-
Cours : Dynamique Non-Linéaire
Laurette [email protected]
VII. Reaction-Diffusion Equations:
1. Excitability
2. Turing patterns
3. Lyapunov functionals
4. Spatial analysis and fronts
-
Reaction-Diffusion Systems
∂tui = fi(u1, u2, . . .)︸ ︷︷ ︸
reaction
+ Di∆ui︸ ︷︷ ︸diffusion
Reactions fi couple different species ui at same location
Diffusivity Di couples same species ui at different
locations
Describe oscillating chemical reactions, such as famous
Belousov-Zhabotinskii
reaction, discovered by two Soviet scientists in
1950s-1960s.
Also describe phenomena in
–biology (population biology, epidemiology, neurosciences)
–social sciences (economics, demography)
–physics
-
Two species Spatially homogeneous
∂tu = f(u, v) + Du∆u ∂tu = f(u, v)∂tv = g(u, v) + Dv∆v ∂tv =
g(u, v)
FitzHugh-Nagumo model Barkley model
f(u, v) = u− u3/3− v + I f(u, v) = 1ǫu(1− u)
(u− v+b
a
)
g(u, v) = 0.08 (u + 0.7− 0.8 v) g(u, v) = u− v
u-nullclines f(u, v) = 0 , v-nullclines g(u, v) = 0 , • steady
statesstable if eigenvalues of
(fu fvgu gv
)
have negative real parts
-
Excitability
f(u, v) = 1ǫu(1− u)
(u− v+b
a
)g(u, v) = u− v
∂tu = f = 0 separates ←− and −→ O(ǫ−1)∂tv = g = 0 separates ↑
and ↓ O(1)
u = 1 excited phaseu = 0 v ∼ 1 refractory phaseu = 0 v ≪ 1
excitable phaseu = (v + b)/a excitation threshold
-
Waves in Excitable Medium
Spatial variation + diffusion + excitability =⇒ propagating
waves
Excitable media in physiology:
–neurons
–cardiac tissue (the heart)
Pacemaker periodically emits electrical signals, propagated to
rest of heart
-
Simulations from Barkley model, Scholarpedia
Spiral waves in 2D Spiral waves in 3D
-
Turing patterns
Instability of homogeneous solutions (ū, v̄) to
reaction-diffusion systems{
0 = f(ū, v̄)0 = g(ū, v̄)
}
=⇒{
0 = f(ū, v̄) + Du∆ū0 = g(ū, v̄) + Dv∆v̄
}
What about stability? Does diffusion damp spatial
variations?
Linear stability analysis:{
u(x, t) = ū + ũeσt+ik·x
v(x, t) = v̄ + ṽeσt+ik·x
}
=⇒{
σũ = fuũ + fvṽ −Duk2ũσṽ = guũ + gvṽ −Dvk2ṽ
}
Mk ≡(
fu −Duk2 fvgu gv −Dvk2
)
=
(fu fvgu gv
)
− k2(
Du 00 Dv
)
If Du = Dv ≡ D, thenσk± = σ0± − k2D ≤ σ0±
(ū, v̄) stable to homogeneous perturbations =⇒(ū, v̄) stable
to inhomogeneous perturbations. Diffusion is stabilizing.
