Embed Size (px)
Citation preview

Introduction à la mécanique classique
cours ESAIP
14 avril 2007
Table des matières
1 Introduction 3
2 Rappels mathématiques 4
2.1 Les fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2 Les vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.1 Dénition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2.2 Changement de base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2.3 Dérivée d'un vecteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2.4 Moment d'un vecteur par rapport à un point . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 Les dérivés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.4 Les intégrales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4.1 Les intégrales dénis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.4.2 Les intégrales non-dénis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.5 Les développements autour d'un petit parametre . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 La mécanique du point 8
3.1 La cinématique du point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.1.1 Dénitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.1.2 Mouvement à accélération constante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.1.3 Mouvement parabolique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.1.4 Mouvement relatif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.1.5 Mouvement circulaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2 Dynamique du point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2.1 Lois de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2.2 La friction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2.3 La gravitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.2.4 Le travail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.2.5 Le pendule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3 Problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.4 Corrigés des exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4 La mécanique des solides rigides 22
4.1 La cinématique des solides rigides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.1.1 Centre de masses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.1.2 Energie cinétique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.1.3 Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.1.4 Equilibre statique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5 La mécanique des uides 26
5.1 Dénitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.1.1 Les uides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.1.2 La masse volumique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.1.3 La pression . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.1.4 Le débit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.1.5 Fluide compressible et incompressible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5.2 Statique des uides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.2.1 Le principe d'équilibre statique dans un uide . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1
5.2.2 Le principe de Pascal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.2.3 Le principe d'Archimède . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.3 Dynamique des uides incompressibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285.3.1 La continuité de la masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285.3.2 L'équation de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.3.3 Les pompes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.3.4 La viscosité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.3.5 Le nombre de Reynolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.3.6 Les pertes de charge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.3.7 La loi de Poiseuile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.4 Problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.5 Corrigés des exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6 Résistance de matériaux 40
6.1 Dénitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406.1.1 Types de sollicitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.1.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.2 Etudes des poutres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.2.1 Equation de Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.3 Problèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
7 Problèmes transversaux 44
A Examens précedents 45
A.1 Examen de mécanique I du 3 février 2006 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45A.2 Examen de mécanique I du 12 Juin 2006 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
A.2.1 Corrigé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50A.3 Examen de mécanique II du 30 Janvier 2007 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
A.3.1 Corrigé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2

Chapitre 1
Introduction
Ce polycopié recueille les notes du cours de mécanique de l'ESAIP, à Grasse. Ce cours est distribué, approximati-vement sur vingt heures de cours la première année, et vingt heures de cours à la deuxième année. Le but est defamiliariser les éleves avec les notions de base de la mécanique. L'enseignement est généraliste et il n'a pas commepriorité l'approfondissement des sciences de la physique. Mais l'auteur n'y peut rien, il est amoureux de la beauté dela mathématique et il a une grosse tendance à partir dans les champs des vecteurs, du calcul diérentiel ou d'autreschoses encore plus obtuses. Par contre, il y a un but très important à l'étude des sciences, qui est l'apprentisagede la riguer et d'une méthode de travail scientique qui, malgré le nom, est completement indispensable aux ingénieurs.
Cet ouvrage veut trouver un équilibre entre ses trois composantes. D'un côté une certaine simplicité mathématique,qui puisse permetre à l'éleve de se centrer sur les concepts physiques, d'un autre côté l'utilisation de temps en temps,de quelques outils mathématiques (et certainement d'entre le plus simples), et pour fermer le triangle, la presentationd'une méthode scientique, c'est à dire, une façon de travailler qui permet de discerner l'essentiel du superu sansappeler A à B ou viceversa entre temps.
La théorie occupe peu de place, parce que on n'a pas besoin de beaucoup de théorie pour présenter des conceptssimples et qui correspondent, géneralment, à un niveau un plus au delà du BAC. Par contre, les exercices prennentbeaucoup de place, parce que c'est grace à la pratique qu'on apprend la méthode. La résolution, aussi nécessaireque l'enoncé, parfois va au delà de l'enoncé, et présente des applications ou de procédures qui peuvent être utiliséd'une façon très generale. Il y a aussi quelques exemples d'examens, question de ne pas faire peur, et, toute à la n,il y a un série de problèmes qui mélangent toutes les notions acquises pendant le cours. A mon avis, ils sont le plusintéressants, car c'est avec eux qu'on peut mieux comprendre que la mécanique n'est qu'un outil qu'il faut connaîtrepour l'utiliser quand il n'a besoin pour un autre n plus elevé, et qui vient donner par le métier de l'ingénieur.
3

Chapitre 2
Rappels mathématiques
2.1 Les fonctions
Une fonction est une opération mathématique qui assigne une valeur a une variable (f) en fonction d'autres variables(x,y,....). On peut écrire une fonction d'une façon générale :
f(x, y, ....) = f(x, y, ....., A,B,C, .....) (2.1)
Dans une fonction on trouve les éléments suivants : variables indépendantes : sont les variables auxquelles on va assigner une valeur. C'est nous qui choisissons la valeurqui aura cette variable en fonction de notre intérêt.
variables dépendantes : sont les variables auxquelles on n'assigne pas une valeur mais qui dépendent des variablesindépendantes.
inconnues : sont les variables des quelles on connaît pas la valeur. paramètres : sont des variables qui décrivent la physique du problème. Leur valeur peut être une inconnue ou unedonnée.
Chaque lettre (f, x, y, A,B,C, ..) peut être une variable, une inconnue ou un paramètre. Pour chaque problèmeparticulier il faudra les identier.
2.2 Les vecteurs
2.2.1 Dénition
Un vecteur est déni comment un segment orienté AB où on a déni l'origine sur A et l'extrémité sur B. Pour dénirun vecteur il est nécessaire d'avoir déni préalablement un repère. Dans le repère utilisé le vecteur sera exprimé selonles trois composantes sur les trois axes du repère :
−−→AB = λ1
−→e 1 + λ2−→e 2 + λ3
−→e 3 (2.2)
Le vecteur peut s'exprimer aussi d'une façon plus compacte :
−−→AB = (λ1, λ2, λ3) (2.3)
où on considère la base implicitement.
2.2.2 Changement de base
Pour changer le repère dans lequel le vecteur est exprimé, il faut exprimer les vecteurs directeurs du premier repèreen fonction des vecteurs directeurs du deuxième.
−→ei =∑
j
αij−→ej (2.4)
4
2.2.3 Dérivée d'un vecteur
La dérivé d'un vecteur est dénie comme :
d−→vdx
= limx→0
∆−→v∆x
(2.5)
C'est à dire :
d−−→AB
dx=
dλ1
dx−→e 1 + λ1
d−→e 1
dx+
dλ2
dx−→e 2 + λ2
d−→e 2
dx+
dλ3
dx−→e 3 + λ3
d−→e 3
dx(2.6)
2.2.4 Moment d'un vecteur par rapport à un point
On dénit le moment d'un vecteur −→v appliqué à un point O exprimé en un autre point C comme :
−→M =
−−→OC ∧ −→v (2.7)
2.3 Les dérivés
Une dérivé est dénie comme :
df
dx= lim
∆x→0
f(x + ∆x)− f(x)∆x
(2.8)
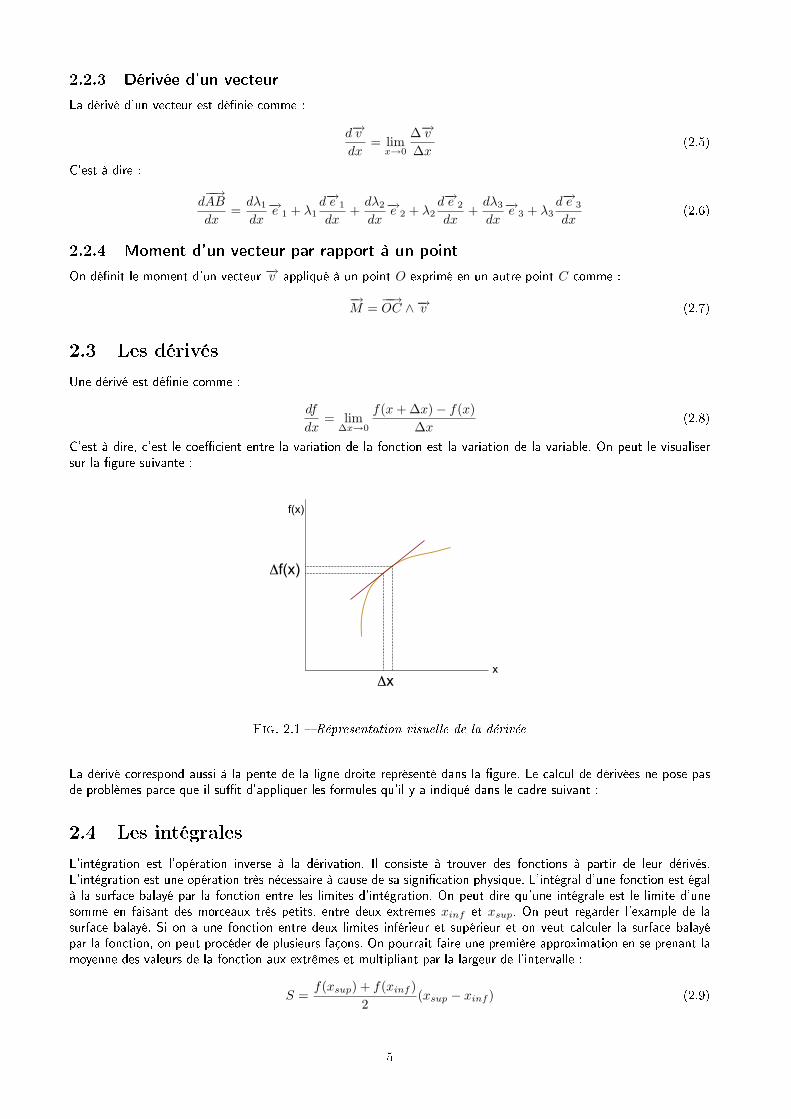
C'est à dire, c'est le coecient entre la variation de la fonction est la variation de la variable. On peut le visualisersur la gure suivante :
!xx
f(x)
!f(x)
Fig. 2.1 Répresentation visuelle de la dérivée
La dérivé correspond aussi à la pente de la ligne droite représenté dans la gure. Le calcul de dérivées ne pose pasde problèmes parce que il sut d'appliquer les formules qu'il y a indiqué dans le cadre suivant :
2.4 Les intégrales
L'intégration est l'opération inverse à la dérivation. Il consiste à trouver des fonctions à partir de leur dérivés.L'intégration est une opération très nécessaire à cause de sa signication physique. L'intégral d'une fonction est égalà la surface balayé par la fonction entre les limites d'intégration. On peut dire qu'une intégrale est le limite d'unesomme en faisant des morceaux très petits. entre deux extremes xinf et xsup. On peut regarder l'example de lasurface balayé. Si on a une fonction entre deux limites inférieur et supérieur et on veut calculer la surface balayépar la fonction, on peut procéder de plusieurs façons. On pourrait faire une première approximation en se prenant lamoyenne des valeurs de la fonction aux extrêmes et multipliant par la largeur de l'intervalle :
S =f(xsup) + f(xinf )
2(xsup − xinf ) (2.9)
5

Fig. 2.2 Dérivées élémentaires
Si on voulait faire un peu plus exacte, on pourrait prendre une, ou deux, ou n valeurs moyennes et calculer la surfacecomme la somme de rectangles :
S =n∑
i=1
f(xi+1) + f(xi)2
xsup − xinf
n1(2.10)
Quand n tend vers l'inni, n →∞, la largeur de charque rectangle tend vers zero, et on va l'appeler dx, et la valeurmoyenne de la fonction tend vers la valeur ponctuelle de la fonction f(x). Il nous reste que à changer le signe desommation (
∑) par le signe d'intégrale (
∫) pour obtenir :
S =∫ xsup
xinf
f(x)dx (2.11)
2.4.1 Les intégrales dénis
Quand les limites d'intégration sont connus, l'intégrale se calcule entre les deux limites, et on appelle l'intégraledénie. Si la primitive de l'intégrale d'une fonction f(x) est F (x) (
∫f(x) = F (x)), l'intégrale déne entre xmin et
xmax vaut : ∫ x max
x min
f(x) = F (xmax)− F (xmin) (2.12)
L'exemple précèdent de la surface d'une fonction, est une intégrale déne.
Example : Calculer la surface comprise entre la fonction f(x) = x2 − 1 et l'axe horizontale, et les droites verticalesx = 1 et x = 4
6

x
f(x)
S1
xmin xsup
f(xmin)
f(xsup)
x
f(x)
S2
xmin xsup
f(xmin)
f(xsup)
Fig. 2.3 Calcul d'une surface
S =∫ x=4
x=1
(x2 − 1)dx =[x3
3− x
]4
1
=43
3− 4− 13
3+ 1 =
543
2.4.2 Les intégrales non-dénis
Quand les limites d'intégration ne sont pas connus, ou quand on cherche toutes les primitives d'une fonction, on ditque l'intégrale est non-dénie, et on rajoute une constante au lieu d'évaluer l'intégrale entre les limites d'intégration :∫
f(x) = F (x) + cte (2.13)
Pour évaluer la valeur de la constante, il faudra évaluer la valeur de la intégrale pour une condition donnée.
Example : Calculer la primitive de la fonction f(x) = 5 cos x− 3 qui vaut zéro à x = 0 .
D'abord il faut intégrer la fonction sans donner les limites d'intégration :
F (x) =∫
(5 cos x− 3)dx = 5 sin x− 3x + K
Au lieu d'appliquer les limites d'intégration, on rajoue une constante K. Pour trouver la valeur de la constante il fautimposer la condition qu'on nous a donné :
5 sin 0− 3.0 + K = 0
Donc, K = 0.
2.5 Les développements autour d'un petit parametre
Pour faire des calculs physiques, on essai d'une façon récurrente à simplier des expressions. Pour cela, on prote descas où une des variables a une faible valeur pour faire un développement en série de Taylor autour de ce paramètre.On utilise l'expression suivante :
f(x0 + dx) = f(x0) +df(x)dx
|x0dx +12
d2f(x)dx2
|x0dx2 + o(dx3) (2.14)
Cette expression est valable seulement si dx < x
7

Chapitre 3
La mécanique du point
3.1 La cinématique du point
La cinématique du point s'occupe de l'étude du mouvement des corps en supposant toute la masse concentrée surun seul point de l'espace. La cinématique ne s'occupe pas de l'étude des forces qui provoquent le mouvement, c'estle rôle de la dynamique.
Pour décrire le mouvement d'un corps il faut toujours le référencer dans un repére. Il y a deux types de repères : inertiel : le repère ne subit pas d'accélérations au cours du temps. Ce type de repères n'existent pas dans la nature,mais, pour chaque problème en particulier, on va en dénir un.
non inertiel : le repère subit d'accélérations au cours du temps.
3.1.1 Dénitions
On dénit la position d'un corps comme la distance entre sa position en un instant donné et l'origine du repére :
−→r =−−→OM (3.1)
Pour connaître le mouvement du corps, il sut de connaître sa position au cours du temps :
−→r = (x(t), y(t), z(t)) (3.2)
On dénit la vitesse d'un corps comme la dérivée de sa position par rapport au temps :
−→v =d−→rdt
(3.3)
Et son accélération comme la dérivée de la vitesse par rapport au temps :
−→a =d−→vdt
(3.4)
On dénit aussi la quantité de mouvement d'un corps comme la multiplication de sa masse et sa vitesse :
−→p = m−→v (3.5)
3.1.2 Mouvement à accélération constante
Le mouvement à accélération constante est le résultat d'intégrer les équations du mouvement quand le vecteuraccélération est constant : −→a . En appliquant les dénitions de la vitesse et de la position on arrive aux résultatssuivants :
−→v (t) = −→v (t0) +−→a (t− t0) (3.6)
−→r (t) = −→r (t0) +−→v (t− t0) +12−→a (t− t0)
2(3.7)
Même si dans la plupart des cas, le mouvement n'a pas une accélération constante, dans certains cas, on va fairecette approximation. Par exemple, la chute libre á faibles distances est normalement modélisé comme un mouvementá accélération constante, même si l'accélération de la gravité varie avec la hauteur.
8

3.1.3 Mouvement parabolique
Le mouvement parabolique est un mouvement qui a lieu dans un plan, et qui est composé, sur l'axe verticale, d'unmouvement á accélération constante, et sur l'axe horizontale, un mouvement non-accéléré. Le vecteur accélérationsera : −→a = (g, 0), g est la valeur de la gravité au point étudié (normalement on utilise la valeur g = 9, 81m2/s),comme on verra plus tard, cette hypothèse est valable seulement pour des faibles hauteurs vue que la gravité varieavec la distance au centre de la terre. Sur l'axe verticale on va appliquer les équations du mouvement uniformémentaccéléré et sur l'axe horizontale le corps va décrire une trajectoire linéaire avec le temps.
Example : tir d'un projectile. Nous nous intéressons au mouvement d'un projectile lancé avec une vitesse initiale demodule v et qui forme un angle α avec la horizontale.
x
y
vx
vy !
Fig. 3.1 Conditions initiales et trajectoire d'un tir parabolique
mouvement sur l'axe vertical : la vitesse initiale sur cet axe sera v sinα, et la position initiale, avec les axes qu'ona dénit, 0. Avec toutes ces données on peut appliquer directement les équations du mouvement uniformémentaccéléré :
vy = v sinα− g.(t− t0) (3.8)
ry = v sinα.(t− t0)−12g(t− t0)2
mouvement sur l'axe horizontale : sur l'axe horizontale le mouvement est á vitesse constante : la vitesse initialeest v cos α, et la position initiale, aussi zéro. Le résultat est :
vx = v cos α (3.9)
rx = v cos α.(t− t0)
Dans ce calcul on a fait deux simplications. D'abord, on a supposé la gravité constante, et deuxièmement, on anégligé la courbure de la Terre. En exercice très intéressant consiste à refaire les calculs en tenant compte de ceseets pour vérier quelle est leur importance.
3.1.4 Mouvement relatif
On parle de mouvement relatif quand on met en relation le mouvement par rapport à deux repères diérents. Larelation de composition de positions est donné par :
−−→OM =
−−→OO′ +
−−−→O′M (3.10)
Et on applique la dénition de la vitesse pour trouver la relation entre les vitesses :
d−−→OM
dt=
d−−→OO′
dt+
d−−−→O′M
dt(3.11)
De la même façon on trouve des relations pour les accélérations :
d2−−→OM
dt2=
d2−−→OO′
dt2+
d2−−−→O′M
dt2(3.12)
9

