Embed Size (px)
Citation preview

Introduction a la Commande Non Lineaire
J. Levine
Centre Automatique et Systemes
Ecole des Mines de Paris35 rue Saint–Honore
77305 Fontainebleau Cedex, France.

Introduction a la Commande Non Lineaire 1
Resume
Le but de ce cours est de montrer a partir d’exemples d’applications comment aborder lesproblemes de planification et de suivi de trajectoire pour des systemes non lineaires. La ques-tion centrale concerne l’analyse de la structure des trajectoires et leur parametrage a l’aide decertaines variables et d’un nombre fini de leurs derivees. On est ainsi amenes a aborder la no-tion d’equivalence au sens de Lie-Backlund entre systemes : deux systemes sont dits Lie-Backlundequivalents si a tout couple forme par une trajectoire de l’un et son champ de vitesse, correspondun unique couple forme d’une trajectoire de l’autre et de son champ de vitesse. Cette relationd’equivalence, dont on montre qu’elle s’interprete en terme de bouclage dynamique endogene, per-met notamment de reduire la complexite d’un systeme en reconnaissant un systeme plus simplequi lui est equivalent. Des notions classiques, comme la commandabilite, et plus nouvelles, commela platitude, s’en deduisent, en faisant appel au formalisme de la geometrie differentielle des jetsinfinis.
Cette approche permet en outre d’insister sur la conception de lois de commande en deuxtemps : planification de trajectoire d’abord, puis stabilisation par bouclage dynamique endogene.Enfin, la solution au probleme de stabilisation des trajectoires est etendue afin de prendre encompte certaines singularites.
Precisons que le point de vue developpe dans ce cours est sensiblement different de ceux desprincipaux ouvrages actuellement disponibles, comme par ex. [31, 36, 41, 52, 65, 74, 76, 79, 85].Nous conseillons cependant vivement leur lecture qui ne manquera pas d’apporter un eclairagecomplementaire sur d’autres outils indispensables a la conception de lois de commande.

Chapitre 1
Un exemple introductif de grue
1.1 Modelisation
Cette partie s’inspire de [19, 20]. D’autres approches sont aussi developpees dans [58, 2] etpour d’autres types de grues dans [22, 48, 45].
XO
Z
x
R
FC
z
-mg
T
q
M}contr�leurs de bas-niveau
x
-T
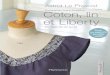
Fig. 1.1: Grue en dimension 2.
Un chariot de masse M roule sur l’axe OX. Sa position est notee x. Un moteur exerce sur luiune force horizontale d’intensite F . Le chariot porte en outre un treuil de rayon ρ pouvant leverune charge au bout d’un cable. La position de la charge dans le repere XOZ est notee (ξ, ζ) et samasse est egale a m. Le couple exerce sur le treuil par un second moteur est note C. La longueurdu cable, sa tension et l’angle par rapport a la verticale sont notes R, T et θ respectivement.Un modele peut etre facilement obtenu en ecrivant le principe fondamental de la dynamique surl’ensemble des deux corps, chariot et charge, relies par une liaison parfaite (le cable est suppose
2

Introduction a la Commande Non Lineaire 3
rigide) et les contraintes geometriques entre les coordonnees des deux corps. On se place aussidans la configuration ou R < R0 pour eviter que la charge ne traıne par terre, et on supposeque la tension du cable T est toujours positive. On peut aussi prendre en compte des frottementsvisqueux γ1(x) au niveau du chariot, et γ2(R) au niveau de la poulie ou produits par la resistancede l’air sur le cable et la charge, les fonctions γ1 et γ2 etant telles que γi(0) = 0, i = 1, 2.
mξ = −T sin θ
mζ = T cos θ −mgξ = x + R sin θζ = −R cos θMx = −γ1(x) + F + T sin θJ
ρR = −γ2(R) + C − Tρ .
(1.1)
Notons que ce modele n’est pas obtenu sous forme explicite. De plus, il contient des variables(T et θ) dont les derivees n’apparaissent pas explicitement, et des equations a la fois algebriqueset differentielles reliant ξ, ζ et x, R, T et θ, ce qui peut permettre d’eliminer une partie de cesinconnues. Cette operation n’etant pas necessaire pour la suite, nous ne la ferons pas. Le lecteurinteresse pourra cependant calculer une repesentation explicite du systeme, de dimension 6, parexemple en prenant comme variables d’etat (x, x, R, R, θ, θ).
1.2 Parametrisation des trajectoires
Un probleme courant dans ce domaine consiste a amener une charge d’un point a un autre, lecable en position verticale, au repos au depart et a l’arrivee.
Notons que les conditions sur la verticalite du cable se traduisent naturellement sur les variablesξ et ζ : si l’on note xi, Ri et xf , Rf les positions du chariot et les longueurs du cable aux instantsti et tf initial et final respectivement, on doit avoir, a l’instant ti,
ξ(ti) = xi , ζ(ti) = −Ri , ξ(ti) = 0 , ζ(ti) = 0 , ξ(ti) = 0 , ζ(ti) = 0
et, a l’instant tf ,
ξ(tf ) = xf , ζ(tf ) = −Rf , ξ(tf ) = 0 , ζ(tf ) = 0 , ξ(tf ) = 0 , ζ(tf ) = 0 .
En effet, on verifie immediatement que ces conditions entraınent, pour t = ti, tf , θ(t) = 0, T (t) =mg, x(t) = 0, R(t) = 0, F (t) = 0 et C(t) = mgρ, qui traduisent bien que le systeme est enequilibre statique en ti et tf .
On peut donc se demander si les variables ξ et ζ permettent aussi de parametrer les trajectoiresdu systeme (1.1) a tout instant entre ti et tf .
Montrons que la reponse est positive. Eliminons T dans les deux premieres equations de (1.1) :
tan θ = − ξ
ζ + g(1.2)

Introduction a la Commande Non Lineaire 4
puis utilisons les deux suivantes :
tan θ =x− ξ
ζ, (x− ξ)2 + ζ2 = R2 . (1.3)
Eliminant enfin tan θ, on obtient le systeme algebro-differentiel :{(ζ + g)(x− ξ) = −ξζ(x− ξ)2 + ζ2 = R2 (1.4)
d’ou l’on deduit
x = ξ − ξζ
ζ + g, R2 = ζ2 +
(ξζ
ζ + g
)2
, θ = arctan
(− ξζ
ζ + g
), T 2 = m2
(ξ2 + (ζ + g)2
). (1.5)
Enfin, utilisant les 2 dernieres equations de (1.1), on tire
F = Mx + γ1(x)− T sin θ = (M + m)ξ −Md2
dt2
(ξζ
ζ + g
)+ γ1
(ξ − d
dt
(ξζ
ζ + g
))(1.6)
et de meme
C =J
ρR + γ2(R) + Tρ
=J
ρ
d2
dt2
√√√√ζ2 +
(ξζ
ζ + g
)2
+ γ2
d
dt
√√√√ζ2 +
(ξζ
ζ + g
)2 + mρ
√ξ2 + (ζ + g)2
(1.7)
ce qui montre que toutes les variables du systeme x,R, θ, ξ, ζ, T, F, C, entrees incluses,peuvent s’exprimer en fonction de ξ et ζ et de leurs derivees par rapport au tempsjusqu’a l’ordre 4.
Plus precisement, a toute trajectoire t �→ (x(t), R(t), θ(t), T (t), F (t), C(t)) on peut faire cor-respondre une trajectoire t �→ (ξ(t), ζ(t)) par les formules ξ = x + R sin θ et ζ = −R cos θ.Inversement, a toute trajectoire t �→ (ξ(t), ζ(t)) au moins 4 fois derivable, on fait correspondreune unique trajectoire t �→ (x(t), R(t), θ(t), T (t), F (t), C(t)) par les formules (1.5), (1.6), (1.7), cequi prouve bien que toutes les trajectoires du systeme peuvent s’obtenir comme des fonctions destrajectoires t �→ (ξ(t), ζ(t)) sans avoir a integrer les equations differentielles du systeme. Notonsen outre que les trajectoires t �→ (ξ(t), ζ(t)) peuvent etre choisies de facon arbitraire a conditiond’etre 4 fois derivables, puisqu’il n’existe aucune equation reliant toutes ou parties des variablesξ, ξ, . . . , ξ(4), ζ, ζ, . . . , ζ(4).

Introduction a la Commande Non Lineaire 5
1.3 Planification de trajectoire
1.3.1 Le cas sans contrainte
On vient de voir que les trajectoires de l’ensemble chariot-cable-masse peuvent etre entierementdecrites a l’aide des variables ξ, ξ, . . . , ξ(4), ζ, ζ, . . . , ζ(4). Ainsi, si l’on se donne un courbe t �→(ξ(t), ζ(t)) pour tout t ∈ [ti, tf ], essayons de trouver comment s’expriment les contraintes surcette courbe pour representer une trajectoire du systeme partant au repos (cable vertical) etarrivant dans les memes conditions. On verifie immediatement, comme precedemment, que l’ondoit seulement verifier les conditions initiales et finales :
ξ(ti) = xi ζ(ti) = Ri ξ(tf ) = xf ζ(tf ) = Rf
ξ(ti) = 0 ζ(ti) = 0 ξ(tf ) = 0 ζ(tf ) = 0
ξ(ti) = 0 ζ(ti) = 0 ξ(tf ) = 0 ζ(tf ) = 0
(1.8)
puisque, en vertu des formules (1.5), (1.6) et (1.7), les equations du systeme (1.1) sont identique-ment verifiees.
Or, pour determiner une courbe verifiant les conditions initiales et finales (1.8) il suffit d’inter-poler ces conditions dans une classe de fonctions choisie a priori. Une classe particulierementadaptee a ce type de calculs est la classe des polynomes par rapport au temps. En effet, sachantque si t �→ ξ(t) et t �→ ζ(t) sont des polynomes, il faut au moins 6 coefficients pour pouvoirsatisfaire (1.8), ce qui revient a chercher ξ et ζ, en tenant compte des 2 premieres derivees nullesa l’instant initial, sous la forme
ξ(t) = xi + (xf − xi)s3(t)
(a0 + a1s(t) + a2s
2(t))
ζ(t) = −Ri − (Rf −Ri)s3(t)
(a0 + a1s(t) + a2s
2(t))
ou l’on a note
s(t) =
(t− titf − ti
)(1.9)
et ou les coefficients a0, a1, a2 sont solutions du systeme lineaire (calculer les derivees initiales etfinales) :
a0 + a1 + a2 = 13a0 + 4a1 + 5a2 = 06a0 + 12a1 + 20a2 = 0
soit a0 = 10, a1 = −15, a2 = 6, ou encore
ξ(t) = xi + (xf − xi)s3(t)
(10− 15s(t) + 6s2(t)
)ζ(t) = −Ri − (Rf −Ri)s
3(t)(10− 15s(t) + 6s2(t)
).
(1.10)
On deduit enfin toutes les variables du systeme x,R, θ, T, F, C en remplacant ξ et ζ ainsi que leursderivees par leurs valeurs obtenues a partir de (1.10) dans (1.5), (1.6) et (1.7). Remarquons quex,R, θ, T, F, C ainsi obtenus ne sont pas des polynomes.

Introduction a la Commande Non Lineaire 6
1.3.2 Contraintes geometriques
On peut vouloir, en plus des conditions intiales et finales (1.8), que le point (ξ(t), ζ(t)) suive unecourbe geometrique definie dans le plan par l’application ξ �→ ζ(ξ), ou par une equation implicitedu type A(ξ, ζ) = 0. En particulier, si l’on veut suivre une droite, on doit avoir ζ(ξ) = aξ+ b, ou sil’on veut suivre une parabole concave (par exemple pour eviter un obstacle), il suffit de se donnerl’equation ζ(x) = ζ0 + a(ξ − ξ0)
2 avec a < 0, et ξ0 et ζ0 l’abscisse et l’ordonnee du maximumrespectivement. On pourra, dans un second temps, regler la vitesse de parcours de la trajectoireen choisissant l’application t �→ ξ(t) telle que les contraintes aux instants initial et final soientrespectees.
Supposons que la courbe d’equation ζ = Z(ξ), avec Z au moins deux fois derivable, soit telleque Z(ξi) = ζi et Z(ξf ) = ζf , avec (ξi, ζi) et (ξf , ζf ) definis par (1.8), et que l’on veuille, encorecomme dans (1.8), demarrer et arriver au repos.
En procedant comme dans le cas sans contraintes, on doit avoir ξ(ti) = xi, ξ(ti) = 0, ξ(ti) = 0et ξ(tf ) = xf , ξ(tf ) = 0, ξ(tf ) = 0.Il suffit donc de choisir l’application partielle t �→ ξ(t) par la formule
ξ(t) = xi + (xf − xi)s3(t)
(10− 15s(t) + 6s2(t)
)(1.11)
etζ(t) = Z(ξ(t)) .
Il reste a verifier que ce choix de ξ garantit que les contraintes sur ζ et ses derivees aux instantsinitial et final sont satisfaites. Or ζ = ∂Z
∂ξξ implique que ζ est nul des que ξ l’est, et donc en
particulier en ti et tf . De meme, puisque ζ = ∂2Z∂ξ2
ξ2 + ∂Z∂ξξ, il vient que ζ(ti) = ζ(tf ) = 0, ce qui
prouve que les relations (1.8) ont lieu.
Exercice 1 Terminer cette construction pour :
1. ζ = Z(ξ) = aξ + b, a et b etant choisis de sorte que −Ri = axi + b et −Rf = axf + b ;
2. ζ = Z(ξ) = ζ0 + a(ξ − ξ0)2 avec a < 0 et ξ0, ζ0 tels que −Ri = ζ0 + a(xi − ξ0)
2 et−Rf = ζ0 + a(xf − ξ0)
2.
Dans le cas d’une trajectoire parabolique, le comportement d’ensemble du chariot et de lacharge est represente sur la figure 1.2. On notera que le cable ne reste pas vertical, contrairementaux techniques dite “quasi-statiques” ou l’on fait bouger la grue suffisamment lentement pour nepas provoquer d’oscillation de la charge. L’interet de notre methode reside donc dans le fait qu’onpeut realiser le deplacement demande sans restreindre les accelerations.
1.3.3 Contraintes sur les actionneurs
En pratique, les forces produites par les moteurs, et souvent aussi les vitesses de rotation,sont limitees et les trajectoires de reference doivent respecter ces limitations sous peine d’etreirrealisables. Nous allons montrer comment adapter la construction des deux derniers paragraphes

Introduction a la Commande Non Lineaire 7
Fig. 1.2: Comportement du cable lors d’un deplacement de la charge
pour prendre en compte ces contraintes. Les trajectoires precedemment construites dependent eneffet de la duree T = tf − ti. Montrons comment la choisir, dans un cas simplifie, pour satisfaireles contraintes de force et de couple :
| F |≤ Fmax , | C |≤ Cmax .
Supposons donc que l’on veut suivre une courbe ζ = Z(ξ), la trajectoire de reference de ξ etantdonnee par (1.11), et que, pour simplifier, les frottements γ1 et γ2 sont negliges.
Posons ξ(t) = X(s(t)) avec, d’apres (1.9), s(t) =1
T(t − ti), ζ(t) = Z(X(s(t)))
def= Z(s(t)) et
notons X ′, Z ′, X ′′ et Z ′′ les deux premieres derivees de X et Z respectivement par rapport a s.On verifie facilement que
F (t) =1
T 2
((M + m)X ′′ −M
d2
ds2
(X ′′Z
Z ′′ + gT 2
))∣∣∣∣∣∣ s=s(t)
(1.12)
et
C(t) =1
T 2
J
ρ
d2
ds2
√√√√Z2 +
(X ′′Z
Z ′′ + gT 2
)2
+ mρ
√(X ′′)2 + (Z ′′ + gT 2)2
∣∣∣∣∣∣ s=s(t)
(1.13)
les fonctions X, Z ainsi que leurs derivees successives par rapport a s etant borneesindependemment de T .
L’existence d’une duree T minimale pour laquelle les contraintes sont verifiees decoule del’exercice suivant :

Introduction a la Commande Non Lineaire 8
Exercice 2 Montrer que, lorsque T →∞, F tend uniformement vers 0 et C vers mgρ. En deduirequ’il existe T < ∞ tel que maxt∈[ti,tf ] (max(F (t), C(t))) ≤ min(Fmax, Cmax) des que Fmax > 0 etCmax > mgρ.
Des contraintes supplementaires sur la vitesse peuvent aussi etre traitees de la meme facon.Pour conclure ce chapitre introductif, nous avons montre l’existence d’une parametrisation des
trajectoires du systeme qui permet de planifier les trajectoires de facon tres simple, sans avoir aresoudre d’equation differentielle.
Nous allons, dans les prochains chapitres, preciser cette propriete et montrer que cette derniereest aussi utile, entre autres, a la mise au point de lois de commande permettant le suivi en bouclefermee des trajectoires de reference. Cependant, comme nous aurons besoin d’outils permettantl’analyse de la stabilite du systeme en boucle fermee, nous consacrons le prochain chapitre a cesujet.

