Embed Size (px)
Citation preview

Caractéristiques du produit
Robot articulé
IRB 6600 - 175/2,55IRB 6600 - 225/2,55IRB 6600 - 175/2,8IRB 6650 - 125/3,2IRB 6650 - 200/2,75IRB 6650S - 90/3,9IRB 6650S - 125/3,5IRB 6650S - 200/3,0IRB 6600ID - 185/2,55IRB 6650ID - 170/2,75M2004


Caractéristiques du produit
Robot articulé3HAC 023933-004
Rév. HIRB 6600 - 175/2,55IRB 6600 - 225/2,55IRB 6600 - 175/2,8IRB 6650 - 125/3,2
IRB 6650 - 200/2,75IRB 6650S - 90/3,9
IRB 6650S - 125/3,5IRB 6650S - 200/3,0
IRB 6600ID - 185/2,55IRB 6650ID - 170/2,75
M2004

Les informations contenues dans ce manuel peuvent être modifiées sans préavis et ne doivent pas être interprétées comme un engagement de la part d'ABB. La responsabilité d'ABB ne sera pas engagée par suite d'erreurs contenues dans ce manuel.Sauf stipulation expresse du présent manuel, aucune des informations ne pourra être interprétée comme une garantie d'ABB couvrant les risques de perte, de dommages corporels ou matériels, l'adaptation à un usage particulier ou toute autre garantie que ce soit.En aucun cas, la responsabilité d'ABB ne pourra être engagée à la suite de dommages fortuits ou liés à l'utilisation du présent manuel ou des produits décrits dans le manuel.Le présent manuel ne doit pas être reproduit ou copié, intégralement ou en partie, sans l'autorisation écrite d'ABB, et son contenu ne doit être ni divulgué à des tiers ni utilisé à des fins non autorisées. Les contrevenants seront poursuivis.D'autres exemplaires de ce manuel peuvent être obtenus auprès d'ABB au tarif en vigueur.
© Copyright 2004 ABB. Tous droits réservés.
ABB ABRobotics Products
SE-721 68 VästeråsSuède

Contenu
Vue d'ensemble 5
1 Description 7
1.1 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71.1.2 Les différentes versions du robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101.1.3 Définition de la désignation de la version . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
1.2 Sécurité/Normes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .141.2.1 Normes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
1.3 Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .191.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .191.3.2 Conditions d'exploitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .201.3.3 Montage du manipulateur. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
1.4 Étalonnage et références . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .281.4.1 Étalonnage précis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .281.4.2 Étalonnage précision absolue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .291.4.3 Références de robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
1.5 Schémas des charges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .341.5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .341.5.2 Schémas des charges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .351.5.3 Charge maximale et moment d'inertie pour mouvement axial (axe 5) complet et limité
(ligne centrale vers le bas) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .511.5.4 Couple de poignet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
1.6 Montage de l'équipement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .541.6.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .541.6.2 Montage de la charge latérale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .56
1.7 Maintenance et dépannage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .621.7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
1.8 Mouvements du robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .631.8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .631.8.2 Performances conformes à la norme ISO 9283 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .711.8.3 Vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
1.9 Ventilateur de refroidissement du moteur des axes 1 à 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .731.9.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .73
1.10 Servopistolet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .741.10.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .741.10.2 Stationary Gun . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .751.10.3 Robot Gun . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .761.10.4 Robot Gun et Track Motion IRBT 6004 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .771.10.5 Track Motion IRBT 6004. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .78
2 SpotPack et DressPack 79
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .792.1.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .792.1.2 Structure des chapitres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .81
2.2 DressPack. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .822.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .82
2.3 Type H. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .922.3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .922.3.2 Configuration résultante pour le type H. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .952.3.3 Description de l'interface du DressPack type H. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .98
3HAC 023933-004 Rév.H 3
Contenu
2.3.4 Récapitulatif type H . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1002.4 Type S. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
2.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1012.4.2 Configuration résultante pour le type S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1042.4.3 Description de l'interface du DressPack type S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1072.4.4 Récapitulatif type S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
2.5 Type HS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1122.5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1122.5.2 Configuration résultante pour le type HS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1152.5.3 Description de l'interface du DressPack type HS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1182.5.4 Description de l'interface de la pince fixe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1222.5.5 Récapitulatif type HS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
2.6 Type Se. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1252.6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1252.6.2 Configuration résultante pour le type Se . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1282.6.3 Description de l'interface du DressPack type Se . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1342.6.4 Récapitulatif type Se . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
2.7 Type HSe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1402.7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1402.7.2 Configuration résultante pour le type HSe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1432.7.3 Description de l'interface du DressPack type HSe. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1462.7.4 Description de l'interface de la pince fixe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1512.7.5 Récapitulatif type HSe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
2.8 Armoire de soudage par points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1552.8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1552.8.2 Description de l'interface de l'armoire de soudage par points . . . . . . . . . . . . . . . . . . . . . . . . 162
2.9 Unité d'eau et d'air. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1632.9.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1632.9.2 Données techniques pour l’unité d’eau et d’air . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
2.10 Kits de connexion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1722.10.1 Options. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
3 Spécification des variantes et des options 179
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1793.1.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
3.2 Manipulateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1793.2.1 Équipement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1823.2.2 Interrupteurs de position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
3.3 Câbles du socle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1903.4 Processus DressPack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
3.4.1 Socle du DressPack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1923.4.2 Bras inférieur et supérieur du DressPack. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1933.4.3 Kits de connexion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1943.4.4 Pince asservie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1953.4.5 Câbles du socle SpotPack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1953.4.6 Armoire de processus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1963.4.7 Eau et air . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1973.4.8 Documentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
4 Accessoires 199
4 Rév.H 3HAC 023933-004

Vue d'ensemble
Vue d'ensembleÀ propos des caractéristiques du produit
Elles décrivent la performance du manipulateur ou d'une famille complète de manipulateurs en termes de :
• Impressions structurelles et dimensionnelles.
• Respect des normes, consignes de sécurité et exigences d'utilisation.
• Schémas des charges, montage d'un équipement supplémentaire, mouvement et portée du robot.
• Équipements auxiliaires intégrés comme : Connexion client, Pistolet à servo, DressPack et SpotPack.
• Spécification des variantes et options disponibles.
UtilisateursDestinées à :
• Responsables et personnel produit
• Personnel ventes et marketing
• Personnel commandes et service clientèle
ContenuReportez-vous à la Table des matières, page 3.
Révisions
Révision Description
Révision 4 - Ajout de spécifications pour la nouvelle variante IRB 6650S - 90/3.9.
- Ajout d'une note signalant qu'une charge de bras de 50 kg pour le bras supérieur n'est pas incluse dans les diagrammes de charge du modèle IRB 6600ID/IRB 6650ID.
- Nouvelles mesures ISO 9283 pour les modèles -225/2.55, -175/2.8, -125/3.2 et -200/2.75.
- Correction de la précision de trajectoire des modèles -125/3.5 et -200/3.0.
Révision G - Modifications pour le SpotPack et le DressPack- Introduction à Foundry Prime et au nouveau panneau de
médias- Texte modifié dans le chapitre Schémas des charges,
Commande du cas de chargement par “RobotLoad”- Les configurations de pince asservie pour Pince fixe et pince
robotisée, Pince fixe double et pince fixe, et Track Motion ont été supprimées du chapitre 1.9.
- Robots pour salle blanche ajoutés- Option 91-2,-3,-4,-5 (Interbus) supprimée- Note de bas de page pour “Précision de pose”- Nouveau texte au chapitre 1.6 Maintenance et dépannage,
Maintenance- Nouveau texte au chapitre 1.8 Ventilateur de refroidissement
pour moteur, axe 1-3
3HAC 023933-004 Rév.H 5

Vue d'ensemble
Documentation complémentaire
Révision H - Modifications apportées au chapitre 1.2- Direction des forces- Chapitre Couple de poignet ajouté- Informations relatives à la garantie pour les schémas des
charges- Modifications apportées au chapitre 1.9- Nouvelle option ajoutée au chapitre 1.10.4- Option 782-3 supprimée- Connecteur Souriau pour CP/CS/CBUS- Note en bas de page, Option 287-6 Foundry Prime- Étiquettes de synchronisation pour les axes 2 à 6
Révision Description
Caractéristiques du produit Description
Controller IRC5 avec FlexPendant
3HAC022906-001
Logiciel du système de commande
Robotware 5.09, 3HAC023049-001
Documentation utilisateur du robot
IRC5 et M2004, 3HAC024534-004
Manuel du produit Description
Manipulateur IRB 6600, 3HAC023082-004
6 Rév.H 3HAC 023933-004

1 Description1.1.1 Introduction
1 Description
1.1 Structure
1.1.1 Introduction
Famille de robotsGrâce à la famille de robots IRB 6600 d'ABB, de nouvelles possibilités s'offrent à vous. Le robot est disponible en dix versions :
Le robot IRB 6600 est idéal pour les applications de processus, quel que soit le domaine industriel. Il convient très bien au soudage par points, à la manutention et à la conduite de machines.
Gamme de logicielsNous avons ajouté toute une gamme de logiciels (tous regroupés sous la désignation sécurité active) pour protéger non seulement le personnel en cas improbable d'accident, mais également les outils du robot, les équipements périphériques et le robot lui-même.
Système d'exploitationLe robot est doté du système d'exploitation BaseWare OS. BaseWare OS contrôle tous les aspects du robot, comme le contrôle du déplacement, le développement et l'exécution de programmes d'application, la communication, etc. Reportez-vous aux caractéristiques du produit - Système de commande IRC5 avec FlexPendant.
Capacité de manutention (kg) Portée (m)
175 kg 2,55 m
225 kg 2,55 m
175 kg 2,8 m
125 kg 3,2 m
200 kg 2,75 m
90 kg 3,9 m
125 kg 3,5 m
200 kg 3,0 m
185 kg 2,55 m
170 kg 2,75 m
3HAC 023933-004 Rév.H 7

1 Description1.1.1 Introduction
Fonctionnalités supplémentairesEn ce qui concerne les fonctionnalités supplémentaires, le robot peut être équipé d'un logiciel optionnel de prise en charge d'applications (comme le soudage par points), de fonctions de communication (communication réseau) et de fonctions avancées (fonctionnement multitâche, contrôle par capteur, etc.). Pour obtenir la description complète des logiciels optionnels, reportez-vous à Caractéristiques du produit - Logiciel du système de commande IRC5.
Robots pour salle blancheLes robots pour salle blanche sont homologués Salle blanche catégorie 100 conformément à la norme fédérale 209 en vigueur aux États-Unis ou Salle blanche catégorie 5 conformément à la norme ISO 14644-1.Le test de salle blanche effectué a permis de classer la pureté de l’air exclusivement en termes de concentration des particules aériennes générées par le robot. Les autres aspects du test de salle blanche ou toute autre exigence en matière de salle blanche ne sont pas pris en considération.
Foundry PlusLe robot Foundry Plus a été conçu pour les environnements difficiles. Sa surface a été traitée et peinte spécifiquement pour garantir une excellente protection contre la corrosion. Les connecteurs sont conçus pour les environnements hostiles, et les roulements, les roues dentées et les autres composants sensibles font l'objet d'une protection élevée. Les robots disposent de la protection Foundry Plus, ce qui signifie que l'intégralité du manipulateur est classée IP67 et lavable à la vapeur.
Foundry PrimeLe robot Foundry Prime est conçu pour le nettoyage par jet d’eau des pièces en acier coulé et des pièces usinées, ainsi que tout autre environnement associé à des conditions difficiles similaires.Le manipulateur peut supporter des détergents à base de solvant environnants (pH maxi de 9,0 contenant un produit antirouille). Le détergent doit avoir été approuvé par ABB. En outre, le manipulateur peut supporter la projection indirecte de jets sous pression (600 bars maxi) et un taux d’humidité de 100 %. Le manipulateur est capable de travailler dans un environnement soumis à une température de bain de décapage de < 60 °C, généralement associée à l’application d’un nettoyage par jet d’eau à vitesse modérée.Le robot est protégé par des joints d’étanchéité spécifiques pour engrenages et roulements, moteurs sous pression et logement pour équipement électronique, dotés d’un système de trois couches de peinture en polyuréthane résistant à tout détergent. Les surfaces non peintes sont revêtues d’un produit antirouille spécifique, et les moteurs sont étanchéifiés grâce à un composé spécifique.
8 Rév.H 3HAC 023933-004

1 Description1.1.1 Introduction
Le robot étant conçu pour travailler dans des environnements très difficiles, un vaste programme d’entretien et de maintenance est nécessaire. Pour obtenir des informations détaillées sur le programme de maintenance, reportez-vous à la section Maintenance du manuel du produit.La protection Foundry Prime n’est disponible que pour les robots RB 6600-225/2.55, IRB 6600-175/2.8 et IRB 6650S-200/3.0.Reportez-vous au chapitre Spécifications des variantes et des options pour en savoir plus concernant les options non disponibles avec Foundry Prime.
Figure 1 Le manipulateur IRB 6600 comporte 6 axes.
-
-
--
-
-
++
+
+
++
Axe 3Axe 4
Axe 5
Axe 6
Axe 2
Axe 1
3HAC 023933-004 Rév.H 9

1 Description1.1.2 Les différentes versions du robot
1.1.2 Les différentes versions du robot
GénéralitésLe robot IRB 6600 est disponible en dix versions.
StandardLes types de robot standard suivants sont disponibles :
Type de robot Capacité de manutention (kg) Portée (m)
IRB 6600 175 kg 2,55 m
IRB 6600 225 kg 2,55 m
IRB 6600 175 kg 2,8 m
IRB 6650 125 kg 3,2 m
IRB 6650 200 kg 2,75 m
IRB 6650S 90 kg 3,9 m
IRB 6650S 125 kg 3,5 m
IRB 6650S 200 kg 3,0 m
IRB 6600ID 185 kg 2,55 m
IRB 6650ID 170 kg 2,75 m
10 Rév.H 3HAC 023933-004

1 Description1.1.3 Définition de la désignation de la version
1.1.3 Définition de la désignation de la version
Montage du robot IRB 6600Capacité de manutention (kg)/Portée (m)
Poids du manipulateur
Autres données techniques
Consommation d'énergie pour une charge maximale
Préfixe Description
Montage - Manipulateur monté sur le sol
Capacité de manutention (kg)
yyy Indique la capacité de manutention maximale (en kg)
Portée (m) x,x Indique la portée maximale au niveau du centre du poignet (en m)
Type de robot Capacité de manutention (kg) Portée (m) Poids
IRB 6600 175 kg 2,55 m 1 700 kga
a. Sans DressPack
IRB 6600 225 kg 2,55 m 1 780 kga
IRB 6600 175 kg 2,8 m 1 780 kga
IRB 6650 125 kg 3,2 m 1 780 kga
IRB 6650 200 kg 2,75 m 1 780 kga
IRB 6650S 90 kg 3,9 m 2275 kga
IRB 6650S 125 kg 3,5 m 2 250 kga
IRB 6650S 200 kg 3,0 m 2 250 kga
IRB 6600ID 185 kg 2,55 m 1 880 kg
IRB 6650ID 170 kg 2,75 m 1 880 kg
Données Description Remarque
Niveau de bruit aérien
Niveau de pression acoustique en dehors de l'espace de travail
< Niveau acoustique continu équivalent inférieur à 73 dB (A) (conformément à la directive Machine 98/37/CEE)
Type de mouvementIRB 6600/6650IRB 6600ID/IRB 6650ID
IRB 6650S
Cube ISOMouvements normaux du robot
2,6 kW3,8 kW
2,4 kW-
3HAC 023933-004 Rév.H 11

1 Description1.1.3 Définition de la désignation de la version
Figure 2 Vue de côté et du dessus des manipulateurs IRB 6600 et IRB 6650 (dimensions en mm). Derrière le pied du manipulateur, laissez 200 mm pour les câbles.
Pos Description
A Dimensions pour des versions sans Foundry = 274 mmDimensions et taille de la serrure pour toutes les versions de Foundry = 376 mm
R R 580 pour le type A.R 595 pour le type B (face avant, axe de moteur Z).R 690 avec élévateur à fourches.
(D)
(B) 200 (290 pour ID)
200
780
320
410
(C)
726
170
175
850
R
450
pour
ID
274376 (A)
Pour connaître les dimensions du DressPack, reportez-vous au chapitre 2.2 DressPack.
12 Rév.H 3HAC 023933-004

1 Description1.1.3 Définition de la désignation de la version
Figure 3 Vue de côté et du dessus du manipulateur IRB 6650S (dimensions en mm). Derrière le pied du manipulateur, laissez 200 mm pour les câbles.
Pos Description
R1 R 960 (partie arrière, dispositif d'équilibrage).
R2 R 813 (face avant, axe de moteur 2).
2042 IRB 6650S-3.91592 IRB 6650S-3.51 142 IRB 6650S-3. 0
200
2295
,4
630
1280
R1
R216
818
2
864
200
726,4
600
410
886
3HAC 023933-004 Rév.H 13
1 Description1.2.1 Normes
1.2 Sécurité/Normes
1.2.1 Normes
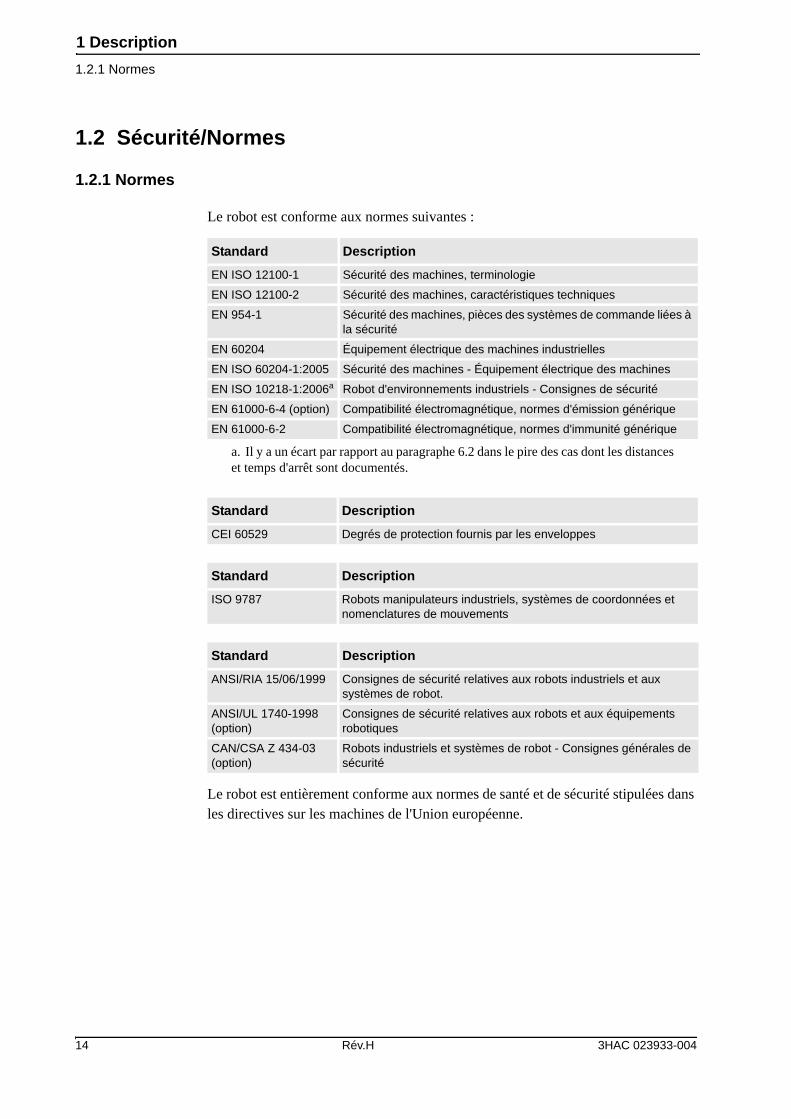
Le robot est conforme aux normes suivantes :
Le robot est entièrement conforme aux normes de santé et de sécurité stipulées dans les directives sur les machines de l'Union européenne.
Standard Description
EN ISO 12100-1 Sécurité des machines, terminologie
EN ISO 12100-2 Sécurité des machines, caractéristiques techniques
EN 954-1 Sécurité des machines, pièces des systèmes de commande liées à la sécurité
EN 60204 Équipement électrique des machines industrielles
EN ISO 60204-1:2005 Sécurité des machines - Équipement électrique des machines
EN ISO 10218-1:2006a
a. Il y a un écart par rapport au paragraphe 6.2 dans le pire des cas dont les distanceset temps d'arrêt sont documentés.
Robot d'environnements industriels - Consignes de sécurité
EN 61000-6-4 (option) Compatibilité électromagnétique, normes d'émission générique
EN 61000-6-2 Compatibilité électromagnétique, normes d'immunité générique
Standard Description
CEI 60529 Degrés de protection fournis par les enveloppes
Standard Description
ISO 9787 Robots manipulateurs industriels, systèmes de coordonnées et nomenclatures de mouvements
Standard Description
ANSI/RIA 15/06/1999 Consignes de sécurité relatives aux robots industriels et aux systèmes de robot.
ANSI/UL 1740-1998 (option)
Consignes de sécurité relatives aux robots et aux équipements robotiques
CAN/CSA Z 434-03 (option)
Robots industriels et systèmes de robot - Consignes générales de sécurité
14 Rév.H 3HAC 023933-004

1 Description1.2.1 Normes
Fonction de sécurité
Système de sécurité active
Fonction de sécurité Description
Service Information System (SIS)
Le système d'information sur l'entretien (Service Information System) collecte des informations sur l'utilisation du robot et détermine son degré d'utilisation. L'utilisation est caractérisée par la vitesse, les angles de rotation et la charge de chaque axe.Grâce à cet ensemble de données, l'intervalle d'entretien de chaque robot de cette génération peut être prévu, afin d'optimiser et de planifier les activités d'entretien. L'ensemble de données est disponible via le FlexPendant ou le lien réseau vers le robot.Cette génération de robots de processus est conçue pour une sécurité absolue. Son but est d'éviter les collisions (de façon active ou passive). Elle offre un niveau maximal de sécurité aux opérateurs et aux machines, ainsi qu'à l'équipement environnant associé. Ces fonctionnalités sont présentées dans les sections Système de sécurité active et Système de sécurité passive.La durée de fonctionnement du robot (freins desserrés) est indiquée sur le FlexPendant. Les données peuvent également être surveillées via le réseau, à l'aide par exemple de WebWare.
Système de sécurité active Description
Général Le système de sécurité active comprend les fonctionnalités logicielles qui conservent la précision de la trajectoire du robot, et celles qui évitent de façon active les collisions qui peuvent se produire si le robot quitte accidentellement la trajectoire programmée ou si un obstacle est placé sur sa trajectoire.
Système de freinage actif (ABS)
Tous les robots sont livrés avec un système de freinage actif qui les aide à conserver la trajectoire programmée à l'arrêt général (GS), à l'arrêt automatique (AS) et à l'arrêt supérieur (SS).Le système de freinage actif est activé pour tous les modes d'arrêt. Il force le robot à s'arrêter au moyen de la puissance du système de servocommande le long de la trajectoire programmée. Au bout d'un certain temps, les freins mécaniques sont activés, garantissant un arrêt en toute sécurité.Le processus d'arrêt correspond à un arrêt de classe 1. Le couple maximal applicable sur l'axe le plus chargé détermine la distance d'arrêt.En cas d'échec du système d'entraînement ou d'une coupure de courant, un arrêt de classe 0 se produit. L'arrêt d'urgence (ES) est un arrêt de classe 0. Tous les arrêts (GS, AS, SS et ES) sont reconfigurables.Lors de la programmation du robot en mode manuel, la gâchette de validation fait l'objet d'un arrêt de classe 0.
3HAC 023933-004 Rév.H 15
1 Description1.2.1 Normes
Système de sécurité passive
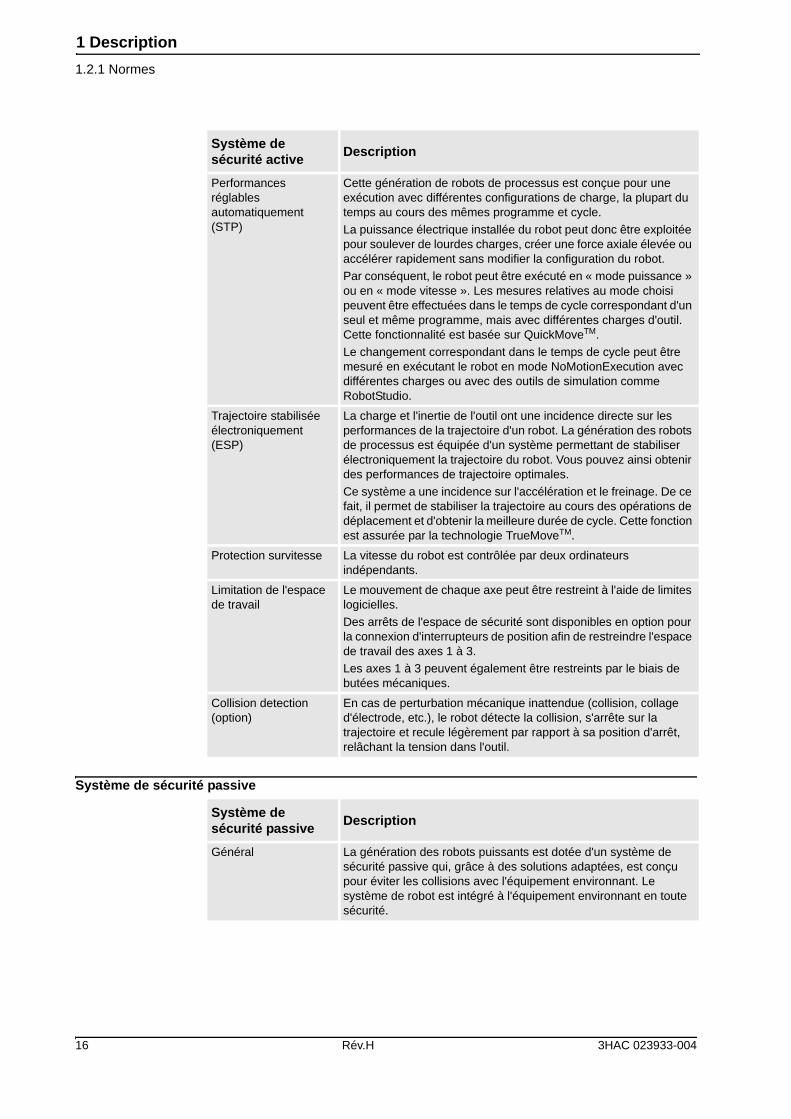
Performances réglables automatiquement (STP)
Cette génération de robots de processus est conçue pour une exécution avec différentes configurations de charge, la plupart du temps au cours des mêmes programme et cycle.La puissance électrique installée du robot peut donc être exploitée pour soulever de lourdes charges, créer une force axiale élevée ou accélérer rapidement sans modifier la configuration du robot.Par conséquent, le robot peut être exécuté en « mode puissance » ou en « mode vitesse ». Les mesures relatives au mode choisi peuvent être effectuées dans le temps de cycle correspondant d'un seul et même programme, mais avec différentes charges d'outil. Cette fonctionnalité est basée sur QuickMoveTM.Le changement correspondant dans le temps de cycle peut être mesuré en exécutant le robot en mode NoMotionExecution avec différentes charges ou avec des outils de simulation comme RobotStudio.
Trajectoire stabilisée électroniquement (ESP)
La charge et l'inertie de l'outil ont une incidence directe sur les performances de la trajectoire d'un robot. La génération des robots de processus est équipée d'un système permettant de stabiliser électroniquement la trajectoire du robot. Vous pouvez ainsi obtenir des performances de trajectoire optimales.Ce système a une incidence sur l'accélération et le freinage. De ce fait, il permet de stabiliser la trajectoire au cours des opérations de déplacement et d'obtenir la meilleure durée de cycle. Cette fonction est assurée par la technologie TrueMoveTM.
Protection survitesse La vitesse du robot est contrôlée par deux ordinateurs indépendants.
Limitation de l'espace de travail
Le mouvement de chaque axe peut être restreint à l'aide de limites logicielles.Des arrêts de l'espace de sécurité sont disponibles en option pour la connexion d'interrupteurs de position afin de restreindre l'espace de travail des axes 1 à 3.Les axes 1 à 3 peuvent également être restreints par le biais de butées mécaniques.
Collision detection (option)
En cas de perturbation mécanique inattendue (collision, collage d'électrode, etc.), le robot détecte la collision, s'arrête sur la trajectoire et recule légèrement par rapport à sa position d'arrêt, relâchant la tension dans l'outil.
Système de sécurité active Description
Système de sécurité passive Description
Général La génération des robots puissants est dotée d'un système de sécurité passive qui, grâce à des solutions adaptées, est conçu pour éviter les collisions avec l'équipement environnant. Le système de robot est intégré à l'équipement environnant en toute sécurité.
16 Rév.H 3HAC 023933-004
1 Description1.2.1 Normes
Concept de sécurité interne
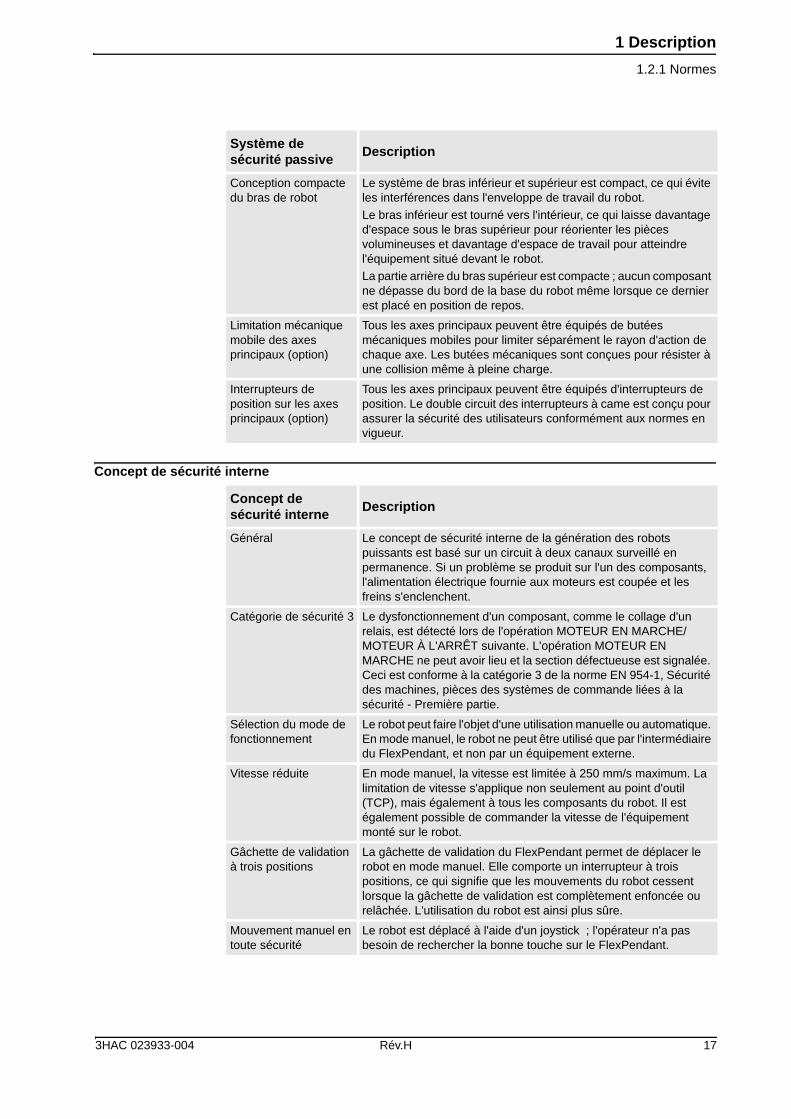
Conception compacte du bras de robot
Le système de bras inférieur et supérieur est compact, ce qui évite les interférences dans l'enveloppe de travail du robot.Le bras inférieur est tourné vers l'intérieur, ce qui laisse davantage d'espace sous le bras supérieur pour réorienter les pièces volumineuses et davantage d'espace de travail pour atteindre l'équipement situé devant le robot.La partie arrière du bras supérieur est compacte ; aucun composant ne dépasse du bord de la base du robot même lorsque ce dernier est placé en position de repos.
Limitation mécanique mobile des axes principaux (option)
Tous les axes principaux peuvent être équipés de butées mécaniques mobiles pour limiter séparément le rayon d'action de chaque axe. Les butées mécaniques sont conçues pour résister à une collision même à pleine charge.
Interrupteurs de position sur les axes principaux (option)
Tous les axes principaux peuvent être équipés d'interrupteurs de position. Le double circuit des interrupteurs à came est conçu pour assurer la sécurité des utilisateurs conformément aux normes en vigueur.
Système de sécurité passive Description
Concept de sécurité interne Description
Général Le concept de sécurité interne de la génération des robots puissants est basé sur un circuit à deux canaux surveillé en permanence. Si un problème se produit sur l'un des composants, l'alimentation électrique fournie aux moteurs est coupée et les freins s'enclenchent.
Catégorie de sécurité 3 Le dysfonctionnement d'un composant, comme le collage d'un relais, est détecté lors de l'opération MOTEUR EN MARCHE/MOTEUR À L'ARRÊT suivante. L'opération MOTEUR EN MARCHE ne peut avoir lieu et la section défectueuse est signalée. Ceci est conforme à la catégorie 3 de la norme EN 954-1, Sécurité des machines, pièces des systèmes de commande liées à la sécurité - Première partie.
Sélection du mode de fonctionnement
Le robot peut faire l'objet d'une utilisation manuelle ou automatique. En mode manuel, le robot ne peut être utilisé que par l'intermédiaire du FlexPendant, et non par un équipement externe.
Vitesse réduite En mode manuel, la vitesse est limitée à 250 mm/s maximum. La limitation de vitesse s'applique non seulement au point d'outil (TCP), mais également à tous les composants du robot. Il est également possible de commander la vitesse de l'équipement monté sur le robot.
Gâchette de validation à trois positions
La gâchette de validation du FlexPendant permet de déplacer le robot en mode manuel. Elle comporte un interrupteur à trois positions, ce qui signifie que les mouvements du robot cessent lorsque la gâchette de validation est complètement enfoncée ou relâchée. L'utilisation du robot est ainsi plus sûre.
Mouvement manuel en toute sécurité
Le robot est déplacé à l'aide d'un joystick ; l'opérateur n'a pas besoin de rechercher la bonne touche sur le FlexPendant.
3HAC 023933-004 Rév.H 17

1 Description1.2.1 Normes
Arrêt d'urgence Un bouton-poussoir d'arrêt d'urgence se trouve sur le système de commande et un autre sur le FlexPendant. Des boutons d'arrêt d'urgence supplémentaires peuvent être connectés au circuit de chaîne de sécurité du robot.
Arrêt de l'espace de sécurité
Le robot comporte un certain nombre d'entrées électriques qui peuvent être utilisées pour la connexion d'équipements de sécurité externes, comme des barrières de sécurité et des rideaux de lumière. Les fonctions de sécurité du robot peuvent ainsi être activées par les équipements périphériques et par le robot lui-même.
Arrêt retardé de l'espace de sécurité
Un arrêt retardé est progressif. Le robot s'arrête de la même manière que pour un arrêt normal du programme, sans dévier de la trajectoire programmée. Après environ 1 seconde, l'alimentation des moteurs est coupée.
Commande Hold-to-run (nécessitant une action maintenue)
Hold-to-run (nécessitant une action maintenue) signifie que vous devez appuyer sur le bouton de démarrage pour déplacer le robot. Lorsque vous relâchez le bouton, le robot s'arrête. La fonction Hold-to-run (nécessitant une action maintenue) sécurise le test des programmes.
Sécurité incendie Le manipulateur et le système de commande répondent aux exigences strictes d'Underwriters Laboratories Inc. en matière de sécurité incendie.
Safety lamp (option) Le robot peut être équipé, en option, d'une lampe de sécurité montée sur le manipulateur. Cette lampe est activée lorsque les moteurs présentent l'état MOTEURS EN MARCHE.
Concept de sécurité interne Description
18 Rév.H 3HAC 023933-004

1 Description1.3.1 Introduction
1.3 Installation
1.3.1 Introduction
GénéralitésToutes les versions du robot IRB 6600 sont conçues pour un montage sur le sol. Selon la version du robot, un terminal (poids maximal compris entre 125 et 225 kg, charge utile comprise) peut être monté sur la bride de montage (axe 6). Reportez-vous au schéma des charges des robots IRB 6600 (1.5.2 Schémas des charges).
Charges supplémentairesDes charges supplémentaires (garnitures de vannes, transformateurs) peuvent être montées sur le bras supérieur (poids maximal de 50 kg). Une charge supplémentaire de 500 kg peut également être montée sur le châssis de l'axe 1. Reportez-vous à Trous pour le montage d'équipements supplémentaires sur les robots IRB 6600/6650 et IRB 6600ID/6650ID . Aucune charge supplémentaire pour le robot IRB 6600ID/6650ID.
Rayon d'actionLe rayon d'action des axes 1 à 3 peut être limité par des butées mécaniques. Des interrupteurs de position peuvent être montés sur les axes 1 à 3 pour indiquer la position du manipulateur.
3HAC 023933-004 Rév.H 19

1 Description1.3.2 Conditions d'exploitation
1.3.2 Conditions d'exploitation
Normes de protectionManipulateur Standard et Fonderie IP67
Normes concernant les salles blanchesSalle blanche classe 100 pour manipulateur conformément à la norme :
Environnements explosifsLe robot ne doit pas être placé ou manipulé dans un environnement explosif.
Température ambiante
Humidité relative
Normes Description
DIN EN ISO 14644 Salles blanches et environnements contrôlés associés
Norme fédérale 209 en vigueur aux États-Unis
Classification de la propreté de l'air
Non disponible pour les modèles IRB 6650S et IRB 6600ID/6650ID.
Description Standard/Option Température
Manipulateur en cours de fonctionnement
Standard +5 °C à +50 °C
Pour le système de commande Standard De +5 °C à +45 °C
Pour le système de commande Option De +5 °C à +52 °C
Pour l’armoire de soudage par points
Standard de +5 °C à +45 °C
Robot complet pendant le transport et le stockage
Standard De -25 °C à +55 °C
Pendant de courtes périodes (ne dépassant pas 24 heures)
Standard Jusqu'à +70 °C
Description Humidité relative
Robot complet pendant le transport et le stockage 95 % max. à température constante
Robot complet en cours de fonctionnement 95 % max. à température constante
Robot complet en cours de fonctionnement, l’option 287-6 Foundry Prime
100 % max. à température constante
20 Rév.H 3HAC 023933-004

1 Description1.3.3 Montage du manipulateur
1.3.3 Montage du manipulateur
Charge maximaleCharge maximale par rapport au système de coordonnées de base.
Charge d'endurance en fonctionnementTous les modèles IRB 6600/6650/6600ID/6650ID
Charge maximale en arrêt d'urgenceTous les modèles IRB 6600/6650/6600ID/6650ID
Force xy ± 10,1 kN ± 20,7 kN
Force z 18,0 ± 13,8 kN 18,0 ± 22,4 kN
Couple xy ± 27,6 kNm ± 50,6 kNm
Couple z ± 7,4 kNm ± 14,4 kNm
Charge d'endurance en fonctionnementIRB 6650S
Charge maximale en arrêt d'urgenceIRB 6650S
Force xy ± 10,6 kN ± 20,9 kN
Force z 28,2 ± 7,7 kN 28,2 ± 16,4 kN
Couple xy 28,2 kN 50,5 kNm
Couple z 7,9 kN 13,6 kNm
3HAC 023933-004 Rév.H 21

