Embed Size (px)
Citation preview
Cours AQ 7
Correction des systèmes asservis
Rappel
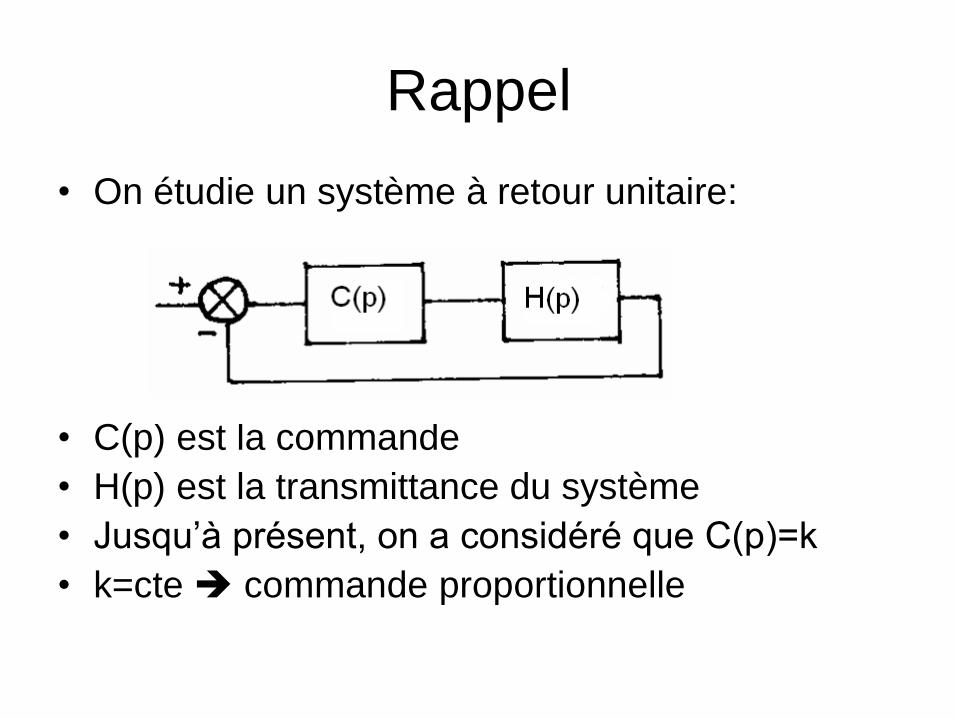
• On étudie un système à retour unitaire:
• C(p) est la commande
• H(p) est la transmittance du système
• Jusqu’à présent, on a considéré que C(p)=k
• k=cte commande proportionnelle
Rappel
• le gain k modifie la stabilité du système
• k modifie aussi l’allure de la réponse.
• Le choix de k assure au système un
comportement équivalent à un second
ordre de z=0,42 (marge de phase de 45°)
Z=0,42 D1=23% t1d=3/ωco %
tr=4,4/ωco tm=0,5 t1d
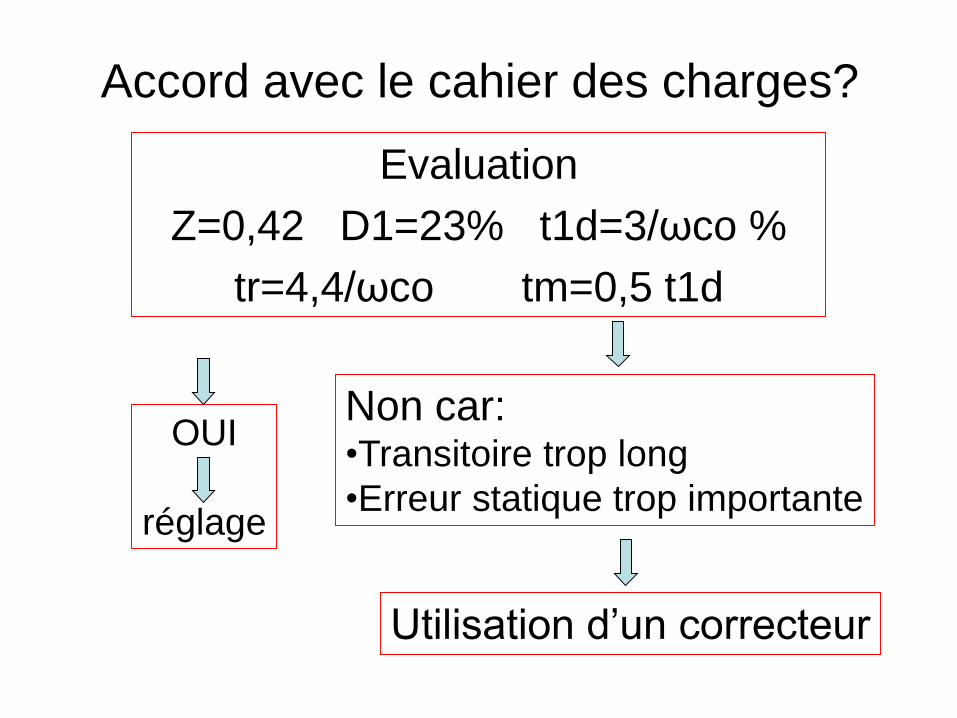
Accord avec le cahier des charges?
Evaluation
Z=0,42 D1=23% t1d=3/ωco %
tr=4,4/ωco tm=0,5 t1d
OUI
réglage
Non car:•Transitoire trop long
•Erreur statique trop importante
Utilisation d’un correcteur
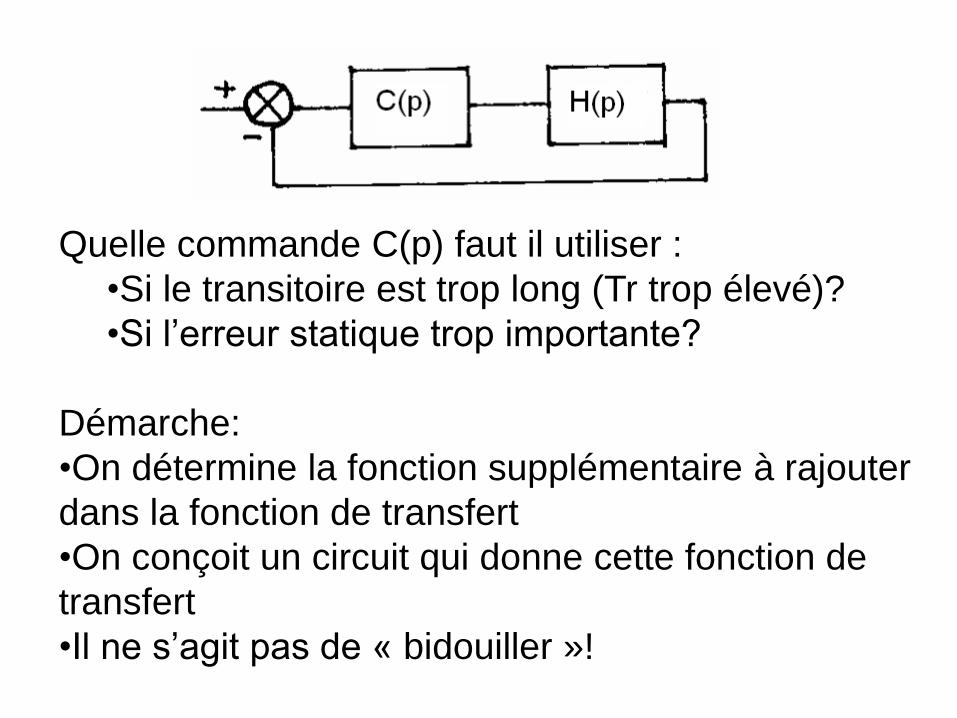
Quelle commande C(p) faut il utiliser :
•Si le transitoire est trop long (Tr trop élevé)?
•Si l’erreur statique trop importante?
Démarche:
•On détermine la fonction supplémentaire à rajouter
dans la fonction de transfert
•On conçoit un circuit qui donne cette fonction de
transfert
•Il ne s’agit pas de « bidouiller »!
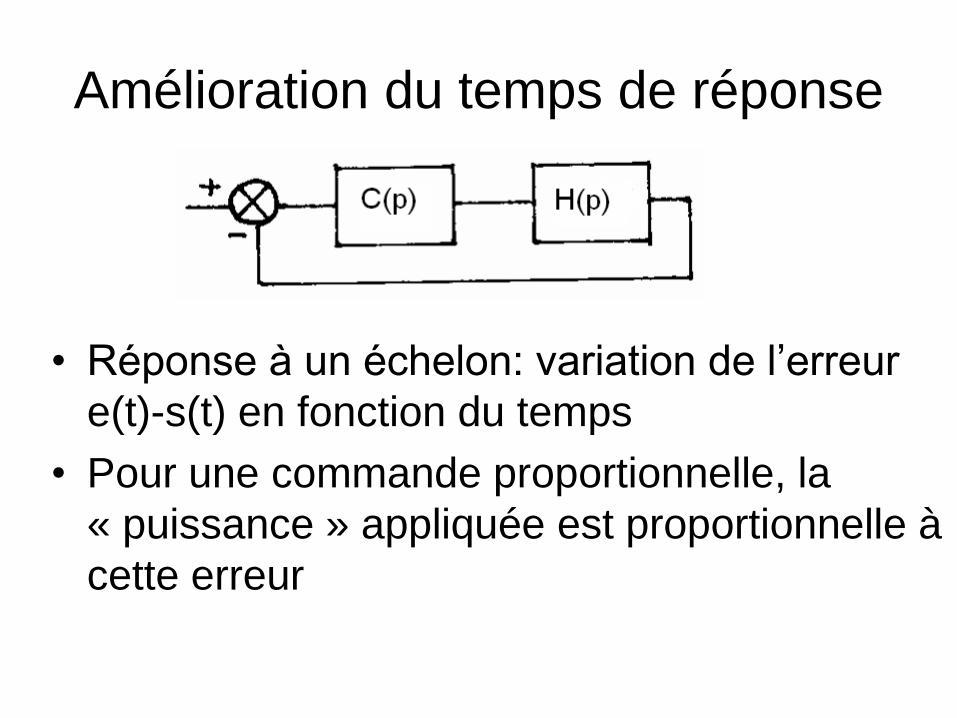
Amélioration du temps de réponse
• Réponse à un échelon: variation de l’erreur
e(t)-s(t) en fonction du temps
• Pour une commande proportionnelle, la
« puissance » appliquée est proportionnelle à
cette erreur
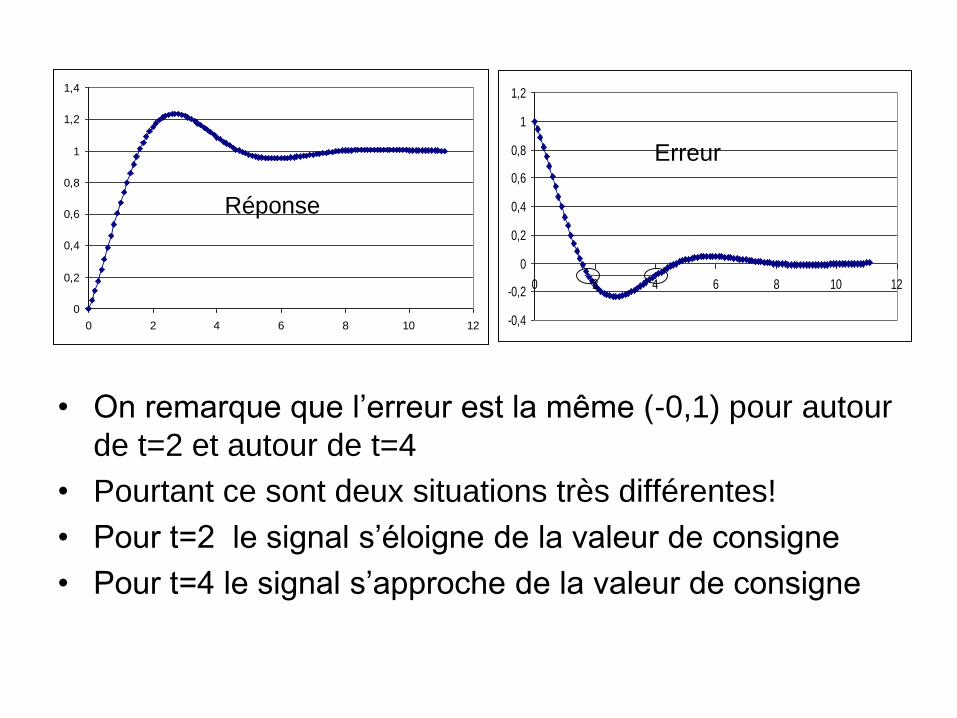
• On remarque que l’erreur est la même (-0,1) pour autour
de t=2 et autour de t=4
• Pourtant ce sont deux situations très différentes!
