Embed Size (px)
Citation preview

1LicenceCreativeCommonsCC-BY
IniRobot
ActivitésrobotiquesavecThymioII
pourl’initiationàl’informatiqueetàlarobotiquewww.inirobot.fr
AvecAsebaVPLversion1.4
Cesactivitésreposentsurdesmissionsàréaliseraveclerobotopen-sourceThymio2,conçu
pourl’éducationnotammentparl’EcolePolytechniqueFédéraledeLausanne.Pourensavoir
plussurcerobot,voirwww.thymio.org.
L’organisationdesactivitésestadaptableenfonctionduniveauetdel’âgedupublic.
Cedocumentcomprend:
• Premièrepartie:lalistedesmissionsàréaliser
• Deuxièmepartie:lesfichesdesmissionsàimprimer
Propositionsd’organisationdeséances(entre30minet75min,selonlepublic):
Desgroupesde3personnesavecunrobotpargroupefonctionnentbien.
• Pour6à10séancesde30à75minchacune:
o Séance1:Missions1et2
o Séance2:Missions3et4
o Séance3:Missions5et6
o Séance4:Missions7,8et9
o Séance5:Missions10,11et12
o Séance6:Missions13et14
• Pouruneséanceuniquede2h30à3h:Missions1,2,3,4,6,8,9,10,11,12
Lesiteinternethttp://www.inirobot.frestàlafoisunsitederessourcesetunsited’échanges
oùchacunpeutfairepartdesonexpérienceetproposerdesvariantesdesactivités.
Cesactivitéssontdistribuéessous licence libreCreativeCommonsCC-BY.Contributeurs(trices):
T.Guitard,D.RoyetP-Y.Oudeyer(équipeFlowersInriaENSTAParisTech),MorganeChevalier(HEPVaud).

2LicenceCreativeCommonsCC-BY
Carnet de missions IniRobot
Documentsexternes
indicationsurladifficulté
Duréeestimée
BesoinduThymio
Besoindulogiciel
Activitédébranchée
_____________________________________________________________________________________________________________
MISSION1:C’estquoicetruc?Ils’agitdedécouvrirlerobotThymio2entotaleautonomie.Consigne:«Onatrouvécetobjet.Aidez-nousàapprendredeschosessurlui.Donnez-luiunnom»Déroulement:Lerobotestdonnéauxenfants.Laconsigneestsimple:ilsdoiventdécouvrirThymio,sansaucuneindication.Alafindecetteactivité,lesenfantsdoiventsavoirallumerlerobotetconstaterqu’enappuyantsurlesflèches,Thymiochangedecouleur.MISSION2:DescouleursetdescomportementsFichepagesuivanteIls’agitdedécouvrirlesprogrammespré-enregistrésdanslerobot.«Quand on appuie sur certains boutons, le truc a descomportentsdifférents»Déroulement : On explique qu’il existe des programmespré-enregistrés dans le Thymio, que les flèches servent àfairedéfilerlescomportementsetqueleboutonrondsertàvalider.Il faut compléter la grille en donnant un nom à chaque.Pour aider àdonnerunnom,onpeutdire: «Si c’était unanimalonpourraitdirequ’ilest…».Dans l’idéal, les 4 premiers comportements (vert, jaune,rouge,rose)doiventavoirétéreconnus.Remarques:
• Silescomportementssemblentnepasfonctionner,vérifierquelasurfacesurlaquelleestleThymioestsuffisammentclair.Untest:lancezlecomportementjaune,siThymion’avancepas,c’estquelasurfacen’estpasassezclaire.
• Les comportements bleu ciel et bleu foncé ne sont pas à trouver car ils nécessitentrespectivementdumatérieletunenvironnementcalme.

