Embed Size (px)
Citation preview

Ecole Nationale Supérieure de Physique de StrasbourgBureau C418 – courriel : [email protected]
Université de Strasbourg, FRANCE
Christophe DOIGNON
Maître de Conférences à l’ENSPS(membre de l’IEEE Computer Society )
http://lsiit-cnrs.unistra.fr/avr/~christophe
Les Systèmes Temps RéelsENSPS 3A, spécialité GLRS (édition 2009-2010)
1

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
« Les systèmes d'exploitation » Conception et mise en oeuvreAndrew Tanenbaum, InterEditions, Paris, ISBN : 2-7296-0259-2, 756 pages, 1991
« Systèmes d'exploitation : concepts et algorithmes »,J. Beauquier, B. Bérard, Ediscience internationale, ISBN : 2-84074-025-7, 538 pages
« Programming for the real world – POSIX 4 »Bill O. Gallmeister, O'Reilly & Associates, inc., ISBN : 1-56592-074-0, 550 pages
« Ordonnancement temps réel »F. Cottet, J. Delacroix, C. Kaiser, Z. Mammeri, Hermes, ISBN : 2-7462-0099-6, 205 pages
« Commande en temps réel: conception et mise en œuvre d’un exécutif multitâchesD.Tschirhart, Dunod-Bordas, Paris, ISBN : 2-04-018983-1, 215 pages, 1990
Bibliographie
2

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
3
Chapitre 1 : Généralités, concepts et terminologie
• Les systèmes temps réels : définition, terminologie et contraintes temporelles
• Modèles de tâches (états, contexte)
• Architecture logicielle des processus informatiques – mémoire virtuelle
• Exemples de quelques SETR
Chapitre 2 : Multiprogrammation et ordonnancement
• Multiprogrammation
• Stratégies d’ordonnancement
Chapitre 3 : Mise en œuvre : signaux, gestion du temps et multi-activités
• Signaux
• Mesure et gestion du temps
• Multi-activités
• Sections critiques
Chapitre 4 : Protection et communication rapide entre processus locaux
• Verrouillage de pages en mémoire
• Entrées/sorties non bloquantes et asynchrones
• Communication par segments partagés,
• Projection des fichiers en mémoire
• File de messages
Plan du cours

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
Chapitre 1
Généralités, Concepts etTerminologies
4

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
DEFINITION (tentative)
Un système temps réel est un système d’exploitation (SETR) ou un ensembled'applications informatique qui doit répondre à des stimuli fournis par unenvironnement externe afin de le contrôler.
• Il se caractérise non seulement par la justesse des calculs mais aussi par tempsnécessaire pour fournir le résultat d’un ensemble de traitements.
• Un système temps réel interagit avec un environnement extérieur et en évolution.Il doit pouvoir interagir avec différents types d'éléments matériels et prendre encompte des contraintes temporelles imposées par ceux-ci.
5

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
TEMPS REEL DUR
• On parle de Temps Réel dur (Hard Real Time) quand les événements traités troptardivement ou perdus provoquent des conséquences catastrophiques pour la bonnemarche du système (perte d ’informations cruciales, plantage…).
• Les systèmes à contraintes temporelles dures ne tolèrent qu’une gestion stricte dutemps afin de conserver l'intégrité du service rendu.
– exemple: les contrôles de processus industriels sensibles comme la régulation descentrales nucléaires ou les systèmes embarqués utilisés dans l'aéronautique.
• Un système d ’exploitation est dit Temps Réel dur s’il est capable de répondre à dessollicitations ou événements (internes ou externes) dans un temps maximum connu.
• Ces systèmes garantissent un temps maximum d'exécution pour chaque tâche. On aune répartition totalitaire du temps CPU entre tâches. On peut dire qu'un systèmetemps réel doit être déterministe et prévisible (predictible), les contraintestemporelles pouvant s'échelonner entre quelques μs et plusieurs secondes.
6

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
TEMPS REEL MOU
• On parle de Temps Réel mou (Soft Real Time) quand les événements traités troptardivement ou perdus sont sans conséquence catastrophique pour la bonne marchedu système. On ne garantit qu’un pourcentage moyen d’utilisation du temps CPU.
• Les systèmes à contraintes temporelles souples ou molles (soft real time) acceptentdes variations dans le traitement des données. On parle alors de Qualité de Services.
– exemple des systèmes multimédia : si quelques images ne sont pas affichées, celane met pas en péril le fonctionnement correct de l'ensemble du système.
• Ces systèmes se rapprochent fortement des systèmes d'exploitation classiques àtemps partagé. Ils garantissent un temps moyen d'exécution pour chaque tâche (undébit, une bande passante , une qualité de services).
• On a ici une répartition égalitaire du temps CPU entre processus.
7

