Embed Size (px)
Citation preview

Groupes de Lie compacts
Michel Matthey
Universite de LausanneInstitut de Geometrie, Algebre et TopologieBCH, EPFL1015 LausanneSuisse
Adresse e-mail : [email protected]

Abstract. Ce cours est une introduction a la theorie des groupes de Lie, eten particulier des groupes de Lie compacts.
Table des matieres
Chapitre 1. Theorie classique des groupes de Lie 51. Varietes topologiques et varietes lisses 52. Remarques sur la topologie des varietes 93. Groupes topologiques 114. Groupes de Lie 165. Matrices quaternioniennes 216. Quelques remarques culturelles sur les groupes de Lie 267. Le fibre tangent et champs de vecteurs 278. Methode de calcul d’une differentielle 339. Differentielles partielles 3510. Le Theoreme d’Inversion Locale et application 3811. L’espace tangent de G et champs de vecteurs invariants a gauche 4012. Deux resultats sur les equations differentielles dans Kn 4313. Sous-groupes a 1-parametre 4614. L’application exponentielle 5015. Differentielle du produit, de l’inversion et du commutateur 5616. Etude des homomorphismes de groupes de Lie 5817. Les isomorphismes continus entre groupe de Lie reels 6418. Sous-varietes et sous-groupes de Lie 6719. Sous-groupes fermes et Theoreme d’Elie Cartan 6920. Applications du Theoreme d’Elie Cartan 7421. Les groupes classiques 7722. D’autres groupes matriciels “semi-classiques” 8323. Les groupes de Lie abeliens connexes 8624. Les groupes de Lie abeliens presque connexes 8925. La representation adjointe 9126. Les groupes de Lie complexes, compacts et connexes 9627. Sur l’injectivite et la surjectivite de l’exponentielle 99
Chapitre 2. Algebres de Lie et lien avec les groupes de Lie 10528. Les algebres de Lie 10529. L’algebre de Lie d’un groupe de Lie 11230. La formule de Campbell-Hausdorff 12131. La representation adjointe d’une algebre de Lie 12832. La forme de Killing d’une algebre de Lie de dimension finie 13233. Algebres de Lie simples, semi-simples et reductives 13834. Groupes de Lie simples et semi-simples 14935. Quotients de groupes de Lie 15036. Revetements de groupes de Lie 152
3
4 TABLE DES MATIERES
37. Proprietes groupales et topologiques des groupes classiques 15938. Le Troisieme Theoreme de Lie et groupes de Lie 1-connexes 16839. Automorphismes et derivations des K-algebres de dimension finie 170
Chapitre 3. Groupes de Lie reels compacts connexes 17540. Motivations 17541. Geodesiques et surjectivite de l’exponentielle 17642. Tores maximaux 18143. Tores maximaux des groupes compacts classiques 19144. Normalisateur de tores maximaux et groupe de Weyl 19945. Normalisateurs et groupes de Weyl des groupes classiques 20446. Systeme de racine et diagramme de Dynkin 20747. Le Theoreme de Classification 21148. Groupes de reflexions, groupes de Coxeter et coracines 21749. Etude du normalisateur et cohomologie du groupe de Weyl 220

CHAPITRE 1
Theorie classique des groupes de Lie
1. Varietes topologiques et varietes lisses
Notation 1.1. Dans la suite, K est fixe et designe soit le corps R des nombresreels, soit le corps C des nombres complexes. Si E et F sont des K-espaces vectorielsde dimension finie, et si f : E0 −→ F0 est une application d’un ouvert de E versun ouvert de F , on dit que f est lisse (sur K) si E0 est vide, ou reduit a unpoint (i.e. dim(E) = 0), ou si f est C∞, i.e. indefiniment derivable. On dit quef est analytique (sur K) ou de classe Cω (sur K) si E0 est vide, ou reduit a unpoint, ou si f est lisse et son developpement de Taylor converge ponctuellementvers f au voisinage de chacun des points de E0. Si K = C, “lisse” et “analytique”coıncident, et on dit souvent holomorphe; ceci s’applique egalement aux definitionsqui suivent (par exemple, “atlas holomorphe”, “application holomorphe”, “varieteholomorphe”, ...).
Notation 1.2. Pour ε > 0, on note Bε = B<ε(0) la boule ouverte centree en0 de rayon ε dans l’espace euclidien K; on designe par Bε la boule fermee centreeen 0 de rayon ε dans K.
Notation 1.3. Par defaut, les groupes seront notes multiplicativement et leneutre sera designe par e.
Convention 1.4. Par “denombrable” on entend “au plus denombrable” (i.e.possiblement fini ou meme vide).
Exemple 1.5. L’application f(x) := e−1/x2de R dans lui-meme (prolongee
par la valeur 0 en 0) est lisse mais pas analytique; en effet, son developpement deTaylor en zero est identiquement nul, mais f(x) 6= 0 quelque soit x 6= 0.
Definition 1.6. Un espace topologique X est a base denombrable (d’ouverts)ou satisfait le second axiome de denombrabilite s’il existe une collection denombrabled’ouverts {Ui}i de X telle que pour tout point x ∈ X et tout voisinage V de x dansX, il existe un Ui tel que x ∈ Ui et tel que Ui ⊆ V .
Definition 1.7. Soient X un espace topologique et E un K-espace vectorielde dimension finie n ∈ N, i.e. E ∼= Kn (isomorphisme non-canonique).
(i) Une carte sur X est un homeomorphisme
ϕα : Eα
∼=−→ Xα ,
avec Eα ⊆ E ouvert et Xα ⊆ X ouvert; on dira dans ce cas que ϕα estmodelee sur E et est une K-carte.
5

6 1. THEORIE CLASSIQUE DES GROUPES DE LIE
(ii) Un atlas (modele sur E) sur X est une collection de cartes {ϕα}α sur X,toutes modelees sur E, telles que
⋃α
Xα = X ;
dans ce cas, on dira aussi que {ϕα}α est un K-atlas.(iii) Un K-atlas {ϕα}α sur X est lisse (resp. analytique) si l’application
ϕβα := ϕ−1β ◦ ϕα : ϕ−1
α (Xα ∩Xβ)︸ ︷︷ ︸⊆E
−→ ϕ−1β (Xα ∩Xβ)
︸ ︷︷ ︸⊆E
est lisse (resp. analytique) sur K, pour tous α, β; l’application ϕβα estappelee application de transition, fonction de transition ou application dechangement de carte.
(iv) Un espace topologique X est appele localement euclidien si, pour toutpoint x ∈ X, il existe nx ∈ N tel que x possede un voisinage homeomorphea l’espace euclidien Rnx , ou, de maniere equivalente, a un ouvert de Rnx
(et donc x admet un systeme fondamental de tels voisinages).(v) Un espace topologique separe M a base denombrable d’ouverts admet-
tant un atlas est appele une variete topologique; en particulier, M estlocalement euclidien, et on supposera toujours M non-vide.
Remarque 1.8. La raison pour laquelle on suppose M separe et a base de-nombrable est, en particulier, pour garantir la paracompacite de M , ce qui assurel’existence d’une partition de l’unite subordonnee a n’importe quel recouvrementouvert. En fait, dans la Section 2, nous allons expliquer que pour un espace locale-ment euclidien separe X, les proprietes suivantes sont equivalentes :
(i) X est a base denombrable;(ii) X est separable et paracompact;(iii) X est separable et metrisable.
Remarque 1.9. On peut montrer que si un espace topologique X possede deuxatlas modeles sur E et F respectivement, alors dim(E) = dim(F ), ou dim = dimKest la dimension comme K-espace vectoriel. En fait, cela revient a demontrer quesi un ouvert non-vide (que l’on peut supposer connexe) de Rm est homeomorphe aun ouvert de Rn, alors m = n (c’est le Theoreme d’Invariance du Domaine).
Definition 1.10. Si M est une variete topologique, alors sa dimension (surK), est la dimension du K-espace vectoriel sur lequel est modele un atlas arbitraire;on la note dim(M), ou dimK(M) s’il est necessaire de preciser le corps de base.
Definition 1.11. Soient(X, {ϕα}α
)et
(Y, {ψβ}β
)deux espaces topologiques
munis d’atlas lisses (resp. analytiques), modeles sur E et F respectivement. Uneapplication
f : X −→ Y
est lisse (resp. analytique), si
ψ−1β ◦ f ◦ ϕα : ϕ−1
α
(Xα ∩ f−1(Yβ)
)︸ ︷︷ ︸
⊆E
−→ F
est lisse (resp. analytique), ou l’on utilise les notations evidentes.

1. VARIETES TOPOLOGIQUES ET VARIETES LISSES 7
Definition 1.12. Deux atlas lisses (resp. analytiques) {ϕα}α et {ψβ}β sur Xsont appeles equivalents si l’identite
idX :(X, {ϕα}
) −→ (X, {ψβ}
)
est une application lisse (resp. analytique).
Definition 1.13. Une variete lisse (resp. analytique) sur K est un espacetopologique separe M a base denombrable d’ouverts muni d’une classe d’equivalencede K-atlas lisses (resp. analytiques) modeles sur des K-espaces vectoriels de dimen-sion finie. On supposera toujours M non-vide. On appelle dimension (sur K) de Mla dimension (sur K) de la variete topologique sous-jacente; si n = dim(M), on ecritparfois Mn pour l’exprimer, mais c’est une notation qui peut preter a confusion.Lorsque K = C, on dit aussi variete complexe ou variete holomorphe.
Remarque 1.14. Pour eviter (une partie de) l’ambiguıte du choix d’un atlasd’une variete lisse ou analytique M dans la classe d’equivalence donnee, on peutsimplement choisir un atlas maximal, dans le sens qu’il n’est strictement contenudans aucun autre atlas (par le Lemme de Zorn, les atlas maximaux existent !).
Definition 1.15. Une application f : M −→ N entre deux varietes lisses (resp.analytiques) sur K est un diffeomorphisme (resp. un diffeomorphisme analytique)si f est lisse (resp. analytique), si f est bijective et si son inverse f−1 est egalementlisse (resp. analytique); dans ce cas, on dit que M et N sont diffeomorphes (resp.analytiquement diffeomorphes) et on ecrit
f : M≈−→ N ou M ≈ N .
Remarque 1.16. Contrairement au Theoreme d’Invariance du Domaine dela Remarque 1.9, qui est un theoreme difficile, le Theoreme d’Invariance du Do-maine Differentiable (qui dit que si un ouvert non-vide (connexe) U de Rm estdiffeomorphe a un ouvert V de Rn, alors m = n), n’est pas ardu. En effet, si fest un tel diffeomorphisme et si x ∈ U a pour image f(x) ∈ V , alors l’applicationtangentielle en x de f , notee Txf : TxU −→ Tf(x)V , est un R-isomorphisme, doncm = dim(TxU) = dim(Tf(x)V ) = n (pour les notations et definitions necessaires,nous renvoyons le lecteur a la Section 7 ci-dessous).
Definition 1.17. Si M est une variete lisse (resp. analytique) sur K, un ouverttrivialisant ou ouvert de carte est un ouvert non-vide de M qui est diffeomorphe(resp. analytiquement) a un ouvert d’un K-espace vectoriel de dimension finie; onconsidere souvent l’ouvert en question comme etant muni d’un tel diffeomorphisme.
Exemple 1.18.
(i) Tout espace discret denombrable est, de maniere canonique, une varieteanalytique reelle de dimension 0, et une variete complexe de dimension 0.
(ii) L’espace Rn est canoniquement une variete analytique de dimension n.(iii) L’espace Cn est canoniquement une variete complexe de dimension n.(iv) Toute variete complexe de dimension n est de maniere canonique une
variete analytique reelle de dimension 2n.(v) Si U est un ouvert non-vide d’une variete M lisse (resp. analytique) sur K,
alors U herite de maniere canonique une structure de variete lisse (resp.analytique) sur K, de meme dimension.

8 1. THEORIE CLASSIQUE DES GROUPES DE LIE
(vi) L’espace Mn(K) est une variete analytique sur K de dimension n2, diffeo-morphe a Kn2
; l’ouvert GLn(K) deMn(K) est, par consequent, une varieteanalytique sur K de dimension n2.
(vii) Si M et N sont des varietes lisses (resp. analytiques) sur K, alors l’espacetopologique produit M ×N porte une structure canonique de variete lisse(resp. analytique) sur K de dimension
dim(M ×N) = dim(M) + dim(N) .
Cette structure est telle que(a) les deux projections qM : M ×N −→ M et qN : M ×N −→ N sont
lisses (resp. analytiques);(b) si L est une variete lisse (resp. analytique) surK, alors une application
f : L −→ M ×N est lisse (resp. analytique) ssi les deux compositionsqM ◦ f et qN ◦ f le sont.
(viii) La sphere Sn ⊂ Rn+1 porte une structure canonique de variete analy-tique reelle de dimension n, dont un atlas est donne par les deux cartesdefinies par les projections stereographiques du pole nord et du pole sudsur l’hyperplan equatorial (ou sur l’hyperplan tangent au pole oppose).
(ix) La sphere S2 ⊂ R3 porte une structure canonique de variete complexede dimension 1, dont un atlas est donne par les deux cartes definies parles projections stereographiques du pole nord et du pole sud sur le planequatorial (ou sur le plan tangent au pole oppose).
Remarque 1.19. On peut demontrer que pour n ∈ {0, 1, 2, 3, 5, 6}, la sphereSn possede une unique structure de variete reelle lisse orientee. La sphere S7
possede 28 classes de diffeomorphisme oriente distinctes de telles structures; cefut Milnor qui decouvrit le premier ce phenomene extraordinaire, en 1956. Onappelle sphere exotique une sphere munie d’une structure de variete lisse reelle quin’est pas la structure usuelle. En dimension 4, il n’est toujours pas connu si S4
admet plusieurs telles structures. En 1962, Stallings a demontre que si n 6= 4,l’espace topologique Rn porte une unique structure de variete reelle lisse. Parcontre, lorsque n = 4, R4 possede une infinite non-denombrable de structures devariete reelle lisse distinctes (et donc non-diffeomorphes deux-a-deux). Donaldson etFreedman furent les premiers a trouver une structure exotique sur R4 en 1982–1983.Gompf a construit en 1983 trois structures exotiques sur R4. On peut demontrerqu’une variete topologique de dimension ≤ 3 non-seulement admet une structurede variete lisse reelle, mais ce, de maniere unique. A partir de la dimension 4, ilexiste des varietes topologiques compactes connexes orientables n’admettant aucunestructure de variete reelle lisse, et des varietes topologiques compactes connexesorientables admettant des structures de variete reelle lisse distinctes (et donc non-diffeomorphes). Le premier exemple de variete topologique compacte n’admettantaucune structure lisse a ete donne par Kervaire en 1960, et est en dimension 10.
Definition 1.20. Soit f : M −→ N une application lisse (resp. analytique)entre varietes lisses (resp. analytiques) sur K, et soit x0 un point de M . On dit quef est un diffeomorphisme local en x0 (resp. diffeomorphisme local analytique en x0)s’il existe un voisinage ouvert U0 de x0 dans M et un voisinage ouvert V0 de f(x0)dans N tels que la restriction
f |U0 : U0≈−→ V0
2. REMARQUES SUR LA TOPOLOGIE DES VARIETES 9
est un diffeomorphisme (resp. analytique), comme indique. Dans ce cas, on ditparfois que f est etale en x0.
Remarque 1.21. On peut aisement definir la notion de variete reelle de classeCr, avec r ∈ {1, 2, . . .}, en imitant ce qui a ete fait pour le cas lisse ou C∞, i.e.pour r = ∞, et le cas analytique ou Cω, i.e. r = ω. Pour tout r ∈ {1, 2, . . . ,∞, ω},on peut demontrer que toute variete reelle de classe Cr est Cr-diffeomorphe aune variete reelle de classe Cω, unique a C∞-diffeomorphisme pres (et meme aCω-diffeomorphisme pres dans le cas compact). Bien mieux, une telle variete,de dimension d, est Cr-diffeomorphe a une Cω-sous-variete plongee d’un espaceeuclidien RN avec N = N(d) suffisamment grand; le premier resultat de ce type aete le Theoreme de Whitney, pour le cas C∞ et compact (auquel cas, N(d) = 2d+1convient). Il y a des resultats analogues pour les varietes reelles a bord. Dans lecas complexe, la question de distinguer les varietes de classe Cr sur C pour lesdifferentes valeurs de r ne se pose pas, puisque une fonction f : U −→ Cn, ou U estun ouvert non-vide de Cm, qui est de classe C1 (au sens de la derivation complexe)est automatiquement holomorphe, et donc analytique sur C.
2. Remarques sur la topologie des varietes
Nous allons discuter ici la raison pour laquelle, dans la definition d’un varietetopologique et d’une variete lisse, nous avons exige que l’espace topologique soitsepare et ait une base denombrable d’ouverts.
Convention 2.1. Un espace compact est suppose separe (sinon, on dira quasi-compact); de meme, un espace localement compact est suppose separe. Cependant,nous ecrirons parfois “localement compact separe” pour insister.
Definition 2.2. Soit X un espace topologique.(i) L’espace X est T1 si les points (singletons) de X sont fermes dans X.(ii) L’espace X est separe ou (de) Hausdorff ou T2 si deux points distincts de
X admettent des voisinages disjoints.(iii) L’espace X est regulier si pour tout point x ∈ X et tout voisinage V de
x dans X, il existe un voisinage ferme de x dans X contenu dans V , ou,de maniere equivalente, si tout point de X et toute partie fermee de X necontenant pas ce point admettent des voisinages disjoints dans X.
(iv) L’espace X est T3 s’il est T1 et regulier.(v) L’espace X est normal si deux fermes de X disjoints admettent des voisi-
nages disjoints.(vi) L’espace X est T4 s’il est T1 et normal.(vii) L’espace X est separable s’il contient une partie denombrable qui est
dense.(viii) L’espace X est (de) Lindelof si tout recouvrement ouvert de X possede
un sous-recouvrement denombrable.(ix) L’espace X est metrisable s’il existe une metrique (i.e. une distance) sur
X induisant la topologie donnee.(x) Si {Ui}i∈I est un recouvrement ouvert de X, alors {Vj}j∈J est un raffine-
ment de {Ui}i∈I si {Vj}j∈J est egalement un recouvrement ouvert de Xet si tout Vj est contenu dans l’un au moins des Ui.
(xi) Un recouvrement ouvert {Vj}j∈J de X est localement fini si tout point xde X admet un voisinage qui ne rencontre qu’un nombre fini des Vj .
10 1. THEORIE CLASSIQUE DES GROUPES DE LIE
(xii) L’espace X est paracompact s’il est separe et si tout recouvrement ouvertde X admet un raffinement localement fini.
(xiii) Si {Ui}i∈I est un recouvrement ouvert de X, une partition de l’unitesubordonnee a {Ui}i∈I est une collection {fi}i∈I de fonctions continuesfi : X −→ [0, 1] telle que(a) pour tout i, le support supp(fi) de fi est contenu dans Ui, ou supp(fi)
est l’adherence dans X du sous-espace f−1i ]0, 1];
(b) tout point x ∈ X admet un voisinage Vx dans X tel que fi|Vx estidentiquement nulle pour presque tout i (i.e. pour tous les i sauf unnombre fini);
(c) la fonction somme∑
i∈I fi : X −→ R, qui est bien definie et continuepar (a) et (b), est la fonction constante valant 1.
(xiv) Un point x ∈ X est un point d’accumulation d’une partie A de X si toutvoisinage de x dans X contient au moins un point de A distinct de x, i.e.s’il existe une suite generalisee dans A ∩ (X r {x}) qui converge vers xdans X.
Remarque 2.3. En topologie generale, on demontre les resultats suivants :(i) Dans un espace a base denombrable, pour toute partie non-denombrable
A, il existe un point de A qui est un point d’accumulation de A.(ii) Dans un espace a base denombrable, tout sous-espace discret non-vide est
denombrable.(iii) Un espace a base denombrable est separable.(iv) Un espace a base denombrable est Lindelof.(v) Un espace regulier Lindelof est normal et donc T4.(vi) Un espace localement compact separe est normal et donc T4.(vii) Un espace paracompact est normal et donc T4.(viii) Un espace separe, localement compact et a base denombrable est para-
compact.(ix) Pour un espace paracompact, tout recouvrement ouvert admet une parti-
tion de l’unite qui lui est subordonnee.(x) Un espace metrisable et separable est a base denombrable.(xi) Un espace T3 a base denombrable est metrisable.
En particulier, toute variete topologique est metrisable, T4, separable, Lindelof, lo-calement compacte, paracompacte et localement connexe par arcs.
Remarque 2.4. Le fait qu’un espace T3 a base denombrable est metrisableest appele Theoreme de Metrisation d’Urysohn. En fait, historiquement, Urysohn(1898–1924) a demontre qu’un espace T4 a base denombrable est metrisable (resultatpublie a titre posthume en 1925); le resultat plus fort est du a Tychonoff, en1926. En fait, pour un espace topologique X, les trois proprietes suivantes sontequivalentes :
(i) X est metrisable et separable;(ii) X est T3 a base denombrable;(iii) X est homeomorphe a un sous-espace du cube de Hilbert [0, 1]N.
Un autre theoreme de metrisation celebre est qu’un espace compact (sous-entendu“separe”) est metrisable ssi il est a base denombrable.
Remarque 2.5. Smirnov a demontre qu’un espace topologique separe locale-ment metrisable, i.e. dont tout point admet un voisinage metrisable (donc un

3. GROUPES TOPOLOGIQUES 11
systeme fondamental de voisinages metrisables) est metrisable ssi il est paracom-pact. Ceci s’applique en particulier aux espaces separes localement euclidiens, d’oules trois proprietes equivalentes de la Remarque 1.8 pour de tels espaces.
Remarque 2.6. Une variete topologique, en plus d’etre localement connexe pararcs, est localement simplement-connexe; ainsi, si elle est connexe, la theorie desrevetements usuelle s’applique et en particulier, elle admet un revetement universel.
Remarque 2.7. La longue droite d’Alexandroff est un espace topologiquesepare, connexe et dont tout point possede un voisinage ouvert homeomorphe aR, mais qui n’est pas a base denombrable.
Remarque 2.8. On peut demontrer que si M est une variete lisse reelle, alorstout recouvrement ouvert {Ui}i∈I de M admet une partition de l’unite {fi}i∈I lissequi lui est subordonnee, i.e. constituee de fonctions fi : M −→ [0, 1] dont la post-composition avec l’inclusion [0, 1] ↪→ R est lisse. – On ne peut pas remplacer “lisse”par “analytique”, ni R par C.
3. Groupes topologiques
Definition 3.1. Un groupe topologique est un groupe G qui porte en plus unestructure d’espace topologique telle que le produit
µ : G×G −→ G , (g, h) 7−→ gh
et le passage a l’inverse
inv : G −→ G , g 7−→ g−1
sont des applications continues.
Lemme 3.2. Soit G un espace topologique muni d’une structure de groupe.Alors G est un groupe topologique ssi l’application
µ∨ : G×G −→ G , (g, h) 7−→ gh−1
est continue.
Preuve. Pour le sens direct, il suffit de realiser que µ∨ est la composition d’applicationscontinues
µ∨ : G×GidG × inv // G×G
µ // G .
Pour la reciproque, remarquons que
inv : Gincl // {e} ×G
incl // G×Gµ∨ // G ,
donc inv est une application continue, et on a
µ : G×Gidg × inv // G×G
µ∨ // G ,
de sorte qu’a son tour, µ est une application continue. ¤Definition 3.3. Un homomorphisme de groupes topologiques est un homomor-
phisme de groupes (entre deux groupes topologiques G et H) qui est continu; c’estun isomorphisme de groupes topologiques si c’est un isomorphisme de groupes, quiest en meme temps un homeomorphisme. Dans ce cas, on ecrit
G∼=−→ H ou G ∼= H ,
et on dit que G et H sont topologiquement isomorphes.

12 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Notation 3.4. Soit G un groupe topologique. Si g ∈ G, on considere latranslation a gauche par g
`g = `G
g : G −→ G , x 7−→ gx ,
la translation a droite par g
rg = rG
g : G −→ G , x 7−→ xg ,
la conjugaison par g
cg = cG
g : G −→ G , x 7−→ gxg−1 .
Ces trois applications sont des homeomorphismes, cg est un automorphisme degroupe topologique, et, pour g, h ∈ G, on a les relations
(a) `g ◦ `h = `gh et `−1g = `g−1 ;
(b) rg ◦ rh = rhg et r−1g = rg−1 ;
(c) cg ◦ ch = cgh et c−1g = cg−1 ;
(d) cg = `g ◦ rg−1 = rg−1 ◦ `g;(e) `g ◦ rh = rh ◦ `g.
Lemme 3.5. Pour un groupe topologique G, le commutateur
[ . , . ] : G×G −→ G , (g, h) 7−→ [g, h] = ghg−1h−1
est une application continue.
Preuve. Il suffit d’observer que le commutateur s’ecrit comme la compositiond’applications continues
G×G∆G×G // G×G×G×G
σ // G×G×G×Gµ×µ // G×G
µ // G ,
ou ∆G×G(g, h) = (g, h, g, h) pour g, h ∈ G, et σ := idG× idG× inv× inv. ¤
Notation 3.6. Si A et B sont des parties d’un groupe G, on pose
A−1 :={g−1
∣∣ g ∈ A}
et A ·B :={gh
∣∣ g ∈ A et h ∈ B}
.
Notation 3.7. Soit G un groupe topologique. Si g ∈ G, notons G(g) la com-posante connexe de g dans G, et Gg la composante d’arcs de g dans G; en particulier,Gg ⊆ G(g).
Remarque 3.8. Pour un groupe topologique G et des elements g, h ∈ G, onverifie aisement les proprietes suivantes :
(i) gG(h) = G(gh) et gGh = Ggh;(ii) (G(g))−1 = G(g−1) et (Gg)−1 = Gg−1 ;(iii) gG(h)g
−1 = G(ghg−1) et gGhg−1 = Gghg−1 ;(iv) G(g) est ferme dans G;(v) G(e) ¢ G et Ge ¢ G (i.e. ce sont des sous-groupes normaux de G).
Le sous-groupe ferme normal G(e) (resp. sous-groupe normal Ge) de G est appelecomposante du neutre (resp. composante d’arcs du neutre) de G.
Nous aurons parfois besoin des resultats classiques suivants sur les groupestopologiques.
Proposition 3.9. Si H est un sous-groupe ouvert d’un groupe topologique G,alors H est ferme dans G.
3. GROUPES TOPOLOGIQUES 13
Preuve. Le complementaire de H dans G est la reunion disjointe des classes lateralesgauches de H dans G, distinctes de H. Donc, ce complementaire est, par hypothese,reunion d’ouverts de G, donc est lui-meme ouvert dans G. Il suit que H est fermedans G. ¤
Proposition 3.10. Si G est un groupe topologique connexe, et si V est unvoisinage du neutre e dans G, alors G est engendre par V , i.e. G = 〈V 〉.Preuve. Soit H := 〈V 〉. Si h ∈ H, alors hV est un voisinage de h dans G, contenudans H, donc H est voisinage de tous ses points. Ceci montre que H est un sous-groupe ouvert, donc ferme, de G. Comme H est non-vide (e ∈ H), de la connexitede G, il suit que H = G. ¤
Corollaire 3.11. Si G est un groupe topologique, et si V est un voisinagedu neutre e dans G, qui rencontre chaque composante connexe de G, alors G estengendre par V , i.e. G = 〈V 〉.Preuve. Par la Proposition 3.10, on a G(e) =
⟨G(e) ∩ V
⟩. Ainsi, le sous-groupe 〈V 〉
engendre par V contient V · ⟨G(e) ∩ V⟩
= V ·G(e) = G, d’ou le resultat. ¤
Corollaire 3.12. Si G est un groupe topologique et si H est un sous-groupeouvert de G, alors H contient G(e); plus precisement, H est une reunion de com-posantes connexes de G.
Preuve. Comme H est ouvert, il contient un voisinage ouvert V de e dans G, donc,si h ∈ H, il contient h · ⟨G(e) ∩ V
⟩, qui est, en vertu de la Proposition 3.10, h ·G(e).
Pour conclure, il suffit d’invoquer l’egalite evidente h ·G(e) = G(h). ¤
Lemme 3.13. Soit G un groupe topologique. Si U est un voisinage (resp. ouvert)de g dans G, alors U−1 est un voisinage (resp. ouvert) de g−1 dans G.
Preuve. C’est evident, puisque inv est un homeomorphisme. ¤
Lemme 3.14. Soit G un groupe topologique. Si U est un voisinage (resp. ouvert)de e dans G, et si A est une partie non-vide de G, alors A · U est un voisinage(resp. ouvert) de A dans G.
Preuve. Il suffit de remarquer que A ⊆ A · U =⋃
g∈A gU est une reunion devoisinages, un pour chacun des points de A. ¤
Exercice 3.15. Si H est un sous-groupe d’un groupe topologique G, demontrerque l’adherence H de H dans G est egalement un sous-groupe. Verifier que si Hest normal dans G, alors H l’est egalement.
Exercice 3.16. Si G est un groupe topologique separe, montrer que le centrede G est ferme dans G.
Remarque 3.17. Tout groupe non-abelien muni de la topologie grossiere four-nit un exemple de groupe topologique non-separe et a centre non-ferme. Le pluspetit exemple est le groupe Sym(3).
Exercice 3.18. Soient G un groupe topologique et g, h ∈ Ge. Si g(t) et h(t)(avec t ∈ [0, 1]) sont des arcs dans G de e vers g et h respectivement, determinerdes arcs explicites dans G de e vers g−1 et de e vers gh.

14 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Exercice 3.19. Soit G un groupe topologique semi-localement connexe pararcs, i.e. dont tout point possede un voisinage connexe par arcs (comme par exempleun groupe de Lie sur K).
(i) Pour tout g ∈ G, montrer que Gg est ouvert et ferme dans G et queGg = G(g); en particulier, Ge = G(e) est un sous-groupe normal ouvert etferme de G.
(ii) Verifier que le groupe des composantes de G, defini par
π0(G) := G/Ge ,
muni de la structure de groupe topologique quotient, est un groupe discret.(iii) Demontrer que, comme espace topologique, on a
G ≈∐
π0(G)
Ge
(homeomorphisme). Si de plus G est un groupe de Lie sur K, alors, commevariete lisse sur K, on a G ≈ ∐
π0(G) Ge (diffeomorphisme, analytique siG est analytique).
Exercice 3.20. Soit G un groupe topologique semi-localement connexe, i.e.dont tout point possede un voisinage connexe (comme par exemple un groupe deLie sur K). Montrer que G(g) est ouvert et ferme dans G, pour tout g ∈ G. Enparticulier, G(e) est un sous-groupe normal ouvert et ferme de G.
Exercice 3.21. Demontrer que si H est un sous-groupe discret et normal d’ungroupe topologique connexe G, alors H est central, i.e. contenu dans le centre Z(G)de G; en particulier, H est abelien. – Indication : Pour x ∈ H, il existe un voisinageU de x dans H tel que U ∩H = {x} et, par continuite de l’application
θx : G −→ G , g 7−→ gxg−1 ,
il existe un voisinage V de e dans G tel que θx(V ) ⊆ U .
Proposition 3.22. Soit G un groupe topologique. Alors G est separe ssi G estT1, ssi {e} est ferme dans G.
Preuve. Les deux implications directes sont evidentes. Supposons donc que {e} estferme dans G. Comme l’application
µ∨ : G×G −→ G , (g, h) 7−→ gh−1
est continue (cf. Lemme 3.2 en cas de doute), le sous-espace
(µ∨)−1(e) ={(g, g) ∈ G×G
∣∣ g ∈ G}
de G×G est ferme dans G, i.e. la diagonale de G est fermee dans G×G. Or, ceciest justement equivalent au fait que l’espace topologique G est separe. ¤
Proposition 3.23. Soient G un groupe topologique, et N un sous-groupe nor-mal de G. Alors l’application de projection
π : G−³ G/N , g 7−→ gN
est une application continue et ouverte.
3. GROUPES TOPOLOGIQUES 15
Preuve. La continuite de π decoule de la definition de la topologie quotient surG/N (c’est en fait la topologie la plus fine sur G/N , i.e. celle avec le plus d’ouverts,pour laquelle π est continue). Si U est un ouvert de G, alors
π−1(π(U)
)= N ·U =
⋃
g∈N
gU ;
cette reunion est une reunion d’ouverts de G, donc est elle-meme ouverte. Il s’ensuit,une fois encore par definition de la topologie quotient sur G/N , que π(U) est ouvertdans G/N , d’ou le resultat. ¤
Lemme 3.24. Soient N ⊆ H ⊆ G trois groupes emboıtes, avec N normal dansG. Si G est un groupe topologique, alors le groupe topologique quotient H/N de Hpar N coıncide, comme groupe topologique, avec le sous-groupe topologique H/N dugroupe topologique quotient G/N de G par N .
Preuve. La composition
H� � incl // G
πG // // G/N
est une application continue, qui est compatible avec la relation d’equivalence surH induite par N , c’est-a-dire qu’elle est constante sur les classes laterales de N dansH. Donc, par la propriete universelle de la topologie quotient, elle induit une ap-plication continue de l’espace quotient H/N dans G/N , qui est un homomorphismede groupes, et qui fait commuter le diagramme
H� � incl //
πH²²²²
G
πG²²²²
H/NidH/N // H/N
� � incl // G/N
Ainsi, l’application identique de l’espace quotient X := H/N du sous-espace H deG vers le sous-espace Y := H/N de l’espace quotient G/N de G est continue. Ilnous reste a montrer que cette application est ouverte. Si Z est un sous-espace deH (resp. de G), on designe par Z/N le sous-espace πH(Z) de H/N (resp. πG(Z)de G/N). Par definition de la topologie de sous-espace de G et celle de quotient deH, un ouvert de X = H/N est de la forme
(U ∩H)/N ,
ou U est un ouvert de G. Or, on a l’egalite ensembliste
(U ∩H)/N = (U/N) ∩ (H/N) .
Ainsi, par definition de la topologie quotient de G et de la topologie de sous-espacede G/N , l’image de (U ∩H)/N par idH/N est un ouvert de Y = H/N . ¤
On va conclure cette section avec le resultat utile suivant.
Proposition 3.25. Soit G un groupe topologique connexe. Si H est un sous-groupe discret central de G, alors le centre du groupe quotient G/H est le quotientdu centre de G par H, i.e. on a
Z(G/H) = Z(G)/H ,
et cette egalite est une egalite de groupes topologiques.

16 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Preuve. La projectionπ : G−³ G/H , g 7−→ gH
se restreint, de toute evidence, en un homomorphisme
ϕ := π|Z(G) : Z(G) −→ Z(H) , g 7−→ gH
dont le noyau est Ker(π) = H, puisque H ⊆ Z(G). Elle induit donc une homomor-phisme injectif
ϕ : Z(G)/H ↪→ Z(H) , gH 7−→ gH .
Nous allons montrer que ϕ est un isomorphisme, en etablissant la surjectivite de ϕ.Soit g ∈ G tel que π(g) = gH est central dans G/H. On a donc
π(gxg−1x−1) = eH = π(e) ,
pour tout x ∈ G. Autrement dit, on a
gxg−1x−1 ∈ H
pour tout x ∈ G. Ainsi, l’application
θ : G 7−→ G , x 7−→ gxg−1x−1
prend ses valeurs dans H. Comme θ est continue (c’est limpide !), comme G estconnexe, et comme H est discret, θ est constante. Ainsi donc, on obtient
gxg−1x−1 = θ(x) = θ(e) = e ,
pour tout x ∈ G, ce qui montre que g est central dans G. Des lors, on a
gH = π(g) = π|Z(G)(g) = ϕ(g) ,
ce qui etablit effectivement la surjectivite de ϕ. Pour l’assertion concernant lestopologies, voir le Lemme 3.24. ¤
Corollaire 3.26. Si G est un groupe topologique connexe a centre discret,alors le groupe quotient G/Z(G) est a centre trivial. ¤
Remarque 3.27. Dans le cas non-connexe, l’enonce correspondant est faux.Par exemple, pour le sous-groupe (ferme et discret) Q8 :=
{ ± 1,±i,±j,±k}
deH×, on a Z(Q8) = {±1}, donc Q8/Z(Q8) possede quatre elements, donc est abelien;en fait, ce quotient est un groupe de Klein, i.e. est isomorphe a Z/2⊕ Z/2.
4. Groupes de Lie
Definition 4.1. Un groupe de Lie sur K est un groupe G, qui est en memetemps une variete lisse sur K, et tel que le produit
µ : G×G −→ G , (g, h) 7−→ gh
et le passage a l’inverse
inv : G −→ G , g 7−→ g−1
sont des applications lisses. On dit que G est un groupe de Lie analytique sur K si Gest une variete analytique sur K et si µ et inv sont des applications analytiques. SiK = R, on dit aussi groupe de Lie reel ou simplement groupe de Lie, et si K = C ondit aussi groupe de Lie complexe. La dimension de G est la dimension (sur K = Rou C, respectivement) de la variete sous-jacente.
Remarque 4.2. Dans la litterature, on dit parfois groupe analytique pourdesigner un groupe de Lie analytique connexe sur K.
4. GROUPES DE LIE 17
Lemme 4.3. Soit G une variete lisse (resp. analytique) sur K munie d’unestructure de groupe. Alors G est un groupe de Lie (resp. analytique) sur K ssil’application
µ∨ : G×G −→ G , (g, h) 7−→ gh−1
est lisse (resp. analytique).
Preuve. On procede exactement comme pour le Lemme 3.2. ¤Definition 4.4. Un homomorphisme de groupes de Lie sur K (resp. analy-
tiques) est un homomorphisme de groupes, entre deux groupes de Lie G et H surK (resp. analytiques), qui est lisse (resp. analytique); c’est un isomorphisme degroupes de Lie sur K (resp. analytiques) si c’est un isomorphisme de groupes, quiest en meme temps un diffeomorphisme (resp. analytique). Dans ce cas, on ecrit
G∼=−→ H ou G ∼= H .
Dans le cas complexe, on dira parfois que G et H sont C-isomorphes pour insistersur le fait qu’ils sont isomorphes comme groupes de Lie complexes.
Exemple 4.5.
(i) Tout groupe denombrable, muni de la topologie discrete, est un groupede Lie (reel ou complexe) de dimension 0.
(ii) Le groupe Rn est un groupe de Lie reel de dimension n.(iii) Le groupe Cn est un groupe de Lie complexe de dimension n.(iv) Tout groupe de Lie complexe de dimension n est un groupe de Lie reel de
dimension 2n.(v) Le groupe R× := Rr{0} (pour la multiplication) est un groupe de Lie
reel de dimension 1.(vi) Le groupe C× := Cr{0} (pour la multiplication) est un groupe de Lie
complexe de dimension 1.(vii) Le groupe H× := Hr{0} (pour la multiplication) est un groupe de Lie
reel de dimension 4.(vii) Le sous-groupe ferme
S0 :={x ∈ R×
∣∣ |x| = 1}
= {±1} ∼= Z/2
de R× est un groupe de Lie reel de dimension 0.(viii) Le sous-groupe ferme
S1 :={z ∈ C× ∣∣ |z| = 1
}
de C× est un groupe de Lie reel de dimension 1.(ix) Le sous-groupe ferme
S3 :={q ∈ H× ∣∣ |q| = 1
}
de H× est un groupe de Lie reel de dimension 3. On peut en effet verifier“a la main” que le produit et le passage a l’inverse sont des applica-tions analytiques, par exemple en utilisant les deux cartes donnees par lesprojections stereographiques du pole nord et du pole sud sur l’hyperplanequatorial (ou sur l’hyperplan tangent au pole oppose).
(x) Le tore de dimension n, defini par
Tn := S1 × . . .× S1
︸ ︷︷ ︸n facteurs
,
18 1. THEORIE CLASSIQUE DES GROUPES DE LIE
est un groupe de Lie reel de dimension n de facon canonique. Nous allonsconsiderer la carte “canonique” suivante au voisinage de (1, . . . , 1) ∈ Tn :
ϕα : ]− 12 , 1
2 [n−→ Tn ,(θ1, . . . , θn
) 7−→ (e2πiθ1 , . . . , e2πiθn
).
(Dans la litterature, on utilise parfois la carte definie de la meme facon,mais avec l’intervalle ]−π, π[ et sans les facteurs 2π dans les exponentielles;notre choix est motive par l’exemple suivant, dans lequel on prefere quo-tienter Rn par Zn plutot que par (2πZ)n.)
(xi) Le groupe Rn/Zn est un groupe de Lie reel de dimension n de facon canon-ique. Il possede une carte canonique au voisinage du neutre
([0], . . . , [0]
)donnee par la restriction de la projection de Rn sur son quotient Rn/Zn,a savoir
ϕα : ]− 12 , 1
2 [n−→ Rn/Zn , (θ1, . . . , θn) 7−→ ([θ1], . . . , [θn]
).
De plus, l’application suivante est un isomorphisme de groupes de Liereels :
Rn/Zn ∼=−→ Tn ,([θ1], . . . , [θn]
) 7−→ (e2πiθ1 , . . . , e2πiθn
).
(xii) Le groupe C/(Z ⊕ Z · i) est un groupe de Lie complexe de dimension 1
de facon canonique. Plus generalement, le groupe Cn/(Z⊕ Z · i)n est un
groupe de Lie complexe de dimension n, qui possede une carte canon-ique au voisinage du neutre
([0], . . . , [0]
)donnee par la restriction de la
projection de Cn sur son quotient Cn/(Z⊕ Z·i)n, a savoir
ϕα : Un −→ Cn/(Z⊕ Z·i)n , (z1, . . . , zn) 7−→ (
[z1], . . . , [zn]),
ou U :={z = x + iy ∈ C
∣∣ x, y ∈ ]− 12 , 1
2 [}
. Bien sur, comme groupe deLie analytique reel, Cn
/(Z⊕ Z · i)n est isomorphe au tore T2n.
(xiii) Si H est un sous-groupe ouvert d’un groupe de Lie G sur K, alors Hherite de maniere canonique une structure de groupe de Lie sur K dememe dimension (comparer avec le Corollaire 3.12).
(xiv) Le groupe Mn(K) (pour l’addition matricielle) est un groupe de Lie an-alytique sur K de dimension n2, isomorphe a Kn2
comme groupe de Lieanalytique sur K.
(xv) Si G et H sont des groupes de Lie sur K de dimension m et n respective-ment, alors le groupe topologique produit G×H (i.e. l’espace topologiqueproduit avec la structure de groupe produit) muni de la structure devariete lisse produit est un groupe de Lie sur K de dimension m + n.Si G et H sont analytiques, alors G×H egalement.
Proposition 4.6. Le groupe lineaire general GLn(K) (pour la multiplicationmatricielle), muni de la structure de variete analytique sur K heritee en le realisantcomme sous-espace ouvert de Mn(K), est un groupe de Lie sur K de dimension n2.
Preuve. La multiplication matricielle est polynomiale en les entrees des matrices amultiplier, donc l’application
µ : GLn(K)×GLn(K) −→ GLn(K) , (A,B) 7−→ AB
est analytique. Si A ∈ GLn(K), alors
A−1 =1
det(A)·Aad ,

4. GROUPES DE LIE 19
ou Aad est la matrice adjointe de A, i.e. la transposee de la matrice des cofacteursAcof de A. Comme les applications det : Mk(K) −→ K sont polynomiales pourk = n− 1 et n, et comme Acof est definie a l’aide de determinants de sous-matrices(n−1)× (n−1) de A et a l’aide de produits dans K, les entrees de A−1 sont toutesdes fractions rationnelles en les entrees de A. Ainsi, l’application
inv : GLn(K) −→ GLn(K) , A 7−→ A−1
est egalement analytique. ¤Remarque 4.7. En particulier, GLn(C) est un groupe de Lie analytique reel
de dimension 2n2.
Remarque 4.8. Si G est un groupe de Lie (resp. analytique) sur K, alors,pour tout g ∈ G, les applications `g, rg et cg, introduites a la Notation 3.4, sont desdiffeomorphismes (resp. analytiques) et cg est un automorphisme de groupe de Lie(resp. analytique) sur K. Pour insister sur le groupe de Lie ambiant G, on noteraparfois ces applications `G
g , rGg et cG
g .
Lemme 4.9. Pour un groupe de Lie G sur K (resp. analytique), le commutateur
[ . , . ] : G×G −→ G , (g, h) 7−→ [g, h] = ghg−1h−1
est une application lisse (resp. analytique).
Preuve. Cela se prouve exactement comme le Lemme 3.5. ¤Lemme 4.10. Soit G un groupe de Lie sur K, et notons µ le produit et inv le
passage a l’inverse dans G. Alors, il existe des voisinages V ⊆ W de e dans G quisont des ouverts trivialisants et tels que
V · V ⊆ W et W−1 = W .
c’est-a-dire µ(V × V ) ⊆ W et inv(W ) = W .
Preuve. Soit U un voisinage de e dans G qui est un ouvert trivialisant. Commeinv est un homeomorphisme, inv(U) = U−1 est un voisinage ouvert de e dans G.Posons W := U ∩ U−1. C’est clairement un voisinage de e dans G, et c’est unouvert trivialisant (car contenu dans U); de plus il verifie la seconde condition, i.e.W−1 = W . Par continuite de µ (et par definition de la topologie produit), il existeun voisinage ouvert V ′ de e dans G tel que µ(V ′, V ′) ⊆ W . Il suffit donc de prendreV := W ∩ V ′. ¤
Le resultat suivant est bien pratique pour verifier “localement” si un groupetopologique connexe donne est un groupe de Lie.
Proposition 4.11. Soit G un groupe topologique connexe, et notons µ le pro-duit et inv le passage a l’inverse dans G. Supposons qu’il existe des voisinagesouverts U , V et W de e dans G (typiquement, V, W ⊆ U) tels que
(i) il existe un homeomorphisme ϕ : E0
∼=−→ U , ou E0 est un ouvert dans unK-espace vectoriel de dimension finie E;
(ii) l’ensemble{`g ◦ ϕ : E0
∼=−→ `g(U)}
constitue un atlas lisse (resp. analy-tique), donc, faisant de G une variete lisse (resp. analytique) sur K;
(iii) la restriction
µ|V×V : V × V −→ G , (g, h) 7−→ gh
est lisse (resp. analytique);

20 1. THEORIE CLASSIQUE DES GROUPES DE LIE
(iv) la restriction
inv |W : W −→ G , g 7−→ g−1
est lisse (resp. analytique).
Alors, G est un groupe de Lie (resp. analytique) sur K, de dimension dimK(E).
Preuve. Si U ′ ⊆ U est un voisinage ouvert de e dans G, et si E′0 := ϕ−1(U ′) ⊆ E,
alors l’ensemble{`g ◦ϕ|E′0 : E′
0
∼=−→ `g(U ′)}
est un atlas equivalent a celui considereen (ii). Donc, quitte a remplacer U , V et W par U ∩ V ∩W , on peut supposer queU = V = W . Fixons x ∈ G. Par construction-meme de cet atlas, l’application
`x : G −→ G , g 7−→ xg
est un diffeomorphisme (resp. analytique), d’inverse `x−1 . Montrons d’abord quel’application
rx : G −→ G , g 7−→ gx
est lisse (resp. analytique), de quoi il suivra que c’est un diffeomorphisme (resp.analytique). Fixons y ∈ G, et supposons, dans un premier temps, que x ∈ U .Comme le fait d’etre lisse ou analytique est une condition locale, il nous suffitd’etablir que l’application
rx|`y(U) : `y(U) −→ G , g 7−→ gx
est lisse (resp. analytique). Pour commencer, remarquons que la restriction rx|Us’ecrit
Uincl // U × {x} incl // U × U
µ|U×U // G ,
donc est lisse (resp. analytique). Maintenant, rx|`y(U) n’est autre que la composition
`y(U)`y−1
// Urx|U // G
`y // G ,
donc est lisse (resp. analytique). Nous venons de montrer que rx est lisse (resp. an-alytique) si x ∈ U . Comme une composition d’application lisses (resp. analytiques)l’est egalement, on a que rx est lisse (resp. analytique), des que x ∈ 〈U〉. Or, parconnexite de G, on a que 〈U〉 = G (cf. Proposition 3.10). Pour conclure, il noussuffit d’etablir que les applications
µ|`x(U)×ry(U) : `x(U)× ry(U) −→ G , (g, h) 7−→ gh
etinv |`x(U) : `x(U) −→ G , g 7−→ g−1
sont lisses (resp. analytiques). Or, ces applications s’ecrivent, respectivement,comme les compositions
`x(U)× ry(U)`x−1×ry−1
// U × Uµ|U×U // G
`x◦ry // G
et
`x(U)`x−1 // U
inv |U // Grx−1 // G ,
et sont donc lisses (resp. analytiques), ce qui acheve la demonstration. ¤
5. MATRICES QUATERNIONIENNES 21
Remarque 4.12. Le Lemme 4.10 nous montre qu’en essayant d’appliquer laProposition 4.11, on peut esperer trouver des voisinages U , V et W de e dans G,qui sont des ouverts trivialisants et tels que V ⊆ W ⊆ U , V ·V ⊆ W et W−1 = W ,ce qui permet d’avoir a tester la differentiabilite (lisse ou analytique) uniquementpour les applications
µ|V×V : V × V −→ W et inv |W : W −→ W ,
qui ont leur domaine et leur co-domaine qui sont des ouverts de cartes, c’est-a-direque ce sont essentiellement des applications entre ouverts d’espaces euclidiens.
Remarque 4.13. Si on desire appliquer un analogue de la Proposition 4.11 aun groupe topologique non-connexe, il suffit, d’apres la preuve ci-dessus, que U , Vet W rencontrent chaque composante connexe de G, les autres hypotheses restantles meme. En effet, la seule difference est d’invoquer le Corollaire 3.11, au lieu dela Proposition 3.10, pour obtenir que 〈U〉 = G. Une autre methode est d’ajouterla condition suivantes a (i)–(iv) :
(ii′) pour tout g ∈ G la translation a droite rg par g est lisse (resp. analytique).En fait, il suffit de verifier cette condition pour un sous-ensemble d’elements de Grencontrant chaque composante connexe.
Nous concluons cette section par une remarque concernant les groupes algebri-ques reels et complexes.
Remarque 4.14. Soit G un groupe algebrique affine sur K = R ou C, disonsrealise comme sous-variete affine dans Kn. Soit Gtop l’espace topologique donnepar l’ensemble sous-jacent a G, muni de sa topologie euclidienne, i.e. heritee de Kn
equipe de la topologie euclidienne usuelle (et non pas de la topologie de Zariski).On peut alors montrer que Gtop muni de la meme structure de groupe que celle deG est un groupe de Lie analytique sur K. De plus, on a l’egalite
dimKrull(G) = dim(Gtop)
et, lorsque K = C, le groupe algebrique G (plus precisement, la variete algebriquesous-jacente) est irreductible ssi Gtop est connexe.
5. Matrices quaternioniennes
Definition 5.1. Soit k un corps (commutatif). Une k-algebre est un espacevectoriel A, disons avec une action de k notee a droite, i.e.
• : k×A −→ A , (λ, x) 7−→ λ•x ,
et qui est muni d’une application k-bilineaire, appelee produit,
µ : A×A −→ A , (x, y) 7−→ µ(x, y) ,
souvent notee sous la forme µ(x, y) = x·y ou µ(x, y) = xy pour x, y ∈ A. L’algebreA est associative si (xy)z = x(yz), pour tous x, y, z ∈ A; elle est commutative sixy = yx, pour tous x, y ∈ A; est unitale ou a unite s’il existe un element 1A ∈ A,appele unite, tel que 1A ·x = x et x ·1A = x, pour tout x ∈ A (l’unite est alorsunique); elle est a division si elle est unitale et si chacun de ses elements non-nulest inversible, i.e. si pour tout x ∈ Ar{0}, il existe y = y(x) ∈ A tel que xy = 1Aet yx = 1A. Le centre de A est la k-sous-algebre
Z(A) :={x ∈ A ∣∣ xy = yx , ∀y ∈ A}
.

22 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Supposons que k est un corps topologique, par exemple que k = R ou C (sinon, onpeut toujours munir k de la topologie discrete). On dit alors que A est une k-algebretopologique si A est a la fois une k-algebre et un espace vectoriel topologique avecl’action “ • ” de k sur A etant une application continue, et si son produit µ est uneapplication continue.
Remarque 5.2. Soit A une k-algebre a unite. Alors la sous-algebre k•1 deA est dans le centre de A. Ainsi, dans ce cas, on peut considerer A comme unk-bimodule central, ou l’action a droite de k est donnee par
x•λ := x·(λ•1) .
pour x ∈ A et λ ∈ k; cette structure est bien centrale puisque
x•λ = x·(λ•1) = (λ•x)·1 = λ•x
en vertu de la k-bilinearite. A noter, par exemple, que H est une R-algebre et,bien que C en soit une R-sous-algebre, H n’est pas une C-algebre; en effet, lamultiplication quaternionienne n’est pas C-bilineaire (ceci est precisement du aufait que C n’est pas central dans H, i.e. pas contenu dans le centre de H, qui est R).
Notation 5.3. Soit Mn(H) la R-algebre des matrices n×n a coefficients dansle corps gauche des quaternions, note H, et soit GLn(H) := Mn(H)× le groupemultiplicatif de cette algebre, i.e. le groupe lineaire quaternionien qui consiste enles matrices n× n quaternioniennes inversibles.
Par convenance, nous allons introduire deux autres notations.
Notation 5.4. Considerons la R-sous-algebre topologique
MH2n(C) :=
{(A −B
B A
)∈M2n(C)
∣∣∣∣∣ A,B ∈Mn(C)
}
de la R-algebre topologique M2n(C) , et designons son groupe multiplicatif par
GLH2n(C) := MH2n(C)× ,
vu comme groupe topologique.
Remarque 5.5.
(i) Il est en effet immediat queMH2n(C) est bien une R-sous-algebre topologiquede M2n(C).
(ii) Si z ∈ C, alors z ·j = j ·z.(iii) Tout quaternion q = a + b·i + c·j + d·k, ou a, b, c et d dans R, s’ecrit de
maniere unique sous la forme q = x + y ·j avec x, y ∈ C. En effet, il suffitde prendre
x := a + b·i ∈ C et y := c− d·i ∈ C .
Par la suite, sauf mention express du contraire, lorsqu’un quaternion estecrit sous la forme q = x + y · j, on sous-entendra que x et y sont desnombres complexes.
Lemme 5.6. L’application
Φ: H∼=−→MH2 (C) , q = x + y ·j 7−→
(x −yy x
)

5. MATRICES QUATERNIONIENNES 23
est un isomorphisme de corps gauches topologiques, comme indique, d’inverse donnepar
Φ−1 : MH2 (C)∼=−→ H ,
(a −bb a
)7−→ a + b·j .
Preuve. Il est immediat de verifier que Φ est bi-continue (i.e. un homeomorphisme),R-lineaire et multiplicative, i.e. satisfait
Φ(q1 ·q2) = Φ(q1)·Φ(q2)
pour tous q1, q2 ∈ H, et que Φ ◦ Φ−1 = idMH2 (C) et Φ−1 ◦ Φ = idH. Il en resulteque Φ et Φ−1 sont des isomorphismes de R-algebres, inverses l’un de l’autre, queMH2 (C) est un corps gauche (tout comme H) et donc que ce sont des isomorphismesde corps gauches, inverses l’un de l’autre. ¤
Lemme 5.7. On a un isomorphisme de R-algebres topologiques
Mn(Φ): Mn(H)∼=−→Mn
(MH2 (C)
)
obtenu en appliquant l’isomorphisme Φ ci-dessus entree-par-entree a une matricequaternionienne, explicitement,
x11 + y11 ·j . . . x1n + y1n ·j...
...
xn1 + yn1 ·j . . . xnn + ynn ·j
7−→
x11 -y11y11 x11
· · · x1n -y1ny1n x1n
......
xn1 -yn1yn1 xn1
· · · xnn -ynnynn xnn
Preuve. C’est absolument evident, puisque Φ est un isomorphisme de R-algebrestopologiques (cf. Lemme 5.6) et que Mn(−) est un foncteur, plus precisement, unendofoncteur de la categorie des R-algebres topologiques. ¤
Notation 5.8. Considerons la matrice 2n× 2n complexe suivante
J2n :=
(On −1In1In On
)∈ GL2n(C) .
Notons que J2n est bel et bien inversible, que J−12n = tJ2n et que J2n ∈ GLH2n(C).
Lemme 5.9. Pour une matrice 2n× 2n complexe X ∈M2n(C), on a
X ∈MH2n(C) ⇐⇒ J2n ·X ·J−12n = X .
Preuve. Il suffit d’ecrire X comme une matrice 2× 2 par blocs, explicitement,
X =
(A C
B D
)
avec A, B, C et D dans Mn(C), puis, par calcul direct, de verifier que
J2n ·X ·J−12n =
(D −B
−C A
),
et finalement, de contempler le paysage ! ¤

24 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Proposition 5.10. L’application
Ψ: MH2n(C)∼=−→Mn(H) ,
(A −B
B A
)7−→ A + B · j
est un isomorphisme de R-algebres topologiques, comme indique, et induit un iso-morphisme de groupes topologiques
Ψ|GLH2n(C) : GLH2n(C)∼=−→ GLn(H) .
Preuve. Au vu du Lemme 5.7, il nous suffit maintenant d’exhiber un isomorphismede R-algebres topologiques entre MH2n(C) et Mn
(MH2 (C)
). Considerons la matrice
P = (pij) ∈ GL2n(C) correspondant a la permutation de l’ensemble {1, . . . , 2n}donnee par
σ :=(
1 2 3 . . . n n + 1 n + 2 n + 3 . . . 2n1 3 5 . . . 2n− 1 2 4 6 . . . 2n
),
c’est-a-dire, pij = δi,σ(j) ∈ {0, 1}. Cette matrice est la matrice du changement debase qui permet de passer de la base canonique (e1, . . . , e2n) de C2n a la nouvellebase (e1, e3, e5, . . . , e2n−1, e2, e4, e6, . . . , e2n). Il est des lors evident que l’application
cP−1 : Mn
(MH2 (C)
) −→MH2n(C) , X 7−→ P−1XP
realise un isomorphisme de R-algebres topologiques souhaite. On prend alors
Ψ := Mn(Φ)−1 ◦ cP : MH2n(C)∼=−→Mn(H) .
Il est (tres honnetement) evident que Ψ est donne par la formule indiquee dansl’enonce, ce qui acheve la demonstration. ¤
Remarque 5.11. L’isomorphisme Ψ−1 peut se construire explicitement commesuit. On identifie le C-espace vectorielHn de dimension 2n avec le C-espace vectoriel
C⊕ . . .⊕ C︸ ︷︷ ︸n sommands
⊕ j ·C⊕ . . .⊕ j ·C︸ ︷︷ ︸n sommands
,
ouj ·C :=
{j ·z ∣∣ z ∈ C} ⊂ H .
Attention, lorsqu’on considere ici j·C comme C-espace vectoriel (de dimension un),l’action (notee “ •” ) d’un scalaire λ ∈ C sur un “vecteur” j·z, ou z ∈ C, est donneepar
λ •(j ·z) := (j ·z)·λ = j ·zλ ,
ou “ · ” designe le produit dans H, i.e. cette action n’est pas donnee par le produitdans H, car λ ·(j ·z) = j · zλ. Ensuite, on identifie une matrice Q ∈ Mn(H) avecl’application H-lineaire a droite (et donc C-lineaire a droite)
Q• : Hn −→ Hn , q 7−→ Qq .
Finalement, l’isomorphisme Ψ−1 associe a Q la matrice de cette application Q• vuecomme endomorphisme (C-lineaire – et pas seulement a droite !) de Cn ⊕ (j · C)n,par rapport a la C-base canonique.
Remarque 5.12. Dans la suite, nous allons souvent identifier les R-algebrestopologiques Mn(H) et MH2n(C), ainsi que les groupes topologiques GLn(H) etGLH2n(C). (A noter que les notations MH2n(C) et GLH2n(C) ne sont pas standards,mais sont introduites ici par pure convenance.)
5. MATRICES QUATERNIONIENNES 25
Proposition 5.13. Le groupe lineaire general GLn(H) (pour la multiplicationmatricielle), muni de la structure de variete analytique reelle heritee en le realisantcomme sous-espace ouvert de Mn(H) ∼= R4n2
, est un groupe de Lie analytique reelde dimension 4n2.
Preuve. Par suite de la Proposition 5.10, Mn(H) est une variete analytique reellede dimension 2·2·n2 = 4n2 de facon canonique. Ensuite, l’espace GLn(H) s’identifiea l’ouvert GLH2n(C) de MH2n(C), donc est lui-meme une variete analytique reelle dedimension 4n2. Comme dans la preuve precedente, la multiplication et le passagea l’inverse sont des fonctions rationnelles en les entrees de la ou des matrices im-pliquees, et sont donc des applications analytiques reelles en les coordonnees reelles(mais pas des applications holomorphes en les coordonnees complexes, a cause dela presence de conjugaisons complexes). ¤
Remarque 5.14. On peut montrer que GLn(H) n’est effectivement pas ungroupe de Lie complexe (car, dans un langage que l’on developpera plus tard, sonalgebre de Lie reelle ne porte pas de structure complexe).
Notation 5.15. On ecrira F pour designer l’une des R-algebres a division R, Cou H. Pour F = H, les espaces vectoriels seront, selon les situations, soit des espacesvectoriels a gauche, soit des espaces vectoriels a droite (auquel cas la representationmatricielle d’une applicationH-lineaire se fait comme a l’accoutumee, i.e. en ecrivantles images des vecteurs de base successivement en colonne). On pose
dF := dimR(F) ;
on a donc un isomorphisme de R-espaces vectoriels canonique F ∼= RdF . Si celas’avere necessaire, pour fixer les idees, on peut choisir l’isomorphisme de R-espacesvectoriels suivants :
Mn(F)∼=−→ Fn2
, (aij) 7−→ (a11, . . . , a1n; a21, . . . , a2n; . . . ; an1, . . . , ann) .
Bien-sur, c’est un isomorphisme de F-espaces vectoriels (a droite si F = H). Onpeut egalement choisir le R-isomorphisme “standard”
(RdF)n2= RdF × . . .× RdF︸ ︷︷ ︸
n2 termes
∼=−→ R× . . .× R︸ ︷︷ ︸dF · n2 termes
= RdF·n2.
Remarque 5.16. Ainsi, le groupe lineaire general GLn(F) est un groupe deLie reel de dimension dF · n2, admettant un atlas analytique sur R constitue d’uneseule carte ϕα, appelee “canonique”, dont l’inverse est donne par l’inclusion
ϕ−1α : GLn(F) incl−→Mn(F) =: E .
Bien sur, on a E ∼= Fn2 ∼= RdF·n2comme R-espace vectoriels. Pour F = C, le
groupe GLn(C) est un groupe de Lie complexe de dimension n2, et la carte ϕα estholomorphe.
Notation 5.17. Si E et F sont des F-espace vectoriels (a gauche, si F = H),on designe par LF(E, F ) le Z(F)-espace vectoriel de tous les homomorphismes F-lineaires de E vers F . Si A ∈ LF(E, F ) et v ∈ E, on ecrira souvent A · v au lieu deA(v). Lorsque E = F , on utilise indistinctement les notations LF(E) et EndF(E)pour designer LF(E, E).

26 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Remarque 5.18. Plus generalement, si E est un F-espace vectoriel (a droite siF = H) de dimension finie n, alors GLF(E) := AutF(E) est un groupe de Lie reel,non-canoniquement isomorphe a GLn(F) (un tel isomorphisme correspond au choixd’une F-base de E). Il admet un atlas analytique sur R constitue d’une seule carteϕα, appelee “canonique”, dont l’inverse est donne par l’inclusion
ϕ−1α : GLF(E) incl−→ EndF(E) =: F .
A nouveau, on a F ∼= Fn2 ∼= RdF·n2(non-canoniques) comme R-espace vectoriels.
Pour F = C, le groupe GLC(E) est un groupe de Lie complexe, et la carte ϕα
est holomorphe. Si le contexte est clair quant au corps (gauche) sur lequel E estconsidere, nous ecrirons GL(F ) en lieu et place de GLF(F ). Pour finir, notons quesi E est un H-espace vectoriel a gauche, alors GLH(E) := AutH(E) porte egalementune structure canonique de groupe de Lie reel, mais, cette fois, le choix d’une H-base de E correspond a un isomorphisme avec le groupe GLn(H)op, i.e. muni duproduit donne par (g, h) 7−→ hg. Or, le passage a l’inverse fournit un isomorphismede groupes de Lie reels GLn(H)op ∼= GLn(H).
6. Quelques remarques culturelles sur les groupes de Lie
Remarque 6.1. Les origines de la theorie des groupes de Lie remontent auxtravaux du mathematicien norvegien Sophus Lie (1842–1899) en 1873. Son but etaitd’imiter la theorie de Galois – dont le role est d’etudier les solutions des equationsalgebriques, i.e. polynomiales, via les symetries des equations et des solutions –afin d’etudier les equations differentielles. Ses travaux, publies successivement en1888, 1890 et 1893, ont ete ecrits conjointement avec Friedrich Engel, et le casholomorphe constituait le point de depart, le cas reel n’apparaissant que par la suite.Ils introduisirent et etudierent egalement la notion d’algebre de Lie, et etablirentune relation etroite avec les groupes de Lie. En fait, la theorie de Lie etait considereed’un point de vue local, ce qui, en langage moderne, signifie que Lie etudiait, enrealite, un voisinage de l’identite dans les groupes de Lie; par opposition, l’aspectglobal, dans lequel on visualise le groupe de Lie dans son ensemble, n’a ete reellementformalise et commence a etre etudie qu’apres 1924 par Hermann Weyl, qui etaitinspire par les travaux d’Issai Schur de 1924. En 1926, Otto Schreier a definila notion de groupe topologique. Ensuite, les travaux d’Elie Cartan et de LevPontryagin ont revetu une grande importance pour la progression du sujet; ilsconcernaient principalement les groupes de Lie et les algebres de Lie pour le premier,et les groupes topologiques pour le second. En 1946, Claude Chevalley presenta lapremiere theorie systematique des groupes de Lie du point de vue global et de leurlien avec les algebres de Lie.
Remarque 6.2. Pour K = R, nous avons defini la notion de groupe de Lieanalytique (ou groupe de Lie de classe Cω), mais on peut egalement definir cellede groupe de Lie de classe Cr pour r ∈ {1, 2, 3, . . .}. On demontre que pour toutgroupe de Lie G de classe Cr avec r ∈ {2, 3, . . . ,∞}, il existe une unique structurede groupe de Lie analytique sur G, disons Gω, qui est compatible avec la structureCr donnee dans le sens que l’application
idG : G −→ Gω

7. LE FIBRE TANGENT ET CHAMPS DE VECTEURS 27
est un diffeomorphisme de classe Cr (le cas r = ∞ etait deja connu de Lie lui-meme, et le cas r ≥ 2 a ete demontre par Schur en 1893). En fait, l’unicite n’estpas difficile; nous allons voir plus tard le cas r = ∞, mais le cas r ≥ 2 est similaire.
Remarque 6.3. Au second Congres International de Mathematiques a Paris,en 1900, David Hilbert a pose 23 problemes fondamentaux. Le fameux 5-iemeprobleme de Hilbert etait de savoir si un groupe topologique portant une structurede variete topologique, admettait necessairement une structure de groupe de Lie.La reponse affirmative a cette question fut donnee par Gleason, Montgomery etZippin en 1952 seulement ! (Ceci montre que la remarque precedente est valide pourr = 0 et r = 1 egalement, mais au prix d’efforts considerablement plus soutenus.)Signalons aussi qu’en 1933, von Neumann avait resolu le 5-ieme probleme de Hilbertpour les groupes compacts. (Parmi les autres problemes poses par Hilbert, il y a laConjecture de Goldbach et la Conjecture de Poincare, qui sont aujourd’hui encoredes questions ouvertes.)
Remarque 6.4. On a vu que les spheres S0, S1 et S3 portent une structure degroupe de Lie. Nous allons donner un argument incomplet (de loin) qui suggere quece sont les seules spheres portant une structure de groupe topologique (et donc degroupe de Lie); bien que notre argument sera incomplet, le resultat n’en demeurepas moins vrai, car il decoule du Theoreme d’Adams, qui outre ce point, etablit quetoute algebre a division de dimension finie sur R est de dimension 1, 2, 4 ou 8. SiSn−1 ⊂ Rn est un groupe topologique, dont le produit est note µ, alors, on definitun produit sur Rn par la formule
(α · x) · (β · y) := αβ · µ(x, y) ,
ou α, β ∈ R et x, y ∈ Sn−1. Il est facile de verifier que ce produit est bien defini(l’element 0 ∈ Rn ne s’ecrit pas de maniere unique sous la forme λ · x), associ-atif et avec unite donnee par le neutre de Sn−1. Malheureusement, on ne peutpas en deduire directement sa R-bilinearite (un indice dans cette direction est quenous n’avons toujours pas utilise la continuite de µ). Si on parvenait a etablir saR-bilinearite directement, Rn deviendrait une R-algebre associative a unite, de di-mension finie, qui en plus serait a division, dans le sens que tout element non-nulest inversible; elle serait egalement normee, dans le sens que ||a · b||2 = ||a||2 · ||b||2pour tous a, b ∈ Rn, ou ||.||2 designe la norme euclidienne usuelle. Or, le Theoremede Frobenius, datant de 1878, affirme que si A est une R-algebre a division associa-tive de dimension finie, alors A est isomorphe a l’une des R-algebres “classiques”R, C ou H; en particulier A est normee et sa dimension est 1, 2 ou 4. Le resultatannonce pour les spheres qui sont des groupes topologiques en decoulerait donc.Malheureusement, la demonstration de ce resultat est beaucoup plus difficile. Sig-nalons que la structure d’algebre a division alternative sur R8, donnee par l’algebreCa des octaves de Cayley (ou octonions), fournit seulement une structure de H-espace sur la sphere S7.
7. Le fibre tangent et champs de vecteurs
Definition 7.1. Soit M une variete lisse sur K et soit {ϕα} un atlas corres-pondant de M , modele sur E. Le fibre tangent de M est l’espace quotient
TM :=∐α
Mα × E/∼

28 1. THEORIE CLASSIQUE DES GROUPES DE LIE
ou (x, v) ∈ Mα × E est identifie a(x, ϕ′βα(x) · v) ∈ Mβ × E pour tout β, ou
ϕβα = ϕ−1β ◦ ϕα : ϕ−1
α (Mα ∩Mβ)︸ ︷︷ ︸⊆E
−→ ϕ−1β (Mα ∩Mβ)
︸ ︷︷ ︸⊆E
et ϕ′βα(x) ∈ LK(E) est la derivee de ϕβα au point x, i.e. sa jacobienne en x. Soit
π = πM : TM −→ M , [x, v] 7−→ x
la projection canonique. Pour x ∈ M , on pose
TxM := π−1(x) ⊆ TM ;
le K-espace vectoriel TxM est appele l’espace tangent a M en x ou fibre de TMau-dessus de x. Un element v ∈ TxM est appele un vecteur tangent a M en x.Explicitons la structure de K-espace vectoriel de TxM , pour x ∈ M fixe :
(i) si λ ∈ K et (x, v) ∈ Mα × E, on pose
λ · [x, v] := [x, λ · v] ∈ TxM ,
ou (x, λ · v) ∈ Mα × E;(ii) si (x, v), (x,w) ∈ Mα × E, on pose
[x, v] + [x,w] := [x, v + w] ∈ TxM ,
ou (x, v + w) ∈ Mα × E;(iii) si (x, v) ∈ Mα × E et (x,w) ∈ Mβ × E, on pose
[x, v] + [x,w] := [x, v + ϕ′αβ(x) · w] ∈ TxM ,
ou (x, v + ϕ′αβ(x) · w) ∈ Mα × E.
Remarque 7.2.
(i) L’espace tangent TxM est de dimension dim(M) (sur K).(ii) Si M est lisse (resp. analytique) sur K, de dimension n, alors le fibre tan-
gent TM porte une structure canonique de variete lisse (resp. analytique)sur K, de dimension 2n, pour laquelle la projection π est une applicationlisse (resp. analytique).
(iii) Si f : M −→ N est une application lisse entre varietes lisses sur K (avecM modelee sur E), alors on definit la differentielle (ou application tan-gentielle) de f comme etant l’application
f∗ = Tf : TM −→ TN
[x, v] 7−→ [f(x), (ψβ ◦ f ◦ ϕα)′
(ϕ−1
α (x)) · v]
pour x ∈ Mα, pour f(x) ∈ Nβ et pour (x, v) ∈ Mα × E . C’est uneapplication bien definie et lisse. La differentielle en x (ou applicationtangentielle en x) de f est definie par
f∗ = Txf := Tf |TxM : TxM −→ Tf(x)N ;
cette application est un homomorphisme de K-espaces vectoriels. Si M ,N et f sont analytiques, alors Tf l’est aussi.
(iv) Cette construction definit un foncteur T de la categorie des varietes lisses(resp. analytiques) sur K vers elle-meme, dans le sens que
T idM = idTM et T (f2 ◦ f1) = Tf2 ◦ Tf1 ,

7. LE FIBRE TANGENT ET CHAMPS DE VECTEURS 29
pour f1 : L −→ M et f2 : M −→ N . Si x ∈ L, notons que la seconderelation signifie que l’on a la Regle de Derivation en Chaıne
Tx(f2 ◦ f1) = Tf1(x)f2 ◦ Txf1 .
(v) En particulier, si f : M −→ N est un diffeomorphisme, alors Tf aussi, etl’application Txf : TxM −→ Tf(x)N est une isomorphisme de K-espacesvectoriels, pour tout x ∈ M ; par consequent, dim(M) = dim(N). Il suitegalement que
(Txf)−1 = Tf(x)(f−1) ,
pour tout x ∈ M .(vi) Si M et N sont des varietes lisses (resp. analytiques) sur K, il y a alors
un diffeomorphisme (resp. analytique) canonique
T (M ×N) ≈ TM × TN
qui fait commuter le diagramme
T (M ×N) ≈ //
πM×N $$IIIIII
I TM × TN
πM×πNzzuuuuuu
u
M ×N
En particulier, si (x, y) ∈ M ×N , on a un K-isomorphisme canonique
T(x,y)(M ×N) ∼= TxM ⊕ TyN ;
dans la suite, nous allons identifier T(x,y)(M ×N) avec TxM ⊕ TyN .(vii) Soient L, M et N des varietes lisses sur K, et soit
F = (f, g) : L −→ M ×N , x 7−→ F (x) =(f(x), g(x)
)
une application lisse (voir aussi l’Exemple 1.18 (vii) (b)). Alors, sousl’identification de (vi) ci-dessus, on a l’egalite
TF = (Tf, Tg) : TL −→ T (M ×N) = TM × TN ,
c’est-a-dire, pour v ∈ TL, on a
TF (v) =(Tf(v), T g(v)
).
En particulier, pour x ∈ L, on a
TxF = (Txf, Txg) : TxL −→ TF (x)(M ×N) = Tf(x)M ⊕ Tg(x)N .
Exemple 7.3.
(i) Pour M = Kn et x ∈ Kn, on a
TKn = Kn ×Kn et TxKn = {x} ×Kn .
On identifie souvent TxKn avec Kn de la facon evidente.(ii) Si U est un ouvert non-vide de Kn et si x ∈ U , alors
TU = U ×Kn et TxU = TxKn = {x} ×Kn .
(iii) Si M est une variete lisse (ou analytique) sur K de dimension 0, alors
TM = M ×K0 ≈ M .

30 1. THEORIE CLASSIQUE DES GROUPES DE LIE
(iv) Si U est un ouvert non-vide d’une variete lisse (resp. analytique) M surK, de dimension n, et si x ∈ U , alors
TU =⋃
x∈U
TxM ⊆ TM et TxU = TxM ,
dans le sens que, dans la premiere egalite, TU est un ouvert non-videde TM et que sa structure de variete lisse (resp. analytique) sur K dedimension 2n est heritee de celle de TM . En particulier, si U est unouvert trivialisant de M et si M est modelisee sur E ∼= Kn, alors
TU = U × E ≈ U ×Kn .
(v) Pour la sphere Sn−1 ⊂ Rn, il y a des homeomorphismes canoniques
TSn−1 ∼=−→ {(x, x + v) ∈ Sn−1 × Rn
∣∣ x ⊥ v}
et
TSn−1 ∼=−→ {(x, v) ∈ Sn−1 × Rn
∣∣ x ⊥ v}
.
(vi) Pour le cercle S1 ⊂ C, on deduit de (v) des homeomorphismes canoniques
TS1 ∼=−→ {(z, λ · iz) ∈ S1 × C
∣∣ λ ∈ R} ∼=−→ S1 × R ,
ou la seconde application est donnee par
(z, λ · iz) 7−→ (z, λ) .
Remarquons que la composition ci-dessus fait commuter le diagramme
TS1∼= //
πS1 ÃÃ@@@
@@S1 × RqS1||yyyyy
S1
ou qS1 est la projection sur le premier facteur.(vii) Il est facile de verifier que pour un quaternion non-nul q ∈ H×, les quatre
quaternionsq , iq , jq et kq
forment une base orthogonale du R-espace vectoriel H, identifie a l’espaceeuclidien R4 de facon canonique; si q est norme, i.e. si q ∈ S3, alors cetteR-base est orthonormee. Pour la sphere S3 ⊂ H, on deduit de (v) deshomeomorphismes canoniques
TS3 ∼=−→ {(q, λ · iq + µ · jq + ν · kq) ∈ S3 ×H ∣∣ λ, µ, ν ∈ R}
et {(q, λ · iq + µ · jq + ν · kq) ∈ S3 ×H
∣∣ λ, µ, ν ∈ R} ∼=−→ S3 × R3
(q, λ · iq + µ · jq + ν · kq) 7−→ (q, (λ, µ, ν)
).
Remarquons que la composition de ces deux homeomorphismes fait com-muter le diagramme
TS3∼= //
πS3 ÃÃ@@@
@@S3 × R3
qS3{{wwwwww
S3
ou qS3 est la projection sur le premier facteur.

