Embed Size (px)
Citation preview

NOTES ET DOCUMENTS LIMSI N° : 2012-01
13 décembre 2011
Simulation numérique de systèmes tourbillonnaires :
dynamique et instabilités
Ivan DELBENDE


Notes et Documents LIMSI N° : 2012-01
Auteurs (Authors) : Ivan DELBENDE
Titre : Simulation numérique de systèmes tourbillonnaires : dynamique et instabilités
Title : Numerical simulation of vortex systems: dynamics and instabilities
Nombre de pages (Number of pages) : 231
Résumé : Ce travail est consacré à l'étude de la dynamique de plusieurs systèmes tourbillonnaires. La méthodologie utilisée couple et confronte des simulations numériques directes des équations de Navier-Stokes et des calculs de modes d'instabilités des divers systèmes à des modèles analytiques. Dans cet esprit sont étudiées les instabilités dans des tourbillons avec écoulement axial, la dynamique bidimensionnelle des dipôles et leur reconnexion tri-dimensionnelle. Le mémoire replace ces études dans le cadre de l'interaction entre vorticité et déformation à laquelle un chapitre est consacré. Un autre chapitre concerne la dynamique des tourbillons hélicoïdaux et, plus généralement, des écoulements à symétrie hélicoïdale. Tous ces travaux mettent en évidence des principes physiques pouvant aider à la compréhension des écoulements de sillages tourbillonnaires à l'aval des avions, des hélicoptères, des hélices, des éoliennes...
Mots clés : Vortex, tourbillons, jets tourbillonnaires, sillages tourbillonnaires, dipôles tourbillonnaires, tourbillons hélicoïdaux, instabilités, dynamique non linéaire, symétrie hélicoïdale, déformation.
Abstract: In this work, the dynamics of several vortex systems are studied. A methodology is used whereby direct numerical simulations of the Navier-Stokes equations and the computation of instability modes in various systems are coupled and compared to analytical models. In this spirit, instabilities in vortices with axial flow, two-dimensional dynamics of vortex dipoles and their three-dimensional reconnection are investigated. In the memoir, these topics areput in the framework of vorticity/strain interactions, to which a chapter is devoted. Another chapter deals with the dynamics of helical vortices, and more generally of flows with helical symmetry. All these studies put into evidence some physical principles which may help to the understanding of wake flows behind aircrafts, helicopters, propellers, wind turbines...
Keywords: Vortices, swirling jets, trailing vortices, vortex dipoles, helical vortices, instabilities, nonlinear dynamics, helical symmetry, strain.


UNIVERSIT E PIERRE ET MARIE CURIE–PARIS 6Laboratoire d’Informatique pour la M ecanique et les Sciences de l’Ingenieur
——————————
Memoire presente pour obtenirL’HABILITATION A DIRIGER DES RECHERCHES
Discipline :Mecanique
par
Ivan DELBENDE
le 13 decembre 2011
Simulation numerique de systemes tourbillonnaires : dynamique et instabilites
——————————
JURY
M. Dwight BARKLEY Professeur de l’University of Warwick, U.K. RapporteurM. Francois CHARRU Professeur de l’Universite Paul Sabatier, IMFT, ToulouseM. Jan DUSEK Professeur de l’Universite de Strasbourg, IMFS, StrasbourgM. Laurent JACQUIN Directeur de Recherchea l’ONERA–DAFE, Meudon RapporteurM. Thomas LEWEKE Directeur de Recherche au CNRS, IRPHE, Marseille RapporteurM. Maurice ROSSI Directeur de Recherche au CNRS, d’Alembert, ParisM. Stephane ZALESKI Professeur de l’UPMC–Paris 6, d’Alembert, Paris


Table des matieres
1 Curriculum Vitae 9
2 Activit es d’enseignement 15
3 Presentation des travaux de recherche 17
4 Interaction vorticit e deformation dans les vortex 214.1 Vortex uniforme en fluide parfait . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . 21
4.1.1 Dynamique dans un champ de deformation 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.1.2 Cas du champ de deformation plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Vortex non uniforme en fluide visqueux . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . 244.2.1 Vortex soumisa etirement axial axisymetrique . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.2.2 Vortex soumisa un champ de deformation 3D non axisymetrique . . . . . . . . . . . . . . . . . 254.2.3 Dipole 2D de vorticite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.3 Solutions non uniformes approchees . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.3.1 Le patchequivalent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 334.3.2 Monopole soumisa un champ de deformation plan . . . . . . . . . . . . . . . . . . . . . . . . . 334.3.3 Paire de vortex co-rotatifs 2D . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . 364.3.4 Applicationa la dynamique du dipole 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 364.3.5 Reconnexion de vortex contrarotatifs quasi-rectilignes . . . . . . . . . . . . . . . . . . . . . . . 374.3.6 Saturation non lineaire d’un jet tourbillonnaire . . . . . . . . . . . . . . . . . . . . . . . .. . . 41
4.4 Mise en œuvre numerique dans le cadre des methodes spectrales Fourier . . . . . . . . . . . . . . . . . . 444.4.1 Ecoulements domines par la deformation : variables de Lundgren . . . . . . . . . . . . . . . . . 444.4.2 Ecoulements domines par la vorticite : formulation perturbative . . . . . . . . . . . . . . . . . . 46
5 Ecoulementsa symetrie helicoıdale 495.1 Equations de Navier–Stokes avec symetrie helicoıdale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495.2 Formulation numerique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515.3 Resultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . 54
5.3.1 Conditions initiales pour un vortex helicoıdal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.3.2 Dynamique etetats quasi-stationnaires . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 555.3.3 Fusion de deux vortex helicoıdaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6 Perspectives 596.1 Tourbillons helicoıdaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 596.2 Instabilites thermoacoustiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 61
Bibliographie 63
Appendices 66
A Liste des articles 67A.1 Tourbillons avececoulement axial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . 67A.2 Paires de vortex contrarotatifs . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . 67A.3 Ecoulementsa symetrie helicoıdale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67A.4 Autresetudes d’instabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
B Articles 69


Chapitre 1
Curriculum Vitae
Ivan DELBENDE decembre 2011
Date de naissance :17/04/1970Nationalit e : francaiseMarie, un enfant ne le 22/06/2001.
Adresse :LIMSI – Campus d’Orsay, bat. 508 – BP 13391403 ORSAY CEDEXTel. : 01 69 85 80 75 — Fax. : 01 69 85 80 88Email : [email protected] Web :http ://www.limsi.fr/Individu/delbende
Statut : Maıtre de conferencesa l’Universite Pierre et Marie Curie-Paris6,60eme section, UFR919 Facute d’Ingenierie.Affecte au Laboratoire d’Informatique pour la Mecanique et les Sciences de l’Ingenieur, Orsay.
Fonctions universitaires
1999-2011Maıtre de conferencesa l’UPMC–Paris 6 (nomination le 1er fev. 1999).
fin 1998 Professeur contractuela l’Universite de Versailles–Saint-Quentin-en-Yvelines (oct. 1998–janv. 1999).
1995-98 Moniteura l’Universite de Versailles–Saint-Quentin-en-Yvelines.
Formation
1994-98 Doctorat au Laboratoire d’Hydrodynamique (LadHyX), Ecole Polytechnique, Palaiseau, sous la directionde Patrick Huerre & Jean-Marc Chomaz.
1990-95 Eleve de l’Ecole Normale Superieure de Lyon (interruption en 1993–94 : Service National en tant queScientifique du Contingent, LadHyX).
1988-90 Classes Preparatoires, Lycee Blaise Pascal, Clermont-Fd. Math Spe P’.
Concours et diplomes
janv. 1998These de doctoratde l’Ecole Polytechnique, specialite Mecanique, soutenue le 8 janvier 1998 (mentiontres honorable avec felicitations).Sujet :Reponse impulsionnelle dans les jets tournants et les sillages plans : analyse spatio-temporelle parsimulation numerique directe.
juil. 1993 Agregationde Sciences Physiques, option Physique (rang :14eme).
sept. 1992DEA dePhysique Statistique et Phenomenes Non Lineaires, Ecole Normale Superieure de Lyon (rang :1er,mention Bien).
juil. 1992 Maıtrise de Physique, ENSL/Universite de Lyon I (mention Assez Bien).
juil. 1991 Licence de Physique, ENSL/Universite de Lyon I (mention Assez Bien).
1988 Baccalaureat C (mention Tres Bien).
9

Encadrement – Administration – Contrats
Encadrement de la recherche
Theses
2008-11 Benjamin Piton, doctorant de l’UPMC sur bourse MESR/EDSMAE.Simulations de tourbillonsa symetriehelicoıdale(taux d’encadrement : 50%, soutenue en octobre 2011).
2001-02 Participationa l’encadrement d’Emmanuel Bretagne, doctorant de l’UPMC.Instabilite thermoacoustiqueet generateur d’onde thermoacoustique : applicationa la conversion d’energie.
Postdoc
2006-07 Gregory Pinon, ATER de l’Universite Paris-Sud.Instabilite secondaire sur un anneau de vorticite. (50%).
Stages
2011 Rani Salame, stagiaire de master 1 de l’UPMC.Simulation de trois vortexa symetrie helicoıdale (3 mois,50%).
2007 Nicolas Del, stagiaire de master 2 de l’ESTIA/CranfieldUniversity.Elliptic instability of a vortex pair inthe wake of an aircraft(4 mois, 100%).
2006 Muhammed Ijaz Iqbal, stagiaire de Master 2 de l’Universite Paris-Sud.Instabilities of vortices with axialflow : an accurate numerical formulation(3 mois, 50%).
2006 Yacine Sahnoun, stagiaire de Licence de Mecanique de l’UPMC.Reconnexion de vortex(3 mois, 50%).
2004 Aurelien Casanova, stagiaire de la Maıtrise de Mecanique de l’UPMCSimulation numerique autour de lareconnexion de deux vortex contrarotatifs(3 mois, 50%).
2002 Astou Kebe, stagiaire de la Maıtrise de mecanique de l’UPMC.Simulation numerique de vortex avececoulement axial(2 mois, 100%).
2001 Christophe Pardieu & Guillaume Provensal, stagiairesde 2eme annee ENSTA.Vortexetires : dynamiquenon lineaire de l’instabilite (2 mois, 100%).
2000 Stephane Durand-Gasselin & Bruno Sanchez, stagiaires de 2eme annee ENSTA.Modelisation numeriqued’un compresseur thermoacoustique(4 mois, 100%).
Fonctions d’interet collectif
Fonctionsa l’UPMC
– Membre du groupe d’experts de la section 60 pour les comites de selection de l’UPMC 2009-2011.– Membreelu de la CSE 60 de l’UPMC 2004–2008.– Elu (college B) au conseil de l’UFR 919 (Faculte d’Ingenierie) 2008–2011.– Elu (college B) au conseil de l’UFR 923 (Mecanique-Energetique-Robotique) 2001–2008.– Membre nomme de la commission preparatoire aux promotions des MCF au titre de l’UPMC pour lessections
60–63 2002–2011.– Correspondant communication etevaluation du departement de licence d’ingenierie mecanique de l’UPMC depuis
2010.
Fonctions au LIMSI
– Membre nomme au conseil de laboratoire depuis 2009.– Membreelu au conseil du departement Mecanique–Energetique du laboratoire 2001–2008.
Animation de la recherche
– Expertise d’articles pour les revuesJ. Fluid Mech.(17),Phys. Fluids(7), Eur. J. Mech. B-Fluid(3), Exp. Fluids(2),Physica D(1), CR Mecanique(1), Mecanique et Industrie(1).
– Membre du comite d’organisation de la1ere Ecole Thematique de Thermoacoustique (CNRS), Roscoff, mai-juin2010.
– Participationa l’organisation du colloqueTourbillons en hydrodynamique, Porquerolles, mai 2003.
Financements, contrats, conges
2007-09 Contrat ANR 06-BLAN-0363-01HiSpeedPIV(porteur F. Moisy, FAST).
10

2007-09 Conge pour Recherches ou Conversion Thematique (1 an fractionne en 2 fois 6 mois).
2004-05 Accueil en delegation au CNRS (1 an).
2002-03 ATIP CNRS Jeunes ChercheursInteraction entre tourbillons : analyse directe et calcul intensif(porteur Ch.Josserand, LMM).
2001-11 Projet CP2–1386 de l’IDRIS–CNRS : attribution de 200h CPU/an en moyenne sur super-calculateur vecto-riel.
1999 Action Incitative (LIMSI)Thermoacoustiqueavec E. Bretagne.
Ecoles suivies
prin. 2010 1ereEcole de Thermoacoustique (ecole thematique CNRS), Roscoff.
juin 2007 3rd European SCAT Workshop & Summer School (Vortices and Vortex sheets : theories, numerics andapplications), Porquerolles.
aut. 2000Ecole d’acoustique dans lesecoulements, INRIA Rocquencourt.
ete 1996 6th National Summer School in Geophysical and Environmental Fluid Dynamics, Cambridge (GB).
prin. 1995 Ecole de printemps de Mecanique des Fluides Numerique (CNRS), Carcans-Maubuisson.
Publications et communications
Publications dans revue internationale ou ouvragea comite de lecture
[A13] DELBENDE, I. AND ROSSI, M. 2011 Investigations on the vortex reconnection processby direct numericalsimulation.Soumisa Phys. Fluids.
[A12] DELBENDE, I., ROSSI, M. AND PITON, B. 2011 Direct numerical simulation of helical vortices.Accepte a Int.J. of Engineering Systems Modelling and Simulation.
[A11] DELBENDE, I., ROSSI, M. AND DAUBE, O. 2012 DNS of flows with helical symmetry.Theor. Comput. FluidDynam.26(1), 141–160.
[A10] DELBENDE, I. AND ROSSI, M. 2009 The dynamics of a viscous dipole.Phys. Fluids.21(7), 073605.
[A9] MARTIN WITKOWSKI , L., DELBENDE, I., WALKER , J.S.AND LE QUERE, P. 2006 Axisymmetric stability ofthe flow between two exactly counter-rotating disks with large aspect ratio.J. Fluid Mech.546, 193–202.
[A8] DELBENDE, I. AND ROSSI, M. 2005 Nonlinear evolution of a swirling jet instability.Phys. Fluids.17(4), 044103.
[A7] DELBENDE, I., GOMEZ, T., JOSSERAND, C., NORE, C. AND ROSSI, M. 2004 Different aspects of fluid vortices.Cr. Mecanique332, 767–781.
[A6] DELBENDE, I., ROSSI, M. AND LE DIZ ES, S. 2002 Stretching effects on the three-dimensional stability ofvortices with axial flow.J. Fluid Mech.454, 419–442.
[A5] ROSSI, M., DELBENDE, I. AND LE DIZ ES, S. 2002 Effect of stretching on vortices with axial flow. InTubes,Sheets and Singularities in Fluid Dynamics, Fluid mechanics and its applications (vol. 71), ed. by K. Bajer & H.K.Moffatt, Kluwer.
[A4] LOISELEUX, T., DELBENDE, I. AND HUERRE, P. 2000 Absolute and convective instabilities of a swirlingjet/wake shear layer.Phys. Fluids12(2), 375–380.
[A3] DELBENDE, I. AND CHOMAZ , J.-M. 2000 Bursting of a swirling jet stemming from a localized perturbation. InVortex Structure and Dynamics, Lecture notes in physics, ed. by A. Maurel and P. Petitjeans, Springer.
[A2] DELBENDE, I., CHOMAZ , J.-M.AND HUERRE, P. 1998 Convective/absolute instabilities in the Batchelor vortex :a numerical study of the linear impulse response.J. Fluid Mech.355, 229–254.
[A1] DELBENDE, I. AND CHOMAZ , J.-M. 1998 Nonlinear convective/absolute instabilitiesof parallel two-dim-ensional wakes.Phys. Fluids10(11), 2724–2736.
Revue d’ouvrage
DELBENDE, I. 1999 Book review onNonlinear Wave Processes in Acousticsby Naugolnykh, K. and Ostrovsky, L.(CUP, 1998).Eur. J. Mech.-B Fluid.18(6), 1105-1106.
Actes de conferences et publications dans revues sans comite de lecture
Actes de conferences
11

[C11] PITON, B., DELBENDE, I. AND ROSSI, M. 2011 Simulation numerique de vortex helicoıdaux. Congres Francaisde Mecanique. Besancon, France.
[C10] DELBENDE, I., ROSSI, M. AND PITON, B. 2011 DNS of helical vortices. 3AF 46th Symposium of AppliedAerodynamics. Orleans, France.
[C9] DELBENDE, I. AND ROSSI, M. 2009 Interaction vorticite/deformation des monopoles et des dipoles. CongresFrancais de Mecanique. Marseille, France.
[C8] PINON, G., DELBENDE, I, RIVOALEN , E. AND ROSSI, M. 2007 Instabilite secondaire sur un anneau de vorticite.Congres Francais de Mecanique. Grenoble, France.
[C7] DELBENDE, I. AND ROSSI, M. 2007 Reconnexion de vortex 3D : simulation et modelisation. Congres Francaisde Mecanique. Grenoble, France.
[C6] DELBENDE, I. AND ROSSI, M. 2005 Reconnexion de vortex contrarotatifs : effet du nombre de Reynolds.Comptes-rendus de la 8e rencontre du non lineaire. Non lineaire Publications, 61–66.
[C5] DELBENDE, I. ET ROSSI, M. 2004 Evolution non-lineaire d’un jet tourbillonnaire.Comptes-rendus de la 7erencontre du non lineaire. Non lineaire Publications, 79–84.
[C4] BRETAGNE, E., DELBENDE, I., FRANCOIS, M.-X. ET JEBALI , F. 2000 Initialisation d’un moteur thermoacous-tique : comparaison des approches experimentale, semi-analytique et numerique.5eme Congres Francais d’Acous-tique, Lausanne, Suisse.
[C3] BILLANT , P., CHOMAZ , J.-M., DELBENDE, I., HUERRE, P., LOISELEUX, T., OLENDRARU, C., ROSSI, M.AND SELLIER, A. 1997 Instabilities and vortex breakdown in swirling jets and wakes.IUTAM Symposium on Dyna-mics of Slender Vortices, Aachen, Allemagne.
[C2] CHOMAZ , J.-M., BILLANT , P., DELBENDE, I. AND HUERRE, P. 1996 Experimental and numerical study ofswirling jet instability. InProceedings of the 19th Congress of Theoretical and AppliedMechanics, Kyoto, Japan.
[C1] DELBENDE, I., CHOMAZ , J.-M. AND HUERRE, P. 1996 Impulse response of the Batchelor vortex : a numericalstudy. InProceedings of the 6th European Turbulence Conference, Gottingen, Allemagne.
Articles de vulgarisation
DELBENDE, I. 2001 Les instabilites hydrodynamiques : elles sont partout.Bulletin de l’ADASTA(Association pour ledeveloppement de l’animation scientifique et technique en Auvergne),50.
BILLANT , P., CHOMAZ , J.-M., DELBENDE, I. ET HUERRE, P. 1996 L’eclatement tourbillonnaire ou la bulle meur-triere.Physi’X(Bulletin d’information sur la vie de la physiquea l’Ecole polytechnique),13.
Memoires et rapports
DELBENDE, I. 1998Reponse impulsionnelle dans les jets tournants et les sillages plans : analyse spatio-temporellepar simulation numerique directe. Memoire de these de l’Ecole Polytechnique.
DELBENDE, I. 1995Etude numerique de l’eclatement tourbillonnaire par la theorie de l’instabilite hydrodynamique.Rapport de stage de Magistere de Sciences de la Matiere, Universite de Lyon I/ENS Lyon.
DELBENDE, I. 1992Relaxation vers l’equilibre statistique dans les systemes fluides bidimensionnels. Memoire deDEA de Physique Statistique et Phenomenes Non Lineaires, ENS Lyon.
DELBENDE, I. 1991Etude de la migration des ions par diffusion de la lumiere dans le superconducteur alumine-β.Rapport de stage de Licence, Universite de Lyon I/ENS Lyon.
Communications orales
Congres et colloques internationaux
juil. 2011 BIFD 4th international symposium on Bifurcations and Instabilites in Fluid Dynamics. Barcelona, Spain.
juin 2011 EUROMECH Colloquium 525 (Instabilities and transition in three-dimensional flows with rotation). Lyon,France.
mars 2011 3AF 46th Symposium of Applied Aerodynamics (Aerodynamics of Rotating Bodies). Orleans, France.
sept. 2010 EUROMECH 8th European Fluid Mechanics Conference. Bad Reichenhall, Allemagne.
sept. 2008 EUROMECH 7th European Fluid Mechanics Conference. Manchester, Royaume-Uni.
nov. 2007 Polish-French workshop (Some topics on vortex dynamics). Conference invitee. Wroclaw, Pologne.
juin 2007 3rd European SCAT Workshop (Vortices and Vortex sheets : theories, num. and appl.). Porquerolles.
sept. 2006 2nd European SCAT Workshop. Paris.
12

juin 2006 EUROMECH 6th European Fluid Mechanics Conference. Stockholm, Suede.
sept.2004 EUROMECH Colloquium 448 (Vortex Dynamics and field interactions). Paris.
nov. 2003 56th annual meeting of the APS-DFD. East Rutherford, NJ, USA.
avr. 2001 1st International Workshop on Thermoacoustics. Bois-le-Duc, Pays-Bas.
dec. 2000 140th meeting of the Acoustical Society of America. Newport Beach, USA.
sept. 1997 EUROMECH 3rd European Fluid Mechanics Conference. Gottingen, Allemagne.
juil. 1996 6th European Turbulence Conference. Lausanne, Suisse.
avr. 1996 EUROMECH Colloquium 353 (Dynamics of Localized Disturb. in Eng. Flows). Karlsruhe, Allemagne.
nov. 1995 48th Annual Meeting of the American Physical Society/Division of Fluid Dynamics. Irvine, USA.
Congres et colloques nationaux et locauxnov. 2010 8eme journee de dynamique des fluides sur le plateau. Orsay.
aout 2009 19eme Congres Francais de Mecanique. Marseille.
nov. 2005 6eme journee de dynamique des fluides sur le plateau. Orsay.
mars 2005 8eme rencontre du non-lineaire. Paris.
nov. 2004 5eme journee de dynamique des fluides sur le plateau. Orsay.
mars 2004 7eme rencontre du non-lineaire. Paris.
mai 2003 Colloque “Tourbillons en hydrodynamique”. Porquerolles.
mai 2001 Rencontres de la mecanique (La dynamique d’un vortex tridim. : exp., sim. et theories). UPMC, Paris.
nov. 2000 2eme journee de dynamique des fluides sur le plateau, Orsay.
oct. 1999 1ere journee de dynamique des fluides sur le plateau, Orsay.
avr. 1999 Journees “Dynamique des vortex”, Rouen.
mars 1998 GDR Mecanique des fluides active. ESPCI, Paris.
oct. 1996 Colloque TIM (Turbulence Interfaces Modelisation), Paris.
sept. 1995 Congres General de Physique SFP’95, Marseille.
Seminaires invitesjuin 2009 Seminaire de l’ENSTA (Palaiseau) : Vortex : dipoles et reconnexion.
mars 2009 Seminaire de l’ONERA (Meudon) : Vortex : dipoles et reconnexion.
mars 2009 Seminaire de vulgarisation “Paris 6 hors les murs” : Tourbillons dans les sillages d’avion.
dec. 2007 Seminaire du LMPG (Le Havre) : Reconnexion de vortex : vers un modele simple.
nov. 2006 Seminaire du LadHyX (Palaiseau) : Reconnexion de vortex ou dejets tournants.
nov. 2000 Seminaire de l’Institut Universitaire des Systemes Thermiques Industriels, Marseille :Instabilite thermoa-coustique :etude numerique.
mars 1998 Seminairea l’Institut Non-Lineaire de Nice :Reponse impulsionnelle dans lesecoulements ouverts simuleepar S.N.D.
mars 1998 Seminaire au Laboratoire de Mecanique des Fluides et Acoustique,Ecole Centrale de Lyon :Reponseimpulsionnelle non lineaire de sillages plans paralleles.
nov. 1997 Seminaire au Laboratoire de Mecanique de Lille :Reponse impulsionnelle non lineaire de sillages plansparalleles.
nov. 1997 Seminaire au Laboratoire de Modelisation pour la Mecanique (Paris VI) :Reponse impulsionnelle dans lesecoulements tournants.
nov. 1995 Seminaire du Laboratoire d’Energetique et de Mecanique Theoriques et Appliquees, Nancy :Eclatementtourbillonnaire.
avr. 1995 Seminaire du Laboratoire de Physique et Mecanique des Milieux Heterogenes, Ecole Superieure de Phy-sique et Chimie Industrielles, Paris :Eclatement tourbillonnaire, instabilites dans les jets tournants ?
Cours dispense dans uneecole thematiquejuin 2010 Instabilites hydrodynamiques. 1ereEcole de Thermoacoustique (CNRS), Roscoff.
Mobilit e Erasmus Enseignantnov. 2007Aircraft wakes : vortex generation and dynamics. Cours donne dans le cadre d’une invitation au Politechnika
Wroclawska, Wroclav, Pologne.
13

14

Chapitre 2
Activit es d’enseignement
A ce jour, j’ai assure plus de 2300 h presentielles d’enseignement, qui se repartissent globalement en 16% de cours,46% de travaux diriges, et 38% de travaux pratiques numeriques et experimentaux. Cet enseignement s’est effectue danstous les niveaux du L1 au M2, dans les domaines de la mecanique generale, de la mecanique des fluides, des methodesnumeriques, de la programmation, de la thermodynamique, de l’energetique et de la physique microscopique.
Au niveau licence :– initiation a l’elasticite (UVSQ, L1)– mecanique du vol (L1)– methodologie et projet bibliographique en mecanique (L1)– mecanique du solide rigide (L2)– mecanique du fluide parfait (L2)– programmation scientifique en FORTRAN 90 (L2)– thermodynamique et thermique (L3)– methodes numeriques pour la mecanique (L3)– projet numerique (L3)
Au niveau master :– aerodynamique et aeronautique (M1)– instabilites hydrodynamiques (M1)– methodes et projet numeriques (M1)– proprietes physiques de la matiere (M1)– ingenierie et aerodynamique deseoliennes (M1)– thermoacoustique (M2)– vortex en hydrodynamique (M2)
Un tableau recapitule mes activites d’enseignement annee par annee (voir page suivante).
J’ai participe a la creation des enseignements suivants au niveau master :– Instabilites hydrodynamiques (M1, avec Pierre Carles)– Du microscopique au macroscopique (M1, avec Arnaud Antkowiak)– Ingenierie desenergies renouvelables (M1, avec Smaıne Kouidri)– Vortex en hydrodynamique (M2, avec Maurice Rossi)– Thermoacoustique (M2, avec Diana Baltean-Carles et Maurice-Xavier Francois).
En 2007, j’ai donne un petit cours sur les sillages d’avion au Politechnika Wroclawska (Wroclav, Pologne).
En juin 2010, j’ai donne un cours sur les instabilites hydrodynamiques dans le cadre d’uneecole thematique du CNRS :1ereEcole de Thermoacoustique, Roscoff.
15

16

Chapitre 3
Presentation des travaux de recherche
L’essentiel de mes travaux de recherche se situe dans le domaine de lasimulation numerique de systemes tourbillon-naires. Les ecoulementsetudies comprennent les tourbillons rectilignes avec ou sans composante de jet en leur cœur,les paires de tourbillons contra-rotatifs et les tourbillons helicoıdaux. Cesecoulements apparaissent en aeronautique, enaeronavale et en turbo-machinerie. Ce sont generalement desecoulements de sillage, qui se developpenta l’aval des ailesd’avion, des rotors d’helicopteres, d’helices propulsives, d’eoliennes. Le but des travaux presentes ici est de decrire et decomprendre la dynamique de telsecoulements, leur stabilite vis-a-vis de perturbations, et le devenir de ces perturbationsquand elles sont instables.
Methodologie
Les sytemes tourbillonnaires consideres dans cesetudes sont simplifies et modelises, parfoisa l’extreme : tourbillonsinfinis ou periodiques en espace, symetrie helicoıdale imposee, equations modifiees, linearisees... Cettemodelisationpermet de reduire au strict necessaire le nombre de parametres qui decrivent le systeme. On a ainsi moins de simulationsaeffectuer, et degager les processus physiques essentiels est d’autant facilit e. En outre, chaque simulation est plus courte :la modelisation diminue la complexite de l’ecoulement reel, et relaxe ainsi des contraintes sur la taille du domaine, laresolution spatiale et le pas de temps numeriques. Pour les memes raisons, le nombre de Reynolds simule est souvent bieninferieura celui de l’ecoulement qu’il modelise : il est beaucoup plus facile d’etudier unecoulement laminaire que desimuler sonequivalent turbulent. C’est toutefois une limitation qu’il faut gardera l’esprit.
Comme les experiences au sens classique du terme, l’experimentation numerique permet de classifier les comporte-ments des systemes en fonction des valeurs des parametres imposes, comme le taux de rotation pour un jet tourbillonnaire,ou le pas d’helice pour un vortex helicoıdal. L’etude numerique offre une certaine facilite pour selectionner ou controlerles conditions initiales, voire pour modifier lesequations du mouvement dans le but d’identifier les mecanismes physiquesen jeu. La precision de l’outil numerique permet en outre des comparaisons quantitatives assez fines avec la theorie, parexemple concernant le taux de croissance dans le temps d’uneinstabilite. Il est aussi possible d’effectuer des simula-tions dans des configurations inaccessiblesa l’experimentation classique : certaines simulations n’ont aucun equivalentdans le monde reel, mais fournissent des enseignements conceptuels au meme titre que les experiences de pensee. En cesens, l’experimentation numerique est un outil formidable complementairea la fois de la theorie et de l’experimentationclassique, mais dont il convient ici encore de bien apprecier les limites.
Dans ces travaux, j’ai utilise deuxcodes de simulation numerique directe. Le premier est un code spectral en co-ordonnees cartesiennes qui resout lesequations de Navier–Stokes bi- ou tri-dimensionnelles incompressibles dans undomaine rectangulaire ou parallelipipedique et periodique suivant chacun des axes. Ce code numerique aete originelle-ment concu par Vincent & Meneguzzi [51] (1991) pour l’etude de la turbulence isotrope, puis recrit en collaboration avecPierre Brancher. Des variantes ont ensuiteete implementees pour prendre en compte l’effet d’un champ de deformationuniforme instationnaire impose a l’ecoulement, par exemple pouretudier l’influence d’une compression et d’unetirementaxial d’origine externe sur le developpement des instabilites dans un jet tourbillonnaire. Ce code est rapide et tres precisgracea la formulation spectrale, un atout pour les simulations d’instabilites. Cependant, il presente le desavantage de laperiodicite spatiale qui est parfois indesirable et impose des domaines de calcul exagerement grands. Le second code,ecrit en collaboration avec Maurice Rossi et Olivier Daube,est un code qui resout lesequations de Navier–Stokes in-compressibles dans un domaine circulaire 2D plan pour lesecoulementsa symetrie helicoıdale, c’esta dire invariants parvissage le long d’un axe. Pour de tels systemes, on peut resoudre lesequations 3D dans un seul plan perpendiculaireal’axe, l’invariance par vissage permettant de reconstruire l’ecoulement complet. Ce code utilise une formulation spectralesuivant l’azimut, et des differences finies d’ordre 2 suivant la direction radiale. Il estaussi assez rapide, puisqu’il met enœuvre une formulation vorticite/vitesse/fonction de courant, de type 2D pour simuler des effets 3D.
Par ailleurs, j’ai utilise descodes d’instabilite qui donnent acces aux modes d’instabilite d’un systeme de base (jettourbillonnaire, cavite thermoacoustique) par resolution d’un probleme aux valeurs propres. Les usages de tels codes sontmultiples ; ils permettent bien sur de determiner le taux de croissance et le seuil d’une instabilite sans recoursa la DNS. Onles utiliseegalement pour preparer des conditions initiales de DNS quand on souhaite exciter un mode d’instabilite par-
17

ticulier, dont on suit ensuite la croissance exponentielleet la dynamique non lineaire. Enfin, determiner les proprietes destabilite lineaire d’ecoulements independammenta l’aide d’un code d’instabilite d’une part, et par simulation numeriquedirecte d’autre part, est une validation quasi-infaillible du code de DNS et des parametres numeriques choisis. De tellesvalidations ontete systematiquement effectuees ici.
Systemes tourbillonnaires
Lestourbillons avec vitesse axiale(jets tourbillonnaires) se rencontrent aussi biena grandeechelle dans le sillage desavions, qu’a petiteechelle dans les structures coherentes desecoulements turbulents [4]. Dans ce cadre, les observationsmontrent que de telles structures se forment et perdurent, avant de se destabiliser brutalement pour former des tourbillonshelicoıdaux plus petits, participant ainsia la cascade vers les petitesechelles. Le prototype de ce type d’ecoulement est letourbillon de Batchelor [3], ouq−vortex du nom du parametre deswirl q mesurant l’importance du mouvement azimutalpar rapporta la vitesse axiale. C’est une solution analytique desequations de Navier–Stokes instationnaires, pour laquelleles composantes axiales de vitesse et de vorticite sont donnees, ici sous forme dimensionnee en coordonnees cylindriques,par :
UBx (r, t) = U(t) exp
(− r
2
a2
), ΩB
x (r, t) =Γ
πa2exp
(− r
2
a2
).
Dans les expressions ci-dessus,a(t) designe le rayon du cœur tourbillonnaire,ν est la viscosite cinematique, etU(t)est la vitessea l’axe. Le cœur diffuse suivant la loia2(t) = a2
0 + 4νt, tandis que la vitessea l’axe diminue suivantU(t) = U0a
20/a
2(t). Le swirl, donne par le rapport des vitesses caracteristiques azimutaleΓ/(2πa) et axialeU :
q(t) =Γ
2πa20
a ,
augmente commea(t). La vitesse axiale et la vorticite axialeetant toutes deux gaussiennes, les gradients de vitesse danscet ecoulement sont plutot moderes, ce qui est un avantage certain sur le plan numerique. J’ai utilise cetecoulement debase dans plusieursetudes :(i) pendant ma these (1994-1998) avec Patrick Huerre et Jean-Marc Chomaz, j’ai simule lareponse impulsionnelle linearisee de ce tourbillon, pour determiner les transitions convectif/absolu ;(ii) apres ma these,j’ai prolonge cetteetude dans le regime non lineaire (publication [A3] en annexe),(iii) avec Maurice Rossi et StephaneLe Dizes, nous avons simule l’effet d’un champ d’etirement ou de compression agissant suivant l’axe du tourbillon, pourmodeliser l’action de l’ecoulement environnant sur le developpement temporel des instabilites (voir§4.2.1 et article [A6]en annexe),(iv) avec Maurice Rossi, nous avonsetudie la saturation non lineaire de modes temporels d’instabilite dans cetecoulement : pour les modes dits non visqueux qui se developpent spontanementa q < 1.5 (voir §4.3.6 et article [A8] enannexe), et pour certains modes purement visqueux, instables pour des nombres de Reynolds intermediaires (Re = 103–104) a des valeurs deq > 1.5 (voir article [A11] en annexe).
Des instabilites se developpentegalement lors de l’interaction d’unepaire de tourbillons contra-rotatifs , avec com-posante de jet faible ou nulle, meme s’ils sont individuellement stables. Par exemple, les tourbillons de bout d’aile d’avion,crees par l’action de l’appareil sur l’air incident en reactiona la force de portance, forment un tel dipole de vortex quasi-rectilignes. Ce systeme est instable par l’instabilite de Crow [5], une instabilite de longueur d’ondeequivalentea dix foisl’espacement entre les tourbillons, ainsi que par une instabilit e de courte longueur d’onde (de l’ordre de la taille de cœur),qui n’est pasetudiee ici. Avec Maurice Rossi, nous avons simule le developpement de l’instabilite de Crow qui precipitedeux tourbillons gaussiens l’un vers l’autre. Au point de contact, les vorticites de sens opposes s’annihilent et les vortex,de part et d’autre du point de contact, se reconnectent l’una l’autre. Dans le plan d’approche maximale, l’annihilationdes vortex peutetre vue comme l’evolution d’un dipole soumisa un champ de deformation exterieur induit par le restede l’ecoulement. Cetteetude de longue haleine a donne lieua deux publications :(i) uneetude de l’evolution aux tempslongs d’un dipole libre visqueux 2D (voir§4.2.3 et article [A10] en annexe),(ii) l’ etude de la reconnexion proprement diteavec la quantification des interactions vorticite/champ de deformation et la presentation d’un modele simplifie ramenantla reconnexion de vortexa l’annihilation d’un anneau tourbillonnaire (voir§4.3.5 et article soumis [A13] mis en annexe).Un resultat important obtenua l’occasion de cetteetude est une extension de la loi de Moore & Saffman entre l’ellipticit ed’un vortex 2D uniforme et un champ de deformation exterieur au cas de vortexa distribution de vorticite non uniforme(voir §4.3.1 et actes [C9] en annexe).
Depuis 2008, je travaille sur lesecoulementsa symetrie helicoıdale avec l’ecriture d’un code numerique dedie ace type de systemes, sa validation et son utilisation dans le cadre de la these de Benjamin Piton, these co-encadreeavec Maurice Rossi. Le sillage des helices, des rotors d’helicopteres et des rotors d’eoliennes sont constitues de vortexhelicoıdaux issus de l’enroulement des nappes tourbillonnaires generees par chacune des pales en rotation.A une distanceaval de l’ordre du diametre du rotor, le systeme presente localement, fluctuations turbulentes misesa part, une symetriehelicoıdale. La destabilisation de ce systeme fait intervenira la fois les vortex de bout de pale et le vortex de moyeu(hub vortex). Le code numeriquea symetrie helicoıdale est adapte pouretudier la dynamique en sillage proche d’untel systeme de vortex, et pour decrire les instabilites qui ne brisent pas cette invariance. On a ainsietudie la fusion devortex helicoıdaux, dans un premier temps en l’absence de vortex de moyeu.Pour les grands pas d’helice, nous avonsidentifie des fusions tres analogues au cas de vortex 2D, alors que, pour des pas d’helice plus petits, la fusion se produit
18

apres regroupement des vortex helicoıdaux (fusion entre spires adjacentes). Ces travaux sont encore en cours (voir§5 etpublications [A11] sur le code et [A12] sur la fusion en annexe) et des perspectives sont donnees en§6.1
J’ai etudie des phenomenes d’instabilite dans d’autres systemes :(i) l’instabilite d’unecavite fermee entre deuxdisques contra-rotatifs a grand rapport d’aspect rayon/espacement avec Laurent Martin Witkowski, Patrick le Quereet John Walker ; bien que ferme, ce systemeetendu est un exemple de developpement d’un mode global d’instabilite dontla frequence est imposee par une petite zone absolument instablea l’extremite des disques (voir article [A9] en annexe) ;(ii) l’ instabilit e thermoacoustiqued’une cavite resonante soumisea gradient thermique ; j’aietudie comment un gra-dient thermique axial modifie les modes acoustiques d’une cavite fermee,a l’aide d’un code d’instabilite dedie (voir [X]en annexe et perspectives en§6.2).
Presentation du memoire
Dans la plupart desetudesevoquees ci-dessus, un meme mecanisme physique revient, central en dynamique desvortex : celui de l’interaction entre vorticite et champ de deformation. Le chapitre 4 presente une breve revue de lalitt erature sur ce theme, dans laquelle sont intercales les resultats de travaux personnels en lien avec cette interaction ;les formulations numeriques originales mises en œuvre sont presentees. Le chapitre 5 est consacre auxecoulementsasymetrie helicoıdale —equations, formulation numerique et resultats. Des perspectives de recherche sont presentees dansle chapitre 6. En appendice sont compiles les principaux articles issus de ces travaux.
19

20

Chapitre 4
Interaction vorticit e deformation dans lesvortex
Un champ turbulent 2D en declin, a nombre de Reynolds suffisammenteleve, est compose de structures bien separeesles unes des autres, les vortex, qui se deplacent et interagissent dans un fond diffus de vorticite issu de la filamentationdes vortex. Si l’on fait abstraction de ce fond de vorticite dont le role sur la dynamique est secondaire [18], chaquevortex se deplace, mu par la vitesse induite par les autres vortex, et subit de leur part un champ de deformation. Engeneral, ce dernierevolue suffisamment lentement pour que la structure internedu vortex (ellipticite, axes principaux)s’y adapte en continu : la dynamique peutetre ainsi vue comme une succession d’etats proches de l’equilibre [7] pourchaque vortex. Cetteevolution quasi-statique (adiabatic steadiness) se poursuit jusqu’a ce qu’unequilibre stable cessed’exister. Il se produit alors, par une dynamique instationnaire rapide, unevenement (filamentation, fusion) par lequel laou les structures se reorganisent localement, puis une nouvelle phase d’evolution quasi-statique commence. L’elliptisationet la rupture d’un vortex circulaire 2D dans un champ de deformation constitue donc un modele fondamental pour cesinteractions.
La complexite des processus qui entrent en jeu en turbulence tri-dimensionnelle (courbure des vortex, instabilites,eclatements tourbillonnaires, reconnexions) ne permettent pas de prolonger une description aussi simple en 3D. Celaetant, certainsecoulements 3D laminaires, en particulier en presence de symetrie comme les paires de vortex parallelescontrarotatifs ou les anneaux tourbillonnaires, sont telsqu’une direction principale du champ de deformation est aligneeavec la vorticite, au moins dans certains plans ou certaines regions de l’espace ; cesecoulements peuventetre decritsal’aide de mecanismes d’interaction vorticite/deformation qui generalisent les interactions purement 2D citees plus haut.
Ce chapitre est consacre a ce type d’interactions. On passe en revue les principaux resultats de la litterature sur lesvortex a vorticite uniforme (vortex patches) soumisa deformation en fluide parfait en§4.1, puis sur les vortex non uni-formes en fluide visqueux, theorie que nousetendons aux dipoles 2D en§4.2. On expose ensuite des solutions approcheesde vortex non uniformes soumisa deformation en§4.3 en introduisant un modele simple de« patchequivalent». Onpresente finalement en§4.4 les methodes numeriques employees, qui different suivant que le comportement du systemeest domine par la deformation ou par la vorticite.
4.1 Vortex uniforme en fluide parfait
4.1.1 Dynamique dans un champ de deformation 3D
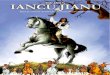
Dans le cadre du fluide parfait, la dynamique d’un vortex soumis a une deformation uniforme imposee aete etudieepar Neu [34, 35], qui generalise des solutions stationnaires obtenues par Moore et Saffman [43] et instationnaires parKida [19]. Les calculs sont presentes ici en utilisant un formalisme adapte de l’etude de Neu. Le point de depart est unvortex 2D de vorticite suivantOx, de circulationΓp, force par un champ de deformation uniforme de vitessevs(t) =(α(t)x, β(t)y, γ(t)z), ou la conditionα(t) + β(t) + γ(t) = 0 est imposee par l’incompressibilite du fluide. On recherchedes solutions pour lesquelles la vorticite uniformeωp est localisee sous forme de« patch» elliptique (figure 4.1), de petitaxeOY et de grand axeOZ, inclines d’un angleθ(t) par rapport aux axesOy etOz, de demi-petit axerY (t) et de demi-grand axerZ(t). L’existence de ces solutions, en presence comme en absence de champ de deformation exterieure, vientdu fait que, dans le plan(y, z), la vitesse depend lineairement du vecteur position, si toutefois on se restreinta l’int erieurdu cœur tourbillonnaire, la zone potentielle environnanten’etant pas calculee ici.
Placons-nous tout d’abord dans le referentiel absolu auquel sont lies les axes(y, z). La vitesse s’ecrit comme la somme(i) de la vitesse associee au vortex patch elliptique de Kirchhoff soit, dans la baseli ee aux axes(Y,Z) de l’ellipse [24]
V ω = − ωp
rY + rZ
(0 rY
−rZ 0
)(YZ
)
21

O
z
ZrY
rZ
θ
y
Y
FIG. 4.1 – Definition de la geometrie du vortex patch elliptique.
(ii) de la vitesse liee au champ de deformation exterieure uniformeβ(t) selony etγ(t) selonz, soit, dans la base(Y,Z) :
V s = R(θ)
(β 00 γ
)R(−θ)
(YZ
), ou R(θ) =
(cos θ sin θ− sin θ cos θ
)
est la matrice de rotation d’angleθ qui fait passer de(y, z) a (Y,Z).Pour obtenir maintenant la vitesse dans le referentiel relatif aux axes de l’ellipse, il faut retrancher la vitesse d’inertie
d’entraınement
V i = θ
(0 1−1 0
)(YZ
).
Dans le cœur tourbillonnaire en un pointX = (Y,Z), la vitesse dans le referentiel de l’ellipse est donc donnee parune loi lineaire :V ω
+ V s − V i
= U(rY , rZ , θ, ωp, β, γ)X. Un vortex elliptique uniforme sera donc transforme a untemps ulterieur en un (autre) vortex elliptique uniforme en vertu de cette linearite, les lignes de vorticite, parallelesaOx,etant transportees par la vitesse.
On derive lesequations d’evolution derY , rZ etθ enecrivant la forme quadratique definissant l’ellipse :
XtEX = 1 , avec E(rY , rZ) =
(r−2Y 0
0 r−2Z
).
Tout pointξ(t) situe a la peripherie du vortex satisfait cetteequation, ce qui implique par derivation temporelle dans lereferentiel relatif
ξtEξ + ξt
Eξ + ξtEξ = 0 .
Sachant queξ = U(rY , rZ , θ, ωp, β, γ)ξ, on obtient
ξt(UtE + E + EU)ξ = 0 ,
qui est automatiquement verifie siU
tE + E + EU = 0 .
Cette relation s’explicite en
rY = rY (β cos2 θ + γ sin2 θ)
rZ = rZ(β sin2 θ + γ cos2 θ)
θ =ωprY rZ
(rY + rZ)2− 1
2(β − γ)
r2Y + r2Zr2Y − r2Z
sin 2θ .
(4.1)
On obtient donc ainsi le systeme dynamique qui regit l’evolution des caracteristiques geometriques (demi-axes et orien-tation) du vortex patch elliptique soumisa deformation 3D en fluide parfait.
En combinant les deux premieres relations du systeme (4.1), il vient
d(rY rZ)
dt= (β + γ)rY rZ = −αrY rZ
ce qui s’integre en
rY rZ = rY (t0)rZ(t0) exp
(−∫ t
t0
α(t′)dt′).
22

Par conservation de la circulationΓp = πrY rZωp, on retrouve l’evolution de la vorticite
ωp(t) = ωp(t0) exp
(∫ t
t0
α(t′)dt′), (4.2)
etiree (resp. compressee) temporellement au tauxα(t) positif (resp. negatif) suivant son axe, tandis que le cœur de sectionπrY rZ se retracte (resp. se dilate) au taux−α(t).
4.1.2 Cas du champ de deformation plan
On voit sur l’equation (4.2) qu’une solution stationnaire, dans ce cadrede fluide parfait, est necessairement telle queα = 0 (champ de deformation plan), ce qui impliqueγ(t) = −β(t). Les deux premieresequations du systeme (4.1) sereduisent alorsa :
− rYrY
=rZrZ
= γ cos(2θ) = 0 .
L’inclinaison de l’ellipse stationnaire soumisea deformation 2D (γ 6= 0) est donc forcement deπ/4 ou 3π/4. Pourθ = π/4, la troisieme relation du systeme (4.1) devient
γ
ωp=
rY rZ(rZ − rY )
(rY + rZ)(r2Y + r2Z)=
E(E − 1)
(E + 1)(E2 + 1)
ou on a introduit l’ellipticiteE = rZ/rY > 1. L’expression du membre de droiteetant positive, cette solution est valablesi γ etωp sont de meme signe, sinon il faut considerer le casθ = 3π/4. On peut regrouper les casθ = π/4 et 3π/4 enecrivant ∣∣∣∣
γ
ωp
∣∣∣∣ =E(E − 1)
(E + 1)(E2 + 1)(4.3)
et en introduisant la regle suivante : l’inclinaison du grand axe de l’ellipse est decalee par rapporta la direction principaled’etirementd’un angleπ/4 compte dans le sens de la rotation du vortex. Dans la suite, on suppose sans perte de generalitequeωp > 0, quez est la direction d’etirement (γ > 0) ; dans ce cas l’inclinaison des ellipses stationnaires estθ = π/4.
0 0.05 0.1 0.15 0.21
1.5
2
2.5
3
E
γ/ωp
FIG. 4.2 – EllipticiteE du vortex patch elliptique de vorticite ωp soumisa un champ de deformation 2D d’intensite γ.Seule la solution stationnaire stable est representee.
La relation reciproquea (4.3) donnantE en fonction du rapportγ/ωp est representee figure 4.2. L’existence desolutions stationnaires est limiteea des taux de deformation tels queγ/ωp < 0.15, valeur au-dessus de laquelle elle n’aplus de solution.A une valeur fixee deγ/ωp < 0.15 correspond une ellipse stable d’ellipticiteE < 2.9 representee sur lafigure 4.2, et une telle queE > 2.9 mais qui est instable [43].
L’ etude des solutions instationnaires de ce systeme dynamique montre par ailleurs qu’il existe trois regimes [35] :– pour les faibles et moyennes deformationsγ/ωp < 0.1227, on peut avoir, outre l’ellipse stationnaire, des ellipses
oscillantes et des ellipses tournantes ;– pour les fortes deformations proches (mais en-dessous) du seuil0.1227 < γ/ωp < 0.15, le systeme se raidit en
quelque sorte, et n’admet, outre l’ellipse stationnaire, que des ellipses oscillant autour deθ = π/4 ;– lorsqueγ/ωp > 0.15, les seules trajectoires qui persistent prennent la forme d’ellipses qui s’etirent indefiniment en
nappes (E → ∞) dans la directionOz de l’etirement, et l’on aθ = 0.L’ evolution couramment observee du vortex vers unetat stationnaire ou quasi-stationnaire ne peutetre decrite par le
systeme (4.1) : quandα = 0 [35], il n’y a pas, dans ce cadre de vortex uniforme en fluide parfait, de mecanisme permettantde rejoindre les points stationnaires. Pour les vortex non uniformes, les ondes de Kelvin correspondantes sont amorties, etun etat quasi-stationnaire peutetre atteint apres quelques oscillations (voir la discussion dans [25]).
23

4.2 Vortex non uniforme en fluide visqueux
Dans le cadre de fluide parfait, on ne peut pas, comme l’indique l’equation (4.2), atteindre d’etat stationnaire enpresence d’un champ de deformation 3D (α 6= 0). La viscosite du fluide en revanche, esta meme de contrecarrer l’effetd’un etirement axial (α > 0), puisque la diffusion visqueuse s’oppose par ses effetsa la contraction radiale induite parl’ etirement. L’analyse dimensionnelle fait apparaıtre une taille
δ =
√ν
α(4.4)
caracteristique des structures — vortex, ou nappes dans un contexte plus general — issues de la competition entrel’ etalement visqueux et la contraction duea un champ de deformation d’intensiteα.
Plusieurs cas peuvent se presenter suivant le champ de deformation dans le plan perpendiculairea l’axe d’etirement :un cas pour lequel la contraction est isotrope (axisymetrique) avecβ = γ < 0 < α (§4.2.1) ; un cas de contractionnon isotrope avecγ < β ≤ 0 < α (§4.2.2) ; aux grands nombres de Reynolds, on peutegalement trouver des vortexquasi-stationnaires meme si l’une des directions principales de deformation dans le plan est une direction d’etirement(§4.2.2).
4.2.1 Vortex soumisa etirement axial axisymetrique
Dans le cas particulier du champ de deformation axisymetrique (β = γ = − 12α(t) < 0), l’ equation d’evolution de la
vorticite axialeω(r, t) pour un vortex axisymetrique s’ecrit :
∂ω
∂t− 1
2αr∂ω
∂r= αω + ν
1
r
∂
∂r
(r∂ω
∂r
).
En introduisant le changement de fonction et de variables deLundgren [29]
ω(r, t) = sΩ(ρ, τ) avec s(t) = exp
(∫ t
t0
α(t′) dt′), ρ =
√sr , τ =
∫ t
t0
s(t′) dt′
on se ramenea l’equation suivante pourΩ :
∂Ω
∂τ= ν
1
ρ
∂
∂ρ
(ρ∂Ω
∂ρ
),
qui n’est autre que l’equation de la chaleur radiale. En variables de Lundgren, ona uneevolution purement diffusive dontles solutions s’approchent aux temps longs de
Ω(ρ, τ) ∼ Γ
πR2exp(− ρ2
R2) , R2 ∼ 4ντ ,
qui estegalement l’etat attracteur quand la condition initiale n’est pas axisymetrique [33].Quand on revient aux variables initiales, pour un vortex gaussien de circulationΓ et de rayona0 a t = t0, on obtient
un vortex gaussien de rayona(t) tel que :
ω(r, t) =Γ
πa2exp(− r
2
a2) , a2 =
a20 + 4ντ
s= a2
0 exp
(−∫ t
t0
α(u)du
)+ 4ν
∫ t
t0
exp
(−∫ t
t′α(u)du
)dt′ .
En particulier, pour un champ de deformation axisymetrique uniforme d’intensite constanteα(t) = α0 > 0 (etirementaxial), le rayona(t) relaxe vers un rayon d’equilibrea∞ entre dissipation et contraction radiale :
a2(t) = a2∞ + e−α0(t−t0)
(a20 − a2
∞
)∼
t→∞a2∞ = 4
ν
α0.
L’ etat asymptotique obtenu dans ce cas est le vortex de Burgers, de rayon2(ν/α0)1/2. L’expression precedente montre en
outre qu’on peut utiliser la relationa2 = 4ν/α de maniere quasi-statique lorsqueα est instationnaire,a condition que sesvariations se fassent sur un temps caracteristique plus grand que le temps de relaxationα−1.
Cas des vortex avec vitesse axiale
On peut generaliser ces solutions au cas des jets tourbillonnaires [12] en superposant au vortex une composante devitesse axialeu(r, t) regie par l’equation :
∂u
∂t− 1
2αr∂u
∂r= −αu+ ν
1
r
∂
∂r
(r∂u
∂r
).
24

Contrairementa la vorticite axiale, la vitesse axiale est affaiblie par l’etirement axial (terme−αu). Si, initialement, lavitesse axiale est gaussienne et de meme extension radialea0 que la vorticite axiale, elle reste gaussienne :
u(r, t) =U0
s2(a/a0)2exp(− r
2
a2) , U0 ≡ u(0, t0) ,
mais son amplitude diminue fortement (commee−2α0t si α(t) = α0 est constant et positif). On a affaire, dans ce cas,a un tourbillon de Batchelor dont les caracteristiques sont instationnaires. En particulier, on peut introduire,a cote de lacirculationΓ constante et du rayona(t) du vortex, un nombre de swirl instantane
q(t) =Γ
2πa20U0
s2a ,
rapport des vitesses caracteristiques azimutaleΓ/(2πa) et axialeU0a20/(s
2a2). Le swirl instantane evolue comme leproduits2a ; soumisa etirement, ce produit diverge asymptotiquement, et le tourbillon de Batcheloretire relaxe vers letourbillon de Burgers, dont le swirl est infini.
(a)
0 10 20 300.9
11.11.21.3
0
0.5
1
1.5
2(a)
a
(b)
t
STABLE
UNSTABLE
q
INSTABLE
STABLE
a
q
t (b)
0 10 20 3010
−3
10−2
10−1
100
101
ST.ST. UNSTABLE
⊥
t
INSTABLEST. ST.
t
A⊥A||
FIG. 4.3 – (a)Evolution temporelle du swirl instantane et de la taille de cœur du tourbillon de Batchelor soumisa contrac-tion axiale pendant la premiere moitie de la simulation, puisetirement axial pendant la seconde. (b) Amplitude rmsA||
(resp.A⊥) des perturbations de vitesse rapporteesa la vitesse de base du tourbillon de Batchelor, relativea la composanteparallele (resp. aux composantes perpendiculaires)a l’axe du tourbillon. [A6]
Lorsqu’un tourbillon avec vitesse axiale est soumisa une sequence instationnaire de contraction/etirement le long deson axe, il peut arriver que le parametreq(t) explore l’intervalle[0, 1.5] ou sont actives des instabilites de fort taux decroissance [26]. Ces instabilites de type jet tourbillonnaire (ou centrifuges generalisees) se developpent alors et peuvent,si elles en ont le temps, generer des structures plus fines, de grande amplitude, au sein de l’ecoulement.
Un exemple en est donne ici, avec la simulation numerique directe, en variables de Lundgren (cf.§4.4.1), de l’evolutiond’un tourbillon de Batchelor, soumis le long de son axea une phase de contraction (intensite α = −0.025 de t = 0 at = 19) puis d’etirement (α = 0.025 de t = 19 a t = 38). La figure 4.3a presente l’evolution temporelle de son swirlinstantaneq et de sa taille de cœura. On voit qu’entret = 5 et t = 33, le swirl reste inferieura 1.5, regime dans lequel desinstabilites sont suceptibles d’apparaıtre. Si la simulation est initialisee par du bruit blanc, on observe, apres une phase dedecroissance naturelle des perturbations, une augmentation de leur amplitude qui, comme le montre la figure 4.3b, coıncideavec la traversee du regime instable. L’organisation spatiale de ces instabilites de type jet tourbillonnaire est illustree parles isosurfaces de vorticite perturbative de la figure 4.4. Les modes azimutauxm = −4 et −5 sont selectionnes (a cesniveaux de swirl,l’instabilite est dominee par les modes azimutauxm < 0) ; la vitesse differentielleelevee en fin de phased’etirement enroule les structures en fines pelures helicoıdales (voirt = 32.5 et 38), ce qui peut accelerer la dissipationde la structure. Ces instabilites ne sont actives que si le temps passe dans la region instable est suffisant : la figure 4.5montre plusieurs simulations pour lesquelles le tourbillon passe deq = 1.6 a q = 0.8 puis retournea q = 1.6 avec destaux de contraction/etirement differents. Comme une interpretation en regime quasi-statique permettrait de le prevoir, lesinstabilites se developpent plus quand les taux de deformation sont faibles car le temps passe dans le regime instable estplus long et les caracteristiques du vortex de base moins instationnaires.
Ce processus pourrait expliquer l’explosion des structures coherentes dans lesecoulements turbulents [4], ou lapresence de grandesechelles est ici modelisee par unetirement instationnaire.
4.2.2 Vortex soumisa un champ de deformation 3D non axisymetrique
On considere dans ce paragraphe les solutions stationnaires obtenues quand le champ de deformation est non axi-symetrique, mais presente toujours un axe d’etirement suivantx, parallele aux lignes de vorticite, i.e.α > 0. L’axisymetrie
25

t = 15
t = 11.5
t = 23
t = 19
t = 26.5
t = 32.5
t = 38
PHASE DE CONTRACTION AXIALE PHASE D’ETIREMENT AXIAL
t = 5.5
FIG. 4.4 – Isosurfaces de la composante axiale de la perturbation de vorticite au cours du temps lors de la sequence decontraction/etirement. Il esta noter que les variations de taille induites par ces deformations ne sont pas visibles ici, car lesvariables utilisees pour le trace sont les variables de Lundgren). L’isosurface jaune (resp. bleue) corresponda la moitie dumaximum (resp. minimum) de la vorticite perturbative. L’aspect conique vient de la perspective geometrique. Les datescorrespondent aux cercles de la figure 4.3a. [A6]
0 20 40 60 80 1000
0.5
1
1.5
2
0 20 40 60 80 10010
−3
10−2
10−1
100
101
102
103
104
105
106
DD
C
BA
(a) (b)B
t
q A⊥
t
A C
t t
q A⊥
(a) (b)
FIG. 4.5 – Influence de l’intensite de l’etirement sur le developpement de l’instabilite. Les graphes montrent (a) le swirlinstantane pour 4 valeurs differentes de l’etirement et (b) l’evolution correspondante de l’intensite des instabilites. Ladeformationα vaut A :±0.1, B : ±0.05, C :±0.025 et D :±0.01. [A6]
26

des solutions n’aa priori plus de raison de perdurer.
Grands nombres de Reynolds
Uneetude asymptotique existe (Moffattet al. [33, 16]) dans la limite des grands nombres de ReynoldsReΓ = Γ/ν.Les grandes lignes en sont retranscrites ici. La vorticite axialeω de l’etat stationnaire verifie
(βy + v)∂ω
∂y+ (γz + w)
∂ω
∂z= αω + ν∆ω ,
ou (u, v, w) sont les composantes de la vitesse, champ de deformation misa part. On utilise la longueur caracteristiqueδ donnee par la relation (4.4) et la vitesse caracteristiqueΓ/δ pour l’adimensionnement et on introduit la fonction decourantψ(y, z, t), ce qui donne :
∂ψ
∂y
∂ω
∂z− ∂ψ
∂z
∂ω
∂y= ǫ
(β
αy∂
∂y+γ
αz∂
∂z− 1 − ∆
)ω , ǫ = 1/ReΓ . (4.5)
On introduit le parametreλ ≡ (γ − β)/α qui decrit le degre d’anisotropie du champ de deformation dans le plan(y, z).En passant en coordonnees cylindriques(r, θ), l’ equation (4.5) devient :
1
r
(∂ψ
∂r
∂ω
∂θ− ∂ψ
∂θ
∂ω
∂r
)= −ǫ(R + λS)ω ,
ou
R(·) = · + r
2
∂ ·∂r
+1
r
∂
∂r
(r∂ ·∂r
)+
1
r2∂2 ·∂θ2
, S(·) =1
2
(cos 2θr
∂ ·∂r
− sin 2θ∂ ·∂θ
).
La solution est cherchee sous la formeψ = ψ0 + ǫψ1 + . . . ,
avec des developpements analogues pour la vitesse et la vorticite. A l’ordre 0, il sort
∂ψ0
∂r
∂ω0
∂θ− ∂ψ0
∂θ
∂ω0
∂r= 0 ,
qui correspond au fait qu’en l’absence de viscosite, les lignes de courant et les lignes d’iso-vorticite sont confondues. Onles suppose circulaires :ψ0 = ψ0(r) etω0 = ω0(r). A l’ordre 1, il vient
1
r
∂
∂θ(ω′
0ψ1 + vθ0ω1) = Rω0 + λSω0 .
Poureviter l’emergence de termes lineaires enθ lors de l’integration, on est amene a imposer la condition de solvabiliteRω0 = 0. Cette derniere selectionne la solution d’ordre 0
ω0(r) =1
4πexp
(−r
2
4
), (4.6)
representee figure 4.6b, qui s’ecrit sous forme dimensionnee :
Γ
4πδ2exp
(− r2
4δ2
).
A cet ordre d’approximation, on trouve donc la vorticite d’un tourbillon de Burgers quelle que soit la valeur deλ. Deplus,
1
r
∂
∂θ(ω′
0ψ1 + v0ω1) = λSω0 =1
2λrω′
0 cos(2θ) .
En integrant par rapportaθ, on obtient(
∆ − ω′0
v0
)ψ1 = −1
4λr2
ω′0
v0sin 2θ + q(r) ,
ce qui conduit,a l’ordreǫ, a des solutions de la forme [33] :
ψ = ψ0(r) + ǫλf(r) sin 2θ et ω = ω0(r) + ǫλΩ(r) sin 2θ ,
ou f(r) est solution de l’equation differentielle ordinaire
f ′′ +1
rf ′ − 4
r2f = (f − 1
4r2)
ω′0
vθ0=
(1
4r2 − f
)r2
4(er2/4 − 1), (4.7)
27

(a)
(b)
(c)
FIG. 4.6 – (a) Fonctionf(r) solution de l’equation (4.7). (b) Fonctionsω0(r) et Ω(r) definies par les relations (4.6) et(4.8). (c) Isocontours deψ etω pourǫ = 0.005. D’apres [33].
etΩ(r) s’en deduit par
Ω(r) =
(1
4r2 − f(r)
)ω′
0
vθ0, (4.8)
ces deux fonctionsetant determinees numeriquement (figures 4.6a,b). Cette analyse mene donca une solution analytico-numerique au probleme du vortex stationnaire dans un champ de deformation 3D, sous la forme d’un developpementen1/ReΓ valablea grand nombre de Reynolds. On peut determiner ainsi la forme des lignes de courant et celles d’iso-vorticite (figure 4.6c) : elles ne coıncident pas, mais ce sont dans les deux cas des ellipses inclinees deπ/4 par rapport auxaxes principaux de deformation, dont l’ellipticite est fonction der, et dont l’ecart au cercle est proportionnel au produitǫλ. Elles sont donc d’autant plus elliptiques que le champ de deformation s’eloigne de l’axisymetrie, et que le nombre deReynolds est plus faible. De plus, cette solution est validea priori quel que soitλ, ce qui recouvre les cas :
– 0 < λ < 1 (ouβ, γ < 0 < α) : etirement axial et contraction radiale non axisymetrique,– λ = 1 (ouγ = 0, α = −β) : c’est le cas particulier du vortex soumisa deformation plane,– 1 < λ < 3 (ouβ < 0 < γ < α) : etirement biaxial : meme dans ce cas, un vortex suffisamment fort peut survivre.
Il est a noter qu’il s’erode peua peu car la diffusion visqueuse suivantz n’est pas contrecarree par une contraction(γ > 0).
– 3 > λ (ou β < 0 < α < γ) : meme si la solution existe dans ce cas, elle est probablement instable car le vortex,initialement suivantx, aura tendancea s’aligner suivant la directionz selon laquelle l’etirement domine.
Petits nombres de Reynolds
A petit nombre de Reynolds, on peut trouver une solution stationnaire forcee par un champ de deformation en seplacant dans l’approximation de Stokes :
βy∂ω
∂y+ γz
∂ω
∂z= αω + ν∆ω .
Cetteequation admet comme unique solution stationnaire [42, 33]
ω(y, z) =Γ
2πν/(βγ)1/2exp
(βy2 + γz2
2ν
),
a condition queβ, γ < 0 (i.e.0 < λ < 1). Les lignes d’isovorticite sont des ellipses dont les axes ne sont plus decales maissont alignes avec les directions principales de deformation, qui sont ici forcement des directions de contraction radiale. Si|β| > |γ|, on aθ = 0.
Reynolds intermediaires
Toujours dans ce meme cas0 < λ < 1, l’angle des ellipses stationnaires passe progressivement de0 a π/4 quandle nombre de Reynolds augmente. Ce resultat, montre quantitativementa l’aide d’un developpement en puissances del’anisotropieλ par Bajer & Moffatt [1], est illustre par la figure 4.7.
28

FIG. 4.7 – Angle de l’inclinaison des vortex elliptiques en fonction du nombre de ReynoldsReΓ, pour diverses valeurs del’anisotropieλ de la deformation [1].
4.2.3 Dipole 2D de vorticite
Quand deux vortex de circulation opposee sont en presence, l’un exerce sur l’autre un champ de deformation. Sousl’effet de l’etalement lie a la diffusion visqueuse, l’intensite de la deformation decroıt au cours du temps, car la circulationdes vortex diminue et la distance qui les separe augmente. Afin de caracteriser la deformation des vortex du dipole aucours du temps, nous nous inspirons de l’etude de Moffattet al. [33] presentee en§4.2.2. L’idee est de developper lasolution en puissances de l’inverse d’un nombre de Reynoldsbati a l’aide de l’espacement entre les deux vortex. Cecipermet de decrire l’evolution temporelle de la vorticite du dipole, et de repondrea diverses questions : autosimilarite dela solution, differences avec le dipole de Lamb [24, 11]...
Simulation numerique du dipole
L’ evolution temporelle de deux vortex initialement concentres, de circulation±Γ0, est simulee par une DNS 2DaReΓ0
= Γ0/ν = 2500. La vorticite est representee figure 4.8. Pendant une premiere phase (t . 40), la distance entre lesvortex reste constante tandis que les cœurs des vortex diffusent. Une seconde phase commence (40 . t) : la separationb(t) entre les centres des vortex augmente en meme temps que la taille des cœurs, et une queue (ou traıne) apparaıt dansle sillage du dipole.
Solution auto-similaire modifiee
On serait tente de trouver une solution auto-similaire desequations de Navier–Stokes pour cette seconde phase del’ evolution, sous la forme
ω(y, z, t) = ωmax(t)ω(y, z) , ou y = y/b(t) et z = z/b(t) ,
ou b(t) designe la distance entre les deux maxima de vorticite. En fait, ceci serait possible uniquement quand le termenon lineaire est nul, comme pour le vortex de Lamb–Oseen, mais ce n’est pas le cas ici. Sur la figure 4.9, on voit que,pourt ≥ 450, les profils de vorticite tendenta devenir auto-similaires, mais cette auto-similarite n’est qu’approchee. Ceciest particulierement visible sur les bords du dipole (figure 4.9a) et dans sa queue (figure 4.9b). On peut alors postuler uneforme auto-similaire« modifiee» par analogie avec l’etude de la section§4.2.2 pour le monopole, de la forme :
ω(y, z, t) = ωmax(t) [ω0(y, z) + ǫ(t)ω1(y, z) + · · · ] (4.9)
ou y = y/b(t), z = z/b(t) et ǫ(t) ≡ νb(t)/I. C’est un developpement en puissances de l’inverseǫ(t) d’un nombre deReynolds effectifRe = I/νb(t), construita l’aide de la separationb(t) des deux extrema de vorticite, et de l’invariantIrepresentant l’impulsion du dipole
I =
∫yωdydz.
Cette hypothese implique que l’impulsion satisfasse la relation
I = ωmax(t)b3(t)(β0 + ǫ(t)β1 + · · · ) , βj ≡
∫yωjdydz , (4.10)
29

t = 0 20 40
50 90 1000
FIG. 4.8 –Evolution temporelle d’un dipole planaReΓ0= 2500, representee dans le referentiel lie a la tete du dipole.
Les contours continus (resp. discontinus) correspondent aux valeurs positives (resp. negatives)ω = pωmax(t)/20 avecp = 1, ...., 20 (resp.p = −1, ....,−20) ; deux isocontours sont rajoutes, relatifs aux valeursωmax/100 etωmax/1000 (resp.−ωmax/100 et−ωmax/1000), et correspondent aux deux contours les plus externes en traits continus (resp. discontinus).Le domaine represente ici [−4, 4]×[−4, 4] n’est qu’une petite partie du domaine de calcul total[−10, 10]×[−6, 54]. [A10]
(a)−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
−1
−0.5
0
0.5
1
y/b (b)−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
0
0.5
1
z/b
t = 1000
(c)−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
0
0.5
1
z/b
t = 70
FIG. 4.9 – (a) Graphe deω(y, z = 0, t)/ωmax(t) sur l’axey en fonction dey/b(t), pour les datest = 450, 550, · · · , 950and1000. (b) Graphes deω(y = ymax, z)/ωmax(t) en fonction dez/b(t) aux memes dates. (c) Comme (b) mais pourles t = 70, 110, 150, 250, 350, 450. Dans les graphes (a)–(b), les fleches indiquent les regions ou l’auto-similarite est lemoins bien verifiee. [A10]
30

et, la quantite I etant un invariant et les coefficientsβj constants, queωmax(t) soit fonction deb(t) seulement :
ωmax(t) =I
b3(t)(β0 + ǫ(t)β1 + · · · ) . (4.11)
Il en va de meme pour la circulationΓ(t) du vortex positif qui satisfait :
Γ(t) = ωmax(t)b2(t)(α0 + ǫ(t)α1 + · · · ) , αj ≡
∫
y>0
ωjdydz. (4.12)
Cette circulation decroıt par anihilation visqueuse sur l’axey = 0 entre les vortex :
dΓ
dt= −ν
∫
y=0
∂ω
∂ydz ,
ce qui s’ecrit icidΓ
dt= −νωmax(t)(γ0 + ǫ(t)γ1 + · · · ) , γj ≡
∫
y=0
∂ωj
∂ydz . (4.13)
Toute l’evolution temporelle est donc contenue dansb(t). La compatibilite desequations (4.11), (4.12) et (4.13) permetd’obtenir (apres calculs) l’equation dynamique suivante pourb :
bdb
dt= ν(θ0 + ǫ(t)θ1 + · · · ), θ0 =
γ0
α0, θ1 =
α1β0 − α0β1
γ1β0 − γ0β1...
La validite de l’hypothese d’auto-similarite modifiee a puetre testee sur les resultats de la simulation. Pour des tempssuffisamment grands, icit > 450, les quantitesI/(ωmaxb
3), Γ/(ωmaxb2) et−dΓ
dt /(νωmax) sont bien trouvees affines enǫ(t) — ǫ etant ici toujours inferieura10−3, les termes enǫ2, ǫ3,. . .sont negligeables.
Quand on introduit directement les developpements (4.9) dans lesequations de Navier–Stokes, on peut verifier quel’on arrive biena decrire l’evolution du systeme avec une dependance en temps entierement contenue dansǫ(t), et onaboutita une hierarchie d’equations dont les deux premieres sont :
u0∂ω0
∂y+ v0
∂ω0
∂z= 0 , (4.14)
−3ω1−(y∂ω1
∂y+ z
∂ω1
∂z
)+
1
β0θ0
(u1∂ω0
∂y+ v1
∂ω0
∂z
)+
1
β0θ0
(u0∂ω1
∂y+ v0
∂ω1
∂z
)=
1
θ0
(∂2ω1
∂y2+∂2ω1
∂z2
). (4.15)
L’ etat asymptotique
La solution du systeme (4.14)–(4.15) n’est pasevidente, mais il est possible d’extraireω0 and ω1 de la DNS. Cecia ete realise en prenant 16 champs instantanes de vorticite entre les datest = 450 andt = 1000, et en effectuant uneregression lineaire au sens des moindres carres. La figure 4.10a montre que le champω0 prend la forme d’un dipole bienregulier et quasiment symetrique par rapporta l’axe joignant les maxima, alors que la queue et la peripherie du dipole sedeforment viaω1 au fur eta mesure queb(t) augmente (figure 4.10b). La combinaison lineaireω0(y, z) + ǫ(t)ω1(y, z)approxime tres bien le champ de vorticite ω(y, z, t), comme illustre figure 4.10c pourt = 650.
L’int eret de ce developpement est qu’il permet clairement de definir le champω0(y, z) comme l’ordre 0 d’unetatasymptotique du dipole, de l’identifier numeriquementa defaut de le calculer analytiquement, et de le comparer avec ledipole de Lamb. On observe sur des coupes de vorticite presentees figure 4.11 de legeres differences qui avaient deja eteobservees sur le champ de vorticite totale [50]. La relation entre vorticite et fonction de courantω0 = f(ψ0) obtenuesnumeriquement n’est d’ailleurs pas lineaire : l’incurvation de la courbe au voisinage de zero est typique d’une elliptisationglobale du dipole (figure 4.12), alors que pour un dipole de Lamb, parfaitement circulaire, la relation est lineaire [22].
4.3 Solutions non uniformes approchees
L’approche du paragraphe§4.2.2 donne une description analytique du vortex elliptique resultant de la competitionrotation/viscosite/deformation. Elle donne des indications analytiques tres precises sur la distribution de vorticite, maiselle est restreinte aux petites deformations (ǫλ ≪ 1) et s’applique aux temps longs. Pour un vortexa distribution devorticite non uniforme quelconque, soumisa un champ de deformation d’intensite quelconque, il est difficile de faire despredictions theoriques. La theorie de Moore & Saffman exposee au paragraphe§4.1.2 est non lineaire et est applicable auxchamps de deformation d’intensite quelconque, mais elle est restreinte au vortex uniforme (patch). Dans cette theorie, desetats stationnaires de vortex elliptiques existent si le taux de deformation plan subi par ces vortex est tel queγ/ωp < 0.15,cas limite qui corresponda une ellipticite deE = 2.9. En cas d’existence et de stabilite d’une telle solution, la relation(4.3) peut s’ecrireE = f(γ/ωp). L’id ee est de generaliser, de maniere heuristique, cette relation au cas de vortex nonuniformes. Le caractere parfait ou visqueux du fluide est de peu d’importance ici :l’application au cas visqueux se faitdans un cadre quasi-stationnaire,a condition que le nombre de Reynolds soit suffisammenteleve.
31

(a)
−3 −2 −1 0 1 2 3
−1
0
1
2
3
4
y
z
(b)
−3 −2 −1 0 1 2 3
−1
0
1
2
3
4
z
y (c)
−1.5 −1 −0.5 0 0.5 1 1.5 2 2.5−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
−2 0 2−2
0
2
4
6
8
10
12
14
16
18
20
z
y
ω ω0 + ǫω1
ω
ω0+ǫω
1
FIG. 4.10 – (a)–(b) Isocontours des champsω0(y, z) et ω1, extraits par regression de la DNS. Les valeurs positives (resp.negatives) se representees par 10 niveauxequidistants en traits pleins (resp. discontinus) ; (a) isocontours deω0(y, z),(b) isocontours deω1(y, z) — les deux contours en traitsepais sont relatifsa ω0 et correspondent au niveaue−1 dumaximum et du minimum. (c) Comparaison entre les champsω(y, z, t) (represente dans le demi-plany < 0) et ω0(y, z)+ǫ(t)ω1(y, z) (represente dans le demi-plany > 0) at = 650, datea laquelleǫ = 8.08·10−4. Memes niveaux d’isocontoursque figure 4.8. [A10]
(a)
−1.5 −1 −0.5 0 0.5 1 1.5−1
−0.5
0
0.5
1
y (b)
−1.5 −1 −0.5 0 0.5 1 1.5−0.2
0
0.2
0.4
0.6
0.8
1
z
FIG. 4.11 – (a) Profil de vorticite pourω0(y, z = 0) (plein) and pour le dipole de LambωLamb(y, z = 0) (pointilles) enfonction dey. (b) De maniere similaire,ω0(y = 1
2 , z) et ωLamb(y = 12 , z) en fonction dez. [A10]
(a)
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
y
z
(b)
−0.1 −0.05 0 0.05 0.1−1
−0.5
0
0.5
1
ψ0
ω0
FIG. 4.12 – (a) Lignes de courant (traits fins) and isocontours devorticite (traitsepais) relatifs au champ d’ordre zeroω0(y, z). (b) Scatter plot montrant la relation fonctionnelleω0(y, z) vs ψ0(y, z). Cette relation est ajustee par la fonctionω0 = 0.33 sinh(31ψ0) (trait discontinu), qui n’est donc pas affine comme dans le cas du dipole de Lamb. [A10]
32

