Embed Size (px)
Citation preview
1
Identification de système en mécaniqueJ. Morlier 2009
2
• Introduction
3
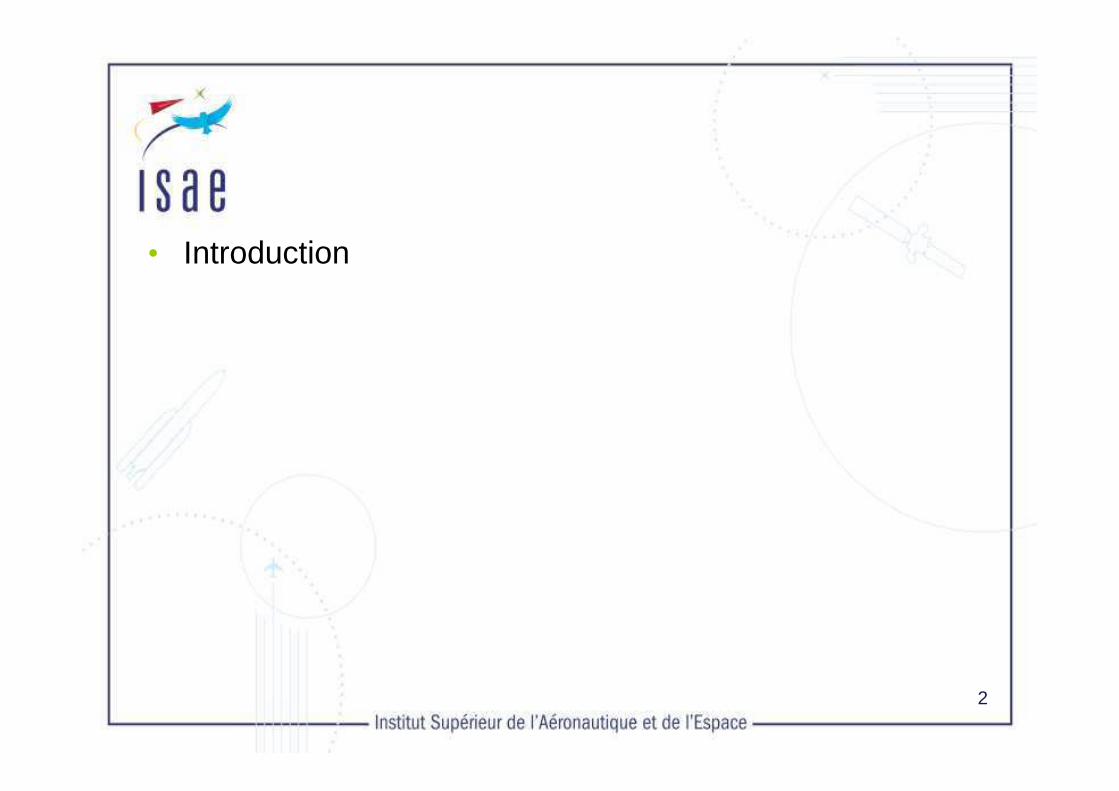
Pourquoi tester dynamiquement une structure?
• Performance en fatigue (accéléré)• Identification de système (paramètres modaux)• Vérification de la conception (placement en fréquences)• Détéction d’endommagement (// CND)• Détection de Flutter• Analyse modale en opération
4
Vibration des structures
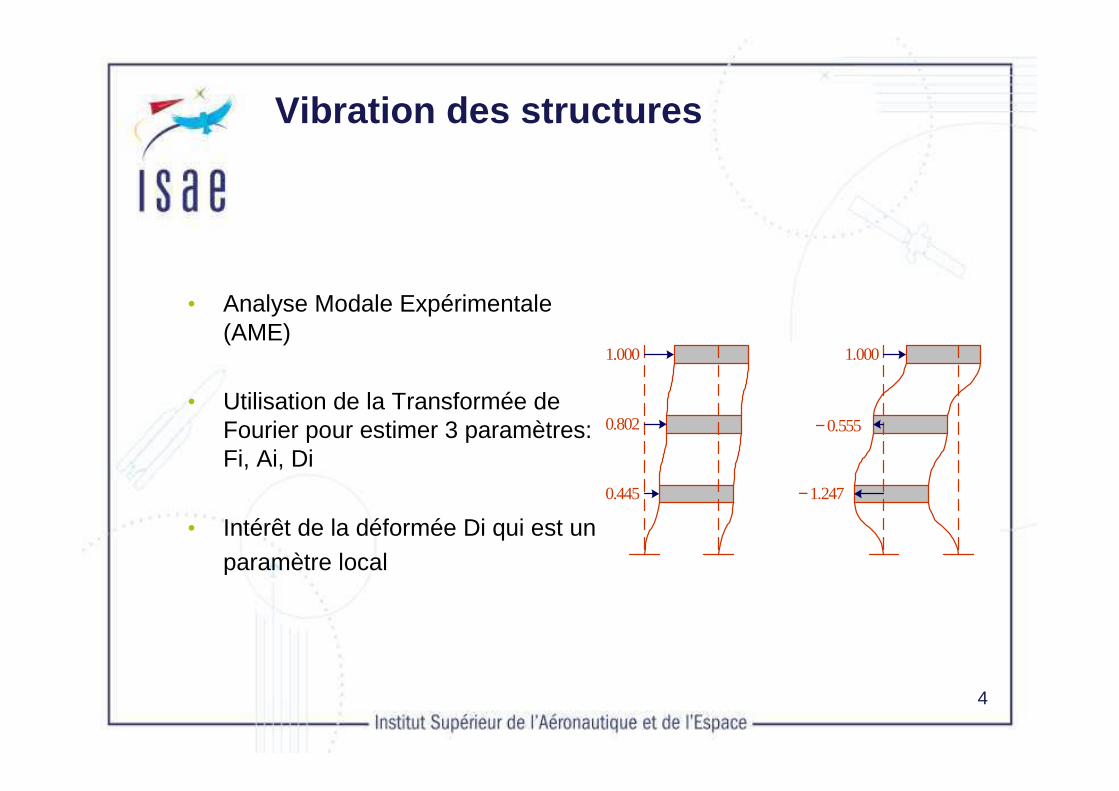
• Analyse Modale Expérimentale (AME)
• Utilisation de la Transformée de Fourier pour estimer 3 paramètres: Fi, Ai, Di
• Intérêt de la déformée Di qui est un paramètre local
1.000
0.802
0.445
1.000
− 0.555
− 1.247
5
Définition
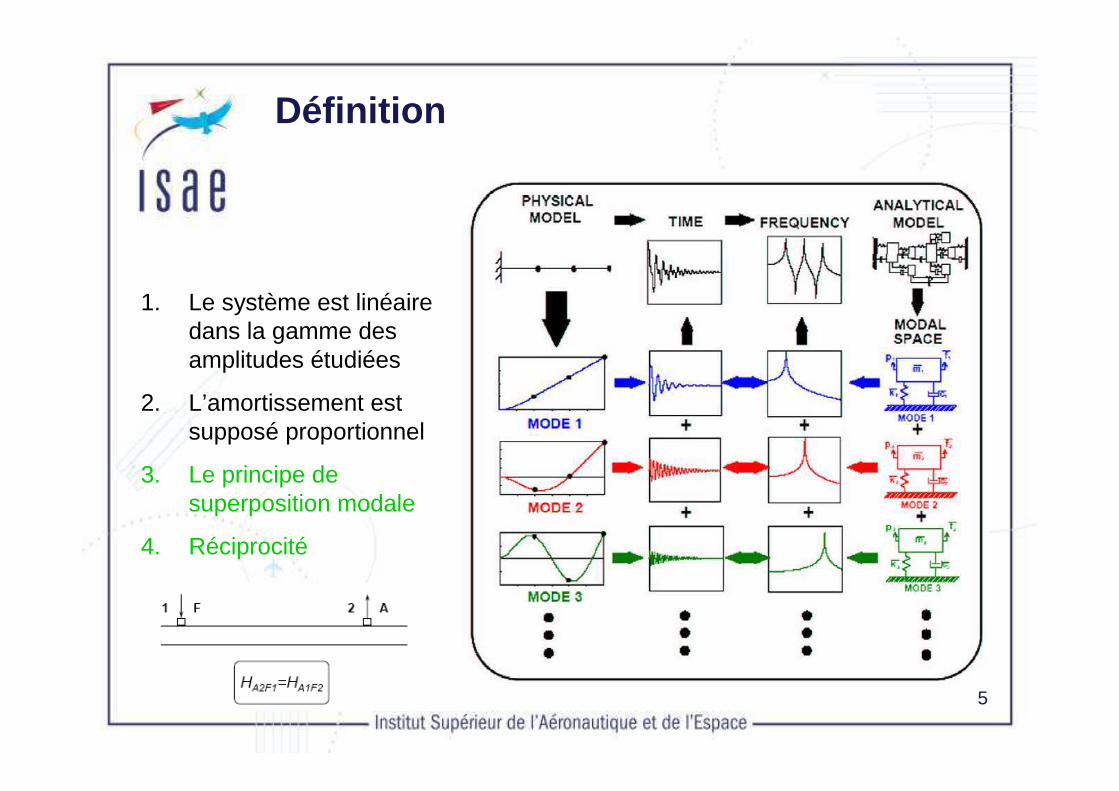
1. Le système est linéaire dans la gamme des amplitudes étudiées
2. L’amortissement est supposé proportionnel
3. Le principe de superposition modale
4. Réciprocité
6
Système
H(jw)
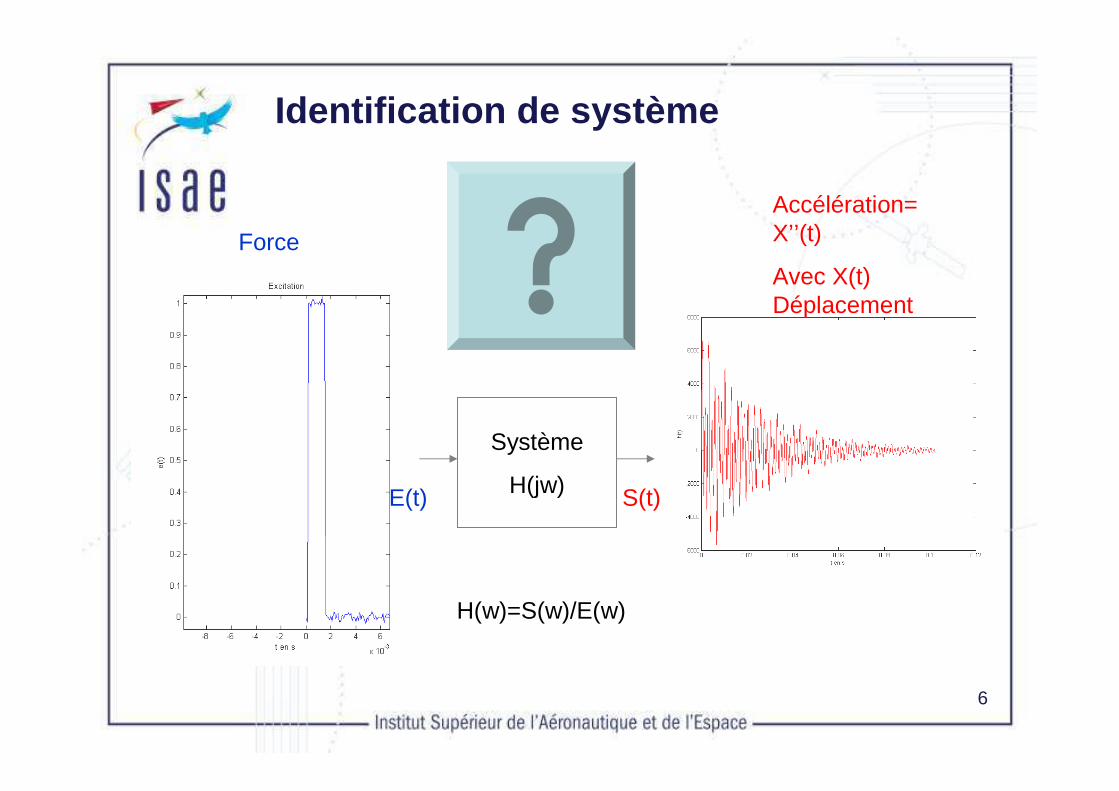
Identification de système
E(t) S(t)
Force
Accélération=X’’(t)
Avec X(t) Déplacement
H(w)=S(w)/E(w)
7
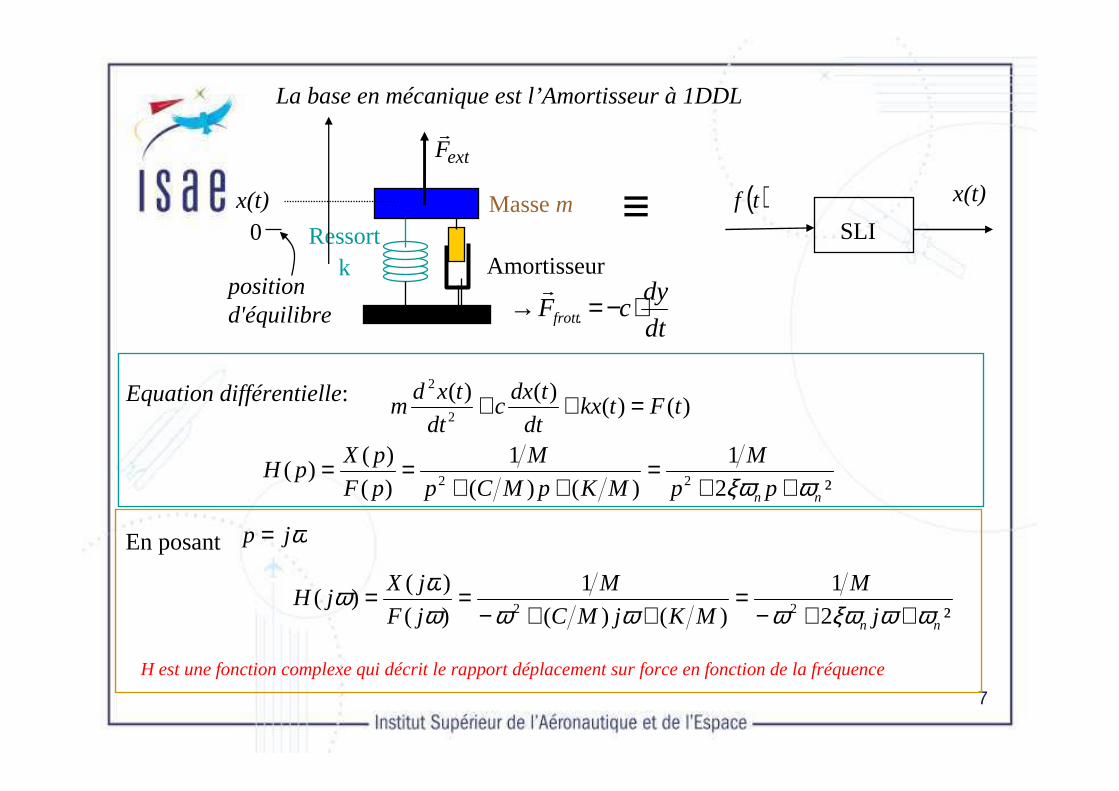
La base en mécanique est l’Amortisseur à 1DDL
Ressortk Amortisseur
Masse m
extFr
≡x(t)0
x(t)
SLI
Equation différentielle: )()()()(
2
2
tFtkxdt
tdxc
dt
txdm =++
( )tf
dt
dycFfrott ⋅−=→ .