7. LE FIBRE TANGENT ET CHAMPS DE VECTEURS 31
(viii) En procedant comme en (vii) pour la sphere S7 ⊂ Ca, ou Ca designela R-algebre des octaves de Cayley (qui est une R-algebre a division, aunite, alternative et de dimension 8), on construit un homeomorphismecanonique
TS7 ∼=−→ S7 × R7
tel que le diagramme
TS7∼= //
πS7 ÃÃ@@@
@@S7 × R7
qS7{{wwwwww
S7
commute, ou qS7 est la projection sur le premier facteur.
Definition 7.4. Soit M une variete lisse sur K. Un champ de vecteurs sur Mest une section de πM , i.e. une application
X : M −→ TM , x 7−→ X (x) = Xx
telle que πM ◦ X = idM , i.e. telle que
Xx ∈ TxM .
On dit que X est champ de vecteurs continu (resp. lisse, resp. analytique) sil’application X est continue (resp. lisse, resp. analytique et M est analytique).
Definition 7.5. Une variete reelle lisse M de dimension n est appelee paralle-lisable s’il existe n champs de vecteurs continus sur M , disons
X (1), . . . ,X (n) : M −→ TM ,
qui sont (partout) lineairement independants, i.e. tels que, pour tout point x de M ,les vecteurs tangents en x
X (1)x , . . . ,X (n)
x ∈ TxM
sont R-lineairement independants, c’est-a-dire forment une R-base de l’espace vec-toriel reel TxM (qui de dimension n).
Remarque 7.6. Il n’est pas difficile de verifier qu’une variete reelle lisse M dedimension n est parallelisable ssi il existe un homeomorphisme
F : M × Rn ∼=−→ TM
(appele trivialisation du fibre tangent) tel que le diagramme
M × Rn F∼=
//
qM ##HHHHHH
TM
πM~~}}}}
}
M
commute (ou qM est la projection sur le premier facteur), i.e. qui envoie la fibre{x} × Rn dans la fibre TxM , et tel que la restriction
Fx := F |{x}×Rn : {x} × Rn ∼=−→ TxM
est un isomorphisme de K-espaces vectoriels, comme indique.
32 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Remarque 7.7. On peut montrer que si une variete reelle lisse M de dimensionn est parallelisable, alors il existe n champs de vecteurs lisses sur M , qui sontlineairement independants; si M est analytique, on peut meme trouver de telschamps de telle sorte qu’ils soient analytiques.
Exemple 7.8.
(i) Formellement, toute variete reelle lisse de dimension 0 est parallelisable.(ii) Il resulte de (i) ci-dessus et de l’Exemple 7.3 (vi), (vii) et (viii) que les
spheres
S0 ⊂ R , S1 ⊂ C , S3 ⊂ H et S7 ⊂ Ca
sont parallelisables. Le Theoreme de Adams-Bott-Milnor-Kervaire (1958)affirme que ce sont les seules spheres parallelisables. Historiquement, en1950, G. W. Whitehead etablit que si Sn−1 est parallelisable, alors n = 1,ou n = 2, ou n est un multiple de 4. En 1952, J. Adem prouve quesi Sn−1 est parallelisable, alors n est une puissance de 2. Toda mon-tre en 1955 que S15 n’est pas parallelisable. La question beaucoup plusgenerale de savoir quel est le nombre maximal ρ(n) de champs de vecteurscontinus lineairement independants sur la sphere Sn−1 n’a ete resoluqu’en 1961 par Adams. En fait, le Theoreme de Eckmann-Hurwitz-Radon(1942) etablissait l’existence d’un certain nombre ρ(n) de tels champsindependants sur Sn−1 (par exemple a l’aide d’algebres de Clifford), etAdams demontre que ce nombre est maximal. On peut ecrire, de maniereunique, l’entier n ∈ N sous forme
n = (2r + 1) · 2c+4d
avec r, d ∈ N et c ∈ {0, 1, 2, 3}. On a alors
ρ(n) = 2c + 8d− 1 .
En particulier, si n est impair, ρ(n) = 0.(iii) On peut demontrer qu’une variete compacte connexe reelle lisse M , de
dimension > 0, admet (au moins) un champ de vecteurs continu partoutnon-nul ssi sa caracteristique d’Euler est nulle, i.e. χ(M) = 0. Le “Theoremede la Boule Chevelue” dit que la sphere S2 n’admet aucun champ devecteurs partout non-nul. Ceci s’illustre par le fait que χ(S2) = 2, doncest non-nulle. Plus generalement, pour n ∈ N, on a
χ(S2n) = 2 et χ(S2n+1) = 0 .
Ainsi, on voit que le fait que χ(S2n) = 2 implique que ρ(2n + 1) = 0, etl’egalite χ(S2n+1) = 0 a pour consequence que ρ(2n + 2) > 0. Commeautre exemple, on pourra citer “la” surface compacte orientable Σg degenre g (i.e. a g trous) pour laquelle χ(Σg) = 2 − 2g, donc admet un telchamp ssi g = 1, ssi “c’est” un tore T2 (qui, bien sur, est parallelisable).
(iv) Si M et N sont des varietes reelles lisses parallelisables, alors il en vade meme de la variete produit M × N . Le cas du tore Tn en est uneillustration evidente.
(v) Le Theoreme de Stiefel affirme que toute variete reelle lisse compacteorientable de dimension 3 est parallelisable. Les seules autres dimensionsou un tel resultat reste vrai, sont les dimensions 0 (tautologiquement) et1 (ou, a diffeomorphisme pres, les seules varietes reelles lisses compactes

8. METHODE DE CALCUL D’UNE DIFFERENTIELLE 33
sont les reunions disjointes d’un nombre au plus denombrable de cerclesS1. Dans toutes les autres dimensions, sauf en dimension 7, la sphere Sn
fournit un exemple de variete reelle lisse compacte connexe orientable etnon-parallelisable; en dimension 7, on montre que certaines S3-fibrations(orientables) au-dessus de S4 ne sont pas parallelisables.
(vi) On peut montrer que si n1, . . . , ns ∈ N∗, avec s > 1, sont des entiers dontl’un au moins est impair, alors Sn1 × . . .× Sns est parallelisable.
8. Methode de calcul d’une differentielle
Dans cette Section, nous allons indiquer une methode de calcul de la differentielled’une application lisse.
Exemple 8.1. Pour l’espace euclidien K, on a le champ de vecteur lisse (non-nul) canonique donne par
E : K −→ TK = K×K , t 7−→ Et := [t, 1] = (t, 1) .
On a alors le vecteur tangent E0 = (0, 1) ∈ {0} × K = T0K. Nous garderons cesnotations dans la suite. Signalons que dans la litterature, ce champ de vecteurslisse sur K est souvent note
E =d
dtet Et =
d
dt t
pour t ∈ K; en particulier,
E0 =d
dt t=0=
d
dt 0.
Voici la raison pour cette notation. Considerons un ouvert U de Kn, et
f : K −→ U , t 7−→ f(t)
une application lisse. Alors, l’application Tf est explicitement donnee par
Tf : K×K︸ ︷︷ ︸=TK
−→ U ×Kn
︸ ︷︷ ︸=TU
, (t, v) 7−→ (f(t), f ′(t) · v)
.
En particulier, on af∗ = Ttf : Et 7−→
(f(t), f ′(t)
)︸ ︷︷ ︸∈Tf(t)U
,
c’est-a-dire, apres l’identification usuelle de Tf(t)U = {f(t)} ×Kn avec Kn,
Ttf(Et) = f∗(Et) = f ′(t) =d
dt tf .
Cet exemple justifie la notation suivante.
Notation 8.2. Soient M une variete lisse sur K, ε > 0 et
f : Bε −→ M , t 7−→ f(t)
une application lisse. Pour t ∈ Bε, on ecrit alors
f ′(t) := Ttf(Et) ∈ Tf(t)M .

34 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Proposition 8.3. Soit M une variete lisse (resp. analytique) sur K. Si x ∈ Met v ∈ TxM , alors il existe ε > 0 et une application lisse (resp. analytique)
γ : Bε −→ M , t 7−→ γ(t) ,
telle que γ(0) = x et T0γ(E0) = v. Motive par l’exemple precedent, on note cesdeux egalites sous la forme
γ(0) = x et γ′(0) = v .
L’application γ est appelee courbe locale sur M tangente a v en x.
Preuve. Soit n := dim(M). Si n = 0, M est discrete et le resultat est clair; sup-posons donc n > 0. Si v = 0, on peut prendre la courbe constante en x; on supposedonc v 6= 0. On trouve δ > 0, un voisinage ouvert U de x dans M , et ϕ : U
≈−→ Bun diffeomorphisme (resp. analytique), ou B est la boule ouverte centree a l’origineet de rayon δ dans Kn. On peut supposer que ϕ(x) = 0. Considerons le vecteurtangent a B en 0 correspondant a v, i.e.
v := Txϕ(v) ∈ T0B = T0Kn = Kn et v = T0ϕ−1(v) .
Soit ρ := ||v||2 > 0 (puisque v 6= 0 et Txϕ est un K-isomorphisme), et consideronsla courbe
γ : Bε −→ B , t 7−→ tv ,
ou ε := δρ > 0. Il est clair que γ est analytique et satisfait γ(0) = 0 et γ′(0) = v
(voir l’Exemple 8.1 en cas de doute). Posons alors
γ := ϕ−1 ◦ γ : Bε −→ M , t 7−→ ϕ−1(tv) .
Bien sur, γ est lisse (resp. analytique) et verifie γ(0) = x. Par la Regle de Derivationen Chaıne (cf. Remarque 7.2 (iv)), on a
T0γ(E0)︸ ︷︷ ︸=γ′(0)
= T0(ϕ−1 ◦ γ)(E0) = Tγ(0)ϕ−1 ◦ T0γ(E0)︸ ︷︷ ︸
=γ′(0)
= T0ϕ−1(v) = v .
Ainsi, γ est bien la courbe cherchee. ¤
Proposition 8.4. Soient M et N des varietes lisses (resp. analytiques) surK. Considerons une application lisse (resp. analytique) f : M −→ N . Pour x ∈ Met v ∈ TxM , soit γ : Bε −→ M une courbe locale sur M tangente a v en x, avecε > 0. Alors, la composition
f ◦ γ : Bε −→ N , t 7−→ f(γ(t)
)
est une courbe locale sur N tangente a Txf(v) en f(x). En particulier, on a l’egalite
Txf(v) = (f ◦ γ)′(0) ∈ Tf(x)N ,
c’est-a-dire, Txf(v) = T0(f ◦ γ)(E0).
Preuve. Il suffit d’etablir la derniere egalite, le reste s’ensuivant. Par la Regle deDerivation en Chaıne (cf. Remarque 7.2 (iv)), on a
T0(f ◦ γ)(E0) = Tγ(0)f ◦ T0γ(E0)︸ ︷︷ ︸=γ′(0)
= Txf(v) ,
ce qui acheve la demonstration. ¤

9. DIFFERENTIELLES PARTIELLES 35
9. Differentielles partielles
Plus tard, nous aurons besoin de la notion de differentielle partielle, a laquellecette section est entierement devolue. Les resultats obtenus ici nous seront utiles,plus loin dans ces notes, pour etablir que certaines applications sont lisses ou ana-lytiques.
Definition 9.1. Soient L, M et N trois varietes lisses sur K. Considerons uneapplication lisse (resp. analytique)
F : L×M −→ N , (x, y) 7−→ F (x, y) .
(i) Soit x0 ∈ L un point que nous fixons provisoirement. Pour chaque y ∈ M ,considerons l’application lisse (resp. analytique)
Fy : L −→ N , x 7−→ Fy(x) := F (x, y)
obtenue par restriction de F a L× {y}, et soit
Tx0Fy : Tx0L −→ TFy(x0)N ⊆ TN
la differentielle, au point x0 ∈ L, de Fy. Alors, l’application definie par
∂x0F : Tx0L×M −→ TN , (X, y) 7−→ Tx0Fy(X)
est appelee la differentielle partielle par rapport a x de F en x0. Pour etreprecis, on peut employer la notation
∂x|x0F ou meme∂
∂x x=x0
F .
(ii) L’application definie par
∂
∂xF : TL×M −→ TN , (X, y0) 7−→ ∂x0F = Tx0Fy0(X) ,
si X ∈ Tx0L, est la differentielle partielle par rapport a x de F .On definit de la meme maniere la differentielle partielle par rapport a y de F (resp.en un point y0 ∈ M), qui est notee ∂y0F (resp. ∂
∂y F ).
Proposition 9.2. Soient L, M et N trois varietes lisses (resp. analytiques)sur K. Considerons une application lisse (resp. analytique)
F : L×M −→ N , (x, y) 7−→ F (x, y)
et sa differentielle partielle, par rapport a x,∂
∂xF : TL×M −→ TN , (X, y0) 7−→ Tx0Fy0(X) (si X ∈ Tx0U) .
Alors, l’application ∂∂xF est lisse (resp. analytique); en particulier, la differentielle
partielle ∂x0F de F , par rapport a x, en un point x0 ∈ L, est egalement lisse (resp.analytique). Il en va de meme de ∂
∂y F et de ∂y0F pour chaque point y0 ∈ M .
Avant de passer a la demonstration de cette proposition, en voici un cas parti-culier.
Corollaire 9.3. Soient M et N des varietes lisses (resp. analytiques) sur K.Considerons une application lisse (resp. analytique)
F : K×M −→ N , (t, x) 7−→ F (t, x) .

36 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Pour chaque x ∈ M , considerons l’application lisse (resp. analytique)
Fx : K −→ N , x 7−→ Fx(t) := F (t, x)
obtenue par restriction de F a K× {x}, et soit
F ′x(0) =d
dt t=0Fx ∈ TFx(0)N ⊆ TN
la derivee, en 0, de Fx par rapport a t. Alors l’application definie par∂
∂t t=0F : M −→ TN , x 7−→ F ′x(0)
est lisse (resp. analytique). ¤
Voici un lemme preparatoire pour la demonstration de la Proposition 9.2.
Lemme 9.4. Soient U ⊆ K`, V ⊆ Km et W ⊆ Kn des ouverts non-vides.Considerons une application lisse (resp. analytique)
Φ: U × V −→ W , (x, y) 7−→ Φ(x, y) .
Considerons l’application
JxΦ: U × V −→ LK(K`,Kn) , (x0, y0) 7−→ JxΦ(x0, y0)
qui associe a un point (x0, y0) de U × V la matrice Jacobienne, par rapport ax = (x1, . . . , x`) et evaluee en x0, de l’application Φ(−, y0) : U −→ W . Alors,cette application JxΦ est lisse (resp. analytique). En particulier, si ~v ∈ K`, alorsl’application
U × V −→ Kn , (x0, y0) 7−→ JxΦ(x0, y0)·~vest lisse (resp. analytique).
Preuve. On peut ecrire Φ sous la forme Φ = (Φ1, . . . , Φn), ou Φi : U × V −→ Kest la i-ieme composante de Φ dans Kn (ce sont toutes des applications lisses (resp.analytiques)). Dans ces conditions, la matrice Jacobienne en question s’ecrit, enun point (x0, y0) ∈ U × V donne,
JxΦ(x0, y0) =(
∂Φi
∂xj(x0, y0)
)∈M`×n(K) = LK(K`,Kn) .
Ainsi, le premier resultat revient simplement a dire que toute derivee partielled’une application lisse (resp. analytique) d’un ouvert non-vide de K`+m vers K estelle-meme lisse (resp. analytique), ce qui est evident (dans le cas analytique, onpeut simplement deriver sous le symbole de sommation dans le developpement deTaylor, ce qui est une consequence, localement, de la convergence uniforme sur lescompacts). Le second resultat en est une consequence immediate. ¤
Nous sommes maintenant en mesure d’etablir la Proposition 9.2.
Preuve de la Proposition 9.2. Pour assurer la lisibilite, ecrivons (x′, y′) pour unpoint de L×M , au lieu de (x, y) comme dans l’enonce. Afin de travailler localement,fixons un point arbitraire (x′1, y
′1) ∈ L×M . Considerons des cartes
• ϕ : U≈−→ U ′ avec U ⊆ K` et x′1 ∈ U ′
• ψ : V≈−→ V ′ avec V ⊆ Km et y′1 ∈ V ′
• ϑ : W≈−→ W ′ avec W ⊆ Kn et F (x′1, y
′1) ∈ W ′ .

9. DIFFERENTIELLES PARTIELLES 37
La continuite de F nous permet de supposer que F (U ′, V ′) ⊆ W ′. Consideronsl’application
Φ: U × V −→ W , (x, y) 7−→ ϑ−1 ◦ F(ϕ(x), ψ(y)
),
qui n’est autre que la retranscription de F sur ces cartes; en particulier, Φ estlisse (resp. analytique). Maintenant, il nous suffit de demontrer que la differentiellepartielle, par rapport a x, de Φ, a savoir
∂
∂xΦ: TU × V −→ TW , (X, y0) 7−→ Tx0Φy0(X) (si X ∈ Tx0U)
est lisse (resp. analytique), car ce n’est rien d’autre que la retranscription de ∂∂xF
dans la carte V est les cartes induites pour TU = U ×K` et pour TW = W ×Kn.Explicitement, dans les notations du Lemme 9.4, cette application s’ecrit
∂
∂xΦ: U ×K` × V −→ W ×Kn , (x0, ~v, y0) 7−→
(Φ(x0, y0), JxΦ(x0, y0)·~v
).
Il est evident que la premiere composante (i.e. celle dans W ) de cette applicationest lisse (resp. analytique); pour la seconde (i.e. celle dans Kn), cela decoule duLemme 9.4. Au total, nous avons bien montre que ∂
∂xF (dans la nouvelle notation)est lisse (resp. analytique). L’argument pour ∂
∂y F est le meme. ¤Nous aurons egalement besoin de la version suivante du Lemme de Schwarz,
qui est un classique dans le cas du calcul differentiel usuel (et qui est valide dansun contexte C2 au lieu de C∞ comme ici).
Lemme 9.5. Soient M un variete lisse (resp. analytique) sur K, et
F : K2 −→ M , (s, t) 7−→ F (s, t) = Fs(t) = F t(s)
une application lisse (resp. analytique). Considerons les differentielles partielles∂
∂s s=0F : K −→ TM , t 7−→ (F t)′(0) ∈ TF (0,t)M
et∂
∂t t=0F : K −→ TM , s 7−→ (Fs)′(0) ∈ TF (s,0)M .
Alors ces applications sont lisses (resp. analytiques) et on a l’egalite entre la diffe-rentielle de la premiere de ces applications par rapport a t, en 0, et la differentiellede la seconde par rapport a s, en 0, c’est-a-dire,
∂
∂t t=0
∂
∂s s=0F =
∂
∂s s=0
∂
∂t t=0F ∈ T (TM) = TM × TM ,
ou les deuxiemes differentielles prises ont ete notee, pour des raisons esthetiques,comme des differentielles partielles.
Preuve. En vertu du Corollaire 9.3, les deux differentielles partielles par rapporta s et par rapport a t sont lisses (resp. analytiques). Pour effectuer les calculs detoutes ces differentielles (y compris les doubles differentielles), on peut commencerpar restreindre F a une ε-boule ouverte B de K2 (pour une norme arbitraire), avecε > 0 suffisamment petit pour que F (B) soit contenu dans le co-domaine V ⊆ M
d’une carte autour de F (0, 0), disons ϕ : U≈−→ V , ou U est un ouvert non-vide de
Kn, avec n designant la dimension de M . Il suffit alors de demontrer l’egalite desdeux doubles differentielles pour la composition
ϕ−1 ◦ F |B : B −→ U ⊆ Kn ,

38 1. THEORIE CLASSIQUE DES GROUPES DE LIE
car cette application n’est autre que la retranscription (localement) de F danscette carte. Dans ce cas, le resultat decoule du Lemme de Schwarz classique. Lesdetails (de nature purement “notationnelle”) sont laisses en exercice au lecteurinteresse. ¤
10. Le Theoreme d’Inversion Locale et application
Nous allons admettre le resultat classique suivant de la geometrie differentielle.
Theoreme 10.1 (Theoreme d’Inversion Locale).Soient M et N deux varietes lisses (resp. analytiques) sur K, et f : M −→ N uneapplication lisse (resp. analytique). Si en un point x0 de M , la differentielle de f ,
Tx0f : Tx0M∼=−→ Tf(x0)N
est un K-isomorphisme, comme indique, alors f est un diffeomorphisme local (resp.analytique) en x0.
Nous allons en deduire le resultat suivant.
Corollaire 10.2. Soient M , M ′ et N trois varietes lisses (resp. analytiques)sur K. Considerons une application lisse (resp. analytique)
f : M ×N −→ M ′ .
Supposons que, pour tout y ∈ N , l’application
fy = f(−, y) : M≈−→ M ′ , x 7−→ fy(x) := f(x, y)
est un diffeomorphisme (resp. analytique), comme indique. Alors, l’application
g : M ′ ×N −→ M , (x′, y) 7−→ g(x′, y) := f−1y (x′)
est lisse (resp. analytique).
Preuve. Considerons les applications
F : M ×N −→ M ′ ×N , (x, y) 7−→ (f(x, y), y
)=
(fy(x), y
)
etG : M ′ ×N −→ M ×N , (x′, y) 7−→ (
g(x′, y), y)
=(f−1
y (x′), y).
Comme f est lisse (resp. analytique), il en va de meme de F . L’application G estlisse (resp. analytique) ssi g l’est. Il est immediat que
G ◦ F = idM×N et F ◦G = idM ′×N .
Ainsi, F et G sont des bijections, inverses l’une de l’autre. Il resulte que g est lisse(resp. analytique) – ce qu’il nous faut demontrer – ssi G est lisse (resp. analytique),ssi F est un diffeomorphisme (resp. analytique), ssi F est un diffeomorphisme local(resp. analytique) en tout point de M ×N , ssi T(x,y)F est un K-isomorphisme pourtout (x, y) ∈ M × N (en vertu du Theoreme d’Inversion Locale). L’applicationK-lineaire T(x,y)F peut etre vu comme une application (cf. Remarque 7.2 (vi))
T(x,y)F : TxM ⊕ TyN −→ Tfy(x)M′ ⊕ TyN ,
et donc comme une matrice 2 × 2 d’applications lineaires, disons ( A BC D ), de la
maniere evidente. Maintenant, observons que
T(x,y)F =(
A BC D
)=
(Txfy B
0 idTyN
)

10. LE THEOREME D’INVERSION LOCALE ET APPLICATION 39
ou 0 est l’application nulle TxM −→ TyN , et ou, par hypothese, Txfy est un K-isomorphisme. Il en resulte que T(x,y)F est un K-isomorphisme, ce qui permet deconclure. ¤
Voici une application directe aux groupes de Lie.
Theoreme 10.3. Soit G un groupe portant une structure de variete lisse (resp.analytique) sur K. Supposons que le produit
µ : G×G −→ G , (g, h) 7−→ gh
est lisse (resp. analytique). Alors, le passage a l’inverse
inv : G −→ G , g 7−→ g−1
est egalement lisse (resp. analytique), de sorte que G est un groupe de Lie (analy-tique) sur K.
Preuve. Considerons l’application
f := µ : G×G −→ G , (x, y) 7−→ xy .
Dans les notations du Theoreme 10.3, on a
fy = ry : G −→ G , g 7−→ xy ,
qui est bien un diffeomorphisme (resp. analytique). De ce theoreme, il resulte quel’application (notee g dans son enonce)
µ∨ : G×G −→ G , (x, y) 7−→ xy−1 .
est lisse (resp. analytique). Le resultat decoule du fait que inv est donne par lacomposition d’applications
Gincl−→ {e} ×G
incl−→ G×Gµ∨−→ G ,
qui sont toutes lisses (resp. analytiques). ¤
Proposition 10.4. Soit G un groupe topologique connexe, et notons µ le pro-duit et inv le passage a l’inverse dans G. Supposons qu’il existe des voisinagesouverts U et V de e dans G (typiquement, V ⊆ U) tels que
(i) il existe un homeomorphisme ϕ : E0
∼=−→ U , ou E0 est un ouvert dans unK-espace vectoriel de dimension finie E;
(ii) l’ensemble{`g ◦ ϕ : E0
∼=−→ `g(U)}
constitue un atlas lisse (resp. analy-tique), donc, faisant de G une variete lisse (resp. analytique) sur K;
(iii) la restriction
µ|V×V : V × V −→ G , (g, h) 7−→ gh
est lisse (resp. analytique);Alors, G est un groupe de Lie (resp. analytique) sur K, de dimension dimK(E). Si Gest non-connexe, sous les memes autres hypotheses, si la condition supplementaire
(ii′) pour tout g ∈ G la translation a droite rg par g est lisse (resp. analytique).est verifiee, alors la meme conclusion est vraie.
Preuve. En imitant la preuve de la Proposition 4.11, on verifie que le produit µ estlisse (resp. analytique), et ce, sans faire appel a l’hypothese (iv) de cette proposition-la (cf. aussi Remarque 4.13). Le Theoreme 10.3 fournit la conclusion. ¤

40 1. THEORIE CLASSIQUE DES GROUPES DE LIE
11. L’espace tangent de G et champs de vecteurs invariants a gauche
Notation 11.1. Soit G un groupe de Lie sur K.(i) L’espace tangent a G est le K-espace vectoriel
LG := TeG
de dimension dim(G). On appelle LG egalement l’algebre de Lie de G,d’ou la notation. (Plus tard, on verra que LG possede une structurecanonique d’algebre de Lie sur K.)
(ii) Si ϕ : G −→ H est un homomorphisme de groupes de Lie sur K, alors onpose
Lϕ := Teϕ : LG −→ LH ;
cette application est un homomorphisme de K-espaces vectoriels.(iii) Cette construction definit un foncteur L de la categorie des groupes de Lie
sur K vers la categorie des K-espaces vectoriels de dimension finie, dansle sens que
L idG = idLG et L(ϕ2 ◦ ϕ1) = Lϕ2 ◦ Lϕ1 ,
pour ϕ1 : G −→ H et ϕ2 : H −→ K. En particulier, si ϕ : G −→ H est unisomorphisme de groupes de Lie sur K, alors Lϕ est un isomorphisme deK-espaces vectoriels.
Exemple 11.2. Pour G = Kn, on a
TKn = Kn ×Kn et TtKn = {t} ×Kn ,
pour tout t ∈ K. En particulier, on a
LKn = {0} ×Kn .
Dans la suite, on va souvent identifier LKn avec Kn de maniere evidente.
Exemple 11.3. Pour le groupe de Lie reel G = GLn(F), on a que l’ouvertGLn(F) lui-meme est un ouvert trivialisant pour la carte canonique, donc
T GLn(F) = GLn(F)×Mn(F) ≈ GLn(F)× RdF·n2
etTA GLn(F) = {A} ×Mn(F) ,
pour toute matrice A ∈ GLn(F). En particulier, on a
LGLn(F) = {1In} ×Mn(F) .
Dans la suite, on va souvent identifier LGLn(F) avec Mn(F) de maniere evidente.De meme, pour le groupe de Lie complexe GLn(C), on a
T GLn(C) = GLn(C)×Mn(C) ≈ GLn(C)× Cn2
etTA GLn(C) = {A} ×Mn(C) ,
pour toute matrice A ∈ GLn(C). En particulier, on a
LGLn(C) = {1In} ×Mn(C) ,
que l’on identifie a Mn(C).

11. L’ESPACE TANGENT DE G ET CHAMPS DE VECTEURS INVARIANTS A GAUCHE 41
Exemple 11.4. Generalisant l’Exemple 11.3, si E est un F-espace vectoriel (adroite ou a gauche si F = H), alors le groupe de Lie GLF(E) sur R ou sur Z(F) apour espace tangent l’espace vectoriel des F-endomorphismes de E, i.e.
LGLF(E) = EndF(E) .
Exemple 11.5. Pour le tore Tn de dimension n, vu groupe de Lie reel, la carte“canonique” de L’Exemple 4.5 (x) permet de faire l’identification
LTn ←→ Rn[e, (θ1, . . . , θn)
] ←→ (θ1, . . . , θn) .
Definition 11.6. Un champ de vecteurs X : G −→ TG sur un groupe de LieG sur K est invariant a gauche si le diagramme
TG(`g)∗ // TG
G
XOO
`g // G
XOO
commute, pour tout g ∈ G; en d’autres termes, cela signifie que
(`g)∗Xh = Xgh ,
c’est-a-dire Th`gXh = Xgh, pour tous g, h ∈ G.
Remarque 11.7. Le champ de vecteurs X sur le groupe de Lie G est invarianta gauche ssi
(`g)∗Xe = Xg ,
pour tout g ∈ G.
Lemme 11.8. Soit G un groupe de Lie (resp. analytique) sur K. Alors, l’application
Θ: G× LG −→ TG , (g, X) 7−→ (`g)∗X ,
est lisse (resp. analytique).
Preuve. Considerons l’application lisse (resp. analytique), donnee par le produitsur G,
µ : G×G −→ G , (g, x) 7−→ gx .
D’apres la Proposition 9.2, la derivee partielle de µ, par rapport a x, en e ∈ G, asavoir
∂xµ : G× TeG︸︷︷︸=LG
−→ TG , (g, X) 7−→ Teµg(X)
est lisse (resp. analytique), ou, pour g ∈ G, l’application µg est definie par
µg : G −→ G , x 7−→ gx ,
c’est-a-dire que µg n’est autre que la translation a gauche par g, i.e. µg = `g. Ainsi,pour g ∈ G et X ∈ LG, on a Teµg(X) = (`g)∗X, d’ou le resultat. ¤
Proposition 11.9. Soit G un groupe de Lie (resp. analytique) sur K, et soitX ∈ LG un vecteur tangent a G en e. Alors, l’application
X : G −→ TG , g 7−→ Xg := (`g)∗X

42 1. THEORIE CLASSIQUE DES GROUPES DE LIE
est un champ de vecteurs lisse (resp. analytique) sur G, qui est invariant a gaucheet qui satisfait Xe = X. On a donc une bijection canonique
LG ←→ {champs lisses invariants a gauche sur G
}.
Par abus de notation, pour g ∈ G, on ecrira
X(−) := X et X(g) := Xg ∈ TgG .
Preuve. D’abord, on a Xe = (`e)∗X = (idG)∗X = X. Dans les notations duLemme 11.8, on a
X = Θ(−, X) ,
donc, X est lisse (resp. analytique) d’apres ce lemme. Il nous suffit maintenant deverifier que le champ de vecteurs X est invariant a gauche. Or cela est evident auvu de la Remarque 11.7, en effet, pour g ∈ G, on a
(`g)∗Xe = (`g)∗X = Xg ,
d’ou le resultat. ¤
Theoreme 11.10. La variete lisse reelle sous-jacente a un groupe de Lie G surK est parallelisable.
Preuve. Si dim(G) = 0, c’est evident. Supposons donc n := dimR(G) > 0. Soit
X1, . . . , Xn ∈ LG
une R-base de LG = TeG considere comme R-espace vectoriel. On en deduit nchamps de vecteurs continus (meme lisses) sur G
X1(−), . . . , Xn(−) : G −→ TG .
Comme Xi(g) = (`g)∗Xi (pour i = 1, . . . , n et g ∈ G), et comme
(`g)∗ : TeG∼=−→ TgG
est un R-isomorphisme (comme indique), il en resulte que les vecteurs
X1(g), . . . , Xn(g) ∈ TgG
constituent une R-base de TgG, ce qui permet de conclure. ¤
Corollaire 11.11. La sphere S2 ne porte aucune structure de groupe de Lie.¤
Remarque 11.12. Cet argument se generalise a toutes les spheres de dimensionpaire non-nulle, car leur caracteristique d’Euler est 2.
Exemple 11.13. Pour le groupe de Lie G = K sur K, rappelons que nous avonsle champ de vecteur lisse (non-nul) canonique donne par
E : K −→ TK = K×K , t 7−→ Et := [t, 1] = (t, 1) .
On a alors E0 = (0, 1) ∈ {0} ×K = LK et
(`t)∗(E0) = Et ,
pour tout t ∈ K. En effet, pour t ∈ K, on a
`′t(0) =d
ds s=0
(s
`t7−→ t + s)
= 1 ,

12. DEUX RESULTATS SUR LES EQUATIONS DIFFERENTIELLES DANS Kn 43
et donc, par calcul direct, on obtient
(`t)∗(E0) = (`t)∗([0, 1]
)=
[`t(0)︸︷︷︸=t+0
, `′t(0)︸︷︷︸=1
·1]= [t, 1] = Et .
Donc, E est invariant a gauche; dans les notations precedentes, on a E = E0.
Remarque 11.14. Si M est une variete complexe de dimension n, soit MR lavariete analytique reelle de dimension 2n sous-jacente. On a alors une identificationcanonique
T (MR) = (TM)R ,
ou (TM)R est la variete analytique reelle de dimension 4n sous-jacente a la varietecomplexe TM de dimension 2n, dont on voit chaque fibre TxM (avec x ∈ M)comme l’espace vectoriel reel de dimension 2n, note (TxM)R = Tx(MR), sous-jacenta l’espace vectoriel complexe TxM de dimension n. On pose des lors
TMR := T (MR) = (TM)R et TxMR := Tx(MR) = (TxM)R ,
pour x ∈ M . De plus, la projection
πMR : (TM)R −→ MR
n’est autre que la projection πM .
Remarque 11.15. Si G est un groupe de Lie sur K, soit Ge la composante duneutre de G, i.e. la composante connexe de l’element neutre e dans G. Notons que Getant semi-localement connexe par arcs – i.e. tout point admet un voisinage connexepar arcs –, les composantes connexes par arcs coıncident avec les composantesconnexes et sont ouvertes et fermees dans G. Il est des lors facile de verifier queGe est un sous-groupe normal ouvert et ferme de G. Bien sur, pour la structure devariete sur K heritee de celle de G, Ge est un groupe de Lie sur K, et on a
LGe = LG .
Si H est un second groupe de Lie sur K, dont la composante du neutre est noteeHe, et si ϕ : G −→ H est un homomorphisme de groupes topologiques, i.e. unhomomorphisme continu, alors ϕ(Ge) ⊆ He, ce qui permet de poser
ϕe := ϕ|Ge : Ge −→ He .
Il est utile de remarquer que ϕ est lisse (resp. analytique) ssi ϕe l’est. En effet, avecles notations evidentes, pour g ∈ G, on a
ϕ|Gg : Gg
`g−1 |Gg // Geϕe // He
`ϕ(g)|He // Hϕ(g)incl // H ,
avec Gg ouvert dans G, d’ou cette affirmation.
12. Deux resultats sur les equations differentielles dans Kn
Nous allons enoncer ici, sans demonstration, deux theoremes classiques et fon-damentaux de la theorie des equations differentielles ordinaires dans Kn (le pre-mier decoule en fait du second). Il s’agit de resultats d’existence, d’unicite et deregularites des solutions.

44 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Theoreme 12.1. Soient U un ouvert de Kn, x0 un point de U , et
X : U −→ Kn , x 7−→ Xx
une application lisse. Considerons l’equation differentielle ordinaire
θ : K −→ U
θ(0) = x0
θ′ : K −→ Kn , t 7−→ Xθ(t) .
Alors, il existe ε > 0 pour lequel il y a une solution locale
θ : Bε −→ U
definie sur la boule ouverte Bε. De plus, pour tout voisinage ouvert B de 0 dansK tel qu’il existe une solution locale sur l’ouvert B, cette solution est unique, et estune fonction lisse (et meme analytique si X est analytique). ¤
Remarque 12.2. En langage plus sophistique, la donnee du theoreme revienta avoir un champ de vecteurs lisse sur U defini par
X : U −→ TU = U ×Kn , s 7−→ (s,Xs) .
De plus, l’equation differentielle peut se lire comme etant
θ : K −→ U
θ(0) = x0
Ttθ : TtK −→ Tθ(t)U , Et 7−→ Xθ(t) (t ∈ K)
ou, de maniere equivalente, comme etant
θ : K −→ U
θ(0) = x0
Tθ : TK −→ TU , E 7−→ X ◦ θ .
Puisqu’une variete lisse est, au voisinage de chacun de ses points, diffeomorphea un ouvert de Kn, on en deduit le corollaire immediat suivant.
Corollaire 12.3. Soient M une variete lisse sur K, x0 un point de M , et
X : M −→ TM , x 7−→ Xx
un champ de vecteurs lisse sur M . Considerons l’equation differentielle
θ : K −→ M
θ(0) = x0
Ttθ : TtK −→ Tθ(t)M , Et 7−→ Xθ(t) (t ∈ K) .
Alors, il existe ε > 0 pour lequel il y a une solution locale
θ : Bε −→ M
definie sur la boule ouverte Bε. De plus, pour tout voisinage ouvert B de 0 dansK tel qu’il existe une solution locale sur l’ouvert B, cette solution est unique, et estune fonction lisse (et meme analytique si M est une variete analytique et si X estun champ analytique). ¤
Remarque 12.4. Dans le contexte du theoreme et de son corollaire, on appellesolution globale de l’equation differentielle une solution θ dont le domaine est Ktout entier.

12. DEUX RESULTATS SUR LES EQUATIONS DIFFERENTIELLES DANS Kn 45
En fait, le Theoreme 12.1 decoule du resultat que voici, qui est le secondtheoreme annonce sur les equations differentielles.
Theoreme 12.5. Soient U un ouvert de Kn, V un ouvert de Km, x0 un pointde U , y0 un point de V , et
X : U × V −→ Kn , (x, y) 7−→ Xx,y
une application lisse. Pour chaque y ∈ V fixe, considerons l’equation differentielleordinaire
θy : K −→ U
θy(0) = x0
θ′y : K −→ Kn , t 7−→ Xθy(t),y .
Alors, il existe ε > 0 et un voisinage ouvert V0 de y0 dans V tels que, pour touty ∈ V0, il y a une solution locale
θy : Bε −→ U
definie sur la boule ouverte Bε. De plus, pour tout voisinage ouvert B de 0 dansK et tout voisinage ouvert V ′
0 de y0 dans V tels qu’il existe une solution locale θysur l’ouvert B pour tout y ∈ V ′
0 , cette solution est unique, et la fonction de deuxvariables
θ : V ′0 ×B −→ U , (y, t) 7−→ θ(y, t) := θy(t)
est lisse (et meme analytique si X est analytique).
A nouveau, pour les varietes lisses, on en deduit le resultat suivant.
Corollaire 12.6. Soient M et N deux varietes lisses sur K, x0 un point deM , y0 un point de N , et
X : M ×N −→ TM , (x, y) 7−→ Xx,y
une application lisse. Pour chaque y ∈ N fixe, considerons l’equation differentielleordinaire
θy : K −→ M
θy(0) = x0
Ttθy : TtK −→ Tθy(t)M , Et 7−→ Xθy(t),y .
Alors, il existe ε > 0 et un voisinage ouvert V0 de y0 dans N tels que, pour touty ∈ V0, il y a une solution locale
θy : Bε −→ M
definie sur la boule ouverte Bε. De plus, pour tout voisinage ouvert B de 0 dans Ket tout voisinage ouvert V ′
0 de y0 dans N tels qu’il existe une solution locale θy surl’ouvert B pour tout y ∈ V ′
0 , cette solution est unique, et l’application
θ : V ′0 ×B −→ M , (y, t) 7−→ θ(y, t) := θy(t)
est lisse (et meme analytique si M et N sont des varietes analytiques et si X estune application analytique). ¤
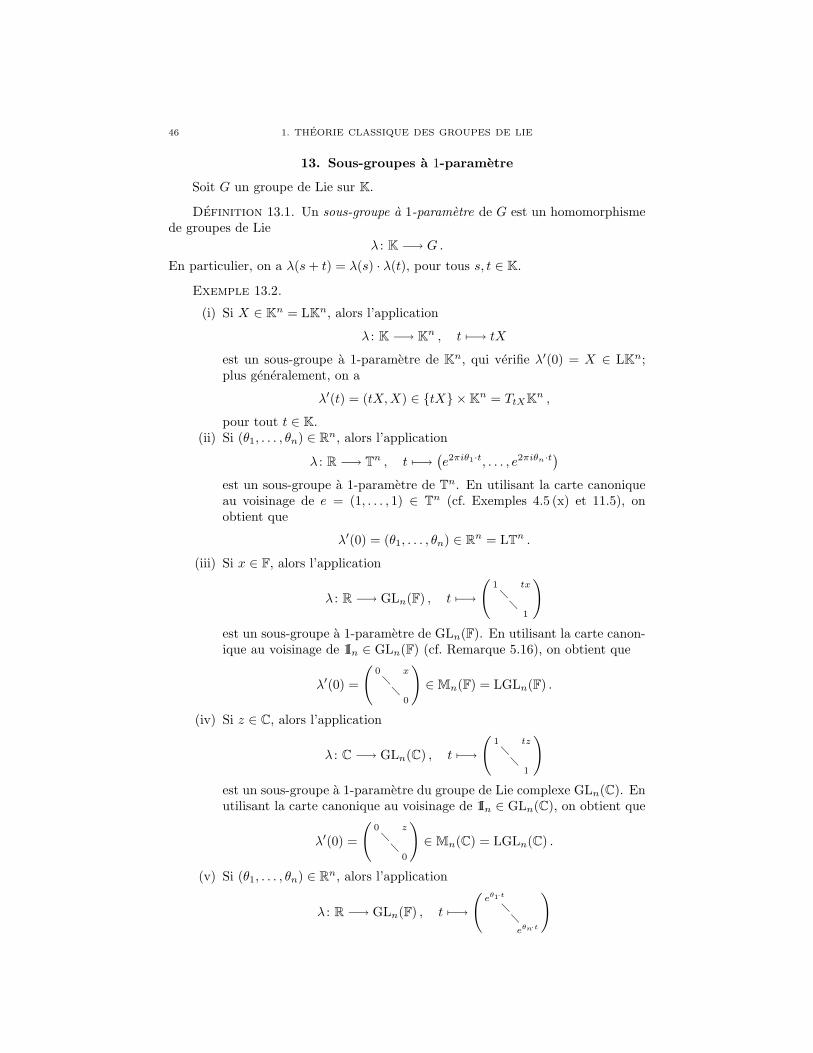
46 1. THEORIE CLASSIQUE DES GROUPES DE LIE
13. Sous-groupes a 1-parametre
Soit G un groupe de Lie sur K.
Definition 13.1. Un sous-groupe a 1-parametre de G est un homomorphismede groupes de Lie
λ : K −→ G .
En particulier, on a λ(s + t) = λ(s) · λ(t), pour tous s, t ∈ K.
Exemple 13.2.
(i) Si X ∈ Kn = LKn, alors l’application
λ : K −→ Kn , t 7−→ tX
est un sous-groupe a 1-parametre de Kn, qui verifie λ′(0) = X ∈ LKn;plus generalement, on a
λ′(t) = (tX, X) ∈ {tX} ×Kn = TtXKn ,
pour tout t ∈ K.(ii) Si (θ1, . . . , θn) ∈ Rn, alors l’application
λ : R −→ Tn , t 7−→ (e2πiθ1·t, . . . , e2πiθn·t)
est un sous-groupe a 1-parametre de Tn. En utilisant la carte canoniqueau voisinage de e = (1, . . . , 1) ∈ Tn (cf. Exemples 4.5 (x) et 11.5), onobtient que
λ′(0) = (θ1, . . . , θn) ∈ Rn = LTn .
(iii) Si x ∈ F, alors l’application
λ : R −→ GLn(F) , t 7−→(
1 tx��
1
)
est un sous-groupe a 1-parametre de GLn(F). En utilisant la carte canon-ique au voisinage de 1In ∈ GLn(F) (cf. Remarque 5.16), on obtient que
λ′(0) =
(0 x��
0
)∈Mn(F) = LGLn(F) .
(iv) Si z ∈ C, alors l’application
λ : C −→ GLn(C) , t 7−→(
1 tz��
1
)
est un sous-groupe a 1-parametre du groupe de Lie complexe GLn(C). Enutilisant la carte canonique au voisinage de 1In ∈ GLn(C), on obtient que
λ′(0) =
(0 z��
0
)∈Mn(C) = LGLn(C) .
(v) Si (θ1, . . . , θn) ∈ Rn, alors l’application
λ : R −→ GLn(F) , t 7−→(
eθ1·t��eθn·t
)

13. SOUS-GROUPES A 1-PARAMETRE 47
est un sous-groupe a 1-parametre de GLn(F). En utilisant la carte canon-ique au voisinage de 1In ∈ GLn(F), on obtient que
λ′(0) =
(θ1��
θn
)∈Mn(F) = LGLn(F) .
(vi) Si F = C ou H, et si (θ1, . . . , θn) ∈ Rn, alors l’application
λ : R −→ GLn(F) , t 7−→(
eiθ1·t��eiθn·t
)
est un sous-groupe a 1-parametre de GLn(F). En utilisant la carte canon-ique au voisinage de 1In ∈ GLn(F), on obtient que
λ′(0) =
(iθ1��
iθn
)∈Mn(F) = LGLn(F) .
(vii) Si (z1, . . . , zn) ∈ Cn, alors l’application
λ : C −→ GLn(C) , t 7−→(
ez1·t��ezn·t
)
est un sous-groupe a 1-parametre du groupe de Lie complexe GLn(C). Enutilisant la carte canonique au voisinage de 1In ∈ GLn(C), on obtient que
λ′(0) =( z1
��
zn
)∈Mn(C) = LGLn(C) .
Theoreme 13.3. Soit G un groupe de Lie sur K. Pour tout X ∈ LG, il existeun unique sous-groupe a 1-parametre λ = λX : K −→ G de G tel que λ′(0) = X,i.e. λ∗(E0) = X. En particulier, il y a des bijections canoniques
sous-groupesa 1-parametre
de G
←→ LG ←→
{champs de vecteurs lissesinvariants a gauche sur G
}.
De plus, si G est analytique, alors λX est analytique.
Preuve.(a) Existence : Par le Corollaire 12.3, il existe ε > 0 et une application lisse (resp.analytique)
θ : Bε −→ G
telle que θ(0) = e et Ttθ : Et 7−→ X(θ(t)
)pour tout t ∈ Bε .
Assertion. Pour tous s, t ∈ B := B ε2, on a θ(s + t) = θ(s) · θ(t).
Pour s ∈ B fixe, et pour t variant dans la boule ouverte B posons
µs(t) := θ(s + t) et νs(t) := θ(s) · θ(t) ;
ceci definit deux fonctions lisses de B dans G. De l’egalite
µs = θ ◦ `s
et du fait que le champ E sur K est invariant a gauche, il suit que
Ttµs = Ts+tθ ◦ Tt`s : Et 7−→ Es+t 7−→ X(θ(s + t)
)= X
(µs(t)
).

48 1. THEORIE CLASSIQUE DES GROUPES DE LIE
De meme, de l’egaliteνs = `θ(s) ◦ θ
et du fait que le champ X(−), associe a X, sur G est invariant a gauche, il suit que
Ttνs = Tθ(t)`θ(s) ◦ Ttθ : Et 7−→ X(θ(t)
) 7−→ X(θ(s) · θ(t)) = X
(νs(t)
).
Ainsi, les deux applications µs et νs sont, sur la boule ouverte B, solution del’equation differentielle
σ : K −→ G
σ(0) = θ(s)Ttσ : TtK −→ Tσ(t)G , Et 7−→ X
(σ(t)
)(t ∈ K) .
Par la partie “unicite” du Corollaire 12.3, on a µs(t) = νs(t) pour tout t ∈ B, etce, quelque soit s ∈ B, i.e. θ(s + t) = θ(s) · θ(t) pour tous s, t ∈ B , ce qui etablitl’Assertion.
Maintenant, on definit une application
λ : K −→ G , t 7−→ θ( tN )N ,
ou, pour t ∈ K, on choisit N = N(t) ∈ N∗ tel que | tN | < ε
2 . Verifions que λ est biendefinie. Si | t
M | < ε2 avec M ∈ N∗, alors, grace a l’Assertion, on a
θ( tMN )M = θ( t
N ) et θ( tMN )N = θ( t
M ) ,
d’ou l’on tire queθ( t
N )N = θ( tMN )MN = θ( t
M )M ,
comme il fallait voir. L’application λ est un homomorphisme de groupes, car sis, t ∈ K et si N ∈ N∗ est tel que | s
N | < ε4 et | st
N | < ε4 , alors, par l’Assertion,
λ(s + t) = θ( s+tN )N
=(θ( s
N ) · θ( tN )
)N
= θ( sN )N · θ( t
N )N
= λ(s) · λ(t) ;
a noter, pour la troisieme egalite, que θ( sN )·θ( t
N ) = θ( s+tN ) = θ( t
N )·θ( sN ). Montrons
que λ est lisse. Fixons R > 0. On trouve N ∈ N∗ tel que RN < ε
2 et tel que
λ(t) = λ( tN )N , ∀t ∈ BR .
Ainsi, l’application λ|BR est la composition
λ|BR: BR
1N ·−→ B ε
2
θ−→ G(−)N
−→ G
et est par consequent lisse. Comme R > 0 est arbitraire, il en resulte que λ estlisse. On vient juste de demontrer que λ est un sous-groupe a 1-parametre de G.Comme λ|B = θ, on a
T0λ(E0) = T0θ(E0) = X(0) = X ∈ LG .
Ainsi, λ est le sous-groupe a 1-parametre cherche.

13. SOUS-GROUPES A 1-PARAMETRE 49
(b) Unicite : Soit λ : K −→ G un sous-groupe a 1-parametre tel que λ∗E0 = X.Fixons t ∈ K. Comme λ ◦ `t = `λ(t) ◦ λ, on a
λ∗ ◦ (`t)∗ = (`λ(t))∗ ◦ λ∗ : TK −→ TG .
On en deduit la deuxieme egalite dans la chaıne suivante :
λ∗(Et) = λ∗ ◦ (`t)∗(E0)
= (`λ(t))∗ ◦ λ∗(E0)
= (`λ(t))∗(X)
= X(λ(t)
).
Ceci montre que tout sous-groupe a 1-parametre λ de G, verifiant λ∗E0 = X, estune solution globale de l’equation differentielle
θ : K −→ G
θ(0) = e
Ttθ : TtK −→ Tθ(t)G , Et 7−→ X(θ(t)
)(t ∈ K) .
L’unicite resulte du Corollaire 12.3. ¤
De la preuve precedente, on deduit immediatement le corollaire suivant.
Corollaire 13.4. Soient G un groupe de Lie sur K et X ∈ LG. L’uniquesous-groupe a 1-parametre de G associe a X, note λX , est l’unique solution globalede l’equation differentielle
θ : K −→ G
θ(0) = e
Ttθ : TtK −→ Tθ(t)G , Et 7−→ X(θ(t)
)(t ∈ K) . ¤
Remarque 13.5. Soit G un groupe de Lie sur K. Le Theoreme 13.3 dit enparticulier que si X ∈ LG = TeG, parmi toutes les courbes locales sur G tangentesa X en e, il y en a une et une seule qui est globale et qui est un homomorphismede groupes de Lie sur K (et elle est analytique si G est analytique).
Remarque 13.6. Soit G un groupe de Lie complexe. Rappelons de la Remar-que 11.14 les notations GR (pour le groupe de Lie analytique reel sous-jacent) etTGR; dans le meme esprit, ecrivons
LGR := (LG)R = L(GR) .
Si X ∈ LG, soit λCX : C −→ G le sous-groupe a 1-parametre du groupe de Liecomplexe G associe a X. Alors, si on voit X comme element de LGR, l’uniquesous-groupe a 1-parametre du groupe de Lie reel G associe a X n’est autre que
λRX := λCX |R : R −→ G , t 7−→ λCX(t) .
Il faut avoir a l’esprit que l’image Im(λ) d’un sous-groupe a 1-parametre d’ungroupe de Lie G sur K est un sous-groupe topologique de G. On peut se demandersi Im(λ) est un groupe de Lie, ou, plus simplement, s’il est localement euclidien.Voici un exemple qui illustre bien la non-trivialite des sous-groupes a 1-parametresdu point de vue topologique.
50 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Exemple 13.7. Soit c ∈ R un nombre reel. Pour le tore T2, consideronsl’application
λ : R −→ T2 , t 7−→ (e2πi·t, e2πi·ct
).
Evidemment, λ est un homomorphisme analytique, i.e. un sous-groupe a 1-parametrede T2. Cette application λ est une courbe sur le tore; elle est fermee (i.e. se refermesur elle-meme) ssi λ n’est pas injective, ssi c est rationnel, auquel cas, Im(λ) esttopologiquement isomorphe au cercle S1. En fait, on verifie que Im(λ) est fermedans T2 ssi c est rationnel, et, comme on le verra plus tard, un sous-groupe fermed’un groupe de Lie reel est lui-meme un groupe de Lie reel de facon canonique,et dans notre situation, pour c ∈ Q, le groupe de Lie Im(λ) est analytiquementisomorphe au groupe de Lie reel S1. La question se pose des lors de savoir cequi se produit si c est irrationnel, ce que nous supposons dans la suite : c 6∈ Q.Par des methodes de topologies generales basiques, mais fastidieuse si on inclut lesdetails, on montre que dans ce cas, la courbe λ s’enroule indefiniment autour dutore, sans jamais passer deux fois par le meme point. Bien mieux, l’image Im(λ)est alors un sous-groupe dense, non-ferme, de T2. L’ensemble des classes lateralesde Im(λ) dans T2, qui sont parametree par le groupe quotient T2/ Im(λ), formentun recouvrement de T2 par des parties, appelee feuilles, qui sont toutes denseset deux a deux disjointes; c’est ce qu’on appelle le feuilletage de Kronecker dutore. On remarque que la feuille canonique Im(λ) est un groupe topologique quin’est pas localement euclidien. En effet, chaque “petite” boule ouverte (pour unemetrique induite par exemple de R3) centree en e dans T2 va intersecter Im(λ) enune infinite de “petits arcs” disjoints qui sont des segments ouverts de Im(λ); enparticulier, cette intersection possede une infinite de composantes d’arcs, de sorteque Im(λ) n’est meme pas semi-localement connexe par arcs. Finalement, men-tionnons qu’il est instructif d’effectuer un schema de la situation d’une telle courbeIm(λ) avec c rationnel, ou au contraire irrationnel, en decrivant le phenomene surle carre [0, 1]× [0, 1] (vu dans R2 “grillage” par le reseau Z2) sur le bord duquel ondefinit la relation d’equivalence habituelle qui fournit une description de T2 apresidentification, i.e. apres passage au quotient.
14. L’application exponentielle
Soit G un groupe de Lie sur K. Gardons les notations du Theoreme 13.3.
Definition 14.1. L’application exponentielle de G est l’application
exp = expG : LG −→ G , X 7−→ λX(1) .
Remarque 14.2. Si G est un groupe de Lie complexe, alors l’exponentielle
expGR : LGR −→ GR
du groupe de Lie reel sous-jacent coıncide avec l’exponentielle expG de G vu commegroupe de Lie complexe. En effet, cela decoule de la Remarque 13.6.
Theoreme 14.3. Si X ∈ LG et t ∈ K, alors on a l’egalite
exp(tX) = λX(t) .
En particulier, l’application
K −→ G , t 7−→ exp(tX)

14. L’APPLICATION EXPONENTIELLE 51
est un homomorphisme lisse (et meme analytique si G est analytique), c’est l’uniquesous-groupe a 1-parametre de G associe a X, et c’est une courbe globale sur Gtangente a X en e.
Preuve. Soit µ : K −→ G l’application donnee par s 7−→ λX(s · t), ou X ∈ LG ett ∈ K sont fixes. Clairement, on a
µ = λX ◦mt : K −→ K −→ G ,
ou mt : K −→ K est la multiplication par t; il s’ensuit que µ est un sous-groupe a1-parametre de G. Etant donne que (mt)∗(E0) = t · E0 ∈ T0K, on a
µ∗(E0) = (λX)∗ ◦ (mt)∗(E0) = (λX)∗(t · E0) = t · (λX)∗(E0) = t ·X .
Par la partie “unicite” du Theoreme 13.3, µ est l’unique sous-groupe a 1-parametrede G associe au vecteur tangent tX ∈ LG, i.e. µ = λtX . On en deduit que
exp(tX) = λtX(1) = µ(1) = λX(1 · t) = λX(t) ,
ce qui permet de conclure (voir aussi la Remarque 13.5). ¤Corollaire 14.4. Pour X ∈ LG et s, t ∈ K, on a les egalites
exp((s + t) ·X)
= exp(sX) · exp(tX) ;
en particulier, pour n ∈ Z, on a
exp(−X) = exp(X)−1 et exp(nX) = exp(X)n .
Preuve. Cela decoule immediatement du Theoreme 14.3 et du fait que le sous-groupe a 1-parametre λX est un homomorphisme de groupes. ¤
Exemple 14.5. Pour le groupe de Lie reel Tn, il suit de l’Exemple 13.2 (ii) etdu Theoreme 13.3 que
exp: Rn = LTn −→ Tn , (θ1, . . . , θn) 7−→ (e2πiθ1 , . . . , e2πiθn
).
Ainsi, dans ce cas, l’exponentielle est un epimorphisme de groupes abeliens, denoyau Zn. Remarquons que Rn est le revetement universel de Tn, que exp coıncideavec l’application de revetement et que
Ker(exp) = Zn ∼= π1(Tn) ,
ou π1 designe le groupe fondamental.
Proposition 14.6. L’application
Λ = ΛG : LG×K −→ G , (X, t) 7−→ λX(t) = exp(tX)
est lisse (et meme analytique si G est analytique).
Preuve. Considerons l’application
X := Θ: G× LG −→ TG , (g, X) 7−→ Xg,X = Θ(g, X) = X(g) ,
qui est lisse (resp. analytique) d’apres le Lemme 11.8. Par le Corollaire 13.4, pourtout X ∈ LG, λX est l’unique solution globale de l’equation differentielle
θ : K −→ G
θ(0) = e
Ttθ : TtK −→ Tθ(t)G , Et 7−→ X(θ(t)
)= Xθ(t),X (t ∈ K) .
Du Corollaire 12.6, il suit que l’application Λ: LG×K −→ G, (X, t) 7−→ λX(t) estlisse (resp. analytique). ¤
52 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Theoreme 14.7. L’application exponentielle exp: LG −→ G est lisse (et memeanalytique si G est analytique). De plus, la differentielle de exp en zero est l’identitede LG, i.e.
T0 exp = idLG : LG −→ LG ,
ou on identifie T0 LG avec LG de facon canonique.
Preuve. Si 1 designe l’application constante sur LG valant 1 ∈ K, on a
exp: LG(id,1)−→ LG×K Λ−→ G .
Ainsi, le fait que exp est lisse (resp. analytique) decoule de la Proposition 14.6.Nous passons au resultat sur la derivee en zero de l’exponentielle. Soit X ∈ LG,et calculons T0 exp(X). Par la Proposition 8.4, il nous suffit de trouver une courbelocale sur LG tangente a X en 0, i.e. une application lisse
γ : Bε −→ LG , t 7−→ γ(t)
telle que γ(0) = 0 et telle que γ′(0) = X (pour un ε > 0), et “d’effectuer le calculdirectement”. Dans notre situation, il y un choix canonique global pour une tellecourbe, a savoir
γ : K −→ LG , t 7−→ γ(t) := tX .
Comme exp ◦γ(t) = exp(tX) = λX(t), pour tout t ∈ K, d’apres la propositionmentionnee, on obtient
T0 exp(X) = (exp ◦γ)′(0) = (λX)′(0) = X ,
ou on a finalement applique le Theoreme 13.3. Ceci termine la preuve. ¤
Theoreme 14.8. L’application exponentielle exp: LG −→ G est un diffeomor-phisme local en 0, i.e. il existe un voisinage ouvert U de 0 dans LG et un voisinageouvert V de e dans G tels que la restriction
exp |U : U≈−→ V
est un diffeomorphisme (meme analytique si G est analytique), comme indique.
Preuve. Cela decoule du Theoreme 14.7 et du Theoreme d’Inversion Locale 10.1.¤
Remarque 14.9. Gardons les notations du Theoreme 14.8. Il est importantde noter que ce resultat implique en particulier que l’application
exp |U : U≈−→ V
fournit une carte au voisinage de e dans G (qui est analytique si G est analytique).Il suit que l’ensemble {
`g ◦ exp |U : U −→ gV}
g∈G
est un atlas (resp. analytique) de G, modele sur le K-espace vectoriel LG. Enfait, dans le cas ou G n’est pas connu comme etant analytique sur K, on demontrejustement que cet atlas fournit un atlas analytique sur G, qui fait de lui un groupede Lie analytique sur K.
Nous aurons besoin du raffinement suivant du Theoreme 14.7.

14. L’APPLICATION EXPONENTIELLE 53
Proposition 14.10. Soit LG = V⊕W une decomposition du K-espace vectorielLG en somme directe de deux K-sous-espaces vectoriels. Alors, l’application
expV,W : LG = V ⊕W −→ G , (X, Y ) 7−→ exp(X) · exp(Y )
est un diffeomorphisme local en zero (et meme analytique si G est analytique).
Preuve. L’application expV,W peut s’ecrire comme la composition
expV,W : LG = V ×Wexp |V ×exp |W // G×G
µ // G ,
donc c’est une application lisse (resp. analytique), en vertu du Theoreme 14.7. Parce meme theoreme, on obtient
(T0 expV,W )|T0V = T0
(expV,W |V
)= T0(exp |V ) = (T0 exp)|T0V = idV ,
ou on identifie T0V avec V a la derniere egalite; de meme, (T0 expV,W )|T0W = idW .Il suit que T0 expV,W = idLG . Par le Theoreme d’Inversion Locale 10.1, on en deduitbien que expV,W est un diffeomorphisme local en zero (resp. analytique). ¤
Corollaire 14.11. Supposons que G est de dimension n > 0 sur K, et soit(X1, . . . , Xn) une K-base de LG. Alors, l’application
Kn −→ G , (t1, . . . , tn) 7−→ exp(t1X1) · · · exp(tnXn)
est lisse (et meme analytique si G est analytique) et est un diffeomorphisme localen (0, . . . , 0) (resp. analytique).
Preuve. Le fait que l’application consideree est lisse (resp. analytique) decoule demaniere evidente du Theoreme 14.3. En imitant le principe de la demonstration dela Proposition 14.10, on obtient que l’application
LG = K·X1 ⊕ . . .⊕K·Xn , (t1X1, . . . , tnXn) 7−→ exp(t1X1) · · · exp(tnXn)
est un diffeomorphisme local en 0 (resp. analytique). Le resultat en decoule. ¤Definition 14.12. L’exponentielle matricielle (de taille n) sur F est l’application
Exp = e(−) : Mn(F)−→GLn(F)X 7−→Exp(X) := eX = 1In + X + 1
2!X2 + 1
3!X3 + . . .
Pour preciser le corps gauche de base, i.e. F, on ecrira parfois ExpF au lieu de Exp.
Remarque 14.13. Soit ||.|| une norme sous-multiplicative sur la R-algebreMn(F), i.e. telle que
||X · Y || ≤ ||X|| · ||Y || ,pour tous X, Y ∈Mn(F). On peut par exemple choisir la norme-operateur
||X|| := sup||v||2≤1
||Xv||2 ,
ou ||.||2 designe la norme usuelle sur Fn ∼= RdF·n, et v parcourt la boule unite fermeedans Fn. On a alors convergence normale de la serie eX , avec la borne superieuredonnee par
||eX || ≤ e||X|| ;en particulier, la serie eX converge dans Mn(F). De plus, on verifie, comme dansle cas n = 1, que si X,Y ∈Mn(F) sont des matrices qui commutent, alors
eX+Y = eX · eY .

54 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Il en resulte que eX est inversible, d’inverse e−X , i.e.
(eX)−1 = e−X ,
et en particulier, l’image de Exp est bien contenue dans GLn(F). Il s’ensuit aussique
e(s+t)X = esX · etX ,
pour tous s, t ∈ Z(F) et toute matrice X ∈ Mn(F), ou Z(F) designe le centre del’algebre F, a savoir
Z(R) = R , Z(C) = C et Z(H) = R .
Remarque 14.14. Il nous sera tres utile de noter que, pour tout X ∈ Mn(F),l’application
FX : Z(F) −→ GLn(F) , t 7−→ etX
est un homomorphisme de groupes et est analytique au sens de Z(F). En d’autrestermes, FX est un homomorphisme de groupes de Lie sur Z(F), i.e. un sous-groupea 1-parametre de GLn(F) vu comme groupe de Lie sur Z(F). En effet, comme laserie definissant etX converge normalement (pour tout t fixe), et donc uniformementen t sur tout compact de Z(F), on peut deriver par rapport a t terme-a-terme. Onen deduit egalement que
F ′X(t0) =d
dt t=t0
etX = X ·etX
t=t0
= X ·et0X ,
pour tout t0 ∈ Z(F); particulier, on a
F ′X(0) =d
dt t=0etX = X ·etX
t=0= X .
Remarque 14.15. A la Remarque 5.11, on a identifie Mn(H) avec la R-sous-algebreMH2n(C) deM2n(C). L’inclusion en question etant un homomorphisme de Q-algebres (et meme de R-algebres), il resulte que les exponentielles matricielles ExpHet ExpC sont compatibles avec cette inclusion, en d’autres termes, le diagrammesuivant commute
Mn(H) � � incl //
ExpH²²
M2n(C)
ExpC²²
GLn(H) � � incl // GL2n(C)
Theoreme 14.16. Pour le groupe de Lie GLn(F) sur Z(F), l’unique sous-groupe a 1-parametre de GLn(F) associe a X ∈ LGLn(F) = Mn(F) est donne par
λX : Z(F) −→ GLn(F) , t 7−→ Exp(tX) = etX .
En particulier, l’exponentielle du groupe du Lie GLn(F) coıncide avec l’exponentiellematricielle, i.e.
expGLn(F) = Exp = e(−) : Mn(F) −→ GLn(F) .
Preuve. Par la Remarque 14.14, FX est un sous-groupe a 1-parametre associe aX ∈ LGLn(F). Il suit du Theoreme 13.3 que FX = λX . Le reste est clair. ¤

14. L’APPLICATION EXPONENTIELLE 55
Remarque 14.17. Pour A,B ∈Mn(F), on a l’implication
∃ε > 0 tq. etA = etB , ∀t ∈ ]−ε, ε[ =⇒ A = B .
En effet, il suffit de deriver en t = 0 les applications lisses ]−ε, ε[ −→Mn(F) donneerespectivement par t 7−→ etA et par t 7−→ etB . Cette propriete est reminiscente dufait que etA et etB , avec t variant sur toute la droite reelle, sont les sous-groupes a1-parametres du groupe de Lie reel GLn(F) associes a A et B respectivement (cf.Theoreme 14.16 et Remarque 13.6) et de l’unicite enoncee dans le Theoreme 13.3.
Remarque 14.18. Considerons un F-espace vectoriel E (a gauche ou a droitesi F = H), de dimension finie, disons dimF(E) = n. Si Φ ∈ EndF(E), on definit sonexponentielle operatorielle comme etant la valeur de la serie
eΦ := idE +Φ + 12!Φ
2 + 13!Φ
3 + . . .
dans GLF(E), ou, pour n ≥ 2, Φn designe l’operateur compose Φ◦. . .◦Φ ∈ EndF(E)avec n termes Φ. Pour verifier que la serie converge dans EndF(E) et que l’operateureΦ ainsi obtenu est inversible, en fait d’inverse e−Φ, on peut soit proceder commepour l’exponentielle matricielle, soit se ramener a ce cas en fixant une F-base de E,ce qui nous fournit un F-isomorphisme E ∼= Fn et un isomorphisme
GLK(E) ∼= GLF(Fn) = GLn(F)
de groupes de Lie analytiques sur Z(F) (cf. la Remarque 5.18 dans le cas ou F = Het E est un H-espace vectoriel a gauche). L’exponentielle operatorielle sera noteeExp ou e(−), tout comme l’exponentielle matricielle. Il est egalement importantd’observer qu’on a
d
dt t=t0
etΦ = Φ ◦ etΦ
t=t0
= Φ ◦ et0Φ ,
pour Φ ∈ EndF(E) et t0 ∈ Z(F).
Theoreme 14.19. Soit E un F-espace vectoriel de dimension finie (a gaucheou a droite si F = H). Pour le groupe de Lie GLF(E) sur Z(F), l’unique sous-groupe a 1-parametre de GLF(E) associe a Φ ∈ LGLF(E) = EndF(E) est donnepar
λΦ : Z(F) −→ GLF(E) , t 7−→ Exp(tΦ) = etΦ .
En particulier, l’exponentielle du groupe du Lie GLF(E) coıncide avec l’exponentielleoperatorielle, i.e.
expGLF(E) = Exp = e(−) : EndF(E) −→ GLF(E) .
Preuve. On peut soit imiter la demonstration du Theoreme 14.16, soit invoquer cememe theoreme et l’isomorphisme GLK(E) ∼= GLn(F) de groupes de Lie analytiquessur Z(F) correspondant a un choix de F-base de E (suppose de dimension n), commea la Remarque 14.18. ¤
Theoreme 14.20. L’application exponentielle est naturelle, en d’autres termes,si ϕ : G −→ H est un homomorphisme de groupes de Lie sur K, alors le diagramme
LGLϕ //
expG
²²
LH
expH
²²G
ϕ // H
56 1. THEORIE CLASSIQUE DES GROUPES DE LIE
commute, ainsi, pour X ∈ LG, on a
ϕ(expG(X)
)= expH
(Lϕ(X)
).
Preuve. Pour X ∈ LG, soit λX le sous-groupe a 1-parametre de G correspondant.Considerons l’application
µ := ϕ ◦ λX : K −→ H , t 7−→ ϕ(λX(t)
).
Evidemment, c’est un sous-groupe a 1-parametre de H, et on a
µ∗(E0) = Lϕ︸︷︷︸=ϕ∗
◦(λX)∗(E0) = Lϕ(X) .
Il suit du Theoreme 13.3 que µ = λLϕ(X) (le sous-groupe a 1-parametre de Hassocie a Lϕ(X)). On en deduit que expH ◦Lϕ(X) est successivement egal a
expH
(Lϕ(X)
)= λLϕ(X)(1) = µ(1) = ϕ
(λX(1)
)= ϕ ◦ expG(X) ,
ce qui dit precisement que le diagramme commute. ¤
15. Differentielle du produit, de l’inversion et du commutateur
Dans cette section, nous allons calculer la differentielle du produit µ, de l’inversion,i.e. du passage a l’inverse inv, et du commutateur [ . , . ] dans un groupe de Lie. Lesresultats obtenus pour le produit et l’inversion seront souvent utilises par la suite.A noter que dans le premier de ces calculs, la differentielle sera determines sansfaire appel a la Proposition 8.4.
Proposition 15.1. Soient G un groupe de Lie sur K, et µ : G×G −→ G sonproduit. Alors la differentielle de µ en (e, e) est l’addition, i.e.
T(e,e)µ : LG⊕ LG −→ LG , (X, Y ) 7−→ X + Y ,
ou on identifie T(e,e)(G×G) avec TeG⊕ TeG = LG⊕ LG de facon evidente.
Preuve. Considerons le diagramme commutatif
G � wi1
**UUUUUUUU
idG
%%G×G
µ // G
G' � i2
44iiiiiiii
idG
99
ou i1 et i2 sont les inclusions evidentes dans le premier et le second facteur, respec-tivement. En appliquant le foncteur Te(−), on obtient le diagramme commutatif
LG � yj1
++XXXXXXXXXX
idLG
((LG⊕ LG
T(e,e)µ // LG
LG% � j2
33ffffffffff
idLG
66
ou j1 et j2 sont les inclusions evidentes dans le premier et le second sommand,respectivement. Ainsi, si l’on ecrit l’application K-lineaire Lµ sous la forme d’unematrice 1× 2 d’applications K-lineaires, on obtient
T(e,e)µ =(idLG idLG
),
15. DIFFERENTIELLE DU PRODUIT, DE L’INVERSION ET DU COMMUTATEUR 57
ce qui signifie que T(e,e)µ(X, Y ) = X + Y , pour tous X,Y ∈ LG. ¤
Proposition 15.2. Soient G un groupe de Lie sur K, et inv : G −→ G lepassage a l’inverse dans G. Alors la differentielle de inv en e est le passage al’oppose, i.e.
Te inv : LG −→ LG , X 7−→ −X .
Preuve. Soit X ∈ LG fixe. Par le Theoreme 14.3, l’application
K −→ G , t 7−→ exp(tX)
est une courbe globale sur G, tangente a X en e. Des lors, la Proposition 8.4 nousdit que
Te inv(X) =d
dt t=0inv
(exp(tX)
)=
d
dt t=0exp(−tX) = −X ,
ou la deuxieme egalite decoule du Corollaire 14.4 et la derniere du Theoreme 14.3a nouveau. ¤
Pour la differentielle du commutateur, nous aurons besoin du Lemme qui suit;d’abord, voici une definition.
Definition 15.3. Soit M une variete lisse sur K. Alors, l’application diagonalede M est l’application donnee par
∆ = ∆M : M −→ M ×M , x 7−→ (x, x) .
Lemme 15.4. Soit M une variete lisse (resp. analytique) sur K. Alors, l’appli-cation diagonale ∆M : M −→ M × M de M est lisse (resp. analytique) et sadifferentielle est l’application diagonale de TM , i.e.
T∆M = ∆TM : TM −→ TM × TM ,
ou on identifie T (M ×M) avec TM × TM de facon evidente. En particulier, pourx ∈ M , on a
Tx∆M = ∆TxM : TxM −→ TxM × TxM .
Preuve. D’abord, pour toute variete lisse N sur K, on peut ecrire ∆N sous la forme
∆N = (idN , idN ) : N −→ N ×N , y 7−→ (y, y) .
Par l’Exemple 1.18 (vii) (b), ∆N est lisse (resp. analytique). Par ce resultat pourN = M et par la Remarque 7.2 (vii), on a
T∆M = (T idM , T idM ) = (idTM , idTM ) = ∆TM ,
ou la derniere egalite decoule du resultat ci-dessus pour N = TM , ce qui etablit lelemme. ¤
Proposition 15.5. Soit G un groupe de Lie (resp. analytique) sur K, et con-siderons le commutateur dans G, plus precisement, l’application
[ . , . ] : G×G −→ G , (g, h) 7−→ [g, h] = ghg−1h−1 .
Alors cette application est lisse (resp. analytique) et sa differentielle en (e, e) estnulle, i.e.
T(e,e)[ . , . ] = 0 : LG⊕ LG −→ LG ,
ou on identifie T(e,e)(G×G) avec TeG⊕ TeG = LG⊕ LG de facon evidente.

58 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Preuve. D’abord, notons que le produit H := G × G est lui-meme un groupede Lie (resp. analytique) sur K. Ensuite, le commutateur peut s’ecrire comme lacomposition
G×G = H∆H // H ×H
idH×InvH // H ×HµG×µG // G×G
µG // G .
De cette decomposition, il resulte que l’application C := [ . , . ] est lisse (resp.analytique), et, en combinant avec la Regle de Derivation en Chaıne, que pourZ = (X,Y ) ∈ LH = LG⊕ LG, on a
T(e,e)C(X,Y ) = T(e,e)µG ◦ T(e,e,e,e)(µG × µG) ◦ T(e◦,e◦)(idH × InvH) ◦ Te◦∆H(Z)
= T(e,e)µG ◦ (T(e,e)µG ⊕ T(e,e)µG) ◦ (Te◦ idH ⊕Te◦ InvH) ◦∆LH(Z)
= T(e,e)µG ◦ (T(e,e)µG ⊕ T(e,e)µG) ◦ (idLH ⊕Te◦ InvH)(Z,Z)
= T(e,e)µG ◦ (T(e,e)µG ⊕ T(e,e)µG)(Z,−Z)
= T(e,e)µG ◦ (T(e,e)µG ⊕ T(e,e)µG)((X,Y ),−(X,Y )
)
= T(e,e)µG(X + Y,−X − Y )
= X + Y −X − Y
= 0
avec e designant le neutre de G et e◦ celui de H, ou la deuxieme egalite decoule duLemme 15.4, la quatrieme de la Proposition 15.2 pour H, et les sixieme et septiemede la Proposition 15.1 pour G. Ceci complete la demonstration. ¤
16. Etude des homomorphismes de groupes de Lie
Theoreme 16.1. Soient G et H des groupes de Lie sur K. Si G est connexeet si ϕ,ψ : G −→ H sont des homomorphismes de groupes de Lie tels que
Lϕ = Lψ : LG −→ LH ,
alors ϕ = ψ.
Preuve. Par le Theoreme 14.20, on a des diagrammes commutatifs
LGLϕ //
expG
²²
LH
expH
²²
LGLψ //
expG
²²
LH
expH
²²G
ϕ // H Gψ // H
Comme par hypothese Lϕ = Lψ, il en resulte que
ϕ|expG(LG) = ψ|expG(LG) .
Le Theoreme 14.8 nous dit que expG est un diffeomorphisme local en 0, et nous endeduisons que V := expG(LG) est un voisinage de e = expG(0) dans G. Il suit que
ϕ|〈V 〉 = ψ|〈V 〉 .Or, justement, la Proposition 3.10, conjuguee a la connexite de G, implique que〈V 〉 = G, d’ou le resultat. ¤
Remarque 16.2. En termes sophistiques, le Theoreme 16.1 nous dit que lefoncteur L(−) de la categorie des groupes de Lie connexes sur K vers la categoriedes K-espaces vectoriels de dimension finie est un foncteur fidele.
16. ETUDE DES HOMOMORPHISMES DE GROUPES DE LIE 59
Remarque 16.3. Soient G et H deux groupes de Lie (resp. analytiques) surK. Soit ϕ : G −→ H un homomorphisme de groupes, et soit V est un voisinageouvert de e dans G, contenu dans Ge. Comme, pour g ∈ G, `g(V ) est un voisinagede g dans G, ϕ est continu (resp. lisse, resp. analytique) ssi
ϕ|`g(V ) : `g(V ) −→ H
est continu (resp. lisse, resp. analytique). Or, ϕ|`g(V ) s’ecrit comme la composition
ϕ|`g(V ) : `g(V )`g−1
// Vϕ|V // He
`ϕ(g) // Hϕ(g)incl // H ,
ou toutes les applications apparaissant, sauf ϕ|V , sont pour des raisons evidenteslisses (resp. analytiques). On voit donc que ϕ est continu (resp. lisse, resp. analy-tique) ssi
ϕ|V : V −→ He
est continu (resp. lisse, resp. analytique).
Remarque 16.4. Avant le resultat suivant, qui ne sera valable que dans le casK = R, observons que la conjugaison complexe
C −→ C , z 7−→ z
est un homomorphisme (meme un isomorphisme) de groupes topologiques, entregroupes de Lie complexes, mais n’est pas holomorphe, donc ce n’est pas un homo-morphisme de groupes de Lie complexes. Par contre, c’est un isomorphisme degroupes de Lie analytiques reels.
Le resultat suivant est fort utile. Nous en donnerons plus tard une secondedemonstration.
Theoreme 16.5. Soient G et H deux groupes de Lie (resp. analytiques) reels.Si ϕ : G −→ H est un homomorphisme de groupes topologiques (i.e. un homomor-phisme continu), alors ϕ est lisse (resp. analytique), donc c’est un homomorphismede groupes de Lie (resp. analytiques) reels.
Preuve.(a) Le cas G = R : On a donc un homomorphisme de groupes continu ϕ : R −→ H.Fixons une norme ||.|| sur LH. Par le Theoreme 14.8, on trouve une boule ouverteW centree 0 dans LH (pour la norme ||.||, de rayon δ > 0), et un voisinage ouvertU de e dans H, tels que exp |W soit un diffeomorphisme (resp. analytique), i.e.
exp |W : W≈−→ U ,
ou exp = expH . Posons W0 := 12W ⊆ W (cette inclusion utilise le fait que W
est une boule, i.e. W0 est la boule ouverte de rayon δ/2) et considerons l’ouvertU0 := exp(W0) ⊆ U dans H. On a donc un diffeomorphisme
exp |W0 : W0≈−→ U0 .
Comme ϕ est continu et comme ϕ(e) = e, on trouve ε > 0 tel que ϕ(B2ε) ⊆ U0 .
Assertion 1 : Si s ∈ Bε, alors il existe un unique Y ∈ W0 tel que ϕ(s) = exp(Y ); deplus, on a ϕ
(12s
)= exp
(12Y
).
Comme ϕ(Bε) ⊆ U0 et comme exp |W0 et exp |W sont des diffeomorphismes surleur image, un tel element Y ∈ W0 existe et est unique, non seulement dans W0,

60 1. THEORIE CLASSIQUE DES GROUPES DE LIE
mais dans W . De meme, on trouve un (unique) Z ∈ W0 tel que ϕ(
12s
)= exp(Z).
On en deduit que
exp(2Z) = exp(Z)2 = ϕ(
12s
)2 = ϕ(s) = exp(Y ) ,
avec 2Z ∈ 2W0 = W (voir le Corollaire 14.4 pour la premiere egalite). Par unicitede Y dans W , on obtient que 2Z = Y , ce qui etablit l’Assertion 1.
Maintenant, on trouve un (unique) X ∈ W0 tel que ϕ(ε) = exp(X).
Assertion 2 : Pour tout n ∈ N∗, on a ϕ( 12n ε) = exp( 1
2n X).
En effet, il suffit d’appliquer l’Assertion 1 successivement avec s = ε, puiss = 1
2ε, puis s = 122 ε, et ainsi de suite.
Assertion 3 : Pour tous m ∈ Z et n ∈ N∗, on a ϕ( m2n ε) = exp( m
2n X).
C’est immediat (cf. Corollaire 14.4).
Assertion 4 : Pour tout t ∈ R, on a ϕ(tε) = exp(tX).
Comme tout nombre reel t admet un developpement diadique, il existe unesuite de nombres rationnels de la forme ( mi
2ni)i∈N qui converge vers t dans R. Par
continuite en t des applications ϕ(tε) et exp(tX), il resulte que ϕ(tε) = exp(tX),pour tout t ∈ R, comme annonce. (C’est precisement ici que l’on utilise l’hypotheseque K = R !!!)
Pour conclure la partie (a), il suffit de remarquer que l’application
λ 1ε X : R −→ H , t 7−→ λ 1
ε X(t) = exp( tεX) = ϕ(t)
est lisse (resp. analytique), voir le Theoreme 14.3 pour la premiere egalite indiquee.
(b) Le cas general : On a donc un homomorphisme ϕ : G −→ H qui est continu.Si G est de dimension 0, i.e. discret, il est clair que ϕ est lisse (resp. analytique).Supposons donc n := dim(G) > 0. Soit X1, . . . , Xn une R-base de LG. Pourj = 1, . . . , n, l’application
µj : R −→ H , t 7−→ ϕ(expG(tXj)
)
est un homomorphisme de groupes topologiques. Par la partie (a), µj est lisse (resp.analytique), donc c’est un sous-groupe a 1-parametre de H. Par le Theoreme 13.3,il existe Yj ∈ LH unique tel que µj = λYj , i.e.
ϕ(expG(tXj)
)= λYj (t) = expH(tYj) ,
voir le Theoreme 14.3 pour la seconde egalite. D’apres le Corollaire 14.11, l’applicationlisse (resp. analytique)
F : Rn −→ G , (t1, . . . , tn) 7−→ expG(t1X1) · · · expG(tnXn)
est un diffeomorphisme local en (0, . . . , 0) (resp. analytique). Soient donc U unvoisinage ouvert de (0, . . . , 0) dans Rn et V un voisinage ouvert de e dans G telsque
F |U : U≈−→ V
soit un diffeomorphisme (resp. analytique), comme indique. Comme ϕ est un homo-morphisme, la composition ϕ ◦ F est donnee par
ϕ ◦ F : Rn −→ H , (t1, . . . , tn) 7−→ expH(t1Y1) · · · expH(tnYn) ,

16. ETUDE DES HOMOMORPHISMES DE GROUPES DE LIE 61
donc est lisse (resp. analytique), en application immediate du Theoreme 14.3. Detout ceci, il resulte que la composition
ϕ|V = (ϕ ◦ F )|U ◦ (F |U )−1 : V −→ H
est lisse (resp. analytique). Par la Remarque 16.3, il en va de-meme pour ϕ, ce quiacheve la demonstration. ¤
Corollaire 16.6. Si G est un groupe de Lie lisse (resp. analytique) reel, alorsil existe une unique structure de variete lisse (resp. analytique) reelle, compatibleavec la topologie donnee, pour laquelle G est un groupe de Lie (resp. analytique)reel.
Preuve. Soit G′ le groupe topologique G muni d’une structure de variete lisse (resp.analytique) reelle, pour laquelle c’est un groupe de Lie (resp. analytique) reel. Lesapplications
idG : G −→ G′ et idG : G′ −→ G
sont des homomorphisme de groupes topologiques, inverses l’un de l’autre. Par leTheoreme 16.5, ce sont des isomorphismes de groupes de Lie (resp. analytiques)reels, inverses l’un de l’autre. ¤
Corollaire 16.7. Pour un groupe de Lie reel G, on a des bijections canoniques
{homomorphismes continus de R dans G
}
l{sous-groupes a 1-parametre de G
}
lLG
l{champs de vecteurs lisses invariants a gauche sur G
}
Preuve. La premiere bijection decoule du Theoreme 16.5 (en fait, de la partie (a) dela demonstration ci-dessus), les autres sont contenues dans le Theoreme 13.3. ¤

62 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Remarque 16.8. Pour un groupe de Lie complexe G, le corollaire precedents’applique a G vu comme groupe de Lie reel, et on obtient des bijections canoniques
{homomorphismes continus de R dans G
}
l{sous-groupes a 1-parametre de G sur R
}
l{sous-groupes a 1-parametre de G sur C
}
lLG
l{champs de vecteurs complexes lisses invariants a gauche sur G
}
l{champs de vecteurs reels lisses invariants a gauche sur G
}
dont la deuxieme se comprend par composition avec la troisieme, et la derniere estune egalite.
Le resultat suivant nous montre que, dans le cas complexe, dans la definitiond’un sous-groupe a 1-parametre d’un groupe de Lie, on ne peut pas remplacer la con-dition d’etre lisse par la continuite, contrairement au cas reel (cf. Theoreme 16.5).
Theoreme 16.9. Soient G un groupe de Lie complexe et µ : C −→ G est unhomomorphisme de groupes topologiques, i.e. continu. Alors, il existe des elementsuniques X, Y ∈ LG tels que
µ : C −→ G , z = s + it 7−→ exp(s·X + it·Y ) ,
en particulier, µ est R-analytique. De plus, µ est holomorphe ssi X = Y .
Avant d’etablir ce resultat, nous allons en donner un corollaire immediat etensuite, nous demontrerons un lemme preparatoire.
Corollaire 16.10. Pour tout homomorphisme continu µ : C −→ GLn(C), ilexiste des matrices X, Y ∈Mn(C) uniques telles que
µ(s + it) = esX+itY ,
pour tous s, t ∈ R; de plus, µ est holomorphe ssi X = Y .
Preuve. Cela decoule des Theoremes 14.16 et 16.9. ¤Passons au resultat preparatoire annonce.
Lemme 16.11. Soit G un groupe de Lie sur K. Si deux elements X, Y ∈ LGsatisfont
exp(sX)·exp(tY ) = exp(tY )·exp(sX)pour tous s, t ∈ K, alors on a l’egalite
exp(sX + tY ) = exp(sX)·exp(tY )
pour tous s, t ∈ K.