Chapitre 2
Elements de theorie des perturbationssingulieres
Le but de ce chapitre est de jeter les bases theoriques de ce qu’on appelle generalement lessystemes en cascade ou hierarchises par echelles de temps, notamment du point de vue de l’analysede la stabilite. On s’inspire dans tout ce chapitre des travaux de Fenichel [12], etendus, dans le casdes systemes commandes, dans [47]. Pour un apercu introductif de ces questions dans le cas noncommande, on pourra consulter [81, 27, 49] et pour une lecture tres approfondie, toujours dans lecas non commande, [26]. En ce qui concerne les extensions aux systemes commandes on pourrase reporter, pour des approches legerement differentes, a [37, 38, 36, 51].
Ces systemes sont, dans des coordonnees adaptees, qui ne sont pas necessairement les coor-donnees dans lesquelles le modele a ete obtenu, de la forme :
x1 = εf1(x1, x2, u, ε)x2 = f2(x1, x2, u, ε)
(2.1)
ou ε est un “petit” parametre, exprimant que le champ de vecteurs f2, suppose de classe C∞ parrapport a tous ses arguments, est beaucoup plus grand, dans un voisinage a preciser, que f1, aussisuppose de classe C∞. Le systeme (2.1) est dit sous forme standard.
L’approche par perturbations singulieres consiste a predire le comportement dynamique dusysteme autour de l’ensemble des points d’equilibre correspondant a ε = 0, dans un voisinage decet ensemble, lorsque ε est non nul mais suffisamment petit. L’ensemble de points d’equilibre dontil est question est la variete determinee par
Σ0 = {(x1, x2, u)|f2(x1, x2, u, 0) = 0}
alors que la variete des points d’equilibre du systeme (2.1), pour ε = 0, donnee par
Σε = {(x1, x2, u)|f1(x1, x2, u, ε) = 0, f2(x1, x2, u, ε) = 0}
est en general de dimension plus faible. Ceci justifie le terme de perturbation singuliere puisque,lorsque ε→ 0, la variete Σε degenere en Σ0. Notons que, par le theoreme des fonctions implicites,
9

Introduction a la Commande Non Lineaire 10
si ∂f2∂x2
est de rang plein dans un voisinage de Σ0, egal a la dimension de x2, on peut ecrire
Σ0 = {(x1, x2, u)|x2 = X2(x1, u)}
2.1 Variete invariante et comportement lent-rapide
Σ0 a la propriete importante suivante : si les conditions initiales (x01, x
02, u0) appartiennent a
Σ0, et si ε = 0, alors les trajectoires du systeme restent entierement contenues dans Σ0 puisque(x1, x2) = (0, 0). On dit que Σ0 est une variete invariante.
Lorsque ε = 0 est suffisamment petit, cette propriete persiste : il existe encore une varieteinvariante, notee Σ0,ε, proche de Σ0, et la dynamique lente du systeme, qui evolue approximative-ment, au premier ordre en ε, dans la direction de x1 est donnee par
x1 = εf1(x1, X2(x1, u), u, 0) + 0(ε2) . (2.2)
Theoreme 1 Pour tout ε suffisamment petit et si u verifie u = εv, v = εw, une approximationau premier ordre en ε de la variete invariante Σ0,ε, dans un voisinage de Σ0, est donnee par
x2 = X2(x1, u) + ε
(∂f2
∂x2
)−1 (∂X2
∂x1
f1 +∂X2
∂uv − ∂f2
∂ε
)(x1, X2(x1, u), u, 0) + 0(ε2) (2.3)
et l’approximation au premier ordre de la dynamique lente par (2.2).
Preuve. Placons-nous dans un voisinage adequat de Σ0 et supposons que Σε est donnee, aupremier ordre en ε, par x2 = X2(x1, u) + εX ′2(x1, u, v) + 0(ε2) avec X ′2 une fonction suffisammentderivable de tous ses arguments dans l’ouvert considere. Precisons qu’invariance au premier ordreen ε par le flot veut dire que la fonction x2−X2(x1, u)− εX ′2(x1, u, v) est d’ordre 0(ε2) le long duflot du systeme
x1 = εf1(x1, X2(x1, u), u, 0) + 0(ε2)x2 = f2(x1, X2(x1, u) + εX ′2(x1, u, v), u, ε) + 0(ε2) .
(2.4)
Utilisant donc l’invariance au premier ordre et le fait que f2(x1, X2(x1, u), u, 0) = 0, on a
x2 = ε∂X2
∂x1
(x1, u)f1(x1, X2(x1, u), u, 0) + ε∂X2
∂u(x1, u)v + 0(ε2)
= ε∂f2
∂x2
(x1, X2(x1, u), u, 0)X ′2(x1, u, v) + ε∂f2
∂ε(x1, X2(x1, u), u, 0) + 0(ε2)
d’ou l’on tire, en identifiant les termes d’ordre 1 en ε :
∂X2
∂x1
f1 +∂X2
∂uv =
∂f2
∂x2
X ′2 +∂f2
∂ε
ce qui, grace a l’inversibilite de ∂f2∂x2
, donne X ′2 et (2.3), d’ou le resultat.

Introduction a la Commande Non Lineaire 11
Ce resultat admet l’interpretation suivante en termes de dynamiques lente et rapide : intro-duisons le nouveau temps τ = εt. τ est ε fois plus lent que t. Utilisant la relation d
dτ= d
dtdtdτ
= 1εddt
,le systeme (2.4) devient :
dx1
dτ= f1(x1, X2(x1, u), u, 0) + 0(ε)
dx2
dτ=
1
εf2(x1, X2(x1, u) + εX ′2(x1, u, v), u, 0) + 0(ε) .
Ainsi la dynamique de x1 est d’ordre 0 en ε, donc synchronisee au temps lent, alors que cellede x2 est d’ordre 1
ε, donc tres grande, c’est pourquoi on l’appelle dynamique rapide. La variete
invariante, si elle est attractive (voir plus loin), joue donc le role suivant : pour toute conditioninitiale proche de Σ0,ε, la dynamique rapide converge a grande vitesse (d’ordre 1
ε) vers Σ0,ε puis
cede la place a la dynamique lente dont le flot, au moins sur un intervalle de temps petit, restesur Σ0,ε (variete invariante). En outre, les flots rapide et lent, pour ε petit, sont localement despetites deformations des flots lent et rapide pour ε = 0 (voir figure 2.1).
Σ0Σ0,ε
x1, x2( ) x1, x2( )
ε petit ε=0
f2(x1, x2, u, ε) f2(x1, x2, u, 0)
εf1(x1, X2(x1, u), u, 0)
Fig. 2.1: Geometrie des systemes lents/rapides.
2.2 Variete invariante et stabilite
On admet l’important resultat de stabilite suivant :

Introduction a la Commande Non Lineaire 12
Theoreme 2 Si, en plus des hypotheses precedentes, la matrice ∂f2∂x2
a toutes ses valeurs propresa partie reelle strictement negative en tout point (x1, x2, u, 0) d’un voisinage ouvert V (Σ0,ε)deΣ0,ε et, notant F1(x1, u) = f1(x1, X2(x1, u), u, 0), si la matrice ∂F1
∂x1a toutes ses valeurs propres a
partie reelle strictement negative en tout point (x1, u) de X−12 (V (Σ0,ε)), alors le systeme (2.1) est
asymptotiquement stable pour tout ε suffisamment petit.
Ce resultat n’est pas aussi evident qu’il n’y paraıt : lorsque deux sous-systemes sontindependants, la stabilite de chacun implique la stabilite de l’ensemble. Cependant, ce resultat n’estplus vrai des que les deux sous-systemes sont couples car le couplage peut devenir preponderantdans certaines zones de l’espace et s’opposer a la partie decouplee de la dynamique. Ici, on estdans le cas “presque” decouple dans un voisinage de Σ0, ce qui nous permet d’utiliser le fait qu’unsysteme stable faiblement perturbe est encore stable.
Exemple 1 Considerons un moteur electrique a courant continu constitue d’un stator et d’unrotor. Sur le stator sont places des aimants permanents et le rotor est constitue d’une bobined’inductance L et de resistance R, dans laquelle circule un courant I, alimentee par une tensionvariable U . La force electromotrice est supposee lineaire par rapport au courant et sa constante decouple est notee K. L’inertie du rotor est note J et la resultante des couples exterieurs appliques al’arbre du moteur est notee Cr. On note enfin Kv la constante de frottement visqueux, ce dernieretant suppose lineaire par rapport a la vitesse de rotation ω du moteur. Le modele s’obtient enecrivant la loi d’Ohm (combinee avec la loi de Lenz pour l’expression de la force electromotrice)pour la bobine d’une part et le principe fondamental de la dynamique d’autre part pour le bilandes couples sur l’arbre moteur :
LdI
dt= U −RI −Kω
Jdω
dt= KI −Kvω − Cr .
(2.5)
Pour la plupart des moteurs de ce type, l’inductance L est petite par rapport aux autres constantes.On va donc poser L = ε et re-ecrire (2.5) en temps rapide τ = t
ε.
dI
dτ= U −RI −Kω
Jdω
dτ= ε(KI −Kvω − Cr) .
On deduit immediatement de ce qui precede, que x1 = ω, x2 = I, u = U , et, en faisant ε = 0,que la variete Σ0 est donnee par U −RI −Kω = 0, soit I = U−Kω
R. La dynamique lente est alors
donnee par J dωdτ
= ε(K(U−KωR
)−Kvω − Cr) soit
Jdω
dτ= ε
(−
(K2
R+ Kv
)ω − Cr +
K
RU
)et en temps lent
Jdω
dt= −
(K2
R+ Kv
)ω − Cr +
K
RU .

Introduction a la Commande Non Lineaire 13
Exercice 3 Calculer la variete invariante Σ0,ε a l’ordre 1 en ε. Montrer que si l’on applique latension constante U = Kω, v = U = 0, qui correspondrait au courant nul en regime permanent siL etait egal a 0, le courant I converge vers un terme d’ordre ε qui ne depend que des frottementset des couples exterieurs.
2.3 Application a la commande hierarchisee
Considerons pour simplifier un systeme de dimension 2 a 1 entree, de la forme :
x1 = f1(x1, x2)x2 = f2(x1, x2) + u
(2.6)
et supposons qu’on veuille faire suivre a la variable x2 une trajectoire de reference x�2 donnee, enrestant dans un domaine ou f2(x1, x2) est borne.
Appliquons la commande a grand gain u = −kε(x2 − x�2), pour ε assez petit. Le systeme (2.6)
devient, apres avoir introduit le temps rapide τ = tε,
dx1
dτ= εf1(x1, x2)
dx2
dτ= εf2(x1, x2)− k(x2 − x�2)
ce qui, par le theoreme 1, a pour effet de rendre la variete d’equation x2 = x�2 + εkf2(x1, x
�2)
invariante a l’ordre 1 en ε. De plus, si k > 0, cette variete est attractive et la dynamique lente quien resulte est donnee par
dx1
dτ= εf1(x1, x
�2)
ce qui revient a commander la dynamique lente par la consigne x�2, qui devient ainsi une entreede commande fictive du sous-systeme lent. En outre, la variete invariante peut etre rendue arbi-trairement proche de x2 = x�2 puisque ε, a notre disposition, peut etre choisi aussi petit qu’onveut.
On a donc transforme un probleme de commande pour un systeme de dimension 2 en deuxproblemes de commande de sous-systemes de dimension 1 en cascade. La boucle rapide estgeneralement appelee boucle de bas-niveau alors que la boucle realisee a partir de la consignex�2, que nous n’avons pas detaillee ici, s’appelle boucle de haut-niveau. Notons que la boucle dehaut-niveau doit respecter l’echelle de temps lente pour conserver le decouplage lent-rapide. Claire-ment, cette construction s’etend a des systemes de dimension quelconque a condition qu’ils aientune structure triangulaire comparable a celle de (2.6).
Exercice 4 Revenons a l’exemple de la grue du premier chapitre. Supposons qu’on mesure laposition x et la vitesse x du chariot et la longueur R et la vitesse R du cable (on peut mesurer cesquantites en pratique a partir de la position et la vitesse des moteurs qui actionnent le chariot etle cable) et qu’on veuille suivre une trajectoire de reference donnee t �→ (x∗(t), R∗(t)) au moins 2

Introduction a la Commande Non Lineaire 14
fois derivable. Etudier le comportement induit par les lois de commande, dites PID a grands gainspar retour de sortie,
F = M
(x∗ − kx,1
ε(x− x∗)− kx,0
ε2(x− x∗)− kx,−1νx
)νx = x− x∗
C =J
ρ
(R∗ − kR,1
ε(R− R∗)− kR,0
ε2(R−R∗)− kR,−1νR
)νR = R−R∗ .
(2.7)
Comment doit-on choisir les gains kx,1, kx,0, kx,−1 et kR,1, kR,0, kR,−1 pour suivre la trajectoirevoulue ?

Chapitre 3
Breve Introduction a la Geometrie desJets Infinis
Les chapitres qui suivent s’inspirent en droite ligne de l’article [18] et suivent une idee ini-tialement exploree par D. Hilbert en 1912 [25] puis reprise par E. Cartan en 1914 [7]. On trou-vera une approche legerement plus restrictive, dans le cas algebrique (voir par ex. [13]), dans[17]. Pour des lectures plus approfondies sur la geometrie des jets infinis, on peut se reportera [39, 66, 90] et, pour certaines applications en physique, a [1, 30]. On trouvera aussi d’autresapproches des questions d’equivalence dans [29, 31, 34, 65, 79] pour des notions plus restrictives,et dans [33, 84, 69, 67, 68, 75] dans des cas plus generaux, proches de l’approche suivie dans cecours.
3.1 Jets infinis, coordonnees
Considerons le systemex = f(x, u) (3.1)
ou f est de classe C∞ sur un ouvert de X × U ⊂ Rn × Rm.f est, en fait, une suite infinie de champs de vecteurs parametes par u. Plus precisement, pour
definir une courbe integrale (solution de l’equation differentielle (3.1), on ne doit pas seulementspecifier la condition initiale x0 a l’instant t = 0, mais aussi la fonction infiniment derivable(on dira lisse dans la suite) t �→ u(t) sur un intervalle de temps donne. Cette dependance, dedimension infinie, par rapport a l’entree u est relativement mal commode si l’on veut utiliser desbouclages dynamiques par exemple. D’apres la discussion des chapitres precedents, il apparaıtnecessaire de developper un formalisme legerement different ou les courbes integrales de (3.1) sontdecrites de facon plus compactes comme des fonctions lisses t �→ (x(t), u(t)), parametrees par lesconditions initiales seules. En d’autres termes, on est amenes a considerer des conditions initialesayant la forme d’une suite infinie ξ0 = (x0, u0, u0, . . . , u
(µ)0 , . . .), ou les derivees de u de tous ordres
a l’instant t = 0 sont notees u(µ)0 , avec µ ≥ 0. Ceci nous conduit a completer les coordonnees
15

Introduction a la Commande Non Lineaire 16
originelles (x, u) par la suite infinie de coordonnees ξ = (x, u, u, . . . , u(µ), . . .) ∈ X × U × R∞m , oul’on note R∞m = Rm × Rm × . . ., le produit d’un nombre infini denombrable de copies de Rm.
3.2 Champs de vecteurs
Dans ce contexte, une fonction lisse est une fonction qui depend de facon infiniment derivabled’un nombre fini (mais arbitraire) de coordonnees. Le champ de vecteurs f admet dans ces coor-donnees un prolongement naturel
F (ξ) = (f(x, u), u, u, . . .)
et l’equation (3.1) devientξ = F (ξ) , (3.2)
avec ξ(0) = ξ0. Ainsi, (3.2) definit un champ de vecteurs, au sens habituel, sur la variete dedimension infinie M = X × U × R∞m .
On arrive a la meme conclusion par un autre raisonnement, en calculant la formule de deriveede Lie suivante. Prenons une fonction lisse h, i.e., dependant de facon infiniment derivable de x,u et d’un nombre fini r de derivees de u. On adopte les notations usuelles
∂h
∂xf =
n∑i=1
∂h
∂xifi
et∂h
∂u(k)u(k+1) =
m∑i=1
∂h
∂u(k)i
u(k+1)i .
La derivee de h le long d’une trajectoire de (3.1) est donnee par
dh
dt=
∂h
∂xf +
∂h
∂uu + . . . +
∂h
∂u(r)u(r+1) (3.3)
en tout point (x(t), u(t), u(t), . . . , u(r)(t), . . .). Notons que, bien que h ne depende que desderivees de u jusqu’a l’ordre r, la coordonnee u(r+1) apparaıt, ce qui constitue une motivationsupplementaire pour considerer des coordonnees formees par la suite infinie des derivees de u.
Cette formule s’interprete comme la derivee de Lie de h par rapport au champ de vecteurs dedimension infinie
(x, u, u(1), u(2), . . .) �→ F (x, u, u(1), u(2), . . .) = (f(x, u), u(1), u(2), . . .) (3.4)
ou, avec des notations aisement comprehensibles a partir de la formule de derivee de Lie precedente(3.3),
F (x, u, u(1), u(2), . . .) = f(x, u)∂
∂x+∞∑j=0
u(j+1) ∂
∂u(j). (3.5)
Notons que chaque composante de F est une fonction lisse, i.e., depend de facon infinimentderivable d’un nombre fini de coordonnees.

