-
8/3/2019 Interpolation Numerique
1/28
.
Interpolation Numrique
Pablo CROTTI, Mathias RIME
Mini-projet effectu au sein de la section de MathmatiquesEt
2007
Professeur responsable Alfio QuarteroniAssistant Benjamin
Stamm
-
8/3/2019 Interpolation Numerique
2/28
Introduction
Linterpolation numrique consiste de manire gnrale approximer une
fonction dont onne connat les valeurs quen certains points. Plus
prcisment, tant donn n + 1 couples (xi, yi),le problme consiste
trouver une fonction = (x) telle que (xi) = yi pour i = 0, . . . ,
n. On
dit alors que interpole {yi} aux noeuds {xi}. La forme de la
fonction dpend du problmeet du but de linterpolation. En effet,
peut tre un polynme, et on parle alors dinterpolationpolynomiale,
ou bien peut tre un polynme trigonomtrique, ou une fonction
polynomiale parmorceaux, et on dit alors que est une interpolation
par morceaux.
Lintrt et le mode dutilisation dune fonction dinterpolation
dpend surtout de la prove-nance des donnes. Les quantits yi
peuvent, par exemple, reprsenter les valeurs aux noeudsxi dune
fonction f connue analytiquement. La fonction dinterpolation permet
alors de simpli-fier des calculs numriques dintgrales ou de drives.
Dautre part, les quantits yi peuventreprsenter des donnes
exprimentales quil faut synthtiser, vu leur nombre parfois lev.
Le but de ce mini-projet est dintroduire les notions de base de
linterpolation dans le cadredune fonction une variable. Nous
parlerons de linterpolation polynomiale de Lagrange avec
noeuds quirpartis, de linterpolation polynomiale par morceaux,
ainsi que de lapproximationau sens des moindres carrs.Pour mieux
comprendre et illustrer ce quest linterpolation numrique, nous
mettons deux
fonctions en exemple (Sinus et Runge) avec lutilisation des
polynmes de Lagrange sur unou plusieurs morceaux. Ces deux exemples
montrent que linterpolation par morceaux est bienmeilleure quune
approximation polynomiale avec des points dinterpolation quirpartis
lorsquele nombre de morceaux est grand.
Nous tenons remercier Benjamin Stamm, notre assistant
responsable, pour sa correctionrapide et trs attentive de notre
projet, ainsi que pour sa disponibilit.
2
-
8/3/2019 Interpolation Numerique
3/28
Table des matires
Introduction 2
Table des figures 4
1 Approximation par les moindres carrs 5
1.1 Rappels dalgbre linaire . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 51.2 Meilleure approximation . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Problme
des moindres carrs . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 61.4 Problme des moindres carrs pour des fonctions . . .
. . . . . . . . . . . . . . . 7
2 Interpolation polynomiale & noeuds quirpartis 10
2.1 Polynme de Lagrange . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 102.2 Erreur dinterpolation . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . 112.3 Dfauts de
linterpolation polynomiale avec noeuds quirpartis . . . . . . . . .
. 142.4 Stabilit du polynme dinterpolation . . . . . . . . . . . .
. . . . . . . . . . . . . 16
3 Interpolation de Lagrange par morceaux 17
4 Forme de Newton du polynme dinterpolation 20
4.1 Quelques proprits des diffrences divises de Newton . . . . .
. . . . . . . . . . 204.2 Erreur dinterpolation avec les diffrences
divises . . . . . . . . . . . . . . . . . . 21
5 Interpolation dHermite-Birkhoff 23
Conclusion 24
Rfrences 25
ANNEXE : CODES MATLAB 26
3
-
8/3/2019 Interpolation Numerique
4/28
Table des figures
1.1 Projection du vecteur v dans le sous-espace W . . . . . . .
. . . . . . . . . . . . 51.2 Lissage de donnes alatoires . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . 92.1 Erreur
dinterpolation du sinus avec noeuds quirpartis . . . . . . . . . .
. . . . 13
2.2 Interpolations de sinus avec degr 2,3,4,5,6,8 . . . . . . .
. . . . . . . . . . . . . . 132.3 Contre-exemple de Runge :
Interpolation de degr 2,4,5,8 et 12 . . . . . . . . . . 152.4
Contre-exemple de Runge : Erreurs dinterpolation avec noeuds
quirepartis . . . 163.1 Interpolation linaire par morceaux de la
fonction sinus . . . . . . . . . . . . . . . 173.2 Erreurs pour
linterpolation par morceaux de la fonction sinus . . . . . . . . .
. . 183.3 Interpolation linaire par morceaux de la fonction de
Runge . . . . . . . . . . . . 183.4 Erreurs dinterpolation par
morceaux de la fonction de Runge . . . . . . . . . . . 19
4
-
8/3/2019 Interpolation Numerique
5/28
1 Approximation par les moindres carrs
Dans cette partie du rapport nous allons tudier une mthode
appele approximation ausens des moindres carrs. Cette mthode permet
dapproximer un ensemble de couples (xi, yi)obtenus de manire
alatoires ou par lintermdiaire dune fonction. Lapproximation nest
pas
une interpolation car la fonction rsultante obtenue aprs calcul
ne passe pas forcment par tousles couples (xi, yi). En effet,
lapproximation par les moindres carrs est obtenue en rsolvant
unsystme dquations linaires surdtermin.
1.1 Rappels dalgbre linaire
Dfinition 1.1. Soit V un R-espace vectoriel de dimension finie
muni dun produit scalaire, . Soient W un sous-espace vectoriel de V
et (w0, w1, . . . , wn) une base orthogonale de W.Soit v V et soit
W(v) W, la projection orthogonale du vecteur v sur le sous-espace
W,dfinie par :
W(v) :=n
i=0v, wi
wi, w
i
wi. (1.1)
Dfinition 1.2. Soit V un R-espace vectoriel de dimension finie
muni dun produit scalaire, et soit W un sous-espace vectoriel de V.