3.1.5 Mouvement circulaire
Quand le point décrit une trajectoire circulaire autour d'un point central, il subit une accélération dite accélérationcentripète, qui est égale à :
acen =v2
r(3.13)
où v est la vitesse du corps et r le rayon du cercle décrit. Le mouvement circulaire a besoin d'une force qui créel'accélération centripète.Normalement on décrit le mouvement circulaire à travers d'un angle θ qui est liée à la distance à travers le rayonx = θ , de la dérivée de l'angle :
ω =dθ
dt(3.14)
qui s'appelle vitesse angulaire, et de la dérivée de la vitesse angulaire, connue comme accélération angulaire.
3.2 Dynamique du point
3.2.1 Lois de Newton
En 1687, Newton publie dans ces 'Principia' les trois lois de la dynamique :
1. Dans un repère inertiel, les corps gardent leur état initial, ou bien le repos, ou bien la vitesse, en absence deforces externes
2. Dans un repère inertiel, la variation de quantité de mouvement est proportionelle à la force qui agit sur lecorps :
d−→pdt
=−→F (3.15)
3. Principe d'action et réaction : quand un corps A produit une force sur un corps B, le corps B produit une forcesur le corps A égale en direction et module, mais avec le sens inverse.
3.2.2 La friction
Quand un corps est en equilibre sur une surface, cette surface peut exercer une force pour compenser la force quiménerait le corps hors de équilibre. Cette force doit être toujours perpendiculaire à la surface, c'est une force dite'normale'.Le frottement entre la surface et le corps va créer une résistance au mouvement, on va l'appeler force de frottement.La force de fortement est proportionnelle à la normale exercée par la surface sur le corps et a un coecient defrottement µ. Ce coecient est diérent en fonction de si il y a un mouvement relatif ou non. S'il n'y a pas demouvement relatif :
FF ≤ µsN (3.16)
et s'il y a un mouvement relatif :
FF = µdN (3.17)
avec :
µd < µs (3.18)
µd : coecient de frottement dynamiqueµs : coecient de frottement statiqueCes deux coecients sont déterminés d'une façon empirique.
10

3.2.3 La gravitation
Newton donna aussi une loi qui relie la force à laquelle est soumise une masse en présence d'une autre masse. Laforce créée par la masse 2 sur la masse 1 est donnée par l'expression :
−→F 12 = −Gm1m2
|−→r 12|3−→r 12 (3.19)
De la même façon, la masse 1 va exercer une force sur la particule 2 :
−→F 21 = −Gm1m2
|−→r 21|3−→r 21 (3.20)
mi : masse de la particule i−→r12 : distance entre les particules 1 et 2
3.2.4 Le travail
Le travail est déni comme :
W =∫ tf
t0
−→F d−→x (3.21)
On peut l'interpréter comme la capacité de réaliser un travail. On associe une énergie à chaque force qui dérive d'unpotentiel. On aura donc l'énergie potentielle de la gravité :
E = mgh (3.22)
L'énergie potentiel d'un ressort :
E =12mx2 (3.23)
Et on associe aussi une énergie à la vitesse, on l'appele énergie cinétique :
E =12mv2 (3.24)
On peut utiliser le theoréme de conservation de l' énergie pour calculer la dynamique d'un sytéme :
∆W = ∆E (3.25)
11
3.3 Problèmes
Exercice 1
Un objet qui tombe dans l'atmosphére est soumis à la force de la gravité et à une force de frottement avec l'air quiest proportionnelle à la vitesse, avec une constante de proportionalité K. Calculer la vitesse et la position de l'objeten fonction des conditions initiales x0 et v0. Calculer la vitesse terminale et tracer les courbes x(t) et v(t).
Exercice 2
Un ballon est lancé avec une vitesse initiale v0, un angle avec l'horizontal de 45, à une hauteur h, et à une distanced'une paroi verticale 2h. A quelle distance de la paroi le ballon va t'il tomber ? (quand le ballon arrive à la parois, lacomposante verticale du ballon change de signe et la composante verticale reste invariante)
Exercice 3
Deux balles sont lancées, depuis un bâtiment avec des vitesses, égales en module, mais avec des angles par rapport àl'horizontal dierents α < 0, β > 0. Montrer que les deux balles vont arriver au sol avec la même vitesse et calculercette vitesse en fonction de la hauteur du bâtiment, et du module initial de la vitesse.
Exercice 4
Calculer la hauteur et la vitesse d'un satellite geostationnaire. Utiliser l'expression exacte de la force de gravité. Unsatellite geostationnaire reste toujours placé sur le même point de la Terre. Quelle est la vitesse minimale pour mettreen orbite un satellite ?
Exercice 5
Calculer le mouvement d'un ressort de constante k dans le plan horizontal, avec et sans frottement (de constanteµ), et dans le plan vertical. Considérer des conditions initiales genériques, elongation x0 et vitesse v0.
Exercice 6
Un corps glisse sans frottement sur une pente d'angle α. Calculer la vitesse et la position en fonction du temps enutilisant les équations de Newton et le principe de conservation de l'énergie. Comment le probléme change si onrajoute une force de frottement avec un coecient dynamique µd ?
Exercice 7
Une masse m est lié à un plafond par une celle de longueur l. En sachant que la masse décrit un cercle dans leplan horizontal de rayon r à une vitesse constante. Calculer la force que subit la celle et la vitesse de rotation de lamasse.
Exercice 8
Un corps de masse m est au repos sur une surface sans frottement qui est incliné d'un angle α. La surface subit uneaccelération constante a vers la droite de façon à ce que le corps reste en equilibre. Calculer l'accelération.
Exercice 9
Un virage est incliné d'un angle α et il a un coecient de frottement dynamique µd. Calculer la vitesse maximale àlaquelle une voiture de masse m peut prendre le virage. Quelle serait la vitesse si il n'y avait pas d'inclinaison ? Et siil n'y avait pas non plus de frottement ?
Exercice 10
Une voiture descend une pente inclinée de θ degrés. En plus de la force de frottement avec le sol de coecientdynamique µd, il y aussi une force de frottement aérodynamique proportionnelle au carré de la vitesse de coecientα. En sachant qu'il part du repos, calculer l'évolution temporelle de la vitesse. (Résoudre explicitement l'intégrale)
Exercice 11
12

Une masse est liée à un point dans l'espace par une barre rigide. La masse décrit un cercle dans le plan vertical autourdu point. Calculer la vitesse minimale nécessaire pour qu'à partir de la position la plus basse, la masse arrive au pointle plus haut. Et si la barre n'était pas rigide ? Quelle serait l'accéleration maximale subit par la masse dans les deuxcas ?Exercice 12
Un mobile M décrit une hélice circulaire d'axe Oz, dénie par les équations, en coordonnées cartésiennes :
x = R cos θy = R sin θz = H
2π θ
On posera h = H2π
1. Le mouvement est déni par la loi θ(t) = ωt (avec ω constant).
1.1. Déterminer la vitesse−→V du mobile : on précisera son module et son orientation.
Déterminer l'accélération−→A , en module et direction.
En déduire l'expression du rayon de courbure RC de la trajectoire.1.2. Reprendre la même étude en coordonnées cylindriques.
2. Utiliser encore les coordonnées cylindriques, et la loi θ(t) étant maintenant quelconque.
2.1. Exprimer−→V et
−→A dans la base (−→er ,−→eθ ,−→ez) associée aux coordonnées cylindriques, en fonction des données et
des dérivéees de θ(t).2.2. En introduisant le rayon de courbure RC , montrer que :
−→V =
√RRC θ
−→T
−→A =
√RRC θ
−→T + Rθ2−→N
(−→T ,−→N ) étant les vecteurs de base du repére mobile.
Exercice 13
Un navire N est animé d'un mouvement rectiligne uniforme de vitesse −→v le long d'une droite D. Un sous-marinimmobile S tire une torpille T à l'instant où l'angle (−→v ,
−−→NS) a la valeur α. T étant animée d'un mouvement
rectiligne uniforme de vitesse −→u , quelle doit être la valeur de l'angle de tir θ = (−−→SN,−→u ) si l'on veut couler N . Si
l'on veut que T atteigne N en un temps minimum, à quel instant, c'est-à-dire pour quelle valeur de α, convient-ilde tirer ? Calculer la valeur de l'angle de tir θ0 correspondant.
Exercice 14
La Terre décrit autour du Soleil, d'un mouvement uniforme, une orbite assimilée à un cercle de rayon R = 150 millionsde kilométres en T = 365 jours. Déterminer par rapport au référentiel lié au Soleil : la vitesse linéaire du centre de la Terre l'accélération du centre de la Terre
Exercice 15
Un nageur parti de A, se déplace à la vitesse constante−→V par rapport à l'eau d'une riviére de largeur d dont les eaux
sont animées d'un courant de vitesse constante −→v (v < V ).1. Le nageur eectue les trajets aller et retour AA1A en un temps t1 et AA2A en un temps t2.1.1. Exprimer le rapport t2
t1en fonction du rapport des vitesses v
V .
1.2. Sachant que t2 = 2t1 = 7 min, déterminer la direction de la vitesse−→V du nageur qui se déplace à contre
courant pour atteindre A (en partant de A1).
2. Le nageur quitte le bord A, au moment où il se trouve à la distance d de l'avant d'un bateau, de largeur l, qui sedéplace à la vitesse constante −→u par rapport à l'eau, en suivant le bord de la riviére dans le sens de A vers A2.2.1. Déterminer la direction et la grandeur de la vitesse absolue minimale du nageur pour ne pas être heurté par lebateau.A.N. l = 20m, d = 98m, u = 19, 8km/h, v = 1, 8km/h.
2.2. Déterminer alors la direction et la grandeur de la vitesse−→V du nageur par rapport à l'eau.
13
Exercice 16
Dans le plan xOy, un cercle de diamétre OA tourne à la vitesse angulaire constante ω autour du point O. On lieà son centre mobile O′ deux axes rectangulaires O′x′ et O′y′ ; l'axe O′x′ est dirigé suivant OA. A l'instant initial,A est sur Ox. Un point M initialement en A parcourt la circonférence dans le sens positif avec la même vitesseangulaire ω.1. Calculer directement les composantes des vecteurs vitesse et accélération de M dans le référentiel lié à Oxy (en
dérivant les composantes de−−→OM).
2. Calculer les composantes de la vitesse et de l'accélération de M dans son mouvement relatif (c'est-à-dire dans leréférentiel lié à O′x′y′z′).
3. Calculer la vitesse d'entraînement, l'accélération d'entraînement et l'accélération complémentaire. Montrer qu'enappliquant les lois de composition des vitesses et des accélérations, on retouve les résultats du 1.
Exercice 17
Un disque (d) de rayon r, roule sans glisser autour d'un disque (D) de rayon R. Soit M un point de la périphérie de(d).Exprimer la vitesse et l'accélération de M dans le repére lié à (D).
Exercice 18
Un train d'engrenages est constitué par 4 roues dentées (1), (2), (3), (4), de rayons R1, R2, R3, R4 dont les centresO, A, B, C restent alignés sur le bras OC tournant autour de Oz dans le plan (Ox,Oy) à la vitesse angulaire Ω.La roue dentée (1) étant xe dans le plan (Ox,Oy), calculer les vitesses angulaires ω2, ω3, ω4 des roues (2), (3),(4) par rapport au repére (Ox, Oy).
Exercice 19
Un cône plein homogéne de demi-angle au sommet α, de hauteur h et de sommet O, roule sans glisser sur un planhorizontal. On appelle −→u le vecteur unitaire porté par la génératrice de contact cône-plan, et l'on repére la positiondu cne par l'angle θ(t) que fait −→u avec l'axe Ox d'un référentiel R, appartenant au plan horizontal.1. Déterminer l'axe instantané de rotation du cône.2. Déterminer la vitesse dans R du centre C de la base du cône, en fonction de h, α et θ.3. En déduire l'expression du vecteur rotation instantané du cône dans R.4. Déterminer la vitesse et l'accélération d'un point de la périphérie de la base du cône au moment ou il concideavec le point de contact cône-plan.
14

3.4 Corrigés des exercices
Exercice 4
D'abord, on résout le probléme en utilisant les lois de Newton.
On applique la troisiéme loi de Newton sur les axes paralléles et perpendiculaires à la pente et on obtient les équations :
N = mg cos α (3.26)
mg sinα− FF = md2x
dt2(3.27)
Et, comme la force de frottement est égal à :
FF = µN (3.28)
on arrive à l'équation diérentielle suivante :
mg sinα− µmg cos α = md2x
dt2(3.29)
Sa résolution, en supposant que, à l'instant initiale la vitesse et la position sont nulles, nous donne :
x(t) =g
2(sinα− µ cos α) t2 (3.30)
Et, si il n'y a pas de frottement, il sut de particulariser le résultat avec µ = 0
x(t) =g
2sinαt2 (3.31)
Et aprés, on utilise le theoréme de conservation de l'énérgie. Les forces présentes sur le corps sont : N : comme elle est perpendiculaire au mouvement, elle ne réalise pas de travail mg : comme il dérive d'un potentiel, il ne réalise pas de travail, mais il faudra tenir compte du potentiel de gravité FF : comme cette force n'est pas conservative, il faudra calculer son travailL'énérgie potentiel gravitationnelle est donné par l'expression :
Ep = mgh (3.32)
où h est la distance verticale à un point de référence, nous prenons comme référence la position originale.Le travail realisé par le frottement est aussi trés facile à calculer parce que la force est constante et paralléle audéplacement :
WFF =∫ xf
x0
−→F−→dx = FF x (3.33)
Et il ne faut pas oublier l'énérgie cinétique !
EC =12mv2 (3.34)
Avec tout ça, on peut appliquer le théoréme de conservation de l'énérgie :
15
E|f − E|0 = ∆W (3.35)
(Ep + EC)|f − (Ep + EC)|0 = ∆W
Dans l'équation antérieur on introduit l'expression des diérents potentiels et du travail réalisé, et, en utilisant larelation issue de la géométrie du probléme :
h = − sinαx (3.36)
On arrive à l'équation :
12m
(dx
dt
)2
−mg sinα = µmg cos αx (3.37)
qui a comme solution :
x =12g (sinα− µ cos α) t2 (3.38)
Expression qui est exactement égal au résultat qu'on trouve en utilisant les lois de Newton. Avec ce probléme onveut montrer que les deux démarches sont possibles et équivalentes et que le choix entre une et l'autre dépendraseulement du probléme et de la facilité de résolution.
16
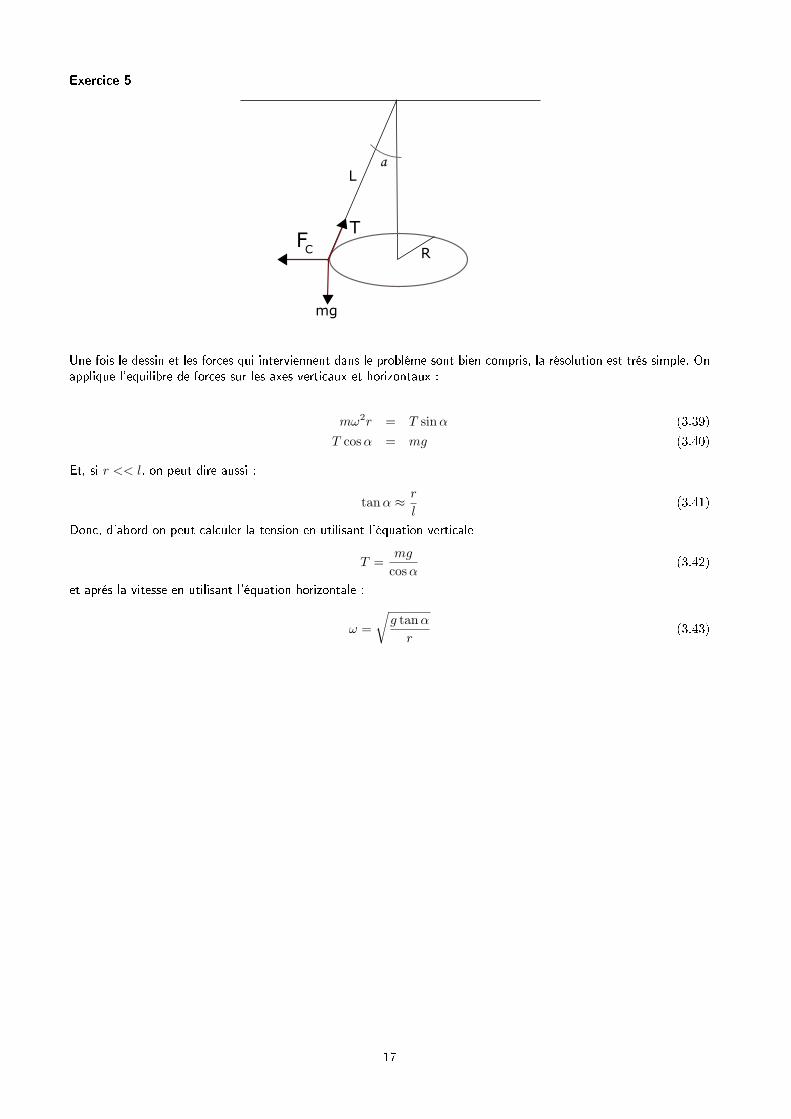
Exercice 5
Une fois le dessin et les forces qui interviennent dans le probléme sont bien compris, la résolution est trés simple. Onapplique l'equilibre de forces sur les axes verticaux et horizontaux :
mω2r = T sinα (3.39)
T cos α = mg (3.40)
Et, si r << l, on peut dire aussi :
tanα ≈ r
l(3.41)
Donc, d'abord on peut calculer la tension en utilisant l'équation verticale
T =mg
cos α(3.42)
et aprés la vitesse en utilisant l'équation horizontale :
ω =
√g tanα
r(3.43)
17
Exercice 6
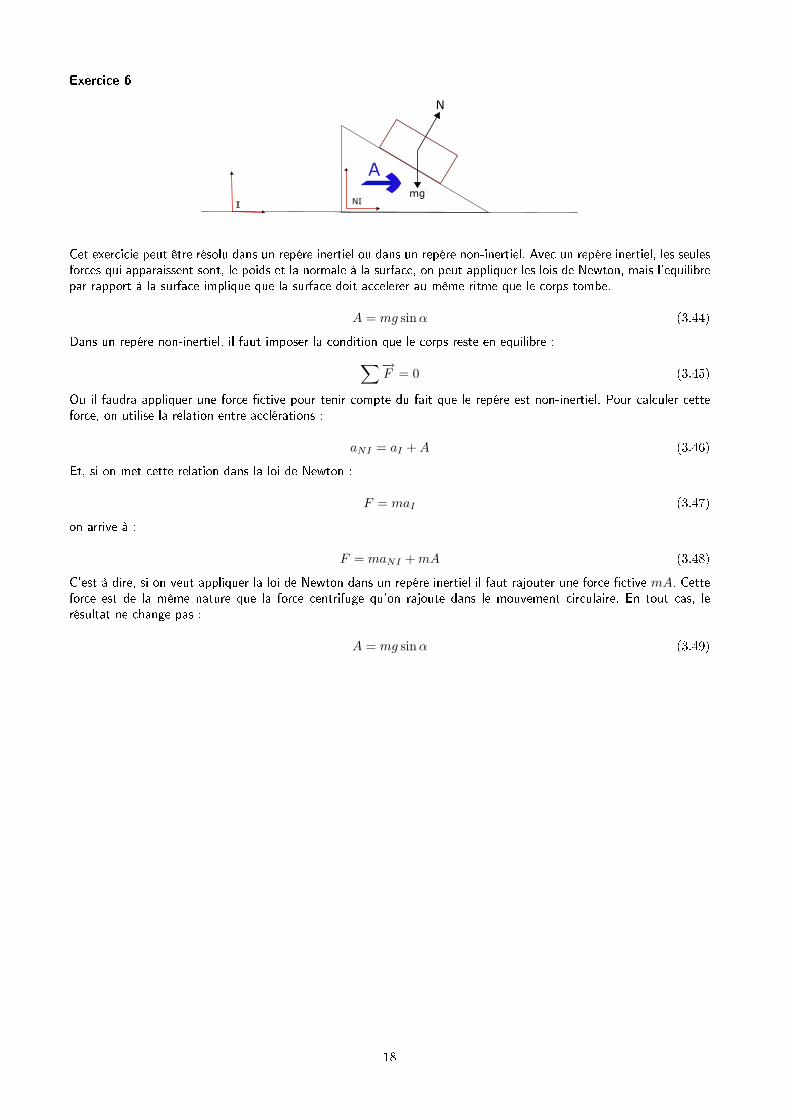
Cet exercicie peut être résolu dans un repére inertiel ou dans un repére non-inertiel. Avec un repére inertiel, les seulesforces qui apparaissent sont, le poids et la normale à la surface, on peut appliquer les lois de Newton, mais l'equilibrepar rapport à la surface implique que la surface doit accelerer au même ritme que le corps tombe.
A = mg sinα (3.44)
Dans un repére non-inertiel, il faut imposer la condition que le corps reste en equilibre :∑−→F = 0 (3.45)
Ou il faudra appliquer une force ctive pour tenir compte du fait que le repére est non-inertiel. Pour calculer cetteforce, on utilise la relation entre acclérations :
aNI = aI + A (3.46)
Et, si on met cette relation dans la loi de Newton :
F = maI (3.47)
on arrive à :
F = maNI + mA (3.48)
C'est à dire, si on veut appliquer la loi de Newton dans un repére inertiel il faut rajouter une force ctive mA. Cetteforce est de la même nature que la force centrifuge qu'on rajoute dans le mouvement circulaire. En tout cas, lerésultat ne change pas :
A = mg sinα (3.49)
18

