Embed Size (px)
Citation preview
Cours 1: Introduction à l’Automatique et aux systèmes dynamiques
Olivier Sename
GIPSA-Lab
Septembre 2021
Olivier Sename (GIPSA-Lab) Cours 1: Introduction à l’Automatique et aux systèmes dynamiques Septembre 2021 1 / 39
UE Automatique et Commande des systèmesResponsable Hayate Khennouf
(5 ECTS)
• 22h de CMTD - 2 ECTS - CT (DS/17 et QCM/3)• 16h de TP - 1 ECTS - CC• 22h de BE - 2 ECTS - CC
Pour le cours : Des QCM auront lieu tout au long du cours. Les questions posées concernentdes applications directes du cours. Attention, le QCM dure une dizaine de minutes et peutdémarrer à 8h.
Les documents, annales, sujets de TP, fichiers nécessaires pour les TP,...sont sur Chamilo.
2 séances de tutorat (janvier) pour les révisions
O. Sename [GIPSA-lab] 2/39
About meCV
• Engineer + PhD : Ecole Centrale de Nantes 1994• Full professor at Grenoble INP / GIPSA-lab
Research skills
• Automatic control : modelling, estimation and control of dynamical systems• Robust control of dynamical systems, Linear Parameter Varying systems• Fault Diagnosis and Fault Tolerant control
Applied Research
• Automotive systems: vehicle dynamics, engine control and autonomous vehicles• Energy systems (Battery, Fuel cell), Aerospace
Industrial collaborations (common PhD studies)
O. Sename [GIPSA-lab] 3/39
1 Objectifs
2 Bibliographie
3 Un peu d’histoire
4 L’automatique et les systèmes dynamiques
5 Domaines d’application
6 La modélisation mathématique
7 Approche transfert : transformée de Laplace
8 Associations de système
9 la Boucle Fermée
10 Schéma fonctionnel de l’asservissement
O. Sename [GIPSA-lab] 4/39
Objectifs
Objectifs du cours
• Comprendre pourquoi l’Automatique est utile à un ingénieur E3.
• Comprendre les idées clé et concepts de "Système Dynamique" et de "Bouclage".
• Être capable de résoudre des problèmes simples d’Automatique (analyse temporelle,fréquentielle, synthèse de régulateurs PID).
• Être conscient des outils de calcul et de simulation disponibles• Matlab/Simulink avec la "Control Toolbox".• Scilab.
• Pré-requis :• Connaître la théorie mathématique sous-jacente (transformée de Laplace, équations différentielles
linéaires, . . . )
O. Sename [GIPSA-lab] 5/39
Objectifs
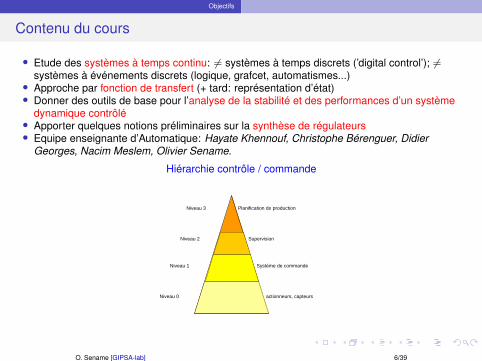
Contenu du cours
• Etude des systèmes à temps continu: 6= systèmes à temps discrets (’digital control’); 6=systèmes à événements discrets (logique, grafcet, automatismes...)• Approche par fonction de transfert (+ tard: représentation d’état)• Donner des outils de base pour l’analyse de la stabilité et des performances d’un système
dynamique contrôlé• Apporter quelques notions préliminaires sur la synthèse de régulateurs• Equipe enseignante d’Automatique: Hayate Khennouf, Christophe Bérenguer, Didier
Georges, Nacim Meslem, Olivier Sename.
Hiérarchie contrôle / commande
actionneurs, capteurs
Système de commande
Supervision
Planification de production
Niveau 0
Niveau 1
Niveau 2
Niveau 3
O. Sename [GIPSA-lab] 6/39
Bibliographie
Bibliographie
• M. Darouach , P. Pierrot , M. Zasadzinski : "Automatique de base - Cours et exercicescorrigés" , ELLIPSES, https://www.editions-ellipses.fr/accueil/61-automatique-de-base-cours-et-exercices-corriges-9782340033016.html
• R.C. Dorf and R.H. Bishop, Modern Control Systems, Prentice Hall, USA, 2005.• K. Ogata, Modern Control Engineering, 5/E, Prentice Hall, 2010• G. Franklin, J. Powell, A. Emami-Naeini, Feedback Control of Dynamic Systems, Prentice
Hall, 2005
The web...
