Embed Size (px)
Citation preview

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
1/20
LES CONSTITUANTS DES SYSTEMES AUTOMATISEES
I. Architecture d'un système pluri technique 1. Chaîne d’information / chaîne d'énergie. On peut distinguer au sein des systèmes pluri techniques deux chaînes, la chaîne d'information et la chaîne d'énergie.
2. Fonctions génériques / schéma topo fonctionnel. A la chaîne d'information et à la chaîne d'énergie, on peut en général associer les fonctions élémentaires suivantes :
3. La chaîne d’énergie. La chaîne d'énergie agit sur la matière d'œuvre. Elle utilise une très grande part de l'énergie consommée.

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
2/20
La chaîne d'énergie est constituée de plusieurs composants : Le pré actionneur distribue une énergie importante, sous l’action d’un ordre (signal de
faible énergie) envoyé par la chaîne d’information. Il peut être « tout ou rien » ou « progressif ». Exemples : Relais, variateur, carte d’alimentation, distributeur pneumatique ou
hydraulique….
L’actionneur transforme l’énergie disponible en une énergie utilisable. Exemples : Moteur, vérin…
Le transmetteur adapte l’énergie reçue de l’actionneur (l’énergie ne change pas de
nature). Exemples : Réducteur, mécanisme…
4. La chaîne d'information.
La chaîne d'information permet d'acquérir, de traiter et de communiquer des informations.
MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
3/20
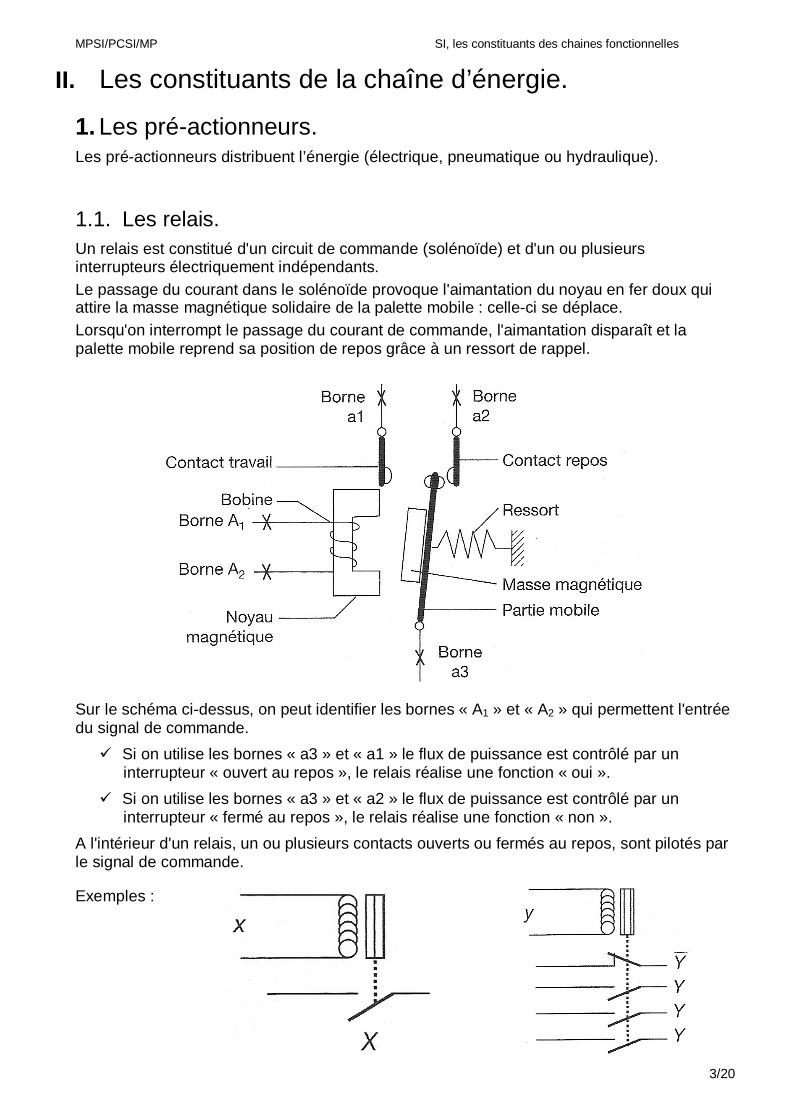
II. Les constituants de la chaîne d’énergie. 1. Les pré-actionneurs. Les pré-actionneurs distribuent l’énergie (électrique, pneumatique ou hydraulique). 1.1. Les relais. Un relais est constitué d'un circuit de commande (solénoïde) et d'un ou plusieurs interrupteurs électriquement indépendants. Le passage du courant dans le solénoïde provoque l'aimantation du noyau en fer doux qui attire la masse magnétique solidaire de la palette mobile : celle-ci se déplace. Lorsqu'on interrompt le passage du courant de commande, l'aimantation disparaît et la palette mobile reprend sa position de repos grâce à un ressort de rappel.