Exercice 7
Encore une fois, toute la diculté de l'exercice est dans le bilan de forces. Même si la voiture prend un virage avecune certaine inclinaison, le virage a lieu à l'horizontale, et la force centrifuge sera aussi horizontale.La force de frottement s'oppose toujours au mouvement. En conséquence, quand la voiture veut se déplacer versl'extérieur, la force de forttement sera dirigiée vers l'intérieur.En faisant le bilan de forces sur les axes paralléle et perpendiculaire au plan on arrive à :
mg sinα−mv2
Rcos α + µN = 0 (3.50)
mg cos α + mv2
Rsinα−N = 0 (3.51)
Les seules inconnues du sytéme sont N et v. Si on résout le probléme on arrive à :
v =
√gR (sinα + µ cos α)
cos α− µ sinα(3.52)
si il n'y a pas d'inclinaison α = 0 :
v =√
gRµ (3.53)
Et si il n'a pas de frottement µ = 0
v =√
gR tanα (3.54)
19

Exercice 8
La diculté de ce probléme est surtout mathématique. Le bilan de forces est facile à faire :
N −mg cos θ = 0 (3.55)
mg sin θ − α− FF = mdv
dt(3.56)
En sachant que la force de frottement est proportionnelle à la normale :
FF = µmg cos θ (3.57)
on trouve l'équation diérentielle suivante :
(g sin θ − µg cos θ)− α
mv2 =
dv
dt(3.58)
Pour la résoudre, d'abord il faut l'écrire sous la forme :
dt =dv
(g sin θ − µg cos θ)− αmv2
(3.59)
Et aprés faire le changement de variable suivant :
z =√
α
m (g sin θ − µg cos θ)v (3.60)
On convertit l'intégrale à :
t =√
m
α
∫ z(t)
z(t0)
dz
1− z2(3.61)
Cette intégrale est immédiate et donne un atan :
t =√
m
αatan
(√α
m (g sin θ − µg cos θ)v
)(3.62)
20

Exercice 9
La meilleure méthode pour résoudre le probléme est l'utilisation du théoréme de conservation de l'énergie parce queil n'y a pas de forces non-conservatives qui agissent sur la masse. Les deux forces qui sont : T : la tension de la barre. Elle est toujours perpendiculaire au déplacement, donc elle ne réalise pas de travail mg : le poids qui provient d'un potentiel. On utilisera l'énergie gravitationnelle.On peut appliquer le principe de conservation de l'énergie entre le point de départ, le plus bas, et le point le plushaut, où on veut arriver :
12mv2
i = mgh +12mv2
f (3.63)
Si la barre est rigide, la vitesse minimale au départ correspond à une vitesse nale nulle :
vi =√
4gR (3.64)
Par contre, si la barre est non-rigide il faut imposer la condition, pour n'importe quel moment, que la tension T soitpositive. Dans la moitié supérieure du cercle, le poids contribue avec une composante negative à la tension, et c'estseulement la force centrifuge qui a une composante positive sur la tension. Le point le plus critique est l'extrêmesupérieur, et c'est là qu'il faut imposer que la condition soit positive :
T ≥ −mg + mv2
f
R(3.65)
Donc,
vf ≥√
gR (3.66)
Et, comme on cherche la vitesse minimale de départ, on veut aussi la vitesse minimale à la n :
vf =√
gR (3.67)
Et, avec la nouvelle vitesse nale, on peut calculer la nouvelle vitesse initiale :
vi =√
4gR (3.68)
21
Chapitre 4
La mécanique des solides rigides
4.1 La cinématique des solides rigides
On dénit un solide rigide comme un ensemble de particules qui gardent les distances entre elles.
4.1.1 Centre de masses
On dénit le centre de masses comme :
−→XCM =
∫ −→x dm∫dm
(4.1)
On va noter :
MT =∫
dm (4.2)
Pour un systéme discret de particules la formule devient :
−→x CM =∑
i−→x imi∑i mi
(4.3)
Et en dérivant ces expressions on trouve aussi la vitesse et l'accélération du centre de masses :
−→v CM =∫ −→v dm∫
dm(4.4)
−→a CM =∫ −→a dm∫
dm(4.5)
Et on peut appliquer aussi le lois de Newton au systéme :
−→F ext =
d
dt(MT
−→v CM ) (4.6)
On peut annoncer la troisiéme loi de Newton en disant que le centre de masse d'un systéme bouge comme uneparticule avec une masse égale à la somme de toutes les masses du systéme, sous l'action des forces externes ausystéme. De la même façon, en absence de forces exterieures la quantité de mouvement du systéme est conservé.
4.1.2 Energie cinétique
L'énergie cinétique d'un systéme est dénie de la façon suivante :
Ec =12
∫V
−→v (m)2dm (4.7)
22

4.1.3 Rotation
Pour décrire le mouvement d'un solide rigide, il ne sut pas de connaître la position d'un des points du solide, il fautaussi connaître son orientation dans l'espace. La cinématique étudie la variation de l'orientation du solide. La rotationd'un solide rigide a toujours lieu autour d'un axe privilégié qui est l'axe de rotation. L'axe de rotation n'est pasforcement constant, il peut varier au cours du temps. La magnitude qui décrit la rotation est la vitesse de rotation :
ω =dΩdt
(4.8)
où Ω est un angle qui décrit l'orientation du solide est ω est la vitesse angulaireOn dénit aussi l'accélération angulaire comme le taux de variation de la vitesse angulaire :
α =dω
dt(4.9)
La dynamique, qui va s'occuper d'étudier les forces qui provoquent ces changements de vitesse, utilise une nouvellequantité, appelée moment d'inertie, et qui est dénie comme :
I =∫
V
r2dm (4.10)
r est la distance entre le diérentiel de masse et un axe (l'axe de rotation), donc le moment d'inertie est déni parrapport à une distribution de masses et par rapport à un axe aussi. La masse aura des moments d'inertie diérentspar rapport à des axes dierents. La relation entre le moment d'inertie de la même masse par rapport à l'axe quipasse par le centre de masses et un axe paralléle situé à une distance h est :
I = Mh2 + ICM (4.11)
L'équivalent de la deuxiéme équation de Newton pour la rotation est :
Mext = Iα (4.12)
4.1.4 Equilibre statique
Un cas particulier de la cinématique est la statique, qui s'occupe d'étudier les corps qui sont en repos ; lorsque lavitesse de tous les points du corps est nulle.Pour un solide rigide, il y a deux conditions d'equilibre :
∑−→F ext =
−→0 (4.13)∑−→
Mext =−→0
23

4.2 Problèmes
Exercice 1
Calculer les moments d'inertie suivants : D'une sphère massive par rapport à un axe qui passe par son centre D'une barre cylindrique massive par rapport à un axe perpendiculaire à l'axe du cylindre qui passe par le centre dela barre
D'une barre cylindrique massive par rapport à un axe parallele à l'axe du cylindre
Exercice 2
Un corps de masse m1 est lié à une corde de masse négligeable qui tourne autour d'un disque de rayon r et de massem2. En négligeant toutes les frictions, calculer la tension de la corde et l'acceleration du corps.
Exercice 3
Deux objets sont liés autour de deux roues de rayons r1 et r2 avec le même axe. Calculer la relation entre les massesdes objets qui sont en équilibre. Calculer le mouvement résultant pour un ensemble de masses quelconques m1 etm2.
Exercice 4
Les calottes polaires de Mars contiennent une quantité de glace M pendant l'hiver. Pendant l'été cette quantité deglace fond et se réparti de maniére homogéne sur toute la surface de la planéte. Calculer la variation de la longueurdu jour résultante.
Exercice 5
Une barre de longueur l et de masse m est accrochée à un plafond par une extrémité. On la laisse en chute libre enpartant d'un angle θ0 avec la verticale. Démontrer que, quand l'angle avec la verticale est θ, le plafond subit uneforce Fr sur l'axe de la barre et une force Ft perpendiculaire à l'axe de la barre de magnitude :
Fr =12mg (5 cos θ − 3 cos θ0) (4.14)
Ft =12mg sin θ
Exercice 6
Pour localiser le centre de gravité d'une personne on fait l'expérience suivante. On place une personne de masse mallongée sur une table de longueur l. La table est appuyé sur les deux côtés et sur un côté on y a mit un dynamométrequi mesure une force N. Quelle est la position du centre de gravité de la personne ?
Exercice 7
Une boîte carrée de côté l et de masse uniforme est placée à l'extrémité d'un plan incliné avec un angle d'inclinaisonvariable θ. En sachant que la force de frottement est assez grande pour empécher le glissement de la boîte, calculerl'angle θmax auquel on peut arriver sans faire tomber la boîte.
Exercice 8
Un cylindre de masse homogéne m et rayon R repose sur une surface horizontale et sur une marche de hauteur h(h < R). Calculer la force F qu'il faut appliquer sur l'axe pour faire monter la marche au cylindre.
24
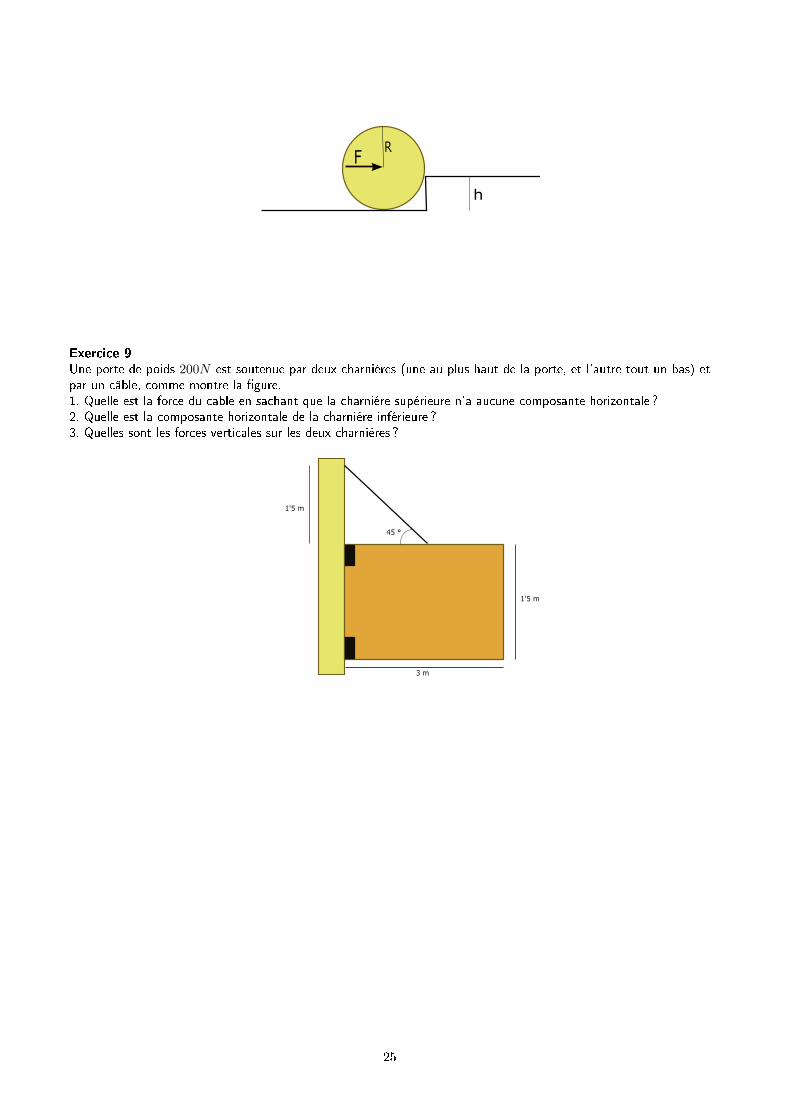
Exercice 9
Une porte de poids 200N est soutenue par deux charniéres (une au plus haut de la porte, et l'autre tout un bas) etpar un câble, comme montre la gure.1. Quelle est la force du cable en sachant que la charniére supérieure n'a aucune composante horizontale ?2. Quelle est la composante horizontale de la charniére inférieure ?3. Quelles sont les forces verticales sur les deux charniéres ?
25
Chapitre 5
La mécanique des uides
5.1 Dénitions
5.1.1 Les uides
Un uide est une substance ou un milieu continu qui se déforme d'une façon continue quand on lui applique uneforce de cisaillement. On peut aussi dénir un uide comme une substance qui, dû à sa faible cohésion moléculaire,est amorphe et adopte la forme du récipient qui le contient.
Le mouvement des gaz et des liquides peut s'étudier en utilisant les équations de la mécanique des uides si on faitla hypothèse de milieu continu. Cette hypothèses exprime le fait que la densité des molécules du uide est assezgrande comme pour appliquer les lois de la statistique sur l'ensemble et supposer que les propriétés du uide commela densité, la pression ou la vitesse sont continues. La validité de cette hypothèse vient donné par le numéro deKnudsen. Le numéro de Knudsen est une magnitude sans dimensions qui exprime le rapport entre la quantité demolécules et leur mobilité. Quand le numéro de Knudsen est très faible par rapport à un, la hypothèse de milieucontinu est valable et on peut étudier le gaz ou le liquide comme un uide.
Mais la mécanique des uides ne s'intéresse pas seulement aux gaz et aux liquides, il y a d'autres cas où les équationssont aussi valables. Par exemple, le sable, ou les amas globulaires (ensemble de milliers d'étoiles connés dans une"petite" région).
5.1.2 La masse volumique
La masse volumique est déni comme le coecient entre la masse et le volume.
ρ =m
V(5.1)
Il n'y a pas d'unités spéciques pour exprimer la masse volumique, on utilise donc le coecient Kgm3
5.1.3 La pression
La pression est une magnitude qui se dénit comme le quotient de la force perpendiculaire à la surface sur la quelleelle s'applique, sur l'aire de cette surface.
ρ =F
S(5.2)
L'unité internationale de pression est le Pascal, qui est la pression résultante d'appliquer un Newton sur une surfaced'un mètre carré. Pa = N
m2 On utilise aussi d'autres unités pour mesurer la pression. Les plus importantes sont lebar (bar) et l'atomsphère (atm). Les relations entre elles sont les suivantes :
1bar = 105Pa = 0.987atm
5.1.4 Le débit
Le débit de masse se dénit comme le quotient de masse sur un temps. On le simbolise avec la lettre q :
qm =∆m
∆t(5.3)
26
Il n'y a pas des unités spéciques pour le débit, mais si on veut garder les unités internationales de masse et de volumeil s'exprime en Kgs−1. Le débit de masse s'utilise pour mesurer le débit des canalisations. Dans le cas d'un écoulementstationnaire, il peut être calculé aussi comme le produit de la vitesse de l'écoulement, la section perpendiculaire àcette vitesse, et la densité :
qm = ρv.S (5.4)
Parfois on utilise aussi le débit en volume (qv). Il est dénit comme le quotient d'un volume sur un temps. La relationavec le débit de masse est la suivante :
qm = ρqv (5.5)
5.1.5 Fluide compressible et incompressible
On parle de uide incompressible quand on suppose sa masse volumique constante. D'un point de vue theorique lesseuls uides incompressibles son les liquides. Dans la pratique, on considère aussi l'air comme étant incompressible áfaibles vitesses. Un uid compressible a une masse volumique qui varie en fonction de la temperature et la pression.Typiquement, sont le gaz. Leur dynamique est beaucoup plus compllqué car il faut tenir compte des variations depression.
5.2 Statique des uides
5.2.1 Le principe d'équilibre statique dans un uide
Un uide est en equilibre quand, sur n'importe quel point du uide, la somme de forces externes au point (pressions)et des forces internes (poids) est égal a zéro. En prenant l'hauteur positive vers le haut, la pression dans un liquideun equilibre est donné par la formule suivante :
p = p0 − ρgz (5.6)
où z est la hauteur. Par example, si on connaît la pression á la surface de l'ocean (pression atmosphèrique), la pressiona une profondeur de hm. est égal á : p0 − ρg(−h) où on met la profondeur avec un signe negative parce que c'estvers le bas.
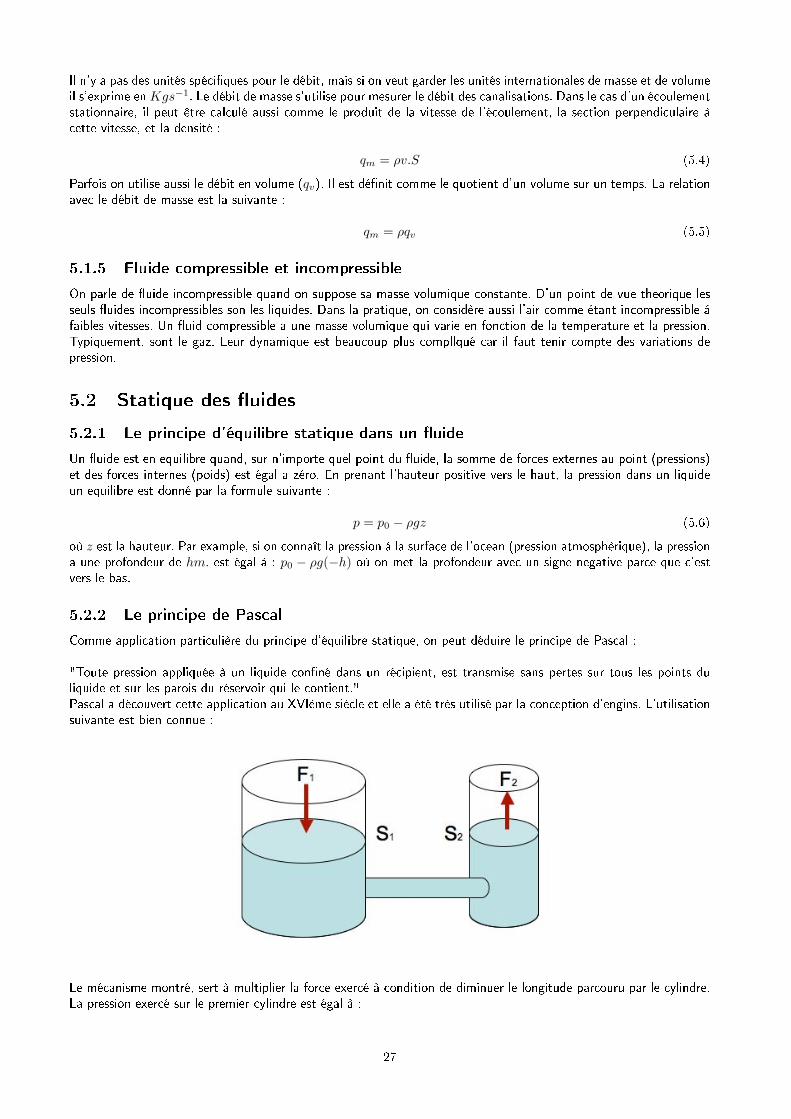
5.2.2 Le principe de Pascal
Comme application particulière du principe d'équilibre statique, on peut déduire le principe de Pascal :
"Toute pression appliquée à un liquide conné dans un récipient, est transmise sans pertes sur tous les points duliquide et sur les parois du réservoir qui le contient."Pascal a découvert cette application au XVIème siècle et elle a été très utilisé par la conception d'engins. L'utilisationsuivante est bien connue :
Le mécanisme montré, sert à multiplier la force exercé à condition de diminuer le longitude parcouru par le cylindre.La pression exercé sur le premier cylindre est égal à :
27

