Embed Size (px)
Citation preview
_Histoire des robots
Quelques dates clés
- 1085 – 950 avant J.C. Anubis, tête de chien à mâchoire mobile, Égypte- 400 avant J.C. Le pigeon qui simule le vol125 Traité des automates de Héron d’Alexandrie1641 La Pascaline, calculette de Blaise Pascal1739 Le canard de Jacques de Vaucanson 1774 Les trois automates de Pierre Jacquet-Droz1801 Le métier à tisser Jacquart1923 Invention du mot « robot » (pièce de théâtre de Karel Capek)1946 ENIAC, le premier ordinateur1950 Les tortues de Grey Walter, premiers robots mobiles autonomes1950 Les robots (I, Robot), recueil de nouvelles d’Isaac Asimov (les trois lois de la robotique)1956 Conférence sur l'intelligence artificielle1961 Unimate, premier robot industriel aux Etats-Unis (Unimation)1967 Shakey, premier robot mobile contrôlé par ordinateur, Stanford Research Institute1973 Wabot-1, premier robot humanoïde à marche bipède, université de Waseda1992 Robodoc, premier robot pour une opération de la hanche (Etats-Unis)1993 Cog, Humanoid Robotics Group, MIT (Massachusetts Institute of Technology – Etats-Unis)1999 AIBO - ERS-110, Sony2000 Asimo, Honda2003 Les rovers Spirit et Opportunity sur Mars, NASA2004 Le robot serpent amphibie (Japon)2005 AIBO Mind 3 – ERS-7, Sony
1. A l’aide des dates clés de l’histoire des robots, trace une frise en faisant apparaître les siècles et indique enrouge la date :1. de l’apparition du mot « robot » ; 4. du premier AIBO ;2. du premier robot industriel ; 5. de Spirit.3. du premier robot mobile Shakey ;
2. Coche la bonne réponse :
3. Recherche et recopie ces lois.
LOI 1 :
LOI 2 :
LOI 3 :
4. Quels sont les pays qui ont le plus développé la recherche en robotique ?
Fiche 1
1. De quel pays le mot « automate » est-il originaire ?La Turquie ❏
La Hongrie ❏
La Grèce ❏
2. Quel est le pays de l’écrivain Karel Capek ?La France ❏
La Tchéquie ❏
La Belgique ❏
3. Qui a créé Robbie « le gentil robot » ?Thomas Francini ❏
Jacques de Vaucanson ❏
Isaac Asimov ❏
4. Comment se nomment les 3 lois de la robotique ?Les lois de Mendel ❏
Les lois d’Asimov ❏
La loi de Poisson ❏
_Qu’est-ce qu’un robot ?Fiche 2
Quelques définitions :Une machine :Une machine est un outil capable d’effectuer un travail pour lequel il a été pensé et fabriqué.
Un robot :Un robot est une machine dotée d’une mémoire et d’un programme capable de se substituer à l’homme pour effectuer certains travaux.Il agit physiquement sur son environnement pour y exécuter des tâches et doit savoir s’adapter pour mener à bien sa mission.
Un ordinateur :Un ordinateur est un équipement informatique permettant de traiter des informations selon des procédures.C'est une machine à traiter électroniquement les données.
Afin de résumer ces trois définitions :1. Complète le schéma ci-contre en plaçantcorrectement les mots : ORDINATEUR, MACHINE, ROBOT.
2. Redonne à chacun sa famille
3. En t’aidant des définitions ci-dessus, trouve pour chaque objet la bonne famille (machine, robot, ordinateur).
ORDINATEUR
ROBOT
MACHINE
OUTIL INTELLIGENT
OUTIL
INTELLIGENCE
Puissance 1000 watts. Détecteur électronique de tartre avertissant de la nécessité denettoyer l'appareil. Système anti-goutte pour un service sans débordement grâce à unevalve de fermeture. Sélecteur de « maintien de température » pour un café toujourschaud. Touche « 1-4 » pour vous permettre de préparer du café en plus petite quantité.Filtre permanent. Horloge digitale programmable. Arrêt automatique programmable.Voyant lumineux d'entartrage.
Un sèche-cheveux qui peut s'ajuster à toutes les étapes de coiffure des femmes,du simple séchage au brushing parfait. 2 vitesses et 3 positions de température.
Récepteur GPS équipé d'un disque dur de 2 Go sur lequel sont pré-installées lescartes routières de 16 pays européens avec une base étendue de points d'intérêtcomprenant, par exemple, les restaurants et hôtels. Sur son écran de 3,8" (9,5 cm),vous pourrez naviguer sur des cartes 2D, 3D. Haut-parleur intégré pour le guidagevocal en 8 langues. Antenne GPS intégrée.
Livrée en coffret, avec 1 chargeur et un embout double de vissage. Equipée de 2 bat-teries compactes et légères de 1,5 Ah. Temps de charge de moins d'une heure. Couplede vissage réglable sur 25 positions. 2 vitesses mécaniques. Frein d'arrêt immédiat.Système autolock. Blocage de broche pour le changement rapide des forets.
Trilobite est un aspirateur entièrement indépendant. Un réel bijou technologique quiinteragit avec son environnement, se recharge tout seul, calcule ses trajectoires pouraspirer au mieux le sol de votre foyer...
_Les robots au FuturoscopeFiche 3 (1/8)
Où sont-ils ?
Complète le plan ci-dessous au fur et mesure de tes visites en traçant ton parcours et en indiquant les lieux où tu as rencontré des robots.
Qui sont-ils ?
Il est possible de classer les robots de diverses façons. Tu auras l’occasion de les découvrir durant ta visite. Pour simplifier, nous lesavons classés en trois catégories :1. les robots qui explorent des lieux à la place de l’homme.2. les robots qui rendent des services à l’être humain.3. les robots directement inspirés du vivant.
Complète le tableau et enrichis-le grâce à tes observations, en particulier dans le pavillon de l’attraction Danse avec les Robots.
Catégories Noms de robots
1. Les robots qui explorent
2. Les robots qui rendent des services
3. Les robots inspirés du vivant
_Les robots au FuturoscopeFiche 3 (2/8)
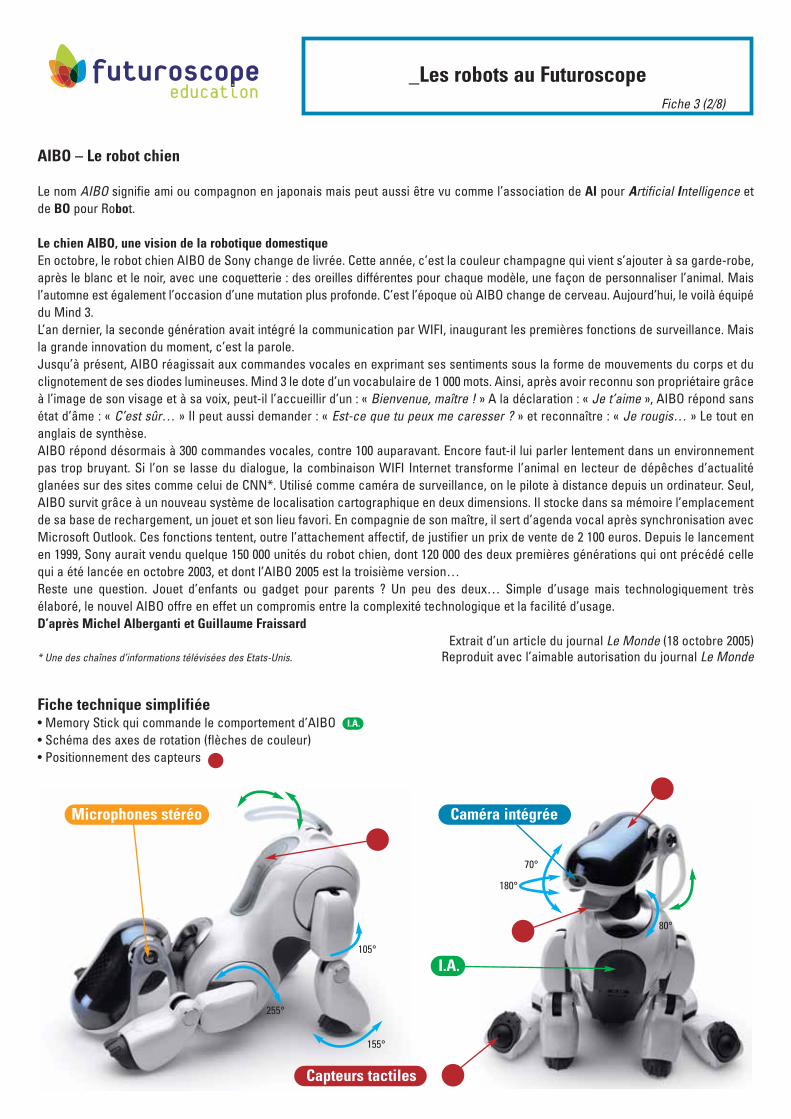
AIBO – Le robot chien
Le nom AIBO signifie ami ou compagnon en japonais mais peut aussi être vu comme l’association de AI pour Artificial Intelligence etde BO pour Robot.