Lespace orthogonal W est lensemble notW dfini par :
W := { v V | w, v = 0 w W}.
Cest un sous-espace vectoriel de V. En effet 0 W, et si w1, w2
W, , R alorsw W on a w1 + w2, w = w1, w + w2, w = 0. Donc w1 + w2
W. Remarquonsque pour tout v V on a v W(v) W. De plus, si A Mnm(R)
alors nous avonsIm(A) = Ker(At) et Ker(A) = Im(At) o on note par At
la transpose de A.
1.2 Meilleure approximation
Thorme 1.3 ([Hess06],page 62). Soit V un Respace vectoriel muni
dun produit scalaire, . Soit W un sous-espace vectoriel de V et
soit v V. Alors W(v) est la meilleureapproximation de v dans W,
dans le sens o
v W(v)< v w, w W, w = W(v)
o . est la norme engendre par le produit scalaire , .
W
V
W(v)v v -
W(v)
Fig. 1.1 Projection du vecteur v dans le sous-espace W
5
-
8/3/2019 Interpolation Numerique
6/28
Dmonstration. Soit w W. On a
v w2= v W(v) W
+ W(v) w W
2.
Par le thorme de Pythagore nous avonsv w2= v W(v)
2+W(v) w2.
Dov W(v)
2 v w2,
avec galit si et seulement siW(v) w
2= 0 ,
ce qui quivaut w = W(v).
1.3 Problme des moindres carrs
Etant donn A Mnm(R) et b Rn, il se peut que le systme dquations
linaires Ax = bavec x Rm soit inconsistant, quil ny ait pas de
solution. La mthode des moindres carrsconsiste trouver une valeur
de x qui minimise la norme euclidienne de Axb. Selon le Thorme1.3,
la meilleure approximation de b dans Im(A) est
Im(A)(b).
Or
b Im(A)(b) Im(A) = Ker(At).
Alors, siAx = Im(A)(b),
on aAtb AtAx = At(b Ax
Ker(At)
) = 0.
DoAtAx = Atb. (1.2)
Si AtA est inversible, le systme a une solution unique
x = (AtA)1Atb, (1.3)
Ax = A(AtA)1Atb. (1.4)
On appelle lquation (1.2) le systme normal du systme
inconsistant et lquation (1.3) lesystme associ au moindre
carrs.
6
-
8/3/2019 Interpolation Numerique
7/28
1.4 Problme des moindres carrs pour des fonctions
Nous considrons ici lapproximation non pas de vecteurs mais de
fonctions relles. Luti-lisation des moindres carrs pour les
fonctions permet de synthtiser un ensemble de donnes,souvent
rsultats dexpriences, sous forme de polynmes, de polynmes
trigonomtriques oudexponentielles. Cette forme synthtique des
donnes permet ainsi par la suite dextrapoler desvaleurs diffrentes
des noeuds de base.
Considrons les donnes {(xi, yi), i = 0, . . . , n} o yi peut tre
vu comme la valeur f(xi)prise par une fonction f au noeud xi, f
tant inconnue priori. Pour un entier m 1 donn(en gnral m n ),
dfinissons Pm = {v : R R : v(x) = a0 + a1x + . . . + anxn , ai R i
}lensemble des polynmes de degr plus petit ou gal m. On cherche un
polynme f Pmvrifiant lingalit
ni=0
[yi f(xi)]2
ni=0
[yi pm(xi)]2, (1.5)
pour tout polynme pm de degr au plus m. Si elle existe, f est
appele meilleure approximationau sens des moindres carrs dans Pm
des donnes {(xi, yi), i = 0, . . . , n}. moins que m n,il nest en
gnral pas possible davoir f(xi) = yi pour tout i = 0, . . . , n. En
posant
f(x) = a0 + a1x + + amxm,
o les coefficients a0, . . . , am R sont inconnus, le problme
(1.5) peut tre reformul ainsi :trouver a0, a1, . . . , am tels
que
(a0, a1, . . . , am) =min
{bi, i=0,...,m}(b0, b1, . . . , bm),
o
(b0, b1, . . . , bm) =
n
i=0 [yi (b0 + b1xi + + bmxmi )]
2.
Rsolvons ce problme dans le cas particulier o m = 1. Puisque
(b0, b1) =n
i=0
[y2i + b20 + b
21x
2i + 2b0b1xi 2b0yi 2b1xiyi],
le graphe de est un parabolode convexe. Le point (a0, a1) o
atteint son minimum satisfaitles conditions
b0(a0, a1) = 0 ,
b1(a0, a1) = 0.
En calculant explicitement les deux drives partielles, on
obtient
ni=0
[a0 + a1xi yi] = 0 ,n
i=0
[a0xi + a1x2i xiyi] = 0,
qui est un systme de deux quations deux inconnues a0 et a1 :
a0(n + 1) + a1
ni=0
xi =n
i=0
yi,
a0
ni=0
xi + a1
ni=0
x2i =n
i=0
yixi.
7
-
8/3/2019 Interpolation Numerique
8/28
En posant D = (n + 1)n
i=0 x2i (
ni=0 xi)
2, la solution scrit, grce la rgle de Cramer :
a0 =1
D
n
i=0
yi
nj=0
x2j n
j=0
xj
ni=0
xiyi
,
a1 = 1D(n + 1) n
j=0
xiyi
nj=0
xj
ni=0
yi.Le polynme correspondant f(x) = a0 + a1x sappelle la droite
des moindrs carrs, ou dergression linaire.
Cette approche peut tre gnralise de plusieurs manires. La
premire gnralisation consiste prendre un m plus grand. Le systme
linaire (m + 1) (m + 1) associ est symtrique et a laforme suivante
:
a0(n + 1) + a1n
i=0 xi + . . . + amn
i=0 xmi =
ni=0 yi
a0ni=0 xi + a1ni=0 x2i + . . . + am ni=0 xm+1i = ni=0 xiyi...
