Embed Size (px)
Citation preview

Projet de Semestre Eté 2006
Section : Microtechnique
Contrôle du mouvement chaotique d’unpendule magnétique
Etudiant : Florent CosandierAssistants : Yvan Michellod et Dr. Philippe Müllhaupt
MER : Dr. Denis Gillet

Table des matières
1 Introduction 41.1 Buts du projet . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 Description du pendule physique existant . . . . . . . . . . . . . 51.3 Réalisation d’un prototype de démontration . . . . . . . . . . . . 5
1.3.1 Caractéristiques du prototype de démontration . . . . . . 51.3.2 Fonctionnement : modes de régulation . . . . . . . . . . . 6
2 Création d’un modèle mathématique 92.1 Description cinématique du pendule . . . . . . . . . . . . . . . . 9
2.1.1 Choix d’un système de coordonnées . . . . . . . . . . . . 92.1.2 Relations de transfert entre systèmes de coordonnées sphé-
rique et sphérique orthogonal . . . . . . . . . . . . . . . . 102.2 Création d’un modèle dynamique : approche Lagrangienne VS
Newtonienne . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2.1 Mécanique Lagrangienne et détermination des équations
du mouvement non-linéaires . . . . . . . . . . . . . . . . 112.3 La constante magnétique des aimants répulsifs . . . . . . . . . . . 13
3 Simulation du système dynamique 153.1 Description symbolique et implémentation avec MATLAB . . . . 153.2 Intégration de la dynamique et simulation numérique . . . . . . . 15
4 Linéarisation de la dynamique 174.1 Méthode de linéarisation autour d’un point d’équilibre . . . . . . 17
4.1.1 Détermination du point d’équilibre . . . . . . . . . . . . . 18
5 Régulation du moteur DC 205.1 Schéma de régulation du moteur DC . . . . . . . . . . . . . . . . 205.2 Equation dynamique du moteur DC . . . . . . . . . . . . . . . . 215.3 Implantation d’un régulateur PD . . . . . . . . . . . . . . . . . . 21
2

6 Contrôlabilité du système linéarisé 236.1 Etude de la contrôlabilité du système linéarisé . . . . . . . . . . . 236.2 Restriction de la commande aux états contrôlables . . . . . . . . . 24
7 Conception d’une loi de commande : détermination des paramètresde régulation 257.1 Régulateur d’états . . . . . . . . . . . . . . . . . . . . . . . . . . 257.2 Placement des pôles par la méthode de Ackermann . . . . . . . . 25
8 Implémentation de la loi de commande linéarisée au système dyna-mique complet 278.1 Schéma de régulation global du système . . . . . . . . . . . . . . 278.2 Système dynamique linéarisé en B.F. . . . . . . . . . . . . . . . . 278.3 Système dynamique non-linéarisé en B.F. . . . . . . . . . . . . . 27
9 Annexes 309.1 Modèle en coordonnées sphériques . . . . . . . . . . . . . . . . . 309.2 Fonctionnement en pompage . . . . . . . . . . . . . . . . . . . . 30
9.2.1 Dérivation du Hamiltonien . . . . . . . . . . . . . . . . . 30
10 Conclusion 31
Contrôle du mouvement chaotique d’un pendule magnétique Page 3

Chapitre 1
Introduction
1.1 Buts du projetDans le contexte de construction d’un démonstrateur pour le laboratoire de
contrôle automatique, il est proposé de contrôler un pendule magnétique chao-tique. Le dispositif proposé est constitué d’un pendule à aimant permanent sebalançant au dessus d’une base contrôlée angulairement avec quatre aimants ré-pulsifs sur elle. Un moteur DC contrôle la position angulaire de la base.
Ce pendule magnétique suit passivement une trajectoire chaotique (résultantede l’interaction entre les aimants), que l’on propose de rejeter en utilisant uncontrôlleur non-linéaire élaboré, agissant sur la position angulaire de la base àaimants.Ce projet inclut les points suivants :
1. Modélisation mathématique de la dynamique du système incluant la com-mande du moteur dans la dynamique
2. Design d’une loi de contrôle linéarisée
3. Design d’un contrôle global rejetant la trajectoire chaotique et stabilisant lependule, soit sur un cercle contrôlé soit sur un point stable
4. Réalisation d’un prototype, incluant les capteurs de position du pendule afinde fermer la boucle
Pour le semestre d’été 2006, le projet s’arrête au point 3 et à la stabilisationsur un point d’équilibre.
4

