Embed Size (px)
Citation preview
Organisation, principes et cahier des charges - Projet EEA Fondamental - 2017 L2 - EEA Fondamentale – FSI – Université de Toulouse (UPS)
1
Asservissement de la vitesse d'un Moteur à Courant Continu au moyen d'un variateur de vitesse à faible pertes constitué d’un hacheur série abaisseur un quadrant piloté par une commande
de type Modulation par Largeur d'Impulsions (M.L.I).
Sommaire
I : Organisation du projet 1 II : Régulation de vitesse d’un moteur à courant continu 8 III : Cahier des charges 18
I : Organisation du projet
Introduction
Le projet technique EEA-Fondamental proposé aux étudiants de L2 EEA durant le semestre S4 est pluridisciplinaire, tout en
demeurant complètement intégré aux matières associées à la filière EEA. Il a pour but de vérifier :
- que l'étudiant possède des connaissances scientifiques et techniques,
- qu'il soit capable de les mobiliser pour réaliser un dispositif technologique d’actualité, en occurrence la régulation de la
vitesse d’un moteur électrique à aimants permanents,
- qu’il puisse s’organiser et mener à bien son projet au moyen d’un travail d’équipe, tout en respectant un cahier de charges,
- qu'il soit capable de synthétiser par écrit et par oral les résultats de ses travaux,
- qu’il puisse gérer, en équipe, le temps qui lui est imparti pour son exposé oral et répondre aux attentes du jury.
I-1. Motivations
Le projet concerne la mise en œuvre complète et la validation de la régulation de vitesse d’un moteur à courant continu
(MCC) au moyen d’un variateur de vitesse à faibles pertes basé sur un hacheur série, abaisseur de tension 1-quadrant,
commandé par modulation de largeur d’impulsions (MLI). Dans son état actuel, ce projet permet de mettre en exergue cinq des
six principales disciplines de l'EEA, notamment :
- l’électrotechnique (moteur à courant continu),
- l’électronique de puissance (hacheur série abaisseur de tension et variateur de vitesse),
- l’électronique (commande par modulation de largeur d’impulsion : MLI et correcteur PI),
- l’automatique (régulation de vitesse, correcteur PI) et
- le traitement de signal (analyse des formes d’ondes du variateur)
afin d’élaborer un dispositif ‘automatisé (asservi)’ couramment utilisé pour réaliser des procédés industriels et dans des
applications diverses pour les domaines, entre autres, domestiques, du transport, de l’aéronautique du spatial et du développement
durable.
A travers cet exemple applicatif, ce projet donne, au préalable, un véritable aperçu de l’interaction de cinq des disciplines
techniques abordées durant le semestre S6 de la L3 EEA Fondamentale et illustre bien comment elles sont intimement liées.
Un enseignement de gestion de projet est assuré au moyen d’un cours d’initiation à la gestion de projet (2h), un cours de
communication (2h) et de 2 Travaux Pratiques (3h). Au cours de cet enseignement les étudiants s’approprieront les outils
(logiciels) indispensables pour l’organisation, la planification, le suivi et la validation des tâches à réaliser ainsi que l’exploitation
des cahiers de charge.
Six travaux dirigés (2h) sont programmés pour introduire les nouvelles notions requises en électrotechnique (machine à
courant continu en régime dynamique, les bases de l’électronique de puissance, le variateur de vitesse, le traitement de signal).
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
2
I-2. Objectifs
Les objectifs à atteindre comprennent plusieurs volets ayant des approches bien identifiées :
I-2-1 Approche scientifique et technique
- la validation d'un régulateur de vitesse à faibles pertes, d'un moteur à courant continu en charge,
- l’interprétation des résultats disciplinaires et globaux obtenus.
I-2-2 Approche organisationnelle du projet
- la mise en œuvre progressive de tâches spécifiques et précises en respectant un cahier des charges,
- l’avancement séquentiel du projet technique et sa vérification au moyen de tests d'essais et de la simulation,
- l’organisation, la coordination, la réalisation et la validation des tâches à effectuer,
- l’interprétation des résultats partiels et finaux.
I-2-3 Approche SHS de l’initiation à la gestion de projet
- l’initiation aux techniques et acquisition du vocabulaire en gestion de projet.
I-2-4 Approche de valorisation
- la rédaction de la partie technique et de la partie initiation à la gestion du projet,
- l’exposé oral de la partie technique et de la partie gestion du projet.
I-3. Moyens techniques requis pour le projet
Pour mener à bien ce projet nous mettons à la disposition des étudiants des moyens techniques suivants :
- un banc de 2 machines à courant continu identiques équipé de son capteur de vitesse,
- une plaquette comportant un correcteur PID ajustable et un comparateur,
- une plaquette pour le câblage de la commande MLI,
- des composants pour réaliser la commande MLI,
- les alimentations nécessaires,
- les appareils de mesures adéquats,
- les accessoires de câblages,
- divers appareils accessoires,
- CAO pour l’automatique,
- Matlab/Simulink,
- CAO pour l’électronique : Pspice
I-4. Réalisation et suivi du projet technique Pour mener à bien ce projet nous mettons à la disposition des étudiants des facilités suivantes :
- trois ateliers (salles de TP) distincts pour réaliser progressivement, grâce à 9 bureaux d’études de durée 2h (4 BE), 3h (4BE)
et 4h (BE d’assemblage), les tâches qui conduisent à la réalisation du régulateur de vitesse du moteur,
- des chefs d’ateliers (encadrants pédagogiques) qui assurent « l’encadrement » et le suivi technique du projet. Le suivi est
réalisé au moyen de carnets de bord qui seront tenus à jour, avec l’aide du coordinateur d’équipe, au fur et à mesure de
l’avancement du projet technique.
Les bureaux d’études sont associés à trois disciplines :
- AUT : automatique,
- ELN : électronique et
- ETP : électrotechnique et électronique de puissance.
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
3
I-5. Pré-requis (à la fin du S3)
Les prérequis nécessaires sont :
- lois de base de circuits électriques linéaires (S2),
- modélisation de la résistance, l’inductance, le condensateur et la bobine (S3)
- notions d'asservissement (S3),
- simples lois de commande en automatique (S3),
- correcteurs PID (S3),
- moteur à courant continu en régime permanent (statique) : modélisation et caractérisation (S2).
- bases d'électronique linéaire (S3),
I-6. Approfondissement
Un approfondissement technique et scientifique, cependant indispensable, sera principalement abordé durant le semestre S4.
- approfondissement du moteur à courant continu en régime permanent (statique),
- caractérisation de la machine à courant continu en régime statique et dynamique,
- convertisseur statique élémentaire : le hacheur série chargé par une f.é.m via un filtre purement inductif,
- variateur de la vitesse d’un moteur à courant continu à faibles pertes,
- initiation à l'électronique non-linéaire (comparateurs et oscillateurs de relaxation),
- rappels sur l’asservissement de la vitesse du moteur à courant continu.
Toutefois, au cours du semestre S4, on procèdera à :
- la caractérisation du moteur à courant continu en régime dynamique,
- l’approfondissement d'électronique non-linéaire (ELN-II),
- l’approfondissement et la mise en œuvre de montages spécifiques de d'électronique linéaire,
- l’approfondissement et la mise en œuvre des correcteurs PID,
- la mise en œuvre d’un variateur de la vitesse à faibles pertes d’un moteur,
- la mise en œuvre de la régulation de la vitesse du moteur en charge,
- l’étude d’un correcteur PI au moyen de Matlab/Simulink.
I-7. Compétences techniques à acquérir au cours du projet
A la fin du projet, vous devrez pouvoir concevoir et réaliser l’asservissement de la vitesse d'un moteur à courant continu.
Ceci nécessite plusieurs étapes qui regroupant :
- la compréhension du fonctionnement de la machine à courant continu à aimant permanent,
- la mise en œuvre des méthodes de caractérisation des principales caractéristiques de la MCC,
- la détermination expérimentale de ces principales caractéristiques de la MCC (statique et dynamique),
- la compréhension du principe d'un hacheur série 1-Quadrant, abaisseur de tension et sa mise en œuvre in fine,
- la détermination expérimentale des principales caractéristiques du hacheur + MCC, en vue de la mise en œuvre des fonctions de
transfert associées,
- la conception et la réalisation d'une commande M.L.I.,
- l'appréciation des performances des diverses possibilités de commande et de correcteur de l'asservissement de l’ensemble
moteur/hacheur, et
- le bouclage de ces ensembles pour réaliser l'asservissement souhaité suivant un cahier de charges bien précises, le moteur
fonctionnant à vide jusqu’au couple nominal.
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
4
Ce travail doit aussi vous conduire à concevoir et à mettre en œuvre les différents tests requis pour quantifier les
performances du dispositif réalisé et de valider le procédé. Au besoin, vous devriez être en mesure de proposer des solutions
d'amélioration ou de perfectionnement.
I-8. Organisation
Les étudiants se gèrent tous seuls pour former des équipes de 4-5 étudiants appartenant obligatoirement au même groupe de
TP. Chaque équipe doit choisir un coordinateur qui servira d’intermédiaire de l’équipe avec l’équipe pédagogique. Le choix de
ce coordinateur est primordial car il impacte le rendement du groupe. Les deux responsables du projet (technique et SHS) ainsi
que les chefs d’ateliers transmettront un certain nombre de consignes, d’instructions à la fois pratiques et utiles, le plus souvent
au coordinateur par souci d’efficacité, comme dans une entreprise. Le coordinateur doit relayer ces informations sans pertes ni
déformations. Il est donc primordial que le coordinateur de l’équipe soit assidu aux enseignements de TD-projet EEA, BE-
projet, Cours et TP d’initiation à la gestion de projet.
Il est important que les tâches soient bien réparties au sein d’une équipe et que le coordinateur puisse suivre la cohérence et la
pertinence des tâches réalisées, en tant qu’animateur plutôt qu’un chef.
Une réunion de démarrage et six travaux dirigés intégrés (TDI) de 2 heures seront dispensés. Ces enseignements traiteront :
- contexte du projet général et l’agencement des disciplines impliquées : Kick-off meeting
- le principe et la caractérisation statique de la machine à courant continu : Cours de Machines Electriques
- le comportement dynamique d’une bobine R-L série sous différents régimes : TDI_Projet EEA
- la caractérisation dynamique d’une machine à courant continu : TDI_Projet EEA
- l’initiation à l’électronique de puissance et interconnexion des sources : TDI_Projet EEA
- le hacheur série abaisseur de tension, à commande M.L.I. : TDI_Projet EEA
- le variateur de vitesse piloté par un hacheur série 1 quadrant, abaisseur : TDI_Projet EEA
- éléments de base de l’asservissement applicable au projet : TDI Projet EEA
Les étudiants seront amenés à réaliser les tâches (selon trois cahiers de charges) avec un suivi, pendant des séances dans des
salles de Bureau d’Etudes (BE) dédiées H0 (ELN)), I3 (AUT) et I2 (ETP. Les ateliers (tableau 1) des bureaux d’études sont :
AUT Automatique SalleTPI3-Bât3TP2
ETP Electrotechnique–Electroniquedepuissance SalleTPI2-Bât3TP2
ELN Electronique SalleTPH0-Bât3TP1
Tableau 1 – Salles des Bureaux d’Etudes du projet EEA Fondamental
Les tâches et réalisations techniques se feront en présence et sous la responsabilité des chefs d’ateliers référents/conseils (I du
RACI). Ce référent tiendra un carnet de bord à jour avec la participation du coordinateur de chaque équipe. Chaque équipe de
cinq (au maximum) étudiants doit suivre :
- 3 séances BE d'Electronique (Commande MLI et Correcteur PI) Total de 7 heures.
- 3 séances BE d’Electrotechnique / Electronique de Puissance (MCC et Variateur) Total de 7 heures.
- 2 séances BE d'Automatique (Asservissent/régulation et correcteur) Total de 6 heures.
- 1 séance BE d’Assemblage final (mise en œuvre de la régulation/correcteur PI) Total de 4 heures.
Pour terminer le projet (assemblage), la dernière séance sera dédié à la mise en œuvre de la régulation de la vitesse du moteur
dans la salle I2 (ELN + ETP + AUT). Cette dernière séance sera en grande partie consacrée à la réalisation technique de
l’asservissement avec le moteur fonctionnant en charge variable. Pour y parvenir, il est nécessaire de calculer au préalable les
paramètres du correcteur PI en respectant le cahier ces charges. Ce calcul nécessite la connaissance du modèle complet des deux
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
5
machines et du variateur de vitesse. Chaque machine possède son propre jeu de valeurs des divers paramètres qu’il est nécessaire
de déterminer expérimentalement en salle durant les BE d’ETP.
Seulement 3 équipes pourront travailler simultanément sur les maquettes de régulation. On procèdera par rotation pour
implanter et finaliser l’asservissement du moteur à l’aide d’une plaquette dédiée. Certains enseignants seront disponibles pour
répondre aux questions techniques des étudiants.
I-9. Dates de réalisation techniques (BE)
Compte tenu de nombreux impondérables, les dates des bureaux d’études, des cours (Initiation à la Gestion de Projet,
Communication), des TP-GP et des TDI-Projet indiquées dans ce cahier peuvent être modifiées. Prière de consulter le site web de
la L2-EEA (http://l2-eea-meca-gc.ups-tlse.fr) pour suivre ces changements éventuels.