1 Description1.3.3 Montage du manipulateur
Figure 4 Direction des forces.
Remarque concernant Mxy et Fxy
La couple de torsion (Mxy) peut se produire dans un sens de l’axe du plan XY du système de coordonnées de base.Ce ci s’applique également à la force transversale (Fxy).
X
Y
C o u p l e ( M )x y x y
F o r c e ( F )x y x y
F o r c e ( F )z z
C o u p l e ( M )z z
Lors de l'utilisation d'entretoises de base (opt. 571-1), le couple xz sur le sol est de 30,4 kNm pour le modèle IRB 6600/6650/6600ID/6650ID et de 31 kNm pour le modèle IRB 6650S pour la charge d'endurance en fonctionnement, et de 55,7 kNm pour le modèle IRB 6600/6650/6600ID/6650ID et de 55,6 kNm pour le modèle IRB 6650S pour la charge maximale en arrêt d'urgence. Les autres valeurs ci-dessus sont les mêmes qu'en l'absence d'entretoises de base.
22 Rév.H 3HAC 023933-004

1 Description1.3.3 Montage du manipulateur
Boulons de fixation de la base du robot - pour toutes les variantes à l'exception du modèle IRB 6650S
Figure 5 Configuration des trous (dimensions en mm).
Compte tenu des performances AbsAcc, les trous de guidage choisis dans la Figure 7 et dans la Figure 10 sont recommandés.
Vis recommandées pour la fixation du manipulateur sur la base
M24 x 140 8,8 avec rondelle plate de 4 mm
Couple 775 Nm
X
BB
AA
(317,34) (4x)
(243,5) (4x)
Y
(317
,34)
(4x)
(243
,5) (
4x)
Z
Ø 800
Ø 0,3
3 7 , 5 º ( 4 x )
1 5 º ( 4 x )
Ø 53 (12x)
Ø 30 (12x)
88 ±
0.3
4x 45H7
B - B A - A
16
Seuls deux goujons de guidage doivent être utilisés. Les trous correspondants sur la plaque d'assise doivent être circulaires et ovales conformément aux Figure 8 et Figure 11.
3HAC 023933-004 Rév.H 23

1 Description1.3.3 Montage du manipulateur
Boulons de fixation de la base du robot - pour le modèle IRB 6650S
Figure 6 Configuration des trous (dimensions en mm).
Compte tenu des performances AbsAcc, les trous de guidage choisis dans la Figure 7 et dans la Figure 10 sont recommandés.
Vis recommandées pour la fixation du manipulateur sur la base
M24 x 140 8,8 avec rondelle plate de 4 mm
Couple 775 Nm
B BXZ
Ø 0,3
A A
1 0 º ( 4 x )
1 5 º ( 4 x )
3 7 , 5 º ( 4 x )
(354
,8) (
4x)
(317
,34)
(4x)
(243
,5) (
4x)
Ø 800
(317,34) (4x)
(243,5) (4x)
(184,7) (4x)
Y
Ø 53 (12x)
Ø 30 (12x)16
88 ±
0.3
4x 45H7B - B
A - A
Seuls deux goujons de guidage doivent être utilisés. Les trous correspondants sur la plaque d'assise doivent être circulaires et ovales conformément aux Figure 8 et Figure 11.
24 Rév.H 3HAC 023933-004

1 Description1.3.3 Montage du manipulateur
Schéma de la plaque d'assise
Figure 7 Principales dimensions et mesures des trous d'impression des dimensions de la plaque d'assise (dimensions en mm).
Pos Description
A Couleur : RAL 9005Épaisseur : 80 - 100 µm
M16 (5x)Ø 22 (16x)
923 (4x)882
800748
565
385
202150
6827 (4x)0
991
(2x)
947
(2x)
813
(2x)
630
(2x)
450
(2x)
293
(2x)
87 (2
x)37
(2x)0
045
137
0 18 358
(2x)
861
(2x)
(A)
2x R525
598,31560,85487,01
243,5
0
73,841 1 1,3 0
0
73,8
413
2,64
317,
3
1020857,350
2,04
560,
85
634,
68
Note 22x 50x45º
12x M24
2x 4
50
231,
595
0 455(Ø 800)
475
813
905
A
AØ 1A
C C
B
BD
3HAC 023933-004 Rév.H 25

1 Description1.3.3 Montage du manipulateur
Schéma de la plaque d'assise
Figure 8 Mesures d'impression des dimensions de la plaque d'assise pour l'adaptation de la base du robot (dimensions en mm).
0 2x 2
06,9
2x 2
19,8
2x 3
11,1
2x 3
65,3
840,9
699,5
625 (2x)
325 (2x)
250,5
109,1
087
4,6
(2x)
790
(2x)
706
(2x)
290
(2x)0
0
11 9138,4
225,8241,1
R50 (12x) 4x Ø18 Note 1
708,9724,2
8 11, 6831
26 Rév.H 3HAC 023933-004
1 Description1.3.3 Montage du manipulateur
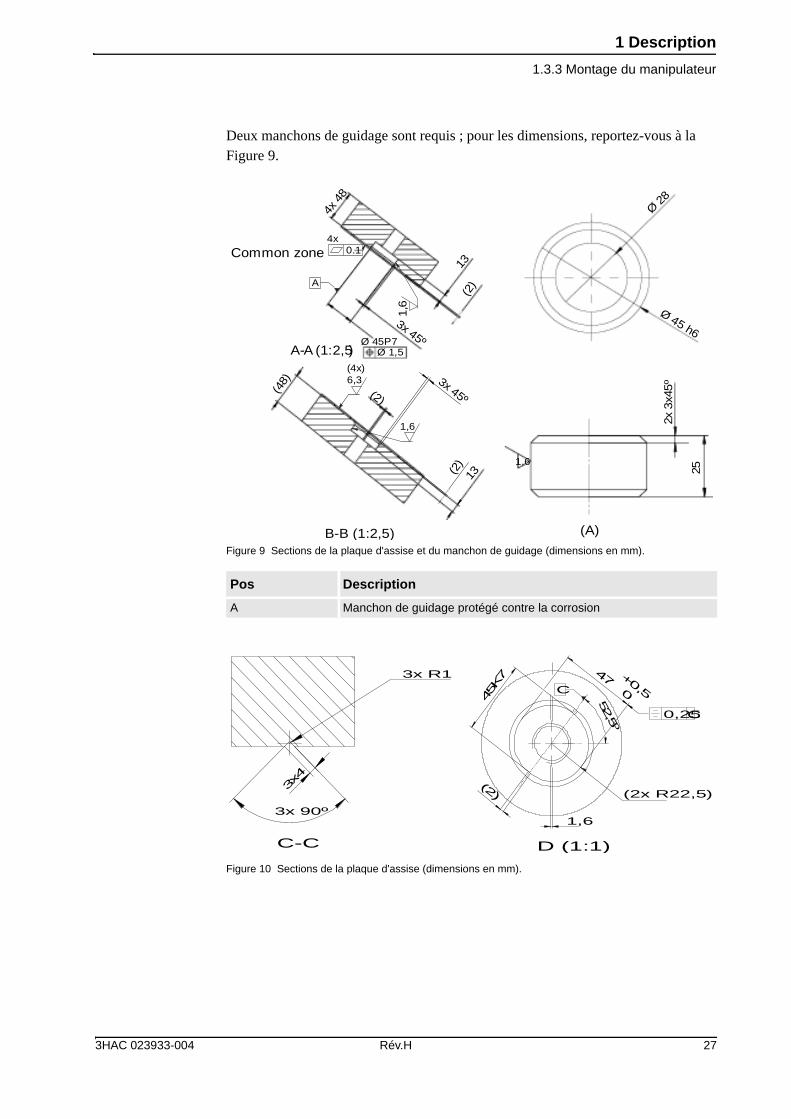
Deux manchons de guidage sont requis ; pour les dimensions, reportez-vous à la Figure 9.
Figure 9 Sections de la plaque d'assise et du manchon de guidage (dimensions en mm).
Figure 10 Sections de la plaque d'assise (dimensions en mm).
Pos Description
A Manchon de guidage protégé contre la corrosion
Common zone
4x 48
13(2
)
(48)
(2)
13
1,6
3x 45º
3x 45º
A-A (1:2,5)Ø 45P7
(4x)6,3
1,6
Ø 1,5
0.1
A
(2)
4x
B-B (1:2,5)
2x 3
x45º
Ø 45 h6
25
1,6
Ø 28
(A)
3x R1
3x4
3x 90º
C-C
+0,5
47 0
0,25C
45K7
(2x R22,5)
1,6
D (1:1)
(2)
52,5º
C
3HAC 023933-004 Rév.H 27
1 Description1.4.1 Étalonnage précis
1.4 Étalonnage et références
1.4.1 Étalonnage précis
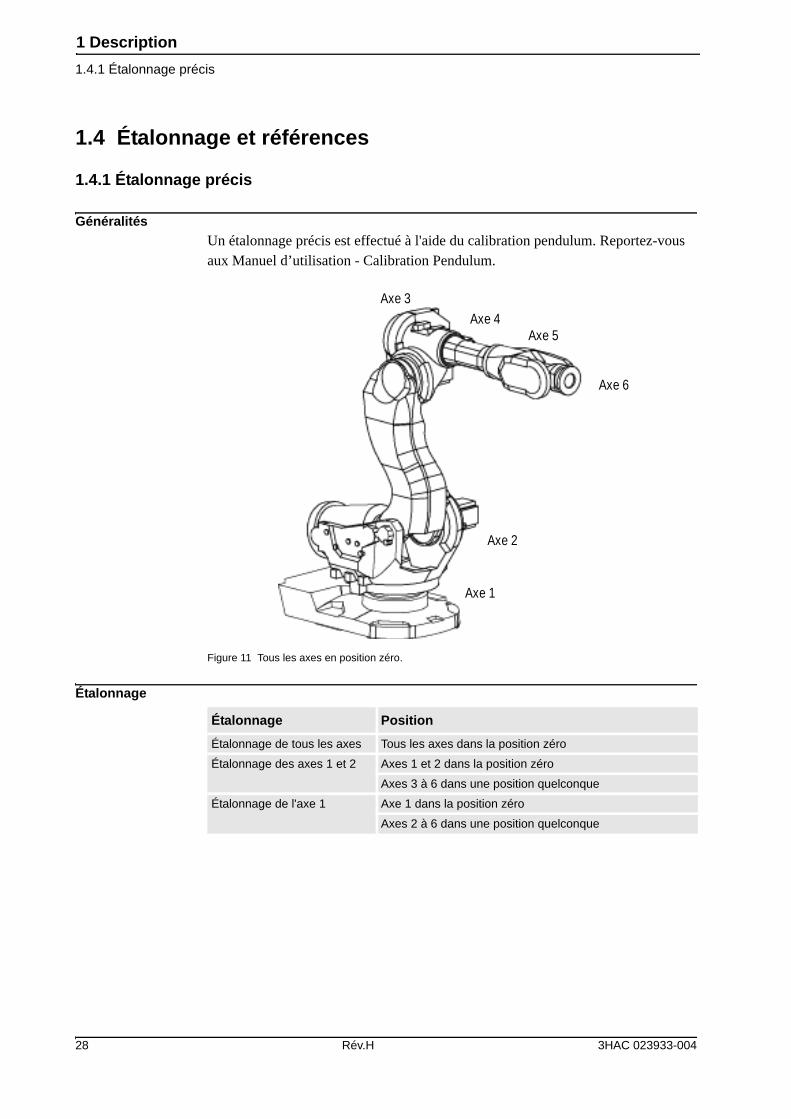
GénéralitésUn étalonnage précis est effectué à l'aide du calibration pendulum. Reportez-vous aux Manuel d’utilisation - Calibration Pendulum.
Figure 11 Tous les axes en position zéro.
Étalonnage
Axe 3Axe 4
Axe 5
Axe 6
Axe 2
Axe 1
Étalonnage Position
Étalonnage de tous les axes Tous les axes dans la position zéro
Étalonnage des axes 1 et 2 Axes 1 et 2 dans la position zéro
Axes 3 à 6 dans une position quelconque
Étalonnage de l'axe 1 Axe 1 dans la position zéro
Axes 2 à 6 dans une position quelconque
28 Rév.H 3HAC 023933-004

1 Description1.4.2 Étalonnage précision absolue
1.4.2 Étalonnage précision absolue
GénéralitésNécessite l'option RobotWare Absolute Accuracy. Pour plus d'informations, reportez-vous à Caractéristiques du produit - Logiciel du système de commande IRC5.
Concept d'étalonnageLe concept d'étalonnage Absolute Accuracy (AbsAcc) assure une précision absolue TCP supérieure à ± 1 mm dans le rayon d'action entier (le rayon d'action des robots de flexion arrière tels que l'IRB 6600 est limité aux positions avant).L'option Absolute Accuracy compense :
• Les tolérances mécaniques de la structure du robot
• La déviation due à la charge
L'étalonnage précision absolue met l'accent sur la précision du positionnement dans le système de coordonnées cartésien du robot. Il inclut également la compensation de charge pour la déviation due à l'outil et à l'équipement. Les données d'outil du programme de robot sont utilisées à cette fin. Le positionnement a lieu selon les performances spécifiées, quelle que soit la charge.
Données d'étalonnageL'utilisateur dispose de données d'étalonnage de robot (fichier de paramètres de compensation, absacc.cfg) et d'un certificat indiquant les performances (Birth Certificate). La différence entre un robot idéal et un robot réel sans AbsAcc est généralement de 8 mm, et s'explique par les tolérances mécaniques et la déviation dans la structure du robot.
3HAC 023933-004 Rév.H 29

1 Description1.4.2 Étalonnage précision absolue
Option Absolute AccuracyL'option Absolute Accuracy est intégrée aux algorithmes du système de commande afin de compenser cette différence, et ne nécessite ni équipements ni calculs externes.L'option Absolute Accuracy est une option RobotWare qui inclut l'étalonnage séparé du robot (bras mécanique).L'étalonnage Absolute Accuracy est un étalonnage du point d'outil (TCP) qui permet d'obtenir (m) un positionnement correct dans le système de coordonnées cartésien.
Figure 12 Système de coordonnées cartésien
Données de productionLes données de production standard concernant l'étalonnage sont les suivantes :
RobotPrécision du positionnement (mm)
Moyenne Max. % dans les 1 mm
IRB 6600 -175/2,55225/2.55175/2.80125/3.20200/2.75
0,50 1,20 97
IRB 6650 -125/3,20200/2.75
0,50 1,20 97
IRB 6650S - 125/3,50200/3.00
0,50 1,20 97
IRB 6600ID - 185/2,55IRB 6650ID - 170/2,75
a
a. Pour les données détaillées et les données manquantes dans la table, veuillezcontacter ABB afin d'obtenir des informations supplémentaires.
a a
IRB 6650S - 90/3,9 a a a
30 Rév.H 3HAC 023933-004

1 Description1.4.3 Références de robot
1.4.3 Références de robot
GénéralitésLes trous représentés de la Figure 13 à la Figure 18 sont utilisés pour mesurer la position du robot lorsque celui-ci est intégré à une cellule de production.
Figure 13 Quatre H8 Ø12 (profondeur 12) sur un rayon de 400 mm à partir du centre de l'axe 1 sur la base du robot.
Figure 14 Un H8 Ø12 (profondeur 12) dans la direction +x- à partir du centre de l'axe 1 sur la base du robot.
3HAC 023933-004 Rév.H 31

1 Description1.4.3 Références de robot
Figure 15 Sept trous A sur un rayon de x mm à partir du centre de l'axe 6 sur les deux brides d'outil standard.
Figure 16 Sept trous B sur un rayon de x mm à partir du centre de l'axe 6 sur les deux brides d'outil isolées.
Figure 17 Sept trous C sur un rayon de x mm à partir du centre de l'axe 6 sur la bride du modèle IRB 6600ID/IRB 6650ID.
A A
B
B
C
32 Rév.H 3HAC 023933-004
1 Description1.4.3 Références de robot
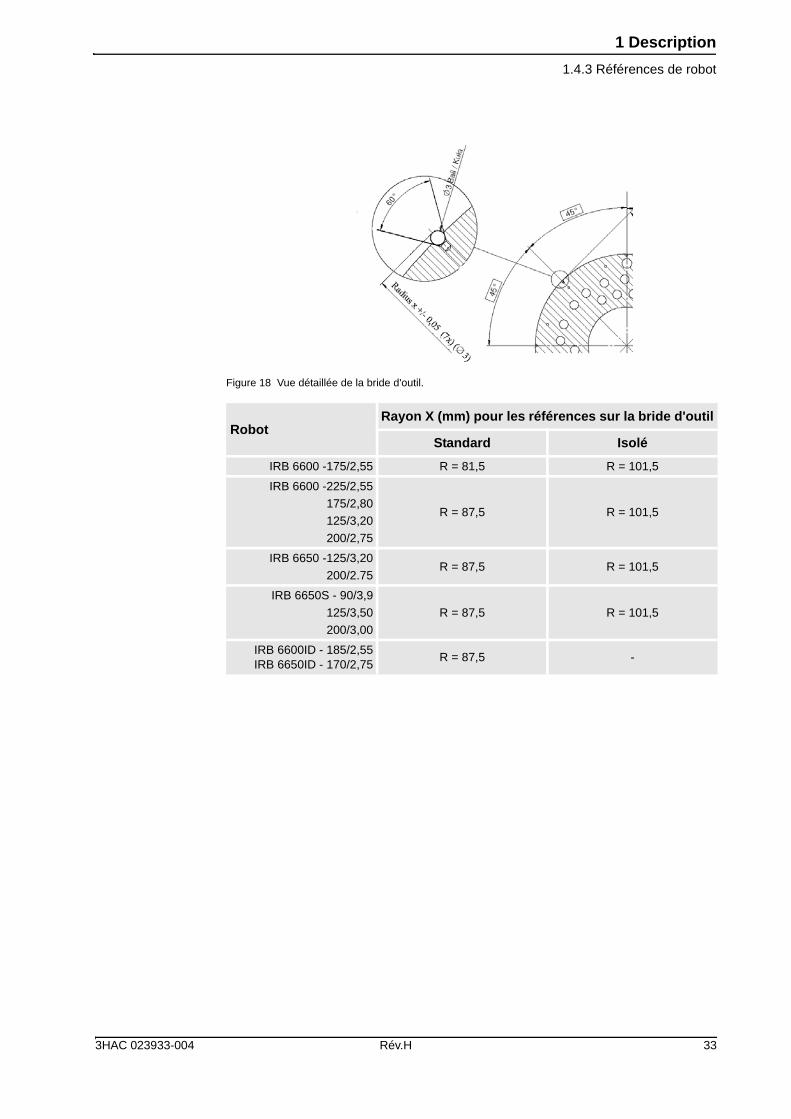
Figure 18 Vue détaillée de la bride d'outil.
RobotRayon X (mm) pour les références sur la bride d'outil
Standard Isolé
IRB 6600 -175/2,55 R = 81,5 R = 101,5
IRB 6600 -225/2,55175/2,80125/3,20200/2,75
R = 87,5 R = 101,5
IRB 6650 -125/3,20200/2.75
R = 87,5 R = 101,5
IRB 6650S - 90/3,9125/3,50200/3,00
R = 87,5 R = 101,5
IRB 6600ID - 185/2,55IRB 6650ID - 170/2,75 R = 87,5 -
3HAC 023933-004 Rév.H 33

1 Description1.5.1 Introduction
1.5 Schémas des charges
1.5.1 Introduction
Si des données de charge incorrectes sont utilisées, les pièces suivantes peuvent être endommagées par une surcharge :
• moteurs
• réducteurs
• structure mécanique
GénéralitésLes schémas des charges comprennent une inertie de charge utile nominale J0 de 15 kgm2, et une charge supplémentaire de 50 kg au niveau du logement du bras supérieur ; reportez-vous à la Figure 19.Non inclus pour le modèle IRB 6600ID/IRB 6650ID.Le schéma des charges varie en fonction de la charge du bras, de la charge utile et du moment d'inertie.
Contrôle de la charge grâce à RobotLoadPour vérifier facilement une charge spécifique, utilisez le programme de calculs RobotLoad d'ABB. Contactez votre distributeur ABB local.
Figure 19 Centre de gravité pour une charge supplémentaire de 50 kg au niveau du logement du bras (dimensions en mm).
Il est primordial de toujours définir les données de charge réelle correctes et de corriger la charge utile du robot. Des définitions incorrectes des données de charge peuvent entraîner une surcharge du robot.
Les robots fonctionnant avec des données de charge incorrectes, hors des limites spécifiées dans ce chapitre, ne seront pas couverts par la garantie du robot.
Pos Description
A Centre de gravité : 50 kg
400
200
(A)
34 Rév.H 3HAC 023933-004
1 Description1.5.2 Schémas des charges
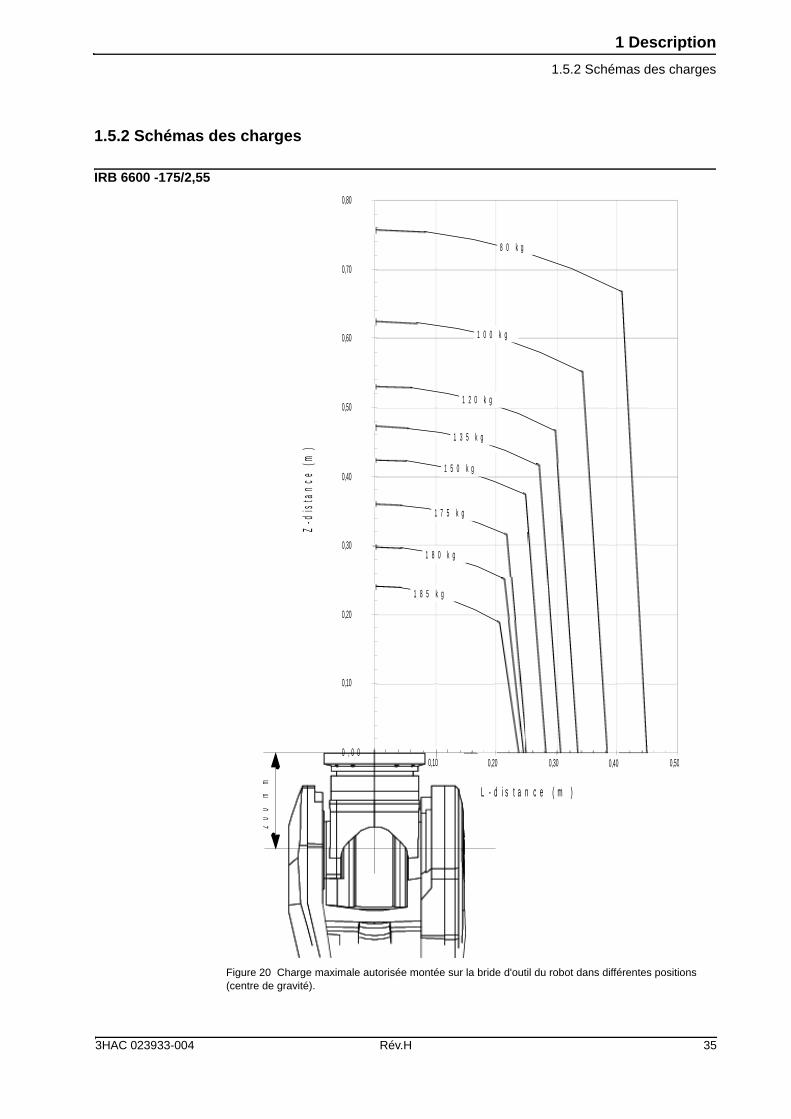
1.5.2 Schémas des charges
IRB 6600 -175/2,55
Figure 20 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité).
0 , 0 0
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
L - d i s t a n c e ( m )
1 8 5 k g
1 8 0 k g
1 7 5 k g
1 5 0 k g
1 3 5 k g
1 2 0 k g
1 0 0 k g
8 0 k gm
m0
02
0,10 0,20 0,30 0,40 0,50
Z-di
stan
ce (m
)
3HAC 023933-004 Rév.H 35

1 Description1.5.2 Schémas des charges
IRB 6600-175/2,55, « poignet vertical » (±10o)
Figure 21 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité) au niveau du « poignet vertical » (±10o), J0 = 15 kgm2.
Pour poignet abaissé (déviation de 0o par rapport à la ligne verticale).
Description
Charge maximale 215 kg
Zmax 0,310 m
Lmax 0,133 m
36 Rév.H 3HAC 023933-004
1 Description1.5.2 Schémas des charges
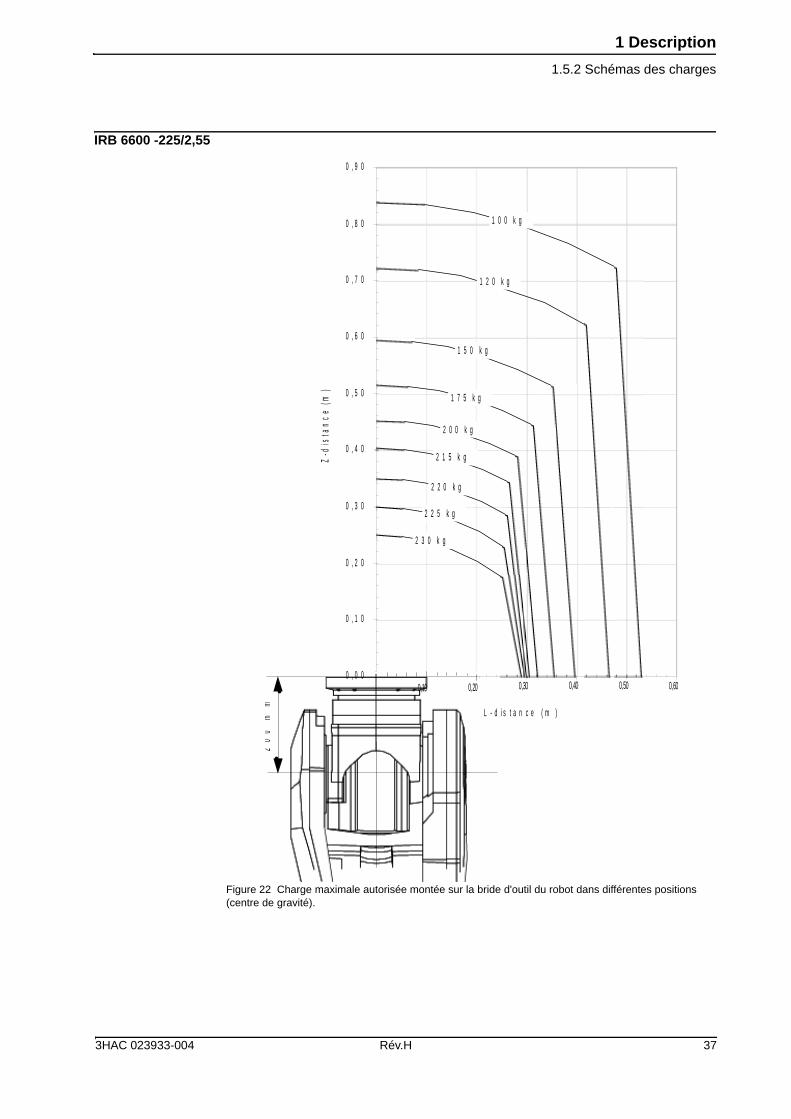
IRB 6600 -225/2,55
Figure 22 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité).
0 , 0 0
0 , 1 0
0 , 2 0
0 , 3 0
0 , 4 0
0 , 5 0
0 , 6 0
0 , 7 0
0 , 8 0
0 , 9 0
L - d i s t a n c e ( m )
)m(
ecnatsid-Z
1 7 5 k g
1 5 0 k g
1 2 0 k g
1 0 0 k g
2 0 0 k g
2 1 5 k g
2 2 5 k g
2 3 0 k g
2 2 0 k g
mm
00
2
0,10 0,20 0,30 0,40 0,50 0,60
3HAC 023933-004 Rév.H 37

1 Description1.5.2 Schémas des charges
IRB 6600-225/2,55, « poignet vertical » (±10o)
Figure 23 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité) au niveau du « poignet vertical » (±10o).
Pour poignet abaissé (déviation de 0o par rapport à la ligne verticale).
Description
Charge maximale 270 kg
Zmax 0,359 m
Lmax 0,124 m
L
0 , 0 0
L - d is t a n c e ( m )
)m(
ecnatsi
d-Z
1 0 0 k g
mm
00
2
1 5 0 k g
2 0 0 k g
2 3 5 k g2 6 0 k g
C h a r g eu t i l e
1 0 o 1 0 o
Z
“ P o ig n e t v e r t ic a l ”
0,20 0,40 0,60 0,80 1,00 1,20 1,40
0,20
0,40
0,60
0,80
1,00
1,20
1,40
1,60
38 Rév.H 3HAC 023933-004

1 Description1.5.2 Schémas des charges
IRB 6600 -175/2,8
Figure 24 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité).
0 , 0 0
0 , 1 0
0 , 2 0
0 , 3 0
0 , 4 0
0 , 5 0
0 , 6 0
0 , 7 0
0 , 8 0
0 , 9 0
1 , 0 0
1 , 1 0
L - d i s t a n c e ( m )
8 0 k g
1 0 0 k g
1 2 0 k g
1 5 0 k g
1 7 0 k g
1 7 5 k g
1 8 0 k g
1 8 5 k g
mm
00
2
0,10 0,20 0,30 0,40 0,50 0,60 0,70
Z-di
stan
ce (m
)
3HAC 023933-004 Rév.H 39

1 Description1.5.2 Schémas des charges
IRB 6600-175/2,8, « poignet vertical » (±10o)
Figure 25 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité) au niveau du « poignet vertical » (±10o).
Pour poignet abaissé (déviation de 0o par rapport à la ligne verticale).
Description
Charge maximale 215 kg
Zmax 0,382 m
Lmax 0,116 m
0 , 0 0
0 , 2 0
0 , 4 0
0 , 6 0
0 , 8 0
1 , 0 0
1 , 2 0
L - d i s t a n c e ( m )
)m(
ecnatsid-Z
1 7 0 k g
mm
002
1 2 5 k g
1 9 0 k g
2 1 0 k g
1 0 0 k g
Chargeuti le
Z
L
“ P o ig n e t v e r t ic a l ”
0,20 0,40 0,60 0,80 1,00 1,20 1,40
10º 10º
40 Rév.H 3HAC 023933-004
1 Description1.5.2 Schémas des charges
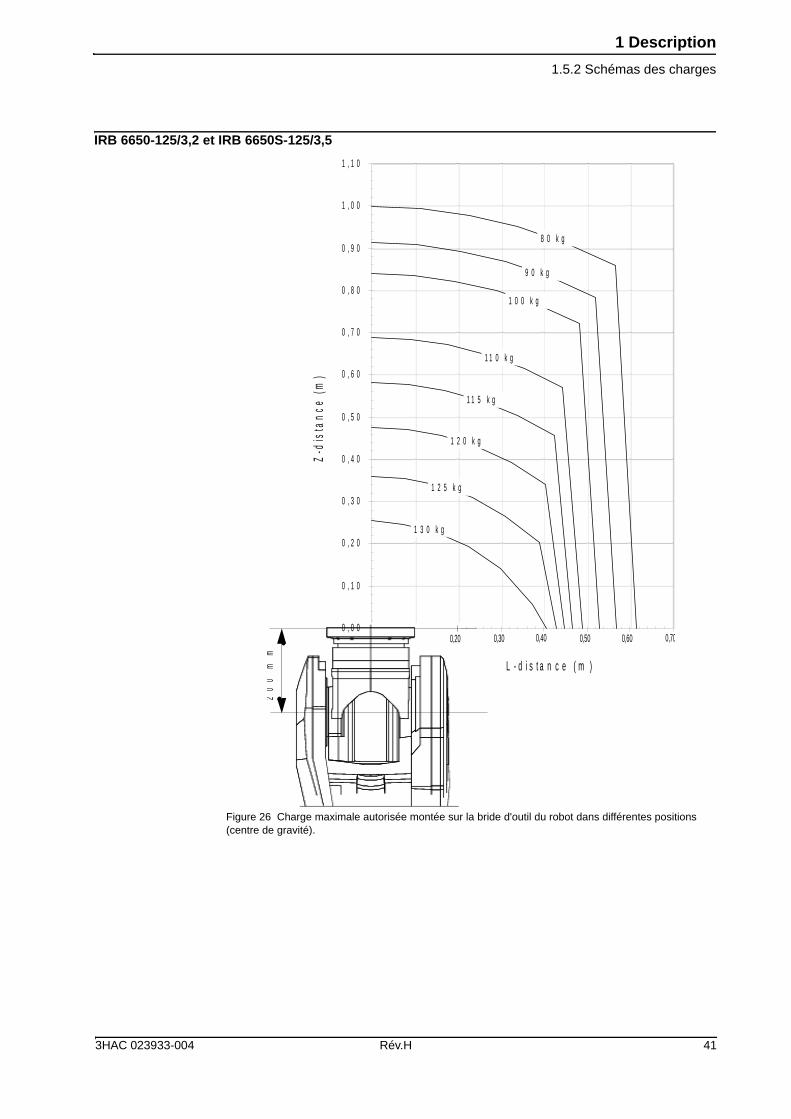
IRB 6650-125/3,2 et IRB 6650S-125/3,5
Figure 26 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité).
0 , 0 0
0 , 1 0
0 , 2 0
0 , 3 0
0 , 4 0
0 , 5 0
0 , 6 0
0 , 7 0
0 , 8 0
0 , 9 0
1 , 0 0
1 , 1 0
mm
00
2
L - d i s t a n c e ( m )
1 0 0 k g
1 1 0 k g
1 1 5 k g
1 2 0 k g
1 2 5 k g
1 3 0 k g
8 0 k g
9 0 k g
0,20 0,30 0,40 0,50 0,60 0,70
Z-di
stan
ce (m
)
3HAC 023933-004 Rév.H 41

1 Description1.5.2 Schémas des charges
IRB 6650-125/3,2 et IRB 6650S-125/3,5, « poignet vertical » (±10o)
Figure 27 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité) au niveau du « poignet vertical » (±10o).
Pour poignet abaissé (déviation de 0o par rapport à la ligne verticale).
Description
Charge maximale 150 kg
Zmax 0,462 m
Lmax 0,156 m
42 Rév.H 3HAC 023933-004

1 Description1.5.2 Schémas des charges
IRB 6650S - 90/3,9
Figure 28 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité).
50 kg
60 kg
65 kg
70 kg
75 kg
80 kg
85 kg
90 kg
95 kg
200
mm
L - distance (m )
Z - d
ista
nce
(m)
3HAC 023933-004 Rév.H 43

1 Description1.5.2 Schémas des charges
IRB 6650S 90/3,9, « poignet vertical » (±10o)
Figure 29 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité) au niveau du « poignet vertical » (±10o).
Pour poignet abaissé (déviation de 0o par rapport à la ligne verticale).
Description
Charge maximale 107 kg
Zmax 0,2 m
Lmax 0,1 m
Chargeutile
“Poignet vertical”
Z-di
stan
ce(m
)
L - d is t a n c e ( m )
44 Rév.H 3HAC 023933-004

1 Description1.5.2 Schémas des charges
IRB 6650-200/2,75 et IRB 6650S-200/3,0
Figure 30 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité).
0 , 0 0
0 , 1 0
0 , 2 0
0 , 3 0
0 , 4 0
0 , 5 0
0 , 6 0
0 , 7 0
0 , 8 0
0 , 9 0
1 0 0 k g
mm
00
2
L - d i s t a n c e ( m )
)m(
ecnatsi
d-Z
1 2 0 k g
1 3 5 k g
1 5 0 k g
1 7 5 k g
1 9 5 k g
2 0 0 k g
2 0 5 k g
2 1 0 k g
0,10 0,20 0,30 0,40 0,50 0,60
3HAC 023933-004 Rév.H 45

1 Description1.5.2 Schémas des charges
IRB 6650-200/2,75 et IRB 6650S-200/3,0, « poignet vertical » (±10o)
Figure 31 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité) au niveau du « poignet vertical » (±10o).
Pour poignet abaissé (déviation de 0o par rapport à la ligne verticale).
Description
Charge maximale 245 kg
Zmax 0,345 m
Lmax 0,098 m
0 , 0
0 , 2 0
0 , 4 0
0 , 8 0
1 , 2 0
1 , 4 0
1 , 0 0
0 , 6 0
L - d i s t a n c e ( m )
)m(
ecnatsi
d-Z
C h a r g eu t i l e
Z
L
2 3 5 k g
2 1 0 k g
1 7 5 k g
1 2 5 k g
1 0 0 k g
“ P o ig n e t v e r t ic a l ”
mm
002
0,20 0,40 0,60 0,80 1,00 1,20 1,40
1 0 º 1 0 º
46 Rév.H 3HAC 023933-004

1 Description1.5.2 Schémas des charges
IRB 6600ID-185/2,55
Figure 32 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité).
0,10
0,20
0,30
0,40
0,50
0,60
0,70
0,80
0,10 0,20 0,30 0,40 0,50
L-distance (m)
Z-di
stan
ce (m
)
1 10 k g
1 10 k g
160 kg
180 kg
185 kg
190 kg
195 kg
290
mm
3HAC 023933-004 Rév.H 47

1 Description1.5.2 Schémas des charges
IRB 6600ID-185/2,55, « poignet vertical » (±10º)
Figure 33 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité) au niveau du « poignet vertical » (±10o).
Pour poignet abaissé (déviation de 0o par rapport à la ligne verticale).
Description
Charge maximale 225 kg
Zmax 0,345 m
Lmax 0,153 m
0 , 0
0 , 2
0 , 4
0 , 6
0 , 8
1 , 0
1 , 2
1 , 4
0 , 0 0 , 2 0 , 4 0 , 6 0 , 8 1 , 0 1 , 2 1 , 4
225 kg
200 kg
175 kg
125 kg
100 kg
L - d i s t a n c e ( m )Z
L
10º10º
Z-di
stan
ce(m
)
Chargeutile
“ P o ig n e t v e r t ic a l”
290
mm
48 Rév.H 3HAC 023933-004
1 Description1.5.2 Schémas des charges
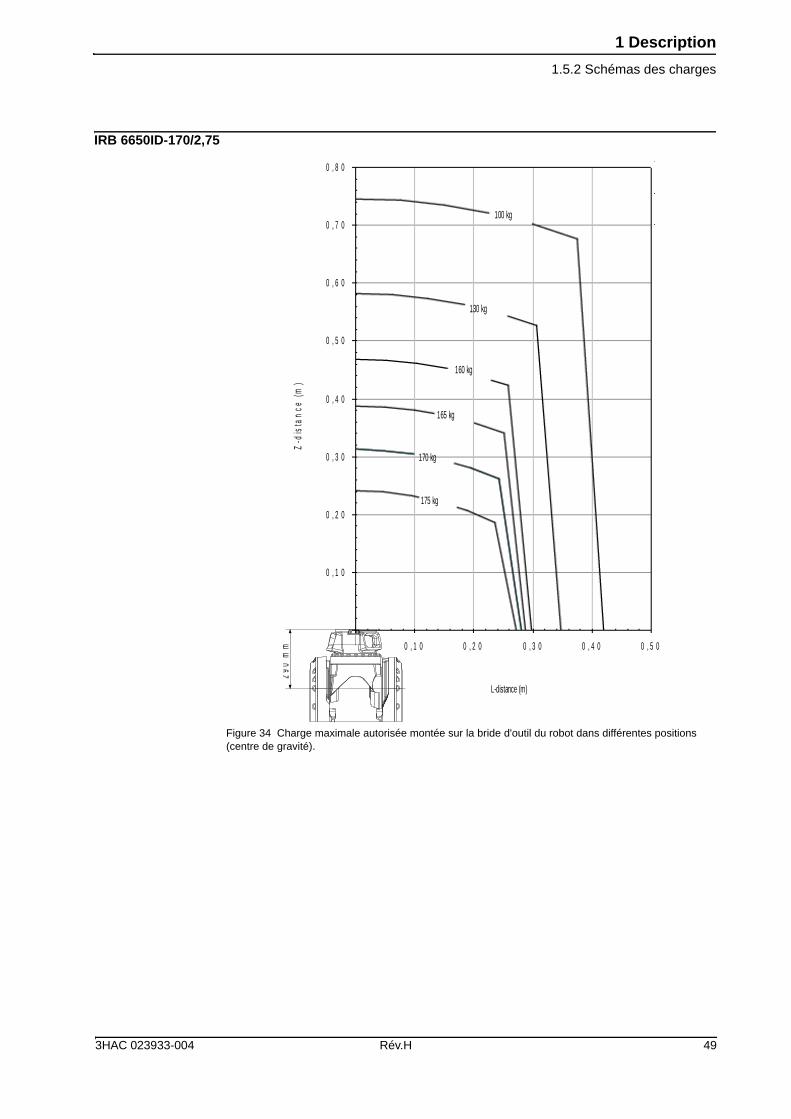
IRB 6650ID-170/2,75
Figure 34 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité).
0 , 1 0
0 , 2 0
0 , 3 0
0 , 4 0
0 , 5 0
0 , 6 0
0 , 7 0
0 , 8 0
0 , 1 0 0 , 2 0 0 , 3 0 0 , 4 0 0 , 5 0
100 kg
130 kg
160 kg
165 kg
170 kg
175 kg
290
mm
L-distance (m)
Z-di
stan
ce (m
)
3HAC 023933-004 Rév.H 49

