Embed Size (px)
Citation preview

Haute Ecole d'Ingéniérie et de Gestion ducanton de Vaud (HEIG-VD )
Département des technologies industrielles(TIN)
Filière Génie électrique
Filière Informatique technique
Automatique avancée(AAV)
1èrepartie
Ai
iutomatisation
n s t i t u t d '
n d u s t r i e l l e
Prof. Michel ETIQUE, mars 2006,Yverdon-les-Bains

HEIG-VD Automatique avancée (AAV)
v.1.0 2 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Table des matières
1 Identication des systèmes dynamiques linéaires 91.1 Identication non-paramétrique de systèmes dynamiques linéaires 9
1.1.1 Estimation de réponse harmonique : ETFE [1] . . . . . . . 101.1.2 Propriétés de l'ETFE . . . . . . . . . . . . . . . . . . . . . 111.1.3 Propriétés statistiques de l'ETFE . . . . . . . . . . . . . . 171.1.4 Amélioration de la variance de l'ETFE : moyennage et lissage 25
1.2 Identication paramétrique . . . . . . . . . . . . . . . . . . . . . . 261.2.1 Structures de modèles . . . . . . . . . . . . . . . . . . . . 261.2.2 Méthode PEM . . . . . . . . . . . . . . . . . . . . . . . . 311.2.3 Cas particulier : modèle de structure ARX, méthode des
moindres carrés . . . . . . . . . . . . . . . . . . . . . . . . 341.2.4 Biais et variance de la méthode des moindres carrés . . . . 381.2.5 Inversibilité de la matrice RN . . . . . . . . . . . . . . . . 44
1.A Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 461.A.1 Identication non-paramétrique et paramétrique des sys-
tèmes A, B et D du laboratoire . . . . . . . . . . . . . . . 461.B Structure ARMAX . . . . . . . . . . . . . . . . . . . . . . . . . . 47
1.B.1 Préambule . . . . . . . . . . . . . . . . . . . . . . . . . . . 471.B.2 Recherche des paramètres d'un modèle ARMAX . . . . . . 481.B.3 Descente de gradient . . . . . . . . . . . . . . . . . . . . . 51
1.C Rappel de théorie des probabilités [2] . . . . . . . . . . . . . . . . 581.C.1 Processus, signaux et variables aléatoires . . . . . . . . . . 581.C.2 Fonction de répartition et densité de probabilité [[2], 14.2] 581.C.3 Espérance mathématique, moyenne et variance . . . . . . . 581.C.4 Fonctions d'autocorrélation et d'autocovariance [[2], 5.2] . 591.C.5 Stationnarité et ergodisme [[2], 5.1.11 et 5.1.13] . . . . . 59
1.D Transformée de Fourier de signaux discrets [[2] et [3]] . . . . . . . 611.D.1 Dénition . . . . . . . . . . . . . . . . . . . . . . . . . . . 611.D.2 Transformée de Fourier d'un signal de durée nie . . . . . 611.D.3 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . 631.D.4 Transformée de Fourier discrète (TFD) . . . . . . . . . . . 641.D.5 Discrétisation de l'axe des fréquences . . . . . . . . . . . . 64
v.1.0 3 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.D.6 Dénition de la TFD . . . . . . . . . . . . . . . . . . . . . 641.D.7 Conséquence de la discrétisation de la transformée de Fourier 651.D.8 Echantillonnage minimal de la transformée de Fourier . . . 651.D.9 Inversion de la TFD . . . . . . . . . . . . . . . . . . . . . 681.D.10 Périodogramme . . . . . . . . . . . . . . . . . . . . . . . . 681.D.11 Densité spectrale de puissance Φ(ω) ("spectre") . . . . . . 691.D.12 Calcul de la densité spectrale de puissance de signaux dé-
terministes . . . . . . . . . . . . . . . . . . . . . . . . . . . 691.D.13 Calcul de la densité spectrale de puissance de signaux aléa-
toires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 701.D.14 Transformation du spectre par des systèmes dynamiques
linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
2 Contrôle robuste 732.1 Fonction de sensibilité ([4], 3.4) . . . . . . . . . . . . . . . . . . . 74
2.1.1 Application : spécication de performance ([4], 3.4) . . . . 762.2 Stabilité robuste [4] . . . . . . . . . . . . . . . . . . . . . . . . . . 80
2.2.1 Incertitude sur la fonction de transfert du système à régler[[4], p.46-47] . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.2.2 Théorème de la stabilité robuste [[4], p.53] . . . . . . . . . 862.2.3 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
3 Régulateur RST polynômial 933.1 Régulateur RST polynômial . . . . . . . . . . . . . . . . . . . . . 94
3.1.1 Structure du régualteur RST [5] [6] . . . . . . . . . . . . . 943.1.2 Fonctions de transfert . . . . . . . . . . . . . . . . . . . . 943.1.3 Forme des polynômes et contraintes . . . . . . . . . . . . . 953.1.4 Calcul de R(z) et S(z) . . . . . . . . . . . . . . . . . . . . 973.1.5 Calcul des polynômes R(z) et S(z) : matrice de Sylvester
[[5], 10.3.3] . . . . . . . . . . . . . . . . . . . . . . . . . . 1003.1.6 Commande a priori [[5], 10.6] . . . . . . . . . . . . . . . . 105
4 Modélisation des systèmes dynamiques dans l'espace d'état 1074.1 Représentation d'un système dynamique linéaire par son modèle
d'état. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1084.1.1 Exemple introductif : circuit RLC série . . . . . . . . . . . 1084.1.2 Dénition . . . . . . . . . . . . . . . . . . . . . . . . . . . 1114.1.3 Forme matricielle . . . . . . . . . . . . . . . . . . . . . . . 1144.1.4 Schéma fonctionnel . . . . . . . . . . . . . . . . . . . . . . 1164.1.5 Calcul de la fonction de transfert à partir du modèle d'état 1174.1.6 Application : linéarisation autour d'un point de fonction-
nement ([[?], chap.11], [[?], 3.6]) . . . . . . . . . . . . . . 1234.A Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
v.1.0 4 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
4.A.1 Modèles d'état . . . . . . . . . . . . . . . . . . . . . . . . 1314.A.2 Modélisation et schéma fonctionnel d'un entraînement avec
transmission exible . . . . . . . . . . . . . . . . . . . . . 1314.A.3 Modélisation et linéarisation du pendule inversé . . . . . . 133
v.1.0 5 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Fiche d'unité d'enseignement
Département d’électricité et d’informatique (E+I)
Version du 04.11.2005 Page 1/2
FICHE D’UNITE D’ENSEIGNEMENT
Nom : Automatique avancée
Identifiant : AAV
Orientation(s) : EM, MIm, EN, EE, IT, TT
Responsable, suppléant : R. Herzog, M.Etique, I.Vaclavik
Charge de travail : 120 heures d'étude, correspondant à 4 crédits ECTS
Répartition approximative des heures d'étude (encadrées et non encadrées) : Suivi d'exposés......................................................................... 20 % Exercices encadrés ................................................................. 10 % Travaux de laboratoire encadrés ........................................ 8 % Contrôle continu ..................................................................... 2 % Travail personnel (pour un-e étudiant-e moyen-ne).... 60 %
Périodes encadrées : 64 (= 48 heures)
Position recommandée des périodes encadrées dans les plans de formation: 1 2 3 4 5 6 7 8 9 10 11 12
3+1L 3+1L
Connaissances préalables recommandées : L’étudiant doit connaître et savoir utiliser les notions suivantes : représentations et propriétés des systèmes analogiques / numériques (équations différentielles / équations aux
différences, fonction de transfert, pôles et zéros); transformée de Fourier discrète, notions des signaux aléatoires; principes de la régulation, et aperçu des méthodes classiques de synthèse.
Les unités d'enseignement SES (Signaux et Systèmes), REN (Régulation Numérique), TSA (Traitement de Signal Appliqué), ALA (Algèbre linéaire et analyse numérique) et PRE (Probabilités et statistique pour l'électronique) permettent d'acquérir ces connaissances.
Objectifs : A l'issue de cette unité d’enseignement, l'étudiant-e sera capable de : appliquer la représentation des systèmes multi variables LTI dans l'espace d'état; définir et interpréter le gain d'un système multi variables LTI; comprendre le concept d'un observateur; appliquer à bon escient les techniques d’identification paramétrique et non paramétrique des systèmes
dynamiques linéaires; décrire les apports et les limites des techniques d’identification; définir les cas où la mise en œuvre d’un régulateur RST améliorerait significativement les performances
d’asservissement; synthétiser un régulateur RST selon un cahier des charges; décrire les éléments non linéaires parasites et utiles; calculer la période des oscillations dans les systèmes avec non-linéarités; mettre en œuvre le régulateur tout ou rien; expliquer les phénomènes inexistants en systèmes linéaires, tels frottement-relaxation (stick-slip), oscillations
autoentretenues, dépendances des conditions initiales.
A l'issue des travaux pratiques en laboratoire, l’étudiant-e sera en outre capable de : appliquer les représentations de systèmes multi variables sur des systèmes réels; synthétiser un régulateur RST pour un processus et des spécifications données, le tester en simulation et sur un
système réel; mettre en œuvre des algorithmes d’identification paramétrique et non paramétrique sur des processus classiques; appliquer la méthode de premier harmonique pour analyser les systèmes non linéaires; tester les performances des systèmes avec des non-linéarités.
v.1.0 6 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Département d’électricité et d’informatique (E+I) Fiche d’unité d’enseignement : Automatique avancée
Version du 04.11.2005 Page 2
Contenu :
Exposés et exercices : 50 périodes Nb. périodes approx.
Modèle d'état pour les systèmes linéaires : définition, utilité, propriétés, et exemples 6 Diagramme de Bode pour les systèmes à plusieurs entrées et sorties (MIMO) : valeurs singulières de la
matrice de transfert. Application : critère de Nyquist pour les systèmes à faible gain 6
Régulateur basé sur la contre-réaction des variables d'état, calcul des gains par placement des pôles 4 Introduction aux régulateurs basés sur observateur 4 Identification non paramétrique, estimateurs de réponses temporelle et fréquentielle (ETFE) 4 Structures de modèles ARX et ARMAX. Identification paramétrique, méthode des moindres carrés 6 Régulateur RST : principe, spécifications, synthèse avec compensateur de perturbation 4 Description des systèmes dynamiques non linéaires 2 Différence entre les systèmes linéaires et non linéaires 2 Non linéarités utiles et parasites rencontrées dans les applications techniques avec les courbes statiques 2 Linéarisation par la contre-réaction 2 Méthode du 1ier harmonique 4 Méthode de plan de phase 4
Travaux de laboratoire : 14 périodes encadrées
Maquette d’hélicoptère : mesure de la matrice de transfert et validation du modèle 4 Mise en œuvre des algorithmes d’identification paramétriques et non paramétrique sur des servo-
entraînements 3
Développement d’un régulateur RST, implantation en langage C sur un DSP et test sur un servo-entraînement
3
Exercices avec la simulation des systèmes non linéaires dans l’environnement MATLAB et SimApp 4
Contrôle des connaissances : Contrôle continu : l'acquisition des matières de cet enseignement sera contrôlée au fur et à mesure par des tests et des travaux personnels tout au long de son déroulement. Il y aura au moins 2 tests d'une durée totale d'au moins 2 périodes.
Travaux de laboratoire : ils seront évalués sur la base des rapports de manipulation, à 2 reprises au minimum.
Contrôle final : l'atteinte de l'ensemble des objectifs de formation sera vérifiée lors d'un contrôle final écrit d'une durée d'au moins 1 heure situé durant la session d’examens suivant la fin de cet enseignement.
Calcul de la note finale de module : Note finale = moyenne contrôle continu x 0.25 + moyenne travaux laboratoire x 0.25 + note contrôle final x 0.5
Contrôle final de 2ème instance : Un contrôle final de 2ème instance commun (voir articles 9 et 9bis du « règlement de promotion EIVD et règlement d’application E+I ») sera organisé par les enseignants concernés, durant la session d’automne. Il se déroulera soit sous la forme d’une interrogation orale, soit sous la forme d’une interrogation écrite. La forme sera choisie par les enseignants en fonction du nombre d’inscriptions.
v.1.0 7 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
v.1.0 8 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Chapitre 1
Identication des systèmes
dynamiques linéaires
1.1 Identication non-paramétrique de systèmes
dynamiques linéaires
L'identication non-paramétrique de systèmes dynamiques consiste à en ob-tenir, i.e. à en estimer, les réponses temporelle (e.g. indicielle, impulsionnelle)et fréquentielle sous forme expérimentale, sans en rechercher directement les pa-ramètres ou la fonction de transfert (celle-ci n'existant par ailleurs que dans lecas linéaire). Le problème de l'identication non-paramétrique est de dénir lesconditions d'expérience à satisfaire pour que les réponses mesurées reètent lecomportement eectif (celui que le régulateur verra) du système que l'on étudieet d'en chirer le degré de concordance.
Il faut en eet réaliser qu'à cause des bruits et autres perturbations, l'on n'apas accès au signal de sortie du "vrai" système (gure 1.1).
Lorsque l'on souhaite déterminer expérimentalement le comportement fré-quentiel de systèmes dynamiques linéaires, deux problèmes clés doivent être ré-
1s
y ( t )u ( t ) " v r a i "s y s t è m e
f _ 0 8 _ 0 4 . e p s
S
n ( t )v ( t )
Fig. 1.1 On n'a pas accès au signal de sortie du "vrai" système, celui-ci étantperturbé par v(t) subissant l'inuence des bruits n(t) (chier source).
Identification, v.1.8 9 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1s
y ( k )u ( k ) G 0 ( z )f _ 0 5 _ 0 5 . e p s
S
v ( k )
Fig. 1.2 Représentation du problème : la vraie fonction de transfert est G0(z)et l'ensemble des signaux perturbateurs, i.e. non-corrélés avec u(k), est représentépar v(k) (chier source).
solus : on doit s'assurer autant que possible que la durée d'acquisition correspondeà un nombre entier de périodes du signal de sortie du système. Cela est ré-solu en tenant compte des indications données dès le 1.1.2, où l'on s'arrangepour que les signaux acquis puissent être considérés comme périodiques ;
la minimisation de l'eet du bruit (y compris perturbations). Cela se faiten augmentant la durée d'aquisition (nombre N de points), en traitant lespectre des signaux (par exemple par moyennage) ou en choisissant judi-cieusement le signal d'excitation u(k).
1.1.1 Estimation de réponse harmonique : ETFE [1]
On considère un système dynamique linéaire de "vraie" fonction de transfertG0(z), ayant u(k) pour entrée et dont la sortie est perturbée par un bruit v(k)(gure 1.2). On a :
y(k) =∞∑l=0
g0(l) · u(k − l) + v(k) = g0(k) ∗ u(k) + v(k)
Il vaut ici la peine de remarquer que l'on ne cherche pas à identier un modèleanalogique, par exemple une fonction de transfert Ga(s), mais directement lemodèle échantillonné G0(z). Analytiquement, ces 2 fonctions de transfert sontliées par la relation ( ?? page ? ?) :
G0(z) =Y (z)
U(z)=
(1− z−1
)· Z
L−1
(Ga(s)
s
)Le signal d'entrée u(k), que l'on peut en principe imposer lors des travaux dédiésà l'identication, est plutôt de nature déterministe alors que la perturbation v(k)est de nature stochastique. On admet que ses paramètres statistiques sont
µ = E [v(k)] = 0, i.e. la moyenne de v(k) est nulle ;
Identification, v.1.8 10 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
σ2 = E[(v(k)− µ)2] = λ, i.e. la variance de v(k) est égale à λ. Notons que
σ =√λ représente ici la (vraie) valeur ecace du bruit v(k).
Un bref rappel des notions relatives aux signaux aléatoires est donné à l'an-nexe 1.C page 58.
Le problème posé est de déterminer une estimation G(ej·ω·h) de la réponseharmonique G0(e
j·ω·h) de G0(z), sachant qu'expérimentalement, seuls N échan-tillons ont été prélevés sur les signaux u(k) et y(k) : on a donc a dispositionuN(k), yN(k) ainsi que les paramètres µ et λ du bruit v(k).
En allant droit au but, il est clair qu'une estimation de G0(ej·ω·h), d'une qua-
lité à dénir, peut être obtenue en calculant les transformées de Fourier discrètes(ci-après TFD, voir 1.D page 61) UN(ω) et YN(ω) de uN(k) et de yN(k) respec-tivement puis en évaluant :
GN(ej·ω) =YN(ω)
UN(ω)=FyN (k)FuN (k)
=
∑N−1k=0 yN (k) · e−j·ω·k·h∑N−1k=0 uN (k) · e−j·ω·k·h
(1.1)
Cette estimation porte le nom de ETFE (empirical transfer function estimate).
1.1.2 Propriétés de l'ETFE
On peut montrer [[1], 6.3, p.147] que
GN(ej·ω) =YN(ω)
UN(ω)= G0(e
j·ω) +RN(ω)
UN(ω)+VN(ω)
UN(ω)(1.2)
où|RN(ω)| ∝ 1√
N
et VN(ω) est la transformée Fourier de vN(k). On observe d'emblée que l'esti-mation GN(ej·ω) de G0(e
j·ω) est d'autant meilleure que le nombre N est élevé,puisque |RN(ω)| ∝ 1√
N.
Cas particulier : u(k) périodique On peut montrer que si u(k) est périodiquede période égale à un multiple de N ·h, i.e. si uN(k) est une période ou un nombreentier de périodes de u(k), alors RN(ω) = 0 pour ω = 2·π
h· i · 1
N, i = 0 . . . N − 1,
i.e. aux fréquences auxquelles la TFD est dénie. Dans le but d'annuler RN(ω),il y a donc intérêt à ce que le signal u(k) soit périodique de période N · h.C'est ce qui est fait avec le logiciel AcqBode (actuellement RTPWatch) créé parle Prof. F.Mudry dans le but d'identier les systèmes dynamiques linéaires :on calcule la transformée de Fourier discrète de deux signaux correspondant àl'excitation et à la réponse du système étudié. Le signal d'excitation u(k) prendla forme d'une suite binaire pseudo aléatoire (SBPA) de N points, répétée R = 2
Identification, v.1.8 11 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.05 0.1 0.15 0.2 0.250
0.2
0.4
0.6
0.8
1
u(k)
, uN
(k)
Signaux (v(k)=0)
0 0.05 0.1 0.15 0.2 0.250
0.05
0.1
0.15
0.2
t [s]
y(k)
| v=0, y
N(k
)|v=
0
f_fft_03_01_2.eps
Fig. 1.3 Signal d'excitation u(k) = uN(k) et réponse y(k) = yN(k). yN(k) neconstitue à l'évidence pas un nombre entier de périodes de y(k), comme requisselon la relation (1.2) pour que le terme RN (ω)
UN (ω)s'annule. L'estimation de la réponse
harmonique GN(ej·ω·h) est donnée sur la gure 1.4 page ci-contre (chier source).
fois an de mettre la sortie y(k) du système en régime permanent périodique.Les N derniers points seuls, i.e. la dernière période seule, sont alors prélevéset leurs TFD calculée. Si les termes transitoires ont eectivement disparu, oncalcule eectivement la TFD d'un signal périodique et le terme RN(ω) est nulaux fréquences auxquelles GN(ej·ω·h) est évaluée.
Exemple
Pour illustrer l'importance du signal d'excitation u(k), on eectue les 3 testssuivants, avec v(k) = 0, i.e. sans bruit an séparer les problèmes. De ce fait, larelation (1.2) devient
GN(ej·ω) = G0(ej·ω) +
RN(ω)
UN(ω)+
0︷ ︸︸ ︷VN(ω)
UN(ω)= G0(e
j·ω) +RN(ω)
UN(ω)
On examine les cas suivants :
1. u(k) = ∆(k) : c'est un signal qui est spectralement très riche, mais qui nemet pas le système G0(z) dans un état de régime permament périodique. Lagure 1.3 montre les signaux uN(k) et yN(k) et la gure 1.4 page ci-contrele diagramme de Bode de GN(ej·ω·h) correspondant.
2. uN(k) constitué de deux impulsions unité discrètes, la première en k = 0et la seconde, avec une polarité inversée, en k = N
2. Ce signal de base est
Identification, v.1.8 12 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
100
101
102
103
−100
−80
−60
−40
−20
0
20
40
Diagrammes de Bode de G0(ejω h) et Y
N(ω)/U
N(ω) (pour v(k)=0)
100
101
102
103
−200
−100
0
100
200
f [Hz]
G0(ejω h)
YN
(ω)/UN
(ω)|v=0
f_fft_03_01_4.eps
Fig. 1.4 Comparaison de la vraie réponse harmomique G0(ej·ω·h) et de son
estimation GN(ej·ω·h), avec uN(k) et yN(k) selon gure 1.3 page ci-contre. Lemauvais résultat s'explique par le fait que le terme RN (ω)
UN (ω)de la relation (1.2) est
non-nul, yN(k) n'étant manifestement pas une période de y(k) (chier source).
répété R = 2 fois, ce qui dans le cas particulier met y(k) dans un état derégime quasi permament périodique pour k > N (gure 1.5 page suivante).La dernière période de y(k) est donc extrayable telle quelle pour eectuerl'analyse selon (1.1) et les résultats (gure 1.6 page suivante) sont meilleursque précédemment (gure 1.4).
Identification, v.1.8 13 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−1
−0.5
0
0.5
1
u(k)
, uN
(k)
Signaux (v(k)=0)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
t [s]
y(k)
| v=0, y
N(k
)|v=
0
f_fft_03_02_2.eps
Fig. 1.5 Signal d'excitation u(k) et réponse y(k). u(k) est constitué de R = 2périodes. On observe que les transitoires sont amorties dès la n de la premièrepériode. De ce fait, le signal y(k) peut être admis périodique de période N · hpour k ≥ N . Si l'on avait généré u(k) avec une période de plus (R = 3), on au-rait simplement obtenu une 3ème période. L'estimation de la réponse harmoniqueGN(ej·ω·h) est donnée sur la gure 1.6 (chier source).
100
101
102
103
−100
−80
−60
−40
−20
0
20
40
Diagrammes de Bode de G0(ejω h) et Y
N(ω)/U
N(ω) (pour v(k)=0)
100
101
102
103
−200
−100
0
100
200
f [Hz]
G0(ejω h)
YN
(ω)/UN
(ω)|v=0
f_fft_03_02_4.eps
Fig. 1.6 Comparaison de la vraie réponse harmomique G0(ej·ω·h) et de son
estimation GN(ej·ω·h), avec uN(k) et yN(k) selon gure 1.5. La légère discordanceapparaissant aux fréquences élevées est due au fait que le signal prélevé yN(k)comporte encore des termes transitoires. Un signal d'excitation u(k) comportantune période de plus résoudrait le problème (chier source).
Identification, v.1.8 14 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−1
−0.5
0
0.5
1
u(k)
, uN
(k)
Signaux (v(k)=0)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−0.5
0
0.5
1
1.5
2
t [s]
y(k)
| v=0, y
N(k
)|v=
0
f_fft_03_03_2.eps
Fig. 1.7 Signal d'excitation u(k) et réponse y(k). On ne prélève que les N der-niers échantillons, ce qui correspond à une période du signal y(k) admis périodiquepour k ≥ N (les N premiers échantillons correspondant au régime transitoire).L'estimation de la réponse harmonique GN(ej·ω·h) est donnée sur la gure 1.8page suivante (chier source).
3. uN(k) est cette fois une SBPA (gure 1.7), répétée également R = 2 fois.Les résultats (gure 1.8 page suivante) sont équivalents au cas précédent(gure 1.6 page ci-contre).
Identification, v.1.8 15 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
100
101
102
103
−100
−80
−60
−40
−20
0
20
40
Diagrammes de Bode de G0(ejω h) et Y
N(ω)/U
N(ω) (pour v(k)=0)
100
101
102
103
−200
−100
0
100
200
f [Hz]
G0(ejω h)
YN
(ω)/UN
(ω)|v=0
f_fft_03_03_4.eps
Fig. 1.8 Comparaison de la vraie réponse harmomique G0(ej·ω·h) et de son
estimation GN(ej·ω·h), avec uN(k) et yN(k) selon gure 1.7 page précédente(chier source).