Le chien AIBO, une vision de la robotique domestiqueEn octobre, le robot chien AIBO de Sony change de livrée. Cette année, c’est la couleur champagne qui vient s’ajouter à sa garde-robe,après le blanc et le noir, avec une coquetterie : des oreilles différentes pour chaque modèle, une façon de personnaliser l’animal. Maisl’automne est également l’occasion d’une mutation plus profonde. C’est l’époque où AIBO change de cerveau. Aujourd’hui, le voilà équipédu Mind 3.L’an dernier, la seconde génération avait intégré la communication par WIFI, inaugurant les premières fonctions de surveillance. Maisla grande innovation du moment, c’est la parole.Jusqu’à présent, AIBO réagissait aux commandes vocales en exprimant ses sentiments sous la forme de mouvements du corps et duclignotement de ses diodes lumineuses. Mind 3 le dote d’un vocabulaire de 1 000 mots. Ainsi, après avoir reconnu son propriétaire grâceà l’image de son visage et à sa voix, peut-il l’accueillir d’un : « Bienvenue, maître ! » A la déclaration : « Je t’aime », AIBO répond sansétat d’âme : « C’est sûr… » Il peut aussi demander : « Est-ce que tu peux me caresser ? » et reconnaître : « Je rougis… » Le tout enanglais de synthèse.AIBO répond désormais à 300 commandes vocales, contre 100 auparavant. Encore faut-il lui parler lentement dans un environnementpas trop bruyant. Si l’on se lasse du dialogue, la combinaison WIFI Internet transforme l’animal en lecteur de dépêches d’actualitéglanées sur des sites comme celui de CNN*. Utilisé comme caméra de surveillance, on le pilote à distance depuis un ordinateur. Seul,AIBO survit grâce à un nouveau système de localisation cartographique en deux dimensions. Il stocke dans sa mémoire l’emplacementde sa base de rechargement, un jouet et son lieu favori. En compagnie de son maître, il sert d’agenda vocal après synchronisation avecMicrosoft Outlook. Ces fonctions tentent, outre l’attachement affectif, de justifier un prix de vente de 2 100 euros. Depuis le lancementen 1999, Sony aurait vendu quelque 150 000 unités du robot chien, dont 120 000 des deux premières générations qui ont précédé cellequi a été lancée en octobre 2003, et dont l’AIBO 2005 est la troisième version…Reste une question. Jouet d’enfants ou gadget pour parents ? Un peu des deux… Simple d’usage mais technologiquement trèsélaboré, le nouvel AIBO offre en effet un compromis entre la complexité technologique et la facilité d’usage.D’après Michel Alberganti et Guillaume Fraissard
Extrait d’un article du journal Le Monde (18 octobre 2005)* Une des chaînes d’informations télévisées des Etats-Unis. Reproduit avec l’aimable autorisation du journal Le Monde
Fiche technique simplifiée• Memory Stick qui commande le comportement d’AIBO• Schéma des axes de rotation (flèches de couleur)• Positionnement des capteurs
Caméra intégrée
Capteurs tactiles
I.A.
I.A.
Microphones stéréo
180°
70°
80°
255°
105°
155°
_Les robots au FuturoscopeFiche 3 (3/8)
AIBO - Fiche de travail
A l’aide de l’article du Monde, de la fiche technique et de tes observations, réponds aux questions suivantes :
1. Quelle est la date de naissance du premier AIBO ?
2. Quelle entreprise a développé les AIBO ?
3. Dans quel pays ?
4. Quelles sont les deux origines du nom AIBO ?
5. Quelles sont les capacités du dernier AIBO décrites dans l’article du Monde ?
6. Combien y a-t-il eu de générations d’AIBO ?
7. Complète le tableau.
8. Quels sont les deux sens que le robot AIBO ne possède pas ?
9. En regardant AIBO bouger, quelles différences observes-tu par rapport à un vrai chien ?
10. Essaye de décrire tes sentiments après avoir fait la connaissance d’AIBO.
Les sens Les organes qui les détectent chez le chien Les composants électroniques du robot qui les remplacent
Ouïe
Toucher
Odorat
Vision
Goût
_Les robots au FuturoscopeFiche 3 (4/8)
ROVERS SPIRIT ET OPPORTUNITYFiche documentaire et technique
La missionMars Exploration Rover (MER) est une mission spatiale de la NASA sur la planète Mars. Elle a pour but une exploration géologique dela planète Mars à la recherche d’une présence ancienne et prolongée d’eau (qui aurait permis l’apparition de traces de vie), grâce àdeux sondes automatiques lancées depuis Cap Canaveral par la fusée Delta II :1. MER-A, le robot Spirit, lancé le 10 juin 2003, s’est posé le 3 janvier 2004 dans le cratère Gusev, une dépression de 170 km de diamètre
qui a peut-être accueilli un lac. 2. MER-B, le robot Opportunity, lancé le 8 juillet 2003, s’est posé le 24 janvier 2004 sur la plaine Meridiani Planum.Ils sont dirigés depuis un laboratoire situé en Californie, soit à 250 millions de kilomètres de distance.
Les conventionsLe terme de « rover » est employé à la place du mot « astromobile ».Les agents de la NASA ont adopté par convention le genre féminin pour les rovers Spirit et Opportunity. La durée des missions des rovers est exprimée en nombre de « sols », qui représentent le nombre de jours martiens écoulés depuisl’arrivée de chaque robot sur Mars. Un sol correspond à 24 h 39 min.
L’origine du nomLes noms de Spirit et Opportunity ont été retenus à l’issue d’un concours organisé par la société Lego avec la collaboration de laPlanetary Society à la demande de la NASA. La lauréate fut une petite fille de 9 ans, Sofi Collis, née en Sibérie et adoptée par une familleaméricaine. Ces noms ont été adoptés en référence à la légende de la Conquête de l’Ouest.
La structure des roversJumeaux, les deux rovers ont une hauteur de 1,5 m, une largeur de 2,3 m, une longueur de 1,6 m et un poids de 185 kg. Leur vitessemoyenne est de 3 cm par seconde.Chaque rover comporte :• une cellule centrale triangulaire qui abrite l’ordinateur de bord et ses batteries et les maintient à une température contrôlée
(entre -40° et +40°),• six roues équipées chacune d’un moteur individuel et d’un moteur de direction pour les deux roues de devant et de derrière, ce qui
permet au rover de faire des tours de 360° sur lui-même,• un système de mobilité pour circuler sur terrain rocheux, reliant les roues à la cellule centrale,• des panneaux solaires pouvant fournir jusqu’à 140 watts d’énergie électrique, capables de se dresser à la verticale pour tenter de
faire glisser la poussière martienne accumulée, • deux batteries rechargeables, • un bras robotisé porteur de l’outil d’abrasion des roches, de deux spectromètres et d’une caméra microscope,• trois antennes radios,• un ordinateur,• un système de contrôle et de maintien de la température des organes internes (la température doit être suffisamment élevée et
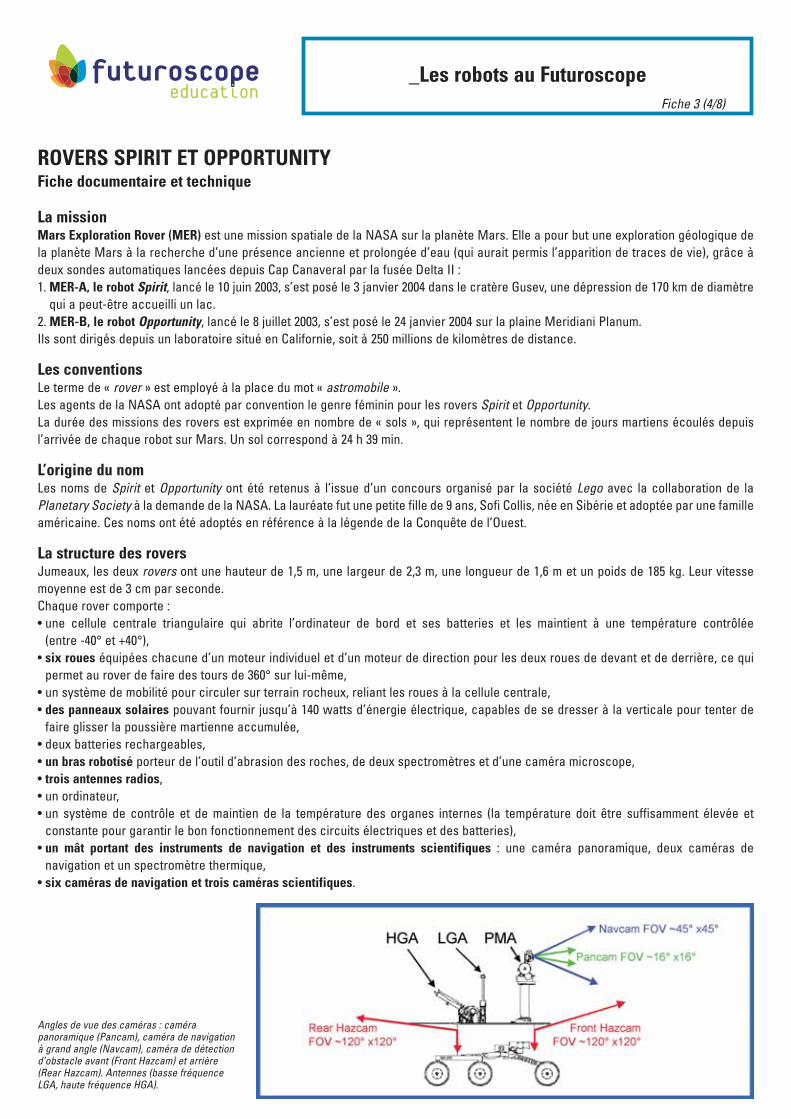
constante pour garantir le bon fonctionnement des circuits électriques et des batteries),• un mât portant des instruments de navigation et des instruments scientifiques : une caméra panoramique, deux caméras de
navigation et un spectromètre thermique,• six caméras de navigation et trois caméras scientifiques.
