Embed Size (px)
Citation preview

Le PI Fréquentiel Observateur/contrôleur Conclusion
Dynamique et contrôle des systèmesQuelques notions de base
Pierre Rouchon
Ecole des Mines de ParisCentre Automatique et Systèmes
CIRM Janvier 2006

Le PI Fréquentiel Observateur/contrôleur Conclusion
Plan
1 Le PI
2 Fréquentiel
3 Observateur/contrôleur
4 Conclusion

Le PI Fréquentiel Observateur/contrôleur Conclusion
Régulateur proportionnel intégral (PI) de la température y = θ àsa consigne v = θ avec une vanne u ∈ [0,1], le contrôle.

Le PI Fréquentiel Observateur/contrôleur Conclusion
PI en temps discret:
uk+1 = Sat(Kp(θ − θk ) + Ik
)Ik+1 = Ik + ∆t
[Ki(θ − θk ) + Ks(uk+1 − Kp(θ − θk )− Ik )
]où Sat(x) = x si x ∈ [0,1], Sat(x) = 0 pour x < 0 etSat(x) = 1
PI en temps continu: avec ddt I∣∣k ≈
Ik+1−Ik∆t , on obtient la
version continue:
u(t) = Sat(Kp(θ − θ(t) + I(t))ddt
I(t) = Ki(θ − θ(t)) + Ks(u(t)− Kp(θ − θ(t))− I(t)).

Le PI Fréquentiel Observateur/contrôleur Conclusion
Modèle thermique simplifié: premier ordre non-linéaire.
MρCpddtθ = Λrad(θrad − θ) + Λext(θext − θ)
uΛ(θch − θrad) = Λrad(θrad − θ)

Le PI Fréquentiel Observateur/contrôleur Conclusion
PI sur un premier ordre:
ddt
x = f (x ,u), x ∈ R, u ∈ [umin,umax]
avec comme seules hypothèses: ∂f∂x ≤ 0, ∂f
∂u > 0 etf (x , u) = 0 avec u ∈ [umin,umax].Le système en boucle fermée est globalementasymptotiquement stable pour tous gains Kp,Ki > 0 etKsKp > Ki (systèmes plans et Poincaré/Bendixon)
ddt x = f (x ,Sat [Kp(x − x) + I])ddt I = Ki(x − x) + Ks (Sat [Kp(x − x) + I]− Kp(x − x)− I)

Le PI Fréquentiel Observateur/contrôleur Conclusion
Trajectoires bornées
Le rectangle Rλ est positivement invariant car le champ devecteurs X 7→ F (X ) pointe vers l’intérieur lorsque X = (x , I)parcours le bord de Rλ