Introduction a la Commande Non Lineaire 17
3.3 Systemes
Ainsi, au systeme commande (3.1), ou f est une famille infinie de champs de vecteursparametree par u, on prefere substituer la definition suivante de systeme, constitue d’un “vrai”champ de vecteurs sur une variete de dimension infinie :
Definition 1 Un systeme est la donnee d’une paire (M, F ) ou F est un champ de vecteurs lissesur M = X × U × R∞m .
Notations Dans la suite, nous utiliserons : u(0) = u, u(1) = u, u(2) = u, . . . , uk =(u(0), u(1), . . . , u(k)) pour tout k, et u = (u(0), u(1), . . .).
Remarque 1 En toute rigueur, nous devons definir la topologie et la structure differentielle sous-jacentes de R∞m pour etre en mesure de parler de voisinages et d’objets lisses. Cette topologie estla topologie de Frechet. Elle permet de travailler sur R∞m comme s’il s’agissait du produit de kcopies de Rm pour k suffisamment grand. En ce qui nous concerne, il suffit de savoir qu’une basede voisinages ouverts de cette topologie est constituee d’un produit infini U0×U1× . . . d’ouverts Uide Rm, tous sauf un nombre fini d’entre eux etant egaux a Rm, et qu’une fonction est lisse, ou C∞,si elle ne depend que d’un nombre fini arbitraire de variables et est lisse, ou C∞, au sens usuel dela dimension finie. De meme, une application Φ : R∞m → R
∞n est lisse si toutes ses composantes
sont des fonctions lisses.Remarquons aussi que R∞m muni de la topologie de Frechet jouit de proprietes beaucoup plus
pauvres que ses homologues de dimension finie : les resultats les plus usuels qui fondent la theoriedes varietes differentiables de dimension finie tels que le theoreme des fonctions implicites, letheoreme de Frobenius ou le theoreme de redressement, cessent d’etre vrais dans ce cadre. Notonscependant que la topologie de Frechet sur un produit de k copies de Rm, pour tout k fini, coıncideavec la topologie euclidienne usuelle.
Les varietes modelees sur R∞m se definissent de la meme facon que les varietes de dimen-sion finie. L’approfondissement de ces aspects techniques n’est absolument pas necessaire a lacomprehension de ce qui suit. Il suffit de remplacer “variete modelee sur R∞m” par “ouvert deR∞m”.
Remarque 2 Une difference importante liee a la representation en dimension infinie de (3.1),par rapport a la representation usuelle, est que la notion de dimension d’etat est perdue (voir lesexemples du chapitre 1). En fait, dans notre formalisme,
x = f(x, u), (x, u) ∈ X × U ⊂ Rn × Rm (3.6)
etx = f(x, u)u = v
(3.7)
ont la meme description (M, F ), avec M = X × U × R∞m et
F (x, u, u(1), u(2), . . .) = (f(x, u), u(1), u(2), . . .) .

Introduction a la Commande Non Lineaire 18
En effet, l’application t �→ (x(t), u(t)) est une trajectoire de (3.6) si, et seulement si, l’applicationt �→ (x(t), u(t), u(t)) est une trajectoire de (3.7). Une telle situation n’est pas surprenante puisquela dimension d’etat n’est pas preservee par bouclage dynamique. Cependant, on verra plus loin quela notion de dimension d’entree continue a avoir un sens dans notre cas.
Exemple 2 Le systeme trivial (R∞m , Tm), de coordonnees y = (y1, . . . , ym), y(1) = (y(1)1 , . . . , y
(1)m ),
y(2) = (y(2)1 , . . . , y
(2)m ), . . . et dont le champ de vecteurs, dit champ de vecteurs trivial et note Tm,
est donne parTm(y, y(1), y(2), . . .) = (y(1), y(2), . . .) (3.8)
ou, en notation operateur differentiel
Tm(y, y(1), y(2), . . .) =m∑i=1
∑j≥0
y(j+1)i
∂
∂y(j)i
(3.9)
represente n’importe quel systeme constitue de m chaınes independantes d’integrateurs delongueurs arbitraires, et en particulier le transfert direct yi = ui, i = 1, . . . ,m.
En effet, soient ν1, . . . , νm une suite de nombres entiers positifs ou nuls et consideronsle systeme donne par x
(νi+1)i = ui, pour i = 1, . . . ,m, autrement dit dont l’etat est x =
(x1, . . . , x(ν1)1 , . . . , xm, . . . , x
(νm)m ). Si h est une fonction lisse de ses arguments (x, u, . . . , u(r)), on
verifie sans difficulte que sa derivee de Lie le long du champ correspondant est donnee par
dh
dt=
m∑i=1
∑j≥0
x(j+1)i
∂h
∂x(j)i
qui n’est autre que la derivee de Lie de h le long du champ trivial Tm, et ceci pour un choixarbitraire des entiers νi, i = 1, . . . ,m, ce qui prouve notre assertion.
Exemple 3 Un systeme lineaire a m entrees independantes correspond a (Rn × R∞m , L) avec lechamp de vecteurs infini L donne par
L(x, u) = (Ax + Bu)∂
∂x+∞∑µ=0
u(µ+1) ∂
∂u(µ)
ou A est une matrice n× n et B une matrice m× n.
Remarque 3 La variete M = X × U × R∞m n’est de dimension finie que s’il n’y a pas d’entree(m = 0), i.e., dans le cas d’un systeme determine d’equations differentielles –autant d’equationsque de variables–. En presence d’entrees, le systeme devient sous-determine –plus de variables qued’equations–, ce qui est a l’origine de la dimension infinie.

Introduction a la Commande Non Lineaire 19
Remarque 4 A la place de la distribution engendree par notre champ de vecteurs F , on au-rait pu travailler de facon duale avec des codistributions. Sur la variete M de coordonnees(t, x, u, u(1), . . .), on peut definir une 1-forme ω comme une combinaison lineaire finie de
{dt, dxi, du(k)j | i = 1, . . . , n; j = 1, . . . ,m; k ≥ 0}. La finitude est rendue necessaire par le fait
que, par definition, une fonction lisse, et donc sa differentielle, ne depend que d’un nombre fini devariables. La codistribution orthogonale au champ de vecteurs F est engendree par les 1-formesω telles que 〈F, ω〉 = 0. Si F est defini par (3.5), sa codistribution orthogonale est engendree parl’ensemble infini de 1-formes, souvent appele 1-formes de Cartan,
{dxi − fi(x, u)dt, du(k)j − u
(k+1)j dt | i = 1, . . . , n; j = 1, . . . ,m; k ≥ 0} .

Chapitre 4
Equivalence au sens de Lie-Backlund etBouclages Dynamiques
4.1 Equivalence
On s’interesse maintenant a definir une relation d’equivalence, dite de Lie-Backlund, perme-ttant de formaliser le fait que deux systemes sont “equivalents” s’il existe une transformationinversible qui echange leurs trajectoires. Elle s’appuie sur la notion d’isomorphisme de Lie-Back-lund utilisee en physique mathematique [1, 30, 39, 90]. Comme on le verra dans la suite, cetteequivalence est beaucoup moins restrictive que la notion classique, par diffeomorphisme et bouclagestatique d’etat (voir par ex. [31, 65, 52, 79]), et s’interprete en termes de bouclage dynamique.
Considerons deux systemes (M, F ) et (N, G) et une application lisse Φ : M → N (rappelonsque, par definition, chaque composante d’une telle application ne depend que d’un nombre fini decoordonnees). Soit p ∈M et notons q = Φ(p).
Si t �→ ξ(t) est une trajectoire de (M, F )dans un voisinage de p, i.e.,
∀t, ξ(t) = F (ξ(t)),
l’application composee t �→ ζ(t) = Φ(ξ(t)) reste dans un voisinage de q et satisfait la regle desderivees composees
ζ(t) =∂Φ
∂ξ(ξ(t)).ξ(t) =
∂Φ
∂ξ(ξ(t)).F (ξ(t)).
Insistons encore une fois sur le fait que ces expressions ne contiennent que des sommes finies,meme si les vecteurs et les matrices ont des tailles infinies : une ligne de ∂Φ
∂ξne contient qu’un
nombre fini de termes non nuls puisque les composantes de Φ ne dependent que d’un nombre finide coordonnees.
Alors, si les champs de vecteurs F et G sont Φ-relies en (p, q), i.e.,
G(Φ(ξ)) =∂Φ
∂ξ(ξ).F (ξ)
20

Introduction a la Commande Non Lineaire 21
pour tout ξ dans un voisinage de p, on a
ζ(t) = G(Φ(ξ(t)) = G(ζ(t)),
ce qui implique que t �→ ζ(t) = Φ(ξ(t)) est une trajectoire de (N, G). Si, en outre, Φ a une inverselisse, notee Ψ, alors G et F sont aussi Ψ-relies en (q, p), et il existe une correspondance localementbijective entre les trajectoires des deux systemes. Nous sommes donc conduits a introduire ladefinition suivante :
Definition 2 Soit Φ une application lisse bijective de (M, F ) dans (N, G) au voisinage du couplede points (p, q) avec p ∈ M et q = Φ(p) ∈ N, dont l’inverse, aussi supposee lisse, est notee Ψ.On dit que Φ est un isomorphisme de Lie-Backlund en (p, q) si, et seulement si, les champs devecteurs F et G sont Φ-relies en (p, q) et les champs G et F sont aussi Ψ-relies en (q, p).
On a vu precedemment qu’a tout systeme (M, F ), avec F donne par (3.5), on peut fairecorrespondre, par la transformation lisse inversible Φ(x, u, . . . , u(r)) = (x, u, v, . . . , v(r−1)), pourtout r ≥ 1, le champ de vecteurs G = f(x, u) ∂
∂x+ u ∂
∂u+
∑∞j=0 v
(j+1) ∂∂v(j)
, ce qui revient a poseru = v, c’est-a-dire a ajouter un integrateur a l’entree u. Or, meme si les systemes (N, G) et(M, F ) sont de dimensions respectives n + m et n, on n’a fait que remettre dans l’etat de (N, G)des variables deja existantes dans le systeme d’origine (M, F ). On vient donc de montrer :
Proposition 1 Tout systeme prolonge par un nombre quelconque fini d’integrateurs est l’imagepar un isomorphisme de Lie-Backlund du systeme d’origine.
Cette definition peut etre etendue aux systemes a temps variable et aux changements de temps.Nous ne le ferons pas ici pour ne pas compliquer l’expose.
Les isomorphismes de Lie-Backlund conduisent naturellement au concept suivant d’equivalenceLie-Backlund :
Definition 3 Deux systemes (M, F ) et (N, G) sont dits Lie-Backlund equivalents en (p, q) ∈M × N, ou plus simplement, equivalents L-B en (p, q), s’il existe une application lisse Φ d’unvoisinage de p sur un voisinage de q = Φ(p) qui soit un isomorphisme de Lie-Backlund en (p, q).
(M, F ) et (N, G) sont Lie-Backlund equivalents s’il existe une application lisse Φ d’un ouvertdense D ⊂ M dans N qui soit un isomorphisme de Lie-Backlund de (M, F ) dans (N, G) auvoisinage de toute paire de points (p,Φ(p)), avec p dans D.
La proposition 1 se traduit trivialement par :
Proposition 2 Tout systeme et le systeme obtenu en prolongeant ce dernier par un nombre finiquelconque d’integrateurs sont Lie-Backlund equivalents.
Remarquons que lorsque M et N ont la meme dimension finie (dans le cas non commande), lessystemes sont naturellement equivalents par le classique theoreme de redressement. Ce resultatn’est, bien entendu, pas generalisable a la dimension infinie.

Introduction a la Commande Non Lineaire 22
Exemple 4 Considerons les deux systemes (M, F ) et (N, G), avec M = X × U × R∞m et N =Y × V × R∞s , decrivant les dynamiques respectives
x = f(x, u), (x, u) ∈ X × U ⊂ Rn × Rm (4.1)
y = g(y, v), (y, v) ∈ Y × V ⊂ Rr × Rs. (4.2)
Les champs de vecteurs F et G sont definis par
F (x, u, u(1), u(2), . . .) = (f(x, u), u(1), u(2), . . .)G(y, v, v(1), v(2), . . .) = (g(y, v), v(1), v(2), . . .).
Rappelons les notations u = (u, u(1), u(2), . . .) et uk = (u, u(1), . . . , u(k)), ou k est un entier finiarbitraire. Si les systemes sont equivalents, l’isomorphisme de Lie-Backlund Φ prend la forme
Φ(x, u) = (ϕ(x, uk), α(x, uk+1), α(x, uk+2), . . .) = (y, v).
Or, puisque y = ϕ(x, uk), et que v est solution de l’equation implicite y− g(y, v) = 0, il en resulteque v s’exprime en fonction de (y, y) ou, ce qui revient au meme, en fonction de (x, uk+1). Dememe,on verifie facilement que v(j)est une fonction de (x, uk+j+1) pour tout j ≥ 0.
Donc Φ est completement determinee par les applications ϕ et α, i.e., par l’expression de y, ven fonction de x, u. De meme, l’inverse Ψ de Φ est de la forme
Ψ(y, v) = (ψ(y, vl), β(y, vl+1), β(y, vl+2), . . .) = (x, u)
pour au moins un l.Comme Φ et Ψ sont des applications inverses, on a
ψ(ϕ(x, uk), αl(x, uk+l+1) = xβ(ϕ(x, uk), αl+1(x, uk+l+2)) = u,
et vice versa. En outre, le fait que F et G soient Φ-relies implique que
x = f(ψ(y, vl), β(y, vl+1)) =∂ψ
∂yg(y, v) +
l∑i=0
∂ψ
∂v(i)v(i+1), (4.3)
pour au moins un l suffisamment grand.En d’autres termes, a chaque fois que t �→ (x(t), u(t)) est une trajectoire de (4.1), alors
t �→ (y(t), v(t)) = ( ϕ(x(t), uk(t)), α(x(t), uk+1(t)) )
est une trajectoire de (4.2), et vice versa.
Une propriete remarquable des isomorphismes de Lie-Backlund est qu’ils preservent le nombred’entrees independantes :