... ... ... ...a0n
i=0 xmi + a1
ni=0 x
m+1i + . . . + am
ni=0 x
2mi =
ni=0 x
mi yi
Quand m = n, le polynme des moindres carrs concide avec le
polynme dinterpolation deLagrange (que nous tudierons au prochain
chapitre).
Une gnralisation de lapproximation au sens des moindres carrs
consiste utiliser dans(1.5) des fonctions f et pm qui ne sont pas
des polynmes mais des fonctions dun espace vectorielVm engendr par
m + 1 fonctions indpendantes j , j = 0, . . . , m.
On peut considrer par exemple des fonctions trigonomtriques j
(x) = cos(j x) (pour unparamtre = 0 donn), des fonctions
exponentielles j (x) = ej x (pour un > 0 donn). Le
choix des fonctions j est en pratique dict par la forme suppose
de la loi dcrivant les donnes.Le lecteur pourra vrifier que les
composantes de
f(x) =m
j=0
ajj (x),
sont les solutions du systme suivant (appel quations
normales)
BTBa = BTb,
o B est la matrice rectangulaire (n + 1) (m + 1) de coefficients
bij = j (xi), a est le vecteur
des inconnues et b le vecteur des donnes.
8
-
8/3/2019 Interpolation Numerique
9/28
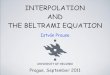
Exemple 1.4. Lissage de donnes alatoires. Nous allons montrer
comment on peut lisserou synthtiser des donnes gnres alatoirement.
Nous avons gnr un ensemble de 10 pointsreprsentant des
perturbations dune loi quadratique (ici la fonction de base est
f(x) = 10x2).Le Programme 1 en annexe montre le code MATLAB utilis
pour gnrer les donnes et lesafficher.
Nous avons utilis la mthode des moindres carrs pour approximer
ces points avec unpolynme du deuxime degr, le choix le plus
judicieux, et nous avons effectu une interpolationde Lagrange de
degr 9 (voir section suivante). On remarque sur la Figure 1.2 que
pour des jeuxde donnes lgrement diffrents, lapproximation au sens
des moindres carrs ne change quetrs peu. Cest en fait une mthode
stable numriquement, ce qui nest pas (pas toujours) le casde
linterpolation de Lagrange, voir le contre-exemple dans lExemple
2.9.
Nous pouvons de plus tenter dextrapoler la valeur de la fonction
en x = 2. En effet, unevaleur gnre pour x = 2 est f(2) = 40.8998,
la valeur de lapproximation quadratique est2f(2) = 42.2559, alors
que la valeur du polynme interpolant est 9f(2) = 7.0738 105
!Lapproximation par les moindres carrs donne ainsi une bonne
reprsentation des donnes,mme aux points o lon ne connat pas la
fonction, et lutilisation de linterpolation de Lagrange
nest pas judicieuse pour ce genre de problme.
0 0.2 0.4 0.6 0.8 15
0
5
10
15
(a) Lissage 1
0 0.2 0.4 0.6 0.8 15
0
5
10
15
(b) Lissage 2
Fig. 1.2 Comparaison entre la mthode des moindres carrs et
linterpolation de Lagrangepour lisser des donnes exprimentales
(croix). En trait plein lapproximation de degr 2 ausens des
moindres carrs ; en trait discontinu le polynme dinterpolation de
Lagrange de degr 9
9
-
8/3/2019 Interpolation Numerique
10/28
2 Interpolation polynomiale & noeuds quirpartis
2.1 Polynme de Lagrange
Nous voulons trouver un polynme m Pm passant par n + 1 couples
(xi, yi), appelpolynme dinterpolation ou polynme interpolant, tel
que
m(xi) = amxmi + + a1xi + a0 = yi i = 0, . . . , n .
Les points xi sont appels noeuds dinterpolation. Si n = m le
problme est sr ou sous dtermin.Si n=m, nous avons le thorme suivant
:
Thorme 2.1. Etant donne n + 1 points distincts x0, . . . , xn et
n + 1 valeurs correspondantesy0, . . . , yn, il existe un unique
polynme n Pn tel que n(xi) = yi pour i = 0, . . . , n.
Dmonstration. Montrons lexistence en construisant n. Posons
i P
n : i(x) =
n
j=0j=i
x xj
xi xj i = 0, . . . , n .
Nous allons montrer que { i, i = 0, . . . , n } est une base de
Pn. Remarquons que commeCard{ i, i = 0, . . . , n } = n + 1 =
dimPn, il suffit de montrer que les i sont linairementsindpendants,
cest--dire que :
ni=0
ii = 0
0 = 1 = = n = 0 avec i R,
Or i(xj ) = ij , o ij est le symbole de Kroenecker. Ainsi nous
trouvons
j = 0, . . . , n 0 =n
i=0
ii(xj ) =n
i=0
iij = j .
Donc lensemble des polynmes caractristiques est une base de Pn.
En dcomposant n surcette base on a
n(x) =n
j=0
bj j(x).
Or on veut
n(xi) =n
j=0 bj j (xi) = yi , i = 0, . . . , n .Comme j (xi) = ij on
obtient bi = yi. Le polynme dinterpolation existe et scrit de
cettemanire
n(x) =n
i=0
yii(x). (2.1)
Lunicit se montre comme ceci. Supposons quil existe m de degr m
n, tel que m(xi) = yi,pour i = 0, . . . , n. La diffrence n m est
encore un polynme de degr n et sannule alorsen n + 1 points
distincts xi, elle est donc nulle. Ainsi m = n.
10
-
8/3/2019 Interpolation Numerique
11/28
La formule (2.1) est appele formule dinterpolation de Lagrange,
et les polynmes i(x) sontles polynmes caractristiques (de
Lagrange).
Si yi = f(xi) pour une certaine fonction f donne, le polynme
n(x) sera not nf(x)
Dfinition 2.2. Le polynme nodale de degr n + 1, not n+1, est
dfinit par :
n+1(x) =
ni=0
(x xi).