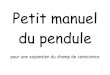
FIG. 1.1 – Pendule existant
1.2 Description du pendule physique existantLe pendule existant est similaire au demonstrateur prévu sur certains points,
mis à part les dimensions et la base avec les aimants ; elle est fixe et le système esten boucle ouverte. Le dispositif possède un électroaimant au centre de la base quirelance le pendule lorsque celui-ci a perdu trop d’énergie mécanique. Il présenteles caractéristiques suivantes :
1. Distance centre/aimant dans la base : R = 30[mm]
2. Longeur pendule : l = 140[mm]
3. Distance origine pendule et centre base : h = 150[mm]
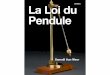
L’illustration de la figure 1.1 présente le pendule existant. Celle de la figure 1.2montre un exemple de trajectoire chaotique d’une durée de 10 secondes réaliséeen simulation en B.O., avec la base fixe.
1.3 Réalisation d’un prototype de démontration
1.3.1 Caractéristiques du prototype de démontrationLe prototype prévu pour l’hiver 2006 à la construction comporte les caracté-
ristiques suivantes :
1. Deux capteurs angulaires incrémentaux
2. Un microcontrôleur + carte électronique pour paramètres de régulation
3. Un moteur CC 5V + réducteur et codeur incrémental
Contrôle du mouvement chaotique d’un pendule magnétique Page 5

FIG. 1.2 – Trajectoire chaotique du pendule en B.O. (Vue de dessus)
4. Position des aimants et hauteur du pendule réglable (si réalisable)
5. Dimensions : 290x200x300 mm
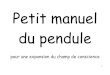
La figure 1.3 illustre l’allure générale du prototype de démonstration.
1.3.2 Fonctionnement : modes de régulationLe fonctionnement du démonstrateur se déroule de la façon suivante :
1. Amorce manuelle (P1)
2. Détection de mouvement (P2)
3. Pompage (P3)
4. Passage de la barrière de potentiel (+ ∆E)
5. Stabilisation au point d’équilibre (P4)
6. Rotation au de la barrière de potentiel (P5)
7. Trajectoires diverses
La phase de mise en route du régulateur est amorcée par l’utilisateur qui in-jecte un peu d’énergie dans le système en touchant le pendule.
Dans la deuxième phase, le système detecte un mouvement et enclenche le ré-gulateur en mode de pompage. Dans ce mode, le régulateur cherche à augmenterl’énergie du système en exitant le pendule à sa fréquence propre. Le détail de cettephase est donnée en section 9.2.
Contrôle du mouvement chaotique d’un pendule magnétique Page 6

FIG. 1.3 – Prototype de démonstration
Une fois que le système possède une énergie suffisante, le pendule peut pas-ser la barrière de potentiel des aimants avec un léger surplus d’énergie (∆E) et lesystème passe en mode de stabilisation au point d’équilibre x0. Le ∆E est dissipéet le pendule est stabilisé.
La faisabilité de la phase suivante reste à démontrer en simulation. Elle consisteen une rotation du pendule autour de l’axe central tout en conservant la même élé-vation que le point d’équilibre.
Le profil de la quantité d’énergie mécanique (cinétique + potentielle) présentedans le système est représentée schématiquement dans la figure 1.4, selon les dif-férentes phases de fonctionement.
Contrôle du mouvement chaotique d’un pendule magnétique Page 7

FIG. 1.4 – Profil du Hamiltonien selon les phases de fonctionnement
Contrôle du mouvement chaotique d’un pendule magnétique Page 8

