-
AVERTISSEMENT
Ce document est le fruit d'un long travail approuv par le jury
de soutenance et mis disposition de l'ensemble de la communaut
universitaire largie. Il est soumis la proprit intellectuelle de
l'auteur. Ceci implique une obligation de citation et de
rfrencement lors de lutilisation de ce document. D'autre part,
toute contrefaon, plagiat, reproduction illicite encourt une
poursuite pnale. Contact : [email protected]
LIENS Code de la Proprit Intellectuelle. articles L 122. 4 Code
de la Proprit Intellectuelle. articles L 335.2- L 335.10
http://www.cfcopies.com/V2/leg/leg_droi.php
http://www.culture.gouv.fr/culture/infos-pratiques/droits/protection.htm
-
Universit de Lorrainecole Doctorale IAEM Lorraine
Mention Systmes lectroniques, Gnie lectrique
T H S Eprsente
LUniversit de LorraineEn vue de lobtention du grade de
Docteur de lUniversit de LorraineSpcialit : Gnie lectrique
Soutenue par
Alexandre BATTISTON
Ingnieur diplm de lcole Nationale Suprieure dlectricit et de
Mcanique
Modlisation, commande, stabilit et mise enuvre des onduleurs
source impdante.
Application aux systmes embarqus.
Soutenue publiquement le 29 septembre 2014 devant le jury compos
de :
Prsident Prof. Maurice FADEL INP Toulouse, LAPLACE
Rapporteurs Prof. ric MONMASSON Univ. de Cergy-Pontoise,
SATIEProf. Delphine RIU Grenoble INP, G2Elab
Examinateurs Dr. Franois BADIN (Directeur-Expert) IFP nergies
nouvellesDr. El-Hadj MILIANI (Encadrant) IFP nergies nouvellesProf.
Serge PIERFEDERICI (Directeur) Univ. de Lorraine, GREENProf. Farid
MEIBODY-TABAR (Codirecteur) Univ. de Lorraine, GREEN
Thse prpare au Groupe de Recherche en lectrotechnique
etlectronique de Nancy
Site de lENSEM - EA No 4366En partenariat avec lIFP nergies
nouvelles (Rueil-Malmaison)
-
mes parents, Louis et Isabelle
ma sur Julie
-
Remerciements
Les travaux prsents dans ce manuscrit de thse ont t raliss au
laboratoire GREEN(site de lcole Nationale Suprieure dlectricit et
de Mcanique) de lUniversit de Lorraine.Ils ont bnfici dun
partenariat avec IFP nergies nouvelles de Rueil-Malmaison.
Ce travail de thse sest effectu sous la direction de MM. Serge
PIERFEDERICI et FaridMEIBODY-TABAR, Professeurs des Universits
lENSEM. Il a bnfici dun encadrementpar lIFP nergie nouvelles
travers lexpertise du Dr. El-Hadj MILIANI.
Jadresse mes remerciements les plus respectueux aux directeurs
du laboratoire GREEN, le Pro-fesseur Shahrokh SAADATE, ancien
directeur du laboratoire, et le Professeur Bernard DAVAT,actuel
directeur du laboratoire.
Jadresse galement mes remerciements les plus chaleureux mes
encadrants directs, les Pro-fesseurs Serge PIERFEDERICI et Farid
MEIBODY-TABAR. Je suis trs fier davoir collaboravec ces personnes
de grandes qualits humaines et scientifiques. Je souhaite leur
exprimer maplus grande reconnaissance quant leur expertise dans ce
travail. Japprcie la confiance quilsmont accord et lautonomie dont
jai pu bnficier dans tous mes choix scientifiques et
exp-rimentaux.
Je tiens remercier galement MM Jean-Philippe MARTIN, Babak
NAHID-MOBARAKEH etThierry BOILEAU, enseignant-chercheurs au
laboratoire, pour leurs comptences et leur sym-pathie. Ils ont
contribu, dune manire ou dune autre, ce travail de thse et auraient
sansaucun doute trouv leur place parmi les membres du jury de thse.
Un remerciement spcial Julien FONTCHASTAGNER pour le template
beamer de la prsentation finale.
Mes remerciements vont galement M. El-Hadj MILIANI, encadrant
IFP nergies nouvelles,qui a suivi ces travaux distance et na pas
manqu dy faire des remarques pertinentes. Aussi,je tiens le
remercier pour sa confiance dans mon travail, et ce, depuis mon
stage ingnieurENSEM effectu IFPEN.
Je souhaite prsent exprimer ma profonde reconnaissance M.
Maurice FADEL, Professeur lINP de Toulouse et directeur du
Laboratoire LAPLACE, pour avoir accept de prsider monjury de thse.
Je remercie galement Mme. Delphine RIU du Laboratoire G2Elab,
Professeure Grenoble INP, pour avoir accept de rapporter sur ce
travail. Je la remercie pour le dialogueque nous avons entretenu
lors de la soutenance et pour ses nombreuses questions pertinentes
ettechniques, qui ont permis douvrir les perspectives aux travaux
concernant la stabilit "grandsignal". Cest un honneur que de
remercier galement M. ric MONMASSON du Laboratoire
-
SATIE, Professeur lUniversit de Cergy-Pontoise, pour avoir
accept de rapporter galementsur ce travail de thse. Lchange lors de
la soutenance fut particulirement enrichissant et per-tinent. Je
souhaite enfin remercier vivement M. Franois BADIN, Directeur de
Recherche etExpert de llectrification des Vhicules IFP nergies
nouvelles, pour avoir accept de siger ce jury de thse et dexaminer
ce travail.
Il me vient prsent le moment de remercier mes collgues du
laboratoire GREEN, qui ontdune manire ou dune autre contribu
llaboration de ce travail de thse. videmment, jeremercie lensemble
des doctorants du laboratoire, quils soient de lancienne ou de la
nouvellegnration, dont le bureau est lENSEM ou la Facult de
Sciences. Merci vous tous pourlambiance chaleureuse que vous avez
su crer au sein de ce laboratoire. Jai t particulirementfier de
vous reprsenter aux diffrents conseils (labo, cole doctorale ou
CLED) et ne doute gurequant votre capacit prendre la main. Je
remercie donc Pierre Magne, Sami Zaim, mon chermentor Nicolas
Lebuf, Majid Zandi et Sisuda, Ehsan Jamshidpour, Azeddine Houari,
BlaiseLaptre, Sara Bazhar, Rada Alhasan, Dinh Lam Dang, Bashar
Gony, Rafael Linares, HassanMoussa, Julien Leclerc. Un remerciement
spcial mes plus proches collaborateurs, aussi bienau labo qu
lextrieur et qui jai fait dcouvrir les joyeux entrainements de
course pied dudimanche matin : Ivano Forrisi, Tingting Ding, Jrmy
Cuenot, Najla Haje Obeid, Diane Le-blanc, Marc Buffo, Hugues
Renaudineau et Geoffrey Devornique. Bon courage Bastien Dolisypour
la reprsentation des doctorants et lorganisation des barbeuc. Et
enfin, je souhaiteraistout particulirement exprimer un remerciement
spcial Roghayeh Gavagsaz Ghoachani, poursa gentillesse, son
soutien, ses gteaux, ses cadeaux... Jai dcouvert une personne
formidable etil ne fait nul doute que nous resterons en contact
!
Je tiens particulirement remercier lensemble des secrtaires,
techniciens et assistant-ingnieursdu laboratoire sans qui ce
travail naurait pu aboutir. Je remercie vivement Fadi Sharif,
IsabelleSchwenker, Sylvie Colinet, Latifa Zoua, Sophie Guichard
ainsi que Fabrice Tesson.
Merci mes plus proches sportifs qui mont accompagn sur les
comptitions, et plus particu-lirement sur le Marathon de Paris 2014
! Un grand merci Isabelle Schwenker, NFamoussaCamara, Julie
Battiston et Zakarya Boufaida.
Je remercie trs chaleureusement mes parents, Louis et Isabelle
pour leur soutiens pendant cestrois annes ainsi que ma sur Julie.
Aussi, je remercie ma marraine Estelle Biri, mon oncleDidier Biri
ainsi que mes cousins Lucie Demange et Sbastien Schaff qui mont
fait lhonneurde leur prsence lors de la soutenance.
Que toutes les personnes que jai oublies trouvent en ces mots
mes remerciements les plusrespectueux.
-
Table des matires
Introduction Gnrale 1
1 Les onduleurs source impdante : gnralits et mise en uvre 31.1
Objectif et contexte de ltude . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 3
1.1.1 Les convertisseurs de puissance dans les systmes de
traction lectrique(exemple de lautomobile lectrique) . . . . . . .
. . . . . . . . . . . . . . 3
1.1.2 Objectif de la thse . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 51.2 Les onduleurs source impdante dans les
systmes de traction lectrique : prin-
cipe de fonctionnement . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 61.2.1 Introduction . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 61.2.2 Modlisation et
caractristique statique dlvation . . . . . . . . . . . . . 8
1.2.2.1 Squence hors court-circuit de bras donduleur : u = 0 . .
. . . . 81.2.2.2 Squence de court-circuit de bras donduleur : u = 1
. . . . . . . 91.2.2.3 Systme dtat de londuleur Z-source et
caractristique sta-
tique dlvation . . . . . . . . . . . . . . . . . . . . . . . . .
. . 91.2.3 Mthodes dinsertion des tats de court-circuits de bras
donduleur dans
sa stratgie de commande MLI . . . . . . . . . . . . . . . . . .
. . . . . . 101.2.3.1 Insertion des court-circuits en MLI symtrique
chantillonne . . 111.2.3.2 Exemple dune mthode alternative
dinsertion des court-circuits :
Maximum Boost Control . . . . . . . . . . . . . . . . . . . . .
. 141.2.3.3 Mthode dinsertion de six commandes de court-circuit
pendant
une priode de dcoupage T . . . . . . . . . . . . . . . . . . . .
151.2.3.4 Insertion des court-circuits en MLI de type SVM . . . . .
. . . . 16
1.3 Application dune mthode de contrle spare de londuleur
Z-source et de lamachine synchrone. . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 201.3.1 Introduction . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.3.2
Contrle du systme et adaptation de la tension du bus . . . . . . .
. . . 21
1.3.2.1 Commande par platitude diffrentielle deux boucles de la
ma-chine synchrone . . . . . . . . . . . . . . . . . . . . . . . .
. . . 21
1.3.2.2 Commande par mode de glissement de londuleur Z-source .
. 241.3.2.3 Gnration de la rfrence de tension du bus continu vDC
pour
son adaptation la vitesse de la machine . . . . . . . . . . . .
. 271.3.2.4 valuation de la contrainte (calibre) en tension des
interrupteurs
de londuleur source impdante . . . . . . . . . . . . . . . . . .
301.3.3 Validation par simulations . . . . . . . . . . . . . . . .
. . . . . . . . . . . 301.3.4 Prsentation du banc exprimental et
validation . . . . . . . . . . . . . . 32
1.4 Mise profit de larchitecture de londuleur Quasi Z-source
pour annuler lesondulations hautes frquences du courant dentre . .
. . . . . . . . . . . . . . . 35
i
-
1.4.1 Modlisation de londuleur Quasi Z-source et condition
mathmatiquedannulation des ondulations du courant iL1 . . . . . . .