4.3.1 Le patchequivalent
Pour un patch elliptique de circulationΓp, les grandeursE etωp s’expriment en fonction des demi petit et grand axede l’ellipserY et rZ :
E =rZrY
et ωp =Γp
πrY rZ. (4.16)
Cependant, les grandeursrY et rZ ne sont pas definies pour les vortexa vorticite non uniforme. En utilisant les momentsde la vorticite, on definit les taillesaY etaZ suivantes :
a2Y =
1
Γ
∫Y 2ω(Y,Z)dY dZ , a2
Z =1
Γ
∫Z2ω(Y,Z)dY dZ.
Pour le patch, ces tailles sont relieesa rY et rZ par
aY =rY2, aZ =
rZ2, (4.17)
et on ne modifie rien si l’on remplace (4.16) par :
E =aZ
aYet ωp =
Γp
4πaY aZ. (4.18)
La premiere utilite de cette remarque concerne la vitesse et le champ de deformation induitsa l’exterieur du vortex parun vortex elliptique de circulationΓ a distribution de vorticite non uniforme. Considerons par exemple la vitesse induitele long du petit axe(OY ), a une distanceL du centre en dehors du vortex (L > rY ). Cette vitesse est dirigee suivantZ et s’ecrit comme la somme de la contribution axisymetriqueΓ/(2πL) et de termes correctifs provenant de la formeelliptique du vortex :
vind =Γ
2πL+
Γ
2πL
(a2
Z
L2− a2
Y
L2
)+ o
(a2
Y
L2,a2
Z
L2
). (4.19)
Pour un vortex elliptique uniforme, on a l’expression exacte [24]
vindp =
Γp
π(L+
√L2 + r2Z − r2Y
) (4.20)
qui se developpe en
vindp =
Γp
2πL+
Γp
2πL
(r2Z4L2
− r2Y4L2
)+ o
(r2YL2,r2ZL2
). (4.21)
A cet ordre d’approximation, cette derniere relation coıncide avec (4.21) siΓp = Γ, et si les relations (4.17) sont utilisees.On peut en deduire que, pour un vortex non uniforme de taillesaY et aZ , la relation (4.20) valable pour le patch est unebonne approximation sirY = 2aY etrZ = 2aZ . La figure 4.13 confirme ceci, en montrant la vitesse induite par un vortexnon uniforme et par sonpatchequivalentle long du petit axe de l’ellipse. L’accord est excellent des quer/a > 2. Cesconsiderations s’etendent au champ de deformation induita l’exterieur du vortex : son intensite est donnee pour le patchpar
ǫindp =
Γp
π(L+
√L2 + r2Z − r2Y
)√L2 + r2Z − r2Y
. (4.22)
Pour un vortex non uniforme de taillesaY etaZ , on peut utiliser cette derniere expression avecrY = 2aY et rZ = 2aZ .On se pose maintenant la question de savoir si cetteequivalence peut s’etendrea l’elliptisation du cœur du vortex
lui-meme en presence d’un champ de deformation exterieur, en d’autres termes, si la loi de Moore & Saffman (4.3)ecriteavec les variables (4.18) est valable pour les vortex non uniformes.
4.3.2 Monopole soumisa un champ de deformation plan
On realise alors l’experience numerique suivante : on place un vortex gaussien dans un champ dedeformation pland’intensite γ que l’on augmente lentementa partir de zero, de maniere quasi-statique. Pendant ce processus, on identifieles directionY etZ (doncθ), on releve les grandeursaY , aZ ainsi que la circulationΓ (cette derniere n’etant pas constantea cause de l’erosion visqueuse) et on en deduit l’ellipticiteE. On peut tracer la fonctionE = g(γ/ωp) ou la vorticite dupatchequivalentωp est donneea partir des caracteristiques du vortex non uniforme en utilisant la correspondance4.18.La figure 4.14a montre que la courbe ainsi obtenue (traits pleins) est tres proche de la loi de Moore & Saffman (4.3)valable pour le patch (traits discontinus). De plus, on perdla solution (quasi-)stationnaire peu avant le seuil inviscideγ/ωp = 0.15, ce qui indique que la filamentation1 du vortex non uniforme se produit quand le patch stationnaireequivalentcesse d’exister.
33

0 1 2 3 4 50
0.05
0.1
0.15
L/a
v
FIG. 4.13 – Comparaison entre la vitesse induitea une distanceL le long de son petit axe par un vortex elliptiquenon uniforme (DNS, traits pleins), par le patch elliptiqueequivalent (formule 4.20, traits discontinus) et par un vortexaxisymetrique de meme circulation (Γ/2πL, pointilles). [A10]
(a)
0 0.05 0.1 0.15 0.21
1.5
2
2.5
3
E
γ/ωp (b)
0 0.05 0.1 0.15 0.21
1.5
2
2.5
3
γ/ωp
E
FIG. 4.14 – (a) Ellipticite du monopole en fonction deγ/ωp determinee par DNS (trait plein) et ellipticite d’un patch devorticite equivalent (trait discontinu). (b) Trajectoire dans ce meme plan de parametres pour deuxevolutions temporellesissues de conditions initiales axisymetriques (ωp = 1 a t = 0), correspondanta deux valeurs differentes deγ imposeesconstantes ( : γ = 0.1 ; : γ = 0.17). On observe que les trajectoires qui partent de l’etat axisymetriqueE = 1rejoignent la courbe de quasi-equilibre (traits discontinus), et qu’elles la suivent jusqu’a filamentation (a droite sur legraphe). [A10, C9]
34

Il est remarquable que la loi de Moore & Saffman soit verifiee par des vortex uniformes et par des vortex gaussiens(de maniere approchee). Cetteequation est donctres robuste vis-a-vis du type de vortexauquel on l’applique.
On realise maintenant une autre experience, dans laquelle on part d’un vortex gaussien axisymetrique, qu’on soumetpour t ≥ 0 a champ de deformation plan d’intensite γ0 fixee (figure 4.14b). La dynamique observee illustre bien lepostulat de Dritschelenonce en introduction : apres une phase rapide de forte deformation, suivie de quelques oscillationsamorties, le tourbillon rejoint lesetats quasi-stationnaires de la courbe presentee ci-dessus. Il la suit ensuite, la diffusionvisqueuse impliquant queωp diminue peua peu, donc queγ0/ωp et E augmentent. Cette tendance est illustree sur lafigure 4.14b dans le plan(γ0/ωp, E) pour deux valeurs deγ0 imposees constantesγ0 = 0.1 et 0.17 (initialement, cesvaleurs correspondenta des rapportsγ0/ωp situes de part et d’autre du seuil 0.15, carωp = 1 a t = 0). Dans le casγ0 = 0.175, le scenario se complete par une filamentation quandγ0/ωp s’approche du seuil 0.15.
Les etudes numerique de Mariotti, Legras & Dritschel [30] d’une part et experimentale de Paireau, Tabeling & Le-gras [37] (voir figure 4.15) d’autre part donnent un critere analogue, base sur le rapport entreγ et ωmax. Ces auteurssoumettent un vortexa un cisaillement — constant dans le cas experimental ou augmente adiabatiquement dans le casnumerique —, une situation tres proche qui combine un champ de deformation et un fond de vorticite supplementaire.Leur conclusion differe legerement au niveau quantitatif : ils montrent que le mecanisme de destruction du vortex parfilamentation est certes inviscide, mais leur seuil 0.0675 est tres inferieura la valeur 0.15 de Moore et Saffman. Trieling,Beckers et van Heijst [48] ont montre qu’on pouvait faire coıncider les deux seuils en utilisant,a la place deωmax, lagrandeur moyenneω donnee par une formule ad hoc :
ω =1
πr2m
∫ 2π
0
∫ rm
0
ω(r)r drdθ ,
ou rm est le rayon de vitesse orthoradiale maximale. Cependant, cette formule suppose une distribution axisymetrique.La notion de patch elliptiqueequivalent telle que definie plus haut, et donc l’utilisation deωp en lieu et place deωmax
permet de rendre compte qualitativement et quantitativement de ce phenomene de maniere plus satisfaisante.
FIG. 4.15 –Evolution d’un vortex visualise par fluorescence en lumiere noire soumisa un cisaillement constant. Quatreinstants sont presentes :t = 0 s, t = 4.4 s, t = 7.2 s ett = 8.4 s. D’apres Paireauet al. [37].
On pourrait essayer de prolonger la correspondance entre vortex non uniforme et patch dans le domaine instationnaire,en utilisant le systeme dynamique (4.1) derive pour un patch. Toutefois, ce systeme hamiltonien ne rend pas compte del’amortissement des oscillations vers l’etat quasi-stationnaire, et presente des orbites periodiques autour de cetetat. Lesoscillations de relaxation que l’on observe pour le vortex non uniforme sont duesa la forte attenuation des modes dedeformation de Kelvin, lieea la presence d’une couche critique [25] ; leur taux d’amortissement est lie au profil (il estd’autant plus grand que le profil est mou, nul pour le patch), et tres peu dependant du nombre de Reynolds quand celui-ciest grand. L’adaptation du systeme dynamique necessiterait alors de connaıtre la forme du profil de vorticite, c’est unelimitation du modele de patchequivalent.
Determination pratique du patch equivalent
En pratique, on rencontre des vortex tres deformes, parfois avec des filaments, qu’il est difficile de caracteriser en tantqu’ellipses quand on souhaite appliquer les relations donnees par le patchequivalent. Il faut alors recourira une chirurgiead hoc pour isoler le cœur sur une surface la plus grande possible et supprimer les filaments. Par exemple, pour le casprecedent d’un vortex soumisa deformation exterieure :
– on determine l’inclinaisonθ du cœurdu vortex, ici defini comme le domaine ou |ω| > |ωmax|/2, et on l’assimilea l’inclinaison du vortex tout entier. Ceci est fait par un ajustement, restreinta ce domaine, de la vorticite par unprofil elliptique gaussien,a l’aide des moindres carres,
1On ne parle pas ici de la filamentation duea l’erosion du vortex par la viscosite,a priori plus faible.
35

– une fois l’angle determine, on symetrise le champ de vorticite par rapport au grand axeOZ de l’ellipse : en chaquepoint (Y,Z) du plan, on calcule une vorticite symetriseeωs a l’aide d’une moyenne geometrique entre les deuxdemi-plans
ωs(Y,Z) =√ω(Y,Z)ω(−Y,Z)
dans le but de se debarrasser des filaments de vorticite qui brisent la symetrie par rapportaOZ,– le champ symetrise obtenu est en general bien localise dans l’espace, et l’on peut alors proceder de maniere habi-
tuelle pour calculer la circulationΓ, les dimensionsaY etaZ , qui donnentE,– le patchequivalent est caracterise parθ, Γ ainsi querY = 2aY et rZ = 2aZ .
4.3.3 Paire de vortex co-rotatifs 2D
Un petit test de la theorie precedente peutetre fait en considerant la deformation elliptique des vortex d’une paire devortex co-rotatifs 2D. Dans ce cas, les deux vortex de circulationΓ0 et espaces initialement deb0 tournent autour de leurbarycentre avec une vitesse angulaireΩ(t) proche deΓ0/(πb
20) (approximation point-vortex). Pour appliquer la theorie
precedente qui est valable pour un champ de deformation stationnaire ou quasi-stationnaire, on doit seplacer dans lereferentiel tournanta cette meme vitesse angulaire. La vorticite relative est alorsω− 2Ω(t), dont on deduit la vorticite dupatchequivalentωp dans ce referentiel. La valeur pourǫ peutetre priseegaleaΓ0/(2πb
2) en premiere approximation. EnutilisantΩ(t) etb(t) obtenus par la DNS de ce systeme, il est possible de prevoir, de maniere semi-analytique, l’ellipticiteE(t) des vortex, et de la comparera sa valeur mesuree dans la DNS. Cette comparaison est montree figure 4.16, elle esttres bonne tant que les vortex restent suffisamment distants l’un de l’autre et n’ont pas engage leur fusion.
t0 100 200 300 400
1
1.2
1.4
1.6
1.8
2
E
FIG. 4.16 –Evolution temportelle de l’ellipticite de deux vortex corotatifs avant leur fusion. Traits pleins: mesure directeissue de DNSaRe = 10000 ; traits discontinus : calcul semi-analytiquea l’aide du patchequivalent dans un champ dedeformation uniforme,evalue dans le referentiel tournant avec les vortex.
4.3.4 Application a la dynamique du dipole 2D
Le patchequivalent s’applique tres bien au cas du dipole enevolution libre deja presente en§4.2.3. La vitesse d’undipole constitue de deux vortex de circulation±Γ dont les centroıdes sont espaces d’une distanceb est inferieurea lavitessev = Γ/(2πb) de deux vortex ponctuels espaces deb. En presence de viscosite, les cœurs des vortex croissent entaille, en meme temps qu’ils s’elliptisent sous l’effet des champs de deformation qu’ils s’induisent mutuellement. Cetteelliptisation est une premiere cause de la diminution de la vitesse du dipole. Quand les vortex entrent en contact, leurcirculation commencea decliner significativement, et les centroıdesa s’ecarter l’un de l’autre, deux autres facteurs res-ponsables de la diminution de la vitesse. De maniere concommitante, une queue de vorticite commencea se formera l’avaldu dipole. Elle n’a a priori aucun role dynamique, mais elle complique la determination des proprietes geometriques desvortex. Comme pour la filamentation d’un monopole, il convient, pour calculer ces proprietes, de supprimer la vorticitesitueea l’exterieur d’une bande et ne conserver que la tete du dipole (voir [A10] pour plus de details).
Effet de l’ellipticit e sur la vitesse du dipole
On peut tester la procedure en utilisant les relations (4.20) et (4.22). On y injecte numeriquementL = b(t) l’espace-ment entre les vortex,Γp = Γ(t) leur circulation, ainsi querY = 2aY (t) et rZ = 2aZ(t) leur taille, toutes ces variablesetant obtenues par la simulation numerique directe (DNS). On peut alors verifier sur la figure 4.17 que cette methode
36

permet de retrouver, de maniere semi-analytique, la vitesse du dipole et le taux de deformation mutuel des deux vortex,en incluant l’effet de leur elliptisation.
(a)
0 200 400 600 800 10000
0.05
0.1
0.15
0.2
t
vd
DNS
semi-analytical
(b)0 200 400 600 800 1000
0
0.1
0.2
0.3
0.4
0.5
t
ǫtot
ǫsa
ǫ
FIG. 4.17 – (a) Comparaison entre vitessevd du dipole visqueux determinee par DNS (traits pleins) et vitesse semi-analytiquevsa
d (traits discontinus) obtenuea partir de (4.20) avecL = b(t) espacement entre les vortex etΓp = Γ(t)circulation, deux grandeurs obtenues par la DNS. (b) : idem pour le taux de deformationǫ induit sur le vortex compagnon(les deux courbes sont quasiment indiscernables). Estegalement represente le taux de deformation totalεtot (induit +autoinduit, en traits mixtes). [A10]
Relation entreE et a/b
Sortant maintenant du cadre semi-analytique, il est possible de deriver, pour le dipole, une relation entreE eta/b, oua designe le rayon de dispersion tel quea2 = a2
Y + a2Z . En effet, l’ellipticite de chacun des vortex est due au champ de
deformation mutuel, impose par l’autre vortex. On suppose que ce champ est uniforme, d’intensite γ = ǫind(L = b(t))donnee par (4.22). D’autre part, on utilise la correspondance :
ωp =Γ
4πayaz.
La loi de Moore & Saffman (4.3) pour le patchequivalent, si l’on utilise les relations
ay =a√
1 + E2, az =
aE√1 + E2
,
s’ecritE − 1
E + 1=
4πa2γ
Γ.
Specifiant maintenantγ en introduisant (4.22) dans cette derniere equation, avecγ = εind(b), on obtient une relationtheorique approchee entreE eta/b :
E − 1
E + 1
(1 +
√1 +
4a2
b2E2 − 1
E2 + 1
)√1 +
4a2
b2E2 − 1
E2 + 1=
4a2
b2, (4.23)
qui est une sorte d’equation d’etat que verifie le dipole tout au long de sonevolution. L’existence d’une relation de cettenature avait deja ete postulee par Sippet al. [46], nous en donnons ici une forme analytique. Aux petites deformations,cette relation estequivalenteaE = 1 + 4(a/b)2, tandis qu’aux grandes deformations, elle rejoint une asymptote lineaireE = a/4b. La figure 4.18 montre que l’evolution lors d’une DNS suit de maniere assez proche cette loi theorique (entraits discontinus).
4.3.5 Reconnexion de vortex contrarotatifs quasi-rectilignes
La comprehension des changements de topologie dans lesecoulements, en particulier de la reconnexion de vortex, estun point crucial de nombreusesetudes : comportements singuliers desequations de Navier–Stokes et d’Euler, dissipation[45, 33]. Les processus de reconnexion sontegalement observesa grandeechelle dans le contexte aerodynamique : lestourbillons contrarotatifs de bout d’aile, si dangereux pour les avions suiveurs, sont deformes par l’instabilite de Crow [5].Lorsque l’amplitude des perturbations est telle que les deux vortex entrent en contact, des processus de reconnexion seproduisent, qui transforment l’ecoulement en une serie d’anneaux tourbillonnaires. Ces derniers sont eux-memes poten-tiellement dangereux, bien que se dissipant ensuite rapidement suitea des dynamiques complexes encore peu decritesdans la litterature [32].
37

0 0.1 0.2 0.3 0.4 0.51
1.2
1.4
1.6
1.8
E
a/b
450250
1000
90
50
20
0
FIG. 4.18 – L’evolution deE en fonction dea/b pour un dipole visqueux par DNS (traits pleins, dates indiquees le longde la courbe) suit approximativement la loi theorique (equation (4.23), traits discontinus). La simulation de Sipp et al.[46]est aussi tracee (pointilles delimites par les deux carres). [A10]
Simulation de la reconnexion
Par simulation numerique, on examine un processus de reconnexion en generant un pincement unique localise surdeux vortex rectilignes contrarotatifs. Pour ce faire, lesconditions initiales sont preparees en deuxetapes. Dans un premiertemps, on superpose deux vortex contra-rotatifs de Lamb–Oseen de circulation±Γ0, rectilignes suivant l’axe desx, derayona0 et distants deb0. Le champ de vorticite s’ecrit comme la sommeΩb = (Ω(1)(y, z) + Ω(2)(y, z))ex avec
Ω(1)(y, z) =Γ0
πa20
exp
(− (y − b0/2)2 + z2
a20
)Ω(2)(y, z) = − Γ0
πa20
exp
(− (y + b0/2)2 + z2
a20
),
Une perturbationω(i) (i = 1, 2) est ensuite ajouteea ce champ qui deforme localement l’axe du vortex :
ω(i)(x, y, z) = −(∂Ω(i)
∂yη(i)(x) +
∂Ω(i)
∂zζ(i)(x)
)ex + Ω(i) dη
(i)
dx(x)ey + Ω(i) dζ
(i)
dx(x)ez .
La composante axialeωx corresponda une legere translation(η(i)(x), ζ(i)(x)) du vortex rectilignei dans le planyz.Les deux autres composantesωy et ωz sont adaptees de manierea assurer que le champ de vorticite soit solenoıdal. Leprobleme est mis sous forme adimensionnellea l’aide de la distanceb0 entre les vortex et de la vitesseΓ0/b0. Deuxparametres adimensionnels sonta0/b0 = 0.15 et le nombre de ReynoldsRe = Γ0/ν = 1000. Le domaine de calculest une boıte parallelipipedique allongee dans la direction axialex, de dimensionsLx = 24, Ly = Lz = 7.3 avec desconditions periodiques. La taille suivant l’axex corresponda peu presa trois longueurs d’onde naturelles de l’instabilitede Crow. Le maillage est512 × 256 × 256.La deformation des axes des vortex(η(i)(x), ζ(i)(x)) imposee corresponda une longueur d’onde naturelle de l’instabilitede Crow (adimensionnelle)λ = 7.23 :
η(1)(x) = ζ(1)(x) = −η(2)(x) = ζ(2)(x) =
−A0(1 + cos(2πx/λ) pour|x| ≤ λ/20 sinon
avecA0 = 0.1. La forme des vortex est decrite sur la figure 4.19.La figure 4.20 presente l’evolution temporelle du processus de reconnexion. Pourt < 30, on observe l’approche des deuxtourbillons dans la region du pincement initial (au centre), par le mecanisme de l’instabilite de Crow. La reconnexionproprement dite se produit de maniere assez rapide autour det = 35 : les deux vortex, au centre, sont precipites l’unvers l’autre alors que de part et d’autre de la region centrale, la vorticite se reoriente de manierea former deux boucles(bien visiblesa partir det = 45) qui interconnectent les deux tourbillons initalement paralleles. Au centre, il reste unpetit dipole qui se ”branche” sur les deux boucles, et qui subit leur influence : il s’etire axialement et s’enroule autour desbouclesa ses extremites (voirt = 55).
Dynamique dipolaire dans le plan d’approche maximale
C’est ce dipole que nous considerons ici, en nous placant dans le plan d’approche maximaledes vortex — planperpendiculairea l’axe des vortex et contenant le point central de reconnexion. On y observe une dynamique de dipole,mais a la difference d’un dipole libre, celui-ci est soumisa des deformations exterieures intenses qui sont duesa lageometrie courbee des vortex de part et d’autre de ce plan (voir figure 4.21). C’est donc un champ de deformation
38

λ ζ(x)
zy
x
η(x)
1a0/b0
FIG. 4.19 – Vue en perspective de la condition initiale pour la simulation de la reconnexion. Les distances sont adimen-sionnelles.
y
xz
xx
yz
25
30
33
t = 20
27
35
40
45
FIG. 4.20 – Isosurfaces de vorticite pour la simulation de reconnexiona Re = 2000, a(0)/b(0) = 0.15. Les deuxniveaux d’isosurface correspondenta ω = 2.5 (pleine) andω = 1 (transparente). (a) Vue en perspective ; (b) vue dedessous ; (c) vue de cote. Les couleurs sur les surface d’iso-vorticite indiquent l’amplitude de la pression (haute pressionen rouge). [A13]
39

27 30 35 45
y0
t = 0 10 20 25
0
z
FIG. 4.21 – Isocontours de vorticite axiale dans le plan d’approche maximale lors du processus de reconnexion de deuxvortex contra-rotatifs. SimulationaRe = 2000. Les niveaux des contours sontpωmax(x = 0, t)/20 ou p = 1, · · · , 20(traits pleins) etp = −1, · · · ,−20 (traits pointilles). Les niveaux ne sont donc pas les memes de graphe en graphe. Lesgraduations suivant l’axey et l’axez sont espacees de 0.5. [A13]
40

d’origine 3D qui esta l’œuvre, mais auquel s’ajoute la deformation mutuelle des deux vortex, dont la contribution est2D, d’intensite ǫ tres superieure. Il est alors tentant d’appliquer la technique du patch equivalent pourelucider dans quelregime ce dipole deforme evolue. La figure 4.22 montre l’evolution temporelle, au cours du temps, du rapportǫ/ωp lorsdu processus de reconnexion. On voit que ce rapport augmenterapidement, mais qu’il est majore par la valeur seuil
0 10 20 30 40
0.1
0.15
0 10 20 30 40
0.1
0.15
0 10 20 30 400
0.05
0.1
0.15
t
ǫ/ωp
R
R
R
Re = 1000
1500
2000
FIG. 4.22 –Evolution temporelle du rapportǫ/ωp dans la simulation de la reconnexion de vortex pour les nombres deReynoldsRe = 1000, 1500 et 2000. La ligne discontinue indique le seuil au-dessus duquel il n’y a plus d’etat quasi-stationnaire possible. Le point marque “R” indique la date de la reconnexion. [A13]
0.15. La saturation de ce rapport s’accompagne d’ejection de vorticite dans le sillage du dipole. Ce phenomene avaitdeja ete observe, notamment dans le cadre de l’auto-reconnexion d’un nœud de vorticite [20], de la collision de deuxanneaux tourbillonnaires [20, 44], d’un modele ad hoc de vortex contrarotatifs courbes [40], et d’un dipole 2D soumisa contraction/etirement 2D [21]. Suivant lesetudes, les interpretations privilegient soit la non-uniformite du champ dedeformation duea la courbure [40], soit la contraction laterale intense [21]. Les resultats presents confortent donc cettederniere interpretation, en la completant quantitativement par la prevision du declenchement de cetteejection : lorsqueǫ/ωp atteint 0.15.A noter egalement l’experience de Trielinget al. [49] (figure 4.23) dans laquelle un dipole genere parinjection de fluide et soumisa un champ de deformation 2D genere une traıne mesurable par PIV.A grand nombre deReynolds, cette traıne est naturellement plus importante que celle d’un dipole en libreevolution tel que presente en§4.3.4,car dans le premier cas, elle resulte du processus dynamique (non visqueux) de contraction laterale, alors que dans lesecond, c’est la diffusion visqueuse quierode les vortex.
(a) (b)
FIG. 4.23 –Evolution d’un dipole visualise par fluorescence induite par laser soumis au champ de deformation induit par4 cylindres situes dans les coins de la figure. (a) Quatre instants sont presentesa intervalles reguliers. (b) Isocontours devorticite determines par PIV, correspondant au troisieme instant du (a). D’apres Trielinget al. [49].
4.3.6 Saturation non lineaire d’un jet tourbillonnaire
On sait le tourbillon de Batchelor sujeta des instabilites d’origine centrifuge sous la forme de modes helicoıdaux.L’instabilite lineaire est largement abordee dans la litterature, mais leur devenir non lineaire tres peu. Or la saturation nonlineaire de l’instabilite du tourbillon de Batchelor depend fortement du niveau de swirl. La figure 4.24a illustre lesetatsasymptotiques rejoints apres le developpement de l’instabilite, dans le cas de simulations initialiseesa l’aide d’un seulmodem = −3 oum = −4, et ce pour une gamme de swirl dans le regime instable.
On observe trois comportements distincts, meme s’il n’y a pas de transition franche entre eux :
41

1.00.8
q01.2=
0.6
m = 3 m = 4
0.40.2
z0 20 40 60 80 100
0
0.5
1
1.5
2
0.8
1
1.2
0
0.5
1
(c)
(b)
(a)
W qavaav
t
(b)
(a) (d)
(c)
FIG. 4.24 – (a)Etats rejoints apres le developpement de l’instabilite d’un tourbillon de Batchelor, pour differentes valeursde swirlq, dans le cas de simulationsaRe = 1000 initialiseesa l’aide d’un seul modem = −3 (colonne de gauche) oum = −4 (colonne de droite). Isocontours de la composante axiale devorticite. (b) Sequence temporellet = 0, 10, 20,30, 40, 80 montrant la relaminarisationa q = 1. (c) Evolution temporelle de la taille de cœuraav, de la vitessea l’axeWc = Ux(r = 0, t) et du swirlqav pour le casq = 1,m = −3. Trait pleins :ecoulement instable moyenne suivantθ, traitsdiscontinus : tourbillon de Batchelor non perturbe. (d) Vue 3D du casq = 0.4. Plus de details en annexe, publication [A8].
42

– aux grands swirls (1 < q < 1.4), l’instabilite se developpe tout d’abord, saturea un niveau relativement faiblecomme l’illustre la figure 4.24b, pour se restabiliser finalement, un processus deja identifie par Jacquin et Pan-tano [15] ; cette relaminarisation s’accompagne d’une forte diminution de la vitesse axiale au cœur de la structureWc, et d’une augmentation du swirl instantane qav pour aboutir dans le regime stable du tourbillon (figure 4.24c) ;
– aux swirls moyens (q ∼ 0.8), l’instabilite saturea un niveau plus fort, sous la forme de monopoles helicoıdaux quipersistent dans l’ecoulement ;
– aux petits swirls (q < 0.6), l’instabilite satureegalementa un niveau assez fort, sous la forme de dipoles d’autantplusequilibres que le swirl est petit, ce qui induit une dynamique centrifuge des structures (figure 4.24d).
Cette diversite de comportements peutetre comprise si l’on considere la rotation differentielle ressentie par les modeshelicoıdaux en formation. Cette rotation differentielle est definie par
Vdif ≡d
dr
(UB
θ
r− k
|m|UBx
), (4.24)
ou UBθ (r) est la vitesse orthoradiale du tourbillon de Batchelor etUB
x (r) sa vitesse axiale (la dependance temporelle lieea la diffusion visqueuse est gelee ici). Elle est representee figure 4.25. La restabilisation aux swirlsq > 1 provient du
0 1 2 3 4 5 6−0.30
−0.15
0.00
0.15
1:2 rq0 = 0:410:8Vdif
FIG. 4.25 – Vitesse differentielle definie par la formule (4.24), pour le tourbillon de Batchelora differents niveaux deswirl, pour l’onde d’instabilite de mode azimutalm = −3 la plus instable. [A8]
fait que,a ces niveaux de swirl, la rotation differentielle est importantea la peripherie du vortex. C’est la qu’apparaissentles structures issues de l’instabilite, avec une amplitude de saturation plutot faible, car on est proche du seuil d’instabiliteqc ≈ 1.5 (et la bifurcation est probablement supercritique). Ces structures de vorticite faibles sont incapables de resisterau champ de deformation et disparaissent peu apres leur creation. Pour des valeurs de swirl plus faibles, la rotationdiff erentielle est plus faible, l’amplitude de saturation de instabilites pluselevee, et ces dernieres persistent. Deux casse distinguent alors :a moyen swirl, le vortex de base, de signe positif, est encoresuffisamment intense et compenseles structures de signe negatif, d’ou l’apparition de monopoles de meme signe que le vortex de base ;a petit swirl, enrevanche, le vortex de base est faible, et laisseemergera des niveaux comparables des structures des deux signes, d’ou laformation de dipoles helicoıdaux.
Ordre de grandeur pour le seuil de relaminarisation
On peut, en restanta l’ambition de l’ordre de grandeur, regarder si le modele de patchequivalent permet de retrouverce niveau de seuil de relaminarisationq ≈ 1.
Placons-nous dans le casq0 = 1, pour l’onde d’instabilite de mode azimutalm = −3 qui a le nombre d’onde axialk leplus instable. La vitesse differentielle vaut,a la positionr = 1.5 en peripherie du vortexVdif(r = 1.5 ; q0 = 1.) = −0.2,d’ou un taux de deformation d’intensite γ ∼ |rVdif | ∼ 0.3. La vorticite maximale des structures qui apparaissent estde l’ordre de1.5 fois la vorticite maximale de l’etat de base, c’est-a-dire1.5 × 2q0, et on peut, en faisant l’hypothese destructures gaussiennes, en deduire queωp ∼ 1.5q0. Le rapportγ/ωp est donc0.2/q0 = 0.2, superieura 0.15, ce qui justifieque la rotation differentielle soit trop forte pour que la structure formee se maintienne, et qu’on ait relaminarisation.
Le meme calcul effectue pour le casq0 = 0.8 donne :Vdif(r = 1.5 ; q0 = 0.8) = −0.15 d’ou γ ∼ |rVdif | ∼ 0.22.La vorticite maximale est dans ce cas plutot de l’ordre de2 × 2q0, doncωp ∼ 2q0. Le rapportγ/ωp est donc0.11/q0 =0.14, cette fois inferieura 0.15 : les structures pourraient se maintenir, adopteraient une forme fortement elliptique voirefilamenteraient, ce qui est effectivement observe.
La prevision plus precise d’un seuil global de relaminarisation du vortex semble doncetre possible en theorie, mais seheurte en pratiquea unecueil : il faut connaıtre, en fonction du swirlq0, pour chaque nombre d’onde azimutalm et chaque
43

nombre d’onde axialk, la vitesse differentielle maximale, ce qui est possible, maisegalement l’amplitude de saturationde l’instabilite avant destruction par la vitesse differentielle. Cette amplitude, si tant est qu’elle soit bien definie car lesprocessus sont simultanes, n’est de toute facon pas calculable de maniere simple.
4.4 Mise en œuvre numerique dans le cadre des methodes spectrales Fourier
Dans cette partie, on presente deux modeles numeriques permettant de simuler l’influence d’un champ de deformationd’origine externesur un systeme tourbillonnaire. On neglige donc la retroaction du systeme simule sur les structuresexterieures qui generent le champ.
Les deux methodes correspondenta deux types bien differents de reponse de l’ecoulementa la contrainte externe,suivant que cette reponse est dominee par l’etirement, ou par la vorticite. Un exemple du premier cas est donne parles vortex soumisa etirement axial uniforme, qui ne peuvent opposer aucune resistance (sauf de maniere ultime, parla diffusion visqueuse). Dans ce cas (§4.4.1), lesechelles spatiales varient fortement dans le temps et un changement devariables peutetre effectue pour s’y adapter. Un exemple du second cas concerne les vortex intenses soumisa deformationplane dans le plan perpendiculaire, qui resistenta la deformation et gardent une forme quasi-circulaire. La simulation sefait alors plus facilement en formulation perturbative (§4.4.2).
4.4.1 Ecoulements domines par la deformation : variables de Lundgren
Le changement de variables et de fonctions introduit par Lundgren [29] etetendu par Gibbon [12] aete explicite en§4.2.1 dans le cas d’un champ de deformation axial axisymetrique. Il repose sur un changement de coordonnees spatialesqui « suivent» le champ de deformation au cours du temps. Ce changement de variable aete utilise dans le cadre 2D parKida et. al [21] pour simuler un dipole soumisa deformation. On le generalise tout d’abord au cas 3D non axisymetrique.
Cas du champ de deformation 3D uniforme
Par souci de simplification,(x, y, z) est note (x1, x2, x3), (u, v, w) est note (u1, u2, u3), (α, β, γ) devient(α1, α2, α3).Les composantesUi du champ de vitesse satisfont auxequations de Navier–Stokes adimensionnees :
∂Ui
∂t+∑
j
Uj∂Ui
∂xj= − ∂P
∂xi+
1
Re
∑
j
∂2Ui
∂x2j
,
∑
j
∂Uj
∂xj= 0 .
Elles sont la superposition d’un champ de vitesse de composantesui et du champ de deformation uniforme :
Ui(x1, x2, x3, t) = ui(x1, x2, x3, t) + αi(t)xi .
On effectue le changement de variables
xi = xi/Si(t) , ui = Si(t)ui , ou Si(t) = exp
(∫ t
0
αi(u)du
).
Les variablesSi(t) ne sont pas independantes : du fait de la relation d’incompressibilite, on aS1S2S3 = 1. En introduisantla fonctionvi ≡ ui/S
2i (t), on peut mettre lesequations de Navier–Stokes modifiees sous la forme :
∂ui
∂t+∑
j
vj∂ui
∂xj= − ∂p
∂xi+
1
Re
∑
j
1
S2j
∂2ui
∂x2j
,
∑
j
∂vj
∂xj= 0 .
La pressionp qui intervient dans l’equation precedente est la pressionP de l’ecoulement totala laquelle est soustraite lapression relative au champ de deformation exterieureventuellement instationnaire. Il faut noter que la condition d’incom-pressibilite ne porte plus sur la vitesseui mais sur la variablevi. A ce stade, on peut introduire la vorticite de composantesωi, que l’on transforme par le meme changement de variables en
ωi = ωi/Si(t) =∑
j,k
ǫijk∂uk
∂xj,
44

et recrire lesequations ci-dessus en formulation vitesse/vorticite :
∂ui
∂t=
∑
j,k
ǫijkvjωk − ∂
∂xi
p+
1
2
∑
j
uj vj
+
1
Re
∑
j
1
S2j
∂2ui
∂x2j
, (4.25)
∑
j
∂vj
∂xj= 0 , (4.26)
ou ǫijk designe le symbole de Levi–Civita.
Formulation spectrale et schema temporel
La mise en œuvre de cesequations dans le cadre de la methode pseudo-spectrale Fourier presente une petite subtilite.En effet, l’interet usuel de cette formulation est que la projection desequations (en variables initiales) perpendiculairementau vecteur d’ondek supprime le terme en gradientik[p + 1
2u2]k puisqu’il est colineairea k. De plus, la condition de
divergence nulle qui s’ecrit en variables initialesik · uk = 0, montre que la vitesse spectraleuk s’identifiea sa projeteeu⊥k≡ P⊥
kuk orthogonalementak.
Quand on examine le systeme (4.25)–(4.26) en variables transformees, on voit que la suppression du gradient esttoujours possible et meme prioritaire poureliminer la pression, mais queu n’est pasa divergence nulle, et que l’on nepeut pas identifieruk a u
⊥k
. Neanmoins, la connaissance deu⊥k
obtenue par integration temporelle de
∂u⊥k
∂t= P
⊥k
[v × ω]k − 1
Re
∑
j
k2j
S2j
u⊥k, (4.27)
permet de remontera uk gracea la relation de continuite en variables transformees∑
j
kj
S2j
uj,k = 0 . (4.28)
Si l’on note θj ≡ 1 − S−2j , les relations de passage entre la vitesse spectrale projetee u
⊥k
et la « vraie» vitesseuk
satisfaisant la relation (4.28) sont donnees par :
u⊥i,k =∑
j
(δij −
kikj
k2θj
)uj,k , (4.29)
uj,k =∑
i
(δij +
kikj
Ak2θj
)u⊥i,k , avec A = 1 −
∑l k
2l θl
k2. (4.30)
L’int egration temporelle (4.27) se fait donc suru⊥k
, mais,a chaque pas de temps, pour le calcul du terme non lineairede meme que pour le post-traitement, il faut calculeruk gracea la relation (4.30). Le passage de l’instanttn a tn+1 sefait par une derivee temporellea deux points, precise au second ordre au point milieutn+ 1
2
. Les termes non lineaires sontestimes par extrapolation entn+ 1
2
des termes non lineaires aux datestn et tn−1 (extrapolation d’Adams–Bashforth du2nd ordre) :
u⊥k
(tn+1) = eu⊥k
(tn) + δt
[3
2eP⊥
k(tn) − 1
2e2P⊥
k(tn−1)
](4.31)
ou P⊥k
(tn) ≡ P⊥k
[v(tn) × ω(tn)]k. Dans (4.31), les termes visqueux sont explicitement integres et apparaissent via lesfacteurs d’attenuatione ete2, ou
e ≡ exp
−
∑
j
k2j
S2j
δt
Re
.
Cas de la deformation axiale axisymetrique
Dans le cas particulier d’un champ de deformation axisymetrique d’axex1, on peut aller un peu plus loin dans latransformation desequations. Dans ce cas, on aα1(t) ≡ α(t) etα2(t) = α3(t) = − 1
2α(t), ce qui implique, si l’on noteS(t) ≡ S1(t) :
S2(t) = S3(t) =1√S(t)
.
Lesequations de Navier–Stokes deviennent
1
S
∂ui
∂t+∑
j
vj
S
∂ui
∂xj= − ∂
∂xi
( pS
)+
1
Re
∑
j
∂2
∂x2j
( vj
S
),
∑
j
∂
∂xj
( vj
S
)= 0 .
45

On se rapproche alors le plus desequations de Navier–Stokes habituelles en effectuant un changement de variable sur letemps. On introduit le temps modifie
τ =
∫ t
0
S(t′) dt′ ,
de sorte que∂/∂τ = S−1∂/∂t. Ce tempsτ coıncide avec le temps physiquet en l’absence de deformation, cas pourlequel on aα ≡ 0 etS ≡ 1. En posantp = p/S, on se ramenea :
∂ui
∂τ+u1
S3
∂u1
∂x1+
3∑
j=2
uj∂ui
∂xj= − ∂p
∂xi+
1
Re
1
S3
∂2u1
∂x21
+
3∑
j=2
∂2uj
∂x2j
,
1
S3
∂u1
∂x1+
3∑
j=2
∂uj
∂xj= 0 .
Cesequations ont la meme forme que lesequations de Navier–Stokes non transformees, avec la difference majeure queles termes axiaux de convection, de diffusion et de l’equation de continuite sont affectes d’un facteurS−3. La formulationspectrale se deduit de maniere analoguea la precedente.
4.4.2 Ecoulements domines par la vorticite : formulation perturbative
Quand la vorticite oppose une resistancea l’etirement, comme dans le cas d’un champ de deformation plan de faibleintensite (tel queγ/ωp < 0.15), l’utilisation des variables de Lundgren n’est plus adequat. On peut alors utiliser uneformulation perturbative, dans laquelle le champ de deformation est pris comme unecoulement de base, connu et impose,eventuellement instationnaire, et la partie vortex est mise dans la perturbation, soumisea integration temporelle. Enecrivant le champ de vitesse comme la superposition
Ui = ui + U si , ou U s
i (x1, x2, x3, t) = αi(t)xi .
on obtient lesequations de Navier–Stokes en formulation perturbative :
∂ui
∂t+∑
j
(U s
j
∂ui
∂xj+ uj
∂U si
∂xj+ uj
∂ui
∂xj
)= − ∂p
∂xi+
1
Re
∑
j
∂2ui
∂x2j
,
∑
j
∂uj
∂xj= 0 .
De meme qu’en§4.4.1, la pressionp est la pression de l’ecoulement totala laquelle est soustraite la pression relative auchamp de deformation. La version vitesse/vorticite de cetteequation est donnee par :
∂ui
∂t=
∑
j,k
ǫijk
(U s
j + uj
)ωk − ∂
∂xi
p+
1
2
∑
j
u2j
+
1
Re
∑
j
∂2ui
∂x2j
,
∑
j
∂uj
∂xj= 0 .
Champ exterieur pour la formulation spectrale Fourier, zone tampon
En formulation spectrale, on est amene a resoudre simplement :
∂u⊥k
∂t= P
⊥k
[(Us + u) × ω]k − 1
Rek2
u⊥k, (4.32)
avecuk = u⊥k
.On se heurte cependanta deux problemes majeurs. Le premier est que le champ de deformation uniformeU s
i n’estpas periodique, et atteint des valeurs importantes aux bornes dudomaine, ce qui favorise le bouclage de vorticite d’unborda l’autre du domaine par periodicite. Une maniere de contourner ce probleme est de situer une zone tampon (“spongelayer” [30]) a la peripherie du domaine utile de calcul (cf. figure 4.26a), ou ce champ tombea zero et ou la dynamiquen’est pas pertinente ; aussi est-il preferable d’y mettreegalementa zero le champ perturbatif, periodiquement au cours dela simulation poureviter la contamination du domaine physiquement pertinent. Ceci doit bien entenduetre accompagnedes precautions d’usage dans les methodes spectrales,a savoir que la misea zero de la perturbation dans la zone tampondoit etre lissee spatialement poureviter les oscillations de Gibbs.
Le second probleme est specifiquea la simulation de monopole(s). En effet, la formulation Fourier interdit la simu-lation d’ecoulementsa circulation totaleΓ non nulle, car la vorticite, derivee d’une vitesse combinaison de modes de
46

Fourier, est necessairementa moyenne nulle. En pratique, si l’on impose malgre tout un champ monopolaire dans l’es-pace physique, une nappe de vorticite apparaıt a la frontiere ; elle est due au fait que la vitesse decroıt (en dehors de lazone de vorticite supposee compacte) enΓ/(2πr) et presente necessairement une discontinuite a cause de la conditionde periodicite. Une premiere facon de proceder est d’utiliser un domaine suffisamment grand de telle sorte que la nappedevient negligeable. Quand cette solution est trop couteuse en temps de calcul, il est preferable d’imposer et controlersoi-meme cette nappe, par exemple sous forme d’une zone annulaireperipherique de vorticite de circulation−Γ situeedans la zone tampon,a travers laquelle la vitesse passe deΓ/(2πr) a zero (cf. figure 4.26b). Cette zone de vorticite estsans influence sur la dynamique, et peutetre regeneree au rythme du« nettoyage» de la zone tampon.
(a)
−10 −5 0 5 10
−10
−5
0
5
10
y
z
ZONE
TAMPON
ZONE
UTILE
(b)
−10 −5 0 5 10
−10
−5
0
5
10
y
z
FIG. 4.26 – (a) Lignes de courant du champ de deformationUs. Ce champ est irrotationnela l’interieur de la zone utiledu domaine de calcul (carre en traits discontinus), et prolonge a l’exterieur dans la zone tampon, par un champ rotationnelqui presente une separatrice circulaire, garantissant que l’anneau de vorticite negative de la figure (b) ne penetrera pasdans le domaine de calcul utile sous l’effet de la vitesseU
s. (b) Exemple de condition initiale, montrant les isocontoursde vorticite ω positive (traits pleins) d’un monopole dans le domaine de calcul(y, z), et la zone annulaire de vorticitenegative peripherique (traits discontinus), ajoutee pour assurer la nullite de la circulation totale.
47

48

Chapitre 5
Ecoulementsa symetrie helicoıdale
A l’aval des machines tournantes telles que les helices, les rotors d’eoliennes ou d’helicopteres (figure 5.1a) sedeveloppe un systeme de tourbillons helicoıdaux. Ces structures se forment par l’enroulement rapide de la nappe tour-billonnaire generee en continu au bord de fuite des pales en rotation. Elles presentent localement, fluctuations turbu-lentes misesa part, une symetrie helicoıdale, i.e. une invariance par translation axiale combinee a une rotation autourdu meme axe. Dans la plupart des situations, cette propriete est perdue au niveau du sillage lointain car des instabilitespeuvent s’y developper. Dans certains cas, la topologie de l’ecoulement peut changer de maniere drastique et dramatiquecomme dans le cas du VRS (vortex ring stateou etat d’anneau tourbillonnaire, voir figure 5.1b) affectantla portance deshelicopteres [13]. Quoi qu’il en soit, il est toujours necessaire de decrire precisement l’ecoulement helicoıdal de referencequi peut conduirea cesetats.
(a) (b)
FIG. 5.1 – (a) Vortex de rotor d’helicoptere Cobra. (b)Ecoulement dans l’etat de VRS (photo Paul Lamar).
Dans la litterature, l’etude de la dynamique des vortex helicoıdaux [14, 23, 10, 28] est restee confinee au cadre du fluideparfait et au cas particulier pour lequel la vorticite est toujours alignee avec les lignes helicoıdales. L’idee est d’utiliserici la simulation numerique directe d’ecoulementsa symetrie helicoıdale. On se place donc dans le cadre visqueux, cadredans lequel la vorticite ne reste pas alignee avec les lignes helicoıdales. On montre ici que lesequations de Navier–Stokesincompressibles pour unecoulementa symetrie helicoıdale se reduisenta un probleme quasi-2D qui prend cependant encompte les effets 3D de courbure et de torsion des vortex. La resolution est de type 2D, ce qui permet d’accedera desmaillages assez fins, des nombres de Reynoldseleves, et des temps d’evolution tres longs. Cesequations sont presenteesen §5.1, leur formulation numerique en§5.2. Des resultats concernant desetats quasi-stationnaires composes d’un ouplusieurs vortex helicoıdaux et la dynamique de fusion de deux vortex sont presentes en§5.3.
5.1 Equations de Navier–Stokes avec symetrie helicoıdale
On ecrit lesequations de Navier–Stokes pour unecoulementa symetrie helicoıdale de pas2πL. Un tel systeme estinvariant par translation d’une distanceH le long d’un axe combineea une rotation d’angleθs = H/L autour du memeaxe (figure 5.2a). En coordonnees cylindriques(er,eθ,ez), les grandeurs de l’ecoulement sont invariantes suivant deslignes helicoıdales d’equationθ − z/L = const. Ces helices sont periodiques suivant l’axe, avec une periode spatiale2πL. L > 0 (resp.L < 0) corresponda des helices droites (resp. gauches). Les limitesL → ±∞ correspondent au casbidimensionnel dans le plan(r, θ). On montre ici que lesequations de Navier–Stokes, pour lesecoulements presentant lasymetrie helicoıdale, peuventetre rameneesa un probleme quasi-2D, plus simple et rapidea resoudre.
On introduit une base orthonormale locale de Beltrami(er,eϕ,eB) (figure 5.2b), formee du vecteurer habituel, du
49

ϕ ≡ θ − z/L = cst
(b)
2πL
H
θs
(a)
rθ
z eB
er
eϕ
z
FIG. 5.2 – (a) Transformation helicoıdale de pas reduitL. (b) Base locale helicoıdale(er,eϕ,eB).
vecteur de Beltrami tangent aux lignes helicoıdales :
eB(r, θ) = α(r)[ez +
r
Leθ(θ)
]ou α(r) =
(1 +
r2
L2
)−1/2
, 0 ≤ α(r) ≤ 1 ,
et d’un troisieme vecteureϕ(r, θ) = eB × er = α(r)
[eθ(θ) −
r
Lez
]
construit suivant le gradient d’une nouvelle variableϕ ≡ θ − z/L. Un champ vectorielu se decompose sur cette base :
u = urer + uϕeϕ + uBeB ,
avecuϕ = α(r)
(uθ −
r
Luz
)et uB = α(r)
(uz +
r
Luθ
).
Dire qu’un systeme possede la symetrie helicoıdale, c’est dire que tout champ scalairef ne depend de l’espace que via lesdeux variablesr etϕ, c’est-a-diref = f(r, ϕ, t), et de meme pour les composantesur, uϕ etuB de tout champ vectorielu. Le point de depart est l’expression du champ de vitesse 3Da divergence nullea l’aide de deux champs scalaires, lacomposanteuB(r, ϕ, t) et une fonction de courantψ(r, ϕ, t) :
u = uB(r, ϕ, t) eB + α(r)∇ψ(r, ϕ, t) × eB .
Les composantesur anduϕ se deduisent deψ par :
ur =1
r
∂ψ
∂ϕ, uϕ = −α(r)
∂ψ
∂r. (5.1)
De maniere similaire, le champ de vorticite, egalement solenoıdal, peutetre exprime comme [28] :
ω = ωB(r, ϕ, t) eB + α∇
(uB(r, ϕ, t)
α
)× eB ,
ce qui implique que les composantesωr andωϕ se deduisent deuB/α par
ωr =1
r
∂
∂ϕ
(uB
α
), ωϕ = −α ∂
∂r
(uB
α
). (5.2)
Par ailleurs, la composanteωB est relieea la fonction de courantψ ainsi qu’a la composante de vitesseuB par
ωB = −Lψ +2α2
LuB, (5.3)
ou l’operateur lineaireL est un Laplacien modifie :
L(·) =1
rα
∂
∂r
(rα2 ∂
∂r(·))
+1
r2α
∂2
∂ϕ2(·) . (5.4)
En bref, les champs de vorticite et de vitesse peuventetre reconstruitsa partir des deux seuls champs scalairesωB(r, ϕ, t)anduB(r, ϕ, t), la fonction de courantψ(r, ϕ, t) etant esclave de ces grandeurs par la relation (5.3). L’evolution du systemeest donc decrite entierement par deuxequations dynamiques : une pourωB(r, ϕ, t) et une pouruB(r, ϕ, t).
50

Lesequations de Navier–Stokes incompressibles sontecrites sous la forme :
∂tu + ω × u = −∇
(p
ρ+
u2
2
)− ν∇ × ω . (5.5)
Par projection de (5.5) sureB, on obtient la premiere desequations de la dynamique :
∂tuB +NLu = V Tu (5.6)
ou le terme non lineaire et le terme visqueux sont donnes par :
NLu ≡ eB · [ω × u] = ωr uϕ − ωϕ ur , et V Tu ≡ ν
[L(uB
α) − 2α2
LωB
]. (5.7)
La secondeequation est obtenue par le rotationnel de (5.5) projete seloneB(r, θ) :
∂tωB +NLω = V Tω (5.8)
ou le terme visqueux est
V Tω ≡ −ν eB · ∇ × [∇ × ω] = ν
[L(ωB
α) −
(2α2
L
)2
ωB
]+ ν
2α2
LL(uB
α) , (5.9)
et le terme non lineaire
NLω ≡ eB · ∇ × [ω × u] =1
rα
[∂
∂r(rαωB ur) +
∂
∂ϕ(ωB uϕ)
]+
2α2
L(ωr uϕ − ωϕ ur) +
α
L2
∂u2B
∂ϕ. (5.10)
Les equations de la dynamique sont donc les suivantes : (5.6)–(5.7) pouruB(r, ϕ, t), (5.8)–(5.10) pourωB(r, ϕ, t),avec la fonction de courantψ(r, ϕ, t) reliee a ces deux grandeurs par (5.3)–(5.4) et par des conditions aux limites aexpliciter. Cette formulationψ–ωB–uB est en fait une generalisation de la methode 2D standardψ–ω.
5.2 Formulation numerique
Formulation spectrale enϕ
Pour lesecoulementsa symetrie helicoıdale, les fonctionsωB et uB sont 2π-periodiques enϕ, ce qui permet deles exprimer comme des series de Fourier suivant cette variable. On introduit donc les modes complexesu(m)
B (r, t) etω
(m)B (r, t), et on peut recrire lesequations (5.6) et (5.8) pour chaque mode de Fourierm (m entier).
Pourm 6= 0, on peut construirea partir deu(m)B (r, t) et deω(m)
B (r, t) toutes les autres quantites. En effet, on calculeψ(m)(r, t) par la relation (5.3)ecrite pour le modem :
L(m)ψ(m) = −ω(m)
B +2α2
Lu
(m)B (5.11)
ou l’operateur lineaireL(m) s’ecrit
L(m)(·) =
1
rα
∂
∂r
(rα2 ∂
∂r(·))− m2
r2α(·) , (5.12)
avec les conditions aux limites surψ(m)(r, t) (voir ci-dessous). Puis on obtientu(m)r (r, t) et u(m)
ϕ (r, t) a l’aide de (5.1)par :
u(m)r (r, t) =
im
rψ(m) , u(m)
ϕ (r, t) = −α(r)∂
∂rψ(m) . (5.13)
De meme, on obtientω(m)r (r, t) etω(m)
ϕ (r, t) a l’aide de (5.2) passe dans l’espace spectral.
Pour le mode axisymetriquem = 0, u(0)r (r, t) est uniformement nul et lesequations dynamiques peuventetreecrites
pour les modes de Fourier reelsu(0)B (r, t) etu(0)
ϕ (r, t), au lieu deu(0)B (r, t) etω(0)
B (r, t).
51

Conditions aux limites
On souhaite simuler un systeme de vortex helicoıdaux places dans un milieu infini dans la direction radiale. Le do-maine de calcul considere est un disque(r, ϕ) ∈ [0, Rext] × [0, 2π[ qui contient toute la region de vorticite non nulle, detelle sorte que l’ecoulement est potentiel au voisinage de la frontiere exterieurer = Rext. Pour les modesm 6= 0, onimpose donc
uB(m)(Rext) = 0 , ωB
(m)(Rext) = 0 ,
et, pourψ(m), on utilise l’expression valable pour unecoulement potentiel infini :
ψ(m)(r) ∝
1/rm si |L| = ∞Km (|m/L| r) siL est fini,
ouKm designe la fonction de Bessel modifiee de seconde espece. Ce comportement deψ(m) est impose par une conditionde Robin :
∂
∂rψ(m)(Rext) = −mCmψ
(m)(Rext) ouCm =1
Rext+
0 if |L| = ∞ ,1
|L|Km−1(|m/L|Rext)
Km(|m/L|Rext)siL est fini,
cette derniere expression pourL fini venant de la relation
d
drKm(γr) = −γKm−1(γr) −
m
rKm(γr) , m ≥ 1 ,
ecrite enr = Rext pourγ = |m/L|. Pour le modem = 0, la condition s’ecrit suru(0)B etu(0)
ϕ comme :
u(0)B (Rext) = α(Rext)
(Γ
2π L+ U∞
z
), et u(0)
ϕ (Rext) = α(Rext)
(Γ
2π Rext− Rext
LU∞
z
).
Pouretre exact, la condition suru(0)ϕ n’est pas imposee enr = Rext mais une demi-maille au-dela, car les maillages sont
decales.L’utilisation des variables(r, ϕ) oblige d’autre parta imposer des conditions de regularite de certaines variables en
r = 0. Pour les modesm 6= 0, on impose
uB(m)(0) = 0 , ωB
(m)(0) = 0 , ψ(m)(0) = 0 ,
puisque ces variables sont proportionnellesa rm quandr → 0. On a aussi besoin d’evalueru(m)r (0) etω(m)
r (0), propor-tionnelles quanta ellesa rm−1. Pourm ≥ 2, on a donc
u(m)r (0) = 0 , ω(m)
r (0) = 0 ,
alors que pourm = 1, u(m)r (0) etω(m)
r (0) sont finies et valent, en vertu de la regle de l’Hospital :
ur(1)(0) = i
∂ψ(1)
∂r(0) , ω(1)
r (0) = i∂
∂r(u
(1)B
α)(0) .
Pour le modem = 0, on impose enr = 0 la condition de Neumann :
∂
∂r
(u
(0)B
α
)= 0.
Schema temporel
Le code est base sur une formulation vitesse/vorticite/fonction de courantecrite par O. Daube [6]. L’evolution dumodeu(m)
B (r, t) obeit a∂tu
(m)B +NL(m)
u = V T (m)u . (5.14)
Le terme visqueuxV Tu etant lineaire, on obtient directement :
V T (m)u = ν
[L
(m)(u
(m)B
α) − 2α2
Lω
(m)B
]
qui coupleu(m)B et ω(m)
B , ce qui est different du casL → ∞. Pour ce qui concerne le terme non lineaireNLu, il estd’abordevalue dans l’espace physique, puis passe dans l’espace physique par transformee de Fourier rapide. On obtientainsiNL(m)
u (formulation pseudo-spectrale).
52

L’ evolution temporelle des modesω(m)B (r, t) est regie, pourm 6= 0, par
∂tω(m)B +NL(m)
ω = V T (m)ω , (5.15)
ou le terme visqueuxV Tω s’ecrit
V T (m)ω = ν
[L
(m)(ω
(m)B
α) −
(2α2
L
)2
ω(m)B
]+
2να2
LL
(m)(u
(m)B
α) ,
expression dans laquelleu(m)B etω(m)
B sont couples. Les coefficientsNL(m)ω sont obtenus de facon similaireaNL(m)
u .Pour le modem = 0, on utiliseu(0)
ϕ (r, t) au lieu deω(0)B (r, t). Ce mode est tel que
∂tu(0)ϕ +NL(0)
uϕ= V T (0)
uϕ, (5.16)
ou le terme visqueux s’ecrit
V T (0)uϕ
= ν α(r)∂
∂r
(ω
(0)B
α
)
avecω
(0)B
α=
2
Lαu
(0)B +
1
r α2
∂
∂r(r α u(0)
ϕ ) ,
alors que le terme non lineaire s’ecrit
NL(0)uϕ
= [(ω × u)ϕ](0) = [ωBur − ωruB](0) .
L’avance en temps deG(m) ≡ (u(m)B , ω
(m)B ) pourm 6= 0 etG(0) ≡ (u
(0)B , u
(0)ϕ ) est donnee par lesequations (5.14),
(5.15) et (5.16). Un schema temporel du second ordre est utilise, les termes visqueux sont implicites alors que, pour lestermes non lineaires, on utilise une extrapolation d’Adams–Bashforth du2nd ordre.G(m)
n+1 au pas de tempsn+ 1 est ainsiobtenu comme :
3G(m)n+1 − 4G
(m)n +G
(m)n−1
2∆t+(2NL(m)
n −NL(m)n−1
)= V T
(m)n+1 , (5.17)
ou l’on definit NL(m) = (NL(m)u , NL
(m)ω ), V T (m) = (V T
(m)u , V T
(m)ω ) pourm 6= 0 etNL(0) = (NL
(0)u , NL
(0)uϕ ),
V T (0) = (V T(0)u , V T
(0)uϕ ). En mettant toutes les inconnues dans le membre de gauche, l’equation (5.17) devient
3G(m)n+1
2∆t− V T
(m)n+1 =
(−2NL(m)
n +NL(m)n−1
)+
4G(m)n −G
(m)n−1
2∆t, (5.18)
et peutetre discretisee dans la direction radiale.
Discretisation spatiale
Pour discretiser le probleme, les series de Fourier sont tronqueesa un nombre fini de modes complexes|m| < M . Dansla suite, on ne s’interesse qu’aux modes de nombre d’ondem positif, le nombre d’onde−m s’obtenant par conjugaisoncomplexe. La methode standard de dialiasing aux2/3 necessite le calcul de3M/2 modes, c’esta dire de discretiserϕ enNθ = 3M angles donnes par
ϕj = j δϕ (j = 0, · · · , Nθ − 1), ϕNθ= ϕ0 = 0 ,
ou δϕ = 2π/Nθ. LesM premiers modes de Fourier complexes sont effectivement utilises, les modes de nombre d’ondespluselevem = M, · · · , 3M/2 − 1 sont remisa zeroa chaque pas de temps.
Dans le domaine radial d’integration[0, Rext], on utilise deux series deNr points :
ri = (i− 1)δr et r+i = ri+ 1
2
= ri + δr/2 (i = 1, · · · , Nr) ,
ou δr = Rext/(Nr − 1). Par souci de simplification, l’expression(i, j) designe dans la suite le point situe en(r, ϕ) =(ri, ϕj).
Dans l’espace physique (voir figure 5.3), les grandeursuB(r, ϕ, t), ωB(r, ϕ, t) et ψ(r, ϕ, t) sont definies aux points(i, j) alors que les composantesuϕ(r, ϕ, t) etωϕ(r, ϕ, t) sont definies aux points(i+ 1
2 , j), ce qui est natureletant issuesde derivees radiales centrees deψ et deuB/α (equations (5.1)–(5.2)). Les composantes radialesur(r, ϕ, t) etωr(r, ϕ, t)sontegalement definies aux points(i, j).
Dans l’espace de Fourier, ceci implique que les quantites complexesu(m)B (r, t) pourm = 1, · · · ,M − 1 et le mode
de Fourier reelu(0)B (r, t) sont definis aux pointsri. De maniere similaire, les quantites complexesω(m)
B (r, t) etψ(m)(r, t)
pourm = 1, · · · ,M − 1 sont definies aux memes pointsri. En revanche, le mode de Fourier reelu(0)ϕ (r, t) est utile aux
pointsr+i .
53

ri ri+1r+
i
rϕ=ϕj
ωr, (ω × u)r, ur
ωB, (ω × u)B, uB, ψ
ωϕ, ωBur, uϕ
FIG. 5.3 – Positions radiales ou sont definies les differentes grandeurs. [A11]
Operateur lin eaireL(m)
La resolution de l’equation (5.11) pour obtenirψ(m) pourm 6= 0 a chaque pas de temps necessite de discretiser letermeL
(m)(ψ(m)) dans la direction radiale,a chaque positionri, en exculant les extremitesr1 = 0 andrNr= Rext ou les
conditions aux limites sont imposees. Ceci est realise avec un schema centre du 2nd ordre :
L(m)(ψ(m))(ri) =
ri− 1
2
α2i− 1
2
riαi δr2ψ(m)(ri−1) −
(ri− 1
2
α2i− 1
2
riαi δr2+ri+ 1
2
α2i+ 1
2
riαi δr2+
m2
r2i αi
)ψ(m)(ri)
+ri+ 1
2
α2i+ 1
2
riαi δr2ψ(m)(ri+1) (2 ≤ i ≤ Nr − 1) .
(5.19)
La formule (5.19) contient, pouri = 2 et i = Nr − 1, les quantitesψ(m)(r1) andψ(m)(rNr) qui peuventetreelimines
a l’aide des conditions aux limites. Le systeme lineaire(Nr − 2) × (Nr − 2) qui en resulte est tridiagonal. On peut leresoudre par une factorisationLU bande (LAPACK). Chaque modem etant traite independemment, la parallelisationamemoire partagee peutetre implementee assez facilement.
Pourm = 0, la contribution axisymetriqueψ(0) peutetre obtenue par integration radiale directe de l’equation (5.13b).Dans l’equation (5.18) pourm 6= 0, les inconnues, apres substitution des conditions aux limites, sontωB
(m)(ri) avec2 ≤ i ≤ Nr − 1, etu(m)
B (ri) avec2 ≤ i ≤ Nr − 1. La discretisation deV T (m)n+1 est tres similairesa celle qui est presentee
dans l’equation (5.19). CommeωB etuB sont couples via lesequations dynamiques, le systeme discretise se met sous laforme de2 × 2 blocks, ou chaque bloc est de taille(Nr − 2) × (Nr − 2). Pour resoudre ce systeme, on reordonne toutd’abord les inconnues dans l’ordre suivant :ω
(m)B (r2), u
(m)B (r2), ω
(m)B (r3), u
(m)B (r3), . . . . Pour chaque modem 6= 0, ceci
conduita une matrice bande de demi-largeur 2a gauche et 3a droite (une matrice hexadiagonale), qui peutetre resolueapres factorisationLU .
Dans l’equation (5.18) pourm = 0, les inconnues sontu(0)ϕ (r+i ) pour1 ≤ i ≤ Nr−1 etu(0)
B (ri) pour2 ≤ i ≤ Nr−1.Apres un re-agencement similaire au precedent, on obtient une matrice pentadiagonale de demi-largeur de bande gaucheet droiteegalea 2.
Termes non lineaires
On calcule les termes non lineaires suivants dans l’espace physique : (i)NLu = (ω × u)B = ωr uϕ − ωϕ ur auxpoints(i, j), (ii) NLω donne par l’equation (5.10) aux points(i, j), (iii) NLuϕ
aux points(i+ 12 , j).
Pour ce faire, onevalue les quantitesωr uϕ, ωϕ ur, −ωB uϕ et u2B
aux points(i, j), et la quantiteωB ur aux points(i+ 1
2 , j), a l’aide des formules :
[ωr uϕ] (i, j) =1
2ωr(i, j)
[uϕ(i− 1
2 , j) + uϕ(i+ 12 , j)
](5.20)
[ωϕ ur] (i, j) =1
2
[ωϕ(i− 1
2 , j) + ωϕ(i+ 12 , j)
]ur(i, j) (5.21)
[ωB uϕ] (i, j) =1
2ωB(i, j)
[uϕ(i− 1
2 , j) + uϕ(i+ 12 , j)
](5.22)
[ωB ur] (i+1
2, j) =
1
2[ωB(i, j)ur(i, j) + ωB(i+ 1, j)ur(i+ 1, j)] . (5.23)
5.3 Resultats
Le code numeriquea symetrie helicoıdal aete valide sur un certain nombre de systemes comme un vortex helicoıdalunique (voir plus bas), mais aussi sur le tourbillon de Batchelor dont les modes d’instabilites presentent la symetriehelicoıdale. Les accords entre taux de croissance theoriques et numeriques sont excellents (voir publication [A11] enannexe). Les resultats pour un vortex unique et pour la fusion de deux tourbillons sont brievement presentes ci-dessous.
54

5.3.1 Conditions initiales pour un vortex helicoıdal
On cherchea construire une condition initiale sous la forme d’un vortex concentre a circulationΓ 6= 0 fixee, enchoisissant un referentiel avec la condition suivante : la vitesse axialeU∞
z ≡ Uz(r → ∞) loin du vortex est prescrite. Oncherche des expressions pour les composantesωB(r, ϕ) etuB(r, ϕ) sous la forme
ωB = AωB et uB/α = C +AuB/α
ou A et C sont des constantes et ou ωB(r, ϕ) et uB(r, ϕ)/α sont deux fonctions qui tendent rapidement vers zero endehors du cœur. On choisit tout d’abordωB(r, ϕ) et uB(r, ϕ)/α, puis on cherche les constantesA etC qui menent auxvaleurs prescrites deΓ etU∞
z . La constanteC est telle que
C =(uB
α
)∞= U∞
z +( rLuθ
)∞= U∞
z +Γ
2π L.
De plus, la circulation s’ecrit :
Γ =
∫∫ωz dS = 2π
∫ ∞
0
ω(0)z r dr .
Vu que
ωz = α(ωB − r
Lωϕ
)et ωϕ = −α ∂
∂r
(uB
α
),
la circulation s’ecrit comme la somme de deux contributions
Γ = 2π
∫ ∞
0
αω(0)B r dr +
2π
L
∫ ∞
0
α2 r2∂
∂r
(u
(0)B
α
)dr . (5.24)
Si on introduit les grandeursΓω et Γu calculeesa partir deωB et uB :
Γω = 2π
∫ ∞
0
α ω(0)B r dr et Γu =
2π
L
∫ ∞
0
α2 r2∂
∂r
(u
(0)B
α
)dr ,
l’ equation (5.24) s’ecritΓ = A (Γω + Γu) et la valeur deA peut se deduire de
A = Γ/(Γω + Γu) .
En bref, une fois que les profils de vorticite ωB et de vitesse axiale(uB/α) dans le cœur du vortex ontete choisis, lescomposantes helicoıdales de vorticite et de vitesse sont donnees par :
ωB =Γ
Γω + Γu
ωB etuB
α= U∞
z +Γ
2π L+
Γ
Γω + Γu
uB
α.
Par exemple, on peut utiliserω = exp[−(r − r0)
2/a20] et uB/α = 0 , (5.25)
ce qui conduit, si l’on se prescrit une circulation initialeΓ0 et une vitessea l’infini U∞z = 0, aux composantes helicoıdales
de vorticite et de vitesse :
ωB =Γ0
πa20
exp[−(r − r0)2/a2
0] etuB
α=
Γ0
2π L, (5.26)
En coupe dans le plan(r, θ), la forme du vortex apparaıt circulaire. En coupe dans un plan coupant le vortex perpendicu-lairementa sa ligne helicoıdale centrale, ce profil est en revanche tres deforme par rapport au cercle, et corresponda unetat treseloigne du quasi-equilibre. La condition initiale suivante fournit unetat plus proche du quasi-equilibre :
ωB = exp[−(r − r0)2/a2
0 − α(r0)2r2(θ − θ0)
2/a20] (avecθ ∈]θ0 − π, θ0 + π]) et uB/α = 0 . (5.27)
La distribution ci-dessus tente de reproduire la forme d’unvortex Gaussien helicoıdal de cœur circulaire de rayona0, situeen (r0, θ0) dans le plan(r, θ). Le profil particulier (5.27) combine l’effet de la courburedu vortex et le fait que le plan(r, θ) n’est pas une section droite du cœur.
5.3.2 Dynamique etetats quasi-stationnaires
Une simulationa partir de la condition initiale (5.26) avecL = 0.5, Γ0 = π, r0 = (1, 0), a0 = 0.1 a ete effectueecomme validation du code. Le nombre de Reynolds est choisi commeRe = Γ0/ν = 1000. La simulation numeriqueest effectuee sur un domain de rayonRext = 2, avec un maillage de512 points radialement pour128 modes azimutaux.L’ evolution temporelle de la composante helicoıdale de vorticiteωB est representee figure 5.4a. Pour des temps tres courts,de petit filaments helicoıdaux se forment (t = 0.08, 0.012) et disparaissent rapidement (t = 0.2, 0.4). Le vortex atteint
55

−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
20
40
60
80
100
120
140
160
180
200
220
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
0.12
t = 0 0.04
0.2
0.08
1
0.41.6
2.23.4
2.8
z
0 1 2 3 4-1
-0.75
-0.5
-0.25
0DNScutoff theory
t
ω
FIG. 5.4 – Convergence d’un vortex helicoıdal unique vers unetat quasi-stationnaire pourRe = 1000 : evolution tem-porelle (a) deωB dans le plan(r, θ) perpendiculairea l’axeOz, (b) de la vitesse angulaire du vortex dans le meme plan,et comparaison avec la valeur semi-analytique issue d’une theorie decut-off. Le pas de l’helice est deL = 0.5 et lesparametresa t = 0 sontΓ0 = π, r0 = ||r0|| = 1, a0 = 0.1. [A11]
ainsi unetat quasi-stationnaire pourt > 0.4, et n’evolue plus que sur uneechelle de temps lente imposee par la diffusionvisqueuse et proportionnelle au nombre de Reynolds. Mesurer la vitesse angulaireω(t) obtenue par DNS et la compareravec sa valeur theorique calculee par la theorie decutoff est un premier test quantitatif. Les valeurs theoriques sont enfait ici semi-analytiques car leur calcul fait intervenir des grandeurs relatives au cœur tourbillonnaire — sa taillea(t),sa distancea l’axermax(t), sa circulationΓ(t) — qui dependent du temps et sont donnees par la DNS. La comparaisonpresentee figure 5.4b est satisfaisante une fois que les filaments ontete detruits et que le vortex a atteint sonetat quasi-stationnaire.
Les vues dans le plan (r, θ) presentees dans ce chapitredoivent etre prolongees mentalement dans l’espace tri-dimensionnel en utilisant l’invariance de l’ecoulement parvissage. Par exemple, la figure ci-contre materialise en troisdimensions unetat quasi-stationnaire compose de deux vor-tex helicoıdaux identiques mais decales d’un demi-tour l’unpar rapporta l’autre. On voit tres nettement que les cœurstourbillonnaires, qui apparaissent tres deformes dans le planinferieur perpendiculaireaOz, sont en fait quasi-circulaires.Le code numerique helicoıdal fournit ainsi desetats quasi-stationnairesa un ou plusieurs vortex. Cesetats peuventservir d’ecoulement de base pour uneetude d’instabilite,en particulier de condition initiale pour des simulationstri-dimensionnelles dans lesquelles la symetrie helicoıdale,forcee ici, serait relaxee (voir les perspectives du chapitre 6).
−10
1
−10
1
0
1
2
3
4
xy
z
Vue 3D de deux vortex helicoıdaux de pasL = 0.5 enevolution quasi-stationnaire. [A12]
5.3.3 Fusion de deux vortex helicoıdaux
Dans le cas purement bi-dimensionnel (L = ∞), deux vortex identiques tournent l’un autour de l’autre tout endiffusant, jusqu’a ce qu’ils atteignent une taille critique (rapporteea leurecartement). Leur distance se meta decroıtrebrutalement dans une phase convective, et la fusion a lieu. La dynamique aux temps longs de deux vortex helicoıdaux (Lfini) a ete etudiee en detail dans la these de Benjamin Piton [38]. Des simulations ontete effectueesa differents nombresde Reynolds et pour differents pas d’helice. Ces simulations ont mis enevidence quatre types de fusion :
– pourL ≥ 1.85, on a unefusion convectivea l’axe : la fusion est tres similaire au cas purement 2D, mais se fait surdes temps de plus en plus longs au fur eta mesure queL diminue (voir figure 5.5, premiere ligne pourL = 2 etRe = 10000).
– pour1.25 ≤ L ≤ 1.85, on a unefusion diffusivea l’axe : il n’y a plus de phase convective, l’ensemble du processusest diffusif, et se fait par consequent sur des temps beaucoup plus longs (voir figure 5.5, deuxieme ligne pourL = 1.5 etRe = 10000).
– pourL ≤ 1.25 a haut ReynoldsRe ≥ 10000, on a unefusion convective entre spires successives(voir figure 5.5,troisieme ligne pourL = 1 etRe = 10000). Les deux vortex entrent en contact par leurs spires, puis se regroupent
56

L
t
L=1.5
t=1700
L=1.5
t=3000
L=1.5
t=4800
L=1.5
t=7000
!""
#$%
&$'(((
)*+
,*-.//
012
31244
567
869::
;<=
><?@A
BCD
ECFFG
FIG. 5.5 –Evolution temporelle de la composante helicoıdale de vorticite ωB pendant la fusion de deux vortex de pasreduit et nombre de Reynolds (de haut en bas) (L = 2, Re = 10000), (L = 1.5, Re = 10000), (L = 1, Re = 10000),(L = 1,Re = 2500). Les vortex initiaux sont tels queΓ0 = 1, r0 = 1, a0 = 0.1 [38].
57

a l’ecart de l’axe, et, apres une interaction complexe, fusionnent. Lors de ce processus qui brise la symetrie centraledu systeme, la periodicite azimutale passe deπ a la valeur2π, et, par consequent, la periodicite axiale passe deπLa2πL. Le phenomene presente des points communs avec l’instabilite sub-harmonique d’appariement d’une rangeede vortex rectilignes ou d’anneaux tourbillonnaires. La fusion a faibleL implique des spires adjacentes et est tressimilairea la fusion de deux anneaux tourbillonnaires [41].
– pourL ≤ 1.25 a bas ReynoldsRe ≤ 1000, on a unefusion diffusive entre spires successives: ce sontegalementles spires successives qui entrent en contact et qui fusionnent, mais de maniere purement diffusive, sans brisurede symetrie, ce qui conduita une nappe cylindrique de vorticite helicoıdale (voir figure 5.5, quatrieme ligne pourL = 1 etRe = 1000).
Ces deux derniers types de fusion coexistent aux nombres de Reynolds intermediaires1000 < Re < 10000. La figure 5.6cartographie les differents scenarios de fusion dans le plan(Re,L).
La section§6.1 presente des perspectives de recherche sur les tourbillons helicoıdaux.
FIG. 5.6 – Differents type de fusion de vortex dans le plan(Re,L). Figure de la these de Benjamin Piton [38].
58