16. ETUDE DES HOMOMORPHISMES DE GROUPES DE LIE 63
Preuve. Fixons s0, t0 ∈ K et posons X0 := s0X et Y0 := t0Y . Considerons lacomposition
θ : K(λX0 ,λY0 )
// G×Gµ // G ,
qui associe a s ∈ K l’element exp(sX0)·exp(tY0) de G, voir le Theoreme 14.3. Cetteapplication θ est lisse et, pour s, t ∈ K, verifie
θ(s + t) = exp((s + t)X0
)·((s + t)Y0
)
= exp(sX0)·exp(tX0)·exp(sY0)·exp(tY0)= exp(sX0)·exp(tt0X)·exp(ss0Y )·exp(tY0)= exp(sX0)·exp(ss0Y )·exp(tt0X)·exp(tY0)= exp(sX0)·exp(sY0)·exp(tX0)·exp(tY0)= θ(s)·θ(t) ;
on a utilise ici le Corollaire 14.4 et l’hypothese de l’enonce sur X et Y . Ainsi, θ estun homomorphisme lisse, i.e. c’est un sous-groupe a 1-parametre de G. La deriveeen 0 de θ se calcule a l’aide de la Proposition 15.1, a savoir
θ′(0) = T0θ(E0)= T(e,e)µ ◦ T0(λX0 , λY0)(E0)= T(e,e)µ ◦ (T0λX0 , T0λY0)(E0)= T(e,e)µ(X0, Y0)= X0 + Y0 .
Par le Theoreme 13.3, on obtient que θ = λX0+Y0 . Ainsi, on a
exp(s0X + t0Y ) = exp(X0 + Y0)= λX0+Y0(1)= θ(1)= exp(X0)·exp(Y0)= exp(s0X)·exp(t0Y ) .
Comme s0 et t0 sont des elements arbitraires de K, ceci etablit l’egalite desiree. ¤Preuve du Theoreme 16.9. Considerons le diagramme commutatif
R � vιR
))SSSSSSSS
µR
##C
µ // G
R( �
ιI55kkkkkkkk
µI
;;
ou ιR(s) := s et ιI(t) := it. En appliquant le Theoreme 16.5 a µR et a µI , onen deduit que ce sont des sous-groupes a 1-parametres du groupe de Lie reel sous-jacent G, d’ou, par le Theoreme 13.3, l’existence d’elements (uniques) X, X ′ ∈ LGtels que
µR(s) = λX(s) = exp(sX) et µR(t) = λX′(t) = exp(tX ′) ,
pour tous s, t ∈ R. En posant Y := 1i X
′ ∈ LG, on obtient µR(t) = exp(itY ), pourtout t ∈ R. Comme
µ(s + it) = µ(s)·µ(it) = µR(s)·µI(t) et µ(s + it) = µ(it)·µ(s) = µI(t)·µR(s) ,
64 1. THEORIE CLASSIQUE DES GROUPES DE LIE
on en deduit que
µ(s + it) = exp(sX)·exp(itY ) = exp(itY )·exp(sX) ,
pour tous s, t ∈ R. En particulier les elements X et iY de LG sont tels que leselements exp(s ·X) et exp(t · iY ) commutent dans G, pour tous s, t ∈ R. Par leLemme 16.11, cela implique que
µ(s + it) = exp(sX + itY ) ,
pour tous s, t ∈ R, avec X,Y ∈ LG uniques. Ceci montre que µ est holomorphe(i.e. est un sous-groupe a 1-parametre du groupe de Lie complexe G) ssi X = Y .En effet, d’apres le Theoreme 13.3, µ est holomorphe ssi il existe Z ∈ LG tel queµ(s + it) = exp
((s + it)Z
), pour tous s, t ∈ R. Il en resulte que
exp(sZ) = µ(s) = exp(sX) et exp(t·iZ) = µ(it) = exp(t·iY ) ,
pour tous s, t ∈ R. Ceci fournit des egalites entre sous-groupes a 1-parametres dugroupe de Lie reel sous-jacent G, d’ou, par le Theoreme 13.3 encore une fois (ousimplement par differentiation en 0), Z = X et iZ = iY , d’ou X = Y = Z. ¤
17. Les isomorphismes continus entre groupe de Lie reels
Cette section est entierement devolue au resultat suivant.
Theoreme 17.1. Si G et H sont des groupes de Lie (resp. analytiques) reels,et si ϕ : G −→ H est un isomorphisme de groupes qui est continu, alors ϕ est unisomorphisme de groupes de Lie (resp. analytiques) reels, i.e. ϕ et ϕ−1 sont lisses(resp. analytiques), et en particulier, ϕ−1 est continu.
Afin d’etablir ce theoreme, nous allons poser quelques definitions et demontrerdifferents resultats. Avant cela, voici une remarque instructive.
Remarque 17.2. Si G est un groupe de Lie reel de dimension non-nulle, alorsG est non-denombrable et n’est pas discret comme espace topologique. Soit Gδ legroupe topologique G pour la topologie discrete. Si on supprime la condition “abase denombrable” dans la definition d’une variete lisse (et d’un groupe de Lie), ilest evident que Gδ est un groupe de Lie reel (de dimension 0), et que l’applicationidentite idG : Gδ −→ G est un isomorphisme de groupes continu, et meme lisse.Cependant, son inverse, idG : G −→ Gδ, n’est pas continu !
Definition 17.3. Soit X un espace topologique. On dit alors que(i) X est un espace de Baire si l’intersection de toute collection d’ouverts
dense dans X est dense, ou, de maniere equivalente, si pour tout recouvre-ment denombrable ferme de X, l’un au moins des fermes du recouvrementest d’interieur non-vide dans H (i.e. contient un ouvert non-vide de H);
(ii) X est metrisable complet s’il admet une metrique complete (i.e. dont toutesuite de Cauchy converge) induisant la topologie donnee;
(iii) X est σ-compact s’il admet un recouvrement compact denombrable.
Nous allons admettre le resultat classique suivant de la topologie generale.
Theoreme 17.4 (Theoreme de Baire).Un espace topologique qui est metrisable complet, ou localement compact regulier,est un espace de Baire.
Corollaire 17.5. Toute variete topologique est un espace de Baire. ¤

17. LES ISOMORPHISMES CONTINUS ENTRE GROUPE DE LIE REELS 65
Lemme 17.6. Un espace localement compact a base denombrable est σ-compact.En particulier, toute variete topologique est σ-compacte.
Preuve. Soit {Un}n∈N une base denombrable d’ouverts de l’espace X considere. SiX est vide, le resultat est clair; on peut donc supposer chaque Un non-vide, disonscontenant un point xn. Clairement, {Un}n∈N est un recouvrement (ouvert) de X.Si n ∈ N, comme Un est un voisinage de xn dans l’espace localement compact X, ontrouve un voisinage compact Kn de xn dans X, contenu dans Un. Comme {Un}n∈Nest une base d’ouverts, pour chaque n ∈ N, on trouve mn ∈ N tel que Umn ⊆ Kn
(et x ∈ Umn). Il s’ensuit que {Kn}n∈N est un recouvrement compact denombrable
de X. ¤Lemme 17.7. Un espace topologique σ-compact est un espace de Lindelof. Un
espace topologique localement compact de Lindelof est σ-compact.
Preuve. Supposons l’espace X considere σ-compact, disons X =⋃
n∈NKn, avecchaque Kn compact. Si {Ui}i∈I est un recouvrement ouvert de X, pour chaquen, on peut trouver un sous-ensemble denombrable In de I tel que Kn ⊆
⋃i∈In
Un.Le sous-ensemble I∞ :=
⋃n∈N In de I est denombrable, et {Ui}i∈I∞ est un sous-
recouvrement denombrable de {Ui}i∈I , ce qui prouve la premiere partie. Supposonsmaintenant que X est localement compact de Lindelof. Si X est vide, le resultatest clair; supposons donc que X est non-vide. Pour chaque x ∈ X, on trouve unvoisinage compact Kx de x dans X, et donc un voisinage ouvert Ux de X contenudans Kx . Du recouvrement ouvert {Ux}x∈X , on extrait un sous-recouvrementdenombrable {Ux}x∈A, ou A est un partie denombrable de X. Il est clair des lorsque {Kx}x∈A est un recouvrement compact denombrable de X. ¤
Lemme 17.8. Soit G un groupe topologique localement compact separe. Soit Kl’ensemble des voisinages compacts de e dans G. Alors l’ensemble{
K−1 ·K ·K}K∈K
est un systeme fondamental de voisinages compacts de e dans G.
Preuve. L’application
f : G×G×G −→ G , (x, y, z) 7−→ x−1yz
etant continue et appliquant (e, e, e) sur e, pour tout voisinage U de e dans G, ilexiste des voisinages V1, V2 et V3 de e dans G tels que V −1
1 ·V2 ·V3 = f(V1, V2, V3)soit contenu dans U . Comme G est localement compact, on trouve K ∈ K tel queK ⊆ V := V1 ∩ V2 ∩ V3. On a alors
K−1 ·K ·K ⊆ V −1 ·V ·V ⊆ V −11 ·V2 ·V3 ⊆ U .
Il reste a montrer que K−1 ·K ·K est bien un voisinage compact de e dans G, or,on a
K−1 ·K ·K ⊆ {e}·{e}·K = K ,
et K−1 ·K ·K est l’image par une application continue, a savoir f , d’un compact, asavoir K ×K ×K, dans un espace separe, donc est compact, d’ou le resultat. ¤
Proposition 17.9. Soit G un groupe topologique localement compact separe etσ-compact, et soit H un groupe topologique separe qui est un espace de Baire. Siϕ : G −→ H est un homomorphisme de groupes topologiques surjectif, alors ϕ estune application ouverte. En particulier, si ϕ est un isomorphisme de groupes quiest continu, alors ϕ est un isomorphisme de groupes topologiques.
66 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Preuve.Assertion 1 : Il existe un systeme fondamental de voisinages compacts de e dans G,dont l’image par ϕ de chaque membre est un voisinage compact de e dans H.
Soit K un voisinage compact de e dans G, et soit U un voisinage ouvert dee dans G contenu dans K. Par le Lemme 17.7, G est de Lindelof, donc du re-couvrement ouvert {gU}g∈G, on peut extraire un sous-recouvrement denombrable{gU}g∈A, ou A est une partie denombrable de G. On a donc un recouvrement com-pact denombrable {gK}g∈A de G. Posons L := ϕ(K) et B := ϕ(A). Comme ϕ estune surjection continue et H separe, {ϕ(gK)}g∈A = {hL}h∈B est un recouvrementcompact denombrable de H, donc un recouvrement ferme denombrable de H (carH est separe). Etant donne que H est un espace de Baire, on trouve h ∈ B tel quehL est d’interieur non-vide dans H. Comme `h−1 est un homeomorphisme de H, Llui-meme est d’interieur non-vide dans H. On trouve donc x ∈ K et un voisinageouvert V de ϕ(x) dans H, contenu dans L (malheureusement, on ne sait pas si Lest voisinage de e dans H, et donc si on peut prendre x = e). L’ensemble K ·U estun voisinage de x dans G, et on a
ϕ(K ·U) ⊇ ϕ(K) ⊇ V 3 ϕ(x) et donc ϕ(x−1 ·K ·U) ⊇ ϕ(x)−1 ·V 3 e .
Au total, on voit que K−1 ·K ·K est un voisinage compact de e dans G, et sonimage ϕ(K−1 ·K ·K) est un voisinage compact de e dans H. L’Assertion 1 decoulemaintenant du Lemme 17.8.
Assertion 2 : Pour tout g ∈ G, il existe un systeme fondamental de voisinagescompacts de g dans G, dont l’image par ϕ de chaque membre est un voisinagecompact de ϕ(g) dans H.
Si {Ki}i∈I est un systeme de voisinages de e comme dans l’Assertion 1, il suffitde prendre {gKi}i∈I .
Soit U un ouvert de G; nous devons montrer que ϕ(U) est ouvert dans H, i.e.est voisinage de tous ses points. Par l’Assertion 2, pour chaque element g de U , ilexiste un voisinage compact Kg de g dans G contenu dans U , tel que ϕ(Kg) est unvoisinage de ϕ(g) dans H. Ainsi, l’ensemble ϕ(U) =
⋃g∈U ϕ(Kg) est voisinage de
tous ses points dans H, i.e. est ouvert dans H. Ceci termine la demonstration. ¤
Tous ces efforts pour en arriver au
Corollaire 17.10. Tout homomorphisme surjectif continu entre groupes deLie sur K est une application ouverte; en particulier, si c’est un isomorphisme degroupes, alors c’est un homeomorphisme.
Preuve. Un groupe de Lie sur K est localement compact separe (clairement), σ-compact (par le Lemme 17.6) et un espace de Baire (par le Corollaire 17.5). Ainsi,la Proposition 17.9 s’applique et donne le resultat. ¤
Nous pouvons enfin passer a la demonstration du Theoreme 17.1.
Preuve du Theoreme 17.1. Par le Corollaire 17.10, ϕ−1 est un homomorphismecontinu, donc le Theoreme 16.5 s’applique autant a ϕ qu’a son inverse ϕ−1, d’ou leresultat. ¤

18. SOUS-VARIETES ET SOUS-GROUPES DE LIE 67
18. Sous-varietes et sous-groupes de Lie
Definition 18.1. Soit M une variete lisse (resp. analytique) sur K, de dimen-sion m. Un sous-ensemble (disons non-vide) N de M est appele sous-variete dedimension n sur K (resp. sous-variete analytique de dimension n sur K) de M , si0 ≤ n ≤ m et si pour tout point x de N , il existe
(i) un K-espace vectoriel E de dimension m(ii) un K-sous-espace vectoriel F de E, de dimension n(iii) un voisinage ouvert U de 0 dans E(iv) un voisinage ouvert V de x dans M
(v) un diffeomorphisme (resp. analytique) ϕ : U≈−→ V
avec (E, F, U, V, ϕ) verifiant
(a) ϕ(0) = x(b) ϕ(U ∩ F ) = V ∩N .
On dit aussi que N est de codimension m−n dans M . Pour indiquer la dependanceen x, on ecrit parfois (Ex, Fx, Ux, Vx, ϕx) au lieu de (E, F, U, V, ϕ). Si K = R, ondit aussi sous-variete reelle ou simplement sous-variete, et si K = C, on dit aussisous-variete complexe ou sous-variete holomorphe.
Remarque 18.2. Soit N une sous-variete (resp. analytique) de dimension nd’une variete lisse (resp. analytique) M sur K, de dimension m, et gardons lesnotations de la Definition 18.1.
(i) L’espace N herite d’une structure de variete lisse (resp. analytique) sur K,de dimension n. En effet, d’abord, N est separe et a base denombrable.Maintenant, pour chaque x ∈ N , choisissons un K-isomorphisme
θx : Km = Kn ×Km−n ∼=−→ Ex tel que θx(Kn) = Fx ,
et posons Wx := θ−1x (Ux) ⊆ Km. Alors l’ensemble{ϕx ◦ θx|Wx∩Kn : Wx ∩Kn −→ Vx ∩N
}
constitue un K-atlas (resp. analytique) sur N .(ii) Notons aussi que, pour tout x ∈ N , l’intersection Vx ∩N est fermee dans
l’ouvert Vx de M . On dit des lors que N est localement fermee dans M .(iii) Le fibre tangent TN s’identifie canoniquement a une sous-variete (resp.
analytique) sur K, de dimension 2n, de TM ; en particulier, pour un pointx ∈ N , l’espace tangent TxN s’identifie canoniquement a un K-sous-espacevectoriel de TxM .
(iv) L’inclusion inclN : N ↪→ M est lisse (resp. analytique) et elle verifie
T inclN = inclTN : TN ↪→ TM
et, en particulier, pour x ∈ N , on a
Tx inclN = inclTxN : TxN ↪→ TxM .
(v) Si P est une variete lisse (resp. analytique) sur K, et si f : P −→ Nest une application, alors f est lisse (resp. analytique) ssi la compositionincl ◦f : P −→ M est lisse (resp. analytique).
68 1. THEORIE CLASSIQUE DES GROUPES DE LIE
(vi) Si Q est une sous-variete (resp. analytique) d’une variete lisse (resp. ana-lytique) P , et si f : P −→ M est une application lisse (resp. analytique)telle que f(Q) ⊆ N , alors la restriction
f |Q : Q −→ N
est egalement lisse (resp. analytique).(vii) Pour i = 1, 2, soit Ni une sous-variete d’une variete Mi sur K. Alors
l’ensemble produit N1 × N2 est une sous-variete de la variete produitM1 × M2, et la structure de sous-variete sur N1 × N2 coıncide avec lastructure de variete produit. Il en va de meme dans le cas analytique.
Exemple 18.3.
(i) Si M est une variete lisse (resp. analytique) sur K, alors tout sous-espacediscret non-vide D de M est une sous-variete (resp. analytique) de dimen-sion 0 (notons que D est denombrable, cf. Remarque 2.3).
(ii) Un ouvert non-vide d’une variete lisse (resp. analytique) sur K en est unesous-variete (resp. analytique) sur K, de codimension 0.
(iii) Si M est une variete lisse (resp. analytique) sur K, et si N est une reunionnon-vide de composantes connexes de M , alors N est une sous-variete lisse(resp. analytique) sur K de M , de codimension 0; en fait N est ouverte etfermee dans M .
(iv) Le sous-ensemble S1 × {1} du tore T2 en est une sous-variete analytiquereelle de dimension 1, qui s’identifie au cercle S1.
(v) La sphere Sn−1 est une sous-variete analytique reelle de Rn.(vi) La sphere Sn−1, vue comme equateur dans la sphere Sn, en est une sous-
variete analytique reelle.
Definition 18.4. Soit G un groupe de Lie sur K. Un sous-groupe de Lie surK de G est un sous-groupe H de G qui est en meme temps une sous-variete de Gsur K. Si K = R, on dit aussi sous-groupe de Lie reel ou simplement sous-groupede Lie; si K = C, on dit aussi sous-groupe de Lie complexe. Si G est analytique etH est une sous-variete analytique, on dit que c’est un sous-groupe de Lie analytiquesur K de G.
Remarque 18.5. Si H est un sous-groupe de Lie (resp. analytique) sur K d’ungroupe de Lie (resp. analytique) sur K, alors H est lui-meme un groupe de Lie (resp.analytique) sur K. Cela decoule de la Remarque 18.2 (i), (vi) et (vii). De plus,l’inclusion inclH : H ↪→ G est lisse (resp. analytique), donc c’est un homomorphismede groupes de Lie (resp. analytiques) sur K, et, par la Remarque 18.2 (iii) & (iv),LH est un K-sous-espace vectoriel de LG et on a l’egalite
inclLH = LinclH : LH ↪→ LG .
Exemple 18.6.
(i) Si H est un sous-groupe discret d’un groupe de Lie (resp. analytique) Gsur K, alors H est un sous-groupe de Lie (resp. analytique) sur K de G.
(ii) Si H est un sous-groupe ouvert d’un groupe de Lie (resp. analytique) Gsur K, alors H est un sous-groupe de Lie (resp. analytique) sur K de G (cf.le Corollaire 3.12 pour constater que cet exemple n’est pas d’une grandeportee).

19. SOUS-GROUPES FERMES ET THEOREME D’ELIE CARTAN 69
(iii) Pour m ≥ n, le groupe de Lie analytique Kn sur K est un sous-groupe deLie analytique sur K de Km = Kn ×Km−n.
(iv) Le groupe de Lie analytique reel S0 est un sous-groupe de Lie analytiquede R× et de S1.
(v) Le groupe de Lie analytique reel S1 est un sous-groupe de Lie analytiquede C× et de S3.
(vi) Le groupe de Lie analytique reel S3 est un sous-groupe de Lie analytiquede H×.
(vii) Pour m ≥ n, le groupe de Lie analytique reel Tn est un sous-groupe deLie analytique de Tm = Tn × Tm−n.
Proposition 18.7. Soit G un groupe de Lie sur K. Alors, un sous-groupe deLie de G est ferme dans G.
Preuve. Soit H le sous-groupe de Lie considere. Par la Remarque 18.2 (ii), H estlocalement ferme dans G, donc on trouve un voisinage ouvert V de e dans G, telque H ∩ V est ferme dans V , i.e. H ∩ V = H ∩ V , ou H est l’adherence de Hdans G. Soit g ∈ H; comme gV −1 est un voisinage de g dans G (cf. Lemme 3.13),il existe h ∈ H ∩ gV −1. Comme g ∈ hV , il s’ensuit que g ∈ H ∩ hV , et donch−1g ∈ H ∩ V = H ∩ V ⊆ H. On en deduit effectivement que g ∈ hH = H. ¤
Remarque 18.8. Si H est sous-groupe de Lie sur K d’un groupe de Lie G surK, alors H est ferme dans G, d’apres la proposition precedente. La Proposition 3.9nous dit que tout sous-groupe ouvert U de G est ferme, et est un sous-groupe deLie de G sur K, d’apres l’Exemple 18.6 (ii). La question se pose naturellement desavoir si un sous-groupe de Lie de G est ouvert dans G. La reponse est “non”,comme le montre l’exemple du sous-groupe trivial {e} si G est de dimension > 0,ou l’exemple de S1 dans C×.
19. Sous-groupes fermes et Theoreme d’Elie Cartan
Le but de cette section est de demontrer le resultat fondamental suivant, quiest la reciproque, dans le cas reel, de la Proposition 18.7.
Theoreme 19.1 (Theoreme d’Elie Cartan).Soit G un groupe de Lie reel. Si H est un sous-groupe ferme de G, alors H possedeune structure canonique de groupe de Lie reel. De plus, pour cette structure, l’espacetangent TeH = LH s’identifie de facon canonique avec le sous-espace vectoriel reel
W = WH :={
X ∈ LG∣∣∣ ∃εX > 0 tq. expG(tX) ∈ H , ∀t ∈ ]−εX , εX [
}
de LG; l’exponentielle expG applique W dans H; la restriction
expG |W : W −→ H
est un diffeomorphisme local en 0; et expH s’identifie a expG |W . En particulier,on a dim(H) = dim(W ), et, si X ∈ W , alors expG(tX) ∈ H pour tout t ∈ R.Finalement, si G est analytique, alors H l’est egalement.
Nous allons “decouper” la preuve en lemmes. Avant cela, voici quatre remar-ques, la premiere sur le nom de Cartan, les deux suivantes sur LH, et la dernieresur le cas complexe.
Remarque 19.2. A ne pas confondre : Elie Cartan (1869–1951) avec son filsHenri Cartan (ne le 8 juillet 1904 et qui est toujours vivant !).

70 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Remarque 19.3. En gardant les notations du Theoreme d’Elie Cartan 19.1,dans la suite (c’est-a-dire apres la demonstration), nous allons identifier LH avecW et simplement ecrire “ LH = W ”. Du theoreme, il suit qu’on a
LH ={
X ∈ LG∣∣∣ ∃εX > 0 tq. expG(tX) ∈ H , ∀t ∈ ]−εX , εX [
}
={
X ∈ LG∣∣∣ expG(tX) ∈ H , ∀t ∈ R
}.
En particulier, LH s’identifie canoniquement avec l’ensemble des sous-groupes a 1-parametres de G entierement contenus dans H (ou, de maniere equivalente, contenudans H localement autour de e).
Remarque 19.4. Soient G un groupe de Lie reel, et H un sous-groupe fermede G. Considerons un voisinage ouvert U de 0 dans LG, et un voisinage ouvertV de e dans G tels que l’exponentielle de G fournisse un diffeomorphisme (cf.Theoreme 14.8)
expG |U : U≈−→ V .
Du Theoreme d’Elie Cartan 19.1, il suit qu’on a les egalites
LH ∩ U ={X ∈ U
∣∣ expG(X) ∈ H ∩ V}
={X ∈ U
∣∣ expG(X) ∈ H}
,
ce qui signifie que pour X ∈ U , on a
X ∈ LH ⇐⇒ expG(X) ∈ H .
Remarque 19.5. Si G est un groupe de Lie complexe et si H est un sous-groupe ferme de G, alors H ne possede pas necessairement une structure de groupede Lie complexe. Par exemple, le groupe de Lie complexe C× a S1 comme sous-groupe ferme, mais celui-ci est de dimension reelle 1, donc ne peut pas posseder destructure de groupe de Lie complexe.
Lemme 19.6. Soit H un sous-groupe ferme d’un groupe de Lie reel G. Soit ||.||une norme arbitraire sur LG. Si (Xn)n∈N est une suite dans LGr{0} telle que
(i) Xn → 0 dans LG;(ii) 1
||Xn|| ·Xn → X dans LG;(iii) expG(Xn) ∈ H, pour tout n ∈ N.
Alors on a exp(tX) ∈ H, pour tout t ∈ R.
Preuve. Soit t ∈ R. Comme ||Xn|| 6= 0 pour tout n ∈ N, et comme ||Xn|| → 0 dansR, il existe une suite d’entiers (mn)n∈N telle que mn · ||Xn|| → t dans R. Etantdonne que t
||Xn|| ·Xn → tX dans LG, on en deduit, par continuite de expG et de lamultiplication scalaire dans LG et dans R, que
expG(mnXn) = expG
(mn·||Xn||||Xn|| ·Xn
)n→∞−→ expG
(limn
t||Xn|| ·Xn
)= expG(tX)
dans G. Or, on a l’egalite expG(mnXn) = expG(Xn)mn ∈ H, par hypothese sur lasuite (Xn)n∈N. Comme H est ferme dans G, on trouve bien que expG(tX) ∈ H. ¤
Lemme 19.7. Sous les hypotheses et notations du Theoreme d’Elie Cartan 19.1,on a
W ={
X ∈ LG∣∣∣ expG(tX) ∈ H , ∀t ∈ R
}.
En particulier, on a expG(W ) ⊆ H.

19. SOUS-GROUPES FERMES ET THEOREME D’ELIE CARTAN 71
Preuve. Si X = 0, le resultat est clair; on suppose donc X non-nul. On muni LGd’une norme ||.|| arbitraire verifiant ||X|| = 1. On choisit une suite (tn)n∈N dansl’intervalle ]0, εX [ (en particulier, tn > 0 pour tout n) convergeant vers 0 dans R.Il suffit alors, pour chaque n, de prendre Xn := tn ·X ∈ LGr{0} et d’appliquer leLemme 19.6. ¤
Remarque 19.8. La preuve de ce lemme montre qu’on a
W ={
X ∈ LG∣∣∣ ∃εX > 0 tq. expG(tX) ∈ H , ∀t ∈ ]0, εX [
}.
En combinant avec le Lemme 19.6, ceci montre meme que
W ={
X ∈ LG∣∣∣ ∃(tX
n )n∈N tq. tX
n → 0 et, ∀n ∈ N , tX
n > 0 et expG(tX
n X) ∈ H}
.
Lemme 19.9. Soit G un groupe de Lie sur K. Soient U un voisinage ouvert de0 dans LG, et V un voisinage ouvert de e dans G, tels que l’exponentielle y soit undiffeomorphisme, et soit log = log |V son inverse, i.e.
exp |U : U≈−→ V et log |V := (exp |U )−1 : V
≈−→ U .
Soient X et Y dans LG. Alors, il existe ε = εX,Y > 0 tel que
exp(tX) · exp(tY ) ∈ V ,
pour tout t ∈ Bε. De plus, si, pour t ∈ Bεr{0}, on pose
Z(t) := 1t · log
(exp(tX) · exp(tY )
) ∈ LG ,
alors, la limite suivante existe et prend la valeur indiquee :
limt→0
Z(t) = X + Y ∈ LG .
Preuve. Le Theoreme 14.8 garantit l’existence de U et de V . Soit µ le produitsur G. Par continuite de µ, il existe un voisinage ouvert V0 de e dans G, tel queV0 ·V0 ⊆ V . Par continuite de exp, il existe un voisinage ouvert U0 de 0 dansLG, tel que exp(U0) ⊆ V0. Pour la premiere partie, il suffit donc de choisir ε > 0suffisamment petit pour que tX, tY ∈ U0, pour tous t ∈ Bε. Considerons la courbelocale (sur G×G)
γ : Bε −→ G×G , t 7−→ γ(t) :=(exp(tX), exp(tY )
),
qui est tangente a (X,Y ) en (e, e), i.e. γ′(0) = (X, Y ), voir le Theoreme 14.3.Considerons maintenant l’application lisse
F := µ ◦ γ : Bε −→ V , t 7−→ exp(tX) · exp(tY ) .
En combinant la Proposition 15.1 avec la Regle de Derivation en Chaıne, on tireque
F ′(0) = T0F (E0) = T(e,e)µ ◦ T0γ(E0)︸ ︷︷ ︸=γ′(0)
= T(e,e)µ(X,Y ) = X + Y .
Par la Regle de Derivation en Chaıne a nouveau, l’application lisse
log ◦F : Bε −→ U ⊆ LG , t 7−→ log(exp(tX) · exp(tY )
)
verifie
(log ◦F )′(0) = T0(log ◦F )(E0) = Te log ◦T0F (E0) = Te log(X + Y ) .

72 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Comme T0(exp |U) = T0(exp) = idLG (cf. Theoreme 14.7) et comme log = (exp |U )−1,on a Te log = idLG, d’ou
(log ◦F )′(0) = X + Y .
D’un autre cote, log ◦F est une fonction vectorielle, donc, les limites suivantesexistent et verifient
(log ◦F )′(0) = limt→0
1t ·
(log ◦F (t)− log ◦F (0)
)= lim
t→0
1t ·log ◦F (t) = lim
t→0Z(t) ,
ou la limite est prise avec t ∈ Bεr{0}. Ceci prouve le corollaire. ¤
Lemme 19.10. Sous les hypotheses et notations du Theoreme d’Elie Cartan 19.1,W est un sous-espace vectoriel de LG.
Preuve. Soient X, Y ∈ W , de sorte que expG(tX) ∈ H et expG(tY ) ∈ H, pour toust ∈ R, en vertu du Lemme 19.7. Si λ ∈ R, alors on a expG(t·λX) ∈ H, pour toutt ∈ R, de sorte que λX ∈ W . Il nous reste a montrer que X + Y ∈ W . On peutsupposer X + Y 6= 0, car sinon le resultat est clair. Soit ||.|| une norme arbitrairesur LG. Motives par le Lemme 19.6, cherchons une suite (Zn)n∈N dans LGr{0}telle que
(i) Zn → 0 dans LG;(ii) 1
||Zn|| ·Zn → λ·(X + Y ) dans LG, pour un λ ∈ R×;(iii) expG(Zn) ∈ H, pour tout n ∈ N.
En gardant les notations du Lemme 19.9, en particulier pour ε = εX,Y > 0, onchoisit une suite (tn)n∈R dans ]0, ε[ qui converge vers 0 dans R, et on pose
Zn := tn ·Z(tn) = log(expG(tnX) · expG(tnY )
) ∈ LG .
Cette suite satisfait notre requete, car (i) decoule de la continuite de exp, de µ etde log. Passons a (ii). D’abord, par le Lemme 19.9, on a
Z(tn) → X + Y et donc ||Z(tn)|| → ||X + Y ||dans LG et R respectivement. Comme X + Y 6= 0, on a ||Z(tn)|| 6= 0 pour n >> 0,donc, la suite suivante est bien definie pour n suffisamment grand et converge dansLG comme indique :
1||Zn|| ·Zn = 1
||Z(tn)|| ·Z(tn) → 1||X+Y || ·(X + Y ) .
Finalement, pour (iii), on a
expG(Zn) = expG ◦ log(expG(tnX) · expG(tnY )︸ ︷︷ ︸
∈V
)= expG(tnX)︸ ︷︷ ︸
∈H
· expG(tnY )︸ ︷︷ ︸∈H
∈ H ,
pour tout n (on utilise ici le fait que tn ∈ ]0, ε[ et que ε est suffisamment petit, voirl’enonce du Lemme 19.9). La conclusion deduite du Lemme 19.6 est que
expG
(t
||X+Y || ·(X + Y ))∈ H ,
pour tout t ∈ R, et donc X + Y ∈ W . ¤
Lemme 19.11. Sous les hypotheses et notations du Theoreme d’Elie Cartan 19.1,expG(W ) est un voisinage de e dans H.

19. SOUS-GROUPES FERMES ET THEOREME D’ELIE CARTAN 73
Preuve. Soit W ′ un supplementaire de W dans LG, de sorte que LG = W ⊕W ′
comme R-espaces vectoriels. Si W = LG, le resultat decoule du Theoreme 14.8,donc on peut supposer que W ′ 6= 0. La Proposition 14.10 montre que l’application
F : LG = W ⊕W ′ −→ G , (X,Y ) 7−→ expG(X) · expG(Y )
est un diffeomorphisme local en (0, 0), disons
F : U × U ′ ≈−→ V ,
ou U et U ′ sont des voisinages de 0 dans W et W ′ respectivement, et V est un voisi-nage de e dans G. Notons que F (W ) = expG(W ). Supposons par l’absurde queF (U) n’est pas un voisinage de e dans H. Soit alors {Vn}n∈N un systeme fondamen-tal de voisinages de e dans G, tous contenus dans V (G est a base denombrable).Pour chaque n, on trouve hn ∈ H ∩ Vn avec hn 6∈ F (U), sinon F (U) contiendraitle voisinage H ∩ Vn de e dans H. Notons que hn → e dans G, par hypothese surles Vn. Comme F |U×U ′ est un diffeomorphisme sur V , pour chaque n, on trouveXn ∈ U et Yn ∈ U ′, uniques, tels que
H 3 hn = F (Xn, Yn) = expG(Xn)︸ ︷︷ ︸∈H
· expG(Yn) ,
et donc expG(Yn) ∈ H; comme hn 6∈ F (U), on a Yn 6= 0, par unicite; notons aussique Yn → 0 dans W ′. Fixons une norme ||.|| sur W ′ et soit
S :={Y ∈ W ′ ∣∣ ||Y || = 1
}
la sphere (non-vide !) correspondante. Comme S est compacte (separee), doncsequentiellement compacte, de la suite
(Yn
||Yn||)n∈N dans S, on peut extraire une
sous-suite( Ynj
||Ynj||)j∈N convergeant vers un Z ∈ S. On voit que le Lemme 19.6
s’applique a la suite (Ynj )j∈N et donne expG(tZ) ∈ H, pour tout t ∈ R. Ainsi, ona Z ∈ W , ce qui est contradictoire avec le fait que Z ∈ S ⊂ W ′r{0}. ¤
Nous pouvons maintenant passer a la demonstration du Theoreme d’Elie Car-tan 19.1.
Preuve du Theoreme 19.1. Notons d’abord que W est un R-sous-espace vectoriel deLG, voir le Lemme 19.10. Pour faciliter la comprehension, ecrivons LH pour W , no-tation que nous justifierons dans un deuxieme temps. D’apres le Lemme 19.11 (et sademonstration), et grace au Theoreme 14.8 qui dit que expG est un diffeomorphismelocal, on trouve un voisinage ouvert U de 0 dans LG, et un voisinage ouvert V dee dans G tels que
expG |U : U≈−→ V et expG |U∩LH : U ∩ LH
∼=−→ V ∩H
soient, respectivement, un diffeomorphisme (analytique si G est analytique) et unhomeomorphisme, comme indique. On voit qu’on se trouve exactement dans lasituation de la Definition 18.1 d’une sous-variete H de G, c’est-a-dire, pour touth ∈ H, on a
(i) un R-espace vectoriel E := LG(ii) un R-sous-espace vectoriel F := LH = W de E(iii) un voisinage ouvert U de 0 dans E(iv) un voisinage ouvert hV de h dans G
(v) un diffeomorphisme (resp. analytique) ϕh := `h ◦ expG |U : U≈−→ hV

74 1. THEORIE CLASSIQUE DES GROUPES DE LIE
verifiant(a) ϕh(0) = h(b) ϕh(U ∩ F ) = hV ∩H.
Ainsi, H devient une variete reelle lisse (resp. analytique), munie de l’atlas{`h ◦ expG |U∩LH : U ∩ LH −→ hV ∩H
}h∈H
.
Par la Remarque 18.5, H est un groupe de Lie reel (resp. analytique), et, pourcette structure, on a bien TeH = W , ce qui justifie la notation LH = W adoptee.Evidemment, pour cette structure de variete sur H, l’application
expG |LH : LH −→ H
est un diffeomorphisme local en 0. Par la Remarque 18.2 (v) & (vi), les sous-groupesa 1-parametres de H sont exactement les sous-groupes a 1-parametre de G dontl’image est contenue dans H. Il decoule donc de la definition de l’exponentielle pourG et pour H que expH = expG |LH . Le reste du theoreme en cours de demonstrationdecoule du Lemme 19.7. ¤
20. Applications du Theoreme d’Elie Cartan
Voici quel est le pendant complexe du Theoreme d’Elie Cartan 19.1.
Theoreme 20.1. Soient G un groupe de Lie complexe, et H un sous-groupede G. Alors H est un sous-groupe de Lie complexe de G (et donc un groupe de Liecomplexe) ssi H est ferme dans G et si le R-sous-espace vectoriel LH de LG, ausens du Theoreme d’Elie Cartan 19.1, en est un sous-espace vectoriel complexe.
Preuve. Si H est un sous-groupe de Lie complexe de G, alors H est ferme dans G(cf. Proposition 18.7) et est une sous-variete complexe de G, donc LH = TeH estun sous-espace vectoriel complexe de TeG = LG (voir aussi la Remarque 18.5).Reciproquement, si H est ferme dans G et si LH est un sous-espace vectorielcomplexe de LG, alors la structure de sous-variete reelle de LH donnee dans lademonstration du Theoreme d’Elie Cartan 19.1 a l’aide des pentuples(
E = LG, F = LH,U, hV, ϕh = `h ◦ expG |U)
pour chaque h ∈ H, est, de toute evidence, une structure de sous-variete complexede G. ¤
Proposition 20.2. Soient H1 et H2 deux sous-groupes de Lie connexes d’ungroupe de Lie G sur K. Alors, on a l’egalite H1 = H2 ssi LH1 = LH2 (vus commeK-sous-espaces vectoriels de LG).
Preuve. Le sens direct est evident. Reciproquement, pour i = 1, 2, il suit de laProposition 18.7 que H1 et H2 sont fermes dans G, et, par le Theoreme d’ElieCartan 19.1, on a que expG(LHi) est un voisinage de e dans Hi, donc, en vertu dela Proposition 3.10, le sous-groupe de G engendre par expG(LHi) n’est autre queHi, d’ou le resultat. ¤
Remarque 20.3. Il a deja ete mentionne que si H est un groupe de Lie sur K,alors LH = LHe, d’ou la necessite de la connexite dans la proposition precedente.
Proposition 20.4. Soient H1 et H2 deux sous-groupes de Lie d’un groupe deLie G sur K. Si H1 ⊆ H2, alors on a LH1 ⊆ LH2 (vus comme K-sous-espacesvectoriels de LG).

20. APPLICATIONS DU THEOREME D’ELIE CARTAN 75
Preuve. Par une double application de la Proposition 18.7, H1 et H2 sont des sous-groupes fermes de G. Par une double application du Theoreme d’Elie Cartan 19.1,on a
LH1 ={X ∈ LG
∣∣∣ expG(tX) ∈ H1 , ∀t ∈ R}
⊆{X ∈ LG
∣∣∣ expG(tX) ∈ H2 , ∀t ∈ R}
= LH2 ,
ce qui acheve la demonstration (en combinaison avec le Theoreme 20.1 dans le cascomplexe). ¤
Proposition 20.5. Soient H1 et H2 deux sous-groupes de Lie d’un groupe deLie G sur K. Alors, l’intersection H1 ∩H2 est un sous-groupe de Lie de G sur K,et on a L(H1 ∩H2) = LH1 ∩ LH2 (vus comme K-sous-espaces vectoriels de LG).
Preuve. Par la Proposition 18.7, H1 et H2 sont des sous-groupes fermes de G, doncil en va de meme de H1 ∩H2. Par le Theoreme d’Elie Cartan 19.1, H1 ∩H2 est unsous-groupe de Lie reel de GR, et, comme R-sous-espace vectoriels de LGR, on a
L(H1 ∩H2) ={
X ∈ LG∣∣∣ expG(tX) ∈ H1 ∩H2 , ∀t ∈ R
}
={
X ∈ LG∣∣∣ expG(tX) ∈ H1 , ∀t ∈ R
}∩
∩{
X ∈ LG∣∣∣ expG(tX) ∈ H2 , ∀t ∈ R
}
= LH1 ∩ LH2 ,
ou la derniere egalite est due a une double application du Theoreme d’Elie Car-tan 19.1, pour H1 et pour H2. Finalement, si K = C, alors, par le Theoreme 20.1,LH1 et LH2 sont des C-sous-espaces vectoriels de LG, donc L(H1∩H2) = LH1∩LH2
egalement, donc H1∩H2 est un sous-groupe de Lie complexe de G, en reappliquantle Theoreme 20.1. ¤
Comme application du Theoreme d’Elie Cartan 19.1, nous allons maintenantpresenter une seconde demonstration du Theoreme 16.5. A cet effet, nous allonsd’abord introduire et etudier la notion de graphe d’un homomorphisme de groupes.
Definition 20.6. Soit ϕ : G −→ H un homomorphisme de groupes. Le graphede ϕ est le sous-groupe (!)
Γ(ϕ) :={(
g, ϕ(g)) ∈ G×H
∣∣ g ∈ G}
de G×H. Si G et H sont des groupes topologiques, on muni Γ(ϕ) de la topologiede sous-espace, faisant de lui un groupe topologique.
Lemme 20.7. Soit ϕ : G −→ H un homomorphisme de groupes entre groupestopologiques, et soit Γ(ϕ) son graphe. Si ϕ est continu et si H est separe, alorsΓ(ϕ) est un sous-groupe ferme de G×H.
Preuve. Soit (x, y) ∈ G×H un point de l’adherence de Γ(ϕ). On trouve donc unesuite generalisee
((gi, hi)
)i∈I
qui converge vers (x, y) dans G×H, i.e. gi → x dans

76 1. THEORIE CLASSIQUE DES GROUPES DE LIE
G et hi → y dans H. Par definition du graphe, pour chaque i ∈ I, on a ϕ(gi) = hi.Par continuite de ϕ, il resulte que
y = limi
hi = limi
ϕ(gi) = ϕ(
limi
gi
)= ϕ(x) ,
ainsi, on obtient (x, y) ∈ Γ(ϕ). – On utilise la separation de H pour garantirl’unicite des limites dans H, ce qui permet l’ecrire limi sans ambiguıte; la separationde G n’est pas necessaire, de sorte que ϕ(limi gi) est un abus de notation. ¤
Deuxieme preuve du Theoreme 16.5. Soit donc ϕ : G −→ H un homomorphisme degroupes entre deux groupes de Lie (resp. analytiques) reels. Nous devons montrerque ϕ est lisse (resp. analytique).
(a) Le cas G = R : Nous le supposons traite independamment (comme par exemplevia la partie (a) de la premiere preuve). Ceci signifie, que pour tout groupe de Liereel G, il y a l’egalite suivante :
{sous-groupes
a 1-parametre de G
}=
{homomorphismes de groupes
continus R −→ G
}
(b) Le cas general : Par le Lemme 20.7, le graphe Γ(ϕ) est un sous-groupe ferme dugroupe de Lie (resp. analytique) reel G×H. Nous allons montrer que cela impliqueque ϕ est lisse (resp. analytique). Par le Theoreme d’Elie Cartan 19.1, Γ(ϕ) est unsous-groupe de Lie (resp. analytique) de G×H, en particulier, l’inclusion
i : Γ(ϕ) ↪→ G×H
est lisse (resp. analytique). Considerons le diagramme commutatif
G
Γ(ϕ) i //
q ++
p33
G×H
πG88 88pppppp
πH && &&NNNNNN
H
ou πG et πH sont les projections canoniques, q := πG ◦ i et p := πH ◦ i. Il suitde l’Exemple 1.18 (vii) (a) que les deux applications πG et πH sont lisses (resp.analytiques); ainsi, la composee q l’est egalement. Observons que q est bijective,d’inverse
q−1 : G −→ Γ(ϕ) , g 7−→ (g, ϕ(g)
).
Cet inverse est manifestement continu, puisque ϕ l’est. Donc, q est un isomorphismede groupes topologiques qui est lisse (resp. analytique), et qui induit une applicationR-lineaire
Lq = Teq : LG −→ LH .
Montrons que Lq est un R-isomorphisme. En combinant le Theoreme 13.3 (pour Get pour H) avec partie (a) ci-dessus (egalement pour G et pour H), on obtient le
21. LES GROUPES CLASSIQUES 77
diagramme symbolique, qui commute, suivant :
LGLq−−−−→ LH
l l{
sous-groupesa 1-parametre de G
}q∗−−−−→
{sous-groupes
a 1-parametre de H
}
‖ ‖{
homomorphismes de groupescontinus R −→ G
}q∗−−−−→
{homomorphismes de groupes
continus R −→ H
}
Ici, les deux applications (d’ensembles) q∗ sont simplement donnees par post-compositionavec l’homomorphisme lisse (resp. analytique) q. Comme q est un isomorphismede groupes topologiques, l’application q∗ du bas est une bijection. Il suit queLq est un R-isomorphisme. Par le Theoreme d’Inversion Locale 10.1, q est undiffeomorphisme local (resp. analytique) en e. Comme q est un homomorphismelisse (resp. analytique), il suit, par un simple argument de translation, que q estun diffeomorphisme local (resp. analytique) partout, i.e. en chaque point de G. Demaniere evidente, un diffeomorphisme local (resp. analytique) partout, qui est enplus bijectif, est un diffeomorphisme global (resp. analytique), ce qui s’applique a q.– Par exemple, la projection de R sur S1 = R/Z est un diffeomorphisme analytiquepartout, mais pas un diffeomorphisme global, puisque non-injectif. – Ainsi, q−1 estun diffeomorphisme (resp. analytique). Pour conclure, il suffit d’observer que
ϕ = πH ◦ q−1 ,
donc est lisse (resp. analytique). ¤Pour conclure sur ce theme, voici le resultat final sur les homomorphismes
continus entre groupes de Lie reels.
Theoreme 20.8. Soit ϕ : G −→ H un homomorphisme de groupes entre deuxgroupes de Lie (resp. analytiques) reels. Alors les proprietes suivantes sont equivalentes :
(i) le graphe Γ(ϕ) est un sous-groupe ferme de G×H;(ii) ϕ est continu;(iii) ϕ est lisse (resp. analytique).
Preuve. Clairement, (iii) implique (ii), et, par le Lemme 20.7 (i) decoule de (ii).Or, l’implication restante, a savoir (i) implique (iii), est justement le contenu de laDeuxieme preuve du Theoreme 16.5 presentee ci-dessus. ¤
21. Les groupes classiques
Grace au Theoreme d’Elie Cartan 19.1, nous allons obtenir de nouveaux ex-emples de groupes de Lie reels, qui seront tous des sous-groupes fermes (pour desraisons evidentes) d’un groupe lineaire GLN (R) ou GLN (C), avec N ∈ N∗ suffisam-ment grand. Ces groupes de Lie reels specifiques sont appeles les groupes classiques.Nous allons egalement introduire d’autres groupes matriciels, qui ne sont en generalpas appeles groupes classiques. Notons que
GLN (R) ⊂ GLN (C) ↪→ GL2N (R) ,

78 1. THEORIE CLASSIQUE DES GROUPES DE LIE
ou l’injection est donnee par
GLN (C) 3 (zk`) =(xk` + iyk`
) 7−→(
(xk`) (-yk`)(yk`) (xk`)
)∈ GL2N (R) ,
ou on suppose que les xk` et yk` sont reels. Ainsi, les groupes classiques peuventetre realises soit comme groupes de matrices reelles, soit comme groupe de matricescomplexes. Pour determiner l’algebre de Lie d’un groupe classique H, nous allonsfaire appel a la description de LH = W donnee dans le Theoreme d’Elie Cartan 19.1,a la Remarque 14.17 et au lemme qui suit; pour la dimension, nous utiliseronsl’egalite dim(H) = dim(LH).
Lemme 21.1. Pour des matrices A ∈Mn(C) et S ∈ GLn(C), on a les proprietes
(i) etA = t(eA);
(ii) eA = eA, ou les barres designent des conjugaisons complexes;(iii) SeAS−1 = eSAS−1
;(iv) det(eA) = eTr(A);(v) si A ∈Mn(R), alors det(eA) > 0;(vi) les points (i), (ii) et (iii) restent valides pour A ∈Mn(H) et S ∈ GLn(H).
Preuve. Pour (i), (ii), (iii) et (vi), il suffit de noter que la transposition, la conju-gaison complexe et la conjugaison par S definissent des applications continues surMn(H), donc elles commutent a la somme du developpement de l’exponentielle, etaux elevations a une puissance qui y apparaissent. Pour (iv), on peut par exemplemettre A sous une forme de Jordan par changement de base, i.e. par conjugai-son, puis prendre l’exponentielle. Il est evident que l’exponentielle d’une matricediagonale par blocs (
A1�
As
)∈Mn(C)
est la matrice diagonale par blocs(eA1
�eAs
)∈ GLn(C) .
En invoquant ce fait et (iii), on peut se ramener au cas d’une matrice de Jordan“monobloc”, i.e. de la forme
( λ 1λ 1� �
λ 1λ
)∈Mn(C) .
Pour une telle matrice, la formule det(eA) = eTr(A) s’obtient par calcul direct deselements diagonaux (uniquement !) de eA. – Remarquons que pour cet argument,il suffit en fait de mettre A sous forme triangulaire. – Finalement, le point (v)decoule de (iv) (pour “≥ 0 ”) et du fait que eA est inversible (pour “ 6= 0”). ¤
Remarque 21.2. Dans les exemples qui suivent, nous allons commettre unabus de terminologie, car nous devrions dire le “groupe lineaire general positif surR de taille n”, “groupe lineaire special sur R de taille n”, et ainsi de suite. Noussupposerons toujours que n > 0.
Exemple 21.3.Le groupe lineaire general positif sur R est le sous-groupe ferme
GL+n (R) :=
{A ∈ GLn(R)
∣∣ det(A) > 0}

21. LES GROUPES CLASSIQUES 79
de GLn(R). Pour ce groupe de Lie reel, on a
LGL+n (R) = LGLn(R) = Mn(R) ,
et sa dimension estdim
(GL+
n (R))
= n2 .
En effet, GL+n (R) est un sous-groupe ouvert de GLn(R).
Exemple 21.4.Le groupe lineaire special sur R est le sous-groupe ferme
SLn(R) :={A ∈ GLn(R)
∣∣ det(A) = 1}
de GLn(R). Pour ce groupe de Lie reel, on a
LSLn(R) ={A ∈Mn(R)
∣∣ Tr(A) = 0}
,
i.e. est constitue des matrices reelles de trace nulle, et sa dimension est
dim(SLn(R)
)= n2 − 1 .
En effet, pour A ∈ Mn(R), on a etA ∈ SLn(R) pour tout t ∈ R ssi det(etA) = 1pour tout t, ssi Tr(tA) = 0 pour tout t, ssi Tr(A) = 0. Il est clair que la dimensionde LSLn(R) est n2 − 1.
Exemple 21.5.Le groupe lineaire special sur C est le sous-groupe ferme
SLn(C) :={A ∈ GLn(C)
∣∣ det(A) = 1}
du groupe de Lie reel GLn(C). Pour ce groupe de Lie reel, on a
LSLn(C) ={A ∈Mn(C)
∣∣ Tr(A) = 0}
,
i.e. est constitue des matrices complexes de trace nulle, et sa dimension (sur R) est
dim(SLn(C)
)= 2n2 − 2 .
En effet, pour A ∈ Mn(C), on a etA ∈ SLn(C) pour tout t ∈ R ssi det(etA) = 1pour tout t, ssi Tr(tA) = 0 pour tout t, ssi Tr(A) = 0. L’enonce sur la dimensionest clair, puisque la R-dimension de Mn(C) est 2n2 et que la condition sur la tracerevient a imposer deux conditions R-lineairement independantes.
Remarque 21.6. On va maintenant montrer que SLn(C) est un sous-groupede Lie complexe du groupe de Lie complexe GLn(C); c’est donc un groupe de Liecomplexe de dimension n2 − 1. En effet, soit U un voisinage ouvert U de On
dans Mn(C), et V un voisinage ouvert de 1In dans GLn(C), tels que l’exponentiellematricielle definissent un diffeomorphisme C-analytique
Exp |U : U≈−→ V
(cf. Theoremes 14.8 et 14.16). On se trouve alors dans la situation de la Defini-tion 18.1 d’une sous-variete complexe SLn(C) de GLn(C), c’est-a-dire, pour toutematrice A ∈ SLn(C), on a
(i) un C-espace vectoriel E := LGLn(C) = Mn(C)(ii) un C-sous-espace vectoriel F := LSLn(C) (decrit ci-dessus) de E(iii) un voisinage ouvert U de On dans E(iv) un voisinage ouvert A·V de A dans GLn(C)(v) un diffeomorphisme C-analytique ϕA := `A ◦ Exp |U : U
≈−→ A·V

80 1. THEORIE CLASSIQUE DES GROUPES DE LIE
verifiant(a) ϕA(On) = A(b) ϕA(U ∩ F ) = V ∩ SLn(C).
Remarque 21.7. Pour certains exemples, comme celui qui va suivre, rappelonsde la Remarque 5.11 l’identification de la R-algebre Mn(H) avec la R-sous-algebre
MH2n(C) =
{(A −B
B A
)∈M2n(C)
∣∣∣∣∣ A, B ∈Mn(C)
}
de M2n(C), et l’identification du groupe de Lie reel GLn(H) avec le sous-groupeferme
GLH2n(C) =
{(A −B
B A
)∈ GL2n(C)
∣∣∣∣∣ A,B ∈Mn(C)
}
du groupe de Lie reel GL2n(C), que nous pouvons a son tour identifier a un sous-groupe ferme du groupe de Lie reel GL4n(R). Remarquons que ces identificationspermettent de parler du determinant d’une matrice quaternionienne sans ambiguıte(et sans faire appel au determinant de Dieudonne), ce qui nous fournit un homo-morphisme de groupes
det : GLn(H) −→ C× .
Or, on peut demontrer que pour Q ∈ GLn(H), on a toujours det(Q) > 0, i.e. c’estun nombre reel strictement positif. On a donc un homomorphisme de groupes
det : GLn(H) −→ R×+(et on peut verifier que c’est le carre du determinant de Dieudonne). Notons aussique pour Q = A + jB ∈Mn(H) avec A,B ∈Mn(C), on a
Tr(Q) = Tr(A) + j Tr(B) alors que Tr
(A −B
B A
)= 2 Re
(Tr(A)
).
Exemple 21.8.Le groupe lineaire special sur H est le sous-groupe ferme
SLn(H) :={Q ∈ GLn(H)
∣∣ det(Q) = 1}
du groupe de Lie reel GLn(H), que l’on identifie avec le sous-groupe ferme
SLH2n(C) := GLH2n(C) ∩ SL2n(C)
de SL2n(C). Pour ce groupe de Lie reel, on a
LSLn(H) ={Q ∈Mn(H)
∣∣ Re(Tr(Q)
)= 0
}
=
{(A−B
B A
)∈MH2n(C)
∣∣∣∣∣ Re(Tr(A)
)= 0
},
et sa dimension estdim
(SLn(H)
)= 4n2 − 1 .
En effet, pour une matrice Z =(
A -BB A
)∈ MH2n(C), on a etZ ∈ SLH2n(C) pour tout
t ∈ R ssi det(etZ) = 1 pour tout t, ssi Tr(tZ) = 0 pour tout t, ssi Tr(Z) = 0, ssiRe
(Tr(A)
)= 0, ssi Re
(Tr(Q)
)= 0 ou Q = A + jB ∈Mn(H) correspond a Z. La
dimension indiquee est deduite du fait que la condition Re(Tr(Q)
)= 0 ne diminue
la dimension sur R que de une unite.

21. LES GROUPES CLASSIQUES 81
Remarque 21.9. Si la formule det(eA) = eTr(A), valide pour A ∈Mn(C), etaitvraie sur Mn(H), on aurait, pour Q ∈ Mn(H), que etQ ∈ SLn(H) pour tout t ∈ Rssi det(etQ) = 1 pour tout t, ssi (!) Tr(tQ) = 0 pour tout t, ssi Tr(Q) = 0, ce quietablirait que la dimension de SLn(H) est 4n2 − 4, ce qui est faux ! En particulier,pour n = 1, la dimension est 3 et on a l’egalite
SL1(H) = S3 ,
comme sous-groupes fermes de H =M1(H). En effet, si q = a+jb ∈ H× = GL1(H),avec a, b ∈ C, alors on a
det(q) = det
(a −b
b a
)= |a|2 + |b|2 = |q|2 ,
qui, en effet, vaut 1 ssi q ∈ S3. Voici un exemple tres simple illustrant le fait que laformule ci-dessus est bel et bien fausse sur les quaternions. Considerons la matriceQ := i π
2n ·1In ∈Mn(H), qui correspond a
Z :=
(i π2n ·1In On
On −i π2n ·1In
)∈MH2n(C) .
On a donc
eZ =
(ei π
2n ·1In On
On e−i π2n ·1In
)∈ GLH2n(C)
de sorte quedet(eQ) = det(eZ) = 1 et eTr(Q) = i .
Exemple 21.10.Le groupe orthogonal est le sous-groupe ferme
O(n) :={A ∈ GLn(R)
∣∣ tA = A−1}
de GLn(R). Pour ce groupe de Lie reel, on a
LO(n) ={A ∈Mn(R)
∣∣ tA = −A}
,
i.e. est constitue des matrices reelles anti-symetriques, et sa dimension est
dim(O(n)
)= n(n−1)
2 .
En effet, pour une matrice A ∈ Mn(R), on a t(esA) = (esA)−1 pour tout s ∈ R ssies tA = e−sA pour tout s ∈ R, ssi tA = −A.
Exemple 21.11.Le groupe orthogonal special est le sous-groupe ferme
SO(n) := O(n) ∩ SLn(R) ={A ∈ GLn(R)
∣∣ tA = A−1 et det(A) = 1}
de GLn(R). Pour ce groupe de Lie reel, on a
LSO(n) = LO(n) ={A ∈Mn(R)
∣∣ tA = −A}
,
i.e. est aussi constitue des matrices reelles anti-symetriques, et sa dimension est
dim(SO(n)
)= n(n−1)
2 .
En effet, l’inclusion LSO(n) ⊆ LO(n) est evidente et l’inclusion reciproque decouledu Lemme 21.1 (v).

82 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Exemple 21.12.Le groupe unitaire est le sous-groupe ferme
U(n) :={A ∈ GLn(C)
∣∣ tA = A−1}
de GLn(C). Pour ce groupe de Lie reel, on a
LU(n) ={A ∈Mn(C)
∣∣ tA = −A}
,
i.e. est constitue des matrices complexes anti-hermitiennes, et sa dimension est
dim(U(n)
)= n2 .
En effet, pour une matrice A ∈ Mn(C), on a t(esA) = (esA)−1 pour tout s ∈ R ssies tA = e−sA pour tout s ∈ R, ssi tA = −A.
Exemple 21.13.Le groupe unitaire special est le sous-groupe ferme
SU(n) := U(n) ∩ SLn(C) ={A ∈ GLn(C)
∣∣ tA = A−1 et det(A) = 1}
de GLn(C). Pour ce groupe de Lie reel, on a
LSU(n) ={A ∈Mn(C)
∣∣ tA = −A et Tr(A) = 0}
,
i.e. est constitue des matrices complexes anti-hermitiennes de trace nulle, et sadimension est
dim(SU(n)
)= n2 − 1 .
En effet, on a LSU(n) = LU(n) ∩ LSLn(C), donc l’egalite indiquee pour l’espacetangent LSU(n). La dimension est bien n2 − 1, et non pas n2 − 2, car si tA = −A,alors Tr(A) ∈ R et peut prendre une valeur reelle arbitraire, donc d’imposer lacondition Tr(A) = 0 diminue la dimension de un exactement par rapport a ladimension de U(n).
Exemple 21.14.Le groupe symplectique est le sous-groupe ferme
Sp(n) :={A ∈ GLn(H)
∣∣ tA = A−1}
de GLn(H). Nous allons identifier ce groupe de Lie reel au sous-groupe ferme
SUH2n := GLH2n(C) ∩U(2n) =
{(A −B
B A
)∈ U(2n)
∣∣∣∣∣ A,B ∈Mn(C)
}
de U(2n) et donc de GL2n(C). A noter que SUH2n est contenu dans SU(2n), d’ou lanotation SUH2n plutot que UH2n; en effet, on a det
(U(2n)
)= S1 et, par la Remar-
que 21.7, det(GLH2n(C)
)= R×+. L’algebre de Lie de Sp(n) est
LSp(n) ={A ∈Mn(H)
∣∣ tA = −A}
,
i.e. est constituee des matrices quaternioniennes anti-hermitiennes, et on va l’iden-tifier avec
LSUH2n =
{(A −B
B A
)∈M2n(C)
∣∣∣∣∣ A,B ∈Mn(C) tq. tA = −A et tB = −B
}.
La dimension de Sp(n) est
dim(Sp(n)
)= 2n2 + n .

22. D’AUTRES GROUPES MATRICIELS “SEMI-CLASSIQUES” 83
En effet, pour une matrice A ∈ Mn(H), on a t(esA) = (esA)−1 pour tout s ∈ Rssi es tA = e−sA pour tout s ∈ R, ssi tA = −A. Pour la dimension, une matricequaternionienne anti-hermitienne possede librement n(n−1)
2 entree quaternioniennesindependantes hors de la diagonale, et librement n entree purement quaternioni-ennes sur la diagonale, donc la dimension est 4 · n(n−1)
2 + 3n = 2n2 + n, commeannonce.
Remarque 21.15. Il est important de noter que le groupe Sp(1) n’est autre quele sous-groupe du groupe multiplicatif des quaternions constitue des quaternions demodule 1. En identifiant H avec R4 comme espace norme, on voit que
Sp(1) ={q ∈ H×
∣∣ |q| = 1}
={~v ∈ R4
∣∣ ||~v|| = 1}
= S3 .
De plus, le groupe SUH2 , auquel on identifie Sp(1), n’est autre que
SUH2 ={ (
a -bb a
) ∈ U(2)∣∣∣ a, b ∈ C
}= SU(2) .
On a donc des identifications canoniques
Sp(1) = S3 ∼= SUH2 = SU(2) .
Exercice 21.16.
(i) Montrer qu’il existe une famille finie P = {P0, Pij}1≤i,j≤n de polynomesreels a 1 + n2 variables, i.e. dans R[∆, Xij ], telle que
O(n) =⋂
P∈PP−1(0) ⊂ R1+n2
.
(ii) Montrer que cette famille P peut etre choisie de telle sorte que les appli-cations (donnees par le produit et le passage a l’inverse)
µ : O(n)×O(n)︸ ︷︷ ︸⊂R1+n2×R1+n2
−→ O(n) ⊂ R1+n2et inv : O(n)︸ ︷︷ ︸
⊂R1+n2
−→ O(n) ⊂ R1+n2
soient polynomiales, dans le sens que leur composition avec chacune des1 + n2 fonctions de coordonnees R1+n2 −³ R soient des polynomes en lescoordonnees de leur domaine, i.e. de O(n)×O(n) et O(n) respectivement.
(iii) Quel est le nombre minimal de polynomes requis dans la famille P poursatisfaire les proprietes (i) et (ii) ?
22. D’autres groupes matriciels “semi-classiques”
Ici, nous allons egalement introduire d’autres groupes matriciels que ceux dela section precedente, et qui ne sont en general pas appeles groupes classiques.Les notations et terminologies que nous allons introduire ne sont pas standard. Anouveau, nous n’ajouterons pas le qualificatif “de taille n” aux noms des differentsgroupes introduits. Les groupes que l’on va considerer ici seront tous des sous-groupes fermes de GLn(F), pour un n donne. Le Theoreme d’Elie Cartan 19.1impliquera que ce sont bel et bien des groupes de Lie reels, et nous fournira une de-scription aisee de leur algebre de Lie, a condition d’employer le lemme fort pratiquesuivant.
Lemme 22.1. Soit X ∈ Mn(F) une matrice, et soient i, j ∈ {1, . . . , n} deuxentiers. S’il existe ε > 0 tel que l’entree (i, j) de la matrice etX ∈ GLn(F) est egalea δij pour tout t ∈ ]−ε, ε[ , alors l’entree (i, j) de la matrice X est nulle.
84 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Preuve. On contrapose. On suppose donc que l’entree (i, j) de X = (xij) estnon-nulle, disons λ := xij ∈ F×. Puisque t ∈ Z(F), on a
etX = 1In + tX +O(|t|2) ,
ou O(|t|2) designe une fonction analytique de la variable reelle t, a valeurs dansMn(F), qui, en norme (arbitraire), decroıt comme |t|2 pour t tendant vers zero.Ainsi, il existe t0 > 0 suffisamment petit par rapport a |λ|, tel que pour 0 < t < t0,l’entree (i, j) de etX est plus proche de δij + tλ (l’entree (i, j) de 1In + tX) que deδij (l’entree (i, j) de 1In), et en particulier est distincte de δij . ¤Deuxieme preuve du Lemme 22.1. On commence par considerer la compositiond’applications analytiques
F : ]−ε, ε[−→ GLn(F) ↪→Mn(F) , t 7−→ etX .
Par la Remarque 14.14, on a F ′(0) = X. Par hypothese, la (i, j)-ieme composanteFij de F est une fonction constante a valeurs dans F. Il s’ensuit que F ′ij(0), quin’est autre que la (i, j)-ieme composante de F ′(0), est nulle, et donc Xij = 0. ¤
Exemple 22.2.Le groupe diagonal sur F est le sous-groupe ferme
Dn(F) :=(F×�F×
)
de GLn(F) constitue de toutes les matrices diagonales inversibles. L’algebre de Liede Dn(F) est
LDn(F) =( F
�F
),
i.e. est constituee de toutes les matrices diagonales (pas necessairement inversibles).La dimension de Dn(F) est
dim(Dn(F)
)= dF · n .
Exemple 22.3.Le groupe diagonal special sur F est le sous-groupe ferme
SDn(F) := Dn(F) ∩ SLn(F)
de GLn(F) constitue de toutes les matrices diagonales inversibles, de determinant(de Dieudonne si F = H, cf. Remarque 21.7) egal a 1. L’algebre de Lie de SDn(F)est
LSDn(F) = LDn(F) ∩ LSLn(F) ,
i.e. est constituee de toutes les matrices diagonales (pas necessairement inversibles)de trace nulle si F = R ou C, et de partie reelle de la trace egale a zero si F = H.La dimension de SDn(F) est
dim(SDn(F)
)= dF · n− dimR
(Z(F)).
Exemple 22.4.Le groupe triangulaire sur F est le sous-groupe ferme
Trin(F) :=
F× F − − F0 �� || �� || � F0 − − − F×

22. D’AUTRES GROUPES MATRICIELS “SEMI-CLASSIQUES” 85
de GLn(F) constitue de toutes les matrices triangulaires superieures inversibles.L’algebre de Lie de Trin(F) est
LTrin(F) =
F F − − F0 �� || �� || � F0 − − − F
,
i.e. est constituee de toutes les matrices triangulaires superieures (pas necessairementinversibles). La dimension de Trin(F) est
dim(Trin(F)
)= dF · n(n+1)
2 .
Exemple 22.5.Le groupe triangulaire special sur F est le sous-groupe ferme
STrin(F) := Trin(F) ∩ SLn(F)
de GLn(F) constitue de toutes les matrices triangulaires superieures inversibles, dedeterminant (de Dieudonne si F = H, cf. Remarque 21.7) egal a 1. L’algebre de Liede STrin(F) est
LSTrin(F) = LTrin(F) ∩ LSLn(F) ,
i.e. est constituee de toutes les matrices triangulaires superieures (pas necessairementinversibles) de trace nulle si F = R ou C, et de partie reelle de la trace egale a zerosi F = H. La dimension de STrin(F) est
dim(STrin(F)
)= dF · n(n+1)
2 − dimR(Z(F)
).
Remarque 22.6. Bien sur, dans les deux exemples precedents, on peut rem-placer les matrices triangulaires superieures par les matrices triangulaires inferieures;les resultats sont parfaitement similaires.
Definition 22.7. Une matrice X ∈ Mn(F) est nilpotente s’il existe un entierN ∈ N∗ tel que XN = On. Une matrice A ∈ GLn(F) est unipotente si la matriceA− 1In ∈Mn(F) est nilpotente.
Remarque 22.8. Si A ∈ GLn(C) (par exemple, A pourrait etre reelle) estunipotente, alors les valeurs propres de A satisfont une equation polynomiale de laforme (λ − 1)N = 0 dans C, donc elle sont toutes egales a 1. Donc, par l’algebrelineaire (ou par le Theoreme de Jordan, pour un meilleur resultat), A est conjugueedans GLn(C) a une matrice triangulaire superieure avec des 1 sur la diagonale; unetelle matrice est appelee unitriangulaire (meme lorsque les coefficients sont quater-nioniens). Par ailleurs, notons qu’une matrice triangulaire superieure inversible eta coefficients dans F est unipotente ssi elle est unitriangulaire.
Exemple 22.9.Le groupe unitriangulaire sur F est le sous-groupe ferme
UTn(F) :=
1 F − − F0 �� || �� || �F0 − − − 1
de GLn(F) constitue de toutes les matrices unitriangulaires, i.e. triangulaires superieuresinversibles avec des 1 sur la diagonale. L’algebre de Lie de UTn(F) est
LUTn(F) =
0 F − − F0 �� || �� || � F0 − − − 0
,
86 1. THEORIE CLASSIQUE DES GROUPES DE LIE
i.e. est constituee de toutes les matrices triangulaires superieures avec des zeros surla diagonale. La dimension de UTn(F) est
dim(UTn(F)
)= dF · n(n−1)
2 .
Exemple 22.10.Le groupe de Heisenberg sur F est le sous-groupe ferme
Heisn(F) :=
1 F F − F F0 1 0 − 0 F| ��� | || �� 0 F| � 1 F0 − − − 0 1
de GLn(F). L’algebre de Lie de Heisn(F) est
LHeisn(F) =
0 F F − F F0 0 0 − 0 F| ��� | || �� 0 F| � 0 F0 − − − 0 0
.
La dimension de Heisn(F) est
dim(Heisn(F)
)= dF · (2n− 3) .
Notons que, dans la litterature, la terminologie “groupe de Heisenberg” designeparfois le groupe Heis3(R) (ou le groupe Heis3(Z), qui est definit de facon evidente).
23. Les groupes de Lie abeliens connexes
Dans cette section, nous allons classifier les groupes de Lie abeliens connexes.Dans les enonces qui suivent, les entiers apparaissant sont a chaque fois uniquespour des raisons evidentes.
Theoreme 23.1. Pour un groupe de Lie reel connexe G, les proprietes sui-vantes sont equivalentes
(i) G est commutatif;(ii) exp: LG −→ G est un homomorphisme de groupes;(iii) G ∼= LG/Γ, ou Γ est un sous-groupe discret de LG;(iv) G ∼= T` × Rm pour des entiers `,m ∈ N.
Avant la demonstration, voici quelques observations utiles.
Remarque 23.2. Aux points (iii) et (iv) de l’enonce du Theoreme 23.1, lesisomorphismes indiques sont des isomorphismes de groupes de Lie reels (ou, pour(iii), on munit le quotient LG/Γ de la structure de groupe de Lie reel evidente (voiraussi la remarque suivante). Il en ira de meme dans les corollaires qui suivent.
Remarque 23.3. Comme groupe abelien (en fait comme R-espace vectoriel),l’algebre de Lie LG est isomorphe a Rn, ou n := dim(G), et par consequent, unsous-groupe discret Γ de LG est isomorphe a Z` pour un ` ≤ n unique. On peutmeme trouver un isomorphisme de LG avec Rn pour lequel l’image de Γ coıncideavec Z` ⊂ R` × Rn−` = Rn, de sorte que le groupe quotient LG/Γ est isomorpheau groupe Rn/Z` = (R` × Rn−`)/Z` ∼= T` × Rn−`.

