-
- 1 -
2014 - Grard Lavau -
http://lavau.pagesperso-orange.fr/index.htmVous avez toute libert
pour tlcharger, imprimer, photocopier ce cours et le diffuser
gratuitement. Toute diffusion titre onreux ou utilisation
commerciale est interdite sans accord de l'auteur.Si vous tes le
gestionnaire d'un site sur Internet, vous avez le droit de crer un
lien de votre site vers mon site, condition que ce lien soit
accessible librement et gratuitement. Vous ne pouvez pas tlcharger
les fichiers de mon sitepour les installer sur le vtre.
CALCUL DIFFERENTIELPLAN
I : Limites et Continuit1) Fonctions valeurs relles2) Limites et
continuit
II : Drivation1) Drives partielles2) Gradient3) Drives de
fonctions composes4) Extremum5) Drives successives
III : Courbes et surfaces1) Tangente une courbe2) Plan tangent
une surface
Annexe : Thorme de Schwarz
I : Limites et continuit
1 Fonctions valeurs rellesDans ce chapitre, on considre des
fonctions dfinies sur un ouvert U de
n, valeurs relles :
f : x = (x1, ..., xn) f(x1, ..., xn)Dans le cas o n = 2, une
telle fonction peut donner lieu une reprsentation graphique dans 3
parla reprsentation de la surface z = f(x, y).
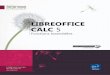
EXEMPLE 1 : diverses reprsentations de la fonction z = x2 +
y2
-
- 2 -
EXEMPLE 2 : reprsentations de z = x2 y2
Les fonctions f de 2 dans peuvent galement tre reprsentes dans
le plan par des lignes deniveaux f(x, y) = Cte. L'utilisation des
lignes de niveau dans divers domaines est trs frquente.Citons,
entre autres :
isobares : lignes de mme pressionisobathes : lignes de mme
profondeurisoclines : lignes de mme inclinaison magntiqueisogones :
lignes de mme dclinaison magntiqueisohytes : lignes de mme
prcipitation moyenneisohypses : ligne de mme altitudeisothermes :
lignes de mme temprature
2 Limites et continuitCes notions ont dj t abordes dans le
chapitre Espaces norms, mais la continuit a surtout ttudie dans le
cas des applications linaires. Rappelons que f tend vers la limite
l quand (le vecteur)x tend vers (le vecteur) x0 si :
> 0, > 0, x, || x x0 || < f(x) l < f est continue en
x0 si l = f(x0).
Il convient de noter qu'il ne suffit pas de vrifier la continuit
des applications partielles dfinies ainsi:
xi f(x1, ..., xi, ..., xn)pour conclure.
EXEMPLE :
Soit f(x, y) = xyx
2 + y2 pour (x, y) (0, 0). On note que f(x, 0) = 0 et que f(x,
x) = 1 de sorte que, pour
= 12, il n'existe aucun l permettant de vrifier :
> 0, a, || a || < f(a) l < 12
-
- 3 -
puisqu'on doit avoir en mme temps 0 l < 12 et 1 l <
12.
La fonction n'admet pas de limite en (0, 0). Cependant, les deux
applications partielles x f(x, 0) ety = f(0, y) admettent une
limite en 0 puisqu'elles sont identiquement nulles.
Comment alors, procder pour dterminer une limite ? Pratiquement,
on se ramne au voisinage de 0en effectuant un changement de
variable x = x0 + a. S'il existe une fonction g de dans telle
quelim
r0 g(r) = 0 et a n, f(a) g(|| a ||) , alors on peut conclure que
lim
a0 f(a) = 0. En effet :
> 0, > 0, || a || < g(|| a ||) < f(a) < On peut
utiliser une norme quelconque, en raison de l'quivalence des normes
en dimension finie.
EXEMPLE 1 : f(x, y) = xy2
x2 + y2. Si on note r = x
2 + y2, on a f(x, y) r. La fonction admet donc une
limite nulle en (0,0). (On a ici g(r) = r)
En ce qui concerne la continuit, on utilise les trois rsultats
suivants : Les fonctions de projection (x1, ..., xi, ..., xn) xi
sont continues (utiliser directement la dfinition
ou bien utiliser le fait qu'elles sont linaires en dimension
finie, et toute application linaire endimension finie est
continue)
La somme, produit, quotient, compose de fonctions continues est
continue. Si la fonction est valeurs dans p, raisonner composante
par composante
EXEMPLE :
La fonction (x, y, z) x2 3y
ez + 3xyz est continue sur son ensemble de dfinition.
II : Drivation
1 Drives partiellesLes fonctions qui suivent sont supposes
dfinies sur un ouvert U de n. Soit f une fonction dfiniede U dans ,
et soit a = (a1, ..., an) un point de cet ouvert. On appelle drives
partielles de f en ales drives des applications partielles
suivantes :
x1 f(x1, a2, ..., an) dont la drive en a1 est note 1f(a) ou
fx1(a)...