I-10. Le rapport écrit (BE)
Le rapport écrit doit comporter :
- un résumé
- des mots clefs,
- une introduction générale faisant un état de l’art du sujet traité, les objectifs du projet, la démarche scientifique, les
moyens et techniques utilisés, une présentation du projet par fonctions, et le plan de la rédaction,
- pour chaque partie technique spécifique, il est nécessaire d’introduire l’approche scientifique et technique, l’essentiel de la
structure adaptée et les rappels théoriques pertinents, une étude des structures et justification des choix, la modélisation,
l’identification de certaines structures, les ordinogrammes, les simulations, les mesures (courbes, oscillogrammes),
comparaison théorie/pratique et/ou simulation/pratique, une conclusion,
- une conclusion générale faisant ressortir les points essentiels et la validation du dispositif réalisé,
- une bibliographie (en évitant de la « webographie »)
- éventuellement des annexes.
Un modèle (template) en format numérique vous sera proposé et contiendra toutes les consignes de rédaction. Il est
indispensable de respecter ces consignes de manière stricte.
I-11. Evaluation du rapport du projet EEA
L'évaluation du projet (ou du module) est divisée en trois composantes :
I-11-1 Evaluation du projet en salle : N1
Le référent évalue individuellement la participation de chaque candidat et accorde une note N1 (technique est SHS ayant le
même poids) dite note conduite du projet qui porte sur :
- la préparation du projet (étude préliminaire, ...)
- l'évaluation du travail individuel et du groupe (investissement, comportement, initiatives ...)
- la pertinence de l’analyse théorique, la cohérence de la démarche expérimentale
- le niveau technique (fonctions mises en place, performances atteintes).
I-11-2 Evaluation du rapport écrit : N2
Un jury de lecture évalue le rapport écrit (technique est SHS ayant le même poids) et accorde une note N2 dite note de
rédaction. Il évalue la présentation, la clarté et le contenu du rapport écrit. Le tableau 2 résume les différentes rubriques
considérées avec leurs poids indicatifs.
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
6
Libellé Coeff.
Longueur et pagination du document 60
Contenu de l'introduction 40
Orthographe 40
Grammaire 40
Ponctuation 40
Vocabulaire français 40
Vocabulaire technique 40
Schémas : contenu, lisibilité, pertinence 40 Figure : lisibilité, contenu, axes, grandeurs, graduations, unités 40
Numérotation et légende des figures 20
Référencement des figures dans le texte 20
Tableau : lisibilité, contenu, grandeurs et unités 40
Numérotation et légende des tableaux 20
Référencement des tableaux dans le texte 20
Mise en page des équations 20
Référencement des équations dans le texte 20
Mise en page globale 20
Plan du rapport 40
Démarche scientifique et technique 100
Qualité et cohérence des résultats 100
Analyses des résultats et comparaison avec la théorie 100
Contenu de la conclusion 100
Gestion de projet 1000
TOTAL 2000
Tableau 2 – Différents points d’évaluation du rapport écrit, avec leurs poids respectifs.
I-11-3 Evaluation de l’oral : N3
Un jury de soutenance évaluera l’oral (technique est SHS ayant le même poids) et accorde une note individuelle N3 dite note de
soutenance. L’exposé dont la durée de rigueur est au maximum 20 minutes sera est suivi d’une séance de 20 minutes de
questions, où le jury évalue les étudiants sur :
- la présentation globale de l’équipe ainsi que la globalité du travail exposé, puis
- pour chaque candidat, la communication (gestion du temps, expression, clarté, précision, concision, contenu des documents
présentés ...),
- pour chaque candidat, sa capacité à justifier et expliquer une fonction, une structure, un choix technologique, un calcul de
dimensionnement,
- pour chaque candidat, sa capacité à présenter succinctement le déroulement du projet, le découpage des tâches et l’analyse des
problèmes rencontrés (partie SHS),
- pour chaque candidat, les réponses aux questions du jury.
Les étudiants peuvent utiliser « Power-Point » ou Keynote. Ils peuvent contacter Mr. N. Sewraj pour réaliser des tests de
leurs présentations avant la soutenance, en s’y prenant suffisamment à l’avance. Un vidéoprojecteur sera mis à la disposition des
étudiants qui peuvent se présenter avec leurs ordinateurs portables. Ceux qui ont des ordinateurs utilisant des connecteurs
particuliers sont priés de se présenter avec leurs connecteurs. Prière de ne pas oublier de charger la batterie de votre ordinateur
portable avant la soutenance. Chaque équipe fera un exposé de 20 minutes équitablement réparti. Il ne faut pas dépasser le
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
7
temps global pour l'exposé. Après l'exposé du groupe, les candidats seront invités à répondre (pendant 20 minutes au maximum)
aux questions individuelles ou à des questions pour le groupe en entier. Des questions faisant appel à des connaissances acquises
dans d'autres modules (de L1 et L2) peuvent être posées. Les réponses doivent être précises et concises.
I-11-4 Evaluation globale du Projet EEA
A la première session, la note finale du PROJET EEA est calculée comme suit : Note du module - Sess1 = (N2 + N3) / 2
La note N1 et les diverses tâches intermédiaires serviront de bonus ou malus.
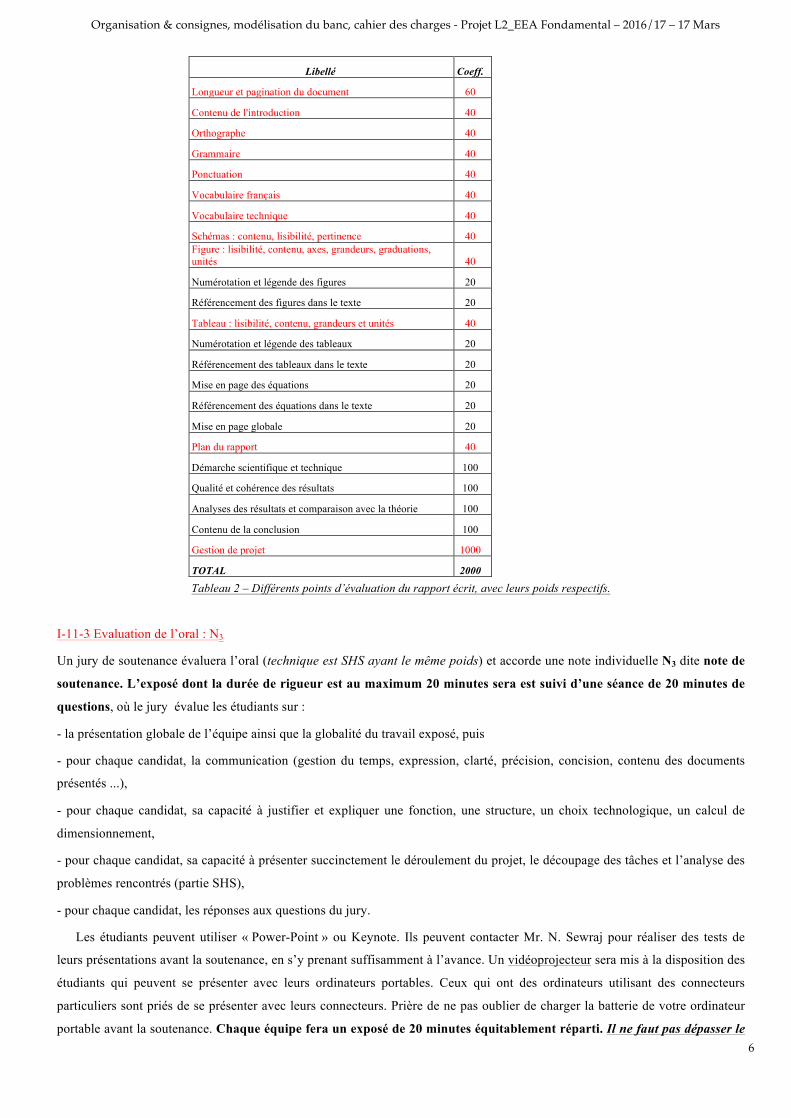
I-12. Dates importantes
Le rapport écrit doit être en format PDF (Portable Document File) et sa taille ne doit pas dépasser 10 Méga-Octets. Il devra être
impérativement envoyé par email à :
- Mr. Neermalsing SEWRAJ ([email protected]) et Mr. Bruno ROUSSEL ([email protected])
Un mail d'accusation de réception sera envoyé dans les plus brefs délais au coordinateur de l’équipe. Faîtes attention à la taille
mémoire du rapport, qui ne doit pas dépasser 10 Moctets.
Les étudiants doivent impérativement déposer DEUX versions manuscrites (version papier) du rapport au secrétariat
pédagogique.
Date limite d’envoi de la version numérique (PDF) du rapport écrit : Vendredi 26 Mai 2016 à 18h.
La date limite de dépôt de la version manuscrite (reliée) du rapport écrit : Lundi 29 Mai 2016 à 11h00.
Attention, ces dates sont susceptibles d’être modifiées pour diverses raisons. Prière de consulter régulièrement l’emploi
du temps de la formation.
Date de soutenance : Le mardi 30 Mai 2017 de 8h00 à 19h Lieu : Salle I2 (Bât 3TP2).
Tableau 3 – Dates prévisionnelles de soutenance du projet L2 EEA Fondamental.
La soutenance se fera successivement équipe par équipe présentant seule, les membres des autres équipes n’étant pas
autorisés à assister à cette soutenance. Ce jury est composé d’enseignants référents/conseils de la partie technique et ceux de la
partie SHS.
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
8
II : Régulation de vitesse d’un moteur à courant continu
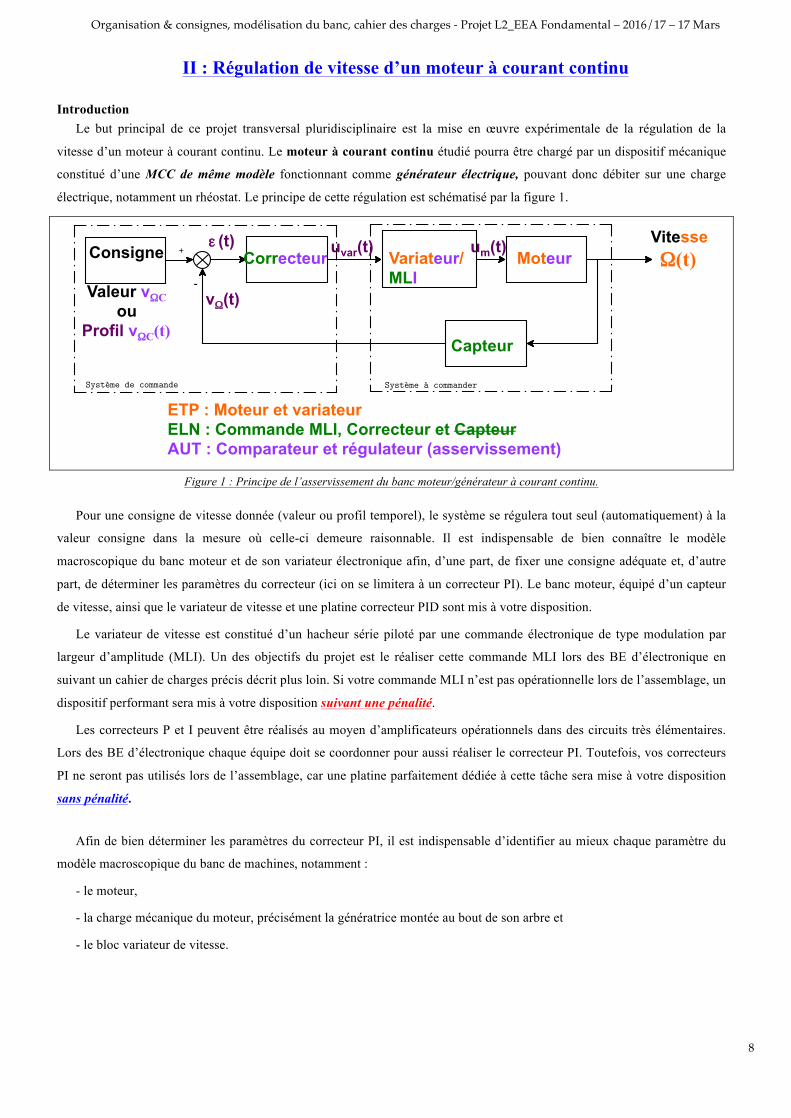
Introduction Le but principal de ce projet transversal pluridisciplinaire est la mise en œuvre expérimentale de la régulation de la
vitesse d’un moteur à courant continu. Le moteur à courant continu étudié pourra être chargé par un dispositif mécanique
constitué d’une MCC de même modèle fonctionnant comme générateur électrique, pouvant donc débiter sur une charge
électrique, notamment un rhéostat. Le principe de cette régulation est schématisé par la figure 1.
Figure 1 : Principe de l’asservissement du banc moteur/générateur à courant continu. Pour une consigne de vitesse donnée (valeur ou profil temporel), le système se régulera tout seul (automatiquement) à la
valeur consigne dans la mesure où celle-ci demeure raisonnable. Il est indispensable de bien connaître le modèle
macroscopique du banc moteur et de son variateur électronique afin, d’une part, de fixer une consigne adéquate et, d’autre
part, de déterminer les paramètres du correcteur (ici on se limitera à un correcteur PI). Le banc moteur, équipé d’un capteur
de vitesse, ainsi que le variateur de vitesse et une platine correcteur PID sont mis à votre disposition.
Le variateur de vitesse est constitué d’un hacheur série piloté par une commande électronique de type modulation par
largeur d’amplitude (MLI). Un des objectifs du projet est le réaliser cette commande MLI lors des BE d’électronique en
suivant un cahier de charges précis décrit plus loin. Si votre commande MLI n’est pas opérationnelle lors de l’assemblage, un
dispositif performant sera mis à votre disposition suivant une pénalité.
Les correcteurs P et I peuvent être réalisés au moyen d’amplificateurs opérationnels dans des circuits très élémentaires.
Lors des BE d’électronique chaque équipe doit se coordonner pour aussi réaliser le correcteur PI. Toutefois, vos correcteurs
PI ne seront pas utilisés lors de l’assemblage, car une platine parfaitement dédiée à cette tâche sera mise à votre disposition
sans pénalité.
