Embed Size (px)
Citation preview

Comportement dynamique des lignes aeriennes de transport d'electricite du aux bris de ciibles. 11. Problemes numeriques associes a la modelisation mathematique
GHYSLAINE MCCLURE ET R E N ~ TINAWI DPpartement de gPnie civil, ~ c o l e ~ o l ~ t e c h n i ~ u e de Montre'al, Campus de I' UniversifP de MonfrPal, C . P . 6079, succursale A,
Monfrkal ( QuPbec ), Canada H3C 3A7
R e p le 27 aoiit 1987
RCvision acceptCe le 29 septembre 1988
L'Cvaluation de la rCponse d'une section de ligne aCrienne de transport d'Clectricit6 soumise a un bris de clble est un probltme dynarnique oh les non-1inCaritCs gComttriques sont importantes. La rtsolution des equations de mouvement du modtle nCcessite I'usage d'algorithmes d'intkgration directe dans le temps dont la stabilitt et le comportement pour les probltmes non 1inCaires sont difficilement prtvisibles. Sept modtles numCriques sont analysis a l'aide des mtthodes Wilson 8 et Newmark P et les rtsultats sont comparCs i ceux mesurCs lors d'essais sur modtles rtduits rCalisCs par d'autres chercheurs pour le cornpte de 1'Electric Power Research Institute amCricain. Cette comparaison permet d'Cvaluer l'importance de la contribution des modes sup6rieurs a la rkponse et de I'amortissement artificiel introduit par la mCthode Wilson 8. Cette mtthode permet d'utiliser un increment d'intkgration trois fois plus grand que celui de la regle trapCzoi'dale qui, retenant la contribution de tous les modes supCrieurs du modtle d'eltments finis, est limitCe par un critere de convergence. Plusieurs observations de cette Ctude, en particulier, s'appliquent a la plupart des problemes dynamiques non 1inCaires 2 plusieurs degrts de libertC ou I'intCgration directe est utilisee.
Mots clis : Analyse dynamique non linCaire, mtthodes d'intCgration directe, lignes atriennes de transport d'ClectricitC, simulation de bris de clbles.
The evaluation of the response of an aerial power line section subjected to cable breakage is a complex dynamic problem in which geometric nonlinearities are important. The solution of the equations of motion of the model calls for direct integration methods for which the stability and behavior, in nonlinear situations, are difficult to predict. Seven numerical models are analyzed with the Wilson-8 and the Newmark-P algorithms and results are compared with those of small-scale tests of the American Electric Power Research Institute. This comparison emphasizes the importance of the high frequency modes in the response and the artificial damping induced by the Wilson-0 method. This method allows up to three times the time increment required by the trapezoidal rule that does not filter the contribution of higher frequencies but is limited by aconvergence criterion. Many observations made in this particular study are also applicable to multi-degree-of-freedom nonlinear dynamic problems using direct time-step integration.
Key words: Nonlinear dynamic analysis, direct integration methods, aerial electric transmission lines, cable breakage simulation.
Can. 1. Civ. Eng. 16,354-374 (1989)
Introduction Le problime pose'
L'Ctude du comportement structural des ouvrages par simula- tion de modkles mathkmatiques est une ttape essentielle de la conception qui, dans le cas de structures complexes, peut accompagner ou mCme remplacer les Ctudes expCrimentales. Les simulations numCriques par modkles d't1Cments finis sont particulikrement utiles pour les problkmes dynamiques qui sont difficiles 8 analyser exptrimentalement, sptcialement pour les structures 8 plusieurs degrCs de libertC avec comportement non
I1 faut souligner que malgre l'abondance de programmes d'analyse non linCaire par tltments finis disponibles sur le marchC, il existe peu de directives quant aux choix des algorithmes numCriques et de leurs paramktres pour la rtsolu- tion de systkmes 8 plusieurs degrCs de libertC. Le problkme qui se pose est donc de trouver une mtthode dlintCgration directe dans le temps des Cquations de mouvement qui soit d'abord stable et ensuite suffisamment prkcise, avec un incrCment dlintCgration At assez grand pour minimiser l'effort numtrique total.
linkaire. Le contexte de l'e'tude Les auteurs ont dtj8 dtmontrt (McClure et Tinawi 1989) que Les dixussions prCsentCes ici sent basCes sur l.expCrience
I'Cvaluation de la dponse d'un modkle de section de ligne des auteurs dans la construction de mathematiques atrienne de transport d'tlectricitk soumise 8 un bns de cBble est pour 196tude des bns de cebles dans les lignes de un problkme dynamique ou les non-1inCaritCs geomttriques sont aenennes, mais elles peuvent s.ttendre d.autres cas de charges imponantes. '1 a montrt que plusieurs dynamiques sur les lignes. Dans une plus globale, prkliminaires sont ntcessaires pour construire des modkles cenaines observations sent peninentes beaucoup d.autres numtriques satisfaisants et fiables (McClure et Tinawi 1987). probl&mes dynamiques non lineaires I plusieurs degrCs de Ces analyses prkliminaires, appliqutes aux sections de lignes, libertC cornme, par exemple, pour les analyses sismiques de ont permis de faire ressortir plusieurs vices dans les premikres structures complexes le logiciel DRAIN-2D est un exemple tentatives de simulation de modkles d'ClCments finis, particu- dyutilisation intensive (Kansan et Powell 1973). likrement au niveau du choix des mkthodes numkriques de Les mCthodes numtnques considtrtes sent la mCthode rtsolution. Newmark P (Newmark 1959) sous la forme de la rkgle
NOTA : Les comrnentaires sur le contenu de cet article doivent &tre tra~Czoydale (Y = 1/29 P = 114) et la mtthode Wilson 6 envoyCs au directeur scientifique de la revue avant le 31 octobre 1989 (Wilson et al. 1973) avec 6 = 1,4. 11 s'agit de deux des (voir l'adresse au verso du plat sugr ieur ). mCthodes implicites les plus populaires, implanttes dans la
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.

MCCLURE ET TINAWI : I1 355
plupart des programmes commerciaux d'analyse non linCaire par ClCments finis. Ces algorithmes sont disponibles dans le programme ADINA (ADINA Engineering 1984) utilisC dans la prCsente ttude. Sept modkles numCriques sont analysCs a l'aide des deux mCthodes et les rCsultats sont comparCs a ceux mesurts lors d'essais expCrimentaux sur modkles rtduits rapportCs par Mozer (1978). D'autres details concernant le modkle mathC- matique servant a 1'Ctude du comportement des lignes aCriennes de transport d'ClectricitC sont prCsentCs par McClure et Tinawi (1988).
Revue des caracteristiques des methodes d'integration directe etudiees
Parmi les nombreuses techniques d'intkgration directe dispo- nibles (Hughes 1987), seul un bref aperqu des mCthodes Newmark P et Wilson 0 sera present6 dans le cadre de cette Ctude. Cette revue est essentielle pour les lecteurs non familiers avec ces techniques, en vue de la discussion des problkmes relits a la stabilitt et a la precision des rCsultats prCsentCs par la suite.
L'algorithme de la me'thode Newmark P La mCthode proposte par Newmark (1959) considkre les
Cquations d7Cquilibre du systkme au temps t + At. Dans un systkme ou les non-lintaritCs gComttriques pridominent, ces Cquations s'Ccrivent gCnCralement sous la forme incrkmentale proposCe par Wilson, Farhoomand et Bathe (1973) :
La matrice d'inertie M et la matrice d'amortissement C sont constantes alors que la matrice de rigidit6 tangente K, doit &tre CvaluCe dans la configuration dCformCe, tout comme le vecteur des forces internes c, Au,, AU, et AU, sont les increments des vecteurs d'accCltration, de vitesse et de deplacement qui surviennent durant l'intervalle de temps At (pour une dCfinition des autres symboles, voir la liste en annexe).
La mtthode Newmark P compte deux param&res, y et P , qui permettent de varier l'importance de 1'acctlCration a la fin de l'intervalle d'intkgration At dans le calcul des vitesses et des dkplacements nodaux au temps t + At, suivant les relations suivantes :
Ces deux paramktres permettent Cgalement d'influencer la stabilitk et la prCcision de la mCthode. Outre le choix de l'incrtment d'integration At, le paramktre y influence beaucoup la prkcision des rCsultats, en supposant que la mtthode soit stable. Seule la valeur y = 112 n'introduit pas d'amortissement artificiel (aussi appelC amortissement algorithmique) dans les systkmes 1inCaires. Pour y > 112, l'amortissement introduit est positif, alors que pour y < 112, l'amortissement est nCgatif, ce qui risque de causer l'instabilitt dynamique du systkme d'Cqua- tions. Newmark recommande donc d'utiliser y = 112 pour un maximum de prCcision. Cette hypothkse rdduit 17Cquation 2 a
ce qui Cquivaut a considCrer 1'acctlCration moyenne de l'inter- valle cornme une accClCration constante durant cet intervalle.
I1 est gCnCralement recomrnandt d'itkrer aprks chaque incrC- ment de calcul afin de s'assurer que 1'Cquilibre est bien satisfait en gardant le vecteur des forces rCsiduelles, R:+A,, en deq8 d'une tolCrance prCCtablie. Ce vecteur est donnC par la relation
et mesure le dCsCquilibre entre les forces extCrieures appliquCes et les forces dynamiques induites dans le systeme.
Corzvergence, stabilite' et pre'cision de la me'thode Newrnark P duns les systkmes line'aires
Pour un systkme linCaire plusieurs degrts de libertC, le taux de convergence p de la mCthode, dtfini comme le rapport entre l'erreur sur les acctltrations dCrivtes et l'erreur sur les accClCrations supposCes, dCpend de la frCquence du mode de vibration le plus ClevC du systkme.
[ 6 ] p = - p ~ i ( A t ) ~
ou w, est la pulsation naturelle du mode le plus ClevC du systkme. Pour assurer la convergence, il faut avoir Ipl 5 1 d'ou, a la limite -
Comme la stabilitC de l'algorithme depend aussi de la grandeur du At retenu, plus le systkme compte de degrCs de libertC dynamiques, plus le At permissible est rCduit.
L'ttude de la stabilitC numCrique de la mCthode a t t t faite pour un systkme a un degrC de libertt non amorti et en vibration libre, avec paramktre y = 112. Newmark a dCmontrt que pour assurer la stabilitt de I'opCrateur, il faut choisir At tel que
Si p = 114, on remarque que I'opCrateur est inconditionnelle- ment stable et que le choix de At sera bas6 sur le critere de convergence. En fait, pour des valeurs de p 2 118, si At est choisi suivant le critkre de convergence, l'algorithme sera toujours stable. Par contre, pour P < 118, la convergence ne garantit pas la stabilitC. C'est pourquoi Newmark (1959) recommande de limiter l'incrtment d'inttgration At aux valeurs prescrites par le critkre de stabilitC. La perte de stabilitC de l'algorithme, m&me convergent, peut survenir soudainement et, comme I'instabilitC se manifeste par une oscillation artificielle qui s'ajoute une oscillation libre du systkme, il est difficile de distinguer la source de ces oscillations combinCes; ainsi, une instabilitk dans les modes supCrieurs peut facilement Cchapper a l'attention de l'analyste.
Outre le paramktre y, la prCcision de l'optrateur est aussi influencte par le paramktre p . En fixant y = 112, l'amortisse- ment artificiel est CliminC mais il reste une imprCcision a 1'Cchelle du temps. La pCriode calculCe pour un mode i donnC (la pseudo-pCriode Tci) surestime la pCriode rCelle Ti suivant la relation
[ 9 ] Tci/Ti 2. 1 - (1 - 12p)a2/24 - (17 - 120P + 720p2)a4/576O - . . .
avec
Le parametre p intervient aussi dans 1a'prCcision de la vitesse maximale calculte si le systkme est soumis a un mouvement libre initiC par une vitesse non nulle; seule la valeur P = 114 n'introduit pas d7erreur dans le calcul.
Les recommandations de Newmark pour le choix des pararnktres de la mCthode appliquh aux systkmes lintaires sont :
y = ,112 (pour Climiner l'amortissement algorithmique)
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.

356 CAN. I. CIV. ENG. VOL. 16, 1989
La mCthode est inconditionnellement stable et foumit un maximum de prCcision pour P = 114. Dans la prtsente etude, y = 112 et p = 114 sont utilisCs et, sous cette forme, la mtthode est bien connue sous l'appellation de rkgle trapCzoldale.
L'algorithme de la me'thode Wilson 8 La mCthode proposee par Wilson, Farhoomand et Bathe
(1973) considkre les Cquations d'tquilibre du systkme au temps t + 0 A t :
avec
L'hypothkse de base de la methode est que l'accC1Cration varie linkairement sur l'intervalle de temps ttendu [ t , t + 0 A t ] ou 0 est 2 1. L'Ctat du systkme Ctant connu au temps t , on calcule la rtponse au temps t + 0At . Une fois le vecteur accelCration connu au temps t + 0At , on calcule les vecteurs acceleration, vitesse et deplacement au temps d'intCrEt t + At, toujours en utilisant l'hypothbe de variation linCaire de l'accC1Cration :
L'ajustement du paramktre 0 ( 0 r 1) permet de varier la precision et les conditions de stabilite de 1'opCrateur dlintCgra- tion. Pour 0 = 1, on retrouve la mkthode d'accC1Cration lineaire.