3LicenceCreativeCommonsCC-BY
MISSION3:Si…alors…Docexterne:FicheàremplirIl s’agit de remplir une fiche en reliant leséléments afin de comprendre la logiqueévénementielle. On utilise les comportements debaseduThymio.Déroulement:Laficheseprésenteen2colonnes.Agauche,lesévènementsetàdroite,lesactions.Ils’agitde formerdespairesd’événements/actionsen les reliant par un trait. Pour réaliser cetexercice,lesenfantsutilisentleThymio.MISSION4:Etsionprogrammait?FichespagessuivantesIls’agitdedécouvrirlelogicieldeprogrammationgraphique.Déroulement:
• Lancerlelogiciel«ThymioVPL».• Expliquerqueprogrammerlerobotconsisteàmettrecôteàcôteunecarteprisedans
labarreverticaledegaucheetunecarteprisedanslabarreverticalededroite.• Pour compléter les fiches, il faut tester les programmes présentés. Fiche 1 sur le
fonctionnementdulogiciel,puisFiche2surlerôledescartes.

4LicenceCreativeCommonsCC-BY
MISSION5:Al’intérieurdurobotDocexterne:Ficheàcompléter+étiquettesàplacerIls’agirderepérerlessystèmesdeprised’informations,deprisededécisionetd’actionsurlerobot.Déroulement:Fairecompléterlaficheenplaçantlesétiquettesaubonendroit.Remarque:Ilpeutêtreintéressantdedémonterunrobotetdelefairepasserdemainsenmainspourvoircequ’ilyaàl’intérieur.

5LicenceCreativeCommonsCC-BY
MISSION6:Bonnedétection!FichepagesuivanteIls’agitdetester lesprogrammesproposéssur laficheafindedécouvrircequ’ilsfont.Déroulement :Deuxprogrammes sontproposéssurlafiche(quelesenfantscomplètent).Remarque:Pour lesenfantsquiontterminéplusrapidementquelesautres,ilpeutêtreintéressantdeproposerdesexercicespermettantdemettreenpratiquecequivientd’êtreabordé.Exemple:Thymiosecoloreenjaunes’ildétectelesoletenvioletsinon.MISSION7:Lerobotetl’HommeDocexterne:FicheàcompléterIls’agitderepérerlessystèmesdeprised’information,deprisededécisionetd’actionsurlerobotetsurl’Homme.Déroulement : Faire compléter la fiche. Pour cela, ondessine sur les schémas les systèmes de prised’information,dedécisionetd’actionetonnommechacundeceséléments(oreilles,cerveau,muscles…).

6LicenceCreativeCommonsCC-BY
MISSION8:Premiersdéfis
Ils’agitdereleverdespetitsdéfis.Déroulement:Al’aidedulogicieldeprogrammationgraphiqueVPL:• Défi1.Créeruninstrumentdemusique(àchaquecapteur,associerunson).• Défi2.Créerunsélecteurdecouleur(àchaquecapteur,associerunecouleur).MISSION9:Mêmepaspeur!
Ils’agitd’éviterdesobstacles.Déroulement : Il fautprogrammer leThymiopourqu’il avancequand ilnedétecte rienetrecules’ildétectequelquechose.Associerdescouleursàcesactions.MISSION10:Parcoursd’obstaclesFichepagesuivante(sibesoind’aide)Ils’agitderéaliserunprogrammequipermetauThymiodesedéplacerparmidesobstacles.Parexemple,uncheminàparcourirsanstoucherlesbordures.Déroulement : Il faut inventerunalgorithmed’évitementd’obstacles. Si c’est tropdifficile,uneficheestfourniepourfaciliterlarecherche.Plusieurssolutionssontpossibles.MISSION11:ThymioenbeautéFichepagesuivanteIls’agitdedécorerleThymio.Déroulement:Donnerlaficheàdécorer.Onpeutladécoreràl’aidedefeutresetdegommettes.Lafichepeutensuiteêtrecolléesurlerobotavecduscotch.Remarque:Attentionànepascollerlafichedevantlescapteurs,sinonlerobotdétecteraunobjetenpermanence,etsoncomportementseraalorsdifficileàmaîtriser.