Proposition 2.3. Le polynme dinterpolation n scrit sous la forme
suivante :
n(x) =n
i=0
n+1(x)
(x xi)n+1(xi)
yi.
Dmonstration. Nous avons
n+1(x) =n
j=0
ni=0i=j
(x xi),
ainsi
n+1(xi) =n
j=0j=i
xi xj,
et finalementn+1(x)
(x xi)n+1(xi)
=n
j=0j=ix xjxi xj
= i(x).
Et on retrouve la formule (2.1).
Exemple 2.4. Considrons les couples de points suivants (0, 0),
(1, 2), (2, 0) avec (x0 = 0, y0 =0), . . . , (x2 = 2, y2 = 0) pour
un degr polynomiale n = 2. Aprs avoir calcul les
polynmescaractristiques nous obtenons les rsultats suivants
0(x) =x2 3x + 2
2
1(x) = x2 + 2x
2(x) =x2 x
2.
Ce qui nous donne
2(x) = 0(x2 3x + 2
2) + 2(x2 + 2x) + 0(
x2 x
2) = 2x2 + 4x
2.2 Erreur dinterpolation
Dans cette section, nous donnons une valuation de lerreur
dinterpolation faite quand onremplace une fonction f (donne) par le
polynme nf qui linterpole aux noeuds x0, x1, . . . , xn(par
forcment quirpartis). De plus, nous obtenons une estimation plus
fine de lerreur maxi-male dans le cas particulier o les noeuds sont
quirpartis sur un intervalle [a, b].
11
-
8/3/2019 Interpolation Numerique
12/28
Thorme 2.5. Soient x0, . . . , xn, n + 1 noeuds distincts et
soit x un point appartenant audomaine de dfinition de f. On suppose
que f Cn+1(Ix), o Ix est le plus petit intervallecontenant les
noeuds x0, . . . , xn et x. Lerreur dinterpolation au point x est
donne par
En(x) := f(x) nf(x) =f(n+1)()
(n + 1)!n+1(x) (2.2)
o Ix et n+1 est le polynme nodal de degr n + 1.
Dmonstration. Le rsultat est trivial si x concide avec lun des
noeuds dinterpolation carn+1(xi) = 0 i = 0, . . . , n. Autrement,
dfinissons pour t Ix la fonction G(t) = En(t) n+1(t)En(x)/n+1(x).
Comme nous savons que f Cn+1(Ix) et que n+1 est un polynmealors G
Cn+1(Ix) et possde au moins n + 2 zros distincts dans Ix. En
effet,
G(xi) = En(xi) n+1(xi)En(x)/n+1(x) = 0, i = 0, . . . , n
G(x) = En(x) n+1(x)En(x)/n+1(x) = 0.
Par le thorme des valeurs intermdiaires, G
admet au moins n + 1 zros distincts, et par
rcurrence G(j)
a au moins n + 2 j zros distincts. Par consquent, G(n+1)
a au moins un zro,quon note . Dautre part, puisque E(n+1)n (t) =
f(n+1)(t) et
(n+1)n+1 (x) = (n + 1)! on obtient
G(n+1)(t) = f(n+1)(t) (n + 1)!
n+1(x)En(x)
ce qui donne, avec t = , lexpression voulue pour En(x).
Corollaire 2.6. Soient x0, x1, . . . , xn [a, b], n + 1 noeuds
quirpartis avec x0 = a et xn = b.On suppose que f Cn+1([a, b]).
Lerreur dinterpolation sur [a, b] est estime par
En(f) = maxx[a,b]
|f(x) nf(x)| 1
4(n + 1) b a
n n+1
maxx[a,b]
|f(n+1)(x)| (2.3)
Dmonstration. Notons f= maxx[a,b]|f(x)|. Le thorme 2.5 nous
donne dj que
En(f) f(n+1)
(n + 1)!n+1. (2.4)
Il reste estimer n+1. Soit x [a, b] avec x = xi i. On a que x Ik
= (xk1, xk) pourun certain k { 1, . . . , n }. Comme les noeuds
sont quirepartis, nous avons xi+1 = xi + h, oh = ( ba
n). On obtient
maxxIk
|(x xk1)(x xk)| =h2
4
de plus on peut estimer |x xk2| par 2h, |x xk3| par 3h etc.
Do
n+1= maxx[a,b]
n
i=0
(x xi)
h2
4
(hn1n!) =
n!
4hn+1 (2.5)
En substituant (2.5) dans (2.4) on obtient
En(f) f(n+1)
(n + 1)!n+1 =
f(n+1)(n + 1)!
n!
4
b a
n
n+1=
1
4(n + 1)
b a
n
n+1max
x[a,b]|f(n+1)(x)|,
ce quil fallait dmontrer.
12
-
8/3/2019 Interpolation Numerique
13/28
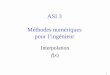
Exemple 2.7. Interpolation de la fonction sinus. Nous avons
appliqu linterpolation deLagrange la fonction f(x) = sin(x) sur
lintervalle [0, 3], cela pour les degrs allant de 2 8.Nous voyons
dans la Figure 2.2(a) & (b), que linterpolation semble
converger vers la fonctionsin(x) lorsque le degr augmente. Cela
semble aussi vident dans le graphique 2.1 et la table 2.1o nous
comparons lerreur effective due linterpolation et lestimation
thorique donne par
la formule (2.3).Bien que cela conduise penser que le polynme
interpolant converge vers la fonction f
quand n , nous verrons dans la section suivante que cela dpend
en grande partie du choixdes noeuds dinterpolation.
2 3 4 5 6 7 801234
56789
Degr
E
rreurs
Fig. 2.1 Erreur thorique (carrs) et erreur calcule (ronds) de
linterpolation du sinus
0 2 4 6 8
1
0.5
0
0.5
1
1.5
(a) 2f (trait mixte), 3f (pointills) et4f (trait
discontinu).