r
En posant
position d'équilibre
²2
1
)()(
1
)(
)()(
22nn pp
M
MKpMCp
M
pF
pXpH
ωξω ++=
++==
ωjp =
²2
1
)()(
1
)(
)()(
22nn j
M
MKjMC
M
jF
jXjH
ωωξωωωωωωω
++−=
++−==
H est une fonction complexe qui décrit le rapport déplacement sur force en fonction de la fréquence
8
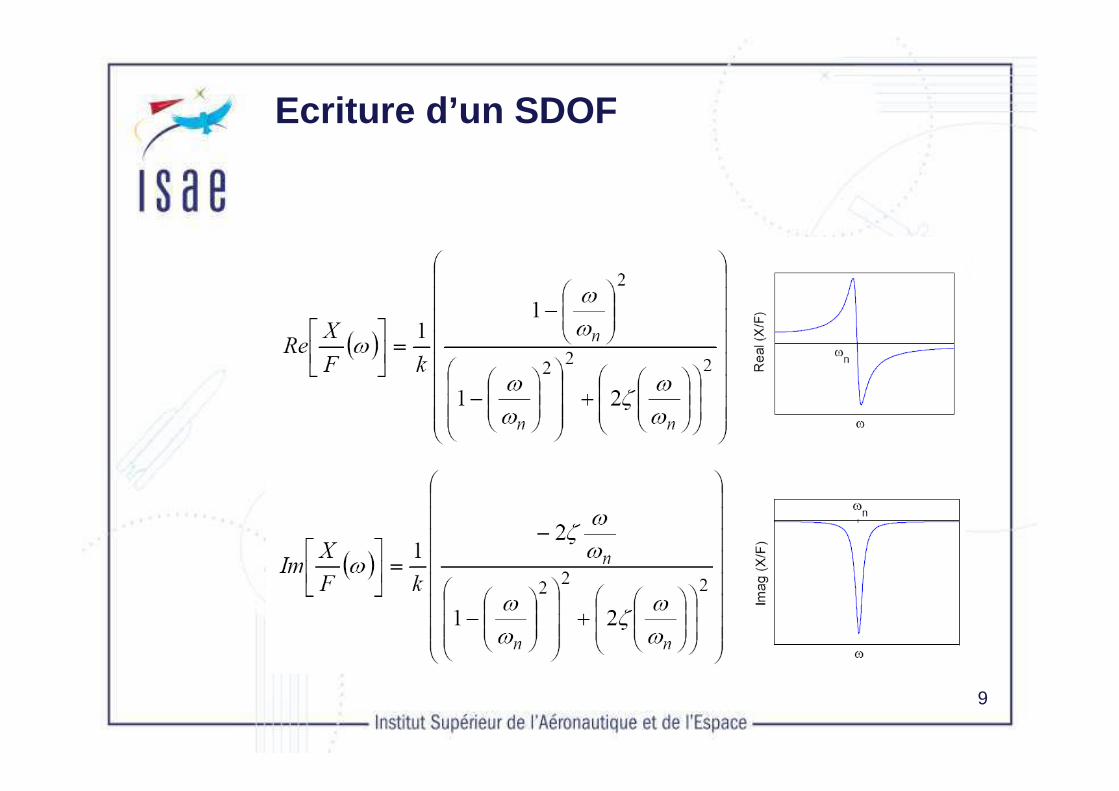
Resonance ?
• L’amplitude de la FRF atteind un maximum (déphasage de 180 ).
• La partie réelle de la FRF passe par 0.
• La partie imaginaire de la FRF atteind un minima (or maxima) local.
La transformée de Fourier permet d ’avoir une vision « système » des équations différentielles,et de mieux comprendre leur effet sur un signal d ’entrée
9
Ecriture d’un SDOF
10
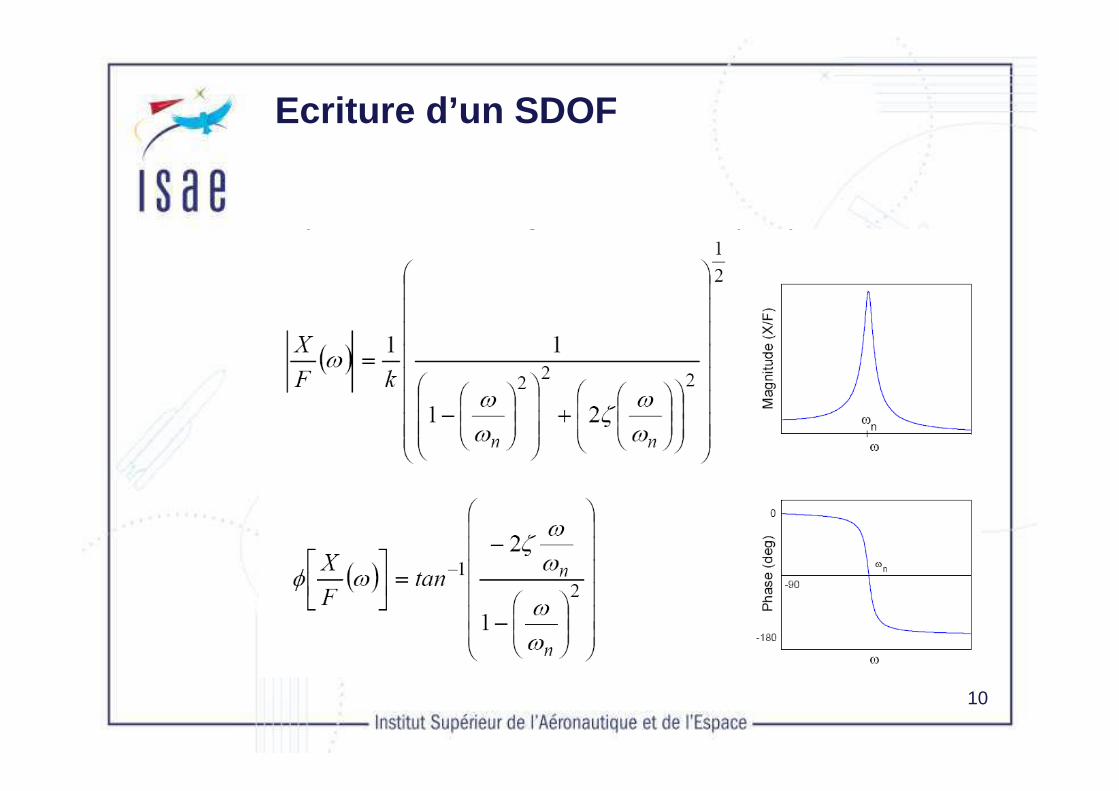
Ecriture d’un SDOF
11
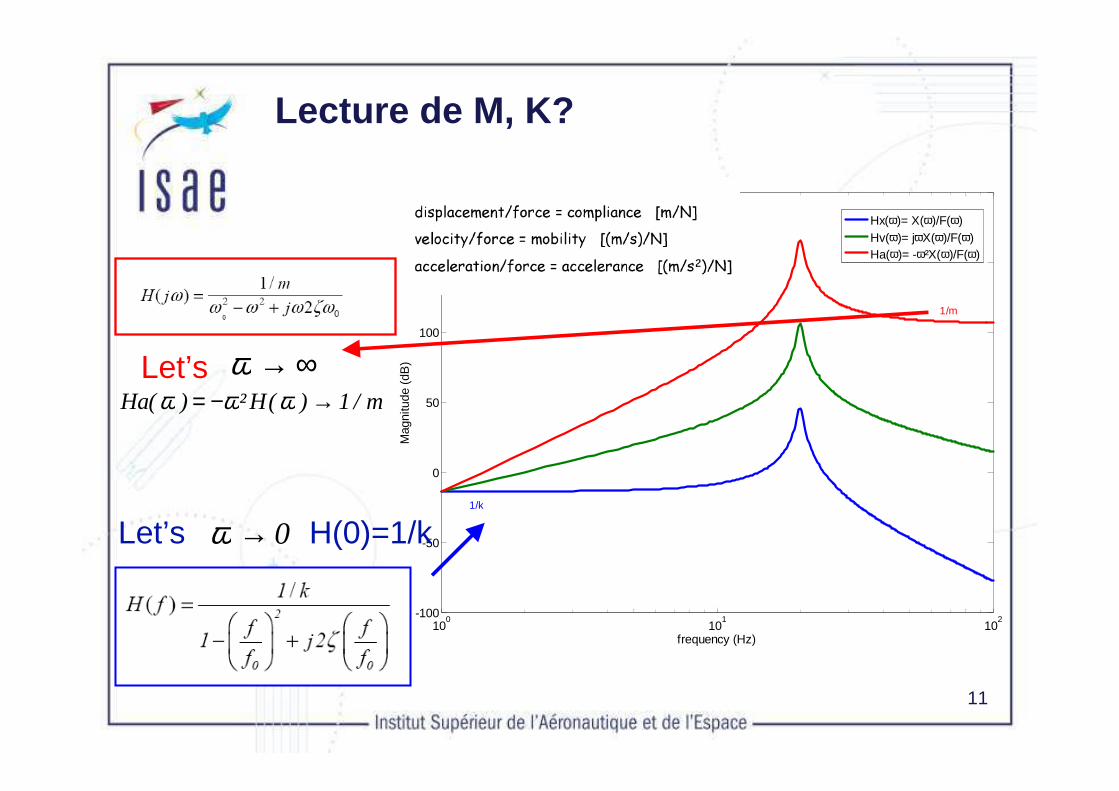
Lecture de M, K?
100
101
102-100
-50
0
50
100
150
200
frequency (Hz)
Mag
nitu
de (
dB)
Hx(ω)= X(ω)/F(ω)Hv(ω)= jωX(ω)/F(ω)Ha(ω)= -ω²X(ω)/F(ω)
1/k
1/m
Let’s H(0)=1/k
Let’s ∞→ω
0→ω
m/1)(H²)(Ha →−= ωωω
12
• Les bases « SYSTEME »
13
14
15
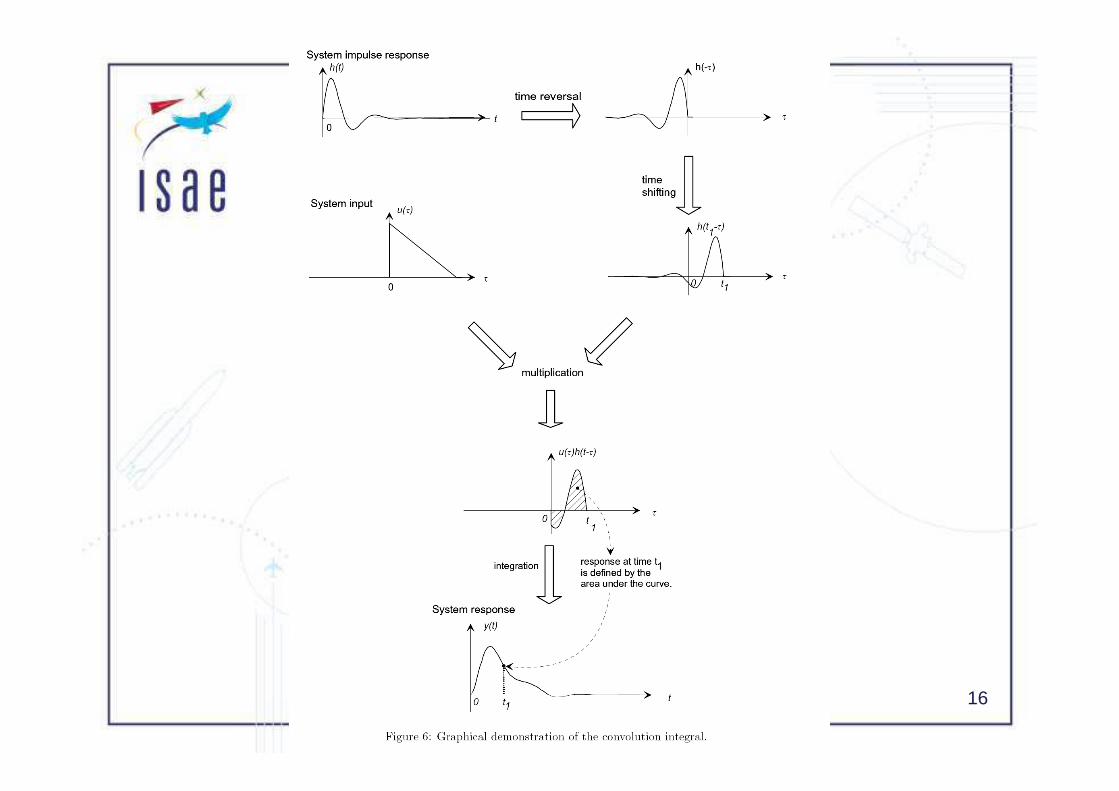
16
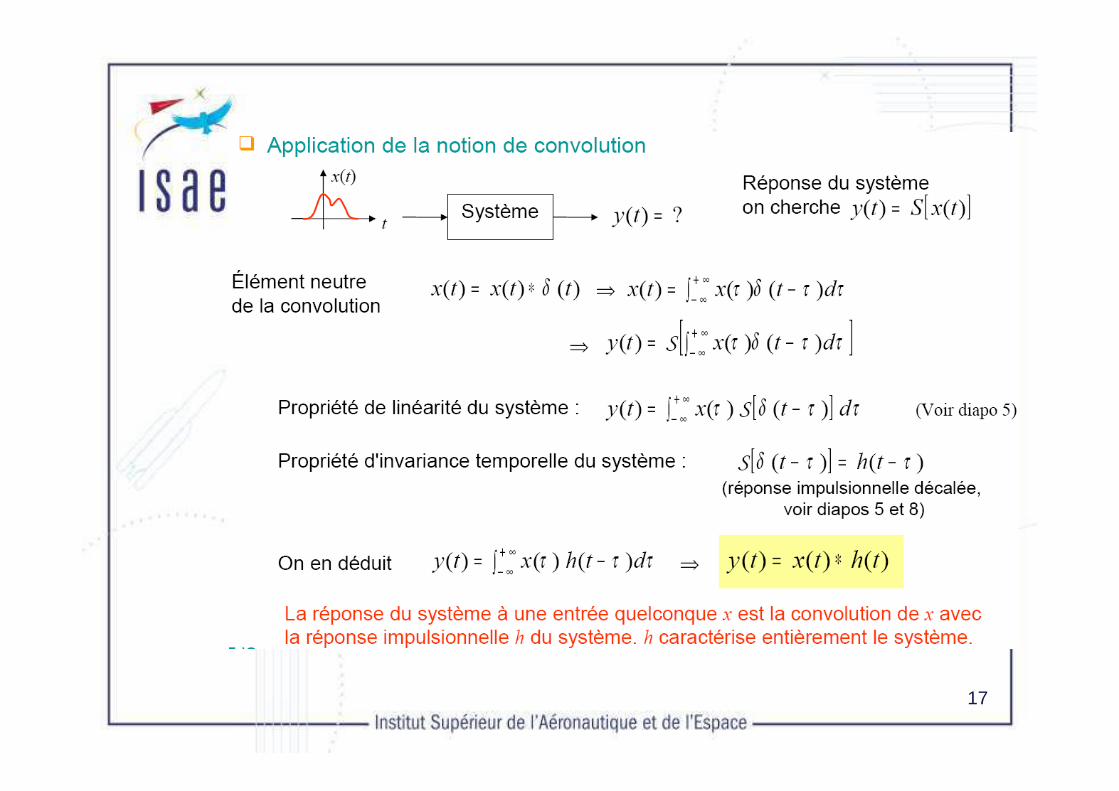
17
18
• Les bases « SIGNAL »
19
Data Transformation
• Functions that modify data are also termed operationsor transformations.