. . . . . . . . . . 35
1.4.2 Condition magntique dannulation des ondulations du courant
dentre . 371.4.3 Rsultats de simulation . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 401.4.4 Rsultats exprimentaux . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 401.4.5 Effet sur le
rendement du systme . . . . . . . . . . . . . . . . . . . . . .
441.4.6 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 44
1.5 Conclusion du chapitre 1 . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 45
2 Comparaison des onduleurs source impdante avec les
architectures clas-siques tage dlvation 472.1 Introduction . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 472.2 Rpartition du courant de court-circuit dans les
semiconducteurs dun onduleur
source impdante . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 482.2.1 Configuration 1 : Mthode 1-bras . . .
. . . . . . . . . . . . . . . . . . . . 482.2.2 Configuration 2 :
Mthode 2-bras . . . . . . . . . . . . . . . . . . . . . . . 492.2.3
Configuration 3 : Mthode 3-bras . . . . . . . . . . . . . . . . . .
. . . . . 502.2.4 Comparaison des courants commuts . . . . . . . .
. . . . . . . . . . . . . 512.2.5 valuation de la contrainte
(calibre) en courant des interrupteurs de lon-
duleur source impdante par rapport ceux de londuleur de tension
. . 522.3 Calcul de pertes et de rendement . . . . . . . . . . . .
. . . . . . . . . . . . . . . 53
2.3.1 Calcul analytique des pertes par conduction dans les
onduleurs (classiquesou source impdante) . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 532.3.1.1 Calcul des pertes par
conduction avec la Mthode 1-bras . . . . 552.3.1.2 Calcul des
pertes par conduction avec la Mthode 2-bras . . . . 572.3.1.3
Calcul des pertes par conduction avec la Mthode 3-bras . . . .
57
2.3.2 Calcul analytique des pertes par conduction dans les
interrupteurs externes 582.3.2.1 Pertes par conduction dans la
diode D de londuleur source
impdante . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 582.3.2.2 Pertes par conduction dans linterrupteur Kb et la
diode Db du
convertisseur boost . . . . . . . . . . . . . . . . . . . . . .
. . . 592.3.3 Calcul analytique des pertes par commutation . . . .
. . . . . . . . . . . 60
2.3.3.1 Cas de londuleur de tension classique . . . . . . . . .
. . . . . . 602.3.3.2 Cas de londuleur source impdante . . . . . .
. . . . . . . . . 61
2.3.4 Calcul des pertes par commutation des interrupteurs
externes . . . . . . . 632.3.4.1 Pertes en commutation de la diode
D des onduleurs source
impdante . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . 632.3.4.2 Pertes en commutation de Kb et Db du convertisseur
boost . . . 64
2.3.5 Calcul des pertes Joule dans les lments passifs . . . . .
. . . . . . . . . 642.3.5.1 Pertes Joule dans les inductances . . .
. . . . . . . . . . . . . . 642.3.5.2 Pertes Joule dans les
condensateurs . . . . . . . . . . . . . . . . 64
2.3.6 Pertes fer dans les inductances . . . . . . . . . . . . .
. . . . . . . . . . . 652.3.7 Bilan des pertes prises en compte et
validation exprimentale . . . . . . . 662.3.8 Conclusion du critre
rendement . . . . . . . . . . . . . . . . . . . . . . . 70
2.4 Considration du stockage dnergie dans les convertisseurs . .
. . . . . . . . . . 702.4.1 Cas du convertisseur boost . . . . . .
. . . . . . . . . . . . . . . . . . . . 712.4.2 Cas de londuleur
Z-source . . . . . . . . . . . . . . . . . . . . . . . . . 712.4.3
Cas de londuleur Quasi Z-source . . . . . . . . . . . . . . . . . .
. . . . 71
ii
-
2.4.4 Rsultats . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 722.5 Considration nergtique sur cycle de
fonctionnement des convertisseurs . . . . 73
2.5.1 Bilan nergtique des systmes . . . . . . . . . . . . . . .
. . . . . . . . . 732.5.2 tude dun cycle de fonctionnement . . . .
. . . . . . . . . . . . . . . . . 73
2.6 valuation des ratios dlvation en tenant compte des lments
parasites . . . . 752.7 Critre des courants efficaces dans les
condensateurs . . . . . . . . . . . . . . . . 762.8 Conclusion du
chapitre 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 78
3 Commande par platitude dynamique leve de londuleur Quasi
Z-source :rduction des capacits de ltage continu 793.1 Introduction
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 793.2 Modlisation et preuve de platitude du systme . . .
. . . . . . . . . . . . . . . . 81
3.2.1 Modlisation du systme considr . . . . . . . . . . . . . .
. . . . . . . . 813.2.2 Preuve de platitude du modle tabli . . . .
. . . . . . . . . . . . . . . . . 83
3.2.2.1 Choix de la sortie plate y . . . . . . . . . . . . . . .
. . . . . . . 833.2.2.2 Expression des variables dtat du systme . .
. . . . . . . . . . 833.2.2.3 Expression des variables de commande
du systme . . . . . . . . 843.2.2.4 Bilan . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 84
3.3 Dfinition des trajectoires de rfrence . . . . . . . . . . .
. . . . . . . . . . . . . 853.3.1 Trajectoire de la vitesse
mcanique y . . . . . . . . . . . . . . . . . . . . 85
3.3.1.1 Trajectoire polynomiale de type arrt-arrt . . . . . . .
. . . . . 853.3.1.2 Trajectoire temporelle de type second ordre . .
. . . . . . . . . . 87
3.3.2 Trajectoire de la composante ye . . . . . . . . . . . . .
. . . . . . . . . . . 873.4 Paramtres de rgulation et synoptique de
commande . . . . . . . . . . . . . . . 883.5 Validation de la
commande une boucle propose . . . . . . . . . . . . . . . . .
90
3.5.1 Rsultats de simulation . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 903.5.2 Validation exprimentale . . . . . . . .
. . . . . . . . . . . . . . . . . . . 923.5.3 Bilan . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
95
3.6 Prise en compte de la saturation des variables de commande,
origines et corrections 953.6.1 tude en cas de saturation des
commandes . . . . . . . . . . . . . . . . . 953.6.2 Proposition
dune saturation passive base sur ladaptation de la rfrence
de vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 973.6.2.1 Loi de contrlabilit . . . . . . . . . .
. . . . . . . . . . . . . . . 973.6.2.2 Saturations passives
contrles par adaptation de la rfrence de
vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 983.6.2.3 Validation par simulation de la mthode de
saturation passive . 993.6.2.4 Validation exprimentale de la mthode
de saturation passive . . 99
3.6.3 Cas du systme perturb : proposition dune mthode de
saturation active 1013.6.3.1 tude de la robustesse un chelon de
couple de charge en limite
de contrlabilit de la machine . . . . . . . . . . . . . . . . .
. . 1023.6.3.2 Principe de la mthode de saturation active propose .
. . . . . 1033.6.3.3 Validation par simulation . . . . . . . . . .
. . . . . . . . . . . . 1043.6.3.4 Validation exprimentale . . . .
. . . . . . . . . . . . . . . . . . 105
3.6.4 Protection de dernier recours : mthode de saturation max .
. . . . . . . 1063.6.4.1 Principe . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 107
3.7 Comparaison PI-Platitude . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 1083.7.1 Prsentation du systme de contrle
compar . . . . . . . . . . . . . . . . 108
iii
-
3.7.2 tudes comparatives en termes de stabilit et de robustesse
vis vis dela valeur des capacits C . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 109
3.7.3 Quelques rsultats de simulation . . . . . . . . . . . . .
. . . . . . . . . . 1123.7.3.1 Essai de stabilit . . . . . . . . .
. . . . . . . . . . . . . . . . . . 1123.7.3.2 Essai en rejet de
perturbations . . . . . . . . . . . . . . . . . . . 112
3.8 Conclusion du Chapitre 3 . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 115
4 Solutions de commutations douces pour un onduleur Quasi
Z-source 1174.1 Introduction . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 117
4.1.1 Commutation dure / commutation douce . . . . . . . . . . .
. . . . . . . 1174.1.2 Prsentation de ltude mene dans ce chapitre .
. . . . . . . . . . . . . . 118
4.2 tude du mode de fonctionnement "moteur" . . . . . . . . . .
. . . . . . . . . . . 1194.2.1 tude de lenchainement des squences .
. . . . . . . . . . . . . . . . . . . 1194.2.2 Rsum, trac du plan
de phase et contraintes sur les interrupteurs . . . . 1244.2.3
Insertion des commutations douces dans le schma de commande par
MLI
propre londuleur Quasi Z-source . . . . . . . . . . . . . . . .
. . . . . 1254.2.4 Condition de fonctionnement du dispositif
commutations douces appli-
qu au systme prsent . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 1264.2.5 Validation par simulations . . . . . . . . . .
. . . . . . . . . . . . . . . . . 1284.2.6 Validation exprimentale
en mode moteur . . . . . . . . . . . . . . . . . . 130
4.2.6.1 Cycle de fonctionnement du dispositif de commutations
douces . 1304.2.6.2 Dtail de la rsonance aprs amorage de Kr1 et
observation des
courants primaire et secondaire des inductances couples . . . .
1324.2.6.3 lments parasites et exploitation . . . . . . . . . . . .
. . . . . 134
4.3 Mode de rcupration . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 1364.3.1 tude de lenchainement des squences
. . . . . . . . . . . . . . . . . . . . 1364.3.2 Plan de phase en
mode de rcupration et gnration des commandes . . 1424.3.3
Validation par simulation . . . . . . . . . . . . . . . . . . . . .
. . . . . . 1444.3.4 Validation exprimentale en mode de rcupration
. . . . . . . . . . . . . 1464.3.5 Phnomnes de recouvrement et
exploitation . . . . . . . . . . . . . . . . 149
4.4 valuation du rendement du systme avec et sans dispositif
commutations douces1504.5 Conclusion du chapitre 4 . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 152
5 Contribution ltude de la stabilit "grand signal" base sur la
dcomposi-tion en valeurs singulires dordre lev 1535.1 Introduction
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 1535.2 Stabilit de type "petit signal" et stabilisation
travers un exemple exprimental 154
5.2.1 tude de la stabilit petit signal du systme de traction
muni dun ondu-leur Quasi Z-source . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 154
5.2.2 Stabilisation de londuleur Quasi Z-source quand d = 0 . .
. . . . . . . 1585.2.3 Rsultats de simulation et exprimentaux . . .
. . . . . . . . . . . . . . . 1605.2.4 Bilan sur la stabilit petit
signal et stabilisation . . . . . . . . . . . . . . . 161
5.3 Rappels sur les notions de stabilit de type "grand signal" .
. . . . . . . . . . . . 1635.3.1 Fonction de Lyapunov . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 1635.3.2 Mise sous
forme de multi-modles de Takagi-Sugeno dun systme non
linaire . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 1635.3.3 Application un exemple concret : le cas
de londuleur Quasi Z-source
non command alimentant une charge puissance constante . . . . .
. . . 165
iv
-
5.3.3.1 Modlisation sous forme de multi-modles de Takagi-Sugeno
. . 1665.3.3.2 Recherche et trac du bassin dattraction . . . . . .