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
CLASSIFICATION
• Temps réel dur (hard real-time) : le non respect des contraintes temporelles entraînela faute du système.– exemple: contrôle de trafic aérien, système de conduite de missile, ...
• Temps réel souple (soft real-time) : le respect des échéances est important mais lenon respect de toutes éles chéances ne peut pas occasionner de graves conséquences.– exemple: système d'acquisition de données pour affichage
REMARQUES
• Il ne faut pas confondre contrainte temporelle (qui dépend de l'application et del'environnement) et rapidité de traitement (qui dépend de la technologie utiliséeet de la conception d’un exécutif).
• Un système temps-réel inclut généralement différents sous-systèmes chacunpouvant avoir ses propres contraintes temporelles (dures ou souples)
8

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
UTILISATION DU TEMPS
Au sein d'une application ou d'un système temps-réel, il faut pouvoir gérer le temps(horloge). Le temps sera utilisé de plusieurs façons:
– Soit en définissant la date à laquelle une action doit être commencée– Soit en définissant la date à laquelle une action doit être finie
• Il peut être nécessaire de pouvoir modifier ces paramètres en cours d'exécution etde pouvoir préciser les actions à prendre en cas de faute temporelle.
DECOUPAGE EN TACHES OU EN PROCESSUS (concurrents)
Dans le monde réel les périphériques et l'environnement du système évoluentsimultanément (en parallèle et parfois en concurrence). Pour calquer fidèlement laréalité il faut s'appuyer sur de la programmation concurrente :
– utiliser un modèle de tâches,– utiliser des moyens de communication et de synchronisation inter-tâches ou inter-processus (mémoire partagée, boites aux lettres, files de messages, sémaphores ...)
9

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
REMARQUES
• L'exécution des applications temps réel se fait généralement dans unenvironnement monoprocesseur.
• On "simule" l'exécution concurrente des processus par la mise en œuvre dupseudo-parallélisme : le parallélisme est apparent à l'échelle de l'utilisateur maisle traitement sur le processeur (unique) est fait séquentiellement en tirant profitdes entrées/sorties réalisées par les processus.
Tâches ou processus exécutés en apparence en parallèle 10

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
Tâches ou processus exécutés séquentiellement en réalité (env. mono-processeur)
• Dans un tel contexte, quels intérêts a-t-on de concevoir un programme s’exécutantsur plusieurs processus ?
• Comment décomposer les instructions et/ou les données sur plusieurs processus ?
• Comment communiquer entre processus ?
11

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
Système CodageMono-
utilisateurMulti-
utilisateurMono-tâche Multitâche
DOS 16 bits X X
Windows3.1 16/32 bits X non préemptif
Windows95/98/Me 32 bits X coopératif
WindowsNT/2000 32 bits X préemptif
WindowsXP 32/64 bits X préemptif
Windows7 32/64 bits X préemptif
Unix / Linux 32/64 bits X préemptif
MAC/OS X 32 bits X préemptif
VMS 32 bits X préemptif
PREEMPTION
Un système d’exploitation est dit à noyau préemptif (ou aussi à réquisition -preemptive scheduling – le processus du système d’exploitation qui contrôle tout)lorsqu’aucune requête (appel système) est nécessaire pour effectuer l’attributiondu processeur à un processus. C’est le système d’exploitation qui interrompt oureprend l’exécution des processus informatiques.
12

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
RESPECT DES ECHEANCES TEMPORELLES : ordonnancement
La limitation des ressources (en particulier du processeur) conduit à bloquer desprocessus (ils ne peuvent progresser du fait de manque de ressource).Afin de respecter en permanence les échéances, il faut gérer efficacement lapénurie et tenter de favoriser les processus dont l'avancement est le plus urgent.
• Un ordonnancement consiste à définir un ordre sur l'utilisation des ressources dusystème afin de respecter les échéances temporelles. On appelle ordonnanceur(scheduler) le processus système qui gère l'ordonnancement des processus.
• Un algorithme d'ordonnancement est une méthode ou stratégie utilisée pourordonnancer les processus. Un tel algorithme s'appuie sur la connaissance decertaines caractéristiques des processus ou du système :
– processus périodiques ou apériodiques,– processus cycliques,– préemption possible ou pas (pas de réquisition),– échéance et pire temps d'exécution des processus,– système à priorités fixes, dynamiques ou à échéance,– charge du système,...
13

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
RESPECT DES ECHEANCES TEMPORELLES : ordonnancement
Un SETR préemptif est piloté par le temps: le processeur commute de processus enprocessus sous le contrôle d’un module du noyau appelé ordonnanceur (scheduler).
Le processeur est alors attribué à un processus pendant un quantum de temps dt(time slice ou tick) indivisible, sauf lors d'arrivée de signaux ou d’interruptions.
Algorithmes classiques d'ordonnancement (exemples parmi d’autres…)
– RR (Round Robin) : algorithme (du tourniquet) pour priorités fixes: chaqueprocessus dispose du processeur à tour de rôle.
– RM (Rate Monotonic) : algorithme à priorité fixe pour processus cycliques (leprocessus le plus prioritaire est celui de plus petite échéance)
– EDF (Earliest Deadline First) : algorithme à priorité dynamique pour processuscycliques (le processus le plus prioritaire est celui de plus petite échéance)
– DM (Deadline Monotonic) : algorithme d’ordonnancement préemptif à prioritésconstantes affectées selon le principe suivant : la tâche la plus prioritaire est celledont le délai critique est le plus faible (délai maximum acceptable pour l’exécutiond’une tâche).
14

