Embed Size (px)
Citation preview
Afin de répondre aux demandes croissantes de formations sur la nouvelle
génération d’armoire de commande detype IRC5, le Centre de Formation d’ABBbasé à Saint-Ouen l’Aumône met à votre
disposition de nouvelles installations :
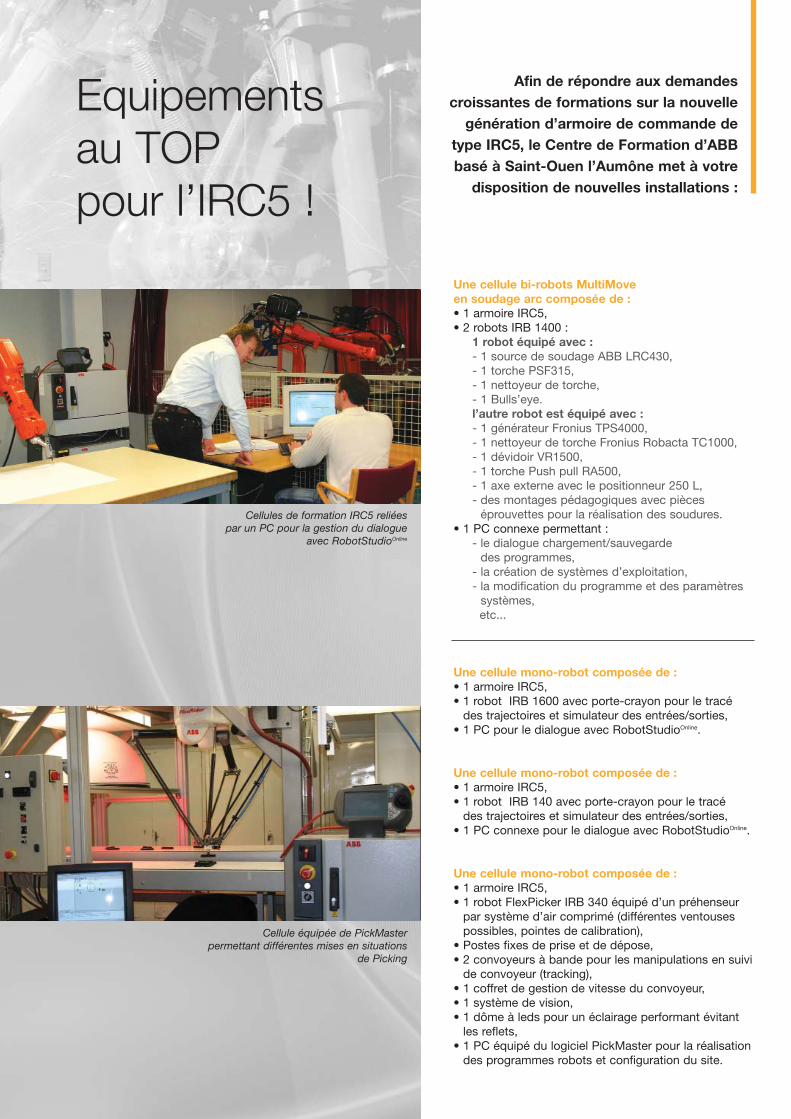
Une cellule bi-robots MultiMove en soudage arc composée de : • 1 armoire IRC5,• 2 robots IRB 1400 :
1 robot équipé avec : - 1 source de soudage ABB LRC430,- 1 torche PSF315,- 1 nettoyeur de torche,- 1 Bulls’eye.l’autre robot est équipé avec :- 1 générateur Fronius TPS4000,- 1 nettoyeur de torche Fronius Robacta TC1000,- 1 dévidoir VR1500,- 1 torche Push pull RA500,- 1 axe externe avec le positionneur 250 L, - des montages pédagogiques avec pièces
éprouvettes pour la réalisation des soudures.• 1 PC connexe permettant :
- le dialogue chargement/sauvegarde des programmes,
- la création de systèmes d’exploitation,- la modification du programme et des paramètres
systèmes,etc...
Une cellule mono-robot composée de :• 1 armoire IRC5,• 1 robot IRB 1600 avec porte-crayon pour le tracé
des trajectoires et simulateur des entrées/sorties,• 1 PC pour le dialogue avec RobotStudioOnline.
Une cellule mono-robot composée de :• 1 armoire IRC5,• 1 robot IRB 140 avec porte-crayon pour le tracé
des trajectoires et simulateur des entrées/sorties,• 1 PC connexe pour le dialogue avec RobotStudioOnline.
Une cellule mono-robot composée de :• 1 armoire IRC5,• 1 robot FlexPicker IRB 340 équipé d’un préhenseur
par système d’air comprimé (différentes ventousespossibles, pointes de calibration),
• Postes fixes de prise et de dépose,• 2 convoyeurs à bande pour les manipulations en suivi
de convoyeur (tracking),• 1 coffret de gestion de vitesse du convoyeur,• 1 système de vision,• 1 dôme à leds pour un éclairage performant évitant
les reflets,• 1 PC équipé du logiciel PickMaster pour la réalisation
des programmes robots et configuration du site.
Equipements au TOP pour l’IRC5 !