P1 =F1
S1(5.7)
et, par le principe de Pascal, cette pression est transmise sur l'autre cylindre. Donc, la pression exercé par l'autrecylindre sera égale à P2 = P1, mais la force résultante, sera proportionnelle au rapport de surface :
F2 = F1S2
S1(5.8)
Et, si la surface S2 est plus grande que la surface S1, la force résultante sera plus grande. Le prix à payer est quele déplacement du cylindre sera plus court aussi. En appliquant la conservation de la masse, et si on supposer quele liquide et incompressible, le volume ne va pas diminuer, donc le volume parcouru par le premier cylindre doit êtreégal au volume parcouru par le deuxième. En imposant cette condition on trouve facilement la relation entre les deuxdistances L1, L2 :
L2 = L1S1
S2(5.9)
5.2.3 Le principe d'Archimède
"Tout corps plongé dans un uide, entièrement mouillé par celui-ci ou traversant sa surface libre, subit une forceverticale, dirigée de bas en haut et égale au poids du volume de uide déplacé ; cette force est appelée Ç pousséed'Archimède."Cette force résulte de la variation de la pression du uide avec la profondeur : la pression augmente lorsque l'ondescend (eet de la gravité sur le uide), donc la pression sur la face du bas d'un objet immergé est supérieure à lapression sur la face du haut, d'où une force globalement verticale dirigée vers le haut. Même si le calcul suivant n'estpas une démonstration rigoureuse, elle peut servir à comprendre le fondement physique de la poussé d'Archimède.Imaginons un cube de côté L immergé dans un uide de densité ρ. Grce à l'équation d'équilibre statique d'un uide,on sait que la pression varie linéairement avec la profondeur. Sur l'axe vertical, ils vont agir seulement deux forcesdues à la pression. Du côté superieur, la force sera égal à la surface (L2) fois la pression (p0 + ρgz0), et du côtéinferieur, la force sera égal aussi à la surface (L2) fois la pression inferieur (p0 + ρg(z0 + L)), mais dans la directionopposée. Quand on fait la diérence entre les duex, la force résultante est :
F = ρgLL2 = ρgV (5.10)
tel comme est prédit par le principe d'Archimède
5.3 Dynamique des uides incompressibles
Les équations de la dynamique des uides, dans sa forme plus générale, sont très complexes. On va se limiter à étudierseulement le cas des uides incompressibles. Comme leur densité reste constante, leur comportement dynamique estbeaucoup plus facile à modéliser.
5.3.1 La continuité de la masse
En régime stationnaire, le débit de masse est le même à travers toutes les sections droites d'un même tube de courant.Par example, si on a un débit constant dans un tube avec des aires d'entrée (S1) et de sortie (S2) diérentes, lesvitesses d'entrée (v1) et de sortie seront diérentes aussi. Elles sont reliés para la conservation de masse. Comme onsait que :
q1 = q2 (5.11)
On peut facilment deduire que :
S1.v1 = S2.v2 (5.12)
28

5.3.2 L'équation de Bernoulli
L'équation de Bernoulli est la simplication de l'équation de conservation d'énergie pour le cas d'un uide incom-pressible en regime stationnaire sans frottement.Elle a la forme suivante :
ρv2
2+ ρgz + p = cte (5.13)
où v est la vitesse moyenne de l'écoulement et z est une hauteur moyenne par rapport à une référence. Si on introduitdes pompes dans le système, l'expression n'est plus valables, il faudrait rajouter les termes correspondants. Pourconvertir la puissance (P ) introduite ou extraite du système en pression, il faut la diviser par le débit en volume. Onretrouve l'expression suivante :
ρv21
2+ ρgz1 + p1 = ρ
v22
2+ ρgz2 + p2
P
qv(5.14)
Le signe plus ou moins va dépendre de si la puissance est introduite (-) ou extraite (+) du système.
5.3.3 Les pompes
Les pompes sont de mecanismes qui servent á introduire ou a extraire de l'énergie d'un écoulement. D'un point devue, mathematique, pour les introduire il faut rajouter des variations dans l'équation de Bernoulli ∆pP .L'équation de Bernoulli modié sera :
ρv21
2+ ρgz1 + p1 ±∆pP = ρ
v22
2+ ρgz2 + p2 (5.15)
où le signe sera positif si la pompe introduite énergie dans le système, et negatif si la pompe extrait énergie del'écoulement, et :
∆pP =P
qv(5.16)
où P est la puissance de la pompe.On dénit le rendement d'une pompe η comme le rapport entre l'énergie consommé et l'énergie fournie :
η =Pfournie
Pconsomm(5.17)
La qualité d'une pompe vient déterminé par son rendement. Plus grand est le rendement, meilleure est la pompe. Unrendement typique d'une pompe peut osciller entre 0, 5 et 0, 7.
5.3.4 La viscosité
La viscosité est une propriété des uides qui désigne leur capacité à s'écouler. Lorsque la viscosité augmente, lacapacité du uide à s'écouler diminue. La viscosité tend à diminuer lorsque la température augmente. Par contre, onpourrait croire que la viscosité d'un uide s'accroît avec sa densité mais ce n'est pas nécessairement le cas. Il existedeux coecients pour mesurer la viscosité : η : viscosité dynamique µ = η
ρ : viscosité cinématique
5.3.5 Le nombre de Reynolds
Le nombre de Reynolds est un coecient adimmensionel qui donne le type d'écoulement. Il a été déni en 1886 parReynolds, qui s'est apperçu que le type d'écoulement varié en fonction de ce paramètre. Il est dénit de la façonsuivante :
Re =ρvD
µ(5.18)
où ρ est la de masse volumique du liquide, v la vitesse de l'écoulement, D le diamètre de l'écoulement, et µ est uncoecient de la viscosité. Il y a deux types d'écoulements : écoulement laminaire : il a lieu quand le nombre de Reynolds est faible (Re < 1000). Dans ce type d'écoulement,la viscosité joue un rôle très important, de façon a que les mouvements relatifs entre les diérents couches de uidesont peu importants. Le mouvement du uide est donc très ordonné.
29
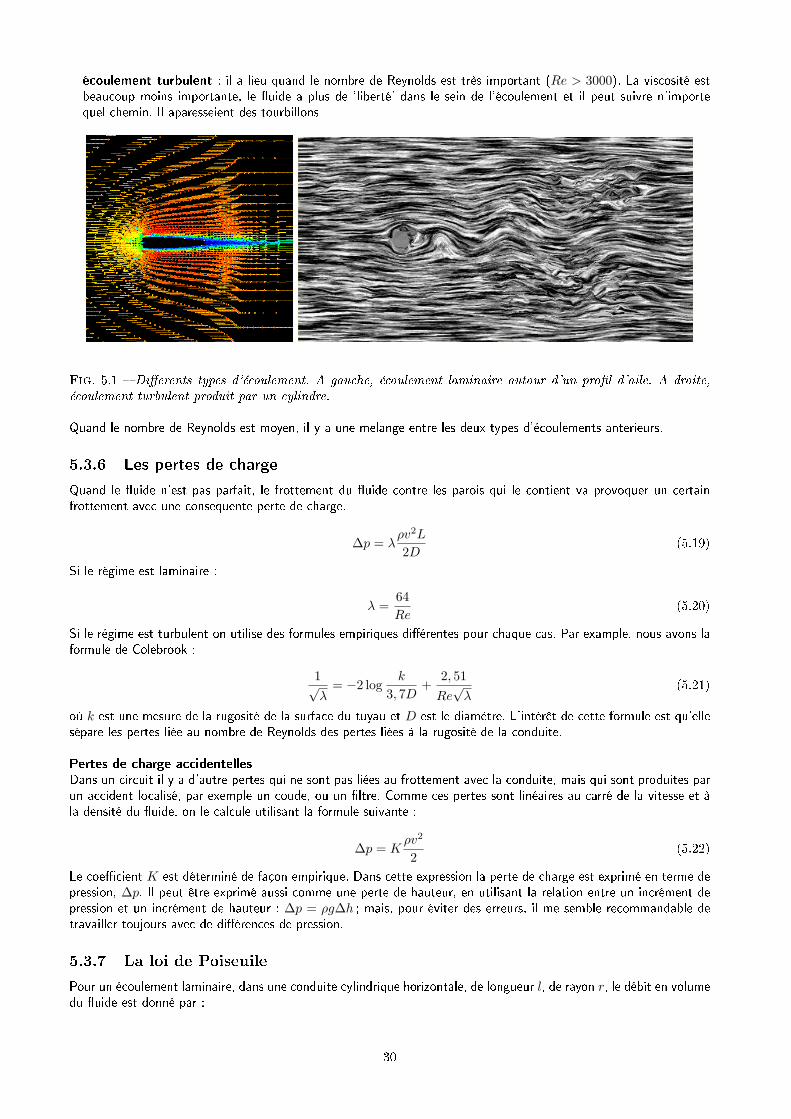
écoulement turbulent : il a lieu quand le nombre de Reynolds est très important (Re > 3000). La viscosité estbeaucoup moins importante, le uide a plus de 'liberté' dans le sein de l'écoulement et il peut suivre n'importequel chemin. Il aparesseient des tourbillons
Fig. 5.1 Dierents types d'écoulement. A gauche, écoulement laminaire autour d'un prol d'aile. A droite,
écoulement turbulent produit par un cylindre.
Quand le nombre de Reynolds est moyen, il y a une melange entre les deux types d'écoulements anterieurs.
5.3.6 Les pertes de charge
Quand le uide n'est pas parfait, le frottement du uide contre les parois qui le contient va provoquer un certainfrottement avec une consequente perte de charge.
∆p = λρv2L
2D(5.19)
Si le régime est laminaire :
λ =64Re
(5.20)
Si le régime est turbulent on utilise des formules empiriques diérentes pour chaque cas. Par example, nous avons laformule de Colebrook :
1√λ
= −2 logk
3, 7D+
2, 51Re√
λ(5.21)
où k est une mesure de la rugosité de la surface du tuyau et D est le diamètre. L'intérêt de cette formule est qu'ellesépare les pertes liée au nombre de Reynolds des pertes liées à la rugosité de la conduite.
Pertes de charge accidentelles
Dans un circuit il y a d'autre pertes qui ne sont pas liées au frottement avec la conduite, mais qui sont produites parun accident localisé, par exemple un coude, ou un ltre. Comme ces pertes sont linéaires au carré de la vitesse et àla densité du uide, on le calcule utilisant la formule suivante :
∆p = Kρv2
2(5.22)
Le coecient K est déterminé de façon empirique. Dans cette expression la perte de charge est exprimé en terme depression, ∆p. Il peut être exprimé aussi comme une perte de hauteur, en utilisant la relation entre un incrément depression et un incrément de hauteur : ∆p = ρg∆h ; mais, pour éviter des erreurs, il me semble recommandable detravailler toujours avec de diérences de pression.
5.3.7 La loi de Poiseuile
Pour un écoulement laminaire, dans une conduite cylindrique horizontale, de longueur l, de rayon r, le débit en volumedu uide est donné par :
30

qv =Πr4
8ηL(p2 − p1) (5.23)
31
5.4 Problèmes
Exercice 1 : Flotabilité d'une sphère
Une sphère creuse de rayon r, épaisseur de parois h, et masse volumique ρS otte dans un liquide de masse volumiqueρL. Calculer le pourcentage de rayon qui va rester immergé.
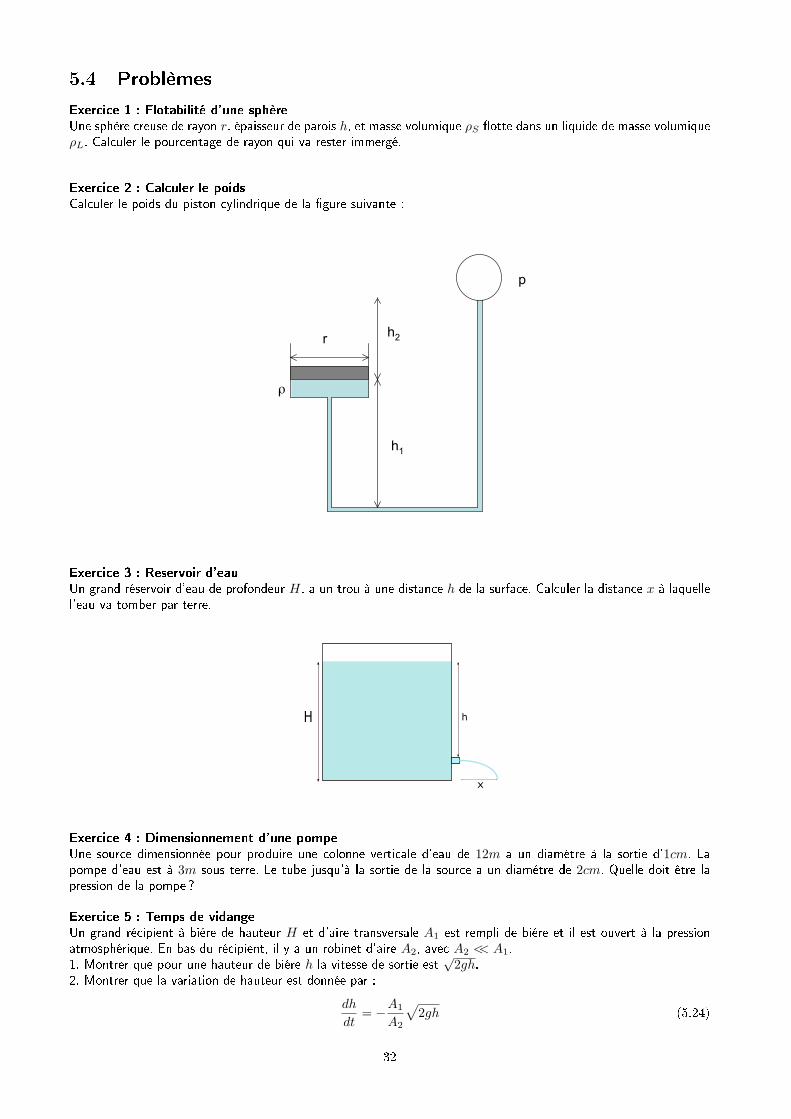
Exercice 2 : Calculer le poids
Calculer le poids du piston cylindrique de la gure suivante :
r
h1
h2
p
!
Exercice 3 : Reservoir d'eau
Un grand réservoir d'eau de profondeur H, a un trou à une distance h de la surface. Calculer la distance x à laquellel'eau va tomber par terre.
Exercice 4 : Dimensionnement d'une pompe
Une source dimensionnée pour produire une colonne verticale d'eau de 12m a un diamétre à la sortie d'1cm. Lapompe d'eau est à 3m sous terre. Le tube jusqu'à la sortie de la source a un diamétre de 2cm. Quelle doit être lapression de la pompe ?
Exercice 5 : Temps de vidange
Un grand récipient à biére de hauteur H et d'aire transversale A1 est rempli de biére et il est ouvert à la pressionatmosphérique. En bas du récipient, il y a un robinet d'aire A2, avec A2 << A1.1. Montrer que pour une hauteur de biére h la vitesse de sortie est
√2gh.
2. Montrer que la variation de hauteur est donnée par :
dh
dt= −A1
A2
√2gh (5.24)
32

