Embed Size (px)
Citation preview

Théorie des mécanismes
Objectifs du cours :
Aprés avoir étudié ce cours et les TD associés, vous devez être capable de :
– déterminer si un problème de cinématique ou de statique/dynamique est soluble,
– critiquer le choix de modèles de mécanisme,
– imaginer des modèles de mécanismes isostatiques équivalents cinématiquement,
– interpréter l’hyperstatisme (influence sur la rigidité, le montage, . . .).
Table des matières
1 Préliminaires : liaisons et espaces vectoriels associés 21.1 Caractérisation cinématique d’une liaison . . . . . . . . . . . . . . . . . . . . . 21.2 Caractérisation statique d’une liaison . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Interprétation graphique des espaces L12 et T12 . . . . . . . . . . . . . . . . . . 3
2 Association de deux liaisons en parallèle 32.1 Point de vue cinématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Point de vue statique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 Relation liant mobilité, hyperstatisme et nombres d’inconnues . . . . . . . . . 42.4 Exemple : liaison pivot réalisée à l’aide de deux liaisons sphérique . . . . . . 52.5 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Association de deux liaisons en série 63.1 Relations liant mobilité et nombre d’inconnues . . . . . . . . . . . . . . . . . . 73.2 Exemple : liaison sphère-plan réalisée par une sphérique et un appui-plan . . 7
4 Analyse d’une chaîne bouclée 9
5 Analyse d’un système complexe 105.1 Nombre cyclomatique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115.2 Relation entre mobilité, hyperstatisme et nombres d’inconnues dans le cas
général . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115.3 Remarque sur les problèmes plans . . . . . . . . . . . . . . . . . . . . . . . . . 12
6 Bilan 13
7 Méthodologie et utilisation de la théorie des mécanismes en modélisation 14

Théorie des mécanismes
1 Préliminaires : liaisons et espaces vectoriels associés
1.1 Caractérisation cinématique d’une liaison
1 2
L12
Soient deux solides 1 et 2 en liaison l’un avec l’autre. La liaison autorise m mouvementsparmi les 6 mouvements possibles de 2 par rapport à 1. Le torseur
V2/1
est donc un élé-
ment d’un espace vectoriel L12 de dimension m, caractérisant l’ensemble des mouvementspossible de 2 par rapport à 1.
L12 est un sous-espace de l’espace vectoriel des mouvements de corps rigide (espace deschamps de torseurs T ).
m est la mobilité de la liaison.
Exemple : liaison pivot d’axe (A, ~x)
L12 =
V2/1
=A
ω.~x~0
, ω ∈ R
L’espace vectoriel L12 est de dimension 1.
1.2 Caractérisation statique d’une liaison
1 2
L12T12
L’effort transmissible dans une liaison est défini par dualité vis-à-vis des mouvementsautorisés.
Pour une liaison parfaite, le torseur statiqueT 1/2
est tel que pour tout mouvement
V2/1
,T 1/2
⊗V2/1
= 0. Il appartient donc à un sous-espace vectoriel T12, carac-
térisant l’ensemble des actions mécaniques transmissibles entre 1 et 2 :
T12 =T 1/2
∈ T/∀
V2/1
∈ L12,
T 1/2
⊗V2/1
= 0
C’est un sous-espace de l’espace des champs de torseur T , orthogonal à L12 et de dimen-sion 6−m.
2
Théorie des mécanismes
L12
T12
T, dimension 6
dimension m=Ic
dimension 6-m=Is
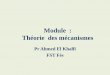
1.3 Interprétation graphique des espaces L12 et T12
T12 est l’orthogonal à L12 dans T . Les deux espaces peuvent donc se représenter commeindiqué sur la figure.
Une première relation sur les dimensions indique :
dim L12 + dim T12 = dimT
où dim L12 = m et dimT = 6.Si on note maintenant :
Ic le nombre d’inconnues cinématiques de la liaison (Ic = dim L12),Is le nombre d’inconnues statiques de la liaison (Is = dim T12),on obtient la relation valable pour toutes les liaisons parfaites :
Ic + Is = 6
2 Association de deux liaisons en parallèle
2.1 Point de vue cinématique
Soit L12 la liaison équivalente à l’association en parallèle de deux liaisons LA12 et LB
12.
1 2
L12
A
L12
B
dimension m
T12
AT12
B
L12
A L12
B
L12
V2/1
∈ L12 est donc à la fois un élément de LA
12 et LB12. On en déduit l’égalité :
L12 = LA12 ∩ LB
12
Le nombre de mobilités autorisés entre 1 et 2 vaut : m = dim L12 = dim LA12 ∩ LB
12.