Introduction a la Commande Non Lineaire 23
Theoreme 3 Si les deux systemes (M, F ) et (N, G) sont Lie-Backlund equivalents, ils admettentle meme nombre d’entrees independantes.
Preuve. Considerons l’isomorphisme de Lie-Backlund Φ de (M, F ) dans (N, G). En coordonneeslocales, il est de la forme :
Φ(x, u) = (y, v) = (ϕ(t, x, uk), α(t, x, uk+1), α(t, x, uk+2), . . .)
ou k est un entier “suffisamment grand”. Notons
Φµ(x, uk+µ+1) = (ϕ(t, x, uk), αµ(t, x, uk+µ+1))
pour µ ≥ 0. On a(y, vµ) = Φµ(x, u
k+µ+1) .
Puisque Φ est inversible, Φµ est une surjection pour tout µ. Donc la dimension de l’espace dedepart est superieure a celle de l’image,
∀µ, n + m(k + µ + 2) ≥ n′ + s(µ + 1),
ou n′ est la dimension de Y , soit
(m− s)µ + (1 + n + m(k + 2))− (1 + n′ + s) ≥ 0 , ∀µ ≥ 0 .
Clairement, ceci implique que m ≥ s car sinon (m−s)µ pourrait etre rendu arbitrairement negatifpour µ suffisamment grand. Le meme raisonnement applique a Ψ prouve que s ≥ m.
Pour les systemes lineaires commandables, ce resultat peut-etre affine :
Theoreme 4 Deux systemes lineaires commandables sont Lie-Backlund equivalents si, et seule-ment si, ils ont le meme nombre d’entrees independantes.
Preuve. La necessite est une consequence directe du theoreme 3. Inversement, comme un systemelineaire commandable admet une forme canonique de Brunovsky, dite de commandabilite, il suffitde prouver que deux formes canoniques avec m entrees sont Lie-Backlund equivalentes. Con-siderons deux telles formes : x
(µi)i = ui et y
(νi)i = vi, i = 1, . . . ,m ou les µi et νi sont les indices de
commandabilite associes. On remarque alors immediatement qu’ils sont tous deux Lie-Backlundequivalents au systeme trivial (R∞m , Tm) (voir l’exemple 2).
4.2 Bouclages dynamiques endogenes
Considerons les deux systemes de l’exemple 4 (M, F ) et (N, G), avec M = X × U × R∞m etN = Y × V × R∞s , decrivant respectivement les dynamiques
x = f(x, u), (x, u) ∈ X × U ⊂ Rn × Rm (4.4)
y = g(y, v), (y, v) ∈ Y × V ⊂ Rr × Rs. (4.5)

Introduction a la Commande Non Lineaire 24
Les champs de vecteurs F et G sont definis par
F (x, u, u(1), u(2), . . .) = (f(x, u), u(1), u(2), . . .)G(y, v, v(1), v(2), . . .) = (g(y, v), v(1), v(2), . . .).
Si les systemes (4.4) et (4.5) sont Lie-Backlund equivalents, on va montrer qu’il est possiblede transformer (4.4) en (4.5) et vice versa par un bouclage dynamique endogene
u = σ(x, z, w)z = a(x, z, w),
(4.6)
avec z ∈ Z ⊂ Rq, au sens usuel, c’est-a-dire par un diffeomorphisme de l’espace d’etat etenduX × Z.
On dit que le bouclage dynamique (4.6) est endogene si le systeme d’origine (4.4) est Lie-Backlund equivalent au systeme en boucle fermee (4.4)-(4.6). Un tel bouclage est appele endogenepuisque les nouvelles variables z peuvent s’exprimer en fonction de l’etat et d’un nombre fini dederivees de l’entree du systeme d’origine.
Bien entendu, on ne peut pas esperer aller d’une dynamique a l’autre sans changer la dimensiond’etat. Le resultat suivant est emprunte a Ph. Martin [54].
Theoreme 5 Supposons que les systemes (M, F ) et (N, G) sont Lie-Backlund equivalents. Alorsil existe un bouclage dynamique endogene tel que le systeme en boucle fermee (4.4)-(4.6) soitdiffeomorphe a (4.5) prolonge par un nombre suffisant d’integrateurs.
Par “(4.5) est prolonge par un nombre suffisant d’integrateurs” il faut comprendre
y = g(y, v)v = v(1)
v(1) = v(2)
...v(µ) = w
(4.7)
pour µ suffisamment grand.
Preuve. Soit y = (y, vµ) = (y, v, v(1), . . . , v(µ)) et w = v(µ+1). Avec les notations de l’exemple 4, onvoit que, pour µ suffisamment grand, ψ ne depend que de y et β que de (y, w), i.e. l’isomorphismede Lie-Backlund Ψ est de la forme
Ψ(y, w, w(1), . . .) = (ψ(y), β(y, w), β(y, w1), . . .),
et l’equation (4.3) devient
f(ψ(y), β(y, w)) =∂ψ
∂(y)g(y, w), (4.8)

Introduction a la Commande Non Lineaire 25
ou g = (g, vµ) est le champ de vecteurs prolonge correspondant a (4.7).Soit y = (ya, yb) une partition des composantes de y telle que l’application
y �→ K(y) = (ψ(y), yb)
soit inversible (une telle partition existe puisque ϕ, etant un bloc de composantes de l’isomorphismeΦ, est de plein rang). Appliquons alors le bouclage dynamique
u = β(K−1(x, z), w)z = gb(K
−1(x, z), w),
ou gb est la projection de g correspondant a yb, pour obtenir la dynamique en boucle fermee(xz
)= f(x, z, w) =
(f(x, β(K−1(x, z), w))
gb(K−1(x, z), w)
). (4.9)
Utilisant (4.8), on a
f(K(y), w) =
(f(ψ(y), β(y, w))
gb(y, w)
)=
( ∂ψ∂y
(y) 0
0 I
).g(y, w) =
∂K
∂y(y).g(y, w)
ce qui implique que (4.9) et (4.7) sont diffeomorphes.Enfin, puisque y = ϕ(x, uν) et v = α(x, uν+1) pour au moins un ν, on obtient que z = yb =
ϕb(x, uν+µ+1), ou ϕ est l’application (ϕ, α, . . . , α(ν)) et ou ϕb est la projection de ϕ correspondant
a yb, ce qui prouve que (4.4) est Lie-Backlund equivalent a sa dynamique en boucle fermee (4.9)et donc que le bouclage dynamique ainsi construit est bien endogene.
Remarquons qu’il n’est pas a priori evident qu’une relation d’equivalence basee sur des trans-formations par bouclage dynamique soit interessante du point de vue de la commande. En fait, sil’on considere l’integrateur scalaire x = u auquel on applique le bouclage dynamique z = v, u = v,bien que le bouclage soit inversible, en accord avec la terminologie usuelle, le systeme en bouclefermee n’est pas commandable, et on ne peut pas retrouver sa commandabilite par bouclage. Ceciindique que la classe des bouclages associes a notre equivalence Lie-Backlund par le theoreme 5est plus petite que la classe des bouclages dynamiques inversibles. En fait, le bouclage construitdans la preuve jouit d’une vraie “reversibilite” : on peut effectivement trouver un autre bouclagequi retransforme le systeme boucle en le systeme d’origine prolonge par des integrateurs.

Chapitre 5
Systemes plats
La notion de platitude a ete mise en evidence par M. Fliess, J. Levine, Ph. Martin et P.Rouchon en 92 [15, 16]. Elle s’inscrit dans divers courants, notamment celui de la linearisationpar bouclage statique [78, 34, 28] (voir aussi [31, 65, 40]) puis dynamique [32, 10, 8, 9, 33]. Voiraussi l’article de synthese [44]. Par ailleurs, un nombre eleve d’applications industrielles releventde cette approche et recoivent, dans ce cadre, une solution particulierement simple et efficace. Onen trouvera un apercu dans [3, 4, 20, 45, 48, 46, 53, 55, 56, 57, 61, 62, 70, 71].
5.1 Notion de platitude
Rappelons qu’un systeme trivial est un systeme (R∞s , Ts), ou Ts(y, y(1), y(2), . . .) =
(y(1), y(2), y(3), . . .), avec y ∈ Rs.Definition 4 Le systeme (M, F ) est dit differentiellement plat (ou plus simplement plat) auvoisinage d’un point p, si, et seulement si, il est equivalent a un systeme trivial dans un voisinagede p. Il est dit differentiellement plat s’il est differentiellement plat au voisinage de tout point pd’un ouvert dense de M.
La sortie y = {yj | j = 1, . . . , s} est appelee sortie plate du systeme (M,F).
Cette propriete s’interprete de la facon suivante : considerons le systeme (M, F ) avec F donnepar (3.5). Il est differentiellement plat au voisinage d’un point p ∈ M, par definition, si, etseulement si, il existe un isomorphisme de Lie-Backlund Φ au voisinage de p tel que, si l’on notey = Φ(x, ur), avec les notations du chapitre precedent ur = (u, . . . , u(r)) (rappelons que Φ nedepend que d’un nombre fini de variables), alors y ∈ R∞m et l’image par Φ de F est egale a Tm. Enoutre, Ψ etant l’application inverse de Φ, on doit avoir (x, u) = Ψ(ys+1) = (ψ(ys), β(ys+1)) pourun entier s et l’image par Ψ du champ trivial Tm est egal, au voisinage de q = Φ(p), a F .
La platitude differentielle equivaut donc a dire qu’il existe une sortie de dimension m,
y = Φ(x, ur)
26

Introduction a la Commande Non Lineaire 27
telle qu’on ait localement
x = ψ(ys) , u = β(ys+1) et∂ψ
∂ysys+1 = f(ψ(ys), β(ys+1)) .
5.2 Exemples
5.2.1 Systeme masses-ressort
k1 k2
G1 G2
m1 m2
l1 + x1
l2 + x2
u
Ox
Fig. 5.1: Systeme masses-ressorts.
Considerons un systeme fait de deux solides de masses respectives m1 et m2, accroches a deuxressorts de raideurs respectives k1 et k2, pouvant se deplacer le long de l’axe Ox (voir figure 5.1).Les abscisses respectives des centres de gravite G1 et G2 des deux solides sont notees l1 + x1 etl2 + x2, ou l1 et l2 sont les positions au repos de G1 et G2. On suppose que les deux masses sontsoumises a des frottements visqueux γ1(x1) et γ2(x2) respectivement. Les fonctions γ1 et γ2 sontsupposees non negatives, 2 fois continument derivables et γ1(0) = γ2(0) = 0. Enfin, on exerce uneforce u sur G2.
Les equations de la mecanique s’ecrivent immediatement :{m1x1 + k1x1 + γ1(x1) = k2(x2 − x1)m2x2 + k2(x2 − x1) + γ2(x2) = u .
(5.1)
Montrons qu’on peut exprimer x2 et u en fonction de x1. De la premiere equation de (5.1), ontire :
x2 =m1
k2
x1 +1
k2
((k1 + k2)x1 + γ1(x1)) (5.2)
et, en derivant, notant γ′1 la derivee de la fonction γ1,
x2 =m1
k2
x(3)1 +
1
k2
((k1 + k2)x1 + γ′1(x1)x1) , (5.3)

Introduction a la Commande Non Lineaire 28
puis de la seconde equation de (5.1), utilisant les expressions de x2 et x2 ci-dessus
u =m1m2
k2
x(4)1 +
(m2k1
k2
+ m2 + m1
)x1 + k1x1 + γ1(x1) +
m2
k2
(γ′′1 (x1)(x1)
2 + γ′1(x1)x(3)1
)
+γ2
(m1
k2
x(3)1 +
1
k2
((k1 + k2)x1 + γ′1(x1)x1)
)(5.4)
ce qui montre que x2 et u s’expriment en fonction de x1 et d’un nombre fini de ses derivees etdonc que le systeme (5.1) est plat avec x1 comme sortie plate.
Remarque 5 La transformation obtenue a partir de la sortie plate y = x1 revient a mettre lesysteme sous forme canonique commandable (forme de Brunovsky [6, 35]), qui s’ecrit ici y(4) = v.Cette forme est generalement, et a juste titre, consideree comme peu robuste pour les systemesobtenus par un procede d’identification dit “boıte noire”. Par contre, lorsque le systeme est obtenupar modelisation (ici en utilisant les equations de la mecanique), cette forme rend fidelementcompte des proprietes physiques intrinseques au systeme : en particulier, la forme generale de latransformation mettant sous forme de Brunovsky laisse penser qu’on perd l’interpretation physiquedes variables sous cette forme, ce qui n’est pas le cas pour notre exemple (la sortie correspondanteest la position du centre de gravite du premier solide) ainsi que pour les nombreux exemplesdeveloppes dans le cadre de ce cours. Il est donc recommande de prendre de nombreux principes“issus du folklore” de l’automatique appliquee avec une grande prudence.
5.2.2 Commande de robot
On considere un bras de robot a n degres de libertes et n actionneurs. Comme pour la plu-part des systemes mecaniques, on peut obtenir un modele realiste rendant compte des couplagesdynamiques par les equations d’Euler-Lagrange qui supposent le systeme ferme, c’est-a-dire sansechange energetique avec l’exterieur. En particulier, les frottements sont supposes nuls. Dans le casou ces derniers ne peuvent plus etre consideres comme negligeables, le modele peut etre modifieen ajoutant des termes de dissipation et/ou de friction. Placons-nous dans le cas le plus simple :
Γ0(q)q + Γ1(q, q) = Q(q, q)u (5.5)
ou q sont les coordonnees generalisees (coordonnees angulaires pour un robot rigide a jointsrotoıdes), dim q = dimu = n, rang (Q) = n, Γ0(q) etant la matrice d’inertie, supposee partoutinversible, Γ1(q, q) le vecteur des forces centrifuges et de Coriolis et la matrice Q(q, q) caracterisantles actionneurs (localisation, entraınement direct ou indirect, presence de reducteurs, . . . ).
On pose x1 = q, x2 = q et le systeme devient :{x1 = x2
x2 = −(Γ0(x1))−1 (Γ1(x1, x2) + Q(x1, x2)u) .
(5.6)

Introduction a la Commande Non Lineaire 29
•
+
d
C
�Fx
�Fzm �g�k θ
A�ı�
Yε•
×
Fig. 5.2: Le pendule inverse dans le plan vertical
Comme precedemment, le vecteur x1 est une sortie plate de (5.6). En effet, x2 = x1 et
u = Q−1(x1, x1) (Γ0(x1)x1 + Γ1(x1, x1))
formule, dite du couple calcule.
5.2.3 Pendule
Considerons un pendule inverse dans le plan de coordonnees (x, z), de masse m, commande au
moyen de la force exterieure ?F appliquee au point A situe a une distance d du centre de masseC du pendule (voir figure 5.2). Considerons le repere inertiel (?ı,?,?k). La force ?F s’ecrit dans ce
repere : ?F = Fx?ı+Fz?k. La force resultante appliquee au centre de masse est la somme de ?F et dupoids −mg?k : Fx?ı + (Fz −mg)?k. Notons (xC , O, zC) les coordonnees du point C. On a
mxC = Fx , mzC = Fz −mg .
Notons θ l’angle entre le pendule et la verticale (parallele a ?k) et J l’ inertie du pendule. Le
vecteur ?CA s’ecrit ?CA = −d(sin θ ?ı + cos θ ?k) et le moment angulaire autour de C est donne par
Jθ? = ?CA ∧ ?F = d(Fz sin θ − Fx cos θ)? .
On a donc
mxC = FxmzC = Fz −mgJ
dθ = Fz sin θ − Fx cos θ .

Introduction a la Commande Non Lineaire 30
En posant
x =xCg
, z =zCg
, u1 =Fxmg
, u2 =Fzmg− 1 , ε =
J
mgd
on obtient
x = u1
z = u2
εθ = −u1 cos θ + (u2 + 1) sin θ(5.7)
ou u1 et u2 sont les composantes du vecteur d’entree. Ce systeme est appele modele du pendule.Insistons sur le fait que ce qui va suivre est intrinseque, c’est-a-dire ne depend ni de la
representation du systeme choisie ni du choix des entrees. En effet, une representation implicitede (5.7) peut s’obtenir en eliminant les variables d’entree u1 et u2 :
εθ = −x cos θ + (z + 1) sin θ . (5.8)
Cette equation differentielle implicite scalaire admet 3 fonctions independantes inconnues (x, z, θ).On dit qu’elle est sous-determinee et que le nombre de ses degres de liberte est egal a 3−1 = 2, quicorrespond au nombre d’entrees independantes. Si l’on veut preciser ces deux entrees, par exempleen posant x = u1 et z = u2 (une infinite d’autres choix, comme −x cos θ + (z + 1) sin θ = u1
et z = u2 par exemple, sont possibles), le systeme redevient determine et on montre facilementque les trajectoires de (5.7) sont aussi solution de (5.8) et reciproquement. Ainsi, a part le faitque les variables d’entree ne sont pas directement specifiees, (5.8) contient exactement les memesinformations dynamiques que (5.7).
Considerons maintenant un autre systeme differentiel implicite a 4 fonctions inconnues et 2equations : {
(ξ − x)2 + (ζ − z)2 = ε2
ξ(ζ − z)− (ξ − x)(ζ + 1) = 0 .(5.9)
Ce systeme admet l’interpretation geometrique suivante : soit (ξ, ζ) la position d’un point Ysitue a la distance ε de C, c’est-a-dire (ξ − x)2 + (ζ − z)2 = ε2, et dont l’acceleration moins le
vecteur constant −?k, acceleration de la gravite normalisee, est colineaire au vecteur ?Y C :
ξ
ζ + 1=
ξ − x
ζ − z. (5.10)
Le point Y , verifiant (ξ − x)2 + (ζ − z)2 = ε2, ou, en coordonnees polaires :
ξ = x + ε sin θ , ζ = z + ε cos θ , (5.11)
est appele le centre d’oscillation ou le centre d’oscillation d’ Huygens [16, 18, 86].Montrons que (5.9) est equivalent a (5.7) ou, ce qui revient au meme, que (5.9) et (5.8) sont
equivalents.