• Pour t=2 le signal s’éloigne de la valeur de consigne
• Pour t=4 le signal s’approche de la valeur de consigne
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 2 4 6 8 10 12 -0,4
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12
Erreur
Réponse
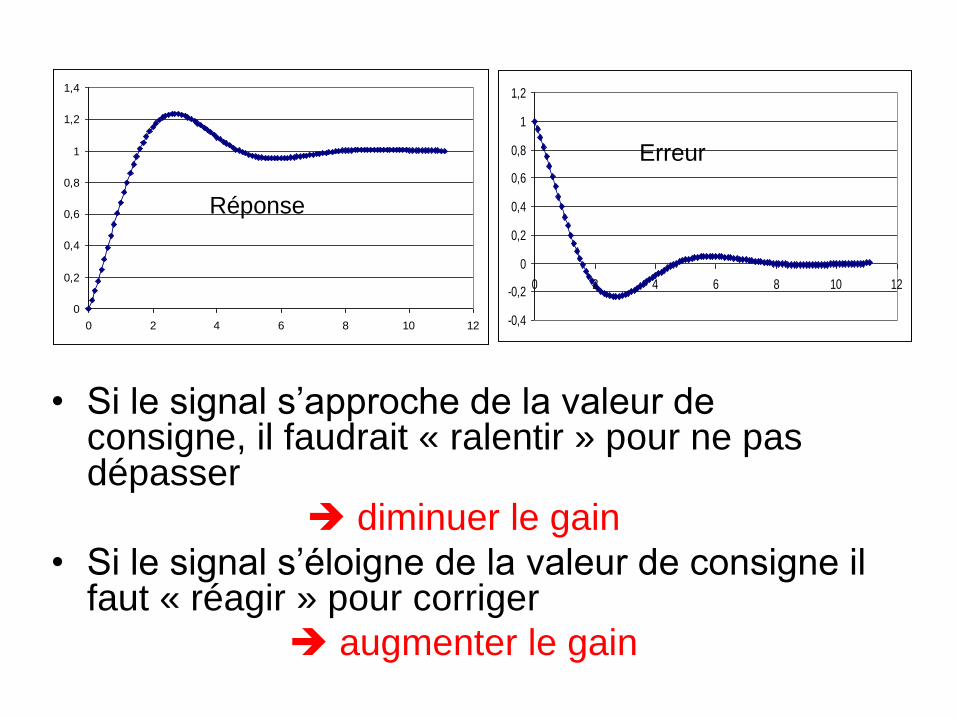
• Si le signal s’approche de la valeur de consigne, il faudrait « ralentir » pour ne pas dépasser
diminuer le gain
• Si le signal s’éloigne de la valeur de consigne il faut « réagir » pour corriger
augmenter le gain
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 2 4 6 8 10 12 -0,4
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12
Erreur
Réponse
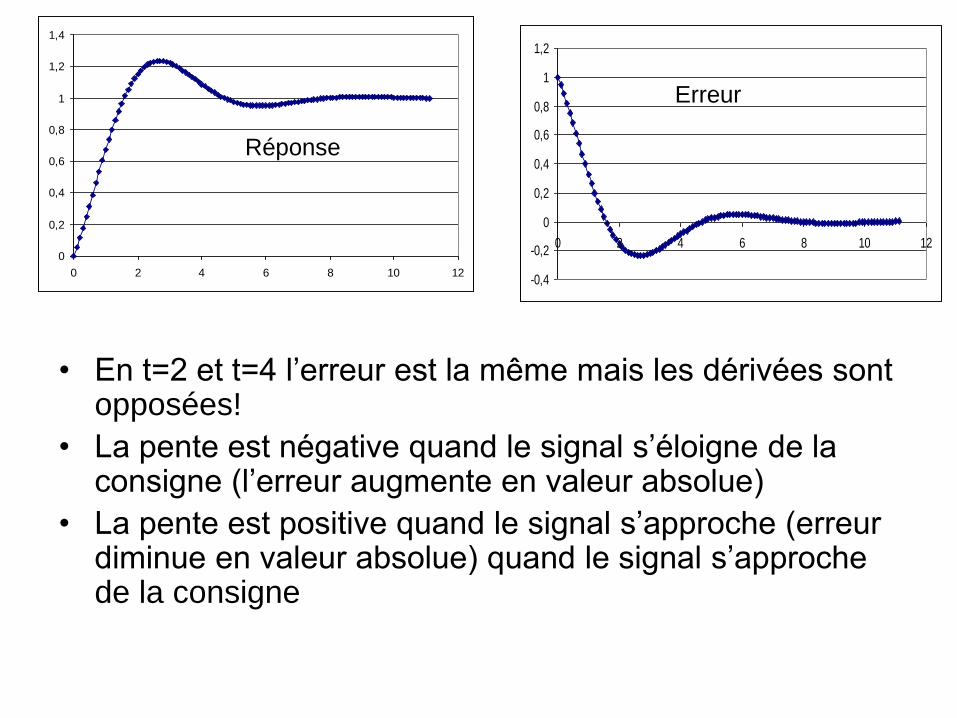
• En t=2 et t=4 l’erreur est la même mais les dérivées sont opposées!
• La pente est négative quand le signal s’éloigne de la consigne (l’erreur augmente en valeur absolue)
• La pente est positive quand le signal s’approche (erreur diminue en valeur absolue) quand le signal s’approche de la consigne
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 2 4 6 8 10 12-0,4
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12
Erreur
Réponse
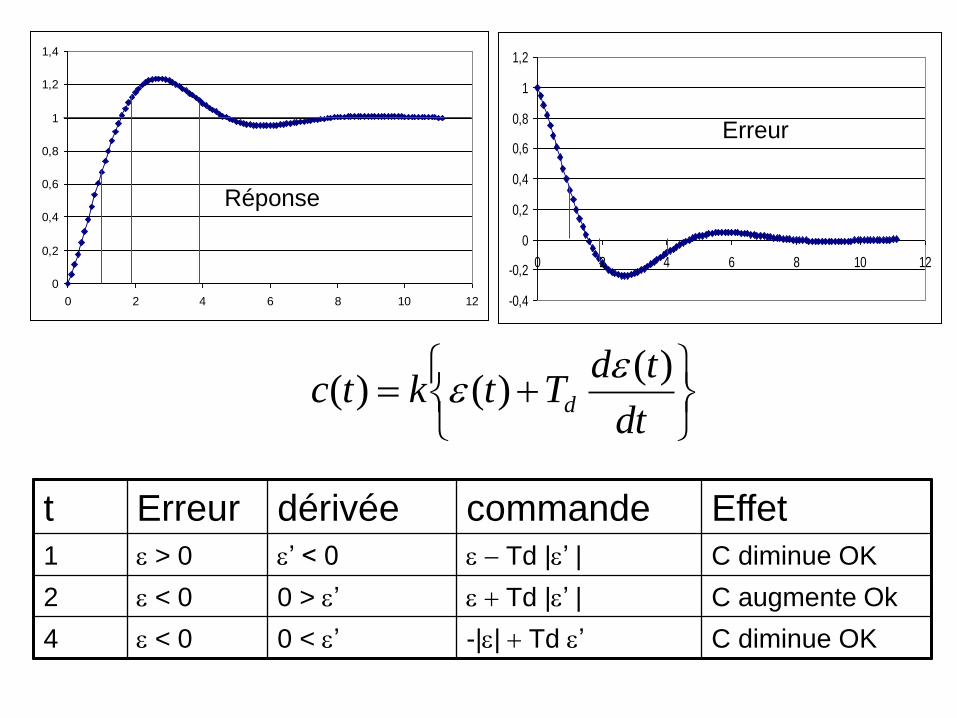
Correction Dérivée
)()( tktc
dt
tdTtktc d
)()()(
Au lieu de la commande proportionnelle
On utilisera une commande Proportionnelle- Dérivée
Td est la constante de temps du dérivateur
Analyse:
dt
tdTtktc d
)()()(
•L’erreur peut être positive ou négative car la sortie
oscille autour de la consigne avant de se stabiliser
•La dérivée de l’erreur peut être positive ou négative