Sur le schéma ci-dessus, on peut identifier les bornes « A1 » et « A2 » qui permettent l'entrée du signal de commande. Si on utilise les bornes « a3 » et « a1 » le flux de puissance est contrôlé par un
interrupteur « ouvert au repos », le relais réalise une fonction « oui ». Si on utilise les bornes « a3 » et « a2 » le flux de puissance est contrôlé par un
interrupteur « fermé au repos », le relais réalise une fonction « non ». A l'intérieur d'un relais, un ou plusieurs contacts ouverts ou fermés au repos, sont pilotés par le signal de commande.
Exemples :
MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
4/20
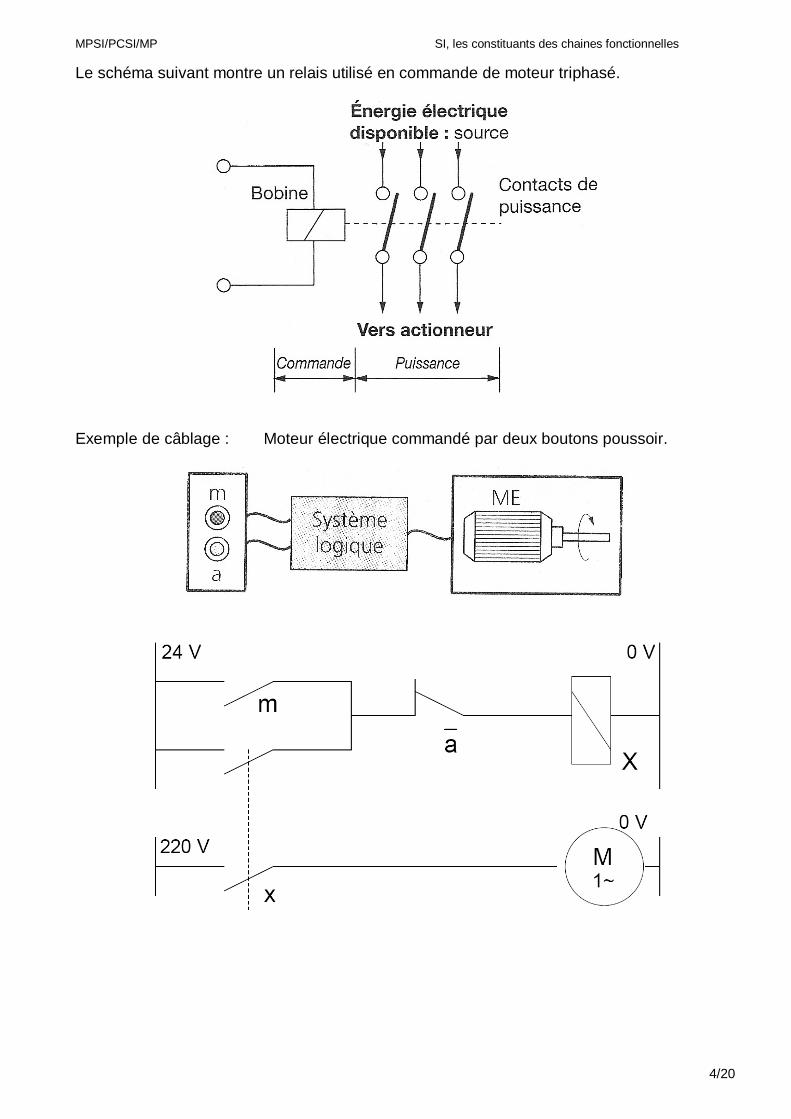
Le schéma suivant montre un relais utilisé en commande de moteur triphasé.
Exemple de câblage : Moteur électrique commandé par deux boutons poussoir.

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
5/20
1.2. Les distributeurs pneumatiques Principe : Le distributeur est constitué d'un corps, d'un tiroir et d'une commande pour
translater le tiroir par rapport au corps. Il est associé à deux types d'actionneurs : le vérin et le moteur pneumatiques ou hydrauliques). Les schémas suivants montrent l'association d’un distributeur et d’un vérin : la position du tiroir permet de mettre en communication l'arrivée d'air dans la chambre appropriée selon le sens de déplacement du piston du vérin.
Position 1 : L'action D pousse le tiroir vers la droite.
La chambre arrière du vérin est mise en communication avec la source de pression S ; la chambre avant est mise à l'échappement : la tige du vérin sort. Schéma associé
Position 2 : L'action G pousse le tiroir vers la gauche.