Le PI Fréquentiel Observateur/contrôleur Conclusion
Poincaré/Bendixon
Les quatre comportements asymptotiques possibles pour unetrajectoire d’un système dynamique autonome défini dans leplan:
La divergence ∂f∂x − Kp
∂f∂u (Sat)′ + Ks((Sat)′ − 1) est négative et
on a un seul point d’équilibre: reste uniquement le cas 2a.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Linéaire tangent
Soit Rn 3 x 7→ v(x) ∈ Rn continûment dérivable par rapport à xet x ∈ Rn tel que v(x) = 0. L’état d’équilibre x de
ddt
x = v(x)
(on dit aussi état stationnaire, ou point critique du champ devecteurs v ) est asymptotiquement stable si les valeurs propresde la matrice jacobienne (pôles du linéaire tangent)
∂v∂x
(x) =
(∂vi
∂xj
)1≤i,j≤n
sont toutes à parties réelles strictement négatives. x n’est passtable au sens de Lyapounov lorsque l’une des valeurs propresdu jacobien ∂v
∂x (x) est à partie réelle strictement positive.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Stabilité au sens de Lyapounov
Soit le système dynamique, ddt x = v(x , t),x ∈ Rn d’équilibre x :
v(x , t) = 0 pour tout temps t .x est dit stable au sens de Lyapounov si, et seulement si,pour tout ε > 0, il existe η > 0 tel que pour toute conditioninitiale x0 vérifiant ‖x0 − x‖ ≤ η, la solution deddt x = v(x , t) qui part de x0 à t = 0, vérifie alorsobligatoirement ‖x(t)− x‖ ≤ ε pour tout temps t ≥ 0.x est dit asymptotiquement stable (localement) si , etseulement si, il est stable au sens de Lyapounov et si, enplus, il existe η > 0 tel que toutes les solutions deddt x = v(x , t) qui partent en t = 0 d’une condition initiale x0
vérifiant ‖x0 − x‖ ≤ η convergent vers x lorsque t tendvers +∞.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Pour (x , I) autour de (x , I), le système s’écrit
ddt x = f (x ,Kp(x − x) + I)ddt I = Ki(x − x)
Le calcul du linéaire tangent fait apparaît la matrice jacobiennesuivante: (
∂f∂x
∣∣∣(x ,u)
− Kp∂f∂u
∣∣∣(x ,u)
∂f∂u
∣∣∣(x ,u)
−Ki 0
).
La trace de cette matrice 2× 2 est strictement négative car∂f∂x ≤ 0 et ∂f
∂u > 0 par hypothèse et les gains Kp, Ki sont > 0.Son déterminant est strictement positif pour les mêmesraisons. Donc ses deux valeurs propres sont à parties réellesstrictement négatives. Ainsi, pour tous Kp > 0 et Ki > 0, lelinéaire tangent est toujours stable.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Schéma bloc de la boucle ouverte.
contrôle
perturbation
sortie
système

Le PI Fréquentiel Observateur/contrôleur Conclusion
Schéma bloc de la boucle fermée.
rétroaction (feedback)
contrôleur
perturbation
con
sig
ne contrôle
sortiesystème

Le PI Fréquentiel Observateur/contrôleur Conclusion
Deux types de pré-compensations: l’une sur laperturbation mesurée θext ,l’autre sur la consigne variableθr . Algorithme PI avec anticipa-tion (feedforward) suivant:
u(t) = Sat[Kp(θr (t)− θ(t) + I(t)+Kr θr (t)−Kextθext
]ddt
I(t) = Ki(θr (t)− θ(t))
+ Ks
[u(t)− Kp(θr (t)− θ(t))− I(t)−Kr θr (t)+Kextθext
].

Le PI Fréquentiel Observateur/contrôleur Conclusion
ddt
y = −ay + bu + dw
avec a > 0, b > 0 et d > 0. La température y est le résultatd’un filtre du premier ordre, à la constante de temps τ = 1/a,de τ(bu + dw).But: suivre la référence t 7→ yr (t) continue et dérivable parmorceaux tout en connaissant à chaque instant la perturbationw(t).On définit le contrôle de référence (feedforward) comme étantla fonction t 7→ ur (t) continue par morceaux et définie parddt yr = −ayr + bur + dw c’est à dire
ur (t) =ddt yr (t) + ayr (t)− dw(t)
b.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Pour obtenir u, on rajoute alors à ur une correction de type PIsur l’erreur de suivi, e = y − yr :
u(t) = ur (t) + Kpe(t) + I(t),ddt
I(t) = Kie(t).
On obtient ainsi en boucle fermée un système différentielordinaire autonome pour les variables e = y − yr et I:
ddt
e = − (bKp + a) e + bI,ddt
I = −Kie.
Ainsi, même si w et yr varient au cours du temps, leurvariations sont pré-compensées par ur qui est une combinaisonlinéaire de yr , d
dt yr et w .

Le PI Fréquentiel Observateur/contrôleur Conclusion
laser
photo détecteur
Une particule (m, q) selon 0x , dans le potentiel harmoniqueU(x) et soumis à une onde plane électromagnétique polariséelinéairement; loin de l’origine, en z = −L, on dispose d’unesource classique résonnante d’amplitude u(t) ∈ [0,umax], lecontrôle, et d’un photo-détecteur, y(t), la mesure. Un modèlesimplifié (version simplifiée des équations de pompage, parexemple): d
dt y(t) = −Λy(t) + u(t − 2TL).

