Embed Size (px)
Citation preview
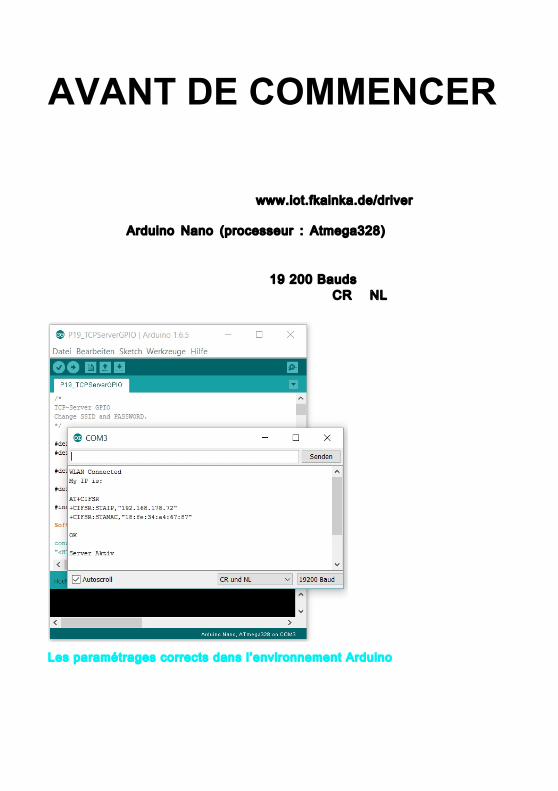
AVANT DE COMMENCER À la première connexion du IoT-WiFi-Boards (ci-après également appelé NanoESP) il peut arriver que l’ordinateur ne trouve pas automatiquement le pilote indispensable pour le convertisseur série USB. Si c’est le cas, vous devez télécharger le pilote depuis la page www.iot.fkainka.de/driver et l’installer ma-nuellement. Dans le logiciel Arduino vous pouvez ensuite sélectionner le port et comme carte Arduino Nano (processeur : Atmega328). Ensuite le contrôleur doit être prêt à l’emploi. Pour travailler avec le moniteur série vous devez en effet procéder à des paramé-trages. Le débit en bauds utilisé ici est 19 200 Bauds. Pour envoyer des instruc-tions vous devez d’autre part sélectionner l’option CR et NL à côté du menu pour le débit en bauds.
Les paramétrages corrects dans l’environnement Arduino
J’ai travaillé avec les versions Arduino IDE 1.6 5 et 1.6 6. Les versions plus an-ciennes peuvent provoquer des problèmes. Vous trouverez la version actuelle

Arduino-IDE sur le site internet www.arduino.cc. En cas de difficultés ou de problèmes avec la carte ou le kit d’apprentissage vous pouvez trouver de l’aide à tout moment sur la page webwww.iot.fkainka.de. Sur cette page vous trouverez de plus un forum, de nouveaux projets d’utilisateurs et également tous les programmes présentés ici dans la toute dernière version. Dans le kit d’apprentissage se trouve une platine d’expérimentation sur laquelle vous pouvez enficher le NanoESP, comme indiqué sur la figure ci-dessous. Cela laisse plus de place pour l’expérimentation pendant que le module WLAN derrière dépasse sur la platine d’expérimentation. Le câble micro USB peut ensuite être enfiché, comme indiqué sur la figure dans la section suivante, et la perturbation est minimale. Des figures de montage détaillées se trouvent dans les chapitres respectifs.
La carte IoT-WiFi (NanoESP) L’élément principal de ce kit d’apprentissage est la carte IoT-WiFi (NanoESP). Comme on le remarque très bien sur la carte, celle-ci est constituée de deux com-posants. Sur la moitié gauche il s’agit d’un système microcontrôleur compatible Arduino qui est comparable au nano Arduino. La partie droite est le module WLAN avec la désignation ESP8266. Ces deux composants communiquent entre eux par l’interface série générée par logiciel.
NanoESP sur la platine d’expérimentation
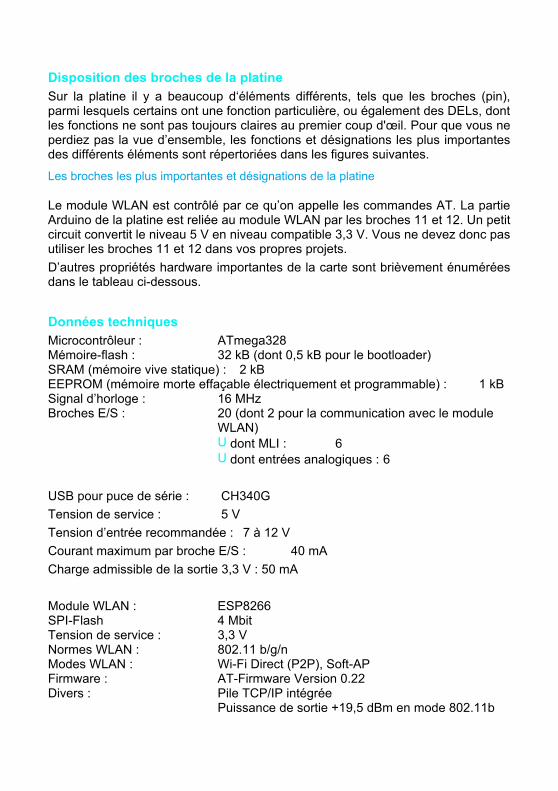
Disposition des broches de la platine Sur la platine il y a beaucoup d‘éléments différents, tels que les broches (pin), parmi lesquels certains ont une fonction particulière, ou également des DELs, dont les fonctions ne sont pas toujours claires au premier coup d'œil. Pour que vous ne perdiez pas la vue d’ensemble, les fonctions et désignations les plus importantes des différents éléments sont répertoriées dans les figures suivantes.
Les broches les plus importantes et désignations de la platine
Le module WLAN est contrôlé par ce qu’on appelle les commandes AT. La partie Arduino de la platine est reliée au module WLAN par les broches 11 et 12. Un petit circuit convertit le niveau 5 V en niveau compatible 3,3 V. Vous ne devez donc pas utiliser les broches 11 et 12 dans vos propres projets. D’autres propriétés hardware importantes de la carte sont brièvement énumérées dans le tableau ci-dessous.
Données techniques Microcontrôleur : ATmega328 Mémoire-flash : 32 kB (dont 0,5 kB pour le bootloader) SRAM (mémoire vive statique) : 2 kB EEPROM (mémoire morte effaçable électriquement et programmable) : 1 kB Signal d’horloge : 16 MHz Broches E/S : 20 (dont 2 pour la communication avec le module
WLAN) U dont MLI : 6 U dont entrées analogiques : 6 USB pour puce de série : CH340G Tension de service : 5 V Tension d’entrée recommandée : 7 à 12 V Courant maximum par broche E/S : 40 mA Charge admissible de la sortie 3,3 V : 50 mA Module WLAN : ESP8266 SPI-Flash 4 Mbit Tension de service : 3,3 V Normes WLAN : 802.11 b/g/n Modes WLAN : Wi-Fi Direct (P2P), Soft-AP Firmware : AT-Firmware Version 0.22 Divers : Pile TCP/IP intégrée Puissance de sortie +19,5 dBm en mode 802.11b
Faible puissance CPU 32 bit intégrée Communication via UART
ELEMENTS DU KIT D’APPRENTISSAGE Ci-dessous se trouve un aperçu des éléments contenus dans le kit d’apprentissage. 1 carte IoT-WiFi (NanoESP) 1 platine d’expérimentation 1 m fil électrique 2 boutons-poussoirs 1 cosse clip 9 V 1 DEL (rouge) 1 DEL RGB (4 pattes de raccordement) 1 résistance 10 kOhm (marron, noire, orange) 1 résistance 1 kOhm (marron, noire, rouge) 1 phototransistor (2 pattes de raccordement) 1 NTC 10 kOhm 1 haut-parleur Piezo 1 potentiomètre 10 kOhm avec bouton rotatif rouge
CONNAITRE LE MODULE Ce premier chapitre aborde les fonctions de base du module WLAN. Le module est contrôlé par ce qu’on appelle les commandes AT. Vous retrouverez tous les exemples de programmes utilisés ainsi que l’aide et d’autres information sur www.iot.fkainka.de
Le plus simple est de télécharger le répertoire zip complet et de copier le dossier décompressé complètement dans votre dossier Sketch. Ensuite vous pouvez ouvrir tous les programmes l’un après l’autre confortablement depuis l’interface Arduino.
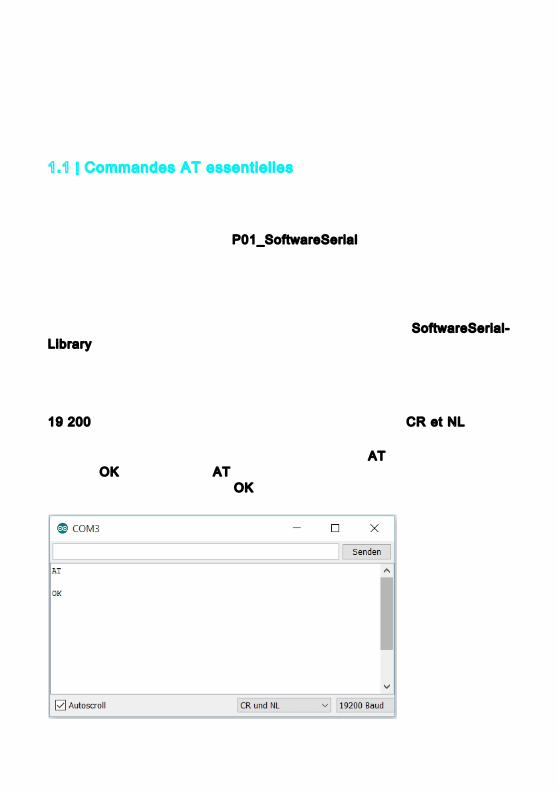
1.1 | Commandes AT essentielles C’est tout simplement en l’essayant que l’on obtient la meilleure première impres-sion des commandes AT. C’est pourquoi vous allez vous familiariser dans cette section avec quelques unes des commandes de base du module. Ouvrez pour cela le programme P01_SoftwareSerial dans Arduino-IDE. Il s’agit ici d’un programme simple qui ne fait rien de plus que transférer les données re-çues par l’interface hardware du microcontrôleur au contrôleur ESP par l’interface logiciel définie. Tout fonctionne également en sens inverse. Comme on peut le voir dans le code source, les deux connexions de l’interface logiciel sont les broches 11 et 12. Celles-ci ne doivent pas être utilisées comme broches GPIO dans vos propres projets. D’autre part, vous avez besoin de la librairie SoftwareSerial-Library, qui est déjà préinstallée dans la plupart des versions Arduino. Dans le cas contraire, vous devez télécharger la libraire par le gestionnaire. Une fois le programme téléchargé, vous pouvez démarrer le moniteur série de l’interface Arduino. Avant de le lancer, vous devez encore procéder à deux para-métrages importants sur le moniteur série, à savoir placer le débit en bauds sur 19 200 dans le coin inférieur droit et procéder au paramétrage CR et NL dans la case à côté à gauche. Vous pouvez maintenant déjà voir un message, à savoir AT et quelques lignes en dessous OK. La commande AT a été envoyée par le microcontrôleur au module ESP et le module a répondu par OK. À partir de là vous pouvez remarquer que le module WLAN fonctionne et est prêt à être utilisé.
Paramétrages du terminal : CR et NL et un débit en bauds de 19 200
1.1.1 | Commandes de base Vous pouvez désormais tester certaines commandes de base du module, en sai-sissant simplement la commande et en l’envoyant au module par [Enter]. L’utilisation des majuscules pour l’instruction a son importance ici. Vous pouvez transmettre votre première instruction en saisissant
AT
dans le moniteur en série et en appuyant sur [Enter]. Le programme téléchargé transmet l’instruction au module ESP qui répond par retour à AT et ensuite OK . La commande suivante que vous pouvez tester est :
AT+GMR
Le firmware actuel et le numéro de version sont affichés par cette instruction. Avec l’instruction
AT+RST
Vous pouvez réinitialiser le module. Vous voyez d’abord dans le terminal quelques caractères illisibles et au bout readycomme caractère, indiquant que le module est prêt maintenant. Une autre instruction est :
ATE0
Avec celle-ci on peut désactiver ce qu’on appelle l’écho du module. Cela signifie que vous n’avez pas reçu la commande envoyée mais seulement la réponse. Si par exemple vous envoyez AT il n’y a pas d’abord AT et ensuite OK, mais seule-ment OK en retour. Pour vos premiers pas, il est cependant souhaitable que l’écho
ATE1
soit de nouveau activé.
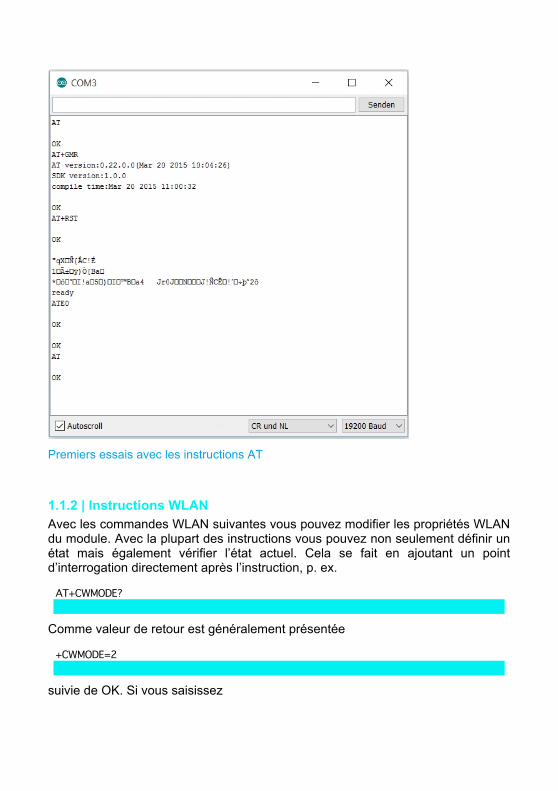
Premiers essais avec les instructions AT
1.1.2 | Instructions WLAN Avec les commandes WLAN suivantes vous pouvez modifier les propriétés WLAN du module. Avec la plupart des instructions vous pouvez non seulement définir un état mais également vérifier l’état actuel. Cela se fait en ajoutant un point d’interrogation directement après l’instruction, p. ex.
AT+CWMODE?
Comme valeur de retour est généralement présentée
+CWMODE=2
suivie de OK. Si vous saisissez
AT+CWMODE=?
Le module vous répond avec les paramètres possibles de l’instruction, à savoir ici 1-3. AvecCWMODE il s’agit d’ailleurs de l’instruction avec laquelle vous pouvez déterminer le mode WLAN. Il y a trois modes de fonctionnement que je peux appeler l’un après l’autre.
1 AT+CWMODE=2 – le module comme point d’accès (Access Point mode AP) À la livraison, le module est un point d’accès. Cela signifie que vous pouvez enregis-trer avec un appareil compatible WLAN, comme un smartphone ou un PC, une connexion directe avec le module. Pour cela, recherchez simplement le WLAN ou-vert avec le nom NanoESP et connectez-le avec. En réglage usine, aucun mot de passe n’est attribué de façon à ce que la connexion ne représente aucun problème. Lorsque vous êtes connecté au module, vous n’avez pas de connexion internet car le module n’est pas un routeur avec une propre connexion au réseau téléphonique. Ce mode WLAN est néanmoins utile si vous avez besoin par exemple d’un réseau fermé sécurisé. À propos de sécurité : Il est également possible d’attribuer un mot de passe au réseau et ce par l’instruction :
AT+CWSAP
Des paramètres doivent encore être indiqués et dans l’ordre et séparés par des virgules : U le nom du réseau entre guillemets, U le mot de passe entre guillemets, U l’identifiant du canal (Channel ID de préférence une valeur entre 1 et 13), U et le mode de cryptage (valeur de 0 à 4). Un paramétrage potentiel serait :
AT+CWSAP="MyNanoESP","MyPassword",5,3
Après un bref moment apparaît OK comme confirmation. Si ERROR apparaît, vérifiez à nouveau vos données, avant tout les guillemets. Si cependant ERROR apparaît, vérifiez si le CWMODE est vraiment 2. Si tout a fonctionné, vous pouvez vous connecter avec un appareil compatible WLAN avec la platine. Vous pouvez afficher tous les appareils connectés au mo-dule avec les adresses IP et MAC par l’instruction
AT+CWLIF
.
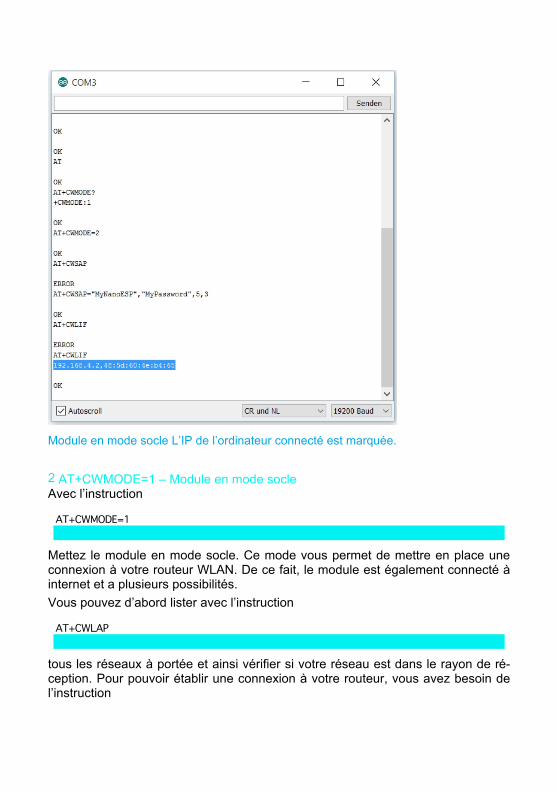
Module en mode socle L’IP de l’ordinateur connecté est marquée.
2 AT+CWMODE=1 – Module en mode socle Avec l’instruction
AT+CWMODE=1
Mettez le module en mode socle. Ce mode vous permet de mettre en place une connexion à votre routeur WLAN. De ce fait, le module est également connecté à internet et a plusieurs possibilités. Vous pouvez d’abord lister avec l’instruction
AT+CWLAP
tous les réseaux à portée et ainsi vérifier si votre réseau est dans le rayon de ré-ception. Pour pouvoir établir une connexion à votre routeur, vous avez besoin de l’instruction
AT+CWJAP
Celle-ci, comme l’instruction CWSAP, a des paramètres importants, à savoir le nom du réseau WLAN (également appelé SSID) et le mot de passe, les deux de nouveau entre guillemets et séparés par une virgule. La mise en place d’une con-nexion à un deuxième module, paramétré avec les données mentionnées dans la section précédente, ressemblerait donc à :
AT+CWJAP="MyNanoESP","MyPassword"
La mise en place de la connexion peut durer quelques secondes et devrait ensuite renvoyer OK. Vous pouvez d’ailleurs appeler l’IP du module attribuée par le rou-teur par l’instruction
AT+CIFSR
. Cela sera important plus tard si vous voulez établir une connexion au serveur TCP du module. Avec l’instruction
AT+CWQAP
Vous pouvez à nouveau séparer la connexion de votre routeur.
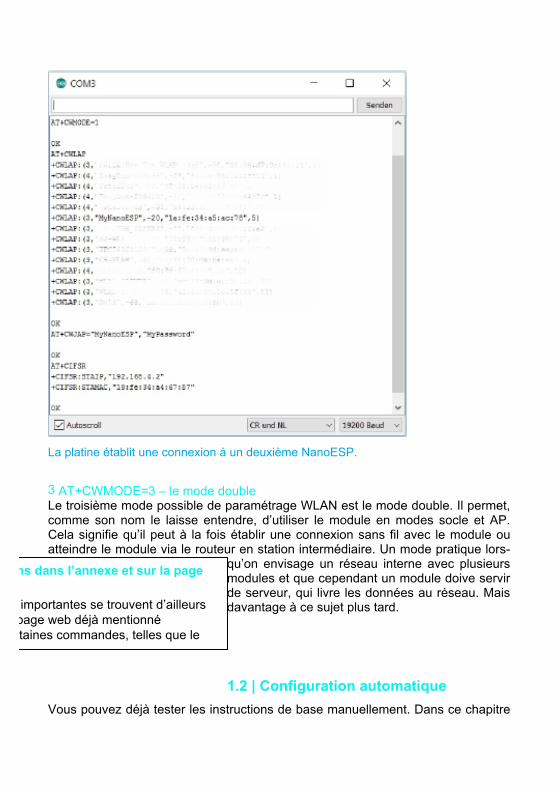
La platine établit une connexion à un deuxième NanoESP.
3 AT+CWMODE=3 – le mode double Le troisième mode possible de paramétrage WLAN est le mode double. Il permet, comme son nom le laisse entendre, d’utiliser le module en modes socle et AP. Cela signifie qu’il peut à la fois établir une connexion sans fil avec le module ou atteindre le module via le routeur en station intermédiaire. Un mode pratique lors-
qu’on envisage un réseau interne avec plusieurs modules et que cependant un module doive servir de serveur, qui livre les données au réseau. Mais davantage à ce sujet plus tard.
1.2 | Configuration automatique Vous pouvez déjà tester les instructions de base manuellement. Dans ce chapitre
Aperçu des instructions dans l’annexe et sur la page web Toutes les commandes importantes se trouvent d’ailleurs dans l’annexe et sur la page web déjà mentionné www.iot.fkainka.de. Certaines commandes, telles que le réglage du débit en bauds n’ont pas été répertoriées vo-lontairement car elles peuvent rendre le module inutilisa-ble.
la question est maintenant de préciser comment ces instructions peuvent être actionnées directement par le contrôleur. D’autre part, vous vous familiarisez avec une autre instruction avec laquelle vous pouvez tester si un PC dans un réseau ou un serveur sur internet peut être atteint. Dans cet exemple le serveur Google est en effet pingué. Dans ce programme d’exempleP02_GooglePing les processus, que vous avez saisis manuellement dans le premier exemple, sont maintenant principalement automatisés. Le contrôleur envoie des instructions les unes après les autres au module ESP et établit ainsi la connexion au WLAN. Les différents longs Timeout (temps de latence) donnent suffisamment de temps de réponse au module. Avant que le programme puisse cependant fonctionner correctement, vous devez inscrire vos données derrière #define SSID et #define PASSWORD dès le début du programme code source. Le module nécessite en effet un accès internet pour pouvoir exécuter sa dernière instruction. Avec l’instruction
AT+PING
d’autres appareils peuvent être pingués au réseau. Le ping signifie que l’on de-mande si un ordinateur est généralement accessible. Ici la commande ping est envoyé au serveur Google-Server avec AT+PING="www.google.de". Si une infor-mation revient, un message de réussite apparaît dans le moniteur en série et la DEL inscrite avec D3 qui est connectée à la broche D13 de la platine est activée. Alors la première communication avec internet aurait réussi.
Le programme Par la suite nous analyserons progressivement les fonctions du programme. Pour commencer nous abordons la communication avec le module.
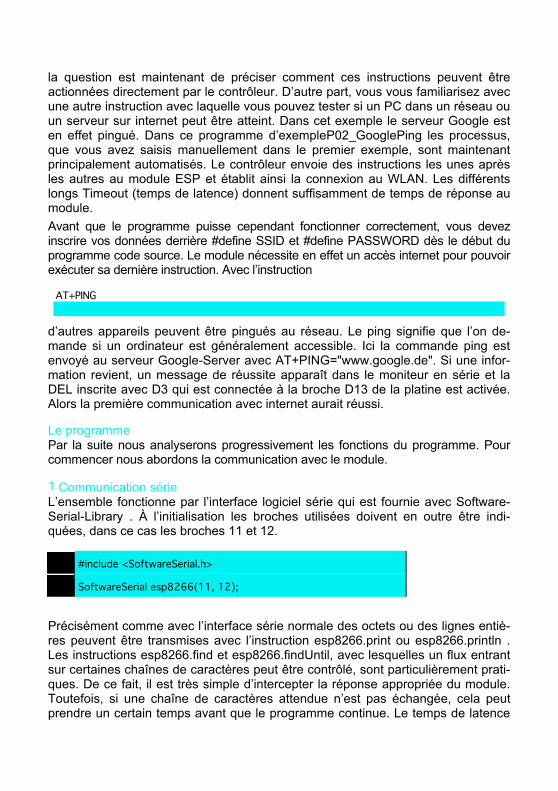
1 Communication série L’ensemble fonctionne par l’interface logiciel série qui est fournie avec Software-Serial-Library . À l’initialisation les broches utilisées doivent en outre être indi-quées, dans ce cas les broches 11 et 12.