Introduction a la Commande Non Lineaire 31
Partant de (5.9) et derivant deux fois (5.11), on obtient
ξ = x + εθ cos θ − εθ2 sin θ , ζ = z − εθ sin θ − εθ2 cos θ . (5.12)
En tenant compte du fait que ξ − x = ε sin θ et ζ − z = ε cos θ, on a
ξ(ζ − z)− (ζ + 1)(ξ − x) = ε(ξ cos θ − (ζ + 1) sin θ) = ε(εθ + x cos θ − (z + 1) sin θ).
Donc, si (5.9) a lieu, alors (5.8) aussi, et reciproquement, ce qui prouve l’equivalence annoncee.
Dans (5.9), les variables de commande sont x et z, ce qui implique, par (5.11), que x = u1
et z = u2, ou (u1, u2) est l’entree du modele du pendule (5.7). Donc, (5.9) s’interprete commeun modele reduit ou les deux doubles integrateurs decrivant l’acceleration du centre de masse dupendule inverse ont ete supprime.
Proposition 3 Le systeme (5.7) est plat avec les coordonnees (ξ, ζ) du centre d’oscillation poursortie plate.
Preuve. De (5.11) et (5.10), on tire
tan θ =ξ − x
ζ − z=
ξ
ζ + 1
soit
θ = arctan
(ξ
ζ + 1
), sin θ =
ξ√(ξ)2 + (ζ + 1)2
, cos θ =ζ + 1√
(ξ)2 + (ζ + 1)2
.
En outre
x = ξ − εξ√
(ξ)2 + (ζ + 1)2
, z = ζ − εζ + 1√
(ξ)2 + (ζ + 1)2
(5.13)
et la force s’en deduit aisement en derivant deux fois les expressions de x et z :
u1 =d2
dt2
ξ − ε
ξ√(ξ)2 + (ζ + 1)2
, u2 =
d2
dt2
ζ − ε
ζ + 1√(ξ)2 + (ζ + 1)2
, (5.14)
expression qui contient des derivees de ξ et ζ jusqu’a l’ordre quatre.Il en resulte que toutes les variables de (5.7) peuvent s’exprimer, de facon inversible, comme
des fonctions de ξ, ζ et d’un nombre fini de leurs derivees par rapport au temps ξ, ξ, . . . , ζ, ζ, . . ..La platitude du systeme s’en deduit immediatement avec (ξ, ζ) pour sortie plate.

Introduction a la Commande Non Lineaire 32
x
y
θ
ϕ
l
P
Q
O
Fig. 5.3: Le robot mobile.
5.2.4 Vehicule non holonome
Considerons un vehicule a 4 roues roulant sans glisser sur un plan horizontal [17, 21, 43, 42, 59,63, 64, 72, 73, 83, 82]. Dans le plan (O,X, Y ), on note (x, y) les coordonnees du point P , milieu
de l’essieu arriere, Q le point milieu de l’essieu avant, ‖ ?PQ‖ = l, θ l’angle entre l’axe du vehiculeet l’axe Ox, et ϕ l’angle de braquage des roues (voir figure 5.3). Les conditions de roulement sans
glissement s’expriment par le fait que d $OPdt
est parallele a ?PQ et que d $OQdt
est parallele aux roues
avant. Notons v =∥∥∥d $OPdt ∥∥∥ · $PQ
‖ $PQ‖ . Un calcul cinematique elementaire donne :
x = v cos θy = v sin θ
θ =v
ltanϕ .
(5.15)
Montrons que ce systeme est plat avec (x, y) comme sortie plate. Les deux premieres equations de(5.15) donnent
tan θ =y
x, v2 = x2 + y2 . (5.16)
Derivant l’expression de tan θ, on trouve θ(1 + tan2 θ) =yx− yx
x2d’ou l’on tire
θ =yx− yx
x2 + y2
et, par la troisieme equation de (5.15),
tanϕ =lθ
v= l
yx− yx
(x2 + y2)32
. (5.17)

Introduction a la Commande Non Lineaire 33
Toutes les variables du systeme x, y, θ, v, ϕ s’expriment donc en fonction de x, x, x, y, y, y, ce quiprouve notre assertion.
5.3 Platitude et commandabilite
Rappelons qu’un systeme lineaire est commandable si et seulement s’il ne peut exister aucuneequation differentielle lineaire reliant les etats et independante de l’entree (voir les notes de coursde M. Fliess ainsi que [13, 87], ou des approches plus classiques dans [35, 60, 89, 88]). Dans lecas d’un systeme lineaire stationnaire de dimension finie de la forme x = Fx + Gu, ou x est dedimension n et u de dimension m, cette definition equivaut au critere de Kalman : le rang de lamatrice (G|FG| . . . |F n−1G) est egal a n.
Le resultat suivant resulte directement des theoremes 3 et 4.
Corollaire 1 Etant donne un systeme plat, le nombre de composantes d’une sortie plate est egalau nombre de variables d’entree independantes.
Une reformulation du theoreme 4 donne :
Corollaire 2 Un systeme lineaire est plat si, et seulement si, il est commandable.
Preuve. Considerons un systeme lineaire plat x = Ax+Bu, les notations etant celles de l’exem-ple 3, et, pour le systeme trivial, de l’exemple 2. Si le systeme n’est pas commandable, il existeune equation differentielle lineaire
E0x + E1x + . . . + Eαx(α) = 0 (5.18)
independante de l’entree u, avec α ≥ 0 et ou au moins l’une des matrices Ej, 0 ≤ j ≤ α, est nonnulle. Si l’on tient compte de l’equivalence a un systeme trivial, on doit avoir x = Φ(yβ), pourau moins un entier β ≥ 0, avec, comme precedemment, yβ = (y, y, . . . , y(β)) et Φ une submersion.
Par un calcul immediat, on montre que, pour tout entier k, x(k) = Ak(yβ+k−1)+ ∂Φ
∂yβdkyβ
dtkou Ak est
une expression ne comprenant que des derivees de y jusqu’a l’ordre β + k − 1. Remplacant dans
(5.18), il vient E0Φ(yβ) + . . . + Eα
(Ak(y
β+k−1) + ∂Φ∂yβ
dkyβ
dtk
)= 0. En raison de l’independance des
composantes de yα+β et du fait que l’application Φ est une submersion, ∂Φ∂yβ
est une matrice de
rang plein dans un ouvert dense et on a donc Eα = 0. Par le meme raisonnement, on obtient Eα =Eα−1 = · · · = E1 = 0. On en deduit en outre que E0Φ(yβ) = 0 implique E0 = 0 puisque, une foisde plus, Φ etant une submersion, dans le cas contraire, les composantes de yβ seraient dependantesen vertu du theoreme des fonctions implicites, ce qui acheve de prouver la commandabilite. Lareciproque est une consequence directe du theoreme 4.
On peut generaliser ce resultat au cas non lineaire : un systeme plat est fortement commandableau sens ou il verifie la condition de rang d’accessibilite forte due a Sussmann et Jurdjevic [80].Nous ne developperons pas cet aspect ici et renvoyons le lecteur interesse a [23, 24, 31, 65, 79, 14].

Introduction a la Commande Non Lineaire 34
5.4 Platitude et linearisation
Precisons le theoreme 5 dans le cas des systemes plats :
Corollaire 3 Tout systeme plat est linearisable par bouclage dynamique endogene.
Remarque 6 L’ensemble des diffeomorphismes et bouclages statiques d’etat etant, de faconevidente, un sous-ensemble strict des bouclages dynamiques endogenes, les systemes linearisablespar diffeomorphisme et bouclage statique d’etat (souvent appeles plus simplement linearisables parbouclage statique) forment donc un sous-ensemble strict de l’ensemble des systemes plats. Dans lecas des systemes mono-entree (m = 1), on peut cependant montrer que la platitude est equivalentea la propriete de linearisation par bouclage statique d’etat [8, 9]. La propriete de platitude ne reveledonc toute sa richesse que dans le cas multi-entrees ou linearisation par bouclage statique et parbouclage dynamique ne sont plus equivalents. Le lecteur interesse verifiera par exemple que le pen-dule et le vehicule non holonome sont plats mais ne sont pas linearisables par bouclage statique(utiliser pour cela le critere de Jakubczyk-Respondek [34]. Voir aussi [28, 31, 44, 50, 52, 65]).
Remarque 7 Il n’existe pas, a l’heure actuelle, en dehors de classes particulieres de systemes, deconstruction effective des sorties linearisantes et donc de verification de la platitude d’un systeme(voir par exemple [56]). Il ressort neanmoins des nombreux exemples traites que la platitude ap-paraıt comme une propriete physique de ces systemes et que les sorties linearisantes correspondenta des variables physiques naturelles.
Reprenons les exemples precedents et construisons les bouclages linearisants associes.
5.4.1 Systeme masses-ressort (suite)
D’apres (5.1), (5.2), (5.3), (5.4), x1 est une sortie plate et l’entree u s’exprime en fonction dex1 et ses derivees jusqu’a l’ordre 4. Posons :
x(4)1 = v (5.19)
et montrons que les systemes (5.1) et (5.19) sont Lie-Backlund equivalents. D’apres (5.4), on a :
x(4)1 =
k2
m1m2
(u−X(x1, x1, x1, x
(3)1 )
)(5.20)
avec
X(x1, x1, x1, x(3)1 ) =
(m2k1
k2
+ m2 + m1
)x1 + k1x1 + γ1(x1) +
m2
k2
(γ′′1 (x1)(x1)
2 + γ′1(x1)x(3)1
)
+γ2
(m1
k2
x(3)1 +
1
k2
((k1 + k2)x1 + γ′1(x1)x1)
)
et le bouclage linearisant est donc donne par v =k2
m1m2
(u−X(x1, x1, x1, x
(3)1 )
). Notons qu’il
s’agit dans ce cas d’un bouclage statique.

Introduction a la Commande Non Lineaire 35
5.4.2 Commande de robot (suite)
On verifie comme au paragraphe precedent que (5.6) est Lie-Backlund equivalent a x1 = v(comme precedemment par bouclage statique).
5.4.3 Pendule (suite)
D’apres (5.14), il suffit de poser
ξ(4) = v1 , ζ(4) = v2 . (5.21)
Le calcul du bouclage dynamique endogene se fait en identifiant les derivees 4emes de ξ et ζ avecleur valeur en fonction des entrees u1 et u2 : on a
ξ =(u1 sin θ + (u2 + 1) cos θ − εθ2
)sin θ , ζ =
(u1 sin θ + (u2 + 1) cos θ − εθ2
)cos θ − 1
soit, en faisant le changement de commande :
w1 = u1 sin θ + (u2 + 1) cos θ − εθ2 , (5.22)
ξ = w1 sin θ , ζ = w1 cos θ − 1 .
en derivant de nouveau 2 fois et en posant
w2 = −u1 cos θ + (u2 + 1) sin θ (5.23)
on obtient :
ξ(4) = w1 sin θ +1
εw1w2 cos θ + 2w1θ cos θ − w1θ
2 sin θ = v1
ζ(4) = w1 cos θ − 1
εw1w2 sin θ − 2w1θ sin θ − w1θ
2 cos θ = v2 .
Inversant ce systeme lineaire par rapport a w1 et w2, il vient
w1 = v1 sin θ + v2 cos θ + w1θ2
w2 =ε
w1
(v1 cos θ − v2 sin θ − 2w1θ
) (5.24)
avecu1 = (w1 + εθ2) sin θ − w2 cos θ
u2 = (w1 + εθ2) cos θ + w2 sin θ − 1 .(5.25)
On a donc construit un bouclage dynamique endogene en introduisant un compensateur dontl’etat est donne par (w1, w1, w2) pour lequel le systeme (5.7) est equivalent a (5.21).

Introduction a la Commande Non Lineaire 36
5.4.4 Vehicule non holonome (suite)
Comme precedemment, montrons que (5.15) est Lie-Backlund equivalent a
x = v1 , y = v2 .
Un calcul elementaire donne :
x = v cos θ − v2
lsin θ tanϕ = v1
y = v sin θ +v2
lcos θ tanϕ = v2
et, apres inversion de ce systeme lineaire en v et tanϕ, on obtient le compensateur dynamiqueendogene :
v = v1 cos θ + v2 sin θ , tanϕ =l
v2(−v1 sin θ + v2 cos θ)
d’ou le resultat.
5.5 Conditions necessaires de platitude
Considerons le systeme commande classique
x = f(x, u), x ∈ Rn, u ∈ Rm
avec n > m. On suppose que le systeme admet effectivement m commandes independantes, i.e.,
le rang de∂f
∂uest egal a m.
Par elimination de u, on obtient le systeme sous-determine implicite
F (x, x) = 0. (5.26)
Exercice 5 Montrer que la forme implicite sous-determinee du modele de pendule (5.7) est
εθ + x cos θ − (z + 1) sin θ = 0 .
Meme question pour le systeme masses-ressort (5.1) :
m1x1 + k1x1 + γ1(x1)− k2(x2 − x1) = 0 .
Meme question pour le vehicule non holonome (5.15) :
y − x tan θ = 0 .
Meme question pour la grue (1.1). Montrer que la forme recherchee n’est autre que (1.4).