• Auto Formation à suivre : MATLAB Onramp in https://matlabacademy.mathworks.com (voiraussi: http://fr.mathworks.com/help/matlab/index.html• Lecture + Videos: Dennis Freeman. 6.003 Signals and Systems, Fall 2011. (Massachusetts
Institute of Technology: MIT OpenCourseWare), http://ocw.mit.edu (Search:6.003).License: Creative Commons BY-NC-SA
O. Sename [GIPSA-lab] 7/39
Un peu d’histoire
1 Objectifs
2 Bibliographie
3 Un peu d’histoire
4 L’automatique et les systèmes dynamiques
5 Domaines d’application
6 La modélisation mathématique
7 Approche transfert : transformée de Laplace
8 Associations de système
9 la Boucle Fermée
10 Schéma fonctionnel de l’asservissement
O. Sename [GIPSA-lab] 8/39

Un peu d’histoire
Quelques dates importantes
O. Sename [GIPSA-lab] 9/39
Régulateur "à boules" de Wattpour contrôler la vitesse d’unemachine à vapeur
Watt (1736-1819)"flyball governor"
1930s: Bode (1905-1982)1932: Nyquist(1889-1976)
1942 Ziegler-Nichols (Process control(pression, température)
1945s Aéroautique
1950s Télécommunications
1960s Début de l’automatique moderne
1990s Automobile
1990s Percée de l’automatique due à lacomplexité des systèmes et aux besoinsen augmentation: systèmesmulti-capteurs, multi-actionneurs,performances atteignables qu’en modecontrôlé....
21è siècle Robotique
Rafaello d’Andrea ETH
Un peu d’histoire
L’automatique en France et à Grenoble
O. Sename [GIPSA-lab] 10/39
Figure: Victor Broida(diplomé INPG-ENSIEG), cfRemaud, P. and Bissell, C.(2009). The development ofautomatic control in France.IEEE Control SystemsMagazine, 29(2), pp.108-114.
Les conditions initiales:
1945: Première conférence sur l’Automatique enFrance, au Conservatoire National des Arts etMétiers
1956: constitution de l’IFAC (International Federationof Automatic Control): comité de rédaction (pdtVictor Broida)
21ème siècle: IFAC World Congress (>3000 participants,2020): la France est toujours la premièrecommunauté mondiale (en nombre departicipants aux grands congrès IFAC et IEEE)
Formation et Recherche en Automatique:• Ecoles d’ingénieurs: Supélec, Supaéro, EC Nantes, INSA
Lyon, INP Toulouse & Bordeaux, Grenoble INP• Laboratoires de recherche (communs avec le CNRS):
LAAS (Toulouse), LSS (Paris), CRAN (Nancy), Ampère(Lyon), IMS (Bordeaux), LS2N (Nantes), GIPSA-lab(Grenoble)
L’automatique et les systèmes dynamiques
1 Objectifs
2 Bibliographie
3 Un peu d’histoire
4 L’automatique et les systèmes dynamiques
5 Domaines d’application
6 La modélisation mathématique
7 Approche transfert : transformée de Laplace
8 Associations de système
9 la Boucle Fermée
10 Schéma fonctionnel de l’asservissement
O. Sename [GIPSA-lab] 11/39
L’automatique et les systèmes dynamiques
Qu’est-ce qu’un système ?
O. Sename [GIPSA-lab] 12/39
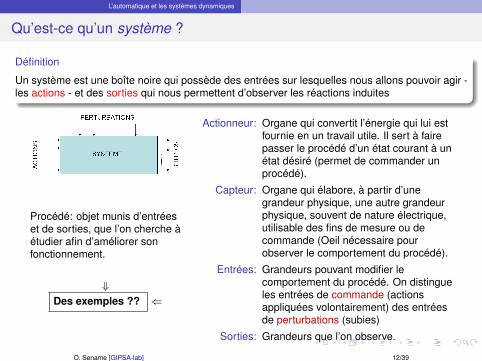
Définition
Un système est une boîte noire qui possède des entrées sur lesquelles nous allons pouvoir agir -les actions - et des sorties qui nous permettent d’observer les réactions induites
Procédé: objet munis d’entréeset de sorties, que l’on cherche àétudier afin d’améliorer sonfonctionnement.
⇓Des exemples ?? ⇐
Actionneur: Organe qui convertit l’énergie qui lui estfournie en un travail utile. Il sert à fairepasser le procédé d’un état courant à unétat désiré (permet de commander unprocédé).
Capteur: Organe qui élabore, à partir d’unegrandeur physique, une autre grandeurphysique, souvent de nature électrique,utilisable des fins de mesure ou decommande (Oeil nécessaire pourobserver le comportement du procédé).
Entrées: Grandeurs pouvant modifier lecomportement du procédé. On distingueles entrées de commande (actionsappliquées volontairement) des entréesde perturbations (subies)
Sorties: Grandeurs que l’on observe.