en fonction que le signal s’approche ou s’éloigne de
la consigne
•Le correcteur doit fonctionner quel que soit le cas de
figure
dt
tdTtktc d
)()()(
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 2 4 6 8 10 12 -0,4
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10 12
Erreur
Réponse
t Erreur dérivée commande Effet
1 > 0 ’ < 0 - Td |’ | C diminue OK
2 < 0 0 > ’ Td |’ | C augmente Ok
4 < 0 0 < ’ -|| Td ’ C diminue OK
dt
tdTtktc d
)()()(
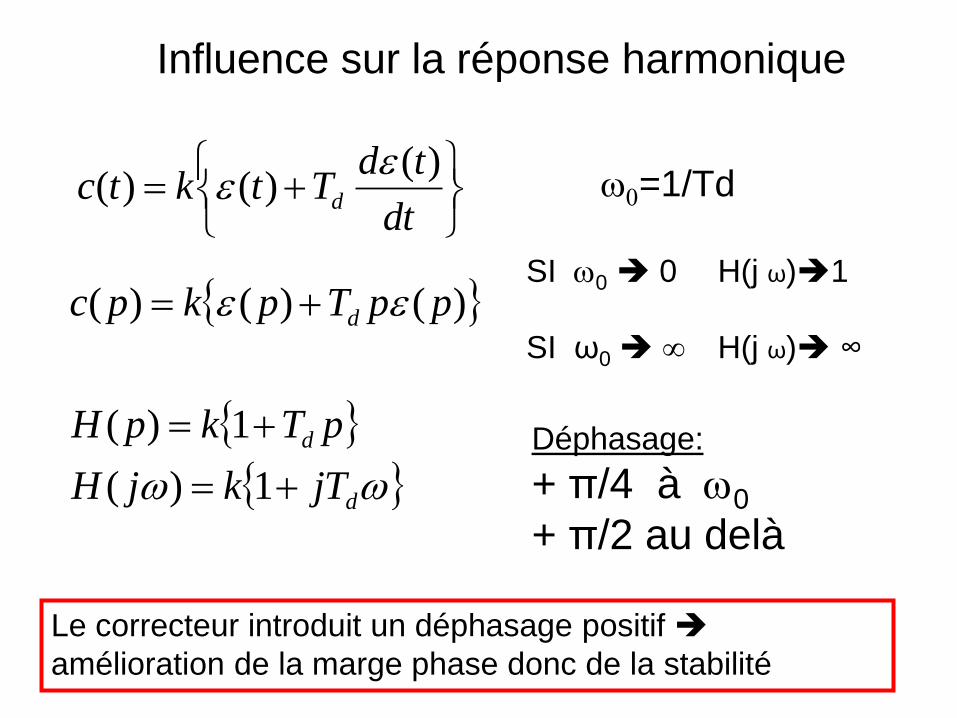
Influence sur la réponse harmonique
d
d
d
jTkjH
pTkpH
ppTpkpc
1)(
1)(
)()()(
0=1/Td
SI 0 0 H(j ω)1
SI ω0 ∞ H(j ω) ∞
Déphasage:
+ π/4 à 0
+ π/2 au delà
Le correcteur introduit un déphasage positif
amélioration de la marge phase donc de la stabilité
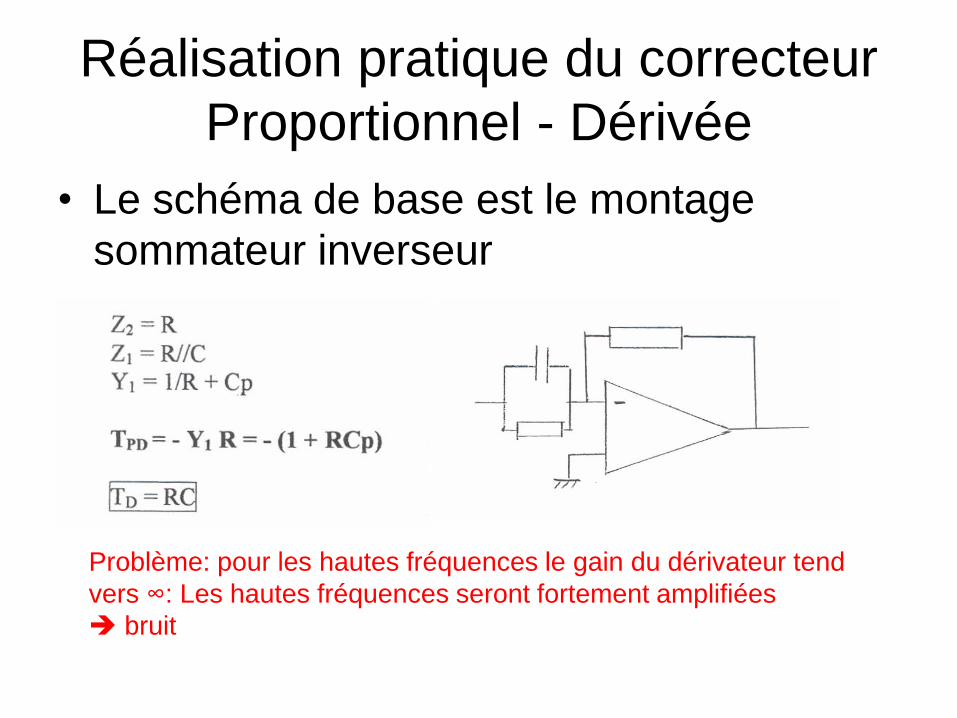
Réalisation pratique du correcteur
Proportionnel - Dérivée
• Le schéma de base est le montage
sommateur inverseur
Problème: pour les hautes fréquences le gain du dérivateur tend
vers ∞: Les hautes fréquences seront fortement amplifiées
bruit
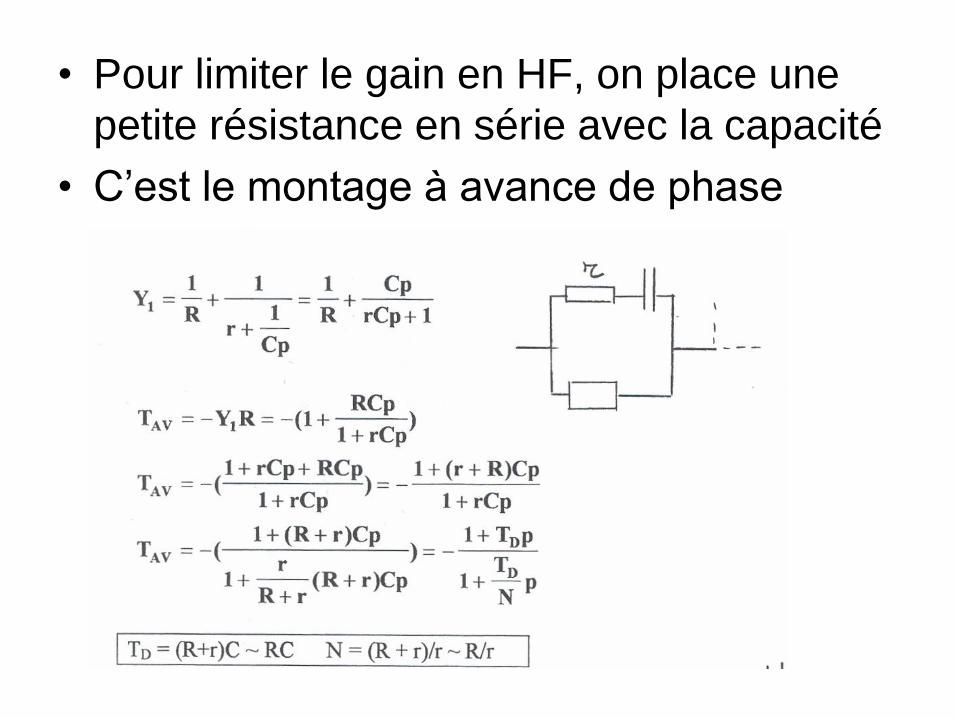
• Pour limiter le gain en HF, on place une
petite résistance en série avec la capacité
• C’est le montage à avance de phase
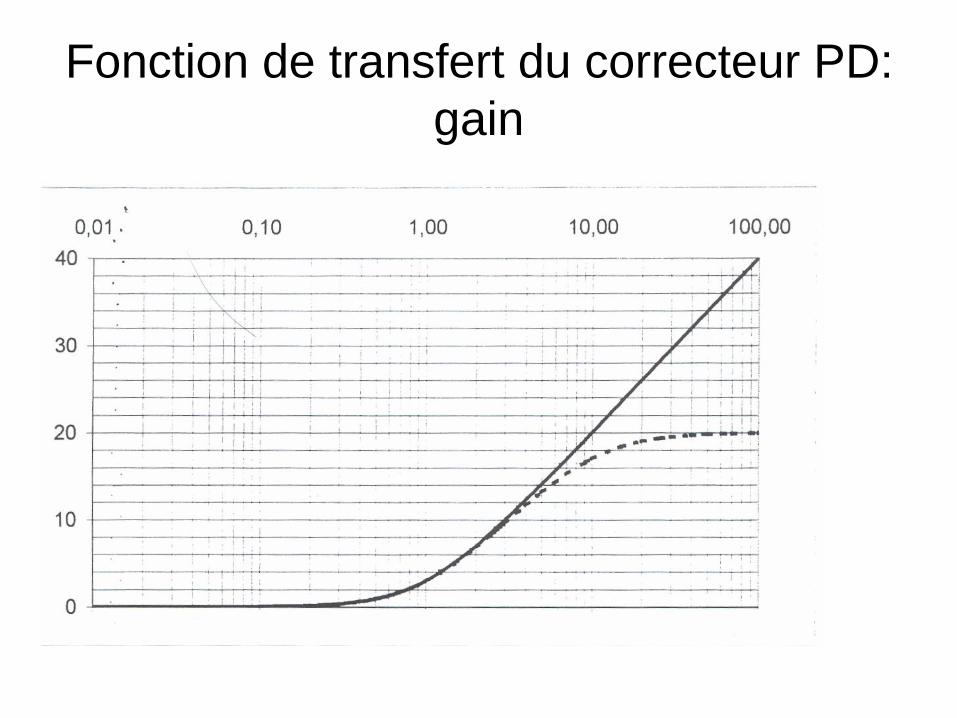
Fonction de transfert du correcteur PD:
gain
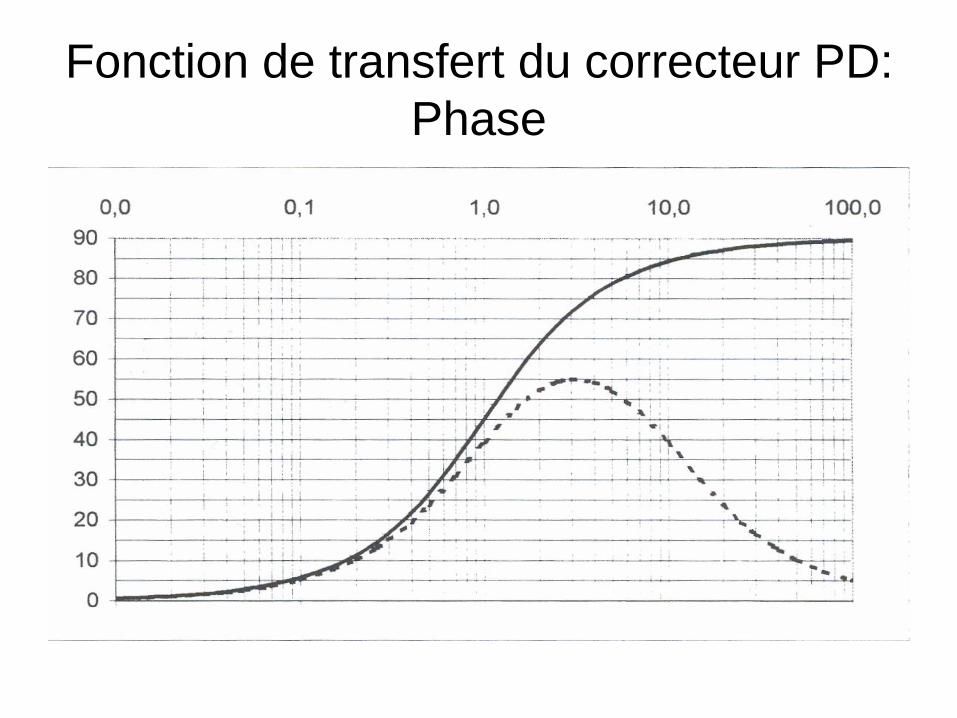
Fonction de transfert du correcteur PD:
Phase
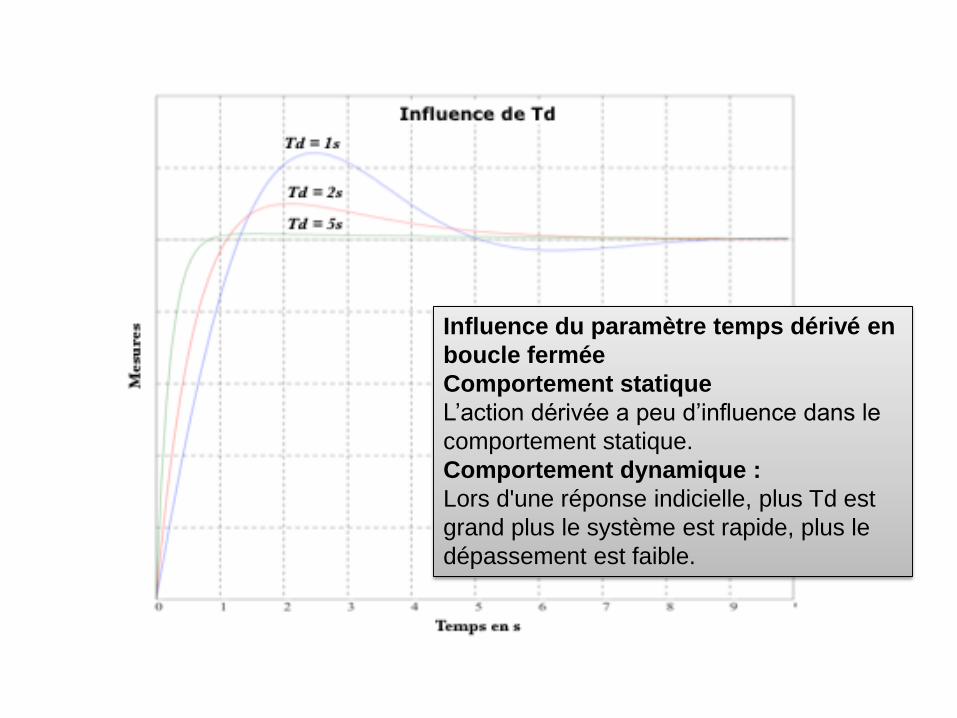
Influence du paramètre temps dérivé en
boucle fermée
Comportement statique
L’action dérivée a peu d’influence dans le
comportement statique.