Introduction a la Commande Non Lineaire 37
Le resultat suivant est etabli sous des formes diverses dans [17, 71, 77].
Theoreme 6 Si le systeme x = f(x, u) est plat, alors le systeme sous-determine F (x, x) = 0,obtenu en eliminant u, admet la propriete suivante : pour tout x et p tels que F (x, p) = 0, ilexiste au moins un champ de vecteurs g = 0 sur R∞n tel que, pour tout λ ∈ R, F (x, p + λg) = 0.Geometriquement, les equations F (x, p) = 0 definissent, pour chaque x une sous-variete reglee dusous espace affine {(x, p) | p ∈ Rn}.Preuve. Dire que le systeme x = f(x, u) est plat revient a dire qu’il existe une sortie y =(y1, . . . , ym) a m composantes independantes telle que y = h(x, x, . . . , x(µ)) pour un µ fini et telleque
x = ϕ(y1, . . . , y(ν1)1 , . . . , ym, . . . , y
(νm)m )
est une solution locale de F (x, x) = 0 pour tout choix de trajectoire t �→ yj(t) de classe Cνj etdont la derivee (νj + 1)eme est continue par morceaux, pour tout j = 1, . . . ,m.
Notons que ϕ est de classe C∞ et sa surjectivite resulte directement de la definition.Considerons, sur l’intervalle de temps [t0, t1], une trajectoire y∗ telle que chaque composante y∗i
est de classe Cνi+1 au moins, i = 1, . . . ,m, et une trajectoire perturbee y dont chaque composanteest de classe Cνi definie par
y(j)i (t) =
(y∗i )(j)(t) si j ≤ νi, ∀t ∈ [t0, t0 + τ ]
(y∗i )(j)(t) si j = νi + 1 , ∀t ∈ [t0, t0 + τ [
(y∗i )(j)(t) + λi si j = νi + 1 , t = t0 + τ
pour un τ tel que t0 + τ < t1 et avec λi ∈]− li, li[ pour tout i = 1, . . . ,m.A y∗ (resp. y) correspond la solution x∗ (resp. x) de F (x∗(t), x∗(t)) = 0 (resp. F (x(t), ˙x(t)) = 0)
pour t0 ≤ t ≤ t0 + τ . On verifie alors facilement que, pour t0 ≤ t < t0 + τ , on a x(t) = x∗(t),˙x(t) = x∗(t) et, utilisant la surjectivite de ϕ,
˙x(t0 + τ) = x∗(t0 + τ) +m∑j=1
λj∂ϕ
∂y(νj)j
(ϕ−1(x∗(t0 + τ)))
ou x∗(t) = (x∗(t), x∗(t), x∗(t), . . .), d’ou l’on deduit que l’un au moins des gj definis par
gj(x) =n∑i=1
∂ϕi
∂y(νj)j
(ϕ−1(x))∂
∂xi, j = 1, . . . ,m
est non nul, ce qui acheve de prouver le resultat.
Exemple 5 Appliquons ce critere au double pendule inverse, decrit sur la figure 5.4, ou les com-mandes u et v sont les vitesses horizontale et verticale du point de suspension (x, z) (et non pas,

Introduction a la Commande Non Lineaire 38
gα1
α2
0 x
z
u
vba
rre 1
barre 2
Fig. 5.4: le double pendule inverse.
comme habituellement, les composantes horizontale et verticale de la force appliquee au point desuspension) . Les equations du mouvement sont :
p1 = I1α1 + Iα2 cos(α1 − α2) + n1x cosα1 − n1z sinα1
p2 = Iα1 cos(α1 − α2) + I2α2 + n2x cosα2 − n2z sinα2
p1 = n1g sinα1 − n1α1x sinα1 − n1α1z cosα1
p2 = n2g sinα2 − n2α2x sinα2 − n2α2z cosα2
x = uz = v
(5.27)
ou p1 et p2 sont les impulsions generalisees associes au coordonnees generalisees α1 et α2. Lesquantites g, I, I1, I2, n1 et n2 sont definies comme suit :
I1 =(m1
3+ m2
)(l1)
2, I2 =m2
3(l2)
2, I =m2
2l1l2, n1 =
(m1
2+ m2
)l1, n2 =
m2
2l2,
ou m1 et m2 (resp. l1 et l2) sont les masses (resp. longueurs) des barres 1 et 2 supposees homogenes.
Proposition 4 SiI
n1
= I2
n2
etI1
n1
= I
n2
, le systeme (5.27) avec les commandes u et v n’est pas
plat.
Preuve. Appliquons le critere necessaire ci-dessus. Comme u = x et v = z, (5.27) est plat, si et

Introduction a la Commande Non Lineaire 39
seulement si, le systeme reduit,
p1 = I1α1 + Iα2 cos(α1 − α2) + n1x cosα1 − n1z sinα1
p2 = Iα1 cos(α1 − α2) + I2α2 + n2x cosα2 − n2z sinα2
p1 = n1g sinα1 − n1α1x sinα1 − n1α1z cosα1
p2 = n2g sinα2 − n2α2x sinα2 − n2α2z cosα2
(5.28)
est plat. On note F (ξ, ξ) = 0 les equations (5.28) ou ξ = (α1, α2, x, z, p1, p2). Considerons (ξ, ζ) telque F (ξ, ζ) = 0. On cherche un vecteur non nul γ = (γα1 , γα2 , γx, γz, γp1 , γp2) tel que, pour tout λ ∈R, F (ξ, ζ+λγ) = 0. Remplacons donc ζ par ζ+λγ dans (5.28). On obtient 4 polynomes du second
degre en λ qui doivent etre identiquement nuls. Le coefficient associe a λ2, soitd2
dλ2
∣∣∣∣λ=0
F (ξ, ζ +
λγ), devant etre nul, il vient
γα1(γx sinα1 + γz cosα1) = 0, γα2(γx sinα2 + γz cosα2) = 0.
Utilisant deux autres conditions obtenues a partir des coefficients du premier degre en λ, quidoivent aussi etre nuls, on obtient
−γx cosα1 + γz sinα1 = I1
n1γα1 + I
n1cos(α1 − α2)γα2
−γx cosα2 + γz sinα2 = In2
cos(α1 − α2)γα1 + I2n2γα2
Des calculs elementaires montrent que, siI
n1
= I2
n2
etI1
n1
= I
n2
(conditions toujours realisees
pour deux barres homogenes), alors (γα1 , γα2 , γx, γz) = 0 et, utilisant les deux dernieres conditionsobtenues a partir des termes du premier degre en λ, il vient (γp1 , γp2) = 0. Ainsi γ = 0 et le doublependule inverse commande en vitesse n’est pas plat.

Chapitre 6
Planification et suivi de trajectoirespour les systemes plats
6.1 Platitude et planification de trajectoires
Rappelons les relations donnant l’etat x et l’entree u en fonction de la sortie plate y et d’unnombre fini de ses derivees :
x = ψ(y, y, . . . , y(s)) , u = β(y, y, . . . , y(s+1)). (6.1)
L’une des proprietes fondamentales des systemes plats est donc que l’etat et l’entree peuvent etreobtenus directement sans integration, a partir de la sortie plate y dont les composantes sontlibres. On peut donc suivre des trajectoires arbitraires (suffisamment derivables) dans l’espacedes (y, y, . . . , y(s+1)) et en deduire les trajectoires correspondantes de l’etat et de l’entree sans avoira integrer d’equation differentielle, d’ou l’interet pour resoudre le probleme de la planification detrajectoire (motion planning).
Plus precisement, si l’on veut aller du point x(ti) = xi a l’instant initial ti, avec u(ti) = ui, aupoint x(tf ) = xf a l’instant final tf , avec u(tf ) = uf , le systeme etant plat par hypothese, il suffitde calculer y(ti), y(ti), . . . , y
(s+1)(ti) en fonction de x(ti) et u(ti), et y(tf ), y(tf ), . . . , y(s+1)(tf ) en
fonction de x(tf ) et u(tf ), ce qui est possible grace aux relations (6.1) puisque la paire de fonctions(ψ, β) est surjective par definition. Comme les composantes de y et leurs derivees ne sont soumisesa aucune autre contrainte dans l’intervalle ouvert ]ti, tf [, on peut trouver une trajectoire t �→ yj(t)polynomiale par rapport au temps t pour tout j = 1, . . . ,m : comme chaque composante de ydoit verifier s + 2 conditions initiales et s + 2 conditions finales, le degre minimal du polynomed’interpolation sera 2(s + 2)− 1 = 2s + 3. On aura donc pour tout j = 1, . . . ,m,
yj(t) = yj(ti) +2s+3∑k=1
aj,k
(t− titf − ti
)k
(6.2)
les coefficients aj,k etant calcules en fonction des donnees intiales et finales par la resolution d’unsysteme lineaire (voir le chapitre 1.3).
40

Introduction a la Commande Non Lineaire 41
On obtient de cette facon, et sans integrer les equations differentielles du systeme, les trajec-toires t �→ x(t) et t �→ u(t) en reportant y obtenu par (6.2) dans (6.1).
La meme approche peut etre utilisee en presence de contraintes diverses, qu’il s’agisse decontraintes geometriques sur les courbes de reference du type A(y1, y2, . . . , ym) = 0 (voir 1.3.2), oude saturations sur les composantes de la sortie plate et leurs derivees et les commandes (voir 1.3.3).
6.1.1 Vehicule sans remorque
Commencons par appliquer la methode au vehicule decrit en 5.2.4. Supposons qu’on veuillerealiser un creneau le long d’un trottoir en marche arriere. La position de depart, a l’instant ti, estnotee (xi, yi), l’axe du vehicule et les roues avant paralleles a l’axe des x, et la position finale, al’instant tf , est notee (xf , yf ), l’axe du vehicule et les roues avant toujours paralleles a l’axe des x.On suppose, pour simplifier, que la vitesse initiale (horizontale) −vi est strictement negative ainsique la vitesse finale −vf . Le cas des vitesses vi et vf nulles est plus delicat a cause de la presencede singularites, et sera etudie separement au paragraphe 6.3.
La contrainte geometrique s’exprime donc ici par le choix d’une fonction y = Y (x) telle que
yi = Y (xi) , 0 =dY
dx(xi) , 0 =
d2Y
dx2(xi) et yf = Y (xf ) , 0 =
dY
dx(xf ) , 0 =
d2Y
dx2(xf ) .
La fonction
Y (x) = yi + (yf − yi)
(x− xixf − xi
)3(
10− 15
(x− xixf − xi
)+ 6
(x− xixf − xi
)2)
satisfait ces contraintes.On doit donc maintenant trouver une courbe t �→ x(t) telle que x(ti) = xi, x(ti) = −vi et
x(tf ) = xf , x(tf ) = −vf .L’interpolation polynomiale donne, en posant s(t) =
t− titf − ti
,
x(t) = xi + (xf − xi)s2(t) (3− 2s(t)) + (tf − ti)s(t)
(−vi + (vf + 2vi)s(t)− (vf + vi)s
2(t))
.
Il suffit alors de composer y(t) = Y (x(t)) pour avoir la trajectoire du milieu de l’essieu arriere duvehicule. Le reste des variables s’obtient par les formules (5.16), (5.17).
6.1.2 Vehicule a remorques
Montrons maintenant comment cette approche s’applique dans le cas du camion a plusieursremorques (voir par exemple [17]) decrit sur la figure 6.1, chaque remorque etant attachee aumilieu de l’essieu arriere de la remorque qui la precede.

Introduction a la Commande Non Lineaire 42
θ0
d1
d0
Q
P0
θ1
d2θ2
θn-1dn
dn-1
θn
Pn
Pn-1
P1
P2
xn
yn
ϕ
xn-1 x2 x1 x0
yn-1
y2
y1
y0
Fig. 6.1: Le camion a n remorques.
Les equations du systeme, conditions de roulement sans glissement incluses, sont donnees par
x0 = u cos θ0
y0 = u sin θ0
θ0 =u
d0
tanϕ
θi =u
di
(i−1∏j=1
cos(θj−1 − θj)
)sin(θi−1 − θi) , i = 1, . . . , n .
(6.3)
avec la convention, pour i = 1,0∏j=1
cos(θj−1 − θj)def= 1.
Rappelons que u est le module de la vitesse du vehicule de tete et constitue l’une des deuxcommandes, la seconde etant l’angle ϕ des roues avant.
Montrons que les coordonnees (xn, yn) du milieu de l’essieu arriere de la derniere remorqueconstitue une sortie plate. On verifie facilement par recurrence que le module de la vitesse ui de

Introduction a la Commande Non Lineaire 43
Pi-1
Pi
Pi-1
Pi
θi-1
θi
θi
θi-1
Ci-1Ci
Fig. 6.2: Interpretation geometrique des conditions de roulement sans glissement.
la ieme remorque verifie
ui = ui∏
j=1
cos(θj−1 − θj) , i = 1, . . . , n
et quexi = ui cos θi , yi = ui sin θi
si bien que
tan θn =ynxn
et donc sin θn =yn
(x2n + y2
n)12
et cos θn =xn
(x2n + y2
n)12
. Comme, en outre, on a xn−1 = xn + dn cos θn
et yn−1 = yn + dn sin θn, d’une part et tan θn−1 =yn−1
xn−1
d’autre part, il vient immediatement que
xn−1 et yn−1 s’expriment en fonction de xn, yn et leurs derivees premieres et que θn−1 s’exprimeen fonction de xn, yn et leurs derivees jusqu’au second ordre.
On montre de la meme maniere, de proche ne proche, que tous les xi et yi s’expriment enfonction de xn, yn et leurs derivees jusqu’a l’ordre n− i, et que les θi s’expriment en fonction dexn, yn et leurs derivees jusqu’a l’ordre n− i + 1, i = 0, . . . n. Finalement, on deduit que u est unefonction de xn, yn et leurs derivees jusqu’a l’ordre n + 1 et de meme jusqu’a l’odre n + 2, ce quiacheve de prouver notre assertion.

Introduction a la Commande Non Lineaire 44
Cette propriete peut etre directement verifiee sur la figure 6.2.Pour la planification de trajectoires, il suffit donc d’assigner les trajectoires du milieu de l’essieu
arriere du dernier chariot et on pourra suivre des trajectoires arbitraires n + 2 fois derivables. Laconstruction des trajectoires de reference, par exemple dans le cas du creneau depart axe et rouesparalleles au trottoir et arrivee le long du trottoir, roues paralleles au trottoir (on suppose sansperte de generalite que le trottoir est parallele a l’axe Ox) et avec vitesses initiale et finale nonnulles, se fait de facon analogue au cas sans remorque du debut de ce paragraphe : on commencepar se donner une courbe polynomiale yn = Y (xn) dont toutes les derivees sont nulles jusqu’al’ordre n+ 2 au depart et a l’arrivee, d’ou un polynome de degre 2n+ 3. On calcule ensuite la loihoraire t �→ xn(t) comme precedemment en tenant compte des conditions sur les positions et lesvitesses initiales et finales de chaque remorque. Notons que l’alignement de toutes les remorquesau depart comme a l’arrivee est deja contenu dans la fonction Y et u’il ne reste qu’a tenir comptedes vitesses initiale et finale du point xn, ce qui fait donc 4 conditions, soit un degre au moins egala 3.
6.2 Platitude et suivi de trajectoires
Le suivi de trajectoires, dans un domaine ouvert ne contenant pas de point singulier (pointou l’isomorphisme de Lie-Backlund degenere ou n’est plus defini) se fait grace au theoreme 5 surl’equivalence par bouclage dynamique endogene a un systeme trivial. En effet, si y est la sortieplate correspondant a l’etat x et l’entree u reels, et si y∗ est la trajectoire de reference de lasortie plate, posons ei = yi − y∗i , i = 1, . . . ,m. Par le theoreme 5, on sait construire un bouclagedynamique endogene tel que le systeme s’ecrive, a un diffeomorphisme pres, y(ν+1) = v. Si l’onpose v∗ = (y∗)(ν+1), l’equation d’erreur en e s’ecrit
e(ν+1) = v − v∗ .
Il suffit alors de poser, composante par composante :
vi = v∗i +ν∑j=0
ki,je(j)i , i = 1, . . . ,m
avec les gains ki,j tels que les m polynomes sν+1 −∑ν
j=0 ki,js(j) = 0 aient toutes leurs racines a
partie reelle strictement negative, i = 1, . . . ,m. On montre alors tres facilement que e convergeexponentiellement vers 0 et que, grace a la differentiabilite de l’isomorphisme de Lie-Backlund,l’ensemble des variables x et u du systeme originel convergent localement exponentiellement versleur reference.

Introduction a la Commande Non Lineaire 45
6.2.1 Pendule (suite et fin)
Reprenons le bouclage dynamique endogene calcule au paragraphe 5.4.3. Utilisant (5.24) et(5.25), le systeme boucle s’ecrit, pour w1 = 0,
x = (w1 + εθ2) sin θ − ε
w1
(v1 cos θ − v2 sin θ − 2w1θ) cos θ
z = (w1 + εθ2) cos θ +ε
w1
(v1 cos θ − v2 sin θ − 2w1θ) sin θ − 1
εθ =ε
w1
(v1 cos θ − v2 sin θ − 2w1θ)
w1 = v1 sin θ + v2 cos θ + w1θ2 .
Donc, si v∗1 et v∗2 sont les entrees de reference correspondant aux trajectoires de reference y∗1 et y∗2,et si l’on mesure tout l’etat (x, x, z, z, θ, θ), il suffit de choisir
vi = v∗i +3∑j=0
ki,j(y(j)i − (y∗i )
(j)) , i = 1, 2 ,
en remplacant les y(j)i et (y∗i )
(j) par leurs expressions en fonction de (x, x, z, z, θ, θ, w1, w1), pouravoir la convergence exponentielle locale de l’ensemble des variables (x, x, z, z, θ, θ, w1, w1) versleur reference.
6.2.2 Vehicule non holonome (suite et fin)
Reprenons le bouclage obtenu au paragraphe 5.4.4 :
x = v cos θy = v sin θ
θ =1
v(−v1 sin θ + v2 cos θ)
v = v1 cos θ + v2 sin θ .
Si l’on mesure l’etat (x, y, θ), et si la vitesse v ne s’annule pas, on peut poser, commeprecedemment,
v1 = v∗1 +1∑j=0
k1,j(x(j) − (x∗)(j)) , v2 = v∗2 +
1∑j=0
k2,j(y(j) − (y∗)(j))
pour obtenir la convergence de x, y et θ vers leurs references.