Afin de bien déterminer les paramètres du correcteur PI, il est indispensable d’identifier au mieux chaque paramètre du
modèle macroscopique du banc de machines, notamment :
- le moteur,
- la charge mécanique du moteur, précisément la génératrice montée au bout de son arbre et
- le bloc variateur de vitesse.
PRHE Group
Régulateur et disciplines scientifiques
FSI : Département EEA : L2 EEA : Projet Interdisciplinaire
Principe d’un régulateur de vitesse d’un moteur électrique
T2 N. Sewraj
1er 2nd
Systeme de commande Systeme a commander
-
+Consigne
Valeur vΩC ou
Profil vΩC(t)
Correcteur Variateur/ MLI
Moteur
Capteur
Vitesse Ω(t)
ETP : Moteur et variateur ELN : Commande MLI, Correcteur et Capteur AUT : Comparateur et régulateur (asservissement)
uvar(t) ε (t)
vΩ(t)
um(t)
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
9
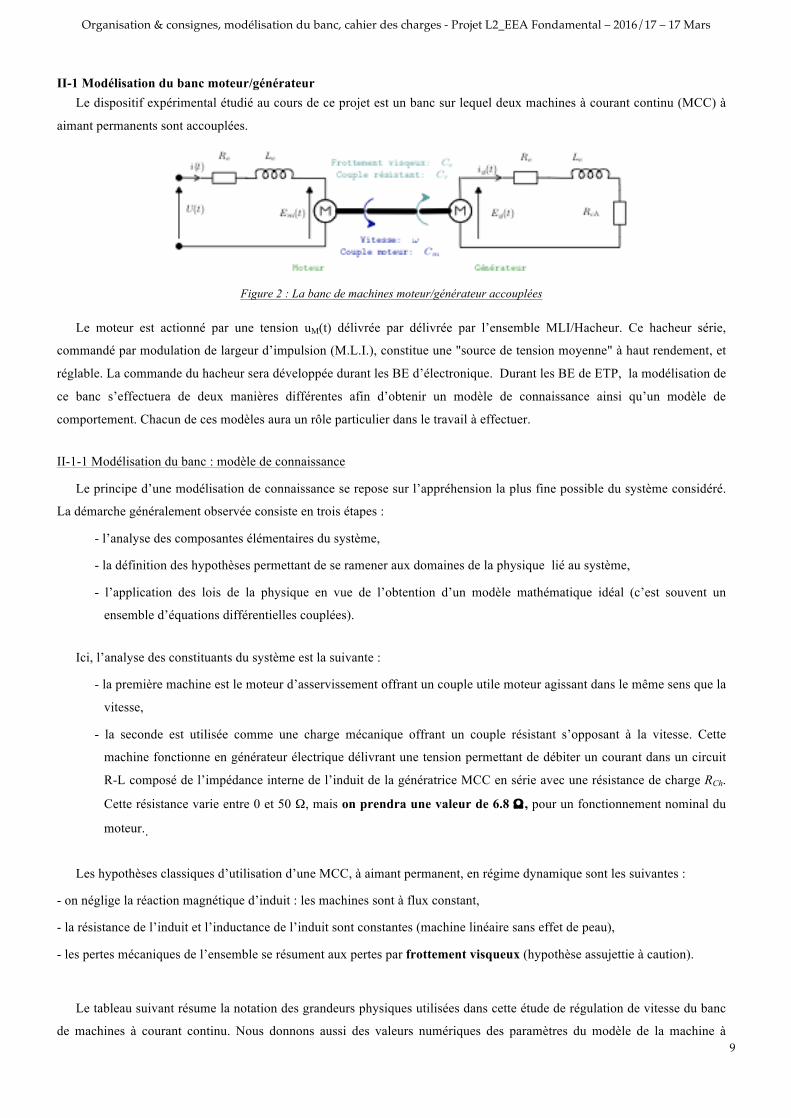
II-1 Modélisation du banc moteur/générateur Le dispositif expérimental étudié au cours de ce projet est un banc sur lequel deux machines à courant continu (MCC) à
aimant permanents sont accouplées.
Figure 2 : La banc de machines moteur/générateur accouplées Le moteur est actionné par une tension uM(t) délivrée par délivrée par l’ensemble MLI/Hacheur. Ce hacheur série,
commandé par modulation de largeur d’impulsion (M.L.I.), constitue une "source de tension moyenne" à haut rendement, et
réglable. La commande du hacheur sera développée durant les BE d’électronique. Durant les BE de ETP, la modélisation de
ce banc s’effectuera de deux manières différentes afin d’obtenir un modèle de connaissance ainsi qu’un modèle de
comportement. Chacun de ces modèles aura un rôle particulier dans le travail à effectuer.
II-1-1 Modélisation du banc : modèle de connaissance
Le principe d’une modélisation de connaissance se repose sur l’appréhension la plus fine possible du système considéré.
La démarche généralement observée consiste en trois étapes :
- l’analyse des composantes élémentaires du système,
- la définition des hypothèses permettant de se ramener aux domaines de la physique lié au système,
- l’application des lois de la physique en vue de l’obtention d’un modèle mathématique idéal (c’est souvent un
ensemble d’équations différentielles couplées).
Ici, l’analyse des constituants du système est la suivante :
- la première machine est le moteur d’asservissement offrant un couple utile moteur agissant dans le même sens que la
vitesse,
- la seconde est utilisée comme une charge mécanique offrant un couple résistant s’opposant à la vitesse. Cette
machine fonctionne en générateur électrique délivrant une tension permettant de débiter un courant dans un circuit
R-L composé de l’impédance interne de l’induit de la génératrice MCC en série avec une résistance de charge RCh.
Cette résistance varie entre 0 et 50 Ω, mais on prendra une valeur de 6.8 Ω , pour un fonctionnement nominal du
moteur..
Les hypothèses classiques d’utilisation d’une MCC, à aimant permanent, en régime dynamique sont les suivantes :
- on néglige la réaction magnétique d’induit : les machines sont à flux constant,
- la résistance de l’induit et l’inductance de l’induit sont constantes (machine linéaire sans effet de peau),
- les pertes mécaniques de l’ensemble se résument aux pertes par frottement visqueux (hypothèse assujettie à caution).
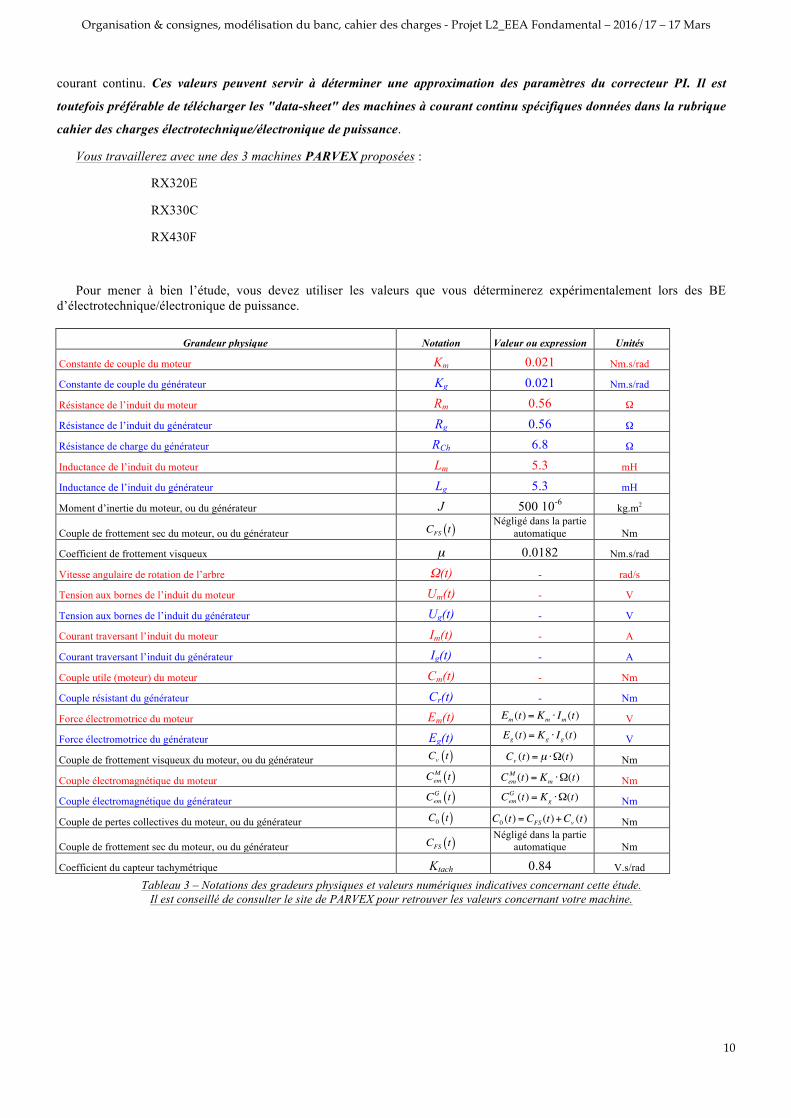
Le tableau suivant résume la notation des grandeurs physiques utilisées dans cette étude de régulation de vitesse du banc
de machines à courant continu. Nous donnons aussi des valeurs numériques des paramètres du modèle de la machine à
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
10
courant continu. Ces valeurs peuvent servir à déterminer une approximation des paramètres du correcteur PI. Il est
toutefois préférable de télécharger les "data-sheet" des machines à courant continu spécifiques données dans la rubrique
cahier des charges électrotechnique/électronique de puissance.
Vous travaillerez avec une des 3 machines PARVEX proposées :
RX320E
RX330C
RX430F
Pour mener à bien l’étude, vous devez utiliser les valeurs que vous déterminerez expérimentalement lors des BE
d’électrotechnique/électronique de puissance.
Grandeur physique Notation Valeur ou expression Unités
Constante de couple du moteur Km 0.021 Nm.s/rad
Constante de couple du générateur Kg 0.021 Nm.s/rad
Résistance de l’induit du moteur Rm 0.56 Ω
Résistance de l’induit du générateur Rg 0.56 Ω
Résistance de charge du générateur RCh 6.8 Ω
Inductance de l’induit du moteur Lm 5.3 mH
Inductance de l’induit du générateur Lg 5.3 mH
Moment d’inertie du moteur, ou du générateur J
500 10-6 kg.m2
Couple de frottement sec du moteur, ou du générateur CFS t( ) Négligé dans la partie automatique Nm
Coefficient de frottement visqueux µ 0.0182 Nm.s/rad
Vitesse angulaire de rotation de l’arbre Ω(t) - rad/s
Tension aux bornes de l’induit du moteur Um(t) - V
Tension aux bornes de l’induit du générateur Ug(t) - V
Courant traversant l’induit du moteur Im(t) - A
Courant traversant l’induit du générateur Ig(t) - A
Couple utile (moteur) du moteur Cm(t) - Nm
Couple résistant du générateur Cr(t) - Nm
Force électromotrice du moteur Em(t) Em (t) = Km ⋅ Im (t) V
Force électromotrice du générateur Eg(t) Eg (t) = Kg ⋅ Ig(t) V
Couple de frottement visqueux du moteur, ou du générateur Cv t( ) Cv (t) = µ ⋅Ω(t) Nm
Couple électromagnétique du moteur CemM t( ) Cem
M (t) = Km ⋅Ω(t) Nm
Couple électromagnétique du générateur CemG t( ) Cem
G (t) = Kg ⋅Ω(t) Nm
Couple de pertes collectives du moteur, ou du générateur C0 t( ) C0 (t) =CFS (t)+Cv (t) Nm
Couple de frottement sec du moteur, ou du générateur CFS t( ) Négligé dans la partie automatique Nm
Coefficient du capteur tachymétrique Ktach 0.84 V.s/rad
Tableau 3 – Notations des gradeurs physiques et valeurs numériques indicatives concernant cette étude. Il est conseillé de consulter le site de PARVEX pour retrouver les valeurs concernant votre machine.

Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
11
Le comportement de la MCC motrice, soumise à la tension de commande um(t), est régit par les équations différentielles
électromécaniques suivantes en convention de signe récepteur :
– L’équation électrique pour l’induit du moteur :
um (t) = Em (t)+ Rm ⋅ im (t)+ Lmdim (t)dt
(1)
– L’équation mécanique du banc moteur/générateur :
2J dΩ(t)dt
=Cm (t)−Cr (t) =CemM (t)−C0
M (t)− CemG (t)+C0
G (t)( )
En supposant les paramètres mécaniques des deux machines identiques, cette équation devient :
2J dΩ(t)dt
=CemM (t)−Cem
G (t)− 2C0 (t)
2J dΩ(t)dt
= − 2CFS (t) − 2 µ Ω(t) + CemM (t) − Cem
G (t)
(2a)
Pour l’étude de la régulation, il est commode de négliger le couple de frottement sec pour aboutir à un système linéaire.
Avec cette hypothèse, l’équation mécanique se simplifie de la manière suivante :
2J dΩ(t)dt
≈ − 2 µ Ω(t) + CemM (t) − Cem
G (t) (2b)
Pour l’étude dynamique en BE d’électrotechnique, vous utiliserez l’équation 2a car le couple de pertes par frottement sec
CFS est très supérieur au couple de pertes par frottement visqueux Cv, même à la vitesse nominale de la machine.