001 #include <SoftwareSerial.h>
002 SoftwareSerial esp8266(11, 12);
Précisément comme avec l’interface série normale des octets ou des lignes entiè-res peuvent être transmises avec l’instruction esp8266.print ou esp8266.println . Les instructions esp8266.find et esp8266.findUntil, avec lesquelles un flux entrant sur certaines chaînes de caractères peut être contrôlé, sont particulièrement prati-ques. De ce fait, il est très simple d’intercepter la réponse appropriée du module. Toutefois, si une chaîne de caractères attendue n’est pas échangée, cela peut prendre un certain temps avant que le programme continue. Le temps de latence
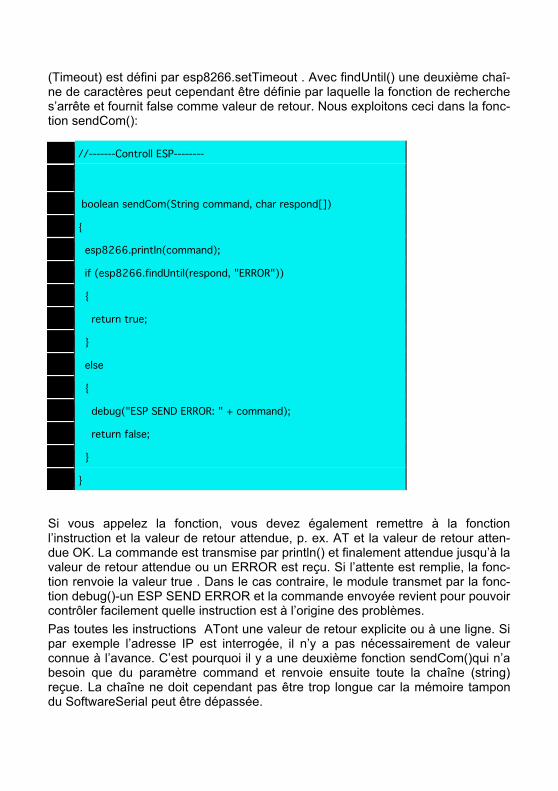
(Timeout) est défini par esp8266.setTimeout . Avec findUntil() une deuxième chaî-ne de caractères peut cependant être définie par laquelle la fonction de recherche s’arrête et fournit false comme valeur de retour. Nous exploitons ceci dans la fonc-tion sendCom():
001 //-------Controll ESP--------
002 003 boolean sendCom(String command, char respond[])
004 {
005 esp8266.println(command);
006 if (esp8266.findUntil(respond, "ERROR"))
007 {
008 return true;
009 }
010 else
011 {
012 debug("ESP SEND ERROR: " + command);
013 return false;
014 }
015 }
Si vous appelez la fonction, vous devez également remettre à la fonction l’instruction et la valeur de retour attendue, p. ex. AT et la valeur de retour atten-due OK. La commande est transmise par println() et finalement attendue jusqu’à la valeur de retour attendue ou un ERROR est reçu. Si l’attente est remplie, la fonc-tion renvoie la valeur true . Dans le cas contraire, le module transmet par la fonc-tion debug()-un ESP SEND ERROR et la commande envoyée revient pour pouvoir contrôler facilement quelle instruction est à l’origine des problèmes. Pas toutes les instructions ATont une valeur de retour explicite ou à une ligne. Si par exemple l’adresse IP est interrogée, il n’y a pas nécessairement de valeur connue à l’avance. C’est pourquoi il y a une deuxième fonction sendCom()qui n’a besoin que du paramètre command et renvoie ensuite toute la chaîne (string) reçue. La chaîne ne doit cependant pas être trop longue car la mémoire tampon du SoftwareSerial peut être dépassée.
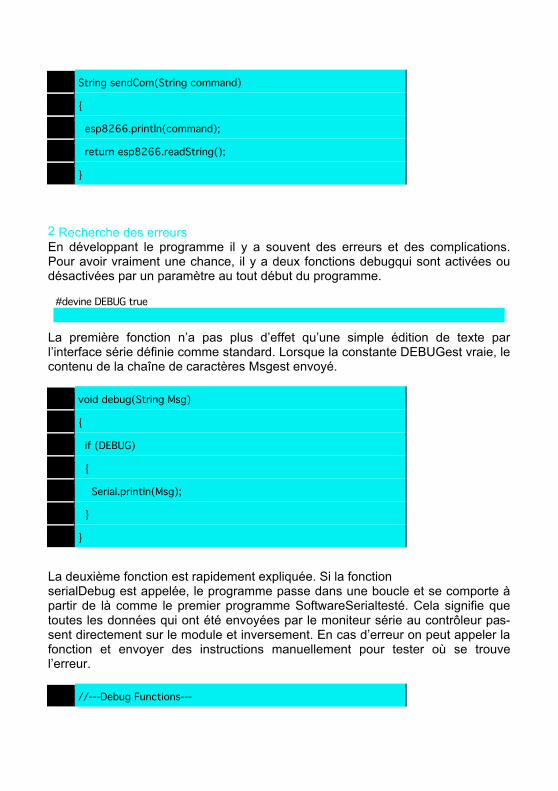
001 String sendCom(String command)
002 {
003 esp8266.println(command);
004 return esp8266.readString();
005 }
2 Recherche des erreurs En développant le programme il y a souvent des erreurs et des complications. Pour avoir vraiment une chance, il y a deux fonctions debugqui sont activées ou désactivées par un paramètre au tout début du programme.
#devine DEBUG true
La première fonction n’a pas plus d’effet qu’une simple édition de texte par l’interface série définie comme standard. Lorsque la constante DEBUGest vraie, le contenu de la chaîne de caractères Msgest envoyé.
001 void debug(String Msg)
002 {
003 if (DEBUG)
004 {
005 Serial.println(Msg);
006 }
007 }
La deuxième fonction est rapidement expliquée. Si la fonction serialDebug est appelée, le programme passe dans une boucle et se comporte à partir de là comme le premier programme SoftwareSerialtesté. Cela signifie que toutes les données qui ont été envoyées par le moniteur série au contrôleur pas-sent directement sur le module et inversement. En cas d’erreur on peut appeler la fonction et envoyer des instructions manuellement pour tester où se trouve l’erreur.
001 //---Debug Functions---
002 void serialDebug() {
003 while (true)
004 {
005 if (esp8266.available())
006 Serial.write(esp8266.read());
007 if (Serial.available())
008 esp8266.write(Serial.read());
009 }
010 }
3 Configuration Pour rendre les programmes en général plus clairs, la plupart des paramètres sont externalisés dans des fonctions propres, tous dans la fonction espConfig, dans laquelle sont placés les principaux paramètres pour le programme respectif.
001 //---Config ESP8266---
002 boolean espConfig()
003 {
004 boolean success = true;
005 esp8266.setTimeout(5000);
006 success &= sendCom("AT+RST", "ready");
007 esp8266.setTimeout(1000);
008
009 if (configStation(SSID, PASSWORD)) {
010 success &= true;
011 debug("WLAN Connected");
012 debug("My IP is:");
013 debug(sendCom("AT+CIFSR"));
014 }
015 else
016 {
017 success &= false;
018 }
019 020 success &= sendCom("AT+CIPMODE=0", "OK");
021 success &= sendCom("AT+CIPMUX=0", "OK");
022 023 return success;
024 }
Au début de la fonction la variable success est d’abord posée sur true , car cette variable est liée désormais avec différentes fonctions et. Cela signifie que même si une seule des fonctions retourne la valeur, falsesuccess est donc immédiatement false et toue la configuration a échoué. La première instruction AT contrôlée avec succès est l’instruction Resetqui est presque toujours exécutée au début du pro-gramme, pour s’assurer que les essais précédents ne revendiquent pas encore le module. Cela peut durer en effet jusqu’à cinq secondes jusqu’à ce que le module renvoie le message ready. C’est pourquoi brièvement avant la fonction send-Com()le temps de latence pour esp8266.findUtil est fixé haut. Après le reset, le temps de latence et de nouveau établi sur la valeur standard d’une seconde. Ce qui suit ensuite est l’appel d’une fonction elle-même définie avec le nom configStation()qui est abordée dans la section suivante. Elle sert à connecter le module avec son réseau domestique. À cette fin, les paramètres SSID et PASS-WORD que vous avez enregistrés au début du programme, sont transmis. Si la connexion a été établie avec succès, le message de réussite d’abord et ensuite l’adresse IP actuelle du module sont transférés au module série. À la fin de la fonction sont encore fixés des paramètres sur lesquelles je reviendrai plus tard. Enfin la variable success est renvoyée qui, nous l’espérons, a gardé le valeur true.
001 boolean configStation(String vSSID, String vPASSWORT)
002 {
003 boolean success = true;
004 success &= (sendCom("AT+CWMODE=1", "OK"));
005 esp8266.setTimeout(20000);
006 success &= (sendCom("AT+CWJAP=\"" + String(vSSID) + "\",\"" + String(vPASSWORT) + "\"", "OK"));
007 esp8266.setTimeout(1000);
008 return success;
009 }
La fonction configStation() a été appelée dans la fonction espConfig(). Ici le para-métrage du mode WLAN sur le mode socle a été entrepris avec la commande CWMODE et ensuite la connexion avec le réseau par l’instruction CWJAP. Cela peut durer relativement longtemps jusqu’à ce que la connexion soit établie, c’est pourquoi le temps de latence est brièvement dépassé à 20 secondes. Si vous préférez le mode sans fil double, vous pouvez inscrire ici pour CWMODEun3.
001 boolean configAP()
002 {
003 boolean success = true;
004 005 success &= (sendCom("AT+CWMODE=2", "OK"));
006 success &= (sendCom("AT+CWSAP=\"NanoESP\",\"\",5,0", "OK"));
007 008 return success;
009 }
La fonction configAP() n’est pas appelée dans cet exemple mais doit être cepen-dant traitée brièvement. Elle représente pour ainsi dire la contrepartie à la fonction configStation()car le module est ici paramétré comme point d’accès. Un temps de latence plus long n’est pas nécessaire ici car le module peut transformer la com-mande CWSAPplus rapidement. Dans des essais ultérieurs dans la fonction esp-Config()à la place de configStation() la fonctionconfigAP()sera appelée.
001 void setup()
002 {
003 // Open serial communications and wait for port to open:
004 Serial.begin(19200);
005 // set the data rate for the SoftwareSerial port
006 esp8266.begin(19200);
007 008 if (!espConfig()) serialDebug();
009 else debug("Config OK");
010 011 if (sendCom("AT+PING=\"www.google.de\"", "OK"))
012 {
013 Serial.println("Ping OK");
014 digitalWrite(13, HIGH);
015 }
016 else
017 {
018 Serial.println("Ping Error");
019 }
020 }
021 022 void loop() // run over and over
023 {
024 //Start serial Debug Mode - Type Commandos over serial Monitor
025 serialDebug();
026 }
Les fonctions les plus importantes que vous trouverez dans presque tous les pro-grammes sont traitées ainsi. Dans les fonctions Arduino connues setup() et loop() ces fonctions sont maintenant utilisées. Les deux interfaces série sont d’abord initialisées avec 19 200 bauds. Ensuite seulement est appelée la fonction esp-Config(). En cas d’erreur la fonction serialDebug()est immédiatement lancée. Si tout est correct un message de réussite est envoyé. Dans les programmes ulté-rieurs, la DEL à la broche 13 qui est marquée D3 sur la platine s’allumera en plus dans une configuration réussie. Pour cela vous avez également un retour si le module n’est pas connecté à un PC avec un moniteur série. Dans cet essai la DEL est en effet nécessaire pour le message de retour du statut ping La requête s’exécute également dans les lignes suivantes après la configuration. La com-mande AT+PINGest envoyée comme paramètre à l’adresse Google. Vous pouvez appeler également une adresse IP dans votre réseau local à la place de cette adresse. En cas de réussite un message apparaît et la DEL nommée D3 est acti-vée. En dernière action le programme saute à la fonction loopqui de son côté appelle la fonction serialDebug()-. Vous pouvez donc tester d’autres instructions après le programme et par exemple envoyer une commande ping à d’autres adresses.
1.3 | Détection d’un réseau Dans ce chapitre entre autres il s’agit pour la première fois d’une petite structure hardware. Le but de ce projet est un type d'alarme qui réagit quand un certain réseau est à portée ou est activé.
Il ne nécessite que deux composants et un peu de fil. Vous pouvez voir la conception précise dans les figures de construction.
Composants nécessaires 1 circuit imprimé, 1 nanoESP, 1 piezo, fil électrique
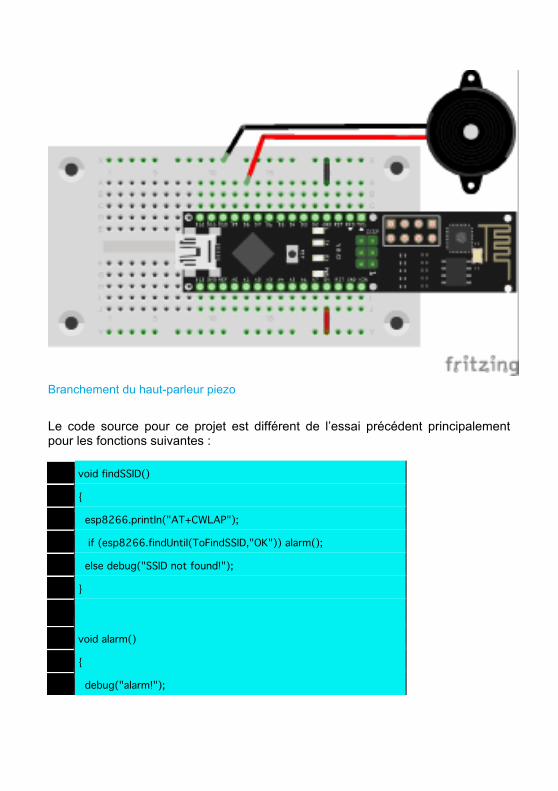
Branchement du haut-parleur piezo
Le code source pour ce projet est différent de l’essai précédent principalement pour les fonctions suivantes :
001 void findSSID()
002 {
003 esp8266.println("AT+CWLAP");
004 if (esp8266.findUntil(ToFindSSID,"OK")) alarm();
005 else debug("SSID not found!");
006 }
007 008 void alarm()
009 {
010 debug("alarm!");
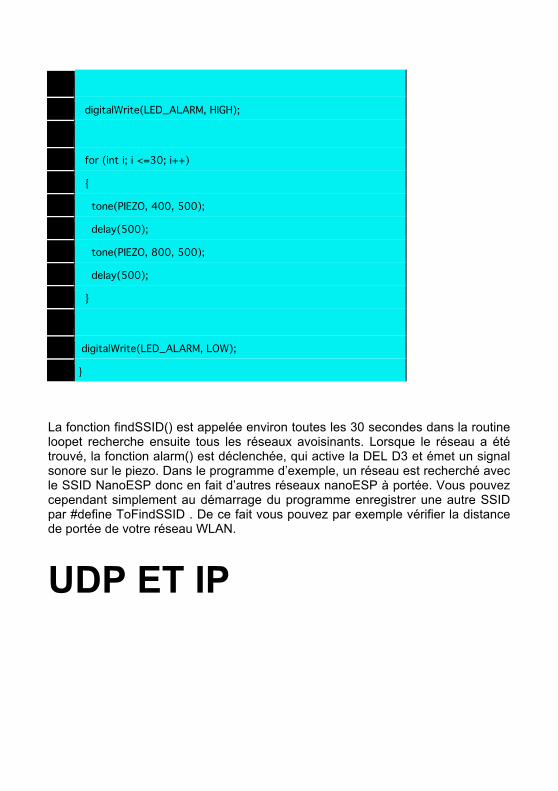
011 012 digitalWrite(LED_ALARM, HIGH);
013 014 for (int i; i <=30; i++)
015 {
016 tone(PIEZO, 400, 500);
017 delay(500);
018 tone(PIEZO, 800, 500);
019 delay(500);
020 }
021 022 digitalWrite(LED_ALARM, LOW);
023 }
La fonction findSSID() est appelée environ toutes les 30 secondes dans la routine loopet recherche ensuite tous les réseaux avoisinants. Lorsque le réseau a été trouvé, la fonction alarm() est déclenchée, qui active la DEL D3 et émet un signal sonore sur le piezo. Dans le programme d’exemple, un réseau est recherché avec le SSID NanoESP donc en fait d’autres réseaux nanoESP à portée. Vous pouvez cependant simplement au démarrage du programme enregistrer une autre SSID par #define ToFindSSID . De ce fait vous pouvez par exemple vérifier la distance de portée de votre réseau WLAN.
UDP ET IP Il s’agit dans ce chapitre de l’échange de données entre deux systèmes via un réseau WLAN. Nous aborderons les sujets tels que ports IP et protocole UDP. Ces concepts de base doivent d’abord être expliqués.
Qu’est-ce qu’une adresse IP ? Une adresse IP fonctionne comme une adresse postale. Un ordinateur du réseau peut être identifié et adressé clairement par celle-ci. Une adresse IP selon la nor-me IPv4 encore en cours est la suivante :
192.168.4.1
Il s’agit de quatre chiffres ou plus précisément de quatre octets. Cela signifie que la valeur d’un chiffre peut être 255 maximum. Fondamentalement, il y a des adresses IP locales qui sont réparties sur les ordinateurs et appareils de votre réseau domestique et des IP globales. Les IP locales sont en général réparties par votre routeur. La plupart commence par 192 168. Le chiffre qui suit est différent de routeur à routeur. Lorsque le Na-noESP fonctionne en point d’accès et se connecte aux ordinateurs dans son ré-seau, les PC reçoivent une adresse qui commence par 192 168.4. En même temps il y a un sous-réseau étendu. Les routeurs Fritz!Box répartissent en général des adresses IP locales selon le schéma 192.168.178.X. Vous pouvez trouver votre IP en entrant par exemple dans Windows dans l’invite de commande (sous Start-> Programmes->Accessoires->Invite de commande) l’instruction ipconfig. Une plus longue liste apparaît qui contient également le point adresse IPv4 avec votre IP locale dans le réseau.. Les IP globales sont transmises en général par le fournisseur internet. Il s’agit par exemple de l’adresse par laquelle votre routeur peut être atteint dans le réseau mondial. Le routeur fixe le réseau local et répartit les données aux clients. Une possibilité de trouver votre adresse IP globale est par exemple d’appeler la page web http://www.meine-aktuelle-ip.de/. Sur la page sont présentées en plus d’autres données visibles par un serveur web. Sur internet vous n'êtes donc pas aussi anonyme que vous le croyez.
Qu’est-ce qu’un port ? Par analogie à l’adresse postale, un port pourrait être quelque chose comme la porte d’entrée d’un immeuble. Un ordinateur avec une IP unique peut fournir diffé-rents services par différents ports. Vous pouvez atteindre le serveur par l’IP mais vous devez choisir le service à utiliser via le port. Cela peut être par exemple le port 20 pour le transfert de données FTP ou le port 23 pour une connexion telnet. En général, vous pouvez choisir librement le port, en effet, il y a des ports normali-sés qui rendent le traitement des applications web plus facile. Vous trouverez une liste des ports normalisés dans https://de.wikipedia.org/wiki/Liste_der_standardisierten_Ports
Qu’est-ce que UDP ? UDP est l’abréviation de User Datagram Protocol (protocole de datagramme utili-sateur). Il s’agit d’un protocole réseau minimal sans connexion. C’est à dire qu’il
est plus minimaliste et simple que tous les autres protocoles internet, comme p. ex. TCP que nous aborderons ultérieurement. La comparaison à ce stade n’est pas encore particulièrement simple mais vous pouvez vous rappeler ce qui suit sur les propriétés du protocole : U UDP peut transmettre. U Il n’y a aucun contrôle de l’exactitude des données et aucune
correction des erreurs. U Il n’y a également aucune garanties que les données ont été
transmises avec succès. U Il n’y a d’autre part aucune garantie que les données ne sont pas
corrompues pendant la transmission ou interceptées par un tiers. U Il n’est pas nécessaire d’établir une connexion mais c’est plutôt un
échange de données plus rapide. U Il n’y a pratiquement pas de fluctuations de retards de transfert. U Le format est adapté par exemple à VoIP (Voice over IP – téléphone
via internet). Ce sont en premier lieu les bases les plus importantes pour les principes des pro-jets suivants. On pourrait traiter le sujet de façon plus approfondie et au moment opportun d’autres informations suivront. Mais d’abord la partie pratique.
2.1 | Échanger des données entre la platine et le PC avec l’UDP Dans ce premier projet pour le sujet UDP des données sont échangées entre la platine et le PC via WLAN. À condition que votre ordinateur dispose d’un adapta-teur WLAN. Un programme du côté PC assure la bonne réception des messages. Une structure hardware n’est pas nécessaire pour cette expérience.
Le programme Lorsque vous chargez le programme P04_UDPBasics.ino sur le contrôleur, le contrôleur est configuré comme point d’accès et vous pouvez trouver un réseau ouvert appelé NanoESP. Avant de vous connecter avec le réseau, vous devez d’abord télécharger un programme pour le PC depuis internet. Pour mes tests j’ai utilisé le programme Packet Sender de Dan Nagle, que vous pouvez télécharger par le lien suivant : https://packetsender.com/ Après le chargement et l’installation du programme, vous pouvez connecter votre PC avec le réseau ouvert NanoESP. Assurez-vois que le firewall reconnaît le réseau comme réseau domestique pour qu’aucune donnée ne soit bloquée. Votre ordinateur doit avoir reçu maintenant l’IP 192.168.4.2. Vous pouvez le vérifier en
envoyant l’instruction
AT+CWLIF
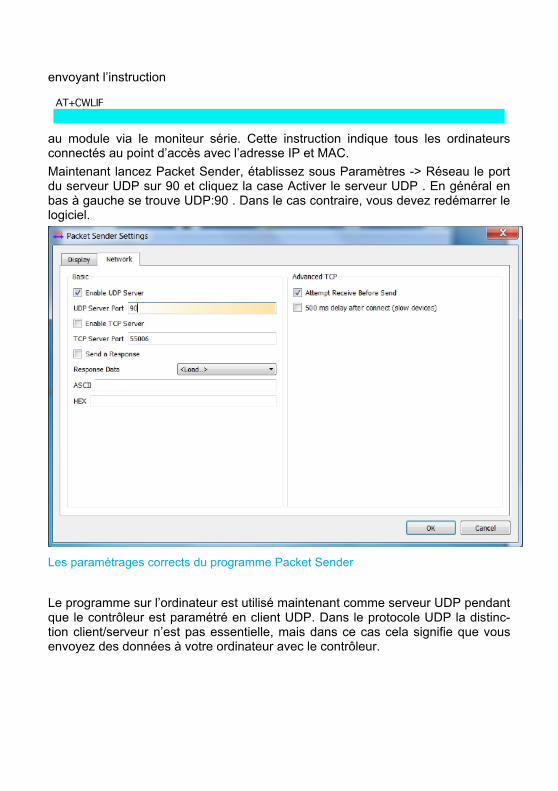
au module via le moniteur série. Cette instruction indique tous les ordinateurs connectés au point d’accès avec l’adresse IP et MAC. Maintenant lancez Packet Sender, établissez sous Paramètres -> Réseau le port du serveur UDP sur 90 et cliquez la case Activer le serveur UDP . En général en bas à gauche se trouve UDP:90 . Dans le cas contraire, vous devez redémarrer le logiciel.
Les paramétrages corrects du programme Packet Sender
Le programme sur l’ordinateur est utilisé maintenant comme serveur UDP pendant que le contrôleur est paramétré en client UDP. Dans le protocole UDP la distinc-tion client/serveur n’est pas essentielle, mais dans ce cas cela signifie que vous envoyez des données à votre ordinateur avec le contrôleur.
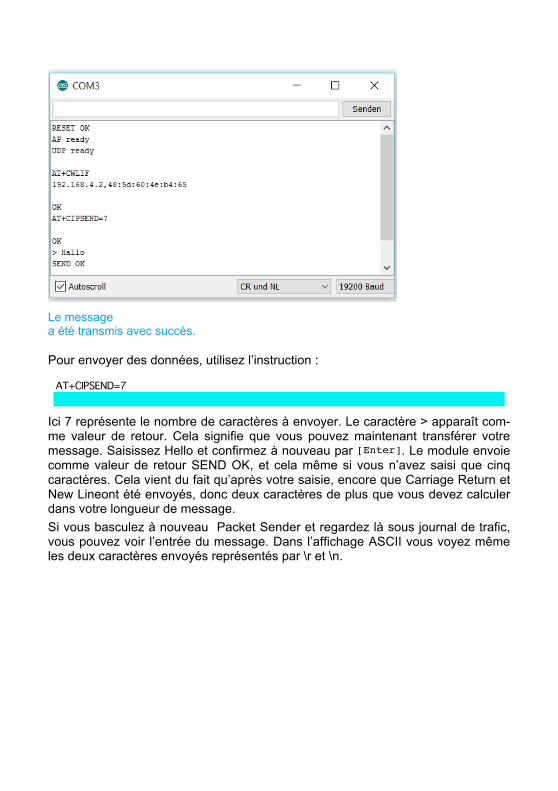
Le message a été transmis avec succès.