Stabilite' et pre'cision de la me'thode Wilson 8 dans les sysremes line'aires
La methode est inconditionnellement stable pour 0 2 1,37. Une fois la stabilite assuree, c'est le choix de l'incrkment d'intigration At qui influence la prCcision de la methode. Dans les systkmes linkaires, les imprecisions surviennent a deux niveaux : l'allongement des pCriodes et la reduction des ampli- tudes du mouvement. Comme pour la mtthode de Newmark, les pCriodes naturelles calculCes sont superieures aux pCriodes rCelles. L'erreur augmente a mesure que At est augmente et, pour un rapport At/Ti fixe, mesure que 0 est augment& Peu importe la valeur de 0 r 1,37 choisie, la mCthode introduit un arnortissement artificiel qui filtre la reponse des modes sugrieurs. Encore une fois, l'amortissement augmente avec 0 , alors il est recommand6 d'utiliser une valeur de 0 la plus proche possible de la limite de stabilite. La valeur optimale est 0 = 1,421 (Craig 1981), mais la plus couramment utilisCe, dans la prCsente Ctude notarnrnent, est 0 = 1,4.
Des courbes pour le calcul d'erreur sont donnCes dans Wilson et al. (1973) et Bathe et Wilson (1973) pour 0 = 1,4 et 0 = 2,O. Le calcul d'erreur montre que pour 0 = 1,4, tous les modes avec pCriode Ti 5 5At sont pratiquement filtres de la solution, la reduction d'amplitude approchant 20%. L'amortissement des modes supCrieurs n'est pas indtsirable dans les problkmes ou le modkle discret analyst5 idealise un systkme continu. En effet, les modes superieurs du modkle discret sont toujours errones par rapport au cas reel. La difficult6 consiste a choisir un At qui reprhente bien le contenu en frauences du chargement a ttudier et qui supprime la contribution des autres hautes frCquences
(celles qui ne sont pas sollicittes par le chargement) erronees de toute faqon, tout en conservant assez de precision dans les modes infkrieurs. Si le systkme contient de l'amortissement physique, il faut s'assurer que les effets de l'amortissement artificiel de la methode restent petits lorsque cornparis ceux de l'amortisse- ment physique, au moins pour les frequences significatives.
La mCthode Wilson 0 prCsente aussi un comportement particulier a court terme: la rtponse exacte B 1'Cquation dif- fkrentielle du systkme est surestimte dans les premiers At, surtout pour les dtplacements et beaucoup moins pour les vitesses. Hughes ( 1987) donne plus de details sur l'ordre de ces erreurs qui s'avkrent peu importantes pour l'application Ctudite ici.
Problimes nume'riques particuliers aux systemes line'aires a plusieurs degre's de liberte'
Les conditions de convergence, de stabilitk et de prkcision des deux methodes ttudiCes ont CtC Ctablies pour un systkme non amorti a un seul degrC de libertC. Pour les systkmes 1inCaires a plusieurs degrCs de libertC, les conditions de stabilitt s'appli- quent au mode de vibration le plus tlevC. Dans la rkgle trap6 zoi'dale, la convergence peut exiger un incrtment d'integration irraisonnablement petit puisque la contribution des frequences Clevtes est retenue dans la rtponse.
La perte de precision dans la rtponse globale calculCe est pratiquement imprkvisible Ctant donnt que chaque mode est affecte d'un pourcentage d'erreur diffkrent. A 1'Cchelle du temps, par exemple, il est impossible d'Cvaluer le decalage entre la reponse calculCe et la rCponse reelle, cette distorsion Ctant mtme variable a chaque instant lorsqu'il s'agit d'un mouvement force. I1 est possible cependant de rCduire ces erreurs induites artificiellement en utilisant une formulation non diagonale pour la matrice d'inertie. Cette formulation, a l'inverse de l'operateur d'integration, a tendance a sous-estimer les pCriodes naturelles (Hughes 1987). Dans la methode Wilson 0 ( 0 = 1.4). l'erreur sur l'am~litude modale varie aussi . ,,
en pourcentage d'un mode a l'autre, ce qui complique encore 1'Cvaluation de l'erreur sur la reponse totale. Ce problkme vient du fait que le mtme At est impose tout le systkme alors que les exigences de precision ne sont pas uniformes pour tous les modes. La rkgle trapezoi'dale reste cependant la mCthode de prkcision du second ordre avec la plus petite constante d'erreur, et tout effort pour introduire de l'amortissement algorithmique, soit en variant ses paramktres, soit en changeant de mCthode, provoque une perte de precision.
Une methode d'integration directe fiable pour les systkmes plusieurs degres de libertC se doit d'Ctre inconditionnellement stable et d'avoir une bonne prCcision dans les basses frCquences, tout en offrant une possibdit~ de grande dissipation des effets des hautes frkquences. Hughes (1987) resume certains dtve- loppements recents qui visent justement a contrbler l'amortisse- ment algorithmique des modes supkrieurs. Des mkthodes avec predicteur-correcteur, combinant des algorithmes implicites et explicites connus, et mtme des methodes avec prkdicteur- multicorrecteur s'approchent de cet objectif, mais l'analyse de leur stabilite se complique.
Nickel1 ( 1973) rappelle que dans les problkmes de propaga- tion d'ondes, contrairement aux problkmes de vibrations libres ou forcCes, il devient plus delicat de savoirjusqu'a quel point les modes suptrieurs sont importants et s'ils doivent ou non ttre filtrks de la riponse. I1 est donc imperatif, dans tout problkme d'integration numCrique des equations du mouvement, de comprendre la nature et la source des erreurs d'integration et de
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
MCCLURE ET TINAWI : I1
CHEVALET DU kl CABLE DE GARDE - I?
POINT DE BRlS *%
[7 Noeud
0 Element T I G E DE SUSPENSION (114 rnrn)
i SUPPORT 2
P O R T ~ E 2 A DONN~ES DES TESTS SIMUL~S DE L'EPRI, D ' A P R ~ S MOZER (1978) \\
Longueur de l a t i g e T r a c t i o n i n i t i a l e (N) Tes t de suspension (mrn) Conducteur Cable de ga rde
E: NOTA : Choque port6e rnesure 9754 mm.
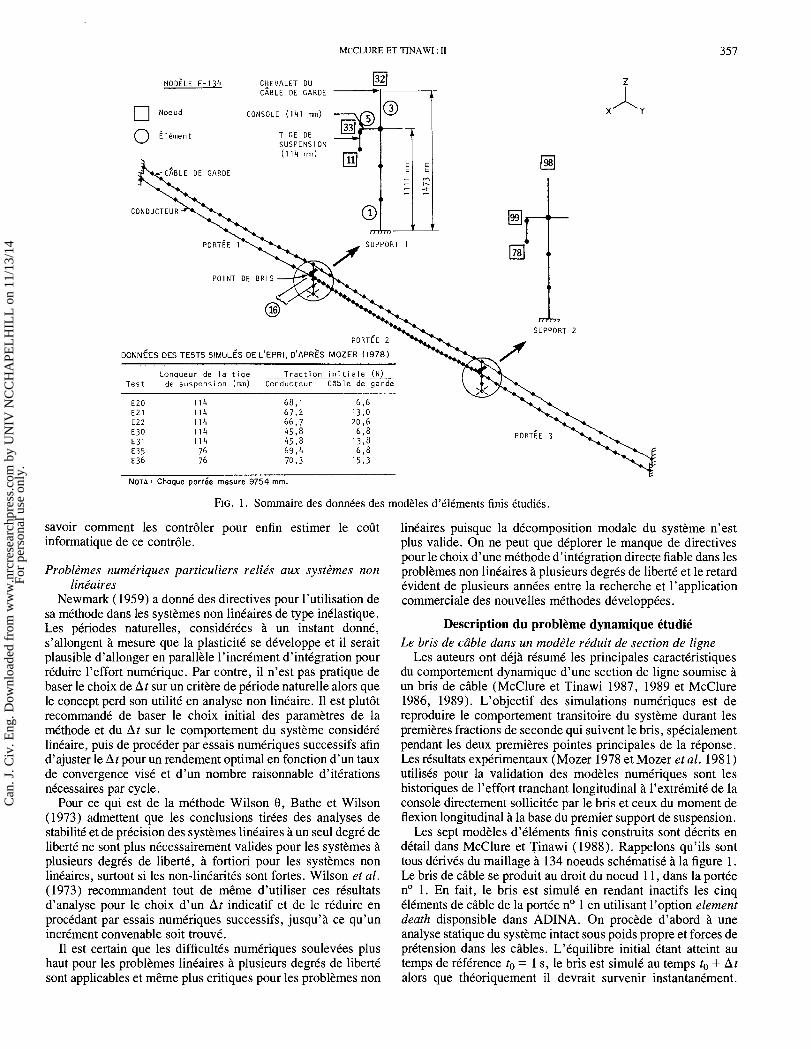
FIG. 1. Sommaire des donnCes des modkles dlCICments finis CtudiCs.
savoir comment les contr6ler pour enfin estimer le coQt informatique de ce contr6le.
Problimes nume'riques particuliers reliks aux systimes non line'aires
Newmark (1959) a donnC des directives pour l'utilisation de sa mCthode dans les systkmes non linCaires de type inklastique. Les pCriodes naturelles, considCrCes h un instant donne, s'allongent h mesure que la plasticit6 se dCveloppe et il serait plausible d'allonger en parallkle l'increment d'intCgration pour rCduire l'effort numCrique. Par contre, il n'est pas pratique de baser le choix de At sur un critkre de pCriode naturelle alors que le concept perd son utilitC en analyse non 1inCaire. I1 est plut6t recommand6 de baser le choix initial des paramktres de la mCthode et du At sur le comportement du systkme considCrC linCaire, puis de procCder par essais numCriques successifs afin d'ajuster le At pour un rendement optimal en fonction d'un taux de convergence vise et d'un nombre raisonnable d'itkrations nkcessaires par cycle.
Pour ce qui est de la mCthode Wilson 8, Bathe et Wilson (1973) admettent que les conclusions tirCes des analyses de stabilitC et de prCcision des systkmes 1inCaires h un seul degrC de libertC ne sont plus nkcessairement valides pour les systkmes h plusieurs degrCs de libertC, h fortiori pour les systkmes non linCaires, surtout si les non-1inCaritCs sont fortes. Wilson et al. (1973) recommandent tout de mCme d'utiliser ces rksultats d'analyse pour le choix d'un At indicatif et de le rCduire en procCdant par essais numCriques successifs, jusqu'h ce qu'un incrkment convenable soit trouvC.
I1 est certain que les difficultCs numCriques soulevCes plus haut pour les problkmes 1inCaires h plusieurs degrCs de libertC sont applicables et mCme plus critiques pour les problkmes non
linCaires puisque la dCcomposition modale du systkme n'est plus valide. On ne peut que dCplorer le manque de directives pour le choix d'une mCthode d'intkgration directe fiable dans les problkmes non 1inCaires h plusieurs degrCs de libertC et le retard Cvident de plusieurs annCes entre la recherche et l'application commerciale des nouvelles mCthodes dCveloppCes.
Description du probleme dynamique etudie Le bris de cdble dans un modile rkduit de section de ligne
Les auteurs ont dCjh rCsumC les principales caractCristiques du comportement dynamique d'une section de ligne soumise h un bris de clble (McClure et Tinawi 1987, 1989 et McClure 1986, 1989). L'objectif des simulations numCriques est de reproduire le comportement transitoire du systkme durant les premikres fractions de seconde qui suivent le bris, spkcialement pendant les deux premikres pointes principales de la rCponse. Les rCsultats expkrimentaux (Mozer 1978 et Mozer et al. 198 1) utilisCs pour la validation des modkles numCriques sont les historiques de l'effort tranchant longitudinal h 1'extrCmitC de la console directement sollicitCe par le bris et ceux du moment de flexion longitudinal h la base du premier support de suspension.
Les sept modkles d'C1Cments finis construits sont dCcrits en dCtail dans McClure et Tinawi (1988). Rappelons qu'ils sont tous dCrivCs du maillage h 134 noeuds schCmatisC 2 la figure 1. Le bris de clble se produit au droit du noeud 1 1, dans la portCe no 1. En fait, le bris est simulC en rendant inactifs les cinq ClCments de clble de la portCe no 1 en utilisant l'option element death disponsible dans ADINA. On prockde d'abord h une analyse statique du systkme intact sous poids propre et forces de prktension dans les clbles. L'Cquilibre initial Ctant atteint au temps de rCfCrence to = 1 s, le bris est simulC au temps to + At alors que thkoriquement il devrait s u ~ e n i r instantanement.
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.

358 CAN. J. CIV. ENG . VOL. 16, 1989
Rappelons que ce At a aussi Ctt choisi comme incrCment d'integration numCrique du problkme et qu'il doit Ctre suffisam- ment court par rapport aux pCriodes naturelles du systeme pour bien modCliser le phCnomkne de rellchement instantank.
Le choix initial des incre'ments de temps pour l'inte'gration directe
Les premiers essais numCriques ont CtC faits avec la rkgle trapCzoi'dale sur des modkles simplifiCs de section de ligne (McClure et Tinawi 1987). Dans ces modkles prkliminaires, les portCes du cible de garde intact ne sont pas reprCsentCes et les supports sont considCres comme des appuis rigides. Ces essais ont permis dYCtablir des repkres pour le choix du maillage et du At appropriCs en simulant le phCnomkne de propagation d'ondes Clastiques induites dans la ligne par le bris. Pour les conditions du test E21 de I'EPRI (Mozer 1978), on a estimC une vitesse de propagation d'onde initiale c de l'ordre de 650 m/s et une durCe Td = 7,5 ms pour l'onde de relichement de tension initiale, 2 partir des historiques de rCponse de I'accClCration longitudinale et de traction dans le cible au point de suspension no 1. I1 est certain que ces mesures ne sont qu'indicatives pour les modkles plus realistes qui font l'objet de la prCsente Ctude. En visant un Cchantillonnage de 10 At pour cette durCe, on choisit At = 0,75 ms, ce qui correspond Cgalement a l'increment d'inttgra- tion utilist pour l'essai numkrique. La longueur d'onde du phCnomkne h = cT, est de l'ordre de 4900 mm et I'espacement s entre les points d'inttgration des ClCments de clble ne devrait pas dCpasser h/10 = 490mm, en conservant le mCme taux d'kchantillonnage de 1/ 10.
