Embed Size (px)
Citation preview

CIN Cinématique CIN-2 Cinématique graphique
Lycée Jules Ferry Page 1 sur 6 TSI1
Cours CIN-2 : Cinématique graphique
1 Données du problème de cinématique
1.1 Mouvements des pièces Les mouvements des différentes pièces sont définis à partir du schéma cinématique du mécanisme. Le schéma cinématique permet de déterminer les mouvements et trajectoires dans le mécanisme (voir le cours de cinématique précédent).
1.2 Mouvement d'entrée
1.2.1 Donnée : La donnée connue est soit:
- la vitesse de rotation du moteur ou la vitesse de rotation attendue en sortie
(ω1/0 en rad/s) ou (N1/0 en tr/min) avec ��/� = ��
���/�
- la vitesse d'un point du mécanisme (V�, /������������� en m/s).
Exemple du compresseur : le moteur contrôle la vitesse du mécanisme par la position de la pièce 1 par rapport à 0 : N1/0= 3000 tr/min soit ω1/0=314 rad/s
1.3 Tracé de la 1 ère vitesse linéaire: Les tracés que nous allons effectuer pour résoudre graphiquement le problème de cinématique sont ceux des points des solides . Vitesse linéaire On note V�, /������������� la vitesse du point B du solide 1 par rapport au solide 0:
- origine du vecteur : le point considéré ici B, - direction : tangente à la trajectoire (ici ��, /� = ������(�,��)), - sens : celui du mouvement (indiqué par une flèche sur le schéma ou par un sens de
rotation trigonométrique ou horaire),
- intensité noté ��,�/� en m/s (une échelle permet d'associer une longueur de tracé à
une intensité : 1cm↔5m/s).
Compétences attendues: - Qualif ier les grandeurs d’entrée et de sortie d’un système isolé - Déterminer la loi entrée-sortie d’une chaîne cinématique simple - Déterminer le vecteur vitesse d’un point d’un solide par rapport à un autre - Paramétrer les mouvements d’un solide indéformable - Déterminer les relations de fermeture cinématique d’une chaîne cinématique, et résoudre le système associé
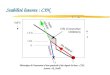
Figure 1 : Schéma cinématique d'un système bielle -manivelle (compresseur)
Repère fixe accroché au bâti 0 : R� = (A,x������, y������, z�����)
0
A
B
C
3 1 2
0
ω1/0
x������
y������

CIN Cinématique CIN-2 Cinématique graphique
Lycée Jules Ferry Page 2 sur 6 TSI1
Vitesse linéaire en fonction du mouvement de la 1 ère pièce de vitesse connue: Il convient de déterminer la vitesse linéaire d'un point de la pièce à partir de la vitesse de rotation du solide éventuellement donnée. Le point choisi est souvent le centre de la liaison avec la pièce suivante. Deux formules relient la vitesse d'un point V et la vitesse de rotation ω du solide :
- pièce 1 en rotation d'axe fixe (A, #�o) perpendiculaire au plan d'étude par rapport à 0: norme :��,�/� =%�.'�/�
avec��,�/� : vitesse linéaire en m/s, AB : rayon en m, '�/� : vitesse de rotation en rad/s,
direction : perpendiculaire au rayon de la trajectoire circulai re. sens : dans celui du sens de la vitesse de rotation donnée .
- pièce 1 en rotation autour d'un axe fixe (M, (��) dans le plan d'étude et en liaison hélicoïdale de pas p (en mètre) avec la pièce suivante en M :
norme :�),*/� =+�,
.'�/�. avec�),-/� : vitesse linéaire en m/s, p : pas en m, '�/� : vitesse de rotation en rad/s
direction : axe de la vis ,
sens : sens du tire bouchon pour un pas à droite (le plus courant) : si la vitesse de rotation . /- > 0 autour de 1� alors la vitesse de translation 23, /->0 sur 1�.
2 Résolution graphique des problèmes de cinématique s Avantages des résolutions graphiques:
- obtenir rapidement la valeur de la vitesse de sortie pour une vitesse d'entrée donnée. Inconvénients et limites des résolutions graphiques :
- ne permettent d'obtenir la loi entrée-sortie que dans la position étudiée (la détermination des vitesses à chaque instant ne peut se faire que de façon analytique).
- ne peuvent s'appliquer qu'à des mécanismes à cinématique plane (c'est-à-dire des mécanismes dans lesquels les trajectoires des solides sont parallèles au plan d'étude). Beaucoup de mécanismes ont une cinématique plane.
Figure 2 : Vitesse connue du compresseur
Echelle pour la géométrie : 1:2 → AB= et V�, /� =
Echelle pour les vitesses : 1cm↔5 m/s → V�, /� ↔
bâti 0
axe moteur 1 pièce 4
O
5�1�
6�
M
Figure 3 : Vitesse linéaire à partir de la vitesse de rotati on avec une liaison hélicoïdale (axe de machine)
Calcul de la vitesse : p=12 mm=12.10-3m ω /� = 628rad/s
d'où V?,-/� =@
ABω /�=1,2 m/s
Echelle pour les vitesses : 1cm↔0,5m/s
→ V?,-/� = 1,2m/s ↔ ,A
�,E. 1 = 2,4cm
0
A
B
C
3 1 2
0
ω1/0
x������
y������

CIN Cinématique CIN-2 Cinématique graphique
Lycée Jules Ferry Page 3 sur 6 TSI1
2.1 Mécanisme articulé Pour passer de la vitesse d'un solide au suivant on utilise la composition des vitesses :
Exemple: V�,A/������������� = V�,A/ ������������ + V�, /�������������. Pour les mécanismes articulés plan faisant intervenir comme seules liaisons entre ensembles mobiles les liaisons , on passera de la vitesse d'un solide 1 à la vitesse du solide 2 en écrivant l'égalité au centre de liaison B : V�,A/������������� = V�, /������������� (car V�,A/ ������������ = 0��).
2.2 Méthode du centre instantané de rotation CIR Définition du CIR : Pour tout mouvement plan d'un solide 2 par rapport à un solide 0, il existe à chaque instant dans le plan d'étude un point noté I2/0 dont la vitesse est nul : VIJ/K,A/������������������� = 0�� Ce point est appelé centre instantané de rotation (abréviation : CIR). Etape 1 : Détermination graphique du CIR: Le CIR (IA/�)est à l'intersection des perpendiculaires à l'origine des vecteurs vitesses
(V�,A/�������������etVO,A/�������������� .) d'un même mouvement (2/0).
Etape 2 : Déplacement du point de vitesse connue sur le rayon de la vitesse inconnue (rayon de la vitesse = segment de droite reliant le CIR "IA/�"à l'origine du
vecteur vitesse B'): on trace le point B' de même rayon que le point B de vitesse connue IA/�B =IA/�B′ et donc de
même vitesse SV�,A/�������������S = SV�T,A/��������������S
Figure 4 : � CIR
Figure 5 : �Déplacement de la vitesse connue
0
A
B
C
3 1 2
0
ω1/0
x������
y������
0
A
B
C
3 1 2
0
ω1/0
x������
y������
B'
I2/0

CIN Cinématique CIN-2 Cinématique graphique
Lycée Jules Ferry Page 4 sur 6 TSI1
Etape 3 : Triangle des vitesses (ou distribution des vitesses ) Le triangle des vitesses traduit graphiquement la formule de distribution des vitesses reliant la norme de la vitesse linéaire à celle de la vitesse de rotation(V�T,A/� = IA/�B′.ωA/�).
Les 3 côtés du triangle des vitesses sont donc : - la vitesse V�T,A/��������������, - le rayon de la vitesse IA/�B′,
- la droite d'homothétie qui passe par le CIR et par l'extrémité de la vitesse connue V�T,A/�������������� (droite qui traduit graphiquement l'équation V�T,A/� = IA/�B′.ωA/�).
Théorème des 3 plans glissants : Soient 3 solides 1,2,3 dont les centres instantanés seront noté I12,I23 et I31:
• les 3 CIR sont alignés ,
• les 3 CIR vérifient la relation : IUJIUVWWWWWWWWW
XV/JWWWWWWW = IVJIUJWWWWWWWWW
XU/VWWWWWWW = IVJIUVWWWWWWWWW
XU/JWWWWWWW
Ce théorème peut permettre de trouver les CIR dans les mécanismes articulés.
On vérifie sur l'exemple précédant que I10,I20 et I21 sont alignés (théorème des 3 plans glissants).
Figure 6 : � Triangle des vitesses
0
A
B
C
3 1 2
0
ω1/0
x������
y������
B'
I2/0

CIN Cinématique CIN-2 Cinématique graphique
Lycée Jules Ferry Page 5 sur 6 TSI1
2.3 Equiprojectivité L'équiprojectivité est une conséquence directe de la nature indéformable des solides. La projection des vitesses sur la droite reliant 2 points B et C d'un même solide doit être constante (sinon cela conduirait à ce que la distance BC varie).
Etape 1 : Projection YY′WWWWW de la vitesse connue sur la droite (BC) où B et C sont les points de vitesse connue (en B) et recherchée (en C).
Etape 2 : Equiprojection YY′WWWWW = ZZ′WWWWW.
Etape 3 : Projection inverse de ZZ′WWWWW vers la direction de la vitesse recherchée
2.4 Comparatif des 2 méthodes équiprojectivité et C IR : La méthode de l'équiprojectivité est :
- généralement plus rapide car elle nécessite moins de tracés, - la seule possible lorsque le CIR est trop loin pour tenir sur la feuille.
La méthode du CIR est:
- intéressante lorsque l'on souhaite connaître la vitesse de plusieurs points du même solide, - recommandée lorsque les projections de l'équiprojectivité sont petites (vitesses proches de
la perpendiculaire à la droite de projection) car le tracé devient dès lors très imprécis,
- plus rapide lorsqu'il s'agit de trouver le support d'un vecteur vitesse (par l'utilisation éventuelle du théorème des 3 plans glissants).
Figure 7 : � Projection de la vitesse connue
Figure 8 : � Equiprojection
Figure 9 : �Projection inverse sur la vitesse inconnue
0
A
B
C
3
1 2
0
ω1/0
x������
y������ B'
C'
C'
0
A
B
C
3
1 2
0
ω1/0
x������
y������
0
A
B
C
3 1 2
0
ω1/0
x������
y������

CIN Cinématique CIN-2 Cinématique graphique
Lycée Jules Ferry Page 6 sur 6 TSI1
2.5 Composition des vitesses La composition des vitesses est utile notamment pour la résolution des mécanismes à structure ouverte ou pour les mécanismes ayant des liaisons dont la direction de translation est mobile en rotation:
[\,�/]������������� = [\,�/�
������������ + [\,�/^������������ +⋯+[\,(]`�)/]
���������������������
Exemple : pompe à piston oscillant
Mouvement Tracé des vecteurs vitesse Mouvement de 2/1: ……………………………..
Mouvement de 2/3: ………………………………
Mouvement de 3/0 : ………………………… donnée : VP,3/0=2m/s
Mouvement de 1/0: …………………………….
Résolution graphique de l'équation de composition des vitesses
3
0
2
1
P
ω3/0
0
A
B
3
0
2
1
P
ω3/0
0
A
B
3
0
2
1
P
ω3/0
0
A
B
3
0
2
1
P
ω3/0
0
A
B
3
0
2
1
P
ω3/0
0
A
B