Embed Size (px)
Citation preview

Comportement dynamique d'une eolienne a axe vertical (developpement theorique)
MARIO VEILLEUX' ET R E N ~ TINAWI De'parternent de ge'nie civil, ~ c o l e polytechnique de Montre'al, C.P. 6079, Station A, Montre'al (Que'bec), Canada H3C 3A7
R e y le 1"' avril 1987
Revision acceptCe le 8 dtcembre 1987
Dans le but de dktecter, pour une vitesse de rotation donnee, les instabilitCs dynamiques d'une Colienne haubannCe i axe vertical, une proctdure de calcul permettant de dCterminer les frkquences et les modes de vibration complexes est prCsentCe. Les Cquations de mouvement de la structure sont dCrivCes dans le systkme d'axes tournants du rotor de f a ~ o n a Climiner les termes dtpendants du temps. Ces Cquations tiennent compte des effets gyroscopiques par I'intermCdiaire des matrices de Coriolis et de relbchement. Les haubans sont remplacCs par un systkme de ressorts Cquivalents non-IinCaires. La matrice de rigidit6 gComCtrique est Cgalement prise en compte initialement. Elle est obtenue i partir d'une analyse statique non-linCaire qui inclut I'effet des forces centrifuges, de gravitC et de compression verticale due aux haubans. Une rCduction du nombre de degrCs de libertC dynamiques est effectuCe en utilisant la mCthode de Rayleigh-Ritz. Les valeurs propres complexes sont obtenues i l'aide de la mCthode QR. Un logiciel base sur la procCdure dCcrjte a CtC dCveloppC sur un micro-ordinateur; ce logiciel a permis d'Ctudier les instabilitis dynamiques de I'Colienne du projet EOLE. Les rCsultats obtenus sont prCsentCs dans I'article suivant.
Mots cle's : Eoliennes i axe vertical, haubans, frCquences complexes, modes de vibration complexes, forces centrifuges, forces de Coriolis, logiciel numCrique.
Complex frequencies and mode shapes are evaluated and presented for a guyed vertical axis wind turbine to detect any dynamic instability for a given speed of rotation. The equations of motion are developed in the rotating system of axes of the rotor to eliminate the time dependent terms. These equations take into account gyroscopic effects by evaluating the Coriolis and Circulatory (softening) matrices. The guys are replaced by nonlinear springs. The geometric stiffness matrix is also considered by performing a nonlinear static analysis that includes centrifugal effects and gravity loads, as well as compression from the vertical component of the guys. A reduction of the dynamic degrees of freedom is performed using the Rayleigh-Ritz technique. The complex frequencies and mode shapes are obtained using the QR algorithm. A program developed on a microcomputer was used to evaluate the dynamic instabilities of the EOLE Project. These results are described in the following paper.
Key words: Vertical axis wind turbines, guys, complex frequencies, complex mode shapes, centrifugal forces, Coriolis forces. numerical software.
Can. J. Civ. Eng. 15, 355-368 (1988)
1. Introduction La forme classique des tquations de mouvement (Clough et
Penzien 1975) pour rCsoudre des problkmes dynamiques ne s'applique pas directement aux problkmes d'une Colienne a axe vertical. Les tquations de mouvement sont en gtntral develop- ptes dans un systkme de rkftrence fixe. ~ i e n que celles-ci soient applicables a un grand nombre de problkmes structuraux linCaires ou non-linCaires, l'analyse d'une structure tournante nous montre que des forces dues aux effets gyroscopiques et centrifuges sont engendrks dam la structure. La prise en compte de ces effets dans un repere fixe ntcessiterait l'introduction de coefficients dependants du temps.
MCme s'il existe des techniques numtriques pour intCgrer les Cquations de mouvement (Bathe 1982) dans un systeme d'axes fixes, cette approche demeure complexe et tres coiiteuse pour les systemes $ plusieurs degrCs de iibert~. Par contre si l'analyse dynamique ne tient pas compte de la non-1inCaritC due B la plastification des matCriaux, il est avantageux de trans- former les Cquations de mouvement dans un systkme de rCfC- rence mobile tournant a la m&me vitesse que la structure. Cette manikre de proctder permet d'inclure les effets gyroscopiques et centrifuges B l'aide des matrices de Coriolis et de relAche-
NOTA : Les cornmentaires sur le contenu de cet article doivent Ctre envoyCs par Ccrit au directeur de la revue avant le 30 septembre 1988 (voir I'adresse au verso du plat supkrieur).
1. Adresse actuelle : Beauchemin-Beaton-Lapointe Inc., 1134 Ouest rue Ste-Catherine, MontrCal (Quebec), Canada H3B 1H4.
ment dont les coefficients sont indkpendants du temps (Meiro- vitch et Ryland 1979). Cependant, la matrice de Coriolis ainsi obtenue n'est pas symttrique.
Dans ce premiei article, les tquations de mouvement pour une Colienne axe,vertical, telle que montrCe a la figure 1, seront presentees. Etant donnC le fait que ces structures sont habituellement haubannCes, les aspectsthCoriques concernant le traitement des ciibles seront brikvement exposCs dans le but de remplacer ces haubans par des ressorts Cquivalents non- lidaires. A partir des tquations de mouvement dCveloppCes dans un repkre mobile, une mCthode d'analyse est proposCe pour la solution des tquations et le calcul des frCquences et modes de vibration complexes de 1'Colienne. Un programme de calcul numCrique dtcoulant de cette approche est Cgalement present&
L'application de ce programme, operant a partir d'un micro- ordinateur, et les rCsultats obtenus pour diffkrentes vitesses de rotation de 1'Colienne du projet EOLE feront l'objet d'un autre article (Veilleux et Tinawi 1988).
2. Aspects theoriques 2.1. Discre'tisation par e'le'ments jinis
Nous savons que l'analyse d'un systkme structural complexe, qu'elle soit statique ou dynamique, ne peut Ctre envisagee sans une discrktisation du modkle rCel. La mCthode des ClCments finis est une mCthode d'analyse numCrique matricielle particu- lierement adaptte aux calculs dynamiques des structures com- plexes ayant un comportement non-lidaire.
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
CAN. I. CIV. ENG. VOL. 15, 1988
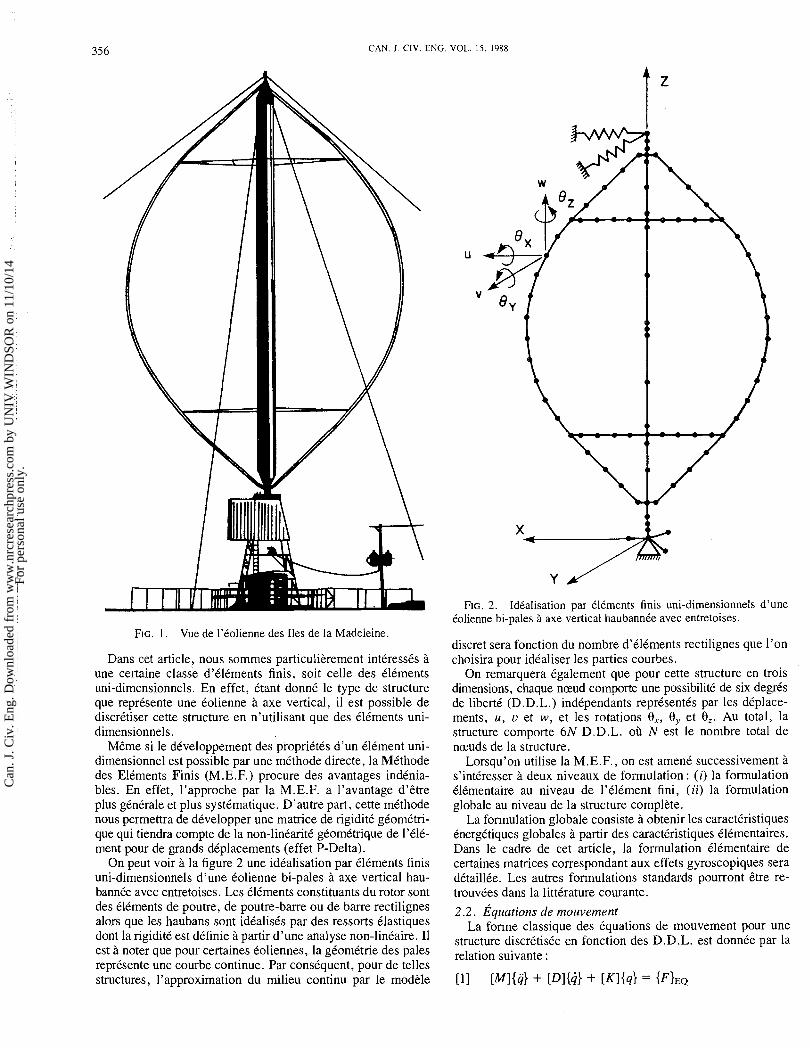
FIG. 1. Vue de I'Colienne des Iles de la Madeleine.
Dans cet article, nous sommes particulierement intCressCs B une certaine classe d'C1Cments finis, soit celle des Cltments uni-dimensionnels. En effet, Ctant donnC le type de structure que reprksente une Colienne B axe vertical, il est possible de discrCtiser cette structure en n'utilisant que des ClCments uni- dimensionnels.
Mime si le dCveloppement des propriCtes d'un ClCment uni- dimensionnel est possible par une mCthode directe, la MCthode des Elements Finis (M.E.F.) procure des avantages indCnia- bles. En effet, l'approche par la M.E.F. a l'avantage d'Ctre plus gCnCrale et plus systtmatique. D'autre part, cette mCthode nous permettra de dCvelopper une matrice de rigidit6 gCornCtri- que qui tiendra compte de la non-linCaritC gComCtrique de 1'616- ment pour de grands dkplacements (effet P-Delta).