L'ordre d'intkgration de Gauss utilisC pour les ClCments de clble est N = 3 et l'espacement maximum entre les points de sus- pension s,,, vaut 190,380 et 750 mm pour les maillages de 20, 10 et 5 ClCments par portCe, respectivement (fig. 1). I1 faut noter que la portte du clble de garde qui a un maillage plus grossier est CloignCe du point de bris et est probablement davantage sollicitCe en vibrations transversales d'ou l'espace- ment accru entre les points d'intkgration ne devrait pas trop perturber la rCponse de l'ensemble. I1 reste toutefois 2 vCrifier que 1'incrCment d'inttgration retenu est convenable par rapport aux plus hautes frCquences des modkles.
L'Ctude du problkme aux valeurs propres des ClCments de clble individuels a permis d'Ctablir un estimt pour les plus hautes frkquences des cibles dans chaque modkle. Les mailla- ges les plus fins Ctant considCrCs pour les deux types de cibles (20 ClCments par portCe pour le conducteur et 10 ClCments par portte pour le cible de garde), c'est 1'ClCment de conducteur qui fournit les plus hautes frkquences naturelles. Ces valeurs sont peu affectCes par le niveau de prCtension du clble, et le premier mode de vibration axiale pour un ClCment unique se situe autour de 440 Hz pour les sept modkles. Un deuxikme mode axial, le mode le plus Clevt pour 1'ClCment i trois noeuds, se situe autour de 2500 Hz, mais il est rejeter car sa dCformCe correspond un mode de compression axiale non admissible pour un Clement clble devenu llche suite 2 une perte de prCtension.
L'Ctude du problkme aux valeurs propres d'un modkle du support avec deux portCes de clble de garde ancries a I'extrCmitC du chevalet (McClure et Tinawi 1989) a aussi permis d'Ctablir un estimC pour les plus hautes fr4uences contri- buCes par le support, cette fois. Le mode de flexion le plus ClevC du mit se situe vers 310 Hz. D'autres modes avec frCquences encore plus ClevCes ( 1600-2800 Hz) correspondent a des vibrations axiales du support, mais comme ces hautes frCquen- ces ne sont pratiquement pas sollicitees lors du bris de clble,
TABLEAU 1. EstimC des erreurs d'intkgration numkrique dans les modes supCrieurs d'aprts Bathe et Wilson (1973)
MCthode Allongement Diminution d'intkgration At de la pkriode d'amplitude
directe ( m s ) At/T,* ( % I ( % I
Wilson 0 0,75 0,33 > 20 >20 Wilson 8 0,25 O,11 6 5 9 Wilson 0 0,20 0,09 4,5 5,5 Newmark P 0,25 0,11 4 0
NOTA : 0 = 1.4 pour la mtthode Wilson 8; y = 112 et P = 114 pour la mtthode Newmark P.
*On considtre f,, = 440Hz ( T,, = 2,27 ms) dans les calculs.
elles ne limitent pas le critkre de convergence. En effet, les essais numkriques dCmontrent que le critkre de convergence proposC par Newmark (Cquation 7) est trop sevkre dans la mesure oh la plus haute frCquence naturelle (la plus basse pCriode Tn) du modkle d7C1Cments finis n'est pas necessaire- ment excitCe par le chargement dynamique appliquC. La plus haute frCquence a considCrer est donc la plus haute frCquence importante du modkle d'61Cments finis, laquelle peut Ctre identifiCe plus rigoureusement par une analyse du contenu en frkquences et de la configuration du chargement.
Pour le problkme CtudiC, la valeur fn = 440Hz est donc choisie comme rCfCrence pour la plus haute frCquence naturelle des modkles sollicitte par le bris de clble. Dans ce cas, avec At= 0,75ms, on obtient At/Tn = 0,33, ce qui exckde les rapports de 116 a 1 /5 recommandCs par Newmark. La limite de convergence de la mCthode gouverne maintenant le choix du At puisque P vaut 114. Cette lirnite exige un A t/T, 5 2/(2~r) = 0,32. Le At choisi se trouve donc tout juste 2 la limite de convergence de la rkgle trapCzoi'dale.
Resultats des essais numeriques La divergence de la rhgle trapkzoi'dale avec At = 0,75 ms
Tel qu'annonck par la limite de convergence Ctablie au paragraphe pricedent, le premier modkle numCrique CtudiC (modkle E2 1 ) a diver@ pour le At initial choisi, ce qui confirme aussi la validit6 de l'ordre de grandeur de la plus haute frkquence naturelle significative estimte. En rCduisant I'incrCment d'in- tegration B At = 0,25 ms, on a At/Tn = 0,11, ce qui satisfait amplement le critkre de convergence. Selon les courbes d'erreur donnCes dans Bathe et Wilson (1973), ce At/Tn produit un allongement de la pCriode de l'ordre de 4%, ce qui annonce une excellente precision de llopCrateur. Cependant, la rCduction du At, bien qu'elle entraine une rCponse plus prCcise, vient tripler l'effort numCrique d'inttgration. La question consiste alors 2 juger si cet effort additionnel est justifiable compte tenu du fait que les modkles d'elCments finis ne peuvent pas reprksenter fidklement le comportement rtel du systkme continu dans les hautes frkquences. UtilisC avec At = 0,75 ms, l'algorithme Wilson 8 (8 = 1,4) est stable et filtre efficacement tous les modes de frkquence supCrieure a 270 Hz (environ 1 /(5A t)). Toutefois, l'amortissement artificiel induit agit aussi sur les modes infkrieurs et il devient nCcessaire dlCtudier la prCcision de l'algorithme en cornparaison avec la rkgle trapCzoi'dale qui n'induit pas d'amortissement artificiel.
~ t u d e de la pre'cision de l'algorithme Wilson 0 L'Ctude de la prkcision de l'algorithme Wilson 8 est illustrke
parles rksultats des modkles exptrimentaux des tests E21 et E35 de I'EPRI, rapportCs par Mozer (1978). Les simulations
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
MCCLURE ET TINAWI : I1
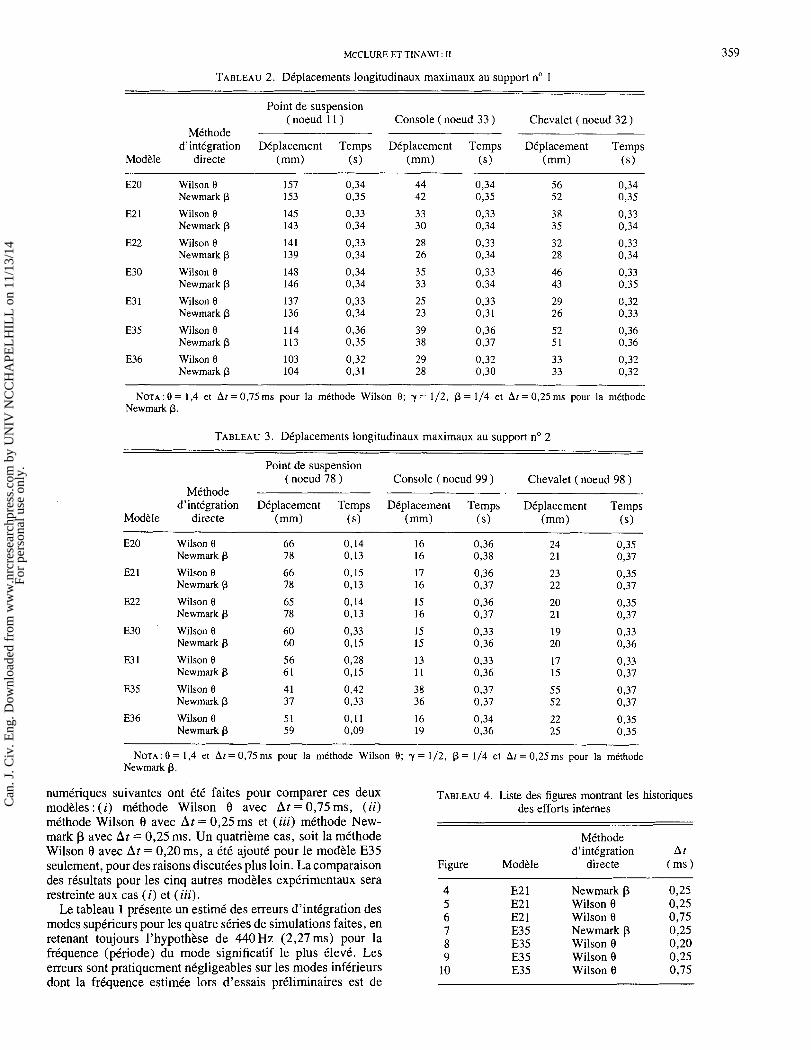
TABLEAU 2. DCplacements longitudinaux maximaux au support no 1
Point de suspension ( noeud 1 1 ) Console ( noeud 33 ) Chevalet ( noeud 32)
MCthode dlintCgration DCplacement Temps DCplacement Temps DCplacement Temps
Modkle directe (mm) (s) (mm) (s) (mm) (s)
E20 Wilson 0 Newmark P
E2 1 Wilson 0 Newmark P
E22 Wilson 0 Newmark P
E30 Wilson 0 Newmark P
E3 1 Wilson 0 Newmark P
E35 Wilson 0 Newmark P
E36 Wilson 0 Newmark P
NOTA : 0 = 1,4 et At = 0,75 ms pour la mtthode Wilson 0; y = 112, P = 114 et At = 0.25 ms pour la mtthode Newmark P.
TABLEAU 3. DCplacements longitudinaux maximaux au support no 2 - -
Point de suspension ( noeud 78 ) Console ( noeud 99 ) Chevalet ( noeud 98 )
MCthode d'intkgration DCplacement Temps Dtplacement Temps DCplacement Temps
Modkle directe (mm) (s) (mm) (s) (mm) (s)
E20 Wilson 0 66 0,14 16 0,36 24 0,35 Newmark P 78 0,13 16 0,38 21 0,37
E2 1 Wilson 0 66 0,15 17 0,36 23 0,35 Newmark P 78 0,13 16 0,37 22 0,37
E22 Wilson 0 65 0,14 15 0,36 20 0,35 Newmark P 78 0,13 16 0.37 2 1 0,37
E30 Wilson 0 60 0,33 15 0,33 19 0,33 Newmark P 60 0,15 15 0,36 20 0,36
E3 1 Wilson 0 56 0,28 13 0,33 17 0,33 Newmark P 6 1 0,15 11 0,36 15 0,37
E35 Wilson 0 41 0,42 38 0,37 55 0,37 Newmark P 37 0,33 36 0,37 52 0.37
E36 Wilson 0 5 1 0.11 16 0,34 22 0,35 Newmark P 59 0,09 19 0.36 25 0,35
NOTA : 0 = 1.4 et At = 0,75 ms pour la mtthode Wilson 0; y = 112, P = 114 et A! = 0,25 ms pour la mkthode Newmark P.
numtriques suivantes ont Ctt faites pour cornparer ces deux modkles : (i) mCthode Wilson 0 avec At = 0,75 ms, (ii) mCthode Wilson 0 avec At = 0,25 ms et (iii) mCthode New- mark p avec At = O,25 ms. Un quatribme cas, soit la mCthode Wilson 0 avec At = 0,20 ms, a CtC ajoutC pour le modkle E35 seulement, pour des raisons discutCes plus loin. La comparaison des rCsultats pour les cinq autres modbles expCrimentaux sera restreinte aux cas ( i ) et (iii).
