Embed Size (px)
Citation preview
Équations différentiellesLe corps des scalaires, ℝ ou ℂ est noté K. L'espace vectoriel des n -uplets K n est canoniquement assimilé à l'espace vectoriel des matrices colonnes Mn ,1 (K ) .
0. Pré-requis....................................................................................................................................p.1Théorème fondamental de l'analyse. Équations différentielles linéaires scalaires d'ordre 1. Équations différentielles linéaires scalaires d'ordre 2 à coefficients constants.
1. Équations différentielles linéaires scalaires d'ordre 2..............................................p.9Théorème de Cauchy linéaire.Équation différentielle avec second membre. Principe de superposition.Résolution dans le cas où une solution de l'équation homogène ne s'annulant pas est connue.
2. Systèmes différentiels linéaires à coefficients constants.........................................p.11Écriture matricielle d'un système différentiel linéaire homogène à coefficients constants.Existence et unicité de la solution d'un problème de Cauchy.Structure de l'ensemble des solutions.Comportement asymptotique des solutions.Équivalence entre une équation différentielle scalaire linéaire homogène d'ordre n et un système de n équations différentielles linéaires d'ordre 1.
--------------
0. Pré-requis
Théorème de « la dérivée nulle sur un intervalle »
Soient I un intervalle et f : I→K une fonction dérivable sur l'intervalle I. Si ∀ x∈I , f ' (x )=0 alors il existe un scalaire k∈K tel que ∀ x∈I , f (x )=k .
Démonstration : d'après l'inégalité des accroissements finis (le théorème des accroissements finis n'étant pas valide pour les fonctions à valeurs complexes), ∀ (a ;b )∈I2 , ∣f (b )− f (a )∣⩽(sup
x∈I∣f ' ( x )∣)∣b−a∣
Or ici supx∈I∣f ' (x )∣=0 donc ∀ (a ;b )∈I2 , f (b )= f (a ) . □
Ce théorème est faux si I n'est pas un intervalle.
Exemple : pour f : x→arctan( 1x )+arctan (x )
f est dérivable sur ℝ * et ∀ x∈ℝ *, f ' (x )=0Et pourtant f n'est pas constante sur ℝ * !
Corollaire : sur les primitives d'une fonction continue sur un intervalle
Deux primitives, sur un intervalle I, d'une même fonction continue sur I diffèrent d'une constante.
Démonstration : soient f : I→K et g : I→K telles que ∀ x∈I , f ' (x )=g ' (x ) alors ∀ x∈I , ( f −g )' (x )=0Donc ∃ k∈K tel que ∀ x∈I , f ( x )−g ( x )=k . □
Théorème fondamental de l'analyse
Soient I un intervalle, f : I→K , x0∈I et y0∈K .Si f est continue sur l 'intervalle I alors
l'unique primitive de f sur I, valant y0 en x0 est la fonction F définie sur I par : F ( x )=∫x0
xf (t )dt+ y0
Démonstration : soit f une fonction continue sur I, x∈I et h∈ℝ* tel que x+h∈I alors :
Équations différentielles 1/18 pycreach.free.fr - TSI2
F ( x+h)−F (x )=∫x0
xf (t )dt−∫x0
x+hf (t )dt=∫x
x+hf (t )dt et ∫x
x+hf (x )dt=h f (x )
Ainsi, ∣F (x+h)−F (x )h
− f ( x )∣=∣1h(∫x
x+hf (t )dt+∫x
x+hf ( x )dt )∣= 1
∣h∣∣∫x
x+h( f (t )− f ( x ))dt∣
Pour h>0 , on a donc : ∣F (x+h)−F (x )h
− f ( x )∣⩽ 1h∫x
x+h∣f (t )− f ( x )∣dt
Pour h<0 , on a donc : ∣F (x+h)−F ( x )h
− f (x )∣⩽ 1−h∫x+h
x∣ f (t )− f ( x )∣dt=
1h∫x
x+h∣ f ( t )− f ( x )∣dt
Or f étant continue en x , ∀ε>0 , ∃η>0 tel que ∣x−t∣<η⇒∣f (t )− f (x )∣<ε
Donc ∀ε>0 , ∃h∈ℝ* tel que ∣F (x+h)−F ( x )h
− f (x )∣⩽ hh ε=εCe qui signifie que lim
h→0
F( x+h )−F(x )h
= f (x ) donc F' (x )= f ( x ) □
Équations différentielles linéaires scalaires du premier ordre
Soient I un intervalle, x0∈I , deux fonctions a :I→K et f : I→K continues sur l'intervalle I et l'équation différentielle (E) : y'+a (x )× y= f ( x ) .
►Caractérisation des solutions de (E) sur l'intervalle I :g est solution de (E) sur I si et seulement si g∈C1 ( I; K ) et ∀ x∈I , g' (x )+a ( x )×g (x )= f (x )
► L'équation différentielle homogène associée à (E) est (H ) : y' +a (x ) y=0
L'ensemble des solutions de (H ) sur l'intervalle I est la droite vectorielle de C1 (I ; K ) : D= VectK (I → K
x → e−∫x 0
xa (u)du)
► Soit g une solution ( appelée « particulière ») de (E) sur I, alors l'ensemble des solutions de (E) sur I est le sous-
ensemble de C1 (I ; K ) (K_sous-espace affine de direction D) : {I → Kx → g ( x )+h (x )
∣h solution de (H) sur I}► Existence et unicité de la solution d'un problème de Cauchy :
Soit y0∈K . Le problème de Cauchy {y'+a (x ) y= f (x )y ( x0 )= y0
admet une unique solution sur l'intervalle I : la condition
initiale permet de fixer le paramètre libre pour les solutions de y'+a (x ) y= f (x ) sur I.
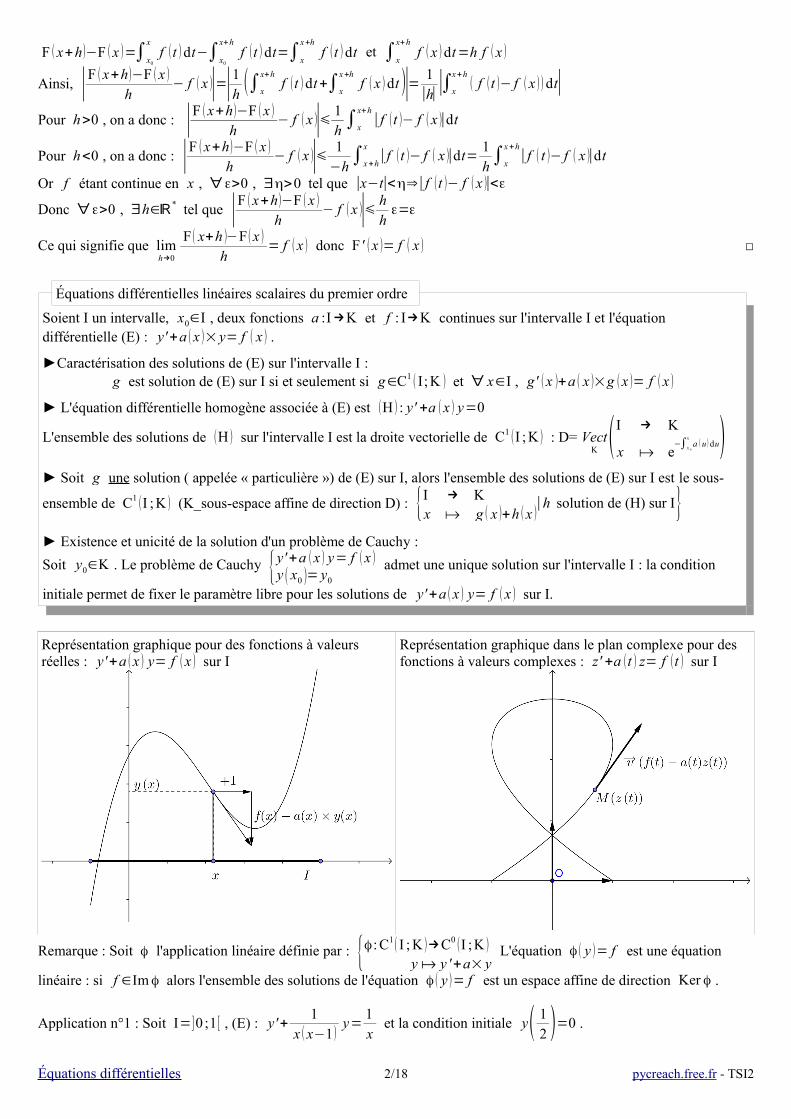
Représentation graphique pour des fonctions à valeurs réelles : y'+a (x ) y= f (x ) sur I
Représentation graphique dans le plan complexe pour des fonctions à valeurs complexes : z' +a (t ) z= f (t ) sur I
Remarque : Soit φ l'application linéaire définie par : {φ : C1( I ; K )→C0 (I ;K )
y→ y '+a× y L'équation φ ( y )= f est une équation
linéaire : si f ∈Im φ alors l'ensemble des solutions de l'équation φ ( y )= f est un espace affine de direction Ker φ .
Application n°1 : Soit I=]0 ;1[ , (E) : y'+1
x ( x−1)y=
1x
et la condition initiale y( 12 )=0 .
Équations différentielles 2/18 pycreach.free.fr - TSI2

1) Vérification des hypothèses : I est un intervalle et x→1
x (x−1) et x→
1x
sont continues sur ]0;1[ et à valeurs dans
ℝ .
2) Résolution sur ]0;1[ de l'équation différentielle homogène (EH ) : y'+1
x ( x−1)y=0
∀ x∈]0; 1 [ , 1
x ( x−1)=−
1x+
1x−1
donc ∫12
x 1t (t−1)
dt=∫12
x−
1t+
1t−1
dt=[−ln (t )+ln (1−t ) ]t=
12
t=x=−ln (x )+ln (1−x )
De plus eln (x )−ln (1−x )=x
1−x donc l'ensemble des solutions de (EH) sur ]0;1[ est Vect
ℝ (]0;1[ → ℝ
x →x
1−x)
3) Recherche d'une solution particulière de (E) sur ]0;1[ à l'aide de la méthode de « variation de la constante ».