• Since most signal processing operations are implemented using digital electronics, functions are represented in discrete form as a sequence of numbers:
• x(n) = [x(1),x(2),x(3), . . . ,x(N)]• A transform can be thought of as a re-mapping of the
original data into a function that provides more information than the original.*
20
Fourier Transform
• The Fourier Transform is a classic example as it converts the original time data into frequency information which often provides greater insight intothe nature and/or origin of the signal.
• Many of the transforms are achieved by comparing the signal of interestwith some sort of probing function. This comparison takes the form of a correlation (produced by multiplication) that is averaged (or integrated) over the duration of the waveform, or some portion of the waveform:
• where x(t) is the waveform being analyzed, fm(t) is the probing functionand m is some variable of the probing function, often specifying a particular member in a family of similar functions. For example, in the Fourier Transform fm(t) is a family of harmonically related sinusoids and m specifies the frequency of an individual sinusoid in that family (e.g., sin(mft)).
21
22
-0.2
-0.1
0
0.1
0.2
0.3
0 2 4 6 8 10sampling time, t k [ms]
Vol
tage
[V]
ts
-0.2
-0.1
0
0.1
0.2
0.3
0 2 4 6 8 10sampling time, t k [ms]
Vol
tage
[V]
ts
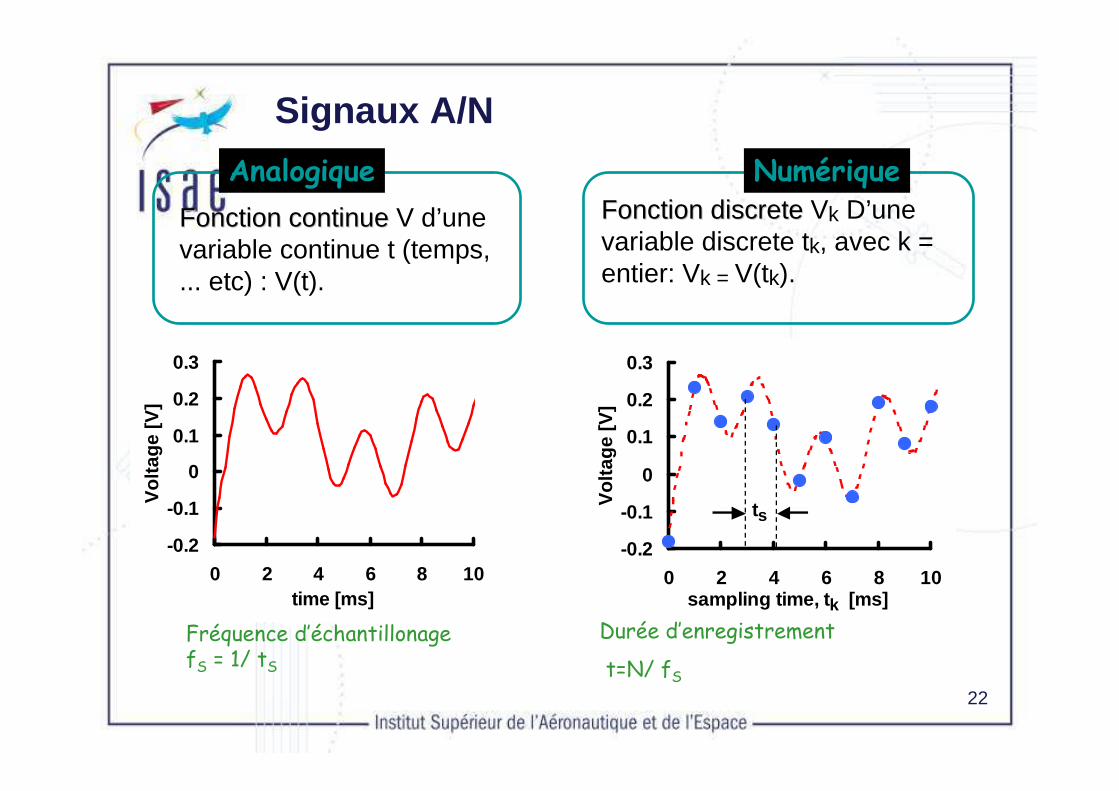
Signaux A/N
FonctionFonction continuecontinue V d’unevariable continue t (temps, ... etc) : V(t).
AnalogiqueFonctionFonction discretediscrete Vk D’unevariable discrete tk, avec k = entier: Vk = V(tk).
Numérique
-0.2
-0.1
0
0.1
0.2
0.3
0 2 4 6 8 10time [ms]
Vol
tage
[V]
Fréquence d’échantillonagefS = 1/ tS
Durée d’enregistrement
t=N/ fS
23
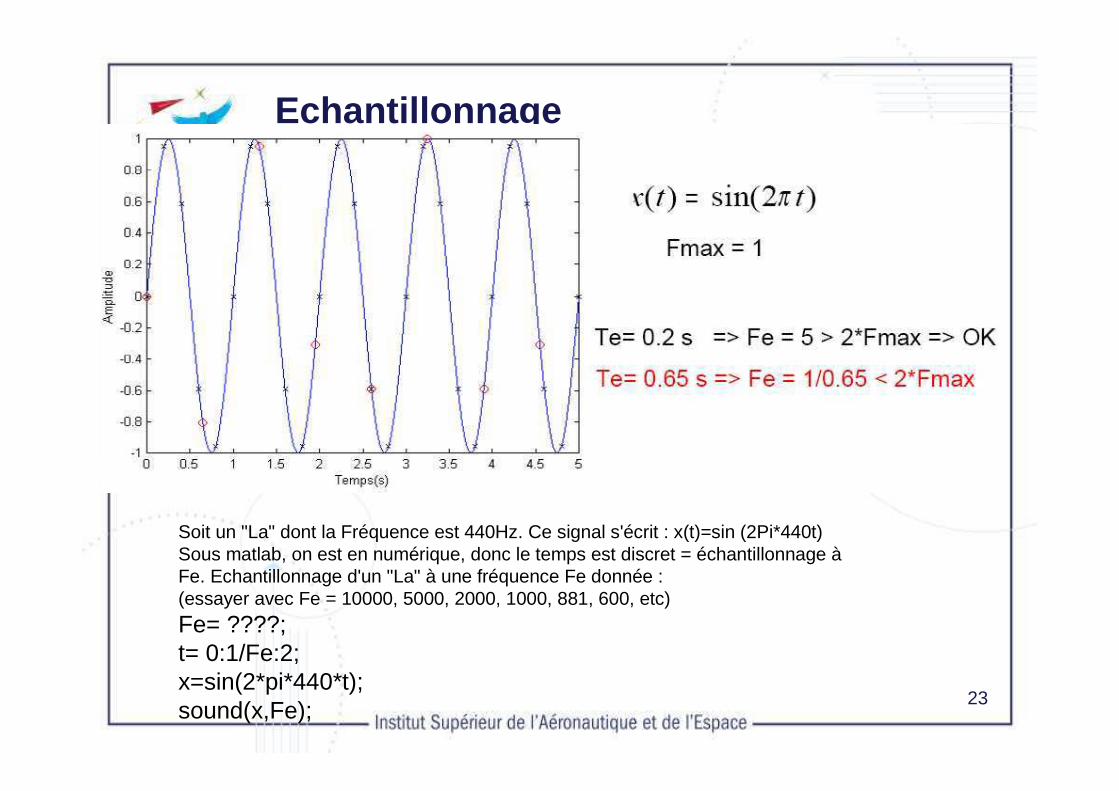
Echantillonnage
Soit un "La" dont la Fréquence est 440Hz. Ce signal s'écrit : x(t)=sin (2Pi*440t)Sous matlab, on est en numérique, donc le temps est discret = échantillonnage àFe. Echantillonnage d'un "La" à une fréquence Fe donnée :(essayer avec Fe = 10000, 5000, 2000, 1000, 881, 600, etc)
Fe= ????;t= 0:1/Fe:2;x=sin(2*pi*440*t);sound(x,Fe);
24
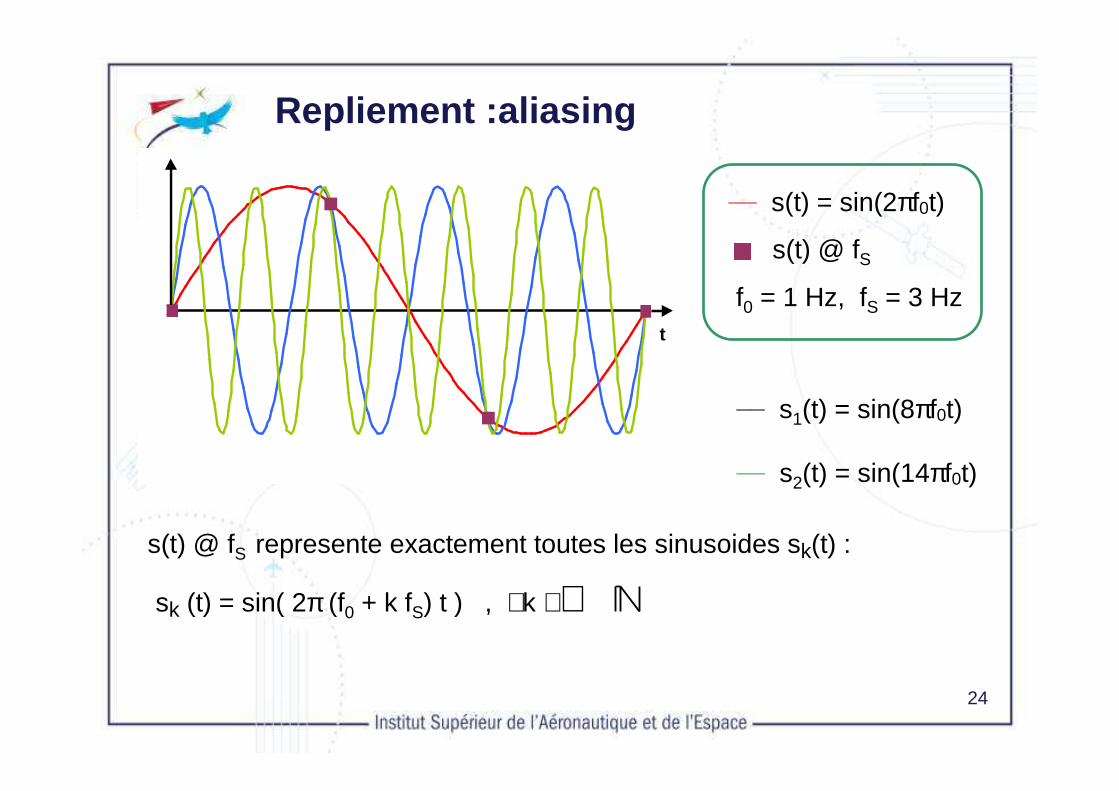
Repliement :aliasing
__ s(t) = sin(2πf0t)
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t
s(t) @ fS
f0 = 1 Hz, fS = 3 Hz
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t
__ s1(t) = sin(8πf0t)
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t
__ s2(t) = sin(14πf0t)-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t
sk (t) = sin( 2π (f0 + k fS) t ) , k ∈s(t) @ fS represente exactement toutes les sinusoides sk(t) :
25
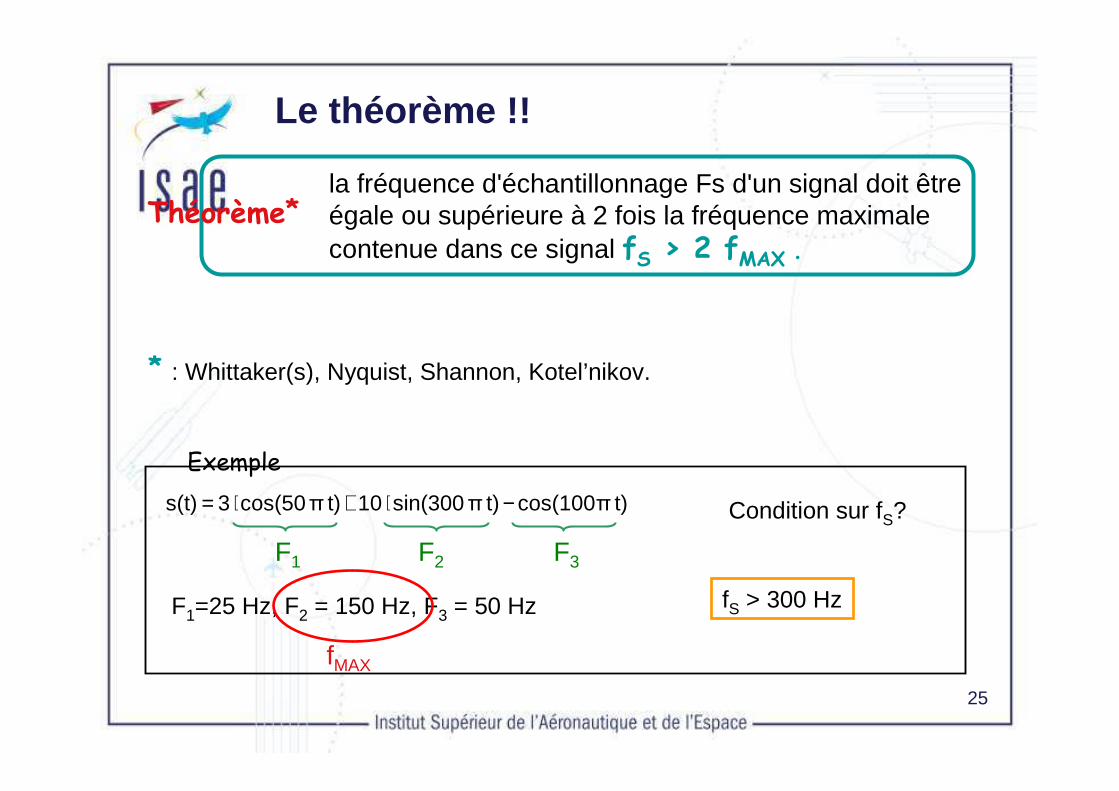
Le théorème !!
la fréquence d'échantillonnage Fs d'un signal doit être égale ou supérieure à 2 fois la fréquence maximale contenue dans ce signal fS > 2 fMAX .