3

Théorie des mécanismes
2.2 Point de vue statique
1 2
T12
A
T12
B
A
L’action mécanique résultante des deux actions mécaniques transmises par les deux liai-sons vaut :
T 1/2
=T A1/2
+T B1/2
On en déduit : T12 = TA12 + TB12.
ConnaissantT 1/2
, il est possible de déterminer la part transmise par chaque liaison
A et B, sauf pour les composantes communes de TA12 ∩ TB12.Lorsque TA12 ∩ TB12 6= ∅, on dit que la liaison est hyperstatique de degré h = dim TA12 ∩ TB12.
2.3 Relation liant mobilité, hyperstatisme et nombres d’inconnues
– TA12 ∩ TB12 est orthogonal à LA12 + LB
12 d’où :
dim(TA12 ∩ TB12) = 6− dim(LA12 + LB
12)
soit h = 6− (dim LA12 + dim LB
12) + dim(LA12 ∩ LB
12)
donc h = 6− Ic +m
où Ic est le nombre d’inconnues cinématiques des torseursVA2/1
etVB2/1
,
et m la mobilité de la liaison L12.
– T12 est orthogonal à L12. Donc dim T12 = 6− dim L12. On en déduit :
(dim TA12 + dim TB12)− dim(TA12 ∩ TB12) = 6−m
donc Is − h = 6−m
où Is est le nombre d’inconnues statiques des torseursT A1/2
etT B1/2
,
et h l’hyperstatisme de la liaison.
4
Théorie des mécanismes
L1
0
x
y
z
0 1
L01A
L01B
T01A
T01B
BA
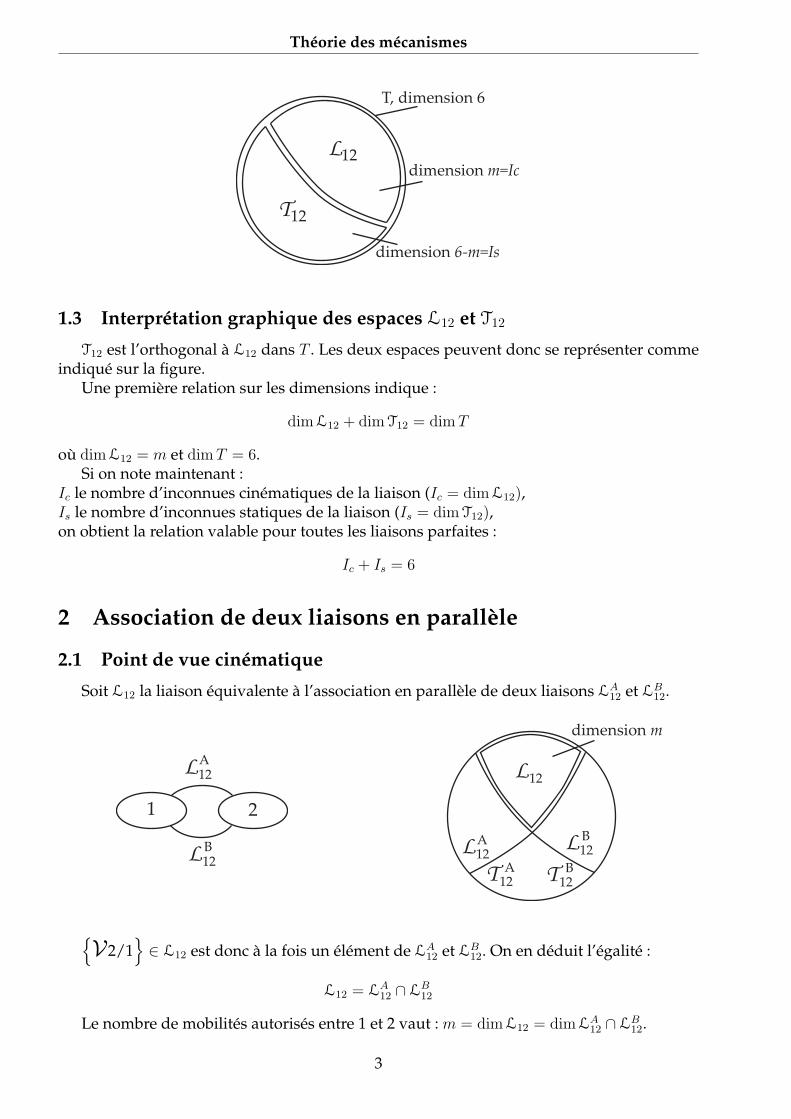
2.4 Exemple : liaison pivot réalisée à l’aide de deux liaisons sphérique
On observe :– m = 1 : 1 mobilité autorisée (rotation suivant (A, ~x)).– Ic = 2× 3 (trois rotations pour chaque sphérique)– Is = 2× 3 (trois efforts pour chaque sphérique)
On en déduit :– Par la relation cinématique : h = 6− Ic +m = 6− 6 + 1 = 1– Par la relation statique : h = Is − 6 +m = 6− 6 + 1 = 1
Le degré d’hyperstatisme est donc de 1. En effet, les efforts de 0 sur 1 suivant ~x sont transmispar les deux liaisons à la fois. Il est donc impossible de déterminer la part de chacune.