Cellules de formation IRC5 reliées par un PC pour la gestion du dialogue
avec RobotStudioOnline
Cellule équipée de PickMaster permettant différentes mises en situations
de Picking
w Voir détails du stage sur la page indiquée La flèche positionnée au dessus du stage indique le prérequis obligatoire
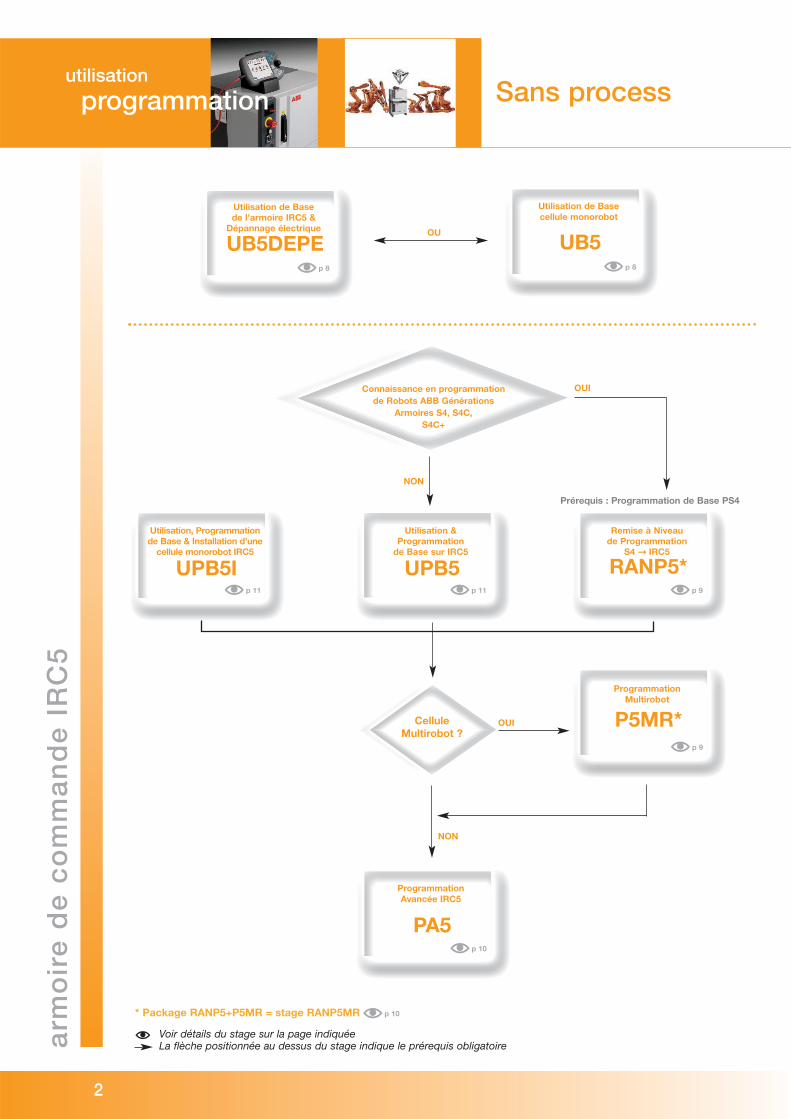
ProgrammationMultirobot
w p 9
P5MR*
Connaissance en programmation de Robots ABB Générations
Armoires S4, S4C, S4C+
CelluleMultirobot ?
ProgrammationAvancée IRC5
w p 10
PA5
Utilisation de Basecellule monorobot
w p 8
UB5
Utilisation de Basede l’armoire IRC5 &
Dépannage électrique
w p 8
UB5DEPE
Utilisation &Programmation
de Base sur IRC5
NON
NON
OUI
OUI
w p 11
UPB5
Utilisation, Programmationde Base & Installation d’une
cellule monorobot IRC5
w p 11
UPB5I
Remise à Niveaude Programmation
S4 ➞ IRC5
w p 9
RANP5*
OU
Prérequis : Programmation de Base PS4
Sans processa
rmo
ire
de
co
mm
an
de
IR
C5
2
utilisation
programmation
* Package RANP5+P5MR = stage RANP5MR w p 10
3
arm
oir
e d
e c
om
ma
nd
e I
RC
5
3
w Voir détails du stage sur la page indiquée La flèche positionnée au dessus du stage indique le prérequis obligatoire
Process Soudage arcutilisation
programmation
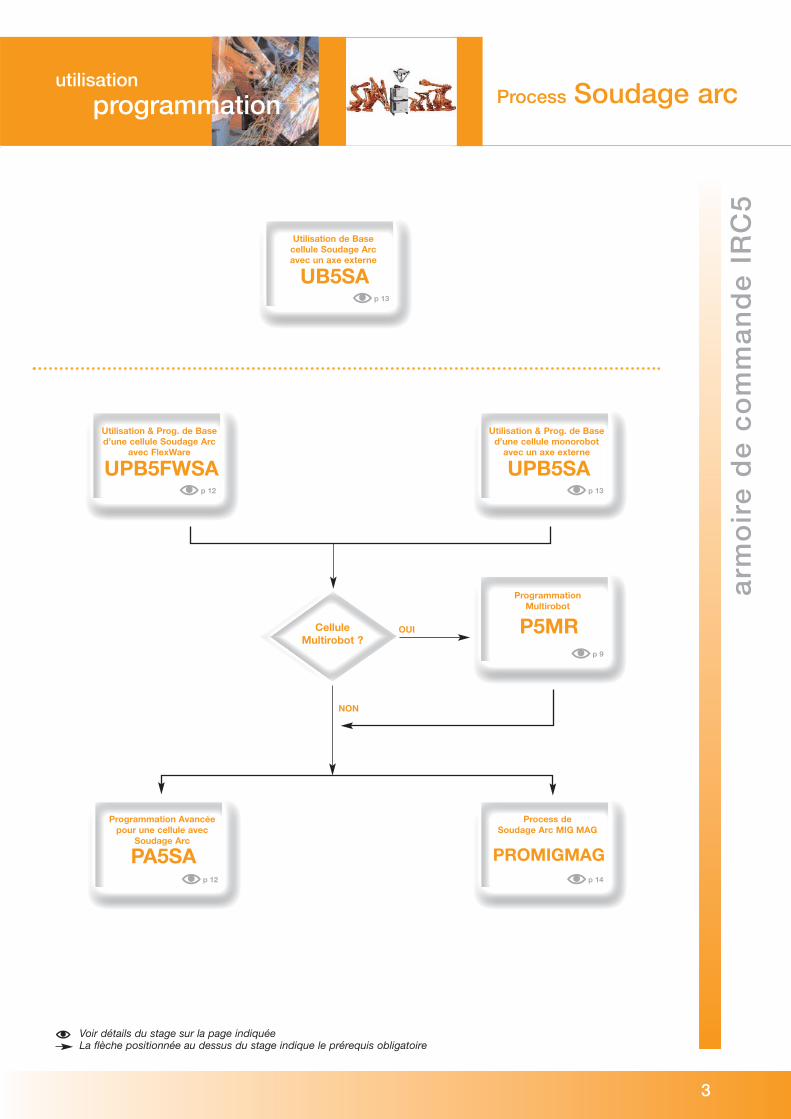
ProgrammationMultirobot
w p 9
P5MRCelluleMultirobot ?