. . . . . . . 166
5.4 Transformation des modles non linaires en produit de
tenseurs : dterminationnumrique des modles polytopiques de
Takagi-Sugeno . . . . . . . . . . . . . . . 1685.4.1 Dfinitions et
thormes fondamentaux . . . . . . . . . . . . . . . . . . . 168
5.4.1.1 La dcomposition en valeurs singulires dordre lev des
ten-seurs (HOSVD) . . . . . . . . . . . . . . . . . . . . . . . . .
. . 168
5.4.1.2 Approximation de la dcomposition des tenseurs HOSVD,
exis-tence dune version "rduite" du tenseur de dpart . . . . . . .
. 171
5.4.2 Application lexemple de la section 5.3.3 . . . . . . . . .
. . . . . . . . . 1735.4.2.1 Premire tape : lchantillonnage . . . .
. . . . . . . . . . . . . 1745.4.2.2 Seconde tape : excution de la
HOSVD pour aboutir lcriture
de la dcomposition en produit de tenseur . . . . . . . . . . . .
1745.4.2.3 tablissement de la modlisation sous forme de modles
polyto-
piques . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 1775.4.2.4 Convexit et normalisation : quivalence avec
ltude analytique 178
5.4.3 Bilan intermdiaire, gnralisation . . . . . . . . . . . . .
. . . . . . . . . 1805.5 tude de la stabilit grand signal dun
onduleur Quasi Z-source command
alimentant une charge puissance constante . . . . . . . . . . .
. . . . . . . . . . 1805.5.1 Petite digression . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 1815.5.2 Application au
systme dtude . . . . . . . . . . . . . . . . . . . . . . . .
182
5.5.2.1 Prparation du modle . . . . . . . . . . . . . . . . . .
. . . . . 1825.5.2.2 Calculs des SVD sur chaque mode . . . . . . .
. . . . . . . . . . 1855.5.2.3 criture des modles polytopiques de
Takagi-Sugeno . . . . . . . 1895.5.2.4 Trac de lestimation du
domaine de stabilit . . . . . . . . . . . 191
5.6 Conclusion du chapitre 5 . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 195
Conclusion Gnrale 197
Bibliographie 200
Annexes 207
A Mthode de calcul des temps dapplication des tats actifs et
zros de lon-duleur command en MLI de type SVM (avec court-circuits
ou non) 209
B Complments au Chapitre 2 213B.1 Calcul du courant commut dans
un onduleur source impdante avec ajout de
court-circuits . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 213B.2 Calcul des pertes dans londuleur .
. . . . . . . . . . . . . . . . . . . . . . . . . . 215
B.2.1 Dveloppement du calcul des pertes en conduction pour la
Mthode 2-bras 215B.2.2 Dveloppement du calcul des pertes en
conduction pour la Mthode 3-bras 216
B.3 Calcul de la valeur efficace de courants . . . . . . . . . .
. . . . . . . . . . . . . . 217B.3.1 Valeur efficace des courants
dans les inductances . . . . . . . . . . . . . . 217B.3.2 Valeur
efficace du courant dentre donduleur Iond avec court-circuits . .
219
B.4 Calcul des pertes par commutation dans londuleur pour les
Mthodes 2-bras et3-bras . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . 220
B.5 Calcul des pertes fer dans les inductances . . . . . . . . .
. . . . . . . . . . . . . 222B.5.1 Cas du convertisseur boost . . .
. . . . . . . . . . . . . . . . . . . . . . . 222
v
-
B.5.2 Cas des onduleurs source impdante (calculs mens pour
londuleur Z-source) . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 222
B.6 Dimensionnement des lments passifs des systmes dlectronique
de puissance . 223B.6.1 Cas du convertisseur boost . . . . . . . .
. . . . . . . . . . . . . . . . . . 223B.6.2 Cas de londuleur
Z-source ou Quasi Z-source . . . . . . . . . . . . . . . 223
C Rduction du modle de londuleur Quasi Z-source en vue de sa
commande225
D Algorithme de dcision de lactivation des trois mthodes de
saturation 229
E Complments sur la dcomposition HOSVD 231E.1 Expression des
composantes dun produit de tenseur de mode n . . . . . . . . . .
231E.2 Expression des composantes dun produit de tenseur . . . . .
. . . . . . . . . . . 232E.3 Dmonstration du thorme de la
dcomposition des tenseurs HOSVD . . . . . . 233
vi
-
Introduction Gnrale
lheure o la pollution de lair, les gaz effet de serre et
lpuisement des ressources p-trolires sont un problme majeur dans
nos socits modernes, les systmes embarqus utilisantllectricit comme
source principale dnergie deviennent des alternatives de plus en
plus convoi-tes. Il suffit de constater la tendance depuis les dix
dernires annes pour se rendre compte dece changement, surtout dans
le domaine des transports, quils soient automobiles (vhicule
lec-trique, hybride, hydrogne), avioniques (avion plus lectrique),
ferroviaires (train, tramway),voire navals.
Llectronique de puissance a jou et joue encore actuellement un
rle certain dans lessor de cessystmes plus lectriques. Bien que
llectronique de puissance soit apparue la fin du 19ime
sicle, cest linvention du thyristor en 1957 qui en a amplifi son
intrt. Cela marque effective-ment le dbut de la fabrication des
semi-conducteurs base de silicium. Leur utilisation ne cessede
progresser aujourdhui encore grce leur dveloppement toujours plus
performant. Cestpourquoi certaines applications lectriques qui
taient encore impossibles mettre en uvrele sicle dernier sont
aujourdhui rendues concevables, ce qui justifie lintrt et le
dynamismecroissant du domaine dans les technologies actuelles.
La traction lectrique est au cur des systmes lectriques embarqus
du transport. Cest no-tamment le cas de lautomobile lectrique ou
hybride, domaine qui servira de support cettethse. De manire
basique, ces systmes consistent en un moteur ou alternateur
lectrique, desconvertisseurs de puissance (regroupant llectronique
de puissance) ainsi quune ou plusieurssources lectriques (par
exemple une batterie, une pile combustible, etc . . . ). Afin de
pro-pulser le vhicule, la machine lectrique a pour rle de convertir
lnergie lectrique en nergiemcanique. Elle permet galement de
convertir lnergie mcanique en nergie lectrique lors-quelle
fonctionne en mode alternateur de manire avoir un rle de rcupration
en freinagepour recharger la source de stockage dnergie. Les
convertisseurs de puissance sont utilisspour interfacer la source
dnergie et le moteur afin quil soit aliment avec le bon niveau
detension. Il existe dans lindustrie et la littrature scientifique
plusieurs types de ces convertis-seurs : continu-continu (DC/DC),
continu-alternatif (DC/AC), alternatif-continu (AC/DC)
oualternatif-alternatif (AC/AC). Dans le cas particulier de cette
thse et de lautomobile lectrique,seuls les deux premiers types
seront retenus. Les convertisseurs de type DC/AC, appels
desonduleurs, sont trs rpandus dans les systmes embarqus de
traction lectrique. Ils permettentde convertir un signal de type
continu en un signal alternatif ncessaire pour le fonctionnementdun
moteur alternatif (type de moteurs utiliss dans lautomobile
lectrique).
Les travaux mens dans cette thse se concentrent justement sur
ces convertisseurs de puissanceau sein des systmes embarqus. Elle
value la possibilit de remplacer une structure associantun
convertisseur DC/DC et un onduleur DC/AC par une topologie
donduleur DC/AC qui estapparue il y a une dizaine danne. Cette
structure, nomme par son inventeur onduleur source
1
-
Introduction Gnrale
impdante, est de type DC/AC. Elle permet non seulement de
convertir un signal continu en unsignal alternatif mais possde
galement la fonction lvatrice lui permettant dlever la tensionde la
source un niveau suprieur. Lobjectif de cette thse consiste en
lanalyse objective dela mise en uvre de ces convertisseurs pour des
applications de traction lectrique. Plusieurstudes sont menes en
prenant en compte diffrents critres tels que la stratgie de
commande, lerendement, lnergie stocke sur cycle de fonctionnement
ou la stabilit. Certaines propositionsviennent complter
larchitecture de base afin den amliorer la qualit des signaux
(possibilitdannulation des ondulations du courant dentre du
convertisseur) ou de rduire les contraintessur les interrupteurs de
londuleur (proposition dune structure commutations douces).
Cestudes sont rparties dans cinq chapitres que nous dtaillons
ci-aprs.
Le Chapitre 1 rappelle lobjectif et le contexte de ltude. Il
permet notamment de prsenter leprincipe de fonctionnement des
onduleurs source impdante ainsi que les mthodes disponiblesdans la
littrature pour lever la tension de source. Dans ce chapitre est
galement introduite unestructure de commande dont le but est
dadapter la tension disponible aux bornes de londuleur la vitesse
du moteur pour amliorer le rendement du systme. Nous profitons
galement de cepremier chapitre pour prsenter le systme dtude qui
sera la base de cette thse : londuleur Quasi Z-source. Une stratgie
de conception du convertisseur est finalement propose de manire
mettre en avant un de ses avantages : lannulation des ondulations
de son courant dentre.
Le Chapitre 2 mne une analyse comparative entre les structures
classiques utilises et lesonduleurs source impdante. Plusieurs
critres sont retenus comme les pertes, lnergie stockedans les
convertisseurs, les courants efficaces dans les condensateurs. Ce
chapitre permet ainside donner une comparaison objective, de
souligner les avantages mais aussi les inconvnients deces
structures source impdante.
Une stratgie de commande adapte est propose dans le Chapitre 3.
Elle permet de contr-ler lensemble {onduleur source impdante +
machine lectrique} laide du formalisme decontrle par platitude
diffrentielle. Ce moyen de commande est notamment intressant dans
lecas de londuleur source impdante puisquil permet une matrise
parfaite des rgimes tran-sitoires de toutes les variables, ce qui
est requis pour ladaptation de la tension la vitesse.Nous tirons
profit de la matrise des transitoires pour proposer une stratgie de
commande une boucle de rgulation, ce qui augmente la rapidit du
contrle et reprsente un atout en vuede la rduction des lments
passifs. Ce critre du gain en encombrement tant pertinent dansles
systmes embarqus de lautomobile.
En Chapitre 4, nous proposons un dispositif externe commutations
douces de manire rduire les contraintes en commutation des
interrupteurs de londuleur source impdante.Il sagit dun systme
rversible (il fonctionne en mode moteur et gnrateur) qui
simplantedirectement aux bornes de londuleur Quasi Z-source. Il
permet de faire commuter tous lesinterrupteurs lorsquune tension
nulle est applique leurs bornes, assurant thoriquement
unecommutation sans pertes. Il assure galement une matrise des
dv/dt appliqus aux enroulementsde la machine, contribuant
laugmentation de leur dure de vie.
Enfin, le Chapitre 5 est un chapitre traitant de la stabilit des
systmes lectriques nonlinaires. Il prsente de nouveaux outils pour
tudier la stabilit de type "grand signal", cest--dire lestimation,
autour dun point de fonctionnement du systme, dun bassin de
stabilitdans lequel lutilisateur est sr que le systme est stable.
Ces nouveaux outils viennent repoussercertaines des limites
observes dans dautres travaux traitant du sujet. Londuleur Quasi
Z-source est pris comme exemple pertinent car il correspond
justement un systme dont ltudede la stabilit "grand signal" aurait
difficilement pu tre envisage.