Pour envoyer des données, utilisez l’instruction :
AT+CIPSEND=7
Ici 7 représente le nombre de caractères à envoyer. Le caractère > apparaît com-me valeur de retour. Cela signifie que vous pouvez maintenant transférer votre message. Saisissez Hello et confirmez à nouveau par [Enter]. Le module envoie comme valeur de retour SEND OK, et cela même si vous n’avez saisi que cinq caractères. Cela vient du fait qu’après votre saisie, encore que Carriage Return et New Lineont été envoyés, donc deux caractères de plus que vous devez calculer dans votre longueur de message. Si vous basculez à nouveau Packet Sender et regardez là sous journal de trafic, vous pouvez voir l’entrée du message. Dans l’affichage ASCII vous voyez même les deux caractères envoyés représentés par \r et \n.
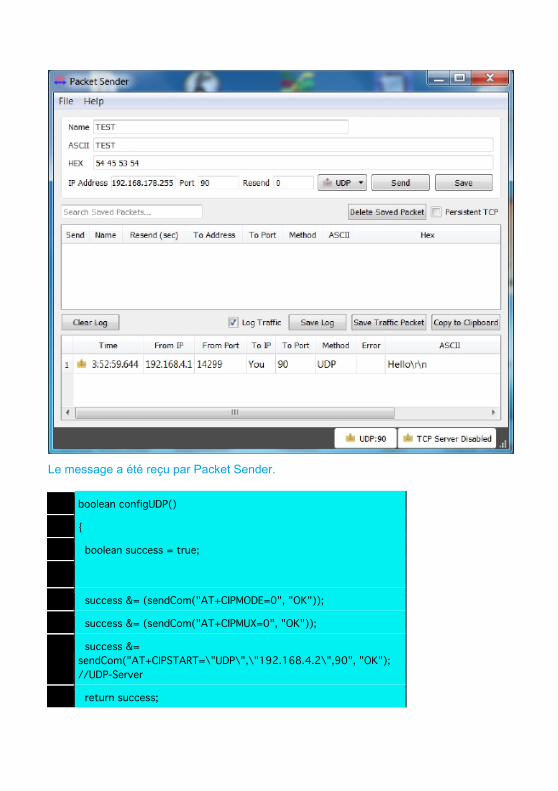
Le message a été reçu par Packet Sender.
001 boolean configUDP()
002 {
003 boolean success = true;
004 005 success &= (sendCom("AT+CIPMODE=0", "OK"));
006 success &= (sendCom("AT+CIPMUX=0", "OK"));
007 success &= sendCom("AT+CIPSTART=\"UDP\",\"192.168.4.2\",90", "OK"); //UDP-Server
008 return success;

009 }
Dans le programme Arduino la fonction configUDP() est avant tout décisive pour le trajet de communication. Ici sont entrepris les paramétrages importants pour le transfert. D’abord, le mode transparence des données est placé avec CIPMODE sur0. Ensuite avec CIPMUX=0 est paramétré la connexion d’une seule connexion. L’instruction essentielle est CIPSTART. Avec celle-ci une connexion est établie et notamment à l’IP 192.168.4.2, donc votre PC, et le PORT 90, auquel le program-me Packet Sender écoute avec son serveur UDP. Ce sont avant tout les étapes nécessaires pour établir une première connexion.
2.2 | Envoyer et recevoir des données avec UDP Dans le projet précédent, la communication UDP a été testée dans une direction, à savoir de la platine au PC. Dans ce programme le module est paramétré de telle manière qu’une communication dans l’autre direction est également possible, presque comme dans un chat.
Le programme Dans le fond, le programme comporte seulement une modification minime qui a cependant un effet important sur la communication avec le protocole UDP. Lors-que vous téléchargez le programme, un point d’accès est à nouveau établi avec lequel vous pouvez vous connecter à votre PC. Ici aussi vous avez besoin de Packet Sender ou d’un programme similaire. Démarrez le programme et prenez les mêmes paramétrages que précédemment (Fichier -> Paramètres -> Réseau : Activer serveur UDP, Port 90). Enfin vous devez encore saisir dans la fenêtre principale dans le champ Adresse IP l’adresse du module (192.168.4.1), placer le Port sur 91 et dans le menu déroulant plus loin à droite choisir le point UDP. Si ces paramétrages sont faits et le moniteur série ouvert, vous pouvez envoyer le premier message au module en tapant p. ex. Hi dans le champ étiqueté ASCII . Lorsque vous cliquez sur Send apparaît dans le moniteur série :
001 +IPD,2:Hi
002 OK
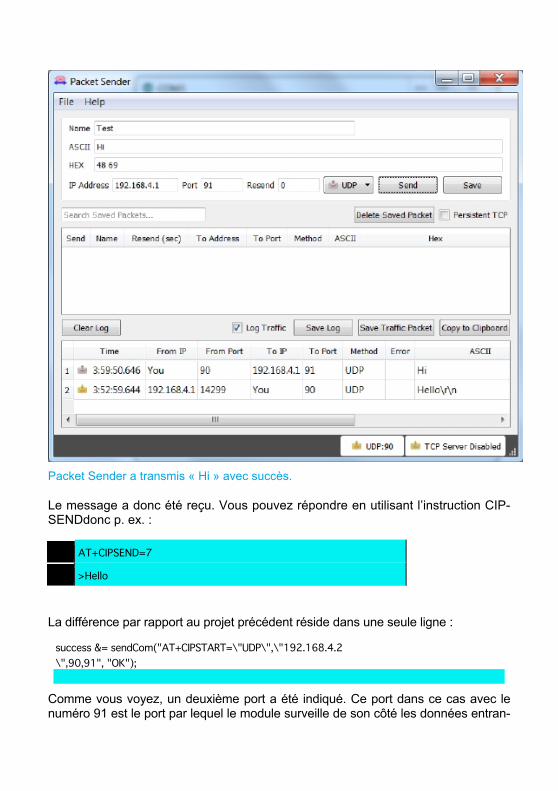
Packet Sender a transmis « Hi » avec succès.
Le message a donc été reçu. Vous pouvez répondre en utilisant l’instruction CIP-SENDdonc p. ex. :
001 AT+CIPSEND=7
002 >Hello
La différence par rapport au projet précédent réside dans une seule ligne :
success &= sendCom("AT+CIPSTART=\"UDP\",\"192.168.4.2 \",90,91", "OK");
Comme vous voyez, un deuxième port a été indiqué. Ce port dans ce cas avec le numéro 91 est le port par lequel le module surveille de son côté les données entran-

tes. Avec l’ajout de cette simple ligne, il est possible également d’envoyer des don-nées au module. Vous pouvez d’ailleurs surveiller le même port auquel vous en-voyez. Vous pourriez donc attribuer le chiffre 90 aux deux ports. Théoriquement, il est cependant possible avec la modification que le module reçoive ses propres don-nées.
2.3 | Activer une DEL avec UDP Dans le programme P06_UDPLED.ino il s’agit maintenant finalement de comman-der du matériel via le protocole UDP. Avec ce programme il est possible d’allumer et d’éteindre une DEL avec de simples instructions. De plus, un autre paramètre sur la communication UDP est effectué, qui permet de contrôlér la matériel simultanément de plusieurs ordinateurs. Pour cela vous avez besoin d’un circuit comme le montre l’image la figure ci-dessous. La DEL ressemble beaucoup à un autre composant, le
phototransistor. Vous pouvez distinguer les deux composants en regardant la tête du dispositif d’en haut. L’intérieur de la DEL a une grande surface blanche.
Packet Sender a transmis « Hi » avec succès.
Le programme Alors que les programmes d’exemples précédents demandaient beaucoup de saisie de l’utilisateur via le moniteur série, ce programme doit travailler de manière
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 DEL (rouge), 1 résistan-ce 1 kOhm (marron, noir, rouge), fil électrique
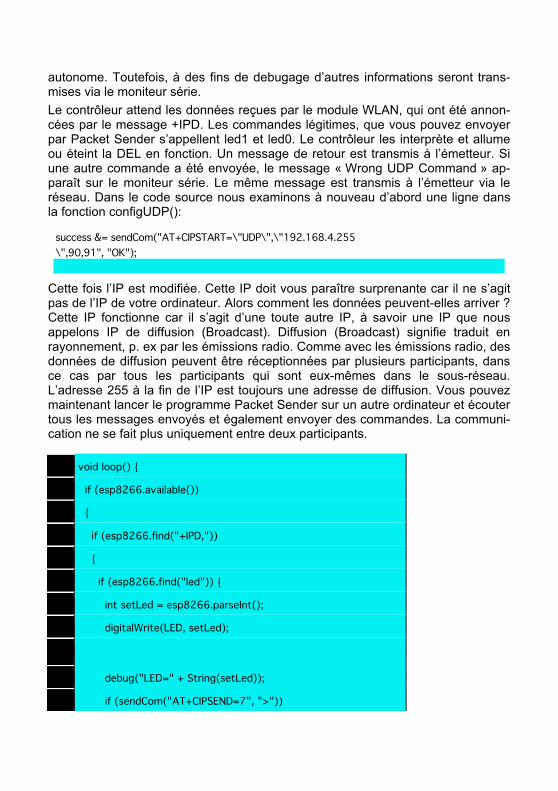
autonome. Toutefois, à des fins de debugage d’autres informations seront trans-mises via le moniteur série. Le contrôleur attend les données reçues par le module WLAN, qui ont été annon-cées par le message +IPD. Les commandes légitimes, que vous pouvez envoyer par Packet Sender s’appellent led1 et led0. Le contrôleur les interprète et allume ou éteint la DEL en fonction. Un message de retour est transmis à l’émetteur. Si une autre commande a été envoyée, le message « Wrong UDP Command » ap-paraît sur le moniteur série. Le même message est transmis à l’émetteur via le réseau. Dans le code source nous examinons à nouveau d’abord une ligne dans la fonction configUDP():
success &= sendCom("AT+CIPSTART=\"UDP\",\"192.168.4.255 \",90,91", "OK");
Cette fois l’IP est modifiée. Cette IP doit vous paraître surprenante car il ne s’agit pas de l’IP de votre ordinateur. Alors comment les données peuvent-elles arriver ? Cette IP fonctionne car il s’agit d’une toute autre IP, à savoir une IP que nous appelons IP de diffusion (Broadcast). Diffusion (Broadcast) signifie traduit en rayonnement, p. ex par les émissions radio. Comme avec les émissions radio, des données de diffusion peuvent être réceptionnées par plusieurs participants, dans ce cas par tous les participants qui sont eux-mêmes dans le sous-réseau. L’adresse 255 à la fin de l’IP est toujours une adresse de diffusion. Vous pouvez maintenant lancer le programme Packet Sender sur un autre ordinateur et écouter tous les messages envoyés et également envoyer des commandes. La communi-cation ne se fait plus uniquement entre deux participants.
001 void loop() {
002 if (esp8266.available())
003 {
004 if (esp8266.find("+IPD,"))
005 {
006 if (esp8266.find("led")) {
007 int setLed = esp8266.parseInt();
008 digitalWrite(LED, setLed);
009 010 debug("LED=" + String(setLed));
011 if (sendCom("AT+CIPSEND=7", ">"))

012 {
013 sendCom("LED=" + String(setLed), "OK");
014 }
015 }
016 017 else {
018 debug("Wrong UDP Command");
019 if (sendCom("AT+CIPSEND=19", ">"))
020 {
021 sendCom("Wrong UDP Command", "OK");
022 }
023
024 }
025 }
026 }
027 }
L’analyse des instructions qui arrivent a lieu dans la routine loopqui tourne en permanence. S’il y a des données du module (esp8266.available()), elles sont analysées sur la présence des caractères « +IPD, ». Si d’autre part l’instruction led est trouvée, l’instruction parseInt()mémorise automatiquement les prochains nombres dans les variables setLed. Grâce à notre définition des instructions, ce doit être soit 1 ou 0 pour ainsi activer ou désactiver la DEL. Ensuite, la fonction debug transmettra une confirmation à l’ordinateur via l’instruction CIPSEND. Si l’instruction led ne faisait pas partie des données reçues par le module, un mes-sage d'erreur informe d’une instruction défaillante. La première commande par le réseau serait ainsi complète.
2.4 | Commutateur réseau Dans le programme précédent, les premières commandes ont été évaluées et une DEL activée en fonction.
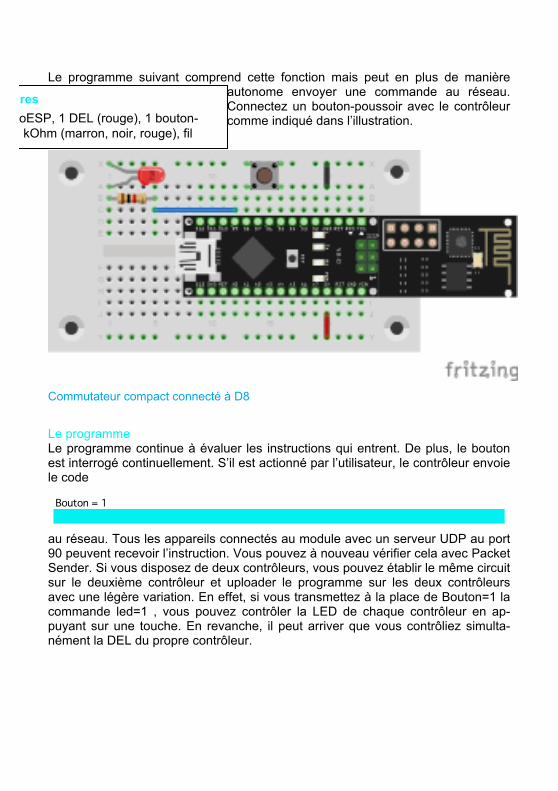
Le programme suivant comprend cette fonction mais peut en plus de manière autonome envoyer une commande au réseau. Connectez un bouton-poussoir avec le contrôleur comme indiqué dans l’illustration.
Commutateur compact connecté à D8
Le programme Le programme continue à évaluer les instructions qui entrent. De plus, le bouton est interrogé continuellement. S’il est actionné par l’utilisateur, le contrôleur envoie le code
Bouton = 1
au réseau. Tous les appareils connectés au module avec un serveur UDP au port 90 peuvent recevoir l’instruction. Vous pouvez à nouveau vérifier cela avec Packet Sender. Si vous disposez de deux contrôleurs, vous pouvez établir le même circuit sur le deuxième contrôleur et uploader le programme sur les deux contrôleurs avec une légère variation. En effet, si vous transmettez à la place de Bouton=1 la commande led=1 , vous pouvez contrôler la LED de chaque contrôleur en ap-puyant sur une touche. En revanche, il peut arriver que vous contrôliez simulta-nément la DEL du propre contrôleur.
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 DEL (rouge), 1 bouton-poussoir, 1 résistance 1 kOhm (marron, noir, rouge), fil électrique
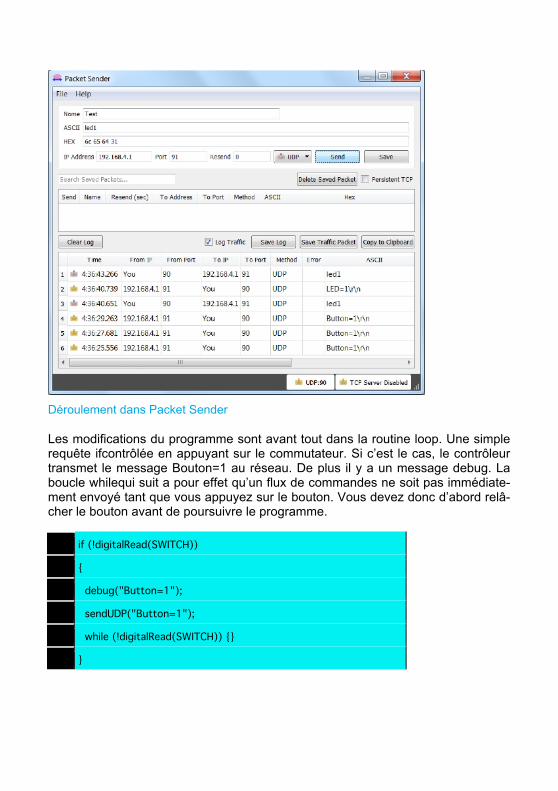
Déroulement dans Packet Sender
Les modifications du programme sont avant tout dans la routine loop. Une simple requête ifcontrôlée en appuyant sur le commutateur. Si c’est le cas, le contrôleur transmet le message Bouton=1 au réseau. De plus il y a un message debug. La boucle whilequi suit a pour effet qu’un flux de commandes ne soit pas immédiate-ment envoyé tant que vous appuyez sur le bouton. Vous devez donc d’abord relâ-cher le bouton avant de poursuivre le programme.
001 if (!digitalRead(SWITCH))
002 {
003 debug("Button=1");
004 sendUDP("Button=1");
005 while (!digitalRead(SWITCH)) {}
006 }
Dans un projet d’automatisation de la maison, un serveur recevrait maintenant le message d’état par exemple d’un capteur de proximité et enverrait ensuite la commande d’allumer la lumière à un autre contrôleur. Ainsi se monte tout un ré-seau de capteurs et acteurs.
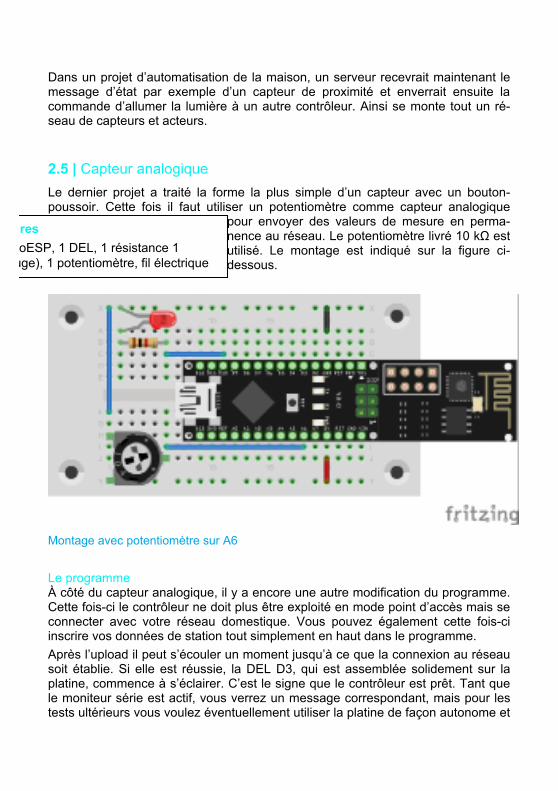
2.5 | Capteur analogique Le dernier projet a traité la forme la plus simple d’un capteur avec un bouton-poussoir. Cette fois il faut utiliser un potentiomètre comme capteur analogique
pour envoyer des valeurs de mesure en perma-nence au réseau. Le potentiomètre livré 10 kΩ est utilisé. Le montage est indiqué sur la figure ci-dessous.
Montage avec potentiomètre sur A6
Le programme À côté du capteur analogique, il y a encore une autre modification du programme. Cette fois-ci le contrôleur ne doit plus être exploité en mode point d’accès mais se connecter avec votre réseau domestique. Vous pouvez également cette fois-ci inscrire vos données de station tout simplement en haut dans le programme. Après l’upload il peut s’écouler un moment jusqu’à ce que la connexion au réseau soit établie. Si elle est réussie, la DEL D3, qui est assemblée solidement sur la platine, commence à s’éclairer. C’est le signe que le contrôleur est prêt. Tant que le moniteur série est actif, vous verrez un message correspondant, mais pour les tests ultérieurs vous voulez éventuellement utiliser la platine de façon autonome et
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 DEL, 1 résistance 1 kOhm (marron, noir, rouge), 1 potentiomètre, fil électrique
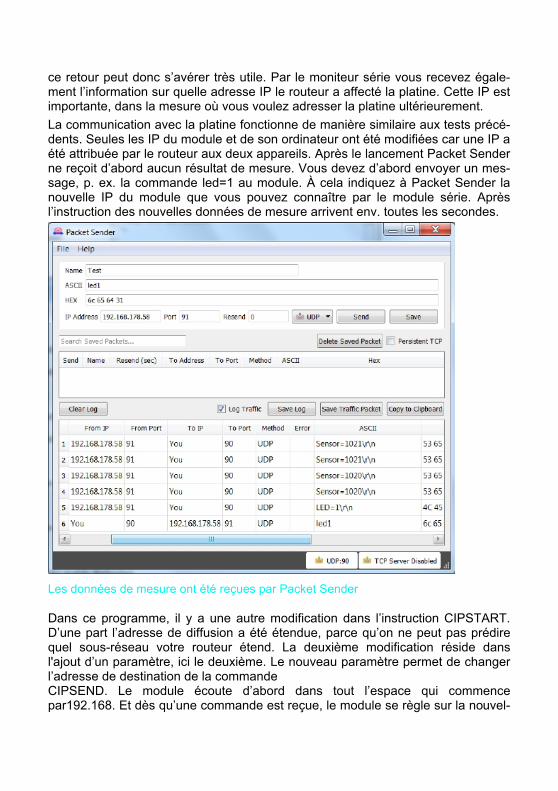
ce retour peut donc s’avérer très utile. Par le moniteur série vous recevez égale-ment l’information sur quelle adresse IP le routeur a affecté la platine. Cette IP est importante, dans la mesure où vous voulez adresser la platine ultérieurement. La communication avec la platine fonctionne de manière similaire aux tests précé-dents. Seules les IP du module et de son ordinateur ont été modifiées car une IP a été attribuée par le routeur aux deux appareils. Après le lancement Packet Sender ne reçoit d’abord aucun résultat de mesure. Vous devez d’abord envoyer un mes-sage, p. ex. la commande led=1 au module. À cela indiquez à Packet Sender la nouvelle IP du module que vous pouvez connaître par le module série. Après l’instruction des nouvelles données de mesure arrivent env. toutes les secondes.
Les données de mesure ont été reçues par Packet Sender
Dans ce programme, il y a une autre modification dans l’instruction CIPSTART. D’une part l’adresse de diffusion a été étendue, parce qu’on ne peut pas prédire quel sous-réseau votre routeur étend. La deuxième modification réside dans l'ajout d’un paramètre, ici le deuxième. Le nouveau paramètre permet de changer l’adresse de destination de la commande CIPSEND. Le module écoute d’abord dans tout l’espace qui commence par192.168. Et dès qu’une commande est reçue, le module se règle sur la nouvel-
le IP.
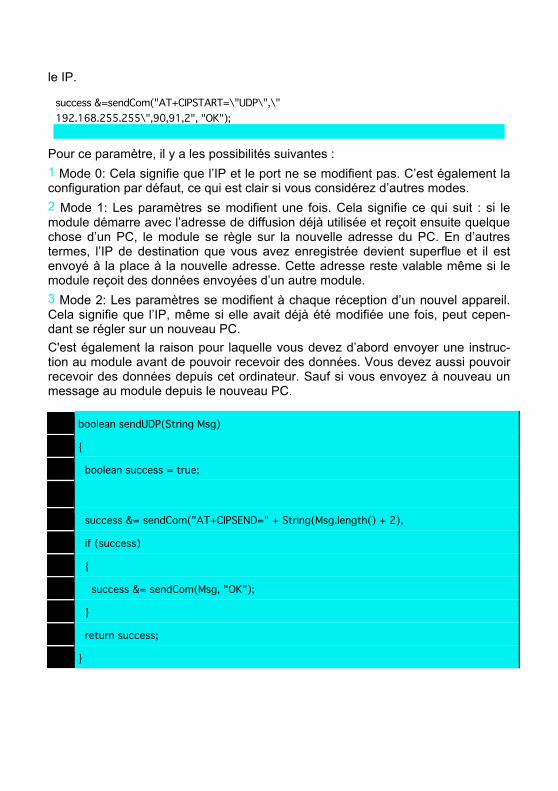
success &=sendCom("AT+CIPSTART=\"UDP\",\" 192.168.255.255\",90,91,2", "OK");
Pour ce paramètre, il y a les possibilités suivantes : 1 Mode 0: Cela signifie que l’IP et le port ne se modifient pas. C’est également la configuration par défaut, ce qui est clair si vous considérez d’autres modes. 2 Mode 1: Les paramètres se modifient une fois. Cela signifie ce qui suit : si le module démarre avec l’adresse de diffusion déjà utilisée et reçoit ensuite quelque chose d’un PC, le module se règle sur la nouvelle adresse du PC. En d’autres termes, l’IP de destination que vous avez enregistrée devient superflue et il est envoyé à la place à la nouvelle adresse. Cette adresse reste valable même si le module reçoit des données envoyées d’un autre module. 3 Mode 2: Les paramètres se modifient à chaque réception d’un nouvel appareil. Cela signifie que l’IP, même si elle avait déjà été modifiée une fois, peut cepen-dant se régler sur un nouveau PC. C'est également la raison pour laquelle vous devez d’abord envoyer une instruc-tion au module avant de pouvoir recevoir des données. Vous devez aussi pouvoir recevoir des données depuis cet ordinateur. Sauf si vous envoyez à nouveau un message au module depuis le nouveau PC.
