.11 dans la couche de liaison, et une
implémentation du routage dynamique pour la couche réseau ont été développées
dans le projet Monarch [64].
� SensorSim
SensorSim est construit sur Ns-2 pour inclure des modèles d'énergie et du
canal de capture [65]. À chaque noeud, les consommateurs d'énergie opèrent dans de
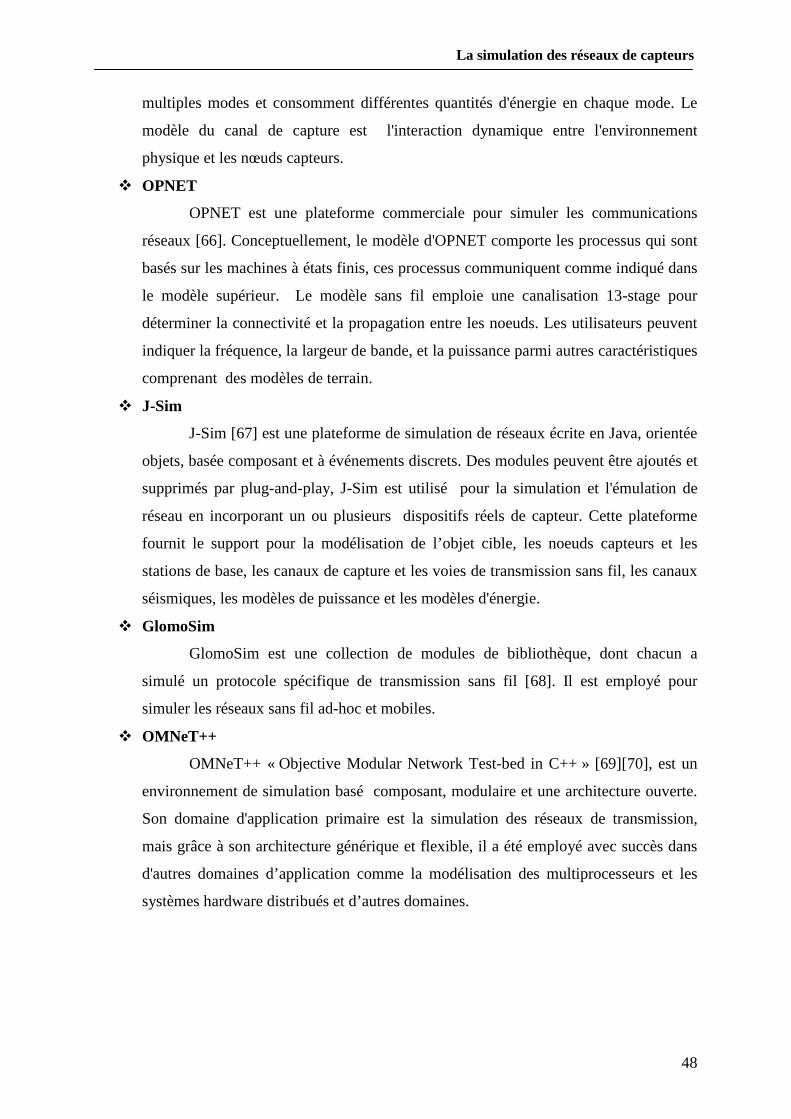
La simulation des réseaux de capteurs
48
multiples modes et consomment différentes quantités d'énergie en chaque mode. Le
modèle du canal de capture est l'interaction dynamique entre l'environnement
physique et les nœuds capteurs.
� OPNET
OPNET est une plateforme commerciale pour simuler les communications
réseaux [66]. Conceptuellement, le modèle d'OPNET comporte les processus qui sont
basés sur les machines à états finis, ces processus communiquent comme indiqué dans
le modèle supérieur. Le modèle sans fil emploie une canalisation 13-stage pour
déterminer la connectivité et la propagation entre les noeuds. Les utilisateurs peuvent
indiquer la fréquence, la largeur de bande, et la puissance parmi autres caractéristiques
comprenant des modèles de terrain.
� J-Sim
J-Sim [67] est une plateforme de simulation de réseaux écrite en Java, orientée
objets, basée composant et à événements discrets. Des modules peuvent être ajoutés et
supprimés par plug-and-play, J-Sim est utilisé pour la simulation et l'émulation de
réseau en incorporant un ou plusieurs dispositifs réels de capteur. Cette plateforme
fournit le support pour la modélisation de l’objet cible, les noeuds capteurs et les
stations de base, les canaux de capture et les voies de transmission sans fil, les canaux
séismiques, les modèles de puissance et les modèles d'énergie.
� GlomoSim
GlomoSim est une collection de modules de bibliothèque, dont chacun a
simulé un protocole spécifique de transmission sans fil [68]. Il est employé pour
simuler les réseaux sans fil ad-hoc et mobiles.
� OMNeT++
OMNeT++ « Objective Modular Network Test-bed in C++ » [69][70], est un
environnement de simulation basé composant, modulaire et une architecture ouverte.
Son domaine d'application primaire est la simulation des réseaux de transmission,
mais grâce à son architecture générique et flexible, il a été employé avec succès dans
d'autres domaines d’application comme la modélisation des multiprocesseurs et les
systèmes hardware distribués et d’autres domaines.
La simulation des réseaux de capteurs
49
Langage/script Modules
disponibles
Support
graphique
émulation
1DaSSF/TOSSF C++/DML C/W/A/WSN+ propriétaire limité
JiST/SWANS Java/Jython W/A - oui
J-Sim Java/Jacl C/W/A/WSN+ Bonne édition et
débugage
oui
NCTUns C C/W/A Excellente
édition et
débugage
oui
1NS-2 C++/OTcl C/W/A/WSN - limité
1OMNET++ C++/NED C/W/A Limité pour
l’édition,
excellent pour
le débugage et
l’éxecution est
animée.
limité
Ptolemy II Java C/W/A/WSN+ Excellente
édition et
débugage
Oui
1 inclue un support pour une simulation parallèle.
*C: modèles classiques (par exemple : TPC/IP, Ethernet)
A: support Ad hoc (par exemple MANET protocols: AODV, DSR)
W: support Wireless (par exemple, la propagation, mobilité, IEEE802.11)
WSN: quelques protocoles communs des WSNs (par exemple, Directed Diffusion, S-MAC)
WSN+: un support WSN riche avec un environnement et modèle de batterie.
Tableau V.1 : plateformes de simulation des réseaux [71].
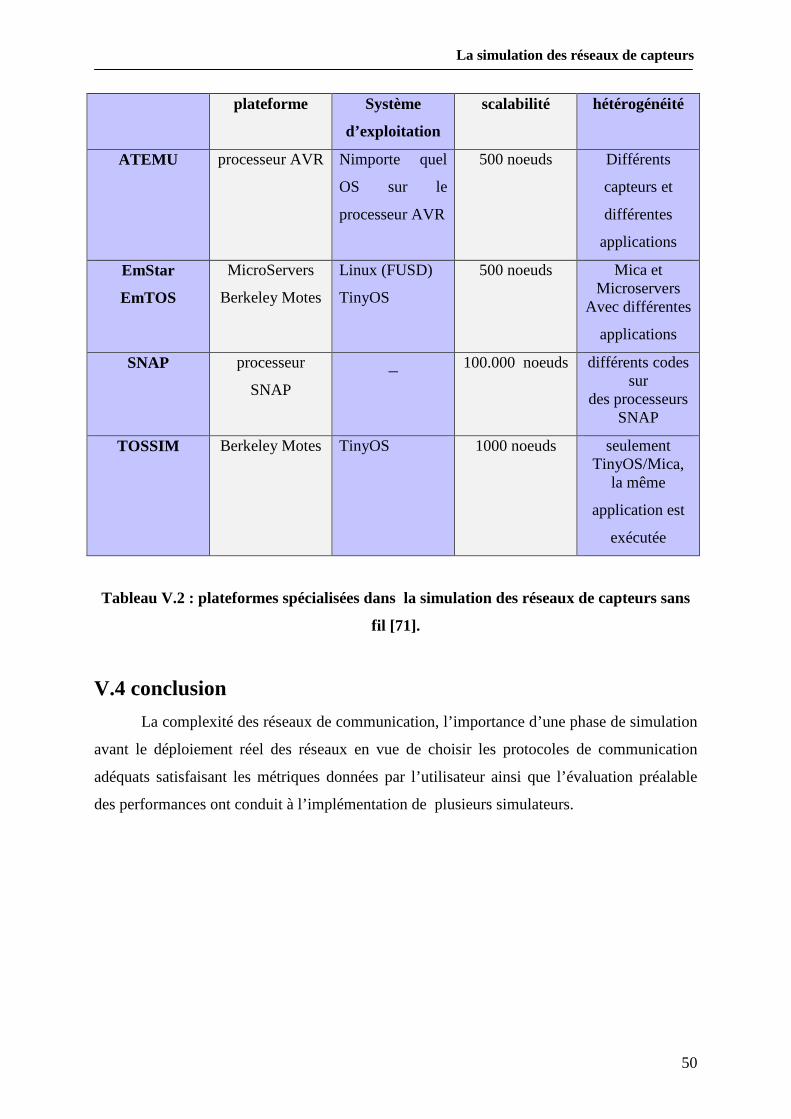
La simulation des réseaux de capteurs
50
plateforme Système
d’exploitation
scalabilité hétérogénéité
ATEMU processeur AVR Nimporte quel
OS sur le
processeur AVR
500 noeuds Différents
capteurs et
différentes
applications
EmStar
EmTOS
MicroServers
Berkeley Motes
Linux (FUSD)
TinyOS
500 noeuds Mica et Microservers
Avec différentes
applications
SNAP processeur
SNAP _ 100.000 noeuds différents codes
sur des processeurs
SNAP
TOSSIM Berkeley Motes TinyOS 1000 noeuds seulement TinyOS/Mica,
la même
application est
exécutée
Tableau V.2 : plateformes spécialisées dans la simulation des réseaux de capteurs sans
fil [71].
V.4 conclusion
La complexité des réseaux de communication, l’importance d’une phase de simulation
avant le déploiement réel des réseaux en vue de choisir les protocoles de communication
adéquats satisfaisant les métriques données par l’utilisateur ainsi que l’évaluation préalable
des performances ont conduit à l’implémentation de plusieurs simulateurs.
Les protocoles de communication utilisés dans les WSNs
51
VI.1 Introduction
Nous nous intéressons dans ce chapitre aux protocoles de communications dans les
réseaux WSN. Un grand nombre de protocoles ont vu le jour, durant les trente dernières
années, marquées par une intense activité de recherche dans ce domaine. Ils différent les uns
des autres par les types de média utilisés et les exigences de performance pour lesquelles ils
ont été conçus et optimisés.
Nous présenterons les aspects fondamentaux des protocoles MAC et nous
expliquerons les exigences spécifiques et les problèmes auxquels ces protocoles doivent
respectivement y répondre et y faire face. La plus importante des exigences est sans doute
l’efficience de l’énergie. A ce titre, il est impératif d’examiner les sources spécifiques de perte
d’énergie, inhérentes aux protocoles MAC.
VI.2 Les protocoles de la couche MAC
VI.2.1 Les raisons de la perte d’énergie
Physiquement, un nœud émetteur-récepteur du WSN, possède quatre modes
principaux de fonctionnement :
• Le mode émetteur.
• Le mode récepteur.
• Le mode sommeil.
• Le mode ralenti.
A chacun des quatre états est associé un niveau de consommation d’énergie. Celle-ci
n’est nulle pour aucun des quatre régimes de fonctionnement.
Un ensemble d’autres raisons, intimement liées au protocole, vont être responsables de pertes
supplémentaires d’énergie, nous citons :
• Les collisions : Lorsque plus d’un paquet convergent simultanément vers un nœud
récepteur, qu’ils chevauchent partiellement ou totalement, ils sont en collisions et
sont par conséquent tous rejetés et doivent faire l’objet de re-transmissions.
• La sur-écoute, « Overhearing », compte tenu du caractère « large diffusion » du
medium utilisé dans les WSN, tous les nœuds récepteurs du voisinage de la source
émettrice reçoivent le paquet de données avant de se rendre compte qu’il ne leur est
pas destiné.
• L’ « Overemitting » : Cette situation correspond à la transmission d’un paquet par un
nœud émetteur alors que le destinataire n’est pas prêt à la réception.
Les protocoles de communication utilisés dans les WSNs
52
• Les paquets de contrôle : ce sont les flots de données destinés au contrôle et qui
doivent être réduits à leur expression minimale.
VI.2.2 Les modèles de communication dans un WSN
Il existe plusieurs typologies pour classer les modèles de communication dépendant
des critères utilisés. Kulkarni [72] et al définissent trois types de modèles de communications
dans les WSN :
• La diffusion large, «broadcast », c’est généralement le schéma utilisé par une station
de base pour transmettre une information à tous les nœuds du réseau. L’information,
objet de la transmission, peut inclure des requêtes destinées aux nœuds, des mises à
jour de programmes ou des paquets de contrôle.
• La diffusion convergente, « convergecast », ce deuxième schéma correspond à la
situation où un groupe de capteurs ciblent un nœud particulier par une information.
Ce noeud particulier peut aussi bien être la tête d’une grappe « Clusterhead », un
nœud central de fusion de données ou une station de base.
• La conversation locale, « local gossip », c’est le cas d’un capteur qui envoie à ses
voisins (avec une définition adéquate de la profondeur du voisinage) une information
particulière, qui peut être, par exemple, la détection d’un intrus.
Dans les protocoles incluant la mise en grappes, les clusterheads communiquent avec
leurs membres, les récepteurs visés par la communication peuvent ne pas être tous les voisins
du clusterhead, mais un ensemble de voisins. Ce genre de communication peut être considéré
comme un quatrième modèle, désigné par diffusion multiple, « multicast ». C’est de la
diffusion multiple sélective qui vise un ensemble spécifique, à ne pas confondre avec la large
diffusion.
VI.2.3 Les attributs d’un bon protocole MAC
Au vu de ce que nous venons de mentionner, on peut dresser une liste d’attributs
qu’un protocole MAC bien conçu devrait posséder. Traditionnellement, les exigences de
performance les plus importantes pour les protocoles MAC sont l’efficience, la stabilité, un
temps mort d’accès minimal (c’est l’intervalle de temps qui s’écoule entre l’arrivée d’un
paquet de données et la première tentative pour le transmettre) et un temps mort minimal
pour la transmission (la durée séparant l’arrivée d’un paquet de données et sa livraison avec
succès). A cela, on peut ajouter, l’adaptabilité aux changements et l’auto ajustement
d’échelle « scalability ».
Les protocoles de communication utilisés dans les WSNs
53
Pour des applications pour lesquelles le temps revêt un caractère critique, le protocole doit
fournir des garanties déterministes ou stochastiques sur le temps de livraison ou sur le taux
minimal de transmission de données. Quelquefois, le traitement préférentiel des paquets jugés
importants doit primer sur les paquets de moindres importances.
Ne perdons pas de vue, cependant, que comme bien même on essaie de réunir toutes
ces qualités dans le protocole MAC, celui-ci reste soumis aux contraintes incontournables de
la couche physique. Rappelons, en effet, qu’en raison du médium utilisé pour les WSNs
(communications par ondes électromagnétiques), un tas de problèmes risque d’affecter le
fonctionnement de ces réseaux tels que : l’atténuation rapide du signal, perte sur le trajet,
bruits thermiques, etc…
A défaut de pouvoir satisfaire toutes les exigences, on préfère mettre en avant, pour
une application donnée dans un contexte spécifique, les attributs les plus pertinents pour le
fonctionnement du WSN en cherchant le meilleur compromis possible.
Dans ce qui suit on va décrire le comportement des protocoles MAC les plus célèbres,
utilisés dans les WSNs avec leurs avantages et leurs inconvénients. � Sensor -MAC(S-MAC)
La gestion locale des synchronisations et les ordonnancements périodiques
des phases de sommeil - écoute basés sur ces synchronisations constitue l’idée
fondamentale du protocole S-MAC.
Les noeuds voisins forment des clusters virtuels pour installer un
ordonnancement commun du sommeil. Si deux noeuds voisins résident dans deux
clusters virtuels différents, ils se réveillent pour l’écoute sur les périodes associées
aux deux clusters.
Un inconvénient de S-MAC est la possibilité de suivre deux ordonnancements
différents, qui augmente la consommation d'énergie à cause de l’écoute oisive et
l’overhearing. Des échanges d’ordonnancement sont accomplis par les émissions
périodiques de paquets SYNC aux voisins immédiats. La période de chaque noeud
pour l’envoi d’un paquet SYNC s'appelle période de synchronisation. L'action
permettant d'éviter une collision est réalisée par un carrier sense, qui est représenté
comme CS. En outre, les paquets de RTS/CTS sont utilisés pour le type paquets de
données d'unicast .Une technique importante de S-MAC est sa manière de passer le
message où les messages volumineux en les divisant en frames. Grâce à cette
technique, il devient possible de conserver l'énergie en réduisant la communication
overhead. Le sommeil périodique peut avoir comme conséquence un temps d’attente
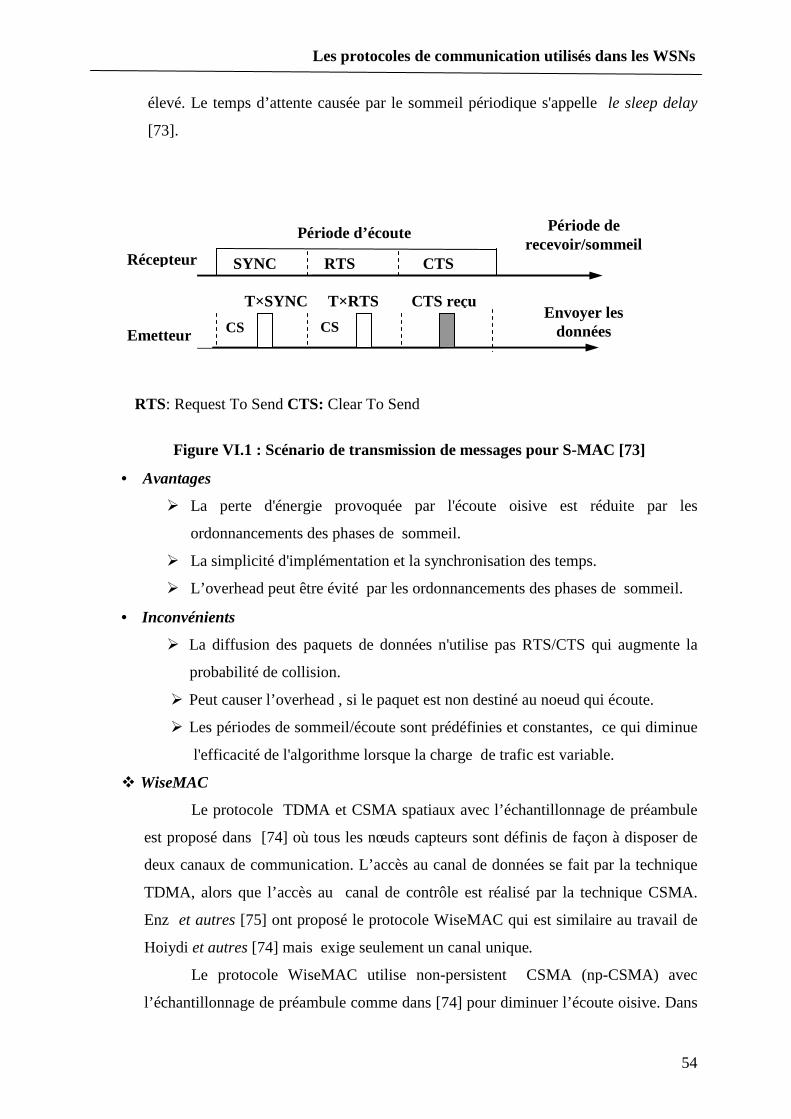
Les protocoles de communication utilisés dans les WSNs
54
élevé. Le temps d’attente causée par le sommeil périodique s'appelle le sleep delay
[73].
Figure VI.1 : Scénario de transmission de messages pour S-MAC [73]
• Avantages
� La perte d'énergie provoquée par l'écoute oisive est réduite par les
ordonnancements des phases de sommeil.
� La simplicité d'implémentation et la synchronisation des temps.
� L’overhead peut être évité par les ordonnancements des phases de sommeil.
• Inconvénients
� La diffusion des paquets de données n'utilise pas RTS/CTS qui augmente la
probabilité de collision.
� Peut causer l’overhead , si le paquet est non destiné au noeud qui écoute.
� Les périodes de sommeil/écoute sont prédéfinies et constantes, ce qui diminue
l'efficacité de l'algorithme lorsque la charge de trafic est variable.
� WiseMAC
Le protocole TDMA et CSMA spatiaux avec l’échantillonnage de préambule
est proposé dans [74] où tous les nœuds capteurs sont définis de façon à disposer de
deux canaux de communication. L’accès au canal de données se fait par la technique
TDMA, alors que l’accès au canal de contrôle est réalisé par la technique CSMA.
Enz et autres [75] ont proposé le protocole WiseMAC qui est similaire au travail de
Hoiydi et autres [74] mais exige seulement un canal unique.
Le protocole WiseMAC utilise non-persistent CSMA (np-CSMA) avec
l’échantillonnage de préambule comme dans [74] pour diminuer l’écoute oisive. Dans
SYNC RTS CTS
Période d’écoute Période de recevoir/sommeil
CS CS Envoyer les
données
T×SYNC T×RTS CTS reçu
RTS: Request To Send CTS: Clear To Send
Récepteur
Emetteur
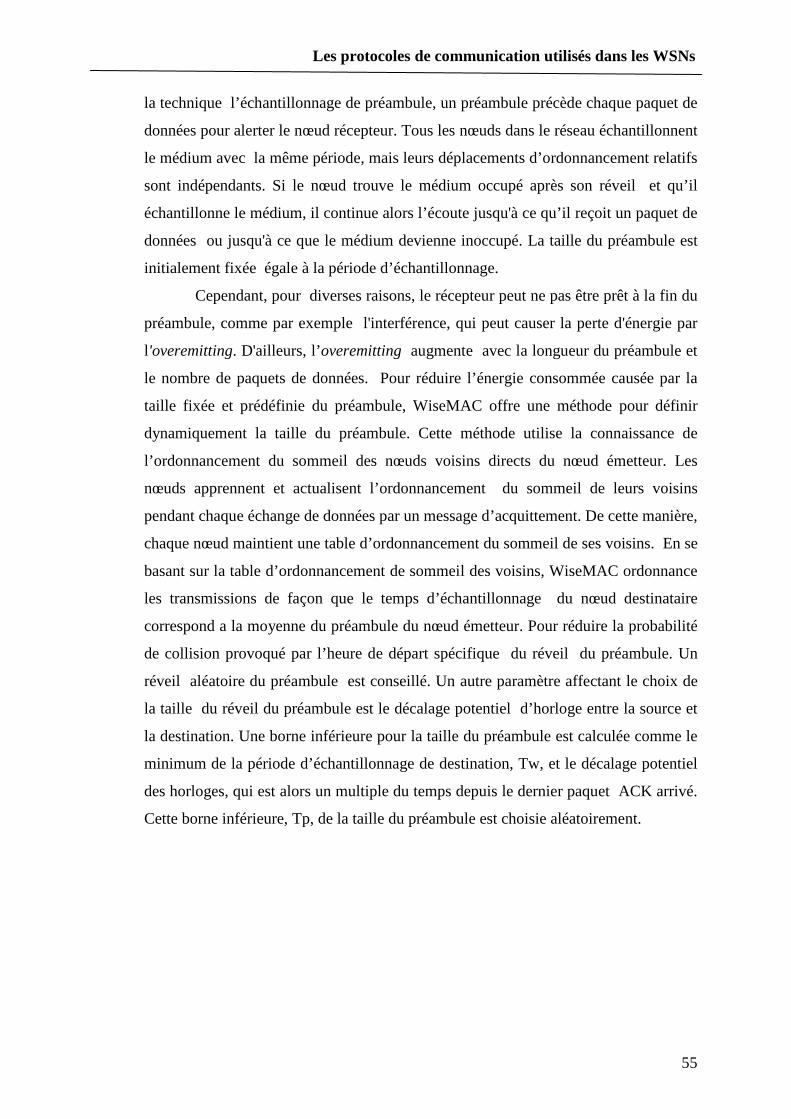
Les protocoles de communication utilisés dans les WSNs
55
la technique l’échantillonnage de préambule, un préambule précède chaque paquet de
données pour alerter le nœud récepteur. Tous les nœuds dans le réseau échantillonnent
le médium avec la même période, mais leurs déplacements d’ordonnancement relatifs
sont indépendants. Si le nœud trouve le médium occupé après son réveil et qu’il
échantillonne le médium, il continue alors l’écoute jusqu'à ce qu’il reçoit un paquet de
données ou jusqu'à ce que le médium devienne inoccupé. La taille du préambule est
initialement fixée égale à la période d’échantillonnage.
Cependant, pour diverses raisons, le récepteur peut ne pas être prêt à la fin du
préambule, comme par exemple l'interférence, qui peut causer la perte d'énergie par
l 'overemitting. D'ailleurs, l’overemitting augmente avec la longueur du préambule et
le nombre de paquets de données. Pour réduire l’énergie consommée causée par la
taille fixée et prédéfinie du préambule, WiseMAC offre une méthode pour définir
dynamiquement la taille du préambule. Cette méthode utilise la connaissance de
l’ordonnancement du sommeil des nœuds voisins directs du nœud émetteur. Les
nœuds apprennent et actualisent l’ordonnancement du sommeil de leurs voisins
pendant chaque échange de données par un message d’acquittement. De cette manière,
chaque nœud maintient une table d’ordonnancement du sommeil de ses voisins. En se
basant sur la table d’ordonnancement de sommeil des voisins, WiseMAC ordonnance
les transmissions de façon que le temps d’échantillonnage du nœud destinataire
correspond a la moyenne du préambule du nœud émetteur. Pour réduire la probabilité
de collision provoqué par l’heure de départ spécifique du réveil du préambule. Un
réveil aléatoire du préambule est conseillé. Un autre paramètre affectant le choix de
la taille du réveil du préambule est le décalage potentiel d’horloge entre la source et
la destination. Une borne inférieure pour la taille du préambule est calculée comme le
minimum de la période d’échantillonnage de destination, Tw, et le décalage potentiel
des horloges, qui est alors un multiple du temps depuis le dernier paquet ACK arrivé.
Cette borne inférieure, Tp, de la taille du préambule est choisie aléatoirement.
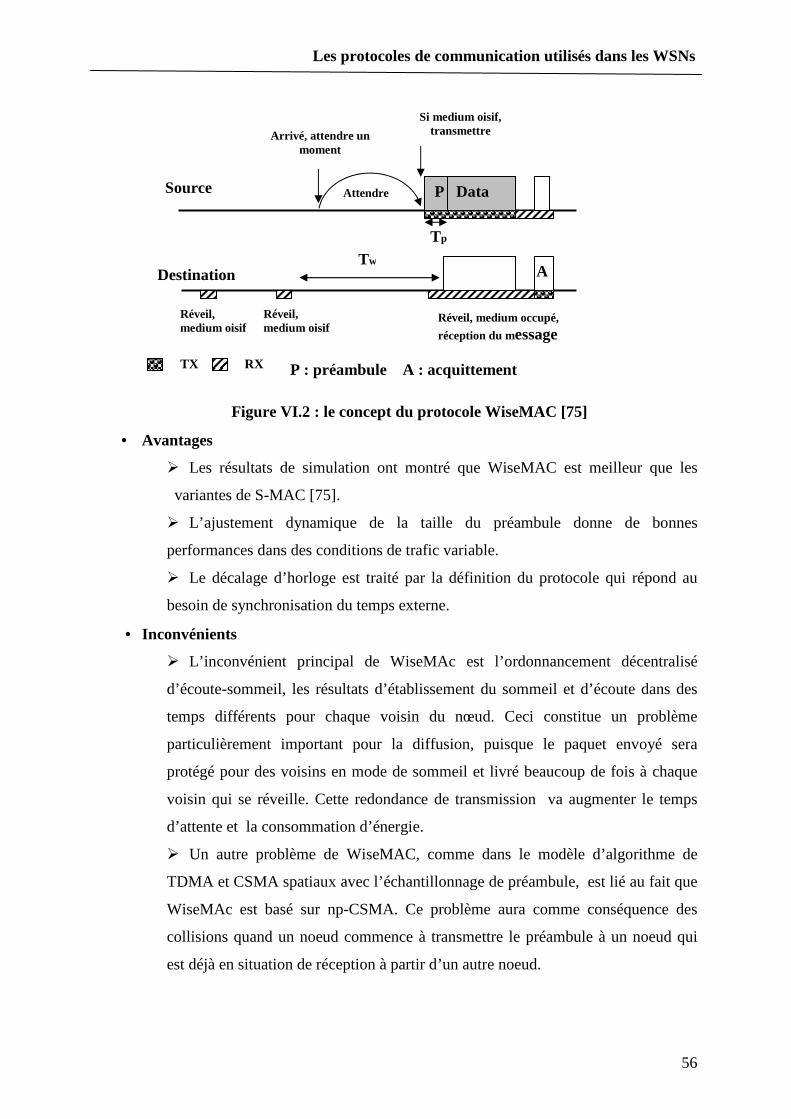
Les protocoles de communication utilisés dans les WSNs
56
Figure VI.2 : le concept du protocole WiseMAC [75]
• Avantages
� Les résultats de simulation ont montré que WiseMAC est meilleur que les
variantes de S-MAC [75].
� L’ajustement dynamique de la taille du préambule donne de bonnes
performances dans des conditions de trafic variable.
� Le décalage d’horloge est traité par la définition du protocole qui répond au
besoin de synchronisation du temps externe.
• Inconvénients
� L’inconvénient principal de WiseMAc est l’ordonnancement décentralisé
d’écoute-sommeil, les résultats d’établissement du sommeil et d’écoute dans des
temps différents pour chaque voisin du nœud. Ceci constitue un problème
particulièrement important pour la diffusion, puisque le paquet envoyé sera
protégé pour des voisins en mode de sommeil et livré beaucoup de fois à chaque
voisin qui se réveille. Cette redondance de transmission va augmenter le temps
d’attente et la consommation d’énergie.