L’automatique et les systèmes dynamiques
Objets de l’Automatique
• Modéliser, Analyser et Contrôler des systèmes
• Contrôle/Commande : Agir sur un système dynamique afin d’obtenir les performancesdésirées avec un coût acceptable et malgré les incertitudes et les contraintes.
• Méthodologie de conception de commandes des systèmes :
• Modélisation: proposer des modèles simplifiés (intégrant plus ou moins de connaissancesphysiques). On parle de modèles boite noire, blanche ou grise.
• Analyse et Simulation : prise en main du système, de ses caractéristiques, contraintes• Conception des lois de commande: cahier des charges, méthodologies de synthèse• Tests et validation en simulation (aujourd’hui sur simulateurs complexes, parfois en co-simulation)• Implémentation (mise en oeuvre pratique sur banc d’essais ou système pilote... couteuse)• Mise en marche et Intervention : robustesse et fiabilité
O. Sename [GIPSA-lab] 13/39
L’automatique et les systèmes dynamiques
Objets de l’Automatique
• Modéliser, Analyser et Contrôler des systèmes
• Contrôle/Commande : Agir sur un système dynamique afin d’obtenir les performancesdésirées avec un coût acceptable et malgré les incertitudes et les contraintes.
• Méthodologie de conception de commandes des systèmes :
• Modélisation: proposer des modèles simplifiés (intégrant plus ou moins de connaissancesphysiques). On parle de modèles boite noire, blanche ou grise.
• Analyse et Simulation : prise en main du système, de ses caractéristiques, contraintes• Conception des lois de commande: cahier des charges, méthodologies de synthèse• Tests et validation en simulation (aujourd’hui sur simulateurs complexes, parfois en co-simulation)• Implémentation (mise en oeuvre pratique sur banc d’essais ou système pilote... couteuse)• Mise en marche et Intervention : robustesse et fiabilité
O. Sename [GIPSA-lab] 13/39
L’automatique et les systèmes dynamiques
Objets de l’Automatique
• Modéliser, Analyser et Contrôler des systèmes
• Contrôle/Commande : Agir sur un système dynamique afin d’obtenir les performancesdésirées avec un coût acceptable et malgré les incertitudes et les contraintes.
• Méthodologie de conception de commandes des systèmes :
• Modélisation: proposer des modèles simplifiés (intégrant plus ou moins de connaissancesphysiques). On parle de modèles boite noire, blanche ou grise.
• Analyse et Simulation : prise en main du système, de ses caractéristiques, contraintes• Conception des lois de commande: cahier des charges, méthodologies de synthèse• Tests et validation en simulation (aujourd’hui sur simulateurs complexes, parfois en co-simulation)• Implémentation (mise en oeuvre pratique sur banc d’essais ou système pilote... couteuse)• Mise en marche et Intervention : robustesse et fiabilité
O. Sename [GIPSA-lab] 13/39
L’automatique et les systèmes dynamiques
Objets de l’Automatique
• Modéliser, Analyser et Contrôler des systèmes
• Contrôle/Commande : Agir sur un système dynamique afin d’obtenir les performancesdésirées avec un coût acceptable et malgré les incertitudes et les contraintes.
• Méthodologie de conception de commandes des systèmes :
• Modélisation: proposer des modèles simplifiés (intégrant plus ou moins de connaissancesphysiques). On parle de modèles boite noire, blanche ou grise.
• Analyse et Simulation : prise en main du système, de ses caractéristiques, contraintes• Conception des lois de commande: cahier des charges, méthodologies de synthèse• Tests et validation en simulation (aujourd’hui sur simulateurs complexes, parfois en co-simulation)• Implémentation (mise en oeuvre pratique sur banc d’essais ou système pilote... couteuse)• Mise en marche et Intervention : robustesse et fiabilité
O. Sename [GIPSA-lab] 13/39
L’automatique et les systèmes dynamiques
Objets de l’Automatique
• Modéliser, Analyser et Contrôler des systèmes
• Contrôle/Commande : Agir sur un système dynamique afin d’obtenir les performancesdésirées avec un coût acceptable et malgré les incertitudes et les contraintes.
• Méthodologie de conception de commandes des systèmes :
• Modélisation: proposer des modèles simplifiés (intégrant plus ou moins de connaissancesphysiques). On parle de modèles boite noire, blanche ou grise.
• Analyse et Simulation : prise en main du système, de ses caractéristiques, contraintes• Conception des lois de commande: cahier des charges, méthodologies de synthèse• Tests et validation en simulation (aujourd’hui sur simulateurs complexes, parfois en co-simulation)• Implémentation (mise en oeuvre pratique sur banc d’essais ou système pilote... couteuse)• Mise en marche et Intervention : robustesse et fiabilité
O. Sename [GIPSA-lab] 13/39
L’automatique et les systèmes dynamiques
Objets de l’Automatique
• Modéliser, Analyser et Contrôler des systèmes
• Contrôle/Commande : Agir sur un système dynamique afin d’obtenir les performancesdésirées avec un coût acceptable et malgré les incertitudes et les contraintes.
