Embed Size (px)
Citation preview
(c) JP Marca pour CNAM INTEC
UV205 UV205 MATHEMATIQUES #1
(c) JP Marca pour CNAM INTEC
• Mettre en oeuvre les outils mathématiques sur lesquels s'appuient les méthodes quantitatives de gestion
• Utiliser les outils mathématiques pour résoudre des problèmes d'optimisation et d'organisation
ObjectifsObjectifs
(c) JP Marca pour CNAM INTEC
PlanPlan
• Présentation de la formation.
• Matrices et programmation linéaire
• Théorie des graphes
• Probabilités et statistiques
• Analyse des données
(c) JP Marca pour CNAM INTEC
MatriceMatrice et et programmationprogrammation linlinééaireaire
• Notion de présentation matricielle
• Programmation linéaire : résolution graphique, méthode du simplexe
(c) JP Marca pour CNAM INTEC
ThThééorieorie des des graphesgraphes
• Langage élémentaire des graphes
• Application à des problèmes d'ordonnancement et de transport
• Méthode des potentiels et méthode PERT
(c) JP Marca pour CNAM INTEC
ProbabilitProbabilitééss et et statistiquesstatistiques
• Définition, axiomes, théorèmes généraux
• Variables aléatoires, fonction de répartition et espérance mathématique
• Loi usuelles, loi binomiale, loi exponentielle, loi normale, variance et écart type.
• Initiation à la statistique inductive
(c) JP Marca pour CNAM INTEC
• Lecture des résultats d'une analyse de données
AnalyseAnalyse des des donndonnééeses
(c) JP Marca pour CNAM INTEC
UV205 UV205 MathMathéématiquesmatiques
Matrices
(c) JP Marca pour CNAM INTECUne sUne séérie de questionsrie de questions
• Qu’est ce qu’une matrice ?• Quel est l’intérêt des matrices ?• Quelles opérations sont possibles sur
les matrices• Qu’est ce que l’inversion d’une
matrice ? Quel intérêt ?• Quels fonctions nous offrent les
tableurs pour traiter les problèmes de matrices ? Quel intérêt pratique ?
(c) JP Marca pour CNAM INTEC
• Matrice ?• Matrice carrée ?• Matrice transposée ?• Matrice symétrique ?• Matrice diagonale ?• Matrice unité?• Vecteur ?• Système d’équations et matrice ?• Matrice des coefficients
techniques ?
QuizzQuizz
(c) JP Marca pour CNAM INTEC
• Matrices égales ?• Somme de matrices ?• Produits de matrices ?
• Produit matrice * nombre ?• Produit vecteur * vecteur ?• Produit matrice * vecteur ?• Produit matrice * matrice ?
• Inversion matrice ?• Résolution matricielle système
d’équation ?
QuizzQuizz
(c) JP Marca pour CNAM INTEC
• Déterminant ?• Méthode inversion matrice ?
• Déterminants ?• Combinaisons linéaires ?
QuizzQuizz
(c) JP Marca pour CNAM INTEC
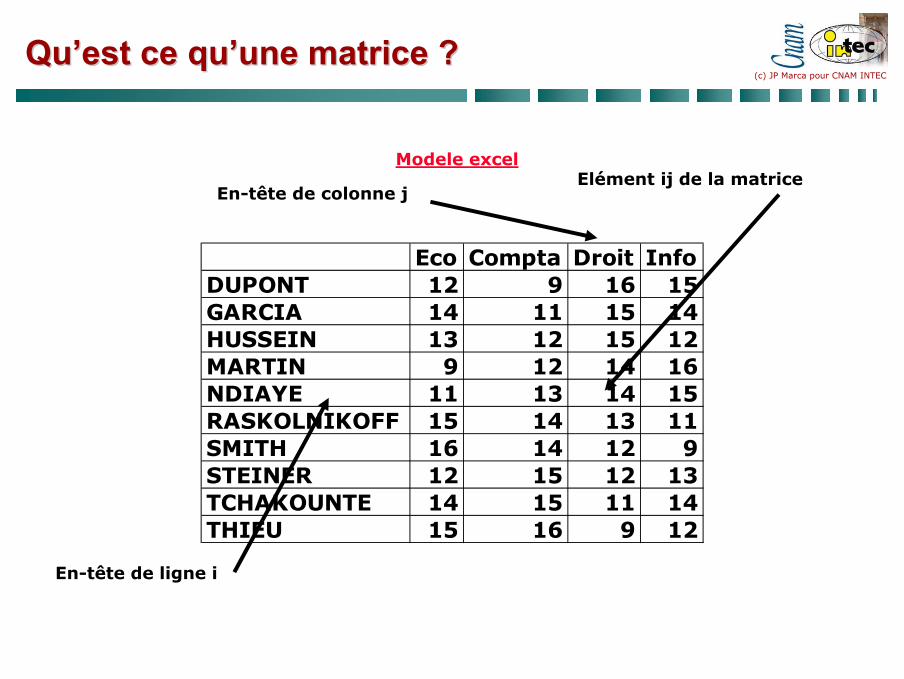
• Un tableau rectangulaire de nombres sur lesquels on définit certaines opérations
QuQu’’est ce quest ce qu’’une matrice ?une matrice ?
(c) JP Marca pour CNAM INTEC
• Physique• Statistiques• Economie
· Econométrie· Production· Consommation
IntIntéérêt du calcul matricielrêt du calcul matriciel
(c) JP Marca pour CNAM INTEC
QuQu’’est ce quest ce qu’’une matrice ?une matrice ?
Eco Compta Droit InfoDUPONT 12 9 16 15GARCIA 14 11 15 14HUSSEIN 13 12 15 12MARTIN 9 12 14 16NDIAYE 11 13 14 15RASKOLNIKOFF 15 14 13 11SMITH 16 14 12 9STEINER 12 15 12 13TCHAKOUNTE 14 15 11 14THIEU 15 16 9 12
Modele excelElément ij de la matrice
En-tête de colonne j
En-tête de ligne i
(c) JP Marca pour CNAM INTEC
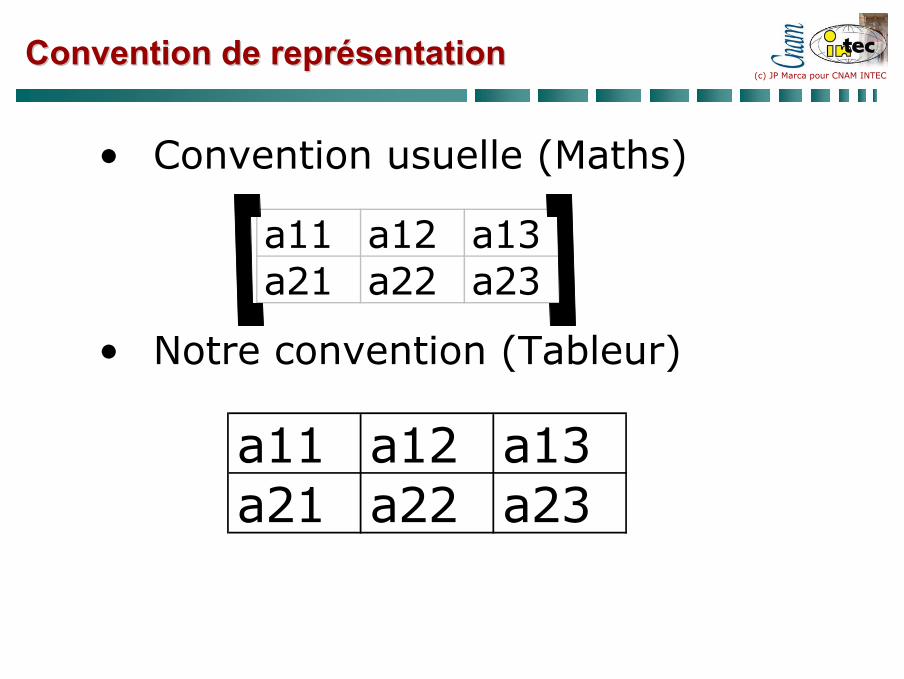
• Convention usuelle (Maths)
• Notre convention (Tableur)
Convention de reprConvention de repréésentationsentation
a11 a12 a13a21 a22 a23
a11 a12 a13a21 a22 a23
(c) JP Marca pour CNAM INTEC
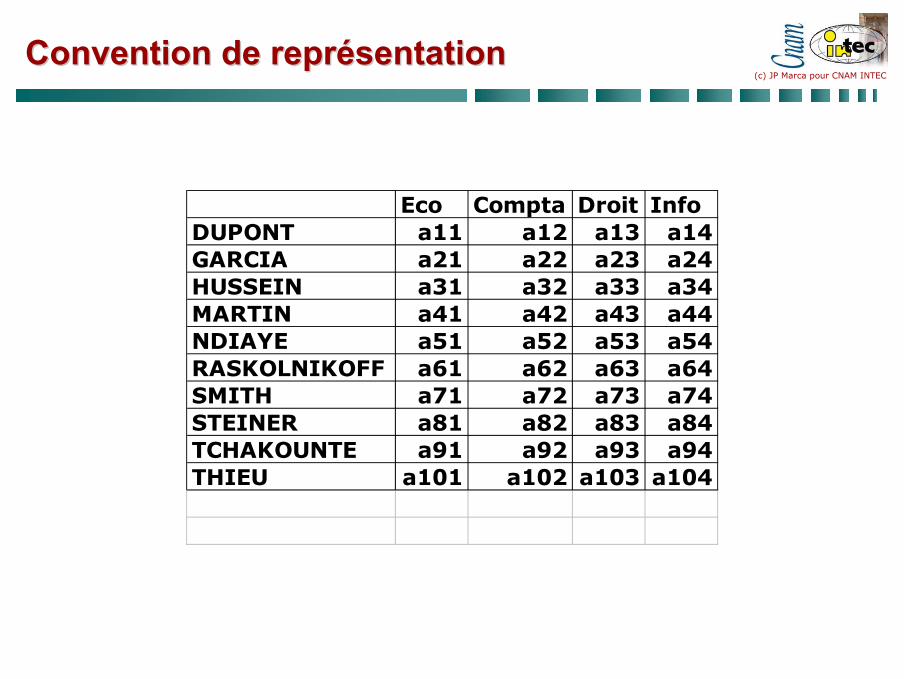
Convention de reprConvention de repréésentationsentation
Eco Compta Droit InfoDUPONT a11 a12 a13 a14GARCIA a21 a22 a23 a24HUSSEIN a31 a32 a33 a34MARTIN a41 a42 a43 a44NDIAYE a51 a52 a53 a54RASKOLNIKOFF a61 a62 a63 a64SMITH a71 a72 a73 a74STEINER a81 a82 a83 a84TCHAKOUNTE a91 a92 a93 a94THIEU a101 a102 a103 a104
(c) JP Marca pour CNAM INTEC
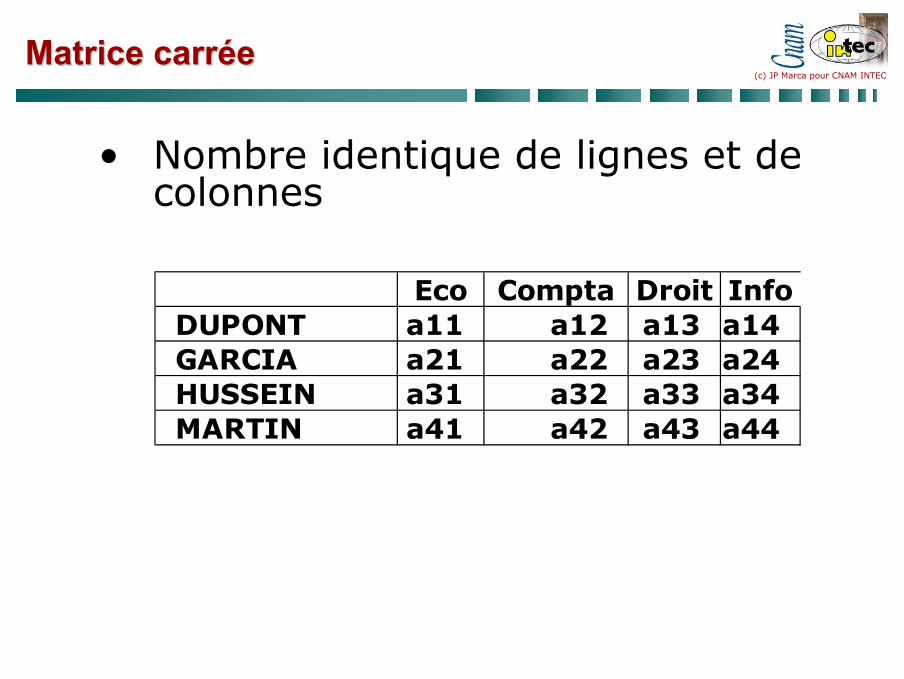
• Nombre identique de lignes et de colonnes
Matrice carrMatrice carrééee
Eco Compta Droit InfoDUPONT a11 a12 a13 a14GARCIA a21 a22 a23 a24HUSSEIN a31 a32 a33 a34MARTIN a41 a42 a43 a44
(c) JP Marca pour CNAM INTEC
• Les lignes deviennent colonnes et les colonnes deviennent lignes.
• Fonction Collage spécial Transpose
Matrice transposMatrice transposééee
(c) JP Marca pour CNAM INTEC
Matrice symMatrice syméétriquetrique
Paris Lyon MarseilleParis 0 460 800Lyon 460 0 340Marseille 800 340 0
(c) JP Marca pour CNAM INTEC
Matrice diagonale. Matrice IdentitMatrice diagonale. Matrice Identitéé..
3 0 00 7 00 0 6
1 0 00 1 00 0 1
(c) JP Marca pour CNAM INTEC
Matrice Matrice uniligneuniligne ou ou unicolonneunicolonne : vecteur: vecteur
7 12 6 9 11 7
712
69
117
(c) JP Marca pour CNAM INTEC
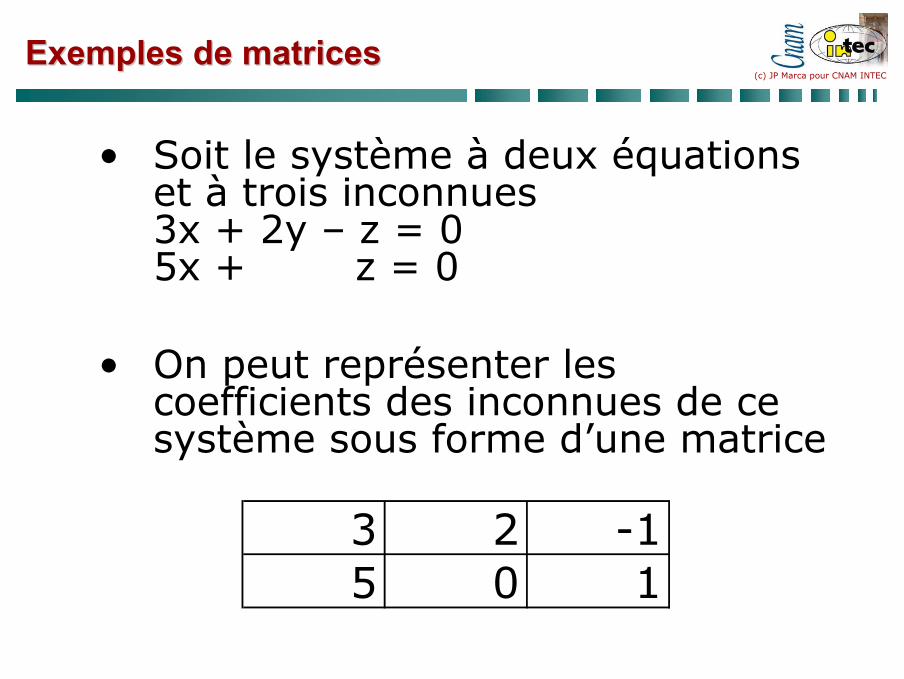
• Soit le système à deux équations et à trois inconnues3x + 2y – z = 05x + z = 0
• On peut représenter les coefficients des inconnues de ce système sous forme d’une matrice
Exemples de matricesExemples de matrices
3 2 -15 0 1
(c) JP Marca pour CNAM INTEC
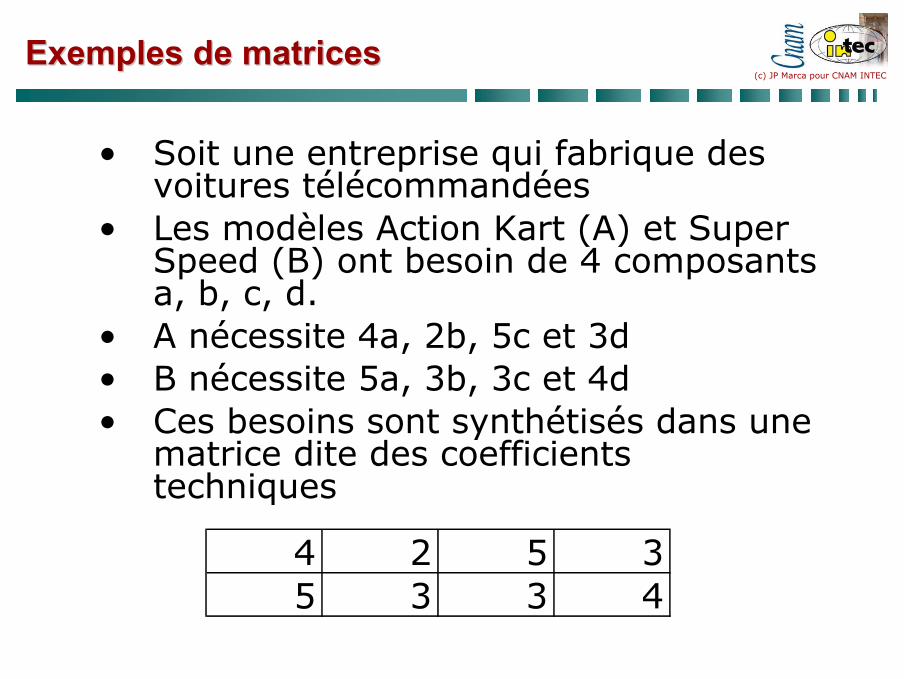
• Soit une entreprise qui fabrique des voitures télécommandées
• Les modèles Action Kart (A) et Super Speed (B) ont besoin de 4 composants a, b, c, d.
• A nécessite 4a, 2b, 5c et 3d• B nécessite 5a, 3b, 3c et 4d• Ces besoins sont synthétisés dans une
matrice dite des coefficients techniques
Exemples de matricesExemples de matrices
4 2 5 35 3 3 4
(c) JP Marca pour CNAM INTEC
OpOpéérations sur les matrices : rations sur les matrices : EgalitEgalitéé
• Deux matrices sont égales lorsqu’elles sont de même dimension et que les éléments de même indice sont égaux
(c) JP Marca pour CNAM INTEC
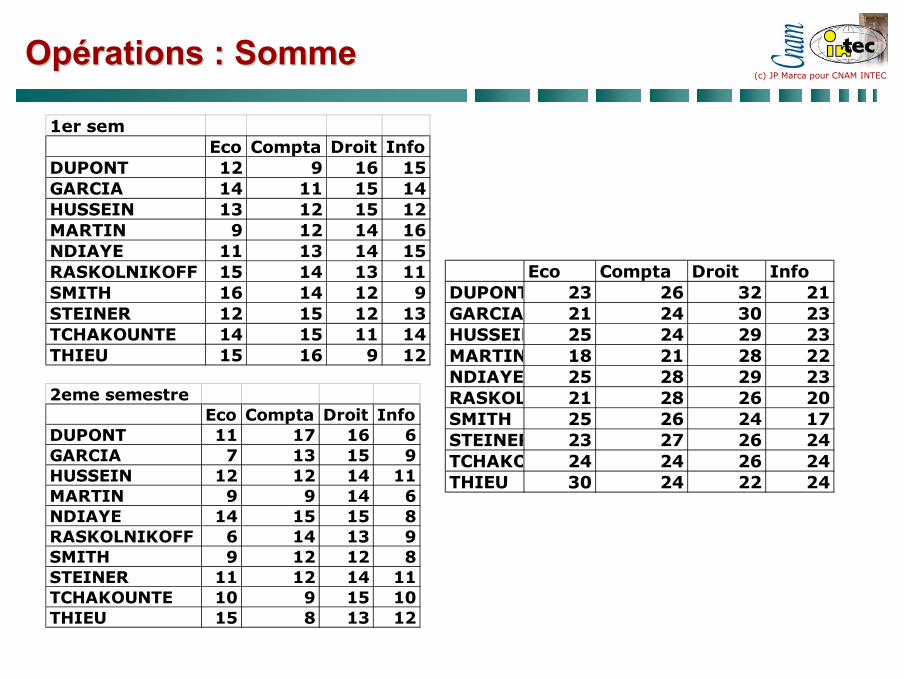
OpOpéérations : Sommerations : Somme
1er semEco Compta Droit Info
DUPONT 12 9 16 15GARCIA 14 11 15 14HUSSEIN 13 12 15 12MARTIN 9 12 14 16NDIAYE 11 13 14 15RASKOLNIKOFF 15 14 13 11SMITH 16 14 12 9STEINER 12 15 12 13TCHAKOUNTE 14 15 11 14THIEU 15 16 9 12
2eme semestreEco Compta Droit Info
DUPONT 11 17 16 6GARCIA 7 13 15 9HUSSEIN 12 12 14 11MARTIN 9 9 14 6NDIAYE 14 15 15 8RASKOLNIKOFF 6 14 13 9SMITH 9 12 12 8STEINER 11 12 14 11TCHAKOUNTE 10 9 15 10THIEU 15 8 13 12
Eco Compta Droit InfoDUPONT 23 26 32 21GARCIA 21 24 30 23HUSSEIN 25 24 29 23MARTIN 18 21 28 22NDIAYE 25 28 29 23RASKOL 21 28 26 20SMITH 25 26 24 17STEINER 23 27 26 24TCHAKO 24 24 26 24THIEU 30 24 22 24
(c) JP Marca pour CNAM INTEC
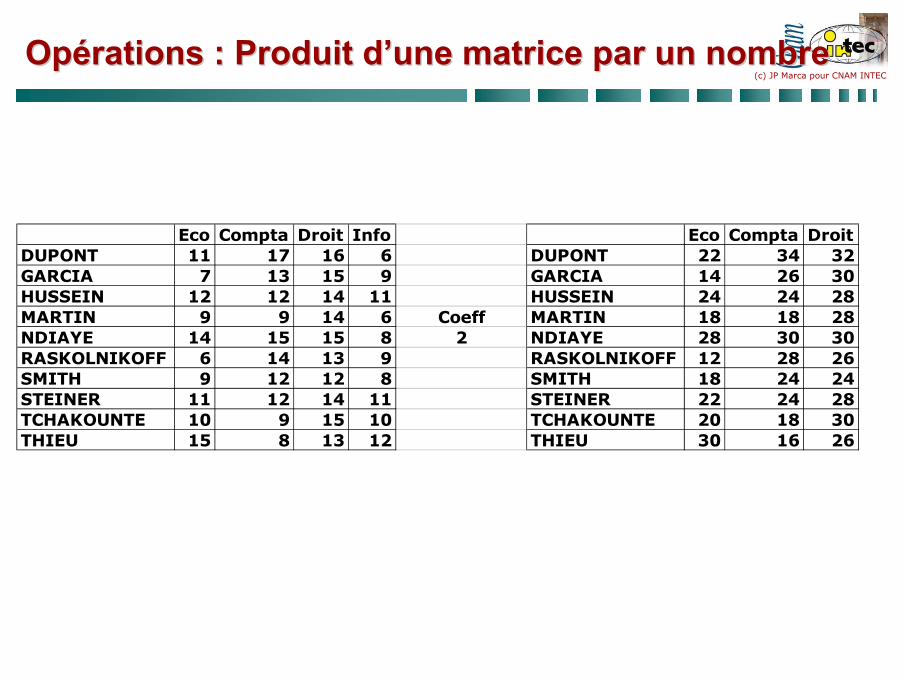
OpOpéérations : Produit drations : Produit d’’une matrice par un nombreune matrice par un nombre
Eco Compta Droit Info Eco Compta DroitDUPONT 11 17 16 6 DUPONT 22 34 32GARCIA 7 13 15 9 GARCIA 14 26 30HUSSEIN 12 12 14 11 HUSSEIN 24 24 28MARTIN 9 9 14 6 Coeff MARTIN 18 18 28NDIAYE 14 15 15 8 2 NDIAYE 28 30 30RASKOLNIKOFF 6 14 13 9 RASKOLNIKOFF 12 28 26SMITH 9 12 12 8 SMITH 18 24 24STEINER 11 12 14 11 STEINER 22 24 28TCHAKOUNTE 10 9 15 10 TCHAKOUNTE 20 18 30THIEU 15 8 13 12 THIEU 30 16 26
(c) JP Marca pour CNAM INTEC
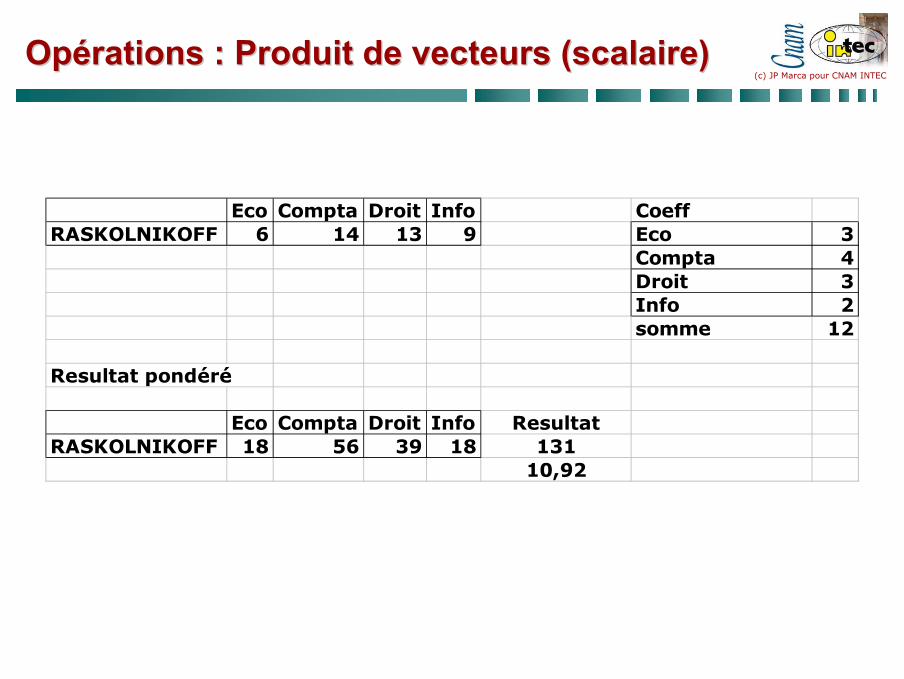
OpOpéérations : Produit de vecteurs (scalaire)rations : Produit de vecteurs (scalaire)
Eco Compta Droit Info CoeffRASKOLNIKOFF 6 14 13 9 Eco 3
Compta 4Droit 3Info 2somme 12
Resultat pondéré
Eco Compta Droit Info ResultatRASKOLNIKOFF 18 56 39 18 131
10,92
(c) JP Marca pour CNAM INTEC
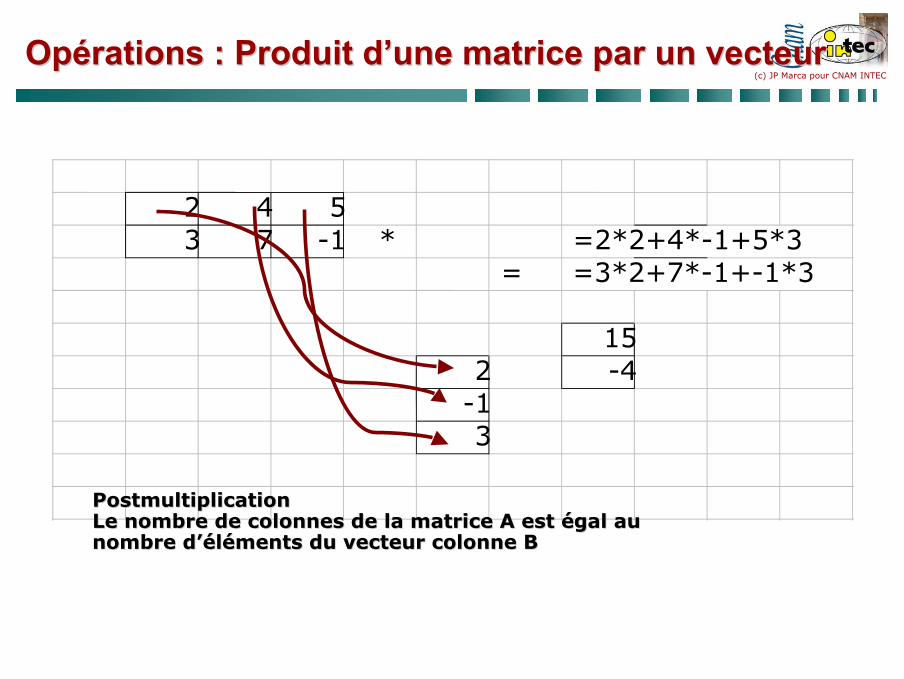
OpOpéérations : Produit drations : Produit d’’une matrice par un vecteurune matrice par un vecteur
2 4 53 7 -1 * =2*2+4*-1+5*3
= =3*2+7*-1+-1*3
152 -4
-13
PostmultiplicationPostmultiplicationLe nombre de colonnes de la matrice A est Le nombre de colonnes de la matrice A est éégal au gal au nombre dnombre d’é’éllééments du vecteur colonne Bments du vecteur colonne B
(c) JP Marca pour CNAM INTEC
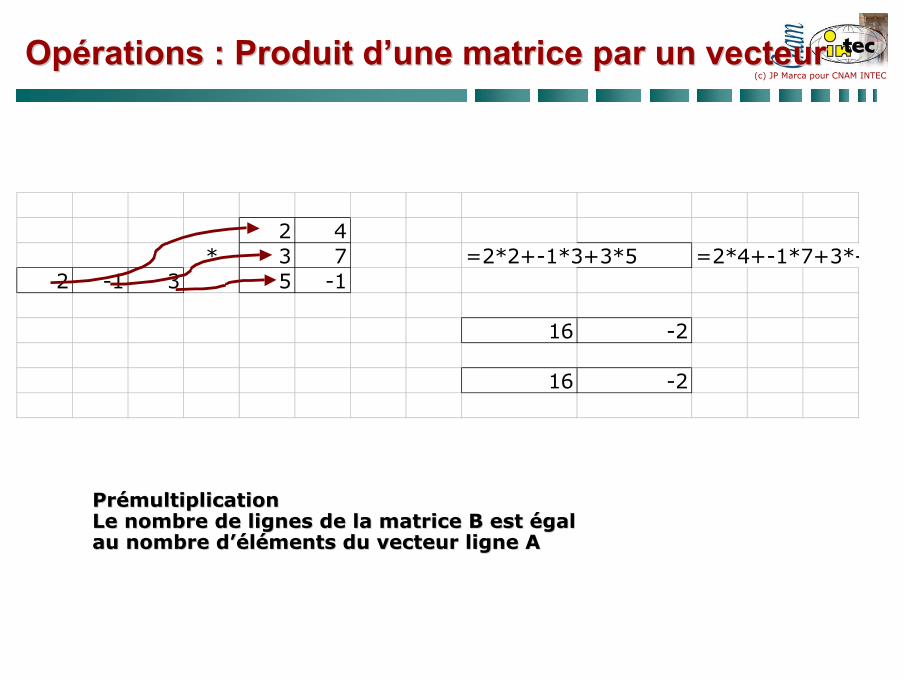
OpOpéérations : Produit drations : Produit d’’une matrice par un vecteurune matrice par un vecteur
PrPréémultiplicationmultiplicationLe nombre de lignes de la matrice B est Le nombre de lignes de la matrice B est éégalgalau nombre dau nombre d’é’éllééments du vecteur ligne Aments du vecteur ligne A
2 4* 3 7 =2*2+-1*3+3*5 =2*4+-1*7+3*-
2 -1 3 5 -1
16 -2
16 -2
(c) JP Marca pour CNAM INTEC
• Le produit est de deux matrices est uematrice
• On ne peut multiplier 2 matrices que si le nombre de colonnes de la 1e matrice est égal au nombre de lignes de la seconde
• Le produit n’est pas une opération commutative
Produit de matricesProduit de matrices
(c) JP Marca pour CNAM INTEC
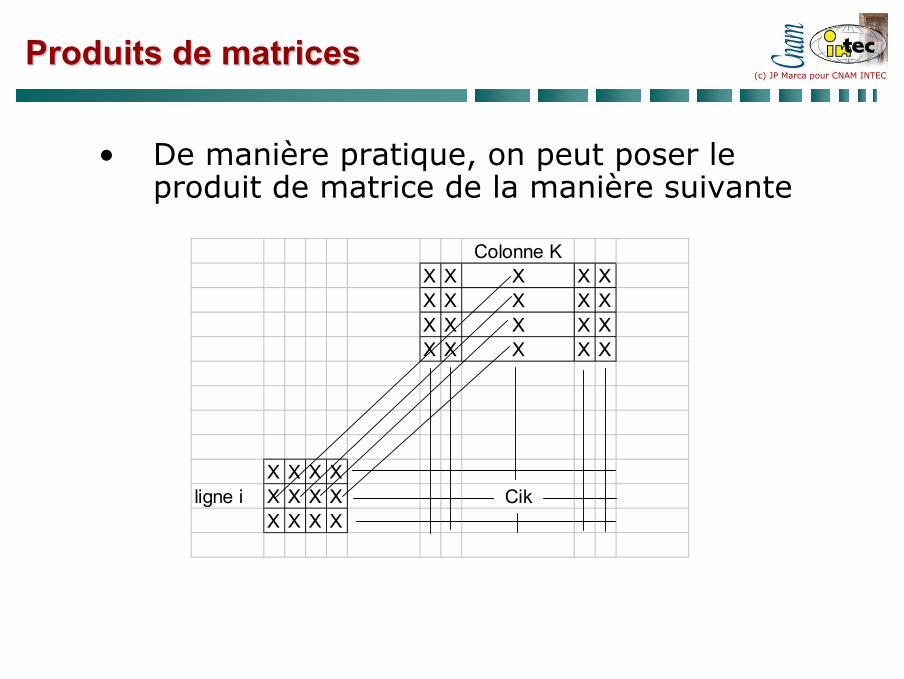
• De manière pratique, on peut poser le produit de matrice de la manière suivante
Produits de matricesProduits de matrices
Colonne KX X X X XX X X X XX X X X XX X X X X
X X X Xligne i X X X X Cik
X X X X
(c) JP Marca pour CNAM INTEC
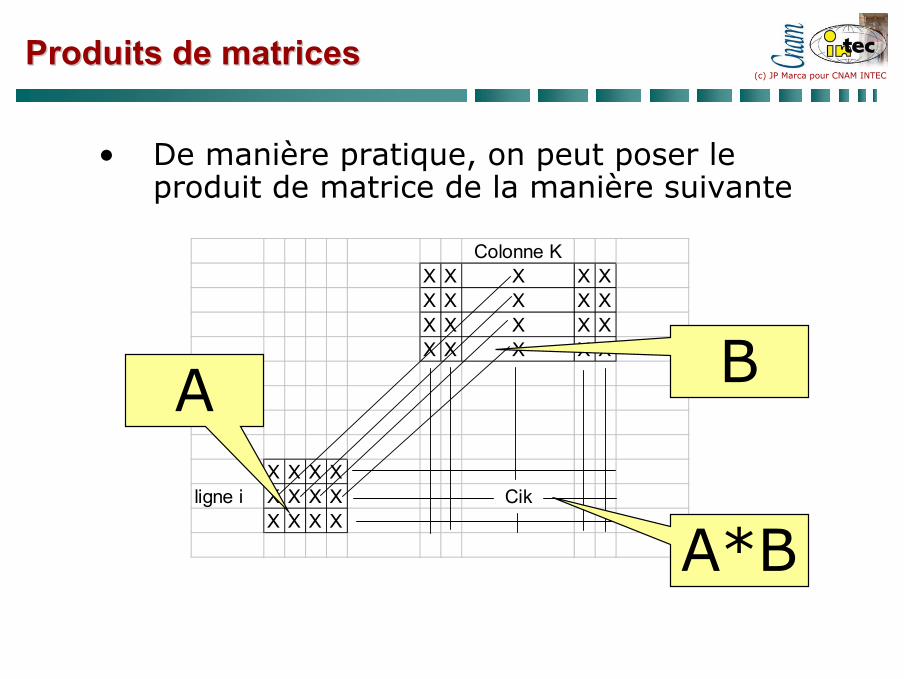
• De manière pratique, on peut poser le produit de matrice de la manière suivante
Produits de matricesProduits de matrices
Colonne KX X X X XX X X X XX X X X XX X X X X
X X X Xligne i X X X X Cik
X X X X
A B
A*B
(c) JP Marca pour CNAM INTEC
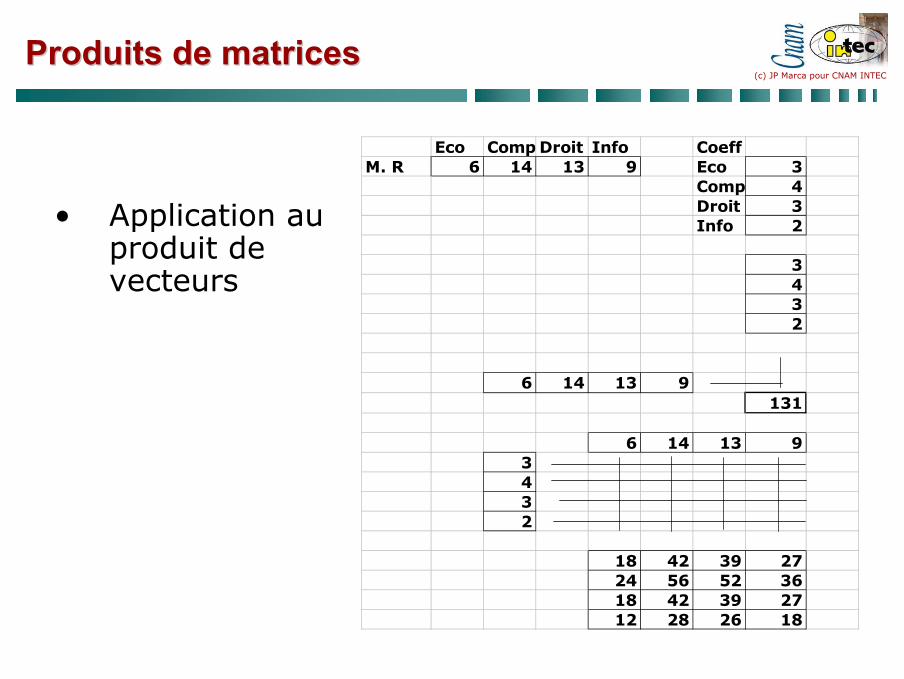
• Application au produit de vecteurs
Produits de matricesProduits de matrices
Eco Comp Droit Info CoeffM. R 6 14 13 9 Eco 3
Comp 4Droit 3Info 2
3432
6 14 13 9131
6 14 13 93432
18 42 39 2724 56 52 3618 42 39 2712 28 26 18
(c) JP Marca pour CNAM INTEC
UtilitUtilitéé
Pour quelles applications ces formulesPour quelles applications ces formulesSontSont--elles utiles ?elles utiles ?
(c) JP Marca pour CNAM INTEC
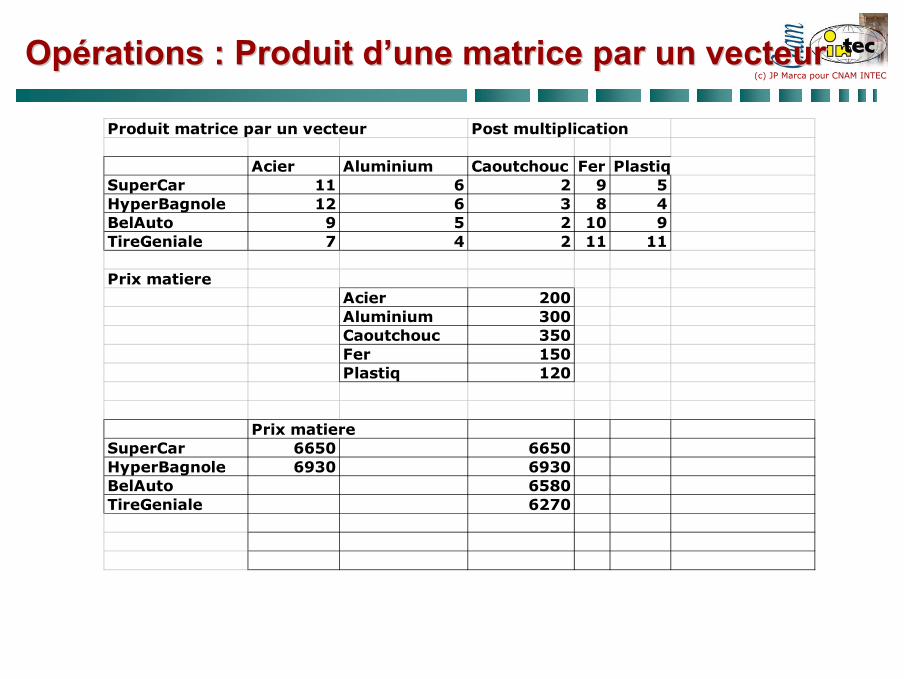
OpOpéérations : Produit drations : Produit d’’une matrice par un vecteurune matrice par un vecteur
Produit matrice par un vecteur Post multiplication
Acier Aluminium Caoutchouc Fer PlastiqSuperCar 11 6 2 9 5HyperBagnole 12 6 3 8 4BelAuto 9 5 2 10 9TireGeniale 7 4 2 11 11
Prix matiereAcier 200Aluminium 300Caoutchouc 350Fer 150Plastiq 120
Prix matiereSuperCar 6650 6650HyperBagnole 6930 6930BelAuto 6580TireGeniale 6270
(c) JP Marca pour CNAM INTEC
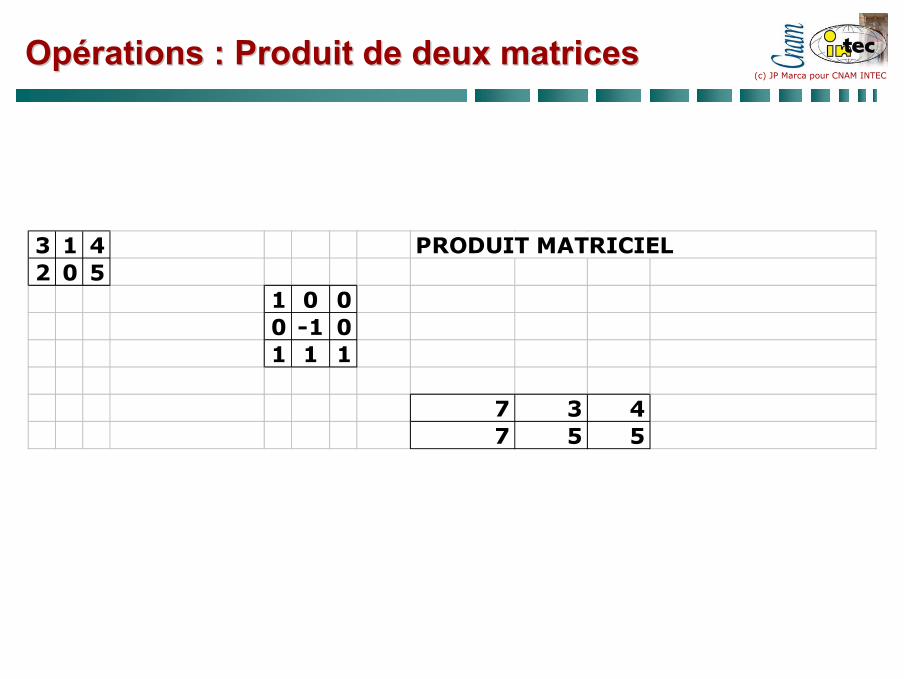
OpOpéérations : Produit de deux matricesrations : Produit de deux matrices
3 1 4 PRODUIT MATRICIEL2 0 5
1 0 00 -1 01 1 1
7 3 47 5 5
(c) JP Marca pour CNAM INTEC
OpOpéérations : Inversion drations : Inversion d’’une matrice carrune matrice carrééee
• Soit A une matrice carrée• On note A-1 l’inverse de la matrice
A telle que :• A-1 * A = I matrice identité• Plusieurs méthodes permettent
d’obtenir l’inverse d’une matrice (déterminant, pivot)
• Fonction Inversemat d’Excel• Pour pouvoir inverser une
matrice, il faut que son déterminant ne soit pas nul
(c) JP Marca pour CNAM INTEC
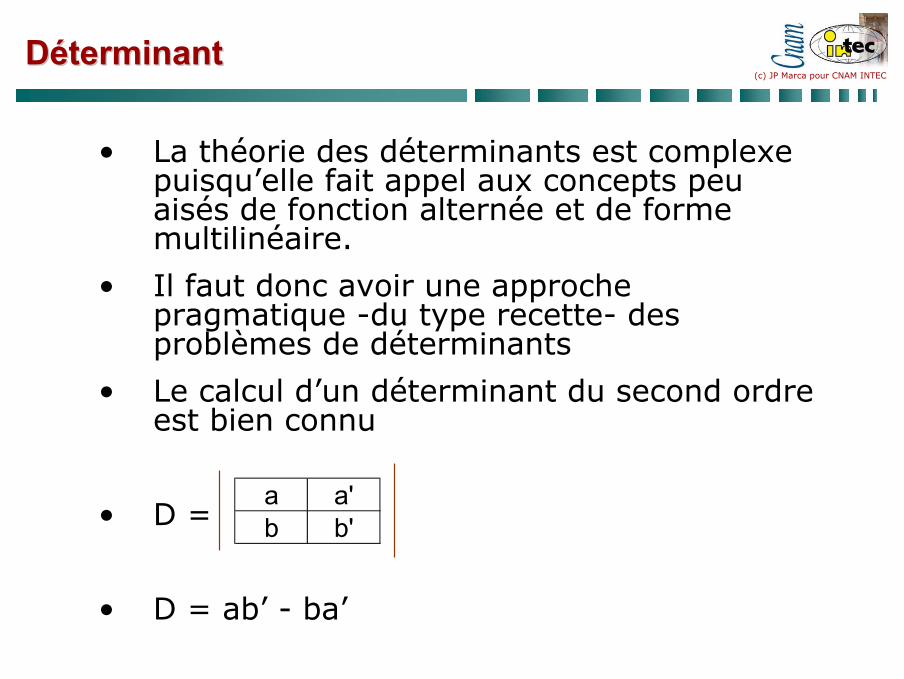
• La théorie des déterminants est complexe puisqu’elle fait appel aux concepts peu aisés de fonction alternée et de forme multilinéaire.