� Un autre problème de WiseMAC, comme dans le modèle d’algorithme de
TDMA et CSMA spatiaux avec l’échantillonnage de préambule, est lié au fait que
WiseMAc est basé sur np-CSMA. Ce problème aura comme conséquence des
collisions quand un noeud commence à transmettre le préambule à un noeud qui
est déjà en situation de réception à partir d’un autre noeud.
P Data
A
Source
Destination
Arrivé, attendre un moment
Attendre
Si medium oisif, transmettre
Tp
Tw
Réveil, medium occupé,
réception du message Réveil, medium oisif
Réveil, medium oisif
TX RX P : préambule A : acquittement
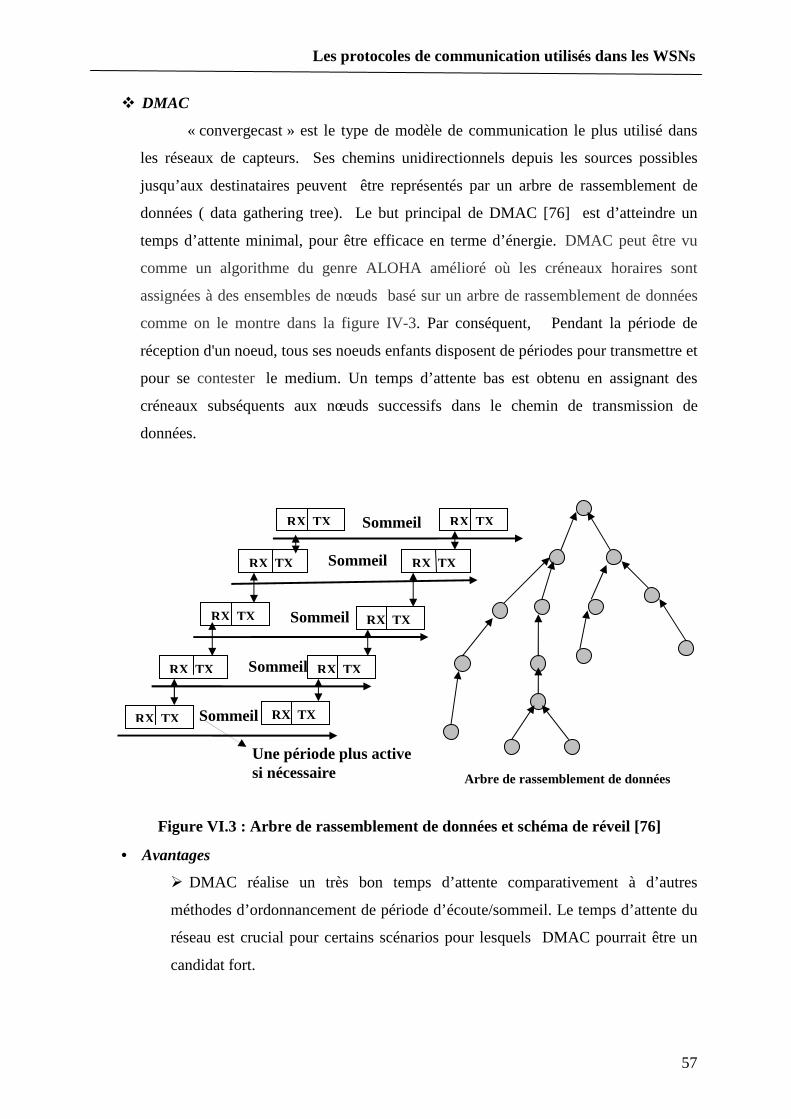
Les protocoles de communication utilisés dans les WSNs
57
� DMAC
« convergecast » est le type de modèle de communication le plus utilisé dans
les réseaux de capteurs. Ses chemins unidirectionnels depuis les sources possibles
jusqu’aux destinataires peuvent être représentés par un arbre de rassemblement de
données ( data gathering tree). Le but principal de DMAC [76] est d’atteindre un
temps d’attente minimal, pour être efficace en terme d’énergie. DMAC peut être vu
comme un algorithme du genre ALOHA amélioré où les créneaux horaires sont
assignées à des ensembles de nœuds basé sur un arbre de rassemblement de données
comme on le montre dans la figure IV-3. Par conséquent, Pendant la période de
réception d'un noeud, tous ses noeuds enfants disposent de périodes pour transmettre et
pour se contester le medium. Un temps d’attente bas est obtenu en assignant des
créneaux subséquents aux nœuds successifs dans le chemin de transmission de
données.
Figure VI.3 : Arbre de rassemblement de données et schéma de réveil [76]
• Avantages
� DMAC réalise un très bon temps d’attente comparativement à d’autres
méthodes d’ordonnancement de période d’écoute/sommeil. Le temps d’attente du
réseau est crucial pour certains scénarios pour lesquels DMAC pourrait être un
candidat fort.
Arbre de rassemblement de données
RX TX RX TX
RX TX RX TX
RX TX RX TX
RX TX RX TX
RX TX RX TX
Sommeil
Sommeil
Sommeil
Sommeil
Sommeil
Une période plus active si nécessaire
Les protocoles de communication utilisés dans les WSNs
58
• Inconvénients
� Les méthodes pour éviter les collisions ne sont pas à l’oeuvre, par conséquent
quand un nombre de nœud de même niveau dans l’arbre essayent de transmettre
vers le même nœud, une collision aura fatalement lieu.
� En outre, les chemins de transmission de données peuvent ne pas être connus à
l'avance, ce qui empêche la formation d'arbre de rassemblement de données.
VI.3 Les protocoles de routage
Une panoplie de protocoles de routage a été élaborée durant les trente dernières
années. La diversité trouve son origine dans la recherche incessante et croissante de
protocoles de plus en plus optimisés, répondant aux impératifs de performance et tenant
compte de la multiplicité des contextes.
Nous allons décrire les protocoles célèbres, les plus utilisés, en mettant l’accent sur
leurs avantages et leurs inconvénients, en rappelant que tout est affaire de compromis.
Signalons, en premier lieu, que les protocoles de routage, peuvent être classés,
approximativement en trois catégories :
• Les protocoles à assignations fixées.
• Les protocoles à demande d’assignation.
• Les protocoles à accès aléatoires.
a- Les protocoles à assignations fixées
Pour cette classe de protocoles, les ressources disponibles sont réparties entre
les nœuds à long terme. Chaque nœud peut alors utiliser exclusivement les ressources
qui lui sont alloués sans risque de collisions. Le long terme, signifie ici, des durées
importantes de plusieurs minutes, de plusieurs heures, voire plus, par opposition avec
le court terme, pour lequel l’affectation des ressources a un horizon temporel de
quelques centaines de millisecondes au plus. Pour tenir compte des changements de
topologie, dus, par exemple, aux nœuds qui disparaissent ou aux nœuds nouvellement
déployés ou tout simplement aux changements induits par la mobilité, ces protocoles
doivent contenir des mécanismes de signalement pour renégocier l’allocation des
ressources.
b- Les protocoles à demande d’assignation
L’affectation exclusive de ressources aux nœuds est faite, dans ce cas sur le
court terme, typiquement, la durée nécessaire au traitement d’un paquet. Cette
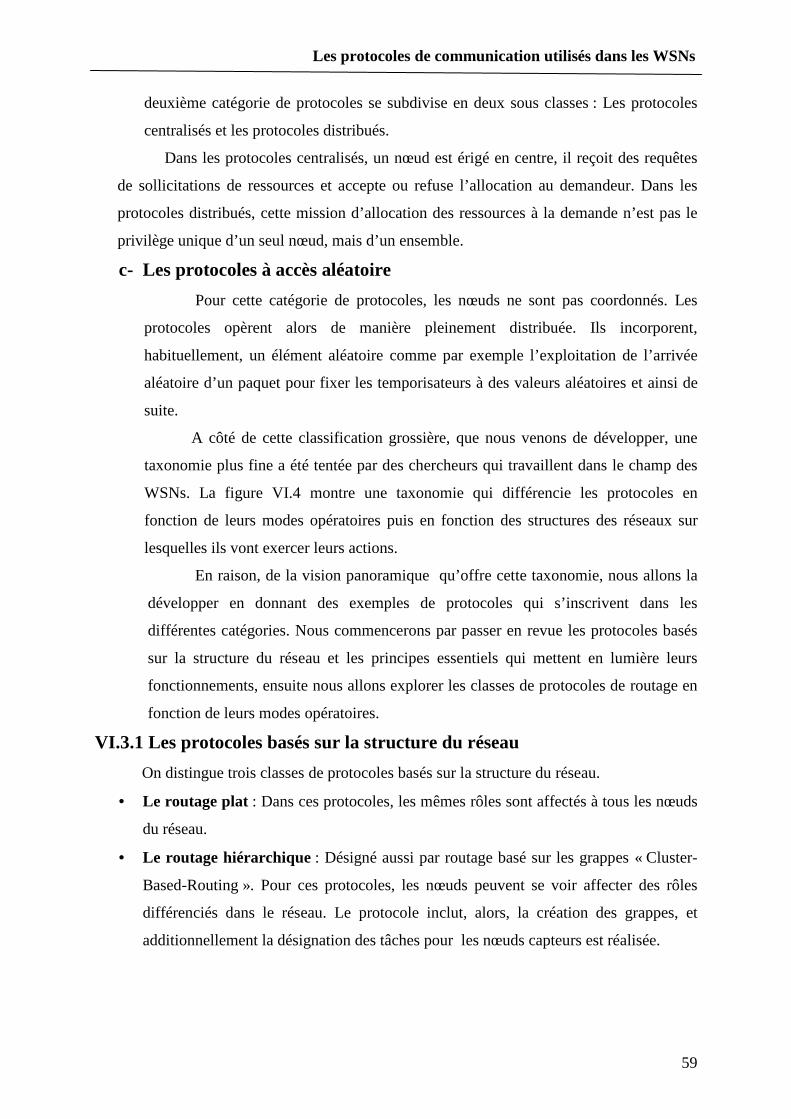
Les protocoles de communication utilisés dans les WSNs
59
deuxième catégorie de protocoles se subdivise en deux sous classes : Les protocoles
centralisés et les protocoles distribués.
Dans les protocoles centralisés, un nœud est érigé en centre, il reçoit des requêtes
de sollicitations de ressources et accepte ou refuse l’allocation au demandeur. Dans les
protocoles distribués, cette mission d’allocation des ressources à la demande n’est pas le
privilège unique d’un seul nœud, mais d’un ensemble.
c- Les protocoles à accès aléatoire
Pour cette catégorie de protocoles, les nœuds ne sont pas coordonnés. Les
protocoles opèrent alors de manière pleinement distribuée. Ils incorporent,
habituellement, un élément aléatoire comme par exemple l’exploitation de l’arrivée
aléatoire d’un paquet pour fixer les temporisateurs à des valeurs aléatoires et ainsi de
suite.
A côté de cette classification grossière, que nous venons de développer, une
taxonomie plus fine a été tentée par des chercheurs qui travaillent dans le champ des
WSNs. La figure VI.4 montre une taxonomie qui différencie les protocoles en
fonction de leurs modes opératoires puis en fonction des structures des réseaux sur
lesquelles ils vont exercer leurs actions.
En raison, de la vision panoramique qu’offre cette taxonomie, nous allons la
développer en donnant des exemples de protocoles qui s’inscrivent dans les
différentes catégories. Nous commencerons par passer en revue les protocoles basés
sur la structure du réseau et les principes essentiels qui mettent en lumière leurs
fonctionnements, ensuite nous allons explorer les classes de protocoles de routage en
fonction de leurs modes opératoires.
VI.3.1 Les protocoles basés sur la structure du réseau
On distingue trois classes de protocoles basés sur la structure du réseau.
• Le routage plat : Dans ces protocoles, les mêmes rôles sont affectés à tous les nœuds
du réseau.
• Le routage hiérarchique : Désigné aussi par routage basé sur les grappes « Cluster-
Based-Routing ». Pour ces protocoles, les nœuds peuvent se voir affecter des rôles
différenciés dans le réseau. Le protocole inclut, alors, la création des grappes, et
additionnellement la désignation des tâches pour les nœuds capteurs est réalisée.
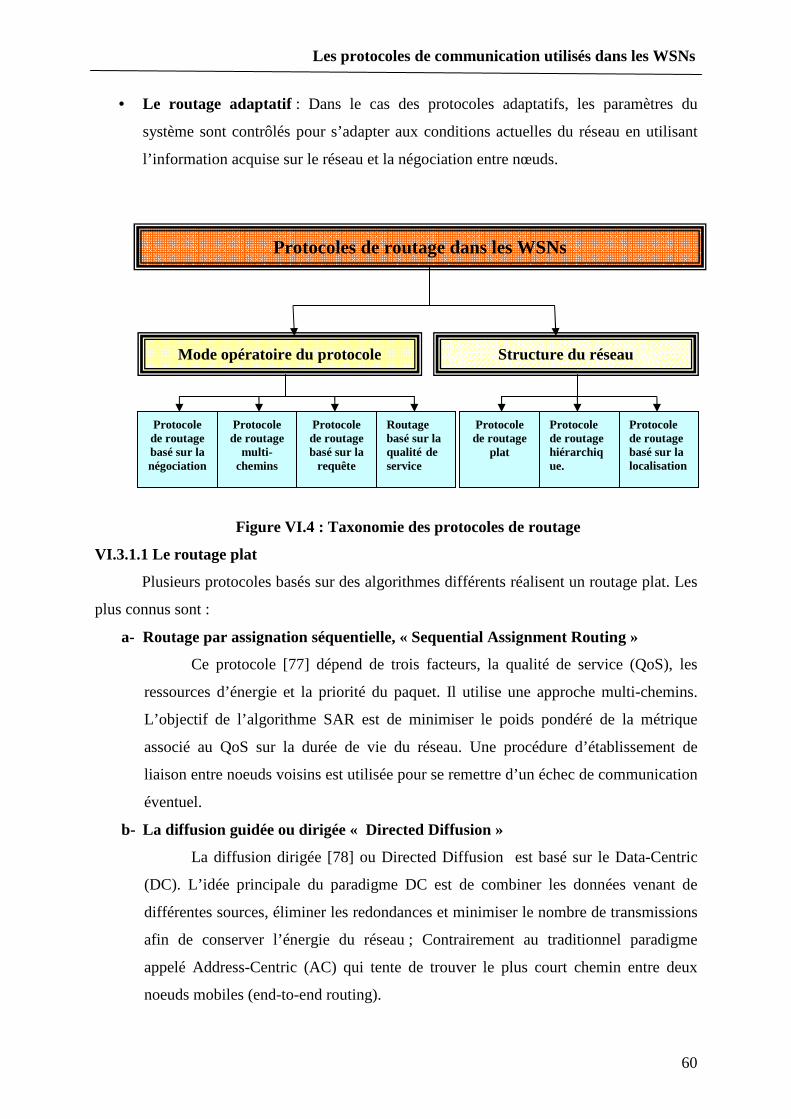
Les protocoles de communication utilisés dans les WSNs
60
• Le routage adaptatif : Dans le cas des protocoles adaptatifs, les paramètres du
système sont contrôlés pour s’adapter aux conditions actuelles du réseau en utilisant
l’information acquise sur le réseau et la négociation entre nœuds.
Figure VI.4 : Taxonomie des protocoles de routage
VI.3.1.1 Le routage plat
Plusieurs protocoles basés sur des algorithmes différents réalisent un routage plat. Les
plus connus sont :
a- Routage par assignation séquentielle, « Sequential Assignment Routing »
Ce protocole [77] dépend de trois facteurs, la qualité de service (QoS), les
ressources d’énergie et la priorité du paquet. Il utilise une approche multi-chemins.
L’objectif de l’algorithme SAR est de minimiser le poids pondéré de la métrique
associé au QoS sur la durée de vie du réseau. Une procédure d’établissement de
liaison entre noeuds voisins est utilisée pour se remettre d’un échec de communication
éventuel.
b- La diffusion guidée ou dirigée « Directed Diffusion »
La diffusion dirigée [78] ou Directed Diffusion est basé sur le Data-Centric
(DC). L’idée principale du paradigme DC est de combiner les données venant de
différentes sources, éliminer les redondances et minimiser le nombre de transmissions
afin de conserver l’énergie du réseau ; Contrairement au traditionnel paradigme
appelé Address-Centric (AC) qui tente de trouver le plus court chemin entre deux
noeuds mobiles (end-to-end routing).
Protocoles de routage dans les WSNs
Mode opératoire du protocole Structure du réseau
Protocole de routage basé sur la négociation
Protocole de routage
multi-chemins
Protocole de routage basé sur la
requête
Routage basé sur la qualité de service
Protocole de routage
plat
Protocole de routage hiérarchique.
Protocole de routage basé sur la localisation
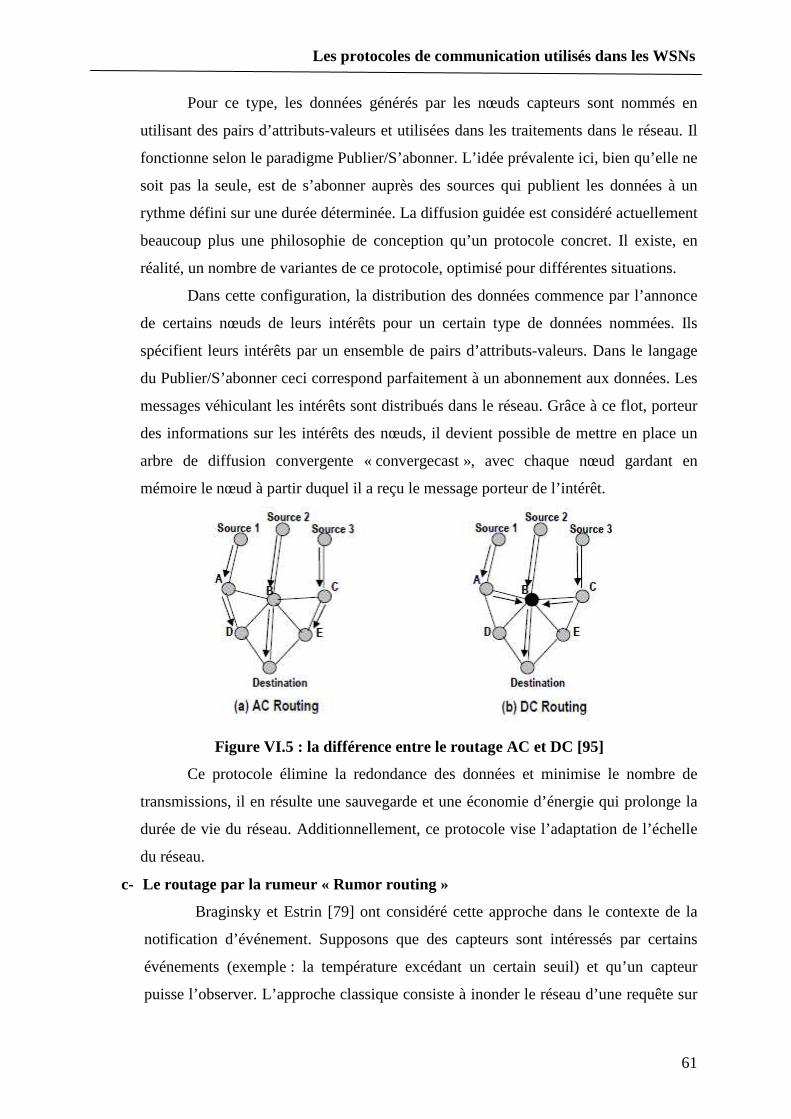
Les protocoles de communication utilisés dans les WSNs
61
Pour ce type, les données générés par les nœuds capteurs sont nommés en
utilisant des pairs d’attributs-valeurs et utilisées dans les traitements dans le réseau. Il
fonctionne selon le paradigme Publier/S’abonner. L’idée prévalente ici, bien qu’elle ne
soit pas la seule, est de s’abonner auprès des sources qui publient les données à un
rythme défini sur une durée déterminée. La diffusion guidée est considéré actuellement
beaucoup plus une philosophie de conception qu’un protocole concret. Il existe, en
réalité, un nombre de variantes de ce protocole, optimisé pour différentes situations.
Dans cette configuration, la distribution des données commence par l’annonce
de certains nœuds de leurs intérêts pour un certain type de données nommées. Ils
spécifient leurs intérêts par un ensemble de pairs d’attributs-valeurs. Dans le langage
du Publier/S’abonner ceci correspond parfaitement à un abonnement aux données. Les
messages véhiculant les intérêts sont distribués dans le réseau. Grâce à ce flot, porteur
des informations sur les intérêts des nœuds, il devient possible de mettre en place un
arbre de diffusion convergente « convergecast », avec chaque nœud gardant en
mémoire le nœud à partir duquel il a reçu le message porteur de l’intérêt.
Figure VI.5 : la différence entre le routage AC et DC [95]
Ce protocole élimine la redondance des données et minimise le nombre de
transmissions, il en résulte une sauvegarde et une économie d’énergie qui prolonge la
durée de vie du réseau. Additionnellement, ce protocole vise l’adaptation de l’échelle
du réseau.
c- Le routage par la rumeur « Rumor routing »
Braginsky et Estrin [79] ont considéré cette approche dans le contexte de la
notification d’événement. Supposons que des capteurs sont intéressés par certains
événements (exemple : la température excédant un certain seuil) et qu’un capteur
puisse l’observer. L’approche classique consiste à inonder le réseau d’une requête sur
Les protocoles de communication utilisés dans les WSNs
62
l’événement ou sur ses notifications sur le réseau entier. Le routage par la rumeur
n’inonde pas le réseau par l’information portant sur l’occurrence d’un événement mais
installe un petit nombre de chemins dans le réseau en y répandant un ou plusieurs
agents. Chacun de ces agents va se propager d’un nœud à l’autre et chemin faisant il
va installer l’information de routage concernant l’événement et ceci dans chaque
nœud visité. Lorsque un nœud tente une requête sur l’événement, il dissémine lui-
même un ou plusieurs agents. Un tel agent de recherche est envoyé à travers le réseau
jusqu’à ce qu’il croise un chemin pré-installé de l’événement. Il saura alors comment
trouver l’événement.
Comme, on peut s’en rendre compte, ce protocole de routage a un caractère
probabiliste. La probabilité pour trouver un nœud disposant de l’information sur
l’événement a été estimée à 69% pour deux chemins. Cette probabilité atteint 99.7%
pour cinq chemins.
d. Le routage par gradient « (GRAB) »
L’algorithme de routage par gradient [80] attribue une hauteur à chaque nœud.
Le nombre de sauts qui sépare le nœud du puits est un candidat, qui exprime cette
grandeur, pour gérer de manière efficiente l’énergie ; Le couple formé par le nombre
de sauts qui sépare le nœud du puits et l’énergie résiduelle du nœud peut se substituer
au choix précédent pour exprimer la hauteur. L’attribution de la hauteur au nœud se
fait lors d’une phase d’initialisation. Au cours d’une première étape, le puit envoie un
message avec une hauteur courante nulle, dans une seconde phase chaque nœud
destinataire de ce message, initialise sa hauteur à la valeur courante incrémentée de 1
et renvoie le message avec cette nouvelle valeur comme hauteur courante. Au terme
de ce processus d’initialisation, tout nœud dispose de sa hauteur et de la hauteur du
proche voisinage. L’information relative à la hauteur des voisins peut être explorée
par l’envoi de messages périodiques.
Une fois les hauteurs attribuées, la différence entre la hauteur d’un nœud et la
hauteur de son voisin forme le gradient sur ce lien. Des techniques auxiliaires, tel par
exemple, l’agrégation des données, ont été élaborées et viennent en appoint pour
améliorer l’efficacité de l’algorithme en étalant le trafic pour l’équilibrer
uniformément sur le réseau. Sur ce dernier les nœuds font office de relais sur des
chemins multiples ; Il est alors possible de combiner des entités pour agréger des
donnés. D’un autre coté, trois techniques différentes d’étalement des données ont été
proposées :
Les protocoles de communication utilisés dans les WSNs
63
� Un schéma stochastique : qui consiste à choisir de façon aléatoire entre deux
liens qui ont même gradient.
� Un schéma basé sur l’énergie : lorsque l’énergie d’un nœud chute au dessous
d’une valeur seuil, ce noeud augmente sa hauteur pour augmenter le gradient.
� Un schéma basé sur le flot : l’idée est de dissuader les nouveaux flots pour les
éloigner des nœuds qui font partie du chemin d’autres flots.
e. Le routage d’informations par la négociation
L’un des protocoles de routage opérant par la négociation est désigné par
l’acronyme SPIN [81,82] (Sensors Protocols for Information via Negotiation). C’est
l’un des premiers protocoles construits pour mettre en œuvre le mécanisme de routage
centré-données. L’idée essentielle derrière le protocole SPIN est de nommer les
données en utilisant des descripteurs de hauts niveaux ou des méta données. Avant la
transmission, ces méta donnés sont échangées entre capteurs par un mécanisme
d’annonce qui est la caractéristique clé du protocole SPIN.
A chaque réception d’une donnée nouvelle, le nœud l’annonce à ses voisins ou
aux nœuds qui ont déjà exprimé leurs intérêts pour ce type de données. La figure(п)
illustre le fonctionnement du protocole SPIN, on voit dans cette figure le mécanisme de
propagation s’opérant par la négociation.
• Le nœud NA commence par annoncer les données à disposition au nœud NB.
• Le nœud NB émet une requête pour solliciter les données
• Le nœud NA livre alors les données à NB.
• Le nœud NB va alors réitérer l’action de NA, et alors de proche en proche les
données vont se propager dans le réseau.
L’un des avantages du protocole SPIN tient au fait que les changements de
topologie sont localisés, puisque chaque nœud a besoin de connaître uniquement les
sauts de ces voisins. Le gain en terme de dissipation d’énergie est dans un rapport de
3.5 par rapport à un protocole qui inonde le réseau de façon non sélective. Le
mécanisme de négociation parvient en général à réduire de presque de moitié les
données redondantes. Toutefois, le mécanisme d’annonce du protocole SPIN ne peut
pas garantir la livraison des données. Par exemple, si les nœuds qui ont de l’intérêt pour
les données sont loin du nœud source et que les nœuds entre la source et la destination
ne manifestent aucun intérêt pour les données. Dans cette situation défavorable, les
Les protocoles de communication utilisés dans les WSNs
64
données ne seront jamais délivrées. Par conséquent, SPIN n’est pas considéré comme
un bon choix, pour les applications intégrant la détection d’intrus, qui exigent une
fiabilité en matière de livraison des paquets de données à intervalles réguliers.
f. Energy aware routing
Shah et Rabaey [83] ont proposé l’usage d’un ensemble de chemins sous-
optimales de façon à augmenter occasionnellement la durée de vie du réseau. Ces
chemins sont choisis en utilisant une fonction probabiliste qui dépend de la
consommation d’énergie sur chaque chemin. Le critère de survie du réseau est
considéré alors comme la métrique principale ciblée par ce type de protocoles.
Cette approche est basée sur l’argument de taille suivant:
Si on utilise toujours le chemin de faible consommation d’énergie, ceci aboutira
fatalement à une diminution drastique des ressources d’énergie des nœuds appartenant
à ce chemin. Il risque alors de devenir impraticable.
Pour éviter cette situation et accroître la durée de vie du réseau, il est alors
préférable de router les données sur plusieurs chemins avec une certaine probabilité.
Ce protocole suppose que chaque nœud puisse faire l’objet d’un adressage basé
sur une classe d’adresses qui contient les localisations et les types de nœuds. Il se
déroule en 3 phases :
• La phase de préparation : elle consiste à localiser les chemins et à créer des tables de
routage. Lors de cette phase, le coût total en énergie est calculé pour chaque nœud.
Ainsi, si la requête est envoyé du nœud Ni vers le nœud Nj, ce dernier calculera le
coût induit sur ce chemin par :
CNiNj =Coût (Ni) +Metric (Nj, Ni)
Dans cette expression, la métrique de l’énergie utilisée comptabilisera la
consommation à la transmission, à la réception et bien sûr l’énergie résiduelle des
nœuds.
Au terme de ce calcul, les chemins présentant des coûts élevés seront bien
évidemment écartés. La sélection du nœud est faite en fonction de la proximité à la
destination.
Le nœud affecte une probabilité à chacun de ces voisins dans la table de routage
correspondant à un chemin formé. La probabilité est inversement proportionnelle au coût.
∑∈
=
FTk NjNk
NjNiNjNi
C
CP
1
1
,
Les protocoles de communication utilisés dans les WSNs
65
Le nœud Nj calcule, alors le coût moyen, pour atteindre la destination, en utilisant
les voisins dans la table d’envoi, et ceci en utilisant la formule :
Ce coût moyen est fixé dans le champ coût de la requête
• La phase de communication des données :
Au cours de cette phase, chaque nœud procède à l’envoi par un choix aléatoire
du nœud voisin, à partir de la table de routage en utilisant les probabilités. C’est ce
choix aléatoire qui garantit que le chemin emprunté n’est pas le même à chaque fois et
qui permettra de maintenir les énergies des nœuds à des niveaux acceptables
permettant de prolonger la durée de vie du réseau.
• La phase de maintenance des chemins :
Pour s’adapter aux changements dans le réseau, les chemins sont ré explorés de
temps à autre pour s’assurer que l’on garde toujours les meilleurs.
Des simulations ont été menées pour mesurer le gain en énergie et en allongement
de la durée de vie. Ainsi, une comparaison avec l’algorithme DD montre un gain
d’énergie de 21.5% et un allongement de la durée de vie de 44%.
g. L’algorithme du coût minimal d’envoi « Minimum cost forwarding Algorithm »,
(MCFA)
Cet algorithme [84] considère que la direction du routage est toujours connue
(puits externe fixe), chaque nœud doit connaître le chemin de moindre coût qui le relie
au puits. Il maintient le moindre coût estimé le reliant au puits. Chaque message
envoyé par le nœud fait l’objet d’une large diffusion à ses voisins.