Soit λ∈C1 (]0;1[ ;ℝ ) et g définie par ∀ x∈]0; 1[ , g ( x )=λ (x )x
1−x
Alors g est dérivable sur ]0 ;1[ et ∀ x∈]0 ; 1[ g' (x )=λ ' ( x )x
1−x+λ ( x )
1
(1−x )2
Donc ∀ x∈]0; 1[ , g' (x )+1
x ( x−1)×g ( x )=λ ' ( x )
x1−x
+λ ( x )1
(1−x )2+
1x (x−1)
×λ ( x )x
1−x=λ ' (x )
x1−x
x→λ (x )x
1−x est solution de (E) sur ]0;1[ ⇔ ∀ x∈]0; 1 [ , λ ' ( x )
x1−x
=1x
⇔ ∀ x∈]0; 1 [ , λ ' ( x )=1−x
x2
⇔ ∀ x∈]0; 1 [ , λ ' ( x )=1
x2−
1x
⇔ ∃k∈ℝ tel que ∀ x∈]0; 1[ , λ ( x )=−1x−ln (x )+k
Par exemple la fonction x→(− 1x−ln ( x )) x
1−x est solution de (E) sur I.
4) Résolution du problème de Cauchy.
g est solution de (E) sur ]0;1[ si et seulement s'il existe C∈ℝ tel que ∀ x∈]0; 1 [ , g (x )=1x−1
+x ln (x )x−1
+Cx
1−x
Or 1
12−1
+
12
ln( 12 )
12−1
+C
12
1−12
=−2+ ln (2)−C et −2+ln (2 )+C=0 ⇔ C=2−ln (2)
Ainsi : g est solution de (E) sur ]0;1[ et g( 12 )=0 ⇔ ∀ x∈]0 ; 1[ , g (x )=
1x−1
+x ln (x )x−1
+(2−ln (2 ))x
1−xExemples de codes Python permettant l'approximation d'un problème de Cauchy :
En implémentant la méthode d'Euler explicite utilisant la relation : y ( x+ε)= y (x )+ε y' (x )+o (ε )
123456789101112131415
a=lambda x: 1/(x*(x-1))f=lambda x: 1/x
x,y=1/2,0X,Y=[x],[y]ep=0.001for k in range(400): y=y+ep*(-a(x)*y+f(x)) x=x+ep X.append(x) Y.append(y)
import matplotlib.pyplot as pltplt.plot(X,Y)plt.show()
En utilisant odeint (« fonction donnant y' (x ) à l'aide de x et y » , y ( x0) , [ x0 ;....])123456789101112
def y_prime_de_x(y,x): return -1/(x*(x-1))*y+1/x
import numpy as npX = np.linspace(0.5, 0.9, 1000)
from scipy.integrate import odeintY=odeint(y_prime_de_x,0,X)
import matplotlib.pyplot as pltplt.plot(X,Y)plt.show()
Équations différentielles 3/18 pycreach.free.fr - TSI2
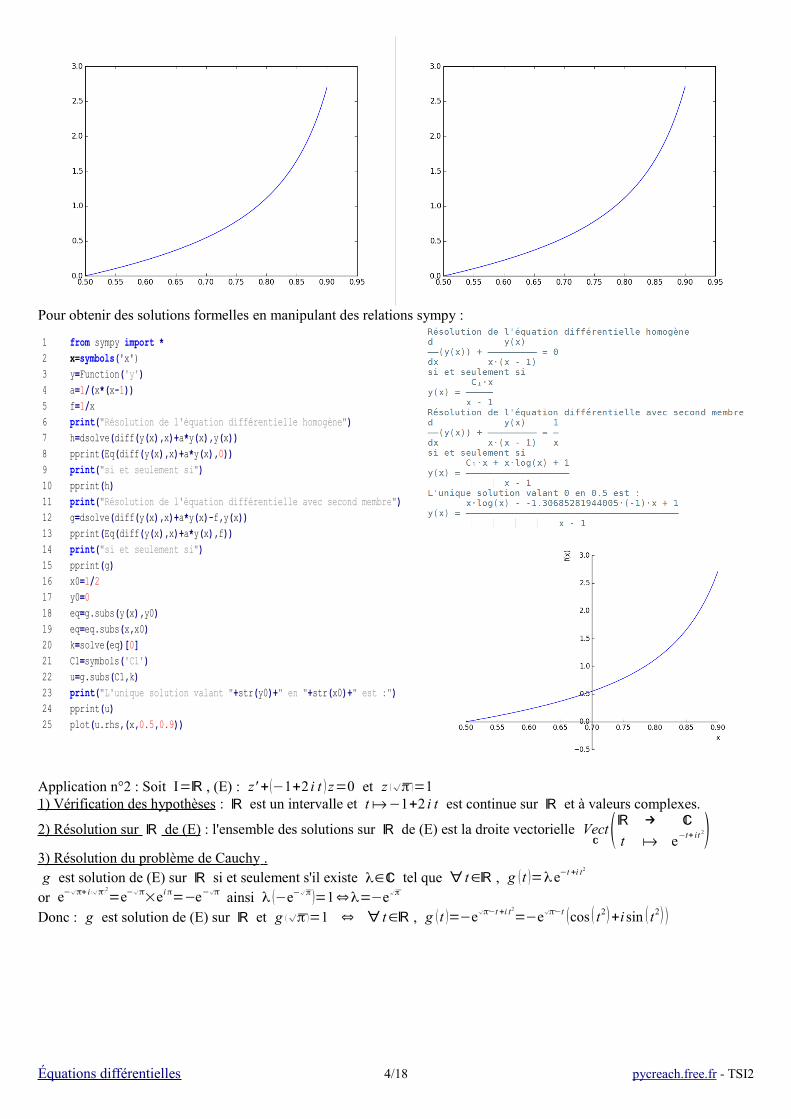
Pour obtenir des solutions formelles en manipulant des relations sympy :
12345678910111213141516171819202122232425
from sympy import *x=symbols('x')y=Function('y')a=1/(x*(x-1))f=1/xprint("Résolution de l'équation différentielle homogène")h=dsolve(diff(y(x),x)+a*y(x),y(x))pprint(Eq(diff(y(x),x)+a*y(x),0))print("si et seulement si")pprint(h)print("Résolution de l'équation différentielle avec second membre")g=dsolve(diff(y(x),x)+a*y(x)-f,y(x))pprint(Eq(diff(y(x),x)+a*y(x),f))print("si et seulement si")pprint(g)x0=1/2y0=0eq=g.subs(y(x),y0)eq=eq.subs(x,x0)k=solve(eq)[0]C1=symbols('C1')u=g.subs(C1,k)print("L'unique solution valant "+str(y0)+" en "+str(x0)+" est :")pprint(u)plot(u.rhs,(x,0.5,0.9))
Application n°2 : Soit I=ℝ , (E) : z' +(−1+2 i t ) z=0 et z (√π )=11) Vérification des hypothèses : ℝ est un intervalle et t→−1+2 i t est continue sur ℝ et à valeurs complexes.
2) Résolution sur ℝ de (E) : l'ensemble des solutions sur ℝ de (E) est la droite vectorielle Vectℂ (
ℝ → ℂ
t → e−t+ it2)
3) Résolution du problème de Cauchy .g est solution de (E) sur ℝ si et seulement s'il existe λ∈ℂ tel que ∀ t∈ℝ , g (t )=λe−t +i t
2
or e−√π+ i (√π )2
=e−√π×ei π=−e−√π ainsi λ (−e−√π )=1⇔λ=−e√π
Donc : g est solution de (E) sur ℝ et g (√π )=1 ⇔ ∀ t∈ℝ , g (t )=−e√π−t +i t2
=−e√π−t (cos ( t2)+i sin ( t2) )
Équations différentielles 4/18 pycreach.free.fr - TSI2

Rappels sur les équations différentielles linéaires d'ordre 2 à coefficients constants : Soient a et b deux nombres complexes, I un intervalle et f : I→ℂ une fonction continue sur un intervalle I.
L'application : Φ : C2 (I ,ℂ )→C0( I ;ℂ ) y→ y' '+a y' +b y
est ℂ -linéaire donc l'équation Φ ( y )= f est une équation linéaire, ainsi
l'ensemble de ses solutions est un ℂ _espace affine de direction KerΦ .
De plus y'' +ay'+by=0 ⇔ ( y'y '')=(0 1−b −a)( yy' ) ⇔ Y'=AY avec Y=( yy ') et A=( 0 1
−b −a)Or le polynôme caractéristique χA (X )=∣X −1
b X+a∣=X (X+a )+b=X2+aX+b
Alors χA (X ) est scindé dans ℂ [ X ] à racines simples si et seulement si...Dans ce cas A est semblable à une matrice ….La méthode de résolution de ce système d'équations différentielles sera exposée dans la partie II de ce cours.Si Δ=0 alors χA (X ) est scindé dans ℂ [ X ] et admet une seule racine double donc la matrice A est... De plus la matrice A n'est pas diagonalisable sinon elle serait semble à une matrice scalaire (λ I2) et serait donc elle même une matrice scalaire ce qui est absurde. Ainsi la matrice A est semblable à une matrice …
Solutions complexes des équations différentielles linéaires du second ordre à coefficients constants et réels
Soient a et b deux réels et f : I→ℂ une fonction continue sur un intervalle I.L'équation différentielle linéaire d'ordre 2 à coefficients constant (E) : z' '+az'+bz= f (t )a pour équation différentielle homogène l'équation différentielle (H ) : z' '+az'+bz=0
Soit Δ le discriminant de l'équation caractéristique (C ) : r 2+ar+b=0 .► Solutions de l'équation différentielle homogène :Si Δ≠0 alors en notant z1 et z 2 les racines complexes distinctes de l'équation caractéristique (C ) , l'ensemble des solutions de l'équation différentielle homogène (H ) sur I est le ℂ _espace vectoriel de dimension 2 :
Vectℂ ( I→ℂ
t→ez1 t; I→ℂt→ ez2 t)
Si Δ=0 alors en notant z 0 la racine complexe double de l'équation caractéristique (C ) , l'ensemble des solutions de l'équation différentielle homogène (H ) sur I est le ℂ _espace vectoriel de dimension 2 :
Vectℂ ( I→ℂ
t→ ez0 t; I→ℂt→ te z0t)
► Solutions de l'équation différentielle avec second membre :En notant g : I→ℂ une solution particulière de l'équation différentielle (E), l'ensemble des solutions de l'équation
différentielle (E ) sur I est le ℂ _espace affine de dimension 2 : {I → ℂ
t → g (t )+h (t )∣h solution de (H ) sur I}
► Existence et unicité de la solution d'un problème de Cauchy .