Identification, v.1.8 16 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.1.3 Propriétés statistiques de l'ETFE
Les propriétés statistiques (notamment la moyenne et la variance) de GN(ej·ω·h)relativement à l'entrée stochastique v(k) permettent de chirer la qualité de l'es-timation.
Moyenne
L'espérance mathématique de GN(ej·ω·h) doit montrer si l'estimateur GN(ej·ω·h)tend bel et bien vers G0(e
j·ω·h). On a [[1], 6.3, p.148] :
E[GN(ej·ω·h)
]= E
[G0(e
j·ω·h)]︸ ︷︷ ︸
G0(ej·ω·h)
+E[RN(ω)
UN(ω)
]︸ ︷︷ ︸
RN (ω)
UN (ω)
+ E[VN(ω)
UN(ω)
]︸ ︷︷ ︸
0 carE [VN (ω)] =
FE [v(k)] = 0
On voit que
GN(ej·ω·h) −→ G0(ej·ω·h) pour N −→∞
puisque limN→∞RN(ω) = 0 et E [v(k)] = 0. GN(ej·ω·h) est ainsi un estimateurnon biaisé de G0(e
j·ω·h).
Variance
La variance de l'estimateur GN(ej·ω·h) montre comment uctue celui-ci autour
de sa moyenne E[GN(ej·ω·h)
]= G0(e
j·ω·h). On montre que [[1], 6.3, p.149] :
E[(GN(ej·ω·h)−G0(e
j·ω·h))2
]−→ Φv(ω)
|UN(ω)|2pour N −→∞
où Φv(ω) est la densité spectrale de puissance ("spectre", 1.D.11 page 69) del'entrée stochastique v(k) et UN(ω) est la transformée de Fourier de uN(k). Onvoit que la variance de l'estimateur ne tend pas vers 0, même pour un grandnombre N d'échantillons, mais vers
Φv(ω)
|UN(ω)|2
La variance de GN(ej·ω·h) est donc dépendante du spectre (plus pécisément dela densité spectrale de puissance) Φv(ω) du bruit v(k). Si Φv(ω) est donnée, lavariance ne peut être réduite qu'en choisissant |UN(ω)| de manière à diminuer lerapport Φv(ω)
|UN (ω)|2 . On conçoit dès lors que le choix d'un signal d'excitation spec-tralement très riche est un avantage. La conséquence de ce fait est que souvent,le graphe de la réponse harmonique est très uctuant lorsque le rapport signalsur bruit n'est pas satisfaisant (gures 1.9 page suivante, 1.13 page 21 et 1.15page 22, la gure 1.15 page 22 montrant l'amélioration obtenue en augmentantla densité spectracle de uN(k)).
Identification, v.1.8 17 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
101 102 103 104−120
−110
−100
−90
−80
−70
−60
−50
Diagramme de Bode de YN
(ω)/UN
(ω)
101 102 103 104−200
−100
0
100
200
ω [rad/s]
YN
(ω)/UN
(ω)|
f_lse_m_03_9.eps
Fig. 1.9 Même dans de bonnes conditions d'expériences (ici un cas réel d'iden-tication d'un système mécanique comportant une élasticité, schéma technolo-gique de la gure 1.10 page suivante), l'ETFE GN(ej·ω·h) fournit une réponse trèsuctuante, principalement à cause du bruit v(k). Cela est la conséquence de lavariance de GN(ej·ω·h), laquelle est dépendante du spectre de v(k) et tend vers
Φv(ω)
|UN (ω)|2 . A v(k) donné, on ne peut donc réduire la variance qu'en choisissant un
signal d'excitation uN(k) tel que |UN(ω)|2 soit élevé (chier source).
Identification, v.1.8 18 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
R f
q 1 ( t )T e m ( t ) q 2 ( t )
i n e r t i e d u r o t o r :J 1
i n e r t i e d e l a c h a r g e :J 2
r i g i d i t é d e l ' a r b r ed e t r a n s m i s s i o n :
k [ N m / r a d ]
c o e f f i c i e n t d ef r o t t e m e n t v i s q u e u x :
d e s p a l i e r sR f [ N m s / r a d ]
R f
f _ 0 8 _ 0 6 . e p s
Fig. 1.10 Schéma technologique d'un système mécanique (supposé linéaire),possédant un arbre élastique (i.e. non inniment rigide). La consigne de couplemoteur u(k) = Temc(k) a été imposée (SBPA) et la vitesse (y(k) = ω(k)) de celui-ci a été mesurée avant de calcul l'ETFE. Les résultats de l'ETFE sont indiqués surla gure 1.9 page ci-contre et les signaux sont visibles sur la gure 1.11 (chier source).
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−3
−2
−1
0
1
2
3
u N(k
)
Signal d’entrée : SBPA de 1024 points
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−3
−2
−1
0
1
2
3x 10−3
t [s]
y N(k
)
Réponse du système à la SBPA
f_lse_m_03_1.eps
Fig. 1.11 Signal d'excitation et réponse du système représenté sur la gure 1.10(chier source).
Identification, v.1.8 19 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−1
−0.5
0
0.5
1
u(k)
, uN
(k)
Signaux
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−0.1
0
0.1
0.2
0.3
y N(k
)|v=
0, yN
(k)|
v ≠
0
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−0.04
−0.02
0
0.02
0.04
t [s]
v(k)
f_fft_03_04_1.eps
Fig. 1.12 Signal d'excitation uN(k), réponse yN(k) et bruit v(k). L'estimationde la réponse harmonique GN(ej·ω·h) est donnée sur la gure 1.13 page ci-contre(chier source).
Corrélation entre deux fréquences voisines
Les estimations fournies par GN(ej·ω·h) à deux fréquences diérentes f1 et f2
ne sont asymptotiquement pas corrélées ! On montre que [[1], 6.3, p.149]
E[(GN(ej·ω1·h)−G0(e
j·ω1·h))·(GN(ej·ω2·h)−G0(e
j·ω2·h))]
−→ 0 pour N −→∞
Cela signie par exemple que l'estimateur ne voit pas de dépendance forte entrele gain de la fonction de transfert à deux fréquences voisines l'une de l'autre.Or, cela contredit l'expérience, puisque l'on sait que la réponse harmonique d'unsystème linéaire ne varie que de manière "douce".
Exemple
On considère maintenant le même système que le premier exemple traité( 1.1.2 page 12), désormais perturbé par un bruit v(k) de moyenne µ nulleet de variance λ = 0.0001, soit une valeur ecace σ =
√λ = 0.01.
Dans un premier temps, le système excité un signal uN(k) formé à nouveaupar la répétition périodique (R = 2 fois) de deux impulsions unité discrètesde signes opposés (selon gure 1.5 page 14). Ce signal est également donnésur la gure 1.12, avec le signal de sortie yN(k), bruité par la perturbationv(k) également gurée.
le système est ensuite maintenant excité par une SBPA (gure 1.14 page 22).Les résultats sont donnés à la gure 1.15 page 22 qui montre une améliora-tion substantielle par rapport à ceux de la gure 1.13.
Identification, v.1.8 20 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
100
101
102
103
−100
−80
−60
−40
−20
0
20
40
Diagrammes de Bode de G0(ejω h), Y
N(ω)/U
N(ω) (pour v(k)=0) et Y
N(ω)/U
N(ω) avec bruit v(k) de variance λ=0.0001
100
101
102
103
−200
−100
0
100
200
f [Hz]
G0(ejω h)
YN
(ω)/UN
(ω)|v=0
YN
(ω)/UN
(ω)|v ≠=0
f_fft_03_04_6.eps
Fig. 1.13 Comparaison de la vraie réponse harmomique G0(ej·ω·h) et de son
estimation GN(ej·ω·h), avec uN(k) et yN(k) selon gure 1.12 page ci-contre. Lesrésultats de l'estimateur sans bruit sont également donnés (chier source).
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−1
−0.5
0
0.5
1
u(k)
, uN
(k)
Signaux
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−1
0
1
2
y N(k
)|v=
0, yN
(k)|
v ≠
0
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−0.04
−0.02
0
0.02
0.04
t [s]
v(k)
f_fft_03_05_1.eps
Fig. 1.14 Signal d'excitation uN(k), réponse yN(k) et bruit v(k). L'estimationde la réponse harmonique GN(ej·ω·h) est donnée sur la gure 1.15 (chier source).
Identification, v.1.8 21 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
100
101
102
103
−100
−80
−60
−40
−20
0
20
40
Diagrammes de Bode de G0(ejω h), Y
N(ω)/U
N(ω) (pour v(k)=0) et Y
N(ω)/U
N(ω) avec bruit v(k) de variance λ=0.0001
100
101
102
103
−200
−100
0
100
200
f [Hz]
G0(ejω h)
YN
(ω)/UN
(ω)|v=0
YN
(ω)/UN
(ω)|v ≠=0
f_fft_03_05_6.eps
Fig. 1.15 Comparaison de la vraie réponse harmomique G0(ej·ω·h) et de son
estimation GN(ej·ω·h), avec uN(k) et yN(k) selon gure 1.14. Les résultats del'estimateur sans bruit sont également donnés (chier source).
Cet exemple met en évidence l'importance du signal d'excitation. Dans le derniercas, les résultats obtenus sont meilleurs car la variance asymptotique
Φv(ω)
|UN(ω)|2
de GN(ej·ω·h) a été diminuée en choisissant un signal d'excitation ayant |UN(ω)|élevé.
Néanmoins, la comparaison de l'estimateur ETFE avec la vraie réponse har-monique montre, même dans le cas de la gure 1.15 page suivante, toute ladiculté qu'il y a à identier la réponse fréquentielle de systèmes dynamiques.
En guise de conclusion de cet exemple, on choisit maintenant un signal d'exci-tation uN(k) constitué d'une somme de sinus d'amplitude 1, de fréquences variantde ∆fe
Nà N
2· ∆fe
Net de phase aléatoire à distribution uniforme (µ = 0, σ = 1).
Ce signal a pour propriété d'avoir une densité spectrale de puissance encore plusélevée que la SBPA, i.e. d'être plus puissant pour chaque composante spectrale.Répété R = 2 fois, ce signal est donné sur la gure 1.16 page 23 et la réponseharmonique de l'estimateur se trouve sur la gure 1.17 page 24.
Identification, v.1.8 22 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−40
−20
0
20
40
u(k)
, uN
(k)
Signaux
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−5
0
5
10
15
y N(k
)|v=
0, yN
(k)|
v ≠
0
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−0.04
−0.02
0
0.02
0.04
t [s]
v(k)
f_fft_03_06_1.eps
Fig. 1.16 Signal d'excitation uN(k), réponse yN(k) et bruit v(k). L'estimationde la réponse harmonique GN(ej·ω·h) est donnée sur la gure 1.17 page suivante(chier source).
Identification, v.1.8 23 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
100
101
102
103
−100
−80
−60
−40
−20
0
20
40
Diagrammes de Bode de G0(ejω h), Y
N(ω)/U
N(ω) (pour v(k)=0) et Y
N(ω)/U
N(ω) avec bruit v(k) de variance λ=0.0001
100
101
102
103
−200
−100
0
100
200
f [Hz]
G0(ejω h)
YN
(ω)/UN
(ω)|v=0
YN
(ω)/UN
(ω)|v ≠=0
f_fft_03_06_6.eps
Fig. 1.17 Comparaison de la vraie réponse harmomique G0(ej·ω·h) et de son
estimation GN(ej·ω·h), avec uN(k) et yN(k) selon gure 1.16 page précédente. Lesrésultats de l'estimateur sans bruit sont également donnés (chier source).
Identification, v.1.8 24 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.1.4 Amélioration de la variance de l'ETFE : moyennageet lissage
Pour diminuer la variance de l'estimation GN(ej·ω·h), on peut prendre encompte le fait que la valeur moyenne du bruit v(k) est nulle. En répétant l'expé-rience plusieurs fois (disons R fois N points, soit un nombre total de M = R ·Npoints) et en sommant les réponses fréquentielles estimées, on diminue la variancedu facteur R. On a :
GM(ej·ω·h) =1
R·
R∑l=1
GN(ej·ω·h)
L'inconvénient de cette manière de faire est évidemment que la durée des essais estprolongée d'un facteur R, puisqu'il faut acquérir R ·N mesures. Une alternative[[7], 8.5, p.212] consiste à partager un ensemble existant de N mesures en R sous-ensembles de M points et à calculer GM(ej·ω·h) pour chacun des sous-ensemblesavant de sommer. On a :
GN(ej·ω·h) =1
R·
R∑l=1
GM(ej·ω·h)
La variance est également divisée par R mais en revanche la résolution fréquen-tielle ( 1.D.8 page 65) est dégradée, puisque l'on aura
∆f =fe
M= R · fe
R ·M︸ ︷︷ ︸N
= R · fe
N
La résolution fréquentielle est ainsi R fois plus grossière. Cette dernière manièrede faire porte le nom de méthode de Welch.
Une méthode d'amélioration de la variance de l'estimation GN(ej·ω·h) consisteà lisser la réponse harmonique obtenue à l'aide d'un ltre (ce que font sans autrenos propres yeux !). C'est la méthode de Blackman-Tukey, décrite dans [[1],6.4]et [[7], 8.5].
Identification, v.1.8 25 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.2 Identication paramétrique
L'identication paramétrique a pour objectif d'estimer chacun des paramètresde la fonction de transfert supposée
G(z) =Y (z)
U(z)=b1 · z−1 + b2 · z−2 + . . .+ bn−1 · z−n+1 + bn · z−n
1 + a1 · z−1 + . . .+ an−1 · z−n+1 + an · z−n=B(z)
A(z)
d'un système dynamique linéaire discret. U(z) et Y (z) sont respectivement lestransformées en z des signaux temporels discrets d'entrée u(k) et de sortie y(k).
k ∈ Z est l'instant d'échantillonnage, i.e. un entier relatif tel que t [s] = k · hoù h est la période (constante) d'échantillonnage en [s]. Les signaux discrets u(k)et y(k) que l'on considère sont admis nuls pour k < 0, ce qui revient à dire :
u(k) = 0 pour k < 0
y(k) = 0 pour k < 0
La théorie de la transformation en z permet facilement de retrouver l'équationaux diérences décrivant le comportement du système dans le domaine temporel ;on a en eet, sachant que l'opérateur z−1 correspond à un retard d'une périoded'échantillonnage h :
y(k) + a1 · y(k − 1) + . . .+ an−1 · y(k − n+ 1) + an · y(k − n)
= b1 · u(k − 1) + . . .+ bn−1 · u(k − n+ 1) + bn · u(k − n) (1.3)
Les méthodes d'identication paramétrique se doivent donc de délivrer les esti-mations (les notations utilisées normalement pour désigner une estimation, i.e.ai et bj, sont abandonnées pour alléger la notation) :
a1 a2 . . . an b1 b2 . . . bn
La qualité des estimations doit pouvoir être chirée, typiquement par l'intermé-diaire de la moyenne et de la variance de chaque paramètre estimé.
1.2.1 Structures de modèles
On présente dans ce paragraphe 2 structures permettant de représenter dessystèmes physiques linéaires ayant une entrée (déterministe) u(k), une entréestochastique v(k) et une sortie y(k). Ces structures ont pour caractéristique re-marquable de modéliser, avec une dynamique appropriée, l'inuence du bruit/desperturbations agissant sur le système.
L'ensemble des eets des bruits et perturbations sont représentées par le si-gnal stochastique v(k), lui-même étant généré avec une dynamique H(z) par lesignal également stochastique e(k), de type bruit blanc, de distribution normale
Identification, v.1.8 26 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1s
y ( k )u ( k ) G ( z )f _ 0 5 _ 0 1 . e p s
S
H ( z )
e ( k )
v ( k )
Fig. 1.18 Modèle de structure générale, prenant en compte les perturbationsv(k) en ltrant un bruit blanc e(k) avec la dynamique H(z) (chier source).
(Gauss), à moyenne µ nulle et à variance σ2 = λ. e(k) étant externe au sys-tème et indépendant, on dénomme e(k) "variable exogène", la lettre x expliquantl'adjonction de X aux modèles standards AR et ARMA connus en traitement designal et devenant ainsi ARX (p.27) et ARMAX (p.29).
La structure générale est représentée par la gure 1.18, et l'on peut écrire :
Y (z) = G(z) · U(z) +H(z) · E(z)
On se limite ici à la présentation de 2 structures particulières, ARX et AR-MAX. On se référera à [[1], 4.2] pour un traitement détaillé.
Structure ARX
Dans le cas de la structure ARX (AR="AutoRegressive", X="eXogeneous"ou "eXtra" variable), le bruit e(k) perturbe la sortie brute de la fonction detransfert G(z) du système via la dynamique
H(z) =1
A(z)
alors que le système lui-même est représenté par
G(z) =B(z)
A(z)=
B(z)︷ ︸︸ ︷b1 · z−1 + b2 · z−2 + . . .+ bn−1 · z−n+1 + bn · z−n
1 + a1 · z−1 + . . .+ an−1 · z−n+1 + an · z−n︸ ︷︷ ︸A(z)
Identification, v.1.8 27 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1s
y ( k )u ( k )
f _ 0 5 _ 0 2 . e p s
S
e ( k )
v ( k )
A ( z )1
A ( z )B ( z )
Fig. 1.19 Modèle de structure ARX (chier source).
On a donc :
Y (z) =B(z)
A(z)︸ ︷︷ ︸G(z)
·U(z) +1
A(z)︸ ︷︷ ︸H(z)
·E(z)
et l'équation aux diérences associée à cette structure est donc :
y(k) + a1 · y(k − 1) + . . .+ an−1 · y(k − n+ 1) + an · y(k − n)
= b1 · u(k − 1) + . . .+ bn−1 · u(k − n+ 1) + bn · u(k − n)
+ e(k)
L'inconvénient de cette structure est qu'elle impose par A(z) une dynamiquecommune pour la propagation du signal d'entrée u(k) et du bruit e(k). On conçoitque ce modèle ne puisse convenir pour certaines applications. Une conséquenceen est que l'identication des paramètres par la méthode des moindre carrésprésentée au 1.2.2 page 31 a tendance à favoriser une bonne identication dusystème G(z) = B(z)
A(z)aux hautes fréquences, au détriment des basses fréquences
([[1], 8.5 p.228 et relation (8.68)]).
Identification, v.1.8 28 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1s
y ( k )u ( k )
f _ 0 8 _ 0 3 . e p s
S
e ( k )
v ( k )
A ( z )C ( z )
A ( z )B ( z )
Fig. 1.20 Modèle de structure ARMAX (chier source).
Modèle de structure ARMAX
Avec la structure ARMAX (AR = "auto-regressive, "MA="moving average",X=eXogeneous, gure 1.20), on ore comparativement à la structure ARX undegré de liberté supplémentaire pour modéliser la dynamique des perturbationse(k) en les faisant intervenir sur le système avec la fonction de transfert
H(z) =V (z)
E(z)=
C(z)︷ ︸︸ ︷1 + c1 · z−1 + c2 · z−2 + . . .+ cnc−1 · z−nc+1 + cnc · z−nc
1 + a1 · z−1 + . . .+ ana−1 · z−na+1 + ana · z−na︸ ︷︷ ︸A(z)
=C(z)
A(z)
Grâce à C(z), on peut avoir des dynamiques très diérentes entre u(k) (signaldéterministe, contrôlé) et y(k) et entre e(k) (bruit blanc à µ = 0 et σ2 connu) ety(k), ce qui compense en partie les lacunes de la structure ARX.
On a
Y (z) =B(z)
A(z)︸ ︷︷ ︸G(z)
·U(z) +C(z)
A(z)︸ ︷︷ ︸H(z)
·E(z)
avec
G(z) =
B(z)︷ ︸︸ ︷b1 · z−1 + b2 · z−2 + . . .+ bnb−1 · z−nb+1 + bnb
· z−nb
1 + a1 · z−1 + . . .+ ana−1 · z−na+1 + ana · z−na︸ ︷︷ ︸A(z)
=B(z)
A(z)
Identification, v.1.8 29 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
L'équation aux diérences correspondante est :
y(k) + a1 · y(k − 1) + . . .+ ana−1 · y(k − na + 1) + ana · y(k − na)
= b1 · u(k − 1) + . . .+ bnb−1 · u(k − nb + 1) + bnb· u(k − nb)
+e(k) + c1 · e(k − 1) + . . .+ cnc−1 · e(k − nc + 1) + cnc · e(k − nc)
(1.4)
Identification, v.1.8 30 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1s
y ( k )u ( k ) G ( z )f _ 0 5 _ 0 1 . e p s
S
H ( z )
e ( k )
v ( k )
Fig. 1.21 Modèle de structure générale, prenant en compte les perturbationsv(k) en ltrant un bruit blanc e(k) avec la dynamique H(z) (chier source).
1.2.2 Méthode PEM
Lorsque l'on a sélectionné une structure de modèle (ARX, ARMAX, etc, 1.2.1 page 26) potentiellement capable de représenter le système dynamiquelinéaire que l'on souhaite identier ainsi que la nature des perturbations v(k)l'aectant, il reste à déterminer les valeurs numériques de ses paramètres, i.e. àeectuer une identication paramétrique.
Si l'on se replace dans le contexte de l'identication de la réponse fréquentiellevu au 1.1 page 9, où l'estimateur ETFE GN(ej·ω) fournissait le gain et la phase(estimés) d'une fonction de transfert G0(z) en plusieurs fréquences (et non pas lafonction de transfert elle-même), on cherche ici directement un estimateur pourchacun des paramètres de la même fonction de transfert G0(z).
On présente ici la méthode PEM ("prediction-error identication method"),une technique permettant d'obtenir les valeurs numériques des paramètres desfonctions de transfertG(z) etH(z) d'un modèle de structure générale (gure 1.21).Une alternative à la méthode PEM est celle des variables instrumentales, nontraitée ici.
La méthode PEM se base sur la comparaison du signal de sortie y(k) du vraisystème et de celui d'un prédicteur y(k) de cette même sortie. Comme son nom lesous-entend, ledit prédicteur y(k) est conçu de façon à ce qu'il soit en mesure deprédire au mieux le signal de sortie y(k) à l'instant présent en ne se basant queque sur les informations disponibles jusqu'à l'instant précédent, i.e. à l'instantk − 1.
On peut montrer que le prédicteur y(k) prend la forme générale [[1], 3.3,
Identification, v.1.8 31 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
p.56]
Y (z) =G(z)
H(z)· U(z) +
[1− 1
H(z)
]· Y (z) (1.5)
L'établissement de ce prédicteur dans le cas particulier de la structure ARX estfait dans le 1.2.3 page 34.
La méthode PEM a donc pour objectif trouver les paramètres des fonctionsde transfert G(z) et H(z) de telle façon que l'erreur de prédiction
ε(k) = y(k)− y(k)
soit minimisée.Dans le cas d'une structure ARX ( 1.2.1 page 27), on a G(z) = B(z)
A(z)et
H(z) = 1A(z)
, alors que G(z) = B(z)A(z)
et H(z) = C(z)A(z)
pour une structure ARMAX( 1.2.1 page 29).
Partant d'un ensemble de N mesures yN(k) correspondant aux entrées uN(k),on réunit les paramètres de G(z) et H(z) à identier dans le vecteur-colonne
−→θ ,
lequel prend dans le cas de la structure ARX la forme−→θ =
[a1a2 . . . anb1b2 . . . bn
]T
et l'on utilise la méthode PEM pour fournir une estimation−→θ N de
−→θ minimisant
la fonction
VN
(−→θ , yN(k), uN(k)
)=
1
N·
N−1∑k=0
`(ε(k))
où ε(k) correspond donc à l'erreur de prédiction y(k)− y(k). On obtient :
−→θ N = argmin
VN
(−→θ , yN(k), uN(k)
)à comprendre comme "θN est la valeur de l'argument θ de la fonction VN
(−→θ , yN(k), uN(k)
)minimisant VN".
L'estimateur−→θ N recherché doit donc minimiser la fonction VN
(−→θ , yN(k), uN(k)
)à partir des signaux d'entrée uN(k) et de sortie yN(k), oùN correspond au nombred'échantillons prélevés.
