Embed Size (px)
Citation preview

1
ASI 3
Méthodes numériquespour l’ingénieur
Résolution de systèmes linéaires par des méthodes itératives :
Jacobi, Gauss Seidel, relaxation
Résoudre un système linéaire
=++−=++−=++
−=−+
⇔=
6 2
8 2 3
0 3
6242
432
4321
421
321
xxx
xxxxxxx
xxx
bAx
( )
( )
ii
n
ijjjiji
ia
xabx
xxx
xxxx
xxx
xxx
AAdistbxA
xxxx
∑≠=
−
=
−+=
−+−=
−−=
+−−=
<=
,1
324
4213
412
321
4321
~
soit
1
~2~61
~2~~38
3
~~0
2
~2~46
:essayait on si
~, exemplepar avec ~~~ que imaginons
solution presque"" une ~,~,~,~soit
ε

2
Résoudre un système linéaire en itérant
ii
n
ijjjiji
i a
xabx
xxx
xxxx
xxx
xxx
∑≠=
−
=
−+=
−+−=
−−=
+−−=
,1
324
4213
412
321
~
soit
1
~2~61
~2~~38
3
~~0
2
~2~46
Si Ax n’est pas encore égale à b, on recommence !
fin
)10 ( ),( quetant
,1
old
new
12-
ii
n
ijjjiji
i
new
a
xabx
i.e.bAxdist
∑≠=
−
=
> ε
Osons itérer ! méthode de Jacobi
fin
)10 ( ),( quetant
,1
old
new
12-
ii
n
ijjjiji
i
new
a
xabx
i.e.bAxdist
∑≠=
−
=
> ε
Soit D la diagonale de la matrice A, et G le reste :A = D+G
( )old1newoldnew
1,1
,11,
,,11,1
,121
111211
0
0
0
0
0
0000
0000
0000
0000
0000
GxbDxGxbDx
aaa
aaaaaa
aa
aaa
G
a
a
a
D
nnnin
nnii
niiiiii
ii
ni
nn
ii
−=⇔−=
=
=
−
−
−+
−−
−
L
OM
MO
L
O
O

3
=++−
=++−
=++
−=−+
⇔=
6 2
8 2 3
0 3
6242
432
4321
421
321
xxx
xxxxxxx
xxx
bAx
ii
n
ijjij
i
jjiji
i a
xaxabx
xxx
xxxx
xxx
xxx
∑∑+=
−
=−−
=
−+=
−+−=
−−=
+−−=
1
1
1
324
4213
412
321
~
soit
1
261
~238
3
~0
2
~2~46
Gauss Seidel
méthode de Gauss-Seidel
fin
)10 ( ),( quetant
1
old1
1
new
new
12-
ii
n
ijjij
i
jjiji
i
new
a
xaxabx
i.e.bAxdist
∑∑+=
−
=
−−
=
> ε
Soit E la triangulaire inférieure et F la supérieure de la matrice A :A = D+E+F
( ) ( ) ( )old1newoldnew
,1
,,1
,1
1112
1,1
1,
1,1
21
0000
00
000
00
0
0
00
000
00
0000
FxbEDxFxbxED
a
aaa
aaa
F
aaaa
aaa
Enn
niii
ii
ni
nnnin
ii
iii
−+=⇔−=+
=
=
−
−
−
−
−
+
−
L
OM
MO
L
L
OM
MO
L

4
La relaxation( )
relaxation de paramètre:0
)1(
>
−+=
=
ω
ωω
ϕoldnewnew
r
oldnew
xxx
xx
] [
] [
∈
=
∈
tionextrapolla :2,1
quo status :1
tioninterpolla :1,0
ω
ω
ω
( ) ( ) ( )
( )( )
( ) ( ) ( )
( ) ( )( ) old
oldold1
old
oldold1
1
1
1
par t multiplianen
1
xFDbxED
xFxbEDx
xGDbDx
D
xGxbDx
newr
newr
newr
newr
ωωωω
ωω
ωωω
ωω
−−+=+
−+−+=
−−+=
−+−=
−
−( ) ( )
( ) ( )old1new
old1new
: SeidelGauss
)( :Jacobi
FxbEDx
xFEbDx
−+=−
+−=
−
−
Résumé « algorithmique »
( )
( ) ( )
( ) ( )
=
+=+=+
−=
+=−=+
−
−−=
=+−=
+=
−−
−−
FDN
EDMxFDbxED
R
FN
EDMFxbxED
FEN
DMxFEbDx
bNxMx
ω
ωω
ω
ω
ω 1
1old1new1
oldnew
oldnew
oldnew
:
:elaxation
:
: SeidelGauss
:)(
:Jacobi