7LicenceCreativeCommonsCC-BY
MISSION12:ThymiodansleGrandParcours!Ils’agitderéunirtouslesrobotsdesgroupesdansunmêmeespaceavecdesobstacles.Déroulement : Les robots étant munis du programme du «Parcours d’obstacles», lesdéposerdansunenclosavecdesborduresetdesobstacles(d’aumoins6cmdehauteur).Si le sol estmunid’unesurfaceoùdessiner,onpeut choisirégalementunstylo-feutreet leglisserdansletrouprévudanslerobot.Lesrobotsétantensuiteallumés,ceux-cisedéplacentsurleparcourseninteragissantaveclesobstaclesetlesautresrobots,enlaissantdestracésdeleursdéplacements.MISSION13:Ok,jesors!Il s’agit d’identifier parmi les comportements préprogrammés ceux qui sont les plusperformantspoursortird’unlabyrinthe.Déroulement:Construireunlabyrinthesimpleavecdesobjetsd’aumoins6cmdehauteur.Parmiles6comportementsdisponiblesdebasedanslerobot,quelssontceuxquipermettentdesortirdulabyrintheetcommentlesutiliserdanscebut?Vert:guiderlerobotpasàpasaveclamainouavecunobjetsedéplaçantdevantlerobot.Rouge:idemvertmaisensedéplaçantderrièrelerobot.Jaune:rienàfaire,lerobotestautonome.Violet:guiderlerobotaveclesboutonsavance,droite,gauche.Cyan:dessinerunepistenoiredanslelabyrinthe.MISSION14:UnpetittestDocexterne:FicheàcompléterIls’agirderépondreàunQCMrécapitulanttoutcequiaétévudurantcemodule.Déroulement : Faire compléter la fiche. Pour cela, il faut cocher les cases de la fiche. Lacorrectionengroupeestunexcellentmoyenpourlancerunediscussioncollectiveautourduthèmedesrobots.

8LicenceCreativeCommonsCC-BY
Fichesdesmissions

9LicenceCreativeCommonsCC-BY
MISSION2:Descouleursetdescomportements–Fiche
Couleur Actionobservée Enunmot
VERT
JAUNE
ROUGE
ROSE

10LicenceCreativeCommonsCC-BY
MISSION3:Si…Alors….–Fiche
SIThymiodétecteunobjetdevantlui � � ALORSiltourneàgauche
SIThymiodétecteunobjetàdroite � � ALORSiltourneàdroite
SIThymiodétecteunobjetàgauche � � ALORSilavance
SIThymiodétecteunobjetdevantlui � � ALORSilrecule
SIThymiodétecteunobjetàdroite � � ALORSilreculeentournantàdroite
SIThymiodétecteunobjetàgauche � � ALORSilreculeentournantàgauche
SIThymiodétecteunobjetderrièrelui � � ALORSilavance
SIonappuiesurlaflècheavant � � ALORSilavance
SIonappuiesurlaflèchearrière � � ALORSilrecule
SIonappuiesurlaflèchededroite � � ALORSiltourneàgauche
SIonappuiesurlaflèchedegauche � � ALORSiltourneàdroite
SIThymiodétecteunobjetdevantlui � � ALORSiltourneàgauche
SIThymiodétecteunobjetàdroite � � ALORSiltourneàdroite
SIThymionedétecterien � � ALORSilrecule
SIThymiodétecteunobjetàgauche � � ALORSilavance

11LicenceCreativeCommonsCC-BY
MISSION4:Etsionprogrammait?–Fiche1Placerdeuxcartesaucentrepourfaireleprogrammeci-dessous.Entoureensuitelesbonnesréponsesdanslesphrasesendessous.Leboutonsertà:DémarrerleprogrammeArrêterleprogrammeLeboutonsertà:DémarrerleprogrammeArrêterleprogrammeLesimagesdanslecadreenvertmontrentles: ActionsCapteursLesimagesdanslecadreenrougemontrentles: ActionsCapteursLebouton«+»encadréenvertsertà: SupprimerunordreAjouterunordreLebouton«×»encadréenrougesertà: SupprimerunordreAjouterunordre