Condition sur fS?
fS > 300 Hz
t)cos(100πt)πsin(30010t)πcos(503s(t) −⋅+⋅=
F1=25 Hz, F2 = 150 Hz, F3 = 50 Hz
F1 F2 F3
fMAX
Exemple
Théorème*
* : Whittaker(s), Nyquist, Shannon, Kotel’nikov.
26
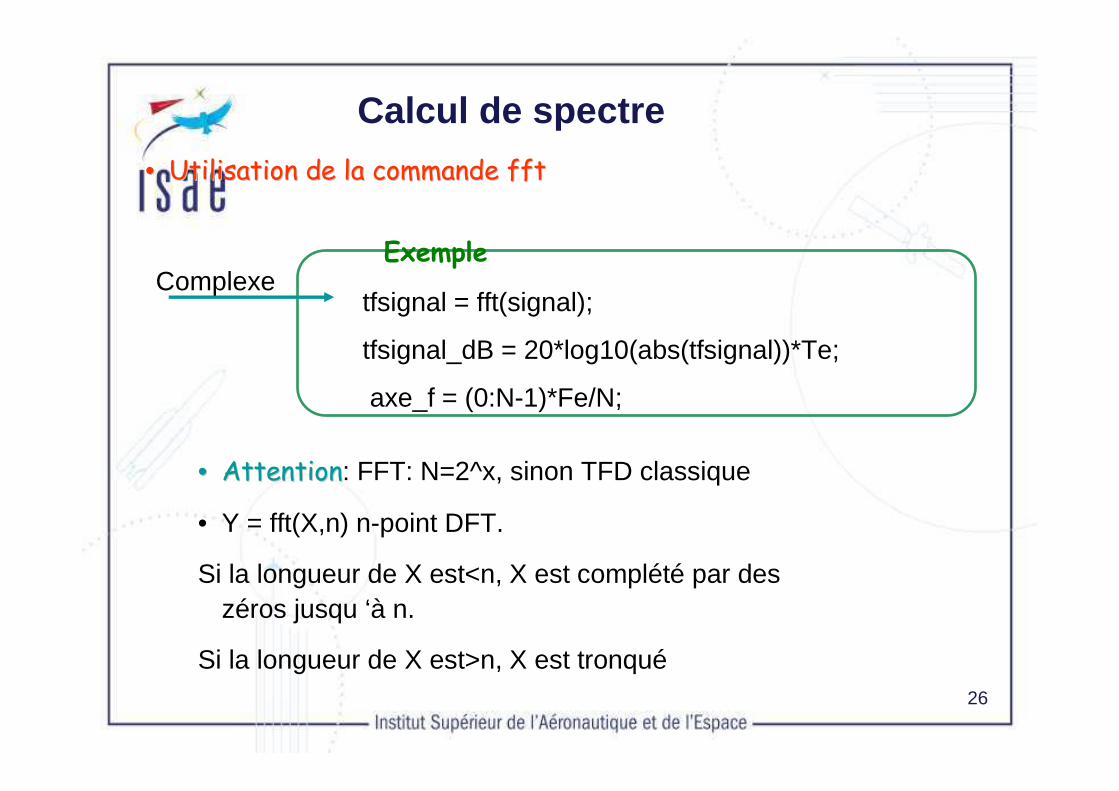
Calcul de spectre
•• AttentionAttention: FFT: N=2^x, sinon TFD classique
• Y = fft(X,n) n-point DFT.
Si la longueur de X est<n, X est complété par des zéros jusqu ‘à n.
Si la longueur de X est>n, X est tronqué
tfsignal = fft(signal);
tfsignal_dB = 20*log10(abs(tfsignal))*Te;
axe_f = (0:N-1)*Fe/N;
•• Utilisation de la Utilisation de la commandecommande fftfft
ExempleComplexe
27
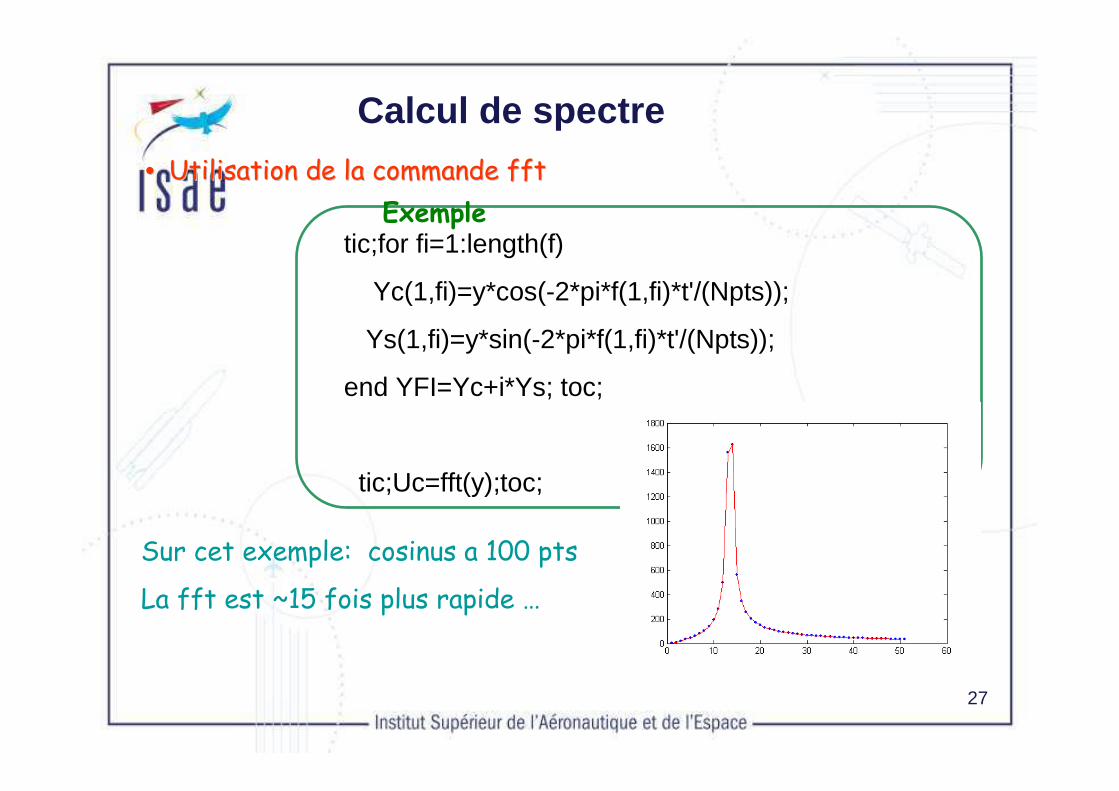
Calcul de spectre
•• Utilisation de la Utilisation de la commandecommande fftfft
Exempletic;for fi=1:length(f)
Yc(1,fi)=y*cos(-2*pi*f(1,fi)*t'/(Npts));
Ys(1,fi)=y*sin(-2*pi*f(1,fi)*t'/(Npts));
end YFI=Yc+i*Ys; toc;
tic;Uc=fft(y);toc;
Sur cet exemple: cosinus a 100 pts
La fft est ~15 fois plus rapide …
28
Fourier Transform
• A family of probing functions is also termed a basis. For discrete functions, a probing function consists of a sequence of values, or vector, and the integralbecomes summation over a finite range:
where x(n) is the discrete waveform and fm(n) is a discrete version of the family of probing functions. This equation assumes the probe and waveform functionsare the same length.
29
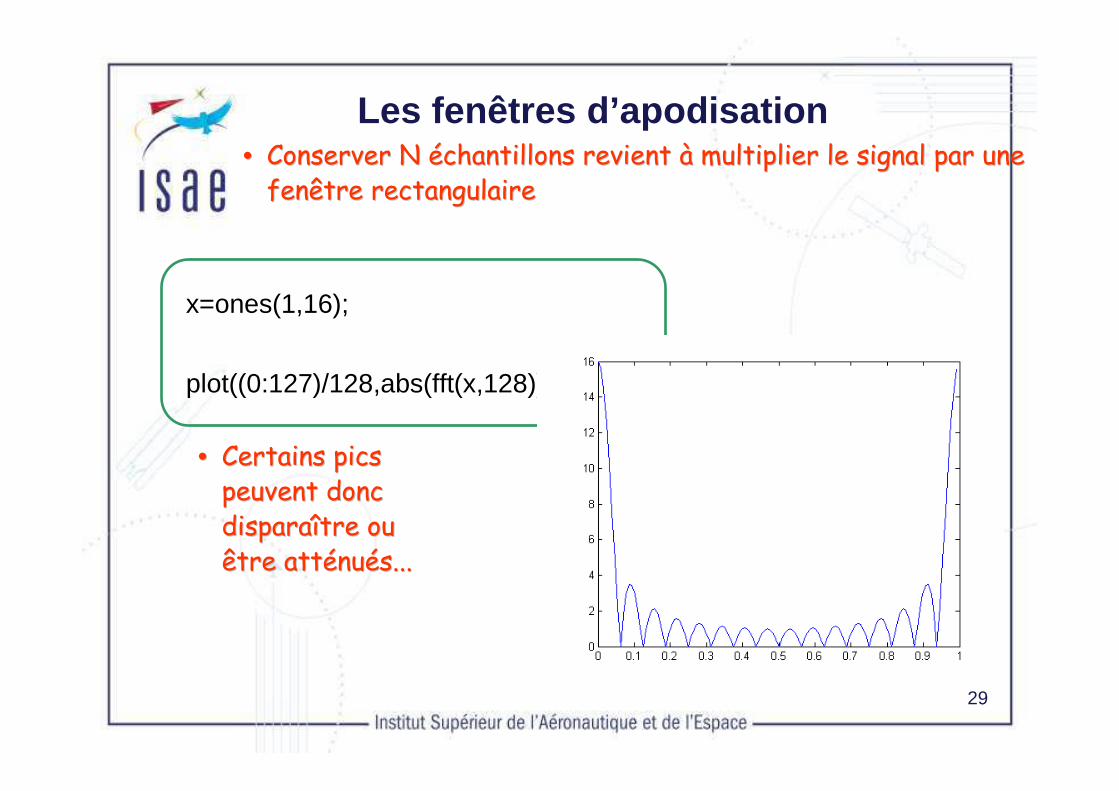
Les fenêtres d’apodisation•• Conserver N Conserver N ééchantillonschantillons revientrevient àà multiplier le signal par multiplier le signal par uneunefenêtrefenêtre rectangulairerectangulaire
x=ones(1,16);
plot((0:127)/128,abs(fft(x,128)))
•• CertainsCertains picspicspeuventpeuvent doncdoncdisparadisparaîîtretre ououêtreêtre attattéénunuééss......