Comportement dynamique :
Lors d'une réponse indicielle, plus Td est
grand plus le système est rapide, plus le
dépassement est faible.

Amélioration de l’erreur statique
• Au-delà de t=10 l’erreur
ne change plus: la
puissance fournie au
système sera très faible
et ne permet pas de
corriger l’erreur
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 2 4 6 8 10 12 14 16
Réponse
La courbe est plate donc la dérivée est nulle
Le correcteur PD ne sert à rien
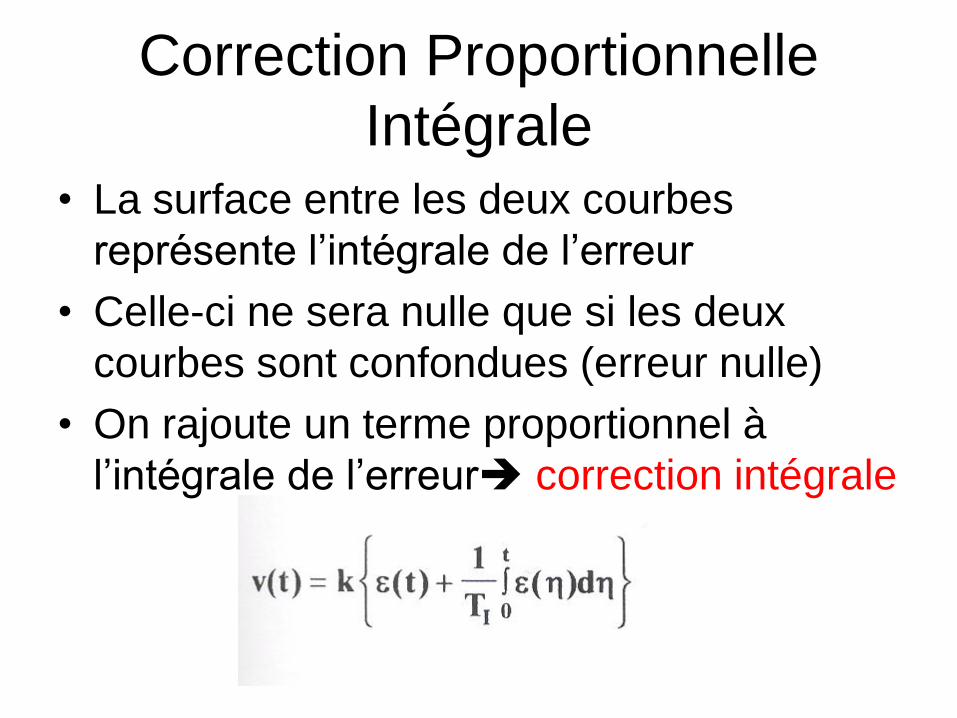
Correction Proportionnelle
Intégrale• La surface entre les deux courbes
représente l’intégrale de l’erreur
• Celle-ci ne sera nulle que si les deux
courbes sont confondues (erreur nulle)
• On rajoute un terme proportionnel à
l’intégrale de l’erreur correction intégrale
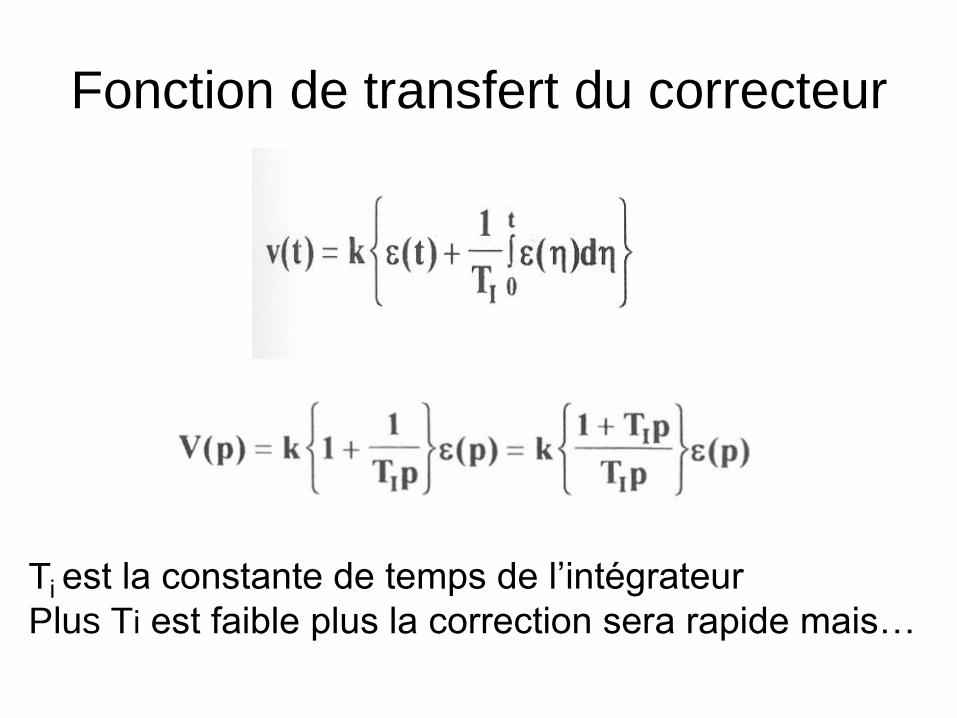
Fonction de transfert du correcteur
Ti est la constante de temps de l’intégrateur
Plus Ti est faible plus la correction sera rapide mais…
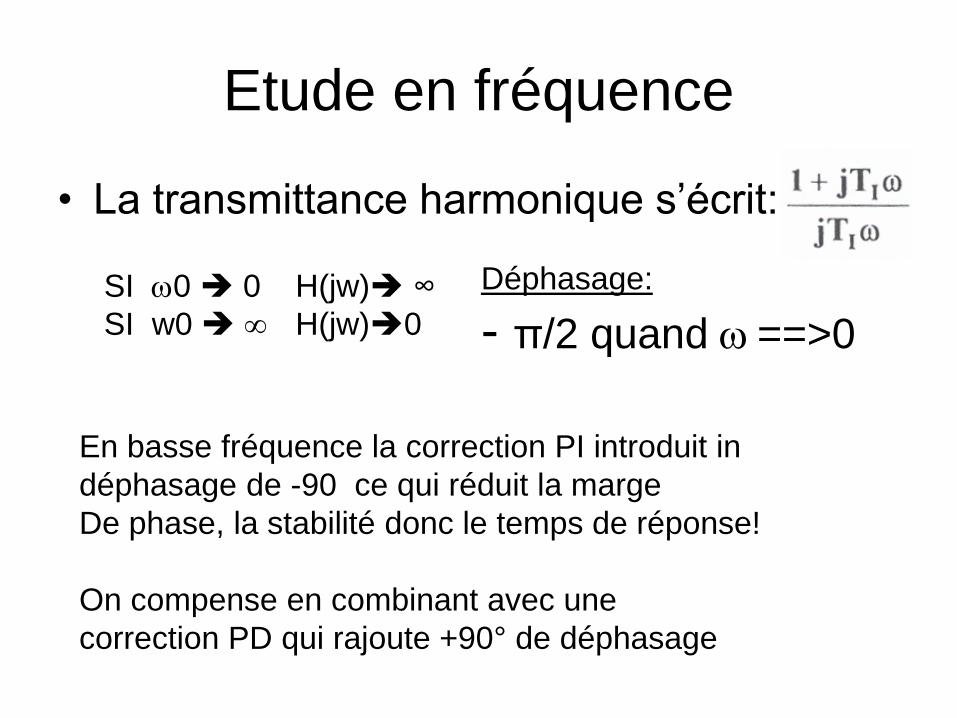
Etude en fréquence
• La transmittance harmonique s’écrit:
SI 0 0 H(jw) ∞
SI w0 ∞ H(jw)0
Déphasage:
- π/2 quand ==>0
En basse fréquence la correction PI introduit in
déphasage de -90 ce qui réduit la marge
De phase, la stabilité donc le temps de réponse!
On compense en combinant avec une
correction PD qui rajoute +90° de déphasage
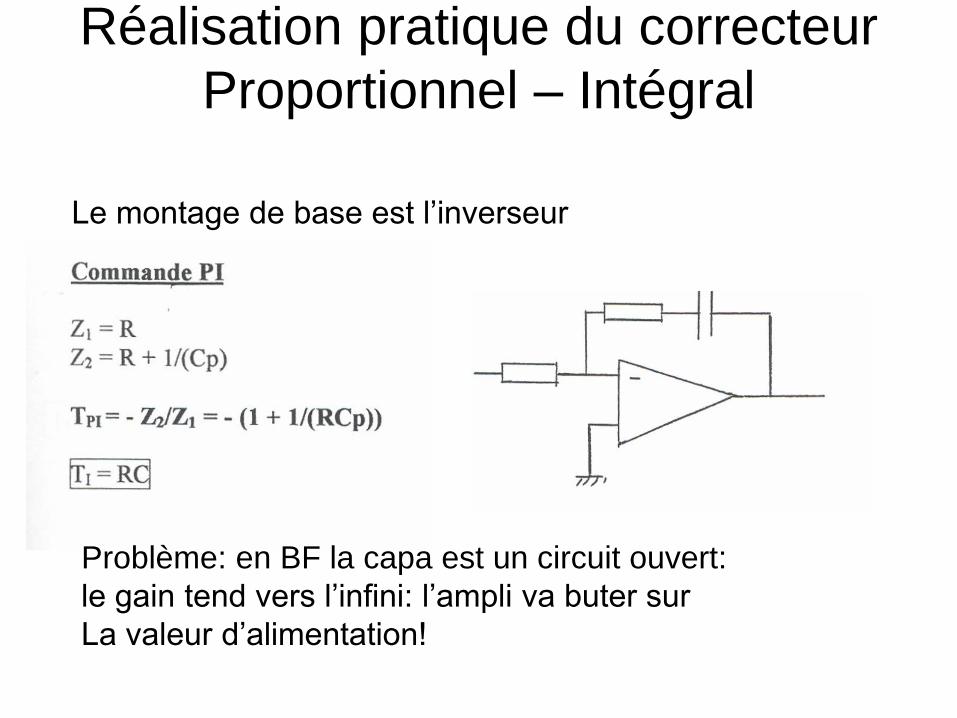
Réalisation pratique du correcteur
Proportionnel – Intégral
Le montage de base est l’inverseur
Problème: en BF la capa est un circuit ouvert:
le gain tend vers l’infini: l’ampli va buter sur
La valeur d’alimentation!