001 boolean sendUDP(String Msg)
002 {
003 boolean success = true;
004 005 success &= sendCom("AT+CIPSEND=" + String(Msg.length() + 2),
006 if (success)
007 {
008 success &= sendCom(Msg, "OK");
009 }
010 return success;
011 }
L’envoi de la valeur analogique se fait dans la routine loop. D’ailleurs la nouvelle fonction sendUDP() est utilisée, et rend les fonctions connues plus facilement accessibles. Il ne doit pas y avoir nécessairement de retard entre les envois d’instructions car le transfert dure un certain temps. En effet, la fréquence, par laquelle les nouvelles données sont transférées, est tellement élevée que le PC est littéralement bombardé de messages.
CLIENT TCP Le dernier chapitre a traité du protocole UDP avec lequel les données sont en-voyées et reçues de façon simple. Une multitude d’applications peut déjà être réalisée avec le protocole. Dans ce chapitre nous allons nous intéresser au proto-cole TCP (Transmission Control Protocol). Le module va prendre le rôle d’un client TCP dans ce chapitre. C’est le rôle que prend votre PC à domicile face à un ser-veur web. La différence entre TCP et UDP se résume en gros dans les mots-clés suivants : U La connexion est précisément uniquement entre deux appareils. U Les paquets envoyés sont contrôlés sur les erreurs de transfert et
corrigés le cas échéant. U TCP est avant tout utilisé pour internet. U Le protocole est un peu plus lent que UDP mais plus sûr. Le protocole est également utilisé par votre PC et un serveur web, dont vous vou-lez charger une page web, pour établir une connexion entre les deux participants. Les contenus véritables des pages web sont transférés ensuite sous format HTTP (HyperText Transfer Protocol). Nous verrons dans le chapitre suivant comment cela fonctionne exactement.
3.1 | Un navigateur Cet essai utilise à nouveau l’installation existante. Il s’agit de se familiariser avec les structures de base de la communication TCP avec le moniteur série.
Le programme Le programme dans son mode de fonctionnement ressemble à SoftwareSerial-
Le programme du premier test établit entre autres la connexion WLAN indépen-damment au démarrage. Vous économisez ainsi une quantité de travail d’écriture et pouvez commencer plus vite. N’oubliez pas de transférer les données de votre réseau domestique dans le programme. Saisissez ensuite dans le moniteur série les lignes de commandes suivantes :
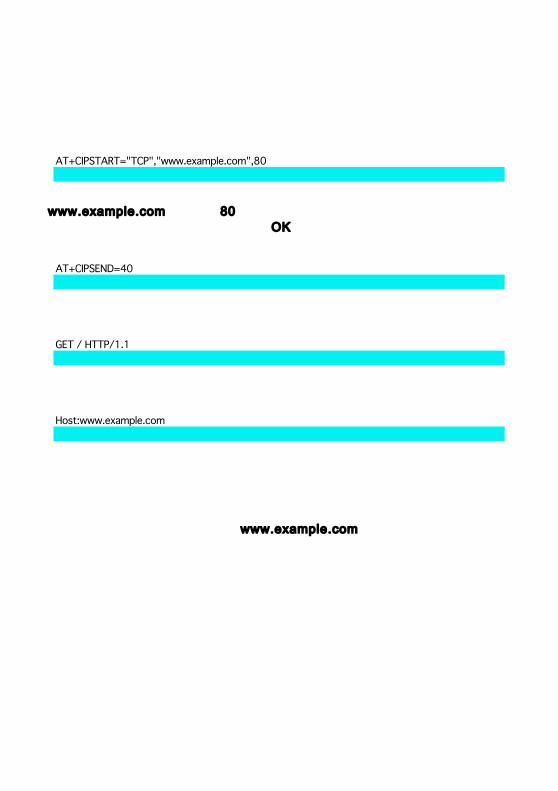
AT+CIPSTART="TCP","www.example.com",80
Avec cette commande vous établissez une connexion TCP avec le site web www.example.com. Le port 80 est le port par défaut pour les requêtes HTTP. Après confirmation de la connexion par OK vous pouvez saisir l’instruction suivan-te que vous connaissez déjà.
AT+CIPSEND=40
Vous voulez maintenant envoyer un message par la connexion établie. Lorsque vous êtes invité par > à saisir un code, tapez d’abord
GET / HTTP/1.1
et appuyez ensuite sur [Enter]. [Enter]n’apparaît pas dans le moniteur série mais le module le reçoit. Ensuite le message continue avec
Host:www.example.com
suivi deux fois par[Enter]. Vous devez en effet envoyer les saisies l’une après l’autre très vite. Le mieux est de préparer un document texte à partir duquel vous pouvez copier rapidement les lignes. Un long texte revient. La première partie est la réponse du serveur et contient quelques informations pour le navigateur. Le texte après <!doctype html> est la page web que vous voyez également quand vous appelez directement la page www.example.com ici en format texte brut. Un navigateur interprèterait ce texte et nous le représenterait dans une forme couran-te.

Extrait de la réponse du serveur web
Sur cet exemple vous voyez les principes de base du format HTTP. Un client éta-blit une connexion avec un serveur web. Que vous ne deviez pas saisir l’adresse IP, mais que vous puissiez utiliser le nom de domaine en format texte est lié à ce qu’on appelle le DNS (Domain Name System). Cela transmet la requête à l’IP difficile à remarquer. Si le client est connecté, le navigateur envoie une requête Get Request. La page appelée ou les ressources (dans ce cas la page principale), le protocole utilisé (http 1.1) et l’hôte demandé (www.example.com) doivent au moins être indiqués dans cette requête. Les données de l’hôte sont importantes car il peut y avoir plusieurs adresses internet sur un serveur et avec derrière une IP. Si vous souhaitez demander une autre page que la page principale, écrivez à la place p. ex. /example.html. À côté de la sous-page demandée votre navigateur envoie d’ailleurs une quantité d’informations en plus des ressources appelées. Des données telles que navigateur utilisé, système d'exploitation, résolution de l’écran et d’autres encore sont transmises. Ainsi le serveur peut ajuster les conte-nus. Ensuite arrive la réponse du serveur qui d’abord semble complexe. La partie entête de la réponse comprend beaucoup d’informations supplémentaires pour votre navigateur. Uniquement à la fin suit le contenu réel de la page web.
3.2 | Une horloge internet Ce projet nécessite de connaître les chapitres précédents pour que le NanoESP récupère de façon autonome les informations d’un site web. Concrètement, le programme charge l’heure en cours depuis une page spécialement conçue pour cela et règle ainsi l’heure interne du contrôleur réalisée par librairie pour afficher une heure précise. L’heure est donnée par le moniteur série. Pour l'installation vous n’avez besoin que de la platine.
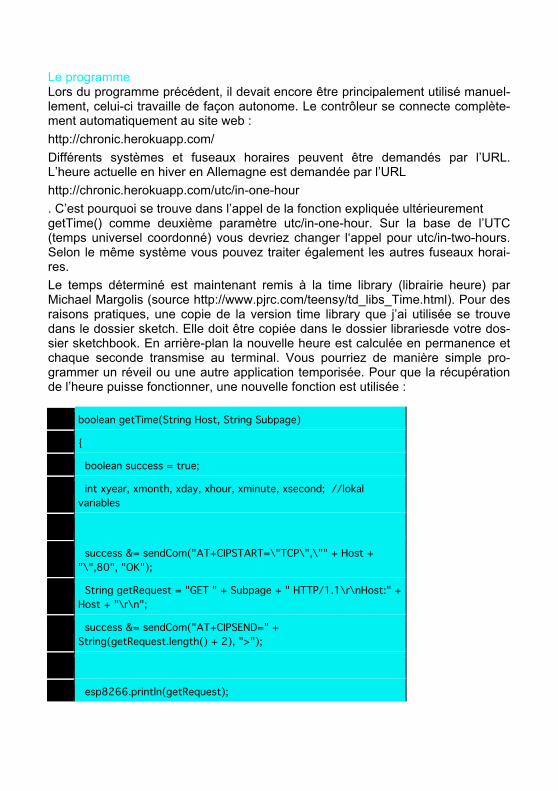
Le programme Lors du programme précédent, il devait encore être principalement utilisé manuel-lement, celui-ci travaille de façon autonome. Le contrôleur se connecte complète-ment automatiquement au site web : http://chronic.herokuapp.com/ Différents systèmes et fuseaux horaires peuvent être demandés par l’URL. L’heure actuelle en hiver en Allemagne est demandée par l’URL http://chronic.herokuapp.com/utc/in-one-hour . C’est pourquoi se trouve dans l’appel de la fonction expliquée ultérieurement getTime() comme deuxième paramètre utc/in-one-hour. Sur la base de l’UTC (temps universel coordonné) vous devriez changer l‘appel pour utc/in-two-hours. Selon le même système vous pouvez traiter également les autres fuseaux horai-res. Le temps déterminé est maintenant remis à la time library (librairie heure) par Michael Margolis (source http://www.pjrc.com/teensy/td_libs_Time.html). Pour des raisons pratiques, une copie de la version time library que j’ai utilisée se trouve dans le dossier sketch. Elle doit être copiée dans le dossier librariesde votre dos-sier sketchbook. En arrière-plan la nouvelle heure est calculée en permanence et chaque seconde transmise au terminal. Vous pourriez de manière simple pro-grammer un réveil ou une autre application temporisée. Pour que la récupération de l’heure puisse fonctionner, une nouvelle fonction est utilisée :
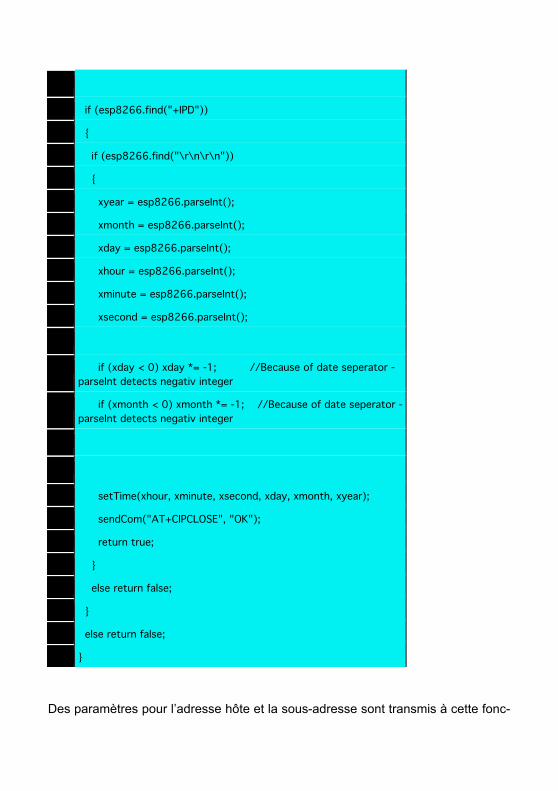
001 boolean getTime(String Host, String Subpage)
002 {
003 boolean success = true;
004 int xyear, xmonth, xday, xhour, xminute, xsecond; //lokal variables
005 006 success &= sendCom("AT+CIPSTART=\"TCP\",\"" + Host +
"\",80", "OK");
007 String getRequest = "GET " + Subpage + " HTTP/1.1\r\nHost:" + Host + "\r\n";
008 success &= sendCom("AT+CIPSEND=" + String(getRequest.length() + 2), ">");
009 010 esp8266.println(getRequest);
011 012 if (esp8266.find("+IPD"))
013 {
014 if (esp8266.find("\r\n\r\n"))
015 {
016 xyear = esp8266.parseInt();
017 xmonth = esp8266.parseInt();
018 xday = esp8266.parseInt();
019 xhour = esp8266.parseInt();
020 xminute = esp8266.parseInt();
021 xsecond = esp8266.parseInt();
022 023 if (xday < 0) xday *= -1; //Because of date seperator -
parseInt detects negativ integer
024 if (xmonth < 0) xmonth *= -1; //Because of date seperator - parseInt detects negativ integer
025 026 027 setTime(xhour, xminute, xsecond, xday, xmonth, xyear);
028 sendCom("AT+CIPCLOSE", "OK");
029 return true;
030 }
031 else return false;
032 }
033 else return false;
034 }
Des paramètres pour l’adresse hôte et la sous-adresse sont transmis à cette fonc-
tion. Il en résulte que la requête Get Request crée et, après la création d’une con-nexion, transmet au serveur TCP de la page web. La réponse du serveur doit maintenant être analysée. De plus, toute la partie Request Header est sautée en recherchant \r\n\r\n, qui ne signifie rien d’autre que ce qu’il se passe après un double Carriage Return und New Line. Les autres chiffres correspondent à la date et heure recherchées qui ont été mémorisées en variables intermédiaires par un certain nombre de fonctions parseInt(). Il y a une particularité dans la date, car ici les valeurs distinctes sont séparées par un trait, ce que la fonction par-seInt()interprète comme un chiffre négatif. Par conséquent, les valeurs sont sim-plement multipliées par -1. Enfin, l’heure est réglée avec la fonction setTime()et affichée par la routine loopune fois par seconde. L’heure est maintenant totale-ment opérationnelle.
3.3 | Affichage de la température Avec ce projet il s’agit de l’affichage de la température actuelle et de la météo générale. Cette fois également les valeurs sont transmises par le moniteur série. Il
y a en plus cependant une sortie intuitive avec la DEL RVB. On peut ainsi estimer par un seul coup d'œil s’il est opportun d’emmener une veste chau-de.
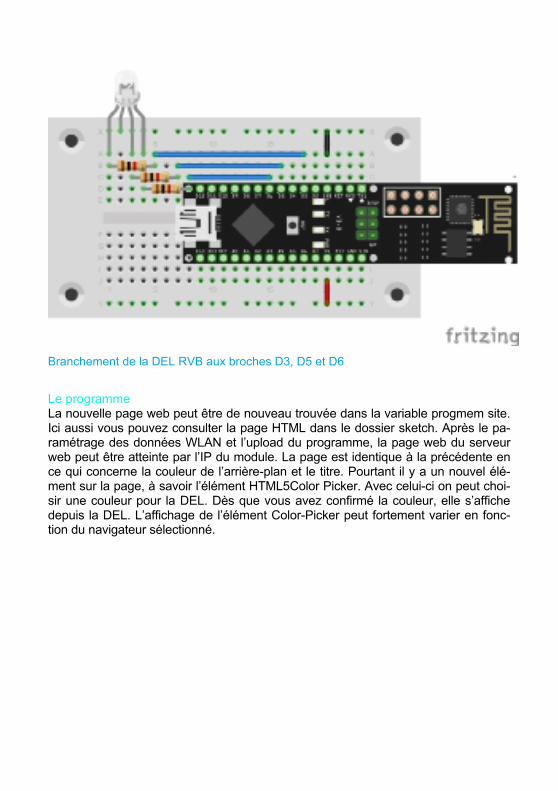
Il est important lors du montage de brancher correctement la DEL RVB. RVB si-gnifie Rouge, Vert, Bleu, car la DEL est composée de plusieurs DELs avec une broche de cathode commune. Par une combinaison des différentes couleurs avec des luminosités distinctes, il est possible de représenter pratiquement chaque couleur. La DEL doit être branchée aux sorties PWM D3, D5 et D6 du contrôleur avec prérésistances, comme indiqué sur la figure.
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 DEL RVB, 3 résistances 1 kOhm (marron, noir, rouge), fil électrique

Branchement de la DEL RVB aux broches D3, D5 et D6
Le programme Dans Sketch il s’agit à nouveau de la requête d’une page internet, mais cette fois il s’agit d’une page spécialement programmée pour ce projet qui prend des données depuis la page météo http://www.openweathermap.com/ . Sur cette page on peut obtenir des informations sur la météo d’une ville par va-riation de l’URL. Vous pouvez saisir la ville, que vous voulez interroger, simple-ment dans le code source derrière City. Comme exemple j’utilise ma ville natale Essen : www.temp.fkainka.de/?city=Essen Le programme extrait la température de cette page et représente le résultat en couleur via la DEL RVB. Simultanément la valeur est transmise par le moniteur série. La plage de température utilisée dans le programme d’exemple pour la représentation sur la DEL va de –20 °C à +40 °C. Fondamentalement le programme fonctionne rapidement comme le précédent mais avec quelques petites particularités. La fonction getTemp() est cette fois-ci chargée de l’acquisition des données et renvoie la température actuelle, comme la fonction de l’heure du programme précédent.
001 void rgbTemp(int val)
002 {
003 int green, blue, red ;
004 005 if (val <= 10 & val >= -20)
006 blue = map(val, -20, 10, 255, 0);
007 else blue = 0;
008 009 if (val >= 10 & val <= 40)
010 green = map(val, 10, 40, 255, 0);
011 else if (val >= -20 & val < 10) green = map(val, -20, 10, 0, 255);
012 else green = 0;
013 014 if (val > 10 & val <= 40) red = map(val, 10, 40, 0, 255);
015 else red = 0;
016 017 analogWrite(RED, red);
018 analogWrite(GREEN, green);
019 analogWrite(BLUE, blue);
020 }
L'ajustement des luminosités DEL est exécuté dans la fonction rgbTemp() . À l’aide de la commande maples valeurs sont basculées en valeurs octets (0-255) adéquates et délivrées à la DEL. Bleu correspond aux températures particulière-ment froides et a un impact dans la plage de –20 °C à +10 °C. Vert est dans tou-tes les plages de températures mais a un maximum avec la valeur 10 °C. Rouge débute à la valeur de +10 °C avec un maximum à +40 °C. Ce codage intuitif est conçu pour évaluer la température actuelle en plus de l’affichage plus précis dans le moniteur série.
SERVEUR TCP Après avoir appris certains éléments sur l’utilisation du module en client TCP dans le chapitre précédent, le module doit maintenant agir comme serveur TCP. D’une manière pratique il existe également une instruction AT simple avec laquelle vous pouvez démarrer cette application serveur complexe. Le module se comporte ensuite comme un serveur TCP internet, sauf que vous devez programmer vous-même l’envoi de la page web.
4.1 | Serfvice web TCP Les premières étapes en terme de serveur web TCP se font sans configuration matérielle supplémentaire. Testez d’abord les instructions les plus importantes simplement via le moniteur série.
Le programme Saisissez comme jusqu’à présent les données WLAN et téléchargez le program-me sur votre platine. Ensuite démarrez le moniteur. Cela peut durer à nouveau quelques secondes jusqu’à ce que le message apparaisse, selon lequel la platine est connectée. Lorsque le message de réussite est apparu et l’IP du module a été affichée, vous pouvez démarrer dans le moniteur série avec la première instruc-tion :
AT+CIPMUX=1
Vous autoriser plusieurs connexions au module par cette instruction. Ainsi plu-sieurs ordinateurs peuvent accéder au serveur web. Vous démarrer le serveur web avec l’instruction suivante :
AT+CIPSERVER=1,80
Le paramètre 1 signifie que le serveur est démarré. Avec0 vous arrêtez le ser-veur. Le chiffre 80 représente le port par lequel le serveur est accessible. Les requêtes HTTP envoyées par le navigateur sont généralement envoyées par le port 80. Vous pouvez maintenant ouvrir un navigateur de votre choix et saisir dans la barre d’adresse l’IP du module et confirmer avec [Enter]. Dans le navigateur apparaît d’abord un message de chargement mais vous pouvez remarquer une modifica-tion dans le moniteur série. Vous voyez une requête similaire à celle que vous
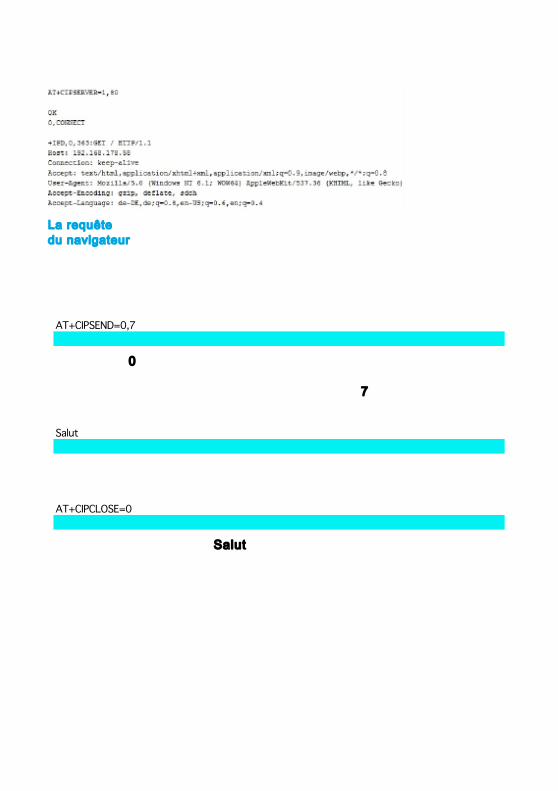
avez déjà envoyé manuellement.
La requête du navigateur
Le navigateur attend une réponse et indique un caractère de chargement jusqu’à ce que la connexion soit arrêtée en raison du temps de latence. Vous pouvez envoyer un message avec une variante d’une instruction connue au navigateur :
AT+CIPSEND=0,7
Le paramètre 0 indique ici le client auquel le message doit être envoyé. Ceci est nécessaire car plusieurs connexions sont autorisées et donc plusieurs clients peuvent être connectés. Le deuxième paramètre, ici 7, indique de nouveau le nombre de caractères à envoyer. > apparaît et vous pouvez saisir un simple
Salut
et envoyer avec [Enter]. Pourtant dans votre navigateur rien ne change d’abord car vous devez fermer la connexion. Utilisez pour cela la commande :
AT+CIPCLOSE=0
Maintenant vous pouvez voir Salut dans votre navigateur. Vous avez réalisé ainsi une première application serveur web. Ce premier test montre beaucoup sur les processus précis de communication dans internet. La représentation de « Salut » dans le navigateur est encore assez facile car un texte plus simple à la place d’une page HTML complexe a été en-voyé. Pour une page HTML correcte vous avez dû écrire manuellement toute une entête aussi bien pour la requête Get Request que pour le texte HTML. Je vous épargne cet effort dans le premier test.
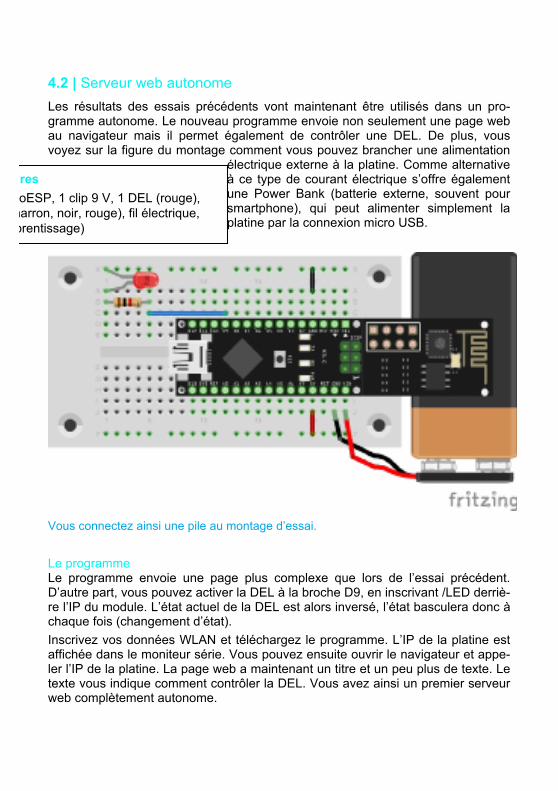
4.2 | Serveur web autonome Les résultats des essais précédents vont maintenant être utilisés dans un pro-gramme autonome. Le nouveau programme envoie non seulement une page web au navigateur mais il permet également de contrôler une DEL. De plus, vous voyez sur la figure du montage comment vous pouvez brancher une alimentation
électrique externe à la platine. Comme alternative à ce type de courant électrique s’offre également une Power Bank (batterie externe, souvent pour smartphone), qui peut alimenter simplement la platine par la connexion micro USB.
Vous connectez ainsi une pile au montage d’essai.
Le programme Le programme envoie une page plus complexe que lors de l’essai précédent. D’autre part, vous pouvez activer la DEL à la broche D9, en inscrivant /LED derriè-re l’IP du module. L’état actuel de la DEL est alors inversé, l’état basculera donc à chaque fois (changement d’état). Inscrivez vos données WLAN et téléchargez le programme. L’IP de la platine est affichée dans le moniteur série. Vous pouvez ensuite ouvrir le navigateur et appe-ler l’IP de la platine. La page web a maintenant un titre et un peu plus de texte. Le texte vous indique comment contrôler la DEL. Vous avez ainsi un premier serveur web complètement autonome.
