Embed Size (px)
Citation preview

VA L U AT I O N D U R I S Q U E D E T E L E S C O PA G EE
Etudiants :Maxime DEMANYassine SAHELI
Encadrants :Thomas SPROESSERJean-Nicola RUSSO
Objectifs :
• Tester l’algorithme en conditions réellesFaire les premiers essais sur des robots pour préparer les essaissur des voitures
• Adapter l’algorithme d’évaluation du risque de télescopage de M. Russo sur un robot lego EV3Déterminer et adapter dans l’algorithme la vitesse du robot et sadéccélération maximale
Présentation de l’algorithme :
• Acquérir les grandeurs utiles à l’algorithmeMesure de vitesse, d’accéleration et d’interdistance avec lescapteurs du robot
• Commander en temps réel le robot sous matlabCommande de la vitesse et du profil de route avec le clavier
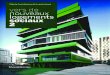
• Simuler le comportement d’une voitureAccélération et feinage sur route sèche, mouillée et verglacée
Protocole expérimental :Deux robots lego EV3 se suivent à vitesse constante. Le robot qui fermela marche avance plus vite que le premier, jusqu’à la collision
Evolutions possibes du projet :Implémenter l’algorithme sur une plateforme temps réel comme RTMapsContinuer les essais sur une voiture
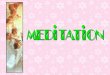
Exploitation des courbes :L’algorihme arrive à évaluer le risque et à le classer en trois cathégories, ce quipermet de prévenir le conducteur en avance
Problèmes rencontrés :• La mesure de vitesse se fait en temps réel avec matlab. Cette mesure estbruitée et perturbe les résultats de l’algorithme• Matlab n’est pas optimisé pour le multi-tâche et le temps réel
Evaluation du risque de télescopage entre deux robots EV3 en temps réel
Détermination de la déccélération maximale
• Suivre une ligne droiteSuiveur de ligne PID
Adapter l’algorithme sur un robot lego EV3 :
Tester l’algorithme en conditions réelles :
*Risque de télescopage : risque de collision entre deux véhicules qui se suivent,lorsque le premier freine brutalement.
Temps (s)4 5 6 7 8 9 10 11 12 13
Prob
abili
té d
e ris
que
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
▬ : absence de risque▬ : présence de risque▬ : collision inévitable▬ : interdistance▬ : vitesse du 2nd robot
CollisionAccélération
▬ : route mouillée▬ : route verglacée▬ : route sèche
Déccélération (m/s²)-0.12 -0.1 -0.08 -0.06 -0.04 -0.02 0
Prob
abili
té d
e dé
ccél
érat
ion
norm
alis
ée
0
0.05
0.1
0.15
0.2
0.25
L’algorithme calcule le risque télescopage*. Il se base sur la vitesse, l’accélération,l’interdistance, la déccélération maximale et le temps de réaction du conducteur