mobilité m
T01A
T01B
L01A
L01B
hyperstatisme h
U
T01A
T01B U
L01B
L01A
T01A
T01B U
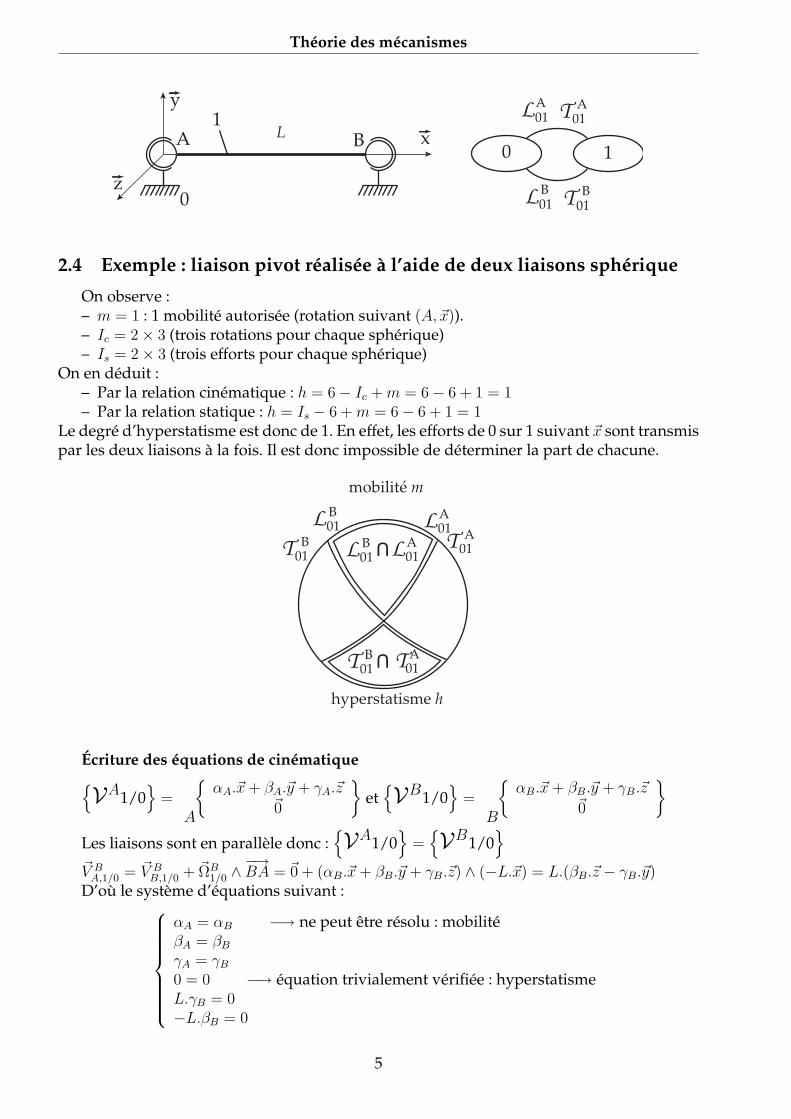
Écriture des équations de cinématiqueVA1/0
=
A
αA.~x+ βA.~y + γA.~z
~0
etVB1/0
=
B
αB.~x+ βB.~y + γB.~z
~0
Les liaisons sont en parallèle donc :
VA1/0
=VB1/0
~V BA,1/0 = ~V B
B,1/0 + ~ΩB1/0 ∧
−→BA = ~0 + (αB.~x+ βB.~y + γB.~z) ∧ (−L.~x) = L.(βB.~z − γB.~y)
D’où le système d’équations suivant :
αA = αB −→ ne peut être résolu : mobilitéβA = βBγA = γB0 = 0 −→ équation trivialement vérifiée : hyperstatismeL.γB = 0−L.βB = 0
5

Théorie des mécanismes
– Ic = 6 inconnues dont m = 1 doit être imposée pour résoudre.– 6 équations dont h = 1 trivialement vérifiée.
