-
8/7/2019 Groundwater-Voyager
1/4Technology Today Summer 20102
W
hile spelunkingand cave divingmake or good,i somewhat
dangerous, recreationalactivities, geologists andhydrologists
requentlyrely on instruments carriedby human divers to gener-ate
reliable maps o underwater cavernsthrough which groundwater enters,
movesabout and then exits rom karst limestoneaquiers. Inormation
gathered rom thesedives is collected and analyzed, then
gen-eralized to create a reasonable estimate othe size o the cave
network, water-bearing capacity, ease o recharge andsensitivity to
pollution or contamination.
Aside rom the hazard to humansaety, exploring aquiers and
underwatercaverns in this manner is limited in somecases by sheer
distance and in others bychannel segments that are too narrow
toaccommodate a human diver.
Some limited inormation aboutgroundwater behavior can be
gainedindirectly by means o tracers, such asdyes introduced at a
recharge eature and
then tracked to the place where theyemerge at a spring or well.
However,to map the actual limestone corridorsthrough which
groundwater owsrequires a mechanical system that cangather, store
and transmit dimensionaldata as it travels with the groundwa-ters
ow. This requires a system that issmall, inexpensive,
non-polluting, sae,autonomous, sel-powered and able tocommunicate
electronically with receiv-ing equipment once it has emerged.
A team o hydrologists and electri-cal engineers at Southwest
ResearchInstitute (SwRI) has developed aneutrally buoyant sensor to
remotelycharacterize the path, dimension andmorphology o caves and
other under-ground conduits and cavities. The
patent-pending systemwas developed underinternal unding, and
theunits were constructedusing o-the-shel com-ponents whenever
pos-sible to minimize the cos
Neutrally buoy-ant sensors, so-called
because they are designed to neither ridon the surace nor sink
to the bottom,gather dimensional and directional datavia an array o
ultrasound sensors relativto a compass, or, in this case, a
three-axismagnetometer.
The sensor also is equipped with apropulsion system to move it
through
the cave and avoid becoming hung on anobstacle or trapped in an
eddy. Inorma-tion gathered during travel is collected athe
conclusion o the voyage, either byretrieving the sensor and
physically transerring the data or by remotely transer-ring the
data to a static sensor tethered tthe ground surace close enough to
allowremote communication. Spatial scale isdetermined by comparing
ultrasoundmeasurements taken o a stationary objec
An SwRI-developed miniature robotsensor creates a map of
submergedcaves and channels
Groundwater Voyager
By Ronald T. Green, Ph.D., and Ben Abbott, Ph.D.
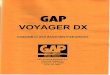
Neutrally buoyant sensors are designed to
ride the current within a ooded undergroundchannel or cave and,
using miniature
transmitters and receivers, gather information
about the shape and morphology of the chambe
through which they travel
R&D Magazine has recognized SwRIs neutrallybuoyant sensor
technology with its R&D 100 Award,
presented annually to the 100 most signicant advancesin
technology. In all, SwRI has won 35 o the awards
dating back to 1971.
D017565
D017567
-
8/7/2019 Groundwater-Voyager
2/4Technology Today Summer 2010 3
by multiple sensors at multipletimes. A sufcient number o
measurements can uniquely determinethe spatial scale and
morphology o thecave interior.
Existing systems can perorm someo the unctions o the
SwRI-developedsensor using a profling sonar unit or alaser-based
range measurement tool,but they are constrained by relativelyhigh
cost, excessive size or a need to bedeployed through a borehole.
The SwRI-developed remote sensors are uniquein their ability to
access small caves andconduit passageways. Their low cost alsomakes
them relatively expendable. Manycan be deployed, yet a survey is a
successi inormation is retrieved rom only onesensor. Finally, the
resolution o mappingis superior to that typically provided bycave
divers because o the richness odata collected by multiple
ultrasoundsensors.
The science o cave water fow
Besides its importance to water-resource managers, knowledge
owater ow through caves and conduits,and the size and shape o the
voids, isalso important when karst eatures are
regime (that is, whether it is laminar orturbulent) provide
additional meaningulmodel calibration targets to augment
theconventional targets o hydraulic headand spring discharge.
Methods such astracer tests or mapping by cave diversare o limited
applicability, and attemptsto iner conduit locations using
geologiceatures such as racture lineaments andsinkholes have not
been encouraging.Scientists needed new tools to character-ize
conduits to improve the chances o
success using karst aquier ow model-ing tools.
Developing a new sensor
The SwRI teams initial objective wasto develop and demonstrate
an inex-pensive sensor designed or placementin conduits up-gradient
rom springorifces, with deployment either throughsinkholes or wells
that intersect karstconduits. The sensors were instrumentedto
record velocity, path traveled and con-duit dimensions as they ow
along. Data
would be extracted manually rom thesensors, so they had to be
retrieved atthe spring orifces.