3. Calculer le temps necessaire pour vider le récipient.
Exercice 6 : Ecoulement permanent à travers un ajutage
On utilise en travaux pratiques une cuve verticale remplie d'eau ; on supposera que le niveau A dans la cuve estconstant. Le uide s'écoule par un trou de diamètre D situé dans le fond de la cuve. L'eau sera considérée commeun uide parfait incompressible.1. Enoncer le théorème de Bernoulli pour un uide parfait en précisant la signication des diérents termes.2. Appliquer la relation de Bernoulli entre les points A et B et déterminer l'expression littérale de la vitesse vB auniveau du trou.3. Donner la relation permettant de calculer le débit-volume théorique qv au point B.4. Calculer numériquement la vitesse vB et le débit en volume qv au point B.valeurs numériques : H = 0.82m, D = 2.0m, ρ(eau) = 1000kg/m3, g = 9.81m/s2
Exercice 7 : Convergent
On veut accélérer la circulation d'un uide parfait dans une conduite de telle sorte que sa vitesse soit multipliée par4. Pour cela, la conduite comporte un convergent caractérisé par l'angle α.1. Calculer le rapport des rayons R1/R2. Application numérique.2. Calculer (R1 −R2) en fonction de L et α. En déduire la longueur L. (R1 = 50mm,α = 15)
Exercice 8 : Hauteur d'un reservoir
On veut construire un réservoir qui fournit un débit d'eau de 30l/s a une fontaine. Le tuyau a une longuer de 350m., et un diamètre de 12 cm.. A quelle hauteur par rapport à la fontaine il faut situer le réservoir ? Si le réservoir estplacé à un mètre au dessous de la fontaine, quelle est la puissance de la pompe nécessaire pour faire monter l'eau ?
Exercice 9 : Etude d'un siphon
Soit un siphon de diamètre d (d = 10mm) alimenté par un récipient rempli d'eau, de grande dimension par rapportà d et ouvert à l'atmosphère.
1. Calculer la vitesse moyenne du uide en S puis le débit en volume qv du siphon. (H=3.0 m)2. Donner l'expression de la pression pM au point M en fonction de h.
33
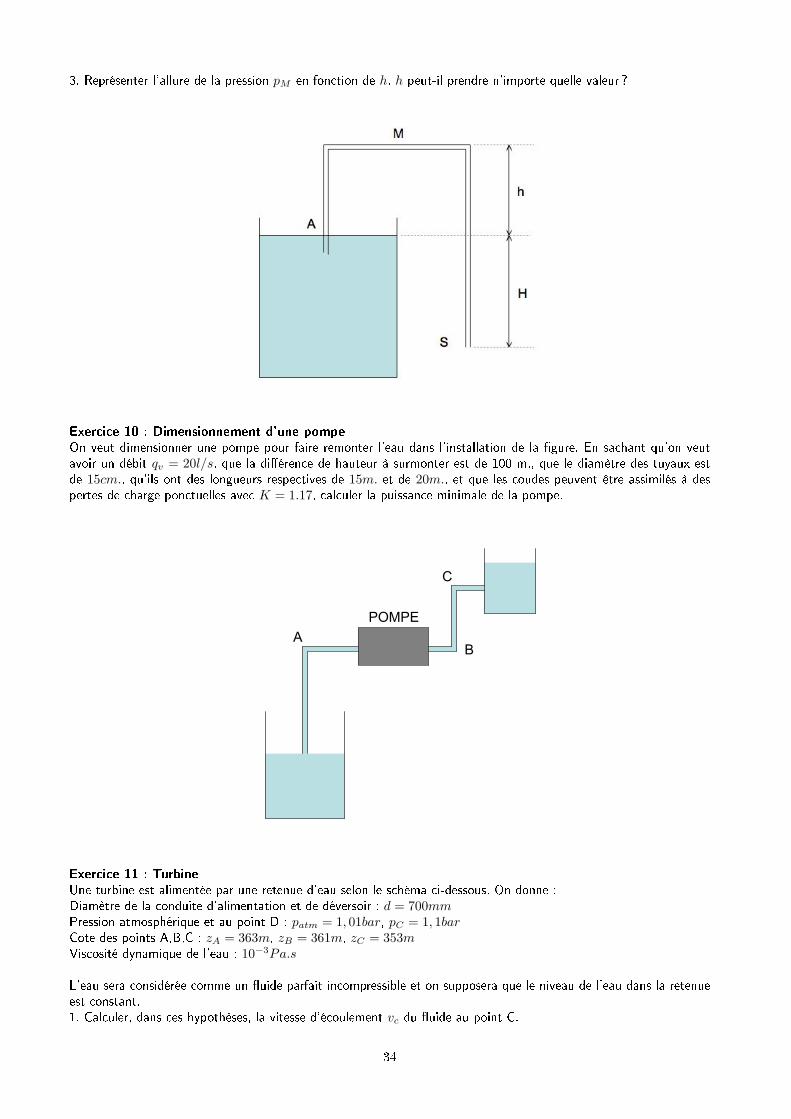
3. Représenter l'allure de la pression pM en fonction de h. h peut-il prendre n'importe quelle valeur ?
Exercice 10 : Dimensionnement d'une pompe
On veut dimensionner une pompe pour faire remonter l'eau dans l'installation de la gure. En sachant qu'on veutavoir un débit qv = 20l/s, que la diérence de hauteur à surmonter est de 100 m., que le diamètre des tuyaux estde 15cm., qu'ils ont des longueurs respectives de 15m. et de 20m., et que les coudes peuvent être assimilés à despertes de charge ponctuelles avec K = 1.17, calculer la puissance minimale de la pompe.
POMPE
AB
C
Exercice 11 : Turbine
Une turbine est alimentée par une retenue d'eau selon le schéma ci-dessous. On donne :Diamètre de la conduite d'alimentation et de déversoir : d = 700mmPression atmosphérique et au point D : patm = 1, 01bar, pC = 1, 1barCote des points A,B,C : zA = 363m, zB = 361m, zC = 353mViscosité dynamique de l'eau : 10−3Pa.s
L'eau sera considérée comme un uide parfait incompressible et on supposera que le niveau de l'eau dans la retenueest constant.1. Calculer, dans ces hypothèses, la vitesse d'écoulement vc du uide au point C.
34
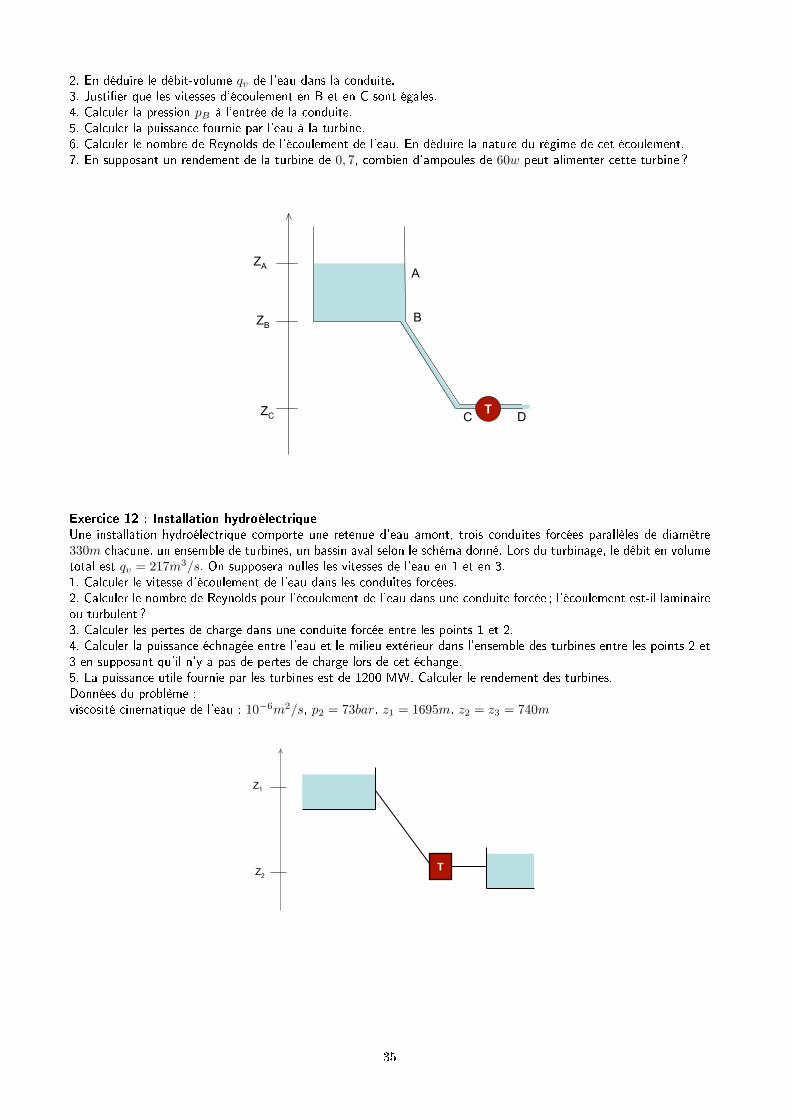
2. En déduire le débit-volume qv de l'eau dans la conduite.3. Justier que les vitesses d'écoulement en B et en C sont égales.4. Calculer la pression pB à l'entrée de la conduite.5. Calculer la puissance fournie par l'eau à la turbine.6. Calculer le nombre de Reynolds de l'écoulement de l'eau. En déduire la nature du régime de cet écoulement.7. En supposant un rendement de la turbine de 0, 7, combien d'ampoules de 60w peut alimenter cette turbine ?
TDC
B
A
ZA
ZB
ZC
Exercice 12 : Installation hydroélectrique
Une installation hydroélectrique comporte une retenue d'eau amont, trois conduites forcées parallèles de diamètre330m chacune, un ensemble de turbines, un bassin aval selon le schéma donné. Lors du turbinage, le débit en volumetotal est qv = 217m3/s. On supposera nulles les vitesses de l'eau en 1 et en 3.1. Calculer le vitesse d'écoulement de l'eau dans les conduites forcées.2. Calculer le nombre de Reynolds pour l'écoulement de l'eau dans une conduite forcée ; l'écoulement est-il laminaireou turbulent ?3. Calculer les pertes de charge dans une conduite forcée entre les points 1 et 2.4. Calculer la puissance échnagée entre l'eau et le milieu extérieur dans l'ensemble des turbines entre les points 2 et3 en supposant qu'il n'y a pas de pertes de charge lors de cet échange.5. La puissance utile fournie par les turbines est de 1200 MW. Calculer le rendement des turbines.Données du problème :viscosité cinematique de l'eau : 10−6m2/s, p2 = 73bar, z1 = 1695m, z2 = z3 = 740m
Z1
Z2
T
35

5.5 Corrigés des exercices
Exercice 1
Fa
mg
H
r
h
!s
!L
Pour résoudre le problème on va imposer la condition d'equilibre statique sur la sphère. Il y a deux forces qui agissentsur la sphère, son poids (mg), et la force ascenscionnelle (Fa) . Quand la sphère est en equilibre, il faudra que lesdeux forces soit égales avec les singes opposées (le poids vers le bas et la force ascenscionnelle vers le haut) :
Fa = mg (5.25)
Le poids de la sphère est xe, et il est égal à la somme du poids de la couverte en plastique, et du air qu'il y a àl'intérieur. Si on suppose que la densité de l'air est beaucoup plus faible que la densité du plastique (ρa <ρS), on vanégliger le poids de l'air. Pour calculer le poids du plastique il nous faudra connaître son volume est le multiplier parsa densité :
mg = gρSVplastique = gρ43π[r3 − (r − h)3
](5.26)
où on a utilisé la formule du volume de la sphère.La force ascenscionnelle sera égale à la masse de liquide fois la gravité. On va mettre en relation la masse déplacéavec le volume déplacé à travers de la dénsité du liquide :
Fa = gρLVdep (5.27)
Et, nalment, on va trouver la relation entre le volume déplacé est la hauteur H qui nous est demandé de calculer.Pour celà, il faudra calculer le volume d'un morceau de sphère en fonction de la hauteur H, qui est équivalent à laintégral suivante :
xr0
dx
S(x)
dx
Vdep =∫ R−H
R
S(x).dx (5.28)
En sachant que S(x) est la surface du dierentiel de volume :
S(x) = π(r2 − x2) (5.29)
36

on peut résoudre l'intégral :
Vdep = pi
∫ r
r−H
(r2 − x2)dx = pi
(23r3 − r2(r −H)− (r −H)3
3
)(5.30)
Une fois on a l'expression du volume dépalcé, on peut réecrire l'égalité de forces :
gρs43π
[r3 − (r − h)3
]= gρLπ
[23r3 − r2(r −H)− (r −H)3
3
](5.31)
Expression que, une fois simplifée, devient :
4ρs
ρL
[1− (1− h
r)3
]= 2− 3(1− H
r)− (1− H
r)3 (5.32)
Dans cette expression, on trouve le rapport qui est inconnu, Hr comme fonction de deux parametres qui nous sont
donnés, le rapport de densités, et le rapport entre l'épaisseur de la parois et le rayon. La résolution explicite del'équation necessite de quelques simplications. Si on suppose que h
r << 1 et que Hr << 1 on peut garder que les
termes linéaires et retrouver l'expression suivante :
H
r=
13
+ 2ρs
ρL
h
r(5.33)
Evidenment cette solution est fausse, il y a un problème de signes quelque part.
37

Exercice 2
r
h1
h2
p
!
A
B
En appliquant l'équation de Bernoulli entre elles deux points A et B indiqué sur la gure, on trouve la relation entrele pression qu'il y a en dessous du piston et la pression indiqué par le baromètre :
pA = p + ρgh2 (5.34)
Et, en applicant la relation d'équilibre statique sur le piston, on trouve la relation entre la pression au point A et lepoids du piston. Il faut considérer le deux forces qui agissent sur le piston, d'un côté le poids, et de l'autre côté lapression qui la force produite par la pression, qui est égale à la pression fois la surface :
mg = πr2pA = πr2(p + ρgh2) (5.35)
Donc :
m = πr2
(p
g+ ρh2
)(5.36)
Exercice 3
On appelle point A à un point placé sur le haut du réservoir, et point B à un point placé à la sortie du réservoir. Onva appliquer l'équation de Bernoulli entre les deux points :
12ρv2
A + ρghA + pA =12ρv2
B + ρghB + pB (5.37)
Comme les deux points sont en contacte avec l'atmosphère, la pression est égale à la pression atmosphérique. Ladiérence d'hauteur entre les deux points et bien connu (h), et il nous manque que les vitesses. La relation entre lesdeux vitesses peut être obtenu gràce à la condition de continuité :
vAsA = VBsB (5.38)
Mais, comme l'énonce ne nous donne pas la relation de surfaces, et à la vû du dessin, on peut supposer que sB <sA
et que, en conséquence la vitesse au point A est négligeable. Avec tout ça, quand on applique l'équation de Bernoullion obtient :
vB =√
2gh (5.39)
Jusqu'là, on connaît la vitesse de sortie du tuyau, il reste à étudier la trajectoire de la chute pour connaître la distanceparcouru. Cette trajectoire est un mouvement parabolique, c'est à dire, la vitesse est constante sur l'axe horizontal,et il y a une accélération constante et égale à la gravité sur l'axe vertical. La déscription du mouvement paraboliqueest donné dans le deuxième chapitre. Si on suppose que la vitesse de sortie est horizontale, le mouvement sur l'axehorizontale est égale à la vitesse de sortie fois le temps de chute (t) :
38

x =√
2ght (5.40)
le temps de chute peut être calculé en imposant le temps de chute sur l'axe vertical :
t =√
2g(H − h) (5.41)
Et, nalment, on obtient :
x(h) = 2g√
h(H − h) (5.42)
Ici, on peut s'intéresser par cette fonction et se demander à quelle hauteur h il faut placer la sortie pour maximiserla distance. Pour celà, il sut d'égaliser la derivé à zéro :
dx
dh= g
H − 2h√h(H − h)
= 0 (5.43)
Il faut donc, placer la sortie à la moitié du réservoir h = H2
39
Chapitre 6
Résistance de matériaux
6.1 Dénitions
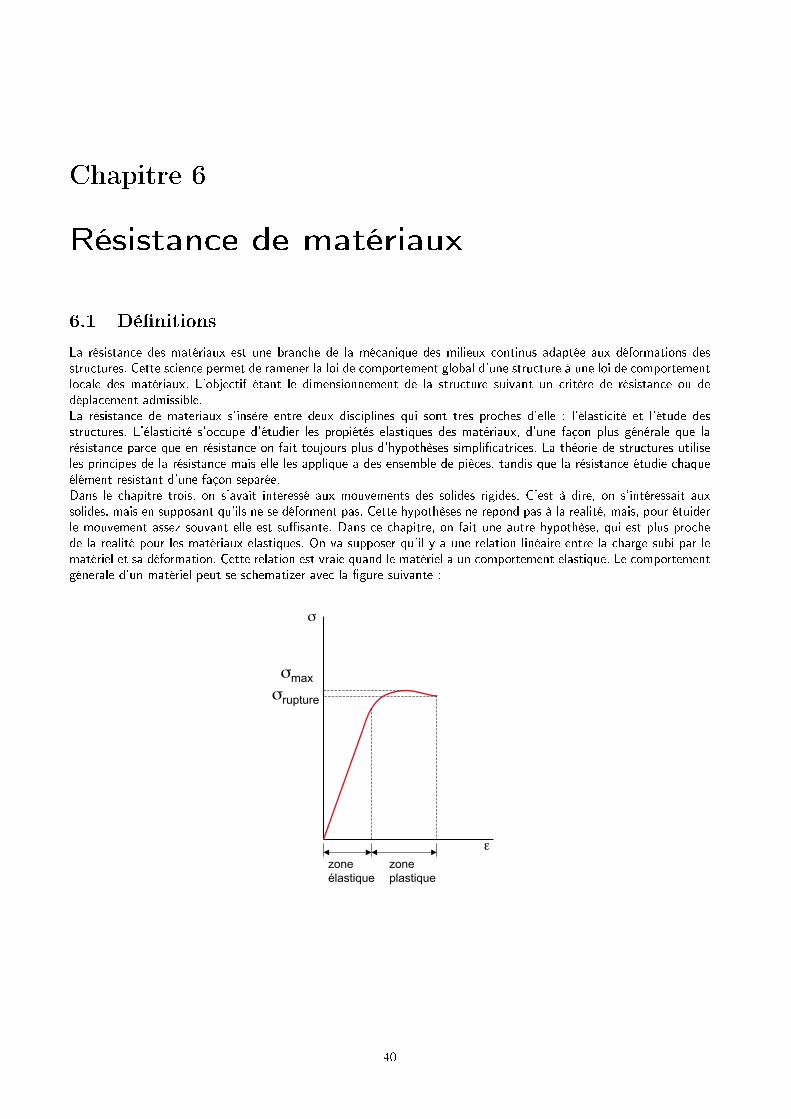
La résistance des matériaux est une branche de la mécanique des milieux continus adaptée aux déformations desstructures. Cette science permet de ramener la loi de comportement global d'une structure à une loi de comportementlocale des matériaux. L'objectif étant le dimensionnement de la structure suivant un critère de résistance ou dedéplacement admissible.La résistance de materiaux s'insère entre deux disciplines qui sont très proches d'elle : l'élasticité et l'étude desstructures. L'élasticité s'occupe d'étudier les propiétés elastiques des matériaux, d'une façon plus générale que larésistance parce que en résistance on fait toujours plus d'hypothèses simplicatrices. La théorie de structures utiliseles principes de la résistance mais elle les applique a des ensemble de pièces, tandis que la résistance étudie chaqueélément resistant d'une façon separée.Dans le chapitre trois, on s'avait interessé aux mouvements des solides rigides. C'est à dire, on s'intéressait auxsolides, mais en supposant qu'ils ne se déforment pas. Cette hypothèses ne repond pas à la realité, mais, pour étuiderle mouvement assez souvant elle est susante. Dans ce chapitre, on fait une autre hypothèse, qui est plus prochede la realité pour les matériaux elastiques. On va supposer qu'il y a une relation linéaire entre la charge subi par lematériel et sa déformation. Cette relation est vraie quand le matériel a un comportement elastique. Le comportementgénerale d'un matériel peut se schematizer avec la gure suivante :
!
"
"max"rupture
zone
élastique
zone
plastique
40

