Embed Size (px)
DESCRIPTION
As de Pic. Nous sommes une équipe indépendante de passionnés de robotique, d’origines et de formations diverses, réunis grâce à Internet - [email protected]. - PowerPoint PPT Presentation
Citation preview

As de Pic
Funny Golf > Coupe de France de Robotique 2006
Nous sommes une équipe indépendante de passionnés de robotique, d’origines et de formations diverses,
réunis grâce à Internet - [email protected]
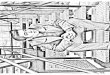
Le robot est équipé d’une webcam directionnelle et deux algorithmes de reconnaissance de formes. Il détecte les balles, les trous, et les totems et détermine sa position à partir de ces informations.
Le robot utilise une distribution Linux (Debian) qui fonctionne sur une carte mère au format mini-ITX utilisant une compact flash comme disque dur.
Un bus série de conception maison permet au PC de commander les différentes cartes électroniques :-le panneau de commande-la carte d’asservissement des moteurs de puissance-la carte capteurs-la carte actionneurs
Pour ne pas être gêné par les trous, le robot dispose de deux grosses roues motrices aux coins arrières et deux gros patins en téflon aux coins avants.
Le système de ramassage/stockage/dépose de balles :
Une règle collante à l'avant (ne laissant pas de résidu sur les balles) garde collées les balles entrant en contact avec le robot. La règle mue par deux servomoteurs se soulève, ce qui vide les balles collées dans une gouttière située derrière la règle, puis elle reprend sa position normale. Cinq balles peuvent être collées simultanément et cinq autres au maximum sont conservées dans la gouttière.
Une trappe en bas de celle-ci permet de retenir les balles stockées ou de libérer une seule balle à la fois; soit pour la mettre dans un trou aménagé dans le plancher du robot, soit pour s'en débarrasser par-dessus bord (balle noire).
Un bras manipulateur fonctionnant avec trois servomoteurs permettant d'atteindre n'importe quel point dans sa zone de couverture (un demi-cercle devant le robot), un servomoteur permettant le mouvement vertical d’une tige à l’extrémité collante pour attraper les balles sur l'aire mais aussi et surtout dans un trou. Le bras peut alors soit la déposer immédiatement, soit la conserver dans la gouttière.
Pour la mise au point de la stratégie du robot un simulateur 3D à été réalisé avec OpenGL, et pour vérifier le comportement du robot en situation, un protocol réseau à été développé pour que le robot communique ses informations, on peut ainsi suivre son évolution sur une interface graphique sur un ordinateur distant et sans fils (grâce à un pont Wifi amovible)