La chambre avant du vérin est mise en communication avec la source de pression S ; la chambre arrière est mise à l'échappement, la tige du vérin rentre. Schéma associé
MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
6/20
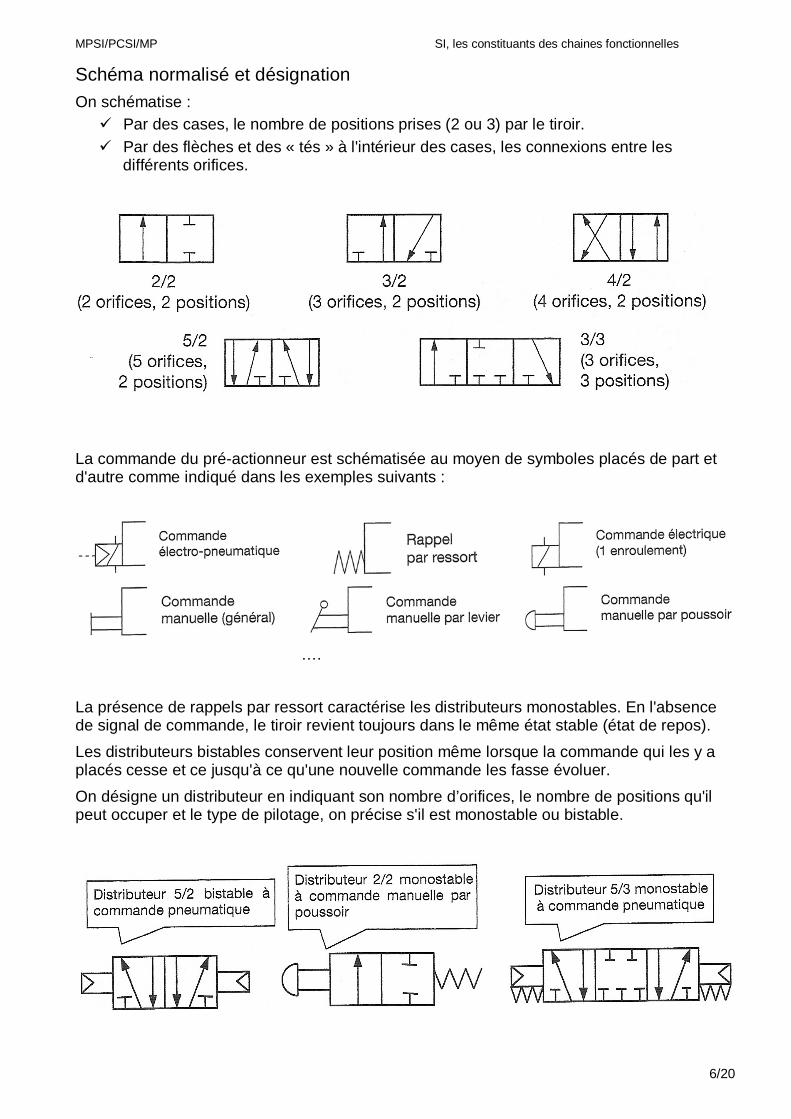
Schéma normalisé et désignation On schématise : Par des cases, le nombre de positions prises (2 ou 3) par le tiroir. Par des flèches et des « tés » à l'intérieur des cases, les connexions entre les
différents orifices.
La commande du pré-actionneur est schématisée au moyen de symboles placés de part et d'autre comme indiqué dans les exemples suivants :
….
La présence de rappels par ressort caractérise les distributeurs monostables. En l'absence de signal de commande, le tiroir revient toujours dans le même état stable (état de repos). Les distributeurs bistables conservent leur position même lorsque la commande qui les y a placés cesse et ce jusqu'à ce qu'une nouvelle commande les fasse évoluer. On désigne un distributeur en indiquant son nombre d’orifices, le nombre de positions qu'il peut occuper et le type de pilotage, on précise s'il est monostable ou bistable.

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
7/20
2. Les actionneurs La fonction globale d'un actionneur est de transformer l'énergie donnée par le pré-actionneur en énergie utilisable par la chaîne d'action. L’énergie change de nature. La grande majorité des actionneurs est composée par les moteurs (électriques, thermiques, hydrauliques ou pneumatiques) qui convertissent l'énergie disponible (électrique, chimique, hydraulique ou pneumatique) en énergie mécanique.
2.1. Les actionneurs électriques On distingue 4 types de moteurs : Le moteur à courant continu, le moteur asynchrone, le moteur synchrone et le moteur pas à pas. Exemple de fonctionnement : le moteur à courant continu. Le moteur à courant continu est constitué :
D'un stator qui est à l'origine de la circulation d'un flux magnétique longitudinal fixe créé soit par des bobinages soit par des aimants permanents.
D'un rotor bobiné relié à un collecteur rotatif inversant la polarité dans chaque enroulement au moins une fois par tour de façon à faire circuler un flux magnétique transversal en quadrature avec le flux statorique.