VI.3.1.2 Le routage hiérarchique
L’adaptation à l’augmentation de la taille du réseau et les capacités d’ajustement
(scalability) sont des attributs fondamentaux visés en phase de conception du réseau. Un
réseau à étage unique peut causer la surcharge des points d’entrée du réseau lorsque la densité
des capteurs augmente. Ce type d’architecture ne permet pas l’adaptation à l’échelle pour un
large ensemble de capteurs couvrant une grande aire d’intérêt, puisque typiquement les
capteurs sont incapables de communication sur de longs parcours. Pour permettre au système
de se débrouiller avec la charge additionnelle et d’être capable de couvrir un large domaine
sans dégradation de service, la mise en grappes dans les réseaux (clustering) a été mise en
œuvre dans les protocoles de routage. L’objectif principal du routage hiérarchique est de
NiNjFTi
NiNj CPNjCoût ,,)( ∑∈
=
Les protocoles de communication utilisés dans les WSNs
66
maintenir de façon efficace la consommation d’énergie des nœuds en les impliquant dans des
communications dans un cluster particulier et en procédant à l’agrégation et la fusion des
données dans le but de diminuer la masse des messages transmis au puits. La formation du
cluster est basée sur la réserve d’énergie des capteurs et de leurs proximités de la tête du
cluster.
Des protocoles basés sur le routage hiérarchique ont vu le jour. L’un des tout premiers
est LEACH, mais il y en bien d’autres sur les quelles nous allons nous arrêter.
a. LEACH « Low energy adaptation clustering hierarchy »
LEACH [85] est l’un des algorithmes de routage hiérarchique les plus
populaires. L’idée qui gouverne le fonctionnement de LEACH est de former des
grappes de nœuds de capteurs basés sur l’intensité du signal reçu et d’utiliser ensuite
les têtes du cluster local comme des routeurs vers les puits. Ceci devrait évidemment
économiser de l’énergie puisque les transmissions seront effectuées uniquement par
les têtes des clusters plutôt que par tous les nœuds. Le nombre optimal de têtes de
clusters est estimé à 5% du nombre total de nœuds.
Tous les traitements de données tel que la fusion et l’agrégation se déroulent
localement au cluster.
Les têtes de cluster sont dynamiques, elles changent aléatoirement avec le
temps pour équilibrer la dissipation d’énergie par les nœuds. Cette décision est prise
par le nœud en choisissant un nombre aléatoire compris entre 0 et 1.
Le nœud devient alors tête de cluster pendant cette période si le nombre tiré au
hasard est inférieur au seuil suivant :
autrementGnprp
pnT 0et si
)/1 mod (1)( ∈
−=
Où p est le pourcentage de clusterhead souhaité, r le tour courant, G
l’ensemble des nœuds qui n’ont pas été tête de cluster au cours des 1/p tours
précédents.
Sur le registre des avantages de LEACH, nous citons une réduction d’un
facteur 7 de la dissipation d’énergie comparativement avec la communication directe
et un facteur de 4 à 8 avec le protocole de routage à minimum de transmission. Parmi
les autres caractéristiques de LEACH citons aussi le fait qu’il soit complètement
distribué et qu’il n’exige pas la connaissance du réseau. A sa charge, cependant, son
fonctionnement à saut unique, c'est-à-dire que chaque nœud peut transmettre
Les protocoles de communication utilisés dans les WSNs
67
directement à la tête du cluster ou au puit. Par conséquent LEACH n’est pas
applicable aux réseaux déployés sur de vastes régions. En outre, l’idée du clustering
dynamique amène des frais supplémentaires; le changement de tête du cluster, les
annonces, etc...vont diminuer l’économie d’énergie
b. PEGASIS et Hierarchical PEGASIS, « power efficient gathering sensor
information systems »
PEGASIS [86] est une amélioration du protocole LEACH. Au lieu de former
des clusters multiples, PEGASIS forme des chaînes à partir des nœuds de capteurs de
sorte que chaque nœud transmet et reçoit de son voisin, et un seul nœud de la chaîne
est sélectionné pour assurer la transmission vers la station de base. Les données
rassemblées se déplacent d’un nœud à l’autre, elles sont agrégés et éventuellement
envoyés vers la station de base. La construction de la chaîne se fait selon une
approche gloutonne.
A la différence de LEACH, PEGASIS réalise un routage multi-sauts en
formant des chaînes et en sélectionnant un nœud et un seul pour transmettre vers la
station de base au lieu que cela se fasse avec plusieurs nœuds. Une comparaison avec
LEACH montre que PEGASIS dépasse en performance LEACH de 100 à 300 % pour
des réseaux de différentes tailles et de différentes topologies. Ce gain en performance
est attribué à l’élimination des frais supplémentaires générés par le clustering
dynamique et la réduction du nombre de transmissions et de réceptions en utilisant
l’agrégation des données.
A coté de ces aspects positifs, mentionnons toutefois des retards excessifs pour
des nœuds très distants sur la chaîne, ainsi que la possibilité d’apparition de goulots
d’étranglements.
A coté de PEGASIS, Hierarchical PEGASIS [87] a vu le jour comme une
extension du premier pour tenter de palier aux retards encourus durant la transmission
vers la station de base et propose d’apporter une solution à l’accumulation des
données en considérant la métrique énergie x retard. Afin de réduire les retards
invoqués pour PEGASIS, des transmissions simultanées de messages sont exécutés.
Pour éviter les collisions et les interférences entre les signaux des capteurs
deux approches ont été tentées. La première incorpore le codage du signal (CDMA)
(code division multiple access). La seconde approche consiste à autoriser uniquement
les nœuds spatialement séparés à transmettre en même temps.
Les protocoles de communication utilisés dans les WSNs
68
Le protocole basé sur des chaînes avec le codage de signaux CDMA autorise
la construction de chaînes de nœuds qui forme une structure hiérarchique en arbre.
Chaque nœud sélectionné dans un niveau particulier, transmet les données au nœud se
trouvant dans un niveau supérieur de la hiérarchie. Cette méthode assure la
transmission parallèle et réduit significativement le retard. Puisque l’arbre est
équilibré, le retard sera en O (log N) où N est le nombre de nœuds.
La seconde approche, n’utilisant pas le CDMA, crée une hiérarchie à trois
niveaux entre les nœuds. Les effets d’interférence se trouvent réduits si on planifie
avec attention les transmissions simultanées. Une amélioration d’un facteur 60 a été
invoquée pour un tel protocole comparé à la forme de base de PEGASIS.
c. Les protocoles TEEN et APTEEN « Threshold sensitive Energy Efficient sensor
Network protocole »,
TEEN [88] est un protocole hiérarchique conçue pour être sensible à des
variations soudaines des attributs des grandeurs observées (la température par
exemple). La sensibilité est fondamentale pour les applications où le temps revêt un
caractère critique. Pour ces applications, on attend du réseau une réaction prompte.
TEEN vise une approche hiérarchique avec un mécanisme centré-données.
L’architecture du réseau de capteurs est réalisée en groupant hiérarchiquement les
nœuds de sorte que les nœuds les plus proches forment des clusters et ce procédé va
vers le niveau secondaire jusqu’à atteindre le puits. Une fois les clusters formés, la
tête du cluster diffuse deux seuils pour les nœuds, l’un dit « hard »et l’autre
« soft »pour les grandeurs observées. Le seuil « hard » est la valeur minimale possible
d’un attribut qui fait déclencher l’émetteur du nœud capteur et lui fait transmettre un
message à la tête du cluster. Ainsi, le seuil « hard » permet aux nœuds de transmettre
seulement lorsque les grandeurs observées ont des valeurs dans un domaine précis,
réduisant ainsi de façon significative le nombre de transmissions. Lorsqu’un nœud
détecte une valeur supérieur ou égale au seuil « hard », il transmet les données
uniquement quand la valeur de l’attribut change d’une valeur supérieur ou égale du
seuil « soft ». Et comme conséquence, le seuil « soft » va lui aussi réduire le nombre
de transmissions. On peut même ajuster les deux seuils de façon telle qu’on peut
contrôler le nombre de paquets transmis. Cependant TEEN n’est pas un bon protocole
pour les applications nécessitant des rapports périodiques puisque l’utilisateur ne
reçoit aucune donnée si les seuils ne sont pas atteints.
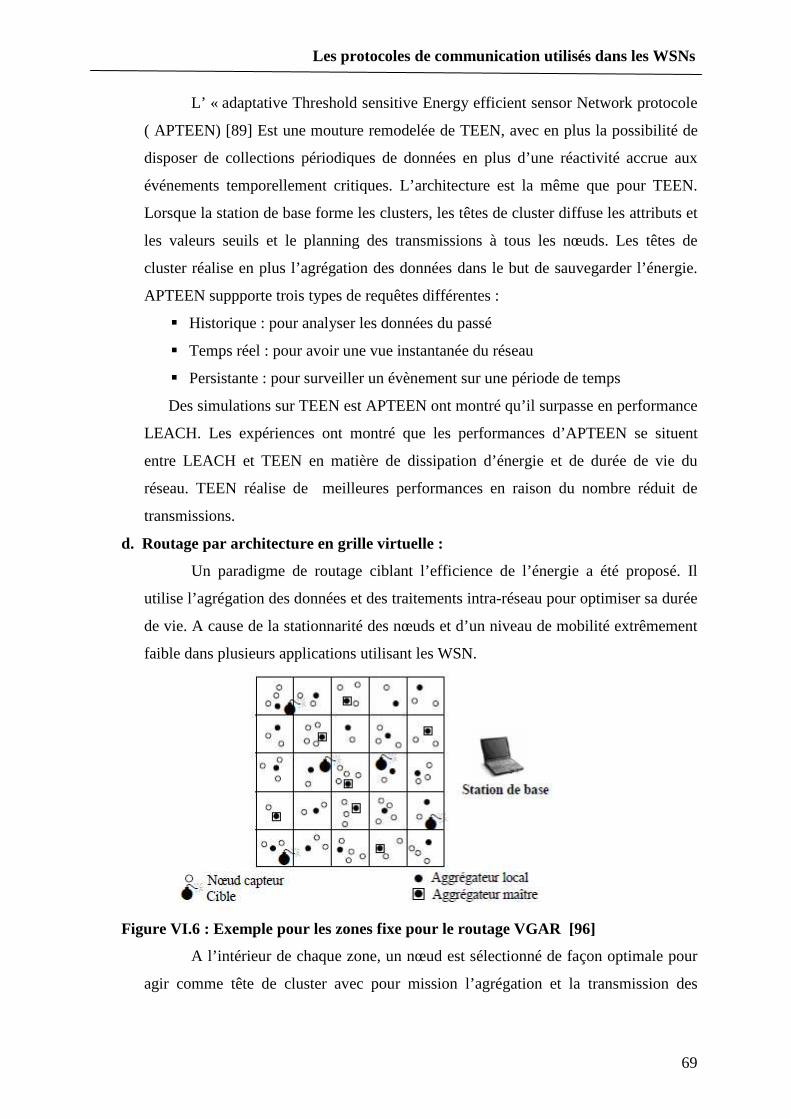
Les protocoles de communication utilisés dans les WSNs
69
L’ « adaptative Threshold sensitive Energy efficient sensor Network protocole
( APTEEN) [89] Est une mouture remodelée de TEEN, avec en plus la possibilité de
disposer de collections périodiques de données en plus d’une réactivité accrue aux
événements temporellement critiques. L’architecture est la même que pour TEEN.
Lorsque la station de base forme les clusters, les têtes de cluster diffuse les attributs et
les valeurs seuils et le planning des transmissions à tous les nœuds. Les têtes de
cluster réalise en plus l’agrégation des données dans le but de sauvegarder l’énergie.
APTEEN suppporte trois types de requêtes différentes :
� Historique : pour analyser les données du passé
� Temps réel : pour avoir une vue instantanée du réseau
� Persistante : pour surveiller un évènement sur une période de temps
Des simulations sur TEEN est APTEEN ont montré qu’il surpasse en performance
LEACH. Les expériences ont montré que les performances d’APTEEN se situent
entre LEACH et TEEN en matière de dissipation d’énergie et de durée de vie du
réseau. TEEN réalise de meilleures performances en raison du nombre réduit de
transmissions.
d. Routage par architecture en grille virtuelle :
Un paradigme de routage ciblant l’efficience de l’énergie a été proposé. Il
utilise l’agrégation des données et des traitements intra-réseau pour optimiser sa durée
de vie. A cause de la stationnarité des nœuds et d’un niveau de mobilité extrêmement
faible dans plusieurs applications utilisant les WSN.
Figure VI.6 : Exemple pour les zones fixe pour le routage VGAR [96]
A l’intérieur de chaque zone, un nœud est sélectionné de façon optimale pour
agir comme tête de cluster avec pour mission l’agrégation et la transmission des
Les protocoles de communication utilisés dans les WSNs
70
données. En raison de l’architecture figée il est possible d’implémenter des stratégies
spécifiques pour l’agrégation des données.
VI.3.1.3 Le routage basé sur la localisation
Il y a quelques protocoles de routage basé essentiellement sur la localisation :
• Le réseau de communication à petit minimum d’énergie.(small minimum
Energy communication Network SMECN)
• Le routage par fidélité géographique adaptative (Geografic Adaptative fidelity)
• Routage géographique énergie (geografic and energy aware routing)
a. Le routage MECN
c’est un protocole qui a été proposé [90] en vue de calculer un sous réseau
pour lequel l’énergie est efficiente, ce protocole (MECN) a été appliqué pour trouver
le minimum d’énergie pour un certain réseau de capteurs utilisant un GPS à basse
puissance. Le MECN identifie alors une région relais pour chaque nœud. La région
« relais » est constituée de l’ensemble des nœuds d’un environnement où la
transmission à travers ces nœuds est plus efficiente énergétiquement que la
transmission directe. L’enclos pour un nœud i est crée en faisant la réunion de toutes
les régions relais que le nœud i peut atteindre.
L’idée principale du MECN est de trouver un sous réseau possédant un
nombre limité de nœuds et exigeant moins de puissance pour assurer la transmission
entre n’importe quelle paire de nœuds. De cette manière, des chemins ayant un
minimum global de puissance sont trouvés, sans qu’il y ait une nécessité de considérer
tous les nœuds du réseau. Ceci est réalisé en procédant à une recherche locale pour
chaque nœud en explorant sa région relais.
MECN est un protocole qui s’auto-reconfigure, il peut donc s’adapter
dynamiquement en cas d’échec d’un nœud ou de déploiement de nouveaux nœuds.
SMECN [91] est une extension de MECN. Alors que dans MECN, il est supposé que
tout nœud est en mesure de transmettre aux autres, ce qui n’est pas toujours possible ;
dans SMECN les obstacles possibles entre une paire de nœuds quelconque sont
considérés. Toutefois, comme dans le cas de MECN, le réseau est supposé pleinement
connecté. Le sous-réseau construit par SMECN pour le minimum d’énergie est plus
petit en terme de contours que celui obtenu par MECN. Aussi, faut il noter, le fait que
le sous-réseau obtenu par SMECN est plus petit que celui trouvé par MECN si la
région de diffusion est circulaire autour du nœud émetteur pour une puissance donnée.
En utilisant, le langage de la théorie des graphes, on dira que le sous graphe G’ du
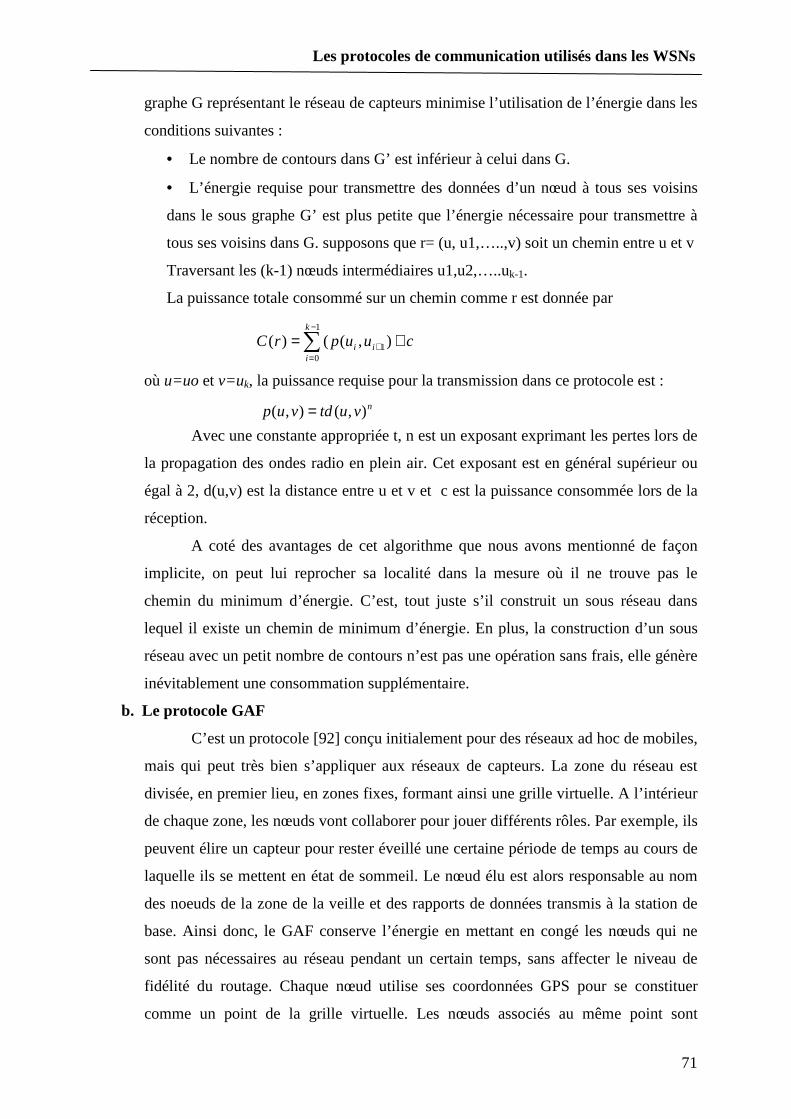
Les protocoles de communication utilisés dans les WSNs
71
graphe G représentant le réseau de capteurs minimise l’utilisation de l’énergie dans les
conditions suivantes :
• Le nombre de contours dans G’ est inférieur à celui dans G.
• L’énergie requise pour transmettre des données d’un nœud à tous ses voisins
dans le sous graphe G’ est plus petite que l’énergie nécessaire pour transmettre à
tous ses voisins dans G. supposons que r= (u, u1,…..,v) soit un chemin entre u et v
Traversant les (k-1) nœuds intermédiaires u1,u2,…..uk-1.
La puissance totale consommé sur un chemin comme r est donnée par
où u=uo et v=uk, la puissance requise pour la transmission dans ce protocole est :
Avec une constante appropriée t, n est un exposant exprimant les pertes lors de
la propagation des ondes radio en plein air. Cet exposant est en général supérieur ou
égal à 2, d(u,v) est la distance entre u et v et c est la puissance consommée lors de la
réception.
A coté des avantages de cet algorithme que nous avons mentionné de façon
implicite, on peut lui reprocher sa localité dans la mesure où il ne trouve pas le
chemin du minimum d’énergie. C’est, tout juste s’il construit un sous réseau dans
lequel il existe un chemin de minimum d’énergie. En plus, la construction d’un sous
réseau avec un petit nombre de contours n’est pas une opération sans frais, elle génère
inévitablement une consommation supplémentaire.
b. Le protocole GAF
C’est un protocole [92] conçu initialement pour des réseaux ad hoc de mobiles,
mais qui peut très bien s’appliquer aux réseaux de capteurs. La zone du réseau est
divisée, en premier lieu, en zones fixes, formant ainsi une grille virtuelle. A l’intérieur
de chaque zone, les nœuds vont collaborer pour jouer différents rôles. Par exemple, ils
peuvent élire un capteur pour rester éveillé une certaine période de temps au cours de
laquelle ils se mettent en état de sommeil. Le nœud élu est alors responsable au nom
des noeuds de la zone de la veille et des rapports de données transmis à la station de
base. Ainsi donc, le GAF conserve l’énergie en mettant en congé les nœuds qui ne
sont pas nécessaires au réseau pendant un certain temps, sans affecter le niveau de
fidélité du routage. Chaque nœud utilise ses coordonnées GPS pour se constituer
comme un point de la grille virtuelle. Les nœuds associés au même point sont
cuuprC i
k
ii += +
−
=∑ ),(()( 1
1
0
nvutdvup ),(),( =
Les protocoles de communication utilisés dans les WSNs
72
considérés comme équivalents en matière de coût de routage des paquets. Cette
équivalence est alors exploitée pour mettre en sommeil quelques nœuds localisés dans
un secteur particulier de la grille avec évidemment le souci de sauvegarder l’énergie et
la prolongation de la durée du réseau. Il y a trois états différents dans GAF,
découverte, activité (reflétant la participation au routage) et sommeil. Afin de gérer la
mobilité, chaque nœud de la grille estime le temps permis pour quitter la grille et
envoie cette estimation à ses voisins. Les voisins ajustent la durée du sommeil avec
l’impératif de maintenir la fidélité du routage. La relève entre équipes de capteurs se
fait avec le souci de l’efficacité et du maintien de la qualité du service. Ainsi avant
que les nœuds actifs ne quittent (se mettent en sommeil), les nœuds en sommeil se
réveillent et l’un d’eux devient immédiatement actif.
Figure VI.7 : Un exemple de découpage en zone dans un réseau de capteurs [95]
GAF a été implémenté aussi bien pour un contexte de non mobilité
(GAF_basic) et en situation de mobilité (GAF-mobility adaptation) des nœuds. Les
résultats des simulations ont montré que GAF est au moins aussi performant que les
protocoles de routage ad hoc en terme de latence et de perte de paquets et qu’à qualité
de service égale il permet de prolonger la durée de vie.
Par rapport à la taxonomie que nous avons évoqué, GAF peut être vu, aussi
bien comme un protocole basé sur la localisation que comme un protocole à caractère
hiérarchique, Entendu dans ce cas que le « clustering » se fait sur la base de la
localisation géographique. Pour chaque secteur particulier de la grille un nœud
représentatif agit comme leader pour garantir la transmission aux autres nœuds, mais
il ne fait ni agrégation ni fusion, comme dans le cas des protocoles hiérarchiques que
nous avons préalablement invoqués.
Les protocoles de communication utilisés dans les WSNs
73
c. Le « geographic and Energy Aware Routing »(GEAR)
Yu et Al [93] ont discuté et argumenté l’utilisation de l’information
géographique pendant la dissémination des requêtes dans les régions appropriées
puisque les requêtes de données incluent les attributs géographiques.
Le protocole GEAR utilise l’énergie et informe géographiquement les voisins
sélectionnés sur une base heuristique pour router le paquet vers la région de
destination. L’idée de base est de restreindre le nombre d’intérêts, que nous avons
évoqué avec le protocole de diffusion guidé, en ne considérant qu’une certaine région
au lieu d’envoyer à l’intégralité du réseau. En précédent, de la sorte, GEAR réussit à
conserver l’énergie beaucoup plus que ne le fera la diffusion dirigée.
Chaque nœud dans GEAR garde un coup estimé et un coup appris (mesuré par
apprentissage) pour atteindre la destination à travers les voisins. Le coût estimé est une
combinaison de l’énergie résiduelle et de la distance le séparant de la destination. Le
coût appris est un raffinement du coût estimé comptabilité pour le routage autour des
trous dans le réseau. Par trou, nous entendons le schéma qui se produit lorsque un
nœud n’a de voisin proche dans la région cible autre que lui-même. En cas d’absence
de trous, le coût estimé s’identifie alors au coût appris. Ce dernier est propagé d’un
saut en arrière à chaque fois qu’un paquet atteint la destination de sorte que le routage
du prochain paquet y sera ajusté. Cet algorithme GEAR se déroule en deux phases :
Expédition des paquets à travers la région cible
A la réception d’un paquet, un nœud vérifie ses voisins pour voir s’il
n’en existe pas un qui soit plus proche que lui de la région cible. S’il en existe
plus qu’un, le voisin le plus proche de la région cible est sélectionné comme
étant le prochain saut. Si, tous s’avèrent plus loin que lui, cela signifie la
présence d’un trou. Dans ce cas l’un d’eux est trié sur le volet pour se charger
de la transmission en se basant sur le coût appris.
Ce choix, peut être, mis à jour conformément à la convergence du coût
appris au cours de la livraison des paquets.
L’envoi des paquets à l’intérieur de la région
Si le paquet a atteint la région, il peut faire l’objet de diffusion dans
cette région soit par un envoi géographique récursif ou par inondation
restreinte. Cette dernière, est bien indiquée, lorsque les capteurs ne sont pas
disséminés avec une forte densité. Dans les réseaux à forte densité, la
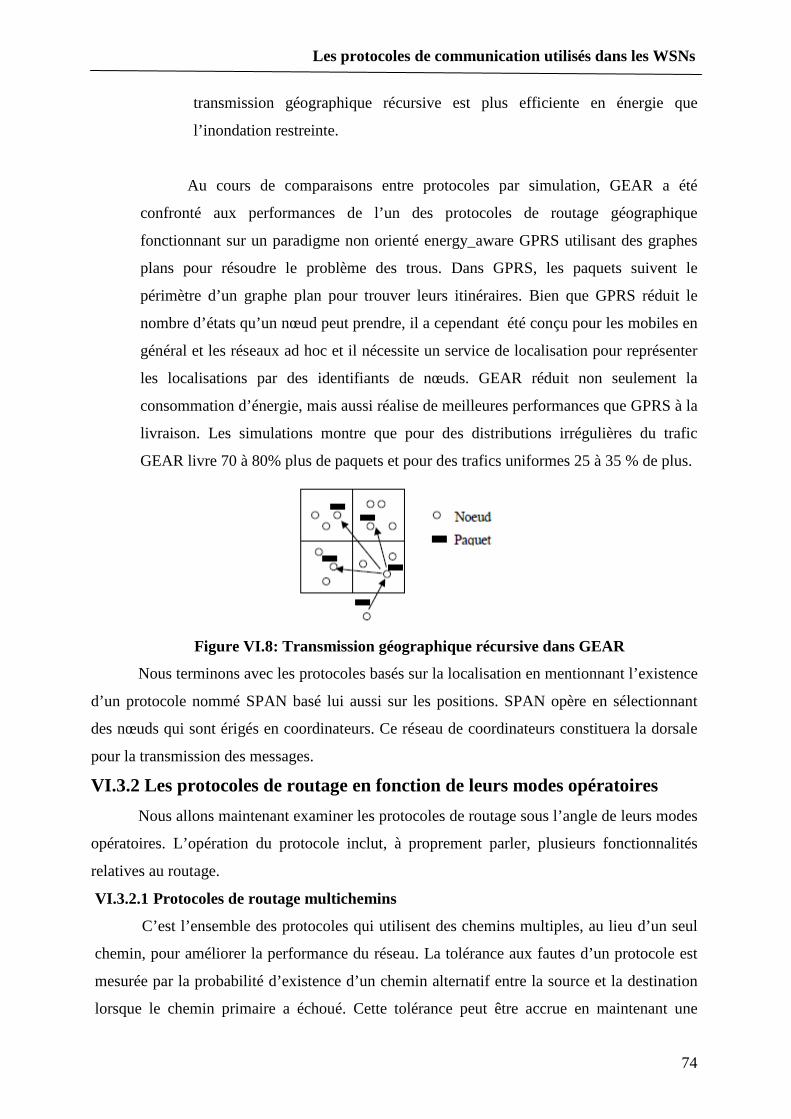
Les protocoles de communication utilisés dans les WSNs
74
transmission géographique récursive est plus efficiente en énergie que
l’inondation restreinte.
Au cours de comparaisons entre protocoles par simulation, GEAR a été
confronté aux performances de l’un des protocoles de routage géographique
fonctionnant sur un paradigme non orienté energy_aware GPRS utilisant des graphes
plans pour résoudre le problème des trous. Dans GPRS, les paquets suivent le
périmètre d’un graphe plan pour trouver leurs itinéraires. Bien que GPRS réduit le
nombre d’états qu’un nœud peut prendre, il a cependant été conçu pour les mobiles en
général et les réseaux ad hoc et il nécessite un service de localisation pour représenter
les localisations par des identifiants de nœuds. GEAR réduit non seulement la
consommation d’énergie, mais aussi réalise de meilleures performances que GPRS à la
livraison. Les simulations montre que pour des distributions irrégulières du trafic
GEAR livre 70 à 80% plus de paquets et pour des trafics uniformes 25 à 35 % de plus.
Figure VI.8: Transmission géographique récursive dans GEAR
Nous terminons avec les protocoles basés sur la localisation en mentionnant l’existence
d’un protocole nommé SPAN basé lui aussi sur les positions. SPAN opère en sélectionnant
des nœuds qui sont érigés en coordinateurs. Ce réseau de coordinateurs constituera la dorsale
pour la transmission des messages.
VI.3.2 Les protocoles de routage en fonction de leurs modes opératoires
Nous allons maintenant examiner les protocoles de routage sous l’angle de leurs modes
opératoires. L’opération du protocole inclut, à proprement parler, plusieurs fonctionnalités
relatives au routage.
VI.3.2.1 Protocoles de routage multichemins
C’est l’ensemble des protocoles qui utilisent des chemins multiples, au lieu d’un seul
chemin, pour améliorer la performance du réseau. La tolérance aux fautes d’un protocole est
mesurée par la probabilité d’existence d’un chemin alternatif entre la source et la destination
lorsque le chemin primaire a échoué. Cette tolérance peut être accrue en maintenant une
Les protocoles de communication utilisés dans les WSNs
75
multiplicité de chemins entre la source et la destination au dépends de l’augmentation de la
consommation d’énergie et de l’augmentation du trafic. Ces chemins alternatifs sont
entretenus par des envois de messages et procurent une fiabilité supplémentaire au dépends
d’une rallonge des frais. Parmi les approches qui ont été proposées pour améliorer le routage
multi- chemins celle qui consiste à router les données à travers les nœuds du chemin
possédant l’énergie résiduelle la plus large et de basculer vers un autre chemin dés que ce
dernier se révèle meilleur. En adoptant cette stratégie, les nœuds du chemin primaire ne vont
pas épuiser continûment leurs ressources en énergie en utilisant toujours le même chemin.