• Méthodologie de conception de commandes des systèmes :
• Modélisation: proposer des modèles simplifiés (intégrant plus ou moins de connaissancesphysiques). On parle de modèles boite noire, blanche ou grise.
• Analyse et Simulation : prise en main du système, de ses caractéristiques, contraintes• Conception des lois de commande: cahier des charges, méthodologies de synthèse• Tests et validation en simulation (aujourd’hui sur simulateurs complexes, parfois en co-simulation)• Implémentation (mise en oeuvre pratique sur banc d’essais ou système pilote... couteuse)• Mise en marche et Intervention : robustesse et fiabilité
O. Sename [GIPSA-lab] 13/39
L’automatique et les systèmes dynamiques
Objets de l’Automatique
• Modéliser, Analyser et Contrôler des systèmes
• Contrôle/Commande : Agir sur un système dynamique afin d’obtenir les performancesdésirées avec un coût acceptable et malgré les incertitudes et les contraintes.
• Méthodologie de conception de commandes des systèmes :
• Modélisation: proposer des modèles simplifiés (intégrant plus ou moins de connaissancesphysiques). On parle de modèles boite noire, blanche ou grise.
• Analyse et Simulation : prise en main du système, de ses caractéristiques, contraintes• Conception des lois de commande: cahier des charges, méthodologies de synthèse• Tests et validation en simulation (aujourd’hui sur simulateurs complexes, parfois en co-simulation)• Implémentation (mise en oeuvre pratique sur banc d’essais ou système pilote... couteuse)• Mise en marche et Intervention : robustesse et fiabilité
O. Sename [GIPSA-lab] 13/39
L’automatique et les systèmes dynamiques
Objets de l’Automatique
• Modéliser, Analyser et Contrôler des systèmes
• Contrôle/Commande : Agir sur un système dynamique afin d’obtenir les performancesdésirées avec un coût acceptable et malgré les incertitudes et les contraintes.
• Méthodologie de conception de commandes des systèmes :
• Modélisation: proposer des modèles simplifiés (intégrant plus ou moins de connaissancesphysiques). On parle de modèles boite noire, blanche ou grise.
• Analyse et Simulation : prise en main du système, de ses caractéristiques, contraintes• Conception des lois de commande: cahier des charges, méthodologies de synthèse• Tests et validation en simulation (aujourd’hui sur simulateurs complexes, parfois en co-simulation)• Implémentation (mise en oeuvre pratique sur banc d’essais ou système pilote... couteuse)• Mise en marche et Intervention : robustesse et fiabilité
O. Sename [GIPSA-lab] 13/39
L’automatique et les systèmes dynamiques
Objets de l’Automatique
• Modéliser, Analyser et Contrôler des systèmes
• Contrôle/Commande : Agir sur un système dynamique afin d’obtenir les performancesdésirées avec un coût acceptable et malgré les incertitudes et les contraintes.
• Méthodologie de conception de commandes des systèmes :
• Modélisation: proposer des modèles simplifiés (intégrant plus ou moins de connaissancesphysiques). On parle de modèles boite noire, blanche ou grise.
• Analyse et Simulation : prise en main du système, de ses caractéristiques, contraintes• Conception des lois de commande: cahier des charges, méthodologies de synthèse• Tests et validation en simulation (aujourd’hui sur simulateurs complexes, parfois en co-simulation)• Implémentation (mise en oeuvre pratique sur banc d’essais ou système pilote... couteuse)• Mise en marche et Intervention : robustesse et fiabilité
O. Sename [GIPSA-lab] 13/39
L’automatique et les systèmes dynamiques
Objets de l’Automatique
• Modéliser, Analyser et Contrôler des systèmes
• Contrôle/Commande : Agir sur un système dynamique afin d’obtenir les performancesdésirées avec un coût acceptable et malgré les incertitudes et les contraintes.
• Méthodologie de conception de commandes des systèmes :
• Modélisation: proposer des modèles simplifiés (intégrant plus ou moins de connaissancesphysiques). On parle de modèles boite noire, blanche ou grise.