Soient t0∈I , z 0∈ℂ et z1∈ℂ . Le problème de Cauchy {z '' +az' +bz= f ( t )z ( t0)=z0
z ' (t0 )=z1
admet une unique solution sur I : les
deux conditions dites initiales permettent de fixer les deux paramètres pour les solutions de z' '+az'+bz= f (t ) sur I.
Équations différentielles 5/18 pycreach.free.fr - TSI2
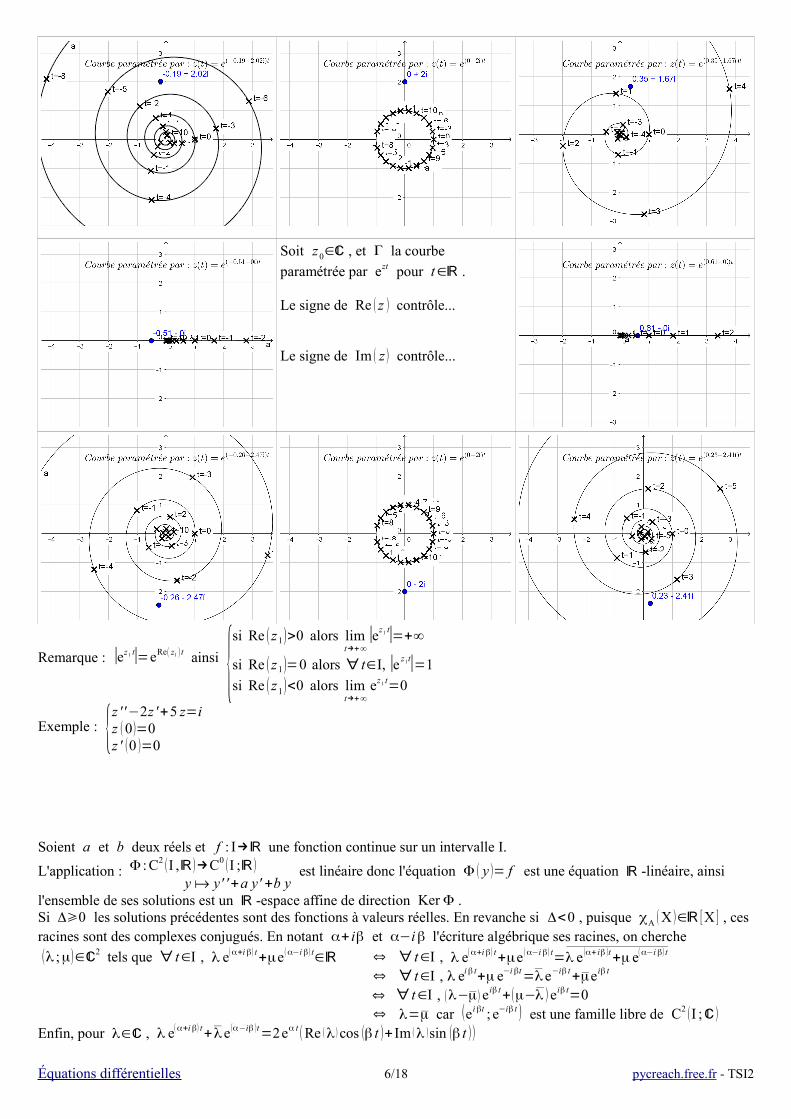
Soit z0∈ℂ , et Γ la courbe
paramétrée par ezt pour t∈ℝ .
Le signe de Re ( z ) contrôle...
Le signe de Im ( z ) contrôle...
Remarque : ∣ez1 t∣=eRe( z1 ) t ainsi {si Re (z1)>0 alors lim
t→+∞∣ez1 t∣=+∞
si Re (z1)=0 alors ∀ t∈I, ∣e z1t∣=1
si Re (z1)<0 alors limt→+∞
ez1 t=0
Exemple : {z ''−2z'+5 z=iz (0)=0z ' (0 )=0
Soient a et b deux réels et f : I→ℝ une fonction continue sur un intervalle I.
L'application : Φ : C2 (I ,ℝ )→C0 (I ;ℝ ) y→ y' '+a y' +b y
est linéaire donc l'équation Φ ( y )= f est une équation ℝ -linéaire, ainsi
l'ensemble de ses solutions est un ℝ -espace affine de direction KerΦ .Si Δ⩾0 les solutions précédentes sont des fonctions à valeurs réelles. En revanche si Δ<0 , puisque χA (X )∈ℝ [X ] , ces racines sont des complexes conjugués. En notant α+ iβ et α−iβ l'écriture algébrique ses racines, on cherche
(λ ;μ)∈ℂ2 tels que ∀ t∈I , λ e(α+i β) t+μe(α−i β) t∈ℝ ⇔ ∀ t∈I , λ e(α+i β) t+μe(α−i β) t=λ e(α+ iβ )t+μ e(α−i β) t
⇔ ∀ t∈I , λ eiβ t+μ e−i βt=λ e−iβ t+μeiβ t
⇔ ∀ t∈I , (λ−μ) eiβ t+(μ−λ )eiβ t=0⇔ λ=μ car (ei βt ; e−iβ t ) est une famille libre de C2 (I ;ℂ )
Enfin, pour λ∈ℂ , λ e(α+i β) t+λ e(α−iβ )t=2eα t (Re (λ )cos (β t )+Im (λ )sin (β t ))
Équations différentielles 6/18 pycreach.free.fr - TSI2

Solutions réelles des équations différentielles linéaires du second ordre à coefficients constants et réels
Soient a et b deux réels et f : I→ℝ une fonction continue sur un intervalle I.L'équation différentielle linéaire d'ordre 2 à coefficients constant (E) : y'' +ay'+by= f (x )a pour équation différentielle homogène l'équation différentielle (H ) : y'' +ay'+by=0
Soit Δ le discriminant de l'équation caractéristique (C ) : r 2+ar+b=0 .► Solutions de l'équation différentielle homogène :Si Δ>0 alors en notant r1 et r 2 les racines réelles distinctes de l'équation caractéristique (C ) , l'ensemble des solutions de l'équation différentielle homogène (H ) sur I est le ℝ _espace vectoriel de dimension 2 :
Vectℝ ( I→ℝ
x→er1 x; I→ℝx→er2 x) .
Si Δ=0 alors en notant r la racine réelle double de l'équation caractéristique (C ) , l'ensemble des solutions de l'équation différentielle homogène (H ) sur I est le ℝ _espace vectoriel de dimension 2 :
Vectℝ ( I→ℝ
x→erx; I→ℝx→ xerx)
Si Δ<0 alors α+ iβ et α−iβ étant les racines complexes conjuguées de l'équation caractéristique (C ) , l'ensemble des solutions de l'équation différentielle homogène (H ) sur I est le ℝ _espace vectoriel de dimension 2 :
Vectℝ ( I→ℝ
x→eα x cos (β x ); I→ℝx→eα x sin (β x ))
Rappel a cos (θ )+b sin (θ )=Re ((a−ib )ei θ)=√a 2+b2 cos (θ−arg (a+ ib))
► Solutions de l'équation différentielle avec second membre :En notant g : I→ℝ une solution particulière de l'équation différentielle (E), l'ensemble des solutions de l'équation
différentielle (E ) sur I est le ℝ _espace affine de dimension 2 : {I → ℝ
x → g ( x )+h (x )∣h solution de (H ) sur I}
► Existence et unicité de la solution d'un problème de Cauchy .
Soient x0∈I , y0∈ℝ et y1∈ℝ . Le problème de Cauchy {y' '+ay' +by= f ( x )y (x0 )= y 0
y' ( x0)= y1
admet une unique solution sur I : les
deux conditions dites initiales permettent de fixer les deux paramètres pour les solutions de y'' +ay'+by= f (x ) sur I.
Remarque : soit (α ;β)∈ℝ2 , pour x∈ℝ ,
{eα x cos (β x )=
12
e (α+ iβ )x+12
e(α−iβ) x
eα xsin (β x )=12 i
e(α+ iβ )x−12 i
e(α−i β) x
⇒ Vectℂ ( I→ℝ
x→eα x cos (β x ); I→ℝx→eα x sin (βx )) ⊂ Vect
ℂ (I→ℂx→ e(α+ iβ ) x
; I→ℂx→e(α+i β) x)
{e(α+i β) x=eα xcos (β x )+i eα x sin (β x )
e(α−i β)x=eα x cos (β x )−ieα x sin (β x ) ⇒ Vect
ℂ (I→ℂx→e(α+ iβ ) x
; I→ℂx→e(α+i β) x) ⊂ Vect
ℂ (I→ℝx→eα x cos (β x )
; I→ℝx→eα x sin (β x ))
Ainsi : Vectℂ (I→ℂ
x→e(α+ iβ ) x; I→ℂx→e(α+i β) x) = Vect
ℂ ( I→ℝx→eα x cos (β x )
; I→ℝx→eα x sin (βx ))
Exemple : {y' '+2y' +3 y=xy (0)=1y' (0 )=−1
...