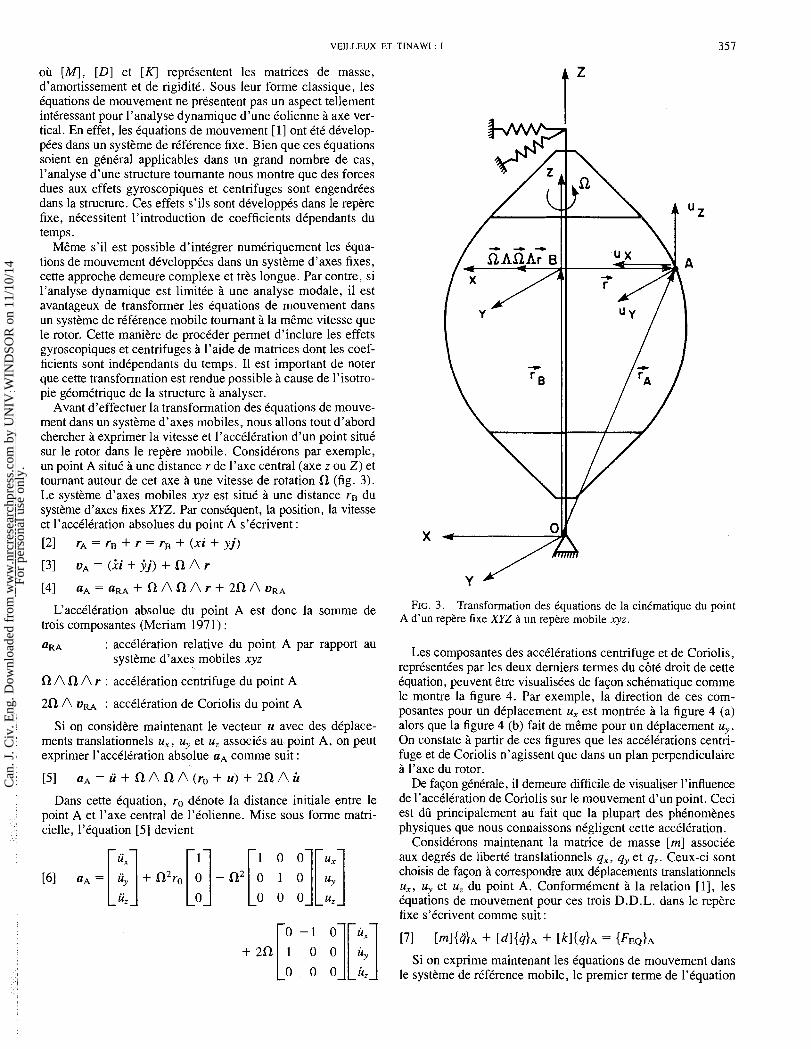
On peut voir B la figure 2 une idCalisation par ClCments finis uni-dimensionnels d'une Colienne bi-pales B axe vertical hau- bannk avec entretoises. Les elements constituants du rotor sont des Cltments de poutre, de poutre-bane ou de bane rectilignes alors que les haubans sont idCalisCs par des ressorts Clastiques dont la rigidit6 est dCfinie a partir d'une analyse non-lintaire. I1 est noter que pour certaines Coliennes, la gCornCtrie des pales reprCsente une courbe continue. Par consCquent, pour de telles structures, l'approximation du milieu continu par le modele
FIG. 2. IdCalisation par ClCments finis uni-dimensionnels d'une Colienne bi-pales h axe vertical haubannCe avec entretoises.
discret sera fonction du nombre d1C1Cments rectilignes que l'on choisira pour idCaliser les parties courbes.
On remarquera Cgalement que pour cette structure en trois dimensions, chaque neud comporte une possibilitC de six degrCs de libertC (D.D.L.) indkpendants reprCsentCs par les dCplace- ments, u, u et w , et les rotations 0,, 0, et 0,. Au total, la structure comporte 6N D.D.L. ou N est le nombre total de neuds de la structure.
Lorsqu'on utilise la M.E.F., on est amen6 successivement B s'intkresser B deux niveaux de formulation : (i) la formulation ClCmentaire au niveau de 1'ClCment fini, (ii) la formulation globale au niveau de la structure complete.
La formulation globale consiste a obtenir les caractCristiques CnergCtiques globales B partir des caractCristiques ClCmentaires. Dans le cadre de cet article, la formulation tltmentaire de certaines matrices correspondant aux effets gyroscopiques sera dCtaillCe. Les autres formulations standards pourront itre re- trouvCes dans la litttrature courante.
2.2. ~quat ions de mouvement La forme classique des Cquations de mouvement pour une
structure discrCtisCe en fonction des D.D.L. est donnCe par la relation suivante :
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
VEILLEUX ET TINAWI : I
ou [MI, [Dl et [a reprtsentent les matrices de masse, d'amortissement et de rigidite. Sous leur forme classique, les Cquations de mouvement ne presentent pas un aspect tellement intkressant pour l'analyse dynamique d'une Colienne a axe ver- tical. En effet, les Cquations de mouvement [ l ] ont CtC dCvelop- pCes dans un systkme de rCfCrence fixe. Bien que ces Cquations soient en gCnCral applicables dans un grand nombre de cas, l'analyse d'une structure tournante nous montre que des forces dues aux effets gyroscopiques et centrifuges sont engendrCes dans la structure. Ces effets s'ils sont dCveloppCs dans le repere fixe, ntcessitent l'introduction de coefficients dCpendants du temps.
Mtme s'il est possible d'intCgrer numeriquement les Cqua- tions de mouvement dCveloppCes dans un systkme d'axes fixes, cette approche demeure complexe et trks longue. Par contre, si l'analyse dynamique est limitCe a une analyse modale, il est avantageux de transformer les Cquations de mouvement dans un systkme de rCference mobile tournant a la mtme vitesse que le rotor. Cette manikre de proceder permet d'inclure les effets gyroscopiques et centrifuges 2 l'aide de matrices dont les coef- ficients sont indkpendants du temps. I1 est important de noter que cette transformation est rendue possible A cause de l'isotro- pie gComCtrique de la structure a analyser.
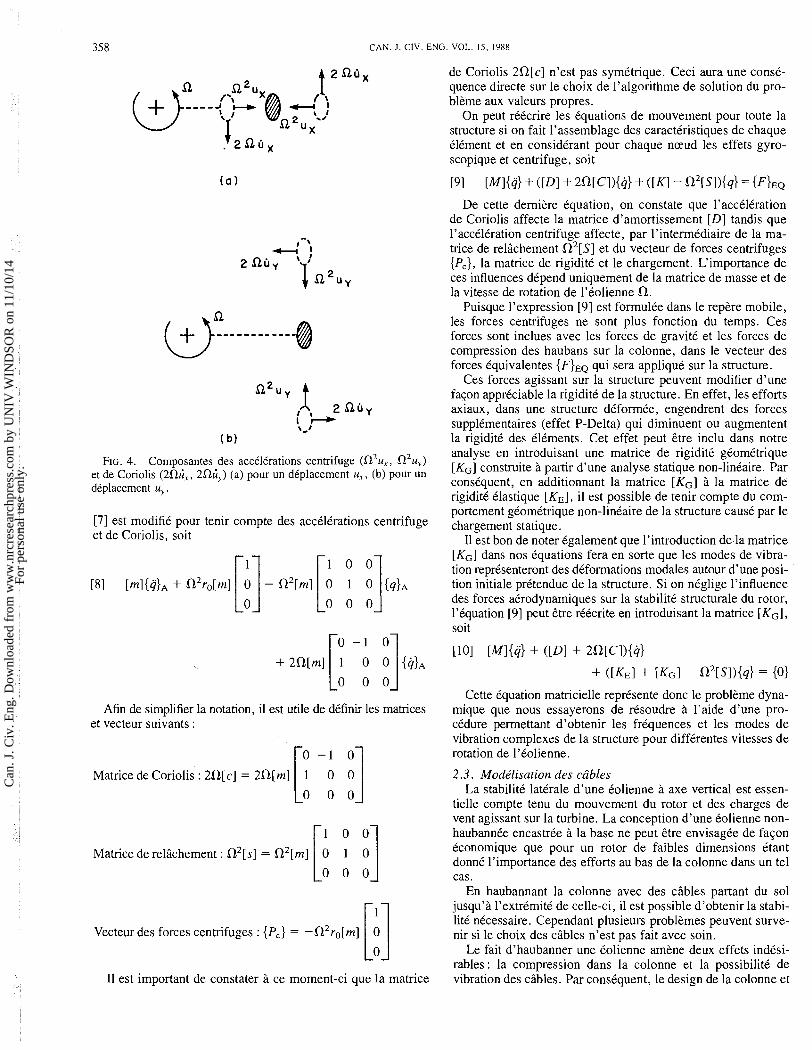
Avant d'effectuer la transformation des Cquations de mouve- ment dans un systkme d'axes mobiles, nous allons tout d'abord chercher ?I exprimer la vitesse et I'accClCration d'un point situC sur le rotor dans le repkre mobile. ConsidCrons par exemple, un point A situC ?I une distance r de l'axe central (axe z ou Z) et tournant autour de cet axe a une vitesse de rotation R (fig. 3). Le systkme d'axes mobiles xyz est situe a une distance r~ du systkme d'axes fixes XYZ. Par consQuent, la position, la vitesse et 17accC1Cration absolues du point A s'Ccrivent :
[2] r, = r, + r = r, + ( x i + yj)
[3] uA = ( i i + j j ) + R A r
L'accClCration absolue du point A est donc la somme de trois composantes (Meriam 1971) :
~ R A : accC1Cration relative du point A par rapport au systkme d'axes mobiles xyz
R A R A r : accClCration centrifuge du point A
2R A URA : accClCration de Coriolis du point A
Si on considkre maintenant le vecteur u avec des dkplace- ments translationnels ux, uy et u, associCs au point A, on peut exprimer llaccCICration absolue aA comme suit :
Dans cette Cquation, ro dCnote la distance initiale entre le point A et l'axe central de l'tolienne. Mise sous forme matri- cielle, l'equation [5] devient
FIG. 3. Transformation des Cquations de la cinimatique du point A d'un rep?re fixe XYZ ti un repbre mobile xyz.
Les composantes des accClCrations centrifuge et de Coriolis, reprCsentCes par les deux derniers termes du c6tC droit de cette Cquation, peuvent Etre visualiskes de f a~on schematique comme le montre la figure 4. Par exemple, la direction de ces com- posantes pour un dCplacement ux est montrCe a la figure 4 (a) alors que la figure 4 (b) fait de mtme pour un dkplacement u,. On constate i partir de ces figures que les accClCrations centri- fuge et de Coriolis n'agissent que dans un plan perpendiculaire ii l'axe du rotor.
