Contribution la commande de voiliers robotiss Miguel Angel
ROMERO RAMIREZ Institut des Systmes Intelligents et Robotique
Page 2
Cadre applicatif Collecte de donnes des masses ocaniques
Collecte de donnes des masses ocaniques Cartographie de zone
dhabitats marins Cartographie de zone dhabitats marins Mesure de
paramtres physico- chimiques Mesure de paramtres physico- chimiques
2
Projet ASAROME Autonomous Sailing Robot for Oceanographic
Measurements Financ par lANR 4 Plateforme (mini-j) Simulateur
numrique Perception Navigation et commande
Page 5
Particularit Pas de contrle direct de la force de propulsion
Pas de contrle direct de la force de propulsion une direction o la
force de propulsion est nulle une direction o la force de
propulsion est nulle 5
Page 6
Particularit Deux entres de commande disponibles : 6 Angle de
bme, qui modifie la force de propulsion Angle de safran, qui fait
changer le cap du bateau
Page 7
Objectif 7 Dtermination dun cap afin : datteindre un ou
plusieurs points de passage de faon autonome de sadapter aux
conditions du vent dviter les obstacles
Page 8
Plan 8 Simulateur Voilier Navigation Commande Description du
simulateur Description du simulateur Outils de simulation (IG)
Outils de simulation (IG) Exploitation du simulateur. Exploitation
du simulateur. ConclusionPerspectives Simulateur Architecture L/M
(ASAROME) Architecture L/M (ASAROME) Architecture L/M (RC)
Architecture L/M (RC) Voilier Slection dangle de voile Slection
dangle de voile Asservissement du cap Asservissement du cap
Commande Projection de la vitesse Projection de la vitesse Floue
Floue Champs de potentiel artificiel Champs de potentiel artificiel
Navigation et vitement des obstacles Simulation Simulation
Exprimentaux Exprimentaux Rsultats
Page 9
9 Description du simulateur Description du simulateur Outils de
simulation (IG) Outils de simulation (IG) Exploitation du
simulateur Exploitation du simulateurSimulateur Simulateur
Simulateur Voilier Commande Navigation Rsultats Conclusion
Perspectives
Page 10
Simulateur Exact par rapport la dynamique des corps solides en
mouvement + Dtermination des efforts hyrdro-arodynamiques grce aux
modles empiriques 10 Modlecinmatique Modlearodynamique
Modlehydrodynamique Equations de mouvement RK tat t Position
Orientation Vitesses Acclrations Vent Ang. safran Ang. safran Ang.
voile Ang. voile
Page 11
Simulateur Interface aise avec des outils de simulation, tel
que Matlab, des interfaces graphiques utilisateurs, etc. 11
Simulateur numrique cod en Fortran prend la forme dune librairie
dynamique (DLL : Dynamic Link Library) sous Windows
Page 12
Interface graphique 12
Page 13
Interface graphique Boucle ouverte : Boucle ouverte :
lutilisateur assigne directement les valeurs des angles de voile et
safran Boucle ferme : Boucle ferme : lutilisateur spcifie un (ou
plusieurs) point(s) de passage Grce cette interface graphique il
est possible de piloter le voilier selon deux modes : 13 WP IG
Algo. Nav. consignes Simulateur. Algo cmd. Etat
Page 14
Exploitation du simulateur Polaires de vitesse 14 Polaire de
bme Enveloppe Convexe Vitesses du vent Polaire de vitesse (Pour une
vitesse de vent fix.) Polaires de vitesse
Page 15
Exploitation du simulateur Polaires de vitesse 15 No-go zone up
wind No-go zone down wind
Page 16
16 Test sous conditions similaires celles dfinies par l ITTC
Exploitation du simulateur Comportement en virage
Page 17
17 Rponse au changement dangle de safran Approximation de la
fonction de transfert en cap Exploitation du simulateur Rponse
indicielle
Architecture (RC) 22 CaractristiqueUnitsValeur Dplacementkg18
Longueurm1,40 Surface de voilem2m2 0,70
Page 23
Architecture (RC) Logicielle 23 Compatible avec le voilier
ASAROME Modulaire : facilit pour intgrer autres algorithmes de
commande / autres fonctionnalits Cod en C / C++
Page 24
Architecture (RC) Matrielle 24
Page 25
Architecture (RC) 25 Bas sur une coque commerciale de la marque
Robe Modification pour intgrer llectronique embarque et maintenir
son tanchit Conception et fabrication des pices ncessaires pour
ladaptation du voilier, par exemple : Girouette / anmomtre Codeur
de la bme. Pice dadaptation de la quille.
