Embed Size (px)
Citation preview
Expérimentation du robot Tropic’Oz pour l’automatisation du désherbage de différentes cultures
Ansfrid GEFFROY
33004639
Stage de Master 2 InformatiquesDépartement de Mathématiques et Informatiques, Université de la Réunion.
Du 19 Janvier au 4 Juillet 2015
Encadrants :Denis PAYET Pierre-Yves BRACHELET
Responsable : Frédéric MESNARD

Plan INTRODUCTION
PRÉSENTATION DU ROBOT Généralités
Conditions d’accueil
Paramétrages
UTILISATION EN SERRE La fraiseraie
Parcours « escargot »
Simulation avec V-REP
Résultats
CONCLUSION

INTRODUCTION
INTRODUCTION
PRÉSENTATION DU ROBOTGénéralités
Conditions d’accueil
Paramétrages
UTILISATION EN SERRELa fraiseraie
Parcours « escargot »
Simulation avec V-REP
Résultats
CONCLUSION
INTRODUCTION
LIM Laboratoire d’Informatiques et de Mathématiques
Équipe SCA (Système Collectifs Adaptatifs)
Encadrant : Denis PAYET
AGROBOTYS Entreprise spécialisée dans l’agriculture de précision
Partenariat avec Naïo Technologies
Encadrant : Pierre-Yves BRACHELET
LIM & AGROBOTYS
INTRODUCTION
Contexte robotique agricole
Sujet : Expérimentation du robot Tropic’Oz pour l’automatisation du désherbage de différentes cultures
Particularités de l’Île de la Réunion
Cultures en serre : la fraiseraie
Cultures de canne à sucre
Sujet de stage
Plus de 20 robots Oz vendus en métropole par Naïo
ROBOT OVERWIEV
INTRODUCTION
PRÉSENTATION DU ROBOTGénéralités
Conditions d’accueil
Paramétrages
UTILISATION EN SERRELa fraiseraie
Parcours « escargot »
Simulation avec V-REP
Résultats
CONCLUSION

ROBOT OVERVIEW
Generalities
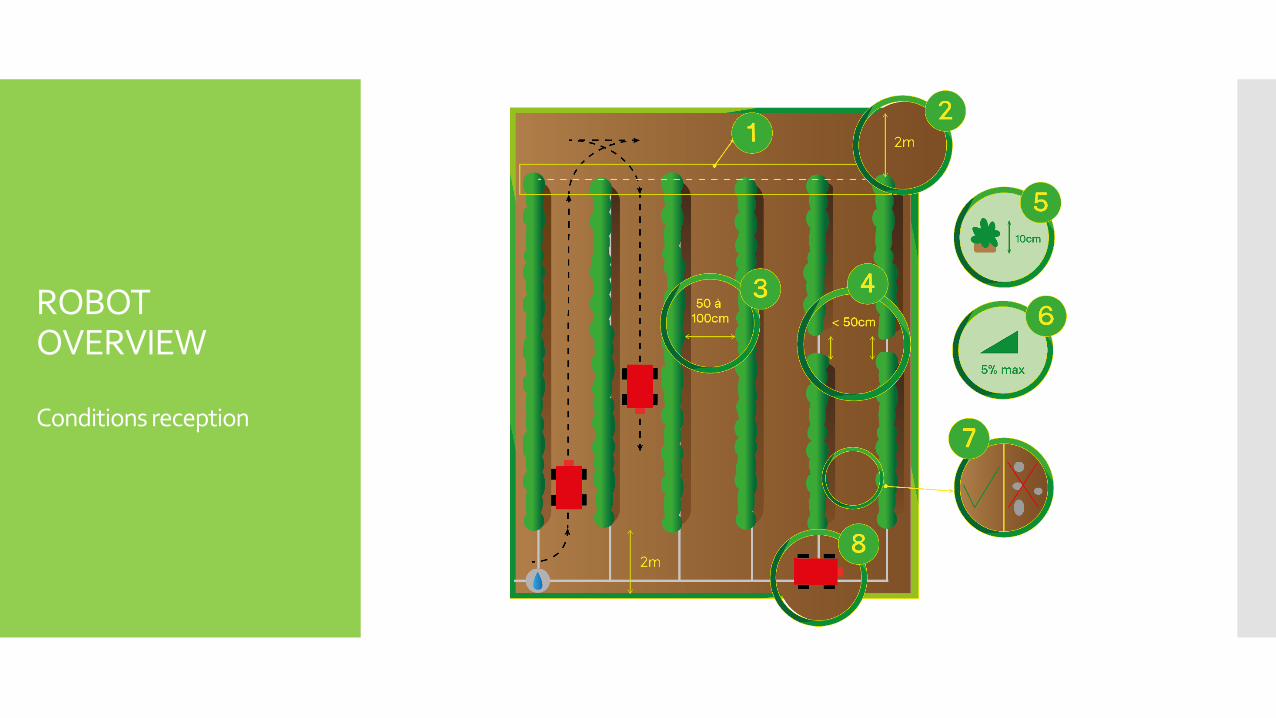
ROBOT OVERVIEW