Exemples de codes Python permettant l'approximation d'un problème de Cauchy :
On a : y'' +ay'+by= f ( x ) ⇔ y''= f (x )−ay'−by ⇔ ( y'y '' )=(0f (x ))+(
0 1−b −a)( yy')
Ainsi en notant Y=( yy ') et A=( 0 1−b −a) on a (E) : Y'=( 0
f ( x ))+AY et Y (0 )=(y0
y1)
Équations différentielles 7/18 pycreach.free.fr - TSI2
En implémentant la méthode d'Euler utilisant la relation : Y ( x+ε )=Y ( x )+εY' (x )+o (ε )
123456789101112131415
import numpy as npx,Y=0,np.array([[1],[-1]])Lx,Ly=[x],[Y[0]]ep=0.001A=np.array([[0,1],[-3,-2]])f=lambda t: tfor k in range(10000): Y=Y+ep*(np.array([[0],[f(x)]])+np.dot(A,Y)) x=x+ep Lx.append(x) Ly.append(Y[0])
import matplotlib.pyplot as pltplt.plot(Lx,Ly)plt.show()
En utilisant odeint (« fonction donnant Y' ( x ) à l'aide de x et Y » , Y (x 0) , [ x0 ;....])12345678910111213
import numpy as np
def Y_prime_de_x(Y,x): return np.array([Y[1],x-3*Y[0]-2*Y[1]])
Lx = np.linspace(0, 10, 10000)
from scipy.integrate import odeintLy=odeint(Y_prime_de_x,np.array([1,-1]),Lx)
import matplotlib.pyplot as pltplt.plot(Lx,Ly[:,0])plt.show()
odeint() utilise une premier argument de type array correspondant à une matrice ligne.
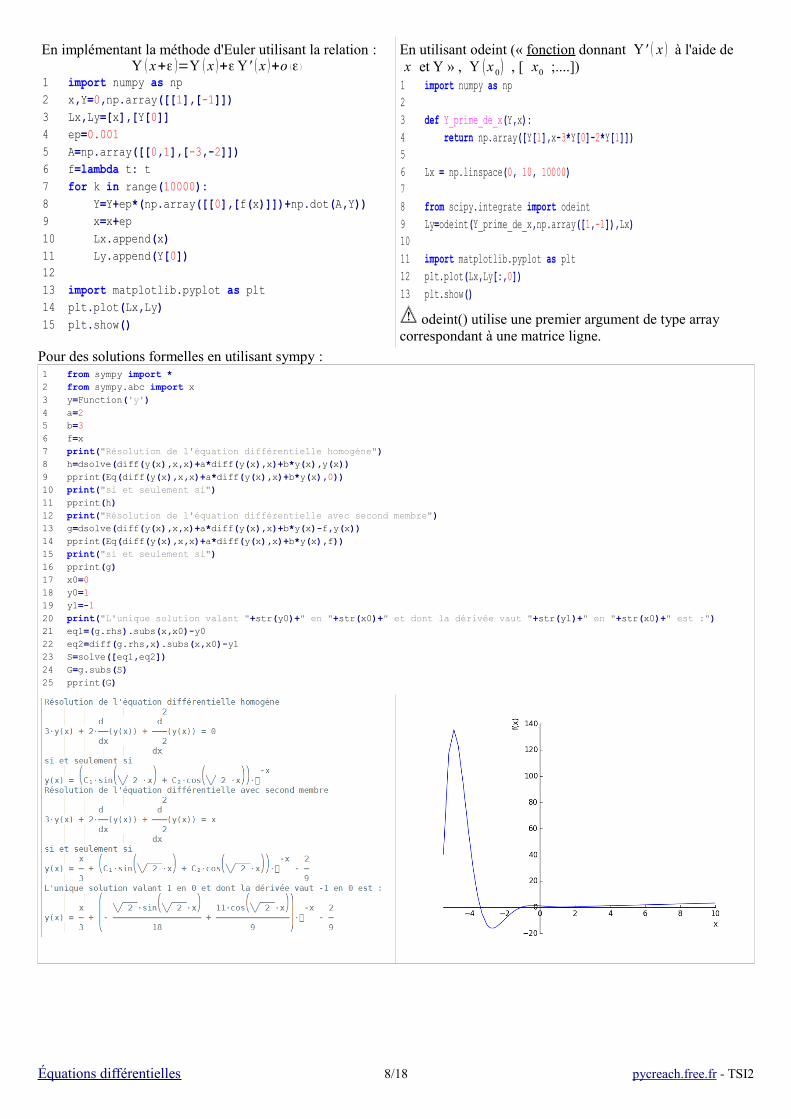
Pour des solutions formelles en utilisant sympy :12345678910111213141516171819202122232425
from sympy import *from sympy.abc import xy=Function('y')a=2b=3f=xprint("Résolution de l'équation différentielle homogène")h=dsolve(diff(y(x),x,x)+a*diff(y(x),x)+b*y(x),y(x))pprint(Eq(diff(y(x),x,x)+a*diff(y(x),x)+b*y(x),0))print("si et seulement si")pprint(h)print("Résolution de l'équation différentielle avec second membre")g=dsolve(diff(y(x),x,x)+a*diff(y(x),x)+b*y(x)-f,y(x))pprint(Eq(diff(y(x),x,x)+a*diff(y(x),x)+b*y(x),f))print("si et seulement si")pprint(g)x0=0y0=1y1=-1print("L'unique solution valant "+str(y0)+" en "+str(x0)+" et dont la dérivée vaut "+str(y1)+" en "+str(x0)+" est :")eq1=(g.rhs).subs(x,x0)-y0eq2=diff(g.rhs,x).subs(x,x0)-y1S=solve([eq1,eq2])G=g.subs(S)pprint(G)
Équations différentielles 8/18 pycreach.free.fr - TSI2

Recherche d'une solution particulière d'une équation différentielle linéaire du second ordre à coefficients constants avec un second membre de la forme k eω t
Soient a≠0 , b et c trois complexes, k∈ℂ et ω∈ℂ l'équation différentielle (E) : ay'' +by' +cy=k eω t
Soit l'équation caractéristique (C ) : ar 2+br+c=0 .
Si ω n'est pas racine de l'équation (C ) alors il existe λ∈ℂ tel que ℝ→ℂt→λ eω t
soit solution de (E).
Si ω est racine simple de (C ) alors il existe λ∈ℂ tel que ℝ→ℂt→λ teω t
soit solution de (E).
Si ω est racine double de (C ) alors il existe λ∈ℂ tel que ℝ→ℂt→λ t2 eω t
soit solution de (E).
Exemple : y'' +2 y' + y=2e−t
1. Équations différentielles linéaires scalaires d'ordre 2
Théorème de Cauchy linéaire
Soient I un intervalle, x0∈I , y0∈K , y1∈K et trois fonctions a :I→K , b : I→K et c :I→K .Si les fonctions a , b et c sont continues sur I
alors le problème de Cauchy {y' '+a (x ) y'+b ( x ) y=c ( x )y (x0 )= y 0
y' ( x0)= y1
admet une unique solution sur I.
Théorème admis.
Remarque : y'' +a( x )y'+b (x ) y=c ( x ) ⇔ y''= f (x )−a(x )y'−b (x ) y ⇔ ( y'y '')=(0f (x ))+(
0 1−b ( x ) −a ( x ))( yy')
Ainsi en notant Y=( yy ') et A (x )=( 0 1−b ( x ) −a ( x )) on a (E) : Y'=( 0
f ( x ))+A ( x )×Y et Y (0 )=(y0
y1)
Il suffit donc d'adapter les codes Python précédents valides pour les équations différentielles linéaires du second ordre à coefficients constants.
Structure de l'ensemble des solutions d'une équation différentielle linéaire scalaire d'ordre 2
Soient I un intervalle et trois fonctions a :I→K , b : I→K et c :I→K . Soit l'équation différentielle (E) : y'' +a( x )y'+b ( x ) y=c ( x )et l'équation différentielle homogène (H) : y'' +a( x )y'+b ( x ) y=0Si les fonctions a , b et c sont continues sur I alors :
► Solutions de l'équation différentielle homogène : L'ensemble des solutions de (H) est un K_sous-espace vectoriel des fonctions C2 (I ; K ) de dimension 2.En conséquence, si h1 et h2 sont deux solutions de (H) sur I et ne sont pas proportionnelles alors l'ensemble des solutions de (H) sur I est Vect (h1;h2) .
► Solutions de l'équation différentielle avec second membre : Soit g : I→K une solution de (E) sur I alors l'ensemble des solutions de (E) sur I est le sous-ensemble (sous-espace
affine de dimension 2) de C2 (I ; K ) : {I → Kx → g ( x )+h (x )
∣h est solution de (H ) sur I}► Existence et unicité de la solution du problème de Cauchy :
Soit x0∈I , y0∈K et y1∈K . Le problème de Cauchy {y' '+a (x ) y'+b (x ) y=c (x )y (x0 )= y 0
y' ( x0)= y1
admet une unique solution sur I :
les deux conditions dites initiales fixent les deux paramètres libres des solutions de y'' +a( x ) y'+b ( x ) y= f (x ) sur I.
Démonstration : si f est solution de (E) sur I alors f est deux fois dérivable sur I et ∀ x∈I , f '' ( x )=−a( x ) y' ( x )−b (x ) y ( x )−c ( x ) donc f '' est continue sur I. Ainsi f ∈C2 (I ; K ) .
Soit ϕ : C2 (I ; K ) → C0 ( I; K )
f → f ' '+af '+bf. Alors ϕ est linéaire et Ker ϕ est l'ensemble des solutions de (H) sur I, c'est
Équations différentielles 9/18 pycreach.free.fr - TSI2

donc un sous-espace vectoriel de C2 (I ; K ) . Sa dimension est donnée par le théorème de Cauchy linéaire précédent.Si ϕ (g )=c alors f est solution de (E) sur I ⇔ϕ ( f )=c
⇔ϕ ( f )=ϕ (g )⇔ϕ ( f )−ϕ (g )=0
C2(I ; K )
⇔ϕ ( f−g )=0C
2(I ; K )
⇔ f−g∈Ker (ϕ )
⇔ f −g est solution de (H) sur I □Exemple : x2 y' '−2 y=x
Principe de superposition des solutions des deux équations différentielles linéaires
Soient I un intervalle et quatre fonctions a :I→K , b : I→K et c :I→K ; d : I→K . On considère les équations différentielles (E ) : y ''+a(x )y' +b ( x ) y=c (x )+d ( x )
(E1) : y ''+a(x ) y '+b ( x ) y=c (x )(E2) : y'' +a( x )y'+b (x ) y=d (x )
L'ensemble des solutions de (E) sur I est {I → Kx → f ( x )+g ( x )
∣{f solution de (E1) sur Ig solution de (E2) sur I }
Démonstration : soit f solution de (E1) sur I et g solution de (E2) sur I Alors ∀ x∈I , ( f + g )' ' ( x )+a ( x ) ( f + g )' ( x )+b ( x )( f +g )(x )=…
Donc f + g est solution de (E) sur I.