De fa~on gCnCrale, il demeure difficile de visualiser l'influence de I'accClCration de Coriolis sur le mouvement d'un point. Ceci est dQ principalement au fait que la plupart des phCnomknes physiques que nous connaissons nCgligent cette accC1Cration.
Considtrons maintenant la matrice de masse [m] associte aux degrCs de libertC translationnels q,, q, et q,. Ceux-ci sont choisis de fa~on a correspondre aux dCplacements translationnels ux, uy et u, du point A. ConformCment 5 la relation [I], les Cquations de mouvement pour ces trois D.D.L. dans le repkre fixe s'ecrivent comme suit :
Si on exprime maintenant les Cquations de mouvement dans le systkme de rCfCrence mobile, le premier terme de 1'Cquation
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
CAN. J . CIV. ENG. VOL. 15, 1988
a 2 u Y f 2aay : '+
\ ,' (b)
FIG. 4. Composantes des accClCrations centrifuge (Ohu,, R2uY) et de Coriolis (2R~i,, 2R4) (a) pour un dCplacement u,, (b) pour un dCplacement uy .
[7] est modifiC pour tenir compte des accClerations centrifuge et de Coriolis, soit
Afin de simplifier la notation, il est utile de dtfinir les matrices et vecteur suivants :
Matrice de Coriolis : 2LR[c] = 2 f l [ m ] 1 [U, - I] Matrice de reldchement : f12[s] = LR2[m] 0 1 0 [: :: :I Vecteur des forces centrifuges : {PC) = - f12ro[m] 0 [:I
I1 est important de constater a ce moment-ci que la matrice
de Coriolis 2LR[c] n'est pas symktrique. Ceci aura une conse- quence directe sur le choix de l'algorithme de solution du pro- blkme aux valeurs propres.
On peut rCtcrire les Cquations de mouvement pour toute la structure si on fait l'assemblage des caracttristiques de chaque ClCment et en considtrant pour chaque naeud les effets gyro- scopique et centrifuge, soit
[9I [Ml{i i) + ( [D l + 2 N C I ) { 4 ) + ( [KI - f12[SI){q) = {F)EQ
De cette derniere tquation, on constate que I'accClCration de Coriolis affecte la matrice d'amortissement [Dl tandis que I'accelCration centrifuge affecte, par l'intermtdiaire de la ma- trice de reldchement f12[s] et du vecteur de forces centrifuges {PC), la matrice de rigidit6 et le chargement. L'importance de ces influences dtpend uniquement de la matrice de masse et de la vitesse de rotation de 1'Colienne f l .
Puisque l'expression [9] est formulCe dans le repere mobile, les forces centrifuges ne sont plus fonction du temps. Ces forces sont inclues avec les forces de gravitC et les forces de compression des haubans sur la colonne, dans le vecteur des forces Cquivalentes {FIEQ qui sera appliquC sur la structure.
Ces forces agissant sur la structure peuvent modifier d'une faqon apprkciable la rigidit6 de la structure. En effet, les efforts axiaux, dans une structure dtformee, engendrent des forces supplCmentaires (effet P-Delta) qui diminuent ou augmentent la rigiditt des Cltments. Cet effet peut Ctre inclu dans notre analyse en introduisant une matrice de rigidite gComCtrique [KG] constmite 2 partir d'une analyse statique non-lintaire. Par constquent, en additionnant la matrice [KG] i la matrice de rigidit6 Clastique [ K E ] , il est possible de tenir compte du com- portement gComttrique non-lintaire de la structure cause par le chargement statique.
I1 est bon de noter Cgalement que l'introduction de la matrice [KG] dans nos Cquations fera en sorte que les modes de vibra- tion reprksenteront des dCformations modales autour d'une posi- tion initiale prttendue de la structure. Si on ntglige l'influence des forces atrodynamiques sur la stabilitC structurale du rotor, 1'Cquation [9] peut Ctre rCCcrite en introduisant la matrice [ K G ] , soit
1101 [ M l { 4 + ( [ D l + 2 f l [ C I ) { 4 )
+ ( [ K E ] + [KG] - f i2[S l ){q) = ( 0 )
Cette equation matricielle reprksente donc le probleme dyna- mique que nous essayerons de rCsoudre a l'aide d'une pro- cedure permettant d'obtenir les frtquences et les modes de vibration complexes de la structure pour diffkrentes vitesses de rotation de 1'Colienne.
2.3. Mode'lisation des cbbles La stabilitt latCrale d'une Colienne a axe vertical est essen-
tielle compte tenu du mouvement du rotor et des charges de vent agissant sur la turbine. La conception d'une Colienne non- haubannte encastrie a la base ne peut &tre envisagee de faqon Cconomique que pour un rotor de faibles dimensions Ctant donnC l'importance des efforts au bas de la colonne dans un tel cas.
En haubannant la colonne avec des cdbles partant du sol jusqu'i l'extrtmitt de celle-ci, il est possible d'obtenir la stabi- lit6 nkcessaire. Cependant plusieurs problkmes peuvent surve- nir si le choix des cdbles n'est pas fait avec soin.
Le fait d'haubanner une Colienne amene deux effets indCsi- rables: la compression dans la colonne et la possibilitC de vibration des cdbles. Par consCquent, le design de la colonne et
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
VEILLEUX ET TINAWI : I
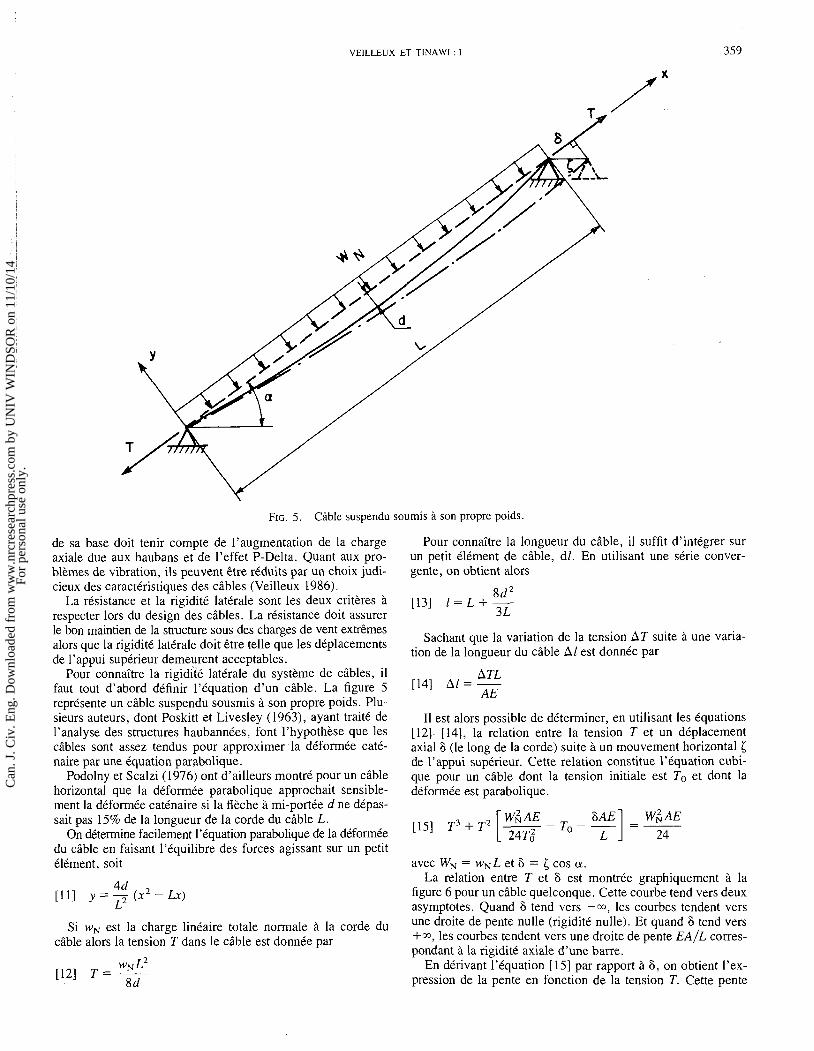
FIG. 5. Clble suspendu soumis B son propre poids.
de sa base doit tenir compte de l'augmentation de la charge axiale due aux haubans et de l'effet P-Delta. Quant aux pro- blkmes de vibration, ils peuvent &tre reduits par un choix judi- cieux des caracttristiques des clbles (Veilleux 1986).
La rtsistance et la rigiditt laterale sont les deux critkres a respecter lors du design des clbles. La rtsistance doit assurer le bon maintien de la structure sous des charges de vent extrkmes alors que la rigiditt lattrale doit &tre telle que les dtplacements de l'appui suptrieur demeurent acceptables.
Pour connaitre la rigiditt lattrale du systkme de clbles, il faut tout d'abord dtfinir l'tquation d'un clble. La figure 5 represente un clble suspendu sousmis a son propre poids. Plu- sieurs auteurs, dont Poskitt et Livesley (1963), ayant trait6 de l'analyse des structures haubanntes, font l'hypothkse que les clbles sont assez tendus pour approximer la dtformte catt- naire par une equation parabolique.
Podolny et Scalzi (1976) ont d'ailleurs montrt pour un clble horizontal que la dtformte parabolique approchait sensible- ment la dCformte cattnaire si la flkche 2 mi-portte d ne depas- sait pas 15% de la longueur de la corde du clble L.
On dttennhe facilement l'@uation parabolique de la defonnee du clble en faisant l'equilibre des forces agissant sur un petit tltment, soit
Si W N est la charge lintaire totale normale a la corde du clble alors la tension T dans le clble est donnCe par
Pour connaitre la longueur du clble, il suffit d'integrer sur un petit Clement de clble, dl. En utilisant une serie conver- gente, on obtient alors
Sachant que la variation de la tension AT suite a une varia- tion de la longueur du clble A1 est donnte par
I1 est alors possible de dtterminer, en utilisant les Cquations [12]-[14], la relation entre la tension T et un dtplacement axial 6 (le long de la corde) suite a un mouvement horizontal 5 de l'appui supkrieur. Cette relation constitue l'equation cubi- que pour un clble dont la tension initiale est To et dont la deformee est parabolique.