• Il faut donc avoir une approche pragmatique -du type recette- des problèmes de déterminants
• Le calcul d’un déterminant du second ordre est bien connu
• D =
• D = ab’ - ba’
DDééterminantterminant
a a'b b'
(c) JP Marca pour CNAM INTEC
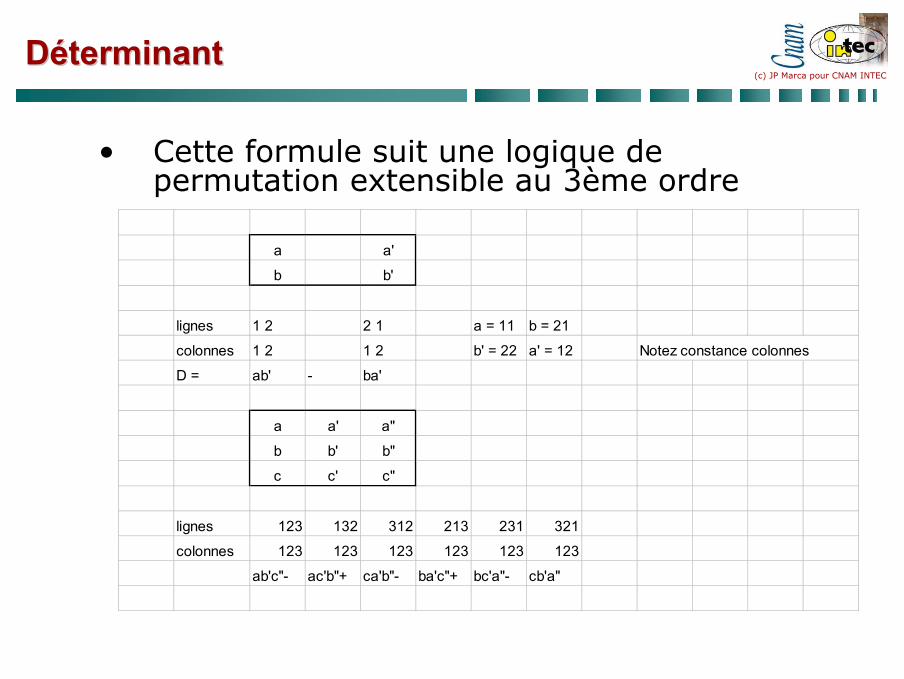
• Cette formule suit une logique de permutation extensible au 3ème ordre
DDééterminantterminant
a a'
b b'
lignes 1 2 2 1 a = 11 b = 21
colonnes 1 2 1 2 b' = 22 a' = 12 Notez constance colonnes
D = ab' - ba'
a a' a"
b b' b"
c c' c"
lignes 123 132 312 213 231 321
colonnes 123 123 123 123 123 123
ab'c"- ac'b"+ ca'b"- ba'c"+ bc'a"- cb'a"
(c) JP Marca pour CNAM INTEC
• Plusieurs méthodes possibles
• Les plus pratiquées :
· Méthode des déterminants
· Méthode des combinaisons linéaires
• Méthodes fastidieuses qui imposent le recours à l’ordinateur pour les rangs > 3
Inverse matriceInverse matrice
(c) JP Marca pour CNAM INTEC
• Trois étapes (2ème ordre)
1. Calcul du déterminant (cf § précédent : ab’-ba’) )
2. Obtention matrice adjointe : permuter les éléments a et b’, changer le signe des termes a’ b.
3. Multiplication de la matrice adjointe par l’inverse du déterminant.
MMééthode des dthode des dééterminantsterminants
(c) JP Marca pour CNAM INTEC
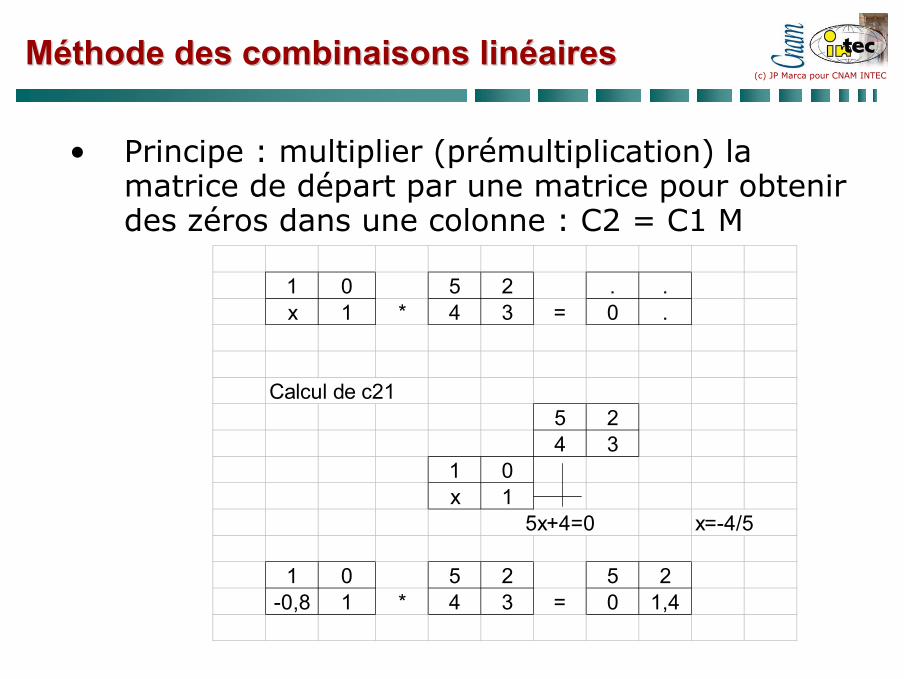
• Principe : multiplier (prémultiplication) la matrice de départ par une matrice pour obtenir des zéros dans une colonne : C2 = C1 M
MMééthode des combinaisons linthode des combinaisons linééairesaires
1 0 5 2 . .x 1 * 4 3 = 0 .
Calcul de c215 24 3
1 0x 1
5x+4=0 x=-4/5
1 0 5 2 5 2-0,8 1 * 4 3 = 0 1,4
(c) JP Marca pour CNAM INTEC
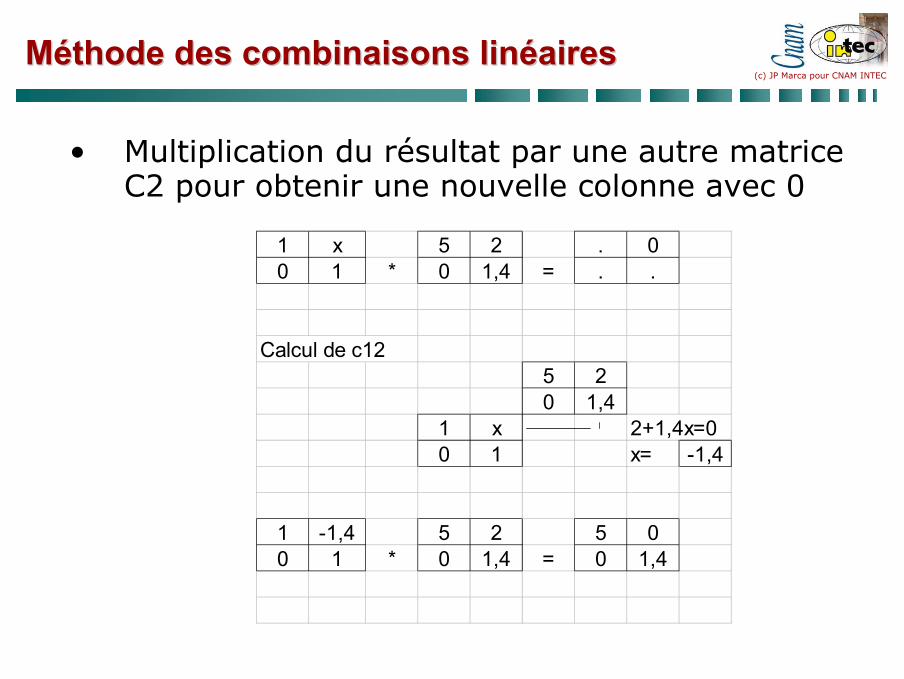
• Multiplication du résultat par une autre matrice C2 pour obtenir une nouvelle colonne avec 0
MMééthode des combinaisons linthode des combinaisons linééairesaires
1 x 5 2 . 00 1 * 0 1,4 = . .
Calcul de c125 20 1,4
1 x 2+1,4x=00 1 x= -1,4
1 -1,4 5 2 5 00 1 * 0 1,4 = 0 1,4
(c) JP Marca pour CNAM INTEC
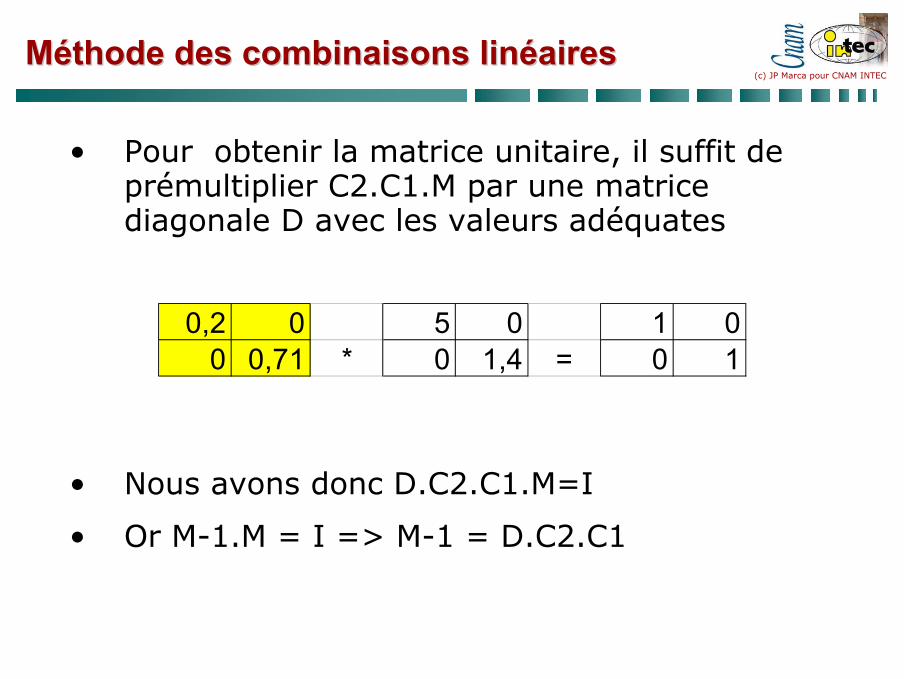
• Pour obtenir la matrice unitaire, il suffit de prémultiplier C2.C1.M par une matrice diagonale D avec les valeurs adéquates
• Nous avons donc D.C2.C1.M=I
• Or M-1.M = I => M-1 = D.C2.C1
MMééthode des combinaisons linthode des combinaisons linééairesaires
0,2 0 5 0 1 00 0,71 * 0 1,4 = 0 1
(c) JP Marca pour CNAM INTEC
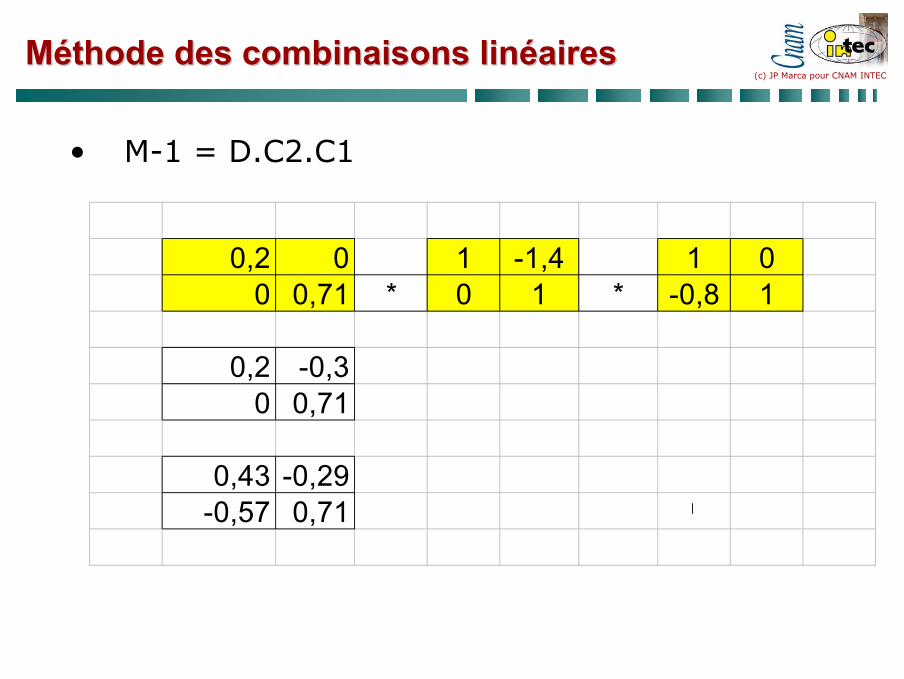
• M-1 = D.C2.C1
MMééthode des combinaisons linthode des combinaisons linééairesaires
0,2 0 1 -1,4 1 00 0,71 * 0 1 * -0,8 1
0,2 -0,30 0,71
0,43 -0,29-0,57 0,71
(c) JP Marca pour CNAM INTEC
RRéésolution matricielle dsolution matricielle d’’un systun systèème dme d’é’équations quations linlinééairesaires
• a1x+b1y+c1z=d1• a2x+b2y+c2z=d2• a3x+b3y+c3z=d3
• AX = D• A-1 A X = A-1 D• X = A-1 D
(c) JP Marca pour CNAM INTEC
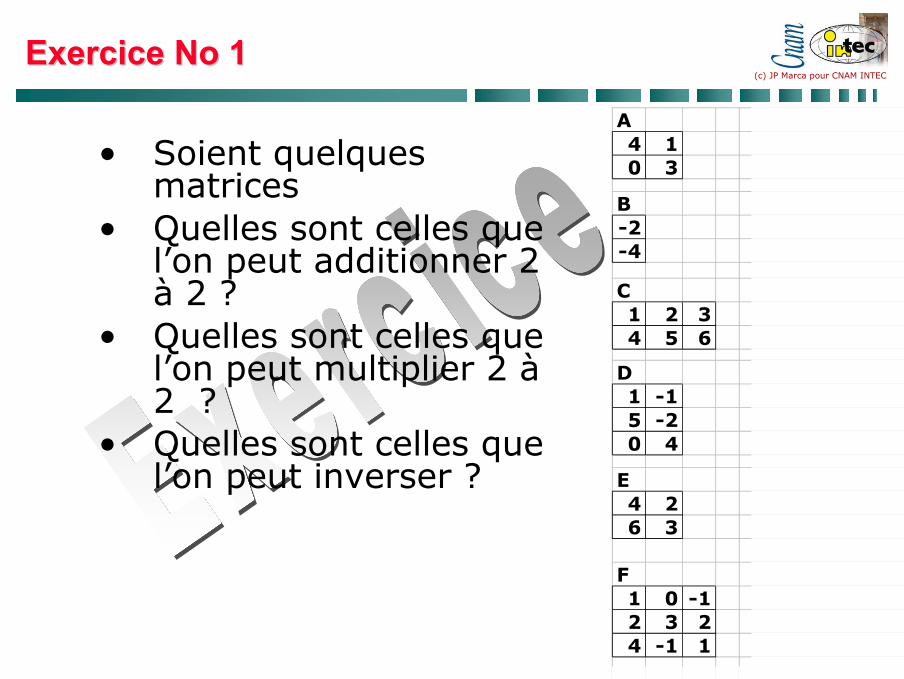
• Soient quelques matrices
• Quelles sont celles que l’on peut additionner 2 à 2 ?
• Quelles sont celles que l’on peut multiplier 2 à2 ?
• Quelles sont celles que l’on peut inverser ?
Exercice No 1Exercice No 1
A4 10 3
B-2-4
C1 2 34 5 6
D1 -15 -20 4
E4 26 3
F1 0 -12 3 24 -1 1
(c) JP Marca pour CNAM INTEC
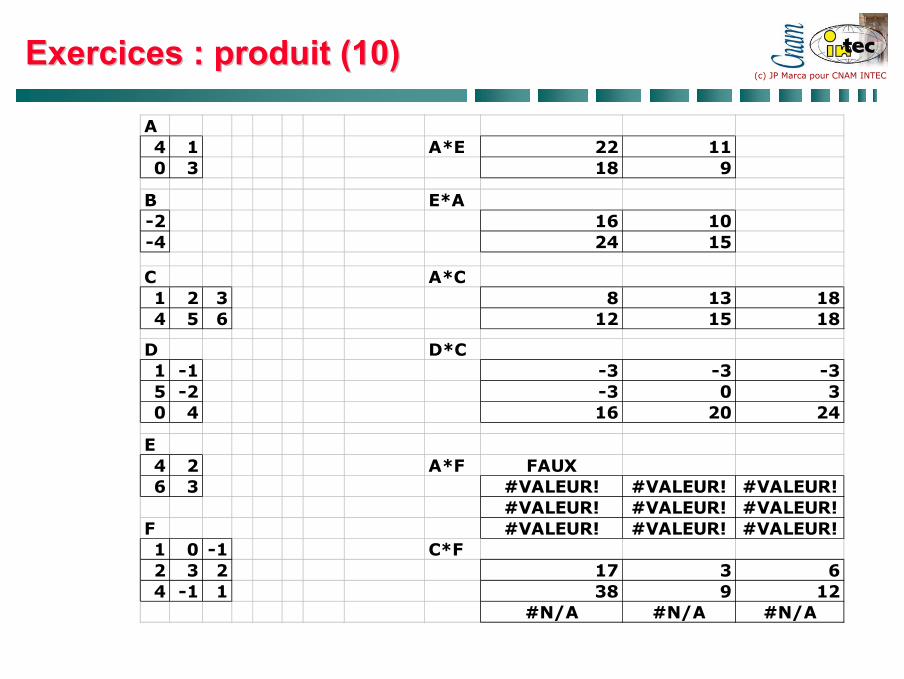
Exercices : produit (10)Exercices : produit (10)
A4 1 A*E 22 110 3 18 9
B E*A-2 16 10-4 24 15
C A*C1 2 3 8 13 184 5 6 12 15 18
D D*C1 -1 -3 -3 -35 -2 -3 0 30 4 16 20 24
E4 2 A*F FAUX6 3 #VALEUR! #VALEUR! #VALEUR!
#VALEUR! #VALEUR! #VALEUR!F #VALEUR! #VALEUR! #VALEUR!1 0 -1 C*F2 3 2 17 3 64 -1 1 38 9 12
#N/A #N/A #N/A
(c) JP Marca pour CNAM INTEC
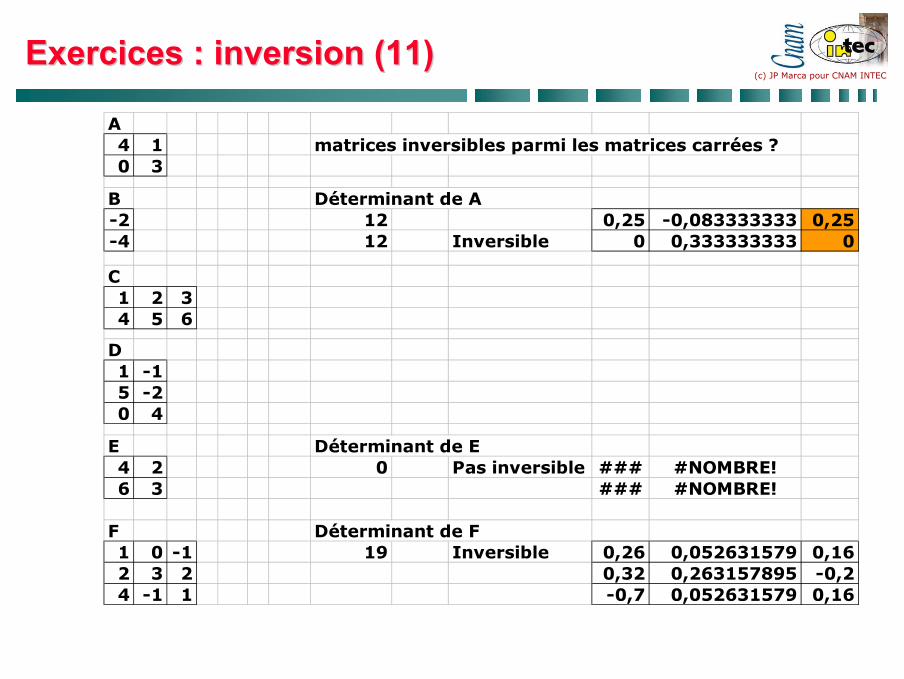
Exercices : inversion (11)Exercices : inversion (11)
A4 1 matrices inversibles parmi les matrices carrées ?0 3
B Déterminant de A-2 12 0,25 -0,083333333 0,25-4 12 Inversible 0 0,333333333 0
C1 2 34 5 6
D1 -15 -20 4
E Déterminant de E4 2 0 Pas inversible ### #NOMBRE!6 3 ### #NOMBRE!
F Déterminant de F1 0 -1 19 Inversible 0,26 0,052631579 0,162 3 2 0,32 0,263157895 -0,24 -1 1 -0,7 0,052631579 0,16
(c) JP Marca pour CNAM INTEC
• Soient deux matrices• Vérifier que l’une est l’inverse de
l ’autre• Résoudre un système d’équations
Exercice No 2 Exercice No 2
(c) JP Marca pour CNAM INTEC
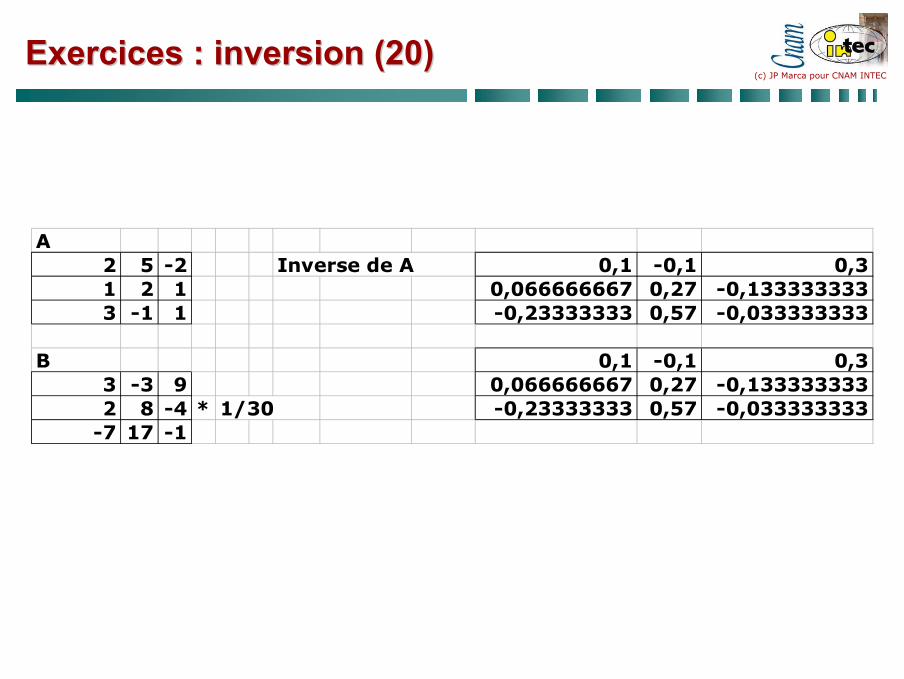
Exercices : inversion (20)Exercices : inversion (20)
A2 5 -2 Inverse de A 0,1 -0,1 0,31 2 1 0,066666667 0,27 -0,1333333333 -1 1 -0,23333333 0,57 -0,033333333
B 0,1 -0,1 0,33 -3 9 0,066666667 0,27 -0,1333333332 8 -4 * 1/30 -0,23333333 0,57 -0,033333333
-7 17 -1
(c) JP Marca pour CNAM INTEC
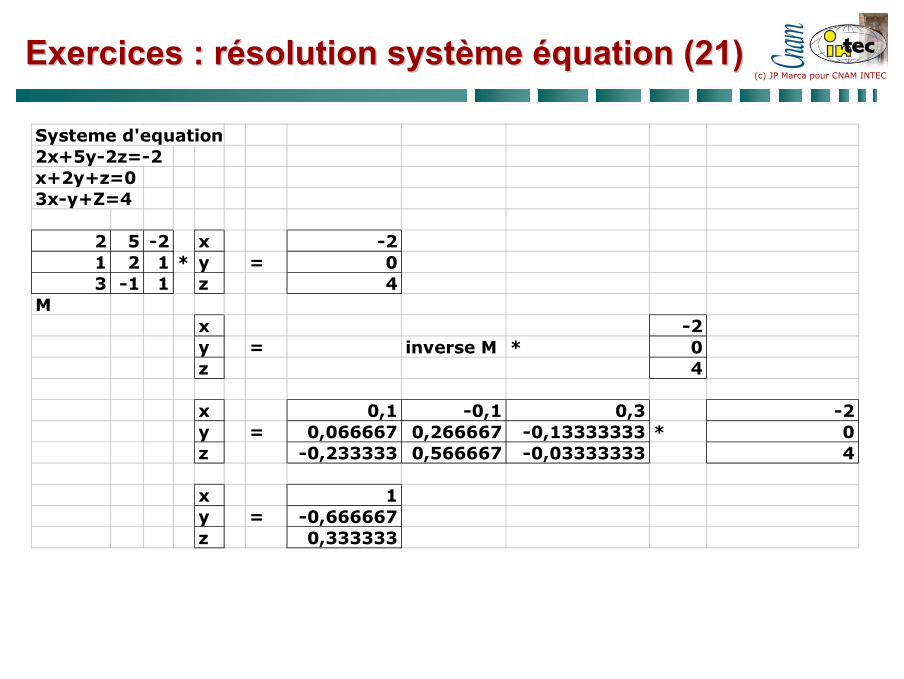
Exercices : rExercices : réésolution systsolution systèème me ééquation (21)quation (21)
Systeme d'equation2x+5y-2z=-2x+2y+z=03x-y+Z=4
2 5 -2 x -21 2 1 * y = 03 -1 1 z 4
Mx -2y = inverse M * 0z 4
x 0,1 -0,1 0,3 -2y = 0,066667 0,266667 -0,13333333 * 0z -0,233333 0,566667 -0,03333333 4
x 1y = -0,666667z 0,333333
(c) JP Marca pour CNAM INTEC
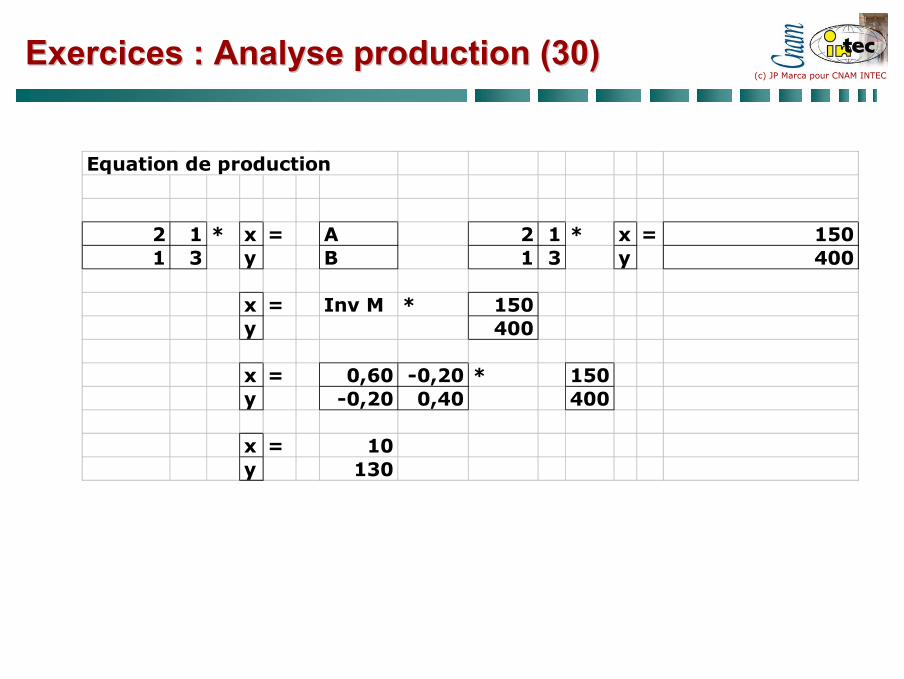
• La production d’une unité de 2 types d’aliments A et B nécessitent :
· 2 unités de viande et 1 unité de légumes pour A
· 1 unité de viande et 3 unités de légumes pour B
• Nous savons :· Stock journalier de viande de 150 unités
· Stock journalier de légumes de 400 unités
• Formaliser le pgm de fabrication permettant d’épuiser complètement les stocks quotidiens
Exercice No 3 Exercice No 3
(c) JP Marca pour CNAM INTEC
Exercices : Analyse production (30)Exercices : Analyse production (30)
Equation de production
2 1 * x = A 2 1 * x = 1501 3 y B 1 3 y 400
x = Inv M * 150y 400
x = 0,60 -0,20 * 150y -0,20 0,40 400
x = 10y 130
(c) JP Marca pour CNAM INTEC
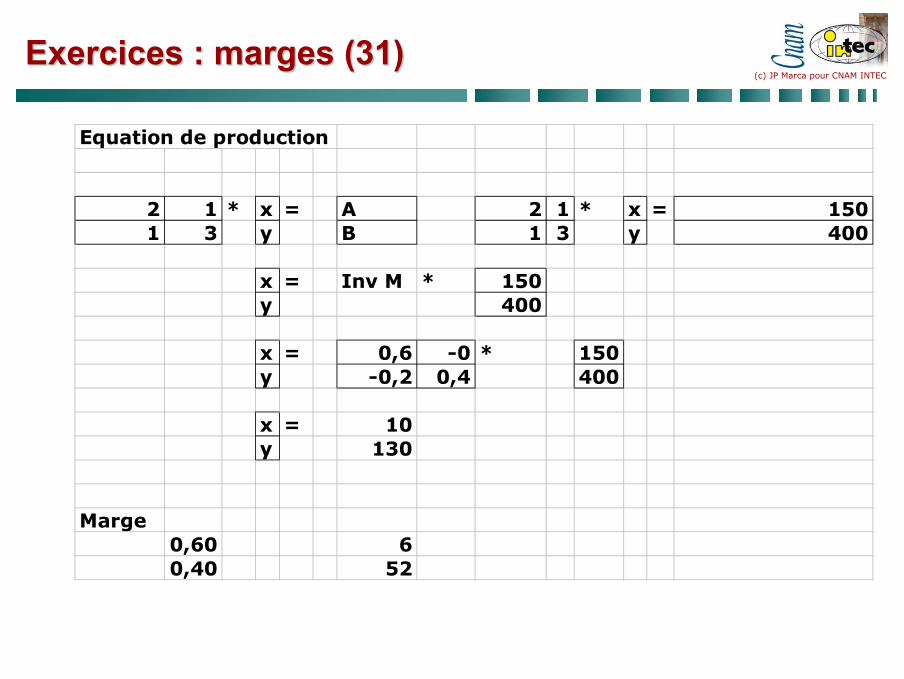
Exercices : marges (31)Exercices : marges (31)
Equation de production
2 1 * x = A 2 1 * x = 1501 3 y B 1 3 y 400
x = Inv M * 150y 400
x = 0,6 -0 * 150y -0,2 0,4 400
x = 10y 130
Marge0,60 60,40 52
(c) JP Marca pour CNAM INTEC
• Une usine fabrique 3 articles X, Y et Z• Chaque article exige le passage dans 3
ateliers A1, A2, A3· X (A1=2, A2=5, A3=3)· Y (A1=1, A2=3, A3=2)· Z (A1= 1, A2=2, A3=2)
• Au cours d’un cycle, la charge horaire a été :
• A1 = 48, A2=118, A3=81• Déterminer les quantités de produits
fabriquées• Les coûts unitaires : X=25, Y = 22, Z = 23• Coût total de fabrication ?
Exercice No 4Exercice No 4
(c) JP Marca pour CNAM INTEC
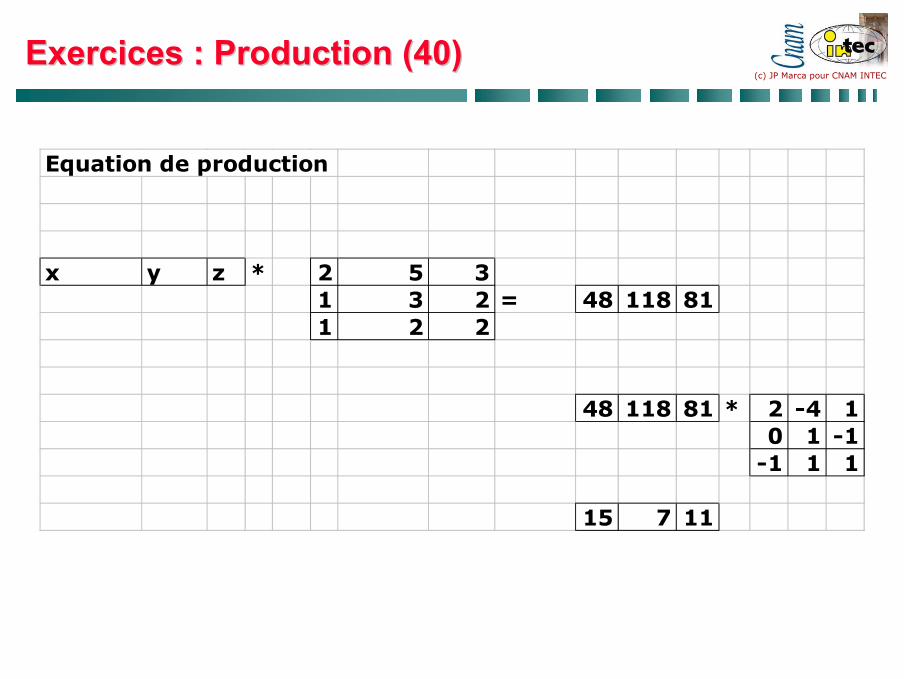
Exercices : Production (40)Exercices : Production (40)
Equation de production
x y z * 2 5 31 3 2 = 48 118 811 2 2
48 118 81 * 2 -4 10 1 -1
-1 1 1
15 7 11
(c) JP Marca pour CNAM INTEC
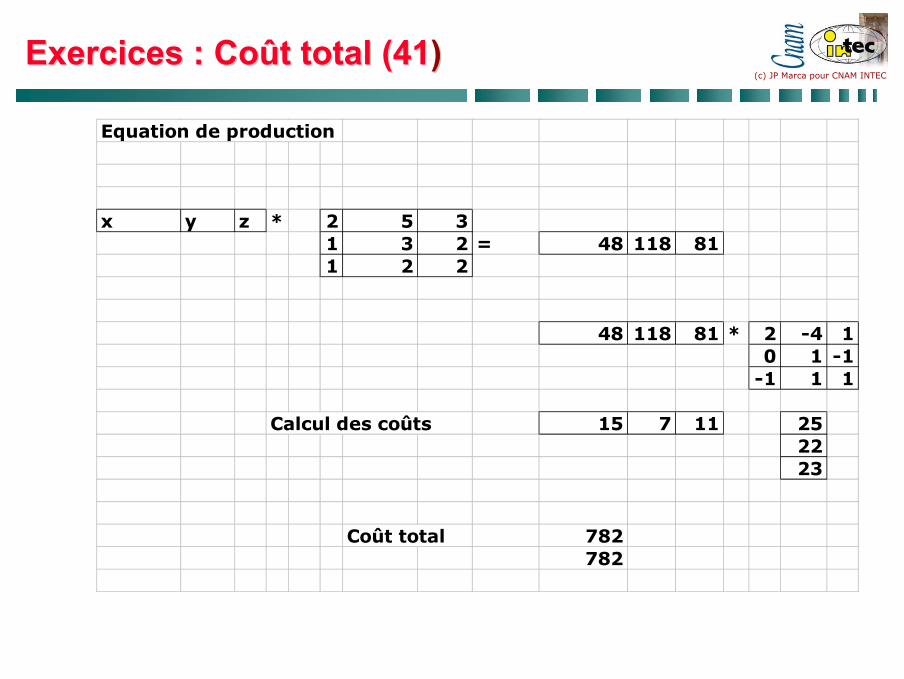
Exercices : CoExercices : Coûût total (41t total (41))
Equation de production
x y z * 2 5 31 3 2 = 48 118 811 2 2
48 118 81 * 2 -4 10 1 -1
-1 1 1
Calcul des coûts 15 7 11 252223
Coût total 782782
(c) JP Marca pour CNAM INTECRRééponses ponses àà nos questionsnos questions
• Intérêt des matrices : dans de nombreux domaines
• Qu’est ce qu’une matrice : un tableau• Opérations sur les matrices : somme,
produit par un scalaire, produit de vecteurs, produit de matrice par un vecteur, produit de matrices
• Inversion de matrices : intéressant pour la résolution d’équations matricielles
• Matrices et tableurs : la saisie des fonctions matricielles, les fonctions produitmat, inversemat et determatd’Excel

(c) JP Marca pour CNAM INTEC
UV205 UV205 -- MathMathéématiquesmatiques
PROGRAMMATION LINEAIREALGORITHME DU SIMPLEXE
DUALITE
(c) JP Marca pour CNAM INTECUne sUne séérie de questionsrie de questions
• Qu’est ce que la programmation linéaire ?
• Quel intérêt dans le domaine de la gestion ?
• Comment résoudre les problèmes de programmation linéaire ?
(c) JP Marca pour CNAM INTEC
• Programmation linéaire ?• Formalisation des
programmes de PL ?• Résolution graphique ?• Solveur sur tableur ?• Règle du simplexe ?• Dualité ?
QuizzQuizz

(c) JP Marca pour CNAM INTEC
QU’EST CE QUE LA PROGRAMMATION
LINEAIRE ?
(c) JP Marca pour CNAM INTEC
• Héritage de la « Recherche opérationnelle « , science qui a connu beaucoup de succès après le seconde guerre mondiale.
• Objectif : optimisation de l’emploi des ressources.
• Méthode : recherche de l’optimum d’une fonction de plusieurs variables liées entre elles par des contraintes sous forme d’égalités et d’inégalités.
• Contraintes linéaire (C=ax+b) => Programmation linéaire
• Regain d’intérêt en fonction de l’augmentation de la puissance des processeurs (supply chain).
