Embed Size (px)
Citation preview

1MK03 : Calcul des structures2008 – 2009
« Utiliser le bon outil pour dimensionner une structure. »
MK03 : Calcul des structuresMK03 : Calcul des structures

2MK03 : Calcul des structures2008 – 2009
1 - Approche énergétique du comportement des structuresÉnergie de déformation dans les modèles poutre.Théorème de Castigliano.Théorème de Ménabréa (Résolution de problèmes hyperstatiques)Théorème de Muller Breslau (charge fictive)
2 - Introduction à la Mécanique des Milieux Continus (MMC)Contrainte (scalaire, vecteur, tenseur).Déformation (scalaire, vecteur, tenseur).Cercle de MohrDensité d’énergie de déformation.Équation d’équilibreCritère de dimensionnement des structures.
Objectifs du coursObjectifs du cours

3MK03 : Calcul des structures2008 – 2009
BibliographieBibliographie
Bac +2 Bac +5

4MK03 : Calcul des structures2008 – 2009
ModalitModalitéé du coursdu cours
Cours : 15,5 h
TD : 4,5 h
Évaluation : Exam écrit 2 h
Critères d’évaluations :
Modélisation des problèmes 35 %Choix de la méthode de résolution 15 %Résolution 15 %Analyse critique des résultats 35 %

5MK03 : Calcul des structures2008 – 2009
Chapitre 1 : Approche Chapitre 1 : Approche éénergnergéétique dans les modtique dans les modèèles poutreles poutre
But : Découvrir l’approche énergétique dans le calcul des poutres
Contexte : Structure pouvant se décomposer en élément poutre afin de réaliser un dimensionnement simple et rapide « papier crayon ».
Avantages :
Calcul de flèche sur des structures complexesSimplification des calculsÉviter les erreurs de signe
Déterminations de inconnues hyperstatiques

6MK03 : Calcul des structures2008 – 2009
1 Rappel des hypothèses de la théorie des poutresQu’est qu’une poutre ?Torseurs : Vitesses / Déplacements / de CohésionÉquation d’équilibre
2 Les sollicitations simplesTraction / compressionCisaillement purTorsionFlexion
3 Énergie de déformationExemple d’une poutre en traction compressionDéfinition de l’énergie de déformationsThéorème de CastiglianoThéorème de Ménabréa (problèmes hyperstatiques)Théorème de Muller-Breslau (de la charge fictive)
Plan du Chapitre 1Plan du Chapitre 1

7MK03 : Calcul des structures2008 – 2009
QuQu’’est ce quest ce qu’’une poutre ?une poutre ?
Langage commun : Poutre : Quelque chose d’allongé.
Langage mathématique : Poutre : Objet dont les dimensions respectent : largeur = o(longueur)
hauteur = o(longueur)
Langage Mécanicien : Toute structure dont la modélisation en modèle
poutre permettra de répondre au cahier des charges.
Arbre de transmission Châssis mécano-soudé Dent d’engrenage

8MK03 : Calcul des structures2008 – 2009
HypothHypothèèses gses gééomoméétriquestriques
Fibre neutre : Courbe comprenant l’ensemble des centres de gravité des sections droites
Section droite Σ(s) : Surface perpendiculaire à la fibre neutre
Centre de gravité G(s) : Associé à chaque section droite
Orientation de la fibre neutreParamétrée par l’abscisse curviligne s

9MK03 : Calcul des structures2008 – 2009
DDééfinitions du repfinitions du repèère localre local
)(sxr
Premier vecteur unitaire :tangent à la fibre neutreperpendiculaire à la section droite
)(syr
)(szr
Second et troisième vecteurs unitaires :inclus à la section droitetrièdre orthonormé directrespectant les éventuelles
géométries particulièresde la section droite
Attention : Le repAttention : Le repèère R(s) =(G,x,y,z) est local.re R(s) =(G,x,y,z) est local.
CC’’estest--àà--dire qudire qu’’il dil déépend de s !!!pend de s !!!
)(sxr
)(syr
)(szr)(sG

10MK03 : Calcul des structures2008 – 2009
HypothHypothèèses complses compléémentairesmentaires
1 Petites déformationsOn effectue les calculs sur la structure non déformée. Il faut donc que les déformations soient petites au regard des dimensions de la poutre. De plus, on considère que les déformations ne modifient pas la position des efforts.
3 Hypothèse de Saint-Venant :Les résultats obtenus ne sont valables qu'à une distance suffisamment grande des points d'application des chargements et des conditions aux limites.
2 Section discontinueLes changements brusque de section ne sont pas pris en compte. Les résultats dans ces zones sont fortement discutables. On introduit alors des facteurs correctifs de concentration de contraintes (entre autres …).

11MK03 : Calcul des structures2008 – 2009
Torseur cinTorseur cinéématiquematique
On suppose que localement chaque section droite S se comporte comme un solide se déplaçant par rapport à un repère de référence O.
On peut alors définir un torseur cinématique analogue à celui utilisé en mécanique des solides.
{ })(0/
0/0/ )(
)(
sGG sVs
V⎭⎬⎫
⎩⎨⎧
=Σ∈
ΣΣ
rrω
0)(0/ sΣωr
)(0/ sVG Σ∈
r
Vecteur rotation de S par rapport à 0
Vecteur vitesse du point G appartenant à S par rapport à 0
)(0/ sΣωr
)(0/ sVG Σ∈
r
)(sxr
)(syr
)(szr
)(sG

12MK03 : Calcul des structures2008 – 2009
Torseur des petits dTorseur des petits dééplacementsplacements
On intègre par rapport au temps le torseur cinématique entre la position initiale et la position déformée.
On peut alors définir le torseur des déplacements.
{ })(0/
0/0/ )(
)(
sGG sUs
U⎭⎬⎫
⎩⎨⎧
=Σ∈
ΣΣ
rrϕ
Vecteur d’orientation de la section Σ
Vecteur de déplacement du point G
)(0/ sΣϕr
)(0/ sUG Σ∈
r
0
)(sxr
)(syr
)(szr
)(sG
)(0/ sΣϕr
)(0/ sUG Σ∈
r