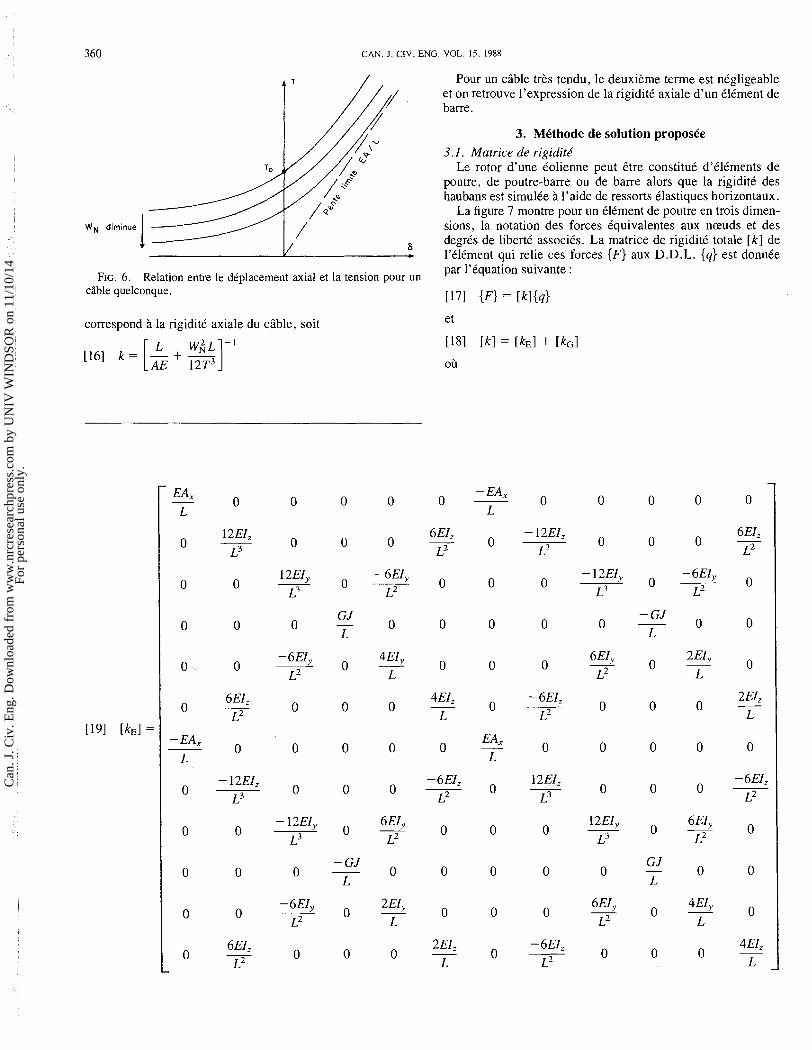
avec WN = w N L et 6 = 5 cos a. La relation entre T et 6 est montrte graphiquement a la
figure 6 pour un clble quelconque. Cette courbe tend vers deux asymptotes. Quand 6 tend vers - m , les courbes tendent vers une droite de pente nulle (rigiditt nulle). Et quand 6 tend vers +m, les courbes tendent vers une droite de pente EA/L corres- pondant a la rigidit6 axiale d'une barre.
En dtrivant l'tquation [I51 par rapport a 6, on obtient l'ex- pression de la pente en fonction de la tension T. Cette pente
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
CAN. J. CIV. ENG. VOL. 15. 1988
I W N diminue
8
FIG. 6. Relation entre le dkplacement axial et la tension pour un clble quelconque.
correspond 2 la rigidit6 axiale du cbble, soit
12 EI, - L3
0
Pour un chble trks tendu, le deuxikme terme est nkgligeable et on retrouve l'expression de la rigidit6 axiale d'un ClCment de barre.
3. Methode de solution proposee 3.1. Matrice de rigidite'
Le rotor d'une Colienne peut &tre constitut d'tlCments de poutre, de poutre-barre ou de barre alors que la rigidit6 des haubans est simulCe a l'aide de resorts Clastiques horizontaux.
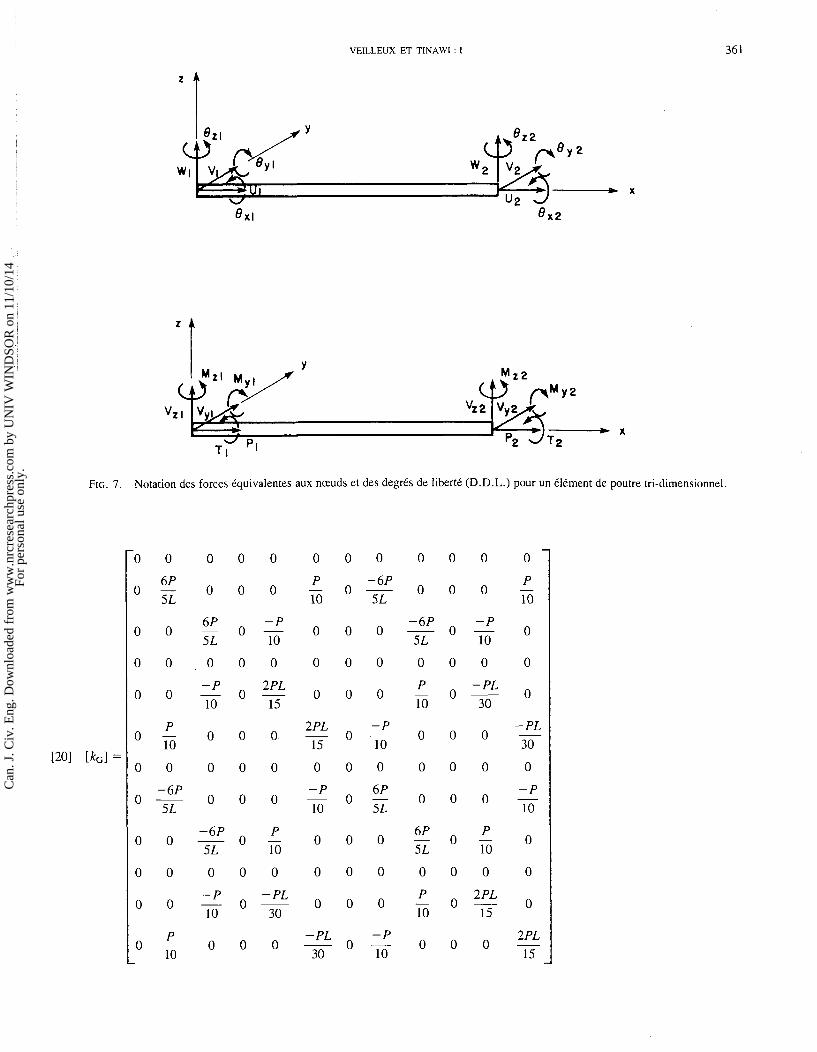
La figure 7 montre pour un ClCment de poutre en trois dimen- sions, la notation des forces Cquivalentes aux m u d s et des degrCs de libertC associCs. La matrice de rigidit6 totale [ k ] de 1'ClCment qui relie ces forces { F ) aux D.D.L. {q) est donnte par 1'Cquation suivante :
~ 7 1
et
t181
oh
0
6 EI, - L2
0
0
0
4 EI, - L
0
- 6 EI,
L2
0
0
0
2EIz - L
0
- 12EIz L3
0
0
0
- 6 El,
L2
0
12 EI, - L3
0
0
0
- 6EI, L2
0
0
- 6E1, L2
0
2 El, -
L
0
0
0
6 El, - L2
0
4 El, - L
0
0
6EIz - L2
0
0
0
2 EI,
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
VEILLEUX ET TINAWI . I
FIG. 7 . Notation des forces Cquivalentes aux neuds et des degrCs de libert6 (D.D.L.) pour un ClCment de poutre tri-dimensionnel,
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
362 CAN. I. CIV. ENG. VOL. 15. 1988
D'autre part, dans la rCsolution de problemes structuraux variCs on doit souvent envisager la possibilitC qu'une ou que deux extrCmitCs de 1'ClCment soit rotulte. La prCsence d'une rotule modifie sensiblement les coefficients de la matrice de rigidit6 [ k ] puisqu'on impose la force Cquivalente associCe la rotule de prendre une valeur nulle. Si on veut tenir compte de la matrice de rigidit6 gComCtrique, on doit utiliser la proce- dure de condensation statique pour Climiner les D.D.L. asso- ciCs une rotule afin de dCterrniner la matrice de rigidit6 modifiee pour un ClCment de poutre-barre ou un ClCment de barre.
De plus, pour certaines structures, comme le rotor d'une Colienne, on est amen6 a idialiser quelquefois des ClCments dont la section ou l'inertie varie suivant une certaine distribu- tion le long de l'element. Par exemple, les entretoises du rotor qui servent a rigidifier la structure sont souvent constituCes de treillis dont les caracteristiques varient suivant la longueur. Bien qu'il serait possible, connaissant cette distribution, de dCvelopper par la formulation des ClCments finis la matrice de rigiditt d'un tel tltment, il est prCfCrable d'opter pour une for- mulation approximative. Une mCthode facilement program- mable consiste a dCfinir des nceuds internes pour lesquels les
propriCtCs de la section sont connues et a Climiner ces m u d s par condensation statique de fason obtenir un ClCment Cqui- valent d'ordre 12 x 12 simulant une poutre a inertie variable.