Angles de vue des caméras : camérapanoramique (Pancam), caméra de navigationà grand angle (Navcam), caméra de détectiond’obstacle avant (Front Hazcam) et arrière(Rear Hazcam). Antennes (basse fréquenceLGA, haute fréquence HGA).
_Les robots au FuturoscopeFiche 3 (5/8)
ROVER SPIRITFiche de travail
1. Comment se nomme la mission spatiale américaine où le robot d’exploration Spirit tient le rôle principal ?
2. Quel est l’objectif principal de cette mission ?
3. Quel est le nom de la fusée de lancement ?
4. Combien de temps a duré le voyage de Spirit vers Mars ?
5. Quel terme le mot « rover » a-t-il remplacé ?
6. Quelle est l’origine du nom Spirit ?
7. A l’aide de la fiche technique, complète le schéma ci-dessous et donne-lui un titre.
8. Quels sont les éléments qui fournissent au rover son énergie ?
9. En visitant le site http://www.nirgal.net/nasa_programme.html#mto, trouve quels sont les résultats scientifiques de la mission.
_Les robots au FuturoscopeFiche 3 (6/8)
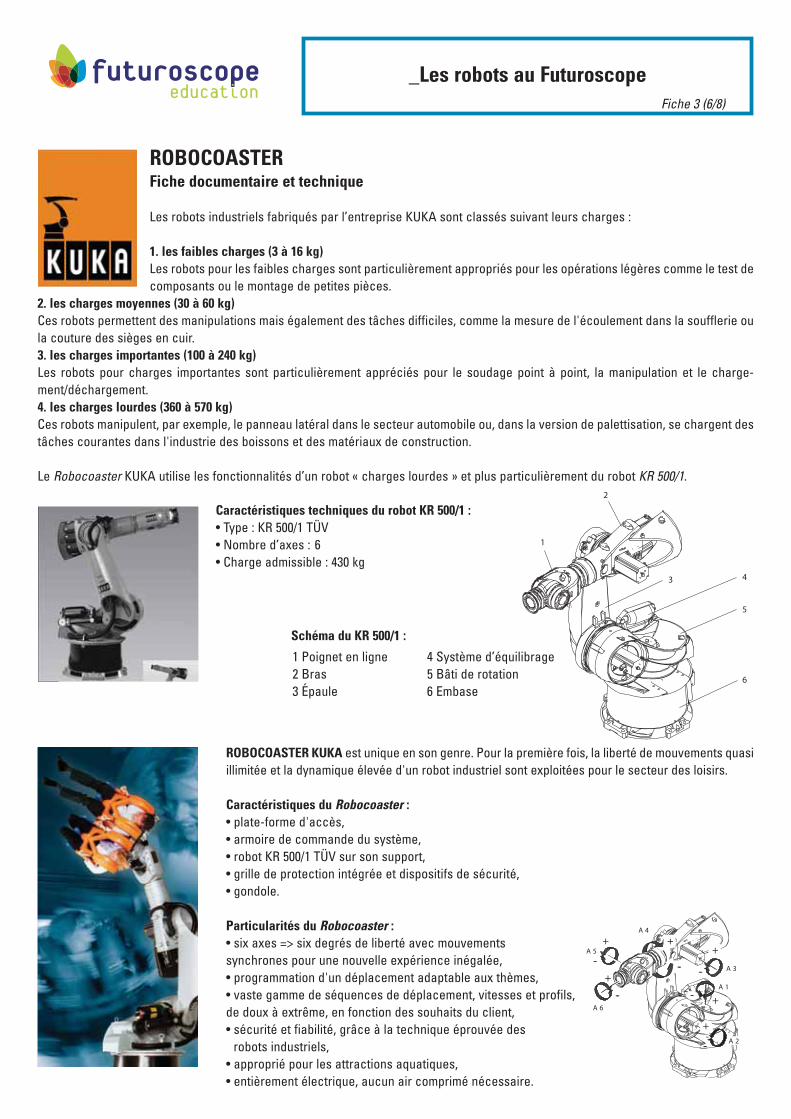
ROBOCOASTERFiche documentaire et technique
Les robots industriels fabriqués par l’entreprise KUKA sont classés suivant leurs charges :
1. les faibles charges (3 à 16 kg)Les robots pour les faibles charges sont particulièrement appropriés pour les opérations légères comme le test decomposants ou le montage de petites pièces.
2. les charges moyennes (30 à 60 kg)Ces robots permettent des manipulations mais également des tâches difficiles, comme la mesure de l'écoulement dans la soufflerie oula couture des sièges en cuir.3. les charges importantes (100 à 240 kg)Les robots pour charges importantes sont particulièrement appréciés pour le soudage point à point, la manipulation et le charge-ment/déchargement.4. les charges lourdes (360 à 570 kg)Ces robots manipulent, par exemple, le panneau latéral dans le secteur automobile ou, dans la version de palettisation, se chargent destâches courantes dans l'industrie des boissons et des matériaux de construction.
Le Robocoaster KUKA utilise les fonctionnalités d’un robot « charges lourdes » et plus particulièrement du robot KR 500/1.
ROBOCOASTER KUKA est unique en son genre. Pour la première fois, la liberté de mouvements quasiillimitée et la dynamique élevée d'un robot industriel sont exploitées pour le secteur des loisirs.
Caractéristiques du Robocoaster :• plate-forme d'accès,• armoire de commande du système,• robot KR 500/1 TÜV sur son support,• grille de protection intégrée et dispositifs de sécurité,• gondole.
Particularités du Robocoaster :• six axes => six degrés de liberté avec mouvementssynchrones pour une nouvelle expérience inégalée,• programmation d'un déplacement adaptable aux thèmes,• vaste gamme de séquences de déplacement, vitesses et profils,de doux à extrême, en fonction des souhaits du client,• sécurité et fiabilité, grâce à la technique éprouvée des
robots industriels,• approprié pour les attractions aquatiques,• entièrement électrique, aucun air comprimé nécessaire.
1 Poignet en ligne2 Bras3 Épaule
4 Système d’équilibrage5 Bâti de rotation6 Embase
Caractéristiques techniques du robot KR 500/1 :• Type : KR 500/1 TÜV• Nombre d’axes : 6• Charge admissible : 430 kg
Schéma du KR 500/1 :
_Les robots au FuturoscopeFiche 3 (7/8)