2.2. Les actionneurs pneumatiques : Les vérins (exemples de schématisation)
Vérin simple effet avec rappel par ressort
Vérin double effet
Vérin double effet avec amortisseur
Exemple : Schéma de câblage pneumatique du tiroir de distribution de capsules.

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
8/20
3. Les transmetteurs Le transmetteur adapte l'énergie utilisable délivrée par l'actionneur. L’énergie ne change pas de nature. On peut distinguer deux catégories.
Les transmetteurs linéaires : Le réducteur à engrenages. Le réducteur (ou multiplicateur) à poulie-
courroie, pignon-chaîne ou roue de friction. Le système vis-écrou. …
Les transmetteurs non linéaires : Limiteur de couple.
Mécanisme plan à barres articulées. …
4. Les effecteurs L'effecteur agit directement sur la matière d'œuvre (contact physique) et lui apporte la valeur ajoutée. Exemples classiques : pince, poussoir, tapis roulant, aiguillage, vantail, ventouse…
III. La chaîne d’information. 1. Les capteurs Le rôle des capteurs est de traduire l'état du système et de son environnement sous forme de signaux interprétables. Un capteur est un dispositif qui convertit une grandeur physique appelée « mesurande » en une autre grandeur physique appelée « image ». Le signal délivré par un capteur n'est pas en général exploitable directement, il doit faire l'objet de traitements complémentaires. 1.1. Quelques notions sur les capteurs On appelle « étendue de mesure » la plage de valeurs mesurée. L' « étendue de mesure » d'un capteur est limitée par les phénomènes de saturation. La « caractéristique statique » est la fonction qui relie la grandeur de sortie à la valeur mesurée. La « sensibilité » est le quotient de la variation locale du signal de sortie rapporté à la variation du mesurasse qui la provoque. Elle est représentée par la pente de la caractéristique statique. Deux modèles linéaires possibles :

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
9/20
La « fidélité » exprime la capacité d'un capteur à donner des mesures successives concordantes (peu importe qu'elles soient justes ou non). La « justesse » exprime la capacité d'un capteur à donner des mesures successives proches en moyenne de la valeur vraie de la valeur à du mesurer. La « précision » caractérise l'association de la fidélité et de la justesse.
La « résolution » est la plus petite variation de la mesure détectable par le capteur. La « rapidité » traduit la capacité d'un capteur à suivre les variations de la valeur à mesurer (elle peut être caractérisée par exemple par le « le temps de réponse à 5 % »). La « robustesse » caractérise l'invariance du comportement d'un capteur par rapport à des événements extérieurs : variations de la température ambiante, de l'hygrométrie, de la pression atmosphérique, chocs et vibrations, vieillissement... Le « décalage de zéro » (offset) peut être identifié par une mesure à vide : en présence d'un mesurable nul, la réponse du capteur n'est pas nulle (Y penser en TP !!!).

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
10/20
On parle « d'hystérésis » lorsque l'image que donne le capteur est différente selon qu'au moment de la mesure ce niveau est en train de croître ou de décroître. Ce phénomène apparait quand le capteur vieillit.
1.2. Mesure numérique de la position absolue. Le « codeur » numérique de position angulaire Tous les codeurs de ce type sont construits autour d'un disque divisé en « n » pistes concentriques. Chaque piste comporte des « cases » qui peuvent être laissées transparentes ou rendues opaques.
Les pistes sont « coloriées » : Dans l'ordre binaire naturel : l'image de la position peut alors être lue, directement,
en binaire naturel sur le disque lui-même. Problème : erreur de lecture possible lorsque plusieurs cellules optiques doivent commuter en même temps.
Dans l'ordre du code Gray : le signal fourni par le lecteur optique est alors très fiable, puisqu'une seule cellule commute à chaque passage d'un secteur au secteur voisin. Problème : la traduction en binaire naturel de l'image de la position nécessite un circuit de transcodage.

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
11/20
Il suffit alors d'éclairer le disque d'un côté et de placer de l'autre côté « n » récepteurs optiques (un par piste) pour connaître à chaque instant la position du disque. Pour un codeur à « n » pistes, il y a 2n positions pour un tour. La résolution est égale à 1/2n tour. La piste la plus proche du centre est opaque sur un demi-tour et transparente sur l'autre, la piste la plus éloignée du centre comporte le plus grand nombre de secteurs opaques. Exemple :
1.3. Capteurs de position absolus analogiques. Le potentiomètre résistif. Le capteur est constitué d'une piste conductrice dont la résistance par unité de longueur est uniforme, sur laquelle frotte un contacteur mobile. Lorsqu'on alimente la piste avec une tension U connue, la tension récupérée par le contacteur US est proportionnelle à sa position. Avantages : Simplicité, prix, existe en version linéaire ainsi qu'en version angulaire (jusqu'à
10 tours, grâce à une piste hélicoïdale). Inconvénient : Robustesse (usure due aux frottements).