Programmation linProgrammation linééaireaire
(c) JP Marca pour CNAM INTEC
• Premier type : maximisation du profit dégagé par une unité de production (business unit) en fonction des contraintes de limitation des facteurs de production
• Second type : la demande étant fixée, quel est la manière optimale de combiner les ressources de la BU pour la satisfaire (minimisation du coût de production)
Typologie des problTypologie des problèèmesmes
(c) JP Marca pour CNAM INTEC
• Production de n biens• Quantités à produire : X1, X2, …, Xn >= 0• m facteurs de productions• Quantités des facteurs de production (Qté limitée, d’où
contrainte): b1, b2, …, bm• aij : quantité du facteur de production i nécessaire pour
produire une unité du bien j• cj : bénéfice unitaire apporté par Xj• a11X1 + a12X2 + … + a1nXn <= b1• a21X1 + a22X2 + … + a2nXn <= b2• ……• am1X1 + am2X2 + … + amnXn <= bm
n
• Maximisation profit : Recherche X1, X2, .. Pour max(ΣcjXjj=1
Premier type : maximisation du profitPremier type : maximisation du profit
(c) JP Marca pour CNAM INTEC
• Production de 3 (n) voitures : R5, R12, R20 • Quantités à produire (variables): X1, X2, X3 >= 0• 4 (m) facteurs de productions : acier, alu, plastique,
caoutchouc• Quantités des facteurs de production (Qté limitée, d’où
contrainte): 107 500, 80 500, 154 000, 69 500• aij : quantité du facteur de production i nécessaire pour
produire une unité du bien j• 50*X1 + 75*X2 + 100*X3 <= 107 500 (Acier)• 50*X1 + 45*X2 + 40*X3 <= 80 500 (Alu)• 100*X1 + 80*X2 + 70*X3 <= 154 000 (Plastique)• 40*X1 + 45*X2 + 35*X3 <= 69 500 (Caoutchouc)• c1 = 35, c2= 45, c3 = 65 : bénéfice unitaire apporté par X1,
X2 et X3• Maximisation profit : Recherche X1, X2, X3 pour max(35*X1
+ 45*X2 + 65*X3)
ExempleExemple
(c) JP Marca pour CNAM INTEC
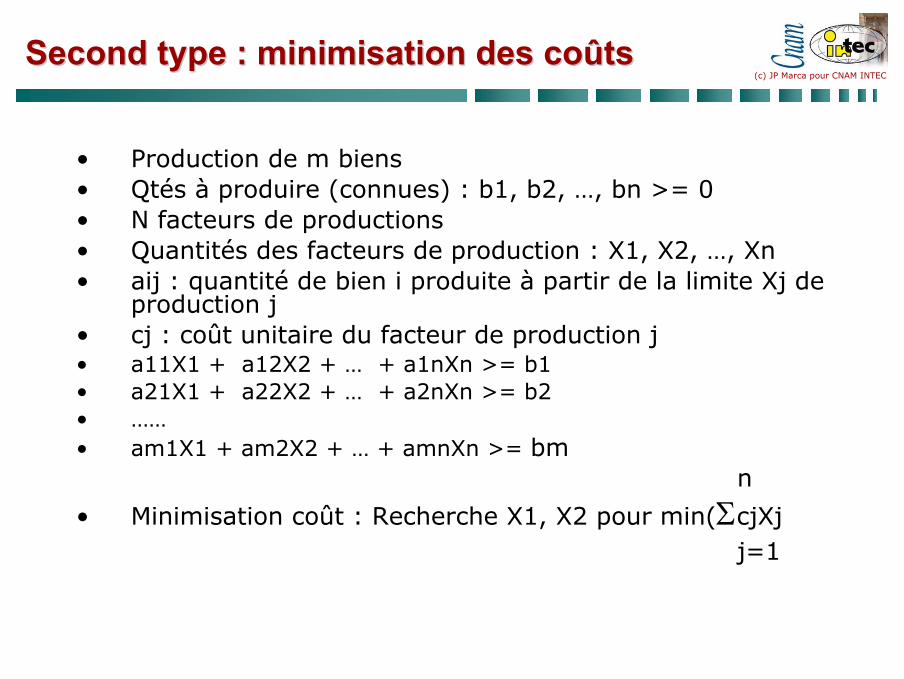
• Production de m biens• Qtés à produire (connues) : b1, b2, …, bn >= 0• N facteurs de productions• Quantités des facteurs de production : X1, X2, …, Xn• aij : quantité de bien i produite à partir de la limite Xj de
production j• cj : coût unitaire du facteur de production j• a11X1 + a12X2 + … + a1nXn >= b1• a21X1 + a22X2 + … + a2nXn >= b2• ……• am1X1 + am2X2 + … + amnXn >= bm
n
• Minimisation coût : Recherche X1, X2 pour min(ΣcjXjj=1
Second type : minimisation des coSecond type : minimisation des coûûtsts
(c) JP Marca pour CNAM INTEC
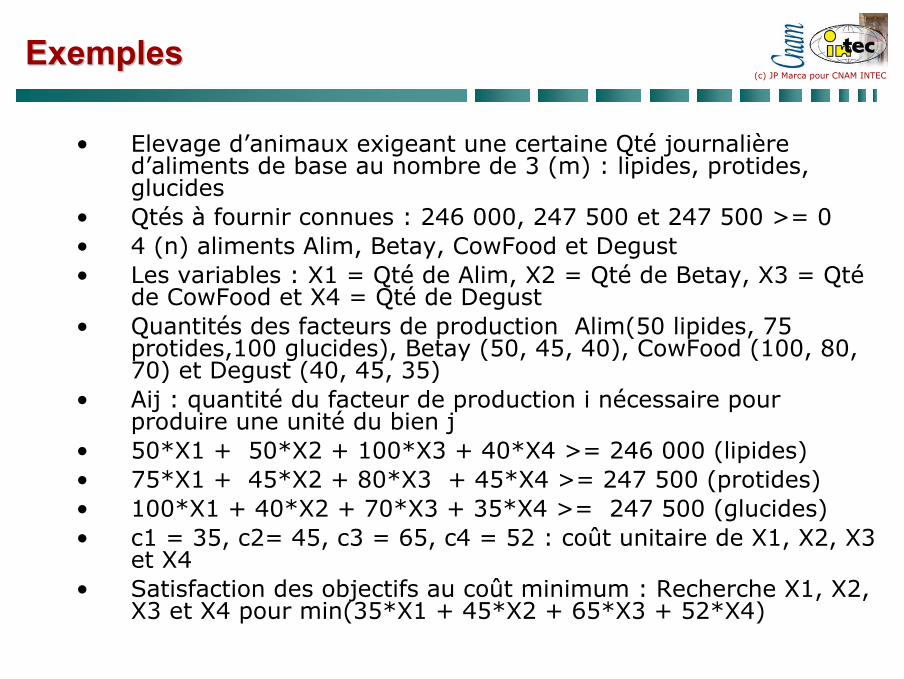
• Elevage d’animaux exigeant une certaine Qté journalière d’aliments de base au nombre de 3 (m) : lipides, protides, glucides
• Qtés à fournir connues : 246 000, 247 500 et 247 500 >= 0• 4 (n) aliments Alim, Betay, CowFood et Degust• Les variables : X1 = Qté de Alim, X2 = Qté de Betay, X3 = Qté
de CowFood et X4 = Qté de Degust• Quantités des facteurs de production Alim(50 lipides, 75
protides,100 glucides), Betay (50, 45, 40), CowFood (100, 80, 70) et Degust (40, 45, 35)
• Aij : quantité du facteur de production i nécessaire pour produire une unité du bien j
• 50*X1 + 50*X2 + 100*X3 + 40*X4 >= 246 000 (lipides)• 75*X1 + 45*X2 + 80*X3 + 45*X4 >= 247 500 (protides)• 100*X1 + 40*X2 + 70*X3 + 35*X4 >= 247 500 (glucides)• c1 = 35, c2= 45, c3 = 65, c4 = 52 : coût unitaire de X1, X2, X3
et X4• Satisfaction des objectifs au coût minimum : Recherche X1, X2,
X3 et X4 pour min(35*X1 + 45*X2 + 65*X3 + 52*X4)
ExemplesExemples
(c) JP Marca pour CNAM INTEC
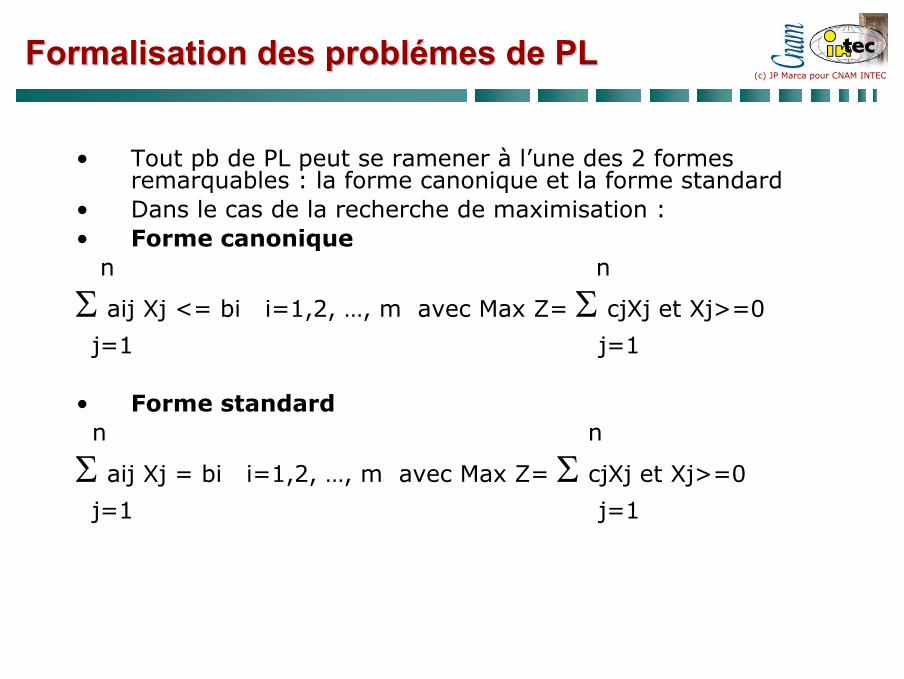
• Tout pb de PL peut se ramener à l’une des 2 formes remarquables : la forme canonique et la forme standard
• Dans le cas de la recherche de maximisation :• Forme canonique
n n
Σ aij Xj <= bi i=1,2, …, m avec Max Z= Σ cjXj et Xj>=0
j=1 j=1
• Forme standardn n
Σ aij Xj = bi i=1,2, …, m avec Max Z= Σ cjXj et Xj>=0
j=1 j=1
Formalisation des Formalisation des problprobléémesmes de PLde PL

(c) JP Marca pour CNAM INTEC
ETUDE DU CASDENIS PAPIN
(c) JP Marca pour CNAM INTEC
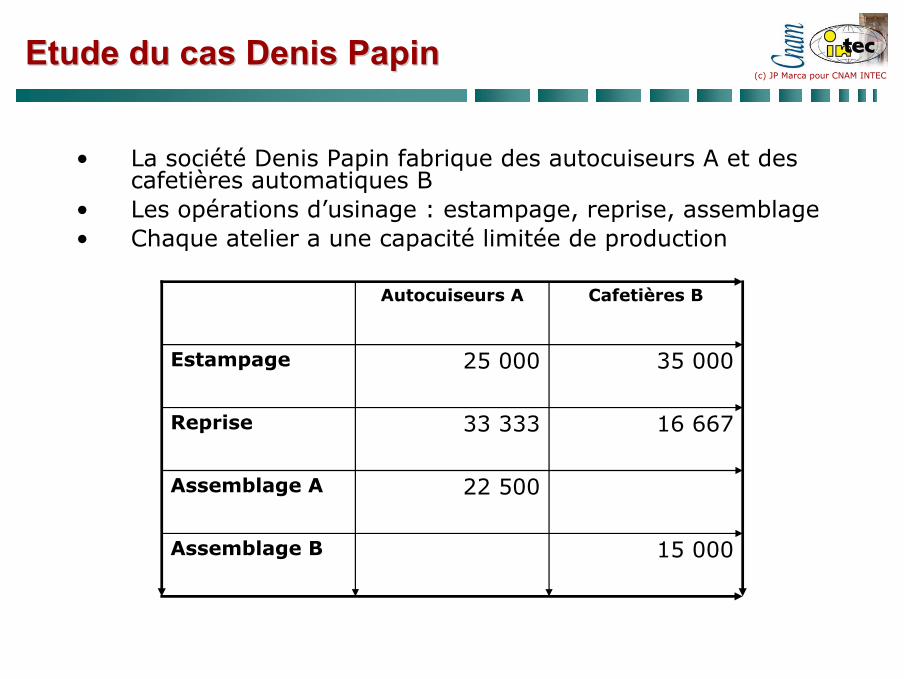
• La société Denis Papin fabrique des autocuiseurs A et des cafetières automatiques B
• Les opérations d’usinage : estampage, reprise, assemblage• Chaque atelier a une capacité limitée de production
EtudeEtude du cas Denis Papindu cas Denis Papin
22 500Assemblage A
15 000Assemblage B
16 66733 333Reprise
35 00025 000Estampage
Cafetières BAutocuiseurs A
(c) JP Marca pour CNAM INTEC
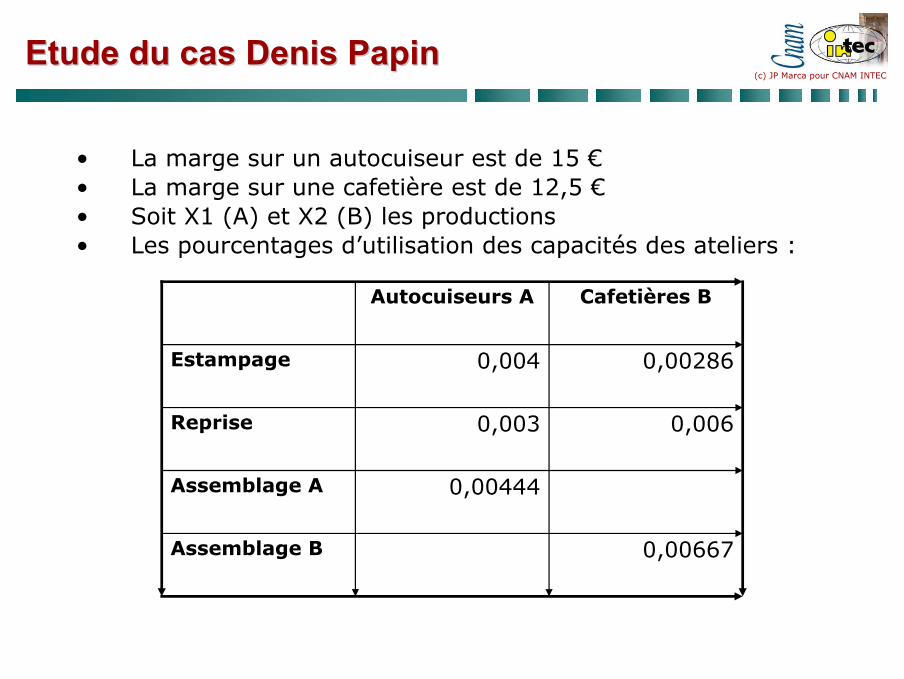
• La marge sur un autocuiseur est de 15 €• La marge sur une cafetière est de 12,5 €• Soit X1 (A) et X2 (B) les productions• Les pourcentages d’utilisation des capacités des ateliers :
EtudeEtude du cas Denis Papindu cas Denis Papin
0,00444Assemblage A
0,00667Assemblage B
0,0060,003Reprise
0,002860,004Estampage
Cafetières BAutocuiseurs A
(c) JP Marca pour CNAM INTEC
• Quelles quantités d’autocuiseurs et de cafetières doit on produire pour que le profit soit maximal ?
• Profit = 15*X1 + 12,5*X2
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
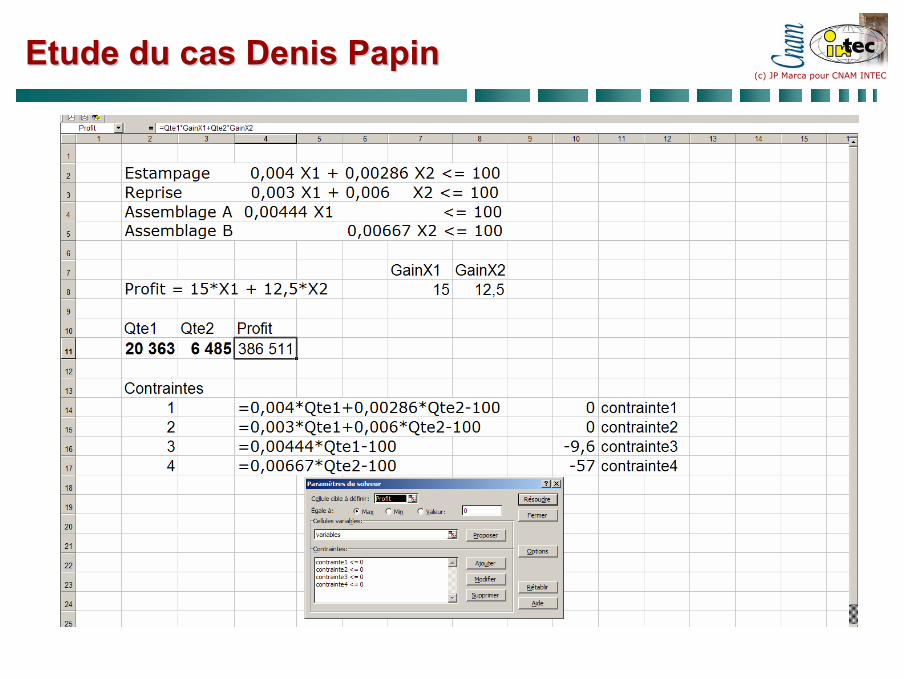
• Formalisation mathématique du problème posé
Estampage 0,004 X1 + 0,00286 X2 <= 100Reprise 0,003 X1 + 0,006 X2 <= 100Assemblage A 0,00444 X1 <= 100Assemblage B 0,00667 X2 <= 100
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
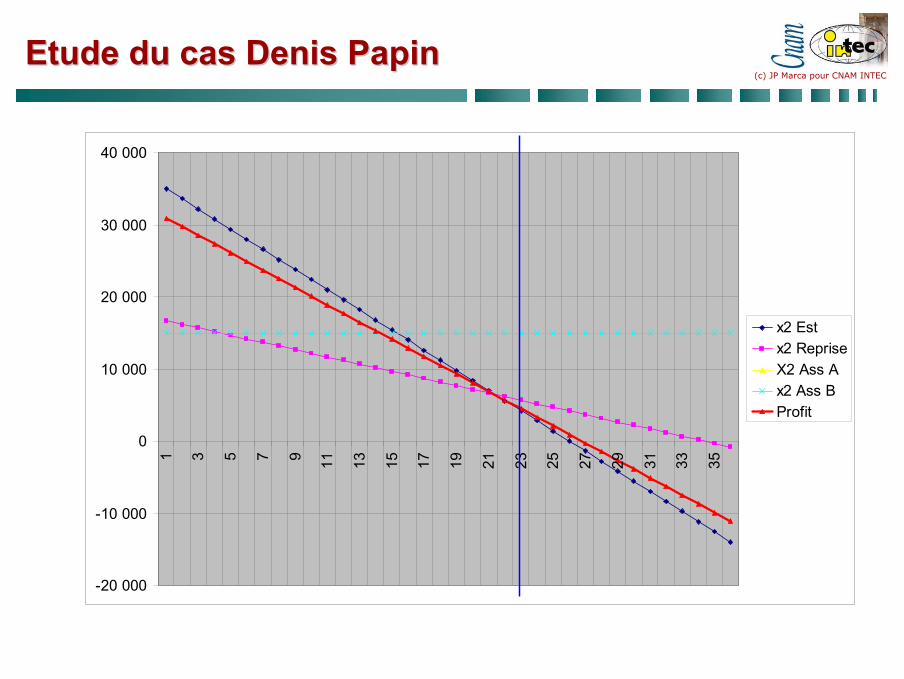
• Résolution graphique
Dans le repère (X2, X1) les droitesx2 = (100-0,004X1)/0,00286 Estampagex2 = (100-0,003X1)/0,006 RepriseX1 = 100/0,00444 Ass AX2 = 100/0,00667 Ass BX2 = (P - 15 X1)/12,5 Equation du profit
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
EtudeEtude du cas Denis Papindu cas Denis Papin
• Résolution graphique
• Les quatre premières droites définissent un espace (polygone) des solutions possibles
• La droite du profit est une droite de pente constante de paramètre P
• On la fait glisser dans le polyèdre en recherchant la valeur de P maxi
(c) JP Marca pour CNAM INTEC
EtudeEtude du cas Denis Papindu cas Denis Papin
-20 000
-10 000
0
10 000
20 000
30 000
40 0001 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35
x2 Estx2 RepriseX2 Ass Ax2 Ass BProfit
(c) JP Marca pour CNAM INTEC
• Max P = 386 111 €• Pour x1 = 20 363 et x2 = 6 485• Ces valeurs correspondent approximativement au
point d’intersection des courbes Estampage et Reprise
• Ces deux ateliers sont donc utilisés au maximum de leurs capacités
• Les ateliers d’assemblage sont utilisés à 90% (A) et 43% (B).
• La solution se trouve toujours sur un des sommets du polygone
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
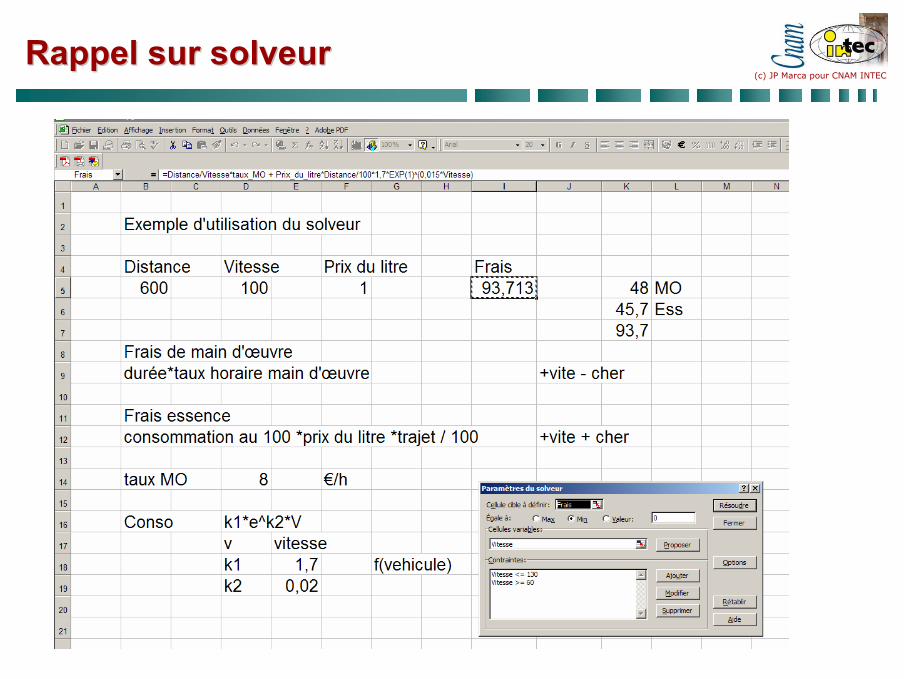
• Dans la pratique :• Utilisation du solveur du tableur
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
Rappel sur Rappel sur solveursolveur
(c) JP Marca pour CNAM INTEC
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
• Avec l’ouverture des marchés de l’est européen, Denis Papin & Co se propose de fabriquer des samovars.
• La modélisation de la gestion de production se complique et passe à trois dimensions (ou plus si plus de produits, ce qui est le cas général dans la pratique).
• Dans l’espace, le polygone devient polyèdre.• Nécessité d’une autre méthode.• La méthode utilisée est la méthode du simplexe.• La démonstration en a été faite par un
mathématicien américain : Georges Dantzig.
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
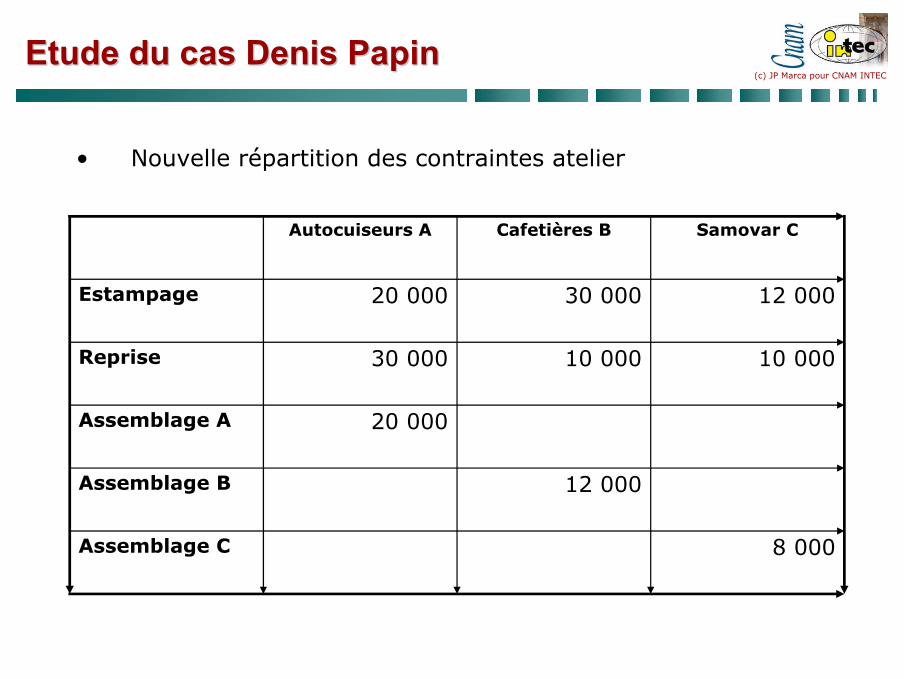
• Nouvelle répartition des contraintes atelier
EtudeEtude du cas Denis Papindu cas Denis Papin
12 000Assemblage B
10 000
30 000
Cafetières B
20 000Assemblage A
8 000Assemblage C
10 00030 000Reprise
12 00020 000Estampage
Samovar CAutocuiseurs A
(c) JP Marca pour CNAM INTEC
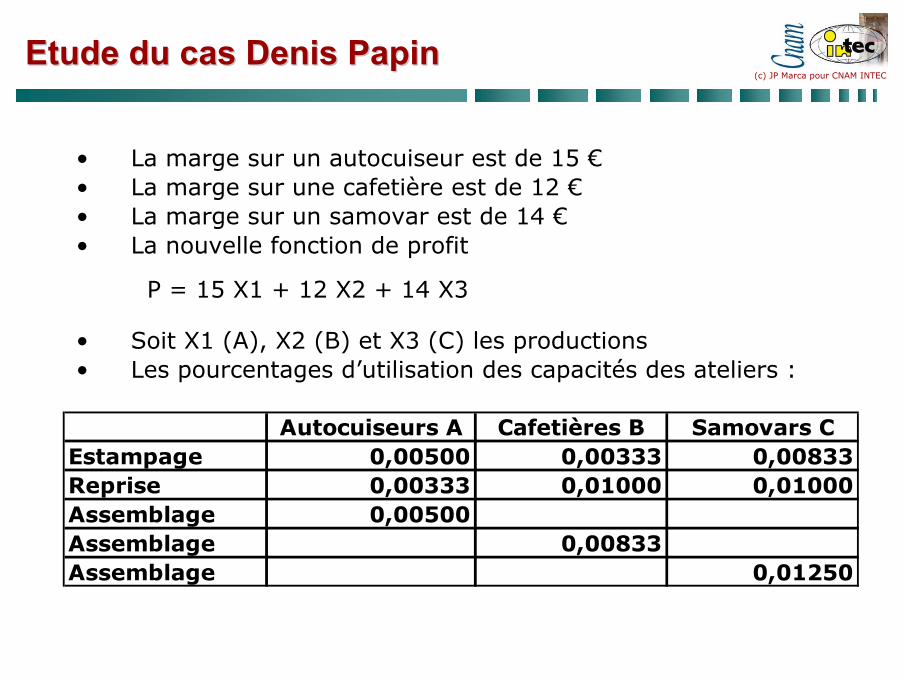
• La marge sur un autocuiseur est de 15 €• La marge sur une cafetière est de 12 €• La marge sur un samovar est de 14 €• La nouvelle fonction de profit
P = 15 X1 + 12 X2 + 14 X3
• Soit X1 (A), X2 (B) et X3 (C) les productions• Les pourcentages d’utilisation des capacités des ateliers :
EtudeEtude du cas Denis Papindu cas Denis Papin
Autocuiseurs A Cafetières B Samovars CEstampage 0,00500 0,00333 0,00833Reprise 0,00333 0,01000 0,01000Assemblage 0,00500Assemblage 0,00833Assemblage 0,01250
(c) JP Marca pour CNAM INTEC
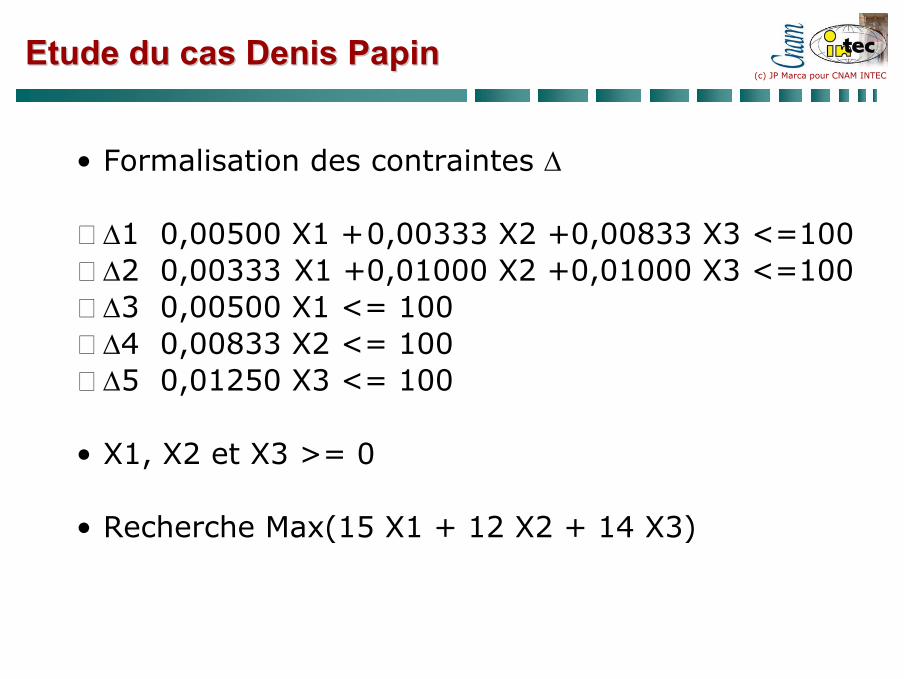
• Formalisation des contraintes ∆
∆1 0,00500 X1 +0,00333 X2 +0,00833 X3 <=100∆2 0,00333 X1 +0,01000 X2 +0,01000 X3 <=100∆3 0,00500 X1 <= 100∆4 0,00833 X2 <= 100∆5 0,01250 X3 <= 100
• X1, X2 et X3 >= 0
• Recherche Max(15 X1 + 12 X2 + 14 X3)
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
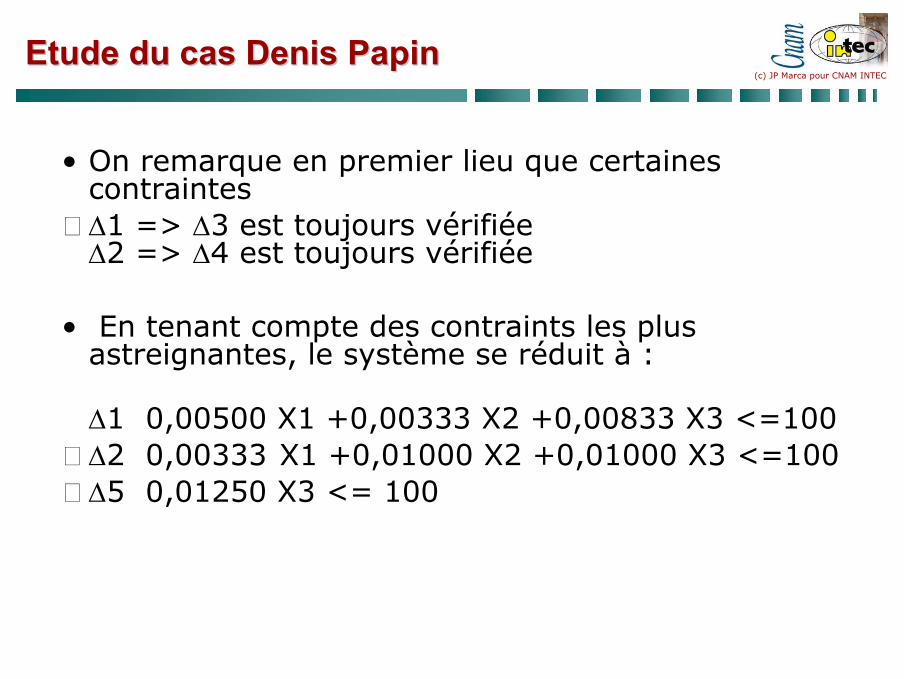
• On remarque en premier lieu que certaines contraintes∆1 => ∆3 est toujours vérifiée∆2 => ∆4 est toujours vérifiée
• En tenant compte des contraints les plus astreignantes, le système se réduit à :
∆1 0,00500 X1 +0,00333 X2 +0,00833 X3 <=100∆2 0,00333 X1 +0,01000 X2 +0,01000 X3 <=100∆5 0,01250 X3 <= 100
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
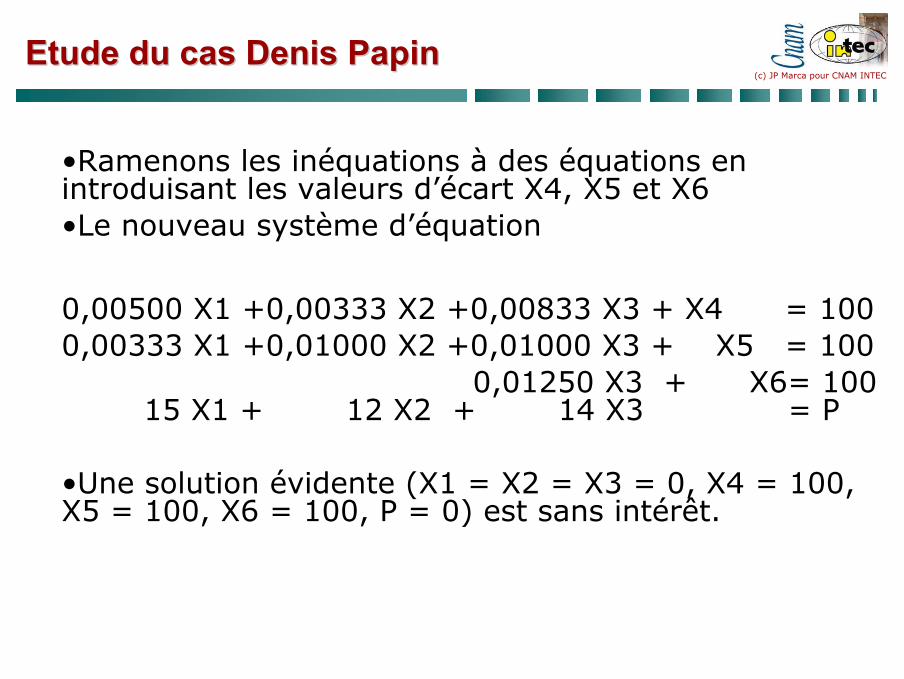
•Ramenons les inéquations à des équations en introduisant les valeurs d’écart X4, X5 et X6•Le nouveau système d’équation
0,00500 X1 +0,00333 X2 +0,00833 X3 + X4 = 1000,00333 X1 +0,01000 X2 +0,01000 X3 + X5 = 100
0,01250 X3 + X6= 10015 X1 + 12 X2 + 14 X3 = P
•Une solution évidente (X1 = X2 = X3 = 0, X4 = 100, X5 = 100, X6 = 100, P = 0) est sans intérêt.
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
• La solution graphique nous a montré que la solution se trouvait sur un des sommets du polyèdre.
• Un quelconque des sommets constitue une solution dans laquelle trois des six variables X1 à X6 sont nulles.
• La solution X1 = X2 = X3 = 0 donne le sommet O (Point origine) du polyèdre.
• L’idée est de passer d’un sommet du polyèdre à un autre, en augmentant la valeur de P si possible.
• On choisit la variable qui a dans P le plus grand coefficient positif, soit X1.
• Par substitution, ligne par ligne, on s’arrange pour que demeure un seul coefficient non nul dans la colonne des x1 et que le coefficient des x1 disparaisse dans P.
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
• On multiplie la 1ere ligne par 200 pour avoir le coefficient 1 sur X1
• 0,00500 X1 +0,00333 X2 +0,00833 X3 + X4 = 100 devientX1 + 0,666 X2 + 1,666 X3 + 200 X4 = 20000
• On élimine le terme en X1 en combinant avec les autres équations
• Une nouvelle solution apparaît, plus avantageuse que O :X2 = X3 = X4 = 0X1 = 20 000X5 = 33X6 = 100P = 300 000
• Pour ce point, l’équation de P :2 X2 - 11 X3 - 3000 X4 = P - 300 000
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
• Le calcul se poursuit en s’intéressant au sommet suivant, cette fois en éliminant X2 du système d’équation
• La solution donne :X3=X4=X5 = 0X1 = 17143X2 = 4286P = 310 714
• C’est le point recherché car dans l’équation de P, tous les coefficients sont négatifs
-12,14 X3 - 2828 X4 - 257 X3 = F - 310 714• On peut vérifier le résultat par le biais du solveur• Nécessité d’une démarche formalisée, plus
systématique, celle-la même mise en œuvre dans le tableur => Algorithme du simplexe
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
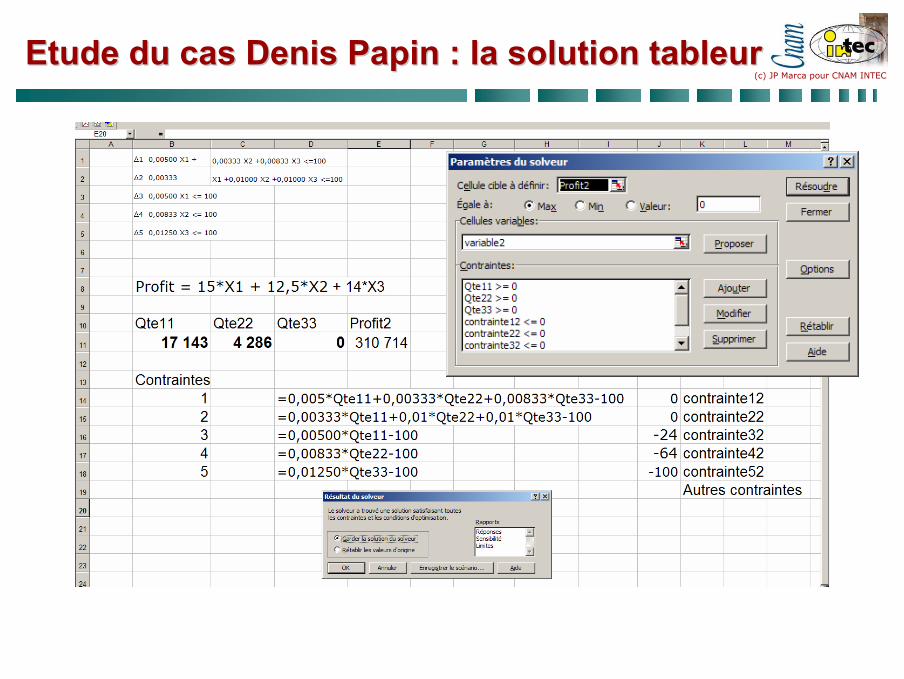
EtudeEtude du cas Denis Papin : la solution tableurdu cas Denis Papin : la solution tableur
(c) JP Marca pour CNAM INTEC
• Bilan de l’étude :• La fabrication de samovars conduirait à une
dégradation du résultat• Il faut donc se recentrer sur les deux produits de
base
EtudeEtude du cas Denis Papindu cas Denis Papin
(c) JP Marca pour CNAM INTEC
ALGORITHME DU SIMPLEXE
(c) JP Marca pour CNAM INTEC
• Processus de calcul manuel• Soit une situation économique, analogue à celle de
notre société Denis Papin, décrite par le système d’équation suivant :
X1 + 5X2 <= 1005X1 + 5X2 <= 180X1 <= 30
avec la fonction économique à maximiser
P = 400 X1 + 800 X2
• N’oublions pas X1 et X2 sont >=0
RRèègle pratique du simplexegle pratique du simplexe
(c) JP Marca pour CNAM INTEC
• En introduisant les variables d’écart, le problème s ’énonce :
1X1 + 5X2 + X3 = 1005X1 + 5X2 + X4 = 1801X1 + + X5 = 30
X1, X2, X3, X4, X5 >= 0
Avec Max(P = 400 X1 + 800 X2)
RRèègle pratique du simplexegle pratique du simplexe
(c) JP Marca pour CNAM INTEC
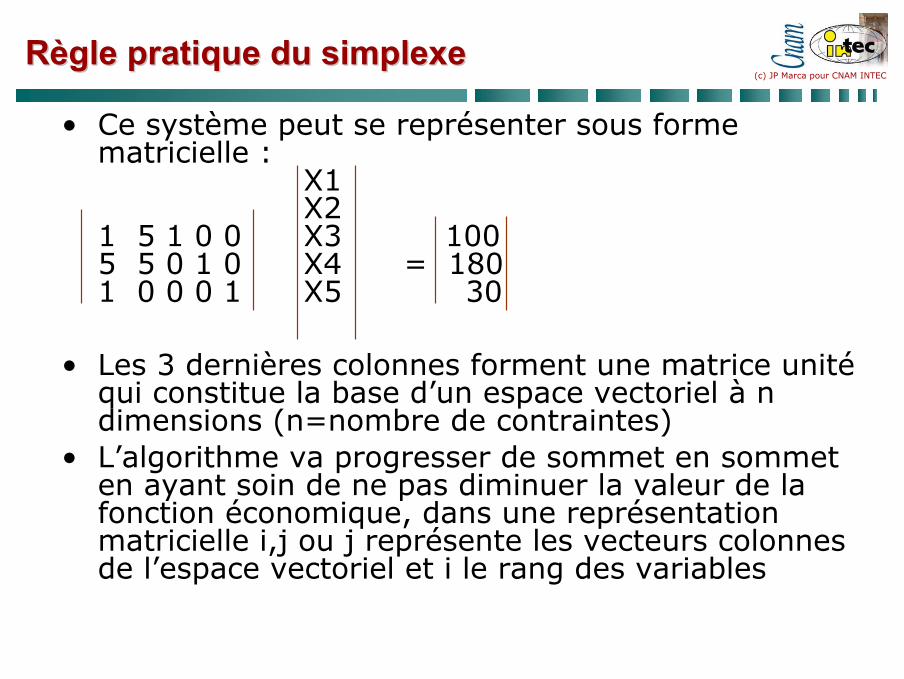
• Ce système peut se représenter sous forme matricielle :
X1X2
1 5 1 0 0 X3 1005 5 0 1 0 X4 = 1801 0 0 0 1 X5 30
• Les 3 dernières colonnes forment une matrice unitéqui constitue la base d’un espace vectoriel à n dimensions (n=nombre de contraintes)
• L’algorithme va progresser de sommet en sommet en ayant soin de ne pas diminuer la valeur de la fonction économique, dans une représentation matricielle i,j ou j représente les vecteurs colonnes de l’espace vectoriel et i le rang des variables
RRèègle pratique du simplexegle pratique du simplexe
(c) JP Marca pour CNAM INTEC
• Tout vecteur de l’espace vectoriel peut être représenté en fonction d’un certain nombre de vecteurs unitaires appelés base, qui sont ceux des axes X3, X4 et X5
• Les variables X3, X4 et X5 sont les variables de base• Les variables X1 et X2 sont les variables hors base
RRèègle pratique du simplexegle pratique du simplexe
(c) JP Marca pour CNAM INTEC
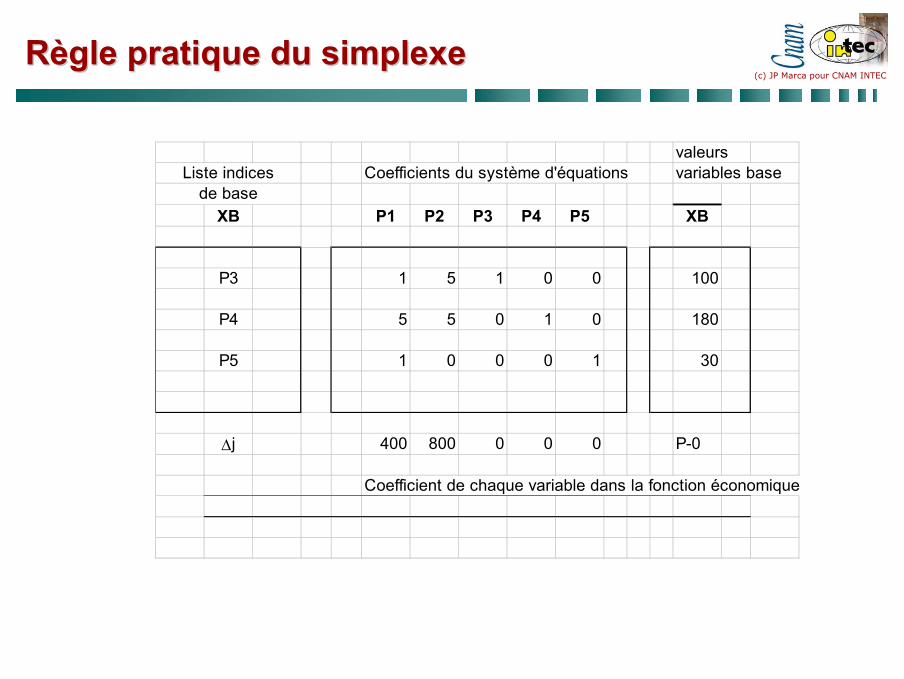
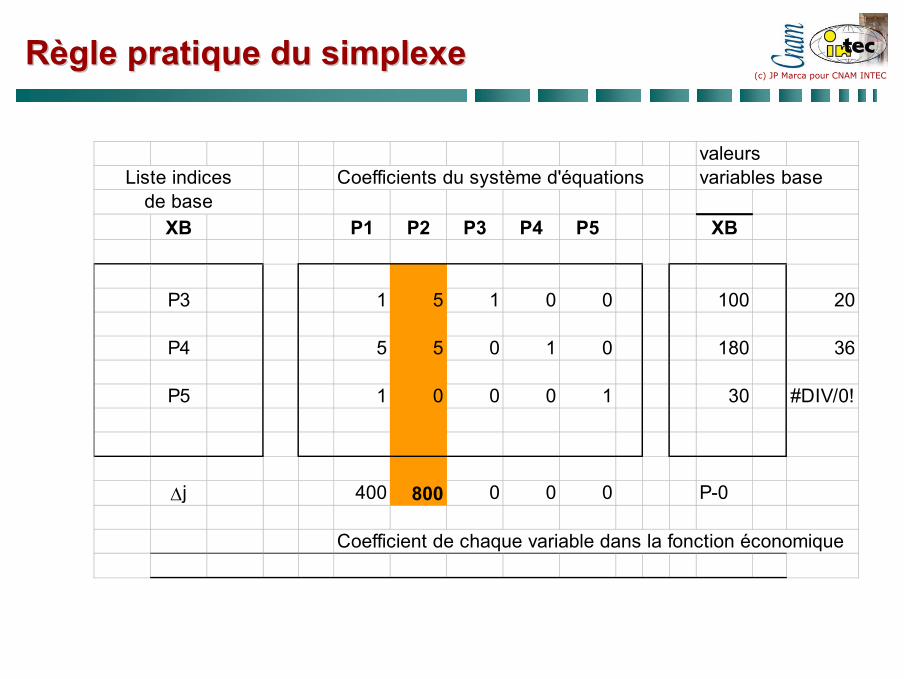
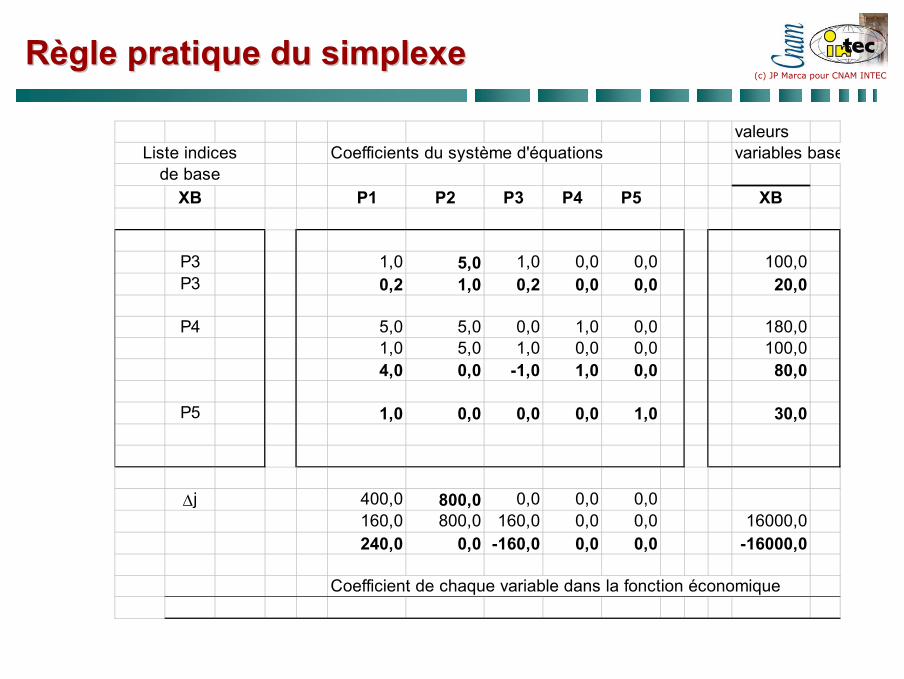
RRèègle pratique du simplexegle pratique du simplexe
valeursListe indices Coefficients du système d'équations variables base
de baseXB P1 P2 P3 P4 P5 XB
P3 1 5 1 0 0 100
P4 5 5 0 1 0 180
P5 1 0 0 0 1 30
∆j 400 800 0 0 0 P-0
Coefficient de chaque variable dans la fonction économique
(c) JP Marca pour CNAM INTEC
• On procède par itération• On sélectionne dans la ligne des ∆j la plus grande
valeur positive (1er critère de Dantzig)• C’est 800 qui correspond à X2• C’est cette variable qui va entrer en base• On calcule pour chaque ligne i le quotient du terme
de XB par le coefficient de la ligne i qui se trouve dans la colonne 2
RRèègle pratique du simplexegle pratique du simplexe
(c) JP Marca pour CNAM INTEC
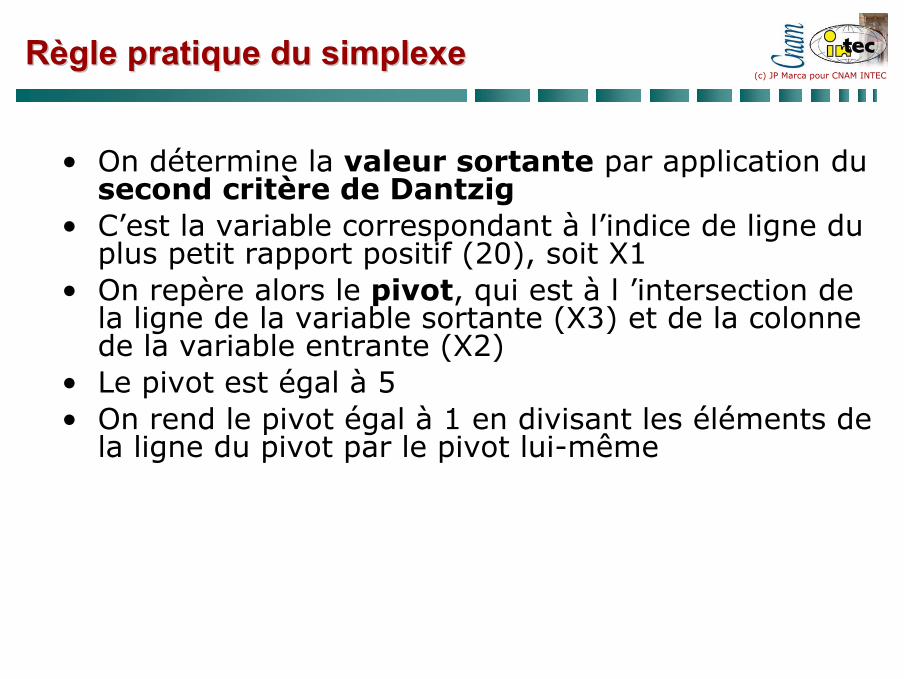
RRèègle pratique du simplexegle pratique du simplexe
valeursListe indices Coefficients du système d'équations variables base
de baseXB P1 P2 P3 P4 P5 XB
P3 1 5 1 0 0 100 20
P4 5 5 0 1 0 180 36
P5 1 0 0 0 1 30 #DIV/0!