Un cas particulier très important est celui où la fonction `(ε(k)) est quadra-tique :
VN
(−→θ , yN(k), uN(k)
)=
1
N·
N−1∑k=0
1
2·
y(k)− y(k)︸ ︷︷ ︸ε(k)
2
=1
N·
N−1∑k=0
1
2· ε(k)2 (1.6)
Dans ce cas, on indique dans le 1.2.3 page 34 qu'il existe même une solutionanalytique pour
−→θ N .
Identification, v.1.8 32 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
10−1 100 101 102 103−120
−110
−100
−90
−80
−70
−60
−50
Diagrammes de Bode de GARMAX
(ejω h), YN
(ω)/UN
(ω)
10−1 100 101 102 103−200
−100
0
100
200
f [Hz]
G(ejω h)Y
N(ω)/U
N(ω)|
f_lse_m_03_8.eps
Fig. 1.22 L'identication paramétrique du système mécanique conduit à unetrès bonne concordance avec l'identication de la réponse fréquentielle. On ob-serve un eet de lissage de l'ETFE. En cela, le procédé pourrait être vu commeune alternative aux méthodes discutées au 1.1.4 page 25. Mais l'identicationparamétrique apporte bien plus puisqu'elle ore directement la fonction de trans-fert estimée G(z) du système linéaire étudié (chier source).
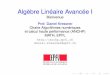
Exemple
Reprenant l'exemple du système mécanique traité aux gures 1.10, 1.11 et1.9, on présente ci-dessous (gure 1.22) les résultats de l'identication paramé-trique par l'intermédiaire de la réponse harmonique G(ej·ω·h) de l'estimateur G(z)du modèle G(z) dont les paramètres ont été identiés. Le modèle choisi a unestructure ARMAX. La comparaison l'estimation non-paramétrique (ETFE) de laréponse harmonique montre une très bonne concordance. Fait remarquable, alorsque l'achage de l'ETFE tel qu'il est présenté sur la gure nécessite 1024 infor-mations, celui de G(ej·ω·h) n'en nécessite que 9, correspondant aux paramètresestimés b0 . . . b5 et a1 . . . a5 de G(z), d'où un facteur de compression d'informationimportant.
La fonction de transfert obtenue est
G(z) =b0 · z5 + b1 · z4 + b2 · z3 + b3 · z2 + b4 · z + b5
z5 + a1 · z4 + a2 · z3 + a3 · z2 + a5 · z + a5
=3.917 · 10−5 · z5 + 3.469 · 10−5 · z4 − 10.46 · 10−5 · z3 + 1.353 · 10−5 · z2 + 4.631 · 10−5 · z
z5 − 1.286 · z4 + 0.6549 · z3 + 0.1233 · z2 − 0.5827 · z + 0.11
Identification, v.1.8 33 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
avec h = 500 [µs].
1.2.3 Cas particulier : modèle de structure ARX, méthodedes moindres carrés
Soit la fonction de transfert G(z)
G(z) =B(z)
A(z)=b0 · zm + b1 · zm−1 + . . .+ bm−1 · z + bmzn + a1 · zn−1 + . . .+ an−1 · z + an
De façon à simplier la notation, G(z) est tout d'abord présentée sous une formelégèrement remaniée, avec m = n − 1 (la fonction de transfert de tout systèmephysiquement réalisable est toujours strictement propre, i.e. n > m) :
G(z) =B(z)
A(z)=
B(z)︷ ︸︸ ︷b1 · zn−1 + b2 · zn−2 + . . .+ bn−1 · z + bn
zn + a1 · zn−1 + . . .+ an−1 · z + an︸ ︷︷ ︸A(z)
En réunissant dans le vecteur-colonne−→θ l'ensemble des 2 · n paramètres à iden-
tier
−→θ =
a1
a2
. . .an
b1b2. . .bn
et on considérant un modèle de type ARX,
Y (z) =B(z)
A(z)· U(z) +
1
A(z)· E(z)
on a, dans le domaine temporel :
y(k) + a1 · y(k − 1) + . . .+ an−1 · y(k − n+ 1) + an · y(k − n)
= b1 · u(k − 1) + . . .+ bn−1 · u(k − n+ 1) + bn · u(k − n)
+ e(k)
L'estimation y(k) "naturelle" (qui correspond à l'expression générale (1.5) donnéeau 1.2.2 page 31) de la sortie du système considéré est fournie par
y(k) = −a1 · y(k − 1)− . . .− an−1 · y(k − n− 1)− an · y(k − n)
+ b1 · u(k − 1) + . . .+ bn−1 · u(k − n+ 1) + bn · u(k − n)
Identification, v.1.8 34 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
avec toutefois l'erreur de prédiction (due à une modélisation inexacte et à laprésence de bruit)
ε(k) = y(k)− y(k)
En dénissant le vecteur −→ϕ (k) comme suit
−→ϕ (k) =
−y(k − 1)−y(k − 2)
. . .−y(k − n)u(k − 1)u(k − 2). . .
u(k − n)
on a
y(k) = −→ϕ (k)T ·−→θ
et l'erreur de prédiction peut s'écrire
ε(k) = y(k)−−→ϕ (k)T ·−→θ
La méthode des moindres carrés consiste à trouver−→θ minimisant la fonction
coût :
VN
(−→θ , yN(k), uN(k)
)=
1
N·
N−1∑k=0
1
2· ε(k)2 =
1
N·
N−1∑k=0
1
2·
y(k)−−→ϕ (k)T ·−→θ︸ ︷︷ ︸
ε(k)
2
Il s'agit d'un problème standard en statistique, dont, une fois n'est pas coutume,la solution existe sous forme analytique ! On a :
θN = argminVN
(−→θ , yN(k), uN(k)
)=
[1
N·
N−1∑k=0
−→ϕ (k) · −→ϕ (k)T
]−1
· 1
N·
N−1∑k=0
−→ϕ (k) · y(k)
= R−1N · 1
N·
N−1∑k=0
−→ϕ (k) · y(k)
(1.7)
Exemple
On considère le système analogique d'ordre 1
Ga(s) =Y (s)
U(s)=
K
1 + s · T=
1
1 + s · 0.01
Identification, v.1.8 35 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.01 0.02 0.03 0.04 0.05 0.06−10
−5
0
5
10
u N(k
)
Signaux, σu=10.0593 σ
y=4.271 σ
v=0.035737 SNR
dB=σ
y/σ
v=41.5483
0 0.01 0.02 0.03 0.04 0.05 0.06−10
−5
0
5
10
y N(k
)| v=0, y
N(k
)| v ≠
0
0 0.01 0.02 0.03 0.04 0.05 0.06−0.1
−0.05
0
0.05
0.1
t [s]
v(k)
f_lse_01_1.eps
Fig. 1.23 Signal d'excitation, réponses (avec et sans bruit) et bruit (chier source).
dont le modèle échantillonné est
G(z) =Y (z)
U(z)=
b1z + a1
avec
a1 = −e−hT = −e−
0.0010.01 = −0.9048
b1 = K · (1 + a1) = 1 · (1 + (−0.9048)) = 0.0952
où h est la période d'échantillonnage et vaut 0.001 [s].L'objectif de l'identication paramétrique est d'obtenir les valeurs numériques
des paramètres a1 et b1 à partir des signaux uN(k) et yN(k).Dans ce but, on excite le système avec un premier signal u(k) de type carré,
choisi ainsi volontairement riche compte tenu de l'expérience acquise lors del'identication de réponses fréquentielles ( 1.1 page 9). Les signaux sont don-nés sur la gure 1.23, où l'on observe le bruit v(k) dont la variance est λ =0.001 = σ2 ≈ 0.032.
Les résultats de l'identication sont donnés sur la gure 1.24 page ci-contre.La gure 1.24 page suivante montre l'excellent modèle obtenu, le modèle G(z)
étant visiblement capable de reproduire le comportement du système G(z). Lesvaleurs numériques des paramètres estimés coïncident avec les valeurs eectives.
Pour valider le modèle ainsi identié, on peut également visualiser les résidusε(k) (gure 1.25 page ci-contre) qui devraient alors être un bruit aléatoire, avantde visualiser leur fonction d'autocovariance
RNε (k) =
1
N·
N−1∑l=0
ε(l) · ε(l + k)
Identification, v.1.8 36 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.01 0.02 0.03 0.04 0.05 0.06−8
−6
−4
−2
0
2
4
6
8
t [s]
y G(z
), yG
est(z
)| v=0, y
Ges
t(z)| v≠
0
Réponses du système réel et du modèle, avec et sans bruit. a1=−0.90484 b
1=0.095163 a
1est=−0.90511 b
1est=0.095
G(z)G
est(z)
v≠0G
est(z)
v=0
f_lse_01_2.eps
Fig. 1.24 Réponse du vrai système G(z), de son modèle identié G(z) avec etsans bruit (chier source).
0 0.01 0.02 0.03 0.04 0.05 0.06−0.15
−0.1
−0.05
0
0.05
0.1
t [s]
ε(k)
Résidus ε(k)
Fig. 1.25 Erreur de prédiction ε(k) (chier source).
Identification, v.1.8 37 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 5 10 15 20 25−1
−0.5
0
0.5
1Correlation function of residuals. Output # 1
lag
−25 −20 −15 −10 −5 0 5 10 15 20 25−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15Cross corr. function between input 1 and residuals from output 1
lag
Fig. 1.26 Fonctions d'autocovariance de ε(k) et d'intercovariance (covariancecroisée) de ε(k) et u(k) (chier source).
qui devrait tendre vers 0 dès que k 6= 0 si ε(k) est eectivement un bruit aléatoire.La gure 1.26 montre que c'est bien le cas. De plus, les résidus devraient êtreindépendants de l'entrée uN(k), ce qui se vérie en examinant la fonction decovariance croisée
RNεu(k) =
1
N·
N−1∑l=0
ε(l) · u(l + k)
laquelle est également représentée sur la gure 1.26.
1.2.4 Biais et variance de la méthode des moindres carrés
Si les données uN(k) et yN(k) acquises l'on été par le vrai système, dont lesparamètres sont réunis dans le vecteur-colonne
−→θ 0, on a :
y(k) = −→ϕ (k)T ·−→θ 0 + v0(k)
Alors, selon (1.7) avec
RN =1
N·
N−1∑k=0
−→ϕ (k) · −→ϕ (k)T
Identification, v.1.8 38 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
on a :
−→θ N = R−1
N · 1
N·
N−1∑k=0
−→ϕ (k) · y(k)
= R−1N · 1
N·
N−1∑k=0
−→ϕ (k) ·(−→ϕ (k)T ·
−→θ 0 + v0(k)
)=−→θ 0 +R−1
N · 1
N·
N−1∑k=0
−→ϕ (k) · v0(k)︸ ︷︷ ︸→0 pour v0(k)−→ϕ (k)
On voit d'ores et déjà que si le niveau des perturbations v0(k) est faible par rap-port aux composantes de −→ϕ (k) et que RN est non singulière, i.e. inversible, alors−→θ N sera proche de
−→θ 0. L'estimateur
−→θ N a donc un biais nul, i.e. les paramètres
a1, a2, . . . an−1, an, b1, b2, . . . , bn−1, bn du système sont estimés sans biais.La variance de
−→θ N indique comment les valeurs estimées des mêmes para-
mètres uctuent autour de leur moyenne. En eet, les estimations dea1, a2, . . . an−1, an, b1, b2, . . . , bn−1, bn sont inuencées par le signal stochastiquev(k) et sont de ce fait également des variables stochastiques. On peut montrerqu'une estimation de cette variance est donnée par
cov−→θ N =
1
N· λN ·
[1
N·
N−1∑k=0
−→ψ (k,
−→θ N) ·
−→ψ T (k,
−→θ N)
]−1
avec
λN =1
N·
N−1∑k=0
ε(k)2
et−→ψ (k,
−→θ N) =
d
d−→θ N
y(k)
cov−→θ N est la matrice de covariance des paramètres estimés. Les variances re-
cherchées se trouvent la diagonale de cov−→θ N .
L'expression cov−→θ N montre en premier lieu qu'un moyen très ecace de
diminuer la dispersion des paramètres estimés consiste à augmenter N .La fonction ψ(k,
−→θ N) indique comment varie le signal de sortie y(k) en fonc-
tion du paramètre a1, a2, . . . an−1, an, b1, b2, . . . , bn−1, bn pour lequel la dérivationd
d−→θ N
y(k) est eectuée. On voit donc que si la sensibilité de y(k) est grande par
rapport au paramètre considéré, alors la variance de la distribution de celui-cisera d'autant plus faible ! Il y a donc intérêt à choisir un signal d'entrée u(k)provoquant un signal de sortie y(k) très sensible au paramètre à identier.
Identification, v.1.8 39 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.01 0.02 0.03 0.04 0.05 0.06−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
t [s]
y G(z
), yG
est(z
)| v=0, y
Ges
t(z)| v≠
0
Réponses du système réel et du modèle, avec et sans bruit. a1=−0.90484 b
1=0.095163 a
1est=−0.89686 b
1est=0.096904
G(z)G
est(z)
v≠0G
est(z)
v=0
f_lse_02_2.eps
Fig. 1.27 Réponse du modèle lorsque le rapport signal sur bruit est médiocre(comparer avec les résultats présentés sur la gure 1.24 page 37) (chier source).
Cette dernière observation met en évidence toute l'importance du choix dusignal d'excitation u(k). Il vaut la peine que le spectre Φu(ω) soit dense dansles fréquences où la sensibilité de la fonction de transfert par rapport aux para-mètres à identier est élevée [[1], 14.3, p.371]. Cela sera illustré dans l'exempledu paragraphe 1.2.4.
Ces résultats, présentés ici dans le cas particulier d'un modèle de type ARX,sont généralisables aux paramètres correspondant à d'autres structures [[1], 9.2].
Exemple
Reprenant l'exemple du 1.2.3 page 35, on se place cette fois dans la situationoù l'amplitude du signal d'excitation u(k) est divisée par 10. Le rapport signalsur bruit est alors dégradé et l'on peut observer sur la gure 1.27 que l'estimationdes 2 paramètres est moins bonne.
Si dans le premier exemple, on avait
cov b1 ≈ 0.0005
cov a1 ≈ 0.001
on a maintenant :
cov b1 ≈ 0.005
cov a1 ≈ 0.01
L'eet du caractère stochastique des estimations est illustré sur les gures1.28 et 1.29 où les paramètres des 2 modèles identiés sont perturbés selon leurs
Identification, v.1.8 40 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
10 20 30 40 50 60
−8
−6
−4
−2
0
2
4
6
8
10
Output number 1
Fig. 1.28 Illustration de la dispersion des paramètres du premier modèle, selon 1.2.3 page 35 (chier source).
variances respectives. Les réponses correspondantes sont tracées et donnent uneidée de la dispersion des paramètres de chacun des 2 modèles.
Finalement, on peut encore tenir compte de l'observation faite à la n du1.2.4 et former d'un signal u(k) dont le spectre Φu(ω) est riche aux fréquencesoù la sensibilité de la fonction de transfert aux variations des paramètres estélevée. Dans le cas de l'exemple, et en raisonnant dans le domaine ananlogique,supposant que le système est d'ordre 1 fondamental (un gain K et une constantede temps T ), la sensibilité de la fonction de transfert
au paramètre K sera maximale en régime permanent constant, car
argmax
d
dK
[1
1 + j · ω · T
]= 0
[rads
] au paramètre T sera maximale à la pulsation ω = 1
T, valeur obtenue résol-
vant
argmaxd
dT
[K
1 + j · ω · T
]Comme les identications précédentes ont montré que
1
T= −1
h· log (−a1) ≈ −1
h· log (−a1) = − 1
0.001· log (0.9) ≈ 105
[rads
]on peut introduire dans u(k) une composante périodique de pulsation ω =105
[rads
].
Identification, v.1.8 41 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
10 20 30 40 50 60
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Output number 1
Fig. 1.29 Illustration de la dispersion des paramètres du modèle obtenu avecun rapport signal sur bruit médiocre (chier source).
Les gures 1.30 et 1.31 montrent les résultats obtenus. Malgré un rapport signalsur bruit médiocre comme dans le dernier cas traité, les résultats sont nettementmeilleurs, comme les variances en témoignent :
cov b1 ≈ 0.006
cov a1 ≈ 0.007
Identification, v.1.8 42 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.01 0.02 0.03 0.04 0.05 0.060
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
t [s]
y G(z
), yG
est(z
)| v=0, y
Ges
t(z)| v≠
0
Réponses du système réel et du modèle, avec et sans bruit. a1=−0.90484 b
1=0.095163 a
1est=−0.90586 b
1est=0.094001
G(z)G
est(z)
v≠0G
est(z)
v=0
Fig. 1.30 Réponse du modèle obtenu avec rapport signal sur bruit médiocremais une excitation adaptée aux paramètres à identier (chier source).
10 20 30 40 50 60
0
0.5
1
1.5
2
Output number 1
Fig. 1.31 Illustration de la dispersion des paramètres du modèle obtenu avecun rapport signal sur bruit médiocre (comme pour le cas des gures 1.27 page 40et 1.29 page précédente) mais avec un signal d'entrée u(k) excitant les fréquencesoù la fonction de transfert est le plus sensible aux variations des paramètres(chier source).
Identification, v.1.8 43 MEE \cours_aav.tex1er septembre 2007

HEIG-VD
Automatiqueavancée(AAV)
1.2.5 Inversibilité de la matrice RN
Pour eectuer (1.7), avec
RN =1
N·
N−1∑k=0
−→ϕ (k) · −→ϕ (k)T
on doit donc eectuer le produit matriciel
−→ϕ (k) · −→ϕ (k)T =
−y(k − 1)−y(k − 2)
. . .−y(k − n)u(k − 1)u(k − 2). . .
u(k − n)
·[−y(k − 1) −y(k − 2) . . . −y(k − n) u(k − 1) u(k − 2) . . . u(k − n)
]
−→ϕ (k) · −→ϕ (k)T est le produit d'un vecteur-colonne et d'un vecteur-ligne. Le résultat est une matrice carrée, de dimensionn× n :
−→ϕ (k) · −→ϕ (k)T =
=
y(k − 1) · y(k − 1) y(k − 1) · y(k − 2) . . . y(k − 1) · y(k − n) −y(k − 1) · u(k − 1) −y(k − 1) · u(k − 2) . . . −y(k − 1) · u(k − n)y(k − 2) · y(k − 1) y(k − 2) · y(k − 2) . . . y(k − 2) · y(k − n) −y(k − 2) · u(k − 1) −y(k − 2) · u(k − 2) . . . −y(k − 2) · u(k − n)
. . . . . . . . . . . . . . . . . . . . . . . .y(k − n) · y(k − 1) y(k − n) · y(k − 2) . . . y(k − n) · y(k − n) −y(k − n) · u(k − 1) −y(k − n) · u(k − 2) . . . −y(k − n) · u(k − n)−u(k − 1) · y(k − 1) −u(k − 1) · y(k − 2) . . . −u(k − 1) · y(k − n) u(k − 1) · u(k − 1) u(k − 1) · u(k − 2) . . . u(k − 1) · u(k − n)−u(k − 2) · y(k − 1) −u(k − 2) · y(k − 2) . . . −u(k − 2) · y(k − n) u(k − 2) · u(k − 1) u(k − 2) · u(k − 2) . . . u(k − 2) · u(k − n)
. . . . . . . . . . . . . . . . . . . . . . . .−u(k − n) · y(k − 1) −u(k − n) · y(k − 2) . . . u(k − n) · y(k − n) u(k − n) · u(k − 1) u(k − n) · u(k − 2) . . . u(k − n) · u(k − n)
Identification,v.1.8
44MEE\cours_
aav.te
x1erseptembre
2007

HEIG-VD Automatique avancée (AAV)
Il en est par conséquent de même de la somme
RN =
[1
N·
N−1∑k=0
−→ϕ (k) · −→ϕ (k)T
]
qui doit être inversible, i.e. non singulière, pour que (1.7) puisse être calculée. Ace stade, il vaut la peine de remarquer que les éléments de la matrice RN ne sontautres que des termes du type
[RN ]ij =1
N·
N−1∑k=0
y(k − i) · y(k − j)
i.e. chaque élément est une estimation des fonctions de covariance de u(k) et dey(k).
Identification, v.1.8 45 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.A Exercices
1.A.1 Identication non-paramétrique et paramétrique dessystèmes A, B et D du laboratoire
Appliquer la théorie vue au cours pour identier les systèmes A, B et D dulaboratoire, dont les réponses temporelles ont été pré-enregistrées et se trouventsur le site
http ://iai.eivd.ch/users/mee/
suivre lien "Laboratoires de régulation automatique et numérique", puis "Iden-tication des systèmes linéaires (base)".
On protera de la boîte à outils MATLAB "System Identication Toolbox" enfaisant notamment usage de la fonction arx :
th = arx([y,u],[na,nb,nk])
Autres fonstions MATLAB utiles : present compare idsimsd idsim th2tf
Identification, v.1.8 46 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1s
y ( k )u ( k )
f _ 0 8 _ 0 3 . e p s
S
e ( k )
v ( k )
A ( z )C ( z )
A ( z )B ( z )
Fig. 1.32 Modèle de structure ARMAX (chier source).
1.B Structure ARMAX
1.B.1 Préambule
Dans ce paragraphe, on s'intéresse à l'identication des paramètres d'un mo-dèle de structure ARMAX : un système dynamique linéaire discret de fonction detransfert G(z), régi par une équation aux diérences (1.3), est soumis à 2 entrées
u(k), déterministe, contrôlée (imposable par l'utilisateur) e(k), stochastique, traduisant le fait que la sortie brute du système dyna-mique linéaire discret G(z) = B(z)
A(z), dont on recherche les paramètres, est
aectée d'un bruit ltré v(k)et une sortie y(k). u(k) inuence y(k) par le biais d'une dynamique condenséedans la fonction de transfert G(z) = B(z)
A(z)et e(k) par le bruit ltré v(k) via la
fonction de transfert H(z) = C(z)A(z)
(gure 1.32).
Il s'agit, connaissant N points de l'entrée contrôlée u(k−1) . . . u(k−N) et dela sortie mesurée y(k−1) . . . y(k−N) de trouver les paramètres
−→θ des polynômes
A(z), B(z) et C(z) minimisant l'erreur de prédiction
ε(k) = y(k)− y(k,−→θ )
La diculté réside dans le fait contrairement au cas de la structure ARX, les pa-ramètres minimisant l'erreur de prédiction ε(k) ne peuvent se calculer simplementpar une régression linéaire de type (1.6), mais doivent être obtenus itérativement,par exemple par la méthode du gradient ( 1.B.3 page 51).