1 Description1.5.2 Schémas des charges
IRB 6650ID-170/2,75, « poignet vertical » (±10º)
Figure 35 Charge maximale autorisée montée sur la bride d'outil du robot dans différentes positions (centre de gravité) au niveau du « poignet vertical » (±10o).
Pour poignet abaissé (déviation de 0o par rapport à la ligne verticale).
Description
Charge maximale 200 kg
Zmax 0,349 m
Lmax 0,177 m
0 ,0
0 ,2
0 ,4
0 ,6
0 ,8
1 ,0
1 ,2
1 ,4
0 ,0 0 , 2 0 ,4 0 ,6 0 , 8 1 ,0 1 ,2 1 ,4
200 kg
180 kg160 kg
125 kg
95 kg
L - d is t a n c e ( m )
Chargeutile
Z
L
“ P o ig n e t v e r tic a l”
10º10º
Z-di
stan
ce(m
)
290
mm
50 Rév.H 3HAC 023933-004

1 Description1.5.3 Charge maximale et moment d'inertie pour mouvement axial (axe 5) complet et limité
(ligne centrale vers le bas)
1.5.3 Charge maximale et moment d'inertie pour mouvement axial (axe 5) complet et limité (ligne centrale vers le bas)
Mouvement complet de l'axe 5 (±120o/±100º pour ID)
Figure 36 Moment d'inertie pour un mouvement complet de l'axe 5.
Charge en kg, Z et L en m, et J en kgm2
Axe Type de robot Moment d'inertie maximal
5 225/2.55, 175/2.8, 125/3.2,125/3,5, 200/2,75, 200/3 et 90/3,9
Ja5 = Charge x ((Z + 0,200)2 + L2) + J0L≤ 250 kgm2
ID-170/2,75 et ID-185/2,55 Ja5 = Charge x ((Z +0,290)2 + L2) + J0L≤ 250 kgm2
175/2.55 Ja5 = Charge x ((Z + 0,200)2 + L2) + J0L≤ 195 kgm2
6 225/2.55, 175/2.8, 125/3.2,125/3.5, 200/2.75, 200/3.0,ID-170/2,75, ID-185/2,55 et 90/3,9
Ja6 = Charge x L2 + J0Z ≤ 185 kgm2
175/2.55 Ja6 = Charge x L2 + J0Z ≤ 145 kgm2
Pos Description
A Centre de gravité
Description
J0L Moment d'inertie maximal autour du vecteur maximal dans le plan X-Y
J0Z Moment d'inertie maximal autour de Z
Z
X
(A)
3HAC 023933-004 Rév.H 51

1 Description1.5.3 Charge maximale et moment d'inertie pour mouvement axial (axe 5) complet et limité (ligne centrale vers le bas)
Axe 5 limité, ligne centrale vers le bas
Figure 37 Moment d'inertie lorsque la ligne centrale de l'axe 5 est vers le bas.
Axe Type de robot Moment d'inertie maximal
5 225/2.55, 175/2.8, 125/3.2,125/3,5, 200/2,75, 200/3 et 90/3,9
Ja5 = Charge x ((Z + 0,200)2 + L2) + J0L ≤ 275 kgm2
ID-170/2,75 et ID-185/2,55 Ja5 = Charge x ((Z +0,290)2 + L2) + J0L≤ 275 kgm2
175/2.55 Ja5 = Charge x ((Z + 0,200)2 + L2) + J0L≤ 215 kgm2
6 225/2.55, 175/2.8, 125/3.2,125/3.5, 200/2.75, 200/3.0,ID-170/2,75, ID-185/2,55 et 90/3,9
Ja6 = Charge x L2 + J0Z ≤ 250 kgm2
175/2.55 Ja6 = Charge x L2 + J0Z ≤ 195 kgm2
Pos Description
A Centre de gravité
Description
J0L Moment d'inertie maximal autour du vecteur maximal dans le plan X-Y
J0Z Moment d'inertie maximal autour de Z
Z
X
(A)
52 Rév.H 3HAC 023933-004
1 Description1.5.4 Couple de poignet
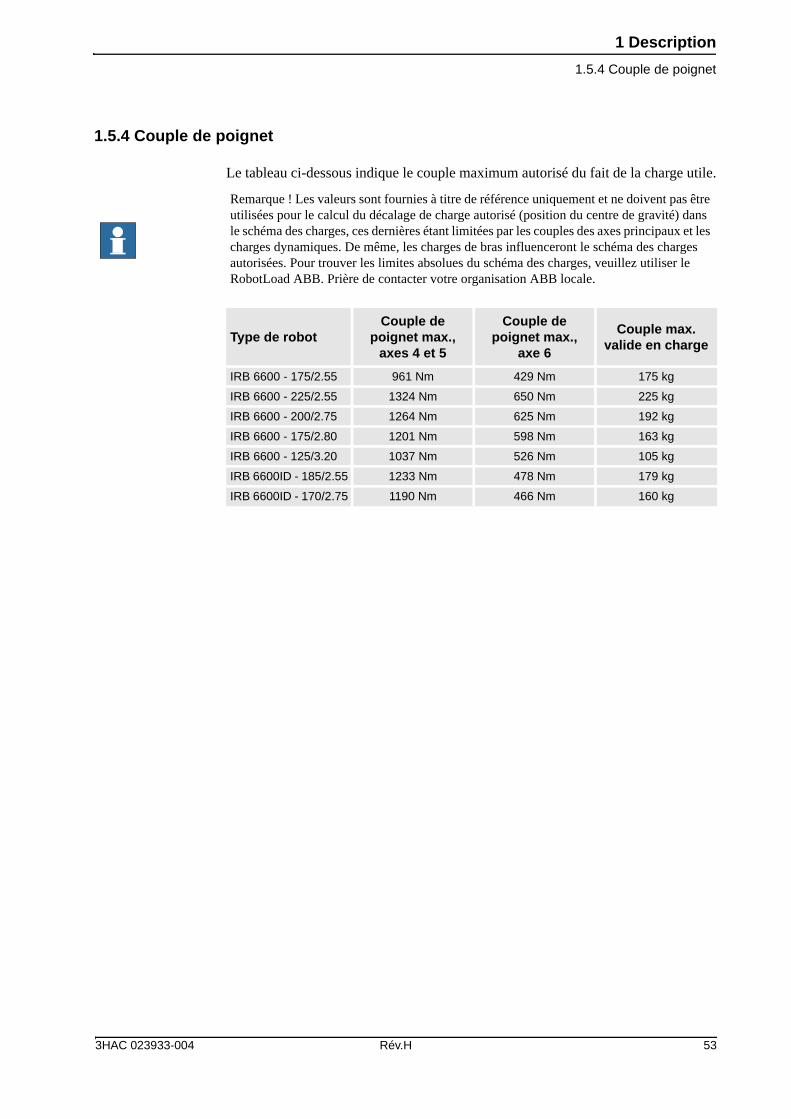
1.5.4 Couple de poignet
Le tableau ci-dessous indique le couple maximum autorisé du fait de la charge utile.
Remarque ! Les valeurs sont fournies à titre de référence uniquement et ne doivent pas être utilisées pour le calcul du décalage de charge autorisé (position du centre de gravité) dans le schéma des charges, ces dernières étant limitées par les couples des axes principaux et les charges dynamiques. De même, les charges de bras influenceront le schéma des charges autorisées. Pour trouver les limites absolues du schéma des charges, veuillez utiliser le RobotLoad ABB. Prière de contacter votre organisation ABB locale.
Type de robotCouple de
poignet max., axes 4 et 5
Couple de poignet max.,
axe 6
Couple max. valide en charge
IRB 6600 - 175/2.55 961 Nm 429 Nm 175 kg
IRB 6600 - 225/2.55 1324 Nm 650 Nm 225 kg
IRB 6600 - 200/2.75 1264 Nm 625 Nm 192 kg
IRB 6600 - 175/2.80 1201 Nm 598 Nm 163 kg
IRB 6600 - 125/3.20 1037 Nm 526 Nm 105 kg
IRB 6600ID - 185/2.55 1233 Nm 478 Nm 179 kg
IRB 6600ID - 170/2.75 1190 Nm 466 Nm 160 kg
3HAC 023933-004 Rév.H 53

1 Description1.6.1 Généralités
1.6 Montage de l'équipement
1.6.1 Généralités
Des charges supplémentaires peuvent être montées sur le logement du bras supérieur, sur le bras inférieur et sur le châssis. Les définitions des distances et des masses sont indiquées dans la Figure 38 et la Figure 39. Le robot comporte des trous pour le montage d'équipements supplémentaires (reportez-vous à la Figure 40). La charge maximale autorisée du bras dépend du centre de gravité de la charge du bras et de la charge utile du robot.
Bras supérieurCharge supplémentaire autorisée sur le logement du bras supérieur plus poids de manutention maximal (reportez-vous à la Figure 38) : M1 ≤50 kg avec une distance ≤500 mm, centre de gravité dans l'extension de l'axe 3. /
Figure 38 Charge supplémentaire autorisée sur le bras supérieur.
Châssis (charge latérale)
Aucune charge supplémentaire pour le modèle IRB 6600ID/6650ID.
Pos Description
A Centre de masse
(A)
M1
M1 a
Description
Charge supplémentaire autorisée sur le châssis
JH = 200 kgm2
Position recommandée(reportez-vous à la Figure 39)
JH = JH0 + M4 x R2
où :JH0 est le moment d'inertie de l'équipementR est le rayon (en m) à partir du centre de l'axe 1M4 est la masse totale (en kg) de l'équipement, y compris le support et le faisceau (≤ 500 kg)
54 Rév.H 3HAC 023933-004

1 Description1.6.1 Généralités
Figure 39 Charge supplémentaire sur le châssis du robot IRB 6600 (dimensions en mm).
Pos Description
A Vue du dessus
B Vue de derrière
45
75
7901195
(B)(A)52
745
7
R
3HAC 023933-004 Rév.H 55

1 Description1.6.2 Montage de la charge latérale
1.6.2 Montage de la charge latérale
GénéralitésLa charge supplémentaire peut être montée sur le châssis. Pour repérer les trous de montage, reportez-vous à la Figure 40 et à la Figure 41. Lors du montage sur le châssis, les quatre trous (2x2, ∅16) situés sur un côté doivent être utilisés.
Trous pour le montage d'équipements supplémentaires sur les robots IRB 6600/6650 et IRB 6600ID/6650ID
Figure 40 Trous destinés au montage d'équipements supplémentaires sur les bras supérieur et inférieur, et sur le châssis du robot IRB 6600/6650 (dimensions en mm).
Pos Description
A Différences du type A
B Type B
200 240
1856xM16
5050
100
(B)
200240
5050
122
6xM16
(A)
1904x M12
3x M12
200150
87 153
4x M12
150
400
(IRB
6600
)50
0 (IR
B 66
50)
128
4x M12
150
300
520
(IRB
6600
)72
5 (IR
B 66
50)
780
56 Rév.H 3HAC 023933-004

1 Description1.6.2 Montage de la charge latérale
Figure 41 Trous destinés au montage d'une charge supplémentaire sur le bras supérieur du robot IRB 6600/6650 (dimensions en mm).
Figure 42 Trous destinés au montage d'une charge supplémentaire sur le bras supérieur du robot IRB 6650S (dimensions en mm)
850
106
170
175
(A)
800
45
30
540,
5
470,
5
1180
4xM12
150
300
725
630
3HAC 023933-004 Rév.H 57

1 Description1.6.2 Montage de la charge latérale
Figure 43 Trous destinés au montage d'une charge supplémentaire sur le bras supérieur du robot IRB 6650S (dimensions en mm).
Pos Description
A R 946 (partie arrière, dispositif d'équilibrage)
B R 813 (face avant, axe de moteur 2)
1 5 02 2 0
87
1 9 04 x M 1 2
3 x M 1 2
4 x M 1 2
2 4 0 4 x M 1 64 8 0
150
500
153
5040
128
58 Rév.H 3HAC 023933-004
1 Description1.6.2 Montage de la charge latérale
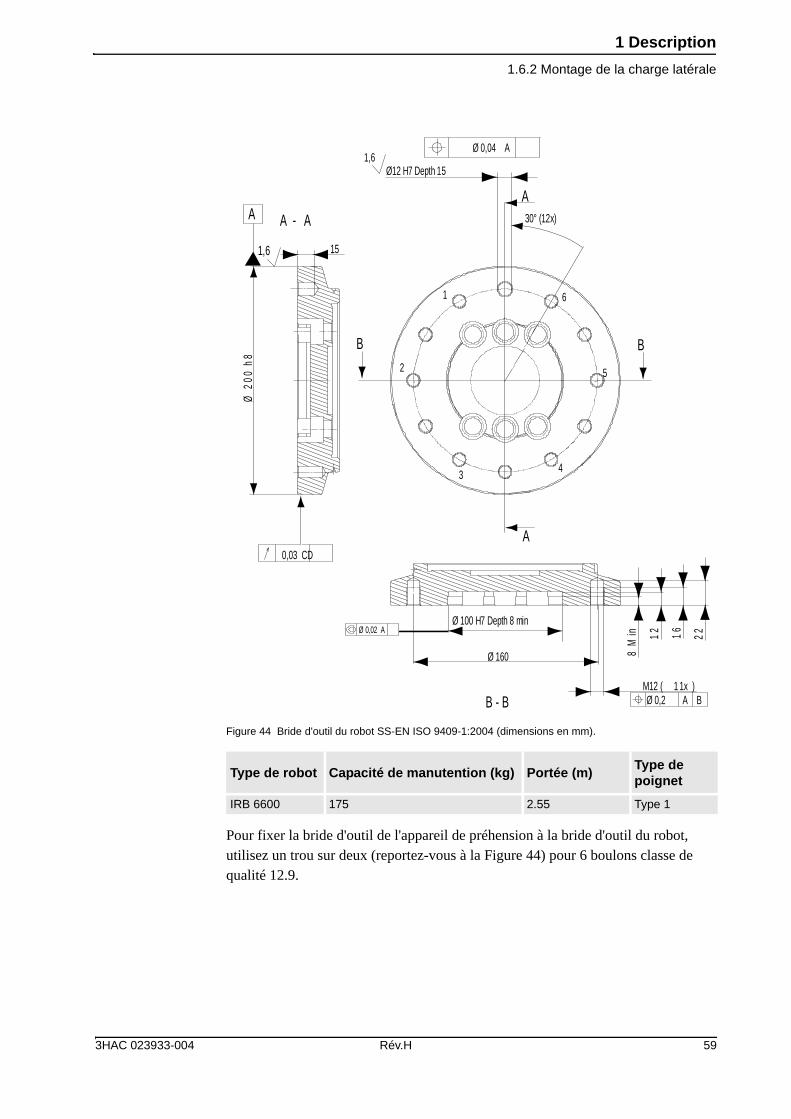
Figure 44 Bride d'outil du robot SS-EN ISO 9409-1:2004 (dimensions en mm).
Pour fixer la bride d'outil de l'appareil de préhension à la bride d'outil du robot, utilisez un trou sur deux (reportez-vous à la Figure 44) pour 6 boulons classe de qualité 12.9.
Type de robot Capacité de manutention (kg) Portée (m) Type de poignet
IRB 6600 175 2.55 Type 1
1,6
2
1
3 4
5
6
Ø 2
00 h
815
1,6Ø12 H7 Depth 15
Ø 0,04 A
30° (12x)
Ø 100 H7 Depth 8 min
Ø 160
M12 ( 1 1x )Ø 0,2 A B
221612
8 M
in
0,03 CD
Ø 0,02 A
B B
A
A
B - B
A - AA
3HAC 023933-004 Rév.H 59

1 Description1.6.2 Montage de la charge latérale
Figure 45 Bride d'outil du robot ISO/DIS 9409-1:2002 (dimensions en mm).
Pour fixer la bride d'outil de l'appareil de préhension à la bride d'outil du robot, (reportez-vous à la Figure 45 )utilisez tous les trous pour 11 boulons classe de qualité 12.9.
Type de robot Capacité de manutention (kg) Portée (m) Type de poignet
IRB 6600 225 2.55 Type 2
IRB 6600 175 2.8 Type 2
IRB 6650 125 3.2 Type 2
IRB 6650 200 2.75 Type 2
IRB 6650S 90 3,9 Type 2
IRB 6650S 125 3.5 Type 2
IRB 6650S 200 3.0 Type 2
Ø 2
00 h
8
1,6
A-A
15
B
A
A
1,6 Ø 0,04 A
30º (12x)
30º
30º
B
Ø 160
B-B M12 ( 1 1x )Ø 0,2 A B
13 M
in15 18
Ø0,02 A
0,02 CD
A
Ø 100 H7 Depth 8 min
Ø12 H7 Depth 15
60 Rév.H 3HAC 023933-004

1 Description1.6.2 Montage de la charge latérale
Figure 46 Bride d'outil du robot SS-EN ISO 9409-1:2004 (dimensions en mm).
Pour fixer la bride d'outil de l'appareil de préhension à la bride d'outil du robot, (reportez-vous à la Figure 46) utilisez tous les trous pour 11 boulons classe de qualité 12.9.
Type de robot Capacité de manutention (kg) Portée (m)
IRB 6600ID 185 2.55
IRB 6650ID 170 2.75
D
15º
30º ( 11x )
B
A
Ø 0,2 BD
Ø16
0
BA
D Ø12
H7
15
Ø 0,04 C
B
Max 25
M12
Hel
icoi
l (11
x)
D
B - B
A - A
3HAC 023933-004 Rév.H 61

1 Description1.7.1 Introduction
1.7 Maintenance et dépannage
1.7.1 Introduction
GénéralitésEn cours de fonctionnement, le robot requiert une maintenance minimale. Il a été conçu pour un entretien aussi simple que possible :
• Des moteurs à courant alternatif ne nécessitant aucune maintenance sont utilisés.
• De l'huile est utilisée pour les réducteurs.
• Le câblage est conçu pour durer et, en cas (improbable) de panne, sa conception modulaire facilite son changement.
MaintenanceLes intervalles de maintenance dépendent de l'utilisation du robot et les opérations de maintenance requises dépendent également des options choisies. Pour obtenir des informations détaillées sur les procédures d'entretien, reportez-vous à la section Entretien du manuel du produit.
62 Rév.H 3HAC 023933-004

1 Description1.8.1 Introduction
1.8 Mouvements du robot
1.8.1 Introduction
Type de mouvement
Axe Type de mouvement
Rayon d'action des mouvements
IRB 6600/6650 IRB 6650S IRB 6600ID/6650ID
1 RotationMouvement
De + 180° à - 180°De + 220° à - 220° (option)
De + 180° à - 180°De + 220° à - 220° (option)
De + 180° à - 180°
2 Mouvement du bras
De + 85° à -65° De + 160° à - 40° De + 85° à - 65°
3 Mouvement du bras
De + 70° à - 180° De + 70° à - 180° De + 70° à - 180°
4 Mouvement du poignet
De + 300° à - 300° De + 300° à - 300° De + 300° à - 300°a
a. Pour les axes 4 et 6 IRB 6600ID/6650ID, de +300º à -300º max.
5 Mouvement de flexion
De + 120° à - 120° De + 120° à - 120° De + 100° à - 100°
6 Mouvement de pivot
De + 360° à - 360° (par défaut)± 96 trsb
b. trs = tours
De + 360° à - 360° (par défaut)± 96 trsb
De + 300° à - 300°a
Remarque : Pour connaître les limitations du rayon d'action avec DressPack, reportez-vous au chapitre 2.2 DressPack
3HAC 023933-004 Rév.H 63
1 Description1.8.1 Introduction
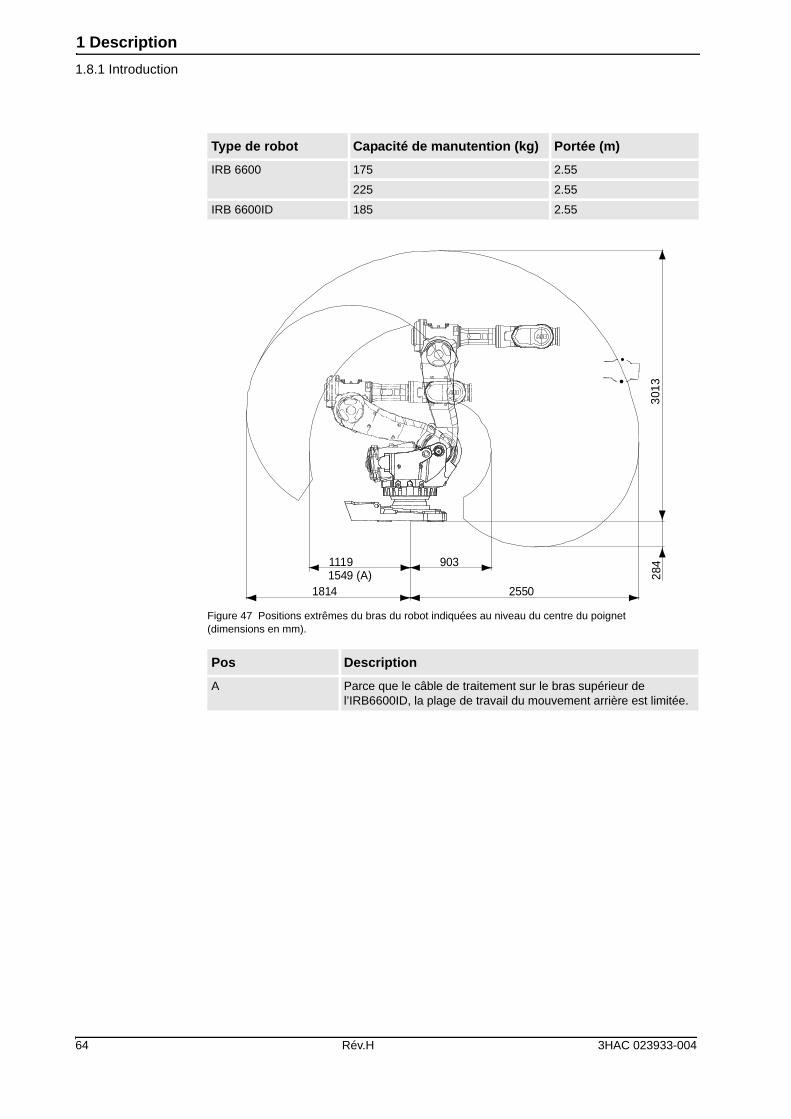
Figure 47 Positions extrêmes du bras du robot indiquées au niveau du centre du poignet (dimensions en mm).
Type de robot Capacité de manutention (kg) Portée (m)
IRB 6600 175 2.55
225 2.55
IRB 6600ID 185 2.55
Pos Description
A Parce que le câble de traitement sur le bras supérieur de l’IRB6600ID, la plage de travail du mouvement arrière est limitée.
1814 2550
9031119
284
3013
1549 (A)
64 Rév.H 3HAC 023933-004
1 Description1.8.1 Introduction
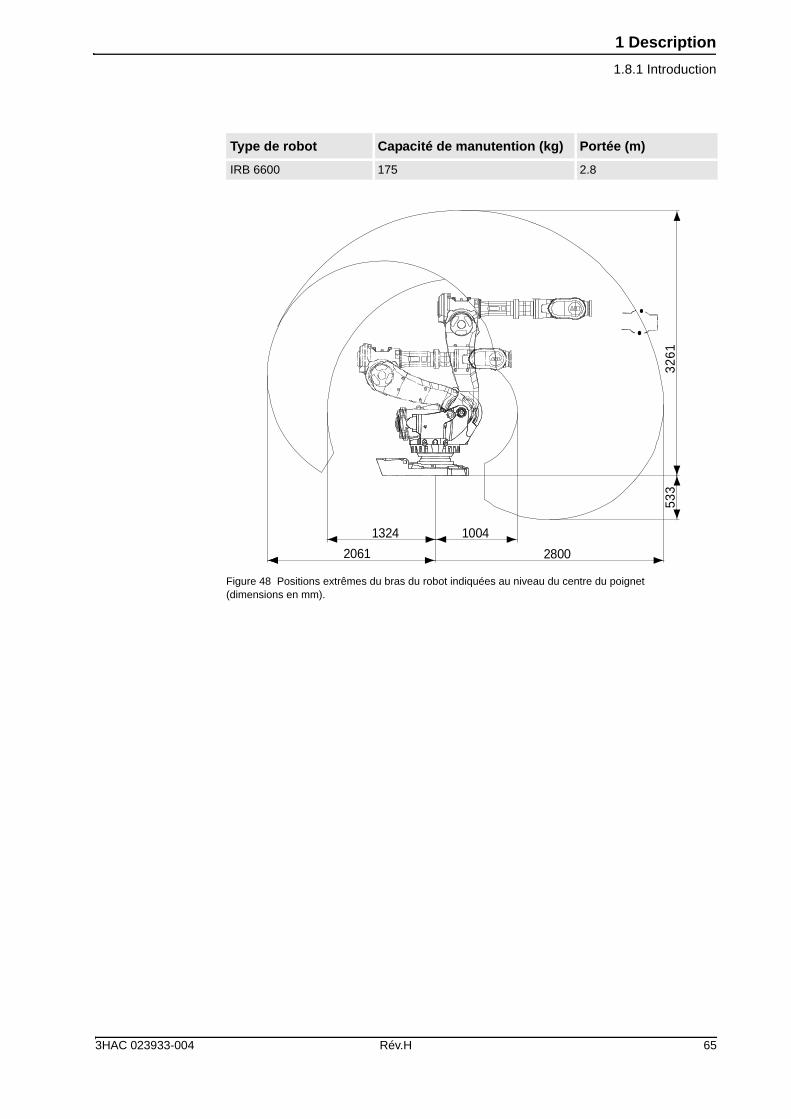
Figure 48 Positions extrêmes du bras du robot indiquées au niveau du centre du poignet (dimensions en mm).
Type de robot Capacité de manutention (kg) Portée (m)
IRB 6600 175 2.8
1324 100428002061
533
3261
3HAC 023933-004 Rév.H 65
1 Description1.8.1 Introduction
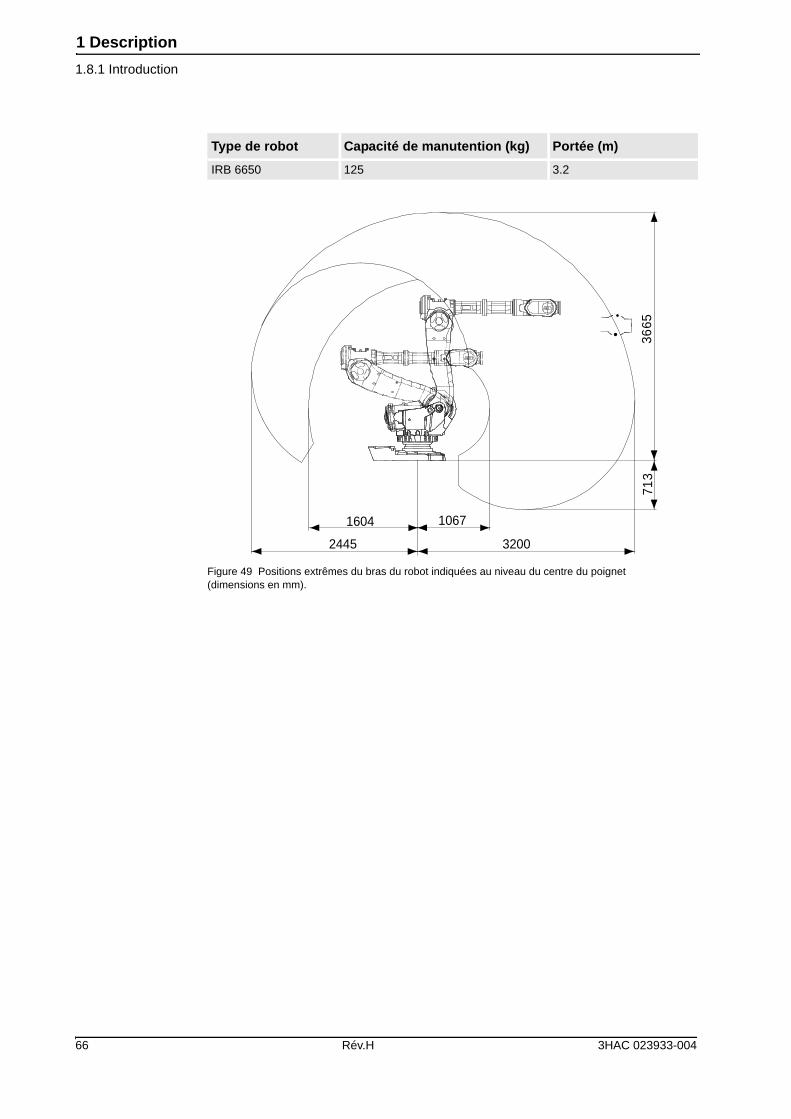
Figure 49 Positions extrêmes du bras du robot indiquées au niveau du centre du poignet (dimensions en mm).
Type de robot Capacité de manutention (kg) Portée (m)
IRB 6650 125 3.2
1604 1067
32002445
713
3665
66 Rév.H 3HAC 023933-004
1 Description1.8.1 Introduction
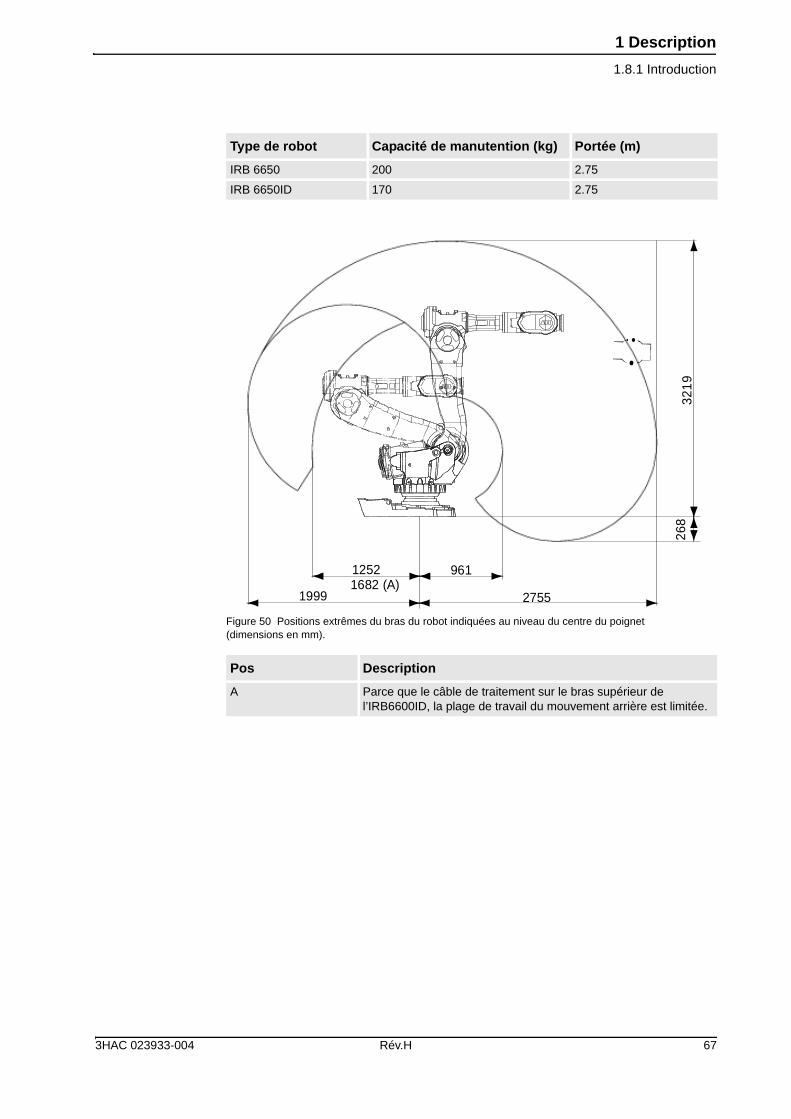
Figure 50 Positions extrêmes du bras du robot indiquées au niveau du centre du poignet (dimensions en mm).
Type de robot Capacité de manutention (kg) Portée (m)
IRB 6650 200 2.75
IRB 6650ID 170 2.75
Pos Description
A Parce que le câble de traitement sur le bras supérieur de l’IRB6600ID, la plage de travail du mouvement arrière est limitée.
1252 961
27551999
268
3219
1682 (A)
3HAC 023933-004 Rév.H 67

1 Description1.8.1 Introduction
Figure 51 Positions extrêmes du bras du robot indiquées au niveau du centre du poignet (dimensions en mm).
Type de robot Capacité de manutention (kg) Portée (m)
IRB 6650S 200 3.0
Pos Description
A Zone marquée non disponible sous la base de robot
1732
3069
122
1382
1241
3039
(A)200
68 Rév.H 3HAC 023933-004

1 Description1.8.1 Introduction
Figure 52 Positions extrêmes du bras du robot indiquées au niveau du centre du poignet (dimensions en mm).
Type de robot Capacité de manutention (kg) Portée (m)
IRB 6650S 125 3.5
Pos Description
A Zone marquée non disponible sous la base de robot
1827
567
1347
3485
3515
2177 (A)
200
3HAC 023933-004 Rév.H 69

1 Description1.8.1 Introduction
Figure 53 Positions extrêmes du bras du robot indiquées au niveau du centre du poignet (dimensions en mm).
Type de robot Capacité de manutention (kg) Portée (m)
IRB 6650S 125 3.5
Pos Description
A et B Zone marquée, charge maximale de 50 kg
B Zone marquée non disponible sous la base de robot
3962
1100
2625
1501014
22751654
3932
(A)
(B)
200
70 Rév.H 3HAC 023933-004

1 Description1.8.2 Performances conformes à la norme ISO 9283
1.8.2 Performances conformes à la norme ISO 9283
GénéralitésPour une charge maximale nominale, un décalage maximal et une vitesse de 1,6 m/s sur le plan de test ISO incliné, 1 m cube avec les six axes en mouvement.
IRB 6600/6650 175/2.55 225/2.55 175/2.8 125/3.2 200/2.75
Précision de pose, APa (mm)
a. L’AP, conformément au test ISO susmentionné, est la différence entre la positionapprise (position modifiée manuellement dans la cellule) et la position moyenneobtenue pendant l’exécution du programme.
0.09 0.12 0.17 0.11 0.16
Répétabilité de pose, RP (mm) 0.18 0.14 0.14 0.11 0.14
Temps de stabilisation de pose, PSt (s)
0.03 0.68 0.24 0.46 0.28
Précision de la trajectoire, AT (mm)
2.33 2.30 2.07 1.85 2.83
Répétabilité de la trajectoire, RT (mm)
1.05 0.56 0.36 0.19 0.41
IRB 6650S 125/3.5 200/3.0 90/3.9
Précision de pose, APa (mm)
a. L’AP, conformément au test ISO susmentionné, est la différence entre la positionapprise (position modifiée manuellement dans la cellule) et la position moyenneobtenue pendant l’exécution du programme.
0.16 0.13 b
b. Les valeurs de modèle IRB 6650S - 90/3.9 ne sont pas encore disponibles.
Répétabilité de pose, RP (mm) 0.13 0.14 b
Temps de stabilisation de pose, PSt (s)
0.33 0.18 b
Précision de la trajectoire, AT (mm)
0.58 0.98 b
Répétabilité de la trajectoire, RT (mm)
0.90 0.70 b
3HAC 023933-004 Rév.H 71

1 Description1.8.3 Vitesse
Les valeurs ci-dessus sont issues de la plage des résultats obtenus après le test d'un certain nombre de robots.
1.8.3 Vitesse
Vitesse maximale des axes
Une fonction de surveillance permet d'empêcher les surchauffes dans les applications avec des mouvements intensifs et fréquents.
Résolution d'axeDe 0,001° à 0,005°.
IRB 6600ID/6650ID 185/2.55 170/2.75
Précision de pose, APa (mm)
a. L’AP, conformément au test ISO susmentionné, est la différence entre la positionapprise (position modifiée manuellement dans la cellule) et la position moyenneobtenue pendant l’exécution du programme.
b
b. Les valeurs de modèle IRB 6600ID - 185/2.55 ne sont pas encore disponibles.
0.11
Répétabilité de pose, RP (mm) b 0.03
Temps de stabilisation de pose, PSt (s)
b 0.61
Précision de la trajectoire, AT (mm)
b 3.54
Répétabilité de la trajectoire, RT (mm)
b 0.46
Type de robot Axe 1 Axe 2 Axe 3 Axe 4 Axe 5 Axe 6
IRB 6600 -175/2,55 100º/s 90º/s 90º/s 150º/s 120º/s 190º/s
IRB 6600 -225/2,55 100º/s 90º/s 90º/s 150º/s 120º/s 190º/s
IRB 6600 -175/2,8 100º/s 90º/s 90º/s 150º/s 120º/s 190º/s
IRB 6650 -125/3,2 110º/s 90º/s 90º/s 150º/s 120º/s 235º/s
IRB 6650 -200/2,75 100º/s 90º/s 90º/s 150º/s 120º/s 190º/s
IRB 6650S - 90/3,9 100º/s 90º/s 90º/s 150º/s 120º/s 235º/s
IRB 6650S -125/3,5 110º/s 90º/s 90º/s 150º/s 120º/s 235º/s
IRB 6650S -200/3,0 100º/s 90º/s 90º/s 150º/s 120º/s 190º/s
IRB 6600ID-185/2,55 100º/s 90º/s 90º/s 150º/s 120º/s 190º/s
IRB 6650ID-170/2,75 100º/s 90º/s 90º/s 150º/s 120º/s 190º/s
72 Rév.H 3HAC 023933-004
1 Description1.9.1 Introduction
1.9 Ventilateur de refroidissement du moteur des axes 1 à 2
1.9.1 Introduction
Option 87-1, 88-1À utiliser pour éviter toute surchauffe des moteurs et engrenages dans les applications avec mouvement intensif (vitesse moyenne élevée et/ou couple moyen élevé et/ou temps d’attente bref) de l’axe 1 et/ou axe 2.IP54 valide pour ventilateur de refroidissement. En cas de panne du ventilateur, le robot s'arrête.
3HAC 023933-004 Rév.H 73