2
-
Chapitre 1
Les onduleurs source impdante :gnralits et mise en uvre
1.1 Objectif et contexte de ltude
1.1.1 Les convertisseurs de puissance dans les systmes de
traction lectrique(exemple de lautomobile lectrique)
Le nombre lev dautomobiles en utilisation dans le monde a cr et
cre encore de srieuxproblmes environnementaux. La pollution de
lair, le rchauffement climatique, lpuisementdes ressources
ptrolires sont dsormais indniables. Les systmes lectriques embarqus
int-grs par exemple dans les vhicules lectriques (EV), hybrides
(HEV) ou hydrogne (FCEV)ont t proposs pour remplacer les
technologies conventionnelles (mcanique, hydraulique, etc. . . ).
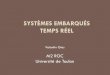
Pour lautomobile, leurs topologies, dont un exemple pour le cas EV
est donn en Figure1.1, sont dtailles dans les ouvrages [1, 2] ou
dans les articles [3, 4]. La structure de tractionlectrique du
vhicule lectrique (EV) est dans la plupart des cas spare en trois
parties prin-cipales. La premire concerne le systme de traction,
cest--dire la partie puissance constituede llectronique de
puissance (convertisseurs), du moteur lectrique, de la transmission
mca-nique vers les roues, ainsi que de la rgulation de lensemble.
La seconde partie concerne la/lessource(s) dnergie ainsi que leur
gestion via la commande. Ces sources peuvent tre une simplebatterie
ou une pile combustible par exemple. Elles peuvent tre associes des
lments detampon de puissance tels que les supercondensateurs. On
parle alors de source hybride [5]. Enfin,la troisime partie englobe
tous les lments auxiliaires tels que la gestion de la
climatisation,de la direction assiste, des feux etc . . .
Le bloc nomm lectronique de puissance regroupe lensemble des
convertisseurs de puissancedinterface entre les sources et les
charges. Ces convertisseurs sont gnralement ncessairescar les
lments de stockage (batteries, piles combustible,
supercondensateurs, . . . ) ou autressources (panneaux
photovoltaques) ont une tension de sortie variable en fonction de
leur tatde charge ou du systme auquel ils sont connects. Pour les
rseaux de traction o le niveaude tension du bus continu est lev,
les sources de basse tension peuvent poser problme. Lerle des
convertisseurs de puissance consiste ainsi interconnecter ces
diffrentes sources une ou plusieurs charges en adaptant le niveau
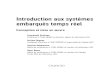
de tension/courant en fonction des besoins. LaFigure 1.2 prsente
une illustration conceptuelle dune chane de traction lectrique dun
vhiculelectrique dans laquelle le bloc lectronique de puissance a t
mise en avant. Les convertisseursDC/DC permettent dajuster et de
"hacher" la tension de source de manire en contrlerson niveau de
sortie, cest--dire le niveau de tension du bus continu qui alimente
par exemple
3
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
Contrleur
vhiculeElectronique de
puissanceMoteur lectrique
Roue
Transmission
mcanique
Roue
Propulsion lectrique
Unit de
gestion de
lnergie
Source
dnergie
Unit de
rechargement
Source dnergie
Alimentation
des systmes
auxiliaires
Unit de
direction
assiste
Climatisation
Auxiliaires
Volant de
direction
Frein
Acclrateur
Liaison
mcanique
Liaison
lectrique
Liaison de
contrle
Figure 1.1 Illustration dune configuration de traction lectrique
de type vhicule lectrique.
Batterie
Supercondensateurs
Pile combustible
DC/DC
DC/DC
DC/DC
Bus
conti
nu
DC/AC Moteur
Tra
nsm
issi
on
Roue
Roue
Electronique
de puissance
Figure 1.2 Chane de traction lectrique simplifie dun vhicule
lectrique (inspir de [6]).
le moteur lectrique et son onduleur (convertisseur DC/AC). La
structure des convertisseursdinterface est souvent contrainte par
un cahier des charges qui limite le cot, le volume etle poids du
systme. Il faut galement que la structure soit fiable, stable,
rendement lev,quelle mette peu dinterfrences lectromagntiques et
que les ondulations hautes frquencesen tension et courant soient
faibles [6]. Il existe dans la littrature et dans de nombreux
ouvragesdes topologies de convertisseurs DC/DC. Ils peuvent tre
isols ou non, rsonance, et sont tousconnus sous les noms de buck,
boost, buck-boost, flyback, Ck, Sepic, push-pull, etc. . . Le
lecteurpourra se rfrer aux ouvrages dtaillant de manire exhaustive
toutes les topologies existantes[6, 7]. Les convertisseurs DC/DC
sont souvent combins avec dautres types de convertisseursde
puissance comme les onduleurs (convertisseurs DC/AC) ou les
redresseurs (AC/DC). Nousnous intressons dans cette thse
lassociation de convertisseurs DC/DC avec un onduleur detension,
association qui reste valable dans les modes de fonctionnement
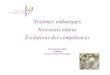
moteur ou gnrateur.Cette structure correspond par exemple celle du
systme de traction lectrique prsent dansla Toyota Prius 2010 [8] et
dont une reprsentation schmatique est fournie en Figure 1.3.
Lareprsentation est donne en mode bidirectionnel. En mode moteur
(transfert de puissance dela source (batterie) vers la charge
(moteur)), le convertisseur DC/DC correspond au hacheur
4
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
Figure 1.3 Chane de traction lectrique de la Toyota Prius PCU
2010 (source : [8]).
survolteur ou boost. Lalimentation du moteur alternatif
seffectue via un onduleur de tensiondont le fonctionnement et la
commande sont dtaills dans la suite de ce chapitre. Diffrentstypes
donduleurs (onduleurs de courant, onduleurs rsonants, onduleurs
multiniveaux) peuventtre trouvs dans louvrage [7]. Ltude de ces
derniers nest cependant pas mene dans cettethse qui se concentre
sur londuleur de tension deux niveaux considr comme structure
derfrence.
1.1.2 Objectif de la thse
Les convertisseurs DC/DC, DC/AC, plus particulirement lusage des
convertisseurs de puis-sance dinterface reste encore incontournable
dans les systmes de traction lectrique. En effet, leniveau de
tension fourni par la source ncessite le dfluxage de la machine
pour pouvoir fonction-ner au del dune certaine vitesse, appele
vitesse de base, jusqu la vitesse maximale. Pour lesmachines qui ne
sont pas quipes dun bobinage dexcitation (machines aimants par
exemple),lorsque le ratio de la vitesse maximale sur la vitesse de
base est relativement lev, lapplicationde la stratgie de dfluxage
consiste en la rduction de la composante directe du courant.
Dansces conditions, cela conduit laugmentation des pertes dans
lensemble onduleur-machine et la rduction de son rendement. Une
solution propose dans de nombreuses applications consiste insrer un
convertisseur DC/DC dinterfaage entre la source et lentre de
londuleur. Ceconvertisseur DC/DC permet donc dajuster la tension de
lentre de londuleur afin dassurerla contrlabilit des courants de la
machine vitesses leves sans lapplication dune stratgiede
dfluxage.Bien que la tendance actuelle semble voluer vers
lutilisation de machines faible tension etforte vitesse, ce qui
permet leur alimentation directe (via un onduleur) la source de
tension(batterie), nous proposons dans cette thse dtudier la mise
en uvre de nouveaux convertis-seurs, les onduleurs source impdante,
permettant de remplacer lassociation "convertisseurDC/DC +
onduleur". Le dtail de leur fonctionnement est donn en section
suivante. Un desavantages de ces onduleurs concerne leur capacit
pouvoir lever le niveau de tension crteapplique la charge, ce qui
est impossible avec un onduleur de tension classique sans
convertis-seur lvateur en amont. Les onduleurs source impdante
apparaissent alors comme solutionalternative ou complment aux
stratgies de dfluxage voques ci-avant lorsque la machineest en
limite de contrlabilit. Le schma de la Figure 1.4 prsente un
diagramme rsumant
5
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
Onduleur source
impdante
Adaptation de la
tension du bus
continu
Mthode de calcul de
pertes et rendement des
onduleurs source
impdante
Structure dannulation des ondulations hautes
frquences du courant de
batterie
Commande adapte et
globale
Comparaison aux
architectures
conventionnelles
Onduleur source
impdante
commutations douces
Stabilit de type
grand signal
Figure 1.4 Cartographie des tudes menes autour des onduleurs
source impdante.
les tudes menes dans cette thse autour des onduleurs source
impdante. Ces tudes sontrparties dans les diffrents chapitres
annoncs en Introduction Gnrale. Elles permettent nonseulement de
souligner les avantages et les inconvnients de ces convertisseurs
mais aussi pro-posent des amliorations au niveau de la structure et
de la topologie ainsi que de la commandepour leur utilisation et
leur mise en uvre.
1.2 Les onduleurs source impdante dans les systmes de trac-tion
lectrique : principe de fonctionnement
1.2.1 Introduction
Les convertisseurs DC/AC de types onduleurs source impdante,
sont apparus dans lalittrature scientifique dans les annes 2000
travers les travaux du Professeur Fang ZhengPeng publis dans
larticle de congrs [9] paru en 2002. lorigine de ces convertisseurs
ap-parat londuleur Z-source reprsent en Figure 1.5a dans un systme
de traction lectrique.Contrairement lassociation de convertisseurs
DC/DC boost et donduleur de tension commecelle de la Figure 1.3,
londuleur Z-source prsente la particularit de pouvoir utiliser les
inter-rupteurs de londuleur pour lever la tension du bus continu
vDC . Le convertisseur est en effetmuni dun rseau impdant de type
LC dispos en "X", autorisant la fermeture simultane
desinterrupteurs haut et bas dun mme bras donduleur pour accomplir
sa fonction dlvation dela tension vDC . Ces tats particuliers de
londuleur seront dornavant qualifis dtatsde court-circuits de bras
donduleur et simplement nots court-circuits en italique.Ils
permettent de faire commuter la diode D en mode de fonctionnement
moteur (ou linterrup-teur K dans le mode de fonctionnement
rversible). Londuleur Quasi Z-source reprsent enFigure 1.5b est le
systme principal dtude dans cette thse. Ce convertisseur, dont le
fonction-nement ne diffre que faiblement du premier, est apparu
dans la littrature en 2008 [10, 11]. Ilprsente de nombreux
avantages par rapport la version originelle qui sont dtaills et mis
enavant tout au long de ce manuscrit. Un des premiers avantages
notables par rapport londuleur Z-source concerne lexistence dun
courant continu circulant dans la source. Nous ne dtaillons
6
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
Onduleur Z-sourceSource de tension machine
iL1L1
vC2
L2
C1vDC
vC1vs
iL2
K,DIond
C2
(a) Avec onduleur Z-source.
Onduleur Quasi Z-sourceSource de tension machine
iL1L1
C2
vC2
L2
C1 vDCvC1
vs
iL2K,D
Iond
(b) Avec onduleur Quasi Z-source.
Figure 1.5 Systmes de traction lectrique munis donduleurs source
impdante.
pas toutes les topologies drives des onduleurs source impdante.