Une approche alternative consiste à utiliser occasionnellement un ensemble de chemins sous
optimaux pour augmenter la durée de vie. Ces chemins sont choisis sur une base probabiliste
qui identifie parmi les chemins sous optimaux celui qui offre la consommation minimale. Le
chemin avec le maximum d’énergie résiduelle peut s’avérer très coûteux lorsqu’il est utilisé
pour router les données, il s’agit alors de trouver un compromis entre la minimisation de
l’énergie totale consommée et l’énergie résiduelle du réseau. Certains auteurs ont proposé des
types de routage multi-chemins en vue d’augmenter la fiabilité des WSN. Le schéma proposé
est utile pour délivrer les données dans des environnements peu sûrs voire même hostiles.
Nous avons déjà mentionné le fait que la fiabilité peut être renforcer de façon notable en
multipliant le nombre de chemins entre la source et la destination et en envoyant le même
paquet de données sur ces différents chemins. Cependant, utiliser cette technique génère
inévitablement du trafic supplémentaire. On doit alors réfléchir à un compromis entre la
quantité de trafic et la fiabilité ciblée du réseau. Ce compromis a été étudié avec l’aide d’une
fonction de redondance qui dépend de la multiplicité des chemins et des probabilités de
défaillance des chemins disponibles. L’idée est de partitionner le paquet original de données
en sous paquets et de les envoyer chacun sur les chemins disponibles. La diffusion dirigée est
un bon candidat pour le routage robuste et la livraison multi-chemins.
VI.3.2.2 Le routage basé sur les requêtes
Dans ce type de routage, les nœuds de destination propagent une requête pour des
données à partir d’un nœud à travers le réseau. Un nœud disposant de ces données va les
livrer au nœud initiateur de la requête. Habituellement ces requêtes sont décrites en langage
naturel ou en langage de requêtes évolué, a titre d’exemple on peut imaginer que sur le théâtre
d’une bataille, un client C1 soumette une requête au nœud N1 pour l’interroger sur l’existence
ou non de véhicules mobiles dans une région du théâtre des opérations. Tous les nœuds
désignés pour détecter des véhicules mobiles répondront à la requête dés sa réception. La
diffusion guidée que nous avons déjà expliquée est un exemple de ce type de protocoles. En
Les protocoles de communication utilisés dans les WSNs
76
effet la station de base va envoyer des messages exprimant des intérêts spécifiques aux
différents nœuds capteurs, et alors que ces intérêts sont propagés à travers les nœuds de
capteurs, les gradients de la source vers la station de base sont établis. Lorsque la source
dispose des données ciblées elle procédera à leurs livraisons le long du chemin du gradient.
Pour faire baisser la consommation d’énergie, l’agrégation des données est opérée au moment
du routage.
Le protocole de routage par la rumeur utilise un ensemble d’agents de grande
longévité pour créer des chemins dirigés vers les évènements qu’ils rencontrent. Chaque fois
qu’un agent traverse un chemin menant à un évènement qu’il n’a pas encore rencontré, il crée
un état indiquant comment aboutir à cet évènement. Lorsque les agents traversent des chemins
plus courts ou plus efficients, ils optimisent en conséquence la table de routage.
Chaque nœud conserve une liste de ses voisins et une table d’évènements qui est mise à jour
chaque fois que de nouveaux évènements sont rencontrés. Chaque nœud peut aussi générer un
agent de façon probabiliste contenant une table d’évènements synchronisés à chaque nœud
visité. L’agent a une durée de vie de quelques sauts avant son extinction (sa mort).
Un nœud ne génère une requête que s’il connaît un itinéraire vers l’évènement en question.
S’il n’ y a aucun itinéraire disponible, le nœud transmet une requête dans une direction
aléatoire. Ensuite le nœud se met en attente pour savoir si la requête a atteint la destination
selon un certain délai; après quoi il procède à l’inondation du réseau si aucune réponse ne
parvient de la destination.
VI.3.2.3 Routage basé sur la négociation
Ces protocoles utilisent des descripteurs de données de haut niveau afin d’éliminer la
redondance des transmissions des données par le biais de la négociation.
Les décisions de communication sont prises conformément aux ressources qui leurs
sont destinées. La famille de protocoles désignés par SPIN que nous avons évoqués
précédemment sont des exemples de protocoles basés sur la négociation. La motivation est que
le recours à l’inondation pour disséminer les données produira l’implosion et le
chevauchement entre les données transmises, si bien que les nœuds vont recevoir des copies
répliquées des mêmes données. Cette opération s’avère évidement coûteuse en énergie. Les
protocoles SPIN sont conçus pour disséminer les données d’un capteur à tous les autres en
supposant que ces capteurs sont potentiellement des stations de base. Donc, l’idée principale
du routage basé sur la négociation est de supprimer les informations répliquées et prévenir la
redondance des données lors de l’envoi au prochain capteur ou à la station de base en
Les protocoles de communication utilisés dans les WSNs
77
conduisant une série de messages de négociations avant le prélude de la transmission réelle
des données.
VI.3.2.4 Routage basé sur la qualité de service
Dans les protocoles basés sur la qualité de service, un équilibre entre la consommation
d’énergie et la qualité des données doit être trouvé. En particulier, le réseau doit satisfaire
certaines métriques qui quantifient la qualité de service (retard, énergie, largeur de bande,
etc…) lorsqu’il délivre les données à la station de base.
Le routage par affectation séquentielle est l’un des premiers protocoles dédiés aux
WSN qui a introduit la notion de qualité de service dans les décisions de routage.
Une décision de routage dans le protocole de routage par affectation séquentielle dépend de
trois facteurs:
• Les ressources d’énergie.
• La qualité de service sur chaque chemin.
• Le niveau de priorité du paquet.
Pour éviter l’échec qui serait du au chemin unique, une approche multi-chemins et
localisation de chemins restaurés est utilisée. Pour créer des chemins multiples d’un nœud
source aux nœuds de destination, un arbre qui tire sa racine du nœud source et qui s’étend aux
nœuds de destination est construit. Les chemins sur cet arbre sont construits pendant que les
nœuds avec une basse énergie sont évités avec garantie de la qualité de service. Au terme de
ce processus, chaque nœud de capteur devient partie intégrante des multi-chemins sur l’arbre.
A ce titre, le protocole de routage par affectation séquentielle est un protocole à
chemin multiple entraîné par une table qui vise une consommation efficiente d’énergie et une
tolérance aux fautes. Ce protocole calcule une métrique de qualité de service pondérée formée
par le produit de QOS additive et d’un cœfficient de pondération associé au niveau de priorité
du paquet. L’objectif au final est de minimiser la métrique que nous venons d’évoquer pour
augmenter la longévité du réseau. Si la topologie change à cause de la défaillance de certains
nœuds, le recalcul des chemins est nécessaire. Comme mesure préventive, un recalcul
périodique des chemins est déclenché par la station de base pour tenir compte de tout
changement de topologie. Une procédure basée sur un schéma de restauration locale entre
nœuds voisins est utilisée pour se remettre d’un échec. La reprise après échec est réalisée en
forçant la consistance de la table de routage en amont et en aval des nœuds sur chaque
chemin.
Les résultats de simulation montre que le protocole d’affectation séquentielle offre
moins d’énergie consommée que l’algorithme basé sur la métrique du minimum d’énergie qui
Les protocoles de communication utilisés dans les WSNs
78
est focalisé exclusivement sur la consommation d’énergie des paquets sans considération de
priorité.
VI.3.2.5 Processus cohérents et non cohérents
Le traitement des données est un composant majeur dans les opérations menées par les
réseaux de capteurs. Les techniques de routage emploient différentes techniques de traitement
des données. En général, les nœuds de capteurs collaborent les uns avec les autres au cours du
traitement des données qui inondent le réseau. Deux exemples de techniques de traitements de
données pour les WSN ont été proposés. La première est qualifiée de cohérente, alors que la
seconde est dite non cohérente. Pour la technique non cohérente, les nœuds traitent
localement les lignes de données avant leur envoi à d’autres nœuds pour un traitement
supplémentaire. Les nœuds qui réalisent des traitements supplémentaires sont appelés des
agrégateurs. Pour la technique dite cohérente, les données sont envoyées aux agrégateurs
après un traitement minimal.
L’approche non cohérente manifeste un trafic moins important. Elle se déroule en trois
étapes :
• Détection de la cible, collecte des données et prétraitement.
• Déclaration de membre.
• Election du nœud central.
Au cours de la première phase, une cible est détectée, ses données sont collectées et
prétraités. Lorsque un nœud décide de participer à une entreprise collaborative, il entre en
phase 2 et annonce cette intention à tous ses voisins. Ceci doit se faire le plus tôt possible, de
sorte que chaque capteur ait une compréhension locale de la topologie du réseau. Il s’ensuit
alors la phase 3 qui consiste à élire le nœud central. Ce dernier, à la vue des missions qui lui
sont confiées doit disposer d’information plus sophistiquées sur les traitements, des
performances de calcul plus importantes et des réserves étendus d’énergie.
Sohrabi et Pottie [94] ont proposé deux algorithmes, le premier dit du gagnant unique
et le second des multiples gagnants pour simuler respectivement le traitement non cohérent.
Au sujet du premier, un seul agrégateur est dédié aux traitements complexes. L’élection d’un
nœud est basée sur ses réserves énergétiques et ses capacités de calcul. Au terme du processus
du gagnant unique un minimum de sauts s’étendant sur l’arbre couvrira complètement le
réseau. Le processus des « multiples gagnants » est une extension de la première technique.
Lorsque tous les nœuds sont des sources et qu’ils envoient leurs données au nœud faisant
office d’agrégateur central, une grande quantité d’énergie est consommée, ce qui rend ce
Les protocoles de communication utilisés dans les WSNs
79
processus à haut coût. Une manière de réduire le coût en énergie est de limiter par exemple le
nombre de sources autorisées à transmettre les données vers l’agrégateur central.
VI.4 Les perspectives du routage dans les WSN
En regardant les choses de plus prés, lorsque nous avons procédé à la classification des
protocoles de routage, nous constatons que certains protocoles ont un caractère hybride et
peuvent aussi bien cadrer avec les spécificités de plusieurs catégories. La raison est que leurs
concepteurs ont tenté de bénéficier simultanément des avantages de plusieurs catégories.
Devant cette panoplie de protocoles, on pourrait se demander si tout est résolue, qu’il n’y a
nul besoin pour améliorer les choses. En réalité, des défis restent posés, des optimisations sont
encore possibles et des algorithmes plus performants doivent impérativement voir le jour.
Voici quelques pistes évoquées par les chercheurs et qui doivent faire l’objet d’une
prospection plus profonde.
• Exploitation de la redondance : Les nœuds dans un réseau sont enclin à subir des
échecs lors de l’exercice de leurs fonctions. Les techniques de routage qui
emploient la tolérance aux fautes de manière efficiente restent dans le domaine de
l’investigation.
• Architectures hiérarchisées : Le routage hiérarchique est une ancienne technique
qui améliore l’adaptabilité à l’échelle et l’efficience du protocole de routage.
Toutefois, les nouvelles techniques employant l’agrégation du réseau pour
maximiser la durée de vie du réseau sont des domaines chauds de recherche.
• Exploitation de la diversité spatiale et de la densité des nouds : Les nœuds
devraient embrasser l’aire d’action définie pour le réseau pour permettre la
communication entre capteurs. Réaliser des communications énergétiquement
efficientes dans un environnement densément peuplé est un objectif qui mérite
qu’on s’y penche. Le déploiement dense de nœuds de capteurs devrait permettre
au réseau de s’adapter à un environnement imprévisible.
• Comportement global : La réalisation du comportement désiré avec des
algorithmes localement adaptatifs dans un environnement dynamique est sans
doute difficilement modélisable.
• Auto-configuration et reconfiguration : sont des nécessités pour la durée de vie
de réseau non soumis à la surveillance dans un environnement dynamique
subissant la contrainte énergétique. A partir de l’instant où des nœuds meurent et
quittent le réseau, les mécanismes de reconfigurations doivent entrer en action.
Les protocoles de communication utilisés dans les WSNs
80
• La sécurité du routage : Les protocoles que nous avons évoqués ont été conçus
avec le souci majeur de l’efficacité mais pas spécialement de la sécurité, qui n’a
pas été prise sérieusement en compte. Il serait intéressant de les examiner et de les
analyser sous l’angle de la sécurité.
VI.5 Conclusion
Le routage dans les réseaux de capteurs est un domaine de recherche d’une grande
fertilité. Nous avons tenté dans ce chapitre de faire une description globale des techniques en
usage dans ce domaine, ayant comme objectif commun l’augmentation de la durée de vie du
réseau, sans compromettre la livraison des données.
Globalement, la classification des techniques de routage basée sur la structure du réseau
distingue trois catégories : plat, hiérarchique et orientée localisation. En outre, ces protocoles
se subdivisent en multi-chemins, basé sur la requête, basé sur la négociation et enfin sur la
qualité de service lorsqu’ils sont examinés sous l’angle du mode opératoire. Enfin, bien que
tous ces protocoles se révèlent prometteurs, ils ne répondent cependant pas à tous les défis
que rencontrent ceux qui les déploient.
Conception et réalisation
81
VII.1 Introduction
L’évaluation des performances d’un réseau de capteur sans fil nécessite une
phase de simulation avant leur déploiement dans l’environnement réel. Le paradigme
multi- agents constitue un choix incontournable pour la modélisation des réseaux de
capteurs sans fil, ceci grâce à son caractère distribué et dynamique pour la réalisation
des systèmes complexes, en l’occurrence dans le cas des WSNs. Ces réseaux
possèdent un grand nombre d’entités (nœuds) mettant en œuvre de nombreuses
interactions (communication entre les nœuds, transferts de données…etc) dans un
environnement dynamique et ouvert, et collaborant à la réalisation d’un objectif
commun ; Ils ne peuvent de ce fait, faire l’objet d’un contrôle centralisé. Notre travail
consiste à implémenter une plateforme d’aide à la conception et à la simulation des
réseaux de capteurs sans fil basée agents. Cette plateforme a comme caractéristique la
possibilité de modéliser les différents types de noeuds du réseau et les diverses
architectures de réseaux ainsi que la possibilité de tester les différents protocoles de
communication.
VII.2 Description générale de l’approche proposée
Dans notre approche le réseau de capteurs sans fil est constitué par trois types
de nœuds : objet cible, capteur et station de base. Chaque type est représenté par un
agent qui a ses propres caractéristiques et son propre comportement. Ces nœuds
interagissent entre eux par le moyen d’envoi de messages. L’agent objet cible envoie
des messages de type « stimulus », lorsque les agents capteurs reçoivent ces stimulus,
ils collaborent ensemble par un routage multi sauts pour atteindre un objectif
commun, qui est la collecte des données pertinentes au niveau des agents stations de
base.
VII.3 Les services fournis par la plateforme de simulation
L’interface utilisateur de la plateforme donne la possibilité aux utilisateurs de
faire plusieurs activités :
� La description des nœuds et de leurs composants :
Elle offre à l’utilisateur la possibilité de définir les caractéristiques des
composants physiques qui constituent le nœud et la simulation du comportement
de ces composants.
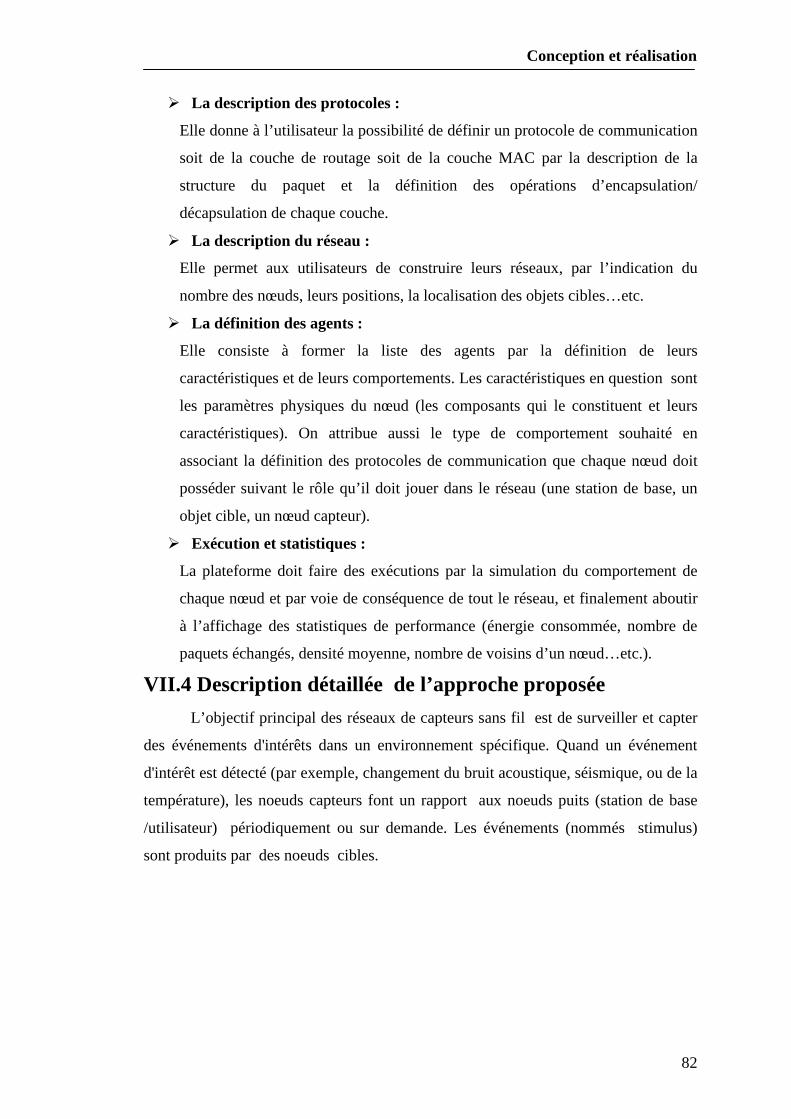
Conception et réalisation
82
� La description des protocoles :
Elle donne à l’utilisateur la possibilité de définir un protocole de communication
soit de la couche de routage soit de la couche MAC par la description de la
structure du paquet et la définition des opérations d’encapsulation/
décapsulation de chaque couche.
� La description du réseau :
Elle permet aux utilisateurs de construire leurs réseaux, par l’indication du
nombre des nœuds, leurs positions, la localisation des objets cibles…etc.
� La définition des agents :
Elle consiste à former la liste des agents par la définition de leurs
caractéristiques et de leurs comportements. Les caractéristiques en question sont
les paramètres physiques du nœud (les composants qui le constituent et leurs
caractéristiques). On attribue aussi le type de comportement souhaité en
associant la définition des protocoles de communication que chaque nœud doit
posséder suivant le rôle qu’il doit jouer dans le réseau (une station de base, un
objet cible, un nœud capteur).
� Exécution et statistiques :
La plateforme doit faire des exécutions par la simulation du comportement de
chaque nœud et par voie de conséquence de tout le réseau, et finalement aboutir
à l’affichage des statistiques de performance (énergie consommée, nombre de
paquets échangés, densité moyenne, nombre de voisins d’un nœud…etc.).
VII.4 Description détaillée de l’approche proposée
L’objectif principal des réseaux de capteurs sans fil est de surveiller et capter
des événements d'intérêts dans un environnement spécifique. Quand un événement
d'intérêt est détecté (par exemple, changement du bruit acoustique, séismique, ou de la
température), les noeuds capteurs font un rapport aux noeuds puits (station de base
/utilisateur) périodiquement ou sur demande. Les événements (nommés stimulus)
sont produits par des noeuds cibles.
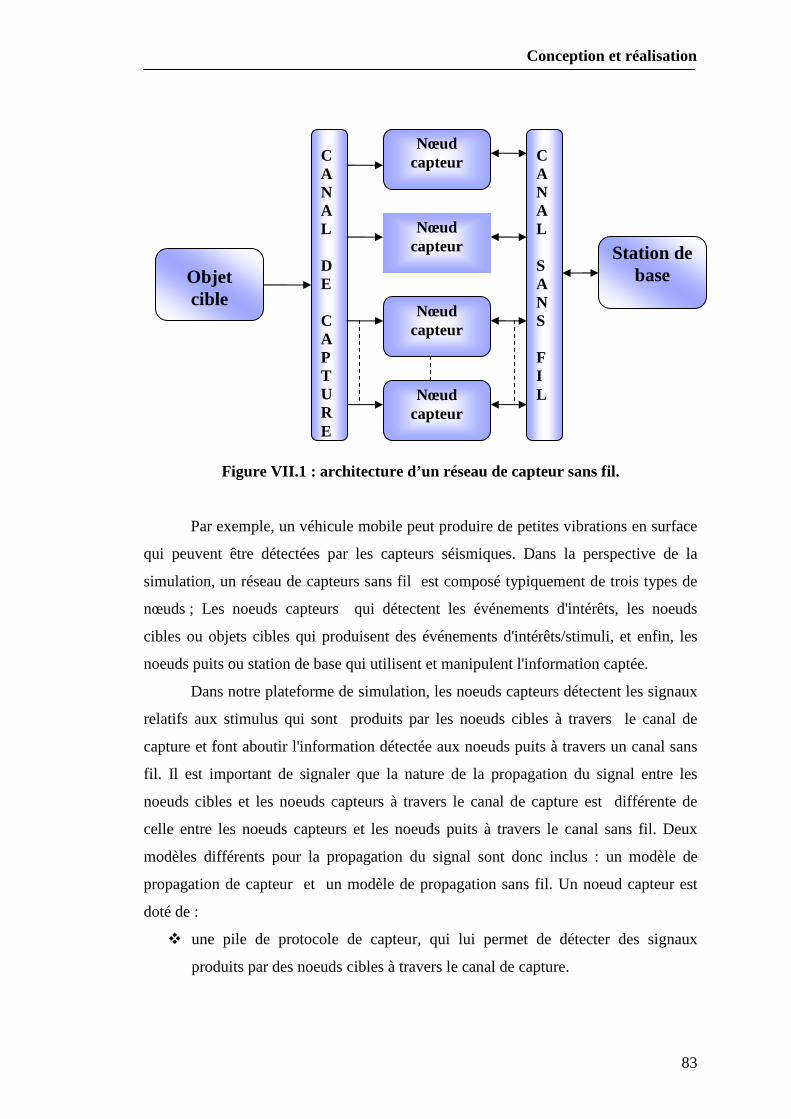
Conception et réalisation
83
Figure VII.1 : architecture d’un réseau de capteur sans fil.
Par exemple, un véhicule mobile peut produire de petites vibrations en surface
qui peuvent être détectées par les capteurs séismiques. Dans la perspective de la
simulation, un réseau de capteurs sans fil est composé typiquement de trois types de
nœuds ; Les noeuds capteurs qui détectent les événements d'intérêts, les noeuds
cibles ou objets cibles qui produisent des événements d'intérêts/stimuli, et enfin, les
noeuds puits ou station de base qui utilisent et manipulent l'information captée.
Dans notre plateforme de simulation, les noeuds capteurs détectent les signaux
relatifs aux stimulus qui sont produits par les noeuds cibles à travers le canal de
capture et font aboutir l'information détectée aux noeuds puits à travers un canal sans
fil. Il est important de signaler que la nature de la propagation du signal entre les
noeuds cibles et les noeuds capteurs à travers le canal de capture est différente de
celle entre les noeuds capteurs et les noeuds puits à travers le canal sans fil. Deux
modèles différents pour la propagation du signal sont donc inclus : un modèle de
propagation de capteur et un modèle de propagation sans fil. Un noeud capteur est
doté de :
� une pile de protocole de capteur, qui lui permet de détecter des signaux
produits par des noeuds cibles à travers le canal de capture.
Objet cible
CA N A L D E CAPTURE
CA N A L SANS F IL
Nœud capteur
Nœud capteur
Nœud capteur
Nœud capteur
Station de base
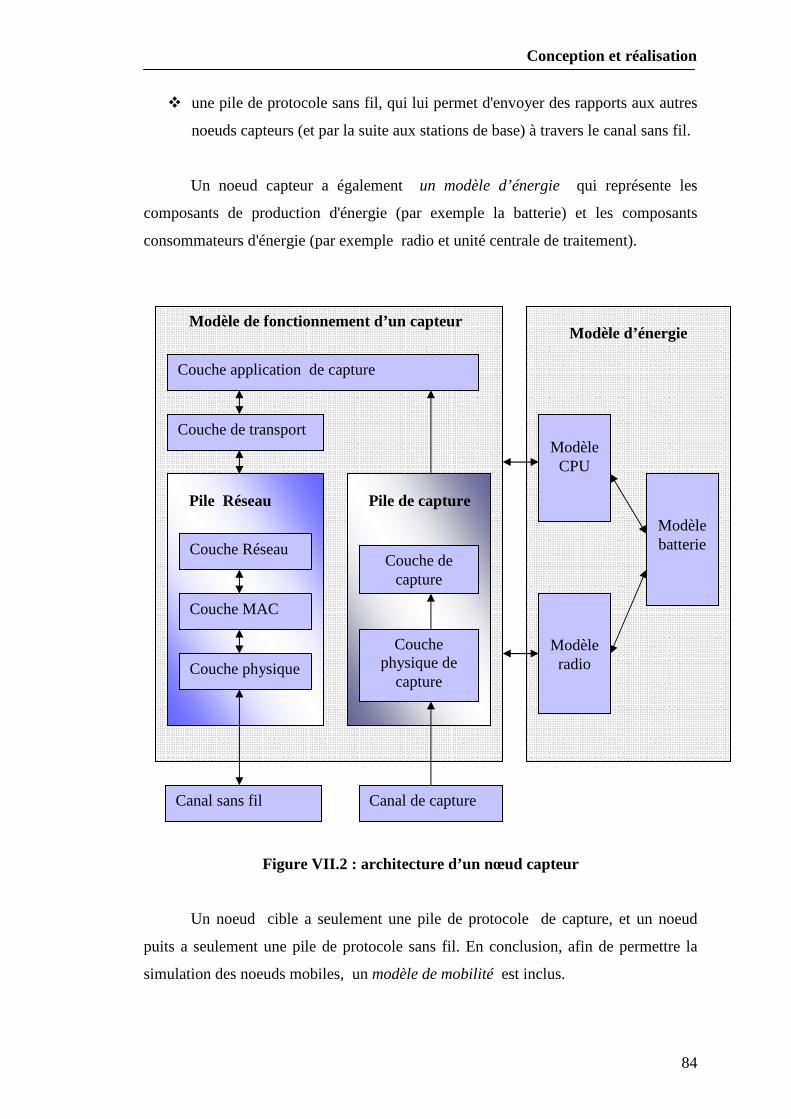
Conception et réalisation
84
� une pile de protocole sans fil, qui lui permet d'envoyer des rapports aux autres
noeuds capteurs (et par la suite aux stations de base) à travers le canal sans fil.
Un noeud capteur a également un modèle d’énergie qui représente les
composants de production d'énergie (par exemple la batterie) et les composants
consommateurs d'énergie (par exemple radio et unité centrale de traitement).
Figure VII.2 : architecture d’un nœud capteur
Un noeud cible a seulement une pile de protocole de capture, et un noeud
puits a seulement une pile de protocole sans fil. En conclusion, afin de permettre la
simulation des noeuds mobiles, un modèle de mobilité est inclus.
Modèle de fonctionnement d’un capteur
Couche application de capture
Couche de transport
Pile Réseau
Couche Réseau
Couche MAC
Couche physique
Pile de capture
Couche de capture
Couche physique de
capture
Modèle d’énergie
Modèle CPU
Modèle radio
Modèle batterie
Canal de capture Canal sans fil
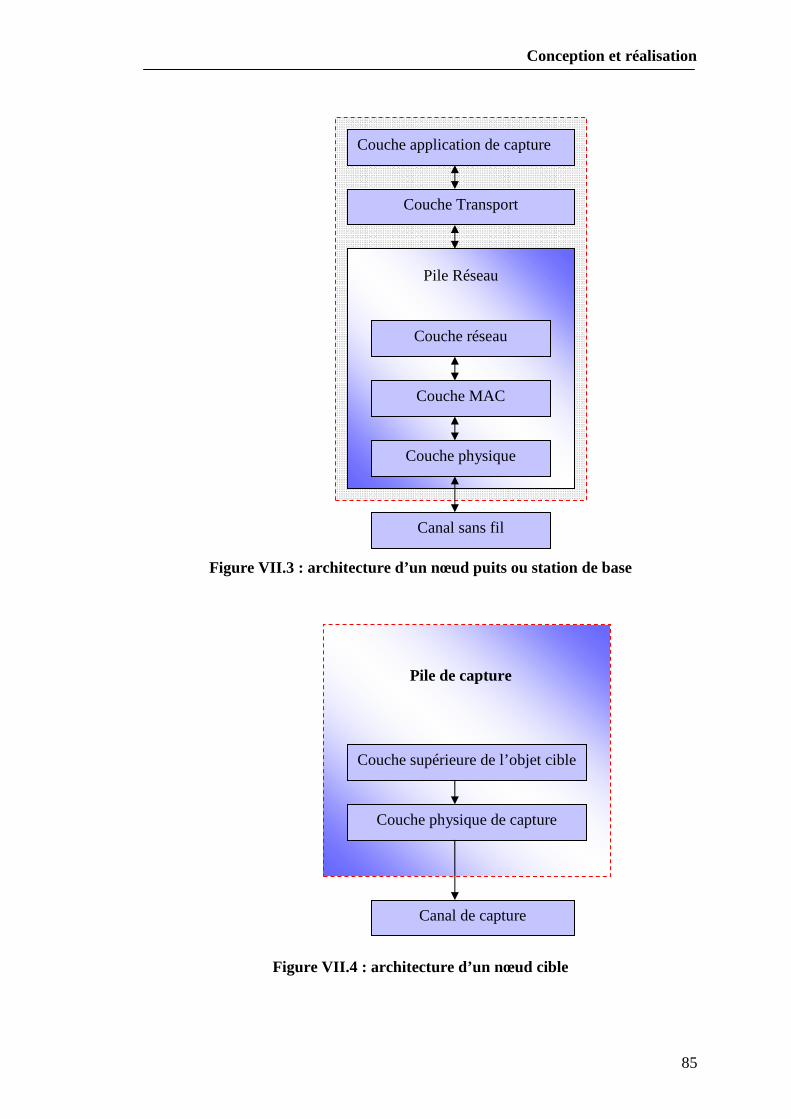
Conception et réalisation
85
Figure VII.3 : architecture d’un nœud puits ou station de base
Figure VII.4 : architecture d’un nœud cible
Pile de capture
Couche supérieure de l’objet cible
Couche physique de capture
Canal de capture
Couche application de capture
Couche Transport
Pile Réseau
Couche réseau
Couche MAC
Couche physique
Canal sans fil
Conception et réalisation
86
Le fonctionnement de l’environnement de simulation de réseaux de capteurs
sans fil proposé peut être illustrée en considérant un protocole de transport de
l’événement au puits (station de base), un stimulus est périodiquement produit par un
objet cible et propagé à travers le canal de capture. Un noeud cible peut seulement
envoyer (mais ne peux pas recevoir) des paquets de données à travers le canal de
capture. Les nœuds capteurs voisins (par exemple, les noeuds capteurs qui sont dans
la même zone de capture du noeud cible) reçoivent le stimulus à travers le canal de
capture. Un noeud capteur peut seulement recevoir (mais ne peux pas envoyer) des
stimulus à travers le canal de capture. Cependant, étant donné que le signal peut être
atténué au cours de la propagation à travers le canal de capture, un noeud capteur
reçoit et détecte un stimulus seulement si la puissance du signal reçu est au moins
égale à un seuil de réception prédéterminé. Le calcul de la puissance du signal reçu
est déterminé par le modèle de propagation de signal capté utilisé.