Programmation Avancéepour une cellule avec
Soudage Arc
w p 12
PA5SA
Process deSoudage Arc MIG MAG
w p 14
PROMIGMAG
Utilisation & Prog. de Based’une cellule monorobot
avec un axe externe
NON
OUI
w p 13
UPB5SA
Utilisation de Base cellule Soudage Arc avec un axe externe
w p 13
UB5SA
Utilisation & Prog. de Based’une cellule Soudage Arc
avec FlexWare
w p 12
UPB5FWSA
Maintenance mécanique et électrique
ma
inte
na
nc
e
4
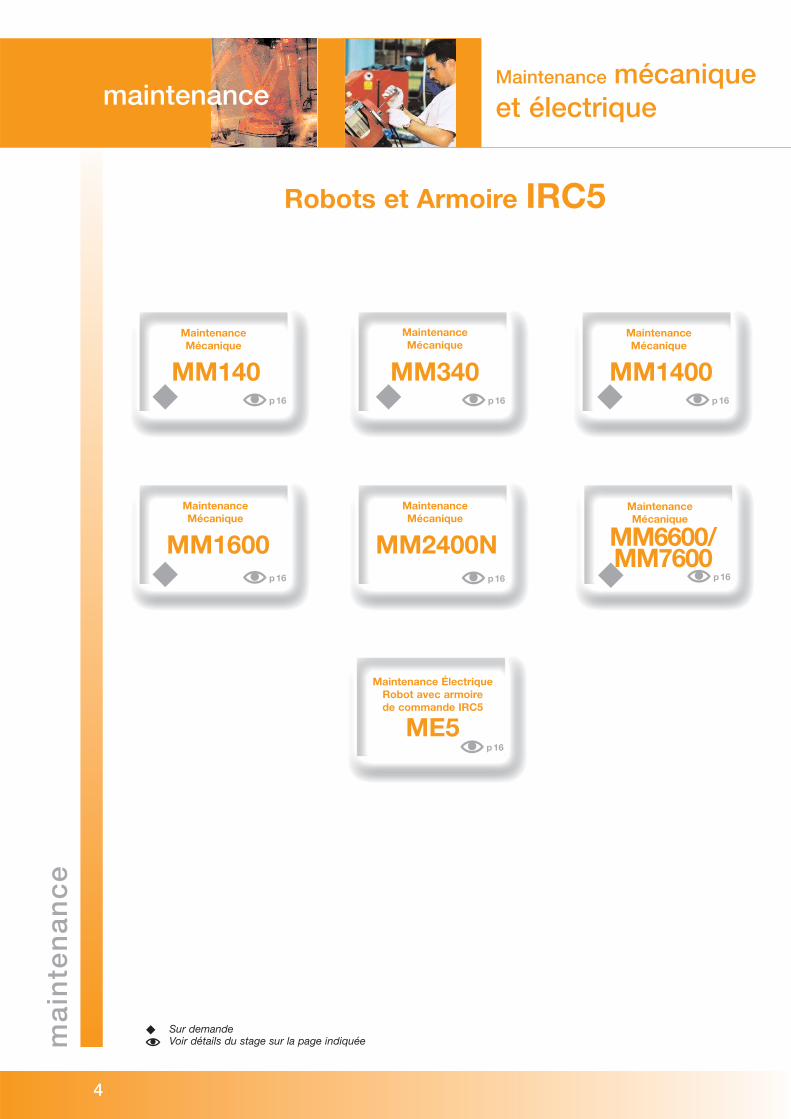
b Sur demande w Voir détails du stage sur la page indiquée
MaintenanceMécanique
w p16
MM140
MaintenanceMécanique
w p16
MM340
MaintenanceMécanique
w p16
MM1400
MaintenanceMécanique
w p16
MM1600
MaintenanceMécanique
w p16
MM2400N
Maintenance ÉlectriqueRobot avec armoirede commande IRC5
w p16
ME5
MaintenanceMécanique
w p16
MM6600/MM7600
Robots et Armoire IRC5
◆ ◆ ◆
◆◆
maintenance
log
icie
ls r
ob
ots
et
pro
ce
ss
5
b Sur demande w Voir détails du stage sur la page indiquée
La flèche positionnée au dessus du stage indique le prérequis obligatoire
Robots et Processlogiciels
Utilisation & Programmationd’une cellule FlexPicker
avec PickMaster
w p 15
UPB5PM
Utilisation & Programmationd’une cellule robot avec
RobotWare Plastics
w p 15
UPB5PW
Programmation Hors LigneRobotStudio IRC5
w p 14
PRS5
Prérequis : Programmation de BaseUPB5
66
no
tes
6
Notes

Formations
Détails des programmes de stages
Ro
bo
ts e
t P
roce
ss
777
88
détailsdes formations
dé
tail
s d
es
form
ati
on
s
UB5
PrérequisAucun.
ParticipantsToute personne chargée de l'exploitation d'un systèmeautomatisé comportant un robot industriel.
ObjectifsAprès ce stage, d'une durée de 2,5 jours, le participant seracapable de manoeuvrer un robot en mode de marche manuelle,de transférer les programmes entre une clé USB et le robot, demodifier des points, de démarrer des programmes en modeautomatique et d'interpréter la signalisation de défauts.
Programme- Découverte d’une cellule robotisée.- Sécurités sur un site robotisé.- Utilisation du FlexPendant.- Exécution/arrêt et reprise d’une trajectoire suivant les
différents modes de marche.- Dégagement d’un robot arrêté en cours de trajectoire
(déplacements manuels du robot).- Utilisation d'un référentiel outil et d'un référentiel objet.- Notions de “programme”.- Modification de trajectoires, modification de points, de
vitesses et de zones.- Savoir lire les informations des Entrées/Sorties.- Sauvegarde des programmes sur clé USB. Chargement d'un
programme.- Interprétation de la signalisation de défaut et des codes
d’erreurs.
Utilisation par le stagiaire d’une cellule robotisée avecprogrammes pré-établis.80 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobots : IRB140, IRB1400 et IRB1600.Armoire de commande : IRC5 monorobot.
Utilisation de Base cellule monorobot
2,5 jours
UB5DEPE
Prérequis- Avoir l’expérience de la maintenance ou de l’installation de
systèmes robotisés.
ParticipantsToute personne impliquée dans l'exploitation et le dépannaged'un système automatisé comportant un robot industriel.
ObjectifsAprès ce stage, d'une durée de 5 jours, le participant seracapable de manoeuvrer un robot en mode de marche manuelle,de transférer les programmes entre une clé USB et le robot, demodifier des points, de démarrer des programmes en modeautomatique, d'interpréter la signalisation de défaut mais ausside remédier rapidement à la plus grande partie des pannes.
Programme- Présentation d’un site robotisé.- Sécurités sur un site robotisé.- Présentation des caractéristiques d’un robot, de la chaîne
cinématique de chaque axe.- Principes de fonctionnement du robot.- Description et utilisation du panneau de commande.- Description et utilisation du FlexPendant.- Etude des modes de marche.- Déplacement manuel du robot (axe/axe, linéaire, alignement,
orientation).- Utilisation d’un référentiel outil et d’un référentiel objet.- Notion de “programme”.- Modification de trajectoires.- Visualisation des E/S.- Sauvegarde des programmes sur clé USB.- Synoptique fonctionnel de l’armoire.- Emplacement des différents sous-ensembles et éléments.- Alimentation de l’armoire, alimentation interne.- Liaisons armoire-robot, liaisons extérieures.- Robot : filerie, boîtiers de raccordement, capteurs embarqués,
carte SMB.- Fonctionnalités des cartes électroniques. Pannes identifiables.- Création d’un “programme de pointe” ou d’un “programme
de référence” pour un changement de moteur.- Etude de la chaîne de sécurité (relayage cartes).- Sauvegardes des paramètres fonctionnels du robot.- Entraînement au diagnostic de pannes.