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
15
TYPE DE TACHES
• Tâche/processus : suite d’instructions + données + contexte d’exécution (état).
• Classification des tâches/processus :
• Tâches dépendantes ou non.• Tâches importantes, urgentes.• Tâches répétitives : activations successives (tâches périodiques ousporadiques) ⇒ tâches critiques.• Tâches non répétitives/apériodiques : une seule activation ⇒ tâches noncritiques.

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
RESPECT DES ECHEANCES TEMPORELLES : exécutif TR
Exécutif : c’est le cœur d’un système d’exploitation. Son rôle est de :
- Ordonnancer les tâches,- Protéger l’accès aux ressources partagées- Recevoir et transmettre les signaux de synchronisations
- Il est composé de modules spécialisés :
• gestion des tâches/processus (commutation, s/r contextes)• gestion des événements matériels et logiciels (de synchronisation)• gestion communications entre tâches• gestion du temps (ordonnanceur)• gestion des ressources partagées• gestion de la mémoire
- Il ne gère pas les fichiers (fichiers sur disques).
16

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
NOYAU vs EXECUTIF vs SETR
Un noyau temps réel (NTR) est le minimum logiciel pour pouvoir faire dutemps réel : ordonnanceur, gestion de tâches, communication inter-tâches.
Un exécutif temps réel possède un noyau temps réel complété demodules/bibliothèques pour faciliter la conception de l'application tempsréel : gestion de la mémoire, gestion des E/S, gestion de du temps (timers),gestion d'accès réseau, gestion de fichiers éventuellement.
Lors de la génération de l'exécutif, les bibliothèques sont choisies en fonctiondes besoins de l'application temps réel. Pour le développement, on a besoind'une machine hôte (host) et de son environnement de développementcroisé (compilateur C croisé, utilitaires, debugger) ainsi que du système cible(target) sur lequel sera téléchargé (par liaison série ou par le réseau ou parliaison firewire) l'application temps réel avec l'exécutif.
Un système d'exploitation temps réel (SETR) est le cas particulier où l'on aconfusion entre le système hôte et le système cible qui ne font plus qu'un.On a donc ici un environnement de développement natif.
17

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
18

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
DETERMINISME (temporel)
Définition (tentative) : un système informatique est déterministe si le tempsd’exécution d’un processus considéré dans un environnement mono-processusest constant, quel que soit le volume et la nature (et valeurs) des donnéestraitées.
La principale différence entre un OS généraliste (temps partagé) et un OS tempsréel est le comportement très déterministe.
On trouvera quelques différences dans l’API (norme POSIX):
• politique d’ordonnancement plus élaborée,• gestion plus précise des timers à la résolution plus fine,• plus d’ouverture sur le matériel en particulier les connexions aux IT matérielles,• plus de modularité dans la construction du noyau,
19

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
RESPECT DES ECHEANCES TEMPORELLES : déterminisme et fiabilité (disponibilité)
Les systèmes à contraintes dures doivent répondre à trois critères fondamentaux :
– Le déterminisme logique : les mêmes entrées appliquées au système doiventproduire les mêmes effets.
– Le déterminisme temporel .
– La fiabilité : le système doit être disponible. Cette contrainte est très forte dans lecas d'un système embarqué car les interventions d'un opérateur (IHM) sont trèsdifficiles voire même impossibles. Cette contrainte est indépendante de la notion detemps réel mais la fiabilité du système sera d'autant plus mise à l'épreuve dans lecas de contraintes dures.
TT ou ET ?
Un système informatique peut être piloté par le temps (TT - Time Triggered) etdisposer alors d’un cadencement par horlogerie ou bien être piloté par événements(ET - Event Triggered). L’approche TT à l’avantage d’inclure les systèmes distribuésdéterministes. En effet, comme le temps physique est l’élément de synchronisationde tous les traitements, ils peuvent être effectués sur différents calculateurs.L’approche ET est plus simple à mettre en œuvre, généralement pour uneapplication spécifique dont l’exécution est sur une machine locale.
20