Chaque noeud capteur qui reçoit et détecte le stimulus à travers le canal de
capture doit envoyer le résultat capté à un ou plusieurs noeuds puits en utilisant le
canal sans fil. À l'intérieur d'un noeud capteur, la coordination entre la pile de
protocole de capture et la pile de protocole sans fil est faite par un coeur agent. Le
réseau de capteur fonctionne selon les spécifications de l’application, un nœud capteur
peut envoyer les paquets de données d’un noeud à l'autre dès qu'il détecte des
événements, ou d'abord les traitent (par exemple, calcule la température moyenne
mesurée sur quelques minutes) puis envoie les données traitées (par exemple, la
température moyenne) au noeud puits / station de base. En général, n'importe quel
mécanisme de traitement dans le réseau peut être implémenté dans la couche
application du capteur. Puisque le noeud puits peut ne pas être proche du noeud
capteur, la communication à travers le canal sans fil est souvent multi-sauts. Plus
exactement, afin d'envoyer un paquet d’un noeud capteur (ci) à un noeud puits (pj),
les nœuds capteurs intermédiaires entre (ci) et (pj) sont sollicités afin de jouer le rôle
de routeurs pour acheminer le paquet tout au long du chemin depuis la source (ci)
jusqu’au la station finale (pj). Ceci implique que les noeuds capteurs doivent pouvoir
envoyer et recevoir des paquets de données à travers le canal sans fil. Les noeuds
capteurs peuvent être détruits en raison de l'épuisement de leurs réserves d’énergie ;
La topologie du réseau de capteurs sans fil ou WSN peut alors s’ajuster
dynamiquement, Il s’ensuit pour le protocole de routage multi-sauts la nécessité de
s’adapter au changement de topologie. Pour signaler la propagation sur le canal de
Conception et réalisation
87
capture, un noeud capteur ou puits reçoit et traite un paquet de données du canal sans
fil seulement si la puissance du signal reçu excède un certain seuil de réception
prédéterminé. Le calcul de l’énergie du signal reçu est déterminé par le modèle de
propagation sans fil utilisé dans le modèle du canal sans fil. L'information reçue au
noeud puits à travers le canal sans fil peut être encore analysée par un serveur et/ou un
opérateur humain. Selon le contexte de l'information, le noeud puits peut devoir
envoyer des requêtes aux noeuds capteurs. Ceci explique pourquoi, comme il est
montré dans la figure VII.3, les noeuds puits doivent pouvoir être en mesure
d’envoyer et de recevoir des paquets de données à travers le canal sans fil. Comme on
le montre dans la figure, le modèle d’énergie dans un noeud capteur inclut des
composants de fourniture d'énergie (par exemple, batterie) et des composants
consommateurs d'énergie (par exemple, l’unité centrale de traitement, l’unité de
capture et le générateur du signal radio). Le modèle de fonctionnement du capteur,
c'est-à-dire, la combinaison de la pile de protocole de capture, de la pile de protocole
de réseau, et de la couche application a une influence sur le modèle d’énergie. Par
exemple, l'énergie consommée en manipulant un paquet de données est influencée par
le modèle d'unité centrale de traitement ; Elle est aussi influencée par le modèle
radio. L'unité centrale de traitement, les modèles radio ainsi que l’unité de capture
peuvent se trouver, selon le cas, parmi plusieurs modes opératoires. Par exemple, le
modèle radio peut être dans un des modes opératoires suivants : Arrêt «Off »,
Sommeil « Sleep », Oisif « Idle », Réception « Receive » et Transmission
« Transmit ». La quantité d'énergie consommée par un composant dépend du mode
dans lequel se trouve ce composant. Le mode d'opération de l'unité centrale de
traitement et les modèles radio peuvent influencer le modèle de fonctionnement du
capteur, et le modèle de fonctionnement du capteur peut également changer le mode
d'opération de l'unité centrale de traitement et des modèles radio.
VII.5 Conception de la plateforme à base d’agent :
Dans le système proposé, chaque nœud du réseau est modélisé par un agent qui
possède deux parties, une partie « caractéristiques » et une autre décrivant le
comportement de ce dernier.
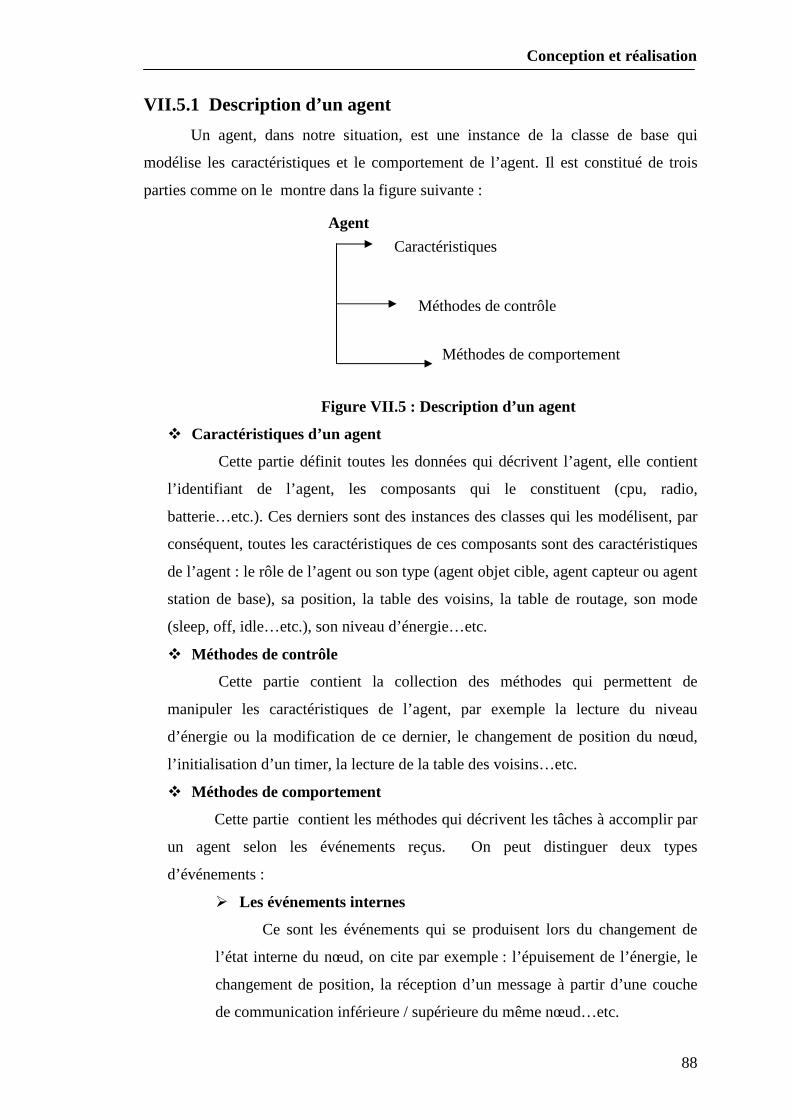
Conception et réalisation
88
VII.5.1 Description d’un agent
Un agent, dans notre situation, est une instance de la classe de base qui
modélise les caractéristiques et le comportement de l’agent. Il est constitué de trois
parties comme on le montre dans la figure suivante :
Figure VII.5 : Description d’un agent
� Caractéristiques d’un agent
Cette partie définit toutes les données qui décrivent l’agent, elle contient
l’identifiant de l’agent, les composants qui le constituent (cpu, radio,
batterie…etc.). Ces derniers sont des instances des classes qui les modélisent, par
conséquent, toutes les caractéristiques de ces composants sont des caractéristiques
de l’agent : le rôle de l’agent ou son type (agent objet cible, agent capteur ou agent
station de base), sa position, la table des voisins, la table de routage, son mode
(sleep, off, idle…etc.), son niveau d’énergie…etc.
� Méthodes de contrôle
Cette partie contient la collection des méthodes qui permettent de
manipuler les caractéristiques de l’agent, par exemple la lecture du niveau
d’énergie ou la modification de ce dernier, le changement de position du nœud,
l’initialisation d’un timer, la lecture de la table des voisins…etc.
� Méthodes de comportement
Cette partie contient les méthodes qui décrivent les tâches à accomplir par
un agent selon les événements reçus. On peut distinguer deux types
d’événements :
� Les événements internes
Ce sont les événements qui se produisent lors du changement de
l’état interne du nœud, on cite par exemple : l’épuisement de l’énergie, le
changement de position, la réception d’un message à partir d’une couche
de communication inférieure / supérieure du même nœud…etc.
Agent
Caractéristiques
Méthodes de contrôle
Méthodes de comportement
Conception et réalisation
89
� Les événements externes
Ce sont les événements qui sont déclenchés par un autre agent
(nœud) ou par l’environnement, on cite par exemple : la réception d’un
message provenant d’un autre nœud, une requête de mise à jour de la table
des voisins, un changement de la table de routage…etc.
On peut illustrer quelques comportements d’un agent :
• A chaque période, l’objet cible va générer un message qui représente
l’événement à détecter.
Exp : Si timer=0 alors envoyer(mesure,date,@voisin)
• Lorsque le niveau d’énergie atteint un certain seuil le composant va changer
son mode.
Exp : Si batterie.énergie<=seuil alors radio.mode := Off
• Lorsque un nœud est détruit, la table de routage va être changée
Exp : Si nœud.etat=détruit alors MAJ(table_ de_ routage)
VII.5.2 Description des agents de la plateforme
Dans cette section, nous décrivons les détails d'architecture et d'exécution de la
plateforme de simulation de WSN, par la description détaillée de chaque type d’agent
qui forment cette plateforme. On va implémenter trois types d’agents : agent objet
cible, agent capteur et agent station de base. Chacun d’entre eux, possédera ses
propres caractéristiques, ses propres méthodes de contrôle et son propre
comportement.
VII.5.2.1 Agent objet cible
Afin de réaliser un agent objet cible figure VII.6, nous avons implémenté les
unités suivantes :
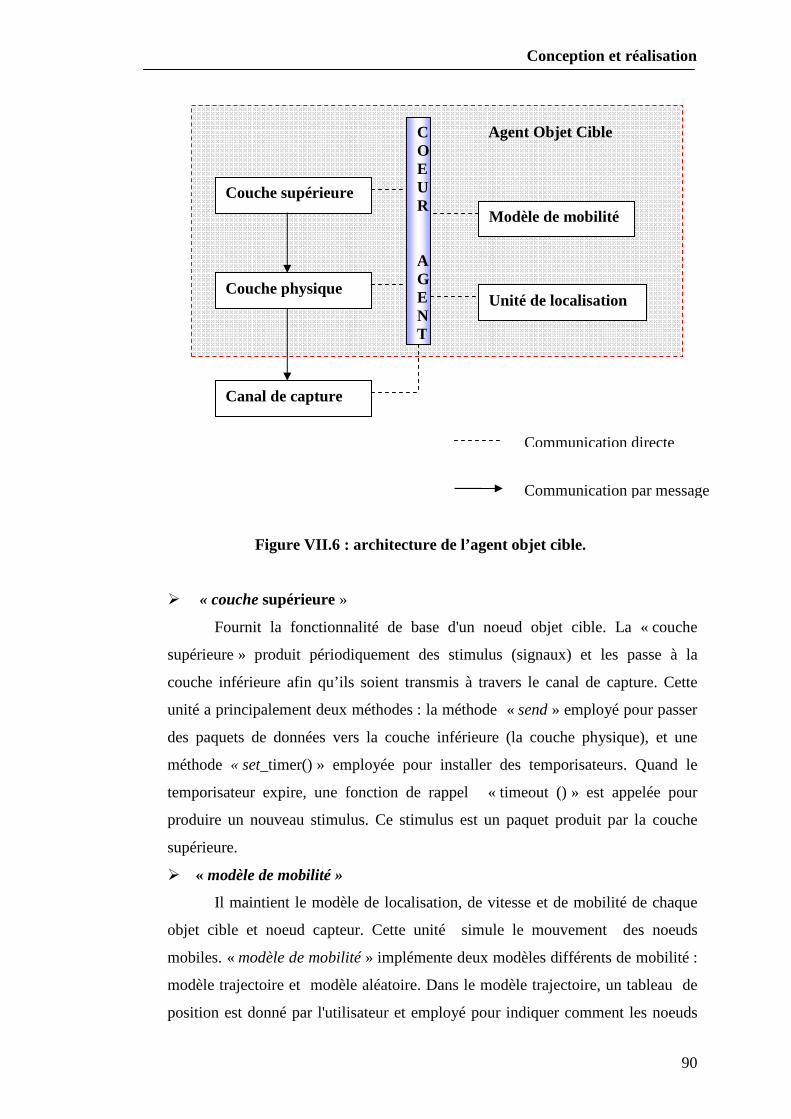
Conception et réalisation
90
Figure VII.6 : architecture de l’agent objet cible.
� « couche supérieure »
Fournit la fonctionnalité de base d'un noeud objet cible. La « couche
supérieure » produit périodiquement des stimulus (signaux) et les passe à la
couche inférieure afin qu’ils soient transmis à travers le canal de capture. Cette
unité a principalement deux méthodes : la méthode « send » employé pour passer
des paquets de données vers la couche inférieure (la couche physique), et une
méthode « set_timer() » employée pour installer des temporisateurs. Quand le
temporisateur expire, une fonction de rappel « timeout () » est appelée pour
produire un nouveau stimulus. Ce stimulus est un paquet produit par la couche
supérieure.
� « modèle de mobilité »
Il maintient le modèle de localisation, de vitesse et de mobilité de chaque
objet cible et noeud capteur. Cette unité simule le mouvement des noeuds
mobiles. « modèle de mobilité » implémente deux modèles différents de mobilité :
modèle trajectoire et modèle aléatoire. Dans le modèle trajectoire, un tableau de
position est donné par l'utilisateur et employé pour indiquer comment les noeuds
Agent Objet Cible C OEUR AGENT
Modèle de mobilité
Couche supérieure
Couche physique Unité de localisation
Canal de capture
Communication directe
Communication par message
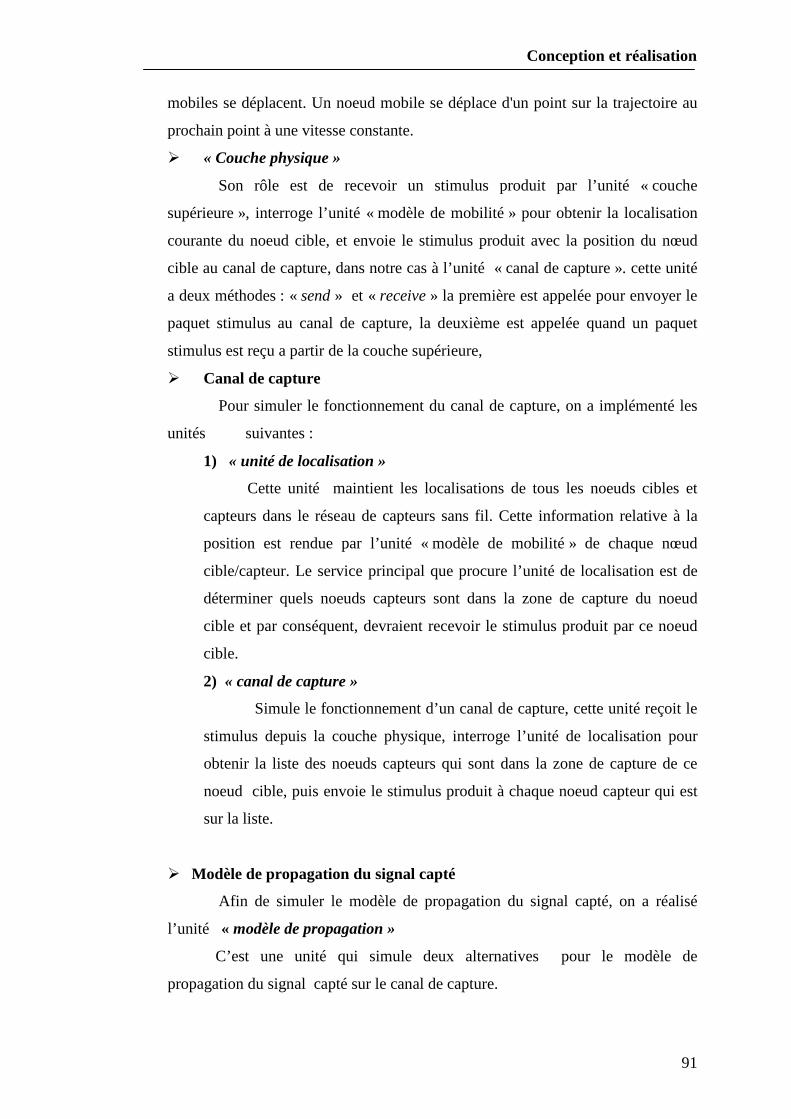
Conception et réalisation
91
mobiles se déplacent. Un noeud mobile se déplace d'un point sur la trajectoire au
prochain point à une vitesse constante.
� « Couche physique »
Son rôle est de recevoir un stimulus produit par l’unité « couche
supérieure », interroge l’unité « modèle de mobilité » pour obtenir la localisation
courante du noeud cible, et envoie le stimulus produit avec la position du nœud
cible au canal de capture, dans notre cas à l’unité « canal de capture ». cette unité
a deux méthodes : « send » et « receive » la première est appelée pour envoyer le
paquet stimulus au canal de capture, la deuxième est appelée quand un paquet
stimulus est reçu a partir de la couche supérieure,
� Canal de capture
Pour simuler le fonctionnement du canal de capture, on a implémenté les
unités suivantes :
1) « unité de localisation »
Cette unité maintient les localisations de tous les noeuds cibles et
capteurs dans le réseau de capteurs sans fil. Cette information relative à la
position est rendue par l’unité « modèle de mobilité » de chaque nœud
cible/capteur. Le service principal que procure l’unité de localisation est de
déterminer quels noeuds capteurs sont dans la zone de capture du noeud
cible et par conséquent, devraient recevoir le stimulus produit par ce noeud
cible.
2) « canal de capture »
Simule le fonctionnement d’un canal de capture, cette unité reçoit le
stimulus depuis la couche physique, interroge l’unité de localisation pour
obtenir la liste des noeuds capteurs qui sont dans la zone de capture de ce
noeud cible, puis envoie le stimulus produit à chaque noeud capteur qui est
sur la liste.
� Modèle de propagation du signal capté
Afin de simuler le modèle de propagation du signal capté, on a réalisé
l’unité « modèle de propagation »
C’est une unité qui simule deux alternatives pour le modèle de
propagation du signal capté sur le canal de capture.

Conception et réalisation
92
� La propagation séismique :
Le modèle de propagation séismique calcule la puissance du signal reçu
comme une fonction de la distance entre l’émetteur et le récepteur. La
puissance du signal reçu Pr est donnée par:
Où
Pt: la puissance du signal transmis.
d: la distance entre l’émetteur et le récepteur.
d0, fa: facteurs d’atténuation du signal.
� La propagation acoustique
Dans la propagation acoustique, la puissance du signal reçu Pr est calculée
par l’équation suivante:
Pt: la puissance du signal transmis
d: la distance entre l’émetteur et le récepteur
� Cœur d’agent
Le rôle de l’unité cœur d’agent est la coordination entre les différentes
unités précédemment décrites.
VII.5.2.2 Agent capteur
Afin de simuler le noeud capteur, comme il est illustré dans la figure VII.7, on
a réalisé les unités suivantes :
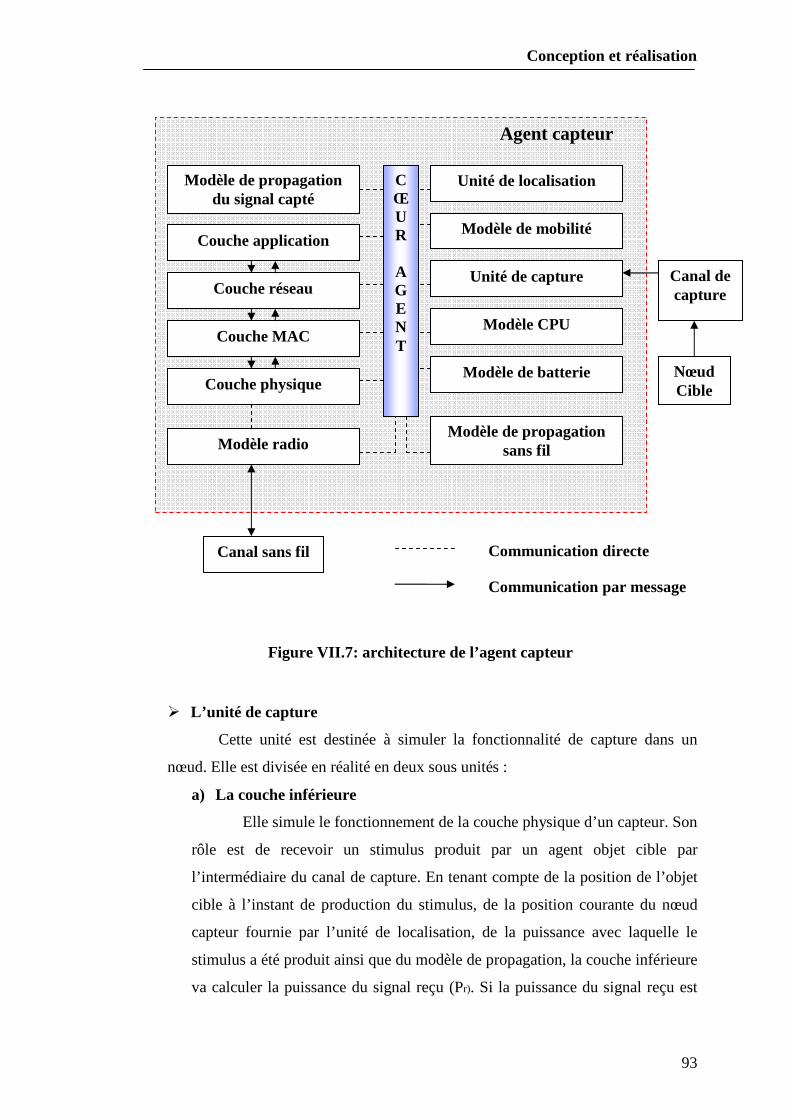
Conception et réalisation
93
Figure VII.7: architecture de l’agent capteur
� L’unité de capture
Cette unité est destinée à simuler la fonctionnalité de capture dans un
nœud. Elle est divisée en réalité en deux sous unités :
a) La couche inférieure
Elle simule le fonctionnement de la couche physique d’un capteur. Son
rôle est de recevoir un stimulus produit par un agent objet cible par
l’intermédiaire du canal de capture. En tenant compte de la position de l’objet
cible à l’instant de production du stimulus, de la position courante du nœud
capteur fournie par l’unité de localisation, de la puissance avec laquelle le
stimulus a été produit ainsi que du modèle de propagation, la couche inférieure
va calculer la puissance du signal reçu (Pr). Si la puissance du signal reçu est
CŒUR
AGENT
Modèle de propagation du signal capté
Couche application
Couche réseau
Couche MAC
Couche physique
Modèle de propagation sans fil
Unité de localisation
Modèle de mobilité
Unité de capture
Modèle CPU
Modèle radio
Modèle de batterie
Canal sans fil
Canal de capture
Nœud Cible
Communication directe
Communication par message
Agent capteur
Conception et réalisation
94
inférieure à un certain seuil le stimulus est ignoré. Sinon, il est envoyé à la
couche supérieure de l’unité de capture.
b) La couche supérieure
Son rôle est de recevoir le stimulus envoyé par la couche inférieure de
l’unité de capture et d’en extraire les données pertinentes. Ces données sont
spécifiques à la couche application dédiée à la capture. Les paramètres qui
rentrent en jeu sont la durée du stimulus produit et la position de l’objet cible.
L’unité de capture a trois états qui sont : Capture, Off, Idle, Sleep. La
figure montre les états de transition ( ou les transitions d’états ) de cette unité.
Figure VII.8 : Etats de transition de l’unité de capture.
� La couche application
Cette couche reçoit les données spécifiques à l’application de capture à
partir de l’unité de capture, elle fait aussi des tâches de traitement, en particulier
la construction du paquet qui contient des données qui doivent faire l’objet d’un
envoi à la station de base. Ce paquet sera passé vers les couches basses de la pile
de protocole de communication sans fil (couche réseau, couche MAC, couche
physique) et puis vers le canal sans fil pour arriver à la station de base.
� La couche réseau
Cette couche est responsable de la mise à jour de la table de routage
conformément à la politique du protocole de routage. A chaque période le nœud
Capture
Off
Idle
Sleep
E S-I
EO-I
E I-C
� Eétat1-état2 : quantité d’énergie consommée
Conception et réalisation
95
capteur envoie des requêtes pour savoir qui sont ses voisins pour acheminer les
données. Elle implémente le protocole de routage pour le réseau de capteurs. La
couche réseau reçoit le message de la couche application puis elle transforme le
message en un paquet MAC et l’envoie à la couche MAC. Le paquet au niveau de
la couche réseau est destiné soit à être diffusé ou bien à être envoyer à un nœud
spécifique (station de base). Pour notre plateforme on a implémenté la simulation
du protocole « Directed Diffusion ».
� Le protocole Directed Diffusion
Directed Diffusion se compose de plusieurs éléments: intérêts, données,
gradients, et renforts. Un intérêt est une demande ou une interrogation qui indique
ce que veut l’utilisateur. Chaque intérêt contient une description d'une tâche de
capture. Typiquement, les données dans les réseaux de capteurs sont les
informations rassemblées ou traitées concernant un phénomène physique. Dans ce
protocole, les données sont décrites en utilisant des paires attribut-valeurs, comme
il est modélisé dans la figure VII.9. Cette diffusion établie des gradients ou des
chemins dans le réseau pour véhiculer les événements.
Figure VII. 9 : Exemple d'une demande
Figure VII.10 : Exemple d'une réponse par une source
Un gradient est une direction créée dans chaque noeud recevant un intérêt.
Le gradient est dirigé du noeud récepteur vers le nœud émetteur de l'intérêt. Les
événements commencent à couler vers les sources d'intérêts à travers plusieurs
chemins. Le puit renforce un ou plusieurs chemins.
Type = Voiture // type du véhicule détecté Heure = 02 :00 :01 // Heure de détection Localisation = [43 ; 51] // Position du noeud détec teur Intensité = 0.045
Type = Voiture // Détection d’un véhicule de type v oiture Heure // Heure de détection Intervalle = 15 s // Taux de prélèvement Localisation // Position du noeud
Conception et réalisation
96
Directed Diffusion se déroule en trois phases principales avant la
transmission de données depuis les noeuds sources vers les noeuds puits:
dissémination des intérêts et établissement des gradients, propagation des données
exploratoires et renforcement des chemins.
a) Propagation de l’intérêt
Le noeud puit défini, en utilisant une liste de paires attribut-valeurs, un
message d’intérêts qui sera injecté dans le réseau avec un faible débit. Chaque
noeud du réseau maintient à son niveau un cache qui a pour but de garder traces
des intérêts reçus pour orienter les données provenant des sources vers les noeuds
puits.
Le premier message d’intérêt envoyé peut être considéré comme
exploration, il essaye de déterminer si il y a, en effet, des noeuds qui détectent les
informations demandées. L’intérêt est rediffusé périodiquement par le nœud puit
vers ses voisins. La retransmission des intérêts est nécessaire parce qu’il ne sont
pas sûrement répandus dans tout le réseau a cause de la perte ou l’expiration de la
durée de vie. Chaque noeud maintient dans sa mémoire une table d'intérêt. Pour
chaque intérêt, les attributs correspondant sont mémorisés afin de les utiliser pour
la comparaison des données reçues. Les attributs de l'intérêt mémorisé ne
contiennent pas les informations sur le nœud puit mais juste du saut
immédiatement précédent, c'est-à-dire le noeuds duquel on a reçu l’intérêt.