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 clip 9 V, 1 DEL (rouge), 1 résistance 1 kOhm (marron, noir, rouge), fil électrique, 1 pile 9 V (hors kit d’apprentissage)
001 void loop() {
002 if (esp8266.available()) // check if the esp is sending a message
003 {
004 if (esp8266.find("+IPD,"))
005 {
006 debug("Incomming Request");
007 int connectionId = esp8266.parseInt();
008
009 if (esp8266.findUntil("LED","\n")) digitalWrite(LED, !digitalRead(LED));
010 011 String webpage = "<h1>Hello World!</h1>Open [IP]/LED to Toggle LED on D9";
012 013 if (sendCom("AT+CIPSEND=" + String(connectionId) + "," + String(webpage.length()),
">"))
014 {
015 sendCom(webpage,"SEND OK");
016 sendCom("AT+CIPCLOSE=" + String(connectionId),"OK");
017 debug("Send and Close");
018 }
019 }
020 }
021 }
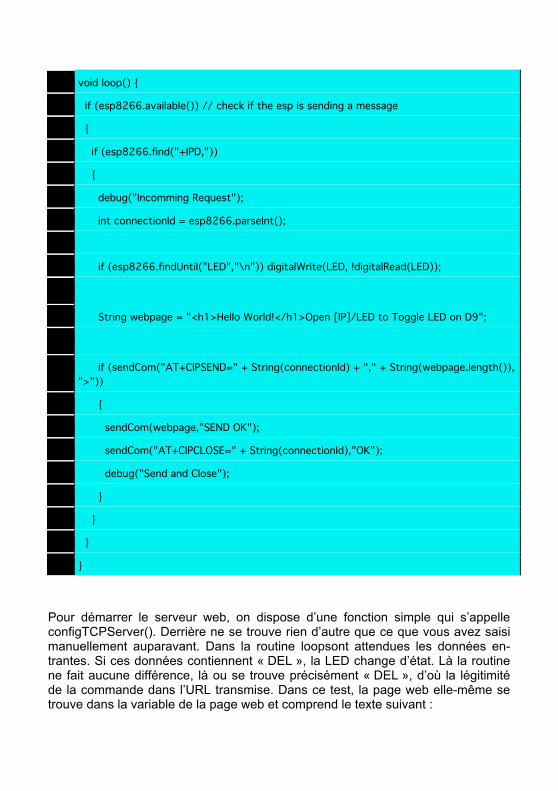
Pour démarrer le serveur web, on dispose d’une fonction simple qui s’appelle configTCPServer(). Derrière ne se trouve rien d’autre que ce que vous avez saisi manuellement auparavant. Dans la routine loopsont attendues les données en-trantes. Si ces données contiennent « DEL », la LED change d’état. Là la routine ne fait aucune différence, là ou se trouve précisément « DEL », d’où la légitimité de la commande dans l’URL transmise. Dans ce test, la page web elle-même se trouve dans la variable de la page web et comprend le texte suivant :
001 <h1>Hello World!</h1>
002 Open [IP]/LED to Toggle LED on D9
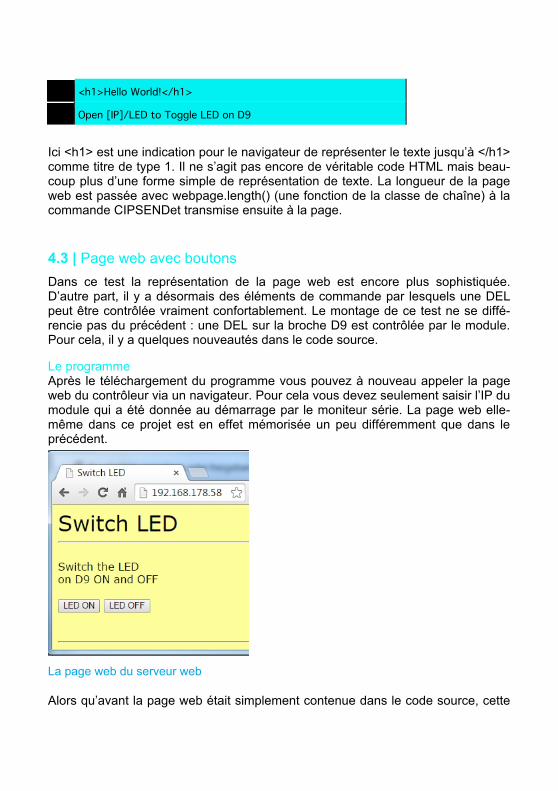
Ici <h1> est une indication pour le navigateur de représenter le texte jusqu’à </h1> comme titre de type 1. Il ne s’agit pas encore de véritable code HTML mais beau-coup plus d’une forme simple de représentation de texte. La longueur de la page web est passée avec webpage.length() (une fonction de la classe de chaîne) à la commande CIPSENDet transmise ensuite à la page.
4.3 | Page web avec boutons Dans ce test la représentation de la page web est encore plus sophistiquée. D’autre part, il y a désormais des éléments de commande par lesquels une DEL peut être contrôlée vraiment confortablement. Le montage de ce test ne se diffé-rencie pas du précédent : une DEL sur la broche D9 est contrôlée par le module. Pour cela, il y a quelques nouveautés dans le code source.
Le programme Après le téléchargement du programme vous pouvez à nouveau appeler la page web du contrôleur via un navigateur. Pour cela vous devez seulement saisir l’IP du module qui a été donnée au démarrage par le moniteur série. La page web elle-même dans ce projet est en effet mémorisée un peu différemment que dans le précédent.
La page web du serveur web
Alors qu’avant la page web était simplement contenue dans le code source, cette
fois-ci elle est mémorisée dans ce qu’on appelle des variables progmem (Program Memory). L’utilisation de ce type de mémorisation décharge la SRAM de la platine qui serait autrement responsable du stockage des variables. La SRAM ne compor-te que 2 kB et est déjà très chargée par l’utilisation des chaînes. Le contenu du site sera placé dans la mémoire du programme par la fonction progmem, qui est beaucoup plus grande avec environ 32 kB. L'accès aux données est également un peu plus complexe.
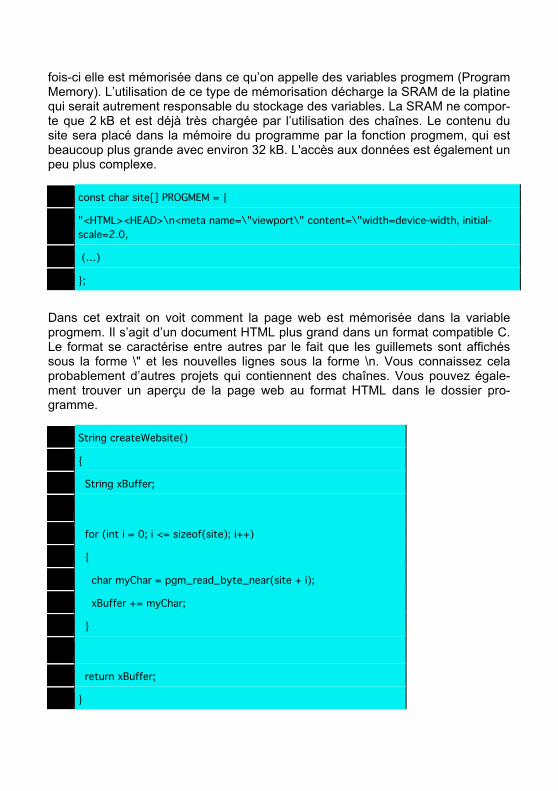
001 const char site[] PROGMEM = {
002 "<HTML><HEAD>\n<meta name=\"viewport\" content=\"width=device-width, initial-scale=2.0,
003 (…)
004 };
Dans cet extrait on voit comment la page web est mémorisée dans la variable progmem. Il s’agit d’un document HTML plus grand dans un format compatible C. Le format se caractérise entre autres par le fait que les guillemets sont affichés sous la forme \" et les nouvelles lignes sous la forme \n. Vous connaissez cela probablement d’autres projets qui contiennent des chaînes. Vous pouvez égale-ment trouver un aperçu de la page web au format HTML dans le dossier pro-gramme.
001 String createWebsite()
002 {
003 String xBuffer;
004 005 for (int i = 0; i <= sizeof(site); i++)
006 {
007 char myChar = pgm_read_byte_near(site + i);
008 xBuffer += myChar;
009 }
010 011 return xBuffer;
012 }
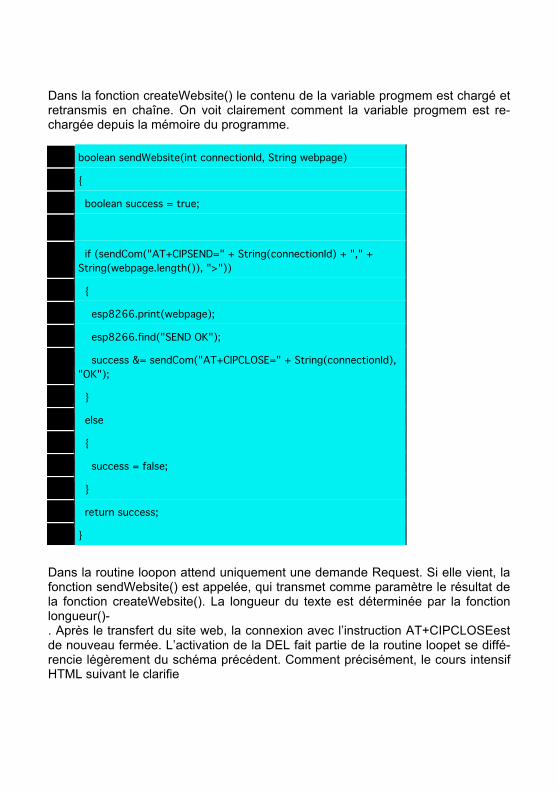
Dans la fonction createWebsite() le contenu de la variable progmem est chargé et retransmis en chaîne. On voit clairement comment la variable progmem est re-chargée depuis la mémoire du programme.
001 boolean sendWebsite(int connectionId, String webpage)
002 {
003 boolean success = true;
004 005 if (sendCom("AT+CIPSEND=" + String(connectionId) + "," +
String(webpage.length()), ">"))
006 {
007 esp8266.print(webpage);
008 esp8266.find("SEND OK");
009 success &= sendCom("AT+CIPCLOSE=" + String(connectionId), "OK");
010 }
011 else
012 {
013 success = false;
014 }
015 return success;
016 }
Dans la routine loopon attend uniquement une demande Request. Si elle vient, la fonction sendWebsite() est appelée, qui transmet comme paramètre le résultat de la fonction createWebsite(). La longueur du texte est déterminée par la fonction longueur()- . Après le transfert du site web, la connexion avec l’instruction AT+CIPCLOSEest de nouveau fermée. L’activation de la DEL fait partie de la routine loopet se diffé-rencie légèrement du schéma précédent. Comment précisément, le cours intensif HTML suivant le clarifie
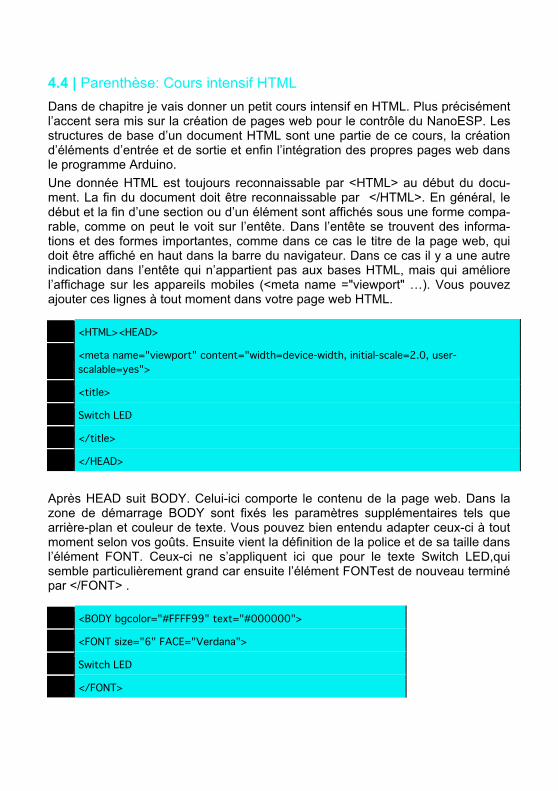
4.4 | Parenthèse: Cours intensif HTML Dans de chapitre je vais donner un petit cours intensif en HTML. Plus précisément l’accent sera mis sur la création de pages web pour le contrôle du NanoESP. Les structures de base d’un document HTML sont une partie de ce cours, la création d’éléments d’entrée et de sortie et enfin l’intégration des propres pages web dans le programme Arduino. Une donnée HTML est toujours reconnaissable par <HTML> au début du docu-ment. La fin du document doit être reconnaissable par </HTML>. En général, le début et la fin d’une section ou d’un élément sont affichés sous une forme compa-rable, comme on peut le voit sur l’entête. Dans l’entête se trouvent des informa-tions et des formes importantes, comme dans ce cas le titre de la page web, qui doit être affiché en haut dans la barre du navigateur. Dans ce cas il y a une autre indication dans l’entête qui n’appartient pas aux bases HTML, mais qui améliore l’affichage sur les appareils mobiles (<meta name ="viewport" …). Vous pouvez ajouter ces lignes à tout moment dans votre page web HTML.
001 <HTML><HEAD>
002 <meta name="viewport" content="width=device-width, initial-scale=2.0, user-scalable=yes">
003 <title>
004 Switch LED
005 </title>
006 </HEAD>
Après HEAD suit BODY. Celui-ici comporte le contenu de la page web. Dans la zone de démarrage BODY sont fixés les paramètres supplémentaires tels que arrière-plan et couleur de texte. Vous pouvez bien entendu adapter ceux-ci à tout moment selon vos goûts. Ensuite vient la définition de la police et de sa taille dans l’élément FONT. Ceux-ci ne s’appliquent ici que pour le texte Switch LED,qui semble particulièrement grand car ensuite l’élément FONTest de nouveau terminé par </FONT> .
001 <BODY bgcolor="#FFFF99" text="#000000">
002 <FONT size="6" FACE="Verdana">
003 Switch LED
004 </FONT>
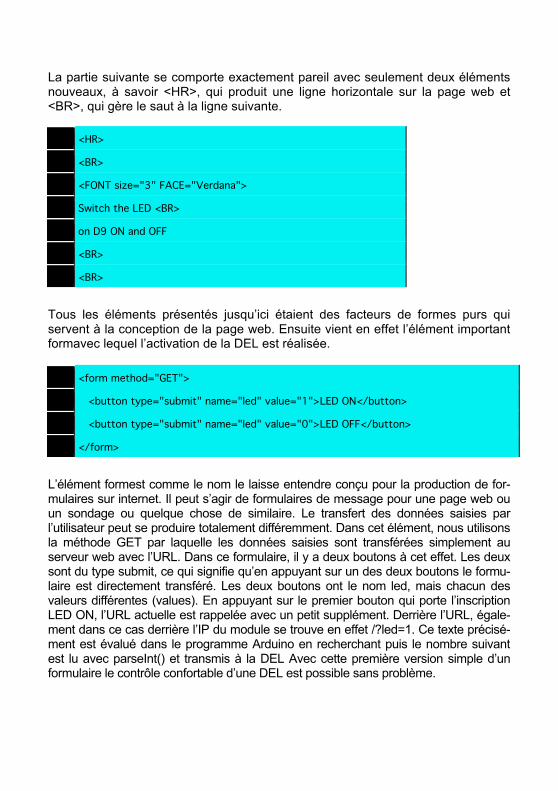
La partie suivante se comporte exactement pareil avec seulement deux éléments nouveaux, à savoir <HR>, qui produit une ligne horizontale sur la page web et <BR>, qui gère le saut à la ligne suivante.
001 <HR>
002 <BR>
003 <FONT size="3" FACE="Verdana">
004 Switch the LED <BR>
005 on D9 ON and OFF
006 <BR>
007 <BR>
Tous les éléments présentés jusqu’ici étaient des facteurs de formes purs qui servent à la conception de la page web. Ensuite vient en effet l’élément important formavec lequel l’activation de la DEL est réalisée.
001 <form method="GET">
002 <button type="submit" name="led" value="1">LED ON</button>
003 <button type="submit" name="led" value="0">LED OFF</button>
004 </form>
L’élément formest comme le nom le laisse entendre conçu pour la production de for-mulaires sur internet. Il peut s’agir de formulaires de message pour une page web ou un sondage ou quelque chose de similaire. Le transfert des données saisies par l’utilisateur peut se produire totalement différemment. Dans cet élément, nous utilisons la méthode GET par laquelle les données saisies sont transférées simplement au serveur web avec l’URL. Dans ce formulaire, il y a deux boutons à cet effet. Les deux sont du type submit, ce qui signifie qu’en appuyant sur un des deux boutons le formu-laire est directement transféré. Les deux boutons ont le nom led, mais chacun des valeurs différentes (values). En appuyant sur le premier bouton qui porte l’inscription LED ON, l’URL actuelle est rappelée avec un petit supplément. Derrière l’URL, égale-ment dans ce cas derrière l’IP du module se trouve en effet /?led=1. Ce texte précisé-ment est évalué dans le programme Arduino en recherchant puis le nombre suivant est lu avec parseInt() et transmis à la DEL Avec cette première version simple d’un formulaire le contrôle confortable d’une DEL est possible sans problème.
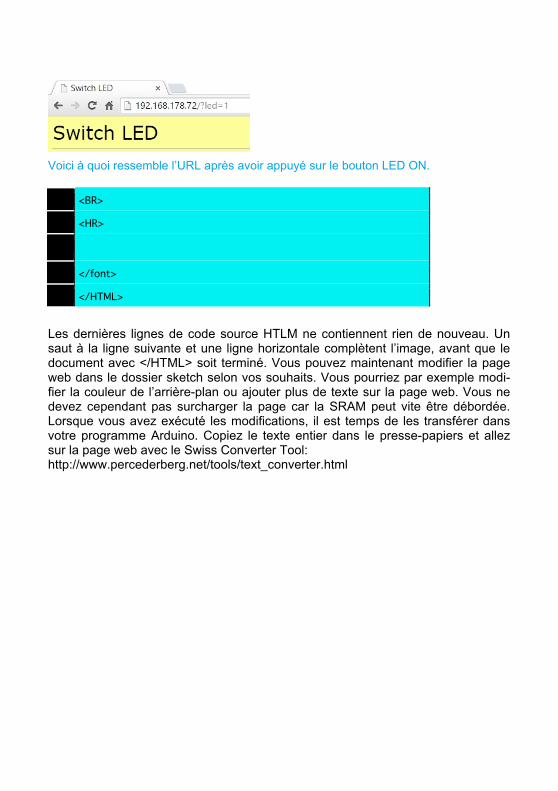
Voici à quoi ressemble l’URL après avoir appuyé sur le bouton LED ON.
001 <BR>
002 <HR>
003 004 </font>
005 </HTML>
Les dernières lignes de code source HTLM ne contiennent rien de nouveau. Un saut à la ligne suivante et une ligne horizontale complètent l’image, avant que le document avec </HTML> soit terminé. Vous pouvez maintenant modifier la page web dans le dossier sketch selon vos souhaits. Vous pourriez par exemple modi-fier la couleur de l’arrière-plan ou ajouter plus de texte sur la page web. Vous ne devez cependant pas surcharger la page car la SRAM peut vite être débordée. Lorsque vous avez exécuté les modifications, il est temps de les transférer dans votre programme Arduino. Copiez le texte entier dans le presse-papiers et allez sur la page web avec le Swiss Converter Tool: http://www.percederberg.net/tools/text_converter.html
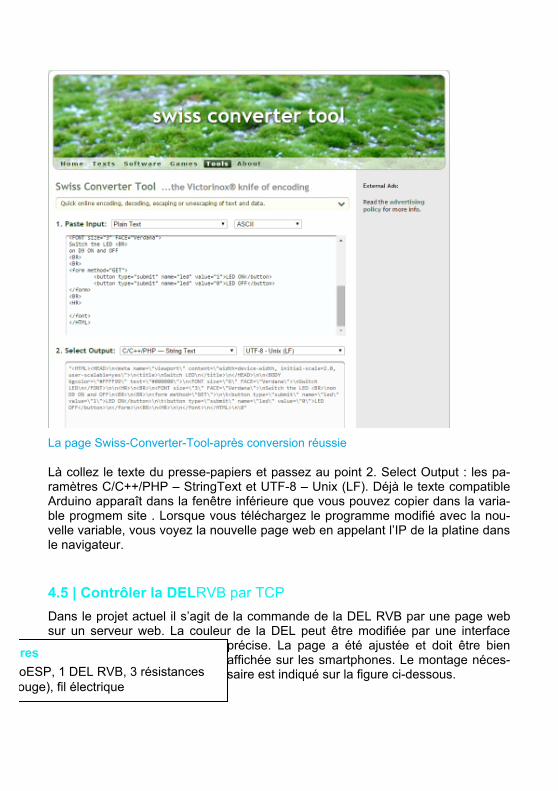
La page Swiss-Converter-Tool-après conversion réussie
Là collez le texte du presse-papiers et passez au point 2. Select Output : les pa-ramètres C/C++/PHP – StringText et UTF-8 – Unix (LF). Déjà le texte compatible Arduino apparaît dans la fenêtre inférieure que vous pouvez copier dans la varia-ble progmem site . Lorsque vous téléchargez le programme modifié avec la nou-velle variable, vous voyez la nouvelle page web en appelant l’IP de la platine dans le navigateur.
4.5 | Contrôler la DELRVB par TCP Dans le projet actuel il s’agit de la commande de la DEL RVB par une page web sur un serveur web. La couleur de la DEL peut être modifiée par une interface
précise. La page a été ajustée et doit être bien affichée sur les smartphones. Le montage néces-saire est indiqué sur la figure ci-dessous.
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 DEL RVB, 3 résistances 1 kOhm (marron, noir, rouge), fil électrique
Branchement de la DEL RVB aux broches D3, D5 et D6
Le programme La nouvelle page web peut être de nouveau trouvée dans la variable progmem site. Ici aussi vous pouvez consulter la page HTML dans le dossier sketch. Après le pa-ramétrage des données WLAN et l’upload du programme, la page web du serveur web peut être atteinte par l’IP du module. La page est identique à la précédente en ce qui concerne la couleur de l’arrière-plan et le titre. Pourtant il y a un nouvel élé-ment sur la page, à savoir l’élément HTML5Color Picker. Avec celui-ci on peut choi-sir une couleur pour la DEL. Dès que vous avez confirmé la couleur, elle s’affiche depuis la DEL. L’affichage de l’élément Color-Picker peut fortement varier en fonc-tion du navigateur sélectionné.
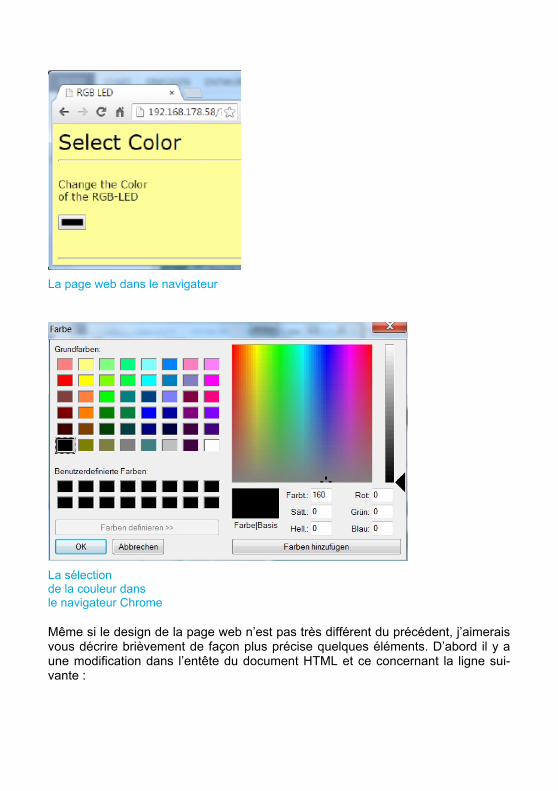
La page web dans le navigateur
La sélection de la couleur dans le navigateur Chrome
Même si le design de la page web n’est pas très différent du précédent, j’aimerais vous décrire brièvement de façon plus précise quelques éléments. D’abord il y a une modification dans l’entête du document HTML et ce concernant la ligne sui-vante :
<link rel="icon" href="data:;base64,iVBORw0KGgo=">
Cette ligne est là pour que le navigateur n’essaie pas après le chargement de charger ce qu’on appelle Favicon. En général, une page web a en effet un symbo-le particulier qui est différent des autres pages web et identifie clairement la page web dans une barre du navigateur avec plusieurs onglets. Pour que le navigateur puisse charger ces caractères, il envoie après l’appel de la page une deuxième requête et demande ce favicon. Dans les premiers essais avec le serveur TCP vous avez peut-être remarqué cette requête supplémentaire. Pour empêcher ces deux requêtes et ne pas surcharger inutilement la platine, la deuxième ligne de code ci-dessus fait comprendre au navigateur qu’il ne doit pas envoyer de deuxième requête. Je vous recommande de prendre cette ligne pour vos propres pages HTML. La deuxième particularité de ce document est l’élément déjà mentionné Color-Picker. Il remplace pour ainsi dire les boutons de l’exemple précédent. Il s’agit d’un élément HTML5 relativement nouveau. Dans la page web précédente nous avons simplement choisi des boutons de type submit pour que les valeurs du formulaire soient directement transmises en ap-puyant. Ceci n’est malheureusement pas possible avec un élément de saisie de type color. Une possibilité de résoudre le problème serait de créer un bouton de type submit qui devrait ensuite être appuyé après le paramétrage de la couleur. Ceci sera démontré dans un test ultérieur. Ici a été collé un petit code JavaScript-Code (il s’agit de la partie onchange="this.form.submit()"), qui veille à ce que le formulaire soit directement transmis après une modification.