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
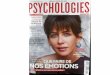
Exemple : programme terminal simplifiéUn programme terminal consiste à afficher sur l’écran chaquecaractère arrivant sur l’entrée série, et à envoyer le caractère frappéau clavier sur la sortie série.Le matériel utilisé dans cet exemple possède les caractéristiquessuivantes:- vitesse de frappe garantie : 10 caractères/seconde- vitesse d’affichage sur l’écran : 1000 caractères/seconde- vitesse de réception ou d’émission des caractères sur la ligne:50…19200 bauds, format 8 bits, 1 bit START, 1 bit STOP (pas de bitsde parité). La vitesse configurée est de 600 bauds.
Le programme comporte deux tâches (voir ci-contre) :-une tâche déclenchée par la frappe d’un caractère avec contraintetemporelle Te1 = 0.1 s,- une tâche d’affichage déclenchée par la réception d’un caractèreavec contrainte temporelle Te2 = (8+1+1)/600 s.
Le temps de cycle, ty , est essentiellement lié à la vitesse del’affichage, nous le supposons égal à ty = 1 ms (cas le plusdéfavorable).
La contrainte de temps la plus forte est:Te2 = (8+1+1)/600 = 16,7 ms ce qui vérifie ty < Te.
Si la vitesse de réception des caractères est 19200 bauds, lacontrainte sera de : Te2 = 10/19200 = 0.52 ms > ty. Terminal fonctionnant par scrutation
21

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
CONTRAINTES DE TEMPS FAIBLES AVEC EVENEMENTS CONTRAIGNANTS
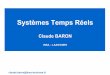
Si le temps de cycle ne permet pas de satisfaire quelques contraintes, on associe lesfonctions concernées à des interruptions ou à des signaux. Chaqueinterruption/signal est associé à un ou plusieurs événements. Le SETR sera ainsisynchronisé sur ces événements et exécutera les traitements liés aux interruptions(gestionnaire d’interruption - interrupt handler) en suspendant le programme enexécution (interrupt driven ou event triggered).
Le traitement d’une interruption allonge le temps de cycle du programmeinterrompu. Les contraintes temporelles devront être analysées avec soin. Ci-dessous un exemple avec deux interruptions signalant des événements à prendreen compte immédiatement :
Gestion des entrées/sorties avec deux événements contraignants
22

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
CONTRAINTES DE TEMPS FAIBLES AVEC EVENEMENTS CONTRAIGNANTS
Soient Te0, Te1, Te2 les contraintes de temps liées à la tâche de fond et auxévénements.
• Cas d’une seule interruption IT1 de fréquence constante f1 :
Pour satisfaire les contraintes : ty1 < Te1 et ty0 + f1 ty1 < Te0
• Cas de plusieurs interruptions non imbriquées : soient f1 et f2 les fréquences desinterruptions IT1 et IT2 :
ty0 + f1 ty1 + f2 ty2 < Te0ty1 + ty2 < Te1 (pour les événements liés à l’interruption IT1)ty1 + ty2 < Te2 (pour les événements liés à l’interruption IT2)
• Cas de plusieurs interruptions imbriquées : supposons l’interruption IT2 la plus prioritaire :
ty0 + f1 ty1 + f2 ty2 < Te0Si f1 < f2 ty1 + f2 ty2 < Te1 (pour les événements liés à l’interruption IT1)Si f1 > f2 ty1 + (f1-f2) ty2 < Te1ty2 < Te2 (pour les événements liés à l’interruption IT2)
23

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
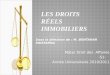
DEPENDANCE ET SYNCHRONISATION : les processus peuvent interagir entre euxselon un ordre prédéterminé ou induit par la communication de données ou parune relation explicite de synchronisation/rendez-vous (c’est le cas très fréquent oùun processus attend le résultat que doit fournir un autre processus pour poursuivreson exécution).
Il y a alors une relation de précédence entre processus. Cette relation est statique,car elle est connue a priori et n’évolue pas. Elle est représentée par un graphe deprécédence.
Des processus sont dits indépendants lorsqu’ils ont entre eux ni de relation deprécédence ni partage de ressources critiques (ressources communes gérées pardes sections de code non-interruptibles, appelées sections critiques).
Exemple de graphe de précédence entre cinq processus 24

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
ARCHITECTURE LOGICIELLE
Un processus/tâche est tout ou partie d'un programme binaire en exécution.
L'exécution signifie que les instructions du programme sont traitées par le(s)processeur(s) et que des requêtes à d'autres ressources communes (mémoire,entrées/sorties) sont effectuées.
Un processus est composé de zones en mémoire (et d’un bloc de contrôle/ouen-tête) :
- une zone pour les instructions (zone partageable),- une zone pour les données statiques (zone partageable),-une zone pour les données dynamiques (zone partageable privée) dont une ouplusieurs piles (zones non partageables).
Si le système informatique possède plusieurs processeurs, les instructions d'unprogramme ne pourront s'exécuter en parallèle (simultanément sur tous lesprocesseurs) que si le programme binaire est décomposé en au moins autantde processus ou d’activités : autrement dit, les instructions d'un processus nepeuvent être traitées que par un processeur.
25