5
ConvergencePrincipes généraux
( ) dxCI
xx
C
dCxx
xkk
=−
−<
+=+
*
*
0
1
0
: desolution la vers pour tout converge dessusci algorithmel' Alors
1 que telleesubordonné ematriciell norme une existe ilS':
donné,
Théorème
Éléments de démonstration- x* est un point fixe de l’algorithme-
( )0 ,1 si
* C *
*
00
1
011
→<≤≤−=
==⇔−−+=−=
∞→
−
−−
kkkkk
k
kkkk
kk
CCeCeCexxC
eCeedCxdCxxxe
ini
n
ii
n
i
pi
pp
n
ii
n
xxxxpxxxx
REynxnyxn
xnxn
xxn
xn
xnx
REn
,111
11
222 sup ; ; )1( ;
; exemples
)()()(
)()(
00)(
positivité 0)(
iant vérif)(
::norme
=∞
===
+
==≥==
=
+≤+
=
=⇔=
≥
→
∑∑∑
λλa
Normes matricielles
DéfinitionSoit A une matrice nxm, étant donnée une norme vectorielle,on appelle norme matricielle subordonnée, la norme matricielledéfinie par :
xAx
AxRx
n0,
max≠∈
=
xAxAx ~ ~:max ceest ~ =Conséquence :

6
-2 .5 -2 -1 .5 -1 -0 .5 0 0 . 5 1 1 . 5 2 2 . 5
-2
-1 .5
-1
-0 .5
0
0 . 5
1
1 . 5
2
x
Ax
Exemples
( )
∞
=≤≤∞=≤≤
==
=
==
==
∑∑
∑∑
'
; max ; max
; tr :Frobénius de norme
1
11111
1
2
1
2
AA
aAaA
A'AaA
m
jijni
n
iijmj
n
iij
m
jF
AxAxRx n 1,
max=∈
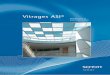
=Illustration 2d
12 =x
x1
x2 x2Ax
x1
2A
à utiliser pour le calcul !
Calculez les valeurs propres de
−
−
111
110
201
Et ses vecteurs propres ?,31,31,1 321 ii −=+== λλλ
1
,
1
,
0
1
1
33
332
333
332
21
=
=
= −
−
i
i
i
i
vvv

7
Rayon spectrale d’une matriceDéfinition : on appelle rayon spectrale d’une matrice carrée A,
le nombre réel ρ(A) tel que :
( ) )(max,1
AA ini
λρ=
=
Théorème : soit A une matrice nxm, alors :
( )AAA F '2ρ=
Corollaire : si A est une matrice carrée symétrique nxn, alors :
( )AA F ρ=
Remarque : en général, le rayon spectrale n’est pas une norme :
( ) 0,01 , 00
10=≠=
= AAA F ρ
Convergence : le retourPrincipes généraux
( ) dxCI
xx
C
dCxx
xkk
=−
−<
+=+
*
*
0
1
0
: desolution la vers pour tout converge dessusci algorithmel' Alors
1 que telleesubordonné ematriciell norme une existe ilS':
donné,
Théorème
Théorème : les points suivants sont équivalents : • C est une matrice convergente, (i.e. Ck tend vers 0)• ρ(C)<1•
1<C

8
Résumé « algorithmique »
( )
( ) ( )
( ) ( )
=
+=+=+
−=
+=−=+
−
−−=
=+−=
+=
−−
−−
FDN
EDMxFDbxED
R
FN
EDMFxbxED
FEN
DMxFEbDx
bNxMx
ω
ωω
ω
ω
ω 1
1old1new1
oldnew
oldnew
oldnew
:
:elaxation
:
: SeidelGauss
:)(
:Jacobi
Convergence
Théorème : Si A est une matrice à diagonale strictement dominante,alors la méthode de Jacobi converge.
Démonstration
( ) ( )
11
max)(
, )( avec
)( :Jacobi
1,1
1
11k1k
k11k
<
=+=
=+=+=
+−=
∑==∞
−
∞
−−+
−+
n
jij
iini aa
FEDC
bDdFEDCdCxx
xFEbDx
Remarque : il en est de même pour la méthode de Gauss-Seidel

9
ConvergenceThéorème : soit une méthode itérative :
Si A est une matrice symétrique définie positive telle que si A = M-N alors M+N’ est définie positiveAlors la méthode itérative est convergente
Démonstration( )
( ) ( )
( )
1max : donc aon
''''''
'''''
posons
' positive définie symétrique
1
1,
1221
22
2221
1
212121
2
<=⇒<−
+−=+−−=
+−−=−−=−=−
=⇔≡
−=−=
=⇔
−
=
−−
−
−
−−−
AxxAAA
AA
AAA
AAA
A
NxMNMxAxMx
yNMyxAyyMyyyMyx
AyyAxyAyxxAyxAyxyxAxMx
AxMyAxMy
AxMxxAMMNxM
AxxxA
A
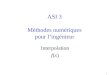
Théorème : Si A est une matrice symétrique définie positive, la méthode de la relaxation converge pour :
k1k bNxMx +=+
20 << ω
0 2
1
rayo
n sp
ectr
al
rayon spectral de la matrice M-1
N
ω
Influence de w