∆j 400 800 0 0 0 P-0
Coefficient de chaque variable dans la fonction économique
(c) JP Marca pour CNAM INTEC
• On détermine la valeur sortante par application du second critère de Dantzig
• C’est la variable correspondant à l’indice de ligne du plus petit rapport positif (20), soit X1
• On repère alors le pivot, qui est à l ’intersection de la ligne de la variable sortante (X3) et de la colonne de la variable entrante (X2)
• Le pivot est égal à 5• On rend le pivot égal à 1 en divisant les éléments de
la ligne du pivot par le pivot lui-même
RRèègle pratique du simplexegle pratique du simplexe
(c) JP Marca pour CNAM INTEC
RRèègle pratique du simplexegle pratique du simplexe
valeursListe indices Coefficients du système d'équations variables base
de baseXB P1 P2 P3 P4 P5 XB
P3 1 5 1 0 0 100 20
P4 5 5 0 1 0 180 36
P5 1 0 0 0 1 30 #DIV/0!
∆j 400 800 0 0 0 P-0
Coefficient de chaque variable dans la fonction économique
(c) JP Marca pour CNAM INTEC
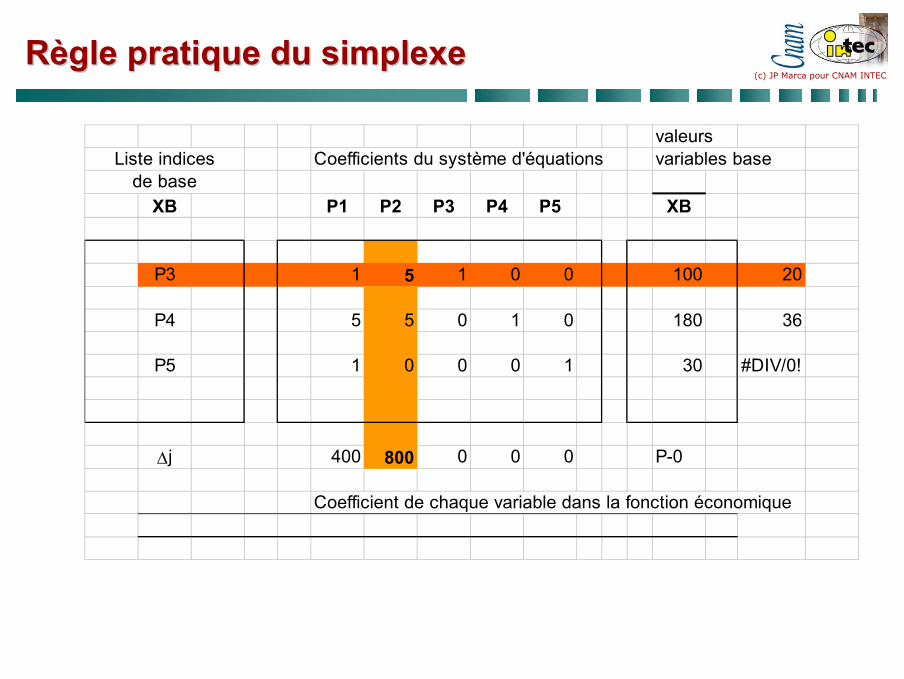
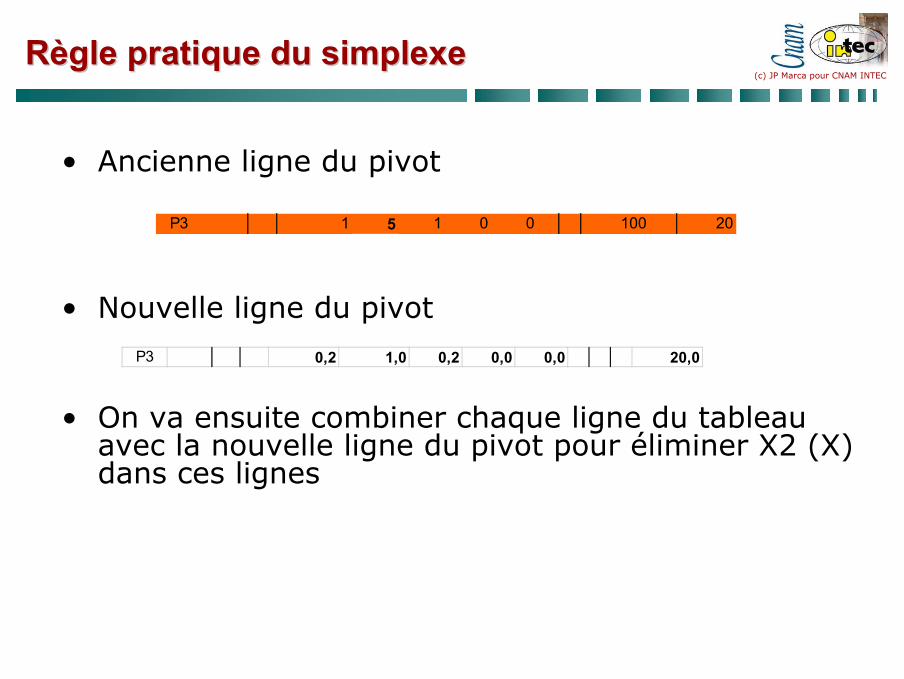
RRèègle pratique du simplexegle pratique du simplexe
• Ancienne ligne du pivot
• Nouvelle ligne du pivot
• On va ensuite combiner chaque ligne du tableau avec la nouvelle ligne du pivot pour éliminer X2 (X) dans ces lignes
P3 1 5 1 0 0 100 20
P3 0,2 1,0 0,2 0,0 0,0 20,0
(c) JP Marca pour CNAM INTEC
RRèègle pratique du simplexegle pratique du simplexe
valeursListe indices Coefficients du système d'équations variables base
de baseXB P1 P2 P3 P4 P5 XB
P3 1,0 5,0 1,0 0,0 0,0 100,0P3 0,2 1,0 0,2 0,0 0,0 20,0
P4 5,0 5,0 0,0 1,0 0,0 180,01,0 5,0 1,0 0,0 0,0 100,04,0 0,0 -1,0 1,0 0,0 80,0
P5 1,0 0,0 0,0 0,0 1,0 30,0
∆j 400,0 800,0 0,0 0,0 0,0160,0 800,0 160,0 0,0 0,0 16000,0240,0 0,0 -160,0 0,0 0,0 -16000,0
Coefficient de chaque variable dans la fonction économique
(c) JP Marca pour CNAM INTEC
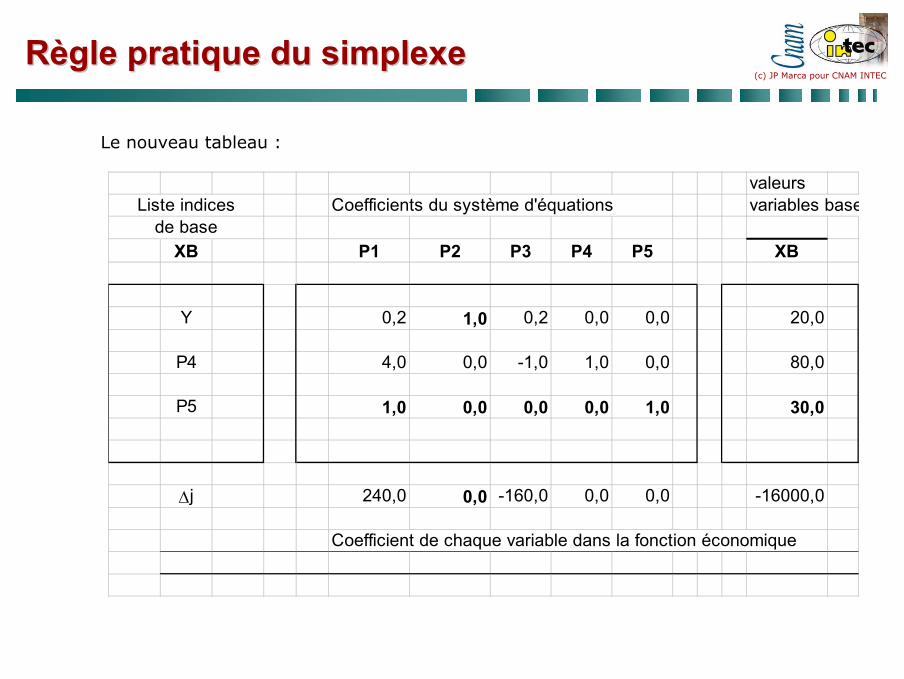
RRèègle pratique du simplexegle pratique du simplexe
valeursListe indices Coefficients du système d'équations variables base
de baseXB P1 P2 P3 P4 P5 XB
Y 0,2 1,0 0,2 0,0 0,0 20,0
P4 4,0 0,0 -1,0 1,0 0,0 80,0
P5 1,0 0,0 0,0 0,0 1,0 30,0
∆j 240,0 0,0 -160,0 0,0 0,0 -16000,0
Coefficient de chaque variable dans la fonction économique
Le nouveau tableau :
(c) JP Marca pour CNAM INTEC
RRèègle pratique du simplexegle pratique du simplexe
• Itération du processus pour remplacer en tant que base la variable d’écart X3 par la deuxième variable recherchée X1 (Y)
(c) JP Marca pour CNAM INTEC
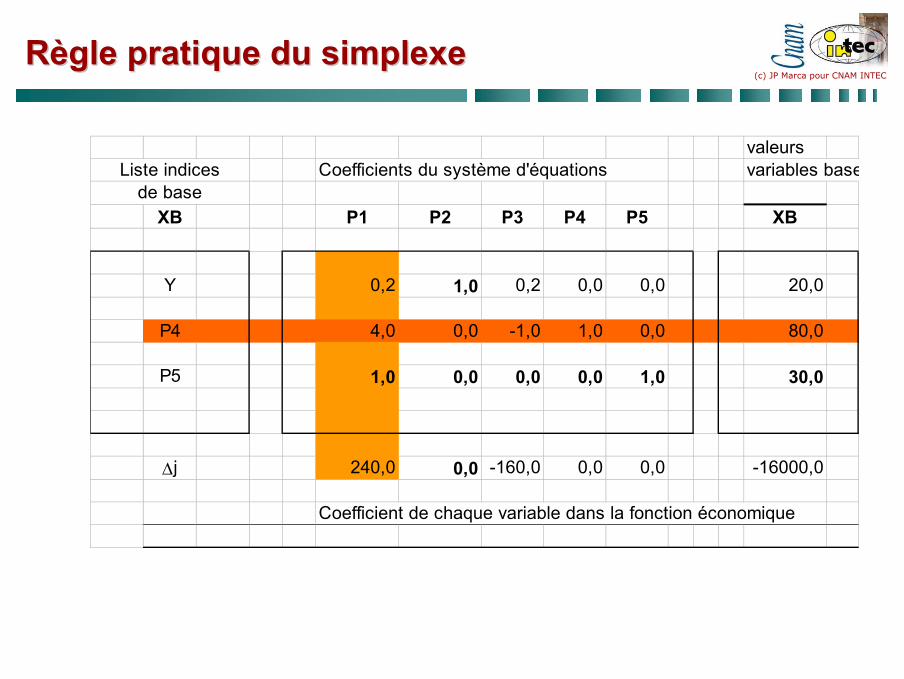
RRèègle pratique du simplexegle pratique du simplexe
valeursListe indices Coefficients du système d'équations variables base
de baseXB P1 P2 P3 P4 P5 XB
Y 0,2 1,0 0,2 0,0 0,0 20,0
P4 4,0 0,0 -1,0 1,0 0,0 80,0
P5 1,0 0,0 0,0 0,0 1,0 30,0
∆j 240,0 0,0 -160,0 0,0 0,0 -16000,0
Coefficient de chaque variable dans la fonction économique
(c) JP Marca pour CNAM INTEC
RRèègle pratique du simplexegle pratique du simplexe
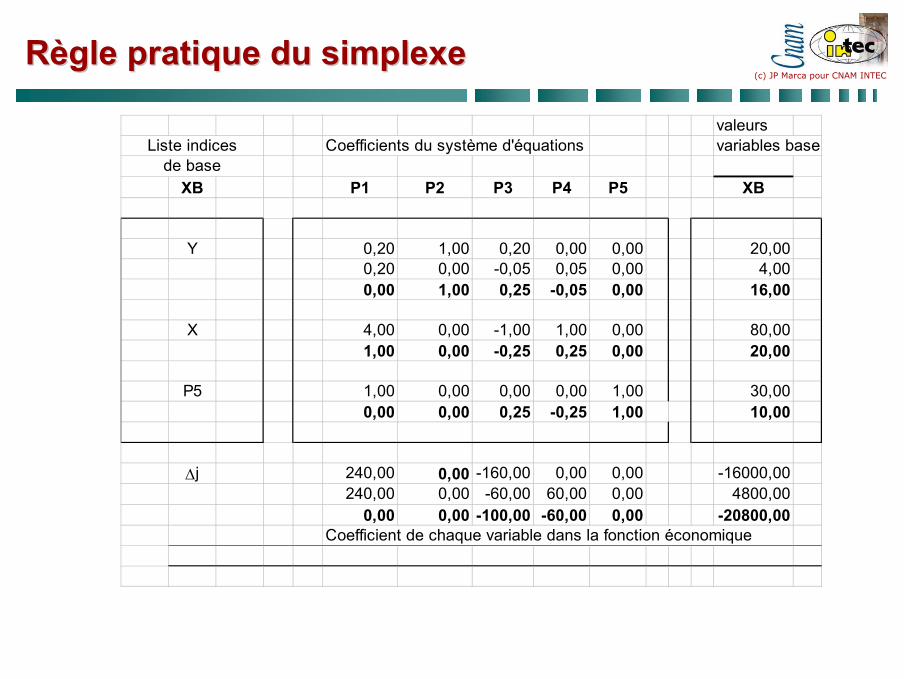
valeursListe indices Coefficients du système d'équations variables base
de baseXB P1 P2 P3 P4 P5 XB
Y 0,20 1,00 0,20 0,00 0,00 20,000,20 0,00 -0,05 0,05 0,00 4,000,00 1,00 0,25 -0,05 0,00 16,00
X 4,00 0,00 -1,00 1,00 0,00 80,001,00 0,00 -0,25 0,25 0,00 20,00
P5 1,00 0,00 0,00 0,00 1,00 30,000,00 0,00 0,25 -0,25 1,00 10,00
∆j 240,00 0,00 -160,00 0,00 0,00 -16000,00240,00 0,00 -60,00 60,00 0,00 4800,00
0,00 0,00 -100,00 -60,00 0,00 -20800,00Coefficient de chaque variable dans la fonction économique
(c) JP Marca pour CNAM INTEC
RRèègle pratique du simplexegle pratique du simplexe
• La solution :• X1 (X) = 16• X2 (Y) = 20• Profit max P = 20 800
•
(c) JP Marca pour CNAM INTEC
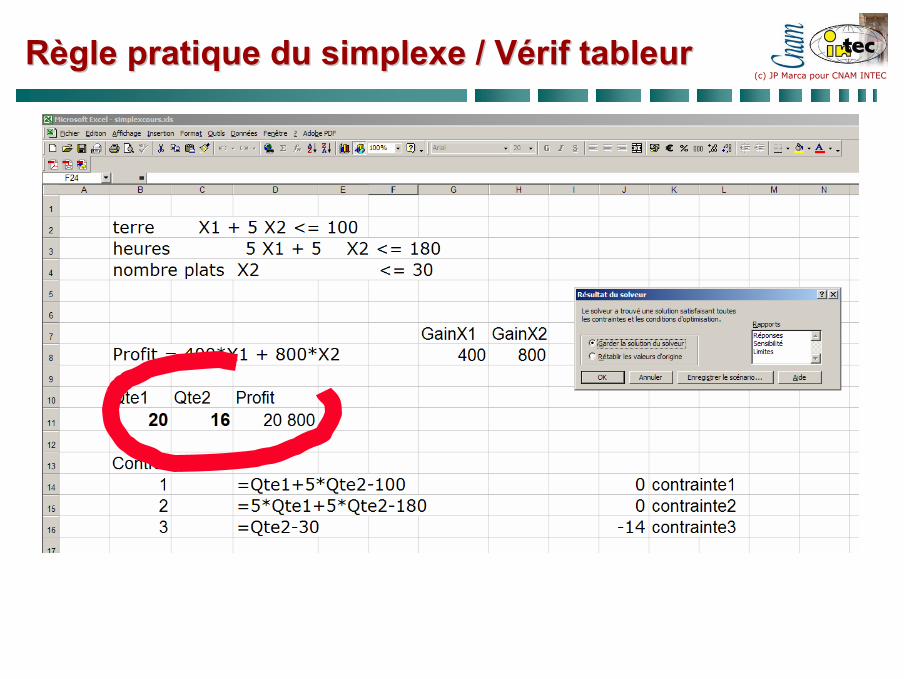
RRèègle pratique du simplexe / gle pratique du simplexe / VVéérifrif tableurtableur
(c) JP Marca pour CNAM INTEC
RRèègle pratique du simplexegle pratique du simplexe
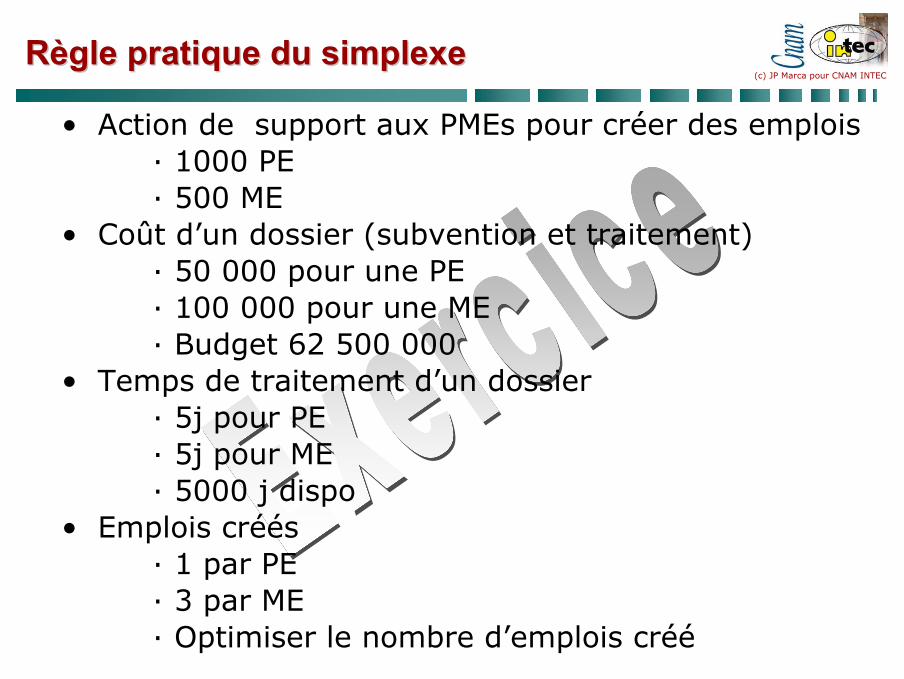
• Action de support aux PMEs pour créer des emplois· 1000 PE· 500 ME
• Coût d’un dossier (subvention et traitement)· 50 000 pour une PE· 100 000 pour une ME· Budget 62 500 000
• Temps de traitement d’un dossier· 5j pour PE· 5j pour ME· 5000 j dispo
• Emplois créés· 1 par PE· 3 par ME· Optimiser le nombre d’emplois créé
(c) JP Marca pour CNAM INTEC
RRèègle pratique du simplexegle pratique du simplexe
• Modele Excel
(c) JP Marca pour CNAM INTEC
DualitDualitéé
• Etant donné un problème de programmation linéaire PL1 mis sous forme canonique
· Ax <= b (A matrice (m,n))· x >= 0 (x vecteur colonne (n,1))· Max Z = Cx (c vecteur ligne (1,n)
• On associe à PL1 un autre problème de programmation linéaire PL2 tel que
· yA >= c (y vecteur ligne (1,m))· y >= 0 · Min Z’ = yb
• PL2 est le dual de PL1
(c) JP Marca pour CNAM INTEC
DualitDualitéé
• Pour passer du primal au dual• Les termes du second membre du primal deviennent
les coefficients de la fonction économique du dual et réciproquement.
• Si le primal est un problème de maximisation, le dual est un problème de minimisation.
• Les inégalités <= deviennent inégalités >=• La matrice A se change sur le dual en sa transposée
(c) JP Marca pour CNAM INTEC
DualitDualitéé
Soit le programme linéaire primalX1 + 2X2 <= 483X1 + 4X2 <= 120X1, X2 >= 0Recherche Max Z = 5X1 + 6X2
Le programme dual s’exprimeY1 + 3Y2 >=52Y2 + 4Y2 >= 6Y1; y2>0=0Recherche Min Z’=48Y1 + 120 Y2
(c) JP Marca pour CNAM INTEC
ExerciceExercice
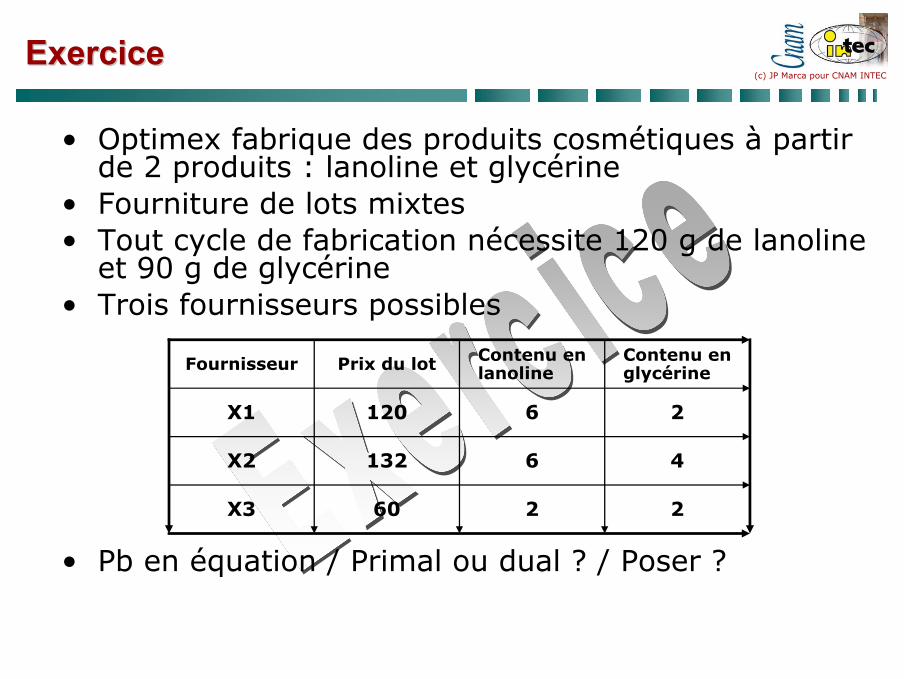
• Optimex fabrique des produits cosmétiques à partir de 2 produits : lanoline et glycérine
• Fourniture de lots mixtes• Tout cycle de fabrication nécessite 120 g de lanoline
et 90 g de glycérine• Trois fournisseurs possibles
• Pb en équation / Primal ou dual ? / Poser ?
2260X3
46132X2
26120X1
Contenu en glycérine
Contenu en lanolinePrix du lotFournisseur
(c) JP Marca pour CNAM INTEC
ExerciceExercice
• Contrainte lanoline : 6X1 + 6X2 + 2X3 >= 120• Contrainte glycérine : 2X1 + 4X2 + 2X3 >= 90• Recherche Min de 120 X1 + 132 X + 60 X3
• Le problème étant la recherche d’un maximum, il faut passer par le dual
(c) JP Marca pour CNAM INTEC
ExerciceExercice
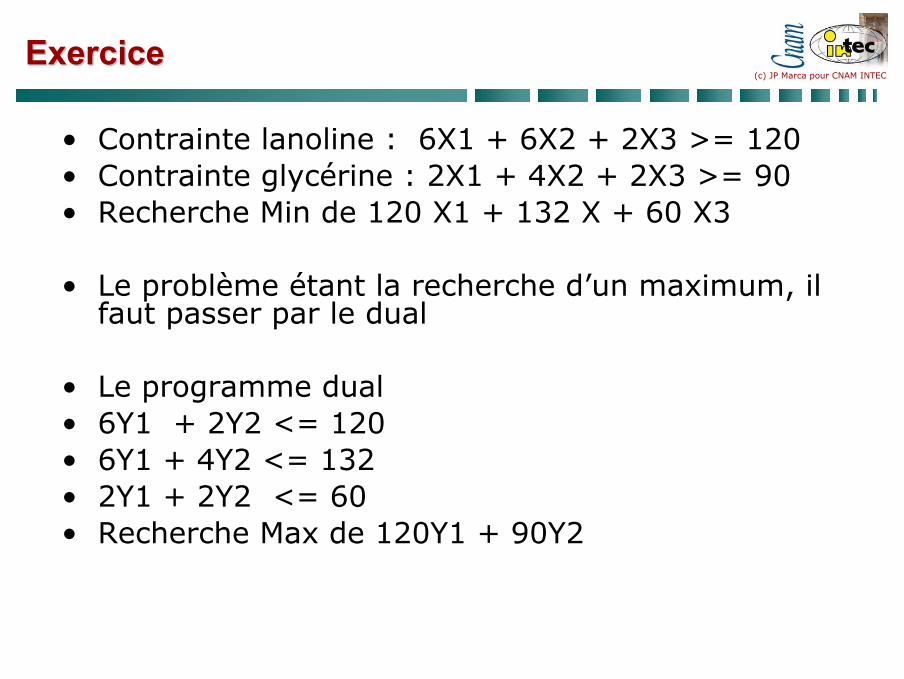
• Contrainte lanoline : 6X1 + 6X2 + 2X3 >= 120• Contrainte glycérine : 2X1 + 4X2 + 2X3 >= 90• Recherche Min de 120 X1 + 132 X + 60 X3
• Le problème étant la recherche d’un maximum, il faut passer par le dual
• Le programme dual• 6Y1 + 2Y2 <= 120• 6Y1 + 4Y2 <= 132• 2Y1 + 2Y2 <= 60• Recherche Max de 120Y1 + 90Y2
(c) JP Marca pour CNAM INTECRRééponses ponses àà nos questionsnos questions
• Méthode de programmation linéaire pour résoudre les problèmes d’optimisation de gain maxi (le plus grand profit) ou de contrainte mini (le coût le plus faible)
• Processus itératif du simplexe• Emploi solveur dans la pratique (qui
fonctionne selon le même principe)

(c) JP Marca pour CNAM INTEC
Espaces vectoriels, matrices et applications linéaires
(c) JP Marca pour CNAM INTEC
• Les sessions 1 et 2.1 ont été consacrées aux matrices
• Les sessions 2. 2 et 3 ont été consacrées àla programmation linéaire, qui fait état d’applications linéaires (les contraintes) entre variables.
• Pour celle-ci, dans le cadre de la présentation de l’algorithme du simplexe, nous avons fait référence à la notion d’espace vectoriel.
• Il y a une relation très forte entre espace vectoriel, matrices et applications linéaires.
Espaces vectoriels, matrices et applis linEspaces vectoriels, matrices et applis linééairesaires
(c) JP Marca pour CNAM INTEC
• La définition mathématique de l’espace vectoriel est assez complexe.
• En première approximation on peut le représenter comme l’ensemble des vecteurs V1, V2, … , Vn que l’on peut définir à partir du point origine dans un référentiel à n dimensions.
• Les vecteurs que l’on peut définir sont des vecteurs abstraits qui n’ont en commun avec les vecteurs géométriques que les lois de composition, mais nous pouvons nous représenter ceux-ci plus facilement, du moins dans un espace à 2 ou 3 dimensions.
Espaces vectoriels et matricesEspaces vectoriels et matrices
(c) JP Marca pour CNAM INTEC
• p vecteurs V1, V2, … Vn d’un espace vectoriel Ep sont déterminés par leurs coordonnées V1(X11, X12, X13, … X1p), V2(X21, X22, X23, ... X2p), …, Vn (Xn1, Xn2, Xn3, ... Xnp) dans une base définie par des vecteurs i (i1, i2, …, ip)
• Il est commode de représenter cet ensemble de la façon suivante :
• V1 V2 …. Vn
• i1 X11 X12 …. X1n
• i2 X21 X22 …. X2n
• ………………………………….
• ip Xp1 Xp2 …. Xpn
Espaces vectoriels et matricesEspaces vectoriels et matrices
(c) JP Marca pour CNAM INTEC
• p vecteurs V1, V2, … Vn d’un espace vectoriel Ep sont déterminés par leurs coordonnées V1(X11, X12, X13, … X1p), V2(X21, X22, X23, ... X2p), …, Vn (Xn1, Xn2, Xn3, ... Xnp) dans une base définie par des vecteurs i (i1, i2, …, ip)
• Il est commode de représenter cet ensemble de la façon suivante :
• V1 V2 …. Vn
• i1 X11 X12 …. X1n
• i2 X21 X22 …. X2n
• ………………………………….
• ip Xp1 Xp2 …. Xpn
Espaces vectoriels et matricesEspaces vectoriels et matrices
Nous reconnaissonsici une matrice
Les vecteurs i constituent la base(au sens d‘une base pour système de coordonnées)
(c) JP Marca pour CNAM INTEC
• Un problème classique est celui du changement de base (E1 -> E2)
• L’espace E2 était rapporté à une première base B(i1, i2, …, ip), dite ancienne, dans laquelle un vecteur Vn a pour coordonnées (X1n X2n …. Xpn).
• E2 est rapporté à une nouvelle base B’(j1, j2, …, jp), dans laquelle le vecteur Vn a pour coordonnées (X’1n X’2n …. Xpn).
Espaces vectoriels et matricesEspaces vectoriels et matrices
(c) JP Marca pour CNAM INTEC
• Pour simplifier, considérons un espace vectoriel à 2 dimensions
• Soit V défini avec la base B(i,j)
• V = X i + Y j
• V défini avec la base B’(i’,j’)
• V = X’ i’ + Y’ j’
• Nous avons donc
• V = X i + Y j = X’ i’ + Y’ j’
Espaces vectoriels et matricesEspaces vectoriels et matrices
(c) JP Marca pour CNAM INTEC
• On résoud l’équation en exprimant les vecteurs i’ et j’ dans l’ancienne base
• i’ = ai + bj
• j’ = a’i + b’j
• On appelle matrice de passage de la base B à la base B’ la matrice dont les vecteurs-colonnes sont les vecteurs de la nouvelle base exprimée dans l’ancienne
X a a’ X’
Y b b’ Y’
Espaces vectoriels et matricesEspaces vectoriels et matrices
=
(c) JP Marca pour CNAM INTEC
• Soit E et F deux espaces vectoriels
• Soit une base U(u1, u2, …) dans E
• Soit une base V(v1, v2, ..) dans F
• Soit X un vecteur de E
• X = u1 x1 + u2 X2 + … + un xn
• L’application linéaire f lui fait correspondre un vecteur f(X) de F
• f(X) = f(u1)x1 + f(u2)x2 + … f(un)xn
• Le problème est de même nature que le précédent avec une matrice de transformation constituée cette fois des coordonnées des vecteurs de la base de E dans la base V de F
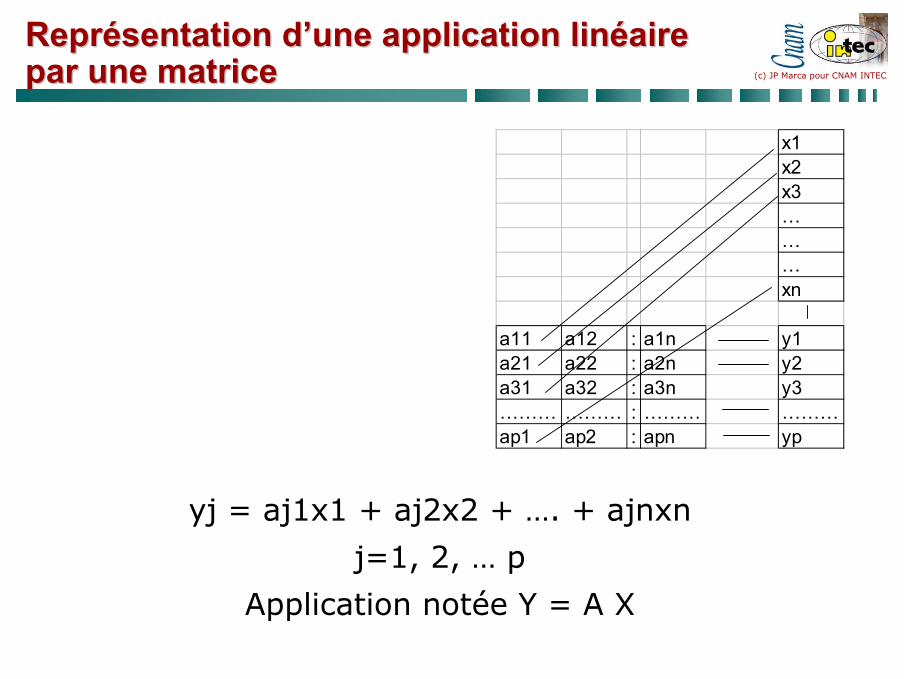
ReprRepréésentation dsentation d’’une application linune application linééaire aire par une matricepar une matrice
(c) JP Marca pour CNAM INTEC
yj = aj1x1 + aj2x2 + …. + ajnxn
j=1, 2, … p
Application notée Y = A X
ReprRepréésentation dsentation d’’une application linune application linééaire aire par une matricepar une matrice
x1x2x3………xn
a11 a12 : a1n y1a21 a22 : a2n y2a31 a32 : a3n y3……… ……… : ……… ………ap1 ap2 : apn yp
(c) JP Marca pour CNAM INTEC
THEORIE DES GRAPHES
(c) JP Marca pour CNAM INTEC
Qu’est ce que la théorie des graphes ?Comment permet-elle de traiter les problèmes d’ordonnancement et de planning ?
Une sUne séérie de questionsrie de questions
(c) JP Marca pour CNAM INTEC
• Langage des graphes· Sommet· Arc· Arète· Graphe orienté
• Représentation d’un graphe· MPM· PERT
QuizzQuizz
(c) JP Marca pour CNAM INTEC
• Dates de début au plus tôt• Dates de début au plus tard• Marge totale• Marge libre• Chemin critique• Réseau de transport
· Algorithme Ford Fulkerson
QuizzQuizz
(c) JP Marca pour CNAM INTEC
• Définition d’un graphe :
• Un ensemble X de n sommets
• Une application A entre les éléments de l’ensemble X
• Le graphe est le couple (X,A) qui définit la relation liant les points.
• Définition d’un graphe orienté
• La relation entre deux sommets peut être orientée ou non.
• Si oui, cette relation est un arc.
• Si non, cette relation est une arête.
• Un graphe dont toutes les relations sont orientées est un graphe orienté.
Langage Langage éélléémentaire des graphesmentaire des graphes
(c) JP Marca pour CNAM INTEC
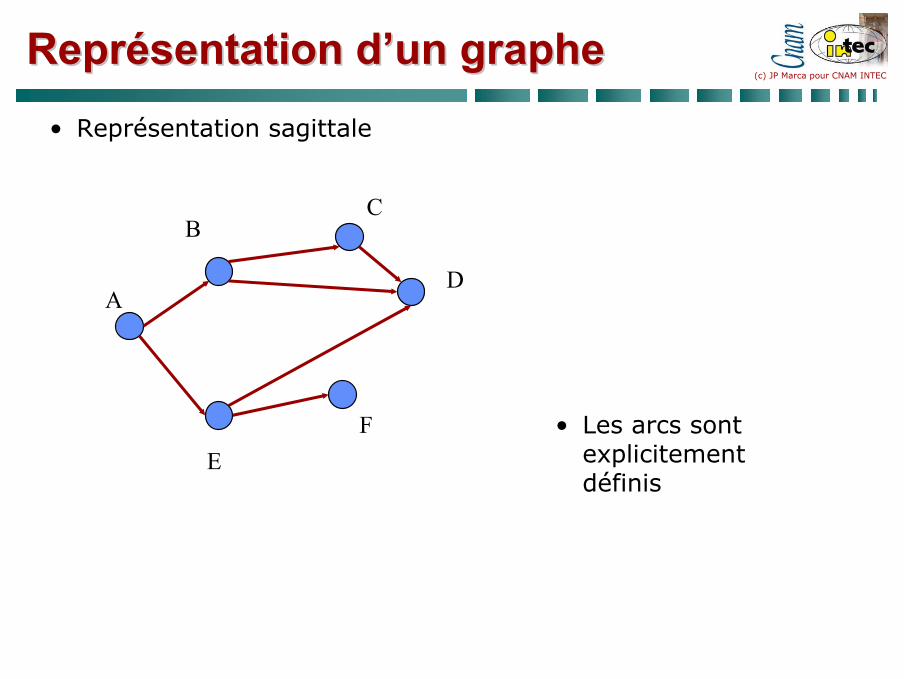
• Représentation sagittale
ReprRepréésentation dsentation d’’un grapheun graphe
A
BC
D
EF • Les arcs sont
explicitement définis
(c) JP Marca pour CNAM INTEC
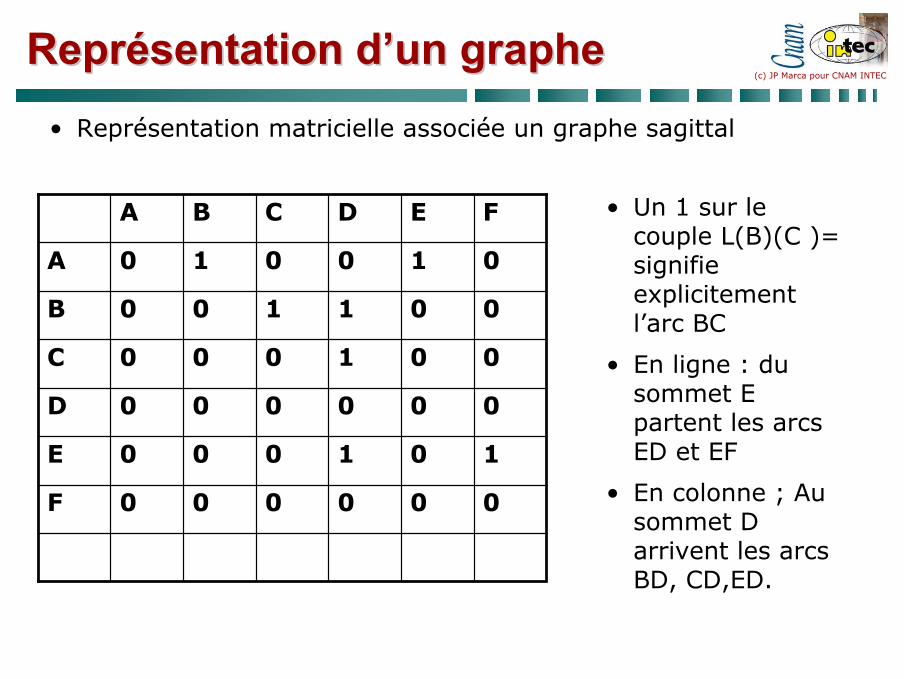
• Représentation matricielle associée un graphe sagittal
ReprRepréésentation dsentation d’’un grapheun graphe
F
E
D
C
B
A
000000
101000
000000
001000
001100
010010
FEDCBA • Un 1 sur le couple L(B)(C )= signifie explicitement l’arc BC
• En ligne : du sommet E partent les arcs ED et EF
• En colonne ; Au sommet D arrivent les arcs BD, CD,ED.