– Les équations électromécaniques du moteur sont :
Em (t) = Km ⋅ Ω(t) (3)
CemM (t) = Km ⋅ im (t) (4)
Le comportement de la génératrice entrainée par le moteur (par son couple utile-moteur Cm(t)) est régit par les équations
différentielles électromécaniques suivantes :
– L’équation électrique pour l’induit du générateur :
ug(t) = Eg(t)+ Rg ⋅ ig(t)+ Lgdig(t)dt
(5)
– Les équations électromécaniques du générateur sont :
Eg(t) = Kg ⋅ Ω(t) (6)
CemG (t) = Kg ⋅ ig (t) (7)
Il est commode d’écrire ces équations en notation Laplace pour simplifier l’étude de l’asservissement1. A l’aide des
équations électromécaniques (1), (2b) et (3) du moteur, on peut établir le modèle dynamique du moteur à MCC. On entend
1 La transformée de Laplace des signaux um(t), Em(t), Eg(t), im(t), ig(t), Ω(t), Cem
M (t) et CemG (t) sont respectivement Um(p),
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
12
par modèle dynamique du moteur en boucle ouverte, la fonction de transfert entre le signal d’entrée um(t) de l’induit du
moteur et le signal de sortie, la vitesse Ω(t). Pour cela, il est commode de définir les fonctions de transfert de la manière
suivante :
(i) , puis entre en utilisant le théorème de superposition2.
(ii) .
(iv) , puis entre F 5(p) =Ω(p)Cem
G (p) en utilisant le théorème de superposition.
II-1-2 Modélisation du banc : modèle de connaissance modèle de comportement (boîte noire)
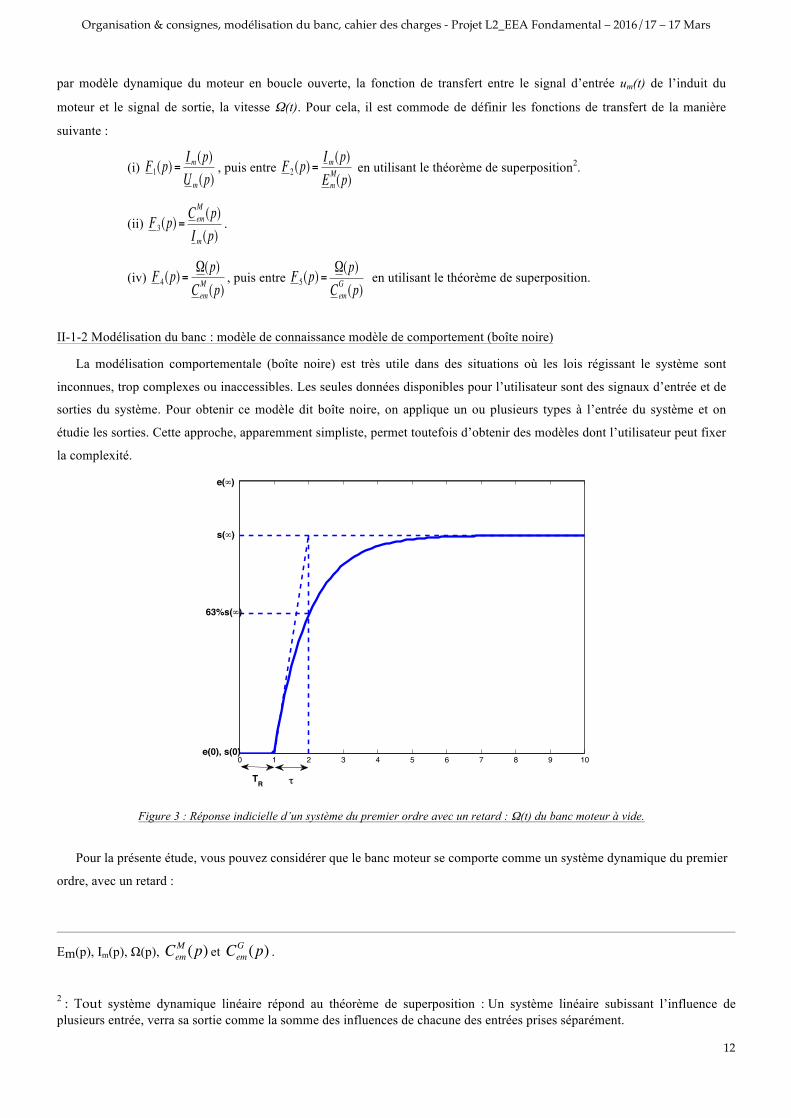
La modélisation comportementale (boîte noire) est très utile dans des situations où les lois régissant le système sont
inconnues, trop complexes ou inaccessibles. Les seules données disponibles pour l’utilisateur sont des signaux d’entrée et de
sorties du système. Pour obtenir ce modèle dit boîte noire, on applique un ou plusieurs types à l’entrée du système et on
étudie les sorties. Cette approche, apparemment simpliste, permet toutefois d’obtenir des modèles dont l’utilisateur peut fixer
la complexité.
Figure 3 : Réponse indicielle d’un système du premier ordre avec un retard : Ω(t) du banc moteur à vide.
Pour la présente étude, vous pouvez considérer que le banc moteur se comporte comme un système dynamique du premier
ordre, avec un retard :
Em(p), Im(p), Ω(p), Cem
M (p) et CemG (p) .
2 : Tout système dynamique linéaire répond au théorème de superposition : Un système linéaire subissant l’influence de plusieurs entrée, verra sa sortie comme la somme des influences de chacune des entrées prises séparément.
F1(p) =I m (p)Um (p)
F 2 (p) =I m (p)EMm (p)
F3(p) =Cem
M (p)I m (p)
F 4 (p) =Ω(p)Cem
M (p)
0 1 2 3 4 5 6 7 8 9 10e(0), s(0)
63%s(∞)
e(∞)
s(∞)
TR τ
Figure 4: Réponse d’un premier ordre
2.2 Modélisation "boite noire" du système à commander
La modélisation boite noire repose sur le principe que les méchanismes du systèmeétudié sont inaccessibles et inconnus. Les seules données disponibles pour l’utilisateursont les signaux d’entrées et de sorties du systèmes. Pour obtenir ce modèle, on introduitun ou plusieurs type de signaux en entrée du système et on étudie les sorties.Cette approche qui peut paraître handicapante au premier abord permet toutefois d’ob-tenir des modèles dont on peut fixer la complexité.Dans l’étude qui nous concerne, nous allons considérer que le banc moteur se comportecomme un système dynamique du premier ordre :
H(p) = e−TRp K
1 + τp
Les paramètres d’un tel modèle peuvent s’identifier par l’étude graphique de la réponseindicielle (cf. figure 4) :
– Retard : TR
– Gain statique : K = s(∞)−s(0)e(∞)−e(0)
– Constante de temps : τUn essai en boucle ouverte a permis d’enregistrer sur la machine la réponse à un
échelon. En considérant qu’en première approximation le modèle se comporte comme unsystème du premier ordre, déterminez les valeurs des paramètres inconnus.
6
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
13
H p( ) = e−TR p K1+τ p
.
Les paramètres d’un tel modèle sont :
- le gain statique K =s(∞)− s(0)e(∞)− e(0)
,
- la constante de temps τ et
- le retard TR
qui peuvent être identifiés graphiquement (figure 3).
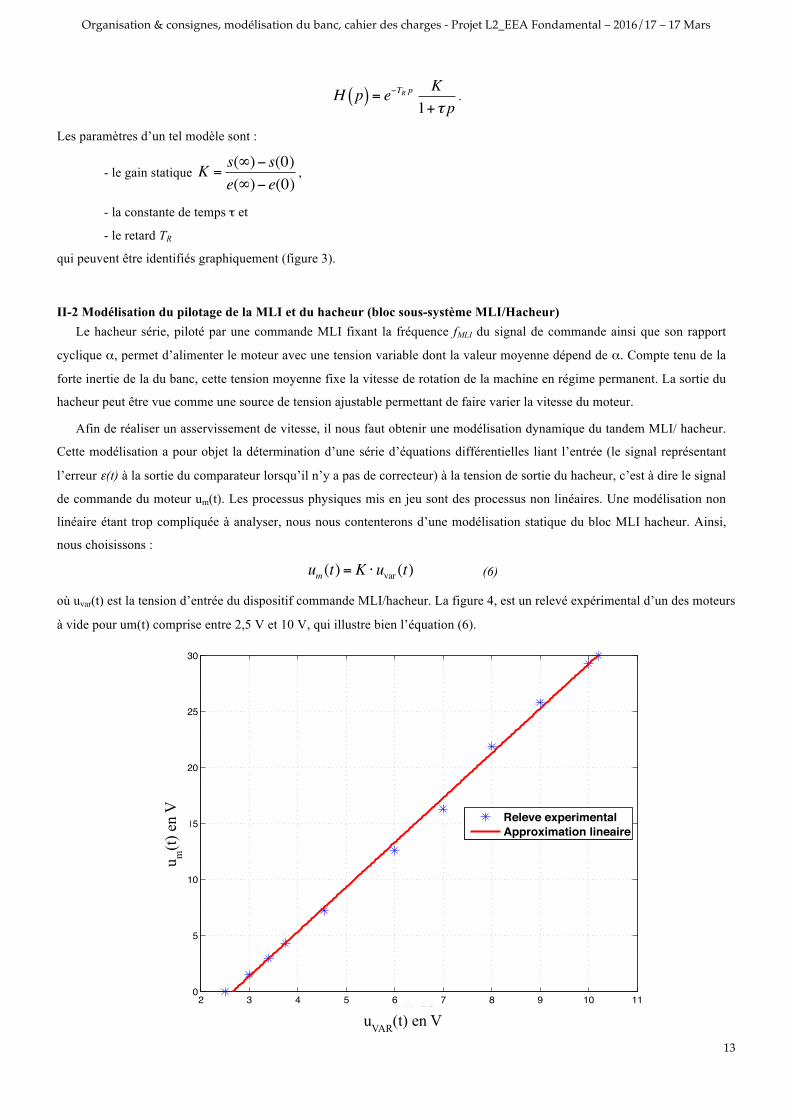
II-2 Modélisation du pilotage de la MLI et du hacheur (bloc sous-système MLI/Hacheur)
Le hacheur série, piloté par une commande MLI fixant la fréquence fMLI du signal de commande ainsi que son rapport
cyclique α, permet d’alimenter le moteur avec une tension variable dont la valeur moyenne dépend de α. Compte tenu de la
forte inertie de la du banc, cette tension moyenne fixe la vitesse de rotation de la machine en régime permanent. La sortie du
hacheur peut être vue comme une source de tension ajustable permettant de faire varier la vitesse du moteur.
Afin de réaliser un asservissement de vitesse, il nous faut obtenir une modélisation dynamique du tandem MLI/ hacheur.
Cette modélisation a pour objet la détermination d’une série d’équations différentielles liant l’entrée (le signal représentant
l’erreur ε(t) à la sortie du comparateur lorsqu’il n’y a pas de correcteur) à la tension de sortie du hacheur, c’est à dire le signal
de commande du moteur um(t). Les processus physiques mis en jeu sont des processus non linéaires. Une modélisation non
linéaire étant trop compliquée à analyser, nous nous contenterons d’une modélisation statique du bloc MLI hacheur. Ainsi,
nous choisissons :
(6)
où uvar(t) est la tension d’entrée du dispositif commande MLI/hacheur. La figure 4, est un relevé expérimental d’un des moteurs
à vide pour um(t) comprise entre 2,5 V et 10 V, qui illustre bien l’équation (6).
um (t) = K ⋅ uvar (t)
série d’équations différentielles liant l’entrée (le signal représentant l’erreur) à la tensionde sortie du hacheur , c’est à dire le signal de commande du moteur. Comme il a étévu en cours, les processus physiques mis en jeu sont des processus non linéaires. Unemodélisation non linéaire étant trop compliquée à analyser, nous nous contenterons d’unemodélisation statique du bloc MLI hacheur. Ainsi, nous choisissons :
u(t) = κum(t)
La caractérisation statique qui a été effectuée sur le bloc d’amplification de puissance aconsisté à relever la tension u lorsqu’est appliquée une tension constante um compriseentre 2, 5V et 10V en entrée. Le résultat est présenté figure 3.
2 3 4 5 6 7 8 9 10 110
5
10
15
20
25
30
Um [V]
U [V
]
Releve experimentalApproximation lineaire
Figure 3: Caractérisation linéaire du bloc d’amplification de Puissance
Donnez les coefficients de la régression linéaire définie sur la figure 3. Pour se faire,vous utiliserez le code suivant :
load caract_mlihacheurplot(U_m,U,’*’)
Puis vous utiliserez les outils Matlab présents dans le menu Tools|Basic Fittingde la fenêtre graphique.
5
u m(t)
en
V
uVAR(t) en V
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
14
Figure 4 : Caractérisation linéaire du bloc d’amplification de puissance pilotant le moteur.