On vérifie donc : Ic −m = 6− h
Écriture des équations statiquesT A1/0
=
A
XA.~x+ YA.~y + ZA.~z
~0
etT B1/0
=
B
XB.~x+ YB.~y + ZB.~z
~0
Les liaisons sont en parallèle donc siT 1/0
=
A
X.~x+ Y.~y + Z.~z
~0
est l’action
globale de 1 sur 0 connue (imposée) et compatible avec la liaison, alors :T A1/0
+T B1/0
=T 1/0
~MBA,1/0 = ~MB
B,1/0 + ~RB1/0 ∧
−→BA = ~0 + (XB.~x+ YB.~y + ZB.~z) ∧ (−L.~x) = L.(YB.~z − ZB.~y)
D’où le système d’équations :
XA +XB = X −→ ne peut être résolu : hyperstatismeYA + YB = YZA + ZB = Z0 = 0 −→ équation trivialement vérifiée : mobilité−L.ZB = 0L.YB = 0
– Is = 6 inconnues dont h = 1 doit être imposée pour résoudre.– 6 équations dont m = 1 trivialement vérifiée.
On vérifie donc : IS +m = 6 + h
2.5 Bilan
La mobilité correspond :au nombre d’équation(s) cinématique(s) ne pouvant être résolue(s),ou aussiau nombre d’équation(s) statique(s) trivialement vérifiée(s).
Le degré d’hyperstatisme correspond :au nombre d’équation(s) statique(s) ne pouvant être résolue(s),ou aussiau nombre d’équation(s) cinématique(s) trivialement vérifiée(s).
3 Association de deux liaisons en série
L13 la liaison équivalente à l’association en série de L12 et L23. La composition des vi-tesses impose
V3/1
=V3/2
+V2/1
donc L13 = L12 + L23.
T13 est l’orthogonale de L13 donc T13 = T12 ∩ T23.
6

Théorie des mécanismes
1 2
L12 L
23
3
T12 T
23
L13T13
mobilité interneà la liaison : m
T23T12
L13
mobilité utile de laliaison équivalente : m
L12 L23
i
u
3.1 Relations liant mobilité et nombre d’inconnues
On note :mu la mobilité utile, correspondant au nombre de degrés de liberté de la liaison équiva-
lente L13 : mu = dim L13,mi la mobilité interne correspondant au nombre de degrés de liberté laissés libres lorsqueV3/1
est imposé : mi = dim(L12 ∩ L23).
– dim L13 = (dim L12 + dim L23)− dim(L12 ∩ L23)On obtient alors la relation : mu = Ic −mi, soit :
mu +mi = Ic
où Ic est le nombre d’inconnues cinématiques des torseursV3/2
etV2/1
.
–
dim L12 = 6− dim T12
dim L13 = 6− dim T13=⇒ Ic = 2× 6− Is
d’où : mu +mi = 2× 6− Is
3.2 Exemple : liaison sphère-plan réalisée par une sphérique et une plan/plan
– mu = 5 mobilités utiles (liaison sphère-plan équivalente entre 1 et 3).– Ic = 3 + 3 inconnues cinématiques.
On en déduit : mi = 6− 5 = 1, rotation de 2 autour de (A, ~y) non imposée parV1/3
.
Écriture des équations de cinématique
7

Théorie des mécanismes
12
x
y
z
A
3
1 A
3
Liaisonéquivalente :
V1/2
=
A
α12.~x+ β12.~y + γ12.~z
~0
etV2/3
=
A
β23.~y
U23.~x+W23.~z
Les liaisons sont en série donc siV1/3
=
A
α.~x+ β.~y + γ.~zU.~x+W.~z
est connu (imposé)
et compatible avec la liaison, alors :V1/2
+V2/3
=V1/3
D’où le système d’équations :
α12 = αβ12 + β23 = β −→ ne peut être résolu : mobilité interneγ12 = γU23 = U0 = 0 −→ équation trivialement vérifiée : immobilité de 1/3 (car chaîne ouverte)W23 = W
– Ic = 6 inconnues dont mi = 1 doit être imposée pour résoudre.– mu = 5 équations.
On vérifie : mu +mi = Ic
Écriture des équations de statique
En imposantT ext/1
compatible avec la liaison :
T ext/1
=
A
Y.~y~0
.
On isole 1 puis 2 (3 est le bâti) :
−X12 + 0 = 0−Y12 + Y = 0−Z12 + 0 = 00 = 00 = 00 = 0
←→
←→
X12 + 0 = 0Y12 + Y23 = 0Z12 + 0 = 00− L23 = 00 = 00−N23 = 0
– 2× 6 équations– Is = 3 + 3 inconnues– mu +mi = 5 + 1 mobilités conduisant à des équations triviales
On vérifie Is = 2× 6− (mu +mi)
8

Théorie des mécanismes
4 Analyse d’une chaîne bouclée
Soit une chaîne bouclée de N solides numérotés de 1 à N . On découpe virtuellement lesolide 1 en deux solides 0 et 1.