1 Description1.10.1 Introduction
1.10 Servopistolet
1.10.1 Introduction
GénéralitésLe robot peut être fourni avec le matériel et le logiciel permettant de contrôler les configurations suivantes :
• Stationary Gun
• Robot Gun
• Robot Gun et Track Motion
• Track Motion
Les pièces spécifiques relatives au contrôle du servomoteur des pistolets de soudage électriques et des configurations de suivi de déplacement sont illustrées ci-dessous. Les pièces majeures et les options requises sont également spécifiées dans les listes de configurations en dessous de chaque illustration.Dans les illustrations, les câbles de contrôle du robot de base sont représentés par des lignes pointillées.
74 Rév.H 3HAC 023933-004

1 Description1.10.2 Stationary Gun
1.10.2 Stationary Gun
Figure 54 Configuration de Stationary Gun.
OptionsLes options indiquées dans le tableau ci-dessous sont nécessaires pour compléter l'équipement. Pour plus d'informations sur chaque option, reportez-vous aux caractéristiques du produit correspondant.
A
G
Axe 7
FB7
Moduled'Entraînement
Module deCommande
Option Description Caractéristiques du produit
785-5 Pistolet fixe. Cette option inclut :Un câble G (7 m de long) pour les signaux du résolveur reliant la base du robot (FB7) au pistolet fixe/à l'axe 7.
770-4 Première unité d'entraînement supplémentaire. Unité d'entraînement du septième axe avec câbles correspondants assemblés dans le module d'entraînement.
Système de commande, IRC5
786-1,-2,-3,-4 Connexion au premier module d'entraînement.Câble A (7-30 m) reliant le module d'entraînement et le pistolet fixe/l'axe 7 pour l'alimentation du système de servocommande.
635-3,-4 ou -5 Spot Servo, Spot Servo Multiple Guns ou Spot Servo Equalizing.
Logiciel du système de commande IRC5
3HAC 023933-004 Rév.H 75

1 Description1.10.3 Robot Gun
1.10.3 Robot Gun
Figure 55 Configuration de Robot Gun.
OptionsLes options indiquées dans le tableau ci-dessous sont nécessaires pour compléter l'équipement. Pour plus d'informations sur chaque option, reportez-vous aux caractéristiques du produit correspondant.
A
Axe 7
Moduled'Entraînement
Module deCommande
Option Description Caractéristiques du produit
785-1 Pistolet robotisé. Cette option inclut :Des câbles à l'intérieur du manipulateur pour les signaux de servoalimentation (servopistolet/axe 7).
770-4 Première unité d'entraînement supplémentaire. Unité d'entraînement du septième axe avec câbles correspondants assemblés dans le module d'entraînement.
Système de commande, IRC5
786-1,-2,-3,-4 Connexion au premier module d'entraînement.Câble A (7-30 m) reliant le module d'entraînement et la base du robot pour l'alimentation du système de servocommande.
635-3, -4 ou -5 Spot Servo, Spot Servo Multiple Guns ou Spot Servo Equalizing.
Logiciel du système de commande IRC5
76 Rév.H 3HAC 023933-004

1 Description1.10.4 Robot Gun et Track Motion IRBT 6004
1.10.4 Robot Gun et Track Motion IRBT 6004
Figure 56 Configuration de Robot Gun et Track Motion.
OptionsLes options indiquées dans le tableau ci-dessous sont nécessaires pour compléter l'équipement. Pour plus d'informations sur chaque option, reportez-vous aux caractéristiques du produit correspondant.
F
E
Axe 7M
SMB
Axe 8
B
Moduled'Entraînement
Module deCommande
Option Description Caractéristiques du produit
785-2 + 1002-8a
a. Pour spécifier le robot sur rail équipé d'une pince asservie. Option 1002-8 dans leformulaire de spécification du Track Motion.
Pistolet robotisé - Suivi de déplacement. Cette option inclut :Des câbles à l'intérieur du manipulateur pour les signaux de servoalimentation (servopistolet/axe 7).
Suivi de déplacement IRBT 6004 + IRB 6600
Track Motion est livré avec
Coffret de mesure série (SMB2, coffret de distribution) pour la distribution de la servoalimentation et des signaux du résolveur vers les axes 7 et 8.Le coffret est placé sur le Track Motion.Câbles reliant le coffret de mesure série au Track Motion.Câble B pour la servoalimentation (1,5 m de long).Câbles E et F (7-22 m) reliant le module d'entraînement et le coffret de mesure série pour l'alimentation double du système de servocommande/les signaux du résolveur.
Suivi de déplacementIRBT 6004/IRBT 7004
770-4 Première unité d'entraînement supplémentaire. Unité d'entraînement du septième axe avec câbles correspondants assemblés dans le module d'entraînement.
Système de commande, IRC5
771-4 Seconde unité d'entraînement supplémentaire. Unité d'entraînement du huitième axe avec câbles correspondants assemblés dans le module d'entraînement.
Système de commande, IRC5
635-3, -4 ou -5 Spot Servo, Spot Servo Multiple Guns ou Spot Servo Equalizing.
Logiciel du système de commande IRC5
3HAC 023933-004 Rév.H 77

1 Description1.10.5 Track Motion IRBT 6004
1.10.5 Track Motion IRBT 6004
GénéralitésLe robot peut être fourni avec Track Motion (reportez-vous aux caractéristiques du produit IRBT 6004). Pour connaître la configuration et les caractéristiques du matériel, reportez-vous à la Figure 57.
Figure 57 Configuration de Track Motion.
OptionsLes options indiquées dans le tableau ci-dessous sont nécessaires pour compléter l'équipement. Pour plus d'informations sur chaque option, reportez-vous aux caractéristiques du produit correspondant.
MAxe 7
EModuled'Entraînement
Module deCommande
Généralités. Le robot peut être combiné à un Track Motion. Pour plus d'informations, reportez-vous aux caractéristiques du produit IRBT 6004/IRBT 7004.
Option Description Caractéristiques du produit
Track Motion est livré avec
Coffret de mesure série (SMB, coffret de distribution) pour la distribution des signaux de servoalimentation vers l'axe 7/Track Motion.Le coffret est placé sur le Track Motion.Câble E reliant le module d'entraînement et la servoalimentation du Track Motion pour la puissance d'entraînement.
Suivi de déplacementIRBT 6004/IRBT 7004
770-4 Première unité d'entraînement supplémentaire. Unité d'entraînement du septième axe avec câbles correspondants assemblés dans le module d'entraînement.
78 Rév.H 3HAC 023933-004
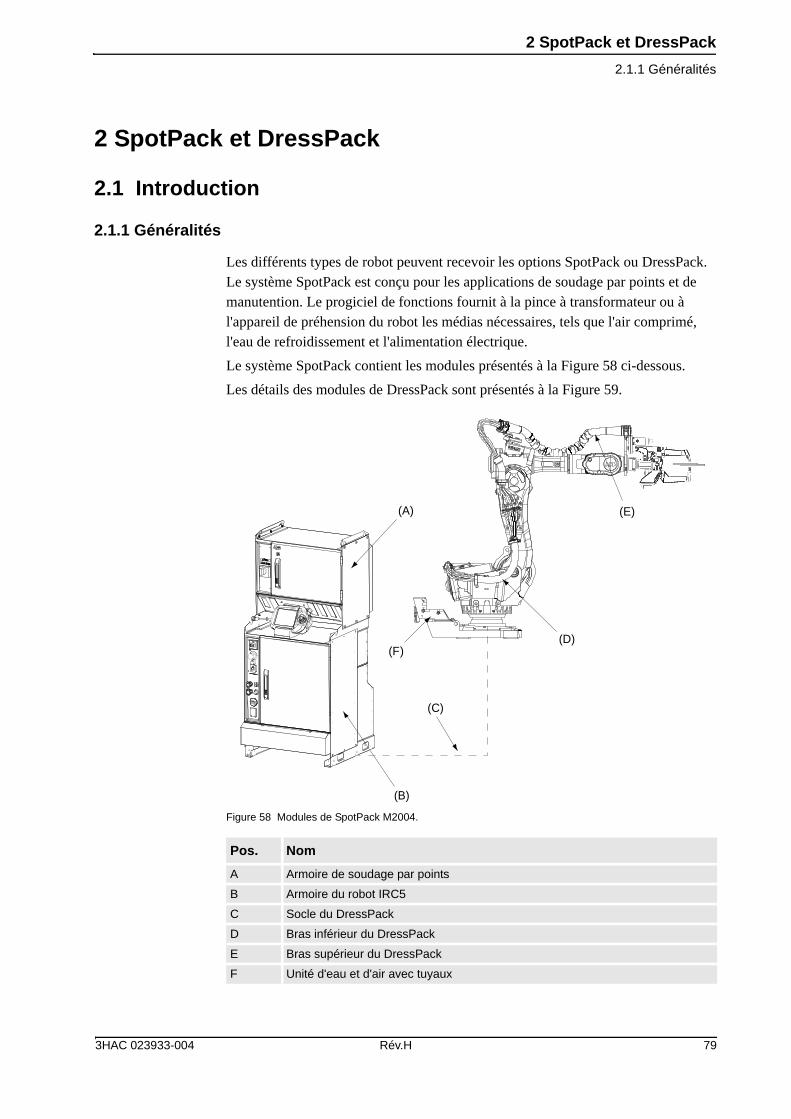
2 SpotPack et DressPack2.1.1 Généralités
2 SpotPack et DressPack
2.1 Introduction
2.1.1 Généralités
Les différents types de robot peuvent recevoir les options SpotPack ou DressPack. Le système SpotPack est conçu pour les applications de soudage par points et de manutention. Le progiciel de fonctions fournit à la pince à transformateur ou à l'appareil de préhension du robot les médias nécessaires, tels que l'air comprimé, l'eau de refroidissement et l'alimentation électrique.Le système SpotPack contient les modules présentés à la Figure 58 ci-dessous.Les détails des modules de DressPack sont présentés à la Figure 59.
Figure 58 Modules de SpotPack M2004.
Pos. Nom
A Armoire de soudage par points
B Armoire du robot IRC5
C Socle du DressPack
D Bras inférieur du DressPack
E Bras supérieur du DressPack
F Unité d'eau et d'air avec tuyaux
(A)
(B)
(C)
(D)
(E)
(F)
3HAC 023933-004 Rév.H 79
2 SpotPack et DressPack2.1.1 Généralités
Illustration de DressPack
Figure 59 Illustration de l’option 798-2
80 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.1.2 Structure des chapitres
2.1.2 Structure des chapitres
Les chapitres relatifs à SpotPack et DressPack sont structurés comme suit. Les systèmes SpotPack et DressPack peuvent être fournis dans cinq versions développées pour deux applications différentes. Chaque type est décrit dans un chapitre distinct.
Application de manutention de matériaux/DressPack
Application de soudage par points/SpotPack et DressPack
Kits de connexion
Chapitre Option Description
2.2 DressPack DressPack contient la description générale de DressPack, ainsi que des informations de base.
Chapitre Option Description
2.3 Type H Conçu pour la manutention des matériaux.
Chapitre Option Description
2.4 Type S Conçu pour les pinces pneumatiques à transformateur montées sur le manipulateur du robot.
2.5 Type HS Conçu pour manipuler les pièces à l'aide de pinces pneumatiques à transformateur fixes.
2.6 Type Se Conçu pour les pinces électriques à transformateur et à servocommande montées sur le manipulateur du robot.
2.7 Type HSe Conçu pour manipuler les pièces à l'aide de pinces électriques à transformateur et à servocommande fixes.
2.8 Armoire de soudage par points
Contient la description générale de l'armoire de soudage par points, ainsi que des informations de base.
2.9 Unité d'eau et d'air Contient la description générale de l'unité d'eau et d'air, ainsi que des informations de base.
Chapitre Option Description
2.10 Kits de connexion Contient la description générale des kits de connexion de SpotPack et DressPack.
3HAC 023933-004 Rév.H 81

2 SpotPack et DressPack2.2.1 Introduction
2.2 DressPack
2.2.1 Introduction
GénéralitésDress Pack inclut des options pour le bras supérieur, le bras inférieur et le socle. Reportez-vous à la Figure 58 (pos. C, D et E). Ces éléments sont décrits séparément ci-dessous mais sont conçus comme un progiciel complet destiné à diverses applications.Le système DressPack du socle comprend des signaux client.Le système DressPack du bras supérieur et du bras inférieur fournit au client des paquets de câbles de processus comprenant des signaux, des médias de traitement (eau et/ou air) et une unité d'alimentation (pour l'application de soudage par points).Les supports et colliers nécessaires sont également inclus.L'acheminement du paquet de câbles de processus sur le robot est disponible dans différentes configurations. Pour le bras supérieur, il existe également d'autres possibilités d'acheminement interne pour certaines variantes du manipulateur et l’option Manutention de matériaux.
Bras inférieur du DressPackPour l’application de manutention de matériaux, il existe deux acheminements alternatifs possibles pour le bras inférieur, indiqués dans la Figure 60 et la Figure 61. Ceci afin de permettre l'adaptation au bras supérieur.
Figure 60 .Vue latérale de droite du bras inférieur du DressPack pour une application de manutention de matériaux (options 778-1 et 798-2).
Pos Description
A Point de connexion
(A)
82 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.2.1 Introduction
Figure 61 Vue latérale de gauche du bras inférieur du DressPack pour une application de manutention de matériaux (options 778-1 et 798-1).
L’acheminement du bras inférieur du DressPack pour l’application de soudage par points est indiqué dans la Figure 62. Ceci afin de permettre l'adaptation au bras supérieur.
Figure 62 Vue latérale de gauche du bras inférieur du DressPack pour une application de soudage par points (options 778-2 et 798-2).
Pos Description
A Point de connexion
Pos Description
A Point de connexion
(A)
(A)
3HAC 023933-004 Rév.H 83

2 SpotPack et DressPack2.2.1 Introduction
Bras supérieur du DressPackIl existe trois alternatives pour l'application Manutention de matériaux, et deux pour l'application Soudage par points. Deux de ces alternatives sont externes et sont illustrées dans la Figure 63 et la Figure 64 ci-dessous. L'acheminement interne est illustré dans la Figure 65.
Figure 63 Bras supérieur du DressPack. Axes 2 à 6, soudage par points et manutention de matériaux, option 778-1 (778-2), option 780-2 (et option 798-2).
Figure 64 Bras supérieur du DressPack. Axes 3 à 6, manutention de matériaux, option 778-1,option 780-3 et option 798-1.
84 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.2.1 Introduction
Figure 65 Acheminement interne. Vue latérale de droite du bras supérieur du DressPack, manutention de matériaux et soudage par points (options 778-2 (778-1), option 780-1 et option 798-2).
Bras supérieur/bras inférieur du DressPackPour l'application de soudage par points, il existe une alternative sans point de connexion entre les bras inférieur et supérieur.
Figure 66 Bras supérieur/inférieur du DressPack pour une application de soudage par points (options 778-2 et 781-1).
3HAC 023933-004 Rév.H 85

2 SpotPack et DressPack2.2.1 Introduction
Paquet de câbles de processus externeLe paquet de câbles de processus externe présente une longueur au repos de 1 000 mm au niveau de l'axe 6 pour la connexion à un outil de robot. Le bras tendeur maintient le paquet de tuyaux à proximité du bras supérieur du robot.Le bras supérieur externe du DressPack présente les caractéristiques principales suivantes :
• Support réglable, axe 6, avec repérage de position.
• Force rétractable réglable permettant d'optimiser le système selon le cycle et le paquet de tuyaux.
• Guidage des tuyaux permettant un large rayon d'action.
Pour la manutention de matériaux, il existe une alternative meilleur marché associée à une certaine limitation au niveau des mouvements possibles, aucun bras tendeur n’étant présent. Le réglage et le montage du DressPack requièrent une attention particulière.Pour les axes 3 à 6, relais externe, le bras supérieur du DressPack (option 780-3) comporte les fonctions principales suivantes:
• Acheminement interne par l’arrière du bras supérieur.
• Il est facile de remplacer la gaine de protection, en cas de dommages.
• Version unique pour toutes les versions de l’IRB 6600.
Pour plus d'informations, reportez-vous au manuel du produit - SpotPack/DressPack.
86 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.2.1 Introduction
Le bras inférieur du DressPack comporte un point de connexion sur la base du manipulateur. La configuration est présentée à la Figure 67 ci-dessous.
Figure 67 Point de connexion sur la base.
Le socle du DressPack comporte un point de connexion (dans le système de commande du robot) où il est possible d'établir des connexions à des bornes.
Pos Description
A R1.SW2/3
B R1.SW1
C R1.CP/CS
D R3.FB7ou R1.SP (pince asservie de soudage par points)
E R1.WELD 3 x 35 mm2. (soudage par points)
F R1.MP
G R1.SMB
H R1.PROC 1 (manutention de matériaux/soudage par points 1/2", M22x1,5, joint 24°)R1.PROC 2-4 (soudage par points 1/2", M22x1,5, joint 24°)
(A)(B) (C) (D) (E) (F)
(G)(H)
3HAC 023933-004 Rév.H 87

2 SpotPack et DressPack2.2.1 Introduction
Limitation des mouvements des axesLorsque vous utilisez les options de DressPack sur le bras supérieur, les mouvements du robot sont limités. La position du support, axe 6, installé sur l'axe 6, doit être prise en compte lors de l'optimisation des mouvements possibles du robot.Remarque : Mouvement maximum de l'axe 5 de ± 110º.
Les dimensions pour les acheminements externes sont présentées dans les figures suivantes : Figure 71 et Figure 72. Les dimensions pour l'acheminement interne (6600ID-185/2,55 et 6650ID-170/2,75) sont présentées dans les figures suivantes : Figure 68, Figure 69 et Figure 70. Tous les autres acheminements sont présentés dans l'application de soudage par points et les options 798-1 et 780-3.
Figure 68 Vue de devant et arrière. Acheminement interne.
Pour de plus amples informations, contactez le support technique SEROP/ABB.Adresse électronique : [email protected]
475
290
615
88 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.2.1 Introduction
Figure 69 Vue latérale de droite. Acheminement interne.
Figure 70 Vue détaillée de l'axe 6. Acheminement interne.
820
475
405
3HAC 023933-004 Rév.H 89

2 SpotPack et DressPack2.2.1 Introduction
Figure 71 Acheminement externe, option 780-2 et 781-1(dimensions en mm).
Figure 72 Acheminement externe, option 780-2 et 781-1(dimensions en mm).
443 605
524
400
725
460
90 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.2.1 Introduction
Figure 73 Acheminement externe, manutention de matériaux, option 798-1 et 780-3 (dimensions en mm).
465
275
3HAC 023933-004 Rév.H 91

2 SpotPack et DressPack2.3.1 Introduction
2.3 Type H
2.3.1 Introduction
GénéralitésLa variante Type H est conçue pour l'application de manutention de matériaux (MH). La Figure 74 représente les modules inclus.
Figure 74 Configuration de Dresspack.
Pos. Nom
A Armoire du robot IRC5
B Socle du DressPack
C Bras inférieur du DressPack
D Bras supérieur du DressPack
E Appareil de préhension du robot
(A)
(B)
(C)
(D)(E)
92 Rév.H 3HAC 023933-004
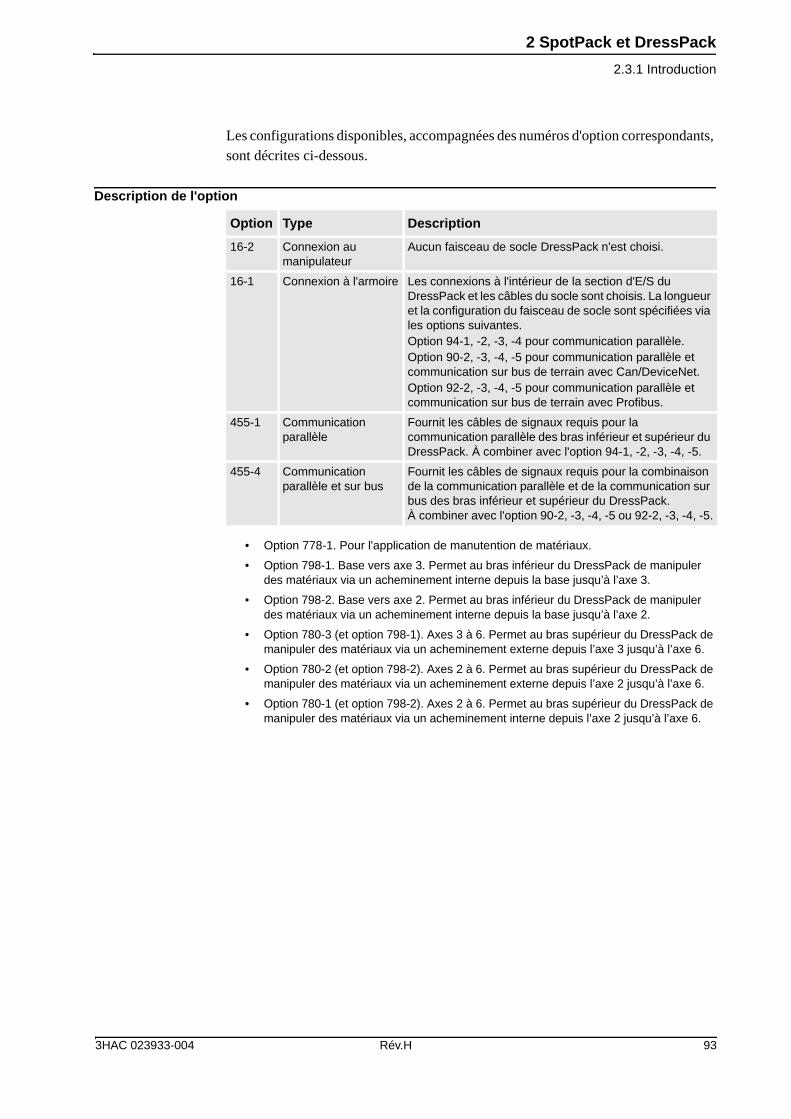
2 SpotPack et DressPack2.3.1 Introduction
Les configurations disponibles, accompagnées des numéros d'option correspondants, sont décrites ci-dessous.
Description de l'option
• Option 778-1. Pour l'application de manutention de matériaux.
• Option 798-1. Base vers axe 3. Permet au bras inférieur du DressPack de manipuler des matériaux via un acheminement interne depuis la base jusqu’à l’axe 3.
• Option 798-2. Base vers axe 2. Permet au bras inférieur du DressPack de manipuler des matériaux via un acheminement interne depuis la base jusqu’à l’axe 2.
• Option 780-3 (et option 798-1). Axes 3 à 6. Permet au bras supérieur du DressPack de manipuler des matériaux via un acheminement externe depuis l’axe 3 jusqu’à l’axe 6.
• Option 780-2 (et option 798-2). Axes 2 à 6. Permet au bras supérieur du DressPack de manipuler des matériaux via un acheminement externe depuis l’axe 2 jusqu’à l’axe 6.
• Option 780-1 (et option 798-2). Axes 2 à 6. Permet au bras supérieur du DressPack de manipuler des matériaux via un acheminement interne depuis l’axe 2 jusqu’à l’axe 6.
Option Type Description
16-2 Connexion au manipulateur
Aucun faisceau de socle DressPack n'est choisi.
16-1 Connexion à l'armoire Les connexions à l'intérieur de la section d'E/S du DressPack et les câbles du socle sont choisis. La longueur et la configuration du faisceau de socle sont spécifiées via les options suivantes.Option 94-1, -2, -3, -4 pour communication parallèle.Option 90-2, -3, -4, -5 pour communication parallèle et communication sur bus de terrain avec Can/DeviceNet.Option 92-2, -3, -4, -5 pour communication parallèle et communication sur bus de terrain avec Profibus.
455-1 Communication parallèle
Fournit les câbles de signaux requis pour la communication parallèle des bras inférieur et supérieur du DressPack. À combiner avec l'option 94-1, -2, -3, -4, -5.
455-4 Communication parallèle et sur bus
Fournit les câbles de signaux requis pour la combinaison de la communication parallèle et de la communication sur bus des bras inférieur et supérieur du DressPack. À combiner avec l'option 90-2, -3, -4, -5 ou 92-2, -3, -4, -5.
3HAC 023933-004 Rév.H 93

2 SpotPack et DressPack2.3.1 Introduction
Les autres possibilités d'acheminement et les combinaisons autorisées sont illustrées à la Figure 75 ci-dessous.
Figure 75 Schéma de la configuration du DressPack pour l'application de manutention de matériaux.
Option 16-1,câblage du socle
Options 94-1, -2, -3, -4Longueur de câble,communicationparallèle
Options 90-2, -3, -4, -5Options 92-2, -3, -4, -5Longueur de câble,communication parallèleet sur bus
Option 455-1,Communication parallèle
Option 455-4,Communication parallèleet sur bus
Option 778-1,manutention matériaux
Option 798-1, de la base à l’axe 3 Option 798-2, de la base à l’axe 2
Option 780-2, de l’axe 2 à 6acheminement externe
Option 780-3, de l’axe 3 à 6acheminement externe
Option 780-1, de l’axe 2 à 6acheminement interne
94 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.3.2 Configuration résultante pour le type H
2.3.2 Configuration résultante pour le type H
GénéralitésLe contenu du DressPack diffère selon les options choisies ci-dessus. Le choix de l'acheminement n'affecte pas le contenu. Reportez-vous aux tableaux pour connaître le contenu des signaux.
DressPack type H. Communication parallèle• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 94-1, -2, -3, -4 permettant de spécifier la longueur de câble)
• Option 455-1. Communication parallèle
• Option 778-1. Manutention de matériaux
• Option 798-1 ou option 98-2. Acheminement interne du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe
• Option 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Option 780-3 (et option 798-1). Acheminement externe
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaire
Terre de protection
2+2 2+2
1a
a. Non inclus avec option 780-3.
0,5 mm2
0,5 mm2
250 VCA, 5 A rmsb
250 VCAa
b. Pour option 780-3 50 VCA / 60 VCC.
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
20
8
20 (10 x 2)c d
8 (4 x 2)
c. Pour IRB 6600/6650ID, 16 signaux au lieu de 20 signaux.d. Pour option 780-3 8 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
MédiaAir (PROC 1) 1 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIe
e. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
3HAC 023933-004 Rév.H 95

2 SpotPack et DressPack2.3.2 Configuration résultante pour le type H
DressPack type H. Communication parallèle et sur bus de terrain, Can/DeviceNet• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 90-2, -3, -4, -5 permettant de spécifier la longueur de câble)
• Option 455-4. Communication parallèle et sur bus
• Option 778-1. Manutention de matériaux
• Option 798-1 ou option 798-2. Acheminement interne du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe
• Option 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Option 780-3 (et option 798-1). Acheminement externe
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaire
Terre de protection
2+2 2+2
1a
a. Non inclus avec option 780-3.
0,5 mm2
0,5 mm2
250 VCA, 5 A rmsb
250 VCA
b. Pour option 780-3 50 VCA / 60 VCC.
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
20
8
20 (10 x 2)c d
8 (4 x 2)
c. Pour IRB 6600/6650ID, 16 signaux au lieu de 20 signaux.d. Pour option 780-3 8 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
Bus client (CBus)Signaux bus
Signaux bus
Paire torsadée de signaux
Sur carte busSur carte bus6
2
2
6 (3 x 2)
0,14 mm2
0,23 mm2
0,14 mm2
Caractéristiques Can/DeviceNet50 VCC, 1 A rms
50 VCC, 1 A rms
MédiaAir (PROC 1) 1 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIe
e. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
96 Rév.H 3HAC 023933-004
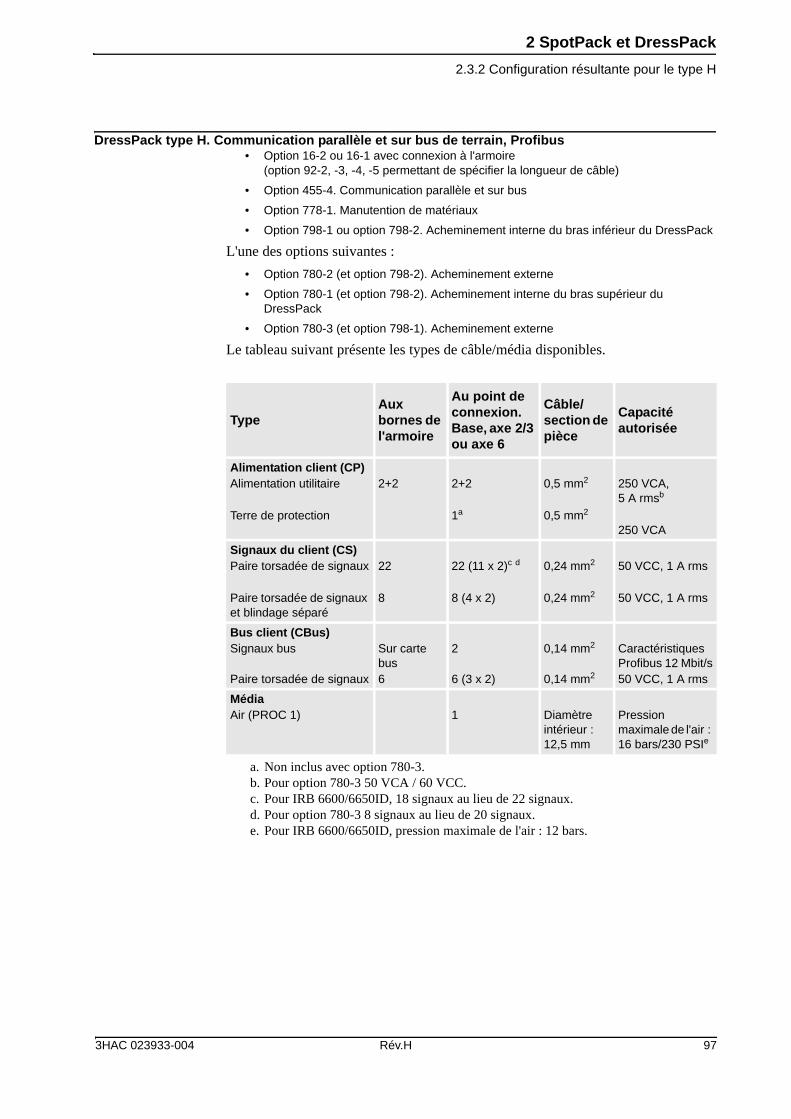
2 SpotPack et DressPack2.3.2 Configuration résultante pour le type H
DressPack type H. Communication parallèle et sur bus de terrain, Profibus• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 92-2, -3, -4, -5 permettant de spécifier la longueur de câble)
• Option 455-4. Communication parallèle et sur bus
• Option 778-1. Manutention de matériaux
• Option 798-1 ou option 798-2. Acheminement interne du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe
• Option 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Option 780-3 (et option 798-1). Acheminement externe
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaire
Terre de protection
2+2 2+2
1a
a. Non inclus avec option 780-3.
0,5 mm2
0,5 mm2
250 VCA, 5 A rmsb
250 VCA
b. Pour option 780-3 50 VCA / 60 VCC.
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
22
8
22 (11 x 2)c d
8 (4 x 2)
c. Pour IRB 6600/6650ID, 18 signaux au lieu de 22 signaux.d. Pour option 780-3 8 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
Bus client (CBus)Signaux bus
Paire torsadée de signaux
Sur carte bus6
2
6 (3 x 2)
0,14 mm2
0,14 mm2
Caractéristiques Profibus 12 Mbit/s50 VCC, 1 A rms
MédiaAir (PROC 1) 1 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIe
e. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
3HAC 023933-004 Rév.H 97

2 SpotPack et DressPack2.3.3 Description de l'interface du DressPack type H
2.3.3 Description de l'interface du DressPack type H
GénéralitésL'interface au niveau de l'axe 6 est dotée d'un tuyau à l'extrémité libre pour l'acheminement externe et d'un système pour l'acheminement interne. Les câbles de signaux se terminent par un connecteur de signaux de type modulaire Harting. Pour l’option 780-3, l’acheminement externe axes 3 à 6, les connecteurs sont de type Souriau. L’un des câbles d’alimentation client et signal client et quand on sélectionne la communication par Bus est sélectionné il en faut aussi un pour ce câble. Les configurations de connecteur sont décrites dans le schéma du circuit inclus dans le manuel du produit du DressPack/SpotPack IRB 6600/7600, réf. 3HAC025058-004.
Connecteur Harting - Acheminement externeLe connecteur Harting pour l'acheminement externe est représenté à la Figure 76. Les pièces principales du connecteur sont décrites dans la liste suivante, avec les noms et les références de produit Harting. (Les pièces correspondantes de l'outil sont disponibles avec un kit de connexion (reportez-vous au chapitre 2.10 Kits de connexion) et dans le cadre de l'offre de produit Harting.)
Figure 76 Connecteur Harting - Acheminement externe.
Nom Réf. produit Harting
Capuchon de plastique transparent 09 30 010 0543
Châssis à charnière, capot 09 14 010 0303
Multicontact, femelle (HD) (25 broches) 09 14 025 3101
Multicontact, femelle (EE) (12 broches) 09 14 012 3101
Multicontact, femelle (DD) (8 broches) 09 14 008 3101
98 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.3.3 Description de l'interface du DressPack type H
Connecteurs Souriau - Acheminement externeLes connecteurs Souriau pour l'acheminement externe sont représentés à la Figure 77. Les éléments principaux dans le connecteur sont décrits dans le tableau ci-dessous.
Figure 77 Connecteurs Souriau - Acheminement externe (UTOW61419SH est représenté).
Connecteur Harting - Acheminement interne
Figure 78 Connecteur Harting pour l'acheminement interne.
Name Souriau article No.
Connecteur à bornes, R3.CPS UTOW61832SH
Adaptateur d'amorçage rétractable, R3.CPS UTO18AD
Borne, R3.CPS RC18W3k
Connecteur à bornes, R3.CBUS UTOW61419SH
Adaptateur d'amorçage rétractable, R3.CBUS
UTO14AD
Bornes, R3.CBUS SC24W3S25
Nom Réf. produit Harting
Capuchon de plastique transparent 09 62 040 0301
Multicontact, femelle (HD) (25 broches) 09 14 025 3101
Multicontact, femelle (EE) (12 broches) 09 14 012 3101
Multicontact, femelle (DD) (8 broches) 09 14 008 3101
3HAC 023933-004 Rév.H 99
2 SpotPack et DressPack2.3.4 Récapitulatif type H
Montage tuyaux, acheminement interne• Pour l'acheminement interne, le tuyau se termine par le type de montage :
Parker Pushlock (½", laiton M22 x 1,5, joint 24°).
2.3.4 Récapitulatif type H
Les options suivantes sont requises pour former un système DressPack type H complet.
• Option 16-1. Connexion à l'armoire (longueur de câble et type de communication à préciser)
• Option 455-1, 455-4. Communication parallèle ou Communication parallèle et sur bus (type de communication à spécifier)
• Option 778-1. Manutention de matériaux
• Option 798-1 ou 798-2. Acheminement interne du bras inférieur du DressPack (type d'acheminement à spécifier)
• Option 780-2. Acheminement externe axes 2 à 6, option 780-3 Acheminement externe axes 3 à 6 ou option 780-1 Acheminement interne, Bras supérieur du DressPack (Type d’acheminement à spécifier)
100 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.4.1 Introduction
2.4 Type S
2.4.1 Introduction
GénéralitésLa variante Type S est conçue pour l'application de soudage par points avec pince pneumatique actionnée par robot. La Figure 79 représente les modules inclus. Les configurations disponibles, accompagnées des numéros d'option correspondants, sont décrites ci-dessous.
Figure 79 Type S du DressPack.
Pos. Nom
A Armoire de soudage par points
B Armoire du robot IRC5
C Socle du DressPack
D Bras inférieur du DressPack
E Bras supérieur du DressPack
F Unité d'eau et d'air avec tuyaux
(A)
(B)
(C)
(D)
(E)
(F)
3HAC 023933-004 Rév.H 101

2 SpotPack et DressPack2.4.1 Introduction
Les configurations disponibles et les combinaisons autorisées, accompagnées des numéros d'option correspondants, sont décrites ci-dessous.
Description de l'option
• Option 778-2 pour l'application de soudage par points.
• Option 798-2. Base vers axe 2. Permet au bras inférieur du DressPack d’effectuer un soudage par points via un acheminement externe.
• Option 780-2 (et option 798-2). Externe, axes 2 à 6. Permet au bras supérieur du DressPack d’effectuer un soudage par points via un acheminement externe.
• Option 781-1 (et option 778-2). Externe, base vers axe 6. Permet aux bras inférieur et supérieur du DressPack un acheminement externe sans point de connexion intermédiaire.
• Option 780-1 (et option 798-2). Interne, axes 2 à 6. Permet au bras supérieur du DressPack d’effectuer un soudage par points via un acheminement interne.
Option Type Description
16-2 Connexion au manipulateur
Aucun faisceau de socle DressPack n'est choisi.
16-1 Connexion à l'armoire Les connexions à l'intérieur de la section d'E/S du DressPack et les câbles du socle sont choisis. La longueur et la configuration du faisceau de socle sont spécifiées via les options suivantes.Option 94-1, -2, -3, -4 pour communication parallèleOption 90-2, -3, -4, -5 pour communication parallèle et communication sur bus de terrain avec Can/DeviceNetOption 92-2, -3, -4, -5 pour communication parallèle et communication sur bus de terrain avec Profibus
455-1 Communication parallèle
Fournit les câbles de signaux requis pour la communication parallèle des bras inférieur et supérieur du DressPack. À combiner avec l'option 94-1, -2, -3, -4.
455-4 Communication parallèle et sur bus
Fournit les câbles de signaux requis pour la combinaison de la communication parallèle et de la communication sur bus des bras inférieur et supérieur du DressPack. À combiner avec l'option 90-2, -3, -4, -5 ou 92-2, -3, -4, -5.
102 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.4.1 Introduction
Les autres possibilités d'acheminement et les combinaisons autorisées sont illustrées à la Figure 80 ci-dessous.
Figure 80 Schéma de la configuration du DressPack pour l'application de soudage par points.
3HAC 023933-004 Rév.H 103