Le PI Fréquentiel Observateur/contrôleur Conclusion
ddt
y(t) = −ay(t) + bu(t) + dw(t).
avec a, b et d positifs. Le contrôle est u, la perturbation w et lamesure y .Correcteur PI
u = Kp(yc − y) + I,ddt
I = Ki(yc − y)
avec Kp,Ki > 0 assure la convergence asymptotique de y(t)vers la consigne yc pour peu que la perturbation w soitconstante. Noter que l’on n’a pas besoin de connaître cetteconstante pour trouver le u qui assure y = yc .

Le PI Fréquentiel Observateur/contrôleur Conclusion
ddt
y(t) = −ay(t) + b(Kp(yc − y) + I) + dw(t),ddt
I = Ki(yc − y)
1 Que se passe-t-il si la mesure de y n’est pas instantanéemais est effectuée avec un certain temps de retard ∆; àl’instant t , on connaît la valeur de y(t −∆).
2 Que se passe-t-il si la perturbation non mesurée w n’estplus constante mais sinusoïdale de la formew(t) = cos(ωt) avec ω constant. Résonances avec lerégulateur PI ?
3 Que se passe-t-il en boucle fermée si l’on superpose lesdeux points précédents, un retard de mesure et uneperturbation sinusoïdale ?
Approche fréquentielle ddt = s ∈ C bien adaptée: critère de
Nyquist, diagramme de Bode.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Avec
G(s) =b
s + a, Gw (s) =
ds + a
, K (s) =
(Kp +
Ki
s
)e−∆s
On a y =GK
1 + GKyc +
Gw
1 + GKw

Le PI Fréquentiel Observateur/contrôleur Conclusion
y =GK
1 + GKyc +
Gw
1 + GKw
La stabilité est caractérisée1par la position des zéros de
1 + GK = 1 + bsKp + Ki
s(s + a)e−∆s
par rapport à l’axe imaginaire: stabilité si toutes les partiesréelles sont strictement négatives ≤ −α, α > 0; instabilité sil’un des zéros à partie réelle strictement positive.
1Pas de simplification pôle/zéro instable.

Le PI Fréquentiel Observateur/contrôleur Conclusion
0
Le théorème de Cauchy pour une fonction méromorphe F (s)de s ∈ C et un domaine Ω ⊂ C délimité par la courbe ferméenotée Cs ; F (s) décrit une courbe fermée notée CF lorsque sparcourt Cs dans le sens direct. Alors, le nombre de tours Nque fait CF autour de 0 est relié aux nombres de pôles P et dezéros Z de F (s) dans Ω par N = Z − P. Ici Z = 4 et P = 2,donc F (s) fait deux fois le tour de 0 dans le sens direct, i.e.,N = 2.

Le PI Fréquentiel Observateur/contrôleur Conclusion
La boucle que doit faire s pour englober tout le demi plan àpartie réelle positive tout en évitant le pôle deGK (s) = b sKp+Ki
s(s+a) e−∆s en s = 0; R > 0 est très grand et ε > 0est très petit.

Le PI Fréquentiel Observateur/contrôleur Conclusion
On commence par une normalisation en posant
s =sa, k = abKp, η =
Ki
Kpa, δ = a∆.
AlorsGK (s) = GK (s) = k exp(−δs)
s + η
s(s + 1).
Ainsi quitte à changer d’unité sur le temps, on peut toujourssupposer a = 1. On confond dans la suite s et s:
GK (s) = k exp(−δs)s + η
s(s + 1).

Le PI Fréquentiel Observateur/contrôleur Conclusion
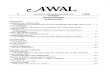
Le lieu de Nyquist de G(s)K (s) = k exp(−δs) s+ηs(s+1) avec k = 1,
δ = 0 et η = 0.5. ; la courbe fermée du plan complexe décritepar G(s)K (s) lorsque s décrit la courbe CR,ε, pour R 1 et0 < ε 1.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Lieu de Nyquist pour G(s)K (s) = ke−δs s+ηs(s+1) avec k = 1,
η = 0.5 et diverses valeurs du retard δ. On s’intéresse auxzéros à < > 0 de 1 + GK .