L’élément Color-Picker-dans le navigateur Android-5.0- .
On économise un autre bouton.
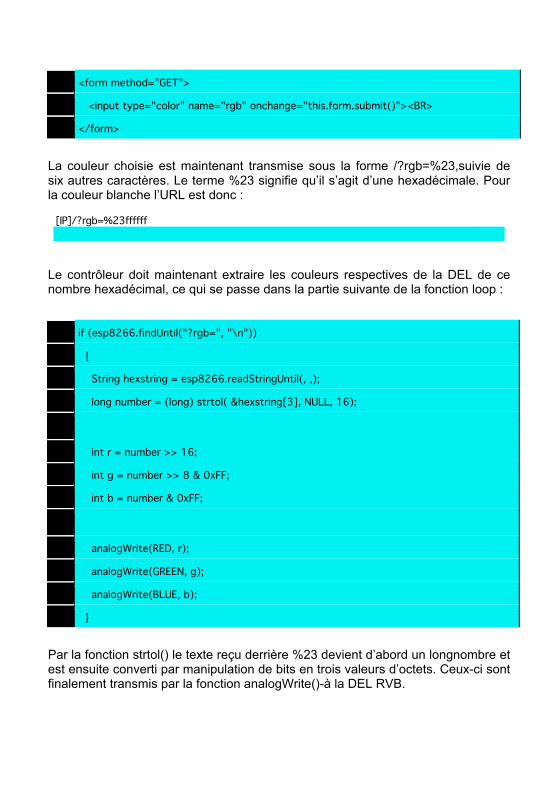
001 <form method="GET">
002 <input type="color" name="rgb" onchange="this.form.submit()"><BR>
003 </form>
La couleur choisie est maintenant transmise sous la forme /?rgb=%23,suivie de six autres caractères. Le terme %23 signifie qu’il s’agit d’une hexadécimale. Pour la couleur blanche l’URL est donc :
[IP]/?rgb=%23ffffff
Le contrôleur doit maintenant extraire les couleurs respectives de la DEL de ce nombre hexadécimal, ce qui se passe dans la partie suivante de la fonction loop :
001 if (esp8266.findUntil("?rgb=", "\n"))
002 {
003 String hexstring = esp8266.readStringUntil(‚ ‚);
004 long number = (long) strtol( &hexstring[3], NULL, 16);
005 006 int r = number >> 16;
007 int g = number >> 8 & 0xFF;
008 int b = number & 0xFF;
009 010 analogWrite(RED, r);
011 analogWrite(GREEN, g);
012 analogWrite(BLUE, b);
013 }
Par la fonction strtol() le texte reçu derrière %23 devient d’abord un longnombre et est ensuite converti par manipulation de bits en trois valeurs d’octets. Ceux-ci sont finalement transmis par la fonction analogWrite()-à la DEL RVB.
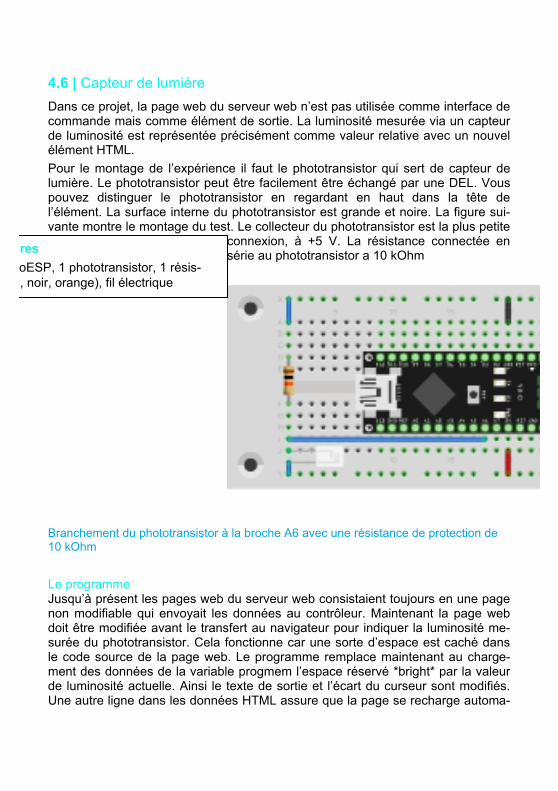
4.6 | Capteur de lumière Dans ce projet, la page web du serveur web n’est pas utilisée comme interface de commande mais comme élément de sortie. La luminosité mesurée via un capteur de luminosité est représentée précisément comme valeur relative avec un nouvel élément HTML. Pour le montage de l’expérience il faut le phototransistor qui sert de capteur de lumière. Le phototransistor peut être facilement être échangé par une DEL. Vous pouvez distinguer le phototransistor en regardant en haut dans la tête de l’élément. La surface interne du phototransistor est grande et noire. La figure sui-vante montre le montage du test. Le collecteur du phototransistor est la plus petite
connexion, à +5 V. La résistance connectée en série au phototransistor a 10 kOhm
Branchement du phototransistor à la broche A6 avec une résistance de protection de 10 kOhm
Le programme Jusqu’à présent les pages web du serveur web consistaient toujours en une page non modifiable qui envoyait les données au contrôleur. Maintenant la page web doit être modifiée avant le transfert au navigateur pour indiquer la luminosité me-surée du phototransistor. Cela fonctionne car une sorte d’espace est caché dans le code source de la page web. Le programme remplace maintenant au charge-ment des données de la variable progmem l’espace réservé *bright* par la valeur de luminosité actuelle. Ainsi le texte de sortie et l’écart du curseur sont modifiés. Une autre ligne dans les données HTML assure que la page se recharge automa-
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 phototransistor, 1 résis-tance 10 kOhm (marron, noir, orange), fil électrique
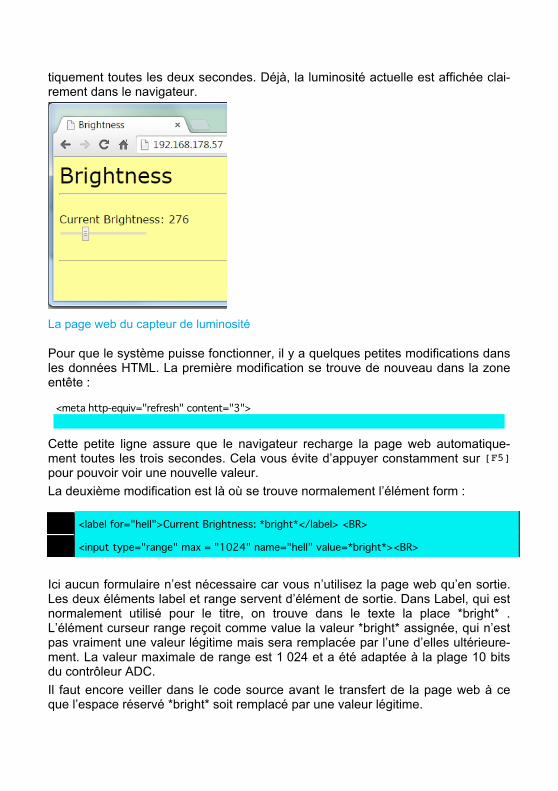
tiquement toutes les deux secondes. Déjà, la luminosité actuelle est affichée clai-rement dans le navigateur.
La page web du capteur de luminosité
Pour que le système puisse fonctionner, il y a quelques petites modifications dans les données HTML. La première modification se trouve de nouveau dans la zone entête :
<meta http-equiv="refresh" content="3">
Cette petite ligne assure que le navigateur recharge la page web automatique-ment toutes les trois secondes. Cela vous évite d’appuyer constamment sur [F5] pour pouvoir voir une nouvelle valeur. La deuxième modification est là où se trouve normalement l’élément form :
001 <label for="hell">Current Brightness: *bright*</label> <BR>
002 <input type="range" max = "1024" name="hell" value=*bright*><BR>
Ici aucun formulaire n’est nécessaire car vous n’utilisez la page web qu’en sortie. Les deux éléments label et range servent d’élément de sortie. Dans Label, qui est normalement utilisé pour le titre, on trouve dans le texte la place *bright* . L’élément curseur range reçoit comme value la valeur *bright* assignée, qui n’est pas vraiment une valeur légitime mais sera remplacée par l’une d’elles ultérieure-ment. La valeur maximale de range est 1 024 et a été adaptée à la plage 10 bits du contrôleur ADC. Il faut encore veiller dans le code source avant le transfert de la page web à ce que l’espace réservé *bright* soit remplacé par une valeur légitime.
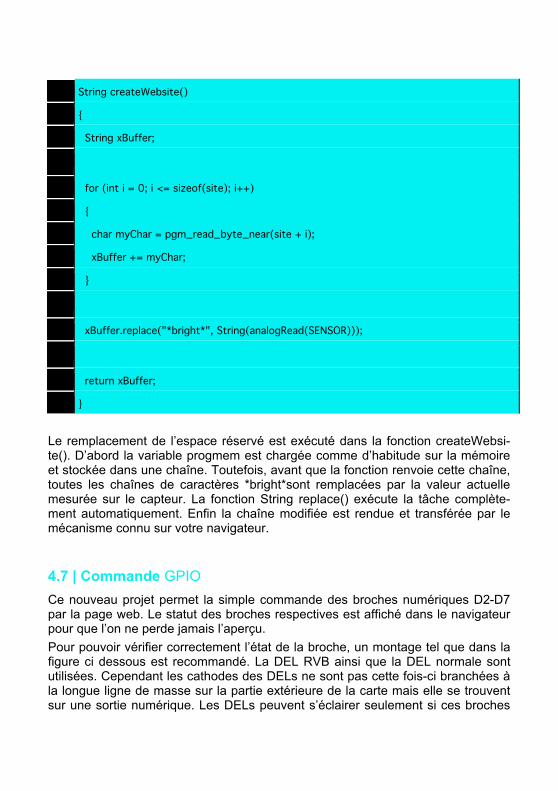
001 String createWebsite()
002 {
003 String xBuffer;
004 005 for (int i = 0; i <= sizeof(site); i++)
006 {
007 char myChar = pgm_read_byte_near(site + i);
008 xBuffer += myChar;
009 }
010 011 xBuffer.replace("*bright*", String(analogRead(SENSOR)));
012 013 return xBuffer;
014 }
Le remplacement de l’espace réservé est exécuté dans la fonction createWebsi-te(). D’abord la variable progmem est chargée comme d’habitude sur la mémoire et stockée dans une chaîne. Toutefois, avant que la fonction renvoie cette chaîne, toutes les chaînes de caractères *bright*sont remplacées par la valeur actuelle mesurée sur le capteur. La fonction String replace() exécute la tâche complète-ment automatiquement. Enfin la chaîne modifiée est rendue et transférée par le mécanisme connu sur votre navigateur.
4.7 | Commande GPIO Ce nouveau projet permet la simple commande des broches numériques D2-D7 par la page web. Le statut des broches respectives est affiché dans le navigateur pour que l’on ne perde jamais l’aperçu. Pour pouvoir vérifier correctement l’état de la broche, un montage tel que dans la figure ci dessous est recommandé. La DEL RVB ainsi que la DEL normale sont utilisées. Cependant les cathodes des DELs ne sont pas cette fois-ci branchées à la longue ligne de masse sur la partie extérieure de la carte mais elle se trouvent sur une sortie numérique. Les DELs peuvent s’éclairer seulement si ces broches
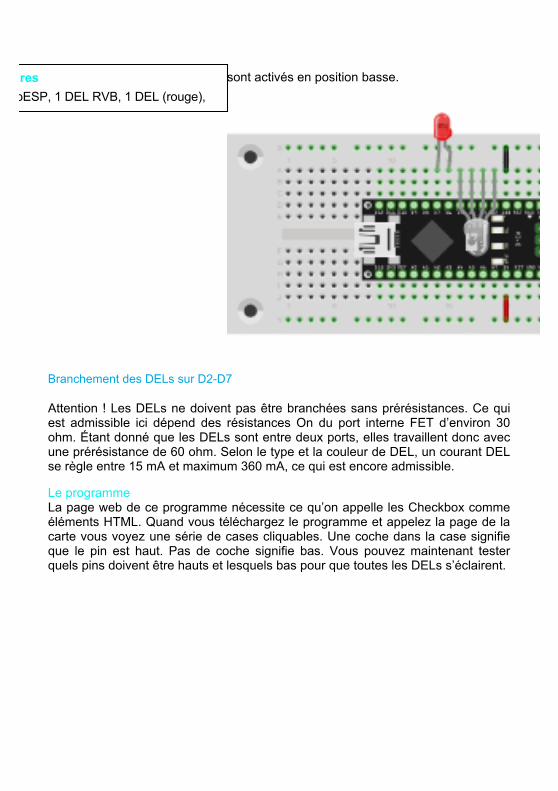
sont activés en position basse.
Branchement des DELs sur D2-D7
Attention ! Les DELs ne doivent pas être branchées sans prérésistances. Ce qui est admissible ici dépend des résistances On du port interne FET d’environ 30 ohm. Étant donné que les DELs sont entre deux ports, elles travaillent donc avec une prérésistance de 60 ohm. Selon le type et la couleur de DEL, un courant DEL se règle entre 15 mA et maximum 360 mA, ce qui est encore admissible.
Le programme La page web de ce programme nécessite ce qu’on appelle les Checkbox comme éléments HTML. Quand vous téléchargez le programme et appelez la page de la carte vous voyez une série de cases cliquables. Une coche dans la case signifie que le pin est haut. Pas de coche signifie bas. Vous pouvez maintenant tester quels pins doivent être hauts et lesquels bas pour que toutes les DELs s’éclairent.
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 DEL RVB, 1 DEL (rouge), fil électrique
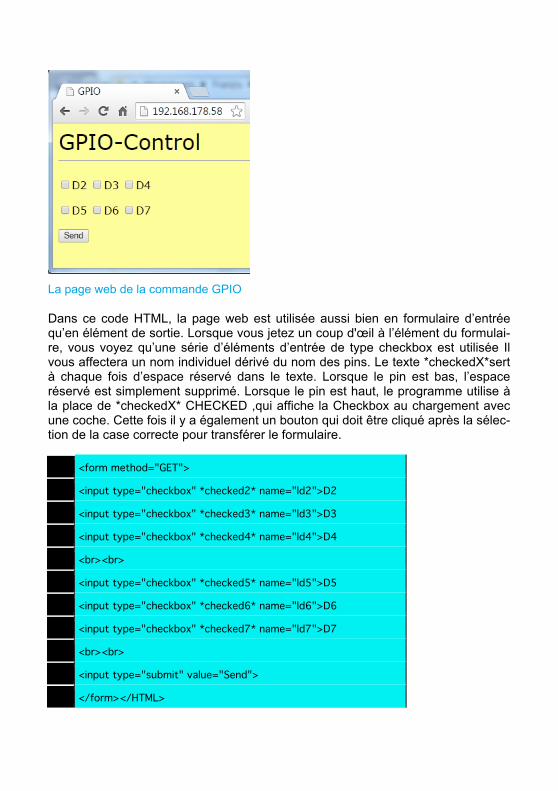
La page web de la commande GPIO
Dans ce code HTML, la page web est utilisée aussi bien en formulaire d’entrée qu’en élément de sortie. Lorsque vous jetez un coup d'œil à l’élément du formulai-re, vous voyez qu’une série d’éléments d’entrée de type checkbox est utilisée Il vous affectera un nom individuel dérivé du nom des pins. Le texte *checkedX*sert à chaque fois d’espace réservé dans le texte. Lorsque le pin est bas, l’espace réservé est simplement supprimé. Lorsque le pin est haut, le programme utilise à la place de *checkedX* CHECKED ,qui affiche la Checkbox au chargement avec une coche. Cette fois il y a également un bouton qui doit être cliqué après la sélec-tion de la case correcte pour transférer le formulaire.
001 <form method="GET">
002 <input type="checkbox" *checked2* name="ld2">D2
003 <input type="checkbox" *checked3* name="ld3">D3
004 <input type="checkbox" *checked4* name="ld4">D4
005 <br><br>
006 <input type="checkbox" *checked5* name="ld5">D5
007 <input type="checkbox" *checked6* name="ld6">D6
008 <input type="checkbox" *checked7* name="ld7">D7
009 <br><br>
010 <input type="submit" value="Send">
011 </form></HTML>
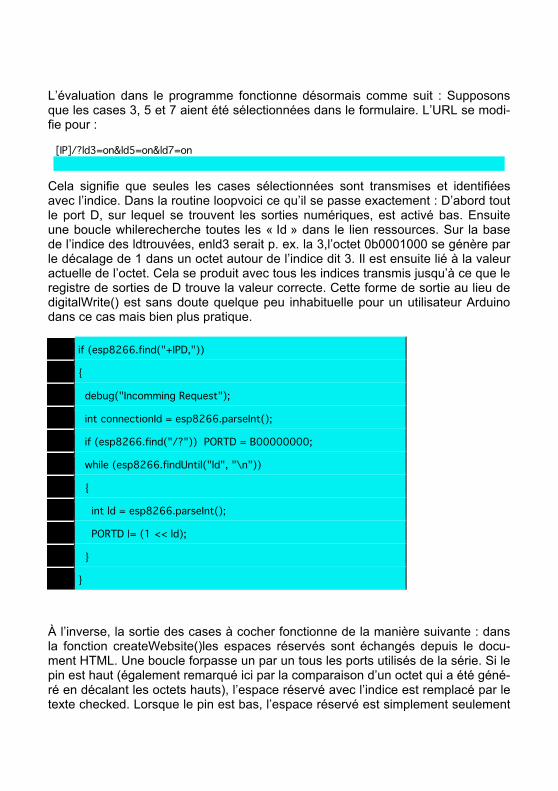
L’évaluation dans le programme fonctionne désormais comme suit : Supposons que les cases 3, 5 et 7 aient été sélectionnées dans le formulaire. L’URL se modi-fie pour :
[IP]/?ld3=on&ld5=on&ld7=on
Cela signifie que seules les cases sélectionnées sont transmises et identifiées avec l’indice. Dans la routine loopvoici ce qu’il se passe exactement : D’abord tout le port D, sur lequel se trouvent les sorties numériques, est activé bas. Ensuite une boucle whilerecherche toutes les « Id » dans le lien ressources. Sur la base de l’indice des ldtrouvées, enld3 serait p. ex. la 3,l’octet 0b0001000 se génère par le décalage de 1 dans un octet autour de l’indice dit 3. Il est ensuite lié à la valeur actuelle de l’octet. Cela se produit avec tous les indices transmis jusqu’à ce que le registre de sorties de D trouve la valeur correcte. Cette forme de sortie au lieu de digitalWrite() est sans doute quelque peu inhabituelle pour un utilisateur Arduino dans ce cas mais bien plus pratique.
001 if (esp8266.find("+IPD,"))
002 {
003 debug("Incomming Request");
004 int connectionId = esp8266.parseInt();
005 if (esp8266.find("/?")) PORTD = B00000000;
006 while (esp8266.findUntil("ld", "\n"))
007 {
008 int ld = esp8266.parseInt();
009 PORTD |= (1 << ld);
010 }
011 }
À l’inverse, la sortie des cases à cocher fonctionne de la manière suivante : dans la fonction createWebsite()les espaces réservés sont échangés depuis le docu-ment HTML. Une boucle forpasse un par un tous les ports utilisés de la série. Si le pin est haut (également remarqué ici par la comparaison d’un octet qui a été géné-ré en décalant les octets hauts), l’espace réservé avec l’indice est remplacé par le texte checked. Lorsque le pin est bas, l’espace réservé est simplement seulement
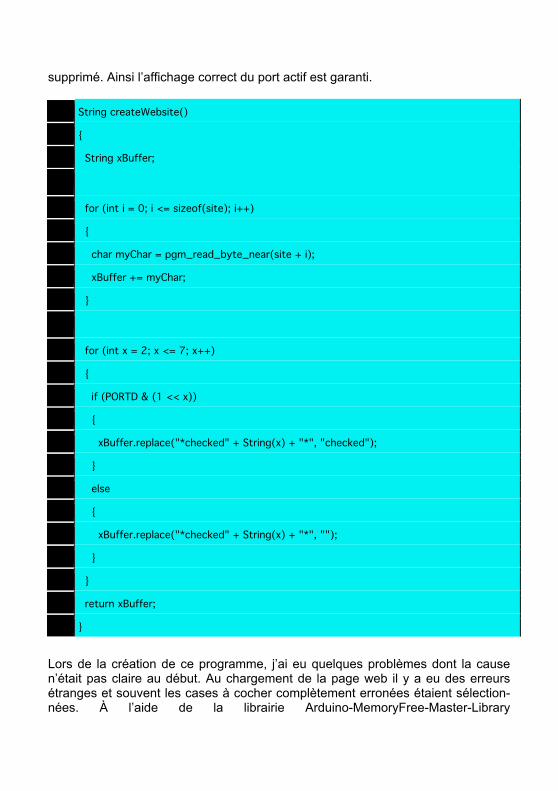
supprimé. Ainsi l’affichage correct du port actif est garanti.
001 String createWebsite()
002 {
003 String xBuffer;
004 005 for (int i = 0; i <= sizeof(site); i++)
006 {
007 char myChar = pgm_read_byte_near(site + i);
008 xBuffer += myChar;
009 }
010 011 for (int x = 2; x <= 7; x++)
012 {
013 if (PORTD & (1 << x))
014 {
015 xBuffer.replace("*checked" + String(x) + "*", "checked");
016 }
017 else
018 {
019 xBuffer.replace("*checked" + String(x) + "*", "");
020 }
021 }
022 return xBuffer;
023 }
Lors de la création de ce programme, j’ai eu quelques problèmes dont la cause n’était pas claire au début. Au chargement de la page web il y a eu des erreurs étranges et souvent les cases à cocher complètement erronées étaient sélection-nées. À l’aide de la librairie Arduino-MemoryFree-Master-Library
(http://playground.arduino.cc/Code/AvailableMemory) je suis arrivé à la solution : La mémoire SRAM était poussée à sa limite et pour cette raison causait des er-reurs extraordinaires et imprévisibles. J’ai dû considérablement alléger la version originale du programme et le code HTML pour que le programme puisse fonction-ner dans cette version. Je mentionne cela car la même chose peut se produire lors de la création de votre propre programme. La raison de l’importante sollicita-tion de la SRAM provient avant tout de l’utilisation généreuse certes bien pratique, mais aussi l’utilisation dévorante de ressources des fonctions chaîne et en général de l’utilisation de chaînes à la place de chaînes char. Un string.replace() est très pratique mais réclame aussi beaucoup d’espace mémoire. Si vous êtes face à des erreurs inexpliquées, je vous recommande de réduire le code source du fichier HTML et d’autre part éventuellement d’optimiser quelques opérations de chaîne. La libraire nommée ci-dessus peut vous aider dans la recherche d’erreur.