Conditions reception
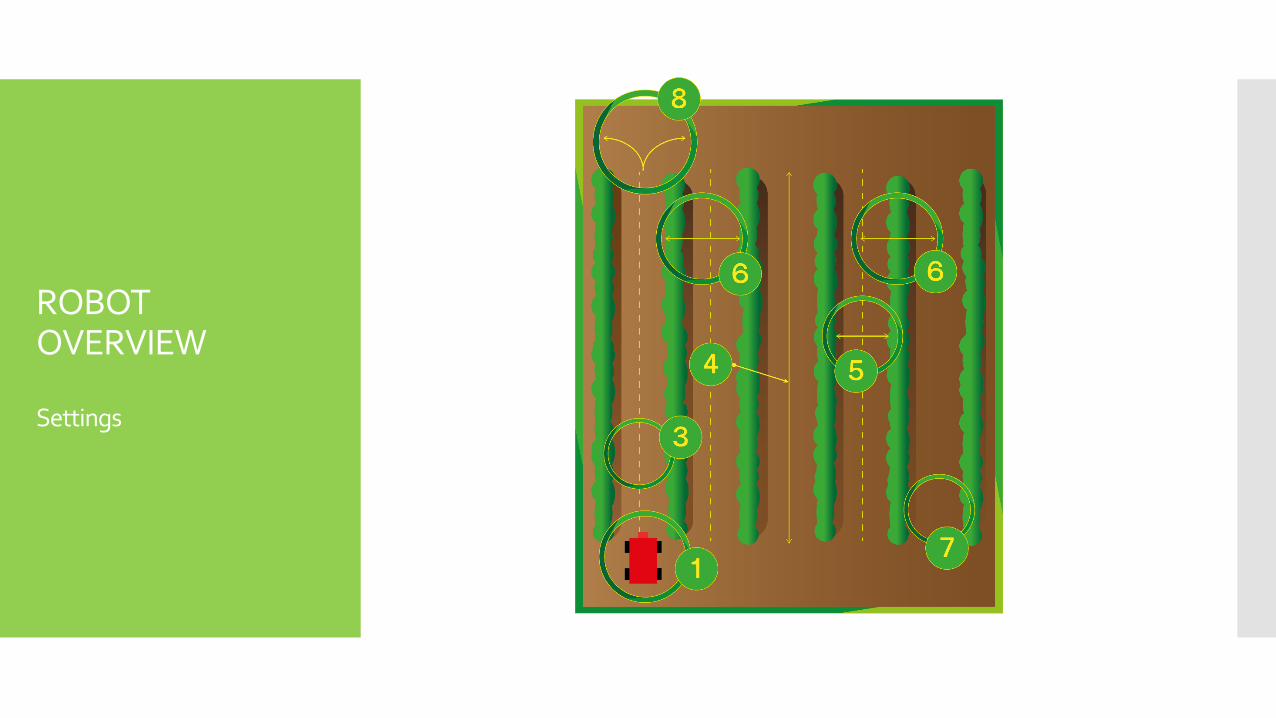
ROBOT OVERVIEW
Settings

UTILISATION EN SERRE
INTRODUCTION
PRÉSENTATION DU ROBOTGénéralités
Conditions d’accueil
Paramétrages
UTILISATION EN SERRELa fraiseraie
Parcours « escargot »
Simulation avec V-REP
Résultats
CONCLUSION
UTILISATION EN SERRE
La fraiseraie
Mise à disposition d’une serre à Saint-Joseph par Jean-Bernard GONTHIER
Cahier des charges : Epierré
Système d’irrigation en goutte à goutte
Hauteur de butte de 20cm
Largeur de rang et d’inter-rang
Problématique de déplacement en serre
UTILISATION EN SERRE
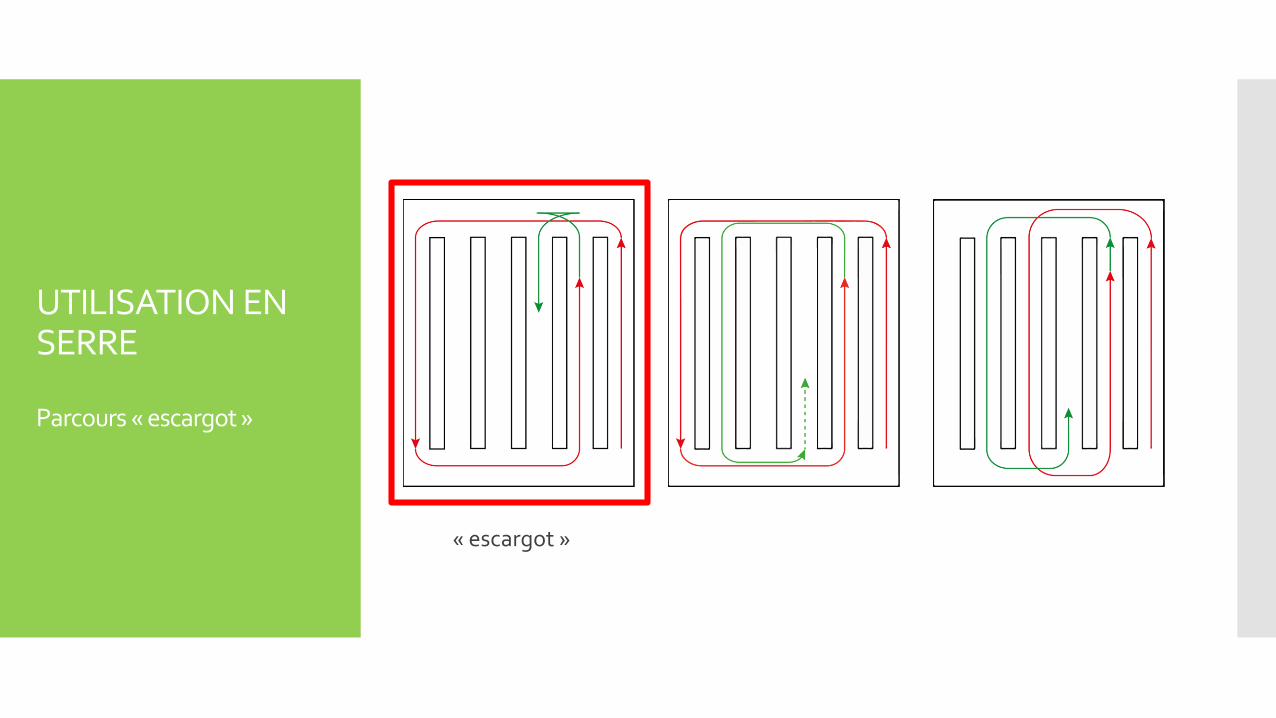
Parcours « escargot »
« escargot »
Permet d’éviter d’abîmer les cultures lors de test
V-REP Cappelia Robotics
Multi-plateforme
API disponible :
C / C++
Python
Java
…
Modélisation 3D
UTILISATION EN SERRE