Chapitre 6
Perspectives
6.1 Tourbillons helicoıdaux
Symetrie helicoıdale
Dans le cadre de la these de Benjamin Piton, these soutenue en octobre 2011, nous avonsetudie la dynamique desystemes de vortex helicoıdaux : un vortex unique, ou deux vortex portes par le meme cylindre et initialement symetriquesl’un de l’autre. Nous avons utilise un code numerique qui resout lesequations de Navier–Stokes incompressibles pour desecoulementsa symetrie helicoıdale stricte (voir chapitre 5). Nous avons caracterise les vortex en suivant l’evolution deleur rayon, de leur taille de cœur, de leur ellipticite dans desetats quasi-stationnaires. Certains points restenta preciser.Par exemple, le cœur tourbillonnaire semble diffuser de maniere acceleree pour les petits pasL d’helice1, de telle sortequea2(t) > a2
0 + 4t/Re pourt > 0. Quel est le mecanisme physique ? La comparaison avec le cas d’anneaux tourbillon-naires dans lequel un phenomene analogue est observe (Bolnot et al., communication privee) serait instructive. Une autreinterrogation : pourquoi deux vortex helicoıdaux en rotation quasi-stationnaire s’eloignent-ils peua peu jusqu’a une dis-tance maximale (independante du Reynolds, et d’autant plus grande queL est petit) avant de se rapprocher et d’entamerla fusion ? Il y a la encore une physique incomprise.
Dans la these, nous avonsetudie en detail la dynamique deN = 2 tourbillons helicoıdaux. Il serait interessant defaire lesetudes analogues pour des configurationsN = 3 et 4, representatives de cas de sillages de rotors d’eoliennesou d’helices propulsives. Tout d’abord, il serait interessant de generaliser lesetudes recentes [31] sur les mecanismeset criteres de fusion de deux vortex au cas deN vortex bi-dimensionnels, d’etudier leur processus de fusion (en effet, 3vortex 2D ne fusionnent pas en rejoignant le centre du triangle mais forment une couronne de vorticite). Ensuite, il faudraitgeneraliser le critere de fusion de 2 vortex helicoıdaux obtenu dans la these de Benjamin PitonaN vortex helicoıdaux.
FIG. 6.1 – Sillage d’une helicea deux pales dans un canal hydraulique, montrant le regroupement des deux helices et latransition vers un sillage helicoıdal unique, (d’apres la photographie, on peut estimer queL ≈ 0.3). D’apres Felliet al.2011 [8].
Toujours dans la these de Benjamin Piton, nous avons mis enevidence quatre scenarii de fusion dans le cas deN = 2vortex helicoıdaux. En particulier,a haut ReynoldsRe = Γ/ν ≥ 10000, la fusion des tourbillons de pasL < 1.25 se faitpar brisure spontanee de la symetrie centrale entre les deux vortex, ici encore tout en respectant la symetrie helicoıdale,forcee dans le code numerique (voir figure 5.5 casL = 0.8). Nous avons appele ce processus fusion convective entrespires. Ce phenomene peutetre rapproche d’observations experimentales recentes [8] reproduites dans la figure 6.1 : dansle sillage d’helices propulsives, cetteetude met enevidence des regroupements des differents vortex helicoıdaux. Il est
1dans ce chapitre, le pasL⋆ de l’helice est adimensionne a l’aide du rayonR⋆ de l’helice, et on aL = L⋆/R⋆.
59

possible que ce phenomene, quispatialementbrise l’invariance helicoıdale du systeme, puisse neanmoinsetre decrit dansnotre cadre purement helicoıdal, et que la fusion convective entre spires que nous observons en soit le pendanttemporel.Pour un nombre de pales plus important, cetteetude montre que les regroupements de tourbillons se font progressivement,et que le nombre d’evenements de ce type est l’entier le plus proche superieur ouegal a log2(B) ou B est le nombrede pales. L’etude numerique de la fusion des differentes spiresa partir d’un polygone deN = B vortex helicoıdauxdevrait permettre de determiner le nombre de ces regroupements, de comparera l’etude experimentale, et, le casecheant,d’interpreter ce comportement en termes d’instabilites du polygone de vortex et de ses avatars.
−2 −1 0 1 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1 0 1 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1 0 1 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1 0 1 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1 0 1 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1 0 1 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1 0 1 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1 0 1 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
(a)
(b)
0
0
25
25
90
90
50
50
FIG. 6.2 – Composante helicoıdale de la vorticite a plusieurs dates. SimulationaRe = 5000, initialisee avec un polygonede vortex helicoıdaux legerement perturbes, de pas (a)L = 1.2, (b) L = 1. L’ etude [36] predit une instabilite pourL < L0 = 1.132. [A11]
Contrairement au cas 2D ou les polygones de vortex restent stables pourN ≤ 7, les polygones de vortex helicoıdaux(desN = 2) deviennent instables vis-a-vis de petites perturbations (deplacement d’un vortex) en dessous d’une valeurcritique deL [36]. Des simulations preliminaires montrent ce phenomene pourN = 3 (voir figure 6.2). Il restea etablirsi cette instabilite lineaire conduit, dans le regime non lineaire, au processus de fusion convective entre spires. Si tel etaitle cas, il serait difficile de predire ces processus de regroupement et/ou fusion, car la donnee de l’amplitude initiale (oudans le sillage proche du rotor) de la perturbation est manquante...
Dans les configurations d’interet pratique, des vortex sontegalement crees en pied de pale avec une circulation op-posee aux vortex de bout de pale. Ces vortex peuvent fusionner dans le sillage du moyeu et donner lieua un vortex dehub, qui stabilise l’arrangement helicoıdal des vortex. Ceci aete montre de maniere theorique dans un cas idealise [36],et le code numerique en symetrie helicoıdale devrait permettre de confirmer les seuils d’instabilite, d’etudier les regimesnon lineaires et l’interaction entre vortex de circulations opposees. En outre, pour les systemes proches de la stabiliteasymptotique marginale, l’existence de transitoires amplifi es doitetre consideree, qui pourrait remettre en cause les seuilstheoriques mentionnes plus haut.
Simulations 3D
Un tourbillon courbe induit un deplacement sur lui-meme, maisegalement un champ de deformation. Comme pourun tourbillon rectiligne place au voisinage d’autres tourbillons, ce champ est responsable de l’instabilite de Widnall,une resonance d’ondes de Kelvin avec la deformation [54, 27]. Plus recemment, Fukumoto et Hattori [9] ont predit uneautre resonance d’ondes de Kelvin, cette fois avec la distorsion due a la courbure du vortex, pour les vortexa petitetaille de cœur eta haut Reynolds, ce qui est le cas dans les applications pratiques. Ces deux types d’instabilites ont unelongueur d’onde courte, comparablea la taille de cœur, et sont susceptibles de croıtre au sein d’un vortex helicoıdal. Leurstructure brise l’invariance helicoıdale, et l’etude de leur croissance lineaire et de leur dynamique non lineaire passe pardes simulations tri-dimensionnelles. Le code numeriquea symetrie helicoıdale est toutefois d’un apport appreciable : ilfournit desetats de base quasi-stationnaires, que l’on injecte ensuite, tels quels ou legerement perturbes, dans un code desimulation pleinement 3D. La phase preliminaire d’adaptation, associeea l’ejection de filaments et destineea rejoindreun etat de quasi-equilibre, est ainsi simulee par le code 2D et non dans le code 3D, ce qui est un gain considerable.
Les instabilites de petite longueur d’onde sont a priori presentes sur tous les vortex courbes. Widnall [53] a montreen outre l’existence de multiples modes d’instabilite dans le cas specifique des vortex helicoıdaux : un mode sous-harmonique (de grande longueur d’onde) faisant intervenirdeux enroulements successifs, et des modes de longueur d’ondeintermediaire promus par l’interaction entre spires voisines. Ces derniers modes apparaissent donc preferentiellement pourles faibles pas d’helice. Certains de ces modes ontete simules recemment par methodes vortex [52] (cf. figure 6.3). L’ex-tension de ces travauxa des vortex multiples, sans ou avec vortex de moyeu, esta effectuer.
60

(b)(a)
FIG. 6.3 – Isosurface de vorticite dans la simulation par methode vortex d’un tourbillon helicoıdal perturbe a deuxstades du developpement de l’instabilite : (a) instabilite de grande longueur d’onde ; (b) instabilite de longueur d’ondeintermediaire. D’apres [52].
Le code pseudo-spectral Fourier presente en§4.4 est assez mal adapte a de telles simulations. D’une part, l’ecoulementest ici a circulation non nulle, ce qui necessite une zone tampon au bord du domaine, couteuse en 3D. D’autre part, deszones de forts gradients (le cœur tourbillonnaire et ses instabilites) coexistent avec de vastes zonesa tres faible gradient,de telle sorte qu’un code de recherche parallelise avec maillage adaptatif comme Gerris [39], semble plus indique.
L’ etude des systemes de vortex helicoıdaux a de beaux jours devantelle, avec le developpement des fermes d’eoliennes notamment, et lanecessaire caracterisation des sillages lointains et de l’impact reel d’uneeolienne sur une autre. Dans le domaine aeronautiqueegalement, la re-mise au gout du jour des CROR (Countra-Rotating Open Rotorsou ro-tors contra-rotatifs non carenes, voir figure ci-contre) pour des imperatifsd’augmentation d’efficacite va susciter d’interessantesetudes d’interac-tion. En effet, si le premier rotor genere une serie de vortex helicoıdauxgauches, le second rotor de plus petit diametre genere une serie devortex helicoıdaux droits, avec une circulation opposee. Les aspectsaeroacoustiques sont bienevidemment une facette importante de tellesetudes, mais la dynamique des vortex est actuellement difficilement priseen compte par des codes industriels tres dissipatifs [47]. Schema d’un CROR. D’apres [47].
La dynamique intrinseque d’un tourbillon helicoıdal ou d’un systeme de tourbillons helicoıdaux peutetre affectee parle sillage des les pieces fixes qui supportent le rotor ou par la presence de jets issus de reacteurs. Pour uneeolienne parexemple, le sillage de la nacelle se combine au vortex de moyeu, un phenomene qui peutetre simule dans le cadre de lasymetrie helicoıdale. L’interaction du vortex avec le mat, en revanche, devraitetre prise en compte dans une simulation3D. Dans le CROR, on aa la fois le jet du flux interne et le sillage de son support, quien constitue d’ailleurs un problemeimportant [47]. Enfin, l’effet de la couche limite atmospherique pourraitetre pris en compte par un cisaillementa grandeechelle superpose au systeme. Cependant la presence de ce cisaillement doit impacter la generation meme des vortex eten moduler l’intensite.
6.2 Instabilites thermoacoustiques
Les phenomenes thermoacoustiques font intervenir des ondes sonores,progressives et/ou stationnaires, et des trans-ferts de chaleur avec des parois. Ce sont des phenomenes complexes car ils mettent en jeu des ondes, cycles de compres-sion/detente associesa des oscillations de temperature et de deplacement des particules,a des couches limites thermiques(et inevitablement dynamiques) au sein desquelles ont lieu lesechanges avec les parois. Parmi les machines thermiques,les machines thermoacoustiques sont particulierement attrayantes du fait de leur fiabilite (pas de piece mobile) et de leurfaculte a fonctionner avec des gaz de travailecologiques. Des moteurs et refrigerateurs thermoacoustiques atteignent au-jourd’hui des rendements acceptables, et sont utilises dans des applications spatiales ou leur fiabilite est un atout. Il enexiste aussi des applications possibles en chimie avec la separation d’isotopes, en MHD avec la generation d’electricite.Le developpement de la thermoacoustique se heurte cependant aux techniques conventionnelles et deja eprouvees, desorte que l’on ne sait quelle application de la thermoacoustique a un avenir industriel2.
En 2000, j’ai ecrit un code d’instabilite a partir desequations de Navier-Stokes bidimensionnelles compressibleslinearisees, dans l’approximation du gaz parfait. Il permet, dans laconfiguration du compresseur thermoacoustiquepresentee figure 6.4a, de determiner les modes propres du resonateur quand le fluide, initialement au repos, est sou-mis a un gradient longitudinal de temperature au niveau du stack. Le domaine de calcul ne comprend qu’un espaceinter-plaques, comme l’indique le schema de la figure 6.4b. Le code utilise des maillages cartesiens decales pour ladiscretisation numerique. Le taux de croissance temporelle est obtenu pour tous les modes, ce qui permet de determiner
2Petite histoire de la thermoacoustique sur la page du groupe de Los Alamoshttp ://www.lanl.gov/thermoacoustics/
61

TC TF
TC TF>T>TCT= TFT=
onde acoustique
resonateurstackechangeurchaud
echangeurfroid
(b)
(a)
FIG. 6.4 – (a) Representation schematique d’un compresseur thermoacoustique. (b) Domaine de calcul correspondantaun espace inter-plaques. On impose au fluide et aux deux plaques (en gras) un gradient de temperature longitudinal dansla region du stack, entre la temperature chaudeTC a gauche et la temperature ambiante froideTF a droite. [X]
le seuil lineaire de declenchement du compresseur en fonction de divers parametres, comme la temperatureTC imposeea l’echangeur chaud, la temperature froideetant fixeea la temperature ambiante. Cetteetude preliminaire est presenteedans l’annexe (article [X]). La technique de differences finies utilisee pour discretiser lesequations est mal adaptee auxgeometries plus complexes qui apparaissent lorsque des partiessolides (plaques) sont prises en compte.
Depuis 2010, en collaboration avec Laurent Martin Witkowski, nousecrivons un code d’instabilite a partir des memesequations, que nous modelisons numeriquementa l’aide d’une approximation de volumes finis. Cette formulation est plusadapteea des geometries complexes et pourra prendre en compte les changements de section du resonateur, resoudre lathermique dans les plaques dustack, coupler un domaine stack+echangeurs maille finementa un domaine ou le fluide peutetre decrit de facon mono-dimensionnelle car l’onde y est plane et les effets visqueux negligeables. Un tel code permettrade nombreusesetudes sur la stabilite et donc le demarrage du systeme thermoacoustique. L’influence de l’epaisseur desplaques sur le taux de croissance, l’influence d’un flux axialdans le resonateur pourrontetre examines. Dans certainscas, de tels flux sont forces (refrigeration en circuit ouvert, MHD), mais ils peuventegalement apparaıtre de maniere nondesiree (vent acoustique, cellules convectives,...) D’eventuels effets transitoires comme ceux observes dans le tube deRijke [2, 17] pourrontegalementetre examines.
62

Bibliographie
[1] BAJER, K. & M OFFATT, H.K. 1998 Theory of non-axisymmetric Burgers vortex with arbitrary Reynolds number. InIUTAM Symposium on Dynamics of Slender Vortices, Eds E. Krause and K. Gersten, 193–202.
[2] BALASUBRAMANIAN , K. & SUJITH, R.I. 2008 Thermoacoustic instability in a Rijke tube : non-normality andnonlinearity.Phys. Fluids20(4), 044103.
[3] BATCHELOR, G.K. 1964 Axial flow in trailing line vortices.J. Fluid Mech. 20, 645–658.
[4] CADOT, O., DOUADY, S. & COUDER, Y. 1995 Characterization of the low pressure filaments in three-dimensionalturbulent shear flow.Phys. Fluids7(3), 630–646.
[5] CROW, S.C. 1970 Stability theory of a pair of trailing vortices.AIAA J.8(12), 2172–2179.
[6] DAUBE, O. 1992 Resolution of the 2D Navier–Stokes equations in velocity/vorticity form by means of an influencematrix technique.J. Comp. Phys.103, 402–414.
[7] DRITSCHEL, D.G. 1995 A general theory for two-dimensional vortex interactions.J. Fluid Mech. 293, 269–303.
[8] FELLI , M., CAMUSSI, R. & DI FELICE, F. 2011 Mechanisms of evolution of the propeller wake in thetransitionand far fields.J. Fluid Mech.682, 5–53.
[9] FUKUMOTO, Y. & H ATTORI, Y. 2005 Curvature instability of a vortex ringJ. Fluid Mech.526, 77–115.
[10] FUKUMOTO, Y. & OKULOV, V. L. 2005 The velocity field induced by a helical vortex tube. Phys. Fluids17, 107101.
[11] GEFFEN, J.H.G.M. & VAN HEIJST, G.J.F. 1998 Viscous Evolution of 2D dipolar vortices.Fluid Dyn. Res.22,191–213.
[12] GIBBON, J. D., FOKAS, A. S. & DOERING, C. R. 1999 Dynamically stretched vortices as solution of the 3DNavier–Stokes equations.Physica D132, 497–510.
[13] GREEN, B. G., GILLIES , E. A. & BROWN, R. E. 2005 The flow field around a rotor in axial descent.J. FluidMech.534, 237–261.
[14] HARDIN , J. C. 1982 The velocity field induced by a helical vortex filament.Phys. Fluids25(11), 1949–1952.
[15] JACQUIN, L. AND PANTANO , C. 2002 On the persistence of trailing vortices.J. Fluid Mech. 471, 159–168.
[16] JIM ENEZ, J., MOFFATT, H.K. & VASCO, C. 1996 The structure of the vortices in freely decaying two-dimensionalturbulence.J. Fluid Mech.313, 209–222.
[17] JUNIPER, M.P. 2011 Triggering in the horizontal Rijke tube : non-normality, transient growth and bypass transition,J. Fluid Mech., 667, 272–308.
[18] KEVLAHAN , N. K.-R. AND FARGE, M. 1997 Vorticity filaments in two-dimensional turbulence: creation, stabilityand effect.J. Fluid Mech.346, 49–76.
[19] K IDA , S. 1981 Motion of an elliptic vortex in a uniform shear flow.Journal of the Physical Society of Japan50(10),3517–3520.
[20] K IDA , S. & TAKAOKA , M. 1987 Bridging in vortex reconnection.Phys. Fluids30, 2911–2914.
[21] K IDA , S., TAKAOKA , M. & H USSAIN, F. 1991 Formation of head-tail structure in a two-dimensional uniformstraining flow.Phys. FluidsA3(11), 2688–2691.
[22] K IZNER, Z. & K HVOLES, R. 2004 Two variations on the theme of Lamb–Chaplygin : Supersmooth dipole androtating multipolesRegular Chaotic Dyn.9, 509–518.
[23] KUIBIN , P. A. & OKULOV, V. L. 1998 Self-induced motion and asymptotic expansion ofthe velocity field in thevicinity of a helical vortex filament.Phys. Fluids10, 607–614.
[24] LAMB , H. Hydrodynamics, CUP.
[25] LE DIZ ES, S. & VERGA, A. 2002 Viscous interactions of two co-rotating vortices before merging.J. Fluid Mech.467, 389–410.
[26] LESSEN, M., SINGH, P.J. & PAILLET , F. 1974 The stability of a trailing line vortex. Part 1. Inviscid theory.J. FluidMech. 63, 753–763.
63

[27] LEWEKE, T. & W ILLIAMSON , C.H.K. 1998 Cooperative elliptic instability of a vortex pair. J. Fluid Mech. 360,85–119.
[28] LUCAS, D. & DRITSCHEL, D. G. 2009 A family of helically symmetric vortex equilibria. J. Fluid Mech.634,245–268.
[29] LUNDGREN, T.S. 1982 Strained spiral vortex model for turbulent fine structure.Phys. Fluids25, 2193–2203.
[30] MARIOTTI , A., LEGRAS, B. & DRITSCHEL, D.G. 1994 Vortex stripping and the erosion of coherent structures intwo-dimensional flows.Phys. Fluids6(12), 3954–3962.
[31] MEUNIER, P. 2001Etude experimentale de deux touribllons corotatifs.These de doctorat de l’Universite de Pro-vence.
[32] MOET, H., LAPORTE, F., CHEVALIER , G. & POINSOT, T. 2005 Wave propagation in vortices and vortex bursting.Phys. Fluids17, 054109.
[33] MOFFATT, H.K., KIDA , S. & OKHITANI , K. 1994 Stretched vortices — the sinews of turbulence ; large-Reynolds-number asymptotics.J. Fluid Mech.259, 241–264.
[34] NEU, J.C. 1984 The dynamics of stretched vortices.J. Fluid Mech.143, 253–276.
[35] NEU, J.C. 1984 The dynamics of a columnar vortex in an imposed strain.Phys. Fluids27(10), 2397–2402.
[36] OKULOV, V. L. & SØRENSEN, J.N. 2007 Stability of helical tip vortices in a rotor far wake. J. Fluid Mech.576,1–25.
[37] PAIREAU , O., TABELING , P. & LEGRAS, B. 1997 A vortex subjected to a shear : an experimental study. J. FluidMech. 351, 1–16.
[38] PITON, B. 2011 Simulations de tourbillonsa symetrie helicoıdale.These de l’Universite Pierre et Marie Curie,Paris 6.
[39] POPINET, S. 2003 Gerris : a tree-based adaptive solver for the incompressible Euler equations in complex geome-tries.J. Comp. Phys.190(2), 572–600.
[40] PUMIR , A. & SIGGIA , E. 1990 Collapsing solutions to the 3-D Euler equations.Phys. FluidsA2(2), 220–241.
[41] RILEY, N. & STEVENS, D. P. 1992 A note on leapfrogging vortex rings.Fluid Dyn. Res.11, 235–244.
[42] ROBINSON, A.C. & SAFFMAN , P.G. 1984 Stability and structure of stretched vortices.Stud. Appl. Maths70, 163–181. Voir aussi [43],§13.3.
[43] SAFFMAN , P.G. 1992Vortex Dynamics, CUP.
[44] SHARIFF, K. LEONARD, A., ZABUSKY, N.J. & FERZIGER, J.H. 1988 Acoustics and dynamics of coaxial interac-ting vortex rings.Fluid Dyn. Res.3, 337–343.
[45] SHELLEY, M.J., MEIRON, D.I. & ORSZAG, S.A. 1993 Dynamical aspects of vortex reconnection of perturbedanti-parallel vortex tubes.J. Fluid Mech.246, 613–652.
[46] SIPP, D., JACQUIN, L. & COSSU, C. 2000 Self-adaptation and viscous selection in concentrated two-dimensionalvortex dipoles.Phys. Fluids12(2), 245–248.
[47] STUERMER, A. & Y IN , J. 2011 Installation impact on pusher-CROR engine low-speed performance and noiseemission characteristics.Proceedings of the 3AF 46th Symposium of Applied Aerodynamics, Polytech’Orleans.
[48] TRIELING, R.R, BECKERS, M. & VAN HEIJST, G.J.F. 1997 Dynamics of monopolar vortices in a strain flow.J.Fluid Mech. 345, 165–201.
[49] TRIELING, R.R,VAN WEESENBECK, J.M.A. & VAN HEIJST, G.J.F. 1998 Dipolar vortices in a strain flow.Phys.Fluids 10(1), 144–159.
[50] VAN GEFFEN, J.H.G.M. & VAN HEIJST, G.J.F 1998 Viscous evolution of 2D dipolar vortices.Fluid Dyn. Res.22,191–213.
[51] V INCENT, A. & M ENEGUZZI, M. 1991 The spatial structure and statistical properties of homogeneous turbulence.J. Fluid Mech. 225, 1–20.
[52] WALTHER, J. H., GUENOT, M., MACHEFAUX, E., RASMUSSEN, J. T., CHATELAIN , P., OKULOV, V. L.,SØRENSEN, J. N., BERGDORF, M. & K OUMOUTSAKOS, P. 2007 A numerical study of the stability of helical vorticesusing vortex methods. InThe Science of Making Torque from Wind, Journal of Physics : Conference Series, 75, 012034.
[53] WIDNALL , S. E. 1972 The stability of a helical vortex filamentJ. Fluid Mech. 54, 641–663.
[54] WIDNALL , S. E., BLISS, D. B. & TSAI, C.-Y. 1974 The instability of short waves on a vortex ringJ. Fluid Mech.66, 35–47.
64

Appendices
65

66

Annexe A
Liste des articles
A.1 Tourbillons avececoulement axial
Reponse impulsionnelle non lineaire d’un jet tourbillonnaire[A3] D ELBENDE, I. AND CHOMAZ , J.-M. 2000 Bursting of a swirling jet stemming from a localized perturbation. InVortex Structure and Dynamics, Lecture notes in physics, ed. by A. Maurel and P. Petitjeans, Springer.Jet tourbillonnaire soumis a etirement/contraction axiale[A6] D ELBENDE, I., ROSSI, M. AND LE DIZ ES, S. 2002 Stretching effects on the three-dimensional stability of vorticeswith axial flow.J. Fluid Mech.454, 419–442.Saturation non lineaire d’un jet tourbillonnaire[A8] D ELBENDE, I. & ROSSI, M. 2005 Nonlinear evolution of a swirling jet instability.Phys. Fluids.17(4), 044103.
A.2 Paires de vortex contrarotatifs
Dynamique d’un dipole visqueux[A10] DELBENDE, I. AND ROSSI, M. 2009 The dynamics of a viscous dipole.Phys. Fluids21(7), 073605.Interaction vorticit e/deformation des monopoles et dipoles[C9] DELBENDE, I. AND ROSSI, M. 2009 Interaction vorticite/deformation des monopoles et des dipoles. CongresFrancais de Mecanique. Marseille, France.Reconnexion de vortex[A13] DELBENDE, I. AND ROSSI, M. 2011 Investigations on the vortex reconnection processby direct numerical simu-lation. SoumisaPhys. Fluids.
A.3 Ecoulementsa symetrie helicoıdale
Resolution desequations de Navier–Stokes en symetrie helicoıdale[A11] DELBENDE, I., ROSSI, M. AND DAUBE, O. 2011 DNS of flows with helical symmetry. AccepteaTheor. Comput.Fluid Dynam.Dynamique de vortex helicoıdaux[A12] DELBENDE, I., ROSSI, M. AND PITON, B. 2012 Direct numerical simulation of helical vortices. Accepte a Int. J.of Engineering Systems Modelling and Simulation.
A.4 Autres etudes d’instabilite
Instabilit es entre disques contrarotatifsa grand rapport d’aspect[A9] M ARTIN WITKOWSKI , L., DELBENDE, I., WALKER , J.S.AND LE QUERE, P. 2006 Axisymmetric stability of theflow between two exactly counter-rotating disks with large aspect ratio.J. Fluid Mech.546, 193–202.Instabilit e thermoacoustique : approche 2D[X] D ELBENDE, I Two-dimensional numerical study of thermoacoustic instability. Unpublished.
67

68

Annexe B
Articles
69

70

[A3]DELBENDE, I. AND CHOMAZ, J.-M. 2000
Bursting of a swirling jet stemming from a localized perturbation.In Vortex Structure and Dynamics, Lecture notes in physics,
ed. by A. Maurel and P. Petitjeans, Springer.


!"# $ %& (')*+&,).-0/1.234 $
57698;:=< >+?A@B>:DCE>9F48#:GCIHJ>+8;:LK7MN8#OQP4RTSEUJVW8#X+YZ\[^]J_a`cbedgf7_ih;jb)kJb.lnm&dg_afpo^qsrJtGq7uWv#qxw#y2z^^vErJ|T l~GQc;r|mhg_bQ]hTc;rB;QccTdgfgmQ\y2bkJbeErJdsm+]JQbtBm+kJT; r j Q+ab l~+#hgbQs]J_a#Jbw;y2zTvLrB;c +lnmAm_f7bm+¡y2bk;beErJdsm]Qb¢*£n¤Q¥Q¦&§¨c¥c©4ª b4«;dgbQf7bQ]hf¬hgk;\_afm+_bkWmh]k;bedgf¬hsm+]kJ_]®hgJb¯bem+]_f7f°_sbm+kecbdgbQ]h.`9+d7hgbe(f¬h7dgJehgJdgbefhg\±;dgf¬hrGm+f)c±Jf7bedg`9bk_]¡²³J(hg;dg±bQ]h´°fµ ¶·~¸¹f7_a]Jcbf¬h7dgJehgJdgb^_afpQ+]f7_akJbedgbQk\bedgb+r#k;bQbk$±$m®|m&hgJbQ+d7x`9+d7hgb´°) ª b)_]bQmdTm+]k\]+]J_]bQmd bQ`9+a;hg_c]+²m]I_]_ihg_am+iaQm+_ºQbk«Lbed7hg;dg±mhg_+]I_f²³+a°bQkI±(»z)vLD¸Tf)mdgbQmck;¼ ]J&°]\µ ¶·r9hgb´&°½_f2_]bm&dgi®]Jf¬hsm+±Jabhg°m&dskJfbQ_Q+_AkJm+Lk;_f¬hgJdg±m]QbefQod7hg_m+JbQ_QbQfm&dgb²³cJ]k¯hg.m&dg_f7bp²Adgc¾hgbfgm&hgJdsmhg_+]+²Lhg_f«Jdg_*md7 _]f¬hsm±__ih¿¸hhgbfgmbhg_bcr+hgJb`c+d7hgbe¯±;dgf¬hgf_]®hgb]JbQ_c#±L+dgJ#k+²Ehgb_]_ihg_am+«Lbed7hgJdg±mhg_c]m&hg_a+]Gr°Jbedgb];JbedgcJf_]bQmdp_]f¬hsm+±J_a_ih\#k;bQf+dg°À_]Á«am+ebcrJhgJb_]hgbedsm+ehg_+]Á+²~°J_$_af_ ¼ bQi*hg®mf7bdsm+«J_ak`c+d7hgbe$kJ_f7f7_«m&hg_c]G
 ÃÄpÅLÆEÇ)È¯É ÊBÅEËgÇpÄRTU;SE>+O>+:JÌÍsÌOeÎDP&ÌÎEOe>+Í~VW89Ï >+VÁ>OeÐ;>2Ñ·OUJVÑ·ÎE?Ò?ÒÏ ÌeÎEO@DÎE?A>+:ÌÓDUÔ.Ín8;Í?AUJ:EÐDÕ&OQ8ÌeSE>OÍsÌOQ8#ÖÒÐ;SÌcÕÖA:Ì>+:DÍ>6;UJOsÌeÖÒP>+Í+×DØ^>&Ñ·UJO>ÌeSE>+Í>$ÍsÌOeÎDP&ÌÎEOe>+ͯCLÖÒÍeÍÖAÙD8#Ì>JÕDÌeSE>ÏVW89Ï¡ÙG8#O̯ÖÒ:ÚÍs>+6;>+Oe8;?P&U;KOU;Ìe8ÌeÖA:DÐSE>+?AÖ³P8;?ÛD?Ò8;VÁ>:ÌeÍ+Õn8;Í®ÍsSDUÔ):Ú>&ÜLÙB>OeÖAVÁ>+:JÌQ8#?Ò?AÏ@Ï1R^8JCLU#Ì(Ý&Þ4ßàAápâ ãäTå4>&ÌsÌeÖA:DÐÍsUJV\>$ÖA:GÍsÖÒÐ;SÌ®ÖA:ÌUÌSE>\VÁ>+PQSD8;:EÖ³ÍsVæOe>+ÍÙGUJ:DÍÖA@E?Ò>Ñ·UJO¯ÌeSEֳͯÙDSE>:EUJVÁ>:EUJ:NÖÒÍ®8¡CLÖaç(PÎE?aÌÌe8;Íè~Õc8JÍÖÒ:LÑ·UJOVW8ÌeÖAUJ:*U;:$@GU;ÌS$6;U;OÌ>Ü®8;:DC*ÍÎEOeOUJÎE:DCLÖÒ:EÐ VÁ>cCLÖAÎDVéÖÒÍ2?³8;PQèÖA:DÐD×9R^8JCLU#Ì)Ý&ÞßàAáâ ã9äSG896;>®VÁ>+8;ÍÎEOe>+C¡ÌSD>ÙEO>cÍÍÎEOe>ÍsÖÒÐ;:D8#ÌÎEOe>ÖÒ:DCLÎDP>+C@Ï¡8ÁÙD8JÍÍÖÒ:EÐ#K¬@Ï(ÍgÌeOÎDP&ÌÎEOe>;×êSE>ÏWSD896J>¯ÍSEUÔ):WÌeSD8Ì^ÌSE>8;XÖÒVÎLÌeSD8#?~P&UJV\ÙBU;:D>:Ì)ëBì¯U#Ñ6J>?ÒULP&ÖAÌgÏ\Ö³Í^>+ÍeÍs>+:ÌÖ³8#?Ò?AÏ\ÌSD>Í8;V\>8JÍÖA:IÌSD>*ØTÎDOÐJ>OQÍT6JU;OÌ>Ü~í
ëBì îðï)ñ >;òBóeôõ ö ÷ ï9øØTÏPU;:ÌOQ8;ÍsÌ+Õc6;>+OÏ4Ñ·>ÔùÍgÌeÎDCLÖÒ>+ÍÑ·ULP&ÎDÍ2U;:ÌSE>8ÜLÖ³8#?LP&UJVÁÙGUJ:E>:ÌëGú4U#ÑD6J>?ÒULP&ÖAÌgÏ4ÙDO>K698;ÖA?ÒÖÒ:EÐ\8;?AUJ:EÐÁÍsÎDPQSIÍgÌeOÎGPÌÎDO>cÍ×Lû.ÎDV\>+OÖ³P8;?ÍsÖÒVÎD?Ò8#ÌÖÒU;:DÍ^ÙB>OÑ·U;OeV\>cC(@Ï¡üSD>WÝÞTß#àAáâ ýäÖA:DCEÖÒP+8Ì>4ÌeSD8Ì ëGúÿþ QßGÞT8#?ÒU;:DÐÌeSE>®6;U;OÌ>Ün×Ø^Ï8;:D8#?ÒU;ÐJÏÁÔ)ÖaÌeSI8#ÌVÁUJÍÙESE>+OÖ³PÌU;Oe:D8JCLU>+Í+Õ;U;:D>¯VÁÖÒÐ;SÌÍÎDÍÙG>cPÌ^ÌSD8#ÌTÌeSE>®8ÜLÖÒ8;?DÓGUÔ¾ÖÒÍ^P&UJ:DP&>+:JÌeOe8#Ì>cCWÔ)ÖaÌeSEÖÒ:ÌeSE>¯6JU;OKÌ>&Ü\P&U;Oe>;Õ+ÌSD>Oe>@ϮѷU;OeVÁÖA:EÐ48¯ÍÔ)ÖÒO?ÒÖA:DÐ#Kg>&Ì2ÓDUÔÕ96;>OeÏCLÖB>+O>+:JÌÑ·OeU;V 84Ø^ÎEOÐJ>OQÍ6JU;OÌ>&Ü
÷ Ñ·U;OÔ)SDÖÒPQS\ÌSD>.8ÜLÖÒ8;?ÓDUÔÀÖ³ÍÎE:EÖAÑ·U;OeV ÖÒ:Á>+8JPQS$ÙE?³8#:D>^ÙB>OeÙB>:DCLÖ³P&ÎD?Ò8;OÌU®ÌSD>.8ÜLÖÒÍ ø ×#êSD>8ÜLÖÒ8;?ÍsSD>+8#OÖ³Í)?ÒÖAèJ>?ÒÏWÌUWÍsÌOeU;:EÐJ?AÏ(8B>cPÌ)ÌSD>ÖA:DÍsÌe8;@EÖÒ?AÖAÌgÏU;Ñ2P&UJSE>Oe>:Ì.ÍsÌOeÎDPÌeÎEO>cÍ×êSE>ÁÙEO>cÍs>+:ÌPU;:ÌOeÖÒ@EÎLÌÖÒU;: Ö³Í8#ÖÒVÁ>+C 8ÌÎE:DCE>OQÍgÌQ8#:DCLÖÒ:EÐIÌSD>(@EÎEOQÍgÌeÖA:DÐIU;Ñ^8;: 8#ÜKÖÒÍÏV\VÁ>ÌOeÖÒP¡6;UJOsÌe>&Ü Ô)SE>: 8g>ÌÁÓDUÔ Ö³Í\ÍÎEÙB>OeÖAVÁÙBUJÍ>+Cù8#?ÒU;:EÐÚÌSE>=8ÜLÖ³Í×êSE>@D8JÍsÖ³PÓDUÔ 8#:DC=ÌSE>\:ÎEVÁ>OeÖÒP+8#?2V\>ÌSEULC½8#Oe>ÙEOe>+Í>:Ì>cC=ÖÒ:½ü>+P&Ì+×ãL×nêSE>$ÖAVÁÙEÎD?ÒÍ>$Oe>+ÍÙBU;:DÍ>

q`cm]\»bea±Lbe]kJbm+]kcbm+];¿uÁmdg y2+*m+ºÖÒͯCL>+ÍeP&OeÖA@B>+CIÖÒ:Úü>+P&Ì+×EÕD8;:DCÖAÌeÍ ÍsÌOeÎDP&ÌÎEOe>ÖÒÍ >?ÒÎDP&Ö³CE8#Ì>+CIÖÒ:Úü>+P&ÌeÍ+×8;:DCLÕGO>cÍsÙB>+P&KÌÖÒ6;>?ÒÏÑ·UJOÌeSE>)?ÒÖA:E>c8#O8#:GC:EUJ:E?ÒÖA:E>c8#OOe>ÐJÖAVÁ>+Í2U;ÑG>6JU;?ÒÎLÌÖÒU;:×c57:Wü>cPÌ+×JýEÕ9ÌSD>ÍÙD8JP&>&K8;:DCÌÖÒV\>K¬ÍeP8;?A>cÍ.ÙEOe>+CEÖÒP&Ì>+CNÖA:=ÌeSE>\ÙEO>cÍs>+:Ì :ÎEVÁ>OeÖÒP+8#?ÍsÌÎGCLÏ=8#Oe>Ì>+:JÌQ8ÌeÖA6J>?ÒÏPU;:LÑ·OeU;:Ìe>+CÌU >&ÜLÙB>OeÖAVÁ>+:JÌQ8#?.Oe>+ÍÎE?AÌeÍÁ@Ï R^8JCLU#̽ÝÞ\ß#àAá4â ãä¿×RTU;:DP?AÎDCEÖA:EÐ Oe>VW8;OèLÍÁ8#Oe>Ð;ÖÒ6;>: ÖÒ:ü>+P&Ì+×L× "!$#ËsÊ&%¯Ç('*)¯ÆEÇ$+-,/.0!įÈðÄÉ213.ÆDËÊ!4,513.nÅ76.Ç)ÈêSE>*Ø8ÌePQSD>?ÒU;O6;UJOsÌe>&ÜSD8JÍ@G>+>:=Í>?Ò>+PÌe>+C8;Í@G8;ÍÖÒP¯ÓDUÔ×8>&Ì29-:*CL>+:EU#Ìe>®ÌSE>6JU;OÌ>&ÜOe8JCLÖAÎGÍ\8;:DC&;-:ú ÖAÌeÍÁP&>+:JÌe>Oe?AÖÒ:E>8ÜLÖ³8#?^6;U;OÌÖ³P&ÖAÌgÏ;Õ2Ô)SE>+O><:NÍgÌQ8#:DCDÍÑ·UJOW8½CLÖÒVÁ>:DÍÖÒU;:D8;?698;OÖ³8#@D?A>J×57: ÌSD>(Ñ·U;?Ò?ÒUÔ)ÖA:EÐGÕ68#OeÖÒ8;@E?Ò>+Í*8;O>WÙEOe>+Í>:Ìe>+C ÖÒ: ÌSE>+ÖAOÁCLÖÒV\>+:DÍÖAUJ:E?A>cÍÍÑ·U;OeVIíOe8JCLÖAÎGÍ(9-:)8#:DC*ÌSE>^ÌgÏÙEÖ³P8;?8;XÖÒVÎLÌeSD8#?6;>+?AULPÖaÌgÏ=;-:ú 9-:SD896J>p@B>>:\PQSEUJÍ>:$8;Í2O>Ñ·>Oe>:DP>?A>+:EÐ#ÌeSÁ8;:DC\6;>+?AULP&ÖAÌgÏÍeP8;?A>cÍO>cÍsÙB>+P&ÌÖÒ6;>+?AÏJ×#êSE>.8ÜLÖ³8#?E8#:GC$OQ8;CEÖÒ8;?L6;>?ÒULP&ÖAÌgÏ$PU;VÁÙGUJ:E>:ÌQÍë ú 8;:DC(ë ó ÕJ8;:DC\ÌSD> Ø^ÎEOÐJ>OQÍgK¬?ÒÖAèJ>^8;XÖÒVÎLÌeSD8#?E6J>?ÒULP&ÖAÌgÏ$P&UJVÁÙGUJ:E>:Ì^ë ì 8;O>ÌeSE>:WÐJÖA6J>:@Ï~í
ë ú>@? > òBóeô ÷ ?BADC ø E ÷ ã#8 øë ó >0C E ÷ ã@ øëBì > ï)ñ >#òBóeôõ ö ÷ ã#P ø57:½ÍÏÍsÌ>+V ÷ ã;8GFLã;P ø Õ ? ÖÒÍ ÌSD>\VW8#ÜÖÒVÎDVU;ÑÌSD>\8#ÜÖ³8#?26;>+?AULPÖaÌgÏ=P&UJVÁÙGUJ:E>:Ì*ë ú ×~êSD>ÍsÖAÌÎD8#ÌÖÒU;: ?">HC PU;OeO>cÍsÙBU;:DCDÍ.ÌeUI8¡ÙEÎEOe>$6JU;OÌ>ÜÔ)ÖAÌSDU;ÎLÌ8ÜLÖ³8#?ÍgÌeO>c8#V×~êSE>\8;@GU6J>ÓDUÔ ÷ ã;8GFEã#P ø Ö³ÍÁè:DUÔ): â 9äÌU @B>NÍsÖÒÐ;:DÖaÛGP+8#:Ì?ÒÏ ÎE:DÍsÌe8;@E?Ò>8JÍÁÍsUU;: 8;Í ? >ÜLP>>cCEÍÁ8P&OeÖaÌeÖÒP+8#?68#?ÒÎE> ?I=JKC ö ×57: ÌSE>Ñ·U;?Ò?AUÔ)ÖÒ:EÐDÕ~ÌeSE>VW8#ÜÖÒVÎDV8ÜLÖ³8#?6J>?ÒULP&ÖAÌgÏÚÖ³ÍÍ>&Ì*ÌeUÌSE>½698;?AÎD> ?3> ï ö ãLEÕÖA:ÌSE>½6Ö³P&ÖÒ:EÖAÌgÏ U#Ñ*Ô)SEÖ³PQSVW8ÜLÖÒVÁ8;? ?ÒÖA:D>+8#OI8#VÁÙE?ÒÖaÛBP8ÌeÖAUJ:¾ÖÒÍO>c8;PQSE>cCn×LM.UÔ^>6J>OcÕÖaÌÍsSDU;ÎE?³CÁ@G> >VÁÙESD8JÍsÖÒX>cC\ÌSD8#ÌÌSE>¯?AÖÒ:E>c8#OpÍsÌe8;@EÖA?ÒÖAÌgÏ$ÙEOeU;ÙB>OÌÖÒ>+ÍU#ÑÌSE>Ø8ÌQPQSE>?ÒU;O^6;UJOsÌe>&ÜCLU\:EU#Ì)>+6;U;?Ò6;>-NÎD8#?ÒÖaÌQ8ÌeÖA6J>?ÒÏWVÎDPQSIÔ)SE>: ? ÖÒÍÖÒ:DPO>c8;Í>+CÁÑ·OeU;V
ï ÌeU\8;@GUJÎLÌ ï C ×êSE>4ÙEO>cÍs>+:ÌÍsÌÎDCEÏWÖÒÍTÌSÎDÍTÌeSEU;ÎEÐJSÌTÌeU$ÙEOeU6ÖÒCE>¯8$Ð;>:D>OeÖÒP ÙEÖÒP&ÌÎEOe>4U#ÑÖAVÁÙEÎE?³Í>O>cÍsÙBU;:DÍ>+Í^ÙEOeU6ÖÒCE>+CÌSE>VW8ÜLÖÒVÎEV 8ÜLÖÒ8;?n6;>+?AULP&ÖAÌgÏ ? Ö³ÍU#ÑÎE:EÖAÌ.U;OQCL>Oc×êSE>*:ÎEVÁ>OeÖÒP+8#?2P&ULCL>âOÕ ä2ÖAVÁÙE?Ò>VÁ>:ÌQÍ.ÌeSE>*ÌeÖAVÁ>ÖÒ:Ì>+Ð;OQ8ÌÖÒU;:U;ÑÖA:DPU;VÁÙEOe>+ÍeÍsÖÒ@E?Ò>û 896ÖA>+OPFEüÌUJè;>cÍT>QNÎD8ÌeÖAUJ:DÍ)ÙB>OÌÎEOe@G>cC=8#OeU;ÎE:GCÌeSE>*@D8JÍsÖ³P4ÓDUÔ ÷ ã;8GFEã#P ø ×EêSE>*6J>?ÒUPÖaÌgÏ8#:DC6;U;OÌÖ³P&ÖAÌgÏÁÙG>+OsÌeÎEOe@D8ÌeÖAUJ:DÍ8#Oe>¯CL>+6;>?ÒU;ÙB>+CU;: ï C ãSRýTRýUEU;ÎDOÖÒ>O^VÁUCE>+Í^ÙG>+OsKÌe8#ÖÒ:EÖÒ:EÐ$ÌU\ÌSE>¯ÌSDO>+>*R^8;OsÌe>+ÍÖÒ8;:CLÖÒO>cPÌeÖAUJ:DÍ×LêSE>46ÖÒÍeP&UJÎDÍCLÖBÎDÍÖÒU;:U;ÑÌeSE>®@D8;ÍÖÒP ÓDUÔÖÒÍ^8;ÍeÍsÎDV\>cC\ÌU*@B>4>&ÜE8;P&Ì?ÒÏ\PU;VÁÙG>+:DÍe8Ì>cCÁ@Ï\8@GULCLÏ\Ñ·U;OQP&>JÕ;Ô)SEÖ³PQS(8#?Ò?ÒUÔ.ÍU;:D>)ÌU\P&U;:EK:E>+P&ÌÌSE> ?AÖÒ:E>+8;OÖÒ:DÍgÌQ8#@EÖÒ?ÒÖaÌgÏ\ÙEOeU;ÙB>OÌÖÒ>+ÍÌeU®ÌSE>4ÍsÎE@GÍs>QNJÎD>:Ì:EU;:D?AÖÒ:E>+8;OpCL>+6;>?ÒU;ÙDV\>+:ÌU#ÑÙG>+OsÌeÎEO@G8ÌÖÒU;:GÍ.ÖÒ:NÌSD>$Íe8#VÁ>@D8JÍsÖ³PK¿ÓDUÔ P&UJ:DCLÖAÌÖÒU;:DÍ+×BêSD>5V)>+Ï:DU;?³CEÍ :ÎEV$@G>+O4CE>&ÛD:E>cC@Ï9W > ;-:ú 9-:QY
X : E ÷ øÔ)SE>Oe> X :ÍsÌe8#:GCEÍ^Ñ·U;O)ÌeSE>èÖA:D>VW8ÌeÖÒP46ÖÒÍeP&UÍsÖAÌgÏ;ÕÖ³Í.Í>&Ì)ÌUL C ×Y ÃZ1[)4É2,\#]._^cÆ7.`#Z)ÇpÄa#Z.b)-6c.Ä Çd13.Ä.Ç ,gÇfe$gh Ìji >kC Õ;ÌeSE> ÓGUÔ Ö³ÍT?AULP8;?A?ÒÏÁÙG>+OsÌeÎEOe@G>cCWÖA:ÌSE>¯ÙE?³8#:E>al >kC × h ÍT8O>cÍsÎE?AÌTU;ÑnÌSE>¯ÓDUÔÖA:DÍsÌe8;@EÖÒ?AÖAÌgÏ;Õ8¡Ô^896J>ÙD8JPQè;>Ì.Ð;OeUÔ.Í.Ñ·UJO-im C 8#?ÒU;:EСÌSE>\6;UJOsÌe>&ÜNP&UJO>J×`n¯:oU2ÖAÐG× ï ÕBÌSD>

|2;dgf¬hg_]®²m4f¬°_idga_]Jqp¬beh
rcsut
rcswvt
rcsyxzt
rcsyzt
rcs3|7t
rcsyzt
~f ©© zTc]Ja_]Jbmd_«Jf7bdgbQf7«L+]f7b²Emf¬°_dg_]4p¿beh_f7cf7Jd7²³m+Qbef²hgbhg+hsmJm&;_Am#`9+d7hg_e_ihmh2f7bQ`9bedsmhg_bQfQ ª JbT_f7cf7;d7² mQb^bQ`9be_f2scf7be]*hg.±Lbpm+±L+Jh +G hgbp*m;_4J¾m;_am+`c+d7hg_Q_ih¿Á²Ò+dhgJb¯±m+f7_¯´°)D~aJ_akW´°f^²Òdg+ be²Òh^hg*dg_+#h ª Jb4k;c*m_a]DrLc]JiW«m&d7hg_Amdgbe«JdgbQf7bQ]hgbkEr_fpbQf7bk$±#\m\c =+ym&d7hgbQf7_am+]+dg_akD ª b.f7*m+G²Adsm+b._]k;_aQmhgbQfhgJbT«Jam+]bT+²Dhgbp_]_ihg_am+L_«Jaf7b+ ª bTf7_a¯amhg_+]«mdsmbehgbedgfm&dgbqqd ++4m+]kST cÌU#ÌQ8#? ÷ Ö× >;×@G8;ÍÖÒP$ÓDUÔ3 ÙG>+OsÌeÎEOe@D8ÌeÖAUJ: ø 8ÜLÖÒ8;?6;UJOsÌeÖÒPÖaÌgÏNPU;VÁÙGUJ:E>:ÌֳͮO>+ÙEO>cÍs>+:Ì>+C×êÖAVÁ>ÖA:GP&Oe>+8;Í>+Í$Ñ·OeU;V ÌeU;ÙùÌU @BU#ÌsÌeU;V @ÏÀO>+Ð;ÎE?³8#OÁÍgÌe>ÙDÍ+×êSE>=ÖÒ:EÖAÌÖ³8#?)ÖÒV\ÙDÎE?ÒÍ>=SD8JÍ@G>+>:WÍs>+?A>cPÌe>+C$ÖA:ÁÍsÎGPQS\84Ô89Ï®ÌSD8#ÌÌSE>ÙB>OÌÎEOe@D8ÌeÖAUJ:\8;VÁÙE?AÖAÌÎGCL>)ÖÒÍU;ÑGÎE:DÖaÌUJOeCL>+O:E>+8;Oi > ï C ×n57:½U;ÌSE>+OÔTUJOeCEÍ+ÕBÌSE>Á>ÜÙBU;:D>:ÌÖ³8#?ÐJOUÔÌeSÚÙEOe>68#ÖÒ?ÒÖA:EÐIÖÒ:½ÌeSE>Á?AÖÒ:E>c8#OOe>Ð;ÖÒVÁ>Ìe8#èJ>+ÍÙE?³8;P>4Ñ·OUJVi >@C ÎEÙIÌU=i > ï C ÕLÔ)SE>+O>®:EUJ:E?AÖÒ:E>c8#OeÖaÌeÖA>cÍ@G>cP&U;VÁ>ÍÖAÐJ:EÖaÛBP8#:Ìc×h Ì?Ò8#Ì>+OÌÖÒVÁ>+Í ÷ iqm ï C ø ÕÌSE>TÙG>+OsÌeÎEOe@D8ÌeÖAUJ:>&ÜLÙD8#:GCEÍ8#?ÒU;:DÐÌSE> l ñ 8ÜLÖ³Í ÷ :EU;:E?ÒÖÒ:E>+8;OO>+Ð;ÖÒV\> ø × h Ì)ÖÒV\VÁ>cCLÖÒ8#Ì>®ÙEOeU9ÜLÖAVÁÖAÌgÏWU#ÑÌeSE>®ÖA:DÖaÌeÖÒ8;?nÖAVÁÙD8JPÌ ÷ ÍÏV@BU;?ÒÖAX+>+C@Ï(ÌSE>ÍVÁ8;?A?Ñ·Oe8;V\>IU;:U2ÖAÐG× ï9ø Õ2ÌSD>¡ÓGUÔ Ô)ÖÒCL>+:DÍW8#:GC @B>+P&UJVÁ>+ÍÁÍgÌeOUJ:EÐ;?ÒÏ CLÖ³ÍsUJOÐ8#:EÖÒX>cCn× h ÌÁÌSD>Ô^896J>ÙD8JPQè;>&Ì)CLUÔ):DÍsÌOe>+8;V >:GC ÷ U;:ÌeSE>*OeÖAÐJSÌ ø ÕDÌSE>ÖA:EÖAÌÖ³8#?6;UJOsÌe>&ÜÙD8;OsÌQÍ)ÖÒ:JÌeUÍ>6;>+Oe8;?6;U;OÌ>Ü(SE>?ÒÖ³P&>+Í ÷ 6ÖÒÍÖÒ@E?A>8#Ìci > C ø ×ØTU;ÌSIO>+Ð;ÖÒVÁ>+Í8#Oe>CL>+ÍeP&OeÖA@B>+C¡ÖÒ:CE>&Ìe8;ÖA?ÖA:IÌSD>®Ñ·U;?Ò?AUÔ)ÖÒ:EÐ$ÌgÔTUWÍ>+PÌeÖAUJ:DÍ+×

q`cm]\»bea±Lbe]kJbm+]kcbm+];¿uÁmdg y2+*m+º $ËsÄc.`!2Æ Æ7.`epË/13.
0.0 0.5 1.0−0.1
0.0
0.1
0.2
0.3
0.4
0.0 0.5 1.00.0
20.0
40.0
60.0
80.0
tt
tt
x
vv\
¡¢
\£
|
vzt
tx
tO|
t
t¤v
t¤v
¥¦¨§
¥ª©§
tt
vzt
«4¬ r
tt
tx
tO|
t £
t
vx
x v <®°¯±® x²³7´Bµ¤¶ ©z· µ¤¶_¸´³¹_º»
¼Tº¸7µ½³7¶ ¥¾¿¾§ ¼º¸7µ½³7¶ ¥¾§
\À vt |
\£
xÁÃÂ
Ä Â
v
v
~f ©ÅD©Æ §zÇ ¸T«Ja_ihgkJb(ÈjÉ m]k Æ £ÃÇ +dg°hg4dsm&hgb4ÊÉ1bQ`+m+mhgbk¯m+c]J^hgbf7«mhg_xhgbe«L+dsm+dsmQ;f¨ËÌÎÍ`ÐÏ®rc²³dbmbQbQbe]#hsm&d7ÑÓÒ°m`9bQ«m+ ¼ beh2kJbQ`9bea+«_])_]hgbf¬°_idg_]fp¬behkJJdg_]JhgJb_]bm&dTdgbQ+_bc ª Jb)«m&dsm+behgbedgfm&dgbcT c®m+]k=qd ++;

|2;dgf¬hg_]®²m4f¬°_idga_]Jqp¬beh h Ì ÌSD>$>c8#Oe?AÏÍgÌQ8#ÐJ>*U#Ñp>+6;UJ?AÎLÌeÖAUJ: ÷ i-Ô ï C ø ÕGÌSD>ÙB>OÌÎEOe@D8ÌeÖAUJ:ÚP8;:N@B>$6ÖÒ>Ô^>+CN8JÍ8W?AÖÒ:E>c8#O¯PU;V$@EÖA:G8ÌÖÒU;:U;ÑVÁ8;:ÏÖÕs>+?A>+VÁ>:Ìe8;OÏ×ÁÔ896;>ÙG8;PQè;>ÌeÍ+ÕÙG>+OsÌQ8#ÖÒ:EÖA:DÐWÌUCEÖÒÍsÌÖÒ:DPÌÍsÙD8#ÌÖÒU#K¿Ì>+V\ÙBU;OQ8#?@EOQ8#:DPQSD>+ÍU;ÑDÌeSE>^Ø8#ÌePQSE>+?AUJO6JU;OÌ>&Ü®?ÒÖA:E>c8#OÖÒ:DÍgÌQ8#@EÖÒ?ÒÖaÌgÏ~×957:ÙD8;OsÌeÖÒPÎE?³8#OcÕ8#XÖÒVÎEÌSD8;?BVÁULCL>cÍqØð8#Oe>.Ñ·U;ÎD:DC¡ÌU\@G>®ÎE:DÍsÌe8;@E?Ò>¯Ñ·UJO ñï ã5ÙÚØÛÙ ñï Ñ·U;O^ÌSE>®ÙD8;Oe8;V\K>&Ì>+O Í>&Ì ?> ï ö ãL\8#:DCÜ9W > C ×7Ýp8JPQS<Ø ñ Ô896;>ÙG8;PQè;>ÌTÐJOUÔ.Í>ÜÙBU;:D>:ÌÖ³8#?Ò?AÏÔ)ÖaÌeSÐ;OeUÔÌSOe8#Ì>cÍcÞß ÷ ë ø 8#?ÒU;:DÐ$ÌeSE>$ÍÙD8#ÌÖÒU#K¿Ì>VÁÙBU;OQ8#?nOQ89ÏLÍàl > ëiÕDÔ)SE>+O>ÌeSE>*68#OeÖ³8#@E?Ò>ë CL>:EU;Ì>cÍ8®Oe89Ï6;>?ÒULP&ÖAÌgÏ;×#Ø^Ï$CE>&ÛD:EÖAÌÖÒU;:ÕÌSE>.ÌgÔTU®ÙD8;OsÌeÖÒPÎE?Ò8;O68#?ÒÎE>+ÍpëWòß 8#:DCWëáß Ñ·UJOÔ)SEÖÒPQSÜÞ ß ÷ ëÁòß ø > Þ ß ÷ ëTáß ø >&C CL>+:EU#Ìe>4ÌSE>6J>?ÒUPÖaÌeÖA>cÍU#Ñ2ÌSE>SØ ñ Ô896;>ÙG8;PQè;>ÌÌOQ8#ÖÒ?AKÖA:EÐ8#:GCN?Ò>+8;CEÖA:EС>+CLÐJ>+Í+× h Ì®8¡Ð;ÖÒ6;>+:=ÛEÜL>+CNÌÖÒV\>JÕ~ÌSE>Á<4û¯üK7P8;?ÒPÎE?Ò8#Ì>cCÚÙB>OÌÎEOe@D8#ÌÖÒU;:VÁ89Ͻ@G>¡CL>+PU;VÁÙGUÍs>cC1@Ï 8M.ÖÒ?Ò@G>+OsÌKÌeOe8;:DÍgÑ·UJOV Ì>cPQSE:EÖNJÎD> ÷ Í>>(<¯>?Ò@G>+:DCL> Ý&ÞßàAáâ #äÑ·U;O)ÌeSE>CL>Ìe8#ÖÒ?Ò>+CIÙEOeUP>+CLÎDO> ø × h Ì ?> ï ö ãL\8#:DCÜ9W > L C Õ ï ã\>?Ò>VÁ>+:JÌQ8#OeÏ(ÎE:DÍsÌe8;@E?Ò>Ô^896J>ÙD8JPQè;>&ÌQÍÙG>+OsÌQ8#ÖÒ:EÖÒ:EÐ*ÌeU$VÁULCL>+Í Ø > ñïLEñ ã E¿ââ¿âEñï ã8#OeÖ³Ís>)Ñ·OeU;V ÌeSE>4CE>+P&UJVÁÙGU;KÍsÖAÌÖÒU;: ÷ U2ÖÒÐD×ã;8 ø ×_ã¾SD>: 8#ÙEÙD?AÖÒ>+C 8Ì®ÌgÔ^U=CLÖÒÍsÌÖÒ:DP&ÌÌÖÒV\>cÍÕÌSE>W8#@BU6;>WCL>cP&UJV\ÙBUJÍÖAÌÖÒU;:8#?Ò?AUÔ.Í U;:E>$ÌU¡O>cP&U6;>+O)ÌSD>$ÐJOUÔÌeSNOe8#Ì>Þß ÷ ë ø U#ÑpÌSE>ÁÍsÙG8ÌÖÒU#K¿Ì>+VÁÙGUJOe8;?ÖÒ:DÍgÌQ8#@EÖÒ?ÒÖaÌgÏV\ULCL>SØð8;?AUJ:EÐÁ>+8JPQSOQ89Ïl > ëiÑ·UJO)>+8;PQSI68#?ÒÎE>U#Ñ¨Ø ÷ U2ÖÒÐD×Gã#@ ø ×n¯:"U2ÖÒÐD×ã#@ÕnÌgÔ^UO>+Ð;ÖÒU;:DÍ®VW89ÏÚOe>+8JCLÖÒ?AÏN@B>CLÖ³ÍsÌÖÒ:EÐ;ÎEÖ³ÍSE>+CníÌSE>(?Ò>+8JCLÖÒ:EÐ#K¬>+CLÐJ>ÁO>KÐ;ÖÒU;:ÕDCE>:EU;Ì>+C8JÍ ÷ 5 ø ÕGOe8;ÙEÖ³CL?AÏ¡VÁU6ÖÒ:EÐW89Ô89ÏÁÑ·OUJV ÌSD>*ÖA:DÖaÌeÖÒ8;?ÖAVÁÙD8JPÌ ?ÒULP8#ÌÖÒU;:ÕE8;:DCÌSE>IÌOQ8#ÖÒ?ÒÖA:EÐ;K¿>cCLÐ;>IOe>Ð;ÖÒU;:ÕCE>:EU;Ì>+C 8;Í ÷ 5s5 ø ÕTÍsÖAÌÎD8#Ì>cCÀÖÒ:ÀÌeSE>=:E>+ÖAÐJS@BU;OeSEUULC U;Ñ ÌSD>ÖAVÁÙD8JPÌ*?ÒUP+8ÌeÖAUJ:×n57: O>+Ð;ÖÒU;: ÷ 5 ø ÕÖÒÍU;?³8Ìe>+CoØ ñ VÁULCL>+Í*ÙEO>+68#ÖÒ?U;: CLÖÒÍsÌÖÒ:DP&ÌOe8;:EÐ;>cÍ4U#ÑOe89Ï6J>?ÒUPÖaÌgÏ\ëWÕ#Ö¿× >J×ÌSD>ÖÒOÐ;OeUÔÌS$Oe8#Ì>àÞß ÷ ë ø ÖÒÍP?A>c8#Oe?AÏSEÖAÐJSE>OÌeSD8#:\ÌeSEUJÍ>^Ñ·U;OU;ÌSE>+OV\ULCL>cÍ ÷ ÌSD>\CLUJVÁÖA:D8;:̯VÁULCL>+Í®8#Oe>*>+ÖaÌeSE>OØ > ñïLEñ ãWU;O ñ CL>+ÙG>+:DCLÖÒ:EСUJ:½ëWÕn8JÍÖA:DCEÖÒP+8Ì>cCN@ÏIÌSE>W8;OOeUÔ.Í)U;:NÌSE>\OÖÒÐ;SÌ4ÙD8#OÌ4U;ÑdU2ÖAÐG×nã#@ ø ×~57:½O>+Ð;ÖÒU;: ÷ 55 ø Õn:ÎEVÁ>OeU;ÎGÍ8#XÖÒVÎEÌSD8;?VÁUCE>+Í ÷ ñ ÙkØäÙ ñ ã ø PU>&ÜLÖÒÍsÌ.Ô)ÖAÌSÚPU;VÁÙD8#OQ8#@D?A>4Ð;OeUÔÌSOQ8Ì>cÍ×EêSD>+Í>V\ULCL>cÍ4ÌSÎDÍÐJOUÔéÔ)ÖAÌS PU;VÁÙD8#OQ8#@D?A>Á8#VÁÙE?ÒÖaÌeÎDCL>cÍ8#?ÒU;:EСÌSE>(Íe8#VÁ>WÍÙD8ÌeÖAU;KÌe>VÁÙGUJOe8;?Oe89ÏLÍ+×êSE>48;@GU6J>¯?ÒÖÒ:E>+8;OTÖÒ:DÍsÌe8#@DÖA?ÒÖaÌgÏ¡P&U;:GÍsÖ³CL>OQ8ÌeÖAUJ:DÍ^CL>>+ÙE?AÏ(8B>cPÌÌSD>4>+6;UJ?AÎLÌeÖAUJ:U;ÑÌSD>Ô^896J>ÙD8JPQè;>&Ì^ÖA:IÌeSE>:EU;:D?AÖÒ:E>+8;OO>+Ð;ÖÒV\>JÕE8;Í)CL>cÍPOÖÒ@B>+C¡@G>+?AUÔ×
å æÿÇpÄ2,ËsÄ2.Ã!ÆÀÆ7.ÃeTË/13.û.U;:D?AÖÒ:E>+8;O>Î~>+PÌQÍ)@B>+P&UJVÁ>®ÍÖÒÐ;:EÖAÛGP8;:Ì8JÍ^ÍUU;:8;ÍTÌSD>ÙG>+OsÌeÎEO@G8ÌÖÒU;:¡68#OeÖÒ8;@E?A>cÍ^O>c8;PQS698;?AÎD>+Í$U#Ñ)ÎE:EÖAÌ\UJOeCE>O ÷ SE>Oe>(Ñ·UJOTim ï C ø ×257: Oe>Ð;ÖÒU;: ÷ 5 ø Õ>+8JPQS CLU;VÁÖÒ:D8#:ÌTØ ñ VÁUCE>ÎE:DCL>+OÐJU>cÍ8WÍ8#ÌÎEOQ8ÌeÖAUJ:ÙEOeULP&>+ÍeÍ^U;:¡ÌSE>*ÍÙD8#ÌÖÒU#K¿Ì>VÁÙBU;OQ8#?~OQ89ÏÍ8;?AUJ:EÐÁÔ)SEÖÒPQSIÖAÌ.ÎDÍs>cCÌUÀCLUJVÁÖA:D8#Ì>=ÌeSE>N?ÒÖA:D>+8#O¡Ô^896J>ÙD8JPQè;>ÌÁCLÏ:D8;VÁÖÒP+Í×^êSEÖÒÍ?A>c8;CEÍWÌU ÌeSE>NÑ·UJOVW8ÌeÖAUJ: U#ÑSE>?ÒÖÒP+8#?E6JU;OÌÖ³P&>cÍÔ)ÖAÌSBç Ø"ç9ÛD?Ò8;VÁ>:ÌeÍ+Õ#Ô)SEÖ³PQS\PU;:E:D>+PÌÌeU®ÌSE>ÛG?Ò8;V\>+:ÌeÍU;ÑG:E>+ÖAÐJS@BU;OeÖÒ:EÐXU;:D>+Í^U#Ñ2O>+Ð;ÖÒU;: ÷ 5 ø ÕEÔ)SE>+O>®8\CLÖ~>Oe>:Ì)68#?ÒÎE>®U#ѨØÙDO>+698;ÖA?³Í+×LüLÎDPQSI8\ÙESD>:EUJV\>+:EU;:¡ÖÒÍP&?Ò>+8#Oe?ÒÏ$6Ö³ÍsÖÒ@E?Ò>.U;:U2ÖÒÐD× ï 8Ìji > C íJÖA:O>+Ð;ÖÒU;: ÷ 5 ø ÕJÌeSEOe>> PU#K¬OU;Ìe8ÌeÖA:DÐSE>?ÒÖÒP>+ÍTP&U;:D:E>+P&ÌÌUÌgÔ^U*SE>+?AÖ³P&>cÍp8#:GCW>6J>:ÌÎD8;?A?ÒÏ*ÌeU$8*ÍÖÒ:EÐ;?Ò>.SE>+?AÖ³P8;?D6;UJOsÌe>&Ü ÷ Ô)SE>+:(Ï;UJÎWÐ;UÑ·OeU;V ?A>Ñ ÌpÌeUOÖÒÐ;SÌ ø ×BüÖÒVÁÖA?³8#O4ÙD8#ÌePQSE>cÍ.U#ÑSD>?ÒÖÒP>+Í.SG896;>*@B>>+:NU;@DÍ>Oe6;>cCI@Ï h @DÖÒCoè Ø^OQ8;PQSE>Ì$â ï äUJ:Ì>VÁÙBU;OQ8#?G:ÎDV\>+OÖ³P8;?DÍÖAV$ÎE?Ò8#ÌÖÒU;:DÍpÖA:DÖaÌeÖÒ8#Ì>+C(@Ï\Ô)SEÖAÌ>.:DU;Ö³Ís>.UJO@Ï\8ÍsÎEÙB>OeÙBUJÍÖaÌeÖAUJ:WU#Ñ>ÖÒÐ;>:DV\ULCL>cÍ×êSE>WÙEOe>+Í>:Ì*ÍgÌeÎDCLÏ1ÎE:6;>ÖÒ?³Í4ÌSE>éDßÞëêì7Þ7ÝÎí2éêîß#àU;OeÐJ8;:EÖAXc8ÌeÖAUJ:NU#ÑÌSD>ÛD?Ò8;VÁ>:ÌeÍ+ÕLÖA:ÙD8;OsÌeÖÒPÎE?³8#OÌSD>*P&U;:D:E>+P&Ì>+C¡XUJ:E>+ÍÔ)ÖAÌS ï ÕDãLÕE8#:GC<\SE>+?AÖ³P&>cÍ×57: O>+Ð;ÖÒU;: ÷ 5s5 ø ÕÍÖAÌÎD8#Ì>+CÀP&?ÒUJÍ>(ÌUÚÌSE>IÖÒ:EÖaÌeÖÒ8;?TÖÒVÁÙEÎE?³Ís>I?ÒUP+8ÌeÖAUJ: ÷ UJ: ÌSE>I?Ò>&Ñ ÌÁU#ÑUÖÒÐD× ï9ø Õ2ÌSE>I>6JU;?ÒÎLÌÖÒU;:ÀÖÒÍ$Ñx8#OÁVÁU;Oe>ÖÒ:ÌOeÖÒP+8Ìe>¡8;Í\8½O>cÍsÎE?AÌÁU#Ñ)ÌSD>I:ÎEVÁ>+OUJÎDÍ?ÒÖÒ:E>+8;OÎE:DÍsÌe8#@D?A>=VÁULCL>+ÍÔ)SEÖ³PQS ÐJOUÔÍsÖÒVÎD?aÌQ8#:E>+U;ÎDÍ?AÏJ×pêSEOeU;ÎEÐJSEU;ÎEÌ\ÌeSE>NOe>ÐJÖAUJ:Õ:EU CLUJV$K

q`cm]\»bea±Lbe]kJbm+]kcbm+];¿uÁmdg y2+*m+ºÖA:D8;:ÌW8;XÖÒVÎLÌeSD8#?)ÍÏV\VÁ>ÌOeÏïØÖÒÍWP?A>c8#Oe?AÏ Í>?Ò>+P&Ì>+C×êSD>I:DU;:E?ÒÖA:D>+8#OÁÖÒ:Ì>OQ8;P&ÌÖÒU;:ùU#ÑÌSE>cÍs>\VÁUCE>+ͯVÁ89Ï=P+8#ÎDÍ>*ÌeSE>$6JU;OÌ>Ü¡ÌeU¡@EÎDOeÍsÌ+×B57:NÌeSEÖÒÍ®P+8;Í>$8#?³ÍUDÕEÌeSE>\ÙESE>:DU;VÁ>:EUJ:U;OeÖAÐJÖA:D8#Ì>cÍTÖÒ:IÌSE>*ÍÙD8#ÌÖÒU#K¿Ì>VÁÙBU;OQ8#?~U;OeÐJ8;:EÖÒX+8ÌeÖAUJ:(U#Ñ2ÌSD>?AÖÒ:E>+8;OÖA:DÍsÌe8;@EÖÒ?AÖAÌgÏVÁULCL>+Í+×û.U#Ìe>)ÌSG8ÌpÌeSE> Ô896;>+ÙD8;PQèJ>&ÌK¿>ÜÙG8#:DÍÖAUJ:6J>?ÒUPÖaÌgÏÁ8#?ÒU;:DЮÌSE>¯6;U;OÌ>Ü\8#ÜÖ³ÍÖ³ÍTÖA:(@BU#ÌeSO>+Ð;ÖÒV\>cÍ F(?AÖÒ:E>+8;O.8#:DC¡:EUJ:E?AÖÒ:E>c8#OjF(U#Ñ2U;OQCL>O ? ×ð ñq)2!Ê.^o!Ä ÈÅEË\1[._^G#Ê!$,P.¹Çdò(Å76c.b)a62.Ä.Çd13.Ä ÇpÄØT>Ñ·U;Oe>®ÙEOUJÙGUÍsÖÒ:EÐ\ÌSD>*ÙEOe>+Í>:Ì)V\>cPQSD8#:DÖÒÍV 8JÍ)8WP8#:GCLÖÒCD8Ì>®Ñ·UJOÌSE>6;U;OÌ>Ü(@EÎEOQÍgÌeÖA:DÐU;@DÍ>Oe6;>cCÚ>ÜÙB>OeÖÒV\>+:Ìe8#?Ò?ÒÏÚ@Ï R^8JCLU#Ì¡ÝÞ®ß#àAáâ ã9ä¬ÕU;:E>VÁ89ϽP&U;VÁÙD8;O>ÁÌeSE>ÍÙD8;P>&K 8;:DCÌÖÒV\>K¬ÍeP8;?A>cÍpU;ÑÌSD>4ÙDSE>:EUJVÁ>:EUJ:ÖÒ:@BU#ÌSIÖÒ:DÍgÌQ8#:DP>+Í+×UEU;O8\ÍsÙB>+PÖaÛGP¯>6J>:Ì ÷ ÍSEUÔ):¡8JÍ8O>+ÙEO>cÍs>+:Ìe8ÌeÖA6J>$Íe8#VÁÙE?Ò>WU;:ïU2ÖAÐG×ãIÖA:1ÌeSE>ÖÒO8#OÌÖ³P&?Ò> ø ÌeSE>(@EÎEOQÍsÌÖÒ:EÐ=CLÎEOQ8ÌÖÒU;:ôóc:ÓõC ö C =Í\Ís>+ÙD8#OQ8ÌeÖA:DÐÌSE>8#ÙEÙB>+8;Oe8;:DP&>WU;Ñ.Ô)ÖAÐJÐ;?Ò>+Í$8#:DC ÌeSE>>ÜLÙE?AUÍsÖÒU;:Õ:EUJOVW8#?ÒÖÒX>+C @ÏÌSE>(CL>Ì>cPÌ>cC½8;XÖÒVÎLÌeSD8#?6J>?ÒULP&ÖAÌgϽë:ì > ãL C P&V â Í&òF\8#:DCÚÌSD>\6JU;OÌ>ÜNOe8JCLÖAÎGÍS9a: >C ö ãL4P&VÕEÖ³ÍÐ;ÖÒ6;>+:¡@Ï~í
ó > ë:ì óc:9 : õ ãL C R C ö C C ö ãL> C ö ÷ ø
êSE>.8#@BU6;>68#?ÒÎE>)Ö³ÍÌSE> 6;>OeÏÍe8#VÁ>)U;OQCL>+O2U;ÑnVÁ8;Ð;:EÖAÌÎGCL>.8;ÍÖÒ:ÁÌSE>)ÙDO>cÍs>+:JÌ:ÎEVÁ>+OÖ³P8;?ÍgÌeÎDCLÏ;×GêSE>ÌgÏÙEÖ³P8#?4ö Ô896;>ÙG8;PQè;>Ì÷ ÷ PU;VÁÙEOeÖÒÍÖÒ:EÐ\ÌSE>>ÜÙD?AULCL>cC¡X+U;:E>*8;:DC¡ÌSE>SD>?ÒÖÒP>+Í ø?A>+:EÐ#ÌeSÓøf: > ï C P&V UJ@DÍs>+O6J>+C$>&ÜLÙB>OeÖAVÁ>:ÌQ8#?Ò?AÏJÕ;:EUJOVW8#?ÒÖÒX>+CÁ@Ï$ÌSE> 6;U;OÌ>Ü\OQ8;CEÖAÎDÍd9a:ÖÒÍ)ÐJÖA6J>:¡@Ï~íø > ød:
9 : õ ï CC ö ãL> C E ÷ øÖA:\Ð;UULC8;Ð;Oe>>VÁ>+:JÌ2Ô)ÖaÌeS\ÌSE>Ô896;>ÙG8;PQè;>Ì?Ò>:EÐ;ÌS\ÙEO>cCLÖ³PÌ>cC*SE>+O> ÷ 8#OeU;ÎE:DCT C Ñ·U;O ?ù>ï ö ãL ø ×&5¬Ì2ÍSEUJÎE?ÒC®@B>pSDUÔT>+6;>On:DU#ÌÖ³P&>cC®ÌSG8ÌÌeSE>p?³8ÌÌ>O28#ÐJO>+>VÁ>:ÌSEUJ?ÒCEÍ@G>cP8;ÎDÍs>pU#ÑLÌSD>Ñ·U;?Ò?AUÔ)ÖÒ:EÐ8JÍÍÎEVÁÙLÌÖÒU;:íEÌSD>@D8JÍsÖ³P*8ÜLÖ³8#?6;>?ÒULP&ÖAÌÖÒ>+ͯ8#Oe>*U#ÑpÍe8#VÁ>*UJOeCL>+O.U#ÑVW8;Ð;:EÖAÌÎDCE>8;Í$ÌSE>+ÖAOW8;XÖÒVÎLÌeSD8#?)P&UJÎE:Ì>+OÙD8;OsÌQÍ ÷ Ö× >;× ? Ö³Í$U;Ñ ÎE:EÖAÌWU;OQCL>O ø Õ2Ô)SEÖ³PQSÀOe>VW8#ÖÒ:DÍ$ÌU1@B>PQSE>+PQèJ>+C(>ÜLÙG>+OÖÒVÁ>:Ìe8;?A?ÒÏ;×
ú û ÇTÄ Ê_,sÉ¯È ËÄce Æ7.`13!Æ7üà#h 6JU;OÌ>ÜK¬@EÎEOQÍsÌÖÒ:EÐ*ÙEOeULP&>+ÍeÍTÖÒÍÖÒ:6;>+ÍsÌÖÒÐJ8#Ì>cCW@Ï(<¯û4üU;ÑÌSD>4:DU;:E?ÒÖA:D>+8#OOe>+ÍÙGUJ:DÍ> U#Ñ28ÍsÔ)ÖÒO?ÒÖÒ:EÐàg>&ÌTÌU8;:WÖA:DÖaÌeÖÒ8;?A?ÒÏÁ?AULP8;?AÖÒX>cC\ÙG>+OsÌeÎEO@G8ÌÖÒU;:×JêSE>4CLÏ:D8#VÁÖ³PÍU;Ñ~ÌSE>¯:EU;:E?ÒÖÒ:E>+8;OÔ^896J>ÙD8JPQè;>&Ì(Ö³ÍCL>+ÍeP&OeÖÒ@G>cCÖÒ:ÌSD>½?ÒÖAÐJSÌIU;ÑÌSE> ?ÒÖA:E>c8#OÍsÙG8ÌÖÒU#K¿Ì>+VÁÙGUJOe8;? ÖÒ:DÍgÌQ8#@EÖÒ?ÒÖaÌgÏÙEOUJÙG>+OsÌeÖA>cÍU#Ñ~ÌeSE>.@D8JÍsÖ³P^ÓDUÔ×;êSEÖ³Í?Ò>+8JCEÍÌeUÙEOUJÙGUÍs>ÌgÔ^U*ÍÖAV$ÎE?aÌQ8#:E>+U;ÎDÍV\>cPQSD8#:DÖÒÍVWÍÑ·U;O)6;UJOsÌe>&Ü¡CEÖÒÍeÍsÖÒÙD8#ÌÖÒU;:×E<¯ÎE>®ÌU(8#ÜLÖÒ8;?ÍsSE>c8#O.8JPÌÖÒ:EÐW8#?ÒU;:DÐ$ÌeSE>ÖÒ:EÖaÌeÖÒ8;?6;UJOsÌe>&ÜnÕSE>?ÒÖ³P8#?ÍgÌeOÎDP&ÌÎEOe>+Í ÷ O>+Ð;ÖÒU;:5 ø VW89Ï*CL>+6;>?ÒU;Ù\8#:DC$ÙEOeU;ÙD8;ÐJ8#Ì>T8;?AUJ:EÐ.ÌeSE>)6;UJOsÌe>&Ü*P&UJO>8Ì8®ÍsÙB>>cCP&U;VÁÙD8;Oe8;@E?Ò>$ÌeU=ÌSD>(VW8ÜLÖAV$ÎEV 8ÜLÖÒ8;?6;>+?AULPÖaÌgÏJ×êSE>+Í>(ÍsÌOeÎDPÌeÎEO>cÍ®Ìe8;è;>ÁÌeSE>(Ñ·UJOVU#ÑSE>?ÒÖÒP+8#?J6;U;OÌÖ³P&>cÍnÔ)ÖAÌS ï Õ9ã)8#:GCSÛD?³8#VÁ>:ÌeÍ+×+Ø^>cP8#ÎGÍs>U;ÑÌeSE>ÙB>OÌÎEOe@D8#ÌÖÒU;:®Ñ·U;OeVÎD?Ò8#ÌÖÒU;:8;CLUJÙLÌ>cCSE>Oe>;Õ+ÖaÌ2SD8;Í:EU;Ì@B>>:ÙGUÍÍÖA@D?A>ÌeU ÖÒ:6;>+ÍsÌÖÒÐJ8#Ì>Ô)SD>&ÌSD>OÌeSE>Ï®VW89Ï®@G>^ÍsÎD@g>+P&ÌÌUÍ>+PU;:DCE8;OÏ$ÖA:GÍgÌQ8#@EÖÒ?AÖAÌÖÒ>+Í+ÕÔ)SEÖÒPQSWÔ^U;ÎD?ÒCÁÙBUJÍeÍsÖÒ@E?ÒÏÁ>:ESD8;:DP&>¯CLÖÒÍeÍÖAÙD8#ÌÖÒU;:×êSE>.6JU;OÌ>&ÜVÁ89Ï8;?ÒÍU @EÎDOeÍsÌ2?ÒULP8;?A?ÒÏ®ÎE:DCL>+OÌeSE>^ÖA:LÓGÎE>:DP>U#ÑE:ÎEVÁ>OeU;ÎDÍÖÒ:DÍgÌQ8#@EÖÒ?ÒÖaÌgÏVÁULCL>+Í2ÐJOUÔ)ÖÒ:EÐ8ÌÁÌSE>NÍe8#VÁ>OQ8Ì> ßý8ÌÁÌSD>NÍ8;V\>IÙE?³8;P> ÷ ÖA: Oe>ÐJÖAUJ:À5s5 ø ÕÔ)SEÖ³PQSÀÑx896JU;OQÍ$PU;VÁÙE?Ò>&ÜÖA:Ì>+Oe8JPÌeÖAUJ:DÍ8#:DCnÕD>6;>+:ÌÎD8;?A?ÒÏ;ÕECLÖ³ÍeÍsÖÒÙD8ÌeÖAUJ:×

|2;dgf¬hg_]®²m4f¬°_idga_]Jqp¬beh þû.ÎEVÁ>OeÖ³P8#?®ÍÖAV$ÎE?Ò8#ÌÖÒU;:DÍ¡SD896J>N@G>+>:ÿÙG>+OsÑ·UJOVÁ>+C¹U;:¾ÌeSE> Rjÿ C RTOQ89Ï 8Ì5g<aV)5süZFR^û2V ü¡ÎE:DCE>O.ÐJOe8;:JÌ5ÿ C ï JRTãLÕ;Ô)SEÖÒPQSÖ³ÍÐ;Oe>+8#Ì?ÒÏ8;PQè:EUÔ)?Ò>+CLÐJ>+Cn×
.`ò.Æ7.Ä Ê.(#+ u¡¸p±_akDru¡ |dsm+sbhlJfQ~_akJf Æ Ç rJGc Æ Qc+ Ç ¯ymckJhrEvL»+m+k;r4y2ckJbedl#;fQ~_akJf Æ Ç rz+c Æ +9 Ç #)q;»bQ±LbQ]kJbcrZJ ¿u¡Ly2Jc*mºQl;fQ~_ak;f Æ c Ç rE Qþ+ Æ Qcc Ç ;)q;»bQ±LbQ]kJbcrZJ ¿u¡Ly2Jc*mºcrl~J^Jbed7dgbQZJ~J_AkÁu\bQDDrE + + Æ Qc+ Ç u¡tDbQf7f7bQ]Drl~ JEv#_]cDr2lnm+_beh;L~_akÁu\beDEr7þc Æ Qþ Ç #n vLv#bcr z9m ¼ f7+]GrEvL ¸ Tdgf7ºm+Lz^mhgJdgbBrL c Æ Qc+ Ç þ.¸ ;o^_]JQbQ]hru¡Eu\bQ]JbQcJºQºQ_½J~_akWu\bQs ÅZÅ DrB Æ c# Ç


[A6]DELBENDE, I., ROSSI, M. AND LE DIZ ES, S. 2002
Stretching effects on the three-dimensional stability of vortices with axial flow.J. Fluid Mech. 454, 419–442.