6.1.1 Types de sollicitations
6.1.2
6.2 Etudes des poutres
6.2.1 Equation de Bernoulli
41
6.3 Problèmes
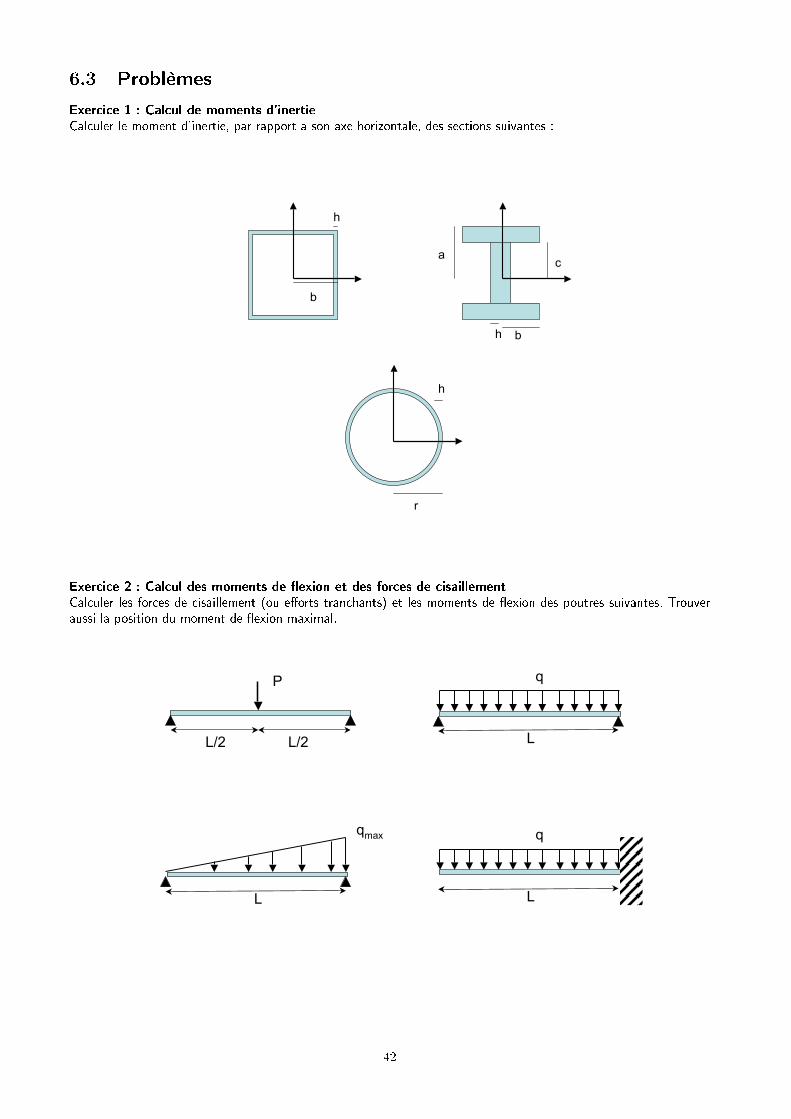
Exercice 1 : Calcul de moments d'inertie
Calculer le moment d'inertie, par rapport a son axe horizontale, des sections suivantes :
b
h
a
b
c
h
r
h
Exercice 2 : Calcul des moments de exion et des forces de cisaillement
Calculer les forces de cisaillement (ou eorts tranchants) et les moments de exion des poutres suivantes. Trouveraussi la position du moment de exion maximal.
P
L/2 L/2 L
q
L
qmax
L
q
42
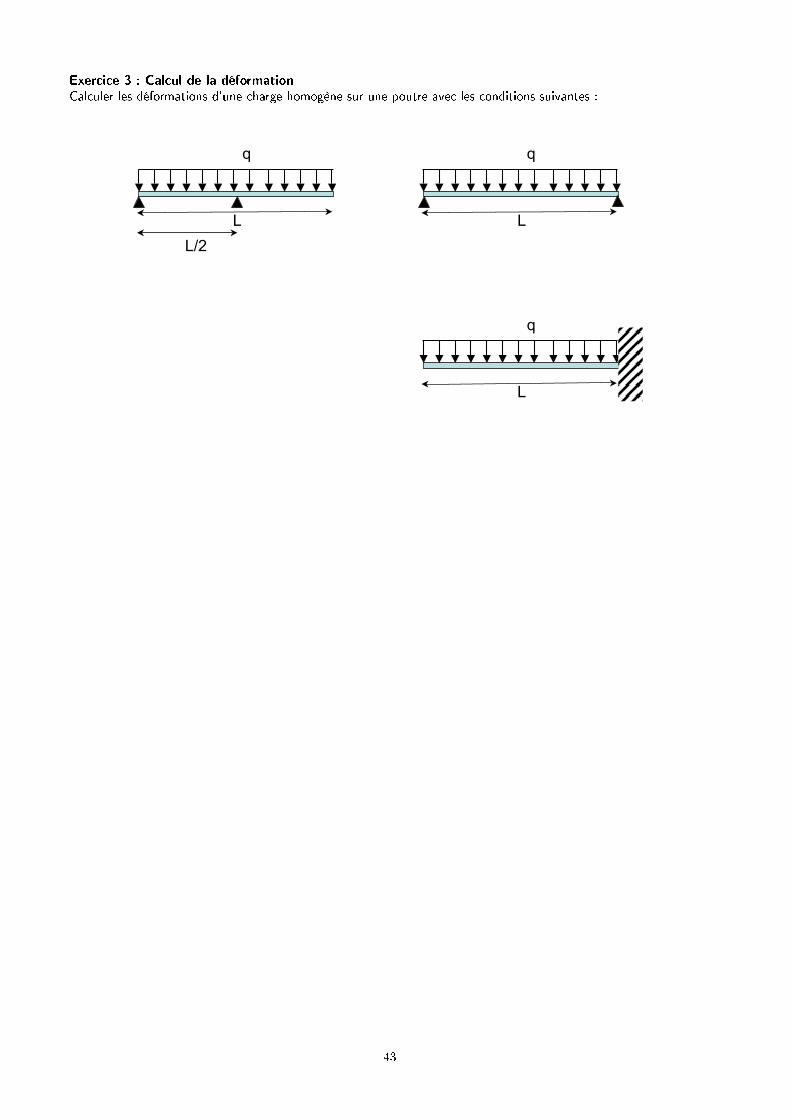
Exercice 3 : Calcul de la déformation
Calculer les déformations d'une charge homogène sur une poutre avec les conditions suivantes :
L
q
L
q
L
q
L/2
43
Chapitre 7
Problèmes transversaux
Le but de ce dernier chapitre est de présenter des problèmes qui mélangent les connaissances acquises dans leschapitres précedents et que, pour les résoudre, il faut aller charger des données ailleurs ou faire des hypothèses quine sont pas indiqués dans l'enoncé. Ce problèmes veulent être des examples du type de problèmes qu'il faut résoudrequand on fait le métier d'ingénieur. Sa résolution n'est pas unique, même si il n'y a une pour montrer les hypothèsesou le type de calculs nécessaires. Attention, le fait que la solution n'est pas unique ne veut pas dire que toutes lessolutions sont bonnes ! Il y aura toujours de bonnes, de moins bonnes, et de fausses solutions.
44
Annexe A
Examens précedents
A.1 Examen de mécanique I du 3 février 2006
Questions de cours
1. Dénition d'un repére inertiel et d'un repére non-inertiel. Donner les équations du mouvement (position-vitesse-accelération) dans les deux repéres.
2. Dénition des coordonnées polaires. Equations du mouvement (position-vitesse) en coordonnées polaires en sachantque :
d~ur
dt= θ~uθ
d~uθ
dt= −θ~ur
3. Principe d'Archimede. Application à un bateau. Quelle est la partie submergée d'un bateau ?
4. Equation de Bernoulli. Quelles sont les diérentes composantes ? Donner un exemple.
5. Quelles sont les conditions d'équilibre statique d'un solide ?
6. Démontrer les équations du mouvement rectiligne uniformément accéléré :
x(t) = x0 + v0∆t + 1/2a∆t2
Probléme 1 : Lancement d'un missile
Depuis une base de lancement, on lance un missile avec une vitesse initiale v0 et un angle avec l'horizontale α. Onnéglige toutes les forces aérodynamiques et on considére seulement la gravitation, qu'on va supposer uniforme.1. Choisir le repére pour étudier le mouvement.2. Décrire les conditions initiales dans ce repére.3. Ecrire les équations du mouvement sur tous les axes.4. Calculer la distance parcourue et la hauteur maximale en fonction de la vitesse et l'angle.5. Quel doit être l'angle de tir pour que la distance soit maximale ?6. Comment les équations sont-elles modiées si on veut prendre en compte la courbure de la Terre ?7. Proposer une méthode geometrique pour prendre en compte la courbure de la Terre. On rappelle que dans ce cas,le missile va décrire un morceau d'ellipse autour de la Terre.
Probléme 2 : Poids sur une pente variable
Un poids M est placé sur une pente d'angle α(t), α étant une fonction du temps. Dans un premier temps on vaconsidérer la loi temporelle : α = ωt. La surface de la pente a un coecient de friction statique µs diérent ducoecient dynamique µd, avec la propriété : µd < µs.1. Faire un schéma avec les forces présentes sur le poids. Quelle force apparaît quand le poids est en mouvement ?
45
2. Faire un décomposition sur les axes x et y.3. Quel est l'angle minimal pour que le poids commence à glisser ?4. Calculer la vitesse en fonction du temps et de l'angle de la pente.5. Calculer la distance parcourue en fonction du temps et de l'angle de la pente.6. Quel est le rôle de ω ? Comment la vitesse nale va t'elle changer ?
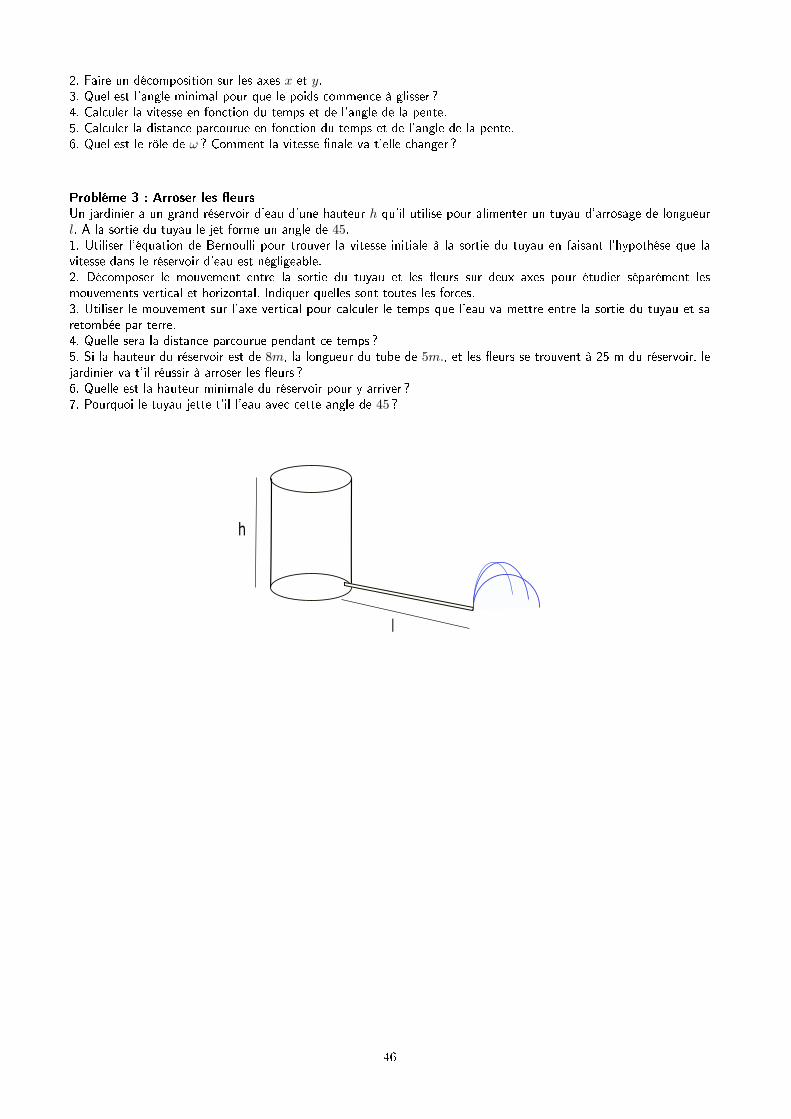
Probléme 3 : Arroser les eurs
Un jardinier a un grand réservoir d'eau d'une hauteur h qu'il utilise pour alimenter un tuyau d'arrosage de longueurl. A la sortie du tuyau le jet forme un angle de 45.1. Utiliser l'équation de Bernoulli pour trouver la vitesse initiale à la sortie du tuyau en faisant l'hypothése que lavitesse dans le réservoir d'eau est négligeable.2. Décomposer le mouvement entre la sortie du tuyau et les eurs sur deux axes pour étudier séparément lesmouvements vertical et horizontal. Indiquer quelles sont toutes les forces.3. Utiliser le mouvement sur l'axe vertical pour calculer le temps que l'eau va mettre entre la sortie du tuyau et saretombée par terre.4. Quelle sera la distance parcourue pendant ce temps ?5. Si la hauteur du réservoir est de 8m, la longueur du tube de 5m., et les eurs se trouvent à 25 m du réservoir, lejardinier va t'il réussir à arroser les eurs ?6. Quelle est la hauteur minimale du réservoir pour y arriver ?7. Pourquoi le tuyau jette t'il l'eau avec cette angle de 45 ?
46
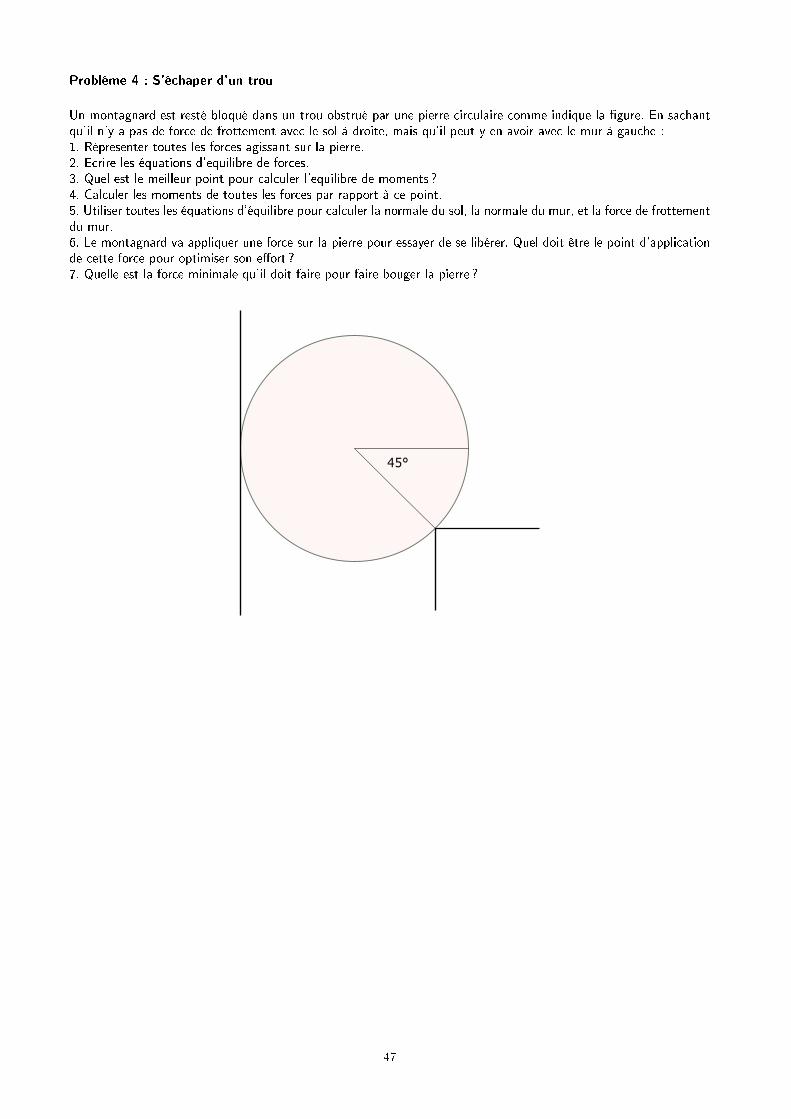
Probléme 4 : S'échaper d'un trou
Un montagnard est resté bloqué dans un trou obstrué par une pierre circulaire comme indique la gure. En sachantqu'il n'y a pas de force de frottement avec le sol à droite, mais qu'il peut y en avoir avec le mur à gauche :1. Répresenter toutes les forces agissant sur la pierre.2. Ecrire les équations d'equilibre de forces.3. Quel est le meilleur point pour calculer l'equilibre de moments ?4. Calculer les moments de toutes les forces par rapport à ce point.5. Utiliser toutes les équations d'équilibre pour calculer la normale du sol, la normale du mur, et la force de frottementdu mur.6. Le montagnard va appliquer une force sur la pierre pour essayer de se libérer. Quel doit être le point d'applicationde cette force pour optimiser son eort ?7. Quelle est la force minimale qu'il doit faire pour faire bouger la pierre ?
47
A.2 Examen de mécanique I du 12 Juin 2006
Questions de cours
1. Enoncer les trois lois de Newton (3 points)
2. Retrouver les équations du mouvement uniformément accéléré, c'est-à-dire, le mouvement d'une masse soumise àune acceleration constante. Utiliser la dénition de la vitesse et de l'accélération et les intégrer. Imposer pour celàdes conditions initiales genériques −→x0 et −→v0 (3 points)
3. Quelles sont les conditions d'équilibre statique d'un solide rigide ? (3 points)
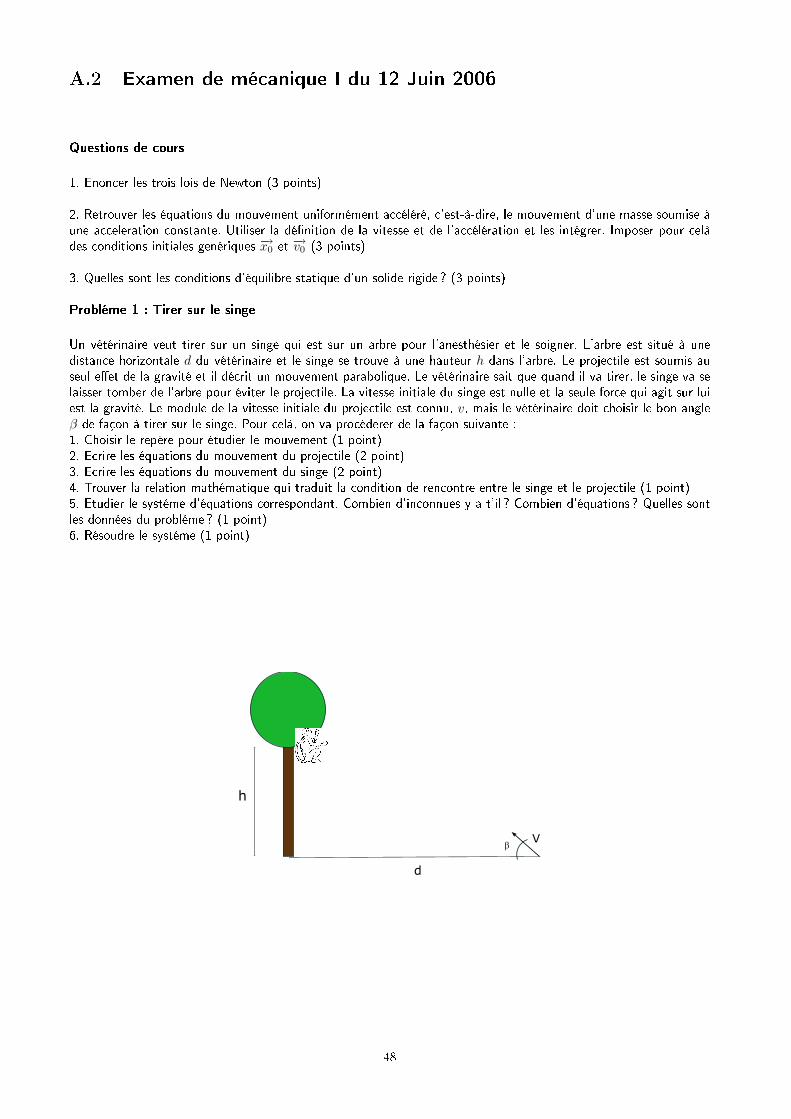
Probléme 1 : Tirer sur le singe
Un vétérinaire veut tirer sur un singe qui est sur un arbre pour l'anesthésier et le soigner. L'arbre est situé à unedistance horizontale d du vétérinaire et le singe se trouve à une hauteur h dans l'arbre. Le projectile est soumis auseul eet de la gravité et il décrit un mouvement parabolique. Le vétérinaire sait que quand il va tirer, le singe va selaisser tomber de l'arbre pour éviter le projectile. La vitesse initiale du singe est nulle et la seule force qui agit sur luiest la gravité. Le module de la vitesse initiale du projectile est connu, v, mais le vétérinaire doit choisir le bon angleβ de façon à tirer sur le singe. Pour celà, on va procéderer de la façon suivante :1. Choisir le repére pour étudier le mouvement (1 point)2. Ecrire les équations du mouvement du projectile (2 point)3. Ecrire les équations du mouvement du singe (2 point)4. Trouver la relation mathématique qui traduit la condition de rencontre entre le singe et le projectile (1 point)5. Etudier le systéme d'équations correspondant. Combien d'inconnues y a t'il ? Combien d'équations ? Quelles sontles données du probléme ? (1 point)6. Résoudre le systéme (1 point)
48
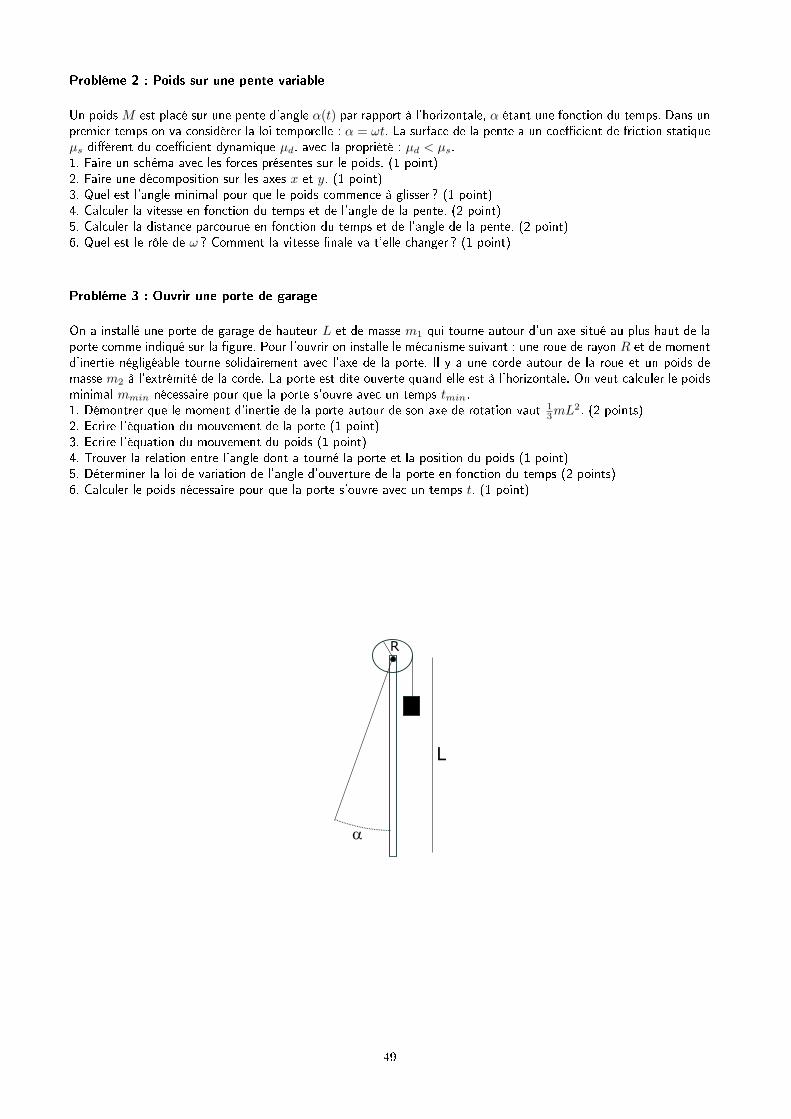
Probléme 2 : Poids sur une pente variable
Un poids M est placé sur une pente d'angle α(t) par rapport à l'horizontale, α étant une fonction du temps. Dans unpremier temps on va considérer la loi temporelle : α = ωt. La surface de la pente a un coecient de friction statiqueµs diérent du coecient dynamique µd, avec la propriété : µd < µs.1. Faire un schéma avec les forces présentes sur le poids. (1 point)2. Faire une décomposition sur les axes x et y. (1 point)3. Quel est l'angle minimal pour que le poids commence à glisser ? (1 point)4. Calculer la vitesse en fonction du temps et de l'angle de la pente. (2 point)5. Calculer la distance parcourue en fonction du temps et de l'angle de la pente. (2 point)6. Quel est le rôle de ω ? Comment la vitesse nale va t'elle changer ? (1 point)
Probléme 3 : Ouvrir une porte de garage
On a installé une porte de garage de hauteur L et de masse m1 qui tourne autour d'un axe situé au plus haut de laporte comme indiqué sur la gure. Pour l'ouvrir on installe le mécanisme suivant : une roue de rayon R et de momentd'inertie négligéable tourne solidairement avec l'axe de la porte. Il y a une corde autour de la roue et un poids demasse m2 à l'extrêmité de la corde. La porte est dite ouverte quand elle est à l'horizontale. On veut calculer le poidsminimal mmin nécessaire pour que la porte s'ouvre avec un temps tmin.1. Démontrer que le moment d'inertie de la porte autour de son axe de rotation vaut 1
3mL2. (2 points)2. Ecrire l'équation du mouvement de la porte (1 point)3. Ecrire l'équation du mouvement du poids (1 point)4. Trouver la relation entre l'angle dont a tourné la porte et la position du poids (1 point)5. Déterminer la loi de variation de l'angle d'ouverture de la porte en fonction du temps (2 points)6. Calculer le poids nécessaire pour que la porte s'ouvre avec un temps t. (1 point)
49