(c) JP Marca pour CNAM INTEC
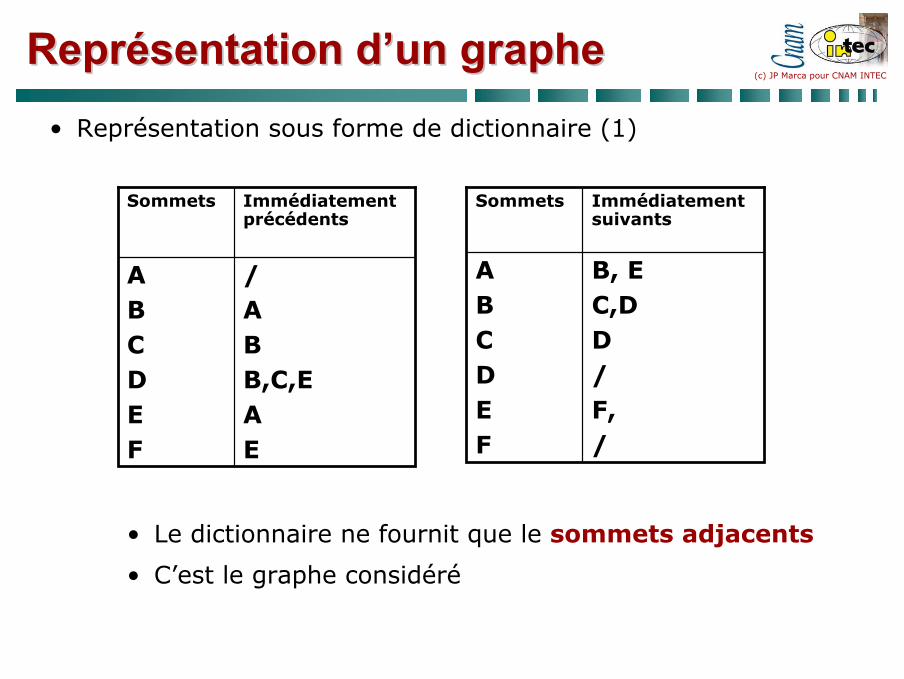
• Représentation sous forme de dictionnaire (1)
ReprRepréésentation dsentation d’’un grapheun graphe
ABCDEF
Sommets
/ABB,C,EAE
Immédiatement précédents
• Le dictionnaire ne fournit que le sommets adjacents
• C’est le graphe considéré
ABCDEF
Sommets
B, EC,DD/F,/
Immédiatement suivants
(c) JP Marca pour CNAM INTEC
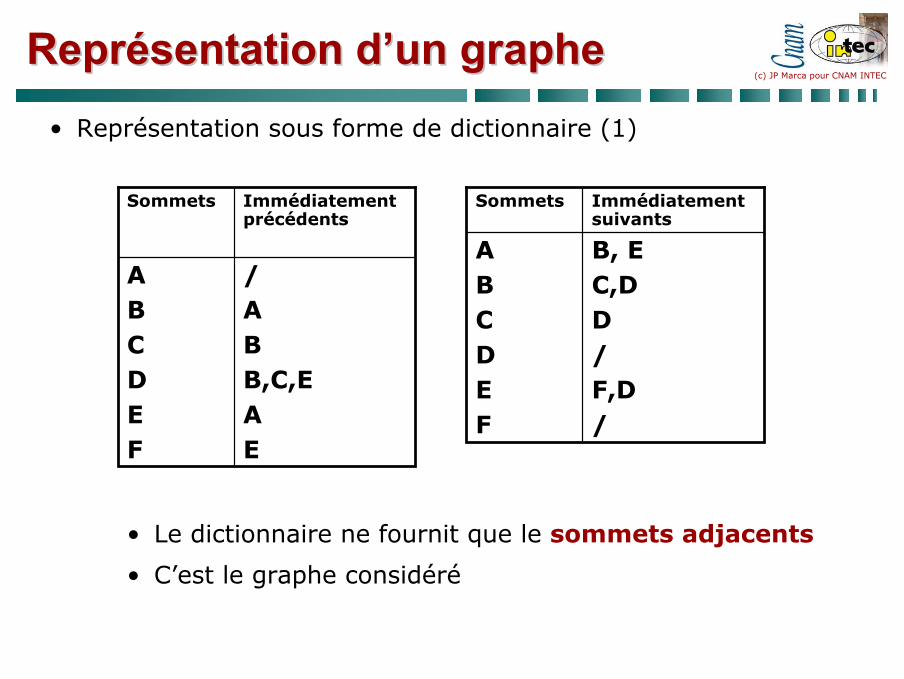
• Représentation sous forme de dictionnaire (1)
ReprRepréésentation dsentation d’’un grapheun graphe
ABCDEF
Sommets
/ABB,C,EAE
Immédiatement précédents
• Le dictionnaire ne fournit que le sommets adjacents
• C’est le graphe considéré
ABCDEF
Sommets
B, EC,DD/F,D/
Immédiatement suivants
(c) JP Marca pour CNAM INTEC
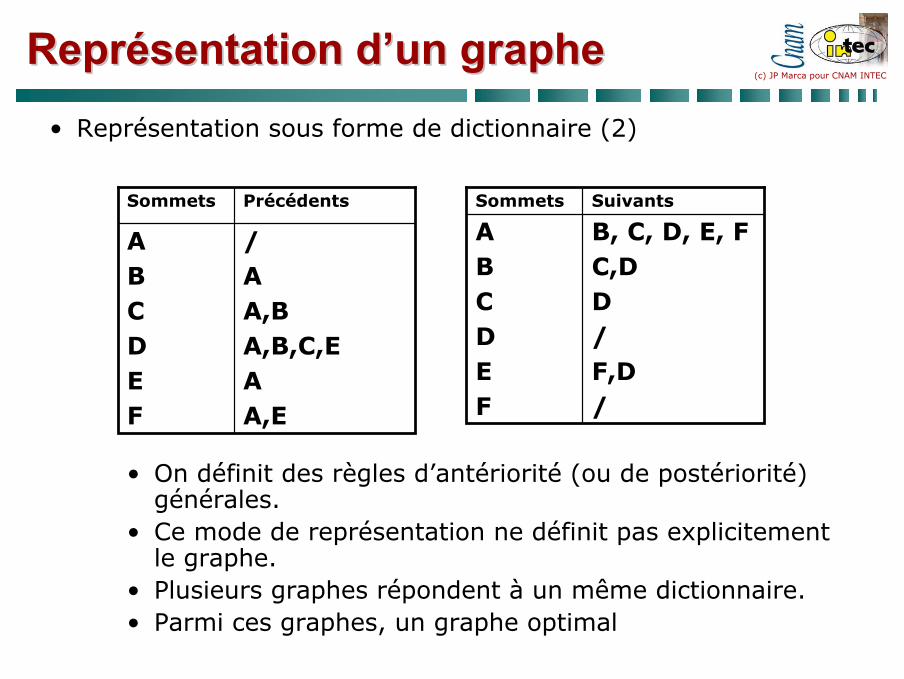
• Représentation sous forme de dictionnaire (2)
ReprRepréésentation dsentation d’’un grapheun graphe
ABCDEF
Sommets
/AA,BA,B,C,EAA,E
Précédents
ABCDEF
Sommets
B, C, D, E, FC,DD/F,D/
Suivants
• On définit des règles d’antériorité (ou de postériorité) générales.
• Ce mode de représentation ne définit pas explicitement le graphe.
• Plusieurs graphes répondent à un même dictionnaire.• Parmi ces graphes, un graphe optimal
(c) JP Marca pour CNAM INTEC
• Le dernier mode est classique dans les problèmes d’ordonnancement
• L’ordonnancement a pour but d’organiser dans le temps un ensemble de tâches, soumises àdes contraintes, qui concourent à la réalisation d ’un objectif.
• Dans ce contexte, il vise à déterminer:
• le meilleur temps de réalisation de l’objectif.
•Les taches qui ne peuvent souffrir de retard sans remettre en cause la durée totale du projet
• Qu’est ce qu’un projet ?
ReprRepréésentation dsentation d’’un grapheun graphe
(c) JP Marca pour CNAM INTEC
• Les méthodes d’ordonnancement sont fondées sur la théorie des graphes.
• La méthode PERT (Program Evaluation ResearchTask) développée aux USA dans les années 50 pour la gestion du projet Polaris
• La méthode MPM (Méthode des potentiels Metra) développée pour l’implantation d’une centrale nucléaire.
ReprRepréésentation dsentation d’’un grapheun graphe
(c) JP Marca pour CNAM INTEC
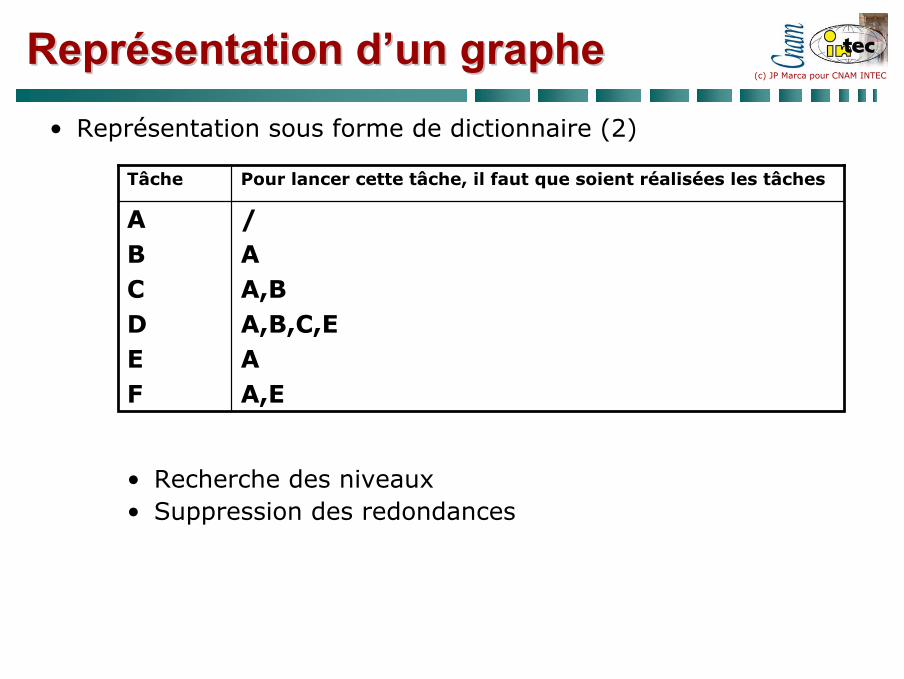
• Représentation sous forme de dictionnaire (2)
ReprRepréésentation dsentation d’’un grapheun graphe
ABCDEF
Tâche
/AA,BA,B,C,EAA,E
Pour lancer cette tâche, il faut que soient réalisées les tâches
• Recherche des niveaux• Suppression des redondances
(c) JP Marca pour CNAM INTEC
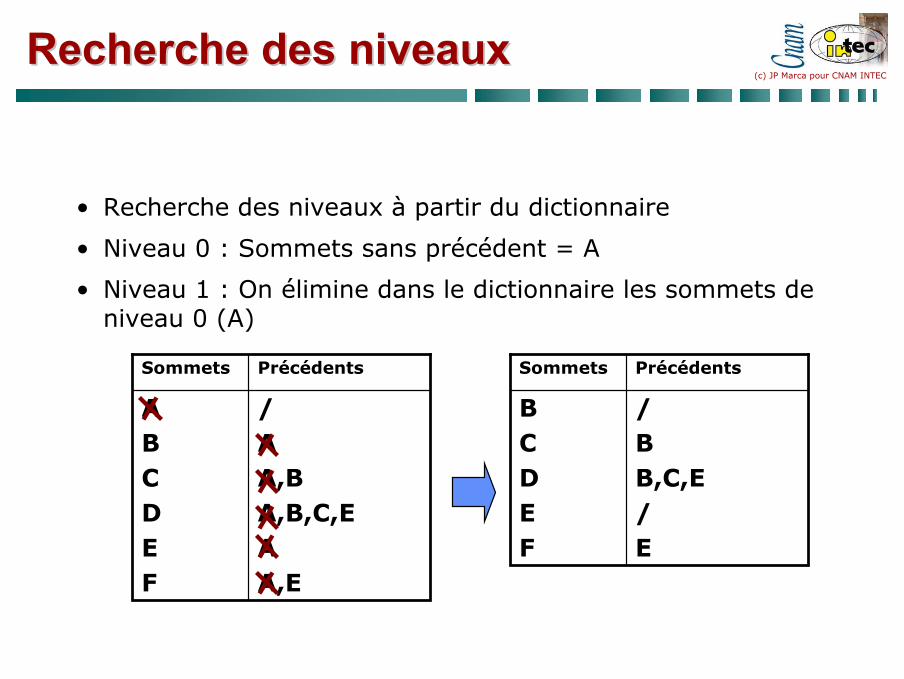
• Recherche des niveaux à partir du dictionnaire
• Niveau 0 : Sommets sans précédent = A
• Niveau 1 : On élimine dans le dictionnaire les sommets de niveau 0 (A)
Recherche des niveauxRecherche des niveaux
ABCDEF
Sommets
/AA,BA,B,C,EAA,E
Précédents
BCDEF
Sommets
/BB,C,E/E
Précédents
(c) JP Marca pour CNAM INTEC
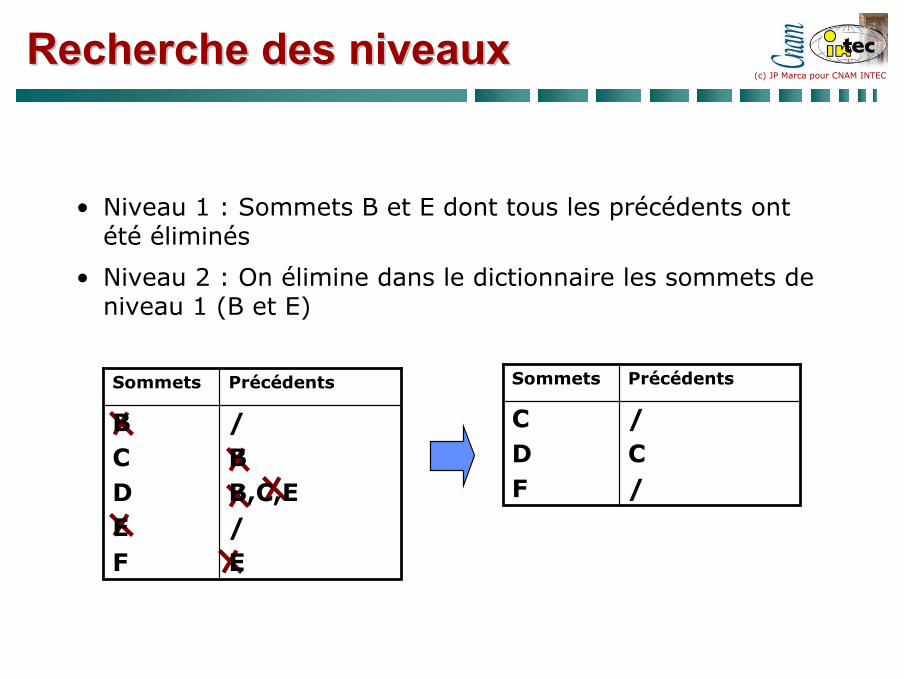
• Niveau 1 : Sommets B et E dont tous les précédents ont été éliminés
• Niveau 2 : On élimine dans le dictionnaire les sommets de niveau 1 (B et E)
Recherche des niveauxRecherche des niveaux
CDF
Sommets
/C/
Précédents
BCDEF
Sommets
/BB,C,E/E
Précédents
(c) JP Marca pour CNAM INTEC
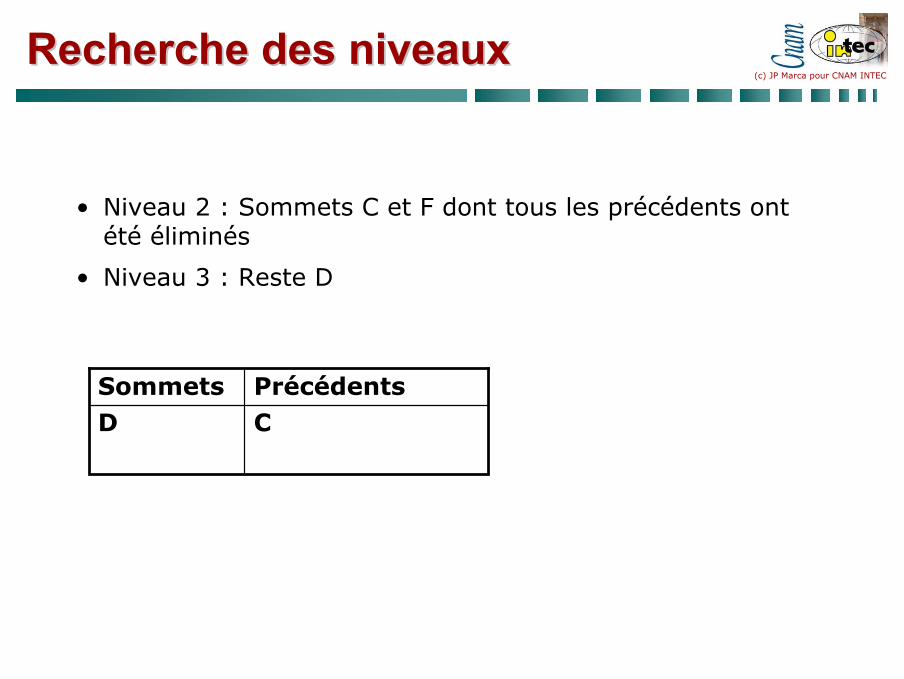
• Niveau 2 : Sommets C et F dont tous les précédents ont été éliminés
• Niveau 3 : Reste D
Recherche des niveauxRecherche des niveaux
DSommets
CPrécédents
(c) JP Marca pour CNAM INTEC
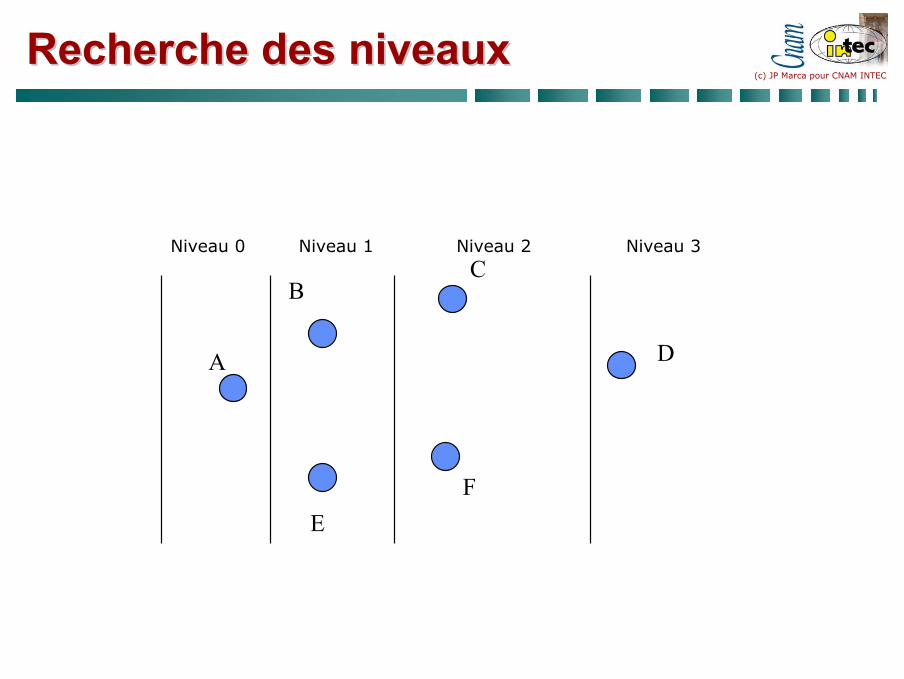
Recherche des niveauxRecherche des niveaux
A
BC
D
EF
Niveau 0 Niveau 1 Niveau 2 Niveau 3
(c) JP Marca pour CNAM INTEC
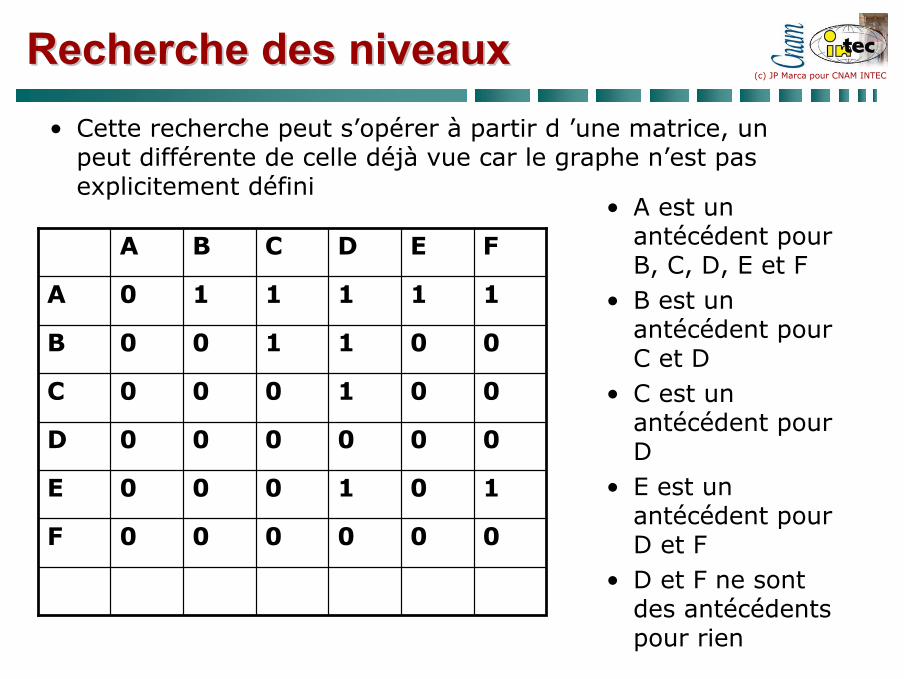
• Cette recherche peut s’opérer à partir d ’une matrice, un peut différente de celle déjà vue car le graphe n’est pas explicitement défini
Recherche des niveauxRecherche des niveaux
F
E
D
C
B
A
000000
101000
000000
001000
001100
111110
FEDCBA
• A est un antécédent pour B, C, D, E et F
• B est un antécédent pour C et D
• C est un antécédent pour D
• E est un antécédent pour D et F
• D et F ne sont des antécédents pour rien
(c) JP Marca pour CNAM INTEC
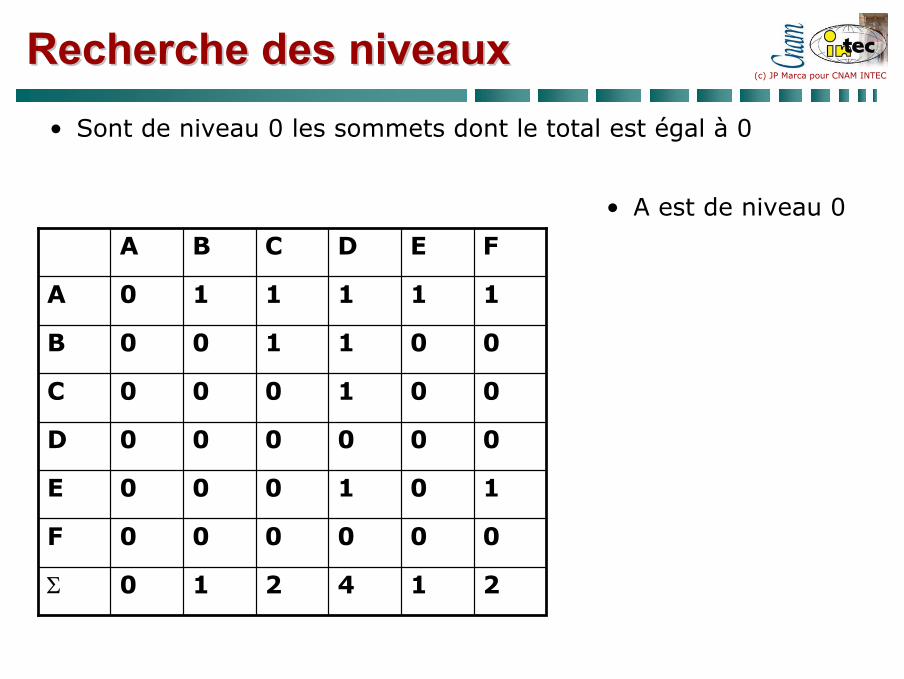
• Sont de niveau 0 les sommets dont le total est égal à 0
Recherche des niveauxRecherche des niveaux
Σ
F
E
D
C
B
A
214210
000000
101000
000000
001000
001100
111110
FEDCBA
• A est de niveau 0
(c) JP Marca pour CNAM INTEC
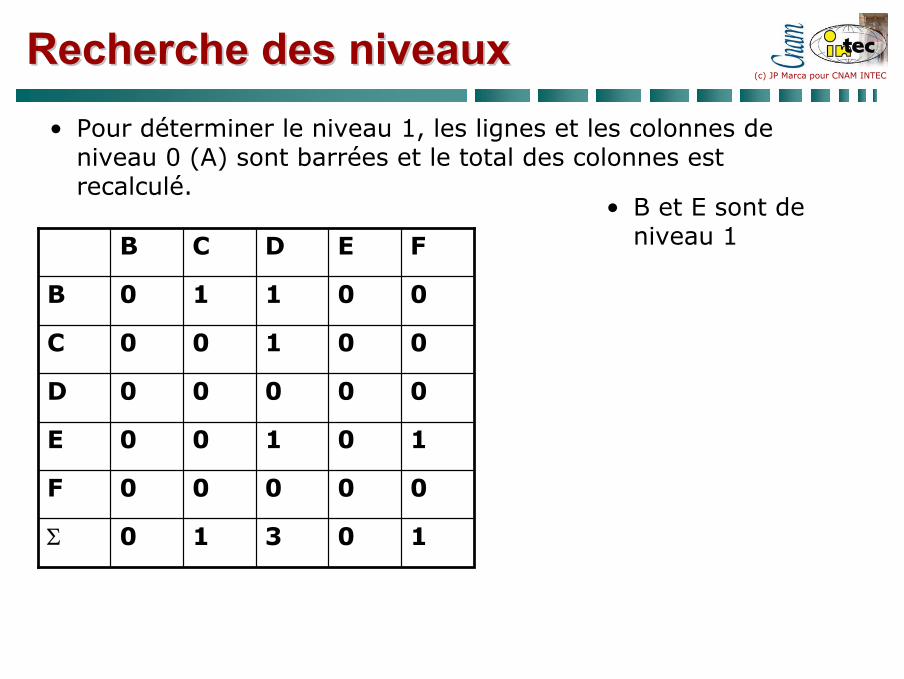
• Pour déterminer le niveau 1, les lignes et les colonnes de niveau 0 (A) sont barrées et le total des colonnes est recalculé.
Recherche des niveauxRecherche des niveaux
Σ
F
E
D
C
B
10310
00000
10100
00000
00100
00110
FEDCB
• B et E sont de niveau 1
(c) JP Marca pour CNAM INTEC
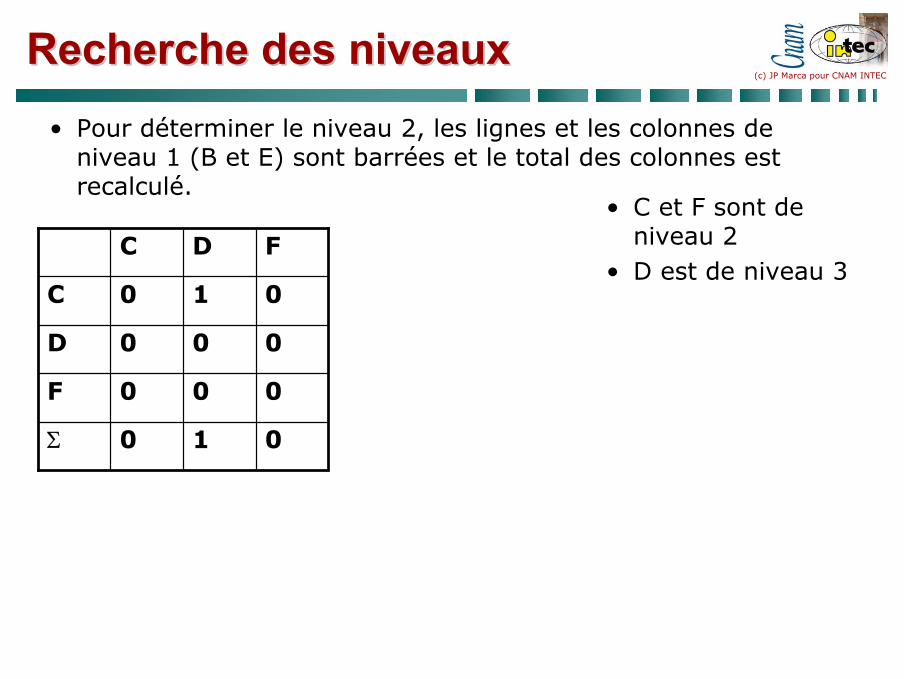
• Pour déterminer le niveau 2, les lignes et les colonnes de niveau 1 (B et E) sont barrées et le total des colonnes est recalculé.
Recherche des niveauxRecherche des niveaux
Σ
F
D
C
010
000
000
010
FDC
• C et F sont de niveau 2
• D est de niveau 3
(c) JP Marca pour CNAM INTEC
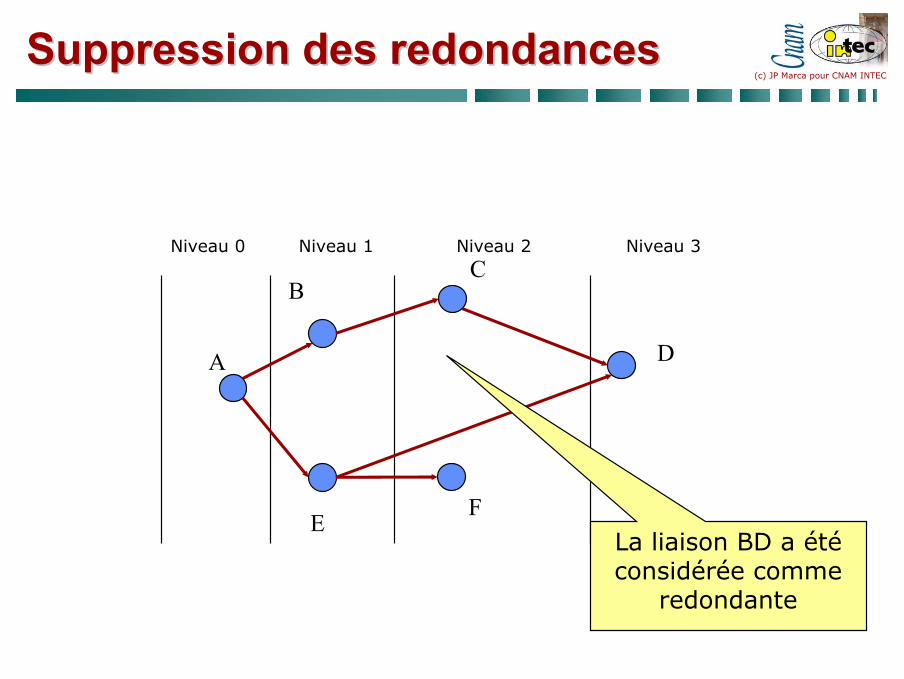
• La suppression des redondances ne s’opère que dans le cas de dictionnaires de type 2
•Graphe non complètement définis
•Tous sommets fournis (et non seulement les sommets adjacents)
• La démarche consiste à rechercher les antécédents des tâches antérieures
Suppression des redondancesSuppression des redondances
(c) JP Marca pour CNAM INTEC
Suppression des redondancesSuppression des redondances
ABCDEF
Sommets
/AA,BA,B,C,EAA,E
Précédents
/AA,A,B,A
A
Antécédents
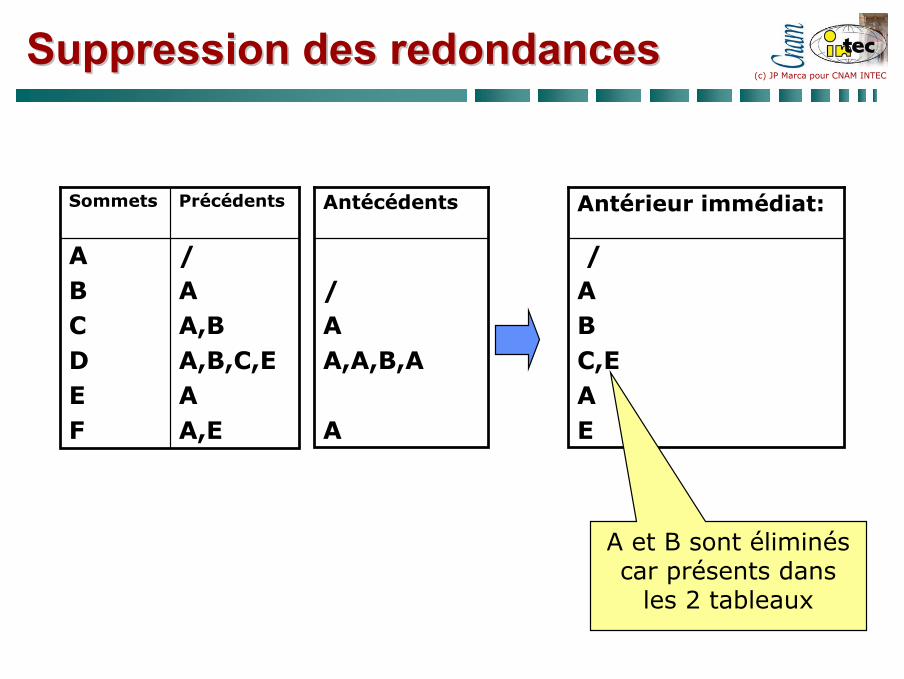
/ABC,EAE
Antérieur immédiat:
A et B sont éliminés car présents dans
les 2 tableaux
(c) JP Marca pour CNAM INTEC
Suppression des redondancesSuppression des redondances
A
BC
D
EF
Niveau 0 Niveau 1 Niveau 2 Niveau 3
La liaison BD a étéconsidérée comme
redondante
(c) JP Marca pour CNAM INTEC
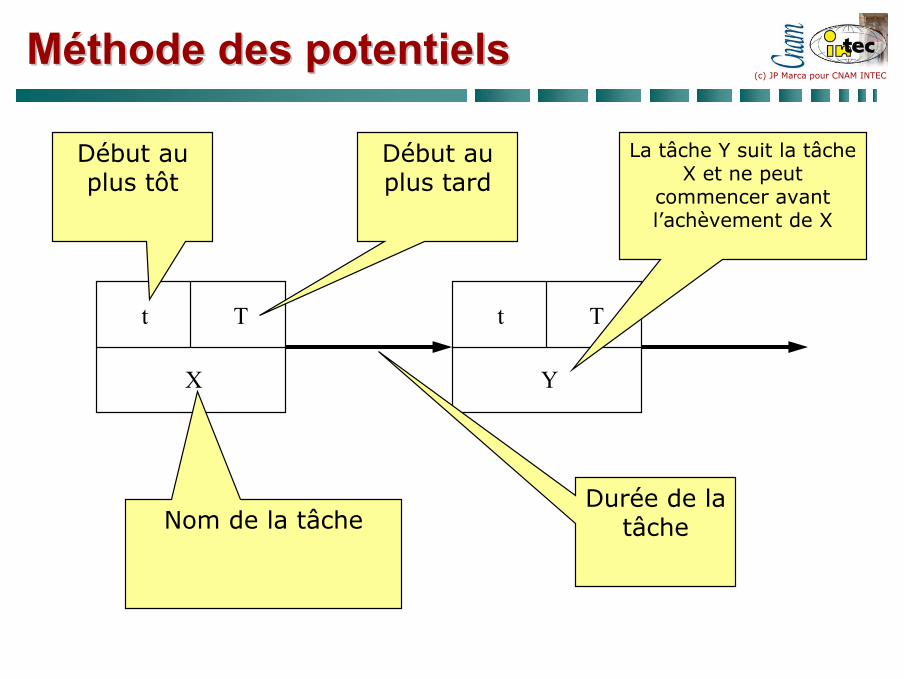
MMééthode des potentielsthode des potentiels
t T
X
t T
Y
Nom de la tâche
Début au plus tôt
Début au plus tard
Durée de la tâche
La tâche Y suit la tâche X et ne peut
commencer avant l’achèvement de X
(c) JP Marca pour CNAM INTEC
MMééthode des potentielsthode des potentiels
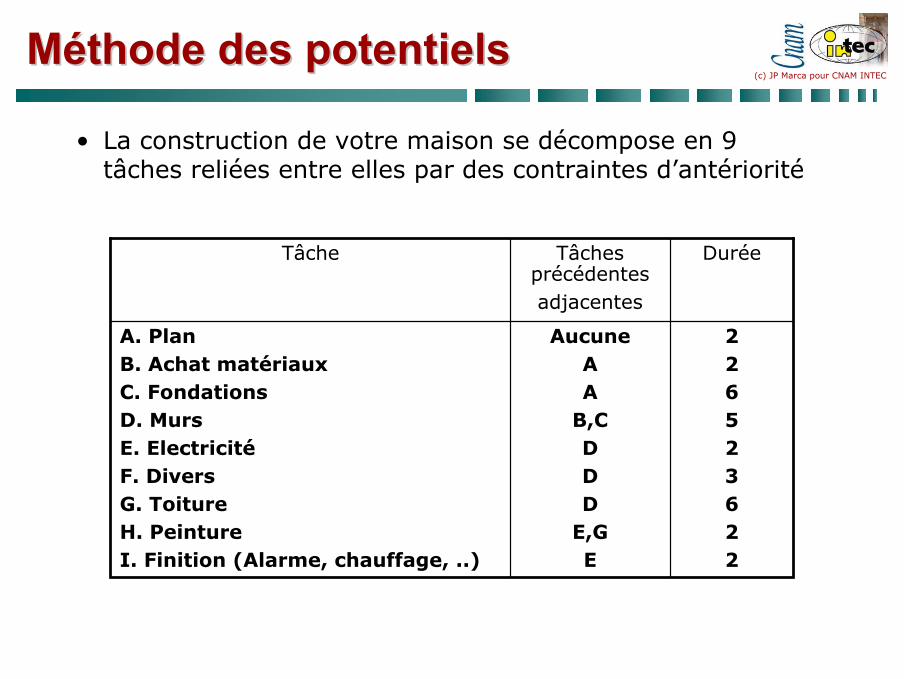
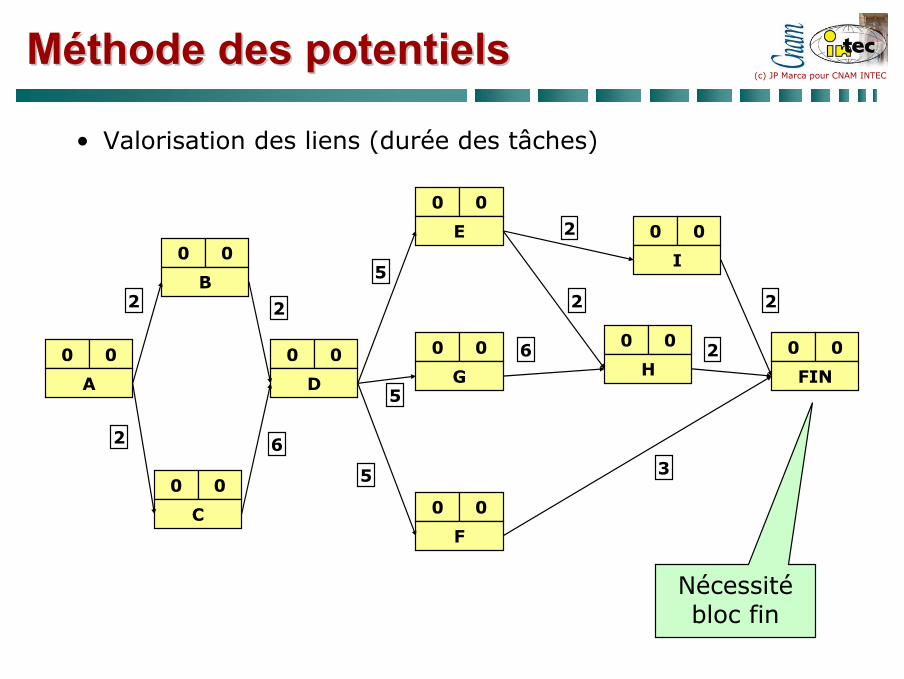
• La construction de votre maison se décompose en 9 tâches reliées entre elles par des contraintes d’antériorité
AucuneAA
B,CDDD
E,GE
Tâches précédentesadjacentes
A. PlanB. Achat matériauxC. FondationsD. MursE. ElectricitéF. DiversG. ToitureH. PeintureI. Finition (Alarme, chauffage, ..)