13MK03 : Calcul des structures2008 – 2009
Torseur des petits dTorseur des petits dééplacementsplacements
Attention les dAttention les dééplacements peuvent se mettre sous la forme dplacements peuvent se mettre sous la forme d’’un un torseur uniquement avec ltorseur uniquement avec l’’hypothhypothèèse des petits dse des petits dééplacementsplacements
)(sUr
Position initiale
Position déformée
)(sxr
)(syr
)(szr
xϕ
yϕ
zϕ
zyx zyx
rrrrϕϕϕϕ ++=

14MK03 : Calcul des structures2008 – 2009
Torseur de cohTorseur de cohéésionsion
Soit une poutre P en équilibre sous l'action d’efforts extérieurs {Aext->p}.
On effectue une coupe fictive de cette poutre suivant une section droite S à l’abscisse s0.
On peut isoler 2 demies poutres :«P-» suivant les abscisses inférieures à s0. (à gauche)«P+» suivant les abscisses inférieures à s0. (à droite)
{ }−→PextA
{ }+→PextAP-
P+
On définit alors le torseur de cohésion comme :
{ } { } { }−→+→ −== PextPextc AAT

15MK03 : Calcul des structures2008 – 2009
Torseur de cohTorseur de cohéésionsion
En exprimant le torseur au point G dans le repère (G,x,y,z) on définit les différents types de sollicitations : { }
)(sGfz
fy
t
z
yc
MMM
TTN
T⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧≡
xNr
xMt
r
zMfz
r
yMfy
r
yTy
r
zTz
r
G
+→PextAr
GPextM +→
r
Effort normal
Effort tranchant
xNr
zMyM fzfy
rr+zTyT zy
rr+
Moment de torsion
Moment de flexion
xMt
r

16MK03 : Calcul des structures2008 – 2009
ÉÉquation dquation d’é’équilibrequilibre
ds
On isole un tronçon de poutre de largeur ds en dynamique.
Bilan des actions mécaniques :
- Torseur de cohésion en sTorseur de cohésion en s+dsGlisseur des actions extérieures réparties (ds trop petite pour exercer un moment)
{ } )(sTc−
{ } )( dssTc +
{ } )(0
)( sdsfsA rr
⎭⎬⎫
⎩⎨⎧
= r
r
xr

17MK03 : Calcul des structures2008 – 2009
ÉÉquation dquation d’é’équilibre de la rquilibre de la réésultantesultante
Théorème de la résultante dynamique :
En supposant que le référentiel est Galiléen
On applique le Principe Fondamental de la Dynamique au tronçon :
{ } { } { } { } )()()()( sDsAsTdssT rcc =+−+
dssSdssfsRdssR RgSGr /)()()()( ∈=+−+ γρrrrr
RgSGr SfdsRd
/∈=+ γρrr
r

18MK03 : Calcul des structures2008 – 2009
ÉÉquation dquation d’é’équilibre du momentquilibre du moment
Théorème du moment dynamique exprimé au point G(s)
dsdMsGsMdssRdssGsGdssM RgSMM
⎥⎦
⎤⎢⎣
⎡Σ∧=−+∧+++ ∈
Σ∈∫ /)()()()()()( γρ
rrrr
Σ∧=∧+ ∈∈
⎯→⎯
∫ dGMRxdsMd
RgSMSM
/γρrrr
r

19MK03 : Calcul des structures2008 – 2009
1 Rappel des hypothèses de la théorie des poutresQu’est qu’une poutre ?Torseurs : Vitesses / Déplacements / de CohésionÉquation d’équilibre
2 Les sollicitations simplesTraction / compressionCisaillement purTorsionFlexion
3 Énergie de déformationExemple d’une poutre en traction compressionDéfinition de l’énergie de déformationsThéorème de CastiglianoThéorème de Ménabréa (problèmes hyperstatiques)Théorème de Muller-Breslau (de la charge fictive)
Plan du Chapitre 1Plan du Chapitre 1

20MK03 : Calcul des structures2008 – 2009
Exemple de structures sollicitExemple de structures sollicitéées en traction/compressiones en traction/compression
Les bielles
Les liens souples (courroie, câble)
Pylônes en béton

21MK03 : Calcul des structures2008 – 2009
ModModèèle dle d’’une poutre en traction / compressionune poutre en traction / compression
{ }iG
RA⎭⎬⎫
⎩⎨⎧
=0
11 r
r
{ }fG
RA⎭⎬⎫
⎩⎨⎧
=0
22 r
r
Dans une poutre sollicitée en traction / compression :la fibre neutre est nécessairement rectiligneles sollicitations sont nécessairement colinéaires àla section peut éventuellement varier
Définition :
Une poutre est soumise à une sollicitation de traction / compression si et seulement si le torseur de cohésion s’écrit :
{ })(0 xG
cxN
T⎭⎬⎫
⎩⎨⎧
≡ r
r
{ }G
rr
xfA
⎭⎬⎫
⎩⎨⎧
=0r
r
xr
)(xS
xs =

22MK03 : Calcul des structures2008 – 2009
Traction ou compression ?Traction ou compression ?
Si N > 0 on parle de la sollicitation de traction
2Rr
1Rr
xNr
Si N < 0 on parle de la sollicitation de compression
2Rr
1Rr
xNr

23MK03 : Calcul des structures2008 – 2009
Expression des contraintes de traction compressionExpression des contraintes de traction compression
On s’intéresse ici à la répartition des contraintes sur une section droite (actions surfaciques élémentaires agissant sur une petite surface dS)
Hypothèse : les contraintes sont uniformes sur la section droitex
r
),( xMσr
xxNr
)(
)()()(),()()(
sSxdSxdSxMxNsSMsSM
σσσ rrrr=== ∫∫
∈∈
xxSxNx
rr
)()()( =σ Les contraintes sont colinéaires à x
r
)(xG
M

24MK03 : Calcul des structures2008 – 2009
Expression des dExpression des dééformations de traction compressionformations de traction compression
On s’intéresse ici à L’allongement relatif d’un tronçon de poutre de longueur ds.
xr
)(xur
)()()()( xdxud
dxxudxxux
rrrr
=−+
=εL’allongement relatif :
dx
xr
)( dxxu +r
)(xG )( dxxG + )(xG )( dxxG +