Prototypes were tested under variouslaboratory and feld settings
to demon-strate and assess their capabilities. Field
located near damsor beneath roadsand buildings. In2004, SwRI
scien-tists and engineersbegan an initiativeto develop toolsor
enhanced char-acterization andrepresentation oow through
karstaquiers. A new
MODFLOW com-puter code variant,MODFLOW-DCMV2.0, was created
aspart o this project.MODFLOW-DCMmodels groundwa-
ter ow through conduits within porousmedia. Three karst aquiers
have beenmodeled using MODFLOW-DCM: theBarton Springs segment o the
EdwardsAquier in South Central Texas, the SantaFe River Sink/Rise
system o the FloridanAquier in North Central Florida, and
the Blue Spring system o the FloridanAquier in Volusia County in
NortheastFlorida.
Efcient and eective applicationo MODFLOW-DCM to karst
aquiershinges on identiying conduit locationand
morphologycharacterization.In particular,reducing uncer-tainty in
conduitlocation andproperties suchas geometry and
size will improvethe prospect thatthe MODFLOW-DCM model
willsuccessully simu-late karst aquierow regimes.Measurements
ogroundwater owvelocity and ow
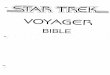
Dr. Ben Abbott, left, is an Institute engineer in the
Communications
and Embedded Systems Department of the Automation and Data
Systems Division. He has extensive expertise in wireless
sensor
network technologies and has participated in development of
several
network-centric data acquisition, recording and telemetry
systems.
Dr. Ronald T. Green, right, is a hydrogeologist with
additional
expertise in geology and geophysics. He is an Institute
scientist in the
Department of Earth, Material and Planetary Sciences within
SwRIs
Geosciences and Engineering Division.
Different sizes of
prototype sensors
were evaluated,
and a number of
modications,such as ns and
propellers, were
added to improve
performance or
address deciencies
DM017542-7716
D017542-7769
-
8/7/2019 Groundwater-Voyager
3/4Technology Today Summer 20104
testing was perormed at the SpringCreek Cave and Honey Creek
Cave nearSan Antonio. Several sizes and versionso sensors were
employed to addressvarious technological challenges encoun-tered
during development and deploy-ment. Sensor sizes varied rom4
centimeters in diameter (gol ball size)to 8 cm (sotball size) and
22 cm (smallsoccer ball size). For proo-o-concept,there was no eort
to miniaturize thesensor components.
Development eorts ocused ontwo unctionalities: an
instrumentationpackage capable o measuring key attri-
butes o a conduit in a karst aquier; andthe ability to negotiate
through the owregime o a ully saturated conduit undernatural
conditions. The frst unctionalitywas straightorward. Meeting the
secondunctionality, however, presented morechallenges than
initially anticipated. Theprototype design evolved during
theproject as the SwRI team addressed unan-ticipated challenges,
such as how to keepthe sensor in the main ow channel o
asemi-saturated conduit.
Instrumentation unctionality
The prototype sensors were assem-bled with commercially
available compo-nents. The need to characterize conduitgeometry, ow
path and ow rate led to adesign that included ultrasound
sensors,dual-axis magnetometers and acceler-ometers. The
magnetometers enable thesensor to gauge its pointing
directionrelative to magnetic North, and the accel-erometer enables
the determination o
motion dynamics as the sensor travelsthrough a conduit. The most
importantaspect o the design, however, was relat-ed to the use o
ultrasonic transducersto characterize conduit geometry
and,ultimately, velocity.
The SwRI team decided to use sixpairs o ultrasonic transducers,
equallypositioned around the sensor enclosure,to transmit sonar
pings outward tothe conduit walls. Each pair consistedo a
transmitter that sent out ultrasoundpulses normal to the sensor
node, anda receiver that recorded the reectedultrasound pulse.
Accurate distances tothe surrounding conduit eatures wouldbe
determined using the time o arrivalo the reected pulses. This sonar
rang-
ing would not only accurately character-ize the conduit geometry
but also detectwall eatures that can be used or veloc-ity
calculations. Post-processing o datarom all components enables
calculationo real-time velocity along the conduitpath as well as
the shape and size o theconduit.
An initial, non-submersible versiono a sensor prototype was
evaluated in abuilding hallway to demonstrate that the
application was unctional in an open-airenvironment. Ater
successul hallwaytests, a submersible prototype was con-structed
using o-the-shel electronic
components and a printed circuit boardor the main circuitry. Six
pairs o water-proo ultrasonic sensors were connectedto the board
via coaxial cabling. For easeo access, the SwRI team mounted
theassembly inside a 22-cm, clear-plasticball. For later
deployments, a motorizedpropeller and control circuitry were ft-ted
to the ball or navigating conduitterrain.
Flow dynamic unctionality
Developing the sensors ow unc-
tionality was an iterative process in whichnew eatures were
added to succeed-ing generations o prototypes deployedinto Spring
Creek Cave. First-generationspherical prototypes tended to oat outo
the main ow channel and stall at thecave walls due to a ow vector
patterncalled Poiseuilles ow. This pattern, nor-mally observed in
pipelines, exhibits thegreatest ow stream in the center and noow at
the walls. This initial batch o
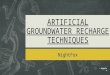
Signals transmitted from a sensor drifting
through the ooded cave are transmitted in three
directions, and the return signals are processed
and stored for analysis following recovery of the
sensor after it emerges from the cave (right).