Identification, v.1.8 47 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.B.2 Recherche des paramètres d'un modèle ARMAX
L'opérateur q−1
An d'alléger la notation et faciliter les calculs, on fait usage de l'opérateurde décalage
q
déni comme suit [6]
q−d · x(k) = x(k − d)
où d ∈ N est un entier naturel. La fonction réalisée par cet opérateur est identiqueà z−1, l'avantage résidant dans le fait qu'il s'applique directement aux signauxtemporels et non pas à leurs transformées en z. On a alors :
A(q) = 1 + a1 · q−1 + a2 · q−2 + · · ·+ ana · q−na
B(q) = b1 · q−1 + b2 · q−2 + · · ·+ bnb · q−nb
C(q) = 1 + c1 · q−1 + c2 · q−2 + · · ·+ cnc · q−nc
L'équation aux diérences (1.4) peut alors être réécrite sous la forme :
A(q) · y(k) = B(q) · u(k) + C(q) · e(k)
Estimation de y(k)
On peut montrer qu'un estimateur y(k, θ) correspondant à une structure quel-conque est donné par [[1], (3.20) p.56, (4.6) p.70] :
y(k, θ) =G(q)
H(q)· u(k) +
[1− 1
H(q)
]· y(k)
Dans le cas de la structure ARMAX (gure 1.32 page précédente), on démontreci-dessous ce résultat. On a ([[1], pp.73-74]) :
v(k) =C(q)
A(q)· e(k) =
1 + c1 · q−1 + c2 · q−2 + · · ·+ cnc · q−nc
1 + a1 · q−1 + a2 · q−2 + · · ·+ ana · q−na· e(k)
qui correspond à l'équation aux diérences :
v(k) + a1 · v(k − 1) + . . .+ ana−1 · v(k − na + 1) + ana · v(k − na)
= e(k) + c1 · e(k − 1) + . . .+ cnc−1 · e(k − nc + 1) + cnc · e(k − nc)
Identification, v.1.8 48 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
La meilleure prédiction de v(k) de v(k) ne peut s'appuyer que sur les valeurspassées de e(k) et v(k) :
v(k) =C(q)
A(q)· e(k − 1)
= v(k)− C(q)
A(q)· e(k)
= v(k)− A(q)
C(q)· v(k)
=
(1− A(q)
C(q)
)· v(k)
On en déduit :
y(k) =B(q)
A(q)· u(k) + v(k)
=B(q)
A(q)· u(k) +
(1− A(q)
C(q)
)· v(k)
=B(q)
A(q)· u(k) +
(1− A(q)
C(q)
)·(y(k)− B(q)
A(q)· u(k)
)=B(q)
A(q)· u(k) +
(1− A(q)
C(q)
)· y(k)−
(1− A(q)
C(q)
)· B(q)
A(q)· u(k)
d'où :
y(k, θ) =B(q)
C(q)· u(k) +
[1− A(q)
C(q)
]· y(k) (1.8)
Pseudo régression linéaire
On peut présenter (1.8) sous la forme :
C(q) · y(k, θ) = B(q) · u(k) + [C(q)− A(q)] · y(k) (1.9)
En additionnant [1− C(q)] · y(k, θ) aux 2 membres de cette expression, on a :
y(k, θ) = B(q) · u(k) + [1− A(q)] · y(k) + [C(q)− 1] · [y(k)− y(k, θ)]
Avec l'introduction de l'erreur de prédiction
ε(k, θ) = y(k)− y(k, θ)
Identification, v.1.8 49 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
des vecteurs
−→ϕ (k, θ) =
−y(k − 1)−y(k − 2)
. . .−y(k − na)u(k − 1)u(k − 2). . .
u(k − nb)ε(k − 1, θ)ε(k − 2, θ)
. . .ε(k − nc, θ)
et
−→θ =
a1
a2
. . .ana
b1b2. . .bnb
c1c2. . .cnc
on a :
y(k, θ) = −→ϕ (k, θ)T · θ
Il ne s'agit malheureusement pas d'une régression linéaire (on parle de régressionpseudo-linéaire) et en conséquence, une solution analytique visant à trouver lejeu de paramètre
−→θ minimisant
VN
(−→θ , yN(k), uN(k)
)=
1
N·
N−1∑k=0
1
2· ε(k)2
=1
N·
N−1∑k=0
1
2·
y(k)−−→ϕ (k, θ)T ·−→θ︸ ︷︷ ︸
ε(k)
2
(1.10)
n'existe pas. Il faut alors recourir a une solution numérique. On propose d'étudierci-après la méthode dite de descente de gradient.
Identification, v.1.8 50 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.B.3 Descente de gradient
La descente de gradient consiste à évaluer, partant d'un jeu de paramètresinitial
−→θ 0, le gradient de la fonction (1.10) par rapport aux paramètres du vecteur
−→θ :
∂VN
∂aj
∂VN
∂bj∂VN
∂cj
On construit ensuite le point de travail suivant−→θ 1 retranchant à
−→θ 0 la quantité
∂VN
∂aj·∆aj
∂VN
∂bj·∆bj
∂VN
∂cj·∆cj
et en répétant la procédure p fois de façon à ce que
VN
(−→θ p, yN(k), uN(k)
)soit minimum.
Dans le cas d'une structure ARMAX décrite par (1.9), on peut tout d'abordécrire :
C(q) · ∂y(k,−→θ )
∂aj
= −y(k − j)
C(q) · ∂y(k,−→θ )
∂bj= u(k − j)
C(q) · ∂y(k,−→θ )
∂cj+∂C(q)
∂cj︸ ︷︷ ︸q−j
·y(k,−→θ ) =
∂C(q)
∂cj︸ ︷︷ ︸q−j
·y(k)
︸ ︷︷ ︸y(k−j)
puis nalement :
∂y(k,−→θ )
∂aj
= − 1
C(q)· y(k − j)
∂y(k,−→θ )
∂bj=
1
C(q)· u(k − j)
∂y(k,−→θ )
∂cj= − 1
C(q)· q−j · y(k,
−→θ ) +
1
C(q)· y(k − j) =
1
C(q)· ε(k − j,
−→θ )
Identification, v.1.8 51 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
L'évaluation de
∂VN
∂aj
∂VN
∂bj∂VN
∂cj
donne :
∂VN
∂aj
=
2·ε(k,−→θ )︷︸︸︷
∂VN
∂ε·
−1︷︸︸︷∂ε
∂y· ∂y∂aj
= − 1
N·
N−1∑k=0
∂y
∂aj
=1
N·
N−1∑k=0
1
C(q)· y(k − j) · ε(k,
−→θ )
∂VN
∂bj=∂VN
∂ε· ∂ε∂y
· ∂y∂bj
= − 1
N·
N−1∑k=0
∂y
∂bj= − 1
N·
N−1∑k=0
1
C(q)· u(k − j) · ε(k,
−→θ )
∂VN
∂cj=∂VN
∂ε· ∂ε∂y
· ∂y∂cj
= − 1
N·
N−1∑k=0
∂y
∂cj= − 1
N·
N−1∑k=0
1
C(q)· ε(k − j,
−→θ ) · ε(k,
−→θ )
En introduisant
−→ϕ (k,−→θ ) =
−y(k − 1)−y(k − 2)
. . .−y(k − na)u(k − 1)u(k − 2). . .
u(k − nb)ε(k − 1)ε(k − 2). . .
ε(k − nc)
Identification, v.1.8 52 MEE \cours_aav.tex
1er septembre 2007

HEIG-VD Automatique avancée (AAV)
ainsi que
ψ(k,−→θ ) =
∂y∂a1∂y∂a2
. . .∂y
∂ana∂y∂b1∂y∂b2
. . .∂y
∂bnb∂y∂c1∂y∂c2
. . .∂y
∂cnc
on peut encore écrire :
ψ(k,−→θ ) =
1
C(q)· −→ϕ (k,
−→θ ) (1.11)
Un algorithme de recherche des paramètres−→θ minimisant VN(
−→θ ) est le sui-
vant [[1], eq. (10.41)] :
−→θ
(i+1)
N =−→θ
(i)
N − µN ·R(i)N
−1· V ′
N(−→θ
(i)
N ) (1.12)
avec
V ′N(−→θ ) = − 1
N·
N−1∑k=0
ψ(k,−→θ ) · ε(k,
−→θ ) (1.13)
avec VN(−→θ N) selon (1.10) et ψ(k,
−→θ ) selon (1.11).
R(i)N est une matrice de dimension na + nb + nc modiant la direction de
recherche et choisie dans un premier temps égale à la matrice identité, faisant de(1.12) une méthode de descente de gradient.
Si l'on prend en compte la double dérivée de VN(−→θ N), i.e. le hessien de
VN(−→θ N), on peut aner la direction de recherche en tenant compte de l'évo-
lution du gradient V ′N(−→θ ) [[1], éq. (10.44)] :
V ′′N(−→θ ) =
1
N·
N−1∑k=0
ψ(k,−→θ ) · ψ(k,
−→θ )T − 1
N·
N−1∑k=0
ψ′(k,−→θ ) · ε(k,
−→θ ) (1.14)
AvecR
(i)N = V ′′
N(−→θ )
Identification, v.1.8 53 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
(1.12) est une méthode Newton. Lorsque l'on est proche du minimum de V ′N(−→θ ),
on peut admettre [[1], éq. (10.46)] que
V ′′N(−→θ ) ≈ 1
N·
N−1∑k=0
ψ(k,−→θ ) · ψ(k,
−→θ )T (1.15)
Implantation en langage MATLAB
%−−−−−−−−−−−−−−− Mesuresload usc1_is1 . datmesures = usc1_is1 ;
%Troncage des mesuresind = find ( mesures ( : , 4 ) <0) ;ind = max( ind ) ;
mesures = mesures ( 1 : ind , : ) ;t = mesures ( : , 1 ) ; %instants d ' echanti l lonnageu = mesures ( : , 4 ) ; %signa l d ' entree ( deterministe )y = mesures ( : , 5 ) ; %signa l de sor t i ey = y − y ( 1 ) ; %enleve o f f s e tN = length ( y ) ; %longueur echant i l lon de mesures
t o l 2 = 1e−3; %tolerance a part i r de l a que l l e on t r a v a i l l e avec l e HessienNBITER = 100 ; %nb d ' i t e ra t ions
%Nb de parametres a estimer pour l e s polynomes A(q ) , B(q) et C(q)na = 2 ;nb = na ;nc = na ;nk = 1 ; %retard pur entree sor t i en = max( [ na , nb , nc ] ) ;theta = zeros ( na+nb+nc , 1 ) ; %vecteur des parametres a estimer
%Insert ion de u(−n ) . . . u(−1) et y(−n ) . . . u(−1) dans u(k) et y(k)u = [ zeros (n , 1 ) ; u ] ;y = [ zeros (n , 1 ) ; y ] ;
ye s t = [ zeros (n , 1 ) ; zeros (N, 1 ) ] ; %estimation de yt = [ 0 : length ( yes t )−1] ' ; %vecteur temps
%Parametre de la routine de recherche du minimum selon (6)VN = zeros (NBITER, 1 ) ; %1/N∗somme du carre de 0.5∗ erreur de predict ionVN(1) = 1e5 ; %Valeur i n i t i a l e mise a l ' i n f i n i ou presqueRN = eye ( na+nb+nc ) ; %direct ion de recherche , i n i t i a l i s a t i o n pour methode de descente de gradientmuN = 0 . 0 1 ; %pas de ca lcu l i n i t i a l pour la recherche
%te s t avec ARMAX MATLAB (ce que l ' on aimerait reuss ir a fa i re nous−memes avec ce f i c h i e r . . . )th_armax = armax ( [ y , u ] , [ na , nb , nc , nk ] )
%Conditions i n i t i a l e s : modele ARX, dont la so lut ion analytique exis te , donc%implantable par nous . . .th_arx = arx ( [ y , u ] , [ na , nb , nk ] ) ;A = th_arx .A;B = rem_zero ( th_arx .B) ;C = [1 , zeros (1 , nc ) ] ; %C est i n i t i a l i s e a q^(−nc)
%backup des polynomes estimesA_1 = A;B_1 = B;C_1 = C;
%Autre condition i n i t i a l e poss i b l e s ( plus quelconques )A = [1 , zeros (1 , na ) ] ;B = ones (1 , nb )∗ 0 . 0 1 ;%A = [1 ,−1.5 ,0.76];%B = [0.0097 ,−0.0057];%C = [1 ,−1.2 ,0.65];
%Formation du vecteur de parametre i n i t i a ltheta = [A( 2 : na+1) ,B,C(2:1+nc ) ] ' ;p = 2 ; %compteur d ' i t e ra t ion
while ( ( p<NBITER))VNp = zeros ( na+nb+nc , 1 ) ; %in i t i a l i s a t i o n du gradient de VNVNpp = zeros ( na+nb+nc ) ; %in i t i a l i s a t i o n du Hessien de VN
%Calcul de l ' estimation avec l e s parametre theta actue ls selon (2)yhat (n+1:n+N) = dls im (B,C, u(n+1:n+N)) + dls im (C−A,C, y (n+1:n+N) ) ;%Residus ( erreur de predict ion )
Identification, v.1.8 54 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
ep s i l o n = y − yhat ;%Somme des carres de l ' erreur de predict ionVN(p) = 1/N∗sum(0 . 5∗ ep s i l o n . ^ 2 ) ; %selon (4)[ p ,VN(p) − VN(p−1)]
%Si la somme des carres cro i t au l i eu de decroitre , on restaure l e s%parametres precedents et l ' on change muN (comment ?)i f ( (VN(p) − VN(p−1))>0)
A = A_1;B = B_1;C = C_1;theta = [A( 2 : na+1) ,B,C(2:1+nc ) ] ' ;muN = 0 . 001 ;yhat (n+1:n+N) = dls im (B,C, u(n+1:n+N)) + dls im (C−A,C, y (n+1:n+N) ) ;e p s i l o n = y − yhat ;VN(p) = 1/N∗sum(0 . 5∗ ep s i l o n . ^ 2 ) ;
end%Calcul de phi , psi , du gradient et du Hessien avec l e jeu de%parametres actue l
for k=n+1:n+Nphi = [−y (k−1:−1:k−na ) ' , u (k−1:−1:k−nb ) ' , e p s i l o n (k−1:−1:k−nc ) ' ] ' ;p s i = dls im ( [ 1 , zeros (1 , nc ) ] ,C, phi ) ; %selon (5)VNp = VNp − ps i ∗ ep s i l o n (k )/N; %selon (7)VNpp = VNpp + ps i ∗psi ' /N; %selon (9)
end
%Passage au Hessien s i l ' on est t res proche du minimum et s i la%variat ion de VN est negativei f ((−(VN(p) − VN(p−1))< to l 2 )&((VN(p) − VN(p−1))<0))
RN = VNpp;% muN = 0.01;
disp ( ' Hess ien ' )else
RN = eye ( na+nb+nc ) ; %methode de descente de gradientend%Calcul des parametres correspondant a l ' i t e ra t iontheta = theta − muN∗ inv (RN)∗VNp %selon (6)
%backup des parametre precedentsA_1 = A;B_1 = B;C_1 = C;
%Formation des polynomes A, B, CA = [1 , theta ( 1 : na ) ' ] ;B = theta ( na+1:na+nb ) ' ;C = [1 , theta ( na+nb+1:na+nb+nc ) ' ] ;p = p + 1 ; %variab le d ' i t e ra t ion
end
figureplot (VN( 2 :NBITER) , ' o ' )t i t l e ( ' Evolut ion du grad i ent ' )
Les résultats sont sur les gures 1.33 page suivante et 1.34 page 57.
Identification, v.1.8 55 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
No itération
Evolution du gradient
f_test_armax_01_1.eps
Fig. 1.33 Evolution de la descente du gradient, pour NBITER=100 itérations(chier source).
Identification, v.1.8 56 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 10 20 30 40 50 60−4
−2
0
2
4
6
y(k)
, yes
t(k)
yy
est
0 10 20 30 40 50 60−20
−10
0
10
20
k
u(k)
f_test_armax_01_2.eps
Fig. 1.34 En haut : mesure y(k) et estimation y(k), après p = 100 itérations.En bas : signal d'entrée u(k) (chier source).
Identification, v.1.8 57 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.C Rappel de théorie des probabilités [2]
1.C.1 Processus, signaux et variables aléatoires
Un processus aléatoire, ou stochastique, est une famille de signaux x(t) denatures aléatoires [[2], 5.1.1]. Un signal x(t) est aléatoire s'il dépend des lois duhasard.
Une variable aléatoire est la valeur prise par un signal aléatoire à un instantti ; on la désigne par xi [[2], 5.1.4].
1.C.2 Fonction de répartition et densité de probabilité [[2],14.2]
Le comportement statistique de la variable aléatoire xi est déni par sa densitéde probabilité p(x) et/ou sa fonction de répartition F (x).
La fonction de répartition F (x) associée à une variable aléatoire xi est lafonction permettant de calculer la probablité que xi soit inférieure ou égale à unecertaine valeur x :
F (x) = Prob [xi ≤ x]
La densité de probabilité p(x) n'est autre que la dérivée de F (x) par rapport àx. On a :
Prob [x1 ≤ xi ≤ x2] =
∫ x2
x1
p(xi) · dxi
Des formes bien connues de densités de probabilité sont les distributions [[2],14.4]
uniforme :
p(x) =1
b− a· (ε(x+ a)− ε(x− b))
avec µx = 12· (b+ a) et σ2
x = (b−a)2
12
gaussienne :
p(x) =1√
2 · π · σx
· exp
[−(x− µx)
2
2 · σ2x
]
1.C.3 Espérance mathématique, moyenne et variance
La valeur moyenne statistique de la variable aléatoire xi est donnée par l'es-pérance mathématique E [xi] de xi [[2], 14.3] :
µx = E [xi] =
∫ +∞
−∞xi · p(xi) · dxi
Identification, v.1.8 58 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
La mesure de la dispersion de xi autour de sa valeur moyenne µx est la variance :
σ2x = E
[(xi − µx)
2] =
∫ +∞
−∞(xi − µx)
2 · p(xi) · dxi
1.C.4 Fonctions d'autocorrélation et d'autocovariance [[2],5.2]
La fonction d'autocorrélation du processus stochastique x(t) est donnée parl'espérance du produit de 2 variables aléatoires obtenues par exemple aux instantst et t+ τ :
Rx(τ) = E [x(t) · x(t+ τ)]
La fonction d'autocovariance se dénit de la même manière, seuls les écarts entreles variables aléatoires x(t) et x(t+ τ) et leur moyenne µx étant toutefois pris encompte :
Cx(τ) = E [(x(t)− µx) · (x(t+ τ)− µx)] = Rx(τ)− µ2x
Pour µx = 0, on a Rx(τ) = Cx(τ).La fonction d'intercorrélation statistique peut également être dénie :
Rxy(τ) = E [x(t) · y(t+ τ)]
Si x(t) et y(t) ne sont pas corrélés, alors Rxy(τ) = 0.
1.C.5 Stationnarité et ergodisme [[2], 5.1.11 et 5.1.13]
Un processus stochastique est stationnnaire si ses propriétés statistiques (parexemple µx et σx) sont invariantes dans le temps. On admet pour la suite queles processus aléatoires considérés sont stationnaires. De plus, on admet qu'ilssont ergodiques, ce qui signie que les espérances mathématiques (ou moyennesstatistiques) de type
E [f(x)] =
∫ +∞
−∞f(x) · p(x) · dx
peuvent être identiées à des moyennes temporelles telles que
f(x(t)) = limT→∞
1
T·∫ +T/2
−T/2
f(x(t)) · dt
Donc, avec l'hypothèse d'ergodicité, on a :
E [f(x)] = f(x(t))
Identification, v.1.8 59 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
La fonction d'autocorrélation d'un processus stochastique ergodique peut ainsise calculer comme suit :
Rx(τ) = E [x(t) · x(t+ τ)] = x(t) · x(t+ τ) = limT→∞
1
T·∫ +T/2
−T/2
x(t) · x(t+ τ) · dt
Son évaluation expérimentale ne peut bien sûr s'eectuer que pour une durée Tnie, typiquement en échantillonnant le signal x(t) considéré :
RNx (k) =
1
N·
N−1∑l=0
x(l + k) · x(l)
Identification, v.1.8 60 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.D Transformée de Fourier de signaux discrets
[[2] et [3]]
1.D.1 Dénition
Par dénition, la transformée de Fourier d'un signal discret x(k) est donnéepar :
X (j · ω) = Fx (k) =+∞∑
k=−∞
x (k) · e−j·ω·k·h (1.16)
Elle est à mettre en regard de la transformée de Fourier de signaux analogiques,
Xa (j · ω) = Fxa (t) =
+∞∫−∞
xa (t) · e−j·ω·t · dt
ce qui montre qu'elle est une simple adaptation à la nature discrète de x(k).La transformée de Fourier inverse s'écrit :
x (k) = F−1X (j · ω) =
+ωe2∫
−ωe2
X (j · ω) · e+j·ω·k·h · dω
1.D.2 Transformée de Fourier d'un signal de durée nie
Dans le cas expérimental, le signal discret transformé selon (1.16) est forcé-ment un signal de durée nie xN(k), provenant par exemple de l'échantillonnagerégulier du signal analogique xa(t) entre les instants k0 · h et (k0 +N − 1) · h. Ona :
x(k) = xa(t)|t=k·h
xN(k) = x(k) · (ε(k − k0)− ε(k − k0 −N)) = x(k) · rect (k − k0, N)
Du fait du nombre ni N d'échantillons, la transformée de Fourier peut s'écrire :
XN (j · ω) = FxN (k) =
k0+N−1∑k=k0
xN (k) · e−j·ω·k·h
On note que FxN (k) = XN (j · ω) est à ce stade une fonction continue de lavariable ω, laquelle peut ainsi varier de manière continue. La gure 1.35 pagesuivante le montre le résultat de la transformée d'une période d'un signal carré,évaluée selon (1.16) pour un grand nombre de valeurs de ω.
Identification, v.1.8 61 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 1 2 3 4 5 6 7 8 9 10−1
−0.5
0
0.5
1
u(t)
t [s]
fsignal
=0.1[Hz], fe=1.6[Hz], N
f=512, ∆f=f
e/N
f=0.003125[Hz]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
0.5
1
1.5
2
2.5
3
|U(jω
)|
f [Hz]
f_fourier_carre_03_1.eps
Fig. 1.35 Module de la transformée de Fourier, i.e. spectre d'amplitude d'unepériode d'un signal carré discret, évalué pour un grand nombre de valeurs def = ω
2·π . On note la périodicité (période fe = 1h
= 1.6 [Hz]) du spectre d'amplitude(chier source).
Identification, v.1.8 62 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 1 2 3 4 5 6 7 8 9 10−1
−0.5
0
0.5
1
u(t)
t [s]
fsignal
=0.1[Hz], fe=1.6[Hz], N
f=512, ∆f=f
e/N
f=0.003125[Hz]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.5
1
1.5
2
2.5
3
|U(jω
)|
f [Hz]
f_fourier_carre_01_1.eps
Fig. 1.36 Module de la transformée de Fourier d'une période d'un signal carrédiscret, évaluée pour un grand nombre de valeurs de ω. Du fait de la périodicitéde période fe de X (j · ω) et de la parité de |X (j · ω)|, l'achage du spectred'amplitude peut être limité à la zone de fréquences 0 . . . fe
2(chier source).
1.D.3 Propriétés
Comme la gure 1.35 page ci-contre le laisse présager, X (j · ω) = Fx (k)est une fonction périodique de période ωe = 2·π
h, puisqu'en eet
X (j · (ω + ωe)) =+∞∑
k=−∞
x (k) · e−j·(ω+ωe)·k·h
=+∞∑
k=−∞
x (k) · e−j·ω·k·h · e−j·ωe·k·h︸ ︷︷ ︸1
=X (j · ω)
ce qui signie qu'on peut se contenter de l'évaluer et de la représenter sur unepériode ωe. D'autre part, le module |X (j · ω)| de X(j ·ω) est une fonction paire,car
|X (−j · ω)| = |X ((j · ω)∗)| = |X∗ (j · ω)| = |X (j · ω)|
pour autant que le signal x(k) soit réel. En conséquence, il est susant de re-présenter |X (j · ω)| dans la gamme de pulsations 0
[rads
]< ω < ωe
2(gure 1.36).
Identification, v.1.8 63 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.80
0.5
1
1.5
2
2.5
3
fsignal
=0.1[Hz], fe=1.6[Hz], N
f=512, ∆f=f
e/N
f=0.003125[Hz], P=64
|U(jf
)| et
|UN
(n)|
f [Hz]
f_fourier_carre_04_2.eps
Fig. 1.37 Module de la transformée de Fourier d'une période d'un signal carrédiscret et sa version échantillonnée dans le domaine des fréquences : ici, on limitela représentation du spectre d'amplitude a P = 64 points répartis entre −fe
2et
+fe
2− fe
P(chier source).
1.D.4 Transformée de Fourier discrète (TFD)
1.D.5 Discrétisation de l'axe des fréquences
Reprenant la dénition de la transformée de Fourier d'un signal de durée niexN(k), on note que bien que le signal original xN(k) soit de nature discrète, satransformée de Fourier XN (j · ω) = FxN (k) est une fonction de la variablecontinue ω. L'évaluation la transformée de Fourier est donc possible pour tout ω.Pour des raisons pratiques [[3], 3.2.2], on doit toutefois se contenter d'une versionéchantillonnée de la fonction XN(j · ω), laquelle est obtenue en discrétisant l'axedes pulsations. On n'évalue et/ou on ne dispose donc de XN(j ·ω) qu'à intervallesréguliers ∆ω plutôt que de manière continue (gure 1.37).
1.D.6 Dénition de la TFD
L'échantillonnage de la fonction XN(j ·ω) sur une période complète entre −ωe
2
et +ωe
2produit ainsi P = ωe
∆ωnombres XN(n) :
XN (j · n ·∆ω)|−P2≤n<+P
2= XN (n)|−P
2≤n<+P
2
Identification, v.1.8 64 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
La suite de P nombres XN(n) représente la transformée de Fourier discrète
de xN(k), abrégée ci-après TFD.