25MK03 : Calcul des structures2008 – 2009
Loi de comportementLoi de comportement
On rajoute des hypothèses ici sur le matériau utilisé (ELHI) :ÉlastiqueLinéaireHomogèneIsotrope E est le module d’Young ou module
d’élasticité homogène à une pression
xxSxNx
rr
)()()( =σ
)()( xdxudxr
r=ε )(
)()( x
dxud
xESxN
r
=
Loi de comportement
)()( xEx εσrr
=Loi de Hooke
Déformation
Contrainte

26MK03 : Calcul des structures2008 – 2009
TD dTD d’’applicationapplication
Tour de BabelAscenseur à câble

27MK03 : Calcul des structures2008 – 2009
Exemple de structure sollicitExemple de structure sollicitéée en cisaillement pure en cisaillement pur
Cisaillage de barre
Les rivets
Les clavettes

28MK03 : Calcul des structures2008 – 2009
ModModèèle du cisaillement purle du cisaillement pur
{ }1
11 0 G
RA⎭⎬⎫
⎩⎨⎧
= r
r
{ }2
22 0 G
RA⎭⎬⎫
⎩⎨⎧
= r
r
Cette poutre soumise est nécessairement soumise à2 glisseurs perpendiculaires à la fibre neutre
Le cisaillement pur n’existe pas car il n’y a pas équilibre de la structure.
G1G2
On modélise le cisaillement pur comme la limite G2 → G1
Définition :
Une poutre est soumise à une sollicitation de cisaillement si et seulement si le torseur de cohésion s’écrit :
{ })(0 sG
czTzyTy
T⎭⎬⎫
⎩⎨⎧ +
≡ r
rr

29MK03 : Calcul des structures2008 – 2009
Expression des contraintes de CisaillementExpression des contraintes de Cisaillement
On s’intéresse ici à la répartition des contraintes sur une section droite (actions surfaciques élémentaires agissant sur une petite surface dS)
Hypothèse : les contraintes sont uniformes sur la section droite
Gxr
M
)(MσrTr
SdSdSMTSMSM
σσσ rrrr=== ∫∫
∈∈
)(
STr
rr== στ Les contraintes sont colinéaires à et ne dépendent que de S T
r

30MK03 : Calcul des structures2008 – 2009
Exemple de structure sollicitExemple de structure sollicitéée en torsione en torsion
Les arbres de transmission
Les ressorts

31MK03 : Calcul des structures2008 – 2009
ModModèèle dle d’’une poutre en torsionune poutre en torsion
{ }⎭⎬⎫
⎩⎨⎧
=1
10
MA r
r{ }
⎭⎬⎫
⎩⎨⎧
=2
20
MA r
r
Nous n’étudierons que les poutres rectilignes cylindriques de révolution (éventuellement creuses) soumises à 2 torseurs couples.
Définition :
Une poutre est soumise à une sollicitation de torsion si et seulement si le torseur de cohésion s’écrit :
{ })(
0
xGtc xM
T⎭⎬⎫
⎩⎨⎧
≡ r
r
xr
En appliquant le TMS : xMxMMt
rrrr.. 12 −==
Le moment de torsion est constant sur toute la longueur de la poutre.

32MK03 : Calcul des structures2008 – 2009
Expression des contraintes de torsionExpression des contraintes de torsion
On s’intéresse ici à la répartition des contraintes sur une section droite (actions surfaciques élémentaires agissant sur une petite surface dS)
xr
)(Mσr
∫∈
∧=SM
t dSMGMxM )(σrr
xMt
rG
Il manque une hypothèse pour trouver l’expression des contraintes
On intègre les moments des contraintes afin de calculer le moment de torsion

33MK03 : Calcul des structures2008 – 2009
Angle de rotation dAngle de rotation d’’une poutre circulaire en torsionune poutre circulaire en torsion
Si on trace une ligne sur la poutre, après déformation cette ligne s’enroule autour d’elle. L’angle final mesuré est appelé angle de torsion θt.
L
La rotation semble uniforme tout au long de la poutre.On peut donc définir un angle unitaire θu de rotation (deg.m-1 ou rad.m-1) L
tu
θθ =
θt

34MK03 : Calcul des structures2008 – 2009
DDééformation dformation d’’une poutre circulaire en torsionune poutre circulaire en torsion
On considère la déformation d’un petit élément de matière. (dx,dr,r dθ)
dθ dxr uθγ
On exprime alors l’angle de distorsion de l’élément
uu rdx
dxrr θθγ ==)(
dxdx
dr
r

35MK03 : Calcul des structures2008 – 2009
Loi de comportementLoi de comportement
Expression de la contrainte de cisaillement grâce à la loi de Hooke :
θθ μθμγτ ururr u
rrr== )()(
Module de Coulomb :
( )νμ+
==12EG
Coefficient de Poisson : ν
Expression du moment de torsion en fonction de l’angle de torsion
00 IL
IM tut
θμμθ ==∫∈
=SM
dSrI 20
On définit l’inertie de surface Loi de comportement
∫∫∫∈∈∈
=∧=∧=SM
uSM
urSM
t dSrxdSururdSMGMxM 2)(rrrrr
μθμθσ θ

36MK03 : Calcul des structures2008 – 2009
Calcul de la contrainte maxCalcul de la contrainte max
θμθτ urr u
rr=)(
0IM ut μθ=
0IMt
u =μθ
Contrainte de cisaillement
θτ uI
rMr t rr
0
)( =La contrainte de cisaillement varie de manière linéaire par rapport au rayon
Loi de comportement de la poutre
On trouve alors la contrainte max en r = R
0max I
RMt=τrzr
yr

37MK03 : Calcul des structures2008 – 2009
TD EX3 : TorsionTD EX3 : Torsion

38MK03 : Calcul des structures2008 – 2009
Exemple de structure sollicitExemple de structure sollicitéée en flexion simplee en flexion simple
Aile d’avion
plongeoir
Châssis de véhicule

39MK03 : Calcul des structures2008 – 2009
ModModèèle dle d’’une poutre en flexion pureune poutre en flexion pure
On se limitera au poutre rectiligne soumise à 2 torseurs couple perpendiculaires à la fibre neutre
{ }⎭⎬⎫
⎩⎨⎧
=1
10
MA r
r
{ }⎭⎬⎫
⎩⎨⎧
=2
20
MA r
r
Définition :
Une poutre est soumise à une sollicitation de flexion pure si et seulement si le torseur de cohésion s’écrit :
{ })(
0
xGfzfyc zMyM
T⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+≡ rr
r
En pratique on ne trouve très rarement de la flexion pure
{ }⎭⎬⎫
⎩⎨⎧
=ext
ext MA r
r0