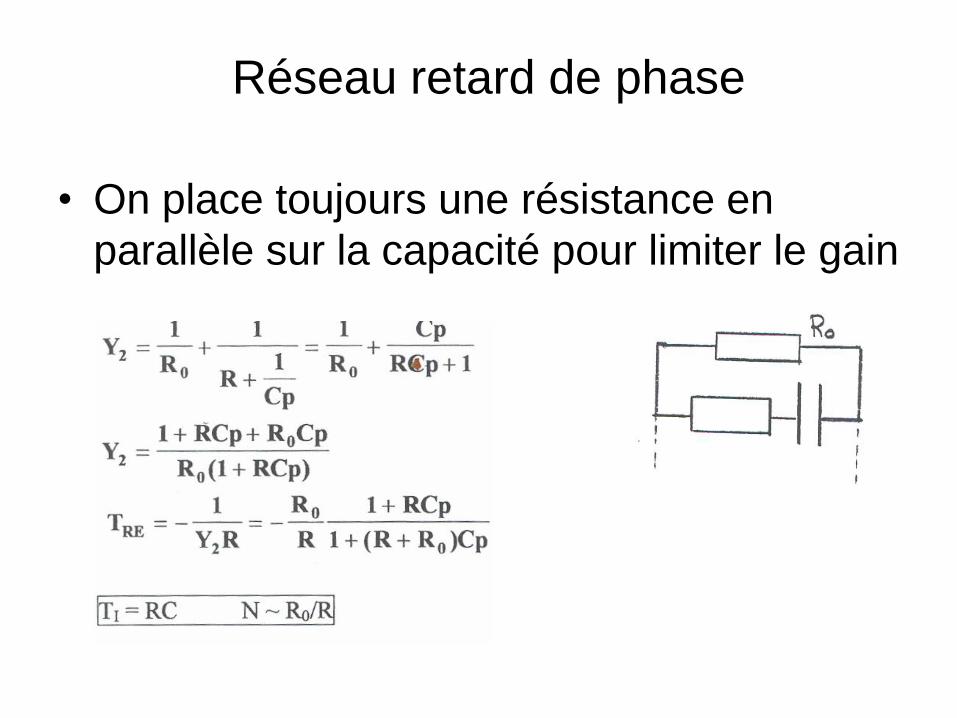
• On place toujours une résistance en
parallèle sur la capacité pour limiter le gain
Réseau retard de phase
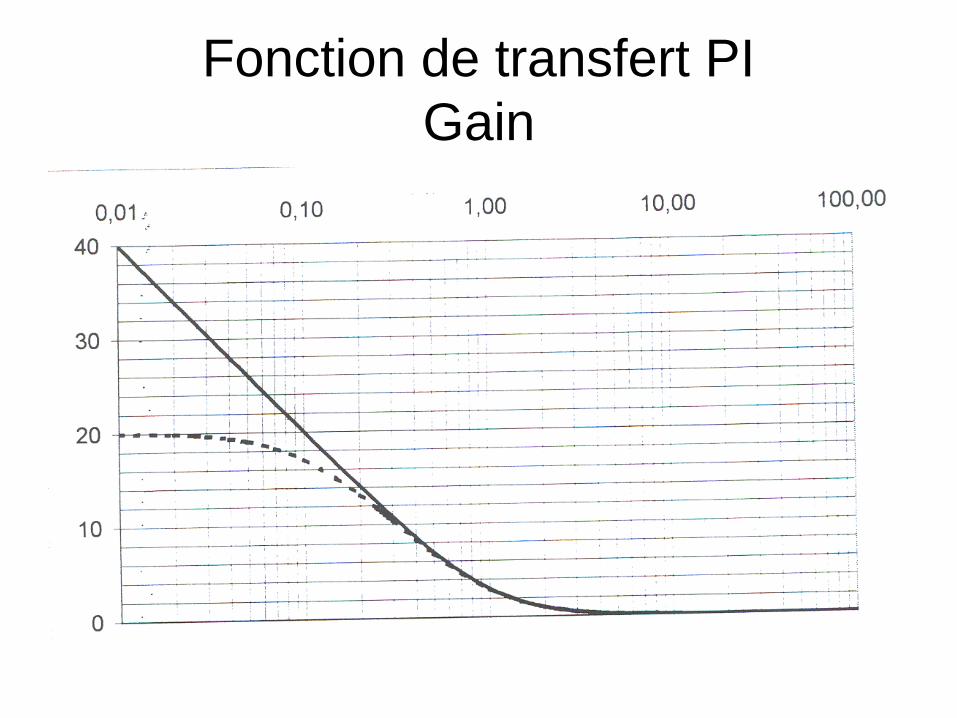
Fonction de transfert PI
Gain
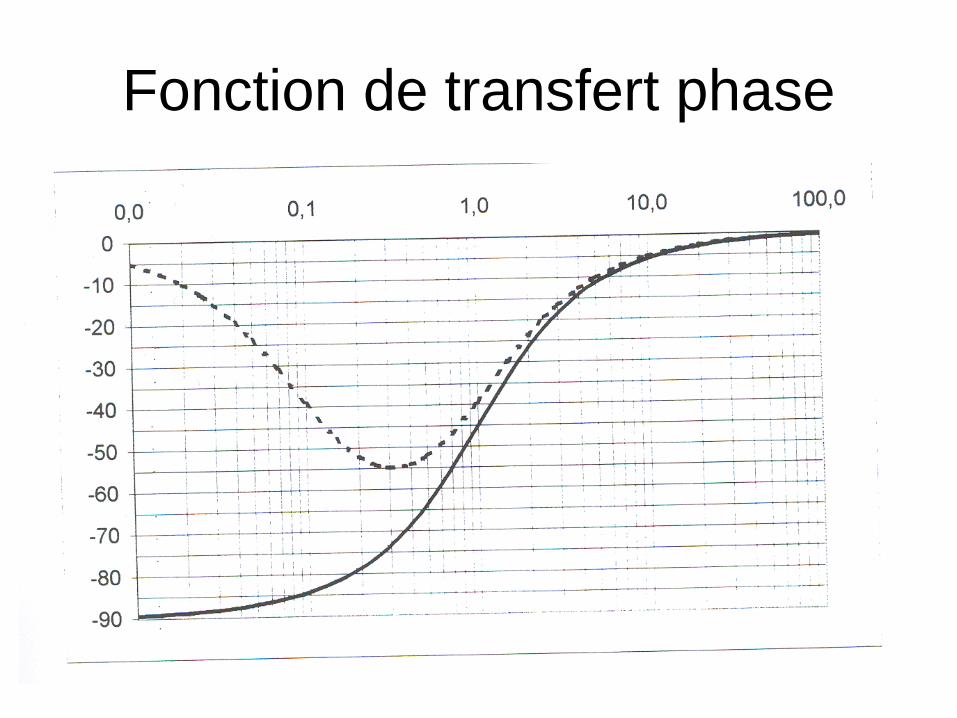
Fonction de transfert phase
Correcteurs PID et méthodes
de réglage
(Ziegler Nichols)
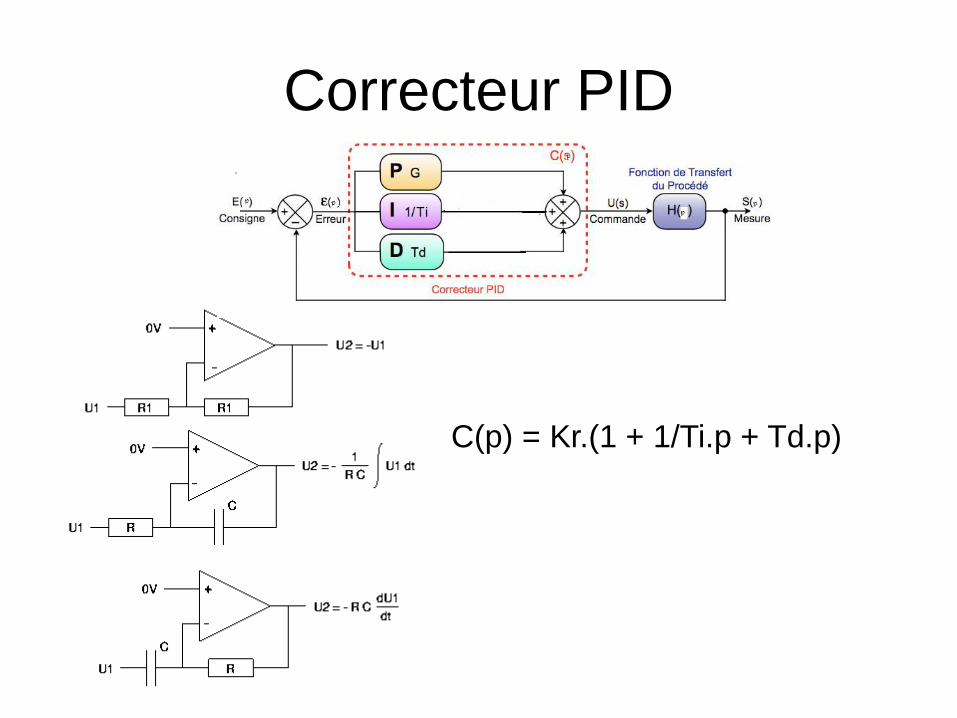
Correcteur PID
C(p) = Kr.(1 + 1/Ti.p + Td.p)
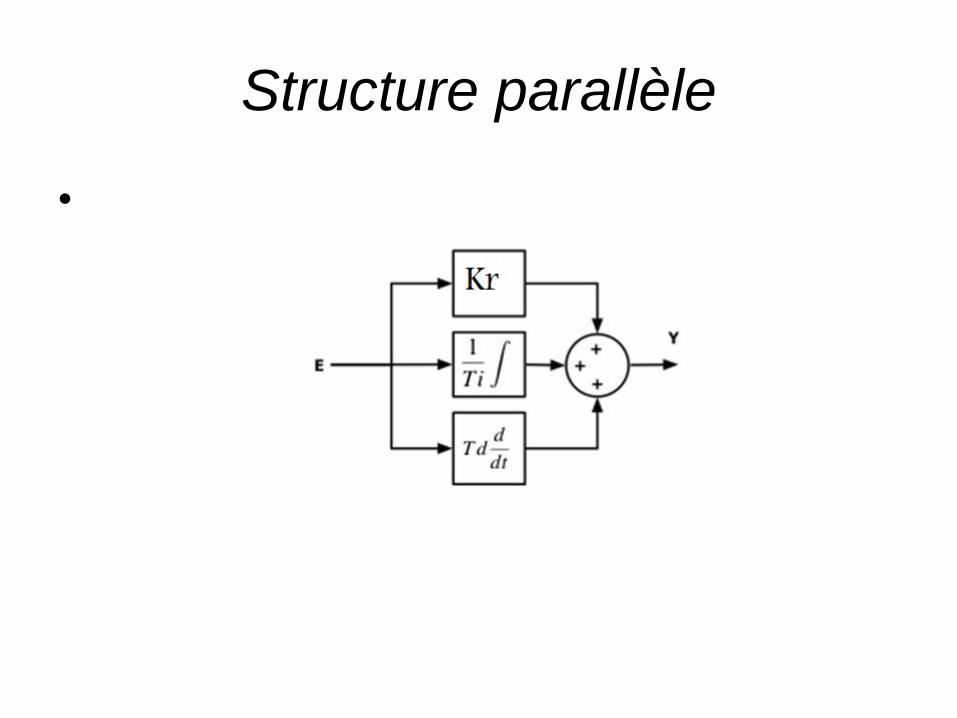
Structure parallèle
•
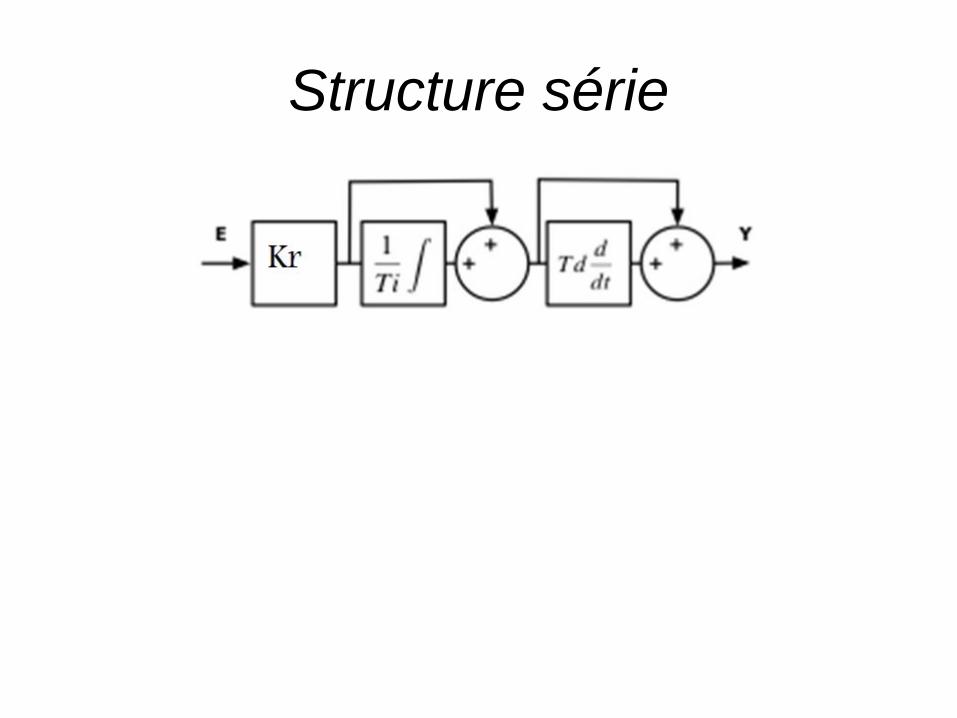
Structure série
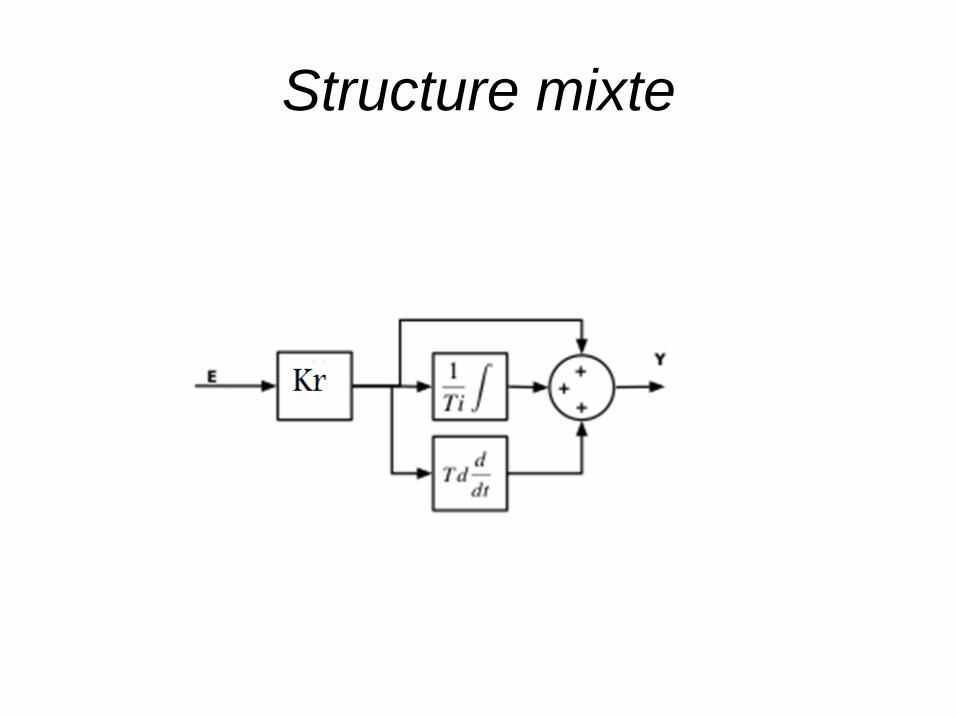
Structure mixte
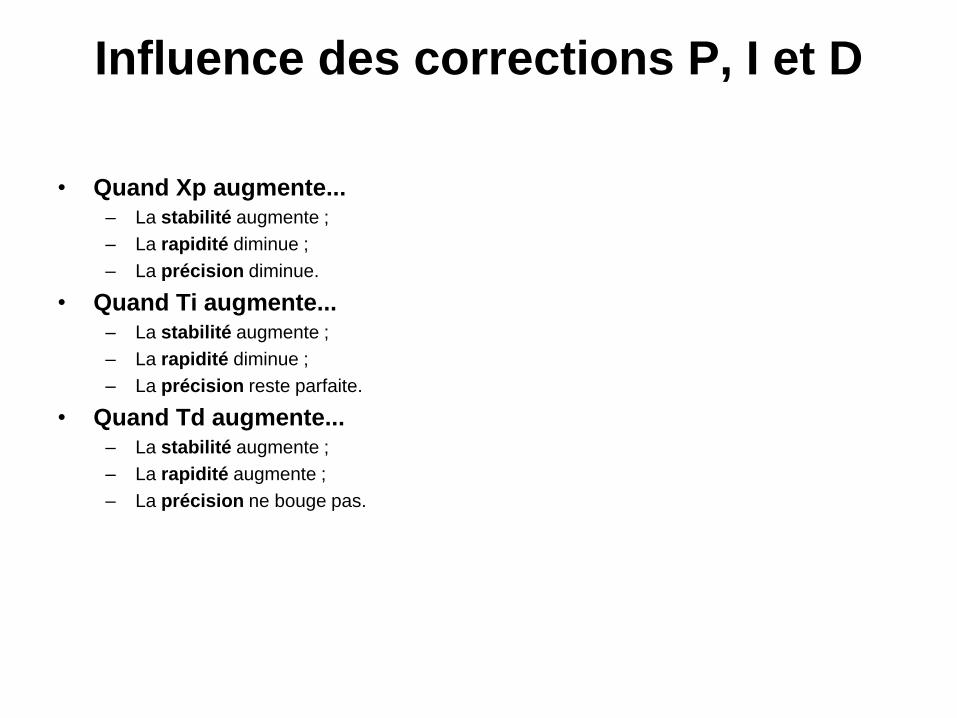
Influence des corrections P, I et D