Nanmoins, il est possibleden citer quelques unes comme par exemple
londuleur trois niveaux Z-source dual [12] quiutilise deux
onduleurs connects une mme source continue ou deux sources
continues iso-les. Les onduleurs Trans-Z-source ou
Trans-Quasi-Z-Source sont des versions des onduleurs source
impdante [13] pour lesquels les inductances ont t couples et seul
un condensateurest utilis. Cependant, cette topologie souffre du
fait que le courant en entre du convertisseurest discontinu. Ces
topologies existent galement en versions isoles comme dtaill en
[14, 15]ou multiniveau [16,17].
Cette section a pour objectif de prsenter le principe de
fonctionnement de londuleur Z-source.Ltude sintresse principalement
au rgime permanent et prsente diffrentes mthodes connuesdans la
littrature pour insrer les commandes de court-circuits dans la
stratgie de commandeMLI. Ces premiers rsultats sont tablis pour la
topologie de londuleur Z-source. Ils restent
7
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
iL1L1
vC2
L2
C1
vDC
vC1vs
iL2
D ON
Ich C2
T OFF
r1
r2
(Caia+Cbib+Ccic)
Figure 1.6 Reprsentation schmatique de londuleur Z-source lors
de la squence horscourt-circuits.
nanmoins valables pour toutes les architectures donduleurs
source impdante, en particuliercelle de londuleur Quasi
Z-source.
1.2.2 Modlisation et caractristique statique dlvation
Le schma de la Figure 1.5a sert de rfrence. Soit u(t) la
grandeur de commande logiquepermettant de reprer ltat de
court-circuit ou non de londuleur. u(t) = 1 signifie que lon-duleur
est en tat de court-circuit, cest--dire que les interrupteurs haut
et bas dun mmebras sont ferms simultanment, alors que u(t) = 0
signifie quil volue hors de ces tats. Ondistingue ainsi deux
squences de fonctionnement donnes selon la valeur de la commande
u(t).Une reprsentation schmatique simplifie du systme de la Figure
1.5a est adopte o les sixinterrupteurs de londuleur sont simplement
reprsents par un unique interrupteur not T . Lecourant en entre de
londuleur est reprsent par une source de courant note Ich.
1.2.2.1 Squence hors court-circuit de bras donduleur : u = 0
Une reprsentation schmatique est donne en Figure 1.6. La premire
squence de fonc-tionnement correspond au cas o londuleur volue de
manire classique (avec commandes desinterrupteurs haut et bas dun
mme bras complmentes). Lexpression du courant absorbest identique
celle des onduleurs de tension classiques et donne par Ich(t) =
Ca(t) ia(t) +Cb(t) ib(t) + Cc(t) ic(t) o Ca(t), Cb(t) et Cc(t)
reprsentent les commandes des interrupteurssuprieurs de londuleur.
Les courants ia(t), ib(t) et ic(t) sont les courants absorbs par
unecharge triphase. Pendant cette squence, la diode de commutation
D devient passante car ellevoit une tension positive ses bornes. Le
courant la traversant qui doit tre positif mne lacontrainte
suivante : iL1(t) + iL2(t) > Ich(t) quel que soit ltat des
commandes Ca, Cb ou Cc.Les condensateurs se chargent pendant cette
squence. Le systme dtat est donn par :
L1diL1dt
= r1 iL1(t) + vs vC1(t)
L2diL2dt
= r2 iL2(t) + vs vC2(t)
C1dvC1dt
= iL1(t) Ich(t)
C2dvC2dt
= iL2(t) Ich(t)
(1.1)
8
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
iL1L1
vC2
L2
C1
vDC = 0vC1vs
iL2
D OFF
C2
T ON
ICC=iL1+iL2r1
r2
Figure 1.7 Reprsentation schmatique de londuleur Z-source lors
de la squence de court-circuits.
1.2.2.2 Squence de court-circuit de bras donduleur : u = 1
Une illustration de cette squence est fournie en Figure 1.7.
Elle correspond une squencede court-circuit pour laquelle un ou
plusieurs bras ont leurs interrupteurs haut et bas
fermssimultanment. La tension du bus continu vDC est donc impose
zro, ce qui isole la charge(machine). Le courant de court-circuit,
not ICC(t) est gal la somme des courants traversantles inductances
L1 et L2, soit ICC(t) = iL1(t)+iL2(t). La diode D est bloque dans
cette squencecar la tension vs (vC1(t) + vC2(t)) est ngative, ce
qui permet la dcharge des condensateursdans les inductances. Le
modle dtat est donn par :
L1diL1dt
= r1 iL1(t) + vC2(t)
L2diL2dt
= r2 iL2(t) + vC1(t)
C1dvC1dt
= iL2(t)
C2dvC2dt
= iL1(t)
(1.2)
1.2.2.3 Systme dtat de londuleur Z-source et caractristique
statique dl-vation
partir des systmes dtat (1.1) et (1.2) modlisant chaque squence
de fonctionnement, ilest possible dexprimer le systme dtat global
du convertisseur crit en fonction de la variablelogique de commande
u(t) :
L1diL1dt
= r1 iL1(t) + vC2(t) u(t) + (vs vC1(t)) (1 u(t))
L2diL2dt
= r2 iL2(t) + vC1(t) u(t) + (vs vC2(t)) (1 u(t))
C1dvC1dt
= iL2(t) u(t) + (iL1(t) Ich(t)) (1 u(t))
C2dvC2dt
= iL1(t) u(t) + (iL2(t) Ich(t)) (1 u(t))
(1.3)
Remarque 1.1. Afin de travailler avec des grandeurs dont le
dcoupage li la variable logiqueu(t) est ignor du point de vue de la
commande, nous considrons un modle "pseudo-moyen".Il sagit dun
modle dpendant du temps mais dont les composantes hautes frquences
(lies audcoupage) ont t "filtres". Ainsi la commande u(t) peut tre
remplace par sa valeur moyenned, rapport cyclique de londuleur
Z-source. Ces grandeurs "pseudo-moyennes" sont prsent
9
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
t
x(t)
x
Figure 1.8 Illustration du modle pseudo-moyen considr par la
suite, exemple dune va-riable dtat quelconque x(t).
notes sans la dpendance au temps (t), ce qui permet de
simplifier les quations. Une illustrationde ce propos est donn en
Figure 1.8. La grandeur x volue bien en fonction du temps, mais
lesondulations hautes frquences sont omises.
Lcriture du modle (1.3) en modle "pseudo-moyen" est donn par
:
L1diL1dt
= r1 iL1 + vC2 d+ (vs vC1) (1 d)
L2diL2dt
= r2 iL2 + vC1 d+ (vs vC2) (1 d)
C1dvC1dt
= iL2 d+ (iL1 Ich) (1 d)
C2dvC2dt
= iL1 d+ (iL2 Ich) (1 d)
(1.4)
Il est possible prsent de chercher exprimer la caractristique
statique dlvation vDC/vs duconvertisseur partir de ce modle (1.4).
La tension aux bornes de londuleur vDC prend deuxvaleurs. Une
valeur nulle lors des tats de court-circuit et une valeur gale vC1
+ vC2 vs endehors de ces tats. Cest cette dernire valeur qui sera
prise en compte pour exprimer le rapportcherch. En effet, nous
montrerons dans la suite que la manire dinsrer les court-circuits
dansle schma de commande par MLI fait en sorte que la charge ne
voit que la valeur de tension nonnulle. ce stade, admettons ce
rsultat. En moyennant (1.4), on exprime la tension vDC :
vDC = vC1 + vC2 vs =vs
1 2 d (1.5)
o vCi reprsente la valeur moyenne de la grandeur vCi et la
notation vDC insiste sur le faitque seule la valeur non-nulle (hors
des tats de court-circuit) est prise en compte. Ce rsultatreprsente
le rapport dlvation bien connu de londuleur Z-source dont le
rapport cycliqued volue dans lintervalle [0, 0.5]. Il a t tabli en
ngligeant les pertes dans les interrupteurs(diodes et IGBTs de
londuleur) ainsi que les chutes de tension rsistives.
1.2.3 Mthodes dinsertion des tats de court-circuits de bras
donduleurdans sa stratgie de commande MLI
Il a t voqu prcdemment que les interrupteurs de londuleur
jouaient un rle importantdans le processus dlvation de la tension
de source. Cela par linsertion dtat de court-circuitpermettant de
faire commuter la diode D (dans le cas dabsorption de puissance de
la charge en
10
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
fonctionnement moteur) pour lobtention dun rapport cyclique d.
Lobjectif de ce paragrapheest de prsenter la manire dont ces tats
supplmentaires sont ajouts dans les stratgies deMLI dans le cadre
dun systme de traction lectrique o londuleur Z-source alimente
unemachine triphase (voir Figure 1.5a). Lobjectif tant de ne pas
perturber le fonctionnement de lamachine, les tats de court-circuit
sont gnralement insrs pendant les tats zros de londuleur[16, 18].
Il sagit des tats pendant lesquels les trois interrupteurs
suprieurs ou infrieurs sontferms. Ainsi, la charge triphase volue
en "roue libre" (ses enroulements sont court-circuits)et nest donc
pas influence par le rseau ct continu (aucun transfert de puissance
nest oprpendant ces tats particuliers).
t
maxp
maxp
*
av
*
bv*
cv
T
1Act
2Act
1Act
2ActEZ1
EZ2
EZ1
Cbh
Cch
Cah
Cab Cb
bCcb
Figure 1.9 Schma de gnration des commandes des interrupteurs dun
onduleur en MLIsymtrique chantillonne.
1.2.3.1 Insertion des court-circuits en MLI symtrique
chantillonne
Dans la plupart des articles traitant du sujet [9, 1620], les
auteurs prsentent les tech-niques dinsertion dtats de court-circuit
partir dune commande MLI de type symtriquechantillonne. Les trois
tensions de rfrence triphases de commande de la charge sont
ainsicompares une porteuse hautes frquences. La Figure 1.9 illustre
ce propos dans le cas dunecommande classique de londuleur pour un
secteur o va > v
b > v
c correspondant un angle
11
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
[0, /3]. Un systme de tensions sinusodales triphases quilibres
est considr de la forme :
va = Vmax cos ()
vb = Vmax cos(
23
)
vc = Vmax cos(
+23
)(1.6)
t
maxp
maxp
*basav
*bashautbv
*hautcv
T
1Act
2Act
1Act
2Act
*hautav
*bascv
CC CC CC CCEZ1 EZ2 EZ1
Cbh
Cch
Cah
Cab
Cbb
Ccb
t*
dT/4
Figure 1.10 Schma de gnration des commandes des interrupteurs
dun onduleur en MLIsymtrique chantillonne avec insertion de
court-circuits dans les tats zros.
Les commandes envoyes aux interrupteurs haut et bas dun bras
donduleur de tension classiquesont complmentes aux temps morts prs.
Avec lutilisation dun onduleur source impdante,il nest plus
ncessaire de protger le convertisseur contre les court-circuits. En
effet, le courant lentre de londuleur court-circuit est limit
ICC(t) = iL1(t) + iL2(t). Les temps mortspeuvent alors tre
supprims.