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
12/20
Capteurs capacitifs et inductifs. Ce sont des capteurs passifs : l'image de la mesure est une impédance ou une capacité dont il faut déterminer la valeur au moyen d'un dispositif annexe (pont de Wheatstone par exemple). Avantage : Robustesse (mesure sans contact). Inconvénient : Prix (ils sont donc rares). 1.4. La mesure incrémentale. La mesure est réalisée par comptage des impulsions produites par le déplacement d'un dispositif mobile par rapport à un détecteur fixe (ou vice-versa) :
Aimant devant un capteur à effet hall. Disque crénelé en acier devant une bobine. Succession de zones opaques et transparentes devant un détecteur optique.
MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
13/20
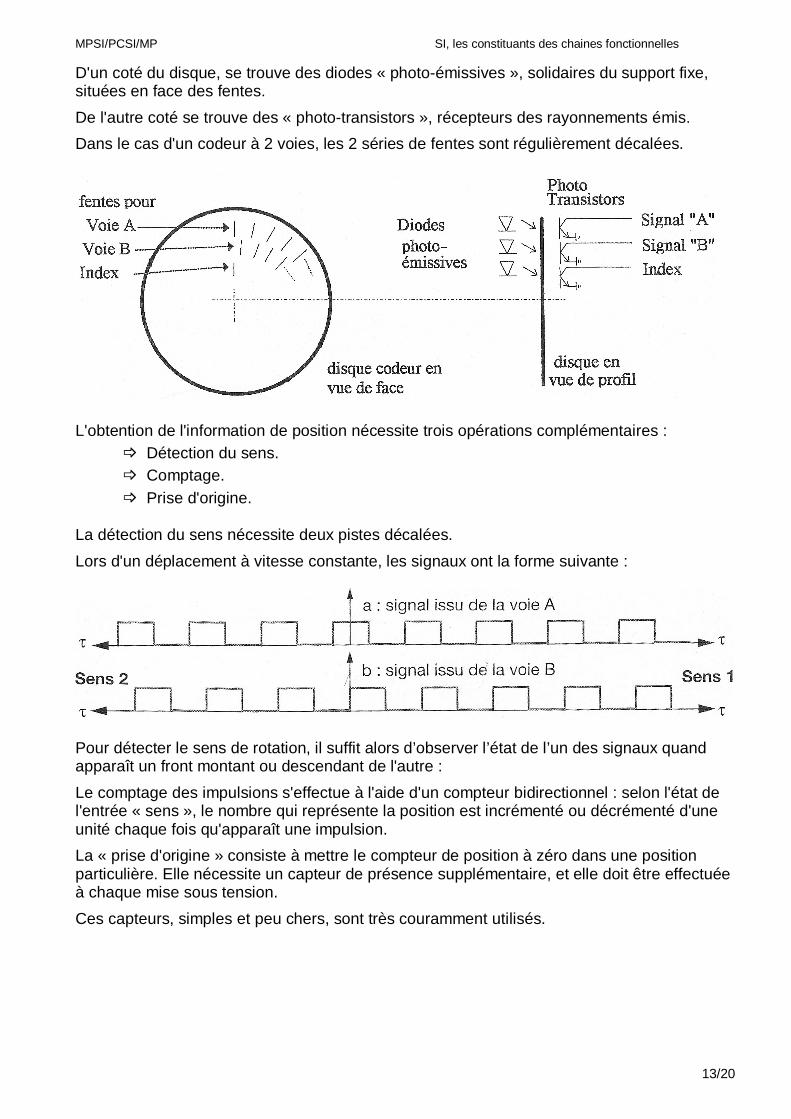
D'un coté du disque, se trouve des diodes « photo-émissives », solidaires du support fixe, situées en face des fentes. De l'autre coté se trouve des « photo-transistors », récepteurs des rayonnements émis. Dans le cas d'un codeur à 2 voies, les 2 séries de fentes sont régulièrement décalées.
L'obtention de l'information de position nécessite trois opérations complémentaires :
Détection du sens. Comptage. Prise d'origine.
La détection du sens nécessite deux pistes décalées. Lors d'un déplacement à vitesse constante, les signaux ont la forme suivante :
Pour détecter le sens de rotation, il suffit alors d’observer l’état de l’un des signaux quand apparaît un front montant ou descendant de l'autre : Le comptage des impulsions s'effectue à l'aide d'un compteur bidirectionnel : selon l'état de l'entrée « sens », le nombre qui représente la position est incrémenté ou décrémenté d'une unité chaque fois qu'apparaît une impulsion. La « prise d'origine » consiste à mettre le compteur de position à zéro dans une position particulière. Elle nécessite un capteur de présence supplémentaire, et elle doit être effectuée à chaque mise sous tension. Ces capteurs, simples et peu chers, sont très couramment utilisés.