60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationArmoires de commande IRC5 : monorobot.
Utilisation de Base et Dépannage Electrique
5 jours
Utilisation et Programmation
99
dé
tail
s d
es
form
ati
on
s
P5MR
Prérequis- Avoir suivi auparavant, soit le stage Utilisation et
Programmation de Base IRC5 (UPB5), soit le stage Remise àNiveau de Programmation des armoires génération S4 versIRC5 (RANP5).
Rappel des prérequis pour un stage de programmation :- Avoir la pratique d'une communication interactive avec un
menu présenté sur un écran pour dialoguer avec unautomatisme (introduction de données, validation dedonnées).
- Savoir situer un objet dans l'espace avec différents repèresgéométriques.
- Posséder les notions de base sur l'utilisation d'un micro-ordinateur, les automatismes et un langage deprogrammation informatique est un plus.
ParticipantsToute personne impliquée dans l'utilisation, la conception,l'étude ou la mise en service d'un système IRC5 multirobot. Cestage s'adresse également aux opérateurs de production ayantbesoin des notions de programmation d’une cellule multirobot.
ObjectifsAprès ce stage, d'une durée de 2,5 jours, le participant sera enmesure de programmer une cellule avec les différentespossibilités MultiMove.
Programme- Principe.- Fonctionnements MultiMove :
• Robots indépendants,• Robots synchronisés,• Robots coordonnés.
- Création d’un système de commande.- Détermination des repères de base des robots.- Création des repères : base, porteur et objet embarqué.- Instructions, paramètres et données.- Synchronisation des tâches.- Synchronisation des mouvements :
• entre 1 robot et 1 axe externe,• entre 2 robots et 1 axe externe,• entre 2 robots.
- Exécutions.
70 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationArmoire de commande IRC5 : cellule multirobot avec 2 robotset 1 axe externe IRBP250L.
Programmation Multirobot
2,5 joursRANP5
Prérequis- Avoir suivi la Programmation de Base S4 (PS4) auparavant.
Rappel des prérequis pour un stage de programmation :- Avoir la pratique d'une communication interactive avec un
menu présenté sur un écran pour dialoguer avec unautomatisme (introduction de données, validation dedonnées).
- Savoir situer un objet dans l'espace avec différents repèresgéométriques.
- Posséder les notions de base sur l'utilisation d'un micro-ordinateur, les automatismes et un langage deprogrammation informatique est un plus.
ParticipantsToute personne impliquée dans l'utilisation, la conception,l'étude ou la mise en service d'un système automatisécomportant un robot industriel. Ce stage s'adresse égalementaux opérateurs de production et aux techniciens demaintenance ayant besoin des notions de base deprogrammation du robot.
ObjectifsAprès ce stage, d'une durée de 2,5 jours, le participant sera enmesure d'utiliser ses connaissances S4 sur un systèmemonorobot IRC5.
Programme- Présentation de la sécurité sur un site robotisé.- Description des nouveaux robots.- Description du système de commande IRC5 :
• Information et description basique des modules de la baie.- Description du nouveau pupitre de programmation :
• Présentation des nouvelles fenêtres,• Navigation dans les écrans tactiles.
- Nouvelle structure de programmation.- Nouvelles possibilités sur les outils et objets.- Nouvelles fonctionnalités de la carte SMB et réglages.- Présentation et utilisation de RobotStudioOnline.- Les Entrées/Sorties :
• Présentation hard et soft,• Création et modification des E/S via le FlexPendant
et RobotStudioOnline,• Visualisation des E/S via le FlexPendant
et RobotStudioOnline.- Gestion et transfert de fichiers entre armoire et PC.- Sauvegardes et rechargements sur FlashDrive et Clé USB :
• Via FlexPendant,• Via RobotStudioOnline.
60 % du temps de ce stage sont consacrés à la manipulation.
Matériel d’applicationRobots : IRB140, IRB1400 et IRB1600.Armoire de commande : monorobot.
Remise à Niveau de Programmation des armoiresgénération S4 vers IRC5
2,5 jours
Utilisation et Programmation
101010
détailsdes formations
dé
tail
s d
es
form
ati
on
s
PA5
Prérequis- Avoir obligatoirement suivi le stage de Programmation de
Base (UPB5) auparavant.- Avoir des connaissances de base en informatique et en
programmation.- Savoir concevoir un algorithme simple ou un organigramme.
ParticipantsToute personne impliquée dans la conception et laprogrammation d'un système automatisé comportant un robotindustriel.
ObjectifsCe stage, d'une durée de 5 jours, est un complément de laprogrammation de base. Le participant sera ensuite capabled’élaborer des programmes évolués par l’utilisation defonctionnalités avancées de programmation, tout en intégrantle robot dans un automatisme.
Programme- Structure de la mémoire de travail.- Architecture et Modularisation d’un "programme".- Données : types, nature, localisation, décomposition,
tableaux.- Opérateurs et expressions.- Procédures : appel, paramétrage.- Fonctions.- Acquisition d’informations par système d’interruption.- Interruption d’un mouvement (exécution asynchrone).- Programmation d’une recherche.- Déplacement d’une trajectoire : modification des outils et
objets, décalage entre deux positions, calcul de repères àpartir de 3 points.
- Traitement des "dysfonctionnements prévisibles" de laproduction (Gestionnaire d’erreurs).
- Paramètres du site (Paramètres système) : déclaration etsauvegarde.• Réseaux, Entrées/Sorties système, Entrées/Sorties
virtuelles, séquenceur d’Entrées/Sorties (interconnexions).• Programmation des routines événement.• Configuration des touches programmables du pupitre
mobile.- Programmation des zones universelles.- Déplacements avec actions synchronisées.- Protection des programmes, verrouillages, privilèges de
connexion.- Divers : accélérations, softservo, charges, …- Principes de base sur : Multirobot, Multitâche, …- Création, chargement d’un système de commande.- Transfert de fichiers avec RobotStudioOnline.
Elaboration par le stagiaire de programmes dérivésd'applications pratiques.50 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobots : IRB140, IRB1400, IRB2400 et IRB1600.Armoire de commande : cellules monorobot IRC5.