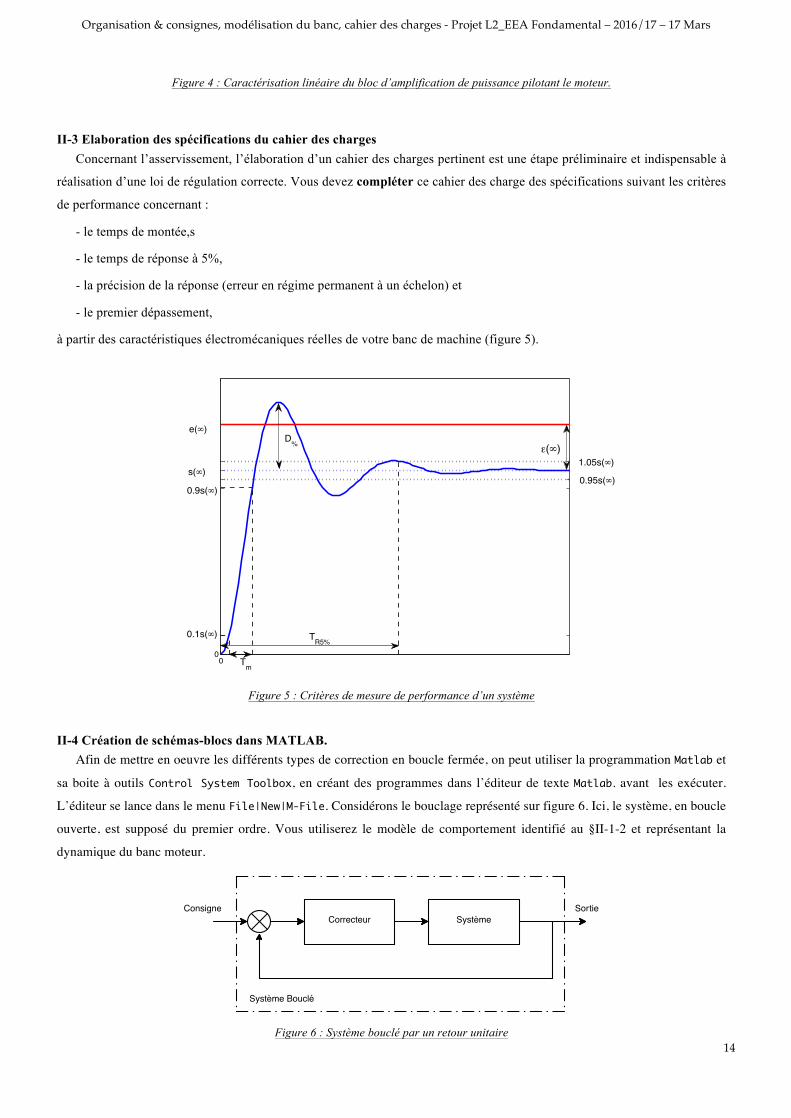
II-3 Elaboration des spécifications du cahier des charges
Concernant l’asservissement, l’élaboration d’un cahier des charges pertinent est une étape préliminaire et indispensable à
réalisation d’une loi de régulation correcte. Vous devez compléter ce cahier des charge des spécifications suivant les critères
de performance concernant :
- le temps de montée,s
- le temps de réponse à 5%,
- la précision de la réponse (erreur en régime permanent à un échelon) et
- le premier dépassement,
à partir des caractéristiques électromécaniques réelles de votre banc de machine (figure 5).
Figure 5 : Critères de mesure de performance d’un système
II-4 Création de schémas-blocs dans MATLAB. Afin de mettre en oeuvre les différents types de correction en boucle fermée, on peut utiliser la programmation Matlab et
sa boite à outils Control System Toolbox, en créant des programmes dans l’éditeur de texte Matlab. avant les exécuter.
L’éditeur se lance dans le menu File|New|M-File. Considérons le bouclage représenté sur figure 6. Ici, le système, en boucle
ouverte, est supposé du premier ordre. Vous utiliserez le modèle de comportement identifié au §II-1-2 et représentant la
dynamique du banc moteur.
Figure 6 : Système bouclé par un retour unitaire
00
1.05s(∞)
TR5%
D%
0.95s(∞)
Tm
0.9s(∞)
s(∞)
e(∞)
ε(∞)
0.1s(∞)
Figure 6: Critère de mesure de performance
Consigne Sortiekp modele
Erreur Commande
Figure 7: Système corrigé par un correcteur proportionnel
de sortie :Erreur = Consigne− Sortie
1. Calculez la Fonction de transfert en boucle ouverte. Déduisez-en la fonction detransfert en boucle fermée.
2. Pour kp = 1 : Calculez, grâce au théorème de la valeur finale, la précision pour un
échelon unitaire. 3
3. Construisez dans votre script Matlab le système équivalent au système bouclé dela figure 7 grâce aux instructions de la section 2.3. Tracez la réponse indicielle grâceà l’instruction suivante :
step(sys)
3. Sans rentrer dans les détails, le théorème de la valeur finale énonce que
limt→∞
y(t) = limp→0
pY (p)
Rappelez-vous que Y (p) = F (p)U(p) avec U(p) la transformée de la place du signal d’entrée et F (p) letransfert entre l’entrée et la sortie
9
Afin d’afficher à l’écran le résultat de l’essai en boucle ouverte, vous utiliserez le codesuivant :
load acquisition1.txttps=acquisition1(:,1);V_ref=acquisition1(:,2);V_omega=acquisition1(:,3);plot(tps,V_ref,tps,V_omega,’r’)grid
2.3 Création de schéma-blocs dans Matlab
Dans cette partie, nous allons mettre en oeuvre différents types de correction parboucle fermée. Pour ce faire nous allons nous initier avec la programmation Matlab etsa boite à outils Control System Toolbox. Les travaux qui vont suivre vont êtreprogrammés et exécutés dans l’éditeur de texte Matlab.L’éditeur se lance dans le menu File|New|M-File.Nous allons mettre en place un bouclage représentée sur figure 5. Le modèle utilisé seracelui du premier ordre identifié dans la partie 2.2 et représentant la dynamique du bancmoteur.
Systeme Boucle
Consigne SortieCorrecteur Systeme
Figure 5: Système bouclé
Nous allons aborder, ici, les méthodes de création de système par schéma-blocs. L’élé-ment de base d’un schéma-bloc est la fonction de transfert. Matlab et sa boite à outilsControl System Toolbox permettent de déclarer des fonctions de transfert grâce àl’instruction tf :
num=[...];den=[...];F=tf(num,den)
où num et den sont des vecteurs contenant les coefficients (même nuls), rangés dans l’ordredes puissances décroissantes, des polynômes du numérateur et dénominateur respective-ment.Tout schéma-bloc est l’agencement de sous systèmes, eux mêmes définis comme agence-ments de fonctions de transfert. La Control System Toolbox propose des mécanismesdécrivant ces agencements (cf. tableau 2).
7
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
15
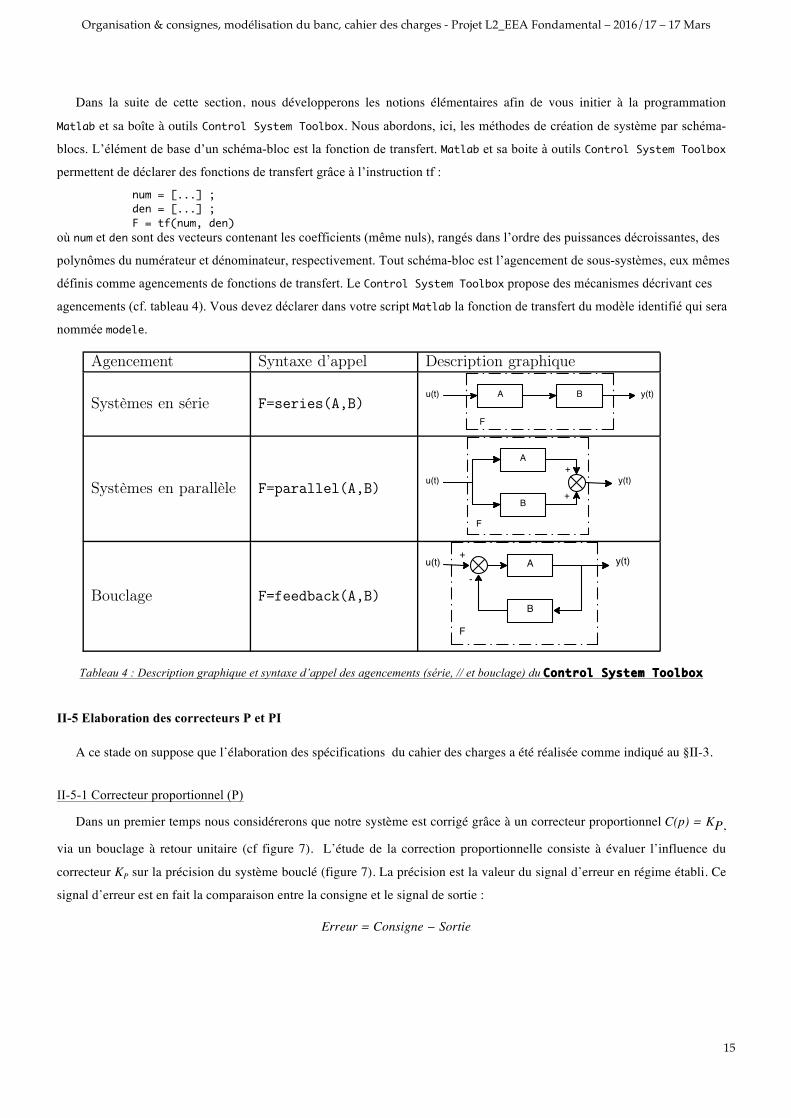
Dans la suite de cette section, nous développerons les notions élémentaires afin de vous initier à la programmation
Matlab et sa boîte à outils Control System Toolbox. Nous abordons, ici, les méthodes de création de système par schéma-
blocs. L’élément de base d’un schéma-bloc est la fonction de transfert. Matlab et sa boite à outils Control System Toolbox
permettent de déclarer des fonctions de transfert grâce à l’instruction tf :
num = [...] ; den = [...] ; F = tf(num, den)
où num et den sont des vecteurs contenant les coefficients (même nuls), rangés dans l’ordre des puissances décroissantes, des
polynômes du numérateur et dénominateur, respectivement. Tout schéma-bloc est l’agencement de sous-systèmes, eux mêmes
définis comme agencements de fonctions de transfert. Le Control System Toolbox propose des mécanismes décrivant ces
agencements (cf. tableau 4). Vous devez déclarer dans votre script Matlab la fonction de transfert du modèle identifié qui sera
nommée modele.
Tableau 4 : Description graphique et syntaxe d’appel des agencements (série, // et bouclage) du Control System Toolbox
II-5 Elaboration des correcteurs P et PI
A ce stade on suppose que l’élaboration des spécifications du cahier des charges a été réalisée comme indiqué au §II-3.
II-5-1 Correcteur proportionnel (P)
Dans un premier temps nous considérerons que notre système est corrigé grâce à un correcteur proportionnel C(p) = KP,
via un bouclage à retour unitaire (cf figure 7). L’étude de la correction proportionnelle consiste à évaluer l’influence du
correcteur KP sur la précision du système bouclé (figure 7). La précision est la valeur du signal d’erreur en régime établi. Ce
signal d’erreur est en fait la comparaison entre la consigne et le signal de sortie :
Erreur = Consigne − Sortie
Agencement Syntaxe d’appel Description graphique
Systèmes en série F=series(A,B)A B y(t)u(t)
F
Systèmes en parallèle F=parallel(A,B)
A
B
y(t)u(t)
F
+
+
Bouclage F=feedback(A,B)
u(t) y(t)A
B
+
-
F
Table 2
– Déclarez dans votre script Matlab la fonction de transfert du modèle identifié quisera nommée modele.
3 Elaboration de correcteurs
3.1 Elaboration des spécifications
L’élaboration d’un cahier des charges pertinent est une étape préliminaire et indispen-sable à la création d’une loi de régulation correcte.
1. Définissez un cahier des charges suivant les critères de performance suivants (cf.figure 6) :– Temps de montée– Temps de réponse à 5%– Précision de la réponse (erreur en régime permanent)
3.2 Etude d’une correction proportionnelle
Dans un premier temps nous allons considérer que notre système est corrigé grâce àun correcteur proportionnel C(p) = kp et via un bouclage à retour unitaire (cf figure 7).
L’étude de la correction proportionnelle va à consister évaluer l’influence du correcteurK sur la précision du système bouclé (figure 7). La précision est la valeur du signal d’erreuren régime établi. Ce signal d’erreur est en fait la comparaison entre la consigne et le signal
8
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
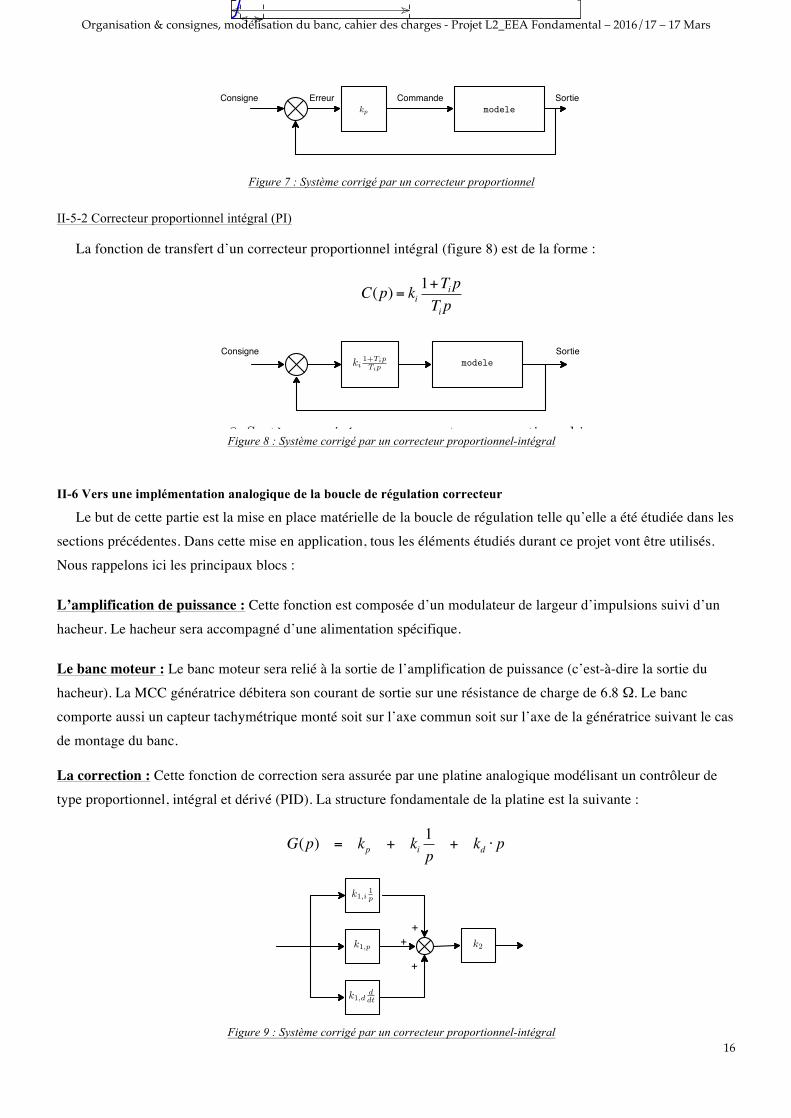
16
Figure 7 : Système corrigé par un correcteur proportionnel II-5-2 Correcteur proportionnel intégral (PI)
La fonction de transfert d’un correcteur proportionnel intégral (figure 8) est de la forme :
C(p) = ki1+Ti pTi p
Figure 8 : Système corrigé par un correcteur proportionnel-intégral
II-6 Vers une implémentation analogique de la boucle de régulation correcteur
Le but de cette partie est la mise en place matérielle de la boucle de régulation telle qu’elle a été étudiée dans les sections précédentes. Dans cette mise en application, tous les éléments étudiés durant ce projet vont être utilisés. Nous rappelons ici les principaux blocs :
L’amplification de puissance : Cette fonction est composée d’un modulateur de largeur d’impulsions suivi d’un hacheur. Le hacheur sera accompagné d’une alimentation spécifique.