Le couple produit par les pales est transmis a la gCnCratrice par un raccord reliant la colonne du rotor a un arbre de trans- mission. Si on veut que la modelisation de la structure soit complete, on doit pouvoir idCaliser un tel ClCment. En analy- sant le comportement rigide de ce raccord flexible, il est possi- ble de developper la matrice de rigidit6 par similitude a la rigidit6 d'un ressort. Pour ce faire, nous devons considCrer chaque effort de fason indipendante. Ainsi, si on pose que la rigidite est linCaire, nous aurons pour la rigidite axiale, la torsion, la flexion dans les plans q et xz et le cisaillement dans les plans q et xz une relation linCaire similaire a celle d'un ressort, soit
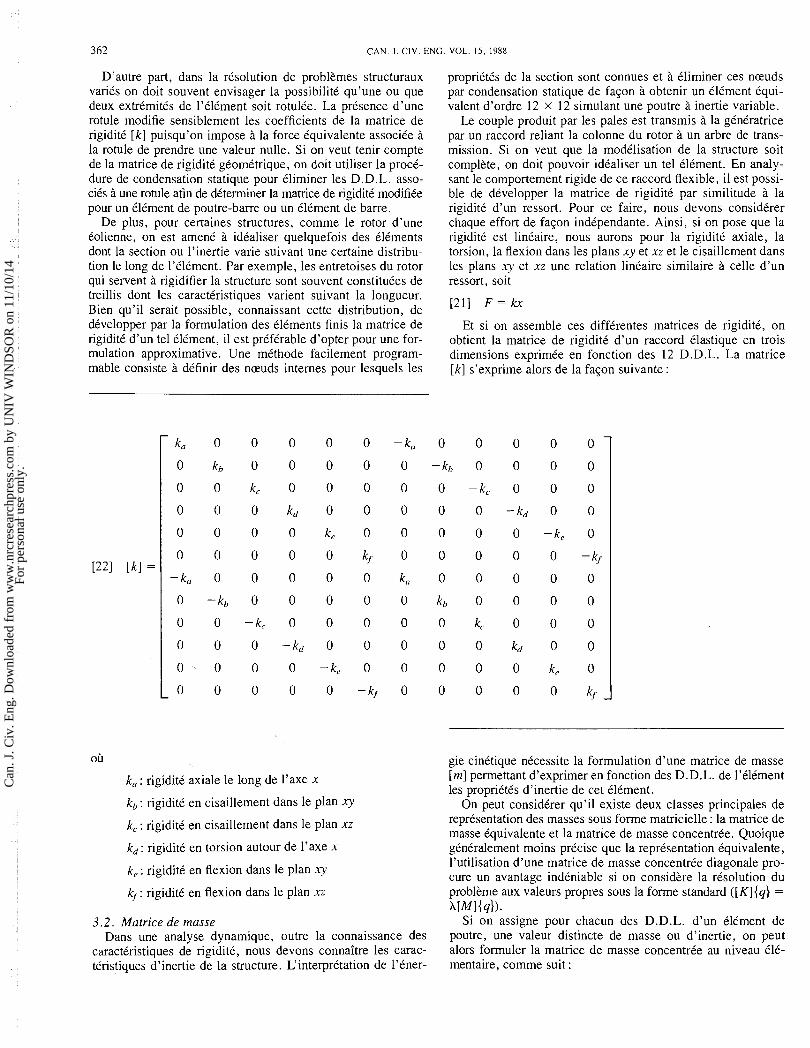
Et si on assemble ces diffkrentes matrices de rigiditC, on obtient la matrice de rigidit6 d'un raccord Clastique en trois dimensions exprimCe en fonction des 12 D.D.L. La matrice [ k ] s'exprime alors de la fason suivante :
k, : rigidite axiale le long de l'axe x
k6 : rigidit6 en cisaillement dans le plan q
k c : rigidit6 en cisaillement dans le plan xz
k d : rigidit6 en torsion autour de l'axe x
k , : rigidit6 en flexion dans le plan q
k f : rigidit6 en flexion dans le plan xz
3 . 2 . Matrice d e masse Dans une analyse dynamique, outre la connaissance des
caractCristiques de rigiditC, nous devons connaitre les carac- teristiques d'inertie de la structure. L'interprCtation de l'iner-
gie cinCtique nCcessite la formulation d'une matrice de masse [ m ] pennettant d'exprimer en fonction des D.D.L. de 1'ClCment les propriCtCs d'inertie de cet Cltment.
On peut considirer qu'il existe deux classes principales de representation des masses sous fonne matricielle : la matrice de masse Cquivalente et la matrice de masse concentrke. Quoique gCnCralement moins precise que la reprksentation Cquivalente, l'utilisation d'une matrice de masse concentrCe diagonale pro- cure un avantage indeniable si on considhe la rbolution du problkme aux valeurs propres sous la fonne standard ( [ K ] { q ) = U M I { q ) ) .
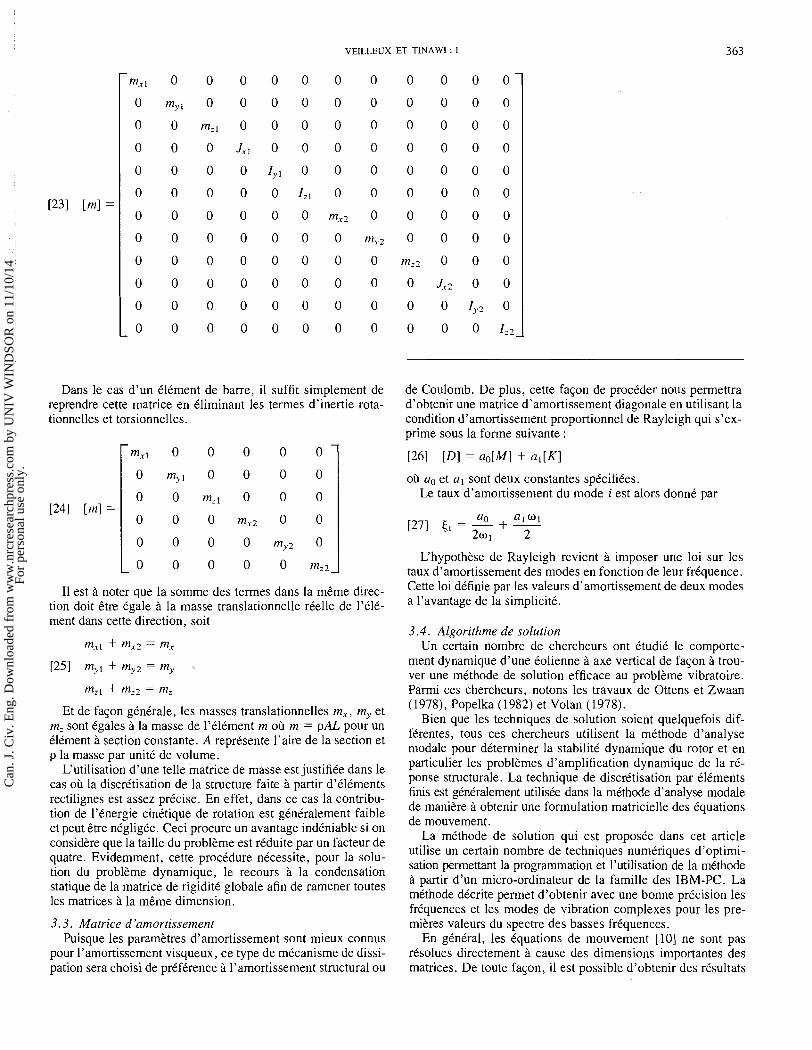
Si on assigne pour chacun des D.D.L. d'un ClCment de poutre, une valeur distincte de masse ou d'inertie, on peut alors fonnuler la matrice de masse concentrke au niveau ClC- mentaire, comme suit :
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
VEILLEUX ET TINAWI : I
L o o o o o o o 0
Dans le cas d'un ClCment de barre, il suffit simplement de reprendre cette matrice en Climinant les termes d'inertie rota- tionnelles et torsionnelles.
I1 est a noter que la somme des termes dans la mCme direc- tion doit Ctre Cgale a la masse translationnelle rCelle de 1'Cle- ment dans cette direction, soit
Et de faqon gCnCrale, les masses translationnelles m,, m, et m, sont Cgales a la masse de 1'ClCment m ou m = PAL pour un element a section constante. A reprksente l'aire de la section et p la masse par unit6 de volume.
L'utilisation d'une telle matrice de masse est justifiCe dans le cas oh la discritisation de la structure faite a partir d'C1Cments rectilignes est assez precise. En effet, dans ce cas la contribu- tion de 1'Cnergie cinCtique de rotation est gCnCralement faible et peut Ctre nCgligCe. Ceci procure un avantage indeniable si on considere que la taille du problkme est rCduite par un facteur de quatre. Evidemment, cette procedure nCcessite, pour la solu- tion du problkme dynamique, le recours a la condensation statique de la matrice de rigidit6 globale afin de ramener toutes les matrices a la mCme dimension.
3.3. Matrice d 'amortissement Puisque les paramktres d'amortissement sont mieux connus
pour l'amortissement visqueux, ce type de mCcanisme de dissi- pation sera choisi de prCfkrence a l'amortissement structural ou
de Coulomb. De plus, cette faqon de procider nous permettra d'obtenir une matrice d'amortissement diagonale en utilisant la condition d'amortissement proportionnel de Rayleigh qui s'ex- prime sous la forme suivante :
[261 [Dl = ao[Ml + a1[KI
ou a0 et a, sont deux constantes spCcifiCes. Le taux d'amortissement du mode i est alors donnk par
L'hypothbe de Rayleigh revient a imposer une loi sur les taux d'amortissement des modes en fonction de leur frkquence. Cette loi dCfinie par les valeurs d'amortissement de deux modes a l'avantage de la simpliciti.
3.4. Alaorithme de solution " Un certain nombre de chercheurs ont CtudiC le comporte-
ment dynamique d'une Colienne a axe vertical de faqon a trou- ver une mCthode de solution efficace au problkme vibratoire. Parmi ces chercheurs, notons les travaux-de Ottens et Zwaan (1978), Popelka (1982) et Volan (1978).
Bien que les techniques de solution soient quelquefois dif- fkrentes, tous ces chercheurs utilisent la rnkthode d'analyse modale pour dkterminer la stabilitC dynamique du rotor et en particulier les problkmes d'amplification dynamique de la rC- ponse stmcturale. La technique de discrCtisation par ClCments finis est gkdralement utilisCe dans la mCthode d'analyse modale de manikre a obtenir une formulation matricielle des Cquations de mouvement.
La mCthode de solution qui est proposCe dans cet article utilise un certain nombre de techniques numkriques d'optimi- sation permettant la programmation et I'utilisation de la mCthode a uartir d'un micro-ordinateur de la famille des IBM-PC. La mCthode dCcrite permet d'obtenir avec une bonne prCcision les frkquences et les modes de vibration complexes pour les pre- mikres valeurs du spectre des basses frkquences.