J. Fluid Mech. (2002), vol. 454, pp. 419–442. c© 2002 Cambridge University Press
DOI: 10.1017/S0022112001007261 Printed in the United Kingdom
419
Stretching effects on the three-dimensionalstability of vortices with axial flow
By I V A N D E L B E N D E1, M A U R I C E R O S S I2
AND S T E P H A N E L E D I Z E S3
1LIMSI, CNRS–UPR 3251, BP 133, F-91403 Orsay Cedex, France2LMM, Universite Paris VI, 4 place Jussieu, F-75252 Paris Cedex 05, France
3IRPHE, CNRS–UMR 6594, 49 rue Joliot Curie, F-13384 Marseille Cedex 13, France
(Received 11 January 2001 and in revised form 23 July 2001)
The effect of stretching on the three-dimensional stability of a viscous unsteady vortexis addressed. The basic flow, which satisfies the Navier–Stokes equations, is a vortexwith axial flow subjected to a time-dependent strain field oriented along its axis. Thelinear equations for the three-dimensional perturbations of the stretched vortex arefirst reduced by using successive changes of variables to equations which are almostidentical to those of the unstretched vortex but with time-dependent parameters.These equations are then numerically solved in the particular case of the Batchelorvortex with a strain field which first compresses then stretches the vortex. Through thissimulation, it is qualitatively demonstrated how the simultaneous action of stretchingand azimuthal vorticity may destabilize a vortex. It is also argued that it provides apossible mechanism for the vortex bursts observed in turbulence experiments.
1. IntroductionOn the one hand, axisymmetric vortices with axial flow are known to be subject
to three-dimensional instabilities. On the other hand, stretching is known to modifyboth the vortex characteristic parameters and the evolution of the perturbations. Inthis work, general equations for the evolution of three-dimensional perturbations ona stretched vortex with axial flow are derived. The effect of stretching on instabilityis analysed, and a mechanism for the breakdown of vortices in turbulent flows isproposed.
Stretching is one of the important features that differentiate three-dimensionalflows from two-dimensional flows as it prevents the local inviscid conservation ofenstrophy. In three-dimensional flows, vorticity can be enhanced (resp. diminished)by stretching (resp. by compression) when oriented along a principal direction ofstrain. This effect is described well by the Lundgren (1982) transform which mapstwo-dimensional Navier–Stokes solutions to three-dimensional uniformly stretched(or compressed) solutions. In particular, this transform demonstrates that the maineffect of an axial stretching/compression field is to modify the time and spacecharacteristics (vorticity maximum and core radius) of the vortex. In a turbulentflow, one thus expects vorticity-filament characteristics to be continuously modifiedby the background stretching field generated by surrounding vortices. In this context,numerical studies have been recently performed where the stretching field acting ona straight vortex is non-uniform (Verzicco, Jimenez & Orlandi 1995), time-periodic

420 I. Delbende, M. Rossi and S. Le Dizes
(Verzicco & Jimenez 1999), or generated by an array of vortex rings (Marshall 1997;Abid et al. 2002).
Stretching also appears to be important for the statistical properties of turbulence.Indeed, the only dynamical model which was successful in predicting the k−5/3 energyspectrum of Kolmogorov turbulence was designed from uniformly stretched spiralvortices (Lundgren 1982; see also Pullin & Saffman 1998 for a review). However,despite its impressive success, the uniformly stretched vortex model used by Lundgrenis too simple as vorticity is always aligned with the vortex axis and with a principaldirection of strain.
This limitation has recently been overcome by Gibbon, Fokas & Doering (1999)who extended Lundgren’s solutions to account for an axial flow component alongthe vortex axis. Their solutions are interesting because both axial and azimuthalvorticity are now present and because the stretching field is no longer uniform.These new features make these solutions very attractive for vortex filament models inturbulent flows. The presence of axial flow along the vortex axis, which appears to beubiquitous in stretched vortices (see for instance Andreotti, Douady & Couder 1997and Petitjeans et al. 1998) could in particular explain some dynamical behavioursof vortex filaments in turbulent flows such as bursts or vortex breakdowns. Indeed,the latter phenomenon, which is characterized by a localized blow-up of the vortexcore and the appearance of a stagnation point has always been associated with axialflows. Although there is still a controversy about whether or not vortex instabilityis needed for vortex breakdown,† it is established that unstable modes do exist invortices with axial flow, especially in the Batchelor vortex. This vortex was introducedby Batchelor (1964) in the context of an asymptotic description of trailing vortices.Both its axial vorticity and axial velocity have the same Gaussian profile. Moregenerally it constitutes an exact solution of the Navier–Stokes equations if one takesinto account the modification of the core radius due to viscous diffusion. This weaktime-dependence effect has usually been neglected and the Batchelor vortex has beenconsidered as a stationary solution on which normal modes exist. Temporal instabilityproperties are given by Lessen, Singh & Paillet (1974), Lessen & Paillet (1974), Mayer& Powell (1992) and Ash & Khorrami (1995). These authors showed that for largeReynolds numbers and intermediate swirl numbers q (0 < q < 1.5), where q is definedas the ratio of azimuthal to axial velocity, the instability is dominated by inviscidnegative helical modes. These modes become stable for swirl numbers larger than 1.5.The absolute/convective character of this instability was analysed by Olendraru et al.(1996, 1999) and Delbende, Chomaz & Huerre (1998).
In the present paper, we consider a Batchelor vortex subjected to a time-dependentstretching/compression field along its axis. Remarkably, Gibbon et al. (1999) showedthat even subjected to a stretching field, the Batchelor vortex remains a Navier–Stokessolution provided its radius and swirl number follow particular time evolutions givenin § 2. This general family of stretched vortices naturally contains Burgers’ vortex asa particular case (constant stretching and infinite swirl number). Our goal is hereto analyse the linear evolution of three-dimensional perturbations on such a time-evolving flow. More specifically, we address the issue of whether three-dimensionalperturbations on the stretched vortex are related to those on the unstretched one.
So far, the effect of stretching on three-dimensional perturbations has been analysed
† Vortex breakdown, i.e. the appearance of a stagnation point, occurs in various geometries(boxes with rotating ends, cylinders with varying diameter) for which other theories exist (seeLeibovich 1978, 1983 and Escudier 1988 for a review).

Stretching effects on three-dimensional vortex instability 421
only in the context of vortices without axial flow. Rossi & Le Dizes (1997) showed thatthe three-dimensional temporal spectrum of steady stretched vortices (axisymmetricor not) only contains modes which are independent of the axial coordinate (stretchingaxis). The effect of stretching on the elliptical instability of a vortex was analysed byLe Dizes, Rossi & Moffatt (1996) for a uniform vorticity flow and by Eloy & Le Dizes(1999) for an elliptically deformed Gaussian vortex. In both instances, the authorsshowed that stretching tends to limit the growth of the unstable modes in time, andtherefore to stabilize the vortex for a sufficiently strong stretching rate.
In the present paper, the same issue is addressed for the Batchelor-vortex instability.However, by contrast with asymptotic analyses of the elliptical instability, a directnumerical simulation is used here, whereby a time-varying stretching rate is considered.In this framework, the selection process of the most unstable perturbations from whitenoise initial conditions is considered.
The paper is organized as follows. In § 2, the results of Gibbon et al. (1999) arereviewed and the stretched Batchelor vortex solution, which is considered in the restof the paper, is presented. In § 3, the equations governing the dynamics of linear three-dimensional perturbations to the stretched Batchelor vortex are derived. It is shownhow they are related to those for the unstretched vortex via changes of variables anda quasi-static approximation. The numerical procedure used for the simulations isthen presented in § 4: it is a velocity/vorticity pseudo-spectral method adapted to thecurrent problem. Results are given and discussed in § 5.
2. The basic flowGibbon et al. (1999) recently obtained new exact solutions to the Navier–Stokes
equations which extend the solutions previously used by Lundgren (1982). In the caseof an axisymmetric flow, the velocity field of these solutions has, in polar coordinates(r, θ, z), the following form:
Utotr (r, t) = −γ(t)
2r, (2.1)
Utotθ (r, t) = Uθ(r, t), (2.2)
W tot(r, z, t) = γ(t)z +W (r, t), (2.3)
which is a combination of an axisymmetric vortex of azimuthal velocity Uθ(r, t), anaxial jet of velocity W (r, t) and an unsteady linear stretching field of strain rateγ(t). These solutions are more general than the Burgers vortex as vorticity is notnecessarily aligned along with the vortex axis or with a principal direction of strain.Indeed, there are both an axial and an azimuthal component of vorticity, given by
Ωtotz (r, t) =
1
r
∂(rUθ)
∂r, Ωtot
θ (r, t) = −∂W∂r
.
Gibbon et al. (1999) showed that the governing equations reduce to a system of threeequations for Ωtot
z , W and γ:
DΩtotz
Dt= γΩtot
z + ν∆Ωtotz , (2.4)
DW
Dt= −γW + ν∆W, (2.5)
Dγ
Dt+ γ2 +
∂2P tot
∂z2= ν∆γ, (2.6)

422 I. Delbende, M. Rossi and S. Le Dizes
whereD
Dt≡ ∂
∂t− γr
2
∂
∂r.
In system (2.4)–(2.6), ν stands for the fluid kinematic viscosity and the second partialz-derivative of the pressure P tot is assumed uniform. Here, we impose the strain rateγ(t) and deduce the pressure from
P tot(r, t) =
∫ r
0
U2θ (r′, t)r′
dr′ +(
dγ
dt− γ2
2
)r2
4−(
dγ
dt+ γ2
)z2
2. (2.7)
Note that equations (2.4) and (2.5) demonstrate that axial vorticity is enhanced bystretching while axial velocity and azimuthal vorticity are reduced. The dynamicalexchange between the different vorticity components makes these solutions richer thanunidirectional vortices and probably better candidates for vortex filament models.
When stretching/compression terms are discarded, equations (2.4) and (2.5) reduceto radial diffusion equations which are known to possess a Gaussian kernel. Usingtime and space rescalings, Gibbon et al. (1999) have extended this property, findingthe following self-similar solution of (2.4) and (2.5):
Uθ(r, t) =Γ
2πr
[1− exp
(− r
2
a2
)], (2.8)
W (r, t) =W0
s2(a/a0)2exp
(− r
2
a2
), (2.9)
where a(t) denotes the vortex core size, a0 its initial value, Γ the constant vortexcirculation, W0 the initial centreline velocity, and s(t) the dimensionless quantity
s(t) = exp
(∫ t
0
γ(u)du
). (2.10)
The core size a(t), which has been chosen identical for both axial and azimuthalvelocity components, depends on the kinematic viscosity ν and the strain rate γ(t) via
a2(t) =a2
0 + 4ντ
s, (2.11)
where
τ =
∫ t
0
s(u)du (2.12)
stands for a modified time which coincides with time t in the case of zero strain γ = 0.At each time t, expressions (2.8) and (2.9) for Uθ and W characterize an instan-
taneous Batchelor vortex of radius a(t) and swirl number q(t), where
q(t) =Γ
2πa20W0
s2a
denotes the ratio of the characteristic azimuthal velocity Γ/(2πa) to the centrelineaxial velocity W0a
20/(s
2a2).The present paper is aimed at investigating the three-dimensional stability properties
of solution (2.1)–(2.3) with the Batchelor profiles (2.8) and (2.9). The same analysis isnaturally possible with other profiles but would require the consideration of varyingprofiles which always tend towards the Batchelor profile through viscous diffusion.

Stretching effects on three-dimensional vortex instability 423
Hence the choice of the Batchelor profile is natural. Moreover, the stability propertiesof the unstretched Batchelor vortex are well-known, which allows a direct comparisonbetween stretched and unstretched cases.
As mentioned above, the time-evolution of the characteristic parameters of theBatchelor vortex depends on the way the strain rate varies. One could imagine that ina turbulent environment this variation would be coupled to the dynamics of distantvortices (via the pressure term in equation (2.6)). Such an explicit coupling is notconsidered here, but will be modelled by a particular variation of the strain rate.Moreover, only perturbations which are localized in the vortex core are considered.In the numerical part § 5.2 of the present study, the basic flow (2.1)–(2.3) evolves intime as follows. For 0 6 t < t?, the vortex is compressed with a constant negativestrain rate γ = −γ0 < 0, so that
s(t) = exp(−γ0t), (2.13)
τ(t) =1− exp(−γ0t)
γ0
, (2.14)
a2(t) =
(a2
0 +4ν
γ0
)exp(γ0t)− 4ν
γ0
. (2.15)
When time t varies from 0 to t?, the modified time τ and the characteristic radiusa(t) increase. By definition, τ varies from 0 to τ? such that τ?γ0 = 1 − exp(−γ0t?);in particular, if t? = ∞, τ? = 1/γ0. If t? is large enough, there exists a time tq afterwhich the swirl number q(t) decreases, i.e. the jet component of the flow increaseswith respect to the swirling component. The value of tq depends on the relative sizeof a0 with respect to (ν/γ0)
1/2.
For t > t?, the vortex is stretched with the opposite strain rate γ = γ0 > 0:
s(t) = s(t?) exp[γ0(t− t?)], (2.16)
τ(t) = τ(t?) +s(t)− s(t?)
γ0
= τ? + s(t?)exp[γ0(t− t?)]− 1
γ0
, (2.17)
a2(t) =
[a2(t?)− 4ν
γ0
]exp [−γ0(t− t?)] +
4ν
γ0
. (2.18)
Time t varies from t? to +∞ when variable τ increases from τ? to +∞. The char-acteristic radius a(t) tends towards a finite value 2(ν/γ0)
1/2 while the swirl numberq(t) increases to +∞. In this case, the jet component always decreases with respectto the swirling component. Asymptotically one recovers a stationary stretched vortexaligned with the z-axis and subjected to a global strain field, i.e. the well-knownBurgers vortex governed by the balance between stretching and viscous diffusion.
Note that, from a mathematical point of view, quantity γ(t) might a priori followany time dependence, so that steady or time-periodic† functions could be used insteadof (2.13)–(2.18). However, we expect quantity γ(t), which models the action of largestructures on the vortex, to fluctuate with a characteristic time larger than the turnovertime. Our choice has been guided by simplicity: the selected time dependence is thesimplest fluctuation containing a single stretching and compression phase.
† A time-periodic fluctuation is of interest if its period becomes of the same order as the turnovertime.

424 I. Delbende, M. Rossi and S. Le Dizes
3. Linear three-dimensional perturbations: governing equationsIn this section, the three-dimensional stability equations of the stretched vortex
with basic flow velocity U tot(t) are considered. It is shown how the evolution ofthree-dimensional perturbations are connected to those in an unstretched vortex.
The dynamics of infinitesimal pressure p and velocity u perturbations is governedby the linear system
∂tu+ (U tot(t) · ∇)u+ (u · ∇)U tot(t) = −∇p+ ν∆u, (3.1)
∇ · u = 0, (3.2)
which is inhomogeneous with respect to time t and spatial coordinates r and z. Inpolar coordinates, the above equations for perturbations u = (u, v, w) and p are
Du
Dt− γ(t)
2u− 2
Uθ(r, t)
rv = −1
ρ
∂p
∂r+ ν(∆u)r, (3.3)
Dv
Dt− γ(t)
2v +
(∂Uθ(r, t)
∂r+Uθ(r, t)
r
)u = − 1
ρr
∂p
∂θ+ ν(∆u)θ, (3.4)
Dw
Dt+ γ(t)w +
∂W
∂ru = −1
ρ
∂p
∂z+ ν(∆u)z, (3.5)
∂u
∂r+u
r+
1
r
∂v
∂θ+∂w
∂z= 0, (3.6)
where ν(∆u)r , ν(∆u)θ and ν(∆u)z denote the classical polar components of the viscousterm and D/Dt stands for the convective derivative relative to the basic state:
D
Dt≡ ∂
∂t− γ(t)r
2
∂
∂r+Uθ(r, t)
r
∂
∂θ+ (W (r, t) + γ(t)z)
∂
∂z. (3.7)
This stability problem cannot be handled by a standard Fourier transform techniquebecause of the explicit space and time dependences. However, the present sectionprovides a connection between equations (3.1)–(3.7) and the linear equations gov-erning the dynamics of infinitesimal disturbances in an axisymmetric time-dependentunstretched basic flow. This is reminiscent of the Lundgren transformation
t −→ τ =
∫ t
0
s(u)du, (3.8)
r −→ r =√s(t)r, (3.9)
θ −→ θ, (3.10)
which precisely relates the basic flow U tot(t) to the Navier–Stokes solution formed bythe diffusing unstretched Batchelor vortex (0, U2D
θ (r, τ),W 2D(r, τ)), where
U2Dθ (r, τ) =
Uθ(r/√s(t), t)√s(t)
=Γ
2πr
[1− exp
(− r2
a20 + 4ντ
)](3.11)
W 2D(r, τ) = s(t)W (r/√s(t), t) =
W0a20
a20 + 4ντ
exp
(− r2
a20 + 4ντ
). (3.12)
An appropriate change of variables is now applied on the stability equations (3.1)–(3.7)which eliminates the terms relative to stretching as well as the explicit z-dependence.

Stretching effects on three-dimensional vortex instability 425
To this end, in addition to Lundgren’s transformation (3.8)–(3.10), a change of variablefor z
z −→ z =z
s(t)(3.13)
is performed. This transformation, which is often written in terms of a time-dependentwavenumber, is commonly used in the context of inertial waves (see Craik & Criminale1986) or rapid distortion theory (Batchelor & Proudman 1954; Cambon & Scott 1999).
Such changes of variable neither modify the partial derivatives with respect to θnor affect the elementary volume. Moreover the following relations hold:
∂
∂t= S(τ)
∂
∂τ+
dS
dτ
r
2
∂
∂r− dS
dτz∂
∂z(3.14)
and
∂
∂r=√S(τ)
∂
∂r,
∂
∂z=
1
S(τ)
∂
∂z, (3.15)
where the function S(τ) ≡ s(t) satisfies
γ(t) =dS
dτ=
1
s
ds
dt. (3.16)
Transformation (3.8)–(3.9) (resp. (3.13)) eliminates the term − 12γr∂r (resp. γz∂z) in the
convective derivative, which then becomes
D
Dt= S(τ)
D
Dτ, (3.17)
where
D
Dτ≡ ∂
∂τ+U2Dθ (r, τ)
r
∂
∂θ+W 2D(r, τ)
S3(τ)
∂
∂z. (3.18)
It is readily seen that stretching has been explicitly eliminated in (3.18).In accordance with equations (3.11)–(3.12), the following transformations are in-
troduced to preserve the ratio between perturbations and basic state:
u =u√S, v =
v√S, w = Sw, p =
p
S. (3.19)
This procedure removes the amplification factor due to external strain which affectsperturbation amplitudes. The complete linear system then becomes
Du
Dτ− 2
U2Dθ
rv = −1
ρ
∂p
∂r+ ν
[(∆2Du)r +
1
S3
∂2u
∂z2
], (3.20)
Dv
Dτ+
(∂U2D
θ
∂r+U2Dθ
r
)u = − 1
ρr
∂p
∂θ+ ν
[(∆2Du)θ +
1
S3
∂2v
∂z2
], (3.21)
Dw
Dτ+∂W 2D
∂ru = −1
ρ
∂p
∂z+ ν
[(∆2Du)z +
1
S3
∂2w
∂z2
], (3.22)
∂u
∂r+u
r+
1
r
∂v
∂θ+
1
S3
∂w
∂z= 0. (3.23)

426 I. Delbende, M. Rossi and S. Le Dizes
Quantities (∆2Du)r , (∆2Du)θ and (∆2Du)z denote the components of the viscous Lapla-cian term in which the derivatives with respect to z are omitted:
(∆2Du)r =∂
∂r
[1
r
∂(ru)
∂r
]+
1
r2
∂2u
∂θ2− 2
r2
∂v
∂θ, (3.24)
(∆2Du)θ =∂
∂r
[1
r
∂(rv)
∂r
]+
1
r2
∂2v
∂θ2+
2
r2
∂u
∂θ, (3.25)
(∆2Du)z =1
r
∂
∂r
[r∂w
∂r
]+
1
r2
∂2w
∂θ2. (3.26)
This transformation thus shows that the two-dimensional stability (∂/∂z ≡ 0) of astretched vortex (2.1)–(2.3) is directly related to the two-dimensional stability prob-lem for its unstretched and diffusing counterpart (0, U2D
θ (r, τ),W 2D(r, τ)), as alreadyimplied by Gibbon et al. (1999). For the general three-dimensional stability problem,the above system is quite close to the three-dimensional stability of the unstretchedbasic flow state (0, U2D
θ (r, τ),W 2D(r, τ)). It differs only through the presence of 1/S3
terms associated with z-derivatives. In particular, equation (3.23) expresses the fluidincompressibility via a modified divergence-free condition. In system (3.20)–(3.23),the explicit time dependence originates (a) in the viscous diffusion acting on theunstretched basic Batchelor vortex, and (b) in the 1/S3 factors. A quasi-static approx-imation might help to understand the dynamics of perturbations, a feature that willbe exploited in §5. Near a time τ1, viscous diffusion is neglected in the basic state, i.e.the core size a is taken to be constant and equal to a1 = (a2
0 +4ντ1)1/2. Locally in time,
this characteristic length scale a1 provides a characteristic velocity scale Γ/(2πa1) andtime scale 2πa2
1/Γ . Let us now assume that the non-dimensional strain rate 2πγa21/Γ
is small. Such an hypothesis is generally made in turbulence studies where stretchingdue to large scales, typically of magnitude γa1, is small with respect to the velocity inthe vortex Γ/(2πa1). As a result, S(τ) is slowly evolving in time (see (3.16)), althoughit might be of order one. A quasi-static approximation is thus fully justified: neartime τ1, the parameter S is frozen, in the above equations, to its value S1 = S(τ1).
Let Γ/(2πa1) be employed as a scale for velocity components u and v, ΓS3/21 /(2πa1)
as a scale for velocity component w, ρ[Γ/(2πa1)]2 as a scale for pressure p, a1 as
length scale for r, a1S−3/21 as length scale for z, and 2πa2
1/Γ as time scale. Written indimensionless form, the quasi-static equations are identical to the equations governingthe linear perturbations of an unstretched Batchelor vortex with azimuthal and axialvelocity respectively given by
Uθ(r) =1− exp(−r2)
r, (3.27)
W (r) =1
qexp(−r2), (3.28)
with swirl and Reynolds numbers
q =S
3/21 Γa1
2πW0a20
, ReΓ =Γ
2πν.
In this quasi-static approximation, the linear stability characteristics are thus directlyconnected to those of an unstretched Batchelor vortex. In particular, the swirl numberq indicates whether we enter the region of the equivalent swirling jet instability.

Stretching effects on three-dimensional vortex instability 427
4. Numerical formulationFor numerical purposes, the perturbation equations (3.20)–(3.23) are put in dimen-
sionless form using the initial axial velocity W0 as the velocity scale, the initial coresize a0 as the spatial scale, a0/W0 as time scale for t or τ and ρW 2
0 as the pressurescale:
Du
Dτ− 2
U2Dθ
rv = −∂p
∂r+
1
Re
[(∆2Du)r +
1
S3
∂2u
∂z2
], (4.1)
Dv
Dτ+
(∂U2D
θ
∂r+U2Dθ
r
)u = −1
r
∂p
∂θ+
1
Re
[(∆2Du)θ +
1
S3
∂2v
∂z2
], (4.2)
Dw
Dτ+∂W 2D
∂ru = −∂p
∂z+
1
Re
[(∆2Du)z +
1
S3
∂2w
∂z2
], (4.3)
∂u
∂r+u
r+
1
r
∂v
∂θ+
1
S3
∂w
∂z= 0, (4.4)
where the convective derivative D/Dτ is
D
Dτ=
[∂
∂τ+U2Dθ (r, τ)
r
∂
∂θ+WD(r, τ)
S3(τ)
∂
∂z
]. (4.5)
Three dimensionless parameters are of importance here, namely the Reynolds numberRe, the initial swirl number q0 and the dimensionless strain rate γ(τ):
q0 =Γ
2πa0W0
, Re =W0a0
ν=ReΓ
q0
, γ(τ) =γa0
W0
. (4.6)
When the strain rate γ is constant during a time interval [τ?, τ], recall that thedimensionless parameter S satisfies S(τ) = S(τ?) + γ(τ− τ?).
The basic flow in (4.1)–(4.4) evolves in time according to
U2Dθ (r, τ) =
q0
r
[1− exp
(− r2
1 + 4τ/Re
)], (4.7)
W 2D(r, τ) =1
1 + 4τ/Reexp
(− r2
1 + 4τ/Re
). (4.8)
In the subsequent analyses, we focus on a period of time much smaller than theone in which viscous diffusion acts on the basic flow, i.e. we assume that 4τ/Re 1in (4.7)–(4.8). Indeed for high Reynolds numbers Re 1, such a time may belarge with respect to the time in which instability takes place. Note that, within thisapproximation, a1 = a0 and the instantaneous swirl number is
q(τ) =S3/2Γ
2πa0W0
= S3/2q0 . (4.9)
In the remaining part of this section, bars are omitted in order to simplify thenotation. Equations (4.1)–(4.3) may then be recast as follows:
∂τu+ (U 2D · ∇)u+ (u · ∇)U 2D =
(1− 1
S3
)W 2D∂zu− ∇p
+1
Re
(∆2Du+
1
S3
∂2u
∂z2
), (4.10)

428 I. Delbende, M. Rossi and S. Le Dizes
where the field U 2D is now stationary, and is given in polar coordinates by
U 2D(r) = (0, U2Dθ (r),W 2D(r)). (4.11)
The numerical code used in the present paper is adapted from Vincent & Meneguzzi(1991). It is written using the velocity/vorticity formulation pertaining to formula(4.10):
∂τu = U 2D × ω + u×Ω2D +
(1− 1
S3
)W 2D∂zu
−∇(p+U 2D · u) +1
Re
(∆2Du+
1
S3
∂2u
∂z2
), (4.12)
where Ω2D = ∇ × U 2D and ω = ∇ × u. So far, the incompressibility condition (4.4)has not been used. Equation (4.12) may be expressed in the spectral domain relativeto the three Cartesian directions (x, y, z). Each Fourier mode uk corresponding to thewavevector k = (kx, ky, kz) evolves according to
dukdτ
=[U 2D × ω + u×Ω2D
]k
+ ikz
(1− 1
S3
)[W 2Du
]k
−ik[p+U 2D · u]
k− 1
Re
(k2x + k2
y +k2z
S3
)uk, (4.13)
where [·]k denotes the k-Fourier coefficient of the term inside the brackets. Note thatrelation ∂zW
2D = 0 is used to derive equation (4.13). Following standard practice, eachFourier mode uk is then decomposed into a component u
‖k parallel to the wavevector
k and a component u⊥k orthogonal to it. The temporal evolution of u⊥k is obtained byprojecting equation (4.13) onto the plane orthogonal to k:
du⊥kdτ
= P⊥k
([U 2D × ω + u×Ω2D
]k
+ ikz
(1− 1
S3
)[W 2Du
]k
)− 1
Re
(k2x + k2
y +k2z
S3
)u⊥k , (4.14)
where the symbol P⊥k stands for the projection operator. The parallel component u‖k is
thereafter obtained as a by-product of the modified incompressibility condition (4.4)as explained below. The usual divergence-free condition k · uk = 0 would impose
u‖k = 0. The modified condition (4.4) now yields
k · uk =
(1− 1
S3
)kzuz,k , (4.15)
where uz,k denotes the axial component of uk. As a consequence, the following relationbetween u⊥k and uk is established:
u⊥k ≡ P⊥k uk ≡ uk − k · ukk2
k = uk −(
1− 1
S3
)kzuz,k
k2k. (4.16)
This relation may be easily inverted to yield the three components of uk from thecomponents (u⊥x,k, u⊥y,k, u⊥z,k) of u⊥k :
ux,k = u⊥x,k +
(1− 1
S3
)kxkz
k2
[1− k2
z
k2
(1− 1
S3
)]−1
u⊥z,k, (4.17)

Stretching effects on three-dimensional vortex instability 429
uy,k = u⊥y,k +
(1− 1
S3
)kykz
k2
[1− k2
z
k2
(1− 1
S3
)]−1
u⊥z,k, (4.18)
uz,k =
[1− k2
z
k2
(1− 1
S3
)]−1
u⊥z,k. (4.19)
Let δτ denote the time step. The velocity perturbation u(τ + δτ) is computed usingu(τ) and u(τ−δτ) as follows. The application of a fast Fourier transform first providesuk(τ) from which u⊥x,k(τ), u⊥y,k(τ) and u⊥z,k(τ) are extracted using (4.16). The time advanceis then performed by discretizing equation (4.14) according to an explicit second-orderAdams–Bashforth scheme:
u⊥k (τ+ δτ) = eu⊥k (τ) +[
32eP⊥k (τ)− 1
2e2P⊥k (τ− δτ)] δτ, (4.20)
where the damping factor e = exp−(k2x + k2
y + S−3k2z )δτ/Re stems from the exact
integration of the modified viscous term. Vector P⊥k (τ) stands for
P⊥k (τ) = P⊥k
([U 2D × ω + u×Ω2D
]k
+ ikz
(1− 1
S3
)[W 2Du
]k
)(4.21)
evaluated at time τ. Note that products U 2D × ω + u × Ω2D and W 2Du are firstevaluated in physical space, then transformed in spectral space and finally projectedonto the plane perpendicular to k. The above procedure yields the three componentsu⊥x,k(τ+δτ), u⊥y,k(τ+δτ) and u⊥z,k(τ+δτ). It can be checked that the property u⊥k ·k = 0, byconstruction of vector P⊥k (τ), is verified at τ+ δτ by simply taking the dot product ofequation (4.20) with k. Relations (4.17)–(4.19) then provide uk(τ+ δτ) and eventuallylead to u(τ+ δτ) via a reverse Fourier transform.
In this numerical Fourier formulation, periodic boundary conditions are enforcedand the computational domain consists of a cubic box of size L = 10.24, meshedby a Cartesian grid of 1283 collocation points with spacing δl = 0.08 in the threedirections. Along the x- and y-axes, the computational domain is wide enoughrelative to the vortex diameter that the numerical solution satisfactorily approxi-mates the dynamics of an isolated vortex in an infinite medium. Along the vortexz-axis, periodicity imposes a discretization in the axial wavenumber spectrum: themaximum wavenumber equals π/δl ≈ 40 and successive axial wavenumbers are sep-arated by δkz = 2π/L ≈ 0.61. One may wonder whether this numerical spacing ofaxial wavenumber δkz is small enough. First, note that the time evolution of eachaxial mode computed is properly taken into account, since the equations are linearand homogeneous in the z-direction. Second, figure 2 indicates that for any givenazimuthal number, the region where the stability curve reaches its maximum con-tains at least one discretized wavenumber. As a consequence, it is expected that thisspacing δkz is sufficient to get the main part of the phenomenology, in particularthe correct time evolution and spatial structures. This feature has been checked byperforming a simulation in which the kz spacing is reduced by a factor two. Thisis done by doubling the streamwise extent Lz . No major consequences have beendetected. In order to satisfy a CFL-type condition, the time step δτ is chosen in therange 1 − 5 × 10−3. During the simulation, the time step δτ is adapted – especiallyduring a vortex compression phase, since the time t diverges when the dimensionlesstime τ approaches W0/(a0γ0) (see equation (2.14)).

430 I. Delbende, M. Rossi and S. Le Dizes
5. Results
Instability for an unsteady basic flow such as (2.8)–(2.9) is not as straightforward anotion as for a steady state. For a steady basic flow, the instability criterion is definedthrough a norm based, for instance, on the kinetic energy of the perturbations
I(t) =
∫V
(u2 + v2 + w2)rdrdθdz (5.1)
over some physical domain V (hereafter the computational domain). The equivalentquantity I0 for the basic flow is constant. When the flow is unsteady, one cannotquantify how perturbations modify the flow structure as time evolves simply by usingI(t) since the basic state and therefore I0 are time dependent. In such a case, ratiosbetween perturbation and basic-state energies seem more appropriate. For instance,one may examine the two ratios Ipl(t)/I
0pl(t), Iax(t)/I
0ax(t) where
Ipl(t) =
∫V
(u2 + v2)rdrdθdz, I0pl(t) =
∫VU2θrdrdθdz,
Iax(t) =
∫Vw2rdrdθdz, I0
ax(t) =
∫VW 2rdrdθdz.
(5.2)
Note that only the vortical part, and not the external strain, is used to compute thebasic flow energy. Similar quantities may be defined in the transformed system:
Jpl(t) =
∫V
(u2 + v2)rdrdθdz, J0pl(t) =
∫V
(U2Dθ )2rdrdθdz,
Jax(t) =
∫Vw2rdrdθdz, J0
ax(t) =
∫V
(W 2D)2rdrdθdz.
(5.3)
It is noteworthy that the following equalities hold between the ratios written in theoriginal and transformed systems:
Jpl(t)
J0pl(t)
=Ipl(t)
I0pl(t)
,Jax(t)
J0ax(t)
=Iax(t)
I0ax(t)
. (5.4)
In the present study, J0pl and J0
ax are constant since the action of viscous diffusion on
the basic flow U 2D is neglected. As a consequence, the study of ratios (5.4) amounts,in this unsteady case, to examining the evolution of Jpl(t) and Jax(t) in a fashion verysimilar to that used for steady flows. In what follows the ratios written in the originaland transformed systems are used indiscriminantly. Some insight into the flow axialstructure may be also obtained by examining two functions of the axial variable z:
jpl(z, τ) =
∫(u2 + v2)rdrdθ, jax(z, τ) =
∫w2rdrdθ, (5.5)
which denote the instantaneous energy, at the streamwise location z, of transverseand axial velocities respectively.
In the following, the Reynolds number is fixed to Re = 667 to allow comparisonwith previous works (Delbende et al. 1998). In all the simulations, perturbations areinitiated using a random field which is obtained by projecting a spatial white noise onthe space of divergence-free fields. At time t = 0, this projection is simply performedin Fourier space by applying the operator P⊥k .

Stretching effects on three-dimensional vortex instability 431
101
100
10–1
10–2
10–3
0 10 20 30
q = 0.8r = 0.30
q =1.6r = –0.011
t
Jax
J 0ax√
Jpl
J 0pl√
Figure 1. Temporal evolution of (Jpl/J0pl)
1/2 (solid line) and (Jax/J0ax)1/2 (dotted line) for γ = 0 at
swirl numbers q = 0.8 and q = 1.6, with Re = 667.
5.1. Simulations with γ = 0
The first two simulations are performed with no stretching applied. The usual Batch-elor vortex at constant swirl number q is then recovered. Apart from a numericalcheck, these computations reveal the main features observed when using white noiseinitial conditions. They hence provide reference cases for later analyses.
Two values of the swirl number q = 0.8 and q = 1.6 are considered, whichcorrespond to an unstable and a stable configuration respectively (Lessen et al. 1974).The Reynolds number is set to Re = 667. In figure 1, the temporal evolution of(Jpl/J
0pl)
1/2 and (Jax/J0ax)
1/2 is plotted for both swirl numbers. As expected, the firstone displays an asymptotic growth of perturbations, while the second leads to anasymptotic damping.
A transient period of decrease is initially observed corresponding to the dampingof most small-scale modes and positive azimuthal wavenumbers. Indeed it is knownfrom classical stability analyses of the Batchelor vortex that azimuthal wavenumbersn = 0 and n > 2 are always stable, and mode n = 1 is stabilized as soon as q > 0.074.The next stage of the simulation is reached when the unstable modes for q = 0.8(respectively the less stable modes for q = 1.6) emerge from the initial noise. Notethat an instantaneous growth rate can be defined as the amplitude derivative
d
dt
[log
√Jpl
J0pl
]. (5.6)
The maximum of this quantity may then be obtained, in the semi-log representationof figure 1, as the asymptotic slope of the plotted curves. For q = 0.8, the computedvalue σ = 0.30 agrees with the standard stability analyses of the Batchelor vortex.
According to previous studies (Mayer & Powell 1992), the overall maximum inviscidgrowth of perturbations is attained at q ≈ 0.87. Moreover, the maximum inviscidgrowth rate for a fixed swirl number q and negative azimuthal wavenumber n increaseswith |n| and saturates as n→ −∞ (Leibovich & Stewartson 1982). However, viscositycounterbalances this latter effect thus leading to an overall maximum for a finitevalue of n. For instance, the growth rate curves σn(kz) at Re = 667 and swirl numberq = 0.8 are drawn as solid lines on figure 2 (Delbende et al. 1998). The most unstablemodes are associated with the azimuthal wavenumber n = −3 and axial wavenumber

432 I. Delbende, M. Rossi and S. Le Dizes
0.4
0.3
0.2
0.1
0
0 2 4 6 8
–12–11
–10
–9
–8
–7–6
–5–4
–3
–2
–1
kz
rn
Figure 2. Temporal growth rate σ as a function of axial wavenumber kz for parameters γ = 0, q = 0.8and Re = 667. The symbols • denote the growth rates of the discrete axial wavenumbers obtainedin the present simulation, computed from the time evolution of perturbation spectra. Each solidline (reported from Delbende et al. 1998) shows the growth rate σn(kz) for each unstable azimuthalwavenumber n (n is indicated near the associated curve) obtained from a viscous DNS-basedstability analysis at the same Reynolds number.
kz ≈ 1.68 (σ ≈ 0.31), the azimuthal wavenumber n = −4 and axial wavenumberkz ≈ 2.17 (σ ≈ 0.31) and the azimuthal wavenumber n = −5, axial wavenumberkz ≈ 2.68 (σ ≈ 0.30). The time evolution of perturbation spectra in the presentsimulation for q = 0.8 may be used to recover, for each discrete axial wavenumberkz , the associated growth rate σ. More precisely, we have separated, at some giventimes, the different axial kz and azimuthal n wavenumbers of the axial velocity field,which provides various discretized components un(kz, r, τ). By integrating this functionover r, a quantity is obtained which undergoes an exponential time evolution nearthe end of the simulation. The growth rate for each (kz, n) is then obtained by aprimitive two-point interpolation with respect to time. Indeed, this study does notaim at providing an accurate comparison with the theoretical stability results for suchmodes. These results, plotted as circles in figure 2, are consistent with the growth ratecurves σn(kz) and indicate that modes emerging in the present simulations must berelated to these predominant azimuthal wavenumbers n = −3, n = −4 and n = −5.
5.2. Simulations with γ 6= 0
The third simulation consists of a compression phase immediately followed by astretching phase. More specifically, the strain rate is set to γ = −0.025 for 0 6 τ 6 15,and to γ = +0.025 for 15 < τ 6 30. Quantity γ is expected to be small whenscaled using the vortex characteristics (see e.g. the asymptotic analysis by Moffatt,Kida & Ohkitani 1994). For the same reasons, it is assumed that it fluctuates witha characteristic time larger than the turnover time. Therefore, we choose relativelylow values for γ0 and values significantly larger than 1 for τ?. For this strain-ratetime evolution, τ (see relations (2.14) and (2.17)) is not identical to physical time tas illustrated in figure 3. The instantaneous swirl number, initially set to q(0) = 1.8,decreases during the compression down to the value q ≈ 0.88, and thereafter increasesback towards its initial value (figure 4a). Similarly, the basic-state core expands andshrinks back, as depicted in figure 4(b). Let us hereafter call the q-region whereunstable modes prevail for the unstretched inviscid Batchelor vortex, the Batchelor-vortex instability domain. Initially the basic vortex flow lies outside this region,then penetrates it and finally leaves it. The time evolution of fluctuations perturbing

Stretching effects on three-dimensional vortex instability 433
40
30
20
10
0 10 20 30τ
t
Figure 3. Physical time t versus modified time τ used for the simulation with compression andstretching. The circles denote the position of the snapshots pictured in figures 6–10. The straightline indicates function t = τ prevailing when γ = 0.
2.0
1.5
1.0
0.5
01.3
1.2
1.1
1.0
0.90 10 20 30
t
a
q
(a)
(b)
Unstable
Stable
Figure 4. Instantaneous (a) swirl number q(t) and (b) core size a(t) as functions of physicaltime t for the simulation with compression and stretching. The dashed line corresponds to theBatchelor-vortex instability threshold at q ≈ 1.50. The circles denote the position of the snapshotspictured in figures 6–10.
the above basic flow may be divided as well into three stages (figure 5): an initialenergy decrease followed by an instability phase and a re-stabilization. The growthphase lies within the Batchelor-vortex instability domain, though it does not startwith the crossing of q = 1.5. By contrast, the re-stabilization occurs very close toq = 1.5. Within the quasi-static approximation, this latter effect is accounted for ina straightforward manner, since the local dynamics is understood in terms of thestability of an unstretched steady Batchelor vortex with instantaneous swirl numberq(τ). The time delay between growth and penetration into the Batchelor-vortexinstability domain is clearly of the same transient nature as the one observed in theunstretched case (figure 1). In other words, these perturbations are not optimal whenparameters enter the instability domain. Similar observations were made for otherflows, e.g. the Gortler instability (Cossu et al. 2000). The instantaneous growth rate

434 I. Delbende, M. Rossi and S. Le Dizes
101
100
10–1
10–2
10–3
0 10 20 30t
Jax
J 0ax√
Jpl
J 0pl√
Unstable St.St.
Figure 5. Temporal evolution of quantities (Jpl/J0pl)
1/2 (solid line) and (Jax/J0ax)1/2 (dotted line) for
the simulation with compression and stretching. The dashed line corresponds to the Batchelor-vortexinstability threshold.
100
10–5
10–10
10–15
10–20
0 10 20 30 40
(a)τ = 0
5
30
10–1 (b)τ = 30
25
20
0
5
543210
10–2
10–3
10–4
10–1 (d)
τ = 30
25
20
0
5
543210
10–2
10–3
10–415
kz
0 10 20 30 40
kz
(c)τ = 0
5
30
jpl√
jax√
100
10–5
10–10
10–15
10–20
15
Figure 6. Spectrum of transverse j1/2pl (a, b) and axial j
1/2ax (c, d ) r.m.s. perturbation velocities with
respect to the axial wavenumber kz at τ = 0, 5, 10, 12.5, 15, 17.5, 20, 25, 30. Frames (b) and (d ) areclose-ups of the low-wavenumber region, where pertinent phenomena occur.
(5.6) reaches a maximum value 0.35 at t ≈ 20 (or τ ≈ 15), i.e. when q(τ) ≈ 0.88. Thisvalue may be tentatively compared with the growth rate 0.39 deduced after rescalingthe value computed for the unstretched Batchelor vortex of § 5.1 at q = 0.8 (see theAppendix for details).
Figure 6 displays at various times τ (corresponding to circles in figures 3 and 4)

Stretching effects on three-dimensional vortex instability 435
10–1
10–2
10–3
10–4
0 1 2 3 4
τ = 30
jpl√
5 6 7
kzS–3/2
2520
15
0
5
Figure 7. Same as figure 6(b) but plotted with respect to the rescaled wavenumber kzS−3/2.
the spectrum of the instantaneous energies jpl(z, τ), jax(z, τ) in terms of the axialwavenumber kz . At τ = 0, the spectrum is flat, as expected, since white noise is initiallyintroduced. For larger times, a bell-shaped spectrum emerges for both functions atlarge scales (kz = O(1)) while small scales are being rapidly damped. Such featuresensure that the computational domain is large enough in the axial z-direction, thatthe simulation is sufficiently well resolved in spectral space to capture the mainflow-instability structures. The quasi-static approximation may provide a qualitativeinterpretation of such an evolution. Note, however, that, in this latter framework,the reference length scale along the axis is equal to a0S
−3/2 (see the end of § 3): kz ,which, in the simulation, is made dimensionless using length scale a0, must hencebe rescaled by a factor S−3/2. This rescaling is precisely applied in the companionfigure 7. First, the perturbation spectra between τ = 10 and τ = 20 undergo a rapidgrowth which particularly affects rescaled wavenumbers kzS
−3/2 between 2 and 3.Indeed, the growth rate of an unstretched Batchelor vortex at similar swirl numbersachieves a maximum for axial wavenumbers between 2 and 3 (see figure 2). Secondly,the maximum in figure 7 is progressively shifted, for larger τ, towards smaller rescaledwavenumbers while the interval of amplified wavenumbers is reduced. In this range,the swirl number q(τ) progressively increases across q ≈ 1.50: from standard results,it is known that the upper unstable axial wavenumber then decreases while negativehelical modes are progressively restabilized, the mode n = −1 being the last one tobecome stable (Delbende et al. 1998). This feature explains why, at final time τ = 30,a ‘preferred’ relatively small axial wavenumber kz ≈ 1.25 emerges through the processof compression and stretching (see curve τ = 30 in figure 7).
The transverse flow structure is represented for different times in figure 8 whereisocontours of the axial component of the perturbation vorticity ωz are plotted ata fixed streamwise location. The physical domain shown is a transverse cut of thevortex centred around its core (the effective computational domain is much larger,which avoids spurious periodic effects). One observes first a filtering of small scalesand the gradual appearance of a vortical structure. The observed symmetries indicatethe presence of azimuthal wavenumbers |n| = 4 and |n| = 5 which are reminiscentof the most unstable azimuthal modes of the viscous unstretched Batchelor vortex

436 I. Delbende, M. Rossi and S. Le Dizes
3
2
1
0
–1
–2
–3–3 –2 –1 0 1 2 3
Figure 8. Isocontours in the (r, θ)-plane of the axial component ωz of the perturbation vorticity ata fixed axial location. Contours shown correspond to ωz(r, θ, t) = ±ωz,max/2
p, where p = 1, 2, · · · , 5.Positive (resp. negative) values are represented by solid (resp. dashed) lines. Each snapshot cor-responds to a circle in figures 3 and 4. Figure should be read from left to right and top tobottom.
at q = 0.8. During the subsequent stretching phase, this structure is finally rolled-up.Compression and stretching effects appear on the average vortex core size. A glimpseat the three-dimensional perturbation is given in figure 9 where isosurfaces of theaxial vorticity perturbation ωz are shown. Note that the expansion and compressionof the vortex core is not apparent here since, unlike in figure 8, the frames aredisplayed in the modified spatial coordinates in which the vortex core size is constant.These snapshots display the gradual appearance of axial and azimuthal symmetrystructures.
The above perturbation structure, when superimposed on the basic unsteady state,leads to the three-dimensional flows displayed in figure 10(a, b). One isosurface ofthe axial component of the total vorticity field Ωz = Ω2D
z + ωz is presented for twodifferent initial r.m.s. perturbation levels (Jpl(0)/J0
pl)1/2 = 8×10−4 for figure 10(a) and

Stretching effects on three-dimensional vortex instability 437
τ =5
10
12.5
15 30
25
20
τ =17.5
Figure 9. Isosurfaces of the axial component ωz of the perturbation vorticity forωz(r, θ, z, τ) = ± 1
2ωz,max. Each snapshot corresponds to a circle in figures 3 and 4. Note that
the conical aspect of the vortex is only due to the geometrical perspective.
(Jpl(0)/J0pl)
1/2 = 1.4× 10−2 for figure 10(b). Results are shown until the maximum of
perturbation ωz(τ) becomes larger than the maximum of the basic flow Ω2Dz . When
both amplitudes are of the same order of magnitude, this procedure is pertinentonly if nonlinear terms mainly affect the amplitude without drastically modifying thespatial perturbation structure selected through the linear evolution. This hypothesis,known to be valid in the framework of weakly nonlinear analyses, is an attempt toreveal the nonlinear structure that may emerge from the compression and stretchingprocess. Such an assumption remains to be verified using a fully nonlinear simulationcode, which is outside the scope of the present paper. These frames indicate that thevortex becomes corrugated as in a Matisse collage (Matisse 1952) with 4 or 5 lobes.It is conjectured that a further evolution into the nonlinear regime might lead to theformation of several interwoven filaments as observed in the experiment by Cadot,Douady & Couder (1995) and in the numerical simulation of the nonlinear evolutionof the unstretched Batchelor vortex by Delbende & Chomaz (2000).
The influence of the time Tinst spent by the perturbation within the Batchelor-vortexinstability domain is now investigated. Figure 11(a, b) shows the results of varioussimulations of compression and stretching processes with γ = ±0.05 for various timeintervals Tinst (see figure 11a). The initial swirl q(0) is now set to the value 1.6. Thetotal amplification gain† which results from the excursion of the perturbation insidethe Batchelor-vortex instability domain can be deduced from the energy curves onfigure 11(b). It clearly increases with the time interval Tinst as expected from a naivequasi-static approximation. On curve (i), the vortex remains inside the instability
† It is clear, as for any linear evolution, that the displayed total gains computed over a finitetime depend on the selected initial conditions. The present curves are obtained for an initialdivergence-free white noise field. Larger amplitudes could certainly be reached with more optimalinitial conditions.

438 I. Delbende, M. Rossi and S. Le Dizes
τ = 0
5
10
15 30
25
20
τ =17.5
(a)
(b)
τ = 0
5 15
12.5
τ =10
Figure 10. Isosurfaces of the axial component Ωz of the total vorticity for Ωz(r, θ, z, τ) = 12Ωz,max.
For series (a), the simulation is initiated with a r.m.s. value (Jpl(0)/J0pl)
1/2 = 8× 10−4. For series(b), a stronger noise amplitude is used (Jpl(0)/J0
pl)1/2 = 1.4× 10−2. Each snapshot corresponds to a
circle in figures 3 and 4. Note that the conical aspect of the vortex is only due to the geometricalperspective.
region for a short period, and energy is always decreasing. On curve (ii), the totalamplification is less than unity even though the energy temporarily increases. Bycontrast, curves (iii) and (iv) are characterized by respective substantial gains oforder 10 and 100. Note that on curve (iv), the amplitude derivative (5.6) has a localminimum (near t = 22) inside the Batchelor-vortex instability domain. This featuremay be revealed by the quasi-static approximation since the instantaneous growth rateof an associated unstretched Batchelor vortex following the path q(t) on figure 11(a),

Stretching effects on three-dimensional vortex instability 439
2.0
1.5
1.0
0.5
0 10 20 30 40t
(a)(i) (ii) (iii) (iv)
q
(b)
(i)
(ii)
(iii)
(iv)
102
101
100
10–1
10–2
10–3
0 10 20 30 40t
Jpl
J 0pl√
Figure 11. Various simulations (i–iv) with compression and stretching for the same value ofγ = ±0.05 and for various time intervals Tinst. (a) Instantaneous swirl number q(t); (b) temporalevolution of energy (Jpl/J
0pl)
1/2.
2.0
1.5
1.0
0.5
0 6020 8040t
(a)(i) (ii) (iii) (iv)
q
(b)
(i) (ii)
(iii)
(iv)
106
104
102
100
10–2
0 4020 60 80t
Jpl
J 0pl√
100 100
Figure 12. Various simulations (i–iv) with compression and stretching for different values ofγ (respectively ±0.1, ±0.05, ±0.025, ±0.01). (a) Instantaneous swirl number q(t); (b) temporalevolution of energy (Jpl/J
0pl)
1/2.
reaches a local minimum at t ≈ 20. In the same spirit, figure 12(a) presents varioussimulations performed with the same q(t?) ≈ 0.8 (i.e. swirl numbers cross the sameinstability region) but with different γ values. In that case, the time spent Tinst is alsochanged. Once |γ| increases, the time spent in the instability region decreases until theamplification mechanism is no longer active (in figure 12 when |γ| > 0.05).
In turbulent flows, vortex filaments are subjected to fluctuating strain caused bylarge-scale structures. The simple process defined by figures 11 and 12 aims atemulating such fluctuations and provides the following mechanism: a stable vortexis first brought inside the Batchelor-vortex instability domain by a sufficiently longcompression. It remains in that region and grows until γ, which expresses the actionof surrounding large scales, changes sign. Stretching then makes the vortex leavethe instability domain, which stops the perturbation growth. If perturbations havereached a high enough amplitude, the vortex may be disrupted because of nonlinearinteractions. This two-step mechanism tentatively explains the abrupt destruction ofvortices as observed in turbulent flows.
6. ConclusionIn this paper, the three-dimensional linear stability problem of a stretched vortex
with axial flow has been addressed. It has first been shown that these stabilityequations could be reduced to equations similar to those governing perturbations of

440 I. Delbende, M. Rossi and S. Le Dizes
an unstretched vortex, however with particular time-varying parameters. It has alsobeen argued how this slight difference (an additionnal time-varying factor in the axialderivatives) drops out in a quasi-static approximation. This regime should be valid inthe limit of weak stretching and large Reynolds numbers.
The general perturbation equations for the stretched Batchelor vortex have thenbeen numerically solved for particular variations of the stretching rate, using whitenoise as initial condition. Compressing and stretching the vortex leads to the ap-pearance of axial and azimuthal symmetry structures whereby the vortex becomescorrugated with several lobe structures. In addition, the local time evolution of per-turbations may be understood in the framework of a quasi-static approximationprovided the strain rate is not too large.
Results were also discussed in the context of turbulence. The stretched Batchelorvortex subjected to the prototype stretching field might mimic the behaviour offilaments in a turbulent background flow and their destruction could be due to themodification of the vortex characteristics by stretching. This mechanism is clearlydifferent from the elliptic instability mechanism (Le Dizes et al. 1996; Eloy & LeDizes 1999) although both could be active in turbulence. In the elliptical mechanism,the instability is generated by the stretching field and not by the vortex itself. Inparticular, the local growth rate of the elliptical instability is proportional to thenon-axisymmetric component of the stretching rate and therefore it is expected tobe much smaller than the growth rate of the Batchelor vortex instability, which isproportional to the axial vorticity of the vortex.
The nonlinear interactions which are needed to describe the vortex destructionhave not been considered in the present analysis. This constitutes an important issueas nonlinear effects can induce both rich dynamics in the Batchelor vortex (Abid &Brachet 1998; Delbende & Chomaz 2000) and strong modification of the stretchingfield (Abid et al. 2002). Linear aspects are also not fully explored as we have not triedto seek the most unstable perturbation. The determination of the optimal perturbationis indeed an open issue which could have important applications in aeronautics. Inthe context of vortex stability, such an issue has only been addressed by Nolan &Farrell (1999) for two-dimensional perturbations in a class of tornado-like vortices. Infuture work, it would be interesting to extend their analysis to the three-dimensionalproblem and to perform a full generalized three-dimensional stability analysis (Farrell& Ioannou 1996) of the system (3.20)–(3.23).
We would like to acknowledge the use of a NEC–SX5 supercomputer at IDRIS–CNRS in the frame of projects CP2–#990173 and #000173. Thanks to Dang Anh-Tuan for his rapid and kind technical assistance.
AppendixIn the framework of the quasi-static approximation, the instantaneous growth
rate (5.6) at time t is associated with the growth rate of an unstretched Batchelorvortex at q(τ) provided that a proper normalization factor is taken into account. Thislatter quantity arises because the unstretched vortex dimensionless characteristics areevaluated (i) using time τ and (ii) with the time scale a(t)/W (t) = S(τ)1/2a0/W0. Thisimplies that the standard growth rate must be divided by a factor S(τ) to account forthe relation dτ = s(t)dt and multiplied by a factor S(τ)1/2 since the time scale of thesimulation is taken to be a0/W0.
In the simulation considered in § 5.2, the instantaneous growth rate 0.35 is obtained

Stretching effects on three-dimensional vortex instability 441
at t ≈ 20 (or τ ≈ 15) and may be associated with the the standard growth rate 0.31(computed for the unstretched Batchelor vortex at q = 0.8 in § 5.1) which, divided byan overall factor S(τ = 15)1/2 ≈ 0.79, yields 0.39. Note, however, that this is only arough estimate since the swirl number 0.8 used for comparison purposes is locatedslightly below the lower value for q(τ) and since the Reynolds number should also berescaled.
REFERENCES
Abid, M., Andreotti, B., Douady, S. & Nore, C. 2002 Oscillating structures in a stretched-compressed vortex. J. Fluid Mech. 450, 207–233.
Abid, M. & Brachet, M. E. 1998 Direct numerical simulations of the Batchelor trailing vortex bya spectral method. Phys. Fluids 10, 469–475.
Andreotti, B., Douady, S. & Couder, Y. 1997 About the interaction between vorticity andstretching. In Turbulence Modelling and Vortex Dynamics (ed. O. Boratav, A. Eden & A.Erzan). Lecture Notes in Physics, pp. 92–107. Springer.
Ash, R. L. & Khorrami, M. R. 1995 Vortex stability. In Fluid Vortices (ed. Green, S. I.), ChapVIII, pp. 317–372. Kluwer.
Batchelor, G. K. 1964 Axial flow in trailing line vortices. J. Fluid Mech. 20, 645–658.
Batchelor, G. K. & Proudman, I. 1954 The effect of rapid distortion in a fluid in turbulent motion.Q. J. Mech. Appl. Maths 7, 83–103.
Cadot, O., Douady, S. & Couder, Y. 1995 Characterization of the low pressure filaments inthree-dimensional turbulent shear flow. Phys. Fluids 7, 630–646.
Cambon, C. & Scott, J. F. 1999 Linear and nonlinear models of anisotrop turbulence. Annu. Rev.Fluid Mech. 31, 1–53.
Cossu, C., Chomaz, J.-M., Huerre, P. & Costa, M. 2000 Maximum spatial growth of Gortlervortices. Flow, Turbul. Combust. 65, 369–392.
Craik, A. D. D. & Criminale, W. O. 1986 Evolution of wavelike disturbances in shear flows: aclass of exact solutions of the Navier-Stokes equations. Proc. R. Soc. Lond. A 406, 13–26.
Delbende, I. & Chomaz, J.-M. 2000 Bursting of a swirling jet stemming from a localized pertur-bation. In Vortex Structure and Dynamics (ed. A. Maurel & P. Petitjeans). Lecture Notes inPhysics, pp. 140–146. Springer.
Delbende, I., Chomaz, J.-M. & Huerre, P. 1998 Absolute/convective instabilities in the Batchelorvortex: a numerical study of the linear impulse response. J. Fluid Mech. 355, 229–254.
Eloy, C. & Le Dizes, S. 1999 Three-dimensional instability of Burgers and Lamb-Oseen vortices ina strain field. J. Fluid Mech. 378, 145–166.
Escudier, M. P. 1988 Vortex breakdown: observations and explanations. Prog. Aerospace Sci. 25,189–229.
Farrell, B. F. & Ioannou, P. J. 1996 Generalized stability theory. Part I: Autonomous Operators.Part II: Nonautonomous operators. J. Atmos. Sci. 53, 2025–2053.
Gibbon, J. D., Fokas, A. S. & Doering, C. R. 1999 Dynamically stretched vortices as solution ofthe 3D Navier–Stokes equations. Physica D 132, 497–510.
Le Dizes, S., Rossi, M. & Moffatt, H. K. 1996 On the three-dimensional instability of ellipticalvortex subjected to stretching. Phys. Fluids 8, 2084–2090.
Leibovich, S. 1978 The structure of vortex breakdown. Annu. Rev. Fluid Mech. 10, 221–246.
Leibovich, S. 1983 Vortex stability and breakdown: survey and extension. AIAA J. 17, 471–477.
Leibovich, S. & Stewartson, K. 1983 A sufficient condition for the instability of columnar vortices.J. Fluid Mech. 126, 335–356.
Lessen, M. & Paillet, F. 1974 The stability of a trailing line vortex. Part 2. Viscous theory. J. FluidMech. 65, 769–779.
Lessen, M., Singh, P.J. & Paillet, P. 1974 The stability of a trailing line vortex. Part 1. Inviscidtheory. J. Fluid Mech. 63, 753–763.
Lundgren, T. S. 1982 Strained spiral vortex model for turbulent fine structure. Phys. Fluids 25,2193–2203.
Marshall, J. S. 1997 The flow induced by periodic vortex rings wrapped around a columnar vortexcore. J. Fluid Mech. 345, 1–30.

442 I. Delbende, M. Rossi and S. Le Dizes
Matisse, H. 1952 La Tristesse du Roi. Musee National d’Art Moderne, Paris.
Maurel, A. & Petitjeans, P. (Eds.) 2000 Vortex Structure and Dynamics. Springer.
Mayer, E. W. & Powell, K. G. 1992 Viscous and inviscid instabilities of a trailing line vortex.J. Fluid Mech. 245, 91–114.
Moffatt, H. K., Kida, S. & Ohkitani, K. 1994 Stretched vortices – the sinews of turbulence;large-Reynolds-number asymptotics. J. Fluid Mech. 259, 241–264.
Nolan, D. S. & Farrell, B. F. 1999 Generalized stability analyses of asymmetric disturbances inone- and two-celled vortices maintained by radial inflow. J. Atmos. Sci. 56, 1282–1307.
Olendraru, C., Sellier, A., Rossi, M. & Huerre, P. 1996 Absolute/convective instability of theBatchelor vortex. C. R. Acad. Sci. Paris 323, 153–159.
Olendraru, C., Sellier, A., Rossi, M. & Huerre, P. 1999 Inviscid instability of the Batchelorvortex: Absolute/convective transition and spatial branches. Phys. Fluids 11, 1805–1820.
Petitjeans, P., Robres, J. H., Wesfreid, J. E. & Kevlahan, N. 1998 Experimental evidence for anew type of stretched vortices. Eur. J Mech.B/Fluids 17, 549–560.
Pullin, D. I. & Saffman, P. G. 1998 Vortex dynamics in turbulence. Ann. Rev. Fluid Mech. 30,31–51.
Rossi, M. 2000 Of vortices and vortical layers: an overview. In Vortex Structure and Dynamics (ed.A. Maurel & P. Petitjeans). Lecture Notes in Physics, pp. 40–123. Springer.
Rossi, M. & Le Dizes, S. 1997 Three-dimensional stability spectrum of stretched vortices. Phys.Rev. Lett. 78, 2567–2569.
Verzicco, R. & Jimenez, J. 1999 On the survival of strong vortex filaments in ‘model’ turbulence.J. Fluid Mech. 394, 261–279.
Verzicco, R., Jimenez, J. & Orlandi, P. 1995 On steady columnar vortices under local compression.J. Fluid Mech. 299, 367–388.
Vincent, A. & Meneguzzi, M. 1991 The spatial structure and statistical properties of homogeneousturbulence. J. Fluid Mech. 225, 1–20.

[A8]DELBENDE, I. & ROSSI, M. 2005
Nonlinear evolution of a swirling jet instability.Phys. Fluids. 17(4), 044103.