Le PI Fréquentiel Observateur/contrôleur Conclusion
Le fait que le complexe GK (ıϑ) =
k (ıϑ+η)ıϑ(ıϑ+1) est de module 1, donne
ϑ =
√1−k2+
√(1−k2)2+4k2η2
2 . On noteϕ ∈ [0, π[ l’argument suivant:
exp(ıϕ) = −k(ıϑ+ η)
ıϑ(ıϑ+ 1)
ϕ est la marge de phase et δ∗ = ϕϑ est le
retard critique au delà duquel des instabilitésapparaissent.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Réalisation
On part d’un transfert rationnel causal (degré de N(s) inférieurau degré D(s)):
y =N(s)
D(s)u
que l’on souhaite représenter sous la forme d’état:
ddt
x = Ax + Bu, y = Cx
avec x ∈ Rn, n = degré(D(s) et A, B et C matrices constantes.On cherche donc A, B, C tels que
y = C(sI − A)−1Bu.
C’est toujours possible.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Exemple de réalisation: y(s) = b1s+b0s2+a1s+a0
u(s) où (a0,a1,b0,b1)
sont des paramètres.
d2
dt2 y + a1ddt
y + a0y = b1ddt
u + b0u.
On pose z = (z1, z2) = (y , ddt y) et alors on a
ddt
z1 = z2,ddt
z2 = −a0z1 − a1z2 + b1ddt
u + b0u.
On regroupe les dérivées dans la seconde équation en uneseule variable x2 = z2 − b1u au lieu de z2. Avec les variables(x1 = z1, x2), on a la réalisation d’état souhaitée
ddt
x1 = x2 + b1u,ddt
x2 = −a0x1 − a1x2 + (b0 − a1b1)u
car y = x1.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Un problème typiqueOn part du système entrée/sortie u 7→ y sous la forme d’état
ddt
x = Ax + Bu, y = Cx
avec dim(u) = dim(y) = 1 et dim(x) = n.On souhaite aller du régime stationnaire caractérisé pary = yα, u = uα vers l’état stationnaire y = yβ , u = uβ en untemps T > 0.Règles du jeu: on connaît à l’instant t , y(t) la mesure et onpeut ajuster u en temps réel de façon à compenser leserreurs et les perturbations.Une solution classique: planification et suivi de trajectoiresdans l’espace des états x ∈ Rn avecl’observateur/contrôleur (la commande modale).

Le PI Fréquentiel Observateur/contrôleur Conclusion
Pour ddt x = Ax + Bu, y = Cx , solution en deux étapes:
1 Planification de trajectoires pour aller de l’état stationnairexα à l’état xβ: une trajectoire de référence[0,T ] 3 t 7→ (xr (t),ur (t), yr (t)) telle que
∀t ∈ [0,T ],ddt
xr (t) = Axr (t) + Bur (t), yr (t) = Cxr (t)
avec les conditions aux limites: Axr (0) + Buα = 0,yα = Cxr (0), Axr (T ) + Buβ = 0, yβ = Cxr (T ). Cette étapedonne le contrôle en boucle ouverte [0,T ] 3 t 7→ ur (t)(feedforward) qui, si tout est parfait, amène le système del’équilibre α à l’équilibre β.
2 Calcul de la correction ∆u, u = ur + ∆u, de sorte que lesécarts observés sur la sortie, ∆y = yr − y = C(xr − x)restent proches de 0: Cela revient à stabiliser à zéroddt ∆x = A∆x + B∆u, uniquement en utilisant ∆y = C∆xpour calculer ∆u