• Analyse et Simulation : prise en main du système, de ses caractéristiques, contraintes• Conception des lois de commande: cahier des charges, méthodologies de synthèse• Tests et validation en simulation (aujourd’hui sur simulateurs complexes, parfois en co-simulation)• Implémentation (mise en oeuvre pratique sur banc d’essais ou système pilote... couteuse)• Mise en marche et Intervention : robustesse et fiabilité
O. Sename [GIPSA-lab] 13/39
Domaines d’application
1 Objectifs
2 Bibliographie
3 Un peu d’histoire
4 L’automatique et les systèmes dynamiques
5 Domaines d’application
6 La modélisation mathématique
7 Approche transfert : transformée de Laplace
8 Associations de système
9 la Boucle Fermée
10 Schéma fonctionnel de l’asservissement
O. Sename [GIPSA-lab] 14/39
Domaines d’application
O. Sename [GIPSA-lab] 15/39
Automobile - Véhicule autonome
Figure: Renault’s goal: make riding in cars it morepleasant, less stressful and more productive c© GroupeRenault 2019
Aérospatiale
Mécatronique
Robotique humanoïde

Domaines d’application
Véhicule électiqueSystème hydraulique
Robotique industrielleTraitement des eaux
O. Sename [GIPSA-lab] 16/39
Domaines d’application
Domaines d’application nombreux et variés
• Energie :• production, transport et distribution• Energies renouvelables, réseaux
• Transport• automobile, ferroviaire• aéronautique, aérospatial• maritime
• Robotique: humanoïde, drone...• Electronique grand public : TV, Hifi, Photo,
Smartphones, Robots + Drones ...
• Mécatronique, Robotique• Environnement• procédés chimiques• production industrielle• Instrumentation• Médecine• Economie• Biologie• . . .
Systems & Control for the future of humanity, research agenda, Annual Review in Control 2017
Control technologies are everywhere - aircraft and spacecraft, chemical process plants,manufacturing, homes and buildings, automobiles and trains, GPS, cellular telephones and ..... -these and other complex systems testify to the ubiquity of Systems & Control technology.
O. Sename [GIPSA-lab] 17/39
Domaines d’application
Qq applications menées à Gipsa-lab / Département Automatique /http://www.gipsa-lab.grenoble-inp.fr
Nouvelles Technologies Grand Public
Nanotechnologies
Dynamique des Véhicules
Canaux d’irigationFusion thermonucléaire
Systèmes autonomes coopératifs
O. Sename [GIPSA-lab] 18/39
Domaines d’application
Qq applications menées à Gipsa-lab / Département Automatique /http://www.gipsa-lab.grenoble-inp.fr
Bâtiment
Robotique Santé
Environnement (Glaciologie) Energies nouvellesBiomécanique
O. Sename [GIPSA-lab] 19/39
Domaines d’application
O. Sename [GIPSA-lab] 20/39
La modélisation mathématique
1 Objectifs
2 Bibliographie
3 Un peu d’histoire
4 L’automatique et les systèmes dynamiques
5 Domaines d’application
6 La modélisation mathématique
7 Approche transfert : transformée de Laplace
8 Associations de système
9 la Boucle Fermée
10 Schéma fonctionnel de l’asservissement
O. Sename [GIPSA-lab] 21/39
La modélisation mathématique
Modélisation d’un système dynamique
Compromis
Précision: nécessité d’un modèle mathématique le plus précis possible• pour considérer l’ensemble des phénomènes caractérisant un système,• pour analyser le comportement du système en simulation,
Simplicité: le modèle doit être le plus simple possible pour• effectuer le calcul mathématique d’une loi de commande (ou d’une estimation de variables
non mesurées)• réaliser la mise en oeuvre pratique (implémentation) de la stratégie sur un calculateur
embarqué
Approche
Nécessité pour un automaticien de "maîtriser" la modélisation des systèmes physiques(dynamiques) par des équations: électriques, mécaniques, hydrauliques, thermodynamiques,chimiques, thermiques. D’où savoir:• Représenter mathématiquement des phénomènes physiques• Proposer un modèle simplifié permettant l’étude du comportement dynamique d’un système
(ou d’un sous système)• "Jongler" entre les deux types de modèles: idéal (pour la simulation) et simplifié (pour la
synthèse de lois de commande).O. Sename [GIPSA-lab] 22/39
La modélisation mathématique
Modélisation d’un système dynamique
Compromis
Précision: nécessité d’un modèle mathématique le plus précis possible• pour considérer l’ensemble des phénomènes caractérisant un système,• pour analyser le comportement du système en simulation,
Simplicité: le modèle doit être le plus simple possible pour• effectuer le calcul mathématique d’une loi de commande (ou d’une estimation de variables
non mesurées)• réaliser la mise en oeuvre pratique (implémentation) de la stratégie sur un calculateur
embarqué
Approche
Nécessité pour un automaticien de "maîtriser" la modélisation des systèmes physiques(dynamiques) par des équations: électriques, mécaniques, hydrauliques, thermodynamiques,chimiques, thermiques. D’où savoir:• Représenter mathématiquement des phénomènes physiques• Proposer un modèle simplifié permettant l’étude du comportement dynamique d’un système
(ou d’un sous système)• "Jongler" entre les deux types de modèles: idéal (pour la simulation) et simplifié (pour la
synthèse de lois de commande).O. Sename [GIPSA-lab] 22/39
La modélisation mathématique
Méthodologies classiques
Méthodes
Modèle de connaissance : lois fondamentales, principes physiques ....Utilisation de softwares dédiés (Siemens/Amesim, Catia/Dymola, Maplesoft,Matlab/Simulink....)Cette approche requiert parfois une étape de linéarisation autour de conditionsd’opération.