40MK03 : Calcul des structures2008 – 2009
ModModèèle dle d’’une poutre en flexion simpleune poutre en flexion simple
On se limitera au poutre rectiligne de section éventuellement variable.
{ }⎭⎬⎫
⎩⎨⎧
=1
11 M
TA r
r
{ }⎭⎬⎫
⎩⎨⎧
=2
2 MTA r
r
Définition :
Une poutre est soumise à une sollicitation de flexion pure si et seulement si le torseur de cohésion s’écrit :
{ })(xGfzfy
zyc zMyM
zTyTT
⎭⎬⎫
⎩⎨⎧
++
≡ rr
rr
En pratique on ne trouve très souvent de la flexion simple
{ }⎭⎬⎫
⎩⎨⎧
=ext
extext M
TA r
r

41MK03 : Calcul des structures2008 – 2009
HypothHypothèèse de Bernoullise de Bernoulli
« Les sections droites restent planes et perpendiculaires à la fibre neutre après la déformation. »

42MK03 : Calcul des structures2008 – 2009
ConsConsééquences de lquences de l’’hypothhypothèèse de Bernoullise de Bernoulli
xr
yr
zr
dx
)(xUz)( dxxUz + )(syϕ−
dx
)(xUy)( dxxUy + )(xzϕ
dx
yr
xr
zr
xr
)()tan()( xdxdu
x yzz =≈ ϕϕ
)()tan()( xdxdux z
yy −=≈ ϕϕ

43MK03 : Calcul des structures2008 – 2009
DDééformations des poutres en flexionformations des poutres en flexion
yr
xr
xr
yr
zr
zr
xr
xxdx
dzx
dxdyzyx yz rr
⎥⎦
⎤⎢⎣
⎡+−= )()(),,(
ϕϕε
dx
moyyy dxx ϕϕ −+ )(
))()(( xdxxz yy ϕϕ −+
dx
moyyy x ϕϕ −)(
dx
Avant déformation
2)()( xdxx zzmoy
zϕϕϕ −+
=
2)()( xdxx yymoy
y
ϕϕϕ
−+=
))()(( xdxxy zz ϕϕ −+−
moyzz x ϕϕ −)(
moyzz dxx ϕϕ −+ )(

44MK03 : Calcul des structures2008 – 2009
Loi de Hooke Loi de Hooke
Application de la loi de Hooke :
xxdx
udEzxdx
udEyzyxEzyx zy rrr
⎥⎥⎦
⎤
⎢⎢⎣
⎡+−== )()(),,(),,( 2
2
2
2
εσ
xxdx
udzxdx
udyzyx zy rr
⎥⎥⎦
⎤
⎢⎢⎣
⎡−−= )()(),,( 2
2
2
2
εRépartition linéaire des déformations dans la section :
)()tan()( xdxdu
x yzz =≈ ϕϕ
)()tan()( xdxdux z
yy −=≈ ϕϕ
Bernoulli : Relation de déformation
xxdx
dzx
dxdyzyx yz rr
⎥⎦
⎤⎢⎣
⎡+−= )()(),,(
ϕϕε
Répartition linéaire des contraintes dans la section :

45MK03 : Calcul des structures2008 – 2009
Contraintes de flexion et moment flContraintes de flexion et moment flééchissantchissant
xr
yr
zr
G
M
dSxxdx
udEzGMxMxSM
zfy
rr)()(
)(2
2
∫∈
−∧=
ydSzxdx
udEdSxxdx
udEzzzxSM
z
xSM
z rrr
⎥⎥⎦
⎤
⎢⎢⎣
⎡−=−∧= ∫∫
∈∈ )(
22
2
)(2
2
)()(
dSxxdx
udEyGMxM
xSM
yfz
rr)()(
)(2
2
∫∈
−∧=
zdSyxdx
udEdSxx
dxud
EyyyxSM
y
xSM
y rrr
⎥⎥⎦
⎤
⎢⎢⎣
⎡=−∧= ∫∫
∈∈ )(
22
2
)(2
2
)()(
zdx
udEIy
dxudEIM y
zz
yf
rrr2
2
2
2
+−= dSyxIxSM
z ∫∈
=)(
2)(
dSzxIxSM
y ∫∈
=)(
2)(
Hypothèse de symétrie de la section

46MK03 : Calcul des structures2008 – 2009
Calcul de la contrainte maxCalcul de la contrainte max
z
fzy
EIM
dxud
=2
2
y
fyz
EIM
dxud
−=2
2
Expression de la contrainte normale
xxdx
udzxdx
udyEzyx zy rr
⎥⎥⎦
⎤
⎢⎢⎣
⎡+−= )()(),,( 2
2
2
2
σ
Loi de comportement de la poutre
xxI
Mzx
IMyzyx
y
fy
z
fz rr
⎥⎥⎦
⎤
⎢⎢⎣
⎡+−= )()(),,(σ
xr
yr
zr
xr
yr
zr

47MK03 : Calcul des structures2008 – 2009
TD EX3 : FlexionTD EX3 : Flexion

48MK03 : Calcul des structures2008 – 2009
1 Rappel des hypothèses de la théorie des poutresQu’est qu’une poutre ?Torseurs : Vitesses / Déplacements / de CohésionÉquation d’équilibre
2 Les sollicitations simplesTraction / compressionCisaillement purTorsionFlexion
3 Énergie de déformationExemple d’une poutre en traction compressionDéfinition de l’énergie de déformationsThéorème de CastiglianoThéorème de Ménabréa (problèmes hyperstatiques)Théorème de Muller-Breslau (de la charge fictive)
Plan du Chapitre 1Plan du Chapitre 1

49MK03 : Calcul des structures2008 – 2009
Analogie Analogie éénergnergéétiquetique
RrU
r
On tire régulièrement l’extrémité d’une poutre avec un effort .Le déplacement u peut être considéré comme quasi-statique.
Rr
2max
00 21maxmax
uL
ESuduL
ESRduWuu
ext === ∫∫
2
21 R
ESLWext =
ESLRu =max
On calcule le travail des efforts extérieurs