A.2.1 Corrigé
Questions théoriques
1. (a) Dans un repére inertiel, les corps gardent leur état initial, ou bien le repos, ou bien la vitesse, en absencede forces externes
(b) Dans un repére inertiel, la variation de quantité de mouvement est proportionnelle à la force qui agit surle corps :
d−→pdt
=−→F (A.1)
(c) Principe d'action et réaction : quand un corps A produit une force sur un corps B, le corps B produit uneforce sur le corps A égale en direction et module, mais avec le sens inverse.
2. Par dénition :−→a = d−→vdt
Si on intégre :
−→v =∫ t
t0
−→a dt
Comme l'acceleration est constante on peut la sortir de l'intégrale et imposer la condition initiale (−→v (t0) =−→v 0) :
−→v (t) = −→v 0 +−→a (t− t0)
Aussi par dénition : −→v = d−→xdt
Si on intégre :
−→x =∫ t
t0
−→v dt
On utilise l'expression de la vitesse qu'on a trouvé précédenment :
−→x =∫ t
t0
(−→v 0 +−→a (t− t0)) dt
De la même façon on impose la condition initiale (−→x (t0) = −→x 0), et on arrive à :
−→x (t) = −→x 0 +−→v (t− t0) +−→a2
(t− t0)2
3. Pour un solide rigide, il y a deux conditions d'équilibre :
∑−→F ext =
−→0 (A.2)∑−→
Mext =−→0
50

Probléme 1
1. Le choix du repére est libre, tant qu'on est cohérent avec les équations qu'on développe par la suite. J'ai choisiun repére avec l'origine au dessous de l'arbre, avec l'axe x orienté vers le projectile et l'axe y orienté vers le singe.La position du projectile est donnée par (xp, yp), et la position du singe par (xs, ys). g est la force de gravité, et t letemps ecoulé depuis le tir.
2. La seule force qui agit sur le projectile est la gravité. Si on utilise les formules du mouvement uniformément accéléréon trouve, pour l'axe x :
xp = d− v cos βt (A.3)
et pour l'axe y :
yp = v sinβt− 12gt2 (A.4)
3. La seule force qui agit sur le singe est aussi la gravité. Les équations de son mouvement sont :
xs = 0
ys = h− 12gt2
4. La condition est que leurs coordonnées x et y sont égales.
xs = xp ys = yp
5. inconnues : t, y, βnombre d'équations : 3données du probléme : h, d, v, g
6. Pour résoudre le systéme, à partir de l'égalité sur l'axe x on trouve :
v cos βt = d
on injecte cette condition sur l'égalité sur l'axe y et on arrive à :
tanβ =h
d
51

Probléme 2
1.
2. Encore une fois les axes sont libres. Nous prenons l'axe x suivant le mouvement, et l'axe y perpendiculaire. Leséquations sur les deux axes sont :
mg sinα− µN = ma (A.5)
mg cos α = 0
3. Pour que le corps commence à glisser il faut que la force de gravité soit plus importante que la force de frottement :
g sinα > µsg cos α
Où le coecient de friction est le coecient statique, donc le corps est encore au repos. De cette expression on peuten déduire l'angle minimal pour que le corps commence à bouger :
α0 = tan−1 µs
Cet angle α0 sera l'angle à l'instant t0 quand le corps commence à bouger.4. Comme on connait l'accélération :
a = g sinα− µdg cos α
En utilisant la dénition de l'accelération on peut trouver la vitesse :
dv
dt= g (sinα− µd cos α)
Et aprés l'intégration on arrive à :
v(α) =g
ω((cos α0 − cos α) + µd(sinα0 − sinα))
5. De la même façon, une fois que la vitesse est connue, on applique sa dénition pour calculer la position :
x =g
ω
∫ α
α0
((cos α0 − cos α) + µd(sinα0 − sinα)) dt
Et aprés nouvelle intégration (longue mais pas dicile) on trouve :
x =g
ω2[(cos α0 + µd sinα0)(α− α0) + (sinα0 − µd cos α0)− (sinα− µd cos α)]
52