-
- 4 -
xi f(a1, ..., xi, ..., an) dont la drive en ai est note if(a) ou
fxi(a)...
xn f(a1, ..., an1, xn) dont la drive en an1 est note nf(a) ou
fxn(a)On drive donc f par rapport la ime composante en considrant
les autres composantes commeconstantes. Si chaque drive partielle
est continue, on dit que f est de classe C1.
EXEMPLE :
f(x, y) = 2x3y2 fx(x, y) = 6x2y2 et fy(x, y) = 4x
3y
L'intrt des drives partielles est qu'elles permettent un
dveloppement limit de f au voisinage dechaque point. Ainsi, avec
l'exemple cidessus : f(x + h, y + k) = 2(x + h)3(y + k)2 = 2(x 3 +
3x2h + 3xk + h3)(y 2 + 2yk + k 2)
= 2x3y 2 + 6x2y2h + 4x3yk + o(||(h, k )||) = f(x, y) + h fx (x,
y) + k
fy (x, y) + o(||(h, k)||)
partie linaire en (h, k) de la variation de f
PROPOSITION :Soit f de classe C1 sur un ouvert U de
n. Alors, pour tout lment a de U, et tout vecteur h tel quea + h
appartienne U, on a :
f(a + h) = f(a) + i=1
n
hi fx1(a) + o(|| h ||)Cette expression s'appelle dveloppement
limit de f l'ordre 1.
Dmonstration hors programme, mais est-elle si difficile ?On fera
la dmonstration dans le cas n = 2 pour simplifier. On applique deux
fois le thorme desaccroissements finis pour les fonctions
respectives x f(x, a2 + h2), et y f(a1, y) :
f(a1 + h1, a2 + h2) f(a1, a2) = f(a1 + h1, a2 + h2) f(a1, a2 +
h2) + f(a1, a2 + h2) f(a1, a2) = h1 fx1(a1 + 1h1, a2 + h2) + h2
fx2
(a1, a2 + 2h2) avec 0 1 1 et 0 2 1
= h1 ( fx1(a1, a2) + o(1)) + h2 (fx2
(a1, a2) + o(1))o o(1) dsigne des fonctions de (h1, h2) qui
tendent vers 0 lorsque (h1, h2) tend vers (0, 0). Ontrouve bien
l'expression annonce.
L'application linaire h = (h1, ..., hn) i=1
n
fx1
(a) hi s'appelle diffrentielle de f en a, note df(a). Par
ailleurs, les applications h hi sont notes dxi, de sorte que
:
df(a)(h) = i=1
n
fxi
(a) hi
-
- 5 -
df(a) = i=1
n
fxi
(a) dxi
df = i=1
n
fxi
dxi
En physique, on note souvent de la mme faon les fonctions et les
valeurs qu'elles prennent(E(x, y, z) est moins la fonction qui (x,
y, z) associe une nergie E(x, y, z) que cette nergie elle-mme).
Alors que le mathmaticien considre dx comme la fonction qui (h1,
h2, h3) associe lavariation h1 de x, dx est considr par le
physicien comme la variation de x elle-mme. De mme, lemathmaticien
considre df comme l'application qui, une variation de position h,
associe la partielinaire de la variation de f, alors que le
physicien considre df comme cette variation elle-mme,d'autant plus
que h peuvent tre choisis suffisamment petits pour rendre l'erreur
o(|| h ||) indcelablepar les instruments de mesure.
EXEMPLE :
f(x, y) = xy en (1,2) fx = yxy1
= 2 et fy = ln(x) xy = 0
df(1,2) = 2dxainsi, 1,021.99 = 1,04019... alors que le calcul du
dveloppement limit au premier ordre donne :
1 + 2 0,02 = 1,04.
En (2,2), on a df(2,2) = 4 dx + 4ln(2) dyainsi, 1,982,01 =
3,94727... alors que le calcul du dveloppement limit au premier
ordre donne :
4 4 0,02 + 4ln(2) 0,01 = 3,9477...
2 Gradient
Dans n muni de sa structure euclidienne, on peut voir la quantit
i=1
n
fxi
(a) hi comme le produit
scalaire du vecteur h par le vecteur de composantes fxi(a). Ce
dernier vecteur s'appelle le gradient def en a, not gradf(a) ou
f(a) (en physique). On a donc df(a)(h) = , ou encore :
f(a + h) = f(a) + + o(|| h ||)On remarquera que, pour un
dplacement h de longueur donne, la variation (au premier ordre de
f)df(a)(h) est maximale lorsque h est colinaire grad(f), nulle si
elle est orthogonale grad(f). Celas'interprte gomtriquement par le
fait que les surfaces de niveaux f(x1, ..., xn) = Cte
sontorthogonales au gradient. La direction du gradient indique la
direction suivant laquelle f varie le plusvite, la norme du
gradient mesurant l'intensit de cette variation. Par exemple, si f
est l'altitude en unpoint de latitude et longitude (x, y), grad(f)
est le vecteur orient dans la direction de la ligne de plusgrande
pente, de norme gale la pente locale. Au contraire, si on se dplace
orthogonalement augradient, f ne varie pas. On suit une ligne de
niveau.