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
14/20
1.5. La mesure de la vitesse On peut toujours ramener une mesure linéaire à une mesure angulaire au moyen de mécanismes simples, les vitesses linéaires peuvent être mesurées avec des capteurs de vitesse angulaire. Génératrice tachymètrique Lorsqu'on fait tourner le rotor d'une machine à courant continu non chargée, la tension qui apparaît entre ses bornes est proportionnelle à la vitesse de rotation : on obtient une « génératrice tachymétrique ». La mesure de cette tension permet d’obtenir une image de la vitesse angulaire du rotor. Remarque : le courant débité par la génératrice étant pratiquement nul, on peut considérer que la mesure ne perturbe pas le phénomène observé. Gyromètre A cause du prix et des difficultés de mise en œuvre, la mesure de vitesse angulaire par gyromètre n'est utilisée que très rarement (principalement en aéronautique et dans les sous-marins). Autres dispositifs Il existe plusieurs méthodes de détermination de vitesse à partir d'informations fournies par des capteurs de présence ou des capteurs d'accélération :
Comptage d'impulsions dans un intervalle de temps. Conversion fréquence tension Dérivation temporelle d'une information de position Intégration d'une information d'accélération.
1.6. La mesure de l'accélération. La mesure de l'accélération est indirecte : sous l'action de la force que le corps d'épreuve exerce sur une masse, il se déforme, on interprète la mesure de cette déformation comme une image de l'accélération. Schéma fonctionnel d'un accéléromètre
MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
15/20
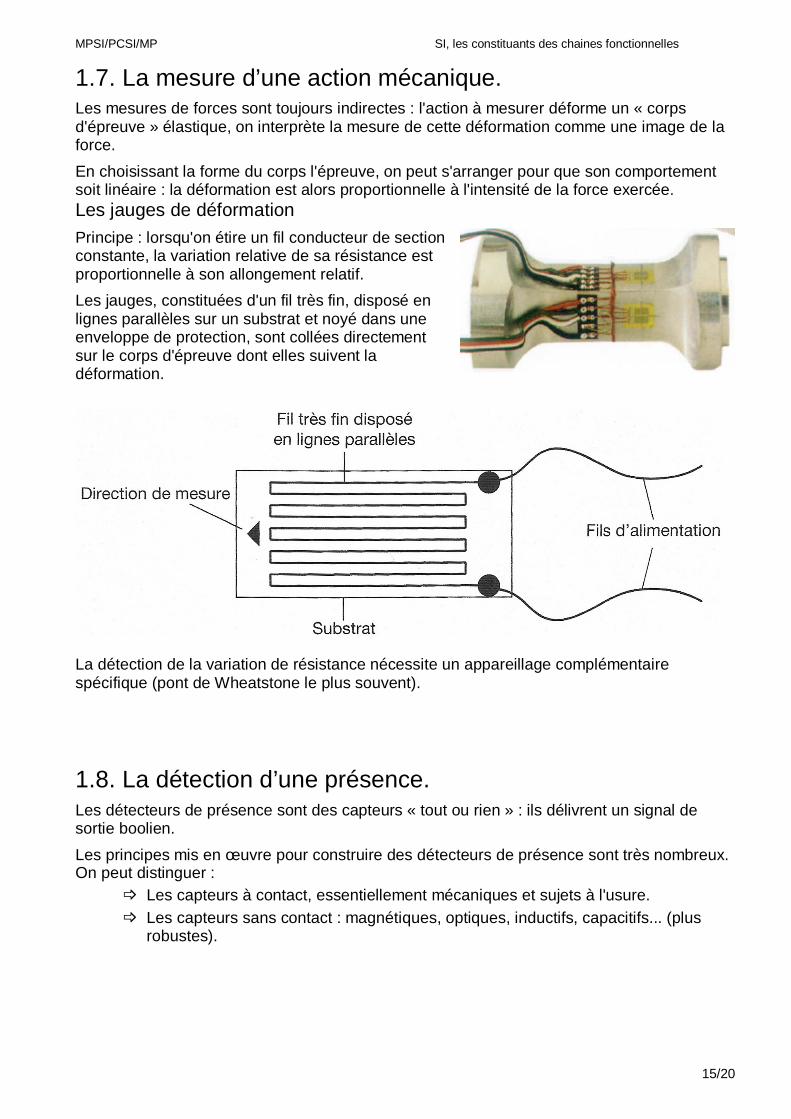
1.7. La mesure d’une action mécanique. Les mesures de forces sont toujours indirectes : l'action à mesurer déforme un « corps d'épreuve » élastique, on interprète la mesure de cette déformation comme une image de la force. En choisissant la forme du corps l'épreuve, on peut s'arranger pour que son comportement soit linéaire : la déformation est alors proportionnelle à l'intensité de la force exercée. Les jauges de déformation Principe : lorsqu'on étire un fil conducteur de section constante, la variation relative de sa résistance est proportionnelle à son allongement relatif. Les jauges, constituées d'un fil très fin, disposé en lignes parallèles sur un substrat et noyé dans une enveloppe de protection, sont collées directement sur le corps d'épreuve dont elles suivent la déformation.