23. LES GROUPES DE LIE ABELIENS CONNEXES 87
Remarque 23.4. Bien sur, lorsque les conditions equivalentes du Theoreme 23.1sont satisfaites, l’exponentielle exp est non seulement un homomorphisme de groupe,mais un homomorphisme (surjectif) de groupes de Lie reels. Notons aussi que dansce cas, exp coıncide (a isomorphisme pres) avec l’application de revetement uni-versel de G ∼= T` × Rm, que G ∼= LG ∼= Rn et que π1(G) ∼= Ker(exp) ∼= Γ dans lesnotations du theoreme (comparer avec l’Exemple 14.5).
Remarque 23.5. Rappelons que si G est un groupe, alors le produit dans G,i.e. µ : G×G −→ G, est un homomorphisme de groupes ssi G est commutatif. Ainsi,pour un groupe de Lie G sur K, le produit µ est un homomorphisme de groupes deLie sur K ssi G est commutatif.
Preuve du Theoreme 23.1.(i) =⇒ (ii) : Fixons X, Y ∈ LG et considerons l’application
θ : R −→ G , t 7−→ λX(t)·λY (t) = exp(tX)·exp(tY ) ,
qui n’est autre que la composition
R ∆ // R× R λX×λY // G×Gµ // G ,
ou ∆ est l’application diagonale qui applique t sur (t, t), et µ est le produit dans G.L’application θ est lisse et, comme G est commutatif, c’est un homomorphismede groupes (cf. Remarque 23.5), donc c’est un sous-groupe a 1-parametre de G.Comme T0∆ = ∆ (sous les identifications habituelles), de la Proposition 15.1 ilresulte que
θ′(0) = T(e,e)µ ◦ T(0,0)(λX × λY )︸ ︷︷ ︸=T0λX×T0λY
◦T0∆︸︷︷︸=∆
(E0) = T(e,e)µ(X, Y ) = X + Y .
Par le Theoreme 13.3, on a necessairement θ = λX+Y , d’ou
exp(X + Y ) = λX+Y (1) = θ(1) = exp(X)·exp(Y ) ,
ce qui montre bien que exp est un homomorphisme de groupes.
(ii) =⇒ (i) : Comme exp est un diffeomorphisme local en 0 (cf. Theoreme 14.8),son image, i.e. exp(LG), est un voisinage de e dans G. Comme, par hypothese,exp est un homomorphisme de groupes, exp(LG) est un sous-groupe de G. Encombinant ces deux observations avec le fait que G est connexe, on deduit de laProposition 3.10 que exp(LG) = 〈exp(LG)〉 = G, i.e. que exp est un epimorphismede groupes, donc G est, tout comme LG, un groupe commutatif.
(ii) =⇒ (iii) : L’enonce sous-entend, evidemment, que Γ = Ker(exp). Il suffitdonc de montrer que ce noyau est discret. Par le Theoreme 14.8, exp est undiffeomorphisme local en 0, donc il existe un voisinage ouvert U de 0 dans LGtel que la restriction exp |U est injective. Il suit que Ker(exp)∩U = {0}, donc 0 estun point ouvert dans Ker(exp). Par un argument de translation evident, Ker(exp)est discret.
(iii) ⇐⇒ (iv) : C’est un resultat classique et relativement elementaire sur les sous-groupes discrets de Rn (cela revient essentiellement au contenu de la Remarque 23.3).
(iv) =⇒ (i) : C’est absolument limpide ! ¤

88 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Definition 23.6. Un reseau dans un espace euclidien E sur K de dimension n,i.e. un K-espace vectoriel isomorphe a Kn, est un sous-groupe discret de rang maxi-mal, i.e. isomorphe a ZdK·n; c’est, de maniere equivalente, un sous-groupe discret Λtel que E/Λ est de volume fini, ou encore, tel que E/Λ est compact.
Corollaire 23.7. Pour un groupe de Lie reel compact connexe G, les pro-prietes suivantes sont equivalentes
(i) G est commutatif;(ii) exp: LG −→ G est un homomorphisme de groupes;(iii) G ∼= LG/Λ, ou Λ est un reseau dans LG;(iv) G ∼= Tn, pour un entier n ∈ N.
Preuve. Cela decoule immediatement du Theoreme 23.1. ¤
Corollaire 23.8. Si G est Lie complexe connexe et abelien, alors, commegroupe de Lie reel, G ∼= T` × Rm pour des entiers `,m ∈ N.
Preuve. A nouveau, cela decoule directement du Theoreme 23.1. ¤
Remarque 23.9. Dans le Corollaire 23.8, l’isomorphisme indique, c’est-a-direG ∼= T` × Rm, est seulement un isomorphisme de groupes de Lie reels (sous-jacents). Il y a pour cela deux raisons. D’abord, les dimensions ` et m ne sontpas necessairement paires ! En fait, pour le groupe de Lie complexe abelien C×, ona des isomorphismes de groupes de Lie reels
C× ∼= C/Z ∼= R2/Z ∼= S1 × R ,
l’inverse du premier etant fournit par l’exponentielle complexe (et c’est egalementun C-isomorphisme). La seconde raison est que lorsque n 6= 0, le tore T2n possedeune infinite de structures de groupe de Lie complexe differentes, i.e. non deux-a-deux isomorphes, mais dont les groupes de Lie reels sous-jacents sont tous iso-morphes. Ces structures sont toutes obtenues en quotientant Cn par un reseau Λarbitraire, i.e. comme un quotient Cn/Λ. Une variete abelienne de dimension n estun tel quotient Cn/Λ ou Λ satisfait des “proprietes de symetries additionnelles”.Plus precisement, Λ doit satisfaire les conditions suivantes : il existe une Z-base(e1, . . . , e2n) de Λ, i.e. Λ =
⊕2nj=1 Z·ej , telle que e1, . . . , en forment une C-base de
Cn, pour laquelle la matrice AΛ := (ask) ∈Mn(C), donnee par
en+k =n∑
s=1
ask ·es pour k = 1, . . . , n ,
est symetrique et sa partie imaginaire Im(AΛ) ∈ Mn(R) est definie positive. Onmontre assez facilement que tout tore complexe de dimension 1, i.e. tout C/Λ,est une variete abelienne. A partir de la dimension 2, “presque la totalite” destores complexes ne sont pas des varietes abeliennes (elles jouissent donc bien de“symetries additionnelles”). Finalement mentionnons qu’un groupe de Lie complexeabelien et connexe de dimension complexe 1 est C-isomorphe a un des groupessuivants :
C , C× ∼= C/Z et A(z) := C/(Z⊕ Z·z)
,
ou z ∈ C verifie Im(z) > 0, i.e. z ∈ H2 ≈ SL2(R)/
SO(2) (le demi-plan hyperboliquereel). De plus, pour z1, z2 ∈ H2, les groupes de Lie complexes A(z1) et A(z2) sont

24. LES GROUPES DE LIE ABELIENS PRESQUE CONNEXES 89
isomorphes ssi il sont sur la meme SL2(Z)-orbite, ou SL2(Z) agit sur H2 via l’action(appelee modulaire) donnee par
SL2(Z)×H2 −→ H2 ,( (
a bc d
), z
)7−→ az+b
cz+d .
Les classes de C-isomorphisme de groupes de Lie de la forme A(z) sont donc enbijection avec l’espace des orbites SL2(Z)
∖H2 ∼= SL2(Z)∖
SL2(R)/
SO(2). Pour ter-miner, exhibons un C-isomorphisme entre les varietes abeliennes A(z) et A
(az+bcz+d
),
pour z ∈ H2 et(
a bc d
) ∈ SL2(Z). D’abord, l’application
C/(Z⊕ Z· az+b
cz+d
) ∼=−→ C/(Z·(cz + d)⊕ Z·(az + b)
), [ ζ ] 7−→ [
(cz + d)·ζ]
est un C-isomorphisme de groupes de Lie, comme indique, car cz + d ∈ H2, doncest non-nul. Ensuite, on a evidemment les egalites Z ⊕ Z · z = Z · z ⊕ Z · 1 etZ·(cz + d)⊕ Z·(az + b) = Z·(az + b)⊕ Z·(cz + d). De plus, l’egalite
α·(az + b) + β ·(cz + d) = γ ·z + δ ·1 pour (γ δ) := (α β)·( a bc d
),
valable pour α, β ∈ Z, et le fait que la matrice(
a bc d
)est entiere et inversible, i.e.
est dans GL2(Z), implique que les reseaux Z⊕ Z·z et Z·(cz + d)⊕ Z·(az + b) de Csont egaux. Au total, on voit que l’isomorphisme cherche est donne par
C/(Z⊕ Z· az+b
cz+d
) ∼=−→ C/(Z⊕ Z·z)
, [ ζ ] 7−→ [(cz + d)·ζ]
.
24. Les groupes de Lie abeliens presque connexes
Dans cette section, nous allons classifier les groupes de Lie abeliens presqueconnexe.
Definition 24.1. Un groupe topologique localement connexe par arcs G (commepar exemple un groupe de Lie sur K) est presque connexe s’il possede un nombrefini de composantes connexes, i.e. si son groupe des composantes π0(G) = G/Ge
est fini.
Remarque 24.2. De maniere generale, nous considerons un groupe fini commeetant discret si, dans un enonce, sa topologie intervient. Ce sera le cas dans letheoreme et le corollaire contenus dans cette section.
Theoreme 24.3. Pour un groupe de Lie reel presque connexe G, les proprietessuivantes sont equivalentes
(i) G est commutatif;(ii) G ∼= T` × Rm ×A ou `,m ∈ N et A est un groupe abelien fini.
De plus, G est compact ssi m = 0.
Remarque 24.4. Au point (ii) de l’enonce du Theoreme 24.3, l’isomorphismeindique est un isomorphisme de groupes de Lie reels.
Remarque 24.5. Il existe des groupes de Lie non-commutatifs compacts et desnon-compacts (meme complexes et presque connexes) pour lesquels l’exponentielleexp est un homomorphisme. L’exemple le plus simple dans le cas reel compact estle groupe O(2) ∼= SO(2)oZ/2 ∼= S1oZ/2, ou le generateur de Z/2 agit par passagea l’inverse sur SO(2) et sur S1. Pour les cas complexes (et donc reels) compact etnon-compact, on pourra prendre
(T2 × T2)o Z/2 et (C× C)o Z/2 ,

90 1. THEORIE CLASSIQUE DES GROUPES DE LIE
ou chaque copie de T2 est vue comme etant C/(Z ⊕ Z ·i), et ou le generateur de
Z/2 agit, dans les deux cas, en echangeant les facteurs.
Preuve du Theoreme 24.3.(i) =⇒ (ii) : Nous allons commencer par aborder un cas plus general. Soit donc Gun groupe de Lie reel commutatif (pas necessairement presque connexe). CommeG est suppose commutatif, il en va de meme de sa composante de neutre Ge. Parle Theoreme 23.1, on a un isomorphisme
Ge∼= T` × Rm .
Comme Ge ¢ G, on a une extension de groupes
0 −→ T` × Rm −→ G −→ π0(G) −→ 0 ,
ou π0(G) = G/Ge est le groupe des composantes de G. Ce quotient de G estforcement abelien, puisque G l’est, et est denombrable puisque G est, comme toutevariete topologique, suppose a base denombrable (sinon, G aurait une infinite non-denombrable de composantes connexes). Maintenant, posons A := π0(G). Parla theorie classique des extensions centrales de groupes, les classes d’equivalences(dans un sens specifique) d’extensions du groupe (abelien) A par le groupe abelienT` × Rm sont classifiees (i.e. sont en bijection canonique) avec le deuxieme groupede cohomologie
H2(A;T` × Rm) ,
ou A agit trivialement sur les coefficients T` × Rm. Le zero de ce groupe de co-homologie correspond a l’extension triviale, i.e. au produit direct T` × Rm ×A. Anoter aussi que deux classes de cohomologie distinctes peuvent correspondre a desgroupes (situes au milieu dans l’extension) isomorphes, alors que les extensions sontnon-equivalentes. On a des isomorphismes evidents
H∗(A;T` × Rm) ∼= H∗(A;T`)⊕H∗(A;Rm) ∼= H∗(A; S1)` ⊕H∗(A;R)m .
La suite exacte courte 0 −→ Z −→ R −→ S1 −→ 0 de A-modules triviaux induitla longue suite exacte en cohomologie suivante :
. . . −→ H2(A;R) −→ H2(A; S1) −→ H3(A;Z) −→ H3(A;R) −→ . . .
Ces outils devraient en principe permettre d’aborder serieusement le calcul dugroupe H2(A;T` × Rm). Par exemple, si A ∼= Z2, alors ce groupe est isomor-phe a T` × Rm. Malheureusement, dans le cas general, i.e. dans le cas ou A n’estpas fini, l’auteur ne sait pas calculer ce groupe en toute generalite (et une foiscalcule, lorsqu’il s’avere etre non-nul – ce qui arrive parfois –, il faudrait encoreverifier si les extensions correspondants a un element non-nul porte effectivementune structure de groupe de Lie reel). Supposons donc que G est presque connexe,i.e. que A est fini. Dans ce cas, les groupes Hn(A;R`) sont nuls pour n > 0 par unresultat classique de cohomologie. On a donc, pour n ≥ 1, des isomorphismes
Hn(A; S1) ∼= Hn+1(A;Z) et Hn(A;T` × Rm) ∼= Hn+1(A;Z)` .
Comme A est une somme directe finie de groupes cycliques finis, il est relativementaise de verifier que H2n+1(A;Z) = 0 pour tout n ∈ N. Au total, on en deduitH2(A;T` ×Rm) est nul, donc que G est isomorphe a T` ×Rm×, i.e. a Ge × π0(G).
(ii) =⇒ (i) : C’est evident. ¤

25. LA REPRESENTATION ADJOINTE 91
Remarque 24.6. Dans le cas ou G est un groupe de Lie reel abelien arbitraire,i.e. pas necessairement presque connexe, la demonstration precedente contient, sursa structure, quelques bribes d’informations utiles, mais lacunaires.
Corollaire 24.7. Si G est Lie complexe presque connexe et abelien, alors,comme groupe de Lie reel, G ∼= T`×Rm×A ou `, m ∈ N et A est un groupe abelienfini. De plus, G est compact ssi m = 0.
Preuve. Le resultat suit du Theoreme 24.3. ¤
25. La representation adjointe
Nous allons etudier une representation tres particuliere et tres naturelle d’ungroupe de Lie sur K, appelee la representation adjointe. Elle nous permettrad’etablir bon nombre de resultats generaux sur les groupes de Lie, et en particulier,on l’exploitera pour enfin definir une structure de K-algebre de Lie sur LG.
Etant donne un espace vectoriel E de dimension finie sur F (a gauche si F = H),rappelons la Remarque 5.18 concernant la definition de GLF(E) et sa structure degroupe de Lie sur Z(F).
Definition 25.1. Une representation (lineaire) d’un groupe topologique G estun homomorphisme de groupes topologiques
% : G −→ GLK(E) ,
ou E est un espace vectoriel de dimension finie sur K (pour preciser si K = R ou C,on parlera de representation reelle ou de representation complexe respectivement).La representation % est appelee fidele si elle est injective, i.e. si Ker(%) = {e}.
Remarque 25.2. Si E = Kn, on identifie GLK(E) avec GLn(K), de sorte qu’onvoit % comme un homomorphisme de groupes topologiques % : G −→ GLn(K).
Remarque 25.3. Si G est un groupe de Lie sur K, alors, le Theoreme 16.5nous apprend qu’une representation de G est lisse au sens des reels, et meme R-analytique si G est analytique (comme par exemple lorsque K = C).
Dans le contexte des representations, le resultat suivant peut s’averer utile.
Proposition 25.4. Supposons que G est un groupe topologique (resp. un groupede Lie sur K, resp. un groupe de Lie analytique sur K). Soient E un F-espace vec-toriel (a gauche si F = H) de dimension finie et % : G −→ GLF(E) un homomor-phisme de groupes. Alors % est continu (resp. lisse, resp. analytique) ssi il existeun voisinage ouvert U de e dans G, et un voisinage V de 0 dans E, tels que, pourtout ~v ∈ V , l’application
%~v|U : U −→ E , g 7−→ %~v(g) := %(g)·~vest continue (resp. lisse, resp. analytique).
Preuve. Dans cette demonstration, par pure convenance, nous dirons “reguliere”pour dire “continue” (resp. “lisse”, resp. “analytique”). D’abord, l’implicationindirecte est claire, car si % est reguliere, alors, pour ~v ∈ E, il suffit de remarquerque
%~v : Gincl // G× {~v} incl // G× E
% // GLF(E)× E• // E ,

92 1. THEORIE CLASSIQUE DES GROUPES DE LIE
ou “ •” est l’action naturelle (qui est Z(F)-analytique), pour en deduire que %~v estreguliere, donc %~v|U egalement. Passons a l’implication directe. En premier lieu,par linearite de %(g) avec g ∈ G, %~v|U est reguliere pour tout ~v ∈ E (on utilise icique V · F = E). Maintenant, choisissons une F-base (e) := (~e1, . . . , ~en) de E, oun := dimF(E). Cela nous fournit un isomorphisme de groupes de Lie analytiquessur Z(F), a savoir
GLF(E) ∼= GLn(F) .
Le fait que les fonctions %~e1 |U , . . . , %~en|U sont regulieres implique que pour tout
g ∈ U , les n2 entrees de la matrice Φg ∈ GLn(F) correspondant a %(g) ∈ GLF(E)sont regulieres (car les n composantes d’un vecteur de E dans la base (e) dependentZ(F)-analytiquement du vecteur). Donc, l’application
%|U : U −→ GLF(E) , g 7−→ %(g)
est reguliere. Finalement, si h ∈ G, alors hU est un voisinage ouvert de h dans G,et on a
%|hU : hU`h−1 // U
%|U // GLF(E)`%(h) // GLF(E) ,
ce qui montre que % est reguliere au voisinage de tous les points de G, donc elle estreguliere “tout court”, ce qui acheve la demonstration. ¤
Remarque 25.5. On peut legerement ameliorer la Proposition 25.4, tout engardant la meme preuve, en supposant seulement que V est une partie F-generatricede E, i.e. telle que V · F = E (et, bien sur, un voisinage ouvert de 0 fait l’affaire).A noter qu’il n’est pas necessaire de supposer V ouvert dans E, meme dans le cas“lisse” et le cas “analytique”; par exemple, une sphere de rayon positif (pour unemetrique arbitraire) pourrait faire l’affaire.
Pour la suite de cette section, fixons un groupe de Lie G sur K.
Remarque 25.6. Les conjugaisons fournissent un homomorphisme de groupe
c : G −→ AutK(G) , g 7−→ cg ,
ou cg est l’automorphisme interieur
cg : G −→ G , x 7−→ cg(x) := gxg−1 .
Ici, AutK(G) designe le groupe des automorphismes de groupes de Lie sur K de G,i.e. le groupe de tous les automorphismes de G qui sont en meme temps desdiffeomorphismes sur K. Remarquons qu’il est clair que c est un homomorphismede groupes, i.e. que cgh = cg ◦ ch pour tous g, h ∈ G.
Definition 25.7. La representation adjointe de G est la representation donneepar
Ad: G −→ GLK(LG) , g 7−→ Ad(g) := Lcg ,
ou Lcg est la differentielle en e de cg, i.e.
Lcg = Tecg : LG −→ LG .
Si g ∈ G et X ∈ LG, on ecrit souvent Ad(g)X ou Ad(g)·X au lieu de Ad(g)(X).
Remarque 25.8. La representation adjointe est bien un homomorphisme degroupes, puisque
Ad(gh) = L(cgh) = L(cg ◦ ch) = Lcg ◦ Lch = Ad(g) ◦Ad(h) ,

25. LA REPRESENTATION ADJOINTE 93
pour tous g, h ∈ G. Il nous faut, selon la definition d’une representation, encoreverifier que Ad est continue. La proposition suivante montre qu’elle est en fait lisse.
Proposition 25.9. La representation adjointe
Ad = AdG : G −→ GLK(LG) , g 7−→ Ad(g) = Lcg ,
est un homomorphisme de groupes de Lie sur K, en particulier, elle est lisse (etmeme analytique si G est analytique).
Avant d’etablir cette proposition, voici un resultat preparatoire fort utile.
Lemme 25.10. Pour g ∈ G et X ∈ LG, on a l’egalite
Ad(g)·X =d
dt t=0g ·exp(tX)·g−1 .
Preuve. Par le Theoreme 14.3, l’application
K −→ G , t 7−→ exp(tX)
est une courbe globale sur G, tangente a X en e. Par la Proposition 8.4, on a
Ad(g)·X = Te(cg)(X) =d
dt t=0cg
(exp(tX)
)=
d
dt t=0g ·exp(tX)·g−1 ,
d’ou le resultat. ¤Preuve de la Proposition 25.9. D’abord, considerons l’application
Φ: G×K× LG −→ G , (g, t, X) 7−→ g ·exp(tX)·g−1.
Montrons que Φ est lisse (resp. analytique). Il suffit pour cela d’observer que Φ estla composition des applications lisses (resp. analytiques)
G×K× LGidG × • // G× LG
idG × exp // G×G∇×idG // G×G×G
ν // G ,
avec “ •” designant l’action lineaire de K sur LG, et avec ∇(g) := (g, g−1) etν(g, h, x) := gxh pour g, x, h ∈ G; pour etre tres complet, on a
∇ = (idG, inv) et ν = µ ◦ (idG×µ) ◦ (idG×τ) ,
ou τ est le diffeomorphisme (resp. analytique) de G × G qui echange les deuxfacteurs, ce qui montre bien que ces applications sont lisses (resp. analytiques). Ilsuit du Corollaire 9.3 que la differentielle partielle, en 0, de Φ par rapport a t estegalement lisse (resp. analytique), i.e. l’application
∂
∂t t=0Φ: G× LG −→ TG , (g, X) 7−→ ∂
∂t t=0g ·exp(tX)·g−1
est lisse (resp. analytique) et prend toute ses valeurs dans LG = TeG ⊆ TG. Parconsequent, en appliquant le Lemme 25.10 (ou la differentielle est totale – paropposition a partielle – car X y est considere comme etant fixe) en combinaisonavec la Remarque 18.2 (v), on voit que l’application
G× LG −→ LG , (g, X) −→ Ad(g)·Xest lisse (resp. analytique). Ainsi, la Proposition 25.4 s’applique – avec F := K,E := LG, % := Ad, U := G et V := LG – pour nous dire que Ad est une applicationlisse (resp. analytique). ¤
Voici une autre formule utile concernant la representation adjointe.

94 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Proposition 25.11. Si g ∈ G et X ∈ LG, alors, dans G, on a la formule
exp(Ad(g)·X)
= g exp(X)g−1 .
Preuve. C’est un cas particulier de la naturalite de l’exponentielle, i.e. qu’on a
exp ◦Lcg = cg ◦ exp ,
voir le Theoreme 14.20 (applique a l’endomorphisme cg de G). ¤
Remarque 25.12. Soit G un groupe de Lie complexe, et soit GR le groupe deLie analytique reel sous-jacent. On a alors, de maniere evidente, la representationadjointe de GR est donnee par la composition
AdGR = incl ◦AdG : G −→ GLC(LG) ↪→ GLR(LG) .
ou, pour etre precis, GLR(LG) designe GLR(LGR).
Rappelons que la Remarque 18.5 nous dit en particulier que si G est un groupede Lie sur K et si H en est un sous-groupe de Lie sur K, alors LH s’identifie defacon canonique a un K-sous-espace vectoriel de LG. Rappelons egalement, par leTheoreme d’Elie Cartan 19.1 que si H est un sous-groupe ferme d’un groupe de Liereel, alors H est un sous-groupe de Lie reel de G.
Proposition 25.13. Soit H un sous-groupe de Lie sur K d’un groupe de LieG sur K. Alors, sous l’identification de LH avec un K-sous-espace vectoriel de LG,pour h ∈ H et X ∈ LH, on a
AdH(h)X = AdG(h)X ,
c’est-a-dire, AdH(h) = AdG(h)|LH (avec le co-domaine LH ⊆ LG).
Preuve. Cela decoule des definitions. En effet, si h ∈ H, alors la conjugaison cH
h
par h dans H est la restriction, a H, de la conjugaison cG
h par h dans G (avec leco-domaine H); donc, on a
AdH(h) = LcH
h = L(cG
h |H) = (LcG
h)|LH = AdG(h)|LH
dans EndK(LH). ¤
Theoreme 25.14. Soit G un sous-groupe ferme du groupe lineaire GLn(F).Alors, sous l’identification de LG avec un sous-espace vectoriel reel de Mn(F)donnee par le Theoreme d’Elie Cartan 19.1, pour g ∈ G et X ∈ LG, on a
Ad(g)·X = gXg−1 .
Preuve. D’apres la Proposition 25.13, il suffit de considerer le cas G = GLn(F), con-sidere comme groupe de Lie reel. En combinant le Lemme 25.10 et le Theoreme 14.16,on obtient que
Ad(g)·X =d
dt t=0g exp(tX)g−1 =
d
dt t=0getXg−1 = gXetXg−1
t=0= gXg−1 ,
ce qui etablit le resultat (voir aussi la Remarque 14.14). ¤
Theoreme 25.15. Soit E un F-espace vectoriel de dimension finie (a gaucheou a droite si F = H). Alors, pour ϕ ∈ GLF(E) et Ψ ∈ LGLF(E) = EndF(E), on a
Ad(ϕ)·Ψ = ϕ ◦Ψ ◦ ϕ−1 .
25. LA REPRESENTATION ADJOINTE 95
Preuve. Par choix d’une F-base de E, on peut se ramener au Theoreme 25.14 (voiraussi la Remarque 5.18). Une autre methode consiste a imiter la preuve de cetheoreme-la et d’invoquer le Theoreme 14.19 pour obtenir
Ad(ϕ)·Ψ =d
dt t=0ϕ ◦ etΨ ◦ ϕ−1 = ϕ ◦Ψ ◦ etΨ ◦ ϕ−1
t=0= ϕ ◦Ψ ◦ ϕ−1 ,
d’ou le resultat. ¤
Proposition 25.16. Si G est un groupe de Lie connexe sur K, le noyau de larepresentation adjointe est le centre de G, i.e.
Ker(Ad) = Z(G) .
En particulier, si G est a centre trivial, alors la representation adjointe est fidele.
Preuve. L’inclusion Z(G) ⊆ Ker(Ad) est immediate; en effet, si g ∈ Z(G), alorscg = idG et donc Ad(g) = Lcg = Lidg = idLG. Pour l’inclusion reciproque, soitg ∈ Ker(Ad); on a alors
Lcg = Ad(g) = idLG = LidG ,
donc, par connexite de G et par fidelite du foncteur L(−) pour les groupes de Lieconnexes, cf. Theoreme 16.1, on a cg = idG, ce qui revient a dire que g est centraldans G. ¤
Corollaire 25.17. Si G est un groupe de Lie connexe sur K, alors le groupequotient G/Z(G) est isomorphe (comme groupe abstrait, i.e. en oubliant la topolo-gie) a un sous-groupe de GLn(K), ou n est la dimension de G sur K.
Preuve. C’est une consequence du Premier Theoreme d’Isomorphisme. ¤
Definition 25.18. Si G est un groupe de Lie connexe sur K, le groupe quotientPG := G/Z(G) est parfois appele groupe de type adjoint de G ou groupe adjointde G. Si G est a centre trivial, ont dit que G est de type adjoint.
Remarque 25.19. Comme on le verra plus tard, si G est un groupe de Lieconnexe sur K, alors PG porte une structure canonique de groupe de Lie connexesur K, analytique si G est analytique, voir le Theoreme 35.10 plus loin.
Remarque 25.20. Si G est un groupe de Lie compact connexe sur K, onpeut montrer que son groupe adjoint PG = G/Z(G) est a centre trivial (voir leCorollaire 3.26 pour le cas ou le centre de G est discret, et donc fini).
Proposition 25.21. La representation adjointe est naturelle, plus precisement,si ϕ : G −→ H est un homomorphisme de groupes de Lie sur K, alors, pour toutg ∈ G, le diagramme
LGAdG(g) //
Lϕ
²²
LG
Lϕ
²²LH
AdH(ϕ(g)) // LH
commute, en d’autres termes, si g ∈ G et X ∈ LG, alors on a
Lϕ(AdG(g)·X)
= AdH
(ϕ(g)
)·Lϕ(X) .

96 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Preuve. Si g, x ∈ G, on a les egalites
ϕ ◦ cG
g (x) = ϕ(gxg−1) = ϕ(g)·ϕ(x)ϕ(g)−1 = cH
ϕ(g)
(ϕ(x)
)= cH
ϕ(g) ◦ ϕ(x) ,
et donc ϕ ◦ cGg = cH
ϕ(g) ◦ ϕ : G −→ H. Donc, en appliquant le foncteur L(−) a cetterelation, on obtient
Lϕ ◦ LcG
g = LcH
ϕ(g) ◦ Lϕ ,
et, en evaluant en un X ∈ LG, on trouve
Lϕ ◦ (AdG(g)
)(X) = Lϕ ◦ LcG
g (X) = LcH
ϕ(g) ◦ Lϕ(X) = AdH
(ϕ(g)
) ◦ Lϕ(X) ,
ce qui est precisement la relation a etablir. ¤
26. Les groupes de Lie complexes, compacts et connexes
Notre but dans cette section est de demontrer que les groupe de Lie complexesqui sont compacts et connexes sont abeliens.
Nous allons utiliser deux resultat classiques de l’analyse complexe, plus pre-cisement, le premier provient de la theorie des fonctions holomorphes de plusieursvariables complexes, et le second provient de la theorie des fonctions holomorphesd’une variable complexe; nous allons profiter ce cette occasion pour les demontrertous les deux.
Voici le premier resultat d’analyse complexe (a noter que le cas general del’enonce n’est pas plus difficile a etablir que le cas particulier d’un ouvert non-videconnexe de C).
Theoreme 26.1 (Principe du Prolongement Analytique sur les varietes).Soient M une variete complexe connexe, et f, g : M −→ C deux fonctions holomor-phes. Si les fonction f et g coıncident au voisinage d’un des points de M , alorselles coıncident sur tout M .
Preuve. Considerons la fonction h := f − g : M −→ C donnee par la difference.Nous devons montrer que h est nulle. Considerons le sous-espace
N :={z ∈ M
∣∣ f est nulle au voisinage de z}
de M . Clairement, N est non-vide (puisque f et g coıncident au voisinage d’unpoint de M) et ouvert. Montrons que N est ferme. Soit x ∈ N , i.e. un point de Madherent a N . On trouve un voisinage ouvert V de x dans N et une carte
ϕ : U≈−→ V ⊆ M ,
avec U un ouvert de Cm, telle que ϕ(0) = x (ici, m est la dimension de M). Ontrouve egalement une suite (xn)n∈N dans N∩V qui converge vers x dans M . Posons
yn := ϕ−1(xn) ∈ U et ψ := ϕ ◦ h : U −→ C .
Notons que la suite (yn)n∈N converge vers 0 dans U ⊆ Cm. Fixons n ∈ N; commeψ est nulle au voisinage de yn, chaque derivee partielle
∂k
∂zk11 · · · ∂zkm
m
ψ
s’annule en yn, ou k := k1 + . . . + km. Par continuite de ces derivees, on trouvequ’elles s’annulent toutes en 0, donc le developpement de Taylor en 0 de ψ estidentiquement nul. Comme ψ est holomorphe, elle coıncide avec ce developpementau voisinage de 0, donc ψ est nulle au voisinage de 0. Par extension, h est nulle au

26. LES GROUPES DE LIE COMPLEXES, COMPACTS ET CONNEXES 97
voisinage de x. Il suit que x ∈ N , montrant que N est ferme dans M . Au total, onvoit N est un sous-espace non-vide, ouvert et ferme de M . Par connexite de M , ils’ensuit que N = M , et donc h est identiquement nulle sur M . ¤
Avant d’enoncer le second resultat d’analyse complexe, introduisons deux no-tations et une definition.
Notation 26.2. Soit D :={z ∈ C ∣∣ |z| < 1
}le disque unite ouvert dans C.
Notation 26.3. Pour ε > 0 et z ∈ C, soient Br(z) :={w ∈ C ∣∣ |z−w| ≤ ε
}la
boule fermee de rayon ε centree en z dans C, et ∂Br(z) :={w ∈ C ∣∣ |z − w| = ε
}son bord.
Definition 26.4. Soient M une variete complexe et f : M −→ C une fonctionholomorphe. On dit que |f | admet un maximum local s’il existe un point z0 ∈ Met un voisinage V de z0 dans M tels que |f(z)| ≤ |f(z0)| pour tout z ∈ V . Dansce cas, pour etre plus precis, on dira que |f | admet un maximum local au voisinagede z0.
Theoreme 26.5 (Principe du Maximum sur D).Soit f : D −→ C une fonction holomorphe. Si la fonction |f | admet un maximumlocal au voisinage d’un point z0 ∈ D, alors f est une fonction constante (sur tout D).
Preuve. Soit V un voisinage de z0 dans D sur lequel |f | admet un maximum en z0,i.e. tel que |f(z)| ≤ |f(z0)| pour tout z ∈ V . On trouve ε > 0 tel que la boulefermee Bε(z0) soit contenue dans V . Si r est tel que 0 < r ≤ ε, on a alors
|f(reiθ)| ≤ |f(z0)| , pour 0 ≤ θ ≤ 2π , (∗)et, d’apres la formule de Cauchy, on a
f(z0) =1
2πi
∮
∂Br(z0)
f(z)z − z0
dz =12π
∫ 2π
0
f(z0 + reiθ) dθ .
Il suit des deux dernieres egalites que
|f(z0)| ≤ 12π
∫ 2π
0
∣∣f(z0 + reiθ)∣∣ dθ .
Supposons par l’absurde que f n’est pas constante au voisinage de z0. On trouvedonc r, avec 0 < r ≤ ε, et θ1, avec 0 ≤ θ1 < 2π, tels que
|f(reiθ1)| < |f(z0)| .Par continuite de f , on trouve θ2, avec θ1 < θ2 < 2π, tel que
|f(reiθ)| < |f(z0)| , pour θ1 ≤ θ ≤ θ2 . (∗∗)Dans ces conditions, on a
|f(z0)∣∣ ≤ 1
2π
(∫ θ1
0
∣∣f(z0 + reiθ)∣∣ dθ +
∫ θ2
θ1
∣∣f(z0 + reiθ)∣∣ dθ +
∫ 2π
θ2
∣∣f(z0 + reiθ)∣∣ dθ
)
et donc, par suite de (∗) et de (∗∗),
|f(z0)∣∣ <
12π
(θ1 ·|f(z0)|+ (θ2 − θ1)·|f(z0)|+ (2π − θ2)·|f(z0)|
)= |f(z0)| ,
ce qui est contradictoire. Ainsi, f est constante au voisinage de z0, donc la fonctionanalytique f coıncide au voisinage de z0 avec la fonction constante, definie sur D,

98 1. THEORIE CLASSIQUE DES GROUPES DE LIE
valant f(z0). Comme D a la vertu d’etre connexe, le Principe du ProlongementAnalytique 26.1 s’applique et montre que f ≡ f(z0) sur D tout entier. ¤
Corollaire 26.6 (Principe du Maximum dans les domaines de Cn).Soient U un ouvert non-vide de Cn, et f : U −→ C une fonction holomorphe. Si lafonction |f | admet un maximum local au voisinage d’un point z0 ∈ U , alors f estune fonction constante sur la composante connexe de z0 dans U .
Preuve. Quitte a remplacer U par U−z0 et f par la fonction z 7−→ f(z+z0) definiesur U − z0, on peut supposer que z0 = 0. On trouve alors ε > 0 tel que le cubeouvert
Cε :={z = (z1, . . . , zn) ∈ C
∣∣ |zj | < 1 , ∀j = 1, . . . , n}
soit contenu dans V . Fixons un point w = (w1, . . . , wn) de Cε, et considerons lafonction
fw : D −→ C , z 7−→ f(w1z, . . . , wnz) ,
qui est bien definie et holomorphe. Par hypothese sur f , la fonction |fw| admet unmaximum local au voisinage de 0 ∈ D, donc, par le Principe du Maximum sur D,cf. 26.5, fw est constante, i.e. fw(z) = fw(0) = f(0) pour tout z ∈ D. Il suit que
f(w1z, . . . , wnz) = f(0) , pour tout z ∈ D et tout (w1, . . . , wn) ∈ Cε .
Ceci implique que f est constante sur Cε. Soit U0 la composante connexe de z0
dans U (a noter que U0 est ouverte dans Cn). Ainsi, la fonction holomorphe f |U0
coıncide au voisinage de z0 avec la fonction constante, definie sur U0, valant f(z0).Par le Principe du Prolongement Analytique 26.1, f est constante sur U0. ¤
Corollaire 26.7 (Principe du Maximum sur les varietes complexes).Soient M une variete complexe connexe et f : M −→ C une fonction holomorphe.Si la fonction |f | admet un maximum local au voisinage d’un point z0 ∈ M , alorsf est une fonction constante (sur M tout entiere).
Preuve. En composant f avec une carte
ϕ : U≈−→ V ⊆ M
au voisinage de z0, avec U un ouvert non-vide de Cn, on peut applique le Principedu Maximum pour les domaines de Cn, cf. 26.6, a la composee f ◦ ϕ et en deduireque f ◦ ϕ est constante au voisinage de ϕ−1(z0) dans U , et par extension quef elle-meme est constante au voisinage de z0 dans M . Conclusion : la fonctionholomorphe f coıncide au voisinage de z0 avec la fonction constante, definie sur M ,valant f(z0). Par le Principe du Prolongement Analytique 26.1, f ≡ f(z0) sur M(qui est bel et bien connexe), ce qui acheve la demonstration. ¤
Theoreme 26.8. Un groupe de Lie complexe, compact et connexe est abelien.
Preuve. Nous devons montrer que G = Z(G), et donc que G = Ker(Ad), envertu de la Proposition 25.16 (G est connexe). Soit n := dim(G) et considerons lediagramme commutatif (de varietes complexes et applications holomorphes)
GAd //
fj
,,YYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYYY GLC(LG) � � incl // EndC(LG)ψ
∼=// Cn2
pj
²²C
27. SUR L’INJECTIVITE ET LA SURJECTIVITE DE L’EXPONENTIELLE 99
ou ψ est un choix d’isomorphisme de C-espace vectoriels, et, pour 1 ≤ j ≤ n2,l’application pj est la projection sur le j-ieme facteur et fj := pj◦ψ◦Ad. Notons quechaque fj est holomorphe, et en particulier continue. Fixons un j. Par compacitede G et continuite de fj , l’image fj(G) est compacte, donc bornee, dans C; ainsil’application |fj | atteint un maximum (global) sur G, disons en g0 ∈ G. CommeG est un voisinage de g0 dans G (evidemment !), |fj | admet un maximum localen g0. Donc, par le Principe du Maximum sur les varietes complexes, cf. 26.7,fj est constante (on utilise a nouveau la connexite de G). Comme ceci est vraipour tout j et comme ψ ◦ incl est injective, ceci montre que Ad est une applicationconstante, et donc que G = Ker(Ad). ¤
Remarque 26.9. Dans cette demonstration, l’observation evidente que G estun voisinage de g0 a la raison-d’etre que nous allons maintenant expliquer. Si Gest un groupe de Lie complexe, qui est connexe, mais pas forcement compact, iln’est pas necessairement abelien (comme le montre GL2(C), qui, comme on le verraplus loin, est connexe, ou le groupe de Heisenberg Heis3(C) dont la question dela connexite ne pose aucune difficulte). On pourrait alors etre tente de modifierl’argument de la preuve ci-dessus comme ceci. D’abord, on considere un compactK d’interieur non-vide dans G (cela existe, puisque G est localement compact).Alors, par compacite de K, la fonction |fj | prend un maximum sur K, disonsen k0 ∈ K. Cependant, il n’est pas necessairement vrai que dans ce cas, |fj |possede un maximum local en k0, simplement du fait que K n’est pas forcement unvoisinage de k0 dans K, en d’autres termes, il se peut que k0 se situe sur le bord (ausens topologique) ∂K de K dans G. Ainsi, le Principe du Maximum ne peut pastoujours s’appliquer dans ce cas pour nous permettre de conclure la demonstrationde la meme maniere.
Remarque 26.10. Il existe des groupes de Lie complexes qui sont compacts etpresque connexe, mais qui ne sont pas abeliens. Nous en avons deja rencontre unen la personne de
(T2 × T2)o Z/2 ,
ou chaque copie de T2 est vue comme etant C/(Z ⊕ Z ·i), et ou le generateur de
Z/2 agit en echangeant les facteurs.
27. Sur l’injectivite et la surjectivite de l’exponentielle
Dans cette section, nous allons montrer que l’application exponentielle pourun groupe de Lie n’est en general ni injective, ni surjective, et que, pour certainsgroupes de Lie particuliers, elle peut etre ni l’un ni l’autre, l’un ou l’autre, ou memeles deux.
Remarque 27.1. Remarquons d’abord que si G est un groupe de Lie sur K,alors, par continuite de l’exponentielle exp: LG −→ G (cf. Theoreme 14.7) et parconnexite de LG, son image exp(LG) est connexe et contient le neutre e, donc estcontenue dans la composante du neutre de G, symboliquement,
exp(LG) ⊆ Ge .
Ensuite, selon l’Exemple 14.5, pour le tore Tn, l’exponentielle est donnee par
exp: Rn = LTn −→ Tn , (θ1, . . . , θn) 7−→ (e2πiθ1·t, . . . , e2πiθn·t) .

100 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Ainsi, dans ce cas, exp est surjective mais pas injective. Pour le groupe de Lie reelG = R×+ = GL+
1 (R), on a LG = R et l’exponentielle est donnee par
exp: R −→ R×+ , x 7−→ ex ,
donc, dans ce cas, exp est une bijection (et meme un isomorphisme de groupes deLie reels). Similairement, Pour le groupe de Lie complexe G = C× = GL1(C), on aLG = C et l’exponentielle est donnee par
exp: C −→ C× , z 7−→ ez ,
donc, dans ce cas, exp est une bijection (et meme un isomorphisme de groupes deLie complexes). Un autre exemple interessant est donne par le groupe de Heisenbergsur K (vu comme groupe de Lie sur K), dont l’exponentielle
exp: LHeisn(K) =
0 K K − K K0 0 0 − 0 K| ��� | || �� 0 K| � 0 K0 − − − 0 0
−→
1 K K − K K0 1 0 − 0 K| ��� | || �� 0 K| � 1 K0 − − − 0 1
= Heisn(K)
est l’exponentielle matricielle et est explicitement donnee, pour une matrice
X =
0 a1 a2 − an-2 b0 0 0 − 0 c1| � � � | || � � 0 cn-3| � 0 cn-20 − − − 0 0
,
par les egalites exp(X) = eX = 1In + X + 12X2 et donc
exp(X) =
1 a1 a2 − an-2 dX
0 1 0 − 0 c1| � � � | || � � 0 cn-3| � 1 cn-20 − − − 0 1
avec dX := b + 1
2 (a1c1 + . . . + an−2cn−2) ,
comme le montre un calcul direct immediat. Il devient alors evident que exp estun diffeomorphisme analytique (et meme K-lineaire) de LHeisn(K) sur Heisn(K),et par consequent, c’est une bijection. En fait, c’est un cas particulier d’un resultatplus general qui dit que l’exponentielle pour un groupe de Lie nilpotent 1-connexe,i.e. connexe et simplement connexe, est un diffeomorphisme.
Notation 27.2. Pour une matrice X ∈ Mn(K), on definit deux matricescarrees de taille n par les series
cos(X) = 1In − 12!X
2 + 14!X
4 −+ . . .
etsin(X) = X − 1
3!X3 + 1
5!X5 −+ . . .
(que l’on verifie aisement etre convergente – de convergence normale –, commeon procede pour l’exponentielle matricielle, c’est-a-dire a l’aide d’une norme sous-multiplicative sur Mn(K)).
Exemple 27.3. Considerons la matrice (notee J2n dans 5.8)
Λ :=
(On −1In1In On
)∈ GL2n(K) .
Du fait que cette matrice verifie Λ2 = −1I2n, on montre que
eΛX = cos(X) + Λ sin(X) ,
27. SUR L’INJECTIVITE ET LA SURJECTIVITE DE L’EXPONENTIELLE 101
pour toute matrice X ∈Mn(K), exactement comme l’on etablit la fameuse Formuled’Euler
eiϕ = cos(ϕ) + i sin(ϕ)pour ϕ ∈ K, a savoir, en regroupant les puissances paires de X d’un cote, et lespuissances impaires de l’autre (la convergence de l’exponentielle est normale, desorte que l’on peut permuter les termes de la serie a souhait). En particulier, siϕ ∈ K, alors on a
eϕ·Λ = cos(ϕ)·1I2n + sin(ϕ)·Λ .
Pour n = 1 et ϕ = 2π, on trouve
e( 0 -2π2π 0 )
= 1I2 = eO2 .
En inserant la matrice ( 0 -2π2π 0 ) comme bloc 2× 2 en-haut a gauche dans la matrice
nulle On avec n ≥ 2, on obtient la matrice
Xn :=
0 -2π 0 − 02π 0 0 − 00 0 0 − 0| | | |0 0 0 − 0
∈Mn(K)
qui verifieeXn = 1In = eOn .
Comme Xn est contenue dans LG pour G parcourant la liste
GLn(F) , SLn(F) , GL+n (R) , O(n) , SO(n) , U(n) , SU(n) et Sp(n)
de groupes de Lie (reels ou complexes) pour n ≥ 2, on en deduit que pour tous cesgroupes de Lie, l’exponentielle n’est pas injective.
Theoreme 27.4. L’exponentielle matricielle complexe est surjective, i.e.
ExpC : Mn(C)−³ GLn(C) .
Nous aurons besoin de quelques lemmes preparatoires.
Lemme 27.5. Si X ∈ Mn(F) est une matrice diagonale par blocs, i.e. de laforme
X =
(X1
X2�
X`
),
alors son exponentielle eA ∈ GLn(F) est egalement diagonale par blocs, avec desblocs correspondants de la meme taille et qui sont donnes par les exponentielles desblocs respectifs, i.e.
eX =
(eX1
eX2
�eX`
).
Preuve. C’est immediat. ¤
Notation 27.6. Si λ ∈ C est un nombre complexe, on note Jn(λ) la matricede Jordan de taille n associee a λ, i.e.
Jn(λ) :=
λ 1 0 ——— 0λ 1 0 —— 0�� � |� � � |� 1 0
λ 1λ
∈Mn(C) .

102 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Lemme 27.7. Soit λ ∈ C un nombre complexe. Alors l’exponentielle du bloc deJordan de taille n correspondant est donne par
Exp
λ 1 0 ——— 0λ 1 0 —— 0�� � |� � � |� 1 0
λ 1λ
=
eλ eλ eλ
2! ——— eλ
(n-1)!eλ eλ eλ
2! —— eλ
(n-2)!� � � |� � � |� eλ eλ
2!
eλ eλ
eλ
.
Preuve. Le resultat s’obtient par calcul direct. ¤
Lemme 27.8. Si µ ∈ C× est un nombre complexe non-nul, alors la matrice
µ µ ∗——— ∗µ µ ∗ —— ∗�� � |� � � |� µ ∗
µ µµ
∈ GLn(C)
possede µ comme valeur propre de multiplicite algebrique egale a 1, en d’autrestermes, cette matrice est conjuguee au bloc de Jordan Jn(µ) de taille n associe a µ.
Preuve. Notons A la matrice de l’enonce. Comme µ est inversible, il est evidentque la matrice A− µ · 1In, qui est echelonnee, est le rang n− 1, donc son noyau estde dimension 1. Ceci implique que µ est la seule valeur propre de A, et elle est demultiplicite algebrique n et de multiplicite geometrique 1. Le resultat s’ensuit. ¤Preuve du Theoreme 27.4. Par le Theoreme de Jordan, toute matrice complexe(en particulier celles qui sont inversibles) est conjuguee a une matrice diagonalepar blocs de Jordan. Par les Lemmes 21.1 (iii) et 27.5, il suffit donc de montrerque toute matrice de Jordan inversible est l’exponentielle d’une matrice complexe.Considerons donc une matrice de Jordan de taille m, associee a un nombre complexenon-nul µ, i.e.
Jm(µ) =
µ 1 0 ——— 0µ 1 0 —— 0�� � |� � � |� 1 0
µ 1µ
∈ GLm(C) .
Par les Lemmes 27.7 et 27.8, Jm(µ) est conjuguee a la matrice eJm(λ), ou λ ∈ Cdesigne un logarithme de µ, i.e. n’importe quel nombre complexe tel que eλ = µ (etun tel nombre existe). On peut donc conclure en re-invoquant le Lemme 21.1 (iii).
¤
Proposition 27.9. Soit X ∈ Mn(C), et soient λ1, . . . , λ` les valeurs propresdistinctes de X, i.e. sans repetition. Si
Jn1,1(λ1), . . . , Jn1,q1(λ1); Jn2,1(λ2), . . . , Jn2,q2
(λ2); . . . ; Jn`,1(λ`), . . . , Jn`,q`(λ`)
sont les blocs de Jordan d’une forme de Jordan de X, alors
Jn1,1(eλ1), . . . , Jn1,q1
(eλ1); Jn2,1(eλ2), . . . , Jn2,q2
(eλ2); . . . ; Jn`,1(eλ`), . . . , Jn`,q`
(eλ`)
sont les blocs de Jordan d’une forme de Jordan de eX .
Preuve. Cela decoule des Lemmes 27.5, 27.7 et 27.8. ¤

27. SUR L’INJECTIVITE ET LA SURJECTIVITE DE L’EXPONENTIELLE 103
Remarque 27.10. La Proposition 27.9 permet en particulier de determiner lesmultiplicites algebriques et geometriques des valeurs propres de eX , en fonction decelles de X (en additionnant les valeurs correspondant a toutes les valeurs propresde X dont les exponentielles coıncident).
Proposition 27.11. Pour le groupe de Lie complexe SLn(C), l’exponentielleest surjective ssi n = 1.
Preuve. Lorsque n = 1, on a SL1(C) = {1} et il est clair que l’exponentielle estsurjective. Considerons maintenant la matrice de Jordan
Jn(e2πi/n) =
e2πi/n 1 0 —— — 0e2πi/n 1 0 — — 0
� � � |� � � |� 1 0
e2πi/n 1e2πi/n
∈ SLn(C) .
D’apres la Proposition 27.9, toute matrice X ∈ Mn(C) verifiant eX = Jn(e2πi/n)est conjuguee a une matrice de Jordan Jn(λ) avec λ designant un nombre complexetel que eλ = e2πi/n, c’est-a-dire,
λ ∈ 2πin + Z·2πi .
Il s’ensuit que
0 = Tr(X) = Tr(Jn(λ)
)= n·λ ∈ 2πi + Z·2nπi ,
ce qui montre que n = 1. ¤
Proposition 27.12. Si une matrice inversible reelle A ∈ GLn(R) est dansl’image de l’exponentielle matricielle reelle
ExpR : Mn(R) −→ GLn(R)
alors det(A) > 0 et pour chaque valeur propre negative de A, disons −λ avec λ > 0,et chaque bloc de Jordan Jm(−λ) d’une forme de Jordan de A, il y a un nombrepair de tels blocs. En particulier, ExpR est surjective sur GL+
n (R) ssi n = 1.
Preuve. Soit λ > 0 tel que −λ soit une valeur propre de A, et supposons queA = eX avec X ∈ Mn(R). Alors X possede une valeur propre µ ∈ C telle queeµ = −λ. Clairement, comme X est reelle et comme −λ < 0, le nombre µ ne peutpas etre reel, donc son conjugue µ est egalement une valeur propre de X, distinctede µ. Par l’algebre lineaire, les multiplicites algebriques (resp. geometriques) de µet µ sur C sont egales. En fait, on peut montrer le resultat plus precis disant quesi Jm(µ) est un bloc de Jordan apparaissant q fois dans une forme de Jordan de X,alors il en va exactement de meme de Jm(µ). Par la Proposition 27.9, on voit queJm(−λ) = Jm(eµ) = Jm(eµ) est un bloc de Jordan dans une forme de Jordan de Xapparaissant 2q fois, d’ou le premier resultat. Pour le second, il est clair, lorsquen = 1, que ExpR est surjective sur GL+
1 (R) = R×+. Si n ≥ 2, par la premiere partie,la matrice
-1 1 00 -1 00 0 1
1�
1
∈ SLn(R) ⊂ GL+
n (R) ,
qui est sous forme de Jordan, n’est pas dans l’image de ExpR. ¤De cette demonstration, on tire immediatement le resultat suivant.
104 1. THEORIE CLASSIQUE DES GROUPES DE LIE
Corollaire 27.13. Pour le groupe de Lie reel SLn(R), l’exponentielle est sur-jective ssi n = 1. ¤
Information 27.14. On peut montrer que pour n ≥ 2, l’image de ExpR dansGL+
n (R) n’est ni dense ni ouverte. Pour tout n, l’image de l’exponentielle pour legroupe de Lie complexe SLn(C) a une image dense. L’application exponentielle estsurjective pour les groupes de Lie complexes
PGLn(C) := GLn(C)/Z(
GLn(C))
et PSLn(C) := SLn(C)/Z(
SLn(C))
qui sont en fait isomorphes.
Information 27.15. En 1950, Morinaga a demontre que pour les groupes deLie GLn(C), GLn(R) et SLn(R), l’exponentielle se restreint en un diffeomorphismeanalytique de l’ouvert de l’espace tangent constitue des matrices dont toutes lesvaleurs propres λ dans C satisfont | Im(λ)| < π sur l’ouvert du groupe de Lieconstitue des matrices sans valeur propre strictement negative.

CHAPITRE 2
Algebres de Lie et lien avec les groupes de Lie
28. Les algebres de Lie
Fixons un corps (commutatif) k. Typiquement, les exemples auxquels onpensera seront le corps des rationnels Q, celui des reels R, celui des nombresalgebriques Q, celui des complexes C et celui des nombres p-adiques Qp (qui sonttous de caracteristique nulle). On supposera implicitement que k est de caracteristiquedifferente de deux, i.e. char(k) 6= 2. On ecrira n ⊥ char(k) pour exprimer le faitqu’un entier non-nul n donne est premier a char(k) (rappelons que, par convention,tout nombre entier non-nul est premier a zero).
Rappelons la notion de k-algebre introduite a la Definition 5.1.
Definition 28.1.
(i) Une algebre de Lie sur k ou k-algebre de Lie est un k-espace vectoriel gmuni d’une application k-bilineaire, appelee crochet de Lie ou crochet,
[ . , . ] : g× g −→ g , (X, Y ) 7−→ [X, Y ]
satisfaisant les deux proprietes supplementaires suivantes :(a) antisymetrie ou anti-commutativite : pour tous X, Y ∈ g, on a
[Y,X] = −[X,Y ] ;
(b) identite de Jacobi : pour tous X,Y, Z ∈ g, on a[[X,Y ], Z
]+
[[Y, Z], X
]+
[[Z, X], Y
]= 0 .
En d’autres termes, g est une k-algebre anti-commutative dont le pro-duit, note [ . , . ], satisfait la propriete d’associativite specifique donnee parl’identite de Jacobi. Si k = Q (resp. k = R, resp. k = C), on dit aussialgebre de Lie rationnelle (resp. reelle, resp. complexe). Si le corps debase est clair selon le contexte, on dit simplement algebre de Lie.
(ii) Si g et h sont deux algebres de Lie sur k, un homomorphisme d’algebresde Lie (sur k) est une application k-lineaire Φ: g −→ h qui est compatibleavec le crochet de Lie, i.e. telle que
Φ([X, Y ]g
)= [Φ(X), Φ(Y )]h ,
pour tous X, Y ∈ g. En d’autres termes, il s’agit d’un homomorphisme dek-algebres. On ecrit souvent ΦX au lieu de Φ(X), pour X ∈ g. On dit queΦ est un isomorphisme d’algebres de Lie (sur k) si Φ est en plus bijectif(auquel cas son inverse Φ−1 est automatiquement un homomorphismed’algebres de Lie).
105

106 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
(iii) Soit s et t des parties d’une k-algebres de Lie g; le crochet (dans g) de set t est defini par
[s, t] := Link({
[X,Y ]∣∣ X ∈ s et Y ∈ t
}),
ou Link(−) designe l’enveloppe k-lineaire dans g. Par anti-symetrie ducrochet de Lie, on a [s, t] = [t, s].
(iv) On dit que deux elements X et Y d’une algebre de Lie commutent si leurcrochet est nul, i.e. si [X,Y ] = 0. Cela revient a dire que [X,Y ] = [Y, X](par antisymetrie et car char(k) 6= 2), i.e. que X et Y commutent au sensusuel des algebres.
(v) Une algebre de Lie g est abelienne si son crochet de Lie est nul, i.e. si[X, Y ] = 0 pour tous X, Y ∈ g, en d’autres termes, si
[g, g] = 0 .
Cela revient a dire que g est commutative comme k-algebre (rappel :char(k) 6= 2).
(vi) Si g est une k-algebre de Lie, une sous-algebre de Lie (sur k) de g est unk-sous-espace vectoriel h qui est stable par crochets, i.e. tel que [X, Y ] ∈ hdes que X, Y ∈ h, en d’autres termes, tel que
[h, h] ⊆ h .
Cela revient a dire que h est une k-sous-algebre de g dans le sens usuel.(vii) Si g est une k-algebre de Lie, un ideal de Lie (sur k) de g est un k-sous-
espace vectoriel a tel que [X, Y ] ∈ a pour tout X ∈ g et tout X ∈ a, end’autres termes, tel que
[g, a] ⊆ a ;
par antisymetrie, cette seconde condition est equivalente a avoir [a, g] ⊆ a.Ainsi, cela revient a dire que a est un ideal bilatere de la k-algebre g ausens usuel des k-algebres (et pas des anneaux). Un ideal de Lie de g estappele propre s’il est distinct de g.
(viii) Si g est une k-algebre de Lie et si a est un ideal de Lie de g, l’algebre deLie quotient g/a est le k-espace vectoriel quotient g/a muni du crochet deLie (bien defini !)
[X+a, Y +a]g/a := [X,Y ]g + a ,
pour X,Y ∈ g. Cela munit g/a d’une structure canonique de k-algebre deLie pour laquelle la projection canonique g−³ g/a est un homomorphismed’algebres de Lie.
(ix) Le centre d’une algebre de Lie g est le sous-ensemble
z(g) :={X ∈ g
∣∣ [X,Y ] = 0 , pour tout Y ∈ g}
de g; c’est en fait un ideal de Lie de g.(x) L’ideal des commutateurs d’une algebre de Lie g sur k est le sous-ensemble
[g, g] de g, i.e. k-lineairement engendre par l’ensemble de tous les crochetsde Lie [X,Y ] dans g; c’est, comme son nom l’indique, un ideal de Lie de g.
(xi) Soit Φ: g −→ h un homomorphisme d’algebres de Lie. Le noyau de Φ estle sous-ensemble
ker(Φ) :={X ∈ g
∣∣ Φ(X) = 0}

28. LES ALGEBRES DE LIE 107
de g; c’est en fait un ideal de Lie de g. L’image de Φ est le sous-ensemble
im(Φ) :={Φ(X) ∈ h
∣∣ X ∈ g}
de h; c’est en fait une sous-algebre de Lie de g.(xii) Si {gi}i∈I est une collection d’algebres de Lie sur k, alors l’algebre de Lie
somme directe (sur k) est le k-espace vectoriel somme directe g :=⊕
i∈I gi
muni du crochet de Lie definit par[(Xi)i∈I , (Yi)i∈I
]:=
([Xi, Yi]
)i∈I
,
pour (Xi)i∈I , (Yi)i∈I ∈ g, i.e. obtenu en effectuant le crochet de Lie terme-a-terme; cette meme definition peut egalement s’ecrire sous la forme[ ∑
i∈I
Xi ,∑i∈I
Yi
]:=
∑i∈I
[Xi, Yi] .
Remarque 28.2. Comme char(k) 6= 2, de l’antisymetrie du crochet de Lie, ildecoule que pour tout element X d’une algebre de Lie g, on a [X, X] = 0 dans g.Reciproquement, si on suppose, a la place de l’antisymetrie, que [X, X] = 0 pourtout X ∈ g, alors l’antisymetrie en decoule. En effet, si Y, Z ∈ g, alors
0 = [Y + Z, Y + Z] = [Y, Y ]︸ ︷︷ ︸=0
+[Y,Z] + [Z, Y ] + [Z,Z]︸ ︷︷ ︸=0
= [Y, Z] + [Z, Y ] ,
d’ou [Z, Y ] = −[Y, Z] (sans faire appel a l’hypothese sur la caracteristique de k). Ilen resulte qu’en caracteristique 2, il y a deux definitions “raisonnables” distinctesde la notion d’algebre de Lie, l’une en demandant l’antisymetrie, l’autre, plus res-trictive, en exigeant que [X,X] = 0 pour tout X (en general, c’est plutot cettederniere qui est consideree comme definition).
Remarque 28.3. Soit g une k-algebre de Lie. Lorsqu’on ecrit g ∼= ⊕i∈I gi,
avec {gi}i∈I une collection de k-algebres de Lie, on sous-entend qu’il s’agit d’unisomorphisme de k-algebres de Lie, ou le membre de droite est muni de la structurede k-algebre de Lie somme directe; en particulier, si i, j ∈ I avec i 6= j, alors, danscette somme directe, on a
[gi, gj ] = 0 ,
ou on identifie gi et gj a des k-sous-espaces vectoriels de la somme directe de faconevidente. A noter que dans ce cas, chaque gi est un ideal de Lie de
⊕i∈I gi. De
meme, si {ai}i∈I une collection d’ideaux de Lie de g, on ecrit
g =⊕
i∈I
ai
pour exprimer, primo, le fait que le k-espace vectoriel g est la somme directe de sesk-sous-espaces vectoriels ai, i.e.
g = Link
( ⋃
i∈I
ai
)et
⋂
i∈I
ai = 0 ,
et, secundo, que[ai, aj ] = 0 , ∀i 6= j dans I ;
dans ce cas, on parle de decomposition d’algebre de Lie (par opposition a decom-position d’espace vectoriel).
Exemple 28.4.

108 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
(i) Si E est un k-espace vectoriel, alors E muni du crochet nul est une algebrede Lie abelienne. Toute k-algebre de Lie abelienne est obtenue de cettefacon. Si F est un k-sous-espace vectoriel de E, alors F est un ideal de Liede E. Par exemple, E = {0} est (a isomorphisme pres) l’unique k-algebrede Lie de dimension nulle; on la note simplement 0. Il est immediat quek, muni du crochet nul, est (a isomorphisme pres) l’unique k-algebre deLie de dimension un. En particulier, une k-algebre de Lie non-abelienneest de dimension ≥ 2.
(ii) Si A est une k-algebre associative (cf. Definition 5.1), alors le crochetdonne par le commutateur
[ . , . ]assoc : A×A −→ A , (a, b) 7−→ [a, b]assoc := ab− ba
muni A d’une structure de k-algebre de Lie qui est abelienne ssi A estcommutative. En effet, la k-bilinearite decoule du fait que le produitsur A est k-bilineaire, l’antisymetrie est evidente, et l’identite de Jacobis’obtient par verification directe, en exploitant l’associativite de A pourson produit originel; l’assertion sur le cas abelien est limpide.
(iii) La k-algebre associative Mn(k) de toutes les matrices carrees de taille n,vue comme k-algebre de Lie pour le crochet [ . , . ]assoc est notee par gln(k),c’est-a-dire
gln(k) :=(Mn(k), [ . , . ]assoc
).
On la note parfois egalement gln(k). Pour etre vraiment clairs et ex-plicites, ecrivons le crochet de deux matrices carrees X, Y ∈ Mn(k) ex-plicitement :
[X, Y ] := XY − Y X .
(iv) Plus generalement, si A est une k-algebre associative, alors on pose (aveck sous-entendu dans la notation)
gln(A) :=(Mn(A), [ . , . ]assoc
),
ou Mn(A) est consideree comme une k-algebre associative de maniereevidente. Par exemple, gln(H) est la R-algebre de Lie de toutes les matri-ces n× n quaternioniennes pour le crochet donne par le commutateur.
(v) Si E est un k-espace vectoriel, on pose
glk(E) :=(
Endk(E), [ . , . ]assoc
),
ainsi, pour Φ, Ψ ∈ Endk(E), le crochet de Lie est
[Φ, Ψ] = Φ ◦Ψ−Ψ ◦ Φ .
Si dimk(E) = n < ∞, le choix d’une k-base de E fournit un isomorphismede k-algebres de Lie glk(E) ∼= gln(k).
(vi) Plus generalement, si D est une k-algebre a division et si E est un D-espacevectoriel (a gauche ou a droite), on pose
glD(E) :=(
EndD(E), [ . , . ]assoc
),
ou EndD(E) designe la k-algebre associative des endomorphismes D-line-aires de E. En fait, le seul cas de cette situation que nous allons rencontrer

28. LES ALGEBRES DE LIE 109
par la suite est le cas ou k = R, D = H et donc E est un H-espace vectoriel(a gauche ou a droite); ainsi, la notation glH(E) est maintenant explicitee.
(vii) Les k-algebres de Lie sln(k) = sln(k), son(k) = son(k) et spn(k) = spn(k)sont definies comme etant, respectivement, les sous-algebres de Lie suiv-antes de gln(k) :
• sln(k) :={X ∈ gln(k)
∣∣ Tr(X) = 0}
• son(k) :={X ∈ gln(k)
∣∣ Tr(X) = 0 et tX = −X}
={X ∈ gln(k)
∣∣ tX = −X}
• spn(k) :={X ∈ gl2n(k)
∣∣ tXJ2n = −J2nX}
,
ou J2n designe la matrice (cf. Notation 5.8 et Lemme 5.9)
J2n :=
(On −1In1In On
)∈ GL2n(k) .
Si k = R, on ecrit aussi so(n) = so(n) pour designer son(R). Il estimportant de noter que [
gln(k), gln(k)] ⊆ sln(k) ,
et donc, sln(k) est un ideal de Lie de gln(k). En effet, si X, Y ∈ gln(k),alors, par la propriete de trace de Tr, on a
Tr[X, Y ] = Tr(XY − Y X) = Tr(XY )− Tr(Y X) = 0 .
(viii) Si k est muni d’une involution σ : λ 7−→ λ, i.e. un automorphisme decorps qui est involutif, i.e. qui satisfait σ ◦ σ = idk, alors les k-algebresde Lie un(k) = un(k) et sun(k) = sun(k) sont definies comme etant,respectivement, les sous-algebres de Lie suivantes de gln(k) :
• un(k) :={X ∈ gln(k)
∣∣ tX = −X}
• sun(k) :={X ∈ gln(k)
∣∣ Tr(X) = 0 et tX = −X}
,
ou, pour X ∈ Mn(k), X designe la matrice Mn(σ)(X) obtenue en appli-quant l’involution σ entree-par-entree. Si k = C (avec la conjugaison com-plexe), on ecrit aussi u(n) = u(n) pour designer un(C), et su(n) = su(n)a la place de sun(C). Pour k = R, on definit egalement
sp(n) :={A ∈Mn(H)
∣∣ tA = −A}
,
que l’on designe egalement par sp(n). A noter que les R-algebres de Liespn(R), spn(C) (vue sur R) et sp(n) sont non-isomorphes deux a deux; deplus, il existe un isomorphisme d’algebres de Lie reelles
sp(n) ∼= spn(C) ∩ u(2n) .
(ix) Toute k-algebre de Lie de dimension ≤ 1 est abelienne, donc isomorphe a0 ou k munis du crochet nul. Une k-algebre de Lie de dimension 2 est soitabelienne, et donc isomorphe soit a k2 muni du crochet nul, soit a l’algebrede Lie non-abelienne aff(k) qui est donnee par le fait qu’elle possede unebase prescrite (X, Y ), i.e. aff(k) = k·X ⊕ k·Y comme k-espace vectoriel,qui satisfait la relation
[X, Y ] = Y

110 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
(outres les relations qui decoulent automatiquement de la k-bilinearite,l’antisymetrie et l’identite de Jacobi, comme par exemple [X,X] = 0,[Y, Y ] = 0 et [Y, X] = −Y ). Finalement, mentionnons que k ·Y est unideal non-trivial de aff(k). Toutes ces observations sont faciles a etabliret sont laissees en exercice au lecteur interesse.
(x) L’algebre de Lie de Heisenberg sur k (de taille n) est definie par
heisn(k) :=
0 k k − k k0 0 0 − 0 k| ��� | || �� 0 k| � 0 k0 − − − 0 0
.
(xi) Voici d’autres exemples de k-algebres de Lie inspires par les groupes deLie rencontres a la Section 22 et pour lesquels les notations adoptees nesont pas standard. D’abord, il y a l’algebre de Lie des matrices diagonales
dn(k) :=( k
�k
)
et celles des matrices diagonales de trace nulle
sdn(k) := sln(k) ∩ dn(k) .
Bien sur, dn(k) ∼= kn et sdn(k) ∼= kn−1 (ce sont des algebres de Lieabeliennes). Ensuite, il y ensuite l’algebre de Lie des matrices triangulairessuperieures
tn(k) :=
k k − − k0 �� || �� || � k0 − − − k
et celles des matrices triangulaires superieures de trace nulle
stn(k) := sln(k) ∩ tn(k) .
Finalement, il y a l’algebre de Lie des matrices nilpotentes et triangulairessuperieures
utn(k) :=
0 k − − k0 �� || �� || � k0 − − − 0
.
(xii) Si Φ: g −→ h est un homomorphisme d’algebres de Lie sur k, alorsl’application
g/ker(Φ)∼=−→ im(Φ) , X + ker(Φ) 7−→ Φ(X)
est un isomorphisme de k-algebres de Lie, comme indique; cette pro-priete, qui est immediate, est le Premier Theoreme d’Isomorphisme pourles algebres de Lie.
(xiii) Si g est un k-algebre de Lie, alors 0 et g sont des ideaux de Lie de g. Ondit que g n’a pas d’ideal de Lie propre non-trivial, si 0 et g sont ses seulsideaux de Lie.
(xiv) Si {gi}i∈I est une collection de k-algebres de Lie, alors on a
z
( ⊕
i∈I
gi
)=
⊕
i∈I
z(gi) et[ ⊕
i∈I
gi,⊕
i∈I
gi
]=
⊕
i∈I
[gi, gi] .

28. LES ALGEBRES DE LIE 111
Lemme 28.5. Soit g un k-algebre de Lie, et soient a et b deux ideaux de Liede g. Alors la somme a + b (i.e. Link(a∪ b)), l’intersection a∩ b et le crochet [a, b]sont des ideaux de Lie de g.
Preuve. C’est evident pour la somme et l’intersection. Pour le crochet, par l’identitede Jacobi et l’anti-symetrie (et en utilisant le fait que tous les termes apparaissantsont des k-sous-espaces vectoriels de g), on a
[g, [a, b]
]=
[a, [b, g]
]+
[b, [g, a]
] ⊆ [a, b] + [b, a] = [a, b] ,
d’ou le resultat. ¤
Lemme 28.6. Soit π : g−³ h un homomorphisme surjectif de k-algebres de Lie.Si a est un ideal de Lie de g, alors son image π(a) est un ideal de Lie de h.
Preuve. Comme π est surjectif et un homomorphisme, on a[h, π(b)
]=
[π(g), π(b)
]= π
([g, b]
)= π(b) ,
ce qui montre que π(b) est un ideal de Lie de h. ¤
Definition 28.7. Soit g une algebre de Lie reelle. La complexifiee de g estl’algebre de Lie complexe
gC := g⊗R C = g⊕ i·gobtenue en complexifiant l’espace vectoriel reel g et en le munissant du crochet deLie donne (sur les tenseurs elementaires) par
[X ⊗ λ, Y ⊗ µ]gC := [X,Y ]g ⊗ λµ ,
pour X, Y ∈ g et λ, µ ∈ C, et en etendant par Z-bilinearite; en d’autres termes, cecrochet de Lie est donne par
[X + iX ′, Y + iY ′]gC := [X, Y ]g − [X ′, Y ′]g + i([X, Y ′]g + [X ′, Y ]g
),
pour X,X ′, Y, Y ′ ∈ g. C’est en effet une algebre de Lie complexe.
Exemple 28.8. On a des isomorphismes d’algebres de Lie complexes cano-niques (et evidents)
• gln(R)C ∼= gln(C) • sln(R)C ∼= sln(C)
• son(R)C ∼= son(C) • spn(R)C ∼= spn(C)
• aff(R)C ∼= aff(C) • heisn(R)C ∼= heisn(C)
• dn(R)C ∼= dn(C) • sdn(R)C ∼= sdn(C)
• tn(R)C ∼= tn(C) • stn(R)C ∼= stn(C)
• utn(R)C ∼= utn(C) .
Definition 28.9. Soit g une algebre de Lie complexe. Une forme reelle de gest une algebre de Lie reelle h dont la complexifiee est isomorphe a g comme algebrede Lie complexe, i.e. telle que hC ∼= g sur C.
Exemple 28.10.
(i) L’Exemple 28.8 nous donne 11 exemples de formes reelles d’algebres deLie “classiques”.
112 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
(ii) Il est possible qu’une algebre de Lie complexe donnee ait deux formesreelles non-isomorphes (comme algebres de Lie reelles). Par exemple, onpeut montrer que
gln(R)C ∼= gln(C) et u(n)C ∼= gln(C) ,
alors que gln(R) et u(n) ne sont pas isomorphes pour n ≥ 1; de maniereanalogue, on peut etablir que
sln(R)C ∼= sln(C) et su(n)C ∼= sln(C) ,
alors que sln(R) et su(n) ne sont pas isomorphes pour n ≥ 2; de meme,on verifie que
spn(R)C ∼= spn(C) et sp(n)C ∼= spn(C) ,
alors que spn(R) et sp(n) ne sont pas isomorphes pour n ≥ 1.
Definition 28.11. La reellification d’une algebre de Lie complexe g, notee gR,est l’algebre de Lie reelle obtenue en considerant g comme un R-espace vectoriel defacon canonique, et muni du meme crochet de Lie.
Tous les exemples d’algebres de Lie que nous allons rencontrer dans ces notessont des algebres de Lie matricielles. Il y a une bonne raison pour cela :
Information 28.12 (Theoreme d’Ado, 1935 & 1947).Si k est un corps de caracteristique nulle, alors toute k-algebre de Lie de dimensionfinie est une algebre de Lie matricielle, i.e. est isomorphe a une sous-algebre de Liede gln(k) pour un n ∈ N.
Ce resultat avait deja ete “conjecture” par Lie pour le corps des complexes.
29. L’algebre de Lie d’un groupe de Lie
Dans cette section, nous allons – enfin ! – munir l’espace tangent LG = TeGd’un groupe de Lie G sur K d’une structure (canonique) de K-algebre de Lie, ou,comme a l’accoutumee, K = R ou C.
Rappelons que par uneK-algebre nous entendons uneK-algebre “au sens large”,i.e. pas necessairement associative, cf. Definition 5.1.
Avant la definition tant attendue, rappelons que la representation adjointe d’ungroupe de Lie G sur K est un homomorphisme de groupes de Lie sur K
Ad = AdG : G −→ GLK(LG) , g 7−→ Ad(g) := Lcg ,
voir la Proposition 25.9. Rappelons egalement que l’espace tangent au groupe deLie GLK(LG) sur K est donne par
LGLK(LG) = EndK(LG) ,
voir l’Exemple 11.4.
Definition 29.1. Soit G un groupe de Lie sur K, et soit LG = TeG son espacetangent vu comme K-espace vectoriel de dimension finie. On considere l’application
ad = adLG := LAd: LG −→ LGLK(LG) = EndK(LG) , X 7−→ ad(X)

29. L’ALGEBRE DE LIE D’UN GROUPE DE LIE 113
obtenue en differentiant la representation adjointe Ad en e ∈ G. On definit alorsune structure canonique de K-algebre (au sens large) sur LG en le munissant duproduit K-bilineaire, appele crochet, donne par
[X, Y ] := ad(X)·Y ,
pour X,Y ∈ LG.
Remarque 29.2. L’un des buts principaux de cette section est de montrer quecette structure de K-algebre “au sens large” est en fait une structure de K-algebrede Lie, ce qui n’est pas evident. Une fois ce resultat obtenu, nous appellerons lecrochet [ . , . ] le crochet de Lie sur LG, et l’application ad la representation adjointede l’algebre de Lie LG (comparer avec la Definition 31.4 et la Remarque 31.5 ci-apres).
Remarque 29.3. Si G est un groupe de Lie complexe, alors le crochet [ . , . ]sur LG coıncide avec le crochet sur L(GR), c’est-a-dire (LG)R = L(GR) dans lesnotations de la Definition 28.11 (ce qui ne fait que renforcer le sens de la Remar-que 13.6).
Exemple 29.4. Soit G un groupe de Lie commutatif sur K. Alors, pour toutg ∈ G, la conjugaison cg est l’identite de G, donc Ad(g) = Lcg = idLG. Ainsi,la representation adjointe de G, i.e. Ad: G −→ GLK(LG), est l’homomorphismetrivial, de sorte que
ad = 0: LG −→ EndK(LG) .
Finalement, on voit que le crochet de LG est nul, c’est-a-dire,
[X,Y ] = 0 ,
pour tous X, Y ∈ LG.
Lemme 29.5. Soit E un F-espace vectoriel (a gauche si F = H) de dimensionfinie. Soient ε > 0 et Bε la boule correspondante dans R ou dans Z(F). Consideronsune application lisse
F : Bε −→ GLF(E) , t 7−→ F (t) ,
et F ′(0) ∈ LGLF(E) = EndF(E) sa derivee en 0. Si ~v ∈ E, alors on a
F ′(0)·~v =d
dt t=0
(F (t)·~v)
,
ou cette derniere derivee est celle, en 0, de l’application lisse
Bε −→ E , t 7−→ F (t)·~v .
Preuve. Soit n := dimF(E), que l’on peut supposer non-nul (car sinon le resultatest clair) et fixons une base (e) := (~e1, . . . , ~en) de E. On a donc une identification(i.e. un diffeomorphisme) entre GLF(E) et GLn(F). Pour chaque t ∈ Bε, on ecritla matrice F (t) sous la forme (fij(t)), ce qui definit n2 fonctions lisses
Fij : Bε −→ F , t 7−→ Fij(t)

114 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
et qui satisfont, pour des raisons evidentes F ′(0) =(F ′ij(0)
). Soit (v1, . . . , vn) les
composantes du vecteur ~v dans la base (e). On a alors
F ′(0)·v =∑i,j
F ′ij(0)vj · ~ei
=∑i,j
ddt t=0
(Fij(t)·vj
) · ~ei
=∑i,j
ddt t=0
((Fij(t)·vj
) · ~ei
)
= ddt t=0
(∑i,j
(Fij(t)·vj
) · ~ei
)
= ddt t=0
(F (t)·~v)
,
ou toutes les sommes sur i et sur j portent de 1 a n. Ceci etablit le lemme. ¤
Lemme 29.6. Soit G un groupe de Lie sur K. Pour X, Y ∈ LG, on a les egalites
ad(X) =d
dt t=0Ad
(exp(tX)
)
dans LGLK(LG) = EndK(LG), et
[X, Y ] =d
dt t=0
(Ad
(exp(tX)
)·Y)
dans LG.
Preuve. Pour X ∈ LG fixe, considerons la courbe globale
K −→ G , t 7−→ exp(tX)
sur G, tangente a X en e, cf. Theoreme 14.3. D’apres la Proposition 8.4, on a
ad(X) = Te Ad(X) =d
dt t=0Ad
(exp(tX)
)
dans LGLK(LG) = EndK(LG). Le Lemme 29.5 s’applique dans notre situation pournous donner
[X,Y ] = ad(X)·Y =d
dt t=0
(Ad
(exp(tX)
)·Y)
,
quelque soit Y ∈ LG. ¤
Theoreme 29.7. Pour le groupe de Lie GLn(F) sur Z(F), le crochet [ . , . ] surle Z(F)-espace vectoriel LGLn(F) = Mn(F) est donne par le commutateur, i.e.
[X, Y ] = XY − Y X ,
pour X, Y ∈ LGLn(F). En d’autres termes, LGLn(F) n’est autre que la Z(F)-algebre de Lie gln(F).
Preuve. Le Theoreme 14.16 nous apprend que l’exponentielle pour GLn(F) estdonnee par l’exponentielle matricielle, et le Theoreme 25.14 que la representationadjointe, dans ce cas, est donnee par la conjugaison de matrices. Ainsi, a partir dela seconde formule du Lemme 29.6, on obtient
[X, Y ] =d
dt t=0
(Ad
(exp(tX)
)·Y)
=d
dt t=0
(etX ·Y ·e−tX
),
29. L’ALGEBRE DE LIE D’UN GROUPE DE LIE 115
d’ou, par calcul direct (cf. Remarque 14.14),
[X,Y ] = X ·etX ·Y ·e−tX
t=0+ etX ·Y ·(−X)·e−tX
t=0= XY − Y X ,
comme annonce. ¤
Proposition 29.8. Soit ϕ : G −→ H un homomorphisme de groupes de Liesur K. Alors l’application tangentielle Lϕ : LG −→ LH est un homomorphisme deK-algebres (pour les crochets correspondants), en d’autres termes, pour X, Y ∈ LG,on a
Lϕ([X,Y ]LG
)=
[Lϕ(X), Lϕ(Y )
]LH
.
Preuve. Rappelons, par suite a la Proposition 25.21, que pour tout g ∈ G, lediagramme
LGAdG(g) //
Lϕ
²²
LG
Lϕ
²²LH
AdH(ϕ(g)) // LH
commute. Rappelons les notations adoptees dans la Notation 5.17, et notons queLK(LG, LH) est de facon canonique un groupe de Lie sur K pour l’addition, non-canoniquement isomorphe a Kdim(G)·dim(H); son espace tangent d’identifie canoni-quement a LK(LG, LH). Considerons maintenant les deux compositions d’applica-tions lisses
Φ: GΦ1:=AdG // GLK(LG)
Φ2:=Lϕ∗ // LK(LG, LH)
et
Ψ: GΨ1:=ϕ // H
Ψ2:=AdH // GLK(LH)Ψ3:=Lϕ∗ // LK(LG, LH) ,
ou Lϕ∗ designe l’application K-lineaire
EndK(LG) −→ LK(LG, LH) , ψ 7−→ Lϕ ◦ ψ
ou sa restriction a l’ouvert GLK(LG), et Lϕ∗ designe
EndK(LH) −→ LK(LG,LH) , ϑ 7−→ ϑ ◦ Lϕ
ou sa restriction a l’ouvert GLK(LH). Le diagramme commutatif ci-dessus nous ditprecisement que Φ = Ψ, ce qui nous permet de calculer la differentielle en e de cetteapplication, evaluee en un X ∈ LG donne, de deux manieres differentes. D’abord,pour Φ, on a
TeΦ1 = LAdG = adLG et TidLGΦ2 = (Lϕ∗)′ = Lϕ∗ ,
ou la derniere egalite decoule de la K-linearite de Lϕ∗. On a donc
TeΦ(X) = Lϕ∗ ◦ adLG(X) ∈ LK(LG,LH) .
Ainsi, pour Y ∈ LG, on obtient
TeΦ(X)·Y = Lϕ∗ ◦ adLG(X)·Y = Lϕ[X, Y ]LG .
Maintenant, pour Ψ, on a
TeΨ1 = Lϕ , TeΨ2 = LAdH = adLH et TidLH Ψ3 = (Lϕ∗)′ = Lϕ∗ ,
ou, comme avant, la derniere egalite decoule de la K-linearite de Lϕ∗. On a donc
TeΨ(X) = Lϕ∗ ◦ adLH ◦Lϕ(X) ∈ LK(LG, LH) .

116 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Il en resulte que pour Y ∈ LG, on a
TeΨ(X)·Y = Lϕ∗ ◦ adLH ◦Lϕ(X)·Y= adLH ◦Lϕ(X)·Lϕ(Y )
= adLH
(Lϕ(X)
)·Lϕ(Y )
=[Lϕ(X), Lϕ(Y )
]LH
.
Au total, la formule cherchee decoule de l’egalite TeΦ(X)·Y = TeΨ(X)·Y . ¤Corollaire 29.9. Soit E un F-espace vectoriel de dimension finie (a gauche
ou a droite si F = H). Alors la Z(F)-algebre de Lie LGLF(E) est egale a glF(E),en d’autres termes, le crochet est donne par
[Φ, Ψ] = Φ ◦Ψ−Ψ ◦ Φ ,
pour Φ, Ψ ∈ LGLF(E) = EndF(E).
Preuve. Si n = dimF(E), alors le choix d’une F-base (ordonnee) de E fournit unisomorphisme de groupes de Lie sur Z(F)
ϕ : GLF(E)∼=−→ GLn(F) ,
qui associe a un endomorphisme F-lineaire de E sa matrice par rapport a la basechoisie (cf. aussi la Remarque 5.18). En appliquant le foncteur Te(−), on obtientune application
Lϕ : EndF(E) = LGLF(E) −→ LGLn(F) = Mn(F) ,
qui n’est pas seulement un isomorphisme de Z(F)-espaces vectoriels, mais vraimentun isomorphisme de Z(F)-algebres pour la composition d’applications d’un cote etla multiplication matricielle de l’autre. Par la Proposition 29.8, Lϕ est egalementun isomorphisme de Z(F)-algebres pour les crochets correspondants de chaque cote.Par le Theoreme 29.7, le crochet sur LGLn(F) est donne par le commutateur dematrices. Il s’ensuit que le crochet sur LGLF(E) est donne par le commutateurd’applications. ¤Deuxieme preuve du Corollaire 29.9. En utilisant le Theoreme 25.15, on peut imiterla preuve du Theoreme 29.7 pour obtenir
[Φ, Ψ] =d
dt t=0
(Ad
(exp(tΦ)
)·Ψ)
=d
dt t=0
(etΦ ◦Ψ ◦ e−tΦ
),
en vertu du Lemme 29.6, d’ou, par calcul direct,
[Φ, Ψ] = Φ ◦ etΦ ◦Ψ·e−tΦ
t=0+ etΦ ◦Ψ·(−Φ) ◦ e−tΦ
t=0= Φ ◦Ψ−Ψ ◦ Φ ,
d’ou le resultat ¤Dans la suite, pour un groupe (de Lie) G, [ . , . ]G va designer le commutateur
dans G, afin de ne pas insister a la confusion avec un quelconque crochet de Lie.
Lemme 29.10. Soit G un groupe de Lie sur K (resp. analytique).(i) Pour X ∈ LG et h ∈ G, l’application
Φ: K −→ G , s 7−→ [exp(sX), h]G = exp(sX)·h·exp(−sX)·h−1
est lisse (resp. analytique), et sa derivee en 0 verifie
Φ′(0) = X −Ad(h)·X .