Soit f solution de (E1) sur I :
y est solution de (E) sur I ⇔ ∀ x∈I , y'' ( x )+a( x )y ' ( x )+b ( x ) y ( x )= f ' ' ( x )+a (x ) f ' (x )+b (x ) f (x )+d ( x )⏞=c (x )
⇔ ∀ x∈I , ( y− f )' ' ( x )+a ( x ) ( y− f )' (x )+b ( x )( y− f ) ( x )=d ( x )⇔ y− f est solution de (E2) sur I⇔ ∃ g solution de (E2) sur I telle que y− f =g⇔ ∃ g solution de (E2) sur I telle que y= f +g □
Techniques classiques de résolution d'équations différentielles linéaires d'ordre 2 ► Expression des solutions de l'équation complète lorsqu'une solution de l'équation homogène ne s'annulant pas sur I est connue (ou « variation de la constante ») : Soit I un intervalle, trois fonctions a : I→K ; b : I→K et c : I→K continues sur l'intervalle I et l'équation différentielle :
(E) : x' '+a(t )x' +b (t ) x=c (t )Soit f une solution solution (dite particulière) de l'équation homogène (H) sur I : x' '+a(t )x' +b (t ) x=0Si f (t ) se s'annule pas sur l'intervalle I, i.e. : ∀ t∈I , f (t )≠0 .
Alors , en posant x= f ×y (variation de la constante y ) on a y≝xf
et : x∈C2( I; K )⇔ y∈C2( I; K )
Ainsi, pour tout réel t∈I , les égalités suivantes sont vérifiées :f (t )× y (t )= x (t ) L0
f (t )× y' (t )+ f ' (t )×y (t )= x' (t ) L1
f (t )× y' ' ( t )+ 2 f ' (t )× y' (t )+ f ' ' (t )× y ( t )= x' ' ( t ) L2
f (t ) y ' ' (t )+ (a (t ) f (t )+2 f ' (t ) )y' (t )+ ( f ' ' (t )+a(t ) f ' (t )+b (t ) f (t ))⏟=0
y (t )= x' ' (t )+a(t ) x' (t )+b (t ) x (t ) L2+a (t )L1+b (t )L0
x' '+a(t )x' +b (t ) x=c (t )⇔{x= fyf (t )y ''+ (a ( t ) f ( t )+2 f ' (t ))y'=c (t )Ainsi l'équation différentielle (E) se ramène à la résolution d'une équation différentielle linéaire scalaire du premier ordre car en posant z= y' on a l'équation différentielle : f (t )z '+(a (t ) f (t )+2 f ' (t )) z=c (t )
Autres « classiques » pour la résolution de : (E) : a (t )x ''+b (t ) x'+c (t ) x=d (t )►Si les fonctions a , b , c et d sont polynomiales rechercher une (ou des) solutions polynomiales►Si les fonctions a , b et c sont polynomiales et d est développables en série entière, rechercher des solutions développables en séries entières en utilisant l'unicité du développement en série entière.
Équations différentielles 10/18 pycreach.free.fr - TSI2

►Utiliser un changement de fonction inconnue pour se ramener à une équation différentielle plus simple.En posant ∀ t∈I , y (t )≝ϕ (x ( t ); t ) , on cherche à exprimer a(t )x'' (t )+b(t )x' (t )+c (t ) x (t ) en fonction de y (t ) , y' (t )
et y'' ( t ) . On veillera à s'assurer que toute fonction x solution de (E) puisse définir une fonction y deux fois dérivable sur I.
En général, y' (t )≠ϕ (x ' (t ); t )y'' ( t )≠ϕ (x' ' (t ); t )
Après avoir déterminé y' (t ) et y'' ( t ) , on détermine trois fonctions A, B et C définies sur I telles que : ∀ t∈I , a(t )x'' (t )+b(t )x' (t )+c (t ) x (t )=A( t )y'' (t )+B(t )y' (t )+C (t ) y (t )
a(t )x'' +b(t )x' +c (t )x=d (t ) (E ) A( t )y'' (t )+B(t )y' (t )+C (t ) y (t )=D (t ) (E ' )
f est solution de (E) sur l'intervalle I ⇔ g :t→ϕ ( f (t ); t ) est solution de (E') sur l'intervalle I
⇔ ∀ t∈I , g (t )=…
∀ t∈I , f (t )=… ⇔
►Utiliser un changement de variable pour se ramener à une équation différentielle plus simple (si possible à coefficients constants).
Exemple : en posant t=ϕ (u ) , où ϕ :I '→I est un C2 difféomorphisme de l'intervalle I' dans l'intervalle I : I'→I u→ϕ (u )ϕ−1(t ) ↤t
∀ t∈I , a(t )x'' (t )+b(t )x' (t )+c (t ) x (t )=d (t ) ⇔ ∀ u∈I ' , a(ϕ (u ))x' ' (ϕ (u ))+b(ϕ (u ))x' (ϕ (u ))+c (ϕ (u )) x (ϕ (u ))=d (ϕ (u ))
En général, (x (ϕ (u )))'≠x' (ϕ (u ))(x (ϕ (u )))''≠x'' (ϕ (u ))
∀ u∈I ' , en posant y (u)≝x (ϕ (u))=x (t ) on a : y' (u )=(x (ϕ (u )))'=ϕ ' (u )×x' (ϕ (u ))
y'' (u)=(x (ϕ (u)))''=ϕ '' (u)×x' (ϕ (u ))+(ϕ ' (u ))2×x' ' (ϕ (u ))En utilisant ces relations, on détermine trois fonctions A, B et C telles que :∀ u∈I ' , a(ϕ (u ))x' ' (ϕ (u ))+b(ϕ (u ))x' (ϕ (u ))+c (ϕ (u )) x (ϕ (u ))=A(u ) y' ' (u )+B(u ) y' (u )+C (u ) y (u )
a(t )x'' +b(t )x' +c (t )x=d (t ) (E ) A(u)y '' +B(u )y'+C (u) y=d (ϕ (u )) (E ' )
f est solution de (E) sur l'intervalle I ⇔ g≝ f ∘ϕ est solution de (E') sur l'intervalle I'
⇔ ∀ u∈I ' , g (u )=…
∀ t∈I , f (t )=… ⇔
L'équation différentielle (E) n'est résolue que lorsque x (t ) est déterminée. Ainsi il est nécessaire d'utiliser la relation ϕ−1(t )=u car : g (u )= f (ϕ (u )) ⇔ g (ϕ−1( t ))= f (t )
2. Systèmes différentiels linéaires à coefficients constants
Définition d'un système différentiel linéaire homogène à coefficients constants
Soit une matrice A∈Mn (K ) , Le système différentiel linéaire (S) : X'=AX est un système de n équations différentielles scalaires.
En effet, pour X (t )=(x1 (t )⋮x n (t )
) , on a : (S) : (x'1 ( t )⋮x' n (t )
)=(a1,1 … a1,n
⋮ ⋮an ,1 … a n, n
)×(x1 (t )⋮xn (t )
) ⇔ {x' 1 (t )=a1,1 x1 (t )+…+a1, n xn (t )⋮x' n (t )=an , 1 x1 (t )+…+an ,n xn (t )
Une solution du système différentiel (S) sur un intervalle I est une fonction vectorielle
f : I → Kn
t → (x1 (t )⋮xn (t ))
dérivable
sur l'intervalle I telle que : ∀ t∈I , f ' (t )=A× f (t ) .Résoudre le système différentiel (S) sur I consiste à déterminer l'ensemble des fonctions solutions de (S) sur I.L'espace affine E étant muni d'un repère (O; i⃗1 ;…; i⃗n) , et f étant une solution de (S), la courbe Γ paramétrée par
{x1= x1( t )⋮xn=xn (t )
est appelée courbe intégrale du système (S) : Γ={M∈E∣∃ t∈I tel que ⃗OM(t )=x1 (t ) i⃗1+…+xn (t ) i⃗n}
Équations différentielles 11/18 pycreach.free.fr - TSI2
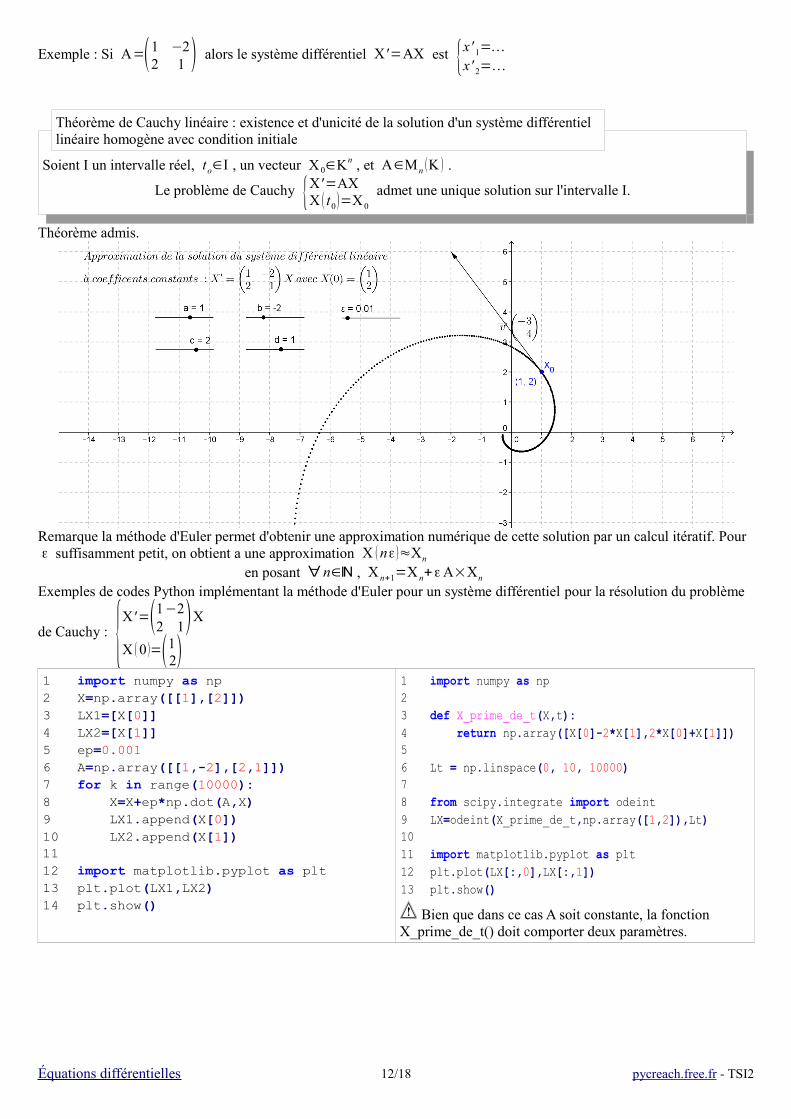
Exemple : Si A=(1 −22 1 ) alors le système différentiel X'=AX est {x' 1=…x' 2=…
Théorème de Cauchy linéaire : existence et d'unicité de la solution d'un système différentiel linéaire homogène avec condition initiale
Soient I un intervalle réel, to∈I , un vecteur X 0∈Kn , et A∈Mn (K ) .