Le tableau 1 prCsente un estimC des erreurs d'intCgration des modes supCrieurs pour les quatre sCries de simulations faites, en retenant toujours l'hypothbse de 440Hz (2,27ms) pour la frCquence (pCriode) du mode significatif le plus ClevC. Les erreurs sont pratiquement nCgligeables sur les modes inferieurs dont la frCquence estimCe lors d'essais prkliminaires est de
TABLEAU 4. Liste des figures montrant les historiques des efforts internes
Figure
MCthode d'intigration
directe
Newmark P Wilson 0 Wilson 0 Newmark P Wilson 0 Wilson 0 Wilson 0
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
360 CAN. J. CIV. ENG. VOL. 16, 1989
0 WILSON 6 -
0 At = 0,25 ms - 3
D~PLACEMENT LONGITUDINAL AU POINT DE D ~ P L A C E M E N T LONGITUDINAL L'EXTREMITE SUSPENSION No 1 DE L A CONSOLE NO^ NEWMARK ,~9 NEWMARK ,19
E z l , / , I
5 0 1 ~ , 0 ~ 10,80 11,60 12,40 13,ZO
W I TEMPS ( x l o - ' s)
A t = 0,25 ms g Ln- 0- -
0 0
0 0
0- - a- E E -
0 0 0
0 0- In -
0 0 0 0
1 0 I I I n
3 WILSON 6
At = 0,25 ms
I I I I
TEMPS ( s )
- 10,oa l o ,BO 11,6a 12.40 13,zo 10,oo IO,BO I I .60 12.40 13,zo
E E
TEMPS ( x lo- ' s) TEMPS ( x lo-' s )
WILSON 6
TEMPS ( x l o - ' s)
WILSON 6
l l , o o I,IO I,ZO I ,JO 1,4a
TEMPS ( s )
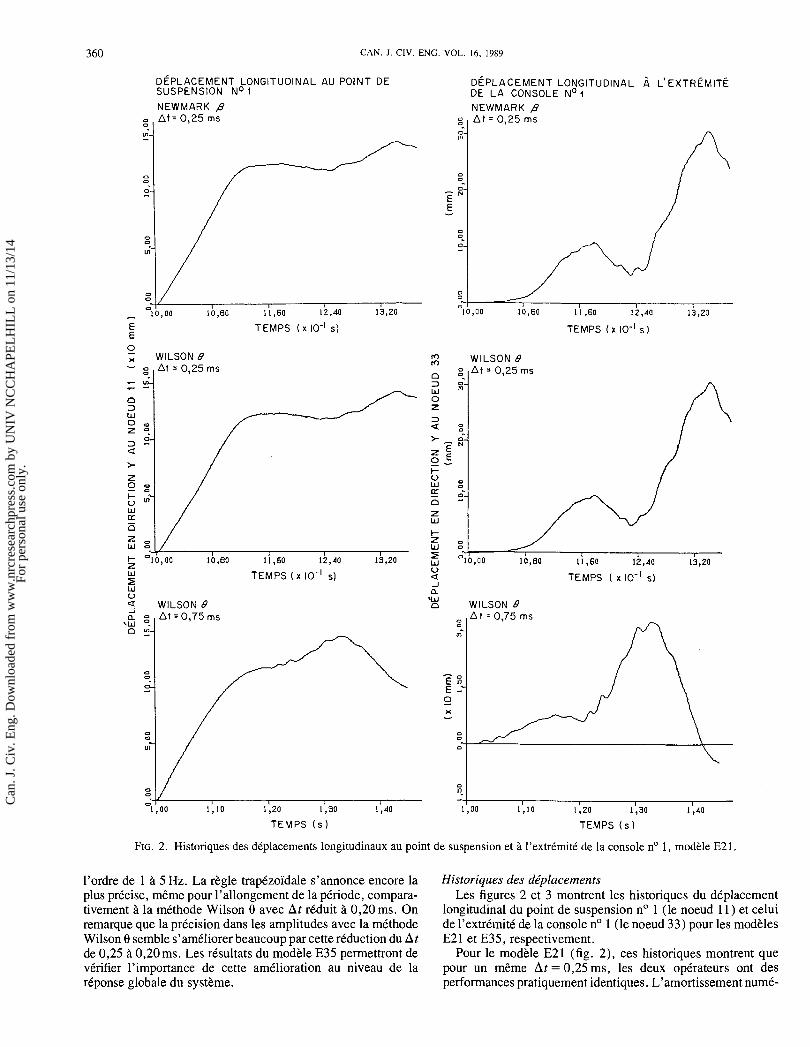
FIG. 2, Historiques des dkplacements longitudinaux au point de suspension et i I'extrCmitC de la console no 1, modkle E21.
l'ordre de 1 ?I 5 Hz. La rbgle trapCzo'idale s'annonce encore la plus precise, mCme pour l'allongement de la pCriode, compara- tivement la methode Wilson 0 avec At reduit ?I 0,20 ms. On remarque que la precision dans les amplitudes avec la methode Wilson 0 semble s'amiliorer beaucoup par cette reduction du At de 0,25 ?I 0,20ms. Les rksultats du modble E35 permettront de verifier l'importance de cette amelioration au niveau de la reponse globale du systbme.
Historiques des dkplacements Les figures 2 et 3 montrent les historiques du deplacement
longitudinal du point de suspension no 1 (le noeud 11) et celui de l'extr6mitC de la console no 1 (le noeud 33) pour les mod2les E21 et E35, respectivement.
Pour le modble E21 (fig. 2), ces historiques montrent que pour un mCme At = 0,25 ms, les deux opirateurs ont des performances pratiquement identiques. L'amortissement nume-
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
MCCLURE ET TINAWI : I1 36 1
&PLACEMENT LONGITUDINAL AU POINT DE SUSPENSION No 1
D ~ P L ACEMENT LONGITUDINAL b L ' E X T R ~ M I T ~ DE L A CONSOLE No 1
NEWMARK .B NEWMARK ,B 3 At = 0.25 m r
E TEMPS ( x l o - ' s ) E
c J WILSON B i 3 ~t = 0.75 ms
TEMPS (x lo- ' 5)
TEMPS ( x lo-' s)
o , WILSON B
Y "' = OV2O "'
TEMPS ( x l o - ' s)
WILSON B y A t = 0 7 5 ms
TEMPS ( s ) TEMPS ( 5 )
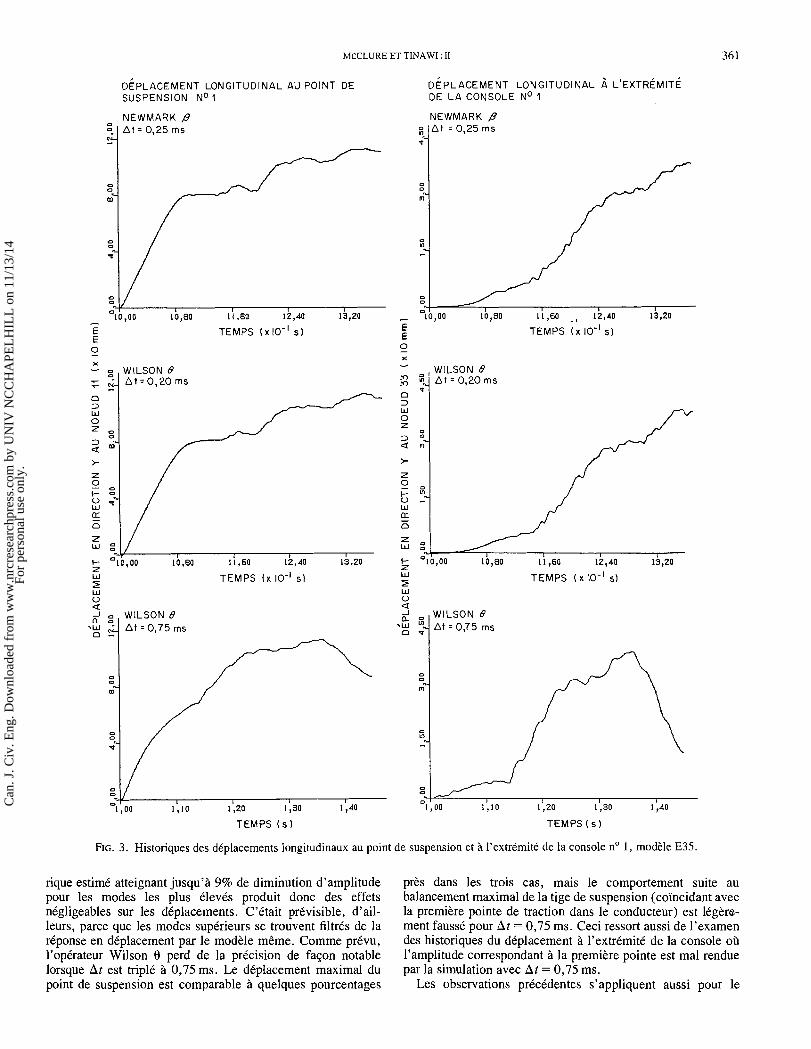
FIG. 3. Historiques des dkplacements longitudinaux au point de suspension et a I'extrkmite de la console no 1 , rnodkle E35.
rique estimt atteignant jusqu'h 9% de diminution d'amplitude pour les modes les plus tlevts produit donc des effets ntgligeables sur les dtplacements. C'ttait prtvisible, d'ail- leurs, parce que les modes suptrieurs se trouvent filtrts de la rtponse en dtplacement par le modkle m&me. Comme prtvu, l'optrateur Wilson 0 perd de la prtcision de f a ~ o n notable lorsque At est triplt h 0,75 ms. Le dtplacement maximal du point de suspension est comparable h quelques pourcentages
prks dans les trois cas, mais le comportement suite au balancement maximal de la tige de suspension (coi'ncidant avec la premikre pointe de traction dans le conducteur) est ltgkre- ment fausst pour At = 0,75 ms. Ceci ressort aussi de l'examen des historiques du dtplacement h l'extrtmitt de la console ou l'amplitude correspondant h la premikre pointe est ma1 rendue par la simulation avec At = 0,75 ms.
Les observations prtctdentes s'appliquent aussi pour le
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
CAN. J . CIV. ENG. VOL. 16, 1989
TABLEAU 5. Pointes de traction dans le conducteur au point de bris (noeud 11)
Premikre pointe Deuxikme pointe MMhode
d'intkgration h t T I 11 AI T2 t2 A2 ~2 12
Modkle directe ( m s ) ( N ) ( s ) ( N . s ) ( N ) ( s ) ( N . s ) ( N ) ( s )
E20 Wilson 0 Newrnark P
E2 1 Wilson 0 Wilson 0 Newrnark P
E22 Wilson 0 Newrnark P
E30 Wilson 0 Newmark P
E3 1 Wilson 0 Newrnark P
E35 Wilson 0 Wilson 0 Wilson 0 Newmark P
E36 Wilson 0 Newmark P
NOTA : A;, aire approximative sous la courbe de l'historique de traction; T;, traction dans le cible conducteur, pointe no i; T 2 , valeur moyenne de la tracjion i la deuxitme pointe; t i , temps correspondant i Ti sur I'historique de traction ( temps de dCIai entre la pointe i et ['instant du bris); t2 , instant qui correspond environ i la moitit de la deuxitme pointe. 0 = 1,4 pour la mtthode Wilson 0; y = 112 et p = 114 pour la mtthode Newmark P.
modble E35 (fig. 3). Cette fois, cependant, les resultats prCsentts sont pour At = 0,20 ms au lieu de 0,25 ms. Les imprtcisions dans l'allure des historiques obtenus avec At = 0,75 ms sont plus marqutes cependant pour la premibre pointe de traction dans le conducteur. Ceci s'explique par le fait que, les tiges de suspension du modble E35 Ctant plus courtes (76 mm au lieu du 114 mm du modble E21), les dCbalance- ments gCnCrCs par le bris contiennent de plus hautes friquences que celles du modble E2 1. Ces hautes frCquences sont ma1 rendues par l'algorithme dlintCgration qui filtre pratiquement tous les modes dont la frCquence est supCrieure B 270 Hz.
Le tableau 2 compare les dkplacements longitudinaux maxi- maux calculCs au support no 1. Ces rCsultats sont donnCs pour les sept modbles CtudiCs avec les deux simulations suivantes : mtthode Wilson 8 avec At = 0,75 ms et rbgle trapCzoi'dale avec At = 0,25 ms. Le tableau 3 compare ces m&mes dkplacements mais calculCs au support no 2. c i s comparaisons permettent de conclure que la mCthode Wilson 8, avec un incrCment dlintCgra- tion At = 0,75 ms, soit trois fois plus grand que celui de la rbgle trapCzoi'dale, permet de prCdire correctement les valeurs maxi- males des dCplacements & quelques pourcentages prbs. Les prkdictions des maximums & 1'Cchelle du temps sont aussi bonnes.