Programmation Avancée IRC5
5 joursRANP5MR
Prérequis- Avoir suivi la Programmation de Base S4 (PS4) auparavant.
Rappel des prérequis pour un stage de programmation :- Avoir la pratique d'une communication interactive avec un
menu présenté sur un écran pour dialoguer avec unautomatisme (introduction de données, validation dedonnées).
- Savoir situer un objet dans l'espace avec différents repèresgéométriques.
- Posséder les notions de base sur l'utilisation d'un micro-ordinateur, les automatismes et un langage deprogrammation informatique est un plus.
ParticipantsToute personne impliquée dans l'utilisation, la conception,l'étude ou la mise en service d'un système IRC5 multirobot. Cestage s'adresse également aux opérateurs de production ayantbesoin des notions de programmation d’une cellule multirobot.
ObjectifsAprès ce stage, d'une durée de 5 jours, le participant sera enmesure d'utiliser les principales fonctions et possibilités deprogrammation de base d’une installation multirobot.
ProgrammeCe stage est constitué de 2 parties distinctes, qui font chacunel’objet d’un stage de 2,5 jours. Se reporter donc auxprogrammes de ces stages, soit :
• Remise à Niveau de Programmation IRC5 (2,5 jours) :Voir programme du stage RANP5, en page 9 de ce document.
• MultiMove IRC5 (2,5 jours) :Voir programme du stage P5MR,en page 9 de ce document.
60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobots : IRB140, IRB1400 et IRB1600.Armoire de commande IRC5 : cellules monorobot et multirobot.
5 jours
Remise à Niveau de Programmationdes armoires génération S4 > IRC5 et Programmation Multirobot - PACK1
Utilisation et Programmation
111111
dé
tail
s d
es
form
ati
on
s
UPB5I
Prérequis- Avoir les connaissances de base en informatique et en
programmation.- Savoir effectuer l’analyse d’un problème d’automatisme.- Avoir réalisé l’intégration d’autres produits robotiques
(indispensable).
ParticipantsToute personne devant réaliser l’intégration d’une cellulemonorobot IRC5.
ObjectifsAprès ce stage, d'une durée de 5 jours, le participant sera enmesure d’installer une cellule monorobot dans unenvironnement de production et d’utiliser les fonctionnalités deprogrammation de base.
Programme- Présentation d’un site robotisé IRC5 et de sa sécurité.- Description du robot : mécaniques, capacité, câblage et
prises terminales, carte SMB (stockage, purge,…).- Armoire de commande : synoptique de fonctionnement,
sous-ensembles, alimentations, chaines de sécurité.- Description détaillée du panneau de commande et du
FlexPendant.- Etude des modes de marche.- Présentation et utilisation du logiciel RobotStudioOnline :
• Visualisation en ligne d’un programme.• Visualisation des paramètres système.• Visualisation et modification des Entrées-Sorties
(configuration, état).- Réglages : procédure de synchronisation, valeurs
d’étalonnage.- Déplacements manuels du robot (axe/axe, linéaire,
réorientation, alignement).- Création et utilisation d'un référentiel outil et d'un référentiel
objet.- Détermination des charges et supervision de mouvement.- Principes de base de programmation : architecture, création
d’un programme.- Exécution d’un programme.- Instructions de mouvement, création/modification de points
et de vitesses, droites, arcs de cercle et cercles.- Entrées/Sorties : cartes réseaux et unités d’interface :
configuration, visualisation, positionnement et forçage.- Instructions logiques de base : Attentes, Choix, Répétitions,
Affectations.- Utilisation de l’écran “Dialogue opérateur”.- Sauvegarde et chargement total ou partiel (programme,
modules, …).- Redémarrage, Niveau de connexion (mot de passe).- Configuration des paramètres fonctionnels : charges, butées, …- Principes du multirobot et du multitâche.
Elaboration par le stagiaire de programmes dérivésd'applications pratiques.60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobots : IRB140, IRB1400 et IRB1600.Armoire de commande : IRC5 monorobot.
Utilisation, Programmation de Base et Installation d’une cellule monorobotIRC5
5 jours
UPB5
Prérequis- Avoir la pratique d'une communication interactive avec un
menu présenté sur un écran pour dialoguer avec unautomatisme (introduction de données, validation de données).
- Savoir situer un objet dans l'espace par rapport à différentsrepères géométriques.
NOTA : Posséder les notions de base sur l'utilisation d'un micro-ordinateur, les automatismes et un langage de programmationinformatique est un plus. Une expérience sur l'utilisation d’unrobot n'est pas nécessaire.
ParticipantsToute personne impliquée dans l'utilisation, la conception,l'étude ou la mise en service d'un système automatisécomportant un robot industriel. Ce stage s'adresse égalementaux opérateurs de production et aux techniciens demaintenance ayant besoin des notions de base deprogrammation.
ObjectifsAprès ce stage, d'une durée de 5 jours, le participant sera enmesure d'utiliser les principales fonctions et possibilités deprogrammation de base d’une cellule équipée d’un seul robot.
Programme- Présentation d’un site robotisé.- Présentation de la sécurité d’un site robotisé.- Description du robot et de l’armoire de commande.- Description détaillée du panneau de commande et du
FlexPendant.- Etude des modes de marche.- Présentation et utilisation du logiciel RobotStudioOnline :
• Visualisation en ligne d’un programme.• Visualisation des paramètres système.• Visualisation et modification de l’état des Entrées-Sorties.
- Procédure de synchronisation d’un robot.- Déplacements manuels du robot (axe/axe, linéaire,
réorientation, alignement).- Création et utilisation d'un référentiel outil et d'un référentiel
objet.- Détermination des charges et supervision de mouvement.- Principes de base de programmation : architecture, création
d’un programme.- Exécution d’un programme.- Instructions de mouvement, création/modification de points
et de vitesses, droites, arcs de cercle et cercles.- Entrées/Sorties : configuration, visualisation, positionnement
et forçage, via le FlexPendant et le RobotStudioOnline.- Instructions logiques de base : Attentes, Choix, Répétitions,
Affectations.- Utilisation de l’écran “Dialogue opérateur” : affichage
d’informations sur l'écran et saisie d’informations parl’opérateur en cours de production.
- Sauvegarde et chargement total ou partiel (programme,modules, …).
- Redémarrage, Niveau de connexion (mot de passe).- Impression d'un programme.
Elaboration par le stagiaire de programmes dérivésd'applications pratiques.60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobots : IRB140, IRB1400 et IRB1600.Armoire de commande : IRC5 monorobot.