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
CREATION DYNAMIQUE DE PROCESSUS
Un processus peut créer, durant son exécution (c'est-à-dire dynamiquement),un autre processus que l'on nomme processus fils. Il ne se substitue pas auprocessus père, mais tous les deux sont concurrents pour l'obtention detoutes les ressources nécessaires au traitement de leurs instructions (àcommencer par le processeur).
FILS D’EXECUTION
Un processus peut être décomposé en plusieurs activités ou fils d’exécution(threads). Généralement dans les SE actuels, à une tâche correspond un fild’exécution.
L’ordonnanceur du SE gère les threads/tâches. La notion de processus définitun espace d’adressage protégé dans lequel s’exécute au moins une tâche (lemain thread) qui est activé quand le processus est lancé. Le processus setermine quand la dernière tâche qu’il contient se termine.Comme les threads se partagent des ressources communes aux processus, il ya lieu de protéger certains accès aux données.
Dans certains SE simples il n’y a pas d’espace mémoire protégé, il y a alorséquivalence entre les termes: processus = thread = tâche.
26

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
Zone créée au moment duchargement en mémoire
(taille minimale)
Zones créées au moment dela compilation :fichier binaire exécutable
Zones composantun processus
ARCHITECTURE LOGICIELLE
27

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXEMPLE : en analysant le programme source simplissime suivant, indiquer dansquelles zones se trouveront chacun des éléments (données et instructions) duprocessus prog0, suite à la compilation ou durant l’exécution.
/**************************************prog0.c
**************************************/
void afficher( long );
unsigned long n = 32;
int main( void ){long i;for ( i = 0 ; i < n ; i++ ) afficher( i );return 0;}
void afficher( long a ){printf(«affichage pour la %ld ieme fois parmi %ld.\n»,a,n);return;}
28

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
L'état d'un processus permet d'exprimer si le processus est réellement exécuté,s'il est seulement prêt à être exécuté, c'est-à-dire en attente du processeur, ouencore, s'il est en attente d'autres ressources que le processeur ou d'unévénement extérieur. C'est le système d'exploitation qui détermine et modifiel'état d'un processus.
A cette fin, chaque processus est représenté par une structure appelée bloc decontrôle ou BPC et qui renferme le contexte du processus : ce contextepermettra de reprendre l'exécution du processus après une interruption de sonexécution. Les données des contextes contiennent les informations suivantes :
- numéro du processus et de son parent,- adresse du début du code du processus : adresse de main(),- adresse de la pile du processus,- état du processus et la priorité,- valeurs de certains registres du processeur,- descripteurs des fichiers ouverts- masques de signaux.
Les contextes sont liés afin d'enchaîner les processus les uns aux autres (tableaud'adresses (ou liste chaînée) de début de contexte). L'ordre dans lequel lesprocessus sont exécutés est fonction de la stratégie d'ordonnancement quiélabore la table des tâches.
29

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
Les différents états d’un processus et leurs transitions
30

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
Le passage d'un état à l'autre s'effectue à l'aide de fonctions programmées dans lenoyau. Ces fonctions sont appelées requêtes du noyau. L'ensemble de cesrequêtes forme les primitives de l'exécutif (ensemble appelé API : ApplicationProgram Interface).
• Etat NON CREE : un processus à l'état NON CREE est un processus inconnu del'exécutif. Dans un système comportant des périphériques de stockage (ouRAMDisk), ces processus ne sont pas chargés en mémoire et ne possèdent pas(encore, ou plus du tout) de zone de code, de données ou de pile. La seuletransition possible à partir de cet état est celle permettant de faire évoluer leprocessus vers l'état CREE.
• Etat CREE ou DORMANT : un processus à l'état CREE est un processus connu del'exécutif. Un identificateur lui a été attribué, ainsi qu'une zone de pile. Leprocessus reste dans cet état tant qu'une requête ne l'a fait pas évoluer vers unautre état. Les seules transitions possibles à partir de cet état sont celles vers l'étatPRET (vers une exécution) ou NON CREE (destruction).
• Etat PRET : un processus à l'état prêt est candidat au(x) processeur(s). Sonlancement ne dépend que de sa priorité par rapport aux processus en coursd'exécution ou aux autres processus à l'état PRET. Lorsque celui-ci devientprioritaire, l'ordonnanceur lui attribue le processeur (virtuel). A partir de cet état,le processus peut évoluer vers les états EXEC, DORMANT ou NON CREE.
31

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
• Etat EXEC : un processus en exécution est en possession du processeur virtuelou réel. L'exécution (processeur réel) du processus commence alors dès que leprocessus en cours termine son quantum dt (sauf dans le cas d’arrivée designaux ou d’interruptions matérielles pour lesquelles le processeur réel estattribué sans attendre). L'attribution du processeur réel est de la compétence del'ordonnanceur et du commutateur. Dans un système monoprocesseur, plusieursprocessus de même priorité peuvent être en exécution virtuelle mais un seul esten possession du processeur réel. Un processus reste dans cet état tant qu'il estle plus prioritaire et qu'il ne rencontre pas une condition de blocage.
• Etat BLOQUE ou SUSPENDU : un processus à l'état BLOQUE ou SUSPENDUn'est plus en possession du processeur. Le processus a été interrompu avant safin (temporairement ou définitivement) sur l'apparition d'une condition deblocage. Il peut également avoir été suspendu volontairement par une requêtede type mise en sommeil (pause()). Les causes de blocage sont multiples :ressource non disponible, synchronisation avec un autre processus, exécutiond'un gestionnaire d'interruption, communication par tube,...
Au moment du blocage, tout le contexte du processus est sauvegardé. Il estimportant de distinguer l'état PRET de l'état BLOQUE. Lorsqu'un processus passeen exécution à partir de l'état PRET, il suffit de mettre à jour une variablesignifiant le nouvel état du processus et d'initialiser les registres du processeur.
32