50MK03 : Calcul des structures2008 – 2009
Analogie Analogie éénergnergéétiquetique
RrU)(xVx
r
)(xNr
−
∫∫∫ −=−=−=LLL
x dxES
xNdtddx
dtxdN
ESxNdx
dtxdxNP
0
2
00int
)(21)()()()( ε
On calcule la puissance des inters efforts
dtPWt
t∫=1
0
intint ∫−=L
dxES
xNW0
2
int)(
21
On calcule le travail des inters efforts 0)0,( ==txN x∀

51MK03 : Calcul des structures2008 – 2009
ThThééororèème de lme de l’é’énergie cinnergie cinéétiquetique
extc WWE +=Δ int
En statique, la variation de l’énergie cinétique est nulle
extWW =− int
2
0
2
21)(
21 R
ESLdx
ESxNE
L
d == ∫
On définit alors l’énergie potentielle élastique ou énergie de déformation d’une poutre en traction
On applique le théorème de l’énergie cinétique

52MK03 : Calcul des structures2008 – 2009
ÉÉnergie de dnergie de dééformationformation
Soit une poutre dont le torseur de cohésion est { }⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
fz
fy
t
z
yc
MMM
TTN
r
r
r
r
r
r
τ
On définit son énergie de déformation
∫⎥⎥⎦
⎤
⎢⎢⎣
⎡++++=
L
z
fz
y
fytd ds
EIM
EIM
GIM
GST
ESNE
0
22
0
222
21

53MK03 : Calcul des structures2008 – 2009
ThThééororèème de Castiglianome de Castigliano
Alberto Castigliano1847-1884
iAr
jAr
kAr
kk AdArr
+
iAr
jAr
kAdrkdδ
r
iAr
jAr
dE dEd 2
kk AdArr
+
dd dEE +
kδr
dd dEE +
kkd AddErr
⋅= δ

54MK03 : Calcul des structures2008 – 2009
ÉÉnoncnoncéé du thdu thééororèème de Castiglianome de Castigliano
iMr
kAr
kδr
iαr
Soit une structure poutre, en matériau ELHI, chargée par :Des efforts répartisDes forces aux pointsDes couples ponctuels aux points
kAr
iMr
Chaque point d’application des forces se déplace de
Chaque repère au point d’application des couples tourne de
kP
iP
kP kδr
kP
iP
),,,( iiii zyxPrrr
Cette structure emmagasine de l’énergie potentielle de déformation qui s’écrit :
iαr
∫⎥⎥⎦
⎤
⎢⎢⎣
⎡++++=
L
z
fz
y
fytd ds
EIM
EIM
GIM
GST
ESNE
0
22
0
222
21
k
dkk A
Eu∂∂
=rr
.δk
kk
AAu r
rr
=i
dii M
Eu∂∂
=rr .α
i
ii
MMu r
rr=
Alors, ces déplacements s’expriment en fonction de l’énergie de déformation

55MK03 : Calcul des structures2008 – 2009
Application directe du thApplication directe du thééororèème de Castiglianome de Castigliano
0xr
0yr
0zr
Ar
Ar
−
E = 200 GPa
G = 77 GPa
Nombre de spires : N
Diamètre d’enroulement :
Angle d’enroulement : α
Surface circulaire de rayon : r
Chargé par deux glisseurs :
Calculer sa raideur en utilisant l’énergie de déformation
Un ressort spiral en acier
O

56MK03 : Calcul des structures2008 – 2009
ParamParaméétragetrage
0xr
0yr
0zr
Ar
Ar
−rur
θur
On paramètre le système par l’angle cylindrique
Oθ
G
θαR
L’angle d’enroulement est faible rad1,0=α
αα ≈)tan(
Les coordonnées du point G sont
0zRuROG r
rrθα+=
⎯→⎯
21 αθ += Rs
L’abscisse curviligne s’écrit
θαR
θR
s
θ

57MK03 : Calcul des structures2008 – 2009
Torseur de cohTorseur de cohéésionsion
0xr
0yr
0zr
Ar
Ar
−rur
θurO
θG
0xr
0yr
θ
θrur
θur
ruszrr
=)(
0zr
α
α)(sx
r
θur
)(syr
0zr
0zRuROG r
rrθα+=
⎯→⎯
{ }G
GA
c sMAs
⎭⎬⎫
⎩⎨⎧
=)(
)( r
r
τ
0zAArr
=

58MK03 : Calcul des structures2008 – 2009
Calcul de lCalcul de l’é’énergie de dnergie de dééformationformation
{ }))(),(),(,(
0)sin()cos(
0)cos()sin(
)()(
szsysxGG
GA
c ARAR
AA
sMAs
rrr
r
r
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−=
⎭⎬⎫
⎩⎨⎧
= αα
αα
τ
∫⎥⎥⎦
⎤
⎢⎢⎣
⎡+++=
Lfyt
d dsIEM
GIM
GST
ESNE
0
2
0
222
21
∫=
+⎥⎦
⎤⎢⎣
⎡+++=
N
d dRIE
RAGI
RAGS
AES
AEπ
θ
θααααα2
0
2222
0
2222222
1)(sin)(cos)(cos)(sin21
⎥⎥⎦
⎤
⎢⎢⎣
⎡++⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
×+
=6,2
)(sin2)(cos2
)(cos26,2)(sin1 2
22222
0
232 αααααπRr
Rr
GIRNAEd
21 αθ += RsChangement de variable :

59MK03 : Calcul des structures2008 – 2009
Calcul de la raideurCalcul de la raideur
GIRNAEd
0
32π=
Théorème de Castigliano
AGd
NDGI
NARAEd
A 4
3
0
3 82==
∂∂
=πδ
Calcul de la raideur du ressort
NDGdAk
A3
4
8==
δ 3max2
rARπ
τ =r
ARMt =
Vérification de la contrainte max