Nonlinear evolution of a swirling jet instabilityIvan Delbendea!
Laboratoire d’Informatique pour la Mécanique et les Sciences de l’Ingénieur (LIMSI-CNRS),Université Pierre-et-Marie-Curie (Paris VI), Boîte Postale 133, 91403 Orsay Cedex, France
Maurice RossiLaboratoire de Modélisation en Mécanique (LMM-UPMC), Université Pierre-et-Marie-Curie (Paris VI),4 Place Jussieu, 75252 Paris Cedex 05, France
sReceived 1 September 2004; accepted 20 January 2005; published online 10 March 2005d
The nonlinear evolution of the three-dimensional instability of a viscous unsteady swirling jet,namely, the Batchelor vortex, is addressed. Two types of initial perturbations are considered: asingle unstable normal mode with given azimuthal symmetry and white noise. Three differentscenarios have been put into evidence according to the value of the swirl numberq selected in theunstable rangeq,1.5. When helical symmetry is present, the dynamics can be interpreted in atwo-dimensional framework. More specifically, the process is viewed as the simultaneous action ofa destabilizing “instantaneous” swirling jet instability and a stabilizing accelerated viscous diffusioninduced by differential rotation. For swirl numbers close to the critical values1,q,1.5d, this lattereffect dominates and leads the vortex to relaminarize in the nonlinear regime. For intermediatevalues of swirlsq,0.8d, it breaks into an array of equal sign vortices containing most of the initialcirculation and surrounding a central part with axial velocity. For lower swirlsq,0.6d, the initialvortex gives birth to an array of dipoles, the ejection of which drastically increases the structure size.Similar trends are observed on simulations with an initial white noise condition. ©2005 AmericanInstitute of Physics. fDOI: 10.1063/1.1868412g
I. INTRODUCTION
Numerous works have considered the dynamics of a vor-tex with axial flow, i.e., a swirling jet.1,2 This flow configu-ration observed in many situations of interestsrotating cavi-ties, delta wings, turbomachineryd is also associated to theabrupt destruction of a vortex core known as vortex break-down. This latter phenomenon is often related to the exis-tence of an imposed axial pressure gradient. However, thisingredient is not always necessary for the vortex disruptionto occur.3 The presence of axial flow along the vortex axismay also explain some dynamical behaviors of vorticity fila-ments in turbulent flows such as bursts.4,5
Vortices with an axial jet flow are known to sustainthree-dimensionals3Dd unstable modes. Such instabilitieshave been particularly analyzed in the context of the Batch-elor vortex, an asymptotic solution introduced6 to describetrailing vortices. This flow is characterized by a Gaussianprofile for both its axial vorticity component and axial veloc-ity component. The temporal linear instabilities of the Batch-elor vortex solution have been extensively studied.1,7,8 Forlarge Reynolds numbers and swirl numbers 0øqø1.5,whereq quantifies the ratio of azimuthal to axial motionffora mathematical definition see Eq.s3dg, the instability is domi-nated by inviscid negative helical modes, which becomestable for swirl numbers larger than 1.5. At fixedq, the in-viscid instability reaches its maximum for infinite azimuthalwavenumberunu. This numerical observation was confirmedby an asymptotic study whereby unstable ring eigenmodes
were exhibited. A criterion based on this asymptotic structurewas derived by Leibovich and Stewartson generalizing theprevious centrifugal Rayleigh criterion to basic velocity pro-files with azimuthaland axial flow.9 The above ring modesare clearly stabilized by viscous effects.10 Other unstableeigenmodes have also been discovered through numericalresolution of the eigenvalue problem, namely, viscous modeswhich cannot be obtained through the inviscid analysis.Some have been found1,11 for positive azimuthal wavenum-bern=1. More recently,12 viscous modes have also been dis-covered for values ofq in the inviscidly unstable range 0,q,1.5 as well as forq.1.5, displaying critical layerswhere viscosity plays a particularly important role. All ofthem possess relatively small growth rates when compared tothe inviscid instability. In many experimental situations, thevortex profile is spatially evolving, e.g., for trailing edgevortices. It was precisely in this specific case that the Batch-elor profile was first derived through an asymptoticexpansion.6 However most part of the available literature fo-cuses on a temporal setting rather than a spatial one. In thelinear regime, only few studies have considered the spatialinstability: some works suppose the basic flow to be paralleland determine the convective/absolute nature of its linearinstability within the framework of inviscid13 or viscous14,15
dynamics. In the inviscid case, a moderate amount of swirl isable to trigger absolute instability of modesn=−2,−3 nearqvalues 0.6 and 0.4, respectively. However, the absolutegrowth rate becomes negative at moderate Reynolds number.Other linear studies adopt a spatially evolving basic profilesolution of boundary-layer equations coupled with spatiallyevolving perturbations.16 For the Batchelor vortex which isadElectronic mail: [email protected]
PHYSICS OF FLUIDS17, 044103s2005d
1070-6631/2005/17~4!/044103/21/$22.50 © 2005 American Institute of Physics17, 044103-1
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

self-similar, this latter point of view simply corresponds to astreamwise dependence of the Reynolds number. In thepresent paper, we disregard this aspect and focus on the dy-namics in its simplest form, i.e., with streamwise periodicconditions.
So far, the influence of nonlinear terms on 3D perturba-tions has been mainly investigated in the context of the tem-poral Batchelor vortex. We remain in this framework. Note,however, that steeper velocity profiles have also beenconsidered,17 the dynamics of which is dominated by theKelvin–Helmholtz instability. The relaminarization of an ini-tially unstable Batchelor vortex has been first described byRagab and Sreedhar18 using direct numerical simulationsDNSd and large eddy simulation. These authors introduced aphenomenology essentially based on spatially averagedquantities, which was later confirmed by Jacquin andPantano.19 This latter study, aimed at explaining the persis-tence of aircraft trailing vortices, introduced the idea that thelocal linear Leibovich–Stewartson criterion9 may explain theexistence forq.0.8 of an external locally stable zone im-peding nonlinearities to disrupt the vortex structure. In a dif-ferent context, the formation of spiral structures has beenobserved in the Batchelor vortex.3 Note that the spatial non-linear problem isa priori closer to experimental situations.However it has been less extensively studied due to the time-consuming character of spatial simulations and also becausethe choice of boundary conditions may be controversial.20
Indeed, boundary conditions may significantly perturb thewhole flow since, in swirling jets, perturbations may travelupstream. In the present work, we hence focus on the non-linear saturation and adopt the standard Taylor hypothesis.
In the present paper, the same issue is addressed usingdirect numerical simulations of the Navier–Stokes equationsin perturbative formulation around the unsteady Batchelorvortex diffusing through viscous effects. By contrast withprevious works, we analyze and compare the nonlinear evo-lutions for two types of initial 3D infinitesimal perturbations:the time evolution of a pure unstable normal mode withgiven azimuthal symmetry superimposed on the basic flow isconsidered, as well as the evolution of white noise. Our goalis to give a dynamical interpretation of the different regimeswithout resorting to spatially averaged quantities as in previ-ous studies.18,19 Simulations started with a single normalmode are particularly suitable for such a treatment since theflow can be viewed in the context of a two-dimensional dy-namics, as shown below. Moreover, this framework providesa clear picture of the various competing effects and allows usto analyze precisely why the nonlinear regime changes fromthe relaminarization process observed at high swirl18,19to theejection of several helical structures at lower swirl.3
The paper is organized as follows. In Sec. II, some gen-eral considerations on the basic flow and its stability proper-ties are presented. In Sec. III, the equations governing thedynamics of nonlinear 3D perturbations are provided in di-mensionless form as well as the numerical procedure usedfor simulation. Some concepts related to helical symmetry,which turn out to be pertinent for this problem, are intro-duced in Sec. IV. Results are then discussed in Sec. V forsimulations started with a pure normal mode initial condi-
tion. Section VI contains the results of simulations startedwith divergence-free white noise fields.
II. THE BASIC FLOW
Most experimental or theoretical works on swirling jetproblems use the axisymmetric Batchelor vortex6 as basicflow. We follow this hypothesis though, in some aeronauticalinstances, this field may not be satisfactory to fit experimen-tal situations21 and more involved profiles are then necessary.The velocity fieldUBsx ,td is a combination of an azimuthalcomponentUu
B and an axial componentWB. In polar coordi-natessr ,u ,zd, it reads
UrBsr,td = 0, Uu
Bsr,td =G
2prs1 − e−r2/a2
d,
s1d
WBsr,td =W0
B
sa/a0d2e−r2/a2,
where G stands for the vortex circulation andW0B for the
initial axial velocity atr =0. The vortex core sizeastd, whichis chosen to be identical for azimuthal and axial velocitycomponents, evolves according to the equationa2std=a0
2
+4nt, wherea0 denotes the initial core size andn the kine-matic viscosity. Axial and azimuthal vorticity componentsare thus both present:
VzBsr,td =
1
r
]srUuBd
]r=
G
pa2e−r2/a2,
s2d
VuBsr,td = −
]WB
]r=
2r
a2WB.
The diffusing Batchelor vortex is a true Navier–Stokes solu-tion characterized by two dimensionless numbers: the Rey-nolds number Re and the swirl numberq0 which is the ratioof the characteristic azimuthal velocityG /2pa0 to the cen-terline axial velocityW0
B:
Re =W0
Ba0
n, q0 =
G
2pa0W0B . s3d
An alternative Reynolds number based on the circulationmay also be defined ReG;G /n=2pq Re. Throughout the pa-per, quantityq0 can be assumedpositivewithout loss of gen-erality because of symmetry: for a swirling jet with a nega-tive q0, positive and negative azimuthal wavenumbersexchange their properties.
When viscous diffusion is disregarded, the Batchelor so-lution becomes steady and hence suitable for a classical tem-poral instability analysis in terms of normal modes
fursrd,uusrd,wsrdgeikzz+inu−iÃt+st. s4d
In the above expression, integern and real quantitieskz, Ã, srespectively denote the azimuthal wavenumber, the axialwavenumber, the frequency of the mode, and its temporalgrowth rate. Temporal stability studies1 indicate that the flowis inviscidly unstable for swirl numbersq0ø1.5 and that theinstability is dominated by negative helical modesn,0.More recently, other instability modes have been put into
044103-2 I. Delbende and M. Rossi Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

evidence which intrinsically depend on viscosity.11,12 Sucheigenmodes possess growth rates typically an order of mag-nitude smaller than inviscid ones. In this study, we henceconsider only the inviscidly unstable regimeq0ø1.5.
When viscous diffusion is taken into account, expres-sionss1d for Uu
B andWB can be associated, at each timet, toa steady Batchelor profile with an instantaneous swirl num-ber
qstd =G
2pa02W0
Ba = q0Î1 + 4nt/a0
2 s5d
defined as the ratio ofG /2pa to the centerline axial velocityW0a0
2/a2. More generally, at each time during the numericalsimulation, average velocity profiles can be fitted by a“steady” Batchelor profile with the same circulationG andsame centerline axial velocityWcstd. Its core size may beevaluated as the radiusaavstd such that
aav2 ;
1
GE r2Vzr dr du, s6d
where the integral is taken over a cross section. This definesan instantaneous average swirl number
qavstd ;G
2paavstdWcstd. s7d
The underlying idea is to connect the instability properties ofthe mean velocity profiles obtained by DNS at timet to thoseof an instantaneous Batchelor vortex of swirl numberqavstd.This quasistatic approximation was already shown to be ad-equate for a Batchelor vortex subjected to axial strain.5
III. NONLINEAR PERTURBATIONS: GOVERNINGEQUATIONS AND NUMERICAL METHOD
The nonlinear evolution is simulated by numerical inte-gration of the Navier–Stokes equations written in a perturba-tive formulation around the unsteady Batchelor basic states1d. Pressurep and velocityu perturbations—capital letterswill always refer to global fields and lower case letters toperturbative fields—are governed by the nonlinear system:
]u
]t+ fUBstd · = gu + su · = dUBstd + su · = du
= −1
r= p + nDu, s8d
= ·u = 0. s9d
These equations are put in dimensionless form using the ini-tial axial centerline velocityW0
B as velocity scale, the initialcore sizea0 as spatial scale,a0/W0
B as time scale, andrfW0Bg2
as pressure scale. Introducing the Reynolds number Re andthe swirl numberq0, the nonzero components of the basicvelocity now read in dimensionless form
UuBsr,td =
q0
rs1 − e−r2/s1+4t/Redd, s10d
WBsr,td =1
1 + 4t/Ree−r2/s1+4t/Red. s11d
The numerical code used is adapted from Ref. 22. It iswritten using the velocity/vorticity formulation ofs8d:
]u
]t= UB 3 v + u 3 VB + u 3 v
− = Sp + UB ·u +u2
2D +
1
ReDu, s12d
where VB= = 3UB and v= = 3u. Equation s12d is thenexpressed in the spectral domain relative to the three Carte-sian directionssx,y,zd. Each Fourier modeuk correspondingto the wavevectork =skx,ky,kzd evolves according to
duk
dt= fUB 3 v + u 3 VB + u 3 vgk
− ikFp + UB ·u +u2
2G
k−
1
Rek2uk , s13d
where f·gk denotes thek-Fourier coefficient of the term in-side the brackets. Each Fourier modeuk is orthogonal to thewavevectork since the incompressibility conditions9d im-posesk ·uk =0. Equations13d can thus equivalently be pro-jected onto the plane orthogonal tok to yield
duk
dt= PksfUB 3 v + u 3 VB + u 3 vgkd −
1
Rek2uk ,
s14d
wherePk stands for the projection operator.Let dt denote the time step. The velocity perturbation
ukst+dtd is computed using an explicit second-order Adams–Bashforth time advance scheme
ukst + dtd = eukstd + f 32ePkstd − 1
2e2Pkst − dtdgdt. s15d
In s15d, the damping factore=exph−k2dt /Rej stems from theexact integration of the viscous term and vectorPkstd standsfor
Pkstd = PksfUB 3 v + u 3 VB + u 3 vgkd s16d
evaluated at timet. The cross products appearing ins16d arefirst evaluated in physical space; to do so, quantitiesu andvare, respectively, obtained in physical space fromuk andvk =ik 3u via reverse Fourier transforms. The cross prod-ucts are then transformed in spectral space and finally pro-jected onto the plane perpendicular tok to yield Pkstd. It canbe checked that the propertyuk ·k =0 is verified att+dt bytaking the dot product of Eq.s15d with k and using the prop-erty Pkstd ·k =0.
In this numerical Fourier formulation, periodic boundaryconditions are enforced. The computational domain consistsof a rectangular box of sizeLx3Ly3Lz. For simulationswith a single initial mode, the axial sizeLz is taken equal tothe wavelength; for simulations initialized by white noise,Lz=12. The selected domain size in thex-y plane isLx=Ly
=12, which is sufficiently large compared to the vortex di-ameter. Practically, this has been checked by increasing the
044103-3 Nonlinear evolution of a swirling jet instability Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

cross-stream dimensionssLx=Ly=18d. In addition, the per-turbative formulation used here is known to better approxi-mate the dynamics of an isolated vortex in an infinite me-dium, than the standard periodic condition imposed on the
total velocity field. Indeed, cross-stream periodicity artifactsare almost suppressed since the perturbation has zero circu-lation. In that case, the elliptical instability arising from theinfinite vortex array23 is clearly absent. This approach is situ-ated midway between the standard method and the one byRennich and Lele24 devised to cancel spurious periodicityeffects due to the basic flow as well as those due to pertur-bations.
The domain is meshed by a Cartesian grid of 1922364collocation pointsssingle initial moded or 1923 collocationpointsswhite noise initial conditionsd. Along the vortex axis,periodicity imposes a discretization of the axial wavenumberspectrum: successive axial wavenumbers are separated bydkz=2p /Lz and the maximum wavenumber equals 2pNz/Lz
with Nz=64 or 192. The time stepdt is chosen to be 0.67310−2 which ensures convergence at the selected Reynoldsnumber Re=1000.
We use two types of initial conditions: a single mode orwhite noise. The first one is chosen to be the most unstableeigenmode for given azimuthal wavenumbern. The velocityperturbationusr ,u ,z,0d is initially proportional to
fursrd,uusrd,wsrdgeikzz+inu + c.c. s17d
The second one is obtained through a uniform random num-ber generator in the intervalf−0.05,0.05g which provides thethree velocity components at each grid point. This vectorfield is then transformed from physical to spectral spacewhere it is made divergenceless using the projectorPk for allk ’s.
TABLE I. Most unstable axial wavenumberkz, growth rates, and associatedL;1/b=−n/kz at swirl numbersq0=1, 0.8, 0.4, Reynolds number Re=1000 for azimuthal wavenumbersn=−3 and −4.
n=−3q0=1
n=−3q0=0.8
n=−3q0=0.4
n=−4q0=1
n=−4q0=0.8
n=−4q0=0.4
kz 1.84 1.70 1.09 2.45 2.19 1.33
s 0.28 0.32 0.24 0.29 0.33 0.23
L 1.63 1.76 2.75 1.63 1.82 3.01
FIG. 1. Growth ratess as a function of axial wavenumberkz for the Batch-elor vortex at swirl numberssad q0=1, sbd q0=0.8,scd q0=0.4, and Reynoldsnumber Re=1000. Each curve corresponds to a different value of the azi-muthal wavenumbern. The curve forn=−1 is located at the very left andcurves forn=−2,−3, . . . follow in an orderly manner from left to right.
FIG. 2. Differential rotationVdif =dsUxB/ rd /dr for the “steady” Batchelor
vortex s10d and s11d at various swirl levelsq0=1.2,1,0.8,0.4. For eachq0
value, the reduced helix pitchL used to computeUxB is taken to beL
=−n/kz relative to the most unstable axial wavenumberkz for n=−3 sseeTable Id.
044103-4 I. Delbende and M. Rossi Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

IV. HELICAL SYMMETRY AND SWIRLING JETS
In the inviscid limit, it was numerically found7 by di-rectly solving the eigenvalue problem that the most amplifiedunstable eigenmode of a swirling jet is attained for largenegative azimuthal wavenumbersn and large axial wave-numberskz. This actually suggested that, in a purely invisciddynamics, the maximum is reached forn→−` and kz→`with −n/kz going to a constant value. The property has beenexplained via an asymptotic approach9 for large azimuthal
wavenumbern: the most amplified eigenmode is shown to bea solution radially concentrated around a locationr=r0sq,bd where d/drsUu / r −bWdr=r0
=0. The constantb;−kz/n necessarily satisfiesq/2,b,1/q. At finite Rey-nolds numbers, viscosity damps out high wavenumbersn andthus selects a maximum corresponding to a finite value forwavenumbersn and kz. In our simulations, the Reynoldsnumber is chosen to be Re=1000 and the swirl numberq0
varies within the interval 0.2øq0ø1.2. In this framework,azimuthal wavenumbers with −8ønø−2 are predominantsalson=−1 for high swirl levelsd as seen in Fig. 1. Higher-order modesn=−8,−9, . . .possess smaller growth rates. At agiven swirl numberq0, the maximum growth rates for eachnare associated to values 1/b;−n/kz which do not changemuch with increasingn. For instance, atq0=1 and Re=1000, one obtains −n/kz<1.72,1.68,1.63,1.63,1.62,
FIG. 3. Isocontours of the most amplified normal modekz=1.84 atq0=1 form=−3 presented in thesr ,ud plane at a given axial locationz0. sad Axialvorticity perturbationvz, sbd axial velocity perturbationw, and scd radialvelocity perturbationur. Positivesrespectively, negatived values are repre-sented by solidsrespectively, dashedd lines. The dotted circle indicates po-sition r =1. Displayed isocontours pertain to values ±pQmax/10, p=1,2, . . . ,10 whereQmax stands for the maximum value of the quantityconsidered.
FIG. 4. Modulus of axialsplaind, radial sdashedd, and azimuthalsdotteddvelocity eigenfunctions pertaining to the most amplified normal mode form=−3 at different swirl numbers:sad q0=1 skz=1.84d, sbd q0=0.8 skz
=1.70d, andscd q0=0.4 skz=1.09d.
044103-5 Nonlinear evolution of a swirling jet instability Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

1.61,1.60,1.59 forn=−1,−2,−3,−4,−5,−6,−7,−8, respec-tively.
Assume that a single unstable mode or a combination ofunstable modessn,kzd with −n/kz constant is considered asan initial perturbation. Such flows may emerge from a noisyenvironment because of the above mentioned property of theswirling jet instability. The global flow, i.e., the Batchelorvortex s10d and s11d plus the perturbation, then displays ahelical symmetry.25–27This statement means that the velocityfield is unaffected by a continuous one-parameter family oftransformations defined by a translation of arbitrary magni-tude Dz along thez axis followed by a rotation of angleDu=Dz/L along the same axis, where 2pL denotes thehelixpitch. In the present situation,L=−n/kz. Since variablesuandz do not explicitly appear in the governing equations8dand since finite distance boundaries are not present, the he-lical symmetry is thereafter preserved during the entire non-linear evolution. As a consequence, the flow characteristicsalways remain 2pL periodic along thez axis and invariantalong helical linesx=const wherex;u−z/L. Since unstableazimuthal modes possess a negative azimuthal wavenumbern, quantityL;−n/kz is positive, which corresponds to right-handed helix vortices. Finally note that, forL→`, one re-covers the case of a purely two-dimensional flow.
In order to take advantage of the helical symmetry, anew coordinate system can be adopted.25,27 It consists of alocal vector basis comprising the usual radial unit vectorer
and theBeltrami vector
H = N2Sez +r
LeuD with N2 = S1 +
r2
L2D−1
. s18d
The nonunitary vectorH is orthogonal toer and directedalong helical lines. FromH ander, a third vector
ex = H 3 er = N2Seu −r
LezD s19d
can be constructed along the direction of increasingx, whichcompletely defines the orthogonal basisser ,ex ,Hd. The totalvelocity field
U = Urer + Uxex + WHH s20d
possesses helical symmetry if
H · = Ur = H · = Ux = H · = WH = 0, s21d
which means that the threescalar functions
Ur, Ux = Uu −r
LW, WH = W+
r
LUu s22d
only depend on the two variablessr ,xd instead ofsr ,u ,zd. Asa consequence, the nonlinear dynamics can be considered ina two-dimensional framework. The incompressibility condi-tion is identical to the condition for two-dimensional flowsprovidedu be replaced byx:
FIG. 5. Simulation atq0=1 initialized by a single mode of azimuthal wavenumberm=−3 and axial wavenumberkz=1.84.sad Time evolution of amplitudesanstd for modesn=m sbold lined, n=0 splain lined, andn=−6,−9, . . . ,−27sdashed linesd as a function of time;sbd ratio of numerical growth rates in the lineargrowth regimesn
num/sm vs n; scd time evolution of quantitiesar,nstd, au,nstd, andaz,nstd for moden=m; sdd time evolution of quantitiesau,nstd andaz,nstd forn=0. Note thatur,0=0 and thereforear,0std=0 because of incompressibility.
044103-6 I. Delbende and M. Rossi Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

]srUrd]r
+]Ux
]x= 0. s23d
A streamfunctionCsr ,x ,td may be introduced such that
Ur =1
r
]C
]x, Ux = −
]C
]rs24ad
or in vector form
U = WHH + = C 3 H . s24bd
In a similar fashion, vorticityV can be decomposed into
V = jH + = WH 3 H , s25d
where the kinematic conditionV= = 3U has been used. Re-lation s25d reads in scalar form
Vr =1
r
]WH
]x, Vu =
N2r
Lj − N2]WH
]r,
s26d
Vz = N2j +N2r
L
]WH
]r.
The conditionV= = 3U also indicates that the function—hereafter called “helical vorticity”—defined by
Vhel ; N2j −2N4
LWH
and the streamfunctionC are linked by the relation
LC = − Vhel, s27d
where the operator
L ;1
r
]
]rSrN2 ]
]rD +
1
r2
]2
]x2
plays the role of the two-dimensional Laplacian. The com-plete dynamics is thus dependent upon the three quantitiesC, WH, andVhel as for a two-dimensional vortex of velocityfield fUrsr ,ud ,Uusr ,udg with superimposed axial flowUzsr ,ud.
When L→` stwo-dimensional perturbationskz=0d,quantitiesVhel andWH tend to coincide with axial vorticityVz and axial velocityW, respectively. In this limit,Vhel andWH become uncoupled and both are governed by the diffu-sive action of differential rotation. More precisely, the veloc-ity componentWH strictly behaves as a passive scalar ad-vected by the velocity fieldsUr ,Uud while the vorticitycomponentVhel is governed by a two-dimensional vorticitydynamics. In that case, except for high initial perturbationamplitudes, the behavior of vorticity is similar to that of apassive scalar.28 The cooperative action of the differentialrotation d/drfUu
B/ rg and viscosity is at the origin of anaccelerated diffusion process leading both quantities to decaymore rapidly than through standard viscous diffusion. In thelimit of high Reynolds numbers, this action is
FIG. 6. Simulation atq0=1 initialized by a single mode of azimuthal wavenumberm=−4 and axial wavenumberkz=2.45.sad Time evolution of amplitudesanstd for modesn=m sbold lined, n=0 splain lined, andn=−8,−12, . . . ,−28sdashed linesd as a function of time;sbd ratio of numerical growth rates in thelinear growth regimesn
num/sm vs n; scd time evolution of quantitiesar,nstd, au,nstd, andaz,nstd for moden=m; sdd time evolution of quantitiesau,nstd andaz,nstdfor n=0. Note thatar,0=0 because of incompressibility.
044103-7 Nonlinear evolution of a swirling jet instability Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

known to bring a multiplicative damping factorexp(−fd/drsUu
B/ rdg2n2t3/3Re) for the amplitude of any azi-muthal modenÞ0.
For the nonlinear regimes 0.4øq0ø1.2, the helix pitch2pL, generated by the linear instability, is not infinite but liesin the range 10–20ssee Table Id. At finite L, the Euler equa-tions for an inviscid incompressible fluid read in thesr ,xdcoordinate system as
DWH
Dt= 0, s28d
DVhel
Dt+ FUr
]
]r+ SUx
r+
WH
LD ]
]xGS2N4WH
LD = 0, s29d
whereD /Dt stands for the material derivative:
D
Dt;
]
]t+ Ur
]
]r+
Ux
r
]
]x.
The first conditions28d implies that the velocity componentWH remains a scalar field but it is now advected by the “two-dimensional” flowfUrsr ,xd ,Uxsr ,xdg. Note that the nonuni-tary character ofH is important to get relations28d. In thisframework, the basic differential rotation associated to theBatchelor vortex reads
Vdif ;d
drSUx
B
rD =
d
drSUu
B
rD −
1
L
dWB
dr. s30d
Note that this quantity is dependent on the axial velocity andthat it vanishes at the radial positionr =r0 around which themost amplified mode of the swirling jet instability is centeredsinceL;−n/kz. The value ofVdif is displayed in Fig. 2 atvarious swirl numbersq0, and L defined for the most un-stable axial wavenumberkz ssee Table Id of azimuthal wave-number n=−3 at Re=1000ssince −n/kz does not changemuch with n this is also representative of other azimuthalwavenumbersnd. For 0.8,q,1.5 it is seen thatsid positionr0 is always within the corese.g.,r0=0.9 for q0=0.8d and isgetting closer to the vortex center asq increases andsii d themagnitudeuVdifu of the differential rotation is increasing rap-idly for r larger thanr0. For q0=0.4 the differential rotationVdif is much weaker outside the vortex core than in the pre-vious regime and, reversely, it is larger in the vortex core.
When viscous diffusion is included, the dynamics ofWH
is governed by the equation
DWH
Dt=
1
ReDWH +
1
ReS−
2
L2r
]
]rsN2r2WHd
+2
LrF ]Ur
]x−
]
]rsN2rUxdGD s31d
whereD is the usual Laplacian operator in thesr ,xd coordi-nate system. At high Reynolds number, the term with thehighest derivative inr predominates among right-hand sidesrhsd terms for any given moden, as asymptotic calculationsdemonstrate in pure two-dimensional cases.28 The supple-mentary terms inside the brackets in Eq.s31d should hencenot be dynamically determinant, and the helical velocityWH,for finite L, is expected to behave as a passive scalar ad-
FIG. 7. Total axial vorticityVzsr ,u ,zd in a given planez=z0 for dimension-less timet=40 sexcept forq0=0.2 where saturation occurs much later, inwhich case t=70 is representedd for swirl numbers q0
=1.2,1,0.8,0.6,0.4,0.2sfrom top to bottomd. Initial eigenmodem=−3sleftd or m=−4 srightd. Only the region −4øx,yø4 is represented, as willbe done in all similar figures.
044103-8 I. Delbende and M. Rossi Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

vected by the “two-dimensional” velocity fieldfUrsr ,xd ,Uxsr ,xdg. This feature is important to understandthe phenomenology presented in Sec. V.
For helical vortices at finiteL, vorticity Vhel plays therole of axial vorticity for two-dimensional vortices. Thisquantity governed by Eq.s29d submits to the action of basicdifferential rotations30d, which may cause the damping ofazimuthal modesnÞ0. However, quantityVhel behaves nei-
ther as a passive scalar nor as the axial vorticity in two-dimensional flows. First, the differential rotation is much re-duced inside the vortex core as soon asq decreases fromswhich pertains to the two-dimensional Lamb-vortex case,see this trend in Fig. 2d. Second, supplementary terms cou-pling WH and Vhel intervene in the inviscid equationss29d.Their suppression would lead to inviscid equations similar tothose of pure two-dimensional vortices. However, these
FIG. 8. Total axial vorticityVzsr ,u ,z0d at times t=0,10,20,30,40,80 sfrom left to right and top tobottomd. Simulation atq0=1 with ini-tial eigenmodem=−3.
FIG. 9. sad Mean axial velocityW0;WBsr ,td+w0sr ,td, sbd mean azimuthal velocityUu,0;UuBsr ,td+uu,0sr ,td, andscd mean circulation distributionrUu,0sr ,td
as a function ofr. The different curves correspond to timest=0,10,20,30,40,80. Simulation atq0=1 with initial eigenmodem=−3.
044103-9 Nonlinear evolution of a swirling jet instability Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

terms are crucial: they are at the origin of the swirling jetinstability. This property is shown in the Appendix where theLeibovich–Stewartson criterion9 is recovered from the analy-sis of Eqs.s27d–s29d. These supplementary coupling termsare expected to be particularly active in the vortex corewhere the differential rotation is weaker than outside.
These considerations are illustrated in Sec. V where theflow dynamics is shown to depend mainly on the two com-peting effects, namely, differential rotation and swirling jetinstability.
V. RESULTS FOR A SINGLE NORMAL MODE INITIALCONDITION
In this section, we follow the nonlinear evolution at Re=1000 of an initial condition given by a single eigenmode of
the form s17d. As already noted, the evolution preserves thehelical symmetry of the initial condition, and can thus beanalyzed in the framework introduced in Sec. IV.
At a given swirl number, the most amplified unstableeigenmode for the azimuthal wavenumberm=−3 orm=−4 istaken as initial conditionsin this section, variablem willalways refer to the azimuthal wavenumberof the initial con-ditiond. The above values ofm are chosen to be representa-tive of unstable modes in the range 0.2øq0ø1.2 at Re=1000. The corresponding axial wavenumberskz and growthratess are given in Table I. Figure 3 depicts the structure ofmodem=−3 atq0=1. For such a low azimuthal wavenumberthe mode is not yet ring-like but its maximum amplitude isreached near the radial location where the differential rota-tion vanishes. The mode amplitude becomes negligible out-
FIG. 10. Axial vorticity Vz−Vz,0 inthe sr ,ud plane at times t=0,10,20,30,40,80. Simulation atq0=1 with initial eigenmodem=−3.
FIG. 11. Helical vorticityVhel−Vhel,0
in the sr ,xd plane at times t=0,10,20,30,40,80. Simulation atq0=1 with initial eigenmodem=−3.
044103-10 I. Delbende and M. Rossi Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

side the core, as soon asr .1. Figure 4 indicates that asqdecreases, the radial velocity contribution is less and lessimportant with respect to that of the azimuthal velocity per-turbation.
From this single unstable mode of azimuthal wavenum-ber m, the nonlinear terms in Eq.s8d generate other wave-numbersn=0, n=2m, n=3m, . . . as can beshown by evalu-ating the Fourier coefficient of any quantityfsr ,u ,z,td:
fnsr,z,td =1
2pE
0
2p
fsr,u,z,tde−inudu.
Here we use the kinetic energiesar,n2 , au,n
2 , az,n2 of the radial
Ur,n, azimuthalUu,n, and axialWn velocity components, re-spectively:
ar,n2 std ; E uUr,nu2rdr dz, au,n
2 std ; E uUu,nu2rdr dz,
az,n2 std ; E uWnu2rdr dz, an
2std ; az,n2 + au,n
2 + ar,n2 ,
where the integration is performed over ther-z computa-tional domain. For all simulations, the amplitudeamstd of theinitial azimuthal modem first increases exponentially as pre-dicted by the linear stability analysisfsee Fig. 5sad for m=−3 and Fig. 6sad for m=−4g. A numerical instantaneousgrowth ratesn
num;d lnsand /dt may be evaluated from thetime evolution of these amplitudes. The values−3
num=0.26srespectively,s−4
num=0.29d computed through the amplitude-curve fit neart=0 in Fig. 5sad frespectively, Fig. 6sadg isconsistent with the stability analysis results−3=0.28srespec-tively, s−4=0.29d taken from Table I.
In the subsequentnonlinearevolution,various scenarioshave been observed according to the interval in which theinitial swirl number q0 is located. Figure 7 shows theisocontours of the total axial vorticity after saturationshere,saturation corresponds to the time whenam reaches its maxi-mum valued. Different states are obtained: an axisymmetricvortex s1øq0ø1.5d, a vortex arraysq0,0.8d, or a vortexdipole arraysq0ø0.6d. The number of structures in the arraydepends on the initial azimuthal numberm: a trio for m=−3 and a quartet form=−4. The transition between theseregimes is not abrupt like in a bifurcation: the system gradu-ally changes its behavior in the nonlinear phase asq0 is low-
FIG. 12. Helical velocityWH−WH,0 inthe sr ,xd plane at times t=0,10,20,30,40,80. Simulation atq0=1 with initial eigenmodem=−3.
FIG. 13. sad Mean velocityWH,0sr ,td at timest=0,10,20,30,40,80 andsbdmodulus ofWH,msrd at timest=0,10,20, . . . ,100. Simulation atq0=1 withinitial eigenmodem=−3.
044103-11 Nonlinear evolution of a swirling jet instability Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

ered. The reasons for such a phenomenology are given belowin more details.
A. Nonlinear regime at high swirl 1 Ïq0Ï1.5
Once the linear growth phase has elapsed, the amplitudeam of the initial modem saturates and afterwards decreasesfFigs. 5sad and 6sadg. The amplitude of the moden=0 ini-tially grows asam
2 fsee Figs. 5sbd and 6sbdg and its growththen ceasesfFigs. 5sad and 6sadg when a0,am. Afterwards,amplitudea0 is decaying but less rapidly than amplitudeam.This decay is only due to standard diffusion since accelerateddiffusion does not operate on the wavenumbern=0.
When saturation is reached, the perturbation amplitudebecomes of the same order as the basic state. The amplitudesan of modesn=2m,3m, . . . initially grow asam
2 ,am3 , . . . due to
nonlinear generation from modem; effective growth rates
s0num<s2m
num<2sm, s3mnum<3sm, . . . are observed and re-
ported in Figs. 5sbd and 6sbd. The modesn=2m,3m, . . . reacha maximum at the same time as moden=m and moden=0,and their decay is more pronounced than for moden=0fFigs. 5sad and 6sadg. Since azimuthal modesnÞ0 decay andn=0 remains near its saturation level, the complete flow fieldtends to become axisymmetric anew. In physical space, thiscan be retrieved on the axial vorticityVz. For instance, Fig.8 displays the case of them=−3 mode: three vortices,formed in the initial stage, are afterwards rapidly destroyed.The same process with four vortices is also seen form=−4.This “reaxisymmetrization” has already been observed infully turbulent cases.18,19 The new axisymmetric vortex pos-sesses different mean axial and azimuthal velocity fields asconfirmed by the time evolution of the mean axial velocityW0sr ,td=WBsr ,td+w0sr ,td fFig. 9sadg and of the mean azi-
FIG. 14. sad Total helicalWHsr ,xd ve-locity andsbd axial Wsr ,u ,z0d velocityat timest=0,10,20,30,40,80. Simu-lation at q0=1 with initial eigenmodem=−3.
044103-12 I. Delbende and M. Rossi Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

muthal velocity Uu,0sr ,td=UuBsr ,td+uu,0sr ,td fFig. 9sbdg.
Note that the mean axial velocity profile decays more rapidlythan s1+4t /Red−1 which is the factor associated to the pureviscous core diffusions11d sat t=80 viscous diffusion alonefor Re=1000 would imposeWc=0.85 instead of 0.67d. Theazimuthal profile is modified as wellfsee Figs. 5sdd and6sddg. However, the axial velocity is more affected nearr=0 while the azimuthal velocity is more affected nearr=0.8. The same process is found for the casem=−4 snotrepresentedd.
Using the concepts developed in Sec. IV, this nonlinearbehavior may be viewed in physical space as the simulta-neous competition of a stabilizing factor onWH and Vhel,namely, the diffusive action due to differential rotations30dand a destabilizing factor onVhel due to the coupling termsleading to the swirling jet linear instability. The action of thedifferential rotation was already pointed out concerning thedynamics of average turbulent quantities.19
For r . r0 satq0=1, this area is located outside the vortexcored, the differential rotationuVdifu increases rapidly, as seenon the curves relative toq0=1, 1.2 in Fig. 2. In this region,differential rotation is thus likely to strongly influence thedynamics ofWH andVhel. Its action on all azimuthal wave-numbersnÞ0 can be seen directly in physical space by com-putingsid the axial vorticityVz−Vz,0 sFig. 10 form=−3d, sii dthe helical vorticityVhel−Vhel,0 sFig. 11 form=−3d, andsiii dthe helical velocityWH−WH,0 sFig. 12 for m=−3d. Thesefigures are very similar to Fig. 1 of Ref. 28 representing theevolution of a localized axial vorticity perturbation in a two-dimensional axisymmetric vortex. The latter dynamics wasshown28 to be close to that of a pure passive scalar: the axialvorticity is wrapped up by the basic flow in a spiral-likepattern which arises because the basic angular velocity is notuniform. In our three-dimensional case, following the anal-ogy of Sec. IV, velocityWH plays the role of the passivescalar andVhel the role of the axial vorticity. These quantitiesare indeed seen to be wrapped up in a way similar to apassive scalar. For two-dimensional vortices, this advection-diffusion process leads to the decay of all azimuthal modesnÞ0. In the asymptotic regime Re→`, a damping factorcan be calculated28 that brings about a time scale propor-tional to Re1/3, much smaller than the usual one in Re. Thisscaling law is not observed here in the three-dimensionalcase for quantitiesWH andVhel: a weak outwards advection
FIG. 15. Instantaneoussad mean core sizeaavstd, sbd centerline axial velocityWcstd;Wsr =0,td, scd mean swirl numberqavstd as a function of timet. Boldline, simulation atq0=1 with initial eigenmodem=−3; dashed line, unper-turbed flows10d and s11d at q0=1.
FIG. 16. Simulation initialized by a single azimuthal modem=−3. Timeevolution of amplitudeanstd for modesad n=m andsbd n=0. Different swirllevelsq0 are plotted as indicated on the graph.
FIG. 17. Total axial vorticityVzsr ,u ,z0d at timest=20,40,50,90. Simula-tion atq0=1 for which the perturbation field has been initialized att=20 bythat of the simulation atq0=0.8, m=−3, t=20.
044103-13 Nonlinear evolution of a swirling jet instability Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

of the spiral patterns is foundsFig. 13 form=−3d which maybe attributed to the presence of the weak radial velocity in-duced by the swirling jet instability mode. This feature is notpresent in the usual two-dimensional case where the scalinglaw was determined. In addition, the Reynolds numberachieved in our simulations is too low: a true asymptoticregime is not attained.
For r , r0, the differential rotation is weakersFig. 2d. Itis also known to act in a less prominent way.29 On the con-trary, the radial advection and coupling terms are now play-ing a major role. In the corefFig. 14sadg, the radial velocityUrsr ,xd produced by the swirling jet instabilityssee the un-stable eigenmode structure of modem in Fig. 3d is of thesame order as the azimuthal velocityUxsr ,xd. The almostpassive scalarWH is hence mixed not only by the differentialrotation but also by the radial velocity field. Initially thehelical velocity fieldWH is, apart from the infinitesimal nor-mal mode, given by its basic flow value
WH = WB +r
LUu
B = S1 −q0
LDexps− r2d +
q0
L. s32d
This quantity is thus maximum atr =0 for t=0 sone checksthat q0,L sinceL=1.63d. Except in a small region close tothe origin r =0 where the velocity fieldfUrsr ,xd ,Uxsr ,xdggoes to zerosno modesn= ±1 are generated here; for otherinitial conditions with modesn= ±1, the mixing might beeven more efficientd, the advection generates gradients of thepassive scalarWH as can be seen from the isocontours of Fig.14sad. The maximal values ofWH initially located in thecentral core are mixed with lower values initially surround-ing the core. This process which connects the various azi-muthal modesn, accounts for and leadsin fine to the de-crease of the mean fieldWH,0 by an accelerated diffusionsFig. 13d. Near the center the helical velocityWH is approxi-mately equal to the axial velocityW fsee Eq.s22dg. Thisprocess thus induces the decay of the average axial velocityW0sr ,td near the center.
During this process, the mean core sizeaavstd is evolvingin time as that of the unperturbed diffusing flows10d ands11d fFig. 15sadg. This feature was correctly pointed out inprevious works19,30 by an analysis based on the second mo-ment of axial vorticity. The increase of the core sizeaav
along with the decay of the mean core axial velocityW0
cause the mean swirl numberqavstd defined by Eq.s7d toincreasefFigs. 15sbd and 15scdg. In turn, this means that thelocal swirling jet instability is being modified. This instabil-ity, due to the supplementary terms of Eq.s29d governing thehelical vorticityVhel, is mainly present in the vortex core, asseen on Fig. 3 for the normal mode structure and Fig. 8 forthe time evolution ofVz. The destabilizing action of suchterms may be quantified in a broad manner by determiningthe linear properties of an equivalent instantaneous Batchelorvortex. Whenqavstd is increasing, the instability is gettingweaker and weaker and probably becomes inactive whenqavstd is close to the critical value above which swirling jetinstability disappears for modem. The vortex then evolvestowards a stable Batchelor vortex and the differential rotationeventually dominates the whole flow domain.
In the range 1øq0ø1.5, the swirling jet instability canbe easily suppressed in the nonlinear regime by accelerateddiffusion. Several reasons may be invoked to explain thisfeature: sid the initial swirl q0 is close to the swirling jetinstability threshold;sii d the characteristic time of the insta-bility increases near the threshold, and becomes of the sameorder or larger than the time scale of the diffusion advection;siii d the perturbation amplitude is too weak to counterbalancethe differential rotation effects. This last point refers to whatis known for two-dimensional flows where an initial pertur-bation with large enough amplitude can suppress the mixinginduced by differential rotation.31 This will be illustrated inthe following section.
Another point concerns the circulation overshoot whichwas predicted to occur in turbulent swirling flows.32 Theovershoot is found here to be physically related to the nega-
FIG. 18. Total axial vorticityVzsr ,u ,z0d at times t=0,10,20,30,60,100. Simulation atq0=0.8 with ini-tial eigenmodem=−3.
044103-14 I. Delbende and M. Rossi Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

tive part of the axial vorticity created by the swirling jetinstability and then transported outwardsfsee inset in Fig.9scdg. This feature will get even more pronounced in theregimes for lower swirl valuesq0ø1.
B. Nonlinear regime at intermediate swirl q0É0.8
Whenq0<0.8, the growth rate of modem is larger thanin the previous regime at higher swirlssee Fig. 1d, but thedifferential rotation is weakersFig. 2d as well as the radialvelocity contribution generated by the eigenmodesFig. 4d. Inthe nonlinear regime, all these effects tend to favor the de-stabilizing action of the swirling jet instability. As a conse-quence, the instability mode reaches an amplitude at which
the differential rotation is suppressed before the instanta-neous swirl numberqav has reached the linear stabilitythreshold. The pattern thus formed cannot be destroyed byaccelerated diffusion, as observed on the energy curvessFig.16d. In order to emphasize the role of amplitude in cancelingdifferential rotation, a simulation at swirlq0=1 has been ini-tialized using a high amplitude initial conditionsactually wehave taken the saturated field obtained att=20 in the simu-
FIG. 19. sad Mean circulation distribution rUu,0sr ,td at times t=0,10,20,30,60,100.sbd Time evolution of the centerline axial velocityWcstd;Wsr =0,td. Simulation atq0=0.8 with initial eigenmodem=−3.
FIG. 20. Total axial velocityWsr ,u ,z0d plane at times t=0,10,20,30,60,100. Simulation atq0=0.8 with initial eigenmodem=−3.
FIG. 21. Time evolution of the dispersion radiir+ andaav at swirl numbersq0=1, 0.8, and 0.4. Simulation initialized by a single azimuthal modesadm=−3 or sbd m=−4.
044103-15 Nonlinear evolution of a swirling jet instability Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

lation at q0=0.8d in the spirit of Ref. 31. While the systemrelaminarizes when the initial amplitude is weaksFig. 8d, astronger amplitude makes it split into an array of vorticessFig. 17d. If the swirling jet instability is able to produce suchan amplitude by itself then it might overcome the dampingeffect and then destroy the initial vortex structure. This isprecisely the case atq0=0.8. Betweent=0 and t=40, anarray of corotative helical vortices is formed which sur-rounds the position of the initial coresFig. 18d. Afterwardsthe solution relaxes according to the initial wavenumberm,
e.g., towards a vortex trio form=−3 to reach a quasisteadyrotating state slowly diffusing in time: this is reminiscent ofwhat was found for a pure two-dimensional vortex.31 Notethat the local swirling jet instability should also be sup-pressed since the vortex state is now very far from a swirlingjet configuration.
Almost all initial axial vorticity—and, as a by-product,all circulation—is now ejected outside the initial core andredistributed in the newly formed corotating vortex arraysFig. 18d. Each vortex possesses a companion of oppositesign but of much weaker intensity which is finally wrappedup by its fellow. The strength of this negative companion islinked to that of the circulation overshootsFig. 19d which ismuch greater than in the previous regime.
In the newly formed configuration, the axial velocityprofile is much flatter in the center than at the initial stagescomparet=0 andt=100 in Fig. 20d and a segregation of theaxial components of vorticity and velocity seems to occur.Note that this latter quantity remains remarkably constant intime aftert=30, as plotted in Fig. 19sbd. Since the mean coresize aavstd is evolving as for the laminar unperturbed flows10d and s11d fFig. 15sadg, this quantity is not very informa-tive about the effective radius of the pattern! It is then usefulto define a “positive” dispersion radiusr+ such that
fr+g2 ;E
Vz.0r2Vzrdr du
G+ with G+ ; EVz.0
Vzrdr du.
s33d
The temporal evolution of this positive dispersion radius pre-sented in Fig. 21sad for m=−3 accounts for the increase ofthe overall structure size. Similar results are found for modem=−4 fFig. 21sbdg. Note that the weaker negative structuresshould be located at the periphery of the positive vortex ar-ray so that the mean core sizeaavstd indeed evolves like inthe unperturbed flow cases10d and s11d.
FIG. 22. Total axial vorticityVzsr ,u ,z0d at times t=0,10,20,30,40,80. Simulation atq0=0.4 with ini-tial eigenmodem=−3.
FIG. 23. Isosurfaces of the total vorticity magnitude att=30 showing thehelical vortex pair ejection at low swirl. Simulation atq0=0.4 with initialeigenmodem=−3.
044103-16 I. Delbende and M. Rossi Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

C. Nonlinear regime at low swirl q0Ï0.6
If the swirl level is further loweredsin the following,q0=0.4d, the perturbation amplitude remains almost at thesame level. Indeed, fromq0=0.8 to 0.4 the saturation ampli-tudeamstd of modem does not drastically change, as shownin Fig. 16sad. Even though the amplitude of the nonlinearperturbation remains close to that ofq0=0.8, the axial vor-ticity of the basic state is much weaker. The negative andpositive vortices formed at saturation are hence of compa-rable strength: one observes the emergence of a series ofcontrarotative vortex pairssFigs. 22 and 23d, each pair form-ing a dipole less asymmetric than in the previous regime.Dipoles now possess a substantial outward velocity. Contrar-ily to the q0<0.8 regime where the three equal-sign vorticescould not escape, a drastic increase of the positive dispersion
radiusr+ is now possible and indeed occurs, as illustrated inFig. 21. The phenomenon is strikingly apparent on theisocontours of axial vorticitysFig. 22 att=20,30,40d. Notethat, eventually, the axial velocity is present not only in thecentral zone where no axial vorticity is present, but also inthe dipole vortex cores: see Fig. 24 fortù20, compare withFig. 14sbd for q0=1 and Fig. 20 forq0=0.8. The structure ofthe nonlinear state eventually reached by the system is rathercomplex: it consists of a central pure jet bordered by an arrayof umu positive helical vortices, themselves surrounded byumunegative helical vortices. All these peripheral vortices pos-sess a weak axial velocity componentsthey are helical swirl-ing jetsd. A three-dimensional view of the vorticity patterns isalso presented on Fig. 23.
FIG. 24. Total axial velocityWsr ,u ,z0d at times t=0,10,20,30,40,80. Simulation atq0=0.4 with ini-tial eigenmodem=−3.
FIG. 25. Total axial vorticityVzsr ,u ,z0d at times t=0,10,20,30,40,80. Simulation atq0=1 initializedby random incompressible noise. Theinset displays the closeup on the nega-tive vorticity structure.
044103-17 Nonlinear evolution of a swirling jet instability Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

VI. RESULTS FOR RANDOM INITIAL CONDITIONS
So far, the basic mechanisms have been presented forsimulations initialized with a single unstable eigenmode. Thecase with random initial conditions is now considered. Thenumerical parameters selected for the present simulationsimpose a strong discretization of the axial wavenumberkz:successive modes are separated bydkz=0.52 and the use ofat least 80 unstable modes is used to account for the dynam-ics. In these simulations, helical symmetry is lost. Neverthe-less, some of the conclusions of Sec. V are still valid.
For the three simulations presentedsq0=1,0.8,0.4d atReynolds number Re=1000, the first stage corresponds to arapid damping of all stable modessn,kzd present in the ran-dom initial condition. The predominant unstable azimuthalmodesn=−2 to n=−7 then emergessee Figs. 25–27 att
=10,20d. Once this linear phase is completed, one recoverssome features in physical domain already encountered in theordered cases of Sec. V, though the picture is here far lessordered. In particular, vorticity is seen to roll up into vorticeswhose number depends on the range of dominant unstableazimuthal wavenumbers. At swirl numberq0=1, the vorticesare predominantly of positive axial vorticity, as previouslyobtained with a single initial mode at swirl 1øq0ø1.5.Similarly, the relaminarization process is recovered, in con-cordance with previous studies.18,19As in the ordered cases,the circulation overshoot is found to be related to the nega-tive axial vorticity produced by instability and ejected fromthe centerssee, for instance, the inset in Fig. 25 att=40d. Forq0=0.8, the array of vortices persist during the nonlinearevolution sFig. 26d, as in the ordered case. A marked asym-
FIG. 26. Total axial vorticityVzsr ,u ,z0d at times t=0,10,20,30,40,80. Simulation atq0=0.8 initial-ized by random incompressible noise.
FIG. 27. Total axial vorticityVzsr ,u ,z0d at times t=0,10,20,30,40,80. Simulation atq0=0.4 initial-ized by random incompressible noise.
044103-18 I. Delbende and M. Rossi Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

metry is observed between strong positive and weak negativestructures. Finally forq0=0.4, vortex dipoles are vigorouslyejected from the center regionssee Fig. 27 att=30,40d. InFig. 28, the axial velocity pattern is observed to roughlyfollow, as in Sec. V, the dipole vorticity structure, thusspreading into the whole vorticity region.
The evolution of the dispersion radiusr+ is displayed inFig. 29 at swirl numbersq0=1,0.8,0.4: fort.30, the radiusr+ grows linearly and its growth is faster for smallerq0 val-ues. However, contrary to what is observed for the orderedcases, saturation is not reached at the end of the simulations.In order to quantify the importance of vortex pair ejection,one may also plot the ratioG−/G+ between negative andpositive contributions to the vortex circulation where
G− ; −EVz,0
Vzrdr du.
For t.40, this quantity saturates at 0.05, 0.18, 0.44 forq0
=1,0.8,0.4, respectivelyfFig. 30sbdg. These saturation levelsare almost identical to the peak levels measured in the or-
dered case simulationsfsee Fig. 30sadg: 0.05, 0.16, 0.44. Thisfeature clearly connects the vortex spreading to the emer-gence of dipole structures in the flow at low swirl levels.
VII. CONCLUSION
The nonlinear dynamics of a diffusing Batchelor vortexat Reynolds number Re=1000 and swirl number 0.2øq0
ø1.2 has been investigated using perturbative direct numeri-cal temporal simulations initialized bysad a single eigen-mode of azimuthal wavenumberm typical for the linear in-viscid swirling jet instability and sbd a randomincompressible velocity field. The simulations have been in-terpreted in the light of the two-dimensional framework ofhelical flows. The swirling jet linear instability, which stems
FIG. 28. Total axial velocityWsr ,u ,z0d at times t=0,10,20,30,40,80. Simulation atq0=0.4 initial-ized by random incompressible noise.
FIG. 29. Time evolution of the dispersion radiir+ and aav. Simulations atswirl numbersq=1, 0.8, and 0.4, initialized by random incompressiblenoise.
FIG. 30. Time evolution of the circulation ratioG−/G+. Simulations at swirlnumbersq=1, 0.8, and 0.4, initializedsad by a single azimuthal modem=−3, sbd by random incompressible noise.
044103-19 Nonlinear evolution of a swirling jet instability Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

from a coupling betweenVhel andWH, is followed by a non-linear saturation where the dynamics strongly depends on theinitial swirl level q0. Clearly the temporal approximation aswell as the helical symmetry are not strictly valid for realjets. However the present work shows that, within the tem-poral and helically symmetric case, some features may be-come more apparent and tractable than in the full Navier–Stokes problem.
Near the upper inviscid instability thresholdsq0ù1d, thesaturation level of modem is insufficient to counterbalancethe stabilizing action of the differential rotationVdif
=d/drsUxB/ rd. In the meantime, the accelerated diffusion of
the axial core velocity induces the increase of the instanta-neous swirl number above the linear instability threshold atq0=1.5 leading to the flow relaminarization.
At intermediate swirl levelsq0,0.8d, swirling jet insta-bility and its saturation amplitude are maximum while differ-ential rotation is weaker. The latter stabilizing action is notable to relaminarize the flow: an array ofumu equal-sign he-lical vortices forms around which weak amplitude opposite-sign companions are wrapped up and eventually dissipate.
At lower swirl sq0ø0.6d, the saturation amplitude is stilllarge while the basic axial vorticity of the basic state isweaker. The flow saturates as an array ofumu counterrotatingvortex pairs. These dipoles are ejected far from the axis,causing a significant increase of the vortex core size. In thepresent work, the circulation overshoot finds a dynamicalinterpretation: it stems from the negative axial vorticity re-gions of the dipoles.
The white noise simulations, although far less ordered,display the same phases and asymptotical behaviors as singlemode simulations.
While the flow relaminarization may be pertinent to un-derstand the vortex persistence in aircraft wakes, the two lowswirl regimes may occur in other swirling jet configurations,e.g., in combustion chambers when mixing is desired. Theselatter phenomena may also explain why turbulent vorticityfilaments often burst into multiple vortices.
ACKNOWLEDGMENTS
The authors would like to acknowledge the financialsupport of the Centre National de la Recherche ScientifiquesCNRSd in the framework of a Thematic and Incentive Pro-gramme Action for young scientistssATIP Jeunes Cher-cheursInteraction entre tourbillons: analyse directe et calculintensifd. The computations were performed on a NEC-SX5supercomputer at the Institute for Development and Re-sources in Intensive Scientific ComputingsIDRIS-CNRSd inthe frame of Projects No. CP2-020173 and No. CP2-030173.
APPENDIX: THE LEIBOVICH–STEWARTSONCRITERION
It is shown here that the Leibovich–Stewartson criterion9
can be recovered from the analysis of Eqs.s28d and s29d.Let us consider a perturbation in the vicinity of the basic
states10d and s11d at Re= . Radial and helical velocityUr
andWH as well as the vorticity componentVhel are written asthe superposition of the basic state contribution and pertur-bation:
Ur = ur, WH = WHB + wH, Vhel = Vhel
B + vhel. sA1d
Perturbations are sought in their normal mode forms4d ofinfinitesimal amplitudeursrd, wHsrd, and vhelsrd, respec-tively. Equationss28d and s29d now read
gsrdwH + Esrdur = 0, sA2d
gsrdvhel + Fsrdur +2in
L
Csrdr
wH = 0, sA3d
with
gsrd ; s − ià +inUx
B
r, Fsrd ;
d
drFN2SVz
B +r
LVu
BDG ,
Csrd ; N2UuB, Esrd ;
dWHB
dr.
According to Eqs.s24d ands27d, ur andvhel are related to the
perturbation streamfunctionc by
ur =inc
r, vhel = −
1
r
d
drSrN2dc
drD +
n2
r2 c. sA4d
Upon eliminatingwH and using relationssA4d, one can recast
systemsA2d and sA3d as a single equation forc :
1
r
d
drSrN2dc
drD =
n2
r2F1 +2CsrdEsrd
L
1
g2srd+
ir
ngsrdFsrdGc.
sA5d
This equation, identical to Eq.s4.1d obtained in Ref. 9 for
quantity f=inÎrNc is precisely the one on which theLeibovich–Stewartson asymptotics is based. Moreover quan-tity b contained in Eq.s4.1d of Ref. 9 is such thatbsrd=−2CsrdEsrd /L. In the limit of largen and at leading order,the growth rates of the asymptotic unstable mode is shown9
to be such thats2=bsr0d, hences2=−2Csr0dEsr0d /L writtenat r =r0 whered/drsUx
B/ rdr=r0=0.
QuantityCsrd originates in the supplementary term thatappears in the nonlinear equations29d for Vhel or in its lin-earized versionsA3d. This coupling term is thus at the originof the swirling jet instability.
Finally note that, since
−2CsrdEsrd
L= −
2N2
LUu
B d
drSWB +
r
LUu
BD , sA6d
the identity
d
drSUu
B
rD =
1
L
dWB
drat r = r0 sA7d
and the elimination of lengthL lead to the standard form forthe growth rate given by Eq.s5.8d in Ref. 9.
1R. L. Ash and M. R. Khorrami, “Vortex stability,” inFluid Vortices, editedby S. I. GreensKluwer, Dordrecht, 1995d, Chap. VIII, pp. 317–372.
044103-20 I. Delbende and M. Rossi Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp

2S. Leibovich, “Vortex stability and breakdown: Survey and extension,”AIAA J. 17, 471 s1983d.
3M. Abid and M.-E. Brachet, “Direct numerical simulations of the Batch-elor trailing vortex by a spectral method,” Phys. Fluids10, 469 s1998d.
4O. Cadot, S. Douady, and Y. Couder, “Characterization of the low pressurefilaments in three-dimensional turbulent shear flow,” Phys. Fluids7, 630s1995d.
5I. Delbende, M. Rossi, and S. Le Dizès, “Stretching effects on the three-dimensional stability of vortices with axial flow,” J. Fluid Mech.454, 419s2002d.
6G. K. Batchelor, “Axial flow in trailing line vortices,” J. Fluid Mech.20,645 s1964d.
7M. Lessen, P. J. Singh, and F. Paillet, “The stability of a trailing linevortex. Part 1. Inviscid theory,” J. Fluid Mech.63, 753 s1974d.
8M. Lessen and F. Paillet, “The stability of a trailing line vortex. Part 2.Viscous theory,” J. Fluid Mech.65, 769 s1974d.
9S. Leibovich and K. Stewartson, “A sufficient condition for the instabilityof columnar vortices,” J. Fluid Mech.126, 335 s1983d.
10K. Stewartson, “The stability of swirling flows at large Reynolds numberwhen subjected to disturbances with large azimuthal wavenumber,” Phys.Fluids 25, 1953s1982d.
11E. W. Mayer and K. G. Powell, “Viscous and inviscid instabilities of atrailing line vortex,” J. Fluid Mech.245, 91 s1992d.
12D. Fabre and L. Jacquin, “Viscous instabilities in trailing line vortices atlarge swirl numbers,” J. Fluid Mech.500, 239 s2004d.
13C. Olendraru, A. Sellier, M. Rossi, and P. Huerre, “Inviscid instability ofthe Batchelor vortex: Absolute-convective transition and spatial branches,”Phys. Fluids11, 1805s1999d.
14I. Delbende, J.-M. Chomaz, and P. Huerre, “Absolute/convective instabili-ties in the Batchelor vortex: A numerical study of the linear impulse re-sponse,” J. Fluid Mech.355, 229 s1998d.
15C. Olendraru and A. Sellier, “Viscous effects in the absolute-convectiveinstability of the Batchelor vortex,” J. Fluid Mech.459, 371 s2002d.
16G. Lu and S. Lele, “Inviscid instability of compressible swirling mixinglayers,” Phys. Fluids11, 450 s1999d.
17G.-H. Hu, D.-J. Sun, and X.-Y. Yin, “A numerical study of dynamics of atemporally evolving swirling jet,” Phys. Fluids13, 951 s2001d.
18S. Ragab and M. Sreedhar, “Numerical simulation of vortices with axialvelocity deficits,” Phys. Fluids7, 549 s1995d.
19L. Jacquin and C. Pantano, “On the persistence of trailing vortices,” J.Fluid Mech. 471, 159 s2002d.
20W. Althaus, Ch. Brücker, and M. Weimer, “Breakdown of slender vorti-ces,” in Fluid Vortices, edited by S. I. GreensKluwer, Dordrecht, 1995d,pp. 373–426.
21D. Fabre, “Instabilités et instationnarités dans les tourbillons: applicationaux sillages d’avions,” Ph.D. thesis, Université de Paris VI, 2002.
22A. Vincent and M. Meneguzzi, “The spatial structure and statistical prop-erties of homogeneous turbulence,” J. Fluid Mech.225, 1 s1991d.
23D. S. Pradeep and F. Hussain, “Effects of boundary condition in the nu-merical simulations of vortex dynamics,” J. Fluid Mech.516, 115s2004d.
24S. C. Rennich and S. K. Lele, “Numerical method for the incompressiblevortical flows with two unbounded directions,” J. Comput. Phys.137, 101s1997d.
25M. J. Landman, “On the generation of helical waves in circular pipe flow,”Phys. Fluids A2, 738 s1990d.
26D. Dritschel, “Generalized helical Beltrami flows in hydrodynamics andmagnetohydrodynamics,” J. Fluid Mech.222, 525 s1991d.
27S. V. Alekseenko, P. A. Kuibin, V. L. Okulov, and S. I. Shtork, “Helicalvortices in swirl flow,” J. Fluid Mech.382, 195 s1999d.
28A. J. Bernoff and J. F. Lingevitch, “Rapid relaxation of an axisymmetricvortex,” Phys. Fluids6, 3717s1994d.
29K. Bajer, A. Bassom, and A. D. Gilbert, “Accelerated diffusion in thecentre of a vortex,” J. Fluid Mech.437, 395 s2001d.
30P. G. Saffman,Vortex DynamicssCambridge University Press, Cambridge,1992d.
31L. F. Rossi, J. F. Lingevitch, and A. J. Bernoff, “Quasi-steady monopoleand tripole attractors for relaxing vortices,” Phys. Fluids9, 2329s1997d.
32S. P. Govindaraju and P. G. Saffman, “Flow in a turbulent trailing vortex,”Phys. Fluids14, 2074s1971d.
044103-21 Nonlinear evolution of a swirling jet instability Phys. Fluids 17, 044103 ~2005!
Downloaded 15 Jan 2008 to 129.175.97.14. Redistribution subject to AIP license or copyright; see http://pof.aip.org/pof/copyright.jsp


[A10]DELBENDE, I. AND ROSSI, M. 2009
The dynamics of a viscous dipole.Phys. Fluids. 21(7), 073605.


The dynamics of a viscous vortex dipoleIvan Delbende1,a and Maurice Rossi21Laboratoire d’Informatique pour la Mécanique et les Sciences de l’Ingénieur (LIMSI-CNRS, UPR 3251),Université Pierre et Marie Curie-Paris 6, BP 133, 91403 Orsay Cedex, France2Institut Jean le Rond d’Alembert (IJLRDA-UPMC, UMR 7190), CNRS,Université Pierre et Marie Curie-Paris 6, 4 Place Jussieu, 75252 Paris Cedex 05, France
Received 19 December 2008; accepted 23 June 2009; published online 31 July 2009
The structure of a two-dimensional viscous dipole is accurately analyzed using both numericalsimulations and theoretical analyses. First, a model is proposed, which computes the dipole velocityand the vortex ellipticity based on a heuristic relation between a vortex patch and a vortex withdistributed vorticity profile. Second, during the stage where vortices are close to each other, ageneralized self-similar solution is postulated to describe the vorticity profiles observed during theviscous spreading of the dipole. Numerical as well as theoretical considerations are given, whichdemonstrate the adequacy of such a hypothesis. Finally the structure of the tail that is generatedbehind the dipole is given in an analytical form, which favorably compares to numerical results.© 2009 American Institute of Physics. DOI: 10.1063/1.3183966
I. INTRODUCTION
Two-dimensional 2D vortices are present in manyphysical situations that range from large scales, such as geo-physical vortices in the ocean1 or atmosphere, to small scalesas in soap films2 or stratified fluids.3 In 2D flows, the vortic-ity field generally separates into two major basic elementsthat can keep their identity while interacting for a muchlonger time scale than their turnover time: monopolar vorti-ces with a given sign of vorticity and dipolar vortices. Tri-polar vortices also appear but less frequently or in very spe-cific conditions, e.g., as a by-product of an isolated vortexinstability.4 The other structures such as shielded monopoles,quadrupolar vortices may exist but they do generally evolvebecause of instability processes into these two basic flowelements.4 For similar reasons, a localized turbulence vortic-ity field ultimately decays through the inverse cascade pro-cess toward a monopole or a dipole, depending on its initialglobal circulation which is conserved. From a practical pointof view, the dipole field turns out to be generated from animpulse jet flow and, more generally, when an external forc-ing characterized by a net linear momentum is present. In theocean, for instance, dipoles can be generated by variousmechanisms. In the surf zone, local wave breaking createsdipolar structures causing rip currents. Dipoles also originatefrom jets generated at a strait or from the coupling betweentopography and the oscillating tide motion. Dipolar vorticesare also self-propagating, which implies some consequenceson the transport of mass and heat. For instance, a dipole cantrap passive scalars such as phytoplankton5 within its core,and thereafter transport it.
Many works deal with interacting monopoles and pro-vide their velocity and structure. When such vortices are farapart, except in some particular instances,6 a monopole ofcirculation remains circular at leading order in 1 /Re,where Re= / denotes the Reynolds number and is the
kinematic viscosity. Indeed a noncircular monopole rapidlyevolves into a circular one through an axisymmetrizationprocess. In such a case, a relation =F between vorticityr , t and streamfunction r , t is trivially satisfied at lead-ing order thus ensuring that the nonlinear term automaticallyvanishes. The external potential strain field due to other vor-tices as well as viscous diffusivity then arise at next orders in1 /Re inducing a slight vortex deformation as well as, moreimportantly, a viscous selection of the leading order vorticityprofile.7,8 By contrast, when a monopole approaches anothervortex of the same sign within a critical distance that can bedetermined in terms of an equilibrium state,9 the nonlinearadvective term does not remain zero at leading order any-more. As a consequence, a rapid motion arises, which finallyleads to merging into a single vortex plus some filaments.10
The case of a dipole, i.e., of two nearby vortices withequal but opposite circulations, is quite specific: the flow isclearly nonaxisymmetric, the vortex separation and the coresizes are of the same order and, nevertheless, the structurepersists on a diffusion time scale. Clearly the nonlinear termshould also vanish in the Euler limit and again a functionalrelationship =F should hold. Only a few such solutionsare known. One analytical solution of the Euler equations isthe Lamb dipole:11 this flow is characterized by a linear re-lationship =k2 between vorticity and streamfunction. It isnot a smooth profile since the first derivative of vorticity isdiscontinuous on the vortex boundary. A nonsymmetric ex-tension of the Lamb dipole known as the Chaplygin dipole isalso possible in which the functional F becomes an affinefunction F=k2−; these solutions are however unstablefor 0.12 Finally, a shielded dipole has also beenproposed13 in which the functional takes the nonlinear formF=−+3, which is also found to be unstable. Note thatsolutions for a stable pair of vortex patches have also beennumerically computed.14
Another point which has been discussed in previousworks concerns the selection of the dipole profile by viscos-aElectronic mail: [email protected].
PHYSICS OF FLUIDS 21, 073605 2009
1070-6631/2009/217/073605/15/$25.00 © 2009 American Institute of Physics21, 073605-1
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

ity and, if any selection is present, the functional relationshipthat arises. Contrary to the single monopole, which is knownmathematically to converge toward a Lamb–Oseen vortex byviscous diffusion, this problem seems not to be settled in thecase of the dipole. Numerical solutions have been computedby van Geffen and van Heist11 starting with various initialconditions: an initial Lamb dipole, two Rankine vortices, orelliptic Kirchhoff vortices, all giving at the end of thesimulation a Lamb-like dipole. In Ref. 11, the functional re-lationship is found to evolve toward a nonlinear form= sinh, where and were constants. Note thatsuch a functional was predicted by statistical mechanicsmethods applied to a system of point vortices.15 A selectionprocess by viscosity was also observed by Sipp et al.16 Othernumerical simulations however seem to show a dependenceof the final functional form on the initial conditions: for in-stance, in Ref. 17, a turbulent patch evolves into a laminardipole with a different functional F depending on the initialnoise level. These apparently contradictory results may bedue to transient effects: simulations in Ref. 11 or in Ref. 17are limited in time due to finite box size and periodicityeffects. In the present paper, thanks to larger computationalfacilities, we have increased the box size which allows alarger time of simulation.
Some heuristic solutions for the dipolar dynamics havealso been attempted: this is the case of the works by Ting andBauer18 or Cantwell and Rott19 in which each vortex of thedipole is assumed to be a decaying Lamb–Oseen vortex andthe nonlinear interactions between dipole vortices are disre-garded. The motion and size of the diffusing Lamb dipolehave been also modeled through an adiabatic theory byNielsen and Rasmussen.17 In this latter study, basic integralequations for the evolution of energy and enstrophy are used,and it is assumed that the relations valid for the Lamb dipolebetween energy or enstrophy and radius and velocity holdduring the whole evolution. Finally the presence of a tailbehind the dipole and the cause of its formation have beenstudied as a viscous symmetry breaking. This has been par-ticularly put into evidence theoretically20 or experimentally21
in the presence of an external strain.In the present paper, we study the dynamics of a dipole
without external strain using a long simulation time and amuch larger box. In Sec. II, numerical results are providedfor a viscous dipole concerning vorticity fields and the timeevolution of several dynamical and geometrical quantities.Section III is devoted to the description of a semianalyticalmodel, which enables to compute the dipole velocity andellipticity. Section IV describes the dipole solution when thetwo vortices are in contact and shows how a modified self-similar solution is obtained and how it is coherent with thegoverning equations. Finally the structure of the dipole tail isobtained analytically in Sec. V in terms of a boundary-layerapproximation. All these semianalytical and theoretical argu-ments are carefully confronted with the results of the numeri-cal simulation and corroborated.
II. DIRECT NUMERICAL SIMULATION:DIPOLE EVOLUTION
In this section, we study numerically the time evolutionof the diffusing dipole. Initial conditions and simulation pa-rameters are given in Sec. II A, followed in Sec. II B by adetailed presentation of vorticity snapshots and of severalquantities that are pertinent to describe the flow field such ascirculation, sizes, ellipticity, and maximum vorticity.
A. Initial conditions and simulation parameters
The initial condition used in the direct numerical simu-lation DNS is chosen to be a superposition of two slightlyelliptical Lamb–Oseen vortices with circulation 0, locatedat b0 /2,0 in the y ,z-plane. More precisely, the initialvorticity field y ,z , t=0 reads as
y,z,t = 0 = +y,z + −y,z
with
y,z = 0
a02exp−
y b0/22
2ay02 −
z2
2az02 .
Quantities ay0 and az0 are chosen in such way that the radiusa02ay0az01/2 of each vortex is equal to a0=0.1b0 and theratio az0 /ay0 is equal to 1.02. In that case, the profile is quiteclose to an Euler equilibrium state. In the first period ofevolution, some Kelvin wave oscillations22 are observed butthey are rapidly damped out, the ratio az0 /ay0 being ad-equately chosen. In a few turnover times, the dipole thusreaches a typical quasiequilibrium solution of the Navier–Stokes equations. The structure of each vortex correspondsto a quasiequilibrium solution for a monopole in the presenceof the strain produced by its companion.
The Reynolds number Re=0 / based on the initialcirculation and the kinematic viscosity is set toRe=2500. In the following, variables are assumed nondi-mensional using the distance b0 as length scale and b0
2 /0 astime scale. In such dimensionless units, the initial turnovertime tR=42a0
2 /0 is equal to 0.39.The code is based on a spectral method with Fourier
modes both in the y- and z-directions. The periodic-periodiccomputational domain is taken to be sufficiently large so thatperiodicity affects the dynamics in a negligible way thisperiodicity effect is discussed, e.g., in Ref. 11: it has beenchecked that within the time interval considered, this is in-deed the case when the domain size along y and z isLy =20, Lz=60. The 2D Navier–Stokes equations are inte-grated using 5121536 Fourier modes. In physical space,this implies that grid points are separated by y=z0.039.Depending on the stage of evolution, the time stepvaries between t=0.005 and t=0.02. Since the vortexdipole moves, the computational domain is redefined aftereach time step so that the maximum vorticity is kept at lo-cation z=0. Moreover, vorticity distribution being asymmet-ric with respect to z, the domain is chosen accordingly as−10,10 −6,54. Spurious effects due to the simulta-neous presence of domain periodicity and a potential vortic-ity leak through the upper z-boundary should be avoided. Abuffer zone23 has been implemented, whereby the vorticity
073605-2 I. Delbende and M. Rossi Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

lying in a strip of width z=1 along the upper boundary isset to zero at every t=1. This practically ensures that vor-ticity leaving through the upper z-boundary does not comeback toward the dipole through the lower z-boundary. Otherdetails on the numerical formulation can be foundelsewhere.24
B. Results
Figures 1 and 2 display vorticity isocontours of the di-pole evolution, which can be broadly divided into two mainstages. During the first one t 40, the vortex distance re-mains constant, while each vortex core size increases andbecomes elongated. The second stage 40 t corresponds toan increase in the separation distance in addition to a further
increase in the vortex core size and to the appearance of atail. At the final time tf =1000, the size of the dipole hasgrown by a factor 2.4 with respect to the size at t=40. Morequantitatively, Fig. 3 provides the time evolution of follow-ing dynamical quantities: maximum vorticity maxt, circu-lation t, and impulse It along the z-direction
t = D
dydz, It = ydydz . 1
Note that the spatial integration is performed over the half-plane y0 denoted by D for t, whereas the integrationis performed over the whole domain for impulse I. This latterquantity is used as a numerical test for our computationssince it is a true conserved quantity. In the simulations, thisinvariance has been checked up to a relative error of 10−4
Fig. 3b. By constrast, the circulation t remains con-stant only during the first stage of evolution. Thereafter, itdecreases due to viscous cancellation.
Several geometrical variables have been computed: thepositions ymaxt ,0 of the vorticity maxima as well as thepositions of the vortex centroids yct ,zct with
t = 0 20 40
50 90 1000
FIG. 1. Time evolution of the dipole in the y ,z-plane. Positive negativevorticity isocontours = pmaxt /20 with p=1, . . . ,20 p=−1, . . . ,−20 arerepresented by solid dashed lines; two additional values max /100 andmax /1000 −max /100 and −max /1000 are also considered, whichcorrespond to the two external solid dashed contours. Only a small part ofthe numerical domain is displayed here: it corresponds to the square−4,4 −4,4 located around the dipole head.
t = 90 250 450 1000
FIG. 2. Time evolution of the dipole in the y ,z-plane. The vorticityisocontours similar to those of Fig. 1 are plotted in the larger domain−5,5 −4,50 which contains most of vorticity.
(a) 0 200 400 600 800 100010
−1
100
101
102
t
ωmax
0 200 400 600 800 10000
0.2
0.4
0.6
0.8
1
1.2
t
Γ
I
Γh
(b)
FIG. 3. a Maximum vorticity maxt on a logarithmic scale. b Verticalimpulse I over the computational domain, vortex circulations dashedline and h solid line, as a function of time.
073605-3 The dynamics of a viscous vortex dipole Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

yct =1
Dydydz, zct =
1
Dzdydz . 2
In Fig. 4a, the coordinate ymaxt of the vorticity maximumis shown to remain constant and equal to yct during the firststage of evolution. In the following, the distance b betweenthe vortices will be defined as bt2ymaxt. The vorticitydistribution in the dipole Fig. 1 displays a breaking of thesymmetry z→−z which was initially satisfied. This symme-try breaking can be quantified in various ways. First, coordi-nate zc substantially differs from zmax=0 Fig. 4a, i.e., thevortex centroid differs from the point of maximum vorticity.Second, if the upstream downstream stagnation point is lo-cated at 0,zs
+t 0,−zs−t in the reference frame of the
dipole, Fig. 4b indicates that zs+tzs
−t.The overall flow geometry can be further described by
introducing the dipole extension. In Ref. 11, the dipole radiusa is defined as the radius of the point where the streamfunc-tion computed in the comoving frame crosses zero along aline joining the two vorticity extrema. In Ref. 17, it is de-fined in a different way using the relation connecting b to ain a Lamb dipole: bt=0.96at. Only for a pure Lamb-dipole profile the definitions used in Refs. 11 and 17 areidentical. In the present paper, the initial condition is not aLamb dipole as in both previous instances. As a conse-
quence, we choose different geometrical characteristics,namely the vortex core extensions ay
tot, aztot along the y- and
z-directions
aytott 1
Dy − yc2dydz,
3
aztott 1
Dz − zc2dydz ,
as well as the vortex core size atot
atott aytot2 + az
tot2. 4
When a vorticity field possesses an elliptical shape, thesequantities are sufficient to define its geometry. However eachdipole vortex does not correspond to such an elliptical struc-ture during the second stage see Fig. 1 but can be describedas an almost elliptical vortex thereafter called head plus atail shed by the head. In the following, we compare somecharacteristics of the vortex head to theoretical predictionsbased on an elliptical vortex model. This explains why thedipole characteristics h, yc
h, zch, ay
h, azh, and ah are introduced
see Figs. 3–5. Such quantities are defined in a similar wayto Eqs. 2–4 except that the integration is not performedover the whole domain D but is now restricted to a strip Htexcluding the tail region—the strip is chosen symmetricalwith respect to the z=0 axis and is defined by z −zs
− ,zs−.
When comparing variables relative to the strip Ht with
(a)0 200 400 600 800 10000
0.2
0.4
0.6
0.8
1
1.2
1.4
t
zc
yc
ymax
yhc
zhc
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3
t
z−s
z+s
(b)
FIG. 4. a Positions as a function of time of the maximum vorticityymax,0 dotted line, of the positive vortex centroid yc ,zc based on theintegration domain D dashed line, and of the positive vortex centroidyc
h ,zch based on the integration domain Ht solid line. b Positions as a
function of time of the two stagnation points 0, zs.
0 200 400 600 800 10000
0.2
0.4
0.6
0.8
1
1.2
t
atotz
atoty
ahz
ahy
(a)
0 200 400 600 800 10000
0.5
1
1.5
2
t
E
ah/b
(b)
FIG. 5. a Vortex extensions ayh and az
h solid lines and aytot and az
tot dashedlines. b Ellipticity E and ratio ah /b as a function of time.
073605-4 I. Delbende and M. Rossi Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

those relative to the whole half-plane D, it is observed thatvariable yc
h is almost identical to yc, whereas zch is much
closer to zero throughout the simulation see Fig. 4. Simi-larly, variables ay
h and aytot are almost identical, whereas vari-
able azh and az
tot differ substantially. In the domain Ht, theellipticity E=az
h /ayh as well as the ratio ah /b can be computed
to quantify the shape of the dipole. It is to be noted that afteran initial increase, both quantities saturate toward fixed val-ues: 0.42 for ah /b and 1.69 for ellipticity E. For the Lambdipole, these values are, respectively, 0.44 and 1.73. The dif-ference between and h shown in Fig. 3b indicates howmuch of circulation is lost in the dipole tail. This leak ofcirculation in the tail contributes to the decrease in the dipolevelocity vd Fig. 6a, though it is a rather negligible effect.Actually, viscous cancellation of vorticity at the axis y=0 aswell as vortex ellipticity and separation induce greaterchanges in the dipole motion. The ellipticity itself is depen-dent on the effective mutual strain solid line, which isexerted by the left vortex on its companion vortex see Fig.6b. In practice, this quantity is computed as follows: thevorticity field is set to zero in the half-plane D where theright vortex is located, and the strain tensor is evaluated anddiagonalized at the point ymax,0, yielding two eigenvalues. Note that the total strain tot dot-dashed line measured
at ymax,0 in which the complete vorticity field is used canbe much larger than .
III. VELOCITY AND ELLIPTICITYOF THE VORTEX DIPOLE
At the beginning of the first stage, when atot /b is suffi-ciently small, the dipole velocity, mutual strain, and elliptic-ity can be estimated by an asymptotic approach like the oneperformed for slightly elliptical vortices.7,25 However this isvalid in the present simulation for a very limited time. Whenatot /b is not small enough, a heuristic model is proposed hereto represent these quantities. In Sec. III A, an analytical ex-pression is derived for the velocity and strain induced by asingle elliptical vortex with a distributed vorticity profile. InSec. III B, such a relation is used to get the ellipticity of avortex monopole in an external strain. Finally the dipole ve-locity and induced strain causing the ellipticity of each vor-tex in the dipole are obtained in a semianalytical way in Sec.III C.
A. Induced velocity and strain: Connection betweenpatch vortices and vortices with a distributedvorticity profile
Let us consider an elliptical vortex patch of vorticity p,surface Sp=ryrz, and circulation p=pSp, where ry and rz
denote the minor and major semiaxes of the ellipse. Such avortex patch induces at a distance L from the center andalong the minor axis here the y-axis, a velocity field vp
indLdirected along the major axis, and a strain field of principalvalues p
indL. Using elliptical coordinates,26 it is possibleto get the following analytical expressions:
vpindL =
p
L + L2 + rz2 − ry
2, 5
pindL =
p
L + L2 + rz2 − ry
2L2 + rz2 − ry
2. 6
It is proposed to extend the above formulas to the case ofelliptical vortices with distributed vorticity profile. In orderto associate the two types of profiles, it is required that thevelocity field in the potential region for both vortices shouldbe as close as possible. Let us write the expansion of thefar-field velocity for the patch vortex up to the second orderin terms of rz /L
vpindL =
p
2L−
p
2L rz
2
4L2 −ry
2
4L2 7
or for the vortex with distributed vorticity profile
vsindL =
2L−
2L az
2
L2 −ay
2
L2 , 8
up to the second order in terms of az /L, where ay and az arethe vortex characteristic sizes defined as
(a) 0 200 400 600 800 10000
0.05
0.1
0.15
0.2
t
vsad
vd
0 200 400 600 800 10000
0.1
0.2
0.3
0.4
0.5
t
tot
sa
(b)
FIG. 6. a Dipole velocity as a function of time obtained from the DNSvd, solid line, from the semianalytical formula 11 vd
sa, dashed line. bTotal strain tot at the maximum vorticity point measured on the simulationdot-dashed line. Mutual strain at the maximum vorticity point computedfrom the simulation , solid line and from the semianalytical formula 12sa, dashed line.
073605-5 The dynamics of a viscous vortex dipole Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

ay2t =
1
y − yc2dydz,
9
az2t =
1
z − zc2dydz .
By comparing Eqs. 7 and 8, one is led to enforce thefollowing conditions:
p = , ry = 2ay, and rz = 2az. 10
The vortex core extensions ay and az and circulation for adistributed vorticity profile are hence associated with thecharacteristics ry, rz, and p of a patch vortex. At this orderof approximation, an analytical expression can thus be ob-tained using Eqs. 5 and 6 along with Eq. 10 for thevelocity and strain induced by a vortex with a distributedvorticity profile at a distance L along its minor y-axis,yielding
vind =
2L
2
1 +1 +S
L2 E − 1/E, 11
ind =
2L2
2
1 +1 +S
L2 E − 1/E1 +S
L2 E − 1/E,
12
where S4ayaz and E=az /ay.Using a DNS of a monopole with a distributed vorticity
profile and subjected to a uniform external strain brieflypresented in Sec. III B, it has been checked that the abovevalues for vind and ind are valid as soon as L /a2 see Figs.7a and 7b.
B. Vortex ellipticity due to external strain:Connection between patch vortices and vorticeswith a distributed vorticity profile
Let us now evaluate the ellipticity of a vortex with adistributed vorticity profile when such a structure is sub-jected to an external strain. Again we consider the case of avortex patch of vorticity p, surface Sp, and circulationp=pSp when subjected to a uniform external strain ext.Such a vortex becomes elliptical of semiaxes ry and rz
satisfying27,28
ryrz = Sp, rz/ry = E withEE − 1
E2 + 1E + 1=
ext
p.
13
The above relation is also assumed to hold for a vortex witha distributed vorticity profile provided that the correspon-dence 10 is made between the two vortices implying that
az/ay = E withEE − 1
E2 + 1E + 1=
ext
p=
ext
4ayaz.
14
Since ay =a /E2+1 and az=aE /E2+1, the theoretical rela-tion 14 can be reduced to
E − 1
E + 1=
4exta2
15
involving solely the core size a of the vortex with a distrib-uted vorticity profile, its ellipticity E, and circulation .
In order to test the above relations, a DNS is performedin the spirit of Mariotti et al.23 A monopole is subjected to auniform external 2D strain ext which is steadily increasing intime from 0 initially to 0.18 at t=180. Numerically theNavier–Stokes equations are solved in velocity/vorticity for-mulation in which the velocity field is explicitly splitted inan external strain field contribution and a monopole contri-bution. Moreover, a Fourier pseudospectral method is em-ployed which requires some modifications not presentedhere from the basic pseudospectral code.
(a)0 1 2 3 4 5
0
0.05
0.1
0.15
L/a
v
0 1 2 3 4 50
0.05
0.1
0.15
L/a
(b)
FIG. 7. a Velocity vL solid line induced by a monopole with a distrib-uted vorticity profile and subjected to a uniform external strain at a distanceL along its minor y-axis. This quantity is computed from a DNS in whichthe vortex circulation and dispersion radius are respectively set to =1 anda=1. The ellipticity due to the external strain is equal to E=1.23. Thisvelocity is compared to vindL dashed line obtained from formula 11 andto axisymmetric approximation / 2L dotted line. b Similarly thestrain L induced by a monopole with a distributed vorticity profile com-puted from a DNS, from formula 12, and from the axisymmetric approxi-mation / 2L2.
073605-6 I. Delbende and M. Rossi Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