Le problème de Cauchy {X'=AXX ( t0)=X 0
admet une unique solution sur l'intervalle I.
Théorème admis.
Remarque la méthode d'Euler permet d'obtenir une approximation numérique de cette solution par un calcul itératif. Pour ε suffisamment petit, on obtient a une approximation X (nε)≈Xn
en posant ∀ n∈ℕ , X n+1=X n+εA×Xn Exemples de codes Python implémentant la méthode d'Euler pour un système différentiel pour la résolution du problème
de Cauchy : {X'=(1−22 1)X
X (0)=(12)1234567891011121314
import numpy as npX=np.array([[1],[2]])LX1=[X[0]]LX2=[X[1]]ep=0.001A=np.array([[1,-2],[2,1]])for k in range(10000): X=X+ep*np.dot(A,X) LX1.append(X[0]) LX2.append(X[1])
import matplotlib.pyplot as pltplt.plot(LX1,LX2)plt.show()
12345678910111213
import numpy as np
def X_prime_de_t(X,t): return np.array([X[0]-2*X[1],2*X[0]+X[1]])
Lt = np.linspace(0, 10, 10000)
from scipy.integrate import odeintLX=odeint(X_prime_de_t,np.array([1,2]),Lt)
import matplotlib.pyplot as pltplt.plot(LX[:,0],LX[:,1])plt.show()
Bien que dans ce cas A soit constante, la fonction X_prime_de_t() doit comporter deux paramètres.
Équations différentielles 12/18 pycreach.free.fr - TSI2
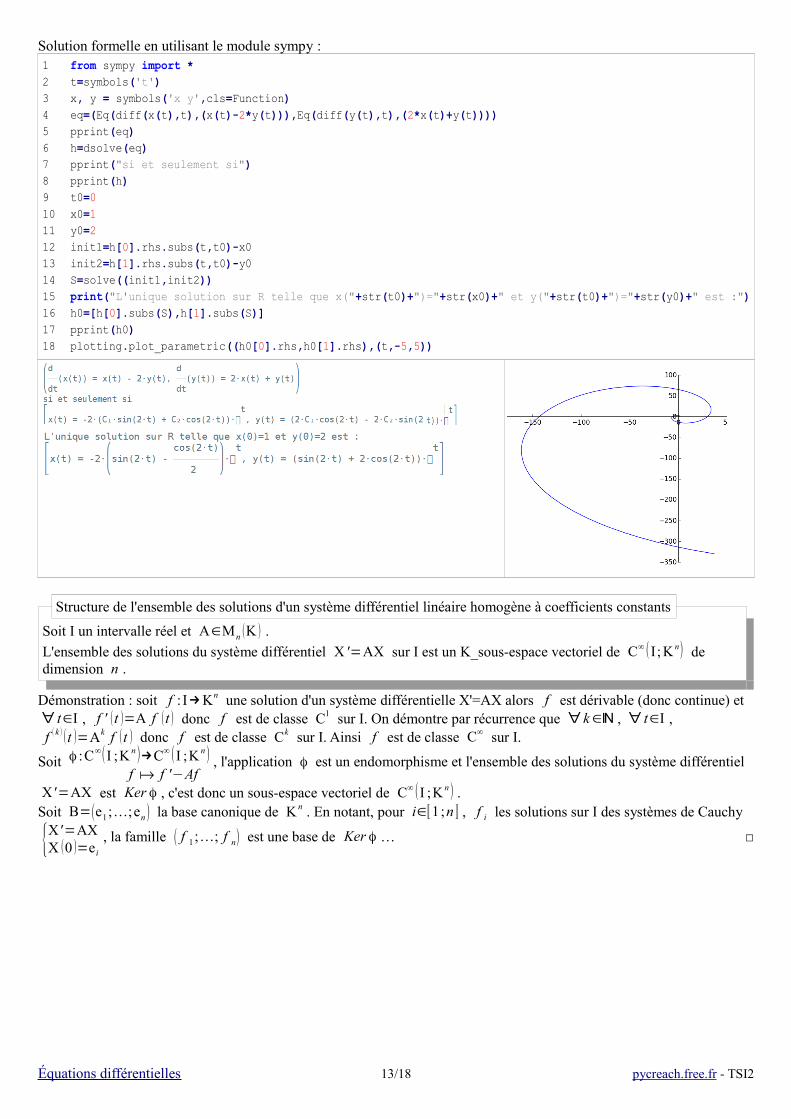
Solution formelle en utilisant le module sympy :123456789101112131415161718
from sympy import *t=symbols('t')x, y = symbols('x y',cls=Function)eq=(Eq(diff(x(t),t),(x(t)-2*y(t))),Eq(diff(y(t),t),(2*x(t)+y(t))))pprint(eq)h=dsolve(eq)pprint("si et seulement si")pprint(h)t0=0x0=1y0=2init1=h[0].rhs.subs(t,t0)-x0init2=h[1].rhs.subs(t,t0)-y0S=solve((init1,init2))print("L'unique solution sur R telle que x("+str(t0)+")="+str(x0)+" et y("+str(t0)+")="+str(y0)+" est :")h0=[h[0].subs(S),h[1].subs(S)]pprint(h0)plotting.plot_parametric((h0[0].rhs,h0[1].rhs),(t,-5,5))
Structure de l'ensemble des solutions d'un système différentiel linéaire homogène à coefficients constants
Soit I un intervalle réel et A∈Mn (K ) .
L'ensemble des solutions du système différentiel X '=AX sur I est un K_sous-espace vectoriel de C∞ (I; Kn) de dimension n .
Démonstration : soit f : I→Kn une solution d'un système différentielle X'=AX alors f est dérivable (donc continue) et ∀ t∈I , f ' (t )=A f (t ) donc f est de classe C1 sur I. On démontre par récurrence que ∀ k∈ℕ , ∀ t∈I , f ( k ) (t )=Ak f (t ) donc f est de classe Ck sur I. Ainsi f est de classe C∞ sur I.
Soit φ :C∞(I ;K n )→C∞ (I ;K n ) f → f '−Af
, l'application φ est un endomorphisme et l'ensemble des solutions du système différentiel
X'=AX est Ker φ , c'est donc un sous-espace vectoriel de C∞ (I ;K n ) .Soit B=(e1 ;…;en ) la base canonique de K n . En notant, pour i∈⟦1;n ⟧ , f i les solutions sur I des systèmes de Cauchy
{X'=AXX (0 )=ei
, la famille ( f 1 ;…; f n) est une base de Ker φ … □
Équations différentielles 13/18 pycreach.free.fr - TSI2

Lien entre solutions à valeurs complexes et solutions à valeurs réelles
Soient A∈Mn (ℝ ) , le système différentiel (S):X '=AX et I un intervalle.
Si la fonction vectorielle
I → ℂn
t → (x1 (t )⋮xn (t ))
est une solution de (S) sur I alors les fonctions vectorielles
I → ℂn
t → (x1 (t )⋮xn (t )
) ,
I → ℝn
t → (Re ( x1( t ))
⋮Re ( xn (t )))
et
I → ℝn
t → (Im ( x1 (t ))
⋮Im ( xn (t )))
sont aussi des solutions de (S) sur I.
Démonstration : Si ∀ t∈I , (x '1 (t )⋮x' n (t ))=A(
x1 (t )⋮xn (t )) alors (
x'1 (t )⋮x' n (t )
)=A(x1 (t )⋮xn (t )
) or …
Par stabilité par combinaison linéaire de l'ensemble des solutions de (S), t→12 (x1 (t )⋮xn (t )
)+ 12 (x1 (t )⋮xn ( t )
) est solution de (S) sur
I et de même t→−i2 (x1( t )⋮x n (t )
)+ i2 (x1 (t )⋮xn (t )
) est solution de (S) sur I. □
Méthode de résolution d ' u n système différentiel linéaire homogène : soit A∈Mn (K ) et (S) :X'=AX► Si la matrice A est diagonalisable, en notant P la matrice de passage de la base canonique à la base de vecteurs propres de A, et D la matrice diagonale on a : D=P−1 AP c'est-à-dire PDP−1=A
Alors : (S) ⇔ X'=PDP−1 X ⇔ P−1 X'=DP−1 X
Or P−1 X'=(P−1 X )' donc en posant Y=P−1 X , on obtient : X'=AX⇔{Y'=DYX=PY
(inutile de calculer P−1 )
En notant Y (t )=(y1 (t )⋮yn (t )
) et D=(λ1 0 … 00 ⋱ ⋱ ⋮⋮ ⋱ ⋱ 00 … 0 λn
) on obtient Y'=DY⇔{y' 1=λ1 y1
⋮y' n=λn yn
Il s'agit donc de résoudre n équations différentielles linéaires homogènes du premier ordre à coefficients constants.
Y'=DY ⇔ ∃ (α1 ;…;αn)∈K n : ∀ t∈I , {y1 ( t )=α1 eλ1 t
⋮
yn (t )=αn eλn t
Par multiplication matricielle X=PY, chacune des n fonctions coordonnées des solutions du système différentiel (S) est combinaison linéaire des fonctions t→ eλ1t ;… ; t→eλnt .