Cette interprtation est utilise :q en mcanique : f = grad(E) o E
est l'nergie potentielle. f indique dans quel sens
l'nergiepotentielle dcrot le plus vite. f est la force drivant de
l'nergie potentielle E.
-
- 6 -
Par exemple : la thorie Newtonienne de la gravitation considre
que la Terre est soumise uneforce centrale dirige vers le Soleil de
la forme f = C
r2 u o u est un vecteur norm dirig du Soleil
vers la Terre, (C < 0) et r = x2 + y2 + z2 . Soit E = Cr
. On a :
Ex =
Cr
2 rx =
Cxr
3
de mme pour les autres drives. D'o f = grad(E).
Autre exemple, au voisinage d'un point la surface de la Terre,
si E = mgz, alors f = mgk. E estl'nergie potentielle de
pesanteur.
Dans le cas de la Terre dans son ensemble, il est dfini en
chaque point un champ g de pesanteurdrivant d'un potentiel. La
surface de niveau, perpendiculaire tout point ce champ g de
pesanteur,et correspondant au niveau moyen 0 de la mer, est appel
gode. On peut l'approximer par unellipsode, dont le gode peut
cependant diffrer en certains lieux par plusieurs centaines de
mtresd'altitude. L'International Association of Geodesy a dfini le
Geodetic Reference SystemIAG GRS 1980 en convenant des longueurs
des demi-axes de l'ellipsode, savoir :
a = 6 378 137 m l'quateurb = 6 356 752,3141 m aux ples
Ces longueurs diffrent de modles d'ellipsodes prcdemment dfinis,
par exemple celui de Hayforden 1909 pour lequel :
a = 6 378 388 mb = 6 356 911,9461 m
et celui de Clarke en 1880, pour lequel :a = 6 378 249,2 mb = 6
356 515,0 m
Le systme godsique franais NTF (Nouvelle Triangulation Franaise)
utilisait encore rcemmentl'ellipsode de Clarke, mais le dcret
n2000-1276 du 26 dcembre 2000 dfinit un nouveau rseau, leRGF93
(Rseau Gographique Franais de 1993), bas sur l'ellipsode IAG GRS
1980. Cetellipsode est en effet utilis au niveau mondial par le
WGS84 (World Geodesic System de 1984) surlequel est bas le
positionnement GPS. Quant l'Europe, elle utilisait encore
l'ellipsode de Hayfordpour sa base de donnes ED50 (Europe Datum de
1950) avant de s'aligner elle aussi sur le nouvelellipsode dans le
cadre de l'ETRS89 (Europe Terrestrial Reference System de 1989).
L'utilisationd'un mme ellipsode au niveau franais, europen ou
mondial est une ncessit afin d'viter lesdiffrences de
positionnement selon les systmes utiliss. L'IGN (http://www.ign.fr)
donne l'exemplesuivant du positionnement d'un mme point :
NTF Ellipsode de Clarke 74414.0" 483600.0"ED50 Ellipsode de
Hayford 74416.4" 483603.0"WGS84 Ellipsode IAG GRS 1980 74412.2"
483559.9"
Le dcalage pourrait atteindre plusieurs centaines de mtres si on
prenait les mmes coordonnesdans les trois systmes.
q en lectricit : E = grad(V) o V est le potentiel lectrique. E
indique dans quel direction lepotentiel dcrot le plus vite. E est
le champ lectrique. Cet exemple est trs ressemblant auprcdent, car
une particule de charge q place dans un champ lectrique E est
soumise une forceqE, qui drive donc de l'nergie potentielle qV.
-
- 7 -
Dans un conducteur en quilibre, celuici se trouve un potentiel
constant. Le champ est nul l'intrieur du conducteur, et le champ
extrieur est orthogonal la surface.
L'intrt du potentiel est que sa connaissance suffit pour
connatre le champ de vecteurs, et que lescalculs ventuels sur des
quantits scalaires sont plus faciles que les calculs sur des
quantitsvectorielles.
Donnons un dernier exemple : on considre la Terre comme un
fluide en quilibre hydrostatique demasse volumique constante
(hypothses trs rductrices !!). Dans ce cas :
grad P = go P est la pression, la masse volumique et g
l'acclration de la pesanteur au point considr.L'acclration de la
pesanteur indique dans quel sens augmente la pression. Elle est
orthogonale auxlignes isobares et la variation de pression est
d'autant plus importante que est grand. Ainsi, auvoisinage de la
surface terrestre, on a, en fonction de la profondeur z :
dPdz = g P = P0 + gz (avec z orient vers le bas)
Plus gnralement, si R est le rayon de la Terre (considre comme
sphrique ici), x la distance dupoint considr au centre et g0
l'acclration la surface de la Terre, on a g = g0xR . En effet,
l'acclration gravitionnelle vaut la surface g0 = GMR2 (avec G
constante universelle de gravitation,
M masse de la Terre), soit 43piR3 GR2 ou encore
4piGR3 alors qu' la distance x, on a g =
4piGx3 .
d'o :dPdx =
g0xR P = P0 g0
x2
2R + g0R2
Au centre de la Terre, x = 0 et P = P0 + g0R2.