Utilisation et Programmation de Base sur IRC5
5 jours
Utilisation et Programmation
121212
détailsdes formations
dé
tail
s d
es
form
ati
on
s
UPB5FWSA
Prérequis- Avoir la pratique d'une communication interactive avec un
menu présenté sur un écran pour dialoguer avec unautomatisme (introduction de données, validation dedonnées).
- Savoir situer un objet dans l'espace par rapport à différentsrepères géométriques.
- Posséder les notions de base du soudage à l’arc est un plus.Une expérience sur l'utilisation du robot n'est pas nécessaire.
ParticipantsToute personne impliquée dans l'utilisation ou la mise enservice d'un système robotisé de soudage à l’arc avec l’optionFlexWare Arc.
ObjectifsAprès ce stage, d'une durée de 5 jours, le participant sera enmesure d'utiliser les différentes fonctionnalités d’uneinstallation FlexWare Arc (apprentissage, programmation etutilisation en production, paramétrage du lancement enproduction).
Programme- Présentation d’un site robotisé, présentation de la sécurité.- Description du robot et de l’armoire de commande.- Présentation du matériel de soudage.- Description détaillée du panneau de commande et du pupitre
mobile.- Etude des modes de marche.- Déplacements manuels du robot (axe/axe, linéaire,
réorientation, alignement) et des axes externes.- Interface "FlexWare" : Comment ça marche ? Arborescence
des écrans.- Instructions de mouvement, création/modification de points,
vitesse, droites, arcs de cercle, cercles.- Exécution d’un cycle ; test en automatique.- Création et utilisation d'un référentiel outil.- Création et utilisation de référentiels objet fixes ou mobiles.- Apprentissage des points POC et repli, des trajectoires et des
cycles.- Instructions spécifiques au soudage à l’arc.- Réglages et programmation du poste de soudage.- Signification des signaux d’Entrées/Sorties Arc. Utilisation et
visualisation.- Procédure de synchronisation du robot et des axes externes
(mise à jour des compteurs).- Sauvegarde et chargement des modules spécifiques Flexware.
Elaboration par le stagiaire de programmes dérivésd'applications pratiques. Des exercices sont réalisés aveccordons de soudure.
60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobots : IRB1400, IRB1600 et IRB140 équipés en soudure arc(différents postes).Armoire : IRC5 mono et multirobot, avec un axe externe.
Utilisation et Programmation deBase d’une cellule Soudage Arcavec FlexWare
5 jours
PA5SA
Prérequis- Avoir suivi le stage Utilisation de Base sur une cellule
monorobot avec Soudure Arc (UPB5SA).- Avoir des connaissances de base en informatique et en
programmation.- Savoir effectuer l’analyse d’un problème d’automatisme.- Posséder les notions de base du soudage à l’arc.
ParticipantsToute personne impliquée dans la conception, l’étude, la miseen service et la programmation d’un système automatisécomportant un robot industriel de soudage à l’arc avec desaxes externes.
ObjectifsAprès ce stage, d'une durée de 5 jours, le participant seracapable d’élaborer des programmes en utilisant les fonctionsélaborées de soudage et des éléments de programmation s’yrapportant. Il saura utiliser des axes extérieurs (de type ABB) deson installation et configurer un panneau de commandeextérieur.
Programme- Instructions logiques de choix.- Instructions de répétitions.- Axes externes : détermination du repère de base et utilisation
d’un repère mobile.- Déplacement d’une trajectoire : utilisation des différentes
fonctions de décalage.- Les instructions de recherche.- Traitement des erreurs avec le gestionnaire d’erreurs.- Les singularités et les configurations d’axes.- Ecran de dialogue opérateur.- Surveillance fil : par système d’interruption.- Contrôle torche en manuel avec Bull’s Eye.- Paramètres système du robot : modifications des paramètres
process et sauvegarde de tous les paramètres.- Configuration des Entrées/Sorties : réseaux, unités, E/S
système, rebouclages, …- Différents redémarrages.- Création et chargement d’un système de commande.
60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobots : IRB1400, IRB1600 et IRB140 équipés en soudure arc(différents postes).Armoires : IRC5 mono et multirobot, avec un axe externe.
Programmation Avancée pour une cellule avec Soudage à l’Arc
5 jours
Utilisation et Programmation
131313
dé
tail
s d
es
form
ati
on
s
UPB5SA
Prérequis- Avoir la pratique d'une communication interactive avec un
menu présenté sur un écran pour dialoguer avec unautomatisme.
- Savoir situer un objet par rapport à différents repèresgéométriques.
- Posséder si possible les notions de base du soudage à l’arc.- Posséder les notions de base sur l'utilisation d'un micro-
ordinateur, les automatismes et un langage deprogrammation informatique est un plus. Une expérience surl'utilisation d’un robot n'est pas nécessaire.
ParticipantsToute personne impliquée dans l'utilisation, la conception,l'étude ou la mise en service d'un système automatisécomportant un robot industriel faisant de la soudure à l’arc etd’un axe externe. Ce stage s'adresse également auxopérateurs de production et aux techniciens de maintenanceayant besoin des notions de base de programmation.
ObjectifsAprès ce stage, d'une durée de 5 jours, le participant sera enmesure d'utiliser les principales fonctions et possibilités deprogrammation de base d’une cellule de soudage arc équipéed’un robot et d’un axe externe.
Programme- Présentation d’une cellule robotisée de soudage.- Sécurités sur un site robotisé.- Description et utilisation du panneau de commande.- Utilisation du FlexPendant.- Pilotage manuel du robot et des axes externes.- Modes de marche : exécutions, arrêts, reprises d’un
programme.- Création d'un référentiel outil.- Création de référentiels objet fixe et mobile (sur axe externe).- Synchronisation du robot et de l’axe externe.- Structure de programmation : tâches, programmes et
modules.- Création de trajectoires, création de points, de vitesses et de
zones.- Premières Instructions logiques de base : Attente avec
WaitDI, Choix avec IF, Boucle avec WHILE.- Utilisation des Entrées/Sorties soudure.- Création d’Entrées/Sorties utilisateur.- Sauvegardes et chargements.- Interprétation des signalisations de défaut et des codes
d’erreurs sur : Postes à souder, Dévidoirs et torches, Systèmede nettoyage de torche et le Bull’s Eye.
- Instructions liées à la soudure.- Données spécifiques soudure : seamdata, welddata,
weavedata.- Utilisation de RobotStudioOnline pour visualiser le programme
(et légèrement le modifier), visualiser l’état des E/S.
60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobots : IRB1400, IRB1600 et IRB140 équipés en soudure arc(différents postes).Armoire : IRC5 mono et multirobot, avec un axe externe.