0 2 4 6 8
1
0.5
0
0.5
1
1.5
(b) 5f (trait discontinu), 6f (trait mixte) et8f
(pointills).
Fig. 2.2 Interpolation de Lagrange avec noeuds quirpartis de la
fonction f(x) = sin(x) (traitplein).
13
-
8/3/2019 Interpolation Numerique
14/28
Tab. 2.1 Tableau comparatif des erreurs dinterpolation du sinus
pour les degrs 2 8. Onremarque que lerreur calcule est bien moindre
que lestimation derreur thorique et que cesdeux erreurs tendent
vers 0 lorsque n augmente
n En(sin) =max
x[0,3]| sin(x) sin(x)| 14(n+1)(3n )n+1max
x[0,3]| sin(n+1)(x)|2 1.5925 8.72053 1.0000 6.08814 0.6363
3.63105 0.4224 1.86896 0.1301 0.84277 0.0895 0.33758 0.0162
0.1214
2.3 Dfauts de linterpolation polynomiale avec noeuds
quirpartis
Nous tudions dans cette section le comportement de lerreur
dinterpolation lorsque n tendvers linfini. On rappel que la norme
du maximum dune fonction f C0([a, b]) est dfinie par
f = maxx[a,b]
|f(x)|
Nous introduisons une matrice triangulaire infrieure X de taille
infinie appele matrice din-terpolationsur [a, b] dont les
coefficients xij pour i, j = 0, 1, . . . , reprsentent des points
de [a, b],avec lhypothse que sur chaque ligne les coefficients sont
tous distincts. Pour n 0, la n+1-meligne de X contient n + 1
valeurs distinctes que lon identifie des noeuds. Pour une fonctionf
donne, on peut dfinir de faon unique un polynme nf de degr n qui
interpole f en ces
noeuds (le polynme nf dpend de X et de f). Pour une fonction f
donne et pour une matricedinterpolation X, on dfinit lerreur
dinterpolation
En,(X) = f nf, n = 0, 1, . . .
On note pn Pn la meilleure approximation polynomiale, i.e
linterpolation pour laquelle
En = f pn f qn qn Pn.
On a alors le rsultat suivant :
Proprit 2.8. Soient f C0([a, b]) et X une matrice dinterpolation
sur [a, b]. Alors
En,(X) En(1 + n(X)), n = 0, 1, . . .
o n(X) dsigne la constante de Lebesgue de X dfinie par
n(X) =
n
j=0
|(n)j |
et o (n)j Pn est le j-ime polynme caractristique associ la n +
1-ime ligne de X,
cest--dire le polynme satisfaisant (n)j (xnk) = jk , j ,k = 0,
1, . . .
14
-
8/3/2019 Interpolation Numerique
15/28
Puisque En ne dpend pas de X, toute linformation concernant les
effets de X sur En,(X)doit tre cherche dans n(X). Bien quil existe
une matrice dinterpolation X telle que n(X)soit minimum, la
dtermination explicite de ses coefficients nest en gnral pas une
tche facile.Aussi, pour tout choix de X, il existe une constante C
> 0 telle que (voir [Erd61])
n(X) >2
log(n + 1) C, n = 0, 1, . . .
Cette proprit implique que n(X) quand n , ce qui a des
consquences importantes :on peut en particulier montrer que pour
une matrice dinterpolation X sur un intervalle [a, b], ilexiste
toujours une fonction continue f sur [a, b] telle que nf ne
converge pas uniformment versf. Ainsi, linterpolation polynomiale
ne permet pas dapprocher convenablement toute fonctioncontinue.
Cest ce que montre lexemple suivant.
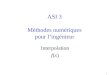
Exemple 2.9. Contre-exemple de Runge. Tentons dapprocher la
fonction suivante
f(x) =1
1 + x2, 5 x 5 (2.6)
en utilisant linterpolation de Lagrange avec noeuds quirpartis.
On peut vrifier quil existedes points x lintrieur de lintervalle
dinterpolation tels que
limn
|f(x) nf(x)| = 0.
En particulier, linterpolation de Lagrange diverge pour |x| >
3.63 . . . . Ce phnomne est parti-culirement vident au voisinage
des extrmits de lintervalle dinterpolation, comme le montrela
Figure 2.3(b). Il est d au fait que les noeuds sont quirpartis.
Notons quen choisissant conve-nablement les noeuds, on peut tablir
la convergence uniforme du polynme dinterpolation versla fonction
f.
5 0 50.5
0
0.5
1
(a) 2f (trait mixte), 4f (pointills) et 5f(trait
discontinu).
5 0 54
3
2
1
0
1
(b) 8f (trait discontinu) et 12f (traitmixte).
Fig. 2.3 Contre-exemple de Runge : interpolation de Lagrange
avec noeuds quirpartis de lafonction f(x) = 1/(1 + x2) (trait
plein)
15
-
8/3/2019 Interpolation Numerique
16/28
2 3 4 5 6 7 8 9 10 11 120
1
2
3
4
Degr
E
rreurs
Fig. 2.4 Contre-exemple de Runge : Erreur dinterpolation pour la
fonction f(x) = 1/(1 + x2)
2.4 Stabilit du polynme dinterpolation
On note f les valeurs rsultant de la perturbation dun ensemble
de donnes f(xi) en des
noeuds xi [a, b], i = 0, . . . , n. La perturbation peut tre
due, par exemple, aux erreurs darrondiou des erreurs dans des
mesures exprimentales. En notant nf le polynme qui interpole
lesvaleurs f(xi), on a
nf nf = maxaxb
nj=0
(f(xj ) f(xj ))j (x)
n(X) max
i=0,...,n|f(xi) f(xi)|
Par consquent, de petites modifications sur les donnes
ninduisent des petites modifications surle polynme dinterpolation
que si la constante de Lebesgue est petite. Cette constante joue
le
role de conditionnementpour le problme dinterpolation. Comme on
la not prcdemment, ncrot quand n . En particulier, pour
linterpolation de Lagrange sur des noeuds quirpartison peut montrer
que
n(X) 2n+1
en log n,
o e = 2.7183 . . . est le nombre de Neper. Ceci montre que, pour
n grand, cette forme dinterpo-lation peut devenir instable.