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
L’ordonnanceur s’acquitte de l’élection du processus pour le prochainquantum de temps (et donc amenant à des transitions entre états sichangement de processus) selon plusieurs critères :
- le nombre de processus,- la priorité des processus,- la stratégie d’ordonnancement.
La commutation entre processus est le rôle d’un autre module particulierdu noyau qui s’appelle le commutateur : plus précisément, il s’occupe desauvegarder/restituer des contextes (context switch) au moment duchangement de processus. Cela nécessite un certain temps : le temps decommutation Tc qui est une caractéristique importante d’un SETR. Tc estde l’ordre de 10 à 100 microsecondes sur les SETR actuels.
33

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
TEMPS de LATENCE
La gestion des entrées/sorties peut générer des « temps morts » car une tâchepeut être bloquée en attente d'accès à un élément d'entrée/sortie. La gestion desinterruptions reçues par une tâche n'est pas optimisée sur tous les SETR. Letemps de latence caractérise le temps maximum écoulé entre la réception del'interruption et son traitement garanti par le système. C’est une caractéristiqueimportante d’un SETR.
GIGUE (JITTER)
Variation du temps de latence d’un SE pour délivrer un signal, en comparaison desa cadence (tops d’horloge ou timer tick) .On distingue deux formes de gigue de tâches :
- la gigue maximale de début d’exécution d’une tâche qui représente la variationmaximale du délai entre deux débuts d’exécution successifs de cette tâche,
- la gigue maximale de temps de réponse d’une tâche qui désigne la variationmaximale du temps de réponse de cette tâche.
34

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXTENSION POSIX
La complexité des systèmes et l'interopérabilité omniprésente nécessitent unestandardisation de plus en plus grande tant au niveau des protocoles utilisésque du code source des applications. Même si elle n'est pas obligatoire,l'utilisation de systèmes conformes à POSIX est de plus en plus fréquente.
POSIX est l'acronyme de Portable Operating System Interface ou interfaceportable pour les systèmes d'exploitation. Cette norme a été développée parl'IEEE (Institute of Electrical and Electronic Engineering) et standardisée parl'ANSI (American National Standards Institute) et l'ISO (International StandardsOrganisation). Le but de POSIX est d'obtenir la portabilité des logiciels auniveau de leur code source.
POSIX a initialement été mis en place pour les systèmes de type UNIX maisd'autres systèmes d'exploitation comme Windows XP Pro sont aujourd'huiconformes à POSIX. Le standard POSIX est divisé en plusieurs sous-standardsdont :
• IEEE 1003.1b-1993 : Interface de programmation (API) temps réel, appeléePOSIX.4.
• IEEE 1003.1c-1995 : Interface de programmation (API) pour le multithreading.
35

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
MEMOIRE VIRTUELLE
Les processus sont composés de segments de code, de segments de donnéesstatiques et de segments de données dynamiques.
Pour faciliter la gestion de l’espace mémoire pour tous les segments de tous lesprocessus, la mémoire physique (mémoire vive + mémoire d’échange) estdécomposée en pages (page frames) d’une taille constante (4 Ko par exemple).Ces pages sont mises en correspondance avec les pages de la mémoire virtuellequi est un espace mémoire adressable par un processus, indépendamment desautres processus et indépendamment de la mémoire physique. Ce mécanismepermet de ne charger en mémoire physique que les pages des segmentsconcernés pour l’exécution immédiate.
Possibilité d’exécuter des programmes dont la taille est bien supérieure à celle de la mémoire physique.
Sur les ordinateurs actuels, l’espace mémoire virtuel projeté pour un processus peut atteindre plusieurs Go (32 bits).
36

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
37

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
MEMOIRE VIRTUELLE : exercice
On considère un ordinateur dont le système d'exploitation est multitâches. Lamémoire physique totale est de 32 Mo. La mémoire vive (RAM) et la mémoired'échange (swap) sont composées de 16 Mo chacune répartis en pages de 4 Ko.Le système d'exploitation possède, pour lui tout seul, les 6 Mo supérieurs (10 à 16Mo) de la mémoire vive. Cinq processus utilisateurs se partagent la mémoire viverestante (10 Mo) sous le contrôle du système d'exploitation. Le premier processusutilisateur a besoin de placer 4 Mo de données statiques, 512 Ko de code (pourles instructions) et 8 Ko pour sa zone initiale de données dynamiques (pile initialede 8 Ko, tas nul) en mémoire vive. Les autres processus utilisateur sont identiquesentre eux, à savoir :1 Mo pour les données statiques, 256 Ko pour le code et 8 Ko pour la pile initiale.
a) Combien de pages sont nécessaires à chaque processus utilisateur ?
b) le premier processus utilisateur fait une requête d'allocation dynamique demémoire. Combien d'octets peuvent-ils être alloués pour lui sans faire appel à lamémoire d'échange ?(remarque : 1 Mo = 1024 Ko)
38