Le banc moteur : Le banc moteur sera relié à la sortie de l’amplification de puissance (c’est-à-dire la sortie du hacheur). La MCC génératrice débitera son courant de sortie sur une résistance de charge de 6.8 Ω. Le banc comporte aussi un capteur tachymétrique monté soit sur l’axe commun soit sur l’axe de la génératrice suivant le cas de montage du banc.
La correction : Cette fonction de correction sera assurée par une platine analogique modélisant un contrôleur de type proportionnel, intégral et dérivé (PID). La structure fondamentale de la platine est la suivante :
G(p) = kp + ki1p
+ kd ⋅ p
Figure 9 : Système corrigé par un correcteur proportionnel-intégral
00
1.05s(∞)
TR5%
D%
0.95s(∞)
Tm
0.9s(∞)
s(∞)
e(∞)
ε(∞)
0.1s(∞)
Figure 6: Critère de mesure de performance
Consigne Sortiekp modele
Erreur Commande
Figure 7: Système corrigé par un correcteur proportionnel
de sortie :Erreur = Consigne− Sortie
1. Calculez la Fonction de transfert en boucle ouverte. Déduisez-en la fonction detransfert en boucle fermée.
2. Pour kp = 1 : Calculez, grâce au théorème de la valeur finale, la précision pour un
échelon unitaire. 3
3. Construisez dans votre script Matlab le système équivalent au système bouclé dela figure 7 grâce aux instructions de la section 2.3. Tracez la réponse indicielle grâceà l’instruction suivante :
step(sys)
3. Sans rentrer dans les détails, le théorème de la valeur finale énonce que
limt→∞
y(t) = limp→0
pY (p)
Rappelez-vous que Y (p) = F (p)U(p) avec U(p) la transformée de la place du signal d’entrée et F (p) letransfert entre l’entrée et la sortie
9
où sys représente le système considéré. Comparez les erreurs obtenu par le calculet la simulation.
4. Pour kp = 1 : Calculez le gain de commande proportionnel permettant d’assurer uneerreur en régime établi de 0.1.Testez ce gain sous Matlab.
5. Tracez la sortie du système en réponse à une entrée constante.
3.3 Un correcteur proportionnel intégral
La fonction de transfert d’un correcteur proportionnel intégral est de la forme :
C(p) = ki1 + Tip
Tip
Dans un premier temps, nous poserons Ti = ki = 1.
Consigne Sortieki
1+TipTip
modele
Figure 8: Système corrigé par un correcteur proportionnel intégral
1. Appliquez le théorème de la valeur finale au système bouclé de la figure 8. Déduisezdu précédent calcul l’erreur de position. Concluez sur l’intérêt de l’action intégrale.
2. Construisez la fonction de transfert du correcteur en utilisant l’instruction tf
3. Simulez la réponse indicielle du système bouclé (instruction step). L’erreur correspond-elle à l’erreur théorique calculée ?
L’un des principaux problèmes de l’automaticien est de choisir les paramètres ducorrecteur (ici Ti et ki). Nous proposons une approche heuristique.
1. Quel est l’ordre de la fonction de transfert de la boucle fermée.
2. En faisant varier Ti entre 0.01 et 0.1 et ki entre 1 et 10, relevez la pulsation propreet le coefficient d’amortissement du transfert en boucle fermée. Utilisez l’instructionsuivante [Wn,Z] = damp(SYS). Cette commande Matlab renvoie Wn la pulsationpropre ωn et Z le coefficient d’amortissement ζ . Afin de récupérer l’ensemble descalculs en vue d’une exploitation graphique, vous appliquerez un script voisin dusuivant :
m=10;n=10;Tv=linspace(.01,0.1,n); % vecteur des valeur des paramètres du correcteur à testerkv=linspace(1,10,m); % vecteur des valeur des paramètres du correcteur à testerZ=zeros(n,m); % Matrice de stockage des coeff d’ammortissementWn=zeros(n,m); % Matrice de stockage des pulsations propres
10
4 Vers une implantation analogique de la boucle de ré-
gulation correcteur
Le but de cette partie est la mise en place matérielle de la boucle de régulation tellequ’elle a été étudiée dans les sections précédentes. Dans cette mise en application, tousles éléments étudiés durant ce projet vont être utilisés. Nous rapellons ici les principauxblocs :
L’amplification de puissance : Cette fonction est composée d’un modulateur de lar-geur d’impulsions suivi d’un hacheur. Le hacheur sera accompagné d’une alimenta-tion spécifique.
Le banc moteur : Il sera relié à la sortie de l’amplification de puissance (c’est-à-direla sortie du hacheur). La MCC génératrice débitera sa tension de sortie sur unerésistance de charge de 6.8Ω. Le banc comporte aussi un capteur tachymétriquemonté soit sur l’axe commun soit sur l’axe de la génératrice suivant le cas de montagedu banc.
La correction : Cette fonction sera assurée par une platine analogique modélisant uncontrôleur de type proportionnel, intégral et dérivé (PID). La structure fondamen-tale de la platine est la suivante :
G(p) = kp + ki1
p+ kdp (1)
Cette structure est modélisée sur platine comme le décrit la figure 9. On en déduitles relations entre les paramètres du contrôleur PID, kp, ki, kd et ceux de la platine :
kp = k2k1,pki = k2k1,ikd = k2k1,d
Comme nous le verrons pendant la manipulation, chacune des actions proportion-nelle, intégrale ou dérivée pourra être connectée ou mise hors circuit grâce à desinterrupteurs.
k1,p
k1,i1p
++
k1,dddt
+
k2
Figure 9: Structure d’un correcteur proportionnel intégral et dérivé
12

Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
17
Cette structure est modélisée sur la platine mise à disposition, comme le décrit la figure 9. On en déduit les
relations entre les paramètres du contrôleur PID, kp, ki, kd et ceux de la platine :
kp = k2 ⋅ k1,pki = k2 ⋅ k1,ikd = k2 ⋅ k1,d
Comme nous le verrons pendant la manipulation, chacune des actions proportionnelle, intégrale ou dérivée pourra être connectée ou mise hors circuit grâce à des interrupteurs.
La génération de consigne : Cette fonction sera réalisée par un générateur basse fréquence permettant d’obtenir des créneaux de tensions. Nous travaillerons essentiellement sur des créneaux de 0 à 6 V à une fréquence de signal autour de 0.1Hz. La période devrait être adapter aux observations afin d’obtenir le régime établi sur chaque créneau montant.
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
18
III : Cahier des charges
III-1 : Cahier des charges - Electronique
Présentation du système général
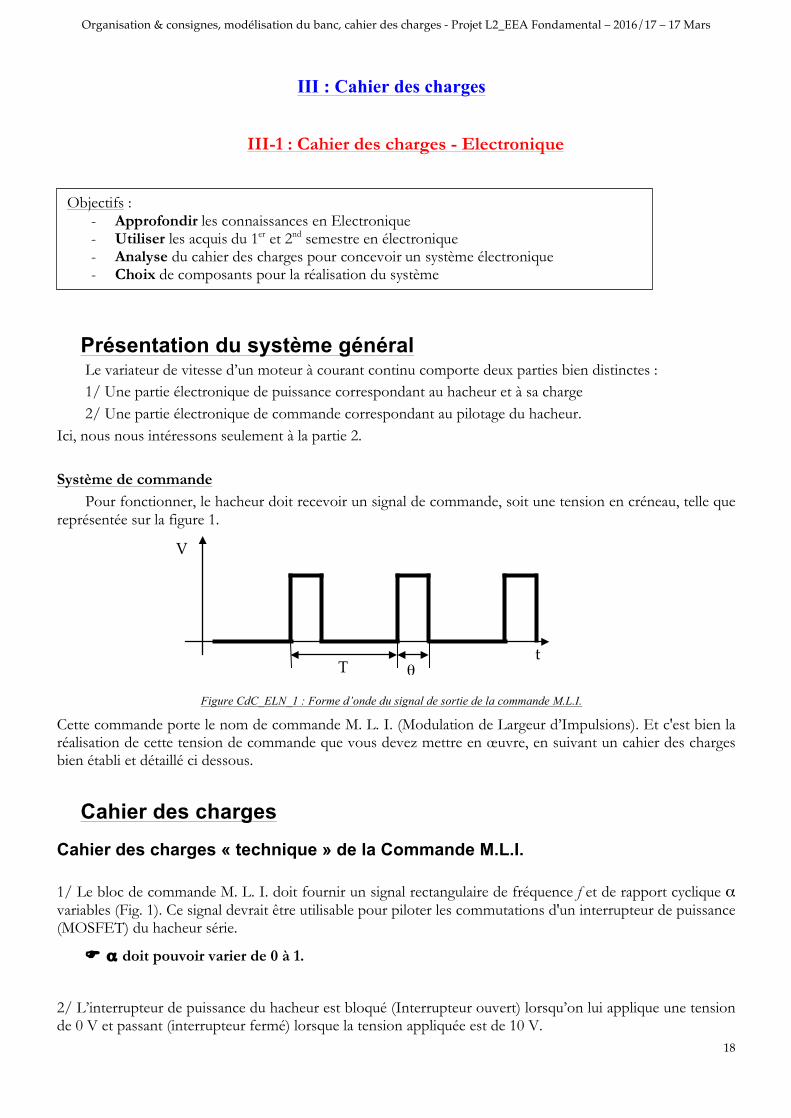
Le variateur de vitesse d’un moteur à courant continu comporte deux parties bien distinctes : 1/ Une partie électronique de puissance correspondant au hacheur et à sa charge 2/ Une partie électronique de commande correspondant au pilotage du hacheur. Ici, nous nous intéressons seulement à la partie 2. Système de commande Pour fonctionner, le hacheur doit recevoir un signal de commande, soit une tension en créneau, telle que représentée sur la figure 1.
Figure CdC_ELN_1 : Forme d’onde du signal de sortie de la commande M.L.I.
Cette commande porte le nom de commande M. L. I. (Modulation de Largeur d’Impulsions). Et c'est bien la réalisation de cette tension de commande que vous devez mettre en œuvre, en suivant un cahier des charges bien établi et détaillé ci dessous.
Cahier des charges Cahier des charges « technique » de la Commande M.L.I. 1/ Le bloc de commande M. L. I. doit fournir un signal rectangulaire de fréquence f et de rapport cyclique α variables (Fig. 1). Ce signal devrait être utilisable pour piloter les commutations d'un interrupteur de puissance (MOSFET) du hacheur série.
F α doit pouvoir varier de 0 à 1. 2/ L’interrupteur de puissance du hacheur est bloqué (Interrupteur ouvert) lorsqu’on lui applique une tension de 0 V et passant (interrupteur fermé) lorsque la tension appliquée est de 10 V.
Objectifs : - Approfondir les connaissances en Electronique - Utiliser les acquis du 1er et 2nd semestre en électronique - Analyse du cahier des charges pour concevoir un système électronique - Choix de composants pour la réalisation du système
V
t T θ
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
19
F Le signal de sortie de la commande MLI doit donc être entre 0 et 10 V 3/ La commande MLI doit fonctionner pour f réglable dans le dispositif avec : 1 kHz < f < 20 kHz.
F Son point de fonctionnement « médian » doit être dimensionné pour f = 10 kHz.
4/ La valeur de α doit être commandée par une tension continue (pour la boucle de régulation)
F La tension continue de commande de α se situe entre : 0 V (α=0) et 15 V (α = 1). 5/ Seule une alimentation +15V/-15V symétrique est à disposition pour alimenter le circuit de commande de la MLI.
Cahier des charges de réalisation 1/ La commande MLI sera réalisée à l'aide d'AOP. 2/ Les étages choisis devront dans un premier temps être dimensionnés sur le papier (calculs) puis à l'aide des outils de modélisation que vous connaissez (LT SPICE ou Cadence). 3/ Un prototype du dispositif complet sera réalisé sur platine labdec avec un soin particulier concernant le câblage des différents étages. 4/ Vous devrez définir votre projet étape par étape et faire valider chacune des étapes par l'enseignant référent/conseil en remplissant dûment le carnet de bord ‘ELECTRONIQUE’. Quelques indications: - Votre commande va comporter probablement plusieurs étages. - Un des étages sera probablement un oscillateur. - Tout est réalisable avec vos connaissances en électronique.