Chapitre 2
Création d’un modèlemathématique
2.1 Description cinématique du pendule
2.1.1 Choix d’un système de coordonnéesLe système de coordonnées choisi pour le développement du modèle de connais-
sance est un système non commun qui utilise comme grandeur deux angles d’élé-vation (θ et ϕ) dans deux directions orthogonales comme présenté en figure 2.1.Nous appelerons ce système de coordonnées ’sphérique orthogonal’. Deux raisonsont été déterminantes dans ce choix.La première est l’existence d’un point singulier présent dans le système de coor-données sphérique (θ∗ = 0, ϕ∗ indéterminé).La deuxième raison est la correspondance directe entre le système de mesure desangles (les capteurs angulaires) et les deux angles du système de coordonnéessphérique orthogonal (voir figure 1.3).
La longueur du pendule étant fixée, le nombre de degré de liberté du penduleest bien de deux.
L’introduction d’un degré de liberté supplémentaire est nécessaire pour décrirela rotation du rotor. Conformément à la notation de la figure 2.1, nous l’appelonsα.
Il est à noter que le modèle a été au départ également développé dans un sys-tème de coordonnées cartésien, mais les calculs étaient trop importants pour conti-nuer dans ce système de représentation.
9

FIG. 2.1 – Coordonées sphériques et sphériques orthogonales
2.1.2 Relations de transfert entre systèmes de coordonnées sphé-rique et sphérique orthogonal
Les relations pour passer du système de coordonnées sphérique au systèmesphérique orthogonal et inversément sont données par les équations (2.1) à (2.4) :
θ∗ = arctan(
tanϕ
tanθ) (2.1)
ϕ∗ = arccos(cosθcosϕ) (2.2)θ = arctan(cosθ
∗ tanϕ∗) (2.3)
ϕ = arctan(sinθ∗ tanϕ
∗) (2.4)
Ces relations de passage entre les systèmes de coordonnées sphérique et sphé-rique orthogonal démontre l’unicité de la deuxième représentation ; à chaque pointcorespond donc une seule combinaison de coordonnées.
Contrôle du mouvement chaotique d’un pendule magnétique Page 10

2.2 Création d’un modèle dynamique : approche La-grangienne VS Newtonienne
Le modèle de connaissance nécessaire à la conception du régulateur a été réa-lisé dans un premier temps selon une approche newtonienne, puis par la méthodede Lagrange. L’avantage de la seconde méthode est sa généralité. Elle est baséesur le principe de la conservation d’énérgie mécanique plutôt que sur le conceptde force, comme avec Newton.
Dans ce modèle, on admet les hypothèses suivantes :
1. La masse du pendule est ponctuelle
2. Les aimants de la base sont également ponctuels
3. Le champs magnétique crée par un aimant dans la base est isotrope dansl’espace
4. La tige du pendule est infiniment rigide et sans poids
5. Le frottement de l’air est négligeable
6. Le frottement est uniquement créer par la rotation au niveau des paliersrotatifs (capteurs)
N.B. : la méthode newtonnienne a été réalisée en posant les équations de ladynamique puis en résolvant avec la fonction solve.m.
2.2.1 Mécanique Lagrangienne et détermination des équationsdu mouvement non-linéaires
Détermination du Lagrangien
Les équations du mouvement du pendule sont déterminées par la méthodede Euler-Lagrange. Le Lagrangien est défini comme la différence entre l’énergiecinétique et l’énergie potentielle du système :
L = T −V (2.5)
On exprime l’énergie cinétique du système :
T =12
m3
∑i=1
x2i +
12
Imotα2 (2.6)
Contrôle du mouvement chaotique d’un pendule magnétique Page 11