1.D.7 Conséquence de la discrétisation de la transforméede Fourier
Il va sans dire que la discrétisation de la transformée de Fourier n'est pas sansconséquence puisque XN(j · n · ∆ω) ne représente que partiellement XN(j · ω).Pour évaluer l'éventuelle perte d'information qui en résulte, on peut calculer latransformée de Fourier inverse xp(k) deXN(n) selon la relation (1.17) et compareravec le signal original xN(k). Sans entrer dans les détails de calcul (voir [[3],3.2.10]), le résultat que l'on obtient en s'appuyant sur (1.17) est le suivant :
xp (k) = F−1XN (n) = . . . =+∞∑
l=−∞
xN (k + l · P )
Alors que XN(j · ω) est la transformée de Fourier (exacte) de xN(k), la TFDXN(n) de xN(k) est la transformée de Fourier exacte d'un signal périodique xp(k)de période P · h formé de la superposition de xN(k) tous les P échantillons.
Si P ≥ N , la superposition ne crée aucun recouvrement et la somme xp (k) =+∞∑
l=−∞x (k + l · P ) revient à juxtaposer le signal xN(k) tous les P échantillons.
1.D.8 Echantillonnage minimal de la transformée de Fou-rier
On peut en déduire le nombre P = ωe
∆ωd'échantillons à prélever sur la trans-
formée de Fourier XN(j · ω) pour former la TFD XN(n). En se rappelant quex(k) est de longueur N , on voit qu'il est indispensable que P ≥ N , le cas limiteP = N étant susant. En le choisissant, l'expression de la TFD est ainsi
XN (n)|−N2≤n<+N
2= XN (j · n ·∆ω)|−N
2≤n<+N
2=
k0+N−1∑k=k0
x (k) · e−j·n·∆ω·k·h
Dans un tel cas de gure, une période de xp(k) coïncide parfaitement avecxN(k) prélevé précédemment sur xa(t) et aucune information n'est perdue. End'autres termes, calculer la TFD de xp(k) ou celle de xN(k) donne le mêmerésultat.
En pratique, on échantillonne donc la période ωe de XN(j ·ω) au moins autantde fois que l'on a prélevé d'échantillons sur xa(t) an d'obtenir N nombres XN(n)(gure 1.38 page suivante) avec
XN(n) = XN(j · n ·∆ω) pour −N/2 ≤ n < +N/2.
Identification, v.1.8 65 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.80
0.5
1
1.5
2
2.5
3
fsignal
=0.1[Hz], fe=1.6[Hz], ∆f=f
e/N=0.1[Hz], P=N=16
|U(jf
)| et
|UN
(n)|
f [Hz]
f_fourier_carre_05_2.eps
Fig. 1.38 Echantillonnage de la transformée de Fourier d'une période d'unsignal carré (N = 16 échantillons). La TFD est également échantillonnée avecN = 16, soit le cas limite pour éviter le recouvrement (chier source).
La résolution ∆ω de l'axe des pulsations s'en déduit immédiatement :
∆ω =ωe
N
Sachant queXN(j·ω) est périodique de période ωe et que l'on peut en conséquencelimiter son achage à la plage −ωe
2, . . .+ ωe
2, les N valeurs de ω sont :
−N2·∆ω, . . . ,−∆ω, 0,+∆ω,+2 ·∆ω, . . .+
(N
2− 1
)·∆ω
Le simple fait de songer à la TFD de xN(k) suppose donc que le signal xN(k)est périodique de période N · h ! On pouvait d'ailleurs le pressentir en relevantnotamment que le module |XN(j · ω)| de XN(n) n'est pas sans rappeler le spectrede raies d'un signal analogique périodique (gure 1.39 page ci-contre).
La conséquence évidemment importante est qu'avec un outil tel que la TFD,seuls des signaux périodiques de période N · h et ses sous-multiples peuventêtre transformés sans erreur. Pour les signaux non périodiques, les techniques defenêtrage (Hamming, Hanning, etc) permettent de limiter les inexactitudes [[3],3.7].
Identification, v.1.8 66 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 1 2 3 4 5 6 7 8 9 10−1
−0.5
0
0.5
1
u(t)
t [s]
fsignal
=0.1[Hz], fe=1.6[Hz], N=16, ∆f=f
e/N=0.1[Hz]
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.80
0.5
1
1.5
2
2.5
3
|U(jω
)|
f [Hz]
f_fourier_carre_02_1.eps
Fig. 1.39 Transformée de Fourier d'une période d'un signal carré (N = 16échantillons). La TFD est également échantillonnée avec N = 16, soit le caslimite pour éviter le recouvrement. L'achage est limité à la zone de fréquences−fe
2. . . fe
2− fe
N(chier source).
Identification, v.1.8 67 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.D.9 Inversion de la TFD
Partant de la TFD XN(n), la formule d'inversion est :
xp (k) = F−1XN (n) =
+N2−1∑
n=−N2
XN(n) · e+j·n·2·π·k (1.17)
Notons que par suite de la discrétisation de la fréquence inhérente à la TFD, onn'a pas d'égalité parfaite entre xp(k) et xN(k) puisque l'on a mentionné que
xp (k) = F−1XN (n) = . . . =+∞∑
l=−∞
xN (k + l · P )
1.D.10 Périodogramme
On appelle périodogramme d'un signal x(k) l'expression
ΦN(ω) =1
N· |XN(ω)|2
Le périodogramme permet de mesurer les contributions des diérentes fréquencesà l'énergie du signal.
Identification, v.1.8 68 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1.D.11 Densité spectrale de puissance Φ(ω) ("spectre")
Dans l'optique de pouvoir traiter les signaux déterministes et les signauxaléatoires avec un outil commun [[1], 2.3], on dénit ici la densité spectrale depuissance du signal x(k), appelée couramment spectre, et dénotée Φx(ω).
On appelle densité spectrale de puissance la fonction Φx(ω) telle que l'intégrale∫ ω2
ω1
Φx(ω) · dω
fournisse la puissance du signal x(k) correspondant aux pulsations comprisesentre ω1 et ω2 ([[7], 3.8 p.65]).
La densité spectrale de puissance s'applique aux signaux déterministes et aléa-toires à puissance moyenne nie, i.e. aux signaux tels que
Px = limN→∞
1
N·
N∑k=0
x(k)2 <∞
Notons que pour les signaux déterministes à énergie nie, i.e. les signaux tels que
Wx =∞∑
k=0
x(k)2 <∞
on préfère utiliser la notion de densité spectrale d'énergie [[7], 3.8, p.66] (aussiappelée spectre !), dont il est facile de démontrer qu'elle a pour expression :
Φx(ω) = |X(ω)|2
1.D.12 Calcul de la densité spectrale de puissance de si-gnaux déterministes
On peut montrer d'une part que
Φx(ω) = FRx(k) =∞∑
k=0
Rx(k) · e−j·ω·k·h
i.e., la densité spectrale de puissance est égale à la transformée de Fourier de lafonction d'autocorrélation
Rx(k) =∞∑l=0
x(l + k) · x(l)
de x(k), et d'autre part que
Φx(ω) = limN→∞
1
N·
∣∣∣∣∣∣∣∣∣∣N∑
k=0
x(k) · e−j·ω·k·h
︸ ︷︷ ︸XN (ω)
∣∣∣∣∣∣∣∣∣∣
2
= limN→∞
1
N· |XN(ω)|2
Identification, v.1.8 69 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Donc :
Φx(ω) = FRx(k) = limN→∞
1
N· |XN(ω)|2 (1.18)
Lorsque la durée d'acquisition est limitée à N · h, on a :
RNx (k) =
1
N·
N−1∑l=0
x(l + k) · x(l)
et
ΦNx (ω) = F
RN
x (k)
=1
N· |XN(ω)|2
On voit que la densité spectrale de puissance ΦNx (ω) coïncide avec le périodo-
gramme déni au 1.D.10 page 68.
1.D.13 Calcul de la densité spectrale de puissance de si-gnaux aléatoires
Pour les signaux aléatoires, l'évaluation de la fonction d'autocorrélation nepeut se faire qu'en termes statistiques :
Rx(k) = E [x(l + k) · x(l)]
Sous l'hypothèse d'ergodicité (i.e. en admettant que les moyennes statistiquescoïncident avec les moyennes temporelles, 1.C.5 page 59), on peut cependantécrire :
Rx(k) = E [x(l + k) · x(l)] = Rx(k)) = limN→∞
1
N·
N−1∑l=0
x(l + k) · x(l)
La densité spectrale de puissance d'un signal aléatoire x(k) peut alors être calculéede manière analogue à ce qui a été fait pour les signaux déterministes et l'on peutmontrer que
Φx(ω) = FRx(k) = limN→∞
E[
1
N· |XN(ω)|2
](1.19)
Si seules N valeurs sont à disposition, on a également :
ΦNx (ω) = F
RN
x (k)
Ces expressions mettent en lumière le parfait parallélisme entre les expressionsde la densité spectrale de puissance pour des signaux déterministes (1.18) etaléatoires (1.19).
Pour ces derniers, la densité spectrale de puissance sera plutôt évaluée enmesurant x(k), en calculant RN
x (k) avant d'obtenir ΦNx (ω). Quant aux signaux
Identification, v.1.8 70 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
déterministes, la même démarche est potentiellement appliquable, mais il est clairque le calcul de ΦN
x (ω) s'eectuera plus directement sur la base de la descriptionanalytique de x(k).
Relevons nalement que l'on peut montrer que ΦNx (ω) = F
RN
x (k)est un
estimateur non biaisé de Φx(ω) puisque [[7], 8.5, p.211]
E[ΦN
x (ω)]
= Φx(ω) +RN
où RN ∝ 1√N.
1.D.14 Transformation du spectre par des systèmes dyna-miques linéaires
On considère le système dynamique linéaire [[1], 2.3 p.32]
Y (z) = G(z) · U(z) +H(z) · V (z)
dont la formulation dans le temps est
y(k) =∞∑l=0
g(l) · u(k − l) +∞∑l=0
h(l) · v(k − l) = g(k) ∗ u(k) + h(k) ∗ v(k)
où u(k) est un signal déterministe et v(k) un signal aléatoire de moyenne µv = 0et de variance σ2
v = λ. Alors
Φy(ω) =∣∣G(ej·ω)
∣∣2 · Φu(ω) + λ ·∣∣H(ej·ω)
∣∣2et
Φyu(ω) = G(ej·ω) · Φu(ω)
La dernière égalité provient du fait que u(k) et v(k) sont non corrélés. En consé-quence, E [u(k) · v(k + l)] = 0 et donc Φuv(ω) = 0.
Identification, v.1.8 71 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Identification, v.1.8 72 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Chapitre 2
Contrôle robuste
Régulation robuste 73 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1s
S 1s
-
w ( t ) y ( t )u ( t )
y ( t )
e ( t )G c ( s ) G a ( s )
f _ 0 7 _ 7 8 _ 0 3 . e p s
S
v ( t )
-
Fig. 2.1 Système asservi (chier source).
2.1 Fonction de sensibilité ([4], 3.4)
La fonction de sensibilité S(s) d'un système asservi (gure 2.1) exprime lavariation relative ∆Gw(s)
Gw(s)de la fonction de transfert en boucle fermée, régulation
de correspondance, Gw(s), par rapport à la variation relative ∆Ga(s)Ga(s)
de la fonctionde transfert du système à régler Ga(s) :
S(s) =
dGw(s)Gw(s)
dGa(s)Ga(s)
On a :
dGw(s)
dGa(s)=d Go(s)
1+Go(s)
dGa(s)
=d Gc(s)·Ga(s)
1+Gc(s)·Ga(s)
dGa(s)
=Gc(s) · (1 +Gc(s) ·Ga(s))−Gc(s) ·Ga(s) ·Gc(s)
(1 +Gc(s) ·Ga(s))2
=Gc(s)
(1 +Gc(s) ·Ga(s))2
Régulation robuste 74 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
d'où :
dGw(s) =Gc(s)
(1 +Gc(s) ·Ga(s))2· dGa(s)
dGw(s)
Gw(s)=
Gc(s)(1+Gc(s)·Ga(s))2
· dGa(s)
Gw(s)
=
Gc(s)(1+Gc(s)·Ga(s))2
· dGa(s)
Gc(s)·Ga(s)1+Gc(s)·Ga(s)
=1
1 +Gc(s) ·Ga(s)· dGa(s)
Ga(s)
La fonction de sensibilité S(s) a donc pour expression :
S(s) =
dGw(s)Gw(s)
dGa(s)Ga(s)
=1
1 +Go(s)
On constate que, sous réserve d'un maintien de la stabilité en boucle fermée, plusle gain de boucle Go(s) est élevé, moins les variations des paramètres du systèmeà régler Ga(s) n'ont d'inuence sur les performances en boucle fermée, i.e. lesparamètres de la fonction de transfert Gw(s). Cette observation concorde avec lespropriétés de linéarisation oertes par la contre-réaction.
On note également que cette expression est identique à celle que l'on obtientsi l'on calcule la fonction de transfert liant la consigne w(t) à l'erreur e(t) :
Gew(s) =E(s)
W (s)=
1
1 +Go(s)
La réponse harmonique de S(j ·ω) a une allure tout à fait typique (gure 2.2 pagesuivante) : son module est faible à basse fréquences (peu de sensibilité, i.e. bonneperformance en précision) et tend vers l'unité (grande sensibilité) aux hautesfréquences.
Une propriété tout à fait remarquable ([4], 4.2) de la fonction de sensibilitéest que le maximum du module de sa réponse harmonique
max |S(j · ω)| = ‖S‖∞
correspond à la distance minimum entre le lieu de Nyquist de Go(j ·ω) et le point
Régulation robuste 75 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Frequency (rad/sec)
Pha
se (d
eg);
Mag
nitu
de (d
B)
Réponses harmoniques
−40
−20
0
20
40
|S( j ⋅ ω)|
|Gw
( j ⋅ ω)|
|Go( j ⋅ ω)|
10−2 10−1 100 101
−150
−100
−50
0
50
Fig. 2.2 Diagrammes de Bode de Go(j ·ω), Gw(j ·ω) et S(j ·ω) : allures typiques.
critique −1 + j · 0 (gure 2.3 page suivante) :
distance minimum entre − 1 et Go(j · ω)
= min |1 +Go(j · ω|)
= max∣∣∣∣ 1
1 +Go(j · ω)
∣∣∣∣= max |S(j · ω)|= ‖S‖∞
Il s'agit donc d'une mesure plus ne de la distance entre le lieu de Nyquist et lepoint critique que celle donnée classiquement par les marges de phase ϕm et degain Am.
2.1.1 Application : spécication de performance ([4], 3.4)
En relevant que la fonction de sensibilité dénie comme S(s) =dGw(s)Gw(s)dGa(s)Ga(s)
coïncide
avec la fonction de transfert
Gew(s) =E(s)
W (s)=
1
1 +Go(s)= S(s)
Régulation robuste 76 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0
G o ( j w )I m
R e- 1
w = 0 [ r a d / s ]w = [ r a d / s ]¥
G o ( j w )G o ( j w )1 + G o ( j w )
1
G o ( j w )1 + G o ( j w )
1
f _ 0 7 _ 0 8 _ 0 1 . e p s
- 1
Fig. 2.3 Lieu de Nyquist de Go(j · ω) : sa distance minimale au point critique−1 + j · 0 est donnée par min|1 + Go(j · ω|), soit l'inverse du maximum dumodule de la fonction de sensibilité max|S(j · ω)| (chier source).
Régulation robuste 77 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
w [ r a d / s ]
A ( w ) |[ d B ]
0 [ d B ]
w c o| W 1- 1 ( j w ) |
| S ( j w ) |
| W 1 ( j w ) |
f _ 0 7 _ 2 3 . e p s
Fig. 2.4 Illustration d'une méthode de spécication des performances d'unsystème asservi : on impose que le module de fonction de sensibilité soit inférieurà une limite
∣∣W−11 (j · ω)
∣∣ variant en fonction de la fréquence (chier source).
traduisant l'eet de la consigne sur l'erreur, il est envisageable de spécier lesperformances de précision d'un système de régulation automatique en imposantune valeur maximale 1
|W1(j·ω)| de la fonction de sensibilité pour chaque pulsationω. On pourrait écrire :
|S(j · ω)| < 1
|W1(j · ω)|
i.e. le module de la fonction de sensibilité doit être inférieur à la borne∣∣W−1
1 (j · ω)∣∣
(gure 2.4). On peut condenser cela sous la forme
‖W1(j · ω) · S(j · ω)‖∞ < 1 (2.1)
illustrée par la gure 2.5 page suivante.Typiquement, on choisira |W1(j · ω)| élevé à basse fréquence (bonne précision)
et tendant vers 1 aux hautes fréquences, là où l'action régulateur est sans eetsur le système à régler, vu le caractère ltrant de ce dernier (y(t) → 0 =⇒e(t) = w(t)− y(t) → w(t)).
Il existe une interprétation graphique intéressante de la relation 2.1 : pourque le module de la fonction de sensibilité soit toujours inférieur à
∣∣W−11 (j · ω)
∣∣,il faut que lieu de Nyquist de Go(j ·ω) soit toujours en dehors du disque de rayon|W1(j · ω)| et de centre −1 + j · 0 (gure 2.6 page ci-contre).
Régulation robuste 78 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
w [ r a d / s ]
A ( w ) |[ d B ]
0 [ d B ]
w c o
| S ( j w ) |
| W 1 ( j w ) |
| W 1 ( j w ) S ( j w ) |
f _ 0 7 _ 2 4 . e p s
Fig. 2.5 Spécication des performances d'un système asservi : on imposeque la valeur supérieure de |W1(j · ω) · S(j · ω)| soit inférieure à 1, i.e. à 0 [dB](chier source).
G o ( j w )I m
R e
w = 0 [ r a d / s ]w = [ r a d / s ]¥
- 1
| W 1 |
f _ 0 7 _ 2 5 . e p s
Fig. 2.6 Interprétation graphique de la condition de performance‖W1(j · ω) · S(j · ω)‖∞ < 1 (chier source).
Régulation robuste 79 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
1s
S-
w ( t ) y ( t )u ( t )
y ( t )
e ( t )G c ( s ) G a 0 ( s )
f _ r o b u s t e _ 0 2 . e p s
S
v ( t )
-
Fig. 2.7 Système asservi dont les paramètres du système à régler Ga(s) sontsusceptibles de varier (chier source).
2.2 Stabilité robuste [4]
Le critère de stabilité de Nyquist se base sur la connaissance de la réponseharmonique en boucle ouverte. Avec l'étude de la stabilité robuste, on tente derépondre à la question "qu'en est-il de la stabilité en boucle fermée lorsque laréponse harmonique en boucle ouverte n'est connue qu'avec une certaine préci-sion ?"
On considère un système de régulation automatique mono-variable (gure 2.7),dont la fonction de transfert du système à régler Ga(s) n'est connue qu'avec uneprécision donnée, i.e. dont les paramètres subissent des uctuations. La valeur no-minale de Ga(s) est Ga0(s). La fonction de transfert en boucle ouverte nominaleest ainsi
Go0(s) = Gc(s) ·Ga0(s) (2.2)
alors que la fonction de transfert nominale en boucle fermée, régulation de cor-respondance, est
Gw0(s) =Y (s)
W (s)=
Go0(s)
1 +Go0(s)=
Gc(s) ·Ga0(s)
1 +Gc(s) ·Ga0(s)(2.3)
L'imprécision dont il est question est l'incertitude liée à la modélisation et àl'identication de la réponse harmonique en boucle ouverte. Celle-ci étant forméede la mise en cascade du régulateur Gc(s) et du système à régler Ga(s), c'estnormalement à cette dernière fonction de transfert que sont dues des variations.
Régulation robuste 80 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
2.2.1 Incertitude sur la fonction de transfert du système àrégler [[4], p.46-47]
Prol d'incertitude |W2(j · ω)|
Pour représenter l'incertitude aectant la fonction de transfert du système àrégler, on se place ici dans le domaine fréquentiel et l'on construit la fonction
|W2(j · ω)| ≥∣∣∣∣Ga(j · ω)−Ga0(j · ω)
Ga0(j · ω)
∣∣∣∣ (2.4)
que l'on appelle prol d'incertitude. On voit que |W2(j · ω)| représente uneborne supérieure sur l'incertitude relative aectant le modèle nominal Ga0(s).
Le modèle d'incertitude utilisé ici est non-structuré, ce qui signie grosso modoque l'on ne prend pas en compte les variations individuelles des paramètres (parexemple, pour l'asservissement de vitesse d'un moteur DC, on aurait J = J0±∆Jpour l'inertie en charge et/ou Ramin ≤ Ra0 ≤ Ramax pour la résistance de l'induit)du modèle nominal Ga0(s), mais que |W2(j · ω)| traduit plutôt leur eet globalen fonction de la fréquence.
Notons qu'aucune hypothèse n'a été posée sur |W2(j · ω)|, qui peut être unefonction quelconque, notamment une fonction non-linéaire avec la fréquence.
Disque d'incertitude
L'inégalité de la dénition de |W2(j · ω)| indique que |W2(j · ω)| est la bornesupérieure de la variation relative du modèle. A une pulsation ωp donnée, lemodule de la variation relative maximale de Ga(j · ωp) par rapport à Ga0(j · ωp)n'est autre que |W2(j · ω)| et peut être
d'amplitude comprise comprise entre 0 et |W2(j · ωp)| d'une phase quelconque, comprise entre 0 et 360 []
Ce que l'on décrit ici n'est autre qu'un disque, appelé disque d'incertitude, centréen Ga0(j ·ωp) et de rayon |W2(j · ωp) ·Ga0(j · ωp)| (gure 2.8 page suivante). Pourune fréquence donnée ωp, l'évolution de l'amplitude dans tout le disque ainsi quela variation de phase (gure 2.9 page suivante) est intégrée au prol d'incertitude|W2(j · ω)| en écrivant que
Ga(s)−Ga0(s)
Ga0(s)= ∆(s) ·W2(s) (2.5)
où ∆(s) est une fonction de transfert stable telle que
Supω |∆(j · ω)| = ‖∆‖∞ ≤ 1 (2.6)
Il est clair que le modèle d'incertitude non-structuré choisi ici est conservateur,puisqu'il constitue une sorte de cas le plus défavorable : il est en eet peu probable
Régulation robuste 81 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
G a ( j w )I m
R e
f _ r o b u s t e _ 0 7 . e p s
| W 2 G a 0 |
G a 0
0
Fig. 2.8 Le disque d'incertitude dénit, pour une pulsation ωp donnée, la zonedans laquelle la fonction de transfert Ga(j ·ω) peut se trouver. |W2(j · ωp)| corres-pond à la limite du disque, soit à la variation maximale par rapport à la fonctionde transfert nominale Ga0(j · ω) (chier source).
G a ( j w )I m
R e
f _ r o b u s t e _ 0 8 . e p s
D W 2 G a 0
G a 0
0G a
| W 2 G a 0 |
Fig. 2.9 C'est ∆(s) qui fait évoluer la fonction de transfert Ga(s) dans tout ledisque d'incertitude (chier source).
Régulation robuste 82 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
qu'en prenant vraiment en compte les variations cumulées de ses paramètresindividuels, le système à régler Ga(s) se diérencie autant de sa valeur nominaleGa0(s) que ne le prévoit le prol d'incertitude |W2(j · ω)|.
En se limitant ainsi au modèle d'incertitude non-structuré, on simplie gran-dement l'analyse mathématique du problème, ce qui aura l'avantage de fournirdes méthodes d'analyse applicables aisément. De surcroît, on couvre égalementla situation où une partie de la dynamique du système à régler n'a pas pu êtremodélisée, faute de temps ou de connaissance.
Régulation robuste 83 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
w [ r a d / s ]
A ( w ) |[ d B ]
0 [ d B ]
w c o
f _ r o b u s t e _ 0 3 . e p s
| W 2 ( j w ) |
Fig. 2.10 Allure typique du prol d'incertitude |W2(j · ω)| (chier source).