4.8 | Parenthèse: Accéder à la carte depuis internet Beaucoup des tests présentés ici sont pratiques pour la commande de la carte dans son propre réseau domestique. En tout cas cela peut être utile pour atteindre la carte depuis de plus grandes distances. On pourrait p. ex. activer l’éclairage chez soi alors que l’on est en vacances pour effrayer les cambrioleurs. Ou on contrôle par le capteur de lumière si la lumière est vraiment éteinte. Ou on envoie un message court à ceux à la maison qu’il se fait tard. Pour que ces idées puis-sent devenir réalité vous devez procéder à quelques paramétrages sur votre rou-teur. En général, les différents types de routeurs utilisent également différents logiciels. Je vais présenter ici les étapes principales avec un routeur Fritz!Box. Les paramé-trages de votre routeur devraient être similaires. La plupart des routeurs modernes ont une interface web simple similaire à celle que nous avons créée avec le module. Vous avez besoin d’un identifiant et d’un mot de passe pour pouvoir vous enregistrer sur l’interface. Pour des routeurs de type Fritz!Box l’IP est souvent 192.168.178.1. Ou vous pouvez également entrer http://fritz.box. Si vous utilisez un autre routeur vous devez essayer de trouver l’IP adaptée. En général le routeur utilise dans le sous-réseau l’IP avec l’adresse 1. Si l’IP de votre ordinateur est p. ex. 192.168.4.2, l’IP de votre routeur sera vraisem-blablement 192.168.4.1. Le mot de passe et l’identifiant se trouvent la plupart du temps au dos du routeur ou dans le manuel correspondant. Lorsque vous vous êtes inscrit dans l’interface utilisateur vous devez trouver le point renvoi de port ou redirection de port. Dans ma Fritz!Box le point se trouve sous Internet -> Renvoi. Créez une nouvelle règle de port. Les paramètres doivent être choisis de façon à ce que les requêtes externes sur le port 80 soient rediri-gées sur l’IP de votre carte et sur le port 80. Dans le menu de la Fritz!Box le ré-glage est facilité et j’ai juste dû choisir le point HTTP-Serverensuite j’ai pu choisir dans le menu déroulant simplement dans les IP présentes. Le résultat doit être
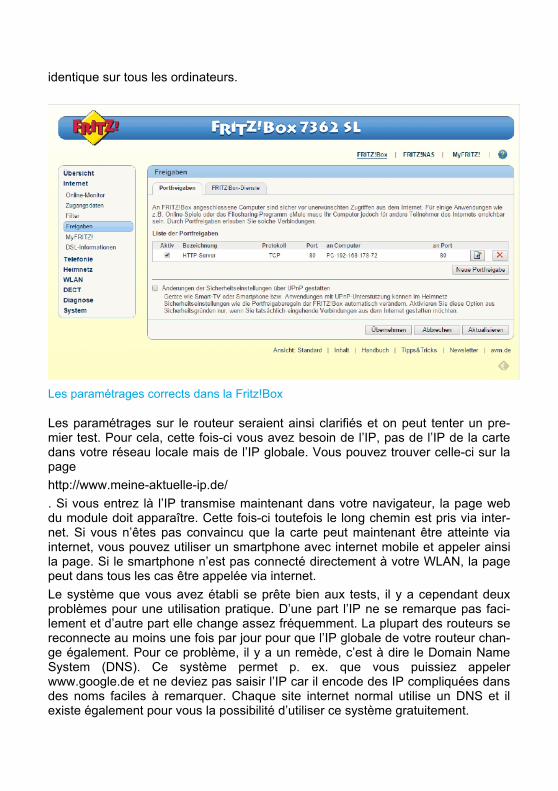
identique sur tous les ordinateurs.
Les paramétrages corrects dans la Fritz!Box
Les paramétrages sur le routeur seraient ainsi clarifiés et on peut tenter un pre-mier test. Pour cela, cette fois-ci vous avez besoin de l’IP, pas de l’IP de la carte dans votre réseau locale mais de l’IP globale. Vous pouvez trouver celle-ci sur la page http://www.meine-aktuelle-ip.de/ . Si vous entrez là l’IP transmise maintenant dans votre navigateur, la page web du module doit apparaître. Cette fois-ci toutefois le long chemin est pris via inter-net. Si vous n’êtes pas convaincu que la carte peut maintenant être atteinte via internet, vous pouvez utiliser un smartphone avec internet mobile et appeler ainsi la page. Si le smartphone n’est pas connecté directement à votre WLAN, la page peut dans tous les cas être appelée via internet. Le système que vous avez établi se prête bien aux tests, il y a cependant deux problèmes pour une utilisation pratique. D’une part l’IP ne se remarque pas faci-lement et d’autre part elle change assez fréquemment. La plupart des routeurs se reconnecte au moins une fois par jour pour que l’IP globale de votre routeur chan-ge également. Pour ce problème, il y a un remède, c’est à dire le Domain Name System (DNS). Ce système permet p. ex. que vous puissiez appeler www.google.de et ne deviez pas saisir l’IP car il encode des IP compliquées dans des noms faciles à remarquer. Chaque site internet normal utilise un DNS et il existe également pour vous la possibilité d’utiliser ce système gratuitement.
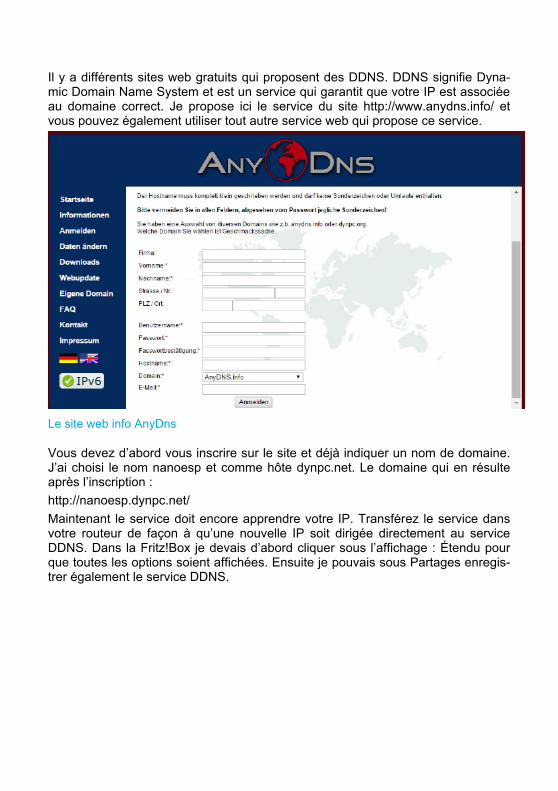
Il y a différents sites web gratuits qui proposent des DDNS. DDNS signifie Dyna-mic Domain Name System et est un service qui garantit que votre IP est associée au domaine correct. Je propose ici le service du site http://www.anydns.info/ et vous pouvez également utiliser tout autre service web qui propose ce service.
Le site web info AnyDns
Vous devez d’abord vous inscrire sur le site et déjà indiquer un nom de domaine. J’ai choisi le nom nanoesp et comme hôte dynpc.net. Le domaine qui en résulte après l’inscription : http://nanoesp.dynpc.net/ Maintenant le service doit encore apprendre votre IP. Transférez le service dans votre routeur de façon à qu’une nouvelle IP soit dirigée directement au service DDNS. Dans la Fritz!Box je devais d’abord cliquer sous l’affichage : Étendu pour que toutes les options soient affichées. Ensuite je pouvais sous Partages enregis-trer également le service DDNS.
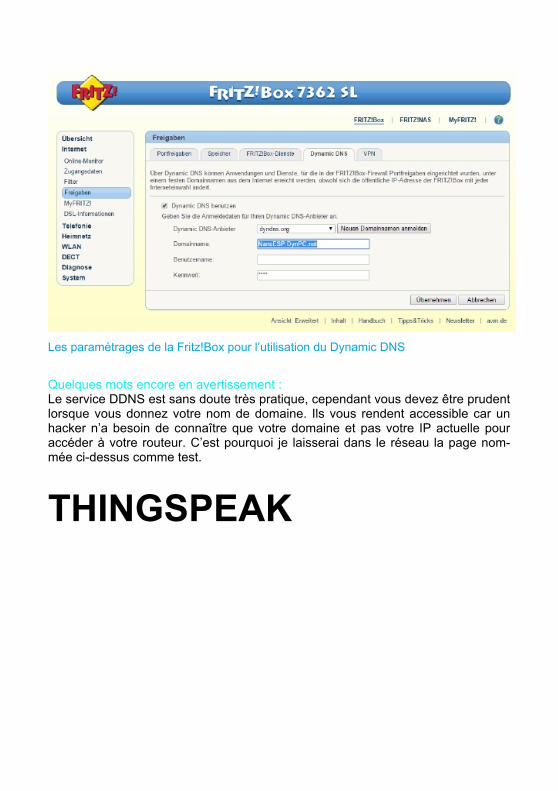
Les paramétrages de la Fritz!Box pour l’utilisation du Dynamic DNS
Quelques mots encore en avertissement : Le service DDNS est sans doute très pratique, cependant vous devez être prudent lorsque vous donnez votre nom de domaine. Ils vous rendent accessible car un hacker n’a besoin de connaître que votre domaine et pas votre IP actuelle pour accéder à votre routeur. C’est pourquoi je laisserai dans le réseau la page nom-mée ci-dessus comme test.
THINGSPEAK Dans ce dernier chapitre il s’agit d’un tout nouveau sujet, à savoir la plate-forme ThingSpeak. Ce site a été spécialement développé pour le sujet Internet of Things et met à votre disposition différentes fonctions pratiques. Entre autres, vous pou-vez à l’aide de cette page d’une manière simple journaliser une surveillance lon-gue durée de capteurs de mesure et les représenter sous forme plus claire. Tant que vous êtes connecté à internet, vous vous épargnez l’enregistrement des va-leurs sur un support de stockage externe. De plus, vous pouvez réaliser différen-tes commandes via internet. Vous apprendrez au cours de ce chapitre à quoi ressemblent exactement ces fonctions.
5.1 | ThingSpeak Comme d’habitude, avant de voir le montage et le programme, vous devez vous créer d’abord un compte sur le site www.ThingSpeak.com . Connectez-vous ensuite avec vos données utilisateur sous le point Sign In . Vous voyez une page qui indique votre canal (channel). Comme vous n’avez en-core aucun canal cette page semble plutôt vide. Cliquez sur New Channel et donnez un nom p. ex. Light,car dans ce projet vous allez mesurer la luminosité. Sous le point Field 1 vous pouvez encore donner un nom pour le champ, éven-tuellement Brightness. Tous les autres champs peuvent rester vides pour l’instant.
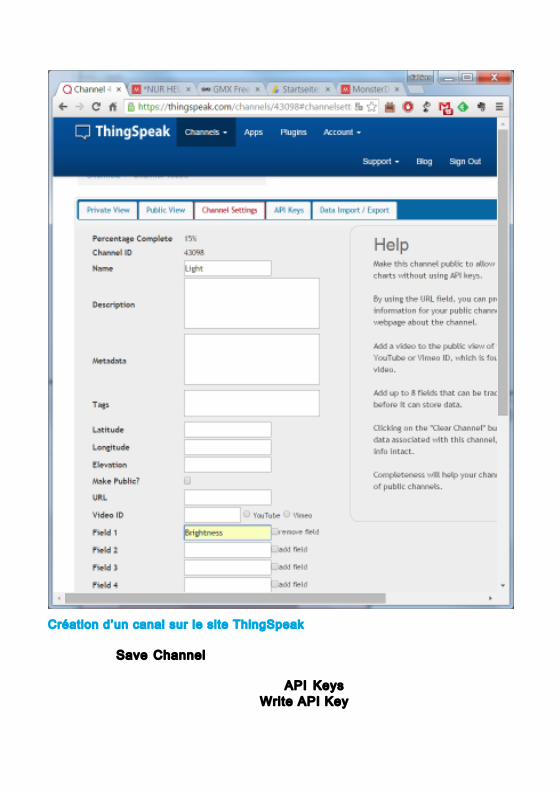
Création d’un canal sur le site ThingSpeak
Cliquez sur Save Channel pour sauvegarder les paramètres. Vous êtes redirigé sur la page de votre canal sur laquelle on peut voir uniquement un diagramme vide. Cliquez dans l’onglet ci-dessus sur API Keys. Les suites de chiffres et de lettres que vous trouvez sous le point Write API Key vous serviront bientôt.
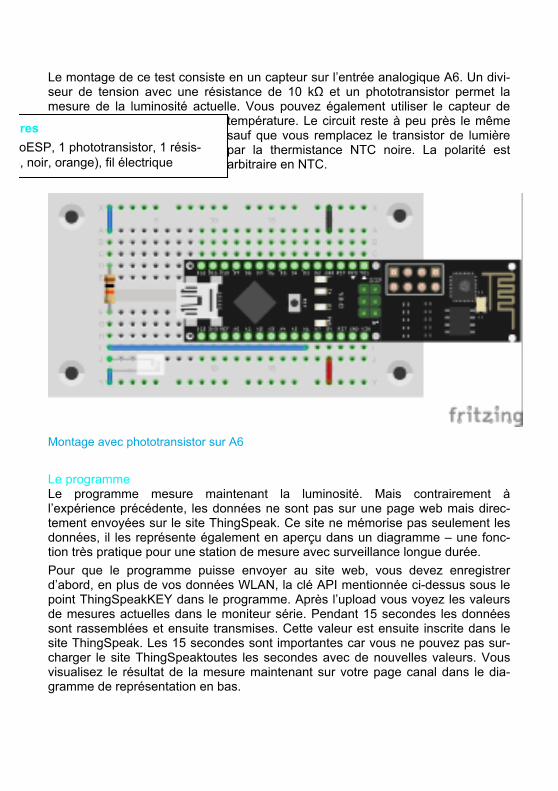
Le montage de ce test consiste en un capteur sur l’entrée analogique A6. Un divi-seur de tension avec une résistance de 10 kΩ et un phototransistor permet la mesure de la luminosité actuelle. Vous pouvez également utiliser le capteur de
température. Le circuit reste à peu près le même sauf que vous remplacez le transistor de lumière par la thermistance NTC noire. La polarité est arbitraire en NTC.
Montage avec phototransistor sur A6
Le programme Le programme mesure maintenant la luminosité. Mais contrairement à l’expérience précédente, les données ne sont pas sur une page web mais direc-tement envoyées sur le site ThingSpeak. Ce site ne mémorise pas seulement les données, il les représente également en aperçu dans un diagramme – une fonc-tion très pratique pour une station de mesure avec surveillance longue durée. Pour que le programme puisse envoyer au site web, vous devez enregistrer d’abord, en plus de vos données WLAN, la clé API mentionnée ci-dessus sous le point ThingSpeakKEY dans le programme. Après l’upload vous voyez les valeurs de mesures actuelles dans le moniteur série. Pendant 15 secondes les données sont rassemblées et ensuite transmises. Cette valeur est ensuite inscrite dans le site ThingSpeak. Les 15 secondes sont importantes car vous ne pouvez pas sur-charger le site ThingSpeaktoutes les secondes avec de nouvelles valeurs. Vous visualisez le résultat de la mesure maintenant sur votre page canal dans le dia-gramme de représentation en bas.
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 phototransistor, 1 résis-tance 10 kOhm (marron, noir, orange), fil électrique
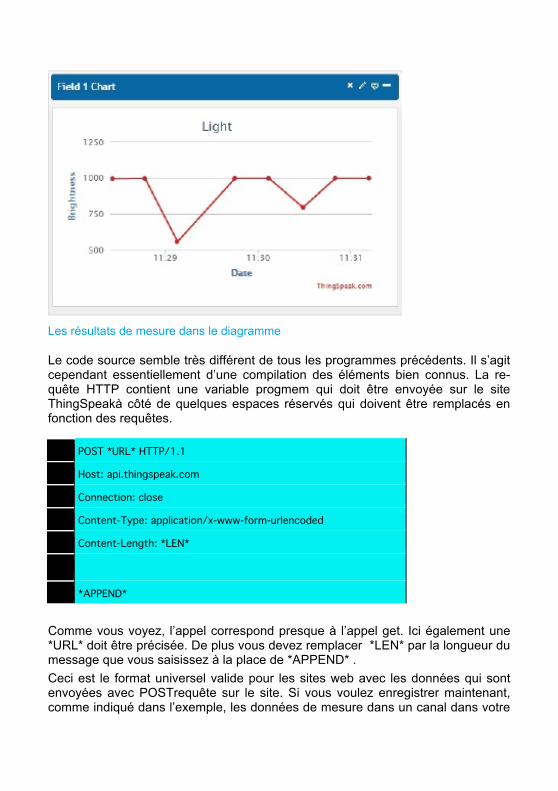
Les résultats de mesure dans le diagramme
Le code source semble très différent de tous les programmes précédents. Il s’agit cependant essentiellement d’une compilation des éléments bien connus. La re-quête HTTP contient une variable progmem qui doit être envoyée sur le site ThingSpeakà côté de quelques espaces réservés qui doivent être remplacés en fonction des requêtes.
001 POST *URL* HTTP/1.1
002 Host: api.thingspeak.com
003 Connection: close
004 Content-Type: application/x-www-form-urlencoded
005 Content-Length: *LEN*
006 007 *APPEND*
Comme vous voyez, l’appel correspond presque à l’appel get. Ici également une *URL* doit être précisée. De plus vous devez remplacer *LEN* par la longueur du message que vous saisissez à la place de *APPEND* . Ceci est le format universel valide pour les sites web avec les données qui sont envoyées avec POSTrequête sur le site. Si vous voulez enregistrer maintenant, comme indiqué dans l’exemple, les données de mesure dans un canal dans votre
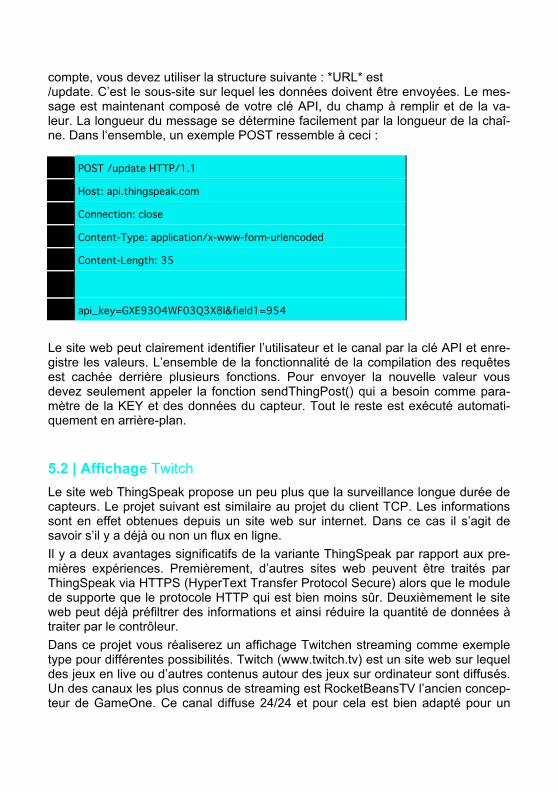
compte, vous devez utiliser la structure suivante : *URL* est /update. C’est le sous-site sur lequel les données doivent être envoyées. Le mes-sage est maintenant composé de votre clé API, du champ à remplir et de la va-leur. La longueur du message se détermine facilement par la longueur de la chaî-ne. Dans l‘ensemble, un exemple POST ressemble à ceci :
001 POST /update HTTP/1.1
002 Host: api.thingspeak.com
003 Connection: close
004 Content-Type: application/x-www-form-urlencoded
005 Content-Length: 35
006 007 api_key=GXE93O4WF03Q3X8I&field1=954
Le site web peut clairement identifier l’utilisateur et le canal par la clé API et enre-gistre les valeurs. L’ensemble de la fonctionnalité de la compilation des requêtes est cachée derrière plusieurs fonctions. Pour envoyer la nouvelle valeur vous devez seulement appeler la fonction sendThingPost() qui a besoin comme para-mètre de la KEY et des données du capteur. Tout le reste est exécuté automati-quement en arrière-plan.
5.2 | Affichage Twitch Le site web ThingSpeak propose un peu plus que la surveillance longue durée de capteurs. Le projet suivant est similaire au projet du client TCP. Les informations sont en effet obtenues depuis un site web sur internet. Dans ce cas il s’agit de savoir s’il y a déjà ou non un flux en ligne. Il y a deux avantages significatifs de la variante ThingSpeak par rapport aux pre-mières expériences. Premièrement, d’autres sites web peuvent être traités par ThingSpeak via HTTPS (HyperText Transfer Protocol Secure) alors que le module de supporte que le protocole HTTP qui est bien moins sûr. Deuxièmement le site web peut déjà préfiltrer des informations et ainsi réduire la quantité de données à traiter par le contrôleur. Dans ce projet vous réaliserez un affichage Twitchen streaming comme exemple type pour différentes possibilités. Twitch (www.twitch.tv) est un site web sur lequel des jeux en live ou d’autres contenus autour des jeux sur ordinateur sont diffusés. Un des canaux les plus connus de streaming est RocketBeansTV l’ancien concep-teur de GameOne. Ce canal diffuse 24/24 et pour cela est bien adapté pour un
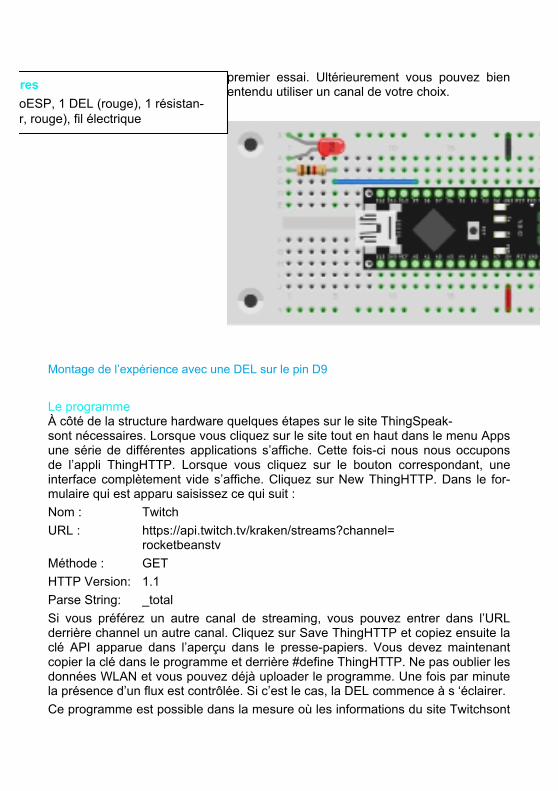
premier essai. Ultérieurement vous pouvez bien entendu utiliser un canal de votre choix.
Montage de l’expérience avec une DEL sur le pin D9
Le programme À côté de la structure hardware quelques étapes sur le site ThingSpeak- sont nécessaires. Lorsque vous cliquez sur le site tout en haut dans le menu Apps une série de différentes applications s’affiche. Cette fois-ci nous nous occupons de l’appli ThingHTTP. Lorsque vous cliquez sur le bouton correspondant, une interface complètement vide s’affiche. Cliquez sur New ThingHTTP. Dans le for-mulaire qui est apparu saisissez ce qui suit : Nom : Twitch URL : https://api.twitch.tv/kraken/streams?channel=
rocketbeanstv Méthode : GET HTTP Version: 1.1 Parse String: _total Si vous préférez un autre canal de streaming, vous pouvez entrer dans l’URL derrière channel un autre canal. Cliquez sur Save ThingHTTP et copiez ensuite la clé API apparue dans l’aperçu dans le presse-papiers. Vous devez maintenant copier la clé dans le programme et derrière #define ThingHTTP. Ne pas oublier les données WLAN et vous pouvez déjà uploader le programme. Une fois par minute la présence d’un flux est contrôlée. Si c’est le cas, la DEL commence à s ‘éclairer. Ce programme est possible dans la mesure où les informations du site Twitchsont
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 DEL (rouge), 1 résistan-ce 1 kOhm (marron, noir, rouge), fil électrique
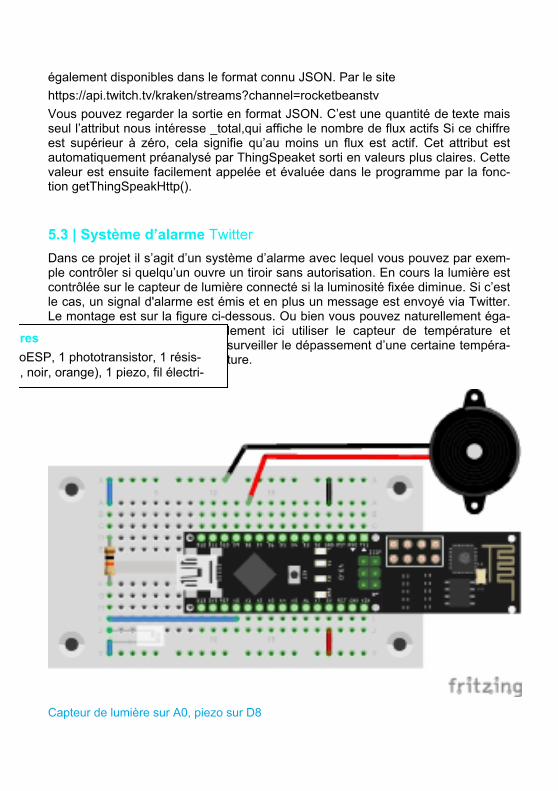
également disponibles dans le format connu JSON. Par le site https://api.twitch.tv/kraken/streams?channel=rocketbeanstv Vous pouvez regarder la sortie en format JSON. C’est une quantité de texte mais seul l’attribut nous intéresse _total,qui affiche le nombre de flux actifs Si ce chiffre est supérieur à zéro, cela signifie qu’au moins un flux est actif. Cet attribut est automatiquement préanalysé par ThingSpeaket sorti en valeurs plus claires. Cette valeur est ensuite facilement appelée et évaluée dans le programme par la fonc-tion getThingSpeakHttp().