Étude du comportement asymptotique des solutions
∀ t∈ℝ , ∣eλk t∣=eRe (λ k ) t ainsi : {si Re (λk )>0 alors lim
t→−∞∣eλ kt∣=0 et lim
t→+∞∣eλ k t∣=+∞
si Re (λk )=0 alors ∀t∈I, ∣eλk t∣=1
si Re (λk )<0 alors limt→−∞
∣eλ kt∣=+∞ et limt→+∞
eλk t=0
En particulier, si A∈Mn (K ) est diagonalisable et ℝ → Kn
t → f (t ) est une solution du système différentiel X '=AX
alors : Si ∀λ∈Sp (A ) , Re (λ )<0 alors lim
t→+∞
f (t )=0Kn
Si ∀λ∈Sp (A ) , Re (λ )>0 alors limt→−∞
f (t )=0Kn
Remarque : selon le signe des valeurs propres et les conditions initiales du problème de Cauchy, les courbes intégrales peuvent admettre des asymptotes dirigées par les vecteurs dont les coordonnées sont vecteurs propres de A.
Équations différentielles 14/18 pycreach.free.fr - TSI2
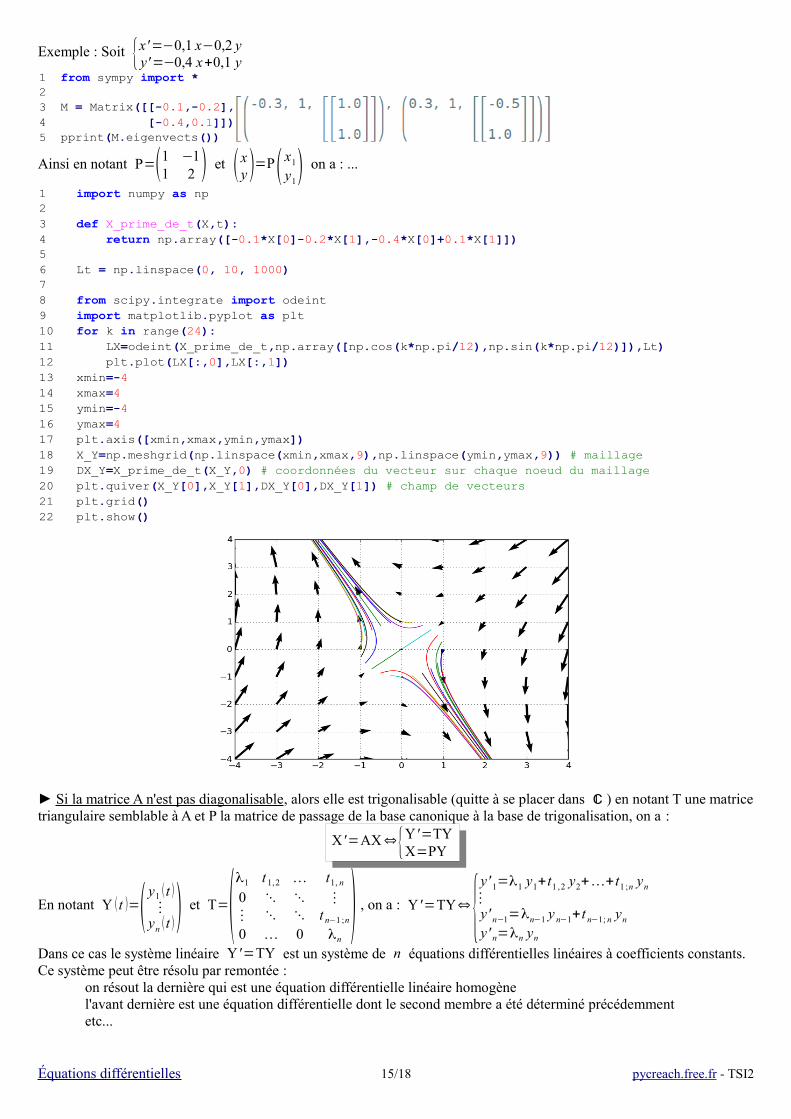
Exemple : Soit {x'=−0,1 x−0,2 yy'=−0,4 x+0,1 y
12345
from sympy import *
M = Matrix([[-0.1,-0.2], [-0.4,0.1]])pprint(M.eigenvects())
Ainsi en notant P=(1 −11 2 ) et (xy)=P(x1
y1) on a : ...
12345678910111213141516171819202122
import numpy as np
def X_prime_de_t(X,t): return np.array([-0.1*X[0]-0.2*X[1],-0.4*X[0]+0.1*X[1]])
Lt = np.linspace(0, 10, 1000)
from scipy.integrate import odeintimport matplotlib.pyplot as pltfor k in range(24): LX=odeint(X_prime_de_t,np.array([np.cos(k*np.pi/12),np.sin(k*np.pi/12)]),Lt) plt.plot(LX[:,0],LX[:,1])xmin=-4xmax=4ymin=-4ymax=4plt.axis([xmin,xmax,ymin,ymax])X_Y=np.meshgrid(np.linspace(xmin,xmax,9),np.linspace(ymin,ymax,9)) # maillageDX_Y=X_prime_de_t(X_Y,0) # coordonnées du vecteur sur chaque noeud du maillageplt.quiver(X_Y[0],X_Y[1],DX_Y[0],DX_Y[1]) # champ de vecteursplt.grid()plt.show()
► Si la matrice A n'est pas diagonalisable, alors elle est trigonalisable (quitte à se placer dans ℂ ) en notant T une matrice triangulaire semblable à A et P la matrice de passage de la base canonique à la base de trigonalisation, on a :
X'=AX⇔{Y'=TYX=PY
En notant Y (t )=(y1 (t )⋮yn (t )
) et T=(λ1 t 1,2 … t1, n
0 ⋱ ⋱ ⋮⋮ ⋱ ⋱ t n−1 ;n
0 … 0 λn) , on a : Y'=TY⇔{
y' 1=λ1 y1+t1 ,2 y2+…+t1 ;n yn⋮y' n−1=λn−1 y n−1+t n−1; n yny' n=λn yn
Dans ce cas le système linéaire Y'=TY est un système de n équations différentielles linéaires à coefficients constants. Ce système peut être résolu par remontée :
on résout la dernière qui est une équation différentielle linéaire homogènel'avant dernière est une équation différentielle dont le second membre a été déterminé précédemmentetc...
Équations différentielles 15/18 pycreach.free.fr - TSI2

Par multiplication matricielle X=PY, chacune des n fonctions coordonnées des solutions du système différentiel (S) est combinaison linéaire des fonctions t→P1 (t )e
λ 1t ;… ; t→Pn (t )eλn t où les fonctions Pi sont des fonctions
polynomiales.
► Si A∈Mn (ℝ ) ne peut pas être réduite dans Mn (ℝ ) (c'est-à-dire si son polynôme caractéristique n'est pas scindé dans ℝ [X ] ) alors les valeurs propres non-réelles sont conjuguées deux-à-deux.
En effet PA (X )∈ℝ [X ] , donc, ∀λ∈ℂ , PA(λ )=PA
(λ )
Ainsi, si λ∈sp (A ) alors PA(λ )=PA
(λ )=0=0 donc λ∈sp (A )
De plus le conjugué d'un vecteur propre associé à λ est un vecteur propre associé à λ .En effet : si V∈Eλ (A ) alors AV=λV donc AV=λV et comme A∈Mn (ℝ ) , A V=λV donc V∈Eλ (A )
En notant λ=a+ib avec (a ;b )∈ℝ2 , on a :∀ (α ;β)∈ℂ2 , ∀ t∈ℝ , αeλ t+β eλ t=eat (αei b t+βe−ib t )=eat ((α+β) cos (b t )+i (α−β) sin (bt ))
Ainsi ∀ t∈ℝ αeλ t+βeλ t∈ℝ ⇒ pour t=0 , α+β∈ℝ et pour b t= π2
, i (α−β )∈ℝ
⇒ {α+β=α+βα−β=β−α ⇒ {α+β=α+βα−β=β−α
⇒ α = β L1+L2 ou L1−L2
Réciproquement, si α = β alors α eλ t+β eλ t=eat (2Re (α )×cos (bt )−2 Im (α )×sin (bt ))Ce calcul permet alors d'exprimer les fonctions coordonnées des solutions du système différentiel à l'aide des fonctions exponentielle, sinus et cosinus.
Exemple : Soit A=(1 −22 1 ) et le problème de Cauchy (P) : {
X'=AX
X (0)=(12)Le polynôme caractéristique de A est donné par χA (X )=X 2−2 X+5=(X−1+2 i ) (X−1−2 i ) .χA étant scindé et à racines simples, la matrice A est diagonalisable dans M2 (ℂ) .
dim (E1+2i (A ))=1 et (A−(1+2 i ) I2 )( i1)=(00) donc E1+2 i (A )=Vect (( i1))
dim (E1−2i (A ))=1 et E1−2i (A )=Vect ((−i1 ))
Ainsi en notant P=( i −i1 1 ) on a : A=P(1+2 i 0
0 1−2 i)P−1
D'où : X'=AX⇔{Y'=(1+2 i 00 1−2 i)Y
X=PY ⇔ {∃(λ ;μ )∈ℂ2 tel que : Y : t→(λ e(1+2 i ) t
μ e(1−2i ) t)X=P Y
Les solutions complexes définies sur ℝ de X'=AX sont donc les fonctions de la forme :
t→λ(ie(1+2i )t
e(1+2i) t )+μ(−ie(1−2i ) t
e(1−2i ) t ) avec (λ ;μ )∈ℂ2 c'est-à-dire : t→et(λ i e2it−iμe−2it
λ e2it+μ e−2it )Pour déterminer deux solutions réelles définies sur ℝ il faut et il suffit de fixer λ=μ
Par exemple : si {λ=1μ=1
alors t→ et(−2sin (2 t )2cos (2 t ) ) est une solution sur ℝ réelle de X'=AX .
Si {λ=iμ=−i alors t→ et(−2cos (2 t )
−sin (2 t ) ) est une solution sur ℝ réelle de X'=AX .