Application numrique : R = 6370 km, M = 6 1024 kg, G = 6,67 1011
N.m2.kg2P vaut environ 174 109 Pa. (La valeur trouve dans ce modle
extrmement simplifi est en fait deuxfois plus petite que la valeur
actuellement estime dans des modles plus labors, mais l'ordre
degrandeur est bon).Si on pose x = R z, on obtient : P0 + g0(z
z
2
2R) soit une erreur par rapport P0 + gz gale
g0 z2
2R.
3 Drives de fonctions composesa) Considrons d'abord le cas
suivant :
2
f
g
t (t) f((t)) = g(t)On suppose que f est C1, de mme que . On
notera 1 et 2 les deux composantes de . Alors g estC1 et :
g'(t) = fx1((t)) 1'(t) + fx2
((t)) 2'(t)
-
- 8 -
En effet :g(t + h) = f(1(t + h), 2(t + h)) = f(1(t) + h1'(t) +
o(h), 2(t) + h2'(t) + o(h))
H1 H2 = f(x1 + H1, x2 + H2) en posant x1 = 1(t) et x2 = 2(t) =
f(x1, x2) + H1 fx1(x1, x2) + H2
fx2
(x1, x2) + o(||(H1, H2||)
= g(t) + h(1'(t) fx(x1, x2) + 2'(t) fy(x1, x2)) + o(h)
car || (H1, H2) || = h O(1) o O(1) est born. Donc o(||(H1,
H2)||) = o(h)Donc g est drivable en t de drive l'expression
annonce. On notera que, si la courbe t (t) estincluse dans une
courbe de niveau de f, alors g = f o est constante, de sorte que la
quantit
fx1
((t)) 1'(t) + fx2((t)) 2'(t) est nulle. Cela signifie que le
gradient de f de composantes
fx1
fx2
est orthogonale la tangente la ligne de niveau, dirige par le
vecteur 1'2' . Ce fait a dj t
signal.
Le rsultat prcdent, ainsi que sa dmonstration, se gnralise (avec
n indices au lieu de 2) sous laforme suivante :
n
f
g
t (t) f((t)) = g(t)On a alors :
g'(t) = i=1
n
fxi
((t)) i'(t)
On peut aussi crire cette drive sous la forme g'(t) =
-
- 9 -
gxi
(x) = k=1
n
fyk
((x)) kxi(x)
En effet, gxi est la drive de l'application partielle en xi, et
l'on applique le rsultat du a) sur la
fonction partielle x1 g(x1, ..., xi, ..., xn)
Les notations utilises en physique sont peut-tre plus faciles
pour comprendre et mmoriser lesformules. Le physicien en effet, ne
donne pas de nom aux fonctions mais traite directement avec lenom
des variables.
x =
x1
...
xp
y =
y1
...
yn z
zxi
= zy1
y1xi
+ zy2
y2xi
+ ... + zyn
ynxi
Cette formule est la gnralisation de la drivation des fonctions
composes de dans , que le
physicien crit sous la forme dzdx = dzdy
dydx (Rgle de la chane ou chain rule en anglais).
EXEMPLE 1 :Passage en polaire
(r, ) (x, y) f(x, y) = g(r, ) x = rcos() y = rsin()gr =
fx cos() +
fy sin()
1r
g =
fx sin() +
fy cos()
Ce systme permet d'en dduire inversement que :fx =
gr cos()
1r
g sin()
fy =
gr sin() +
1r
g cos()
On obtient ainsi l'expression du gradient en polaire :
grad f = gr er + 1r
g e
On remarquera que, en physique, les fonctions f et g sont notes
de la mme faon, la diffrence desvariables tant prcises par
l'utilisation d'units diffrentes (ex, mtres et mtres pour (x, y) ;
mtreset radians pour (r, )). Ceci apparat galement dans la
situation suivante : une quantit parexemple l'nergie interne d'un
gaz peut s'exprimer comme fonction de diverses variables, (T,P)
ou(T,V). Dans le premier cas, les physiciens sont obligs de noter
(UT)P et (
UT)V les drives partielles
de U par rapport T respectivement lorsque les variables sont
(T,P) et (T,V). Le problme ne se
-
- 10 -
pose pas en Mathmatique, car le mathmaticien aurait not de
manire diffrente les fonctionnelles
U = f(T,P) et U = g(T,V). Il crirait alors simplement fT ou gT
sans ambigut.
EXEMPLE 2 :
f
4
g G
t
x(t)y(t)
z(t)t
g(x,y,z,t)
La fonction compose est la fonction t g(x(t), y(t), z(t), t). Sa
drive est gx x' + gy y' +
gz z' +
gt
. Ce cas se prsente en physique lorsque l'on considre une
particule se dplaant dans un champscalaire E(x, y, z, t), o t est
le temps. Cela signifie qu'en chaque point de l'espace est dfinie
unefonction E dpendant ventuellement du temps. On souhaite connatre
les variations de E que subit laparticule, non seulement du fait
que E dpend de t, mais aussi du fait que la particule se dplace.