-
Alan Turing (famous WW II UK cryptologist, founder of computer
science)
1952: homogeneous state can be unstable if Du 6= Dv
For instability, need Trk > 0 or Detk < 0
-
For instability, need Trk > 0 or Detk < 0
Homogeneous stability⇐⇒{
Tr0 = fu + gv < 0 andDet0 = fugv − fvgu > 0
}
Trk = fu + gv − (Du + Dv)k2 = Tr0 − (Du + Dv)k2 < Tr0 <
0So for instability, need Detk < 0
Detk = fugv − fvgu + DuDvk4 − (Dvfu + Dugv)k2= Det0︸ ︷︷ ︸
>0
+ DuDvk4
︸ ︷︷ ︸
>0, dominates for k≫1
−(Dvfu + Dugv)k2
Find negative minimum for intermediate k2:
0 =d Detk
dk2
∣∣∣∣k∗
= 2DuDvk2∗ − (Dvfu + Dugv)
k2∗ =Dvfu + Dugv
2DuDv=⇒ need Dvfu + Dugv > 0
-
Need Detk < 0 at k2∗ = (Dvfu + Dugv)/(2DuDv):
0 > Detk|k∗ = Det0 + DuDvk4∗ − (Dvfu + Dugv)k2∗
= Det0 +(Dvfu + Dugv)
2
4DuDv− 2(Dvfu + Dugv)
2
4DuDv
= Det0 −(Dvfu + Dugv)
2
4DuDv0 > 4DuDv(fugv − fvgu)− (Dvfu + Dugv)2
Collecting the four conditions:
Tr0 = fu + gv < 0
Det0 = fugv − fvgu > 02DuDvk
2∗ = Dvfu + Dugv > 0
4DuDv Detk|k∗ = 4DuDv(fugv − fvgu)− (Dvfu + Dugv)2 < 0
-
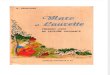
Turing patterns were first produced experimentally:
–in 1990 by de Kepper et al. at Univ. of Bordeaux
–in 1992 by Swinney et al. at Univ. of Texas at Austin
Turing pattern in a chlorite-
iodide-malonic acid chemical
laboratory experiment. From
R.D. Vigil, Q. Ouyang &
H.L. Swinney, Turing patterns in
a simple gel reactor, Physica A
188, 17 (1992)
Might be mechanism for:
–differentiation within embryos
–formation of patterns on animal coats, e.g. zebras and
leopards
-
Lyapunov functionals
1D systems: no limit cycles, usually just convergence to fixed
point
Generalize to multidimensional variational, potential, or
gradient flows:
du
dt= −∇Φ ⇐⇒ dui
dt= −∂Φ
∂ui
For gradient flow, Jacobian is Hessian matrix:
H = −
∂2Φ/(∂u1∂u1) ∂2Φ/(∂u1∂u2) . . .
∂2Φ/(∂u2∂u1) ∂2Φ/(∂u2∂u2) . . .
......
...
H symmetric =⇒ no complex eigenvalues =⇒ no Hopf
bifurcationsdΦ
dt=
∑
i
∂Φ
∂ui
dui
dt= −
∑
i
∂Φ
∂ui
∂Φ
∂ui= −|∇Φ|2
Φ decreases monotonically, either to−∞ or to point wheredu/dt =
−∇Φ = 0 =⇒ no limit cycles
-
Generalize to reaction-diffusion systems involving potential
Φ(u):
∂u
∂t= −∇Φ + ∂
2u
∂x2on xlo ≤ x ≤ xhi
Boundary conditions:
Dirichlet u(xlo) = ulo u(xhi) = uhi
or Neumann (homogeneous) ∂u∂x
(xlo) = 0∂u∂x
(xhi) = 0
Define free energy or Lyapunov functional:
F(u) ≡∫ xhi
xlo
dx
[
Φ(u(x, t))︸ ︷︷ ︸
potential energy
+1
2
∣∣∣∣
∂u(x, t))
∂x
∣∣∣∣
2
︸ ︷︷ ︸
kinetic energy
]
Seek quantity analogous to gradient:
F (x + dx) = F(x) +∇F(x) · dx + O(|dx|)2 for all dxThe
functional derivative δF/δu is defined to be such that
F(u + δu) = F(u) +∫ xhi
xlo
dxδFδu· δu + O(δu)2 for every δu
-
Expand:
F(u + δu) =∫ xhi
xlo
dx
[
Φ(u + δu) +1
2
∣∣∣∣
∂(u + δu)
∂x
∣∣∣∣
2]
=
∫ xhi
xlo
dx
[
Φ(u) +∇Φ(u) · δu + . . . + 12
∣∣∣∣
∂u
∂x+
∂δu
∂x+ . . .