Modèle de comportement : Etude de la relation entrée-sortie par:• réponse indicielle• réponse harmonique• réponse à des signaux pseudo-aléatoires
puis on réalise une étape d’identification pour obtenir la "meilleure" fonction detransfert représentant le comportement observé.
Le modèle linéaire obtenu est ensuite utilisé pour la synthèse de lois de commande.Dans ce cours: systèmes linéaires ou linéarisés
O. Sename [GIPSA-lab] 23/39
La modélisation mathématique
Cadre de l’étude
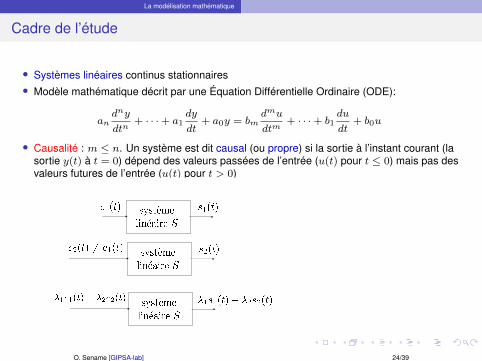
• Systèmes linéaires continus stationnaires• Modèle mathématique décrit par une Équation Différentielle Ordinaire (ODE):
andny
dtn+ · · ·+ a1
dy
dt+ a0y = bm
dmu
dtm+ · · ·+ b1
du
dt+ b0u
• Causalité : m ≤ n. Un système est dit causal (ou propre) si la sortie à l’instant courant (lasortie y(t) à t = 0) dépend des valeurs passées de l’entrée (u(t) pour t ≤ 0) mais pas desvaleurs futures de l’entrée (u(t) pour t > 0)
O. Sename [GIPSA-lab] 24/39
La modélisation mathématique
Systèmes non linéaires
O. Sename [GIPSA-lab] 25/39
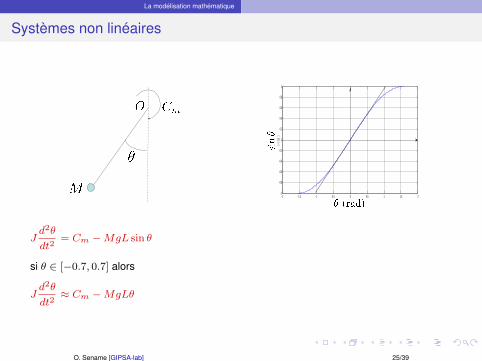
Jd2θ
dt2= Cm −MgL sin θ
si θ ∈ [−0.7, 0.7] alors
Jd2θ
dt2≈ Cm −MgLθ
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
θ (rad)
sin(
θ )
La modélisation mathématique
Linearisation
C’est une étape souvent nécessaire préalable à l’analyse ou la synthèse.
Méthode
Considérons une fonction non linéaire g(x(t)).1 Il faut tout d’abord choisir un point de fonctionnement (ou point d’équilibre ou d’opération), x0.2 On réalise un développement en série de Taylor
g(x(t) = g(x0) +dg
dx
∣∣∣x=x0
(x− x0)
1!+ .....
3 The pente de la fonction g en x0 est dgdx
∣∣∣x=x0
, est une bonne approximation (au premier
ordre) des variations de la fonction g autour de x0.