Tâche
226523622
Durée
(c) JP Marca pour CNAM INTEC
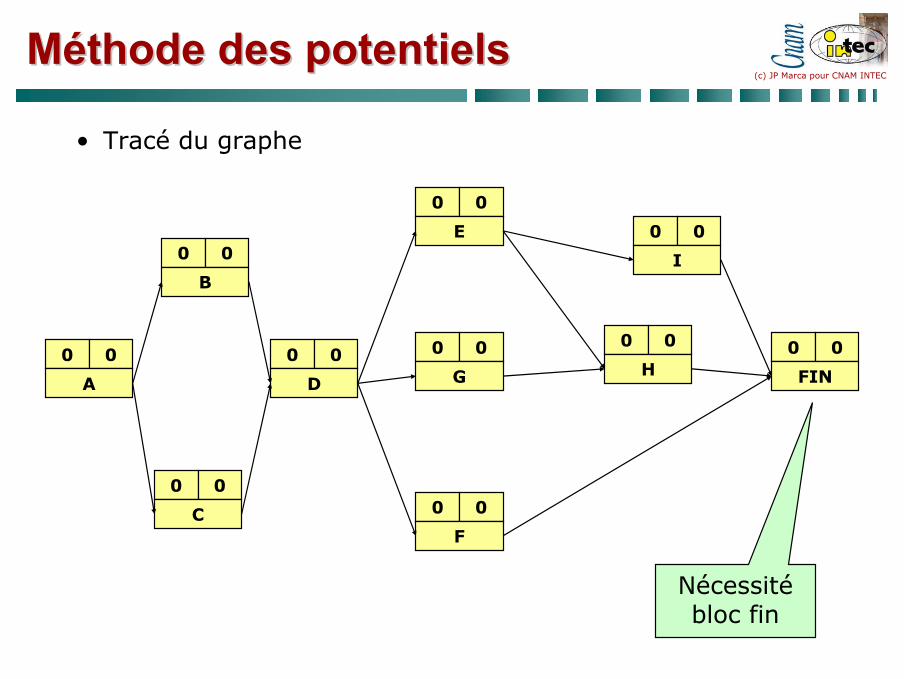
MMééthode des potentielsthode des potentiels
0 0
A
0 0
C
0 0
B
0 0
D
0 0
E
0 0
G
0 0
F
0 0
H
0 0
I
0 0
FIN
Nécessitébloc fin
• Tracé du graphe
(c) JP Marca pour CNAM INTEC
MMééthode des potentielsthode des potentiels
0 0
A
0 0
C
0 0
B
0 0
D
0 0
E
0 0
G
0 0
F
0 0
H
0 0
I
0 0
FIN
Nécessitébloc fin
• Valorisation des liens (durée des tâches)
2
2
2
6
5
5
5
2
2
3
6 2
2
(c) JP Marca pour CNAM INTEC
• Détermination des dates de début au plus tôt
• On part du début (Gauche)
• La date de début au plus tôt est la date àlaquelle une tâche peut commencer
• Une tâche ne peut commencer tant que les tâches antérieures ne sont pas toutes terminées
• Quand il y a convergence vers une tâche, on retient le chemin le plus long
MMééthode des potentielsthode des potentiels
(c) JP Marca pour CNAM INTEC
MMééthode des potentielsthode des potentiels
0 0
A
2 0
C
2 0
B
8 0
D
13 0
E
13 0
G
13 0
F
19 0
H
15 0
I
21 0
FIN
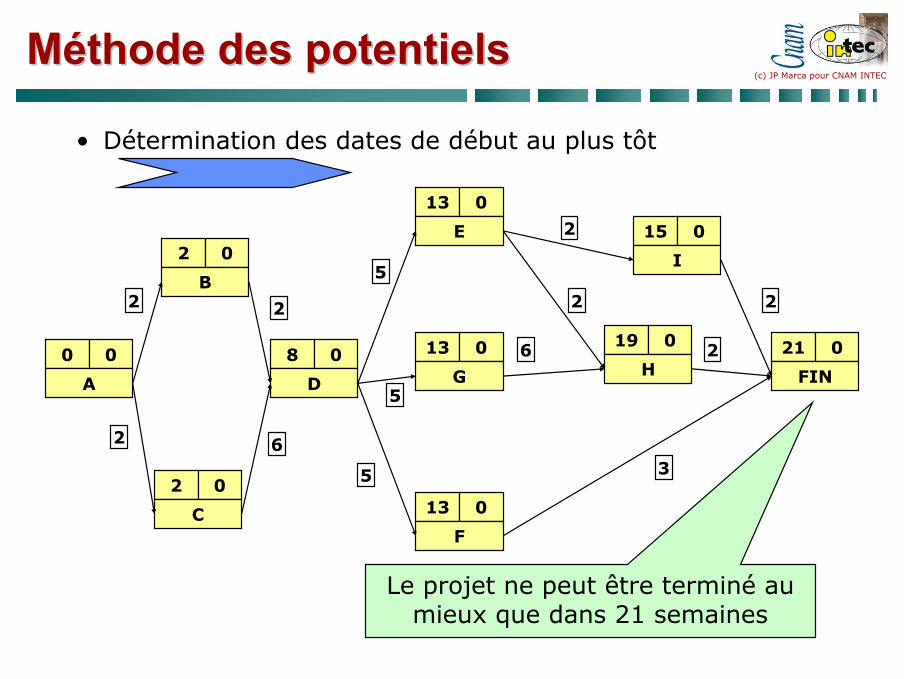
Le projet ne peut être terminé au mieux que dans 21 semaines
• Détermination des dates de début au plus tôt
2
2
2
6
5
5
5
2
2
3
6 2
2
(c) JP Marca pour CNAM INTEC
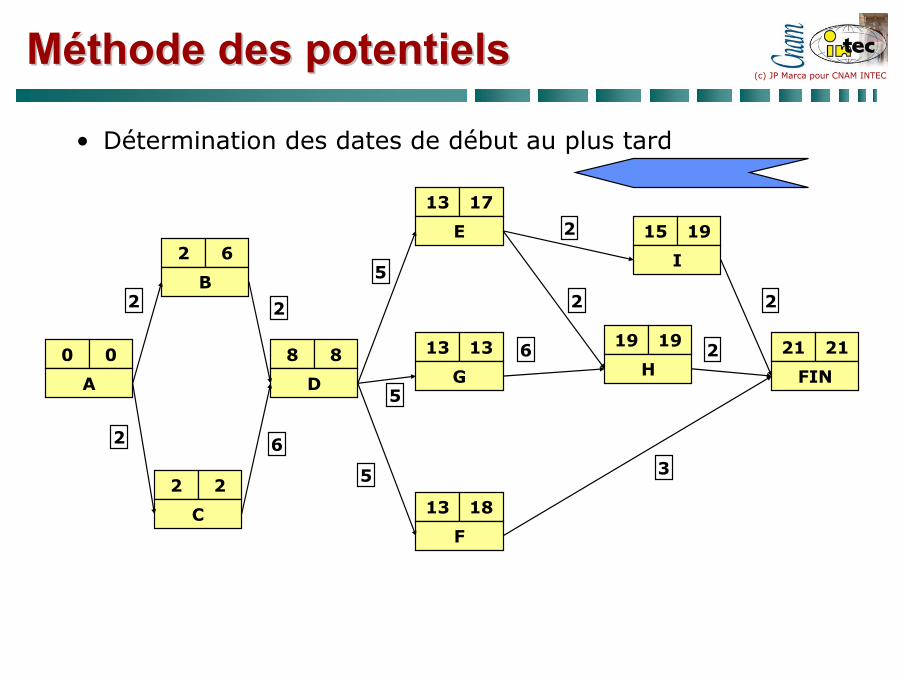
• Détermination des dates de début au plus tard
• On part de la fin (Droite)
• La date de début au plus tard est la date limite à laquelle une tâche doit commencer sous peine de retarder le projet
• Une tâche ne doit pas remettre en cause la durée totale du projet
• Quand il y a convergence vers une tâche, on retient le chemin le plus court
MMééthode des potentielsthode des potentiels
(c) JP Marca pour CNAM INTEC
MMééthode des potentielsthode des potentiels
0 0
A
2 2
C
2 6
B
8 8
D
13 17
E
13 13
G
13 18
F
19 19
H
15 19
I
21 21
FIN
• Détermination des dates de début au plus tard
2
2
2
6
5
5
5
2
2
3
6 2
2
(c) JP Marca pour CNAM INTEC
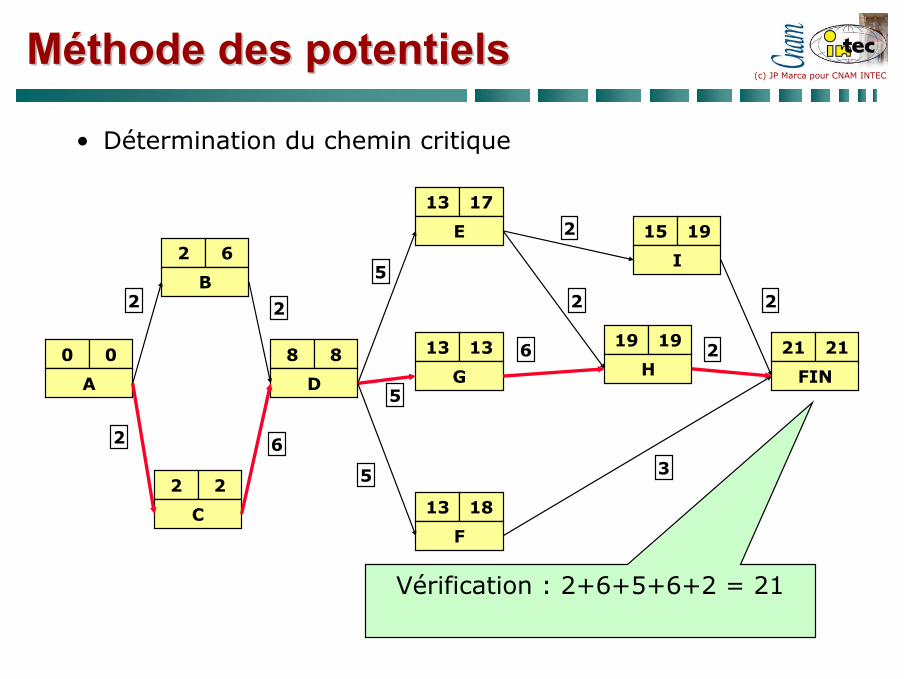
• Détermination du chemin critique
• Le chemin critique est le chemin le plus long entre le début et la fin du projet
• Il est constitué par l’ensemble des tâches critiques c’est à dire dont la réalisation ne souffre aucun retard
• Une tâche est critique quand sa date de début au plus tôt est égale à sa date de début au plus tard
• La longueur du chemin critique est donc égale àla somme des durées des tâches critiques
MMééthode des potentielsthode des potentiels
(c) JP Marca pour CNAM INTEC
MMééthode des potentielsthode des potentiels
0 0
A
2 2
C
2 6
B
8 8
D
13 17
E
13 13
G
13 18
F
19 19
H
15 19
I
21 21
FIN
• Détermination du chemin critique
2
2
2
6
5
5
5
2
2
3
6 2
2
Vérification : 2+6+5+6+2 = 21
(c) JP Marca pour CNAM INTEC
MMééthode des potentielsthode des potentiels
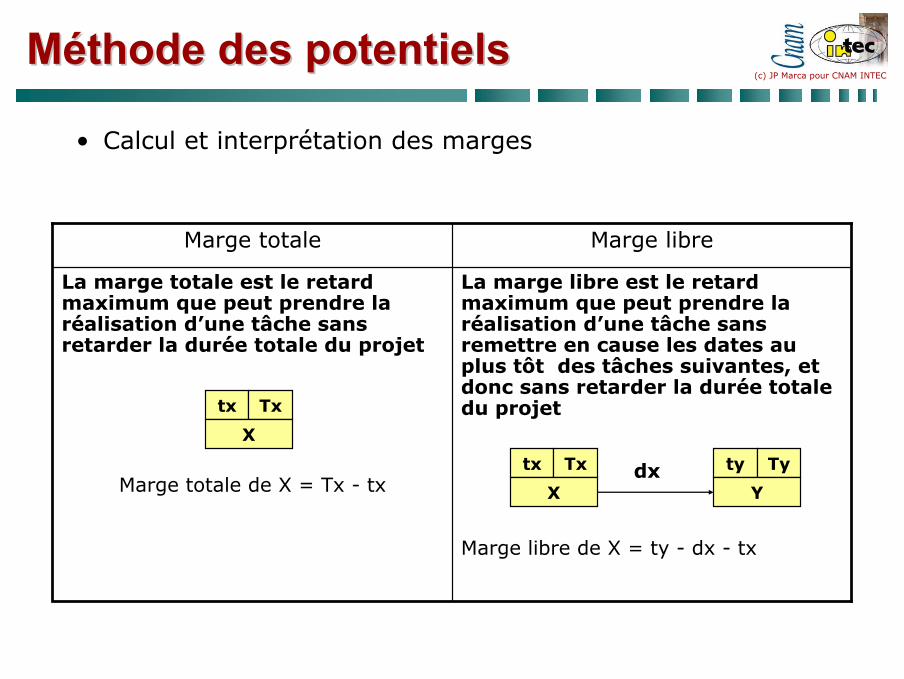
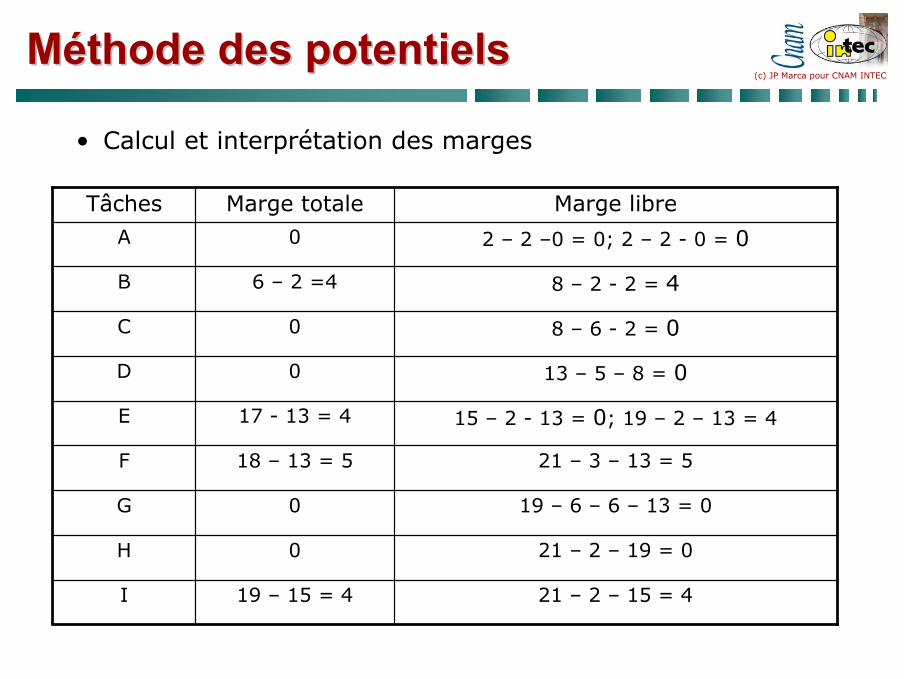
• Calcul et interprétation des marges
La marge libre est le retard maximum que peut prendre la réalisation d’une tâche sans remettre en cause les dates au plus tôt des tâches suivantes, et donc sans retarder la durée totale du projet
Marge libre de X = ty - dx - tx
La marge totale est le retard maximum que peut prendre la réalisation d’une tâche sans retarder la durée totale du projet
Marge totale de X = Tx - tx
Marge libreMarge totale
tx Tx
X
tx Tx
X
ty Ty
Ydx
(c) JP Marca pour CNAM INTEC
MMééthode des potentielsthode des potentiels
• Calcul et interprétation des marges
13 – 5 – 8 = 00D
21 – 2 – 19 = 00H
19 – 6 – 6 – 13 = 00G
21 – 3 – 13 = 518 – 13 = 5F
15 – 2 - 13 = 0; 19 – 2 – 13 = 4 17 - 13 = 4E
8 – 6 - 2 = 00C
8 – 2 - 2 = 46 – 2 =4B
2 – 2 –0 = 0; 2 – 2 - 0 = 00A
19 – 15 = 4
Marge totale
21 – 2 – 15 = 4I
Marge libreTâches
(c) JP Marca pour CNAM INTEC
• Les marges d ’une tâche critique sont nulles
• La marge libre d’une tâche est toujours inférieure ou égale à sa marge totale
• Interprétation de E :
•La marge totale de 4 implique qu’un retard de 4 semaines sur cette tâche ne met pas en cause la date de fin prévue du projet.
•Mais, une marge libre de 0 implique qu’un retard est impossible si on ne veut pas remettre en cause la date de début au plus tôt des tâches suivantes
MMééthode des potentielsthode des potentiels
(c) JP Marca pour CNAM INTEC
• Les tâches critiques ont des marges nulles puisqu’aucun retard n’est possible pour ces tâches
• Tout retard dans l‘accomplissement d’une tâche critique retarde d’autant le projet
• La réduction de la durée d’une tâche critique ne réduit la durée totale du projet que si il y a un seul chemin critique
• La durée d’une tâche non critique peut varier dans le limite de sa marge libre
MMééthode des potentielsthode des potentiels
(c) JP Marca pour CNAM INTEC
ExerciceExercice
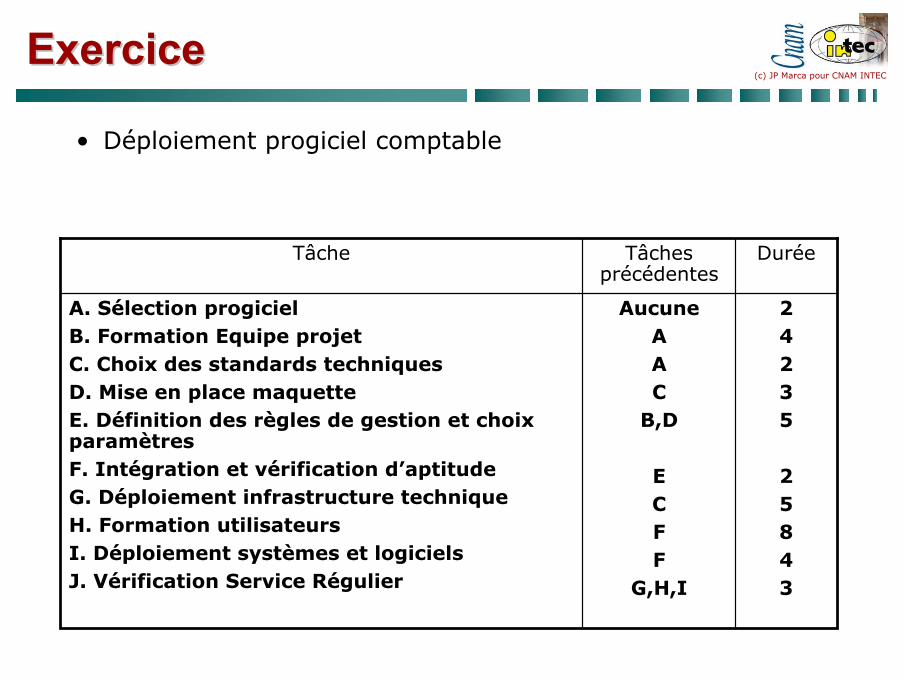
AucuneAAC
B,D
ECFF
G,H,I
Tâches précédentes
A. Sélection progicielB. Formation Equipe projetC. Choix des standards techniques D. Mise en place maquetteE. Définition des règles de gestion et choix paramètresF. Intégration et vérification d’aptitudeG. Déploiement infrastructure techniqueH. Formation utilisateursI. Déploiement systèmes et logicielsJ. Vérification Service Régulier
Tâche
24235
25843
Durée
• Déploiement progiciel comptable
(c) JP Marca pour CNAM INTEC
ExerciceExercice
AucuneAucuneAucune
A,BB,CB
D,FE, F
Tâches précédentes
A. B. C. D. E. F. G. H.
Tâche
54643654
Durée
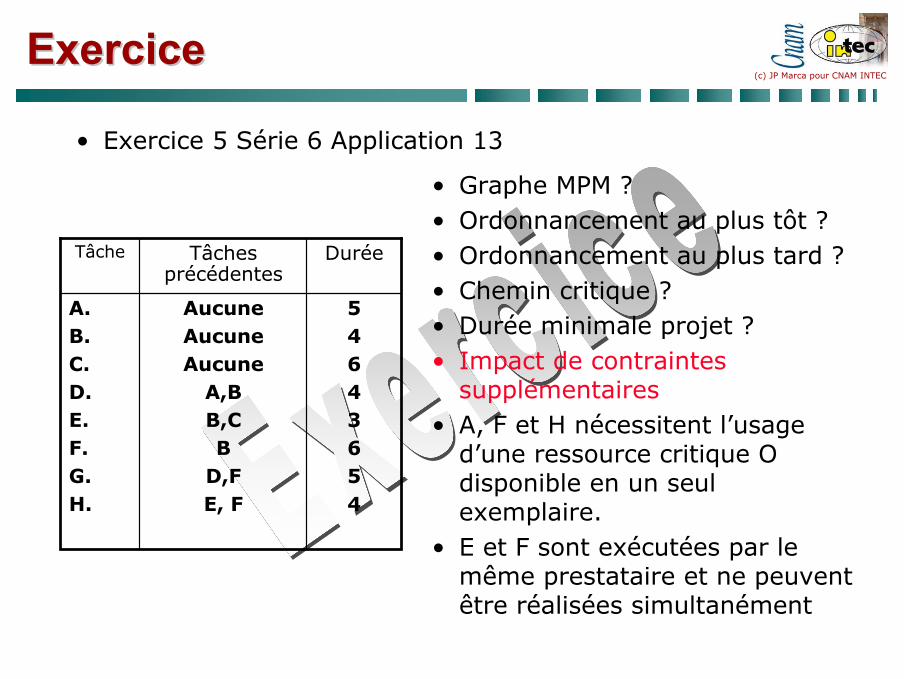
• Exercice 5 Série 6 Application 13
• Graphe MPM ?• Ordonnancement au plus tôt ? • Ordonnancement au plus tard ?• Chemin critique ?• Durée minimale projet ?• Impact de contraintes
supplémentaires• A, F et H nécessitent l’usage
d’une ressource critique O disponible en un seul exemplaire.
• E et F sont exécutées par le même prestataire et ne peuvent être réalisées simultanément
(c) JP Marca pour CNAM INTEC
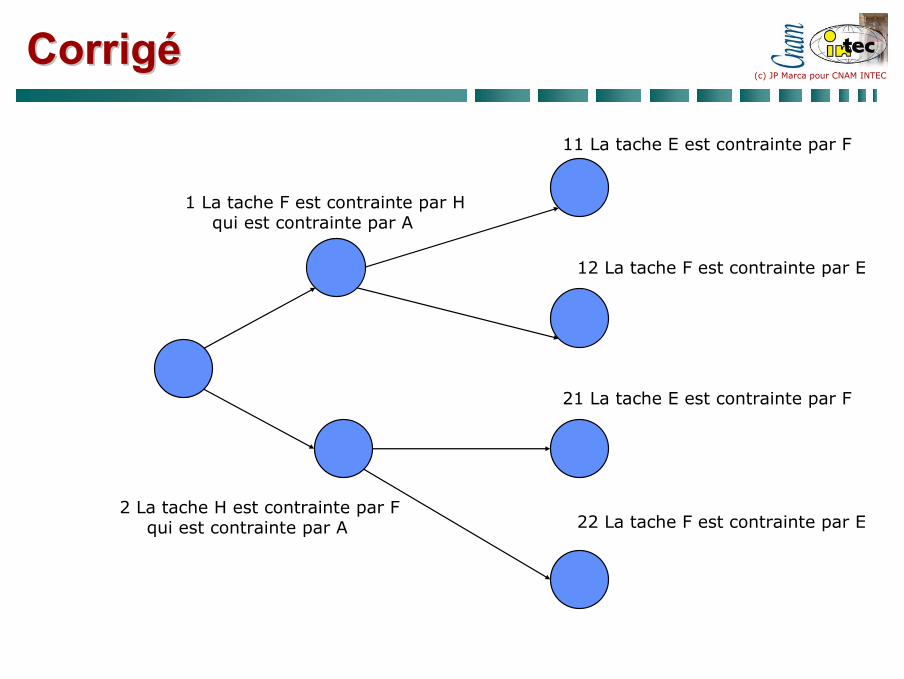
CorrigCorrigéé
1 La tache F est contrainte par H qui est contrainte par A
2 La tache H est contrainte par F qui est contrainte par A
11 La tache E est contrainte par F
12 La tache F est contrainte par E
21 La tache E est contrainte par F
22 La tache F est contrainte par E
(c) JP Marca pour CNAM INTEC
CorrigCorrigéé
AucuneAucuneAucune
A,BB,C,FB, HD,F
E,F,A
Tâches précédentes
A. B. C. D. E. F. G. H.
Tâche
54643654
Durée
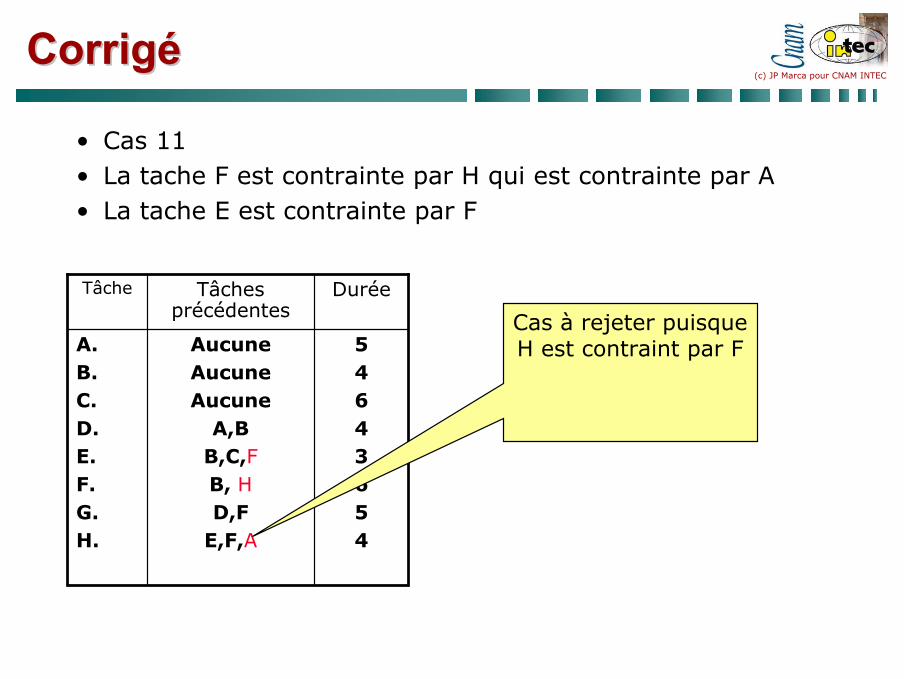
• Cas 11• La tache F est contrainte par H qui est contrainte par A• La tache E est contrainte par F
Cas à rejeter puisque H est contraint par F
(c) JP Marca pour CNAM INTEC
CorrigCorrigéé
AucuneAucuneAucune
A,BB,C
B, H, ED,F
E,F,A
Tâches précédentes
A. B. C. D. E. F. G. H.
Tâche
54643654
Durée
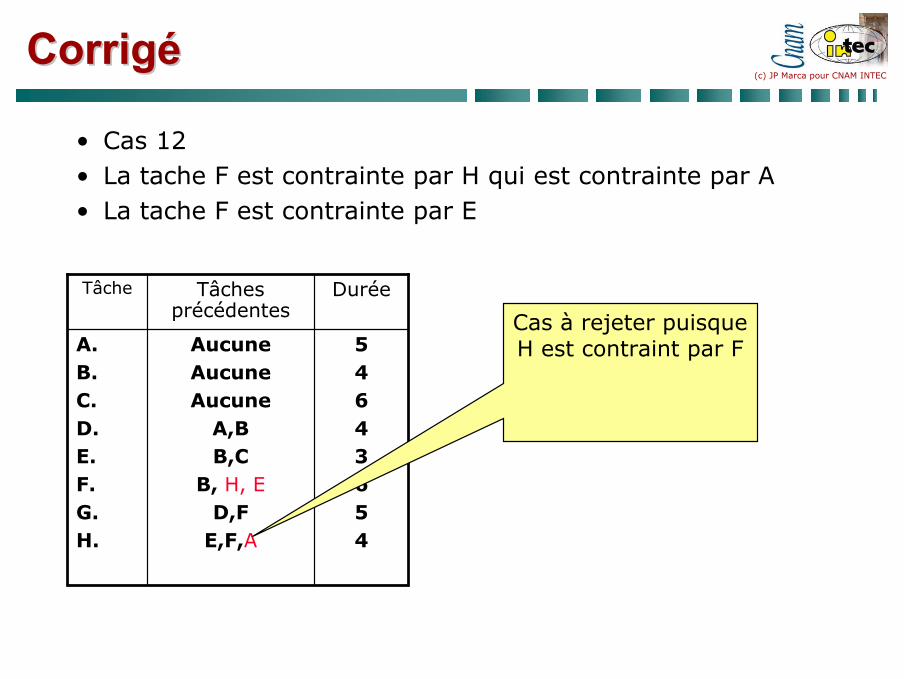
• Cas 12• La tache F est contrainte par H qui est contrainte par A• La tache F est contrainte par E
Cas à rejeter puisque H est contraint par F
(c) JP Marca pour CNAM INTEC
CorrigCorrigéé
AucuneAucuneAucune
A,BB,C,FB,AD,FE,F
Tâches précédentes
A. B. C. D. E. F. G. H.
Tâche
54643654
Durée
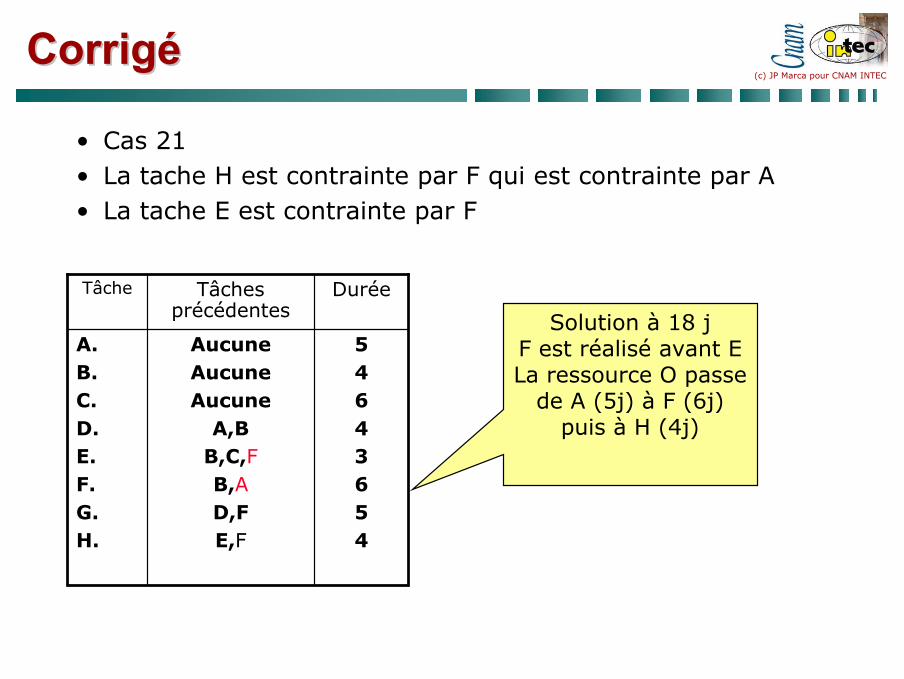
• Cas 21• La tache H est contrainte par F qui est contrainte par A• La tache E est contrainte par F
Solution à 18 jF est réalisé avant ELa ressource O passe
de A (5j) à F (6j) puis à H (4j)
(c) JP Marca pour CNAM INTEC
CorrigCorrigéé
AucuneAucuneAucune
A,BB,C
B,E,AD,FE,F
Tâches précédentes
A. B. C. D. E. F. G. H.
Tâche
54643654
Durée
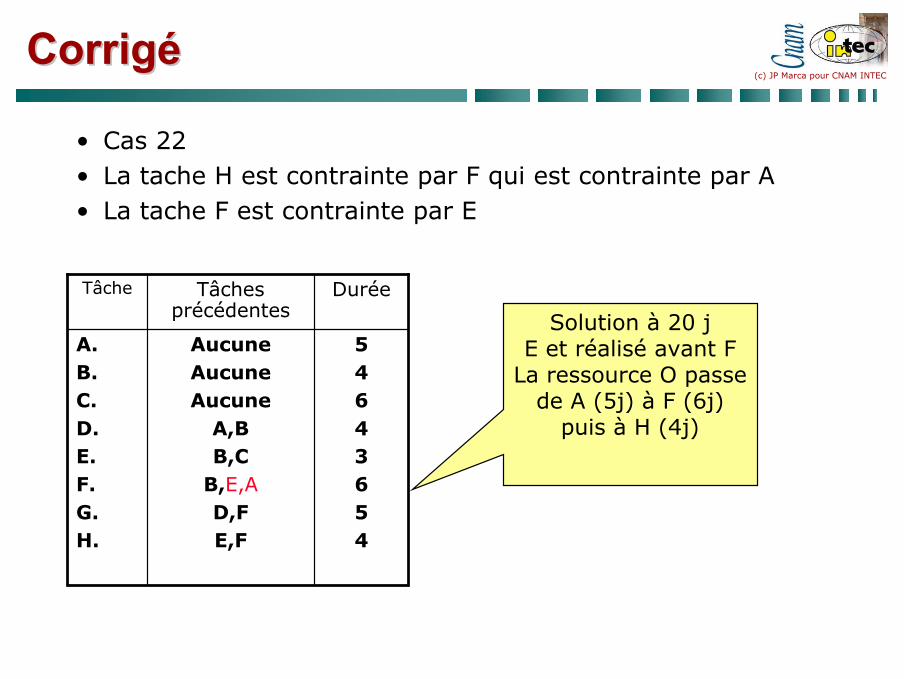
• Cas 22• La tache H est contrainte par F qui est contrainte par A• La tache F est contrainte par E
Solution à 20 jE et réalisé avant F
La ressource O passe de A (5j) à F (6j)
puis à H (4j)
(c) JP Marca pour CNAM INTEC
ExerciceExercice
AucuneAucune
A,BA,BA,BAAFF
I,G,H,EDKD
J,C,M,L
Tâches précédentes
A. B. C. D. E. F. G.H.I.J.K.L.M.N.
Tâche
63536455225462
Durée
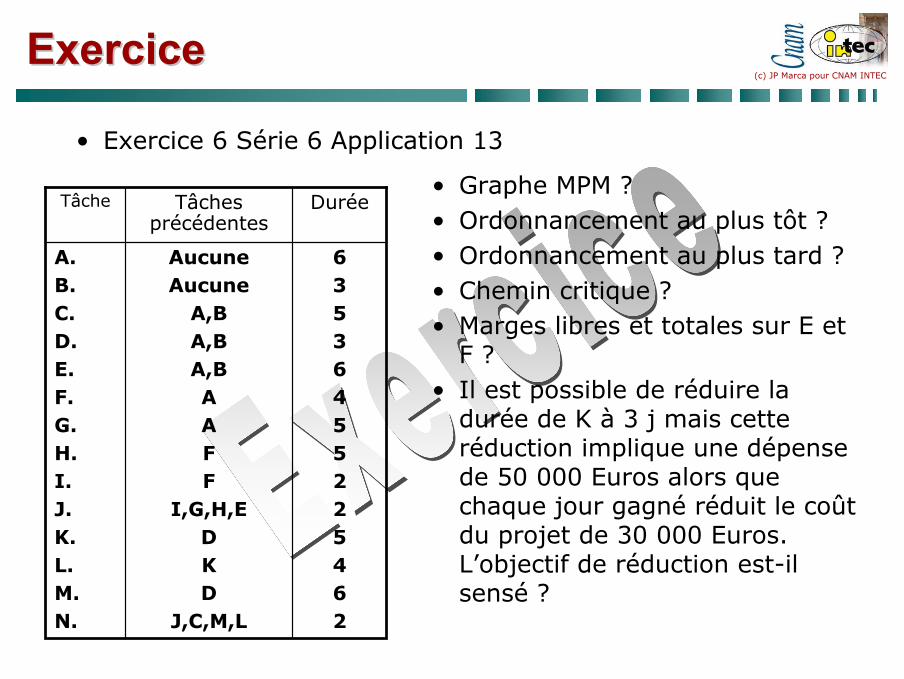
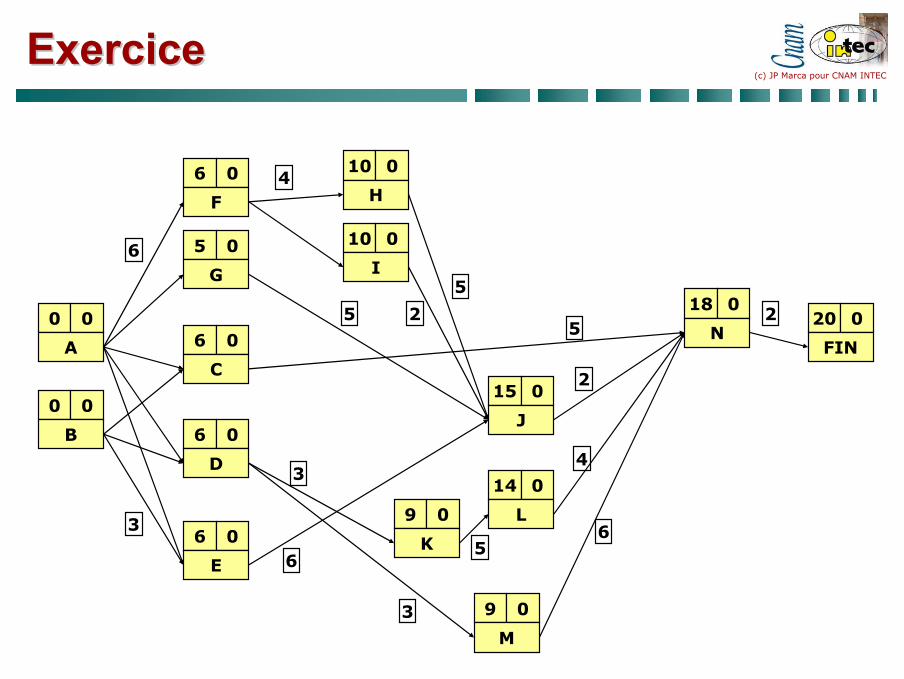
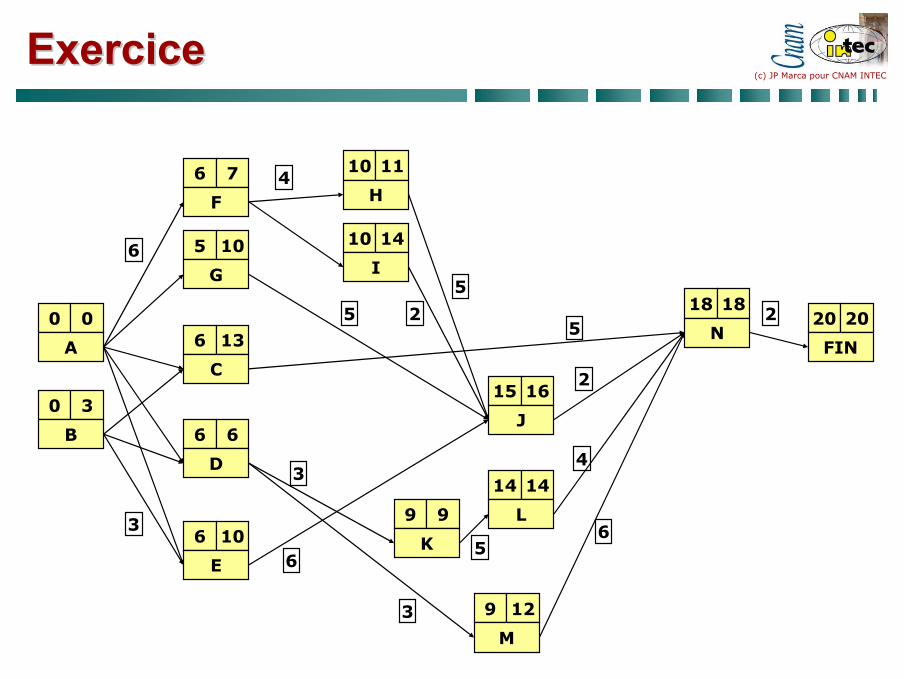
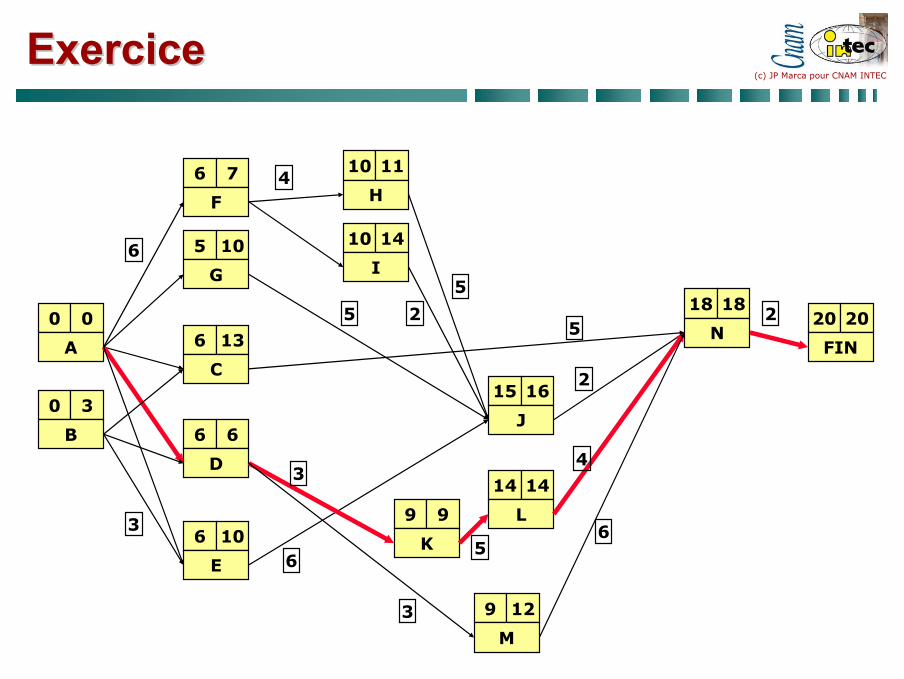
• Exercice 6 Série 6 Application 13
• Graphe MPM ?• Ordonnancement au plus tôt ? • Ordonnancement au plus tard ?• Chemin critique ?• Marges libres et totales sur E et
F ?• Il est possible de réduire la
durée de K à 3 j mais cette réduction implique une dépense de 50 000 Euros alors que chaque jour gagné réduit le coût du projet de 30 000 Euros. L’objectif de réduction est-il sensé ?