12LicenceCreativeCommonsCC-BY
MISSION4:Etsionprogrammait?–Fiche2
Voici4programmesdifférents,chacunforméavecunecarteévénementetunecarteaction.Compléterlesphrasesassociées.
Phrase
Prog
ramme1
SIALORS
Prog
ramme2
SIALORS
Prog
ramme3
SIALORS
Prog
ramme4
SIALORS

13LicenceCreativeCommonsCC-BY
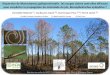
MISSION5:Al’intérieurdurobot–Fiche
Pour détecter
Pour décider
Processeur
ACTIONNEURS
Pour agir

14LicenceCreativeCommonsCC-BY
MISSION5:Al’intérieurdurobot–Étiquettes(pour2fiches)

15LicenceCreativeCommonsCC-BY
MISSION6:Bonnedétection!–Fiche1/Essayerleprogrammesuivantetentourerlabonneréponse.
DequellecouleurestleThymiolorsqu’onmetquelquechosedevantlescapteursdederrière?VERT /BLEUDequellecouleurestleThymiolorsqu’onnemetriendevantlescapteursdederrière?VERT /BLEU
2/Essayerleprogrammesuivantetrépondreauxquestions.
LeThymioavance-t-illorsqu’onmetquelquechosedevantlescapteursdel’arrière?..............LeThymioavance-t-illorsqu’onnemetriendevantlescapteursdel’arrière?..............
3/Relielespetitsdessinsàcequ’ilsveulentdire.L’icône lecapteurn’apasd’importance,onnes’enoccupepasL’icône lecapteurnedétecterien L’icône lecapteurdétectequelquechose
•
•
•
•
•
•

16LicenceCreativeCommonsCC-BY
MISSION7:Lerobotetl’homme–Fiche
Pour détecter
CAPTEURS
Bouton
DétecteurdesonsROBOT
Détecteurdechocs
Détecteurd’objets
Pour décider
ORDINATEUR
Processeur
Circuitélectronique
Pour agir
ACTIONNEURS
Lampes
Haut-parleur

17LicenceCreativeCommonsCC-BY
MISSION10:Parcoursd’obstacles–Fiche
1)
CréeruneinstructionpourqueThymioavances’ilnedétecterienavecsescapteursdedevant
2)
AjouteruneinstructionpourqueThymiotourneàdroitelorsqu’ildétectequelquechoseàgauche
3)
AjouteruneinstructionpourqueThymiotourneàgauchelorsqu’ildétectequelquechoseàdroite
4)
AjouteruneinstructionpourqueThymioreculelégèrementtoutentournantunpeus’ildétectequelquechosedevantlui
5)
AjouterdesinstructionspourqueThymios’allumeenrouges’ildétecteunobstacle,etenvertsinon
(Facultatif)