Le PI Fréquentiel Observateur/contrôleur Conclusion
Stabilisation via ∆u de ddt ∆x = A∆x + B∆u, avec ∆y = C∆x
Contrôleur: calcul d’un feedback d’état, ∆u = K∆x tel quela dynamique en boucle fermée d
dt ∆x = (A + BK )∆x , soitstable, feedback utilisable que si on mesure à chaqueinstant ∆x , ce qui est rarement le cas.Estimation de ∆x en fonction de ∆y avec un observateurasymptotique donnant l’estimée ∆x par le filtre
ddt
∆x = A∆x + B∆u(t) + L(C∆x −∆y (t))
Ainsi u = ur (t) + K ∆x avec ∆x qui dépend de la mesure y(t)via le filtre causal (observateur asymptotique):
ddt
∆x = (A + BK )∆x + L(C∆x − (y(t)− yr (t))).
Convergence si K et L sont choisis de sorte que A + BK etA + LC soient des matrices stables: c’est toujours possible si lesystème est observable et commandable.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Linéarisation de Schrödinger pour un système à trois états:ψ = ψ0 |0〉+ ψ1 |1〉+ ψ2 |2〉, contrôle ε(t) ∈ R,
ıddtψ =
0 0 00 ω1 00 0 ω2
ψ + ε(t)µ
0 1 11 0 01 0 0
ψ
autour de ψ = |0〉 et ε = 0:
ıddtδψ0 = 0, ı
ddtδψ1 = ω1δψ1 + µδε, ı
ddtδψ2 = ω2δψ2 + µδε
Contrôle avec un même u de deux oscillateurs de fréquencesdifférentes:(a1 6= a2, a1 = (ω1)
2, a2 = (ω2)2):
d2
dt2 x1 = −a1(x1 − u),d2
dt2 x2 = −a2(x2 − u);
avec
δψ1 =µ(ω1x1 + ı d
dt x1)
(ω1)2 , δψ2 =µ(ω2x2 + ı d
dt x2)
(ω2)2 , δε = −u.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Planification de trajectoires pour
d2
dt2 x1 = −a1(x1 − u),d2
dt2 x2 = −a2(x2 − u).
On passe par la variable intermédiaire z = a2x1−a1x2a1+a2
, la sortiede Brunovsky car
a2x1 − a1x2 = (a1 + a2)z, a1a2(x2 − x1) = (a1 + a2)d2
dt2 z
et donc x1, x2 et u sont fonctions de (zr ,d2
dt2 zr , z(4)r ).
Génération de trajectoires de l’état stationnaire uα à l’étatstationnaire uβ: zr (t) = (1− S(t/T ))zα + S(t/T )zβ où S estn’importe quelle fonction telle que
S(0) = 0, S(1) = 1,dkSdtk (0,T ) = 0, k = 1,2,3,4
Par exemple S(r) = r5
r5+(1−r)5 .

Le PI Fréquentiel Observateur/contrôleur Conclusion
Stabilisation de
d2
dt2 x1 = −a1(x1 − u),d2
dt2 x2 = −a2(x2 − u).
Approche Lyapounov et/ou passivité: le feedback
u = −k(a1ddt
x1 + a2ddt
x2), k > 0
stabilise le système en zéro. L’energie
V =12(
ddt
x1)2 +
a1
2(x1)
2 +12(
ddt
x2)2 +
a2
2(x1)
2
est une fonction de Lyapounov contrôlée (CLF) car
ddt
V = (a1ddt
x1 + a2ddt
x2)u = −k(a1ddt
x1 + a2ddt
x2)2 ≤ 0
(sorte de frottement rajouté par le contrôle).

Le PI Fréquentiel Observateur/contrôleur Conclusion
Commandabilité (contrôlabilité) et planification de trajectoires:

Le PI Fréquentiel Observateur/contrôleur Conclusion
Commandabilité (contrôlabilité) et stabilisation ou suivi detrajectoires:

Le PI Fréquentiel Observateur/contrôleur Conclusion
Le système ddt x = Ax + Bu, x ∈ Rn est commandable en temps
T > 0, ssi, pour tout p,q ∈ Rn il existe [0,T ] 3 t 7→ u(t) tel quela solution du problème de Cauchy:
ddt
x = Ax + Bu(t), x(0) = p
vérifie x(T ) = q.Critère de Kalman: la commandabilité en temps T > 0 équivautà
rang(B,AB, . . . ,An−1B) = n.