For low values of ext typically ext /p0.14, the vor-tex adiabatically follows the external strain evolution in sucha way that a quasiequilibrium is reached. This state is almostelliptical and its ellipticity az /ay can be measured solid linein Fig. 8 and compared to the value computed from relation14 dashed line in Fig. 8. The system at quasiequilibriumis found to follow the theoretical relation 14. For highervalues of ext typically ext /p0.14, the vortex cannot beconsidered at quasiequilibrium anymore since vorticity fila-ments are being ejected in a significant manner, as indicatedby vorticity-isocontour inserts on the graph. However, thetheoretical relation 14 seems to be still pertinent in thatregime.
C. Application to the dipole velocity and ellipticity
In this section, we use Eq. 11 to compute the velocityof the dipole. For a given time t, one fixes the values of L, ,ay, and az in Eq. 11, respectively, to the distance betweenvortices, the circulation, and the core sizes in the dipole headwhich are evaluated from the DNS,
L = bt, = h, ay = ayh,
az = azh, a = ay
h2 + azh2.
This procedure provides a semianalytical value vdsa for the
dipole velocity dashed line in Fig. 6a which is found inexcellent agreement with the velocity vd obtained directlyfrom the DNS. The same procedure in Eq. 12 leads to asemianalytical value for the strain sa dashed line in Fig.6b, also in excellent agreement when compared to mutualstrain obtained in the DNS.
The two quantities vdt and bt may also be comparedto the relations obtained by the adiabatic theory of Nielsenand Rasmussen.17 Using our notations, they read as
vdt =vdt0b2t0
b2t,
16b2t = b2t0 + Ct − t0 ,
where C13.43 is a constant related to the Lamb-dipoleprofile. In Ref. 17, formula 16 seems valid, but it should bepointed out that the initial condition is a pure Lamb-dipoleprofile and the simulation is shorter than in the present paper:we have evaluated this duration to be 1/4 of ours. In Ref. 11,the numerical simulations performed with an initial Lambprofile corroborate formula 16 for bt but not for the di-pole velocity. This may arise simply because of a finite com-putational box size, which can result in an underestimationof vd, and this numerical artifact may become significantwhen the dipole grows. In the present study, we have per-formed such a comparison in Fig. 9. As our computations arenot initialized from a Lamb dipole, we have integrated for-mula 16 from two different states, namely, from t0=100 orfrom t0=450. For the velocity, the agreement is excellentwhen t0=450 is chosen. On the contrary, the slope for b2t isnot recovered.
In the dipole simulations, the ellipticity E of each vortexranges in the interval 0E1.7. One may thus be temptedto apply Eq. 15 to each vortex of the dipole since it is a
0 0.05 0.1 0.15 0.21
1.5
2
2.5
3
E
ext/Ωp
FIG. 8. Ellipticity E=az /ay of a monopole with a distributed vorticity pro-file subjected to uniform strain ext. The dashed line is obtained from theformula 13 and solid line is obtained through the DNS of a vortex mono-pole subject to an adiabatically increased external strain. Vorticity isocon-tours are shown ten contours regularly spaced from 0 to the maximumvalue at the time considered for four values ext /p=0, 0.081, 0.133, and0.145, respectively, corresponding to E=1, 1.5, 2, and 2.5.
(a) 0 200 400 600 800 10000
10
20
30
40
50
t
v−1d
0 200 400 600 800 10001
2
3
4
5
6
t
b2
(b)
FIG. 9. a 1 /vdt as a function of time from the DNS solid line and fromNielsen and Rasmussen’s formula 16 integrated from t0=100 dotted lineor t0=450 dashed line. b Same as a for b2t.
073605-7 The dynamics of a viscous vortex dipole Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

good approximation for a single monopole at values as highas E=2.5. For a given value of a /b, it is first assumed thatthe external strain ext produced by the companion vortex isuniform and thus given by Eq. 12. Together with relation15, an implicit relation between a /b and E is hence ob-tained as
E − 1
E + 11 +1 +
4a2
b2
E2 − 1
E2 + 11 +
4a2
b2
E2 − 1
E2 + 1=
4a2
b2 .
17
The value of E computed through Eq. 17 favorably com-pares to the vortex ellipticity in the dipole extracted from thesimulation. Figure 10 displays such a comparison in theplane a /b ,E: the theoretical value E obtained through Eq.17 is shown in dashed line and the effective value az
h /ayh
obtained by DNS shown in solid line. Note that, at the be-ginning of the simulation t50, E is found to be quadraticin a /b, as would be expected from a perturbation analysis inthe small strain approximation in the spirit of Jiménez et al.7
However at larger times, E reaches a linear asymptote ina /b. This is predicted by the nonlinear formula 17 obtainedusing the equivalent patch since at large E and a /b values, itreduces to E 4a /b.
IV. A MODIFIED SELF-SIMILARITYIN THE VORTEX HEAD
During the dipole evolution, a second stage has beenidentified in our simulation it occurs at t40. This stageinitiates when the circulation starts to decrease. It is knownthat the circulation t of the positive vortex satisfies
d
dt= −
y=0
ydz . 18
Such a decrease thus arises when a significant vorticity gra-dient is reached at y=0. After a transient period, the vorticityfield approaches an almost self-similar solution t450.This is seen in Figs. 11a and 11b where the normalizedfield y ,z , t /maxt is, respectively, displayed along theaxis z=0 as a function of y /bt and y=ymaxt as a functionof z /bt: the various curves corresponding to different timesalmost collapse on a single one, as already reported by Sipp
0 0.1 0.2 0.3 0.4 0.51
1.2
1.4
1.6
1.8
E
a/b
450250
1000
90
50
20
0
FIG. 10. Relation between vortex ellipticity and ratio a /b during the dipoleevolution. The curve is parametrized by t, the values of which are indicatedalong the curve. Dashed line: theoretical formula 17 valid for ellipticalvortex patches. Solid line: az
h /ayh as a function of ah /b obtained by DNS.
Thick dotted line delimited by two solid squares: DNS results taken fromRef. 16.
(a)
(b)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−1
−0.5
0
0.5
1
y/b
−2 −1.5 −1 −0.5 0 0.5 1 1.5 20
0.5
1
z/b
t = 1000
−2 −1.5 −1 −0.5 0 0.5 1 1.5 20
0.5
1
z/b
t = 70
(c)
FIG. 11. a Plot of y ,z=0, t /maxt on the y-axis as a function ofy /bt, at several times t=450,550, . . . ,950 and 1000. b Plots ofy=ymax,z /maxt as a function of z /bt at the same times. c Same asb for times t=70,110,150,250,350,450.
073605-8 I. Delbende and M. Rossi Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

et al.16 The transient period can be identified here by the factthat the collapse is not observed for 40 t 450, as shown inFig. 11c. Simulations that are run on too short time periodsmight wrongly indicate that the selected profile depends onthe initial condition. Note that at the end of the simulation inRef. 17 Ref. 11, the radius of the dipole has only increasedby a factor 1.25 1.6 which may not be sufficient for theinitial conditions to be forgotten. This difficulty may be dem-onstrated in an analytical form on a monopole flow solutionas follows. The vorticity profile
r,t =0
a2exp−r2
a2 +M0
a4 1 −r2
a2exp−r2
a2with a2 = a0
2 + 4t 19
is a Navier–Stokes solution which combines a Lamb–Oseenvortex and a Taylor vortex. At time t, the ratio between theTaylor and the Lamb–Oseen vortex terms decreases by afactor a2 /a0
2. For such a solution, a factor of the order of 1.562.56 used in Ref. 17 in Ref. 11 would be a priori notsufficient to demonstrate that the monopole solution asymp-totically converges toward a Lamb–Oseen solution. Such anartifact can be present in the more complex situation of thedipole. In the present paper, the box size is increased to allowfor a larger simulation time, which corresponds to a factor of6 for the ratio a2 /a0
2.Actually, a true self-similar solution of the Navier–
Stokes equations
y,z,t = maxty, z with y = y/bt and z = z/bt
20
is only possible when the nonlinear term vanishes as for theLamb–Oseen vortex solution. In the dipole, the lack of self-similarity most importantly appears in the trail of the dipolefor z 1 or z b Fig. 11.
In Sec. IV A, a “modified self-similarity” solution ispostulated and it is shown to be compatible with the Navier–Stokes equations. A numerical check of the various conse-quences is also performed. Finally the solution is extractedfrom the DNS in Sec. IV B.
A. Assumptions and numerical checks
One may postulate the existence of a “modified self-similarity” solution for the Navier–Stokes equations,
y,z,t = maxt0y, z + t1y, z + ¯ 21
with y=y /bt, z=z /bt, and tbt / I. This type ofsolution is assumed in the spirit of previous works7,25 onthe diffusing monopole subjected to a constant strain. Itis written as an expansion in terms of the inverse t ofan effective Reynolds number Re= I /bt. Indeed, anticipat-ing on equalities 22 and 24, the Reynolds numberRe= / based on circulation is directly related to Re byRe 0 /0Re, where it is shown in the following that0 /01.
The modified self-similarity hypothesis implies that theimpulse satisfies
I = maxtb3t0 + t1 + ¯, j = y jdydz .
22
Since this quantity is an invariant of motion and the coeffi-cients j are constants, t and the maximum of vorticitymaxt must be only functions of bt,
maxt =I
b3t0 + t1 + ¯. 23
The modified self-similarity hypothesis implies as well thatcirculation satisfies
t = maxtb2t0 + t1 + ¯, j = y0
jdydz .
24
Introducing expansion 21 into the dynamical equation 18leads to
d
dt= − maxt0 + t1 + ¯ with j =
y=0
j
ydz .
25
Finally the modified self-similarity hypothesis imposes thatellipticity E and rescaled size S /b2 can be written as expan-sions in . In addition, if one applies Eq. 11 together withrelation 24, the dipole velocity becomes
vd = maxtbt0 + t1 + ¯ . 26
The coefficients j being constants, the circulation and thedipole velocity are functions of bt. In order to define com-pletely the modified self-similarity solution, it is thus neces-sary to provide an additional equation for the scaling param-eter bt. It is possible to get a dynamical equation for bt asfollows. Let us first differentiate expansion 24 and divideby max. This provides the following relation:
1
max
d
dt= b2
1
max
dmax
dt+
2b
db
dt0 + t1 + ¯
+b2
d
dt1 + 2t2 + ¯ . 27
According to Eq. 25, this expression must be an expansionin t alone. If one uses the invariance of impulse I and thedefinition of t, one gets
b2
d
dt=
b2
d
dtb
I =
b
db
dt. 28
From Eq. 23, it is easily found that
b2
1
max
dmax
dt= − 3
b
db
dt−
b2
d
dt
1 + 2t2 + ¯0 + t1 + ¯
.
29
Using Eqs. 28 and 29, relation 27 can be transformedinto
073605-9 The dynamics of a viscous vortex dipole Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

1
max
d
dt=
b
db
dt− 1 − t
1 + 2t2 + ¯0 + t1 + ¯
0 + t1 + ¯ + t1 + 2t2 + ¯ .
30
Finally expansions 25 and 30 are compatible if and onlyif the scaling parameter bt satisfies a dynamical equation ofthe form
bdb
dt= 0 + t1 + ¯, 0 =
0
0,
31
1 =10 − 01
10 − 01.
It is easy to test the validity of the modified self-similarityhypothesis by trying to examine if expansions 22 and 24–26 can be observed directly on the DNS solution. In thatcase, quantities
I
maxb3 ,
maxb2 , −
1
max
d
dt, and
vd
maxb
should be affine functions of t since is here alwayssmaller than 10−3. Figure 12 indicates that this is indeed thecase, at least for t450. The values of j, j, and j forj=0,1 which are retrieved by linear regression, are given inTable I. The zeroth-order coefficient for the dipole velocity isfound by linear regression to be equal to 0=6.8610−2,which can be compared to the equivalent value 7.0210−2
for the Lamb dipole.Another compatibility test for this modified self-similar
solution consists of introducing expansion 21 directly intothe Navier–Stokes equations to assess if there are compatiblewith these governing equations. To do so, let us write in aformal way the vorticity field as
y,z,t = maxty, z,t . 32
The Navier–Stokes equations written in the referential mov-ing with the dipole using tilde variables y , z , t instead of the
primitive variables y ,z , t become, without any loss ofgenerality,
−d
dt 1
max +
1
max
t−
1
max
1
b
db
dty
y+ z
z
+ u
y+ v
z =
b2max 2
y2 +2
z2 . 33
At this point, the introduction of the modified self-similarityhypothesis allows the computation of various parameters.First, by using Eq. 23, one obtains
b2max= 0 + t1 + ¯t . 34
The factor in front of the third left hand side term of Eq. 33can be rearranged so that
1
max
1
b
db
dt=
b2maxb
db
dt . 35
Using Eqs. 31, 34, and 35, this term can be written as anexpansion in t
1
max
1
b
db
dt= 0 + t1 + ¯t0 + t1 + ¯ .
36
The second left hand side term of Eq. 33 reads as
1
max
t=
1
max
d
dt1y, z + 2t2y, z + ¯ . 37
From the definition of , the impulse invariance and result36, one gets
1
max
d
dt=
maxI
db
dt
= t1
maxb
db
dt
= 2t0 + t1 + ¯0 + t1 + ¯ . 38
As a consequence, the second left hand side term of Eq. 33can be written as an expansion in t. Finally the factor in
0.0004 0.0006 0.0008 0.0010
0.2
0.4
0.6
0.8
νb/I
FIG. 12. Quantities from top to bottom / maxb2, I / maxb
3,−d /dt / 10max, and vd / maxb plotted against tbt / I. Thecurves reach a linear asymptote for b / I7.010−4, i.e., for t450.
TABLE I. Numerical values of j, j, and j for j=0 and 1 as obtained bylinear regression of Eqs. 22–25 or by direct integration of j. Values arealso displayed for the Lamb dipole Lamby , z note that in terms of tildevariables the Lamb-dipole solution is such that the vortex boundary is lo-cated at r=1.0456.
Regression of Eqs. 22–25 Integration of 0 Lamb dipole
0 0.502 0.503 0.675
0 0.477 0.479 0.649
0 3.40 3.28 3.75
Regression of Eqs. 22–25 Integration of 1
1 101.4 101.0
1 94.3 93.4
1 505.2 609.4
073605-10 I. Delbende and M. Rossi Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

front of the first left hand side term of Eq. 33 can be rear-ranged so that
d
dt 1
max =
b3t1 + 2t2 + ¯I
d
dt
+3b2t
I
db
dt0 + t1 + ¯ . 39
Using Eq. 28, one finally obtains
d
dt 1
max = 2b
db
dt1 + 2t2 + ¯ + 3b
db
dt
0 + t1 + ¯ , 40
which shows that the first left hand side term of Eq. 33 canbe written as an expansion in t. A solution can thus defi-nitely be found in terms of an expansion in t. The Navier–Stokes equations are compatible since the time dependencyis solely included in t. This expansion leads to a hierarchyof equations. The first two equations of the hierarchy read as
u00
y+ v0
0
z= 0, 41
− 31 − y1
y+ z
1
z +
1
00u1
0
y+ v1
0
z
+1
00u0
1
y+ v0
1
z =
1
0 21
y2 +21
z2 .
42
The solution of systems 41 and 42 is clearly not straight-forward. Indeed, the solution at order zero cannot be as-sumed axisymmetric as for a monopole and consequently, afamily of the Euler solution cannot be found analytically atorder zero. A solvability condition cannot be then appliedthat selects one member of the family through viscosity.However the previous analysis demonstrates the compatibil-ity of these expansions in powers of t.
B. Determination of 0 and 1 from the DNS
Instead of trying to get such a solution directly, one canextract the fields 0y , z and 1y , z from the DNS by aleast-squares fit in the variable =b / I at all discrete y , zlocations. The procedure has been performed using 16 snap-shots taken between times t=450 and t=1000. The result isshown in Fig. 13. The field 0 takes the form of a neatregular vortex dipole, while the tail and the periphery of thedipole evolve through 1 as bt naturally increases. Onemay also check that the combination 0y , z+t1y , zsuccessfully approximates the DNS vorticity field at anytime t450, as illustrated in Fig. 14 for t=650. In addition,note that the first order field 0y , z differs from the Lambdipole Fig. 15. This has already been noted for the totalvorticity field in Ref. 11.
Using the extracted fields 0y , z and 1y , z, one canthen perform the integrals in Eqs. 22, 24, and 25 andcompute values for 0, 0, and 0. Such values can then becompared to those obtained through linear regression. Table I
−3 −2 −1 0 1 2 3
−1
0
1
2
3
4
y
z
(a)
−3 −2 −1 0 1 2 3
−1
0
1
2
3
4
z
y(b)
FIG. 13. Isocontours of fields 0y , z and 1, as deduced from the regres-sion of DNS snapshots. For positive negative values, ten equally spacedlevels are plotted using solid dashed lines. a Isocontours of 0y , z. bIsocontours of 1y , z. The two additional bold isocontours correspond tothe isovalues of 0 at level e−1 of the maximum and minimum which arevisualized by two dots.
−1.5 −1 −0.5 0 0.5 1 1.5 2 2.5−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
−2 0 2−2
0
2
4
6
8
10
12
14
16
18
20
z
y
ω ω0 + ω1
ω
ω0+
ω1
FIG. 14. Comparison between fields y , z , t represented in the half-planey0 and 0y , z+t1y , z represented in the half-plane y0 at timet=650 for which =8.0810−4. Same contour levels as in Figs. 1 and 2.
073605-11 The dynamics of a viscous vortex dipole Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

shows that both sets agree in a satisfactory manner. Thesevalues are significantly smaller than those pertaining to theLamb dipole. Similarly, using the extracted field 1y , z, thevalues of 1, 1, and 1 obtained by integration correspondto those obtained through the linear regressions within 1%error for 1 and 1 and 20% error for 1. Note also that, atleading order, Eq. 31 reduces to bdb /dt=0 so that btscales like t1/2. The coefficient 0 can be obtained in differentways: a as the ratio 0 /0=6.77 evaluated using the values0 and 0 found by regression Table I; b as the ratio0 /0=6.52 evaluated using the values 0 and 0 found byintegration of 0 Table I; and c by using formula 16which gives 0=6.71. This latter coefficient based on themodel in Ref. 17 is not far from the two values obtained inthe present study. The DNS follows the t1/2 scaling law.However, the mean slope of b2t directly measured on thesimulation provides the value of 6.14. This discrepancy isprobably due to higher order term effects.
Let us finally examine the functional relationship=F that is obtained for the zeroth-order field 0y , z.From this field and the value of velocity maxtbt0 at the
same order, one computes 0y , z. Streamlines and isovor-ticity contours are found to coincide, as shown in Fig. 16a.Moreover the relationship is close to the one obtained in Ref.
11 see Fig. 16b. A fit in 0=0.33 sinh310 is found to
be satisfactory and is in close agreement with Ref. 11 since itcorresponds with their scaling to =2.1 sinh2 instead of=2.2 sinh2.
V. THE TAIL STRUCTURE
The dipole tail is located near the z-axis and originatesfrom the combined effects of vorticity diffusion outside thedipole head and its convection downstream of it. After deriv-ing the governing equation in Sec. V A, Sec. V B providesan analytical description of the structure.
A. Governing equation
The vorticity field 32 satisfies the Navier–Stokes equa-tions which are here written in variables y , z , t and in thereferential moving with the dipole:
u
y+ v
z −
d
dt 1
max +
1
max
t
−1
max
1
b
db
dty
y+ z
z =
b2max 2
y2 +2
z2 .
43
The modified self-similarity in the head provides an evalua-
(a)−1.5 −1 −0.5 0 0.5 1 1.5
−1
−0.5
0
0.5
1
y
−1.5 −1 −0.5 0 0.5 1 1.5−0.2
0
0.2
0.4
0.6
0.8
1
z(b)
FIG. 15. a Vorticity profile for 0y , z=0 solid and for the Lamb dipoleLamby , z=0 dotted as a function of y. b Similarly 0y= 1
2 , z andLamby= 1
2 , z as a function of z.
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
y
z
(a)
(b)
−0.1 −0.05 0 0.05 0.1−1
−0.5
0
0.5
1
˜
ω0
ψ0
FIG. 16. a Streamlines thin lines and isocontours of vorticity bold linesrelative to the zeroth-order field 0y , z. b Scatterplot showing the func-
tional relation 0y , z as a function of 0y , z. This relation is fitted by
function 0=0.33 sinh310 dashed line.
073605-12 I. Delbende and M. Rossi Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

tion of some coefficients of the above equation. More pre-cisely, by keeping the highest order terms in , Eqs. 31 and40, Eq. 36, and finally Eq. 34, respectively, provide thefollowing three equalities:
d
dt 1
max = 300,
1
max
1
b
db
dt= 00,
b2max= 0 .
44
Instead of expansion 21, one may postulate in the tail theexistence of a boundary-layer type of solution. One thus in-
troduces a “slow” variable Zz to express this boundary-layer character and assumes that the solution reads as
y,z,t = maxt0y,Z + t1y,Z + ¯ . 45
In such an approximation the quantity 1 /max /t scaleslike 1 /maxd /dt and is thus of the order of 2 because ofEq. 38. This term will not be considered here since we onlykeep the terms of the order of . In the tail, the velocityproduced by the vorticity contained in the head can be evalu-ated as
uy,z,t = −Iy
z3 and vy,z,t = vd −I
2z2 . 46
Since I=maxtb3t0+t1+¯ and vd=maxtbt0+t1+¯, one gets, using tilde variables
uy,Z,t = −0y3
Z3
47
and vy,Z,t vy,Z,t
maxtbt= 0 −
02
2Z2.
At first order in , one has u , v= 0,0. The governingequation 43 can thus be written as
0
Z− 300 − 00y
y+ Z
Z
= 0 2
y2 + 22
Z2 , 48
which is simplified by keeping only the highest order termsinto
Zc − Z
Z= 3 + y
y+
1
0
2
y2 , where Zc =0
00.
49
Note that some terms in Eq. 49 are introduced via the timedependence of the rescaling.
B. Analytical solution and comparisonwith the DNS results
In the left hand side, a factor Zc− Z arises; location Zc
corresponds to the point on the Z-axis where the upwardadvection exactly counterbalances the radial contraction in-
duced by the rescaling. If one restricts the study to Z Zc,
one may introduce the two changes in variables Z→ andy→ defined by
= Z0
Z dZ
Zc − Z= ln
Zc − Z0
Zc − Z, Sy , 50
where function S is momentarily unspecified. Equation49 becomes
− 3 = 1 −
1
S
dS
d
+
S2
0
2
2
with , y, z . 51
At this point, one may specify function S so that Se.This yields
1
S2
=
1
0
2
2 with e−3 . 52
A final change in variable → defined by
0
S2d =e2 − 1
253
leads to a simple heat equation for ,,
=
1
0
2
2 . 54
A double vorticity layer of zero circulation which satisfiesEq. 54 can describe the transverse vorticity structure in thetail,
, = 2emax 02
2
e−/2
55with 2 = 0
2 + 4/0 and 0 = = 0 .
When written in tilde variables y , Z, such a solution readsas
mody,Z = 2emodmaxZ
y
mod
e−y/mod2, 56
where the maximum vorticity modmax and the thickness mod at
station Z are given by
modmaxZ = mod
maxZ01 −2
002 Zc − Z
Zc − Z0
+2
002
Zc − Z0
Zc − Z−1
57
and
073605-13 The dynamics of a viscous vortex dipole Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

mod2 Z = 0
21 −2
002 Zc − Z
Zc − Z0
2
+2
002 . 58
At each station z and given time, one may compare the val-ues obtained by DNS for the maximum vorticity and thevorticity thickness the 2/3 factor is present because of the
definition of in the analytical solution 55:
z2 =2
3
y3y, zdy
yy, zdy,
to the above analytical solutions 57 and 58. As can beseen in Fig. 17 for t=1000, the model fairly reproduces theDNS results. However, it clearly depends on the value of z0.If z0 is too close to the stagnation point, the boundary-layerapproach clearly breaks down, but for z03, the choice of z0
is found to be moderately important see the influence of z0
in Fig. 17. The quantity modmax is linked to the loss of circu-
lation through the hyperbolic point. Yet, a quantitative deter-mination has not been achieved.
VI. CONCLUSION
The dipole is one of the main building blocks of 2Dflows. We have described a heuristic model for such a flow,whereby the vortex ellipticity and dipole velocity are com-puted semianalytically during the complete time evolution.As seen in the simulation initiated from a dipole with twowell separated vortices, several phases can be defined for thetime evolution. The first phase, which is well documented,can be understood in terms of strained monopoles. The sec-ond phase starts when such an hypothesis breaks down: thishappens when the vorticity fields of the two structures beginto “overlap” for our simulation t40. This period starts bya transient evolution for our simulation 40 t450, duringwhich the spatiotemporal pattern evolves toward a new state:an analytical treatment seems rather difficult for this timeinterval. Once this transient has elapsed t450, we haveshown that a new state is obtained, which we have analyzedthrough a modified self-similar hypothesis. Such an assump-
tion is shown to be compatible with the Navier–Stokes equa-tions and its validity has been tested numerically. An analyti-cal solution for the tail structure has also been investigated inthis latter regime.
ACKNOWLEDGMENTS
This work was partly supported by the ANRAgence Nationale de la Recherche under Grant No. 06-BLAN-0363-01 “HiSpeedPIV.” The use of a NEC-SX8 su-percomputer in the framework of Project No. CP2-0137 atIDRIS-CNRS is acknowledged. Thanks are due to LaurentMartin Witkowski for numerous discussions and to JalelChergui and Dang Anh Tuan for their kind and efficient as-sistance at LIMSI.
1K. Ahlnas, T. C. Royer, and T. H. George, “Multiple dipole eddies in theAlaska coastal current detected with Landsat thematic mapper data,” J.Geophys. Res. 92, 13041, DOI: 10.1029/JC092iC12p13041 1987.
2Y. Couder, J.-M. Chomaz, and M. Rabaud, “On the hydrodynamics ofsoap films,” Physica D 37, 384 1989.
3J. B. Flor and G. J. F. van Heijst, “An experimental study of a dipolarvortex structure in a stratified fluid,” J. Fluid Mech. 279, 101 1994.
4R. C. Kloosterziel, “On the evolution and saturation of instabilities oftwo-dimensional isolated circular vortices,” J. Fluid Mech. 388, 2171999.
5A. Provenzale, “Transport by coherent barotropic vortices,” Annu. Rev.Fluid Mech. 31, 55 1999.
6S. Le Dizès, “Non-axisymmetric vortices in two-dimensional flows,” J.Fluid Mech. 406, 175 2000.
7J. Jiménez, H. K. Moffatt, and C. Vasco, “The structure of the vortices infreely decaying two-dimensional turbulence,” J. Fluid Mech. 313, 2091996.
8L. Ting and C. Tung, “Motion and decay of a vortex in a nonuniformstream,” Phys. Fluids 8, 1039 1965.
9P. Meunier, U. Ehrenstein, Th. Leweke, and M. Rossi, “A merging crite-rion for two-dimensional co-rotating vortices,” Phys. Fluids 14, 27572002.
10Ch. Josserand and M. Rossi, “The merging of two co-rotating vortices: Anumerical study,” Eur. J. Mech. B/Fluids 26, 779 2007.
11J. H. G. M. van Geffen and G. J. F. van Heijst, “Viscous evolution of 2Ddipolar vortices,” Fluid Dyn. Res. 22, 191 1998.
12V. V. Meleshko and G. J. F. van Heijst, “On Chaplygin’s investigations oftwo-dimensional vortex structures in an inviscid fluid,” J. Fluid Mech.272, 157 1994.
13J. Juul Rasmussen, J. S. Hesthaven, J. P. Lynov, A. H. Nielsen, and M. R.Schmidt, “Dipolar vortices in two-dimensional flows,” Math. Comput.Simul. 40, 207 1996.
14R. T. Pierrehumbert, “A family of steady, translating vortex pairs withdistributed vorticity,” J. Fluid Mech. 99, 129 1980.
15D. Montgomery and G. Joyce, “Statistical mechanics of negative tempera-ture states,” Phys. Fluids 17, 1139 1974.
16D. Sipp, L. Jacquin, and C. Cossu, “Self-adaptation and viscous selectionin concentrated two-dimensional vortex dipoles,” Phys. Fluids 12, 2452000.
17A. H. Nielsen and J. J. Rasmussen, “Formation and temporal evolution ofthe Lamb dipole,” Phys. Fluids 9, 982 1997.
18L. Ting and F. Bauer, “Viscous vortices in two-and three-dimensionalspace,” Comput. Fluids 22, 565 1993.
19B. Cantwell and N. Rott, “The decay of a viscous vortex pair,” Phys.Fluids 31, 3213 1988.
20S. Kida, M. Takaoka, and F. Hussain, “Formation of head-tail structure ina two-dimensional uniform straining flow,” Phys. Fluids A 3, 26881991.
21R. R. Trieling, J. M. A. van Wesenbeeck, and G. J. F. van Heijst, “Dipolarvortices in an strain flow,” Phys. Fluids 10, 144 1998.
0 5 10 15 20 250
0.5
1
0 5 10 15 20 250
0.01
0.02
δmod
δ
z
zc
ωmax
ωmaxmod
FIG. 17. Comparisons between the results obtained at t=1000 by the DNSsolid line at Re=2500, the model starting at z0=3 dashed line and themodel starting at z0=5 dotted line. Top: tail thickness as a function of z.
Bottom: maximum vorticity at each z station. Note that at t=1000, Zc cor-responds to the location zc=22.6.
073605-14 I. Delbende and M. Rossi Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions

22S. Le Dizès and A. Verga, “Viscous interactions of two co-rotating vorti-ces before merging,” J. Fluid Mech. 467, 389 2002.
23A. Mariotti, B. Legras, and D. G. Dritschel, “Vortex stripping and theerosion of coherent structures in two-dimensional flows,” Phys. Fluids 6,3954 1994.
24I. Delbende and M. Rossi, “Nonlinear evolution of a swirling jet instabil-ity,” Phys. Fluids 17, 044103 2005.
25H. K. Moffatt, S. Kida, and K. Okhitani, “Stretched vortices—the sinews
of turbulence; large-Reynolds-number asymptotics,” J. Fluid Mech. 259,241 1994.
26H. Lamb, Hydrodynamics Cambridge University Press, Cambridge,1932.
27P. G. Saffman, Vortex Dynamics Cambridge University Press, Cambridge,1992.
28S. Kida, “Motion of an elliptic vortex in a uniform shear flow,” J. Phys.Soc. Jpn. 50, 3517 1981.
073605-15 The dynamics of a viscous vortex dipole Phys. Fluids 21, 073605 2009
Downloaded 12 Oct 2011 to 129.175.154.83. Redistribution subject to AIP license or copyright; see http://pof.aip.org/about/rights_and_permissions


[C9]DELBENDE, I. AND ROSSI, M. 2009
Interaction vorticite/deformation des monopoles et des dipoles.Congres Francais de Mecanique. Marseille, France.


19 emeCongres Francais de Mecanique Marseille, 24-28 aout 2009
Interaction vorticit e/deformation des monopoles et des dipoles
I. D ELBENDEa, M. ROSSIb
a. UPMC, LIMSI–CNRS, UPR 3251, BP133, 91403 Orsay Cedexb. CNRS, IJLRDA–UPMC, UMR 7192, 4 place Jussieu, 75252 Paris Cedex 5
Resume :Par des approches theoriques et numeriques, nous generalisons aux vortex non uniformes la relationetablie par Moore& Saffman entre l’ellipticite d’une tache de vorticite et le champ de deformation exterieure qu’il subit. Nous en montronsles implications dans le cadre des monopoles et celui des dipoles.
Abstract :Using both theoretical and numerical approaches, we generalize the Moore–Saffman relation between the ellipticity ofavortex patch and the external strain field, to vortices with nonuniform vorticity. Applications to monopoles and dipolesare given.
Mots clefs : tourbillon, champ de deformation, elliptisation
1 IntroductionUn champ turbulent 2D en declin, a nombre de Reynolds suffisammenteleve, est compose de structures bienseparees les unes des autres, les vortex, qui se deplacent dans un fond diffus de vorticite qui joue un rolequasi-passif. L’evolution peut alorsetre interpretee comme une dynamique de vortex. Chacun de ces vortex,soumis au champ de deformation induit par les vortex distants, est dans unetat proche de l’equilibre [1]. Cetteevolution quasi-statique (”adiabatic steadiness”) se poursuit sous l’effet de l’induction mutuelle des vortexjusqu’a ce que le quasi-equilibre stable cesse d’exister. Il se produit alors une dynamique instationnaire rapide(filamentation, fusion) qui reorganise la ou les structures et conduita une nouvelle phase d’evolution quasi-statique. Durant ces phases quasi-statiques, deux types destructures gardent leur identite lors de leurevolution :les monopoles dont la vorticite a un signe donne, et les dipoles. Dans les deux cas, les vortex sont en generalelliptiques, comme consequence de la presence d’un champ de deformation engendre par l’environnementexterne dans le cas des monopoles, ou par le vortex compagnon dans le cas des dipoles. De plus, la distributionde vorticite dans les tourbillons est non uniforme, or la seule relationexploitable pour predire l’ellipticite etl’inclinaison des vortex concerne des taches de vorticite (uniforme), relation presentee en§2.1. Nous proposonsune methode heuristique mais quantitative et tres utile pour l’etendre au cas des vortex non uniformes en§2.2.Des applications sont finalement presentees dans le cas des monopoles soumisa un champ de deformation en§3.1 et des dipoles enevolution libre en§3.2.
2 Monopole dans un champ de deformation plan
2.1 Solution 2D stationnaire de Moore–SaffmanOn considere un vortex 2D dans le plan(y, z), de circulationΓp, soumisa un champ de deformation de laforme (−γy, γz). On peut trouver des solutions pour lesquelles la vorticite uniformeωp est localisee sousforme d’une tache de vorticite (dite “patch”) elliptique, de petit axeOY et de grand axeOZ, inclines d’unangleθ par rapport aux axesOy etOz, de demi-petit axerY et de demi-grand axerZ (voir figure 1). En effet,ces grandeurs verifient lesequations dynamiques [2, 3]
− rY
rY
=rZ
rZ
= γ cos(2θ) , (1)
et
θ =ωprY rZ
(rY + rZ)2+ γ
r2
Y + r2
Z
r2
Y − r2
Z
sin 2θ , (2)
ou le point surmontant une variable designe la derivation temporelle. Ces deuxequations montrent qu’unesolution stationnaire peutetre obtenue sous la forme d’un patch elliptique incline deθ = π/4 ou 3π/4. Pour
1

19 emeCongres Francais de Mecanique Marseille, 24-28 aout 2009
O
z
ZrY
rZ
θ
y
Y
FIG. 1 – Definitions pour le patch elliptique.
θ = π/4, l’ equation (2) implique
γ
ωp
=rY rZ(rZ − rY )
(rY + rZ)(r2
Y + r2
Z)=
E(E − 1)
(E + 1)(E2 + 1)
ou aete introduite l’ellipticiteE = rZ/rY > 1. L’expression du membre de droiteetant positive, cette solutionest valable siγ et ωp sont de meme signe, sinon il faut considerer le casθ = 3π/4. On peut regrouper les casθ = π/4 et3π/4 enecrivant
∣
∣
∣
∣
γ
ωp
∣
∣
∣
∣
=E(E − 1)
(E + 1)(E2 + 1)(3)
et en introduisant la regle suivante : l’inclinaison du grand axe de l’ellipse est decalee par rapporta la directionprincipale d’etirementd’un angleπ/4 compte dans le sens de la rotation du vortex.La relation (3) limite l’existence de solutions stationnairesa des taux de deformationγ tels queγ/ωp < 0.15,valeur au-dessus de laquelle elle n’a plus de solution.A une valeur fixee deγ/ωp < 0.15 correspond uneellipse stable d’ellipticiteE < 2.9 (et une telle queE > 2.9 mais qui est instable [4]).
2.2 Solutions approchees de vorticite non uniforme – PatchequivalentEn presence de viscosite, la vorticite cesse d’etre uniforme sous l’effet de la diffusion visqueuse ; on ne peutstrictement parlant trouver de solution stationnaire qu’en presence d’etirement axial, qui concentre la vorticiteet, de ce fait, contrecarre l’etalement visqueux comme dans le vortex de Burgers. De telles solutions ontetedeterminees analytiquement sous la forme de developpementsa haut Reynolds [5]. Toutefois, en l’absenced’etirement axial, un vortex non uniforme soumisa deformation plane(−γy, γz) a, sur des temps courts parrapporta l’evolution visqueuse, un comportement analoguea celui du patch inviscide pour ce qui concernel’inclinaison et l’ellipticite. Nous proposons ici une interpretation de cette propriete en faisant correspondreaun vortex non uniforme un patchequivalent dont le comportement analytique est connu.Le vortex elliptique non uniforme est caracterise par sa circulation
Γ =
∫
ω(y, z)dydz ,
la position de son centroıde(yc, zc)
yc =1
Γ
∫
yω(y, z)dydz , zc =1
Γ
∫
zω(y, z)dydz ,
et son rayon de dispersiona tel que
a2 =1
Γ
∫
[(y − yc)2 + (z − zc)
2]ω(y, z)dydz .
Dans la suite, on suppose par simplicite queyc = zc = 0. Ce tourbillon, soumisa un champ de deformationplan d’intensite γ impose de l’exterieur, s’elliptise selon des axes (Y, Z) et on peut definir son ellipticite parE = aZ/aY ou
a2
Y =1
Γ
∫
Y 2ω(Y, Z)dY dZ , a2
Z =1
Γ
∫
Z2ω(Y, Z)dY dZ.
Notons quea2
Y + a2
Z = a2, et que, pour un vortex circulaire,aY = aZ = a/√
2.
2

19 emeCongres Francais de Mecanique Marseille, 24-28 aout 2009
Pour sa part, le patch suppose place a l’origine, elliptique d’axes (Y, Z), de demi-axesrY et rZ possede unecirculation
Γp = ωpπrY rZ
et une ellipticite E = rZ/rY . Pour un tel patch, on a un acces analytique directa des proprietes comme lavitesse induite, le champ de deformation induit, l’ellipticite sous l’effet d’une deformation exterieure donneepar la relation (3). En particulier, la vitesse induite le long du petit axea une distanceL du centre est donneepar
vind(L) =Γp
π(
L +√
L2 + r2z − r2
y
) , (4)
et le champ de deformation aux directions principales inclinees deπ/4 est d’intensite
ǫind(L) =Γp
π(
L +√
L2 + r2z − r2
y
)√
L2 + r2z − r2
y
. (5)
Afin de pouvoir utiliser ces proprietesegalement dans le cas d’un vortex non uniforme, on introduitla notionde patchequivalent, qui repose sur l’identification de trois caracteristiques essentielles : l’intensite des vortex(circulation), leuretendue (surface) et leur forme (ellipticite et orientation). Pour la circulation et l’orientation,la correspondance entre patch et vortex non uniforme est immediate. Pour ce qui est de leuretendue, la corres-pondance est moins triviale. On choisit la regle suivante : pour la vitesse induitea l’exterieur du tourbillon, lescorrections elliptiques au cas axisymetrique sontegales (au premier ordre) pour le patch et pour le vortex nonuniforme. Ceci mene aux relations de correspondance
rY = 2aY , rZ = 2aZ . (6)
La figure 2 donne la comparaison entre la vitesse induite par un vortex non uniforme et son patchequivalentle long du petit axe de l’ellipse. L’accord est excellent des quer/a > 2. De ce point de vue, les deux vortexauront un comportement identique vis-a-vis de l’exterieur.
0 1 2 3 4 50
0.05
0.1
0.15
L/a
v
FIG. 2 – Comparaison entre la vitesse induitea une distanceL le long de son petit axe par un vortex elliptiquenon uniforme (DNS, traits pleins), par le patch elliptiqueequivalent (formule 4, traits discontinus) et par unvortex axisymetrique de meme circulation (Γ/2πL, pointilles).
3 Applications
3.1 Monopole soumisa un champ de deformation planOn realise alors l’experience numerique suivante [6] : on place un vortex gaussien dans un champ de defor-mation plan d’intensiteγ que l’on augmente lentementa partir de zero, de maniere quasi-statique. Pendant ceprocessus, on releve l’ellipticite E, de meme que les demi-axes de l’ellipseaY , aZ et la circulationΓ, cette
3

19 emeCongres Francais de Mecanique Marseille, 24-28 aout 2009
derniere n’etant pas constantea cause de la diffusion visqueuse. Utilisant la correspondance (6), on peut tracerla fonctionE = g(γ/ωp) ou la vorticite du patchequivalent est donnee par
ωp =Γ
4πaY aZ
.
La figure 3a montre que la courbe obtenue (traits pleins) est tres proche de la loi de Moore & Saffman valablepour le patch (traits discontinus). De plus, on perd la solution (quasi-)stationnaire peu avant le seuil inviscideγ/ωp = 0.15, ce qui indique que la filamentation1 du vortex non uniforme se produit quand le patch stationnaireequivalent cesse d’exister.Mariotti, Legras & Dritschel [7] donnent un critere analogue, base sur le rapport entreγ et ωmax. Leur etudeest basee sur une simulation de vortex soumisa un cisaillement augmente adiabatiquement, une situation tresproche de la notre, avec un fond de vorticite supplementaire. Leur conclusion differe legerement : ils montrentque le mecanisme de destruction du vortex par filamentation est certes inviscide, mais leur seuil est tres inferieura celui de Moore et Saffman. L’utilisation deωp en lieu et place deωmax devrait permettre de resorber cetecart.
On peut aussi montrer que lesetats elliptiques ainsi obtenus sont attracteurs pour l’evolution des vortex soumisa un champ de deformation impose de l’exterieur. Comme l’illustre la figure 3b, des conditions initiales quel-conquesevoluent, apres quelques oscillations vers la courbe de quasi-equilibre. Ce comportement est d’ailleurspropre aux vortex non uniformes, car dans la theorie des fluides parfaits, des patches de vorticite oscilleraientindefiniment [2, 8].
0 0.05 0.1 0.15 0.21
1.5
2
2.5
3
E
γ/ωp
0 0.05 0.1 0.15 0.21
1.5
2
2.5
3
γ/ωp
E
FIG. 3 – (a) Ellipticite du monopole en fonction deγ/ωp determinee par DNS (trait plein) ou par le patchelliptiqueequivalent (trait discontinu). (b) Trajectoire dans ce meme plan de parametres pour deuxevolutionstemporelles issues de conditions initiales axisymetriques (ωp = 1 a t = 0), correspondanta deux valeursdiff erentes deγ imposees constantes ( : γ = 0.1 ; : γ = 0.17). On observe que les trajectoires qui partentde l’etat axisymetriqueE = 1 rejoignent la courbe de quasi-equilibre (traits discontinus), et qu’elles la suiventjusqu’a filamentation (a droite sur le graphe).
3.2 Application a la dynamique du dipole 2DLe patchequivalent s’applique tres bien au cas du dipole enevolution libre. On sait d’une part que la vitessemaximale d’un dipole constitue de deux vortex de circulation±Γ dont les centroıdes sont espaces d’une dis-tanceb est obtenue pour des vortex ponctuels,v = Γ/(2πb). Cette solution desequations d’Euler est unetranslation rectiligne uniforme du dipole. En presence de viscosite, les cœurs des vortex croissent en taille,en meme temps qu’ils s’elliptisent sous l’effet des champs de deformation mutuels (qu’ils induisent l’un surl’autre). Cette elliptisation est le premier facteur qui diminue la vitesse du dipole, avant que les vortex neviennent en contact et que la circulation des vortex ne commence a decliner significativement. De maniereconcommitante, une queue de vorticite commencea se formera l’aval du dipole. Elle n’a a priori aucun roledynamique, mais elle complique la determination des proprietes geometriques des vortex du dipole. Il convientalors en pratique de supprimer la vorticite situeea l’exterieur d’une bande pour ne conserver que la tete du
1On ne parle pas ici de la filamentation duea l’erosion du vortex par la viscosite,a priori plus faible.
4

19 emeCongres Francais de Mecanique Marseille, 24-28 aout 2009
dipole.
On peut tester la procedure en utilisant les relations (4) et (5). On y injecte numeriquementL = b(t) l’espace-ment entre les vortex,Γp = Γ(t) leur circulation, ainsi query = 2ay(t) et rz = 2az(t) leur taille, toutes cesvariablesetant obtenues par la simulation numerique directe (DNS). On peut alors verifier sur la figure 4 quecette methode permet de retrouver, de maniere semi-analytique, la vitesse du dipole et le taux de deformationmutuel des deux vortex, en incluant l’effet de leur elliptisation.
0 200 400 600 800 10000
0.05
0.1
0.15
0.2
t
vsa
d
vd
0 200 400 600 800 10000
0.1
0.2
0.3
0.4
0.5
t
ǫtot
ǫsa
ǫ
FIG. 4 – (a) Comparaison entre vitessevd du dipole visqueux determinee par DNS (traits pleins) et vitessesemi-analytiquevsa
d(traits discontinus) obtenuea partir de (4) avecL = b(t) espacement entre les vortex et
Γp = Γ(t) circulation, deux grandeurs obtenues par la DNS. (b) : idem pour le tauxde deformationǫ induitsur le vortex compagnon (les deux courbes sont quasiment indiscernables). Estegalement represente le taux dedeformation totalεtot (induit + autoinduit), nettement superieur.
Sortant maintenant du cadre semi-analytique, il est possible de deriver, pour le dipole, une relation entreE eta/b. En effet, l’ellipticite de chacun des vortex est due au champ de deformation mutuel, impose par l’autrevortex. On suppose que ce champ est uniforme, d’intensite γ = ǫind(L = b(t)) donnee par (5). D’autre part,on utilise la correspondance :
ωp =Γ
4πayaz
.
La loi de Moore & Saffman (3) pour le patchequivalent, si l’on utilise les relations
ay =a√
1 + E2, az =
aE√1 + E2
,
s’ecritE − 1
E + 1=
4πa2γ
Γ.
Specifiant maintenantγ en introduisant (5) dans cette derniere equation, avecγ = εind(b), on obtient unerelation theorique approchee entreE eta/b :
E − 1
E + 1
(
1 +
√
1 +4a2
b2
E2 − 1
E2 + 1
)
√
1 +4a2
b2
E2 − 1
E2 + 1=
4a2
b2, (7)
qui est une sorte d’equation d’etat que verifie le dipole tout au long de sonevolution. L’existence d’une relationde cette nature avait deja ete postulee [9], nous en donnons ici une forme analytique. La figure 5 montre quel’ evolution lors d’une DNS suit de maniere assez proche cette loi theorique (en traits discontinus).
4 ConclusionMoore et Saffman ont demontre une relation entre l’ellipticite d’un vortex et le champ exterieur de deformationplan valable pour une distribution de vorticite uniforme. On montre ici par des approches theoriques et nume-riques directes comment cette loi peutetreegalement utilisee, quoique de maniere approchee, dans le cas de
5

19 emeCongres Francais de Mecanique Marseille, 24-28 aout 2009
0 0.1 0.2 0.3 0.4 0.51
1.2
1.4
1.6
1.8
E
a/b
450
250
1000
90
50
20
0
FIG. 5 – L’evolution deE en fonction dea/b pour un dipole visqueux par DNS (traits pleins, dates indiqueesle long de la courbe) suit approximativement la loi theorique (equation (7), traits discontinus).
vortex non uniformes : dans le cas des monopoles, nous trouvons que cesetats de quasi-equilibre entre vorti-cite et deformation sont attractifs pour la dynamique d’un vortex dans un champ exterieur impose ; dans le casdes dipoles, cette approche permet de deriver une formule semi-empirique pour la vitesse de translation, ainsiqu’une ”loi d’etat” liant l’ellipticite des deux vortex et le rapport taille du coeur/separation, valable pour toutdipole.
Les simulations numeriques directes de cetteetude ontete pour la plupart effectuees sur un supercalculateurNEC-SX8a l’IDRIS–CNRS, dans le cadre du projet CP2–0137. Ce travail aete en partie finance par le projetANR no. 06-BLAN-0363-01 “HiSpeedPIV”.
References[1] Dritschel D. A general theory for two-dimensional vortex interactions. J. Fluid Mech., 293, 269–303,
1995.[2] Kida S. Motion of an elliptic vortex in a uniform shear flow. Journal of the Physical Society of Japan,
50(10), 3517–3520, 1981.[3] Neu J. The dynamics of a columnar vortex in an imposed strain. Phys. Fluids, 27(10), 2397–2402, 1984.[4] Saffman P. Vortex Dynamics. Cambridge University Press, Cambridge, 1992.[5] Moffatt H., Kida S., and Okhitani K. Stretched vortices — the sinews of turbulence ; large-reynolds-
number asymptotics. J. Fluid Mech., 259, 241–264, 1994.[6] Delbende I. and Rossi M. The evolution of a viscous vortex dipole. submitted to Phys. Fluids, 2009.[7] Mariotti A., Legras B., and Dritschel D. Vortex strippingand the erosion of coherent structures in two-
dimensional flows. Phys. Fluids, 6(12), 3954–3962, 1994.[8] Le Dizes A. and Verga A. Viscous interactions of two co-rotating vortices before merging. J. Fluid Mech.,
467, 389–410, 2002.[9] Sipp D., Jacquin L., and Cossu C. Self-adaptation and viscous selection in concentrated two-dimensional
vortex dipoles. Phys. Fluids, 12(2), 245–248, 2000.
6

[A13]DELBENDE, I. AND ROSSI, M. 2011
Investigations on the vortex reconnection process by direct numerical simulation.Soumisa Phys. Fluids


Numerical investigations on the vortex reconnection process
Investigations on the vortex reconnection process by direct numericalsimulation
Ivan Delbende1, a) and Maurice Rossi2, b)
1)Universite Pierre et Marie Curie (UPMC, Paris 6)Laboratoire d’Informatique pour la Mecanique et les Sciences de l’Ingenieur (LIMSI–CNRS, UPR 3251), BP 133,91403 Orsay Cedex, France2)CNRS, Universite Pierre et Marie Curie (UPMC, Paris 6)Institut Jean le Rond d’Alembert (IJLRDA–UPMC, UMR 7190), 4 Place Jussieu, 75252 Paris Cedex 05,France
(Dated: Submitted 1 June 2011)
We analyze the phenomenon of vortex reconnection using direct numerical simulations. First, the problem of twoantiparallel vortices subjected to a localized Crow instability is quantitatively studied. Several quantities (pressureminimum lines, strain, circulation, transverse vorticityfield, stagnation point position) are presented in order to providea complete picture of vortex bridge formation and of thread dynamics. The time of reconnection is clearly identifiedand relationships between different dynamical aspects such as bridging and stagnation points are put into evidence. Thephenomenon of vorticity ejection above threads is explained on quantitative grounds in terms of mutual strain/vortexinteraction. In a second part, an interpretation of the reconnection process is proposed. It is based on the annihilationthrough strain and viscous diffusion of an elongated central vortex ring overlapping two external vortex loops. Thissimplified view is tested using a second type of simulations,in which the initial conditions are synthetically generatedas the superposition of such elementary vortex structures.This approach helps to describe the bridge formation, itsroll-up and its entanglement with threads, as well as to highlight the mutual interactions between these flow structures.
PACS numbers: 47.32.C, 47.20.-kKeywords: Vortex dynamics, vortex reconnection, Crow instability, direct numerical simulation
I. INTRODUCTION
The reconnection of two vortices is the main mechanismresponsible for topological changes in fluid flows. At smallscales, this phenomenon is important in evaluating dissipationprocesses or analyzing the singular behaviour of the Euler orthe Navier–Stokes equations1–5. At larger scales, vortex re-connection is often observed, e.g. during the interaction of asingle elliptic ring6 or the interaction of two counter-rotatingwing-tip vortices as in aircraft wakes. More particular situa-tions in which reconnection occurs have been studied, amongwhich trifoiled vortex loops7, vortex ring collisions8, orthog-onal vortices9, unequal antiparallel vortices10.
In the present paper, we use a direct numerical simulationof a localized Crow instability to analyze the general problemof vortex reconnection. More precisely, we study two hori-zontal vortices with opposite circulations±Γ0 which are al-most rectilinear and distant from a distanceb0. The rectilinearcharacter of the vortices is broken by the presence of a weakperturbation. While translating downwards with a global ve-locity of orderΓ0/(2πb0), this structure evolves since the lo-cal perturbation increases in amplitude through the Crow in-stability11. In some regions, the two vortices get nearer andthen reconnect, causing a progressive change of flow topol-ogy into an alley of vortex rings. Surely enough, this standardcase has been extensively studied. Melander & Hussain12 forinstance decomposed the process into three main phases: an
a)Electronic mail: [email protected])Electronic mail: [email protected]
inviscid induction phase associated to vortex core deformationand stretching, a bridging phase whereby vorticity lines inter-connect the two initial vortices, and finally, a decay of the rem-nants of the initial structures called threads. Kida & Takaokapointed out that though the bridging process occurs becauseof viscous diffusion, it also evolves via the entanglement ofvorticity lines13. Two new interconnecting vortex loops areformed while threads are being longitudinally stretched.
A lot of studies have been rather qualitative. The sketchesof Fig. 1 provide a picture of the main ingredients before andafter reconnection. It is clear that exhibiting pertinent quanti-ties to quantitatively model such a complex three-dimensionalprocess is no straightforward task. For instance, using vortic-ity lines may seem the most appropriate approach to followthe reconnection process, but the fundamental role of viscousdiffusion forbids to track these lines in time as one would dowhen Helmholtz’ laws are valid13. An alternative approachproposed by Saffman14 uses a scalar field, pressure. This lat-ter quantity is pertinent if the longitudinal pressure gradientis assumed to be the driving mechanism for reconnection. In-deed, the viscous cancellation that weakens the vortices intheclosest approach region results in a pressure high; a longitudi-nal divergent axial flow is thus created which in turn stretchesthe threads and thereby enhances their viscous cancellation.Saffman modeled this process as an unsteady one-dimensionalaxial problem. DNS results by Shelley, Meiron & Orszag15
have proven this approach to be partially relevant: the stretch-ing effect of the newly formed loops, which is not properlytaken into account in Saffman’s model, modifies the strainfield acting upon the thread dipole near the plane of closestapproach.

Numerical investigations on the vortex reconnection process 2
(a)
bridge
closest approachplane of
(b)
head
tail
loop
thread
FIG. 1. Sketch of the vortex system (a) just before reconnection and(b) just after reconnection. The names given to the different parts ofthe flow in the present paper are indicated on the figure. The com-plete vortex system is obtained by reflection with respect to the planeof closest approach (x = 0).
In this paper, we bring more quantitative material to somealready discussed fields (such as pressure and strain), and in-depth descriptions to some aspects of reconnection (vorticityejection in threads, bridge evolution and entanglement). Anoriginal description is also proposed in terms of simple vor-tex structures, which enables to focus on interactions betweenvarious flow regions. Indeed, measure and prediction of thestrain field due to some part of the flow acting on the vorticityfield present in another part might help to understand the phys-ical mechanisms driving the different phases of reconnection.
After a brief presentation of the numerical technique andinitial conditions (Sec. II), three-dimensional dynamical fea-
tures are given (Sec. III): the successive phases of vortex re-connection, the reconnection time and the vortex 3D topol-ogy are described using the lines of minimum pressure; thedynamics is quantified through vortex circulation along thethreads, transverse bridging vorticity component or stagna-tion point position. Sec. IV provides a picture of the vortexstructure in the plane of closest approach by using separationdistance, core sizes, ellipticity, strain rates. Interactions be-tween different parts of the flow are then considered (Sec. V).Ejection of vorticity in the threads is quantitatively explainedas a 2D mutual strain/vortex interaction in the thread dipole(Sec. V A). The approach based on simple vortex structuresis then discussed in Sec. V B. Finally, the 3D dynamics of thethreads is described as the dynamics of a 2D dipole in a 3Dstrain after reconnection (Sec. V C).
II. INITIAL CONDITIONS AND NUMERICAL METHOD
The initial condition is prepared by considering two parallelcounter-rotating Lamb–Oseen vortices, rectilinear alongthex-axis, separated by a distanceb0 along they-axis. The coresare characterized by a sizea0 and circulations±Γ0. Theirvorticity field thus reads
Ωb = (Ω(1)(y, z) + Ω(2)(y, z))ex
where
Ω(1)(y, z) =Γ0
πa20
exp
(
−(y − b0/2)2 + z2
a20
)
and
Ω(2)(y, z) = −Γ0
πa20
exp
(
−(y + b0/2)2 + z2
a20
)
.
A perturbationω(i) is then superimposed onto the fieldΩ(i)ex
which induces a local perturbation on vortexi:
ω(i)(x, y, z) = −
(
∂Ω(i)
∂yη(i)(x) +
∂Ω(i)
∂zζ(i)(x)
)
ex
+ Ω(i) dη(i)
dx(x)ey + Ω(i) dζ(i)
dx(x) ez , i = 1, 2 .
The perturbation axial componentωx corresponds to a slightshift (η(i)(x), ζ(i)(x)) of the rectilinear vortexi(= 1, 2) inthe plane(y, z). The other componentsωy andωz are definedin a way to preserve the divergenceless character of the vor-ticity field. We have chosen the localized axis deformation(η(i)(x), ζ(i)(x)) given by
η(1)(x) = ζ(1)(x) = −η(2)(x) = ζ(2)(x) =
−A0 (1 + cos(2πx/λ)) for |x| ≤ λ/2 ,0 otherwise,
which mimics one single wavelength of the Crow instabil-ity with a wavelengthλ = 7.3b0 and a weak amplitude

Numerical investigations on the vortex reconnection process 3
y
xz
xx
yz
25
30
33
t = 20
27
35
40
45
FIG. 2. Vorticity isosurfaces during the reconnection process for the simulation withRe = 2000, a(0)/b(0) = 0.15: the two isosurface levelscorrespond toω = 2.5 (solid) andω = 1 (transparent). (a) Perspective view; (b) View from below ; (c) Side view. Colors on the iso-vorticitysurfaces indicate pressure amplitudes, red corresponding to the highest pressure values.
A0 = 0.025b0. Note that the initial condition is made up witha single pinching of the two vortices in order to isolate onereconnection event. The above vorticity field evolves rapidly,typically within a few turnover times, so that the two vortexcores become slightly elliptic to comply with the strain thateach vortex is exerting on its companion. Once the quasi-equilibrium state is reached, this prepared flow field is consid-ered as the true initial condition (from now ont = 0) of thereconnection simulation. The value ofa0 is prepared in sucha way that att = 0, one effectively reaches the prescribedvaluea(t = 0)/b(t = 0) = 0.15 where core sizea(t) andvortex separationb(t) are precisely defined in Sec. IV A. Inpractice,a0 is slightly smaller thana(t = 0) (we start thefirst simulation with a small core so that the axisymmetric so-lution is almost exact) andb(t = 0) is almost identical tob0. The problem is put in non-dimensional form using the dis-tanceb(0) between vortices as length scale andΓ(0)/b(0) as a
velocity scale. Note that the non-dimensional initial turnovertime4π2[a(0)/b(0)]2 is of order unity (0.89).
The planex = 0 corresponds to the plane of closest ap-proach for the two vortices and the computational domain iscontained in a box of sizeLx = 14, Ly = Lz = 7 with peri-odic boundary conditions. The size along thex-axis is compa-rable to two natural Crow instability wavelengths. It has beenchecked that periodicity in the transversey andz directionsdoes not affect the overall dynamics. The origin is taken to beat the box centre. Moreover, a translation along thez-directionis performed at each time step in order to keep the vortex coressituated in the plane of closest approach at the fixed positionz = 0. Finally, the Reynolds numberRe = Γ(0)/ν whereνdenotes the fluid kinematic viscosity is taken within the range1000–2000.
The Navier–Stokes equations are integrated using a pseudo-spectral method based on Fourier modes. When necessary, the

Numerical investigations on the vortex reconnection process 4
number of modes is increased or decreased during a run. Forinstance, at the most severe Reynolds numberRe = 2000,2563 modes are used at the beginning of the run fort < 15where the complexity in thex direction is moderate; then for15 ≤ t ≤ 22, the number is increased to512 × 2562 modes;the end of the simulation including reconnection requiring768 × 3842 modes. An explicit 2nd order Adams–Bashforthscheme is used to extrapolate the nonlinear terms; viscous dis-sipation is exactly taken into account thanks to the Fourierfor-mulation. The shortest selected time step isδt = 0.005. Sim-ulations are run on a NEC-SX8 supercomputer (simulation atRe = 2000 requires 20 CPU hours).
Simulations at Reynolds numberRe = 1500 or Re = 1000are started with the initial flow field obtained by the simula-tion at Re = 2000 for t = 15. This is done so that, whenapproaching the reconnection event, the vortex core size issimilar regardless of the Reynolds number. Indeed, should westart all the simulations from the same initial vorticity field att = 0, the ratioa/b near reconnection time between ReynoldsnumbersRe = 1000 andRe = 2000 would differ too signifi-cantly to allow comparisons between the different cases.
III. THREE-DIMENSIONAL DYNAMICAL FEATURES
A. Topology change
Figure 2 depicts the temporal evolution of the reconnectionprocess atRe = 2000. For t < 20, the two vortices are get-ting closervia Crow instability. For20 < t < 30, the vorticesinteract strongly in a central zone around the plane of maxi-mal approachx = 0. This zone expands with time along theaxis forming a dipole structure called threads. A sheet of vor-ticity is observed above the threads. This region is of higherpressure than the other parts of the iso-surface, as indicated bythe color coding. Aroundt = 30, a rearrangement of vortextubes rapidly takes place. Two new vortex loops are clearly inevidence fort ≥ 30, connecting the two previously parallelvortices. The threads themselves are stretched and eventuallyroll up around the loops at their extremities (seet ≥ 35).
In order to get a closer look at the vortex geometry duringthe process and to pinpoint the time of reconnection, we in-vestigate some properties of the pressure field. Indeed, theuse of vorticity lines is made difficult by the fact that they areconvoluted in a complex fashion in the reconnection region,and, as already mentioned, they may even be inappropriate ina viscous setting since their tracking is no more possible. As aconsequence, we consider pressure minimum lines. Namely,at each timet and for each collocation planex = xi, wedetermine the point
(
xi, y1i (t), z1
i (t))
at which the pressureminimum is reached in that plane: this set of points definesthe discretized vortex centerline of vortex1 at time t. TheCrow instability mode being symmetric with respect to plane(x, z), the two vortices remain symmetrical: the centerline ofthe second vortex is thus located at
(
xi,−y1i (t), z1
i (t))
. Theselines are pertinent not only because they locate the positionof the vortex core center and thus define a vortex skeleton ascould be done using theq criterion, but also because the pres-
(a)
-3 -2 -1 0 1 2 30
0.5
1
1.5
2
z
x
30
25
20
(b)
-3 -2 -1 0 1 2 3-1
-0.5
0
0.5
1
x
20
3025y
FIG. 3. Location(y, z) of the point of pressure minimum in theplane x = x0 for −3 ≤ x0 ≤ 3 before reconnection for thesimulation withRe = 2000 : (a) z-position (side view) at timest = 20, 25, 26, · · · , 30; (b) y-position (top view) at these sametimes.
sure gradient along these lines is linked to stretching along thesame direction14.
The position of pressure minima up tot = 30 is presentedfor Re = 2000 on Fig. 3. First, in a central region extendingaround the closest approach plane, the vortices progressivelybecome parallel along a curve. This is reminiscent of fila-ments dynamics based on the Biot–Savart law: vortices tend

Numerical investigations on the vortex reconnection process 5
to become anti-parallel in the region of reconnection, an ar-gument put forward by Siggia16. Moreover at the end of theregion there exist a bump in the pressure minimum locationthat appears in time and progressively increases in amplitudeuntil the thread region extends up tox ≈ ±λ/2 at t = 30.After time t = 30, the topology of the minimum-pressureline changes. Concerning the minimum pressure value it-self, a pressure low abruptly appears betweent = 30 andt = 31 (Fig. 4), the amplitude of the pressure low thereafterdecreases. For these reasons, we consider timet = 30 to bethe reconnection time. It also corresponds to the time whenexternal loops form (Fig. 2). After reconnection time, thethreads keep getting longer, remaining parallel while beingwrapped up by these external loops.
-4 -2 0 2 4-0.25
-0.2
-0.15
-0.1
-0.05
0
x
p − p∞
FIG. 4. Pressure minimum values for−4 ≤ x ≤ 4 at timest = 22, 23, · · · , 34 from bottom to top, for the simulation withRe = 2000. The thicker line corresponds to timet = 30. p∞ isthe pressure far from the vortices.
B. Circulation along the threads
The vorticity domain of the two vortices first overlap in theplane of closest approachx = 0 and opposite vorticity annihi-lates by viscous diffusion as the two vortices are pushed onetowards the other through the Crow instability. Consequentlycirculation first decreases in the closest approach region,andthen progressively along the thread. Figure 5 displays at sev-eral timest and forRe = 2000 such a decrease of circulation
Γ(x0, t) =
∫
D
ωx(x0, y, z, t)dydz, (1)
where the spatial integration is performed over the half planeD defined byx = x0, y ≥ 0. Note that the reconnection oc-curs when circulationΓ(0, t) has decreased below0.4Γ0. This
has been checked for simulations at different Reynolds num-bers. After reconnection,Γ(0, t) keeps decreasing in time butΓ(x, t) remains almost homogeneous along the thread axis.
-6 -4 -2 0 2 4 60
0.25
0.5
0.75
1
Γ
x
40
30
20
FIG. 5. Vortex circulationΓ(x, t) at eachx-location for−7 ≤ x ≤ 7at timest = 20, 21, · · · , 40 for the simulation withRe = 2000.
C. The transverse vorticity component ωy
This reconnection process can also be observed fromanother viewpoint: by plotting the vorticity componentωy(x, y = 0, z, t) in the mid-planey = 0. Indeed the changeof circulation Γ(x, t) along x before reconnection must becounterbalanced by the appearence of vorticity componentsorthogonal to thex-axis because of the divergenceless charac-ter of vorticity: this is the bridging process7. Beforet = 30,the fieldωy is located in a thin band situated under the threadvortices (Fig. 6). More precisely, the region whereωy ispresent closely follows the position of the lower stagnationpoint engendered by the dipolar field of the thread. Computa-tionally, the velocity field in the reference frame linked tothevortex centroids atx = 0 is determined to locate the upperand the lower stagnation points of the dipole (dots in Fig. 6).The procedure can also be applied to otherx locations. Theresult is plotted as a hatched area for the reconnection timet = 30 in Fig. 6.
At t = 25, the maximum ofωy is close tox = 0. Itthen moves away (Fig. 7) while the maximum value increases(Fig. 8a). This growth is almost exponential until timet = 30(Fig. 8b), a behaviour which can be related to the stretchingof ωy near the lower stagnation point generated by the dipole.At t = 30, the growth abruptly stops. Since reconnection timehas been defined via pressure, this indicates a strong relation-ship between pressure low and the fact that the fieldωy rollsup in a stronger vortex betweent = 29 andt = 31 (see Fig. 6).After t = 30, the flow dynamics has changed, being abruptlydominated by theωy component rather than by the threads inωx. This behaviour is valid for the various Reynolds numbersand is more prominent with increasing Reynolds number.

Numerical investigations on the vortex reconnection process 6
0 0.5 1 1.5 2 2.5 3 3.5 4−0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4−0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4−0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4−0.5
0
0.5
1
1.5
0 0.5 1 1.5 2 2.5 3 3.5 4−0.5
0
0.5
1
1.5
t = 25
30
31
29
35
x
FIG. 6. Isocontours of the transverse vorticity componentωy(x, y =0, z, t) for the simulation withRe = 2000. Dashed lines correspondto the location of the pressure minimum in each planex = const.The dot in the planex = 0 corresponds to the lower dipole stagna-tion point. The hatched area shown fort = 30 delineates the regionbetween the two stagnation points in the threads. Interval between(positive) isocontour levels is set to the same value 0.5 for all pic-tures.
25 30 350
1
2
3
4
t
xy
FIG. 7. Axial locationxy(t) of the point whereωmax
y reaches amaximum in the mid-planey = 0. Solid: Re = 2000, dashed:Re = 1500, dot-dashed:Re = 1000.
IV. QUANTITIES IN THE PLANE OF CLOSESTAPPROACH
In the plane of closest approachx = 0, vorticity is purelyaxial due to mirror symmetry with respect to this plane andthis field has a dipolar form (Fig. 9). One can thus apply ideasof two-dimensional flows to quantify some characteristics ofthis complex flow. Since threads are somewhat homogeneousalong their axis, the conclusions of this local analysis canbeextended to most part of the thread region. As seen fort ≤ 25in Fig. 9, each vortex appears to possess an elliptical shape.For t ≥ 25, on the contrary, a different structure emerges:head vortices with an almost elliptical shape are associated toa tail of vorticity17. This feature is also valid for a larger axialextent, as can be seen att = 30 on Fig. 10.
A. Dipole geometry
In the plane of closest approachx = 0, methods used fortwo-dimensional flows are applied to quantitatively describethe vorticity field18. The dipole separation can be character-ized by the positions(±ymax(t), 0) of their vorticity maximaor else by the positions of vortex centroids(±yc(t), zc(t))
yc(t) =1
Γ(0, t)
∫
D0
yωx(0, y, z, t) dydz ,
zc(t) =1
Γ(0, t)
∫
D0
zωx(0, y, z, t) dydz ,(2)

Numerical investigations on the vortex reconnection process 7
(a)
0 10 20 30 400
5
10
15
20
t
ωmaxy (y = 0, t)
(b)
0 10 20 30 400.001
0.01
0.1
1
10
100
t
ωmaxy (y = 0, t)
FIG. 8. Time evolution ofωmax
y (y = 0, t) using (a) linear scale (b)semi-log scale. Solid:Re = 2000, dashed:Re = 1500, dot-dashed:Re = 1000.
where the integration domainD0 corresponds to the half planex = 0, y ≥ 0. In the following, the separation distanceb(t)between the vortices is defined byb(t) ≡ 2ymax(t).
Beforet = 25, the two vortices have elliptical shapes andtheir extension and geometry can be characterized by vortex
core sizes along they− andz−directions
atoty (t) ≡
√
1
Γ
∫
D(y − yc)2ωxdydz ,
atotz (t) ≡
√
1
Γ
∫
D(z − zc)2ωxdydz ,
(3)
and by the total core size
atot(t) ≡√
(atoty )2 + (atot
z )2 . (4)
For t ≥ 25, the two vortices are no more elliptical and theabove computations are restricted to the vortex head whichitself remains elliptical: one computes variablesΓh, ah
y , ahz ,
ah defined in a similar way to (1)-(4), except that integra-tion is now restricted to a stripH(t) excluding the tail re-gion. This strip is defined byx = 0, y > 0, z ∈ [−z−s , z−s ]where−z−s (t) is the position of the lower stagnation point inthe dipole reference frame. Fort ≥ 25, variableah
y evolvesalmost identically toatot
y (not shown, see Ref.18 for typicalevolutions) whereas variableah
z substantially differs fromatotz
because of tail formation.Fort . 20, the vortex distanceb decreases because of Crow
instability and the size of the vortex cores increases becauseof diffusion (Fig. 11). During this early phase, it has beenchecked that the simple 2D relationa2(t) = a2(0) + 4t/Reholds, andah ≈ a. When quantityah meets quantityb/2,vortices come into contact. This occurs neart = 20, there-after denoted as contact time. Vortex-core then ceases to grow(Fig. 11a). In the subsequent evolution, both variablesah
andb simultaneously decrease while their ratioah/b remainsclose to the value1/2 (Fig. 11b). Concomitantly one observesa steep decrease of the head vortex areaA(t) ≡ 4πah
yahz
(Fig. 12a). This holds for any Reynolds number presented.Note that quantityA(t), already introduced in Ref.18, allowsfor an analogy between a distributed vortex and an equivalentpatch (see also Sec. V A).
B. High-frequency bursts
On Fig. 12b, an additional feature is clearly visible, exceptfor Re = 1000: after reconnection time, the head-vortex el-lipticity Eh = ah
z/ahy sustains high frequency bursts. Such
a phenomenon is thought to be a signature of perturbationscreated in the reconnection region. These oscillations arebarely observable on the time evolution of lengthesah, b orareaA, which suggests that these bursts are associated tocore-perturbation modes rather than displacement or bulgingmodes. The dominant frequencyf of such perturbations isa function of time, but quantityfah/Γh, when evaluated onseveral time intervals (displayed in the insets of Fig. 12b), isalways found in the range1.3–1.6. This scaling based on headcirculation and vortex core size strengthens the hypothesis thatwaves are generated at reconnection time by the reconnec-tion process itself, propagate along the threads, and crossthex = 0 plane where they are observed.