18LicenceCreativeCommonsCC-BY
MISSION11:ThymioenbeautéMISSION 14 : Un
petittest

19LicenceCreativeCommonsCC-BY
MISSION14:Unpetittest–Fiche
1 Sais-tu ce qu'est un robot ? Oui
Non Je ne sais pas
2 Est-ce qu'un robot a forcément une tête ? Oui Non Je ne sais pas
3 Est-ce qu'on peut discuter avec un robot comme avec un humain ?
Oui Non Je ne sais pas
4 Est-ce qu'il y a des robots aspirateurs pour la maison ?
Oui Non Je ne sais pas
5 Est-ce qu'un robot a forcément des capteurs, pour détecter des choses ?
Oui Non Je ne sais pas
6 Est-ce qu'il y a de l'électronique dans un robot ?
Oui Non Je ne sais pas
7 Est-ce qu'il y a de l'informatique dans un robot ?
Oui Non Je ne sais pas
8 Est-ce qu'un robot est vivant ? Oui Non Je ne sais pas
9 As-tu déjà fait des activités avec un robot ? Oui Non Je ne sais pas
10 As-tu peur des robots ? Oui Non Je ne sais pas
11 Est-il important de savoir comment fonctionne un robot ?
Oui
Non Je ne sais pas
12 Aimerais-tu refaire des activités de robotique ?
Oui
Non Je ne sais pas
13 Aimerais-tu travailler dans la robotique plus tard ?
Oui Non Je ne sais pas
14 A quoi correspond cette carte ?
Un capteur Un actionneur Je ne sais pas
16 A quoi correspond cette carte ?
Un capteur Un actionneur Je ne sais pas
17 Si on débranche le robot, se souvient-il de notre programme ?
Oui Non Je ne sais pas
18 Peut-on dire au robot de détecter plusieurs choses en même temps ?
Oui Non Je ne sais pas
19 Que peut-on détecter avec cette carte ?
Un son Un objet Je ne sais pas
20 Peut-on dire au robot de faire quelque chose quand il ne détecte rien ?
Oui Non Je ne sais pas

20LicenceCreativeCommonsCC-BY
Correctionsdesmissions

21LicenceCreativeCommonsCC-BY
MISSION2:Descouleursetdescomportements–Fiche
Couleur Actionobservée Enunmot
VERT
ilsuitunobjetenfacedelui.Sil’objetesttropprès,ilrecule.
Amical
JAUNE Ilexplorelemondetoutenévitant
lesobstacles Explorateur
ROUGE Ilreculefaceàunobstacle Peureux
ROSE Ilsuitlesordresdonnéspar les
boutons Obéissant

22LicenceCreativeCommonsCC-BY
MISSION3:Si…Alors….–Fiche
SIThymiodétecteunobjetdevantlui
ALORSiltourneàgauche
SIThymiodétecteunobjetàdroite ALORSiltourneàdroite
SIThymiodétecteunobjetàgauche ALORSilavance
SIThymiodétecteunobjetdevantlui
ALORSilrecule
SIThymiodétecteunobjetàdroite ALORSilreculeen
tournantàdroite
SIThymiodétecteunobjetàgauche ALORSilreculeentournantàgauche
SIThymiodétecteunobjetderrièrelui
ALORSilavance
SIonappuiesurlaflècheavant
ALORSilavance
SIonappuiesurlaflèchearrière ALORSilrecule
SIonappuiesurlaflèchededroite ALORSiltourneàgauche
SIonappuiesurlaflèchedegauche ALORSiltourneàdroite
SIThymiodétecteunobjetdevantlui
ALORSiltourneàgauche
SIThymiodétecteunobjetàdroite ALORSiltourneàdroite
SIThymionedétecterien ALORSilrecule
SIThymiodétecteunobjetàgauche ALORSilavance

23LicenceCreativeCommonsCC-BY
MISSION4:Etsionprogrammait?–Fiche1Placerdeuxcartesaucentrepourfaireleprogrammeci-dessous.Entoureensuitelesbonnesréponsesdanslesphrasesendessous.Leboutonsertà:DémarrerleprogrammeArrêterleprogrammeLeboutonsertà:DémarrerleprogrammeArrêterleprogrammeLesimagesdanslecadreenvertmontrentles: ActionsCapteursLesimagesdanslecadreenrougemontrentles: ActionsCapteursLebouton«+»encadréenvertsertà: SupprimerunordreAjouterunordreLebouton«×»encadréenrougesertà: SupprimerunordreAjouterunordre

24LicenceCreativeCommonsCC-BY
MISSION4:Etsionprogrammait?–Fiche2
Voici4programmesdifférents,chacunforméavecunecarteévénementetunecarteaction.Compléterlesphrasesassociées.
Phrase
Prog
ramme1
SIonappuiesurlaflècheavantALORSThymioavance
Prog
ramme2
SIThymiodétectéunobjetàdroiteALORSils’allumeenrougedessus
Prog
ramme3
SIThymiodétecteunobjetsousluiALORSiljouedelamusique
Prog
ramme4
SIThymiodétecteunchocALORSils’allumeenjaunedessous

