Embed Size (px)
Citation preview

Mécanique des Milieux Continus
Classes: 3EM
Année universitaire: 2013-2014

2
Plan de coursI. Hypothèses de la MMCII. Cinématique des milieux continus Descriptions: Eulérienne et Lagrangienne Tenseur Gradient de transformations Tenseur Gradient de déplacements Tenseur de déformations (cas général) Tenseur de déformations (cas des PP)
III. Dynamique des milieux continus Efforts appliqués sur un domaine Torseur des efforts appliqués et torseur dynamique Enoncé du PFD Notion des contraintes Equation de mouvement Equation d’équilibre
IV. Loi de comportement Elastique Linéaire Isotrope (ELI)

3
Motivation
Sécurité: résistance? stabilité? tenue à la fatigue?Il faut vérifier ces aspects avant de
fabriquer les structures
Modélisation

4
Motivation
Modélisation et Résolution du modèle : SIMULATION
Réduction des expérimentations (cas des voitures au crash)

5
I. Hypothèses de continuité
Travail à une échelle à partir de laquelle on peut négliger les discontinuités de la matière

6
I. Hypothèses de continuité
• Continuité du milieu Bien que la matière soit discontinue, ce qui peut mettre en évidence
n'importe quelle observation microscopique voire macroscopique, les mécaniciens ont besoin d'une hypothèse de continuité permettant de décrire les grandeurs physiques par des champs de fonctions mathématiques ayant les 'bonnes' propriétés de continuité et de dérivabilité.
Toutes les propriétés physiques du milieu sont supposées, à chaque instant, continues par rapport aux coordonnées spatiales. Par exemple, la masse volumique ρ(x) des différents points matériels occupant à l'instant t les points de coordonnées x est supposée continue par rapport à x.

7
• Continuité de la transformationLe mouvement est défini par la donnée de la fonction f (ouson inverse à t fixé g) bijective à t fixé, continue et suffisamment
dérivable : x = f (X,t) ⇔ X = g (x,t)
I. Hypothèses de continuité

8
• Description lagrangienne: Avec cette description, toutes les inconnues du problème (coordonnées xi de la position du point matériel à un instant t, vitesse, accélération, température, masse volumique, ...) s'écrivent en fonction des variables (Xi, t). Il s’agit donc de l’étude du mouvement et des propriétés d'une particule que l'on suit dans son mouvement.
• Description Eulérienne: Les variables xi sont les coordonnées d'un point représentant la position du point matériel à l'instant t. Avec cette description on peut étudier l'état actuel du milieu sans s'intéresser à une particule matérielle déterminée. Le mouvement est décrit par la donnée du champ des vitesses en chaque point.
II. Cinématique des milieux continus

9
• La différence entre la description lagrangienne et eulérienne est donc, que du point de vue de Lagrange, on décrit les variations de la vitesse, de l'accélération, de la température etc. d'un point matériel particulier, alors que selon Euler, on décrit ces mêmes quantités dans une région spatiale donnée sans individualiser les particules matérielles.
• La description eulérienne est bien adaptée à la mécanique des fluides, alors que la description lagrangienne est utilisée en mécanique des solides.

10
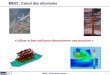
La figure ci dessous représente l’indentation d’un solide par un cylindre, nous avons choisi comme configuration initiale la configuration non déformée. Sur les deux configurations est représenté un réseau de lignes.

11
Après déformation (dans la configuration C(t)), le réseau de lignes initialement orthogonal est distordu.
Nous remarquons que la distorsion du réseau:
• N’est pas constante dans tout le solide.
• Se traduit par une variation des angles initialement droits.
• Se traduit par une variation des longueurs.
Dans la suite de ce chapitre, nous introduirons une mesure de la distorsion angulaire et une mesure de la variation des longueurs. Ces mesures doivent être locales puisque les distorsions du réseau peuvent varier dans le solide

12
La position de chaque particule M sera donc déterminée si on connaît sa position dans la configuration de référence et une fonction Φ telle que:
x(t) = Φ(X,t)
Configuration de référence et configuration actuelle (d’étude)

13
Puisqu’il s’agit d’un milieu continu, on peut écrire en différenciant:
Tenseur gradient de transformations

14
Le tenseur gradient de transformation peut s’écrire comme suit:
F est l’application linéaire qui fait passer de l’espace vectoriel dans lequel peut varier dX dans l’espace vectoriel où varie à priori dx.
Donc c’est l’application qui permet le passage de la configuration de référence vers la configuration actuelle.

15
• Une transformation est dite homogène si le tenseur gradient de transformations F est indépendant des coordonnées de référence (X1,X2,X3)
F(X,t)=F(t)Transport d’un volume
Transformation homogène

VI-16
Le déplacement par rapport à la configuration C0 , à l’instant t, de la particule M est le vecteur:
Déplacement d’une particule

17
Tenseur gradient de déplacements
Le tenseur gradient de déplacements est défini comme suit:

18
• D'après l'étude précédente, on serait tenté de croire que le tenseur F est suffisant pour représenter l'état de déformation d'un domaine matériel. En effet il permet de bien faire apparaître les différences entre les deux vecteurs dX et dx. Il semble même que la différence entre ces deux vecteurs soit à associer directement au champ de déplacement. En effet nous avons:
Tenseur de déformations (cas général)
On pourrait alors conclure que le tenseur gradient du champ de déplacement est le tenseur qui suffit à caractériser les déformations d'un domaine matériel. Cette conclusion est erronée, car il existe des cas de déplacement d'un domaine matériel qui respectent la notion de solides indéformables alors que le tenseur gradient du champ de déplacement est non nul. On peut par exemple imaginer le phénomène de rotation autour d'un axe. Il faut donc définir proprement un état de déformation.

19
Pour caractériser les déformations d'un domaine matériel, il faut en fait considérer les variations entre deux configurations de la distance existante initialement entre deux points matériels arbitraires. mais cette notion de distance n'est pas simple à mettre en oeuvre et on préfère considérer les variations de deux vecteurs "matériels". Mathématiquement, cela revient à examiner les variations du produit scalaire de ces deux vecteurs. Un produit scalaire invariant quels que soient les deux vecteurs considérés est équivalent à une déformation nulle du milieu (pas de variation de longueur, pas de variation d'angle). On aura alors défini les changements de formes.
Configuration de référence
Configuration actuelle

20

21
Dans cette relation C est un tenseur symétrique d'ordre deux (représentable par une
matrice 3*3) appelé tenseur des dilatations ou tenseur de Cauchy-Green droit.
La variation du produit scalaire devient donc:
Soit encore:
Nous obtenons ainsi un nouveau tenseur:
C’est le tenseur de déformations de Green-Lagrange

22
• Les hypothèses de transformations infinitésimales (ou des petites perturbations) sont:
* Le déplacement de chacun des points du domaine matériel est petit. On pourra ainsi confondre l'état actuel avec l'état de référence.
* Le tenseur gradient de déplacement ne contient que des termes négligeables devant l'unité.
• Le tenseur de déformations linéarisé peut s’écrire donc:
Tenseur de déformations (cas des petites perturbations)

23