Remarquer quon a laiss de ct jusqu prsent les erreurs lies la
construction de nf. On peut nanmoins montrer que leurs effets sont
en gnral ngligeables.
16
-
8/3/2019 Interpolation Numerique
17/28
3 Interpolation de Lagrange par morceaux
Lorsquon a des noeuds dinterpolation quirpartis, nous avons vu
quon ne peut pas garantirde convergence uniforme de nf vers f.
Cependant, linterpolation de Lagrange de bas degr estassez prcise
quand on lutilise sur des intervalles petits (y compris avec des
noeuds quirpartis).
On peut donc introduire une partition h de [a, b] en N
sous-intervalles Ij = [xj , xj+1] de longeurhj , avec h = max0jN1
hj , tels que [a, b] = N1j=0 Ij et dutiliser une interpolation de
Lagrange
sur chaque Ij en k + 1 noeuds quirpartis {x(i)j , 0 i k}, avec k
petit. Pour k 1 et pour
une partition h donne, on introduit
Xkh = {v C0([a, b]) : v|Ij Pk(Ij ) Ij h j = 0, . . . , N 1}
qui est lespace des fonctions continues sur [a, b] dont la
restriction chaque Ij est polynomialede degr k. Pour toute fonction
f continue sur [a, b], le polynme dinterpolation par morceaux
khf concide sur chaque Ij avec linterpolant de f|Ij aux k + 1
noeuds {x(i)j , 0 i k}. Par
consquent, si f Ck+1([a, b]), en utilisant lquation (2.2) dans
chaque intervalle, on obtient
lestimation derreur suivante
f khf Chk+1f(k+1). (3.1)
On peut obtenir une petite erreur dinterpolation mme pour des
valeurs de k peu leves, dslors que h est assez petit .Remarque :
Par la suite nous utiliserons la notation kNf pour le polynme
dinterpolation dedegr k sur N morceaux.
0 2 4 6 8
1
0.5
0
0.5
1
(a) 14f (trait mixte) et 1
8f (trait discontinu).
0 2 4 6 8
1
0.5
0
0.5
1
(b) 110f (trait mixte) et 1
20f (trait discontinu).
Fig.
3.1 Interpolation linaire par morceaux de la fonction f(x) =
sin(x) (trait plein).
Exemple 3.1. Interpolation par morceaux du sinus. Nous avons vu
dans lexemple 2.7 lersultat de linterpolation de Lagrange du sinus
sur lintervalle [0, 3]. Nous faisons ici de mmepour linterpolation
linaire (de degr k = 1) par morceaux.
On remarque dans la Figure 3.1(b) que linterpolation converge
rapidement vers la fonctionlorsque quon augmente le nombre de
morceaux. Dans la Figure 3.2 nous avons reprsent
lerreurdinterpolation ainsi que son estimation thorique donne par
la formule (3.1).
Lutilisation dechelles logarithmiques permet de mettre en
vidence lexposant de h dansla formule. En effet, dans le cas o la
partition est rgulire, on a h = (b a)/N, o N est le
17
-
8/3/2019 Interpolation Numerique
18/28
nombre de morceaux. Le log nous donne donc :
log
f khf
C + (k + 1)log(h)
= (C + (b a)) (k + 1) log(N) (3.2)
o C = log Cf(k+1). Ici k = 1, donc la courbe derreur thorique,
en echelle logarithmique,est une droite de pente 2, et on voit que
lerreur dinterpolation converge rapidement vers cettedroite. Ainsi,
partir dun N assez grand, en doublant le nombre de morceaux, on
quadruple ledegr de prcision.
2 3 4 5 6 7 8 10 15 20 30 4010
3
102
101
100
101
log(N)
Er
reur(log)
Fig. 3.2 Erreurs (ronds) pour linterpolation linaire par
morceaux de la fonction sinus. Entrait plein lestimation
thorique.
Exemple 3.2. Interpolation par morceaux de la fonction de Runge.
Dans lExemple 2.9
nous avons interpol la fonction f(x) = 1/(1 + x2
) sur lintervalle [5, 5] avec des noeuds qui-rpartis. Nous
avions vu que cette interpolation ne converge pas uniformment vers
la fonctionlorsque le degr n tend vers linfini. Ici nous obtenons
de bien meilleurs rsultats en effectuantune interpolation linaire
par morceaux sur cette fonction.
La Figure 3.3(a) montre des polynmes dinterpolation avec un
nombre impair de morceaux,et dans la partie (b) les polynmes pour
un nombre pair de morceaux. On voit quen partitionnantlintervalle
en morceaux de mme longueur, la symtrie de la fonction influe sur
le rsultat delinterpolation.
5 0 50
0.2
0.4
0.6
0.8
1
(a) 15f (trait mixte) et 1
13f (trait discontinu).
5 0 50
0.2
0.4
0.6
0.8
1
(b) 14f (trait mixte) et 1
18f (trait discontinu).
Fig. 3.3 Interpolation linaire par morceaux de la fonction f(x)
= 1/(1 + x2) (trait plein).
18
-
8/3/2019 Interpolation Numerique
19/28
Dans la Figure 3.4, nous avons compar lerreur effective et
lestimation thorique commefait prcdemment dans lExemple 3.1
concernant linterpolation linaire par morceaux du sinus. nouveau,
linterpolation par morceaux converge vers la fonction, et lerreur
effective converge,en chelle logarithmique, vers la droite thorique
de pente 2.