2 SpotPack et DressPack2.4.2 Configuration résultante pour le type S
2.4.2 Configuration résultante pour le type S
GénéralitésLe contenu du DressPack diffère selon les options choisies ci-dessus. Le choix de l'acheminement n'affecte pas le contenu. Reportez-vous aux tableaux pour connaître le contenu des signaux.
DressPack type S. Communication parallèle• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 94-1, -2, -3, -4 permettant de spécifier la longueur de câble)
• Option 455-1. Communication parallèle
• Option 778-2. Soudage par points
• Option 798-2. Acheminement externe du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe du bras supérieur du
DressPack
• Option 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Option 781-1 (et option 778-2). Acheminement de la base à l'axe 6
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaireTerre de protection
2+2 2+21
0,5 mm2
0,5 mm2250 VCA, 5 A rms250 VCA
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux etblindage séparé
20
8
20 (10 x 2)a
8 (4 x 2)
a. Pour IRB 6600/6650ID, 16 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
MédiaEau/air (PROC 1-4) 4 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIb
Pression maximale de l'eau : 10 bars/145 PSI
b. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
Alimentation de soudage (WELD)Bras inférieur et supérieur
Terre de protection (bras inférieur et supérieur)
2
1
35 mm2
35 mm2
600 VCA, 150 A rms à 20 °C
104 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.4.2 Configuration résultante pour le type S
DressPack type S. Communication parallèle et sur bus de terrain, Can/DeviceNet• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 90-2, -3, -4, -5 permettant de spécifier la longueur de câble)
• Option 455-4. Communication parallèle et sur bus
• Option 778-2. Soudage par points
• Option 798-2. Acheminement externe du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe
• Option 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Option 781-1 (et option 778-2). Acheminement de la base à l'axe 6
Le tableau suivant présente les types de câble/média disponibles.
Type Aux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaireTerre de protection
2+2 2+21
0,5 mm2
1 mm2250 VCA, 5 A rms250 VCA
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
20
8
20 (10 x 2)a
8 (4 x 2)
a. Pour IRB 6600/6650ID, 16 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
Bus client (CBus)Signaux bus
Signaux busPaire torsadée de signaux
Sur carte bus
Sur carte bus6
2
26 (3 x 2)
0,14 mm2
0,23 mm2
0,14 mm2
Caractéristiques Can/DeviceNet50 VCC, 1 A rms50 VCC, 1 A rms
MédiaEau/air (PROC 1-4) 4 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIbPression maximale de l'eau : 10 bars/145 PSI.
b. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
Alimentation de soudage (WELD)Bras inférieur et supérieur
Terre de protection (bras inférieur et supérieur)
2
1
35 mm2
35 mm2
600 VCA, 150 A rms à 20 °C
3HAC 023933-004 Rév.H 105

2 SpotPack et DressPack2.4.2 Configuration résultante pour le type S
DressPack type S. Communication parallèle et sur bus de terrain, Profibus• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 92-2, -3, -4, -5 permettant de spécifier la longueur de câble)
• Option 455-4. Communication parallèle et sur bus
• Option 778-2. Soudage par points
• Option 798-2. Acheminement externe du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-1 ou 798-2). Acheminement externe
• Option 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Option 781-1 (et option 778-2). Acheminement de la base à l'axe 6
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaireTerre de protection
2+2 2+21
0,5 mm2
0,5 mm2250 VCA, 5 A rms250 VCA
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
22
8
22 (11 x 2)a
8 (4 x 2)
a. Pour IRB 6600/6650ID, 18 signaux au lieu de 22 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
Bus client (CBus)Signaux bus
Paire torsadée de signaux
Sur carte bus6
2
6 (3 x 2)
0,14 mm2
0,14 mm2
Caractéristiques Profibus 12 Mbit/s50 VCC, 1 A rms
MédiaEau/air (PROC 1-4) 4 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIbPression maximale de l'eau : 10 bars/145 PSI.
b. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
Alimentation de soudage (WELD)Bras inférieur et supérieur
Terre de protection (bras inférieur et supérieur)
2
1
35 mm2
35 mm2
600 VCA, 150 A rms à 20 °C
106 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.4.3 Description de l'interface du DressPack type S
2.4.3 Description de l'interface du DressPack type S
Interface clientL'interface du DressPack au niveau de l'axe 6 est dotée d'un connecteur de signaux de type modulaire Harting. Pour l'acheminement externe, les tuyaux et le câble de soudage comportent des extrémités libres. Pour l'acheminement interne, le câble de soudage se termine par un connecteur et les tuyaux par des montages. Les configurations de connecteur sont décrites dans le schéma du circuit inclus dans le manuel du produit du DressPack/SpotPack IRB 6600/7600, réf. 3HAC025058-004.
Connecteur Harting - Acheminement externeLe connecteur Harting pour l'acheminement externe est représenté à la Figure 81 ci-dessous. Les pièces principales du connecteur sont décrites dans la liste suivante, avec les noms et les références de produit Harting. (Les pièces correspondantes de l'outil sont disponibles avec un kit de connexion (reportez-vous au chapitre 2.10 Kits de connexion) et dans le cadre de l'offre de produit Harting.)
Figure 81 Connecteur Harting pour acheminement externe.
Nom Réf. produit Harting
Capuchon de plastique transparent 09 30 010 0543
Châssis à charnière, capot 09 14 010 0303
Multicontact, femelle (HD) (25 broches) 09 14 025 3101
Multicontact, femelle (EE) (12 broches) 09 14 012 3101
Multicontact, femelle (DD) (8 broches) 09 14 008 3101
3HAC 023933-004 Rév.H 107

2 SpotPack et DressPack2.4.3 Description de l'interface du DressPack type S
Connecteur/tuyaux Harting - Acheminement interne
Figure 82 Connecteur Harting pour l'acheminement interne.
Connecteurs et montages de soudage - Acheminement interne• Pour l'acheminement interne, le câble de soudage se termine par le type de
connecteur : MC TSB 150/35
• Les tuyaux se terminent par le type de montage : Parker Pushlock (½", laiton M22 x 1,5, joint 24°).
Options générales requises pour le type SAfin que le système SpotPack IRB 6600/6650 opère comme souhaité, les options de robot standard sont requises. Ces options standard sont décrites en détail dans d'autres chapitres et sont mentionnées dans celui-ci.
• Option 716-1. 1 pc. 16 entrées/16 sorties d'E/S numériques 24 VCC
• Option 727-1. Alimentation 24 V 8 A
• Option 635-1. Spot. Option logicielle pour pinces pneumatiques (l'option logicielle 635-2 peut également être utilisée)
Nom Réf. produit Harting
Capuchon de plastique transparent 09 62 040 0301
Multicontact, femelle (HD) (25 broches) 09 14 025 3101
Multicontact, femelle (EE) (12 broches) 09 14 012 3101
Multicontact, femelle (DD) (8 broches) 09 14 008 3101
108 Rév.H 3HAC 023933-004
2 SpotPack et DressPack2.4.3 Description de l'interface du DressPack type S
Options de l'armoire de soudage par points requises pour le type SLe système SpotPack IRB 6600/6650 nécessite également une armoire de soudage par points (option 768-3) pour opérer comme souhaité. Deux variantes (voir ci-dessous) de l'armoire de soudage par points sont disponibles. La marque du temporisateur de soudage et la capacité de soudage sont spécifiées via le choix de l'une des variantes facultatives. Des options supplémentaires peuvent être ajoutées à chacune des variantes de l'armoire.Toutes ces options sont décrites en détail dans le chapitre 2.8 Armoire de soudage par points et sont mentionnées dans celui-ci.
Figure 83 Vue d'ensemble de l'armoire de soudage par points.
Les options supplémentaires des différentes armoires de soudage par points sont mentionnées ci-dessous. Pour plus de détails techniques et pour connaître les restrictions de combinaison, reportez-vous au chapitre 2.8 Armoire de soudage par points.
Option Type Description
782-1 CA de base Bosch Cette option fournit une armoire de soudage par points de base équipée d'un temporisateur de soudage Bosch avec thyristor CA intégré d'une capacité de base. Type Bosch PST 6100.630L1.
782-7 MFDC de base Bosch Cette option fournit une armoire de soudage par points de base équipée d'un temporisateur de soudage Bosch avec inverseur intégré d'une capacité de base. Type Bosch PSI 6100.630L1.
3HAC 023933-004 Rév.H 109

2 SpotPack et DressPack2.4.3 Description de l'interface du DressPack type S
Options d'unité d'eau et d'air requises pour le type SLe système SpotPack IRB 6600/6650 nécessite également des options d'unité d'eau et d'air pour opérer comme souhaité. Ces options sont décrites en détail dans le chapitre 2.9 Unité d'eau et d'air et sont mentionnées dans celui-ci.
Figure 84 Présentation de l'unité d'eau et d'air.
Option Type Description
788-1 Refroidissement à air forcé
Offre un ventilateur de refroidissement (avec boîtier), placé à l'arrière de l'armoire de soudage par points, qui dirige l'air sur la surface de refroidissement (grilles) du thyristor ou de l'inverseur MFDC.
789-1 Unité de protection des défauts à la terre
Garantit la protection des défauts à la terre du disjoncteur pour la puissance de soudage.
790-1 Contacteur pour puissance de soudage
Offre au contacteur le câblage nécessaire à l'intérieur de l'armoire de soudage par points.
791-1 Câble de puissance de soudage, 7 m
Offre un câble de socle de 7 m de longueur pour la puissance de soudage.
791-2 Câble de puissance de soudage, 15 m
Offre un câble de socle de 15 m de longueur pour la puissance de soudage.
Option Type Description
792-1 Unité d'eau et d'air, type S
Fournit l'unité d'eau et d'air de base du type S, y compris le coffret de distribution pour la distribution des signaux.
793-1 Second retour d'eau Fournit un circuit de retour d'eau supplémentaire.
796-1 Vanne proportionnelle d'air électrique
Fournit une vanne proportionnelle avec câbles et tuyaux supplémentaires.
797-1 Câble vers coffret de distribution, 7 m
Fournit un câble de socle de 7 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
797-2 Câble vers coffret de distribution, 15 m
Fournit un câble de socle de 15 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
480
43030160
110 Rév.H 3HAC 023933-004
2 SpotPack et DressPack2.4.4 Récapitulatif type S
2.4.4 Récapitulatif type S
Les options suivantes sont requises pour former un système SpotPack type S complet :
DressPack• Option 16-1. Connexion à l'armoire (longueur de câble et type de communication à
préciser)
• Option 455-1, 455-4. Communication parallèle ou Communication parallèle et sur bus (type de communication à spécifier)
• Option 778-2. Soudage par points
• Option 798-2. Acheminement externe du bras inférieur du DressPack
• Option 780-2. Acheminement externe, ou option 780-1, acheminement interne. Bras supérieur du DressPack (type d'acheminement à spécifier)
Autre acheminement sans changement au point de connexion :• Option 781-1. Acheminement de la base à l'axe 6
Options générales• Option 716-1. 1 pc. 16 entrées/16 sorties d'E/S numériques 24 VCC
• Option 727-1. Alimentation 24 V 8 A
• Option 635-1. Spot
Armoire de soudage par points• Option 768-3. Petit soudage par points
• Options 782-1,-7. Capacité du temporisateur de soudage
• Option 791-1. Câble d'alimentation 7 m (autres longueurs disponibles)
Unité d'eau et d'air• Option 792-1. Unité d'eau et d'air, type S
• Option 797-1. Câble de coffret de distribution 7 m (autres longueurs disponibles)
(De plus, l'option 796-1 de l'unité d'eau et d'air est normalement requise pour la manipulation de la pince pneumatique.)D'autres options décrites dépendent des besoins et des performances système spécifiques.
797-3 Câble vers coffret de distribution, 22 m
Fournit un câble de socle de 22 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
797-4 Câble vers coffret de distribution, 30 m
Fournit un câble de socle de 30 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
Option Type Description
3HAC 023933-004 Rév.H 111

2 SpotPack et DressPack2.5.1 Introduction
2.5 Type HS
2.5.1 Introduction
GénéralitésLa variante Type HS est conçue pour la manipulation à l'aide d'une pince pneumatique de soudage par points fixe. La Figure 85 ci-dessous représente les modules principaux inclus. Les configurations disponibles, accompagnées des numéros d'option correspondants, sont décrites ci-dessous à partir du DressPack.
Figure 85 Type HS du DressPack.
Les configurations disponibles, accompagnées des numéros d'option correspondants, sont décrites ci-dessous.
Pos. Nom
A Armoire de soudage par points
B Armoire du robot IRC5
C Socle du DressPack
D Bras inférieur du DressPack
E Bras supérieur du DressPack
F Unité d'eau et d'air avec tuyaux
G Appareil de préhension du robot
H Pince fixe
(A)
(B)
(C)
(D)
(E)
(F)
(G)
(H)
112 Rév.H 3HAC 023933-004
2 SpotPack et DressPack2.5.1 Introduction
Description de l'option
• Option 778-1. Pour l'application de manutention de matériaux.
• Option 798-1. Base vers axe 3. Permet au bras inférieur du DressPack de manipuler des matériaux via un acheminement interne depuis la base jusqu’à l’axe 3.
• Option 798-2. Base vers axe 2. Permet au bras inférieur du DressPack de manipuler des matériaux via un acheminement interne depuis la base jusqu’à l’axe 2.
• Option 780-3 (et option 798-1). Axes 3 à 6. Permet au bras supérieur du DressPack de manipuler des matériaux via un acheminement externe depuis l’axe 3 jusqu’à l’axe 6.
• Option 780-2 (et option 798-2). Axes 2 à 6. Permet au bras supérieur du DressPack de manipuler des matériaux via un acheminement externe depuis l’axe 2 jusqu’à l’axe 6.
• Option 780-1 (et option 798-2). Axes 2 à 6. Permet au bras supérieur du DressPack de manipuler des matériaux via un acheminement interne depuis l’axe 2 jusqu’à l’axe 6.
Option Type Description
16-2 Connexion au manipulateur
Aucun faisceau de socle DressPack n'est choisi.
16-1 Connexion à l'armoire
Les connexions à l'intérieur de la section d'E/S du DressPack et les câbles du socle sont choisis. La longueur et la configuration du faisceau de socle sont spécifiées via les options suivantes.Option 94-1, -2, -3, -4 pour communication parallèle.Option 90-2, -3, -4, -5 pour communication parallèle et communication sur bus de terrain avec Can/DeviceNet.Option 92-2, -3, -4, -5 pour communication parallèle et communication sur bus de terrain avec Profibus.
455-1 Communication parallèle
Fournit les câbles de signaux requis pour la communication parallèle des bras inférieur et supérieur du DressPack. À combiner avec l'option 94-1, -2, -3, -4, -5.
455-4 Communication parallèle et sur bus
Fournit les câbles de signaux requis pour la combinaison de la communication parallèle et de la communication sur bus des bras inférieur et supérieur du DressPack. À combiner avec l'option 90-2, -3, -4, -5 ou 92-2, -3, -4, -5.
3HAC 023933-004 Rév.H 113

2 SpotPack et DressPack2.5.1 Introduction
Les autres possibilités d'acheminement et les combinaisons autorisées sont illustrées à la Figure 86 ci-dessous.
Figure 86 Schéma de la configuration du DressPack pour l'application de manutention de matériaux.
Option 16-1,câblage du socle
Options 94-1, -2, -3, -4Longueur de câble,communicationparallèle
Options 90-2, -3, -4, -5Options 92-2, -3, -4, -5Longueur de câble,communication parallèleet sur bus
Option 455-1,Communication parallèle
Option 455-4,Communication parallèleet sur bus
Option 778-1,manutention matériaux
Option 798-1, de la base à l’axe 3 Option 798-2, de la base à l’axe 2
Option 780-2, de l’axe 2 à 6acheminement externe
Option 780-3, de l’axe 3 à 6acheminement externe
Option 780-1, de l’axe 2 à 6acheminement interne
114 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.5.2 Configuration résultante pour le type HS
2.5.2 Configuration résultante pour le type HS
GénéralitésLe contenu du DressPack diffère selon les options choisies ci-dessus. Le choix de l'acheminement n'affecte pas le contenu. Reportez-vous aux tableaux pour connaître le contenu des signaux.
DressPack Type HS. Communication parallèle• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 94-1, -2, -3, -4 permettant de spécifier la longueur de câble)
• Option 455-1. Communication parallèle
• Option 778-1. Manutention de matériaux
• Option 798-1 ou option 798-2. Acheminement interne du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe
• Options 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Option 780-3 (et option 798-1). Acheminement externe du bras supérieur du DressPack
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaire
Terre de protection
2+2 2+2
1a
a. Non inclus avec option 780-3.
0,5 mm2
0,5 mm2
250 VCA, 5 A rmsb
250 VCAa
b. Pour option 780-3 50 VCA / 60 VCC.
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
20
8
20 (10 x 2)c d
8 (4 x 2)
c. Pour IRB 6600/6650ID, 16 signaux au lieu de 20 signaux.d. Pour option 780-3 8 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
MédiaAir (PROC 1) 1 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIe
e. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
3HAC 023933-004 Rév.H 115
2 SpotPack et DressPack2.5.2 Configuration résultante pour le type HS
DressPack Type HS. Communication parallèle et sur bus de terrain, Can/DeviceNet• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 94-1,-2,-3,-4 permettant de spécifier la longueur de câble)
• Option 455-1. Communication parallèle
• Option 778-1. Manutention de matériaux
• Option 798-1 ou option 798-2. Acheminement interne du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe
• Option 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Option 780-2 (et option 798-1). Acheminement externe du bras supérieur du DressPack
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaire
Terre de protection
2+2 2+2
1a
a. Non inclus avec option 780-3.
0,5 mm2
0,5 mm2
250 VCA, 5 A rmsb
250 VCAa
b. Pour option 780-3 50 VCA / 60 VCC.
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
20
8
20 (10 x 2)c d
8 (4 x 2)
c. Pour IRB 6600/6650ID, 16 signaux au lieu de 20 signaux.d. Pour option 780-3 8 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
Bus client (CBus)Signaux bus
Signaux bus
Paire torsadée de signaux
Sur carte busSur carte bus6
2
2
6 (3 x 2)
0,14 mm2
0,23 mm2
0,14 mm2
Caractéristiques Can/DeviceNet50 VCC, 1 A rms
50 VCC, 1 A rms
MédiaAir (PROC 1) 1 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIe
e. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
116 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.5.2 Configuration résultante pour le type HS
DressPack Type HS. Communication parallèle et sur bus de terrain, Profibus• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 94-1,-2,-3,-4 permettant de spécifier la longueur de câble)
• Option 455-1. Communication parallèle
• Option 778-1. Manutention de matériaux
• Option 798-1 ou option 798-2. Acheminement interne du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe
• Option 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Option 780-3 (et option 798-1). Acheminement externe du bras supérieur du DressPack
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaire
Terre de protection
2+2 2+2
1a
a. Non inclus avec option 780-3
0,5 mm2
0,5 mm2
250 VCA, 5 A rmsb
250 VCAa
b. Pour option 780-3 50 VCA / 60 VCC.
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
22
8
22 (11 x 2)c d
8 (4 x 2)
c. Pour IRB 6600/6650ID, 16 signaux au lieu de 20 signaux.d. Pour option 780-3 8 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
Bus client (CBus)Signaux bus
Paire torsadée de signaux
Sur carte bus6
2
6 (3 x 2)
0,14 mm2
0,14 mm2
Caractéristiques Profibus 12 Mbit/s50 VCC, 1 A rms
MédiaAir (PROC 1) 1 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIe
e. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
3HAC 023933-004 Rév.H 117

2 SpotPack et DressPack2.5.3 Description de l'interface du DressPack type HS
2.5.3 Description de l'interface du DressPack type HS
GénéralitésL'interface au niveau de l'axe 6 est dotée d'un tuyau à l'extrémité libre pour l'acheminement externe et d'un système pour l'acheminement interne. Les câbles de signaux se terminent par un connecteur de signaux de type modulaire Harting. Pour l’option 780-3, l’acheminement externe axes 3 à 6, les connecteurs sont de type Souriau. Les configurations de connecteur sont décrites dans le schéma du circuit inclus dans le manuel du produit du DressPack/SpotPack IRB 6600/7600, réf. 3HAC025058-004.
Connecteur Harting - Acheminement externeLe connecteur Harting pour l'acheminement externe est représenté à la Figure 87. Les pièces principales du connecteur sont décrites dans la liste suivante, avec les noms et les références de produit Harting. (Les pièces correspondantes de l'outil sont disponibles avec un kit de connexion (reportez-vous au chapitre 2.10 Kits de connexion) et dans le cadre de l'offre de produit Harting.)
Figure 87 Connecteur Harting - Acheminement externe.
Nom Réf. produit Harting
Capuchon de plastique transparent 09 30 010 0543
Châssis à charnière, capot 09 14 010 0303
Multicontact, femelle (HD) (25 broches) 09 14 025 3101
Multicontact, femelle (EE) (12 broches) 09 14 012 3101
Multicontact, femelle (DD) (8 broches) 09 14 008 3101
118 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.5.3 Description de l'interface du DressPack type HS
Connecteurs Souriau - Acheminement externeLes connecteurs Souriau pour l'acheminement externe sont représentés à la Figure 88. Les éléments principaux dans le connecteur sont décrits dans le tableau ci-dessous.
Figure 88 Connecteurs Souriau - Acheminement externe (UTOW61419SH est représenté).
Connecteur Harting - Acheminement interne
Figure 89 Connecteur Harting pour l'acheminement interne.
Name Souriau article No.
Connecteur à bornes, R3.CPS UTOW61832SH
Adaptateur d'amorçage rétractable, R3.CPS UTO18AD
Borne, R3.CPS RC18W3k
Connecteur à bornes, R3.CBUS UTOW61419SH
Adaptateur d'amorçage rétractable, R3.CBUS
UTO14AD
Bornes, R3.CBUS SC24W3S25
Nom Réf. produit Harting
Capuchon de plastique transparent 09 62 040 0301
Multicontact, femelle (HD) (25 broches) 09 14 025 3101
Multicontact, femelle (EE) (12 broches) 09 14 012 3101
Multicontact, femelle (DD) (8 broches) 09 14 008 3101
3HAC 023933-004 Rév.H 119

2 SpotPack et DressPack2.5.3 Description de l'interface du DressPack type HS
Montage tuyaux, acheminement interne• Pour l'acheminement interne, le tuyau se termine par le type de montage :
Parker Pushlock (½", laiton M22 x 1,5, joint 24°).
Options générales requises pour le type HSAfin que le système SpotPack IRB 6600/6650 opère comme souhaité, les options de robot standard sont requises. Ces options standard sont décrites en détail dans d'autres chapitres et sont mentionnées dans celui-ci.
• Option 716-1. 1 pc. 16 entrées/16 sorties d'E/S numériques 24 VCC
• Option 727-1. Alimentation 24 V 8 A
• Option 635-1. Spot. Option logicielle pour pinces pneumatiques (l'option logicielle 635-2 peut également être utilisée)
Options de l'armoire de soudage par points requises pour le type HSLe système SpotPack IRB 6600/6650 nécessite également une armoire de soudage par points (option 768-3) pour opérer comme souhaité. Deux variantes (voir ci-dessous) de l'armoire de soudage par points sont disponibles. La marque du temporisateur de soudage et la capacité de soudage sont spécifiées via le choix de l'une des variantes facultatives. Des options supplémentaires peuvent être ajoutées à chacune des variantes de l'armoire. Toutes ces options sont décrites en détail dans le chapitre 2.8 Armoire de soudage par points et sont mentionnées dans celui-ci.
Figure 90 Vue d'ensemble de l'armoire de soudage par points.
Option Type Description
782-1 CA de base Bosch Cette option fournit une armoire de soudage par points de base équipée d'un temporisateur de soudage Bosch avec thyristor CA intégré d'une capacité de base. Type Bosch PST 6100.630L1.
782-7 MFDC de base Bosch
Cette option fournit une armoire de soudage par points de base équipée d'un temporisateur de soudage Bosch avec inverseur intégré d'une capacité de base. Type Bosch PSI 6100.630L1.
120 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.5.3 Description de l'interface du DressPack type HS
Les options supplémentaires des différentes armoires de soudage par points sont mentionnées ci-dessous. Pour plus de détails techniques et pour connaître les restrictions de combinaison, reportez-vous au chapitre 2.8 Armoire de soudage par points.
Option Type Description
788-1 Refroidissement à air forcé
Offre un ventilateur de refroidissement (avec boîtier), placé à l'arrière de l'armoire de soudage par points, qui dirige l'air sur la surface de refroidissement (grilles) du thyristor ou de l'inverseur MFDC.
789-1 Unité de protection des défauts à la terre
Garantit la protection des défauts à la terre du disjoncteur pour la puissance de soudage.
790-1 Contacteur pour puissance de soudage
Offre au contacteur le câblage nécessaire à l'intérieur de l'armoire de soudage par points.
791-1 Câble de puissance de soudage, 7 m
Offre un câble de socle de 7 m de longueur pour la puissance de soudage.
791-2 Câble de puissance de soudage, 15 m
Offre un câble de socle de 15 m de longueur pour la puissance de soudage.
809-1 Câble de processus vers pince fixe, 7 m
Offre un câble de socle de 7 m de longueur pour les signaux de processus situés entre l'armoire de soudage par points et la pince fixe.
809-2 Câble de processus vers pince fixe, 15 m
Offre un câble de socle de 15 m de longueur pour les signaux de processus situés entre l'armoire de soudage par points et la pince fixe.
809-3 Câble de processus vers pince fixe, 22 m
Offre un câble de socle de 22 m de longueur pour les signaux de processus situés entre l'armoire de soudage par points et la pince fixe.
809-4 Câble de processus vers pince fixe, 30 m
Offre un câble de socle de 30 m de longueur pour les signaux de processus situés entre l'armoire de soudage par points et la pince fixe.
3HAC 023933-004 Rév.H 121
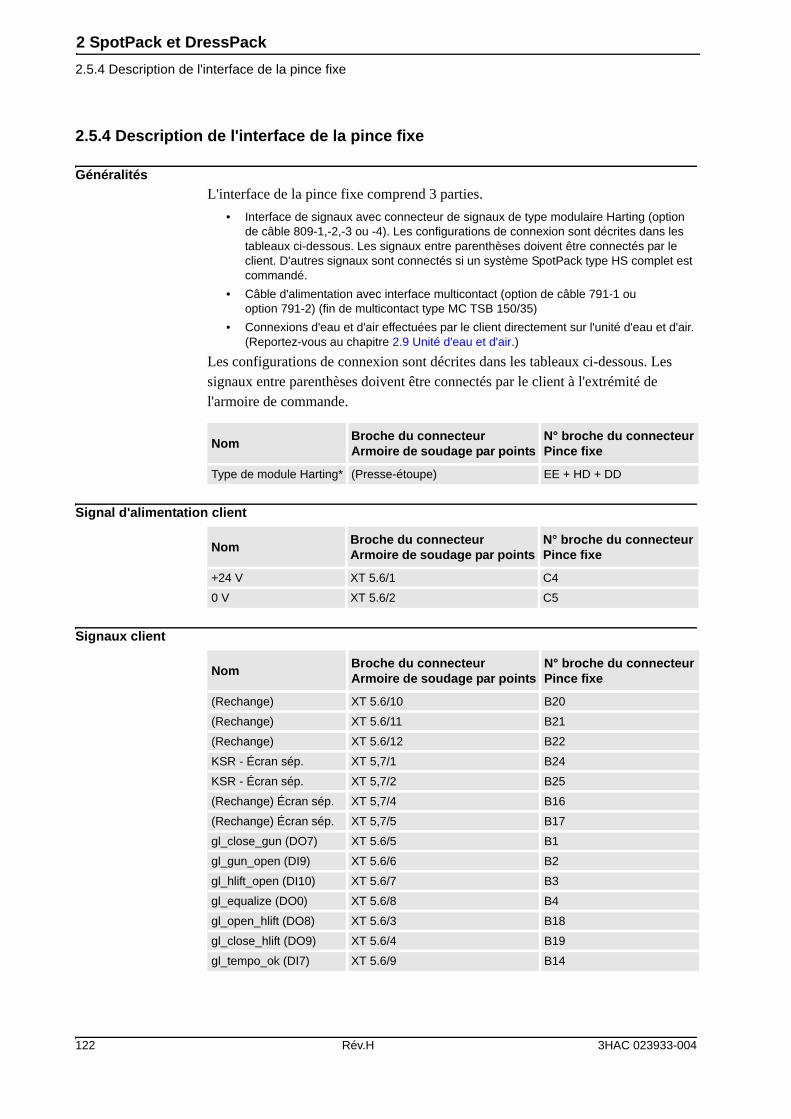
2 SpotPack et DressPack2.5.4 Description de l'interface de la pince fixe
2.5.4 Description de l'interface de la pince fixe
GénéralitésL'interface de la pince fixe comprend 3 parties.
• Interface de signaux avec connecteur de signaux de type modulaire Harting (option de câble 809-1,-2,-3 ou -4). Les configurations de connexion sont décrites dans les tableaux ci-dessous. Les signaux entre parenthèses doivent être connectés par le client. D'autres signaux sont connectés si un système SpotPack type HS complet est commandé.
• Câble d'alimentation avec interface multicontact (option de câble 791-1 ouoption 791-2) (fin de multicontact type MC TSB 150/35)
• Connexions d'eau et d'air effectuées par le client directement sur l'unité d'eau et d'air. (Reportez-vous au chapitre 2.9 Unité d'eau et d'air.)
Les configurations de connexion sont décrites dans les tableaux ci-dessous. Les signaux entre parenthèses doivent être connectés par le client à l'extrémité de l'armoire de commande.
Signal d'alimentation client
Signaux client
Nom Broche du connecteurArmoire de soudage par points
N° broche du connecteurPince fixe
Type de module Harting* (Presse-étoupe) EE + HD + DD
Nom Broche du connecteurArmoire de soudage par points
N° broche du connecteurPince fixe
+24 V XT 5.6/1 C4
0 V XT 5.6/2 C5
Nom Broche du connecteurArmoire de soudage par points
N° broche du connecteurPince fixe
(Rechange) XT 5.6/10 B20
(Rechange) XT 5.6/11 B21
(Rechange) XT 5.6/12 B22
KSR - Écran sép. XT 5,7/1 B24
KSR - Écran sép. XT 5,7/2 B25
(Rechange) Écran sép. XT 5,7/4 B16
(Rechange) Écran sép. XT 5,7/5 B17
gl_close_gun (DO7) XT 5.6/5 B1
gl_gun_open (DI9) XT 5.6/6 B2
gl_hlift_open (DI10) XT 5.6/7 B3
gl_equalize (DO0) XT 5.6/8 B4
gl_open_hlift (DO8) XT 5.6/3 B18
gl_close_hlift (DO9) XT 5.6/4 B19
gl_tempo_ok (DI7) XT 5.6/9 B14
122 Rév.H 3HAC 023933-004
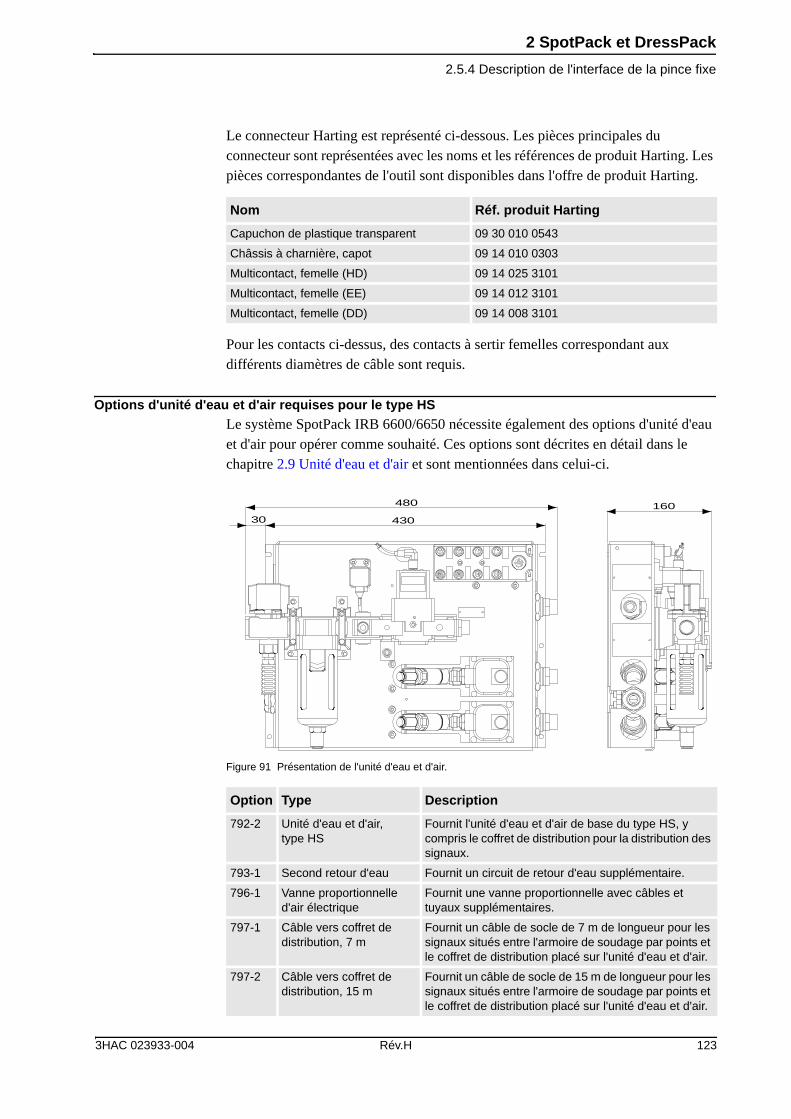
2 SpotPack et DressPack2.5.4 Description de l'interface de la pince fixe
Le connecteur Harting est représenté ci-dessous. Les pièces principales du connecteur sont représentées avec les noms et les références de produit Harting. Les pièces correspondantes de l'outil sont disponibles dans l'offre de produit Harting.
Pour les contacts ci-dessus, des contacts à sertir femelles correspondant aux différents diamètres de câble sont requis.
Options d'unité d'eau et d'air requises pour le type HSLe système SpotPack IRB 6600/6650 nécessite également des options d'unité d'eau et d'air pour opérer comme souhaité. Ces options sont décrites en détail dans le chapitre 2.9 Unité d'eau et d'air et sont mentionnées dans celui-ci.
Figure 91 Présentation de l'unité d'eau et d'air.
Nom Réf. produit Harting
Capuchon de plastique transparent 09 30 010 0543
Châssis à charnière, capot 09 14 010 0303
Multicontact, femelle (HD) 09 14 025 3101
Multicontact, femelle (EE) 09 14 012 3101
Multicontact, femelle (DD) 09 14 008 3101
Option Type Description
792-2 Unité d'eau et d'air, type HS
Fournit l'unité d'eau et d'air de base du type HS, y compris le coffret de distribution pour la distribution des signaux.
793-1 Second retour d'eau Fournit un circuit de retour d'eau supplémentaire.
796-1 Vanne proportionnelle d'air électrique
Fournit une vanne proportionnelle avec câbles et tuyaux supplémentaires.
797-1 Câble vers coffret de distribution, 7 m
Fournit un câble de socle de 7 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
797-2 Câble vers coffret de distribution, 15 m
Fournit un câble de socle de 15 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
480
43030160
3HAC 023933-004 Rév.H 123
2 SpotPack et DressPack2.5.5 Récapitulatif type HS
2.5.5 Récapitulatif type HS
GénéralitésLes options suivantes sont requises pour former un système SpotPack type HS complet :
DressPack• Option 16-1. Connexion à l'armoire (longueur de câble et type de communication à
préciser)
• Option 455-1, 455-4. Communication parallèle ou Communication parallèle et sur bus (type de communication à spécifier)
• Option 778-1. Manutention de matériaux
• Option 798-1 ou option 798-2. Acheminement interne du bras inférieur du DressPack (type d'acheminement à spécifier)
• Option 780-2, option 780-3. Acheminement externe, ou option 780-1, acheminement interne. Bras supérieur du DressPack (type d'acheminement à spécifier)
Options générales• Option 716-1. 1 pc. 16 entrées/16 sorties d'E/S numériques 24 VCC
• Option 727-1. Alimentation 24 V 8 A
• Option 635-1. Spot
Armoire de soudage par points• Option 768-3. Petit soudage par points
• Options 782-1,-7. Capacité du temporisateur de soudage
• Option 791-1. Câble d'alimentation 7 m (autres longueurs disponibles)
• Option 809-1. Câble de processus vers pince fixe (autres longueurs disponibles)
Unité d'eau et d'air• Option 792-2. Unité d'eau et d'air, type HS
• Option 797-1. Câble de coffret de distribution 7 m (autres longueurs disponibles)
(De plus, l'option 796-1 de l'unité d'eau et d'air est normalement requise pour la manipulation de la pince pneumatique.)D'autres options décrites dépendent des besoins et des performances système spécifiques.
797-3 Câble vers coffret de distribution, 22 m
Fournit un câble de socle de 22 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
797-4 Câble vers coffret de distribution, 30 m
Fournit un câble de socle de 30 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
Option Type Description
124 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.6.1 Introduction
2.6 Type Se2.6.1 Introduction
GénéralitésLa variante Type Se est conçue pour l'application de soudage par points avec outil contrôlé par robot (pince électrique). La Figure 92 représente les modules inclus. Les configurations disponibles, accompagnées des numéros d'option correspondants, sont décrites ci-dessous.
Figure 92 Type Se du DressPack.
Pos. Nom
A Armoire de soudage par points
B Armoire du robot IRC5 (incluant le septième entraînement d'axe)
C Socle du DressPack
D Bras inférieur du DressPack
E Bras supérieur du DressPack
F Unité d'eau et d'air avec tuyaux
(A)
(B)
(C)
(D)
(E)
(F)
3HAC 023933-004 Rév.H 125
2 SpotPack et DressPack2.6.1 Introduction
Les configurations disponibles, accompagnées des numéros d'option correspondants, sont décrites ci-dessous. Pour les connexions spécifiques du servomoteur à l'intérieur du DressPack, l'option 785-1, Pince robotisée, doit également être utilisée. Pour plus d'informations, reportez-vous au chapitre 1.10.3 Robot Gun.
Description de l'option
• Option 778-2 pour l'application de soudage par points
• Option 798-2. Base vers axe 2. Permet au bras inférieur du DressPack d’effectuer un soudage par points via un acheminement externe.
• Option 780-2 (et option 798-2). Axes 2 à 6. Permet au bras supérieur du DressPack d’effectuer un soudage par points via un acheminement externe.
• Option 781-1 (et option 778-2). Base vers axe 6. Permet aux bras inférieur et supérieur du DressPack un acheminement externe sans point de connexion intermédiaire.
• Option 780-1 (et option 798-2). Axes 2 à 6. Permet au bras supérieur du DressPack d’effectuer un soudage par points via un acheminement interne.
Option Type Description
16-2 Connexion au manipulateur
Aucun faisceau de socle DressPack n'est choisi.
16-1 Connexion à l'armoire Les connexions à l'intérieur de la section d'E/S du DressPack et les câbles du socle sont choisis. La longueur et la configuration du faisceau de socle sont spécifiées via les options suivantes.Option 94-1, -2, -3, -4 pour communication parallèleOption 90-2, -3, -4, -5 pour communication parallèle et communication sur bus de terrain avec Can/DeviceNetOption 92-2, -3, -4, -5 pour communication parallèle et communication sur bus de terrain avec Profibus
455-1 Communication parallèle
Fournit les câbles de signaux requis pour la communication parallèle des bras inférieur et supérieur du DressPack. À combiner avec l'option 94-1, -2, -3, -4.
455-4 Communication parallèle et sur bus
Fournit les câbles de signaux requis pour la combinaison de la communication parallèle et de la communication sur bus des bras inférieur et supérieur du DressPack. À combiner avec l'option 90-2, -3, -4, -5 ou 92-2, -3, -4, -5.
126 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.6.1 Introduction
Les autres possibilités d'acheminement et les combinaisons autorisées sont illustrées à la Figure 93 ci-dessous.
Figure 93 Schéma de la configuration du DressPack pour l'application de soudage par points.
3HAC 023933-004 Rév.H 127