Introduction a la Commande Non Lineaire 46
6.3 Singularites, changement de temps
Pour tous les exemples precedents, si les trajectoires de consigne ne passent pas par des pointssinguliers, la stabilisation de ces trajectoires se fait de facon immediate en stabilisant l’equationde l’erreur par rapport a la trajectoire de consigne dans les coordonnees plates et revient a placerles poles d’un systeme lineaire stationnaire.
Cependant, le probleme est plus delicat en presence de singularites. Dans le cas du vehicule avecou sans remorques, tous les points a vitesse nulle sont des points d’equilibre degeneres. Verifier(exercice) que ces points d’equilibre ne sont pas commandables au 1er ordre. Or la command-abilite au 1er ordre est necessaire pour la platitude puisqu’un systeme plat est equivalent a unsysteme lineaire commandable (lineaire donc commandable au 1er ordre puisqu’il n’y a pas d’ordresuperieur). Cependant, on peut quelquefois utiliser un procede de desingularisation pour rendre lesysteme plat apres une transformation, elle-meme singuliere. Dans le cas que nous allons etudier,un changement de temps permet de desingulariser, et ainsi de stabiliser, dans un sens qui seraprecise plus loin, la trajectoire de consigne.
Notons qu’en reference a des resultats de Brockett et de Coron [5, 11], il n’existe pas dans ce casde bouclage d’etat continu et independant du temps qui stabilise asymptotiquement le systeme.
6.3.1 Singularites, desingularisation
Definition 5 Etant donnes un systeme plat (M, F ) et Φ l’isomorphisme de Lie-Backlund vers lesysteme trivial (R∞m , Tm), nous dirons que le point p ∈M est singulier si l’application Φ n’est pasbijective, ou pas definie, au point p. Dans tous les autres cas, nous dirons que p est regulier.
Notons que cette definition ne depend pas du choix des coordonnees sur M.
Definition 6 Soit t �→ ξ(t) une courbe integrale du systeme (M, F ) passant par le point p ∈ M
au temps T fini ou non. On dit que l’homeomorphisme σ de M dans M est une desingularisationsi la trajectoire image t �→ σ(ξ(t)) est partout reguliere. On dit alors que Φ est desingularise aupoint p.
On s’interesse dans la suite de ce paragraphe au cas ou p est un point d’equilibre singulier(i.e. F (p) = 0 et p singulier). Notons qu’on peut toujours se ramener au cas ou le point p estl’origine : le changement de coordonnees q = q − p est tel que F (q) = F (q + p) = F (q) etF (p) = F (0, 0, . . .) = 0.
6.3.2 Systemes homogenes et changement de temps
Considerons un systeme de la forme x = f(x, u), avec u = (u1, . . . , um) et f homogene d’ordreα > 0 par rapport a u1, i.e. f(x, λu1, u2, . . . , um) = λαf(x, u1, u2, . . . , um) pour tout (x, u) et toutscalaire λ > 0.
Pour cette famille de systemes, on peut facilement mettre en evidence une desingularisationexplicite.

Introduction a la Commande Non Lineaire 47
Considerons en effet le point p = 0 ∈ M singulier, un reel T > 0 fini ou non et F (0) =(f(0, 0), 0, . . .) = 0.
Supposons qu’il existe des courbes integrales t �→ ξ(t) = (x(t), u(t), u(t), . . .) de F telles que(x(T ), u(T )) = (0, 0) (dans le cas ou T = ∞, il faut remplacer cette derniere condition parlimt→∞(x(t), u(t)) = (0, 0)) avec u1, la premiere composante de u, differentiable et de signe con-
stant sur [0, T ], verifiant
∫ T
0
|u1(t)|αdt <∞.
Supposons aussi qu’il existe v un scalaire = 0, de meme signe que u1, et tel que, si l’on posev = (v, 0, . . . , 0) ∈ Rm, le point p = (0, v, 0, . . .) ∈M est regulier et f(0, v) = 0 (autrement dit, pn’est pas un point d’equilibre de F et est regulier).
Posons alors
λ(t) =u1(t)
v.
Par la propriete d’homogeneite, il vient
f(x(t), u(t)) = λα(t)f(x(t), v, u2(t), . . . , um(t)) .
La fonction scalaire t �→ λ(t) ainsi definie est non negative et, comme u1, differentiable sur [0, T ]
avec limt→T λ(t) = 0. De plus,
∫ T
0
λα(t)dt =
∫ T
0
(u1(t)
v
)α
dt =1
|v|α∫ T
0
|u1(t)|αdt def= Λ < ∞ et
limt→T f(x(t), v, u2(t), . . . , um(t)) = f(0, v) = 0.Posons alors
τ(t) =
∫ t
0
λα(s)ds , σ(x(t), u(t), u(t), . . .) = (x(τ(t)), u(τ(t)),d
dτu(τ(t)), . . .) (6.4)
On a alors :
Proposition 5 Si la trajectoire t �→ ξ(t) consideree est telle que tous les points ξ(t) pour t = Tsont reguliers, alors l’application σ definie par (6.4) est une desingularisation.
L’interet de ce resultat reside dans le fait que pour planifier ou stabiliser une trajectoire passantpar un point singulier, il suffit de le faire sur la trajectoire transformee par la desingularisationσ, planification et stabilisation qui peuvent alors etre concus (avec la variable τ remplacant letemps) comme dans les chapitres precedents puisque, hors singularites, le systeme est plat. Ilest important cependant de noter que la stabilisation de l’erreur de suivi par rapport a τ n’estpas equivalente a la stabilisation asymptotique au sens usuel. En effet, comme τ varie entre 0 etΛ < ∞, meme si l’on realise une stabilisation exponentielle en τ , l’erreur ne tendra pas vers 0.Par contre, l’erreur initiale sera d’autant plus reduite que Λ est grand. Nous appellerons ce typede stabilisation “stabilisation pratique” dans la suite.

Introduction a la Commande Non Lineaire 48
6.3.3 Application au depart et a l’arret d’un vehicule non holonome
Revenons au modele (5.15) et remarquons qu’il est homogene d’ordre 1 : ici le champ
de vecteurs f a pour composantes (u cos θ, u sin θ,u
ltanϕ), si bien que f(x, y, θ, λu, ϕ) =
(λu cos θ, λu sin θ,λu
ltanϕ) = λ(u cos θ, u sin θ,
u
ltanϕ) = λf(x, y, θ, u, ϕ) pour tout λ.
Soient donc v0 = 0 et τ verifiantdτ
dt=
u
v0
ou
τ(t) =1
v0
∫ t
ti
u(s)ds .
Comme u est le module de la vitesse, τ represente, au facteur v0 pres, la longueur d’arc sur lacourbe y = Y (x) solution de (5.15) (apres elimination du temps). En effet,
dτ
dt=
u
v0
=
√x2 + y2
v0
=x
v0
√1 +
(y
x
)2
=x
v0
√1 +
(dy
dx
)2
d’ou l’on tire v0dτ
dx=
√1 +
(dy
dx
)2
, ou v0τ(x) =
∫ x
xi
√1 +
(dy
dx(s)
)2
ds, ce qui prouve notre
assertion. Par consequent, si L est la longueur totale, L =
∫ xf
xi
√1 +
(dy
dx(s)
)2
ds, on a Λ =L
v0
.
Supposons qu’on veuille partir a l’instant ti du point (xi, yi) avec ui = 0 (vitesse nulle) etϕi = 0 (roues paralleles au trottoir) et arriver a l’instant tf au point (xf , yf ) avec uf = 0 etϕf = 0. La planification de trajectoire se fait, par rapport a τ , comme au paragraphe 6.1.1 avec
v0 = vi = vf , puis on cherche τ(t) defini par τ(ti) = 0, τ(tf ) = Λ,dτ
dt(ti) = 0,
dτ
dt(tf ) = 0. Il vient
donc
τ(t) = Λ
(t− titf − ti
)2 (3− 2
(t− titf − ti
)),
formule que l’on compose avec
Y (x) = yi + (yf − yi)
(x− xixf − xi
)3(
10− 15
(x− xixf − xi
)+ 6
(x− xixf − xi
)2)
et
x(τ) = xi + (xf − xi)( τ
Λ
)2 (3− 2
( τ
Λ
))− v0(tf − ti)
( τ
Λ
) (1− 3
( τ
Λ
)+ 2
( τ
Λ
)2)
.
Supposons maintenant que l’on mesure la position relative du milieu de l’essieu arriere parrapport au trottoir, l’angle θ d’orientation du vehicule, l’angle des roues ϕ et le module de la

Introduction a la Commande Non Lineaire 49
vitesse u du vehicule. On veut suivre la trajectoire de reference construite ci-dessus avec stabiliteen depit de perturbations exterieures (glissement des roues, mesures bruitees, etc.). On peut alorsutiliser la meme desingularisation (6.4).
En effet, notons la trajectoire de reference x∗, y∗ et les entrees correspondantes u∗ et ϕ∗.Prenons, pour simplifier (sans perte de generalite) v0 = 1 et posons
τ(t) =1
v0
∫ t
ti
u∗(s)ds =
∫ t
ti
u∗(s)ds .
Si l’on pose
v =u
u∗
rapport entre la commande de vitesse reellement appliquee au vehicule et sa reference, le systemes’ecrit alors
dx
dτ= v cos θ ,
dy
dτ= v sin θ ,
dθ
dτ=
v
ltanϕ .
On est alors ramenes a la construction de la boucle fermee du paragraphe 6.2.2, en remplacantt par τ :
dx
dτ= v cos θ
dy
dτ= v sin θ
dθ
dτ=
1
v(−v1 sin θ + v2 cos θ)
dv
dτ= v1 cos θ + v2 sin θ .
avec tanϕ =l
v2(−v1 sin θ + v2 cos θ), et en posant
v1 = v∗1 +1∑j=0
k1,j
(djx
dτ j− djx∗
dτ j
), v2 = v∗2 +
1∑j=0
k2,j
(djy
dτ j− djy∗
dτ j
)
pour obtenir la convergence (par rapport a τ) de x, y et θ vers leurs references. Notons que lapresence des termes 1
vet l
v2dans le compensateur dynamique n’est plus ici un probleme si la
trajectoire est suffisamment proche de sa reference puisqu’alors, par definition, v = uu∗ est proche
de 1. Par ailleurs, le bouclage propose assure que
|x(τ)− x∗(τ)| ≤ C1 exp(−α1τ) , |y(τ)− y∗(τ)| ≤ C2 exp(−α2τ)
ou αi est la partie reelle de la plus grande racine du polynome s2 − ki,1s− ki,0, i = 1, 2, les gainski,j ayant ete choisis de sorte que toutes les racines soient a partie reelle strictement negative.Cependant, comme nous l’avons annonce au debut de ce paragraphe, τ ∈ [0,Λ] avec ici Λ = L

Introduction a la Commande Non Lineaire 50
longueur totale de la courbe de reference, qui est finie. On a donc obtenu une methode permettantde contracter l’erreur mais pas de la faire tendre vers 0, c’est ce que nous avons appele stabilisationpratique, puisque si L et le choix des racines sont suffisants pour faire decroıtre convenablementl’erreur, la convergence a 0 n’est pas necessaire.
Pour donner un exemple du comportement du vehicule en boucle fermee, la simulation suivantemontre comment le vehicule se rapproche de sa trajectoire de reference pour une erreur sur la po-sition initiale (xi, yi) du milieu de l’essieu arriere, de l’orientation du vehicule θi et de l’orientationdes roues ϕi. La longueur du trajet est de l’ordre de 3 fois la longueur du vehicule et les racinesα1 et α2 sont toutes deux egales a -2.
trajectoire de rtrajectoire de r�f�rence
d�but
fin
conÞguration initialeguration initiale
sortie plate
Notons que pour le trajet inverse (en marche avant), le signe de τ serait positif, oppose decelui en marche arriere, ce qui implique que les racines αi devraient etre choisies positives pourstabiliser l’erreur de suivi.

Chapitre 7
Defaut, commande haute frequence
Un systeme non plat est un systeme pour lequel aucune sortie ne permet de resumer l’etat etl’entree par des relations statiques du type x = φ(y, y, . . . , y(α)) , u = ψ(y, y, . . . , y(β)).
Il reste donc necessairement des relations differentielles entre l’etat et la sortie et entre l’entreeet la sortie. Le defaut d’un systeme est defini comme le nombre minimum de telles relationsdifferentielles independantes pour tout choix de sortie.
7.1 Pendule inverse de Kapitsa
Nous proposons une methode pour commander les systemes non plats. La methode consiste aintroduire un terme oscillant rapidement dans la commande. Cela nous permet de considerer lesysteme moyenne qui contient plus de commande et qui devient plat. Cette methode peut etreutilisee sur le double pendule inverse 5.4. Pour des raisons pedagogiques, nous la presentons ici endetail sur le simple pendule de Kapitsa ou les calculs sont simples.
Plus precisement nous reprenons une idee du physicien russe Kapitsa. Il considere le mouve-ment d’une particule dans un champ de force oscillante et il propose une methode pour obtenirles equations du mouvement moyen et du potentiel. Ainsi la position inversee du pendule est “sta-bilisee” lorsque la position de son point de suspension oscille rapidement dans un plan vertical.
7.1.1 Les equations
Les notations sont rappelees sur la figure 7.1. On suppose que la commande physique est lavitesse verticale du point de suspension z = u. Les equations du mouvement sont les suivantes :
α = p +
u
lsinα
p =
(g
l− u2
l2cosα
)sinα− u
lp cosα
z = u
(7.1)
51

Introduction a la Commande Non Lineaire 52
gα
z
l
m
Fig. 7.1: le pendule de Kapitsa.
ou p est proportionnel a l’impulsion generalisee ; g est l sont des constantes physiques > 0. Cesysteme n’est pas plat (utiliser, par exemple, le critere de platitude). Son defaut est egal a 1.Cependant il est fortement accessible.
7.1.2 La commande haute frequence
On poseu = u1 + u2 cos(t/ε)
ou u1 et u2 sont des commandes auxxiliaires et 0 < ε�√
l/g.Il est alors naturel de considerer le systeme moyen :
α = p +
u1
lsinα
p =
(g
l− (u1)
2
l2cosα− (u2)
2
2l2cosα
)sinα− u1
lp cosα
z = u1.
(7.2)
Le systeme moyen admet deux commandes, u1 et u2, alors que le systeme physique (7.1) enadmet une seule. De plus (7.2) est plat avec (α, z) comme sortie linearisante.
Ainsi, le bouclage endogene
ξ = v1
u1 = ξ
u2 =
√2l
cosα(g + v1)−
2l2
cosα sinαv2
(7.3)
transforme (7.2) en {z = v1
α = v2.(7.4)

Introduction a la Commande Non Lineaire 53
On pose
v1 = −(
1
τ1
+1
τ2
)ξ − 1
τ1τ2
(z − zsp)
v2 = −(
1
τ1
+1
τ2
) (p +
ξ
lsinα
)− 1
τ1τ2
(α− αsp)
(7.5)
ou τ1, τ2 > 0 sont des parametres et αsp ∈] − π/2, π/2[/{0}. Alors, le systeme moyen en bouclefermee (7.2,7.3,7.5) admet un point d’equilibre hyperboliquement stable (zsp, αsp).
Considerons maintenant (7.1) et la commande haute frequence u = u1 + u2 sin(t/ε) avec0 < ε �
√l/g et (u1, u2) donne par (7.3,7.5) ou α, p et z sont remplaces par α, p et z. Alors,
le systeme moyen associe n’est rien d’autre que (7.4) avec v1 et v2 verifiant (7.5). Comme iladmet un point d’equilibre hyperboliquement stable, le systeme perturbe admet une petit cyclelimite attracteur autour de (α, p, z) = (αsp, 0, zsp) : une telle commande maintient (z, α) prochede (zsp, αsp). De plus, cette commande est robuste : l’existence et la stabilite du petit cycle limitene sont pas deduites par des erreurs statiques sur l et g ou sur les mesures de α, p, z et u.
Comme le montrent les simulations de la figure 7.2, la generalisation au suivi de trajectoiresest immediate. Ces simulations fournissent egalement une estimation des erreurs qui peuvent etretolerees par la commande. Les parametres du systemes sont l = 0.10 m et g = 9.81 ms−2. Lesparametres de la commande sont ε = 0.025/2π s et τ1 = τ2 = 0.10 s. Pour les deux courbes enhaut de la figure 7.2, aucune erreur n’est introduite : la commande est calculee avec l = 0.10 met g = 9.81 ms−2. Pour les deux courbes en bas de la figure 7.2, des erreurs sont introduites : lacommande est calculee avec l = 0.11 m et g = 9.00 ms−2.