La famille {t→et(cos (2 t )sin (2 t )); t→ et(−sin (2 t )
cos (2 t ) )} est libre car, par exemple pour t=0 on a :
α e0(cos (2×0 )sin (2×0 ))+β e0(−sin (2×0)
cos (2×0 ) )=0 ⇒ {α=0β=0
Conclusion, les solutions sur ℝ réelles de X'=AX sont Vect(t→ et(cos (2 t )sin (2 t )); t→et(−sin (2 t )
cos (2 t ) ))Le problème de Cauchy (P) a donc pour unique solution sur ℝ réelle la fonction t→ et(cos (2 t )
sin (2 t ))+2et(−sin (2 t )cos (2 t ) ) .
Équations différentielles 16/18 pycreach.free.fr - TSI2
Équivalence entre une équation différentielle scalaire linéaire homogène d'ordre n et un système de n équations différentielles linéaires d'ordre 1
Soient I un intervalle réel, n scalaires (a0 ;…;an−1)∈K n et l'équation différentielle scalaire linéaire d'ordre n :
(E ) : y (n )+a n−1 y(n−1 )+…+a1 y' +a0 y=0 .
f : I→K est solution de (E) sur I ⇔ F=(ff '⋮f (n−1 )): I→K n est solution de Y'=(
0 1 0 … 00 ⋱ ⋱ ⋱ ⋮⋮ ⋱ ⋱ ⋱ 00 … 0 0 1
−a0 … … … −a n−1
)Y sur I
Ainsi pour x0∈I , la donnée du vecteur F ( x0) assure l'unicité de la solution de (E) sur I.L'ensemble des solutions de (E) est un sous-espace vectoriel de C∞ (I ; K ) de dimension n .
Démonstration : (0 1 0 … 00 ⋱ ⋱ ⋱ ⋮⋮ ⋱ ⋱ ⋱ 00 … 0 0 1
−a0 … … … −an−1
) × (ff '⋮⋮f (n−1)
) =...
Exemple : pour résoudre (E ) : y '' '+32y' '+4y'−
52y=0 avec pour conditions initiales (I ) ;{
y (0 )=1y ' (0)=−1y '' (0 )=−3
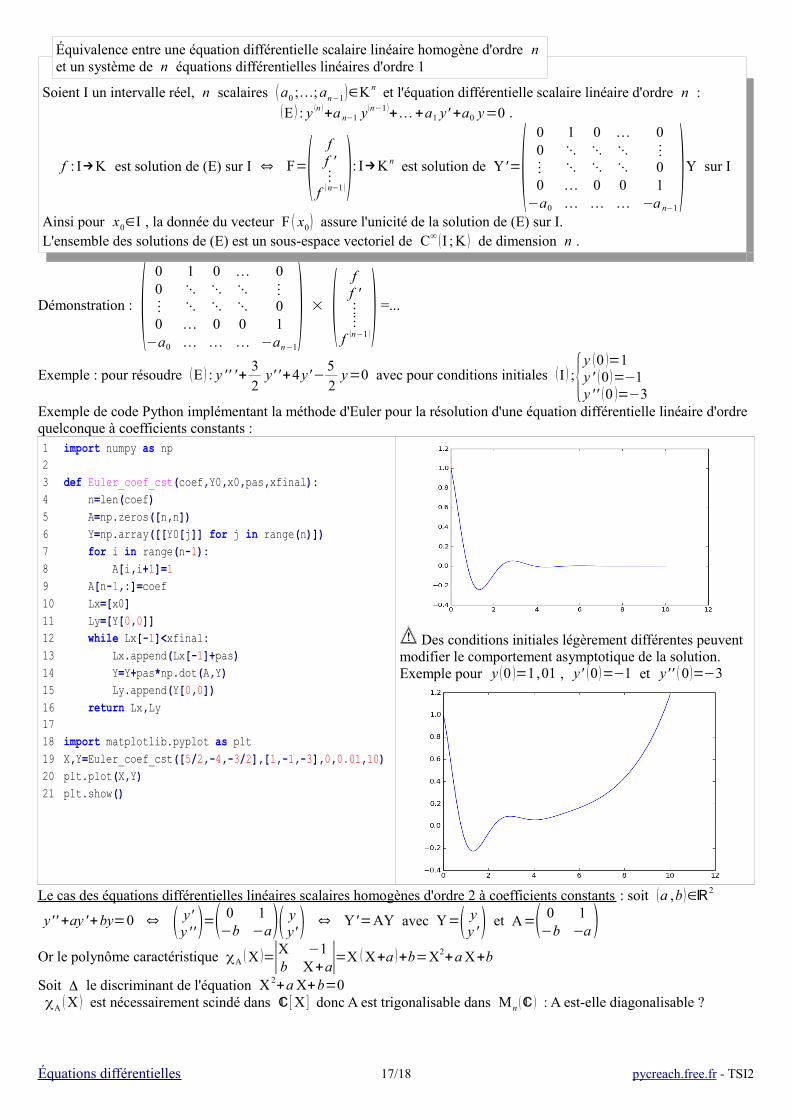
Exemple de code Python implémentant la méthode d'Euler pour la résolution d'une équation différentielle linéaire d'ordre quelconque à coefficients constants :123456789101112131415161718192021
import numpy as np
def Euler_coef_cst(coef,Y0,x0,pas,xfinal): n=len(coef) A=np.zeros([n,n]) Y=np.array([[Y0[j]] for j in range(n)]) for i in range(n-1): A[i,i+1]=1 A[n-1,:]=coef Lx=[x0] Ly=[Y[0,0]] while Lx[-1]<xfinal: Lx.append(Lx[-1]+pas) Y=Y+pas*np.dot(A,Y) Ly.append(Y[0,0]) return Lx,Ly
import matplotlib.pyplot as pltX,Y=Euler_coef_cst([5/2,-4,-3/2],[1,-1,-3],0,0.01,10)plt.plot(X,Y)plt.show()
Des conditions initiales légèrement différentes peuvent modifier le comportement asymptotique de la solution. Exemple pour y (0 )=1,01 , y' (0)=−1 et y'' (0)=−3
Le cas des équations différentielles linéaires scalaires homogènes d'ordre 2 à coefficients constants : soit (a ,b)∈ℝ2
y'' +ay'+by=0 ⇔ ( y'y '')=(0 1−b −a)( yy') ⇔ Y'=AY avec Y=( yy ') et A=( 0 1
−b −a)Or le polynôme caractéristique χA (X )=∣X −1
b X+a∣=X (X+a )+b=X2+aX+b
Soit Δ le discriminant de l'équation X 2+aX+b=0 χA (X ) est nécessairement scindé dans ℂ [ X ] donc A est trigonalisable dans Mn (ℂ ) : A est-elle diagonalisable ?
Équations différentielles 17/18 pycreach.free.fr - TSI2

►Si Δ≠0 alors χA (X ) est scindé dans ℂ [ X ] et à racines simples, notées r 1 et r2 , donc A est diagonalisable :
∃P∈GL2 (ℂ ) tel que A=P(r1 00 r2
)P−1
Y'=AY⇔Y '=P(r1 00 r2
)P−1 Y ⇔ {Z'=(r1 00 r 2
)Z
Y=PZ
En notant Z (t )=( z1(t )z2( t )) , on a : Y'=AY⇔{
(z 1)'=r1 z1
(z 2)'=r2 z 2
Y=P( z1
z2)
⇔ ∃(α1 ;α)∈ℂ2 tel que ∀ t∈ℝ {z 1 (t )=α1 er1 t
z 2 (t )=α2 er2t
Y=P( z1
z2)
En notant P=( p1 ,1 p1 ,2
p2 ,1 p2,2) on a ( yy ')=P(z1
z2) ⇒ y= p1,1 z1+ p1 ,2 z 2
y'' +ay'+by=0 ⇒ ∃(α1 ;α)∈ℂ2 tel que ∀ t∈ℝ , y (t )= p1,1α1 er1t+ p1 ,2α2 er2 t d'où y ∈ Vectℂ ({I→ℂt→e
r1 t;{I→ℂt→e
r2 t)Réciproquement, si y∈ Vect
ℂ ({I→ℂt→er1 t;{I→ℂt→er2 t)….
►Si Δ=0 , soit r la racine double de χA (X ) . Si A était diagonalisable alors elle serait semblable à la matrice scalaire
(r 00 r )=r(
1 00 1)=r I2 donc A serait une matrice diagonale ce qui est absurde par définition de A.
Ainsi ∃λ∈ℂ * et ∃P∈GL2 (ℂ ) tel que A=P(r λ0 r )P−1
Y'=AY⇔Y '=P(r λ0 r )P−1 Y ⇔{Z '=(
r λ0 r )Z
Y=PZ
En notant Z (t )=( z1(t )z2( t )) , on a : Y'=AY⇔{
(z1)'=r z 1+λ z2
(z2)'=r z 2
Y=P( z1
z2)
⇔ ∃α2∈ℂ tel que ∀ t∈ℝ {( z1)' (t )=r z1 (t )+λα2 er t
z 2 (t )=α2 e rt
Y=P( z1
z2)
or l'équation différentielle linéaire (z1)'−r z 1=λα2 ert admet pour solution particulière sur ℝ la fonction t→λ α2 tert
et (z 1)'−r z1=0 sur ℝ ⇔ ∃α1∈ℂ tel que ∀ t∈ℝ , z1 (t )=α1 ert
Donc (z 1)'−r z1=α2 ert sur ℝ ⇔ ∃α1∈ℂ tel que ∀ t∈ℝ , z1 (t )=α1 ert+λ α2 tert .
Ainsi Y'=AY⇔ ∃(α1 ;α2)∈ℂ2 tel que ∀ t∈ℝ {
z1 (t )=α1 ert+λα2 t ert
z2 (t )=α2 e rt
Y=P( z1
z 2)
En notant P=( p1 ,1 p1 ,2
p2 ,1 p2,2) on a ( yy ')=P(z1
z2) ⇒ y= p1,1 z1+ p1 ,2 z 2
y'' +ay'+by=0 ⇒ ∃(α1 ;α)∈ℂ2 tel que ∀ t∈ℝ , y (t )=( p1,1α1+ p1, 2α2)er t+ p1,1 λα2 te
rt
d'où y∈ Vectℂ ({I→ℂt→er t
;{I→ℂt→t er t)Réciproquement, si y∈ Vect
ℂ ({I→ℂt→er t;{I→ℂt→t er t) ...
Équations différentielles 18/18 pycreach.free.fr - TSI2