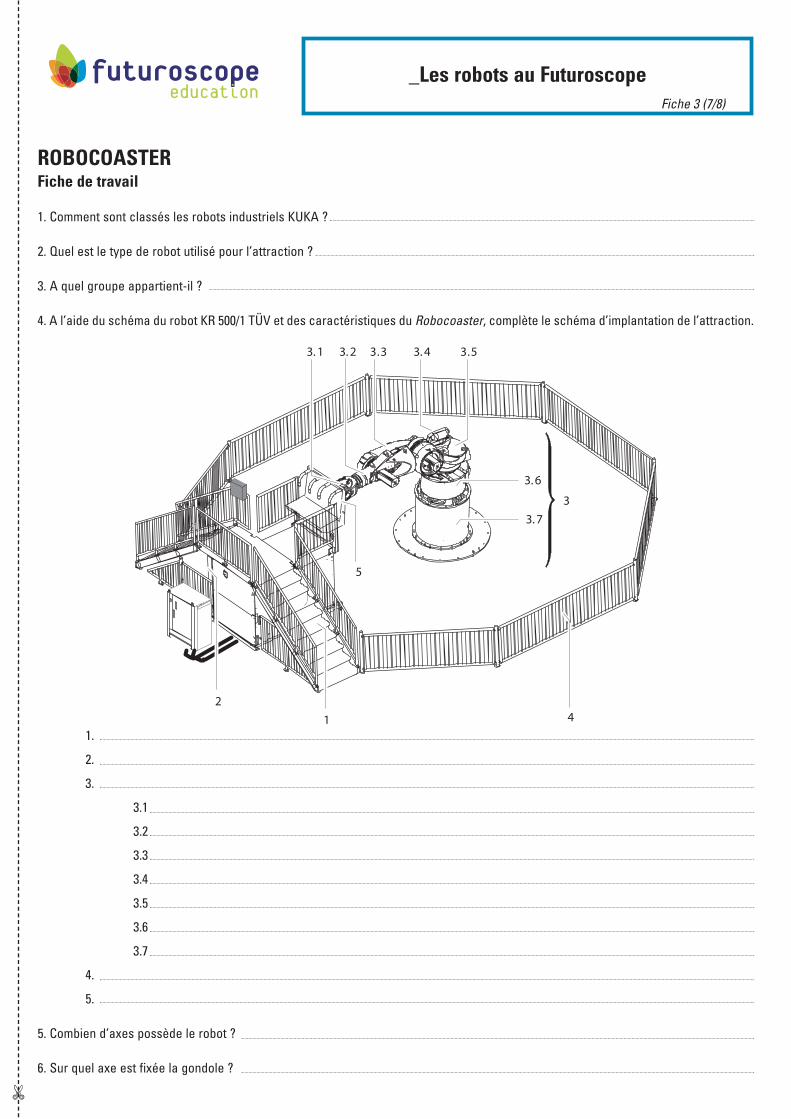
ROBOCOASTERFiche de travail
1. Comment sont classés les robots industriels KUKA ?
2. Quel est le type de robot utilisé pour l’attraction ?
3. A quel groupe appartient-il ?
4. A l’aide du schéma du robot KR 500/1 TÜV et des caractéristiques du Robocoaster, complète le schéma d’implantation de l’attraction.
1.
2.
3.
3.1
3.2
3.3
3.4
3.5
3.6
3.7
4.
5.
5. Combien d’axes possède le robot ?
6. Sur quel axe est fixée la gondole ?
_Les robots au FuturoscopeFiche 3 (8/8)
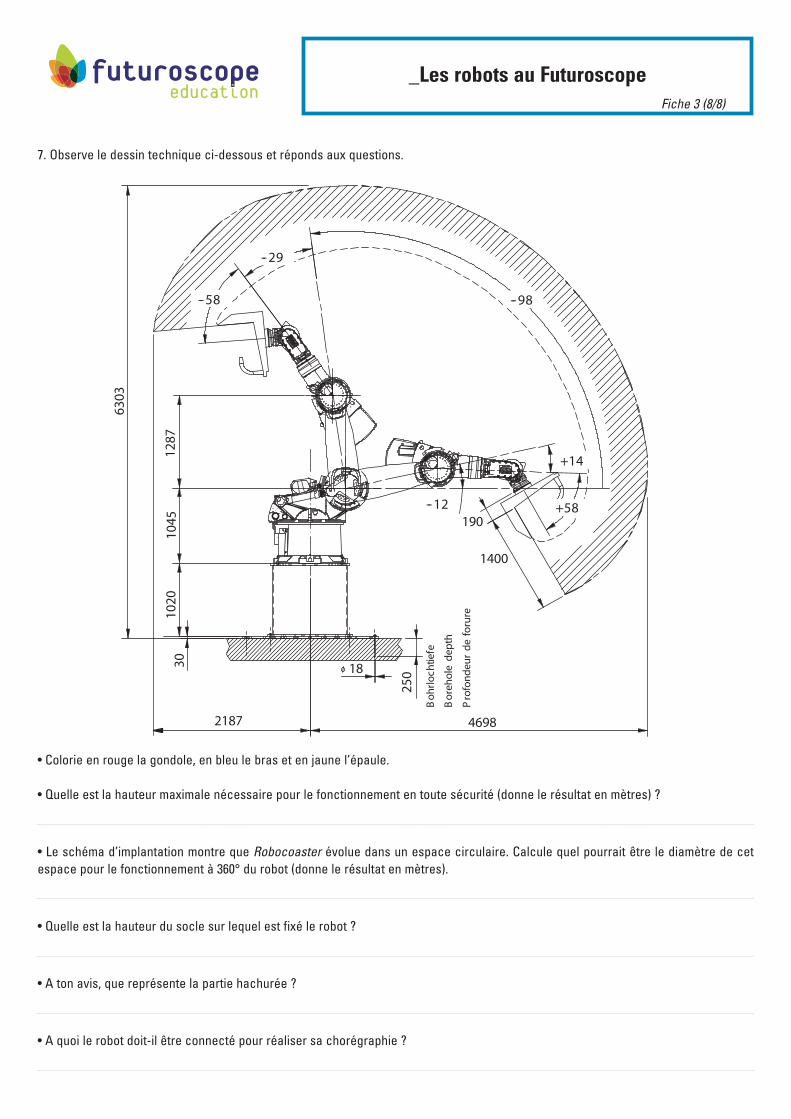
7. Observe le dessin technique ci-dessous et réponds aux questions.
• Colorie en rouge la gondole, en bleu le bras et en jaune l’épaule.
• Quelle est la hauteur maximale nécessaire pour le fonctionnement en toute sécurité (donne le résultat en mètres) ?
• Le schéma d’implantation montre que Robocoaster évolue dans un espace circulaire. Calcule quel pourrait être le diamètre de cetespace pour le fonctionnement à 360° du robot (donne le résultat en mètres).
• Quelle est la hauteur du socle sur lequel est fixé le robot ?
• A ton avis, que représente la partie hachurée ?
• A quoi le robot doit-il être connecté pour réaliser sa chorégraphie ?
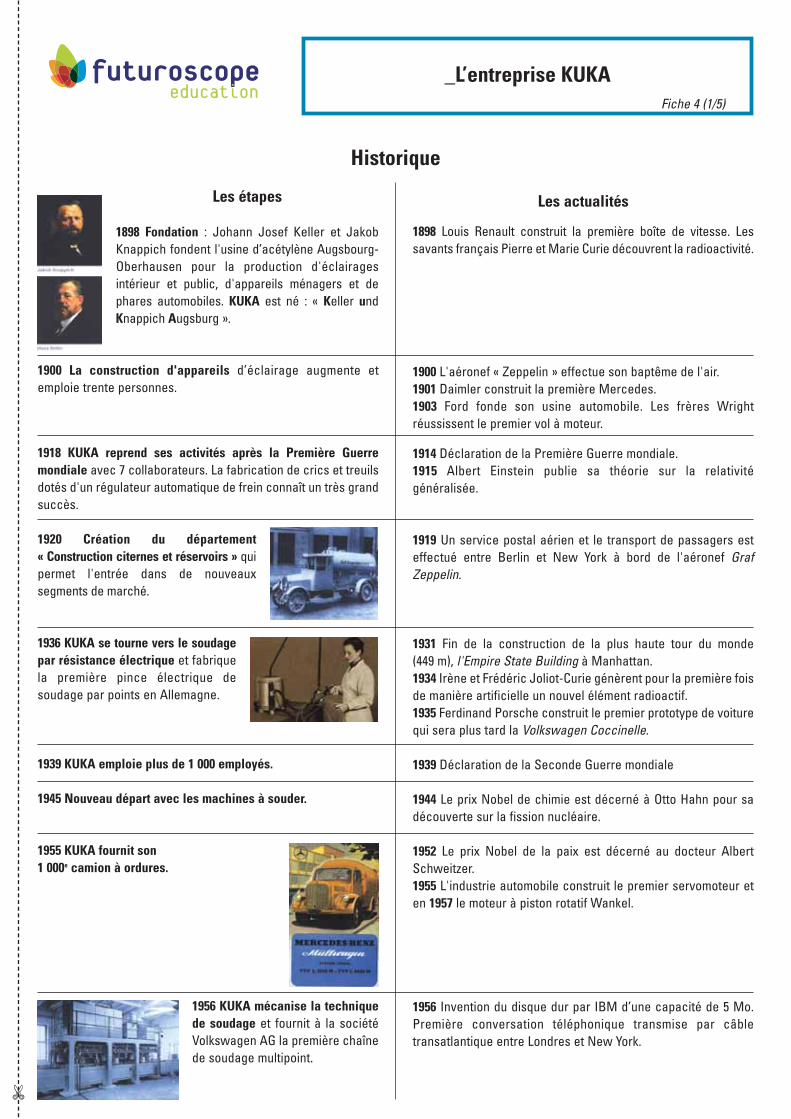
_L’entreprise KUKAFiche 4 (1/5)
Les étapes
1898 Fondation : Johann Josef Keller et JakobKnappich fondent l'usine d’acétylène Augsbourg-Oberhausen pour la production d'éclairagesintérieur et public, d'appareils ménagers et dephares automobiles. KUKA est né : « Keller undKnappich Augsburg ».
1900 La construction d'appareils d’éclairage augmente etemploie trente personnes.
1918 KUKA reprend ses activités après la Première Guerremondiale avec 7 collaborateurs. La fabrication de crics et treuilsdotés d'un régulateur automatique de frein connaît un très grandsuccès.