1
2
LN-1
LN
N
L1
N-1
1
2
LN-1
LN
N
L1
N-1
0
On s’intéresse aux mouvements possibles de 0 par rapport à 1, autorisés par la boucle.
L01 =N∑i=1
Li et T01 =N⋂i=1
Ti
T01
L01
dimension : h
Les mouvements déjà interdits par la boucle seront en concurrence avec l’encastrement0-1 et conduisent à de l’hyperstatisme.
h = dim T01 = dimN⋂i=1
TN
Or dim T01 + dim L01 = 6et dim L01 =
∑Ni=1(dim Li)−
∑Ni=1;j>i dim(Li ∩ Lj) = Ic −m, soit :
6− h = Ic −m
Sachant que, pour chaque liaison, dim Ti + dim Li = 6, soit Ic + Is = 6N , on en déduit :
h = m− 6.(N − 1) + Is
Remarque : Ces relations ne sont rien d’autre que la généralisation à une chaîne desrelations obtenues au paragraphe 2.3.
9
Théorie des mécanismes
Système d’équations cinématiques
La fermeture cinématique de la boucle s’écrit :VN/1
=VN/N-1
+ ...+
V2/1
– 6 équations dont h seront trivialement vérifiées,– Ic inconnues dont m doivent être imposées pour résoudre.
On retrouve ainsi : 6− h = Ic −m
Système d’équations statiquesLe PFD appliqué à 2 puis 3 puis ... puis N (1 est le bâti) conduit à :– 6× (N − 1) équations dont m seront trivialement vérifiées,– Is inconnues dont h doivent être imposées pour résoudre
On retrouve ainsi : 6.(N − 1)−m = Is − h
RemarqueLa mobilité correspond au nombre de paramètres cinématiques à imposer afin d’obtenir
une solution unique, et peut donc aussi être exprimée comme la différence entre le nombred’inconnues cinématiques et le rang des équations de la fermeture de chaîne cinématique,rc :
m = Ic − rc
Pour calculer la mobilité à partir de cette expression, il est nécessaire d’entamer une ré-solution partielle du système de façon à mettre en évidence les inconnues cinématiques àimposer afin de résoudre complètement le système.
– si m = 0, la seule solution au système d’équations est la solution triviale, toutes lesinconnues cinématiques sont nulles et la chaîne est immobile. Elle ne transmet aucunmouvement.
– si m > 0, Il existe alors m inconnues principales qui peuvent prendre des valeurs arbi-traires, on dit que le mécanisme est à m degrés de liberté. C’est-à-dire qu’il faut fixerles valeurs dem paramètres pour connaître à tout instant la configuration complète dusystème. C’est le seul cas intéressant du point de vue de l’étude des mécanismes.
Le degré d’hyperstatisme caractérise le nombre d’inconnues d’actions mécaniques à im-poser afin de résoudre le système linéaire, et peut donc être exprimé comme la différenceentre le nombre d’inconnues statiques et le rang du système d’équations issu des isolementsde tous les solides en présence, rs :
h = Is − rs
Pour calculer l’hyperstatisme à partir de cette expression, il est nécessaire d’entamer partiel-lement la résolution du système d’équations statiques (ou dynamiques si nécessaire), ce quiest relativement lourd. Tout l’intérêt du cours est d’obtenir un moyen de calculer rapidementl’hyperstatisme !
– si h = 0, le système est dit isostatique. La seule connaissance des actions mécaniquesextérieures suffit à déterminer les actions mécaniques de liaisons en appliquant le PFS.
– si h > 0, le système est dit hyperstatique de degré h. Certaines actions mécaniques deliaisons ne peuvent pas être déterminées.
5 Analyse d’un système complexe
Soient S solides liés par N liaisons.