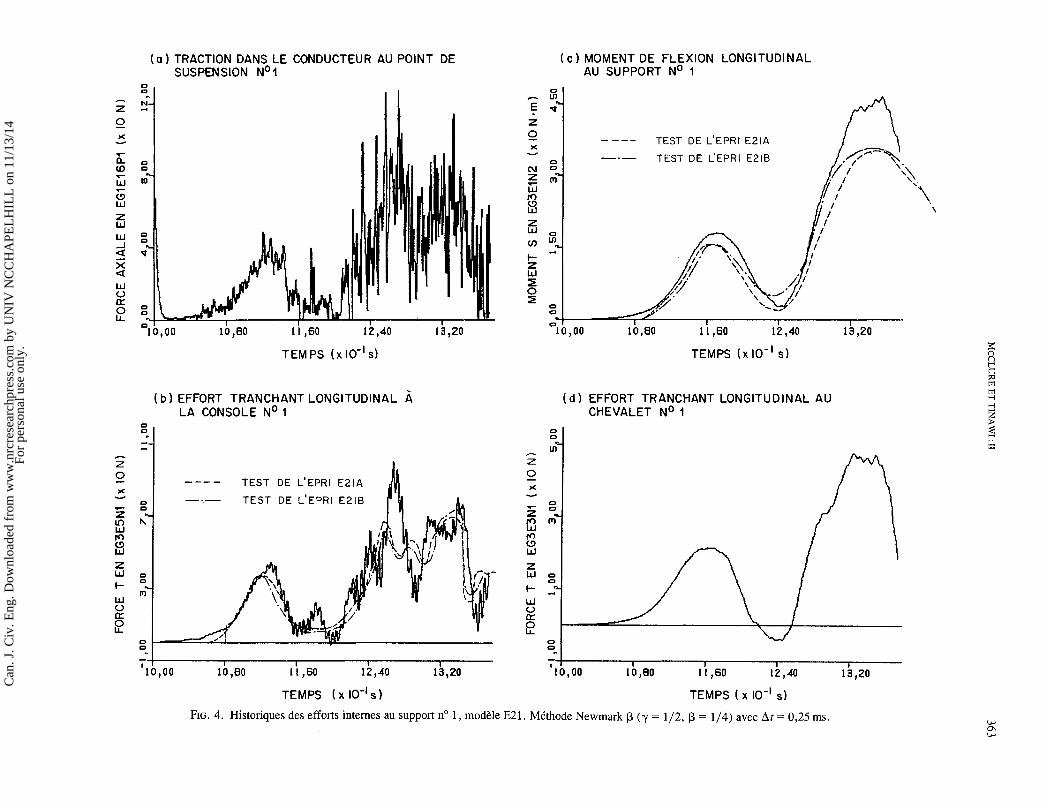
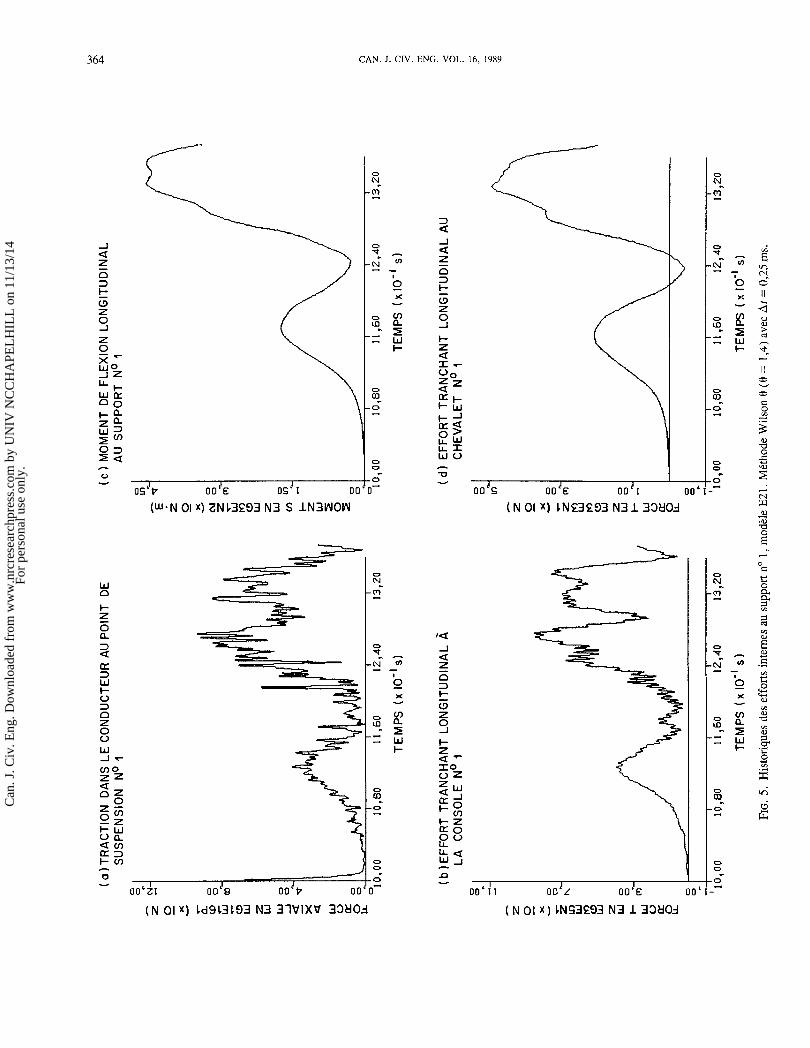
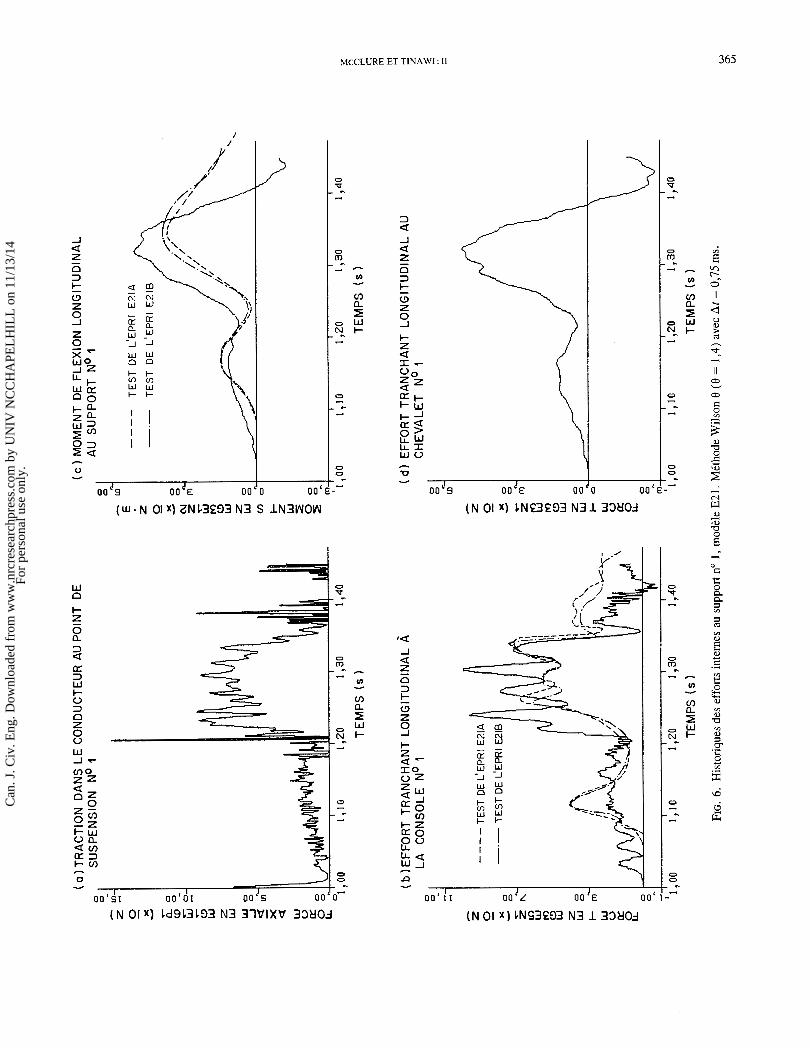
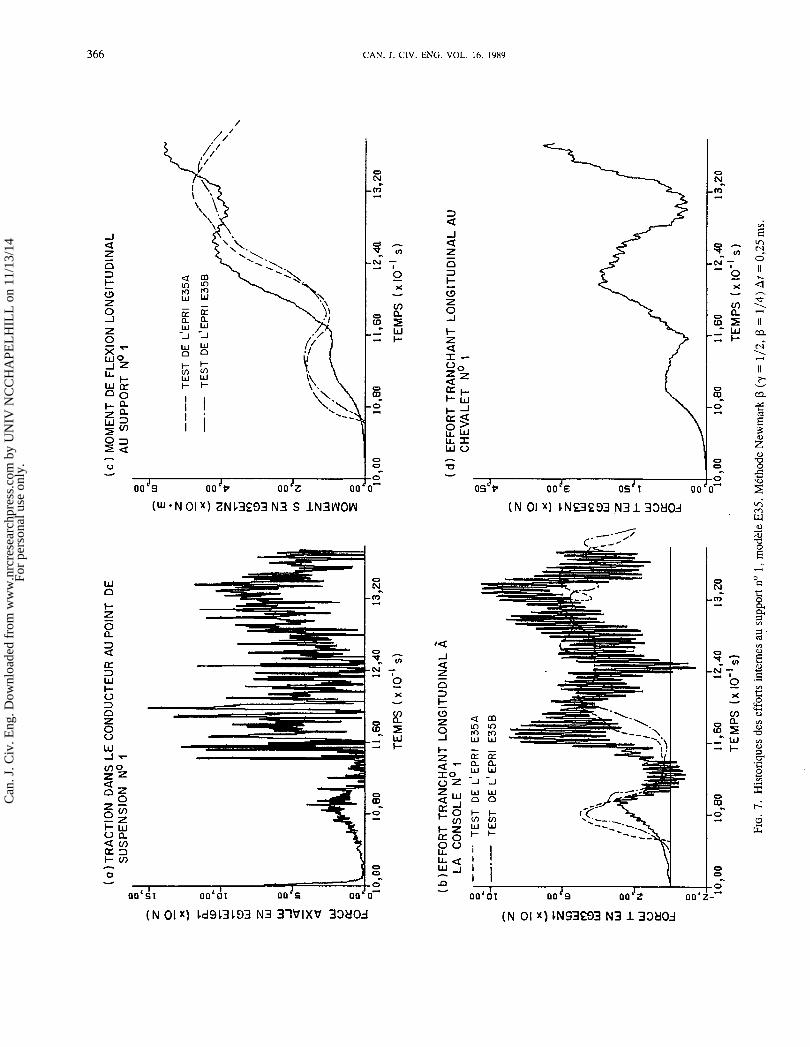
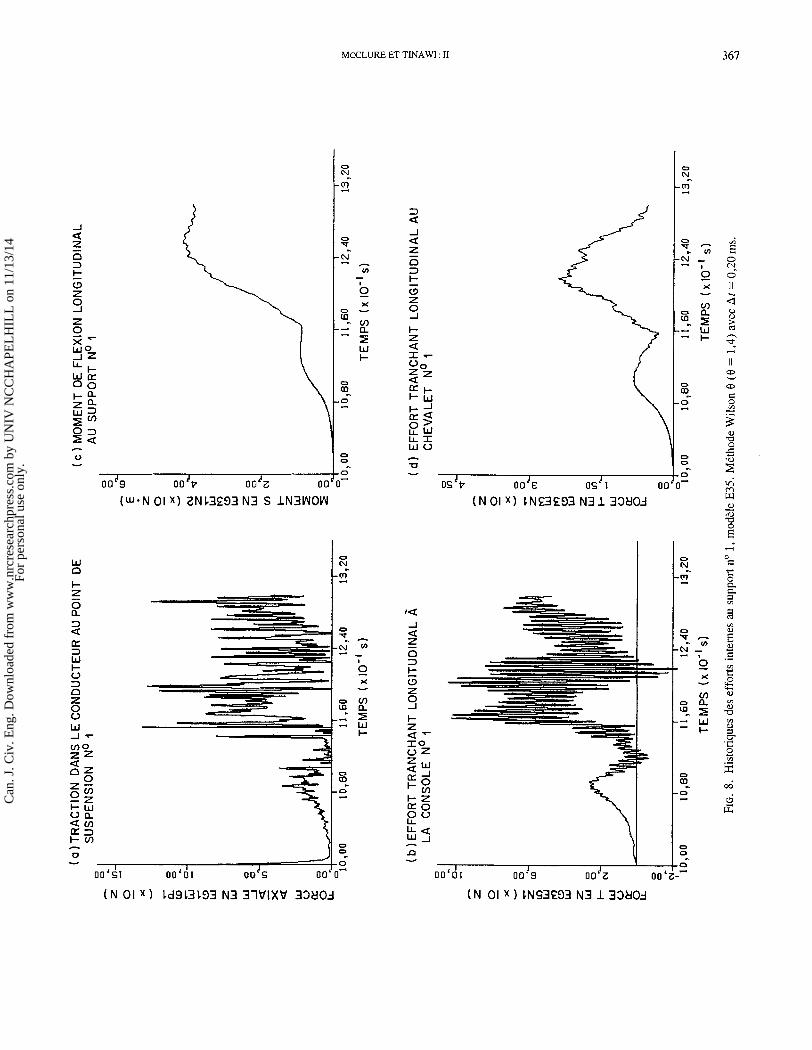
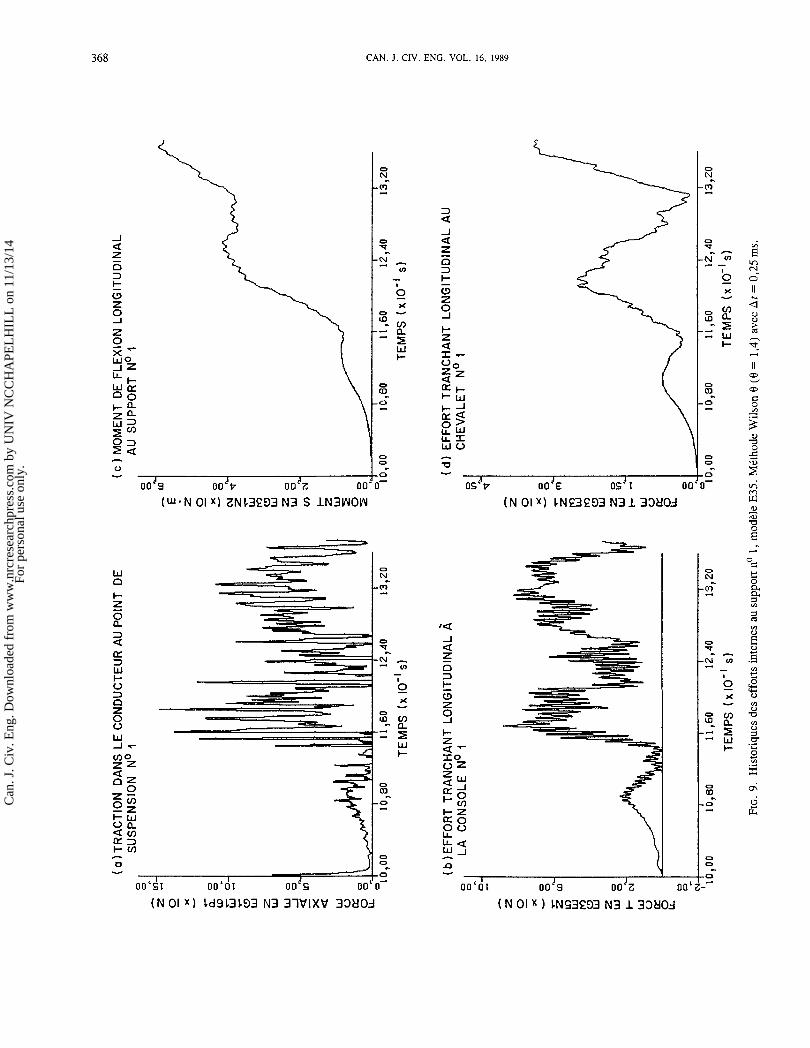
Historique des efforts internes Quatre historiques d'efforts internes au support no 1 sont
prtsentCs pour chaque variante d'intCgration numCrique. Ces efforts sont ( i ) la traction dans le conducteur au point de bris, (ii) l'effort tranchant longitudinal & 1'extrCmitC de la console directement adjacente au bris, ( iii) l'effort tranchant longitudi- nal h I'extrtmitC du chevalet du ciible de garde et ( iv) le moment de flexion longitudinal & la base. Ces historiques sont groupCs sur une m&me figure pour chaque cas simulC. Une liste de ces
figures donnte au tableau 4 facilitera les references ulterieures. Ces figures ont CtC tracCes & l'aide du logiciel post-processeur ADINA-PLOT qui ne permet pas de superposer plusieurs historiques sur un mCme graphique.