Numerical investigations on the vortex reconnection process 8
27 30 35 45
y0
t = 0 10 20 25
0
z
FIG. 9. Isocontours of vorticityωx(x = 0, y, z, t) for the simulation withRe = 2000. Note that the selected levels are given bypωmax(x =0, t)/20 with p = 1, · · · , 20 (solid) andp = −1, · · · ,−20 (dotted). The level sets are hence not identical from snapshot to snapshot. Tickmarks are spaced every 0.5 along both they- andz-axes.
C. Quantifying 3D strain near the plane x = 0
As previously noticed, the reconnection process is relatedtothe combined action of viscosity and three-dimensional strainacting on the dipole. The strain originates in part from vortexcurvature and, in part, from core variation. Vortex curvaturecan be understood by a cut-off Biot–Savart theory. It appearsfirst and brings the vortex cores nearer. After contact time,the differential of vortex size and circulation along the threadscreate a longitudinal pressure gradient (Fig. 4) which causesan extra strain.
In the spirit of Ref.14, we attempt to model this complex
flow as a 2D dipole subjected to an external uniform 3D strain.In this perspective, we split the total strain tensorσ into twocontributions:σ2D andσ
3D = σ−σ2D. The 2D contribution
is the strain associated to the truly rectilinear dipole with vor-ticity ω
2D = ωx(x = 0, y, z, t)ex. Technically, one subtractsthe 2D vorticity field generated by the rectilinear dipole tothetotal 3D vorticity field and evaluate the associated strainσ
3D
in the plane of closest approach.
The strain componentσ3Dxx (0, y, z, t) is displayed on Fig. 13
at contact time as well as reconnection time. Note that, apartfrom the diagonal components, onlyσ3D
yz = σ3Dzy are nonzero
in the plane of closest approach. The componentσ3Dxx is

Numerical investigations on the vortex reconnection process 9
z
xy
FIG. 10. Isosurfaces of the vorticity magnitudeω at t = 30 forthe simulation withRe = 2000. The choice of two vorticity levelsω = 2.5 (solid) andω = 0.6 (transparent) puts into evidence theejection of vorticity above the central threads.
clearly non-homogeneous, as already noted in a similar set-ting1. In order to quantify an effective strain acting upon thevortices, two quantities are tentatively computed: (a) averagedcomponentsα(t), β(t), γ(t)
α(t) =
∫
x=0
σ3Dxx ω2
xdy dz∫
x=0
ω2xdy dz
, β(t) =
∫
x=0
σ3Dyy ω2
xdy dz∫
x=0
ω2xdy dz
,
γ(t) =
∫
x=0
σ3Dzz ω2
xdy dz∫
x=0
ω2xdy dz
,
(5)and (b)αc(t), βc(t), γc(t), the respective values ofσ3D
xx , σ3Dyy
andσ3Dzz evaluated at the point of maximum vorticity in the
planex = 0. The time evolution of these quantities is plottedon Fig. 14a, where it is seen that axial stretching (α > 0 orαc(t) > 0) is the dominant 3D strain effect, and that it isalmost entirely compensated by lateral compression (β < 0or βc(t) < 0). A compression along the verticalz−directionalso exists, but it is weaker. Note that the quantitiesαc(t),βc(t), γc(t) andα, β, γ are found to be almost identical onlyafter reconnection time.
D. Circulation cancellation & vorticity ejection
For t > 20, the two opposite vortices are in contact.This can be also seen on the time evolution of circulationΓ(x = 0, t) (Fig. 15a) which decreases due to viscous can-cellation of vorticity. This dynamics differs significantly fromwhat would be observed in a purely two-dimensional frame-work: for a free dipole18, a andb monotonically increase andΓ(t) ∝ t−1/2. In the present case, circulationΓ in the halfplane decreases at an accelerated pace, due to the strong lat-eral compression (see Sec. IV C). One observes an increaseof ωmax(t) (Fig. 15b). This is due to the concomitant axialstretchingα(t), which is also responsible for the steep de-crease of the areaA(t) of the dipole vortex head. Note thatα(t) reaches its maximum shortly before the peak of axial vor-ticity (which occurs at reconnection time), and before the area
(a)
0 10 20 30 400
0.2
0.4
0.6
0.8
1
t
b
ah
(b)
0 10 20 30 400
0.1
0.2
0.3
0.4
0.5
0.6
t
ah/b
FIG. 11. (a) Vortex core radiusah and separation distanceb, (b)ratioah/b as a function of timet. Solid: Re = 2000, dashed:Re =1500, dot-dashed:Re = 1000. Simulations atRe = 1000 and1500 are started from the vorticity field obtained att = 15 in thesimulation atRe = 2000.
reaches its minimum. Note that the maximum axial stretch-ing is increasing with Reynolds number; as a consequence thethread vortices become very intense and thin. After recon-nection, the strong axial stretching and vorticity enhancementcease rapidly.
Due to vorticity ejection (see Figs. 9 and 10), all the vortic-ity is not contained in the vortex head. The differenceΓ− Γh

Numerical investigations on the vortex reconnection process 10
(a)
0 10 20 30 400
0.1
0.2
0.3
0.4
t
A
(b)
0 10 20 30 401
1.5
2
2.5
30 35 401.5
1.6
1.7
30 35 401.6
1.7
1.8
t
Eh
FIG. 12. Time evolution of (a) vortex areaA, (b) ellipticity Eh.Solid: Re = 2000, dashed:Re = 1500, dot-dashed:Re = 1000.The insets in graph (b) zoom on the high-frequency bursts atRe =2000 andRe = 1500; thick horizontal lines indicate the time inter-vals selected to evaluate their mean frequenciesf .
indicates how much circulation is localized inside the dipoletail. ForRe = 2000, almost 30% of the initial circulationΓ0
is contained in the tail att = 25 (see lower curves in Fig. 16),and it represents only 8% att = 40 due to cancellation viacompression and viscosity effects. The ratio(Γ−Γh)/Γ keepsincreasing (see upper curves in Fig. 16), so that there is rela-
(a)
0 1 2-1-2
0
-1
-2
1
2
t = 20
y
z
(b)
0 1 2-1-2
0
-1
-2
1
2
y
z
t = 30
FIG. 13. (a)σ3D
xx in the plane of closest approach, at timet = 20for Re = 2000. Distance between levels:δσ = 0.025. The thickcontours correspond toω = ωmax(x = 0, t)/e and indicate thelocation of the dipole vortices. (b) Same fort = 30.
tively more and more circulation in the tail.
V. INTERACTIONS BETWEEN DIFFERENT FLOWREGIONS
In order to gain some insight on the reconnection process,we look at the way different regions of the flow interact:we investigate the interactions between vorticity presentin agiven region and the potential flow acting on it, which mainly

Numerical investigations on the vortex reconnection process 11
(a)
0 10 20 30 40
-0.2
-0.1
0
0.1
0.2
t
ααc
γc
β
γβc
(b)
0 10 20 30 400
0.05
0.1
0.15
0.2
0.25
t
α
FIG. 14. Time evolution of diagonal strain components for the sim-ulation withRe = 2000. (a) Averaged componentsα(t), β(t), γ(t)(solid); strainαc(t), βc(t), γc(t) at the point of maximum vorticityin the planex = 0 (dashed). (b) Axial componentα(t) for sev-eral Reynolds numbers; solid:Re = 2000, dashed:Re = 1500,dot-dashed:Re = 1000.
induces translation and deformation. The most relevant as-pects are sketched in Fig. 17: (i) interactions between the twothread vortices leading to vorticity ejection (Sec. V A), (ii) in-teractions between thread and vortex loops during reconnec-tion (Sec. V B), (iii) action of the loops upon the thread dipole,tentatively reduced to a uniform strain field after reconnection
(a)
0 10 20 30 400
0.2
0.4
0.6
0.8
1
t
Γ
(b)
0 10 20 30 400
5
10
15
20
t
ωmax(x = 0, t)
FIG. 15. Time evolution of (a) circulationΓ(x = 0, t) and (b)maximum vorticityωmax(x = 0, t). Solid: Re = 2000, dashed:Re = 1500, dot-dashed:Re = 1000. It is reminded that the simu-lations atRe = 1000 andRe = 1500 are started from the vorticityfield obtained att = 15 in the simulation atRe = 2000.
(Sec. V C).

Numerical investigations on the vortex reconnection process 12
0 10 20 30 400
0.1
0.2
0.3
0.4
0.5
0.6
t
(Γ − Γh)/Γ
(Γ − Γh)/Γ0
FIG. 16. Lower three curves: normalized circulation situated outsidethe dipole head(Γ−Γh)/Γ0; Upper three curves: ratio(Γ−Γh)/Γbetween circulation outside the dipole head and total circulation.Solid: Re = 2000, dashed:Re = 1500, dot-dashed:Re = 1000.
Sec.VA
Sec.VCSec.VB2
Sec.VB1
Sec.VB3
FIG. 17. Sketch of the various interactions studied in the presentsection.
A. Vorticity ejection as mutual 2D vorticity/straininteraction in the thread dipole
When vortices are getting closer through lateral compres-sion, the head-vortex ellipticity increases (Fig. 12b) as are-sult of the mutual strain exerted by the companion vortex.In order to quantify this 2D strain, the 2D vorticity fieldω(x = 0, y, z, t) is set to zero in the half-planey ≥ 0, andthe strain tensor generated by this field is diagonalised at thepointy = ymax > 0, z = 0 yielding two eigenvalues±ǫ.
One expects vortices to be in quasi-equilibrium when thestrain is below a critical level with respect to vorticity magni-tude. It is known that for a vortex patch with vorticityωp sub-jected to an external uniform strainǫ, equilibria exist as longasǫ/ωp < 0.1519. In the present case, one defines the vorticity
ωp = Γh/Ah of an equivalent patch18 and evaluates the ratioǫ/ωp. It is seen in Fig. 18 that this ratio increases and reachesthe threshold value of 0.15 att = 22, which corresponds to thetime at which ellipticity first saturates (see Fig. 12b). There-after the ratioǫ/ωp overshoots the threshold0.15. This phase(22 ≤ t ≤ 25) is associated to significant vorticity ejection,as indicated by the strong increase of circulation outside thehead(Γ − Γh)/Γ0 (see Fig. 16). In this manner, the ratioǫ/ωp decreases back to values below 0.15, and ejection ceases(Fig. 16 att = 25). For the Reynolds numbersRe = 1500and2000, several overshoots can be observed, causing otherejection phases. After reconnection, this process completelyceases andǫ/ωp remains in the vicinity of0.15.
0 10 20 30 40
0.1
0.15
0 10 20 30 40
0.1
0.15
0 10 20 30 400
0.05
0.1
0.15
t
ǫ/ωp
R
R
R
Re = 1000
1500
2000
FIG. 18. Time evolution of ratioǫ/ωp for three Reynolds numbersRe = 1000, 1500 and2000. The dashed line indicates the thresholdabove which no quasi-steady state exists. The point denoted as “R”indicates the reconnection time.
B. Modeling reconnection with simple vortex structures
In the reconnection region, vorticity and pressure fieldsform a complex flow. As a step towards reconnection mod-eling, we describe the vorticity field as a sum of elementaryvortex structures. The sum of simple flow elements may in-deed lead to complex vorticity-line geometries such as thoseseen in the reconnection zone. Moreover, this constructionensures the divergenceless character of the total vorticity andvelocity fields. Here we superpose two external loops withcirculationΓ and an elongated vortex ring with circulationΓc
arranged as sketched in Fig. 19. WhenΓc = Γ, the vortic-ity fields overlap so that the total circulation is almost zeroin the x > 0, y = 0 half plane (same forx < 0, y = 0).

Numerical investigations on the vortex reconnection process 13
ΓΓ
ΓΓ
ΓΓ(a)
(b)
(c)
y
xΓ
Γ/2
≈ 0
FIG. 19. Sketch of reconnection seen as the annihilation of a vortexring.
This reproduces the topology of two antiparallel vortices atthe initial stage of reconnection (Fig. 19a). WhenΓc ≪ Γ,the total vorticity field is similar to the one observed when ex-ternal loops become dominant (Fig. 19c). SituationΓc = Γ/2is a reproduction of the topology just before reconnection time(Fig. 19b). In the true process, the circulation in the ring de-creases due to strain and viscosity, while it remains identicalin the external loops. This approach is clearly over-simplifiedbut has the advantage to reduce the reconnection process tothe annihilation of a vortex ring.
Γ0Γc
z
xy
x
FIG. 20. Isosurface of the vorticity magnitude for the superpositionof external loops with circulationΓ0 (light) and central ring withcirculationΓc (dark). Side and top view.
In order to estimate the pertinence of such a simplifiedview of reconnection, we numerically build an initial con-dition composed of two external loops and a curved vortexring (Fig. 20). By summing such elementary structures, one
can reproduce geometries close to the actual geometries ob-tained via the DNS of the Crow instability (hereafter referredto as the Crow DNS for simplicity). Such synthetic initialconditions will be employed in Sec. V B 1, Sec. V B 2 andSec. V B 3.
Technically, each elementary structure is itself constructedusing two simple types of bricks: (i) finite-length axisymmet-ric straight tubes with axial vorticityω = f(r), r being theradial distance to the tube axis and (ii) angular sections ofanaxisymmetric ring with azimutal vorticityωθ = g(r′), r′ be-ing the distance to the centerline in the ring. Note that vortic-ity should match in the planes where the different bricks join:this imposes the choice ofg(r′) oncef(r) is prescribed. Inthe following, f is chosen to be Gaussian. By joining dif-ferent bricks with various lengthes, curvature radii and an-gles, a curved elongated vortex ring and external loops areconstructed. A unique geometry, which mimics the geometryobtained near reconnection time (t = 29) in the Crow DNS, isadopted as initial conditions for the simulations in the presentsection. This defines a time originτ = 0 — here, time isdenoted byτ to avoid confusion with the Crow DNS.
1. Bridging and entanglement dynamics
A first simulation is performed using the above syntheticinitial conditions in which external loops and central ringpos-sess approximately equal circulationsΓc / Γ0. This situationis similar to the situation prior to reconnection in the CrowDNS: the vortices touch and their circulation is almost uni-form. Contrary to this case, however, transverse vorticityωy
reaches a maximum just between the two vortex centerlines atτ = 0 (see Fig. 21a). The time evolution of this initial con-dition is shown forRe = 1200 on Fig. 21a. The transversevorticity rapidly moves and accumulates in the stagnation re-gion below the thread (τ = 0.2). In addition, its magnitude in-creases fourfold and becomes larger than the amplitude of thetotal vorticity in the plane of closest approach (Fig. 21b).Therole of the strain due to the stagnation point below the threaddipole appears again in this case: it seems to be a robust fea-ture of any reconnection process. The bridge is then wrappedaround vortex loops (τ = 0.5 − 1); this can be described asa process of entanglement between a vorticity tube originat-ing from the bridge and the pre-existing almost uniform tube(τ = 1 − 4). By entanglement and amplification, the bridgebecomes progressively dominant and completes the formationof a continuous vortex loop, while the thread vortices becomeperipheral. This effect ends nearτ = 4, when transverse vor-ticity becomes of the same order as the vorticity prevailinginthe loop far from the reconnection region (Fig. 21b).
2. Effect of the central ring on the external loops
Initial conditions with identical geometry as above but withdifferent central ring circulationΓc have been simulated atRe = 2000. One may hence observe the influence of the cen-tral vortex ring on the loops when ratioΓc/Γ0 is increased

Numerical investigations on the vortex reconnection process 14
(a)
21 4
0.2τ = 0 0.5
z
xy
(b)0 1 2 3 4 5-40
-30
-20
-10
0
10
20
τ
ω1
ω2
ω3
FIG. 21. (a) Isovorticity surfaces (solidω = 8 and transparentω = 2) during the evolution of a synthetic initial condition withΓc / Γ0 at Re = 1200. Snapshots are taken at timesτ indicatedon the graph. (b) Time evolution of vorticity amplitudes for the samesimulation.ω1 stands for the vorticity maximum in the loop far fromthe reconnection region,ω2 for the vorticity maximum in the threadat the plane of closest approach andω3 for the (negative) transversevorticity minimum in the symmetry plane between the two initialvortices.
from 0 (no ring) to0.5. For values0, 0.3 and0.5, isovortic-ity surfaces are plotted forτ = 0, 1, · · · , 4 on Fig. 22. Whencompared to the case without ring (Fig. 22a), isosurfaces inthe caseΓc/Γ0 = 0.3 (Fig. 22b) are somewhat deformed, butthe positions of the loop in time do not differ significantly.By contrast, the caseΓc/Γ0 = 0.5 (Fig. 22c) leads to a sub-stantially different dynamics. This effect can be seen quanti-tatively on Fig. 23: the position of the minimim pressure lineof the loopx > 0 is plotted in the(x, y) plane for the sametime τ = 5 and for several values ofΓc/Γ0. It is confirmedthat, as this ratio is increased from 0 (thick line), the deviationbecomes significant for the value 0.4 and above. The compar-ison using synthetic initial conditions with or without centralring ascertains that, after reconnection in the Crow DNS (i.e.for t ≥ 30), external loops are affected by the central ring in a
negligible way since the circulationΓ(t) in that case has thendecreased below 0.4.
(a)
(b)
(c)
x
z
FIG. 22. Vorticity isosurfaces atτ = 0, 1, · · · , 4 (from left to right)for three simulations withRe = 2000. The synthetic initial condi-tions consist of external loops of circulationΓ0 plus a central ring ofcirculationΓc equal to (a) 0 (no ring), (b) 0.3Γ0, (c) 0.5Γ0. On thisside view restricted to thex ≥ 0 region, only one vorticity isosurfacelevel is presented forω = 12 ≈ ωmax(τ = 0)/3.
3. Dynamics of the central ring
In order to focus on the dynamics of the curved central ring,we perform a simulation using the same synthetic initial con-ditions in which external loops are now absent. Figure 24ashows the evolution of the ring governed by its own dynam-ics: similarly to the Crow DNS, the bridging is present belowthe structure but contrary to the Crow DNS results, threadsare not stretched, the bridge remains very weak and there isno entanglement.
One could attempt to introduce the effect of external loopsthrough an external uniform and constant strain field with ax-ial stretching and lateral compression (see the Appendix toshow how this is numerically performed). The value of thestretching term is chosen to be of same order of magnitudeas the averaged stretchingα(t) in the Crow DNS. The pres-ence of this uniform strain ensures the lengthening of threads.

Numerical investigations on the vortex reconnection process 15
2.5 3 3.5 40.5
0.6
0.7
0.8
0.9
1
1.1
x
0.5
0.40.3
0.2
0y
FIG. 23. Positions atτ = 5 of the minimum pressure line along oneof the vortex loops in the(x, y) plane. The different curves corre-spond to simulations withRe = 2000 for synthetical initial condi-tions, at different values of the ratioΓc/Γ0 indicated in the graph.In particular, the thick curve corresponds to the simulation withoutcentral ring.
However the strain does not modify the bridge dynamics (seeFig. 24b). The simplified approximation of using an exter-nal uniform strain as in Ref.14 instead of loops is thus unableto capture the true dynamics in the reconnection region. Af-ter reconnection however, this approximation can be valid,asshown in the following section.
C. Thread dynamics after reconnection: a 2D dipolesubjected to 3D strain
Finally, we investigate the threads dynamics in the plane ofclosest approach when reconnection has already taken place.The dynamics of the 3D thread dipole is then compared to thedynamics of a 2D dipole subjected to the uniform 3D strain.To generate the 2D flow, one initiates the 2D simulation bythe vorticity observed for the 3D system in the planex = 0at timet = 30. In addition, one solves the 2D strain flow bythe method described in the appendix. The 3D uniform strainis given by(α(t)x, β(t)y, γ(t)z) where one used the valuesextracted form the 3D Crow DNS through formulas (5). Theinitial condition for the 2D simulation is taken to be the vor-ticity for the 3D system in the planex = 0 at timet = 30.A comparison between the two runs is performed in the planex = 0: figure 25 indicates that the evolution of the vortic-ity distribution is similar for the 3D system and the strained2D system. More quantitatively, the vortex circulation, posi-tion and sizes are comparable (see Fig. 26). The same attemptdoes not work when starting the 2D-3D comparison before re-connection. This can be related to the fact that the strain field
in the planex = 0 has a uniform sign over each dipole vortexafter reconnection, which is not true before reconnection (seeFig. 13).
VI. CONCLUSION
In the present work, we have provided some quantitativedata relative to the vortex reconnection process based onnumerical simulations of the Crow instability. The changeof topology has been characterized using minimum pressurelines rather that vorticity lines. In addition, reconnection isconcommitant with the appearance of a sudden and markeddrop of pressure, as well a peak of transverse vorticity in thebridge and its roll-up. The bridge location and its amplifica-tion have been numerically shown and related to one of thestagnation points of the thread dipole. Quantification has alsobe performed in the plane of closest approach by carefullystudying the dipole geometry and the ejection of vorticity.This latter phenomenon can be understood as a loss of equi-librium of one thread vortex subjected to the strain due to itscompanion. It is responsible, together with the vorticity can-cellation through viscous diffusion, for the weakening of thethreads.
In an attempt to reduce the complexity of the reconnectionprocess and to identify the respective roles of the differentvorticity regions (loops and threads), we have synthetizedini-tial conditions as a superposition of elementary vortex struc-tures. Comparing several DNS initiated with different ele-ments helped to identify their roles on the process of bridgeformation, thread-bridge entanglement and thread lengthen-ing.
After the reconnection time (as determined by the pressurelow), the dynamics suddenly changes: the vortex loops pos-sess a dynamics independent on the threads and the threadsthemselves behave similarly to a 2D dipole subjected to 3Dstrain. However, high-frequency bursts are observed in theplane of closest approach: this is probably due to the prop-agation of waves along the threads, previously excited in thereconnection region.
ACKNOWLEDGMENTS
We acknowledge the technical help from Dang Anh-Tuanand Jalel Chergui at LIMSI–CNRS. This work was grantedaccess to the HPC resources of IDRIS–CNRS under the allo-cations 2005/10-021386 made by GENCI (Grand EquipementNational de Calcul Intensif, France). We thank StephanePopinet for discussions.

Numerical investigations on the vortex reconnection process 16
5
β
α
xz
y
30
20
15
10
τ = 0
FIG. 24. Comparison of two dynamics atRe = 2000: (a) central ring of circulationΓc = 0.3 and (b) same ring in a uniform strain field ofintensityα = 0.05 along thex axis, andβ = −0.05 along they transverse direction. One vorticity isosurface at levelω = ωmax(τ)/2 isplotted.
35t = 30 40 45
0.5-0.5 y3D 2D
0
z
1
2
FIG. 25. Time evolution of vorticity profiles for the 3D system inthe plane of closest approach (left half part of each graph) and forthe strained 2D system (right half). Direct numerical simulation atRe = 2000 starting att = 30. Vorticity isolevels are identical inboth cases, and their levels are as in figure 9.
25 30 35 40 450
0.1
0.2
0.3
0.4
0.5
0.6
25 30 35 40 450
0.05
0.1
0.15
0.2
0.25
tt
Γhb
ah
ahz
ahy
FIG. 26. Comparison between 3D (solid) and strained 2D (dashed)solutions for circulationΓh and sizes.

Numerical investigations on the vortex reconnection process 17
Appendix
It is possible to find solutions of the Navier-Stokes equa-tions under the form
u1(x1, x2, x3, t) + α1(t)x1
u2(x1, x2, x3, t) + α2(t)x2
u3(x1, x2, x3, t) + α3(t)x3
.
These correspond to flows in the presence of an unsteady uni-form strain field with principal valuesαi(t) along the axis di-rections(x1, x2, x3). To simulate such flows, one uses thechange of variables
xi = xi/Si(t) , ui = Si(t)ui ,
with
Si(t) = exp
(∫ t
0
αi(u)du
)
,
The Navier–Stokes and continuity equations applied to theabove solutions are transformed into:
∂ui
∂t+
∑
j
vj∂ui
∂xj= −
∂Π
∂xi+
1
Re
∑
j
1
S2j
∂2ui
∂x2j
,
∑
j
∂vj
∂xj= 0 ,
wherevi ≡ ui/S2i (t) andΠ is a modified pressure function.
In a velocity/vorticity formulation, one obtains
∂ui
∂t=
∑
j,k
ǫijkvjωk −∂
∂xi
Π +1
2
∑
j
uj vj
+1
Re
∑
j
1
S2j
∂2ui
∂x2j
,
(A.1)
where the transformed vorticity componentωi is related tovorticity ωi by
ωi =∑
j,k
ǫijk∂uk
∂xj= ωi/Si(t) .
This system resembles the standard Navier–Stokes equationswithout external strain up to the time-dependent factorsSj .
In the spectral formulation, only partial modifications to thestandard code are necessary to numerically implement suchequations. This was done to simulate the evolution of the vor-tex ring subjected to external stretching (see Sec. V B 3). Thistrick has been already used in the 2D framework8 and in theaxisymmetric base flow case20.
Equation (A.1) can be reduced to 2D solutions[u1 =0, u2(x2, x3, t), u3(x2, x3, t)]. These solutions correspondto 3D solutions in the(x1, x2, x3) coordinates for field(u1, u2, u3). They are used in Sec. V C.
1A. Pumir and E. Siggia, “Collapsing solutions to the 3-D Eulerequations,”Phys. Fluids2, 220–241 (1990).
2K. Ohkitani and J. D. Gibbon, “Numerical study of singularityformationin a class of Euler and Navier–Stokes flows,” Phys. Fluids12, 3181–3194(2000).
3H. K. Moffatt, “The interaction of skewed vortex pairs: a model for blow-upof the Navier–Stokes equations,” J. Fluid Mech.409, 51–68 (2000).
4R. M. Kerr, “Velocity and scaling of collapsing Euler vortices,” Phys. Fluids17, 075103 (2005).
5H. K. Moffatt, “Singularities in Fluid Dynamics and their Resolution,”(Springer, 2009) pp. 157–166, Lectures on Topological Fluid Mechanics.
6F. Hussain and H. S. Husain, “Elliptic jets. Part 1. Characteristics of unex-cited and excited jets,” J. Fluid Mech.208, 257–320 (1989).
7S. Kida and M. Takaoka, “Bridging in vortex reconnection,” Phys. Fluids30, 2911–2914 (1987).
8S. Kida, M. Takaoka, and F. Hussain, “Collision of two vortexrings,” J.Fluid Mech.230, 583–646 (1991).
9O. N. Boratav, R. B. Pelz, and N. J. Zabusky, “Reconnection inorthogo-nally interacting vortex tubes: Direct numerical simulations and quantifica-tions,” Phys. Fluids4, 581 (1992).
10J. S. Marshall, P. Brancher, and A. Giovannini, “Interaction of unequalanti-parallel vortex tubes,” J. Fluid Mech.446, 229–252 (2001).
11S. C. Crow, “Stability theory for a pair of trailing vortices,” AIAA J. 8,2172–2179 (1970).
12M. V. Melander and F. Hussain, “Cross-linking of two antiparallel vortextubes,” Phys. Fluids1, 633–636 (1989).
13S. Kida and M. Takaoka, “Vortex reconnection,” Ann. Rev. Fluid Mech.26,169–177 (1994).
14P. G. Saffman, “A model of vortex reconnection,” J. Fluid Mech.212, 395–402 (1990).
15M. J. Shelley, D. I. Meiron, and S. A. Orszag, “Dynamical aspects of vortexreconnection of perturbed anti-parallel vortex tubes,” J.Fluid Mech.246,613–652 (1993).
16E. D. Siggia, “Collapse and amplification of a vortex filament,”Phys. Fluids28, 794–805 (1985).
17S. Kida, M. Takaoka, and F. Hussain, “Formation of head–tail structurein a two-dimensional uniform straining flow,” Phys. Fluids3, 2688–2697(1991).
18I. Delbende and M. Rossi, “The dynamics of a viscous vortex dipole,” Phys.Fluids21, 073605 (2009).
19P. G. Saffman,Vortex dynamics(Cambridge Univ Press, 1992).20I. Delbende, M. Rossi, and S. Le Dizes, “Stretching effects on the three-
dimensional stability of vortices with axial flow,” J. Fluid Mech.454, 419–442 (2002).


[A11]DELBENDE, I., ROSSI, M. AND DAUBE, O. 2012
DNS of flows with helical symmetry.Theor. Comput. Fluid Dynam. 26(1), 141–160.


Theor. Comput. Fluid Dyn. (2012) 26:141–160DOI 10.1007/s00162-011-0241-y
ORIGINAL ARTICLE
Ivan Delbende · Maurice Rossi · Olivier Daube
DNS of flows with helical symmetry
Received: 15 March 2011 / Accepted: 17 October 2011 / Published online: 4 November 2011© Springer-Verlag 2011
Abstract Some flows such as the wakes of rotating devices often display helical symmetry. We present anoriginal DNS code for the dynamics of such helically symmetric systems. We show that, by enforcing heli-cal symmetry, the three-dimensional Navier–Stokes equations can be reduced to a two-dimensional unsteadyproblem. The numerical method is a generalisation of the vorticity/streamfunction formulation in a circulardomain, with finite differences in the radial direction and spectral decomposition along the azimuth. Whencompared to a standard three-dimensional code, this allows us to reach larger Reynolds numbers and to com-pute quasi-steady patterns. We illustrate the importance of helical pitch by some physical cases: the dynamicsof several helical vortices and a quasi-steady vortex flow. We also study the linear dynamics and nonlinearsaturation in the Batchelor vortex basic flow, a paradigmatic example of trailing vortex instability. We retrievethe behaviour of inviscid modes and present new results concerning the saturation of viscous centre modes.
Keywords Helical vortex · Navier–Stokes equations · Vortex dynamics · Swirling jet ·Viscous instability mode
1 Introduction
Rotating devices such as propellers, wind turbines and helicopter rotors are known to develop a system ofhelical vortices in their wake. These structures result from the rapid roll-up of the vorticity sheet continuouslygenerated at the trailing edge of the rotating blades. Experiments show that they interact with the mean flow:the radial location of helical tip vortices follows the expansion (resp. the contraction) of the fluid tube passingthrough the turbine (resp. the propeller) and becomes constant within a downstream distance comparable tothe diameter of the rotating device. At this distance, the fluid system—apart from turbulent fluctuations—haslocally become helically symmetric, meaning that it is locally invariant through combined axial translation and
Communicated by Eldredge.
I. Delbende · M. RossiUPMC, Université Pierre et Marie Curie-Paris 6, Orsay Cedex, France
I. Delbende (B) · O. DaubeLIMSI–CNRS, UPR 3251, BP 133, 91403 Orsay Cedex, FranceE-mail: [email protected]
M. RossiCNRS, IJLRA–UPMC, UMR 7190, 75232 Paris Cedex 05, FranceE-mail: [email protected]
O. DaubeUEVE, Université d’Évry–Val d’Essonne, Évry, FranceE-mail: [email protected]
Author's personal copy

142 I. Delbende et al.
rotation about the same axis. In most real situations, this property does not hold into the far wake: instabilitiesoften develop and drive the system to a fully three-dimensional turbulent flow. In some cases, a bifurcationmay lead to a completely different wake structure, as in the case of the vortex ring state in helicopter flight [1].In all instances however, it is of great interest to have a reliable description of the reference helical flow atsufficiently high Reynolds number, so that its subsequent evolution can be predicted, for instance, by standardinstability theory.
Earlier descriptions of such helical vortex systems made use of the vortex filament model. On one hand,Hardin [2] gives an expression for the velocity field induced by a helical vortex filament on the surroundingfluid, which was later extended to small finite core sizes [3]. This is useful to compute the angular velocityinduced by this vortex onto another vortex of the wake (mutual induction). On the other hand, it is also necessaryto evaluate the velocity induced by the vortex filament on itself (self-induction). This was done either withinthe cut-off theory framework whereby the singularity of the filamentary Biot–Savart law is removed [4,5] orby analytical developments on Hardin’s solution—the asymptotic study for small and large pitch regimes [6]was then extended to arbitrary pitch values [7]. All these studies are aimed at analytically predict the flowfield associated with a helical vortex system with prescribed geometry (helix radius, helix pitch and, whennecessary, vorticity distribution within the core).
In the small core limit and in the inviscid framework, such solutions are known to be “shape-preserving”meaning that they are stationary in a reference frame rotating at the angular velocity predicted for the system.When the core size is finite, the question is raised whether a given vorticity distribution may yield a station-ary state or not. Using numerical contour techniques, Lucas & Dritschel [8] recently answered this questionby determining the core shape for the particular case of inviscid helical vortex patches (uniform vorticitywithin the core) with prescribed helix radius and vortex core size. Note that the above-mentioned studies areall strictly restricted to the inviscid framework—though in certain instances a contour surgery is applied toremove filaments—a condition for the existence of stationary motion without any forcing.
Helically symmetric flows can also be produced by instabilities of axisymmetric jets, wakes or trailingvortices. For instance, downstream of a vortex breakdown bubble, one observes a helical flow generated bythe instability of the swirling wake [9]. More generally, the unstable linear perturbations of swirling jets takea helical form, which may or may not remain valid in the nonlinear régime [10].
In all the above flow instances, the dynamical complexity of helical flows can be analysed using generalthree-dimensional DNS. However, the Reynolds numbers reachable by such a tool are moderate and long-timedynamics clearly out of reach with nowadays facilities. In addition, it is difficult using 3D DNS to producequasi-steady basic helically symmetric flows on which a stability analysis can be performed. We present here anoriginal numerical code aimed at specifically describing the viscous dynamics of helically symmetrical flows,which avoids in part the two above-mentioned drawbacks. For the inviscid dynamics, the enforcement of thehelical symmetry indeed reduces the three-dimensional equations to a modified two-dimensional unsteadyproblem [11–14]. For the viscous dynamics, this is still true : the present viscous code thus takes into account3D vortex curvature and torsion effects through the helical symmetry, but the resolution is of a 2D type,allowing for larger numbers of grid points, higher Reynolds numbers and longer integration times. The presentcode is able to analyse continuous distributed vorticity distributions within the vortex cores, such as Gaussianprofiles. Note that in most studies on helical vortices, the vorticity field is assumed to be directed along thehelical lines. This assumption that can be done only for inviscid flows is not enforced here. This enables toconsider more general velocity distributions within vortex cores.
The Navier–Stokes equations with helical symmetry are presented in Sect. 2. The numerical formulationis described in Sects. 3 and 4. Initial conditions are explained in Sect. 5. The code is validated on the linearand nonlinear inviscid instability of the Batchelor vortex in Sect. 6. Further examples are also given in thissection: they concern the interaction of three helical vortices, the dynamics of a single helical vortex at smallpitch, and finally the linear and nonlinear instability of so-called viscous centre modes in the Batchelor vortexat high Reynolds number. Concluding remarks are given in Sect. 7.
2 Navier–Stokes equations with helical symmetry
When a flow displays helical symmetry of helix pitch 2πL along a given axis, its velocity field is unaffectedby a continuous one-parameter family of transformations: an axial translation given by a length parameter Hfollowed by a rotation of angle θs = H/L around the same axis, as depicted in Fig. 1a. Using the standardcylindrical coordinate system (er , eθ , ez), it is equivalent to state that the flow characteristics remain invariant
Author's personal copy

DNS of flows with helical symmetry 143
(a) (b)
Fig. 1 a Helical transformation of reduced pitch L , consisting in an axial translation of H combined to a rotation of angleθs = H/L along the same axis. b Local helical basis (er , eϕ, eB)
along the helical lines θ − z/L = const. These helices are spatially periodic along the axis with wavelength2πL . Note that L > 0 corresponds to a right-handed helix and L < 0 to a left-handed helix. When L → ∞, theflow becomes two dimensional. It is shown that the Navier–Stokes equations for flows with helical symmetrycan be reduced from a complete 3D problem to a simpler quasi-2D problem.
In addition to the cylindrical coordinate system, we introduce the orthogonal Beltrami basis (er , eϕ, eB)(see Fig. 1b). It consists of a local orthonormal vector basis containing the usual radial unit vector er , a unitvector directed along helical lines called the Beltrami vector:
eB(r, θ) = α(r)[ez + r
Leθ (θ)
](1)
with
α(r) =(
1 + r2
L2
)− 12
, 0 ≤ α(r) ≤ 1. (2)
In some references [11–13], the Beltrami vector is defined differently as α2(r)[ez + (r/L)eθ (θ)] and is hencenot normalised. Here, on the contrary, we use the unit vector eB defined in Eq. (1). Both choices are equivalent.The option used here has been selected for convenience since the projections of u and ω on eB coincide withtheir respective components along the tangential direction (see Eqs. (7) and (9)). In references [11–13], theother option was used because these works focussed on the inviscid dynamics, in which a conservation lawexists for αωB (using our notation), which is precisely the projection of ω on the non-unit Beltrami vector usedin these works.
Finally, a third unit vector
eϕ(r, θ) = eB × er = α(r)[eθ (θ)− r
Lez
](3)
is constructed along the direction of an increasing new variable ϕ ≡ θ − z/L .By construction, a scalar field f possesses helical symmetry if it depends only on the two space variables
r and ϕ instead of the three coordinates r , θ and z, namely f = f (r, ϕ, t). For a vector field, helical symmetrymeans that it can be written as
u = ur (r, ϕ, t)er (θ)+ uϕ(r, ϕ, t)eϕ(r, θ)+ uB(r, ϕ, t)eB(r, θ). (4)
The three components ur , uϕ and uB depend only on r , ϕ and t and are such that
uϕ = α(r)(
uθ − r
Luz
)and uB = α(r)
(uz + r
Luθ
), (5)
where uz and uθ are velocity components in the cylindrical coordinate system. Note, however, that the unitvectors eϕ(r, θ) and eB(r, θ) depend on r and θ and not on r and ϕ.
Author's personal copy

144 I. Delbende et al.
Our purpose is to write the Navier–Stokes equations restricted to helically symmetric solutions. In thisprocess, we are not seeking to change from the cylindrical coordinate system to another orthogonal system(r, ϕ, b) where the coordinate b would be a function of (r, θ, z). By restricting to solutions of the form (4), thedivergence and the components of the gradient or rotational operator along the local basis (er , eϕ, eB) can bewritten in terms of ur , uϕ and uB , which are functions of r and ϕ only and of their derivatives with respect tor and ϕ. For instance, the divergence (resp. gradient) for a helically symmetric vector (resp. scalar) reads
∇ · a = 1
r
∂
∂r(rar )+ 1
rα
∂aϕ∂ϕ
, ∇ψ = ∂ψ
∂rer + 1
rα
∂ψ
∂ϕeϕ. (6)
From these relations, it is easily seen that a general incompressible helical flow can be expressed with onlytwo scalar fields, namely the velocity component uB(r, ϕ, t) along eB(r, θ) and a streamfunction ψ(r, ϕ, t):
u = uB(r, ϕ, t) eB + α(r)∇ψ(r, ϕ, t)× eB . (7)
Note that as r → ∞, uB/α tends towards a non-zero constant: uB/α → U∞z + /(2πL), where U∞
z standsfor uz(r → ∞). The components ur and uϕ are computed using the streamfunction ψ :
ur = 1
r
∂ψ
∂ϕ, uϕ = −α(r)∂ψ
∂r. (8)
Finally, the vorticity field can be expressed as follows:
ω = ωB(r, ϕ, t) eB + α∇(
uB(r, ϕ, t)
α
)× eB . (9)
This implies that components ωr and ωϕ are given by
ωr = 1
r
∂
∂ϕ
(uB
α
), ωϕ = −α ∂
∂r
(uB
α
)(10)
while ωB , the vorticity component along eB , is linked to the streamfunction ψ as well as to the velocitycomponent uB by
ωB = −Lψ + 2α2
LuB (11)
where the linear operator L stands for
L(·) = 1
rα
∂
∂r
(rα2 ∂
∂r(·)
)+ 1
r2α
∂2
∂ϕ2 (·). (12)
To summarise, the total vorticity and velocity fields are given by only two scalar fieldsωB(r, ϕ, t) and uB(r, ϕ, t).The streamfunction ψ(r, ϕ, t) is slaved to these variables through Eq. (11). The flow evolution can thus bedescribed by only two dynamical equations: one for quantity ωB(r, ϕ, t) and one for uB(r, ϕ, t).
Using incompressibility, the Navier–Stokes equations can be written as
∂t u + ω × u = −∇(
p
ρ+ u2
2
)− ν∇ × ω. (13)
The scalar product of Eq. (13) with eB(r, θ) leads to the dynamical equation for uB(r, ϕ, t)
∂t uB + N Lu = V Tu (14)
where the viscous term is given by
V Tu ≡ ν
[L
(uB
α
)− 2α2
LωB
], (15)
and the nonlinear term by
N Lu ≡ eB · [ω × u] = ωr uϕ − ωϕ ur . (16)
Author's personal copy

DNS of flows with helical symmetry 145
A dynamical equation for ωB is derived by taking the curl of Eq. (13) and projecting onto eB(r, θ):
∂tωB + N Lω = V Tω (17)
where the viscous term is given by
V Tω ≡ −ν eB · ∇ × [∇ × ω] = ν
[L
(ωB
α
)−
(2α2
L
)2
ωB
]+ ν
2α2
LL
(uB
α
), (18)
and the nonlinear term by
N Lω ≡ eB · ∇ × [ω × u] . (19)
This quantity can be explicited as
N Lω = 1
rα
∂
∂r
(rαaϕ
) − 1
rα
∂
∂ϕar + 2α2
LaB (20)
with
aϕ ≡ (ω × u)ϕ = ωB ur − ωr uB
ar ≡ (ω × u)r = ωϕ uB − ωB uϕaB ≡ (ω × u)B = ωr uϕ − ωϕ ur .
One can easily show that expression (20) can be further simplified:
N Lω = 1
rα
∂
∂r
(rαgϕ
) − 1
rα
∂
∂ϕgr + 2α2
LgB + α
L2
∂
∂ϕ
(u2
B
)(21)
where
gϕ = ωB ur , gr = −ωB uϕ, gB = ωr uϕ − ωϕ ur .
The complete set of dynamical equations is thus defined by relations (14)–(15) for uB(r, ϕ, t), relations(17)–(18) for ωB(r, ϕ, t), together with the streamfunction ψ(r, ϕ, t) slaved to these two variables throughEqs. (11)–(12), as well as boundary conditions to be defined below in Sect. 4.3. This ψ–ωB–uB formulationturns out to be a generalisation of the standard 2D ψ–ω method.
For helically symmetrical flows, quantitiesωB and uB are 2π-periodic with respect to variable ϕ = θ−z/L .These fields can thus be expressed as Fourier series along ϕ. Introducing the complex modes u(m)B (r, t) andω(m)B (r, t), Eqs. (14) and (17) can be recast for each Fourier mode m (m is an integer).
For m = 0, one obtains from modes u(m)B (r, t),ω(m)B (r, t) all the other quantities. Indeed, the valueψ(m)(r, t)is computed using Eq. (11) written for mode m:
L(m)ψ(m) = −ω(m)B + 2α2
Lu(m)B (22)
where the operator L(m) is given by
L(m)(·) = 1
rα
∂
∂r
(rα2 ∂
∂r(·)
)− m2
r2α(·), (23)
together with the boundary conditions for ψ(m)(r, t) (see Sect. 4.3.1 below). From this value ψ(m)(r, t), onethen gets u(m)r (r, t), u(m)ϕ (r, t) through:
u(m)r (r, t) = im
rψ(m), u(m)ϕ (r, t) = −α(r) ∂
∂rψ(m). (24)
For the axisymmetric mode, m = 0, u(0)r (r, t) is bound to be zero and the dynamical equations are writtenfor the real Fourier modes u(0)B (r, t) and u(0)ϕ (r, t), instead of u(0)B (r, t) and ω(0)B (r, t).
The complete flow field is thus given by u(m)B (r, t), ω(m)B (r, t) for m = 0, and u(0)B (r, t), u(0)ϕ (r, t).
Author's personal copy

146 I. Delbende et al.
3 Numerical method: temporal scheme
The present numerical code is adapted from a code integrating the 2D Navier–Stokes equations in velocity/vor-ticity form written by O. Daube [15]. The time evolution of mode u(m)B (r, t) is governed by
∂t u(m)B + N L(m)u = V T (m)u . (25)
As the viscous term V Tu is a linear term, one directly obtains
V T (m)u = ν
[L(m)
(u(m)B
α
)− 2α2
Lω(m)B
](26)
which couples u(m)B and ω(m)B , a feature different from the case L → ∞. Concerning the nonlinear termN Lu , it is evaluated in physical space and then Fourier-transformed to yield the various coefficients N L(m)u(pseudo-spectral formulation).
The time evolution for modes ω(m)B (r, t) with m = 0 is governed by
∂tω(m)B + N L(m)ω = V T (m)ω , (27)
where the viscous term V Tω being linear, V T (m)ω simply reads
V T (m)ω = ν
[L(m)
(ω(m)B
α
)−
(2α2
L
)2
ω(m)B
]+ 2να2
LL(m)
(u(m)B
α
), (28)
where u(m)B and ω(m)B are again coupled. As for the nonlinear term N Lu , the nonlinear term N Lω is evaluatedin physical space and then Fourier-transformed to yield N L(m)ω .
For mode m = 0, one uses u(0)ϕ (r, t) instead of ω(0)B (r, t). This quantity is governed by
∂t u(0)ϕ + N L(0)uϕ = V T (0)uϕ , (29)
where the viscous term is given by
V T (0)uϕ = ν α(r)∂
∂r
(ω(0)B
α
)(30)
with
ω(0)B
α= 2
Lα u(0)B + 1
r α2
∂
∂r
(r α u(0)ϕ
), (31)
and the nonlinear term by
N L(0)uϕ = [(ω × u)ϕ](0) = [ωBur − ωr uB](0). (32)
Let us define quantity G(m) =(
u(m)B , ω(m)B
)for m = 0 and G(0) =
(u(0)B , u(0)ϕ
). The time advance of
quantity G(m) is given by Eqs. (25), (27) and (29). The value G(m)n+1 at time step n + 1 is obtained by:
3 G(m)n+1 − 4 G(m)
n + G(m)n−1
2t+
(2 N L(m)n − N L(m)n−1
)= V T (m)n+1, (33)
where one defines N L(m) =(
N L(m)u , N L(m)ω
), V T (m) =
(V T (m)u , V T (m)ω
)for m = 0 and N L(0) =(
N L(0)u , N L(0)uϕ
), V T (0) =
(V T (0)u , V T (0)uϕ
). A second-order backward discretisation has been used for the
temporal derivative, nonlinear terms are made explicit through second-order Adams–Bashforth extrapolationfrom quantities at times n and n − 1, and the viscous terms have been made completely implicit. Putting all
Author's personal copy

DNS of flows with helical symmetry 147
Fig. 2 Radial locations where quantities are defined
unknown variables (relative to time step n + 1) to the l.h.s. and all known variables (relative to n and n − 1)to the r.h.s., Eq. (33), recast as
3 G(m)n+1
2t− V T (m)n+1 =
(−2 N L(m)n + N L(m)n−1
)+ 4 G(m)
n − G(m)n−1
2t, (34)
is ready for radial discretisation.
4 Numerical method: Spatial discretisation
4.1 Linear operators in Eq. (34)
In order to discretise the problem, we truncate the Fourier series to a finite number of complex modes |m| < M .In the following, we consider only positive m values since modes with negative m can be directly obtained ascomplex conjugates. The standard 2/3 dealiasing procedure requires the computation of 3M/2 modes. Thisis done by discretising ϕ at Nθ = 3M physical angles given by
ϕ j = j δϕ ( j = 0, . . . , Nθ − 1), ϕNθ = ϕ0 = 0,
where δϕ = 2π/Nθ . The M first complex Fourier modes are effectively used, the higher modes m =M, . . . , 3M/2 − 1 being dismissed at each time step.
The radial domain is restricted to the interval [0, Rext], where Rext is chosen large enough to include thevorticity region. The spatial discretisation in the radial direction uses two series of Nr grid points:
ri = (i − 1)δr and r+i = ri+ 1
2= ri + δr/2 (i = 1, . . . , Nr ),
where δr = Rext/(Nr − 1). For convenience, expression (i, j) will hereafter designate points located at(r, ϕ) = (ri , ϕ j ).
In physical space (see Fig. 2), quantities uB(r, ϕ, t), ωB(r, ϕ, t) and ψ(r, ϕ, t) are defined at points (i, j),whereas azimuthal components uϕ(r, ϕ, t) and ωϕ(r, ϕ, t) live at points (i + 1
2 , j) as they stem from discretecentred radial derivatives of ψ and uB/α (see Eqs. (8)–(10)). As shown later, radial components ur (r, ϕ, t)and ωr (r, ϕ, t) are also defined at points (i, j).
In Fourier space, this implies that the complex quantities u(m)B (r, t) for m = 1, . . . ,M − 1 and the realFourier mode u(0)B (r, t) are defined at points ri . Similarly, the complex quantities ω(m)B (r, t) and ψ(m)(r, t) form = 1, . . . ,M − 1 are defined at the very same points ri . On the contrary, the real Fourier mode u(0)ϕ (r, t) isneeded at points r+
i .
4.2 Linear operators in Eqs. (22) and (34)
The resolution of Eq. (22) to obtain ψ(m) at each time step for m = 0 requires the radial discretisation of theterm L
(m)(ψ(m)) at each radial location ri , excluding the extremities r1 = 0 and rNr = Rext where boundaryconditions are to be imposed. This is performed with a second-order centred scheme:
Author's personal copy

148 I. Delbende et al.
L(m)(ψ(m))(ri ) =
ri− 12α2
i− 12
riαi δr2 ψ(m)(ri−1)−⎛⎝
ri− 12α2
i− 12
riαi δr2 +ri+ 1
2α2
i+ 12
riαi δr2 + m2
r2i αi
⎞⎠ ψ(m)(ri )
+ri+ 1
2α2
i+ 12
riαi δr2 ψ(m)(ri+1) (2 ≤ i ≤ Nr − 1). (35)
Note that formula (35) for i = 2 and i = Nr − 1 contains the quantities ψ(m)(r1) and ψ(m)(rNr ), which canbe substituted using the boundary conditions given in Sect. 4.3. The resulting (Nr − 2)× (Nr − 2) system hasa tridiagonal structure. It is solved using a band LU factorisation of the LAPACK library. As each mode m istreated independently, parallel computing with shared memory is most conveniently implemented.
For m = 0, the axisymmetric contribution ψ(0) is obtained through direct radial integration of Eq. (24b).In Eq. (34) for m = 0, the unknown variables after substitution of the boundary conditions are ωB
(m)(ri )
with 2 ≤ i ≤ Nr − 1, and u(m)B (ri ) with 2 ≤ i ≤ Nr − 1. The discretisation of terms V T (m)n+1 is similar to theone presented in Eq. (35). As ωB and uB are coupled through the dynamical equations, the discretised systemdisplays 2 × 2 blocks, each block being of size (Nr − 2) × (Nr − 2). In order to solve this system, we firstreorder the variables according to ω(m)B (r2), u(m)B (r2), ω
(m)B (r3), u(m)B (r3), . . .. For each mode m = 0, this leads
to a single band matrix with a left half-bandwidth 2 and right half-bandwidth 3—a hexadiagonal matrix, alsosolved using band LU factorisation.
In Eq. (34) for m = 0, the unknown variables are u(0)ϕ(r+
i
)with 1 ≤ i ≤ Nr − 1 and u(0)B (ri ) with
2 ≤ i ≤ Nr − 1. A reordering procedure similar to the previous one leads to a pentadiagonal matrix with leftand right half-bandwidth 2.
4.3 Boundary conditions and their discrete implementation
4.3.1 Modes m = 0
As the flow is assumed potential near the boundary r = Rext, the condition for ωB(m) with m = 0 reads as
ωB(m)(rNr ) = 0. (36)
Moreover, since ωr and ωϕ tend to zero outside the vorticity region, uB(m) for m = 0 decreases for large r ,
hence imposing
uB(m)(rNr ) = 0. (37)
For m = 0, regularity conditions at r = r1 = 0 impose the following boundary conditions on ψ(m), ωB(m)
and uB(m):
ψ(m)(r1) = 0, ωB(m)(r1) = 0, uB
(m)(r1) = 0. (38)
The same regularity conditions lead to ur(m)(r1) = 0 and ω(m)r (r1) = 0 for m ≥ 2, whereas for m = 1,
ur(1)(r1) and ω(1)r (r1) are finite. Using l’Hospital’s rule, they are given by:
ur(1)(r1) = i
∂ψ(1)
∂r(r1), ω(1)r (r1) = i
∂
∂r
(u(1)B
α
)(r1). (39)
A second-order scheme leads to
ur(1)(r1) = i
−3ψ(1)(r1)+ 4ψ(1)(r2)− ψ(1)(r3)
2δr= i
4ψ(1)(r2)− ψ(1)(r3)
2δr. (40)
A similar condition applies for ω(1)r (r1).
Author's personal copy

DNS of flows with helical symmetry 149
Concerning the outer boundary condition at r = rNr = Rext, we use the asymptotic behaviour of stream-function ψ(m) at large r , valid since the vorticity region is included in the circular domain of radius Rext:
ψ(m)(r) ∝
1/rm if |L| = ∞Km (|m/L| r) if L finite, (41)
where Km denotes the modified Bessel function of second kind. The boundary condition on ψ(m) is thenimposed through a Robin condition:
∂
∂rψ(m)(Rext) = −mCmψ
(m)(Rext) where Cm = 1
Rext+
⎧⎨⎩
0 if |L| = ∞,1
|L|Km−1(|m/L|Rext)
Km(|m/L|Rext)if L finite, (42)
this latter expression for finite L stemming from the relationship
d
drKm(γ r) = −γ Km−1(γ r)− m
rKm(γ r), m ≥ 1, (43)
written at r = Rext for γ = |m/L|. The second-order accurate discretisation of condition (42) reads:
ψ(m)(rNr ) = 4
3 + 2mCm δrψ(m)(rNr −1)− 1
3 + 2mCm δrψ(m)(rNr −2), (44)
which is introduced explicitly into the linear system in the Eq. (22) for ψ(m)(rNr −1). It is also used to evaluateψ(m)(rNr ) after the system for ψ(m) has been solved. Note that the constants Cm have to be evaluated once atthe beginning of the simulation.
4.3.2 Variable uB(0)
At r = 0, one imposes the boundary condition
∂
∂r
(u(0)B
α
)= 0, (45)
which is numerically implemented using a second-order accurate expression
u(0)B (r1) = 4
3
u(0)B (r2)
α(r2)− 1
3
u(0)B (r3)
α(r3). (46)
This condition is used in the evolution equation for u(0)B (r2) as well as in the equation for u(0)ϕ (r+1 ). The latter
equation thus involves a term proportional to u(0)B (r3), which is unpleasant since it does not preserve the matrixbandwidth imposed by discretizing the equation for u(0)ϕ (r
+i ) at other grid points 2 ≤ i ≤ Nr − 1. Fortunately,
replacing the equation for u(0)ϕ (r+1 ) by a linear combination with the equation for u(0)B (r2)makes it possible to
remove this undesirable extra-diagonal term and to preserve the matrix bandwidth, while ensuring a uniformsecond-order precision.
Concerning the boundary condition at r = Rext, it reads
u(0)B (Nr ) = α(Rext)
(U∞
z +
2π L
). (47)
Author's personal copy

150 I. Delbende et al.
4.3.3 Variable uϕ(0)
There is no need for an explicit condition at r = 0 for uϕ(0) since this quantity is defined at r+i . However,
the viscous term (30) should be expressed as a function of uϕ(0)(ri+ 12). At radial distance r = r3/2 = δr/2, a
centred finite difference scheme imposes:[α∂
∂r
(ω(0)B
α
)](r3/2) = α(r3/2)
δr
[ω(0)B (r2)
α(r2)− ω
(0)B (r1)
α(r1)
]. (48)
Variables ω(0)B (r1) and ω(0)B (r2) are expressed with the help of u(0)ϕ . From Eq. (31), one gets
rα ω(0)B = 2
Lrα3 u(0)B + ∂
∂r
(rα u(0)ϕ
). (49)
Integration of (49) from r = 0 to r = δr/2 and discretisation of this integral yields the second-order accurateformula:
ω(0)B (r1) = 2
Lu(0)B (r1)+ 4α(r3/2)
δru(0)ϕ (r3/2). (50)
In addition, Eq. (49), when discretised with a centred finite difference scheme at r = r2, yields
ω(0)B (r2) = 2
Lα2(r2) u(0)B (r2)+ r5/2α(r5/2) u(0)ϕ (r5/2)− r3/2α(r3/2) u(0)ϕ (r3/2)
r2α(r2) δr. (51)
Finally, the boundary condition for uϕ(0) is imposed at r = rNr + 12
= Rext + δr/2:
u(0)ϕ (rNr + 12) = α(Rext + δr/2)
(
2π (Rext + δr/2)− Rext + δr/2
LU∞
z
). (52)
4.4 Nonlinear terms
Equation (34) for m = 0 involves u(m)B and ω(m)B at points ri . The nonlinear term N L(m) is thus needed at thesame points ri . Hence, we have to compute the following nonlinear terms in physical space at points (i, j): (i)N Lu = (ω × u)B = ωr uϕ −ωϕ ur , which requires the two quantities ωr uϕ and ωϕ ur at points (i, j) and (ii)N Lω given by Eq. (21). Note that the Fourier transform of this latter quantity is
N L(m)ω = 1
rα
∂
∂r
(rαg(m)ϕ
)− im
rαg(m)r + 2α2
Lg(m)B + imα
L2 (u2B)(m). (53)
Its computation only requires gr , gB and u2B in physical space at points (i, j) and gϕ at points (i + 1
2 , j). For
m = 0, N L(0)u is obtained by the Fourier transform of N Lu already discussed above.The real Fourier mode u(0)ϕ (r, t) is provided at points r+
i . Therefore, Eq. (34) for u(0)ϕ is solved at points
r+i . To get N L(0)uϕ at r+
i , the quantity (ω × u)ϕ = [ωBur −ωr uB] is a priori needed in physical space at points(i + 1
2 , j). Actually one needs to evaluate only part of this quantity: the term ωBur is needed, but the term−ωr uB can be discarded. Indeed, Eq. (10) implies that the contribution of
ωr uB = 1
r
∂
∂ϕ
(uB
α
)uB = 1
2r
∂
∂ϕ
(u2
B
α
)(54)
to the m = 0 Fourier mode, vanishes.To summarise, one needs to evaluate quantities ωr uϕ , ωϕ ur , −ωB uϕ and u2
B at points (i, j) and quantityωB ur at point (i + 1
2 , j). In addition, it is recalled that quantitiesωϕ(m)(r, t) and uϕ(m)(r, t) are known at radial
locations r3/2 = δr/2, . . . , rNr + 12
= Rext +δr/2 and variablesω(m)r (r, t) and ur(m)(r, t) at r2 = δr, . . . , rNr =
Rext.
Author's personal copy

DNS of flows with helical symmetry 151
We evaluate quantities ωr uϕ and ωϕ ur at (i, j) using the values of ωϕ , uϕ at points (i − 12 , j), (i + 1
2 , j)and the values of ωr , ur at points (i, j) through
[ωr uϕ](i, j) = 1
2ωr (i, j)
[uϕ(i − 1
2 , j)+ uϕ(i + 12 , j)
], (55)
and
[ωϕ ur ](i, j) = 1
2
[ωϕ(i − 1
2 , j)+ ωϕ(i + 12 , j)
]ur (i, j). (56)
Corner cells (i = 1) are not needed since we use the above formula only for i = 2, . . . , Nr − 1.In order to evaluate quantity ωB ur at (i + 1
2 , j) from ωB, uB , ωr , ur at points (i, j) and (i + 1, j), we use:
[ωB ur ](
i + 1
2, j
)= 1
2
[ωB(i, j) ur (i, j)+ ωB(i + 1, j) ur (i + 1, j)
]. (57)
Corner cells (i = 1) should be taken into account since the formula is applied at r3/2 = δr/2, but formula isidentical since we assume that ur (1, j) is proportional to cos(θ j ) as r → 0.
Finally, in order to evaluate quantities ωB uϕ at (i, j) from uϕ at points (i − 12 , j), (i + 1
2 , j) and ωB atpoints (i, j), the expression:
[ωB uϕ](i, j) = 1
2ωB(i, j)
[uϕ(i − 1
2 , j) + uϕ(i + 12 , j)
](58)
is used. Corner cells (i = 1) are not needed for the computation of this term.
5 Initial conditions
Two types of initial conditions are used to present results of helical flows.
5.1 First case: a Batchelor vortex perturbed with a helical instability mode
A perturbed Batchelor vortex [16] constitutes a possible initial condition. More precisely, the initial flow fieldis generated directly in Fourier space as the combination of the basic Batchelor vortex put in the m = 0component and a superimposed perturbation. For the initial basic Batchelor vortex, the helical velocity andvorticity are given by
u(0)B (r) = α(r)[Uz + r
L Uθ], Uz = Uz(0) exp
(− r2
a2
), Uθ =
2πr
[1 − exp
(− r2
a2
)](59)
ω(0)B (r) = α(r)
[z + r
Lθ], z = 2qUz(0) exp
(− r2
a2
), θ = 2Uz(0) r
a2 exp(− r2
a2
)(60)
with
q =
2πa2Uz(0). (61)
As for any axisymmetric basic flow, the perturbations can be expanded on modes with azimuthal wave-number n, positive axial wavenumber k and complex frequency ω:
(ur , uθ , uz, p)(r, θ, z, t) = (ur (r), uθ (r), uz(r), p(r)) exp [i(kz + nθ − ωt)] , (62)
where hat variables are complex eigenfunctions. The eigenfunctions (ur (r), uθ (r), uz(r)) are provided by aninstability code based on a collocation Chebyshev formulation.
The flow constituted by each such instability mode plus the basic flow displays helical symmetry. Indeed,the expression kz + nθ = n(θ + kz/n) can be written as n(θ − z/L) = nϕ with the reduced pitch L = −n/k.In that instance, components (62) become functions only on r , ϕ and t , and since the complete phase writesnϕ − ωt , the mode rotates around the z-axis with angular velocity = ω/n.
Author's personal copy

152 I. Delbende et al.
For prescribed swirl q , Reynolds number Re = aUz(0)/ν, and azimuthal wavenumber n, only the mostamplified mode among all k values is considered. The corresponding eigenfunctions are used to initialise them = |n| perturbation component of the helical fields (the sign of n is contained in the variable L , these twovariables have opposite signs):
u(m)B (r) = α[uz + r
Luθ
], (63)
and
ω(m)B (r) = 1
rα
∂
∂r(rαuϕ)− im
rαur + 2α2
LuB, (64)
where
uϕ(r) = α(
uθ − r
Luz
)and u B(r) = α
(uz + r
Luθ
). (65)
The eigenmodes are normalised so that the maximum of |uz(r)| is 1. The perturbation amplitude is initiallyset to the value A0 = 0.01 for inviscid modes or A0 = 0.001 for viscous modes. These different values canbe accounted for by the different nonlinear saturation levels for each type of mode.
5.2 Second case: a helical vortex with small core size
Let us construct the velocity and vorticity fields of one helical vortex with prescribed circulation = 0 andprescribed far-field axial velocity U∞
z ≡ Uz(r → ∞). This constitutes a building block for more complexhelical flows.
Expressions for the helical vorticity ωB(r, ϕ) and velocity uB(r, ϕ) components are sought in the form
ωB = AωB and uB/α = C + AuB/α (66)
where A and C are constants and ωB(r, ϕ) and u B(r, ϕ)/α are both functions rapidly vanishing outside thevortex core. First one chooses the two localised profiles ωB(r, ϕ) and u B(r, ϕ)/α, and thereafter, one finds outthe constants A and C that yield the prescribed and U∞
z values. Constant C is such that
C =(uB
α
)∞ = U∞z +
( r
Luθ
)∞ = U∞z +
2π L. (67)
Moreover, circulation reads
=∫∫
ωz dS = 2π
∞∫
0
ω(0)z r dr (68)
where ω(0)z denotes the axisymmetric part (m = 0) of ωz . Since
ωz = α(ωB − r
Lωϕ
)and ωϕ = −α ∂
∂r
(uB
α
), (69)
the circulation can also be written as the sum of two contributions
= 2π
∞∫
0
α ω(0)B r dr + 2π
L
∞∫
0
α2 r2 ∂
∂r
(u(0)B
α
)dr. (70)
If one introduces the quantities ω and u based on ωB and u B
ω = 2π
∞∫
0
α ω(0)B r dr and u = 2π
L
∞∫
0
α2 r2 ∂
∂r
(u(0)B
α
)dr, (71)
Author's personal copy

DNS of flows with helical symmetry 153
Table 1 Theoretical growth rates σth and growth rates σnum obtained by simulations of instability modes n at swirl q andRe = 1,000, for the most unstable wave number k
n q k σth σnum
−1 0. 0.64 0.04916 0.0492−1 0.8 0.55 0.15251 0.1525−2 0.8 1.18 0.28469 0.2847−3 0.4 1.09 0.23881 0.2388−3 0.8 1.70 0.32331 0.3233−3 1.0 1.84 0.27928 0.2793
equation (70) reads = A (ω + u) and the value of A can be deduced as
A = /(ω + u).
To sum up, once the profiles ωB and (uB/α) have been chosen, the helical vorticity and velocity distributionsover the whole domain are given by:
ωB =
ω + uωB and
uB
α= U∞
z +
2π L+
ω + u
uB
α. (72)
One may use for instance
ωB = exp[−(r − r0)2/a2 − α(r0)
2r2(θ − θ0)2/a2] (with θ ∈]θ0 − π, θ0 + π]) and u B/α = 0. (73)
This distribution aims at reproducing the shape of a helical Gaussian vortex with circular core of size a, situatedat (r0, θ0) in the (r, θ)-plane: the peculiar profile (73) is due to vortex curvature and to the fact that this planeis not perpendicular to the vortex core axis.
When several vortices are initially present, the simulation is initialised using the sum of such contributions.Note that the Reynolds number is defined by Re = /ν where is the circulation of one of the vortices.
6 Results
6.1 Inviscid modes of Batchelor vortex: linear and nonlinear régimes
The code has been checked on the linear and nonlinear evolution of initial inviscid instability modes with fixedazimuthal wavenumber n = −1,−2,−3 in a swirling jet, namely the Batchelor vortex model [16,17]. Such acomputation is a crucial test for the numerical code since ωB and uB/α have the same order of magnitude andare fully coupled in such flows.
First, a linearised version of the code has been implemented, whereby the rhs of Eq. (34) is replaced byzero except for the component m = |n|. At t = 0, this latter component is initialised with an instability modeof the Batchelor vortex. The basic flow is put in the m = 0 component, which is then kept untouched during thewhole simulation: in such conditions, one should observe the exponential growth of the m = |n| componentwith the constant instability growth rate of the investigated mode. These simulations have been performed atthe fixed value of the Reynolds number Re = 1,000, with domain radius Rext = 6, mesh size Nr = 512by M = 64 and time step δt = 10−2. Some computed growth rates σnum are displayed in Table 1. Whencompared to their theoretical values σth, one obtains a precision better than 10−4.
The nonlinear dynamics of some of these instability modes have also been computed. The initial condi-tion is the same, but now the full code is activated, in particular, all nonlinear terms and viscous diffusionof the m = 0 component are restored. Figure 3a, b show the vortex dipole formation (t = 10) and ejection(t = 20, 30) prevailing in such swirling jets at low swirl q = 0.4. At swirl levels q ≥ 1, the vortex is known torelaminarise after the growth and saturation of the instability have taken place, due to the high strain exertedby the basic vortex on the newly created vortices. This is seen on the energy of the different modes plottedon Fig. 4, where the energy of mode m = 3 (bold line) strongly decreases for t > 15 after saturation. Thiscomputation compares very well with the figure 5a in Ref. [10], which is based on a completely differentnumerical algorithm.
Author's personal copy

154 I. Delbende et al.
Fig. 3 a Helical vorticity ωB and b helical velocity uB/α at times t = 0, 10, 20, 30, 40, 80. Simulation at Re = 1,000, initialcondition: Batchelor vortex at q0 = 0.4, with most unstable eigenmode n = −3 (L ≈ 2.75)
Author's personal copy

DNS of flows with helical symmetry 155
Fig. 4 Time evolution of amplitudes am(t) for modes m = 3 (bold), 6, . . . , 27 from top to bottom. Nonlinear simulation atRe = 1,000, initial condition: Batchelor vortex at q0 = 1, with most unstable eigenmode n = −3 (L ≈ 1.63)
6.2 Interaction of three helical vortices
Here, we compare a pure two-dimensional case (L = ∞) to simulations, where the helical symmetry is acti-vated at finite values of L = 2 and L = 1. For the pure 2D simulation, the initial condition consists of 3 vorticeschosen in such a way that equivalent point vortices would collapse in a finite time [18]. Here, the vorticeshave a finite radius, but their mutual induction should drive them to a very compact configuration and stronginteractions are expected. The vortices have circulations 1, 2 = 1
21 and 3 = − 131 and are, respectively,
situated at points (x, y) = (0, 0), (1, 0) and (1,√
3/3). They have initially a Lamb–Oseen profile with radiusa = 0.1. For all cases, the Reynolds number is set to Re = 1/ν = 10,000. The numerical parameters are asfollows: Rext = 2, Nr = 512, M = 256 and δt = 10−4.
Figure 5a describes the temporal evolution of vorticity when L = ∞. The two positive vortices are com-pelled by the negative one to collide (t = 5). The weaker vortex 2 is stretched and rolls up around vortex 1 andaround vortex 2 (t = 7, 10) through simultaneous partial straining-out processes [19]. Eventually, this yieldsa rotating dipole (t = 15).
For the finite-L simulations, the initial condition consists of 3 vortices with circulations and initial locationsin the (x, y)-plane identical to those of the 2D case. These vortices have a circular core of radius a = 0.1and, since L is finite, are thus elongated in the (x, y)-plane. The dynamics is illustrated by snapshots of thehelical component of vorticity ωB in the (x, y)-plane. When L = 2 (Fig. 5b), the straining-out of vortex 2still occurs, but in a slightly different way when compared to the 2D case. When L = 1 (Fig. 5c), the overalldynamics is modified in two ways: (1) each helical vortex induces a circular motion, which imposes now asignificant negative angular velocity on itself, and the motion is slowed down with respect to the previouscases; (2) mutual induction may also significantly differ. As a result, the synchronisation prevailing in 2D iscompletely lost and vortices are found to interact in a much weaker manner, at least up to t = 15.
6.3 Polygonal array of identical helical vortices
Another case of interest is the interaction of N ≥ 2 identical helical vortices forming a polygonal equilibrium,which can be encountered in multi-bladed rotor wakes. The stability of such a configuration has been ana-lysed [20] when embedded or not in a hub vortex. In particular, a critical pitch L0 is provided in the Table 2of [20], for each configuration without hub vortex. Here, we simply focus on the case of three helical vorticeswithout hub vortex and show that our code is capable to reproduce the stability transition. We have performedtwo simulations at two different pitch values with vortices of unit circulation and initial size a = 0.05. Forboth cases, the Reynolds number is set to Re = 5,000. The numerical parameters are as follows: Rext = 3,Nr = 256, M = 128 and δt = 6.67 ·10−4. Initially, the vortices are slightly shifted from the regular triangularsetting so as to introduce a small perturbation from the perfect polygonal situation. Figure 6a, b show theevolutions at L = 1.2 and L = 1, which are found to be, respectively, stable and unstable. This is coherentwith the threshold value L0 = 1.132 obtained in the inviscid framework [20]. In our viscous approach, the
Author's personal copy

156 I. Delbende et al.
Fig. 5 Vorticity component ωB at several times indicated in the plots. Simulation at Re = 10,000, initial condition: 2D three-vortex collapsing configuration (see text). a L = ∞, b L = 2, c L = 1. For each series, contour levels are constant and set to thevalues ±pωmax/20 with ωmax = 32 and p = 1, . . . , 20; dotted contours pertain to negative values
Author's personal copy

DNS of flows with helical symmetry 157
Table 2 Theoretical growth rates σth and growth rates σnum obtained by simulation of instability modes n at swirl q = 2, for themost unstable wave numbers k and Re = 10,000
n q k σth σnum
−1 2.0 0.27 0.01942 0.0195−2 2.0 0.57 0.02352 0.0237
Fig. 6 Vorticity component ωB at several times indicated in the plots. Simulation at Re = 5,000, initial condition: slightlyperturbed three-vortex polygonal array. a L = 1.2, b L = 1. Ten contour levels are selected corresponding to values pωmax(t)/10with p = 1, . . . , 10
vorticity distribution in vortex cores evolves in time. The basic profile is thus unsteady, which precludes theinstability threshold to be defined in an accurate fashion.
6.4 A single helical vortex at low pitch
The evolution of a single helical vortex with small core size is simulated at a low value of the reduced pitchL = 0.5. The initial profile is given by formulas (72)–(73) with = 1, a = 0.1, U∞
z = 0. By contrast with theprevious section, the initial shape of the vortex is chosen to be circular in the (r, θ)-plane, and its cross-sectionis thus strongly elongated. Following parameters are adopted: Re = /ν = 5,000, Rext = 2, Nr = 512,M = 128 and δt = 4 · 10−3.
The temporal evolution of the helical vorticity component ωB is shown on Fig. 7a. At short times, helicalfilaments rapidly appear (t = 0.2, 0.4) and are then destroyed by diffusion (t = 0.7, 1), while the vortexrecovers a circular core shape in a section orthogonal to the vortex axis. The flow then reaches a state, whichis quasi-steady in a rotating frame, evolving for t > 1 on a slow time scale prescribed by viscous diffusion. Itis also shown on Fig. 7b how viscosity affects the helical component uB/α of velocity according to Eq. (26): itis initially a uniform positive quantity but gradually decreases within the vortex core where ωB is significant.
6.5 Viscous modes of the Batchelor vortex: linear and nonlinear régime
Going back to the Batchelor vortex, the numerical code has also been tested on the linear growth of the so-calledviscous instability modes [21–24] with fixed azimuthal wavenumber n = −1,−2 at higher swirl level q = 2
Author's personal copy

158 I. Delbende et al.
Fig. 7 a Helical vorticityωB and b helical velocity uB/α at several times. Simulation at L = 0.5 and Re = 5,000, initial condition:single helical Gaussian vortex. Contour levels are held constant during the simulation and correspond to (a) pωB,max(0)/20 andb p(uB,max/α)/20 with ωB,max(0) = 71.09, uB,max/α = 0.32 and p = 1, . . . , 20. Note that in plot (b) the maximum value 0.32is reached outside the vortex
and higher Reynolds number Re = 10,000. To our knowledge, this is the first time they are simulated by directnumerical simulation. Indeed, the standard stability analysis finds two features that makes this computationsdifficult : a) these modes are obtained for high Reynolds number and b) they are quite localised within thevortex core (typically at r < 0.6). Note that this very high Reynolds number can be easily reached thanksto the quasi-2D helical framework. The modes being more localised, the radial domain is reduced from theinviscid Batchelor case to Rext = 2, the mesh has to be refined to Nr = 1,024, M = 64, and the time stepset to 10−3. The results obtained with these parameters are given in Table 2. The precision is similar to theone achieved in the inviscid case; however, the computational cost is much larger due to space and time steprefinements. The results have also been found much sensitive to the quality of the initial condition.
The nonlinear regime of these two modes has also been simulated, with the same domain and same gridpoints. In both cases, the instability is seen to saturate (at t = 100 for n = −1 and t = 60 for the moreunstable mode n = −2). The flow eventually relaxes towards axisymmetry. This is shown on the amplitudecurves of Fig. 8a, b, and on vorticity isocontours in Fig. 9a–d. Again to our knowledge, it is the first result onthe nonlinear evolution of the viscous modes.
Author's personal copy

DNS of flows with helical symmetry 159
Fig. 8 Time evolution of amplitudes am(t) in the nonlinear simulation at Re = 10,000, initial condition: Batchelor vortex atq0 = 2, with most unstable viscous eigenmode (a) n = −1 (L ≈ 3.70) and b n = −2 (L ≈ 3.51). The modes shown are fromtop to bottom (a) m = 1 (bold), 2, . . . , 5 and b m = 2 (bold), 4, . . . , 8. The dashed line is the perturbation amplitude obtained inthe linear regime, where only the mode m = |n| is present
Fig. 9 a, b Helical vorticity perturbation ωB − ω(0)B in the nonlinear simulation at Re = 10,000, at several times (central plots
correspond to saturation time). c, d Total helical vorticity ωB at saturation time. Initial conditions: Batchelor vortex at q0 = 2,with most unstable viscous eigenmode (a)–(c) n = −1 (L ≈ 3.70) or (b)–(d) n = −2 (L ≈ 3.51). For a and b, the isocontourlevels are the same for all plots: pωmax/10 with ωmax = 0.15 and p = ±1, . . . ,±10; dotted lines correspond to negative levels.For c and d, the isocontour levels are pωB,max(t)/20 with p = 1, . . . , 20
7 Conclusion
In this paper, we present an original DNS code aimed at solving the Navier–Stokes equations for incompress-ible flow with helical symmetry. The dynamics is governed by a set of three coupled equations for the helicalcomponents of vorticity ωB , of velocity uB and for the helical streamfunction ψ . The code is shown to giveaccess to the dynamics of one or several helical vortices. In particular, quasi-equilibrium states can be obtained,here presented for one helical vortex.
The present code has several advantages: while taking into account three-dimensional effects of curvatureand torsion, the resolution is basically of the 2D type, which allows for finer grids, higher Reynolds numbersand longer integration times.
For example, this allows one to investigate the dynamics of the viscous unstable modes of the Batchelorvortex at swirl q = 2 and high Reynolds number Re = 10,000.
Author's personal copy

160 I. Delbende et al.
Acknowledgments During this work, the authors benefited from discussions with Laurent Martin Witkowski, MouaouiaFirdaouss, Laurette Tuckerman and Benjamin Piton. We also want to thank an anonymous referee for constructive comments.The technical help provided by Jalel Chergui and Dang Anh Tuan (LIMSI–CNRS) is also acknowledged. Part of this work wassupported by the ANR grant no. 06-BLAN-0363-01 HiSpeedPIV.
References
1. Green, R.B., Gillies, E.A., Brown, R.E.: The flow field around a rotor in axial descent. J. Fluid Mech. 534, 237–261 (2005)2. Hardin, J.C.: The velocity field induced by a helical vortex filament. Phys. Fluids. 25(11), 1949 (1982)3. Fukumoto, Y., Okulov, V.L.: The velocity field induced by a helical vortex tube. Phys. Fluids 17(10), 107101 (2005)4. Widnall, S.E.: The stability of a helical vortex filament. J. Fluid Mech. 54, 641–663 (1972)5. Moore, D.W., Saffman, P.G.: The motion of a vortex filament with axial flow. Proc. R. Soc. A 272(1226), 403 (1972)6. Kuibin, P.A., Okulov, V.L.: Self-induced motion and asymptotic expansion of the velocity field in the vicinity of a helical
vortex filament. Phys. Fluids. 10(3), 607 (1998)7. Okulov, V.L.: On the stability of multiple helical vortices. J. Fluid Mech. 521, 319–342 (2004)8. Lucas, D., Dritschel, D.G.: A family of helically symmetric vortex equilibria. J. Fluid Mech. 634, 245–268 (2009)9. Delbende, I., Chomaz, J.M., Huerre, P.: Absolute/convective instabilities in the Batchelor vortex: a numerical study of the
linear impulse response. J. Fluid Mech. 355, 229–254 (1998)10. Delbende, I., Rossi, M.: Nonlinear evolution of a swirling jet instability. Phys. Fluids. 17(4), 044103 (2005)11. Landman, M.J.: On the generation of helical waves in circular pipe flow. Phys. Fluids A. 2(5), 738–747 (1990)12. Dritschel, D.G.: Generalized helical Beltrami flows in hydrodynamics and magnetohydrodynamics. J. Fluid Mech. 222,
525–541 (1991)13. Alekseenko, S.V., Kuibin, P.A., Okulov, V.L.: Theory of Concentrated Vortices. Springer, Berlin (2007)14. Rossi, M.: Of vortices and vortical layers: an overview. In: Maurel A., Petitjeans P. (eds.) Lecture Notes in Physics. Vortex
Structure and Dynamics, pp. 40–123. Springer (2000)15. Daube, O.: Resolution of the 2D Navier–Stokes equations in velocity-vorticity form by means of an influence matrix
technique. J. Comput. Phys. 103(2), 402–414 (1992)16. Batchelor, G.K.: Axial flow in trailing line vortices. J. Fluid Mech. 20, 645–658 (1964)17. Lessen, M., Singh, P.J., Paillet, F.: The stability of a trailing line vortex. Part 1. Inviscid theory. J. Fluid Mech. 63,
753–763 (1974)18. Aref, H.: Motion of three vortices. Phys. Fluids. 22(3), 393 (1979)19. Trieling, R.R., Fuentes, O.U.V., van Heijst, G.J.F.: Interaction of two unequal corotating vortices. Phys. Fluids.
17(8), 087103 (2005)20. Okulov, V.L., Sørensen, J.N.: Stability of helical tip vortices in a rotor far wake. J. Fluid Mech. 576, 1–25 (2007)21. Mayer, E.W., Powell, K.G.: Viscous and inviscid instabilities of a trailing vortex. J. Fluid Mech. 245, 91–114 (1992)22. Khorrami, M.R.: On the viscous modes of instability of a trailing line vortex. J. Fluid Mech. 225, 197–212 (1991)23. Fabre, D., Jacquin, L.: Viscous instabilities in trailing vortices at large swirl numbers. J. Fluid Mech. 500, 239–262 (2004)24. Le Dizès, S., Fabre, D.: Large-Reynolds-number asymptotic analysis of viscous centre modes in vortices. J. Fluid
Mech. 585, 153–180 (2007)
Author's personal copy

[A12]DELBENDE, I., ROSSI, M. AND PITON, B. 2012Direct numerical simulation of helical vortices.
Sous pressea Int. J. of Engineering Systems Modelling and Simulation.