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
20
III – 2 : Cahier des charges – Electrotechnique/Electronique de puissance
MATERIELS MIS À DISPOSITION - un banc de 2 MCC identiques, à aimants permanents, couplés mécaniquement, qu’il faut identifier avec
un autocollant. (Pensez à recueillir les données du constructeur de votre machine MCC).
Machine Parvex : RX320, RX330, - un générateur de fonctions à basses fréquences (GBF) - une alimentation continue réglable : 0 – 60 V / 20 A - rhéostats : 50 Ω / 5 A 33 Ω/6 A 100 Ω/2.5 A 330 Ω/1 A 1000 Ω/0.7 A - un oscilloscope numérique TDS210 ou équivalent, - une sonde de courant (à effet Hall) PR30 pour visualiser le courant instantané, - des ampèremètres pour mesurer des courants dc ou ac - des voltmètres pour mesurer des tensions dc ou ac - un banc hacheur série, abaisseur à 1 quadrant, avec possibilité de réglage de la fréquence f et du rapport
cyclique α
OBJECTIFS
FEUILLE DE ROUTE : Conversion d’Energie Proposer un montage qui permet de réaliser la variation de vitesse d’un moteur à courant continu à aimants permanents, à faibles pertes, basé sur une structure simple de type hacheur série abaisseur 1 quadrant piloté par une commande M. L. I. (Modulation de Largeur d’Impulsions). Carac t é r i s e r complètement la machine à courant continu à aimants permanent (inducteur et induit), afin de déterminer tous les paramètres de son modèle (linéaire) afin d’analyser le comportement dynamique de la machine. Pour cela, vous devez proposer et réaliser la détermination expérimentale des paramètres de son modèle, d’un point de vue statique et dynamique. Réal i s e r expér imenta l ement le profil de vitesse du moteur "à vide" avec une excitation échelon de la tension appliquée à l’induit du moteur. Cette courbe est indispensable pour les BE d’automatique. Nous vous proposons de procéder en quatre étapes : 1/ Caractérisation statique et dynamique d’une machine à courant continu 2/ Profil de vitesse du moteur à vide en réponse indicielle. 3/ Performances d’un variateur de vitesse à faibles pertes (écologique).
Objectifs principaux : - Analyse du cahier des charges pour concevoir un système de conversion d’énergie électrique - Mise en oeuvre d’un variateur de vitesse d’une MCC à faibles pertes - Analyse du variateur de vitesse pour la MCC
Objectifs intermédiaires : - Caractérisation d’une MCC en régimes statique et dynamique - Approfondir les connaissances en Electrotechnique et Electronique de puissance via l’utilisation d’un
hacheur série 1 quadrant abaisseur (de tension) en tant que variateur de vitesse d’un moteur à courant continu
Points d’appui : - Utiliser les acquis du S3 de L2 SPI/EEA : (Cours/Td/Tp d’Energie Electrique) - Mettre à profit l’enseignement Cours/Td/Tp du S4 de L2 EEA (Machines électriques) - Mettre à profit l’enseignement TDI du S4 en L2 EEA (Projet EEA Fondamental)
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
21
Rappels sur la platine de commande Cette platine MLI (Modulation de Largeur d’Impulsion) délivre un signal carré de rapport cyclique α variable,
utilisable pour piloter les commutations d'un interrupteur de puissance. Le circuit intégré utilisé est le circuit SG352. Le principe de base employé, consiste à générer une dent de scie asymétrique (DS), et de la comparer à une tension de commande ou de référence (Vref) réglable. Cette comparaison se fait à l’aide d’un AOP (amplificateur opérationnel) qui suivant le résultat délivre en sortie une tension nulle ou maximale de 15 Volts. Le résultat de la comparaison (Vcom) accessible sur les bornes de sortie, est alors un signal carré de rapport cyclique variable, utilisable pour piloter les commutations d'un interrupteur de puissance.
Remarque : La commande MLI est réalisée durant la partie Electronique de ce projet.
Précautions - Remarques - Recommandations
Ø Il est impératif de faire vérifier tous les montages à chaque modification.
Ø L'oscilloscope est l'instrument de mesure de base dans cette manipulation. Il est vivement conseillé de revoir son
fonctionnement, étudié en premier cycle, et en particulier de connaître la distinction entre les positions AC (CA) et DC
(CC) ! De plus, il est impératif d'utiliser la sonde différentielle double ST1000 pour visualiser les différentes tensions.
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
22
Cahier des charges de réalisation 1/ Il est souhaitable de réaliser cette étude en suivant les étapes définies par les tâches 1 à 3 ci-dessous.
2/ Vous devrez définir votre projet étape par étape et faire valider chacune des étapes par l'enseignant référent/conseil en remplissant dûment le carnet de bord "Electrotechnique/Electronique de Puissance".
================================================================= Tâche N°1 : Caractérisation statique et dynamique d’une machine à courant continu (MCC).
1-1 Réaliser la détermination expérimentale de r = Re (résistance d’induit), KΩ = Km (coefficient de couple) et C0 (couple de pertes collectives : C0 = 0CFS + µ∗Ω), pour les deux machines :
1-2 Réaliser la détermination expérimentale de L = Le, pour les deux machines.
1-3 Réaliser la détermination expérimentale de J (moment d’inertie du moteur) et µ (coefficient de frottement visqueux du moteur), en supposant que C0 est le même Attention Ω(t) correspond à ω(t) de la partie automatique.
1-4 Synthèse et conclusions de la caractérisation expérimentale de la MCC. Tâche N°2 : Profil de vitesse du moteur
2-1 Réaliser expérimentalement le montage permettant de faire varier la vitesse (au moyen d’un hacheur) de votre moteur MCC chargé mécaniquement par un générateur à courant continu, lui même chargé électriquement par une rhéostat adapté.
2-2 En exploitant votre modèle (valeurs numériques) du moteur, proposer et faire valider par le
chef d’atelier le protocole complet qui permet de visualiser le profil de vitesse de votre moteur "à vide mécaniquement" en réponse indicielle.
2-3 Réaliser le relevé expérimental du profil de vitesse du moteur "à vide" entre 0 et la vitesse
nominale. 2-4 Réaliser le relevé expérimental du profil de vitesse du moteur "à vide" en imposant deux
paliers à 20% de 1000 tr/min. 2-5 Réaliser le relevé expérimental du profil de vitesse du moteur "en charge" en imposant deux
paliers à 20% de 1000 tr/min avec un couple moteur moyen égal à la moitié du couple nominal du moteur.
Tâche N°3 : Etude du variateur de vitesse, à faibles pertes, du moteur Faire fonctionner le variateur de vitesse avec le moteur à vide et observer la tension de sortie um(t) du hacheur.
3-1 Tracer En faisant varier la tension d’entrée uVAR (tension dc) tracer la caractéristique expérimentale de la tension moyenne à la sortie du hacheur Um_moy =f1(uVAR_moy) pour le moteur. Vous avez besoin de cette courbe pour les BE d’automatique.
3-2 Tracer la caractéristique expérimentale de la vitesse N =f1(α) pour le moteur à vide (N étant en
tr/min) et analyser. 3-3 Tracer l’évolution expérimentale de α = f2(Cu) pour le moteur en charge, à vitesse constante) et
analyser. =================================================================
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
23
III – 3 : Cahier des charges - AUTOMATIQUE
OBJECTIFS
Cahier des charges de réalisation 1/ Il est souhaitable de réaliser cette étude en suivant les étapes définies par les tâches 1 à 8 ci-dessous.
2/ Vous devrez définir votre projet étape par étape et faire valider chacune des étapes par l'enseignant référent/conseil en remplissant dûment le carnet de bord "Automatique".
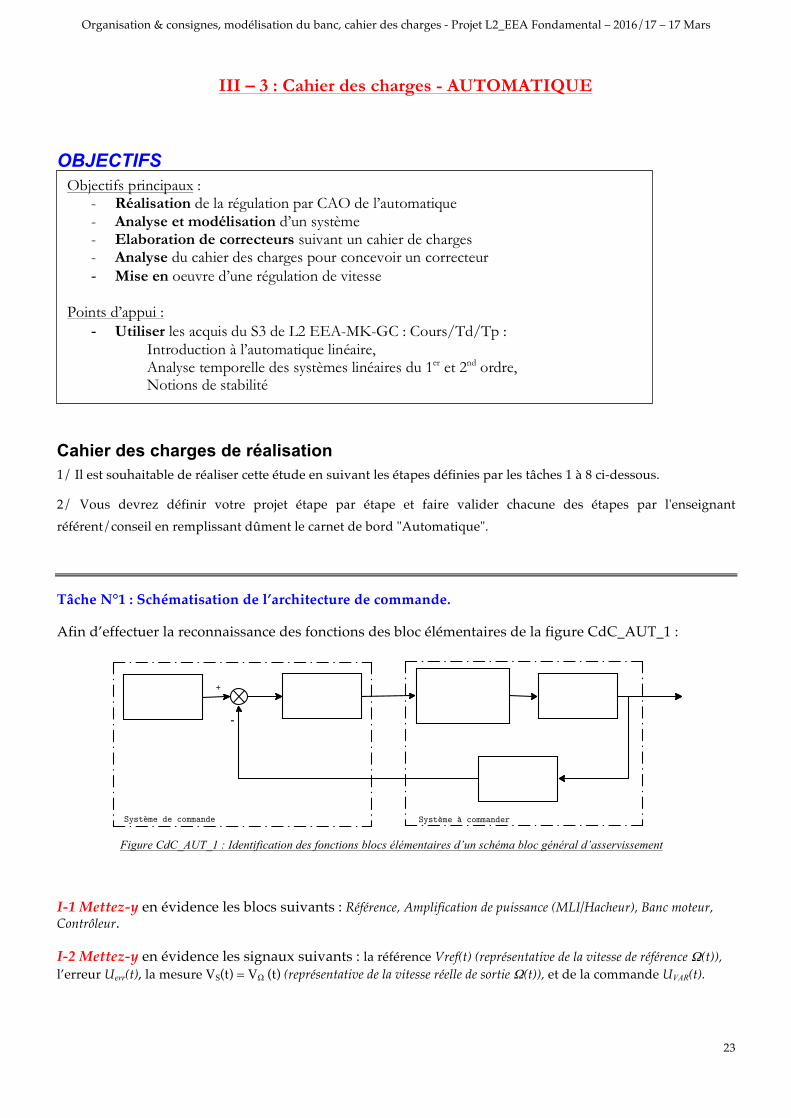
Tâche N°1 : Schématisation de l’architecture de commande. Afin d’effectuer la reconnaissance des fonctions des bloc élémentaires de la figure CdC_AUT_1 :
Figure CdC_AUT_1 : Identification des fonctions blocs élémentaires d’un schéma bloc général d’asservissement
I-1 Mettez-y en évidence les blocs suivants : Référence, Amplification de puissance (MLI/Hacheur), Banc moteur, Contrôleur.
I-2 Mettez-y en évidence les signaux suivants : la référence Vref(t) (représentative de la vitesse de référence Ω(t)), l’erreur Uerr(t), la mesure VS(t) = VΩ (t) (représentative de la vitesse réelle de sortie Ω(t)), et de la commande UVAR(t).
Régulation d’un moteur à courant continu
Objectifs : CAO de l’automatique, Analyse et modélisation de système, Matlab, Ela-boration de correcteurs, régulation de vitesse.Pré-requis : Cours d’Introduction à l’automatique linéaire, Analyse temporelle des sys-tèmes linéaire du 1er et 2nd ordre, Notion de stabilité
1 Principe général
Le but principal de cette manipulation est l’étude de la variation de vitesse d’unmoteur à courant continu et à aimants permanents au moyen d’un hacheur série . C’estun ensemble utilisé par exemple pour la propulsion de véhicules électriques, ou encorepour les perceuses sans fil.L’objectif de la partie Automatique de ce module est le développement d’un système decommande autonome controlant la vitesse du système banc moteur via un hacheursérie etudié durant les parties électronique et électrotechnique du projet. Bien entendu cesystème de commande devra répondre à un cahier des charges spécifique.
2 Modélisation et identification du modèle dynamique
Le premier travail de l’automaticien commence par la définition d’un modèle propre àêtre commandé. Une architecture classique de commande est donnée figure 1. Cette figurereprésente un schéma bloc général d’asservissement.
Systeme de commande Systeme a commander
-
+
Figure 1
1. Mettez en évidence les blocs suivants : Référence, Amplification de puissance (MLIet Hacheur), Banc moteur, Controleur, Capteur.
1
Objectifs principaux : - Réalisation de la régulation par CAO de l’automatique - Analyse et modélisation d’un système - Elaboration de correcteurs suivant un cahier de charges - Analyse du cahier des charges pour concevoir un correcteur - Mise en oeuvre d’une régulation de vitesse
Points d’appui :
- Utiliser les acquis du S3 de L2 EEA-MK-GC : Cours/Td/Tp : Introduction à l’automatique linéaire, Analyse temporelle des systèmes linéaires du 1er et 2nd ordre, Notions de stabilité
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
24
Tâche N°2 : Modélisation de connaissance du banc moteur en boucle ouverte, et Tâche N°3 : Création d’un modèle de simulation simulink Il s ‘agit dans un premier, d’établir le modèle dynamique du banc moteur en boucle ouverte :
um(t) ==> Ω(t), puis de l’exploiter pour déterminer la réponse d’un système par simulation à l’aide de
Matlab/Simulink. Les tâches 2 et 3 sont donc imbriquées. 2-1 : A l’aide des équations électromécaniques du moteur données au §II-1-1, établissez le modèle
dynamique du moteur à MCC H (p) = Ω(p)Um (p)
, au moyen des fonctions de transfert F1(p), F2(p), F3(p),
F4(p) et F5(p), en suivant le protocole indiqué au §II-1-1. 2-2 : En associant un bloc à chaque fonction de transfert calculées précédemment (F1(p) à F5(p)),
représentez le schéma-bloc du système banc de moteur, sur papier libre. 3-1 : Crééz le modèle Simulink et le fichier Matlab d’initialisation de variables, en utilisant les blocs :
– Simulink|Continuous|Transfer Function,
– Simulink|Math Operations|Gain,
– Simulink|Math Operations|Sum.