Les historiques de la traction dans le conducteur au point de suspension no 1 (en ( a ) des fig. 4-10) montrent l'impor- tance des hautes friquences dans les forces de dkbalancement gCnCrCes par le bris. Comme prCvu, cette importance est plus marquCe pour le modble E35 avec tige de suspension raccourcie et elle commence B se manifester surtout au debut de la seconde pointe de traction, lorsque l'interaction de tous les compo- sants de la ligne est mobilisie. Le filtrage des friquences su@rieures par I'opCrateur Wilson 8 est mis en Cvidence par la comparaison des figures 4a et 7a aux figures 5a et 9a, respectivement. Toutefois, ce filtrage affecte peu les valeurs moyennes des rkponses de pointe (une indication des maxi- mums les plus probables) etleur situation dans le temps. Ces valeurs moyennes influencent davantage le comporteme?t dynamique de l'ensemble que les vraies pointes maximales. A cet effet, l'aire approximative sous la courbe de l'historique est aussi un point de comparaison suppltmentaire utile. Le tableau 5 rCsume tous ces rCsultats pour l'ensemble des simulations produites. Dans le modble E21, l'amortissement artificiel induit par la mCthode Wilson 8 avec At = 0,25 ms dirninue l'arnplitude de la premibre pointe d'environ 16% et celle de la deuxibme pointe d'environ 26%, ce qui montre encore l'importance des modes suptrieurs dans la rCponse du modble. Cet effet est amplifiC dans le modkle E35 oil la premibre pointe de traction est excessivement amortie par I'opCrateur Wilson 8; un essai supplCmentaire avec At = 0,20 ms amCliore la prCcision avec une rCduction d'amplitude de l'ordre de 10%. Dans tous les modkles Ctudits, la perte de prkcision pour la premibre pointe est encore plus remarquable lorsque At est trip16 & 0,75 ms : de
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
( a 1 TRACTION DANS LE CONDUCTEUR AU POINT DE SUSPENSION NO 1
( c 1 MOMENT DE FLEXION LONGITUDINAL AU SUPPORT No I
I ---- T C C T n C I ' C f 3 D l C 9 l A I L., I V L L LI 1,1 LL,,-,
-.- TEST DE L'EPRI €218
"*
TEM PS (x lo-' s) TEMPS (x lo- ' s)
( b ) EFFORT TRANCHANT LONGITUDINAL ( d EFFORT TRANCHANT LONGITUDINAL AU LA CONSOLE NO 1 CHEVALET No I
0 0 - - Ln
Z
TEST DE L'EPRI E21A 0 x
TEST DE L'EPRI €218 u
0
i a- m m W 0 (3 W
Z - W o 0 ' 2
W 0 LL e
0 0 -
I I I I I I I I I -
llO,oo 10,80 11,60 12,40 13,ZO 10,OO 10,80 1 1,60 12,40 13,20 I
TEMPS (X IO - Is ) TEMPS ( x lo-' s)
FIG. 4. Historiques des efforts internes au support no 1, modele E21. MCthode Newmark P (y = 112, P = 114) avec A t = 0,25 ms.
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
CAN. 1. CIV. ENG. VOL. 16, 1989
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
McCLURE ET TINAWI : I1
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
( a 1 T
RA
CT
ION
D
AN
S L
E C
ON
DU
CTE
UR
AU
PO
INT
DE
S
US
PE
NS
ION
NO
1 T
EM
PS
( x
lo-'
s)
TE
MP
S (
x lo
-' s
)
(c
MO
ME
NT
DE
FLE
XIO
N L
ON
GIT
UD
INA
L A
U
SU
PP
OR
T N
O 1
(b )E
FF
OR
T T
RA
NC
HA
NT
LO
NG
ITU
DIN
AL
LA
C
ON
SO
LE N
O I
( d
) E
FFO
RT
TR
AN
CH
AN
T L
ON
GIT
UD
INA
L A
U
CH
EV
ALE
T
NO
1
TE
ST
D
E L
'EP
Rl
E3
5A
TE
ST
D
E L
' EP
Rl
E3
5B
- Z 0
x
C - Z
In
W S
W
Z
W
I-
W
U
a e
TE
MP
S (
x 1
0-'
sl
TE
MP
S (
x lo
-' s
)
FIG
. 7.
His
tori
ques
des
eff
orts
inte
rnes
au
supp
ort n
o 1,
mod
kle
E35
. MC
thod
e N
ewm
ark
P (y
= 1
12, P
= 1
14) A
t =
0,2
5 m
s.
0
0 h
- Ill
E
Z
2
X u
o
---- T
ES
T D
E L
'EP
RI
E3
5A
TE
ST
DE
L'E
PR
I E
35
B
cu z
P
6
M
a
w Z
w
= U)
N
I-
Z
w E 0
5
g 0
I 1
I I
10,O
O
10,B
O
11,6
0 12
,411
13
,20
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
( a
) TR
AC
TIO
N D
AN
S L
E C
ON
DU
CTE
UR
AU
PO
INT
DE
(c
M
OM
EN
T D
E F
LEX
ION
LO
NG
ITU
DIN
AL
- S
US
PE
NS
ION
N
O 1
AU
SU
PP
OR
T N
O 1
TEM
PS
( x
lo-'
s)
( b
EFF
OR
T T
RA
NC
HA
NT
LO
NG
ITU
DIN
AL
h L
A C
ON
SO
LE
NO
1
TE
MP
S (
x lo
-' s)
( d
) E
FFO
RT
TR
AN
CH
AN
T
LON
GIT
UD
INA
L A
U
CH
EV
ALE
T
NO
1
TE
MP
S (
x 1
0-I
s)
TEM
PS
( x
lo-'
s)
FIG
. 8.
His
tori
ques
des
eff
orts
inte
rnes
au
supp
ort n
o 1,
mod
kle
E35
. MC
thod
e W
ilson
0 (
0 =
1,4
) ave
c A
t =
0,2
0 m
s.
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
( a
) TR
AC
TIO
N D
AN
S L
E C
ON
DU
CTE
UR
AU
PO
INT
DE
S
US
PE
NS
ION
N
O 1
z I
TE
MP
S (
x 10
-' sl
(b ) E
FFO
RT
TR
AN
CH
AN
T L
ON
GIT
UD
INA
L L
A C
ON
SO
LE N
O
1 9 1
(c )
MO
ME
NT
DE
FLE
XIO
N L
ON
GIT
UD
INA
L A
U S
UP
PO
RT
N
O 1
TE
MP
S (
x 1
0-I s
l
( d
) E
FFO
RT
TR
AN
CH
AN
T L
ON
GIT
UD
INA
L A
U
CH
EV
AL
ET
N
O I
!j
TE
MP
S (
x lo
-' s
l T
EM
PS
(x
10-I s
l
FIG
. 9.
His
tori
ques
des
eff
orts
inte
rnes
au
supp
ort
no 1
, mod
kle
E35
. M
Cth
ode
Wils
on 0
(0
= 1
,4)
avec
At =
0,2
5 m
s.
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
( a
1 TR
AC
TIO
N
DA
NS
LE
CO
ND
UC
TEU
R A
U P
OIN
T D
E
0
1 S
US
PE
NS
ION
N
O 1
(c
1 M
OM
EN
T D
E F
LEX
ION
LO
NG
ITU
DIN
AL
AU
S
UP
PO
RT
NO
1
z I
TEM
PS
(s
1 T
EM
PS
(s
1
( t~
1 EF
FO
RT
TR
AN
CH
AN
T L
ON
GIT
UD
INA
L ii
LA
C
ON
SO
LE N
O I
----
D
TE
ST
DE
L'E
PR
1 E
35
A
DJ
TE
ST
D
E c~
~~~
€3
58
n
- I I
I I
I I
1 ,a0
1,1a
1,20
1,30
1,4a
TE
MP
S (
s 1
( d
) E
FFO
RT
TR
AN
CH
AN
T
LON
GIT
UD
INA
L A
U
CH
EV
ALE
T
No
1
m I
I
I
I I
I I
1 ,0
0 1,
IO
1,20
1,30
1,40
TE
MP
S
(s 1
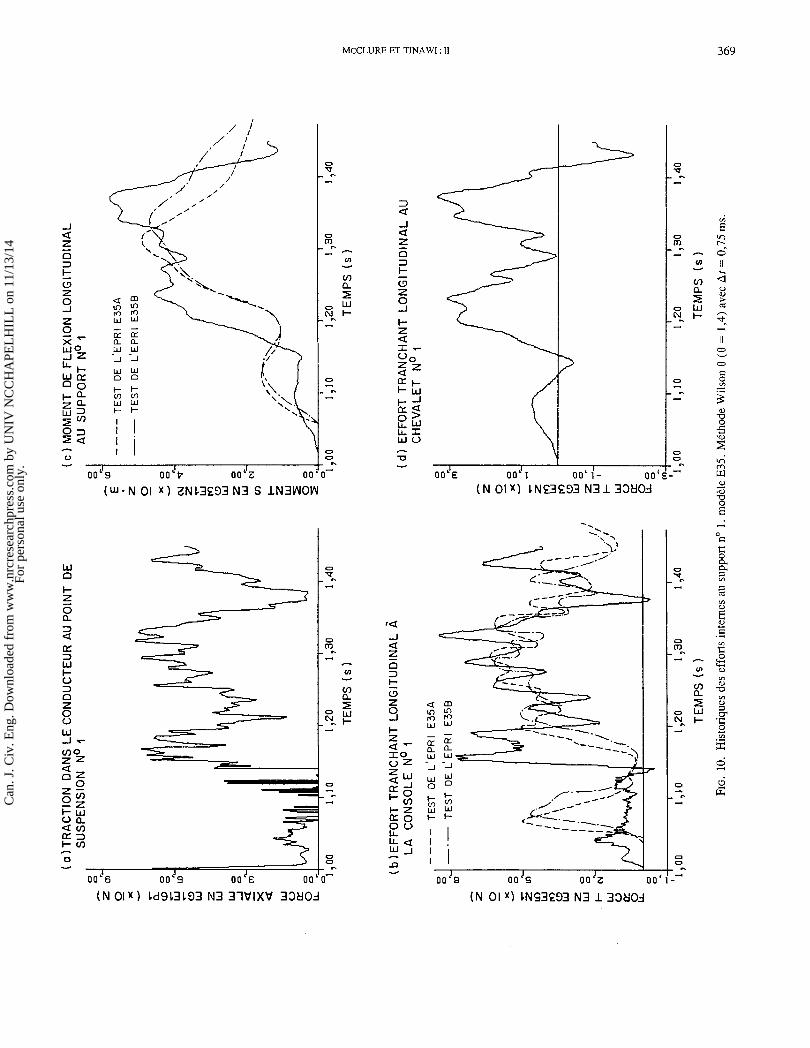
FIG
. 10.
His
tori
ques
des
eff
orts
inte
rnes
au
supp
ort n
o 1.
mod
kle
E35
. M
Cth
ode
Wils
on 0
(0
= 1
,4) a
vec
At =
0,7
5 m
s.
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
CAN. J. CIV. ENG. VOL. 16, 1989
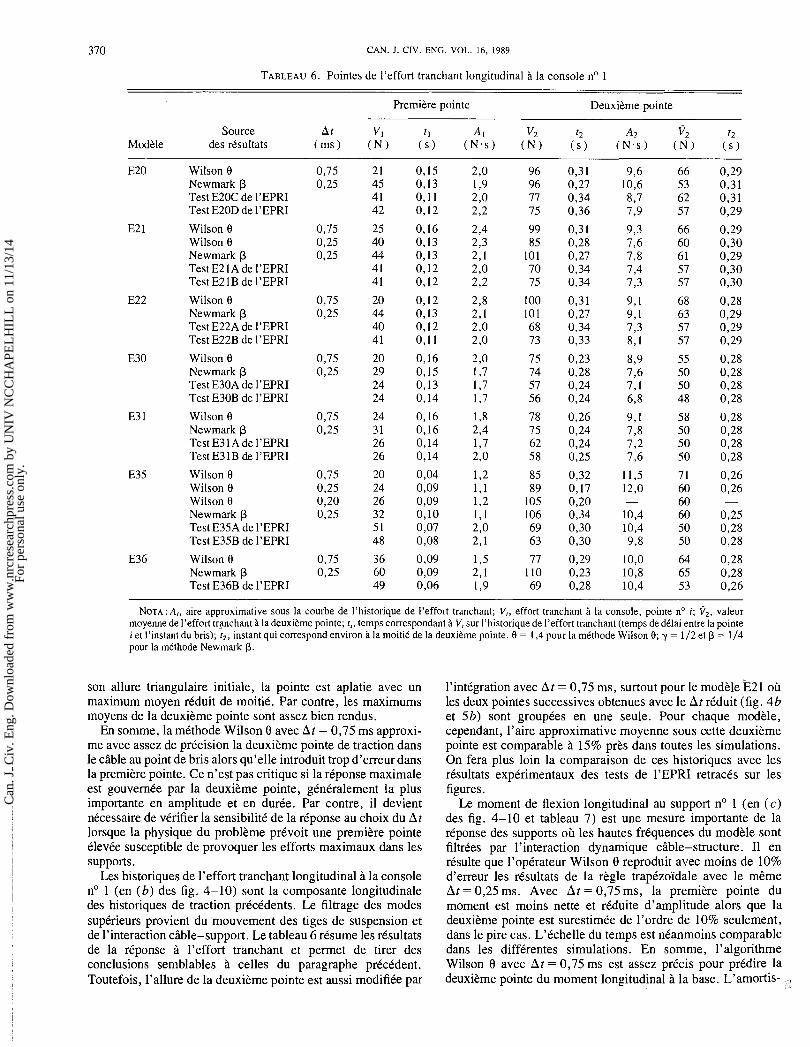
TABLEAU 6. Pointes de I'effort tranchant longitudinal i~ la console no 1
Premiere pointe Deuxieme pointe
Source At VI * I A I V 2 t 2 Az v 2 12
Modele des rksultats ( m s ) ( N ) ( s ) ( N . s ) ( N ) ( s ) ( N . s ) ( N ) ( s )
E20 Wilson 8 Newmark P Test E20C de I'EPRI Test E20D de I'EPRI
E2 1 Wilson 8 Wilson 8 Newmark P Test E2 I A de I'EPRI Test E2 1 B de 1'EPRI
E22 Wilson 8 Newmark P Test E22A de I'EPRI Test E22B de 1'EPRI
E30 Wilson 8 Newmark P Test E30A de 1'EPRI Test E30B de I'EPRI
E3 1 Wilson 8 Newmark P Test E3 1 A de 1'EPRI Test E3 IB de 1'EPRI
E35 Wilson 8 Wilson 8 Wilson 8 Newmark P Test E35A de I'EPRI Test E35B de I'EPRI
E36 Wilson 8 Newmark P Test E36B de I'EPRI
NoTA:A~, aire approximative sous la courbe de I'historique de I'effort tranchant; V,, effort tranchant B la console, pointe no i; v2, valeur moyenne de I'effort tr_anchant a la deuxitme pointe; ti, temps correspondant a V ; sur I'historique de I'effort tranchant (temps de dtlai entre la pointe i et I'instant du bris); r,, instant qui correspond environ B la moitit de la deuxikme pointe. 0 = 1,4 pour la mCthode Wilson 0; y = 112 et P = 114 pour la mtthode Newmark P.