Allure typique du prol d'incertitude |W2(j · ω)|
L'allure typique de |W2(j · ω)| est une fonction croissant avec la fréquence(gure 2.10), puisqu'il est d'autant plus dicile de modéliser et identier lesmodes rapides, i.e. la dynamique à fréquences élevées.
Il faut remarquer que le niveau d'incertitude peut se révéler très élevé, enparticulier lorsque le gain du système à régler Ga(j · ω) est faible. En eet, si legain nominal |Ga0(j · ωp)| à une pulsation ωp donnée est par exemple de l'ordrede 0.01, soit de −40 [dB], une bande d'incertitude de ±20 [dB] tracée autour dugain nominal paraît tout à fait réaliste dans le diagramme de Bode au vu de ladiculté à identier précisément le système à cause du mauvais rapport signal-sur-bruit [[8], chap.8]. Or, cela correspond à rien moins qu'une incertitude relativemaximale de
|W2(j · ωp)| =∣∣∣∣Ga(j · ωp)−Ga0(j · ωp)
Ga0(j · ωp)
∣∣∣∣ ≈
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣0.01 ·
+20 [dB]
d'incerti-
tude !︷︸︸︷10 −0.01
0.01
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣= 900% !
(2.7)Ce phénomène est particulièrement marqué lorsque le système à régler, commecelui du schéma technologique de la gure ?? page ? ?, possède une anti-résonance(gure 2.11 page ci-contre).
Régulation robuste 84 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
10−1 100 101 102 103−120
−100
−80
−60
−40
Diagrammes de Bode de GARMAX
(ejω h), YN
(ω)/UN
(ω)
10−1 100 101 102 103−300
−200
−100
0
100
200
f [Hz]
G(ejω h)Y
N(ω)/U
N(ω)|
f_lse_m_04_mes_id_2004_05_08_2_8.eps
Fig. 2.11 Diagramme de Bode expérimental d'un système mécanique exible :dans la zone de 100 [Hz], la présence d'une anti-résonance provoque un aaiblisse-ment considérable du gain et dégrade ainsi le rapport signal-sur-bruit. Il s'ensuitque la précision du modèle à cette fréquence est mauvaise que le niveau du gaba-rit d'incertitude W2(j · ω) se devra d'être élevé (≈ 20 [dB]), limitant les chancesde réalisabilité d'un régulateur robuste (chier source).
Régulation robuste 85 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
w [ r a d / s ]
A ( w ) |[ d B ]
0 [ d B ]
w c o
f _ r o b u s t e _ 0 4 . e p s
| G w 0 ( j w ) |
| W 2 ( j w ) |
| W 2 ( j w ) G w 0 ( j w ) |
Fig. 2.12 Test de la stabilité robuste (chier source).
2.2.2 Théorème de la stabilité robuste [[4], p.53]
On énonce ci-dessous le théorème de la stabilité robuste :
Un système de régulation automatique linéaire est à stabilité robuste si
‖W2(j · ω) ·Gw0(j · ω)‖∞ < 1 (2.8)
avec ‖W2(j · ω) ·Gw0(j · ω)‖∞ = Supω |W2(j · ω) ·Gw0(j · ω)|.Partant du prol d'incertitude |W2(j · ω)| et de la fonction de transfert nomi-
nale en boucle fermée, régulation de correspondanceGw0(s) = Y (s)W (s)
= Gc(s)·Ga0(s)1+Gc(s)·Ga0(s)
,il sut donc de tracer le diagramme de Bode du module de W2(j ·ω) ·Gw0(j ·ω)et de vérier qu'il est toujours inférieur à 0 [dB] (gure 2.12).
Sur la base de la gure 2.12, on peut qualitativement estimer la précision re-quise sur le modèle : l'atténuation du gain en boucle fermée doit au moins compen-ser la croissance du prol d'incertitude. On voit que probablement, ‖W2 ·Gw0‖∞intervient non loin de la bande passante en boucle fermée, et donc approximati-vement de la pulsation de coupure à 0 [dB] en boucle ouverte ωco.
Démonstration Partant du lieu de Nyquist de Go(j · ω) (gure 2.13 pagesuivante) on a successivement :
Go0(j ·ω) correspond au design nominal, lequel satisfait le critère de Nyquist La distance entre le point critique −1 + j · 0 et Go0(j · ω)
|−1−Go0(j · ω)| = |1 +Go0(j · ω)| (2.9)
Régulation robuste 86 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
G o ( j w )I m
R e
- 1 + j 0 w = 0 [ r a d / s ]w = [ r a d / s ]¥
f _ r o b u s t e _ 2 4 . e p s
G o1 + Go
| W2 G
o |
Fig. 2.13 Lieu de Nyquist de Go(j · ω) nominal, disque d'incertitude, mise enévidence des distances (chier source).
Régulation robuste 87 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
est telle que le point critique est laissé sur la gauche du lieu de Nyquist(gure 2.13 page précédente). Cette distance peut être considérée commeun sorte de "réserve". La perte intégrale de cette distance amènerait le lieude Nyquist sur le point critique, ce qui est à éviter absolument !
La variation de distance potentielle |W2(j · ω) ·Go0(j · ω)| doit donc êtreinférieure à la distance nominale |1 +Go0(j · ω)| :
|W2(j · ω) ·Go0(j · ω)|︸ ︷︷ ︸variation de distance potentielle
< |1 +Go0(j · ω)|︸ ︷︷ ︸distance nominale selon design
(2.10)
D'où, par division des 2 membres de l'égalité par |1 +Go0(j · ω)| :
|W2(j · ω) ·Go0(j · ω)||1 +Go0(j · ω)|
< 1 (2.11)
Donc|W2(j · ω) ·Gw0(j · ω)| < 1 (2.12)
Régulation robuste 88 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
G o ( j w )I m
R e- 1
w = 0 [ r a d / s ]w = [ r a d / s ]¥
f _ r o b u s t e _ 0 5 . e p s
| W 2 G o 0 |
Fig. 2.14 Interprétation graphique du théorème de la stabilité robuste : le pointcritique doit rester à l'extérieur du disque (chier source).
Interprétation graphique
La condition de stabilité robuste peut être interprétée graphiquement commesuit : le système de régulation automatique est stable si le point critique −1+j ·0demeure à l'extérieur du disque
de centre Go0(j · ω) de rayon |W2(j · ω) ·Go0(j · ω)|
comme le montre la gure 2.14.
Régulation robuste 89 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Time (sec.)
Am
plitu
de
Step Response
0 150 300 450 600 750 900
0
0.2
0.4
0.6
0.8
1
1.2
Fig. 2.15 Réponse indicielle en boucle fermée, cas nominal (chier source).
2.2.3 Exemple
On considère un système à régler de fonction de transfert nominale
Ga0(s) =Y (s)
U(s)= Ka ·
1
(1 + s · 11124) · (1 + s · 2) · (1 + s · 2)(2.13)
asservi par le régulateur PID
Gc(s) =U(s)
E(s)=
Kp
Ti
s· (1 + s · Ti + s2 · Ti · Td) (2.14)
avec Kp = 349.7, Td = 38 [s] et Ti = 380 [s]. Il s'agit d'un système de régula-tion automatique de la température d'un élément d'une machine de productionindustrielle (observer la valeur de la constante de temps dominante !).
Avec les paramètres du régulateur PID donnés, la réponse indicielle en bouclefermée est satisfaisante (gure 2.15), et la question se pose de savoir quelle est larobustesse de la stabilité oerte dans le cas nominal. Dans ce but, on dénit unprol d'incertitude (gure 2.16 page suivante), sur la base des informations quel'on a quant à la qualité de Ga0(s). Dans le cas particulier, des variations observéesdu gain à basse fréquence amènent à prendre en compte une incertitude relative dequelque −6 [dB], soit 50%. Cette imprécision s'améliore aux fréquences moyennes(−10 [dB] = 33%) et nit bien sûr par augmenter considérablement aux hautesfréquences.
Régulation robuste 90 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
10−3 10−2 10−1 100−20
−15
−10
−5
0
5
10
15
20
ω [rad/s]
W2(ω
)
Fig. 2.16 Prol d'incertitude : −6 [dB] = 50% à basse fréquence, −10 [dB] =33% aux fréquences intermédiaires et augmentation aux hautes fréquences. Onremarque que la fonction W2(j · ω) peut être quelconque (mais doit être stable),en particulier discontinue. Ce n'est donc pas forcément une fonction de transfert(chier source).
Régulation robuste 91 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
10−3 10−2 10−1 100−60
−50
−40
−30
−20
−10
0
10
ω [rad/s]
A(ω
)
W2
Gw
W2G
w
Fig. 2.17 Test de la condition de stabilité robuste : on voit que ce test estsatisfait puisque la courbe ‖W2(j · ω) ·Gw0(j · ω)‖∞ est inférieure à 1 = 0 [dB](chier source).
Notons qu'en principe, c'est plutôt la démarche inverse qui est suivie : ayantdéni le prol d'incertitude |W2(j · ω)|, on en déduit les performances possiblesde Gw0(s) et par suite le régulateur Gc(s) : c'est l'objet de la synthèse robuste.
On peut alors faire le test de la stabilité robuste, en traçant ici le diagrammede Bode du gain ‖W2(j · ω) ·Gw0(j · ω)‖∞ < 1 (gure 2.17).
On observe que la condition de stabilité robuste est satisfaite.
Régulation robuste 92 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Chapitre 3
Régulateur RST polynômial
Régulateur RST 93 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
T (z) Σ-
1R(z) Σ
S(z)
B(z)A(z)
Σ
w[k] y[k]u[k]
v[k]
n[k]
Fig. 3.1 Structure du régulateur RST (chier source).
3.1 Régulateur RST polynômial
3.1.1 Structure du régualteur RST [5] [6]
Un système asservi par un régulateur RST a la structure dénie sur la -gure 3.1. Toutes les lettres situées dans des blocs désignent des polynômes en zet non des fonctions de transfert. La gure 3.2 page ci-contre montre un schémaéquivalent où les blocs correspondent cette fois à des fonctions de transfert cau-sales (voir également l'équation (3.17)). Dans ce schéma, on a tenu compte del'existence de bruit n(k) sur la grandeur réglée mesurée. On remarque que l'onne considère que des signaux discrets, aussi bien pour le bruit que pour les per-turbations. De même, c'est le modèle échantillonné du système à régler qui estemployé
H(z) =Y (z)
U(z)=
(1− z−1
)· Z
L−1
(Ga(s)
s
)où Ga(s) est le modèle analogique du système à régler. On part de l'hypothèseque A(z) et B(z) n'ont pas de facteur commun, i.e. les simplications pôles-zéroon été faites.
3.1.2 Fonctions de transfert
Les fonctions de transfert suivantes peuvent être calculées :Système à régler
H(z) =Y (z)
U(z)=B(z)
A(z)(3.1)
Boucle ouverte
Go(z) =S(z) ·B(z)
R(z) · A(z)(3.2)
Régulateur RST 94 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
T (z)zδR Σ
-
zδR
R(z) Σ
S(z)zδR
B(z)A(z)
Σ
w[k] y[k]u[k]
v[k]
n[k]
Fig. 3.2 Structure du régulateur RST. δR est l'ordre du polynôme R(z)(chier source).
Régulation de correspondance
Gw(z) =Y (z)
W (z)=
T (z)R(z)
· B(z)A(z)
1 +Go(z)=
T (z)R(z)
· B(z)A(z)
1 + S(z)·B(z)R(z)·A(z)
=B(z) · T (z)
A(z) ·R(z) +B(z) · S(z)=Bm(z)
Am(z)
(3.3)
Régulation de maintien
Gv(z) =Y (z)
V (z)=
B(z)A(z)
1 +Go(z)=
B(z)A(z)
1 + S(z)·B(z)R(z)·A(z)
=B(z) ·R(z)
A(z) ·R(z) +B(z) · S(z)
(3.4)
Réjection des perturbations (bruit n[k])
Gn(z) =Y (z)
N(z)=
S(z)R(z)
· B(z)A(z)
1 + S(z)·B(z)R(z)·A(z)
=B(z) · S(z)
A(z) ·R(z) +B(z) · S(z)(3.5)
3.1.3 Forme des polynômes et contraintes
Les performances en asservissement sont spéciées par le modèle en bouclefermée
Gw(z) =Y (z)
W (z)=Bm(z)
Am(z)= Hm(z) (3.6)
lequel peut être xé dès le début du projet sur la base d'informations comme ladurée de réglage Treg, la bande passante en boucle fermée ω−3dB, la précision enpoursuite de consigne et en réjection des perturbations, le taux de dépassement de
Régulateur RST 95 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
la réponse indicielle autorisé, etc. Si l'on souhaite un comportement apériodiqueen boucle fermée avec une durée de réglage Treg, il sura alors de poser
Am(z) ∝ (z − pf1) =(z − e
− hTreg
)(3.7)
Le polynôme B(z) détermine les zéros du système à régler. Il est dans le casgénéral envisageable de les compenser, à condition toutefois que l'on se limite auxzéros de B(z) situés dans le disque unité (voir ?? page ? ?). Des conditions plusdrastiques d'amortissement absolu et relatif peuvent également être imposées.En désignant par B+(z) le polynôme monique facteur de B(z) dont les racinesrépondent à cette condition, on peut alors écrire B(z) comme
B(z) = B+(z) ·B−(z) (3.8)
Le polynôme Bm(z) devra ainsi contenir le terme B−(z) an de s'assurer qu'aucunzéro hors du disque unité, voire hors d'une zone plus restrictive spéciée par desconditions d'amortissement absolue et relative, n'ait été compensé :
Bm(z) = B−(z) ·B′m(z) (3.9)
Si le polynôme B+(z) est compensé, la seule possibilité est qu'il le soit par deszéros de R(z) puisque A(z) et B(z) n'ont par hypothèse pas de facteurs communs :
Go(z) =S(z)
R(z)· B(z)
A(z)=
S(z)
B+(z) ·R′(z)· B
+(z) ·B−(z)
A(z)=S(z) ·B−(z)
R′(z) · A(z)
On en déduit queR(z) = B+(z) ·R′(z) (3.10)
En réécrivant la fonction de transfert en boucle fermée, régulation de correspon-dance, on a :
Hm(z) =Y (z)
W (z)=
B(z) · T (z)
A(z) ·R(z) +B(z) · S(z)
=B−(z) ·B+(z) · T (z)
A(z) ·B+(z) ·R′(z) +B+(z) ·B−(z) · S(z)
=B−(z) · T (z)
A(z) ·R′(z) +B−(z) · S(z)
D'autre part, selon (3.3) et (3.9) :
Hm(z) =Bm(z)
Am(z)=B−(z) ·B′
m(z)
Am(z)
On en déduit :
B−(z) · T (z)
A(z) ·R′(z) +B−(z) · S(z)=B−(z) ·B′
m(z)
Am(z)=B−(z) ·B′
m(z)
Am(z)· Ao(z)
Ao(z)
Régulateur RST 96 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Le polynôme Ao(z) porte le nom de polynôme observateur : il permet de tenircompte du fait que si
7
4=
7
4· 3
3=
21
12
on ne peut cependant égaler directement les numérateurs et dénominateurs dechacune des fractions. Dans le cas de l'exemple, Ao(z) = 3.
Pour la synthèse du régulateur, i.e la détermination des polynômes R(z),S(z) et T (z) à partir des polynômes A(z), B(z), Am(z) et Bm(z), les équationssuivantes sont donc à résoudre :
A(z) ·R′(z) +B−(z) · S(z) = Ao(z) · Am(z) (3.11)
T (z) = Ao(z) ·B′m(z) (3.12)
Si une compensation des perturbations d'ordre j est spéciée, il sut d'incluredans Go(z) le nombre l = j + 1 correspondant d'intégrateurs. S'inspirant de ladémarche ayant conduit à l'équation (3.10), ceci se fait en imposant que R(z) aitla forme :
R(z) = B+(z) · (z − 1)l ·R′(z) (3.13)
3.1.4 Calcul de R(z) et S(z)
Condition d'existence de solutions uniques
Le calcul de R(z) et S(z) passe par la résolution de l'équation de Diophantine
A(z) ·X(z) +B(z) · Y (z) = C(z) (3.14)
où A(z), X(z), B(z), Y (z) et C(z) sont des polynômes. A(z), B(z) et C(z) sontconnus, X(z) et Y (z) sont les polynômes à déterminer. Il est clair qu'une telleéquation possède une innité de solutions. Cependant, on peut démontrer quel'équation (3.14) a des solutions uniques si (la notation δX signie "degré dupolynôme X")
δY < δA (3.15)
i.e. si le degré du polynôme Y (z) est strictement inférieur à celui du polynômeA(z). Dans le cas du régulateur RST, une équation de la même forme est juste-ment obtenue lorsque l'on considère le dénominateur A(z) ·R′(z)+B−(z) ·S(z) =Ao(z) · Am(z) de la fonction de transfert en boucle fermée. En en multipliant les2 membres par B+(z), on a :
A(z) ·R(z) +B(z) · S(z) = B+(z) · Ao(z) · Am(z) (3.16)
Régulateur RST 97 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Contraintes sur les degrés des polynômes
Si (3.15) est respectée, l'on sait que (3.16) a une solution unique orant lespolynômes R(z) et S(z) recherchés : encore faut-il chercher une solution pourceux-ci telle que leurs degrés soient compatibles avec les contraintes contenuesimplicitement dans (3.16). Il faut par exemple que le degré du polynôme dumembre de gauche, résultant de la somme de produits A(z)·R(z)+B(z)·S(z) soitéquivalent à celui du membre de droite, résultant du produit B+(z)·Ao(z)·Am(z).C'est la liste des ces contraintes qui est développée dans ce paragraphe.
Il faut commencer par prendre en compte les contraintes de causalité desfonctions de transfert du système à régler, régulateur et du modèle à poursuivre :
δR ≥ δS (3.17)
δR ≥ δT (3.18)
δA > δB (3.19)
δAm − δBm ≥ δA− δB (3.20)
Degré du polynôme R(z) En examinant (3.16), avec (3.19) et (3.17), on a :
δR + δA > δB + δS
Ainsi :δR + δA = δB+ + δAo + δAm
d'oùδR = δB+ + δAo + δAm − δA (3.21)
Degré du polynôme T (z) Comme
T (z) = Ao(z) ·B′m(z)
on peut écrireδT = δAo + δB′
m
Degré du polynôme Am(z) On peut alors écrire, sachant que selon (3.18)δR ≥ δT :
δB+ + δAo + δAm − δA︸ ︷︷ ︸δR
≥ δAo + δB′m︸ ︷︷ ︸
δT
et nalement :δAm ≥ δB′
m − δB+ + δA (3.22)
Régulateur RST 98 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Degré des polynômes S(z) et Ao(z) Il reste à déterminer les degrés despolynômes S(z) et Ao(z). Pour S(z), on prendra simplement, selon l'équation(3.15) :
δS = δA− 1 (3.23)
Pour Ao(z), la prise en compte des équations (3.17), (3.21) et (3.23) permet decalculer :
δR ≥ δS
δB+ + δAo + δAm − δA︸ ︷︷ ︸δR
≥ δA− 1︸ ︷︷ ︸δS
d'où :δAo ≥ 2 · δA− δAm − δB+ − 1 (3.24)
Résumé
En résumé, pour la synthèse du régulateur RST, on s'arrangera pour respecter,dans l'ordre, les conditions suivantes :
ChoisirB′m(z) selon les contraintes en poursuite de consigne
δAm ≥ δB′m − δB+ + δA
δAo ≥ 2 · δA− δAm − δB+ − 1
δR = δB+ + δAo + δAm − δA
δS = δA− 1
δT = δAo + δB′m
Ces contraintes étant respectées, une solution unique causale (i.e. réalisable) peutêtre trouvée en résolvant l'équation de Diophantine. Celle-ci aura alors la forme :
A(z) ·R(z) +B(z) · S(z) = B+(z) · Ao(z) · Am(z)
On trouvera les coecients des polynômes R′(z) et S(z) d'une manière aisée sil'on construit la matrice de Sylvester, comme indiqué au 3.1.5 page suivante.Il faut remarquer qu'on a imposé que les zéros stables et bien amortis de B,soit ceux du ploynômes B+(z) soient compensés par R(z), qui a alors la formegénérale :
R(z) = B+(z) ·R′(z)
Régulateur RST 99 MEE \cours_aav.tex1er septembre 2007

HEIG-VD
Automatiqueavancée(AAV)
3.1.5 Calcul des polynômes R(z) et S(z) : matrice de Sylvester [[5], 10.3.3]
Les polynômes R(z), S(z), A(z), B(z) et C(z) = B+(z) · Ao(z) · Am(z) ont pour formes :
R(z) = zδR + r1 · zδR−1 + r2 · zδR−2 + . . .+ rδR−1 · z + rδR
S(z) = s0 · zδS + s1 · zδS−1 + s2 · zδS−2 + . . .+ sδS−1 · z + sδS
C(z) = zδC + c1 · zδC−1 + c2 · zδC−2 + . . .+ cδC−1 · z + cδC
B(z) = b0 · zδB + b1 · zδB−1 + b2 · zδB−2 + . . .+ bδB−1 · z + bδB
A(z) = zδA + a1 · zδA−1 + a2 · zδA−2 + . . .+ aδA−1 · z + aδA
En écrivant :
A(z) ·R(z) +B(z) · S(z) =
C(z)︷ ︸︸ ︷B+(z) · Ao(z) · Am(z)
on a dans le détail :
(zδA + a1 · zδA−1 + a2 · zδA−2 + . . .+ aδA−1 · z + aδA
)·(zδR + r1 · zδR−1 + r2 · zδR−2 + . . .+ rδR−1 · z + rδR
)+
(b0 · zδB + b1 · zδB−1 + b2 · zδB−2 + . . .+ bδB−1 · z + bδB
)·(s0 · zδS + s1 · zδS−1 + s2 · zδS−2 + . . .+ sδS−1 · z + sδS
)= zδC + c1 · zδC−1 + c2 · zδC−2 + . . .+ cδC−1 · z + cδC
RégulateurRST
100MEE\cours_
aav.te
x1erseptembre
2007

HEIG-VD
Automatiqueavancée(AAV)
En identiant terme à terme (de mêmes degrés), on peut montrer que l'on aboutit à un système d'équations linéairesreprésentable par la matrice de Sylvester :
1 0 . . . 0 0 0 . . . 0
a1 1. . .
......
.... . .
...
a2 a1. . . 0 b0 0
. . . 0... a2
. . . 1 b1 b0. . .
......
.... . . a1 b2 b1
. . . 0
aδA−1...
. . . a2... b2
. . . b0
aδA aδA−1. . .
... bδB...
. . . b1
0 aδA. . .
... 0 bδB. . . b2
......
. . ....
......
. . ....
0 0 . . . aδA 0 0 . . . bδB
·
r1r2...
rδR−1
rδR
s0
s1...
sδS−1
sδS
=
c1 − a1
c2 − a2...
cδA−1 − aδA−1
cδA − aδA
cδA+1
cδA+2...
cδR+δS−1
cδR+δS
On en déduit les polynômes recherchés R(z) et S(z).
RégulateurRST
101MEE\cours_
aav.te
x1erseptembre
2007

HEIG-VD Automatique avancée (AAV)
Exemple
On considère le système à régler de fonction de transfert :
Ga(s) =Y (s)
U(s)=
1
s· 1
1 + s · 0.1(3.25)
Le modèle échantillonné correspondant est, avec la période d'échantillonnage h =1 [ms] :
H(z) =Y (z)
U(z)= 10−5 · 0.4983 · z + 0.4967
z2 − 1.99 · z + 0.99=
4.9834 · 106 · (z + 0.9967)
(z − 1) · (z − 0.99)
=b0 · (z − z1)
z2 + a1 · z + b2=
b0 · z + b1z2 + a1 · z + b2
=B(z)
A(z)
(3.26)
Les spécications en boucle fermée préconisent d'avoir le modèle à poursuivreayant
1. un comportement dynamique donné par les pôles pf1 = 0.9, pf2 = 0.4. Onen déduit que
Am(z) ∝ (z − 0.9) · (z − 0.4) = P (z)
Le degré δAm de Am(z) étant à ce point indéterminé et comme δP = 2, onplacera en principe le solde des pôles de Am(z) en z = 0 :
Am(z) = zδAm−δP · P (z) = zδAm−2 · (z − 0.9) · (z − 0.4)
2. des performances en poursuite de consigne telles que l'on puisse suivre uneconsigne constante sans erreur. On en déduit que Hm(1) = 1. Sachant que
Hm(z) =Bm(z)
Am(z)=B− ·B′
m(z)
Am(z)
on en déduit que
B′m(1) =
Am(1)
B−(1)= B′
m(z)
Am(z) et B−(z) étant imposés par ailleurs.