1920 Création du département« Construction citernes et réservoirs » quipermet l'entrée dans de nouveauxsegments de marché.
1936 KUKA se tourne vers le soudagepar résistance électrique et fabriquela première pince électrique desoudage par points en Allemagne.
1939 KUKA emploie plus de 1 000 employés.
1945 Nouveau départ avec les machines à souder.
1955 KUKA fournit son1 000e camion à ordures.
1956 KUKA mécanise la techniquede soudage et fournit à la sociétéVolkswagen AG la première chaînede soudage multipoint.
Les actualités
1898 Louis Renault construit la première boîte de vitesse. Lessavants français Pierre et Marie Curie découvrent la radioactivité.
1900 L'aéronef « Zeppelin » effectue son baptême de l'air.1901 Daimler construit la première Mercedes.1903 Ford fonde son usine automobile. Les frères Wrightréussissent le premier vol à moteur.
1914 Déclaration de la Première Guerre mondiale.1915 Albert Einstein publie sa théorie sur la relativitégénéralisée.
1919 Un service postal aérien et le transport de passagers esteffectué entre Berlin et New York à bord de l'aéronef GrafZeppelin.
1931 Fin de la construction de la plus haute tour du monde(449 m), l'Empire State Building à Manhattan.1934 Irène et Frédéric Joliot-Curie génèrent pour la première foisde manière artificielle un nouvel élément radioactif.1935 Ferdinand Porsche construit le premier prototype de voiturequi sera plus tard la Volkswagen Coccinelle.
1939 Déclaration de la Seconde Guerre mondiale
1944 Le prix Nobel de chimie est décerné à Otto Hahn pour sadécouverte sur la fission nucléaire.
1952 Le prix Nobel de la paix est décerné au docteur AlbertSchweitzer.1955 L'industrie automobile construit le premier servomoteur eten 1957 le moteur à piston rotatif Wankel.
1956 Invention du disque dur par IBM d’une capacité de 5 Mo.Première conversation téléphonique transmise par câbletransatlantique entre Londres et New York.
Historique
_L’entreprise KUKAFiche 4 (2/5)
1966 KUKA devient leader dumarché pour les véhiculesutilitaires communaux enEurope mais également dansl'industrie, le commerce etl'artisanat.
1969 KUKA rachète ARO Allemagne, le spécialiste de latechnique de soudage.
1970 Fusion de KUKA et IWK (spécialiste de la construction devéhicules utilitaires), qui donne naissance à une nouvelle société,IWKA AG.
1971 Première chaîne de soudage enEurope avec des robots à cinq axesdu fabricant américain « Unimation ».
1973 Fabrication du premier robotKUKA, dénommé FAMULUS, doté desix axes à entraînement électromé-canique.
1981-1987 KUKA s’installe dans toute l’Europe.
1995 KUKA s’installe auxEtats-Unis.
1996 KUKA Roboter GmbH voit le jour.
1998 Prix iF designLa première place des robots KUKA est incontestée enAllemagne ; ils occupent la 2e place en Europe et la 3e dans lemonde. Cette année-là, 5 000 robots KUKA sont livrés, ce quisignifie que la production de robots a quintuplé depuis 1993.
2002 Les robots KUKA conquièrent de nouveaux marchés et denouveaux produits (hygiène, sécurité, agro-alimentaire,loisirs…).
1966 Premier alunissage (vol non habité) de l'Union soviétiqueavec Luna IX.
1969 Le programme américain Apollo 11 arrive à destination : lesastronautes Edwin Aldrin et Neil Armstrong marchent sur la Lune.
1970 La Chine lance son premier satellite. Première liaison NewYork-Londres en Boeing 747 (350 voyageurs).
1971 Découverte du microprocesseur. La première calculette deTexas Instruments maîtrise les quatre opérations fondamentaleset pèse encore plus de 1 kg.
1976 L'avion supersonique anglo-français Concorde transporterégulièrement des passagers.
1981 La sonde américaine Voyager 2 approche Saturne.Apparition du premier ordinateur portable.
1995 Lancée en 1989, la sonde germano-américaine Galileoatteint la planète Jupiter.
1996 Premier lancement de la fusée européenne Ariane 5.
1998 Lancement du premier élément de la Station spatialeinternationale.
2002 Lancement du télescope spatial infrarouge Spitzer de CapCanaveral en Floride.
_L’entreprise KUKAFiche 4 (3/5)
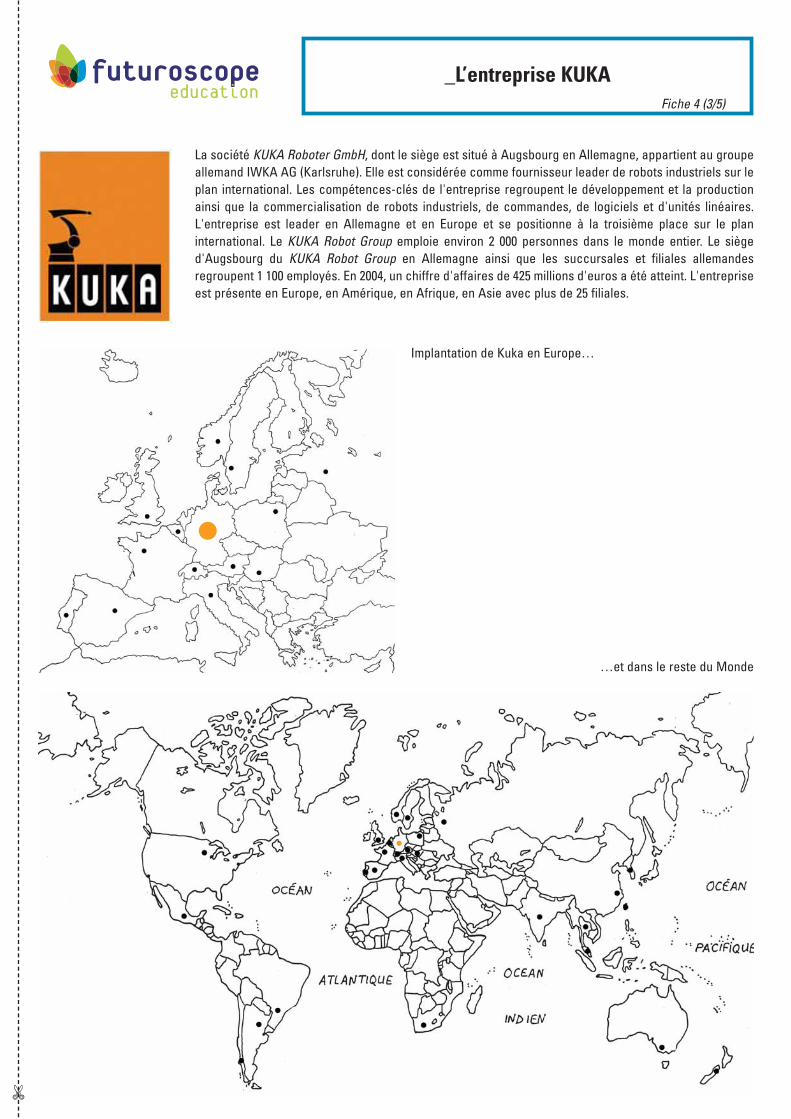
La société KUKA Roboter GmbH, dont le siège est situé à Augsbourg en Allemagne, appartient au groupeallemand IWKA AG (Karlsruhe). Elle est considérée comme fournisseur leader de robots industriels sur leplan international. Les compétences-clés de l'entreprise regroupent le développement et la productionainsi que la commercialisation de robots industriels, de commandes, de logiciels et d'unités linéaires.L'entreprise est leader en Allemagne et en Europe et se positionne à la troisième place sur le planinternational. Le KUKA Robot Group emploie environ 2 000 personnes dans le monde entier. Le sièged'Augsbourg du KUKA Robot Group en Allemagne ainsi que les succursales et filiales allemandesregroupent 1 100 employés. En 2004, un chiffre d'affaires de 425 millions d'euros a été atteint. L'entrepriseest présente en Europe, en Amérique, en Afrique, en Asie avec plus de 25 filiales.