Figure VII.11 : Propagation des intérêts
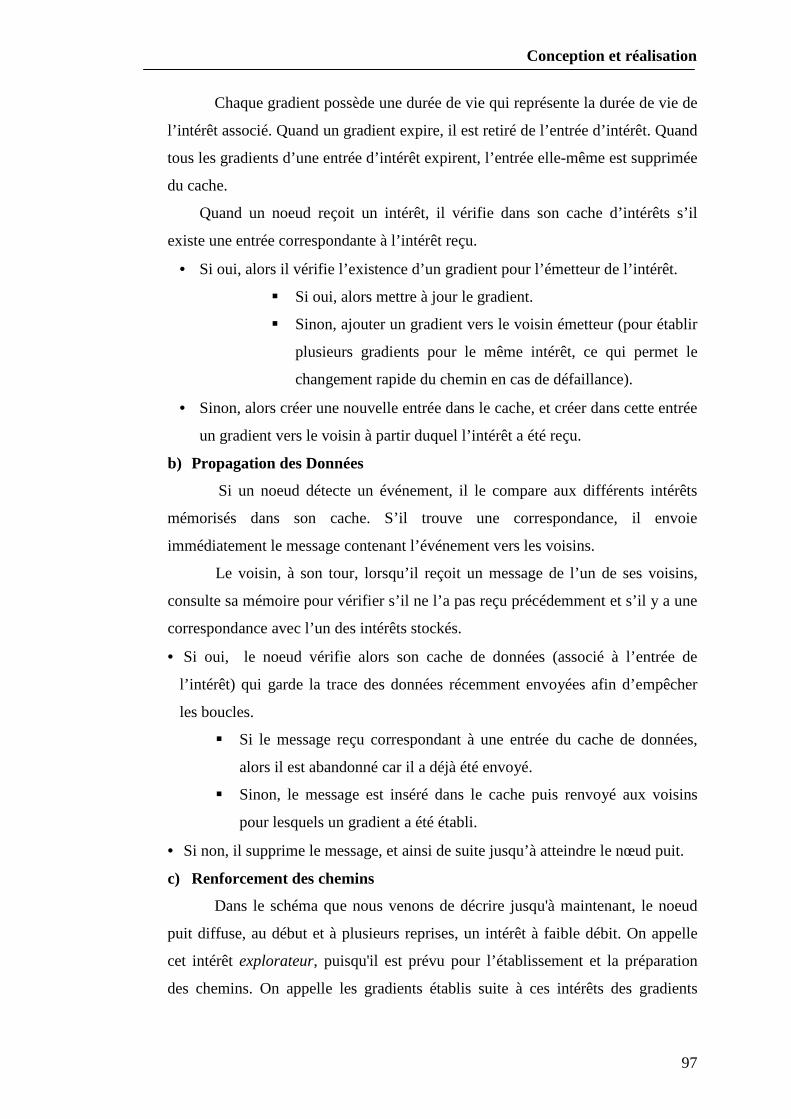
Conception et réalisation
97
Chaque gradient possède une durée de vie qui représente la durée de vie de
l’intérêt associé. Quand un gradient expire, il est retiré de l’entrée d’intérêt. Quand
tous les gradients d’une entrée d’intérêt expirent, l’entrée elle-même est supprimée
du cache.
Quand un noeud reçoit un intérêt, il vérifie dans son cache d’intérêts s’il
existe une entrée correspondante à l’intérêt reçu.
• Si oui, alors il vérifie l’existence d’un gradient pour l’émetteur de l’intérêt.
� Si oui, alors mettre à jour le gradient.
� Sinon, ajouter un gradient vers le voisin émetteur (pour établir
plusieurs gradients pour le même intérêt, ce qui permet le
changement rapide du chemin en cas de défaillance).
• Sinon, alors créer une nouvelle entrée dans le cache, et créer dans cette entrée
un gradient vers le voisin à partir duquel l’intérêt a été reçu.
b) Propagation des Données
Si un noeud détecte un événement, il le compare aux différents intérêts
mémorisés dans son cache. S’il trouve une correspondance, il envoie
immédiatement le message contenant l’événement vers les voisins.
Le voisin, à son tour, lorsqu’il reçoit un message de l’un de ses voisins,
consulte sa mémoire pour vérifier s’il ne l’a pas reçu précédemment et s’il y a une
correspondance avec l’un des intérêts stockés.
• Si oui, le noeud vérifie alors son cache de données (associé à l’entrée de
l’intérêt) qui garde la trace des données récemment envoyées afin d’empêcher
les boucles.
� Si le message reçu correspondant à une entrée du cache de données,
alors il est abandonné car il a déjà été envoyé.
� Sinon, le message est inséré dans le cache puis renvoyé aux voisins
pour lesquels un gradient a été établi.
• Si non, il supprime le message, et ainsi de suite jusqu’à atteindre le nœud puit.
c) Renforcement des chemins
Dans le schéma que nous venons de décrire jusqu'à maintenant, le noeud
puit diffuse, au début et à plusieurs reprises, un intérêt à faible débit. On appelle
cet intérêt explorateur, puisqu'il est prévu pour l’établissement et la préparation
des chemins. On appelle les gradients établis suite à ces intérêts des gradients
Conception et réalisation
98
explorateurs. Le but étant d’obtenir les données à haut débit appelées données
renforcées en appliquant le renforcement positif et supprimer les chemins
redondants et les boucles par le renforcement négatif.
� Renforcement positif
Quand les données exploratoires atteignent le noeud puits, ce dernier
choisit un voisin et lui envoie un message de renforcement positif avec un
débit plus élevé. Un nœud intermédiaire qui reçoit ce message de
renforcement, renforce son gradient vers l’émetteur (en incrémentant sa
valeur par exemple) et l’envoie à l’un de ses voisins. De cette manière, l’un
des chemins explorés est récursivement renforcé.
Le choix du voisin par le noeud puits ou intermédiaire dépend de la
règle de renforcement appliqué. Par exemple quand un noeud choisit le
premier voisin à partir duquel il a reçu une donnée exploratoire. Par
conséquent, un chemin ayant la plus faible latence est établi. Ou bien, on
peut choisir le voisin à partir duquel le noeud a reçu le plus grand nombre de
messages de données. Ainsi, le chemin le plus fiable est renforcé.
Même en présence d’un chemin renforcé, le noeud source rediffuse
périodiquement des données exploratoires dans le but de renforcer
ultérieurement un meilleur chemin vers le noeud puits.
• Renforcement négatif
Le renforcement négatif est utilisé pour supprimer les chemins
inutiles. La règle locale appliquée au niveau de chaque noeud dépend de la
règle choisie pour le renforcement positif.
� Supprimer les chemins redondants
Quand un noeud puits renforce un nouveau chemin grâce à une
nouvelle donnée exploratoire, il envoie un message de renforcement
négatif au noeud voisin appartenant à l’ancien chemin. Quand ce noeud
voisin reçoit ce message, il dégrade son gradient vers le puit et envoie le
renforcement négatif aux voisins qui lui ont transmis des données. Par
cet ordre, l’ancien chemin renforcé positivement est supprimé
rapidement.
� Suppression des boucles
Bien que les messages tournants en boucle seront immédiatement
supprimés grâce au cache de données, il est préférable de tronquer les
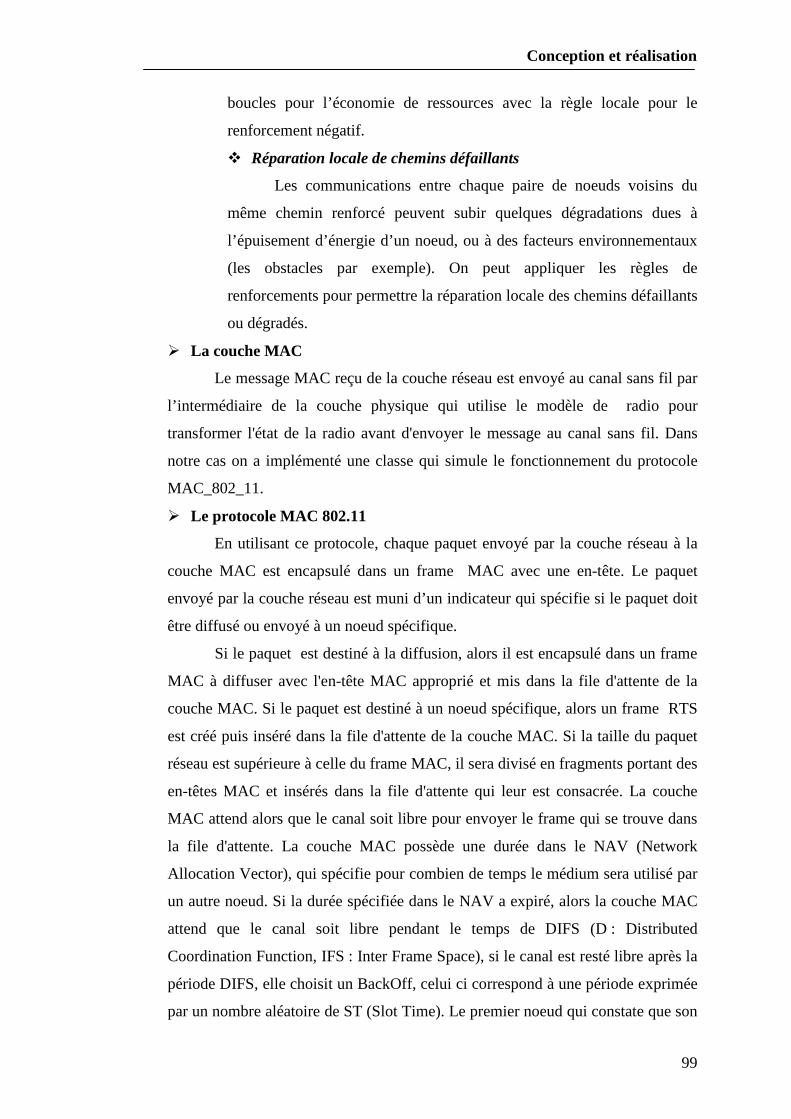
Conception et réalisation
99
boucles pour l’économie de ressources avec la règle locale pour le
renforcement négatif.
� Réparation locale de chemins défaillants
Les communications entre chaque paire de noeuds voisins du
même chemin renforcé peuvent subir quelques dégradations dues à
l’épuisement d’énergie d’un noeud, ou à des facteurs environnementaux
(les obstacles par exemple). On peut appliquer les règles de
renforcements pour permettre la réparation locale des chemins défaillants
ou dégradés.
� La couche MAC
Le message MAC reçu de la couche réseau est envoyé au canal sans fil par
l’intermédiaire de la couche physique qui utilise le modèle de radio pour
transformer l'état de la radio avant d'envoyer le message au canal sans fil. Dans
notre cas on a implémenté une classe qui simule le fonctionnement du protocole
MAC_802_11.
� Le protocole MAC 802.11
En utilisant ce protocole, chaque paquet envoyé par la couche réseau à la
couche MAC est encapsulé dans un frame MAC avec une en-tête. Le paquet
envoyé par la couche réseau est muni d’un indicateur qui spécifie si le paquet doit
être diffusé ou envoyé à un noeud spécifique.
Si le paquet est destiné à la diffusion, alors il est encapsulé dans un frame
MAC à diffuser avec l'en-tête MAC approprié et mis dans la file d'attente de la
couche MAC. Si le paquet est destiné à un noeud spécifique, alors un frame RTS
est créé puis inséré dans la file d'attente de la couche MAC. Si la taille du paquet
réseau est supérieure à celle du frame MAC, il sera divisé en fragments portant des
en-têtes MAC et insérés dans la file d'attente qui leur est consacrée. La couche
MAC attend alors que le canal soit libre pour envoyer le frame qui se trouve dans
la file d'attente. La couche MAC possède une durée dans le NAV (Network
Allocation Vector), qui spécifie pour combien de temps le médium sera utilisé par
un autre noeud. Si la durée spécifiée dans le NAV a expiré, alors la couche MAC
attend que le canal soit libre pendant le temps de DIFS (D : Distributed
Coordination Function, IFS : Inter Frame Space), si le canal est resté libre après la
période DIFS, elle choisit un BackOff, celui ci correspond à une période exprimée
par un nombre aléatoire de ST (Slot Time). Le premier noeud qui constate que son
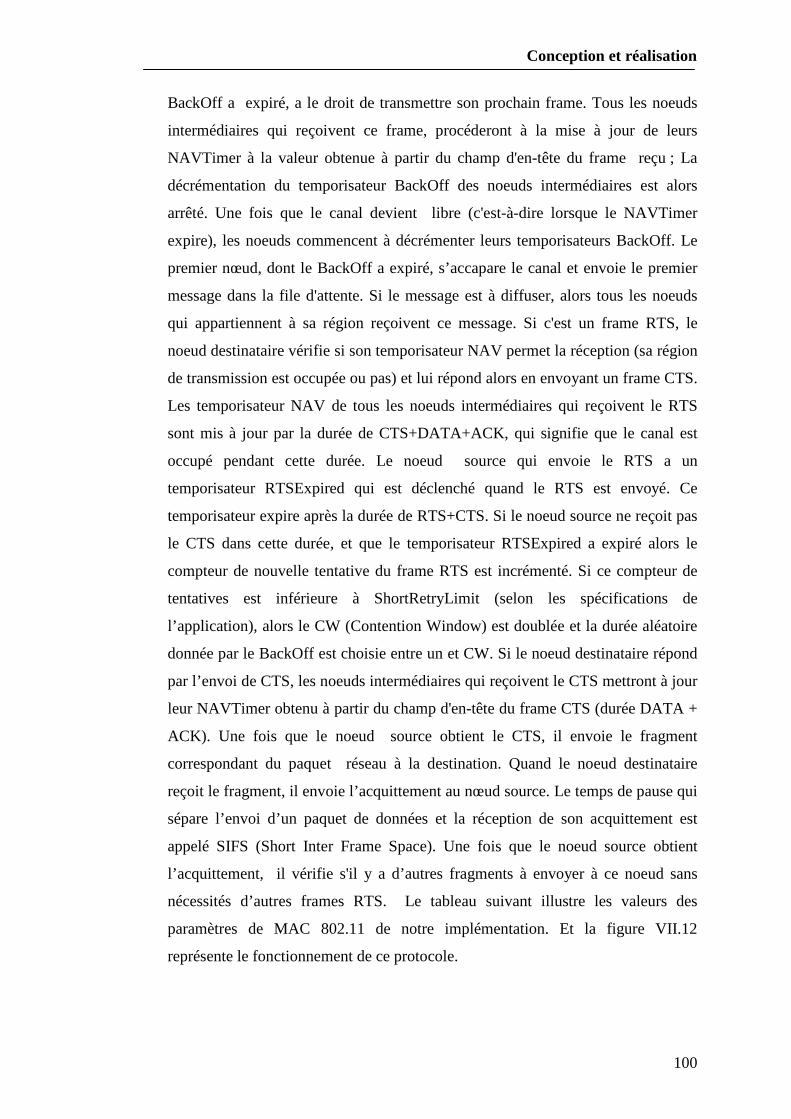
Conception et réalisation
100
BackOff a expiré, a le droit de transmettre son prochain frame. Tous les noeuds
intermédiaires qui reçoivent ce frame, procéderont à la mise à jour de leurs
NAVTimer à la valeur obtenue à partir du champ d'en-tête du frame reçu ; La
décrémentation du temporisateur BackOff des noeuds intermédiaires est alors
arrêté. Une fois que le canal devient libre (c'est-à-dire lorsque le NAVTimer
expire), les noeuds commencent à décrémenter leurs temporisateurs BackOff. Le
premier nœud, dont le BackOff a expiré, s’accapare le canal et envoie le premier
message dans la file d'attente. Si le message est à diffuser, alors tous les noeuds
qui appartiennent à sa région reçoivent ce message. Si c'est un frame RTS, le
noeud destinataire vérifie si son temporisateur NAV permet la réception (sa région
de transmission est occupée ou pas) et lui répond alors en envoyant un frame CTS.
Les temporisateur NAV de tous les noeuds intermédiaires qui reçoivent le RTS
sont mis à jour par la durée de CTS+DATA+ACK, qui signifie que le canal est
occupé pendant cette durée. Le noeud source qui envoie le RTS a un
temporisateur RTSExpired qui est déclenché quand le RTS est envoyé. Ce
temporisateur expire après la durée de RTS+CTS. Si le noeud source ne reçoit pas
le CTS dans cette durée, et que le temporisateur RTSExpired a expiré alors le
compteur de nouvelle tentative du frame RTS est incrémenté. Si ce compteur de
tentatives est inférieure à ShortRetryLimit (selon les spécifications de
l’application), alors le CW (Contention Window) est doublée et la durée aléatoire
donnée par le BackOff est choisie entre un et CW. Si le noeud destinataire répond
par l’envoi de CTS, les noeuds intermédiaires qui reçoivent le CTS mettront à jour
leur NAVTimer obtenu à partir du champ d'en-tête du frame CTS (durée DATA +
ACK). Une fois que le noeud source obtient le CTS, il envoie le fragment
correspondant du paquet réseau à la destination. Quand le noeud destinataire
reçoit le fragment, il envoie l’acquittement au nœud source. Le temps de pause qui
sépare l’envoi d’un paquet de données et la réception de son acquittement est
appelé SIFS (Short Inter Frame Space). Une fois que le noeud source obtient
l’acquittement, il vérifie s'il y a d’autres fragments à envoyer à ce noeud sans
nécessités d’autres frames RTS. Le tableau suivant illustre les valeurs des
paramètres de MAC 802.11 de notre implémentation. Et la figure VII.12
représente le fonctionnement de ce protocole.
Conception et réalisation
101
Figure VII.12 : Exemple montrant le backoff et le defering [97]
Propriété Valeur
SIFS 10 μμμμsec
DIFS 28 28 28 28 μμμμsec
Slot Time 20 20 20 20 μμμμsec
Data Rate 1 Mbps
RTS Length 44 bytes
CTS Length 38 bytes
ACK Length 38 bytes
Tableau VII.1 : les Paramètres de simulation de MAC 802.11
� Couche physique
Cette couche simule des fonctionnalités de la couche physique d'une carte
sans fil. Elle envoie des frames MAC à travers le canal sans fil. Différentes
puissances de transmission peuvent être définies dans cette couche. Quand un
frame MAC est reçue par le biais du canal sans fil, la couche physique utilise le
modèle de propagation pour déterminer si ce frame MAC peut être décodé. S’il
peut être décodé correctement, il va être passé à la couche MAC, puis aux
couches supérieures de la pile de protocole de communication sans fil.
� Modèle de propagation sans fil
Il simule le modèle de propagation par radio à travers le canal sans fil. On
a implémenté deux modèles de propagation radio :
Conception et réalisation
102
� Modèle de propagation à espace libre (Free space model):
Il suppose une propagation idéale à condition qu’il n’y ait pas d’obstacles
entre l’émetteur et le récepteur. H.T. Friis a présenté l’équation qui calcule la
puissance du signal reçu qui est la suivante.
• Pt est la puissance du signal transmis.
• Pr est la puissance du signal reçu.
• Gt, Gr sont respectivement les gains d’antenne de la transmission et de la
réception
• L est la perte et d est la longueur d’onde.
� Modèle Tow-ray ground reflection:
Il est plus exact que le précédent puisque il prend en considération les
réflexions. L’équation de la puissance du signal reçu est la suivante.
ht et hr sont les hauteurs des antennes d’émission et de réception respectivement.
� Unité de localisation
Cette unité maintient les localisations de tous les noeuds cibles et capteurs dans le
réseau de capteurs sans fil. Cette information de localisation est rendue par l’unité
« modèle de mobilité » de chaque nœud cible/capteur. Les informations de
positions données par cette unité sont utilisées pour calculer la puissance du signal
reçu par le canal sans fil / canal de capture.
� Modèle de mobilité
Cette unité simule le mouvement des noeuds mobiles. (Comme illustré
précédemment).
� Modèle CPU (unité de traitement)
Cette unité est conçue pour simuler le rôle de l’unité de traitement (CPU)
qui est l’exécution de l’ensemble des instructions qui assure le fonctionnement du
nœud capteur. Le code exécuté est formé de l’ensemble des instructions qui
manipulent un paquet passant dans la pile de protocoles de communication sans fil
et qui assure le traitement de chaque couche (couche physique, couche MAC,
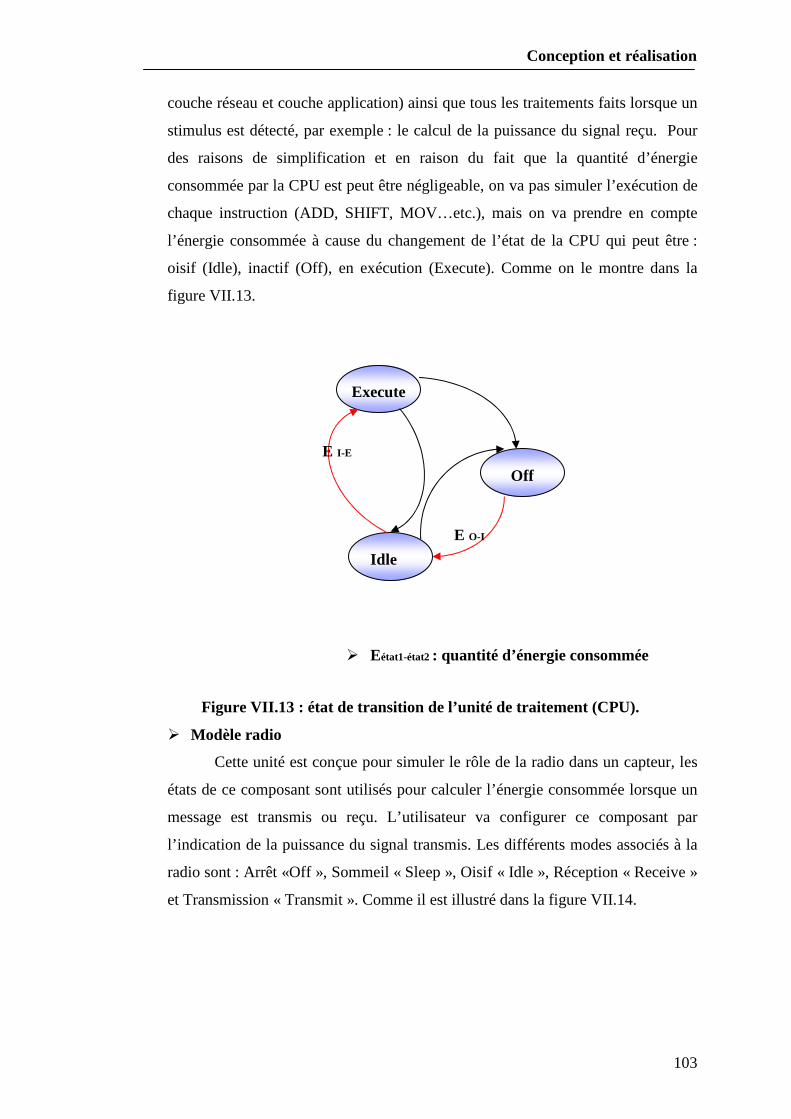
Conception et réalisation
103
couche réseau et couche application) ainsi que tous les traitements faits lorsque un
stimulus est détecté, par exemple : le calcul de la puissance du signal reçu. Pour
des raisons de simplification et en raison du fait que la quantité d’énergie
consommée par la CPU est peut être négligeable, on va pas simuler l’exécution de
chaque instruction (ADD, SHIFT, MOV…etc.), mais on va prendre en compte
l’énergie consommée à cause du changement de l’état de la CPU qui peut être :
oisif (Idle), inactif (Off), en exécution (Execute). Comme on le montre dans la
figure VII.13.
Figure VII.13 : état de transition de l’unité de traitement (CPU).
� Modèle radio
Cette unité est conçue pour simuler le rôle de la radio dans un capteur, les
états de ce composant sont utilisés pour calculer l’énergie consommée lorsque un
message est transmis ou reçu. L’utilisateur va configurer ce composant par
l’indication de la puissance du signal transmis. Les différents modes associés à la
radio sont : Arrêt «Off », Sommeil « Sleep », Oisif « Idle », Réception « Receive »
et Transmission « Transmit ». Comme il est illustré dans la figure VII.14.
Execute
Off
Idle
E O-I
E I-E
� Eétat1-état2 : quantité d’énergie consommée
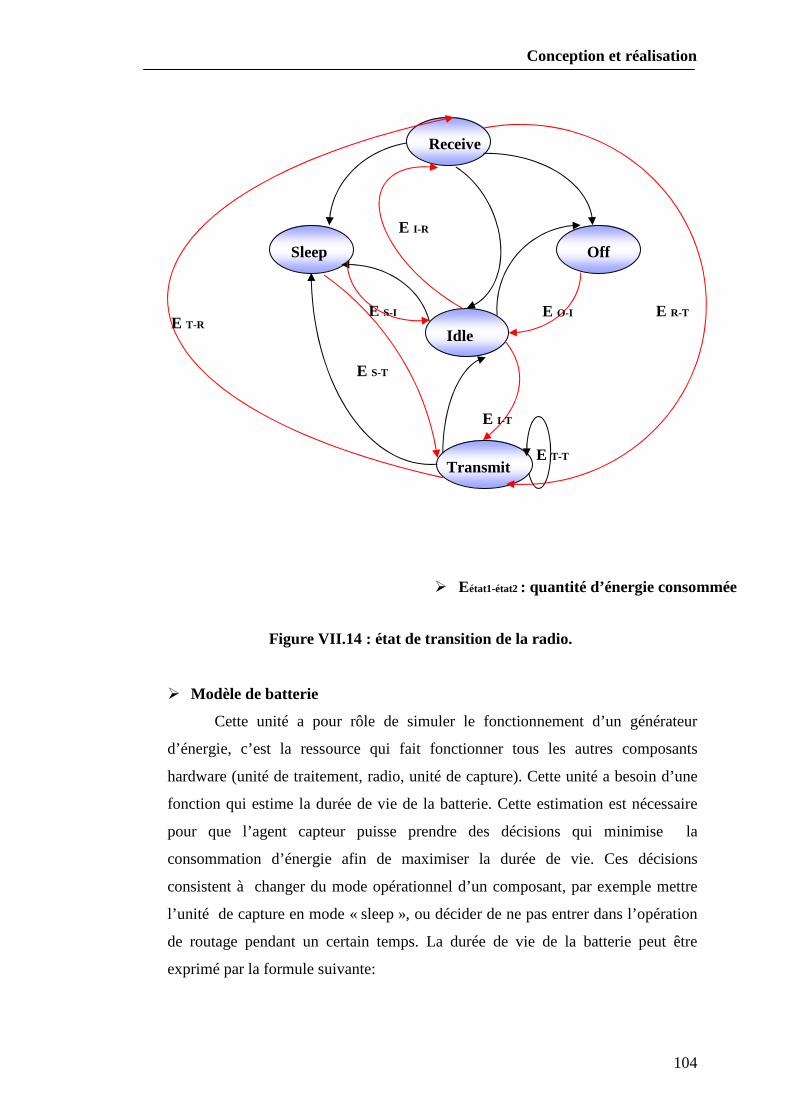
Conception et réalisation
104
Figure VII.14 : état de transition de la radio.
� Modèle de batterie
Cette unité a pour rôle de simuler le fonctionnement d’un générateur
d’énergie, c’est la ressource qui fait fonctionner tous les autres composants
hardware (unité de traitement, radio, unité de capture). Cette unité a besoin d’une
fonction qui estime la durée de vie de la batterie. Cette estimation est nécessaire
pour que l’agent capteur puisse prendre des décisions qui minimise la
consommation d’énergie afin de maximiser la durée de vie. Ces décisions
consistent à changer du mode opérationnel d’un composant, par exemple mettre
l’unité de capture en mode « sleep », ou décider de ne pas entrer dans l’opération
de routage pendant un certain temps. La durée de vie de la batterie peut être
exprimé par la formule suivante:
Receive
Off
Idle
Sleep
E S-I E O-I
E I-R
� Eétat1-état2 : quantité d’énergie consommée
Transmit
E R-T
E T-R
E T-T
E S-T
E I-T
Conception et réalisation
105
T = C/I,
Où :
• C est la capacité restante de la batterie donnée en Ampères/Heure.
• I est l’énergie consommée couramment par le noeud donné en Ampères.
Plusieurs modèles peuvent être utilisés pour estimer la capacité restante de
la batterie. Le plus simple est de prendre le modèle linéaire défini par la formule
suivante:
• Cin est la capacité initiale de la batterie.
• I(t) est l’énergie consommée pendant une durée ∆t
On peut dire qu’il y a une relation de dépendance ente le modèle de
batterie et les modes de fonctionnement des composants hardware (unité de
traitement, radio, unité de capture). En fonction de la durée de vie estimée de la
batterie, les modes de fonctionnement des composants seront changés (par
exemple : mettre la radio en mode sleep à chaque période). D’un autre côté le
mode de fonctionnement des composants hardware influence la capacité de la
batterie puisque à chaque mode correspond sa propre consommation d’énergie. La
batterie est une ressource critique et l’accès à cette unité est protégé ; Par
conséquent, c’est à l’agent qu’incombe les tâches de gestion des demandes de
consommation d’énergie et la mise à jour de la batterie.
� Cœur agent
Cette unité est responsable de la coordination entre les différentes unités
hardware (unité de traitement, radio, unité de capture), et software (pile de
protocoles de communication sans fil, pile de protocole de capture). C’est elle qui
a le droit d’accéder à la capacité de la batterie, et toutes les demandes d’énergie
sont traitées par elle. Après satisfaction des demandes, elle procède à la mise à
jour de la batterie. Elle décide des changements de mode en se basant sur la
quantité d’énergie restante et de la participation ou pas à une opération de
routage…etc. La figure VII.15 donne une synthèse des tâches et des données de
l’agent capteur.