En gCnCral, les equations de mouvement [ lo ] ne sont pas rCsolues directement a cause des dimensions importantes des matrices. De toute faqon, il est possible d'obtenir des rCsultats
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.

364 CAN. 1. CIV. ENG. VOL. 15, 1988
approximatifs valables en rtduisant considCrablement le nom- bre de degrCs de libertC.
Une premiere reduction possible de la taille du probleme consiste a Climiner les D.D.L. rotationnels 2 l'aide de la con- densation de Guyan (1965). Celle-ci est 1'Cquivalent de la con- densation statique en dynamique. Cette technique constitue une approximation valable si on considere que 1'Cnergie cinCti- que de rotation est negligeable par rapport a celle de transla- tion. Par conskquent, le nombre de D.D.L. de notre probleme peut Ctre rCduit de moitiC.
Cependant, la condensation de Guyan, qui peut Ctre consi- dCrte comme une application de la mCthode de Rayleigh-Ritz, dttruit le caractkre bande des matrices. Par consCquent, cette mCthode peut ne pas Ctre avantageuse si l'espace mCmoire est restreint. Ceci est d'ailleurs le cas des micro-ordinateurs.
Cependant, la mCthode de Rayleigh-Ritz va nous permettre, d'une fagon diffkrente, de rtduire la taille de notre probleme en faisant l'hypothbe que les dkplacements {q) sont une com- binaison linCaire des r premiers modes naturels de vibration, solutions du systeme homogene suivant :
Cette approche par modes naturels est une application intC- ressante de la mCthode de Rayleigh-Ritz pour rCduire les sys- tkmes de taille importante. Comme nous le verrons, les modes naturels constituent des intermkdiaires de calcul simples et valables.
Si on dCnote par [cp] la matrice modale correspondant aux premiers vecteurs propres solutions de [28], il est alors possible d'exprimer les dkplacements {q) en fonction des dtplacements modaux {q), soit
1291 (4) = [VIM
En substituant cette relation dans 1'Cquation [lo] et en pre- multipliant par la matrice [cplT, on obtient les Cquations de mouvement suivantes :
P O I 'MI{$ + [[Dl + 2.n[cplT[Cl[cpll{il)
+ [ ~ K J - ~2[cplT[Sl[cpll{rl) = (0)
r M = [cplTIM] [cp] : matrice diagonale des masses gCnCralisCes
r K J = [cpIT[KE + KG] [cp] : matrice diagonale des ~igiditCs gCntralisCes
f~ J = 2wi.5mi : matrice diagonale d'amortissement modal
wi : pulsation naturelle du mode i (w? = Xi)
ti : taux d'amortissement modal du mode i
mi : masse gCntralisCe du mode i
Comme les vecteurs propres sont orthogonaux par rapport aux matrices [K] et [MI, l'utilisation de la mCthode de Rayleigh- Ritz permet de diagonaliser les matrices de masse et de rigiditt. De plus, il est possible d'exprimer la matrice des rigiditCs gCnCralisCes en fonction des masses gCnCralisCes, soit
[31] rKj = rkil = rwZmiJ
D'autre part, comme le montre 17Cquation [26], la matrice d'amortissement gCnCralisCe est diagonaliske suivant la condi-
tion de l'amortissement proportionnel de Rayleigh. I1 est a noter que si les vecteurs propres sont prkalablement norma- lisCs, toutes les masses gCnCralisCes sont Cgales a llunitC.
Les Cquations de mouvement [30] peuvent &tre solutionnCes par diffkrentes mCthodes pour l'obtention des valeurs propres complexes de la forme
La partie rCelle ui determine la stabilitC du mode i. Une valeur positive indique une instabilite tandis qu'une valeur nCgative assure une configuration stable. La partie imaginaire contient la pulsation de vibration wi.
I1 est intkressant ici de faire une analogie avec la solution du problkme de vibration libre d'un systkme sous-amorti a un degrC de libertC. Dans ce cas, les valeurs propres complexes s'expriment de la fagon suivante :
De cette expression, on constate qu'une valeur nCgative de l'amortissement modal 6; correspond a une instabilitt pour le mode i. De fagon gCnCrale, on a une instabilitC lorsque la matrice reprksentant la rigidit6 de la structure est singuliere. Dans notre cas, I'instabilitC de la structure peut se produire pour un mode i, lorsque la combinaison des matrices de rigi- ditC Clastique et gComCtrique et de la matrice de relkhement amkne une singularit6 de la matrice resultante. Ceci pourrait se produire effectivement lorsque les forces centrifuges devien- nent importantes provoquant, par exemple, le flambage de la colonne.
I1 est bon de noter qu'on doit utiliser une mCthode de rCsolu- tion du problkme aux valeurs propres complexes permettant le calcul m&me si certains modes sont instables. Les mCthodes de transformation, comme la mCthode QR, permettent dlCviter les problemes numCriques au niveau de la matrice de rigidit6 rksultante.
Pour le probleme qui nous concerne, la relation [33] peut Ctre utiliste. Cependant, il est important de noter que le taux d'amortissement obtenu pour le mode i est un taux d'amor- tissement modifiC. Ceci est facilement comprChensible, puis- que la matrice d'amortissement Cquivalente est la combinaison de la matrice d'amortissement et de la matrice de Coriolis telle que montrCe en [30].
Bien qu'il existe des sous-routines de solution directe du problkme aux valeurs propres complexes, la mCthode proposte r a m h e ce problkme a une forme standard. Ceci est possible comme le montre Przemieniecki (1968). De fagon a simplifier la notation, posons tout d'abord que
I1 est a noter que la matrice [DD] n'est pas symCtrique puisqu'elle est forrnCe partir de la matrice de Coriolis [C]. La solution de 1'Cquation [37] est donnCe par
[381 {rl) = {x) eP'
ou p est un nombre complexe. En substituant [38] dans [371,
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
VEILLEUX ET TINAWI : I 365
on obtient le problkme de valeurs propres complexes suivant :
[391 (p2 [MDl + p[DDI + [KDI) {x ) = ( 0 )
L'approche utilisCe par Przemieniecki (1968) consiste B com- biner I'identitC suivante aux tquations de mouvement :
Cette demikre tquation peut se rttcrire sous forme compacte
avec
Dans ce cas, si nous posons :
[431 bl) = ( 0 ) eP'
on retrouve la forme standard du problkme aux valeurs propres, soit
[441 [Bl{u) = p[AI{u)
Le seul compromis que l'on doit faire en utilisant cette approche, est de doubler la taille de notre problkme. Ceci ne constitue pas tellement un dksavantage puisque nous avons dCja rtduit considCrablement la taille de notre problkme initial B l'aide de la mtthode de Rayleigh-Ritz.
Pour ramener notre problkme a une forme classique, il suffit de multiplier chaque cat6 de 1'Cquation [44] par la matrice [ B ] - ' :
[451 [BI- ' [Bl{u) = [ I l {u) = p[B l - ' [A l {u )
Soit le problkme aux valeurs propres sous forme classique :
L'inversion de la matrice [ B ] ne pose pas de problkme puis- que si [MD] = [ I ] , le problkme se ramkne B inverser la matrice [KD] de dimension r. Par consCquent, il est facile de determi- ner la ligne i de la matrice de flexibilitk en appliquant au systkme statique [ K D ] { x ) ~ = {F) i un vecteur chargement {F) ; ou seule une charge unitaire est appliquke B la ligne i . Le vecteur solution { x ) ~ correspondra alors ii la colonne ou 2 la ligne i de la matrice [KDI-'.
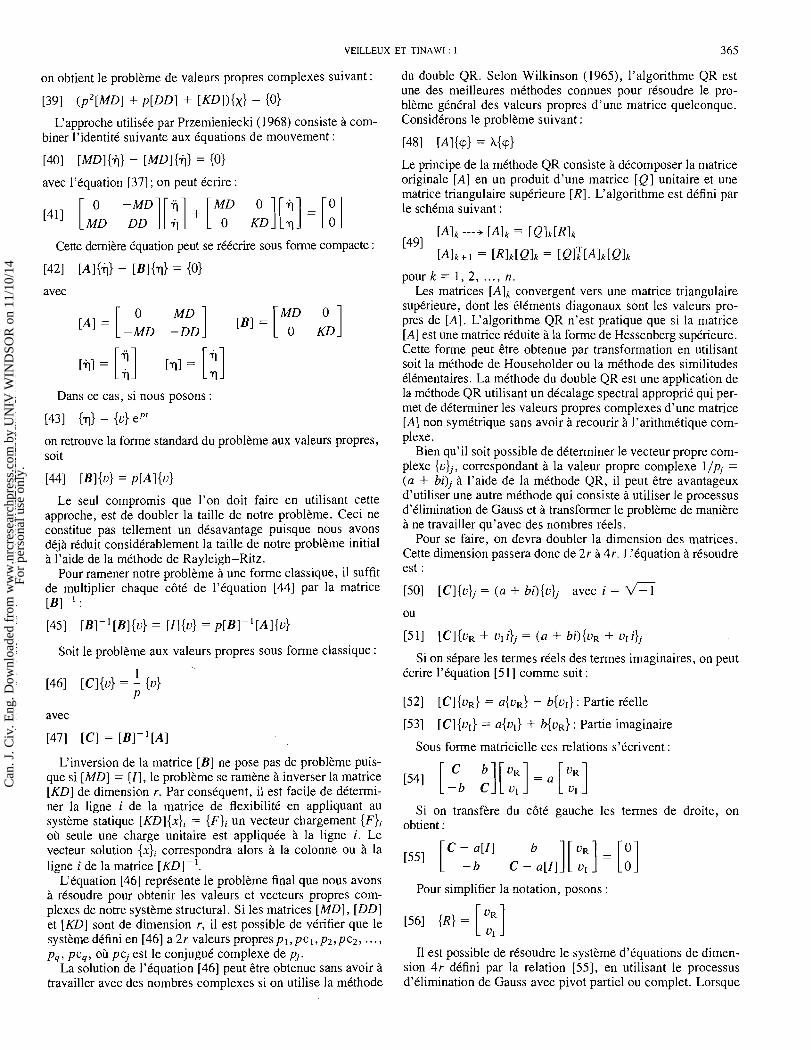
L'Cquation [46] reprtsente le problkme final que nous avons a rCsoudre pour obtenir les valeurs et vecteurs propres com- plexes de notre systkme structural. Si les matrices [ M D ] , [ D D ] et [KD] sont de dimension r , il est possible de vCrifier que le systkme dCfini en [46] a 2r valeurs propres p l , pc1, p2, pc2, . . . , p,, pc,, ou pcj est le conjugut complexe de pj.