Gnration des commandes de court-circuits La Figure 1.10 illustre
une des nombreusesmthodes permettant datteindre cet objectif. Elle
consiste reprer dans un premier temps lestensions maximales et
minimales sur le secteur dvolution de langle lectrique considr
(ici
12
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
le secteur S1 pour lequel va vb vc ). Lide consiste provoquer un
court-circuit en augmen-tant la dure de conduction de linterrupteur
haut associ au bras supportant la maximale destrois tensions (ici
linterrupteur haut du bras a associ la tension va). Cela permet
dajouterdeux court-circuits dans les tats zros nots EZ1 (Figure
1.10). De mme, en augmentant ladure de conduction de linterrupteur
bas du bras supportant la minimale des trois tensions(ici
linterrupteur bas du bras c), il est possible dinsrer deux
court-circuits dans ltat zronot EZ2 (Figure 1.10). On aboutit
lajout de quatre tats de court-circuits dune dure dT/4pendant une
priode de dcoupage T .
Remarque 1.2. Il est important de noter ici que les dures des
tats actifs de londuleur, notesAct1 et Act2 (Figure 1.10), sont
restes inchanges. Seules les tats zros ont t modifis, tatspendant
lesquels la charge est en "roue libre". Son fonctionnement nest
donc pas modifi parlajout des court-circuits de bras.
Du point de vue de limplmentation, chaque interrupteur haut (h)
et bas (b) possde son propresignal de commande logique Cha , C
ba, C
hb , C
bb , C
hc et C
bc . Pour gnrer ces commandes partir
des trois fonctions de rfrences donnes va, vb et v
c , il est ncessaire de crer un total de six
fonctions de rfrence, repres sur le schma de la Figure 1.10.
Lquation de la porteuse sur[0, T/2] est donne par :
p(t) = 2 pmaxT
2
t+ pmax (1.7)
La fonction vbasa est simplement donne par la valeur va car cest
la tension associe linter-
rupteur bas du bras supportant la maximale des trois tensions.
La commande Cba reste doncinchange. En revanche, la tension de
rfrence vhauta pour linterrupteur haut de ce mme brasdoit tre
dcale. Pour cela, nous reprons linstant t sur le schma qui
correspond lintersec-tion entre la porteuse et la fonction de
rfrence vbasa = v
a. Nous en dduisons lexpression de
t donne par :
t =T
4 pmax(pmax va) (1.8)
La dure des quatre court-circuits tant choisie gale dT/4, le
dcalage entre les tensions derfrence vbasa et v
hauta est donn par :
vhauta vbasa = p(
t d T4
)
va (1.9)
On en dduit aisment lexpression de la tension de rfrence vhauta
:
vhauta = va + d pmax (1.10)
Finalement, les court-circuits sont simplement ajouts dans le
schma de commande par MLIchantillonne symtrique en reprant tout
dabord lordre des tensions vmax > v
int > v
min
en fonction du secteur dvolution de langle lectrique , puis en
gnrant les six tensions derfrence associes chacun des six
interrupteurs de londuleur :
vbasmax = vmax
vhautmax = vmax + d pmax
vbasmoy = vint
vhautmoy = vint
vbasmin = vmin d pmax
vhautmin = vmin
(1.11)
13
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
Remarque 1.3. ce stade, pour pouvoir insrer des court-circuits
dune dure dT donnependant T , il faut que la dure des tats zros de
londuleur puisse le permettre. Cest pourquoile dveloppement qui
suit sintresse exprimer la valeur de la dure disponible des tats
zrosen fonction de langle lectrique .
Calcul du rapport cyclique dlvation maximal dans les tats zros
Connaissantlquation de la porteuse p(t) ainsi que lexpression des
tensions de rfrence va, v
b et v
c , on en
dduit le rapport cyclique associ la dure des tats zros TEZ sur
une priode de dcoupageT . Il est calcul laide du schma de MLI en
Figure 1.9 en exprimant la dure des tats pourlesquelles les trois
commandes Cha , C
hb et C
hc sont simultanment gales 1 ou zro. Nous
obtenons pour [0, 3
]:
TEZT
() = 1 +Vmax2 pmax
(
cos() + cos(
+23
))
= 1 Vmax
32 pmax
sin(
+
3
) (1.12)
Gnralement, la valeur de pmax doit couvrir lamplitude maximale
des tensions triphases quilest possible de reconstituer partir de
la tension disponible en entre de londuleur vDC . EnMLI symtrique
chantillonne, et sous lhypothse de tensions de rfrence sinusodales
(sansinjection dhomopolaire), cette amplitude maximale ne peut
excder vDC/2 pour rester en zonede linarit de la MLI (voir [21]
pour plus de dtails). Lexpression (1.12) devient :
TEZT
() = 1 Vmax
3vDC
sin(
+
3
)
(1.13)
Cette dernire quation permet dtablir la relation de
conditionnement du rapport cyclique dpour ninsrer les
court-circuits que lors des tats zros :
d TEZT
() (1.14)
Daprs (1.13), TEZ/T est li la valeur de la tension du bus
continu vDC qui est elle-mmedpendante du rapport cyclique d via la
relation (1.5) dj tablie. Ainsi, pour pouvoir lever latension de
source vs un niveau suprieur, il faut que la dure des tats zros
puisse accueillir ladure de court-circuit dT souhaite pour ce
niveau dlvation. En calculant la valeur minimalede (1.13), nous
obtenons le rapport cyclique dlvation maximal (1.15) quil est
possible dinsrerpour une tension crte de la charge Vmax donne.
dmax = 1
32
VmaxvDC
2
(1.15)
Le fait de calculer la valeur minimale de (1.13) permet de
surdimensionner lgrement la tensiondu bus afin de conserver des
tats zros rsiduels. Cela permet entre autre dempcher les tatsde
court-circuit dempiter sur les tats actifs de londuleur.
1.2.3.2 Exemple dune mthode alternative dinsertion des
court-circuits : Maxi-mum Boost Control
Cette technique, prsente dans [19] permet de remplacer tous les
tats zros de londuleurpar des tats de court-circuit selon le schma
de la Figure 1.11. Ainsi, elle vite ltape de calculdes six tensions
de rfrence pour les six interrupteurs. Lavantage de cette mthode
rside dans
14
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
0 0.002 0.004 0.006 0.008 0.01 0.012
Temps de simulation (s)
Cah
Cab
Cbh
Cch
Ccb
Cbb
va*
vb*vc
*p(t)
Figure 1.11 Formes donde de la technique de Maximum Boost
Control.
le fait que les tats zros de londuleur sont utiliss loptimum. En
revanche, elle contraint tousles interrupteurs de londuleur se
fermer simultanment lors dun court-circuit. Cela augmentealors leur
frquence de commutation, ce qui pourrait augmenter les pertes en
commutation. Cepoint sera notamment trait dans le Chapitre 2 de ce
prsent manuscrit. Un autre inconvnientest d au fait que le
remplacement de lintgralit des tats zros contraint le rapport
cyclique voluer selon lquation (1.13) donne ici sur une priode [0,
/3]. Or, la reprsentation tem-porelle de cette expression contient
des ondulations qui vont se retrouver sur les formes dondesde la
tension du bus continu vDC .
Une mthode permettant de surmonter ce dernier problme existe
dans la littrature et connuesous le nom de Maximum Constant Boost
Control [19, 20]. Elle permet dajouter des court-circuits de dures
gales pendant les tats zros en injectant une composante de troisime
har-monique dans les rfrences de tension va, v
b et v
c . Cette tude reste proche de la prcdente
et nous ne la prsenterons pas dans ce manuscrit.
1.2.3.3 Mthode dinsertion de six commandes de court-circuit
pendant une p-riode de dcoupage T
Les deux mthodes prcdentes sintressent lajout de deux ou quatre
commandes decourt-circuit pendant une priode de dcoupage. Dans ce
paragraphe, nous prsentons une m-thode dajout de six commandes de
court-circuit pendant T [18,22]. La Remarque 1.2 doit trerespecte
ici de manire ne pas modifier le comportement de la charge lors de
linsertion descourt-circuits. Comme dans le cas de linsertion de
quatre court-circuits, il est ncessaire de g-nrer six tensions de
rfrence dont le dveloppement calculatoire reste similaire celui
prsentci-avant. Une reprsentation en MLI symtrique chantillonne est
donne en Figure 1.12. Nousne donnerons ici que les rsultats
dexpressions des tensions de rfrence. Aprs avoir reprle secteur et
donc lordre des tensions vmax > v
int > v
min, les six tensions de rfrence sont
15
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
t
maxp
maxp
*basav
*hautbv
*hautcv
T
1Act
2Act
1Act
2Act
*hautav
*bascv
EZ1 EZ2 EZ1
Cbh
Cch
Cah
Cab
Cbb
Ccb
t*
dT/6
*basbv
Figure 1.12 Mthode dinsertion de six court-circuits pendant
T
donnes par :
vbasmax = vmax + d pmax
vhautmax = vmax +
d pmax3
vbasint = vint +
d pmax3
vhautint = vint
d pmax3
vbasmin = vmin
d pmax3
vhautmin = vmin d pmax
(1.16)
1.2.3.4 Insertion des court-circuits en MLI de type SVM
Rappels sur la MLI de type SVM Dans cette thse, les tats
supplmentaires de court-circuit sont insrs dans un schma de MLI de
type SVM (Space Vector Modulation) pourla grande flexibilit de son
implmentation et pour le gain en profondeur de modulation de15 %
quil est possible dobtenir du fait de lajout naturel de lharmonique
3 dans les rapportscycliques de rfrence des signaux de commande.
Cette technique se base sur la reprsentationdu vecteur des tensions
triphases de rfrence dans le plan selon la transformation
restreinte
16
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
vDC
Cah Cb
h Cch
M
Na
bcvaM
vMN
vaN
Figure 1.13 Schma de repre des tensions de londuleur.
de Concordia T32 (1.17).
(
vv
)
= T T32
vavbvc
avec T T32 =
23
1 12
12
0
3
2
3
2
(1.17)
Daprs le schma de la Figure 1.13 qui repre le neutre des
enroulements et la masse delonduleur, les tensions simples peuvent
sexprimer comme suit :
vavbvc
=
vaNvbNvcN
=
vaMvbMvcM
+
vMNvMNvMN
= vDC
ChaChbChc
+
vMNvMNvMN
(1.18)
Aprs transformation restreinte de Concordia, (1.17) et (1.18)
donnent (1.19).
(
vv
)
= vDC T T32
ChaChbChc
(1.19)
Le vecteur obtenu, not ~VCha Chb Chc , est reprsentable par huit
vecteurs dans le plan selonltat des interrupteurs de londuleur. Six
vecteurs reprsentent des tats actifs de londuleur,cest--dire des
tats de transfert de puissance du rseau ct DC vers la charge AC.
Deuxvecteurs, ~V000 et ~V111, reprsentent les deux tats zros de
londuleur (tats de squence nulle).Ces vecteurs sont nuls dans le
plan . Une reprsentation graphique est donne en Figure 1.14.Dautres
dtails peuvent tre trouvs dans les rfrences [21,23,24].