(c) JP Marca pour CNAM INTEC
ExerciceExercice
0 0
A
0 0
B
6 0
C
6 0
D
6 0
E
5 0
G
6 0
F
10 0
I
10 0
H
15 0
J
9 0
K
14 0
L
9 0
M
18 0
N20 0
FIN
6
4
5
5
25
3
6
3
3
2
5
4
6
2
(c) JP Marca pour CNAM INTEC
ExerciceExercice
0 0
A
0 3
B
6 13
C
6 6
D
6 10
E
5 10
G
6 7
F
10 14
I
10 11
H
15 16
J
9 9
K
14 14
L
9 12
M
18 18
N20 20
FIN
6
4
5
5
25
3
6
3
3
2
5
4
6
2
(c) JP Marca pour CNAM INTEC
ExerciceExercice
0 0
A
0 3
B
6 13
C
6 6
D
6 10
E
5 10
G
6 7
F
10 14
I
10 11
H
15 16
J
9 9
K
14 14
L
9 12
M
18 18
N20 20
FIN
6
4
5
5
25
3
6
3
3
2
5
4
6
2
(c) JP Marca pour CNAM INTEC
ExerciceExercice
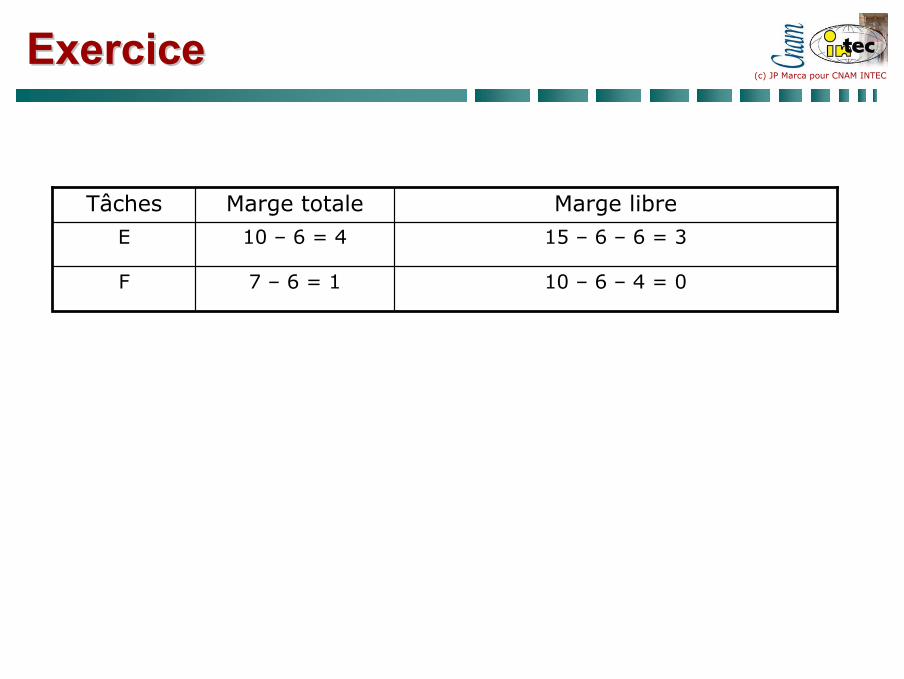
10 – 6 – 4 = 07 – 6 = 1F
15 – 6 – 6 = 310 – 6 = 4E
Marge totale Marge libreTâches
(c) JP Marca pour CNAM INTEC
ExerciceExercice
• Démonstration project
(c) JP Marca pour CNAM INTEC
MMééthode Pertthode Pert
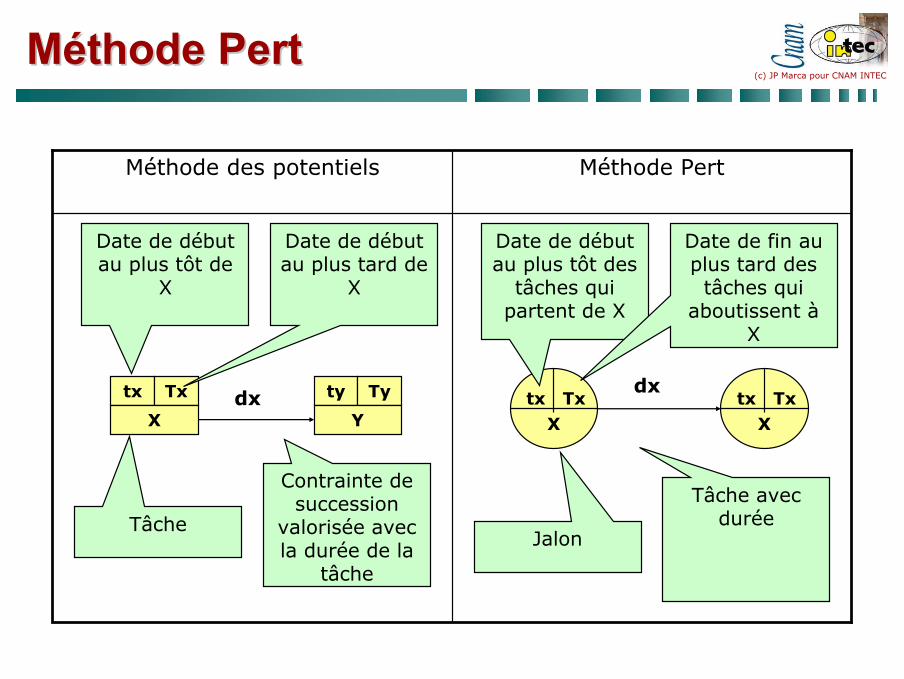
Méthode PertMéthode des potentiels
tx Tx
X
ty Ty
Ydx
Contrainte de succession
valorisée avec la durée de la
tâche
Tâche
dx
Tâche avec durée
Jalon
Xtx Tx
Xtx Tx
Date de début au plus tôt de
X
Date de début au plus tard de
X
Date de début au plus tôt des
tâches qui partent de X
Date de fin au plus tard des tâches qui
aboutissent àX
(c) JP Marca pour CNAM INTEC
MMééthode Pertthode Pert
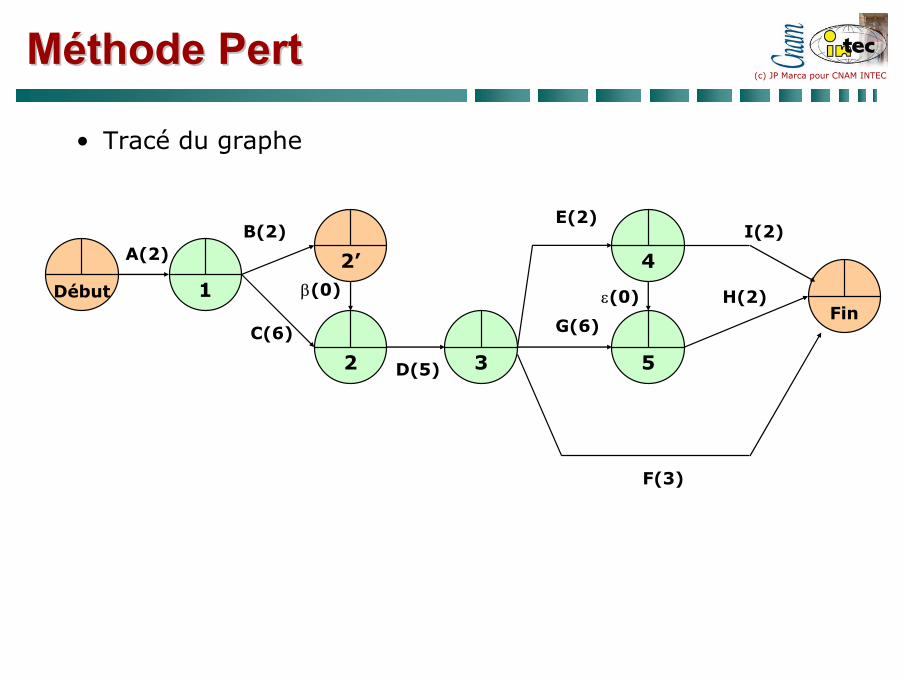
• Tracé du graphe
1
A(2)
2
2’
B(2)
C(6)
β(0)
3D(5) 5
DébutFin
4
F(3)
G(6)
H(2)
E(2)I(2)
ε(0)
(c) JP Marca pour CNAM INTEC
MMééthode Pertthode Pert
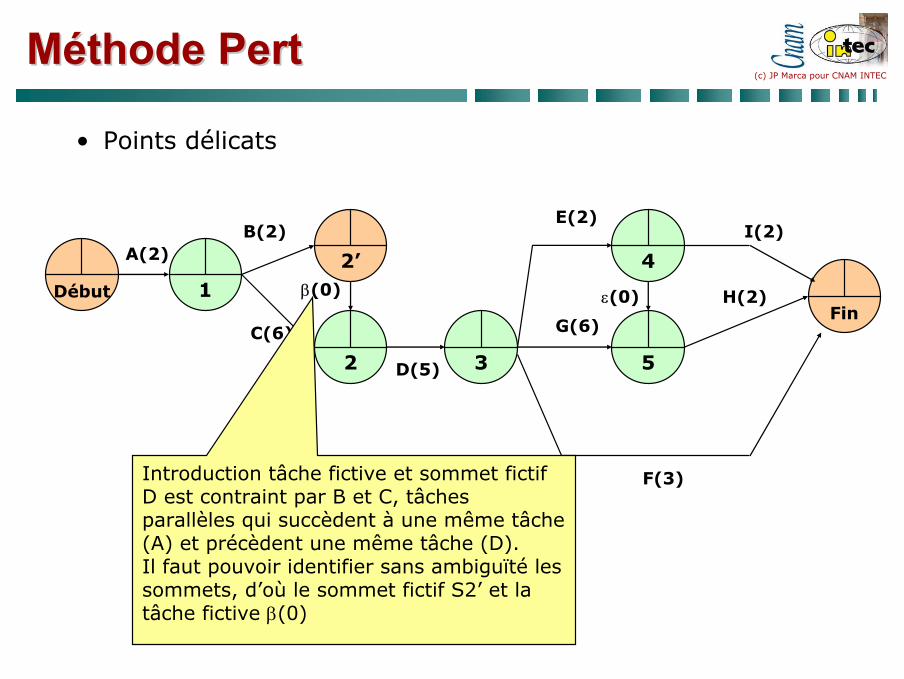
• Points délicats
1
A(2)
2
2’
B(2)
C(6)
β(0)
3D(5) 5
DébutFin
4
F(3)
G(6)
H(2)
E(2)I(2)
Introduction tâche fictive et sommet fictifD est contraint par B et C, tâches parallèles qui succèdent à une même tâche (A) et précèdent une même tâche (D).Il faut pouvoir identifier sans ambiguïté les sommets, d’où le sommet fictif S2’ et la tâche fictive β(0)
ε(0)
(c) JP Marca pour CNAM INTEC
MMééthode Pertthode Pert
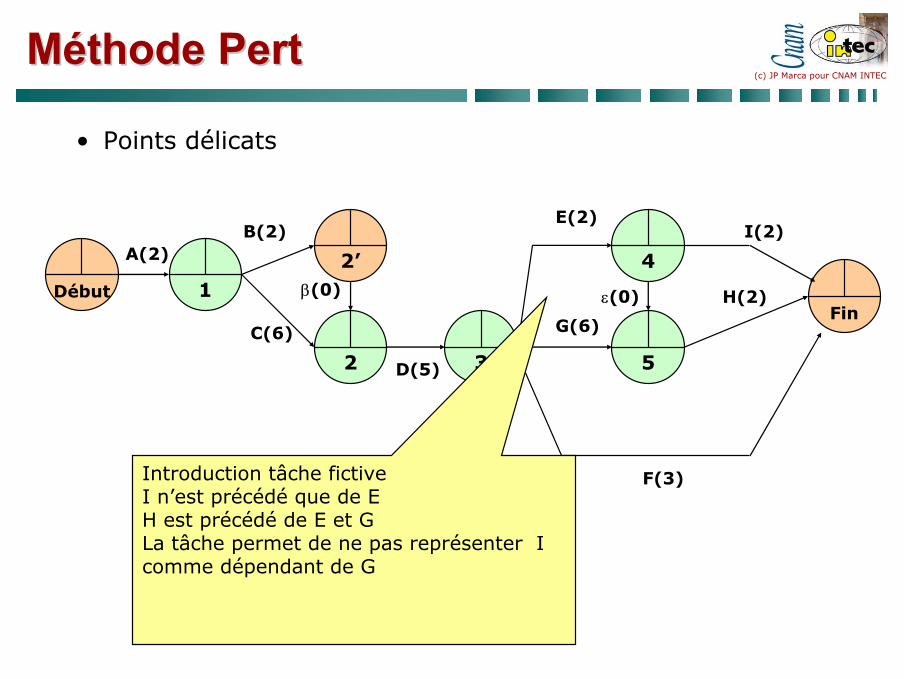
• Points délicats
1
A(2)
2
2’
B(2)
C(6)
β(0)
3D(5) 5
DébutFin
4
F(3)
G(6)
H(2)
E(2)I(2)
Introduction tâche fictiveI n’est précédé que de EH est précédé de E et GLa tâche permet de ne pas représenter I comme dépendant de G
ε(0)
(c) JP Marca pour CNAM INTEC
ε(0)
MMééthode Pertthode Pert
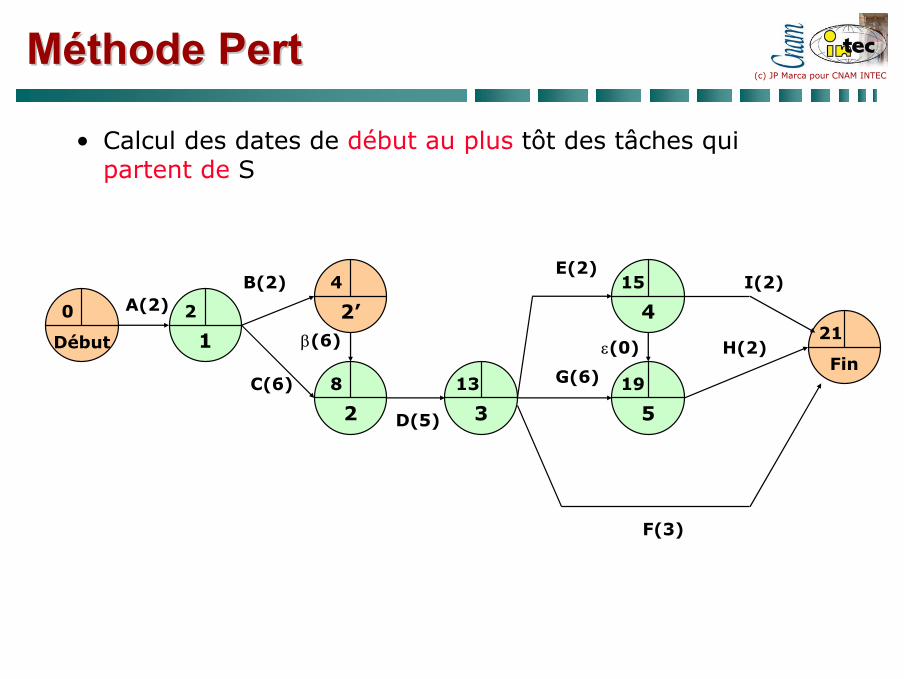
• Calcul des dates de début au plus tôt des tâches qui partent de S
1
A(2)
2
2’
B(2)
C(6)
β(6)
3D(5) 5
DébutFin
4
F(3)
G(6)
H(2)
E(2)I(2)
2
4
8 13 19
15
210
(c) JP Marca pour CNAM INTEC
ε(0)
MMééthode Pertthode Pert
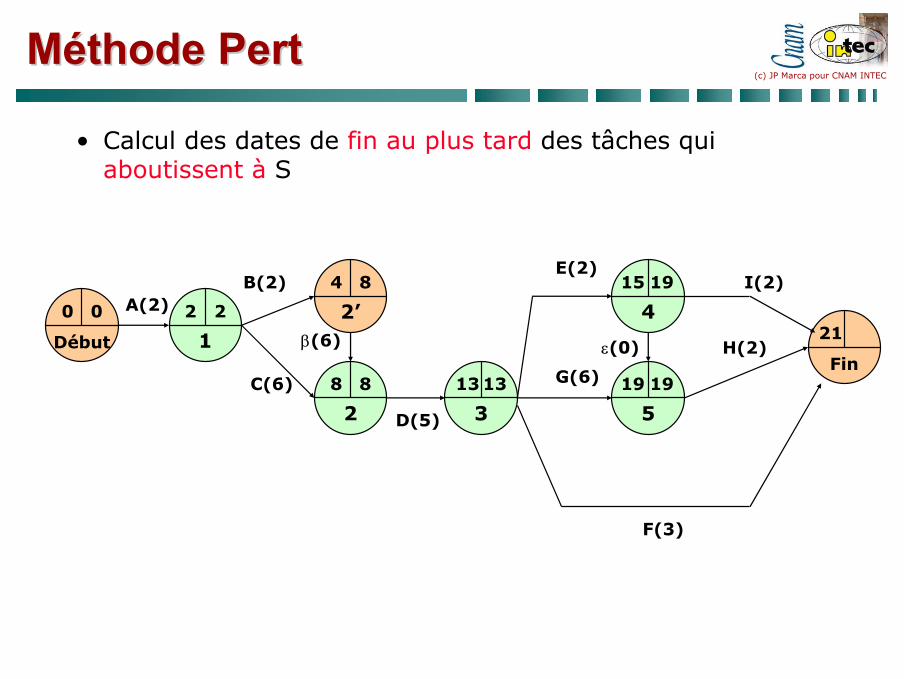
• Calcul des dates de fin au plus tard des tâches qui aboutissent à S
1
A(2)
2
2’
B(2)
C(6)
β(6)
3D(5) 5
DébutFin
4
F(3)
G(6)
H(2)
E(2)I(2)
2
4
8 13 19
15
210
8
2
8 13
19
19
0
(c) JP Marca pour CNAM INTEC
ε(0)
MMééthode Pertthode Pert
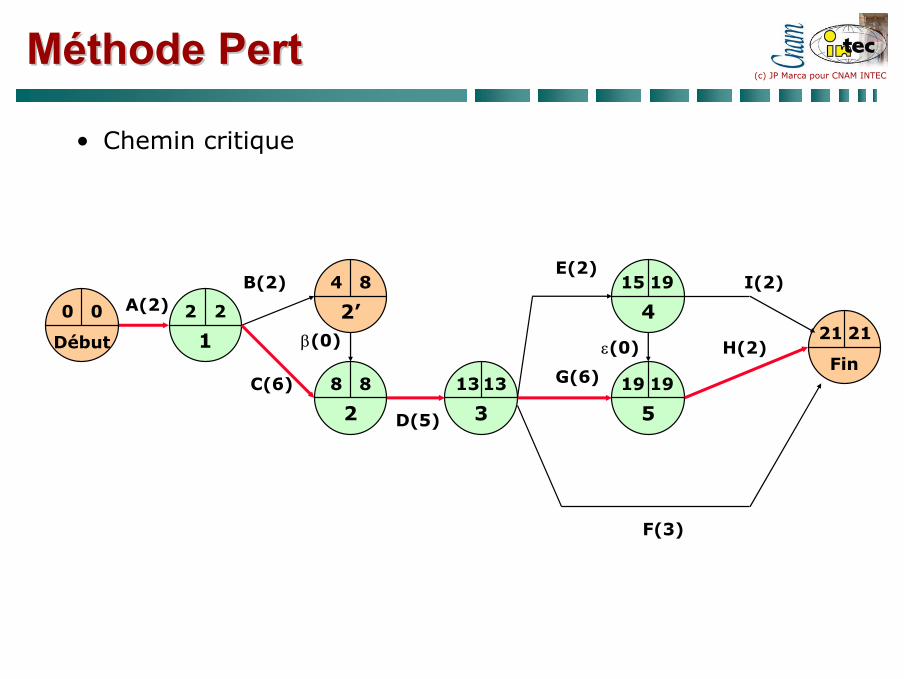
• Chemin critique
1
A(2)
2
2’
B(2)
C(6)
β(0)
3D(5) 5
DébutFin
4
F(3)
G(6)
H(2)
E(2)I(2)
2
4
8 13 19
15
210
8
2
8 13
19
19
021
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
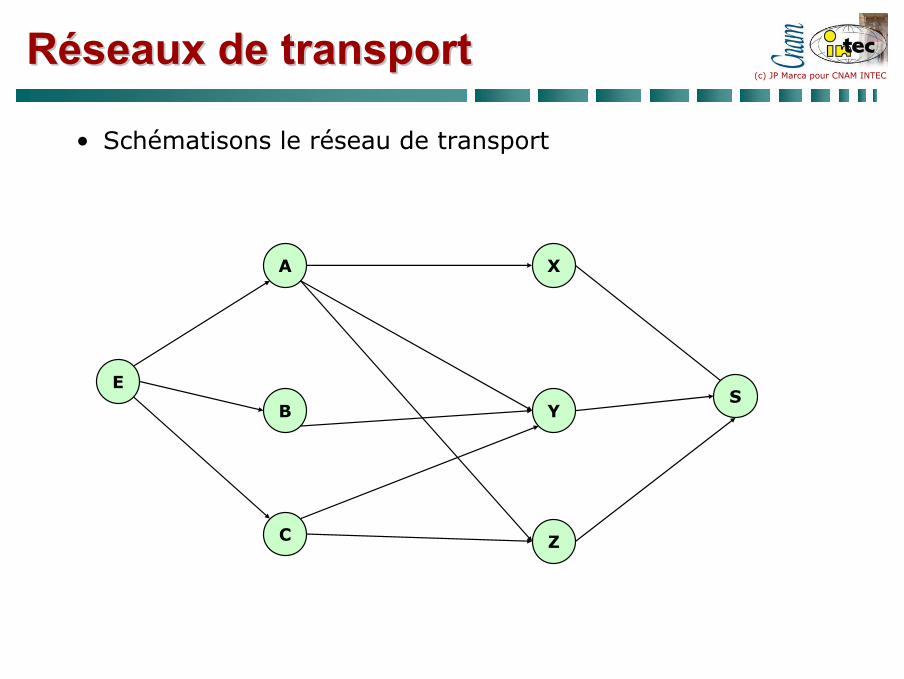
• Un réseau de transport est un graphe dont :
• Un sommet fictif E sans précédent figure le point de départ
• Un sommet fictif S sans suivant figure la fin
• Les autres sommets sont les nœuds du réseau
• Les arcs qui figurent les liaisons entre les sommets possèdent une capacité maximale de transport
• L’algorithme de Ford et Fulkerson permet de maximiser les flux qui circulent sur le réseau, compte tenu des capacités de transport.
(c) JP Marca pour CNAM INTEC
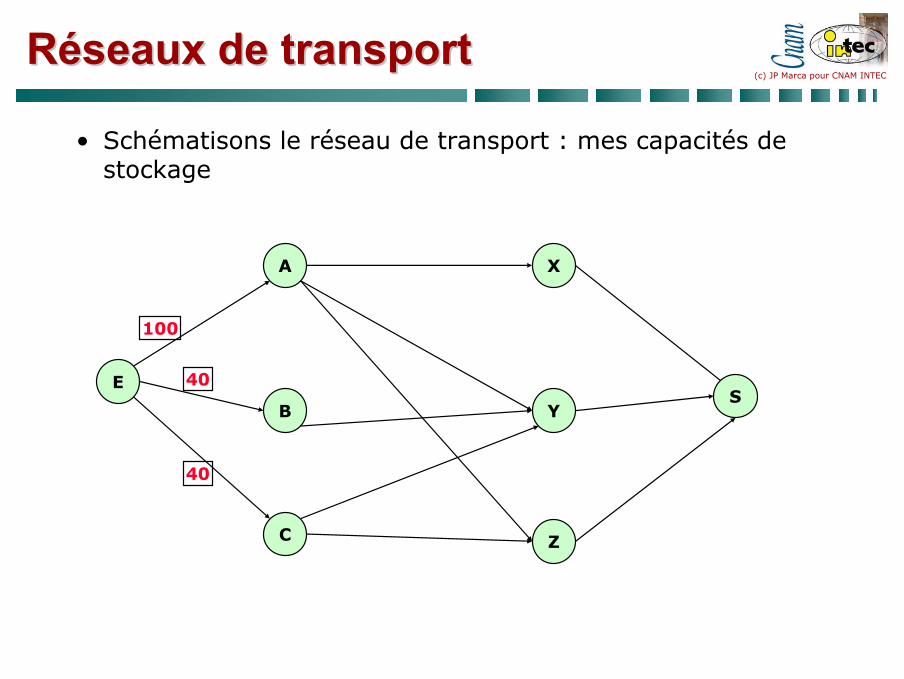
RRééseaux de transportseaux de transport
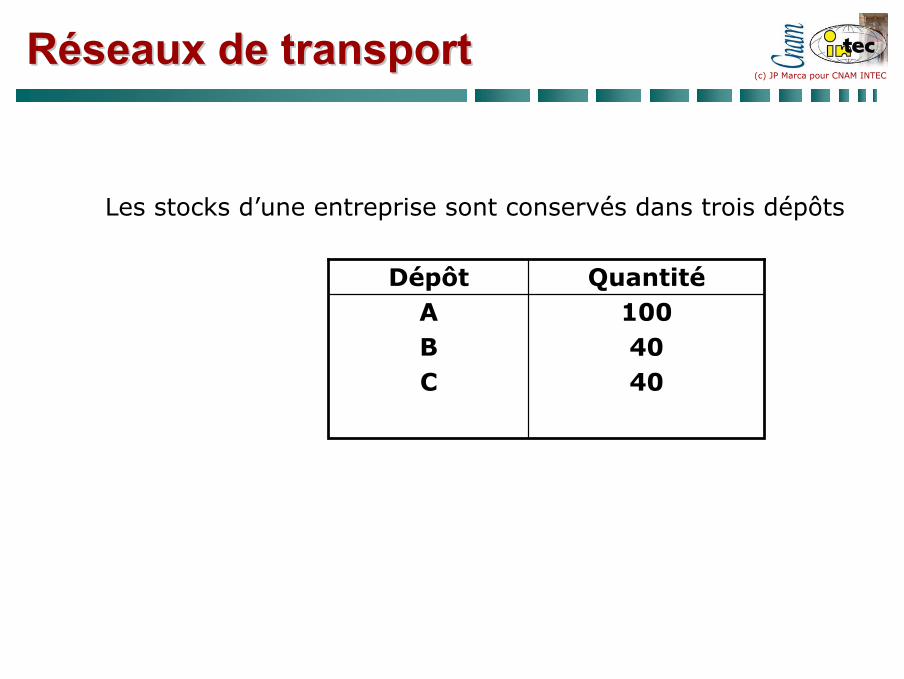
Les stocks d’une entreprise sont conservés dans trois dépôts
ABC
Dépôt1004040
Quantité
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
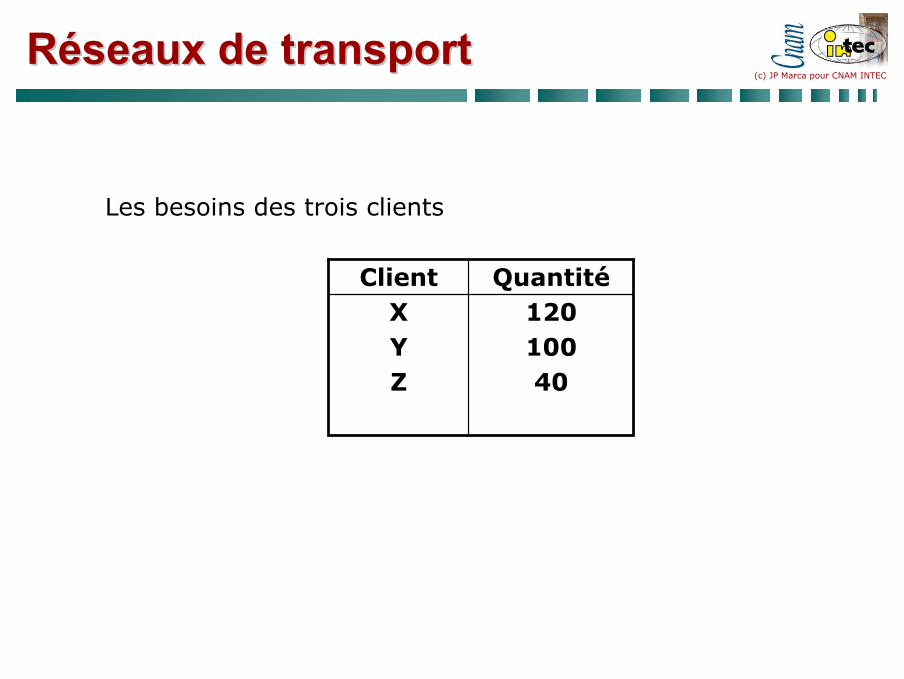
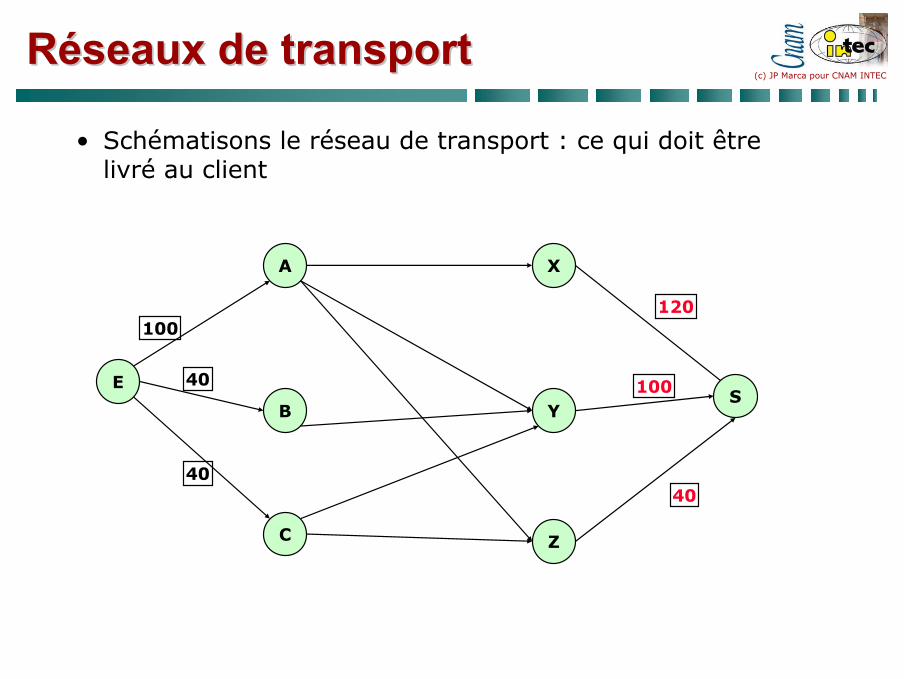
Les besoins des trois clients
XYZ
Client12010040
Quantité
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
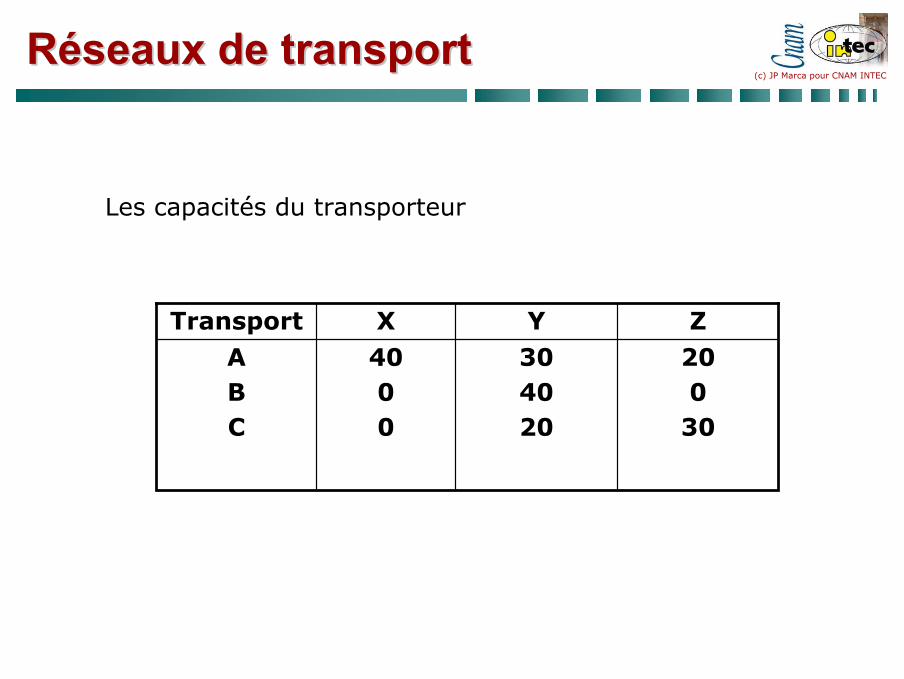
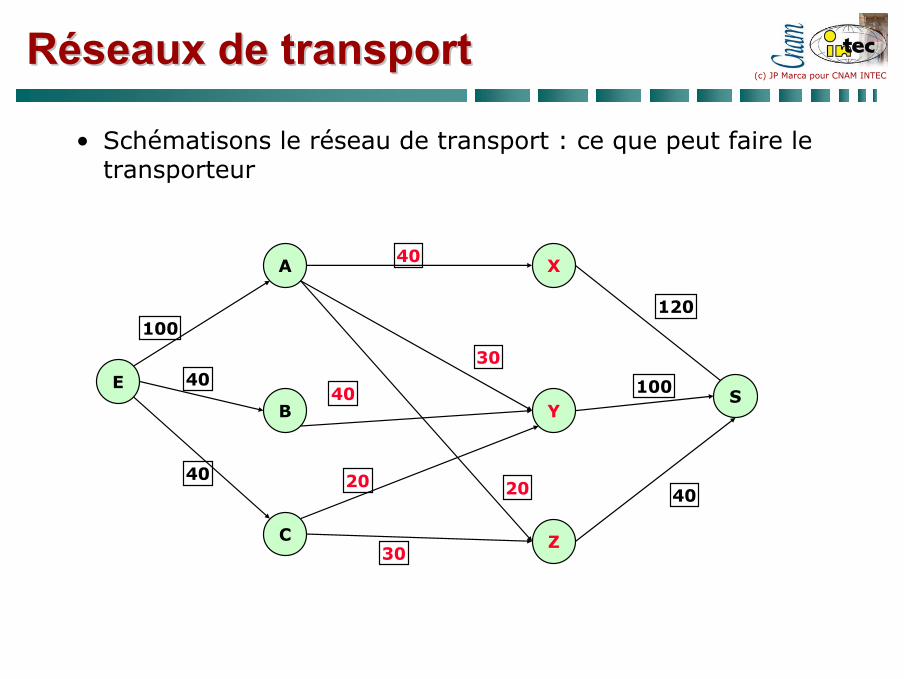
Les capacités du transporteur
4000
X304020
YABC
Transport200
30
Z
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S
• Schématisons le réseau de transport
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S
100
40
40
• Schématisons le réseau de transport : mes capacités de stockage
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S
100
40
4040
100
120
• Schématisons le réseau de transport : ce qui doit être livré au client
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Schématisons le réseau de transport : ce que peut faire le transporteur
(c) JP Marca pour CNAM INTEC
• Le flot (ou flux = flow) est la quantité réelle qui transite sur le réseau
• Il ne peut excéder la capacité des arcs
• Il est soumis à l’hypothèse de conservation ; la somme des flots qui arrivent à un nœud est égale la somme des flots qui en partent.
RRééseaux de transportseaux de transport
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
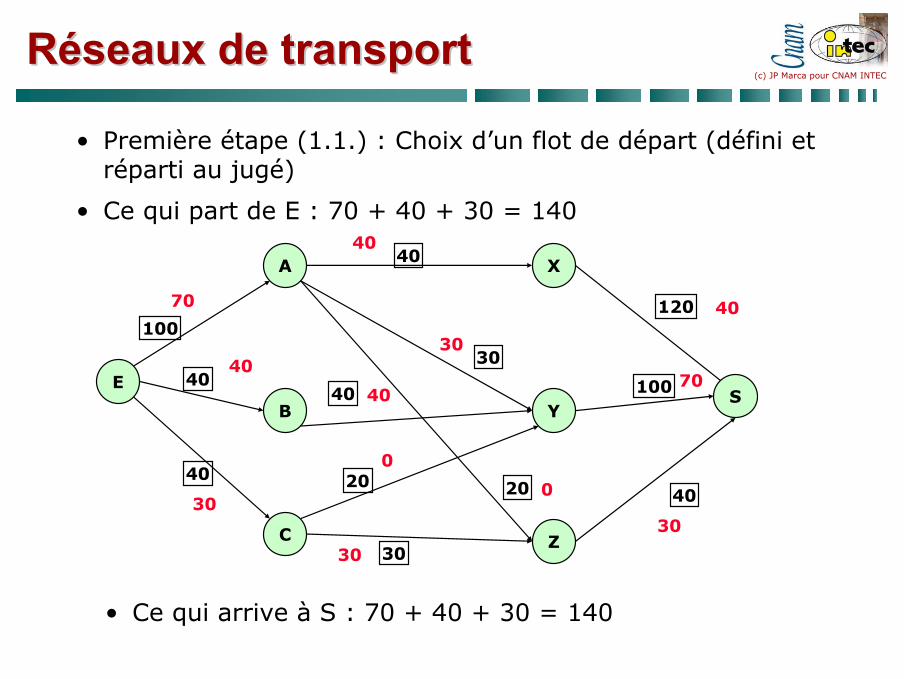
• Première étape (1.1.) : Choix d’un flot de départ (défini et réparti au jugé)
• Ce qui part de E : 70 + 40 + 30 = 140
70
40
30
40
30
0
30
30
0
70
40
40
• Ce qui arrive à S : 70 + 40 + 30 = 140
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
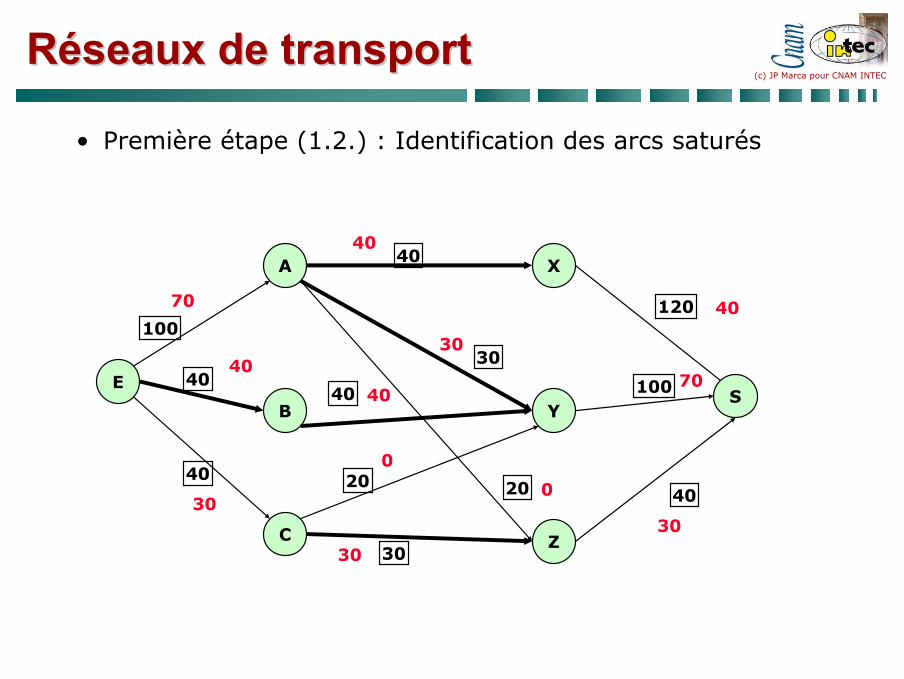
• Première étape (1.2.) : Identification des arcs saturés
70
40
30
40
30
0
30
30
0
70
40
40
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
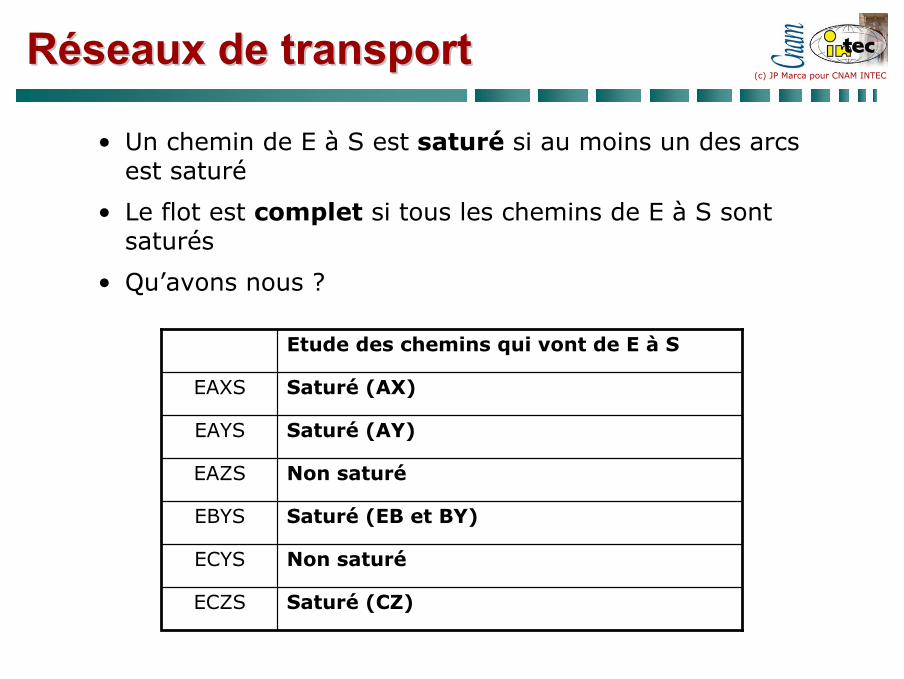
• Un chemin de E à S est saturé si au moins un des arcs est saturé
• Le flot est complet si tous les chemins de E à S sont saturés
• Qu’avons nous ?
Etude des chemins qui vont de E à S
Saturé (CZ)ECZS
Non saturéECYS
Saturé (EB et BY)EBYS
Non saturéEAZS
Saturé (AY)EAYS
Saturé (AX)EAXS
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
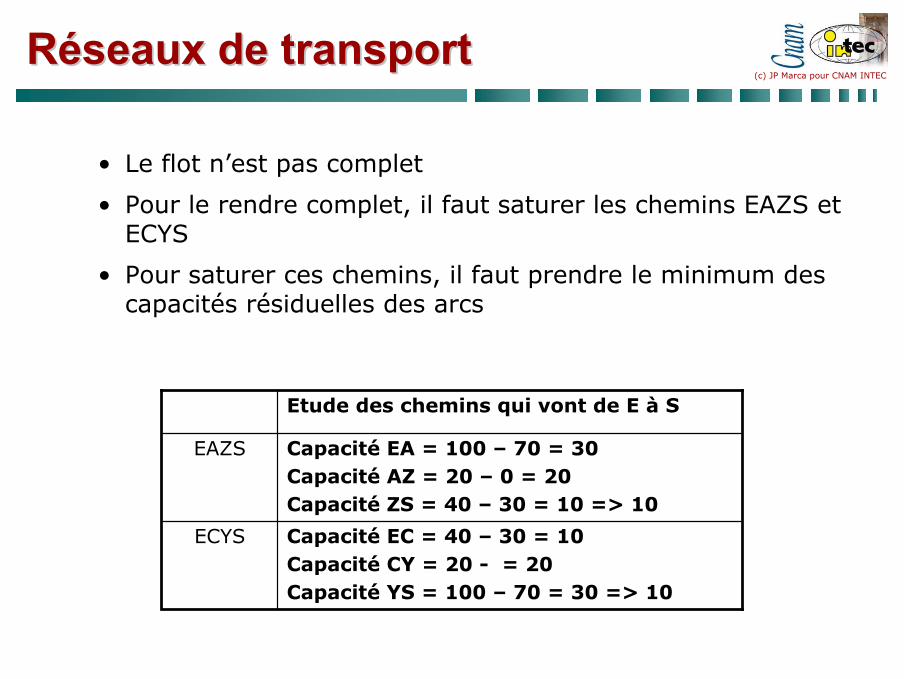
• Le flot n’est pas complet
• Pour le rendre complet, il faut saturer les chemins EAZS et ECYS
• Pour saturer ces chemins, il faut prendre le minimum des capacités résiduelles des arcs
Etude des chemins qui vont de E à S
Capacité EC = 40 – 30 = 10Capacité CY = 20 - = 20Capacité YS = 100 – 70 = 30 => 10
ECYS
Capacité EA = 100 – 70 = 30Capacité AZ = 20 – 0 = 20Capacité ZS = 40 – 30 = 10 => 10
EAZS
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
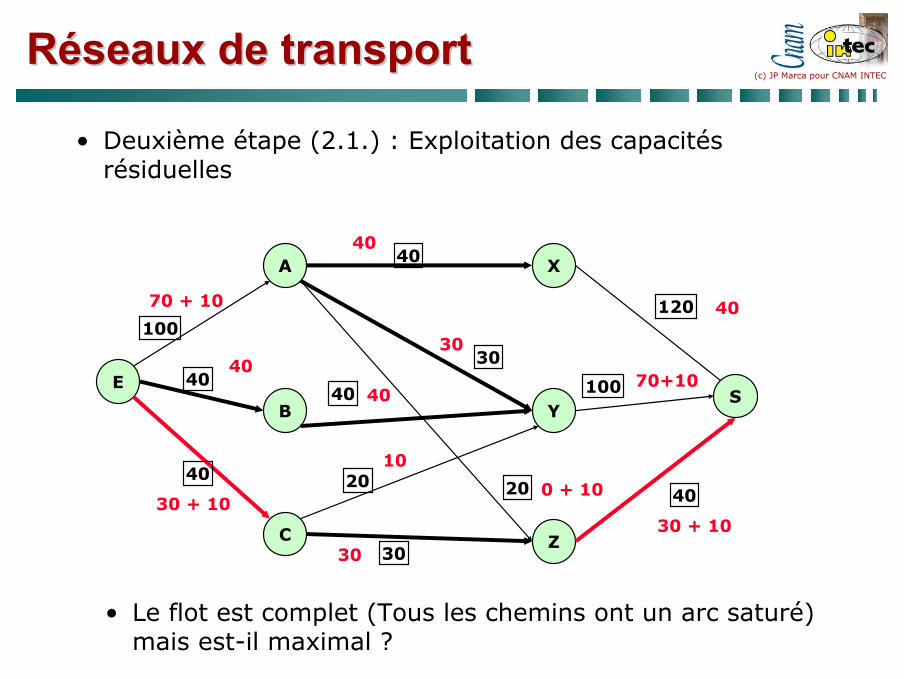
• Deuxième étape (2.1.) : Exploitation des capacités résiduelles
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
• Le flot est complet (Tous les chemins ont un arc saturé) mais est-il maximal ?
(c) JP Marca pour CNAM INTEC
•• Il est encore possible dIl est encore possible d’’augmenter le flot complet saugmenter le flot complet s’’il il existe une chaexiste une chaîîne (suite ordonnne (suite ordonnéée de sommets) non e de sommets) non satursaturéée de E e de E àà S.S.