Le PI Fréquentiel Observateur/contrôleur Conclusion
ddt x = Ax + Bu, x ∈ Rn (dim u = 1 ici) commandable , ssi, ilexiste une changement de variable sur x , z = Mx avec Minversible, tel que,
ddt
z1 = z2, . . . ,ddt
zn−1 = zn,ddt
zn = a1z1 + . . .+ anzn + bu
avec b 6= 0, ou encore en notant y = z1, la sortie de Brunovsky,on a la forme normale suivante:
y (n) − any (n−1) − . . .− a1y = bu.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Stabilisation par feedback de ddt x = Ax + Bu: trouver K tel que
avec u = Kx , le système en boucle fermé soit stable, i.e., telque les valeurs propres de A + BK soient à parties réellespositives.Si le système est commandable, c’est toujours possible: onpeut même choisir comme on veut les valeurs propres deA + BK (placement de pôles) en jouant sur K : il suffit de partirde
y (n) − any (n−1) − . . .− a1y = bu.
et de poser bu = −(an + σ1)y (n−1) − . . .− (a1 + σn)y de sorteque
y (n) + σ1y (n−1) + . . .+ σny = 0.
avec les σi arbitraires (fonctions symétriques élémentaires desvaleurs propres, i.e., des pôles).On fixe les racines, les pôles pi , et on calcule les σi de sorteque: (s − p1) . . . (s − pn) = sn + σ1sn−1 + . . .+ σn−1s + σn

Le PI Fréquentiel Observateur/contrôleur Conclusion
Reconstruire (estimer) x(t) à partir de la connaissance y(τ)pour τ ≤ t (et aussi de u(τ)) sachant que:
ddt
x = Ax + Bu, y = Cx
L’idée des observateurs asymptotiques: estimer x par unevariable x solution de (filtre de u et y ...).
ddt
x = Ax + Bu(t) + L(Cx − y(t)).
Dynamique de l’erreur x = x − x :
ddt
x = (A + LC)x .
Filtre de Kalman: réglage optimal de la matrice des gains L enfonction "d’incertitudes gaussiens" sur le modèle et la mesure.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Le système ddt x = Ax + Bu, y = Cx est observable, ssi, pour
toute trajectoire entrée/sortie t 7→ (u(t), y(t)) il n’existe qu’uneseule trajectoire d’état t 7→ x(t) solution deddt x(t) = Ax(t) + Bu(t) vérifiant en plus y(t) = Cx(t).Critère de Kalman: le système est observable, ssi,
rang
C
CA...
CAn−1
= n = dim(x)
Si le système est observable alors il est possible de choisir lesvaleurs propres de A + LC comme on veut en jouant sur lamatrice L. Il suffit de transposer le résultat sur le placement depôles.

Le PI Fréquentiel Observateur/contrôleur Conclusion
Points non abordés :Systèmes en temps discrets: xk+1 = f (xk ,uk ).contrôle linéaire de dimension finie: robuste H∞,linéaire/quadratique, filtre de Kalman, ....contrôle non linéaire: algèbre de Lie de contrôlabilité,découplage, linéarisation, systèmes plats et problème deMonge, stabilisation, contrôle Lyapounov, ....Contrôle Optimal: principe du maximum de Pontryaguine,synthèse du feedback optimal, programmation dynamique,équation de Hamilton-Jacobi-Bellman, ....dimension infinie: système à retards, contrôle frontière desEDP, méthode HUM, méthode du retour, ...Observateurs non-linéaires, filtre de Kalman étendu,estimation de paramètres, contrôle adaptatif, diagnostic, ....

Le PI Fréquentiel Observateur/contrôleur Conclusion
Références classiques sur les systèmes de dimension finie:Fréquentiel (PID): PID Controllers: Theory, Design andTuning. K. J. Astrom, T. Hagglund. ISA International(Instrument Society of America). 1995Contrôle linéaire: Linear Systems. T. Kailath.Prentice-Hall, Englewood Cliffs, NJ, 1980Contrôle non-linéaire: Nonlinear Systems. H.K. Khalil,MacMillan. 1992.Contrôle optimal: Théorie Mathématique de ProcessusOptimaux. L. Pontryagin et al. Mir, Moscou, 1974.
Aussi des notes de cours sur la page web:http://cas.ensmp.fr/∼rouchon/index.html