(Onparle alors de drive particulaire). Le physicien aura tendance
noter E(t) la fonction de la seulevariable t, compose de E et f. On
a alors :
dEdt =
Ex x' +
Ey y' +
Ez z' +
Et =
Et + , o v est la vitesse de la particule, E est
l'oprateur qui E associe le vecteur
ExEyEz
, autrement dit le gradient, et o < , > est le produit
scalaire. dEdt est la drive de la fonction compose, alors que Et
est la drive partielle de la fonction
initiale.
Le cas d'un champ vectoriel E est identique. Il suffit de
raisonner composante par composante. Onnotera ici :
dEdt =
Et + E
o est l'oprateur qui, au champ de composantes
ExEy
Ez associe le vecteur de composantes
. Un cas important se prsente en cinmatique des fluides : en
tout point du fluide rgne
un champ des vitesses V de ce fluide, dpendant ventuellement du
temps. A l'instant t, une particulese trouvant en (x, y, z) possde
la vitesse v = V(x, y, z, t). Son acclration est, d'aprs la
formuleprcdente :
a = Vt + V
-
- 11 -
qui a pour composantes ( t + Vxx + Vy
y + Vz
z)
VxVy
Vz =
Vxt + Vx
Vxx + Vy
Vxy + Vz
Vxz
Vyt + Vx
Vyx + Vy
Vyy + Vz
Vyz
Vzt + Vx
Vzx + Vy
Vzy + Vz
Vzz
. On
pourra vrifier que cette expression est gale :
a = Vt +
12 grad(V
2) + Rot(V) Vqui est l'autre expression possible de l'acclration
de la particule, avec :
12 grad(V
2) =
Vx
Vxx + Vy
Vyx + Vz
Vzx
Vx Vxy + Vy Vyy + Vz
Vzy
Vx Vxz + Vy Vyz + Vz
Vzz
Rot(V) V =
Vzy
Vyz
Vxz
Vzx
Vyx
Vxy
VxVy
Vz =
(
Vxz
Vzx )Vz (
Vyx
Vxy )Vy
(Vyx Vxy )Vx (
Vzy
Vyz )Vz
(Vzy Vyz )Vy (
Vxz
Vzx )Vx
Terminons par une proprit :PROPOSITIONSoit f une fonction C1
dfinie sur un ouvert convexe U de n, valeurs relles. Alors f est
constantesi et seulement si son gradient est identiquement nul.
Dmonstration :U est dit convexe si : a U, b U, t [0, 1], ta + (1
t)b U. L'ensemble des ta + (1 t)blorsque t dcrit [0, 1] est not [a,
b]. Des exemples de convexes sont donns par un demi-plan, undisque,
etc...
Si f est constante, toutes ses drives partielles sont
nulles.Rciproquement, si toutes les drives partielles sont nulles
et si a et b appartiennent U, alors lafonction g = t f(ta + (1 t)b)
a pour drive donc est nul puisque legradient est identiquement nul.
g est donc constante, donc f(a) = g(1) = g(0) = f(b), ce qui
prouveque la valeur de f ne dpend pas du point choisi.4 ExtremumSi
f : U n admet un extremum en a = (a1, ..., an), alors pour tout i,
la fonction partiellexi f(a1, ..., xi, ..., an) admet un extremum
en ai. Par consquent, pour tout i, fxi(a) = 0, ce qu'onpeut rsumer
en nonant que grad f(a) = 0. Un tel point est dit point
critique.
-
- 12 -
Ce n'est qu'une condition ncessaire. Elle n'est pas suffisante
(elle est fausse dj pour les fonctionsde dans . Exemple : x3 en 0).
Etudions de plus prs ce qui se passe en dimension 2. Poursimplifier
les notations, on suppose que a = 0 et que f admet un dveloppement
limit l'ordre 2 auvoisinage de (0,0) sous la forme :
f(x, y) = f(0, 0) + x2 + xy + y2 + o(r2)o r2 = x2 + y2. Il n'y a
pas de termes linaires car fx(0,0) et
fy(0,0) sont supposs tre nuls.