Simulation avec V-REP
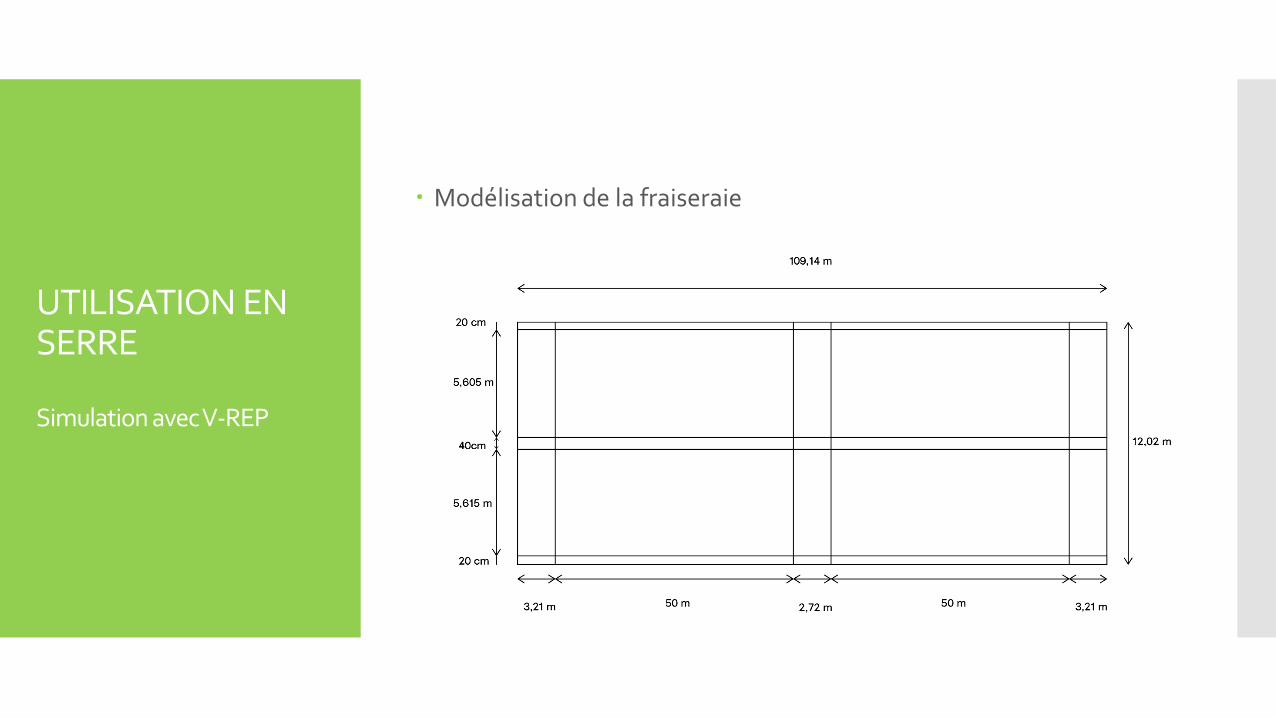
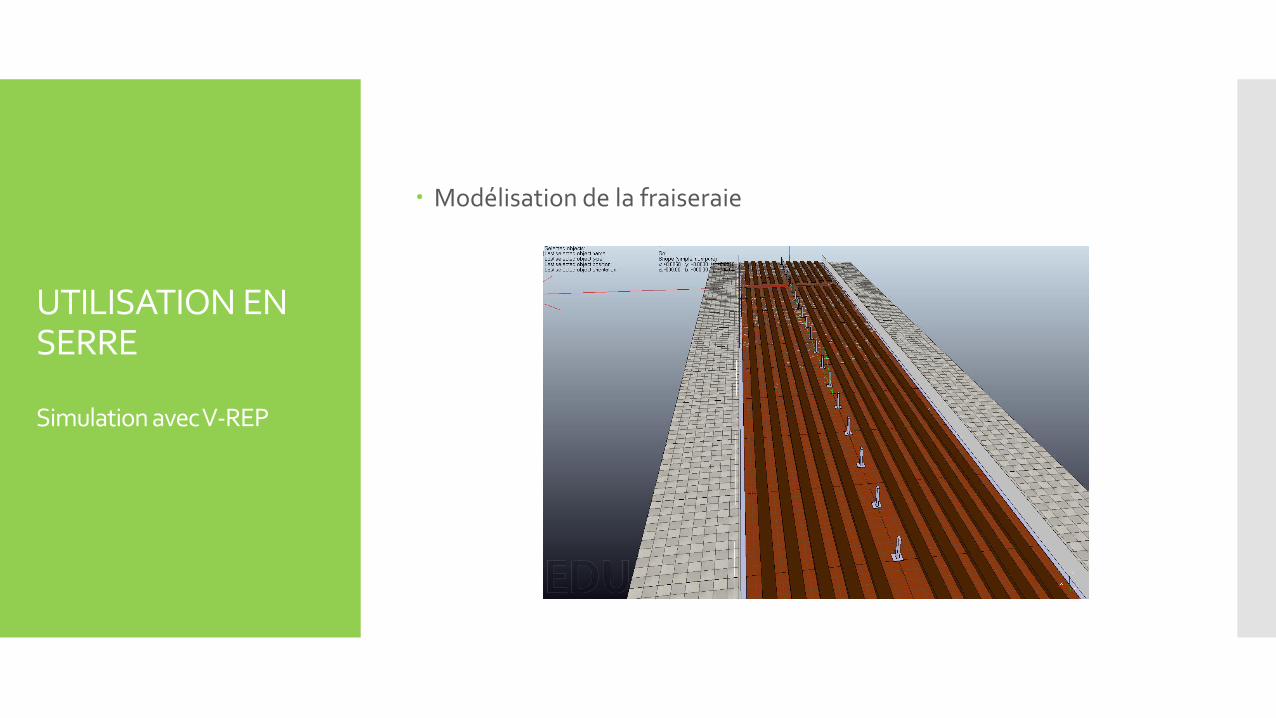
Modélisation de la fraiseraie
UTILISATION EN SERRE
Simulation avec V-REP

Modélisation de la fraiseraie
UTILISATION EN SERRE
Simulation avec V-REP
Modélisation de la fraiseraie
UTILISATION EN SERRE
Simulation avec V-REP
Modélisation du parcours
Outil développé par Denis PAYET Java
XML
Coordonnées du robot
Sans le LIDAR
Programmation du parcours
Modifications Commande move
Chronométrage du parcours
Modèle 3D du robot
UTILISATION EN SERRE
Simulation avec V-REP
Problèmes rencontrés sur la modélisation Logiciel 3D peu optimisé
Modélisation 3D complexe
Problème de structure de la scène
Autres problèmes Préparation de la fraiseraie
Cahier des charges non respecté
Robot en panne
Apprentissage de ces problèmes
UTILISATION EN SERRE
Simulation avec V-REP

Démonstration
UTILISATION EN SERRE
Résultats

CONCLUSION
INTRODUCTION
PRÉSENTATION DU ROBOTGénéralités
Conditions d’accueil
Paramétrages
UTILISATION EN SERRELa fraiseraie
Parcours « escargot »
Simulation avec V-REP
Résultats
CONCLUSION
CONCLUSION
Étude des aspects ergonomiques
Parcours répondant à la problématique en serre
Automatisation du désherbage des cultures de canne à sucre Instrumentalisation du robot
Computer vision
Pl@ntnet
Bilan
Perspectives
Expérimentation du robot Tropic’Oz pour l’automatisation du désherbage de différentes cultures
Ansfrid GEFFROY
33004639
Stage de Masters 2 InformatiqueDépartement de Mathématiques et Informatiques, Université de la Réunion
Encadrants :Denis Payet Pierre-Yves Brachelet
Responsable : Frédéric Mesnard