10
Théorie des mécanismes
Li
k
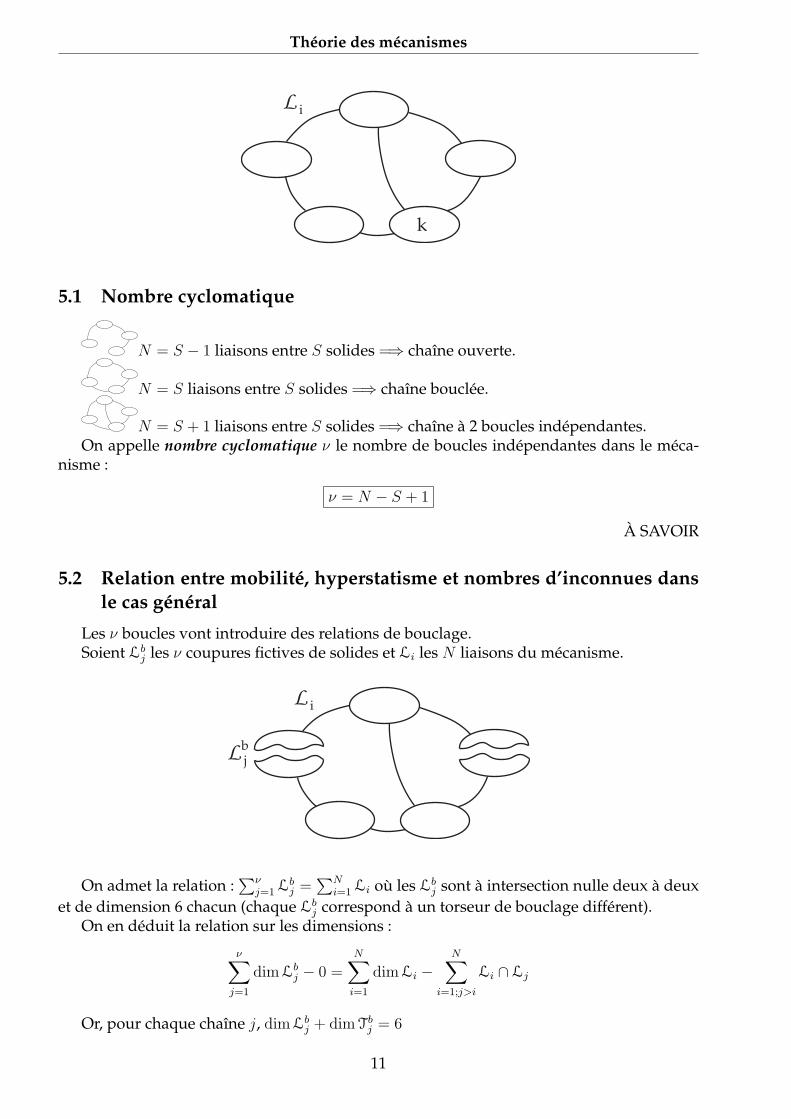
5.1 Nombre cyclomatique
N = S − 1 liaisons entre S solides =⇒ chaîne ouverte.
N = S liaisons entre S solides =⇒ chaîne bouclée.
N = S + 1 liaisons entre S solides =⇒ chaîne à 2 boucles indépendantes.On appelle nombre cyclomatique ν le nombre de boucles indépendantes dans le méca-
nisme :
ν = N − S + 1
À SAVOIR
5.2 Relation entre mobilité, hyperstatisme et nombres d’inconnues dansle cas général
Les ν boucles vont introduire des relations de bouclage.Soient Lb
j les ν coupures fictives de solides et Li les N liaisons du mécanisme.
L j
L i
b
On admet la relation :∑ν
j=1 Lbj =
∑Ni=1 Li où les Lb
j sont à intersection nulle deux à deuxet de dimension 6 chacun (chaque Lb
j correspond à un torseur de bouclage différent).On en déduit la relation sur les dimensions :
ν∑j=1
dim Lbj − 0 =
N∑i=1
dim Li −N∑
i=1;j>i
Li ∩ Lj
Or, pour chaque chaîne j, dim Lbj + dim Tbj = 6
11

Théorie des mécanismes
d’où 6.ν −ν∑j=1
dim Tbj =N∑i=1
dim Li −N∑
i=1;j>i
Li ∩ Lj
Or, par définitions,∑N
i=1 dim Li = Ic,∑N
i=1;j>i Li ∩ Lj = m et∑ν
j=1 dim Tbj = h
Donc 6.ν − h = Ic −m
À SAVOIR
Sachant que Ic+Is = 6.N , on obtient : h = m+6(ν−N)+Is, soit, en utilisant la définitiondu nombre cyclomatique :
h = m− 6.(S − 1) + Is
À SAVOIR
Remarque : Ces relations ne sont rien d’autre que la généralisation à ν chaînes indépen-dantes des relations obtenues au paragraphe 4.
Système d’équations cinématiques– 6× ν équations dont h triviales,– Ic inconnues dont m sont à imposer pour résoudre.
On retrouve ainsi : 6.ν − h = Ic −m.
Système d’équations statiques– 6× (S − 1) équations dont m triviales,– Is inconnues dont h sont à imposer pour résoudre.
On retrouve ainsi : 6.(S − 1)−m = Is − h.
5.3 Remarque sur les problèmes plans
Dans le cadre de la modélisation plane, dimT = 3. Les développements précédents res-tent valables et on obtient les relations suivantes :
Relation cinématique :
3.ν − h = Ic −m
Relation statique :
h = m− 3.(S − 1) + Is
où Ic et Is sont les nombres d’inconnues des torseurs cinématique et statique dans lecadre de la modélisation plane.