Cas 1 : la quantit x2 + xy + y2 strictement positive pour tout
(x, y) non nul. Cette conditionse produit si et seulement si le
discriminant 2 4 < 0 et > 0, si et seulement si elle
peuts'crire comme somme de deux carrs. En effet, dans ce cas, le
trinme considr comme fonctionde x n'admet pas de racine sauf si x =
y = 0. Si on pose x = rcos() et y = r sin(), cette expressions'crit
r2(cos2() + cos()sin() + sin2()). Lorsque dcrit [0, 2pi], la
fonction cos2() + cos()sin() + sin2() est continue, strictement
positive, donc admet unminimum strictement positif m. On a donc
:
f(x, y) f(0,0) + r2m + o(r2) = f(0,0) + r2(m + o(1)) f(0,0) pour
r assez petitDonc f admet un minimum local en (0,0). De mme si 2 4
< 0 et < 0, si et seulement si x2+ xy + y2 s'crit comme
l'oppos d'une somme de deux carrs, f admet un maximum local
en(0,0)
Cas 2 : l'expression (x, y) x2 + xy + y2 change de signe, ce qui
se produit si et seulement sison discriminant est strictement
positif, si et seulement si elle peut s'crire comme diffrence
dedeux carrs. Dans ce cas il n'y a pas d'extremum car si (x1, y1)
est tel que x12 + x1y1 + y12 > 0,alors pour t assez petit,
f(tx1, ty1) = f(0,0) + t2(x12 + x1y1 + y12) + o(t2) est
strictementsuprieur f(0,0), et si (x2, y2) est tel que x22 + x2y2 +
y22 < 0, alors pour t assez petit,f(tx2, ty2) = f(0,0) + t2(x22
+ x2y2 + y22) + o(t2) est strictement infrieur f(0, 0)
Cas 3 : l'expression est de signe constant mais sans tre dans le
cas 1. Cette condition se produitsi et seulement si le discriminant
2 4 = 0, si et seulement si l'expression est un carr parfaitou
l'oppos d'un carr parfait. Dans ce cas, on ne peut rien
conclure.
EXEMPLE 1 :Si f(x, y) = x2 + 3xy + y2 + o(r2) = (x + 3y2 )
2
5y24 + o(r
2), il n'y a pas d'extremum.
Si f(x, y) = x2 + 3xy + 3y2 + o(r2) = (x + 3y2 )2 +
3y24 + o(r
2), il y a minimum local en (0,0)
Si f(x, y) = x2 3xy 3y2 + o(r2) = (x + 3y2 )2
3y24 + o(r
2), il y a maximum local en (0,0)Si f(x, y) = y2 + o(r2), on ne
peut rien dire.
EXEMPLE 2 :Le dernier cas est illustr par l'exemple suivant
:
f(x, y) = y2 2yx2 y3 + x4 = y2 + o(r2)Il est faux de dire que,
si y 0, alors f(x, y) y2 0, et que pour y = 0, f(x, 0) = x4 0 et
d'enconclure que f admet un minimum en (0,0). En effet, la premire
quivalence est incorrecte : poury 0, y2 + o(r2) = y2 (1 + o(r
2
y2)), mais on ne peut absolument pas conclure que o(r
2
y2) tend vers 0quand y tend vers 0. D'ailleurs, pour tout t 0
:
f(t, t2) = t4 2t4 t6 + t4 = t6et f prend des valeurs ngatives
dans tout voisinage de (0,0). Il n'y a pas d'extremum.
-
- 13 -
5 Drives successivesLes drives partielles premires sont de
nouvelles fonctions de n dans . On peut videmmentitrer le procd de
drivation, dfinir des drives partielles secondes, et parler de
fonctions declasse C2, lorsque ces drives sont continues, et plus
gnralement de fonctions de classes Ck pourdes fonctions dont les k
premires drives partielles existent et sont continues.
On note 2f
xi2 ou i2f la drive seconde obtenue en drivant deux fois de
suite par rapport xi,
2fxixj
ou ijf la drive seconde obtenue en drivant d'abord par rapport
xj puis xi, et 2f
xjxi ou jif la
drive seconde obtenue en drivant d'abord par rapport xi puis xj.
Ces deux dernires drivespeuvent tre diffrentes. Cependant, la
plupart du temps, elles sont gales.
THEOREME DE SCHWARZSoit f de classe C2 sur un ouvert de n Alors,
pour tout (i, j)
2fxixj
= 2f
xjxi
Cette proprit est d'usage courant en physique. Une dmonstration
est donne en annexe I.Plus gnralement, pour une fonction de classe
Ck, l'ordre de drivation des k permires drives estsans
importance.
III : Courbes et surfaces
1 Tangente une courbeUne courbe de !! 2 est le plus souvent
donne par un paramtrage t (t) :Si '(t) est non nul (point rgulier),
il s'agit du vecteur tangent en (t) la courbe.
dans le plan, par une quation f(x, y) = 0 :
Soit m = (a, b) un point de la courbe. On a vu que le
gradient
fx(m)
fy(m)
est orthogonal la tangente
la courbe en m. Si ce gradient est non nul, on dit que le point
est rgulier. L'quation de la tangenteest alors :
fx(m) (x a) +
fy(m) (y b) = 0
EXEMPLE 1 :f(x, y) = x2 + y2 1 = 0
grad f = 2 xy et l'on retrouve le rsultat bien connu que le
rayon d'un cercle est perpendiculaire latangente ce cercle au point
de contact.
EXEMPLE 2 :f(x, y) = (x2 + y2)2 (x2 y2) = 0
En polaire, on obtient :
-
- 14 -
r2 = cos(2)
On constate qu' l'origine, il y a deux tangentes. Ce point n'est
pas rgulier. De fait, le gradient s'yannule.