La solution de 1'Cquation [46] peut Ctre obtenue sans avoir 2 travailler avec des nombres complexes si on utilise la mtthode
du double QR. Selon Wilkinson (1965), l'algorithme QR est une des meilleures mtthodes connues pour rCsoudre le pro- blkme gCnCral des valeurs propres d'une matrice quelconque. Considtrons le problkme suivant :
[481 Ml{d = A { d
Le principe de la mtthode QR consiste 2 dCcomposer la matrice originale [ A ] en un produit d'une matrice [ Q ] unitaire et une matrice triangulaire suptrieure [ R ] . L'algorithme est dtfini par le schCma suivant :
pour k = 1 , 2 , ..., n . Les matrices [AIk convergent vers une matrice triangulaire
suptrieure, dont les Clements diagonaux sont les valeurs pro- pres de [ A ] . L'algorithme QR n'est pratique que si la matrice [A] est une matrice reduite a la forme de Hessenberg suptrieure. Cette forme peut Ctre obtenue par transformation en utilisant soit la mCthode de Householder ou la mCthode des similitudes ClCmentaires. La mtthode du double QR est une application de la mCthode QR utilisant un decalage spectral appropriC qui per- met de dCterminer les valeurs propres complexes d'une matrice [A] non symCtrique sans avoir a recourir A l'arithmetique com- plexe.
Bien qu'il soit possible de dCterminer le vecteur propre com- plexe { u ) ~ , correspondant 2 la valeur propre complexe l / p , = ( a + bi)j 2 l'aide de la mCthode QR, il peut Ctre avantageux d'utiliser une autre mCthode qui consiste a utiliser le processus d'klimination de Gauss et a transformer le problkme de manikre B ne travailler qu'avec des nombres rCels.
Pour se faire, on devra doubler la dimension des matrices. Cette dimension passera donc de 2r B 4r . L'Cquation a rCsoudre est :
[50] [ C ] { U ) ~ = ( a + b i ) { ~ ) ~ avec i =
OU
[5 1 1 [ C ] {uR + uI i)j = ( a + bi){uR + uI i)j
Si on stpare les termes rtels des termes imaginaires, on peut Ccrire 1'Cquation [5 11 comme suit :
[52] [ C ] { u R ) = a{uR) - b { u I ) : Partie rielle
[53] [ C ] { u I ) = a { ~ ) + b{uR) : Partie imaginaire
Sous forme matricielle ces relations s'Ccrivent :
Si on transfkre du cat6 gauche les termes de droite, on obtient :
Pour simplifier la notation, posons : - -
I1 est possible de rCsoudre le systkme d7Cquations de dimen- sion 4 r dCfini par la relation [ 5 5 ] , en utilisant le processus d'tlimination de Gauss avec pivot partiel ou complet. Lorsque
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
366 CAN. J. CIV. ENG. VOL. 15, 1988
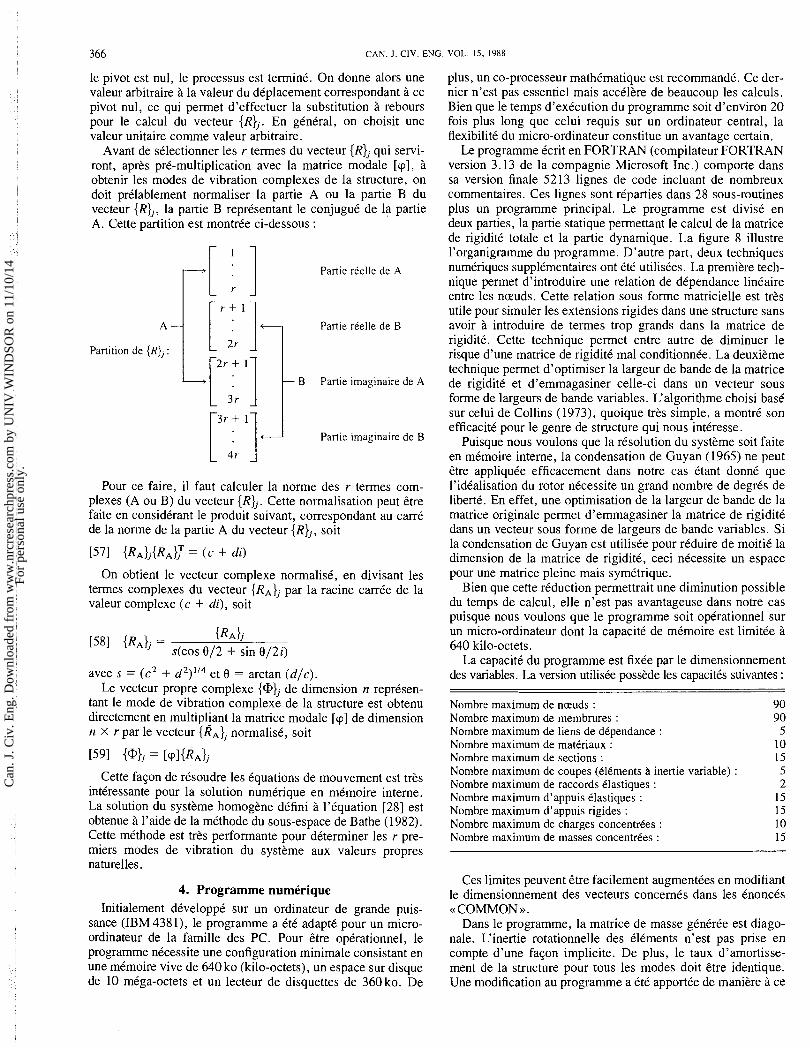
le pivot est nul, le processus est termint. On donne alors une valeur arbitraire B la valeur du deplacement correspondant B ce pivot nul, ce qui permet d'effectuer la substitution B rebours pour le calcul du vecteur {R}j. En gtntral, on choisit une valeur unitaire comme valeur arbitraire.
Avant de stlectionner les r termes du vecteur {Rjj qui servi- ront, apres prt-multiplication avec la matrice modale [cp], ii obtenir les modes de vibration complexes de la structure, on doit prdablement normaliser la partie A ou la partie B du vecteur {R},, la partie B representant le conjugut de la partie A. Cette partition est montrte ci-dessous :
A -
Partition de {R}, :
Partie rCelle de A
Partie rCelle de B
- B Partie imaginaire de A
Partie imaginaire de B
Pour ce faire, il faut calculer la norme des r termes com- plexes (A ou B) du vecteur {Rjj. Cette normalisation peut Ctre faite en considtrant le produit suivant, correspondant au carre de la norme de la partie A du vecteur {Rjj, soit
[57] {R~},{R~}~T = ( c + di)
On obtient le vecteur complexe normalist, en divisant les termes complexes du vecteur {RA}, par la racine carrte de la valeur complexe (c + di), soit
{RA}~ [581 {'A'' = ~ ( C O S 012 + sin 0/2i)
avec s = (c2 + d2)'I4 et 0 = arctan (dlc). Le vecteur propre complexe {@jj de dimension n reprtsen-
tant le mode de vibration complexe de la structure est obtenu directement en multipliant la matrice modale [cp] de dimension n x r par le vecteur {RA}, normalist, soit
l591 { @ j j = [(~l{'A}j
Cette f a ~ o n de rtsoudre les equations de mouvement est tres inttressante pour la solution numtrique en mtmoire interne. La solution du systeme homogene dtfini a l'tquation [28] est obtenue a l'aide de la mtthode du sous-espace de Bathe (1982). Cette mtthode est tres performante pour determiner les r pre- miers modes de vibration du systeme aux valeurs propres naturelles.
4. Programme numerique Initialement dtveloppt sur un ordinateur de grande puis-
sance (IBM4381), le programme a t t t adapte pour un micro- ordinateur de la famille des PC. Pour Ctre operationnel, le programme ntcessite une configuration minimale consistant en une mtmoire vive de 640 ko (kilo-octets), un espace sur disque de 10 mtga-octets et un lecteur de disquettes de 360 ko. De
plus, un co-processeur mathtmatique est recommandt. Ce der- nier n'est pas essentiel mais acctlere de beaucoup les calculs. Bien que le temps d'extcution du programme soit d'environ 20 fois plus long que celui requis sur un ordinateur central, la flexibilitt du micro-ordinateur constitue un avantage certain.
Le programme tcrit en FORTRAN (compilateur FORTRAN version 3.13 de la compagnie Microsoft Inc.) comporte dans sa version finale 5213 lignes de code incluant de nombreux commentaires. Ces lignes sont rtparties dans 28 sous-routines plus un programme principal. Le programme est divist en deux parties, la partie statique permettant le calcul de la matrice de rigiditt totale et la partie dynamique. La figure 8 illustre l'organigramme du programme. D'autre part, deux techniques numtriques suppltmentaires ont Ctt utilistes. La premiere tech- nique permet d'introduire une relation de dtpendance lintaire entre les nceuds. Cette relation sous forme matricielle est tres utile pour simuler les extensions rigides dans une structure sans avoir B introduire de termes trop grands dans la matrice de rigiditt. Cette technique permet entre autre de diminuer le risque d'une matrice de rigiditt ma1 conditionnte. La deuxieme technique permet d'optimiser la largeur de bande de la matrice de rigiditt et d'emmagasiner celle-ci dans un vecteur sous forme de largeurs de bande variables. L'algorithme choisi b a d sur celui de Collins (1973), quoique tres simple, a montrt son efficacitt pour le genre de structure qui nous inttresse.
Puisque nous voulons que la rtsolution du systeme soit faite en mtmoire interne, la condensation de Guyan (1965) ne peut Ctre appliqute efficacement dans notre cas ttant donnt que l'idtalisation du rotor ntcessite un grand nombre de degrts de libertt. En effet, une optimisation de la largeur de bande de la matrice originale permet d'emmagasiner la matrice de rigidit6 dans un vecteur sous forme de largeurs de bande variables. Si la condensation de Guyan est utiliste pour rtduire de moitit la dimension de la matrice de rigiditt, ceci ntcessite un espace pour une matrice pleine mais symttrique.