12
Théorie des mécanismes
6 Bilan
Interprétation de la mobilitéÀ une mobilité utile correspond toujours, sur un système réel, un actionneur.
Une mobilité interne conduit à une équation du type 0 = 0 lors de l’application du PFS enprojection suivant la direction correspondante. Elle n’est donc pas pilotée (imposée) par unactionneur. Il n’y a donc pas d’efforts transmis.
Interprétation de l’hyperstatismeUn hyperstatisme correspond à des actions mécaniques de liaison indéterminables par
le PFS, et non nuls. Donc les paramètres cinématiques correspondants sont imposés à zéro(sous l’hypothèse de liaisons parfaites).
Or, les équations issues de l’écriture des fermetures cinématiques auraient permis de dé-terminer ces paramètres cinématiques. Dans la mesure où ils ont été imposés à zéro, il y aredondance dans le positionnement des pièces. On parle alors de liaisons surabondantes.
Influence de l’hyperstatisme au montage :Un hyperstatisme induit des contraintes géométriques lors du montage des différentes pièces :il s’agit d’être capable de fermer la (ou les) boucle(s).
En effet, sur une chaîne fermée simple, en brisant artificiellement un solide, puis en es-sayant de repositionner les 2 parties en face l’une de l’autre afin de réaliser la liaison encas-trement (démarche menée précédemment), deux cas peuvent alors se produire :
– soit la mobilité des liaisons en série vaut 6, et alors il est possible de bouger comme onle souhaite les deux parties dans l’espace, et donc de le positionner parfaitement l’unepar rapport à l’autre (on peut recoller sans problème les deux morceaux même si lespièces intermédiaires ont des défauts ce qui est le cas après fabrication),
– soit la mobilité de la liaison en série est inférieure strictement à 6. Dans ce cas, à causedes défauts de fabrication des pièces intermédiaires, les deux parties du solide briséne peuvent pas se retrouver en bonne position. Technologiquement :* soit on réalise des liaisons avec jeu, ce qui permet de retrouver un peu de mobilitéet donc de compenser les défauts de fabrication afin de monter l’ensemble des pièces(attention, les jeux ne sont pas mis au hasard, ils sont déterminés analytiquement enfonction des défauts de fabrication et réduit le plus possible afin de conserver une «qualité acceptable » du produit),* soit on déforme les pièces lors du montage, ce qui a pour effet de rigidifier le méca-nisme (il se déformera moins en utilisation) et d’augmenter les efforts de contact dansles liaisons (les calculs sont faits en modélisant les pièces par des solides déformableset nécessitent la connaissance des défauts de fabrication).
Formules à retenirNombre cylcomatique :
ν = N − S + 1
Inconnues totales :Ic + Is = 6N
Mobilité :m = mu +mi
13
Théorie des mécanismes
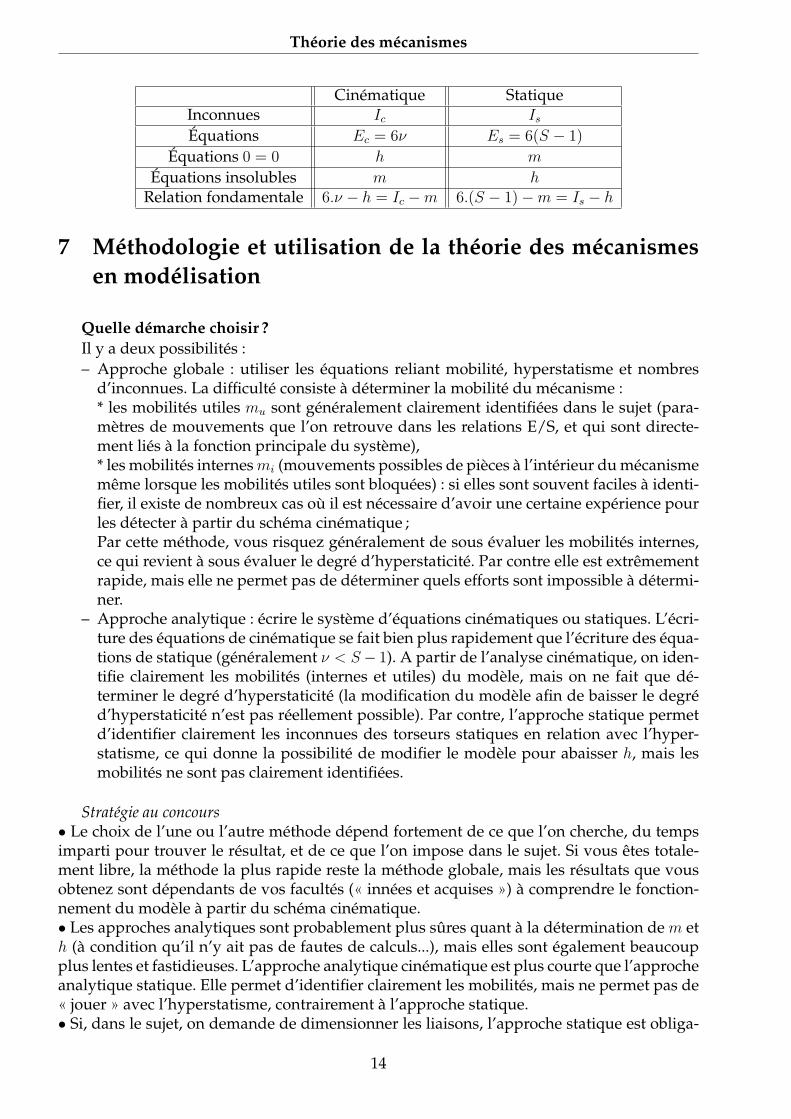
Cinématique StatiqueInconnues Ic IsÉquations Ec = 6ν Es = 6(S − 1)
Équations 0 = 0 h m
Équations insolubles m hRelation fondamentale 6.ν − h = Ic −m 6.(S − 1)−m = Is − h
7 Méthodologie et utilisation de la théorie des mécanismesen modélisation
Quelle démarche choisir ?Il y a deux possibilités :– Approche globale : utiliser les équations reliant mobilité, hyperstatisme et nombres