5.3 | Système d’alarme Twitter Dans ce projet il s’agit d’un système d’alarme avec lequel vous pouvez par exem-ple contrôler si quelqu’un ouvre un tiroir sans autorisation. En cours la lumière est contrôlée sur le capteur de lumière connecté si la luminosité fixée diminue. Si c’est le cas, un signal d'alarme est émis et en plus un message est envoyé via Twitter. Le montage est sur la figure ci-dessous. Ou bien vous pouvez naturellement éga-
lement ici utiliser le capteur de température et surveiller le dépassement d’une certaine tempéra-ture.
Capteur de lumière sur A0, piezo sur D8
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 phototransistor, 1 résis-tance 10 kOhm (marron, noir, orange), 1 piezo, fil électri-que

Le programme Le sujet est ici entre autres l’appli Twitter du site ThingSpeak. Cliquez donc sur Apps et ensuite sur ThingTweet. En cliquant sur Link TwitterAccount et en saisis-sant vos données d’accès, vous établissez une connexion entre les deux services. Si vous n’avez pas encore de compte Twitter, cela vaut la peine de créer un compte pour travailler avec le kit d’apprentissage pour les essais. Une fois que Twitter a été lié avec succès avec ThingSpeak vous pouvez sous Apps/ThingTweet enregistrer la clé API derrière le point #define TwitterKEY . Le programme vérifie maintenant en permanence si la luminosité mesurée passe au-dessus d’une valeur de 500. Si c’est le cas, un message Twitter est envoyé et l’alarme sonne et ce tant que la luminosité n’est pas redescendue sous 500. Vous pouvez suivre les valeurs de luminosité actuelles mesurées par le moniteur série. Pour les premières expériences je recommande de couvrir le capteur de lumière pour que l’alarme ne se déclenche pas trop tôt. La nouvelle fonction dans ce projet s’appelle sendTwitterPost(). Seuls TwitterKEY et le message doivent être spécifiés comme paramètres. La fonction regroupe toutes les parties nécessaires pour en faire un post ThingSpeak. Vous pouvez également envoyer des messages en appuyant sur le bouton ou publier les résul-tats de mesure. Tout cela grâce à ThingSpeak-API.
5.4 | TalkBack Dans ce projet il s’agit d’une autre appli du site ThingSpeak à savoir l’appli Talk-BackAvec cette fonction il est possible de créer une instruction qui est lue et exé-cutée par le contrôleur. Ce qui semble inutile avec un seul contrôleur prend tout son sens lorsque l’on utilise deux contrôleurs ou même tout un réseau de contrô-leurs. Certaines cartes peuvent agir comme capteurs, par exemple avec des cap-teurs de proximité, et lors de la détection d’un mouvement envoyer une instruction TalkBack. Un autre module lit l’instruction du site ThingSpeaket ouvre ensuite la porte ou déclenche l’alarme.
Pour le montage de l’expérience vous avez besoin de deux boutons. Une DEL avec prérésistance affiche l’état actuel.
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 2 boutons,1 DEL (rouge), 1 résistance 1 kOhm (marron, noir, rouge), fil électrique

Montage avec deux interrupteurs sur D5 et D10 et une LED sur D9
Le programme D’abord il faut mettre en place surApps/TalkBack un nouveau canalTalkBack. Vous pouvez utiliser comme nom p. ex. Doors. Si vous souhaitez vous pouvez également enregistrer la commande sur un canal. Il peut s’agir du canal light déjà créé de la première expérience ThingSpeak ou d’un propre canal. Toutes les commandes sont ensuite journalisées. Ce qui est important avant tout c’est la clé API que vous enregistrez via #define TalkBack-KEY . En plus de la clé API, il faut cette fois une ID que vous trouvez sous Talk-Back ID après avoir cliqué sur Save TalkBack. Vous enregistrez cette ID derrière #define TalkBackID dans le programme. Si maintenant vous avez téléchargé le programme et appelé le moniteur série, vous verrez d’abord le message No Command. Appuyez maintenant sur un des deux boutons. Après un bref moment apparaît le message OpenDoor ou Close-Doorselon le bouton sur lequel vous avez appuyé. Avec la commande OpenDoor-la DEL commence à s’éclairer.
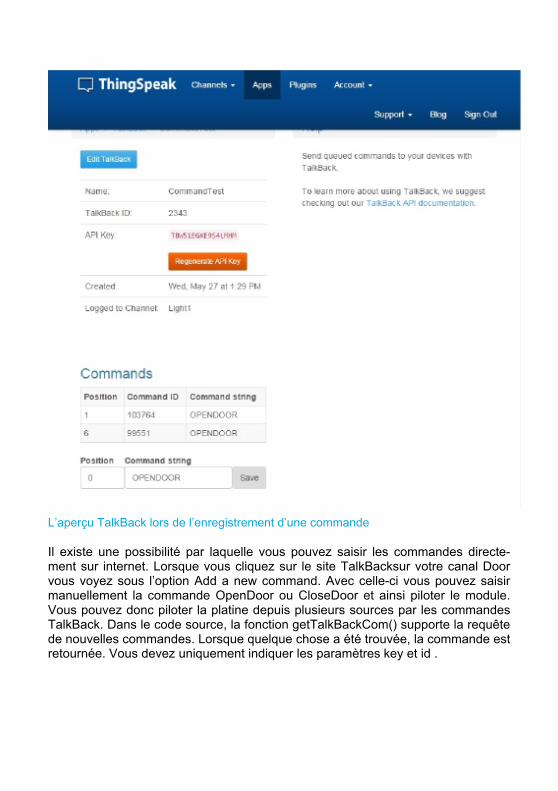
L’aperçu TalkBack lors de l’enregistrement d’une commande
Il existe une possibilité par laquelle vous pouvez saisir les commandes directe-ment sur internet. Lorsque vous cliquez sur le site TalkBacksur votre canal Door vous voyez sous l’option Add a new command. Avec celle-ci vous pouvez saisir manuellement la commande OpenDoor ou CloseDoor et ainsi piloter le module. Vous pouvez donc piloter la platine depuis plusieurs sources par les commandes TalkBack. Dans le code source, la fonction getTalkBackCom() supporte la requête de nouvelles commandes. Lorsque quelque chose a été trouvée, la commande est retournée. Vous devez uniquement indiquer les paramètres key et id .

5.5 | Cheerlights Cette expérience est basée sur un projet de Hans Scharler, qui s’appelle Cheer-lights. L’idée : Dans le monde il y a des lumières en réseau qui se commandent
simultanément via les commandes Twitter. Un bon exemple est que le monde et internet se dévelop-pent ensemble.
Les DEL RVB sur le circuit imprimé aux broches D3, D5 et D6
Le programme Pour ce programme exceptionnellement vous ne devez procéder à aucune modifi-cation ThingSpeakcar le projet a déjà un canal public que vous trouvez sous https://thingspeak.com/channels/1417 . Sur le site vous trouvez d’autre part toujours la couleur actuelle ainsi que d’autres informations sur le projet.
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 DEL RVB, 3 résistances 1 kOhm (marron, noir, rouge), fil électrique
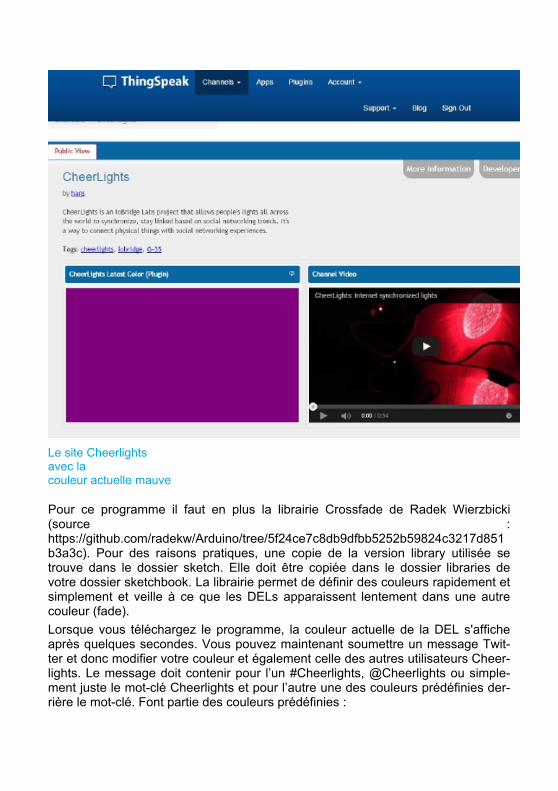
Le site Cheerlights avec la couleur actuelle mauve
Pour ce programme il faut en plus la librairie Crossfade de Radek Wierzbicki (source : https://github.com/radekw/Arduino/tree/5f24ce7c8db9dfbb5252b59824c3217d851b3a3c). Pour des raisons pratiques, une copie de la version library utilisée se trouve dans le dossier sketch. Elle doit être copiée dans le dossier libraries de votre dossier sketchbook. La librairie permet de définir des couleurs rapidement et simplement et veille à ce que les DELs apparaissent lentement dans une autre couleur (fade). Lorsque vous téléchargez le programme, la couleur actuelle de la DEL s'affiche après quelques secondes. Vous pouvez maintenant soumettre un message Twit-ter et donc modifier votre couleur et également celle des autres utilisateurs Cheer-lights. Le message doit contenir pour l’un #Cheerlights, @Cheerlights ou simple-ment juste le mot-clé Cheerlights et pour l’autre une des couleurs prédéfinies der-rière le mot-clé. Font partie des couleurs prédéfinies :
red, green, blue, cyan, white, warmwhite, purple, magenta, yellow, orange, pink
Un Tweet possible pourrait par exemple ressembler à :
Testing my #cheerlights project on my #NanoESP with the color blue #ThingSpeak #IoT
Et déjà vous avez transmis au monde entier une nouvelle couleur. La requête de la couleur actuelle est réalisée avec la fonction getCheerlightColor() . Comme paramètres sont indiqués l’hôte, donc api.thingssspeak.comet l’URL, ici /channels/1417/field/1/last.txt. Il s’agit donc d’une requête client TCP simple de type connu. Ici également la réponse du serveur est réduite au texte pertinent et renvoyée. La comparaison avec les mots-clés donne la couleur recherchée qui apparaît ensuite à l’aide de la libraire crossfade. Un essai comparativement plus simple avec cependant un effet aah plus important.
5.6 | Détecteur d’incendie Twitter avec fonction TalkBack Ce projet de détecteur d’incendie relie deux éléments que avez rencontrés au cours du travail avec le kit d’apprentissage. La platine est utilisée entre autres pour la surveillance longue durée de la température. En même temps la platine déclenche un signal d’alarme si la température dépasse une valeur définie, p. ex à l’apparition d’un incendie. Ici la surveillance du dépassement de seuil n’est pas la tâche de la platine mais de ThingSpeak-App React. Pour le détecteur d’incendie, le type CTN (Coefficient de Température Négative) présenté seulement comme alternative de capteur de lumière est utilisé cette fois-ci comme capteur. Celui-ci modifie sa résistance en fonction de la température.
Vous pouvez le commuter contre une résistance 10 kOhm, mais dans ce cas le potentiomètre est utilisé car on ne peut pas encore ajuster la mesu-re.
Composants nécessaires 1 circuit imprimé, 1 NanoESP, 1 potentiomètre, 1 piezo, 1 CTN, 1 DEL RVB, fil électrique
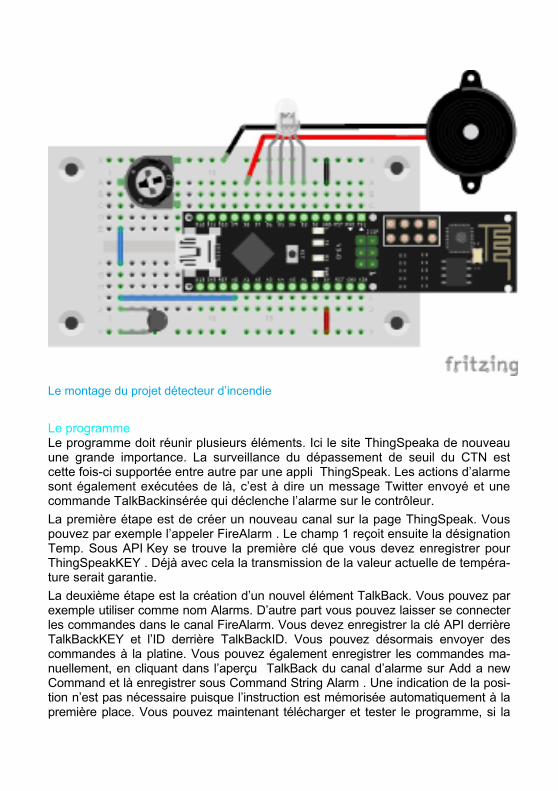
Le montage du projet détecteur d’incendie
Le programme Le programme doit réunir plusieurs éléments. Ici le site ThingSpeaka de nouveau une grande importance. La surveillance du dépassement de seuil du CTN est cette fois-ci supportée entre autre par une appli ThingSpeak. Les actions d’alarme sont également exécutées de là, c’est à dire un message Twitter envoyé et une commande TalkBackinsérée qui déclenche l’alarme sur le contrôleur. La première étape est de créer un nouveau canal sur la page ThingSpeak. Vous pouvez par exemple l’appeler FireAlarm . Le champ 1 reçoit ensuite la désignation Temp. Sous API Key se trouve la première clé que vous devez enregistrer pour ThingSpeakKEY . Déjà avec cela la transmission de la valeur actuelle de tempéra-ture serait garantie. La deuxième étape est la création d’un nouvel élément TalkBack. Vous pouvez par exemple utiliser comme nom Alarms. D’autre part vous pouvez laisser se connecter les commandes dans le canal FireAlarm. Vous devez enregistrer la clé API derrière TalkBackKEY et l’ID derrière TalkBackID. Vous pouvez désormais envoyer des commandes à la platine. Vous pouvez également enregistrer les commandes ma-nuellement, en cliquant dans l’aperçu TalkBack du canal d’alarme sur Add a new Command et là enregistrer sous Command String Alarm . Une indication de la posi-tion n’est pas nécessaire puisque l’instruction est mémorisée automatiquement à la première place. Vous pouvez maintenant télécharger et tester le programme, si la
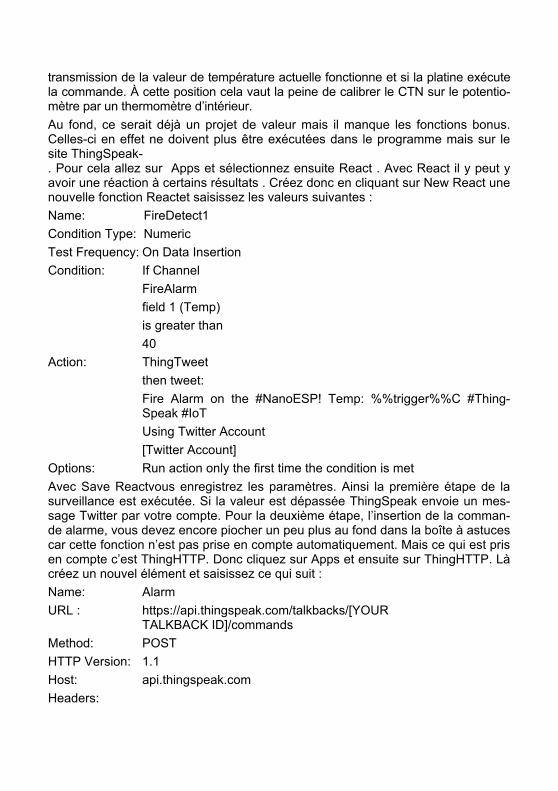
transmission de la valeur de température actuelle fonctionne et si la platine exécute la commande. À cette position cela vaut la peine de calibrer le CTN sur le potentio-mètre par un thermomètre d’intérieur. Au fond, ce serait déjà un projet de valeur mais il manque les fonctions bonus. Celles-ci en effet ne doivent plus être exécutées dans le programme mais sur le site ThingSpeak- . Pour cela allez sur Apps et sélectionnez ensuite React . Avec React il y peut y avoir une réaction à certains résultats . Créez donc en cliquant sur New React une nouvelle fonction Reactet saisissez les valeurs suivantes : Name: FireDetect1 Condition Type: Numeric Test Frequency: On Data Insertion Condition: If Channel FireAlarm field 1 (Temp) is greater than 40 Action: ThingTweet then tweet: Fire Alarm on the #NanoESP! Temp: %%trigger%%C #Thing-
Speak #IoT Using Twitter Account [Twitter Account] Options: Run action only the first time the condition is met Avec Save Reactvous enregistrez les paramètres. Ainsi la première étape de la surveillance est exécutée. Si la valeur est dépassée ThingSpeak envoie un mes-sage Twitter par votre compte. Pour la deuxième étape, l’insertion de la comman-de alarme, vous devez encore piocher un peu plus au fond dans la boîte à astuces car cette fonction n’est pas prise en compte automatiquement. Mais ce qui est pris en compte c’est ThingHTTP. Donc cliquez sur Apps et ensuite sur ThingHTTP. Là créez un nouvel élément et saisissez ce qui suit : Name: Alarm URL : https://api.thingspeak.com/talkbacks/[YOUR
TALKBACK ID]/commands Method: POST HTTP Version: 1.1 Host: api.thingspeak.com Headers:
Body: api_key=[YOUR TALKBACK ID]Key com-mand_string=Alarm&position=1
Assurez-vous de remplacer [YOUR TALKBACK ID] et [YOUR TALKBACK KEY] dans l’URL et le Body-Part par votre TalkBack ID et votre KEY . Maintenant vous pouvez créer un autre élément Reactqui comporte les mêmes paramètres que le premier avec seulement la modification que vous avez sélectionnée par Action ThingHTTP et là le point Alarm . Vous avez ainsi garanti qu’une alarme se déclen-che si la valeur critique est dépassée. Vous pouvez d’ailleurs laisser sonner l’alarme temporisée. Pour cela vous devez cliquer sous Apps sur TimeControl et créer un nouvel élément, avec p. ex. le nom AlarmClock. Là procédez aux paramétrages suivants : Name: Presents Frequency: One Time Time Zone: Berlin Run At: 2015-24-12 7:00 am Fuzzy Time: ± 0 minutes TalkBack: Alarms, add command: Alarm
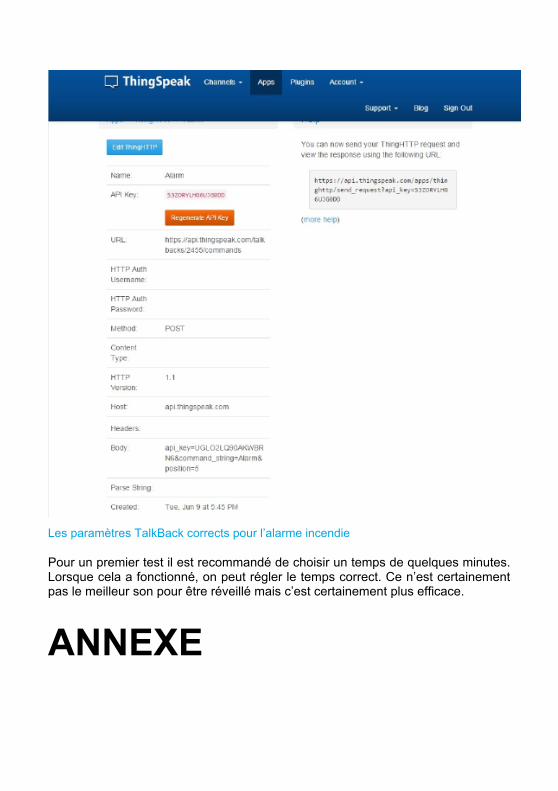
Les paramètres TalkBack corrects pour l’alarme incendie
Pour un premier test il est recommandé de choisir un temps de quelques minutes. Lorsque cela a fonctionné, on peut régler le temps correct. Ce n’est certainement pas le meilleur son pour être réveillé mais c’est certainement plus efficace.
ANNEXE
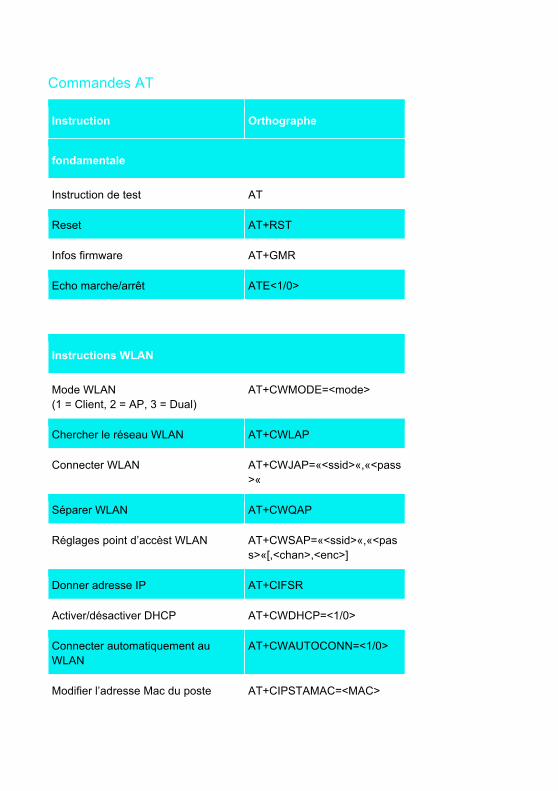
Commandes AT
Instruction Orthographe
fondamentale
Instruction de test AT
Reset AT+RST
Infos firmware AT+GMR
Echo marche/arrêt ATE<1/0>
Instructions WLAN
Mode WLAN (1 = Client, 2 = AP, 3 = Dual)
AT+CWMODE=<mode>
Chercher le réseau WLAN AT+CWLAP
Connecter WLAN AT+CWJAP=«<ssid>«,«<pass>«
Séparer WLAN AT+CWQAP
Réglages point d’accèst WLAN AT+CWSAP=«<ssid>«,«<pass>«[,<chan>,<enc>]
Donner adresse IP AT+CIFSR
Activer/désactiver DHCP AT+CWDHCP=<1/0>
Connecter automatiquement au WLAN
AT+CWAUTOCONN=<1/0>
Modifier l’adresse Mac du poste AT+CIPSTAMAC=<MAC>
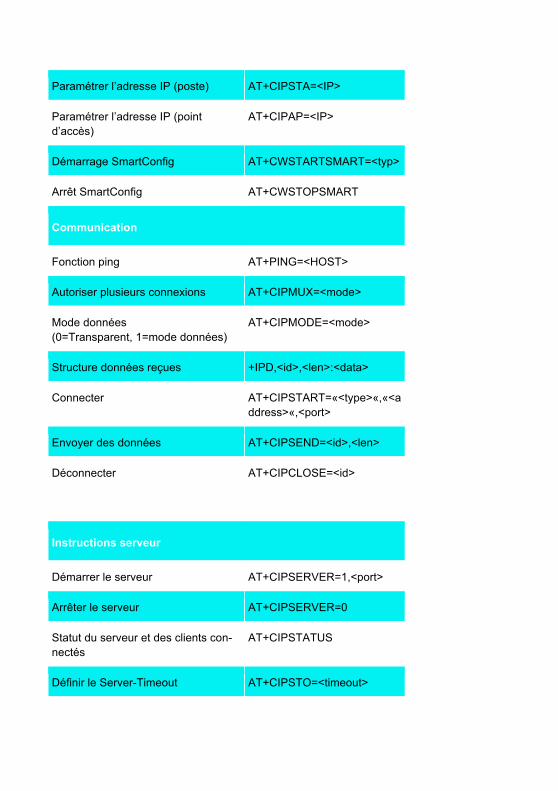
Paramétrer l’adresse IP (poste) AT+CIPSTA=<IP>
Paramétrer l’adresse IP (point d’accès)
AT+CIPAP=<IP>
Démarrage SmartConfig AT+CWSTARTSMART=<typ>
Arrêt SmartConfig AT+CWSTOPSMART
Communication
Fonction ping AT+PING=<HOST>
Autoriser plusieurs connexions AT+CIPMUX=<mode>
Mode données (0=Transparent, 1=mode données)
AT+CIPMODE=<mode>
Structure données reçues +IPD,<id>,<len>:<data>
Connecter AT+CIPSTART=«<type>«,«<address>«,<port>
Envoyer des données AT+CIPSEND=<id>,<len>
Déconnecter AT+CIPCLOSE=<id>
Instructions serveur
Démarrer le serveur AT+CIPSERVER=1,<port>
Arrêter le serveur AT+CIPSERVER=0
Statut du serveur et des clients con-nectés
AT+CIPSTATUS
Définir le Server-Timeout AT+CIPSTO=<timeout>

Afficher les clients connectés AT+CWLIF
Pinout