60MK03 : Calcul des structures2008 – 2009
ThThééororèème de me de MMéénabrnabrééaa (structures hyperstatiques)(structures hyperstatiques)
Pour connaître les efforts aux conditions aux limites, on y applique le théorème de Castigliano :
Soit une structure poutre, en matériau ELHI :
Cette structure est chargée par des efforts extérieurs et elle emmagasine de l’énergie potentielle de déformation qui s’écrit :
∫⎥⎥⎦
⎤
⎢⎢⎣
⎡++++=
L
z
fz
y
fytd ds
EIM
EIM
GIM
GST
ESNE
0
22
0
222
21
iAr kM
r
0. =∂∂
=k
dkk A
Eurr
δ 0. =∂∂
=i
dii M
Eurr
α

61MK03 : Calcul des structures2008 – 2009
ThThééororèème de me de MullerMuller--BreslauBreslau (de la charge virtuelle)(de la charge virtuelle)
Pour connaître les déplacements en un point P où il n’y a pas d’effort, on place un effort virtuel en ce point ou et on y applique le théorème de Castigliano :
Soit une structure poutre, en matériau ELHI :
Cette structure est chargée par des efforts extérieurs et elle emmagasine de l’énergie potentielle de déformation qui s’écrit :
∫⎥⎥⎦
⎤
⎢⎢⎣
⎡++++=
L
z
fz
y
fytd ds
EIM
EIM
GIM
GST
ESNE
0
22
0
222
21
pAr
pMr
)0(. =∂∂
= pp
dPP A
AEu
rrδ )0(. =
∂∂
= pp
dpp M
MEu
rrα
p
pMr
pAr

62MK03 : Calcul des structures2008 – 2009
Chapitre 2 : MChapitre 2 : Méécanique des milieux continus (les bases)canique des milieux continus (les bases)
But :
Savoir interpréter correctement des mesures ou des simulations en terme d’effort ou de déformation.
Appliquer des critères de résistance des matériaux afin de garantir la tenue et la rigidité des structures complexes.

63MK03 : Calcul des structures2008 – 2009
Chapitre 2 : MChapitre 2 : Méécanique des milieux continus (les bases)canique des milieux continus (les bases)
Grandeurs de la mécanique des milieux continus solidesContrainte (scalaire, vecteur, tenseur).Cercle de MohrÉquation d’équilibreDéformation (scalaire, vecteur, tenseur).
Loi de comportementÉlasticitéLoi de Hooke généraliséeDensité d’énergie de déformation.
Critères de dimensionnement des structures.Critère de TrescaCritère de Von Misses

64MK03 : Calcul des structures2008 – 2009
Vecteur contrainteVecteur contrainteOn se place dans une structure quelconque à l’intérieur de la matière au point M.
21→nr
dS
M
1
2
On choisit une surface dS qui partage l’espace en deux parties 1 et 2.
On définit la normale à la surface de 1 vers 2 21→n
r
12→Adr
La contrainte s’écrit alorsdSAdnM 12
21 ),( →→ =
rrrσ

65MK03 : Calcul des structures2008 – 2009
PropriPropriééttéé du vecteur contraintedu vecteur contrainte
21→nr
ds
M
1
2
12→Adr
dSAdnM 12
21 ),( →→ =
rrrσ
La contrainte ne dépend pas du choix de 1 et 2.
La contrainte dépend du point M.
Le vecteur contrainte EST UN VECTEUR.
La contrainte dépend de l’orientation de ds.
Le vecteur contrainte est une fonction vectorielle de l’espace à 6 paramètres.

66MK03 : Calcul des structures2008 – 2009
Contraintes normale et tangentielleContraintes normale et tangentielle
21→nr
dS
M
2121 )).,((),( →→= nnnMnMn
rrrrrr σσ 2121 )).,((),(),( →→−= nnnMnMnMrrrrrrrr σστ
On décompose la contrainte en deux composantes
),(),(),( nMnMnM n
rrrrrr τσσ +=
),( nMn
rrσ
),( nMrrσ
),( nMrrτ
Contrainte normale Contrainte de cisaillement

67MK03 : Calcul des structures2008 – 2009
TTéétratraèèdre de Cauchydre de Cauchy
1xr
nr
2xr
3xr
dS
2Adr
Le vecteur normal se décompose en 3 composantes
332211 xnxnxnnrrrr
++=
Chaque effort s’exprime en fonction des coordonnées
des contraintes :
3131212111111 xdSxdSxdSAdrrrr
σσσ −−−=
3Adr
1Adr
Adr
3232222212122 xdSxdSxdSAdrrrr
σσσ −−−=
3233222313133 xdSxdSxdSAdrrrr
σσσ −−−=
On cherche à déterminer une expression de :
dSAdnMr
rr=),(σ

68MK03 : Calcul des structures2008 – 2009
Tenseur des contraintesTenseur des contraintes
On isole le tétraèdre : 0321
rrrrr=+++ AdAdAdAd
dSdS
dSdS
dSdSxnM 3
132
121
111).,( σσσσ ++=rrr
dSdS
dSdS
dSdSxnM 3
232
221
212).,( σσσσ ++=rrr
dSdS
dSdS
dSdSxnM 3
332
321
313).,( σσσσ ++=rrr
nnM
M
rrr .),(
33
23
13
32
22
12
31
21
11
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
σσσ
σσσ
σσσ
σ
TRS
L’état de contrainte au point M se caractérise par un tenseur (matrice)

69MK03 : Calcul des structures2008 – 2009
SymSyméétrie du tenseur des contraintestrie du tenseur des contraintes
1xr
2xr
2dx
1dx
21σ
21σ−
12σ
12σ−
03211232121 =− dxdxdxdxdxdx σσ
On isole le tétraèdre
TMS en projection sur 3xr
1221 σσ =
On montre de même
1331 σσ = 2332 σσ =
Le tenseur des contraintes est symétrique
M

70MK03 : Calcul des structures2008 – 2009
Cercle de Cercle de MohrMohr
Pour simplifier, on se place en deux dimensions (contraintes planes).Le vecteur normal est paramétré par l’angle
1xr
2xr
)(θnr
θ
θ
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=
)sin()cos(
.)sin()cos(
),(2221
1211
θθ
θθ
σσσσ
σM
n nMr
)(sin)2sin()(cos),( 22212
211 θσθσθσσ ++=nMn
r
⎥⎦
⎤⎢⎣
⎡−⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=
)cos()sin(
.)sin()cos(
),(2221
1211
θθ
θθ
σσσσ
τM
nMr
On calcule la contrainte normale
On calcule la contrainte tangentielle
)2cos()2sin(2
),( 122211 θσθσστ +
−−=nM
r