La détection de la variation de résistance nécessite un appareillage complémentaire spécifique (pont de Wheatstone le plus souvent). 1.8. La détection d’une présence. Les détecteurs de présence sont des capteurs « tout ou rien » : ils délivrent un signal de sortie boolien. Les principes mis en œuvre pour construire des détecteurs de présence sont très nombreux. On peut distinguer :
Les capteurs à contact, essentiellement mécaniques et sujets à l'usure. Les capteurs sans contact : magnétiques, optiques, inductifs, capacitifs... (plus
robustes).

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
16/20
Capteur à contact mécanique Leur très faible prix explique leur large utilisation dans les systèmes automatisés. Les capteurs à commande mécanique sont constitués à partir des éléments suivants : un corps métallique ou thermoplastique, une tête de commande, un dispositif d'attaque et un ou des contacts électriques.
Les détecteurs inductifs Ils détectent uniquement les objets métalliques. Le détecteur se compose d’un oscillateur, dont les bobinages constituent la face sensible, avec émission d’un champ magnétique. Lorsqu’un objet métallique passe dans le champ magnétique, des courants induits constituent une charge additionnelle qui provoque l’arrêt des oscillations. Après mise en forme, un signal de sortie est délivré.
Les détecteurs capacitifs Ils détectent les objets de toutes natures, conducteurs ou non (métal, minerais, bois, plastique, carton, cuir, fluides, etc.). Le détecteur se compose d’un oscillateur dont le condensateur est formé par 2 électrodes placées à l’avant.
Lorsqu’un objet passe devant la face sensible, il provoque une variation du couplage capacitif, provoquant le démarrage de l’oscillateur. Après mise en forme, un signal de sortie est délivré. Les détecteurs à ultrasons Ils détectent les objets de toutes natures, conducteurs ou non, en s’affranchissant totalement de la nature du matériau détecté, de sa couleur et de son opacité (pulvérulents, verres, liquides, etc.). Le détecteur se compose d’un émetteur-récepteur d’ultrasons. Lorsqu’un objet passe devant le détecteur, l’écho revient vers le récepteur, un microprocesseur compare l’intervalle de temps entre le signal émis et l’écho et délivre un signal de sortie.

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
17/20
Les détecteurs photoélectriques Il se compose essentiellement d’un émetteur de lumière : c'est un composant électronique semiconducteur, appelé
diode électroluminescente, qui émet de la lumière lorsqu’il est traversé par un courant électrique. Cette lumière peut être visible ou invisible selon sa longueur d’onde.
d’un récepteur sensible à la quantité de lumière reçue (phototransistor). Il y a détection quand la cible pénètre dans le faisceau lumineux émis par le détecteur et modifie suffisamment la quantité de lumière reçue par le récepteur pour provoquer un changement d’état de la sortie.
Barrage
Réflexion
Réflexion directe
2. La partie commande. On peut réaliser des commandes par câblage ou par programmation. Logique câblée : Les fonctions logiques combinatoires ou séquentielles sont réalisées sous forme de circuits comprenant des relais, contacts, temporisateurs, etc (technologie électromécanique) ou des circuits intégrés interconnectés sur une carte électronique. Ces circuits sont élaborés pour obtenir un comportement bien définie et non modifiable (sauf en modifiant le câblage). Avantages : Adapté aux automatismes simples
Obligatoire pour le traitement des sécurités et de l'arrêt d'urgence. Inconvénients : Solution rigide, rapidement volumineuse et complexe à implémenter Logique programmée : Il s’agit de remplacer les circuits logiques câblés dédiés à un fonctionnement par des circuits intégrés complexes, mais programmables par l’utilisateur en fonction de son application. Un tel système est constitué principalement d'un microprocesseur, de mémoires et de bus pour échanger des informations. Trois principales déclinaisons sont développées pour répondre aux différents besoins : Les micro-ordinateurs.

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
18/20
Les Automates programmables industriels (API).
Dédiés aux pilotages des machines industrielles.
Les microcontrôleurs. Dédiés également au pilotage de systèmes. (gestion ports entrées/sorties). L’intégration du système de traitement se fait dans une seule puce, ce qui est adapté aux systèmes embarquées et produits en grandes séries.
Avantages : Souplesse et adaptabilité de l'installation (remplacement du câblage par
un programme facilement modifiable). Haut degré d'intégration (encombrement réduit).