Pour le pendule
En choisissant θ0 :sin(θ) = sin(θ0) + cos(θ0)(θ − θ0) (1)
D’où, autour de θ0 = 0:sin(θ) ' θ
O. Sename [GIPSA-lab] 26/39
Approche transfert : transformée de Laplace
1 Objectifs
2 Bibliographie
3 Un peu d’histoire
4 L’automatique et les systèmes dynamiques
5 Domaines d’application
6 La modélisation mathématique
7 Approche transfert : transformée de Laplace
8 Associations de système
9 la Boucle Fermée
10 Schéma fonctionnel de l’asservissement
O. Sename [GIPSA-lab] 27/39
Approche transfert : transformée de Laplace
Approche transfert
Consiste en l’utilisation de fonctions de transfert pour représenter des systèmes dynamiques.La méthode suivie est donc:
1 écrire un modèle mathématique d’un système sous forme d’équations différentielles (souventnon linéaires)
2 si besoin linéariser ces équations3 déduire la fonction de transfert, c-a-d le rapport entre la transformée de Laplace de la sortie
sur la transformée de Laplace de l’entrée
Quelques propriétés de la Transformée de Laplace (cf formulaire)
• linéarité• dérivation• intégration• retard• produit de convolution• théorème de la valeur initiale• théorème de la valeur finale
O. Sename [GIPSA-lab] 28/39
Approche transfert : transformée de Laplace
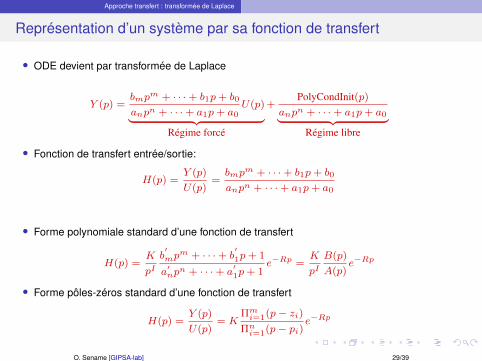
Représentation d’un système par sa fonction de transfert
• ODE devient par transformée de Laplace
Y (p) =bmpm + · · ·+ b1p+ b0
anpn + · · ·+ a1p+ a0U(p)︸ ︷︷ ︸
Régime forcé
+PolyCondInit(p)
anpn + · · ·+ a1p+ a0︸ ︷︷ ︸Régime libre
• Fonction de transfert entrée/sortie:
H(p) =Y (p)
U(p)=bmpm + · · ·+ b1p+ b0
anpn + · · ·+ a1p+ a0
• Forme polynomiale standard d’une fonction de transfert
H(p) =K
pIb′mp
m + · · ·+ b′1p+ 1
a′npn + · · ·+ a
′1p+ 1
e−Rp =K
pIB(p)
A(p)e−Rp
• Forme pôles-zéros standard d’une fonction de transfert
H(p) =Y (p)
U(p)= K
Πmi=1(p− zi)
Πni=1(p− pi)
e−Rp
O. Sename [GIPSA-lab] 29/39
Associations de système
1 Objectifs
2 Bibliographie
3 Un peu d’histoire
4 L’automatique et les systèmes dynamiques
5 Domaines d’application
6 La modélisation mathématique
7 Approche transfert : transformée de Laplace
8 Associations de système
9 la Boucle Fermée
10 Schéma fonctionnel de l’asservissement
O. Sename [GIPSA-lab] 30/39
Associations de système
Associations
O. Sename [GIPSA-lab] 31/39
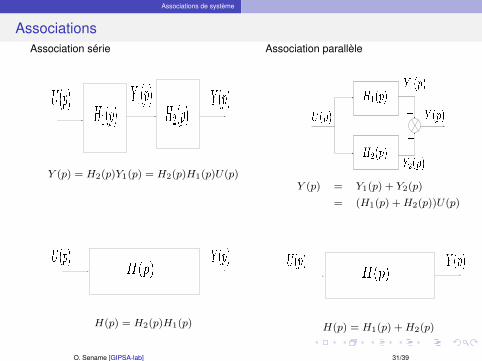
Association série
Y (p) = H2(p)Y1(p) = H2(p)H1(p)U(p)
H(p) = H2(p)H1(p)
Association parallèle
Y (p) = Y1(p) + Y2(p)
= (H1(p) +H2(p))U(p)
H(p) = H1(p) +H2(p)
la Boucle Fermée
1 Objectifs
2 Bibliographie
3 Un peu d’histoire
4 L’automatique et les systèmes dynamiques
5 Domaines d’application
6 La modélisation mathématique
7 Approche transfert : transformée de Laplace
8 Associations de système
9 la Boucle Fermée
10 Schéma fonctionnel de l’asservissement
O. Sename [GIPSA-lab] 32/39
la Boucle Fermée
Le concept clé de boucle fermée
Principe
• Utiliser une mesure de la sortie du système (par un capteur) et la comparer à la réponsedésirée (référence ou consigne)• Agir sur les actionneurs en se basant sur cette différence (en l’amplifiant ou non)
Cette idée en apparence très simple est extrêmement puissante
+ Stabilise un système instable
+ Rend le système peu sensible aux variations du procédé
+ Réduit les effets des perturbations
+ Relation entrée/sortie facilité (consigne-mesure)
+ Donne au concepteur davantage de degrés de liberté
– Risque d’instabilité si mal conçue ou mal maîtrisée
O. Sename [GIPSA-lab] 33/39
la Boucle Fermée
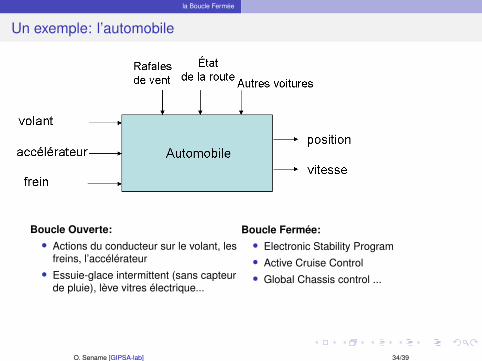
Un exemple: l’automobile
O. Sename [GIPSA-lab] 34/39
Boucle Fermée:• Electronic Stability Program• Active Cruise Control• Global Chassis control ...