The resulting three-dimensional graphic (inset)
represents the size and morphology of the
cave segments interior walls as determined by
processing the sensors stored data.
D017568
D017562
-
8/7/2019 Groundwater-Voyager
4/45Technology Today Summer 2010
sensors traveled no more than 30 metersin two days ater being
deployed.
The SwRI team attached fns to thesensors to avoid this stalling
tendencyand added bottom weights to maintaina constant attitude and
prevent rotation.These proved eective in reducing thetendency to
rotate out o the ow feld.
Meanwhile, the importance o neu-tral buoyancy became apparent as
sen-sors that oated on the surace tendedto snag on stalactites and
other caveeatures and those that sank to the caveoor departed rom
the ow channeland stopped moving. In response, theSwRI team
attached the propeller mecha-nism. Set at an angle near the bottom
oeach sensor shell, the propeller was pro-grammed to engage at
preset intervalsto frst provide orward rotation to drivethe sensor
downward, then reverse rota-tion to drive the sensor upward to
avoidbecoming embedded in mud or silt onthe cave oor.
Three o the propeller-equippedsensors were deployed at various
loca-tions near the cave mouth to observewhether the new
unctionality wouldenable them to navigate past restrictionsin the
ow regime. They perormed wellenough to collect ultrasound,
magne-tometer and accelerometer data or asegment o the cave.
Data analysis
Data rom these prototypes werecollected to ascertain the ability
to
remotely characterize a wet cave. Sonarand magnetometer data
proved moreuseul than accelerometer data. The frststep in reducing
sonar data was to calcu-late the sensor velocity along the
conduitow path. This consisted o cross-corre-lating the ront and
rear sonar signals onboth sides o the sensor to determine
therelative sample delays between detectedeatures. A correlation
was made or eachsample over time windows. Centering
the delay window around each sample,the distance window was
calculatedusing the ront sonar reading or the frstsample o the
window and the rear sonarreading or the last sample o the
window.
Dividing the distance by the delay,the velocity at each sample
was deter-mined. The frst and last windows o thesample were
smoothed to the averagevelocity o the nearest known sample.For each
sample, the ront and rear sonarreadings were used to calculate the
nor-mal distances to each side o the conduit.The top and bottom
samples providedthe distances to the ceiling and oor othe conduit,
respectively. Preliminary dis-tances were converted to fnal
distancesusing calibrated values derived as multi-plication actors
to correlate water traveltimes to distance. Assuming a
smoothtransition arch around theconduit, additional distanceswere
interpolated around theconduit geometry.
Future applications
Future generations o sen-sors might be equipped withadditional
instrumentation tocollect environmental data,such as temperature,
gas com-position and water chemistry.They also could be
miniatur-ized to a diameter as small as2 cm to 5 cm. Meanwhile,
thepropulsion system might bereplaced with a more sophisti-
cated buoyancy system that would acti-vate only as needed.
Neutrally buoyant sensors could beused in applications other
than caves,such as pipes that are limited in diameteror whose
interior size has been reduceddue to sediment deposition or
corrosion;sanitary sewers in older cities whereaccurate maps and
records are not avail-able and whose condition precludes saehuman
access; or geotechnical settings,such as mines or conduits that are
notsae or manned entry. v
Questions about this story?Contact Green at (210) 522-5305or
[email protected], or Abbott at(210) 522-2802 or
[email protected].
ReerencesAlexander, E.C., Jr. and J.F. Quinlan. 1992. Practical
Tracing o
Groundwater, with Emphasis on Karst Terrains. Geological
Society
of America, Boulder, Colorado. 2 Vol. pp. 195 & 133.
Ford, D.C. and P.W. Williams. 1993. Karst Geomorphology and
Hydrology. Chapman and Hall. New York, NY. 601 p.
Painter, S.L., A. Sun, and R.T. Green. 2006. Enhanced Charac
terization and Representation of Flow through Karst Aquifers.
Final
Report. AWWA Research Foundation. Project 2987.Painter, S.L., A.
Sun, and R.T. Green. 2007. Enhanced Char-
acterization and Representation of Flow Through Karst
Aquifers
Phase II. Final Project Report to the Edwards Aquifer Authority
and
the Southwest Florida Water Management District. P. 101.
Quinlan, J.F., and R.O. Ewers. 1989. Subsurface Drainage
in the Mammoth Cave Area, in White, W.B., and White, E.L.,
eds.,
Karst Hydrology: Concepts from the Mammoth Cave Area: New
York, Van Nostrand Reinhold, pp. 65103.
Smart., P.L. and I.M.S. Laidlaw. 1977. An Evaluation of Some
Fluorescent Dyes for Water Tracing. Water Resources Research.
Vo
13. pp. 15-33.
Using internal funding,
SwRI staff members
developed a wireless-
sensor-based system to
map and characterize
water-lled cave passages
using neutrally buoyant
wireless sensors. Drifting
through the passagesand using internal
propulsion systems to
navigate around obstacles
the sensors autonomously
map the pathway, ow
velocity and dimensions
of these important
groundwater conduits to
improve management of
karst aquifers.
D016582