EXEMPLE 3 :L'ellipse x
2
a2 +
y2
b2 1 = 0 admet pour tangente en (x0, y0) la droite d'quation
:
(x x0) x0a
2 + (y y0) y0b2 = 0
quation qu'on peut encore crire xx0a
2
+ yy0b2 1 = 0.
L'quation de la tangente une courbe de niveau peut se retrouver
par le raisonnement suivant.Supposons qu'au voisinage de (x0, y0),
la relation f(x, y) = 0 permet de dfinir localement y commefonction
de x, soit y = (x). On a donc identiquement f(x, (x)) = 0 sur un
intervalle centr en x0.Cette relation permet de donner la valeur de
'(x) en fonction des drives partielles de f. On drivepar rapport x
la fonction compose :
x xy = x
(x) f(x, y) = f(x, (x))Cette fonction compose tant identiquement
nulle, il en est de mme de sa drive.
0 = fx(x, y) + '(x) fy(x, y)
Donc : '(x) = fx(x, y)fy(x, y)
et en particulier pour x = x0 (et y = y0) : '(x0) = fx(x0,
y0)fy(x0, y0)
(On remarquera que ' s'annule l o fx s'annule). Le physicien
notera plut cette relation sous laforme suivante :
f(x, y) = 0 dydx = fxfy
2 SurfacesUne surface dans "" 3 est le plus souvent donne par un
paramtrage :
(u,v)
x(u,v)y(u,v)
z(u,v) = f(u,v)
o f est de classe C1 sur un ouvert U de ## 2.
-
- 15 -
Pour dfinir un arc paramtr au sein de la surface, il suffit de
se donner deux fonctions t u(t), t v(t), indiquant comment les deux
paramtres reprant le point de la surface varient en fonction
duparamtre t.
Le vecteur tangent cette courbe en en point considr est donn par
la drive de t
x(u(t),v(t))y(u(t),v(t))
z(u(t),v(t)) savoir u'(t) fu(u,v) + v'(t)
fv(u,v) o
fu(u,v) (respectivement
fv(u,v)) est le vecteur dont les
composantes sont les drives partielles de x, y et z par rapport
u (respectivement v). En gnral,ces deux vecteurs sont linairement
indpendants. Si c'est le cas, les vecteurs tangents en un point
Mdonn tous les arcs paramtrs passant par M = f(u, v) sont donc tous
lments du plan vectorielengendr par les deux vecteurs fu(u,v)
et
fv(u,v) calculs en M. On dfinit le plan affine passant par
M et de direction le plan vectoriel prcdent {f(u, v) + h fu(u,v)
+ k fv(u,v) | h $$ , k %% } comme
tant le plan tangent en M la surface. Il s'agir du plan
approchant le mieux la surface au voisinage
de f(u,v). On reconnat en effet dans l'expression f(u, v) + h
fu(u,v) + k fv(u,v) le dveloppement
limit de f(u + h, v + k) sans son reste en o(|| (h, k) ||). Le
vecteur normal ce plan est obtenu enfaisant le produit vectoriel de
fu(u,v) par
fv(u,v).
par une quation implicite F(x, y, z) = 0 :La surface s'appelle
surface de niveau de la fonction F. Une courbe incluse dans cette
surface est
donne par un paramtrage t
x(t)y(t)
z(t) de faon que, pour tout t, F(x(t), y(t), z(t)) = 0. Si on
drive
cette relation, on obtient :
x'(t) Fx(x(t), y(t), z(t)) + y'(t) Fy(x(t), y(t), z(t)) +
z'(t)
Fz(x(t), y(t), z(t)) = 0
ce qui exprime que
x'(t)y'(t)
z'(t), vecteur directeur tangente la courbe si le point est
rgulier), est
orthogonal
FxFyFz
au point considr, c'est--dire au gradient. Comme pour les
courbes, le
gradient est orthogonal aux surfaces de niveau.
Etablissons un lien entre les deux situations. Si on suppose que
l'une des variables, z par exemple,est, au moins localement,
fonction des autres, alors on a, dans un voisinage du point considr
:
F(x, y, z) = 0 z = f(x,y) pour une certaine fonction f x,y,
F(x,y,f(x,y)) = 0
-
- 16 -
Fx + Fz
fx = 0 et
Fy +
Fz
fy = 0
fx = FxFz
et fy = FyFz
Il nous faut donc supposer que Fz est non nulle au point
considr, et nous admettrons que, pour fde classe C1, cette
condition est galement suffisante pour l'existence locale de f.