d’inconnues. La difficulté consiste à déterminer la mobilité du mécanisme :* les mobilités utiles mu sont généralement clairement identifiées dans le sujet (para-mètres de mouvements que l’on retrouve dans les relations E/S, et qui sont directe-ment liés à la fonction principale du système),* les mobilités internesmi (mouvements possibles de pièces à l’intérieur du mécanismemême lorsque les mobilités utiles sont bloquées) : si elles sont souvent faciles à identi-fier, il existe de nombreux cas où il est nécessaire d’avoir une certaine expérience pourles détecter à partir du schéma cinématique ;Par cette méthode, vous risquez généralement de sous évaluer les mobilités internes,ce qui revient à sous évaluer le degré d’hyperstaticité. Par contre elle est extrêmementrapide, mais elle ne permet pas de déterminer quels efforts sont impossible à détermi-ner.
– Approche analytique : écrire le système d’équations cinématiques ou statiques. L’écri-ture des équations de cinématique se fait bien plus rapidement que l’écriture des équa-tions de statique (généralement ν < S− 1). A partir de l’analyse cinématique, on iden-tifie clairement les mobilités (internes et utiles) du modèle, mais on ne fait que dé-terminer le degré d’hyperstaticité (la modification du modèle afin de baisser le degréd’hyperstaticité n’est pas réellement possible). Par contre, l’approche statique permetd’identifier clairement les inconnues des torseurs statiques en relation avec l’hyper-statisme, ce qui donne la possibilité de modifier le modèle pour abaisser h, mais lesmobilités ne sont pas clairement identifiées.
Stratégie au concours• Le choix de l’une ou l’autre méthode dépend fortement de ce que l’on cherche, du tempsimparti pour trouver le résultat, et de ce que l’on impose dans le sujet. Si vous êtes totale-ment libre, la méthode la plus rapide reste la méthode globale, mais les résultats que vousobtenez sont dépendants de vos facultés (« innées et acquises ») à comprendre le fonction-nement du modèle à partir du schéma cinématique.• Les approches analytiques sont probablement plus sûres quant à la détermination de m eth (à condition qu’il n’y ait pas de fautes de calculs...), mais elles sont également beaucoupplus lentes et fastidieuses. L’approche analytique cinématique est plus courte que l’approcheanalytique statique. Elle permet d’identifier clairement les mobilités, mais ne permet pas de« jouer » avec l’hyperstatisme, contrairement à l’approche statique.• Si, dans le sujet, on demande de dimensionner les liaisons, l’approche statique est obliga-
14
Théorie des mécanismes
toire (et il est indispensable de faire intervenir les efforts extérieurs, voire même de se placeren dynamique si les quantités d’inertie peuvent influer sur les inter-efforts de liaisons, pourdéterminer les inconnues des torseurs des inter-efforts du système en fonctionnement). Dansce cas, comme toutes les équations sont déjà écrites, il ne reste plus qu’à analyser le systèmed’équations pour déterminer l’hyperstatisme et les mobilités.
Comment « jouer » avec l’hyperstatisme ?La méthode la plus classique pour rendre un mécanisme isostatique consiste à supprimer
les inconnues hyperstatiques, donc à rajouter des degrés de liberté dans une ou plusieursliaisons.
15