Utilisation et Programmation deBase cellule Soudage Arc avec unaxe externe
5 jours
UB5SA
PrérequisAucun.
ParticipantsToute personne chargée de l'exploitation d'un systèmeautomatisé comportant une cellule équipée d’un robotindustriel faisant de la soudure à l’arc et d’un axe externe.
ObjectifsAprès ce stage, d'une durée de 5 jours, le participant seracapable de manoeuvrer un robot en mode de marche manuelle,de transférer les programmes entre une clé USB et le robot, demodifier des points et des tronçons de soudure, de démarrerdes programmes en mode automatique et d'interpréter lasignalisation de défauts.
Programme- Découverte d’une cellule robotisée : robot, axes externes,
postes de soudure, équipements de réglage.- Sécurités sur un site robotisé.- Description et utilisation du panneau de commande.- Utilisation du FlexPendant.- Pilotage manuel du robot et des axes externes.- Exécution/arrêt et reprise d’une trajectoire suivant les
différents modes de marche.- Dégagement d’un robot arrêté en cours de trajectoire
(déplacements manuels du robot).- Vérification de la synchronisation du robot et de l’axe externe.- Utilisation d'un référentiel outil.- Utilisation de référentiels objet fixe ou mobile.- Notions de tâche et de programme.- Modification de trajectoires, modification de points, de
vitesses et de zones.- Savoir lire les informations des Entrées/Sorties soudure et
autres.- Sauvegarde des programmes sur clé USB. Chargement d'un
programme.- Interprétation de la signalisation de défaut et des codes
d’erreurs.• Postes à souder,• Dévidoirs et torches,• Système de nettoyage de torche,• Le Bull’s Eye.
- Instructions liées à la soudure.- Utilisation des données spécifiques soudure : seamdata,
welddata et weavedata.
Utilisation par le stagiaire d’une cellule robotisée avecprogrammes pré-établis.80 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobots : IRB1400, IRB1600 et IRB140 équipés en soudure arc(différents postes).Armoire : IRC5 mono et multirobot, avec un axe externe.
Utilisation de Base celluleSoudage Arc avec un axe externe
5 jours
Utilisation et Programmation
1414
détailsdes formations
dé
tail
s d
es
form
ati
on
s
PROMIGMAG
Prérequis- Avoir obligatoirement suivi un stage de programmation
soudage à l’arc (codes PS4SA, PS4FA, UPB5SA ouUPB5FWSA) auparavant.
ParticipantsToute personne impliquée dans la programmation destrajectoires de soudage à l’arc.
ObjectifsCe stage, d’une durée de 3 jours, est un complément de laprogrammation de base. Le participant sera capable de voirl’influence de tous les paramètres intervenant dans l’aspect etla qualité des cordons de soudure.
Programme- Rappels sur les instructions de soudage.- Notions de métallurgie.- Contrôle des cordons de soudure.- Contrôle de la qualité des cordons de soudure.- Théorie du soudage.- Les différents paramètres de soudage.- Influence des différents paramètres de soudage, hauteur
d’arc, inclinaison de la torche, gaz, tension, vitesse fil, …- Macrographie.- Aspect visuel.- Les différentes matières à souder.- Le mode de transfert pulsé.
60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobot : IRB 1400, avec ou sans axes externes, équipés ensoudure arc.Armoires : S4, S4C, S4Cplus, Arcitec et IRC5.
Process de Soudage à l’ArcMIG MAG
3 jours
PRS5
Prérequis- Avoir la connaissance d’un robot ABB ainsi qu’avoir effectué
le stage de Programmation de Base (code UPB5).- Savoir situer un objet dans l'espace par rapport à différents
repères géométriques.- Posséder les notions de base sur l'utilisation d'un micro-
ordinateur.
ParticipantsToute personne impliquée dans la conception et l'étude d'unecellule mono ou multirobot en avant projet, mais égalementdans la modification hors ligne des programmes de productionet des trajectoires pièces.
ObjectifsAprès ce stage, d'une durée de 3 jours, le participant sera enmesure d'utiliser les fonctionnalités de base de programmationhors ligne des robots ABB sur le produit RobotStudio 5. Desformations spécialisées métier peuvent être proposées encomplément.
Programme- Installation du logiciel.- Principe de la programmation hors ligne avec RobotStudio 5.- Présentation des écrans de travail : navigateurs, journaux,
menus, barres d’outil, raccourcis clavier, navigation souris, …- Création d’une station de travail.- Création d’un système de commande.- Modèles de mouvement.- Création de points, de trajectoires.- Modélisation de pièces 2D et 3D.- Création de repères outil et objet.- Repères atelier, de base et spécifiques pièces.- Génération automatique de trajectoires sur formes
géométriques.- Utilisation de géométries d’un format autre que RobotStudio.- Détection de collision.- Fonction d’accessibilité de trajectoires.- Utilisation des fonctions E/S simulées.- Tableau d’évènements (actions "graphiques" associées aux
sorties).- Programmation RAPID avec RobotStudioOnline.- Création de stations avec des axes externes.- Importation de programmes et modification.
Elaboration par le stagiaire de stations virtuelles dérivéesd'applications pratiques.80% du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationPC : avec Logiciel RobotStudio IRC5.Armoires simulées : IRC5.
Programmation Hors LigneRobotStudio IRC5
5 jours
Utilisation,Programmation et logiciels
1515
dé
tail
s d
es
form
ati
on
s
Logiciels
UPB5PW
Prérequis- Avoir la pratique d'une communication interactive avec un
menu présenté sur un écran pour dialoguer avec unautomatisme (introduction de données, validation dedonnées).
- Savoir situer un objet dans l'espace avec différents repèresgéométriques.
- Posséder les notions de base sur l'utilisation d'un micro-ordinateur, les automatismes et un langage deprogrammation informatique est un plus. Une expérience surl'utilisation du robot n'est pas nécessaire.
ParticipantsToute personne impliquée dans la conception, l'utilisation, laprogrammation ou la mise en service d'une systèmeautomatisé comportant un robot ABB avec de l’optionRobotWare Plastics.
ObjectifsAprès ce stage, d'une durée de 5 jours, le participant sera enmesure d'utiliser les principales fonctions et possibilités deprogrammation de base d’une cellule équipée d’un robot munide l’option RobotWare Plastics.
Programme- Présentation d’un site robotisé.- Présentation de la sécurité d’un site robotisé.- Description du robot et de l’armoire de commande.- Description détaillée du panneau de commande et du
FlexPendant.- Etude des modes de marche.- Présentation et utilisation du logiciel RobotStudioOnline. - Procédure de synchronisation d’un robot.- Déplacements manuels du robot (axe/axe, linéaire, réorientation
et alignement).- Création et utilisation d'un référentiel outil et d'un référentiel objet.- Détermination des charges et supervision de mouvement.- Principes de base de programmation sur IRC5.- Programmation avec l’interface RobotWare Plastics : création
d’une station de travail graphique, création et paramétrage descycles de production.