Bien que cette reduction permettrait une diminution possible du temps de calcul, elle n'est pas avantageuse dans notre cas puisque nous voulons que le programme soit optrationnel sur un micro-ordinateur dont la capacite de mtmoire est limitte B 640 kilo-octets.
La capacitt du programme est fixte par le dimensionnement des variables. La version utiliste possede les capacitts suivantes :
Nombre maximum de nceuds : Nombre maximum de membrures : Nombre maximum de liens de dCpendance : Nombre maximum de matCriaux : Nombre maximum de sections : Nombre maximum de coupes (ClCments inertie variable) : Nombre maximum de raccords Clastiques : Nombre maximum d'appuis Clastiques : Nombre maximum d'appuis rigides : Nombre maximum de charges concentrkes : Nombre maximum de masses concentrkes :
Ces limites peuvent Ctre facilement augmenttes en modifiant le dimensionnement des vecteurs concernts dans les tnoncts (( COMMON N.
Dans le programme, la matrice de masse g tnt r te est diago- nale. L'inertie rotationnelle des tltments n'est pas prise en compte d'une f a ~ o n implicite. De plus, le taux d'amortisse- ment de la structure pour tous les modes doit Ctre identique. Une modification au programme a t t t apportte de maniere ii ce
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.

VEILLEUX ET TINAWI : I 367
Analyse statique non-linCaire Calcul de la rnatrice [ K ] = [ K E ] + [KG]
I Calcul de la rnatrice de masse diagonale [MI I
Calcul des valeurs et des vecteurs propres naturels du systkrne [K]{cp} = A[M]{cp} par la rntthode du sous-espace.
RCduction de la taille initiale du probleme par la mCthode de Rayleigh-Ritz en utilisant les r premiers vecteurs propres naturels [cp],,,, [MDl{ii} + [DDl{il}[KDl{-rl} = {O)
avec
[MDI = [I1
[DDI = P w b I + 2.n[cplT[~l[cpl
[KDI = [w2ml - f 1 2 [ c p l T [ ~ l [ c p 1
RCsolution du problkme aux valeurs propres complexes en utilisant la mCthode du double QR aprks avoir prklablement rCduit la matrice [ C ] ;i la forme de Hessenberg.
= [ B I - ' [ A l { u ) = [C l {u l = l /p{uI
Note : la rnatrice [B] - ' est CvaluCe en calculant les coefficients de flexibilitC de la rnatnce [KD]- '
.1 Calcul des vecteurs propres complexes [ C ] { u ) = a + bi{u) :
en utilisant la technique d'tlirnination de Gauss avec pivot cornplet
I Fin I FIG. 8. Organigramme du programme numCrique.
que le premier mode, qui est un mode rigide cause par le ressort torsionnel B la base du rotor, soit amorti proportion- nellement B la vitesse de rotation de 1'Colienne de manikre i ne pas influencer les autres modes. D'autre part, certains pararnktres de convergence pour le calcul des valeurs et vecteurs propres naturels ne sont pas dCfinis dans le fichier de donnCes et doivent, par condquent, &tre modifiCs directement dans le programme.
Deux fichiers de rCsultats sont gCnCrCs par le programme. Le premier (EOLE.RES) est le fichier des resultats avec ou sans Ccho des donnees. Le deuxikme fichier (EOLE . PIC) renferme l'information nCcessaire pour la genkration graphique des modes de vibration et des dCplacements de la structure. Ce dernier fichier contient l'information dans un format binaire de fason B minimiser l'espace sur disque.
5. Conclusions Les Cquations de mouvement ont CtC presentees pour une
Colienne haubannCe B axe vertical. Une proctdure numCrique permettant le calcul des frCquences et modes de vibration com- plexes de 1s structure et adaptee au calcul sur ordinateur a CtC proposCe. Les rCsultats obtenus permettent d'Ctudier le com- portement dynamique en fonction de la vitesse de rotation de 1'Colienne et de dttecter les instabilitks possibles. L'applica- tion pratique de cette procCdure fait l'objet d'un article sCparC (Veilleux et Tinawi 1988).
Dans le prCsent article, les Cquations de mouvement ont CtC developpCes dans un repkre mobile plut8t que dans un systeme d'axes fixes de fason B tenir compte des effets gyroscopiques. Cette approche a l'avantage de rendre les paramktres de 1'Cqua- tion independants du temps. Par contre, la matrice de Coriolis introduite est non-symCtrique et ceci entraine des frkquences et des modes de vibration complexes. Deux effets non-1inCaires ont CtC inclus dans le developpement de la matrice de rigidite : le premier provient de l'addition de la matrice de rigidit6 gCo- mttrique formCe B partir des contraintes engendrCes par les forces centrifuges, les forces de gravitC et les forces de com- pression introduites par la composante verticale des haubans. Le second provient de la non-linCaritC de la rigidit6 des c2bles.
La mkthode proposCe pour la solution des Cquations de mou- vement d'une Colienne B axe vertical repose sur une riduction importante de la taille du problkme en utilisant la mCthode de Rayleigh-Ritz. Les modes naturels sont CvaluCs facilement i l'aide de la mCthode du sous-espace. Par la suite, l'extraction des valeurs propres complexes est obtenue en utilisant la mCthode du double QR. Cette derniere mkthode est tres performante si la matrice est prialablement transfornee sous la forme de Hessenberg .
Remerciements Les auteurs tiennent B remercier M. Luc Lainey de Lavalin
pour avoir proposC le sujet de cette recherche qui a CtC rendue possible griice au Conseil de recherches en sciences naturelles et en genie du Canada (subvention dCpenses courantes No. A-8958). De plus, une bourse d'ktude du CRSNG octroyte au premier auteur a CtC grandement apprCciCe.
BATHE, K. J. 1982. Finite element procedures in engineering analy- sis. Prentice-Hall Inc., Englewood Cliffs, NJ.
CLOUGH, R., et PENZIEN, J. 1975. Dynamics of structures. McGraw- Hill, New York, NY.
COLLINS, R. J. 1973. Bandwidth reduction by automatic numbering. International Journal for Numerical Methods in Engineering, 6 : 345-356.
GUYAN, R. J. 1965. Reduction of stiffness and mass matrices. AIAA Journal, 3(2) : 380.
MERIAM, J. L. 1971. Dynamics. John Wiley &Sons, New York, NY. MEIROVITCH, L., et RYLAND 11, G. 1979. Response of slightly damped
gyroscopic systems. Journal of Sound and Vibrations, 67 1- 19.
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.
368 CAN. J . CIV. ENG. VOL. 15. 1988
OTTENS, R. H., et ZWAAN, R. J. 1978. Investigations on the aero- elastic stability of large wind turbines. 2nd International Sympo- sium on Wind Energy Systems, The Netherlands. octobre. Paper C3.
PODOLNY, JR., et SCALZI, J. B. 1976. Construction and design of cable-stayed bridges. John Wiley & Sons, New York, NY.
POPELKA, D. 1982. Aeroelastic stability analysis of a Darrieus wind turbine. SAND 82-0672 report Sandia National Laboratories, Albu- querque, NM.
POSKITT, T. J., et LIVESLEY, R. K. 1963. Structural analysis of guyed masts. Proceedings-the Institution of Civil Engineers, 24 : 373-386.
PRZEMIENIECKI, J. S. 1968. Theory of matrix structural analysis. McGraw-Hill Book Co., New York, NY.
VEILLEUX, M. 1986. Analyse du comportement vibratoire d'une Colienne B axe vertical. MCmoire de maitrise (M.Sc.A.), Ecole Polytechnique, Montrkal (Qukbec).
VEILLEUX, M., et TINAWI, R. 1988. Comportement dynamique d'une Colienne i axe vertical (application pratique). Revue canadienne de gCnie civil. Ce numCro.
VOLAN, A. J. 1978. The aeroelastic behaviour of large Darrieus-type wind energy converters derived from the behaviour of a 5.5 m rotor. 2nd International Symposium on Wind Energy Systems, The Netherlands. octobre. Paper C5.
WILKINSON, J. H. 1965. The algebraic eigenvalue problem. Oxford University Press, Inc., London.
Liste des symboles
[ m l , [MI matrices de masse 2 f l [ c ] , 2 f l [ C ] matrice de Coriolis [ d l , [Dl matrices d'amortissement [ k d , [ K E ] matrices de rigidit6 Clastique [ k ~ l , [KG] matrices de rigidit6 gComCtrique [ k l , [K l matrices de rigidit6 totale f12[s] , f12[s] matrices de reliichement {F}EQ vecteur des forces Cquivalentes {PC} vecteur des forces centrifuges {q}, { {q} diplacement, vitesse et accClCratiori du D.D.L.
position, vitesse et accClCration absolues d'un point A position, vitesse et accClCration relatives d'un point A vitesse de rotation de 1'Colienne flkche h mi-portCe d'un ciible longueur totale du ciible longueur d'un ClCment charge linCaire totale normale la corde du ciible charge totale normale h la corde du ciible tension dans le ciible tension initiale dans le ciible aire de la section module d'ClasticitC rigidit6 d'un ciible diplacement axial le long de la corde du ciible diplacement horizontal de l'appui supCrieur de la colonne valeur propre du mode i pulsation du mode i taux d'amortissement du mode i vecteur propre nature1 du mode i matrice des vecteurs propres naturels vecteur des dkplacements modals vecteur propre complexe du mode i matrice diagonale des masses gCnCralisCes matrice diagonale des rigiditCs gCnCralisCes matrice diagonale d'amortissement modal masse gCnCralisCe du mode i masse par unit6 de volume effort axial inerties autour de y et z inertie torsionnelle module de cisaillement masse au naeud i dans les directions x , y, z moment d'inertie de la masse au naeud i autour des axes x , y, z.
Can
. J. C
iv. E
ng. D
ownl
oade
d fr
om w
ww
.nrc
rese
arch
pres
s.co
m b
y U
NIV
WIN
DSO
R o
n 11
/10/
14Fo
r pe
rson
al u
se o
nly.





