En décidant pour cette synthèse qu'aucun zéro du système à régler ne doit êtrecompensé, ceci implique que B+(z) = 1 et donc que B−(z) = b0 · (z − z1). On
Régulateur RST 102 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
peut alors spécier le modèle à poursuivre Hm(z) :
Hm(z) =Y (z)
W (z)=Bm(z)
Am(z)=B− ·B′
m(z)
Am(z)
=b0 · (z − z1) · Am(1)
B−(1)
zδAm−2 · (z − p1) · (z − p2)
=(1− p1) · (1− p2)
b0 · (1− z1)· b0 · (z − z1)
(z − p1) · (z − p2)
=(1− 0.9) · (1− 0.4)
4.9834 · 106 · (1− 0.9967)· 4.9834 · 106 · (z + 0.9967)
zδAm−2 · (z − 0.9) · (z − 0.4)(3.27)
On remarque dans ce modèle à poursuivre que le zéro z1 = −0.9967 du systèmeà régler se retrouve bel et bien en boucle fermée, comme souhaité
On peut alors procéder au calcul des degrés des polynômes :
ChoisirB′m(z) selon les contraintes en poursuite de consigne → B′
m(z) =(1− p1) · (1− p2)
b0 · (1− z1)
(3.28)
δAm ≥ δB′m − δB+ + δA → δAm = 0− 0 + 2 = 2
δAo ≥ 2 · δA− δAm − δB+ − 1 → δAo = 2 · 2− 2− 0− 1 = 1
δR = δB+ + δAo + δAm − δA → δR = 0 + 1 + 2− 2 = 1
δS = δA− 1 → δS = 2− 1 = 1
δT = δAo + δB′m → δT = 1 + 0 = 1
Les polynômes R(z), S(z), A(z), B(z) et C(z) = B+(z) ·Ao(z) ·Am(z) ont alorspour formes :
R(z) = (z + r1) (3.29)
S(z) = (s0 · z + s1) (3.30)
Ao(z) = z (3.31)
Am(z) = (z2 − (p1 + p2) · z + p1 · p2) (3.32)
C(z) = 1 · (z2 − (p1 + p2) · z + p1 · p2) · z (3.33)
B(z) = (b0 · z + b1) (3.34)
B+(z) = 1 (3.35)
A(z) = (z2 + a1 · z + a2) (3.36)
Régulateur RST 103 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
En écrivant :
A(z) ·R(z) +B(z) · S(z) =
C(z)︷ ︸︸ ︷B+(z) · Ao(z) · Am(z) (3.37)
on a dans le détail :
(z2 + a1 · z + a2) · (z + r1) + (b0 · z + b1) · (s0 · z + s1)
= 1 · (z2 − (p1 + p2) · z + p1 · p2) · z (3.38)
L'identication terme à terme prend la forme :
z3 : 1 = 1
z2 : r1 + a1 + b0 · s0 = −p1 − p2
z1 : a1 · r1 + a2 + b0 · s1 + b1 · s0 = p1 · p2
z0 : a2 · r1 + b1 · s1 = 0
soit encore
r1 +b0 · s0 = −p1 − p2 − a1
a1·r1 +b1 · s0 + b0 · s1 = p1 · p2 − a2
a2·r1 + b1 · s1 = 0
Ce système peut être écrit sous forme matricielle, faisant intervenir la matrice deSylvester : 1 b0 0
a1 b1 b0a2 0 b1
·r1s0
s1
=
−p1 − p2 − a1
p1 · p2 − a2
0
Avec p1 = 0.9 et p2 = 0.1, on a :r1s0
s1
=
1 b0 0a1 b1 b0a2 0 b1
−1
·
−p1 − p2 − a1
p1 · p2 − a2
0
=
1 0.4983 · 10−5 0−1.99 0.4967 · 10−5 0.4983 · 10−5
0.99 0 0.4967 · 10−5
−1
·
−0.9− 0.1− (−1.99)0.9 · 0.1− 0.99
0
=
0.47411.0354 · 10−5
−9.4497 · 10−4
On a donc pour R(z) et S(z) :
R(z) = z + r1 = z + 0.4741
S(z) = s0 · z + s1 = 1.0354 · 10−5 · z − 9.4497 · 10−4
Régulateur RST 104 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
k
y Gw
, yH
m
f_rst_exemple_1_1.eps
Fig. 3.3 Réponses indicielles du modèle à poursuivre Hm(z) et de la fonc-tion de transfert eective en boucle fermée, régulation de correspondance, Gw(z)(chier source).
Pour T (z), on a, selon (3.12), (3.28) et (3.31)
T (z) = B′m(z)·Ao(z) =
(1− p1) · (1− p2)
b0 · (1− z1)·z =
(1− 0.9) · (1− 0.1)
0.4983 · 10−5 · (1− 0.9967)·z = 9.0451·103·z
La gure 3.3 montre le résultat obtenu (réponse indicielle en boucle fermée, ré-gulation de correspondance).
3.1.6 Commande a priori [[5], 10.6]
Le régulateur RST possède une commande a priori intrinsèque. En eet, onpeut montrer que
U(z) =T (z)
R(z)·W (z)− S(z)
R(z)· Y (z)
=A(z)
B(z)· Bm(z)
Am(z)·W (z) +
S(z)
R(z)·(Bm(z)
Am(z)·W (z)− Y (z)
)(3.39)
Ceci correspond au schéma fonctionnel de la gure 3.4 page suivante, où la com-mande a priori est bien visible.
Régulateur RST 105 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Bm(z)Am(z) Σ
-
S(z)R(z) Σ
A(z)B(z)
B(z)A(z)
w[k]
wf [k]
y[k]u[k]
Filtre de
consigne
Fig. 3.4 Mise en évidence de la commande a priori intrinsèque au régulateurRST (chier source).
Régulateur RST 106 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Chapitre 4
Modélisation des systèmes
dynamiques dans l'espace d'état
Espace d'état 107 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
4.1 Représentation d'un système dynamique li-
néaire par son modèle d'état.
4.1.1 Exemple introductif : circuit RLC série
Modèle entrée-sortie ("Input-ouput model")
On considère le circuit électrique suivant : En admettant que les paramètres
R
Cu e ( t )
L
u s ( t )i ( t )
f _ 0 2 _ 0 2 _ 0 1 . e p s
Fig. 4.1 Circuit RLC série (chier source).
R, L et C soient constants, la relation mathématique liant la tension de sortieus(t) à celle d'entrée ue(t) peut être trouvée en écrivant l'équation (intégro-)diérentielle régissant le circuit :
ue (t) = R · i (t) + L · didt
+1
C·
t∫−∞
i (τ) · dτ (4.1)
Notant que :
i (t) =dq
dt= C · dus
dt(4.2)
q(t) étant la charge instantanée du condensateur, et que
us (t) =1
C·
t∫−∞
i (τ) · dτ (4.3)
l'équation diérentielle d'ordre 2 devient :
ue (t) = R · C · dus
dt+ L · C · d
2us
dt2+ us (t) (4.4)
soit encore :d2us
dt2+R
L· dus
dt+
1
L · C· us (t) =
1
L · C· ue (t) (4.5)
Sa résolution fournit la relation cherchée entre
Espace d'état 108 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
( )
( )
d u
d t
R
L
d u
d t L Cu t
L Cu t
s ss
e
2
2
1
1
+ × +×
×
=×
×u e ( t ) = u ( t ) u s ( t ) = y ( t )
f _ 0 2 _ 0 2 _ 1 2 . e p s
Fig. 4.2 Description du circuit de la gure 4.1 page ci-contre par un modèle deconnaissance prenant la forme d'une équation diérentielle d'ordre 2. Le modèleindique le lien entre l'entrée ue(t) et la sortie us(t) : il s'agit d'un modèle entrée
sortie (chier source).
l'entrée ue(t)
et
la sortie us(t)
du système.Dans le cas de conditions initiales nulles, on peut extraire la fonction de
transfert :
G (s) =Us (s)
Ue (s)=
1
1 + s ·R · C + s2 · L · C(4.6)
Il s'agit là à nouveau d'une relation
entrée-sortie
où aucune des grandeurs internes du circuit n'intervient, bien que leur connais-sance puisse être importante ; on pense notamment
au courant i(t) ; au ux totalisé Ψ(t) = L · i(t) ; à la charge instantanée du condensateur q(t) ; au champ électrique E(t) entre les armatures du condensateur.Un courant i(t) trop élevé peut provoquer une saturation magnétique se ma-
nifestant directement sur le ux totalisé Ψ(t), alors qu'une charge exagérée ducondensateur peut engendrer un champ électrique E supérieur au champ disrup-tif. Dans un cas comme dans l'autre, les hypothèses de linéarité sont démenties,mais aucune de ces grandeurs n'apparaît dans l'un ou l'autre des modèles entrée-sortie (équation diérentielle d'ordre 2 et fonction de transfert) obtenus.
Modèle d'état
La représentation dans l'espace d'état (State space model) ore une alternativeau modèle entrée-sortie en proposant un modèle liant non seulement les signaux
Espace d'état 109 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
U e ( s ) U s ( s )
U ( s ) Y ( s )G ( s )f _ 0 2 _ 0 2 _ 1 3 . e p s
Fig. 4.3 Description du circuit de la gure 4.1 page 108 par un modèle deconnaissance prenant la forme d'une fonction de transfert d'ordre 2. Comme lemodèle de la gure 4.2 page précédente, il s'agit également d'un modèle entrée
sortie (chier source).
d'entrée et de sortie d'un système dynamique tout en gardant "à l'oeil" certainesgrandeurs internes essentielles, les variables d'état.
Pour l'obtenir, il sut de décrire le système dynamique par n équationsdiérentielles d'ordre 1 en lieu et place d'une seule équation diérentielled'ordre n. Pour le circuit électrique considéré, on pourrait écrire :
ue (t) = R · i (t) + L · didt
+ 1C· q (t)
i (t) = dqdt
(4.7)
où q(t) est la charge électrique instantanée du condensateur. En plaçant les déri-vées premières dans les membres de gauche et en mettant en forme, on a :
didt
= −RL· i (t)− 1
L·C · q (t) + 1L· ue (t)
dqdt
= i (t)(4.8)
Ces deux équations, mises ainsi sous forme canonique, modélisent le comporte-ment dynamique du circuit. Elles sont les équations d'état du système. L'ex-pression de la tension de sortie us(t) est alors simplement
us (t) =1
C· q (t) (4.9)
qui est appelée équation d'observation.En protant de la notation matricielle, on peut présenter les trois dernières
équations sous forme compacte :
ddt
[iq
]=
[−R
L− 1
L·C1 0
]·[iq
]+
[1L
0
]· ue
us =[
0 1C
]·[iq
] (4.10)
Espace d'état 110 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
La résolution de la première de ces équations (i.e. l'équation d'état) fournit i(t)et q(t) en fonction de ue(t). Le calcul de us(t) n'est alors plus qu'une simpleformalité (combinaison linéaire des états i(t) et q(t)) en faisant usage de la secondeéquation, i.e. l'équation d'observation.
Les variables d'états du système sont ici
i(t) et q(t) (4.11)
Elles ont été réunies dans le vecteur d'état
~x =
[iq
](4.12)
Non-unicité de la représentation d'état
Remarquons que d'autres grandeurs pourraient faire oce d'état. En faisantles substitutions
i (t) = 1L·Ψ (t)
us (t) = 1C· q (t)
(4.13)
et en réécrivant les équations du circuit comme suit
1
L· dΨdt
= − R
L2·Ψ (t)− 1
L· us (t) +
1
L· ue (t) (4.14)
C · dus
dt=
1
L·Ψ (t) (4.15)
on a nalement, après avoir multiplié la première équation par L et la secondepar 1
C,
d
dt
[Ψus
]=
[−R
L−1
1L·C 0
]·[Ψus
]+
[10
]· ue (4.16)
us =[0 1
]·[Ψus
](4.17)
ce qui montre déjà que la représentation d'état n'est pas unique.
4.1.2 Dénition
La représentation d'état d'un système dynamique linéaire est un modèle parlequel non seulement la relation entrée-sortie entre u(t) et y(t) est déterminée,comme c'est déjà le cas avec
l'équation diérentielle d'ordre n,
dny
dtn+an−1·
dn−1y
dtn−1+. . .+a1·
dy
dt+a0·y = bm·
dmu
dtm+bm−1·
dm−1u
dtm−1+. . .+b1·
du
dt+b0·u
(4.18)
Espace d'état 111 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
U ( s )u ( t )
Y ( s )y ( t )G ( s )
f _ 0 2 _ 0 1 _ 2 7 . e p s
Fig. 4.4 Modèle entrée-sortie (chier source).
d y
d ta
d y
d ta
d y
d ta y
bd u
d tb
d u
d tb
d u
d tb u
n
n n
n
n
m
m
m m
m
m
+ × + + × + ×
= × + × + + × + ×
-
-
-
-
-
-
1
1
1 1 0
1
1
1 1 0
K
K
y ( t )u ( t )
f _ 0 2 _ 0 1 _ 1 9 . e p s
Fig. 4.5 Représentation d'un système dynamique linéaire par une équationdiérentielle d'ordre n (chier source).
la réponse impulsionnelle g(t) ou la fonction de transfert G(s),mais également le comportement des grandeurs internes x1 . . . xn au système,appelées variables d'état.
dx1
dt= a11 · x1 +a12 · x2 + . . . +a1n · xn +b1 · u
dx2
dt= a21 · x1 +a22 · x2 + . . . +a2n · xn +b2 · u
. . . . . . . . . . . . . . . . . .dxn
dt= an1 · x1 +an2 · x2 + . . . +ann · xn +bn · u
(4.19)
Les variables d'état x1 à xn sont au nombre de n, n étant l'ordre du système.Elles apparaissent naturellement lors de la mise en équations d'un système. Sil'on s'astreint à modéliser celui-ci par un ensemble de n équations diérentiellesdu 1er ordre, les grandeurs d`état sont alors celles faisant l'objet de la dérivée.Les n équations diérentielles d'ordre 1 sont les équations d'état du système.
Bien qu'une dénition claire des variables d'état soit relativement dicile àtrouver dans la littérature, on proposera néanmoins la suivante :Les variables d'état d'un système dynamique d'ordre n sont les n grandeurs x1
à xn qu'il est nécessaire et susant de connaître à l'instant t0 pour calculer laréponse y(t) du système à toute entrée u(t), t ≥ t0.
Cela signie que si x1(t) à xn(t) sont connues à un instant t0, la connaissancedes équations du système ainsi que du signal d'entrée u(t) qui lui est appliquépermet de calculer la réponse y(t) pour t ≥ t0. Dans ce sens, les variables d'étatx1(t0) à xn(t0) à l'instant t0 coïncident avec les conditions initiales du système.
Espace d'état 112 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
U ( s )u ( t )
Y ( s )y ( t )G ( s )
f _ 0 2 _ 0 1 _ 2 8 . e p s
Fig. 4.6 Représentation d'un système dynamique linéaire par sa fonction detransfert (chier source).
La connaissance à un instant donné des variables d'état du système permetdonc d'en dénir rigoureusement l'état, à l'instar par exemple des registres d'état("status registers") d'un processeur. Toute autre donnée est alors superue, hor-mis bien sûr les valeurs des paramètres (R, L, C, J , Rf , etc).
Le jeu de n équations diérentielles ci-dessus doit en principe être complétépar une équation dénissant la relation entre les grandeurs d'état x1(t) à xn(t) etla sortie y(t) du système :
y = c1 · x1 + c2 · x2 + . . .+ cn · xn + d · u (4.20)
Il s'agit de l'équation d'observation, dans laquelle le signal de sortie y(t) ap-paraît comme une combinaison linéaire des états x1 à xn.
Exemple : moteur DC
On considère un moteur DC à excitation séparée dont tous les paramètressont supposés constants :
q ( t )
i a
u a ( t )
L aR a
J
M
C o e f f i c i e n td e f r o t t e m e n t
v i s q u e u x
R f
p al i
e rs
w ( t )
f _ 0 2 _ 0 2 _ 0 9 . e p s
Fig. 4.7 Schéma technologique d'un moteur DC (chier source).
Espace d'état 113 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Les signaux d'entrée u(t) et de sortie y(t) sont ici la tension ua(t) appliquéeaux bornes de l'induit ainsi que la position angulaire θ(t) respectivement. La miseen équations donne :
ua(t) = Ra · ia(t) + La ·diadt
+KE · ω(t) (4.21)
Tem(t) = KT · ia(t) (4.22)
J · dωdt
= Tem(t)−Rf · ω(t) (4.23)
dϑ
dt= ω(t) (4.24)
Par simple mise en forme, on peut en déduire les équations d'état, en choi-sissant ia, ω et θ comme variables d'état :
diadt
= −Ra
La
· ia −KE
La
· ω +1
La
· ua (4.25)
dω
dt=KT
J· ia −
Rf
J· ω (4.26)
dϑ
dt= ω (4.27)
La connaissance de ces trois équations est nécessaire et susante pour décrirele comportement dynamique du système considéré, lequel est donc d'ordre n = 3.
La sortie y du système est donnée par l'équation d'observation et coïncidedans cet exemple avec l'un des états :
y = θ (4.28)
4.1.3 Forme matricielle
Les équations diérentielles d'ordre 1 ci-dessus sont avantageusement repré-sentées en faisant usage de la notation matricielle :
d~x
dt= A · ~x+B · u (4.29)
y = C · ~x+D · u (4.30)
le vecteur
~x =
x1...xn
(4.31)
est le vecteur d'état ; c'est un vecteur colonne de dimension n × 1. Sescomposantes sont les n états du système.
Espace d'état 114 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
la matrice
A =
a11 a12 . . . aan
a21 a22 . . . a2n...
......
...an1 an2 . . . ann
(4.32)
est la matrice d'état ou matrice système ; c'est une matrice carrée dedimension n× n.
Dans le cas d'un système mono-variable (une entrée u, une sortie y), la matrice
B =
b1b2...bn
(4.33)
est la matrice d'entrée prenant la forme d'un vecteur-colonne de dimen-sion n× 1 ;
la matrice
C =[c1 c2 . . . cn
](4.34)
est la matrice de sortie, vecteur-ligne de dimension 1× n ; la matrice
D = [d] (4.35)
est lamatrice de transfert direct. Elle se réduit à un scalaire dans le casmono-variable. Si elle est non-nulle, cela indique que l'entrée u intervientdirectement sur la sortie y, ce qui traduit un comportement statique (voirgure 4.9 page 118).
L'équation
d~x
dt= A · ~x+B · u (4.36)
est l'équation d'état. Elle seule détermine le comportement des états x1 à xn,i.e. le comportement dynamique du système.
L'équation
y = C · ~x+D · u (4.37)
est l'équation d'observation ou encore équation de sortie ; elle n'a aucuneinuence sur les états. Elle permet de construire la/les sortie(s) du système parsimple combinaison linéaire des états.
Espace d'état 115 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Exemple : moteur DC
On reprend l'exemple du moteur DC à excitation séparée précédemmenttraité. Sous forme matricielle, ses équations d'état s'écrivent :
ddt
iaωθ
︸ ︷︷ ︸
~x
=
−Ra
La−KE
La0
KT
J−Rf
J0
0 1 0
︸ ︷︷ ︸
A
·
iaωθ
︸ ︷︷ ︸
~x
+
1La
00
︸ ︷︷ ︸
B
·ua
θ︸︷︷︸y
=[
0 0 1]︸ ︷︷ ︸
C
·
iaωθ
︸ ︷︷ ︸
~x
+ [0]︸︷︷︸D
· ua︸︷︷︸u
(4.38)
où le vecteur d'état est
~x =
x1
x2
x3
=
iaωθ
(4.39)
La représentation dans l'espace d'état constitue par ailleurs la forme idéale pourla simulation ; en eet, la plupart des méthodes de résolution de systèmes d'équa-tions de 1er ordre linéaires ou non-linéaires (Runge-Kutta, Euler, etc) requièrentla forme dite canonique, où les dérivées premières (des états) apparaissent dans lemembre de gauche, le membre de droite comprenant des combinaisons linéairesou non-linéaires des états.
Par exemple, dans le cas linéaire, les réponses impulsionnelle, indicielle ouharmonique du système étudié sont facilement obtenues avec MATLAB, par lescommandes respectives (oertes dans Control System Toolbox ) :
step(A,B,C,D) impulse(A,B,C,D) bode(A,B,C,D)
exécutées après avoir introduit les valeurs numériques des matrices A, B, C etD. On a par exemple pour la réponse indicielle :
4.1.4 Schéma fonctionnel
Les équations d'étatd~xdt
= A · ~x+B · uy = C · ~x+D · u (4.40)
peuvent être représentées graphiquement par le schéma fonctionnel général cor-respondant (gure 4.9 page 118). Ce schéma met en évidence le rôle capital jouépar la matrice d'état A, laquelle détermine les contre-réactions internes au sys-tème. Il sera montré ultérieurement qu'elle seule détermine en fait la stabilité dusystème, ses valeurs propres coïncidant avec les pôles dudit système.
Espace d'état 116 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
x1=ia
x2=omega
x3=teta
t [s]
REPONSE INDICIELLE : EVOLUTION DES ETATS
Fig. 4.8 La réponse indicielle du modèle d'état du moteur DC montre l'évolutiondes 3 états i(t), ω(t) et θ(t).
Exemple : moteur DC
Les équations d'état du moteur DC peuvent être représentées sous forme gra-phique. Un schéma fonctionnel possible celui des gures 4.10 page 119 et 4.11page 122 où les seuls élément dynamiques intervenant sont des intégrateurs.L'avantage de ces schémas est que l'on peut voir au premier coup d'oeil la struc-ture interne du système, notamment les relations existant entre les diérentesgrandeurs.
4.1.5 Calcul de la fonction de transfert à partir du modèled'état
On se propose ici de calculer la fonction de transfert du système sur la basedes équations d'état. Notons que l'opération inverse est également possible.
Dans le cas de conditions initiales nulles, la transformée de Laplace des deuxmembres des équations d'état donne, pour un système mono-variable :
d~xdt
= A · ~x+B · uy = C · ~x+D · u (4.41)
An d'extraire la relation entrée sortie entre U(s) et Y (s), on élimine ~X (s) entre
Espace d'état 117 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
ò
d xd t
rrx
S
D
C SB
D
Af _ 0 2 _ 0 1 _ 2 9 . e p s
u ( t ) y ( t )
Fig. 4.9 Schéma fonctionnel (ou structurel) associé à une représentation par unmodèle d'état. On observe que la matrice d'état A détermine les contre-réactionsdes états du système (chier source).
les deux équations :
s · ~X (s)− A · ~X (s) = B · U (s)
(s · I − A) · ~X (s) = B · U (s)~X (s) = (s · I − A)−1 ·B · U (s)
(4.42)
En introduisant cette dernière expression dans la seconde équation (l'équationd'observation)
Y (s) = C · (s · I − A)−1 ·B · U (s) +D · U (s) (4.43)
on en déduit nalement la fonction de transfert recherchée :
G (s) =Y (s)
U (s)= C · (s · I − A)−1 ·B +D (4.44)
Rappel : inversion d'une matrice L'inverse d'une matrice A est obtenu en
divisant la transposée de la matrice des cofacteurs par le déterminant de A.Cas particulier : matrice 2 sur 2.
A =
[a11 a12
a21 a22
]A−1 =
1
a11 · a22 − a12 · a21
·[a22 −a12
−a21 a11
](4.45)
On peut ainsi obtenir la fonction de transfert du système décrit dans l'espaced'état à partir des matrices A, B, C et D. On voit qu'il est nécessaire d'inverser lamatrice (s ·I−A) qui est d'ordre n, ce qui peut constituer un travail considérable.