29. L’ALGEBRE DE LIE D’UN GROUPE DE LIE 117
(ii) Pour g ∈ G et Y ∈ LG, l’application
Ψ: K −→ G , t 7−→ [g, exp(tY )]G = g ·exp(tY )·g−1 ·exp(−tY )
est lisse (resp. analytique), et sa derivee en 0 verifie
Ψ′(0) = Ad(g)·Y − Y .
Preuve. (i) On peut decrire Φ comme etant la composition
Φ: KλX // G
∇=(idG,inv) // G×GidG ×ch // G×G
µ // G ,
ou λX(s) = exp(sX) pour s ∈ K, voir le Theoreme 14.3. En particulier, Φ estune composition d’applications lisses (resp. analytiques), donc est elle-meme lisse(resp. analytique). Cette decomposition et la Regle de Derivation en Chaıne nouspermettent de calculer que la derivee de Φ en 0 est
Φ′(0) = T0Φ(E0) = T(e,e)µ ◦ T(e,e)(idG×ch) ◦ Te(idG, inv) ◦ T0λX(E0)
= T(e,e)µ ◦ (Te idG⊕Tech) ◦ (Te idG, Te inv) ◦ T0λX(E0)
= T(e,e)µ ◦(idLG⊕Ad(h)
) ◦ (idLG, Te inv)(X)
= T(e,e)µ ◦(idLG⊕Ad(h)
)(X,−X)
= T(e,e)µ(X,−Ad(h)·X)
= X −Ad(h)·X ,
ou on a utilise le Theoreme 13.3 et les Propositions 15.1 et 15.2.(ii) De meme, on peut decrire Ψ comme etant la composition
Ψ: KλY // G
∇=(idG,inv) // G×Gcg×idG // G×G
µ // G ,
d’ou le fait qu’elle est lisse (resp. analytique), et on calcule, en invoquant les memesresultats, que
Ψ′(0) = T0Φ(E0) = T(e,e)µ ◦ T(e,e)(cg × idG) ◦ Te(idG, inv) ◦ T0λY (E0)
= T(e,e)µ ◦ (Tecg ⊕ Te idG) ◦ (Te idG, Te inv) ◦ T0λY (E0)
= T(e,e)µ ◦(Ad(g)⊕ idLG
) ◦ (idLG, Te inv)(Y )
= T(e,e)µ ◦(Ad(g)⊕ idLG
)(Y,−Y )
= T(e,e)µ(Ad(g)·Y,−Y
)
= Ad(g)·Y − Y ,
ce qui acheve la demonstration. ¤
Theoreme 29.11. Soit G un groupe de Lie sur K. La structure de K-algebresur LG donnee par le crochet est une structure de K-algebre de Lie.
Preuve. Montrons d’abord l’anti-commutativite du crochet. Considerons pour celal’application
Θ: K2 −→G
(s, t) 7−→ [exp(sX), exp(tY )]G = exp(sX)·exp(tY )·exp(−sX)·exp(−tY ) ,

118 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
ou X,Y ∈ LG sont fixes. Cette application est lisse (et meme analytique si G estanalytique), car elle s’ecrit comme la composition
Θ: K2λX×λY // G×G
[ . , . ]G // G ,
et le commutateur sur G est evidemment lisse (resp. analytique), cf. Lemme 4.9 encas de doute. Par le Lemme 29.10, les derivees partielles, par rapport a s et parrapport a t, de Θ en 0 sont donnees par
∂
∂s s=0Θ: K −→ TG , t 7−→ X −Ad
(exp(tY )
)·Xet
∂
∂t t=0Θ: K −→ TG , s 7−→ Ad
(exp(sX)
)·Y − Y ;
de plus, elles prennent leurs valeurs dans LG ⊆ TG. Maintenant, on a∂
∂t t=0
∂
∂s s=0Θ = − ∂
∂t t=0
(Ad
(exp(tY )
)·X)
= −[Y,X] ,
ou la derniere egalite provient du Lemme 29.6. De meme, on a∂
∂s s=0
∂
∂t t=0Θ =
∂
∂s s=0
(Ad
(exp(sX)
)·Y)
= [X, Y ] .
Le Lemme 9.5 (style “Lemme de Schwarz”) nous dit que ces deux doubles deriveespartielles coıncident, d’ou l’egalite −[Y, X] = [X, Y ] cherchee.
Passons a l’identite de Jacobi. Par la Proposition 25.9, la representation ad-jointe
Ad: G −→ GLK(LG)est un homomorphisme de groupes de Lie surK. Par la Proposition 29.8, l’applicationtangentielle
ad = LAd: LG −→ LGLK(LG)est un homomorphisme de K-algebres (pour les crochets respectifs). Ainsi, en appli-quant le Corollaire 29.9, pour X, Y ∈ LG, on obtient
ad[X, Y ]LG = [ad(X), ad(Y )]glK(LG) = ad(X) ◦ ad(Y )− ad(Y ) ◦ ad(X) .
Finalement, en evaluant cette relation en un Z ∈ LG, on trouve[[X,Y ]LG, Z
]LG
= ad[X, Y ]LG(Z)
=(ad(X) ◦ ad(Y )− ad(Y ) ◦ ad(X)
)(Z)
=[X, [Y,Z]LG
]LG− [
Y, [X, Z]LG
]LG
,
ce qui est equivalent a l’identite de Jacobi. ¤Corollaire 29.12. Soit ϕ : G −→ H un homomorphisme de groupes de Lie
sur K. Alors l’application tangentielle Lϕ : LG −→ LH est un homomorphisme deK-algebres de Lie. En particulier, si ϕ est un isomorphisme de groupes de Lie surK, alors Lϕ est un isomorphisme de K-algebres de Lie entre LG et LH.
Preuve. Il suffit d’associer la Proposition 29.8 et le Theoreme 29.11. ¤Corollaire 29.13. La correspondance definie par L(−) est un foncteur de la
categorie des groupes de Lie sur K vers celle des K-algebres de Lie de dimensionfinie. Ce foncteur est fidele sur la sous-categorie pleine des groupes de Lie sur Kqui sont connexes.

29. L’ALGEBRE DE LIE D’UN GROUPE DE LIE 119
Preuve. La premiere partie est simplement la juxtaposition d’une observation faitedans la Notation 11.1 (iii), du Theoreme 29.11 et du Corollaire 29.12. L’enonce surla fidelite est, par definition meme de cette notion, le contenu du Theoreme 16.1. ¤
Remarque 29.14. Soit G un groupe de Lie reel. Si son algebre de Lie LG nepossede, comme espace vectoriel, aucune structure complexe telle que le crochet deLie [ . , . ] fasse de LG une algebre de Lie complexe (telle que [ . , . ] soit C-bilineairesuffit !), alors G ne possede aucune structure de groupe de Lie complexe compatibleavec sa structure de groupe topologique. En effet, cela decoule de la Remarque 29.3et du Corollaire 16.6. C’est une methode tres efficace pour montrer que certainsgroupes de Lie reels ne possede aucune structure de groupe de Lie complexe. Cecritere s’applique sans trop de difficultes aux groupes SU(n) pour n ≥ 2, U(n) pourn ≥ 1, et Sp(n) pour n ≥ 1.
Avant le prochain enonce, rappelons que pour sous-groupe de Lie H d’un groupede Lie G sur K, on peut identifier, de facon canonique, le K-espace vectoriel LH aun K-sous-espace vectoriel de LG, cf. Remarque 18.2 (iii).
Theoreme 29.15. Soit G un groupe de Lie sur K, et soit H un sous-groupede Lie de G. Alors le crochet de Lie sur la K-algebre de Lie LH est donne par larestriction du crochet de Lie sur LG, i.e.
[X, Y ]LH = [X, Y ]LG ,
pour tous X, Y ∈ LH. En particulier, LH est une K-sous-algebre de Lie de LG.
Preuve. L’inclusion inclH : H ↪→ G est un homomorphisme de groupes de Liesur K, par definition d’un sous-groupe de Lie sur K. Par le Corollaire 29.12, sonapplication tangentielle LinclH est un homomorphisme de K-algebres de Lie. Or,de la Remarque 18.2 (iv), il suit que
LinclH = inclLH : LH ↪→ LG ,
ce qui etablit le resultat. ¤Deuxieme preuve du Theoreme 29.15. Soient X, Y ∈ LH. Par la seconde formuledu Lemme 29.6, on a
[X, Y ]LH =d
dt t=0
(AdH
(expH(tX)
)·Y)
dans LH. Par le Theoreme d’Elie Cartan 19.1 (et la Remarque 14.2), l’exponentiellepour H est la restriction a H (avec le co-domaine LH ⊆ LG) de l’exponentielle pourG. De plus, par la Proposition 25.13, pour h ∈ H, on a
AdH(h) = AdG(h)|LH
(avec le co-domaine LH ⊆ LG). Au total, on obtient
d
dt t=0
(AdH
(expH(tX)
)·Y)
=d
dt t=0
(AdG
(expG(tX)
)·Y)
.
Or, en reappliquant le Lemme 29.6, on a
d
dt t=0
(AdG
(expG(tX)
)·Y)
= [X, Y ]LG ,
d’ou l’egalite cherchee. ¤
120 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Corollaire 29.16. Si G est un groupe de Lie matriciel, i.e. un sous-groupe deLie de GLn(F) pour un n ∈ N, alors le crochet de Lie sur LG ⊆ Mn(F) est donnepar le commutateur, i.e.
[X, Y ] = XY − Y X ,
pour tous X, Y ∈ LG.
Preuve. C’est la combinaison des Theoremes 29.7 et 29.15. ¤Remarque 29.17. En particulier, le Corollaire 29.16 s’applique a tous les
groupes classiques et “semi-classiques” rencontres dans les Sections 21 et 22.
Corollaire 29.18. Soient G un groupe de Lie complexe, et H un sous-groupede G. Alors H est un sous-groupe de Lie complexe de G (et donc un groupe de Liecomplexe) ssi H est ferme dans G et si le R-sous-espace vectoriel LH de LG, ausens du Theoreme d’Elie Cartan 19.1, en est une sous-algebre de Lie complexe.
Preuve. Le sens direct est une consequence du Theoreme 29.15. La reciproquedecoule du Theoreme 20.1. ¤
Corollaire 29.19. Soient H1 et H2 deux sous-groupes de Lie d’un groupe deLie G sur K. Alors, l’intersection H1 ∩H2 est un sous-groupe de Lie de G sur K,et on a L(H1 ∩H2) = LH1 ∩ LH2 vus comme K-sous-algebres de Lie de LG.
Preuve. Cela resulte de la Proposition 20.5 et du Theoreme 29.15. ¤Exemple 29.20. Le tore Tn de dimension n est isomorphe, comme groupe de
Lie reel, au sous-groupe ferme
Dn(C) ∩U(n)
de GLn(C) constitue de toutes les matrices complexes diagonales qui sont unitaires,i.e. dont les n entrees diagonales sont des nombres complexes de module 1. Par leCorollaire 29.19, on en deduit que
LTn ∼= LDn(C) ∩ LU(n) =( R·i
�R·i
).
Maintenant, par le Corollaire 29.16, on voit que le crochet de Lie s’annule surLTn, en d’autres termes, il s’agit d’une R-algebre de Lie abelienne de dimension n.En fait, par une methode bien moins onereuse, a l’Exemple 29.4, nous avons dejaobtenu un resultat plus general, a savoir que l’algebre de Lie d’un groupe de Liecommutatif sur K est abelienne.
Voici encore une relation utile entre la representation adjointe Ad d’un groupede Lie et la representation adjointe ad de son algebre de Lie. Avant l’enonce,rappelons la Remarque 14.18.
Proposition 29.21. Soit G un groupe de Lie sur K. On a alors l’egalite
Ad ◦ exp = ead ,
a laquelle on donne l’interpretation suivante : pour X ∈ LG, on a
Ad(exp(X)) = ead(X) ∈ GLK(LG) ,
en d’autres termes, pour X, Y ∈ LG, on a la relation
Ad(exp(X)
)·Y = Y + [X, Y ] + 12!
[X, [X, Y ]
]+ 1
3!
[X,
[X, [X, Y ]
]]+ . . .
dans LG (et la serie converge).

30. LA FORMULE DE CAMPBELL-HAUSDORFF 121
Preuve. Par definition, on a ad = LAd, donc le resultat decoule, primo, de lacommutativite du diagramme
LGad=LAd //
expG
²²
LGLK(LG)
expGLK(LG)
²²G
Ad // GLK(LG)
qui provient de la naturalite de l’exponentielle, cf. Theoreme 14.20, et, secundo, del’egalite
expGLK(LG) = e(−)
donnee par le Theoreme 14.19. ¤
Exercice 29.22. Exhiber l’isomorphisme canonique S3 = Sp(1)∼=−→ SU(2) et
son inverse, et montrer que LS3 = sp(1) ∼= su(2). Montrer que
LS3 = H◦ , ou H◦ := R·i⊕ R·j ⊕ R·k ⊂ Hest le R-sous-espace vectoriel de H forme des quaternions purement imaginaires.Determiner le crochet de Lie de l’algebre de Lie LS3, et en deduire que l’application
LS3 ∼=−→ (R3,∧) , a·i + b·j + c·k 7−→ 2a·~e1 + 2b·~e2 + 2c·~e3 (a, b, c ∈ R)
est un isomorphisme de R-algebres de Lie, comme indique, ou “∧ ” est le produitvectoriel usuel sur l’espace vectoriel R3.
30. La formule de Campbell-Hausdorff
Nous allons admettre les resultats contenus dans l’information qui va suivre (ilssont techniquement difficiles a obtenir et sont bases sur des arguments analytiqueset d’autres purement formels). Nous allons ensuite en tirer quelques consequencesinteressantes.
Dans cette section, pour un groupe de Lie G sur K, nous allons utiliser l’identiteexp(−X) = exp(X)−1 pour X ∈ LG sans mention particuliere (cf. Theoreme 14.4en cas de doute).
Information 30.1 (Formule de Campbell-Hausdorff).Soit G un groupe de Lie analytique sur K. (Rappelons qu’on peut montrer quetout groupe de Lie sur K possede une structure analytique, qui est en plus unique,cf. Remarque 6.2). On peut montrer qu’il y a un lien etroit entre le crochet deLie sur LG et le produit dans G. Plus explicitement, on peut montrer que pourX, Y ∈ LG, il existe ε = ε(X, Y ) > 0 tel que pour s, t ∈ Bε ⊂ K, on a l’egalite
exp(sX)·exp(tY ) = exp(sX + tY + st
2 [X, Y ] +O(τ3))
avec τ := max(|s|, |t|). Plus precisement, si on fixe une norme ||.|| arbitraire sur
LG, alors il existe une constante “universelle” ε◦ = ε◦(LG, ||.||) telle que pour
X, Y ∈ LG satisfaisants ||X|| < ε◦ et ||Y || < ε◦, on a
exp(X)·exp(Y ) = exp(X + Y + 1
2 [X, Y ] +O(τ3))
avec τ := max(||X||, ||Y ||). Bien mieux, la Formule de Campbell-Hausdorff nous
dit qu’il existe une famille {ln}n≥1 de polynomes de Lie en deux variables S et T ,c’est-a-dire que chaque ln = ln(S, T ) est un polynome (de degre n, a coefficients

122 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
dans K) s’exprimant a l’aide de S, T et de crochets de Lie iteres en S et en T , telleque pour X, Y ∈ LG satisfaisants ||X|| < ε◦ et ||Y || < ε◦, et pour tout n ≥ 1,
exp(X)·exp(Y ) = exp(l1(X, Y ) + l2(X,Y ) + . . . + ln(X,Y ) +O(τn+1)
)
avec τ := max(||X||, ||Y ||). Par consequent, si X et Y commutent, i.e. si [X, Y ] = 0,
et si X et Y sont de norme < ε◦, alors on a
exp(X)·exp(Y ) = exp(X + Y ) = exp(Y + X) = exp(Y )·exp(X) .
En particulier, si X et Y sont suffisamment petits, et si X et Y commutent dans LG,alors exp(X) et exp(Y ) commutent dans G. De plus, on a les proprietes suivantes :
(i) pour chaque n, le polynome ln(S, T ) est a coefficients rationnels (i.e. dansQ et pas seulement dans Q⊕ i·Q si K = C);
(ii) ces polynomes ln(S, T ) sont universels, dans le sens qu’il existe une uniquetelle famille valable pour tous les groupes de Lie analytiques sur R et C;
(iii) pour chaque n, ln est homogene, i.e.
ln(tX, tY ) = tnln(X,Y ) , ∀t ∈ K ;
(iv) pour tous X, Y ∈ LG tels que ||X|| < ε◦ et ||Y || < ε◦, la serie (appeleeserie de Campbell-Hausdorff )
l(X,Y ) := l1(X, Y ) + l2(X,Y ) + . . .
converge dans LG et definit, sur ce domaine de LG⊕LG, une applicationanalytique de X et Y ; de plus, on a
exp(X)·exp(Y ) = exp(l(X, Y )
).
(v) les premiers termes sont explicitement donnes par
• l1(S, T ) = S + T
• l2(S, T ) = 12 [S, T ]
• l3(S, T ) = 112
[S, [S, T ]
]+ 1
12
[T, [T, S]
]
• l4(S, T ) = 124
[T,
[S, [T, S]
]]
Il est instructif de remarquer que la formule pour l(X, Y ) exprime, localementautour de (e, e) ∈ G × G et de e ∈ G, le produit µ dans la carte donnee parl’exponentielle. (Du fait que exp(X)−1 = exp(−X), l’expression locale du passagea l’inverse dans cette meme carte est donne par le passage a l’oppose dans LG.)
Remarque 30.2. La Formule de Campbell-Hausdorff porte egalement les nomssuivants :
(i) Formule de Campbell-Baker-Hausdorff(ii) Formule de Baker-Campbell-Hausdorff(iii) Formule de Campbell-Baker-Hausdorff-Dynkin.
Remarque 30.3. Le fait qu’on ait l1(X, Y ) = X + Y pour X, Y ∈ LG dans laFormule de Campbell-Hausdorff decoule en fait du Lemme 19.9.
Remarque 30.4. Dans le cas des groupes de Lie matriciels, i.e. des sous-groupes de Lie de GLn(F) (vu comme groupe de Lie sur R ou sur Z(F)), onpeut facilement verifier “a la main” les premiers termes de la Serie de Campbell-Hausdorff (sur la base du Theoreme 14.16). Illustrons cela jusqu’au degre 2. Soient

30. LA FORMULE DE CAMPBELL-HAUSDORFF 123
X, Y ∈ Mn(F) et soient s, t ∈ Z(F). On suppose d’abord qu’on a fixe une normesous-multiplicative ||.|| sur Mn(F), i.e. telle que ||X1X2|| ≤ ||X1||·||X2|| pour tousX1, X2 ∈ Mn(F) (cela existe). On suppose ensuite que s et t suffisamment petitspour que les series de puissances apparaissant ci-dessous convergent normalement(i.e. que les series des normes convergent), de sorte que l’on peut effectuer les som-mations dans l’ordre desire (i.e. travailler formellement); on peut montrer que si
U :={Z ∈Mn(F)
∣∣ ||Z|| < ln 22
},
alors sX ∈ U et tY ∈ U convient. D’un cote, on a
esX ·etY =(1In + sX + s2
2 X2 +O(s3))·(1In + tY + t2
2 Y 2 +O(t3))
= 1In + sX + tY + stXY + s2
2 X2 + t2
2 Y 2 +O(τ3)
avec τ := max(|s|, |t|). De l’autre, on a
esX+tY + st2 [X,Y ]+O(τ3) = 1In + sX + tY + st
2 [X, Y ] + 12 (sX + tY )2 +O(τ3)
= 1In + sX + tY + st2 XY − st
2 Y X + s2
2 X2 + st2 XY +
+ st2 Y X + t2
2 Y 2 +O(τ3)
= 1In + sX + tY + stXY + s2
2 X2 + t2
2 Y 2 +O(τ3) .
On voit que esX ·etY = esX+tY + st2 [X,Y ]+O(τ3) (sous nos hypotheses sur s et t).
Proposition 30.5. Soient G un groupe de Lie analytique sur K, et ||.|| unenorme arbitraire sur LG. Alors, il existe ε′◦ = ε′◦
(LG, ||.||) > 0 tel que pour tous
X, Y ∈ LG verifiant ||X|| < ε′◦ et ||Y || < ε′◦, on a les proprietes suivantes :
• exp(X)·exp(Y )·exp(X)−1 = exp(Y + [X, Y ] +O(τ3)
)
•[exp(X), exp(Y )
]G
= exp([X,Y ] +O(τ3)
)
avec τ := max(||X||, ||Y ||), ou O(τ3) est une fonction analytique (differente dans
les deux cas) donnee par une serie de polynomes de Lie (universelle) en X et Y ,de degres n ≥ 2, a coefficients rationnels, et homogenes. En particulier, si X et Ycommutent et sont de norme < ε′◦, alors on a
• exp(X)·exp(Y )·exp(X)−1 = exp(Y )
•[exp(X), exp(Y )
]G
= e .
Preuve. Pour δ > 0, notons BLGδ le boule ouverte de rayon δ (pour la norme fixee),
centree en 0, dans LG. Soit ε◦ comme dans l’Information 30.1, et consideronsl’application
l : BLGε◦ ×BLG
ε◦ −→ LG , (P, Q) 7−→ l(P, Q) .
Comme l est continue (et meme analytique), on trouve ε1 > 0 tel que
l(BLGε1
×BLGε1
) ⊆ BLGε◦ .
Par le meme argument, on trouve ε > 0 tel que
l(BLGε2
×BLGε2
) ⊆ BLGε1
.

124 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Posons ε′◦ := min{ε1, ε2} > 0 (c’est celui que l’on cherche). D’apres une doubleapplication de la Formule de Campbell-Hausdorff, pour ||X|| < ε′◦ et ||Y || < ε′◦, ona les egalites
exp(l(l(X,Y ),−X
))= exp
(l(X,Y )
)·exp(−X) = exp(X)·exp(Y )·exp(−X) .
En combinant une troisieme application de la Formule de Campbell-Hausdorff avecl’egalite obtenue, pour ||X|| < ε′◦ et ||Y || < ε′◦, on derive les egalites
exp(
l(l(l(X, Y ),−X
),−Y
))= exp
(l(l(X,Y ),−X
))·exp(−Y )
= exp(X)·exp(Y )·exp(−X)·exp(−Y )
=[exp(X), exp(Y )
]G
.
Maintenant, calculons les multi-applications de l apparaissant dans ces formules.D’abord, dans la premiere situation, on a
l(l(X,Y ),−X
)= l
(X + Y + 1
2 [X,Y ] +O(τ3),−X)
= X + Y + 12 [X,Y ]−X + 1
2 [X,−X] + 12 [Y,−X] +O(τ3)
= Y + [X, Y ] +O(τ3) .
Ensuite, en appliquant ce resultat a la deuxieme situation, on trouve
l(l(l(X, Y ),−X
),−Y
)= l
(Y + [X, Y ] +O(τ3),−Y
)
= Y + [X, Y ]− Y + 12 [Y,−Y ] +O(τ3)
= [X, Y ] +O(τ3) .
D’apres la methode adoptee, il est clair que, dans les deux cas, la fonction O(τ3)apparaissant est une serie comme decrite dans l’enonce. ¤
Corollaire 30.6. Soit G un groupe de Lie sur K. Alors, pour X, Y ∈ LG, ilexiste ε = ε(X) > 0 tel que pour t ∈ Bε, on a l’egalite
Ad(exp(tX)
)·Y = Y + t[X, Y ] +O(|t|2) ,
ou O(|t|2) est une serie de polynomes de Lie rationnels, en tX et Y , de degres ≥ 2,et homogenes. En particulier, si X et Y commutent, alors Ad
(exp(tX)
)·Y = Xpour tout t ∈ Bε.
Preuve. D’apres le Lemme 25.10 (avec g = exp(tX)), on a l’egalite
Ad(exp(tX)
)·Y =∂
∂s s=0exp(tX)·exp(sY )·exp(−tX) .
Soit ε := ..., ou ε′◦ est comme dans l’enonce de la Proposition 30.5. Par cetteproposition, pour t ∈ Bε, on a
Ad(exp(tX)
)·Y =∂
∂s s=0exp
(sY + st[X,Y ] +O(|t|3)) ,
car pour s tendant vers 0, la norme ||sY || tend vers 0 (et donc devient, asympto-tiquement, < ε′◦) et τ := max
(|s|, |t|) devient, asymptotiquement, |t|. Comme uneiteration de crochets de Lie ne faisant intervenir que tX est nulle, pour la fonctionO(|t|3) ci-dessus peut necessairement s’ecrire sous la forme s·O(|t|2) (pour t ∈ Bε et

30. LA FORMULE DE CAMPBELL-HAUSDORFF 125
pour s dans une boule ouverte centree en 0 suffisamment petite). Ainsi, l’elementAd
(exp(tX)
)·Y de LG est donne par
∂
∂s s=0exp
(s·(Y + t[X, Y ] +O(|t|2))
)= Y + t[X,Y ] +O(|t|2) ,
ou l’egalite provient du Theoreme 14.3. ¤
Proposition 30.7. Soit G un groupe de Lie analytique sur K. Alors, pourX, Y ∈ LG, les proprietes suivantes sont equivalentes :
(i) pour tout t ∈ K, les elements exp(tX) et exp(tY ) de G commutent;(ii) il existe ε > 0 tel que, pour tout t ∈ Bε, les elements exp(tX) et exp(tY )
de G commutent;(iii) les elements X et Y de LG commutent, i.e. [X, Y ] = 0;(iv) il existe ε > 0 tel que, pour tous s, t ∈ Bε, les elements exp(sX) et exp(tY )
de G commutent;(v) pour tous s, t ∈ K, les elements exp(sX) et exp(tY ) de G commutent.
Si K = C, on obtient encore deux autres proprietes equivalentes, correspondantes a(i) et (iii), en se restreignant a des s et t reels.
Preuve. On suppose donc X et Y fixes. Il est clair que (i) implique (ii), et que(v) implique (iv). D’apres la Proposition 30.5, il existe ε′ > 0 tel que pour touss, t ∈ Bε′ ⊂ K, on a
[exp(sX), exp(tY )
]G
= exp(st[X, Y ] +O(τ3)
),
ou τ := max(|s|, |t|), et avec O(τ3) s’annulant si [X, Y ] = 0. Ceci montre que (iii)
implique (ii) et (iv). Bien sur, (ii) decoule de (iv). Montrons qu (ii) implique (iii).D’apres la formule ci-dessus (avec s = t), des que |t| < min{ε, ε′}, on a
exp(t2[X,Y ] +O(|t|3)) = e .
Comme exp est un diffeomorphisme local en 0 (cf. Theoreme 14.8), il existe ε′′ > 0,avec ε′′ ≤ min{ε, ε′}, tel que
t2[X, Y ] +O(|t|3) = 0
des que |t| < ε′′. Il s’ensuit que [X, Y ] = 0. Maintenant, supposons que (ii) estverifie et montrons (i). Si t ∈ K, on trouve n ∈ N∗ tel que t
n ∈ Bε, et, en appliquantle Corollaire 14.4, on a donc
exp(tX)·exp(tY ) = exp( tnX)n ·exp( t
nY )n
= exp( tnY )n ·exp( t
nX)n
= exp(tY )·exp(tX) .
Finalement, supposons que (iv) est verifiee. Pour s, t ∈ K, on trouve n ∈ N∗ telque t
n ∈ Bε et sn ∈ Bε, et, par le Corollaire 14.4 a nouveau, on obtient
exp(sX)·exp(tY ) = exp( snX)n ·exp( t
nY )n
= exp( tnY )n ·exp( s
nX)n
= exp(tY )·exp(sX) .
Pour la derniere phrase de l’enonce, il suffit de considerer un groupe de Lie complexecomme un groupe de Lie reel. ¤
126 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Proposition 30.8. Soit G un groupe de Lie analytique connexe sur K. Alors,G est commutatif ssi son algebre de Lie LG est abelienne.
Preuve. On a deja vu que si G est commutatif, alors LG est abelienne (voirl’Exemple 29.4). Passons a la reciproque. On suppose donc LG abelienne. D’apresla Proposition 30.5, pour une norme ||.|| arbitraire sur LG, il existe ε > 0 tel quepour tous X, Y ∈ LG verifiant ||X|| < ε et ||Y || < ε, on a
[exp(X), exp(Y )
]G
= exp([X, Y ] +O(τ3)
)= e
avec τ := max(||X||, ||Y ||), ou la seconde egalite provient du fait que [X, Y ] = 0
et que O(τ3) s’annule, puisque c’est une serie de polynomes de Lie de degres ≥ 2dans une algebre de Lie abelienne. Comme exp est un diffeomorphisme local en 0,en vertu du Theoreme 14.8, on trouve un voisinage ouvert U de 0 dans G, contenudans la boule ouverte centree en 0 de rayon ε, et un voisinage ouvert V de e dansG tels que exp y soit un diffeomorphisme, i.e.
exp |U : U≈−→ V .
D’apres ce qui a ete observe, on a [V, V ] = {e}, c’est-a-dire que tous les elementsde V commutent deux a deux. Il s’ensuit que le sous-groupe 〈V 〉 engendre par Vdans G est abelien. Or, par connexite de G, la Proposition 3.10 s’applique pourdire que 〈V 〉 = G, ce qui acheve la demonstration. ¤
Remarque 30.9. Bien sur, l’hypothese de connexite est indispensable dans laProposition 30.8, comme le montre l’exemple des groupes finis non-commutatifs.En fait, ce que la preuve ci-dessus montre est que LG est abelienne ssi Ge estcommutatif.
Voici encore une autre application interessante de la Formule de Campbell-Hausdorff. Avant de l’enoncer, rappelons que pour un sous-groupe de Lie H d’ungroupe de Lie G sur K, l’algebre de Lie LH s’identifie a une K-sous-algebre de Liede LG (voir le Theoreme 29.15).
Theoreme 30.10. Soit G un groupe de Lie analytique sur K. Si G est connexe,alors son centre Z(G) est un sous-groupe de Lie analytique de G sur K et son algebrede Lie coıncide avec le centre de l’algebre de Lie de G, i.e.
LZ(G) = z(LG) .
En particulier, Z(G) est discret ssi z(LG) est trivial.
Preuve. Fixons une norme ||.|| arbitraire sur LG. Soit ε′◦ > 0 comme dans laProposition 30.5. On trouve ε > 0, avec ε ≤ ε′◦, tel que sur la boule ouverte B ⊂ LGde rayon ε, centree en 0, l’exponentielle se restreigne en un diffeomorphisme, i.e.
expG |B : B≈−→ V := expG(B) ⊆ G .
Maintenant, le centre Z(G) est un sous-groupe ferme de G, donc, par le Theoremed’Elie Cartan 19.1, c’est un sous-groupe de Lie analytique reel de G (plus precisementde GR). Par le meme theoreme, son algebre de Lie (comme groupe de Lie reel) estla R-sous-algebre de Lie de LG (i.e. de LGR) donnee par
LZ(G) ={Y ∈ LG
∣∣ expG(tY ) ∈ Z(G) , ∀t ∈ R tq. tY ∈ V}
.

30. LA FORMULE DE CAMPBELL-HAUSDORFF 127
Comme G est connexe, par la Proposition 3.10, on a 〈V 〉 = G. De la et de laProposition 30.5, on deduit successivement que
LZ(G) =�Y ∈ LG
�� �g, expG(tY )�G
= e , ∀g ∈ G , ∀t ∈ R tq. tY ∈ B
=�Y ∈ LG
�� �g, expG(tY )�G
= e , ∀g ∈ V , ∀t ∈ R tq. tY ∈ B
=�Y ∈ LG
�� � expG(sX), expG(tY )�G
= e , ∀X ∈ LG , ∀s, t ∈ R tq. sX, tY ∈ B
=�Y ∈ LG
�� expG
�st[X, Y ] +O(τ3)
�= e , ∀X ∈ LG , ∀s, t ∈ R tq. sX, tY ∈ B
,
ou τ := max(|s|, |t|). Notons que pour deux elements arbitraires X, Y ∈ LG fixes,
on a que st[X, Y ]+O(τ3) est dans B pour tous s, t dans un intervalle ouvert (autourde 0) suffisamment petit; de plus, st[X,Y ] +O(τ3) s’annule pour tous s et t danscet intervalle ssi [X,Y ] = 0. Ainsi, l’exponentielle expG etant un diffeomorphismede B sur V , on en deduit que
LZ(G) ={Y ∈ LG
∣∣ [X, Y ] = 0 , ∀X ∈ LG}
= z(LG) .
Il est evident que Z(G) est discret ssi z(LG) est trivial. Si K = R, la demonstrationest achevee. Supposons donc que K = C. Comme Z(G) est un sous-groupe fermede G, et comme son algebre de Lie LZ(G) est, de toute evidence, une sous-algebrede Lie complexe de LG, le Theoreme 20.1 s’applique pour nous dire que Z(G) estun sous-groupe de Lie complexe de G. ¤
Voici une derniere application de la Formule de Campbell-Hausdorff.
Theoreme 30.11. Soient G un groupe de Lie analytique sur K, et H un sous-groupe de Lie de G sur K. Supposons que G et H sont connexes. Alors H estnormal dans G ssi LH est un ideal de Lie de LG.
Preuve. Supposons que H est normal dans G. Tout element g ∈ G definit uneapplication
cg|H : H −→ H , h 7−→ ghg−1
(a noter que son co-domaine est H), qui est un automorphisme du groupe de LieH sur K. Donc, en prenant la differentielle en e de cette application, on obtientune application K-lineaire induite
L(cg|H) : LH −→ LH .
Or, on a L(cg|H) = L(cg)|LH = AdG(g)|LH (avec le co-domaine LH). Il s’ensuitque pour tout t ∈ K, tout X ∈ LG et tout Y ∈ LH, on a
AdG
(expG(tX)
)·Y ∈ LH .
Par le Corollaire 30.6, il existe ε > 0 tel que pour t ∈ Bε, on a l’egalite
AdG
(expG(tX)
)·Y = X + t[X, Y ] +O(|t|2) .
Ce ceci nous permet de definir une application analytique
F : Bε −→ LH , t 7−→ AdG
(expG(tX)
)·Y = X + t[X, Y ] +O(|t|2)(pour l’analycite, voir le Theoreme 14.3 et la Proposition 25.9). Il s’ensuit que
LH 3 F ′(0) =d
dt t=0
(X + t[X,Y ] +O(|t|2)) = [X, Y ] .
Ceci montre que LH est un ideal de Lie de LG. Reciproquement, supposons queLH est un ideal de Lie de LG. Soit ||.|| une norme arbitraire sur LG. Par la

128 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Proposition 30.5, il existe ε′◦ > 0 tel que pour tous X, Y ∈ LG verifiant ||X|| < ε′◦et ||Y || < ε′◦, on a
expG(X)·expG(Y )·expG(X)−1 = expG
(Y + [X,Y ] +O(τ3)
)
avec τ := max(||X||, ||Y ||), ou O(τ3) est une serie de polynomes de Lie en X et
Y , de degres n ≥ 2. Supposons en plus que Y ∈ LH. Comme LH est un ideal deLie de LG, tous ces polynomes de Lie en X et Y sont dans LH (ceux ne faisantintervenir que X sont nuls). Comme LH est un sous-espace ferme de LG et commela serie converge, elle est contenue dans LH. Ainsi, l’element Y +[X,Y ]+O(τ3) estdans LH, donc, comme expH = expG |LH (avec le co-domaine H, voir le Theoremed’Elie Cartan 19.1 et la Remarque 14.2), on obtient
expG(X)·expH(Y )·expG(X)−1 = expH
(Y + [X,Y ] +O(τ3)
) ∈ H .
Soit B la boule ouverte centree en 0 de rayon ε′◦ dans LG et posons
U := expG(B) ⊆ G et V := expH(B ∩ LH) ⊆ H .
Comme l’exponentielle (pour G comme pour H) est un diffeomorphisme local en0, cf. Theoreme 14.8, U et V sont des voisinages ouverts de e dans G et dans Hrespectivement. On a montre ci-dessus qu’on a
⋃
g∈U
g ·V ·g−1 ⊆ H .
Il est immediat d’en deduire que
H ⊇⋃
g∈U
g ·〈V 〉·g−1 =⋃
g∈U
g ·H ·g−1 ⊇ H ,
ou l’egalite decoule du fait que 〈V 〉 = H du fait que H est connexe, voir la Propo-sition 3.10; on a donc H =
⋃g∈U g·H·g−1. Maintenant, il est facile de se convaincre
(inductivement) qu’on a
H =⋃
g1∈U
g1 ·H ·g−11 =
⋃
g1,g2∈U
g2g1 ·H ·(g2g1)−1 = . . . =⋃
g∈〈U〉g ·H ·g−1 ,
ce qui permet de conclure que H est normal dans G, puisque 〈U〉 = G etant donneque G est connexe (en invoquant une seconde fois la meme proposition). ¤
Remarque 30.12. La preuve ci-dessus montre que si H est un sous-groupe deLie sur K d’un groupe de Lie G sur K, alors LH est un ideal de Lie de LG ssi He
est un sous-groupe normal de Ge. A titre d’exercice, le lecteur pourra verifier quesi H est normal dans G, alors He est normal dans G; de plus, si He est normaldans G, alors He est normal dans Ge (pour cet exercice, l’hypothese que G est ungroupe topologique et que H en est un sous-groupe topologique suffit; le resultatreste valable si l’on considere les composantes connexes G(e) et H(e) en lieu et placedes composantes d’arcs Ge et He – ce qui revient au meme pour les groupes de Liesur K).
31. La representation adjointe d’une algebre de Lie
Soit k un corps (commutatif) fixe, de caracteristique differente de 2.
Definition 31.1. Soit g une k-algebre de Lie.

31. LA REPRESENTATION ADJOINTE D’UNE ALGEBRE DE LIE 129
(i) Une representation (de k-algebre de Lie) de g est un homomorphisme dek-algebres de Lie
Φ: g −→ glk(E) ,
ou E est un k-espace vectoriel (typiquement, de dimension finie).(ii) Une representation matricielle (de k-algebre de Lie) de g est un homo-
morphisme de k-algebres de Lie
Φ: g −→ gln(k) ,
avec n ∈ N.(iii) Une k-derivation de g est une application k-lineaire
d : g −→ g , X 7−→ dX
verifiant la regle de Leibniz
d[X,Y ] = [dX, Y ] + [X, dY ] ,
pour tous X, Y ∈ g. Le k-espace vectoriel de toutes les k-derivations de gest note Derk(g). Si le corps de base k est clair selon le contexte, on dirasimplement derivation.
Lemme 31.2. Soit g une k-algebre de Lie. Alors le k-espace vectoriel Derk(g)porte une structure canonique de k-algebre de Lie pour le crochet donne par
[d, δ] := dδ − δd
pour d, δ ∈ Derk(g), c’est a dire,
[d, δ] : g −→ g , X 7−→ [d, δ]X := dδX − δdX;
on note derk(g) cette k-sous-algebre de Lie de glk(g).
Preuve. Il suffit de verifier la regle de Leibniz pour [d, δ]. Pour X, Y ∈ g, on calcule
[d, δ][X,Y ] = dδ[X, Y ]− δd[X, Y ]
= d[δX, Y ] + d[X, δY ]− δ[dX, Y ]− δ[X, dY ]
= [dδX, Y ] + [δX, dY ] + [dX, δY ] + [X, dδY ]+
−[δdX, Y ]− [dX, δY ]− [δX, dY ]− [X, δdY ]
= [dδX, Y ]− [δdX, Y ] + [X, dδY ]− [X, δdY ]
=[(dδ − δd)X, Y
]+
[X, (dδ − δd)Y
]
=[[d, δ]X, Y
]+
[X, [d, δ]Y
],
ce qui etablit le resultat. ¤
Remarque 31.3. Ce resultat se generalise comme suit. Soit A une k-algebre(cf. Definition 5.1), dont le produit est note µ(x, y) = x·y pour x, y ∈ A. On definitune derivation (sur k) de A comme etant un endomorphisme k-lineaire d de A telque
d(xy) = dx·y + x·dy ,
pour tous x, y ∈ A, i.e. verifiant la regle de Leibniz. On verifie alors, exactementcomme dans le cas d’une k-algebre de Lie, que le k-espace vectoriel des derivationsde A est une k-sous-algebre de Lie, notee derk(A), de la k-algebre de Lie glk(A)pour le crochet donne par le commutateur (voir l’Exemple 28.4 (iii)).

130 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Definition 31.4. Soit g une k-algebre de Lie. La representation adjointe deg est l’application k-lineaire
ad: g −→ Endk(g) , X 7−→ ad(X) := [X,−] ,
c’est-a-dire, pour X ∈ g, ad(X) est l’application k-lineaire
ad(X) : g −→ g , Y 7−→ ad(X)(Y ) := [X,Y ] .
On ecrit souvent ad(X)·Y , ou meme ad(X)Y , au lieu de ad(X)(Y ).
Remarque 31.5. Si G est un groupe de Lie sur K, alors, comme on l’a vuau Theoreme 29.11, son espace tangent LG est une K-algebre de Lie. Les deuxdefinitions pour ad = adLG sont en accord : l’une est introduite a la Definition 29.1(ou le crochet est defini a l’aide de adLG, et adLG a l’aide de AdG) et l’autre a laDefinition 31.4 (ou adLG est defini a l’aide du crochet).
Remarque 31.6. Soit g une algebre de Lie complexe, et soit gR sa reellification(cf. Definition 28.11). Alors la representation adjointe de g et celle de gR sont relieespar
adgR = incl ◦ adg : g −→ EndC(g) ↪→ EndR(g) ,
ou, pour etre precis, EndR(g) designe EndR(gR).
Remarque 31.7. Soit g une algebre de Lie reelle, et soit gC = g ⊗R C sacomplexifiee (cf. Definition 28.7). Alors la representation adjointe de g et celle degC sont reliees par
adgC = adg⊗ idC : g −→ EndC(gC) ,
c’est-a-dire, adgC(X ⊗ λ) = adg(X) ⊗ λ, pour X ∈ g et λ ∈ C, ce qui signifie quepour Y ∈ g et µ ∈ C, on a
adgC(X ⊗ λ)·(Y ⊗ µ) = adg(X)·Y ⊗ λµ .
Proposition 31.8. Pour une k-algebre de Lie g, on a les proprietes suivantes :(i) La representation adjointe est effectivement une representation d’algebre
de Lie de g, c’est-a-dire,
ad: g −→ glk(g)
est un homomorphisme de k-algebres de Lie; en d’autres termes, pour tousX,Y ∈ g, on a l’egalite
ad[X,Y ] = ad(X) ◦ ad(Y )− ad(Y ) ◦ ad(X) .
(ii) Pour X ∈ g, l’application ad(X) est une derivation, i.e.
ad(X) ∈ Derk(g) et ad(X)·[Y,Z] =[ad(X)·Y, Z
]+
[Y, ad(X)·Z]
pour tous Y, Z ∈ g, de sorte que ad prend ses valeurs dans la sous-algebrede Lie derk(g) de glk(g), symboliquement,
ad: g −→ derk(g) ⊆ glk(g) .
(iii) Pour d ∈ derk(g) et X ∈ g, on a l’egalite[d, ad(X)
]= ad(dX) ∈ derk(g) ,
de sorte que l’image im(ad) = ad(g) est un ideal de Lie de derk(g).

31. LA REPRESENTATION ADJOINTE D’UNE ALGEBRE DE LIE 131
(iv) Le noyau de la representation adjointe est le centre de g, i.e.
ker(ad) = z(g) ,
et ad induit un isomorphisme de k-algebres de Lie
g/z(g) ∼= ad(g) ⊆ derk(g) ⊆ glk(g) .
(v) Si g est de dimension finie et a centre trivial, alors g est une algebre deLie matricielle (a isomorphisme pres).
(vi) Si Φ est un automorphisme de la k-algebre de Lie g, alors on a
ad(ΦX) = Φ ◦ ad(X) ◦ Φ−1 ,
pour tout X ∈ g.
Preuve.(i) Soient X,Y ∈ g. Il faut verifier que ad
([X, Y ]
)= [ad(X), ad(Y )], ou le second
crochet est donne par ad(X) ◦ ad(Y )− ad(Y ) ◦ ad(X). Si Z ∈ g, alors, en utilisantl’identite de Jacobi et l’antisymetrie, on obtient
ad[X,Y ]·Z =[[X, Y ], Z
]
=−[[Y, Z], X
]− [[Z,X], Y
]
=[X, [Y, Z]
]+
[[X, Z], Y
]
=[X, [Y, Z]
]− [Y, [X,Z]
]
= ad(X) ◦ ad(Y )(Z)− ad(Y ) ◦ ad(X)(Z)
=(ad(X) ◦ ad(Y )− ad(Y ) ◦ ad(X)
)·Z ,
ce qui montre l’egalite souhaitee.(ii) Pour Y, Z ∈ g, de maniere similaire, on a
ad(X)·[Y,Z] =[X, [Y, Z]
]
=−[[Y, Z], X
]
=[[Z, X], Y
]+
[[X, Y ], Z
]
=−[[X, Z], Y
]+
[[X, Y ], Z
]
=[Y, [X, Z]
]+
[[X, Y ], Z
]
=[Y, ad(X)·Z]
+[ad(X)·Y,Z
],
ce qui est exactement la regle de Leibniz pour ad(X).(iii) Pour d ∈ derk(g) et X,Y ∈ g, on calcule
[d, ad(X)](Y ) = d ◦ ad(X)(Y )− ad(X) ◦ d(Y )
= d[X, Y ]− [X, dY ]
= [dX, Y ] + [X, dY ]− [X, dY ]
= [dX, Y ]
= ad(dX)·Y ,
d’ou l’egalite annoncee. Le fait que ad(g) est un ideal de Lie de derk(g) en decouleimmediatement.
132 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
(iv) Pour X ∈ g, on ad(X) = 0 ssi 0 = ad(X)Y = [X, Y ] pour tout Y ∈ g, ssiX est dans le centre de g. L’isomorphisme indique resulte du Premier Theoremed’Isomorphisme pour les algebres de Lie, voir l’Exemple 28.4 (xii).(v) Cela decoule de (iv) (voir egalement l’Exemple 28.4 (iii)).(vi) Si X, Y ∈ g, alors du fait que Φ est un isomorphisme d’algebres de Lie, on a
ad(ΦX)(Y ) = [ΦX,Y ] = [ΦX, Φ ◦ Φ−1Y ] = Φ[X, Φ−1Y ] = Φ ◦ ad(X) ◦ Φ−1(Y ) ,
ce qui etablit le resultat. ¤La definition suivante est justifiees par la Proposition 31.8 (ii).
Definition 31.9. Soit g une k-algebre de Lie. Une derivation de g de la formead(X) avec X ∈ g est appelee une derivation interieure; l’ensemble ad(g) ⊆ derk(g)des derivations interieures est appele l’ideal des derivations interieures.
32. La forme de Killing d’une algebre de Lie de dimension finie
A nouveau, fixons un corps (commutatif) k, de caracteristique differente de 2.
Definition 32.1. Soit g une k-algebre de Lie de dimension finie.(i) La forme de Killing de g est la forme k-bilineaire symetrique
K = Kg : g× g −→ k , (X,Y ) 7−→ K(X,Y ) := Tr(ad(X) ◦ ad(Y )
),
ou Tr: Endk(g) −→ k est la trace usuelle (et qui est independante de toutchoix de k-base de g). Parfois, K est appelee fonctionnelle de Killing ouforme de Cartan-Killing.
(ii) On dit que K est non-degeneree si le seul element X ∈ g satisfaisantK(X, Y ) = 0 pour tout Y ∈ g est X = 0; dans le cas contraire, on dit queK est degeneree.
(iii) Si la dimension n := dimk(g) est non-nulle et si (X1, . . . , Xn) est une k-base de g alors la matrice de K par rapport a cette base est la matricesymetrique
(K(Xi, Xj)
) ∈Mn(k).
Remarque 32.2. Le fait que K est k-bilineaire decoule de la k-linearite de latrace Tr, et le fait que K est symetrique s’obtient par la propriete de trace de Tr,explicitement,
K(X,Y ) = Tr(ad(X) ◦ ad(Y )
)= Tr
(ad(Y ) ◦ ad(X)
)= K(Y, X) ,
pour tous X, Y ∈ g.
Remarque 32.3. Pour une k-algebre de Lie g de dimension finie, la forme deKilling K(X, Y ) de deux elements X,Y ∈ g est donc la trace de l’endomorphismek-lineaire
ad(X) ◦ ad(Y ) : g −→ g , Z 7−→ [X, [Y,Z]
].
Remarque 32.4. Soit g une k-algebre de Lie de dimension n, finie et non-nulle,et soit (X1, . . . , Xn) une k-base arbitraire de g. Par un resultat classique d’algebrelineaire, la forme de Killing K de g est non-degeneree ssi le determinant de samatrice
(K(Xi, Xj)
)est non-nul, c’est-a-dire ssi
det(K(Xi, Xj)
) ∈ k× .
Dans ce cas, l’application
g∼=−→ Homk(g,k) , X 7−→ K(X,−)

32. LA FORME DE KILLING D’UNE ALGEBRE DE LIE DE DIMENSION FINIE 133
est un isomorphisme de k-espaces vectoriels, comme indique, ou, bien sur, Homk(g, k)designe le dual g∗ du k-espace vectoriel de dimension finie (sous-jacent) g; ici, pourun element X ∈ g, l’application K(X,−) ∈ g∗ designe la forme k-lineaire
K(X,−) : g −→ k , Y 7−→ K(X, Y ) .
Ainsi, sous la meme hypothese, pour chaque element X donne, la forme de KillingK met g et son dual g∗ en correspondance bi-univoque.
Definition 32.5. Si g est une k-algebre de Lie de dimension finie et si s estune partie de g (typiquement un k-sous-espace vectoriel, une k-sous-algebre de Lieou meme un ideal de Lie), alors l’ortho-complement de s dans g est le sous-ensemblesuivant de g :
s⊥ :={X ∈ g
∣∣ K(X, Y ) = 0 , ∀Y ∈ s}
={X ∈ g
∣∣ K(X, s) = 0}
.
Exemple 32.6.
(i) Si g est une algebre de Lie abelienne de dimension finie, alors sa forme deKilling est identiquement nulle; en particulier elle est degeneree si g 6= 0.
(ii) Soit g := aff(k), disons g = k ·X ⊕ k ·Y comme k-espace vectoriel, et[X, Y ] = Y . Dans la base (X,Y ) de g, les matrices de ad(X) et de ad(Y )sont donnees, respectivement, par
MX :=(
0 00 1
)et MY :=
(0 0
−1 0
)
Il suit que K(X,X) = Tr(M2X) = 1, K(X, Y ) = Tr(MXMY ) = 0 et
K(Y, Y ) = Tr(M2Y ) = 0, et donc, la matrice (symetrique) de K dans la
base (X,Y ) est (K(X,X) K(Y, X)K(X,Y ) K(Y, Y )
)=
(1 00 0
).
On voit que K est degeneree et que g⊥ = k·Y .
Pour la notion de reellification, nous renvoyons le lecteur a la Definition 28.11.
Proposition 32.7. Soit g une algebre de Lie complexe de dimension finie, etsoit gR sa reellification. Alors la forme de Killing de g et celle de gR sont relieespar
KgR = 2 Re Kg ,
c’est-a-dire, KgR(X, Y ) = 2 Re(Kg(X,Y )
)pour tous X, Y ∈ g.
Preuve. Par definition, si X, Y ∈ g, alors on a
KgR(X,Y ) = TrR(adgR(X) ◦ adgR(Y )
)et Kg(X, Y ) = TrC
(adg(X) ◦ adg(Y )
).
Par la Remarque 31.6, on a
adgR = incl ◦ adg : g −→ EndC(g) ↪→ EndR(gR) .
Ainsi, de calculer la valeur de ces deux formes de Killing revient a determiner latrace du meme operateur adg(X) ◦ adg(Y ) de l’espace vectoriel de dimension finieg, une fois vu sur R, une fois sur C. On en deduit que la formule de l’enoncerevient a la propriete suivante (apres choix d’une C-base de g). Pour une matriceA = (ajk) ∈ GLn(C), considerons l’operateur
A• : Cn −→ Cn , ~v 7−→ A·~v ,

134 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
dont la matrice par rapport a la base canonique (~e1, . . . , ~en) est precisement A; alors,apres identification de Cn avec Rn ⊕ i ·Rn ∼= R2n, la trace du R-endomorphismecorrespondant
A• : Rn ⊕ i·Rn −→ Rn ⊕ i·Rn
est 2Re(Tr(A)
). En effet, B := (~e1, . . . , ~en, i ·~e1, . . . , i ·~en) est une R-base de
Rn ⊕ i·Rn, et, pour k = 1, . . . , n, on a
A·~ek =n∑
`=1
a`k ·~e` =n∑
`=1
Re(a`k)·~e` +n∑
`=1
Im(a`k)·(i·~e`)
et donc
A·(i·~ek) = −n∑
`=1
Im(a`k)·~e` +n∑
`=1
Re(a`k)·~e` ,
de sorte que la matrice, dans la base B, du R-endomorphisme considere est(Re(A) − Im(A)Im(A) Re(A)
),
et sa trace est bien 2 Re(Tr(A)
). ¤
Pour la notion de complexification, nous renvoyons le lecteur a la Definition 28.7.
Proposition 32.8. Soit g une algebre de Lie reelle de dimension finie, et soitgC = g ⊗R C sa complexifiee. Alors la forme de Killing de g et celle de gC sontreliees par
KgC = Kg ⊗ µC ,
ou µC est le produit sur C, c’est-a-dire, KgC(X ⊗ λ, Y ⊗ ν) = Kg(X, Y )⊗ λν pourtous X, Y ∈ g et tous λ, ν ∈ C; en d’autres termes,
KgC(X + iX ′, Y + iY ′) = Kg(X, Y )−Kg(X ′, Y ′) + i(Kg(X,Y ′) + Kg(X ′, Y )
),
pour tous X, X ′, Y, Y ′ ∈ g.
Preuve. Par C-bilinearite de KgC , pour X,Y ∈ g et λ, ν ∈ C, on a
KgC(X ⊗ λ, Y ⊗ ν) = KgC(X ⊗ 1, Y ⊗ 1)·λν = KgC(X, Y )·λν ,
ou on identifie g a un R-sous-espace vectoriel de gC = g⊕ i·g. Maintenant, par laRemarque 31.7, on a
adgC(X) ◦ adgC(Y ) =(adg(X)⊗ idC
) ◦ (adg(Y )⊗ idC
)=
(adg(X) ◦ adg(Y )
)⊗ idCet donc
KgC(X, Y ) = TrC(adgC(X) ◦ adgC(Y )
)= TrC
((adg(X) ◦ adg(Y )
)⊗ idC)
.
Remarquons que si Φ est un R-endomorphisme d’un R-espace vectoriel E de dimen-sion finie, alors le C-endomorphisme Φ ⊗ idC du C-espace vectoriel de dimensionfinie E ⊗R C a la meme trace que Φ, i.e.
TrR(Φ) = TrC(Φ⊗ idC) ,
ce qui est immediat puisque les matrices des deux operateurs dans une base de Eet dans la base correspondante de E ⊗R C sont egales. Ainsi, dans notre cas, on a
KgC(X, Y ) = TrC((
adg(X)◦adg(Y ))⊗idC
)= TrR
(adg(X)◦adg(Y )
)= Kg(X, Y ) ,
ce qui permet de conclure. ¤

32. LA FORME DE KILLING D’UNE ALGEBRE DE LIE DE DIMENSION FINIE 135
Proposition 32.9. Soit g une k-algebre de Lie de dimension finie.(i) La forme de Killing K de g est invariante dans le sens que la representation
adjointe ad est K-antisymetrique, c’est-a-dire
K(ad(X)·Y,Z
)= −K
(Y, ad(X)·Z)
,
i.e. K([X,Y ], Z
)= −K
(Y, [X,Z]
), pour tous X,Y, Z ∈ g.
(ii) Si Φ est un automorphisme de la k-algebre de Lie g, alors Φ est K-orthogonal, i.e.
K(ΦX, ΦY ) = K(X, Y ) ,
pour tous X,Y ∈ g.(iii) Si a est un ideal de Lie de g, alors on a l’egalite
Ka = Kg|a×a .
Preuve.(i) La Proposition 31.8 (i) nous dit que ad est un homomorphisme de k-algebres deLie, de sorte que
ad[X, Y ] = ad(X) ◦ ad(Y )− ad(Y ) ◦ ad(X)
etad[X,Z] = ad(Z) ◦ ad(X)− ad(X) ◦ ad(Z) .
Fort de ces resultats, par un calcul direct invoquant la propriete de trace de Tr, onobtient
K(ad(X)Y, Z
)= K
([X, Y ], Z
)
= Tr(ad[X, Y ] ◦ ad(Z)
)
= Tr(ad(X) ◦ ad(Y ) ◦ ad(Z)− ad(Y ) ◦ ad(X) ◦ ad(Z)
)
= Tr(ad(X) ◦ ad(Y ) ◦ ad(Z)
)− Tr(ad(Y ) ◦ ad(X) ◦ ad(Z)
)
= Tr(ad(Y ) ◦ ad(Z) ◦ ad(X)
)− Tr(ad(Y ) ◦ ad(X) ◦ ad(Z)
)
= Tr(ad(Y ) ◦ ad(Z) ◦ ad(X)− ad(Y ) ◦ ad(X) ◦ ad(Z)
)
= Tr(ad(Y ) ◦ ad[Z,X]
)
=−Tr(ad(Y ) ◦ ad[X, Z]
)
=−K(Y, [X,Z]
)
=−K(Y, ad(X)Z
),
ce qui est bien la formule cherchee.(ii) En invoquant la Proposition 31.8 (vi) et la propriete de trace pour Tr, on trouve
K(ΦX, ΦY ) = Tr(ad(ΦX) ◦ ad(ΦY )
)
= Tr(Φ ◦ ad(X) ◦ Φ−1 ◦ Φ ◦ ad(Y ) ◦ Φ−1
)
= Tr(Φ ◦ ad(X) ◦ ad(Y ) ◦ Φ−1
)
= Tr(ad(X) ◦ ad(Y ) ◦ Φ−1 ◦ Φ
)
= Tr(ad(X) ◦ ad(Y )
)
= K(X,Y ) ,
d’ou le resultat.

136 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
(iii) Si dimk(a) = 0, le resultat est clair. On peut donc supposer que ` := dimk(a)est > 0; soit n := dimk(g) ≥ `. Fixons une k-base Ba := (Z1, . . . , Z`) de a,et completons-la en une k-base Bg := (Z1, . . . , Z`, Z`+1, . . . , Zn) de g (ce qui estpossible en vertu du Theoreme de Steinitz, aussi appele Theoreme de la Base In-complete). Fixons un element X de a. Comme a est un ideal de Lie de g, pourchaque j ∈ {1, . . . , n}, on a adg(X)·Zj ∈ a et c’est donc une combinaison k-lineairede Z1, . . . , Z`. Ainsi, la matrice de adg(X) dans la base Bg est de la forme
Mg(X) :=
(Ma(X) ∗
O O
)
ou Ma(X) designe la matrice de ada(X) dans la base Ba. De meme, pour un secondelement Y ∈ a, la matrice de adg(Y ) dans la base Bg est donnee par
Mg(Y ) :=
(Ma(Y ) ∗
O O
)
ou Ma(Y ) est la matrice de ada(Y ) dans la base Ba. Il s’ensuit que la matrice deadg(X) ◦ adg(Y ) dans la base Bg est donnee par
Mg(X)·Mg(Y ) :=
(Ma(X)·Ma(Y ) ∗
O O
)
et le produit Ma(X)·Ma(Y ) n’est autre que la matrice de ada(X) ◦ ada(Y ) dans labase Ba. Il est maintenant evident que
Kg(X,Y ) = Tr(Mg(X)·Mg(Y )
)= Tr
(Ma(X)·Ma(Y )
)= Ka(X,Y ) ,
ce qui acheve la demonstration. ¤Proposition 32.10. Soient g1, . . . , gs des k-algebres de Lie de dimension finie,
et soit g := g1⊕. . .⊕gs la k-algebre de Lie somme directe. Alors la forme de Killingde g est la somme directe des formes de Killing des gi dans le sens que
Kg(X1 + . . . + Xs, Y1 + . . . + Ys) = Kg1(X1, Y1) + . . . + Kgs(Xs, Ys) ,
ou Xi, Yi ∈ gi pour i = 1, . . . , s.
Preuve. Nous allons identifier chaque gi a un ideal de Lie de g de facon evidente(cf. Remarque 28.3). Il est clair que le k-endomorphisme adg(X1 + . . . + Xs) de gse decompose, de facon canonique, comme la somme directe des k-endomorphismesadgi(Xi) de gi, i.e.
adg(X1 + . . . + Xs) = adg1(X1)⊕ . . .⊕ adgs(Xs) =
Φ1 O O
O.. . O
O O Φs
ou Φi := adgi(Xi) pour chaque i; de meme pour Y1 + . . . + Ys. De la, il resulte que
Kg(X1 + . . . + Xs, Y1 + . . . + Ys) = Ka(X1, Y1) + . . . + Ka(Xs, Ys)
(sans meme faire appel a la Proposition 32.9 (iii)). ¤Lemme 32.11. Soit g une k-algebre de Lie de dimension finie.
(i) Si s est une partie de g, alors s⊥ est un k-sous-espace vectoriel de g.(ii) Si a est un ideal de Lie de g, alors a⊥ est un ideal de Lie de g.

32. LA FORME DE KILLING D’UNE ALGEBRE DE LIE DE DIMENSION FINIE 137
(iii) La forme de Killing K de g est non-degeneree ssi g⊥ = 0.
Preuve.(i) C’est evident, puisque K est k-bilineaire.(ii) En appliquant la Proposition 32.9 (i), on voit que si X ∈ a⊥ et Z ∈ g, alors
K([Z, X], Y
)= −K
(X, [Z, Y ]
)= 0 ,
pour tout Y ∈ g. Combine avec (i), ceci implique que a⊥ est un ideal de Lie de g.(iii) Par definition meme, la forme de Killing K est non-degeneree ssi g⊥ = 0. ¤
Proposition 32.12. Pour l’algebre de Lie gln(k), la forme de Killing K estdonnee par
K(X, Y ) = 2n Tr(XY )− 2Tr(X)Tr(Y ) ,
pour X, Y ∈ gln(k). En particulier, K est degeneree.
Preuve. Soit E :={Eij
∣∣ 1 ≤ i, j ≤ n}
la k-base canonique de gln(k), i.e. avec Eij
designant la matrice ayant un 1 en position (i, j) et des 0 partout ailleurs. Notonsqu’on a l’egalite
EijEk` = δjkEi` ,
pour i, j, k, ` ∈ {1, . . . , n}. Si X = (xij) ∈ gln(k), i.e. si X =∑n
i,j=1 xijEij ,determinons la matrice de l’endomorphisme ad(X) dans la base E. On calcule
ad(X)·Ek` = [X, Ek`] = XEk` − Ek`X =n∑
i=1
(xikEi` − x`iEki) .
Maintenant, soit Y = (yij) ∈ gln(k), i.e. Y =∑n
i,j=1 yijEij . En appliquant ad(Y )a la formule obtenue pour ad(X) et en utilisant, a repetitions, la meme formulemais avec Y a la place de X cette fois-ci, on obtient
ad(X) ◦ ad(Y )(Ek`) =n∑
i,j=1
(xikyjiEj` + x`iyijEkj)−n∑
i,j=1
(xiky`j + x`jyik)Eij
et, par suite, K(X, Y ) = Tr(ad(X) ◦ ad(Y )
)est donne par
K(X, Y ) = n
n∑
i,j=1
(xijyji + xjiyij)− 2n∑
i,j=1
xiiyjj = 2n Tr(XY )− 2Tr(X)Tr(Y ) ,
exactement comme annonce. Pour X = 1In et pour Y ∈ gln(k) arbitraire, on al’egalite K(1In, Y ) = 0, d’ou la degenerescence de K. ¤
Avant le prochain enonce, rappelons que nous supposons toujours char(k) 6= 2.
Corollaire 32.13. Pour l’algebre de Lie sln(k), la forme de Killing K estdonnee par
K(X, Y ) = 2n Tr(XY ) ,
pour X, Y ∈ sln(k). En particulier, K est non-degeneree ssi n est premier a lacaracteristique de k (pour n = 1, sl1(k) = 0).
Preuve. Comme sln(k) est un ideal de Lie gln(k), cf. Exemple 28.4 (vii), on peutcombiner les Propositions 32.9 (iii) et 32.12 pour en deduire la formule indiqueepour la forme de Killing. Clairement, si n n’est par premier a char(k), alors Kest identiquement nulle. Supposons donc n ⊥ char(k), de sorte que 2n est in-versible dans k. Maintenant, considerons une matrice X = (xij) ∈ sln(k) telle que

138 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
K(X,Y ) = 0 pour toute matrice Y ∈ sln(k), i.e. Tr(XY ) = 0 pour toute matriceY de trace nulle. En particulier, pour i, j ∈ {1, . . . , n} distincts, on a
0 = Tr(XEij) = xij .
Il en resulte que X est diagonale. Pour i ∈ {1, . . . , n}, on a
0 = Tr(X(E11 − Eii)
)= x11 − xii ,
donc X est scalaire, i.e. X ∈ k·1In, disons X = λ·1In avec λ ∈ k. Comme X doitetre de trace nulle, on a
0 = Tr(X) = Tr(λ·1In) = n·λ ∈ k .
En utilisant a nouveau que n est inversible dans k, on obtient λ = 0 et doncX = On. Ceci montre que K est non-degeneree. ¤
Proposition 32.14. Pour l’algebre de Lie son(k), la forme de Killing K estdonnee par
K(X, Y ) = 2(n− 2)Tr(XY ) ,
pour X, Y ∈ son(k). En particulier, K est non-degeneree ssi n 6= 2 et n − 2 estpremier a la caracteristique de k (pour n = 1, so1(k) = 0).
Preuve. L’algebre de Lie son(k) des matrices n × n des matrices anti-symetriquespossede une k-base canonique donnee par les matrices
E[ij] := Eij − Eji
avec i < j parcourant l’ensemble {1, . . . , n}. Comme dans la preuve de la Proposi-tion 32.12, on calcule que, pour X = (xij) =
∑i<j xijE[ij] ∈ son(k) et pour k < `
dans {1, . . . , n},ad(X)E[k`] =
n∑
i=1
(xikE[i`] − x`iE[ki]) .
En procedant a nouveau comme dans la preuve sus-mentionnee, on obtient la for-mule de l’enonce pour K(X, Y ). Clairement, si n ∈ {1, 2}, ou si n − 2 n’est parpremier a char(k), alors K est identiquement nulle. Supposons donc que n ≥ 3 etque (n − 2) ⊥ char(k), de sorte que n − 2 est inversible dans k. Maintenant, con-siderons une matrice X = (xij) ∈ son(k) telle que K(X,Y ) = 0, i.e. Tr(XY ) = 0,pour toute matrice Y ∈ son(k). En particulier, pour i < j dans {1, . . . , n}, on a
0 = Tr(XE[ij]) = xij − xji = 2xij = −2xji .
Comme char(k) 6= 2, il en resulte que X est diagonale et antisymetrique, donc nulle.Ceci montre que K est non-degeneree. ¤
33. Algebres de Lie simples, semi-simples et reductives
Dorenavant, on fixe un corps (commutatif) k de caracteristique zero, commepar exemple, Q, R, Q, C ou Qp. De plus, dans la suite, toutes les algebres de Lieseront implicitement supposees de dimension finie. Nous l’indiquons parfois pourinsister sur cette hypothese.
Definition 33.1. Soit g une k-algebre de Lie (de dimension finie).(i) On dit que g est simple si g est non-abelienne et si g ne possede pas d’ideal
de Lie propre non-trivial, i.e. distinct de 0 et de g.
33. ALGEBRES DE LIE SIMPLES, SEMI-SIMPLES ET REDUCTIVES 139
(ii) On dit que g est semi-simple si g est non-nulle et si sa forme de KillingK = Kg est non-degeneree.
Remarque 33.2. Dans la definition d’une k-algebre de Lie simple (de dimen-sion finie), la condition de non-abelianite est uniquement la pour eviter de devoirconsiderer 0 et k, les seules k-algebres de Lie (a isomorphisme pres) de dimensionzero et un respectivement, comme etant simples.
Remarque 33.3. La definition “usuelle” de semi-simplicite d’une k-algebre deLie (en toute caracteristique, et pas seulement en caracteristique zero) est que lak-algebre de Lie (de dimension finie) ne possede aucun ideal resoluble non-nul. Ilest des lors immediat qu’une k-algebre de Lie simple est semi-simple. Le Critere(de semi-simplicite) de Cartan est le theoreme affirmant que si char(k) = 0, alorsune k-algebre de Lie g (de dimension finie) est semi-simple ssi sa forme de Killingest non-degeneree. Ainsi, la definition adoptee ici est equivalente a la definition“usuelle”, mais a l’avantage d’etre plus conceptuelle, plus facile a verifier dans lescas concrets et ne fait pas appel a la notion d’algebre de Lie resoluble que nousn’avons pas voulu introduire dans ces notes, pour des raisons de longueur. Le seuldesavantage de notre definition, mis-a-part qu’elle n’est valide qu’en caracteristiquezero, est que nous devrons admettre qu’une k-algebre de Lie simple est semi-simple.
Exemple 33.4.
(i) La k-algebre de Lie gln(k) n’est pas semi-simple (cf. Proposition 32.12).(ii) La k-algebre de Lie sln(k) est semi-simple ssi n ≥ 2 (cf. Corollaire 32.13).(iii) La k-algebre de Lie son(k) est semi-simple ssi n ≥ 3 (cf. Proposition 32.14).
Lemme 33.5. Soit g une k-algebre de Lie. Alors g ne possede aucun idealpropre non-trivial ssi soit g est simple, soit g est abelienne de dimension zero ouun, i.e. g = 0 ou g ∼= k.Preuve. Le sens indirect est evident. Passons au sens direct. Supposons que g nepossede aucun ideal propre non-trivial et que g n’est pas simple. Par definition dela simplicite, g doit etre abelienne. Comme tout k-sous-espace vectoriel de g en estun ideal de Lie, la dimension de g ne peut qu’etre zero ou un. ¤
Lemme 33.6. Pour une k-algebre de Lie simple g, on a [g, g] = g.
Preuve. Comme [g, g] est un ideal de Lie de g (cf. Lemme 28.5), par simplicite deg, on a soit [g, g] = g, soit [g, g] = 0; ce second cas est impossible puisque g n’estpas abelienne. ¤
Proposition 33.7. Si g est une k-algebre de Lie semi-simple, alors g nepossede aucun d’ideal de Lie abelien non-nul.
Preuve. Soit a un ideal abelien de g. Nous devons montrer que a est nul. SoientX ∈ a et Y ∈ g, et posons
Φ := ad(X) ◦ ad(Y ) ∈ Endk(g) .
Fixons un element Z ∈ g. Comme a est un ideal de Lie de g, on a
Φ(Z) =[X, [Y,Z]
] ∈ a .
140 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Du fait que a est un ideal de Lie de g, on en deduit que [Y, Φ(Z)] ∈ a. Comme aest abelien et comme X ∈ a, on en deduit que
Φ2(Z) =[X, [Y, Φ(Z)]︸ ︷︷ ︸
∈a
]= 0 .
Comme Z ∈ g est arbitraire, on a Φ2 = 0 dans Endk(g). Par l’algebre lineaire,cela implique que Tr(Φ) = 0. En effet, on peut fixer une k-base de g et ecrire lamatrice M de Φ dans cette base. Pour calculer la trace de M , qui vaut celle deΦ, on peut commencer par trianguler la matrice M par un changement de base,en operant dans une cloture algebrique k de k, disons pour obtenir une matricetriangulaire superieure T ∈ Mn(k) (ou n := dimk(g)), avec les valeurs propresλ1, . . . , λn de Φ dans k sur la diagonale. Comme Φ2 = 0, on a T 2 = On, de sorteque λ2
1 = . . . = λ2n = 0, d’ou λ1 = . . . = λn = 0. Finalement, on trouve bien que
Tr(Φ) = λ1 + . . . + λn = 0 ,
comme annonce. Ainsi, on a montre que K(X, Y ) = Tr(Φ) = 0. Comme X ∈ aet Y ∈ g sont arbitraires, on obtient que a ⊆ g⊥. Par le Lemme 32.11 (iii), lasemi-simplicite de g implique que g⊥ = 0, d’ou l’egalite a = 0. ¤
Corollaire 33.8. Si g est une k-algebre de Lie semi-simple, alors(i) g est non-abelienne;(ii) dimk(g) ≥ 3;(iii) z(g) = 0;(iv) la representation adjointe ad: g ↪→ Endk(g), est injective, comme indique,
donc g est isomorphe a une algebre de Lie de matrices.
Preuve. Le centre z(g) est un ideal abelien de g, donc est nul, en vertu de laProposition 33.7; ceci etablit (iii), et (iv) s’ensuit, cf. Proposition 31.8 (iv) & (v).Par semi-simplicite, g est non-nulle, donc (i) decoule de (iii). Par les Exemples28.4 (i) & (ix) et 32.6 (ii), on a que (i) implique (ii). ¤
Proposition 33.9. Une somme directe finie de k-algebres de Lie simples ousemi-simples est semi-simple.
Preuve. Cela decoule de la Proposition 32.10 (et du fait, admis, qu’une k-algebre deLie simple est semi-simple). En effet, supposons que g := g1⊕ . . .⊕gs, ou g1, . . . , gs
sont des k-algebres de Lie semi-simples. Si un element X = X1 + . . .+Xs ∈ g, avecXi ∈ gi pour chaque i, satisfait
Kg(X1 + . . . + Xs, Y ) = 0
pour tout Y ∈ g, alors, pour chaque j = 1, . . . , s, on a, par la Proposition 32.10,
Kgj (Xj , Yj) = Kg(X1 + . . . + Xs, Yj) = 0
pour tout Yj ∈ gj ⊆ g, d’ou Xj = 0 par non-degenerescence de Kgj (gj etantsemi-simple). Ceci montre que X = 0, donc que g est semi-simple. ¤
Avant de poursuivre, rappelons la convention adoptee a la Remarque 28.3.
Definition 33.10. Une k-algebre de Lie g (de dimension finie) est appeleereductive si pour tout ideal de Lie a de g, il existe un ideal de Lie b de g tel qu’onait une decomposition d’algebre de Lie
g = a⊕ b .

33. ALGEBRES DE LIE SIMPLES, SEMI-SIMPLES ET REDUCTIVES 141
Proposition 33.11. Soit g une k-algebre de Lie semi-simple, et soit a un idealde Lie de g. Alors, on a les proprietes suivantes :
(i) g = a⊕ a⊥ (decomposition d’algebre de Lie); en particulier, [a, a⊥] = 0;(ii) Ka, la forme de Killing de a, est non-degeneree; en particulier, soit a = 0,
soit a est elle-meme une k-algebre de Lie semi-simple.Par consequent, g et tous ses ideaux de Lie sont des algebres de Lie reductives.
Preuve.(i) (a) Le Lemme 32.11 (ii) implique que a⊥ est un ideal de Lie de g.(b) Montrons que [a, a⊥] = 0. Si X ∈ a, Y ∈ a⊥ et Z ∈ g, alors on a [X,Z] ∈ a(puisque a est un ideal de Lie de g), donc, par la Proposition 32.9 (i) et en utilisantle fait que Y ∈ a⊥, on a
K([X, Y ], Z
)= −K
(Y, [X, Z]
)= 0 .
Comme K est non-degeneree (g etant semi-simple), il suit que [X, Y ] = 0, d’ou leresultat.(c) Montrons que a∩ a⊥ = 0. D’abord, il est evident que a∩ a⊥ est un ideal de Liede g (cf. Lemme 28.5). De plus, en appliquant (b), on a
[a ∩ a⊥, a ∩ a⊥] ⊆ [a, a⊥] = 0 .
Par consequent, l’ideal de Lie a ∩ a⊥ est abelien, donc nul en vertu de la Proposi-tion 33.7 (en utilisant une fois de plus la semi-simplicite de g).(d) Montrons que dimk(g) ≤ dimk(a) + dimk(a⊥). Soit (Y1, . . . , Yn) une k-base dea, et considerons l’application (“de projection K-orthogonale sur a”)
π : g −→ a , X 7−→n∑
i=1
K(X, Yi)·Yi .
Il est clair que π est k-lineaire et de noyau a⊥, donc, par l’algebre lineaire, on a
dimk(g) ≤ dimk(a⊥) + dimk(Im(π)
) ≤ dimk(a) + dimk(a⊥) .
(e) L’enonce (i) decoule immediatement des points (a), (b), (c) et (d) ci-dessus.
(ii) Soit X ∈ a tel que Ka(X, Y ) = 0 pour tout Y ∈ a. Soit Z ∈ g un elementarbitraire. En vertu de (i), on peut decomposer Z (de maniere unique) sous laforme
Z = Za + Za⊥ , avec Za ∈ a et Za⊥ ∈ a⊥ .
Ainsi, en utilisant la Proposition 32.9 (iii) et le fait que X ∈ a, on a
Kg(X, Z) = Kg(X,Za) + Kg(X, Za⊥) = Ka(X,Za) + 0 = 0 .
Comme Z ∈ g est arbitraire et comme Kg est non-degeneree (g etant semi-simple),on en deduit que X = 0, ce qui montre bien que Ka est non-degeneree. ¤
Lemme 33.12. Soit g une k-algebre de Lie, et soient h, h1, . . . , hs des k-algebresde Lie simples.
(i) Les ideaux de Lie de g⊕ h sont tous de la forme a ou a⊕ h, ou a est unideal de Lie de g.
(ii) Les ideaux de Lie de g⊕ h1 ⊕ . . .⊕ hs sont tous de la forme a⊕⊕i∈I hi,
ou I est une partie (possiblement vide) de l’ensemble {1, . . . , s}.
142 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Preuve.(i) Soit b un ideal de Lie de g⊕ h. Considerons les projections canoniques
π′ : g⊕ h−³ g et π : g⊕ h−³ h ,
qui sont des homomorphismes surjectifs de k-algebres de Lie. Notons que si X ∈h ⊆ g et si (Y, Z) ∈ g, alors on a
[X, (Y, Z)
]=
[(0, X), (Y,Z)
]= [X, Z] =
[X,π(Y + Z)
];
ceci implique en particulier que [h, b] =[h, π(b)
]. Par le Lemme 28.6, π(b) est un
ideal de Lie de h. Par simplicite de h, on a soit π(b) = 0, soit π(b) = h. Si π(b) = 0,alors b est contenu dans g et en est un ideal de Lie. Par contre, si π(b) = h, alorson a
b ⊇ [g⊕ h, b] ⊇ [h, b] =[h, π(b)
]= [h, h] = h ,
ou la derniere egalite provient du Lemme 33.6. Dans ce cas, b contient h, donccontient egalement π′(b), de sorte qu’on a b = π′(b) ⊕ h, et, par le Lemme 28.6,π′(b) est bien un ideal de Lie de g.(ii) Il suffit d’appliquer la partie (i) en cascade, d’abord a (g⊕h1⊕ . . .⊕hs−1)⊕hs,puis a (g⊕ h1 ⊕ . . .⊕ hs−2)⊕ hs−1, et ainsi de suite, pour l’appliquer finalement ag⊕ h1. ¤
Rappelons une fois encore la convention adoptee a la Remarque 28.3.
Theoreme 33.13. Soit g une k-algebre de Lie semi-simple.(i) Il existe un nombre s ≥ 1 fini d’ideaux de Lie simples a1, . . . , as de g.(ii) On a une decomposition d’algebre de Lie
g = a1 ⊕ . . .⊕ as ;
de plus, cette decomposition est unique a permutation des sommands pres.(iii) Tout ideal de Lie de g est de la forme
⊕i∈I ai, ou I est une partie (pos-
siblement vide) de l’ensemble {1, . . . , s}.Preuve. Nous allons d’abord montrer que g admet une decomposition en sommedirecte finie d’ideaux de Lie simples. Comme g est de dimension finie et non-nulle(car semi-simple), on trouve un ideal de Lie non-nul a de g, de dimension minimale.Soit a⊥ l’ortho-complement de a, de sorte qu’on a
g = a⊕ a⊥ et [a, a⊥] = 0 ,
en vertu de la Proposition 33.11 (i). Comme a est un ideal de Lie non-nul de g, ilest non-abelien (voir la Proposition 33.7). Montrons que a est simple. Soit b unideal de Lie propre de a; nous devons verifier que b est nul. On a
[g, b] = [a⊕ a⊥, b] = [a, b] + [a⊥, b] ⊆ b + [a⊥, a] = b ,
donc b est un ideal de Lie de g, strictement contenu dans a. Par minimalite dela dimension de a, on a b = 0. Il suit de la Proposition 33.11 (ii), que l’ideal deLie a⊥ de g est soit nul (auquel cas, g = a est simple), soit une k-algebre de Liesemi-simple de dimension < dimk(g). Par induction sur la dimension n de g, onvoit que l’on peut decomposer a⊥ sous la forme
a⊥ = b1 ⊕ . . .⊕ br ,
33. ALGEBRES DE LIE SIMPLES, SEMI-SIMPLES ET REDUCTIVES 143
avec chaque bj un ideal de Lie simple de a⊥. (Pour etre precis, l’induction se faitsur les entiers n ≥ nk, ou nk est la plus petite dimension possible pour une k-algebre de Lie semi-simple, qui est forcement simple par la premiere partie de cettedemonstration; on peut montrer que nk = 3 pour tout k.) Clairement, pour chaqueindice j, on a
[g, bj ] = [a⊕ a⊥, bj ] = [a, bj ] + [a⊥, bj ] ⊆ [a, a⊥] + bj = bj ,
ce qui montrer que chaque bj est un ideal de Lie simple de g. On obtient donc ladecomposition de g souhaitee sous la forme
g = a⊕ a⊥ = a⊕ b1 ⊕ . . .⊕ br ,
que nous allons noter g = b0⊕ . . .⊕br, avec b0 := a. Montrons maintenant que si cest un ideal de Lie simple de g, alors c est egal a l’un des bk. Comme c est simple,il est non-abelien, donc
0 6= [c, c] ⊆ [c, g] = [c, b0] + . . . + [c, br] .
Par consequent, on trouve (au moins) un indice k tel que [c, bk] 6= 0, de sorte que
0 6= [c, bk] ⊆ c ∩ bk ⊆{
cbk
(ou la premiere inclusion provient du fait que c et bk sont des ideaux de Lie de g).Ceci montre que c ∩ bk (qui est un ideal de Lie de g) est un ideal de Lie de c et debk. Par simplicite des deux, on trouve
c = c ∩ bk = bk ,
ce qui etablit l’unicite de l’indice k et acheve la demonstration de (i) et (ii). Lapartie (iii) est une consequence de (i) & (ii) et du Lemme 33.12 (ii). ¤
Corollaire 33.14. Une k-algebre de Lie semi-simple g coıncide avec son idealdes commutateurs, i.e.
[g, g] = g .
Preuve. Comme dans le Theoreme 33.13, on decompose g sous la forme
g = a1 ⊕ . . .⊕ as .
Pour chaque i, ai est simple, donc non-abelien, ce qui implique que [ai, ai] est unideal non-nul de ai. Par simplicite de ai, on en deduit que [ai, ai] = ai. On a donc
[g, g] ⊇ [a1, a1] + . . . + [as, as] = a1 + . . . + as = g
(et les sommes sont, bien sur, directes), d’ou l’egalite cherchee. ¤
Corollaire 33.15. Une classification des k-algebres de Lie simples (a iso-morphisme pres) fournit une classification des k-algebres de Lie semi-simples (aisomorphisme pres) donnee par les sommes directes finies de k-algebres de Lie sim-ples.
Preuve. C’est une combinaison de la Proposition 33.9 et du Theoreme 33.13. ¤
Proposition 33.16. Soient z une k-algebre de Lie abelienne, et g une k-algebrede Lie semi-simple. Alors la somme directe z⊕g est une k-algebre de Lie reductivede centre z(z⊕ g) = z.