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXEMPLES DE QUELQUES SETR
• RTEMS (Real-Time Executive for Multiprocessor Systems) est un SETR libre pourles systèmes embarqués (http://www.rtems.com).
Il permet de développer des programmes dans lesquels le temps de réponse et laréactivité sont des contraintes fortes (temps-réel dur). Il a été porté sur denombreux processeurs (ARM, i386, m68k, MIPS, PowerPC) et est très complet.
Caractéristiques :- conforme à la norme POSIX 1003.1b (API)- système multitâches incluant les multi-activités (threads),- supporte les systèmes multiprocesseurs homogènes ou non,- supporte le pilotage par événement,- ordonnancement préemptif basé priorités,- supporte l’ordonnancement RM (rate-monotonic scheduling),- communication and synchronisation entre tâches- héritage de priorités,- gestion des réponses aux interruptions,- supporte l’allocation dynamique de la mémoire- pile TCP/IP
39

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXEMPLES DE QUELQUES SETR
• VxWorks est aujourd'hui l'exécutif temps réel le plus utilisé dans l'industrie.VxWorks est fiable, généralement utilisé dans les systèmes embarqués et porté surun nombre important de processeurs (PowerPC, 68K, ColdFire, MCORE, 80x86,Pentium, i960, ARM, StrongARM, MIPS, SPARC, NECV8xx,…).
Un point fort de VxWorks a été le support réseau (sockets, NFS,...) dès sonapparition. VxWorks est également conforme à POSIX 1003.1b.
Caractéristiques :- noyau TR multitâches préemptif avec ordonnancement round robin,- faible temps de latence, - mémoire protégée – permet d’isoler les applications utilisateurs du noyau,- support des multi-processeurs,- communication inter-tâches,- implémente l’exclusion mutuelle par sémaphores,- héritage de priorités,- gestion de file de messages locales et distribuées- système de fichiers,- pile TCP/IP IPV6- latence moyenne de 1.7 ms, latence max de 6.8 ms sur Pentium 200 MHz
(http://www.windriver.com)40

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXEMPLES DE QUELQUES SETR
• QNX est un SETR adapté aux applications critiques. Développé par QNXSoftware Systems, sa structure est de type Unix et il est compatible POSIX.
On le retrouve entre autres dans le développement de logiciels, le contrôle derobots industriels et les ordinateurs embarqués. Son micro-noyau Neutrino peugourmand en ressource confère à QNX des capacités temps-réel trèsperformantes avec un temps de latence très faible (0.55 µsec sur un Pentium III).Il dispose d’une interface graphique nommée Photon (version 4.x). Le temps decommutation de tâches est très faible (< 1 µsec)
Caractéristiques :- supporte la norme POSIX 1003.1b.- micro-noyau Neutrino,- zone mémoire protégée (Runtime Memory protection),- multi-tâches préemptif,- micro-GUI Photon,- supporte les processeurs x86, SMP jusqu'à 8 processeurs,- système de fichiers.
(http://www.qnx.com/ - version actuelle : 6.4)
41

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXEMPLES DE QUELQUES SETR
• mC/OS-II est un exécutif temps réel destiné à des environnements de très petitetaille construits autour de microcontrôleurs de type Freescale 68HC11. Il estmaintenant disponible sur un grand nombre de processeurs et peut intégrer desprotocoles standards comme TCP/IP (µC/IP) pour assurer une connectivité IP surune liaison série par PPP.
Caractéristiques :- écrit entièrement en langage C,- support de nombreux micro-processeurs et micro-contrôleurs (Atmel, ARM, Freescale, x86, Motorola, NEC, MicroChip, OpenRISC,…),- bus CAN et MOD-bus,- exécutif préemptif basé priorités,- support de TCP/IP et USB,- support d’un système de fichier (µC/FS),- nécessite peu de mémoire (quelques Ko),-il est utilisable gratuitement pour l'enseignement.
(http://micrium.com)
42