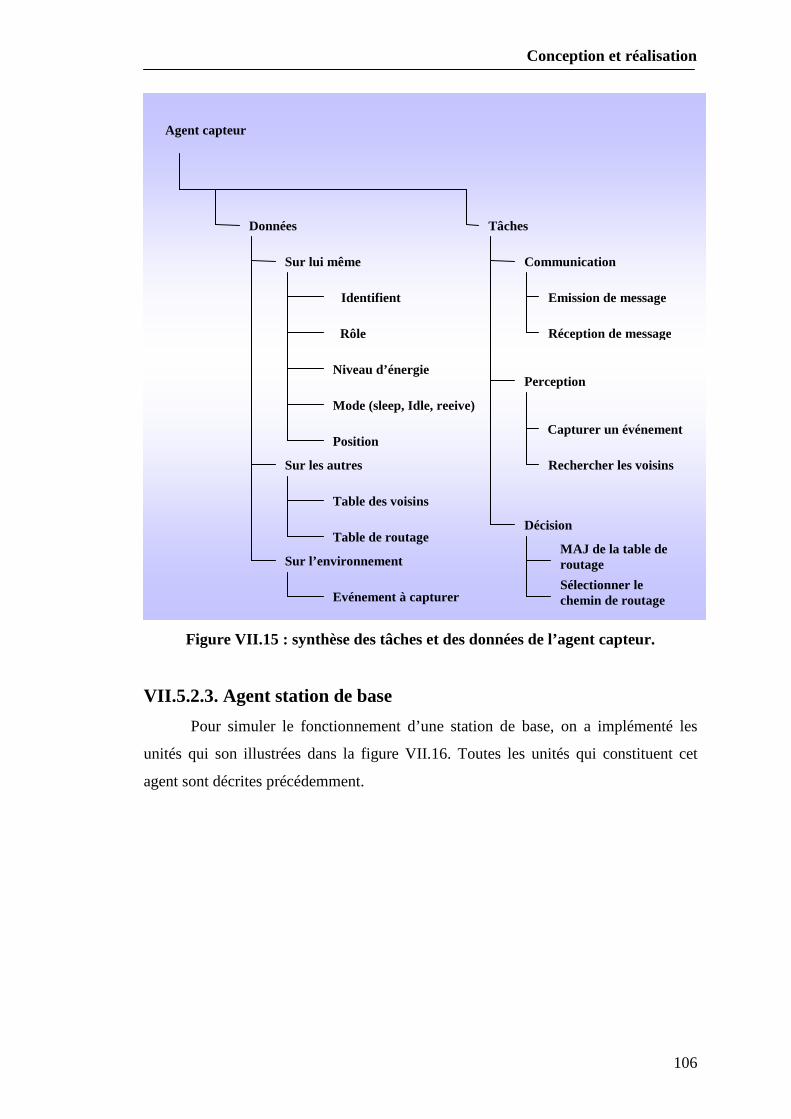
Conception et réalisation
106
Figure VII.15 : synthèse des tâches et des données de l’agent capteur.
VII.5.2.3. Agent station de base
Pour simuler le fonctionnement d’une station de base, on a implémenté les
unités qui son illustrées dans la figure VII.16. Toutes les unités qui constituent cet
agent sont décrites précédemment.
Agent capteur
Données Tâches
Sur lui même
Identifient
Rôle
Niveau d’énergie
Mode (sleep, Idle, reeive)
Position
Sur les autres
Table des voisins
Table de routage
Sur l’environnement
Evénement à capturer
Communication
Perception
Rechercher les voisins
Décision
MAJ de la table de routage
Sélectionner le chemin de routage
Capturer un événement
Emission de message
Réception de message
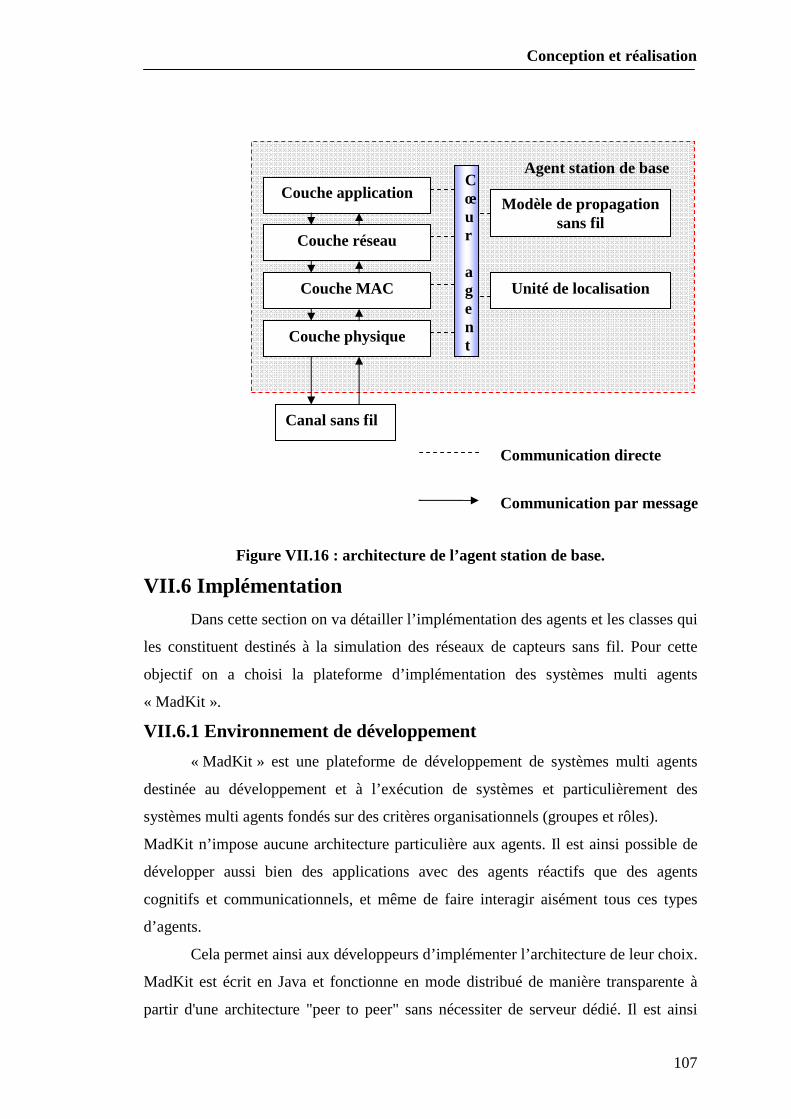
Conception et réalisation
107
Figure VII.16 : architecture de l’agent station de base.
VII.6 Implémentation
Dans cette section on va détailler l’implémentation des agents et les classes qui
les constituent destinés à la simulation des réseaux de capteurs sans fil. Pour cette
objectif on a choisi la plateforme d’implémentation des systèmes multi agents
« MadKit ».
VII.6.1 Environnement de développement
« MadKit » est une plateforme de développement de systèmes multi agents
destinée au développement et à l’exécution de systèmes et particulièrement des
systèmes multi agents fondés sur des critères organisationnels (groupes et rôles).
MadKit n’impose aucune architecture particulière aux agents. Il est ainsi possible de
développer aussi bien des applications avec des agents réactifs que des agents
cognitifs et communicationnels, et même de faire interagir aisément tous ces types
d’agents.
Cela permet ainsi aux développeurs d’implémenter l’architecture de leur choix.
MadKit est écrit en Java et fonctionne en mode distribué de manière transparente à
partir d'une architecture "peer to peer" sans nécessiter de serveur dédié. Il est ainsi
Couche application
Couche réseau
Couche MAC
Couche physique
Cœur agent
Modèle de propagation sans fil
Unité de localisation
Canal sans fil
Communication directe
Communication par message
Agent station de base
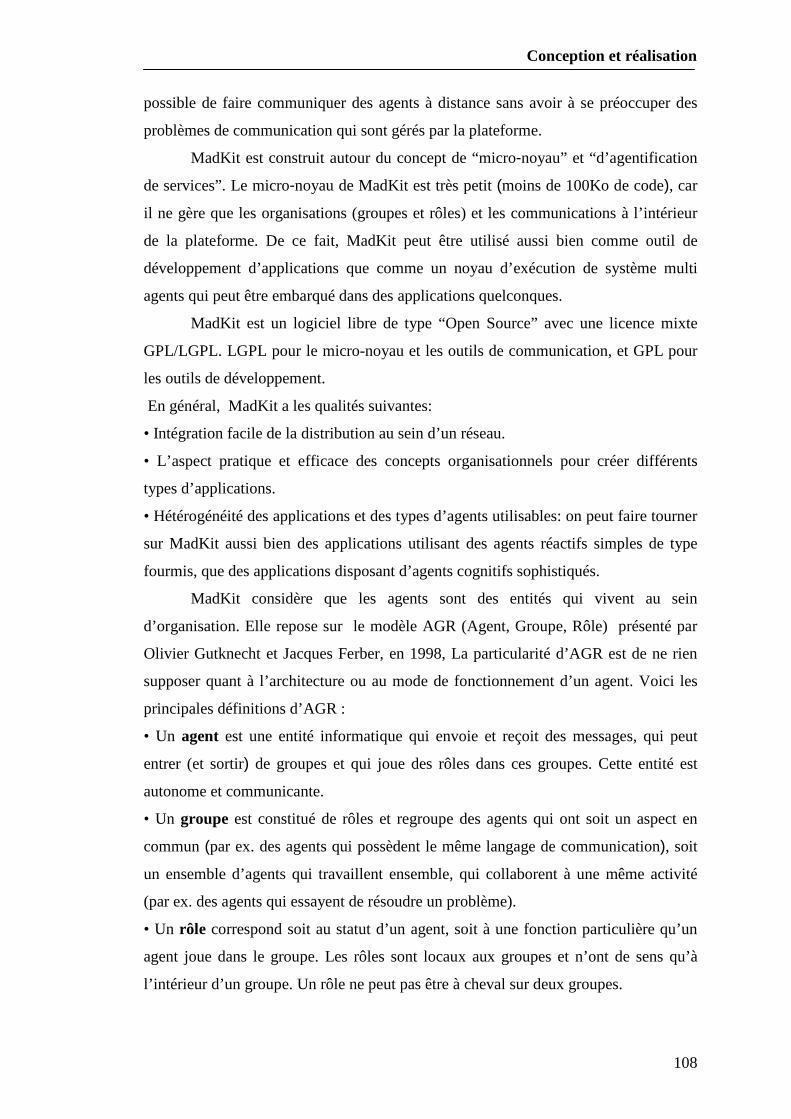
Conception et réalisation
108
possible de faire communiquer des agents à distance sans avoir à se préoccuper des
problèmes de communication qui sont gérés par la plateforme.
MadKit est construit autour du concept de “micro-noyau” et “d’agentification
de services”. Le micro-noyau de MadKit est très petit (moins de 100Ko de code), car
il ne gère que les organisations (groupes et rôles) et les communications à l’intérieur
de la plateforme. De ce fait, MadKit peut être utilisé aussi bien comme outil de
développement d’applications que comme un noyau d’exécution de système multi
agents qui peut être embarqué dans des applications quelconques.
MadKit est un logiciel libre de type “Open Source” avec une licence mixte
GPL/LGPL. LGPL pour le micro-noyau et les outils de communication, et GPL pour
les outils de développement.
En général, MadKit a les qualités suivantes:
• Intégration facile de la distribution au sein d’un réseau.
• L’aspect pratique et efficace des concepts organisationnels pour créer différents
types d’applications.
• Hétérogénéité des applications et des types d’agents utilisables: on peut faire tourner
sur MadKit aussi bien des applications utilisant des agents réactifs simples de type
fourmis, que des applications disposant d’agents cognitifs sophistiqués.
MadKit considère que les agents sont des entités qui vivent au sein
d’organisation. Elle repose sur le modèle AGR (Agent, Groupe, Rôle) présenté par
Olivier Gutknecht et Jacques Ferber, en 1998, La particularité d’AGR est de ne rien
supposer quant à l’architecture ou au mode de fonctionnement d’un agent. Voici les
principales définitions d’AGR :
• Un agent est une entité informatique qui envoie et reçoit des messages, qui peut
entrer (et sortir) de groupes et qui joue des rôles dans ces groupes. Cette entité est
autonome et communicante.
• Un groupe est constitué de rôles et regroupe des agents qui ont soit un aspect en
commun (par ex. des agents qui possèdent le même langage de communication), soit
un ensemble d’agents qui travaillent ensemble, qui collaborent à une même activité
(par ex. des agents qui essayent de résoudre un problème).
• Un rôle correspond soit au statut d’un agent, soit à une fonction particulière qu’un
agent joue dans le groupe. Les rôles sont locaux aux groupes et n’ont de sens qu’à
l’intérieur d’un groupe. Un rôle ne peut pas être à cheval sur deux groupes.
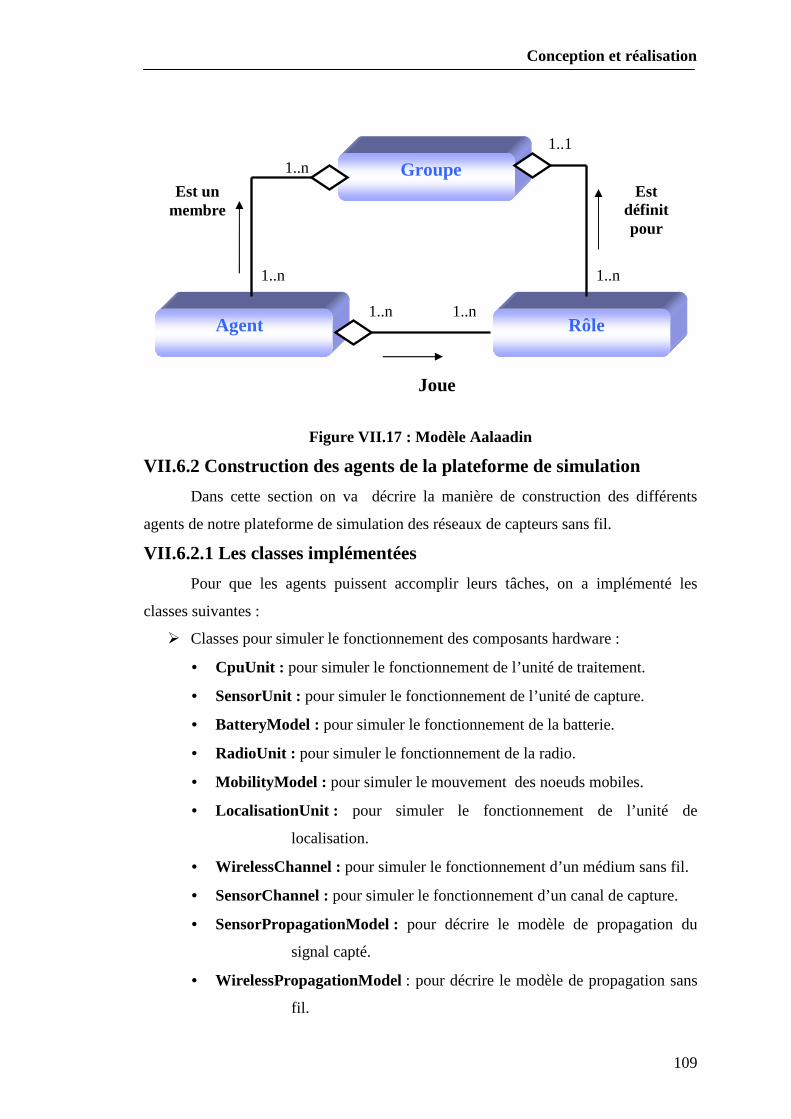
Conception et réalisation
109
Figure VII.17 : Modèle Aalaadin
VII.6.2 Construction des agents de la plateforme de simulation
Dans cette section on va décrire la manière de construction des différents
agents de notre plateforme de simulation des réseaux de capteurs sans fil.
VII.6.2.1 Les classes implémentées
Pour que les agents puissent accomplir leurs tâches, on a implémenté les
classes suivantes :
� Classes pour simuler le fonctionnement des composants hardware :
• CpuUnit : pour simuler le fonctionnement de l’unité de traitement.
• SensorUnit : pour simuler le fonctionnement de l’unité de capture.
• BatteryModel : pour simuler le fonctionnement de la batterie.
• RadioUnit : pour simuler le fonctionnement de la radio.
• MobilityModel : pour simuler le mouvement des noeuds mobiles.
• LocalisationUnit : pour simuler le fonctionnement de l’unité de
localisation.
• WirelessChannel : pour simuler le fonctionnement d’un médium sans fil.
• SensorChannel : pour simuler le fonctionnement d’un canal de capture.
• SensorPropagationModel : pour décrire le modèle de propagation du
signal capté.
• WirelessPropagationModel : pour décrire le modèle de propagation sans
fil.
Groupe
Rôle Agent 1..n 1..n
1..n 1..n
1..n
1..1
Est définit pour
Joue
Est un membre
Conception et réalisation
110
• StimulusGeneration : pour simuler la génération de stimulus pour un
objet cible.
� Classes pour simuler le fonctionnement de la pile de protocoles de
communication sans fil :
• ApplicationLayer : pour simuler les fonctions de base de la couche
application.
• NetworkLayer : pour simuler les fonctions de base de la couche réseau.
• MacLayer : pour simuler les fonctions de base de la couche MAC.
• PhysicalLayer : pour simuler les fonctions de base de la couche physique.
• Mac_802_11 : pour simuler le fonctionnement du protocole MAC 802.11.
• DirectedDiffusion : pour simuler le fonctionnement du protocole
Directed Diffusion
VII.6.2.2 Caractéristiques et méthodes de chaque classe
� CpuUnit
• Caractéristiques
id : identificateur de l’unité de traitement.
name : nom de l’unité de traitement.
execute_power_cons : énergie consommée en exécution.
idle_power_cons : énergie consommée en idle.
state : le mode de fonctionnement.
• Méthodes de contrôle
getState : cette méthode donne l’état courant du CPU (Idle, Execute,
Off).
setState : cette méthode est utilisé par l’agent pour changer l’état de
CPU.
� SensorUnit
• Caractéristiques
id : identificateur de l’unité de capture.
name : nom de l’unité de capture.
sensor_power_cons : énergie consommée en capture.
idle_power_cons : énergie consommée en idle.
sleep_power_con : énergie consommée en mode sleep.
State : état de l’unité de capture.

Conception et réalisation
111
• Méthodes de contrôle
getState : cette méthode donne l’état courant de l’unité de capture.
setState : cette méthode est utilisé par l’agent pour changer l’état de
l’unité.
receiveFromSensorChannel : cette méthode est déclenché lorsqu’un
stimulus est reçu, elle calcule la puissance du signal reçu par
l’utilisation du modèle de propagation, et décide de son acceptation ou
pas.
sendToApplicationLayer : cette méthode est utilisé après l’extraction
des données significative du stimulus et les envoie à la couche
application.
� BatteryModel
• Caractéristiques
id : identificateur de la batterie.
name : le nom de la batterie.
Initial_energy : l’énergie initial de la batterie.
Energy : l’énergie restante.
• Méthodes de contrôle
setEnergy : cette méthode est utilisé par l’agent pour changer l’énergie
restante après une opération.
getEnergy : cette méthode retourne la capacité restante de la batterie.
� RadioUnit
• Caractéristiques
id : identificateur de la radio.
name : nom de la radio.
tx_power_cons : l’énergie consommée en transmission.
rx_power_cons : l’énergie consommée en réception.
idle_power_cons : l’énergie consommée en idle.
sleep_power_cons : l’énergie consommée en sleep.
state : état de la radio.
• Méthodes de contrôle
receiveFromWirelessChannel : méthode déclenchée lorsqu’un message
est reçu depuis le canal sans fil.
Conception et réalisation
112
receiveFromPhyLayer : méthode déclenchée lorsqu’un message est
reçu depuis la couche physique.
setState : cette méthode est utilisée par l’agent pour changer l’état de la
radio.
sendToPhyLayer : pour envoyer un message à la couche physique.
sendToWirelessChannel : pour envoyer un message au canal sans fil.
getState : cette méthode donne l’état courant de l’unité de capture.
� WirelessChannel
• Caractéristiques
delay : délai de transmission.
Data_rate : débit de transmission.
• Méthodes de contrôle
receiveFromRadio : méthode déclenchée lorsqu’un message est reçu
depuis la radio.
sendToRadio : pour envoyer un message a la radio.
� SensorChannel
• Caractéristiques
delay : délai de transmission.
data_rate : débit de transmission.
• Méthodes de contrôle
sendToSensorUnit : pour envoyer un message a l’unité de capture.
receiveFromTarget : méthode déclenchée lorsqu’un message est reçu
depuis un objet cible.
� ApplicationLayer
• Méthodes de contrôle
receiveFromSensorUnit : méthode déclenchée lorsqu’un message est
reçu depuis l’unité de capture.
receiveFromNetLayer : méthode déclenchée lorsqu’un message est
reçu depuis la couche réseau.
sendToNetLayer : pour envoyer un message a la couche réseau.
Conception et réalisation
113
� NetworkLayer
• Méthodes de contrôle
receiveFromMacLayer : méthode déclenchée lorsqu’un message est
reçu depuis la couche MAC.
receiveFromAppLayer : méthode déclenchée lorsqu’un message est
reçu depuis la couche application.
sendToMacLayer : pour envoyer un message a la couche MAC.
sendToAppLayer : pour envoyer un message a la couche application.
� DirectedDiffusion
• Méthodes de contrôle
Cette classe est une sous classe de la classe mère « NetworkLayer » alors
elle a les mêmes méthodes de cette dernière avec une spécification du
fonctionnement du protocole DirectedDiffusion.
� MacLayer
• Méthodes de contrôle
receiveFromNetLayer : méthode déclenchée lorsqu’un message est
reçu depuis la couche réseau.
receiveFromPhyLayer : méthode déclenchée lorsqu’un message est
reçu depuis la couche physique.
sendToNetLayer : pour envoyer un message a la couche réseau.
sendToPhyLayer : pour envoyer un message a la couche physique.
� Mac_802_11
• Caractéristiques
SIFS : Short Inter Frame Space.
DIFS : DCF Inter Frame Space.
slot_time : unité du backoff.
• Méthodes de contrôle
Cette classe est une sous classe de la classe mère « MacLayer » alors elle
a les mêmes méthodes de cette dernière avec une spécification du
fonctionnement du protocole MAC 802.11.
Conception et réalisation
114
� PhysicalLayer
• Méthodes de contrôle
receiveFromMacLayer : méthode déclenchée lorsqu’un message est
reçu depuis la couche MAC.
receiveFromRadio : méthode déclenchée lorsqu’un message est reçu
depuis la radio.
sendToRadio : pour envoyer un message a la radio.
sendToMacLayer : pour envoyer un message a la couche MAC.
VII.6.2.3 Les méthodes principales associées à un agent dans la
plateforme MadKit
• activate : elle crée l’agent et l’active.
• live : fonction qui fait vivre l’agent.
• handleMessage : comportement de l’agent à la réception de message.
• end : action de l’agent lorsque « meurt ».
VII.6.2.4.Les agents construits
On a construit trois types d’agent qui sont les suivants :
� TargetAgent : est l’agent qui simule le comportement d’un objet cible dans un
réseau de capteurs sans fil. C’est un agent qui a un comportement simple, il
importe les classes « StimulusGeneration», « MobilityModel »,
« LocalisationUnit », « SensorChannel ». dans ce qui suit on va illustrer le
rôle de chaque méthode dans cet agent.
� activate : dans cette méthode on initialise les paramètres de l’agent objet
cible. Ces paramètres sont la période pendant laquelle un timer sera
initialisé, l’initialisation de la table des voisins, initialisation de la position
du nœud…etc.
� live : dans cette méthode, à chaque fois que le timer a expiré, la génération
d’un paquet comportant un stimulus est faite par l’utilisation des méthodes
de la classe « StimulusGeneration». Et l’agent va envoyer ce paquet à
l’ensemble des voisins par la méthode « broadcastMessage », cette
méthode est utilisée pour diffuser un message à un groupe d’agent, et enfin
la réinitialisation du timer.
� end : cette méthode est appelée lorsque un agent est détruit.
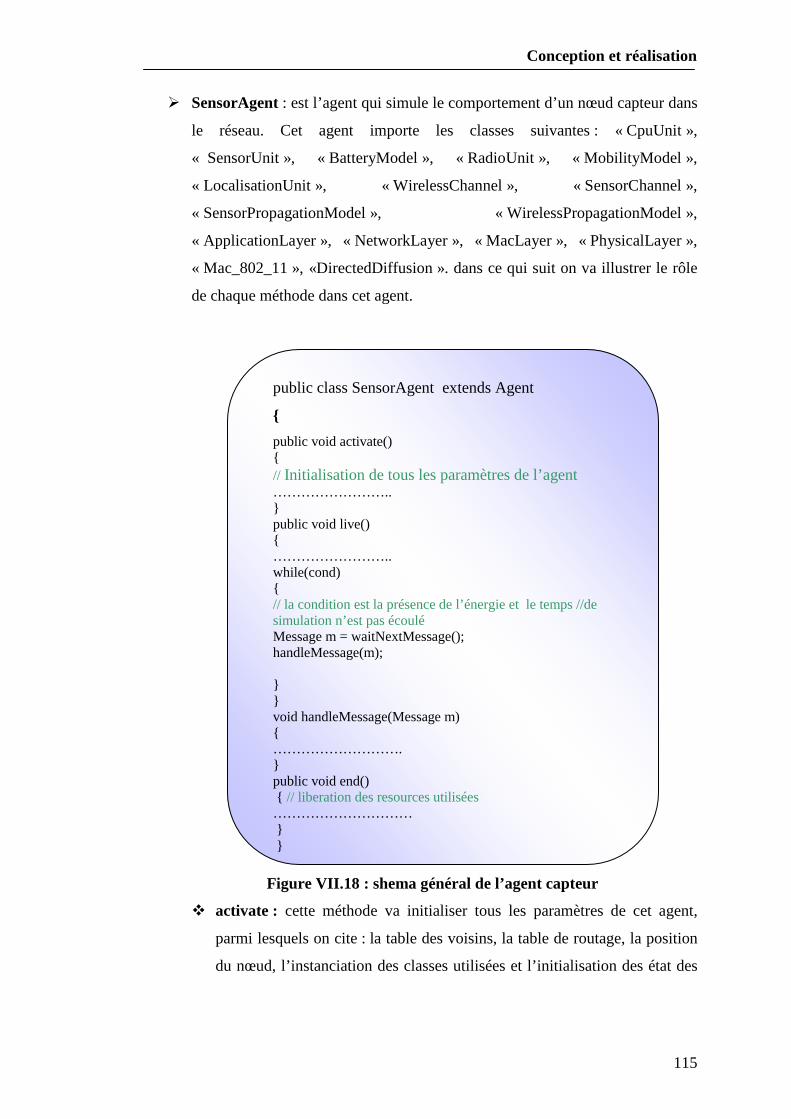
Conception et réalisation
115
� SensorAgent : est l’agent qui simule le comportement d’un nœud capteur dans
le réseau. Cet agent importe les classes suivantes : « CpuUnit »,
« SensorUnit », « BatteryModel », « RadioUnit », « MobilityModel »,
« LocalisationUnit », « WirelessChannel », « SensorChannel »,
« SensorPropagationModel », « WirelessPropagationModel »,
« ApplicationLayer », « NetworkLayer », « MacLayer », « PhysicalLayer »,
« Mac_802_11 », «DirectedDiffusion ». dans ce qui suit on va illustrer le rôle
de chaque méthode dans cet agent.
Figure VII.18 : shema général de l’agent capteur
� activate : cette méthode va initialiser tous les paramètres de cet agent,
parmi lesquels on cite : la table des voisins, la table de routage, la position
du nœud, l’instanciation des classes utilisées et l’initialisation des état des
public class SensorAgent extends Agent
{
public void activate() { // Initialisation de tous les paramètres de l’agent …………………….. } public void live() { …………………….. while(cond) { // la condition est la présence de l’énergie et le temps //de simulation n’est pas écoulé Message m = waitNextMessage(); handleMessage(m); } } void handleMessage(Message m) { ………………………. } public void end() { // liberation des resources utilisées ………………………… } }
Conception et réalisation
116
composants physiques (unité de traitement, la radio, unité de capture) pour
être prêt à fonctionner…etc.
� live : cette méthode décrit le comportement de l’agent capteur, dans cette
méthode on a utilisé la méthode «waitNextMessage» qui détecte l’arrivée
d’un message. Lorsque un message est arrivé alors la méthode
«handleMessage » va être déclenchée. On a implémenté dans cette
méthode deux alternatives possibles. Premièrement on teste le rôle de
l’agent émetteur de ce message ; S’il s’agit d’un agent objet cible alors on
calcule la puissance du signal reçu en utilisant le modèle de propagation du
signal capté, et si ce signal est accepté alors il va être passé à l’unité de
capture ensuite à la couche application par l’utilisation des méthodes des
classes implémentées des unités spécifiques. A la fin de ce processus une
mise à jour de la batterie est nécessaire après une opération de capture.
Dans l’autre situation, si le message est envoyé par un agent capteur ou un
agent station de base alors on calcule la puissance du signal reçu en
utilisant le modèle de propagation sans fil ; Et si ce signal est accepté alors
il va être passé par la pile de protocole de communication sans fil en
utilisant les différentes méthodes des classes qui implémentent ces
couches. Et en fin une mise à jour de la batterie par le calcul de l’énergie
consommée par la radio, et la période du temps pour laquelle l’unité de
traitement est en exécution.
� end : dans cette méthode on enregistre dans des fichiers toutes les données
nécessaires pour l’évaluation de la performance de réseau. Ces données
sont : l’énergie consommée, le nombre de paquets
transmis/reçu/capturés…etc.
� BaseStationAgent : est l’agent qui simule le comportement d’une station de
base dans le réseau. Cet agent importe les classes suivantes :
« LocalisationUnit », « WirelessChannel », « WirelessPropagationModel »,
« ApplicationLayer », « NetworkLayer », « MacLayer », « PhysicalLayer »,
« Mac_802_11 », «DirectedDiffusion ». dans ce qui suit on va illustrer le rôle
de chaque méthode dans cet agent.
� activate : cette méthode va initialiser tous les paramètres de cet agent,
parmi lesquels on cite : la table des voisins, la table de routage, la position
du nœud et l’instanciation des classes utilisées.
Conception et réalisation
117
� live : pour décrire le comportement de l’agent station de base. Dans cette
méthode on a utilisé la méthode «waitNextMessage» qui détecte l’arrivée
d’un message. Lorsque un message est arrivé alors la méthode
«handleMessage » va être déclenchée. Dans ce cas on est sûr que le
message est envoyé par un agent capteur alors on calcule la puissance du
signal reçu en utilisant le modèle de propagation sans fil ; Si ce signal est
accepté alors il va être passé par la pile de protocole de communication
sans fil en utilisant les différentes méthodes des classes qui implémentent
ces couches.
� end cette méthode est appelée lorsque un agent est détruit.
VII.6.3 L’exécution de la simulation et l’affichage des statistiques
Pour déclencher l’exécution de la simulation il faut initialiser tous les
paramètres des noeud à partir des champs remplis par l’utilisateur (choix du modèle
de propagation du signal capté : acoustique/séismique., le modèle de propagation sans
fil, la position de nœud…ect), ainsi que le choix de la période pendant laquelle la
simulation doit être exécutée. Après cette phase d’initialisation, on doit appeler la
méthode « activate » pour activer les agents. Quand cette méthode est appelée les
agents commencent d’interagir entre eux par l’envoi de messages. Quand cette
période est écoulée, des vecteurs sont créés par chaque agent capteur. Ces vecteurs
contiennent des informations qui nous aident à l’analyse des performances du réseau.