144 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Preuve. D’abord, en combinant l’Exemple 28.4 (xiv) et le Corollaire 33.8 (iii), ilsuit que z(z⊕ g) = z. Maintenant, posons h := z⊕ g, et soit a un ideal de Lie de h.Considerons la decomposition
h = z⊕ a1 ⊕ . . .⊕ as
fournie par le Theoreme 33.17 pour g, dans laquelle chaque ai est un ideal de Liesimple de g. Par le Lemme 33.12 (ii), on trouve un k-sous-espace vectoriel z0 de z,et une partie I de l’ensemble {1, . . . , s} tels que
a = z0 ⊕⊕
i∈I
ai .
Soit z′0 un k-sous-espace vectoriel de z tel que z0 ⊕ z′0 = z. Alors, la somme directe
b := z′0 ⊕⊕
j 6∈I
aj
est une k-sous-algebre de Lie de h qui verifie a⊕ b = h. ¤Theoreme 33.17. Soit g une k-algebre de Lie reductive, et soit z(g) son centre.
(i) Il existe un nombre s ≥ 0 fini d’ideaux de Lie simples a1, . . . , as de g.(ii) On a une decomposition d’algebre de Lie
g = z(g)⊕ a1 ⊕ . . .⊕ as ;
de plus, cette decomposition est unique a permutation des sommands pres.(iii) Tout ideal de Lie de g est de la forme z0 ⊕
⊕i∈I ai, ou z0 est un k-
sous-espace vectoriel de z(g), et I est une partie (possiblement vide) del’ensemble {1, . . . , s}.
Ainsi, une k-algebre de Lie reductive est semi-simple ssi son centre est trivial.
Preuve. On peut supposer g non-nulle. Considerons l’ensemble E de tous les ideauxde Lie mon-nuls de g, qui ne contiennent aucun ideal de Lie non-trivial, i.e. qui sontsoit simples, soit isomorphe a k (cf. Lemme 33.5). Soit E⊕ l’ensemble de toutesles sommes directes dans g d’elements de E, i.e. de toutes les k-sous-algebres deLie de g qui sont une somme directe interne d’ideaux de Lie contenus dans E.Comme g 6= 0, E et E⊕ sont non-vides. Soit a ∈ E⊕ de dimension maximale. Parreductivite de g, on trouve une k-sous-algebre de Lie b de g telle que a⊕ b = g. Sib etait non-nulle, on trouverait un ideal de Lie non-nul c de b, qui ne contiendraitaucun ideal de Lie propre non-trivial; comme
[g, c] = [a⊕ b, c] = [a, c] + [b, c] = 0 + [b, c] ⊆ c ,
on aurait que c est un ideal de Lie de g, de sorte que c ∈ E, d’ou
a ( a⊕ c ∈ E⊕ ,
ce qui contredirait la maximalite de a; conclusion : b = 0. On vient de montrer queg = a ∈ E⊕, donc
g = z⊕ a1 ⊕ . . .⊕ as ,
ou z ∼= kr et chaque ai est un ideal de Lie simple de g. Par l’Exemple 28.4 (xiv) et leCorollaire 33.8 (iii), on a z(g) = z. Pour finir, montrons que si d est un ideal de Liesimple de g, alors d est egal a l’un des aj . Comme d est simple, il est non-abelien,donc
0 6= [d, d] ⊆ [d, g] = [d, z(g)] + [d, a1] + . . . + [d, as] = [d, a1] + . . . + [d, as] .

33. ALGEBRES DE LIE SIMPLES, SEMI-SIMPLES ET REDUCTIVES 145
Par consequent, on trouve (au moins) un indice k tel que [d, ak] 6= 0, de sorte que
0 6= [d, ak] ⊆ d ∩ ak ⊆{
dak
(ou la premiere inclusion provient du fait que d et ak sont des ideaux de Lie de g).Ceci montre que d ∩ ak (qui est un ideal de Lie de g) est un ideal de Lie de d et deak. Par simplicite des deux, on trouve
d = d ∩ ak = ak ,
ce qui etablit l’unicite de l’indice k et acheve la demonstration de (i) et (ii). Lapartie (iii) est une consequence de (i) & (ii) et du Lemme 33.12 (ii). ¤
Corollaire 33.18. Pour une k-algebre de Lie reductive g, on a une decom-position d’algebre de Lie
g = z(g)⊕ [g, g] .
Preuve. Considerons la decomposition g = z(g)⊕ h fournie par le Theoreme 33.17,dans laquelle h := a1 ⊕ . . .⊕ as est semi-simple. On a alors
[g, g] = [z(g), z(g)]⊕ [h, h] = [h, h] = h ,
ou la derniere egalite provient du Corollaire 33.14 (voir aussi l’Exemple 28.4 (xiv)).On conclut en re-invoquant le Theoreme 33.17. ¤
Corollaire 33.19. Une somme directe finie de k-algebres de Lie reductivesest reductive.
Preuve. Il suffit de considerer le cas ou il y a deux sommands. Soient g1 et g2 deuxk-algebres de Lie reductives. Par le Theoreme 33.17, on a des decompositions
g1 = z(g1)⊕ a1 ⊕ . . .⊕ ar et g2 = z(g2)⊕ b1 ⊕ . . .⊕ bs ,
ou les ai (resp. bj) sont des ideaux simples (donc semi-simples) de g1 (resp. g2).On a donc
g1 ⊕ g2 = z(g1)⊕ z(g2)⊕ a1 ⊕ . . .⊕ ar ⊕ b1 ⊕ . . .⊕ bs ,
ce qui montre que g1 ⊕ g2 est une somme directe d’une k-algebre de Lie abelienneet d’un nombre fini de k-algebres de Lie semi-simples, donc est reductive par ap-plication de la Proposition 33.16. ¤
Corollaire 33.20. Une classification des k-algebres de Lie simples (a isomor-phisme pres) fournit une classification des k-algebres de Lie reductives (a isomor-phisme pres) donnee par les sommes directes finies de copies de la k-algebre de Lieabelienne k et de k-algebres de Lie simples.
Preuve. C’est une combinaison de la Proposition 33.16 et du Theoreme 33.17. ¤
Voici encore une propriete agreable des algebres de Lie semi-simples.
Proposition 33.21. Pour une k-algebre de Lie semi-simple g, toute derivationest interieure, i.e. ad(g) = derk(g). En particulier, on a
g ∼= ad(g) = derk(g) .

146 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Preuve. Soit d une derivation de g. L’application
d := Tr ◦d ◦ ad: g −→ k , Y 7−→ Tr(d ◦ ad(Y )
)
est k-lineaire, i.e. c’est une forme k-lineaire sur g. Par la Remarque 32.4, on trouveun element (unique) X = X(d) ∈ g tel que
d = K(X,−) .
Nous allons montrer que d = ad(X). Pour Y, Z ∈ g, par la Proposition 31.8 (i)& (iii),on a les egalites
ad[Y,Z] = ad(Y ) ◦ ad(Z)− ad(Z) ◦ ad(Y )
etad(dY ) =
[d, ad(Y )
]= d ◦ ad(Y )− ad(Y ) ◦ d ,
ou le crochet est dans derk(g). En appliquant les egalites obtenues, la propriete detrace de Tr, et l’invariance de K donnee a la Proposition 32.9 (i), on calcule, pourdes elements Y, Z ∈ g,
K(dY, Z) = Tr(ad(dY ) ◦ ad(Z)
)
= Tr((
d ◦ ad(Y )− ad(Y ) ◦ d) ◦ ad(Z)
)
= Tr(d ◦ ad(Y ) ◦ ad(Z)
)− Tr(ad(Y ) ◦ d ◦ ad(Z)
)
= Tr(d ◦ ad(Y ) ◦ ad(Z)
)− Tr(d ◦ ad(Z) ◦ ad(Y )
)
= Tr(d ◦ (
ad(Y ) ◦ ad(Z)− ad(Z) ◦ ad(Y )))
= Tr(d ◦ ad[Y, Z]
)
= d [Y, Z]
= K(X, [Y, Z]
)
=−K([Y, X], Z
)
= K([X,Y ], Z
).
Comme K est non-degeneree, on a necessairement dY = [X, Y ] = ad(X) ·Y pourtout Y ∈ g, d’ou l’egalite cherchee d = ad(X). La seconde partie, plus precisementl’isomorphisme entre g et ad(g), decoule de la Proposition 31.8 (iv) et du Corol-laire 33.8 (iii), explicitement, ad(g) ∼= g/z(g) ∼= g. ¤
Avant le prochain enonce, rappelons que char(k) = 0 (en fait, l’hypothese plusfaible que char(k) 6= 2 convient pour ce theoreme et pour la demonstration presenteeici).
Theoreme 33.22. La k-algebre de Lie sln(k) est simple ssi n ≥ 2.
Esquisse de preuve. Il est clair que la condition n ≥ 2 est necessaire. SoitX = (xij) ∈ sln(k) un element non-nul. Il nous suffit de montrer que l’ideal deLie 〈〈X〉〉 de sln(k) engendre par X est sln(k) tout entier. Nous allons subdiviserla demonstration en trois parties. Avant cela, rappelons que pour i 6= j dans{1, . . . , n}, Eij designe la matrice ayant un 1 en position (i, j) et des zeros ailleurs.
(a) Si X = Eij , avec i 6= j, alors, soit par des calculs fastidieux (mais elementaires),soit par des methodes plus astucieuses, on verifie que l’ideal engendre par Eij

33. ALGEBRES DE LIE SIMPLES, SEMI-SIMPLES ET REDUCTIVES 147
contient toutes les matrices Ek` avec k 6= ` dans {1, . . . , n} et les matrices diagonalesDm := E11 − Emm avec m ∈ {2, . . . , n}. Comme ces matrices constituent une k-base de sln(k), on a l’egalite 〈〈Eij〉〉 = sln(k). Notons que le cas n = 2 est basesur un calcul reellement abordable. En effet, il suffit pour cela de constater quel’ensemble (E12, E21, D2) est une k-base sln(k), et qu’on a les relations
[E12, E21] = D2 et[[E21, E12], E21
]= 2E21 ,
de sorte qu’effectivement 〈〈E12〉〉 = sl2(k) et 〈〈E21〉〉 = sl2(k) (puisque char(k) 6= 2).
(b) S’il existe i 6= j dans {1, . . . , n} avec xji 6= 0, alors on a[Eij , [X, Eij ]
]= 2xjiEij ,
ce qui montre que 〈〈X〉〉 contient 〈〈Eij〉〉 (a nouveau car char(k) 6= 2), d’ou l’egalite〈〈X〉〉 = sln(k) par (a).
(c) Si X ne verifie pas l’hypothese de (b), alors X est diagonale (et non-nulle, detrace nulle), donc il existe k 6= ` dans {1, . . . , n} tels que xkk 6= x``. On a alors
[X, Ek`] = (xkk − x``)Ek` ,
ce qui implique que 〈〈X〉〉 contient 〈〈Ek`〉〉, d’ou l’egalite 〈〈X〉〉 = sln(k) par (a). ¤Remarque 33.23. En particulier, sl2(k) est une k-algebre de Lie simple de
dimension 3, et cette dimension est minimale en vertu du Corollaire 33.8 (ii). Cecicorrobore l’affirmation (non-utilisee) faite dans la preuve du Theoreme 33.13.
Remarque 33.24. L’algebre de Lie gln(k) n’est pas simple, ni semi-simple, carson centre
z(gln(k)
)= k·1In
n’est pas nul, cf. Corollaire 33.8 (iii). Par contre, on a une decomposition de k-algebre de Lie
gln(k) = z(gln(k)
)⊕ sln(k) ,
ce qui implique que gln(k) est reductive, voir la Proposition 33.16 et le Theoreme 33.22(le cas n = 1 est evident).
Proposition 33.25. Soit g une algebre de Lie complexe, et soit gR sa reellification.Alors g est semi-simple (sur C) ssi gR est semi-simple (sur R).
Preuve. Nous allons appliquer la Proposition 32.7 sans mention particuliere. Sup-posons que g est semi-simple. Soit X ∈ gR tel que KgR(X, Y ) = 0, pour toutY ∈ gR; nous devons montrer que X = 0. Alors, pour tout Z ∈ g, on a
2Kg(X,Z) = 2 Re(Kg(X,Z)
)− 2 Im(Kg(X, Z)
)
= 2 Re(Kg(X,Z)
)+ 2 Re
(Kg(X,−iZ)
)
= 2 Re(Kg(X,Z − iZ)
)
= KgR(X,Z)
= 0 .
Comme g est semi-simple, on en deduit que X = 0. Ainsi, gR est semi-simple.Reciproquement, supposons que la R-algebre de Lie gR est semi-simple. Soit X ∈ gtel que Kg(X, Y ) = 0, pour tout Y ∈ g; nous devons montrer que X = 0. On aalors, pour tout Z ∈ gR,
KgR(X, Z) = 2 Re(Kg(X,Z)
)= 0 ,

148 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
d’ou X = 0 par semi-simplicite de gR. Ceci prouve que g est semi-simple. ¤
Proposition 33.26. Soit g une algebre de Lie reelle, et soit gC = g ⊗R C sacomplexifiee. Alors g est semi-simple (sur R) ssi gC est semi-simple (sur C).
Preuve. Nous allons appliquer la Proposition 32.8 sans autre mention. Supposonsque g est semi-simple. Soit X + iX ′ ∈ gC tel que KgC(X + iX ′, Y + iY ′) = 0, pourtout Y + iY ′ ∈ gC (avec, par convention, X, X ′, Y, Y ′ ∈ g); nous devons montrerque X + iX ′ = 0, i.e. X = 0 et X ′ = 0. Alors, pour tout Z ∈ g, on a a la fois
Kg(X, Z) = Re(KgC(X + iX ′, Z)
)= 0
etKg(X ′, Z) = Im
(KgC(X + iX ′, Z)
)= 0 .
Par semi-simplicite de g, ceci implique que X = 0 et que X ′ = 0. Donc, gC estsemi-simple. Reciproquement, supposons que gC est semi-simple. Soit X ∈ g telque Kg(X,Y ) = 0, pour tout Y ∈ g; nous devons montrer que X = 0. On a alors,pour tout Z + iZ ∈ gC (avec Z,Z ′ ∈ g),
KgC(X, Z + iZ) = Kg(X, Z) + iKg(X,Z ′) = 0 ,
d’ou X = 0 par semi-simplicite de gC. Ceci prouve que g est semi-simple. ¤Nous allons admettre le Theoreme suivant (dans lequel k = R dans un premier
temps, puis k = C); pour les notations, cf. Exemple 28.4 (vii) & (viii).
Theoreme 33.27. Considerons les algebres de Lie reelles su(n), so(n) et sp(n).Elles jouissent des proprietes suivantes :
(i) su(n) est simple ssi n ≥ 2;(ii) so(n) est simple ssi n = 3 ou n ≥ 5;(iii) sp(n) est simple ssi n ≥ 1.
De plus, leurs complexifiees su(n)C ∼= sln(C), so(n)C ∼= son(C) et sp(n)C ∼= spn(C)sont des algebres de Lie complexes simples exactement pour les memes valeurs den respectives.
Remarque 33.28. Le fait que so(4) ne soit pas simple est du a l’existence d’unisomorphisme d’algebres de Lie reelles
so(4) ∼= so(3)⊕ so(3) ,
voir le Theoreme 37.18 plus loin. A noter que so(4) est semi-simple, cf. Exem-ple 33.4 (iii).
Remarque 33.29. L’algebre de Lie u(n) n’est pas simple, ni semi-simple, carson centre
z(u(n)
)= iR·1In
n’est pas nul, cf. Corollaire 33.8 (iii). Par contre, on a une decomposition d’algebrede Lie reelle
u(n) = z(u(n)
)⊕ su(n) ∼= R⊕ su(n) ,
ce qui implique que u(n) est une algebre de Lie reelle reductive, voir la Proposi-tion 33.16 et le Theoreme 33.27 (i) (le cas n = 1 est evident).
Cette remarque est a mettre en relation avec l’exercice suivant.

34. GROUPES DE LIE SIMPLES ET SEMI-SIMPLES 149
Exercice 33.30. Montrer que l’application
S1 × SU(n) −→ U(n) , (λ,A) 7−→ λ·Aest un homomorphisme de groupes de Lie analytiques, qui est surjectif et de noyau{
(e−2πiq/n, e2πiq/n ·1In)∣∣ q = 0, 1, . . . , n− 1
} ∼= Z/n .
En deduire que
U(n) ∼= S1 × SU(n)/Z/n , u(n) ∼= R⊕ su(n) , et R× SU(n) ∼= U(n) .
Montrer que l’application
S1 × SU(n) ≈−→ U(n) , (λ,A) 7−→(
λ1�
1
)·A
est un diffeomorphisme analytique, comme indique. Finalement, verifier que
Z(S1 × SU(n)
) ∼= S1 × Z/n et Z(U(n)
) ∼= S1
et en deduire que si n ≥ 2, les groupes de Lie S1 × SU(n) et U(n) ne sont pasisomorphes.
34. Groupes de Lie simples et semi-simples
Definition 34.1. Soit G un groupe de Lie connexe sur K. Alors :(i) G est appele simple si LG est simple comme K-algebre de Lie;(ii) G est appele semi-simple si LG est semi-simple comme K-algebre de Lie.
Remarque 34.2. Un groupe de Lie simple est semi-simple, comme l’expliquela Remarque 33.3.
Proposition 34.3. Le centre d’un groupe de Lie semi-simple sur K est discret.
Preuve. Cela decoule du Theoreme 30.10 (car tout groupe de Lie sur K possedeune structure analytique, cf. Remarque 6.2) et du Corollaire 33.8 (iii). ¤
Dans les deux theoremes qui suivent, nous allons determiner lesquels parmicertains groupes classiques sont simples ou semi-simples, tout en anticipant sur lefait que les cas consideres sont bel et bien des cas de groupes de Lie connexes, cequi sera independamment etablit a la Section 37 ci-apres.
Theoreme 34.4. Le groupe de Lie SLn(K) sur K est simple ssi n ≥ 2. Legroupe de Lie reel GL+
n (R) et le groupe de Lie complexe GLn(C) ne sont ni simples,ni semi-simples.
Preuve. Cela decoule du Theoreme 33.22 et de la Remarque 33.24. ¤Theoreme 34.5. Considerons les groupes de Lie reels SU(n), SO(n) et Sp(n).
Ils jouissent des proprietes suivantes :(i) SU(n) est simple ssi n ≥ 2;(ii) SO(n) est simple ssi n = 3 ou n ≥ 5; de plus, SO(4) est semi-simple;(iii) Sp(n) est simple ssi n ≥ 1.
Par contre, le groupe de Lie reel U(n) n’est ni simple, ni semi-simple.
Preuve. Cela decoule du Theoreme 33.27 et de la Remarque 33.24. ¤A titre d’information, voici une caracterisation de la semi-simplicite d’un groupe
de Lie sur K au niveau des groupes (et non pas des algebres de Lie).

150 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Theoreme 34.6. Soit G un groupe de Lie sur K, qui est connexe. Alors Gest semi-simple ssi G est non-trivial et ne possede aucun sous-groupe de Lie sur K,normal resoluble et connexe distinct de {e}.
35. Quotients de groupes de Lie
Definition 35.1. Un espace (topologique) pointe est une paire (X, x0), ouX est un espace topologique non-vide, et x0 est un point de X, appele point-base; par abus, on ecrit souvent X au lieu de (X,x0). Si f : X −→ Y est uneapplication continue, on dit qu’elle est pointee si elle respecte les points-bases, i.e.si elle applique le point-base de X sur le point-base de Y .
Exemple 35.2. Les groupes topologiques sont canoniquement pointes par l’elementneutre, et les homomorphismes de groupes topologiques sont evidemment pointes.L’intervalle unite [0, 1] est pointe par 0.
Definition 35.3. Une application p : X −→ X entre deux espaces topologiquespointes est une fibration (pointee) si p continue, pointee et surjective, et si pour toutespace topologique pointe Y et tout diagramme commutatif
Yf //
ι0
²²
X
p
²²Y × [0, 1] h // X
d’applications continues pointees, ou ι0(y) := (y, 0) pour tout y ∈ Y , il existe uneapplication continue pointee h : X −→ E (appelee relevement de h) telle que lediagramme resultant
Yf //
ι0
²²
X
p
²²Y × [0, 1] h //
h
;;vvvvvvvvvX
commute egalement. L’espace X est l’espace total de la fibration p, et X est sonespace de base; le sous-espace F := p−1(x0) de X, ou x0 ∈ X est le point-base,s’appelle la fibre de p.
L’une des vertus essentielles des fibrations est qu’elles induisent une longuesuite exacte en homotopie, mais nous n’allons pas en dire plus, mis a part un casparticulier contenu dans le deuxieme theoreme ci-dessous.
Rappel 35.4. Soit X = (X, x0) un espace topologique pointe. Pour n ≥ 0, len-ieme groupe d’homotopie de X est l’ensemble
πn(X, x0) = πn(X) := [Sn, X] ,
i.e. des classes d’homotopies pointees d’applications continues pointees de la sphereSn ⊂ Rn+1 (pointee par ~en, par exemple) vers X. Cet ensemble est pointe dansle sens qu’il possede un element privilegie donne par la classe d’homotopie del’application constante prenant la valeur x0. De plus, on montre que πn(X) est, defacon canonique et naturelle, un groupe pour n ≥ 1 et est abelien pour n ≥ 2. Le

35. QUOTIENTS DE GROUPES DE LIE 151
groupe π1(X) s’appelle de groupe fondamental ou groupe de Poincare de X. Parexemple, il est bien connu que
πn(Rm) = 0 , ∀n ∈ Npour tout m ∈ N, et que
πn(S1) ∼={Z , si n = 10 , sinon.
L’intuition nous fait penser, a raison, que π1(S2) = 0. En fait, pour n ≥ 1, onmontre que
πn(Sm) = 0 des que n < m et πn(Sn) ∼= Z ;
nous aurons besoin uniquement des cas n = 1 et n = 2. L’ensemble π0(X) est enbijection canonique avec les composantes d’arcs de X, et son point-base est donnepar la composante d’arc Xx0 du point-base de X. En particulier, si X est connexepar arcs (on dit aussi 0-connexe), alors π0(X) = 0. Si Y est un second espacetopologique pointe, alors, pour chaque n ≥ 0, il y a une bijection canonique
πn(X × Y ) ≈ πn(X)× πn(Y ) ,
qui est meme un isomorphisme de groupes pour n ≥ 1 (auquel cas on ecrit “∼=”).En particulier, pour tout ` ≥ 0, on a, comme on l’a deja mentionne,
π1(T`) ∼= Z` .
Une application continue pointee f : X −→ Y induit, de facon canonique et na-turelle, des applications pointees d’ensembles pointes
f∗ = πn(f) : πn(X) −→ πn(Y )
pour chaque n ≥ 0; de plus, si n ≥ 1, alors πn(f) est un homomorphisme degroupes; si f est une equivalence d’homotopie – auquel cas on ecrit X ' Y pourexprimer le fait que X et Y sont homotopiquement equivalents –, alors π0(f) estune bijection et, pour n ≥ 1, πn(f) est un isomorphisme de groupes; de plus, chaqueπn(−) est un foncteur de la categorie des espaces topologiques pointes vers cellesdes ensembles pointes, et meme des groupes (resp. des groupes abeliens) si n ≥ 1(resp. n ≥ 2).
Definition 35.5. Soit X un espace topologique non-vide (non-pointe). On ditque X est simplement connexe si π1(X, x0) = 0 pour tout choix d’un point-base x0
de X.
Remarque 35.6. On montre assez facilement que si X est un espace topologiquenon-vide (non-pointe) et si x0 et x′0 sont deux points de X situes dans la memecomposante d’arcs de X, alors il y a des isomorphismes (non-canoniques)
πn(X, x0) ∼= πn(X, x′0)
pour tout n ≥ 1 (et, bien sur, π0(X, x0) = π0(X, x′0) comme ensembles pointes).
Definition 35.7. Soit X un espace topologique pointe. On dit que X est1-connexe si X est connexe par arcs et simplement connexe, i.e. si π0(X) = 0 etπ1(X) = 0 (independamment choix du point base).
Nous allons admettre le theoreme suivant, dont nous n’aurons pas vraimentbesoin (sauf en ce qui concerne la partie evidente sur π0), cf. Remarques 36.22 et37.12 plus loin dans le texte.
152 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Theoreme 35.8. Si G est un groupe topologique, alors π0(G) = G/Ge estle groupe des composantes d’arcs (en particulier, c’est un groupe), et π1(G) estabelien. Si G est un groupe de Lie, alors on a π2(G) = 0.
Nous allons egalement admettre les deux resultats suivants.
Theoreme 35.9. Soient G un groupe de Lie (resp. analytique) sur K, et H unsous-groupe de Lie de G sur K. Alors l’espace topologique quotient G/H porte unestructure canonique de variete lisse (resp. analytique) sur K de dimension
dim(G/H) = dim(G)− dim(H) .
De plus, l’espace tangent a G/H en eH s’identifie de facon canonique avec le quo-tient de K-espaces vectoriels LG/ LH. Finalement, la projection
p : G−³ G/H , g 7−→ gH
est une application lisse (resp. analytique) et une fibration de fibre H; il y a doncune longue suite exacte (canonique et naturelle) en homotopie
. . . // πn+1(G/H) // πn(H)ι∗ // πn(G)
p∗ // πn(G/H) // πn−1(H) // . . . ,
ou ι := inclH , qui se termine par
. . . // π4(G/H) // π3(H)ι∗ // π3(G)
p∗ // π3(G/H) // 0
suivi de
0 //π2(G/H) //π1(H)ι∗ //π1(G)
p∗ //π1(G/H) //π0(H)ι∗ //π0(G)
p∗ //π0(G/H) //0 .
Avant le prochain enonce, rappelons que si H est un sous-groupe de Lie normald’un groupe de Lie G sur K, alors LH est un ideal de Lie de la K-algebre de LieLG, cf. Theoreme 30.11 et Remarque 30.12.
Theoreme 35.10. Soient G un groupe de Lie (resp. analytique) sur K, et H unsous-groupe de Lie de G sur K. Si H est un sous-groupe normal de G, alors le groupetopologique quotient G/H possede une structure canonique de groupe de Lie (resp.analytique) sur K. De plus, la projection p : G−³ G/H est un homomorphismede groupes de Lie (resp. analytiques) sur K tel que Lp : LG −→ L(G/H) induit unisomorphisme de K-algebres de Lie
LG/
LH ∼= L(G/H) .
Finalement, on a une suite exacte
0 // π1(H)incl∗ // π1(G)
p∗ // π1(G/H) // π0(H)incl∗ // π0(G)
p∗ // π0(G/H) // 0 .
36. Revetements de groupes de Lie
Dans cette section, on suppose souvent implicitement que les espaces topologiquessont separes, connexes, et localement connexes par arcs; en particulier, ils sontconnexes par arcs et leurs composantes connexes coıncident avec les composantesd’arcs. A noter que ces hypotheses s’appliquent a toutes les varietes topologiquesconnexes, et en particulier aux groupes de Lie connexes sur K.

36. REVETEMENTS DE GROUPES DE LIE 153
Definition 36.1. Une application p : X −→ X entre deux espaces topologiquessepares, connexes, et localement connexes par arcs est un revetement si p est con-tinue et surjective, et si tout point x ∈ X admet un voisinage ouvert Vx dans X,dont l’image reciproque p−1(Vx) est ouverte dans X, et tel que la restriction del’application
p|p−1(Vx) : p−1(Vx) −→ Vx
a chaque composante connexe de p−1(Vx) est un homeomorphisme (sur Vx). On ditque X est l’espace total du revetement, et que x est son espace de base ou sa base;on dit parfois que p est l’application de revetement. Un voisinage ouvert Vx d’unpoint x ∈ X satisfaisant les proprietes ci-dessus est parfois appele ouvert revetusans pli ou ouvert trivialisant.
Remarque 36.2. Soit p : X −→ X un revetement. Alors l’application p estune application ouverte et un homeomorphisme local en chaque point de X, pardefinition meme. Si la fibre F est denombrable, alors X est a base denombrabled’ouverts ssi X l’est.
Remarque 36.3. Si p : X −→ X est un revetement pointe, on montre quec’est une fibration, dont la fibre F := p−1(x0) est un sous-espace discret de X (ici,x0 designe le point-base de X). En particulier, grace a la longue suite exacte enhomotopie d’une fibration, on en deduit que
p∗ : πn(X)∼=−→ πn(X) , ∀n ≥ 2 ,
et que π1(X) s’identifie a un sous-groupe de π1(X), de tel sorte que le quotientπ1(X)/π1(X) soit en bijection canonique avec F , symboliquement,
π1(X) ⊆ π1(X) et π1(X)/π1(X) ≈ F .
Il s’ensuit que le cardinal de F ne depend pas du choix du point-base, plus precisement,pour tout x ∈ X, on a l’egalite (entre cardinaux)
|p−1(x)| = |F | .Ainsi, si F est un espace fini, disons |F | = n ∈ N∗, alors π1(X) est un sous-groupe de π1(X) d’indice n; dans ce cas, on dit que p est un revetement fini, etplus precisement, un revetement a n feuillets, ou a n feuilles, ou d’ordre n; lorsquen = 2, on parle souvent de revetement double. En general, si π1(X) est un sous-groupe normal de π1(X), on dit que p est un revetement regulier, ou galoisien, ouparfois normal.
Definition 36.4. On dit qu’un revetement p : X −→ X est universel si Xest simplement connexe. Dans ce cas, on dit (un peu abusivement) que X est unrevetement universel de X et on ecrit
X = X .
Remarque 36.5. A noter qu’un revetement universel X d’un espace topologiqueB a les groupes d’homotopie suivants :
πn(X) ∼=
0 , si n = 00 , si n = 1πn(X) , si n ≥ 2 .

154 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
En effet, cela decoule de la Remarque 36.3 (et de la Remarque 35.6 pour le fait quecela ne depend pas du choix d’un point-base x0 de X et x0 de X situe, disons, dansla fibre F = p−1(x0) pour que p soit pointee).
Remarque 36.6. Si π : X −→ X est un revetement universel, alors on a unebijection canonique π1(X) ≈−→ π0(F ) = F , d’ou
|π1(X)| = |F |(egalite entre cardinaux). En particulier, si π est un revetement fini a p feuilles,ou p est un nombre premier, alors π1(X) ∼= Z/p. En effet, tout cela decoule de laRemarque 36.3 (et du fait que tout groupe d’ordre premier est cyclique).
Exemple 36.7.
(i) Un espace simplement connexe est son propre revetement universel.(ii) Un homeomorphisme est un revetement simple, i.e. a une feuille.(iii) Le cercle S1 possede R comme revetement universel. En effet, R est
simplement connexe et la projection canonique
R−³ R/Z = S1
est un revetement (de fibre Z), car un point [x] ∈ S1 possede, par exemple,l’ensemble {
[y] ∈ S1∣∣ |x− y| < 1
2
}
comme voisinage ouvert revetu sans pli dans S1.(iv) Pour chaque n ∈ Z×, l’application
S1 −→ S1 , z 7−→ zn
(ou on voit S1 comme etant plonge dans C) est un revetement a |n| feuilles.(v) Si pi : Xi −→ Xi est un revetement pour i ∈ {1, . . . , n}, alors le produit
p := p1 × . . .× pn : X1 × . . .×Xn −→ X1 × . . .×Xn
est egalement un revetement; p est universel ssi chaque pi l’est. Parexemple, Rn est un revetement universel du tore Tn pour chaque n ∈ N.
(vi) L’espace projectif reel de dimension n, note RPn, est l’espace topologiqueobtenu en quotientant la sphere Sn par la relation antipodale, i.e.
RPn := Sn/Z/2 ,
ou le groupe Z/2 agit (a droite) sur la sphere Sn ⊂ Rn+1 en appliquantun vecteur unite ~v sur son oppose −~v. A l’evidence, RPn possede unestructure canonique de variete reelle analytique pour laquelle la projectioncanonique
p : Sn−³ RPn
est un diffeomorphisme local analytique en chaque point. En particulier, pest un revetement double et, lorsque n ≥ 2, Sn est le revetement universelde RPn. De la Remarque 36.6, il suit que
π1(RPn) ∼= Z/2 , ∀n ≥ 2 .
Soient Sn>0 et Sn
≥0 = Sn>0 ∪ Sn−1 les hemispheres superieurs ouverts et
fermes, respectivement, de la sphere Sn. Clairement, chaque point deRPn possede un representant dans Sn
≥0, qui est unique ssi ce representantest dans Sn
>0; dans le cas contraire, ce point possede exactement deux

36. REVETEMENTS DE GROUPES DE LIE 155
representants dans Sn≥0, qui sont situes tous les deux (en position an-
tipodale) sur l’equateur Sn−1. On peut identifier, de facon evidente,l’hemisphere ferme Sn
≥0 au disque ferme Dn de dimension n, de tellemaniere que son equateur Sn−1 s’identifie au bord ∂Dn = Sn−1 du disqueferme. On a donc un diffeomorphisme analytique canonique
RPn ≈ Dn/∼ ,
ou “∼ ” designe la relation antipodale sur le bord ∂Dn = Sn−1 de Dn.Cette description de RPn, lorsque n = 3, permet de realiser un diffeomor-phisme analytique
RP3 ≈−→ SO(3) , [λ·~v ] 7−→ R(R·~v, πλ) ,
ou λ ∈ [0, 1] et ~v ∈ S2 = ∂D3, et ou R(R·~v, λ·π) designe la rotation dansR3 d’axe R·~v et d’angle λ·π dans le sens donne par la regle du tire-bouchondans la direction positive du vecteur ~v. En particulier, il en decoule desisomorphismes de groupes
π1(SO(3)) ∼= π1(RP3) ∼= Z/2 .
Definition 36.8. Un espace topologique est semi-localement simplement con-nexes, si chacun de ses points possede un voisinage qui est simplement-connexe.
Voici un lien tenu entre la notion de compacite et celle de finitude d’un revete-ment.
Lemme 36.9. Soit p : X −→ X un revetement. Alors, les deux proprietessuivantes sont equivalentes :
(i) l’espace total X est compact;(ii) la base X est compacte et p est un revetement fini.
Preuve.
(i) =⇒ (ii) : Supposons que X est compact. Soit F ⊆ X la fibre de p au-dessus d’unpoint choisit x0 de X. Comme F est un sous-espace discret de X, par compacitede celui-ci, F est fini, i.e. le revetement est fini. Comme X est separe et est l’imagepar l’application continue p de l’espace compact X, il est lui-meme compact.
(ii) =⇒ (i) : Supposons que X est compact et que le revetement est fini. Soit{Ui}i∈I un recouvrement ouvert de X. Pour chaque point y ∈ X, soit Uy l’un desUi contenant y. Ainsi, on obtient un nouveau recouvrement ouvert {Uy}y∈X deX, qui n’est autre qu’un sous-recouvrement du recouvrement initial, mais avec des“repetitions”. Clairement, si on parvient a extraire un sous-recouvrement fini de{Uy}y∈X , il en va de meme de {Ui}i∈I . Par la Remarque 36.2, p est une applicationouverte, donc chaque p(Uy) est un ouvert de X. Pour x ∈ X, posons
Vx :=⋂
y∈p−1(x)
p(Uy) ⊆ X .
Comme le revetement p est fini, chaque fibre p−1(x) est finie, donc chaque intersec-tion Vx est finie et donc est un ouvert de X. Comme p est surjectif, {Vx}x∈X estun recouvrement ouvert de X. Par la propriete de revetement de p, pour chaque

156 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
point x ∈ X, on trouve un voisinage ouvert Wx de x dans X, qui est contenu dansVx, et qui est revetu sans pli par p; a noter que Wx satisfait
p−1(Wx) ⊆⋃
y∈p−1(x)
Uy
(alors qu’a priori, on ne sait pas si Vx satisfait la propriete correspondante). Onobtient ainsi un recouvrement ouvert {Wx}x∈X de X. Par compacite de X, onpeut en extraire un sous-recouvrement fini, disons {Wx}x∈A , avec A designant unepartie finie de X. Montrons que
{Uy}y∈p−1(A)
est un sous-recouvrement fini de {Uy}y∈X . D’abord, par finitude de p et de A,p−1(A) est bien un sous-ensemble fini de X. Maintenant, soit y0 ∈ X un pointarbitraire. On trouve un point x ∈ A tel que p(y0) ∈ Wx, de sorte que
y0 ∈ p−1(p(y0)
) ⊆ p−1(Wx) ⊆⋃
y∈p−1(x)
Uy ⊆⋃
y∈p−1(A)
Uy .
Ceci permet de conclure. ¤
Remarque 36.10. Les varietes topologiques connexes, et en particulier lesgroupes de Lie connexes sur K, sont semi-localement simplement connexes.
Avant le prochain enonce, rappelons que tous les espaces topologiques qui sontdomaine ou co-domaine d’un revetement son supposes etre separes, connexes etlocalement connexes par arcs (en particulier, cela s’applique a Y , X et X ′ dans letheoreme qui suit).
Theoreme 36.11. Soit X un espace topologique pointe (separe, connexe etlocalement connexe par arcs), qui est semi-localement simplement connexe. Alors :
(i) L’espace X possede un revetement universel pointe p : X −→ X.(ii) Pour tout revetement pointe q : X −→ X, il existe une unique application
continue pointee π : X −→ X au-dessus de X, i.e. telle que le diagramme
Xπ //
pºº/
////
X
q¨¨²²²²²
X
commute. De plus, cette application π est un revetement universel de Y .(iii) Le revetement universel de X est unique a un unique isomorphisme de
revetements pres, dans le sens que si p : X −→ X et p′ : X ′ −→ X sontdeux revetements universels de X, alors il existe un unique homeomor-phisme pointe h : X −→ X ′ au-dessus de X, i.e. tel que le diagramme
Xh∼=
//
pºº/
////
X ′
p′§§±±±±±
X
commute.

36. REVETEMENTS DE GROUPES DE LIE 157
Remarque 36.12. Dans l’enonce precedent, on peut remplacer l’hypotheseque l’espace X considere est semi-localement simplement connexes par la condi-tion plus faible que X est localement relativement simplement connexe (ou micro-simplement connexe) dans le sens que tout point x de X admet un voisinage Ux
tel que l’homomorphisme π1(Ux, x) −→ π1(X, x), induit par l’inclusion, est trivial.Cette condition signifie simplement que tout lacet base en x et contenu dans U estretractable dans X tout en restant base en x. En fait, on peut montrer que si X(un espace topologique separe, connexe et localement connexe par arcs) possedeun revetement universel, alors X est localement relativement simplement connexe.Donc, cette condition sur X est necessaire et suffisante pour que le Theoreme 36.11s’applique a X. A noter qu’un espace simplement connexe est localement relative-ment simplement connexe.
Remarque 36.13. Le point (iii) du Theoreme 36.11, qui decoule immediatementde son point (ii), justifie le fait que l’on parle du revetement universel d’un espaceX (au lieu d’un revetement universel), et qu’on introduise une notation pour ledesigner, a savoir X.
Remarque 36.14. En particulier, toute variete topologique connexe M possedeun revetement universel M . Par la Remarque 36.2, il suit que M est un es-pace topologique localement euclidien. Des Remarques 36.2 et 36.6, il suit quesi π1(M) est denombrable, alors M est a base denombrable et est donc une varietetopologique.
Definition 36.15. Soient M et M deux varietes lisses (resp. analytiques) surK, qui sont connexes. Une application p : M −→ M est un revetement lisse (resp.un revetement analytique) si p est un revetement et si tout point x ∈ M admet unvoisinage ouvert Vx dans M , dont l’image reciproque p−1(Vx) est ouverte dans M ,et tel que la restriction de l’application
p|p−1(Vx) : p−1(Vx) −→ Vx
a chaque composante connexe de p−1(Vx) est un diffeomorphisme (resp. analytique).
Remarque 36.16. Soient M et M comme dans la definition precedente. Unrevetement lisse (resp. un revetement analytique) p : M −→ M est une applicationlisse (resp. analytique), et c’est meme un diffeomorphisme local (resp. analytique)en chaque point de M .
Exemple 36.17.
(i) La projection canonique R−³ R/Z = S1 est un revetement analytiquereel.
(ii) La projection canonique Sn−³ RPn est un revetement analytique reel.(iii) L’application d’elevation au cube
p : R −→ R3 , x 7−→ x3
est un revetement et une application analytique, mais ce n’est pas unrevetement analytique (ni un revetement lisse), car l’application reciproque
R −→ R3 , x 7−→ x1/3
n’est pas derivable en 0, de sorte que p n’est pas un diffeomorphisme localen 0.
158 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Nous allons admettre les deux theoremes suivants.
Theoreme 36.18. Soit M une variete lisse (resp. analytique) sur K, qui estconnexe. Alors M possede un revetement universel p : M −→ M . De plus, Mpossede une structure canonique de variete lisse (resp. analytique) sur K telle quep soit un revetement lisse (resp. un revetement analytique), et en particulier undiffeomorphisme local (resp. analytique) en chaque point.
Definition 36.19. Soient G et G deux groupes de Lie (resp. analytiques) surK, qui sont connexes. Une application p : G −→ G est un revetement de groupes deLie (resp. un revetement de groupes de Lie analytiques) si p est un homomorphismede groupes de Lie (resp. analytiques) sur K, et si p est un revetement lisse (resp.un revetement analytique) au sens de la Definition 36.15.
Theoreme 36.20. Soit G un groupe de Lie (resp. analytique) sur K, qui estconnexe. Alors G possede un revetement universel p : G −→ G. De plus, G possedeune structure unique de groupe de Lie (resp. analytique) sur K telle que p soit unrevetement de groupes de Lie (resp. un revetement de groupes de Lie analytiques).Finalement, il y a un isomorphisme de groupes canonique
π1(G) ∼= Ker(p) ,
et Ker(p) est un sous-groupe discret du centre de G; ainsi, π1(G) est abelien.
Remarque 36.21. Notons que la demonstration du Theoreme 36.20 est baseesur le Theoreme 36.18 et sur la Proposition 4.11.
Remarque 36.22. La fibre du revetement universel p : G −→ G est
F := p−1(e) = Ker(p) .
Nous avions deja mentionne l’existence d’une bijection canonique entre π1(G) et F ,cf. Remarque 36.6, mais, ici, on a plus : c’est un isomorphisme de groupes. Ainsi,π1(G) s’identifie a un sous-groupe discret du groupe de Lie connexe G, qui en plusest normal, puisque c’est un noyau. C’est donc de l’Exercice 3.21 qu’il resulte queπ1(G) est central dans G, et donc abelien, comme nous l’avions annonce dans leTheoreme 35.8 (le meme principe fonctionne pour les groupes topologiques qui sontconnexes, localement connexes par arcs et semi-localement simplement connexes;mais, en fait, π1(G) est vraiment abelien pour tout groupe topologique, et memepour tout H-espace pointe).
Nous avons deja a plusieurs reprises fait usage partiel (dans des cas evidents)du resultat suivant, qui decoule du Theoreme 35.10.
Theoreme 36.23. Soit G un groupe de Lie (resp. analytique) sur K. Si H estun sous-groupe discret et normal de G, alors le groupe topologique quotient G/Hpossede une structure canonique de groupe de Lie (resp. analytique) sur K, de memedimension que G et avec une identification canonique de K-algebres de Lie
L(G/H) = LG .
De plus, la projection p : G−³ G/H est(i) une fibration de fibre H;(ii) un homomorphisme de groupes de Lie (resp. analytiques) sur K;(iii) un diffeomorphisme local (resp. analytique) en tout point de G.
37. PROPRIETES GROUPALES ET TOPOLOGIQUES DES GROUPES CLASSIQUES 159
Si G est connexe, alors G/H l’est egalement, H est central dans G, p est unrevetement de groupes de Lie (resp. un revetement de groupes de Lie analytiques),et on a une suite exacte courte
0 // π1(G)p∗ // π1(G/H) // H // 0 .
Si G est 1-connexe, alors G est le revetement universel de G/H et π1(G/H) ∼= H.
Voici une consequence immediate des Theoremes 16.5, 36.20 et 36.23.
Theoreme 36.24. Soient G et G deux groupes de Lie (resp. analytiques) surK, qui sont connexes. Supposons que G est simplement connexe. Alors, il existeun revetement (universel) p : G −→ G qui est un homomorphisme de groupes ssi ilexiste un sous-groupe discret H du centre Z(G) de G, tel qu’on ait un isomorphismede groupes de Lie (resp. analytiques) reels
G ∼= G/H ;
de plus, dans ce cas, le choix H = Ker(p) convient, et on a π1(G) ∼= H.
Remarque 36.25. La conjugaison complexe C −→ C est un revetement (uni-versel) et un homomorphisme de groupes, de noyau trivial, mais ce n’est pas unisomorphisme de groupes de Lie complexes, seulement un isomorphisme de groupesde Lie analytiques reels sous-jacents.
Remarque 36.26. Si K = C dans le Theoreme 36.24, et si p est une applicationholomorphe, alors l’isomorphisme G ∼= G/H est un isomorphisme de groupes deLie complexes pour le choix H = Ker(p).
Remarque 36.27. Dans le Theoreme 36.24, il est important d’exiger que psoit non-seulement un revetement, mais un homomorphisme de groupes. En effet,par exemple, le groupe de Heisenberg Heis3(R) est diffeomorphe a R3, donc ilexiste un revetement (universel) p : Heis3(R) −→ R3/Z3 = T3. Or, le groupe descommutateurs de Heis3(R) est son centre, a savoir
[Heis3(R),Heis3(R)
]= Z(
Heis3(R))
=(
1 0 R0 1 00 0 1
),
de sorte que le seul quotient abelien de Heis3(R) par un sous-groupe central est
Heis3(R)/Z(
Heis3(R)) ∼=
(1 R 00 1 R0 0 1
) ∼= R2 .
Or, il evident que le groupe sans-torsion R2 n’est pas isomorphe a T3.
37. Proprietes groupales et topologiques des groupes classiques
Dans cette section, nous allons, pour chaque groupe classique G, determiner lecentre de G, si G est connexe, si G est compact, et le groupe fondamental de G.En fait, nous allons admettre plusieurs des resultats, et ne presenter que quelquesdemonstrations, en particulier pour les groupes qu’on aura montre etre compacts.
Les groupes classiques consideres sont les suivants :
GLn(F) , SLn(F) , GL+n (R) , O(n) , SO(n) , U(n) , SU(n) et Sp(n) .
En general, on supposera implicitement que n ≥ 1 ou meme que n ≥ 2, le cas n = 0etant sans reel interet, et le cas n = 1 etant souvent de peu d’interet. Lorsqu’ilfaudra distinguer les cas selon la parite de n, on ecrira n = 2m (avec m ≥ 1) et

160 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
n = 2m + 1 (avec m ≥ 0); dans ce cas, on ecrira parfois 2n et 2n + 1 au lieu de 2met 2m + 1, mais cela ne devrait apporter aucune confusion.
Commencons par discuter du centre des groupes classiques.
Notation 37.1. Pour n ≥ 1, posons ωn := e2πi/n, et soit µn le groupe desracines n-iemes de l’unite dans C, c’est-a-dire,
µn :={z ∈ S1
∣∣ zn = 1}
={
1, ωn, ω2n, . . . , ωn−1
n
}.
Theoreme 37.2. Le centre des groupes classiques est donne par
• Z(GLn(F)
)=Z(F)× ·1In
• Z(GL+
2n(R))=R× ·1In et Z(
GL+2n+1(R)
)=R×+ ·1In
• Z(SL2n(R)
)=
{± 1In}
et Z(SL2n+1(R)
)=
{1In
}
• Z(SLn(C)
)= µn · 1In
• Z(SLn(H)
)=
{± 1In}
• Z(O(n)
)=
{± 1In}
• Z(SO(2n)
)=
{± 1In}
et Z(SO(2n + 1)
)=
{1In
}
• Z(U(n)
)= S1 ·1In
• Z(SU(n)
)= µn · 1In
• Z(Sp(n)
)=
{± 1In}
,
avec l’exception que Z(SO(2)
)= SO(2).
Esquisse de preuve. Traitons le cas ou G = GLn(F) ou SLn(F). Soit Eij la matriceayant un 1 en position (i, j) et des 0 ailleurs; a noter que 1In + Eij ∈ SLn(F) pourdes raisons evidentes, et donc cette matrice est dans G. Si A = (aij) ∈ G est dansle centre de G, alors on a
A(1In + Eij) = (1In + Eij)A ,
pour tous i 6= j, et donc AEij = EijA. Or, AEij est la matrice ayant comme j-emecolonne la i-ieme colonne de A, et des 0 ailleurs; de meme, EijA est la matrice ayantcomme i-ieme ligne la j-ieme ligne de A, et des 0 ailleurs. Il s’ensuit que pour touti 6= j, on a aij = 0 et aii = ajj . Ainsi, on a A = a11 ·1In, et donc A ∈ F× ·1In. Maiscomme A est centrale, on en deduit que A ∈ Z(F)×·1In. On conclut en considerantque si G = SLn(F), on doit en plus avoir det(A) = 1 (au sens approprie si F = H,cf. Remarque 21.7). ¤
Nous passons a la question de la compacite.
Notation 37.3. On munit Mn(F) de la norme euclidienne, notee ||.||2, etdonnee, pour une matrice X = (xij) ∈Mn(F), par
||X||2 :=
√√√√n∑
i,j=1
|xij |2 .
37. PROPRIETES GROUPALES ET TOPOLOGIQUES DES GROUPES CLASSIQUES 161
Remarque 37.4. Comme Mn(F) est un espace euclidien, un sous-espace estcompact ssi il est ferme et borne. Dans la suite, nous allons toujours considerer lesgroupes classiques comme sous-espace de l’espace Mn(F) approprie, i.e. pour n etF bien choisis.
Theoreme 37.5. Les groupes classiques
GLn(F) , SLn(F) et GL+n (R) ,
ne sont pas compacts (a l’exception de SL1(K) = {1} et de SL1(H) = Sp(1)), alorsque les groupes classiques suivants le sont :
O(n) , SO(n) , U(n) , SU(n) et Sp(n) .
Preuve. Si n = 1, alors on a GL1(F) = F× et GL+1 (R) = R×+; bien sur, il ne sont
pas bornes, donc pas compacts. Supposons que n ≥ 2. Alors, pour chaque t ∈ R,la matrice
1In + t·E1,n =
1 0 0 − − 0 t1 0 − − 0 0� | |� | |
1 0 01 0
1
est dans GLn(F), dans SLn(F) et dans GL+n (R), ce qui montre qu’ils ne sont pas
bornes, donc pas compacts. Par l’algebre lineaire, les lignes d’une matrice orthog-onale A ∈ O(n) (resp. unitaire A ∈ U(n)) forment une base orthonormee de Rn
(resp. Cn). Ceci montre que O(n) (resp. U(n)) est un sous-espace ferme de Mn(R)(resp. de Mn(C)), qui est situe sur la sphere de rayon
√n pour la norme ||.||2; donc
ils sont compacts. Comme SO(n) est un sous-groupe ferme de O(n), que SU(n) estun sous-groupe ferme de U(n), et que Sp(n) est isomorphe comme groupe de Liereel au sous-groupe ferme SUH2n de U(2n), on voit qu’ils sont tous compacts. ¤
Nous passons a la question plus delicate de la connexite.
Theoreme 37.6. Les groupes classiques
GL+n (R) , GLn(C) , GLn(H) , SLn(F) , SO(n) , U(n) , SU(n) et Sp(n) .
sont connexes. Les groupes classiques GLn(R) et O(n) possedent deux composantesconnexes, et leurs composantes du neutre sont donnees par
GLn(R)e = GL+n (R) et O(n)e = SO(n) ,
ou, bien sur, e = 1In.
Voici un resultat preparatoire.
Proposition 37.7. Soient G un groupe topologique semi-localement connexe,H un sous-groupe de G, et G/H l’espace topologique quotient. Si H et G/H sontconnexes, alors G l’est aussi.
Preuve. Soit D un espace discret, et soit f : G −→ D une application continue;comme G est semi-localement connexe (de sorte que ses composantes connexessont a la fois ouvertes et fermees), il nous suffit de montrer que f est constante.Pour chaque g ∈ G, la classe laterale gH est connexe, donc f |gH est constante. Ils’ensuit que l’application quotient
f : G/H −→ D , gH 7−→ f(gH) := f(g)

162 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
est bien definie. Comme G/H est muni de la topologie quotient, et comme f estcontinue, f est elle-meme continue. Par connexite de G/H, f est constante. Commef est la composition
GπH−³ G/H
f−→ D ,
il appert que f est egalement constante, d’ou le resultat. ¤
Remarque 37.8. La Proposition 37.7 reste valide si G n’est pas suppose loca-lement connexe, mais la demonstration est un peu plus delicate (tout en restantelementaire).
Preuve du Theoreme 37.6. D’abord, le determinant nous montre que GL+n (R) (resp.
SO(n)) est un sous-groupe ouvert et ferme de GLn(R) (resp. O(n)), donc c’est unereunion de composantes connexes de GLn(R) (resp. O(n)), cf. Corollaire 3.12. Donc,pour deduire que GLn(R) et O(n) possedent exactement deux composantes con-nexes et que leurs composantes du neutre sont GL+
n (R) et SO(n), respectivement,il suffit de montrer que GL+
n (R) et SO(n) sont connexes et de constater qu’on a
GLn(R) = GL+n (R)q
(-11�
1
)·GL+
n (R) et O(n) = SO(n)q(-1
1�
1
)·SO(n) .
Pour n ≥ 1, designons par Gn l’un des groupes de Lie
GL+n (R) , GLn(C) , GLn(H) , SLn(F) , SO(n) , U(n) , SU(n) et Sp(n) .
Soit F la R-algebre a division ou les matrices de Gn prennent leurs valeurs pardefinition. Pour des raisons evidentes, la description explicite de G1 permet devoir qu’il est connexe (rappelons que SL1(H) = Sp(1) = S3, cf. Remarques 21.9 et21.15). Supposons pour la suite que n ≥ 2. Soit Xn l’espace topologique (sur lequelGn agit continument, par homeomorphismes) donne par
Xn := Fnr{0} , pour Gn = GL+n (R) , GLn(C) , GLn(H) et SLn(F) ,
et par la sphere correspondante pour les autres cas, i.e.
Xn := SdF·n−1 ⊂ Fnr{0} , pour Gn = SO(n) , U(n) , SU(n) et Sp(n) .
Soit encore ~e1 := (1, 0, . . . , 0) ∈ Fn le premier vecteur de la base canonique; a noterque ~e1 ∈ Xn. On affirme que Gn agit transitivement sur Xn, en d’autres termes,que pour chaque ~v ∈ Xn, il existe g ∈ Gn tel que g·~e1 = ~v (ici, on utilise le fait quen ≥ 2, car, lorsque n = 1, c’est faux pour GL+
1 (R) et pour les groupes “Speciaux”,i.e. SLn(F), SO(n), SU(n) et Sp(n)). En effet, cela decoule de trois faits; primo,que chaque vecteur non-nul ~v1 := ~v de Fn (resp. de norme 1) peut etre completeen une base (resp. orthonormee) (~v1, ~v2, . . . , ~vn) de Fn, et qu’on peut supposer quela matrice A ayant les ~vi comme colonnes soit de determinant > 0 si F = R; etsecundo, du fait que pour une telle base, la matrice A est dans GLn(F) (resp. dansSO(n), SU(n) ou Sp(n) selon que F = R, C ou H), et meme dans GL+
n (R) si F = R;tertio, que le produit A·~e1 n’est autre que ~v1 = ~v. Ici, si F = H, par “orthonormee”,on entend au sens de C2n, via le plongement de GLn(F) dans GL2n(C) decrit a laSection 5. Considerons maintenant le stabilisateur de ~e1 dans Gn, i.e.
Stab(~e1) :={g ∈ Gn
∣∣ g ·~e1 = ~e1
}.
C’est un sous-groupe (ferme) du groupe de Lie Gn, et du fait que l’action (continue,par homeomorphismes) sur Xn est transitive, on a un homeomorphisme (et meme

37. PROPRIETES GROUPALES ET TOPOLOGIQUES DES GROUPES CLASSIQUES 163
un diffeomorphisme analytique) canonique
Xn∼= Gn
/Stab(~e1) .
Dans chaque cas, il est immediat de verifier que Stab(~e1) – qui n’est autre quel’ensemble des matrices dans Gn dont la premiere colonne est ~e1 – est donne par
Stab(~e1) =
1 ∗ · · · ∗0...0
Gn−1
=
1 F · · · F0...0
Gn−1
⊂ Gn .
si Xn = Fnr{0}, et par
Stab(~e1) =
1 0 · · · 00...0
Gn−1
⊂ Gn
si Xn = SdF·n−1. Ceci montre qu’on a un isomorphisme de groupes de Lie analy-tiques canonique
Stab(~e1) ∼={Fn−1 oGn−1 , si Xn = Fnr{0}Gn−1 , si Xn = SdF·n−1
et donc un diffeomorphisme analytique et une equivalence d’homotopie
Stab(~e1) ≈{Fn−1 ×Gn−1 , si Xn = Fnr{0}Gn−1 , si Xn = SdF·n−1
et Stab(~e1) ' Gn−1 .
Au total, le groupe topologique Gn possede Stab(~e1) ' Gn−1 comme sous-groupetel que Gn
/Stab(~e1) ∼= Xn. Comme G1 et Xn sont connexes, la Proposition 37.7
implique, inductivement sur n, que Gn est connexe. ¤Remarque 37.9. Le tableau suivant nous donne les valeurs du determinant
pour les groupes classiques :
G GLn(K) GLn(H) SLn(K) SLn(H) GL+n (R) O(n) SO(n) U(n) SU(n) Sp(n)
det(G) K× R×+ {1} {1} R×+ {±1} {1} S1 {1} {1}dans K× R×+ K× R×+ R× R× R× C× C× R×+
On constate (mais c’est juste une constatation tres agreable, absolument pas jus-ticiable d’etre appelee une demonstration) que le nombre de composantes connexesdes groupes classiques coıncide avec le nombre de composantes connexes de l’imagedu determinant. C’est une astuce permettant de se souvenir rapidement du nom-bre de composantes connexes pour les groupes classiques mentionnes ici; c’est fauxpour les groupes de Lorentz O(m,n) et SO(m,n) avec m,n ≥ 1, que nous n’avonspas definis; par contre, c’est vrai pour O◦(m,n), SO◦(m,n), U(m, n), SU(m,n) etSp(m,n), ainsi que pour SO∗(2n), On(C), SOn(C), Spn(R) et Spn(C); parmi cesgroupes, O(m,n) (resp. SO(m,n)) possede 4 (resp. 2) composantes connexes, alorsque l’image de son determinant en a 2 (resp. 1); de plus, O◦(m,n) et On(C) ont 2composantes connexes, et les groupes restants sont tous connexes.
Remarque 37.10. En general, il est facile de se souvenir que SO(n) est lacomposante du neutre de O(n). Par contre, on se gardera de croire que SU(n) est

164 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
la composante du neutre de U(n). Ce qui est faux puisque les deux sont connexes,et en plus, leurs dimensions sont n2 − 1 et n2 respectivement.
Pour finir, passons a la question de la simple-connexite, et plus precisement acelle du groupe fondamental. Il y a ici plusieurs methodes. Nous allons nous basersur le Theoreme 35.9.
Theoreme 37.11. Les groupes classiques
GLn(H) , SLn(C) , SLn(H) , SU(n) et Sp(n)
sont simplement connexes, et on a
π1
(GLn(C)
) ∼= Z et π1
(U(n)
) ∼= Z .
Finalement, pour Gn designant l’un des groupes classiques
GLn(R) , GL+n (R) , SLn(R) , O(n) et SO(n) ,
le groupe fondamental est donne par
π1(Gn) ∼=
0 , si n = 1Z , si n = 2Z/2 , si n ≥ 3 .
Preuve. D’abord, par le Theoreme 37.6, GL+n (R) (resp. SO(n)) est la composante
du neutre de GLn(R) (resp. O(n)), et les autres groupes classiques consideres sontconnexes. Comme π1(G) = π1(Ge), on peut se retreindre aux cas connexes. Lorsquen = 1, les resultats annonces sont clairs, puisque SL1(H) = Sp(1) = S3 (cf. Remar-ques 21.9 et 21.15) et puisque
GL+1 (R) = R×+ ' pt , GL1(C) = C× ' S1 , GL1(H) = H× ' S3 et U(1) = S1 ,
les autres groupes classiques connexes etant reduits a un point pour n = 1. On peutdonc supposer que n ≥ 2. Gardons les notations de la preuve du Theoreme 37.6.En particulier, Gn est l’un des groupes classiques (de matrices a coefficients dans F)
GL+n (R) , GLn(C) , GLn(H) , SLn(F) , SO(n) , U(n) , SU(n) et Sp(n) ,
et Gn agit sur l’espace Xn. Dans cette demonstration, on a montre que Gn contientun sous-groupe ferme Hn, qui est homotopiquement equivalent a Gn−1, et tel que
Gn/Hn∼= Xn .
Ainsi, par le Theoreme 35.9, on a une suite exacte
0 // π2(Xn) // π1(Gn−1) // π1(Gn) // π1(Xn) // 0 .
Etant donne qu’on a
Fnr{0} ∼= RdF·nr{0} ' SdF·n−1 ,
on voit que dans chaque cas, Xn est homotopiquement equivalent a une sphere,dont la dimension est precisement dF · n− 1. Ainsi, on a
π1(Xn) ∼= π1(SdF·n−1) ∼={Z , si n = 2 et dF = 1, i.e. si n = 2 et F = R0 , sinon

37. PROPRIETES GROUPALES ET TOPOLOGIQUES DES GROUPES CLASSIQUES 165
et
π2(Xn) ∼= π2(SdF·n−1) ∼={Z , si n = 3 et dF = 1, i.e. si n = 3 et F = R0 , sinon.
Ainsi, si F = C ou H, alors on a
π1(Gn) ∼= π1(Gn−1) ∼= . . . ∼= π1(G1) ,
et on conclut dans ce cas, par les valeurs du π1 trouvees ci-dessus pour n = 1. Onpeut donc supposer que F = R, de sorte que Gn est l’un des groupes classiques
GL+n (R) , SLn(R) et SO(n) .
En utilisant que π1(G1) = 0 (cf. plus haut), on obtient des suites exactes
0 // π1(G2) // Z // 0 et 0 // Z // π1(G2) // π1(G3) // 0
et finalement, pour n ≥ 4,
0 // π1(Gn−1) // π1(Gn) // 0 .
On deduit de la premiere et de la troisieme que π1(G2) ∼= Z et π1(Gn) ∼= π1(G3)pour tout n ≥ 4. Malheureusement, de la deuxieme, on arrive a deduire uniquementle fait que π1(G3) est isomorphe a Z/m, pour un entier non-nul m ∈ N∗. Il ne nousreste donc plus qu’a determiner les groupes
π1
(GL+
3 (R)), π1
(SL3(R)
)et π1
(SO(3)
).
Le cas de SO(3) est traite dans l’Exemple 36.7 (vi). Le cas de SL3(R) decoulede celui de GL+
3 (R), car, pour chaque n ≥ 1 (en particulier, pour n = 3), ledeterminant nous fournit une suite exacte courte de groupes
0 // SLn(R) // GL+n (R) // R×+ // 0
qui est scindee par l’application
R×+ −→ GL+n (R) , λ 7−→
(λ
11�
1
),
de sorte que GL+n (R) est le produit semi-direct SLn(R) o R×+, ce qui fournit des
diffeomorphismes analytiques
GL+n (R) ≈ SLn(R)× R×+ ≈ SLn(R)× R ,
de sorte que GL+n (R) et SLn(R) sont homotopiquement equivalents. Pour le cas de
GL+3 (R), on a besoin d’une nouvelle observation, que nous allons presenter en plus
grande generalite, a savoir pour GL+n (R) avec n ≥ 1. Soit
Sn :={X ∈Mn(R)
∣∣ tX = X} ∼= Rn(n+1)
2
le R-espace vectoriel des matrices reelles symetriques de taille n, et soit
Pn :={X ∈Mn(R)
∣∣ X est symetrique definie positive} ⊆ Sn .
On peut montrer que Pn est un (cone) convexe ouvert et non-vide de Sn, donc ilest diffeomorphe a R
n(n+1)2 , et est par consequent contractile (i.e. tous ses groupes
d’homotopie sont nuls). L’application
GL+n (R)×Pn −→ Pn , (A,X) 7−→ A·X ·tA

166 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
est une action analytique de GL+n (R) sur Pn par des diffeomorphismes analy-
tiques. Comme cette action est transitive (par l’algebre lineaire), on en deduitun homeomorphisme (en fait, un diffeomorphisme analytique)
Pn∼= GL+
n (R)/
Stab(1In) .
Or, il est clair que Stab(1In) = SO(n), par definition meme du groupe orthogonal(special). Par le Theoreme 35.9, on a une suite exacte
0 // π2(Pn) // π1
(SO(n)
)// π1
(GL+
n (R))
// π1(Pn) // 0 .
Comme πj(Pn) = 0 pour tout j, on en deduit que π1
(SO(n)
) ∼= π1
(GL+
n (R)). Ceci
acheve la demonstration. ¤Remarque 37.12. A noter que dans la demonstration precedente, nous n’avons
pas utilise le fait que π2(G) = 0 pour tout groupe de Lie G (cf. Theoreme 35.8),resultat qui est implicitement invoque dans le Theoreme 35.9 pour fournir la suiteexacte
0 // π2(Xn) // π1(Gn−1) // π1(Gn) // π1(Xn) // 0 .
Plus precisement, sans ce resultat sur π2, on obtient seulement la suite exacte
π2(Xn) // π1(Gn−1) // π1(Gn) // π1(Xn) // 0 ,
qui suffit amplement pour cette preuve (sauf lorsqu’on dit qu’on peut, pour des casspecifiques, deduire de la suite exacte que π1(G3) est isomorphe a Z/m, pour unentier non-nul m ∈ N∗, resultat qui n’est pas utilise dans la suite de la preuve).
Remarque 37.13. De la demonstration precedente, on tire un diffeomorphismeanalytique canonique
GL+n (R)
/SO(n) ≈ Pn :=
{X ∈Mn(R)
∣∣ X est symetrique definie positive}
et le fait que Pn est diffeomorphe a Rn(n+1)
2 (non canoniquement), et est donccontractile.
Pour conclure cette section, nous allons nous focaliser sur les groupes classiquesqui sont compacts et connexes (outre les cas triviaux SL1(R) et SL1(C)), a savoir
SO(n) , U(n) , SU(n) et Sp(n) .
Les groupes SU(n) et Sp(n) sont simplement connexes, donc ils sont leur proprerevetement universel. Les groupes de Lie reels SO(2) et U(1) = S1 sont isomorphes,et leur revetement universel est le groupe de Lie reel R.
Definition 37.14. Pour n ≥ 3, le groupe spin ou groupe spinoriel (d’ordre n)est le revetement universel de SO(n), en d’autres termes, c’est le groupe de Lie reelconnexe
Spin(n) := SO(n) .
L’algebre de Lie du groupe de Lie Spin(n) est parfois notee spin(n) ou spin(n).
Remarque 37.15. Le fait que le revetement universel de SO(n) porte unestructure de groupe de Lie reel decoule du Theoreme 36.20 (et cette structure estcanonique). Du fait que π1
(SO(3)
) ∼= Z/2 (cf. Theoreme 37.11), le Theoreme 36.20nous apprend qu’il existe un homomorphisme surjectif de groupes de Lie reels
π : Spin(n)−³ SO(n) ,

37. PROPRIETES GROUPALES ET TOPOLOGIQUES DES GROUPES CLASSIQUES 167
dont le noyau est isomorphe a Z/2, qui est un revetement double, et qui induit unisomorphisme d’algebres de Lie reelles
Lπ : LSpin(n)∼=−→ LSO(n) = so(n) .
De plus, par le Lemme 36.9, Spin(n) est compact. Ainsi, c’est egalement ungroupe de Lie reel compact connexe, et Spin(n) est simple ssi n = 3 ou n ≥ 5,cf. Theoreme 34.5 (ii).
Nous allons admettre le resultat suivant.
Theoreme 37.16. Pour n ≥ 3, le centre du groupe Spin(n) est donne par
Z(Spin(n)
) ∼=
Z/2⊕ Z/2 , si n ≡ 0 (mod 4)Z/2 , si n ≡ 1 (mod 4)Z/4 , si n ≡ 2 (mod 4)Z/2 , si n ≡ 3 (mod 4) .
Remarque 37.17. On a donc le tableau suivant :
GSU(n) SO(2n + 1) Spin(2n + 1) Sp(n) SO(2n) Spin(2n)(n≥2) (n≥1) (n≥1) (n≥1) (n≥2) (n≥2)
Z(G) Z/n 0 Z/2 Z/2 Z/2
�Z/2⊕ Z/2Z/4
π1(G) 0 Z/2 0 0 Z/2 0
simple ? oui oui oui oui oui si n ≥ 3 oui si n ≥ 3
Le resultat suivant fournit une description explicite des deux premiers groupesspinoriels, a savoir les groupe de Lie Spin(3) et Spin(4).
Theoreme 37.18. Il existe des isomorphismes de groupes de Lie canoniques
Spin(3) ∼= SU(2) et Spin(4) ∼= SU(2)× SU(2) .
En particulier, il y a des isomorphismes de R-algebres de Lie canoniques
so(3) ∼= su(2) et so(4) ∼= so(3)⊕ so(3) .
Ce resultat decoule des deux exercices suivants.
Exercice 37.19. On munit H du produit scalaire euclidien usuel note
F : H×H −→ R , (p, q) 7−→ F (p, q) .
Soit H◦ = R⊥ comme a l’Exercice 1. Considerer l’application
π : S3 −→ GLR(H◦) , q 7−→ (z 7→ qzq−1
).
Montrer que π n’est autre que la representation adjointe AdS3 . En deduire quec’est un homomorphisme de groupes de Lie analytiques de noyau
Ker(π) = Ker(AdS3) = Z(S3) = {±1} ∼= Z/2 ,
et verifier que son image est contenue dans le sous-groupe ferme
SO(H◦, F ) = SO(3)

168 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
de GLR(H◦) = GL3(R) constitue des transformations lineaires F -orthogonalespreservant l’orientation. En deduire que Im(π) = SO(3) et que
SO(3) ∼= SU(2)/Z/2 , sp(1) ∼= su(2) ∼= so(3) et SU(2) ∼= SO(3) .
Exercice 37.20. On munit a nouveau H du produit scalaire euclidien usuel,note F . Considerer l’application
π : S3 × S3 −→ GLR(H) , (p, q) 7−→ (z 7→ pzq−1
).
Montrer que π est un homomorphisme de groupes de Lie analytique, de noyau
Ker(π) ={±(1, 1)
}︸ ︷︷ ︸
∼=Z/2
⊂ Z(S3 × S3) ={(±1,±1)
} ∼= Z/2× Z/2
et d’image contenue dans le sous-groupe ferme
SO(H, F ) = SO(4)
de GLR(H) = GL4(R) constitue des transformations lineaires F -orthogonales preservantl’orientation. En deduire que Im(π) = SO(4), que
SO(4) ∼= SU(2)× SU(2)/Z/2
et que
su(2)⊕ su(2) ∼= so(3)⊕ so(3) ∼= so(4) et SU(2)× SU(2) ∼= SO(4) ,
puis conclure de la non-simplicite de so(4) et de SO(4).
Remarque 37.21. Seuls les deux groupes spinoriels suivants ont une descrip-tion directe en termes de groupes classiques. Explicitement, il existe des isomor-phismes de groupes de Lie canoniques
Spin(5) ∼= Sp(2) et Spin(6) ∼= SU(4) ,
et qui induisent des isomorphismes de R-algebres de Lie canoniques
so(5) ∼= sp(2) et so(6) ∼= su(4) .
38. Le Troisieme Theoreme de Lie et groupes de Lie 1-connexes
Nous allons, dans cette section, admettre le resultat fondamental et difficilesuivant, qui, contrairement a ce qu’indique son nom, est du a Elie Cartan en 1930.
Theoreme 38.1 (Troisieme Theoreme de Lie).Soit g une K-algebre de Lie de dimension finie. Alors il existe, a isomorphisme pres,un unique groupe de Lie analytique G sur K qui est 1-connexe et dont l’algebre deLie LG est isomorphe a g comme K-algebre de Lie.
Nous allons egalement admettre le resultat (moins difficile) suivant.
Theoreme 38.2. Soient G et H deux groupes de Lie (resp. analytiques) surK. Si G et H sont 1-connexes, alors pour tout homomorphisme Φ: LG −→ LH deK-algebres de Lie, il existe un unique homomorphisme ϕ : G −→ H de groupes deLie (resp. analytiques) sur K tel que Lϕ = Φ.
Une consequence des deux theoremes precedents est le resultat suivant.