Page 26
Architecture (RC) Matrielle 26 Interface avec lordinateur
embarqu Interface pour la tlcommande Contrleur des servomoteurs
Acquisition du vent Activation des comportements durgence Carte bas
niveau : Arduino Nano
Page 27
Architecture (RC) Matrielle 27 Implantation des algorithmes de
navigation Interface USB avec : Carte Arduino Mti G (Centrale
inertielle + GPS) Possibilit de connexion WiFi Ordinateur
Navigation : PC-104 + Linux
Page 28
28 Commande Slection dangle de voile Slection dangle de voile
Asservissement du cap Asservissement du cap Commande Simulateur
Voilier Commande Navigation Rsultats Conclusion Perspectives
Page 29
Commande Slection dangle de voile 29 Rglage de voile en
fonction de langle de vent apparent (Y. Brire, TAROS 2007)
Page 30
Commande 30 Ne sont pas formellement dcouples mais : Langle de
safran modifie principalement le cap Langle de voile modifie
principalement la vitesse davance Hypothse de dcouplage des deux
entres de commande
Page 31
Commande 31 Asservissement de cap : Influence des gains du
rgulateur PD Asservissement de cap
Page 32
Bilan 32 Besoins SimulateurVoiliersCommandeNavigation
PilotageMoyens
Page 33
33 Projection de la vitesse Projection de la vitesse Floue
Floue Champs de potentiel Champs de potentiel Navigation et
vitement des obstacles Navigation Simulateur Voilier Commande
Navigation Rsultats Conclusion Perspectives
Page 34
Navigation No-go zones 34 Principes 1.propulsion non nulle 2.
rejoindre lobjectif 3.viter les obstacles
Page 35
Mthode de projection de la vitesse 35
Page 36
Navigation Mthode de projection de la vitesse 36
Page 37
Navigation 37 Introduction dun facteur dhystrsis privilgier cap
Introduction dun facteur dhystrsis privilgier cap courant pour
rduire : courant pour rduire : Perte de vitesse Perte de vitesse
Utilisation des voiles et safran Utilisation des voiles et safran
(consommation dnergie) (consommation dnergie) Lhystrsis ( w) Actual
heading VMG | w = 1 VMG | w < 1 Influence du facteur dhystrsis
sur la navigation.