30
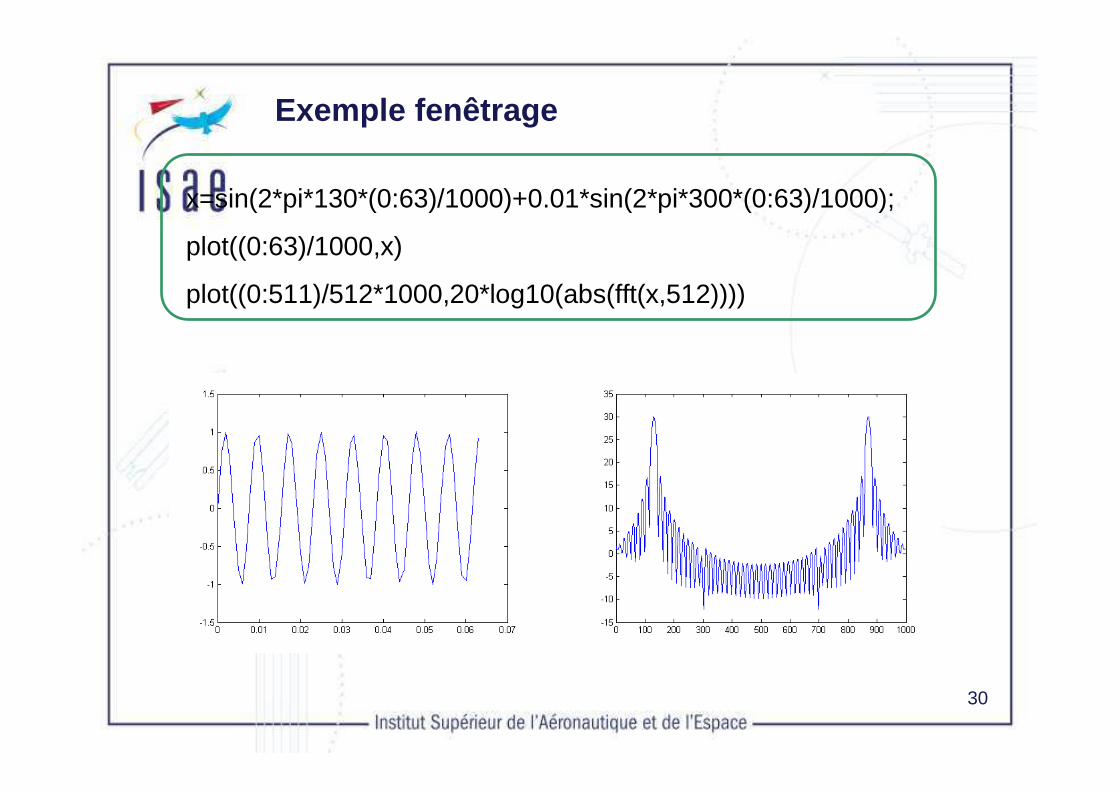
Exemple fenêtrage
x=sin(2*pi*130*(0:63)/1000)+0.01*sin(2*pi*300*(0:63)/1000);
plot((0:63)/1000,x)
plot((0:511)/512*1000,20*log10(abs(fft(x,512))))
31
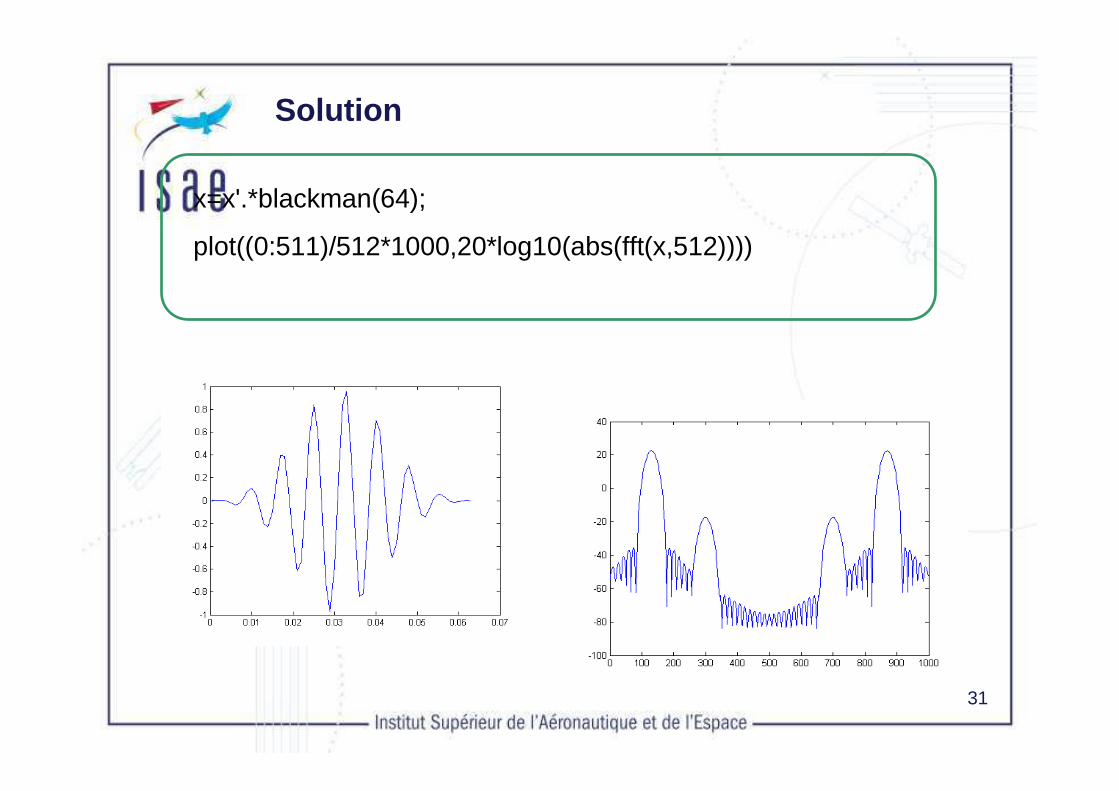
Solution
x=x'.*blackman(64);
plot((0:511)/512*1000,20*log10(abs(fft(x,512))))
32
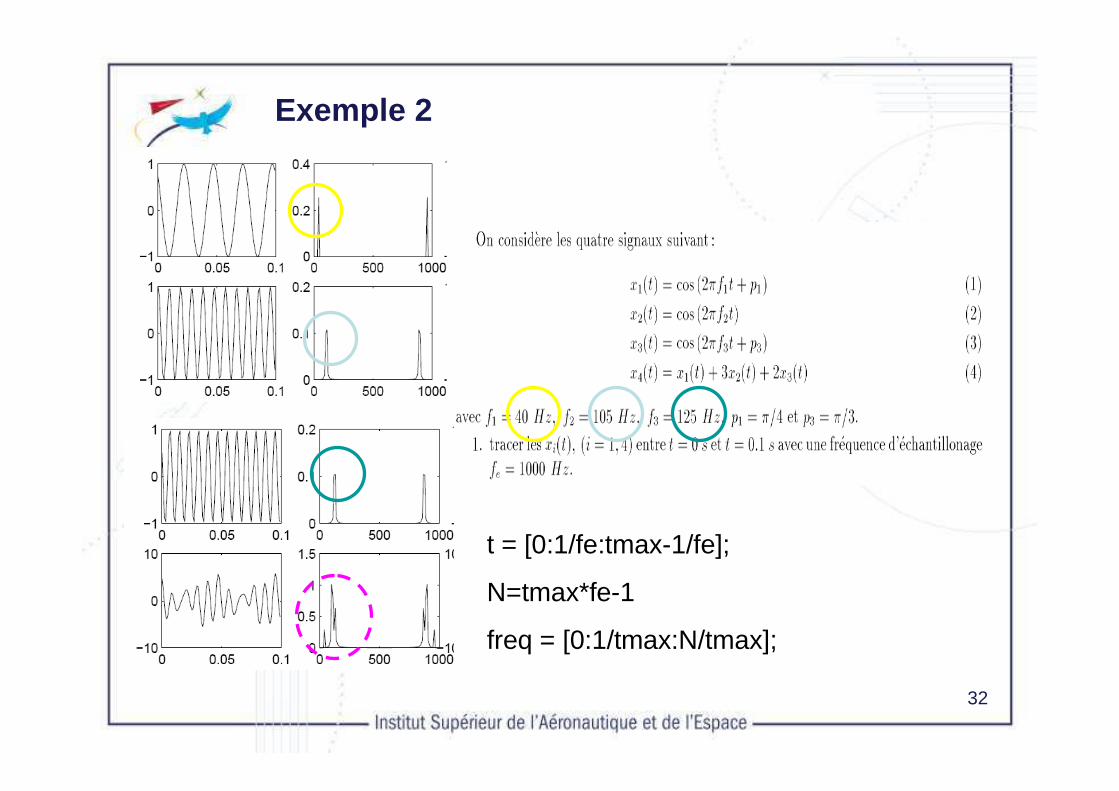
Exemple 2
t = [0:1/fe:tmax-1/fe];
N=tmax*fe-1
freq = [0:1/tmax:N/tmax];
33
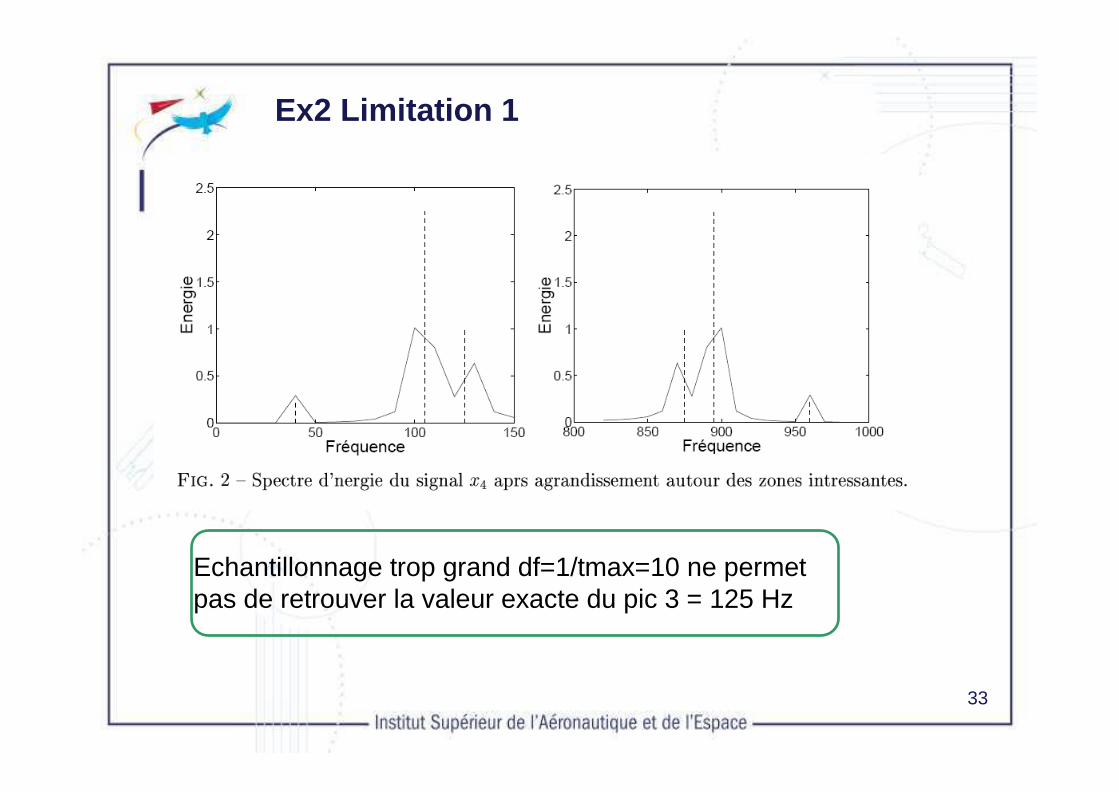
Ex2 Limitation 1
Echantillonnage trop grand df=1/tmax=10 ne permet pas de retrouver la valeur exacte du pic 3 = 125 Hz
34
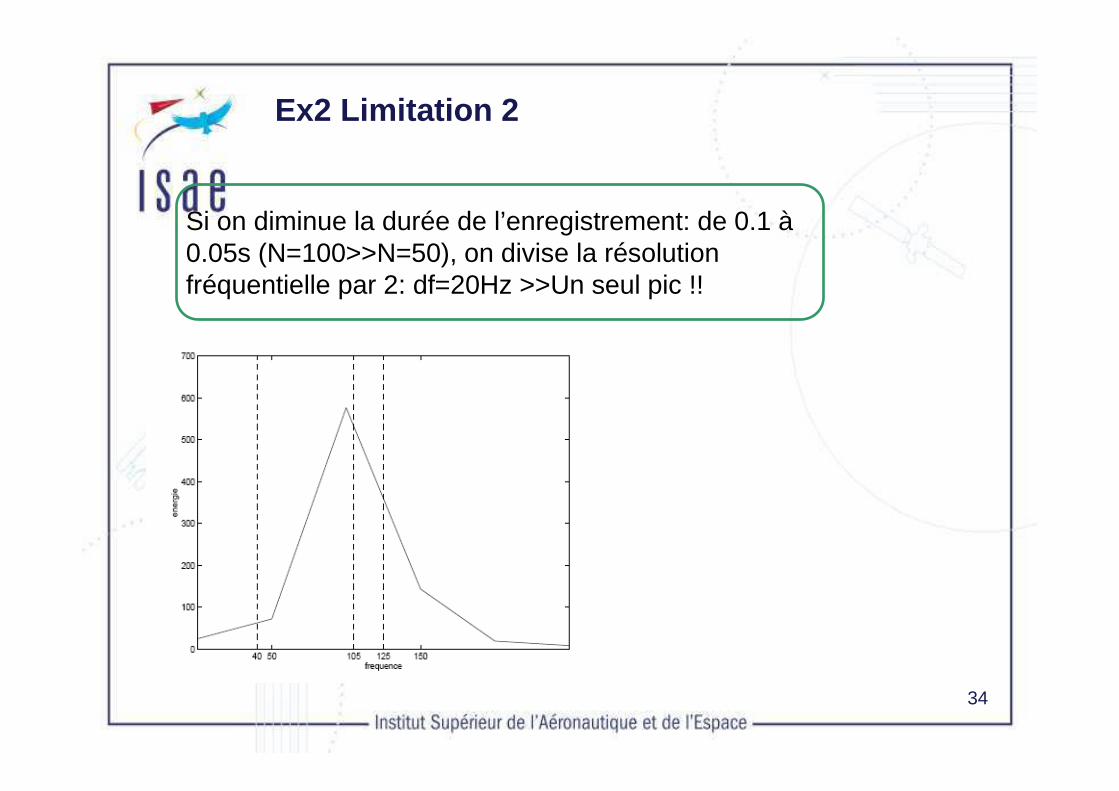
Ex2 Limitation 2
Si on diminue la durée de l’enregistrement: de 0.1 à0.05s (N=100>>N=50), on divise la résolution fréquentielle par 2: df=20Hz >>Un seul pic !!