Introduction a la Commande Non Lineaire 54
0.4
0.6
0.8
1
1.2
0 1 2
time (s)
(rd)
no parameter error
0
0.5
1
0 1 2
time (s)
v (m
)
no parameter error
0.4
0.6
0.8
1
1.2
0 1 2
time (s)
(rd)
parameter error
0
0.5
1
0 1 2
time (s)
v (m
)
parameter error
αα
zz
Fig. 7.2: robustesse de la commande haute frequence du pendule de Kapitsa.

Bibliographie
[1] R. L. Anderson and N. H. Ibragimov. Lie-Backlund Transformations in Applications. SIAM,Philadelphia, 1979.
[2] B. d’ Andrea-Novel and J. Levine. Modelling and nonlinear control of an overhead crane. InM.A. Kashoek, J.H. van Schuppen, and A.C.M. Rand, editors, Robust Control of Linear andNonlinear Systems, MTNS’89, volume II, pages 523–529. Birkhauser, Boston, 1990.
[3] R. Baron, J. Levine, and M. Mastail. Modelling and control of a fish extrusion process. InProc. 1st IMACS/IFAC Conf. on Mathematical Modelling and Simulation in Agriculture andBio-industries, Bruxelles, May 1995.
[4] L. Bitauld, M. Fliess, and J. Levine. A flatness based control synthesis of linear systems andapplication to windshield wipers. In Proc. ECC’97, Brussels, July 1997.
[5] R.W. Brockett. Asymptotic stability and feedback stabilization. In R.W. Brockett, R.S.Millman, and H.J. Sussmann, editors, Differential Geometric Control Theory, pages 181–191.Birkhauser, Boston, 1983.
[6] P. Brunovsky. A classification of linear controllable systems. Kibernetica, 3 :173–187, 1970.
[7] E. Cartan. Sur l’equivalence absolue de certains systemes d’equations differentielles et surcertaines familles de courbes. Bull. Soc. Math. France, 42 :12–48, 1914. reedite in OeuvresCompletes, part II, vol 2, pp. 1133–1168, CNRS, Paris, 1984.
[8] B. Charlet, J. Levine, and R. Marino. On dynamic feedback linearization. Systems ControlLetters, 13 :143–151, 1989.
[9] B. Charlet, J. Levine, and R. Marino. Sufficient conditions for dynamic state feedback lin-earization. SIAM J. Control Optimization, 29(1) :38–57, 1991.
[10] D. Cheng. Linearization with dynamic compensation. J. Sys. Sci., 7 :63–83, 1987.
[11] J.M. Coron. Global asymptotic stabilization for controllable systems without drift. Mathe-matics of Control, Signals and Systems, 5 :295–312, 1992.
[12] N. Fenichel. Geometric singular perturbation theory for ordinary differential equations. J.Diff. Equations, 31 :53–98, 1979.
[13] M. Fliess and S.T. Glad. An algebraic approach to linear and nonlinear control. In H.J.Trentelman and J.C. Willems, editors, Essays on Control : Perspectives in the Theory andits Applications, pages 223–267. Birkhauser, Boston, 1993.
55

Introduction a la Commande Non Lineaire 56
[14] M. Fliess, J. Levine, Ph. Martin, F. Ollivier, and P. Rouchon. A remark on nonlinear acces-sibility conditions and infinite prolongations. Systems and Control Letters, 31 :77–83, 1997.
[15] M. Fliess, J. Levine, Ph. Martin, and P. Rouchon. On differentially flat nonlinear systems.In Proc. IFAC-Symposium NOLCOS’92, Bordeaux, pages 408–412, 1992.
[16] M. Fliess, J. Levine, Ph. Martin, and P. Rouchon. Sur les systemes non lineairesdifferentiellement plats. C.R. Acad. Sci. Paris, I–315 :619–624, 1992.
[17] M. Fliess, J. Levine, Ph. Martin, and P. Rouchon. Flatness and defect of nonlinear systems :introductory theory and examples. Int. J. Control, 61(6) :1327–1361, 1995.
[18] M. Fliess, J. Levine, Ph. Martin, and P. Rouchon. A Lie-Backlund approach to equivalenceand flatness of nonlinear systems. IEEE Trans. Automat. Control, 44(5) :922–937, 1999.
[19] M. Fliess, J. Levine, and P. Rouchon. A simplified approach of crane control via a generalizedstate-space model. In Proc. 30th IEEE Control Decision Conf., Brighton, pages 736–741, 1991.
[20] M. Fliess, J. Levine, and P. Rouchon. A generalized state variable representation for asimplified crane description. Int. J. Control, 58 :277–283, 1993.
[21] J. Fuka and R. Susta. Teaching model : backing up trailers. Technical report, Faculty ofElectrical Engineering, Department of Control Engineering, Karlovo nam. 13, 121 35 Prague,Czechoslovakia., 1992.
[22] T. Gustafsson. On the design and implementation of a rotary crane controller. European J.Control, 2 :166–175, 1996.
[23] G.W. Haynes and H. Hermes. Nonlinear controllability via Lie theory. SIAM J. Contr.,8 :450–460, 1970.
[24] R. Hermann and A.J. Krener. Nonlinear controllability and observability. IEEE Trans.Automatic Control, 22 :728–740, 1977.
[25] D. Hilbert. Uber den Begriff der Klasse von Differentialgleichungen. Math. Ann., 73 :95–108,1912. also in Gesammelte Abhandlungen, vol. III, pp. 81–93, Chelsea, New York, 1965.
[26] M.W. Hirsch, C.C. Pugh, and M. Shub. Invariant Manifolds. Lecture Note in Mathematics.Springer, 1977.
[27] M.W. Hirsch and S. Smale. Differential Equations, Dynamical Systems and Linear Algebra.Acamedic Press, New-York, 1974.
[28] L.R. Hunt, R. Su, and G. Meyer. Design for multi-input nonlinear systems. In R.W. Brockett,R.S. Millman, and H.J. Sussmann, editors, Differential Geometric Control Theory, pages 268–298. Birkhauser, Boston, 1983.
[29] L.R. Hunt, R. Su, and G. Meyer. Global transformations of nonlinear systems. IEEE Trans.Automat. Control, 28 :24–31, 1983.
[30] N. H. Ibragimov. Transformation Groups Applied to Mathematical Physics. Reidel, Boston,1985.
[31] A. Isidori. Nonlinear Control Systems. Springer, New York, 3rd edition, 1995.

Introduction a la Commande Non Lineaire 57
[32] A. Isidori, C. Moog, and A. De Luca. A sufficient condition for full linearization via dynamicstate feedback. In Proc. of 25th. IEEE Conf. Decision Control, Athens, pages 203–207, 1986.
[33] B. Jakubczyk. Remarks on equivalence and linearization of nonlinear systems. In Proc.IFAC-Symposium NOLCOS’92, Bordeaux, pages 393–397, 1992.
[34] B. Jakubczyk and W. Respondek. On linearization of control systems. Bull. Acad. Pol. Sci.Ser. Sci. Math., 28(9–10) :517–522, 1980.
[35] T. Kailath. Linear Systems. Prentice Hall, Englewood Cliffs, NJ, 1980.
[36] H. K. Khalil. Nonlinear Systems. Prentice Hall, Englewood Cliffs, NJ, 1996.
[37] P.V. Kokotovic. Application of singular perturbation techniques to control problems. SIAMReview, 26(4) :501–550, 1984.
[38] P.V. Kokotovic, H.K. Khalil, and J. O’Reilly. Singular Perturbation Methods in Control :Analysis and Design. Academic Press, London, 1986.
[39] I. S. Krasil’shchik, V. V. Lychagin, and A. M. Vinogradov. Geometry of Jet Spaces andNonlinear Partial Differential Equations. Gordon and Breach, New York, 1986.
[40] A.J. Krener. Approximate linearization by state feedback and coordinate change. SystemsControl Lett., 5 :181–185, 1984.
[41] M. Krstic, I. Kanellakopoulos, and P. Kokotovic. Nonlinear and Adaptive Control Design.Wiley, New York, 1995.
[42] J.P. Laumond. Controllability of a multibody mobile robot. In IEEE International Conf. onadvanced robotics, 91 ICAR, pages 1033–1038, 1991.
[43] J.P. Laumond and T. Simeon. Motion planning for a two degrees of freedom mobile withtowing. In IEEE International Conf. on Control and Applications, 1989.
[44] J. Levine. Static and dynamic state feedback linearization. In D. Normand-Cyrot A. Fossard,editor, Nonlinear Systems, volume 3, pages 93–126. Chapman & Hall, 1997.
[45] J. Levine. Are there new industrial perspectives in the control of mechanical systems ? In P.M.Frank, editor, Advances in Control, Highlights of ECC’99, pages 197–226. Springer, London,1999.
[46] J. Levine, J. Lottin, and J. C. Ponsart. A nonlinear approach to the control of magneticbearings. IEEE Trans. Control Systems Technology, 4(5) :524–544, 1996.
[47] J. Levine and P. Rouchon. An invariant manifold appraoch for robust control design andapplications. In U. Helmke, R. Mennicken, and J. Saurer, editors, Systems and Networks :Mathematical Theory and Applications, Proc. MTNS-93, Regensburg, Germany, volume 2,pages 309–312. Akademie Verlag, Berlin, 1994.
[48] J. Levine, P. Rouchon, G. Yuan, C. Grebogi, B.R. Hunt, E. Kostelich, E. Ott, and J. Yorke.On the control of us navy cranes. In Proc. ECC’97, Brussels, paper N. 717, 1997.
[49] A. Liapounoff. Probleme General de la Stabilite du Mouvement. Annales de la Faculte desSciences de Toulouse, deuxieme serie. Edouard Privat, 1907. reprint J. Gabay, Paris, 1988.

Introduction a la Commande Non Lineaire 58
[50] R. Marino. On the largest feedback linearizable subsystem. Systems and Control Letters,6 :345–351, 1986.
[51] R. Marino and P.V. Kokotovic. A geometric approach to nonlinear singularly perturbedcontrol systems. Automatica, 24(1) :31–41, 1988.
[52] R. Marino and P. Tomei. Nonlinear Control Design. Prentice Hall, Englewood Cliffs, NJ,1995.
[53] Ph. Martin. Contribution a l’etude des systemes differentiellement plats. PhD thesis, Ecoledes Mines de Paris, 1992.
[54] Ph. Martin. Endogenous feedbacks and equivalence. In U. Helmke, R. Mennicken, andJ. Saurer, editors, Systems and Networks : Mathematical Theory and Applications, Proc.MTNS-93, Regensburg, Germany, volume 2, pages 343–346. Akademie Verlag, Berlin, 1994.
[55] Ph. Martin, S. Devasia, and B. Paden. A different look at output tracking : control of aVTOL aircraft. Automatica, 32 :101–107, 1996.
[56] Ph. Martin, R.M. Murray, and P. Rouchon. Flat systems. In G. Bastin and M. Gevers,editors, Plenary Lectures and Minicourses, Proc. ECC 97, Brussels, pages 211–264, 1997.
[57] Ph. Martin and P. Rouchon. Flatness and sampling control of induction motors. In Proc.IFAC World Congress, San Francisco, 1996.
[58] A. Marttinen, J. Virkkunen, and R.T. Salminen. Control study with a pilot crane. IEEETrans. Edu., 33 :298–305, 1990.
[59] S. Monaco and D. Normand-Cyrot. An introduction to motion planning under multiratedigital control. In Proc. 31th IEEE Control Decision Conf.,Tucson, pages 1780–1785, 1992.
[60] B.C. Moore. Principal component analysis in linear systems : controllability, observabilityand model reduction. IEEE Trans. Automat. Control, 26(1) :17–31, 1981.
[61] P. Mullhaupt, B. Srinivasan, J. Levine, and D. Bonvin. A toy more difficult to control thanthe real thing. In Proc. ECC’97, Brussels, July 1997.
[62] P. Mullhaupt, B. Srinivasan, J. Levine, and D. Bonvin. Cascade control of the toycopter. InProc. ECC’99, Karslruhe, 1999.
[63] R.M. Murray and S.S. Sastry. Steering nonholonomic systems in chained form. In Proc. 30thIEEE Control Decision Conf., Brighton, pages 1121–1126, 1991.
[64] R.M. Murray and S.S. Sastry. Nonholonomic motion planning : steering using sinusoids.IEEE Trans. Automat. Control, 38 :700–716, 1993.
[65] H. Nijmeijer and A.J. van der Schaft. Nonlinear Dynamical Control Systems. Springer, NewYork, 1990.
[66] P.J. Olver. Equivalence, Invariants, and Symmetry. Cambridge University Press, 1995.
[67] J.B. Pomet. A differential geometric setting for dynamic equivalence and dynamic lineariza-tion. In B. Jakubczyk, W. Respondek, and T. Rzezuchowski, editors, Geometry in NonlinearControl and Differential Inclusions, pages 319–339. Banach Center Publications, Warsaw,1993.

Introduction a la Commande Non Lineaire 59
[68] J.B. Pomet. On dynamic feedback linearization of four-dimensionalaffine control systems with two inputs. ESAIM-COCV, 1997.http ://www.emath.fr/Maths/Cocv/Articles/articleEng.html.
[69] J.B. Pomet, C. Moog, and E. Aranda. A non-exact Brunovsky form and dynamic feedbacklinearization. In Proc. 31st. IEEE Conf. Decision Cont., pages 2012–2017, 1992.
[70] R. Rothfuss, J. Rudolph, and M. Zeitz. Flatness based control of a nonlinear chemical reactormodel. Automatica, 32 :1433–1439, 1996.
[71] P. Rouchon. Necessary condition and genericity of dynamic feedback linearization. J. Math.Systems Estim. Control, 4(2) :257–260, 1994.
[72] P. Rouchon, M. Fliess, J. Levine, and Ph. Martin. Flatness and motion planning : the carwith n-trailers. In Proc. ECC’93, Groningen, pages 1518–1522, 1993.
[73] P. Rouchon, M. Fliess, J. Levine, and Ph. Martin. Flatness, motion planning and trailersystems. In Proc. IEEE Conf. Decision and Control, San Antonio, December 1993.
[74] S. Sastry. Nonlinear Systems, Analysis, Stability and Control. Springer, New York, 1999.
[75] W.F. Shadwick. Absolute equivalence and dynamic feedback linearization. Systems ControlLetters, 15 :35–39, 1990.
[76] J.J.E. Slotine and W. Li. Applied Nonlinear Control. Prentice Hall, Englewood Cliffs, NJ,1991.
[77] W.M. Sluis. A necessary condition for dynamic feedback linearization. Systems ControlLetters, 21 :277–283, 1993.
[78] R. Sommer. Control design for multivariable non-linear time-varying systems. Int. J. Control,31 :883–891, 1980.
[79] E.D. Sontag. Mathematical Control Theory, Deterministic Finite Dimensional Systems.Springer, New York, 2nd edition, 1998.
[80] H.J. Sussmann and V. Jurdjevic. Controllability of nonlinear systems. J. Differential Equa-tions, 12 :95–116, 1972.
[81] A. Tikhonov, A. Vasil’eva, and A. Sveshnikov. Differential Equations. Springer, New York,1980.
[82] D. Tilbury and A. Chelouah. Steering a three-input nonholonomic using multirate controls.In Proc. ECC’93, Groningen, pages 1428–1431, 1993.
[83] D. Tilbury, J.P. Laumond, R. Murray, S. Sastry, and G. Walsh. Steering car-like systemswith trailers using sinusoids. In IEEE International Conf. on Robotics and Automation,pages 1993–1998, 1992.
[84] M. van Nieuwstadt, M. Rathinam, and R.M. Murray. Differential flatness and absolute equiv-alence. In Proc. 33th IEEE Conf. Decision Control, Lake Buena Vista, Fl., pages 326–332,1994.

Introduction a la Commande Non Lineaire 60
[85] M. Vidyasagar. Nonlinear Systems Analysis. Prentice Hall, Englewood Cliffs, NJ, 2nd edition,1993.
[86] E.T. Whittaker. A Treatise on the Analytical Dynamics of Particules and Rigid Bodies.Cambridge University Press, Cambridge, 4th edition, 1937.
[87] J.C. Willems. Paradigms and puzzles in the theory of dynamical systems. IEEE Trans.Automat. Control, 36 :259–294, 1991.
[88] W.A. Wolovich. Linear Multivariable Systems. Springer, New York, 1974.
[89] W.M. Wonham. Linear Multivariable Control : a Geometric Approach. Springer, 1974.
[90] V.V. Zharinov. Geometrical Aspect of Partial Differential Equations. World Scientific, Sin-gapore, 1992.