Le signal de tension um(t) est donnée par le bloc Simulink|Sources|Step et la vitesse de sortie Ω(t) est
récupérable dans un bloc Simulink|Sinks|To Workspace (sélectionner l’option Save format, Structure with time). 2-3 : Effectuez le même type travail de modélisation pour la MCC génératrice en décrivant le transfert du
entre et Ω(p).
3-2 : Puis créez le modèle Simulink permettant de modéliser le banc moteur complet. 3-3 : Tracez sous Matlab la réponse temporelle du système lorsque l’entrée est un échelon de 1V. Vous pourrez vous inspirer de la démarche suivante : !– Dans votre schéma Simulink, fixez un temps de simulation adéquat, c’est à dire permettant d’observer le régime permanent de la réponse. – Sous Matlab, exécutez le code suivant
tps = omega.time ; vitesse = omega.signals.values ; plot(tps, vitesse) grid
CemG (p)
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
25
Tâche N°4 : Modélisation boite noire du moteur et modélisation du bloc amplificateur Durant les BE d’ETP vous avez réalisé un essai en boucle ouverte permettant d’enregistrer pour votre
moteur à vide, la réponse indicielle conduisant à la vitesse Ω(t). Ce relevé peut conduire à la
détermination du modèle de comportement du système sans avoir recours aux lois physiques régissant le fonctionnement du banc. Il s’agit de la modélisation de type boîte-noire du moteur à "vide" considéré comme un système dynamique du premier ordre 4-1 : En considérant que le système se comporte, en première approximation, comme un système dynamique du premier ordre, déterminez les valeurs des trois paramètres inconnus du modèle du
moteur MCC à partir de votre relevé expérimental de Ω(t) en réponse indicielle. Le paragraphe §II-1-2
résume toutes les informations requises pour réaliser cette tâche. Si vous ne disposez pas de relevé expérimental concernant votre banc moteur, vous pouvez utiliser le graphique de la figure 3. Afin de compléter la modélisation de la chaîne directe, il est indispensable de modéliser le bloc amplification constitué par le tandem commande MLI/hacheur, sans en connaître la structure interne. Pour cela de la caractéristique, en valeur moyenne, de transfert direct tension d’entrée VVAR(t), tension de sortie um(t) est indispensable. Vous procèderez à la modélisation du pilotage de la MLI et du hacheur série, de la manière suivante, en vous assurant que votre fichier de données "caract_ampli.txt" contient deux colonnes ASCII : la tension d’entrée, puis la tension de sortie, toutes les deux en V. 4-2 : A partir de votre relevé de la caractéristique tension/tension de votre bloc commande MLI/hacheur, déterminez les coefficients de sa régression linéaire, à l’aide les outils Matlab présents dans le menu Tools|Basic Fitting de la fenêtre graphique. load caract_ampli.txt : Cela suppose que vous avez un fichier ‘caract_ampli.txt’. plot (UVAR, Um, ’*’) : Attention, ici U_m(t) est confondue avec UVAR(t), tandis que U(t) est confondue Um(t). Si vous ne possédez pas un tel fichier, vous pouvez utiliser le fichier préenregistré concernant un des bancs disponibles dans la salle de Conversion-Energie (Salle I2). Pour cela, il suffit de remplacer la première commande ci-dessus par la suivante : load caract_mlihacheur
Tâche N°5 : Elaboration des spécifications du cahier des charges pour le système de commande Afin d’élaborer les spécifications de l’asservissement, inspirez-vous de la figure 5 du §II-3 et des valeurs des paramètres du modèle des machines, et définissez un cahier de charges réaliste pour les critères de performances suivantes :
- le temps de réponse étant fixé à 5%, - temps de montée : - précision de la réponse (erreur en régime permanent) : - dépassement :

Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
26
Tâche N°6 : Etude d’une correction proportionnelle par simulation 6-1 : Pour une correction proportionnelle (§II-5-1), calculez la Fonction de transfert en boucle ouverte. Déduisez-en
la fonction de transfert en boucle fermée. 6-2 : Pour kP = 1, calculez, grâce au théorème de la valeur finale, la précision pour un échelon unitaire.3 6-3 : Construisez dans votre script Matlab le système équivalent au système bouclé de la figure 7 grâce aux
instructions de la secttion §II-4. Tracez la réponse indicielle grâce à l’instruction suivante : step(sys) 6-4 : Pour kp ≠ 1, calculez le gain de commande proportionnel permettant d’assurer une erreur en régime établi de
0.1. Testez ce gain sous Matlab. 6-5 : Tracez la sortie du système en réponse à une entrée constante.
Tâche N°7 : Etude d’une correction proportionnel et intégral par simulation En considérant une correction proportionnel-intégral (§II-5-2), posez dans un premier temps : Ti = 1/ki = 1 s.
7-1 : Appliquez le théorème de la valeur finale au système bouclé de la figure 8. Déduisez du précédent calcul l’erreur de position. Concluez sur l’intérêt de l’action intégrale.
7-2 : Construisez la fonction de transfert du correcteur en utilisant l’instruction tf. 7-3 : Simulez la réponse indicielle du système bouclé (instruction step). L’erreur correspond- elle à l’erreur
théorique calculée ? L’un des principaux problèmes de l’automaticien est de choisir les paramètres du correcteur (ici Ti et ki). Nous proposons une approche heuristique.
7-4 : Quel est l’ordre de la fonction de transfert de la boucle fermée ?
7-5 : En faisant varier, d’une part, Ti entre 0.01 s et 0.1 s et, d’autre part, ki entre 1 et 10, relevez la pulsation
propre ainsi que le coefficient d’amortissement du transfert en boucle fermée. Utilisez l’instruction suivante : [Wn,Z] = damp(SYS). Cette commande Matlab renvoie Wn la pulsation propre ωn et Z le coefficient d’amortissement ζ. Afin de récupérer l’ensemble des calculs en vue d’une exploitation
graphique, vous appliquerez un script voisin du suivant : m = 10 ; n = 10 ; Tv = linspace(0.01, 0.1, n) ; % vecteur des valeur des paramètres du correcteur à tester kv = linspace(1, 10, m) ; % vecteur des valeur des paramètres du correcteur à tester Z = zeros(n, m) ; % Matrice de stockage des coefficient d’amortissement Wn = zeros(n, m); % Matrice de stockage des pulsations propres for i = 1 : n for j = 1 : m Ti = Tv(i) ; Ki = kv(j) BF = ... % Actualiser ici la boucle fermé avec % les nouvelles valeurs de Ti et ki [dum_Wn,dum_Z] = damp(BF) ; Wn(i, j) = dum_Wn(1) ; Z(i, j) = dum_Z(1) ; end end figure(1) surf(Tv, kv, Z) figure(2) surf(Tv, kv, Wn)
3 Sans rentrer dans les détails, le théorème de la valeur finale énonce que : lim
t→∞y(t)( ) = lim
p→0pY (p)( )
Rappelons que Y(p) = F(p)·U(p) avec U(p) la transformée de la place du signal d’entrée et F(p) le transfert entre l’entrée et la sortie
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
27
Nous souhaitons maintenant définir les paramètres Ti et ki du correcteur C(p) de manière à conférer à la sortie
du système la réponse la plus rapide possible (au sens du temps de réponse à 5%), tout en limitant le dépassement à 20% de la valeur finale. En remarquant que le système bouclé est un système du second ordre, procédez en suivant les étapes :
7-6 : Calculez les valeurs limites de ζ (Z) pour lesquelles le dépassement est inférieur à 20%. Le dépassement D est défini par la formule suivante :
D (%) =100 e−
ς π
1−ς 2
7-7 : En utilisant la matrice Z, déduisez les valeurs du couple (Ti, ki) permettant de satisfaire la contrainte sur le
dépassement D ≤ 20%. 7-8 : En considérant que le temps de réponse T5% est donné par :
T5% ≈3
ς ωn
choisissez le paramètre ωn parmi la grille Wn permettant de minimiser le temps de réponse.
7-9 : Déduisez les meilleures valeurs de correction Ti∗ et ki
∗.
En vous référant aux résultats graphiques obtenus pour la précédente tâche et aussi grâce à vos connaissances sur le comportement temporel des systèmes du second ordre, choisissez un jeu de valeurs du couple (Ti, ki)
permettant d’obtenir la réponse la plus rapide possible (au sens du temps de réponse à 5%), tout en limitant le dépassement à 20% de la valeur finale.
Tâche N°8 : Assemblage : Réalisation de la boucle de commande
En vous inspirant des explications données paragraphe §II-6, réaliser l’implémentation de la boucle de
régulation correcteur en effectuant les tâches suivantes.
8-1 : Réalisation de la boucle de commande 1. Formez grâce au bloc MLI et hacheur la fonction d’amplification de puissance. Rappel : – La sortie de la MLI, de type BNC, peut doit être relié au hacheur au moyen d’un câble coaxial. – Le hacheur doit être alimenté par une tension continue de 30 V obtenue grâce au bloc d’alimentation se trouvant au dessus de la paillasse.
2. Branchez l’amplification de puissance à l’induit du de la MCC motrice. Connectez ensuite le circuit induit de la MCC génératrice à la résistance de 6.8 Ω. Vérifiez que la vitesse du moteur varie avec le rapport cyclique α.
3. Sur les indications de l’enseignant, vous connecterez la platine de commande d’une part au générateur de signaux, d’autre part au modulateur de largeur d’impulsions. Enfin, on vous indiquera comment procéder à la fermeture de la boucle de régulation.
4. Soyez attentifs à avoir une masse commune entre tous les éléments du montage. Avant le premier essai, faites vérifier votre montage par l’enseignant.
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
28
8-2 : Etude de la précision du système asservi par un correcteur proportionnel
Pour cette première manipulation, il vous est demandé de shunter les actions intégrale et dérivée de manière à ne
garder que l’action proportionnelle de la platine analogique. Vous réaliserez l’étude de la précision de réponse du
système à des échelons de tension compris entre 0 et 6 V pour différentes valeurs de kp. Cette étude devra être la
plus exhaustive possible. Les valeurs de kp à tester seront 1, 2, ..., 10, 20, 30, 40, 50, 100.
Vous mesurez lors de vos essais l’erreur statique, le temps de réponse à 5% et la valeur d’un éventuel dépassement.
Vous produirez les graphiques permettant d’observer l’erreur statique ainsi le temps de réponse en fonction du gain
du correcteur proportionnel. A partir de ce graphe, apportez vos conclusions sur l’utilisation d’un correcteur
proportionnel. On s’attardera sur l’intérêt et les inconvénients d’un grand gain dans la boucle.
8-3 : Etude de la correction proportionnelle et intégrale
Tout d’abord, sélectionnez les actions proportionnelle et intégrale et laissez l’action dérivée hors circuit.
Vous imposerez un créneau de consigne d’environ compris entre 0 et 6 V. L’étude suivante se réalisera à valeur
constante de kp = 5. Une fois de plus, cette étude sera la plus exhaustive possible. Les valeurs à tester seront :
ki = 0.1, 0.2, ..., 0.9, 1,2, ..., 10, 11, 12, 20, ..., 100.
Lors de vos essais, vous devez mesurer le temps de réponse à 5% et la valeur d’un éventuel dépassement.
Vous fournirez une représentation graphique de vos résultats que vous commenterez avec précision.
Vous conclurez en donnant le couple de paramètres kp, ki que vous conseillerez. Ce choix devra bien sûr être
argumenté.
8-4 : Effet de l’action dérivée
Pour cette étude, vous garderez la valeur de kp et la plage de variation de ki. La valeur de kd sera fixée à 0.3.
Toujours pour un créneau de tension de consigne compris entre 0 et 6 V, mesurez à nouveau le temps de réponse à
5% et la valeur d’un éventuel dépassement. Après avoir compilé vos résultats sous forme graphique, vous
analyserez l’effet de l’action dérivée sur la régulation.
8-5 : Influence de la résistance de charge
La résistance de charge nominale est de 6.8 Ω. On vous demande de mesurer l’effet apporté par le changement de la résistance de charge sur la régulation. En effet, ce changement de résistance peut se comparer au changement de matériel à percer pour une perceuse.
Faites l’essai d’une résistance de charge de 10 Ω pour une boucle de régulation proportionnelle puis sur la boucle de régulation PI. Visualisez et relevez l’effet de ce changement de résistance sur la précision, le temps de
Organisation & consignes, modélisation du banc, cahier des charges - Projet L2_EEA Fondamental – 2016/17 – 17 Mars
29
réponse à 5%. Vous commenterez avec précision ces résultats puis vous conclurez en faisant une analogie entre la valeur de la résistance de charge et la résistance à la pénétration d’un matériel fictif à percer.
8-6 : Conclusion générales
Comparez les résultats des phases de simulation et de manipulation. Observez-vous des différences notables ? Analysez le système physique, pour expliquez ces éventuelles différences (on s’attachera aux effets de saturation notamment).
Glossaire des tâches en automatique 1. Schématisation de l’architecture de commande ;
2. Modélisation de connaissance du banc moteur ;
3. Création d’un modèle de simulation Simulink ;
4. Modélisation "Boite Noire" ;
5. Elaboration du Cahier de Charge pour le système de commande ;
6. Etude d’une correction proportionnelle par simulation ;
7. Etude d’une correction proportionnelle et intégrale par simulation ;
8. Montage et test de l’asservissement du banc moteur ;
9. Etude de différentes lois de commande et de leur robustesse aux variations de paramètres.
=================================================================