Insertion des tats de court-circuit Forts des rappels prcdents
sur la stratgie de MLIde type SVM et du schma de la Figure 1.14, un
vecteur de tensions de rfrence not ~V peut
alors tre reconstitu dans un secteur Si laide de deux vecteurs
adjacents ~VCha Chb Chc et desdeux vecteurs dtats zros pondrs par
leur temps dapplication. Un exemple est donn enFigure 1.14 dans le
cas du secteur S1, le vecteur de rfrence sexprime par :
~V =T1T~V100 +
T2T~V110 +
T0T~V000 +
T7T~V111 (1.20)
o T est la priode de dcoupage/chantillonnage. Lhexagone de la
Figure 1.14 dcrit la zonede linarit de la stratgie de MLI SVM. Il
peut tre soulign que la valeur maximale du vecteurde rfrence est
donne par (1.21). Elle est obtenue en calculant le rayon du cercle
interne
17
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
100V
110V
010V
011V
001V
101V
111V
000V
*
V
1001V
T
T 110
2 VT
T
S1
S2
S3
S4S5
S6
Figure 1.14 Diagramme de Clark des tensions de rfrences de
londuleur.
lhexagone qui dcrit la zone de linarit avec une tension de
rfrence sinusodale (voir [24]).Cela permet den dduire lexpression
de la valeur maximale Vmax de lamplitude des tensionstriphases
(1.22) appliques aux enroulements de la machine.
~V
max
=12
~V100 + ~V110
=
vDC2
(1.21)
V limmax =
23vDC
2=vDC
3(1.22)
Un paramtre important qui sera utilis tout au long de cette thse
est nomm la profondeurde modulation, note m. Elle value le rapport
de la valeur instantane Vmax de lamplitude destensions triphases
sur la valeur maximale V limmax quil est possible dobtenir partir
de la tensionvDC disponible aux bornes de londuleur.
m =VmaxvDC
3
(1.23)
Pour ne pas modifier le comportement de la machine, les tats
supplmentaires de court-circuitssont ajouts pendant les tats zros
de londuleur dapplication des vecteurs ~V000 et ~V111. Il estainsi
intressant de connatre la dure de ces tats puisquelle dfinit la
dure du rapport cycliqued maximal pouvant tre insr par priode de
dcoupage. partir de lquation (1.20), de laconnaissance des
composantes des tensions de rfrence v et v
et en considrant que les dures
des tats zros sont gales (T000 = T111 = TEZ/2), il est possible
dextraire lexpression des tempsT100, T110 et TEZ du secteur S1 par
exemple, pour en dduire la dure totale des tats zros (voirFigure
1.14). Dans le cas du secteur S1, les temps dapplication sont
rpartis selon le schma dela Figure 1.15 qui reprsente les commandes
Cha , C
hb , C
hc pour les interrupteurs du haut et C
ba,
Cbb , Cbc pour les interrupteurs du bas pendant une priode de
dcoupage. Le diagramme prsent
est similaire celui obtenu pour une MLI de type symtrique
chantillonne avec comparaisonentre une porteuse triangulaire de
priode T et trois tensions de rfrence triphases. La mthodede calcul
des temps dapplication cherchs est fournie en Annexe A. Nous
donnons les rsultats
18
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
EZ Act1 Act2 EZ Act2 Act1 EZ
Cah
Cbh Cc
h
Cab Cb
b Ccb
T
TEZ/4 TEZ/4TEZ/2T100/2 T110/2 T100/2T110/2
Figure 1.15 Schma des signaux de commande sur une priode de
dcoupage dune stratgiede MLI de type SVM.
obtenus valables sur le secteur S1, soit pour [0, /3] :
T100() = T m sin(
3
)
T110() = T m sin()TEZ() = 1 T100() T110()
(1.24)
La dure de ltat zro TEZ() sexprime alors par (1.25), laquelle
quation permet den dduirele rapport cyclique maximum quil est
possible dinsrer dans le schma de commande par MLI.
TEZ() = T (
1
3VmaxvDC
sin(
+
3
))
= T (
1 m sin(
+
3
))
(1.25)
En choisissant la valeur minimum de (1.25), cela permet de
surdimensionner lgrement latension du bus continu pour tre certain
de disposer en tout temps dune dure suffisante dtatszros pour
insrer les court-circuits. La valeur maximale choisie pour le
rapport cyclique dmaxest alors constante, ce qui permet de
supprimer les problmes dondulations lies lvolutionde la dure des
tats zros. Nous aboutissons la valeur maximale du rapport cyclique
de court-circuit quil est possible dinsrer dans T , donne en
fonction de la profondeur de modulationm :
dmax = 1 m (1.26)Nous reprenons la mthode dinsertion prsente en
MLI symtrique chantillonne traversla Figure 1.10. Sa version
quivalente en MLI SVM est donne en Figure 1.16 pour linsertionde
quatre court-circuits pendant T . Elle illustre les signaux de
commande gnrs pour lessix interrupteurs de londuleur. Comme dans le
cas de la MLI symtrique chantillonne avecporteuse, le secteur dans
lequel volue langle lectrique doit tre dtermin. Ensuite, la duredes
commandes associes aux interrupteurs haut du bras a et bas du bras
c pour le secteur S1ont leur dure dtat ON augmente. Lavantage de la
mthode dtaille ici rside dans le faitque la priode de dcoupage des
interrupteurs nest pas modifie. Il est important dinsister surle
fait que les tats actifs de londuleur, nots Act1 et Act2 sur le
schma, restent inchangs parrapport au cas de la commande de
londuleur sans court-circuits. La charge triphase est
doncinsensible la modification de MLI opre.
Remarque 1.4. Le choix de la stratgie de MLI SVM sera retenu
pour toutes les tudes menesdans cette thse.
19
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
EZ Act1 Act2 EZ Act2 Act1 EZ
Cah
Cbh Cc
h
Cab Cb
b Ccb
T
T100/2 T110/2 T100/2T110/2dT/4 dT/4 dT/4 dT/4TEZ/4 TEZ/2
TEZ/4
Figure 1.16 Schma des signaux de commande sur une priode de
dcoupage dune stratgiede MLI de type SVM avec insertion des
court-circuits dans les tats zros delonduleur.
1.3 Application dune mthode de contrle spare de londu-leur
Z-source et de la machine synchrone.
1.3.1 Introduction
Dans cette partie, londuleur Z-source est tudi dans un systme de
traction lectriquemuni dune source de tension et alimentant une
machine synchrone aimants. Un contrlespar de la machine et de
londuleur Z-source est propos, ce qui permet dtudier les gran-deurs
pertinentes en rgime permanent ou transitoire. Dans la littrature
scientifique traitantdu sujet, il est possible de trouver des
articles dans lesquels les auteurs ont tudi le systmede traction
lectrique associant un moteur un onduleur Z-source [25,26] mais o
les rgimestransitoires ainsi que les mthodes de contrle ne sont pas
tudis et/ou prsents. Pour ceuxdont les dtails du contrle sont
fournis, des structures de commandes deux boucles (bouclede courant
rapide et boucle de tension plus lente) sont gnralement implmentes.
Dun ct,certains auteurs ont prfr des mthodes de contrle robustes
telles que la commande par modede glissement [2729], de lautre, ils
ont choisi des commandes base de rgulateurs linaires detype PI
[3032].
Nous proposons dans cette section une mthode (prsente en [33])
dadaptation de la ten-sion du bus continu la demande en puissance
de la machine. Cette adaptation est ncessairecar elle entraine une
rduction du surdimensionnement de la tension survolte vDC de
londuleur Z-source (ou Quasi Z-source), permettant daugmenter son
rendement. Une commande basesur la thorie de platitude
diffrentielle est choisie pour contrler la machine. Ce choix se
justifiepar la possibilit de matriser parfaitement les rgimes
transitoires des grandeurs ct machine,en particulier les
transitoires de vitesse mcanique. En effet, la vitesse mesure est
ensuite utilisepour gnrer la tension de rfrence du bus continu vDC
appliquer pour maintenir la contrla-bilit du moteur. vDC ainsi cre
devient la consigne de rgulation des tensions vC1 et vC2 auxbornes
des condensateurs pour un contrle robuste de type glissant de
londuleur Z-source.Ce dernier gnre son tour le rapport cyclique
optimal dlvation d. La mthode de contrlereste valable pour tous les
autres types donduleurs source impdante (Quasi Z-source [10],Trans
Z-source [13], . . . ).
20
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
Calcul de
2 2 iL1 L1
vC2
L2
C1
vDCvC1vs
iL2
K,D Iond
C2
MLI symtrique chantillonne ou de type
SVM
Cah
Cab
Cbh
Cbb
Cch
Ccb
DC
Cbh
Cch
Cah
Cab
Cbb
Ccb
Contrle par mode
de glissement de
londuleur Z-source
Commande par platitude de la
machine
1 1
Figure 1.17 Schma de contrle propos pour le systme de traction
lectrique muni dondu-leur source impdante.
1.3.2 Contrle du systme et adaptation de la tension du bus
Le contrle propos met en uvre des commandes spares de la machine
et de londuleur source impdante. Elles sont toutefois lies par le
niveau de tension du bus continu vDC , quiest lui-mme adapt en
fonction de la demande en puissance (ou vitesse) de la machine.
Lebut tant le gain en rendement du systme utilisant ce type
donduleur. Un schma global dusystme muni de son contrle est
reprsent en Figure 1.17. La commande par platitude deuxboucles est
dtaille en Section 1.3.2.1 pour la rgulation des courants et
vitesse de la machine.En Section 1.3.2.2, une commande de type
"grand signal" par mode de glissement est retenuepour le contrle
des grandeurs dtat de londuleur Z-source. Enfin, lobjet du
dveloppementde la Section 1.3.2.3 concerne ladaptation de la
tension du bus continu partir de la loi decontrlabilit du
moteur.
1.3.2.1 Commande par platitude diffrentielle deux boucles de la
machine syn-chrone
Il est important de souligner ici quune description plus
exhaustive de ltablissement duncontrle par platitude diffrentielle
sera donne au Chapitre 3.
Rappels sur les proprits de platitude diffrentielle dun systme
Les notions deplatitude diffrentielle et de systme plat ont t de
nombreuses fois prsentes et/ou appliques[5, 3438]. La platitude
diffrentielle peut tre dfinie de manire simple par la Dfinition
1.1
21
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
Symbole Description
vs Tension de sourcevDC Tension du bus continud Rapport cyclique
de londuleur Z-source/Quasi Z-sourceu Commande logique de londuleur
Z-source/Quasi Z-sourceP0 Puissance absorbe par londuleur en rgime
permanentIond Courant en entre de londuleur
L1 = L2 = L Inductances de londuleur Z-source/Quasi Z-sourceM
Mutuelle des inductances lorsque celles-ci sont couples
C1 = C2 = C Condensateurs de londuleur Z-source/Quasi Z-sourcers
Rsistance des enroulements statoriques de la machineld, lq
Inductances statoriques de la machine dans le repre dqf Flux total
des aimants travers les bobines statoriquesp nombre de paires de
ples Vitesse mcanique de la machineJ Coefficient dinertie des
parties tournantes
ch Couple de charge appliqu la machinef Coefficient de
frottements visqueuxT Priode de dcoupage/dchantillonnage
Table 1.1 Description et valeur des paramtres.
suivante.
Dfinition 1.1 (Platitude diffrentielle). Un systme dtat x et de
commande u dfini par :
x = f(x, u) x Rn, u Rm (1.27)
est dit plat sil existe une fonction y Rm, appele sortie plate,
de la forme :
y = hy(x, u, u, . . . , u(q))
telle quex = hx(y, y, . . . , y(r))
u = hu(y, y, . . . , y(r+1))
o les fonctions hy : Rn (Rm)q+1 7 Rm, hx : (Rm)r+1 7 Rn et hu :
(Rm)r+2 7 Rm sontrgulires. Elles sont ainsi drivables et leurs
drives successives sont continues.