Le premier terme se rapporte à l’énergie cinétique du pendule et le deuxièmeà celle du rotor. Les xi se calculent de la manière suivante :
~x =
∂x1∂θ
∂x1∂ϕ
∂x2∂θ
∂x2∂ϕ
∂x3∂θ
∂x3∂ϕ
(θ
ϕ
)avec~x donnée en figure 2.1.
L’énergie potentielle comporte deux composantes V = Ehauteur + Emagntique ;une liée à la position du pendule (définie nulle à la verticale) :
Ehauteur = mgl(1− cos(θ)cos(ϕ)) (2.7)
La deuxième composante est l’énergie potentielle magnétique :
Emagntique = K ∑i=1:4
∥∥~ri∥∥−1 (2.8)
Les~ri sont les distances inter-aimants base/pendule.
Si on définit : xaimants =
Rcos(α) h Rsin(α)−Rsin(α) h Rcos(α)−Rcos(α) h −Rsin(α)Rsin(α) h −Rcos(α)
On a alors :
~ri =~xT − xaimants(i, :) (2.9)
On a ainsi tous les élément nécessaire pour déterminer le Lagrangien.
Dérivation du Lagrangien et détermination des équations du mouvement
Dans cette sous-section, la méthode dérivation du Lagrangien va être explici-tée dans le but d’accéder aux équations non-linéaires du mouvement.
L’équation de Euler-Lagrange est la suivante :
ddt
∂L(~q,~q)d~q
− ∂L(~q,~q)d~q
= Q (2.10)
Contrôle du mouvement chaotique d’un pendule magnétique Page 12

Q est le travail fourni par l’extérieur du système, qui est nul dans notre cas. Et
~q est le vecteur des coordonnées générlisées du système : ~q =
θ
ϕ
α
La dérivée temporelle du premier terme va être explicitée en deux dérivée
partielle : ∂
∂~q et ∂
∂~qappliquée à une fonction F qui correspond à ∂L(~q,~q)
d~q . Il est ànoter que L ne dépend pas explicitement du temps mais uniquement de q et q.
dF(~q,~q)dt
=∂F∂~q
∂~q∂t
+∂F∂~q
∂~q∂t
=∂F∂~q
~q+∂F∂~q
~q (2.11)
Ce qui donne alors dans l’équation (2.10) :
∂2L∂~q2
~q+∂2L
∂~q∂~q~q− ∂L
∂~q= Q (2.12)
On utilise pour la fin du développement les notations suivantes :
A = ∂2L∂~q2 et B = Q− ∂2L
∂~q∂~q~q+ ∂L
∂~q
Qui donne dans (2.12) :A~q = B ⇔ ~q = A−1B
Les équations du mouvement (~q) sont à présent connues et nous pouvons pas-ser à l’intégration de ces équations non-linéaires. Mais avant nous allons discuterde l’importance de la constante magnétique K.
2.3 La constante magnétique des aimants répulsifsLa force entre aimants répulsifs est caractérisée par une constante magnétique
K (Fi = K∥∥∥~ri∥∥∥2 ). Il est difficile d’identifier correctement la constante K du pendule
physique ; celle-ci est posée de façon relativement arbitraire, mais dans un ordrede grandeur qui garantit un comportement similaire au pendule physique.
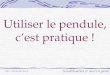
Afin d’obtenir un comportement chaotique, cette constante doit être ni tropgrande, ni trop petite. Comme illustré en fig. 2.2, trois cas se présentent :
1. La constante est correctement dimensionnée : le point de scelle est bien pré-sent derrière l’aimant et il n’y a pas de minimum local entre deux aimants.
Contrôle du mouvement chaotique d’un pendule magnétique Page 13

FIG. 2.2 – Puits de potentiels avec diférentes valeurs de K
2. La constante est trop grande : le point de scelle est bien présent derrièrel’aimant mais il y a un minimum local entre deux aimants.
3. La constante est trop petite : il n’y a aucun point scelle et l’aimant ne peuten aucun cas être stabilisé.
Contrôle du mouvement chaotique d’un pendule magnétique Page 14