Espace d'état 118 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
S-
1J S
wu a
T e mi a
e m
1s qK T
K E
1s
1
L a
S1s
R
La
a
R
Jf
d i
d t
R
Li
K
L Lua a
a
aE
a a
a= - × - × + ×w1 d
d t
K
Ji
R
JT
a
fww= × - ×
d
d t
Jw=
f _ 0 2 _ 0 2 _ 1 6 . e p s
Fig. 4.10 Une représentation graphique possible des équations d'état du moteurDC (chier source).
L'expression de G(s) peut encore être développée en tenant compte de l'ex-pression de l'inverse de (s · I − A) :
G (s) =Y (s)
U (s)= C · [cof (s · I − A)]T
|s · I − A|·B +D
=C · [cof (s · I − A)]T ·B +D · |s · I − A|
|s · I − A|=
polynôme en spolynôme en s
(4.46)
On observe que le dénominateur de G(s) n'est autre que le déterminant de (s ·I −A). Les racines du dénominateur étant les pôles s1 . . . sn de G(s), on voit queceux-ci correspondent aux valeurs propres de A, obtenues en résolvant :
dc (s) = |s · I − A| = 0 ⇒
s1
s2...sn
(4.47)
Espace d'état 119 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Exemple : moteur DC
La fonction de transfert G (s) = Y (s)U(s)
= Θ(s)Ua(s)
est obtenue en procédant parétapes :
(s · I − A) = s ·
1 0 00 1 00 0 1
− −Ra
La−KE
La0
KT
J−Rf
J0
0 1 0
=
s+ Ra
La+KE
La0
−KT
Js+
Rf
J0
0 −1 s
(s · I − A)−1 =
[cof (s · I − A)]T
|s · I − A|
cof (s · I − A) =
s ·
(s+
Rf
J
)s · KT
JKT
J
−KT
La· s s ·
(s+ Ra
La
) (s+ Ra
La
)0 0
(s+ Ra
La
)·(s+
Rf
J
)+ KT ·KE
J ·La
[cof (s · I − A)]T =
s ·
(s+
Rf
J
)−s · KT
La0
KT
J· s s ·
(s+ Ra
La
)0
KT
J
(s+ Ra
La
) (s+ Ra
La
)·(s+
Rf
J
)+ KT ·KE
J ·La
|s · I − A| = s ·
((s+
Ra
La
)·(s+
Rf
J
)+KT ·KE
J · La
)= s ·
(s2 +
(Ra · J +Rf · La
La · J
)· s+
KT ·KE +Ra ·Rf
La · J
)
C · (s · I − A)−1 =[
0 0 1]·
s ·
(s+
Rf
J
)−s · KT
La0
KT
J· s s ·
(s+ Ra
La
)0
KT
J
(s+ Ra
La
) (s+ Ra
La
)·(s+
Rf
J
)+ KT ·KE
J ·La
s ·
(s2 +
(Ra·J+Rf ·La
La·J
)· s+
KT ·KE+Ra·Rf
La·J
)=
[KT
J
(s+ Ra
La
) (s+ Ra
La
)·(s+
Rf
J
)+ KT ·KE
J ·La
]s ·
(s2 +
(Ra·J+Rf ·La
La·J
)· s+
KT ·KE+Ra·Rf
La·J
)(4.48)
On voit ici que la connaissance de la matrice C peut permettre d'abréger lecalcul de l'inverse de (s · I −A), certaines composantes de cette dernière n'étantde toute façon pas prises en compte dans le calcul. La même remarque s'appliqueégalement à la matrice B intervenant dans le calcul suivant. Pour gagner du
Espace d'état 120 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
temps lors de l'extraction de (s · I − A)−1 en évitant le calcul de certaines de sescomposantes, on aura donc intérêt à prendre en compte la forme de B et C dèsle départ.
C · (s · I − A)−1 ·B =
[KT
J
(s+ Ra
La
) (s+ Ra
La
)·(s+
Rf
J
)+ KT ·KE
J ·La
]s ·
(s2 +
(Ra·J+Rf ·La
La·J
)· s+
KT ·KE+Ra·Rf
La·J
) ·
1La
00
=
KT
J· 1
La
s ·(s2 +
(Ra·J+Rf ·La
La·J
)· s+
KT ·KE+Ra·Rf
La·J
)(4.49)
d'où nalement :
G (s) =Y (s)
U (s)= C·(s · I − A)−1·B+ D︸︷︷︸
0
=KT
La·J
s ·(s2 +
(Ra·J+Rf ·La
La·J
)· s+
KT ·KE+Ra·Rf
La·J
)(4.50)
Le calcul symbolique ci-dessus est fastidieux et pourrait être aisément réaliséau moyen de logiciels de calcul symbolique comme Mathematica, Maple, Mathcad(qui comprend quelques primitives de calcul de Maple) ou MATLAB et sa boîteà outil Symbolic (à nouveau un extrait de Maple). Ce long calcul peut aussi êtreévité si l'on se contente d'une solution numérique, laquelle est aisément obtenueavec MATLAB au moyen de ss2tf ("State Space to Transfer Function")
Combiné avec printsys(numG,denG), le résultat est :
>> [numG,denG]=ss2tf(A,B,C,D);
>> printsys(numG,denG)
num/den =
-5.457e-012 s + 1.277e+004
------------------------------
s^3 + 162.4 s^2 + 1.533e+004 s
Du déterminant de (s ·I−A) peuvent être extraites les valeurs propres, i.e. lespôles s1 à s3 du système. Numériquement, cela peut se faire à l'aide de MATLABpar la fonction eig ("eigenvalues"), ce qui donne ici :
>> eig(A)
ans =
0
-81.1766 +93.4977i
-81.1766 -93.4977i
Espace d'état 121 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
-
1J
S w
u a
T e m
i a
e m
1s
q
K T
K E
1s
1
L a
S1s
R
La
a
R
Jf
d i
d t
R
Li
K
L Lua a
a
aE
a a
a= - × - × + ×w1
d
d t
K
Ji
R
JT
a
fww= × - ×
d
d t
Jw=
f _ 0 2 _ 0 2 _ 1 7 . e p s
Fig. 4.11 Une autre représentation graphique des équations d'état du moteurDC (chier source).
Espace d'état 122 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
4.1.6 Application : linéarisation autour d'un point de fonc-tionnement ([[?], chap.11], [[?], 3.6])
Le but de ce paragraphe est de proposer une méthode permettant de linéariserdes systèmes non-linéaires en vue de pouvoir leur appliquer les méthodes d'analyseréservées aux systèmes linéaires. Comme on le verra, la représentation du systèmedans l'espace d'état s'avère être ici particulièrement avantageuse.
On considère l'équation d'état d'un système dynamique mono-variable, causal,stationnaire, linéaire ou non-linéaire, représenté par n équations diérentiellesd'ordre 1 où la variable indépendante est le temps :
dx1
dt= f1 (x1, . . . xn) + g1 (u)
dx2
dt= f2 (x1, . . . xn) + g2 (u)
...dxn
dt= fn (x1, . . . xn) + gn (u)
y = h (x1, . . . xn) + d (u)
(4.51)
Il faut ici mentionner que souvent, un certain travail de mise en forme est né-cessaire an d'obtenir les équations dans cette présentation, dite canonique. Deslogiciels de calcul symbolique commeMathematica ouMaple peuvent ici être d'unetrès grande utilité.
Si l'on considère ce système autour d'un point de fonctionnement Q (u0, ~x0),on peut écrire pour de petites variations (u, ~x) = (u0 + ∆u, ~x0 + ∆~x) :
fi (x1, . . . , xn) = fi (x10 + ∆x1, . . . , xn0 + ∆xn) ≈ fi (x10, . . . , xn0) + ∆fi
= fi (x10, . . . , xn0) +∂fi
∂x1
·∆x1 +∂fi
∂x2
·∆x2 + . . .+∂fi
∂xn
·∆xn
(4.52)
De même, on a :
gi (u) = gi (u0 + ∆u) ≈ gi (u0) + ∆ui = gi (u0) +∂gi
∂u·∆u (4.53)
avec en particulier :
d
dt~x0 = ~0 =
f1 (x10, . . . , xn0) + g1 (u0)f2 (x10, . . . , xn0) + g2 (u0)
· · ·fn (x10, . . . , xn0) + gn (u0)
(4.54)
On peut donc écrire :
ddt
∆x1 = ∂f1
∂x1
∣∣∣Q·∆x1 + ∂f1
∂x2
∣∣∣Q·∆x2 + . . .+ ∂f1
∂xn
∣∣∣Q·∆xn + ∂g1
∂u
∣∣Q·∆u
ddt
∆x2 = ∂f2
∂x1
∣∣∣Q·∆x1 + ∂f2
∂x2
∣∣∣Q·∆x2 + . . .+ ∂f2
∂xn
∣∣∣Q·∆xn + ∂g2
∂u
∣∣Q·∆u
...ddt
∆xn = ∂fn
∂x1
∣∣∣Q·∆x1 + ∂fn
∂x2
∣∣∣Q·∆x2 + . . .+ ∂fn
∂xn
∣∣∣Q·∆xn + ∂gn
∂u
∣∣Q·∆u
(4.55)
Espace d'état 123 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
qui devient en faisant usage de la forme matricielle,
d
dt
∆x1
∆x2
· · ·∆xn
=
∂f1
∂x1
∂f1
∂x2· · · ∂f1
∂xn∂f2
∂x1
∂f2
∂x2· · · ∂f2
∂xn
· · · · · · · · · · · ·∂fn
∂x1
∂fn
∂x2· · · ∂fn
∂xn
Q
·
∆x1
∆x2
· · ·∆xn
+
∂g1
∂u∂g2
∂u
· · ·∂gn
∂u
Q
·∆u (4.56)
soit encore :d (∆~x)
dt= A|Q ·∆~x+ B|Q ·∆u (4.57)
Pour l'équation d'observation, on a simplement :
y = h (~x0 + ∆~x) + d (u0 + ∆u) (4.58)
Le système est ainsi linéarisé autour du point de fonctionnement Q et peut doncêtre traité comme un système linéaire pour de faibles accroissements autour deQ. Le schéma fonctionnel correspondant apparaît ci-après sur la gure 4.12.
u 0
u SSS
-
D
C S
p o i n t d ef o n c t i o n n e m e n T
Q
B Q
A Q
y
x 0
1 / sD u d / d t ( D x ) D x
f _ 0 2 _ 0 2 _ 0 2 . e p s
Fig. 4.12 Schéma fonctionnel pour de faibles accroissements (chier source).
Exemple
On considère un moteur DC à excitation séparée constante (gure 4.13 pageci-contre), pour lequel l'inertie de la charge Jch est dépendante de la positionangulaire θ selon la loi
Jch = Jch (ϑ) = JN · (α+ sin (ϑ)) (4.59)
Espace d'état 124 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
i a
u a ( t )
L aR a
J
w ( t )
M
C o e f f i c i e n td e f r o t t e m e n t
v i s q u e u xR f
p al i
e rs
f _ 0 2 _ 0 2 _ 0 6 . e p s
I n e r t i e v a r i a b l e e n f o n c t i o n d e
l a p o s i t i o n
Fig. 4.13 Schéma technologique d'un moteur DC (chier source).
Cela représente par exemple un entraînement à came ou le bras d'un robot.Pour cet exemple, le signal de sortie du système est la vitesse angulaire ω(t).
Le schéma fonctionnel est donné sur la gure 4.15 page 127. On y reconnaît unbloc non-linéaire symbolisé conventionnellement par un rectangle aux borduresdoubles.
Les équations d'état sont :
dx1
dt=diadt
= −Ra
La
· ia −KE
La
· ω +1
La
· ua
= f1 (x1, x2, x3) + g1 (u)
dx2
dt=dω
dt=KT
Jt
· ia −Rf
Jt
· ω =KT
JN · (α+ sin (ϑ))· ia −
Rf
JN · (α+ sin (ϑ))· ω
= f2 (x1, x2, x3) + g2 (u)
dx3
dt=dϑ
dt= ω
= f3 (x1, x2, x3) + g3 (u)
(4.60)
Ces mêmes équations, linéarisées autour du point de fonctionnementQ(ua0, [ia0, ω0, θ0]),
Espace d'état 125 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 1 2 3 4 5 6 70
0.002
0.004
0.006
0.008
0.01
0.012
0.014
teta [rad]
Iner
tie [k
gm^2
]
VALEUR DE L’INERTIE EN FONCTION DE LA POSITION ANGULAIRE
Fig. 4.14 Evolution du moment d'inertie J en fonction de la position angulaireθ.
deviennent, après calcul des dérivées partielles :
d
dt
∆x1
∆x2
∆x3
=
∂f1
∂x1
∂f1
∂x2
∂f1
∂x3∂f2
∂x1
∂f2
∂x2
∂f2
∂x3∂f3
∂x1
∂f3
∂x2
∂f3
∂x3
Q
·
∆x1
∆x2
∆x3
+
∂g1
∂u∂g2
∂u∂gn
∂u
Q
·∆u
d
dt
∆ia∆ω∆ϑ
=
−Ra
La−KE
La0
KT
JN· 1
(α+sin(ϑ0))−Rf
JN· 1
(α+sin(ϑ0))0
0 1 0
· ∆ia
∆ω∆ϑ
+
1La
00
·∆ua
(4.61)
où en particulier la dérivée partielle de f2(ia, ω, θ) par rapport à θ au point defonctionnement Q(u0, [ia0, ω0, θ0])
∂f2
∂x3
=KT · ia0
JN
· − cos (ϑ0)
(α+ sin (ϑ0))2 −
Rf · ω0
JN
· − cos (ϑ0)
(α+ sin (ϑ0))2 (4.62)
Espace d'état 126 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
K T
i a ( t )
Su a ( t )
T e m ( t )
w ( t )
1s
q ( t )
1
1
R
sLR
a
a
a+ ×
K E
S 1s( )( )
1J N × +a Js i n
-R f
f _ 0 2 _ 0 2 _ 0 7 . e p s
Fig. 4.15 Schéma fonctionnel d'un moteur DC entraînant une inertie variableen fonction de la position angulaire θ (chier source).
est bel et bien nulle puisque
∂f2
∂x3
=KT · ia0
JN
· − cos (ϑ0)
(α+ sin (ϑ0))2 −
Rf · ω0
JN
· − cos (ϑ0)
(α+ sin (ϑ0))2
=
(− cos (ϑ0)
(α+ sin (ϑ0))
)·(
KT
JN · (α+ sin (ϑ0))· ia0 −
Rf
JN · (α+ sin (ϑ0))· ω0
)︸ ︷︷ ︸
f2(x10,...,xn0)+g2(u0)=0
= 0
(4.63)
On peut alors en déduire, selon les besoins, les pôles, les constantes de tempsou la fonction de transfert liant l'entrée ∆ua et la sortie de son choix.
Pour obtenir la fonction de transfert Ga (s) = ∆Ω(s)∆Ua(s)
, on élimine le courant∆ia des équations ci-dessus en l'extrayant de la première équation :(
s+Ra
La
)·∆Ia (s) = −KE
La
·∆Ω (s) +1
La
·∆Ua (s)
∆Ia (s) =−KE
La(s+ Ra
La
) ·∆Ω (s) +1
La(s+ Ra
La
) ·∆Ua (s)(4.64)
En introduisant ce résultat dans la seconde équation, on a successivement :
s · ∆Ω (s) =KT
JN
·1
(α + sin (ϑ0))·
−KELa(
s + RaLa
) · ∆Ω (s) +
1La(
s + RaLa
) · ∆Ua (s)
−Rf
JN
·1
(α + sin (ϑ0))· ∆Ω (s)
s +1
(α + sin (ϑ0))·
Rf
JN
+KT
JN
·KELa(
s + RaLa
) · ∆Ω (s) =
KT
JN
·1
(α + sin (ϑ0))·
1La(
s + RaLa
) · ∆Ua (s)
(s ·(
s +Ra
La
)+
1
(α + sin (ϑ0))·(
Rf
JN
·(
s +Ra
La
)+
KT
JN
·KE
La
))· ∆Ω (s) =
KT
JN
·1
La·
1
(α + sin (ϑ0))· ∆Ua (s)
(s2
+ s ·(
Ra
La+
1
(α + sin (ϑ0))·
Rf
JN
·)
+1
(α + sin (ϑ0))·(
Rf
JN
·Ra
La+
KT
JN
·KE
La
))· ∆Ω (s) =
KT
JN
·1
La·
1
(α + sin (ϑ0))· ∆Ua (s)
(4.65)
Espace d'état 127 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
La fonction de transfert en régime d'accroissements est nalement, présentéesous forme d'Evans (Laplace) puis sous forme de Bode :
Ga (s) =∆Ω (s)
∆Ua (s)
=ka(
s2 + a1 · s + a0)
=
KTLa·JN
· 1(α+sin(ϑ0))(
s2 + s ·(
RaLa
+ 1(α+sin(ϑ0)) ·
RfJN
)+ 1
(α+sin(ϑ0)) ·(
Rf ·Ra+KT ·KELa·JN
))=
KT
Rf · Ra + KT · KE
·11 +
(RaLa
+ 1(α+sin(ϑ0)) ·
RfJN
)1
(α+sin(ϑ0)) ·(
Rf ·Ra+KT ·KELa·JN
) · s + 11
(α+sin(ϑ0)) ·(
Rf ·Ra+KT ·KELa·JN
) · s2
(4.66)
Le système à régler étudié a donc des caractéristiques dynamiques dépendantdu point de fonctionnement Q(u0, [ia0, ω0, θ0]). An d'en juger les eets, on trace(gure 4.16) la réponse indicielle de Ga(s) en diérents points de fonctionnementxés par la valeur de la position angulaire θ :
Q(u0, [ia0, ω0, θ0] = Q
(1 [V],
[0 [A], 0
[rads
], θ0 = 0 . . . 330 []
])(4.67)
On constate très clairement l'inuence de la valeur de la position angulaire surle comportement dynamique du système. Il va donc de soi qu'il faut prendreen compte cet eet si le système est destiné être contre-réactionné en vue d'unasservissement de position, de vitesse ou encore de courant.
Espace d'état 128 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
0 0.01 0.02 0.03 0.04 0.05 0.060
0.5
1
1.5
2
2.5
3
0
t [s]
vite
sse
angu
laire
[rad
/s]
REPONSES INDICIELLES EN DIFFERENTES POSITIONS ANGULAIRES
30
6090120150
180
210
240
270
300
330
Fig. 4.16 Réponses indicielles du système à régler en fonction de la positionangulaire.
Espace d'état 129 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Espace d'état 130 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
4.A Exercices
4.A.1 Modèles d'état
1. Donner le modèle d'état du double intégrateur (analogique) et en obtenirla fonction de transfert à partir de ce modèle.
2. Donner le modèle d'état du système dynamique linéaire ayant pour fonctionde transfert (intégrateur et constante de temps) :
G(s) =Y (s)
U(s)=K
s· 1
(1 + s · T )
3. Déterminer le modèle d'état global résultant de la mise en série de deuxsystèmes dynamiques linéaires a et b donnés par leurs équations d'état.
Indication : former le vecteur d'état global
~x =
[~xa
~xb
]4. Déterminer le modèle d'état global résultant de la mise en contre-réaction
d'un système dynamique linéaire donné par ses équations d'état.
4.A.2 Modélisation et schéma fonctionnel d'un entraîne-ment avec transmission exible
Soit le système mécanique suivant, constitué de deux inerties accouplées parun arbre exible (i.e. non-inniment rigide, élastique...). Il s'agit par exemple durotor d'un moteur électrique et de sa charge (gure 4.17 page suivante).
Les paliers créent un couple de frottement visqueux total Rf
[N·mrads
], et l'arbre
liant les masses en rotation est de rigidité k[N·mrad
]. Les couples résistants Trés1 et
Trés2 agissent sur les charges J1 et J2 au titre de perturbations.
1. Modéliser ce système par ses équations diérentielles. Donner son modèled'état, i.e. ses n équations diérentielles d'ordre 1.
2. Calculer les pôles et les zéros de la fonction de transfert
G1(s) =position angulaire de J1
couple moteur=
θ1(s)
Tem(s)
3. Donner le schéma fonctionnel détaillé du système en se basant sur le mo-dèle d'état. Les seuls élément dynamiques y apparaissant doivent être desintégrateurs.
Espace d'état 131 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
R f
q 1 ( t )T e m ( t ) q 2 ( t )
i n e r t i e d u r o t o r :J 1
i n e r t i e d e l a c h a r g e :J 2
r i g i d i t é d e l ' a r b r ed e t r a n s m i s s i o n :
k [ N m / r a d ]
c o e f f i c i e n t d ef r o t t e m e n t v i s q u e u x :
d e s p a l i e r sR f [ N m s / r a d ]
R f
f _ 0 7 _ 0 1 . e p s
Fig. 4.17
Espace d'état 132 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
4. A l'aide de MATLAB, tracer les réponses impulsionnelles et fréquentiellesdu système. Calculer également les fonctions de tranfert
G1(s) =position angulaire de J1
couple moteur=
θ1(s)
Tem(s)
G2(s) =position angulaire de J2
couple moteur=
θ2(s)
Tem(s)
Paramètres :
J1 = 0.45 · 10−3 [kg ·m2]
J2 = 25 · 10−3 [kg ·m2]
Rf = 20 · 10−3
[N ·mrads
]
k = 1740
[N ·mrad
]
Commandes MATLAB (Control System Toolbox ) impulse(A,B,C,D) ouimpulse(num,den) bode(A,B,C,D) ou bode(num,den) G=ss2tf(A,B,C,D,iu,iy)
4.A.3 Modélisation et linéarisation du pendule inversé
On considère le système dont le schéma technologique est donné sur la -gure 4.18. Il s'agit du fameux pendule inversé, maintenu en équilibre vertical parun système d'asservissement de l'angle ϕ et de la position x.
1. Partant des équations de la dynamique, donner le modèle d'état du pendule.
2. Linéariser le modèle d'état autour de point de fonctionnement correspon-dant aux position angulaires ϕ = 0 [] et ϕ = 180 [].
3. Calculer les fonctions de transfert
GFx(s) =X(s)
F (s)
et
GFϕ(s) =Φ(s)
F (s)
aux deux points de fonctionnement ci-dessus. Quels sont les pôles de cesfonctions de transfert ?
Espace d'état 133 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Fig. 4.18 Schéma technologique du pendule inversé.
Espace d'état 134 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Bibliographie
[1] Lennart Ljung. System Identication, Theory for the User. Prentice-Hallinformation and system sciences series, Thomas Kailath Editor, 1987. Bi-bliothèque HEIG-VD No 40.162-27/02.
[2] F. de Coulon. Traité d'electricité. In Théorie et traitement des signaux,volume 6. Presses Polytechniques Romandes, Lausanne, 1984. bibliothèqueHEIG-VD No 32.100-23.
[3] M.Kunt. Traité d'électricité. In Traitement numérique des signaux, vo-lume 20. Presses Polytechniques Romandes, Lausanne, 1984. BibliothèqueHEIG-VD No 32.100-23.
[4] Tannenbaum Doyle, Francis. Feedback control theory. Maxwell Macmillaninternational editions, 1992. Bibliothèque HEIG-VD No 40.112-04.
[5] R.Longchamp. Commande numérique de systèmes dynamiques. Presses Po-lytechniques Romandes, 1995. Bibliothèque HEIG-VD No 40.120-11.
[6] B.Wittenmark K.Åstrom. Computer controlled systems. Prentice-Hall, 1990.Bibliothèque HEIG-VD No 40.122-03.
[7] Lennart Ljung & Torkel Glad. Modeling of Dynamic Systems. Prentice-Hall information and system sciences series, Thomas Kailath Editor, 1994.Bibliothèque HEIG-VD No 40.162-32.
[8] Michel Etique. Régulation numérique. Cours polycopié, HEIG-VD , http://iai.eivd.ch/users/mee/, 2005.
[9] Rolf Iserman. Identikation dynamischer Systeme, Band I & II. Springer-Verlag, 1988. Bibliothèque HEIG-VD No 40.162-25/01 et 40.162-26/01.
[10] F.Mudry. Introduction au traitement de signal. Cours polycopié, EINEV,1992.
Espace d'état 135 MEE \cours_aav.tex1er septembre 2007

HEIG-VD Automatique avancée (AAV)
Espace d'état 136 MEE \cours_aav.tex1er septembre 2007