71MK03 : Calcul des structures2008 – 2009
Cercle de Cercle de MohrMohr
)(sin)2sin()(cos),( 22212
211 θσθσθσσ ++=nMn
r
)2sin()2cos(22
),( 1222112211 θσθσσσσσ +
−=
+−nMn
r
)2cos()2sin(2
),( 122211 θσθσστ +
−−=nM
r
( ) ( )212
222112
22211
2),(
2),( σσστσσσ +⎟
⎠⎞
⎜⎝⎛ −
=+⎟⎠⎞
⎜⎝⎛ +
− nMnMn
rr
On reconnaît que le point décrit un cercle de centre
de rayon
( )τσ ;n ⎟⎠⎞
⎜⎝⎛ + 0;
22211 σσ
( )212
22211
2σσσ
+⎟⎠⎞
⎜⎝⎛ −
=R

72MK03 : Calcul des structures2008 – 2009
Cercle de Cercle de MohrMohr
)(θτ
11σ)(θσ n 22σ
12σ
12σ−
22211 σσ +
( )212
22211
2σσσ
+⎟⎠⎞
⎜⎝⎛ −
=R
R
θ2
τ
nσ

73MK03 : Calcul des structures2008 – 2009
Tri cercle de Tri cercle de MohrMohr
Si on se replace en 3 dimensions, le tenseur est symétrique, il existe alors une base orthonormée dans laquelle le tenseur est diagonal.
On peut alors effectuer 3 cercles de Mohr en faisant tourner autour des 3 vecteurs propres.
τ
p11σp
22σp33σ
nr
maxτ
Si on oriente de manière quelconque on se trouve entre les 3 cercles.
nr
nσ
On peut trouver la contrainte de cisaillement maximale

74MK03 : Calcul des structures2008 – 2009
ÉÉquation dquation d’é’équilibrequilibre
1xr
2xr
3xr
M1dx
2dx
3dx
On isole le cube en dynamique :
Efforts volumiques :
vfr
dVfvr
Efforts surfaciques sur les 6 facettes :
[ ]i
iiiiiii dxdVxxxxxxA xdSext 332211 )()()()(
rrrrσσσ ++−=→
[ ]i
iiiiiiiiiii dxdVxdxxxdxxxdxxA dxxdSext 332211 )()()()(
rrrr+++++=+→ σσσ
TRD en projection sur kxr
kRgMkvi i
ikiiiki xdVxfdVdxdVxdxx
rrrr..))()(( /
3
1γρσσ =+−+∑
=
kRgdVMkvi i
ki xxfx
rrrr.. /
3
1∈
=
=+∂∂∑ γρσ
[ ] RgMvfdiv /γρσrr
=+
[ ]3,1∈i
[ ]3,1∈k
Équation d’équilibre

75MK03 : Calcul des structures2008 – 2009
Notion de dNotion de dééformationformation
Au cours du chargement d’une structure les particules subissent deux transformations :
Un mouvement d’ensemble
Des déformations des petits cubes élémentaires
),,( zyxur
),,( zyxεr
M
M
dx
dy
xr
yr
),,( zyxur
),,( zyxεr

76MK03 : Calcul des structures2008 – 2009
DDééformations vues en 2Dformations vues en 2D
Mdx
dy
xr
yr
),(),( yxuydxxurr
−+
),(),( yxudyyxurr
−+
M dx
dy
xr
yr
M dx
dy
xr
yr
xux
xx ∂∂
=ε
yuy
yy ∂∂
=ε
M dx
dy
xr
yr
xu
yu yx
xy ∂∂
+∂∂
== εγ 2

77MK03 : Calcul des structures2008 – 2009
Tenseur des dTenseur des dééformationsformations
[ ] ⎟⎠⎞
⎜⎝⎛ +=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡= )()(
21 ugradugrad
T
zzyzxz
yzyyxy
xzxyxxrr
εεεεεεεεε
ε
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
=⎟⎠⎞
⎜⎝⎛ +
zu
yu
zu
xu
zu
yu
zu
yu
xu
yu
xu
zu
xu
yu
xu
ugradugrad
zzyzx
zyyyx
zxyxx
T
21
21
21
21
21
21
)()(21 rr
Le tenseur des déformations est symétrique

78MK03 : Calcul des structures2008 – 2009
Vecteur dVecteur dééformationformation
21→nr
dS
M
),( nMn
rrε
),( nMrr
ε
),( nMt
rrε
[ ] nnM M
rrrεε =),(
tnMnnMnM tn
rrrrrrrr ),(),(),( εεε +=
De même qu’avec le tenseur des contraintes on peut calculer les déformations en tout point avec le tenseur des déformations
On peut décomposer la déformation en deux composantes une normale et une tangentielle

79MK03 : Calcul des structures2008 – 2009
Utilisation des rosettesUtilisation des rosettes
On place une rosette à 45° à la surface d’un matériau.On mesure 3 valeurs de déformation :
yr
xr
1ε
2ε
3ε
[ ] nnnM Mn
rrrr .),( εε =
[ ] xxM xx εεε == 1.rr
[ ] yyM yy εεε == 3.rr
[ ] xyyyxx
M yxyx εεε
εε ++
==++2
2/)).(( 2rrrr
On trouve alors les valeurs du tenseur 2D [ ] ⎥⎦
⎤⎢⎣
⎡=
yyxy
xyxx
εεεε
ε

80MK03 : Calcul des structures2008 – 2009
Chapitre 2 : MChapitre 2 : Méécanique des milieux continus (les bases)canique des milieux continus (les bases)
Grandeurs de la mécanique des milieux continus solidesContrainte (scalaire, vecteur, tenseur).Cercle de MohrÉquation d’équilibreDéformation (scalaire, vecteur, tenseur).
Loi de comportementÉlasticitéLoi de Hooke généraliséeDensité d’énergie de déformation.
Critères de dimensionnement des structures.Critère de TrescaCritère de Von Misses