35
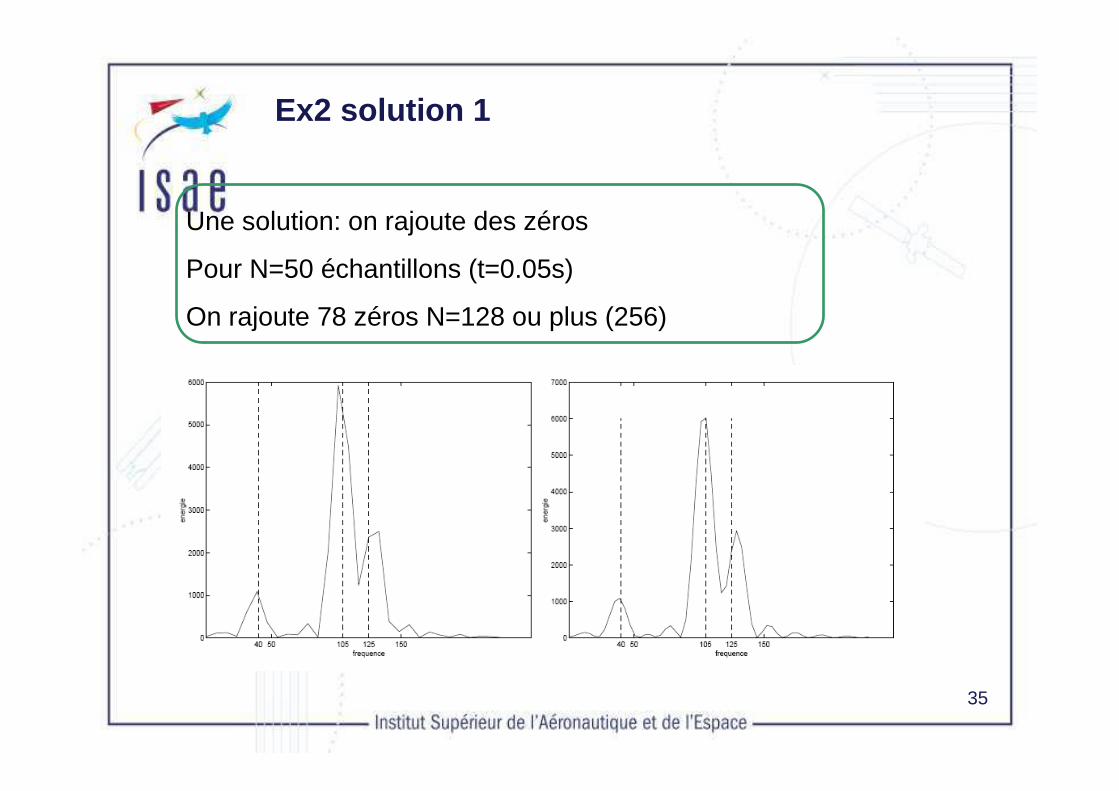
Ex2 solution 1
Une solution: on rajoute des zéros
Pour N=50 échantillons (t=0.05s)
On rajoute 78 zéros N=128 ou plus (256)
36
Conclusion
Lors d’un calcul de spectre il faut:
• Echantillonner de façon suffisamment fine pour éviter le repliement du spectre
• Avoir une durée d’enregistrement suffisamment longue pour avoir une bonne résolution spectrale

37
• Les bases « IDENTIFICATION »
38
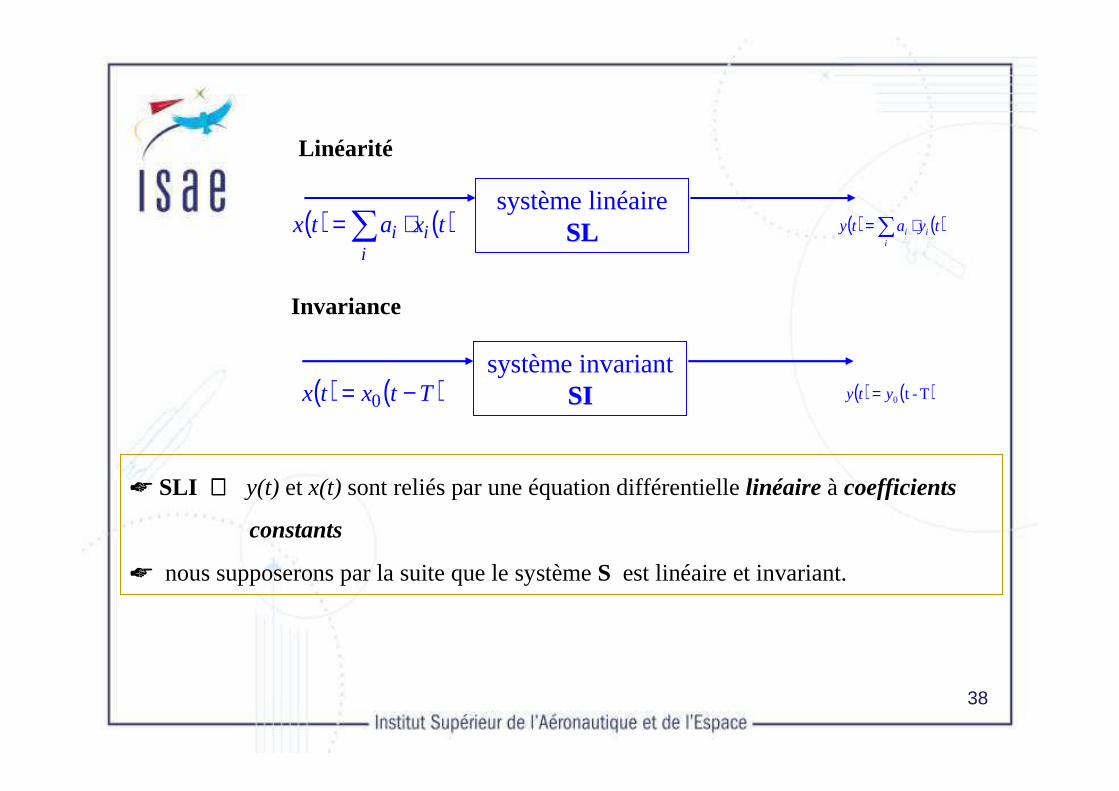
Linéarité
système linéaireSLSL( ) ( )∑ ⋅=
iii txatx ( ) ( )tyaty i
ii ⋅=∑
Invariance
système invariantSISI( ) ( )Ttxtx −= 0 ( ) ( )T-t0yty =
☛ SLI ⇔⇔⇔⇔ y(t) et x(t) sont reliés par une équation différentielle linéaire à coefficients
constants
☛ nous supposerons par la suite que le système S est linéaire et invariant.
39

40
41
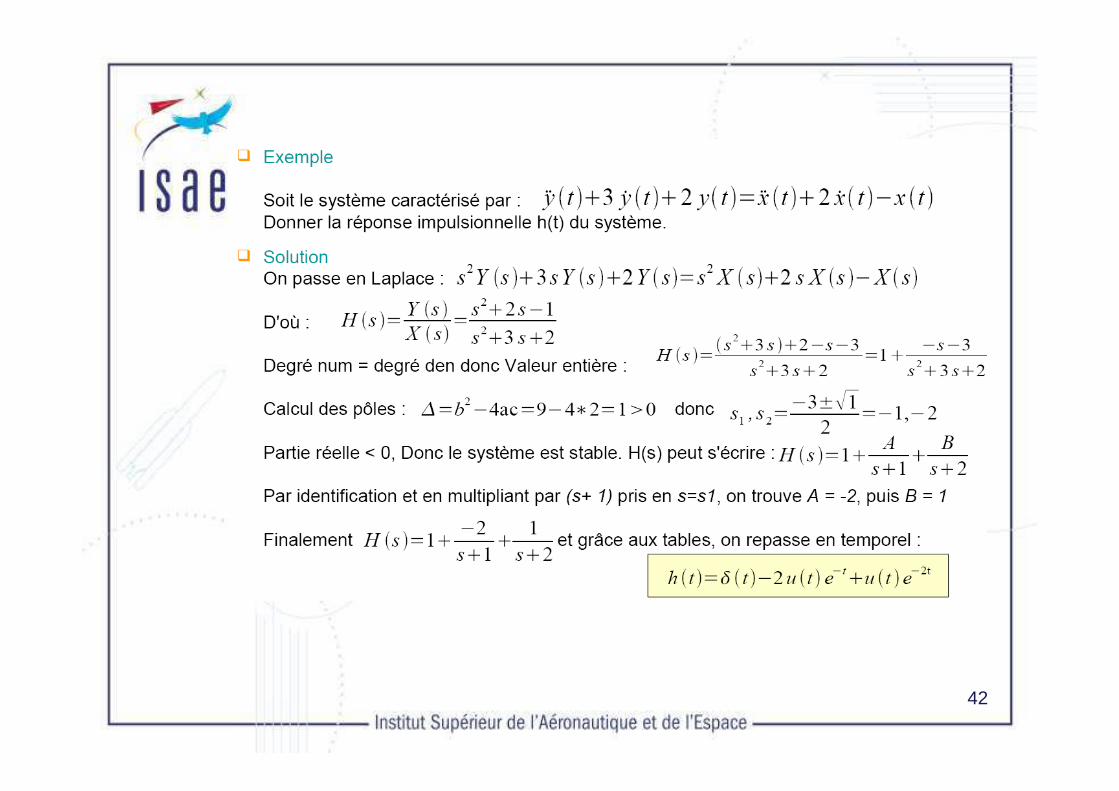
42
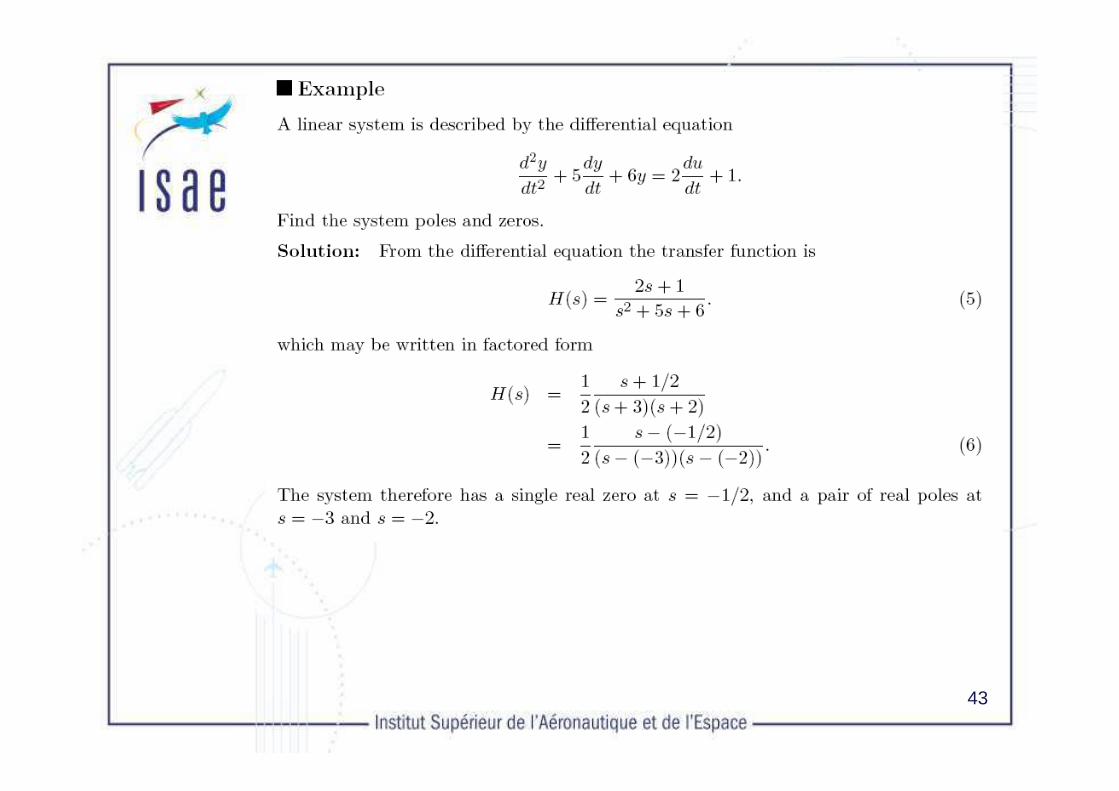
43
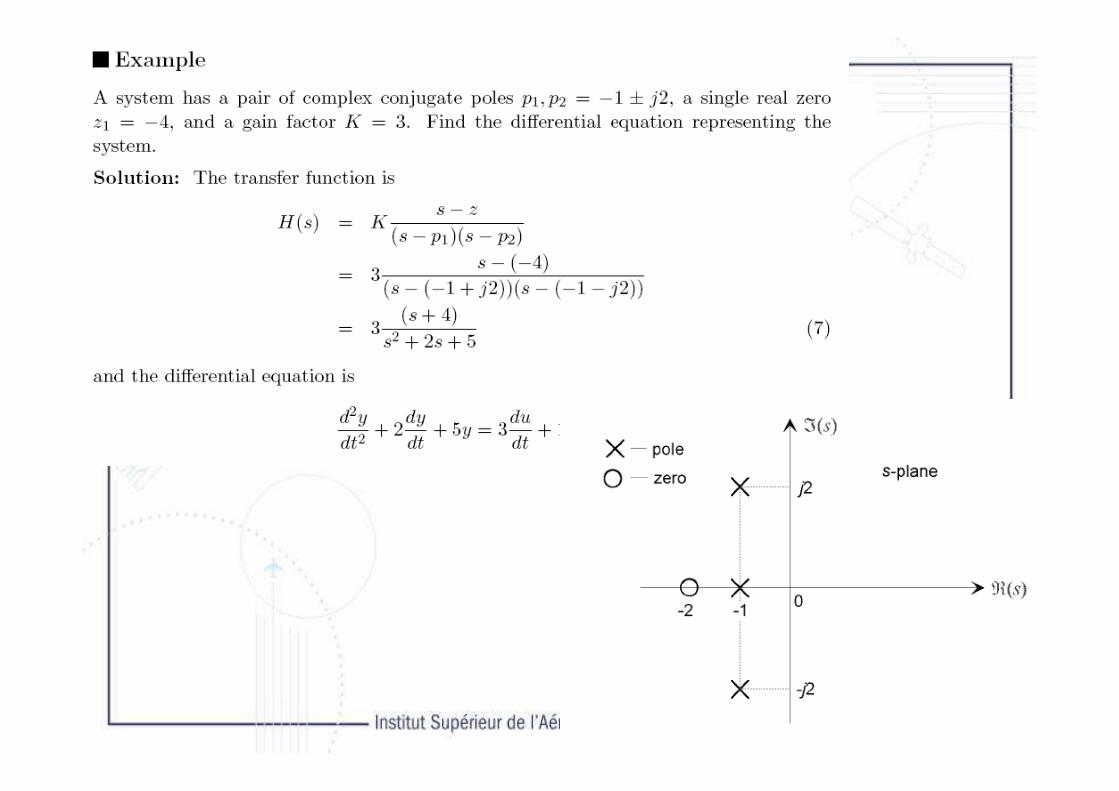
44
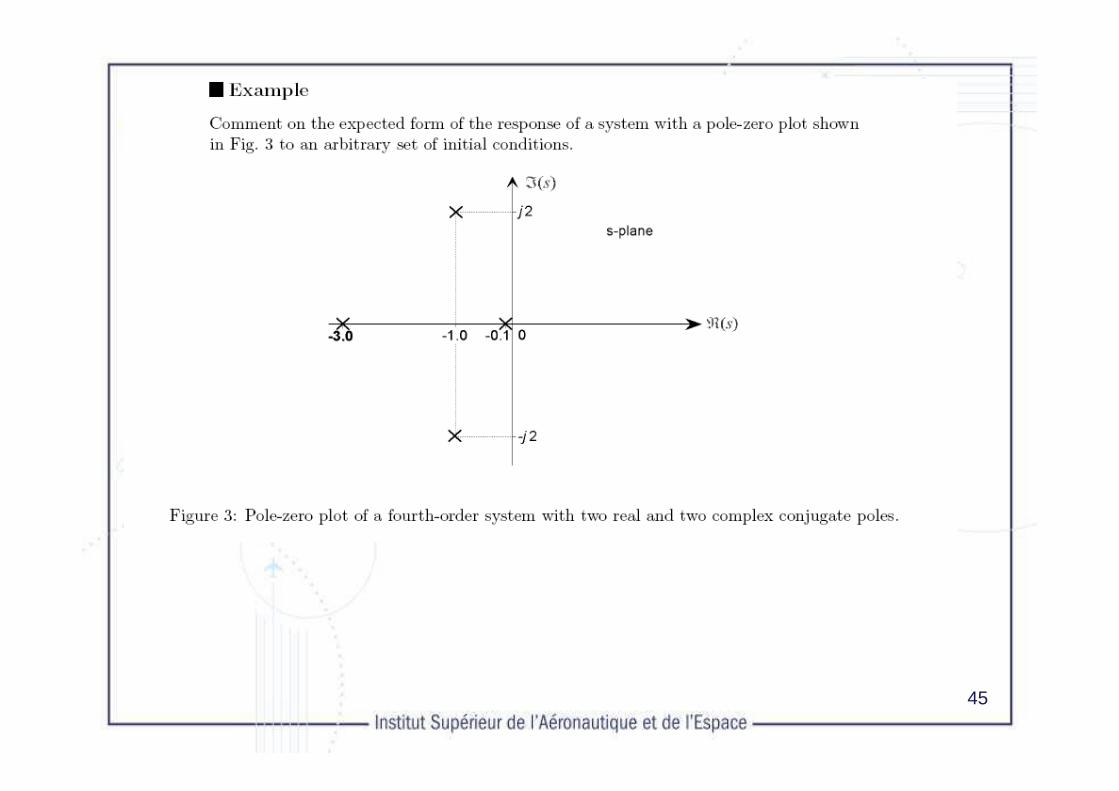
45
46
47
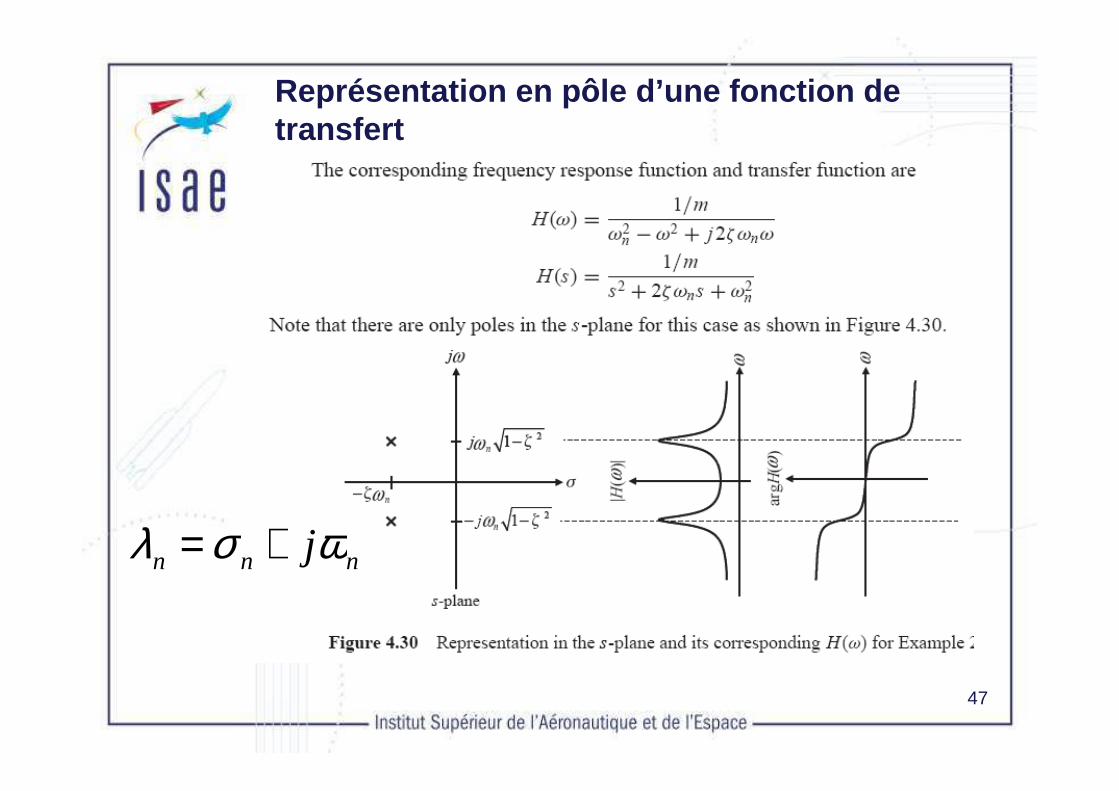
Représentation en pôle d’une fonction de transfert
nnn jωσλ +=
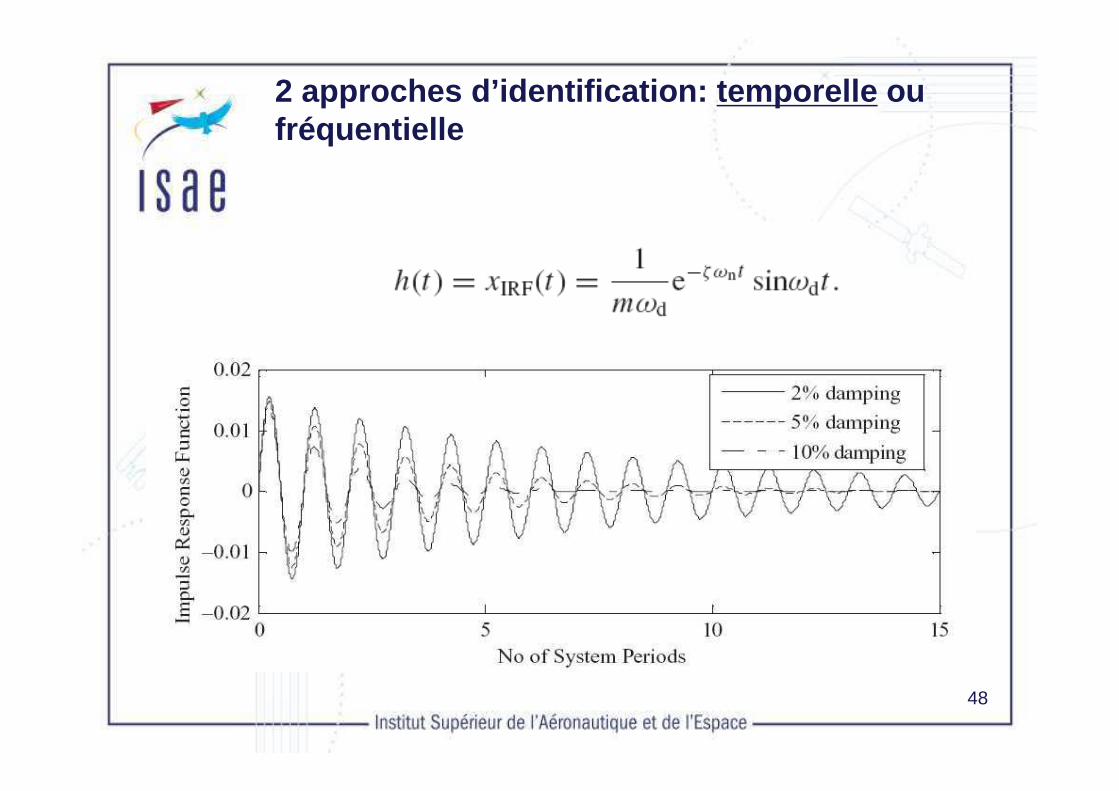
48
2 approches d’identification: temporelle ou fréquentielle