- Exécution d’un programme.- Instructions de mouvement, création/modification de points et de
vitesses, droites, arcs de cercle et cercles.- Entrées/Sorties : configuration, visualisation, positionnement et
forçage, via le FlexPendant et le RobotStudioOnline.- Instructions logiques de base : Attentes, Choix, Répétitions,
Affectations.- Sauvegardes et chargements : total ou partiel (programme,
modules, …).- Impression d'un programme.
Elaboration par le stagiaire de programmes dérivés d'applicationspratiques.60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationArmoire de commande : IRC5 munie de l’option RobotWarePlastics.
Utilisation et Programmationd’une cellule robot avecRobotWare Plastics
5 joursUPB5PM
Prérequis- Avoir des connaissances de base en informatique et en
programmation.- Savoir effectuer l’analyse d’un problème d’automatisme.- Savoir concevoir un algorithme simple ou un organigramme.
ParticipantsToute personne impliquée dans la conception, l'étude, la miseen service et la programmation d'un système robotisécommandé par PickMaster.
ObjectifsAprès ce stage, d'une durée de 5 jours, le participant seracapable d’élaborer des programmes en utilisant la plupart desfonctions de programmation du logiciel PickMaster et deconcevoir des programmes intégrant le robot dans unautomatisme.
Programme- Sécurité sur une cellule robot.- Description détaillée du panneau de commande et du
FlexPendant. - Etude des modes de marches.- Principe de base de programmation.- Instructions de mouvements.- Instructions de programmation de base.- Intérêt et utilisation d’un objet et d’un outil. - Synchronisation du FlexPicker.- Les Entrées-Sorties (utilisation et création)- Présentation générale d’une cellule Pickmaster :
• Description de matériel et du logiciel,• Câblage.
- Présentation de la vision :• Fonctionnement,• Principes de base.
- Présentation du logiciel PickMaster :• Interfaces,• Les signaux E/S,• Concepts de base.
- Configuration du site.- Configuration du projet :
• Création des éléments du projet (items, pattern, ...),• Paramétrage de l'armoire de commande du robot.
- Présentation et modification du PickWare :• Les routines associées,• Les données,• Modification suivant cas.
Elaboration par les stagiaires de programmes dérivésd'applications pratiques.60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationRobot : IRB 340.Armoire de commande : IRC5.
Utilisation et Programmationd’une cellule FlexPicker avecPickMaster
5 jours
1616
détailsdes formations
dé
tail
s d
es
form
ati
on
sMaintenance
MM140 / MM340 / MM1400MM1600 / MM2400N / MM6600MM7600
PrérequisAvoir l'expérience de la maintenance et de l'entretiend'ensembles mécaniques complexes. Une expérience surl’utilisation du robot n’est pas nécessaire. La première journéeest consacrée à la manipulation du robot.
ParticipantsTout mécanicien, électromécanicien d'entretien, régleur ettechnicien désirant se familiariser avec la mécanique desrobots industriels.
ObjectifsAprès ce stage, d'une durée de 3 ou 5 jours, le participant seracapable de remplacer les principaux éléments mécaniques durobot, d'effectuer les réglages mécaniques ainsi que l'entretien.
Programme- Sécurité (électrique, manutention, élingage, système
d'équilibrage).- Pilotage manuel du robot. Création d'un programme de test,
instructions de mouvements.- Précautions électriques, mécaniques et pneumatiques avant
la dépose et la repose.- Outillage standard et spécifique.- Etude de la chaîne cinématique de chaque axe.- Principe de dépose et de repose des éléments principaux :
système d'équilibrage, contrepoids, moteurs, réducteurs,bras inférieur et supérieur, poignet, ...
- Réglages des jeux fonctionnels.- Maintenance préventive.- Entretien, vidange, graissage.
Stages essentiellement pratiques. 90% du temps est consacréà la manipulation.
Matériel d’applicationRobots : IRB 140, IRB 340, IRB 1400, IRB 2400, IRB 6600 / 6700.
*Nota : • MM140 / MM340 / MM1400 / MM1600 et MM2400N :
durée de chaque stage = 3 jours.• MM6600 et MM7600 :
durée de chaque stage = 5 jours.
Maintenance Mécanique
3 ou 5 jours*
ME5
Prérequis- Avoir l'expérience de la maintenance ou de l'installation de
systèmes robotisés.- Avant d'effectuer ce stage, il est nécessaire d'avoir effectué
un stage Utilisation de Base (codes UB5, UPB5, UPB5FWSAou RANP5).
ParticipantsToute personne impliquée dans l'installation, la mise en serviceet le dépannage d'un système automatisé comportant un robotindustriel.
ObjectifsCe stage, d'une durée de 5 jours, permet au participant depouvoir localiser et remédier à la plus grande partie despannes, ainsi que d'effectuer l'entretien du robot.
Programme- Synoptique fonctionnel de l'armoire.- Emplacement des différents sous-ensembles et éléments.- Alimentation de l'armoire, alimentations internes.- Liaisons armoire-robot, liaisons extérieures.- Robot : filerie, boîtiers de raccordement, capteurs
embarqués, carte SMB.- Fonctionnalités des cartes électroniques. Pannes
identifiables.- Motorisation. Principe d'un moteur autosynchrone. Principe
de fonctionnement d'un résolveur.- Génération de mouvement et Boucles d'asservissement.- Principes de calcul d'une position. Réglages robot : Offset
d’étalonnage.- Création d'un “programme de pointe” ou d’un “programme
de référence’’. Détermination du décalage d'un axe.- Etalonnage du robot au niveau électronique.- Etude de la chaîne de sécurité (relayage, cartes).- Séquencement de la Mise Sous Puissance.- Sous-ensemble Puissance : amplificateurs, rectifieur.- Etude des paramètres fonctionnels du robot, de leurs
modifications et de leurs sauvegardes.- Présentation et utilisation du logiciel RobotStudio Online.- Rechargement du système d'exploitation pour les armoires
IRC5.- Mode Hyperterminal.- Entraînement au diagnostic de pannes.
60 % du temps d’un stage sont consacrés à la manipulation.
Matériel d’applicationArmoire de commande : IRC5.
Maintenance Électrique Robotavec armoire de commande IRC5
5 jours





