• Quand Xp augmente...– La stabilité augmente ;
– La rapidité diminue ;
– La précision diminue.
• Quand Ti augmente...– La stabilité augmente ;
– La rapidité diminue ;
– La précision reste parfaite.
• Quand Td augmente...– La stabilité augmente ;
– La rapidité augmente ;
– La précision ne bouge pas.
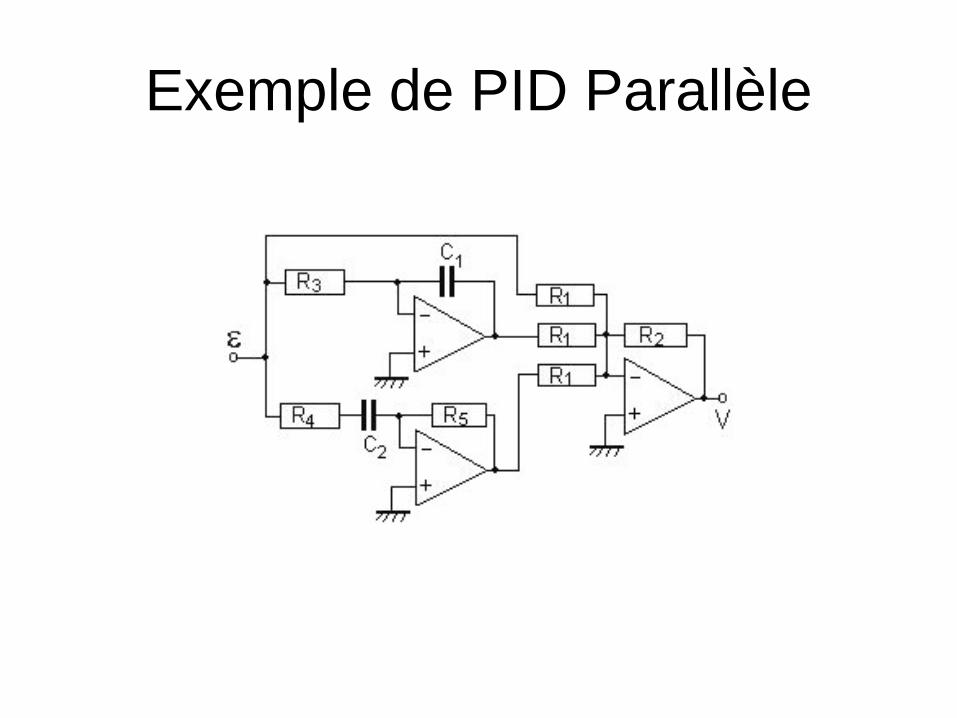
Exemple de PID Parallèle

Régulateurs PID Industriels
Réglage d’un PID
Méthode de Ziegler-Nichols• Méthode empirique qui permet d’ajuster les
paramètres d’un régulateur P.I.D.
• S’utilise à partir de mesures sur sa réponse
indicielle.
• Critère de réglage: le rapport entre les deux
premiers dépassements (positifs) en BF est de
0,25.