∣∣∣∣
2]
=
∫ xhi
xlo
dx
[
Φ(u) +1
2
∣∣∣∣
∂u
∂x
∣∣∣∣
2]
+
∫ xhi
xlo
dx
[
∇Φ(u) · δu + ∂u∂x· ∂δu∂x
]
+ O(δu)2
Integrate by parts:
∫ xhi
xlo
dx∂u
∂x· ∂δu∂x
=
[∂u
∂x· δu
]xhi
xlo
−∫ xhi
xlo
dx∂2u
∂x2· δu
Surface term vanishes since
{∂u∂x
(xlo) =∂u∂x
(xhi) = 0 for Neumann BCs
δu(xlo) = δu(xhi) = 0 for Dirichlet BCs
-
F(u+δu)=∫ xhi
xlo
dx
[
Φ(u) +
∣∣∣∣
∂u
∂x
∣∣∣∣
2]
+
∫ xhi
xlo
dx
[
∇Φ(u)− ∂2u
∂x2
]
· δu+O(δu)2
The functional derivative δF/δu is defined to be such that
F(u + δu) = F(u) +∫ xhi
xlo
dxδFδu· δu + O(δu)2 for every δu =⇒
∫ xhi
xlo
dxδFδu· δu =
∫ xhi
xlo
dx
[
∇Φ(u)− ∂2u
∂x2
]
· δu
Choosing δu to be delta function centered on any x and pointing
in anyvector direction leads to pointwise equality:
δFδu
= ∇Φ(u)− ∂2u
∂x2= −∂u
∂t
-
dFdt
= lim∆t→0
1
∆t[F(t + δt)− F(t)]
= lim∆t→0
1
∆t[F(u(t + ∆t))−F(u(t))]
= lim∆t→0
1
∆t
[
F(
u(t) +∂u
∂t∆t + . . .
)
−F(u(t))]
= lim∆t→0
1
∆t
[
F(u(t)) +∫ xhi
xlo
dxδFδu· ∂u∂t
∆t + . . .−F(u(t))]
= lim∆t→0
1
∆t
[∫ xhi
xlo
dxδFδu· ∂u∂t
∆t + . . .
]
=
∫ xhi
xlo
dxδFδu· ∂u∂t
=
∫ xhi
xlo
dx
(
−∂u∂t
)
· ∂u∂t
= −∫ xhi
xlo
dx
∣∣∣∣
∂u
∂t
∣∣∣∣
2
≤ 0
F decreases so limit cycles cannot occur. Can be applied in
higher spatialdimensions via volume integration and Gauss’s
Divergence Theorem.
-
Spatial Analysis and Fronts
∂u
∂t= −dΦ
du+
∂2u
∂x2
Travelling wave solutions:
u(x, t) = U(x− ct) with c = 0 for steady statesξ ≡ x− ct
∂u
∂t(x, t) = −c dU
dξ(ξ)
∂2u
∂x2(x, t) =
d2U
dξ2(ξ)
Equation obeyed by steady states and travelling waves
becomes
−c dudξ
= −dΦdu
+d2u
dξ2=⇒ d
2u
dξ2=
dΦ
du−c du
dξ
Analogy between space and time =⇒ x must be 1D
-
Spatial analysis or Mechanical analogy
d2u
dξ2︸︷︷︸
“acceleration”
= − d(−Φ)du︸ ︷︷ ︸
“potential gradient”
−c dudξ
︸ ︷︷ ︸
“friction”
u position ξ time
dudξ
velocity −Φ potential E(ξ) ≡ −Φ + 12
(dudξ
)2
energy
d2udξ2
acceleration −cdudξ
friction
Ė =dE
dξ=
d
dξ
[
−Φ + 12
(du
dξ
)2]
= −dΦdu
du
dξ+
du
dξ
d2u
dξ2
=
[
−dΦdu
+d2u
dξ2
]du
dξ= −c
(du
dξ
)2
< 0 if c > 0= 0 if c = 0> 0 if c < 0
c < 0⇐⇒{
“Increase in energy”
“Negative friction”
}
⇐⇒ just leftwards motion
-
If c = 0, then E constant with E = −Φ(u(ξ)) + 12
(du
dξ
)2
E + Φ(u(ξ)) =1
2
(du
dξ
)2
√
2(E + Φ(u(ξ))) =du
dξ∫
dξ =
∫du
√
2(E + Φ(u))
[ξ] ξξlo =
∫ u(ξ)
ulo
du√
2(E + Φ(u))
= elliptic integral if Φ(u) = u3
=⇒ ξ(u) =⇒ u(ξ)
yields results but no intuition
-
Dynamical systems approach with ξ as time
v ≡ dudξ
=⇒{
u̇ = v
v̇ = dΦdu− cv
If c = 0, then system is Hamiltonian:
H = −Φ + 12v2 =⇒
{u̇ = ∂H
∂v
v̇ = −∂H∂u
Add diffusion to supercritical pitchfork =⇒ Ginzburg-Landau
equation:∂u
∂t= µu− u3 + ∂
2u
∂x2
Steady states
0 = µu− u3 + d2u
dx2
Integrate to obtain the potential:
−dΦdu
= µu− u3 =⇒ −Φ = µ2u2 − 1
4u4
-
Steady states:d2u
dx2=
dΦ
du=⇒
{u̇ = v
v̇ = dΦdu
Fixed points of new dynamical system:
0 = v
0 =dΦ
du= −µū + ū3 =⇒ ū = 0 or ū = ±√µ
Same ū as without diffusion, but stability under new dynamics
is different:
J =(
0 1Φ′′ 0
)
=
(0 1
3ū2 − µ 0
)
=
(0 1−µ 0
)
or
(0 1
2µ 0
)
Hamiltonian⇐⇒ Tr(J ) = ∂2H∂u∂v− ∂2H
∂v∂u= 0⇐⇒ eigs are±λ
λ(−λ) = −Φ′′ =⇒ λ± = ±√Φ′′ =
{±√−µ for ū = 0±√2µ for ū = ±√µ
λ = ±iω =⇒ center = elliptic fixed pointλ = ±σ =⇒ saddle =
hyperbolic fixed point
-
µ = −1 µ = +1
-
µ = +1
-
Types of Trajectoriesµ = −1 µ = +1
unbounded, crossing between left to right X X
unbounded, staying on left or on right X X
periodic X
front (limiting case of periodic) X
Periodic:
Trajectories in the (u, u̇) phase plane are elliptical.Particle
oscillates back and forth in potential well.