Remarquons au passage que les physiciens noteront les relations
prcdentes sous la forme suivante,en utilisant x, y et z :
F(x, y, z) = 0 (zx)y = FxFz
et (zy)x = FyFz
Si la relation permet de dfinir z = z(x, y), y = y(x, z) et x =
x(y, z), on aura :
xy
yz
zx =
FyFx
FzFy
FxFz
= 1
relation que les physiciens noteront plutt sous la forme :
(xy)z (yz)x (
zx)y = 1
On dfinit par exemple les coefficients calorimtriques suivants,
en thermodynamique o la pressionP, la temprature T et le volume V
d'un gaz sont relis par une relation F(T, P, V) = 0 :
l = T(PT)V coefficient calorimtrique de dilatation
h = T(VT)P coefficient calorimtrique de compression
On a donc l (VP)T = T(PT)V (
VP)T = T(
VT)P = h
Revenons notre surface, dont le paramtrage de la surface est
xy
f(x,y). Les vecteurs du plan
tangent au point (x,y,z) considr sont
10
fx
et
01
fy
. Un vecteur normal au plan tangent est donc
-
- 17 -
fx
fy1
ou encore par
FxFyFz
. On retrouve donc le fait que, pour une surface donne sous la
forme
implicite F(x, y, z) = 0, un vecteur normal la surface est donn
par le gradient de la fonction F.
EXEMPLE : Soit la surface z = x2 y2. Donner l'quation du plan
tangent au point (1, 2, 3).
Si on considre le paramtrage (x, y)
xy
x2 y2
, alors le plan tangent passe par (1, 2, 3) et est
dirig par les deux vecteurs drivs
10
2x et
01
2y, calculs en ce point, savoir
10
2 et
01
4.
Un vecteur normal est donn par le produit vectoriel de ces deux
vecteurs, ce qui donne
24
1.
On peut aussi paramtriser (mais quelle ide !!) la partie de la
surface contenue dans le demi-
espace z 0 par le paramtrage (r, t)
rch(t)rsh(t)
r2
. Les vecteurs drivs sont proportionnels cette
fois
ch(t)sh(t)
2r et
sh(t)ch(t)
0, dont le produit vectoriel est gal
2rch(t)2rsh(t)
1 qui vaut
24
1 au point
considr, comme ci-dessus. On peut aussi considrer la surface de
niveau z x2 + y2 = 0. Le gradient, orthogonal cette
surface est gal
2x2y
1 qui vaut
24
1 au point considr, comme ci-dessus.
Une quation du plan tangent est donc 2x + 4y + z = 3. Dans le
cas prsent, le plan tangent coupela surface.
-
- 18 -
Annexe : Thorme de SchwarzDans cette annexe, on dmontre le
thorme de Schwarz dans le cas o n = 2. Soit f une fonction declasse
C2 sur un ouvert de && 2. Nous voulons montrer que
2fx1x2
= 2f
x2x1. Nous considrons la
fonction suivante :(h1, h2) = f(x1 + h1, x2 + h2) f(x1 + h1, x2)
f(x1, x2 + h2) + f(x1, x2)
i) Considrons 1(t) = f(t, x2 + h2) f(t, x2). On a, en appliquant
le thorme des accroissements finis 1 :
(h1, h2) = 1(x1 + h1) 1(x1) = h11'(x1 + h1) avec 0 < < 1
(h1, h2) = h1 ( fx1(x1 + h1, x2 + h2)
fx1
(x1 + h1, x2))
= h1h2 2f
x2x1(x1 + h1, x2 + 'h2) avec 0 < ' < 1
en appliquant le thorme des accroissements finis sur la fonction
x2 fx1(x1 + h1, x2). On en
dduit que lim(h1,h2)(0,0)(h1,h2)
h1h2 =
2fx2x1
(x1, x2), car 2f
x2x1 est continue.
ii) On peut galement considrer 2(t) = f(x1 + h1, t) f(x1, t).
Par un raisonnement analogue celuiqui prcde, on a :
(h1, h2) = 2(x2 + h2) 2(x2) = h22'(x2 + h2) avec 0 < < 1 =
h2 ( fx2(x1 + h1, x2 + h2)
fx2
(x1, x2 + h2))
= h2h1 2f
x1x2(x1 + 'h1, x2 + h2) avec 0 < ' < 1
Donc lim(h1,h2)(0,0)(h1,h2)
h1h2 =
2fx1x2
(x1, x2)
On en dduit donc l'galit des deux drives partielles secondes
Voici un contreexemple, dans le cas d'une fonction non C2. Soit
f(x1, x2) = x1x2(x12 x2
2)x1
2 + x2
2 en dehors
de (0,0) et f(0,0) = 0
-
- 19 -
fx1
(x1, x2) = x2(x12 x2
2)x1
2 + x2
2 + 4x12x23
(x12 + x22)2 en dehors de (0,0)fx1
(0,0) = 0, drive en 0 de la fonction x1 f(x1, 0) = 0
fx1
(0, x2) = x2 pour tout x2
2f
x2x1(0, 0) = 1
De mme :fx2
(x1, x2) = x1(x12 x2
2)x1
2 + x2
2 4x13x22
(x12 + x22)2fx2
(0, 0) = 0
fx2
(x1, 0) = x1 pour tout x1
2f
x1x2(0, 0) = 1
On remarque donc que 2f
x2x1(0, 0)
2fx1x2
(0, 0)
u