son allure triangulaire initiale, la pointe est aplatie avec un maximum moyen rCduit de moitit. Par contre, les maximums moyens de la deuxikme pointe sont assez bien rendus.
En somme, la mCthode Wilson 0 avec At = 0,75 ms approxi- me avec assez de prtcision la deuxikme pointe de traction dans le clble au point de bris alors qu'elle introduit trop d'erreur dans la premikre pointe. Ce n'est pas critique si la rCponse maximale est gouvernke par la deuxikme pointe, ginkralement la plus importante en amplitude et en durCe. Par contre, il devient nCcessaire de verifier la sensibiliti de la riponse au choix du At lorsque la physique du problkme prCvoit une prernikre pointe Clevte susceptible de provoquer les efforts maximaux dans les supports.
Les historiques de l'effort tranchant longitudinal ii la console no 1 (en (b ) des fig. 4-10) sont la composante longitudinale des historiques de traction prCcCdents. Le filtrage des modes supirieurs provient du mouvement des tiges de suspension et de l'interaction clble-support. Le tableau 6 rtsume les rtsultats de la riponse ii l'effort tranchant et permet de tirer des conclusions semblables a celles du paragraphe prtctdent. Toutefois, l'allure de la deuxieme pointe est aussi modifiCe par
I'intCgration avec At = 0,75 ms, surtout pour le modkle ~ 2 1 ou les deux pointes successives obtenues avec le At rCduit (fig. 4 b et 5b) sont groupCes en une seule. Pour chaque modkle, cependant, l'aire approximative moyenne sous cette deuxieme pointe est comparable a 15% prks dans toutes les simulations. On fera plus loin la comparaison de ces historiques avec les r~sultatsexpCrimentaux des tests de I'EPRI retracts sur les figures.
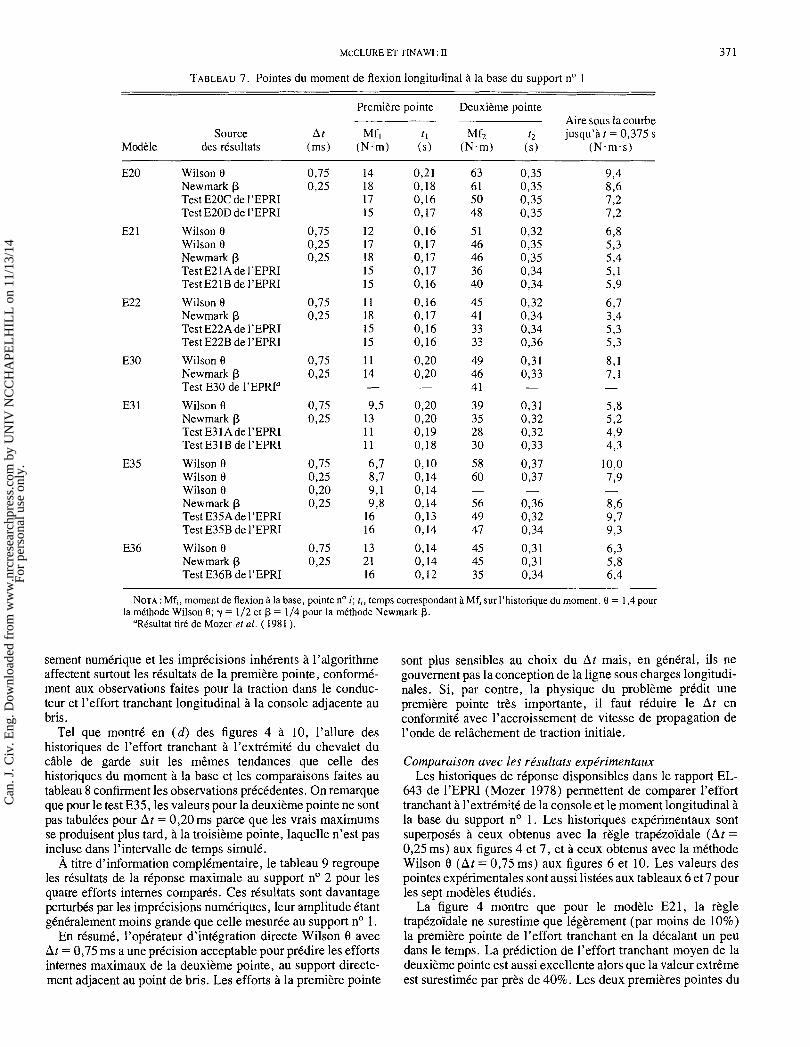
Le moment de flexion longitudinal au support no 1 (en (c) des fig. 4-10 et tableau 7) est une mesure importante de la rtponse des supports ou les hautes frtquences du modkle sont filtrtes par l'interaction dynamique clble-structure. I1 en risulte que I'opCrateur Wilson 0 reproduit avec moins de 10% d'erreur les rtsultats de la regle trapizoi'dale avec le m&me At = 0,25 ms. Avec At = 0,75 ms, la premikre pointe du moment est moins nette et rtduite d'amplitude alors que la deuxikme pointe est surestimke de l'ordre-de 10% seulement, dans le pire cas. L'Cchelle du temps est nianmoins comparable dans les differentes simulations. En somme, l'algorithme Wilson 0 avec At = 0,75 ms est assez prCcis pour prtdire la deuxikme pointe du moment longitudinal ii la base. L'amortis-
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
McCLURE ET TINAWI : I1
TABLEAU 7 . Pointes du moment de flexion longitudinal i la base du support no 1
Premikre pointe Deuxikme pointe Aire sous la courbe
Source At Mf I tl Mf2 t2 jusqu'i t = 0,375 s Modele des resultats (ms) (N.m) (s) (N.m) (s) (N .m.s )
E20 Wilson 0 Newmark P Test E20C de I'EPRI Test E20D de I'EPRI
E2 1 Wilson 0 Wilson 0 Newmark P Test E21A de I'EPRI Test E21B de I'EPRI
E22 Wilson 0 Newmark P Test E22A de 1'EPRI Test E22B de I'EPRI
E30 Wilson 0 Newmark P Test E30 de I'EPRIa
E3 1 Wilson 0 Newmark P Test E3 1A de I'EPRI Test E31 B de I'EPRI
E35 Wilson 0 Wilson 0 Wilson 0 Newmark P Test E35A de I'EPRI Test E35B de I'EPRI
E36 Wilson 0 Newmark (3 Test E36B de I'EPRI
N ~ T A : Mf,, moment de flexion B la base, pointe no i; t;, temps correspondant B Mfi sur I'historique du moment. 0 = 1.4 pour la mtthode Wilson 0; y = 112 et P = 114 pour la mtthode Newmark P.
"Rtsultat tire de Mozer et al. ( 1981 ).
sement numCrique et les imprCcisions inherents h l'algorithme affectent surtout les rCsultats de la premiere pointe, conformC- ment aux observations faites pour la traction dans le conduc- teur et l'effort tranchant longitudinal 5 la console adjacente au bris .
Tel que rnontrk en (d) des figures 4 a 10, l'allure des historiques de l'effort tranchant a 1'extrCmitC du chevalet du ciible de garde suit les mCmes tendances que celle des historiques du moment a la base et les comparaisons faites au tableau 8 confirment les observations prCcCdentes. On remarque que pour le test E35, les valeurs pour la deuxieme pointe ne sont pas tabulCes pour At = 0,20 ms parce que les vrais maximums se produisent plus tard, a la troisikme pointe, laquelle n'est pas incluse dans l'intervalle de temps sirnulC.
A titre d'information complCrnentaire, le tableau 9 regroupe les rCsultats de la rCponse rnaxirnale au support no 2 pour les quatre efforts internes comparks. Ces rksultats sont davantage perturbCs par les imprCcisions numCriques, leur amplitude Ctant gCnCralement rnoins grande que celle mesurCe au support no 1.
En rCsumC, llopCrateur dlintCgration directe Wilson 0 avec At = 0,75 ms a une precision acceptable pour prCdire les efforts internes maximaux de la deuxieme pointe, au support directe- ment adjacent au point de bris. Les efforts a la premikre pointe
sont plus sensibles au choix du At mais, en gCnCral, ils ne gouvernent pas la conception de la ligne sous charges longitudi- nales. Si, par contre, la physique du probleme prCdit une premikre pointe tres importante, il faut rCduire le At en conformit6 avec l'accroissement de vitesse de propagation de l'onde de relgchement de traction initiale.
Comparaison avec les re'sultats expe'rimentaux Les historiques de rCponse disponsibles dans le rapport EL-
643 de 1'EPRI (Mozer 1978) permettent de comparer l'effort tranchant a 1'extrCmitC de la console et le moment longitudinal a la base du support no 1. Les historiques expkrimentaux sont superposCs a ceux obtenus avec la regle trapCzo'idale (At = 0,25 ms) aux figures 4 et 7, et a ceux obtenus avec la methode Wilson 0 (At = 0,75 rns) aux figures 6 et 10. Les valeurs des pointes expCrirnentales sont aussi listCes aux tableaux 6 et 7 pour les sept modeles CtudiCs.
La figure 4 montre que pour le modele E21, la regle trapCzoldale ne surestime que 1Cgkrement (par moins de 10%) la premiere pointe de l'effort tranchant en la dCcalant un peu dans le temps. La prediction de l'effort tranchant moyen de la deuxikme pointe est aussi excellente alors que la valeur extrCme est surestimke par prks de 40%. Les deux premieres pointes du
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
372 CAN. J. CIV. ENG. VOL. 16, 1989
TABLEAU 8. Pointes de I'effort tranchant longitudinal au chevalet du clble de garde no 1
Premikre pointe Deuxi2me pointe
MCthode d'inttgration At VI t~ V2 t2
Modkle directe ( m s ) ( N ) ( s ) ( N ) ( s )
E20 Wilson 0 0,75 7,6 0,13 38 0,32 Newmark P 0,25 17 0,15 39 0,34
E2 1 Wilson 0 0,75 13 0,16 53 0,32 Wilson p 0,25 21 0,16 50 0,33 Newmark P 0,25 21 0,17 48 0,32
E22 Wilson 0 0,75 14 0,16 54 0,32 Newmark P 0,25 23 0,17 53 0,3 1
E30 Wilson 0 0,75 5,6 0,18 31 0,28 Newmark P 0,25 12 0,19 29 0,32
E3 1 Wilson 0 0,75 10 0,16 40 0,30 Newmark P 0,25 16 0,19 39 0,3 1
E35 Wilson 0 0,75 7,2 0,08 34 0,37 Wilson 0 0,25 7,4 0,11 34 0,37 Wilson 0 0,20 8,3 0,11 - - Newmark P 0,25 8,5 0,lO 34 0,37
E36 Wilson 0 0,75 15 0,14 49 0,31 Newmark P 0,25 27 0,14 49 0,3 1
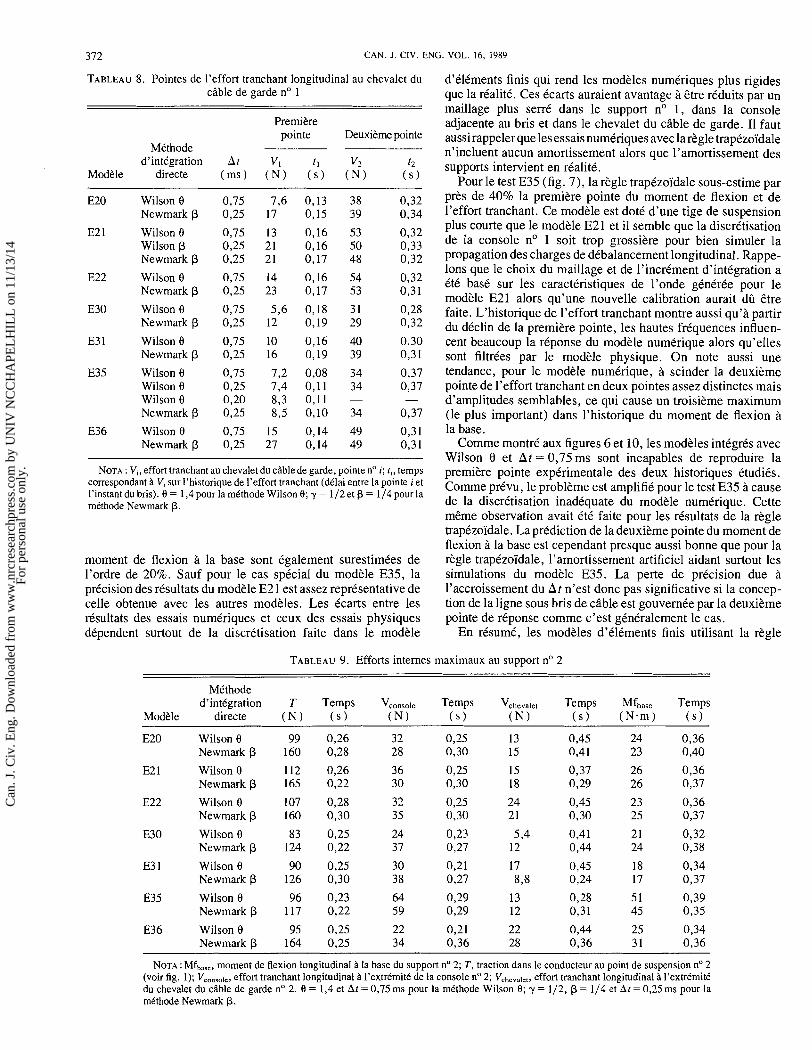
NOTA : V i , effort tranchant au chevalet du clble de garde, pointe no i; r , , temps correspondant ?I V , sur I'historique de I'effort tranchant (dClai entre la pointe i et I'instant du bris). 8 = 1,4 pour la mCthode Wilson 8; y = 112 et P = 114 pour la mCthode Newmark P.