Chapitre 3
Simulation du système dynamique
3.1 Description symbolique et implémentation avecMATLAB
Le système a été décrit de manière symbolique avec des variables réelles dansMATLAB ; les scripts se trouvent dans les routines lagrange.m et lagrange_spherique.mpour les cas de coordonnée sphériques orthogonales et sphériques.
Les trois équations du mouvement alors fournies sont du deuxième ordre. Ellessont ramenées à six équations du premier ordre -correspond au nombre de va-riables d’état (θ θ ϕ ϕ α α)-, puis introduites dans les fichier my_ode_test.m etmy_ode_spherique.m, puis intégrées numériquement.
3.2 Intégration de la dynamique et simulation nu-mérique
La fonction utilisée pour intégrer numériquement les équations différentiellesest ode45.m. Les paramètres donnés en section 1.2 sont introduit à cet endroitainsi que la constante magnétique K, l’inertie du moteur, la masse du pendule etles coefficient de frottement des axes du pendule et du moteur.
La routine ode45.m prend comme argument la fonction à intégrer, le tempsd’intégration et les conditions initiales pour les six états. Puis elle retourne unvecteur avec les temps d’intégration qui ne sont pas régulièrement échantillonnés(prise en compte du gradient du résultat de l’intégration) ainsi qu’une matrice avecles valeurs des six variables d’états à chaque temps.
15

La fonction Anim_pendule.m a été implémentée ; elle permet de réaliser desanimations du pendule en mouvement, avec en argument entre autre le tempsd’échantillonnage de la séquence et un choix entre une vue de dessus et une vueen trois dimensions. En fait, elle ne fait qu’intégrer à un temps d’échantillonnageplus tard et surperposer une figure sur une autre ; le nombre d’images est limité à150 ou 200.
Un exemple d’intégration numérique est donnée en figure 1.2.
Contrôle du mouvement chaotique d’un pendule magnétique Page 16

Chapitre 4
Linéarisation de la dynamique
La dynamique non-linéaire du système va être linéarisée autour d’un pointd’équilibre afin de dissocier la dépendance des équations du mouvement aux va-riables de sortie (θ θ ϕ ϕ) et à la variable de contrôle du système (α), afin d’obtenirun système de la forme suivante :
~x = A~x+Bu (4.1)
Où~x =
θ
θ
ϕ
ϕ
est le vecteur d’états du système et u = α l’entrée du système.
La notation a changé par rapport à celle du chapitre 2, car le système était alorsen B.O., les variables d’état étaient au nombre de six. Ici, la commande α n’estplus considérée comme un état du système.
4.1 Méthode de linéarisation autour d’un point d’équi-libre
Nous définissons ici des nouvelles variables qui sont des variables écart par
rapport au point d’équilibre : ~x0 =
θ0θ0ϕ0ϕ0
.
x =~x−~x0 (4.2)
17

Puis en écrivant le système dynamique non-linéaire sous la forme : ~x(t) =~f (~x(t),u(t), t) et en évaluant le système en ~x0(t) = ~f (~x0(t),u0(t), t), on effectue lalinéariation en développant la fonction f en série de Taylor du premier ordre :
~x(t) = ~x0(t)+ ˙x(t) (4.3)
= ~f (~x0(t)+ x(t),u0(t)+ u(t)) (4.4)
= ~f (~x0(t),u0(t), t)+∂~f∂~x |~x0
x+∂~f∂u |~x0
u (4.5)
Mais u = u ; c’est-à-dire u0 = 0. Et on peut écrire le système linéarisé autourdu point d’équilibre :
˙x(t) = A(t)|~x0x(t)+B(t)|~x0
u(t) (4.6)
Avec A(t) et B(t) les matrices jacobiennes :
A(t) =∂~h∂~x
=
∂h1∂θ
∂h1∂θ
∂h1∂ϕ
∂h1∂ϕ
∂h2∂θ
∂h2∂θ
∂h2∂ϕ
∂h2∂ϕ
∂h3∂θ
∂h3∂θ
∂h3∂ϕ
∂h3∂ϕ
∂h4∂θ
∂h4∂θ
∂h4∂ϕ
∂h4∂ϕ
(4.7)
B(t) =∂~h∂u
=
∂h1∂α∂h2∂α∂h3∂α∂h4∂α
(4.8)
4.1.1 Détermination du point d’équilibreLe point d’équilibre est pris en ~x0 = (θ0,0,0,0)T . Il faut déterminer θ0 qui est
fonction de la constante magnétique K, de la distance R (rayon de la base), de lahauteur h et de la longueur du pendule l. Pour ce faire trois méthodes peuvent êtreconsidérées.
La première consiste à réaliser une simulation avec comme conditions initialeun point au delà d’un aimant, tout en bloquant l’angle ϕ. En prenant la composantecontinue du signal obtenu, ou la valeur centrale entre deux pics d’oscillation, on
Contrôle du mouvement chaotique d’un pendule magnétique Page 18