25LicenceCreativeCommonsCC-BY
MISSION5:Al’intérieurdurobot–Fiche
Pour détecter
Pour décider
Processeur
ACTIONNEURS
Pour agir
ROBOTCAPTEURS
Bouton
Détecteurdechocs
Détecteurd’objets
Détecteurdesons
ORDINATEUR
Mémoire
Circuitélectronique
Haut-parleur
Lampes
Moteursderoues

26LicenceCreativeCommonsCC-BY
MISSION6:Bonnedétection!–Fiche1/Essayerleprogrammesuivantetentourerlabonneréponse.
DequellecouleurestleThymiolorsqu’onmetquelquechosedevantlescapteursdederrière?VERT /BLEUDequellecouleurestleThymiolorsqu’onnemetriendevantlescapteursdederrière?VERT /BLEU
2/Essayerleprogrammesuivantetrépondreauxquestions.
DequellecouleurestleThymiolorsqu’onmetquelquechosedevantlescapteursdel’arrière?ROUGE........DequellecouleurestleThymiolorsqu’onnemetriendevantlescapteursdel’arrière?ROUGE........
3/Relielespetitsdessinsàcequ’ilsveulentdire.L’icône lecapteurn’apasd’importance,onnes’enoccupepasL’icône lecapteurnedétecterien L’icône lecapteurdétectequelquechose
•
•
•
•
•
•

27LicenceCreativeCommonsCC-BY
MISSION7:Lerobotetl’homme–Fiche
MISSION10:Parcoursd’obstacles–Fiche
Pour détecter
CAPTEURS
Bouton
DétecteurdesonsROBOT
Détecteurdechocs
Détecteurd’objets
Pour décider
ORDINATEUR
Processeur
Circuitélectronique
Pour agir
ACTIONNEURS
Lampes
Haut-parleur
Moteursdesroues

28LicenceCreativeCommonsCC-BY
MISSION14:Unpetittest–Fiche
1 Sais-tu ce qu'est un robot ? Oui
Non Je ne sais pas
2 Est-ce qu'un robot a forcément une tête ? Oui Non Je ne sais pas
3 Est-ce qu'on peut discuter avec un robot comme avec un humain ?
Oui Non Je ne sais pas
4 Est-ce qu'il y a des robots aspirateurs pour la maison ?
Oui Non Je ne sais pas
5 Est-ce qu'un robot a forcément des capteurs, pour détecter des choses ?
Oui Non Je ne sais pas
6 Est-ce qu'il y a de l'électronique dans un robot ?
Oui Non Je ne sais pas
7 Est-ce qu'il y a de l'informatique dans un robot ?
Oui Non Je ne sais pas
8 Est-ce qu'un robot est vivant ? Oui Non Je ne sais pas
9 As-tu déjà fait des activités avec un robot ? Oui Non Je ne sais pas
10 As-tu peur des robots ? Oui Non Je ne sais pas
11 Est-il important de savoir comment fonctionne un robot ?
Oui
Non Je ne sais pas
12 Aimerais-tu refaire des activités de robotique ?
Oui
Non Je ne sais pas
13 Aimerais-tu travailler dans la robotique plus tard ?
Oui Non Je ne sais pas
14 A quoi correspond cette carte ?
Un capteur Un actionneur Je ne sais pas
16 A quoi correspond cette carte ?
Un capteur Un actionneur Je ne sais pas
17 Si on débranche le robot, se souvient-il de notre programme ?
Oui Non Je ne sais pas
18 Peut-on dire au robot de détecter plusieurs choses en même temps ?
Oui Non Je ne sais pas
19 Que peut-on détecter avec cette carte ?
Un son Un objet Je ne sais pas
20 Peut-on dire au robot de faire quelque chose quand il ne détecte rien ?
Oui Non Je ne sais pas