Inconvénient : Adapté aux systèmes assez complexes (plus cher pour réaliser des
commandes simples). Architecture et principes de fonctionnement généraux Un micro-ordinateur est fondamentalement constitué d'un microprocesseur, de mémoires et de périphériques entrées/sorties interconnectés sur un bus.
Le microprocesseur aussi appelé unité centrale est lui- même constitué: D'une « unité de contrôle » (encore appelé « séquenceur ») constitué d'un circuit logique
séquentiel cadencé sur un signal d'horloge (horloge à Quartz). D'une « unité de calcul » constitué d’un circuit logique combinatoire (principalement une
Unité Arithmétique et Logique) De petites « mémoires internes » appelées « registres » permettant de stocker
temporairement des informations. D'un « bus » permettant de transmettre des informations (schématisé sur le schéma par
un double trait).
MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
19/20
Principes de fonctionnement généraux Dans un système logique programmable, en plus de coder les informations (et leurs adresses mémoires) sous formes de mots binaires, le principe fondamental consiste à définir un jeu d'instructions codé sous forme de mots binaires (code instruction). Le processeur traite alors les programmes en chargeant les instructions depuis la mémoire, en les décodant et en les exécutant les unes après les autres. Remarques : Les instructions d'un processeur peuvent être grossièrement classées en trois
catégories : Les instructions de calcul arithmétique et logique, les instructions d'accès mémoire (lecture ou écriture d'une information en mémoire) et les instructions de saut (conditionnel ou inconditionnel) qui permettent d'effectuer les tests et les boucles indispensables à tout algorithme.
Le nombre et les types d'instructions sont directement liés aux circuits logiques câblés du microprocesseur.
Les instructions, correspondant au programme compilé, ainsi que les informations (data) à traiter sont stockées en mémoire.
Chaque mot binaire mémorisé (instruction ou donnée) a une adresse mémoire, elle-même codée en binaire.
Le microprocesseur manipule donc principalement trois types d'informations codées en binaire : les données, les instructions et les adresses.
Typologie des mémoires Il existe deux grands types de mémoires. Les mémoires volatiles et non volatiles. Une mémoire est dite non volatile ou permanente si elle conserve son état quand elle n'est plus alimentée en énergie. Elle est dite volatile dans le cas contraire. Exemples : Les mémoires par relais auto maintenu, les mémoires électroniques type RAM
(Random Access Memory) sont volatiles. Les mémoires électroniques type ROM (Read Only Memory) : PROM, EPROM,
EEPROM, CD-ROM, DVD-ROM et les disques durs, mémoires flash sont des mémoires non volatiles.
Remarque : Dans une mémoire type RAM (Random Access Memory), il est possible d'accéder immédiatement (temps d'accès extrêmement court) à n'importe quel mot mémorisé à partir de son adresse. C'est la raison pour laquelle les programmes s'exécutant et les donnes traitées sont mémorisées temporairement en mémoire RAM. Les microcontrôleurs Un microcontrôleur est un circuit intégré ou puce (chips en anglais) sur lequel les organes essentiels d’un micro-ordinateur sont regroupés. Les microcontrôleurs sont aujourd’hui bon marché, très peu encombrants, de plus en plus performants et sont ainsi particulièrement adaptés à la réalisation de tout type de parties commandes de systèmes, en particulier pour les systèmes embarqués (miniaturisation).

MPSI/PCSI/MP SI, les constituants des chaines fonctionnelles
20/20
Microcontrôleur Microchip PIC16C558 Carte de commande Arduino Uno basé sur un microcontroleur ATmega 328
Processus de conception/réalisation d'un système de commande programmable :
Définition du CDCF (fonctionnalités et performances attendues). Modélisation et spécification du comportement envisagé. Raccordement et affectation des entrées/sorties au système de commande
programmable. Elaboration du programme relatif au comportement souhaité avec un logiciel de
programmation (langages de programmations adaptés avec logiciel compilateur). Compilation et mise en mémoire du code exécutable associé au programme dans le
système de commande programmable (Automate Programmable Industriel ou Microcontrôleur) avec un logiciel de programmation + câble (raccordement console de programmation => API ou carte à microcontrôleur).
Spécification d'une commande programmée: structure algorithmique La spécification est une étape fondamentale, préalable à la réalisation du programme dans un langage adapté. Cette étape ne dépend pas du langage de programmation utilisé par la suite. Définitions : Un algorithme est une suite finie et non ambiguë d'opérations ou instructions
permettant de résoudre un problème informatique. L'algorigramme est la représentation graphique d'un algorithme.
Le formalisme SysML abordé avec les diagrammes d'activités et les diagrammes d'états peut être utilisé. Cependant, les outils graphiques les plus employés sont définis par les normes suivantes: NF Z 67-010 et ISO 5807 (les deux normes diffèrent seulement sur la représentation d’une structure itérative).