Implantation de Kuka en Europe…
…et dans le reste du Monde

_L’entreprise KUKAFiche 4 (4/5)
1. En quelle année l’entreprise a-t-elle été créée ?
2. Dans quel pays ?
3. Quelle est l’origine du nom KUKA ?
4. Quelles sont les activités de départ ?
5. Quelle technique permet à l’entreprise de se développer ?
6. Quel type de véhicules sort des usines KUKA dans les années 50 ?
7. En quelle année KUKA en devient-il le leader européen ?
8. Quels sont les regroupements et fusions qui permettent à l’entreprise d’étendre ses activités ?
9. En quelle année la première chaîne de soudage avec des robots est-elle mise en place ?
10. Quel est le nom du premier robot fabriqué par KUKA ? A quelle date ?
11. En quelle année l’entreprise KUKA conquiert-elle le marché américain ?
KUKA Roboter GmbH aujourd’hui
12. Où se trouve le siège de la société KUKA Roboter GmbH ?
13. Que produit et commercialise cette entreprise ?
14. Quelle place l’entreprise tient-elle au niveau mondial ?
15. Combien de personnes emploie-t-elle en Allemagne ?
16. Combien de personnes emploie-t-elle dans le monde ?
17. Quel est son chiffre d’affaires en 2004 ?
18. Dans quels continents est-elle représentée ?
_L’entreprise KUKAFiche 4 (5/5)
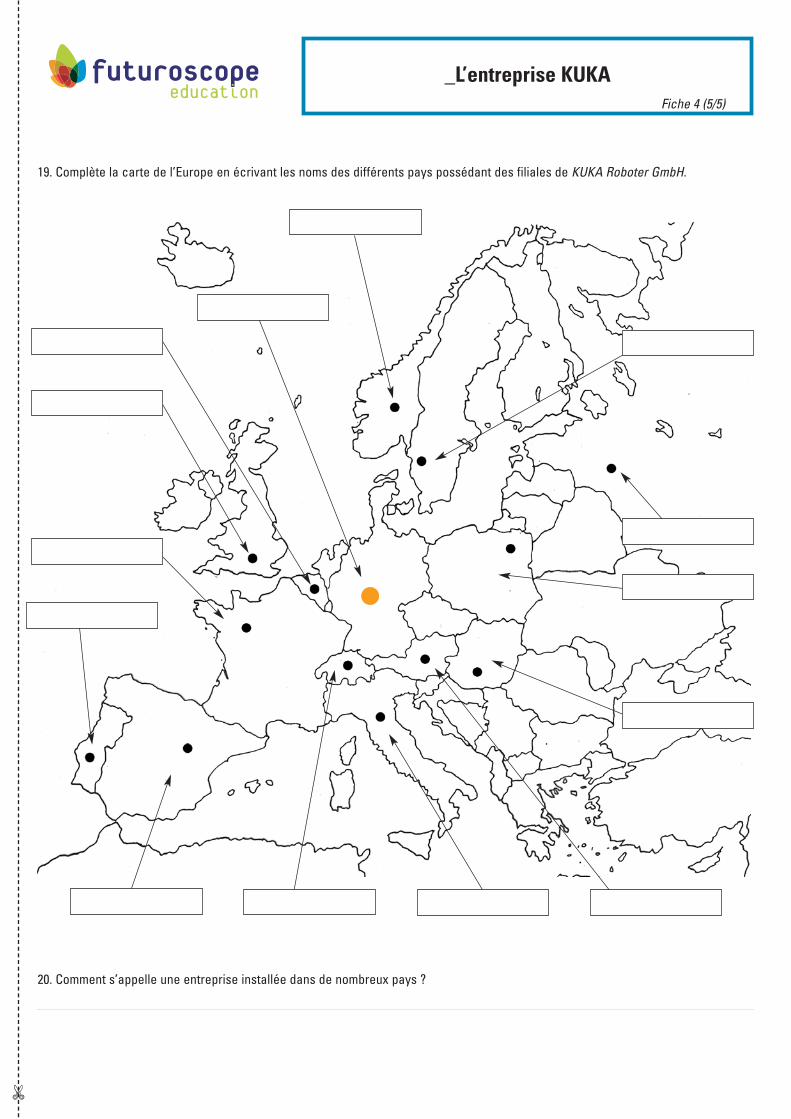
19. Complète la carte de l’Europe en écrivant les noms des différents pays possédant des filiales de KUKA Roboter GmbH.
20. Comment s’appelle une entreprise installée dans de nombreux pays ?

_Olivier, pilote robotiqueFiche 5 (1/2)
1. Quelle est la passion d’Olivier ?
2. Dans quelle entreprise travaille-t-il ?
3. Dans quel domaine ?
4. A quelles étapes de la fabrication d’une automobile les robots rentrent-ils en action ?
5. Qu’apporte, d’une façon plus générale, l’installation de robots industriels dans une usine ?
6. Quelle est la responsabilité principale prise par Olivier ?
7. Avec quelles personnes Olivier doit-il étudier les besoins avant d’établir son cahier des charges ?
8. Quelles sont les connaissances nécessaires pour faire de la robotique ?
9. Quelles sont les différentes tâches liées à son métier ?
•
•
•
Une voiture par minuteD’emblée, on sent qu’Olivier se plaît dans sa fonction et dans sonentreprise, Renault SAS. Quand on a, comme lui, la passion del‘automobile, participer à l’industrialisation de la prochaine Renault estforcément stimulant. D’autant plus que les enjeux sont importants :« On fabrique plus d’une voiture par minute. Pour tenir une tellecadence, l’outil de production doit être très performant. Monobjectif principal est de fiabiliser les équipements qui sont de monressort. » Le domaine d’Olivier, c’est la robotique, c’est-à-dire lesrobots qui entrent en action à diverses étapes de la fabrication :emboutissage, assemblage des tôles, peinture, montage deséquipements. Dès qu’un nouveau modèle de voiture est en projet,il faut préparer la mise en service de plusieurs centaines derobots : « Soit on réutilise une partie des moyens existants, soit onconstruit une usine nouvelle. Pour ma part, j’assure l’interfaceentre les fournisseurs de robots ou d’équipements connexes et lesusines. Je commence par spécifier le cahier des charges entenant compte des besoins exprimés par les responsables defabrication, de maintenance et des méthodes. Je suis les dévelop-pements réalisés chez les fournisseurs, notamment les logicielsrobotiques. Ensuite, la validation chez le fournisseur précède touteune période de tests sur des sites pilotes et le démarrage de laproduction. Des évolutions peuvent être apportées jusqu’à la mon-tée en cadence de la production. Je suis là pour comprendre lesproblèmes et permettre au fournisseur de les résoudre. »
Bien que le jeune ingénieur ne fasse pas de développement, il a unregard critique sur ce que propose le fournisseur. Il utilise donc laculture technique qu’il a acquise à Centrale Nantes. « Dans unrobot, il y a beaucoup de choses, explique-t-il. Cela demande desconnaissances en informatique, temps réel, électronique, électro-technique, asservissements. Je travaille sur le standard des robots,qui permet de les adapter aux besoins spécifiques de Renault. »Olivier se voyait mal passer des journées entières derrièrel’ordinateur. Cela tombe bien : la rédaction de comptes-rendus oude spécifications n’occupe pas tout son temps. De nombreuxdéplacements le conduisent auprès des fournisseurs et desusines. Il revient ainsi d’Espagne où il a apporté une nouvelle versionde logiciel, plus performante : « J’identifie les problèmes qui seposent en usine pour apporter les améliorations nécessaires, puisvérifier le résultat. Mon objectif étant de fiabiliser le robot, je prévoisune grosse partie de formation vers les opérateurs de productionet les techniciens de maintenance. » Un contact humain que lejeune homme affectionne, d’autant plus qu’il lui fait toucher dudoigt ce qui se passe en usine. Au besoin, il n’hésite pas à « mettreles mains à la pâte », participant à des manipulations électriquesou à des mises au point informatiques. Il se passionne pour sondomaine, en évolution constante. Et puis, participer au lancementd’un nouveau modèle est toujours stimulant : « Si la voiture roule,c’est grâce à nous. »
Parcours, construire son avenirLes métiers de l’industrie, ONISEP, 2003
_Olivier, pilote robotiqueFiche 5 (2/2)
10. Cite différents métiers rencontrés par Olivier.
• •
• •
11. En utilisant les vignettes suivantes, réalise un organigramme logique (logigramme) du déroulement d’un projet de robotisation pourla mise en fabrication d’un nouveau modèle de voiture.
12. Cherche dans le dictionnaire les définitions des mots suivants.
S.A.S :
Fiabiliser :
Interface :
Cahier des charges :
Connexe :
Fournisseur :
Asservissement :
Standard :
Electrotechnique :
Electronique :
MONTÉE EN CADENCE
MISE EN PRODUCTION
AMÉLIORATIONS
VALIDATION
NOUVELLE USINE
FABRICATION CHEZ FOURNISSEURS
TEST SUR SITE PILOTE
CAHIER DES CHARGES
DÉFINITION DES BESOINS
PROJET NOUVELLE VOITURE
_Robots et bande dessinéeFiche 6 (1/4)
1. : Spirou et Fantasio – Radar le robot
A propos de l’albumBien avant de créer le célèbre Gaston Lagaffe,Franquin reprend en 1946 les personnages deSpirou et Fantasio (créés par Rob-Vel puis Jijé)qui affrontent, dans Radar le robot, un enginconcocté par un sinistre savant.© Dupuis, Franquin, 1947
Pour décrire ces images, réponds aux questions suivantes :