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXEMPLES DE QUELQUES SETR
• Windows CE est une variation de Windows pour les systèmes embarqués. Ilutilise un noyau distinct des autres Windows et supporte les architectures Intelx86, MIPS, ARM et aussi Hitachi SH. Windows CE est optimisé pour les appareilspossédant une faible capacité de stockage; le noyau peut tourner avec moinsd'un mégaoctet de mémoire vive.Windows CE est un SETR. Il supporte 256 niveaux de priorité et permetl'inversement de priorité. À l'inverse des systèmes basés sur UNIX, l'unitéfondamentale d'exécution est le thread. Windows Mobile est une version de CEpour Smartphone et Pocket PC.
Caractéristiques :- Windows CE peut fonctionner en RAM ou exclusivement en ROM,- ordonnancement préemptif à 256 niveaux de priorités fixes,- temps de latence déterministe des interruptions,- supporte la communication sérielle, Bluetooth, Ethernet (TCP/IP), wifi,- gestion des fichiers (exFAT),- système 32 bits (2 Go pour le noyau, 2Go espace virtuel/réel projeté pour un ou plusieursprocessus sur espace utilisateur),- jusqu’à 32768 processus,- développement d’applications avec Embedded Visual C ou WinDev Mobile
43

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXEMPLES DE QUELQUES SETR
LINUX ET LE TEMPS REEL
Linux n’est pas un SETR dur car le noyau Linux possède de longues sections decode où tous les événements extérieurs sont masqués (non interruptibles) et lenoyau Linux n’est pas préemptible durant toute l’exécution d’un appel système(structure monolithique) par un processus et ne le redevient qu’en retour d’appelsystème (mode utilisateur – user mode). Le noyau Linux n’est pas préemptible nonplus durant le service d’une interruption (ISR - Interrupt Software Routine). Laroutine ISR acquitte l’interruption puis traite les données de façon non préemptiveimmédiatement avant de retourner en mode utilisateur.
Linux n’est pas un SETR dur car en cas d’occurrence d ’une interruption durantl’exécution d ’un appel système en mode noyau, le traitement des données(appelé BH – Bottom Half) programmé par l’ISR et éventuellement les autres BHdes autres ISR) ne sera exécuté qu’à la fin de l’exécution complète de l’appelsystème d ’où un temps de latence important et non borné.
44

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXEMPLES DE QUELQUES SETR
LINUX ET LE TEMPS REEL (suite)Linux n’est pas un SETR dur car l’ordonnanceur de Linux essaye d’attribuer defaçon équitable le CPU à l ’ensemble des processus (ordonnancement de typeold aging mise en oeuvre pour favoriser l’accès CPU aux processus récents). C’estune approche égalitaire. Un ordonnanceur TR donnera toujours la main à latâche prête de plus forte priorité.
Le noyau Linux standard peut être considéré comme Temps Réel mou pardéfinition si un temps de latence de l ’ordre de la centaine de ms ou plusconvient.
Il existe des solutions Linux Temps Réel dur pour un temps de latence dequelques dizaines de μs (RTLinux, RTAI, Xenomai). Entre les deux, il existe dessolutions Linux Temps Réel mou par application de patchs dits préemptifs (RT-Fedora Cora) sur un noyau Linux standard pour une latence de quelquescentaines de μs. Ainsi deux patchs (Prempt Kernel et Low latency) ont étéimplémentés dans le noyau 2.6 de Linux.
45

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXEMPLES DE QUELQUES SETR
• RTLinux se présente sous la forme d’un micro-noyau prenant place entre lamachine réelle (matériel) et le noyau Linux. Il intègre un gestionnaire de tâches(qui dans la pratique est un module). Le noyau de Linux partage le tempsprocesseur avec les autres tâches temps réel et devient une tâche du SETR. Il estutilisé pour des produits sensibles dans le domaine des télécommunications oudes applications militaires. RTLinux propose des systèmes de communication detype FIFO ou mémoire partagée entre les tâches temps réel (dans l’espace noyau)et l'espace utilisateur dans lequel s'exécutent habituellement les applications.Initialement produit libre, il est maintenant devenu un produit commercialisé parla société FSMLabs (http://www.fsmlabs.com). Une version libre supporte lesnoyaux Linux avant 2.6.
Caractéristiques :- système préemptif, ordonnanceur à priorités fixes,- supporte plusieurs processeurs (SMP),- supporte les architectures x86, PPC Alpha (DEC), MIPS, StrongARM, …- autorise la communication et synchronisation IPC (Inter Process Communication : tubes, files de messages, sémaphores, mémoire partagée,…),- communication entre processus utilisateurs et noyau (tâches temps réel) par FIFO, mémoire partagée ou signaux,- noyau Linux est alors une tâche de faible priorité (idle task).
46

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
EXEMPLES DE QUELQUES SETR
• RTAI/ADEOS est un produit Open Source basé sur RTLinux qui intègre la gestiondes nombres à virgules flottantes. Les développeurs de RTAI ont récemment faitun effort particulier sur une extension appelée LXRT (LinuX Real Time) permettantde développer des tâches temps réel dans l'espace utilisateur et non plus dansl'espace noyau.
La structure de RTAI est proche de celle de RTLinux. De même, les fonctionnalitésdu type FIFO de communication ou mémoire partagée sont égalementdisponibles avec RTAI.
http://www.rtai.org
47

ENSP Strasbourg (Edition 2009-2010)Les Systèmes Temps Réels - Ch. DOIGNON
48