2 SpotPack et DressPack2.6.2 Configuration résultante pour le type Se
2.6.2 Configuration résultante pour le type Se
GénéralitésLe contenu du DressPack diffère selon les options choisies ci-dessus (combinées à l'option 785-1, Pince robotisée). Le choix de l'acheminement n'affecte pas le contenu. Reportez-vous aux tableaux pour connaître le contenu des signaux.
DressPack type Se. Communication parallèle• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 94-1, -2, -3, -4 permettant de spécifier la longueur de câble)
• Option 455-1. Communication parallèle
• Option 778-2. Soudage par points
• Option 798-2. Acheminement externe du bras inférieur du DressPack
L'une des options suivantes :• Options 780-2 (et option 798-2). Acheminement externe du bras supérieur du
DressPack
• Options 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack ou
• Options 781-1 (et option 778-2). Acheminement de la base à l'axe 6
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaireTerre de protection
2+2 2+21
0,5 mm2
0,5 mm2250 VCA, 5 A rms250 VCA
Signaux du client (CS)Paire torsadée de signauxPaire torsadée de signaux et blindage séparé
164
16 (8 x 2)4 (2 x 2)
0,24 mm2
0,24 mm250 VCC, 1 A rms50 VCC, 1 A rms
Signaux du servomoteurAlimentation du servomoteur
Terre de protection
Paire torsadée de signaux du résolveurFreinContrôle de la température/PTC
À l'entraîne-mentÀ l'entraîne-ment-
--
3
1
6a
22
1,5 mm2
1,5 mm2
0,23 mm2
0,23 mm2
0,23 mm2
600 VCA, 12 A rms
600 VCA
50 VCC, 1 A rms
50 VCC, 1 A rms50 VCC, 1 A rms
MédiaEau/air (PROC 1-4) 4 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIb Pression maximale de l'eau : 10 bars/145 PSI
128 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.6.2 Configuration résultante pour le type Se
Alimentation de soudage (WELD)Bras inférieur et supérieur
Terre de protection (bras inférieur et supérieur)
2
1
35 mm2
35 mm2
600 VCA, 150 A rms à 20 °C
a. Interface uniquement sur l'axe 3 ou 6b. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
3HAC 023933-004 Rév.H 129

2 SpotPack et DressPack2.6.2 Configuration résultante pour le type Se
DressPack type Se. Communication parallèle et sur bus de terrain, Can/DeviceNet• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 90-2, -3, -4, -5 permettant de spécifier la longueur de câble)
• Option 455-4. Communication parallèle et sur bus
• Option 778-2. Soudage par points
• Option 798-2. Acheminement externe du bras inférieur du DressPack
L'une des options suivantes :• Options 780-2 (et option 798-2). Acheminement externe du bras supérieur du
DressPack
• Options 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack ou
• Options 781-1 (et option 778-2). Acheminement de la base à l'axe 6
Le tableau suivant présente les types de câble/média disponibles.
Type Aux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaireTerre de protection
2+2 2+21
0,5 mm2
0,5 mm2250 VCA, 5 A rms250 VCA
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
14
4
14 (7 x 2)
4 (1 x 2)
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
Bus client (CBus)Signaux bus
Signaux busPaire torsadée de signaux
Sur carte bus
Sur carte bus6
2
26 (3 x 2)
0,14 mm2
0,23 mm2
0,14 mm2
Caractéristiques Can/DeviceNet50 VCC, 1 A rms50 VCC, 1 A rms
Signaux du servomoteurAlimentation du servomoteurTerre de protection
Paire torsadée de signaux du résolveurFreinContrôle de la température/PTC
À l'entraîne-mentÀ l'entraîne-ment-
--
3
1
6a
22
1,5 mm2
1,5 mm2
0,23 mm2
0,23 mm2
0,23 mm2
600 VCA, 12 A rms
600 VCA
50 VCC, 1 A rms
50 VCC, 1 A rms50 VCC, 1 A rms
MédiaEau/air (PROC 1-4) 4 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIbPression maximale de l'eau : 10 bars/145 PSI.
130 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.6.2 Configuration résultante pour le type Se
Alimentation de soudage (WELD)Bras inférieur et supérieur
Terre de protection (bras inférieur et supérieur)
2
1
35 mm2
35 mm2
600 VCA, 150 A rms à 20 °C
a. Interface uniquement sur l'axe 3 ou 6b. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
Type Aux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
3HAC 023933-004 Rév.H 131

2 SpotPack et DressPack2.6.2 Configuration résultante pour le type Se
DressPack type Se. Communication parallèle et sur bus de terrain, Profibus• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 90-2, -3, -4, -5 permettant de spécifier la longueur de câble)
• Option 455-4. Communication parallèle et sur bus
• Option 778-2. Soudage par points
• Option 798-2. Acheminement externe du bras inférieur du DressPack
L'une des options suivantes :• Options 780-2 (et option 798-2). Acheminement externe du bras supérieur du
DressPack
• Options 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Options 781-1 (et option 778-2). Acheminement de la base à l'axe 6
Le tableau suivant présente les types de câble/média disponibles.
Type Aux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaire
Terre de protection
2+2 2+2
1
0,5 mm2
0,5 mm2
250 VCA, 5 A rms
250 VCA
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
16
4
16 (8 x 2)
4 (2 x 2)
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
Bus client (CBus)Signaux bus
Paire torsadée de signaux
Sur carte bus
6
2
6 (3 x 2)
0,14 mm2
0,14 mm2
Caractéristiques Profibus 12 Mbit/s50 VCC, 1 A rms
Signaux du servomoteurAlimentation du servomoteurTerre de protection
Paire torsadée de signaux du résolveurFreinContrôle de la température/PTC
À l'entraînementÀ l'entraînement-
--
3
1
6a
22
1,5 mm2
1,5 mm2
0,23 mm2
0,23 mm2
0,23 mm2
600 VCA, 12 A rms
600 VCA
50 VCC, 1 A rms
50 VCC, 1 A rms50 VCC, 1 A rms
MédiaEau/air (PROC 1-4) 4 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIbPression maximale de l'eau : 10 bars/145 PSI.
132 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.6.2 Configuration résultante pour le type Se
Alimentation de soudage (WELD)Bras inférieur et supérieur
Terre de protection (bras inférieur et supérieur)
2
1
35 mm2
35 mm2
600 VCA, 150 A rms à 20 °C
a. Interface uniquement sur l'axe 3 ou 6b. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
Type Aux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
3HAC 023933-004 Rév.H 133

2 SpotPack et DressPack2.6.3 Description de l'interface du DressPack type Se
2.6.3 Description de l'interface du DressPack type Se
Interface clientL'interface du DressPack au niveau de l'axe 6 est dotée d'un connecteur de signaux de type modulaire Harting. Pour l'acheminement externe, les tuyaux et le câble de soudage comportent des extrémités libres. Pour l'acheminement interne, le câble de soudage se termine par un connecteur et les tuyaux par des montages. Les configurations de connecteur sont décrites dans le schéma du circuit inclus dans le manuel du produit du DressPack/SpotPack IRB 6600/7600, réf. 3HAC025058-004.
Connexion Harting - Acheminement externeLe connecteur Harting pour l'acheminement externe est représenté à la Figure 94. Les pièces principales du connecteur sont décrites dans la liste suivante, avec les noms et les références de produit Harting. (Les pièces correspondantes de l'outil sont disponibles avec un kit de connexion (reportez-vous au chapitre 2.10 Kits de connexion) et dans le cadre de l'offre de produit Harting.)
Figure 94 Connecteur Harting pour acheminement externe.
Nom Réf. produit Harting
Capuchon de plastique transparent 09 30 010 0543
Châssis à charnière, capot 09 14 010 0303
Multicontact, femelle (HD) (25 broches) 09 14 025 3101
Multicontact, femelle (EE) (12 broches) 09 14 012 3101
Multicontact, femelle (DD) (8 broches) 09 14 008 3101
134 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.6.3 Description de l'interface du DressPack type Se
Connecteur/tuyaux Harting - Acheminement interne
Figure 95 Connecteur Harting pour l'acheminement interne.
Connecteurs et montages de soudage - Acheminement interne• Pour l'acheminement interne, le câble de soudage se termine par le type de
connecteur : MC TSB 150/35
• Les tuyaux se terminent par le type de montage : Parker Pushlock (½", laiton M22 x 1,5, joint 24°).
Options générales requises pour le type SeAfin que le système SpotPack IRB 6600/6650 opère comme souhaité, les options de robot standard sont requises. Ces options standard sont décrites en détail dans d'autres chapitres et sont mentionnées dans celui-ci.
• Option 716-1 1 pc. 16 entrées/16 sorties d'E/S numériques 24 VCC
• Option 727-1 - Alimentation 24 V 8 A
Nom Réf. produit Harting
Capuchon de plastique transparent 09 62 040 0301
Multicontact, femelle (HD) (25 broches) 09 14 025 3101
Multicontact, femelle (EE) (12 broches) 09 14 012 3101
Multicontact, femelle (DD) (8 broches) 09 14 008 3101
3HAC 023933-004 Rév.H 135

2 SpotPack et DressPack2.6.3 Description de l'interface du DressPack type Se
Options requises pour la pince asserviePour que le progiciel de fonctions de soudage par points SpotPack IRB 6600/6650 fonctionne avec une pince asservie, certaines options de servocommande (en plus de celles décrites dans la section précédente, Options générales requises pour le type Se) sont requises. Ces options standard sont décrites dans d'autres chapitres et sont également mentionnées ci-dessous dans celui-ci.
• Option 770-4. Première unité d'entraînement supplémentaire, entraînement W
• Option 785-1. Pince robotisée
• Options 786-1, 2, 3, 4. Connexion au premier module d'entraînement (longueur de câble à spécifier)
• Option 635-3. Spot Servo. Option logicielle pour pinces asservies. (L'option logicielle 635-4 et l'option 635-5 peuvent également être utilisées.)
En outre, l'option 630-1 (changement d'outil asservi) doit être ajoutée si le changement de l'outil de pince asservie est requis.
Options de l'armoire de soudage par points requises pour le type SeLe système SpotPack IRB 6600/6650 nécessite également une armoire de soudage par points (option 768-3) pour opérer comme souhaité. Deux variantes (voir ci-dessous) de l'armoire de soudage par points sont disponibles. La marque du temporisateur de soudage et la capacité de soudage sont spécifiées via le choix de l'une des variantes facultatives. Des options supplémentaires peuvent être ajoutées à chaque variante de l'armoire. Toutes ces options sont décrites en détail dans le chapitre 2.8 Armoire de soudage par points et sont mentionnées dans celui-ci.
Figure 96 Vue d'ensemble de l'armoire de soudage par points.
Option Type Description
782-1 CA de base Bosch Cette option fournit une armoire de soudage par points de base équipée d'un temporisateur de soudage Bosch avec thyristor CA intégré d'une capacité de base. Type Bosch PST 6100.630L1.
782-7 MFDC de base Bosch
Cette option fournit une armoire de soudage par points de base équipée d'un temporisateur de soudage Bosch avec inverseur intégré d'une capacité de base. Type Bosch PSI 6100.630L1.
136 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.6.3 Description de l'interface du DressPack type Se
Les options supplémentaires des différentes armoires de soudage par points sont mentionnées ci-dessous. Pour plus de détails techniques et pour connaître les restrictions de combinaison, reportez-vous au chapitre 2.8 Armoire de soudage par points.
Option Type Description
788-1 Refroidissement à air forcé
Offre un ventilateur de refroidissement (avec boîtier), placé à l'arrière de l'armoire de soudage par points, qui dirige l'air sur la surface de refroidissement (grilles) du thyristor ou de l'inverseur MFDC.
789-1 Unité de protection des défauts à la terre
Garantit la protection des défauts à la terre du disjoncteur pour la puissance de soudage.
790-1 Contacteur pour puissance de soudage
Offre au contacteur le câblage nécessaire à l'intérieur de l'armoire de soudage par points.
791-1 Câble de puissance de soudage, 7 m
Offre un câble de socle de 7 m de longueur pour la puissance de soudage.
791-2 Câble de puissance de soudage, 15 m
Offre un câble de socle de 15 m de longueur pour la puissance de soudage.
3HAC 023933-004 Rév.H 137

2 SpotPack et DressPack2.6.3 Description de l'interface du DressPack type Se
Options d'unité d'eau et d'air requises pour le type SeLe système SpotPack IRB 6600/6650 nécessite également des options d'unité d'eau et d'air pour opérer comme souhaité. Ces options sont décrites en détail dans le chapitre 2.9 Unité d'eau et d'air et sont mentionnées dans celui-ci.
Figure 97 Présentation de l'unité d'eau et d'air.
Option Type Description
792-1 Unité d'eau et d'air, type S
Fournit l'unité d'eau et d'air de base du type S, y compris le coffret de distribution pour la distribution des signaux.
793-1 Second retour d'eau Fournit un circuit de retour d'eau supplémentaire.
797-2 Câble vers coffret de distribution, 7 m
Fournit un câble de socle de 7 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
797-2 Câble vers coffret de distribution, 15 m
Fournit un câble de socle de 15 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
797-3 Câble vers coffret de distribution, 22 m
Fournit un câble de socle de 22 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
797-4 Câble vers coffret de distribution, 30 m
Fournit un câble de socle de 30 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
480
43030160
138 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.6.4 Récapitulatif type Se
2.6.4 Récapitulatif type Se
DressPackLes options suivantes sont requises pour former un système SpotPack type Se complet :
• Option 16-1. Connexion à l'armoire (longueur de câble et type de communication à préciser)
• Option 455-1, 455-4. Communication parallèle ou Communication parallèle et sur bus (type de communication à spécifier)
• Option 778-2. Soudage par points
• Option 798-2. Acheminement externe du bras inférieur du DressPack (type d'acheminement à spécifier)
• Option 780-2. Acheminement externe du bras supérieur du DressPack (type d'acheminement à spécifier)
Autre acheminement sans changement au point de connexion :• Option 781-1 (et option 778-2). Acheminement de la base à l'axe 6
Options générales• Option 716-1. 1 pc. 16 entrées/16 sorties d'E/S numériques 24 VCC
• Option 727-1. Alimentation 24 V 8 A
Options requises pour la pince asservie• Option 770-4. Première unité d'entraînement supplémentaire, entraînement W
• Option 785-1. Pince robotisée
• Options 786-1, 2, 3, 4. Connexion au premier module d'entraînement (longueur de câble à spécifier)
• Option 635-3. Spot Servo
Armoire de soudage par points• Option 768-3. Petit soudage par points
• Options 782-1,-7. Capacité du temporisateur de soudage
• Option 791-1. Câble d'alimentation 7 m (autres longueurs disponibles)
Unité d'eau et d'air• Option 792-1. Unité d'eau et d'air, type S
• Option 797-1. Câble de coffret de distribution 7 m (autres longueurs disponibles)
D'autres options décrites dépendent des besoins et des performances système spécifiques.
Pour plus de détails sur l'entraînement, reportez-vous au chapitre 1.10.3 Robot Gun.
3HAC 023933-004 Rév.H 139

2 SpotPack et DressPack2.7.1 Introduction
2.7 Type HSe
2.7.1 Introduction
GénéralitésLa variante Type HSe est conçue pour la manipulation à l'aide d'une pince asservie (électrique) de soudage par points fixe. La Figure 98 ci-dessous représente les modules principaux inclus. Les configurations disponibles, accompagnées des numéros d'option correspondants, sont décrites ci-dessous à partir de DressPack.
Figure 98 Type HSe du DressPack.
Pos. Nom
A Armoire de soudage par points
B Armoire du robot IRC5 (incluant le septième entraînement d'axe)
C Socle du DressPack
D Bras inférieur du DressPack
E Bras supérieur du DressPack
F Unité d'eau et d'air avec tuyaux
G Appareil de préhension du robot
H Pince fixe avec axe 7
(A)
(B)
(C)
(D)
(E)
(F)
(G)
(H)
140 Rév.H 3HAC 023933-004
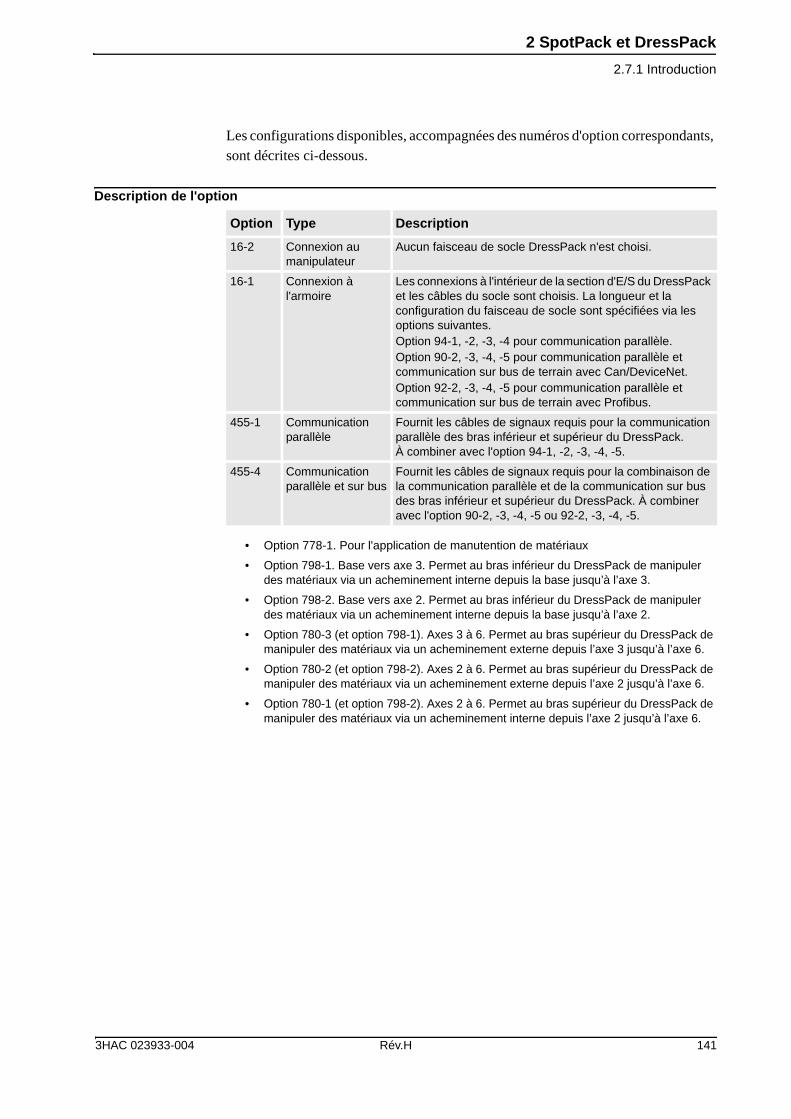
2 SpotPack et DressPack2.7.1 Introduction
Les configurations disponibles, accompagnées des numéros d'option correspondants, sont décrites ci-dessous.
Description de l'option
• Option 778-1. Pour l'application de manutention de matériaux
• Option 798-1. Base vers axe 3. Permet au bras inférieur du DressPack de manipuler des matériaux via un acheminement interne depuis la base jusqu’à l’axe 3.
• Option 798-2. Base vers axe 2. Permet au bras inférieur du DressPack de manipuler des matériaux via un acheminement interne depuis la base jusqu’à l’axe 2.
• Option 780-3 (et option 798-1). Axes 3 à 6. Permet au bras supérieur du DressPack de manipuler des matériaux via un acheminement externe depuis l’axe 3 jusqu’à l’axe 6.
• Option 780-2 (et option 798-2). Axes 2 à 6. Permet au bras supérieur du DressPack de manipuler des matériaux via un acheminement externe depuis l’axe 2 jusqu’à l’axe 6.
• Option 780-1 (et option 798-2). Axes 2 à 6. Permet au bras supérieur du DressPack de manipuler des matériaux via un acheminement interne depuis l’axe 2 jusqu’à l’axe 6.
Option Type Description
16-2 Connexion au manipulateur
Aucun faisceau de socle DressPack n'est choisi.
16-1 Connexion à l'armoire
Les connexions à l'intérieur de la section d'E/S du DressPack et les câbles du socle sont choisis. La longueur et la configuration du faisceau de socle sont spécifiées via les options suivantes.Option 94-1, -2, -3, -4 pour communication parallèle.Option 90-2, -3, -4, -5 pour communication parallèle et communication sur bus de terrain avec Can/DeviceNet.Option 92-2, -3, -4, -5 pour communication parallèle et communication sur bus de terrain avec Profibus.
455-1 Communication parallèle
Fournit les câbles de signaux requis pour la communication parallèle des bras inférieur et supérieur du DressPack. À combiner avec l'option 94-1, -2, -3, -4, -5.
455-4 Communication parallèle et sur bus
Fournit les câbles de signaux requis pour la combinaison de la communication parallèle et de la communication sur bus des bras inférieur et supérieur du DressPack. À combiner avec l'option 90-2, -3, -4, -5 ou 92-2, -3, -4, -5.
3HAC 023933-004 Rév.H 141

2 SpotPack et DressPack2.7.1 Introduction
Les autres possibilités d'acheminement et les combinaisons autorisées sont illustrées à la Figure 99 ci-dessous.
Figure 99 Schéma de la configuration du DressPack pour l'application de manutention de matériaux.
Option 16-1,câblage du socle
Options 94-1, -2, -3, -4Longueur de câble,communicationparallèle
Options 90-2, -3, -4, -5Options 92-2, -3, -4, -5Longueur de câble,communication parallèleet sur bus
Option 455-1,Communication parallèle
Option 455-4,Communication parallèleet sur bus
Option 778-1,manutention matériaux
Option 798-1, de la base à l’axe 3 Option 798-2, de la base à l’axe 2
Option 780-2, de l’axe 2 à 6acheminement externe
Option 780-3, de l’axe 3 à 6acheminement externe
Option 780-1, de l’axe 2 à 6acheminement interne
142 Rév.H 3HAC 023933-004
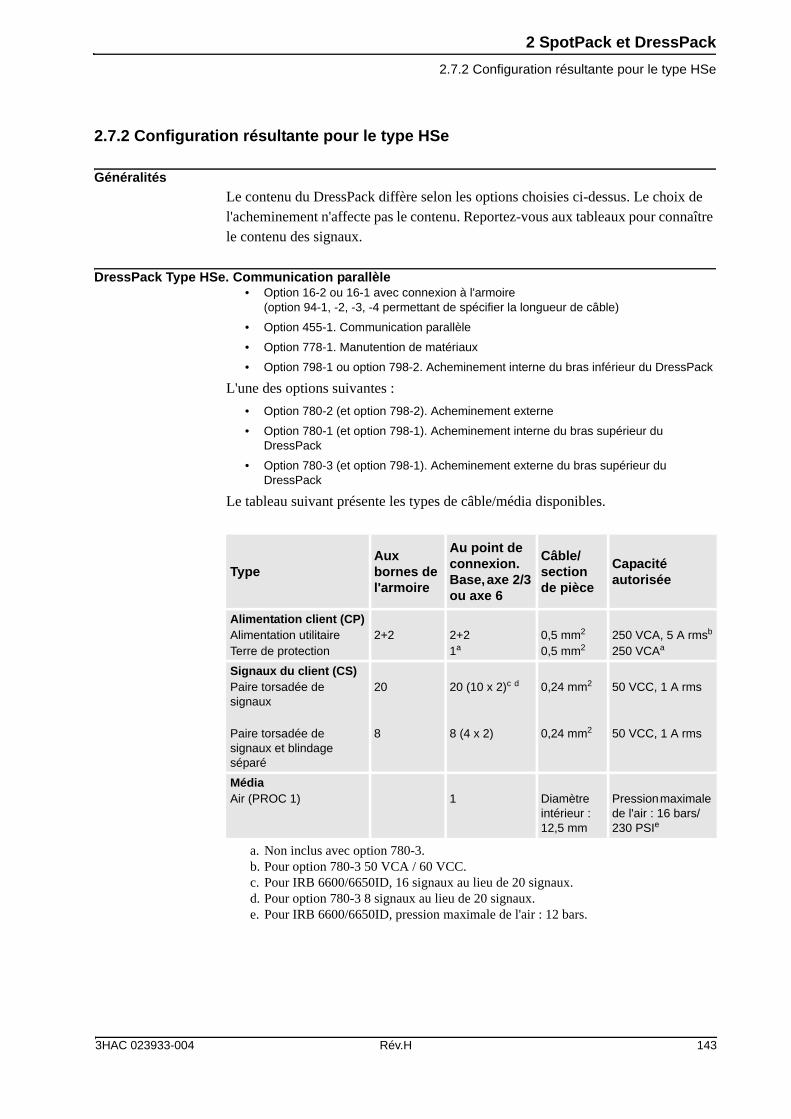
2 SpotPack et DressPack2.7.2 Configuration résultante pour le type HSe
2.7.2 Configuration résultante pour le type HSe
GénéralitésLe contenu du DressPack diffère selon les options choisies ci-dessus. Le choix de l'acheminement n'affecte pas le contenu. Reportez-vous aux tableaux pour connaître le contenu des signaux.
DressPack Type HSe. Communication parallèle• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 94-1, -2, -3, -4 permettant de spécifier la longueur de câble)
• Option 455-1. Communication parallèle
• Option 778-1. Manutention de matériaux
• Option 798-1 ou option 798-2. Acheminement interne du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe
• Option 780-1 (et option 798-1). Acheminement interne du bras supérieur du DressPack
• Option 780-3 (et option 798-1). Acheminement externe du bras supérieur du DressPack
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaireTerre de protection
2+2 2+21a
a. Non inclus avec option 780-3.
0,5 mm2
0,5 mm2250 VCA, 5 A rmsb
250 VCAa
b. Pour option 780-3 50 VCA / 60 VCC.
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
20
8
20 (10 x 2)c d
8 (4 x 2)
c. Pour IRB 6600/6650ID, 16 signaux au lieu de 20 signaux.d. Pour option 780-3 8 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
MédiaAir (PROC 1) 1 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIe
e. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
3HAC 023933-004 Rév.H 143

2 SpotPack et DressPack2.7.2 Configuration résultante pour le type HSe
DressPack Type HSe. Communication parallèle et sur bus de terrain, Can/DeviceNet• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 94-1,-2, 3,-4, permettant de spécifier la longueur de câble)
• Option 455-1. Communication parallèle
• Option 778-1. Manutention de matériaux
• Option 798-1 ou 798-2. Acheminement interne du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe
• Options 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Options 780-3 (et option 798-1). Acheminement externe du bras supérieur du DressPack
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaireTerre de protection
2+2 2+21a
a. Non inclus avec option 780-3.
0,5 mm2
0,5 mm2250 VCA, 5 A rmsb
250 VCAa
b. Pour option 780-3 50 VCA / 60 VCC.
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
20
8
20 (10 x 2)c d
8 (4 x 2)
c. Pour IRB 6600/6650ID, 16 signaux au lieu de 20 signaux.d. Pour option 780-3 8 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
Bus client (CBus)Signaux bus
Signaux bus
Paire torsadée de signaux
Sur carte busSur carte bus6
2
2
6 (3 x 2)
0,14 mm2
0,23 mm2
0,14 mm2
Caractéristiques Can/DeviceNet50 VCC, 1 A rms
50 VCC, 1 A rms
MédiaAir (PROC 1) 1 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIe
e. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
144 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.7.2 Configuration résultante pour le type HSe
DressPack Type HSe. Communication parallèle et sur bus de terrain, Profibus• Option 16-2 ou 16-1 avec connexion à l'armoire
(option 94-1,-2,-3,-4 permettant de spécifier la longueur de câble)
• Option 455-1. Communication parallèle
• Option 778-1. Manutention de matériaux
• Option 798-1 ou 798-2. Acheminement interne du bras inférieur du DressPack
L'une des options suivantes :• Option 780-2 (et option 798-2). Acheminement externe
• Options 780-1 (et option 798-2). Acheminement interne du bras supérieur du DressPack
• Options 780-3 (et option 798-1). Acheminement externe du bras supérieur du DressPack
Le tableau suivant présente les types de câble/média disponibles.
TypeAux bornes de l'armoire
Au point de connexion. Base, axe 2/3 ou axe 6
Câble/section de pièce
Capacité autorisée
Alimentation client (CP)Alimentation utilitaireTerre de protection
2+2 2+21a
a. Non inclus avec option 780-3.
0,5 mm2
0,5 mm2250 VCA, 5 A rmsb
250 VCAa
b. Pour option 780-3 50 VCA / 60 VCC.
Signaux du client (CS)Paire torsadée de signaux
Paire torsadée de signaux et blindage séparé
22
8
22 (11 x 2)c d
8 (4 x 2)
c. Pour IRB 6600/6650ID, 18 signaux au lieu de 22 signaux.d. Pour option 780-3 8 signaux au lieu de 20 signaux.
0,24 mm2
0,24 mm2
50 VCC, 1 A rms
50 VCC, 1 A rms
Bus client (CBus)Signaux bus
Paire torsadée de signaux
Sur carte bus
6
2
6 (3 x 2)
0,14 mm2
0,14 mm2
Caractéristiques Profibus 12 Mbit/s50 VCC, 1 A rms
MédiaAir (PROC 1) 1 Diamètre
intérieur : 12,5 mm
Pression maximale de l'air : 16 bars/230 PSIe
e. Pour IRB 6600/6650ID, pression maximale de l'air : 12 bars.
3HAC 023933-004 Rév.H 145

2 SpotPack et DressPack2.7.3 Description de l'interface du DressPack type HSe
2.7.3 Description de l'interface du DressPack type HSe
GénéralitésL'interface au niveau de l'axe 6 est dotée d'un tuyau à l'extrémité libre pour l'acheminement externe et d'un système pour l'acheminement interne. Les câbles de signaux se terminent par un connecteur de signaux de type modulaire Harting. Pour l’option 780-3, l’acheminement externe axes 3 à 6, les connecteurs sont de type Souriau. Les configurations de connecteur sont décrites dans le schéma du circuit inclus dans le manuel du produit du DressPack/SpotPack IRB 6600/7600, réf. 3HAC025058-004.
Connecteur Harting - Acheminement externeLe connecteur Harting pour l'acheminement externe est représenté à la Figure 100. Les pièces principales du connecteur sont décrites dans la liste suivante, avec les noms et les références de produit Harting. (Les pièces correspondantes de l'outil sont disponibles avec un kit de connexion (reportez-vous au chapitre 2.10 Kits de connexion) et dans le cadre de l'offre de produit Harting.)
Figure 100 Connecteur Harting - Acheminement externe.
Nom Réf. produit Harting
Capuchon de plastique transparent 09 30 010 0543
Châssis à charnière, capot 09 14 010 0303
Multicontact, femelle (HD) (25 broches) 09 14 025 3101
Multicontact, femelle (EE) (12 broches) 09 14 012 3101
Multicontact, femelle (DD) (8 broches) 09 14 008 3101
146 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.7.3 Description de l'interface du DressPack type HSe
Connecteurs Souriau - Acheminement externeLes connecteurs Souriau pour l'acheminement externe sont représentés à la Figure 101. Les éléments principaux dans le connecteur sont décrits dans le tableau ci-dessous.
Figure 101 Connecteurs Souriau - Acheminement externe (UTOW61419SH est représenté).
Connecteur Harting - Acheminement interne
Figure 102 Connecteur Harting pour l'acheminement interne.
Name Souriau article No.
Connecteur à bornes, R3.CPS UTOW61832SH
Adaptateur d'amorçage rétractable, R3.CPS UTO18AD
Borne, R3.CPS RC18W3k
Connecteur à bornes, R3.CBUS UTOW61419SH
Adaptateur d'amorçage rétractable, R3.CBUS
UTO14AD
Bornes, R3.CBUS SC24W3S25
Nom Réf. produit Harting
Capuchon de plastique transparent 09 62 040 0301
Multicontact, femelle (HD) (25 broches) 09 14 025 3101
Multicontact, femelle (EE) (12 broches) 09 14 012 3101
Multicontact, femelle (DD) (8 broches) 09 14 008 3101
3HAC 023933-004 Rév.H 147

2 SpotPack et DressPack2.7.3 Description de l'interface du DressPack type HSe
Montage tuyaux, acheminement interne• Pour l'acheminement interne, le tuyau se termine par le type de montage :
Parker Pushlock (½", laiton M22 x 1,5, joint 24°).
Options générales requises pour le type HSeAfin que le système SpotPack IRB 6600/6650 opère comme souhaité, les options de robot standard sont requises. Ces options standard sont décrites en détail dans d'autres chapitres et sont mentionnées dans celui-ci.
• Option 716-1. 1 pc. 16 entrées/16 sorties d'E/S numériques 24 VCC
• Option 727-1. Alimentation 24 V 8 A
Options requises pour la pince asserviePour que le progiciel de fonctions de soudage par points SpotPack IRB 6600/6650 fonctionne avec une pince asservie, certaines options de servocommande (en plus de celles décrites dans la section précédente, Options générales requises pour le type Se) sont requises. Ces options standard sont décrites dans d'autres chapitres et sont également mentionnées ci-dessous dans celui-ci.
• Option 770-4. Première unité d'entraînement supplémentaire, entraînement W
• Option 785-5. Pince fixe
• Options 786-1,-2,-3,-4. Connexion au premier module d'entraînement (longueur de câble à spécifier)
• Option 635-3. Spot Servo. Option logicielle pour pinces asservies. (L'option logicielle 635-4 et l'option 635-5 peuvent également être utilisées.)
148 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.7.3 Description de l'interface du DressPack type HSe
Options de l'armoire de soudage par points requises pour le type HSeLe système SpotPack IRB 6600/6650 nécessite également une armoire de soudage par points (option 768-3) pour opérer comme souhaité. Deux variantes (voir ci-dessous) de l'armoire de soudage par points sont disponibles. La marque du temporisateur de soudage et la capacité de soudage sont spécifiées via le choix de l'une des variantes facultatives. Des options supplémentaires peuvent être ajoutées à chacune des variantes de l'armoire. Toutes ces options sont décrites en détail dans le chapitre 2.8 Armoire de soudage par points et sont mentionnées dans celui-ci.
Figure 103 Vue d'ensemble de l'armoire de soudage par points.
Les options supplémentaires des différentes armoires de soudage par points sont mentionnées ci-dessous. Pour plus de détails techniques et pour connaître les restrictions de combinaison, reportez-vous au chapitre 2.8 Armoire de soudage par points.
Option Type Description
782-1 CA de base Bosch Cette option fournit une armoire de soudage par points de base équipée d'un temporisateur de soudage Bosch avec thyristor CA intégré d'une capacité de base. Type Bosch PST 6100.630L1.
782-7 MFDC de base Bosch
Cette option fournit une armoire de soudage par points de base équipée d'un temporisateur de soudage Bosch avec inverseur intégré d'une capacité de base. Type Bosch PSI 6100.630L1.
Option Type Description
788-1 Refroidissement à air forcé
Offre un ventilateur de refroidissement (avec boîtier), placé à l'arrière de l'armoire de soudage par points, qui dirige l'air sur la surface de refroidissement (grilles) du thyristor ou de l'inverseur MFDC.
789-1 Unité de protection des défauts à la terre
Garantit la protection des défauts à la terre du disjoncteur pour la puissance de soudage.
790-1 Contacteur pour puissance de soudage
Offre au contacteur le câblage nécessaire à l'intérieur de l'armoire de soudage par points.
791-1 Câble de puissance de soudage, 7 m
Offre un câble de socle de 7 m de longueur pour la puissance de soudage.
3HAC 023933-004 Rév.H 149

2 SpotPack et DressPack2.7.3 Description de l'interface du DressPack type HSe
791-2 Câble de puissance de soudage, 15 m
Offre un câble de socle de 15 m de longueur pour la puissance de soudage.
809-1 Câble de processus vers pince fixe, 7 m
Offre un câble de socle de 7 m de longueur pour les signaux de processus situés entre l'armoire de soudage par points et la pince fixe.
809-2 Câble de processus vers pince fixe, 15 m
Offre un câble de socle de 15 m de longueur pour les signaux de processus situés entre l'armoire de soudage par points et la pince fixe.
809-3 Câble de processus vers pince fixe, 22 m
Offre un câble de socle de 22 m de longueur pour les signaux de processus situés entre l'armoire de soudage par points et la pince fixe.
809-4 Câble de processus vers pince fixe, 30 m
Offre un câble de socle de 30 m de longueur pour les signaux de processus situés entre l'armoire de soudage par points et la pince fixe.
Option Type Description
150 Rév.H 3HAC 023933-004
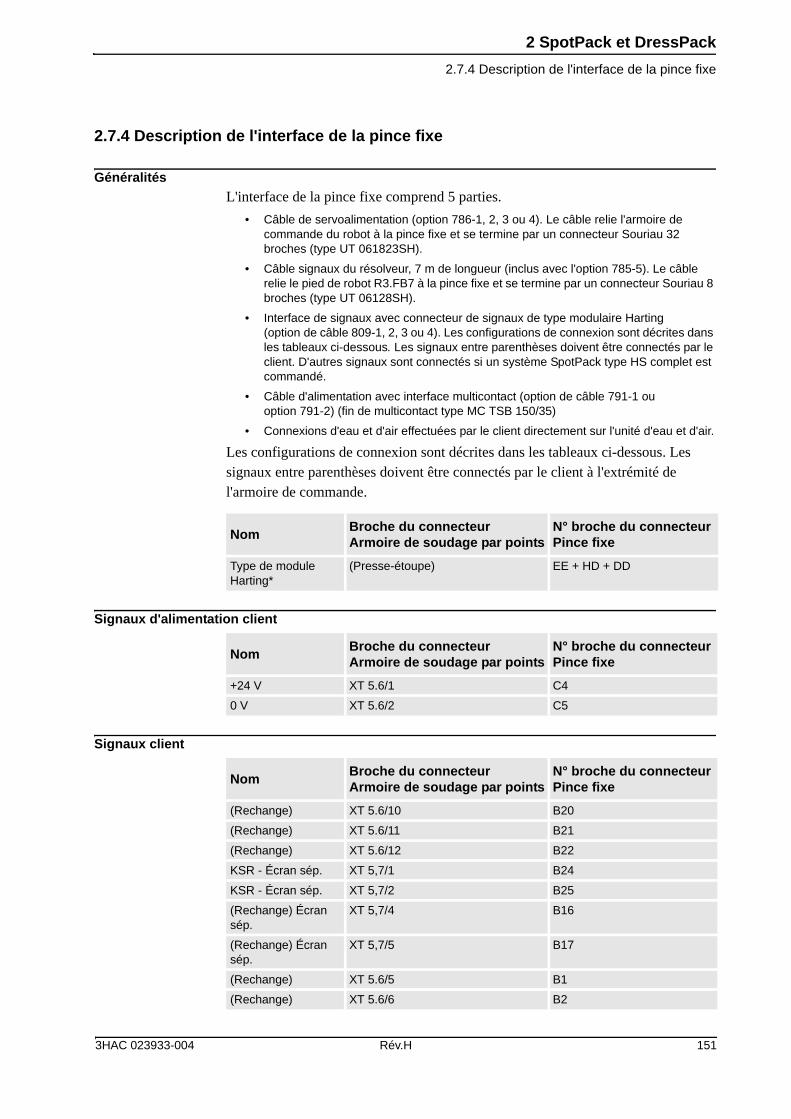
2 SpotPack et DressPack2.7.4 Description de l'interface de la pince fixe
2.7.4 Description de l'interface de la pince fixe
GénéralitésL'interface de la pince fixe comprend 5 parties.
• Câble de servoalimentation (option 786-1, 2, 3 ou 4). Le câble relie l'armoire de commande du robot à la pince fixe et se termine par un connecteur Souriau 32 broches (type UT 061823SH).
• Câble signaux du résolveur, 7 m de longueur (inclus avec l'option 785-5). Le câble relie le pied de robot R3.FB7 à la pince fixe et se termine par un connecteur Souriau 8 broches (type UT 06128SH).
• Interface de signaux avec connecteur de signaux de type modulaire Harting (option de câble 809-1, 2, 3 ou 4). Les configurations de connexion sont décrites dans les tableaux ci-dessous. Les signaux entre parenthèses doivent être connectés par le client. D'autres signaux sont connectés si un système SpotPack type HS complet est commandé.
• Câble d'alimentation avec interface multicontact (option de câble 791-1 ou option 791-2) (fin de multicontact type MC TSB 150/35)
• Connexions d'eau et d'air effectuées par le client directement sur l'unité d'eau et d'air.
Les configurations de connexion sont décrites dans les tableaux ci-dessous. Les signaux entre parenthèses doivent être connectés par le client à l'extrémité de l'armoire de commande.
Signaux d'alimentation client
Signaux client
Nom Broche du connecteurArmoire de soudage par points
N° broche du connecteurPince fixe
Type de module Harting*
(Presse-étoupe) EE + HD + DD
Nom Broche du connecteurArmoire de soudage par points
N° broche du connecteurPince fixe
+24 V XT 5.6/1 C4
0 V XT 5.6/2 C5
Nom Broche du connecteurArmoire de soudage par points
N° broche du connecteurPince fixe
(Rechange) XT 5.6/10 B20
(Rechange) XT 5.6/11 B21
(Rechange) XT 5.6/12 B22
KSR - Écran sép. XT 5,7/1 B24
KSR - Écran sép. XT 5,7/2 B25
(Rechange) Écran sép.
XT 5,7/4 B16
(Rechange) Écran sép.
XT 5,7/5 B17
(Rechange) XT 5.6/5 B1
(Rechange) XT 5.6/6 B2
3HAC 023933-004 Rév.H 151