Ces informations peuvent être : le nombre de paquet transmis/reçu pour chaque nœud,
l’énergie consommée par chaque nœud, le nombre de paquet capturés. Par exemple si
on constate qu’il existe des nœuds qui ont une grande surcharge (un grand nombre de
paquet reçu/transmis) donc une grande consommation d’énergie, on doit changer
l’architecture ou procéder au redéploiement des nœuds du réseau pour pallier à cette
surcharge, et par voie conséquence maximiser la durée de vie du réseau. Ces vecteurs
seront enregistrés dans des fichiers qui vont être utilisés pour afficher des
histogrammes et des courbes, pour mieux analyser les performances.
Pour notre plateforme on a choisit l’enregistrement des paramètres suivants
pour permettre aux utilisateurs d’analyser les performances de leurs réseaux.
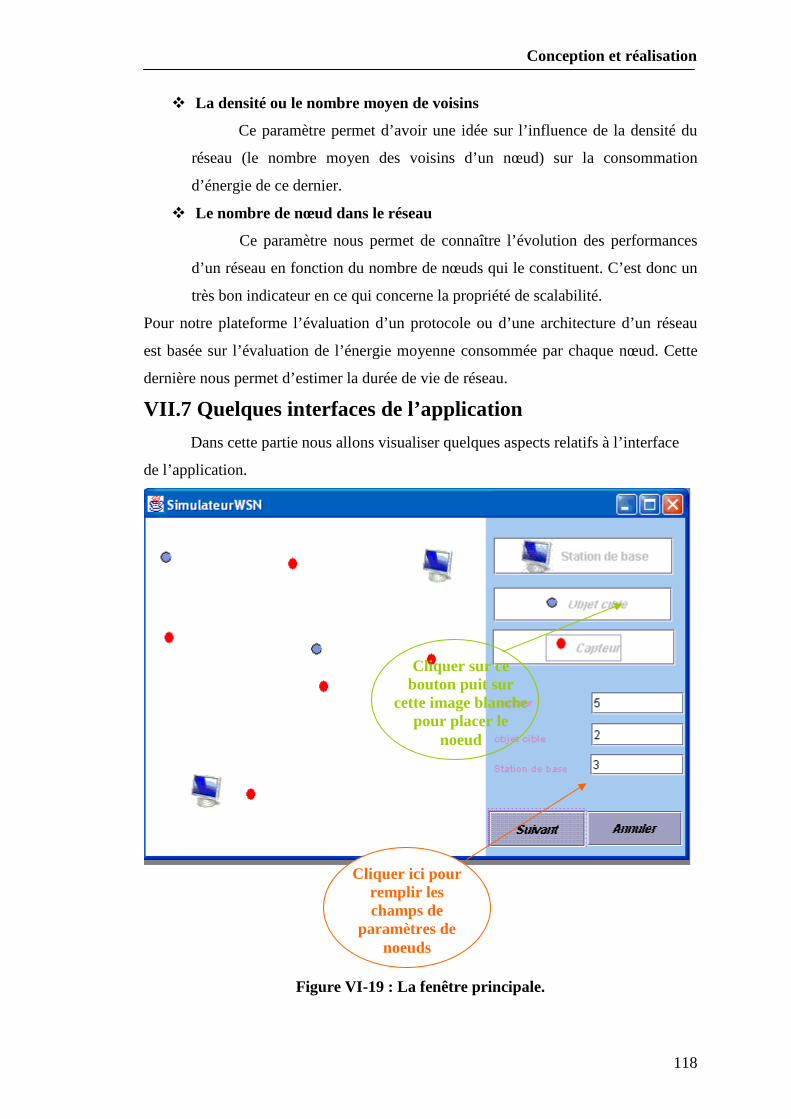
Conception et réalisation
118
� La densité ou le nombre moyen de voisins
Ce paramètre permet d’avoir une idée sur l’influence de la densité du
réseau (le nombre moyen des voisins d’un nœud) sur la consommation
d’énergie de ce dernier.
� Le nombre de nœud dans le réseau
Ce paramètre nous permet de connaître l’évolution des performances
d’un réseau en fonction du nombre de nœuds qui le constituent. C’est donc un
très bon indicateur en ce qui concerne la propriété de scalabilité.
Pour notre plateforme l’évaluation d’un protocole ou d’une architecture d’un réseau
est basée sur l’évaluation de l’énergie moyenne consommée par chaque nœud. Cette
dernière nous permet d’estimer la durée de vie de réseau.
VII.7 Quelques interfaces de l’application
Dans cette partie nous allons visualiser quelques aspects relatifs à l’interface
de l’application.
Figure VI-19 : La fenêtre principale.
Cliquer sur ce bouton puit sur
cette image blanche pour placer le
noeud
Cliquer ici pour remplir les champs de
paramètres de noeuds
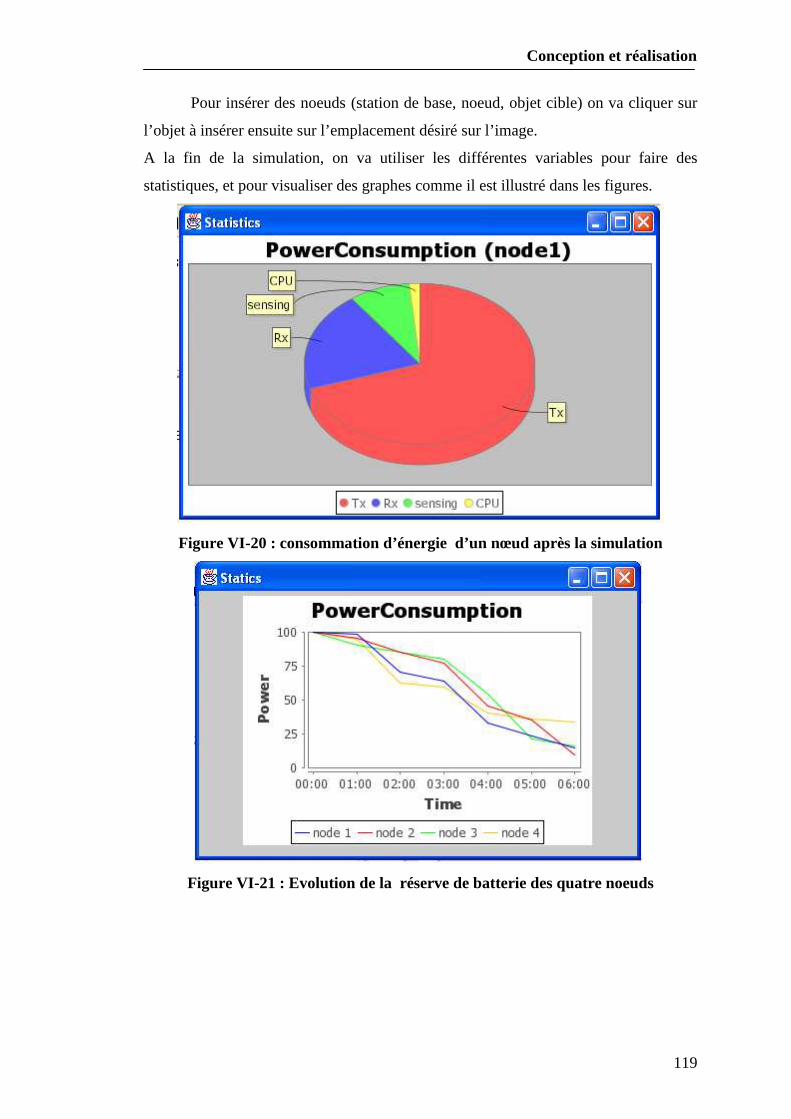
Conception et réalisation
119
Pour insérer des noeuds (station de base, noeud, objet cible) on va cliquer sur
l’objet à insérer ensuite sur l’emplacement désiré sur l’image.
A la fin de la simulation, on va utiliser les différentes variables pour faire des
statistiques, et pour visualiser des graphes comme il est illustré dans les figures.
Figure VI-20 : consommation d’énergie d’un nœud après la simulation
Figure VI-21 : Evolution de la réserve de batterie des quatre noeuds
Conception et réalisation
120
VII.8 Conclusion
Dans ce chapitre, nous avons tenté de mettre en lumière la manière de
concevoir et de réaliser une plateforme d’aide à la conception et à la simulation des
réseaux de capteur sans fil. Cette plateforme comporte trois types d’agent : agent objet
cible, agent capteur et agent station de base. Chacun de ces agents a son propre
comportement suivant le rôle qu’il doit jouer dans cette plateforme, ce rôle est réalisé
par la simulation du comportement de chaque composant physique du nœud et de
chaque protocole de communication. Afin d’assurer une durée de vie maximale du
réseau, il faut minimiser la consommation d’énergie de ses nœuds, notre plateforme
donne une idée sur la consommation d’énergie pour pouvoir valoriser les protocoles et
l’architecture de réseau.
Conclusion générale
121
Les réseaux de capteurs représentent une amélioration significative par rapport aux
capteurs traditionnels. L’étendue des applications des réseaux de capteurs est vaste, on les
retrouve dans le domaine de la santé, de la sécurité et dans le secteur militaire. Les réseaux de
capteurs permettent à l’utilisateur une meilleure compréhension de l’environnement. De nos
jours, les réseaux de capteurs sans fils font partie intégrante de notre vie.
Au terme de ce mémoire de magistère, je peux résumer les choses en disant que le
travail que j’ai mené sur l’application du paradigme multi-agents aux réseaux de capteurs sans
fil, m’a permis dans une première phase d’appréhender l’étendue et la complexité des
concepts et des méthodes afférents à ce domaine. Je me suis familiarisée avec ces concepts et
ces méthodes et pris connaissance de la palette assez large des applications en univers réel.
Au cours d’une seconde phase, j’ai tenté de modéliser une plateforme basée agent dédiée à la
simulation des réseaux de capteurs sans fil. La simulation est fondamentale avant le
déploiement en environnement réel, en raison des avantages qu’elle offre et plus
particulièrement en matière de coût et de tests qui peuvent être réalisés dans les conditions
extrêmes. Fort heureusement pour l’élaboration de la plate forme, je ne suis pas partir de zéro
puisqu’il existe déjà des outils de simulation qui m’ont inspiré et que j’ai avantageusement
utilisé. En matière de fonctionnement des réseaux de capteurs, l’énergie est une ressource
critique qui conditionne la durée de vie du réseau, c’est pour cette raison que nous lui avons
consacré une attention particulière dans la plateforme que nous proposons ; D’autant plus que
les plateformes existantes ne lui accorde pas l’intérêt qu’elle mérite.
Dans ce mémoire, nous avons proposé une nouvelle approche de conception de
protocoles et d’applications pour les réseaux de capteurs qui est basée sur le paradigme multi-
agents. Cette approche consiste à abstraire les caractéristiques physiques du réseau et des
noeuds ainsi que leurs comportements en agents autonomes. La modélisation des agents s’est
faite par le langage Java en utilisant la plateforme de modélisation MadKit.
Toutefois, cet effort ne peut être considéré que comme un début pour un travail plus
profond qui aurait comme objectif une optimisation plus poussée pour augmenter la durée de
vie des réseaux et en fin de compte leurs efficacités et leurs rentabilités.
Références
[1] J. Agre, L. Clare, An integrated architecture for cooperative sensing networks, IEEE
computer Magazine (May 2000) 106–108.
[2] M. Bhardwaj, T. Garnett, A.P. Chandrakasan, Upper bounds on the lifetime of sensor
networks, IEEE International Conference on Communications ICC’01, Helsinki,
Finland, June 2001.
[3] N. Bulusu, D. Estrin, L. Girod, J. Heidemann, Scalable coordination for wireless sensor
networks: self-configuring localization systems, International Symposium on
Communication Theory and Applications (ISCTA 2001), Ambleside, UK, July 2001.
[4] A. Cerpa, D. Estrin, ASCENT: adaptive self-configuring sensor networks topologies,
UCLA Computer Science Department Technical Report UCLA/CSDTR-01-0009,
May 2001.
[5] A. Cerpa, J. Elson, M. Hamilton, J. Zhao, Habitat monitoring: application driver for
wireless communications technology, ACM SIGCOMM’2000, Costa Rica, April
2001.
[6] S. Cho, A. Chandrakasan, Energy-efficient protocols for low duty cycle wireless
microsensor, Proceedings of the 33rd Annual Hawaii International Conference on
System Sciences, Maui, HI Vol. 2 (2000), p. 10.
[7] B. Halweil, Study finds modern farming is costly, World Watch 14 (1) (2001) 9–10.
[8] W.R. Heinzelman, J. Kulik, H. Balakrishnan, Adaptive protocols for information
dissemination in wireless sensor networks, Proceedings of the ACM MobiCom’99,
Seattle, Washington, 1999, pp. 174–185.
[9] C. Intanagonwiwat, R. Govindan, D. Estrin, Directed diffusion: a scalable and robust
communication paradigm for sensor networks, Proceedings of the ACM Mobi-
Com’00, Boston, MA, 2000, pp. 56–67.
[10] C. Jaikaeo, C. Srisathapornphat, C. Shen, Diagnosis of sensor networks, IEEE
international Conference on Communications ICC’01, Helsinki, Finland, June 2001.
[11] J.M. Kahn, R.H. Katz, K.S.J. Pister, Next century challenges: mobile networking for
smart dust, Proceedings of the ACM MobiCom’99, Washington, USA, 1999, pp. 271–
278.
[12] With Glacier Park in Its Path, Fire Spreads to 40,000 Acres, New York Times, Vol.
150, Issue 51864, p. 24, 0p, 1 map, 4c, 9/2/2001.
[13] S. Slijepcevic, M. Potkonjak, Power efficient organization of wireless sensor networks,
IEEE International Conference on Communications ICC’01, Helsinki, Finland, June
2001.
Références
[14] B. Warneke, B. Liebowitz, K.S.J. Pister, Smart dust: communicating with a cubic-
millimeter computer, IEEE Computer (January 2001) 2–9.
[15] http://www.fao.org/sd/EIdirect/EIre0074.htm.
[16] P. Bonnet, J. Gehrke, P. Seshadri, Querying the physical world, IEEE Personal
Communications (October 2000) 10–15.
[17] http://www.alertsystems.org
[18] N. Noury, T. Herve, V. Rialle, G. Virone, E. Mercier, G.Morey, A. Moro, T. Porcheron,
Monitoring behavior in home using a smart fall sensor, IEEE-EMBS Special Topic
Conference on Microtechnologies in Medicine and Biology, October 2000, pp. 607–
610.
[19] J.M. Rabaey, M.J. Ammer, J.L. da Silva Jr., D. Patel, S.Roundy, PicoRadio supports ad
hoc ultra-low power I.F. Akyildiz et al. / Computer Networks 38 (2002) 393–422 421
wireless networking, IEEE Computer Magazine (2000) 42–48.
[20] P. Johnson et al., Remote continuous physiological monitoring in the home, Journal of
Telemed Telecare 2 (2) (1996) 107–113.
[21] M. Ogawa et al., Fully automated biosignal acquisition in daily routine through 1
month, International Conference on IEEE-EMBS, Hong Kong, 1998, pp. 1947–1950.
[22] Y.H. Nam et al., Development of remote diagnosis system integrating digital telemetry
for medicine, International Conference IEEE-EMBS, Hong Kong, 1998, pp. 1170–
1173.
[23] B. Sibbald, Use computerized systems to cut adverse drug events: report, CMAJ:
canadian Medical Association Journal 164 (13) (2001) 1878, 1/2p, 1c.
[24] E.M. Petriu, N.D. Georganas, D.C. Petriu, D. Makrakis, V.Z. Groza, Sensor-based
information appliances, IEEE Instrumentation and Measurement Magazine (December
2000) 31–35.
[25] G.J. Pottie, W.J. Kaiser, Wireless integrated network sensors, Communications of the
ACM 43 (5) (2000) 551–558.
[26] Standard for Information technology_Telecommunications and information exchange
between systems_ Local and metropolitan area networks_Speci_c requirements Part
15.1 : Wireless medium access control (MAC) and physical layer (PHY) speci_cations
for wireless personal area networks (WPANs). New York, 2002.
[27] J. Lansford – HomeRF : Bringing Wireless Connectivity Home – Intel HomeRF
technology Tutorial (Avril 1999)
Références
[28] LAN-MAN Standards Committee of the IEEE Computer Society– 802.15.4 IEEE
Standard for Information technology, Part 15.4: Wireless Medium Access Control
(MAC) and Physical Layer (PHY) Specifications for Low-Rate Wireless Personal
Area Networks (LR-WPANs) –IEEEStd 802.15.4-2003 (2003)
[29] J.F. Llibre, P. Pinel et E. Campo – Quel choix de source d’énergie pour rendre un
système communicant autonome ? – XIIieme Colloque National de la Recherche dans
les IUT, Brest, France (2006)
[30] LAN-MAN Standards Committee of the IEEE Computer Society – 802.11 IEEE
Standard for Information technology, Specific Requirements – Part 11 : Wireless LAN
Medium Access Control (MAC) and Physical Layer (PHY) Specifications – IEEE
standard 8802-11 (1999)
[31] IEEE Standard 802.16-2004 : IEEE Standard for Local and Metropolitan Area
Networks - Part 16 : Air Interface for Fixed Broadband Wireless Access Systems.
New York, 2004.
[32] Agha, K. A., Pujolle, G., and Vivier, G. (2002). Réseaux de mobiles et réseaux sansfil.
Eyrolles.
[33] Lemlouma, T. (2000). Le routage dans les réseaux ad-hoc, Mémoire de maîtrise,
Université des Sciences et de la Technologie Houari Boumèdiene.
[34] K. Akkaya et M. younis. A survey on routing protocols for wireless sensor networks.
Elsevier Ad Hoc Network, vol. 3/3:pages 325-349, 2005.
[35] J.N. Al-Karak and A.E. Kamal. Routing techniques in wireless sensor networks: a
survey. IEEE wireless communications, volume 11: pages 6-28, December 2004.
[36] C.Intanagonviwat, R.Govindan, and D.estrin. directed diffusion : a scalable and robust
communication paradigm for sensor networks. In proceedings of the 6 th annual
international conference on mobile computing and networking, page 56-67, august
2000.
[37] C.Intanagonviwat, R.Govindan, and D.estrin., J.Heidemann, and F.silva. directed
diffusion for wireless sensor networking. IEEE/ACM transactions on networking
IEEE/ACM transactions on networking, 11, February 2003.
[38] Holger Karl and Andreas willig. Protocols and architectures for wireless sensor
networks. Wiley,2005 . ISBN : 0470095105.
[39] Ian F. Akyildiz, Weilian Su, Yogesh Sankarasubramaniam, and Erdal Cayirci. A
Survey on Sensor Networks.Georgia Institute of Technology. Pages 102-114, IEEE
Communications Magazine. August 2002.
Références
[40] Mohammad Ilyas and Imad Mahgoub. Handbook of sensor networks: compact wireless
and wired sensing systems. CRC Press 2004.
[41] Chonggang Wang and Kazem Sohraby. A Survey of Transport Protocols forWireless
Sensor Networks. University of Arkansas, Bo Li, The Hong Kong University of
Science and Technology, Mahmoud Daneshmand, AT&T Labs Research, Yueming
Hu, South China Agricultural University. June 2006.
[42] Carlos Pomalaza-Rez. Wireless Ad Hoc & Sensor Networks.University of Oulu,
Finland, 2004.
[43] Simon, H. A. (1991). Sciences des systèmes, science de l’artificiel. Dunod.
[44] Durand, D. (1998). La systémique. Que sais-je?, 2nd édition, PUF.
[45] Ferber, J. (1995). Les Systèmes Multi-Agents : vers une intelligence collective.
InterEditions.
[46] Demazeau, Y. and Costa, A. R. (1996). Populations and organisations in open multi-
agent systems. In 1st Symposium on Parallel and Distributed AI, Hyderabad, India.
[47] Wooldridge, M. (1999). Intelligent agents. InWeiss, G., editor, Multiagent systems :A
modern approach to Distributed Artificial Intelligence. MIT Press.
[48] Rao, A. and Georgeff, M. (1995). Bdi agents : from theory to practice. In conference
of 1st International Conference on Multi-Agent Systems ICMAS, pages 312–319.
AAAI Press.
[49] Drogoul, A. (1993). De la Simulation Multi-agents à la Résolution Collective de
Problèmes, Thèse de doctorat, Université Paris VI.
[50] Joël Quinqueton. Cours: Fondements des Systèmes Multi-Agents. LIRMM 2003.
www.lirmm.fr/~jq/Cours/3cycle/smaEMA03c1.pdf
[51] Stuart J. Russell and Peter Norvig. Artificial Intelligence.A Modern Approach.
Prentice-Hall, Inc. A Simon & Schuster Company Englewood Cliffs, New Jersey
07632. 1995.
[52] Aušra RAMONAITE « Contribution à la modélisation à base de systèmes multi-
agents d’une architecture communicante pour l’accélération de flux applicatifs au
travers de l’Internet »
[53] E.ADAM « La programmation orientée agent »
[54] Vercouter, L. (2000). Conception et mise en oeuvre de systèmes multi-agents ouverts et
distribués, Thèse de doctorat, Université de Jean Monnet et Ecole des Mines de Saint-
Etienne.
Références
[55] Russell, S. and Norvig, P. (1995). Artificial Intelligence : a Modern Approach. Prentice-
Hall.
[56] Wooldridge, M., Jennings, N., and Kinny, D. (2000). The gaia methodology for agent-
oriented analysis and design. In Autonomous Agents and Multi-Agent Systems,
volume 3, pages 285–312. Kluwer Academic Publishers.
[57] Hairong Qi, Yingyue Xu, Xiaoling Wang. Mobile-Agent-Based Collaborative Signal
and Information Processing in Sensor Networks. Department of Electrical and
Computer Engineering,University of Tennessee, Knoxville, TN 37996-2100 USA.
IEEE 2003.
[58] Mohammed Ketel Numan S. Dogan Abdollah Homaifar. Distributed Sensor Networks
based on Mobile Agents Paradigm. Dept. of Electrical & Computer Eng.North
Carolina A&T State University Greensboro, NC 2741 1. IEEE 2005.
[59] Farid Esmaeili Motlagh (GS22752), Wireless Sensor Networks: Challenges in
Biomedical Applications. Institute of Advanced Technology, University Putra
Malaysia (2008)
[60] Adrien VAN DEN BOSSCHE, Proposition d’une nouvelle méthode d’accès
déterministe pour un réseau personnel sans fil à fortes contraintes temporelles,
MEMOIRE de THESE DOCTORAT de L’UNIVERSITÉ de TOULOUSE II (2007)
[61] Tayeb Lemlouma. Le Routage dans les Réseaux Mobiles Ad Hoc. Mini projet proposé
par Dr. Nadjib Badache septembre 2000.
[62] J. Misra. Distributed discrete-event simulation. ACM Computing Surveys, Vol.
18, No.1, pp. 39-65, March 1986.
[63] NS -2. http://www.isi.edu/nsnam/ns
[64] D.B. Johnson. The Rice University Monarch Project. Technical Report, Rice
University, 2004.
[65] S. Park, A. Savvides, and M. Srivastava. SensorSim: A simulation framework
for Sensor networks. In Proc. of the ACM international Workshop on Modeling,
Analysis and Simulation of Wireless and Mobile Systems, 2000.
[66] OPNET Technolgies, Inc. OPNET Modeler
[67] A. Sobeih and J. C. Hou. A simulation framework for sensor networks in J-Sim.
Technical Report UIUCDCS-R-2003-2386, Department of Computer Science,
University of Illinois at Urbana-Champaign, November 2003.
Références
[68] X. Zeng, R. Bagrodia, and M. Gerla. Glomosim: A library for parallel simulation
of largescale wireless networks. In Workshop on Parallel and Distributed
Simulation, pages 154–161, 1998.
[69] OMNeT++, http://www.omnetpp.org/
[70] A. Vargas. OMNET++ Discrete Event Simulation System, version 2.3 edition,
2003.
[71] E. Egea-Lopez et al., “Simulation Tools for Wireless Sensor Networks,” Proc.
Int’l. Symp. Perf. Eval. of Comp. And Telecommun. Sys., Philadelphia, PA,
July 2005, pp. 559–66.
[72] S.S Kulkarni, « TDMA services for Sensor Networks » Proceedings of 24th
International Conference on Distributed Computing Systems Workshops, Pages 604-
609 , 23-24 mars 2004
[73] W. Ye, J. Heidemann, D.Estrin, “edium Access Control With Coordinated Adaptive
Sleeping for Wireless Sensor Networks” , IEEE/ACM Transactions on Networking,
Volume: 12, Issue: 3,pages: 493-506,June 2004.
[74] A. El-Hoiydi, “Spatial TDMA and CSMA with preambule sampling for low power ad
hoc wireless sensor networks”, proceedings of ISCC 2002, Seventh International
Symposium on Computers and Communications, pages:685-692, 1-4 July 2002.
[75] C.C, Enz, El-Hoiydi, J-D. Decotignie, V. Peiris, “WiseNET: An Ultralow-power
Wireless Sensor Network Solution”, IEEE Computer, Volume: 37, Issue: 8, August
2004.
[76] G.Lu, B.Krishnamachari, C.S. Raghvendra, “An adaptive energy efficient and low-
latency MAC for data gathering in wireless sensor networks”, proceedings of 18th
International Parallel and Distributed Processing Symposium, Pages: 224,26-30 April
2004.
[77] K. Sohrabi, J. Pottie, “ Protocols for self organisation of a wireless sensor network”,
IEEE Personal communications, Volume 7, Issue 5, pp 16-27, 2000
[78] C. Intanagonwiwat, R. Govindan, and D. Estrin, “ Direct diffusion: a scalable and
robust communication paradigm for sensor networks” Proceedings of ACM
MobiCom, Boston, 2000, pp 56-67
[79] D. Braginsky and D. Estrin, “Rumor Routing Algorithm for Sensor Networks”, in the
Proceedings oh the first Workshop on Sensor Networks and Applications , Atlanta,
October 2003
Références
[80] C. Schurgers and M.B. Srivastava “ Energy efficient routing in wireless sensor
networks” , in the MILCOM Proceedings on Communications for Network Centric
Operations: Creating the Information Force, Mc Lean, VA, 2001
[81] W. Heinzelman, J. Kulik, and H. Balakrishnan, « Adaptative Protocols for Information
Dissemination in Wireless Sensor Networks » , Proc. 5Th ACM/IEEE Mobicom
Conference Seatle, August 1999, pp. 174-185.
[82] J. Kulik ,W. Heinzelman, and H. Balakrishnan « Negotiation based protocols for
disseminating information in Wireless Sensor Networks », Wireless Networks,
Volume8, pp 169-185, 2002
[83] R.C. Shah and J. Rabaey « Energy Aware Routing for Low Energy Ad Hoc Sensor
Networks », IEEE Wireless communications and Networking Conference, March 17-
21, 2002, Orlando
[84] F. Ye, A. Chen, S. Liu, L. Zhang, « A scalable solution to minimum cost forwarding
in large sensor networks », Proceedings of the tenth International Conference on
Computer Communications and Networks, pp 304-309, 2001
[85] W. Heinzelman, A. Chandrakasan, and H. Balakrishnan, « Energy-Efficient
Communication Protocol for Wireless Microsensor Networks » Proceedings of the
33th Hawaii International Conference on System Sciences, January 2002
[86] S. Lindsey, C. Raghavendra, « PEGASIS : Power Efficient Gathering in Sensor
Information Systems », IEEE Aerospace Conference Proceedings, 2002, Volume 3, pp
9-16
[87] A. Savvides, C-C Han, M. Srivastava, « Dynamic fine grained localization in Ad-
Hoc Networks of sensors », Proceedings of the seventh ACM Annual International
Conference on Mobile Computing and Networking (MobiCom) , July 2001, pp 166-
179
[88] A. Manjeshwar and D. P. Agarwal, « TEEN : a routing protocol for enhanced
efficiency in wireless sensor networks », In 1st Intenational Workshop on Parallel and
Distributed Computing Issues in Wireless Networks and Mobile Computing, April
2001
[89] A. Manjeshwar and D. P. Agarwal, « APTEEN : a hybrid protocol for efficient routing
and comprehensive information retrieval in wireless sensor networks », Parallel and
Distributed Processing Symposium, Proceedings International, 2002, pp 195-202
[90] V. Rodoplu, and T. H. Meng, « Minimum Energy Mobile Wireless Network », IEEE
Journal Selected Areas in Communications, vol, 17, no 8, Aug 1999
Références
[91] L. Li, and J. Y. Halpern, « Minimum Energy Mobile Wireless Networks Revisited »,
IEEE International Conference on communications, 2001, Vol 1, pp 278-283
[92] Y. Xu, J. Heidemann, D. Estrin, « Geography-informed Energy Conservation for ad-
hoc Routing » In proceedings of the Seventh Annual ACM/IEEE International
Conference on Mobile Computing and Networking, 2001, pp 70-84
[93] Y. Yu, D. Estrin, R. Govindan, « Geographical and Energy-aware Routing : A
recursive Data Dissemination Protocol for Wireless Sensor Networks », UCLA
computer Science Departement Technical Report, May 2001
[94] K. Sohrabi, J. Pottie , « Protocols for self-organization of a wireless sensor network »,
IEEE Personal Communications, Volume 7, Issue 5, pp 16-27, 2000
[95] Edgar H. Callaway. Wireless Sensor Networks: Architectures and Protocols. CRC
Press 2004.
[96] Jamal N. Al-Karaki, Raza Ul-Mustafa, Ahmed E. Kamal. Data Aggregation in
Wireless Sensor Networks - Exact and Approximate Algorithms. Proceedings of IEEE
Workshop on High Performance Switching and Routing (HPSR) 2004,,Phoenix,
Arizona, USA. April 18-21, 2004.
[97] Dominique Dhoutaut. Etude du standard IEEE 802.11 dans le cadre des réseaux Ad
hoc: de la simulation à l’expérimentation. Thèse pour obtenir le grade de Doctorat en
Informatique. 2003.