FIG. 4.1 – Détermination du point d’équilibre
obtient la valeur du θ0 recherchée, comme présenté en figure 4.1.
La deuxième méthode est analytique. Il s’agit d’appliquer les équations new-toniennes au pendule en équilibre et de récupérer l’angle d’équilibre (problème2D). La fonction equilibre_theta.m réalise le calcul de l’angle d’équilibre selonla manière analytique.
La troisième méthode propose une résolution des équations dynamique dusystème avec une valeur nulle pour les accélérations, donc un point fixe.
Contrôle du mouvement chaotique d’un pendule magnétique Page 19

Chapitre 5
Régulation du moteur DC
Dans toue la première partie de la simulation, le moteur DC est approximécomme ayant une dynamique infiniment rapide. C’est à dire :
Hα(s) =Rα
α= 1 (5.1)
5.1 Schéma de régulation du moteur DCLa figure 5.1 présente le schéma de régulation du moteur à courant continu en
boucle férmée. Le régulateur est monté également en asservissement . La pertur-bation créer par la réaction de pendule sur les aimants de la base (d) est considéréecomme négligeable.
FIG. 5.1 – Schéma de régulation du moteur
20

5.2 Equation dynamique du moteur DCLa fonction de transfert du moteur en B.O. s’exprime :
Gα(s) =α
Uα
=KΩ
JR
s2 + 1J ( f + (KΩ)2
R )s(5.2)
5.3 Implantation d’un régulateur PDEn boucle fermée, on peut écrire la fonction de transfert du moteur :
Hα(s) =α
Rα
=Kα(s)Gα(s)
1+Kα(s)Gα(s)(5.3)
L’applet Sysquake PID_dt.sq a été utilisé pour dimensionné les paramètres duPD. Un moteur Maxon (RE 15mm ∅ 1.6 W) ayant les caractéristiques suivantesa été pris comme choix de premier abord :
U = 6[V ] (5.4)R = 10[Ω] (5.5)
KΦ = 7.01[mNm/A] (5.6)
J = 0.528[gcm2] (5.7)
Le frottement visqueux f n’étant pas donné, il faut l’identifier par une mesurede saut indiciel.
Puis, avec un temps d’échantillonnage de h = 10[ms], on trouve les paramètresde régulations suivants :
Kp = 1.7 ·10−2 (5.8)
Kd = 3.9 ·10−2 (5.9)
Ce qui donne le régulateur suivant :
Kα(s) = 1.7 ·10−2 +3.9 ·10−2s (5.10)
Contrôle du mouvement chaotique d’un pendule magnétique Page 21

Les réponses indicielle, en fréquence, en tension et les diagrammes de Nyquistet des pôles sont donnés sur les diagrammes de la figure 5.2 :
On observe que la tension n’atteint pas la valeur de saturation, mais la bandepassante est visiblement trop faible. Il faut d’une part prendre une période d’échan-tillonnage plus courte et/ou prendre un moteur avec une tension plus élevée.
FIG. 5.2 – Figure de saut indiciel, de tension correspondante, de réponse fréquen-tielle, diagramme de Nyquist et du lieu des pôles
Contrôle du mouvement chaotique d’un pendule magnétique Page 22