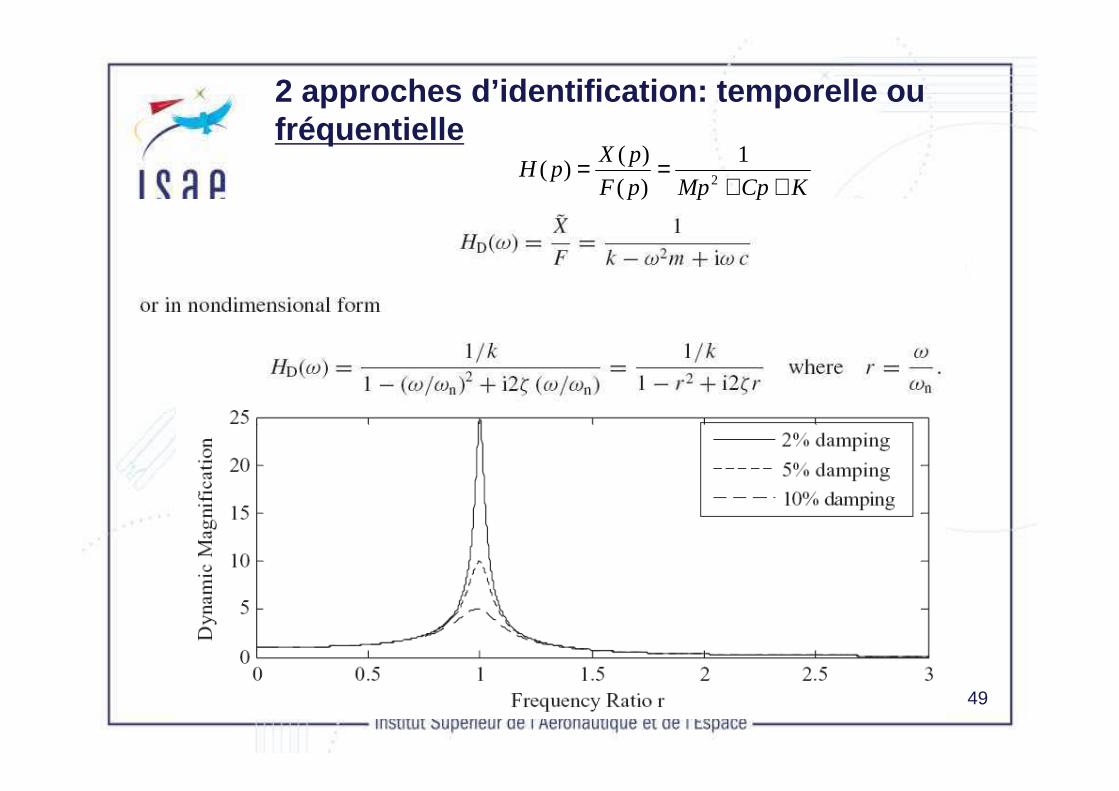
49
2 approches d’identification: temporelle ou fréquentielle
KCpMppF
pXpH
++==
2
1
)(
)()(
50
2 approches : locale (SDOF) ou globale (MDOF)
Une approche SDOF estimePour chaque resonance séparementPuis on moyenne sur toutes les FRFs
Critère semi globale pour une FRF mais tous les modes sur une certaine bande passante
kk etf ξ
Une approche MDOF estime Globalement (en terme de moindre carrés)
kk etf ξ
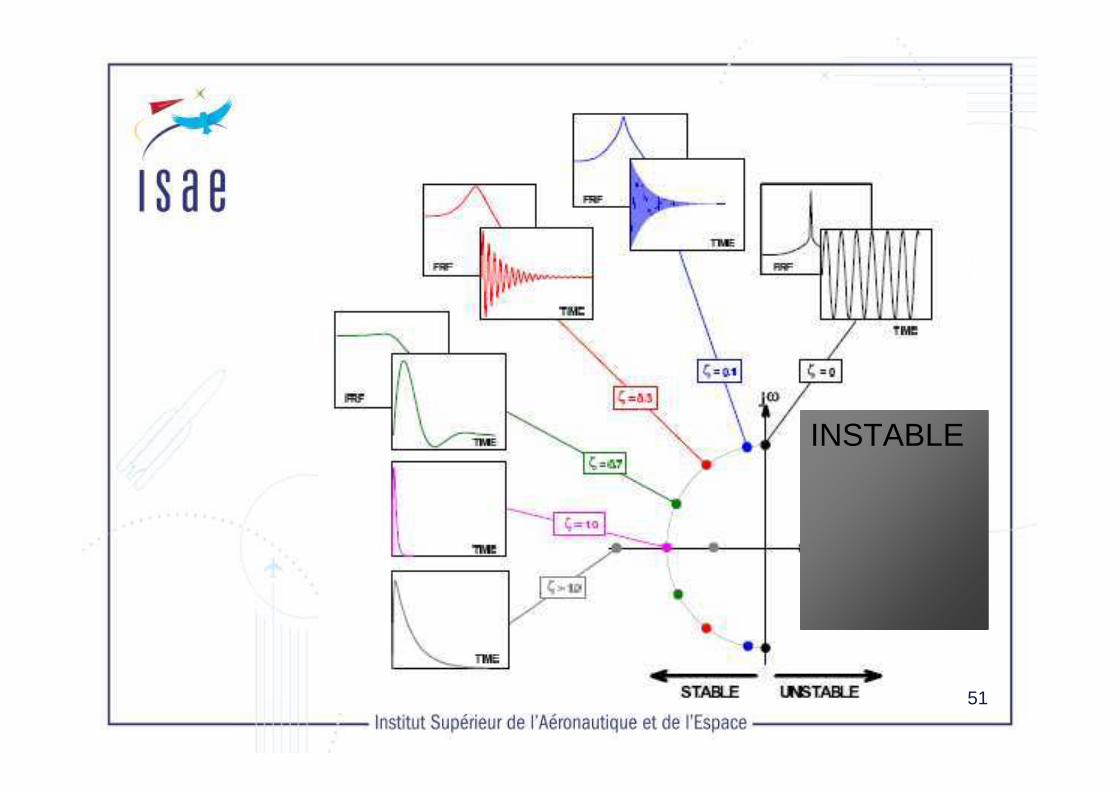
51
INSTABLE
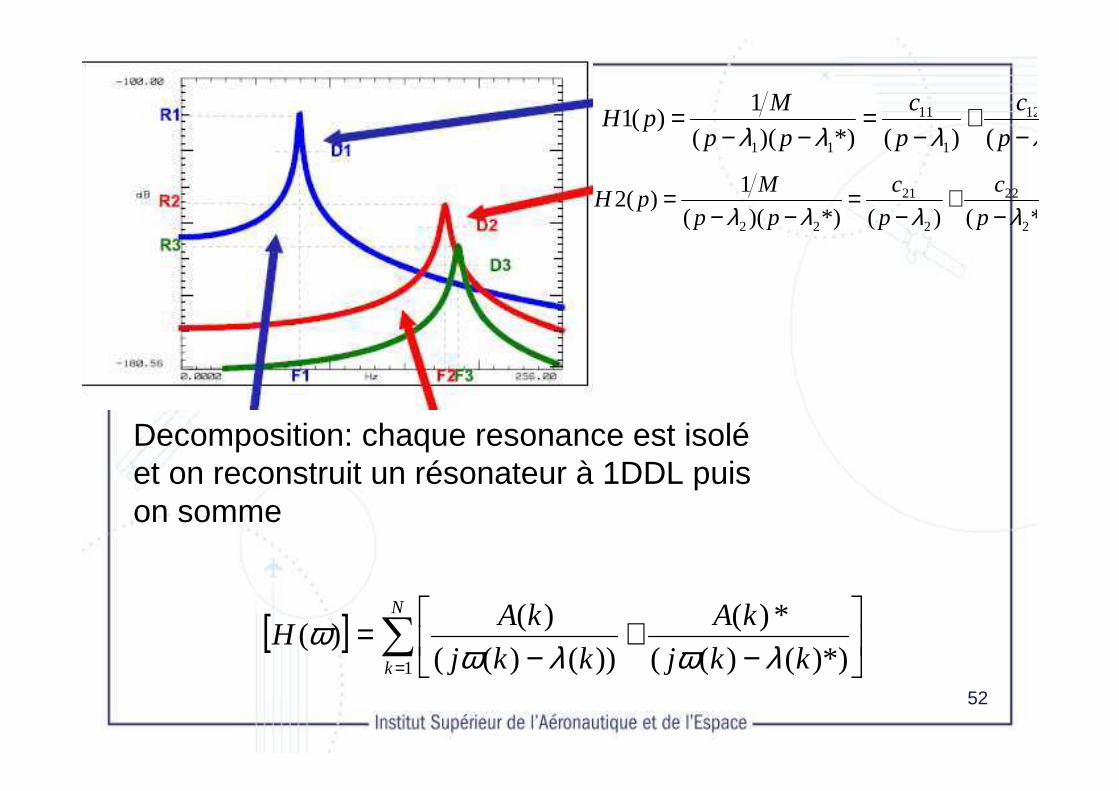
52
()(*))((
1)(1 12
1
11
11 λλλλ −+
−=
−−=
p
c
p
c
pp
MpH
Decomposition: chaque resonance est isoléet on reconstruit un résonateur à 1DDL puis on somme
[ ] ∑=
−+
−=
N
k kkj
kA
kkj
kAH
1 )*)()((
*)(
))()((
)()(
λωλωω
*)()(*))((
1)(2
2
22
2
21
22 λλλλ −+
−=
−−=
p
c
p
c
pp
MpH
53
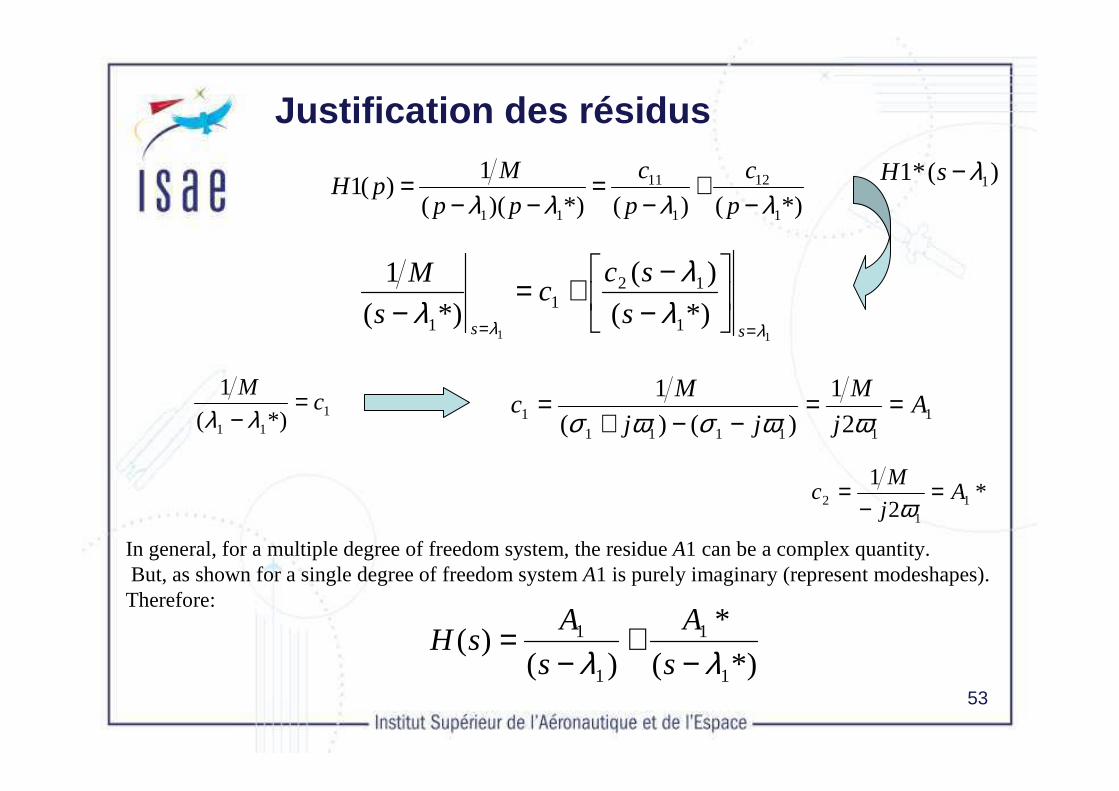
Justification des résidus
*)()(*))((
1)(1
1
12
1
11
11 λλλλ −+
−=
−−=
p
c
p
c
pp
MpH
11*)(
)(
*)(
1
1
121
1 λλ λλ
λ==
−−
+=−
sss
scc
s
M
)(*1 1λ−sH
111 *)(
1c
M =− λλ 1
111111 2
1
)()(
1A
j
M
jj
Mc ==
−−+=
ωωσωσ
*2
11
12 A
j
Mc =
−=
ωIn general, for a multiple degree of freedom system, the residueA1 can be a complex quantity.But, as shown for a single degree of freedom system A1 is purely imaginary (represent modeshapes).Therefore:
*)(
*
)()(
1
1
1
1
λλ −+
−=
s
A
s
AsH
54
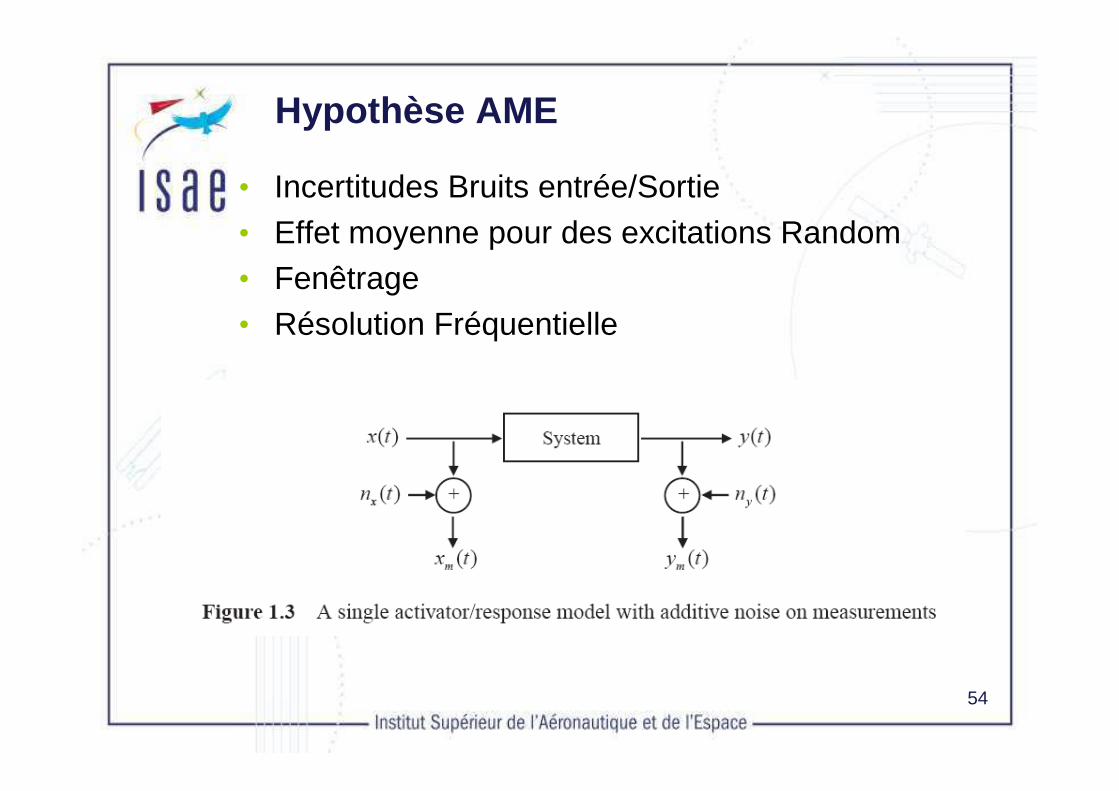
Hypothèse AME
• Incertitudes Bruits entrée/Sortie• Effet moyenne pour des excitations Random• Fenêtrage • Résolution Fréquentielle

55
• Les bases « STOCHASTIQUE »
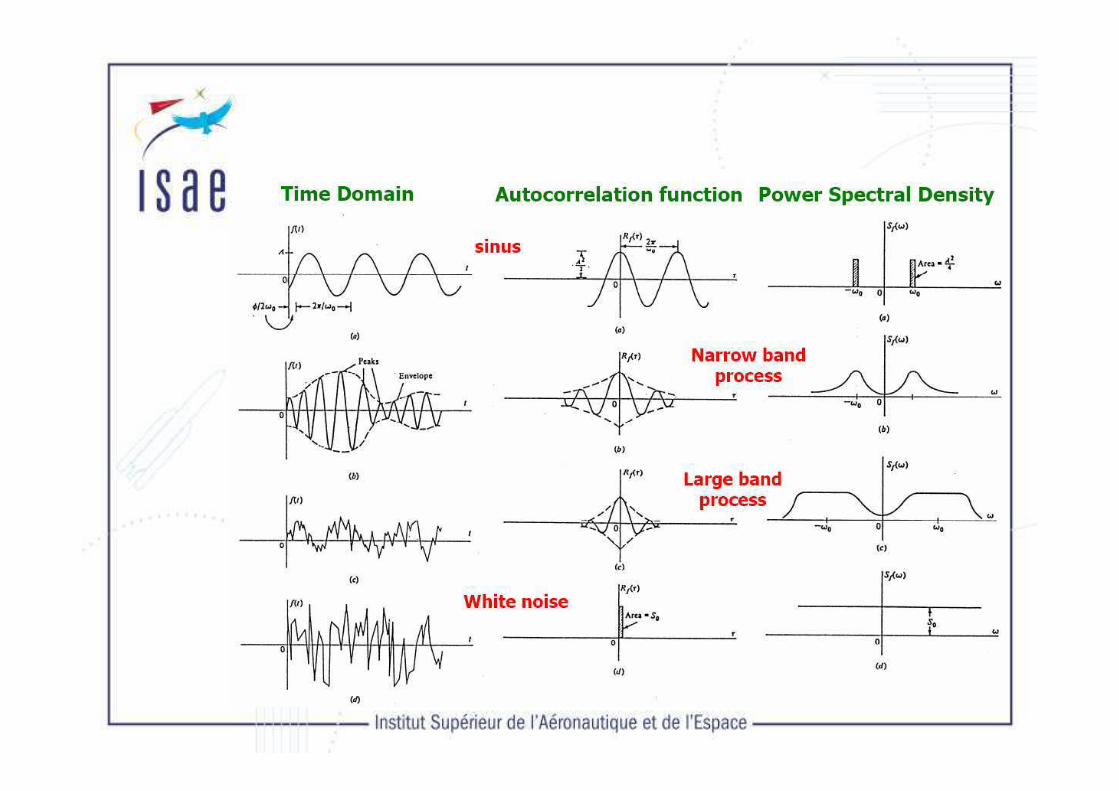
56
Signaux aléatoires
• Exemple 1 sous matlab• Compréhension d’un système sous excitation aléatoire
Signal aléatoire = signal dont on ne sait pas à priori la valeur qu ’il va prendre
On peut observer une REALISATION d ’un signal aléatoire, on ne pouvait pas deviner quelle réalisation on allait observer
On a observé ça ç ’aurait pu être ça
57
58
59
60
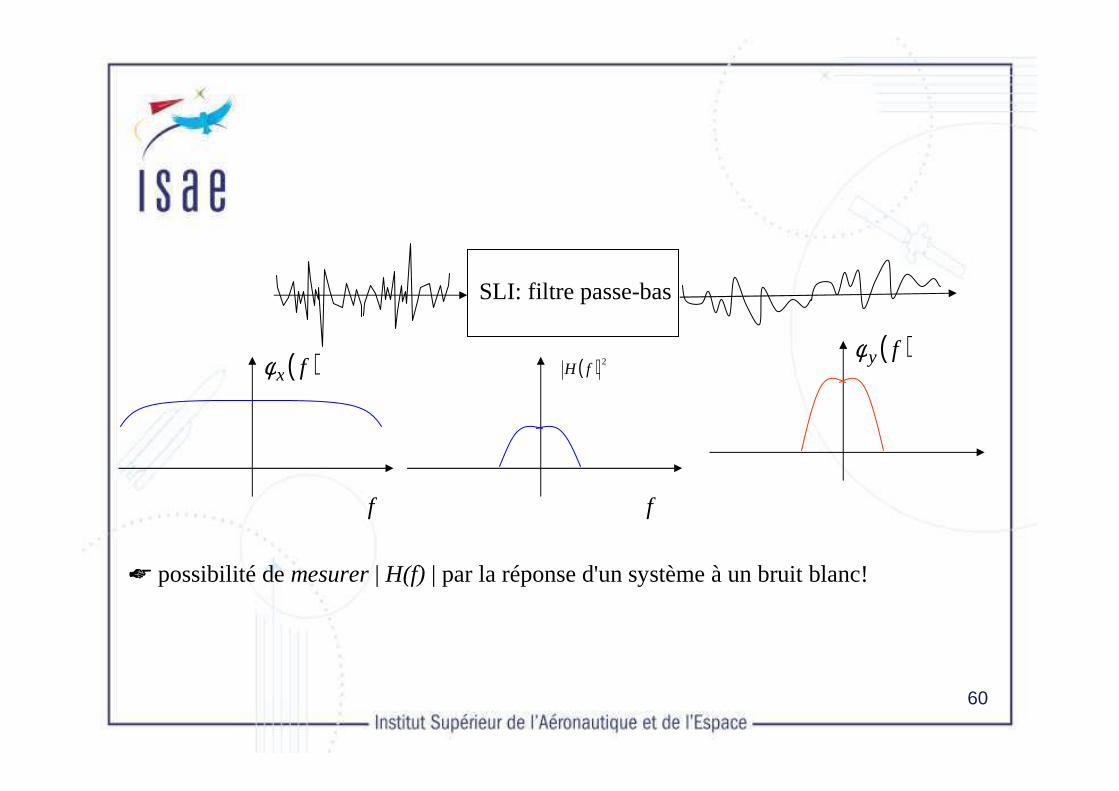
SLI: filtre passe-bas
f f
( )fxφ( )fyφ
( ) 2fH
☛ possibilité de mesurer | H(f) | par la réponse d'un système à un bruit blanc!
61







![Utilisation - Sony · Caméscope numérique HD. HDR-AZ1/RM-LVR2V. Utilisation. À lire en premier. Identification des pièces. Identification des pièces du caméscope [1] Identification](https://img.pdfslide.fr/doc/110x75/5f8904f5b867de06f866296b/utilisation-sony-camscope-numrique-hd-hdr-az1rm-lvr2v-utilisation-lire.jpg)