moment de flexion a la base sont kgalement surestimkes de l'ordre de 20%. Sauf pour le cas sptcial du modkle E35, la precision des rksultats du modele E2 1 est assez representative de celle obtenue avec les autres modkles. Les Ccarts entre les resultats des essais numkriques et ceux des essais physiques dkpendent surtout de la discrCtisation faite dans le modkle
dlCICments finis qui rend les modkles numeriques plus rigides que la realit&. Ces &carts auraient avantage ii Ctre reduits par un maillage plus serrC dans le support no 1, dans la console adjacente au bris et dans le chevalet du cible de garde. I1 faut aussi rappeler que les essais numeriques avec larkgle trapezoidale n'incluent aucun amortissement alors que l'amortissement des supports intervient en rialitk.
Pour le test E35 (fig. 7), la rkgle trapkzoi'dale sous-estime par prks de 40% la premikre pointe du moment de flexion et de l'effort tranchant. Ce modkle est dote d'une tige de suspension plus courte que le modkle E21 et il semble que la discrttisation de la console no 1 soit trop grossikre pour bien simuler la propagation des charges de debalancement longitudinal. Rappe- lons que le choix du maillage et de l'increment d'intkgration a CtC base sur les caractkristiques de l'onde generCe pour le modkle E21 alors qu'une nouvelle calibration aurait dfi Ctre faite. L'historique de l'effort tranchant montre aussi qu ' i partir du dCclin de la premikre pointe, les hautes frdquences influen- cent beaucoup la rCponse du modkle numkrique alors qu'elles sont filtrtes par le modkle physique. On note aussi une tendance, pour le modkle numCrique, a scinder la deuxikme pointe de l'effort tranchant en deux pointes assez distinctes mais d'amplitudes semblables, ce qui cause un troisikme maximum (le plus important) dans l'historique du moment de flexion a la base.
Comme montrC aux figures 6 et 10, les modkles integres avec Wilson 0 et At = 0,75 ms sont incapables de reproduire la premikre pointe experimentale des deux historiques CtudiCs. Comme prkvu, le probleme est amplifie pour le test E35 a cause de la discretisation inadequate du modkle numirique. Cette m&me observation avait CtC faite pour les resultats de la rkgle traptzoidale. La prediction de la deuxikme pointe du moment de flexion B la base est cependant presque aussi bonne que pour la rkgle traptzoi'dale, l'amortissement artificiel aidant surtout les simulations du modkle E35. La perte de precision due a l'accroissement du At n'est donc pas significative si la concep- tion de la ligne sous bris de cible est gouvernee par la deuxikme pointe de rkponse comme c'est gCnCralement le cas.
En rtsumt, les modkles d'C1Cments finis utilisant la rkgle
TABLEAU 9. Efforts internes maximaux au support no 2
MCthode d'intkgration T Temps Vcons0~, Temps Vchevale, Temps Mfb,,, Temps
Modde directe ( N ) ( s ) ( N ) ( s ) ( N ) ( s ) ( N . m ) ( s )
E20 Wilson 0 99 Newmark P 160
E2 1 Wilson 0 112 Newmark P 165
E22 Wilson 0 107 Newmark P 160
E30 Wilson 0 83 Newmark P 124
E3 1 Wilson 0 90 Newmark P 126
E35 Wilson 0 96 Newmark P 117
E36 Wilson 0 95 Newmark P 164
NOTA : Mfburer moment de flexion longitudinal B la base du support no 2; T, traction dans le conducteur au point de suspension no 2 (voir fig. 1); Vc,,,,l,, effort tranchant longitudinal B I'extrCmitC de la console no 2 ; Vchevvlet, effort tranchant longitudinal B I'extrCmitC du chevalet du clble de garde no 2. 0 = 1,4 et At = 0,75 ms pour la mCthode Wilson 0; y = 112, P = 114 et At = 0.25 ms pour la mkthode Newmark P.
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
MCCLURE ET TINAWI : 11 373
trapCzoi'dale ( A t = 0,25 ms) tendent 5 surestimer les rCponses de pointe de 10 a 20%, ce qui foumit quand m&me un estimt skcuritaire pour fin de conception de ligne. I1 faut cependant raffiner davantage le modkle, surtout au niveau du maillage de la console adjacente au bris, si la propagation de l'onde de debalancement est plus rapide que prCvue. I1 reste que l'incon- vCnient majeur de la rkgle trapkzoi'dale est la necessite d'utiliser un At reduit pour converger. Cet inconvenient n'existe plus avec la methode Wilson 8 ( 8 = 1,4) qui est moins precise par contre. L'amortissement artificiel inherent a la methode est cependant bCnCfique au problkme etudie puisque les rksultats mesurks experimentalement ne montrent pas les fluctuations de hautes frkquences des historiques obtenus numeriquement.
Conclusions Pour le problkme non lineaire ktudiC, la mCthode d'intCgra-
tion directe Newmark P (y = 112, P = 1/4), bien qu'incondi- tionnellement stable dans les problkmes lineaires, voit son increment d'intkgration At limit6 par un critkre de convergence. La mkthode Wilson 8 ( 8 = 1,4) est aussi inconditionnellement stable pour les systkmes linCaires et offre l'avantage d'une convergence assurke parce qu'elle filtre les hautes frkquences de la reponse qui sont, de toute fason, ma1 modClisCes par rapport au systkme reel 2 cause de la discretisation du modkle d'kl~ments finis. On croit que cet amortissement numkrique est b6nCfique au problkme puisqu'aucun amortissement physique n'a et6 inclus dans l'analyse dynamique. I1 reste difficile cependant de quantifier a priori cet amortissement artificiel. La fiabilitk des rtsultats ne peut &tre que validie par des essais numkriques; on suggkre de faire des analyses parallkles avec les mkthodes Wilson 8 et Newmark P pour chaque nouveau type de problkme dont les caracteristiques dynamiques slCloignent trop des cas dk.j,ja CtudiCs.
~ ' ~ t u d e presentee illustre encore qu'on ne pourrait trop insister sur l'importance de la comprehension du comportement dynamique du problkme physique et des caractkristiques des outils de calcul disponsibles dans la construction d'un modkle numkrique fiable. Le choix de la mCthode d'integration et de l'intervalle d'integration commande un soin particulier, surtout dans les problkmes dynamiques complexes oh le modhle mathkmatique ne peut pas &tre valid6 par la mesure de la rkponse du modkle physique. Dans ces cas, un mauvais choix des parametres d'integration directe peut fausser complktement les resultats, et ces erreurs sont souvent difficiles a detecter.
Remerciements La recherche rapportee dans cet article a t t t financee par le
Conseil de recherches en sciences naturelles et en genie du Canada sous forme de la subvention no A8958 et d'une bourse d'etudes superieures meritte par G. McClure.
ADINA ENGINEERING. 1984. ADINA : A finite element program for automatic dynamic incremental nonlinear analysis. ADINA Engi- neering rapport no AE-84- 1 .
BATHE, K.-J., et WILSON, E. L. 1973. Stability and accuracy analysis of direct integration methods. Earthquake Engineering and Struc- tural Dynamics, 1 : 283-291.
CRAIG, R. R., JR. 198 1. Structural dynamics. An introduction to computer methods. John Wiley & Sons, Inc., New York.
HUGHES, T. J. R. 1987. The finite element method. Linear static and dynamic finite element analysis. Prentice-Hall, Englewood Cliffs.
KANAAN, A., et POWELL, G. 1973. DRAIN-2D : A general purpose computer program for dynamic analysis of inelastic plane structures. University of California, Berkeley, Earthquake Engineering Research Centre, rapport EERC 73-6 et 73-22.
MCCLURE, G. 1986. Analyse dynamique des structures avec cbbles : revue bibliographique. Ecole polytechnique de Montrtal, Montreal, rapport EPM/RT-86- 12.
1988. Interactions dynamiques dans les lignes aCriennes de t~ansportd'tlectricitt soumises aux bris de cbbles. Thkse de doctorat, Ecole polytechnique de Montrtal, Montrtal.
MCCLURE, G., et TINAWI, R. 1987. Mathematical modeling of the transient response of electric transmission lines due to conductor breakage. Computers and Structures, 26(1/2) : 41-56.
1989. Comportement dynamique des lignes aeriennes de transport d'tlectricitt d13 aux bris de cbbles. I. Modtlisation mathtmatique. Revue canadienne de gtnie civil, 16 : 335-353.
MOZER, J. D. 1978. Longitudinal unbalanced loads on transmission line structures. Electtic Power Research Institute, RapportEPRI-EL- 643.
MOZER, J. D., WOOD, W. A., et HRIBAR, J. A. 198 1. Broken wire tests on a model transmission line system. IEEE Transactions on Power Apparatus and Systems, PAS-100 : 938-947.
NEWMARK, N. M. 1959. A method of computation for structural dynamics. American Society of Civil Engineers, Engineering Mechanics Division, Journal, 85(EM3) : 67-94.
NICKELL, R. E. 1973. Direct integration methods in structural dynamics. American Society of Civil Engineers, Engineering Mechanics Division, Journal, 99(EM2) : 303-3 17.
WILSON, E. L., FARHOOMAND, I., et BATHE, K.-J. 1973. Nonlinear dynamic analysis of complex structures. Earthquake Engineering and Structural Dynamics, 1 : 241-252.
Liste des symboles
matrice d'amortissement vitesse de propagation initiale de l'onde de
dtbalancement de traction dans le ciible suite au bris
vecteur des forces internes rtsistantes, Cvalue dans la configuration dtformte aux temps t et t + At, respectivement
frtquence naturelle du mode le plus tlevt matrice de rigiditt tangente, tvalute dans la
configuration deformte au temps t matrice de masse ordre d'integration de la mithode de Gauss vecteur des forces exterieures exprime aux
temps t et t + At, respectivement vecteur des forces exttrieures extrapolt au
temps t + OAt(voir [ I l l ) vecteur des forces rtsiduelles exprimt au
temps t + At espacement maximum entre les points
d'inttgration de Gauss dans un eltment fini de cbble
durie de l'onde de relbchement de traction initiale dans le cbble suite au bris
p6riode naturelle des modes i et n, respectivement ( le ne mode est le plus eleve du systkme)
pseudo-periode du ie mode ( voir [ 9 ] ) temps vecteur deplacement exprimt aux temps t ,
t + At et t + OAt, respectivement vecteur vitesse exprimt aux temps t , t + At
et t + Oht, respectivement vecteur acctltration exprimt aux temps t ,
t + At et t + Oht, respectivement parametre utilise dans le calcul d'erreur de la
mtthode Newmark P ( voir [ 10 ] ) paramttre de la mkthode Newmark P parametre de la mtthode Newmark P incriment de temps utilise pour l'inttgration
directe
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.
CAN. J . CIV. ENG. VOL. 16, 1989
incrCment du vecteur dCplacement survenant 0 durant l'intervalle de temps considCrC pour A I'Cquilibre dynamique
incrCment du vecteur vitesse survenant durant I'intervalle de temps considCk pour I'Quilibre p dynarnique W n
increment du vecteur accClCration survenant durant l'intervalle de temps considCrC pour 1'Cquilibre dynamique
paramtttre de la mCthode Wilson 0 longueur d'onde de propagation initiale du
dCbalancement de traction dans le cible suite au bris
taux de convergence de la mCthode Newmark P pulsation naturelle du mode de vibration le plus
ClevC
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
NC
CH
APE
LH
ILL
on
11/1
3/14
For
pers
onal
use
onl
y.