38. LE TROISIEME THEOREME DE LIE ET GROUPES DE LIE 1-CONNEXES 169
Theoreme 38.3. Le foncteur de Lie L(−) definit une equivalence de la categoriedes groupes de Lie (resp. analytiques) sur K qui sont 1-connexes vers la categoriedes K-algebres de Lie de dimension finie.
Corollaire 38.4. Soit G un groupe de Lie sur K. Soient AutK(G) le groupedes automorphismes de groupes de Lie sur K de G, et AutK(LG) le groupe desautomorphismes de K-algebre de Lie de LG. Si G est 1-connexe, alors l’applicationsuivante est un isomorphisme de groupes :
L(−) : AutK(G)∼=−→ AutK(LG) , ϕ 7−→ Lϕ .
Voici une version “plus fine” du Theoreme 38.2.
Theoreme 38.5. Soient G et H deux groupes de Lie (resp. analytiques) sur K.Supposons que G est 1-connexe. Soient U un voisinage ouvert de e dans G, et
ϕ : U −→ H
une application lisse (resp. analytique) telle que si g, g′ ∈ U verifient g·g′ ∈ U , alors
ϕ(g ·g′) = ϕ(g)·ϕ(g′)
dans H. Alors, il existe un unique homomorphisme ϕ : G −→ H de groupes de Lie(resp. analytiques) sur K qui prolonge ϕ, i.e. tel que
ϕ|U = ϕ .
Finalement, voici un resultat, essentiellement du a Sophus Lie et Elie Cartanqui dit que “toutes les notions raisonnables d’isomorphisme local entre groupes deLie sont equivalentes”. Avant de l’enoncer, voici une definition et une remarque.
Definition 38.6. Soient G et H deux groupes de Lie sur K, qui sont connexes.Une application ϕ : G −→ H est un isomorphisme local (de groupes de Lie sur K) sic’est un homomorphisme de groupes de Lie sur K et s’il existe des voisinages ouvertsU et V de e dans G et dans H respectivement, tels que ϕ applique U bijectivementsur V , i.e.
ϕ|U : U≈−→ V .
Remarque 38.7. Un isomorphisme local de groupes de Lie sur K est surjectif.En effet, c’est une consequence de la Proposition 3.10. En fait, on peut montrerque les notions d’isomorphisme local de groupes de Lie sur K et de revetement degroupes de Lie sur K coıncident.
Theoreme 38.8. Soient G et H deux groupes de Lie sur K, qui sont connexes.Alors les proprietes suivantes sont equivalentes :
(i) LG et LH sont des K-algebres de Lie isomorphes;(ii) il existe un voisinage ouvert U de e dans G et un voisinage ouvert V de
e dans H pour lesquels il existe un diffeomorphisme
θ : U≈−→ V
tel que si g, g′ ∈ U verifient g ·g′ ∈ U , alors
θ(g ·g′) = θ(g)·θ(g′)dans V ; (de meme en echangeant les roles de G et de H);
170 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
(iii) il existe un groupe de Lie L sur K, qui est connexe, et des isomorphismeslocaux de groupes de Lie sur K
ϕ : L −→ G et ψ : L −→ H ;
(iv) il existe un groupe de Lie L sur K, qui est connexe, et des revetements degroupes de Lie sur K
ϕ : L −→ G et ψ : L −→ H ;
(v) il existe un sous-groupe normal discret (donc central) N de G tel que H
soit isomorphe au quotient G/N comme groupe de Lie sur K; (de memeen echangeant les roles de G et de H).
Il en va de meme dans le cas analytique.
39. Automorphismes et derivations des K-algebres de dimension finie
Rappelons la definition generale de K-algebre (pas forcement unitale, ni asso-ciative, ni commutative, ni de Lie, ...) donnee dans la Definition 5.1.
Notation 39.1. Soit A une K-algebre. On designe par AutK(A) ⊆ GLK(A) legroupe des automorphismes de K-algebre de A.
Remarque 39.2. Notons que si la K-algebre A est unitale, alors un automor-phisme ϕ ∈ AutK(A) preserve automatiquement l’unite, i.e. est unital lui-meme.En effet, si x ∈ A verifie ϕ(x) = 1, alors on a
ϕ(1) = ϕ(1)·1 = ϕ(1)·ϕ(x) = ϕ(1·x) = ϕ(x) = 1 .
Voici un lemme technique, qui n’est autre que la regle de Leibniz dans un cadrespecifique.
Lemme 39.3. Soit A une K-algebre de dimension finie, et designons son produitpar µ : A×A −→ A. Alors, cette application µ est analytique sur K. De plus, si
ϕ,ψ : K −→ A , t 7−→{
ϕ(t)ψ(t)
sont deux applications lisses, alors la composee
θ := µ ◦ (ϕ× ψ) : K −→ A , t 7−→ ϕ(t)·ψ(t)
est lisse et satisfaitθ′(t) = ϕ′(t)·ψ(t) + ϕ(t)·ψ′(t) ,
pour tout t ∈ K.
Preuve. Si A est nulle, le resultat est clair. Supposons des lors que n := dimK(A) >0. Soit B = (x1, . . . , xn) une K-base de A. Soit c`
jk ∈ K, ou 1 ≤ j, k, ` ≤ n, lesconstantes de structures de A par rapport a B, i.e. les nombres satisfaisant
µ(xj , xk) = xj ·xk =n∑
`=1
c`jk ·x` ,
pour tous j, k ∈ {1, . . . , n}. On a donc
µ
( n∑
j=1
λjxj ,
n∑
k=1
νkxk
)=
n∑
j,k,`=1
λjνkc`jk ·x` ,

39. AUTOMORPHISMES ET DERIVATIONS DES K-ALGEBRES DE DIMENSION FINIE 171
ce qui montre que µ est polynomiale, donc K-analytique. Il est des lors clair que lacomposee θ est lisse. Maintenant, on trouve des applications lisses
α1, . . . , αn : K −→ K et β1, . . . , βn : K −→ K
sur K telles que
ϕ(t) =n∑
j=1
αj(t)·xj et ψ(t) =n∑
k=1
βk(t)·xk ,
pour tout t ∈ K. Ainsi, pour t ∈ K, on a
θ(t) =n∑
j,k,`=1
αj(t)·βk(t)·c`jk ·x` ,
d’ou, par la regle de Leibniz pour les derivees d’applications lisses de K dans K,
θ′(t) =n∑
j,k,`=1
(αj)′(t)·βk(t)·c`jk ·x` +
n∑
j,k,`=1
αj(t)·(βk)′(t)·c`jk ·x` .
Par ailleurs, pour t ∈ K, on a evidemment
ϕ′(t) =n∑
j=1
(αj)′(t)·xj et ψ(t) =n∑
k=1
(βk)′(t)·xk ,
d’ou
ϕ′(t)·ψ(t) + ϕ(t)·ψ′(t) =n∑
j,k,`=1
(αj)′(t)·βk(t)·c`jk ·x` +
n∑
j,k,`=1
αj(t)·(βk)′(t)·c`jk ·x` ,
ce qui implique effectivement l’egalite θ′(t) = ϕ′(t)·ψ(t) + ϕ(t)·ψ′(t) cherchee. ¤Avant le prochain enonce, rappelons la Remarque 31.3.
Theoreme 39.4. Soit A une K-algebre de dimension finie. Alors, le groupeAutK(A) est un sous-groupe de Lie de GLK(A) sur K, et en particulier, c’est ungroupe de Lie sur K. De plus, son algebre de Lie est la K-algebre de Lie des K-derivations de A, i.e.
LAutK(A) = derK(A) ,
vue comme K-sous-algebre de Lie de LGLK(A) = glK(A).
Preuve.(A) Montrons d’abord que AutK(A) est un sous-groupe ferme de GLK(A). SiA = 0, le resultat est clair. Supposons donc que n := dimK(A) est non-nul. SoitB = (x1, . . . , xn) une K-base de A, et soit c`
jk ∈ K, ou 1 ≤ j, k, ` ≤ n, les constantesde structures de A par rapport a B; on a donc
xj ·xk =n∑
`=1
c`jk ·x` ,
pour tous j, k ∈ {1, . . . , n}. Etant donne ϕ ∈ GLK(A), soit (akj ) ∈ GLn(K) la
matrice de ϕ par rapport a la base B, i.e.
ϕ(xj) =n∑
k=1
akj ·xk ,

172 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
pour tous j ∈ {1, . . . , n}. Pour j, k ∈ {1, . . . , n}, on a donc
ϕ(xjxk) = ϕ
( n∑
`=1
c`jk ·x`
)=
n∑
`,m=1
c`jkam
` ·xm
et
ϕ(xj)·ϕ(xk) = ϕ
( n∑p=1
apj ·xp
)·ϕ
( n∑q=1
aqk ·xq
)=
n∑m,p,q=1
cmpqa
pja
qk ·xm .
Au total, on voit qu’une application K-lineaire bijective ϕ ∈ GLK(A) est un auto-morphisme de K-algebre, i.e. est un element de AutK(A), ssi
n∑
`=1
c`jkam
` =n∑
p,q=1
cmpqa
pja
qk , ∀j, k, m ∈ {1, . . . , n} ,
c’est-a-dire ssi les entrees akj de la matrice de ϕ annule la famille de polynomes de
degre total deux{n∑
`=1
c`jk ·X`m −
n∑p,q=1
cmpq ·XjpXkq
∣∣∣∣∣ 1 ≤ j, k, m ≤ n
}
en les n2 variables {Xrs | 1 ≤ r, s ≤ n}. Cette condition est “fermee” (en les akj ),
donc l’isomorphisme de groupes de Lie sur K
GLK(A)∼=−→ GLn(K) , ϕ 7−→ (ak
j )
(comme ci-dessus), qui est induit par le choix de la base B de A, applique AutK(A)sur un sous-groupe ferme de GLn(K). Ainsi, AutK(A) est effectivement un sous-groupe ferme de GLK(A).
(B) Par la partie (A) et par le Theoreme d’Elie Cartan 19.1, AutK(A) est un sous-groupe de Lie reel de GLK(A) (plus precisement, du groupe de Lie reel sous-jacentsi K = C).
(C) Le Theoreme d’Elie Cartan 19.1, le Theoreme 14.19 et la Remarque 14.2 im-pliquent que l’algebre de Lie du groupe de Lie reel AutK(A) est donnee par
LAutK(A) ={Φ ∈ glK(A)
∣∣ etΦ ∈ AutK(A) , ∀t ∈ R}.
Ainsi, pour montrer que LAutK(A) = derK(A) comme algebre de Lie reelle, il noussuffit d’etablir que pour un endomorphisme K-lineaire δ ∈ glK(A), on a l’equivalence
δ ∈ derK(A) ⇐⇒ etδ ∈ AutK(A) , ∀t ∈ R ,
ou, en d’autres termes, l’equivalence
δ(x·y) = δx·y + x·δy , ∀x, y ∈ A ⇐⇒ etδ(x·y) = etδ(x)·etδ(y) , ∀t ∈ R .
Supposons d’abord que la relation de droite est satisfaite par tout t ∈ R (pour deselements x, y ∈ A arbitraires). Etant donne que
etδ = idA+tδ +O(t2)
dans GLK(A), on a, pour chaque t ∈ R,
etδ(x·y) = x·y + tδ(x·y) +O(t2)
d’une part, et
etδ(x)·etδ(y) =(x + tδx +O(t2)
)·(y + tδy +O(t2))
= x·y + t(δx·y + x·δy) +O(t2)

39. AUTOMORPHISMES ET DERIVATIONS DES K-ALGEBRES DE DIMENSION FINIE 173
d’autre part. Donc, en derivant par rapport a t la relation donnee, puis en evaluanten t = 0, on trouve bien
δ(x·y) = δx·y + x·δy .
Reciproquement, supposons que la relation de gauche est verifiee (a nouveau, pourdes elements x, y ∈ A arbitraires). Considerons l’application
f = fxy : R −→ A , t 7−→ e−tδ(etδ(x)·etδ(y)
),
qui est lisse pour des raisons elementaires (en particulier, l’application λδ : t 7−→ etδ
est lisse, cf. Theoreme 14.3, l’evaluation d’applications lineaires en un element donneest lisse, car le produit matriciel l’est, et enfin, le produit dans A est lisse, cf.Lemme 39.3). Maintenant, par le Lemme 39.3 a nouveau, pour t ∈ R, on a
f ′(t) = e−tδ(−δ
(etδ(x)·etδ(y)
)+ δetδ(x)·etδ(y) + etδ(x)·δetδ(y)
)= 0 ,
ou la nullite decoule de la regle de Leibniz pour δ, i.e. du fait que c’est une derivation.Il s’ensuit que f est une application constante, et donc que, pour tout t ∈ R, on a
e−tδ(etδ(x)·etδ(y)
)= f(t) = f(0) = x·y ,
d’ou, quelque soit t ∈ R,
etδ(x)·etδ(y) = e−tδ(x·y) ,
ce qui est bien la relation cherchee, i.e. celle de droite.
(D) SiK = R, par (B) et (C), la demonstration est complete. Supposons maintenantque K = C. Or, nous venons d’etablir en (B) et (C) que AutC(A) est un sous-groupeferme du groupe de Lie complexe GLC(A), dont l’algebre de Lie, vu comme groupede Lie reel, est la R-sous-algebre de Lie derC(A) de glC(A). Comme derC(A) est uneC-sous-algebre de Lie de glC(A), le Theoreme 20.1 nous dit justement que AutC(A)est necessairement un sous-groupe de Lie complexe de GLC(A). ¤
Corollaire 39.5. Si g est une K-algebre de Lie de dimension finie, alors legroupe AutK(g) porte une structure canonique de groupe de Lie sur K. De plus,pour cette structure, on a, comme K-algebres de Lie,
LAutK(g) = derK(g) .
Preuve. C’une consequence immediate du Theoreme 39.4. ¤
Corollaire 39.6. Pour un groupe de Lie G sur K, on a
LAutK(LG) = derK(LG) .
Preuve. C’une un cas particulier du Corollaire 39.5. ¤
Corollaire 39.7. Soit G groupe de Lie sur K. Si G est 1-connexe, alors legroupe AutK(G) porte une structure canonique de groupe de Lie sur K, et, pourcette structure, il y a un isomorphisme de K-algebres de Lie canonique
LAutK(G) = derK(LG) .
Preuve. Il suffit de combiner les Corollaires 38.4 et 39.6. ¤Voici maintenant une application un peu surprenante (a comparer avec le
Troisieme Theoreme de Lie 38.1, que nous n’avons pas demontre, et dont aucunedemonstration constructive n’est a ce jour connue).
174 2. ALGEBRES DE LIE ET LIEN AVEC LES GROUPES DE LIE
Theoreme 39.8. Soit g une K-algebre de Lie de dimension finie. Si g estsemi-simple, alors
g ∼= LAutK(g) .
En particulier, g est l’algebre de Lie d’un groupe de Lie sur K explicitement cons-truit.
Preuve. En combinant le Theoreme 39.4 et la Proposition 33.21, on trouve
LAutK(g) ∼= derK(g) = ad(g) ∼= g/z(g) ∼= g ,
ce qui fournit le resultat (on a rappele ici que z(g) = 0, cf. Corollaire 33.8 (iii)). ¤Exemple 39.9. Considerons les R-algebres R, C et H. Clairement, on a
AutR(R) = {idR}, AutC(C) = {idC}, et
AutR(C) = {idC, z 7→ z} ∼= Z/2 .
Pour leurs algebres de Lie respectives, on a derR(R) = {0}, derC(C) = {0} etderR(C) = {0}. On peut montrer qu’il y a un isomorphisme de groupes de Lie reelscanonique
AutR(H) ∼= SO(3) ,
et par consequent, il y a un isomorphisme d’algebres de Lie reelles canonique
derR(H) ∼= so(3) .
CHAPITRE 3
Groupes de Lie reels compacts connexes
40. Motivations
Dans cette section, nous allons presenter quelques raisons pour lesquelles on vase restreindre aux groupes de Lie qui sont, primo, connexes, secundo, compacts, et,tertio, reels.
D’abord, pour la correspondance de Lie, i.e. le lien tenu entre les groupes deLie sur K et les algebres de Lie sur K incarne par le foncteur de Lie L(−), soitraisonnablement efficace, on est amene a considerer les groupes de Lie sur K qui sontconnexes (en tout cas dans un premier temps). La raison est que l’exponentielled’un groupe de Lie G sur K applique LG entierement dans Ge. Pour se rendrecompte du peu d’information que l’on peut en tirer sur les autres composantesconnexes – que l’on peut imaginer comme etant infiniment eloignees, compareravec l’Exercice 3.19 (iii) –, il suffit de considerer le cas de dimension 0, qui devraitdes lors englober toute la theorie des groupes discrets denombrables !
Ensuite, soit G un groupe de Lie connexe sur K; en fait, on va seulement lesupposer presque connexe, cf. Definition 24.1. On peut demontrer que G contientun sous-groupe K qui est un compact maximal, dans le sens que si K ′ est un sous-groupe compact de G, qui contient K, alors K ′ = K. (A noter que K, etant ferme,est un sous-groupe de Lie reel de G, mais generalement pas un sous-groupe de Liecomplexe.) De plus, on montre que tous les sous-groupes compacts maximaux dansG sont conjugues, que π0(K) = π0(G), et que K est un retracte par deformationde G, et, en fait, la variete lisse reelle quotient G/K est diffeomorphe a un espaceeuclidien Rk; voir la preuve du Theoreme 37.11 pour l’exemple ou G = GL+
n (R),auquel cas, K = SO(n) et G/K ≈ Pn; comme autre exemple, non-connexe cettefois-ci, citons le cas de G = GLn(R) pour lequel K = O(n) et G/K ≈ Pn. Ils’ensuit, dans le cas general, que
πn(K) ∼= πn(G) ,
pour tout n ∈ N. Ainsi, du point de vue topologique, l’etude de G se ramene acelle du groupe de Lie reel compact K, qui est connexe ssi G l’est. Finalement,on montre que si BG et BK sont les espaces classifiants (que nous n’avons pasdefinis ici) de G et de K, respectivement, vus comme groupes topologiques, alorsl’inclusion K ↪→ G, qui est une equivalence d’homotopie, induit une equivalenced’homotopie
BK ' BG .
Donc, l’etude topologique de BG se ramene a celle de BK. Voici encore un tableaufournissant les compacts maximaux (standards – ils sont definis a conjugaison pres)
175
176 3. GROUPES DE LIE REELS COMPACTS CONNEXES
dans les groupes classiques consideres qui ne sont pas compacts :
G GLn(R) GL+n (R) GLn(C) GLn(H) SLn(R) SLn(C) SLn(H)
K O(n) SO(n) U(n) Sp(n) SO(n) SU(n) Sp(n)
(a noter que SL1(F) est deja compact, et donc coıncide avec son compact maximal).
Finalement, nous avons montre dans le Theoreme 26.8 qu’un groupe de Liecomplexe qui est compact et connexe est abelien. Et, comme l’illustre bien laRemarque 23.9, l’etude des groupes de Lie complexes abeliens et connexes est unsujet a part entiere.
Remarque 40.1. Pour toutes ces raisons, nous allons dorenavant nous focalisersur les groupes de Lie reels, compacts et connexes. Rappelons qu’un tel groupe estabelien ssi il est soit trivial, soit isomorphe a un tore Tn avec n ≥ 1, cf. Corol-laire 23.7.
Convention 40.2. Dans la suite, sauf mention expres du contraire, par groupede Lie, on entend groupe de Lie reel. De meme, en parlant de variete lisse (ouanalytique), on sous-entend reelle.
41. Geodesiques et surjectivite de l’exponentielle
Notation 41.1. Si X est un espace topologique, on designe par C(X,K) laK-algebre des applications continues de X dans K. On note par 0X et par 1X lesfonctions constantes sur X valant 0 et 1 respectivement.
Nous allons admettre le resultat classique suivant.
Theoreme 41.2. Soit G un groupe de Lie compact connexe. Alors G possedeune mesure de Haar bi-invariante, en d’autres termes, il existe une fonctionnelleR-lineaire ∫
G
: C(G,R) −→ R , f 7−→∫
G
f(x) dx =∫
G
f dx
satisfaisant les proprietes suivantes :(i) positivite : si f ≥ 0, i.e. si f(x) ≥ 0 pour tout x ∈ G, et si f 6= 0G, alors∫
G
f(x)dx > 0 ;
(ii) normalisation : ∫
G
1G dx = 1 ;
(iii) bi-invariance ou unimodularite : pour tout g ∈ G, on a∫
G
f(g ·x) dx =∫
G
f(x) dx =∫
G
f(x·g) dx .
Corollaire 41.3. Soient G un groupe de Lie compact, et E un K-espacevectoriel de dimension finie, muni d’un produit scalaire ( . | . ). Si
% : G −→ GLK(E) , g 7−→ (~v 7→ %(g)(~v) = g ·~v)
est une representation de G sur E, i.e. un homomorphisme de groupes topologiques,alors l’application
( . | . )% : E × E −→ K , (~u,~v) 7−→ (~u|~v)% :=∫
G
(g ·~u|g ·~v) dg

41. GEODESIQUES ET SURJECTIVITE DE L’EXPONENTIELLE 177
est un produit scalaire sur E, qui est G-invariant, dans le sens que
(g ·~u|g ·~v)% = (~u|~v)% ,
pour tous g ∈ G, et tous ~u,~v ∈ E.
Preuve. La preuve est laissee en exercice au lecteur. ¤Proposition 41.4. Soit G un groupe de Lie compact connexe. Il existe sur
LG un produit scalaire F ( . , . ) (non-canonique) qui est Ad-invariant, en d’autrestermes tel que Ad soit une representation F -orthogonale, i.e. verifiant
F(Ad(g)·X, Ad(g)·Y )
= F (X, Y ) ,
pour tout g ∈ G et tous X, Y ∈ LG. De plus, un tel produit scalaire est automa-tiquement ad-invariant dans le sens que la representation adjointe ad de LG estK-antisymetrique, c’est-a-dire,
F(ad(X)·Y, Z
)= −F
(Y, ad(X)·Z)
,
i.e. F([X,Y ], Z
)= −F
(Y, [X,Z]
), pour tous X,Y, Z ∈ LG.
Preuve. Soit ( . | . ) un produit scalaire arbitraire sur LG. Par le Corollaire 41.3, ontrouve un produit scalaire G-invariant F ( . , . ) := ( . | . )Ad sur LG, i.e. invariant sousla representation adjointe Ad de G, ce qui etablit la premiere assertion. Passons ala seconde. Par la premiere partie, Ad est un homomorphisme de groupes de Lie
Ad: G −→ O(LG,F ) ,
ou O(LG,F ) designe le groupe F -orthogonal du R-espace euclidien LG, i.e. lesous-groupe ferme de GLR(LG) constitue de toutes les transformations lineairesinversibles et F -orthogonales de LG. Ce groupe est isomorphe au groupe orthog-onal O(n) avec n := dim(LG), simplement via le choix d’une base F -orthonormeeB de LG. Par l’Exemple 21.10, l’algebre de Lie de O(LG,F ) n’est autre que lasous-algebre de Lie de glR(LG) constituee de toutes les transformation lineairesde LG dont la matrice par rapport a la base B de LG est anti-symetrique, i.e.LO(LG,F ) est l’algebre de Lie des transformations lineaires F -antisymetriques deLG, symboliquement,
LO(LG, F ) = so(LG,F ) .
Ainsi, en prenant la differentielle au neutre de Ad, on obtient l’application
ad = LAd: LG −→ LO(LG,F ) = so(LG, F ) ⊆ glR(LG) ,
ce qui montre qu’en effet, ad(X) est F -anti-symetrique, pour tout X ∈ LG. Voiciune autre demonstration “a la main” de cette propriete. Soit X ∈ LG et, pourt ∈ R, posons xt := exp(tX) ∈ G. Par la Proposition 29.21, on a
Ad(xt) = Ad(exp(tX)
)= ead(tX) = idLG +t ad(X) +O(t2) .
Si Y,Z ∈ LG, on obtient, pour tout t ∈ R,
F (Y,Z) = F(Ad(xt)·Y, Ad(xt)·Z
)
= F(Y + t[X, Y ] +O(t2), Z + t[X,Z] +O(t2)
)
= F (Y,Z) + t·(F
(Z, [X, Y ]
)+ F
(Y, [X, Z]
))+O(t2)
= F (Y,Z) + t·(F
([X,Y ], Z
)+ F
(Y, [X, Z]
))+O(t2) ,
d’ou il resulte que F([X, Y ], Z
)+ F
(Y, [X,Z]
)= 0, ce qui permet de conclure. ¤

178 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Remarque 41.5. La Proposition 41.4 devrait fortement rappeler au lecteur laProposition 32.9 (i) & (ii). En effet, d’apres cette derniere, si G est un groupe deLie sur K (pas necessairement compact, ni connexe), alors sa forme de Killing
KG := KLG = K : LG× LG −→ K , (X, Y ) 7−→ Tr(ad(X) ◦ ad(Y )
)
est une forme K-bilineaire qui est ad-invariante, dans le sens que ad est K-anti-symetrique, voir partie (i) de 32.9, mais, en vertu de la partie (ii) de 32.9, elleest egalement Ad-invariante, dans le sens que Ad(g) est K-orthogonal pour toutg ∈ G. Malheureusement, meme si G est compact connexe et reel, la forme deKilling n’est en general pas un produit scalaire. En fait, K est non-degeneree ssiG est semi-simple (par definition de la semi-simplicite), et on peut demontrer quesi G est un groupe de Lie reel compact connexe et semi-simple, alors K est definienegative, de sorte que −K est un produit scalaire canonique sur LG, qui est Ad- etad-invariant.
Nous allons, pour la suite, supposer le lecteur familier avec les notions de struc-ture riemannienne sur une variete lisse M , d’isometrie de M , et de geodesique surM . Une structure riemannienne sur M revient, grossierement parlant, a disposer,pour chaque point x ∈ M , d’un produit scalaire ( . | . )x sur TxM , qui varie lissementavec x, dans le sens que si U est un ouvert non-vide de M et si Y et Z sont deschamps de vecteurs lisses sur U , alors la fonction
U −→ R , x 7−→ (Yx,Zx)x
est lisse.
Proposition 41.6. Soit G un groupe de Lie compact. Alors G possede unestructure riemannienne, donnee par une famille
{( . | . )x}x∈G de produits scalaires,
qui est invariante (par translations) a gauche et a droite, dans le sens que(Tx`yX
∣∣ Tx`yY)yx
= (X|Y )x =(TxryX
∣∣ TxryY)xy
,
pour tous x, y ∈ G et tous X, Y ∈ TxG.
Preuve. Par la Proposition 41.4, on trouve sur LG un produit scalaire F ( . , . ) quiest Ad-invariant. Pour chaque point x ∈ G, soit
( . | . )x : TxG× TxG −→ R , (X, Y ) 7−→ F (Tx`x−1X , Tx`x−1Y )
le produit scalaire sur TxG obtenu en transportant le produit scalaire F ( . , . ) surLG par le R-isomorphisme
Te`x : LG = TeG∼=−→ TxG
d’inverse Tx`x−1 . Soient x, y ∈ G. Montrons que cette structure est invariante agauche (ce qui paraıt fort plausible). Etant donne que
Tyx`x−1y−1 ◦ Tx`y = Tx(`x−1 ◦ `y−1 ◦ `y) = Tx`x−1 ,
pour X,Y ∈ TxG, on a
(Tx`yX |Tx`yY )yx = (Tyx`x−1y−1 ◦ Tx`yX |Tyx`x−1y−1 ◦ Tx`yY )e
= (Tx`x−1X |Tx`x−1Y )e
= (X |Y )x .

41. GEODESIQUES ET SURJECTIVITE DE L’EXPONENTIELLE 179
Pour conclure, montrons l’invariance a gauche (ce qui est un peu plus surprenant).D’abord, on a
Ad(y−1) = Tecy−1 = Te(`y−1 ◦ ry) ,
relation que nous employons a la derniere egalite du calcul suivant :
Txy`y−1x−1 ◦ Txry = Tx(`y−1 ◦ `x−1 ◦ ry)= Tx(`y−1 ◦ ry ◦ `x−1)= Te(`y−1 ◦ ry) ◦ Tx`x−1
= Ad(y−1) ◦ Tx`x−1 .
Fort de ce resultat, pour X, Y ∈ TxG, on obtient
(TxryX |TxryY )xy = (Txy`y−1x−1 ◦ TxryX |Txy`y−1x−1 ◦ TxryY )e
= (Ad(b−1) ◦ Tx`x−1X | Ad(b−1) ◦ Tx`x−1Y )e
= (Tx`x−1X |Tx`x−1Y )e
= (X |Y )x ,
ou la derniere egalite est deduite de l’Ad-invariance de ( . | . )e = F ( . , . ), proprietenon encore utilisee dans cette demonstration. ¤
Lemme 41.7. Soit G un groupe de Lie compact. Pour toute structure rieman-nienne invariante a gauche et a droite sur G, le passage a l’inverse
inv : G −→ G , g 7−→ g−1
est une isometrie.
Preuve. Fixons un element g ∈ G. L’application inv peut s’ecrire comme la com-position
rg−1 ◦ inv ◦`g−1 : G`g−1
// Ginv // G
rg−1// G .
Ainsi, en appliquant la Proposition 15.2, on a
Tg inv = Terg−1 ◦ Te inv ◦Tg`g−1
= Terg−1 ◦ (− idLG) ◦ Tg`g−1
=−Terg−1 ◦ Tg`g−1 .
Par hypothese, rg−1 et `g−1 sont des isometries de G, donc Terg−1 et Tg`g−1 sontdes isometries lineaires, donc Tg inv egalement. Comme g est arbitraire, il s’ensuitque l’application inv est une isometrie de G. ¤
Theoreme 41.8. Soit G un groupe de Lie compact. Pour toute structure rie-mannienne invariante a gauche et a droite sur G, les geodesiques passant par e sontprecisement les sous-groupes a 1-parametres de G.
Preuve. Considerons une geodesique
γ : ]−ε, ε[−→ G , s 7−→ γ(s)
sur G, telle que γ(0) = e (avec ε > 0). On suppose que ε est suffisamment petitpour que l’image de γ soit l’unique geodesique reliant n’importe quelle paire de sespoints. Par le Lemme 41.7, le passage a l’inverse inv est une isometrie de G, donc
inv ◦γ : ]−ε, ε[−→ G , s 7−→ γ(s)−1

180 3. GROUPES DE LIE REELS COMPACTS CONNEXES
est egalement une geodesique. Si X := γ′(0) ∈ TeG, alors, la Proposition 15.2, ona
inv ◦γ′(0) = −γ′(0) = −X .
Par unicite locale de la geodesique γ (hypothese faite ci-dessus), on a
inv ◦γ(s)︸ ︷︷ ︸=γ(s)−1
= γ(−s) ,
pour tous s ∈ ]−ε, ε[ . Posons δ := ε2 > 0. Pour t ∈ ]−δ, δ[ fixe, les applications
ϕ = ϕt : s 7−→ γ(t)·γ(s) et ψ = ψt : s 7−→ γ(t + s) ,
definies sur ]−δ, δ[ , sont des geodesiques sur G (obtenues par translation a gaucheet reparametrisation respectivement), qui satisfont
ϕ(−t) = γ(t)·γ(−t) = γ(t)·γ(t)−1 = e et ϕ(0) = γ(t)
pour l’une, etψ(−t) = γ(0) = e et ψ(0) = γ(t)
pour l’autre. Par unicite de γ (hypothese faite au depart), il s’ensuit que ϕt = ψt
globalement sur ]−δ, δ[ , pour tout t ∈ ]−δ, δ[ , et donc que
γ(t)·γ(s) = γ(s + t)
pour tous s, t ∈ ]−δ, δ[ . Ainsi, γ est, localement autour de 0, un sous-groupe a1-parametre de G. Par un argument de translation elementaire, on deduit que lessous-groupes a 1-parametres sont des geodesiques globales sur G passant par leneutre e, et reciproquement. ¤
Corollaire 41.9. Soit G un groupe de Lie compact, muni d’une structureriemannienne invariante a gauche et a droite. Si g ∈ G et X ∈ LG, alors ilexiste une unique geodesique globale sur G tangente a X(g) = Te`gX ∈ TgG en g,explicitement donnee par
R −→ G , t 7−→ g ·exp(tX) .
Preuve. Cela decoule immediatement des Theoremes 14.3 et 41.8. ¤
Remarque 41.10. Sous les memes hypotheses, l’application
R −→ G , t 7−→ exp(tX)·gest egalement une geodesique globale sur G passant par g en t = 0. Cependant,elle est tangente au vecteur TergX ∈ TgG en g, et ce vecteur ne coıncide en generalpas avec le vecteur X(g) = Te`gX ∈ TgG, precisement du fait de la possible non-commutativite de G.
Nous allons admettre le resultat classique suivant de la geometrie riemannienne.
Theoreme 41.11. Soit M une variete riemannienne compacte connexe. Si xet y sont deux points de M , alors il existe sur M une geodesique joignant x et y.
Nous aboutissons au resultat le plus important de la presente section.
Theoreme 41.12. Pour un groupe de Lie compact connexe G, l’exponentielleest surjective, i.e. exp: LG−³ G.

42. TORES MAXIMAUX 181
Preuve. Munissons G d’une structure riemannienne invariante a gauche et a droite,cf. Proposition 41.6. Fixons un point g ∈ G. Par le Theoreme 41.11, on trouve unegeodesique sur G reliant e a g. Par le Theoreme 41.8, cette geodesique est en faitglobale et est un sous-groupe a 1-parametre de G. Donc, par le Theoreme 14.3, ontrouve X ∈ LG et t ∈ R tels que g = exp(tX), ce qui permet de conclure. ¤
Remarque 41.13. On se gardera de conclure du Theoreme 41.12 que l’exponen-tielle d’un groupe de Lie compact connexe G est un revetement. En fait, on peutmontrer que c’est le cas ssi G est un tore, i.e. isomorphe a Tn pour un n ∈ N.
42. Tores maximaux
Definition 42.1. Soit G un groupe de Lie compact connexe. Un tore maximalde G est un sous-groupe (ferme) T de G qui est
(i) un tore, i.e. isomorphe a Tn pour un n ≥ 0;(ii) maximal, dans le sens que si T ′ est un tore de G contenant T , alors T ′ = T .
Remarque 42.2. On n’exclut pas le cas ou T est de dimension 0, i.e. isomorpheau groupe trivial, que l’on voit ici comme le tore T0. On verra plus tard que si Gest non-trivial, alors un tore maximal est de dimension non-nulle. A priori, on nepeut pas garantir que tous les tores maximaux de G ont la meme dimension. Onmontrera que c’est bien le cas.
Remarque 42.3. Tout groupe de Lie compact connexe possede un tore maxi-mal, possiblement de dimension nulle. En effet, en application du Theoreme d’ElieCartan 19.1, tous les tores de G en sont des sous-groupes de Lie (puisque com-pacts, et donc fermes dans G), donc ils sont tous de dimension ≤ dim(G). Untore de dimension maximale (eventuellement nulle) est donc necessairement untore maximal, puisque si S ⊆ S′ sont deux tores de G, alors, etant donne queS = expS(LS) = expG(LS) et S′ = expS′(LS′) = expG(LS′), on a S = S′ ssidim(S) = dim(S′) (cf. Exemple 14.5 et Theoreme d’Elie Cartan 19.1).
Remarque 42.4. Si T est un tore maximal d’un groupe de Lie compact connexeG, et si g ∈ G, alors le conjugue gTg−1 est egalement un tore maximal de G; plusgeneralement, si ψ est un automorphisme (de groupe de Lie) de G, alors ψ(T ) estun tore maximal de G.
Remarque 42.5 (“Recette pour verifier qu’un tore est maximal”).Soit G un groupe de Lie compact connexe G. Si T est un tore de G pour lequelchaque element g ∈ G qui commute a tous les elements de T est dans T , i.e.
g ∈ G et gt = tg , ∀t ∈ T =⇒ g ∈ T ,
alors T est necessairement un tore maximal de G. En effet, si T ′ est un tore de Gcontenant T , alors, T ′ etant abelien, on a necessairement t′t = tt′ pour tout t ∈ T ettout t′ ∈ T ′, et donc, sous cette hypothese, on a T ′ = T . Ceci constitue la methodeusuelle pour etablir qu’un tore donne est maximal. A noter qu’il n’est absolumentpas evident que cette methode est toujours effective, car on ne sais a priori si untore maximal est necessairement un sous-groupe abelien maximal de G. On verraplus que c’est effectivement le cas (cf. Corollaire 42.31 ci-apres).

182 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Exemple 42.6. Le sous-groupe S1 de S3 = Sp(1) en est un tore maximal.En effet, en premier lieu, S1 est un tore de dimension 1. Ensuite, en suivant laRemarque 42.5, considerons un element q = a + jb ∈ S3, avec a, b ∈ C, verifiant
zqz−1 = q
pour tout z ∈ S1. On a donc, pour tout z ∈ S1,
a + jb = zaz−1 + zjbz−1 = a + jzbz−1 = a + jbz−2 ,
d’ou b = bz−2. Ceci implique que b = 0, d’ou q ∈ S3 ∩ C = S1 et donc S1 est untore maximal.
Exemple 42.7. Dans SU(2), le sous-groupe des matrices diagonales
T :={(
eiθ 00 e-iθ
) ∣∣∣ θ ∈ R}
est un tore maximal. En effet, via l’identification standard entre S3 = Sp(1) etSU(2) (cf. Section 5), le tore maximal S1 de S3 s’applique sur T et est donc un toremaximal de SU(2).
Exemple 42.8. Dans SO(3), le sous-groupe (des rotations dans le sol)
T :={(
cos θ sin θ 0-sin θ cos θ 0
0 0 1
) ∣∣∣ θ ∈ R}
=0@SO(2)
00
0 0 1
1Aest un tore maximal. D’abord, T est isomorphe a S1, donc est un tore de dimen-sion 1. Ensuite, en suivant a nouveau la Remarque 42.5, soit A ∈ SO(3) une matriceverifiant AB = BA, pour tout B ∈ T . On a alors, quelque soit B ∈ T ,
B ·(A~e3) = BA·~e3 = AB ·~e3 = A~e3 ,
ce qui montre que A~e3 est un vecteur fixe par chaque element de T ; ainsi, on trouveλ ∈ R tel que A~e3 = λ~e3. Comme λ est une valeur propre de la matrice orthogonaleA, on a λ = ±1, et A est de la forme
A =0@ C
00
0 0 ±1
1A ,
avec C ∈ O(2) = SO(2)q (1 00-1
)·SO(2). Etant donne que det(A) = 1, si λ = 1, alorsC ∈ SO(2) et donc A ∈ T , et si λ = −1, alors
C ∈ (1 00-1
)·SO(2) ,
donc on trouve θ ∈ R tel que
A =(
cos θ sin θ 0sin θ -cos θ 0
0 0 -1
)∈
(1 0 00-1 00 0 -1
)·T ,
ce qui est impossible puisqu’une telle matrice ne centralise pas T ; en effet, si unetelle matrice centralisait T , alors, T etant abelien, la matrice
(1 0 00-1 00 0 -1
)
elle-meme centraliserait T , ce qui est manifestement faux.
Proposition 42.9. Soit G un groupe de Lie compact connexe. Alors, un sous-groupe T de G est un tore maximal ssi T est un sous-groupe abelien connexe maxi-mal.

42. TORES MAXIMAUX 183
Preuve. Si T est un tore maximal et si T ⊆ A avec A un sous-groupe abelienconnexe de G, alors T ⊆ A. Comme A est un sous-groupe ferme de G, c’est ungroupe de Lie (cf. Theoreme d’Elie Cartan 19.1). Ce groupe de Lie est compactconnexe et abelien, donc, par le Corollaire 23.7, A est un tore. Par maximalite deT , on a T = A ⊇ A ⊇ T , d’ou T = A. Reciproquement, si T est un sous-groupeabelien connexe maximal, alors, par le Corollaire 23.7 a nouveau, T est un tore etest maximal parmi les tores de G (puisque maximal parmi les sous-groupes abeliensconnexes de G). ¤
Definition 42.10. Soit G un groupe topologique. On dit que G est topologique-ment cyclique s’il contient un quasi-generateur τ , c’est-a-dire un element τ tel quele sous-groupe cyclique 〈τ〉 = {τm |m ∈ Z} de G engendre par τ est dense dans G,symboliquement,
〈τ〉 = G .
Proposition 42.11 (Theoreme de Kronecker).Le groupe topologique Tn est topologiquement cyclique.
Ce resultat est une consequence immediate du theoreme suivant, dans lequelon pourra par exemple prendre x1 = π, x2 = π2, . . ., xn = πn (le cas n = 0 etanttrivial).
Theoreme 42.12 (Theoreme de Kronecker).Pour un n-tuple de nombres reels x1, . . . , xn ∈ R (avec n > 0), l’element
τ := [x1, . . . , xn] ∈ Tn = Rn/Zn
est un quasi-generateur de Tn ssi les nombres 1, x1, . . . , xn sont Q-lineairementindependants.
Preuve. Montrons d’abord le sens direct par contraposition. Supposons donc que1, x1, . . . , xn sont Q-lineairement dependants. En chassant les denominateurs, ontrouve (λ1, . . . , λn) ∈ Znr{~0} tel que
λ1 ·x1 + . . . + λn ·xn ∈ Z .
Dans ce cas, l’element x := [x1, . . . , xn] ∈ Tn est dans le noyau de l’homomorphismede groupes de Lie
ϕ : Tn −→ S1 = R/Z , [y1, . . . , yn] 7−→ [λ1 ·y1 + . . . + λn ·yn] .
Comme (λ1, . . . , λn) 6= ~0, ϕ n’est pas l’homomorphisme trivial, donc Ker(ϕ) unsous-groupe propre ferme de Tn. Comme x s’y trouve, on a 〈x〉 ⊆ Ker(ϕ) ( Tn, etdonc x n’est pas un quasi-generateur de Tn. Reciproquement, par contrapositionencore, on suppose que τ = [x1, . . . , xn] n’est pas un quasi-generateur de Tn. Posons
S := 〈τ〉e ( Tn ,
i.e. S est la composante du neutre du sous-groupe ferme stricte de Tn engendre parτ . Comme S est un sous-groupe ferme de Tn, par le Theoreme d’Elie Cartan 19.1,c’est un sous-groupe de Lie de Tn, de dimension m < n. Par le Theoreme 35.10,le groupe quotient T := Tn/S est un groupe de Lie de dimension n − m, qui estcompact connexe et abelien, et l’application de projection
π : Tn−³ T = Tn/S

184 3. GROUPES DE LIE REELS COMPACTS CONNEXES
est un homomorphisme de groupes de Lie. Par le Corollaire 23.7, il y a un isomor-phisme de groupes de Lie (non-canonique)
ϕ : T∼=−→ Tn−m = S1 × . . .× S1
︸ ︷︷ ︸n−m facteurs
.
Soit p la projection de Tn−m sur le premier facteur S1 (rappelons que n −m estnon-nul). Ainsi, τ est dans le noyau de l’homomorphisme compose
ψ := p ◦ ϕ ◦ π : Tn −→ S1 ,
qui est surjectif, donc non-trivial. Par le Theoreme 14.20, le diagramme
ZnLψ|Zn //
� _
incl²²
Z� _
incl²²
RnLψ //
expTn²²
RexpS1
²²Tn
ψ // S1
commute, ou on identifie LTn avec Rn, et LS1 avec Z de facon habituelle. CommeLψ est une forme R-lineaire sur Rn, on trouve λ1, . . . , λn ∈ R tels que
Lψ(y1, . . . , yn) = λ1 ·y1 + . . . + λn ·yn ,
pour tous (y1, . . . , yn) ∈ Rn. Le fait que Lψ applique Zn dans Z force chaque λj ,qui n’est autre que Lψ(~ej), a etre entier, i.e.
λ1, . . . , λn ∈ Z .
Comme expTn(x1, . . . , xn) = τ ∈ Ker(ψ) et comme le diagramme commute, on a
λ1 ·x1 + . . . + λn ·xn ∈ Z ;
si λ0 ∈ Z designe l’oppose de cette somme, on a
λ0 ·1 + λ1 ·x1 + . . . + λn ·xn = 0 ,
ce qui prouve que les nombres 1, x1, . . . , xn sont Q-lineairement dependants. ¤Voici une consequence de la Proposition 42.11 (et donc du Theoreme 42.12).
Corollaire 42.13. Un groupe de Lie compact G est topologiquement cycliquessi il est isomorphe a un produit Tn × Z/m, pour des entiers n ∈ N et m ∈ N∗.Preuve. Montrons d’abord que Tn × Z/m est topologiquement cyclique (ce quietablira, de toute evidence, le sens indirect). Soit τ un quasi-generateur du toreTn, voir la Proposition 42.11. Soit τ ∈ Tn une racine m-ieme de τ , i.e. un elementverifiant τm = τ (ce qui existe, puisque Tn = Rn/Zn et Rn est un Q-espacevectoriel). Alors, l’element
σ :=(τ , [1]
) ∈ Tn × Z/m
est un quasi-generateur de Tn × Z/m. En effet, comme σm = (τ, [0]), on a
〈σ〉 ⊇ 〈σm〉 = 〈τ〉 × {[0]
}= Tn × {
[0]}
,
et en particulier 〈σ〉 contient(τ , [0]
)et donc aussi
([~0], [1]
)et ses puissances, d’ou
le resultat. Passons au sens direct. Comme G possede un quasi-generateur, il estabelien, donc c’est un groupe de Lie compact abelien et presque connexe (sinon il

42. TORES MAXIMAUX 185
ne saurait etre compact). Par le Corollaire 24.7, G ∼= Tn × F , ou n ∈ N et F estun groupe abelien fini. L’image par la projection ainsi obtenue G−³ F du quasi-generateur de G est un quasi-generateur du groupe discret F , donc un generateur(“tout court”). Ainsi, F est cyclique fini. ¤
Remarque 42.14. On montre qu’un groupe de Lie non-compact topologique-ment cyclique est cyclique infini, i.e. isomorphe a Z.
Proposition 42.15. Soit G un groupe de Lie compact connexe. Si S est untore de G, alors S est contenu dans un tore maximal T de G.
Preuve. Soit S l’ensemble de tous les tores de G qui contiennent S. C’est unensemble non-vide (il contient S), et l’ensemble des valeurs des dimensions de sesmembres est borne par la dimension de G, i.e.
sup{
dim(S′)∣∣ S′ ∈ S} ≤ dim(G) .
On trouve donc dans S un element T de dimension maximale, i.e. un tore de Gcontenant S, de dimension maximale parmi les tores de G qui contiennent S. SiT ′ est un tore de G contenant T , alors T ′ est un tore de G contenant S, dont ladimension est ≥ dim(T ). Par maximalite de la dimension de T , on a T = T ′. Cecimontre que T est un tore maximal de G, qui contient S. ¤
Nous allons maintenant presenter trois theoremes fondamentaux sur les toresmaximaux dans les groupes de Lie compacts connexes. Voici le premier d’entre eux(duquel on va deriver les deux autres – c’est donc “le gros morceau”).
Theoreme 42.16. Soit G un groupe de Lie compact connexe, et soit T un toremaximal de G. Alors, pour tout element x de G, il existe un element g ∈ G tel que
gxg−1 ∈ T ;
de maniere equivalente, il existe un element h ∈ G tel que x ∈ hTh−1 .
Preuve. Comme dans la Proposition 41.4, soit F ( . , . ) un produit scalaire Ad-invariant sur LG (ceci utilise deja le fait que G est compact connexe). Par laProposition 42.11, on trouve un quasi-generateur τ de T , i.e.
〈τ〉 = T .
Soit x ∈ G un element de G fixe. (Tout le raisonnement qui suit va dependrede ce x, en particulier, tous les elements construits en dependent.) Comme G estcompact connexe, son exponentielle est surjective, cf. Theoreme 41.12, et on trouvedonc des elements X,Z ∈ LG tels que
exp(X) = x et exp(Z) = τ .
Considerons l’application continue (et meme lisse)
G −→ LG , y 7−→ Xy := Ad(y)·X ,
et sa composition avec F (−, Z), c’est-a-dire l’application continue (et meme lisse)
ϕ : G −→ R , y 7−→ F (Xy, Z) = F(Ad(y)·X,Z
).
Par continuite de ϕ et par compacite de G, on trouve un element g ∈ G tel queϕ(g) soit maximal, i.e. tel que
F (Xg, Z) ≥ F (Xy, Z) , ∀y ∈ G .

186 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Fixons un element Y ∈ LG et, pour t ∈ R, considerons l’element
yt := exp(tY )·g ∈ G .
En utilisant la Proposition 29.21, on calcule
Xyt = Ad(yt)·X= Ad
(exp(tY )·g)·X
= Ad(exp(tY )
) ◦Ad(g)(X)
= Ad(exp(tY )
)·Xg
= ead(tY ) ·Xg
=(idLG +t ad(Y ) +O(t2)
)·Xg
= Xg + t[Y, Xg] +O(t2) .
Par substitution dans la relation de maximalite satisfaite par g, on trouve
F (Xg, Z) ≥ F (Xg, Z) + tF([Y, Xg], Z
)+O(t2) ,
pour tout t ∈ R. Il s’ensuit qu’on a
F([Y, Xg], Z
)= 0 .
En appliquant l’ad-invariance de F donnee par la Proposition 41.4, ainsi que lasymetrie de F et l’anti-symetrie du crochet de Lie, on en deduit que
F([Xg, Z], Y
)= 0 ,
et ce, quelque soit Y ∈ LG. Comme F est un produit scalaire (en particulier,non-degenere), on trouve que Xg et Z commutent, i.e.
[Xg, Z] = 0 .
Maintenant, en appliquant la Proposition 30.7 (rappelons que tous les groupes deLie admettent une structure analytique, cf. Remarque 6.2), on trouve que pour touss, t ∈ R, les elements
exp(sXg) et exp(tZ)commutent dans G. Pour t = 1, on a exp(tZ) = exp(Z) = τ (notre quasi-generateurde T ), et, donc, le sous-groupe ferme
〈τ, exp(sXg) | s ∈ R〉 = 〈τ〉·〈exp(sXg) | s ∈ R〉 = T ·〈exp(sXg) | s ∈ R〉de G est abelien. Evidemment, le sous-groupe
T ·〈exp(sXg) | s ∈ R〉de G est connexe par arcs, donc connexe; ainsi, son adherence
T ·〈exp(sXg) | s ∈ R〉est un sous-groupe connexe de G. Au total,
〈τ, exp(sXg) | s ∈ R〉est un sous-groupe compact connexe et abelien de G, donc un tore (cf. Corol-laire 23.7), qui contient T . Comme T est un tore maximal, ce sous-groupe est egala T . En particulier, en prenant s = 1, on a
exp(Xg) ∈ T .

42. TORES MAXIMAUX 187
Or, de la Proposition 25.11, il suit que
exp(Xg) = exp(Ad(g)·X)
= g exp(X)g−1 = gxg−1 ,
ce qui montre bien que x, l’element fixe au depart, possede un conjugue dans T . ¤Corollaire 42.17. Si T est un tore maximal d’un groupe de Lie compact
connexe G, alors les conjugues de T recouvrent G, i.e.
G =⋃
g∈G
gTg−1 .
En particulier, tout element de G est contenu dans un tore maximal.
Preuve. La premiere assertion decoule immediatement du Theoreme 42.16. Laseconde est une consequence de la premiere et du fait qu’un conjugue d’un toremaximal de G est encore un tore maximal de G, cf. Remarque 42.4. ¤
Voici le second theoreme fondamental sur les tore maximaux.
Theoreme 42.18. Soit G un groupe de Lie compact connexe. Si G est non-trivial, alors il possede un tore maximal de dimension non-nulle.
Preuve. Supposons que G est groupe de Lie compact connexe. D’apres la Remar-que 42.3, G possede un tore maximal T , eventuellement de dimension zero. Si telest le cas, i.e. si T = {e}, alors, en vertu du Corollaire 42.17, on a
G =⋃
g∈G
gTg−1 =⋃
g∈G
g{e}g−1 = {e} ,
donc G est trivial. ¤Voici enfin le troisieme theoreme fondamental sur les tore maximaux.
Theoreme 42.19. Soit G un groupe de Lie compact connexe. Alors tous lestores maximaux de G sont conjugues, c’est-a-dire, si T1 et T2 sont deux tores maxi-maux de G, alors il existe un element g ∈ G tel que
gT1g−1 = T2 .
Preuve. D’apres la Proposition 42.11, on trouve un quasi-generateur τ de T1, i.e.un element τ ∈ T1 tel que
〈τ〉 = T1 .
Par le Theoreme 42.16 applique au tore maximal T2, on trouve g ∈ G tel que
gτg−1 ∈ T2 .
Comme G est un groupe topologique et comme T2 est un sous-groupe ferme de G,on deduit que
gT1g−1 = g〈τ〉g−1 = g 〈τ〉 g−1 = 〈gτg−1〉 ⊆ T2 .
Comme T1 est un tore maximal, par la Remarque 42.4, il en va de meme de sonconjugue gT1g
−1. Par maximalite de celui-ci, on obtient l’egalite gT1g−1 = T2
convoitee. ¤Corollaire 42.20. Soit G un groupe de Lie compact connexe, et soit T un
tore maximal fixe de G. Alors l’ensemble de tous les tores maximaux de G estexactement donne par{
tores maximaux de G}
={gTg−1
∣∣ g ∈ G}
.

188 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Preuve. Il suffit de combiner la Remarque 42.4 et le Theoreme 42.19. ¤Corollaire 42.21. Soit G un groupe de Lie compact connexe. Alors, tous les
tores maximaux de G ont la meme dimension. De plus, un tore de G est un toremaximal ssi il est de dimension maximale (parmi les tores de G).
Preuve. La premiere assertion decoule du Theoreme 42.19. Passons a la seconde.Si T est un tore de G, qui est de dimension maximale, d’apres la Remarque 42.3,c’est un tore maximal de G. Reciproquement, soit T un tore maximal de G. SoitT ′ un tore de G, de dimension maximale. Par la Remarque 42.3 une fois encore, T ′
est un tore maximal de G. Le Theoreme 42.19 implique que T et T ′ sont conjugues,donc de meme dimension. Ainsi, T est bien un tore de dimension maximale. ¤
Le Corollaire 42.21 nous permet d’introduire la definition suivante.
Definition 42.22. Soit G un groupe de Lie compact connexe. Le rang de G,note rang(G) ou rg(G), est la dimension commune de tous ses tores maximaux. End’autres termes, si T est un tore maximal de G, alors
rang(G) := dim(T ) .
Notation 42.23. Si G est un groupe de Lie compact connexe, on pose souvent
` := rang(G) ,
de sorte que T ∼= T` et LT ∼= R` (non-canoniquement).
Remarque 42.24. D’apres le Theoreme 42.18, pour un groupe de Lie compactconnexe G, qui est non-trivial, on a les inegalites
1 ≤ rang(G) ≤ dim(G) .
De plus, on est dans le cas d’egalite rang(G) = dim(G) ssi G est lui-meme un torenon-trivial, ssi G ∼= T` avec ` ≥ 1, ssi G est abelien non-trivial (cf. Corollaire 23.7).
Avant l’enonce suivant, rappelons qu’un tore maximal T d’un groupe de Liecompact connexe etant compact, il est ferme dans G et donc, en vertu du Theoremed’Elie Cartan 19.1, son algebre de Lie LT s’identifie de facon canonique a une sous-algebre de Lie de LG.
Theoreme 42.25. Soit G un groupe de Lie compact connexe, et soit T un toremaximal de G. Alors, pour chaque X ∈ LG, il existe un element g ∈ G tel que
Ad(g)·X ∈ LT .
Preuve. En invoquant la Proposition 41.4, on peut fixer un produit scalaire Ad-invariant F ( . , . ) sur LG; soit ||.||F la norme correspondante. Comme expG est undiffeomorphisme local en 0, cf. Theoreme 14.8, on trouve ε > 0 tel que sur la bouleouverte U de rayon ε (pour ||.||F ), centree en 0, dans LG, l’exponentielle soit undiffeomorphisme sur son image, i.e.
expG |U : U≈−→ V := expG(U) ⊆ G .
Par le Theoreme d’Elie Cartan 19.1 (voir aussi la Remarque 19.4), on a
LT ∩ U ={Y ∈ U
∣∣ expG(Y ) ∈ T}
,
ce qui signifie que pour Y ∈ U , on a
Y ∈ LT ⇐⇒ expG(Y ) ∈ T . (∗)

42. TORES MAXIMAUX 189
Comme F est Ad-invariant, pour chaque g ∈ G, l’operateur lineaire Ad(g) de LGest F -orthogonal, et donc applique la boule U sur elle-meme, i.e.
Ad(g)·U = U .
Fixons un element X ∈ LG. Pour tout t ∈ R, par le Theoreme 42.16, on trouve unelement gt ∈ G tel que
gt ·expG(tX)·g−1t ∈ T .
Soit t > 0 tel que ||tX||F < ε, i.e. tel que tX ∈ U . Montrons que Ad(gt)·X ∈ LT ,ce qui permettra de conclure. Par la Proposition 25.11, on a l’egalite
expG
(Ad(gt)(tX)
)= gt ·expG(tX)·g−1
t ∈ T .
Comme Ad(gt) applique U dans U , et comme tX ∈ U , on a Ad(gt)(tX) ∈ U . Del’equivalence (∗), il suit que Ad(gt)(tX) ∈ LT , et donc
Ad(gt)·X = 1t ·Ad(gt)(tX) ∈ LT ,
ce qui acheve la demonstration. ¤Corollaire 42.26. Soit G un groupe de Lie matriciel compact connexe, i.e. un
sous-groupe compact connexe de GLn(F), et soit T un tore maximal de G. Alors,pour toute matrice X ∈ LG ⊆ Mn(F), il existe une matrice inversible A ∈ G telleque
AXA−1 ∈ LT .
Preuve. C’est une combinaison des Theoremes 25.14 et 42.25. ¤Definition 42.27. Soit G un groupe. Si H est un sous-groupe de G, alors :
(i) le centralisateur de H dans G est le sous-groupe suivant de G :
ZG(H) :={g ∈ G
∣∣ ghg−1 = h , ∀h ∈ H}
;
(ii) le normalisateur de H dans G est le sous-groupe suivant de G :
NG(H) :={g ∈ G
∣∣ gHg−1 = H}
;
c’est le plus grand sous-groupe de G dans lequel H est normal.
Remarque 42.28. Si H est un sous-groupe de G, alors le sous-ensemble
NG(H) :={g ∈ G
∣∣ gHg−1 ⊆ H}
={g ∈ G
∣∣ ghg−1 ∈ H , ∀h ∈ H}
est un sous-monoıde de G contenant NG(H), mais il est generalement plus grand;c’est un sous-groupe de G ssi il coıncide avec NG(H). Par exemple, prenons
G := SUT2(R) ={(
λ x0 λ-1
) ∈ SL2(R)∣∣ λ ∈ R× et x ∈ R}
et H :=(
1 Z0 1
) ⊂ G ;
dans ce cas, un calcul elementaire montre que
NG(H) ={(
λ x0 λ-1
) ∈ G∣∣ λ = ±1
}et NG(H) =
{(λ x0 λ-1
) ∈ G∣∣ λ2 ∈ Z}
.
Un autre exemple est donne par
G := Z[ 12 ]o Z et H := Z o {0} ,
ou le generateur 1 de Z agit sur Z[ 12 ] par multiplication par 2; dans ce cas, on a
NG(H) = Z[ 12 ]o {0} et NG(H) = Z[ 12 ]oN ,
et le sous-groupe engendre par NG(H) est G tout entier. Par contre, on peutdemontrer que NG(H) et NG(H) coıncident dans les trois situations suivantes :

190 3. GROUPES DE LIE REELS COMPACTS CONNEXES
(i) H est un sous-groupe fini (sans condition sur G);(ii) G est un groupe topologique compact (sans condition sur H);(iii) G est un groupe de Lie et H est un sous-groupe compact.
Proposition 42.29. Soit G un groupe de Lie compact connexe. Si S est unsous-groupe abelien connexe de G, alors son centralisateur dans G est la reunionde tous les tores maximaux de G qui le contiennent, i.e.
ZG(S) =⋃
T tore max. de GT ⊇ S
T .
Preuve. L’inclusion “⊇ ” est evidente. Passons a l’inclusion “⊆ ”. L’adherence Sde S dans G est un sous-groupe compact connexe et abelien de G, donc c’est unsous-groupe de Lie de G, par le Theoreme d’Elie Cartan 19.1, et donc un tore parle Corollaire 23.7. Si un element de g centralise S, alors il centralise S, de sorteque ZG(S) = ZG(S). On peut des lors supposer que S = S est un tore. Fixons unelement g ∈ ZG(S), et soit
H := 〈S, g〉 = S ·〈g〉le sous-groupe ferme de G engendre par S et g. Comme H est compact et abelien,donc presque connexe, par le Corollaire 24.7, H ∼= Tn × F pour un entier n ∈ N etun groupe abelien fini F . Comme He ⊇ S, la classe gHe de g dans le quotient
H/He∼= F
est un quasi-generateur, donc un generateur par discretude de F . Il s’ensuit queF est cyclique fini et que H ∼= Tn × Z/m pour un m ∈ N∗. Ainsi, par le Corol-laire 42.13, H est topologiquement cyclique. Si h designe un quasi-generateur deH, alors, par le Theoreme 42.16, on trouve un tore maximal T de G le contenant,d’ou
g ∈ H = 〈h〉 ⊆ T .
Ceci etablit que tout element du centralisateur ZG(S) est contenu dans un toremaximal de G. ¤
Theoreme 42.30. Dans un groupe de Lie compact connexe G, un tore maximalT est son propre centralisateur, i.e.
ZG(T ) = T .
Preuve. C’est un dommage collateral immediat de la Proposition 42.29. ¤
Corollaire 42.31. Soit T un tore maximal dans un groupe de Lie compactconnexe. Alors T est un sous-groupe abelien maximal de G.
Preuve. Si T ′ est un sous-groupe abelien de G contenant T , alors T ′ ⊆ ZG(T ) eton conclut en invoquant le Theoreme 42.30. ¤
Remarque 42.32. Le Corollaire 42.31 est un renforcement decisif d’une desdirections de l’equivalence fournie par la Proposition 42.9. Par contre, le renforce-ment correspondant de l’autre direction est faux : en general, un sous-groupe abelienmaximal d’un groupe de Lie compact connexe n’est pas forcement un tore maximal,et pour cause, il peut ne pas etre connexe ! Par exemple, pour n ≥ 3, le sous-groupe
{(ε1�
εn
)∈ SO(n)
∣∣∣ εj ∈ {±1} et ε1 . . . εn = 1}

43. TORES MAXIMAUX DES GROUPES COMPACTS CLASSIQUES 191
de SO(n) est un sous-groupe abelien maximal, comme on le verifie sans difficulte,mais il est discret d’ordre 2n−1.
Theoreme 42.33. Dans un groupe de Lie compact connexe G, le lieu communde tous les tores maximaux est le centre, i.e.
Z(G) =⋂
T tore max. de G
T .
Preuve. Si T est un tore maximal, alors le sous-groupe T ·Z(G) engendre par T etpar le centre de G est abelien et contient T , donc, par maximalite de T parmi lessous-groupes abeliens de G (cf. Corollaire 42.31), il coıncide avec T . Ceci etablitl’inclusion “⊆ ”. Reciproquement, par le Corollaire 42.17, tout element g de G estcontenu dans un tore maximal de G. Ainsi, si un element x de G est contenu danstous les tores maximaux de G, il commute a tous les elements de G, en d’autrestermes, il est central. ¤
Le resultat suivant est une methode effective pour calculer le centre d’un groupede Lie compact connexe, une fois un de ses tores maximaux connu.
Corollaire 42.34. Soit T un tore maximal dans un groupe de Lie compactconnexe G. Le centre de G est alors donne par
Z(G) =⋂
g∈G
gTg−1 .
Preuve. Pour ce resultat, il suffit de combiner les Theoremes 42.19 et 42.33. ¤
Definition 42.35. Soit G un groupe de Lie compact connexe, et soit T untore maximal fixe de G. Alors le sous-groupe
Γ(T ) := Ker(expT : LT −³ T
)
de LT ⊆ LG est appele le reseau entier ou groupe nodal de T (et de G); c’est unreseau dans LT (cf. Definition 23.6).
43. Tores maximaux des groupes compacts classiques
Dans cette section, nous allons exhiber un tore maximal dans chacun desgroupes classiques U(n), SU(n), SO(n) et Sp(n), avec, implicitement suppose, n ≥ 1pour U(n) et Sp(n), et n ≥ 2 pour SU(n) et SO(n). Chacun de ses tores maxi-maux est celui qui est systematiquement etudie, et il est des lors appele le toremaximal standard de U(n), SU(n), SO(n) et Sp(n), respectivement. Point impor-tant, nous allons voir que dans chaque cas le Theoreme 42.16 et le Corollaire 42.26fournissent (au moins) deux theoremes spectraux classiques et fondamentaux del’algebre lineaire.
Theoreme 43.1. Dans le groupe unitaire U(n), le sous-groupe
T ={(
eiθ1
�eiθn
) ∣∣∣∣ θ1, . . . , θn ∈ R}
est un tore maximal; en particulier, le rang de U(n) est n, et l’algebre de Lie de Test donnee par
LT ={(
iθ1�
iθn
) ∣∣∣∣ θ1, . . . , θn ∈ R}
.

192 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Preuve. Soit G designant l’un des groupes de Lie U(n) (avec n ≥ 2), SU(n) (avecn ≥ 3), ou Sp(n) avec n ≥ 2. Nous allons montrer que pour G, on a
T = G ∩{(
eiθ1
�eiθn
) ∣∣∣∣ θ1, . . . , θn ∈ R}
,
ou l’intersection avec G n’est necessaire que pour G = SU(n), pour s’assurer quele determinant est bien egal a 1. A noter que dans les deux cas manquants, asavoir SU(2) et Sp(1), le resultat est egalement vrai, comme on l’a deja vu dansles Exemples 42.6 et 42.7. Soit A ∈ G tel que AB = BA pour tout B ∈ T . Nousdevons simplement etablir que A ∈ T . Fixons un entier q ∈ {1, . . . , n}. On a
AB = BA , ∀B ∈ Hq := G ∩
±1�±1
1±1�±1
⊂ T ,
ou le 1 “impose” est situe en q-ieme position sur la diagonale. A noter que dans lecas de G = U(n), de G = SU(2m + 1) (avec m ≥ 1), ou de G = Sp(n), l’argumentqui suit fonctionne en remplacant Hq par le singleton ne contenant que la matrice
-1�
-11-1�
-1
,
avec le 1 en q-ieme position. On a alors, pour tout B ∈ Hq,
B ·(A~eq) = BA·~eq = AB ·~eq = A~eq .
Ceci montre que A~eq est fixe par tous les elements de Hq. Par consequent (enutilisant la restriction sur la valeur de n dans chacune des situations !), il existeλq ∈ F tel que
A~eq = λq~eq ,
ou F = C si G = U(n) ou SU(n), et F = H si G = Sp(n). Comme ceci est validepour chaque q, on voit que la base canonique de Fn est constituee de vecteurspropres de A (a gauche et a droite, dans le sens evident, lorsque F = H), donc Aest diagonale, de la forme
A =(
λ1�
λn
);
comme A ∈ G, chaque λj est de module 1, i.e. |λq| = 1. Si G = U(n) ou SU(n), ona λq ∈ S1 pour chaque q, de sorte que A ∈ T , ce qui permet de conclure pour cesdeux cas. Supposons donc que G = Sp(n). Comme A commute a tous les elementsde T , il commute a la matrice diagonale i·1In, de sorte que chaque λq commute a i.Ceci implique que
λq ∈ S3 ∩ C = S1 ,
pour tout q = 1, . . . , n. On a bien montre que A ∈ T . Finalement, la descrip-tion de LT est obtenue de celle de T , du Theoreme d’Elie Cartan 19.1, et duTheoreme 14.16. ¤
Corollaire 43.2 (Theoreme Spectral pour les matrices unitaires).Toute matrice unitaire est unitairement diagonalisable.
Preuve. Cela decoule des Theoremes 42.16 et 43.1. ¤

43. TORES MAXIMAUX DES GROUPES COMPACTS CLASSIQUES 193
Corollaire 43.3 (Theoreme Spectral pour les matrices anti-hermitiennes).Toute matrice anti-hermitienne est unitairement diagonalisable.
Preuve. Cela suit du Theoreme 43.1, de l’Exemple 21.12 et du Corollaire 42.26. ¤
Corollaire 43.4 (Theoreme Spectral pour les matrices anti-symetriques).Toute matrice anti-symetriques reelle est unitairement diagonalisable sur C.
Preuve. C’est un cas particulier du Corollaire 43.23. ¤
Remarque 43.5. On decrit souvent le tore maximal T de U(n) sous la forme
T ={(
e2πiθ1
�e2πiθn
) ∣∣∣∣ θ1, . . . , θn ∈ R}
et son algebre de Lie par
LT ={(
2πiθ1�
2πiθn
) ∣∣∣∣ θ1, . . . , θn ∈ R}
.
La raison en est que cela nous fournit une identification entre LT et Rn
(2πiθ1
�2πiθn
)←→ (θ1, . . . , θn)
qui est telle que le reseau entier Γ(T ) s’identifie a Zn, au lieu de (2πZ)n.
Theoreme 43.6. Dans le groupe unitaire special SU(n), le sous-groupe
T ={(
eiθ1
�eiθn
) ∣∣∣∣ θ1, . . . , θn ∈ R et θ1 + . . . + θn ∈ 2πZ}
est un tore maximal; en particulier, le rang de SU(n) est n− 1, et l’algebre de Liede T est donnee par
LT ={(
iθ1�
iθn
) ∣∣∣∣ θ1, . . . , θn ∈ R et θ1 + . . . + θn = 0}
.
Preuve. La determination de T a ete faite dans la preuve du Theoreme 43.1. Ladescription de LT est obtenue de celle de T , du Theoreme d’Elie Cartan 19.1, etdu Theoreme 14.16. ¤
Remarque 43.7. Les trois theoremes spectraux que l’on peut deduire duTheoreme 43.6 sont les memes que ceux que l’on vient de deduire du Theoreme 43.1,aux deux petites nuances pres que les matrices auxquelles les theoremes spectrauxs’appliquent sont de trace nulle (ce qui est de toute facon automatique dans le casanti-symetrique reel), et que la matrice unitaire du changement de base peut etrechoisie comme etant de determinant 1. Or, cette derniere condition peut toujoursetre requise, car si
AXA−1 = Y ,
avec A ∈ U(n) et X,Y ∈Mn(C), alors on a(
1δ A
)X
(1δ A
)−1 = Y ,
avec 1δ A ∈ SU(n) pour δ ∈ S1 designant n’importe quelle racine n-ieme du determinant
de A dans C.
194 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Remarque 43.8. On decrit souvent le tore maximal T de SU(n) sous la forme
T ={(
e2πiθ1
�e2πiθn
) ∣∣∣∣ θ1, . . . , θn ∈ R et θ1 + . . . + θn ∈ Z}
et son algebre de Lie par
LT ={(
2πiθ1�
2πiθn
) ∣∣∣∣ θ1, . . . , θn ∈ R et θ1 + . . . + θn = 0}
.
Cela nous fournit une identification entre LT et le R-sous-espace vectoriel
Rn◦ := (1, . . . , 1)⊥ =
{(x1, . . . , xn) ∈ Rn
∣∣ x1 + . . . + xn = 0}
de dimension n− 1 de Rn, identification donnee par(2πiθ1
�2πiθn
)←→ (θ1, . . . , θn) .
Ainsi, le reseau entier Γ(T ) s’identifie au reseau Zn◦ := Zn ∩ Rn
◦ de Rn◦ .
Theoreme 43.9. Dans le groupe orthogonal special impair SO(2n+1), le sous-groupe
T =
cos θ1 sin θ1-sin θ1 cos θ1
cos θ2 sin θ2-sin θ2 cos θ2
��
cos θn sin θn
-sin θn cos θn1
∣∣∣∣∣∣∣∣∣∣∣∣
θ1, . . . , θn ∈ R
est un tore maximal; en particulier, le rang de SO(2n + 1) est n, et l’algebre de Liede T est donnee par
LT =
0 θ1-θ1 0
0 θ2-θ2 0
��
0 θn
-θn 00
∣∣∣∣∣∣∣∣∣∣∣∣
θ1, . . . , θn ∈ R
.
Preuve. Nous admettrons la determination de T . La description de LT est obtenuede celle de T et du Theoreme d’Elie Cartan 19.1, du Theoreme 14.16, du fait quel’exponentielle respecte les blocs pour les matrices diagonales par blocs (cf. preuvedu Lemme 21.1), du Lemme 22.1 et de l’Exemple 27.3. ¤
Corollaire 43.10 (Theoreme Spectral pour les matrices orthogonales).Toute matrice orthogonale de determinant 1 et de taille 2n + 1 peut etre mise, parchangement de base orthogonal oriente, sous la forme suivante :
cos θ1 sin θ1-sin θ1 cos θ1
cos θ2 sin θ2-sin θ2 cos θ2
��
cos θn sin θn
-sin θn cos θn1
avec θ1, . . . , θn ∈ R designant n angles.
43. TORES MAXIMAUX DES GROUPES COMPACTS CLASSIQUES 195
Preuve. Cela decoule des Theoremes 42.16 et 43.9. ¤
Corollaire 43.11 (Theoreme Spectral pour les matrices anti-symetriques).Toute matrice anti-symetrique reelle de taille 2n+1 peut etre mise, par changementde base orthogonal oriente, sous la forme suivante :
0 θ1-θ1 0
0 θ2-θ2 0
��
0 θn
-θn 00
avec θ1, . . . , θn ∈ R.
Preuve. Cela suit du Theoreme 43.9, de l’Exemple 21.11 et du Corollaire 42.26. ¤
Remarque 43.12. On decrit souvent le tore maximal T de SO(2n + 1) sous laforme
T =
cos 2πθ1 sin 2πθ1-sin 2πθ1 cos 2πθ1
cos 2πθ2 sin 2πθ2-sin 2πθ2 cos 2πθ2
��
cos 2πθn sin 2πθn
-sin 2πθn cos 2πθn1
∣∣∣∣∣∣∣∣∣∣∣∣
θ1, . . . , θn ∈ R
et son algebre de Lie par
LT =
0 2πθ1-2πθ1 0
0 2πθ2-2πθ2 0
��
0 2πθn
-2πθn 00
∣∣∣∣∣∣∣∣∣∣∣∣
θ1, . . . , θn ∈ R
.
Cela nous fournit une identification entre LT et Rn
0 2πθ1-2πθ1 0
0 2πθ2-2πθ2 0
��
0 2πθn
-2πθn 00
←→ (θ1, . . . , θn)
qui est telle que le reseau entier Γ(T ) s’identifie a Zn, au lieu de (2πZ)n.
Theoreme 43.13. Dans le groupe orthogonal special pair SO(2n), le sous-groupe
T =
cos θ1 sin θ1-sin θ1 cos θ1
cos θ2 sin θ2-sin θ2 cos θ2
��
cos θn sin θn
-sin θn cos θn
∣∣∣∣∣∣∣∣∣∣∣
θ1, . . . , θn ∈ R

196 3. GROUPES DE LIE REELS COMPACTS CONNEXES
est un tore maximal; en particulier, le rang de SO(2n) est n, et l’algebre de Lie deT est donnee par
LT =
0 θ1-θ1 0
0 θ2-θ2 0
��
0 θn
-θn 0
∣∣∣∣∣∣∣∣∣∣∣
θ1, . . . , θn ∈ R
.
Preuve. Nous admettrons la determination de T . La description de LT est obtenuede celle de T et du Theoreme d’Elie Cartan 19.1, du Theoreme 14.16, du fait quel’exponentielle respecte les blocs pour les matrices diagonales par blocs (cf. preuvedu Lemme 21.1), du Lemme 22.1 et de l’Exemple 27.3. ¤
Corollaire 43.14 (Theoreme Spectral pour les matrices orthogonales).Toute matrice orthogonale de determinant 1 et de taille 2n peut etre mise, parchangement de base orthogonal oriente, sous la forme suivante :
cos θ1 sin θ1-sin θ1 cos θ1
cos θ2 sin θ2-sin θ2 cos θ2
��
cos θn sin θn
-sin θn cos θn
avec θ1, . . . , θn ∈ R designant n angles.
Preuve. Cela decoule des Theoremes 42.16 et 43.13. ¤
Corollaire 43.15 (Theoreme Spectral pour les matrices anti-symetriques).Toute matrice anti-symetrique reelle de taille 2n peut etre mise, par changementde base orthogonal oriente, sous la forme suivante :
0 θ1-θ1 0
0 θ2-θ2 0
��
0 θn
-θn 0
avec θ1, . . . , θn ∈ R.
Preuve. Cela suit du Theoreme 43.9, de l’Exemple 21.11 et du Corollaire 42.26. ¤
Remarque 43.16. On decrit souvent le tore maximal T de SO(2n) sous laforme
T =
cos 2πθ1 sin 2πθ1-sin 2πθ1 cos 2πθ1
cos 2πθ2 sin 2πθ2-sin 2πθ2 cos 2πθ2
��
cos 2πθn sin 2πθn
-sin 2πθn cos 2πθn
∣∣∣∣∣∣∣∣∣∣∣
θ1, . . . , θn ∈ R

43. TORES MAXIMAUX DES GROUPES COMPACTS CLASSIQUES 197
et son algebre de Lie par
LT =
0 2πθ1-2πθ1 0
0 2πθ2-2πθ2 0
��
0 2πθn
-2πθn 0
∣∣∣∣∣∣∣∣∣∣∣
θ1, . . . , θn ∈ R
.
Cela nous fournit une identification entre LT et Rn
0 2πθ1-2πθ1 0
0 2πθ2-2πθ2 0
��
0 2πθn
-2πθn 0
←→ (θ1, . . . , θn)
qui est telle que le reseau entier Γ(T ) s’identifie a Zn, au lieu de (2πZ)n.
Theoreme 43.17. Dans le groupe symplectique Sp(n), le sous-groupe
T ={(
eiθ1
�eiθn
) ∣∣∣∣ θ1, . . . , θn ∈ R}
est un tore maximal; en particulier, le rang de Sp(n) est n, et l’algebre de Lie de Test donnee par
LT ={(
iθ1�
iθn
) ∣∣∣∣ θ1, . . . , θn ∈ R}
,
Preuve. La determination de T a ete faite dans la preuve du Theoreme 43.1; celle deLT est obtenue de celle de T et du Theoreme d’Elie Cartan 19.1, du Theoreme 14.16et du Lemme 22.1. ¤
Corollaire 43.18 (Theoreme Spectral pour les matrices symplectiques).Toute matrice symplectique, i.e. dans Sp(n), est symplectiquement diagonalisable.
Preuve. Cela decoule des Theoremes 42.16 et 43.17. ¤Corollaire 43.19 (Theoreme Spectral pour les matrices anti-hermitiennes).
Toute matrice quaternionienne anti-hermitienne est symplectiquement diagonalis-able.
Preuve. Cela suit du Theoreme 43.1, de l’Exemple 21.14 et du Corollaire 42.26. ¤Remarque 43.20. On decrit souvent le tore maximal T de Sp(n) sous la forme
T ={(
e2πiθ1
�e2πiθn
) ∣∣∣∣ θ1, . . . , θn ∈ R}
et son algebre de Lie par
LT ={(
2πiθ1�
2πiθn
) ∣∣∣∣ θ1, . . . , θn ∈ R}
.
Cela nous fournit une identification entre LT et Rn
(2πiθ1
�2πiθn
)←→ (θ1, . . . , θn)
qui est telle que le reseau entier Γ(T ) s’identifie a Zn, au lieu de (2πZ)n.

198 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Theoreme 43.21. Dans le sous-groupe SUH2n de SU(2n), qui correspond aSp(n) via l’identification usuelle, le sous-groupe
T =
eiθ1
�eiθn
e-iθ1
�e-iθn
∣∣∣∣∣∣∣∣θ1, . . . , θn ∈ R
est un tore maximal; en particulier, le rang de SUH2n est n, et l’algebre de Lie de Test donnee par
LT =
iθ1�
iθn
-iθ1�-iθn
∣∣∣∣∣∣∣θ1, . . . , θn ∈ R
.
Preuve. Le resultat decoule du Theoreme 43.17. ¤Corollaire 43.22 (Theoreme Spectral pour certaines matrices unitaires).
Toute matrice unitaire de la forme(A −B
B A
)∈ SU(2n) , avec A,B ∈Mn(C)
est unitairement diagonalisable par un changement de base associe a une matriceunitaire de determinant 1 et de la meme forme.
Preuve. Cela decoule des Theoremes 42.16 et 43.21. ¤Corollaire 43.23 (Theoreme Spectral pour certaines matrices anti-herm.).
Toute matrice anti-hermitienne de la forme
X =
(A −B
B A
)∈M2n(C) , avec A,B ∈Mn(C)
est unitairement diagonalisable sous la forme
iθ1�
iθn
-iθ1�-iθn
avec θ1, . . . , θn ∈ R, par un changement de base associe a une matrice unitaire dedeterminant 1 et de la meme forme que X.
Preuve. Cela suit du Theoreme 43.1, de l’Exemple 21.14 et du Corollaire 42.26. ¤Remarque 43.24. On decrit souvent le tore maximal T de SUH2n sous la forme
T =
e2πiθ1
�e2πiθn
e-2πiθ1
�e-2πiθn
∣∣∣∣∣∣∣∣θ1, . . . , θn ∈ R
et son algebre de Lie par
LT =
2πiθ1�
2πiθn
-2πiθ1�-2πiθn
∣∣∣∣∣∣∣θ1, . . . , θn ∈ R
.

44. NORMALISATEUR DE TORES MAXIMAUX ET GROUPE DE WEYL 199
Cela nous fournit une identification entre LT et Rn
2πiθ1�
2πiθn
-2πiθ1�-2πiθn
←→ (θ1, . . . , θn)
qui est telle que le reseau entier Γ(T ) s’identifie a Zn, au lieu de (2πZ)n.
44. Normalisateur de tores maximaux et groupe de Weyl
Definition 44.1. Soit G un groupe de Lie compact connexe, et soit T un toremaximal fixe de G, auquel on se refere comme etant le tore maximal de G.
(i) Le normalisateur (du tore maximal) de G est le groupe
N := NG(T ) ={g ∈ G
∣∣ gTg−1 = T}
.
(ii) Le groupe de Weyl de G est le groupe quotient
W := N/T .
La classe nT d’un element n de N dans W est notee [n]. Si on tient apreciser a quel groupe de Lie G est associe le groupe W , ou de quel toremaximal T il depend, on le note WG, W (T ) ou WG(T ).
Remarque 44.2. Le sous-groupe N de G est ferme. Donc, par le Theoremed’Elie Cartan 19.1, N est lui-meme un groupe de Lie compact, mais pas forcementconnexe, comme on le verra. Par contre, la compacite de N implique qu’il possedeun nombre fini de composantes connexes, symboliquement,
|π0(N)| = |N/Ne| < ∞ .
Remarque 44.3. A ne pas confondre : Hermann Weyl (1885–1955) et AndreWeil (1906–1998).
Exemple 44.4. Si G est abelien, alors G = T = N et le groupe de Weyl W estle groupe trivial.
Proposition 44.5. Soit G un groupe de Lie compact connexe. Alors les nor-malisateurs de tores maximaux dans G sont conjugues. En d’autres termes, si T1
et T2 sont deux tores maximaux dans G, alors il existe g ∈ G tel que
NG(T1) = g ·NG(T2)·g−1 .
De plus, les groupes de Weyl correspondants sont isomorphes, i.e.
WG(T1) ∼= WG(T2) .
Preuve. Par le Theoreme 42.19, il existe un element g ∈ G tel que gT1g−1 = T2.
On a doncNG(T1) = NG(gT2g
−1) = g ·NG(T2)·g−1 ,
d’ou le premier resultat. Pour le second, la conjugaison par g−1 fournit un isomor-phisme de groupes entre NG(T1) et NG(T2), qui applique isomorphiquement le sous-groupe normal T1 du premier sur le sous-groupe normal T2 du second. Cette con-jugaison induit donc, par passage au quotient, l’isomorphisme WG(T1) ∼= WG(T2)cherche. ¤

200 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Notation 44.6. Dans la suite, si G est un groupe de Lie reel, on designe legroupe AutR(G) des automorphismes de groupes de Lie reel de G simplement parAut(G); c’est donc le groupe de tous les automorphismes de groupes qui sont desdiffeomorphismes.
Remarque 44.7. Soit G un groupe de Lie reel. Par le Theoreme 16.5, toutautomorphisme de groupe de G qui est un homeomorphisme est dans Aut(G). Bienmieux, par le Theoreme 17.1, tout automorphisme de groupe de G qui est continuest dans Aut(G).
Exemple 44.8. Pour le tore Tn, on a un isomorphisme de groupes canonique
Aut(Tn)∼=−→ GLn(Z) , ϕ 7−→ Lϕ ,
et en particulier, Aut(Tn) s’identifie a un sous-groupe discret de GLn(R). L’isomor-phisme inverse applique une matrice entiere inversible A ∈ GLn(Z) sur l’automor-phisme de groupe de Lie
ϕA : Tn −→ Tn , [~v ] 7−→ [A·~v ] ,
ou on voit Tn comme etant le quotient Rn/Zn. En effet, si ϕ : Tn −→ Tn estun automorphisme de groupe de Lie, alors il induit un isomorphisme d’espacesvectoriels
Lϕ : Rn = LTn −→ LTn = Rn .
De plus, par naturalite de l’exponentielle, cf. Theoreme 14.20, le diagramme
LTnLϕ //
exp²²
LTn
exp²²
Tnϕ // Tn
commute. Par l’Exemple 14.5 l’exponentielle pour Tn est donnee par
exp: Rn = LTn −→ Tn , (θ1, . . . , θn) 7−→ (e2πiθ1·t, . . . , e2πiθn·t) ,
et son noyau est Zn. On obtient ainsi un diagramme commutatif
ZnLϕ|Zn //
� _
incl²²
Zn� _
incl²²
RnLϕ //
exp²²
Rn
exp²²
Tnϕ // Tn
Ceci implique que Lϕ ∈ GLn(R)∩Mn(Z); de meme pour l’inverse de ϕ, on obtientque (Lϕ)−1 = L(ϕ−1) ∈ GLn(R) ∩Mn(Z). Ces deux resultats combines montrentque
Lϕ ∈ GLn(Z) .
Au total, en appliquant le Theoreme 16.1 (Tn est connexe), on voit que le foncteurde Lie L(−) fournit un homomorphisme de groupe injectif
L(−) : Aut(Tn) ↪→ GLn(R) , ϕ 7−→ Lϕ
dont l’image est contenue dans GLn(Z). La construction de l’automorphisme ϕA
pour A ∈ GLn(Z) presentee plus haut nous montre maintenant que l’image de cethomomorphisme injectif est precisement GLn(Z), d’ou le resultat.