81MK03 : Calcul des structures2008 – 2009
Notion dNotion d’é’élasticitlasticitéé
ε
σ
Élastique non linéaire
ε
σ
Visco Élastique
ε&
ε
σ
inélastique
ε
σ
Inélastique avec endommagement
ε
σ
Relaxation
t
ε
σ
Fluage
t

82MK03 : Calcul des structures2008 – 2009
Loi de Hooke (formalisme tenseur de degrLoi de Hooke (formalisme tenseur de degréés 4)s 4)
On se place dans le cas d’un matériau élastique, linéaire, homogène, isotrope.
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
++
+
=
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
yz
xz
xy
zz
yy
xx
yz
xz
xy
zz
yy
xx
εεεεεε
μμ
μμλλλ
λμλλλλμλ
σσσσσσ
22
20
02
22
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
+
+−−
−−−−
=
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
yz
xz
xy
zz
yy
xx
yz
xz
xy
zz
yy
xx
EEEEEEEEE
σσσσσσ
ν
ν
ννν
νννν
εεεεεε
21
21
21
0
01
11

83MK03 : Calcul des structures2008 – 2009
Loi de Hooke (formalisme tenseur de degrLoi de Hooke (formalisme tenseur de degréés 2)s 2)
[ ] [ ] [ ] [ ]εμελσ 2)( += IdTr
La loi de Hooke peut alors s’écrire :
E Module d’Young υ Coefficient de poisson
Le matériau est caractérisé par deux paramètres que l’on obtient par des essais mécaniques.
[ ] [ ] [ ] [ ]συσυεE
IdTrE
++−=
1)(
On peut inverser la relation en faisant apparaître les coefficients de Lamé :
μλμλμ
++
=23E
)1(2 υμ
+=
E
On passe des coefficients de Lamé aux paramètres de Hooke par les relations suivantes :
)21)(1( υυυλ−+
=E
)(2 μλλυ+
=

84MK03 : Calcul des structures2008 – 2009
Exemple une poutre en tractionExemple une poutre en traction
Fr
Fr
− xr
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
00000000xxσ
σ[ ] [ ] [ ] [ ]συσυε
EIdTr
E+
+−=1)( [ ]
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−=
E
E
E
xx
xx
xx
υσ
υσ
σ
ε
00
00
00
On retrouve les 2 résultats bien connus :
xxxx Eεσ = υεε
εε
−==xx
zz
xx
yy
SF
xx =σ

85MK03 : Calcul des structures2008 – 2009
DensitDensitéé dd’é’énergie de dnergie de dééformation (pour la culture)formation (pour la culture)
Soit une structure en matériau ELHI sous contraintes, on peut calculer l’énergie de déformation élastique accumulée dans un élément infiniment petit de matière de volume dV.
Cette énergie s’exprime en fonction des tenseurs des contraintes et des déformations :
[ ][ ])(21 εσTr
dVdEd =
[ ][ ]∫∫∫=V
d dVTrE )(21 εσ
De même, on exprime l’énergie totale de déformation élastique par :

86MK03 : Calcul des structures2008 – 2009
Chapitre 2 : MChapitre 2 : Méécanique des milieux continus (les bases)canique des milieux continus (les bases)
Grandeurs de la mécanique des milieux continus solidesContrainte (scalaire, vecteur, tenseur).Cercle de MohrÉquation d’équilibreDéformation (scalaire, vecteur, tenseur).
Loi de comportementÉlasticitéLoi de Hooke généraliséeDensité d’énergie de déformation.
Critères de dimensionnement des structures.Critère de TrescaCritère de Von Misses

87MK03 : Calcul des structures2008 – 2009
Essai de tractionEssai de traction
ε
σ
%2,0eR
%2,0
mR
%A
Rupture ductile
Rupture fragile
E

88MK03 : Calcul des structures2008 – 2009
Cercle de Cercle de MohrMohr
Rm
Rupture des matériaux fragiles selon la plus grand contrainte
normale :
Rupture des matériaux ductiles selon la plus grand
contrainte tangentielle :
nσ
maxτ
2maxmR
=τ
τ
La rupture des métaux en traction est due aux
contraintes de cisaillement

89MK03 : Calcul des structures2008 – 2009
CritCritèère de re de TrescaTresca
τ
p11σp
22σp33σ
maxτ
nσ
2eR
ePjj
Pii R<−= σστ max2 max
Il n’y a pas de plastification tant que la contrainte de cisaillement max ne dépasse pas la demie limite élastique :

90MK03 : Calcul des structures2008 – 2009
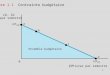
CritCritèère de Von Misesre de Von Mises
ePPPPPP
VM R<−+−+−= 23322
23311
22211 )()()(
21 σσσσσσσ
P11σ
P22σ
P33σ
P11σ P
22σ
P33σ
Basé sur une approche énergétique
Il n’y a pas de plastification tant que la contrainte de Von Mises ne dépasse pas la limite élastique :

91MK03 : Calcul des structures2008 – 2009
TD dTD d’’applicationapplication
Dans un premier temps on a identifié sous Catia le point où les contraintes seront les plus
fortes dans une aile d’avion.
On dispose en ce point sur une pièce prototypeun rosette à 60°et on relève les mesures suivantes :
31 10 −=ε
32 102 −= xε
33 105 −= xε
1 : Trouver les tenseurs de contraintes et des déformations ainsi que leurs directions principales :
2 : Conclure quant à la tenue de la pièce :

92MK03 : Calcul des structures2008 – 2009
MatMatéériau : Alliage driau : Alliage d’’aluminium aaluminium aééronautique 7175 T7351ronautique 7175 T7351
5,16,1
Zn
reste0,150,10,180,28
2,12,9
0,11,22,2
0,200,15
AlautreTiCrMgMnCuFeSi
Composition chimique nominale % (selon norme EN 573-1) :
On choisit une nuance classique d’alliage aéronautique : 7175 (AW-AlZn5,5MgCu (B))
État métallurgique pour des tôles de 1 à 30 mm : T7351
T73 Trempe + sur-revenu désensibilisant à la corrosion sous contrainteTxx51 : détentionnement par traction sans aucun dressage complémentaire après la traction.
Propriétés mécaniques
2800728370470
ρ (kg.m-3)E (GPa)A%Re0,2 (MPa)Rm (MPa)