1 3 5 7 9 13 21 29 3910
2
101
100
101
102
log(N)
Erreur(log)
(a) N impairs
2 4 6 8 10 14 20 26 32 4010
2
101
100
10
1
log(N)
Erreur(log)
(b) N pairs
Fig. 3.4 Erreurs (ronds) pour linterpolation linaire par
morceaux de la fonction de Runge.En trait plein lestimation
thorique.
19
-
8/3/2019 Interpolation Numerique
20/28
4 Forme de Newton du polynme dinterpolation
La forme de Lagrange (2.1) du polynme dinterpolation nest pas la
plus commode dunpoint de vue pratique. Nous introduisons dans cette
section une forme alternative dont le cotde calcul est moins lev.
Notre but est le suivant : tant donn n+1 paires { xi, yi }, i = 0,
. . . , n
on veut reprsenter n (tel que n(xi) = yi avec i = 0, . . . , n)
comme la somme de n1 (telque n1(xi) = yi pour i = 0, . . . , n 1)
et dun polynme de degr n qui dpend des noeudsxi et dun seul
coefficient inconnu. On pose donc
n(x) = n1(x) + qn(x), (4.1)
o qn Pn. Puisque qn(xi) = n(xi) n1(xi) = 0 pour i = 0, . . . , n
1, on a ncessairement
qn(x) = an(x x0) (x xn1) = ann(x).
Pour dterminer le coefficient an, supposons que yi = f(xi), i =
0, . . . , n, o f est une fonctiondonne, pas ncessairement sous
forme explicite. Puisque nf(xn) = f(xn), on dduit de (4.1)que
an =f(xn) n1f(xn)
n(xn). (4.2)
Le coefficient an est appel nime diffrence divise de Newton et
on le note en gnral
an = f[x0, x1, . . . , xn] (4.3)
pour n 1. Par consquent, (4.1) devient
nf(x) = n1f(x) + n(x)f[x0, . . . , xn]. (4.4)
En posant y0 = f(x0) = f[x0] et 0 = 1, on obtient partir de
(4.4) la formule suivante par
rcurrence sur n
nf(x) =n
k=0
k(x)f[x0, . . . , xk]. (4.5)
Daprs lunicit du polynme dinterpolation, cette expression dfinit
le mme polynme que leformule de Lagrange. La forme (4.5) est
communment appele formule des diffrences divisesde Newton du
polynme dinterpolation.
4.1 Quelques proprits des diffrences divises de Newton
On remarque que la nime diffrence divise f[x0, . . . , xn] = an
est le coefficient de xn dans
nf. En isolant ce coefficient dans (2.2) et en lidentifiant avec
le coefficient correspondant dansla formule de Newton (4.5), on
obtient la dfinition explicite
f[x0, . . . , xn] =n
i=0
f(xi)
n+1(xi). (4.6)
Cette formule a des consquences remarquables :
1. la valeur prise par la diffrence divise est invariante par
permutation des indices desnoeuds. Ceci peut tre utilis avec profit
quand des problmes de stabilit suggrentdchanger des indices (par
exemple, si x est le point o le polynme doit tre calcul,il peut tre
commode dintroduire une permutation des indices telle que |x xk| |x
x
k1| pour k = 0, . . . , n) ;
20
-
8/3/2019 Interpolation Numerique
21/28
2. si f = g + h pour , R, alors
f[x0, . . . , xn] = g[x0, . . . , xn] + h[x0, . . . , xn];
3. si f = gh, on a la formule suivante (appele formule de
Leibniz) (voir [Die93])
f[x0, . . . , xn] =n
j=0
g[x0, . . . , xj ]h[xj , . . . , xn];
4. une manipulation algbrique de (4.6) donne la formule de
rcurrence suivante permettantle calcul des diffrences divises
f[x0, . . . , xn] =f[x1, . . . , xn] f[x0, . . . , xn1]
xn x0. (4.7)
laide de la formule (4.7), on peut calculer les diffrences
divises de Newton sous forme dunematrice triangulaire infrieure
stocke sous la forme suivante. Les coefficients intervenant
dans
x0 f[x0]x1 f[x1] f[x0, x1]x2 f[x1] f[x1, x2] f[x0, x1, x2]
......
.... . .
xn f[xn] f[xn1, xn] f[xn2, xn1, xn] . . . f [x0, . . . , xn]
la formule de Newton sont les lments diagonaux de la
matrice..
En utilisant (4.7), seulement n(n + 1) additions et n(n + 1)/2
divisions sont ncessaires pourconstuire la matrice complte. Si on
disposait de la valeur prise par f en un nouveau noeud
xn+1, on aurait calculer seulement une ligne supplmentaire
(f[xn, xn+1], . . . , f [x0, . . . , xn+1]).Ainsi, pour construire
n+1f partir de nf, il suffit dajouter nf le terme an+1n+1(x),ce qui
ncessite (n + 1) divisions et 2(n + 1) additions.
.Remarquer que f[x0, . . . , xn] = 0 pour tout f Pn1. Nanmoins
cette proprit nest pastoujours satisfaite numriquement car le
calcul des diffrences divises peut tre fortement affectpar des
erreurs darrondi.
4.2 Erreur dinterpolation avec les diffrences divises
Soit nf le polynme dinterpolation de f aux noeuds x0, . . . , xn
et soit x un noeud distinct
des prcdents ; en posant xn+1 = x, on note n+1f le polynme
interpolant f aux noeudsxk, k = 0, . . . , n + 1. En utilisant la
formule des diffrences divises de Newton, on a
n+1f(t) = nf(t) + (t x0) (t xn)f[x0, . . . , xn, t].
Puisque n+1f(x) = f(x), on obtient lexpression suivante pour
lerreur dinterpolation ent = x :
En(x) = f(x) nf(x) = n+1f(x) nf(x)
= (x x0) (x xn)f[x0, . . . , xn, x]
= n+1(x)f[x0, . . . , xn, x]. (4.8)
21
-
8/3/2019 Interpolation Numerique
22/28
En supposant f C(n+1)(Ix) et en comparant (4.8) (2.2), on a
donc
f[x0, . . . , xn, x] =f(n+1)()
(n + 1)!(4.9)
pour un certain Ix. Comme (4.9) est le reste du dveloppement de
Taylor de f, la formule
dinterpolation de Newton (4.5) peut tre vue comme un
dveloppement tronqu autour de x0( condition que |xn x0| ne soit pas
trop grand).