Ziegler Nichols en BO
• En boucle ouverte:
– A utiliser sur les systèmes apériodiques
– Assimiler le système à un 1er ordre avec
retard ou un retard pur avec un intégrateur
– Consiste à mesurer:
• la pente de la tangente au point d’inflexion a,
• la valeur finale M
• et le retard r
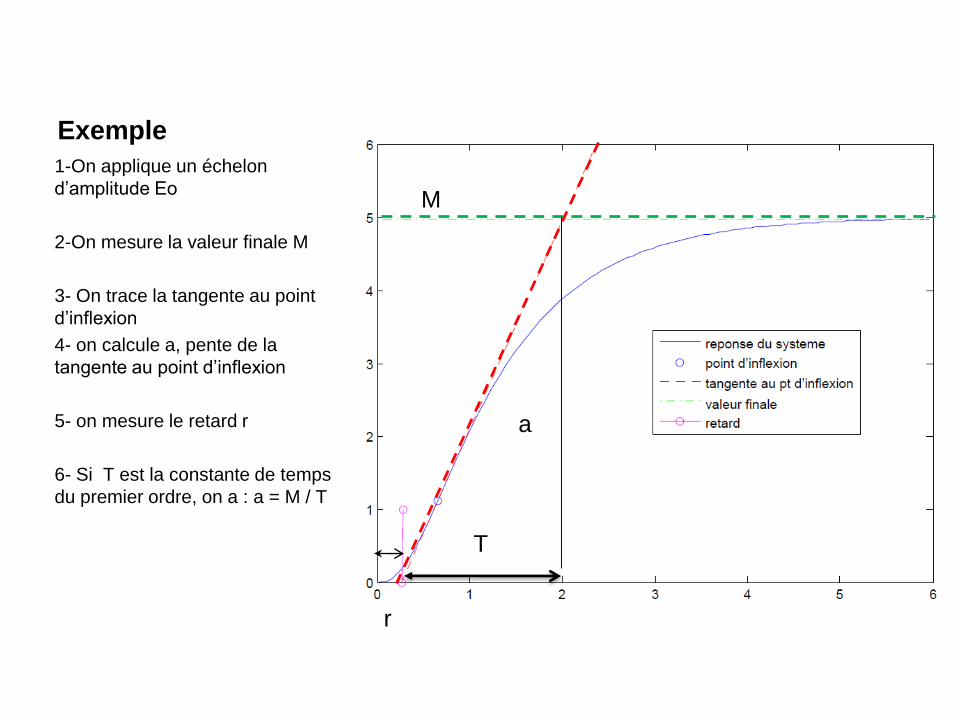
Exemple
1-On applique un échelon
d’amplitude Eo
2-On mesure la valeur finale M
3- On trace la tangente au point
d’inflexion
4- on calcule a, pente de la
tangente au point d’inflexion
5- on mesure le retard r
6- Si T est la constante de temps
du premier ordre, on a : a = M / T
r
a
M
T
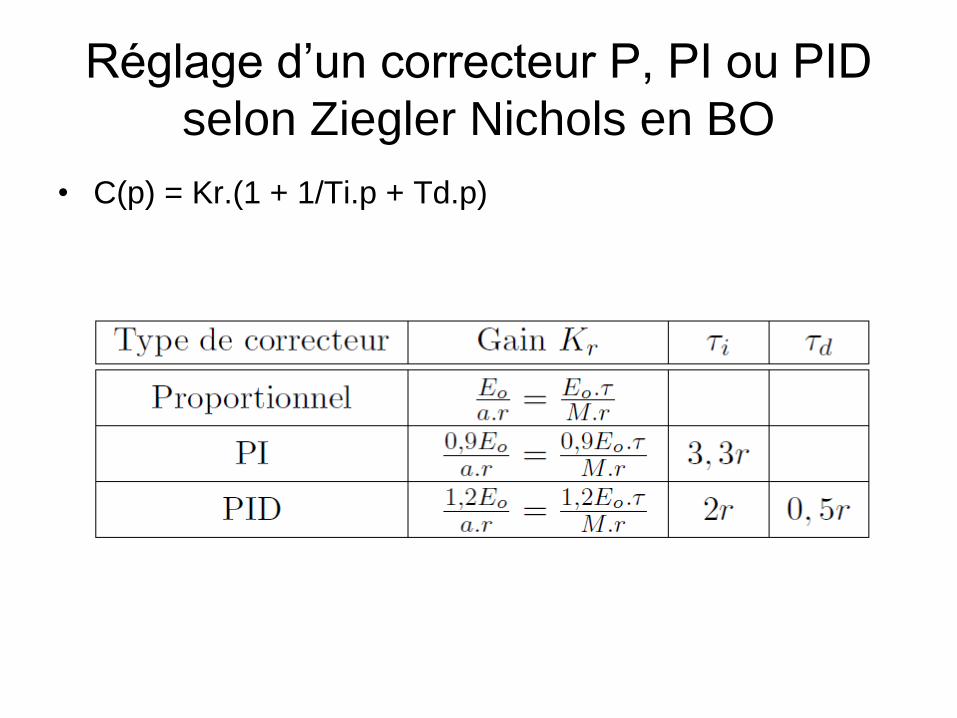
Réglage d’un correcteur P, PI ou PID
selon Ziegler Nichols en BO
• C(p) = Kr.(1 + 1/Ti.p + Td.p)
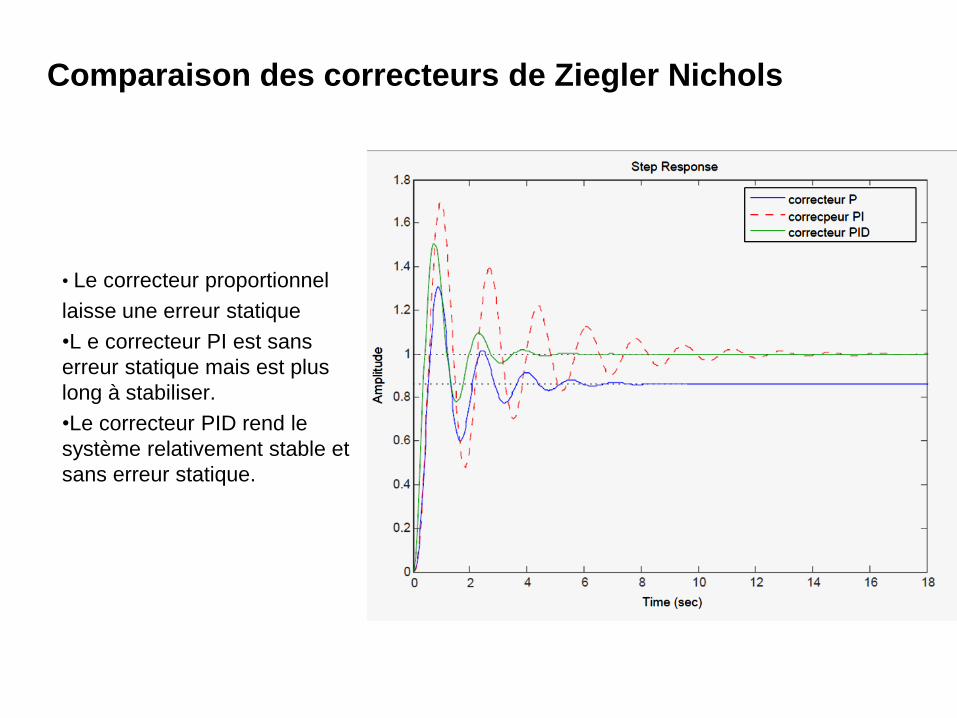
Comparaison des correcteurs de Ziegler Nichols
• Le correcteur proportionnel
laisse une erreur statique
•L e correcteur PI est sans
erreur statique mais est plus
long à stabiliser.
•Le correcteur PID rend le
système relativement stable et
sans erreur statique.
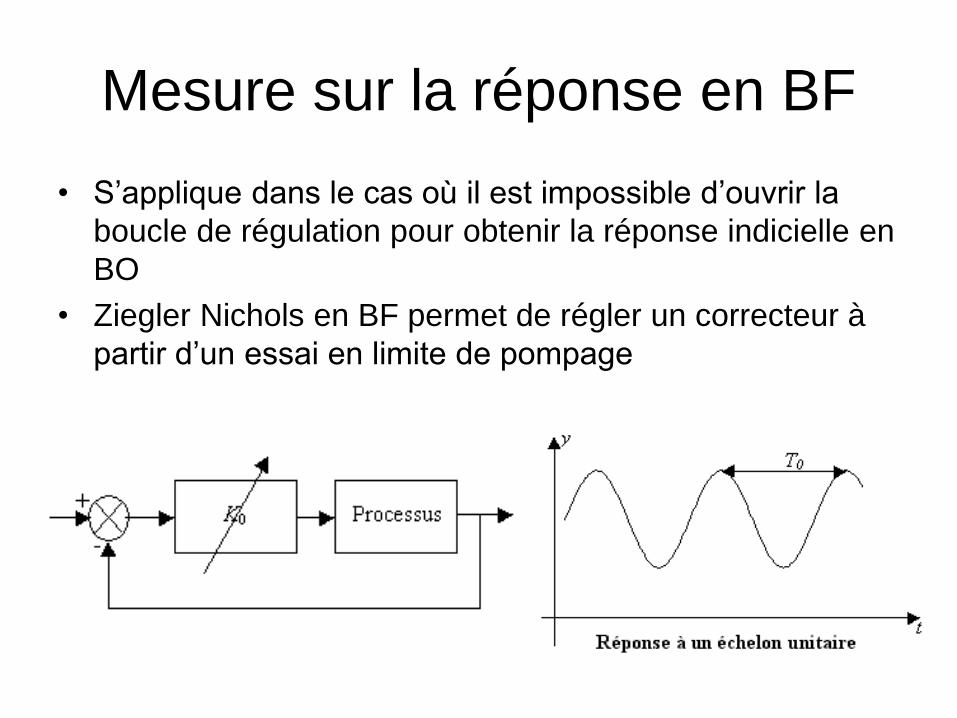
Mesure sur la réponse en BF
• S’applique dans le cas où il est impossible d’ouvrir la
boucle de régulation pour obtenir la réponse indicielle en
BO
• Ziegler Nichols en BF permet de régler un correcteur à
partir d’un essai en limite de pompage
Méthode pratique• Pour obtenir la limite de pompage, on place un
correcteur proportionnel (seul) dans la boucle fermée et
on augmente doucement le gain de ce correcteur
jusqu’`a obtenir des oscillations auto-entretenues
(phénomène de pompage).
• On note le gain Ko qui a amenené le système en limite
de stabilité et la période To des oscillations obtenues.
Les paramètres de régulation pour que la réponse du
système bouclé soit satisfaisante sont donnés dans un
tableau
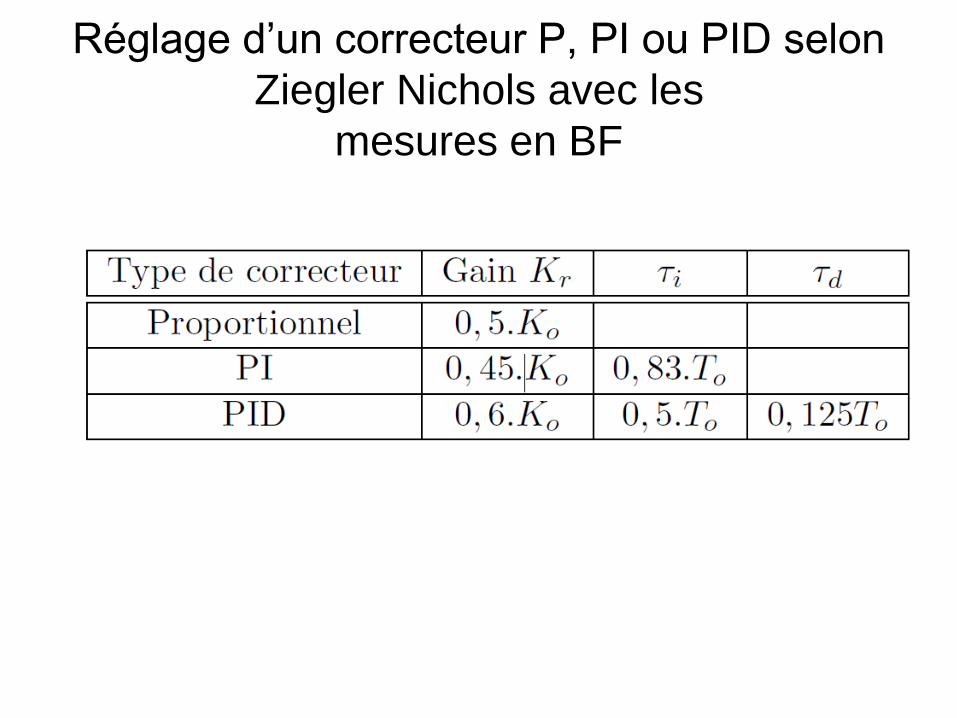
Réglage d’un correcteur P, PI ou PID selon
Ziegler Nichols avec les
mesures en BF
Méthodes d’identification
Identification
• Un système linéaire a une fonction de transfert qui peut
se calculer en établissant les équations différentielles qui
relient entrée et sortie.
• Ces équations théoriques sont parfois difficiles à écrire
car on n’a pas forcément toute la connaissance du
système nécessaire : valeurs numériques, processus
mis en jeu, non linéarité...
• Souvent, un modèle dont le comportement ressemble à
celui du système à étudier est suffisant pour élaborer
une loi de commande adaptée.