Modlisation et contrle de la machine synchrone La modlisation de
la machine syn-chrone en vue de sa commande est gnralement crite
dans le repre fixe li au rotor faisantapparatre deux axes, nomms
direct (indice d) et en quadrature (indice q). Des dtails
peuventtre trouvs dans louvrage [39]. Avec les paramtres dcrits
dans la Table 1.1, le modle dq dela machine est ainsi donn par le
systme dquations suivant :
lddiddt
= rs id(t) + vd(t) + p(t) lq iq(t)
lqdiqdt
= rs iq(t) + vq(t) p(t) (ld id(t) + f )
Jddt
= pf iq(t) ch(t) f (t)
(1.28)
La notation de dpendance au temps (t) sera supprime dans la
suite.
22
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
Rgulation des courants id et iq Les boucles internes de
rgulation des courants permettentde gnrer les rfrences des tensions
vd et v
q crites dans le plan dq. Ces tensions reprsentent
ainsi un vecteur commande not udq = [vd, vq ] pour une sortie
plate choisie comme suit :
ydq = [id, iq]. En exprimant les tensions de commande vd et vq
en fonction des composantes de
la sortie plate ydq, les proprits de platitude du modle compos
des quations en courant sontprouves.
vd = lddiddt
d
+rs id p lq iq = hvd(id, d, iq)
vq = lqdiqdt
q
+rs iq + p (ld id + f ) = hvq (iq, q, id)(1.29)
Les termes nots d et q reprsentent les termes drivs dordre le
plus lev. Dans le cas oil est souhaitable de rejeter les
incertitudes paramtriques ou les erreurs de modlisation, cestermes
sont gnrs par des lois (1.30), (1.31) issues dune linarisation
entre/sortie permettantde fixer le comportement dynamique de la
convergence des erreurs d = (id id) et q = (iq iq) zro. Les
quantits id et i
q reprsentent respectivement les rfrences des composantes
directe
et en quadrature des courants statoriques de la machine.
d = id + 2 d d (id id) + 2d
(id id) d (1.30)
q = iq + 2 q q (iq iq) + 2q
(iq iq) d (1.31)
Les paramtres d, q et d, q reprsentent respectivement les
amortissements et les bandespassantes en boucle ferme des
rgulateurs des composantes directe et en quadrature des cou-rants
statoriques de la machine. Ils sont dimensionns de manire respecter
un certain cahierdes charges donn (bande passante de rgulation,
dpassement, . . . ).
Rgulation de la vitesse mcanique La gnration de la rfrence de la
composante ducourant en quadrature iq seffectue via la boucle
externe de rgulation de la vitesse mcanique.Ainsi ce courant de
rfrence iq reprsente la commande uiq pour une sortie plate choisie
gale y = . Les proprits de platitude du modle de lquation mcanique
sont vrifies enexprimant iq en fonction de la sortie plate y et de
ses drives successives :
iq =J
pf
ddt
+chpf
+f
pf = hiq (, ) (1.32)
Comme prcdemment, correspond au terme driv dordre 1 de la
vitesse qui provient dunelinarisation entre/sortie dont la
trajectoire de ralliement zro de lerreur = ( ) estdonne par :
= + 2 ( ) + 2
( ) d (1.33)
o reprsente la rfrence de vitesse.
Schma de rgulation de la commande par platitude de la machine
synchrone Leschma de la Figure 1.18 prsente une synthse de la
commande par platitude de la machine.Afin de matriser les
transitoires de vitesse, une trajectoire dordre 2 a t considre car
bienconnue mathmatiquement (drivable deux fois). Le choix dune
telle trajectoire est justifi parla suite en Chapitre 3. Les blocs
nots (1.30), (1.31) et (1.33) correspondent aux quations demmes
rfrences qui permettent de gnrer les signaux de commande issus de
la linarisation
23
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
*
ch
qi
di
*
qi
*
di
q
d
*
qvq
d
Filtre
dordre 2
*
dv
+
-
+
-
-+
(1.33)
(1.31)
(1.30)
Figure 1.18 Schma de commande par platitude de la machine
synchrone.
entre/sortie. Ce contrleur retourne finalement les valeurs des
tensions de commande de ma-chine vd et v
q qui, aprs transformation de Concordia et Park, fournissent les
tensions v
a, v
b et
vc (ou v et v
) envoyes vers la gnration des signaux de commande MLI.
1.3.2.2 Commande par mode de glissement de londuleur
Z-source
Le choix du contrle de londuleur sest orient vers une commande
indirecte par modede glissement puisque ses avantages en termes de
robustesse ne sont plus faire. Ce type decontrle semble ainsi
prfrable pour le systme non linaire (1.4) par rapport lutilisation
dergulateurs linaires de type PI [30]. En considrant un onduleur
Z-source symtrique avecL1 = L2 = L et C1 = C2 = C, il est possible
dtablir les galits des tensions aux bornes descondensateurs vC1 =
vC2 ainsi que des courants dans les inductances iL1 = iL2
[9,27,4042]. Ladiffrence des variables dtat tant nulle, cela permet
dtablir un modle dtat rduit pourla commande prenant en compte la
somme des courants et des tensions et donn daprs (1.4)par :
LdiLdt
= r iL + (2 d 1) vC + 2 (1 d) vs
CdvCdt
= iL (1 2 d) 2 Ich(1.34)
avec iL = iL1 + iL2 et vC = vC1 + vC2. Une dmonstration de cette
rduction de modle (souslhypothse dgalit des inductances L1 et L2 et
des condensateurs C1 et C2) est fournie enAnnexe C pour londuleur
Quasi Z-source.
Remarque 1.5. Dans lcriture du modle pseudo-moyen (1.4) tabli
dans le cas gnral, leterme faisant intervenir la charge est not Ich
(1d) o Ich est le courant absorb par londuleurhors des tats de
court-circuit de bras. Nous avons voqu prcdemment que pour prserver
lestats actifs de londuleur, les tats de court-circuit de bras
taient ajouts durant ses tats zrospendant lesquels Ich(t) est nul
(les trois interrupteurs du haut ou les trois interrupteurs du
bastant ouverts). Ainsi, en tout temps, nous avons Ich(t)(1u(t)) =
Ich(t). Donc, sous lhypothsedajout des court-circuits de bras dans
les tats zros, la valeur moyenne du courant de chargeest gale Ich
et non Ich (1 d). Ce qui justifie lcriture du modle (1.34). Sur les
schmasprcdents, nous avons fait intervenir la notation Iond. Il
sagit du courant dentre donduleurgal au courant de court-circuit de
bras ICC(t) = iL1(t) + iL2(t) lors des tats de court-circuitde bras
et au courant Ich(t) (courant absorb par un onduleur de tension
classique) en dehorsde ces tats. Nous notons ainsi Iond(t) = ICC(t)
u(t) + Ich(t) (1 u(t)) = ICC(t) u(t) + Ich(t).Une reprsentation
graphique du courant Iond est fournie en Figure 1.19 et permet de
justifierla remarque.
24
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
Ich (t)
u(t)1
0
EZ Act1 Act2 Act1Act2EZ EZ
dT/4
T
t
t
ICC (t)
Figure 1.19 Formes donde du courant dentre donduleur Iond(t) et
de la commande u(t)dinsertion des court-circuits.
Une troisime variable est ajoute au modle dtat : xV =
(vC vC) d . Elle correspond un terme intgral dans le but de
rejeter les ventuelles erreurs de modlisation. La quantit
vCreprsente la rfrence de la somme des tensions aux bornes des
condensateurs et lie la valeurcrte vDC de la tension du bus
continu. Dans les articles traitant de la commande par modede
glissement de londuleur Z-source [27,29], les techniques mises en
uvre se basent sur unemthode de gnration directe de la commande
logique u(t). Dans ce manuscrit, une mthodeindirecte est considre
[43] et permet de raisonner sur le modle pseudo-moyen (1.34)
pourretourner non pas la commande logique u(t) mais son rapport
cyclique d, grandeur continue.Cela permet alors de travailler
frquence de dcoupage fixe. Le modle rduit (1.34) ajout dela
variable intgrale xV peut scrire sous la forme dtat suivante :
dX
dt= A X +B d+K (1.35)
avec :
X =
iLvCxV
A =
rL 1L 01C 0 00 1 0
B =
2 (vCvs)L
2 iLC0
K =
2 vsL
2 IchCvC
(1.36)
Surface de glissement Tout contrle par mode de glissement
stablit par le choix dunesurface de glissement S sur laquelle les
grandeurs dtat du systme sont amenes converger.Par exemple, la
forme (1.37) est retenue dans ce manuscrit.
S(X) = K1 (iL iL) +K2 (vC vC) +K3 xV = G (X X) (1.37)
avec G = [K1 K2 K3] et X = [iL vC 0]
T . Les coefficients K1, K2 et K3 sont des coeffi-cients de
rgulation dtermins partir de considration de stabilit et dun cahier
des charges.Leur dimensionnement est dtaill dans la suite.
Loi de ralliement la surface de glissement La seconde tape
consiste au choix duneloi de comportement dont le but est de
rallier les grandeurs dtat la surface de glissement
25
-
Chapitre 1 - Les onduleurs source impdante dans les systmes de
traction lectrique
prcdemment dfinie. Une loi de la forme (1.38) est retenue
[43].
dS
dt(X) = S(X) QSign(S(X))
= G (dX
dt dX
dt
)
= G (
A X +B d+K dX
dt
)
(1.38)
Le terme en S(X) permet de rallier la surface de glissement vers
lhyperplan S(X) = 0. Ceterme est actif quand les variables dtat se
situent au voisinage de leur valeur de rfrence. Enrevanche, lorsque
ces dernires sen loignent trop, cest le second terme QSign(S(X))
qui agitpour rallier rapidement la surface de glissement lhyperplan
S(X) = 0. Avec ce choix de loi deralliement, la condition de
convergence est garantie par le choix de coefficient et Q
positifs.En effet :
S(X) dSdt
(X) = S(X) S(X) QS(X) Sign(S(X)) < 0 (1.39)
Gnration du rapport cyclique de court-circuit partir de (1.38),
il est possible dex-traire lexpression du rapport cyclique d :
d = [G B]1 [
S(X) QSign(S(X)) G A X G K +G dX
dt
]
(1.40)
Afin de dterminer les coefficients de rgulation K1, K2, K3 et ,
nous considrons le systmeau voisinage de sa surface de glissement.
Ainsi, le rapport cyclique quivalent est donn par(1.41). En
injectant la commande quivalente deq dans le systme (1.35) prcdent,
on obtientle systme quivalent (1.42).
deq = [G B]1 [S(Xeq) G A Xeq G K] (1.41)
dXeqdt
= A Xeq +B deq +K
=[
AB [G B]1 (GG A)]
Xeq +B [G B]1 (G X G K)(1.42)
La stabilit du systme command est ainsi garantie si la partie
relle des ples du systme estngative. Ces ples sont obtenus en
calculant les valeurs propres de la matrice dtat :
M =[
AB [G B]1 (GG A)]
Cette dernire tant fortement non linaire, les trois valeurs
propres sont difficiles exprimeranalytiquement et dpendent du point
de fonctionnement X0. On obtient, laide dun logicielde calculs
formels :
ev1 = ev2 = f(K1,K2,