Int. J. Engineering Systems Modelling and Simulation, Vol. X, No. Y, 200X 1
Copyright © 200X Inderscience Enterprises Ltd.
Direct numerical simulation of helical vortices
Ivan Delbende* UPMC, Université Pierre et Marie Curie-Paris 6, LIMSI-CNRS, UPR3251, BP133, 91403 Orsay Cedex, France E-mail: [email protected] *Corresponding author
Maurice Rossi UPMC, Université Pierre et Marie Curie-Paris 6, IJLRA-UPMC, UMR7190, 75232 Paris Cedex 05, France E-mail: [email protected]
Benjamin Piton UPMC, Université Pierre et Marie Curie-Paris 6, LIMSI-CNRS, UPR3251, BP133, 91403 Orsay Cedex, France E-mail: [email protected]
Abstract: We herein present a direct numerical simulation method aimed at describing the dynamics of helical vortices such as those developing in the wake of propellers and wind turbine or helicopter rotors. By enforcing a helical symmetry, the 3D incompressible Navier-Stokes equations are reduced to a 2D problem which we solve using a generalised vorticity/streamfunction formulation. In this framework, we simulate the viscous dynamics of one or several helical vortices and describe quasi-steady states as well as long-time (or far-wake) dynamics. In particular, several types of merging in the two helical vortex systems are identified.
Keywords: vortex dynamics; vortex merging; helical vortices; Navier-Stokes equations; numerical simulation.
Reference to this paper should be made as follows: Delbende, I., Rossi, M. and Piton, B. (xxxx) ‘Direct numerical simulation of helical vortices’, Int. J. Engineering Systems Modelling and Simulation, Vol. X, No. Y, pp.000–000.
Biographical notes: Ivan Delbende completed his studies in Physics and Mechanics at the Ecole Normale Supérieure de Lyon (France) and did his PhD at the Ecole Polytechnique in the LadHyX Laboratory under the supervision of Patrick Huerre and Jean-Marc Chomaz. He is now an Assistant Professor at Université Pierre et Marie Curie (UPMC, Paris 6) and works in the fields of open flow instabilities and vortex dynamics in the laboratory LIMSI-CNRS at Orsay.
Maurice Rossi completed his studies in Physics at the Ecole Normale Supérieure de Saint-Cloud (France) and did his PhD at Université Pierre et Marie Curie (UPMC, Paris 6) under the supervision of Gérard Iooss. He is now a Researcher at CNRS, UPMC and works in the fields of instabilities, vortex and lake dynamics in the Laboratory IJLRA in Paris.
Benjamin Piton obtained his Master’s degree in Physics from Université Pierre et Marie Curie (UPMC, Paris 6). He is about to defend his PhD thesis (October 2011) in Fluid Dynamics. He is supervised by Ivan Delbende and Maurice Rossi at the Laboratory LIMSI – CNRS at Orsay, and is granted from UPMC.
1 Introduction
Rotating devices such as propellers, wind turbines, helicopter rotors are known to develop a system of helical vortices in their wake. These structures result from the rapid roll-up of the vorticity sheet continuously generated at the
trailing edge of the rotating blades. Experiments show that they interact with the mean flow: the radius of helical tip vortices follows the expansion (resp. the contraction) of the fluid tube passing through the turbine (resp. the propeller) and becomes constant within a downstream

2 I. Delbende et al.
distance comparable to the diameter of the rotating device. At this distance, the fluid system – apart from turbulent fluctuations – has locally become helically symmetrical, meaning that it is locally invariant through combined axial translation and rotation about the same axis. In most real situations, this property does not hold into the far wake: instabilities often develop and drive the system to a fully three-dimensional turbulent flow. In some cases, a bifurcation may lead to a completely different wake structure, as in the case of the vortex ring state in helicopter flight (Green et al., 2005). In all instances however, it is of great interest to have a reliable description of the reference helical flow at sufficiently high Reynolds number, so that its subsequent evolution can be predicted, for instance, by standard instability theory.
Earlier descriptions of such helical vortex systems made use of the vortex-filament model. On one hand, Hardin (1982) gives an expression for the velocity field induced by a helical vortex filament on the surrounding fluid. This is useful to compute the angular velocity induced by this vortex onto another vortex of the wake (mutual induction). On the other hand, it is also necessary to evaluate the velocity induced by the vortex filament on itself (self-induction). This can be done either by the cutoff theory (Saffman, 1992) whereby the singularity of the filamentary Biot-Savart law is removed (Widnall, 1972; Moore and Saffman, 1972) or by directly removing the singularity on Hardin’s solution (Kuibin and Okulov, 1998). Further extensions to helical vortex tubes with finite core size have also been developed (Fukumoto and Okulov, 2005). All these studies are aimed at analytically predict the motion of a helical vortex system with prescribed geometry (helix radius, helix pitch and, when necessary, vorticity distribution within the core).
In the small core limit and in the inviscid framework, such solutions are known to be ‘shape-preserving’, meaning that they are stationary in a reference frame rotating at the angular velocity predicted for the system. When the core size is finite, the question is raised whether a given vorticity distribution may yield a stationary state or not. In a numerical study, Lucas and Dritschel (2009) recently answered this question for the particular case of inviscid helical vortex patches (uniform vorticity within the core) with prescribed helix radius and vortex core size. Note that the above studies are all strictly restricted to the inviscid framework, a condition for the existence of stationary motion without any forcing.
As mentioned before, wake vortices form through the roll-up of the trailing vorticity sheet, and viscous diffusion eventually leads to continuous distributed vorticity distributions within the vortex cores, such as Gaussian. Moreover, a distribution of axial velocity may also be present, which has always been disregarded in the literature. The complexity of this general problem would lead to use a three-dimensional DNS code. However, the attainable Reynolds numbers are still moderate and long-time dynamics clearly out of reach with nowadays facilities. We present here an original numerical code aimed
at describing the viscous dynamics of helical vortex systems, and more generally helically symmetrical flows by direct numerical simulation of the incompressible Navier-Stokes equations. The enforcement of the helical symmetry allows one to reduce the three-dimensional equations to a modified two- dimensional unsteady problem. The code thus takes into account 3D vortex curvature and torsion effects through the helical symmetry, but the resolution is of a 2D type, allowing for larger numbers of grid points and Reynolds numbers.
The Navier-Stokes equations with helical symmetry are presented in Section 2. The numerical formulation is described in Section 3. Viscous quasi-steady states consisting in one or several helical vortices are presented in Section 4. Long-time (or equivalently far-wake) dynamics have also been investigated and different types for the merging of two helical vortices are presented in Section 5. Concluding remarks are given in Section 6.
2 Navier-Stokes equations with helical symmetry
A flow displays helical symmetry of helix pitch 2πL along a given axis when its velocity field is unaffected by an axial translation given by a length parameter Δz followed by a rotation of angle Δθ = Δz / L around the same axis as depicted in Figure 1. The flow characteristics remain invariant along the helical lines θ − z / L = const. L > 0 corresponds to a right-handed helix and L < 0 to a left-handed helix.
Figure 1 Right-handed helix of reduced pitch L (see online version for colours)
2πLΔθ
Δz
Denoting time by the variable t, an unsteady scalar field f(t) possesses helical symmetry if it depends only, besides time, on the two space variables r and ϕ ≡ θ − z / L instead of the three coordinates r, θ and z. For a vector field u(t), helical symmetry means that it can be written as
( , , ) ( ) ( , , ) ( , )
( , , ) ( , )
r r
B B
u u r t eu r t e r
u r t e r
θθ
θ
=+
+ϕ ϕ
ϕϕ
ϕ
(1)
where the orthogonal Beltrami basis (er, eϕ, eB), presented in Figure 2, is such that

Direct numerical simulation of helical vortices 3
( , ) ( ) ( ) ,
( , ) ( ) ( )
B z
B r z
re r r e eL
re r e e r e eL
θ
θ
θ α θ
θ α θ
⎡ ⎤= +⎢ ⎥⎣ ⎦⎡ ⎤= × = −⎢ ⎥⎣ ⎦ϕ
(2)
with quantity α(r) defined as 1
2 2
2( ) 1 , 0 ( ) 1.rr rL
α α−
⎛ ⎞= + ≤ ≤⎜ ⎟⎝ ⎠
(3)
Figure 2 Local helical basis (see online version for colours)
φ ≡ θ − z/L = cst
eB
er
eφ
rθ
z
A general incompressible helical flow can be expressed with only two scalar fields as:
( , , ) ( ) ( , , )B B Bu u r t e r r t eα= + ∇ ×ϕ ψ ϕ (4)
where uB(r, ϕ, t) is the velocity component along eB(r, θ)
and ψ(r, ϕ, t) is a streamfunction. Note that the vorticity field can be expressed as follows:
( , , )( , , ) .BB B B
u r tr t e eω ω αα
⎛ ⎞= + ∇ ×⎜ ⎟⎝ ⎠
ϕϕ (5)
The vorticity component along eB is linked to the streamfunction ψ as well as to uB by the following relationship
22B Bu
Lαω = − +Lψ (6)
where the linear operator L stands for
22
2 21 1( ) ( ) ( ).r
r r r rα
α α∂ ∂ ∂⎛ ⎞⋅ = ⋅ + ⋅⎜ ⎟∂ ∂⎝ ⎠ ∂
Lϕ
(7)
The total vorticity and velocity fields are thus given by only two scalar fields ωB(r, ϕ, t) and uB(r, ϕ, t). The
streamfunction ψ(r, ϕ, t) is slaved to these variables through equation (6).
In order to describe the flow evolution, we hence have to obtain two dynamical equations for quantities ωB(r, ϕ, t)
and uB(r, ϕ, t). This formulation is a generalisation of the
standard 2D ψ-ω method. Indeed the 3D Navier-Stokes problem for a helical symmetric flow can be reduced to a dynamical equation for uB(r, ϕ, t) and ωB(r, ϕ, t). The first equation reads as
t B u uu NL VT∂ + = (8)
where the non-linear and viscous terms are given by
[ ]2
,
2 .
u B
Bu B
NL e u
uVT
L
ω
α ωα
≡ ⋅ ×
⎡ ⎤⎛ ⎞≡ −⎢ ⎥⎜ ⎟⎝ ⎠⎣ ⎦
Lν (9)
The dynamical equation for ωB reads
t B NL VTω ωω∂ + = (10)
where the non-linear is given by
[ ] ,BNL e uω ω≡ ⋅∇ × × (11)
and the viscous term by
[ ]2 2
2 2B
B BB
VT e
uL L
ω ω
ω α αωα α
≡ − ⋅∇ × ∇ ×
⎡ ⎤⎛ ⎞ ⎛ ⎞= − +⎢ ⎥⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎣ ⎦
L L
ν
ν (12)
More details can be found in Delbende et al. (2011).
3 Numerical formulation
As variable ϕ = θ − z / L is 2π-periodic, the fields can be expressed as Fourier series along that direction. We hence introduce the ‘azimuthal’ modes ( ) ( )( , ), ( , )m m
B Bu r t r tω and write equations (8) and (10) for each Fourier mode m (m is a positive integer). For the axisymmetric mode m = 0, the dynamical equations are written for the real Fourier modes (0) ( , )Bu r t and (0) ( , ),u r tϕ instead of (0) ( , ).B r tω From
quantities ( ) ( )( , ), ( , )m mB Bu r t r tω for m ≠ 0, one obtains the
values ψ(m)(r, t) for m ≠ 0 using equation (6) written for mode m:
2( ) ( )( ) ( ) 2m mm mB Bu
Lαω= − +L ψ (13)
where the operator L(m) is given by
2( ) 2
21( ) ( ) ( ),m mr
r r r rα
α α∂ ∂⎛ ⎞⋅ = ⋅ − ⋅⎜ ⎟∂ ∂⎝ ⎠
L (14)
together with the boundary conditions for ψ(m)(r, t). The
time evolution of mode ( ) ( , )mBu r t is governed by
( ) ( ) ( ) .m m mt u uBu NL VT∂ + = (15)
As the viscous term VTu is a linear term, one directly obtains
( ) 2( )( ) ( ) 2 .
mmm m B
u Bu
VTLα ω
α
⎡ ⎤⎛ ⎞= −⎢ ⎥⎜ ⎟
⎝ ⎠⎣ ⎦Lν (16)
There is no such simple expression for non-linear terms: NLu has to be first evaluated in the physical space and is

4 I. Delbende et al.
then Fourier-transformed to yield ( ) .muNL The time
evolution for modes ( ) ( , )mB r tω with m ≠ 0 and mode
(0) ( , )u r tϕ is treated in a similar way. The code has been adapted from a pure 2D code written by Daube (1992). The time advance of any of these modes is performed using second order backward discretisation of the temporal derivative. Non-linear terms appear explicitly through second order Adams-Bashforth extrapolation whereas the viscous term has been made implicit.
Boundary conditions should be also imposed for ( )mBω
with m ≠ 0, ( )mBu and (0) .uϕ In addition to regularity
conditions at r = 0, one should impose conditions at the outer boundary taken to be at r = Rext:
( ) ( )
( ) ( )
( ) ( )ext ext
(0)ext ext
0, 0 for 0,
.2
m mB B
zB
R u R m
u R R U
ω
απ
∞
= = ≠
Γ⎛ ⎞= +⎜ ⎟Γ⎝ ⎠
(17)
A boundary condition for (0)uϕ is also imposed at the outer boundary. These conditions are described in a much more detailed way in Delbende et al. (2011).
For spatial discretisation, two series of Nr grid points are defined in the radial direction:
12
( 1)( 1, , ), / 2
ir
i ii
r i ri N
r r r r
δ
δ+
+
= −=
= = +
where δr = Rext / (Nr − 1) and only one set of Nθ grid
( ) 0, , 0 1 , 0,Nj Nj jθθδ == − = =ϕ ϕ ϕ ϕ
where δϕ = 2π / Nθ. In physical space, quantities uB(r, ϕ, t),
ωB(r, ϕ, t), ψ(r, ϕ, t) radial components ur(r, ϕ, t) and ωr(r,
ϕ, t) are defined at points (i, j) (which stands thereafter for
(ri, ϕj). Azimuthal components uϕ (r, ϕ, t) and ωϕ (r, ϕ, t)
live at points 1( , ).2
i j+
Non-linear terms such as ( )muNL are needed at points ri,
so that we have to compute the non-linear terms NLu = (ω × u)B = ωr uϕ − ωϕ ur in physical space at points (i, j). To summarise, one needs to evaluate various quantities at different grid points: ωr uϕ, ωϕ ur at points (i, j), ωB ur at
points 1( , ),2
i j+ −ωB uϕ at points (i, j) and 2Bu at points
(i, j).
The resolution of the dynamical equations requires the radial discretisation of operators L(m), ( ) ( ), m m
uVT VTω at each
radial location ri with 2 ≤ i ≤ Nr − 1. This is performed with a second order centred scheme: according to the dynamical equation considered, the resulting system has a tridiagonal, pentadiagonal or hexadiagonal structure, and is solved using a band LU factorisation of the LAPACK library. As each mode m is treated independently, parallel computing with shared memory can be most conveniently implemented.
4 Quasi-steady helical vortices
Here we simulate the evolution of a single helical vortex with small core size at a low pitch value. The initial profile is given by
( )2 200 02
0exp ,B r r a
aω
πΓ ⎡ ⎤= − −⎣ ⎦ (18)
and
0 .2
BuLα π
Γ= (19)
In the above formulas and hereafter, quantities are dimensionless, scaled with the helix radius R as space scale, quantity R2 / Γ as time scale, where Γ is a typical vortex circulation. Here, Γ0 = π, r0 = (1, 0), a0 = 0.1 and we set the reduced pitch to L = 0.5. The Reynolds number is Re0 = Γ0 / ν = 1,000. The numerical simulation is performed with a domain of radial extent Rext = 2 meshed by Nr × Nθ grid points, where Nr = 512 and Nθ = 384.
The temporal evolution of the helical vorticity component ωB is shown on Figure 3. At short times, small helical filaments are rapidly formed (t = 0.08, 0.012) and destroyed (t = 0.2, 0.4). Indeed, the vortex tube as a whole engenders a local strain. As the initial condition is not an inviscid equilibrium state, strain is not counterbalanced by advection. Similarly to the purely 2D vortex case subjected to an external strain, the vortex reaches equilibrium by emitting filaments at its boundary. Thereafter the vortex adopts a shape that remains nearly constant. For t > 0.4, it evolves on a slow time scale imposed by viscous diffusion and proportional to the Reynolds number. The helical vortex has thus reached a quasi-steady state when considered in a reference frame rotating with it at frequency ω.

Direct numerical simulation of helical vortices 5
Figure 3 Convergence of a single helical vortex with L = 0.5 towards a quasi-steady state: temporal evolution of the helical vorticity component ωB at Re0 = 1,000, viewed in a plane perpendicular to the helix axis (see online version for colours)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
20
40
60
80
100
120
140
160
180
200
220
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
0.12
t = 0 0.04
0.2
0.08
1
0.41.6
2.23.4
2.8
Note: The initial vortex is such that Γ0 = π, r0 = || r0 || = 1, a0 = 0.1.
Figure 4 Angular velocity ω(t) of the helical vortex of Figure 3
(see online version for colours)
0 1 2 3 4-1
-0.75
-0.5
-0.25
0DNScutoff theory
t
ω
Note: Comparison between DNS and semi-analytical
cutoff theory.
Figure 5 Quasi-steady state for two vortices represented in 3D (see online version for colours)
−10
1
−10
1
0
1
2
3
4
Note: The parameters are r0 = 1, L = 0.5.

6 I. Delbende et al.
Measuring the angular velocity ω(t) obtained by DNS and comparing with the theoretical value obtained by the cutoff theory (Saffman, 1992) is one of the validation tests of the numerical code. The cutoff results are here semi-analytical since they use the quantities core size a(t), distance rmax(t) from the axis and core circulation Γ(t) evolving in time and given by the DNS. The comparison is shown in Figure 4, and is found very satisfactory once the filaments have been destroyed and that the vortex has reached its quasi-steady state.
It should be noted that vorticity isocontours in Figure 3 are presented in a plane perpendicular to the z-axis: the curved/elongated shape adopted by the vortex for t ≥ 0.4 corresponds in fact to a quasi-circular core shape when considered in an inclined plane perpendicular to the vortex tube.
This can also be seen on Figure 5, presenting a quasi-steady state made of two helical vortices. In this snapshot, the 3D helical structure of the vortex has been materialised. It is clearly seen that the cores are indeed close to circular while they are strongly deformed in the bottom plane perpendicular to z.
The numerical code thus makes it possible to obtain quasi-steady states of the Navier-Stokes equations with one or several helical vortices of given pitch. Note that the three-dimensional stability of these obtained solutions is not known since helical symmetry is enforced by the current formulation. Some states are stable, but other might be unstable with respect to perturbations breaking the helical symmetry. In this latter case however, the present numerical code is able to generate unstable basic helical flows that can be injected for instance in a fully three-dimensional code in order to determine various instability properties. This corresponds to future work.
5 Merging of two helical vortices
The above helical quasi-steady states evolve on a slow time scale associated to viscous diffusion. In the pure two-dimensional case (L = ∞), it is known that two identical vortices rotate around each other for a period of time proportional to Reynolds number (Josserand and Rossi, 2007). Eventually, their mutual distance suddenly decreases and, after some rapid oscillations, vanishes, indicating that the vortices have merged. The distance of one of the vortices from the z-axis during this process is plotted in Figure 6 (curve L = ∞). The merging time for this 2D case is 575.
Numerical simulations have been performed at the same Reynolds number Re0 = 10,000 but for helical vortices at finite L values. Figure 6 shows that decreasing L progressively slows down the process; at L = 3 the merging time is 600, and can reach values as high as 1,400 at L = 2 (not shown). For the above values of L, the merging process is close to that occurring in the pure 2D case, as shown by the snapshots in Figure 7 (see two top rows).
When L is lowered to the value 1.3, another type of merging is observed: as shown in Figure 7 (third row), the vortices gently come into contact at t = 2,610: the helical vortex cores have grown through viscous diffusion up to a point where turns belonging to the two distinct vortices touch. Viscous diffusion then drives the system to a cylindrical annulus of vorticity (see t = 4,400). Thus, for L values close to 1.3, a very slow, merely diffusive merging process takes place, which involves successive vortex turns.
Figure 6 Merging of two helical vortices at Re0 = 10,000 for different values of L
0 200 400 600 8000
0.5
1
1.5
t
rmax
L = ∞3
1.3
2
0.8
Notes: Time evolution of the distance rmax of one of the vortices from the axis. Initial helices Γ0 = 1, r0 = 1, a0 = 0.2.

Direct numerical simulation of helical vortices 7
Figure 7 Snapshots of the helical vorticity component ωB during the merging of two helical vortices with pitch L at Re0 = 10,000 (see online version for colours)
Note: Time evolution of the distance rmax of one of the vortices from the axis. Initial helices are such that Γ0 = 1, r0 = 1, a0 = 0.2. For smaller values of L, the dynamics is again much different. In Figure 6, the curve rmax(t) relative to L = 0.8 is seen to become strongly erratic at some time (here near t = 300). Beside the helical symmetry, the two-vortex initial condition is invariant through the transformation ϕ → ϕ + π. For the largest investigated values of the reduced pitch (L ≥ 1.3), this additional symmetry is preserved during the whole simulation. By contrast, the dynamics for L = 0.8 plotted in Figure 7 (bottom row) shows that it can break at some time (see t = 350), and the two helical vortices interact in a complex way. Symmetry breaking causes the periodicity along the direction φ to change from its initial value π to the value 2π, and therefore the periodicity along the axial direction z also changes from πL to 2πL. The phenomenon has much in common with the subharmonic pairing instability of a row of straight vortices; here it involves two neighbouring turns and the patterns
observed look similar to those obtained during the merging of two vortex rings (Riley and Stevens, 1992). Clearly the proximity of turns belonging to the two vortices at small L values is responsible for such interaction, and the structure resulting from their merging is a single helical vortex with large core size (see t = 500).
6 Conclusions
In this article, we present an original DNS code aimed at solving the Navier-Stokes equations for incompressible flow with helical symmetry. In this framework, the dynamics is governed by a set of three coupled equations for the helical components of vorticity ωB, of velocity uB and for the helical streamfunction ψ. The code is shown to give access to quasi-equilibrium states representing one or several helical vortices. The present code has several

8 I. Delbende et al.
advantages: while taking into account three-dimensional effects of curvature and torsion, the resolution is basically of the 2D type, which allows for finer grids, higher Reynolds numbers and longer integration times. For example, this allows one to investigate the long-time dynamics of merging of two identical helical vortices at Re0 = 10,000. It has been found that, at high values of the helix pitch (typically L ≥ 2), the merging process is similar to the one obtained in pure 2D dynamics, but occurs on larger time scales as L is progressively decreased. At intermediate values of the pitch (L ≈ 1.3), a slow diffusive-type of merging occurs between successive turns of the two-vortex system. At small values of the pitch (typically L ≤ 1), adjacent turns interact as in a subharmonic instability process while remaining helically symmetrical. Of course, this latter symmetry may not hold in a three-dimensional framework, and some results of the present study should be confronted to fully 3D computations.
References Daube, O. (1992) ‘Resolution of the 2D Navier-Stokes equations
in velocity/vorticity form by means of an influence matrix technique’, J. Comp. Phys., Vol. 103, No. 2, pp.402–414.
Delbende, I., Rossi, M. and Daube, O. (2011) ‘DNS of flows with helical symmetry’, Submitted to Theor. Comput. Fluid Dynam.
Fukumoto, Y. and Okulov, V.L. (2005) ‘The velocity field induced by a helical vortex tube’, Phys. Fluids, Vol. 17, No. 10, 107101.
Green, B.G., Gillies, E.A. and Brown, R.E. (2005) ‘The flow field around a rotor in axial descent’, J. Fluid Mech., Vol. 534, pp.237–261.
Hardin, J.C. (1982) ‘The velocity field induced by a helical vortex filament’, Phys. Fluids, Vol. 25, No. 11, pp.1949–1952.
Josserand, C. and Rossi, M. (2007) ‘The merging of two co-rotating vortices: a numerical study’, Eur. J. Mech. B/Fluid, Vol. 26, No. 4, pp.779–794.
Kuibin, P.A. and Okulov, V.L. (1998) ‘Self-induced motion and asymptotic expansion of the velocity field in the vicinity of a helical vortex filament’, Phys. Fluids, Vol. 10, No. 3, pp.607–614.
Lucas, D. and Dritschel, D.G. (2009) ‘A family of helically symmetric vortex equilibria’, J. Fluid Mech., Vol. 634, pp.245–268.
Moore, D.W. and Saffman, P.G. (1972) ‘The motion of a vortex filament with axial flow’, Philos. Trans. R. Soc., London, Ser. A, Vol. 272, No. 1226, pp.403–429.
Riley, N. and Stevens, D.P. (1992) ‘A note on leapfrogging vortex rings’, Fluid Dyn. Res., Vol. 11, No. 5, pp.235–244.
Saffman, P.G. (1992) Vortex Dynamics, Cambridge Monograph on Mechanics and Applied Mathematics, CUP.
Widnall, S.E. (1972) ‘The stability of a helical vortex filament’, J. Fluid Mech., Vol. 54, pp.641–663.

[A9]MARTIN WITKOWSKI , L., DELBENDE, I., WALKER , J.S.AND LE QUERE, P. 2006
Axisymmetric stability of the flow between two exactly counter-rotating disks with large aspect ratio.J. Fluid Mech. 546, 193–202.


J. Fluid Mech. (2006), vol. 546, pp. 193–202. c© 2005 Cambridge University Press
doi:10.1017/S0022112005007433 Printed in the United Kingdom
193
Axisymmetric stability of the flow between twoexactly counter-rotating disks with
large aspect ratio
By L. MARTIN WITKOWSKI 1,2, I. DELBENDE1,2,J. S. WALKER3 AND P. LE QUERE 2
1Universite Paris VI, 4 place Jussieu, F-75252 Paris Cedex 05, France2LIMSI-CNRS, UPR 3251, BP 133, F-91403 Orsay Cedex, France
3Department of Mechanical and Industrial Engineering, University of Illinois, 1206 W. Green St.,Urbana, IL 61801, USA
(Received 21 June 2005 and in revised form 29 September 2005)
We study the first bifurcation in the axisymmetric flow between two exactly counter-rotating disks with very large aspect ratio Γ ≡ R/H , where R is the disk radius and2H is the inter-disk spacing. The scaling law for the critical Reynolds number is foundto be Rec ∝ Γ −1/2, with Re ≡ ΩH 2/ν, Ω being the magnitude of the angular velocityand ν the kinematic viscosity. An asymptotic analysis for large Γ is developed, inwhich curvature is neglected, but the centrifugal acceleration term is retained. TheNavier–Stokes equations then reduce to leading order to those in a Cartesian frame,and the axisymmetric base flow to a parallel flow. This allows us locally to use aFourier decomposition along the radial direction. In this framework, we explain thephysical mechanism of the instability invoking the linear azimuthal velocity profileand the effect of centrifugal acceleration.
1. IntroductionThe flow between two parallel rotating disks with very large aspect ratio can be
thought of as an approach to plane Couette flow with additional degrees of freedom,namely curvature and background rotation, given by the mean angular velocity of thedisks. This analogy has been presented for the rotor–stator system by Schouveiler, LeGal & Chauve (2001). Hoffmann, Busse & Chen (1998) investigated the stability ofplane Couette flow (i.e. zero curvature) with background rotation. The present paperis devoted to the case of exactly counter-rotating disks, for which background rotationis zero. An experiment on this configuration has been carried out by J. Pecheux andE. Foucault (private communication). These authors covered numerically a range ofaspect ratios Γ (disk radius/ half spacing between the disks) varying from 20 to 80and performed an experiment for Γ = 30. They showed that an instability occurs ata very small rotation rate of the disks so that the profile of the azimuthal velocityfor the base flow is almost linear in the axial direction. The observed patterns of theinstability are strongly dominated by an axisymmetric propagating wave. Anotherfeature of this instability is that the spatial wavelength is of the order of the diskspacing and the structures extend from one disk to the other. These patterns differfrom those presented by Nore et al. (2004) for small aspect ratio (Γ < 4) whichare three-dimensional and stationary. They are also different from boundary layerinstabilities over a rotating disk, which still receive much attention (Lingwood 1997;

194 L. Martin Witkowski, I. Delbende, J. S. Walker and P. Le Quere
Free surface
(a) (b)z
0
+H
+Ω
R = ΓHr
–Ω
–H
Cor
e
End
regi
on
Figure 1. (a) Sketch of the configuration using dimensional variables. (b) Base flow:schematic representation of the azimuthal and radial velocities in the core region.
Fernandez-Feria 2000; Serre, Tuliszka-Sznitko & Bontoux 2004). Similar instabilities,i.e. for a base flow without boundary layers, have been observed by Schouveiler et al.(2001) in an experiment with a rotating and a stationary disk but those instabilitiesare spiral waves and become critical only for Γ > 112. An experimental setup withcounter-rotating disks is described in Soong et al. (2003) but Γ = 25 is the largestaspect ratio studied and the instability found by J. Pecheux and E. Foucault will notbe triggered. Gauthier et al. (2002) performed measurements for Γ =41.8, but didnot reach exact counter-rotation. They observed a transition toward slightly inclinedspirals rolling up to the centre in the direction of the slower disk and propagatingtoward the periphery. In numerical simulations, the difficulty lies in the two verydifferent length scales used to mesh the domain. This geometry is suitable for asemi-analytical study whereby the self-similar solutions for the basic flow betweendisks of infinite radius are used. Szeto (1978) performed such a study, but enforcedthe similarity conditions on the perturbation variables as well; this constraint is toostrong and leads to critical Reynolds number values much larger than those foundexperimentally. Our goal is to generalize the study by J. Pecheux and E. Foucault inthe limit of infinite Γ and to remove similarity constraints on perturbations used inSzeto (1978). The approach is both numerical and semi-analytical.
In § 2, we present the problem formulation, show the results of the purely numericalapproach, compare with experimental results for Γ = 30 and find the scaling law of thecritical Reynolds numbers as a function of Γ . In § 3, we derive for large values of Γ aset of asymptotic equations that can be considered as a local parallel approximationof the original problem; an explanation of the mechanism of the instability is thenproposed and a spatio-temporal analysis of the asymptotic equations is used torecover the results found in § 2.
2. Axisymmetric numerical approach2.1. Problem formulation
We use cylindrical coordinates r, θ, z with the z-axis normal to the disks, with theorigin at the symmetry plane and unit vectors er , eθ , ez. We enforce a stress-freeboundary condition located at a radius R and the distance between the disks is 2H .The geometry is presented in figure 1(a).
We normalize length by H and velocity by ΩH , where ±Ω is respectively the upperand lower disk angular velocity. Based on these scales, we introduce the Reynoldsnumber Re =ΩH 2/ν where ν is the kinematic viscosity of the fluid.

Axisymmetric stability of counter-rotating disk flow 195
Assuming axisymmetry, we use the vorticity ω = ∂ur/∂z − ∂uz/∂r , streamfunctionψ formulation where ∇ × (−ψ eθ/r) = (ur, 0, uz) and the velocity V =(ur, uθ , uz). TheNavier–Stokes equations are
∂ω
∂t+
∂(urω)
∂r+
∂(uzω)
∂z− ∂
∂z
(u2
θ
r
)=
1
Re
(∂2ω
∂r2+
1
r
∂ω
∂r− ω
r2+
∂2ω
∂z2
), (2.1)
∂2ψ
∂r2− 1
r
∂ψ
∂r+
∂2ψ
∂z2= rω, (2.2)
∂uθ
∂t+
∂(uruθ )
∂r+
2uruθ
r+
∂(uzuθ )
∂z=
1
Re
(∂2uθ
∂r2+
1
r
∂uθ
∂r− uθ
r2+
∂2uθ
∂z2
). (2.3)
The boundary conditions are ψ = 0, ∂ψ/∂z = 0 and uθ = ± r at z = ± 1 and ψ = 0,ω =0, ∂uθ/∂r−uθ/r = 0 at r = Γ . The boundary condition at the periphery could havebeen chosen differently (e.g. no-slip, open end) but as explained in § 3 a different choicewould only influence our present analysis slightly. The stress-free boundary conditionusually relates to crystal growth applications and we herein follow Harriott &Brown (1984). In addition to comparisons with these authors, the main advantage ofthis boundary condition is to preserve symmetry and to avoid any singularity due todiscontinuous velocities.
We introduce for ψ the form
ψ = ψb(r, z) + ε Re[ψp(r, z) exp(λt)], (2.4)
and a similar form is introduced for uθ . The subscript b denotes the variables forthe steady axisymmetric base flow, the subscript p denotes the complex perturbationeigenfunctions such as ψpR + iψpI , and λ= λR + iλI is the complex eigenvalue. Theforms for ur, uz, ω are deduced directly from ψ .
For the base flow, we use a symmetry condition at mid-plane, namely ψb = 0, ωb = 0,uθb =0 at z = 0 and need only consider the region 0 z 1.
For small perturbations, the governing equations are obtained by introducing theform (2.4) into (2.1)–(2.3) and collecting all terms of order ε. The boundary conditionsat r = Γ and z = 1 are obtained by the same procedure. Regarding the symmetry atz = 0 we need to consider both symmetric (i.e. having the same symmetry as the baseflow) and antisymmetric modes. Symmetric perturbations are such that ψp , uθp areodd functions of z and antisymmetric perturbations are such that ψp , uθp are even. Theuse of symmetry for the perturbation equations reduces the size of the computationaldomain with no loss of generality but implies running two independent calculations:one for the symmetric mode (ψb = 0, ωb = 0 and uθb = 0 at z = 0) and one for theantisymmetric mode (∂ψb/∂z = 0, ∂ωb/∂z = 0 and ∂uθb/∂z = 0 at z = 0).
When the aspect ratio is large (typically Γ > 150) grid resolution becomes a problem.We then restrict the computation to the domain [Γ −Γ, Γ ]× [0, 1]. We assume thatthe variables satisfy similarity conditions for r Γ − Γ and therefore prescribe ar and r2 radial dependence for uθ and ψ respectively in (2.1)–(2.3). This leads to
∂ω
∂t+
2urω
r+
∂(uzω)
∂z− ∂
∂z
(u2
θ
r
)=
1
Re
∂2ω
∂z2, (2.5)
∂2ψ
∂z2= rω, (2.6)
∂uθ
∂t+
4uruθ
r+
∂(uzuθ )
∂z=
1
Re
∂2uθ
∂z2, (2.7)

196 L. Martin Witkowski, I. Delbende, J. S. Walker and P. Le Quere
which we use as boundary conditions at r = Γ − Γ . The set of equations andboundary conditions are discretized by a standard second-order-accurate finite-difference scheme. All computations presented in § 2.2 are performed on a [r × z] =[301 × 61] grid with evenly spaced gridpoints in the z-direction and the mappingfunction Γ tanh(βr/Γ )/ tanh(β) in the r-direction where β is an arbitrary coefficient.For the full domain code, we set β = 1 for Γ < 20 and β = 2 otherwise. The truncateddomain code uses a uniform grid in the r-direction. The procedure to find the baseflow and the eigenmodes is described in Martin Witkowski & Walker (2002). Wechanged the stress-free boundary condition to a no-slip boundary condition at theperiphery in order to compare our results with those presented in table 2 of Noreet al. (2004) for the axisymmetric mode.† Using a [161 × 151] uniform grid, we foundRe = 335.3 for Γ =2.0, Re = 912.7 for Γ = 1.33, Re = 1851 for Γ =1.0, and Re = 4727for Γ =0.66 which agree within 2 %, 6 % (but within 2 % with Gelfgat, Bar-Yoseph& Solan 1996), 1 % and 4 % respectively with those of Nore et al.
2.2. Results
As presented schematically in figure 1(b), the base flow consists of an azimuthaland a meridional flow. The azimuthal flow is driven by the moving boundaries. Thesecondary (meridional) flow is a consequence of the axial variation of the azimuthalvelocity. This can be deduced by noticing that the only source term for the secondaryflowx is ∂(u2
θ/r)/∂z in (2.1).For a large but fixed value of Γ , the base flow has the following characteristics
as the Reynolds number is increased. For small values of the Reynolds number, theflow is purely viscous and a self-similar von Karman solution is valid in the entiredomain except in an O(1) end region close to r =Γ . A regular perturbation analysisin the core region leads to the following analytical expression for the base flow:
uθb = rz + O(Re2) and ψb = Re r2 f (z) + O(Re3) with f (z) =−z(z2 − 1)2
60. (2.8)
For intermediate values of the Reynolds number, the core flow is still dominated byviscosity and must match an end region for which inertia can no longer be neglected.For larger values of the Reynolds number, a boundary layer regime starts to developas described by Batchelor (1951).
For small aspect ratio, the axisymmetric stationary bifurcation has been describedby Harriott & Brown (1984). For Γ =2, they predicted Rec ≈ 109 (to be divided by4 based on our reference scales) which agrees with our value Rec =27.33. For a largeenough aspect ratio (Γ 26.7), an instability via an Hopf bifurcation is triggered. Theperturbed streamfunction consists of pairs of counter-rotating rolls. These travellingwaves propagate from the axis toward the end region. The amplitude of the perturbedstreamfunction is extremely small close to the axis, then steeply increases with r asthe rolls reach the end region and finally drops to zero at r = Γ due to boundaryconditions at the stress-free surface. The instability is antisymmetric, ψp and uθp
being even functions of z. The patterns observed are in good agreement with theexperimental ones (J. Pecheux and E. Foucault, private communication) and criticalvalues of both the Reynolds number and frequency are in the same range. ForΓ =30, they reported a critical Rec = 5.75 and λIc = −2.5 ± 0.1; we found Rec = 5.16and λIc = −2.39. The relatively small disagreement (10 % in Rec and 4 % in λIc) is notdue to boundary conditions since we found Rec = 5.19 and λIc = −2.39 by imposing
† In Nore et al. (2004) the Reynolds number is given by Re Γ 2 and the aspect ratio by 2/Γ .

Axisymmetric stability of counter-rotating disk flow 197
20 22 24 26 28 300
0.51.0
(a) (b)
(c) (d)
00.51.0
00.51.0
z
00.51.0
z
20 22 24 26 28 30
20 22 24 26 28 30r
20 22 24 26 28 30r
Figure 2. Perturbation contours with Γ = 30 and Re = 5.16 for: (a) Re(ψp), (b) Re(uθp),(c) Im(ψp), (d) Im(uθp). The solid curves are positive isovalues, the dashed curves are negativeisovalues and the dash-dotted curves are the zero isovalues. The increments for isovalues are0.01 for ψp and 0.1 for uθp .
5
4
3Rec
2
1
0 100 200 300Γ Γ
400 500 0 100 200 300 400 500
10(a) (b)
8
6–λIc
4
2
Figure 3. Evolution with the aspect ratio Γ of (a) the value of the critical Reynolds numberRec and (b) the imaginary part of the eigenvalue λIc . Symbols are for the numerical calculationsand thin lines are the fit given by (2.9). Thick lines are for the predictions given by the localparallel approximation (3.8).
a no-slip condition at r =Γ in our calculations in order to match the experimentalboundary conditions.
A representation of the real and imaginary parts of the eigenvectors for thestreamfunction and azimuthal velocity perturbation is shown in figure 2. We normalizethe eigenvectors so that uθp = 1 at r = Γ and z = 0. We choose Γ = 30 but for anyother aspect ratio larger than 30, the patterns are similar. We computed on the fulldomain but only show part of the domain as the amplitude of the perturbationrapidly decays with decreasing r .
The values of the critical Reynolds numbers Rec and the imaginary part of theeigenvalue λIc as a function of Γ are plotted in figure 3 for Γ > 30 and some of thecomputed values are given in table 1. We first used a full domain code, i.e. solvingfor [0, Γ ] × [0, 1]; then for larger values of Γ , we truncated the domain so that weonly solved for [Γ − 20, Γ ] × [0, 1]. In order to check the influence of the boundaryconditions (2.5)–(2.7), both the full and truncated domain codes have been used for30 Γ 150. We found that truncating the domain did not affect significantly thevalues of the critical Reynolds number nor the imaginary part of the eigenvalue. Thedifferences were at most 0.3 %. By fitting our results for large values of Γ (Γ 200),we found the following approximate scaling:
Rec ∼ 24.3Γ −0.53 and λIc ∼ −0.42Γ 0.51. (2.9)

198 L. Martin Witkowski, I. Delbende, J. S. Walker and P. Le Quere
Γ Re −λIc Γ Re −λIc Γ Re −λIc Γ Re −λIc
2 27.3 0. 26.6 5.89 0. 100 2.19 4.38 300 1.19 7.714 15.0 0. 26.7 5.86 2.28 150 1.73 5.39 350 1.10 8.34
10 9.22 0. 30 5.16 2.39 200 1.48 6.26 400 1.02 8.9220 6.67 0. 50 3.39 3.07 250 1.31 7.02 500 0.91 9.99
Table 1. Values for the critical Reynolds number and the critical frequency for differentaspect ratios Γ . In all cases, the antisymmetric mode is critical.
The scaling for the critical Reynolds number indicates that the instability mechanismcannot be explained using a simple physical argument such as a shear flow based onthe maximum azimuthal velocity ΩR and a characteristic distance H between thedisks. If these scales were relevant, then Rec would scale as Γ −1.
3. Local parallel approximationIn this section, we show that the instability is driven not by the end region but by
the core region of the system. More precisely, we claim that the instability that takesplace near the end region does not stem from the strong return base flow but is drivenby the core flow for which the velocities are maximum at the edge of the core region.
The key ingredient of the instability can be captured by considering two infinitedisks and viewing Γ as a local radius associated to a local Reynolds number Re.
3.1. Asymptotic analysis for large Γ
In order to find an asymptotic expansion in the vicinity of the local radius Γ forlarge values of Γ , we introduce the following coordinate change and rescaling:
r = Γ + x and Re = ReΓ −1/2. (3.1)
From (2.8), the leading-order terms in the core region for the base azimuthal velocityand the base streamfunction are
Γ uθb and Γ 3/2ψb with uθb = z and ψb = Ref (z). (3.2)
The perturbation variables are defined up to an arbitrary multiplicative constant,so that we choose a scale for one variable, namely we choose uθp to be O(1). Werewrite (2.1)–(2.3) with the perturbation variables having the following form:
ψp(r, z) exp(λt) = (Γ αψp0(z) + · · ·) exp[(Γ γ λ0 + · · ·)t + ikx], (3.3)
uθp(r, z) exp(λt) = (Γ 0uθp0(z) + · · ·) exp[(Γ γ λ0 + · · ·)t + ikx]. (3.4)
In order to retain the maximum number of terms of order ε, the least restrictive choicefor the unknown powers of Γ are α = −1 and γ = 1/2. The decomposition of theperturbation variables in elementary waves in the radial direction with a wavenumberk reduces the system to ordinary differential equations so that (2.1)–(2.3) at respectiveorder εΓ −1, εΓ −1/2 and εΓ 1/2 become
λ0ωp0 + Ref ′ikωp0 − Ref ′′′ikψp0 − 2(z uθp0)′ =
1
Re(−k2ωp0 + ω′′
p0), (3.5)
−k2ψp0 + ψ ′′p0 = ωp0, (3.6)
λ0uθp0 − ikψp0 + Ref ′ikuθp0 =1
Re(−k2uθp0 + u′′
θp0), (3.7)

Axisymmetric stability of counter-rotating disk flow 199
where primes denote differentiation with respect to z. The boundary conditions areuθp0 = ψp0 = ψ ′
p0 = 0 at z = 1 and symmetric or antisymmetric conditions at z =0.
3.2. Local instability results
We solve these Orr–Sommerfeld-type equations using a technique similar to that usedfor the complete partial differential equations. The grid has 61 points evenly spacedin the z-direction. For a given real value of k we search for the values of the criticalReynolds number. The minimum critical Reynolds number Re = 19.5 is found tobe reached at k = 1.12. The corresponding frequency is λI0c = −0.44. Qualitatively,the perturbations are antisymmetric and reproduce the patterns found in figure 2.Quantitatively, the critical Reynolds number Rec and frequency λIc are
Rec ∼ 19.5Γ −1/2 and λIc ∼ −0.44Γ 1/2, (3.8)
to be compared with those reported in (2.9).When comparing the asymptotic prediction (3.8) with the values in table 1, the two
frequencies λIc are in excellent agreement (within 2 %) whereas the critical Reynoldsnumber Rec is lower by up to 36 % (for the worst case Γ = 26.6). The differencedrops below 11 % when Γ > 100. The asymptotic model proposed is valid only forlarge enough values of Γ and the underestimation can be explained by the fact thatthis one-dimensional model does not take into account the stabilizing effect of theend region. The closed end condition ψ =0 at r = Γ strongly modifies the azimuthalvelocity uθ and therefore weakens the source of the instability.
As an illustration, we can compare an evaluation of the phase velocity for Γ =30with the asymptotic prediction. For the full (as well as the truncated) domain calcul-ations, the spatial wavenumber in the radial direction varies (moderately) with theradius so that the phase velocity is at best a rough approximation. From figure 2we found a spatial wavelength of ∼5.5 so that the phase velocity −λI /k ∼ 2.39 ×5.5/(2π) ∼ 2.1. The phase velocity for the local model is given by −λI0c/k whichsatisfactorily yields 0.44
√30/1.12 ∼ 2.2 if we rescale the frequency according to (3.8).
In the locally parallel approximation, the convective/absolute nature of the flow canalso be determined. To do so, we have to solve (3.5)–(3.7) for complex wavenumberk with a prescribed complex frequency λ0. The flow is found to be convectivelyunstable in a very narrow Reynolds number range Rec = 19.5 < Re < Reca = 19.7.The Reynolds number Reca at which the flow becomes absolutely unstable has beendetermined by standard saddle-point tracking and checking that, in the complexk-plane, pinching occurs between the k− and k+ branches. The critical mode haswavenumber kca ≈ 1.26 − 0.08i and a frequency λI0ca
= −0.45.We found that the meridional flow, which has only a radial component at leading
order, does not play a key role in the destabilizing mechanism and in fact slightlystabilizes the flow. If we artificially set f (z) (defined in (2.8)) and its derivatives to
zero in (3.5) and (3.7), the critical Reynolds is lowered to Rec = 15.4 for k = 1.08and the frequency is shifted to λI0c = − 0.36 but the features of the instability areunchanged. In what follows, we disregard this radial component of the base flow inorder to understand the physical mechanism of the instability.
3.3. Physical mechanism
If we retain only the key terms for the perturbation, the equations can be approximatedby
∂ω
∂t= 2
∂(uθb u θ )
∂z+ diff. terms = 2
∂(z u θ )
∂z+ diff. terms, (3.9)

200 L. Martin Witkowski, I. Delbende, J. S. Walker and P. Le Quere
AB
B′
C′ C
D
z
x
Base flow
θ Initial perturbation
Figure 4. Schematic mechanism for the instability over half of a period.
∂u θ
∂t= −u
z
duθb
dz+ diff. terms = −u
z + diff. terms, (3.10)
where the starred variables represent the real perturbation variables. These timeevolution equations are equivalent to (3.5) and (3.7) with f (z) = 0 and clearly showthe competition between convective (or source) and diffusive terms. In addition tothese equations, there is a relation between ω and ψ that can be deduced from (2.2).
In figure 4, we illustrate how the coupling between (3.9) and (3.10) will amplifyand propagate a small perturbation. An initial positive and even azimuthal velocityperturbation A is the source for locally positive vorticity (not represented) at thesymmetry plane (see (3.9)). Positive vorticity induces a clockwise circulation andtherefore the axial velocities B and B′. As indicated by (3.10), convection of the baseflow by axial velocity is a source term for the azimuthal velocities C and C′. Theinitial pattern (B′AB) has propagated in the radial direction toward the peripheryand a counterclockwise circulation has been generated toward the axis. We have thencompleted a quarter of a period. At the point where the perturbation originated, thetwo circulations contribute to a positive axial velocity D with a stronger intensity.Equation (3.10) indicates that this will create a negative azimuthal velocity (notrepresented) and therefore a counterclockwise circulation (dashed). We have thencompleted half a period. The other half is easily deduced with the appropriate changesin signs. Moreover this mechanism is thought to be also indicative of the inward(from A to C′) and outward (from A to C) spreading of energy, suggesting absoluteinstability. It should be noted that contrary to the plane Couette flow invariant underspanwise reflection, the present model includes a centrifugal acceleration that breaksthis symmetry. More specifically, the source term in (3.9) derived from the centrifugalacceleration imposes a positive phase velocity (or outward motion) on the structures.
3.4. Recovering the spatial radial inhomogeneity from the local study
In this section, we use local stability properties deduced from the asymptotic analysisof § 3.1 in order to recover the envelope of the global instability mode obtainedin § 2.2 in the limit of large aspect ratios Γ . The scaling (3.1) indicates that alocal Reynolds number is defined as: Re l(r) ≡ r1/2Re =ΩH 3/2r
1/2d /ν where rd is

Axisymmetric stability of counter-rotating disk flow 201
0 5 10 15 20 25 3010–15
10–10
10–5
100
r
|ψp|
|ψp1D|
Figure 5. Comparison of the perturbation amplitude for the streamfunction at z = 0. Thethin line |ψp| corresponds to the envelope of the global mode ψp presented in figure 2. The
thick line |ψ1Dp | is obtained by integration of (3.11) and the arbitrary multiplicative constant
is chosen so that |ψp| = |ψ1Dp | at r =25.
the dimensional radius. This local Reynolds number virtually vanishes at the axisand increases with r . Thus, a central region exists where the flow is locally stable,bearing only evanescent waves. As the instability source necessarily lies close to theend region, the global mode envelope, in the central region, is locally given by thespatial growth rate k−
I . In this linear framework, the selected frequency is the absolutefrequency λabs
I0 of the local mode at r = Γ (Monkewitz, Huerre & Chomaz 1993). Here,we take λabs
I0 = λI0ca= −0.45. Neglecting non-parallel effects, the numerical integration
of
1∣∣ψ1Dp
∣∣d∣∣ψ1D
p
∣∣dr
= −k−I (3.11)
where k−I is evaluated at Re l(r) allows us to recover the envelope of the global mode
ψp . As shown in figure 5, there is a fair agreement between |ψ1Dp | and |ψp| in the core
region except close to the axis where, not surprisingly, the hypothesis r = O(Γ ) doesnot hold. The discrepancy in the end region is due to the fact that this one-dimensionallocal model does not take into account the closed end of the real geometry.
4. ConclusionsWe have presented a numerical study of the first bifurcation for counter-rotating
disks for arbitrarily large but finite aspect ratio. These axisymmetric computationsare in good agreement with experiment for Γ = 30. The scaling law for the criticalReynolds number and the critical frequency as a function of Γ is found. Thecomparison of the truncated and the full domain computations in § 2 shows thatthe source for the instability is close to the end region. Nevertheless, in § 3, usingan asymptotic model, we show that the physics of the instability can be completelyunderstood with a one-dimensional model and that it is generated in the core regionwhere the base flow has a simple analytical expression. More specifically, we showthat the key term is the centrifugal acceleration which is always of the same orderof magnitude as the diffusive terms for Re = Rec. This latter remark implies that

202 L. Martin Witkowski, I. Delbende, J. S. Walker and P. Le Quere
a centrifugal instability will always occur no matter how large the local radiusconsidered, which distinguishes it from the plane Couette flow.
We thank Emilie Delisle, Eric Foucault, Patrice Le Gal, Caroline Nore, Benoıt Pier,Laurette Tuckerman and Shihe Xin for fruitful discussions.
REFERENCES
Batchelor, G. K. 1951 Note on a class of solutions of the Navier-Stokes equations representingsteady rotationally-symmetric flow. Q. J. Mech. Appl. Maths 4, 29–41.
Fernandez-Feria, R. 2000 Axisymmetric instabilities of Bodewadt flow. Phys. Fluids 12, 1730–1739.
Gauthier, G., Gondret, P., Moisy, F. & Rabaud, M. 2002 Instabilities in the flow between co-and counter-rotating disks. J. Fluid Mech. 473, 1–21.
Gelfgat, A. Y., Bar-Yoseph, P. Z. & Solan, A. 1996 Steady states and oscillatory instability ofswirling flow in a cylinder with rotating top and bottom. Phys. Fluids 8, 2614–2625.
Harriott, G. M. & Brown, R. A. 1984 Flow in differentially rotated cylindrical drop at moderateReynolds number. J. Fluid Mech. 144, 403–418.
Hoffmann, N., Busse, F. H. & Chen, W. L. 1998 Transitions to complex flows in the Ekman–Couettelayer. J. Fluid Mech. 366, 311–331.
Lingwood, R. J. 1997 Absolute instability of the Ekman layer and related rotating flows. J. FluidMech. 331, 405–428.
Martin Witkowski, L. & Walker, J. S. 2002 Solutocapillary instabilities in liquid bridges. Phys.Fluids 14, 2647–2656.
Monkewitz, P. A., Huerre, P. & Chomaz, J. M. 1993 Global linear stability analysis of weaklynon-parallel shear flows. J. Fluid Mech. 251, 1–20.
Nore, C., Tartar, M., Daube, O. & Tuckerman, L. S. 2004 Survey of instability thresholds of flowbetween exactly counter-rotating disks. J. Fluid Mech. 511, 45–65.
Schouveiler, L., Le Gal, P. & Chauve, M. 2001 Instabilities of the flow between a rotating and astationary disk. J. Fluid Mech. 443, 329–350.
Serre, E., Tuliszka-Sznitko, E. & Bontoux, P. 2004 Coupled numerical and theoretical study ofthe flow transition between a rotating and a stationary disk. Phys. Fluids 16, 688–706.
Soong, C. Y., Wu, C. C., Liu, T. P. & Liu, T. P. 2003 Flow structure between two co-axial disksrotating independently. Expl. Therm. Fluid Sci. 27, 295–311.
Szeto, R. K. H. 1978 The flow between rotating coaxial disks. PhD thesis, California Institute ofTechnology, Pasadena.

[X]DELBENDE, I
Two-dimensional numerical study of thermoacoustic instability.Unpublished.


epl draft
Two-dimensional numerical study of thermoacoustic instability
I. Delbende1,2
1 Universite Pierre et Marie Curie-Paris 62 LIMSI–CNRS, BP 133, 91403 Orsay Cedex, France
PACS 43.35.Ud – Thermoacoustics, high temperature acoustics, photoacoustic effectPACS 43.20.Ks – Standing waves, resonance, normal modesPACS 47.20.-k – Flow instabilities
Abstract. - A two-dimensional numerical model is used in order to predict the onset of self-oscillations in a linear thermoacoustic engine. The full compressible Navier–Stokes equationsare linearised in the vicinity of a purely diffusive state, instability modes are computed, theirfrequency and growth rate are followed by a standard continuation technique when mean pressureand temperature gradient are varied. The onset of self-oscillations, which corresponds here to aHopf bifurcation of the first resonance mode, is compared to experimental results.
T= CTT
CTHT
H >T> CTHTT=
resonator
acoustic wave
stack cold
(a)
(b)
(c)
exchangerhot
exchanger
Fig. 1: (a) Schematic representation of a linear thermoacous-tic prime mover. (b) Computational domain pertaining to oneinter-plate space. A longitudinal temperature gradient is en-forced on fluid and plates (represented in bold) in the stackregion, between the hot region at temperature TH on the leftand the cold region at room temperature TC on the right. (c)Example of mesh (the vertical direction has been stretched bya factor of roughly 300).
p-1

I. Delbende
Introduction. – Among heat-driven devices, ther-moacoustic engines are rather attractive due to theirhigh reliability (no moving parts) and their ability to useenvironment-friendly working gases. Through recent de-velopments, their efficiency has become sufficiently largeto enter industrial processes such as gas liquefaction [1,2].The celebrated Rott equations used to model thermoa-coustic devices [3, 4] and subsequent refinements [5–7]rely on a plane pressure-wave assumption. The numericalmodel presented here is based on a two-dimensional for-mulation of the full compressible Navier–Stokes equationsand is aimed at describing the onset of instability inprime-movers. The two-dimensional framework allowsone to tackle situations where the plane-wave assumptionmay be inappropriate, such as an abrupt change in crosssections, or stack edges [8]. However, it is not within thescope of the present paper to investigate such cases indetail: after introducing the linear thermoacoustic engineand its numerical model, we focus on the numericalmethod used to obtain and follow the instability modes.Results and comparisons with experimental data providedby Bretagne et al. [2, 9] are eventually presented.
Linear thermoacoustic engine and model. – Thepresent study is concerned with a simple linear thermoa-coustic engine; such a device has been built at LIMSI–CNRS [9], which provides realistic geometrical and physi-cal parameters for the present numerical study. It consistsof a cylindrical resonator of length Lx = 3.12m filled withnitrogen at mean pressure p0. At 0.25m of one resonatorend, a stack of parallel plates of length l = 0.15m is placed,spaced by a gap of e = 7mm. Two heat exchangers areplaced at each end of the stack with temperatures TH andTC. They are supposed to enforce a steady longitudinaltemperature gradient of magnitude (TH −TC)/l along theplates, whereby the thermoacoustic instability may be ex-cited. The setup is sketched on figure 1a.
In their low-Mach-number model for thermoacoustic re-
frigerators, Worlikar et al. [10, 11] and Duthil et al. [12]adopted a computational domain located around theshort stack, and the forcing acoustic wave was takeninto account through upstream and downstream bound-ary conditions. Here we deal with an engine, for whichwave frequency and fluid velocity are a priori unknown.We thus consider a computational domain which ex-tends up to both resonator ends, although plane-wavemodeling would also be possible outside the stack re-gion [13, 14]. This 2D domain is elongated in the lon-gitudinal x−direction (length Lx) and relatively narrowin the transverse y−direction as it spans only one singleinterplate space (width e), as represented on figure 1b.The plates (represented in bold) are placed outside thedomain and act inside through lateral localized boundaryconditions. Plate thickness and blockage ratio effects arethus disregarded in the present paper. A stationary tem-perature gradient is assumed to be imposed to the gas by
external heat sources, which results in a basic temperaturedistribution T ⋆
0 (x⋆) depending on the longitudinal direc-tion only. A typical distribution for T ⋆
0 is as follows: tworegions with uniform temperature T ⋆
h (hot) and T ⋆c (cold)
are separated by a diffusion region where T ⋆0 (x⋆) decreases
from T ⋆h to T ⋆
c . In its basic state, the gas is at rest at theuniform pressure P ⋆
0 , at temperature T ⋆0 (x⋆).
Governing equations. The compressible Navier–Stokes equations are written in the perfect-gas approxima-tion. Bulk and shear viscosities are assumed to be linkedby the Stokes assumption. The equations are linearisedin the vicinity of the above basic state, and solutions aresought as departures from the basic variables, thereaftercalled acoustic variables. The coordinates x⋆ and y⋆, thecorresponding velocity components u⋆ and v⋆, the acoustictemperature θ⋆ and the acoustic specific mass ρ⋆ may benormalised using the domain length L⋆
x, the pressure P ⋆0 ,
the cold temperature T ⋆c and the corresponding density ρ⋆
c
as reference scales to yield:
x =x⋆
L⋆, y =
y⋆
L⋆, u =
u⋆
√
P ⋆0 /ρ⋆
c
,
v =v⋆
√
P ⋆0 /ρ⋆
c
, θ =θ⋆
T ⋆c
, ρ =ρ⋆
ρ⋆c
.(1)
The temporal evolution of the non-dimensional longitu-dinal velocity u, transverse velocity v, acoustic tempera-ture θ and acoustic specific mass ρ is thus governed by:
∂tu =T0
Re
[
4
3µ∂xx + µ∂yy
]
u +T0
Re
1
3µ∂xyv
+
[
T ′
0
T0
− ∂x
]
θ − T0 [T ′
0 + T0∂x] ρ ,
∂tv =T0
Re
1
3µ∂xyu +
T0
Re
[
µ∂xx +4
3µ∂yy
]
v
−∂yθ − T 20 ∂yρ ,
∂tθ = − [T ′
0 + (γ − 1)T0∂x]u − (γ − 1)T0∂yv
+γT0
Pe[k(∂xx + ∂yy)] θ ,
∂tρ =
[
T ′
0
T 20
−
1
T0
∂x
]
u −
1
T0
∂yv ,
(2)
with associated boundary conditions which will be dis-cussed farther. In system (2), the dynamic viscosity µ andthe thermal conductivity k which a priori both depend onthe basic temperature T0 are assumed constant, which af-fects the results up to a few percents only. Note thatin dimensionless form, the basic density ρ0 distributionis simply given by the perfect gas law ρ0(x) = 1/T0(x).Three numbers intervene in (2), namely the specific heatratio γ, the Reynolds number Re and the Peclet num-ber Pe defined by:
γ =C⋆
p
C⋆v
, Re =L⋆
x
√
P ⋆0 ρ⋆
c
µ⋆, P e =
L⋆xC⋆
p
√
P ⋆0 ρ⋆
c
k⋆, (3)
where C⋆p and C⋆
v respectively denote the gas specific heatat constant pressure and at constant volume.
p-2

Two-dimensional numerical study of thermoacoustic instability
ρθu
v
Fig. 2: Numerical cell. Acoustic density ρ and temperature θare located at the center, whereas u and v are located at themiddle of the “vertical” and “horizontal” edges respectively.
Boundary conditions. Concerning boundary condi-tions, the presence of the plates and of the heat exchangersis expressed through dynamical adherence u = v = 0 andperfect thermal contact θ = 0 at two facing boundary seg-ments represented in bold on figure 1b. At other horizontalboundaries, symmetry conditions ∂yu = v = ∂yθ = 0 areimposed, whereas on vertical boundaries u = ∂xv = ∂xθ =0.
Numerical methods. – The physical domain is di-vided in Nx by Ny cells (see figure 1c). Typically, Nx = 60and Ny = 18. The cells are rectangular and more concen-trated in the inter-plate space where boundary layer effectstake place. In each cell, the collocation points for the dif-ferent variables are shifted according to figure 2 in orderto prevent from spurious numerical odd/even oscillations.
Instability modes. The two-dimensional compressibleNavier–Stokes equations linearised in the vicinity of thesteady state with temperature distribution T0(x) are thendiscretised using a 2nd order finite difference scheme.Boundary conditions are enforced by quadratic extrapo-lation on fictive cells placed outside the physical domain.
Let w stand for the state vector of the system. The4N components of w are the values of the four variables(ui, vi, θi, ρi) relative to each of the N = (Nx +2)(Ny +2)computational cells:
w = (u1, v1, θ1, ρ1, · · · , uN , vN , θN , ρN )T . (4)
Discretising and enforcing boundary conditions lead to alinear differential system:
dw
dt= Lw , (5)
where L denotes the discrete linearised evolution operator.As the coefficients in matrix L do not depend on time,solutions may be sought as a combination of normal modesw(t) of the form: w(t) = weλt + c.c., where the complexvector w and the complex number λ satisfy the relationLw = λw. The eigenvector w represents the complexamplitude describing the spatial organisation and phasefor the mode considered, whereas the temporal evolutionis described by λ: the real part λr is the temporal growthrate, and the imaginary part λi is the oscillation frequency.
The eigenvectors and associated eigenvalues of the bandmatrix L are thus sought, which requires a lot of compu-tational time if one is interested in having a full pictureof the modes. Practically, such a computation is run oncefor each new geometry. A continuation method is thenused to follow the eigenvalue λ relative to a given modewhen the temperature gradient and the mean pressure arevaried. Such a procedure, performed here for the first twoinstability modes, is described below.
Continuation method. Let (w0, λ0) be one eigenmode(with the associated eigenvalue) pertaining to operator L
0
for a given set of parameters, as obtained in the abovesection. If pressure and/or temperature gradient are var-ied, one wishes to find the new eigencouple (w, λ) closeto (w0, λ0) corresponding to the new operator L. Thisamounts to solve the nonlinear equation
F (w, λ) ≡ (L − λI)w = 0 . (6)
The 4N + 1 complex unknown variables (w, λ) are foundby a Newton procedure, using (w0, λ0) as guess values. Atthe (k+1)th iteration step of the Newton method, one hasto solve the linear system
(L − λkI)∆wk+1
− ∆λk+1wk = −(L − λkI)wk (7)
for (∆wk+1,∆λk+1), where
∆λk+1≡ λk+1
− λk , ∆wk+1≡ wk+1
− wk . (8)
This linear system with bordered structure is solved usinga block LU decomposition based on a Crout factorisa-tion [15]. In practice, only 2 or 3 Newton iterations areneeded to ensure a –satisfactory– precision of 10−5.
Results of the instability study. – Upon apply-ing the two procedures listed in the previous section, weanalyse the stability of the basic diffusive state when theparameters — temperature gradient and mean pressure —are varied.
Full picture of instability modes. A full picture of theinstability modes is first given for fixed mean pressurep0 = 2bar and the bifurcation induced by increasing thetemperature gradient is presented.
As the discretised evolution operator L is real, the spec-trum consists of pairs of complex conjugate eigenmodes.On figure 3, the dimensionless eigenvalues are presentedin the complex λ−plane. As in an empty resonator, theirfrequencies λi are multiples of the fundamental (mode 1).When (TH − TC)/TC = 0 (figure 3a), all modes are sit-uated in the λr < 0 half plane, indicating that they areall damped. As no energy is injected into the system,the modes simply decay, mainly because of viscous dissi-pation along the plates: this decay is hence more rapidwhen a velocity antinode is expected within the stack (seef.i. mode 5).
p-3

I. Delbende
−0.4 −0.3 −0.2 −0.1 0 0.1−80
−40
0
40
80
λr
λi
(a)
5
82 1
13
−0.4 −0.3 −0.2 −0.1 0 0.1−80
−40
0
40
80(b)
λr
λi
−0.4 −0.3 −0.2 −0.1 0 0.1−80
−40
0
40
80(c)
λr
λi
Fig. 3: Non-dimensional instability spectrum for p0 = 2bar (a)at (TH − TC)/TC = 0, (b) at onset (TH − TC)/TC = 0.45, (c)at (TH − TC)/TC = 1. In the complex λ plane, λi denotes theoscillation frequency, and λr the temporal growth rate.
When a temperature gradient is enforced, the modesshift as shown on figure 3b for (TH−TC)/TC = 0.45. Someof them become more damped, while other become moreunstable. In particular, mode 1 (the fundamental mode)is crossing the vertical axis from left to right: the value(TH − TC)/TC = 0.45 thus corresponds to the instabilitythreshold whereby the system undergoes a Hopf bifurca-tion towards a self-excited state oscillating at frequencyλi.
When the temperature gradient is further increased,mode 1 becomes more unstable, and mode 2 is less andless damped. Bifurcation of mode 2 (the first harmonic)occurs near (TH − TC)/TC = 1, as depicted on figure 3c.
Instability modes 1 and 2. The instability propertiesof modes 1 and 2 when (TH−TC)/TC and p0 are varied havebeen determined by the continuation method presentedabove.
1 2 3 4p0 (bar)0
0.5
1
1.5(T
H-T
C)/
TC
58.25
58.25
58
58
5960
61 57.5
Frequency (Hz)
+
1 2 3 4p0 (bar)0
0.5
1
1.5
(TH-T
C)/
TC
0
4
8
-4-8
14Growth rate (s-1)
STABLE
UNSTABLE
Fig. 4: Isolines of the dimensional frequency (top) and tem-poral growth rate (bottom) for mode 1 as a function of themean pressure p0 and non-dimensional temperature difference(TH − TC)/TC.
Figures 4a and 4b respectively show the isolines ofthe dimensional growth rate and oscillation frequency formode 1. Of special interest on figure 4a is the line λr = 0which delimits the stability region (below) from the in-stability region (above). As already observed in earlierstudies by Atchley et. al [16], this curve presents a mini-mum (here at 1.5bar) corresponding to the optimal ther-mal boundary layer thickness with respect to the platespacing. A substantial increase of the oscillation frequencyis predicted for high temperatures and low pressures (seefigure 4b). This phenomenon is partly due to the increaseof the sound velocity with T which acts directly on thefrequency, and partly to the thickening of boundary layersin the stack, which acts then as a capillary tube.
The same variables are plotted on figure 5 for mode2 (first harmonic). The instability region is reached forhigher temperature gradients. Regarding the frequency,
p-4

Two-dimensional numerical study of thermoacoustic instability
0.5 1 1.5 2 2.5 3 3.5 4p0 (bar)0
0.5
1
1.5
(TH-T
C)/
TC
117
116.75
116
115
117
118
120
Frequency (Hz)
0.5 1 1.5 2 2.5 3 3.5 4p0 (bar)0
0.5
1
1.5
(TH-T
C)/
TC
0
612
-6
-12
Growth rate(s-1)
STABLE
INSTABLE
Fig. 5: Isolines of the dimensional frequency (top) and tem-poral growth rate (bottom) for mode 2 as a function of themean pressure p0 and non-dimensional temperature difference(TH − TC)/TC.
the same trends prevail as for mode 1.
Marginal curves: comparison with experiments. Inthis section, the above results are tentatively confrontedto experimental results available in [2]. On figure 6a, themarginal λr=0 curves for modes 1 and 2 are plotted, forboth numerical (lines) and experimental (squares) stud-ies. A rather poor qualitative agreement is observed re-garding the instability thresholds. In the pressure rangecovered here, the marginal curves for mode 1 and 2 donot cross, which they do experimentally. Three reasonsmay be invoked to interpret these discrepancies. Firstly,the dissipation at the outer cylinder cannot obviously betaken into account here: more dissipation could shift thenumerical marginal curve closer to its experimental coun-terpart. Secondly, blockage ratio effects in the stack andthe heat exchangers have been neglected. Thirdly, in theexperimental setup, thermal leaks associated to perma-nent flows may strongly shift the instability thresholds.This is probably the main cause of the discrepancies ob-served. On figure 6b, the frequency at onset is plotted
0 1 2 3 40
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6 2
Fre
quen
cy(H
z)
(a)
(TH−
TC)/
TC
1
p0 (bar)
2
mode 1
4 0 1 2 3 40
30
60
90
120Fre
quen
cy(H
z)
(b)
p0 (bar)
Fig. 6: (a) Marginal λr=0 curves in the plane of mean pressurep0 and non-dimensional temperature difference (TH − TC)/TC
for mode 1 (solid line) and mode 2 (dashed line), as obtainedby the numerical model. Experimental data are also plotted formode 1 (filled boxes) and mode 2 (empty boxes). (b) Dimen-sional frequency as a function of pressure along the marginalcurve (i.e. at onset).
for modes 1 and 2. The agreement here is very good, asexpected since these frequencies are very close to the res-onance frequencies of the empty tube.
Conclusion. – A two-dimensional numerical modelof a linear thermoacoustic engine has been implemented.The compressible Navier–Stokes equations are discretisedand linearised in the vicinity of a steady conductive ba-sic state. The instability modes can then be computedand followed by a Newton continuation method when thetemperature difference and the mean pressure are varied.The Hopf bifurcation giving rise to thermoacoustic oscil-lations has been recovered. The instability properties forthe first two modes have been mapped in the pressure
p-5

I. Delbende
and temperature-gradient parameter plane. The marginalcurves agree qualitatively with experimental data. Thepresent numerical procedures are very efficient and shouldbe extended to take into account stack blockage ratio ef-fects as well as convective permanent motions if any.
∗ ∗ ∗
Fruitful discussions with Diana Baltean–Carles,Emmanuel Bretagne, Olivier Daube, Maurice-XavierFrancois, Patrick Le Quere, Laurette Tuckerman andCatherine Weisman are acknowledged. Many thanksto Yann Fraigneau and Dang Anh Tuan for their kindassistance.
REFERENCES
[1] Backhaus S. and Swift G.W., J. Acoust. Soc. Am., 107(2000) 3148.
[2] Bretagne E., Ph.D. Thesis (Universite Pierre et MarieCurie-Paris 6) 2001.
[3] Rott N., Adv. Appl. Mech., 20 (1980) 135.[4] Swift G.W., J. Acoust. Soc. Am., 84 (1988) 1145.[5] Watanabe M., Prosperetti A. and Yuan H., J.
Acoust. Soc. Am., 102 (1997) 3484.[6] Penelet G., Gusev V., Lotton P. and Bruneau M.,
Phys. Rev. E, 72 (2005) 016625.[7] Sugimoto N. and Yoshida M., Phys. Fluids, 19 (2007)
074101.[8] Zoontjens L., Howard C.Q., Zander A.C. and Caz-
zolato B.S., Int. J. Heat Mass Transfer, 51 (2008) 4829.[9] Bretagne E., Francois M.-X. and Delbende I., J.
Acoust. Soc. Am., 107(5) (2000) 2819.[10] Worlikar A.S. and Knio O.M., J. Comp. Phys., 127
(1996) 424.[11] Worlikar A.S., Knio O.M. and Klein R., J. Comp.
Phys., 144 (1996) 299.[12] Duthil P., Weisman C., Bretagne E. and Francois
M.-X, The International Journal of Transport Phenom-
ena, 6(4) (2004) 265.[13] Hireche O., Weisman C., Baltean-Carles D.,
Bauwens L., Francois M.-X. and Le Quere P., J.
Acoust. Soc. Am., 123 (2008) 3708.[14] Hireche O., Weisman C., Baltean-Carles D.,
Francois M.-X., Le Quere P. and Bauwens L., Cana-
dian Acoustics, 36(3) (2008) 164.[15] Govaerts W.J.F., Numerical Methods for Bifurcations
of Dynamical Equilibria (SIAM) 2000, p. 63.[16] Atchley A.A. and Kuo F., J. Acoust. Soc. Am., 95
(1994) 1401.
p-6



ResumeCe travail est consacre a l’etude de la dynamique de plusieurs systemes tourbillonnaires. La metho-dologie utilisee couple et confronte des simulations numeriques directes desequations de Navier–Stokes et des calculs de modes d’instabilites des divers systemesa des modeles analytiques. Danscet esprit sontetudiees les instabilites dans des tourbillons avececoulement axial, la dynamique bidi-mensionnelle des dipoles et leur reconnexion tri-dimensionnelle. Le memoire replace cesetudes dansle cadre de l’interaction entre vorticite et deformationa laquelle un chapitre est consacre. Un autrechapitre concerne la dynamique des tourbillons helicoıdaux et, plus generalement, desecoulementsasymetrie helicoıdale. Tous ces travaux mettent enevidence des principes physiques pouvant aidera lacomprehension desecoulements de sillages tourbillonnairesa l’aval des avions, des helicopteres, deshelices, deseoliennes...Mots-clesVortex, tourbillons, jets tourbillonnaires, sillages tourbillonnaires, dipoles tourbillonnaires, tourbillonshelicoıdaux, instabilites, dynamique non lineaire, symetrie helicoıdale, deformation.
AbstractIn this work, the dynamics of several vortex systems are studied. A methodology is used whereby di-rect numerical simulations of the Navier–Stokes equationsand the computation of instability modes invarious systems are coupled and compared to analytical models. In this spirit, instabilities in vorticeswith axial flow, two-dimensional dynamics of vortex dipolesand their three-dimensional reconnectionare investigated. In the memoir, these topics are put in the framework of vorticity/strain interactions,to which a chapter is devoted. Another chapter deals with thedynamics of helical vortices, and moregenerally of flows with helical symmetry. All these studies put into evidence some physical principleswhich may help to the understanding of wake flows behind aircrafts, helicopters, propellers, windturbines...KeywordsVortices, swirling jets, trailing vortices, vortex dipoles, helical vortices, instabilities, nonlinear dyna-mics, helical symmetry, strain.