Identification
• Identification = méthode pour obtenir un modèle
sous forme de fonction de transfert équivalente
en terme de réponse d’un système dont on ne
sait pas modéliser le comportement.
• Ces m´ethodes NE donnent donc PAS LA
fonction de transfert du système mais en
donnent UNE dont la réponse ressemble à celle
du système.
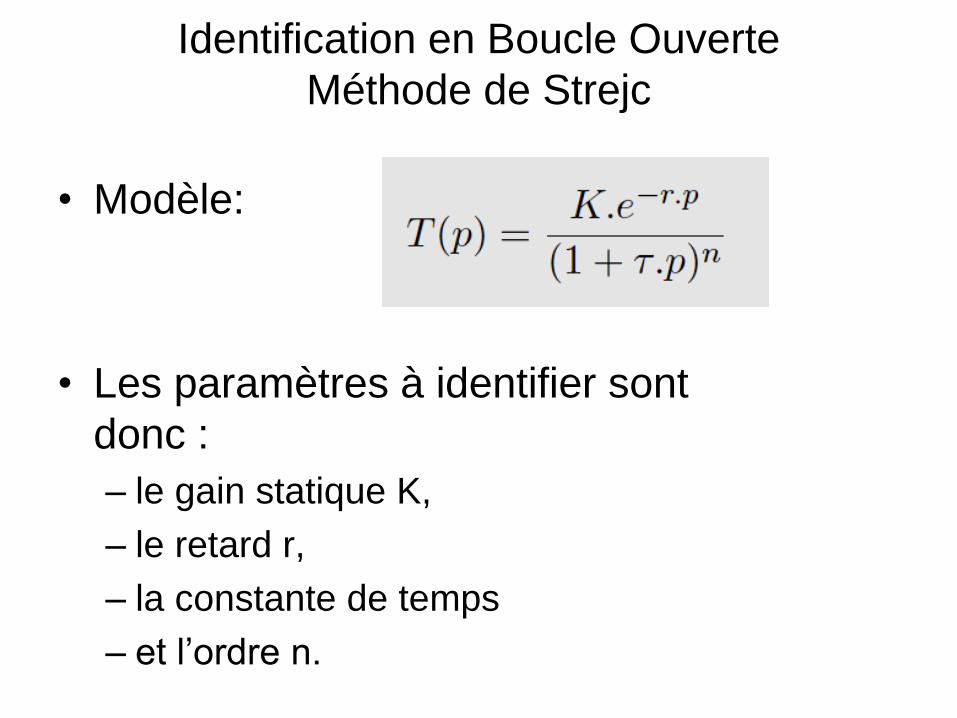
Identification en Boucle Ouverte
Méthode de Strejc
• Modèle:
• Les paramètres à identifier sont
donc :
– le gain statique K,
– le retard r,
– la constante de temps
– et l’ordre n.
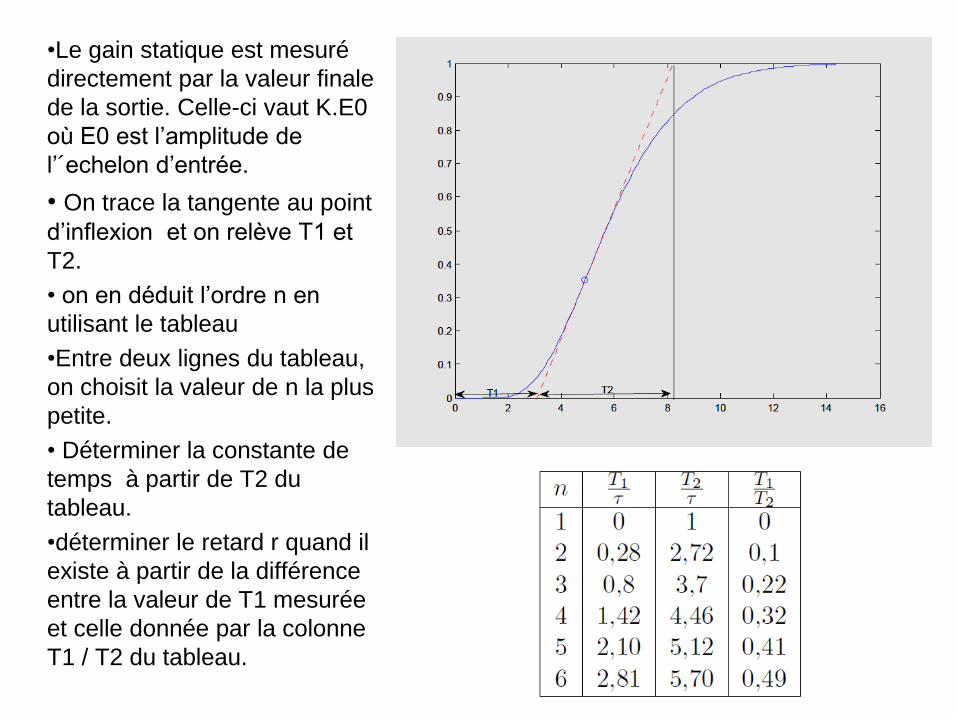
•Le gain statique est mesuré
directement par la valeur finale
de la sortie. Celle-ci vaut K.E0
où E0 est l’amplitude de
l’´echelon d’entrée.
• On trace la tangente au point
d’inflexion et on relève T1 et
T2.
• on en déduit l’ordre n en
utilisant le tableau
•Entre deux lignes du tableau,
on choisit la valeur de n la plus
petite.
• Déterminer la constante de
temps à partir de T2 du
tableau.
•déterminer le retard r quand il
existe à partir de la différence
entre la valeur de T1 mesurée
et celle donnée par la colonne
T1 / T2 du tableau.
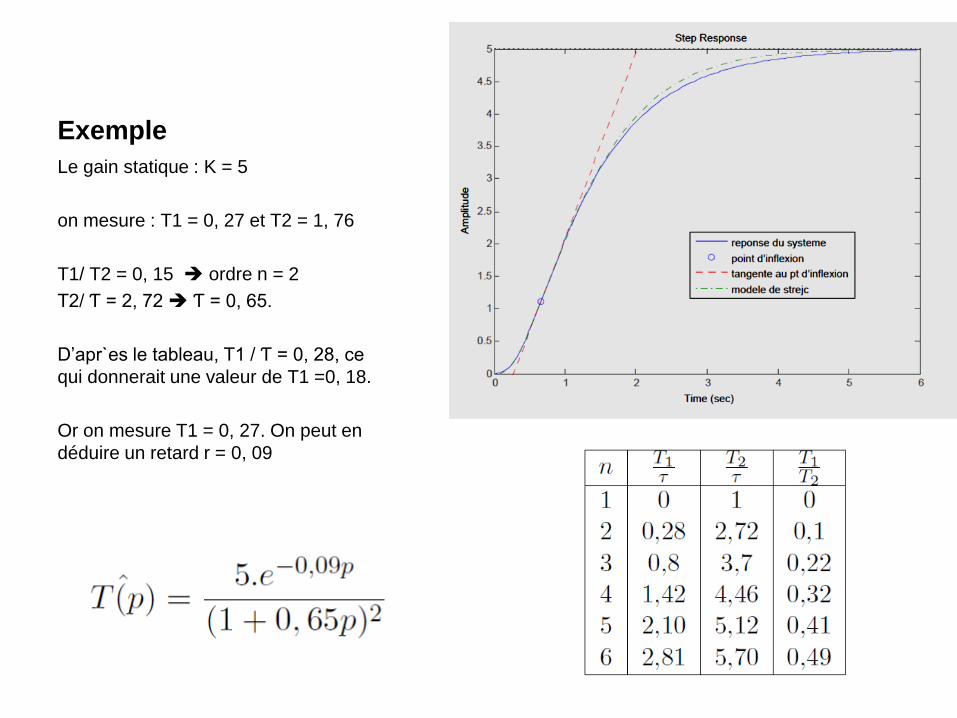
Exemple
Le gain statique : K = 5
on mesure : T1 = 0, 27 et T2 = 1, 76
T1/ T2 = 0, 15 ordre n = 2
T2/ Ƭ = 2, 72 Ƭ = 0, 65.
D’apr`es le tableau, T1 / Ƭ = 0, 28, ce
qui donnerait une valeur de T1 =0, 18.
Or on mesure T1 = 0, 27. On peut en
déduire un retard r = 0, 09
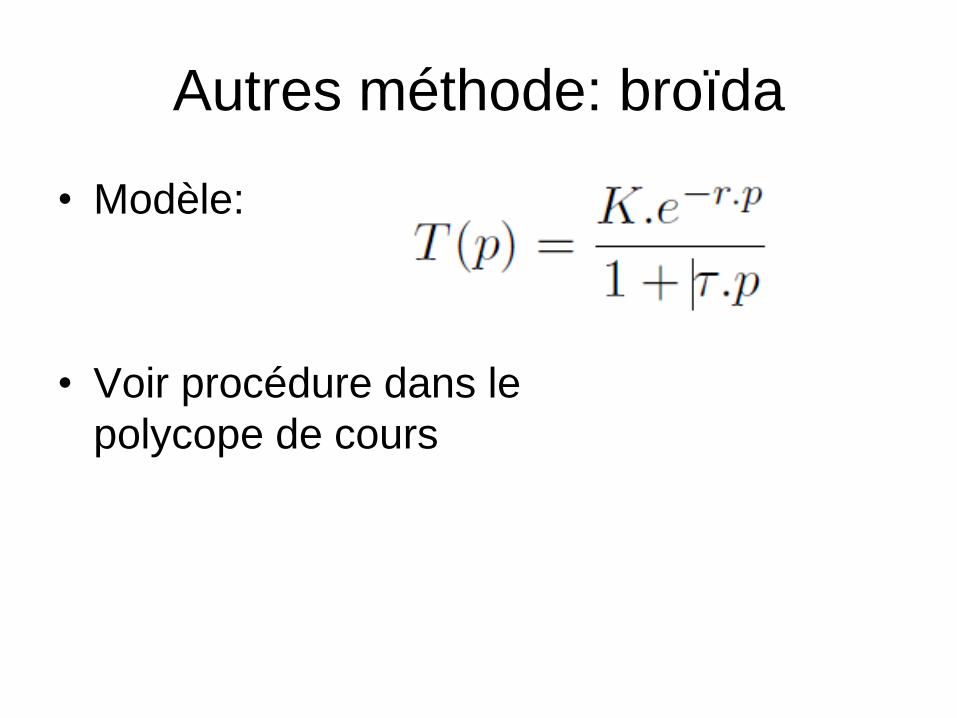
Autres méthode: broïda
• Modèle:
• Voir procédure dans le
polycope de cours





















![[base] . [H [acide] Par exemple, la constante d'acidité … · dans les couples H O / HO et et une (aq) aq) de l'eau met en jeu l'acide du avec la couple H O /HO (aq) H30 /H O aq)](https://img.pdfslide.fr/doc/110x75/5b98ea8609d3f253748d1b4f/base-h-acide-par-exemple-la-constante-dacidite-dans-les-couples-h.jpg)
![PPT AQ CV 25 mai 2018 - VERSION EN LIGNE [Mode de ... · PPT AQ CV 25 mai 2018 - VERSION EN LIGNE [Mode de compatibilité] Author: lroma Created Date: 5/28/2018 3:21:25 PM](https://img.pdfslide.fr/doc/110x75/5ffd54c99daeda14a940f696/ppt-aq-cv-25-mai-2018-version-en-ligne-mode-de-ppt-aq-cv-25-mai-2018-version.jpg)