Boucle Ouverte:• Actions du conducteur sur le volant, les
freins, l’accélérateur• Essuie-glace intermittent (sans capteur
de pluie), lève vitres électrique...
Schéma fonctionnel de l’asservissement
1 Objectifs
2 Bibliographie
3 Un peu d’histoire
4 L’automatique et les systèmes dynamiques
5 Domaines d’application
6 La modélisation mathématique
7 Approche transfert : transformée de Laplace
8 Associations de système
9 la Boucle Fermée
10 Schéma fonctionnel de l’asservissement
O. Sename [GIPSA-lab] 35/39
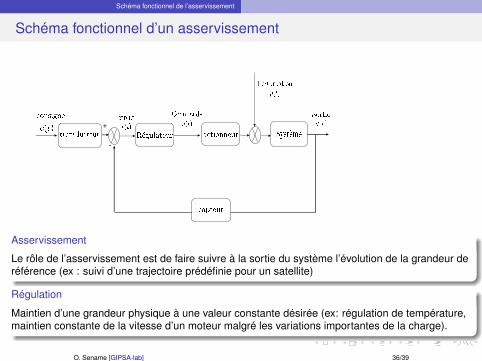
Schéma fonctionnel de l’asservissement
Schéma fonctionnel d’un asservissement
-
+
Asservissement
Le rôle de l’asservissement est de faire suivre à la sortie du système l’évolution de la grandeur deréférence (ex : suivi d’une trajectoire prédéfinie pour un satellite)
Régulation
Maintien d’une grandeur physique à une valeur constante désirée (ex: régulation de température,maintien constante de la vitesse d’un moteur malgré les variations importantes de la charge).
O. Sename [GIPSA-lab] 36/39
Schéma fonctionnel de l’asservissement
Remarques et Illustration
Remarques
• Dans le schéma fonctionnel d’une boucle fermée les entrées sont maintenant des signauxexogènes (l’entrée de consigne, l’entrée de perturbation)• L’entrée de commande du système lui-même (le procédé), c-a-d la variable u dans le
schéma, est, dans ce schéma de boucle fermée, une variable endogène.
Quelques exemples
• Le régulateur de vitesse automobile• Le contrôle d’orientation d’un satellite• La régulation du glucose sanguin dans le corps humain (injection automatique d’insuline pour
les diabétiques)
Déterminer : capteurs ? actionneurs ?
O. Sename [GIPSA-lab] 37/39
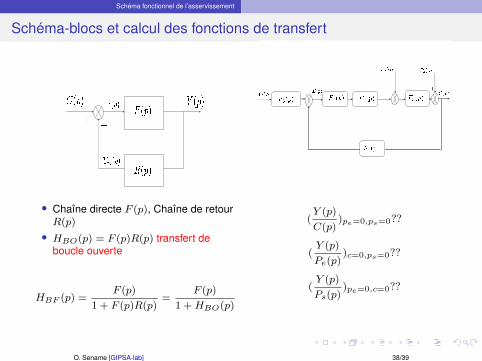
Schéma fonctionnel de l’asservissement
Schéma-blocs et calcul des fonctions de transfert
O. Sename [GIPSA-lab] 38/39
• Chaîne directe F (p), Chaîne de retourR(p)
• HBO(p) = F (p)R(p) transfert deboucle ouverte
HBF (p) =F (p)
1 + F (p)R(p)=
F (p)
1 +HBO(p)
(Y (p)
C(p))pe=0,ps=0??
(Y (p)
Pe(p))c=0,ps=0??
(Y (p)
Ps(p))pe=0,c=0??
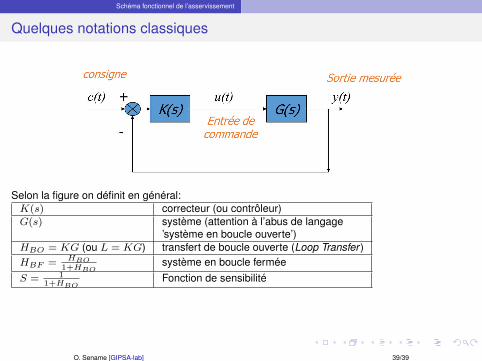
Schéma fonctionnel de l’asservissement
Quelques notations classiques
Selon la figure on définit en général:K(s) correcteur (ou contrôleur)G(s) système (attention à l’abus de langage
’système en boucle ouverte’)HBO = KG (ou L = KG) transfert de boucle ouverte (Loop Transfer )HBF = HBO
1+HBOsystème en boucle fermée
S = 11+HBO
Fonction de sensibilité
O. Sename [GIPSA-lab] 39/39