2 SpotPack et DressPack2.7.4 Description de l'interface de la pince fixe
Le connecteur Harting est représenté ci-dessous. Les pièces principales du connecteur sont représentées avec les noms et les références de produit Harting. Les pièces correspondantes de l'outil sont disponibles dans l'offre de produit Harting.
Pour les contacts ci-dessus, des contacts à sertir femelles correspondant aux différents diamètres de câble sont requis.
(Rechange) XT 5.6/7 B3
gl_equalize (DO0) XT 5.6/8 B4
(Rechange) XT 5.6/3 B18
(Rechange) XT 5.6/4 B19
temp_ok (DI7) XT 5.6/9 B14
Nom Réf. produit Harting
Capuchon de plastique transparent 09 30 010 0543
Châssis à charnière, capot 09 14 010 0303
*Multicontact, femelle (HD) 09 14 025 3101
*Multicontact, femelle (EE) 09 14 012 3101
*Multicontact, femelle (DD) 09 14 008 3101
Nom Broche du connecteurArmoire de soudage par points
N° broche du connecteurPince fixe
152 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.7.4 Description de l'interface de la pince fixe
Options d'unité d'eau et d'air requises pour le type HSeLe système SpotPack IRB 6600/6650 nécessite également des options d'unité d'eau et d'air pour opérer comme souhaité. Ces options sont décrites en détail dans le chapitre 2.9 Unité d'eau et d'air et sont mentionnées dans celui-ci.
Figure 104 Présentation de l'unité d'eau et d'air.
Option Type Description
792-2 Unité d'eau et d'air, type HS
Fournit l'unité d'eau et d'air de base du type HS, y compris le coffret de distribution pour la distribution des signaux.
793-1 Second retour d'eau Fournit un circuit de retour d'eau supplémentaire.
797-1 Câble vers coffret de distribution, 7 m
Fournit un câble de socle de 7 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
797-2 Câble vers coffret de distribution, 15 m
Fournit un câble de socle de 15 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
797-3 Câble vers coffret de distribution, 22 m
Fournit un câble de socle de 22 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
797-4 Câble vers coffret de distribution, 30 m
Fournit un câble de socle de 30 m de longueur pour les signaux situés entre l'armoire de soudage par points et le coffret de distribution placé sur l'unité d'eau et d'air.
480
43030160
3HAC 023933-004 Rév.H 153

2 SpotPack et DressPack2.7.5 Récapitulatif type HSe
2.7.5 Récapitulatif type HSe
DressPackLes options suivantes sont requises pour former un système SpotPack type HSe complet :
• Option 16-1. Connexion à l'armoire (longueur de câble et type de communication à préciser)
• Option 455-1, 455-4. Communication parallèle ou Communication parallèle et sur bus (type de communication à spécifier)
• Option 778-1. Manutention de matériaux
• Option 798-1 ou 798-2. Acheminement interne du bras inférieur du DressPack (type d'acheminement à spécifier)
• Option 780-2, option 780-3. Acheminement externe, ou option 780-1, acheminement interne. Bras supérieur du DressPack (type d'acheminement à spécifier)
Options générales• Option 716-1. 1 pc. 16 entrées/16 sorties d'E/S numériques 24 VCC
• Option 727-1. Alimentation 24 V 8 A
Options requises pour la pince asservie• Option 770-4. Première unité d'entraînement supplémentaire, entraînement W
• Option 785-5. Pince fixe
• Option 786-1. Connexion au premier module d'entraînement (autres longueurs disponibles)
• Option 635-3. Spot Servo. Option logicielle pour pinces asservies
Armoire de soudage par points• Option 768-3. Petit soudage par points
• Options 782-1,-7. Capacité du temporisateur de soudage
• Option 791-1. Câble d'alimentation 7 m (autres longueurs disponibles)
• Option 809-1. Câble de processus vers pince fixe
Unité d'eau et d'air• Option 792-2. Unité d'eau et d'air, type HS
• Option 797-1. Câble de coffret de distribution 7 m (autres longueurs disponibles)
D'autres options décrites dépendent des besoins et des performances système spécifiques.
154 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.8.1 Introduction
2.8 Armoire de soudage par points
2.8.1 Introduction
GénéralitésL'armoire de soudage par points du système SpotPack comprend les composants et circuits électriques nécessaires à l'application de soudage par points. L'armoire de soudage par points, dotée du système de commande de soudage, est contrôlée depuis le système de commande du robot via le logiciel de processus.La capacité et les fonctionnalités dépendent des combinaisons d'options choisies.L'armoire de soudage par points est conçue pour être placée sur l'armoire du système de commande du robot (option 700-3, armoire unique). Reportez-vous à la Figure 105 ci-dessous. Elle est également assemblée ainsi lors de sa livraison.
Figure 105 Armoire de soudage par points et armoire de commande du robot.
Des câbles d'interface relient l'armoire de commande du robot et l'armoire de soudage par points (1,5 m de longueur, connectés à l'arrière de l'armoire de commande et à l'avant de l'armoire de soudage par points). Ces câbles comprennent l'alimentation électrique des circuits de commande, les signaux de processus vers le pistolet de soudage, les signaux de sécurité, la communication vers le temporisateur de soudage et les signaux d'E/S pour les voyants d'indication et les commandes. Le câblage dépend des options choisies (pour plus de détails, reportez-vous aux descriptions des options ci-dessous).
3HAC 023933-004 Rév.H 155

2 SpotPack et DressPack2.8.1 Introduction
L'armoire de soudage par points présente les caractéristiques principales suivantes.• Une conception modulaire pour une réparation et une installation aisées (reportez-
vous à la Figure 106 ci-dessous)
• Un interrupteur rotatif avec levier réglable de déclencheur thermique (sauf pour l'option UL) et de court-circuit
• Une interconnexion de traitement des signaux avec fusibles distincts pour différents circuits afin de permettre la sélectivité
• Un temporisateur de soudage programmable avec vanne proportionnelle
• Une gamme d'armoires compactes basée sur une plate-forme commune, et préparée en vue d'options supplémentaires et d'un échange aisé
Figure 106 Vue éclatée de l'armoire de soudage par points.
156 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.8.1 Introduction
Figure 107 Différentes vues de l'armoire de soudage par points (dimensions en mm).
Les circuits électriques de l'armoire de soudage par points sont composés d'un circuit d'alimentation de soudage et de circuits de commande permettant de contrôler le soudage.
550
715
900
700 710
715
650
100
660
570
150
R 570
3HAC 023933-004 Rév.H 157

2 SpotPack et DressPack2.8.1 Introduction
Circuit d'alimentation de soudageL'alimentation de soudage du pistolet de soudage est assurée via un disjoncteur et un thyristor (pour soudage CA), ou un inverseur (pour soudage MFDC), conduisant au câble de puissance de soudage. L'armoire est conçue pour une alimentation électrique par le sol ou par le dessus. Le câble de puissance de soudage (alimentation sortante) est directement connecté, via un presse-étoupe, aux bornes situées à l'intérieur de l'armoire de soudage par points.Le disjoncteur comporte un déclencheur thermique intégré pouvant être réglé (sauf pour l'option UL) selon les besoins spécifiques du client pour protéger l'équipement de soudage et permettre la sélectivité dans le circuit électrique. Le déclencheur thermique est défini sur 110 A lors de la livraison. Le niveau maximal ne doit pas dépasser 150 A.
Circuits de commandeL'alimentation 240 VCA et 24 VCC des circuits de commande est assurée à partir de l'armoire du système de commande du robot. De plus, les circuits de sécurité situés dans l'armoire du système de commande du robot sont utilisés pour verrouiller le temporisateur de soudage.Un temporisateur de soudage (Bosch ou WTC/Medar), intégré à l'inverseur ou au thyristor refroidi par circulation d'air, contrôle le courant de soudage. Le temporisateur de soudage comprend un programme de commande permettant de programmer différentes séquences de soudage. La programmation s'effectue normalement sur un dispositif de programmation ou un PC connecté directement au temporisateur de soudage. L'interface reliant le système de robot et le temporisateur de soudage est gérée via une interface de bus terrain (Can DeviceNet). Weld start, weld ready, weld program choice et error handling sont des exemples de signaux.De plus, les interconnexions des signaux de l'interface et le verrouillage entre le système de robot (cartes d'E/S), l'unité d'eau et d'air, les signaux vers DressPack ou la pince fixe s'effectuent à l'intérieur de l'armoire de soudage par points. Les interconnexions vers l'unité d'eau et d'air sont fournies lors de la sélection du câble reliant le coffret de distribution (option 797-1, 2, 3 ou 4). Les interconnexions pour les câbles de processus vers la pince fixe sont fournies lors de la sélection du câble de processus vers la pince fixe (option 809-1, 2, 3 ou 4).Le dispositif de programmation du temporisateur de soudage n'est pas fourni.L'option 744-1 fournit un verrouillage de porte avec l'armoire de soudage par points. L'option 429-1 fournit un disjoncteur de type T3.
Pour plus d'informations, reportez-vous aux éléments suivants :- Manuel d'installation et de maintenance du SpotPack et du DressPack- Schémas de câblage- Manuels distincts pour l'équipement Bosch
158 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.8.1 Introduction
La capacité de soudage et la marque du temporisateur de soudage peuvent être choisies parmi les deux versions décrites ci-dessous. Des options supplémentaires peuvent être ajoutées à chacune des variantes de l'armoire.
Option 782-1. CA Bosch de baseCette option fournit une armoire de soudage par points de base équipée d'un temporisateur de soudage Bosch avec thyristor CA intégré d'une capacité de base.
Figure 108 Armoire de soudage par points équipée d'un temporisateur de soudage Bosch.
Option 782-7. MFDC de base BoschCette option fournit une armoire de soudage par points de base équipée d'un temporisateur de soudage Bosch avec inverseur intégré d'une capacité de base.
Données techniques générales Description
Temporisateur de soudage et thyristor Bosch PST 6100.630L1
Alimentation électrique 400-600 VCA
Courant de soudage maximal 130 A rms, transformateur 100 kVA
Distance de câble maximale, courant entrant 3 x 70 mm2
Disjoncteur principal (ABB Sace T1), déclencheur thermique
160 A (réglable) 110-160 A
Disjoncteur principal, déclencheur magnétique 36 kA
Classe de protection IP54
Données techniques générales Description
Temporisateur de soudage et inverseur Bosch PSI 6100.630L1
Distance de câble maximale, courant entrant 3 x 70 mm2
Alimentation électrique 400-480 VCA
Courant de soudage maximal 110 A rms, courant de soudage 20 kA
Disjoncteur principal (ABB Sace T1), déclencheur thermique
160 A (réglable) 110-160 A
Disjoncteur principal, déclencheur magnétique 36 kA
Classe de protection IP54
3HAC 023933-004 Rév.H 159

2 SpotPack et DressPack2.8.1 Introduction
Option 828-1 Région AOffre une alimentation de 120 V.Combinaison impossible avec la prise d'entretien 230 V (option 736-1). Principalement pour le marché nord-américain.
Option 828-2 Région EOffre une alimentation de 230 V.Combinaison impossible avec la prise d'entretien 120 V (option 736-2). Principalement pour le marché européen.
Option 788-1. Refroidissement à air forcéOffre un ventilateur de refroidissement (avec boîtier), placé à l'arrière de l'armoire de soudage par points, qui dirige l'air sur la surface de refroidissement (grilles) du thyristor ou de l'inverseur MFDC (reportez-vous aux images ci-dessous). Le câblage vers le ventilateur passe par un presse-étoupe à l'arrière de l'armoire de soudage par points. Le ventilateur tourne en continu lorsque le système de soudage est sous tension.Le ventilateur doit être utilisé avec l'inverseur MFDC Bosch (option 782-7). Pour l’option CA (option 782-1), cela dépend des conditions de soudage et de la température ambiante.
Figure 109 Vue éclatée de l'ensemble ventilateur à l'arrière de l'armoire de soudage par points.
Option 789-1. Unité de protection des défauts à la terreGarantit la protection des défauts à la terre du disjoncteur pour la puissance de soudage. Cette protection peut être utilisée pour le soudage CA ou MFDC. La sensibilité de la protection des défauts à la terre peut être ajustée. Si un défaut à la terre survient, le disjoncteur déclenche.
160 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.8.1 Introduction
Option 790-1. Contacteur pour puissance de soudageOffre au contacteur le câblage nécessaire à l'intérieur de l'armoire de soudage par points. Le contacteur se monte après le thyristor ou l'inverseur, et ouvre le circuit de soudage à partir de l'armoire. Il est recommandé de l'utiliser pour améliorer la sécurité ou lors d'un changement d'outils pour les pistolets de soudage. Le contacteur est ouvert lorsque les moteurs du système de robot sont arrêtés ou qu'une E/S spécifique est définie.
Figure 110 Vue de devant de l'armoire avec contacteur de soudage
Option 791-1. Câble de puissance de soudage, 7 mOffre un câble de socle de 7 m de longueur pour la puissance de soudage (3 x 35 mm²). Une extrémité du câble de puissance de soudage est connectée aux bornes du temporisateur de soudage (Bosch) ou du contacteur (lorsque l'option 790-1 est choisie). Le câble pénètre dans l'armoire de soudage par points via un presse-étoupe. L'autre extrémité est équipée d'un connecteur MC TSB 150/35 et est connectée à la base du manipulateur (pour une pince commandée par robot de type S ou Se) ou à la pince fixe (pour les types HS ou HSe).
Option 791-2. Câble de puissance de soudage, 15 mOffre un câble de socle de 15 m de longueur pour la puissance de soudage (3 x 35 mm²). Pour plus de détails, reportez-vous à l'option 791-1.
Option 809-1. Câble de processus vers pince fixe, 7 mOffre un câble de socle de 7 m de longueur pour les signaux de processus situés entre l'armoire de soudage par points et la pince fixe. Cette option comprend également des interconnexions internes entre l'E/S, le temporisateur de soudage et l'alimentation électrique, etc.Une extrémité du câble de processus pénètre dans l'armoire de soudage par points via un presse-étoupe et est connectée aux bornes Phoenix. L'autre extrémité est équipée d'un connecteur HD Harting 3 modules et est connectée à la pince fixe (pour le type HS ou HSe).
Pos Description
A Contacteur de soudage
(A)
3HAC 023933-004 Rév.H 161

2 SpotPack et DressPack2.8.2 Description de l'interface de l'armoire de soudage par points
Options 809-2, 3 et 4. Câble de processus vers pince fixeOffre un câble de socle de 15, 22 ou 30 m de longueur pour les signaux de processus situés entre l'armoire de soudage par points et la pince fixe. Pour plus de détails, reportez-vous à l'option 809-1.
2.8.2 Description de l'interface de l'armoire de soudage par points
GénéralitésLes tableaux ci-dessous décrivent l'interface vers l'armoire de soudage par points.
Connexions de l'armoire de soudage par points
Connexions des signaux
Type Pcs Spécification Capacité autorisée
Courant entrant de la lignea
a. Connexion du courant entrant effectuée par le client. Pour connaître lesrecommandations relatives au courant entrant et à la sécurité, reportez-vous aumanuel du produit du DressPack/SpotPack IRB 6600/7600 3HAC025058-001.
1 400-480VCA,110 A rms max., 50/60 Hz
Courant sortant vers robot
1 Presse-étoupe (diamètre de câble : 24 mm min./28 mm max.)
150 A rms max., 50/60 Hz
Câble du socle 2 35 mm2 600 VCA max.,150 A rms à une température ambiante supérieure à 20 °C
Terre de protection du câble du socle
1 35 mm2 600 VCA max.,150 A rms à une température ambiante supérieure à 20 °C
Type Pcs Spécification Capacité autorisée
Unité d'eau et d'air (XS 103) 1 Connecteur modulaire Harting, type DD
24 VCC, Max 0,5 A/sortie
Pince fixe (XS 104) 1 Connecteur modulaire Harting, type HD
24 VCC, Max 0,5 A/sortieReportez-vous à la description de l'interface de la pince fixe de type HS et HSe.
162 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.9.1 Introduction
2.9 Unité d'eau et d'air
2.9.1 Introduction
GénéralitésL'unité d'eau et d'air contient des composants pour la distribution et la commande de l'eau et de l'air à l'intérieur du système SpotPack. Elle est contrôlée à partir du système de commande du robot via le logiciel de processus. Le câblage s'effectue via l'unité d'alimentation.La capacité et les fonctionnalités dépendent des combinaisons d'options choisies (reportez-vous aux options de l'unité d'eau et d'air à la fin de ce chapitre).L'unité est uniquement utilisée pour les applications de soudage par points.
Unité d'eau et d'airL'unité d'eau et d'air présente les caractéristiques principales suivantes (voir Figure 111).
• Détecteurs réglables de débit d'eau à haute vitesse• Pressostat numérique pour air réglable
• Filtre à air avec purge automatique.• Possibilité d'équilibrer le débit d'eau pour les paquets complets et les circuits
individuels• Préparation pour des options supplémentaires et un échange aisé d'unités complètes
ou de circuits distincts• Équipée de sorties d'air supplémentaires (connectées)
Figure 111 Unité d'eau et d'air avec dimensions extérieures, connexion des médias et des signaux (dimensions en mm).
480
43030160
3HAC 023933-004 Rév.H 163

2 SpotPack et DressPack2.9.1 Introduction
L'unité d'eau et d'air standard comprend quatre composants principaux.• Circuit d'entrée d'eau• Circuit de retour d'eau• Circuit d'alimentation en air• Coffret de distribution
Les câbles et les tuyaux nécessaires à l'unité d'eau et d'air sont définis et décrits dans chaque option de l'unité d'eau et d'air.
Circuit d'entrée d'eauLe circuit d'entrée d'eau sert à ouvrir/fermer l'alimentation en eau de refroidissement du pistolet de soudage par points (voir Figure 112). Une électrovanne à port électrique double est utilisée. Elle est commandée par un signal numérique émis par le système de commande du robot.Le circuit commence de gauche à droite avec un fil passant par le trou de la plaque de fixation ; un filetage G ½" est utilisé pour la connexion du système d’alimentation en eau de l’usine (électrovanne à port électrique double) ; le circuit s’achève avec un adaptateur Parker Pushlock. (Nous recommandons le montage Parker Pushlock 39C82-15-8BK qui est adapté à un système Parker Pushlock DIN 20 078 A). De là, l'eau est acheminée vers la pince/base du robot.
Figure 112 Circuit d'entrée d'eau
164 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.9.1 Introduction
Circuit de retour d'eauLe circuit de retour d'eau surveille le débit d'eau de refroidissement revenant du pistolet de soudage par points (voir Figure 113). Le contacteur débitmétrique détecte les débits d'eau trop bas dans le circuit d'eau de refroidissement.Le contacteur débitmétrique envoie un signal numérique au système de commande du robot, qui ferme automatiquement la vanne d'arrêt électrique du circuit si le débit est trop bas.Le système et l'alimentation en eau de refroidissement sont alors automatiquement arrêtés afin de réduire les risques que pourrait subir le système.Le circuit de retour d'eau est fourni avec une limite de débit prédéfinie (environ 8 litres par minute pour une pression d’eau de 0,2 MPa).Le circuit de retour d'eau commence par la droite avec un adaptateur Parker Pushlock (nous recommandons le montage Parker Pushlock 39C82-15-8BK qui est adapté à un système Parker Pushlock DIN 20 078 A).Il est également équipé d'une vanne de contrôle de débit, qui peut régler le débit d'eau au niveau de débit souhaité. Le débit peut être contrôlé via l’échelle située sur la vanne de contrôle de débit. L’échelle peut être tournée pour une lecture aisée. Cette ouverture permet de vérifier approximativement la plage de débit (de 1 à 8litres par minute).La vanne de contrôle de débit est réglée sur un débit maximal à la livraison.Le circuit s’achève avec vanne de contrôle qui empêche tout retour de débit d’eau (fin de circuit associée à un filetage interne G ½"). De là, l'eau est acheminée vers le système d'eau de l'usine.
Figure 113 Circuit de retour d'eau
Un second retour d’eau, option 793-1, présentant les mêmes caractéristiques que ci-dessus est également disponible.
3HAC 023933-004 Rév.H 165

2 SpotPack et DressPack2.9.1 Introduction
Circuit d'alimentation en airLe circuit d'alimentation en air fournit de l'air filtré au progiciel de fonctions (reportez-vous à la Figure 114).Le circuit d'alimentation en air commence par un filetage interne G ½", une vanne d’arrêt manuelle avec pression résiduelle passant par un silencieux, un filtre à air avec filtrage nominal de 5 µm et protection métallique, un pressostat numérique et une interface transversale comportant des ports de sortie d’air connectés (filetages internes G 3/8").Il y a également un pressostat numérique permettant de contrôler la pression d'air et d’envoyer un signal au système de commande si la pression devient trop basse.Le pressostat est livré avec une limitation de pression prédéfinie (réglage sur 0,6 Mpa).Le circuit d’alimentation en air s’achève par un adaptateur Parker Pushlock (nous recommandons le montage Parker Pushlock 39C82-15-8BK qui est adapté à un système Parker Pushlock DIN 20 078 A).
Figure 114 Circuit d'alimentation en air
166 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.9.1 Introduction
Coffret de distributionAvec le coffret de distribution, l'alimentation et les signaux 24 VCC sont connectés et distribués aux différentes unités sur l'unité d'eau et d'air (voir illustration ci-dessous). La conception du système permet de déconnecter très aisément les composants pour entretenir et réparer l'unité d'eau et d'air. Le coffret de distribution appartient à la classe de protection IP67, ce qui signifie qu'il est bien protégé contre la poussière et qu'il est étanche.
Figure 115 Connexions du coffret de distribution.
MontageLa pince de soudage par points de type S est montée sur le robot en usine, les tuyaux d’eau et d’air étant inclus et connectés à la base du robot.
Figure 116 Unité d’eau et d’air montée sur la base.
Le robot de type HS manipule les pièces par rapport à une colonne montée sur la pince de soudage par points, le panneau d’eau et d’air étant livré dans une boîte avec le robot.
3HAC 023933-004 Rév.H 167
2 SpotPack et DressPack2.9.1 Introduction
Vanne proportionnelle électrique (option 796-1)La vanne proportionnelle contrôle la force de soudage du pistolet pneumatique de soudage par points. Elle est contrôlée par le temporisateur de soudage de l'armoire de soudage par points.Un signal analogique de 0 - 10 V contrôle la vanne proportionnelle ; la pression d'air est comprise entre 0,05 et 0,9 MPa.
Figure 117 Unité de vanne proportionnelle électrique.
168 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.9.1 Introduction
Signaux de l'unité d'eau et d'airLes connexions électriques avec la carte d'E/S du robot s'effectuent via le coffret de distribution sur l'unité d'eau et d'air.8 connexions M12 (4 broches) sont disponibles. Le nombre utilisé dépend des options sélectionnées. Toutefois, au moins 2 connexions sont libres et peuvent être utilisées par le client.Le coffret de distribution comprend six connexions préparées pour les unités suivantes.
• 1. Vanne d'arrêt d'eau électrique
• 2. Pressostat
• 3. Contacteur débitmétrique 1
• 4. Contacteur débitmétrique 2 (option 793-1, second retour d'eau)
• 5. Vanne proportionnelle : signal de référence proportionnel & et signal de pression OK(Option 796-1, vanne proportionnelle électrique pour l'air)
• 6. Vanne proportionnelle : Alimentation(Option 796-1, vanne proportionnelle électrique pour l'air)
Le câble et la longueur de câble entre le coffret de distribution et l'armoire de soudage par points doivent être spécifiés (voir options 797-1,-2,-3,-4).
Figure 118 Schéma fonctionnel.
D'arrêt d'eau électrique
Pressostat
Contacteur débitmétrique 1
Vanne proportionnelle :signal de référence proportionnel& et signal de pression OK
Contacteur débitmétrique 2
Vanne proportionnelle :Alimentation
Libre
Libre
XS 101.1
XS 101.7
XS 101.6
XS 101.5
XS 101.4
XS 101.3
XS 101.2
XS 101.8
Option
Option
Option
Co ffret de distributio n
24 VCC et interface parallèle
3HAC 023933-004 Rév.H 169
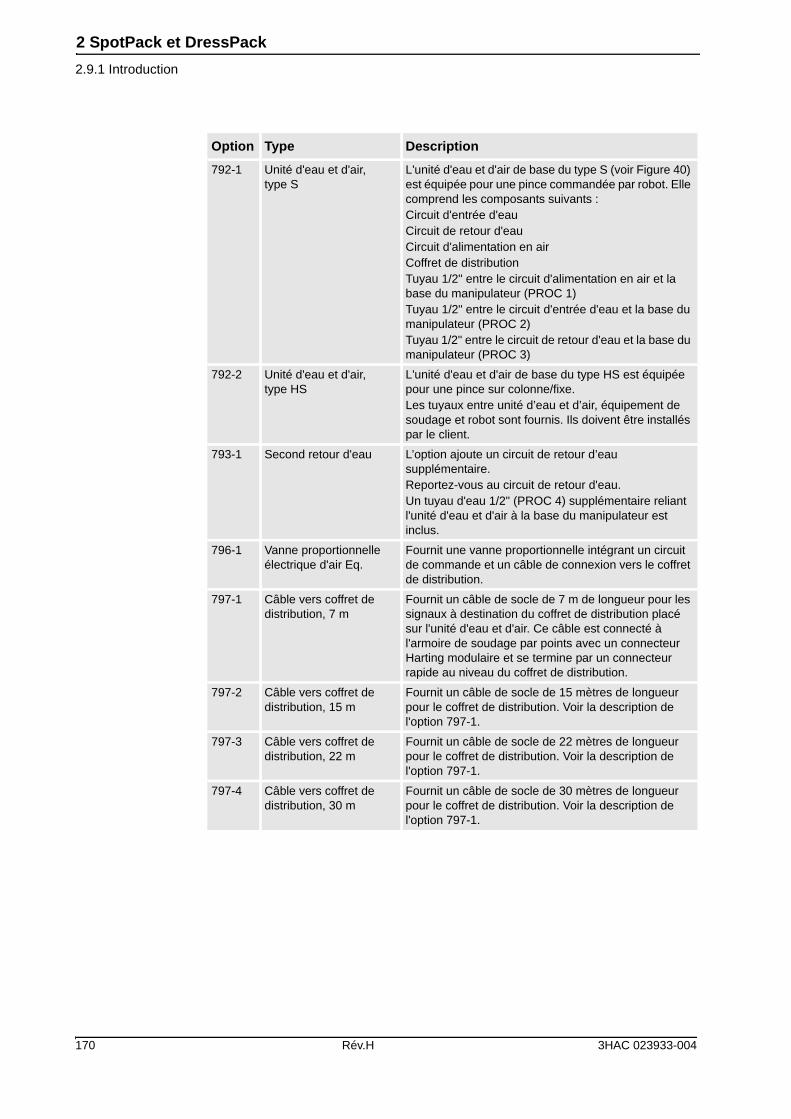
2 SpotPack et DressPack2.9.1 Introduction
Option Type Description
792-1 Unité d'eau et d'air, type S
L'unité d'eau et d'air de base du type S (voir Figure 40) est équipée pour une pince commandée par robot. Elle comprend les composants suivants :Circuit d'entrée d'eauCircuit de retour d'eauCircuit d'alimentation en airCoffret de distributionTuyau 1/2" entre le circuit d'alimentation en air et la base du manipulateur (PROC 1)Tuyau 1/2" entre le circuit d'entrée d'eau et la base du manipulateur (PROC 2)Tuyau 1/2" entre le circuit de retour d'eau et la base du manipulateur (PROC 3)
792-2 Unité d'eau et d'air, type HS
L'unité d'eau et d'air de base du type HS est équipée pour une pince sur colonne/fixe.Les tuyaux entre unité d’eau et d’air, équipement de soudage et robot sont fournis. Ils doivent être installés par le client.
793-1 Second retour d'eau L’option ajoute un circuit de retour d’eau supplémentaire.Reportez-vous au circuit de retour d'eau.Un tuyau d'eau 1/2" (PROC 4) supplémentaire reliant l'unité d'eau et d'air à la base du manipulateur est inclus.
796-1 Vanne proportionnelle électrique d'air Eq.
Fournit une vanne proportionnelle intégrant un circuit de commande et un câble de connexion vers le coffret de distribution.
797-1 Câble vers coffret de distribution, 7 m
Fournit un câble de socle de 7 m de longueur pour les signaux à destination du coffret de distribution placé sur l'unité d'eau et d'air. Ce câble est connecté à l'armoire de soudage par points avec un connecteur Harting modulaire et se termine par un connecteur rapide au niveau du coffret de distribution.
797-2 Câble vers coffret de distribution, 15 m
Fournit un câble de socle de 15 mètres de longueur pour le coffret de distribution. Voir la description de l'option 797-1.
797-3 Câble vers coffret de distribution, 22 m
Fournit un câble de socle de 22 mètres de longueur pour le coffret de distribution. Voir la description de l'option 797-1.
797-4 Câble vers coffret de distribution, 30 m
Fournit un câble de socle de 30 mètres de longueur pour le coffret de distribution. Voir la description de l'option 797-1.
170 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.9.2 Données techniques pour l’unité d’eau et d’air
2.9.2 Données techniques pour l’unité d’eau et d’air
Description de l’interface MédiasLe tableau ci-dessous décrit l'interface de l'unité d'eau et d'air.
Données générales
Les extrémités des tuyaux d'eau (Proc 2 et Proc 3) sont interconnectées au niveau de l'axe 6 (la chute de pression est mesurée sans aucun outil).
Type Pcs Caractéristiques
Eau entrante 1 Filetage G 1/2” a
a. Connexion devant être effectuée par le client.
Eau sortante 1 Filetage G 1/2” a
Air entrant 1 Filetage G 1/2” a
Sortie d'air supplémentaire 1 Filetage G 3/8” b
b. Effectuée à la livraison (à utiliser pour un redresseur de pointe ou un autreéquipement)
Eau Description
Pression de fonctionnement Max. 0,6 MPa / 87 PSI
Pression d’essai 1,2 MPa / 174 PSI
Chute de pression maximale < 0,2 MPa pour 8 litres/minutea
a. La chute de pression est mesurée dans les conditions suivantes :Point de mesure 1 : connexion d'eau entrante sur l'unité d'eau et d'airPoint de mesure 2 : connexion d'eau sortante sur l'unité d'eau et d'air
Régulation de débit (pour chaque circuit)
1 - 8 l/min
Plage de paramétrage de débit -0,100 - 1,000 MPa
Qualité de l'eau Eau industrielle filtrée standard, maillage de 80 à 100.
Air Description
Pression de fonctionnement Max. 1,0 MPa / 145 PSI
Capacité de débit Max. 5800 litres/min. (pour 0.7 MPa avec une chute de pression de 0.1 MPa)
Plage de paramétrage de pressostat
- 0,100 - 1,000 MPa
Qualité de l'air Utilisez un filtre à air.En présence de condensation excessive, installez un système permettant d’éliminer l’eau, tel qu’un dispositif de séchage ou un séparateur d’eau (prise de purge) du côté admission du filtre à air
3HAC 023933-004 Rév.H 171

2 SpotPack et DressPack2.10.1 Options
2.10 Kits de connexion
2.10.1 Options
Option 459-1. CP/CS, Proc 1 sur la baseR1. CP/CS et Proc 1 sur la base.Cette option fournit un kit comprenant des connecteurs. Ce kit doit être monté par le client. Le kit comprend :
• 1 montages tuyaux (Parker Pushlock, (½", laiton M22 x 1,5, joint 24°))
• Connecteur avec :
Option 480-1. Soudage, Proc 2-4 sur la baseR1. Soudage et Proc 2-4 sur la baseCette option fournit un kit avec connecteurs et montages de soudage. Ce kit doit être monté par le client. Le kit comprend :
• 4 montages tuyaux (Parker Pushlock, (½", laiton M22 x 1,5, joint 24°))
• Connecteur de soudage avec :
1 pc, fonderie capot (Harting) HAN EMC/M 40
1 pc, châssis à charnière (Harting) Taille de coque 16
2 pc, multicontact, femelle (Harting) Type HD (25 broches)
1 pc, multicontact, femelle (Harting) Type EE (8 broches)
1 pc, multicontact, femelle (Harting) Type DD (12 broches)
10 pcs, contacts à sertir femelles Pour 1,5 mm2
10 pcs, contacts à sertir femelles Pour 0,5 mm2
10 pcs, contacts à sertir femelles Pour 1,0 mm2
10 pcs, contacts à sertir femelles Pour 2,5 mm2
12 pcs, contacts à sertir femelles Pour 0,14 - 0,37 mm2
45 bornes Pour 0,2 - 0,56 mm2
Accessoires de montage du connecteur
Instruction de montage
1 pc, borne de connecteur de soudage (MC) 3 x 35 mm2
1 pc, presse-étoupe, plastique diamètre 24-28 mm
Accessoires de montage du connecteur
Instruction de montage
172 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.10.1 Options
Option 474-1. Interrupteur de position sur la baseR1. SW1 et SW2/3 sur la baseCette option fournit un kit comprenant deux connecteurs. Ce kit doit être monté par le client. Le kit comprend :
• Connecteur de l'interrupteur de position de l'axe 1 (SW 1) avec :
• Connecteur de l'interrupteur de position de l'axe 2/3 (SW 2/3) avec :
Option 453-1, FB 7R3. FB 7 sur la baseCette option fournit un kit comprenant un connecteur. Ce kit doit être monté par le client. Le kit comprend :
• Connecteur avec :
1 pc, connecteur à bornes (32p) Souriau UTOW
1 pc, adaptateur Utilisé avec réduction de forme
35 pcs, bornes Souriau UTOW Pour 0,13 - 0,25 mm2
Accessoires de montage du connecteur
Instruction de montage
1 pc, connecteur à bornes (32p) Souriau UTOW, version rotation (85 degrés)
1 pc, adaptateur Utilisé avec réduction de forme
35 pcs, bornes Souriau UTOW Pour 0,13 - 0,25 mm2
Accessoires de montage du connecteur
Instruction de montage
1 pc, connecteur multiple (broche) Burndy
1 pc, adaptateur 8 broches
15 pcs, broche Pour 0,13 - 0,25 mm2
Accessoires de montage du connecteur
Instruction de montage
3HAC 023933-004 Rév.H 173

2 SpotPack et DressPack2.10.1 Options
Option 458-1. CP/CS, Proc 1 axe 3R2. CP/CS et Proc 1 sur l'axe 2/3Cette option fournit un kit comprenant des connecteurs. Ce kit doit être monté par le client. Cette option peut également être utilisée sur l'axe 6 pour le robot IRB 6600ID.Le kit comprend :
• 1 montages tuyaux (Parker Pushlock, (½", laiton M22 x 1,5, joint 24°))
• Connecteur avec :
Option 479-1. Soudage, Proc 2-4 axe 3R2. Soudage et Proc 2-4 sur l'axe 2/3Cette option fournit un kit avec connecteurs et montages de soudage. Ce kit doit être monté par le client. Cette option peut également être utilisée sur l'axe 6 pour le robot IRB 6600ID.Le kit comprend :
• 3 montages tuyaux (Parker Pushlock, (½", laiton M22 x 1,5, joint 24°))
• Connecteur de soudage avec :
1 pc, fonderie capot (Harting) HAN EMC/M 40
1 pc, châssis à charnière (Harting) Taille de coque 16
2 pc, multicontact, mâle (Harting) Type HD (25 broches)
1 pc, multicontact, mâle (Harting) Type EE (8 broches)
1 pc, multicontact, mâle (Harting) Type DD (12 broches)
10 pcs, contacts à sertir mâles Pour 1,5 mm2
10 pcs, contacts à sertir mâles Pour 0,5 mm2
10 pcs, contacts à sertir mâles Pour 1,0 mm2
10 pcs, contacts à sertir mâles Pour 2,5 mm2
12 pcs, contacts à sertir mâles For 0,14 – 0,37 mm2
45 broches For 0,2 – 0,56 mm2
Accessoires de montage du connecteur
Instruction de montage
1 pc, broche de connecteur de soudage avec bride (MC)
3 x 35 mm2 (broche 25 mm2)
1 pc, presse-étoupe, plastique diamètre 24-28 mm
Accessoires de montage du connecteur
Instruction de montage
174 Rév.H 3HAC 023933-004
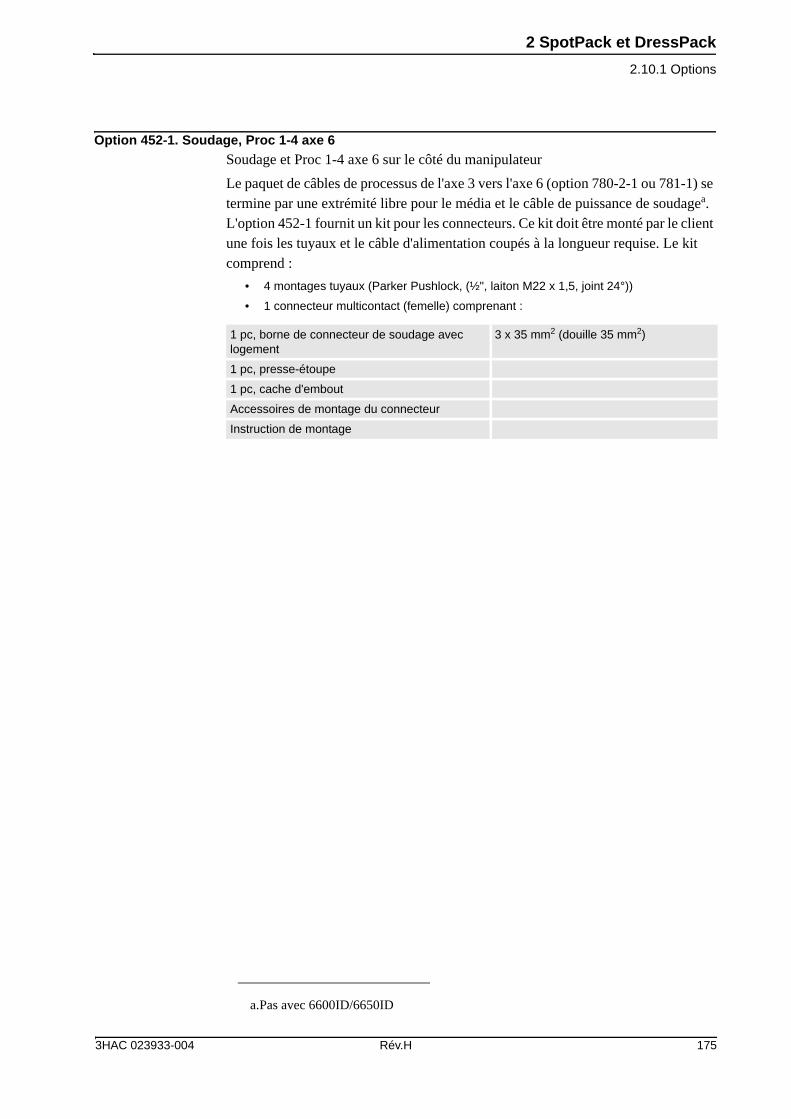
2 SpotPack et DressPack2.10.1 Options
Option 452-1. Soudage, Proc 1-4 axe 6Soudage et Proc 1-4 axe 6 sur le côté du manipulateurLe paquet de câbles de processus de l'axe 3 vers l'axe 6 (option 780-2-1 ou 781-1) se termine par une extrémité libre pour le média et le câble de puissance de soudagea. L'option 452-1 fournit un kit pour les connecteurs. Ce kit doit être monté par le client une fois les tuyaux et le câble d'alimentation coupés à la longueur requise. Le kit comprend :
• 4 montages tuyaux (Parker Pushlock, (½", laiton M22 x 1,5, joint 24°))
• 1 connecteur multicontact (femelle) comprenant :
a.Pas avec 6600ID/6650ID
1 pc, borne de connecteur de soudage avec logement
3 x 35 mm2 (douille 35 mm2)
1 pc, presse-étoupe
1 pc, cache d'embout
Accessoires de montage du connecteur
Instruction de montage
3HAC 023933-004 Rév.H 175