Chapitre 6
Contrôlabilité du système linéarisé
6.1 Etude de la contrôlabilité du système linéariséÀ partir des matrices jacobiennes 4.7 et 4.8, on définit la matrice de contrôla-
bilité du système dont le nombre de colonnes (4) correspond au nombre d’états dusystème :
C =[B AB A2B A3B
](6.1)
Puis par une décomposition qr, on accède au nombre d’états contrôlables dusystème, qui correspond au rang de C ou encore au nombre de lignes non-nulle deR.
[Q,R] = qr(C) ⇔ QR = C
R =
... ... ... ...0 ... ... ...0 0 0 00 0 0 0
(6.2)
Q =
0 0 0 10 0 1 00 1 0 01 0 0 0
(6.3)
On constate que les deux premières colonnes de Q multiplient les lignes non-nulles de R. Elles correspondent aux états contrôlables.
23

La matrice Q est la matrice de passage entre le système global et le sys-tème restreint aux états contrôlables. Comme l’intuition le laisse prévoir, les étatscontrôlables sont ϕ et ϕ. L’élévation est donc non contrôlable. Mais ϕ n’est pas àproprement parler contrôlable, seulement dans une région proche du point d’équi-libre. Ceci est dû au couplage entre les angles θ et ϕ.
Dans le système de coordonnées sphérique (présenté en section 9.1), la vitessede rotation θ∗ devrait être totalement contrôlable.
Q =
0 00 00 11 0
(6.4)
6.2 Restriction de la commande aux états contrô-lables
Les matrices du système des états contrôlables sont les suivantes :
A = QT AQ (6.5)
B = QT B (6.6)
Si on appelle~z = Q~x le vecteur des états contrôlables, le système restreint peuts’exprimer ainsi :
~z = A~z+ Bα (6.7)
Le régulateur est implémenté dans le domaine des~z ou des tildas (notationséquivalentes), puis ramené dans le domaine global des~x par la matrice de passage6.4
Contrôle du mouvement chaotique d’un pendule magnétique Page 24

Chapitre 7
Conception d’une loi de commande :détermination des paramètres derégulation
7.1 Régulateur d’étatsLe régulateur d’état est présenté dans [1] p. 20. Contrairement au régulateur
PID, il propose une architecture qui régule chacun des états contrôlables séparé-ment.
Les pôles du système en B.F. vont être choisis comme les opposés de ceuxen B.O. C’est-à-dire λBF = −λBO. La section suivante présente la méthode deplacement des pôles par la méthode de Ackermann.
7.2 Placement des pôles par la méthode de Acker-mann
La formule d’Ackermann calcule un vecteur de gains tel que la contre-réactiond’états place les pôles de la boucle fermée aux valeurs propres λ11 et λ22. Cesvaleurs prores sont obtenues par décomposition svd de la matrice de contrôlabilitéC :
[U,Λ,V ] = svd(C) ⇔ UΛV T = C
Λ =
λ11 0 0 00 λ22 0 00 0 0 00 0 0 0
(7.1)
25

La formule d’Ackermann est alors appliquées, par le biais de la routine ackerdisponible dans les librairies MATLAB. Elle prend la forme suivante :
K =[0 1
]AckΦ(A) (7.2)
Avec Ack =[B AB
]la matrice d’Ackermann qui a pour nombre de colonnes
le nombre d’états contrôlables du système. Φ(s) = (s +λ11)(s +λ22) est le poly-nôme caractéristique contenant les valeurs propres du système.
Le système restreint en B.F. peut alors s’écrire ainsi :
~z = A~z− BK~z (7.3)
Contrôle du mouvement chaotique d’un pendule magnétique Page 26

Chapitre 8
Implémentation de la loi decommande linéarisée au systèmedynamique complet
8.1 Schéma de régulation global du systèmeLa figure 8.1 présente le schéma de régulation global du système à double
étage de régulation. Comme expliqué dans aux sections 5.3 et 7.1, le régulateursde l’étage moteur Kα est de type PD alors que celui de l’étage de régulation Kθϕ
du pendule est du type régulateur d’état.
8.2 Système dynamique linéarisé en B.F.Le système linéarisé en B.F. s’écrit sous la forme :
~x = (A−KB)~x (8.1)
Avec K le vecteur des paramètres de régulation qui s’obtient par K = KQT .
8.3 Système dynamique non-linéarisé en B.F.La loi de contrôle linéarisée s’implémente dans le système non-linéaire de la
manière suivante :
~xBF = ~xBO−KB~x (8.2)
27