Fronts:
Trajectory leaves ū = −√µ at zero velocity, arrives exactly at
ū = √µwith zero velocity, since there is no friction.
Profile has u = −√µ on left, narrow transition region, u = √µ on
right.
Type of trajectory is determined by the initial conditions
(temporal point of
view) or the boundary conditions (spatial point of view).
Periodic bound-
ary conditions on a domain of fixed wavelength select the
periodic profile.
Boundary conditions u(±∞) = ±√µ lead to front solution.
-
Front solutions connect two maxima of −Φ, i.e. hyperbolic
unstable fixedpoints of the transformed dynamical system.
These correspond to stable spatially homogeneous solutions to
the original
reaction-diffusion system:du
dt= −dΦ
duStability determined by
−d2Φ
du2(ū)
{< 0> 0
}
=⇒ ū{
stable
unstable
}
Thus, homogeneous stable steady states are maxima of−Φ.
-
Nonzero c
Front between u−∞ and u+∞, which are maxima of −Φ(u) and
hencestable solutions to spatially homogeneous equations,
Dirichlet BCs u(ξ = ±∞) = u±∞ =⇒ Neumann BCsdu
dξ(ξ = ±∞) = 0
Travelling wave solutions:
0 = cdu
dξ− dΦ
du+
d2u
dξ2
Multiply by du/dξ:
0 = c
(du
dξ
)2
− dΦ(u(ξ))dξ
+1
2
d
dξ
(du
dξ
)2
Integrate over ξ interval:
0 = c
∫ +∞
−∞dξ
(du
dξ
)2
−∫ +∞
−∞dξ
dΦ(u(ξ))
dξ+
∫ +∞
−∞dξ
1
2
d
dξ
(du
dξ
)2
= c
∫ +∞
−∞dξ
(du
dξ
)2
− [Φ]+∞−∞ +1
2
[(du
dξ
)2]+∞
−∞⇐ vanishes because of
Neumann BCs
-
c =Φ+∞ − Φ−∞∫ +∞−∞ dξ
(dudξ
)2 where Φ±∞ ≡ Φ(u±∞)
Front velocity c > 0 if Φ−∞ < Φ+∞, i.e. if−Φ−∞ >
−Φ+∞.Front moves from left to right =⇒u−∞,−Φ−∞ domain invades
u+∞,−Φ+∞ domainFront motion increases size of domain with
greater−Φ.
Mechanical analogy:
Trajectory goes from u−∞, −Φ−∞ to u+∞, with lower potential
−Φ+∞.For “velocity” du/dξ and “kinetic energy” to vanish at both
endpoints,
energy must be lost via friction. Hence c is positive.
“Negative friction” is possible since c < 0 just means that
the front movestowards the left.
-
Trajectory Phase portrait
from lower left hill to higher right hill Former center has
become focus
uses “negative friction” to increase its energy surrounded by
spiralling trajectories
Perturbed Ginzburg-Landau equation
0 = cdu
dξ+ µu− u3 − 0.1 + d
2u
dξ2
Potential
−Φ = 12µu2 − 1
4u4 − 0.1u
has two maxima of different heights