44. NORMALISATEUR DE TORES MAXIMAUX ET GROUPE DE WEYL 201
Proposition 44.9. Soit G un groupe de Lie compact connexe, et soit T untore maximal de G. L’application
W × T −→ T , (w, t) =([n], t
) 7−→ w •t := cn(t) = ntn−1
definit une action de W sur T par automorphismes de groupe de Lie, et cette actionest fidele, dans le sens que l’application suivante est injective :
W ↪→ Aut(T ) .
De plus, l’action de W sur T induit une action de W sur LT par automorphismesd’espace vectoriel (et donc d’algebre de Lie abelienne) donnee par
W × LT −→ LT , (w, X) =([n], X
) 7−→ w •X := AdG(n)·X ,
et cette action est egalement fidele, i.e.
W ↪→ GLR(LT ) .
Preuve. D’abord, si n ∈ N , alors cn applique T dans T , donc AdG(n) = Lcn
applique LT dans LT . Il est des lors evident que les deux applications donnees sontdes actions par automorphismes de groupe de Lie et, respectivement, d’algebrede Lie. Il reste uniquement a demontrer qu’elles sont fideles. Pour la premiere,si n ∈ N , on a [n]• = idT ssi cn|T = idT , ssi n ∈ ZG(T ) = T (en vertu duTheoreme 42.30), ssi [n] = T (qui est le neutre de W ). De meme, pour la deuxieme,si n ∈ N , on a [n]• = idLT ssi L(cn|T ) = idLT = LidT , ssi cn = idT par connexitede T , cf. Theoreme 16.1; on peut donc conclure par fidelite de la premiere action,i.e. celle sur T . ¤
Remarque 44.10. Suite a la Proposition 44.9, si T est un tore maximal d’ungroupe de Lie compact connexe G, on identifie W a la fois a un sous-groupe deAut(T ) et de GLR(LT ). On designe des lors son element neutre T par idT ou paridLT selon les cas; on utilise parfois la notation id, tout simplement.
Remarque 44.11. Soit G un groupe de Lie compact connexe G, et soient T1 etT2 deux tores maximaux de G. Si g ∈ G designe un element tel que gT1g
−1 = T2,dont l’existence est assuree par le Theoreme 42.19, alors, les deux diagrammes
WG(T1)∼= //
� _
²²
WG(T2)� _
²²Aut(T1)
∼= // Aut(T2)
WG(T1)∼= //
� _
²²
WG(T2)� _
²²GLR(LT1)
∼= // GLR(LT2)
commutent, ou les isomorphismes indiques sont induits, de facon evidente, par laconjugaison par g−1 (voir aussi la Proposition 44.5 et sa preuve), et les inclusionssont fournies par la Proposition 44.9. Cette observation a pour unique but d’illustrerle fait que le choix d’un tore maximal particulier T , n’a pas d’impact sensible surl’etude du groupe de Weyl W et de ses actions naturelles sur T et sur LT (il en serade meme pour l’action naturelle sur le dual LT ∗ qui sera introduite ulterieurement).
Theoreme 44.12. Soit G un groupe de Lie compact connexe, et soit T un toremaximal de G. Alors, la composante du neutre du normalisateur N est T , i.e.
Ne = T .

202 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Preuve. Considerons l’homomorphisme de groupes (qui est bien definie, cf. debutde la preuve de la Proposition 44.9)
Φ: N −→ GLR(LT ) , n 7−→ AdG(n)|LT ,
ou le co-domaine de AdG(n)|LT est LT . Par definition de Φ et de l’action de W surLT , et par fidelite de cette derniere (voir la Proposition 44.9), on a un diagrammecommutatif
NΦ //
%% %%KKKKKK GLR(LT )
W)
66nnnnnnn
Il s’ensuit que Ker(Φ) ⊆ T . Montrons que Ne ⊆ Ker(Φ). Par la Proposition 25.9,l’application
AdG : G −→ GLR(LG)est continue, donc AdG |N aussi, et donc Φ egalement, puisque GLR(LT ) est unsous-espace topologique de GLR(LG) (en fait, Φ est lisse). Pour n ∈ N , on a
Φ(n) = AdG(n)|LT = L(cn|T ) ,
ou cn|T a T pour co-domaine. Par l’Exemple 44.8, il suit que l’image de Φ estcontenue dans le sous-groupe discret{
Lϕ∣∣ ϕ ∈ Aut(T )
} ∼= GL`(Z)
de GLR(LT ) ∼= GL`(R), symboliquement,
NΦ //
!! !!BBB
BBBB
B GLR(LT )∼= // GL`(R)
W, �
99ttttttttt� � // Aut(T )
?�L(−)
OO
∼= // GL`(Z)?�
sous-groupe discret
OO
Par continuite de Φ et par connexite de la composante du neutre Ne de N , il decouleque Φ|Ne est une application constante, i.e.
Φ(Ne) ={
idLT
}.
Au total, on a doncNe ⊆ Ker(Φ) ⊆ T .
L’inclusion T ⊆ Ne etant evidente, il s’ensuit que Ne = T . ¤Theoreme 44.13. Soit G un groupe de Lie compact connexe, et soit T un tore
maximal de G. Alors le groupe de Weyl W est fini, et plus precisement, c’est legroupe des composantes du normalisateur N , i.e.
W = π0(N) = N/Ne .
Preuve. Par definition, on a W = N/T , et le Theoreme 44.12 nous apprend juste-ment que T = Ne. ¤
Corollaire 44.14. Soient G un groupe de Lie compact connexe, et T un toremaximal de G. Supposons que le rang de G est `. Alors, comme variete lisse, lenormalisateur N est diffeomorphe a la reunion disjointe de |W | copies du tore T`,symboliquement,
N ≈ T` q . . .q T`︸ ︷︷ ︸|W | copies
= T` ×W .

44. NORMALISATEUR DE TORES MAXIMAUX ET GROUPE DE WEYL 203
Preuve. Cela decoule du Theoreme 44.13 (voir aussi l’Exercice 3.19 (iii)). ¤
Exemple 44.15. Dans le groupe S3 = Sp(1), on a vu que T = S1 est un toremaximal. On verifie par calcul direct que le normalisateur correspondant est lesous-groupe
N = S1 q jS1 .
de S3. Ainsi, le groupe de Weyl est donne par W ={[1], [j]
} ∼= Z/2. Son actionsur T est determinee par
[j]•z = jzj−1 = z , ∀z ∈ S1 ,
et son action sur LT = R·i ⊂ R·i⊕ R·j ⊕ R·k = LS3 par
[j]•(λ·i) = j(λ·i)j−1 = −λ·i , ∀λ ∈ R .
Ainsi, l’action [j]• sur S1 est la conjugaison complexe, i.e. le passage a l’inverse, etl’action [j]• sur LS1 est le passage a l’oppose.
Exemple 44.16. Dans le groupe SU(2), on a vu que
T :={(
eiθ 00 e-iθ
) ∣∣∣ θ ∈ R}
est un tore maximal. En utilisant l’identification usuelle de SU(2) avec S3, ainsique l’exemple precedent, on voit que le normalisateur correspondant est
N = T q (0-11 0
)·T ={(
eiθ 00 e-iθ
) ∣∣∣ θ ∈ R}q
{(0 -e-iθ
eiθ 0
) ∣∣∣ θ ∈ R}
.
Le groupe de Weyl est donne par
W ={
[1I2],[
0-11 0
]} ∼= Z/2 .
Le generateur[
0-11 0
]de W agit sur T par passage a l’inverse, et sur LT par passage
a l’oppose.
Exemple 44.17. Dans le groupe SO(3), on a vu que
T :={(
cos θ sin θ 0-sin θ cos θ 0
0 0 1
) ∣∣∣ θ ∈ R}
=0@SO(2)
00
0 0 1
1Aest un tore maximal. Par calcul direct, on verifie que le normalisateur correspondantest
N = T q(-1 0 00 1 00 0 -1
)·T =
0@O(2)00
0 0 ∗
1A ,
ou le symbole ∗ prend la valeur du determinant du bloc 2× 2 en-haut a gauche. Legroupe de Weyl est donne par
W ={
[1I3],[-1 0 00 1 00 0 -1
]} ∼= Z/2 .
L’action de son generateur sur T est donnee par[-1 0 00 1 00 0 -1
]•(
cos θ sin θ 0-sin θ cos θ 0
0 0 1
)=
(cos θ -sin θ 0sin θ cos θ 0
0 0 1
)
et sur LT par [-1 0 00 1 00 0 -1
]•(
0 θ 0-θ 0 00 0 0
)=
(0 -θ 0θ 0 00 0 0
)
La premiere de ces actions est donc donnee par le passage a l’inverse, i.e. a la trans-position, et la seconde par le passage a l’oppose, i.e. egalement a la transposition.

204 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Exemple 44.18. Dans le groupe U(2), on montre aisement que
T :={(
eiθ1 00 eiθ2
) ∣∣∣ θ1, θ2 ∈ R}
est un tore maximal. Un calcul elementaire permet de voir que le normalisateurcorrespondant est
N = T q (0-11 0
)·T ={(
eiθ1 00 eiθ2
) ∣∣∣ θ1, θ2 ∈ R}q
{(0 -eiθ2
eiθ1 0
) ∣∣∣ θ1, θ2 ∈ R}
.
Le groupe de Weyl est donne par
W ={
[1I2],[
0-11 0
]} ∼= Z/2 .
Le generateur[
0-11 0
]de W agit sur T par
[0-11 0
]•(
eiθ1 00 eiθ2
)=
(eiθ2 00 eiθ1
)
et sur LT par [0-11 0
]•(
iθ1 00 iθ2
)=
(iθ2 00 iθ1
).
Proposition 44.19. Soit G un groupe de Lie compact connexe. Alors l’ensemblede tous les tores maximaux porte une structure canonique de variete lisse. Deplus, pour cette structure, a tout choix d’un tore maximal T de G correspond undiffeomorphisme {
tores maximaux de G} ≈ G
/NG(T ) .
Preuve. Soit T l’ensemble de tous les tores maximaux de G. Le groupe G agit surcet ensemble par conjugaison (cf. Remarque 42.4) et cette action est, en vertu duTheoreme 42.19, transitive. Bien entendu, si T ∈ T , son stabilisateur dans G pourcette action est le normalisateur NG(T ). Donc, a tout choix d’un element T ∈ Tcorrespond une bijection
G/NG(T ) ≈ {
tores maximaux de G}
.
Par le Theoreme 35.9, l’espace topologique quotient G/NG(T ) possede une struc-
ture canonique de variete lisse. Pour conclure, il nous suffit de montrer que cettestructure-la ne depend pas du choix de l’element T ∈ T . Si T ′ ∈ T est un secondelement, par le Theoreme 42.19, on trouve g ∈ G tel que
gTg−1 = T ′ .
Par la Proposition 44.5 (et sa preuve), la conjugaison par g−1 induit un isomor-phisme de groupes de Lie NG(T ) ∼= NG(T ′). Ainsi, cette conjugaison est un au-tomorphisme du groupe de Lie G qui applique le sous-groupe de Lie NG(T ) iso-morphiquement sur le sous-groupe de Lie NG(T ′), donc, par passage aux varieteslisses quotients, on obtient un diffeomorphisme G
/NG(T ) ≈ G
/NG(T ′), comme
souhaite. ¤
45. Normalisateurs et groupes de Weyl des groupes classiques
Nous allons indiquer ici, sans toute les demonstrations, quel est le groupe deWeyl W des groupes compacts classiques SU(n), U(n), SO(n) et Sp(n) (en sup-posant implicitement que n est plus grand ou egal a 2, 2, 3 et 1 respectivement,afin de s’assurer que les groupes G en questions ne sont pas abeliens, auquel casG = T = N et W est trivial). Nous allons egalement indiquer, dans chaque cas,

45. NORMALISATEURS ET GROUPES DE WEYL DES GROUPES CLASSIQUES 205
l’action du groupe de Weyl sur le tore maximal standard (cf. Section 43), note T ,et sur son algebre de Lie LT .
Theoreme 45.1. Pour le groupe SU(n), il y a un isomorphisme canonique
W ∼= Sym(n) .
De plus, l’action de W sur T et sur LT est donnee par permutation des elementsdiagonaux.
Preuve. Soit G = SU(n) ou U(n), et soit T le tore maximal standard dans G. Parla Proposition 42.11, on trouve un quasi-generateur τ de T , i.e.
〈τ〉 = T .
Soient eiθ1 , . . . , eiθn les n valeurs propres de τ , avec θ1, . . . , θn ∈ R, de sorte que
τ =(
eiθ1
�eiθn
)∈ T .
Si deux (au moins) des valeurs de τ etaient egales, il en irait de meme pour toutepuissance de τ , i.e. pour τk avec k ∈ Z (ce qui est effectivement vrai si k = 0), etdonc pour tout element de 〈τ〉 = T , or, ce n’est pas le cas de la matrice
e2πi/m
e2·2πi/m
e3·2πi/m
�en·2πi/m
∈ T
pour m := n(n+1)2 . Maintenant, si g ∈ G, alors gτg−1 possede egalement eiθ1 , . . . , eiθn
pour valeurs propres. Il s’ensuit que W (qui agit par conjugaison sur T par deselements de N ⊂ G) agit sur τ en permutant les n elements diagonaux. Donc Wagit de la meme facon sur {τk | k ∈ Z} = 〈τ〉 (puisque w •τk = (w •τ)k, pour toutw ∈ W et tout k ∈ Z), donc aussi sur l’adherence de ce sous-groupe dans G, i.e. sur〈τ〉 = T . Ceci prouve que W s’identifie a un sous-groupe de Sym(n), de telle faconque les actions sur T se correspondent, i.e. soient par permutation des elementsdiagonaux. Finalement, pour j < k dans l’ensemble {1, . . . , n}, considerons lamatrice
Ajk :=
1�
10 0−− 0 10 1 0| � |0 1 0-1 0−− 0 0
1
∧j
∧k
�
∈ G .
L’egalite ( 0 1-1 0 )·( a 0
0 b )·( 0 1-1 0 )−1 = ( b 0
0 a ) dans M2(C) (avec a, b ∈ C) montre que
Ajk ·(
eiϑ1
�eiϑn
)·A−1
jk =
eiϑ1
�eiϑj-1
eiϑk
eiϑj+1
�eiϑk-1
eiϑj
eiϑk+1
�eiϑn
206 3. GROUPES DE LIE REELS COMPACTS CONNEXES
pour tous ϑ1, . . . , ϑn ∈ R. En d’autres termes, la matrice Ajk est dans N et echangela j-ieme entree diagonale avec la k-ieme lorsqu’elle agit par conjugaison sur unelement arbitraire de T . Il resulte que le sous-groupe W ′ de Sym(n) correspondanta W contient toutes les transpositions (j k) avec j < k dans l’ensemble {1, . . . , n},donc W ′ = Sym(n) et W ∼= Sym(n). Il est maintenant evident que l’action de Wsur LT est egalement donnee par permutation des entrees diagonales (il suffit decalculer Ajk ·X ·A−1
jk pour X ∈ LT et pour j < k dans {1, . . . , n}). ¤
Theoreme 45.2. Pour le groupe U(n), il y a un isomorphisme canonique
W ∼= Sym(n) .
De plus, l’action de W sur T et sur LT est donnee par permutation des elementsdiagonaux.
Preuve. La demonstration est contenue dans la preuve du Theoreme 45.1. ¤Theoreme 45.3. Pour le groupe SO(2n+1), il y a un isomorphisme canonique
W ∼= (Z/2)n o Sym(n) ,
ou Sym(n) agit sur le F2-espace vectoriel (Z/2)n par permutation des coordonnees.De plus, l’action de W sur T et sur LT est donnee comme suit :
(i) le sous-groupe de W correspondant a Sym(n) agit par permutation desblocs 2× 2 diagonaux;
(ii) le sous-groupe normal de W correspondant a (Z/2)n agit de telle sorteque le generateur de la j-ieme copie de Z/2 transpose le j-ieme bloc 2× 2diagonal, ou 1 ≤ j ≤ n.
Remarque 45.4. Le produit semi-direct (Z/2)noSym(n) est ce qu’on appelleun produit en couronne ou “wreath product”; on le note souvent
(Z/2)n o Sym(n) = Z/2 o Sym(n) .
Theoreme 45.5. Pour le groupe SO(2n), il y a un isomorphisme canonique
W ∼= (Z/2)n−1 o Sym(n) ,
ou Sym(n) agit sur le F2-sous-espace vectoriel E0∼= (Z/2)n−1 du F2-espace vectoriel
E := (Z/2)n, dont les elements sont ceux de somme de coordonnees nulle, i.e.
E0 :={(ε1, . . . , εn) ∈ E
∣∣ ε1 + . . . + εn = 0}
;
W est donc un sous-groupe d’indice 2 de W ′ := (Z/2)noSym(n). De plus, l’actionde W sur T et sur LT est donnee par la restriction a W de l’action de W ′ decritecomme suit :
(i) le sous-groupe de W ′ correspondant a Sym(n) agit par permutation desblocs 2× 2 diagonaux;
(ii) le sous-groupe normal de W ′ correspondant a (Z/2)n agit de telle sorteque le generateur de la j-ieme copie de Z/2 transpose le j-ieme bloc 2× 2diagonal, ou 1 ≤ j ≤ n.
Theoreme 45.6. Pour le groupe Sp(n), il y a un isomorphisme canonique
W ∼= (Z/2)n o Sym(n) ,
ou Sym(n) agit sur le F2-espace vectoriel (Z/2)n par permutation des coordonnees.De plus, l’action de W sur T et sur LT est donnee comme suit :

46. SYSTEME DE RACINE ET DIAGRAMME DE DYNKIN 207
(i) le sous-groupe de W correspondant a Sym(n) agit par permutation deselements diagonaux;
(ii) le sous-groupe normal de W correspondant a (Z/2)n agit de telle sorte quele generateur de la j-ieme copie de Z/2 prend l’inverse du j-ieme elementdiagonal pour l’action sur T , et prend l’oppose du j-ieme element diagonalpour l’action sur LT , ou 1 ≤ j ≤ n.
Remarque 45.7. Pour le groupe SUH2n∼= Sp(n), le groupe de Weyl est isomor-
phe a celui pour Sp(n), et l’action sur T et sur LT est la meme, mais “dedoublee”,c’est-a-dire qu’elle effectue la meme operation a la fois sur la diagonale du blocn× n en-haut a gauche, et sur la diagonale du bloc n× n en-bas a droite.
Remarque 45.8. Les groupes de Weyl pour SO(2n + 1) et pour Sp(n) sontcanoniquement isomorphes, et de telle maniere que leur tores maximaux sont iso-morphes de facon equivariante, i.e. de facon compatible avec l’action du groupe deWeyl respectif.
46. Systeme de racine et diagramme de Dynkin
On fixe un groupe de Lie compact connexe G, et un tore maximal T de G. Onsuppose que G est non-abelien. On considere les C-algebres de Lie
LGC := LG⊗ C = LG⊕ i·LG et LTC := LT ⊗ C = LT ⊕ i·LT
obtenue en complexifiant les R-algebres de Lie LG et LT , voir la Definition 28.7.
Notation 46.1. Soit LT ∗ := HomR(LT,R) le dual du R-espace vectoriel LT ,dont les elements sont les formes R-lineaires sur LT . Etant donne un elementα ∈ LT ∗, on considere le C-sous-espace vectoriel
Lα :={Z ∈ LGC
∣∣ [X,Z] = 2πiα(X)·Z , ∀X ∈ LT}
de LGC.
Remarque 46.2. Lorsque α = 0, on a
L0 ={Z ∈ LGC
∣∣ [X,Z] = 0 , ∀X ∈ LT}
.
Definition 46.3. Un element α ∈ LT ∗ est une racine de G si(i) la forme lineaire α est non-nulle, i.e. α 6= 0;(ii) le C-sous-espace vectoriel Lα de LGC est non-nul, i.e. Lα 6= 0.
L’ensemble R = R(G,T ) ⊆ LT ∗ de toutes les racines de G est appele le systeme deracine de G.
Nous allons admettre le resultat suivant, qui est un classique de la theorie desrepresentations (et qui est base sur le Lemme de Schur).
Theoreme 46.4. L’algebre de Lie LT est une sous-algebre de Lie abeliennemaximale de LG, et on a l’egalite
L0 = LTC .
De plus, le C-espace vectoriel LGC se decompose en somme directe
LGC = LTC ⊕⊕
α∈R
Lα .

208 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Par ailleurs, pour α ∈ R et λ ∈ R, on a
λ·α ∈ R ⇐⇒ λ = ±1 ,
Finalement, pour α ∈ R, on a L−α = Lα (conjugaison complexe), et
dimC(Lα) = 1 .
Corollaire 46.5. Le systeme de racine R de G est un sous-ensemble fininon-vide de LT ∗, de cardinalite paire. Par consequent, on a
dim(G)− rang(G) = 2|R| ∈ 2N∗ .
Preuve. Le Theoreme 46.4 dit que LGC = LT ⊕⊕α∈R Lα, avec dimC(LGC) < ∞
et dimC(Lα) = 1, donc |R| est fini. Les dernieres parties de ce theoreme impliqueque |R| est pair, et que
dim(G)− rang(G) = dimC(LGC)− dimC(LTC) = 2|R| .Finalement, R 6= ∅ du fait que G est suppose non-abelien. ¤
Remarque 46.6. La decomposition LGC = LT ⊕ ⊕α∈R Lα est en fait la
decomposition de la representation AdCG de T , que nous allons maintenant decrire,en composantes irreductibles (avec LT = L0 designant le sommand ou cette repre-sentation est triviale). La representation adjointe de G restreinte a T , i.e.
AdG |T : T −→ GLR(LG) ,
fournit une representation complexe de T donnee par
AdCG := AdG |T ⊗ idC : T −→ GLC(LGC) ,
explicitement donnee par
AdCG(t)·(X ⊗ λ) := AdG(t)·X ⊗ λ ,
pour t ∈ T , X ∈ LG et λ ∈ C, en d’autres termes,
AdCG(t)·(X + iY ) := AdG(t)·X + i·AdG(t)·Y ,
pour t ∈ T et X,Y ∈ LG. Ainsi, pour une racine α ∈ R de G, le groupe T agit surLα via
AdCG(expT (X)
)·Z = e2πiα(X)︸ ︷︷ ︸∈S1
·Z ,
pour tout X ∈ LT et tout Z ∈ Lα (rappelons que expT est surjective).
Definition 46.7. Une base du systeme de racine R est une partie B de R quiverifie les proprietes suivantes :
(i) elle est R-lineairement independante dans LT ∗;(ii) tout element α de R s’ecrit (de maniere unique) comme combinaison
lineaire d’elements de B avec des coefficients soit tous dans N, soit tousdans −N, i.e.
α = n1 ·β1 + . . . + nq ·βq ,
avec q ≥ 1, β1, . . . , βq ∈ B, n1, . . . , nq ∈ Z, et soit n1, . . . , nq sont touspositifs, soit tous negatifs; dans le premier cas, on dit que α est une racinepositive (par rapport a B) et on ecrit α ∈ R+, et dans le second que α estune racine negative (par rapport a B) et on ecrit α ∈ R−. Les elementsde B sont appeles les racines simples.

46. SYSTEME DE RACINE ET DIAGRAMME DE DYNKIN 209
Remarque 46.8. Il est utile d’observer qu’on a
B ⊆ R et R− = −R+ .
On peut etablir les deux resultats suivants.
Proposition 46.9. Le systeme de racine R possede une base (non-unique).
Proposition 46.10. Toutes les bases de R ont le meme cardinal; si G estsemi-simple, ce cardinal est precisement le rang de G.
Nous allons illustrer ces notions par les exemples de SU(n) et de U(n), avecn ≥ 2, que nous allons enoncer comme un theoreme (que nous admettrons).
Theoreme 46.11. Soit G designant, a choix, soit SU(n), soit U(n). Le systemede racine R du groupe G, relativement au tore maximal standard T , est donne par
R ={
αj,k :(
2πiθ1�
2πiθn
)7−→ θj − θk
∣∣∣∣ j 6= k dans {1, . . . , n}}
.
Par ailleurs, la base “standard” de R est decrite par
B ={α1,2, α2,3, . . . , αn−1,n
},
et l’ensemble des racines positives par rapport a B n’est autre que
R+ ={αj,k
∣∣ j < k dans {1, . . . , n}} .
Remarque 46.12. Le groupe de Weyl W agit sur le dual LT ∗ par l’action dualede celle sur LT , i.e.
w •α(X) := α(w−1 •X) ,
pour w ∈ W , ϕ ∈ LT ∗ et X ∈ LT . La raison pour laquelle on ne definit pas cetteaction par la formule ϕ(w •X) est uniquement pour que cette action soit une actiona gauche. Si ( . | . ) est un produit scalaire arbitraire sur LT ∗, alors l’application
〈 . | . 〉 : LT ∗ × LT ∗ −→ R , (ϕ,ψ) 7−→ 〈ϕ|ψ〉 :=∑
w∈W
(w •ϕ|w •ψ)
est un produit scalaire W -invariant sur LT ∗.
Proposition 46.13. Soit 〈 . | . 〉 un produit scalaire W -invariant sur LT ∗. Con-siderons deux racines simples α, β ∈ B distinctes. Alors l’angle ](α, β) entre α etβ ne depend pas du choix de 〈 . | . 〉 et ne peut prendre qu’une des valeurs suivantes :
](α, β) ∈ {π2 = 90◦, 2π
3 = 120◦, 3π4 = 135◦, 5π
6 = 150◦}
.
De plus, quelque soit le choix de 〈 . | . 〉, si cet angle vaut
• 2π3 = 120◦ , alors α et β ont la meme norme;
• 3π4 = 135◦ , alors le rapport des normes de α et β est 2±1;
• 5π6 = 150◦ , alors le rapport des normes de α et β est 3±1.
De plus, le cardinal de B et la liste de ces angles et ces rapports de normes nedependent pas du choix de B, ni de celui de T .
Cette proposition, que nous ne demontrerons pas, permet la definition suivante.

210 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Definition 46.14. Le diagramme de Dynkin de G, que l’on va noterD = D(G),est le graphe dont les sommets representent les racines simples, i.e. les elements deB, et la presence ou non d’une arete (eventuellement multiple et orientee) entredeux racines simples α, β ∈ B est regie par les regles suivantes :
(i) si α = β, alors il n’y a pas d’arete, i.e.
©²ª±°®α
(ii) si ](α, β) = π2 = 90◦, alors il n’y a pas d’arete, i.e.
©²ª±°® ©²ª±°®α β
(iii) si ](α, β) = 2π3 = 120◦, alors il y a une arete simple, non orientee, i.e.
©²ª±°® ©²ª±°®α β
(iv) si ](α, β) = 3π4 = 135◦, alors il y a une arete double, orientee de la plus
longue racine vers la plus courte, i.e.
©²ª±°® ©²ª±°®>α β
ou ©²ª±°® ©²ª±°®<α β
(v) si ](α, β) = 5π6 = 150◦, alors il y a une arete triple, orientee de la plus
longue racine vers la plus courte, i.e.
©²ª±°® ©²ª±°®>α β
ou ©²ª±°® ©²ª±°®<α β
Definition 46.15. Le diagramme de Coxeter de G est le diagramme de Dynkinde G prive de l’orientation eventuelle des aretes; on le note C(G) ou C(W ) (car onmontre qu’il ne depend que du groupe de Weyl de G). On dit que le systeme deracines R de G est irreductible si le diagramme de Coxeter de G est connexe.
Exemple 46.16. Pour le tore maximal standard T de SU(n), l’algebre de LieLT est constituee des matrices diagonales
[θ1, . . . , θn] :=(
2πiθ1�
2πiθn
)
de trace nulle, avec θ1, . . . , θn ∈ R. Donc, toute forme R-lineaire sur LT est univo-quement decrite par un n-tuple (λ1, . . . , λn) ∈ Rn agissant sur LT via la formule
(λ1, . . . , λn)• [θ1, . . . , θn] := λ1 ·θ1 + . . . + λn ·θn .
Ceci fournit une identification entre LT ∗ et Rn et le produit scalaire standard surRn fournit ainsi un produit scalaire sur LT ∗ donne par
⟨(λ1, . . . , λn)
∣∣(µ1, . . . , µn)⟩
:= (λ1 ·µ1, . . . , λn ·µn) .
Il est immediat de verifier que ce produit scalaire est W -invariant (rappelons que Wagit sur T par permutation des entrees diagonales, et donc sur LT ∗, identifie a Rn,par permutation des coordonnees). Ainsi, si j < k sont les elements de {1, . . . , n},alors la racines αj,k ∈ R ⊂ LT ∗ de SU(n) correspond au n-tuple
(0, . . . , 0, 1, 0, . . . , 0,−1, 0, . . . , 0) ∈ Rn ,
avec le 1 en j-ieme position et le −1 en k-ieme position; on a donc
||αj,k|| =√〈αj,k|αj,k〉 =
√2 .

47. LE THEOREME DE CLASSIFICATION 211
Par exemple, si n ≥ 3, on a〈α1,2|α2,3〉
||α1,2||·||α2,3|| = − 12 donc ](α, β) = 2π
3 = 120◦ ,
et, si n ≥ 4, alors
〈α1,2|α3,4〉 = 0 donc ](α, β) = π2 = 90◦ .
En iterant le meme type de calculs, on en deduit que le diagramme de Dynkin deSU(n) coıncide avec son diagramme de Coxeter, et est donne par
©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®···α1,2 α2,3 αn−2,n−1 αn−1,n
Il suit que le systeme de racine de SU(n) est irreductible.
47. Le Theoreme de Classification
Dans la presente section, nous allons enoncer le Theoreme de Classification desgroupes de Lie compacts connexes. La demonstration du theoreme depasse le cadrede ces notes.
Rappel 47.1. Si G est un groupe de Lie compact connexe, son groupe adjointest le groupe de Lie quotient
PG := G/Z(G) ,
voir la Definition 25.18.
Theoreme 47.2 (Theoreme de Classification).Soit G un groupe de Lie compact connexe. Alors :(I) Il existe des entiers r, s ∈ N, des groupes de Lie compacts connexes simples etsimplement connexes G1, . . . , Gs tels que, comme groupe de Lie,
G ∼= (Tr ×G1 × . . .×Gs)/K ,
ou K est un sous-groupe fini du centre de Tr ×G1 × . . .×Gs, i.e.
K 6 Z(Tr ×G1 × . . .×Gs) et |K| < ∞ .
(II) Les entiers r et s sont uniques, et les groupes de Lie G1, . . . , Gs sont uniquesa isomorphisme et a renumerotation pres.(III) Le groupe G est abelien ssi s = 0; G est semi-simple ssi r = 0; G est simplessi r = 0 et s = 1; G est simplement connexe ssi r = 0 et K = {e}. Si r = 0, alorsπ1(G) ∼= K; si r ≥ 1, alors π1(G) est un groupe abelien infini de type fini et derang r. Le centre de G est donne par
Z(G) ∼= Z(Tr ×G1 × . . .×Gs)/K .
Par consequent, le centre de G est fini ssi r = 0.(IV) Le revetement universel G et le groupe adjoint PG de G sont donnes par
G ∼= Rr ×G1 × . . .×Gs et PG ∼= PG1 × . . .× PGs ,
et il y a un isomorphisme d’algebres de Lie
LG ∼= Rr ⊕ LG1 ⊕ . . .⊕ LGs .
Si T1, . . . , Ts sont des tores maximaux dans G1, . . . , Gs respectivement, alors
T := (Tr × T1 × . . .× Ts)/K

212 3. GROUPES DE LIE REELS COMPACTS CONNEXES
est un tore maximal de G. Si W1, . . . , Ws sont les groupes de Weyl de G1, . . . , Gs
correspondants a T1, . . . , Ts respectivement, et si W est le groupe de Weyl de Grelativement a T , alors il y a un isomorphisme
W ∼= W1 × . . .×Ws .
De plus, l’action de W sur T est induite, de facon evidente, par l’action trivialesur Tr et par l’action de chaque Wj sur Tj, pour j = 1, . . . , s. Le diagramme deDynkin de G est la reunion disjointe des diagrammes de Dynkin de G1, . . . , Gs, i.e.
D(G) = D(G1)q . . .qD(Gs) .
(V) Tout groupe de Lie compact connexe simple et simplement connexe, et en parti-culier G1, . . . , Gs, est isomorphe a un unique membre de la liste suivante de groupesde Lie compacts connexes simples et simplement connexes :
• type An , n ≥ 1 : SU(n + 1)
• type Bn , n ≥ 2 : Spin(2n + 1)
• type Cn , n ≥ 3 : Sp(n)
• type Dn , n ≥ 4 : Spin(2n)
• type En , n = 6, 7, 8 : E6, E7, E8
• type Fn , n = 4 : F4
• type Gn , n = 2 : G2
ou E6, E7, E8, F4 et G2 sont certains groupes de Lie specifiques appeles les groupesexceptionnels. De plus, le centre de chaque groupe de toutes ces familles est fini.
Remarque 47.3. La “reciproque” du Theoreme de classification est egalementvraie. Plus clairement, si r et s sont des entiers ≥ 0, si G1, . . . , Gs sont des groupesde Lie compacts connexes simples et simplement connexes, et si K est un sous-groupe fini du centre du produit Tr ×G1 × . . .×Gs, alors le groupe quotient
(Tr ×G1 × . . .×Gs)/K
est, de facon canonique, un groupe de Lie compact connexe. Ainsi, ce theoremedonne une recette pour produire tous les groupes de Lie compacts connexes a iso-morphisme pres. D’apres cette recette, les groupes de Lie compacts connexes sim-ples et simplement connexes, dont la liste exhaustive est donnee (a isomorphismepres), sont les pieces fondamentales – ou “legos” – a partir desquels on peut cons-truire tous les groupes de Lie compacts connexes. A noter egalement que le centredu produit Tr ×G1 × . . .×Gs n’est autre que
Z(Tr ×G1 × . . .×Gs) = Tr ×Z(G1)× . . .×Z(Gs) .
Remarque 47.4. Il est reellement appreciable que les groupes classiques nousfournissent, a isomorphisme pres, tous les “legos” qui permettent de construiretous les groupes de Lie compacts connexes, a cinq exceptions pres (les groupesexceptionnels), et au prix – somme toute modeste – de passer a un revetementdouble pour les groupes orthogonaux speciaux SO(n) afin de disposer de Spin(n)pour n ≥ 3 (ou meme seulement pour n ≥ 5, puisque Spin(3) ∼= SU(2) et puisqueSpin(4) n’est pas simple, et de fait, on a Spin(4) ∼= SU(2)× SU(2)).
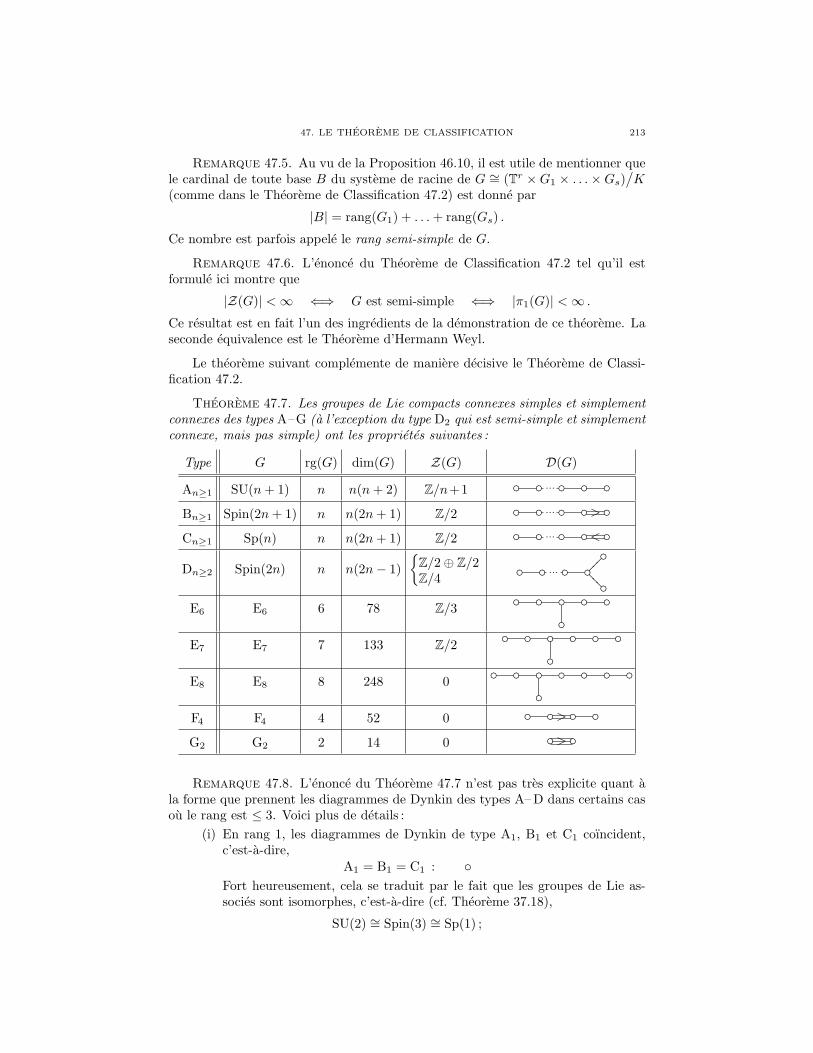
47. LE THEOREME DE CLASSIFICATION 213
Remarque 47.5. Au vu de la Proposition 46.10, il est utile de mentionner quele cardinal de toute base B du systeme de racine de G ∼= (Tr ×G1 × . . .×Gs)
/K
(comme dans le Theoreme de Classification 47.2) est donne par
|B| = rang(G1) + . . . + rang(Gs) .
Ce nombre est parfois appele le rang semi-simple de G.
Remarque 47.6. L’enonce du Theoreme de Classification 47.2 tel qu’il estformule ici montre que
|Z(G)| < ∞ ⇐⇒ G est semi-simple ⇐⇒ |π1(G)| < ∞ .
Ce resultat est en fait l’un des ingredients de la demonstration de ce theoreme. Laseconde equivalence est le Theoreme d’Hermann Weyl.
Le theoreme suivant complemente de maniere decisive le Theoreme de Classi-fication 47.2.
Theoreme 47.7. Les groupes de Lie compacts connexes simples et simplementconnexes des types A–G (a l’exception du type D2 qui est semi-simple et simplementconnexe, mais pas simple) ont les proprietes suivantes :
Type G rg(G) dim(G) Z(G) D(G)
An≥1 SU(n + 1) n n(n + 2) Z/n+1 ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®···
Bn≥1 Spin(2n + 1) n n(2n + 1) Z/2 ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®>···
Cn≥1 Sp(n) n n(2n + 1) Z/2 ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®<···
Dn≥2 Spin(2n) n n(2n− 1){Z/2⊕ Z/2Z/4
©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®©²ª±°®
©²ª±°®···
ÄÄÄ??
?
E6 E6 6 78 Z/3©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®
©²ª±°®E7 E7 7 133 Z/2
©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®©²ª±°®
©²ª±°®
E8 E8 8 248 0©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®
©²ª±°®©²ª±°® ©²ª±°®
F4 F4 4 52 0 ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®>
G2 G2 2 14 0 ©²ª±°® ©²ª±°®>
Remarque 47.8. L’enonce du Theoreme 47.7 n’est pas tres explicite quant ala forme que prennent les diagrammes de Dynkin des types A–D dans certains casou le rang est ≤ 3. Voici plus de details :
(i) En rang 1, les diagrammes de Dynkin de type A1, B1 et C1 coıncident,c’est-a-dire,
A1 = B1 = C1 : ©²ª±°®Fort heureusement, cela se traduit par le fait que les groupes de Lie as-socies sont isomorphes, c’est-a-dire (cf. Theoreme 37.18),
SU(2) ∼= Spin(3) ∼= Sp(1) ;
214 3. GROUPES DE LIE REELS COMPACTS CONNEXES
ils sont egalement isomorphes aux groupes de Lie SUH2 , SO(3) et S3.(ii) En rang 2, les diagrammes de Dynkin de type B2 et C2 coıncident (a
isomorphisme pres), i.e.
B2∼= C2 : ©²ª±°® ©²ª±°®> ∼= ©²ª±°® ©²ª±°®<
Le diagramme de Dynkin de type D2 n’est pas connexe (ce qui a pourorigine la non-simplicite de so(4)), et il coıncide avec la reunion disjointede deux copies du diagramme de Dynkin de type A1, i.e.
D2 = A1qA1 : ©²ª±°® ©²ª±°®A nouveau, ces deux phenomenes se traduisent par des isomorphismesexceptionnels entre les groupes de Lie correspondants (auquel on se referecomme etant des “accidents de basse dimension”), a savoir,
Spin(5) ∼= Sp(2) et SU(2)× SU(2) ∼= Spin(4) ,
cf. Theoreme 37.18 et Remarque 37.21.(iii) En rang 3, les diagrammes de Dynkin de type A3 et D3 coıncident (a
isomorphisme pres), i.e.
A3∼= D3 : ©²ª±°® ©²ª±°® ©²ª±°® ∼= ©²ª±°®
©²ª±°®
©²ª±°®
ÄÄÄÄÄ
????
?
Une fois de plus, cela se traduit par un isomorphisme exceptionnel entreles groupes de Lie correspondants, a savoir,
SU(4) ∼= Spin(6) ,
cf. Remarque 37.21.
Remarque 47.9. Au vu de la presence du quotient central par K dans leTheoreme de Classification 47.2, il est a nouveau appreciable que le centre de toutgroupe de Lie compact connexe simple et simplement connexe possede au plus 4elements, a l’exception des groupes isomorphes a SU(n) avec n ≥ 5 (auquel casle centre a l’agreable propriete d’etre cyclique, d’ordre n, et il est ainsi aise d’yexhauster les sous-groupes centraux).
Remarque 47.10. La notion d’adjoint d’un groupe de Lie connexe fournit lesgroupes classiques de type adjoints suivants :
PSO(n) = PSpin(n) , PSU(n) = PU(n) et PSp(n) .
Bien sur, lorsque le centre de G est trivial, on peut identifier G et son groupeadjoint PG. Pour les groupes exceptionnels, cela nous fournit deux autres groupes,egalement appeles groupes exceptionnels (de type adjoints), a savoir
PE6 = E6
/Z/3 et PE7 = E7
/Z/2 .
Il y a donc, au total, sept groupes exceptionnels (compacts).
Definition 47.11. Si G est un groupe de Lie, on note Aut(G) le groupe desautomorphismes de groupe de Lie de G, et par Int(G) le groupe des automorphismesinterieurs, i.e. le sous-groupe normal
Int(G) :={cg : x 7→ gxg−1
∣∣ g ∈ G}
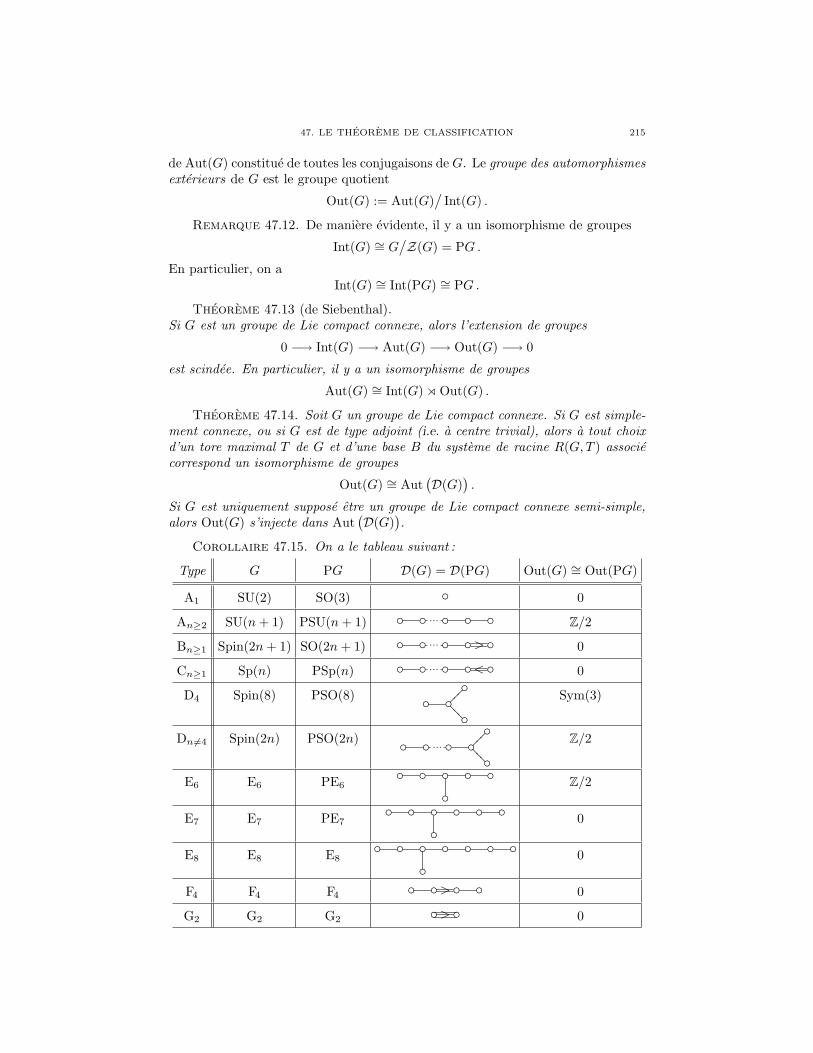
47. LE THEOREME DE CLASSIFICATION 215
de Aut(G) constitue de toutes les conjugaisons de G. Le groupe des automorphismesexterieurs de G est le groupe quotient
Out(G) := Aut(G)/
Int(G) .
Remarque 47.12. De maniere evidente, il y a un isomorphisme de groupes
Int(G) ∼= G/Z(G) = PG .
En particulier, on aInt(G) ∼= Int(PG) ∼= PG .
Theoreme 47.13 (de Siebenthal).Si G est un groupe de Lie compact connexe, alors l’extension de groupes
0 −→ Int(G) −→ Aut(G) −→ Out(G) −→ 0
est scindee. En particulier, il y a un isomorphisme de groupes
Aut(G) ∼= Int(G)oOut(G) .
Theoreme 47.14. Soit G un groupe de Lie compact connexe. Si G est simple-ment connexe, ou si G est de type adjoint (i.e. a centre trivial), alors a tout choixd’un tore maximal T de G et d’une base B du systeme de racine R(G,T ) associecorrespond un isomorphisme de groupes
Out(G) ∼= Aut(D(G)
).
Si G est uniquement suppose etre un groupe de Lie compact connexe semi-simple,alors Out(G) s’injecte dans Aut
(D(G)).
Corollaire 47.15. On a le tableau suivant :
Type G PG D(G) = D(PG) Out(G) ∼= Out(PG)
A1 SU(2) SO(3) ©²ª±°® 0
An≥2 SU(n + 1) PSU(n + 1) ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®··· Z/2
Bn≥1 Spin(2n + 1) SO(2n + 1) ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®>··· 0
Cn≥1 Sp(n) PSp(n) ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®<··· 0
D4 Spin(8) PSO(8) ©²ª±°® ©²ª±°®©²ª±°®
©²ª±°®ÄÄÄ??
? Sym(3)
Dn6=4 Spin(2n) PSO(2n) ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®©²ª±°®
©²ª±°®···
ÄÄÄ??
? Z/2
E6 E6 PE6
©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®©²ª±°®
Z/2
E7 E7 PE7
©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®©²ª±°®
©²ª±°®0
E8 E8 E8
©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®©²ª±°®
©²ª±°® ©²ª±°®0
F4 F4 F4©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®> 0
G2 G2 G2©²ª±°® ©²ª±°®> 0

216 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Remarque 47.16. Comme le montre les exemples de B2, C2, F4 et G2, on nepeut pas remplacer le diagramme de Dynkin D(G) par le diagramme de CoxeterC(G) dans le Theoreme 47.14.
Remarque 47.17. On montre que
Out(SO(8)
) ∼= Z/2 .
Remarque 47.18. Les resultats precedents montrent que tout les groupes deLie compacts connexes simples (pas necessairement simplement connexes ou detype adjoint) n’ont que des automorphismes exterieurs d’ordre 1 ou 2, a l’exceptiondes groupes de Lie isomorphes a Spin(8) ou a PSO(8), qui admettent un automor-phisme de trialite, i.e. un automorphisme exterieur d’ordre 3; pour etre precis, ilsen admettent deux, inverses l’un de l’autre (pour chaque choix d’un tore maximalT est d’une base B de R).
Remarque 47.19. On a vu a l’exemple 39.9 que, pour les R-algebres R, C etH, on a des isomorphismes de groupes de Lie canoniques
AutR(R) = 0 , AutR(C) ∼= Z/2 et AutR(H) ∼= SO(3) .
Il est des lors interessant de se demander quel est le groupe des automorphismes dela R-algebre des octaves de Cayley Ca, groupe qui porte une structure canoniquede groupe de Lie en vertu du Theoreme 39.4. Le miracle est que ce groupe de Lieest l’un des groupes exceptionnels, le plus petit (en rang et en dimension), a savoir
G2 = AutR(Ca) .
Il suit egalement du Theoreme 39.4 que cela fournit aussi une description explicitede l’algebre de Lie de ce groupe exceptionnel, i.e.
LG2 = derR(Ca) .
Il se fait que le deuxieme plus petit groupe exceptionnel, F4, possede egalement unedescription comme groupe d’automorphismes d’une R-algebre de dimension finie.Considerons le R-espace vectoriel de dimension 27
A :={X ∈M3(Ca)
∣∣ tX = X}
de toutes les matrices 3× 3 octaviennes qui sont hermitiennes. Etant donne quetXY = tY tX
pour toutes matrices octaviennes X, Y ∈ Mn(Ca), l’espace vectoriel A est fermepour la multiplication jordanienne definie par
X ◦ Y := 12 (XY + Y X) ,
pour X,Y ∈ M3(Ca). Cette multiplication jordanienne satisfait X ◦ X = XXpour X ∈ M3(Ca), et est commutative, mais elle est “loin d’etre associative”.Le R-espace vectoriel A muni de la multiplication jordanienne est parfois appeleel’algebre d’Albert, en l’honneur d’Abraham Adrian Albert (1905–1972) qui fut l’undes premiers a l’avoir etudiee. Comme indirectement annonce, on a
F4 = AutR(A ) et LF4 = derR(A ) .

48. GROUPES DE REFLEXIONS, GROUPES DE COXETER ET CORACINES 217
48. Groupes de reflexions, groupes de Coxeter et coracines
Definition 48.1. Soit E un R-espace vectoriel de dimension finie, muni d’unproduit scalaire.
(i) Une reflexion dans E est une transformation R-lineaire s de E qui fixe unhyperplan Hs, i.e. un R-sous-espace vectoriel de co-dimension 1 de E, etqui se restreint en l’application − idH⊥s sur le complementaire orthogonalH⊥s de Hs dans E; on a donc
s = idHs⊕(− idH⊥s ) : Hs ⊕H⊥s −→ Hs ⊕H⊥s ,
ou les sommes directes sont orthogonales dans le sens evident.(ii) Un groupe de reflexions fini sur E est un sous-groupe fini non-trivial de
GLR(E), qui est engendre par des reflexions dans E.
Exemple 48.2.
(i) Pour n ≥ 3, le groupe dihedral Dih2n a 2n elements, defini comme etantle groupe de symetries d’un n-gone regulier dans le plan, est un groupede reflexions fini.
(ii) Le groupe de symetries de chacun des cinq solides platoniciens dans R3 estun groupe de reflexion fini. Celui du cube coıncide avec celui de l’octaedre(a conjugaison pres), et celui du dodecaedre avec celui de l’icosaedre.
(iii) Le groupe de symetries de tout polyedre regulier convexe dans Rn estun groupe de reflexions fini. La classification de ces polyedres (disons devolume unite, a isometrie pres) est bien connue dans R2 et R3 (cf. (i) et(ii) ci-dessus). En toute dimension n, il y a toujours l’hypertetraedre (degroupe Sym(n)), l’hypercube et l’hyperoctaedre (ces deux derniers sontduaux l’un de l’autre et donnent des lors le meme groupe de symetries,isomorphe au groupe de Weyl de type Bn ou Cn, i.e. a (Z/2)noSym(n)).En dimension 2, il y une infinite d’autres tels polyedres. En dimension 3, ily a deux “exceptionnels”, le dodecaedre et l’octaedre (qui sont en dualite).En dimension 4, il y a trois autres polyedres, dits “exceptionnels”; l’undeux est auto-dual (son groupe de symetrie est isomorphe au groupe deWeyl de F4), et les deux autres sont en dualite (leur groupe de symetriecommun est note H4). En dimension ≥ 5, il n’y a plus d’“exceptionnels”.
Theoreme 48.3. Munissons LT d’un produit scalaire W -invariant. Alors, pourchaque racine α ∈ R, la reflexion sα dans l’hyperplan Ker(α) ⊂ LT est un elementdu groupe de Weyl W . De plus, si B est une base de R, alors l’ensemble {sα}α∈B
engendre W . En particulier, W est un groupe de reflexion fini dans GLR(LT ).
Proposition 48.4. Pour chaque racine α ∈ R, il existe un unique elementα∨ ∈ LT , appele la co-racine associee a α, tel que
sα(X) = X − α(X)·α∨ ,
pour tout X ∈ LT .
Definition 48.5. Le systeme de co-racines de G est le sous-ensemble (fini)
R∨ :={α∨
∣∣ α ∈ R}
de LT .

218 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Proposition 48.6. L’action naturelle de W sur LT ∗ et celle sur LT se re-streignent en des actions sur R et R∨ respectivement, en d’autres termes, W per-mute les racines et les co-racines de G, i.e. on a
W •R = R dans LT ∗ et W •R∨ = R∨ dans LT .
Le resultat suivant viens preciser le contenu de la Proposition 46.10.
Proposition 48.7. Si R·R∨ designe le R-sous-espace vectoriel de LT engendrepar le systeme de racines R, alors
LT = z(LG)⊕ R·R∨ = LZ(G)⊕ R·R∨ .
De plus, si B designe une base de R, alors
LT = z(LG)⊕⊕
α∈B
R·α∨
(ou la somme indiquee a droite est effectivement une somme directe).
Proposition 48.8. Chaque co-racine de G est dans le reseau entier Γ(T ) de G,c’est-a-dire,
exp(α∨) = e ,
pour tout α ∈ R. Si B designe une base de R, on a donc l’inclusion⊕
α∈B
Z·α∨ ⊆ Γ(T )
(ou la somme indiquee est effectivement une somme directe).
Exemple 48.9. Pour le groupe de Lie SU(n) et pour la racine α := αj,k ∈ R,avec j < k dans {1, . . . , n}, on a
α∨ =
0�
02πi
0�
0-2πi
0�
0
∈ LT ,
avec le 2πi en j-ieme position sur la diagonale, et avec son oppose en k-ieme position.
Definition 48.10. Un groupe de Coxeter est un groupe W admettant unepresentation par generateurs et relations de la forme suivante : il existe un ensembled’indices I non-vide, un systeme de generateurs {si}i∈I de W , sujets aux relations
s2i = e , ∀i ∈ I et (sisj)mij = e , ∀i, j ∈ I , i 6= j
avec mij = mji ∈ {2, 3, . . .} q {∞} pour tous i 6= j dans I; ici, “ (sisj)∞ = e ”signifie l’absence de relation imposee entre si et sj . On convient egalement deposer mii := 1 pour tout i ∈ I. Une telle presentation est appelee presentationde Coxeter. Le diagramme de Coxeter de W est le graphe dont l’ensemble dessommets est I, et tel que si i 6= j sont des elements de I, alors il sont relies par unearete (non-orientee) ssi mij 6= 2, et cette arete est etiquetee par le “nombre” mij ,c’est-a-dire,
©²ª±°® ©²ª±°®i jmij
De plus, on admet les options suivantes (motivees par l’analogie avec le diagrammede Coxeter d’un groupe de Lie compact connexe, cf. plus loin) :

48. GROUPES DE REFLEXIONS, GROUPES DE COXETER ET CORACINES 219
(i) si mij = 3, on peut omettre l’etiquetage, i.e.
©²ª±°® ©²ª±°®i j3 à ©²ª±°® ©²ª±°®i j
(ii) si mij = 4, on peut remplacer l’arete simple etiquetee par une arete doublenon-etiquetee, i.e.
©²ª±°® ©²ª±°®i j4 à ©²ª±°® ©²ª±°®i j
(iii) si mij = 6, on peut remplacer l’arete simple etiquetee par une arete triplenon-etiquetee, i.e.
©²ª±°® ©²ª±°®i j6 à ©²ª±°® ©²ª±°®i j
Remarque 48.11. Le diagramme de Coxeter d’un groupe de Coxeter permetde retrouver (a isomorphisme pres) le groupe ainsi que sa presentation de Coxeter.
Theoreme 48.12. Tout groupe de reflexions fini est un groupe de Coxeter.
Corollaire 48.13. Le groupe de Weyl W est un groupe de Coxeter fini. Plusprecisement, si B est une base de R, alors W admet la presentation suivante :
W =⟨{sα}α∈B
∣∣ (sαsβ)`αβ⟩,
ou `αβ designe l’ordre du produit sαsβ dans W . De plus, la notion de diagrammede Coxeter comme groupe de Weyl et celle comme groupe de Coxeter coıncident.
Exemple 48.14. Le groupe symetrique sur trois objets admet la presentationde Coxeter
Sym(3) =⟨s1, s2
∣∣ s21 = s2
2 = (s1s2)3 = e⟩,
ou s1 := (1 2) et s2 := (2 3). A titre d’exercice, le lecteur pourra ecrire unepresentation de Coxeter du groupe Sym(n) pour n ≥ 4.
On peut etablir la reciproque suivante du Theoreme 48.12.
Theoreme 48.15. Tout groupe de Coxeter fini est isomorphe a un groupe dereflexions fini.
Definition 48.16. Un groupe de reflexions fini W , dans un R-espace vectorielde dimension finie E muni d’un produit scalaire, est cristallographique s’il existeun reseau Λ de E qui est globalement preserve par W , i.e. tel que
W •Λ = Λ .
(Pour la notion de reseau, cf. Definition 23.6.)
Remarque 48.17. Si W est cristallographique dans E et preserve le reseau Λ,alors W est un sous-groupe de
GLZ(Λ) ⊂ GLR(E) ,
ou on utilise la notation evidente. A noter que GLZ(Λ) est un sous-groupe discretde GLR(E), isomorphe a GLn(Z) pour n := dim(E). Par ailleurs, dans ce cas, Winduit une action sur l’espace topologique quotient E/Λ, qui porte une structurecanonique de groupe de Lie, isomorphe au tore Tn; de plus, cette action est uneaction par automorphismes de groupes de Lie.
220 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Exemple 48.18. Si W est le groupe de Weyl d’un groupe de Lie compactconnexe G associe a un tore maximal T , alors W est cristallographique, car ilpreserve le reseau entier Λ := Γ(T ) = Ker(expT ), qui est effectivement un reseaudans E := LT (et le quotient E/Λ n’est autre que T lui-meme, et l’action induiteest simplement l’action naturelle de W sur T ).
Theoreme 48.19. Tout groupe de reflexions fini cristallographique est isomor-phe au groupe de Weyl d’un groupe de Lie compact connexe (et, disons, semi-simple).
Remarque 48.20. Si W1 et W2 dont des groupes de reflexions finis dans desespaces vectoriels E1 et E2, respectivement, munis de produits scalaires, alors onrealise de maniere evidente le produit W1 × W2 comme groupe de reflexions finidans la somme directe orthogonale E1 ⊕ E2. On dit que W est irreductible, s’iln’admet aucune telle decomposition (a isomorphisme pres, avec W1 et W2 non-triviaux, comme on l’a suppose dans la definition d’un groupe de reflexions fini); enfait, W est irreductible ssi son diagramme de Coxeter est connexe. Le Theoreme deClassification des Groupes de Reflexions Finis dit que tout groupe de reflexions finiW est un tel produit fini W1× . . .×Ws de groupes de reflexions finis irreductibles,et que tout groupe de reflexions fini irreductible W◦ est
(i) soit isomorphe au groupe de Weyl d’un groupe de Lie compact connexesimplement connexe et simple, i.e. d’un des types A– G (ceci se produitprecisement lorsque W◦ est cristallographique);
(ii) soit est isomorphe au groupe des symetries du dodecaedre (ou de l’icosaedre),et on dit que W◦ est de type H3; son diagramme de Coxeter est
©²ª±°® ©²ª±°® ©²ª±°®5
(iii) soit est isomorphe au groupe des symetries d’une paire de polyedres con-vexes “exceptionnels” en dualite dans R4, et on dit que W◦ est de typeH4; son diagramme de Coxeter est
©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®5
(iv) soit est isomorphe au groupe dihedral Dih2n avec n = 5 ou n ≥ 7, et ondit que W◦ est de type I2(n); son diagramme de Coxeter est
©²ª±°® ©²ª±°®n
A noter que les autres groupes dihedraux sont realises par des groupes de Weyl, detype A2 pour Dih6
∼= Sym(3), de type B2 ou C2 pour Dih8, et de type G2 pourDih12.
49. Etude du normalisateur et cohomologie du groupe de Weyl
Dans cette section, nous allons presenter, sans demonstration, quelques resultatsplus recents sur les normalisateurs de tores maximaux.
Toute la motivation pour les idees et resultats exposes dans cette section pro-viennent du resultat suivant.
Theoreme 49.1 (Curtis-Wiederhold-Williams, 1974; Notbohm, Osse, 1992).Soient G et G′ deux groupes de Lie compacts connexes. Soient T un tore maximal

49. ETUDE DU NORMALISATEUR ET COHOMOLOGIE DU GROUPE DE WEYL 221
de G, et N son normalisateur, et soient T ′ un tore maximal dans G′, et N ′ sonnormalisateur. Alors, on a l’equivalence
G ∼= G′ ⇐⇒ N ∼= N ′
(ou les isomorphismes sont des isomorphismes de groupes de Lie).
Remarque 49.2. En 1974, Curtis, Wiederhold et Williams ont demontre cetheoreme pour les groupes de Lie compacts connexes qui sont semi-simples. En1992, Notbohm et Osse ont independamment etablit le cas general.
Pour la suite, fixons un groupe de Lie compact connexe G et un tore maximalT de G; soient N le normalisateur de T , et W le groupe de Weyl correspondant, eton note ` le rang de G; de meme pour G′, T ′, N ′, W ′ et `′.
Remarque 49.3. Ainsi, N , qui est un “objet beaucoup plus petit et beaucoupplus simple” que G, caracterise G completement. Ceci nous amene a etudier Nsystematiquement, et en particulier d’un point de vue groupal, par exemple, aessayer de determiner son centre et ses automorphismes. Par ailleurs, le centre deG et les automorphismes de G devraient egalement etre determinables a partir deN , et, “optimistiquement”, a partir du centre de N et des automorphismes de N ,respectivement.
Remarque 49.4. Du point de vue de la structure de groupe, N n’est qu’uneextension de W par T , pour l’action naturelle. On a donc une suite exacte courtede groupes (i.e. une extension de groupes)
0 −→ T −→ N −→ W −→ 0
et une action de W sur T , symboliquement,
T .W
((
La premiere question qui se pose est : si W et W ′ sont isomorphes, et si T etT ′ sont isomorphe de facon equivariante par rapport au groupe de Weyl, a-t-onnecessairement que G et G′ sont isomorphes ? – La reponse est NON ! En effet,comme le montre la Remarque 45.8, pour tout n ≥ 1, les groupes de Lie Sp(n) etSO(2n + 1), qui sont de rang n, possede des groupes de Weyl isomorphes et destores maximaux isomorphes de facon equivariante, mais ils ne sont pas isomorphescomme groupe de Lie (par exemple, le premier est simplement connexe, et le seconda un groupe fondamental a deux elements). En particulier, ceci ce produit dansle cas “le plus simple”, i.e. avec Sp(1) = S3 ∼= SU(2) ∼= Spin(3) et SO(3). Enfait, Osse a demontre que tous les contre-exemples se deduisent de celui-la, commel’explique le resultat suivant.
Theoreme 49.5 (Osse, 1997).Les groupes de Lie G et G′ sont tels que W ∼= W ′ et T ∼= T ′ de facon equivariantessi il existe un groupe de Lie compact connexe H et des nombres m1, . . . ,mp etn1, . . . , nq dans N∗, avec p, q ∈ N, tels que
G ∼= H × Sp(m1)× . . .× Sp(mp)× SO(2n1 + 1)× . . .× SO(2nq + 1)
et
G′ ∼= H × SO(2m1 + 1)× . . .× SO(2mqp + 1)× Sp(n1)× . . .× Sp(nq) .

222 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Remarque 49.6. On se pose des lors la question de savoir quelle information ilfaut ajouter a la connaissance de T , de W et de l’action de W sur T pour determinerN (et donc G). C’est ici que la cohomologie des groupes entre en jeu. En effet,considerons la classe de toutes les extensions de W par T
0 −→ Tι−→ Γ π−→ W −→ 0
telles que si γ ∈ Γ et t ∈ T , alors
γ ·ι(t)·γ−1 = π(γ)︸︷︷︸∈W
•t .
Du seul fait que T est un groupe abelien (on oublie ici sa topologie), il existe surcette classe une notion ‘naturelle’ d’equivalence, telle que l’ensemble E(W ; T ) detoutes les classes d’equivalence est en bijection canonique avec le groupe abelienH2(W ;T ) (ou T est vu comme W -module pour l’action donnee), symboliquement,
E(W ;T ) ←→ H2(W ; T ) .
Ainsi, a l’extension donnee pour N (plus precisement a sa classe d’equivalence dansE(W ;T )) correspond une classe de cohomologie, que l’on va noter [N ], symbolique-ment, [
0 → T → N → W → 0] ←→ [N ] ∈ H2(W ; T ) .
En particulier, la donnee de
(i) T(ii) W(iii) l’action de W sur T(iv) la classe de cohomologie [N ] ∈ H2(W ; T )
determine le groupe de Lie G a isomorphisme pres.
Remarque 49.7. Une autre question qui se pose est la suivante. Etant donnes
(i) T(ii) W(iii) l’action de W sur T(iv) une classe de cohomologie θ ∈ H2(W ;T )
existe-t-il un groupe de Lie compact connexe G′ avec W ′ ∼= W , T ′ ∼= T de faconequivariante, et tel que la classe de cohomologie [N ′] ∈ H2(W ′; T ′) corresponde,via les deux isomorphismes compatibles donnes, a θ ∈ H2(W ; T ) ? – Ici, la reponseest plus difficile a obtenir. Un premier pas dans cette direction est fourni par leresultat suivant de Tits.
Theoreme 49.8 (Tits, 1966).La classe de cohomologie [N ] correspondant au normalisateur N dans G est d’ordreau plus deux, i.e.
2·[N ] = 0 ∈ H2(W ;T ) .
Remarque 49.9. Ceci nous mene a nous demander si le groupe H2(W ; T )peut posseder des elements d’ordre > 2, et si, dans la question posee dans laRemarque 49.7, la condition supplementaire 2θ = 0 est suffisante pour obtenir unereponse affirmative.
49. ETUDE DU NORMALISATEUR ET COHOMOLOGIE DU GROUPE DE WEYL 223
Remarque 49.10. En 1974, Curtis, Wiederhold et Williams ont trouve uncritere effectif qui permet de verifier si l’extension
0 −→ T −→ N −→ W −→ 0
est scindee, c’est-a-dire si N est le produit semi-direct T oW de W par T ; cecirevient a determiner si [N ] est nul dans H2(W ; T ). Ils ont effectues les calculs pourtous les groupes de Lie compacts connexes simples. Par exemple, pour SU(2) lenormalisateur n’est pas scinde, par contre, il l’est pour SO(3), auquel cas, on a
N ∼= O(2) ∼= SO(2)o Z/2 ,
ou le generateur de Z/2 agit par passage a l’inverse sur SO(2) ∼= S1.
Nous allons maintenant essayer de fournir des reponses partielles ou completesau diverses questions posees ci-dessus. Nous allons successivement voir les groupesde cohomologie H0(W ;T ), H1(W ;T ) et H2(W ; T ) entrer en scene.
A) H0(W ; T ) les centres de G et de N :
Proposition 49.11 (M., 1995).Il y a des isomorphismes de groupes
H0(W ; T ) ∼= Z(N) ∼= Z(G)⊕ (Z/2)u ,
ou u designe le nombre de facteurs directs de G isomorphes a un groupe orthogonalimpair, i.e. a SO(2q + 1) pour diverses valeurs de q ∈ N∗.
Exemple 49.12. Si G designe SO(2n + 1) avec n ∈ N∗, et si T et le toremaximal standard, alors
Z(G) = {1I2n+1} et Z(N) ∼= Z/2 ,
avec la matrice (-1-1�
-11
)
comme generateur du centre de N .
B) H1(W ;T ) et les automorphismes de G et de N :
Theoreme 49.13 (Hammerli, 2000).Le groupe des automorphismes exterieurs de N et celui de G sont relies par
Out(N) ∼= H1(W ; T )oOut(G) .
Remarque 49.14. Le groupe Out(G) est en principe “sous controle” puisqu’ils’agit d’un sous-groupe du groupe Aut
(D(G))
des automorphismes du diagrammede Dynkin de G dans le cas semi-simple, voir le Theoreme 47.14.
Theoreme 49.15 (Hammerli, 2000).Le groupe H1(W ;T ) est un 2-groupe abelien elementaire, i.e. un F2-espace vectorielfini.
Remarque 49.16 (Hammerli-M.-Suter; 2002).Le groupe H1(W ;T ) a ete calcule pour tout groupe de Lie compact connexe simple.

224 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Theoreme 49.17 (Hammerli-M.-Suter; 2002).Supposons que G, le revetement universel de G, ne possede aucun facteur directisomorphe a SU(4), Sp(3), Sp(4), Spin(8) et Spin(2q + 1) avec q ≥ 1. Alors, il y aun isomorphisme de groupes
H1(W ;T ) ∼= Hom(W ab,Z2(G)
),
ou W ab := W/[W,W ] est l’abelianise de W , et ou
Z2(G) :={g ∈ Z(G)
∣∣ g2 = e}
.
Remarque 49.18. L’abelianise de W est facile a determiner, car il y a unisomorphisme
W ab ∼= (Z/2)v ,
ou v est le nombre de composantes connexes du graphe obtenu a partir du dia-gramme de Coxeter C(W ) en supprimant toutes les aretes multiples. Par exemple,pour le diagramme de Coxeter suivant, on a v = 6 :
©²ª±°® ©²ª±°® ©²ª±°®©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®©²ª±°® ©²ª±°®
鲪±°® ©²ª±°® ©²ª±°®©²ª±°® ©²ª±°® ©²ª±°® ©²ª±°®©²ª±°® ©²ª±°®
C) H2(W ; T ) et realisabilite par des normalisateurs :
Notation 49.19. Si α ∈ R est un racine de G, on pose
Fα :={t ∈ T
∣∣ sα(t) = t}
et Qα :={t ∈ T
∣∣ sα(t) = t−1}
.
Remarque 49.20. Les ensembles Fα et Qα sont des sous-groupes fermes de T .Les groupes des composantes correspondants sont donc
π0(Fα) = Fα
/(Fα)e et π0(Qα) = Qα
/(Qα)e .
Notation 49.21. Pour une racine α ∈ R, on pose
Tα := (Qα)e ,
de sorte que π0(Qα) = Qα/Tα.
Remarque 49.22. On montre facilement que chaque Tα est un cercle, i.e. unsous-groupe ferme connexe abelien de dimension 1 de T . En fait, on a
LTα = R·α∨ ,
ou α∨ ∈ T est la co-racine associee a α ∈ LT ∗ (cf. Proposition 48.4).
Exemple 49.23. Dans le groupe unitaire special SU(n) avec son tore maximalstandard T , pour la racine α = αj,k, avec 1 ≤ j < k ≤ n, on a
Tα =
1�
1z
1�
1z-1
1�
1
∈ T
∣∣∣∣∣∣∣∣∣∣∣∣
z ∈ S1
,
avec le parametre z en j-ieme position sur la diagonale, et son inverse en k-iemeposition.

49. ETUDE DU NORMALISATEUR ET COHOMOLOGIE DU GROUPE DE WEYL 225
Proposition 49.24 (Tits, 1966).Si G est simplement connexe, alors, pour deux racines simples distinctes α et β,i.e. α 6= β dans B, on a
Tα ∩ Tβ = {e} .
Pour l’enonce suivant, rappelons la notation `αβ introduite dans l’enonce duCorollaire 48.13.
Theoreme 49.25 (Tits, 1966).Le groupe N admet la presentation par generateurs et relations suivantes :
• Generateurs : T ∪ {qα}α∈B
• Relations : (a) toutes les relations entre elements de T
(b) q2α = exp
(α∨2
)
(c) qαtq−1α = sα(t)
(d) qαqβqα · · ·︸ ︷︷ ︸`αβ termes
= qβqαqβ · · ·︸ ︷︷ ︸`αβ termes
Theoreme 49.26 (M., 1995).Soient α et β des racines simples distinctes. On a alors les proprietes suivantes :
(i) Tα ∩ Tβ est soit trivial, soit isomorphe a Z/2, soit a Z/3;(ii) Tα∩Tβ
∼= Z/3 ssi α et β correspondent a un facteur direct de G isomorphea PSU(3);
(iii) si π1(G) est fini, alors |Tα ∩ Tβ | divise |π1(G)|.Theoreme 49.27 (M., 2001).
Soient α et β des racines simples distinctes. On a alors les proprietes suivantes :(i) π0(Fα) est soit trivial, soit isomorphe a Z/2;(ii) π0(Qα) est soit isomorphe a (Z/2)`−2, soit a (Z/2)`−1;(iii) Qα ∩Qβ est isomorphe a l’un des groupes
(Z/2)`−2 , (Z/2)`−1 (Z/2)` , (Z/2)`−2 ⊕ Z/3 ou (Z/2)`−3 ⊕ Z/4 ;
(iv) Qα ∩ Qβ∼= (Z/2)`−2 ⊕ Z/3 ssi α et β correspondent a un facteur direct
de G isomorphe a PSU(3).
Remarque 49.28. Les cas ou Qα ∩ Qβ contient des elements d’ordre 4 sont“extremement rares”. Ainsi, “dans la plupart des cas”, Qα ∩ Qβ est un 2-groupeabelien elementaire.
Theoreme 49.29 (M., 2001).Il y a une suite exacte de groupes abeliens
0 −→ H1(W ; T ) −→⊕
α∈B
π0(Qα) Θ0−→ Q −→ H2(W ;T ) −→ 0 ,
ou Q est un sous-groupe adequat du groupe abelien⊕
α∈B
π0(Fα)⊕⊕
(α, β)∈B2
Qα ∩Qβ ,
avec B2 designant l’ensemble des paires ordonnees de racines simples, i.e. d’elementsde B (pour un ordre lineaire arbitrairement choisi sur B).

226 3. GROUPES DE LIE REELS COMPACTS CONNEXES
Remarque 49.30. L’application Θ0 est explicitement construite. Seul le groupeQ n’a, dans un premier temps, aucune description explicite. Ceci permet neanmoinsde calculer H1(W ; T ) de maniere tres efficace.
Remarque 49.31. Le Theoreme 49.29 redonne le resultat de Hammerli affir-mant que H1(W ; T ) est un 2-groupe abelien elementaire, voir le Theoreme 49.15.
Theoreme 49.32 (M., 2002).Si tout facteur direct de G isomorphe a SU(4) ∼= Spin(6) se projette sur un facteurdirect de G, alors
H2(W ;T ) ∼= (Z/2)ω ⊕ (Z/3)d0 ⊕ (Z/4)δ0 ,
ou(i) ω est un entier naturel (a determiner);(ii) d0 est le nombre de facteurs directs de G isomorphes a PSU(3);(iii) δ0 est le nombre de facteurs directs de G isomorphes a PSU(4) ∼= PSO(6).
Remarque 49.33 (M., 2002).
(i) Dans le cas general, i.e. s’il y a δ1 > 0 facteurs directs de G isomorphesa SU(4) ∼= Spin(6) qui ne se projettent pas sur un facteur direct de G, leresultat du Theoreme 49.32 reste vrai, mais avec un nombre de copies deZ/4 compris entre δ0 et δ0 + δ1 (la formule explicite est connue, mais esttrop compliquee pour etre enoncee ici).
(ii) Grace a des travaux de Burichenko (1995), il a ete possible de donner unedescription explicite du groupe Q, ce qui permet d’ecrire un algorithmetres performant pour calculer H2(W ; T ). Le groupe H2(W ;T ) a ete cal-cule pour G simple de rang ≤ 17. L’ensemble des “valeurs” obtenuesest :
0 , Z/2 , (Z/2)2 , . . . , (Z/2)6 , Z/3 et Z/4 .
(iii) Pour G = F4, on a H2(W ;T ) ∼= Z/2 et la classe triviale ne correspond aaucun normalisateur dans un groupe de Lie compact connexe.
(iv) Pour G = E7, on a H2(W ; T ) ∼= (Z/2)3, et seule une seule parmi ces huitclasses (qui est non-nulle) correspond a un normalisateur dans un groupede Lie compact connexe, en l’occurrence dans E7.
Remarque 49.34. Par exemple, pour les sept groupes exceptionnels, on a letableau suivant :
G H0(W ) H1(W ) H2(W ) [N ] ?= 0
G2 0 0 0 OuiF4 0 0 Z/2 NonE6 Z/3 0 Z/2 Non
PE6 0 0 Z/2 NonE7 Z/2 Z/2 (Z/2)3 Non
PE7 0 0 Z/2 NonE8 0 0 Z/2 Non
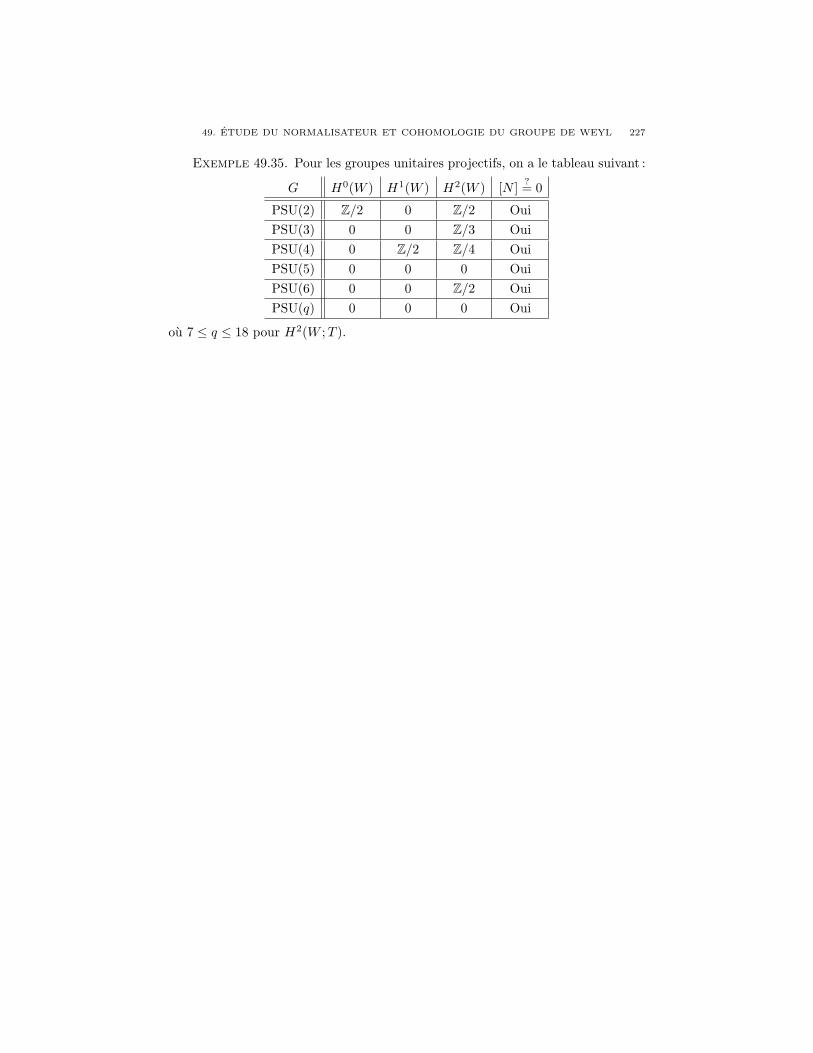
49. ETUDE DU NORMALISATEUR ET COHOMOLOGIE DU GROUPE DE WEYL 227
Exemple 49.35. Pour les groupes unitaires projectifs, on a le tableau suivant :
G H0(W ) H1(W ) H2(W ) [N ] ?= 0
PSU(2) Z/2 0 Z/2 OuiPSU(3) 0 0 Z/3 OuiPSU(4) 0 Z/2 Z/4 OuiPSU(5) 0 0 0 OuiPSU(6) 0 0 Z/2 OuiPSU(q) 0 0 0 Oui
ou 7 ≤ q ≤ 18 pour H2(W ;T ).