FIG. 8.1 – Schéma de régulation du système global
L’entrée α du système est donnée par :
α =−BK~x (8.3)
Le résultat en simulation de la dynamique du système non-linéarisé en B.F. estprésenté en figure 8.2. Sur cet exemple de simulation, le temps de simulation estde 20 secondes et les conditions initiales sont les suivantes :
~x0 =
0.40
0.050
[rad] (8.4)
Contrôle du mouvement chaotique d’un pendule magnétique Page 28

FIG. 8.2 – Trajectoire du pendule régulé
Contrôle du mouvement chaotique d’un pendule magnétique Page 29

Chapitre 9
Annexes
9.1 Modèle en coordonnées sphériquesLe modèle a également été développé en coordonnées sphériques, afin no-
tamment de décrire aisément une trajectoire circulaire, autour de la barrière depotentiel et aussi de démontrer la controlabilité le long de cette trajectoire.
La mécanique lagrangienne à aussi été utilisée pour développer le modèle deconnaissances, avec modification de la représentation du point dans le référentielcartésien.
9.2 Fonctionnement en pompageLe fonctionnement du régulateur en mode de pompage est explicité en section
1.3.2. Il s’agit d’exiter le pendule à sa fréquence propre d’oscillation afin de luitransferer un gain d’énergie.
La fonction H(t) représente la quantité d’énergie mécanique totale du système,qui doit être augmentée dans cette phase de pompage.
9.2.1 Dérivation du HamiltonienLes conditions nécessaires à la détermination adéquate du régulateur en mode
de pompage peuvent être déterminées par la condition suivante :
dH(t)dt
> 0 (9.1)
Le détail de ces calculs suivra d’ici à l’automne 2006.
30

Chapitre 10
Conclusion
En guise de conclusion, je tiens à souligner le caractère pluridisciplinaire de ceprojet qui parcours largement les différents domaines de la mécanique analytique(utilisation du Lagrangien, du Hamiltonnien, du régulateur d’état, de Ackermann)et qui traite également les aspects hardware dans son ensemble avec réalisationd’un prototype de démonstration (le projet pour le semestre d’été 2006 ne s’oc-cupe que de la simulation).
L’utilisation de la fonction d’intégration numérique ode45.m ainsi que le lan-gage symbolique m’étaient inconnus avant la réalisation de ce projet et le suivi ducours de Systèmes multivariables, donné par Philippe Müllhaupt, que je remerciepour ses précisions fort utiles. Ainsi que Yvan Michellod que je remercie pourm’avoir suivi dans ce projet.
La suite du projet doit avoir lieu cet été puis au semestre d’hiver 2006 jusqu’àla réalisation d’un prototype de démonstration.
Lausanne, le 29 juin 2006 Florent Cosandier
31

Bibliographie
[1] H. Büler : Réglage d’états : Bases et Compléments, Collection éléctricité,PPUR Lausanne (2003)
[2] J. Slotine : Applied Nonlinear Control, Prentice-Hall, USA (1991)
[3] R. Longchamp : Commmande Numérique de Systèmes Dynamiques, PPUR,Lausanne (1995)
[4] D. Gilet : Systèmes Multivariables II : Méthodes d’Etats, Lausanne (2001)
[5] P. Müllhaupt : Systèmes Multivariables II : Systèmes Non-linéaires
[6] A. Nayfeh, D. Mook : Nonlinear Oscillations, Pure and Applied Mathema-tics, USA (1979)
[7] J. Neimark : Mathematical Models in Natural Science and Engineering,Springer-Verlag Berlin Heidelberg, New-York (2003)
32