Probléme 3
1. Le moment d'inertie vient donnée par l'intégrale :
I =∫ h
0
r2dm
La relation entre un diérentiel de masse, et un diérentiel de distance pour une porte de section S, et densité ρ est :dm = SρdrEt avec cette relation on peut calculer l'intégrale :
I = Sρh3
3Comme on connaît aussi la relation entre la masse et le volume de la porte : m = SρhOn arrive nalement à l'expression :
I =13mh2
2. On va étudier le probléme en deux parties. D'abord on étudie la rotation de la porte, qui sera soumise à un momentpar la force de la corde F fois le rayon R du disque. On utilise la relation :∑
M = Id2θ
dt2
Et on trouve :
FR =13m1h
2 d2θ
dt2
3. Pour le poids, il y aura la reaction de la force F sur la corde, et son poids. En appliquant F = ma om arrive à :
m2g − F = m2d2x
dt2
4. Cette relation est purement géométrique : x = Rθ5. En utilisant les équations des points précédents (2,3,4) on arrive à :
dθ2
dt2=
13m1h
2 + m2R2
m2Rg
Et aprés intégration :
θ =13m1h
2 + m2R2
2m2Rgt2
6. Pour que la porte soit ouverte (θ = Π2 ) avec un temps tmin il faut avoir une masse mmin :
mmin =13m1h
2t2min
ΠRg + R2t2min
53
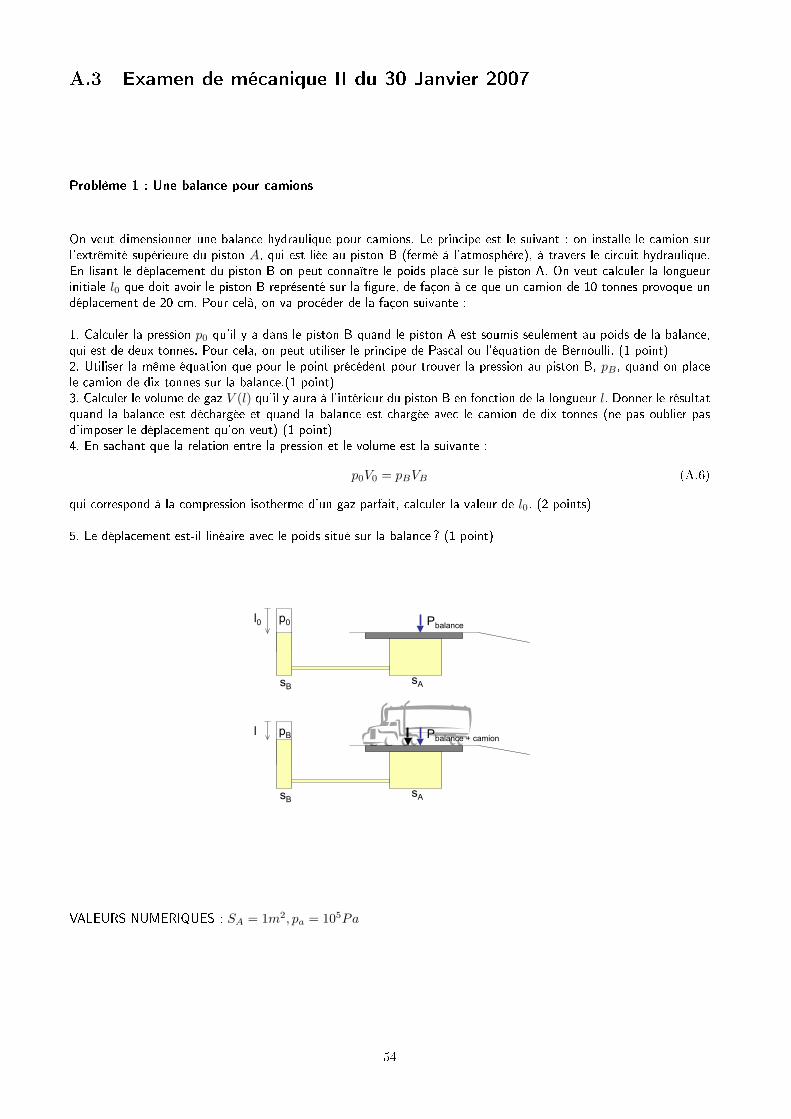
A.3 Examen de mécanique II du 30 Janvier 2007
Problème 1 : Une balance pour camions
On veut dimensionner une balance hydraulique pour camions. Le principe est le suivant : on installe le camion surl'extrêmité supérieure du piston A, qui est liée au piston B (fermé à l'atmosphère), à travers le circuit hydraulique.En lisant le déplacement du piston B on peut connaître le poids placé sur le piston A. On veut calculer la longueurinitiale l0 que doit avoir le piston B représenté sur la gure, de façon à ce que un camion de 10 tonnes provoque undéplacement de 20 cm. Pour celà, on va procéder de la façon suivante :
1. Calculer la pression p0 qu'il y a dans le piston B quand le piston A est soumis seulement au poids de la balance,qui est de deux tonnes. Pour cela, on peut utiliser le principe de Pascal ou l'équation de Bernoulli. (1 point)2. Utiliser la même équation que pour le point précédent pour trouver la pression au piston B, pB , quand on placele camion de dix tonnes sur la balance.(1 point)3. Calculer le volume de gaz V (l) qu'il y aura à l'intérieur du piston B en fonction de la longueur l. Donner le résultatquand la balance est déchargée et quand la balance est chargée avec le camion de dix tonnes (ne pas oublier pasd'imposer le déplacement qu'on veut) (1 point)4. En sachant que la relation entre la pression et le volume est la suivante :
p0V0 = pBVB (A.6)
qui correspond à la compression isotherme d'un gaz parfait, calculer la valeur de l0. (2 points)
5. Le déplacement est-il linéaire avec le poids situé sur la balance ? (1 point)
Pbalancep0l0
sBsA
Pbalance + camionpBl
sBsA
VALEURS NUMERIQUES : SA = 1m2, pa = 105Pa
54
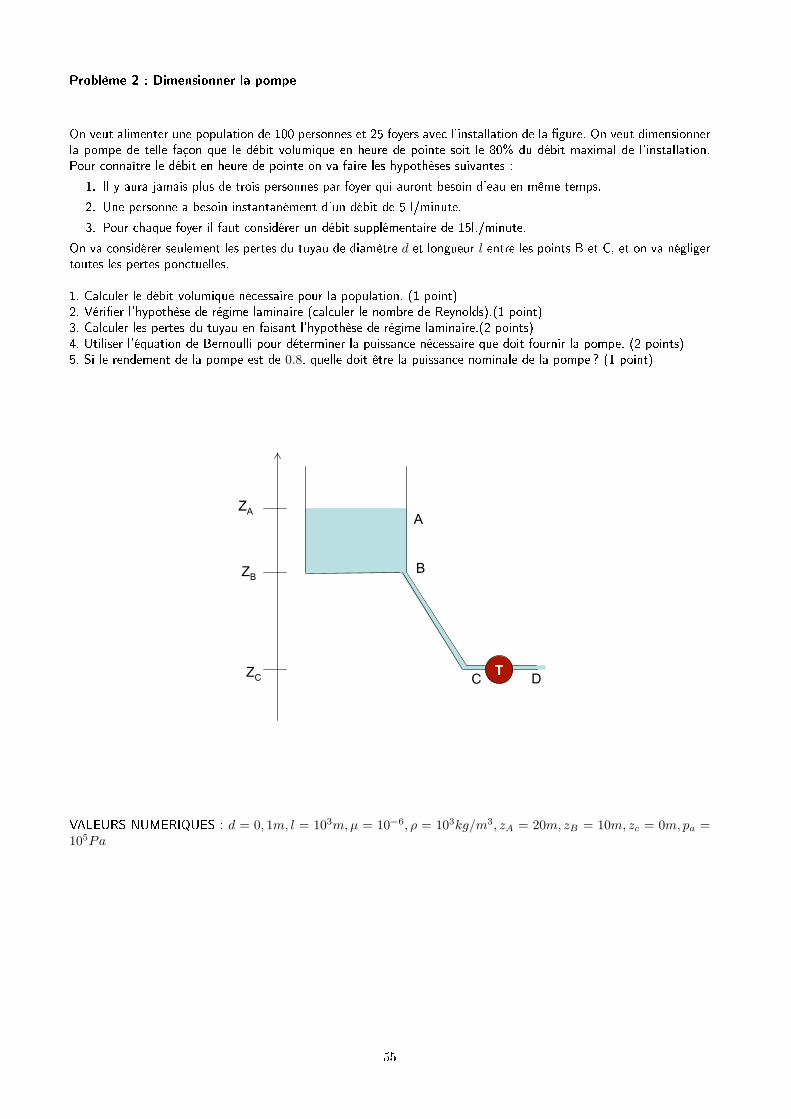
Problème 2 : Dimensionner la pompe
On veut alimenter une population de 100 personnes et 25 foyers avec l'installation de la gure. On veut dimensionnerla pompe de telle façon que le débit volumique en heure de pointe soit le 80% du débit maximal de l'installation.Pour connaître le débit en heure de pointe on va faire les hypothèses suivantes :
1. Il y aura jamais plus de trois personnes par foyer qui auront besoin d'eau en même temps.
2. Une personne a besoin instantanément d'un débit de 5 l/minute.
3. Pour chaque foyer il faut considérer un débit supplémentaire de 15l./minute.
On va considérer seulement les pertes du tuyau de diamètre d et longueur l entre les points B et C, et on va négligertoutes les pertes ponctuelles.
1. Calculer le débit volumique nécessaire pour la population. (1 point)2. Vérier l'hypothèse de régime laminaire (calculer le nombre de Reynolds).(1 point)3. Calculer les pertes du tuyau en faisant l'hypothèse de régime laminaire.(2 points)4. Utiliser l'équation de Bernoulli pour déterminer la puissance nécessaire que doit fournir la pompe. (2 points)5. Si le rendement de la pompe est de 0.8, quelle doit être la puissance nominale de la pompe ? (1 point)
TDC
B
A
ZA
ZB
ZC
VALEURS NUMERIQUES : d = 0, 1m, l = 103m,µ = 10−6, ρ = 103kg/m3, zA = 20m, zB = 10m, zc = 0m, pa =105Pa
55
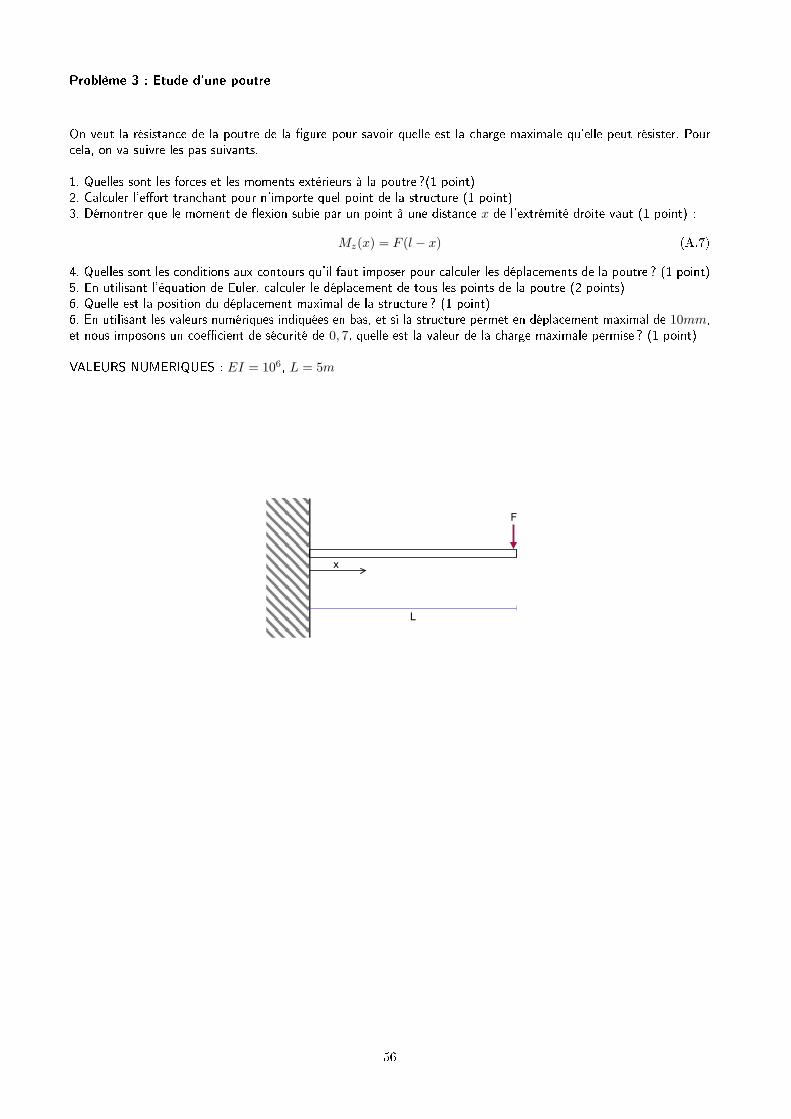
Problème 3 : Etude d'une poutre
On veut la résistance de la poutre de la gure pour savoir quelle est la charge maximale qu'elle peut résister. Pourcela, on va suivre les pas suivants.
1. Quelles sont les forces et les moments extérieurs à la poutre ?(1 point)2. Calculer l'eort tranchant pour n'importe quel point de la structure (1 point)3. Démontrer que le moment de exion subie par un point à une distance x de l'extrémité droite vaut (1 point) :
Mz(x) = F (l − x) (A.7)
4. Quelles sont les conditions aux contours qu'il faut imposer pour calculer les déplacements de la poutre ? (1 point)5. En utilisant l'équation de Euler, calculer le déplacement de tous les points de la poutre (2 points)6. Quelle est la position du déplacement maximal de la structure ? (1 point)6. En utilisant les valeurs numériques indiquées en bas, et si la structure permet en déplacement maximal de 10mm,et nous imposons un coecient de sécurité de 0, 7, quelle est la valeur de la charge maximale permise ? (1 point)
VALEURS NUMERIQUES : EI = 106, L = 5m
F
L
x
56
A.3.1 Corrigé
Problème 1
1. La pression au piston A est facile à calculer : elle correspond à la somme de la pression atmosphérique pa = 105Paplus la pression produite par le poids de la balance. Par le principe de Pascal, la pression au piston B est égale :
p0 = pA = 105 +2000 . 9, 8
1= 11, 96 . 104 (A.8)
2. De la même façon on peut calculer la pression avec le camion :
pB = pA = 105 +12000 . 9, 8
1= 21, 76 . 104 (A.9)
3. Le volume sera égale à la surface SB fois la longueur l. Quand la balance n'est pas chargé la longuer est l0 :V0 = l0SB , et quand la balance est chargé avec dix tonnes, la longueur a diminué de 20 cm. (condition de l'énoncé) :VB = (l0 − 0, 2)SB
4. Il faut tout simplement faire la substitution dans la formule :
11, 96 . 104 . SB . l0 = 21, 76 . 104 . SB(l0 − 0, 2) (A.10)
et isoler l0 :
l0 = 0, 473 m (A.11)
5. Bien sûr que non ! ! La relation entre le poids et le déplacement est :
x
l0=
mg
12 . 104 + mg(A.12)
57

Problème 2
1. Il faut considérer trois personnes par foyer, donc 75 personnes, avec un débit personnels de 5 litres par min, donc375 litres/min. En plus il faut rajouter 15 litres/min par 25 foyers, donc 375 litres/min. La somme totale est, donc,de 750 litres/min. Et, en appliquant un marge de sécurité de 0,8, on trouve 937,5 litres/min. Il ne faut oublier defaire la conversion aux unités internationales, les m3 et les secondes :
qv = 937l/min = 9371 m3
1000 l
1 min
60 s= 1, 5625 . 10−2m3/s (A.13)
La surface de sortie est :
SD = Π(0, 05)2 = 7, 85 . 10−3 m2 (A.14)
Et la vitesse à la sortie :
vD =qV
SD= 1, 99 m/s (A.15)
2. Il sut d'appliquer directement la formule du nombre de Reynolds :
Re =103 . 1, 99 . 0, 1
10−6= 1, 99 . 108 (A.16)
Comme le nombre de Reynolds est beaucoup plus faible que 1000, l'écoulement est laminaire.3. Encore une fois, il sut d'appliquer la formule directement :
∆ppertes =64
1, 99 . 108
103 . 4 . 103
2 .= 64 Pa (A.17)
4. On écrit l'équation de Bernoulli entre les points A et D :
pA +12ρv2
A + ρghA −∆ppertes + ∆ppompe = pD +12ρv2
D + ρghD (A.18)
On va négliger la vitesse au point A parce qu'elle est très faible. La pression au point A et au point D sont égales àla pression atmosphérique. Comme toutes les autres variables sont connues, on peut isoler ∆ppompe :
∆ppompe = −18 . 104Pa (A.19)
Comme le signe est negatif, ça implique qu'il ne faut pas fournir énérgie au système, mais l'évaquer. En conséquence,on n'aura pas une pompe mais une turbine.Et en utilisant l'équation qui lie la diérence de pression avec la puissance réelle :
Prel = ∆pqv =60 . 105
60= 3000w (A.20)
Et, comme c'est une turbine, le rendement est déni par rapport à la puissance extraite :
Pextraite = Prelleη = 2400 w (A.21)
58

Problème 3
1. Il y a deux forces et un moment extérieurs à la poutre. Il y a la force à l'extrémité de la poutre F et la réactionR du mur qui empêche à la poutre de se déplacer verticalement. Il y a aussi le moment du mur qui empêche à lapoutre de tourner et qu'on va appeler M .
L
x
FR
M
2. Pour calculer l'eort tranchant sur une structure il faut considérer toutes les forces à gauche ou à droite de lasection. Comme on a fait un cours, on va considérer toutes les forces à droite de la section. Pour une section à unedistance quelconque x de l'origine, la seule force qu'il faut considérer et F . L'eort tranchant est, donc, constant eta une valeur égale à F :
Fz(x) = F (A.22)
3. De la même façon pour calculer le moment de exion il faut tenir compte des moments provoqués par toutes lesforces à droite de la section. Comme il y a une seule force, il y aura un seul moment. Pour le calculer il faut multiplierla force par la distance entre le point d'application de la force et la section. It is :
Mz(x) = F (l − x) (A.23)
4. Les conditions qu'il faut imposer sont que le déplacement à l'extrême gauche (x = 0) est nul : v(0) = 0 est aussila rotation : dv(0)
dx ) = 0.5. L'équation de Euler, dans ce cas particulier est :
d2v
dx2=
F (l − x)EI
(A.24)
On l'intègre une première fois :
EIdv
dx= F (lx− x2
2) + K1 (A.25)
et une deuxième fois :
v(x) =F
EI
(lx2
2− x3
6+ K1x + K2
)(A.26)
Et, en imposant les conditions aux contours on trouve la valeur des constantes : K1 = 0 et K2 = 06. Si on fait la graphique de la fonction on trouve le résultat suivant :Et donc évidant que le déplacement maximale a lieu à la distance l.
7. Si on veut une marge de sécurité du 0.7, il faut multiplier la distance maximale permise par le coecient de sécurité :vmax = 0.710mm., donc 7mm. En sachant que la deformation maximale a lieu à l'éxtremité de la structure, on vacalculer la force F de façon à que le déformation à l'éxtremité soit de 7mm. Avec les données numériques qu'on a,et l'expression de la déformation qu'on a trouvé :
59
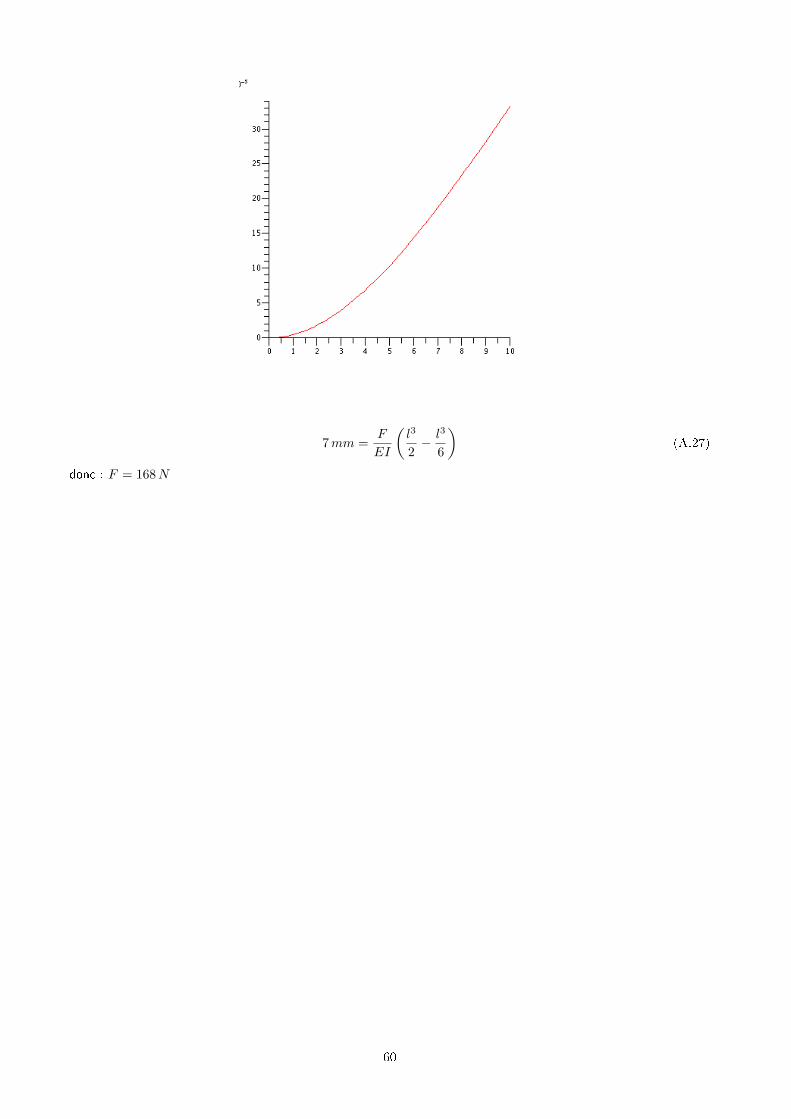
7 mm =F
EI
(l3
2− l3
6
)(A.27)
donc : F = 168 N
60
Bibliographie
[1] Goldstein H. : Mécanique Classique. Presses Universitaires de France
[2] Landau & Lifchitz : Mécanique
[3] Tipler P. A. : Modern Physics
61











![Diplôme Mentionà l’issue de l’année 2016-2017 : aucune nouvelle inscription possible] Diplôme Mention Licence* L2 Mathématiques Licence* L1 L2 L3 Informatique L1 L2 Physique,](https://img.pdfslide.fr/doc/110x75/60513322d80cf77dda780bdf/diplme-laissue-de-laanne-2016-2017-aucune-nouvelle-inscription-possible.jpg)