2 SpotPack et DressPack2.10.1 Options
Option 543-1, CP/CS/CBus, Proc 1 axe 6HartingCP/CS/CBus, Proc 1 axe 6 côté outil pour l’option 780-2.Ce kit offre un kit comprenant des connecteurs à monter du côté de l'outil de l'axe 6b.Ce kit doit être monté par le client.Le kit comprend :
• 1 montage tuyaux (Parker Pushlock (1/2", laiton M22 x 1,5, joint 24°))
• Connecteur avec :
Figure 119 Connecteur pour CP/CS/CBUS, Proc 1 axe 6.
b.Pas avec 6600ID/6650ID
1 pc, fonderie capot (Harting) HAN
1 pc, châssis à charnière (Harting) Taille de coque 10
1 pc, multicontact, mâle (Harting) Type HD (25 broches)
1 pc, multicontact, mâle (Harting) Type EE (8 broches)
1 pc, multicontact, mâle (Harting) Type DD (12 broches)
10 pcs, contacts à sertir mâles Pour 1,5 mm2
10 pcs, contacts à sertir mâles Pour 0,5 mm2
10 pcs, contacts à sertir mâles Pour 1,0 mm2
10 pcs, contacts à sertir mâles Pour 2,5 mm2
15 pcs, contacts à sertir mâles For 0,14 – 0,37 mm2
30 broches For 0,2 – 0,56 mm2
Accessoires de montage du connecteur
Instruction de montage
176 Rév.H 3HAC 023933-004

2 SpotPack et DressPack2.10.1 Options
SouriauCP/CS/CBus, Proc 1 axe 6 côté outil pour l’option 780-3.Ce kit offre un kit comprenant des connecteurs à monter du côté de l'outil de l'axe 6.Ce kit doit être monté par le client.Le kit comprend :
• 1 montage tuyaux (Parker Pushlock (1/2", laiton M22 x 1,5, joint 24°))
• Connecteur avec :
Figure 120 Connecteur pour CP/CS/CBUS, Proc 1 axe 6.
1pc, connecteur 32 broches UTOW (Souriau) Taille de coque 18
1 pcs, enveloppe de connecteur (Souriau) Taille de coque 14
1 pcs, presse-étoupe EMC (Souriau) M20 D=11,0-14,0
1pc, connecteur 19 broches UTOW (Souriau) Taille de coque 14
1 pcs, enveloppe de connecteur (Souriau) Taille de coque 18
1 pc, presse-étoupe, EMC M25 D=13,0-16,0
40 pcs, broche 0,21-0.93 mm²
Accessoires de montage du connecteur
Instruction de montage
3HAC 023933-004 Rév.H 177

2 SpotPack et DressPack2.10.1 Options
178 Rév.H 3HAC 023933-004

3 Spécification des variantes et des options3.1.1 Généralités
3 Spécification des variantes et des options
3.1 Introduction
3.1.1 Généralités
Les différentes variantes et options du robot IRB 6600 sont décrites dans les sections suivantes.Les numéros utilisés ici sont les mêmes que ceux utilisés dans la fiche technique. Pour connaître les options du système de commande, reportez-vous aux caractéristiques du produit IRC5 et à celles du logiciel du système de commande IRC5.
3.2 Manipulateur
Variantes
Couleur du manipulateur
Option Type d'IRB Capacité de manutention (kg)/Portée (m)
435-22 6600 175/2,8
435-17 6600 225/2,55
435-16 6600 175/2,55
435-30 6650 125/3,2
435-19 6650 200/2,75
435-69 6650S 90/3,9
435-50 6650S 125/3,5
435-51 6650S 200/3,0
435-53 6600ID 185/2,55
435-55 6650ID 170/2,75
Option Description Remarque
209-1 Standard Le manipulateur est peint en orange ABB.
209-4 --192 Code RAL Couleurs selon les codes RAL.
3HAC 023933-004 Rév.H 179

3 Spécification des variantes et des options3.1.1 Généralités
Protection
Option Description Remarque
287-4 Standard IP 67
278-3 Foundry Plus Robot adapté à la fonderie ou à d'autres environnements difficiles.Le robot dispose de la protection FoundryPlus, ce qui signifie que l'intégralité du manipulateur est lavable à la vapeur. L'excellente protection contre la corrosion est due à un revêtement spécial. Les connecteurs sont conçus pour un environnement hostile, et les roulements, les roues dentées et les autres composants sensibles font l'objet d'une protection élevée.
287-6 Foundry Primea Robots adaptés pour le nettoyage par jet d’eau des pièces en acier coulé et des pièces usinées, ainsi que tout environnement associé à des conditions difficiles similaires.Le manipulateur peut supporter des détergents à base de solvant environnants (pH maxi de 9,0 contenant un produit antirouille). Le détergent doit avoir été approuvé par ABB. En outre, le manipulateur peut supporter la projection indirecte de jets sous pression (600 bars maxi) et un taux d’humidité de 100 %. Le manipulateur est capable de travailler dans un environnement soumis à une température de bain de décapage de < 60 °C, généralement associée à l’application d’un nettoyage par jet d’eau à vitesse modérée.Le robot porte la mention “Foundry Prime”.
180 Rév.H 3HAC 023933-004
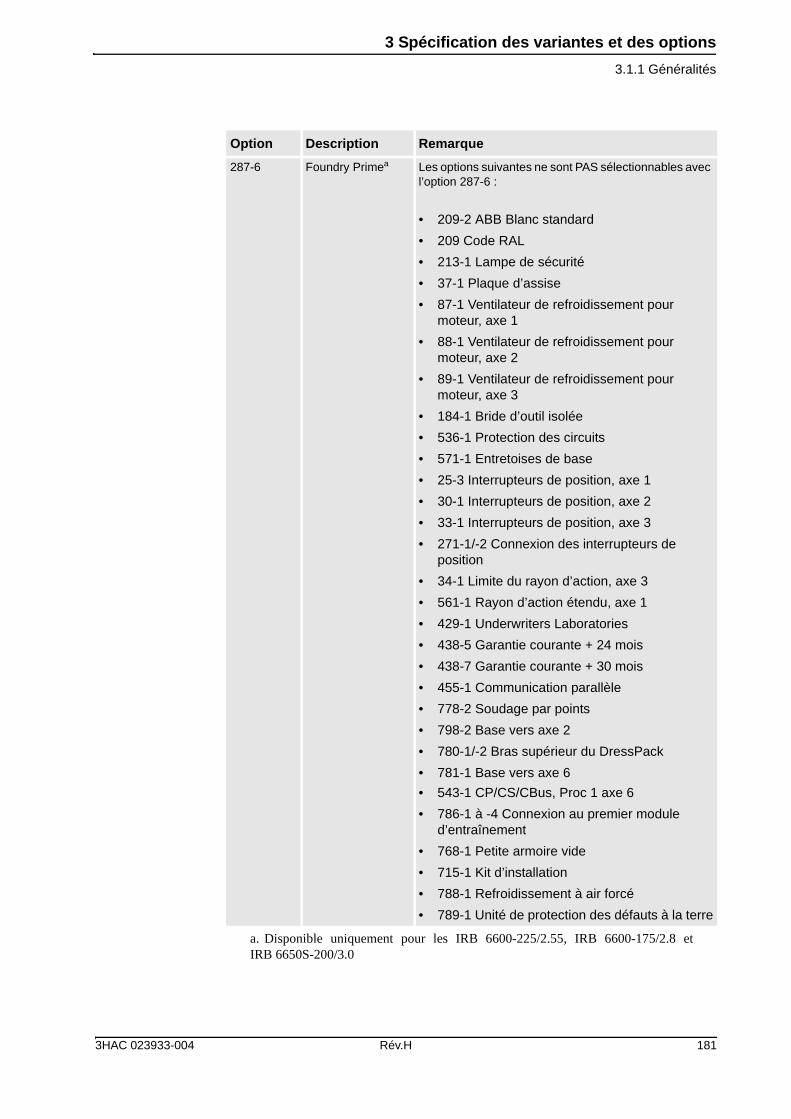
3 Spécification des variantes et des options3.1.1 Généralités
287-6 Foundry Primea Les options suivantes ne sont PAS sélectionnables avec l’option 287-6 :
• 209-2 ABB Blanc standard• 209 Code RAL• 213-1 Lampe de sécurité• 37-1 Plaque d’assise• 87-1 Ventilateur de refroidissement pour
moteur, axe 1• 88-1 Ventilateur de refroidissement pour
moteur, axe 2• 89-1 Ventilateur de refroidissement pour
moteur, axe 3• 184-1 Bride d’outil isolée• 536-1 Protection des circuits• 571-1 Entretoises de base• 25-3 Interrupteurs de position, axe 1• 30-1 Interrupteurs de position, axe 2• 33-1 Interrupteurs de position, axe 3• 271-1/-2 Connexion des interrupteurs de
position• 34-1 Limite du rayon d’action, axe 3• 561-1 Rayon d’action étendu, axe 1• 429-1 Underwriters Laboratories• 438-5 Garantie courante + 24 mois• 438-7 Garantie courante + 30 mois• 455-1 Communication parallèle• 778-2 Soudage par points• 798-2 Base vers axe 2• 780-1/-2 Bras supérieur du DressPack• 781-1 Base vers axe 6• 543-1 CP/CS/CBus, Proc 1 axe 6• 786-1 à -4 Connexion au premier module
d’entraînement• 768-1 Petite armoire vide• 715-1 Kit d’installation• 788-1 Refroidissement à air forcé• 789-1 Unité de protection des défauts à la terre
a. Disponible uniquement pour les IRB 6600-225/2.55, IRB 6600-175/2.8 etIRB 6650S-200/3.0
Option Description Remarque
3HAC 023933-004 Rév.H 181

3 Spécification des variantes et des options3.2.1 Équipement
3.2.1 Équipement
Etiquettes de synchronisationL'option contient des étiquettes de synchronisation pour chaque axe.
Etiquettes de synchronisation pour l'Axe 2
Figure 121 Position de les étiquettes de synchronisation, Axe 2.
Option Type Description
213-1 Lampe de sécurité Une lampe de sécurité avec un éclairage fixe orange peut être montée sur le manipulateur. La lampe est active en mode MOTEURS EN MARCHE. La lampe de sécurité est obligatoire sur les robots homologués UL/UR.
159-1 Élévateur à fourches
Dispositif de levage sur le manipulateur pour la manipulation d'un élévateur à fourches.Remarque : Si un ventilateur de refroidissement est utilisé pour le moteur de l'axe 1, il est nécessaire de le démonter pour utiliser l'élévateur à fourche.
37-1 Plaque d'assise Peut être utilisée pour les robots IRB 6600 et IRB 7600. Pour consulter les schémas d'encombrement, reportez-vous à la section 1.3 Installation.
87-1 Ventilateur de refroidissement du moteur de l'axe 1 (IP 54)
Combinaison avec le ventilateur de refroidissement du moteur de l'axe 2 (option 88-1) impossible. Pour connaître les recommandations, reportez-vous à la section 1.9 Ventilateur de refroidissement du moteur des axes 1 à 2.Non disponible pour la protection Fonderie.
88-1 Ventilateur de refroidissement du moteur de l'axe 2 (IP 54)
Pour connaître les recommandations, reportez-vous à la section 1.9 Ventilateur de refroidissement du moteur des axes 1 à 2.Non disponible pour la protection Fonderie.
430-1 Couvercles du bras supérieur
Reportez-vous à la section Figure 126.Inclus dans la protection Fonderie.
804-1 Étiquettes pour la synchronisation
Pour une synchronisation plus précise du robot. Des instructions de montage sont incluses.Cf. Figure 121 à Figure 125
182 Rév.H 3HAC 023933-004

3 Spécification des variantes et des options3.2.1 Équipement
Etiquettes de synchronisation pour l'Axe 3
Figure 122 Position de les étiquettes de synchronisation, Axe 3.
Etiquettes de synchronisation pour l'Axe 4
Figure 123 Position de les étiquettes de synchronisation, Axe 4.
Etiquettes de synchronisation pour l'Axe 5
Figure 124 Position de les étiquettes de synchronisation, Axe 5.
3HAC 023933-004 Rév.H 183

3 Spécification des variantes et des options3.2.1 Équipement
Etiquettes de synchronisation pour l'Axe 6
Figure 125 Position de les étiquettes de synchronisation, Axe 6.
Couvercles du bras supérieur
Figure 126 Couvercles du bras supérieur
Pos Description
A Option 430-1
(A)
184 Rév.H 3HAC 023933-004

3 Spécification des variantes et des options3.2.1 Équipement
Bride d'outil isolée
Figure 127 Bride d'outil isolée (dimensions en mm).
Option Type Description
184-1 Bride d'outil isolée (A)
La bride d'outil isolée conformément à la norme européenne 60204-1 résiste à des tensions dangereuses (en cas de panne électrique dans l'équipement de soudage par points monté sur la bride d'outil isolée) de 500 VCC pendant 30 secondes dans des applications n'utilisant pas d'eau, sans que cette tension ne soit transmise aux composants électroniques du manipulateur et du système de commande.Non disponible avec la protection Fonderie, option 287-4 et le robot IRB 6600ID/6650ID, options 435-53 et 435-55.Les trous de connexion et toutes les dimensions sont les mêmes que pour la bride d'outil standard, à l'exception de la distance entre le centre de l'axe 5 et la surface de l'extrémité de la bride d'outil isolée. La distance est supérieure de 0,7 mm à celle de la bride d'outil standard (reportez-vous à la Figure 127). Les fraisures des boulons de fixation sur le réducteur sont plus grosses, et les boulons sont isolés de la bride d'outil (reportez-vous à la Figure 127).
(A)
200,7 ±0,3
La bride d'outil isolée en option peut être commandée avec la précision absolue, également en option ; le robot est alors étalonné en usine.Si la bride d'outil isolée est montée après livraison du robot, ce dernier doit être ré-étalonné pour obtenir une précision absolue.
3HAC 023933-004 Rév.H 185

3 Spécification des variantes et des options3.2.1 Équipement
Protection des circuits
Figure 128 Protection des circuits.
Entretoises de base
Figure 129 Entretoises de base.
Option Type Description
536-1 Protection des circuits (A)
La protection mécanique empêche que les déchets issus d'applications comme l'ébarbage, le sciage et le fraisage s'accumulent sur le robot et gênent ses déplacements.Disponible uniquement avec la protection Fonderie. Reportez-vous à la Figure 128.
(A)
Option Type Description
571-1 Entretoises de base (A)
Quatre entretoises permettant de surélever le robot de 100mm au-dessus du sol ou de la plaque d'assise. Reportez-vous à la section Figure 129.
(A)
186 Rév.H 3HAC 023933-004

3 Spécification des variantes et des options3.2.2 Interrupteurs de position
3.2.2 Interrupteurs de position
GénéralitésInterrupteurs de position indiquant la position des trois axes principaux. Des rails avec cames réglables séparées sont fixés au manipulateur. Les cames, qui doivent être adaptées à la fonction d'interrupteur par l'utilisateur, peuvent être montées dans n'importe quelle position dans le rayon d'action de chaque interrupteur. Aucun usinage des cames n'est nécessaire pour l'adaptation ; de simples outils à main peuvent être utilisés.
FonctionPour l'axe 1, trois zones de position redondantes sont disponibles, chacune étant dotée de deux cames d'interrupteur indépendantes. Pour les axes 2 et 3, deux zones de position de canal sont disponibles, chacune étant dotée de deux cames d'interrupteur indépendantes.Chaque zone de position est composée de deux interrupteurs commandés mécaniquement par des cames distinctes. Chaque interrupteur comporte un contact travail et un contact repos. Leur conception et leurs composants permettent de les utiliser comme interrupteurs de sécurité. Ces options peuvent nécessiter des dispositifs de sécurité externes (par exemple, des rideaux de lumière, des cellules photoélectriques ou des matériaux de contact).Les interrupteurs peuvent être connectés à la base du manipulateur (R1.SW1 et R1.SW2/3 ; reportez-vous à la Figure 74) ou au système de commande. Dans le système de commande, les signaux sont connectés à la borne à vis XT8 Phoenix MSTB 2.5/12-ST-5.08. Les interrupteurs sont des interrupteurs multipositions BNS Balluff, conformément aux normes EN 60947-5-1 et EN 60947-5-2.
Interrupteurs de position
Option Type Description
25-3 Interrupteurs de position, axe 1
Trois zones de position redondantes sont disponibles, chacune avec deux cames d'interrupteur indépendantes.Deux plus une zone.
30-1 Interrupteurs de position, axe 2
Deux zones de position redondantes sont disponibles, une avec deux cames d'interrupteur indépendantes, et l'autre avec une came d'interrupteur indépendante. Non disponibles pour la protection Fonderie (option 287-3).
33-1 Interrupteurs de position, axe 3
Deux zones de position redondantes sont disponibles, une avec deux cames d'interrupteur indépendantes, et l'autre avec une came d'interrupteur indépendante. Non disponibles pour la protection Fonderie (option 287-3).
3HAC 023933-004 Rév.H 187

3 Spécification des variantes et des options3.2.2 Interrupteurs de position
Connexion
Limite du rayon d'actionPour accroître la sécurité du robot, le rayon d'action des axes 1, 2 et 3 peut être limité à l'aide de butées mécaniques supplémentaires.
Rayon d'action étendu
Option Type Description
271-2 Manipulateur Connexion sur la base du manipulateur avec un ou deux connecteurs 32 broches Souriau.
271-1 Armoire Connexion à l'intérieur de la paroi de l'armoire. Reportez-vous aux caractéristiques du produit IRC5. Les câbles des interrupteurs de position sont inclus.
Option Type Description
29-2 Axe 1, 7,5 degrés Quatre butées : deux permettent de limiter le rayon d'action par incréments de 15° et les deux autres par incréments de 7,5°.
29-1 Axe 1, 15 degrés Deux butées qui permettent de limiter le rayon d'action par incréments de 15°.
32-1 Axe 2 Six butées qui permettent de limiter le rayon d'action par incréments de 15° aux deux positions extrêmes. Chaque butée réduit le mouvement de 15°.
34-1 Axe 3 Six butées qui permettent de limiter le rayon d'action par incréments de 20° aux deux positions extrêmes. Chaque butée réduit le mouvement de 20°.
Option Type Description
561-1 Rayon d'action étendu, axe 1
Permet d'élargir le rayon d'action de l'axe 1 de +180°à +220°.Lorsque cette option est utilisée, la butée mécanique doit être démontée.Les interrupteurs de position de l'axe 1 (option 25-3) sont requis.
188 Rév.H 3HAC 023933-004
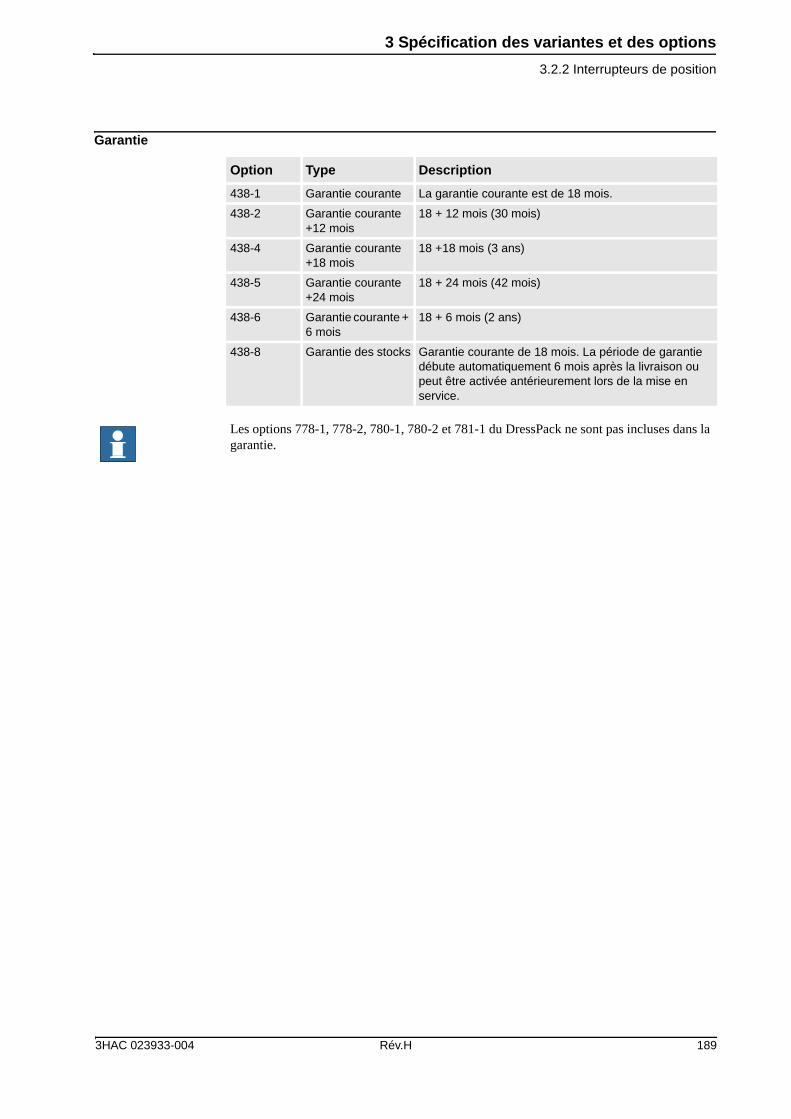
3 Spécification des variantes et des options3.2.2 Interrupteurs de position
Garantie
Option Type Description
438-1 Garantie courante La garantie courante est de 18 mois.
438-2 Garantie courante +12 mois
18 + 12 mois (30 mois)
438-4 Garantie courante +18 mois
18 +18 mois (3 ans)
438-5 Garantie courante +24 mois
18 + 24 mois (42 mois)
438-6 Garantie courante + 6 mois
18 + 6 mois (2 ans)
438-8 Garantie des stocks Garantie courante de 18 mois. La période de garantie débute automatiquement 6 mois après la livraison ou peut être activée antérieurement lors de la mise en service.
Les options 778-1, 778-2, 780-1, 780-2 et 781-1 du DressPack ne sont pas incluses dans la garantie.
3HAC 023933-004 Rév.H 189

3 Spécification des variantes et des options3.2.2 Interrupteurs de position
3.3 Câbles du socle
GénéralitésCâbles de socle supplémentaires pour les options SpotPack. Reportez-vous au chapitre 3.4.1 Socle du DressPack.
Longueur de câble du manipulateur
Interrupteurs de position, longueur de câble de l'axe 1
Interrupteurs de position, longueur de câble des axes 2 et 3
Option Longueurs
210-2 7 m
210-3 15 m
210-4 22 m
210-5 30 m
Option Longueurs
273-1 7 m
273-2 15 m
273-3 22 m
273-4 30 m
Option Longueurs
274-1 7 m
274-2 15 m
274-3 22 m
274-4 30 m
190 Rév.H 3HAC 023933-004
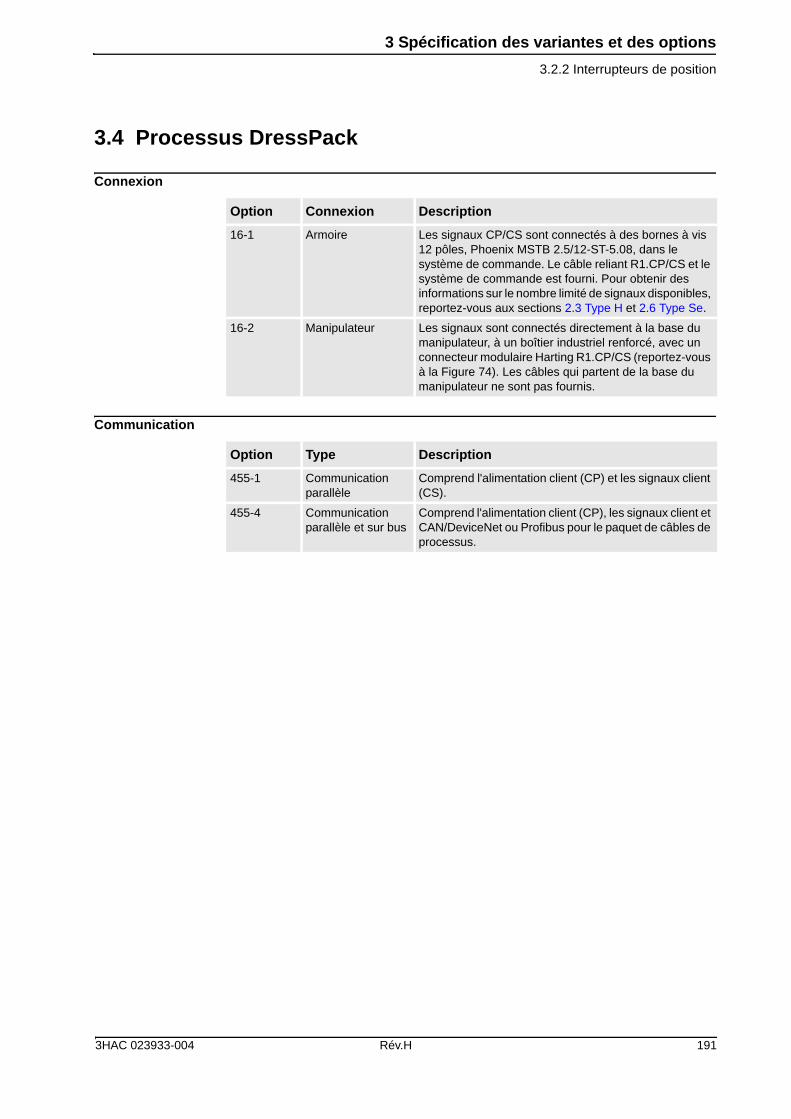
3 Spécification des variantes et des options3.2.2 Interrupteurs de position
3.4 Processus DressPack
Connexion
Communication
Option Connexion Description
16-1 Armoire Les signaux CP/CS sont connectés à des bornes à vis 12 pôles, Phoenix MSTB 2.5/12-ST-5.08, dans le système de commande. Le câble reliant R1.CP/CS et le système de commande est fourni. Pour obtenir des informations sur le nombre limité de signaux disponibles, reportez-vous aux sections 2.3 Type H et 2.6 Type Se.
16-2 Manipulateur Les signaux sont connectés directement à la base du manipulateur, à un boîtier industriel renforcé, avec un connecteur modulaire Harting R1.CP/CS (reportez-vous à la Figure 74). Les câbles qui partent de la base du manipulateur ne sont pas fournis.
Option Type Description
455-1 Communication parallèle
Comprend l'alimentation client (CP) et les signaux client (CS).
455-4 Communication parallèle et sur bus
Comprend l'alimentation client (CP), les signaux client et CAN/DeviceNet ou Profibus pour le paquet de câbles de processus.
3HAC 023933-004 Rév.H 191

3 Spécification des variantes et des options3.4.1 Socle du DressPack
3.4.1 Socle du DressPack
Connexion parallèle/CAN DeviceNet/ProfibusVous trouverez ci-après la longueur de câble nécessaire pour une connexion parallèle/CAN DeviceNet/Profibus à l'armoire.
Connexion aux premier module d'entraînementLes informations suivantes spécifient la longueur de câble pour la connexion au premier module d'entraînement. Pour plus d'informations, reportez-vous au chapitre 1.10 Servopistolet.
Option Longueurs
94-1/90-2/92-2 7 m
94-2/90-3/92-3 15 m
94-3/90-4/92-4 22 m
94-4/90-5/92-5 30 m
Option Longueurs
786-1 7 m
786-2 15 m
786-3 22 m
786-4 30 m
192 Rév.H 3HAC 023933-004

3 Spécification des variantes et des options3.4.2 Bras inférieur et supérieur du DressPack
3.4.2 Bras inférieur et supérieur du DressPack
Configuration de processus du DressPackl
Bras inférieur du DressPack
Bras supérieur du DressPack
Bras inférieur/bras supérieur du DressPack
Pour plus d'informations sur les paquets de câbles de processus, reportez-vous aux sections 2.2 DressPack.
Option Description Remarque
778-1 Manutention de matériaux
Comprend les signaux et un tuyau à air.
778-2 Soudage par points Comprend les signaux, le câble d'alimentation de soudage, un tuyau à air et trois tuyaux de média.
Option Description Remarque
798-1 Manutention de matériaux de la base à l'axe 3
Exige l’option 778-1
798-2 Acheminement de la base à l'axe 2
Option Description Remarque
780-1 Acheminement interne de l'axe 2 à l'axe 6
Disponible uniquement pour les IRB 6600ID/6650ID avec l’option 798-2.
780-2 Acheminement externe de l'axe 2 à l'axe 6
Exige l’option 798-2
780-3 Acheminement externe de l'axe 3 à l'axe 6
Exige l’option 778-1 et l’option 798-1.
Option Description Remarque
781-1 Acheminement de la base à l'axe 2
Acheminement sans changement de connexion.
3HAC 023933-004 Rév.H 193

3 Spécification des variantes et des options3.4.3 Kits de connexion
3.4.3 Kits de connexion
GénéralitésLes connecteurs se fixent sur ceux situés sur la base du manipulateur (axes 2/3 et 6).
ContenuLe kit est composé de connecteurs, de broches et de bornes. Pour obtenir une description technique, reportez-vous à la section 2.10 Kits de connexion.
Option Type Description
459-1 R1.CP/CS et PROC1
Pour le connecteur CP/CS (Alimentation client/Signal client) et un connecteur de processus sur la base du manipulateur. Des bornes pour la communication sur bus sont incluses.
480-1 R1.WELD et PROC2-4
Pour le connecteur de soudage et trois connecteurs de processus sur la base du manipulateur.
474-1 R1.SW1 et SW2/3 Pour le connecteur de l'interrupteur de position, axe 1, et le connecteur de l'interrupteur de position, axes 2/3, sur la base du manipulateur.
453-1 R3.FB7 Pour le connecteur de l'axe 7 sur la base du manipulateur.
458-1 R2.CP/CS et PROC1
Pour le connecteur CP/CS (Alimentation client/Signal client) et un connecteur de processus sur l'axe 2/3. Pour le modèle IRB 6600ID/IRB 6650ID au niveau de l’axe 6. Des broches pour la communication sur bus sont incluses.
479-1 R2.WELD et PROC2-4
Pour le connecteur de soudage et trois connecteurs de processus sur l'axe 2/3.Pour le modèle IRB 6600ID/IRB 6650ID au niveau de l’axe 6
452-1 WELD et PROC1-4, axe 6
Connecteur de soudage et quatre connecteurs de processus, axe 6, côté manipulateur.
543-1 CP/CS/BUS, PROC1 axe 6
Connecteur alimentation client/signal client/bus client, axe 6, côté outil.
194 Rév.H 3HAC 023933-004

3 Spécification des variantes et des options3.4.4 Pince asservie
3.4.4 Pince asservie
ContenuPour obtenir une description technique, reportez-vous au chapitre 1.10 Servopistolet.
3.4.5 Câbles du socle SpotPack
Câble d'alimentation de soudageVous trouverez ci-après la longueur nécessaire pour le câble d'alimentation de soudage reliant l'armoire de processus de soudage par points à la base du manipulateur.
Câble de processus de la pince fixeVous trouverez ci-après la longueur nécessaire pour le câble de processus de la pince fixe reliant l'armoire de processus de soudage par points à la pince fixe.
Câble du coffret de distributionVous trouverez ci-après la longueur nécessaire pour le câble du coffret de distribution reliant l'armoire de processus de soudage par points au coffret de distribution sur la base du manipulateur.
Option Longueurs
785-1 Pour une pince asservie commandée par robot.
785-5 Pour une pince asservie fixe.
Option Longueurs
791-1 7 m
791-2 15 m
Option Longueurs
809-1 7 m
809-2 15 m
809-3 22 m
809-4 30 m
Option Longueurs
797-1 7 m
797-2 15 m
797-3 22 m
797-4 30 m
3HAC 023933-004 Rév.H 195

3 Spécification des variantes et des options3.4.6 Armoire de processus
3.4.6 Armoire de processus
Armoire vide
Armoire de processus
Capacité du temporisateur de soudage
Armoire de soudage préparée pour
Option Type Description
768-1 Petite armoire vide Reportez-vous aux caractéristiques du produit - Système de commande IRC5 avec FlexPendant, chapitre 2.2.1.
715-1 Kit d'installation Reportez-vous aux caractéristiques du produit - Système de commande IRC5 avec FlexPendant, chapitre 2.2.1.
Option Type Description
768-3 Petit soudage par points
Reportez-vous au chapitre 2.8.1.
788-1 Refroidissement à air forcé
Reportez-vous au chapitre 2.8.1.
789-1 Unité de protection des défauts à la terre
Reportez-vous au chapitre 2.8.1.
790-1 Contacteur de soudage
Reportez-vous au chapitre 2.8.1.
Option Type Description
782-1 CA S/SE de base Bosch
Reportez-vous au chapitre 2.8.1.
782-7 MFDC S/SE de base Bosch
Reportez-vous au chapitre 2.8.1.
Option Type Description
828-1 Région A Reportez-vous au chapitre 2.8.1.
828-2 Région E Reportez-vous au chapitre 2.8.1.
196 Rév.H 3HAC 023933-004

3 Spécification des variantes et des options3.4.7 Eau et air
3.4.7 Eau et air
Unité d'eau et d'air
Second retour d'eau
Vanne proportionnelle d'air électrique
3.4.8 Documentation
Documentation utilisateur sur CD
Option Type Description
792-1 Type S Reportez-vous au chapitre 2.9.1.
792-2 Type HS Reportez-vous au chapitre 2.9.1.
Option Type Description
793-1 Second retour d'eau
Reportez-vous au chapitre 2.9.1.
Option Type Description
796-1 Vanne proportionnelle d'air électrique
Reportez-vous au chapitre 2.9.1.
Option Type Description
808-1 Documentation sur CD
Reportez-vous aux caractéristiques du robot dans la documentation utilisateur.
3HAC 023933-004 Rév.H 197

3 Spécification des variantes et des options3.4.8 Documentation
198 Rév.H 3HAC 023933-004
4 Accessoires
4 AccessoiresGénéralités
De nombreux outils et équipements sont spécialement conçus pour le robot.
Logiciel de base/options logicielles du robot et du PCPour plus d'informations, reportez-vous aux Caractéristiques du produit - Système de commande IRC5 avec FlexPendant et aux Caractéristiques du produit - Logiciel du système de commande IRC5.
Périphériques du robot• Track Motion
• Unités moteur
3HAC 023933-004 Rév.H 199

4 Accessoires
200 Rév.H 3HAC 023933-004

Index
Aaccessoires, 199alternatives d’acheminement, 82, 83arrêt d'urgence, 18arrêt de l'espace de sécurité, 18
retardé, 18
Bbras de robot compact, 17bride d'outil du robot, 59, 60, 61bride de montage, 59, 60, 61
CCatégorie de sécurité 3, 17charge, 19, 21charge utile, 19commande Hold-to-run (nécessitant une action main-tenue), 18, 19Concept de sécurité interne, 17concept de sécurité interne, 17conception, 17conditions d'exploitation, 20configuration des trous, 23Connecteur, 108Connecteur Harting - Acheminement externe, 98, 118,146Connecteur Harting - Acheminement interne, 99, 147Connecteur/tuyaux Harting - Acheminement interne, 135couleur du manipulateur, 179couleurs, 179
Ddépannage, 62détection des collisions, 16dispositif de levage, 182dispositif de refroidissement, 11
Eélévateur à fourches, 182entretien, 62équipement, 182
charge supplémentaire autorisée, 54montage, 54
espace de travaillimitation, 16, 19, 188
exigences d'encombrement, 11
FFoundry Plus, 8Foundry Prime, 8Ggâchette de validation, 17
Hhumidité, 20
Iinstallation, 19interface mécanique, 59, 60, 61interne, bras inférieur, 82, 83interrupteurs de fin de course, 17, 19, 187interrupteurs de position, 17, 19, 187interrupteurs de zone, 17
Llampe de sécurité, 18, 182limitation, 17
Mmaintenance, 62mobile, mécanique, axes principaux, 17montage
équipement supplémentaire, 54robot, 21
mouvements, 63
Nniveau de bruit, 11normes, 14normes de protection, 20
Ooptions, 179
PPerformances réglables automatiquement, 16Périphériques du robot, 199protection, 180
Rrayon d'action des mouvements, 63Robot Gun, 76Robot Gun et Track Motion, 77
SSalle blanche, 8schémas des charges, 34sécurité, 14Service Information System, 15Stationary Gun, 75structure, 7système d'information sur l'entretien, 15Système de freinage actif, 15Système de sécurité passive, 16
Ttempérature, 20Trajectoire stabilisée électroniquement, 16trous pour le montage d'équipements supplémentaires,56
Vvariantes, 179versions du robot, 10
3HAC 023933-004 Rév.H 201

Index
vitesse réduite, 17
202 Rév.H 3HAC 023933-004

ABB ABRobotics ProductsS-721 68 VÄSTERÅSSUÈDETéléphone: +46 (0) 21 344000Télécopie: +46 (0) 21 132592
3HA
C 0
2393
3-00
4, R
évis
ion
H, f
r