Embed Size (px)
Citation preview

Coordonnées cylindriques et sphériques
Mécanique : cours 7.1 29.10.13 § 1.7
Dr. Sylvain Bréchet
2 Mécanique | 2013 7.1
Coordonnées cylindriques et sphériques
• Coordonnées cylindriques
• Coordonnées sphériques • Repère cylindrique
• Repère sphérique
• Position en coordonnées cylindriques
• Position en coordonnées sphériques

3 Mécanique | 2013 7.1
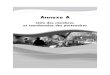
Plateau tournant avec feutre
• Un tel système se prête naturellement à l’usage des coordonnées cylindriques pour exprimer de façon simple la trajectoire du feutre sur le disque.
4 Mécanique | 2013 7.1
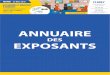
• Un tel système se prête naturellement à l’usage des coordonnées sphériques pour exprimer de façon simple le mouvement de la bille dans la glissière.
Glissière hémisphérique

5 Mécanique | 2013 7.1
Définition : coordonnées cylindriques
O
x1
x2
x3
P
zx1 = ⇢ cos�
x2 = ⇢ sin�
x3 = z
ρ
Coordonnées cartésiennes du point matériel P : Coordonnées cylindriques du point matériel P : Lien géométrique :
P = (⇢,�, z)
P = (x1, x2, x3)
6 Mécanique | 2013 7.1
Définition : coordonnées sphériques
O
x1
x2
x3P
rV
Coordonnées cartésiennes du point matériel P : Coordonnées sphériques du point matériel P : Lien géométrique : x1 = r sin ✓ cos�
x2 = r sin ✓ sin�
x3 = r cos ✓
P = (x1, x2, x3)
P = (r, ✓,�)

7 Mécanique | 2013 7.1
• En ouvrant la sphère, on voit un système de coordonnées sphériques
Modèle 3D des coordonnées sphériques
8 Mécanique | 2013 7.1
Définition : lignes de coordonnées
O
x1
x2
x3
K
�W�z� �W�K�
�z�K�z
ρ
Lignes de coordonnées : lieu géométrique des points dont deux coordonnées sont fixées.
P (r, ✓,�)
P (⇢,�, z)

9 Mécanique | 2013 7.1
Définition : repère cylindrique
z
Repère cylindrique lié au point matériel P : Repère orthonormé direct : Vecteur position de P :
(P, e⇢, e�, ez)
e⇢ · e⇢ = e� · e� = ez · ez = 1
e⇢ ⇥ e� = ez
e� ⇥ ez = e⇢
ez ⇥ e⇢ = e�
r = ⇢ e⇢ + z ez
P
10 Mécanique | 2013 7.1
Lien entre les vecteurs de base des repères
z
Lien entre les vecteurs de base des repères cylindrique et cartésien : Relations d’orthogonalité :
P
e⇢ · e� = 0
e� · ez = 0
ez · e⇢ = 0
e⇢ = cos� x1 + sin� x2
e� = � sin� x1 + cos� x2
ez = x3

11 Mécanique | 2013 7.1
Définition : repère sphérique
Repère sphérique lié au point matériel P : Repère orthonormé direct : Vecteur position de P :
(P, er, e✓, e�)
r = r er
er · er = e✓ · e✓ = e� · e� = 1
er ⇥ e✓ = e�
e✓ ⇥ e� = er
e� ⇥ er = e✓
P
12 Mécanique | 2013 7.1
Lien entre les vecteurs de base des repères
Lien entre les vecteurs de base des repères sphérique et cartésien : Relations d’orthogonalité :
P
er · e✓ = 0
e✓ · e� = 0
e� · er = 0
er = sin ✓ cos� x1 + sin ✓ sin� x2 + cos ✓ x3
e✓ = cos ✓ cos� x1 + cos ✓ sin� x2 � sin ✓ x3
e� = � sin� x1 + cos� x2