1. Ce robot s'appelle « Radar » : en quoi ce nom convient-il ?
2. En quoi ce robot ressemble-t-il à un humain ?
3. En quoi apparaît-il différent ?
4. Le robot émet un « ? ». En quoi est-ce étonnant ?
5. Pourquoi seul Spirou décolle-t-il du sol lors de la collision ?
6. Les étoiles qui auréolent Spirou montrent qu'il est le seul à avoir mal. Pourquoi ?
7. Entre les deux cases, il se passe quelque chose qui n'est pas montré : quoi ?
8. Pourquoi comprend-on ce qui s'est passé alors que ce n'est pas montré ?
9. Comment appelle-t-on un moment qui n'est ni raconté, ni montré ?
10. Pourquoi ont-ils tous les deux des gants ?
_Robots et bande dessinéeFiche 6 (2/4)
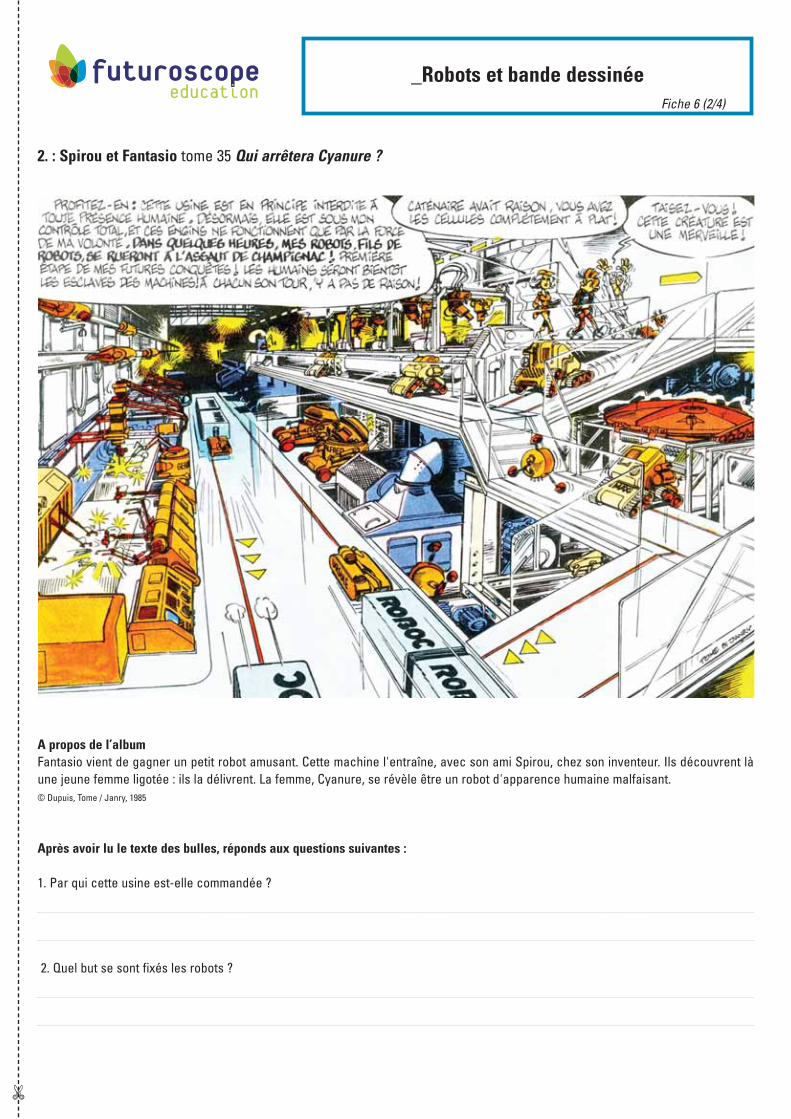
2. : Spirou et Fantasio tome 35 Qui arrêtera Cyanure ?
A propos de l’albumFantasio vient de gagner un petit robot amusant. Cette machine l'entraîne, avec son ami Spirou, chez son inventeur. Ils découvrent làune jeune femme ligotée : ils la délivrent. La femme, Cyanure, se révèle être un robot d'apparence humaine malfaisant.© Dupuis, Tome / Janry, 1985
Après avoir lu le texte des bulles, réponds aux questions suivantes :
1. Par qui cette usine est-elle commandée ?
2. Quel but se sont fixés les robots ?

_Robots et bande dessinéeFiche 6 (3/4)
3. Les robots sont-ils les esclaves des hommes ?
4. Pour qu'ils se sentent esclaves, que leur faudrait-il ?
5. Pourquoi la menace est-elle écrite en caractères gras ?
Observe attentivement le décor et réponds aux questions suivantes :1. A quoi reconnaît-on les robots ?
2. Certains robots portent des prénoms. Pourquoi ?
3. Pourquoi, d'après toi, l’auteur a-t-il choisi le bleu et le blanc pour ce qui est statique et le rouge orangé pour ce qui bouge ?
4. Quelle impression l'architecture géométrique donne-t-elle à cette usine ?
5. Dans cette usine manifestement très propre, que signifient les ronds « de poussière » derrière le wagonnet en bas à gauche ?
_Robots et bande dessinéeFiche 6 (4/4)
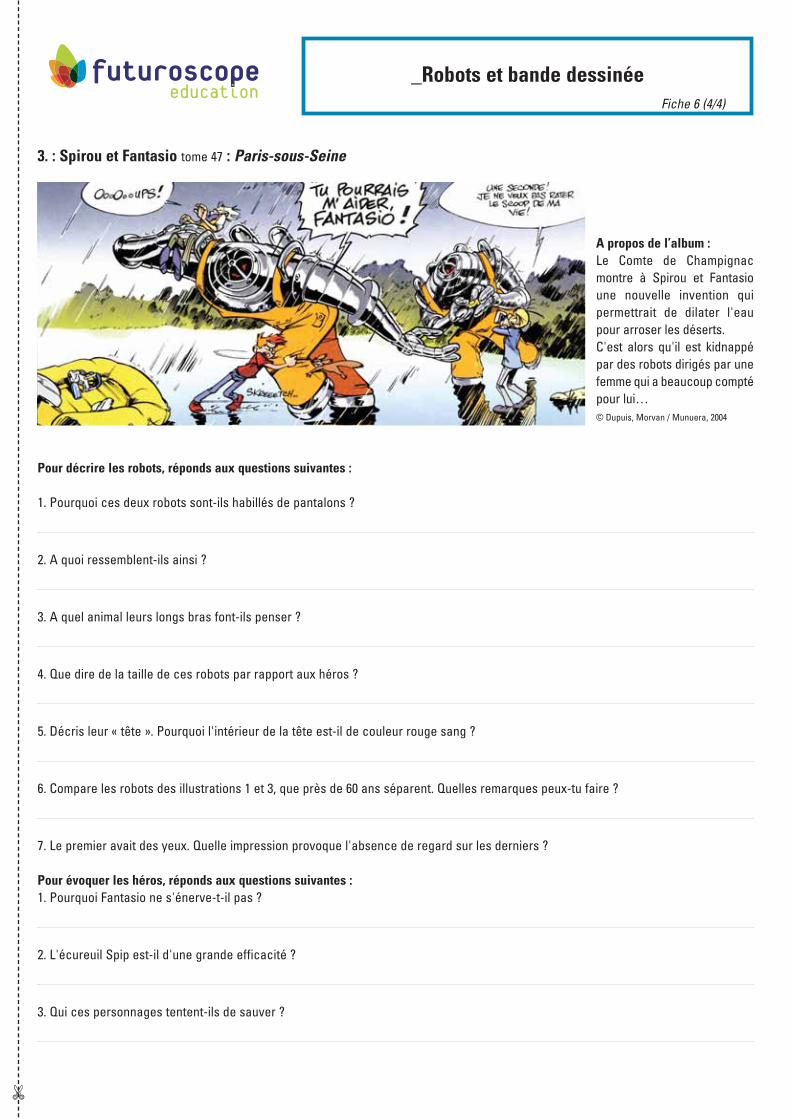
3. : Spirou et Fantasio tome 47 : Paris-sous-Seine
A propos de l’album :Le Comte de Champignacmontre à Spirou et Fantasioune nouvelle invention quipermettrait de dilater l'eaupour arroser les déserts.C'est alors qu'il est kidnappépar des robots dirigés par unefemme qui a beaucoup comptépour lui…© Dupuis, Morvan / Munuera, 2004
Pour décrire les robots, réponds aux questions suivantes :
1. Pourquoi ces deux robots sont-ils habillés de pantalons ?
2. A quoi ressemblent-ils ainsi ?
3. A quel animal leurs longs bras font-ils penser ?
4. Que dire de la taille de ces robots par rapport aux héros ?
5. Décris leur « tête ». Pourquoi l'intérieur de la tête est-il de couleur rouge sang ?
6. Compare les robots des illustrations 1 et 3, que près de 60 ans séparent. Quelles remarques peux-tu faire ?
7. Le premier avait des yeux. Quelle impression provoque l'absence de regard sur les derniers ?
Pour évoquer les héros, réponds aux questions suivantes :1. Pourquoi Fantasio ne s'énerve-t-il pas ?