22
-
8/3/2019 Interpolation Numerique
23/28
5 Interpolation dHermite-Birkhoff
On peut gnraliser linterpolation de Lagrange dune fonction f
pour prendre en compte, enplus de ses valeurs nodales, les valeurs
de ses drives en certains noeuds (ou en tous les noeuds).
On se donne (xi, f(k)(xi)), pour i = 0, . . . , n , k = 0, . . .
, mi o mi N.
En posant N = ni=0(mi + 1), on peut montrer (voir [Dav63]) que
si les noeuds xi sont dis-tincts, il existe un unique polynme HN1
PN1, appel polynme dinterpolation dHermite,tel que
H(k)N1(xi) = y
(k)i , pour tous i = 0, . . . , n , et k = 0, . . . , mi.
Ce polynme scrit
HN1(x) =n
i=0
mik=0
y(k)i Lik(x) (5.1)
o y(k)i = f(k)(xi), pour tous i = 0, . . . , n , et k = 0, . . .
, mi. Les fonctions Lik PN1 sont
appeles les polynmes caractristiques dHermite et sont dfinies
par les relations
dpdxp
(Lik)(xj ) = 1 si i = j et k = p
0 sinon
En dfinissant les polynmes
ij (x) =(x xj )
j
j
nk=0k=i
x xkxi xk
mk+1, i = 0, . . . , n, j = 0, . . . , mi
et en posant Limi(x) = imi(x) pour i = 0, . . . , n, on a les
relations de rcurrence suivantes pourles polynmes Lij
Lij(x) = ij (x) mi
k=j+1
(k)ij (xi)Lik(x) j = mi 1, mi 2, . . . , 0.
Concernant lerreur dinterpolation, on a lestimation
f(x) HN1(x) =f(N)()
N!N(x) x R,
o I(x; x0, . . . , xn) et N est le polynme de degr N dfini
par
N = (x x0)m0+1(x x1)
m1+1 (x xn)mn+1,
avec I(x; x0, . . . , xn) le plus petit intervalle contenant x,
x0, . . . , xn.
23
-
8/3/2019 Interpolation Numerique
24/28
Conclusion
Dans ce projet nous avons abord lapproximation au sens des
moindres carrs, linterpolationpolynomiale avec noeuds quirpartis
sur un ou plusieurs morceaux, ainsi que
linterpolationdHermite-Birkhoff qui prend en compte les valeurs aux
noeuds, des drives dune fonction
en plus des valeurs de cette fonction. Il existe beaucoup
dautres extensions de linterpolationnumrique :La premire est ce
quon appelle les fonctions splines, qui sont en fait des
interpolations poly-
nomiales par morceaux, mais qui demandent en plus que les drives
des polynmes interpolantssoient gales, cela aux points de jointure
entre les morceaux. On obtient ainsi une fonction po-lynomiale par
morceaux qui est (au moins) C1, vue sur lensemble du domaine
dinterpolation.Ensuite, linterpolation peut se faire non pas grce
des polynmes, mais par exemple avec despolynmes trigonomtriques, ou
des fonctions exponentielles.
La seconde extension concerne la dimension du problme. En effet,
il est possible dinterpo-ler des courbes paramtres (dans le plan ou
lespace) et dinterpoler des surfaces de lespace(surfaces paramtres,
ou fonction de R2 dans R). Les lecteurs interresss trouverons plus
din-
formation sur ces sujets dans [Quart07].
24
-
8/3/2019 Interpolation Numerique
25/28
Rfrences
[Axler97] S. Axler. (1997) Linear Algebra Done Right (Second
Edition). Undergraduate Textsin Mathematics, Springer-Verlag.
[Dav63] Davis P. (1963) Interpolation and Approximation.
Blaisdell Pub., New York
[Die93] Dierckx P. (1993) Curve and Surface Fitting with
Splines. Claredon Press, New York.[Erd61] Erds P. (1961) Problems
and Results on the Theory of Interpolation. Acta Math. Acad.
Sci. Hungar. 44 : 235-244
[Hess06] Hess Bellwald K. (2006) Algbre Linaire I / II (notes
manuscrites de Pablo CROTTI)
[Quart07] A. Quarteroni, R. Sacco and F. Saleri, (2007) Mthodes
numriques. Springer, Italia.
25
-
8/3/2019 Interpolation Numerique
26/28
.
ANNEXE : CODES MATLAB
26
-
8/3/2019 Interpolation Numerique
27/28
Programme 1 - Lissage : Gnration et lissage de donne
alatoire
function Lissage
% LISSAGE Approxime un jeu de 10 points, perturbation dune loi
quadratique
x = linspace(0,1,10);
f = 10*x.2+rand(size(x)); % perturbations sur la loi
quadratiquepol9 = polyfit(x,f,9); % polynme interpolant de degr
9
pol2 = polyfit(x,f,2); % approximation de degr 2 au sens des
moindres carrs
x2 = linspace(0,1,100);
y9 = polyval(pol9,x2);
y2 = polyval(pol2,x2);
figure(Name,Lissage);
axes(Box,on);
hold on;
plot(x,f,+r);
plot(x2,y9,--b);
plot(x2,y2,-k);x = 2 ;
f2 = 10*x.2+rand(size(x)) %valeur relle de f au point x=2
y92 = polyval(pol9,2) %valeur du polynme interpollant en x=2
y22 = polyval(pol2,2) %valeur de lapproximation en x=2
legend(char(f,Degr 9,Degr 2),Location,NorthEastOutside);
return;
27
-
8/3/2019 Interpolation Numerique
28/28