10
Remarques
pratique :
• pas de preuve de convergence généralisée,
• on préfère la relaxation avec différents tests pour ω,
• on préfère les méthodes directes,
• voir les méthodes semi directes pour les problèmes degrande taille (cf les méthodes « multigrilles »),
Conditionnement d’un système linéaire
[ ][ ]
2et 0002.0
0002.0 0
00
0
3
1
1
solutionsdeux examinons
3
3
20001.1
21
2
1
2
1
2
1
=−=−
=−=
=−=
=
=
=
=
=
⇔=
yxrr
bAyr
bAxr
y
yy
x
xx
x
xbAx
yx
Ty
Tx
Deux vecteurs très différents donnent des solutions très proches
x2
x11
1
3

11
Conditionnement : influence du second membre
7363)(:007.0,1.24
6.22 10 7.3 :
0.26
6.5
0.11
5.34
,
9.22
1.28
9.12
1.38
1
1
1
1
solution commeadmet ,
23
28
13
38
,
7187
74107
1651
1010108
41
3
=−==
==
−
−
=+
=+
=
=
=
−
Acond
xx
bb
xxbb
xbA
λλ
δδδδ
( )( )
( ) ( )
~ singulièrenon ~ ~
)(~ avec ~
1
1
rAxx
ArAxxxxA
xxxxAAx
bbbr
−
−
≤−⇒
=−⇔−=
+=−=
+−=
δ
δ
ConditionnementDéfinition : on appelle conditionnement d’une matrice carrée A, relatif
à une norme subordonnée, le nombre réel χ(A) :
( ) 1 −= AAAχ
Remarque :( ) 1
11≥⇒≤=
−−AAAAAI χ
Théorème : Si A est une matrice carrée, non singulière (régulière)
( )
( )bb
Axx
bbxxAbAxδ
χδ
δδ
≤
+=+=
, ( )( )
( )AA
Axx
x
bxxAAbAxδ
χδ
δ
δδ
≤+
=++=
,
Perturbation du second membre Perturbation de la matrice
Un problème est dit « bien conditionné » si χ(A) est proche de 1,
il est dit « mal conditionné » si χ(A) est grand (et mal posé si χ(A) est infini)

12
Conditionnement
( )
bb
AAxx
bAxxAbbbxxA
bA
xxAbbAx
δδ
δδδδδδ
1
1
)2 )1
)2
11 )1
−
−
≤⇒+
≤⇒≤⇒+=+
≤⇒≤⇒=
( ) 1 −= AAAχ
Remarque : si A est symétrique, si on note ses valeurs propres λi
( )1
2
22
1
121
doncet
1
,,...,,...,,
λ
λχ
λλ
λλλλ
n
nni
A
AA
=
== −
Dans l ’exemple, ( )
( ) 22.5) trouvéa(on 2.27 de ordrel' deest erreur l' de borne la
0037.0,7363
2
2
=
==
bA
bA
δχ
δχ
Comment améliorer le conditionnement ?
Ajouter un « chouia » sur la diagonale
( )µλ
µλµχ
+
+=+
12
nIA

13
Itérations !A = randn(n);b= ones(n,1);x = A\b;err = A*x-b;norm(err)
ans = 2.8246e-013
dx = A\err;
err2 = A*(x-dx)-b;norm(err2)
ans = 6.4789e-014
( )
xAbbxA
bxxA
bxAerr
bAgaussx
bAx
~~~
~),(~
−==
=+
−=
=
=
δ
δ
TP - la relaxationLe but du TP est d’écrire un programme matlab résolvant un système linéaire par la méthode de la relaxation
x = relax(A,b,w,nite,err)
Pour ce faire, il faut étudier l’évolution du rayon spectal
- mettez vous par binôme- rédigez une page :
recto : ce que vous avez faitverso ce que vous en pensez
- a rendre pour le 8 décembre à 17h30 (publication du corrigé)
Indices : créer un problème test,
les fonction cputime et flopstril et triu pourraient vous simplifier la vie
et diag(diag()) et eig aussi
( ) defonction en 1
ωρ NM−

14
PropriétésDéfinition : on appelle quotient de Rayleigh la fonction qA(x)
xxAxx
xqA ''
)( =
Théorème : si A est symétrique,
)(maxmax xqAx
ii
=λ
λi est une valeur propre de A, vi est un vecteur propre de A.
iii vvA rrλ=
Soit A une matrice carrée, on appelle polynôme caractéristique de A le polynôme défini par :
( )IAp λλ −= det)(
Les n racines λi de ce polynôme sont les valeurs propres de A, vi est un vecteur propre de A. Il existe n vecteurs vi tels que :