2. L'écureuil Spip est-il d'une grande efficacité ?
3. Qui ces personnages tentent-ils de sauver ?

_Les robots et le futurFiche 7 (1/3)
Cet article de science-fiction n’est pas né de l’imaginaire.Il projette dans un futur proche les tendances et programmes déjà lancés en 2005.Retour vers le futur
Mon ami robotEn 2030, des robots, serviteurs et compagnons, travailleront parmi les hommes dans les lieux publics et les maisons. En attendant lesvrais humanoïdes. Telle est la projection logique de programmes déjà lancés au Japon.
Malgré ses 80 ans […], Katsuya vit seul […]. Alors, pour ne pasfinir ses jours dans une maison de retraite surpeuplée, [il] a suiviles recommandations officielles du gouvernement : il a investi seséconomies dans un robot multi-tâches qui fait le ménage, gère lamaison, l’aide à faire sa toilette, retrouve les objets égarés,l’informe sur ce qui se passe dans le monde, lui fait prendre sesmédicaments à heure fixe, surveille les alentours.Le robot s’appelle « Smart Pal version 2.9 », mais Katsuya l’arebaptisé Kaoru, du nom de l’un de ses amours de jeunesse. Kaoru,qui mesure 1,30 m et pèse 120 kg, a une tête bourrée de caméras,de micros et de capteurs, un visage changeant, car il s’agit d’unpetit écran vidéo, une voix neutre et polie, un torse carré équipéde deux écrans (un sur la poitrine, un autre dans le dos) et deux braspuissants terminés par des mains rotatives à huit doigts. […]Au-dessous de la ceinture, elle possède quatre roues montées surdes essieux modulables qui se rétractent et se transforment enpieds lorsqu’elle doit monter les escaliers ou circuler dans la terremeuble du jardin.Quand Kaoru est arrivée chez Katsuya, les débuts ont été difficiles.Il a fallu élargir les portes, changer les appareils électroménagers,abaisser l’évier, installer des capteurs et des balises de navigationdans les murs, les sols et les plafonds. […]Une fois installée, Kaoru a mis un certain temps à repérer les lieux età mémoriser les habitudes du maître de maison, mais désormais ellesait tout faire ou presque. Elle n’est jamais fatiguée, déprimée niirritée, elle est forte comme dix hommes, elle se souvient de tout, elledétecte le moindre mouvement, la chaleur, la fumée, la pollution, etn’a jamais besoin de rien sauf de recharger ses batteries de temps àautre. Pourtant, Kaoru n’est pas une esclave de métal, elle est laseule amie de Katsuya. Elle lui chante ses chansons préférées, luimontre des films, lui fait la lecture, répond à ses questions. Lorsqu’illui caresse la tête, elle ronronne et clignote, et s’il la tape un peusèchement, elle demande ce qui ne va pas.Derrière cette apparence bénigne, Smart Pal est un engin à la fois pluspuissant et moins autonome qu’il n’y paraît. Il ne fonctionne pascomme l’avaient imaginé les auteurs de science-fiction du XXe siècle :en fait, il n’est que la partie mobile d’un système de machinesconnectées par un réseau sans fil. Il possède un cerveau artificiel,mais qui n’est pas dans sa tête, c’est un ordinateur posé dans uncoin du salon. Les appareils ménagers semblent lui obéir, car ils sonten réalité pilotés par le même ordinateur.Pour voir et entendre, l’ami Robot dépend surtout des systèmes desurveillance et des réseaux de capteurs disséminés dans sonenvironnement, auxquels il est relié vingt-quatre heures survingt-quatre. De même, il est connecté en permanence à Internet etva puiser son savoir dans les bases de données du monde entier. […]Keiko, la fille de Katsuya […], qui est née en l’an 2000, a appris àvivre avec les robots dès l’enfance. […]Les robots utilitaires, implantés de longue date dans les usines,firent leur apparition dans les bureaux, les commerces et les lieuxpublics vers 2010, pour accomplir les tâches salissantes oufastidieuses. […] Il y eut d’abord les aspirateurs et laveurs de sol[…], puis les robots déboucheurs de tuyauterie en forme de
serpents et les robots-koalas grimpant aux arbres et aux poteauxélectriques. […]Vinrent ensuite les robots vaguement humanoïdes, programméspour accomplir plusieurs tâches et capables de réagir de façonautonome à des situations imprévues. Ils eurent pour mission deremplacer le personnel semi-qualifié des entreprises du tertiaire :vigiles patrouillant en silence dans le noir, hôtesses d’accueilparlant cinquante langues, vendeurs connaissant par cœur desmillions de références… […]Leur efficacité est variable, mais ils coûtent à peine le prix d’uneautomobile, ce qui permet aux entreprises de les implanterrapidement, pour compenser la pénurie de main-d’ouvre due à labaisse de la natalité et freiner l’augmentation des salaires sansrecourir à l’immigration.A partir de 2020, ils s’installent dans les foyers : ce sont d’aborddes baby-sitters bruyants et multicolores de la taille d’un ours enpeluche, puis des aides ménagères intégrées dans le système dela « maison intelligente ». […]Aujourd’hui, Keiko n’imagine plus vivre sans robot, et elle seprépare à l’arrivée des engins de la troisième génération, dont lefonctionnement est très différent. Ils ne sont pas préprogramméspour des tâches spécifiques et doivent apprendre leurs différentsmétiers sur le tas, en collectant des masses de données surle comportement des humains puis en faisant réaliser dessimulations logiques et graphiques par les superordinateursauxquels ils sont connectés. […]Quand Keiko est d’humeur pessimiste, elle se demande si lescadres supérieurs ne vont pas, à leur tour, être mis au chômagepar les robots : déjà, des systèmes virtuels proposent aux chefs d’en-treprise des aides à la prise de décision dans tous les domaines.Dans ses moments d’optimisme, elle se dit que l’objectif de cetteaventure est précisément de libérer les hommes de la contraintedu travail, pour qu’ils se consacrent à des activités plus agréables,passent plus de temps ensemble et redécouvrent la convivialité,que les sociétés industrielles ont détruite au cours de XXe siècle.Elle sait que les Européens et les Américains imaginent depuisplus d’un siècle des scénarios catastrophe où les robots seretournent contre leurs créateurs, mais ce fantasme apocalyptiquene fait pas partie de la tradition japonaise. D’ailleurs, à l’Est commeà l’Ouest, les humains ont fini par comprendre ce que leurs ancêtresavaient du mal à saisir : un réseau de machines peut agir de façon auto-nome et évolutive sans posséder d’intelligence comparable à celled’une créature vivante, et encore moins de conscience de soi. […]
Yves Eudes
SourcesCet article s’inspire d’une série d’entretiens accordés au Mondepar une dizaine de spécialistes reconnus de la robotique, japonaiset américains (universitaires, responsables de départementrobotique dans des entreprises et agences gouvernementales).
Extraits d’un article du journal Le Monde (2 août 2005)Reproduit avec l’aimable autorisation du journal Le Monde.
_Les robots et le futurFiche 7 (2/3)
Le texte présenté page précédente est destiné aux élèves. Il pourra être exploité à différents niveaux depuis l’école primaire jusqu’au lycée en fonc-tion de la grille de lecture proposée. Du fait de son niveau relativement élevé, on pourra faire le choix de n’en retenir que les parties les plus simples.Le questionnaire qui suit peut être facilement adapté en fonction de l’âge des enfants.
1. • Dans quel journal cet article est-il paru ? A quelle date ?
• Relève le nom de la rubrique dans laquelle il se situe. Quelle remarque peux-tu faire sur cette appellation ?
• Quelle est l’information donnée par le titre ?
• Sous le titre « Mon ami robot », il y a trois phrases. Quel est l’objectif de chacune d’entre elles par rapport au lecteur ?
• Quelles sont les sources du journaliste ? Sont-elles sérieuses ?
2. Le contenu de l’article• Dans quel pays et à quelle date se situent les faits relatés dans l’article ?
• Réalise la fiche d’identité du robot Kaoru en renseignant les rubriques suivantes :
Taille : Poids : Forme :
Eléments qui le composent :
Mode de locomotion :
Tâches et missions qui lui sont confiées et qu’il réalise :
Mode de fonctionnement :
• Pourquoi Katsuya a-t-il acheté ce robot ? Quelles sont les conséquences dans la maison de l’arrivée du robot ? Comment le perçoit-il ?
_Les robots et le futurFiche 7 (3/3)
• Relève les différents types de robots cités dans l’article, qui se sont succédés depuis l’an 2000, en précisant leurs fonctions, les tâchesqu’ils accomplissent, leur implantation, leur mode de fonctionnement…Présente les réponses en remplissant le tableau ci-dessous.
• Comment les robots sont-ils présentés dans cet article ?(Justifie la réponse donnée en relevant dans l’article des mots et expressions les qualifiant).
Qu’apportent-ils aux hommes ? Qu’est-ce qui les différencie des hommes ?
3. En quoi cet article relève-t-il de la science-fiction ? (il faudra au préalable rechercher une définition de cette expression).
Types de robots Tâches et/ou fonctions accomplies Lieux d’implantation