Page 38
Navigation Mthode de projection de la vitesse 38 Pour guider le
navire vers son objectif Base sur la minimisation de fonctions de
cot Avec VMG normalise et w le facteur dhystrsis
Page 39
Navigation 39 Mthode de projection de la vitesse Evitement
dobstacles If d obs < d0 If d obs > d0
Page 40
Navigation Mthode de projection de la vitesse 40 Dtermination
dun cap consigne
Page 41
Mthode dinfrence floue 41
Page 42
Navigation 42 Mthode floue Premier ensemble flou maximise la
vitesse vers lobjectif WWW
Page 43
Navigation 43 Mthode floue Deuxime ensemble floue loigne le
bateau des obstacles If d obs < d0 WWW
Page 44
Navigation Mthode floue 44 Dtermination dun cap consigne
Page 45
Angle qui maximise la surface de sortie du systme dinfrence
floue Navigation 45 Mthode floue
Page 46
Mthode des champs de potentiels 46
Page 47
Navigation 47 Mthode des champs de potentiels Notre mthode
considre deux champs de potentiel : Le premier, local et attach au
bateau, li la direction du vent et le cap courant Le deuxime,
global, li au waypoint et aux obstacles
Page 48
Navigation 48 Potentiel local Le champ de potentiel local
rsulte de la somme de quatre potentiels rpulsifs :
Page 49
Navigation 49 Potentiel local Le champ de potentiel local
rsulte de la somme de quatre potentiels rpulsifs : Ps
Page 50
Navigation 50 Potentiel local Le champ de potentiel local
rsulte de la somme de quatre potentiels rpulsifs : Si 0 up ailleurs
Si 0 down ailleurs Pup Pdown
Page 51
Navigation 51 Potentiel d hystrsis Le champ de potentiel local
rsulte de la somme de quatre potentiels rpulsifs : Si 0 up down
ailleurs Ph
Page 52
Navigation 52 Potentiel global Le champ de potentiel global est
calcul classiquement : Attirer le voilier vers lobjectif et
lloigner des obstacles
Page 53
Navigation 53 Potentiel total Le potentiel total Pt est calcul
par laddition de chacun des potentiels local et global Dtermination
du cap consigne descente de gradient
Rsultats 56 Conditions de simulation TWA = 90 TWS = 10 nd
Page 57
Rsultats 57 Les 3 algorithmes permettent de piloter le voilier
vers son objectif quelque soit la direction du vent floue P.V. C.P.
Vent constat
Page 58
Rsultats 58 Les 3 algorithmes permettent de piloter le voilier
vers son objectif quelque soit la direction du vent floue P.V. C.P.
Vent rel
Page 59
Rsultats 59 Les 3 algorithmes sont robustes par rapport la
forme de la polaire : il est possible dutiliser une polaire raliste
ou bien idale Polaire idale CP Polaire raliste Polaire idale CP
Polaire raliste
Page 60
Rsultats 60 Les 3 algorithmes permettent dviter les obstacles
quelque soit la direction du vent C.P.
Page 61
Courbe polaire Conclusion 61 Projection de la vitesse Mthode
floue Champs de potentiel Amplement utilise par les skippers
humains Amplement utilise par les skippers humains Moins ractif que
la mthode des champs de potentiel Moins ractif que la mthode des
champs de potentiel Trajectoires moins ractives sloignent du chemin
plus court Trajectoires moins ractives sloignent du chemin plus
court Sensible aux rayons dinfluence des obstacles Sensible aux
rayons dinfluence des obstacles Plusieurs paramtres rgler Plusieurs
paramtres rgler Permet de reprsenter les tches et contraintes
(obstacles) de faon unifi Permet de reprsenter les tches et
contraintes (obstacles) de faon unifi Facilit dutilisation (par
rapport aux autres mthodes) Facilit dutilisation (par rapport aux
autres mthodes)
Page 62
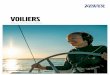
Rsultats exprimentaux (Mthode des champs de potentiel) 62
Voilier bas sur le modle RC Test sur le lac de Crteil
Conclusion 67 Vent Obstacles Wp 3 mthodes de slection de
cap
Page 68
Conclusion La mthode de champs de potentiel prsente la grand
avantage dunifier la reprsentation des contraintes de la navigation
voile et les tches raliser 68
Page 69
Conclusion 69 Validation exprimentale
Page 70
Perspectives 70 Amlioration de la commande des mouvements pour
optimiser : Les manuvres de changement de bord La manuvrabilit La
prise de vitesse
Page 71
Perspectives 71 Lextension des mthodes de navigation : Suivi de
route Introduction de la notion de temps de dplacement
Page 72
Perspectives 72 Le dveloppement dun planificateur de
haut-niveau : Compromis objectif/consommation nergtique Mise en
scurit Capacit de fonctionner en modes dgrads