•• La recherche des chaLa recherche des chaîînes non saturnes non saturéées ses s’’opopèère selon re selon ll’’algorithme suivant :algorithme suivant :
•• Marquer E tout suivant de E atteint par un arc non Marquer E tout suivant de E atteint par un arc non satursaturéé
•• Soit xi un sommet marquSoit xi un sommet marquéé du graphe. Il faut du graphe. Il faut éétudier tudier les suivants et les prles suivants et les prééccéédents de ce sommet et dents de ce sommet et marquer xi prmarquer xi prèès de :s de :
••Tout suivant non non encore marquTout suivant non non encore marquéé de xi atteint de xi atteint par un arc par un arc non saturnon saturéé
••Tout prTout prééccéédent non encore marqudent non encore marquéé de xi atteint de xi atteint par un arc par un arc dont le flot est non nuldont le flot est non nul
RRééseaux de transportseaux de transport
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
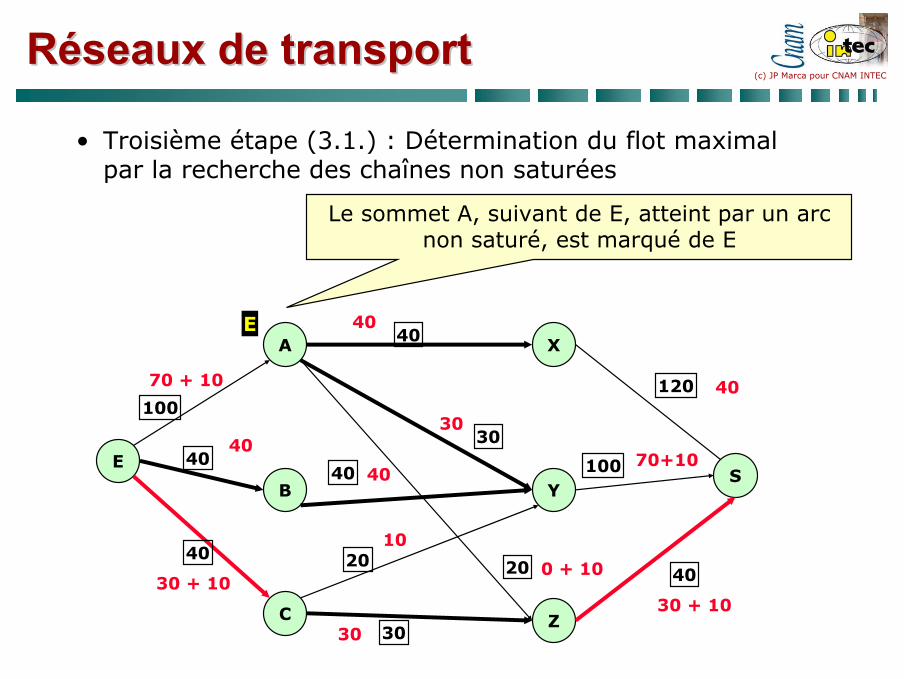
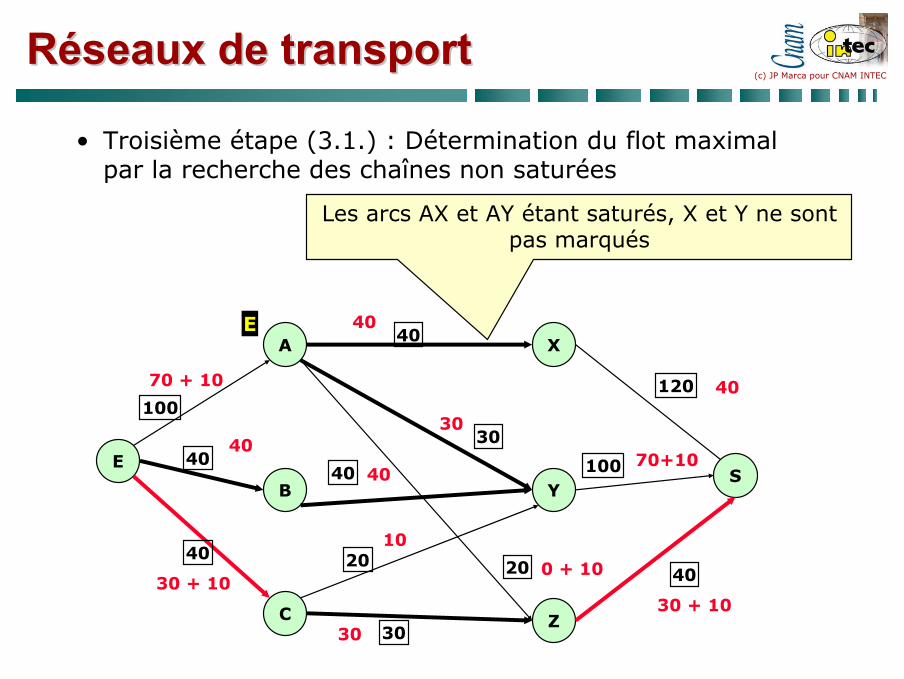
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Le sommet A, suivant de E, atteint par un arc non saturé, est marqué de E
E
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
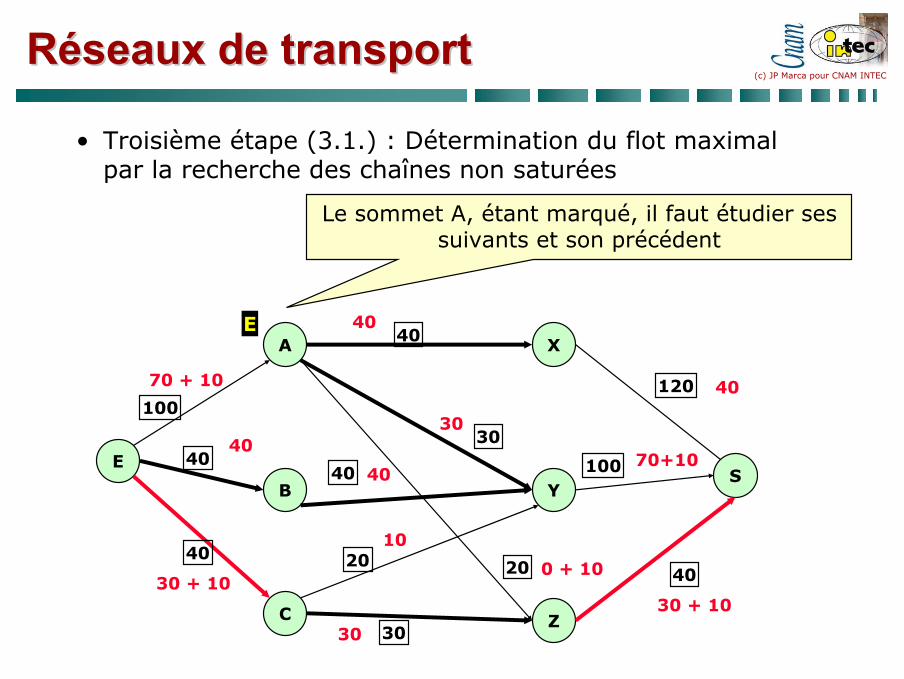
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Le sommet A, étant marqué, il faut étudier ses suivants et son précédent
E
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Les arcs AX et AY étant saturés, X et Y ne sont pas marqués
E
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
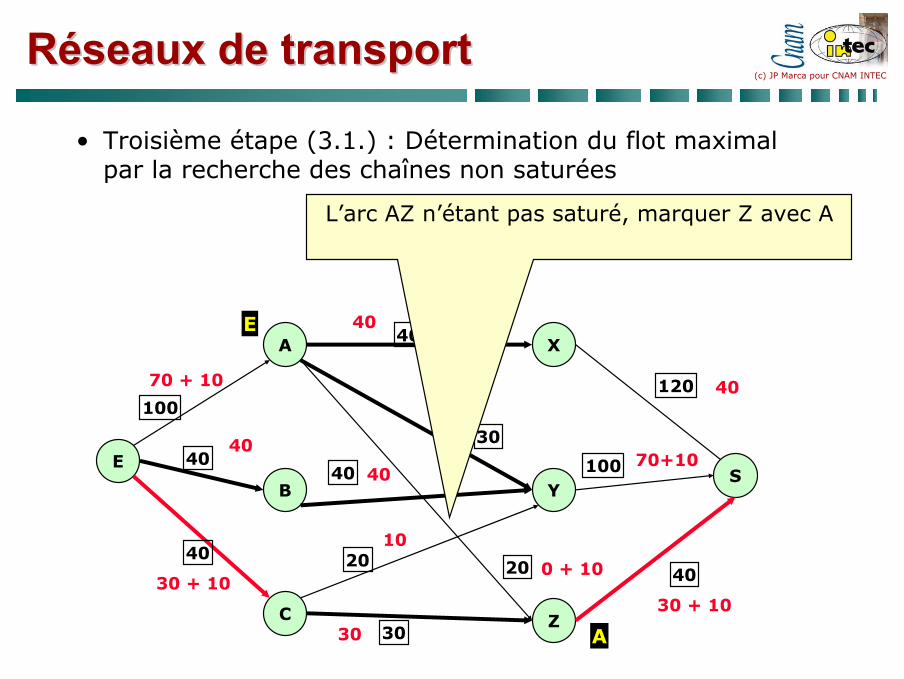
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
L’arc AZ n’étant pas saturé, marquer Z avec A
E
A
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
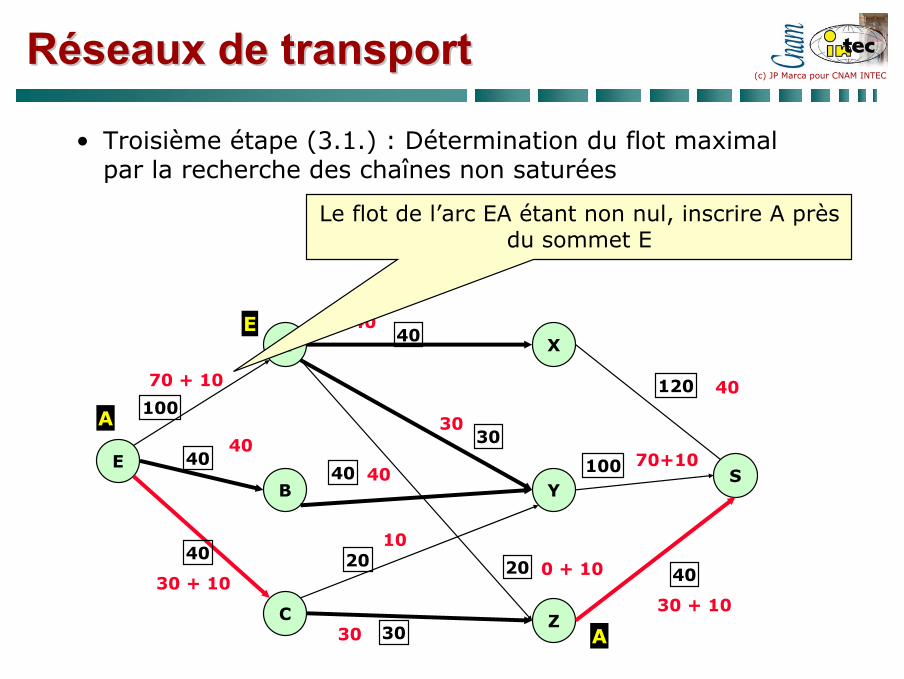
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Le flot de l’arc EA étant non nul, inscrire A près du sommet E
E
A
A
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
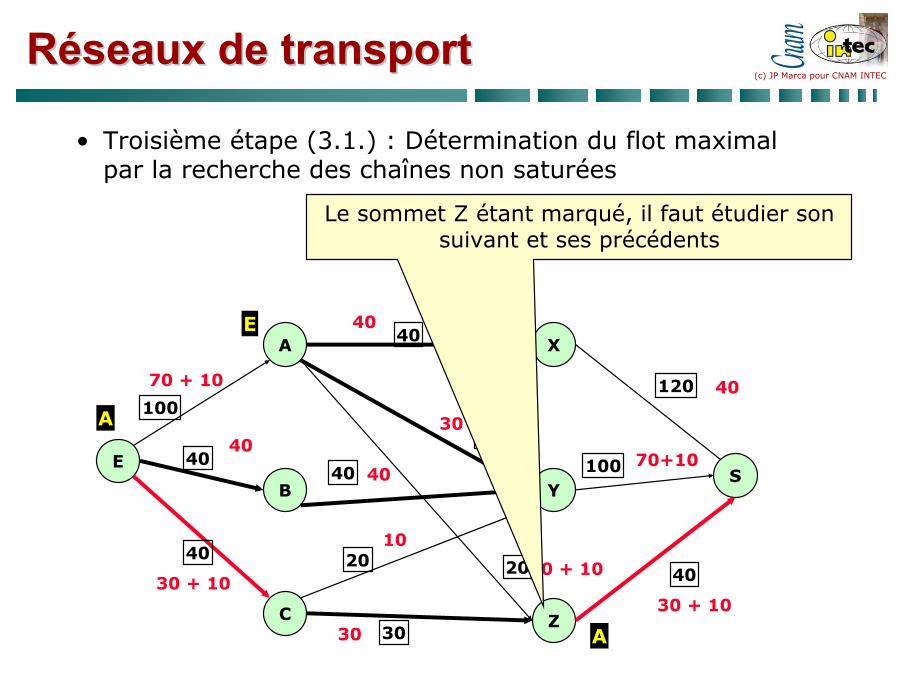
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Le sommet Z étant marqué, il faut étudier son suivant et ses précédents
E
A
A
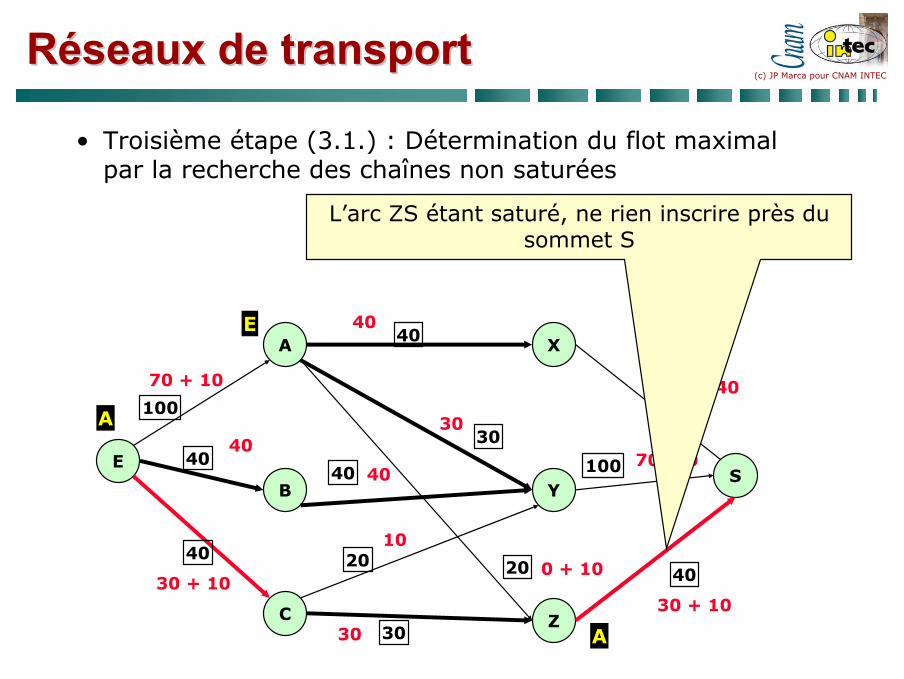
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
L’arc ZS étant saturé, ne rien inscrire près du sommet S
E
A
A
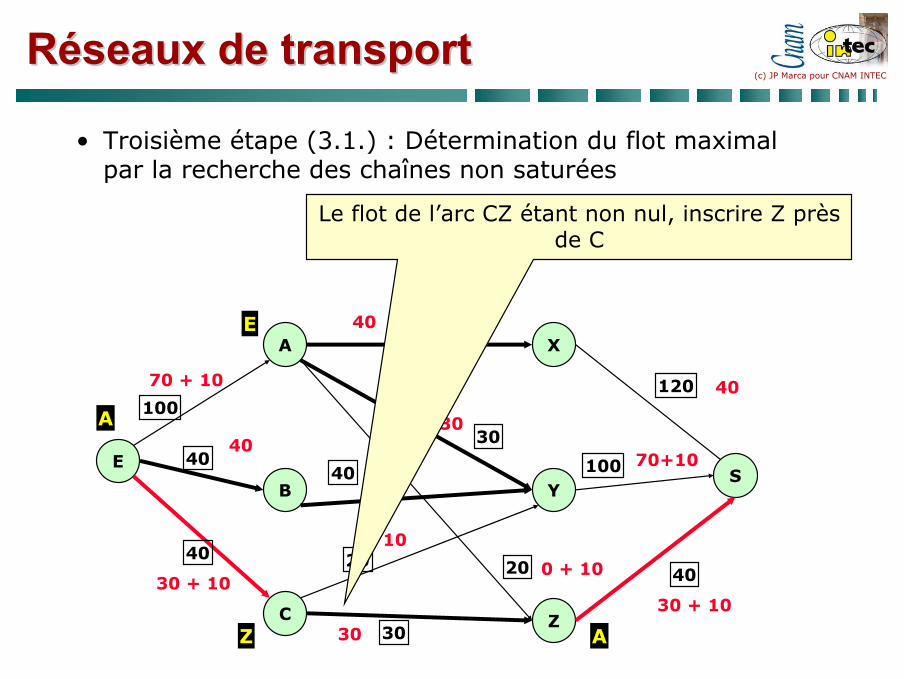
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Le flot de l’arc CZ étant non nul, inscrire Z près de C
E
AZ
A
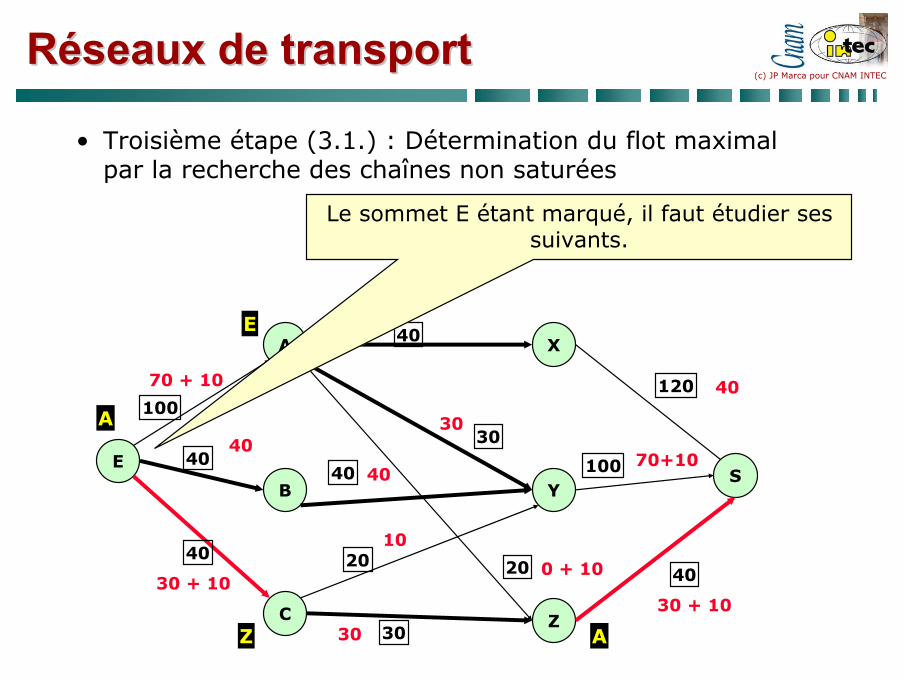
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Le sommet E étant marqué, il faut étudier ses suivants.
E
AZ
A
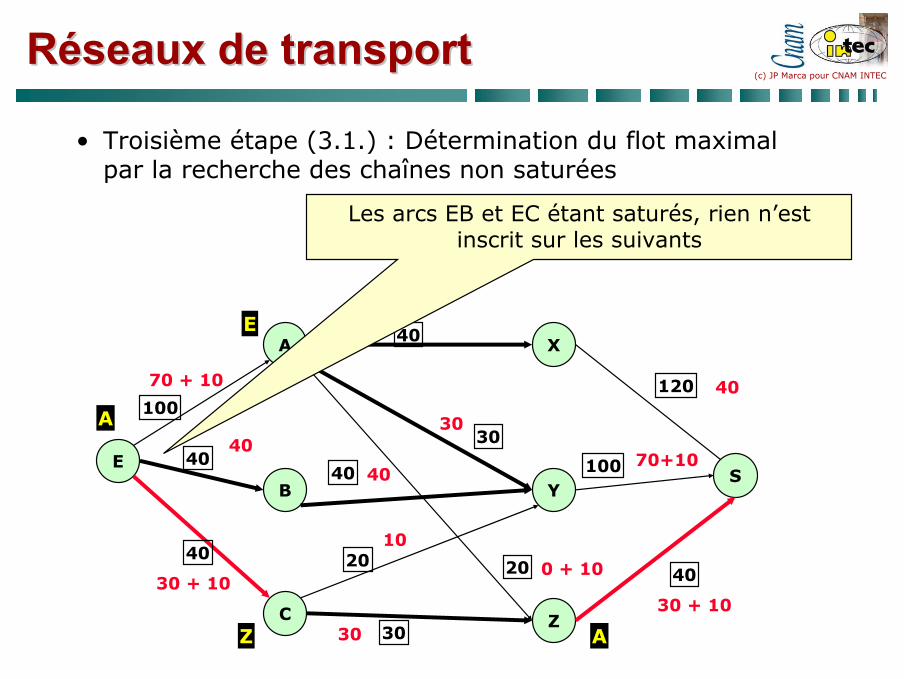
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Les arcs EB et EC étant saturés, rien n’est inscrit sur les suivants
E
AZ
A
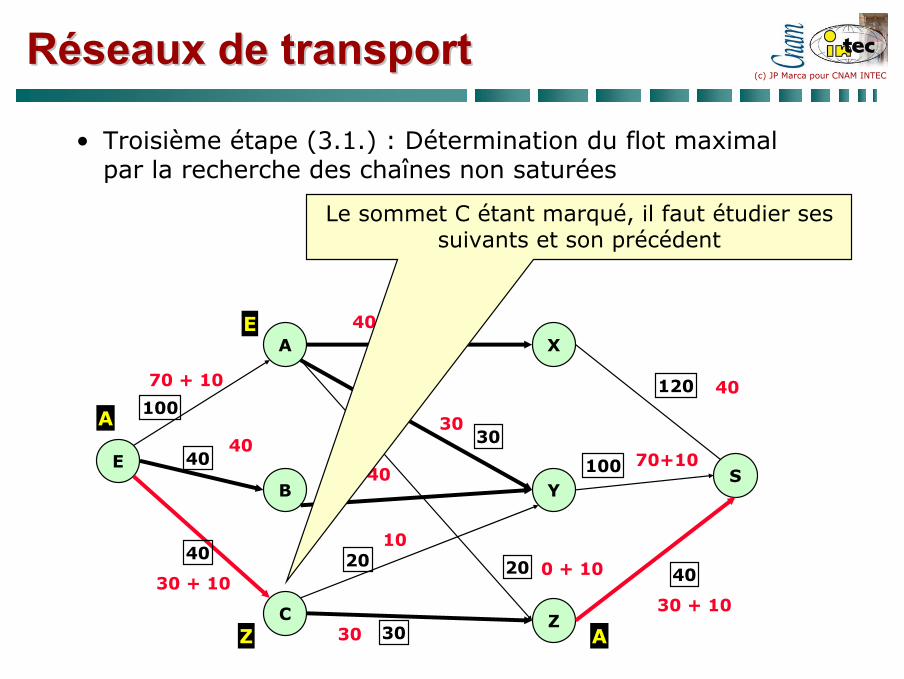
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Le sommet C étant marqué, il faut étudier ses suivants et son précédent
E
AZ
A
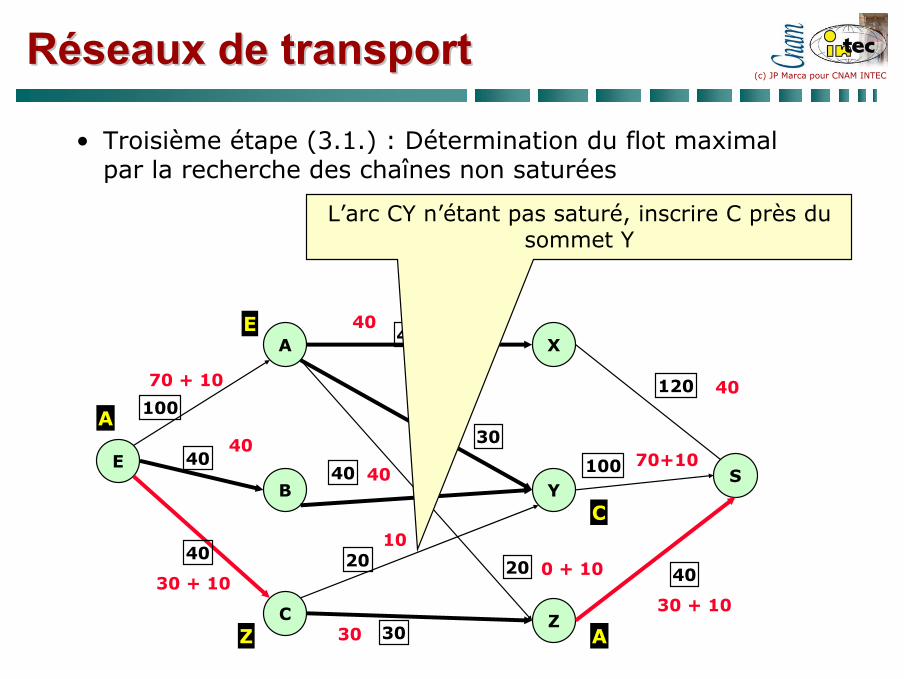
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
L’arc CY n’étant pas saturé, inscrire C près du sommet Y
E
AZ
C
A
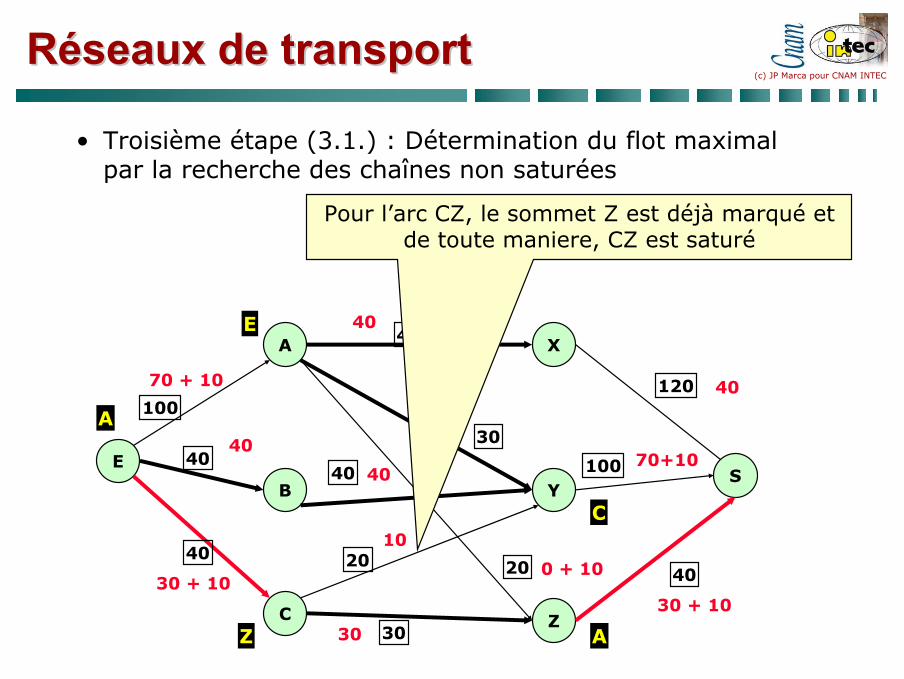
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Pour l’arc CZ, le sommet Z est déjà marqué et de toute maniere, CZ est saturé
E
AZ
C
A
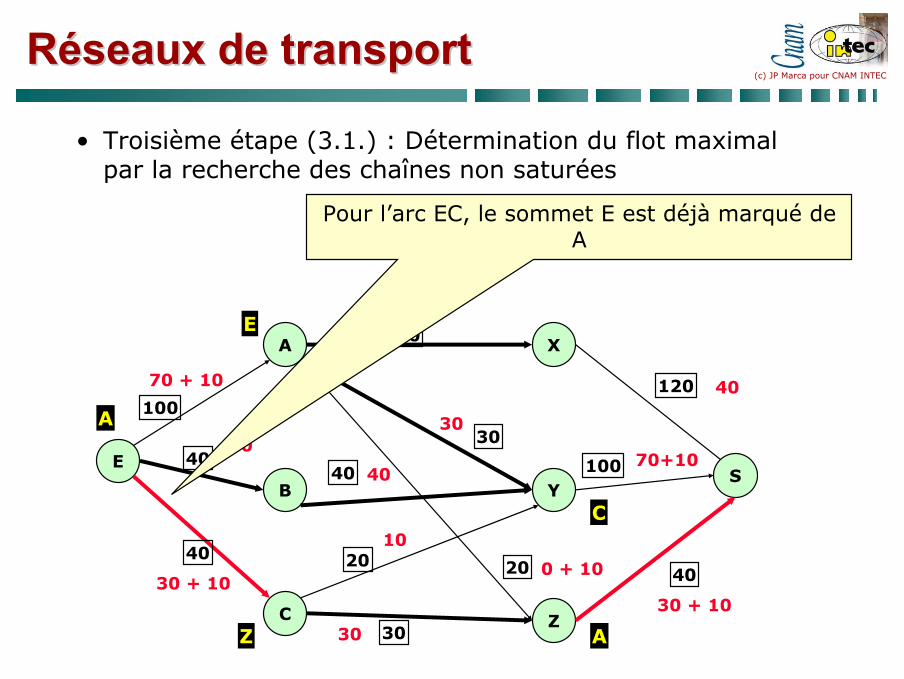
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Pour l’arc EC, le sommet E est déjà marqué de A
E
AZ
C
A
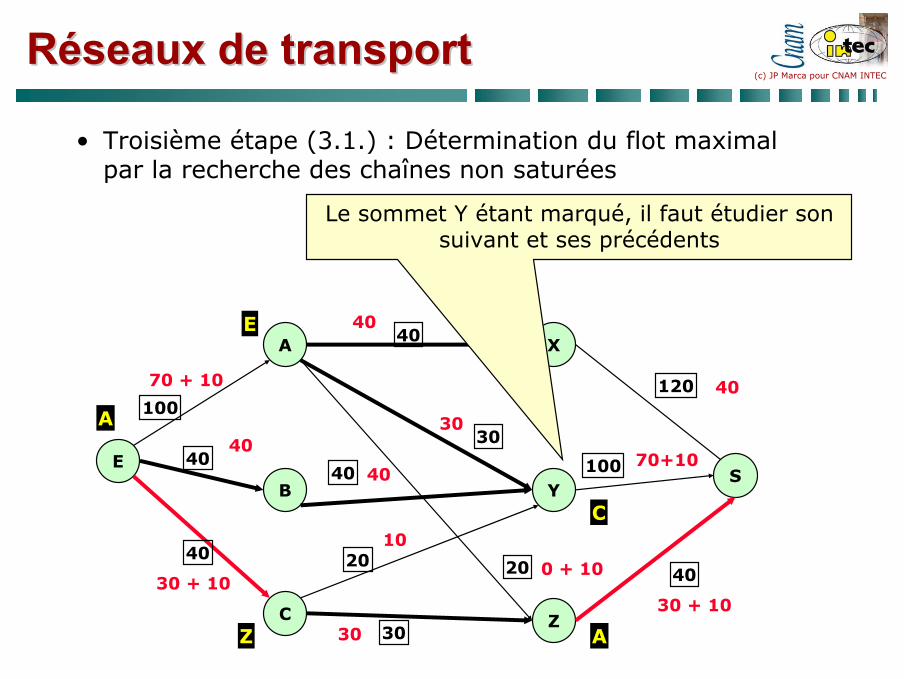
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Le sommet Y étant marqué, il faut étudier son suivant et ses précédents
E
AZ
C
A
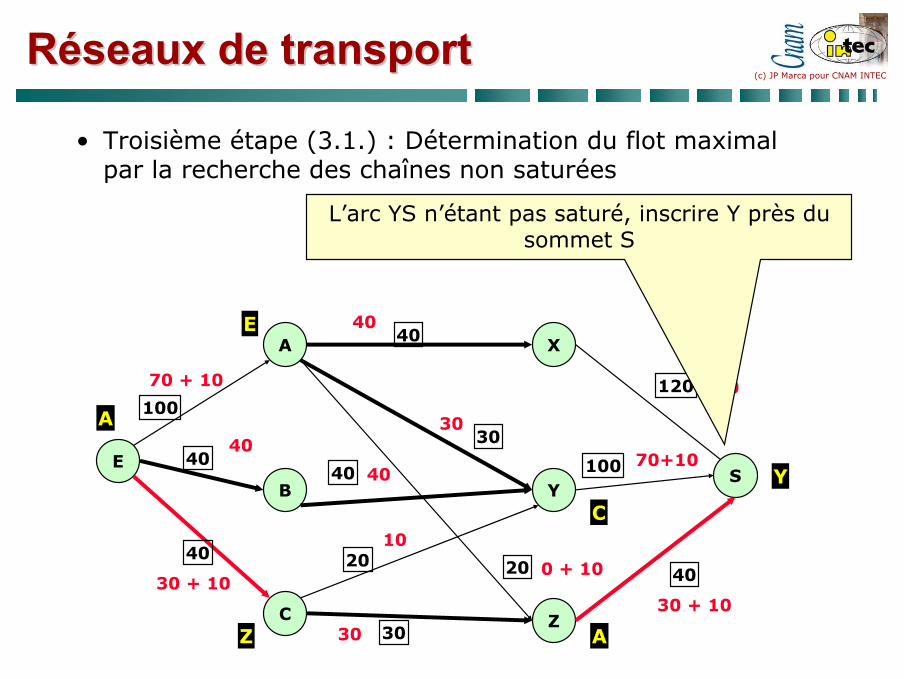
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
L’arc YS n’étant pas saturé, inscrire Y près du sommet S
E
AZ
C
A
Y
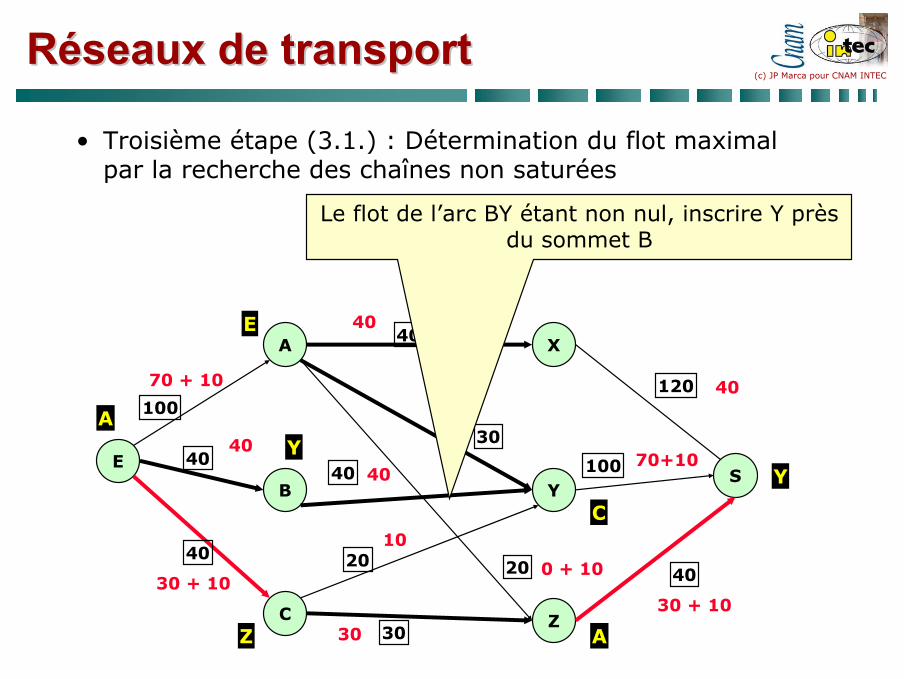
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Le flot de l’arc BY étant non nul, inscrire Y près du sommet B
E
AZ
C
A
YY
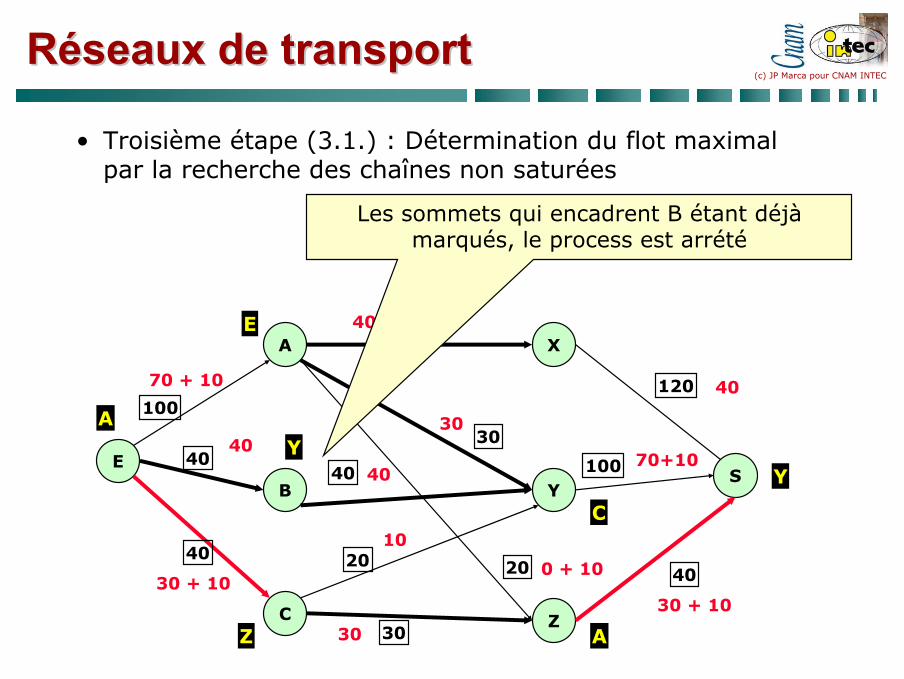
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Les sommets qui encadrent B étant déjàmarqués, le process est arrété
E
AZ
C
A
YY
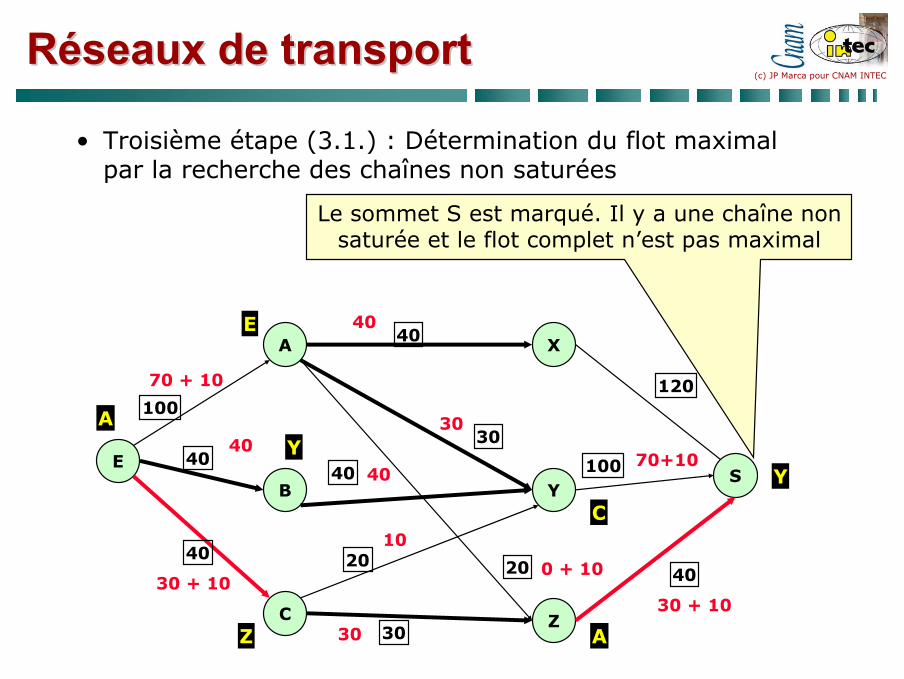
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Le sommet S est marqué. Il y a une chaîne non saturée et le flot complet n’est pas maximal
E
AZ
C
A
YY
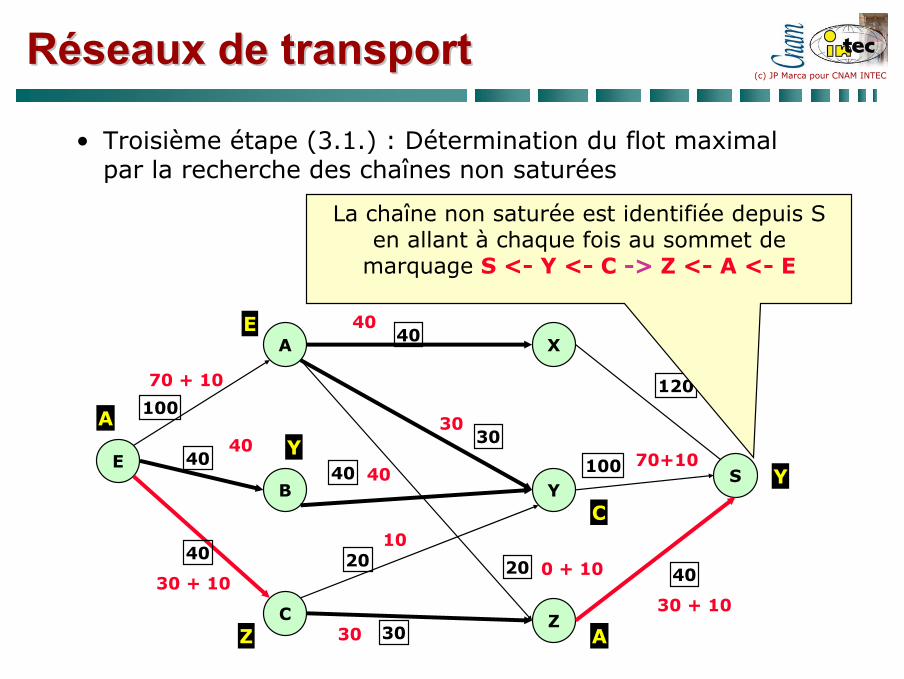
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
La chaîne non saturée est identifiée depuis S en allant à chaque fois au sommet de
marquage S <- Y <- C -> Z <- A <- E
E
AZ
C
A
YY
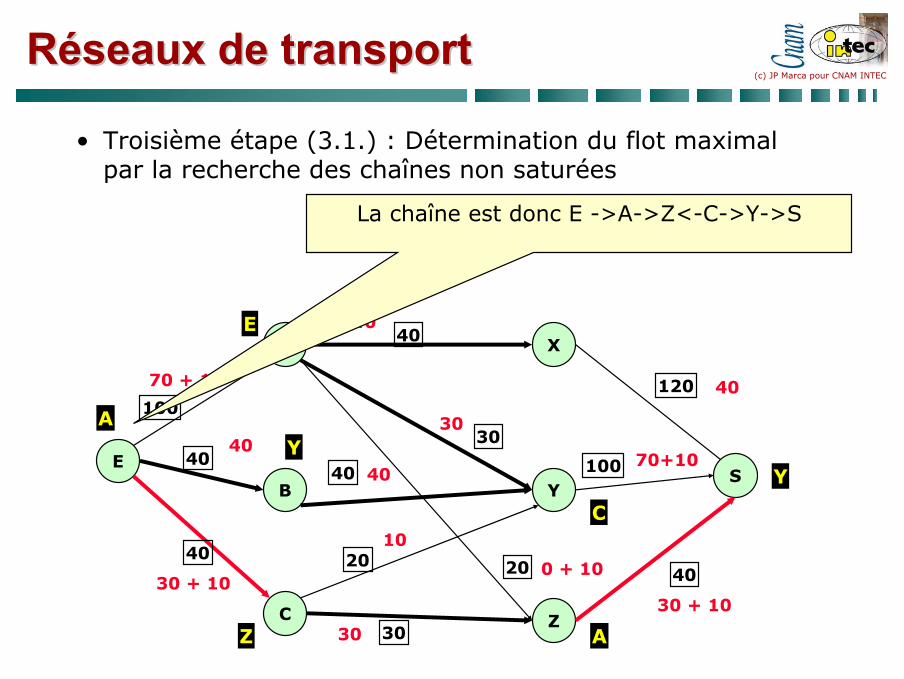
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
La chaîne est donc E ->A->Z<-C->Y->S
E
AZ
C
A
YY
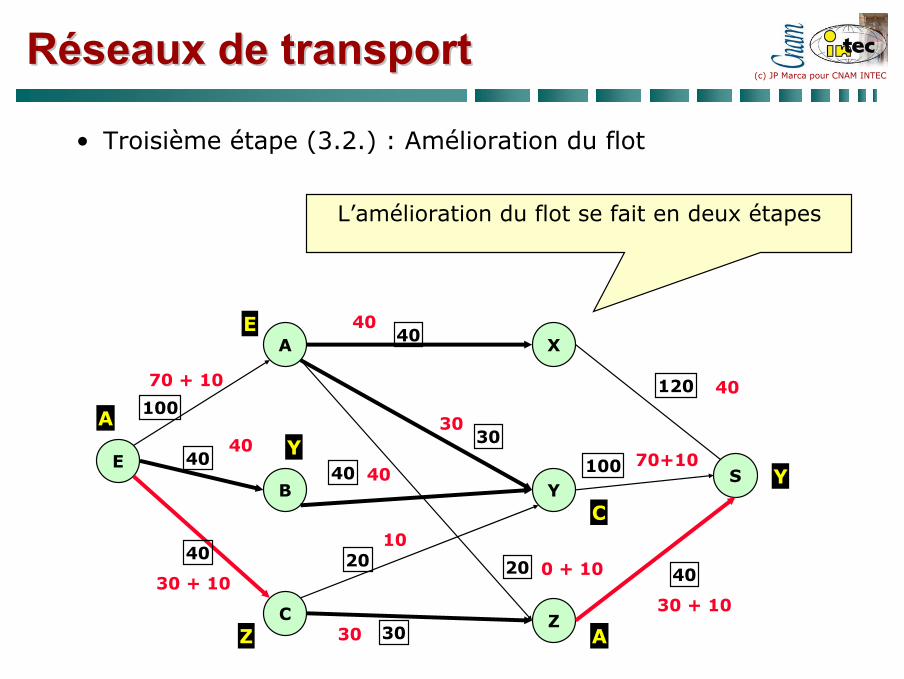
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.2.) : Amélioration du flot
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
L’amélioration du flot se fait en deux étapes
E
AZ
C
A
YY
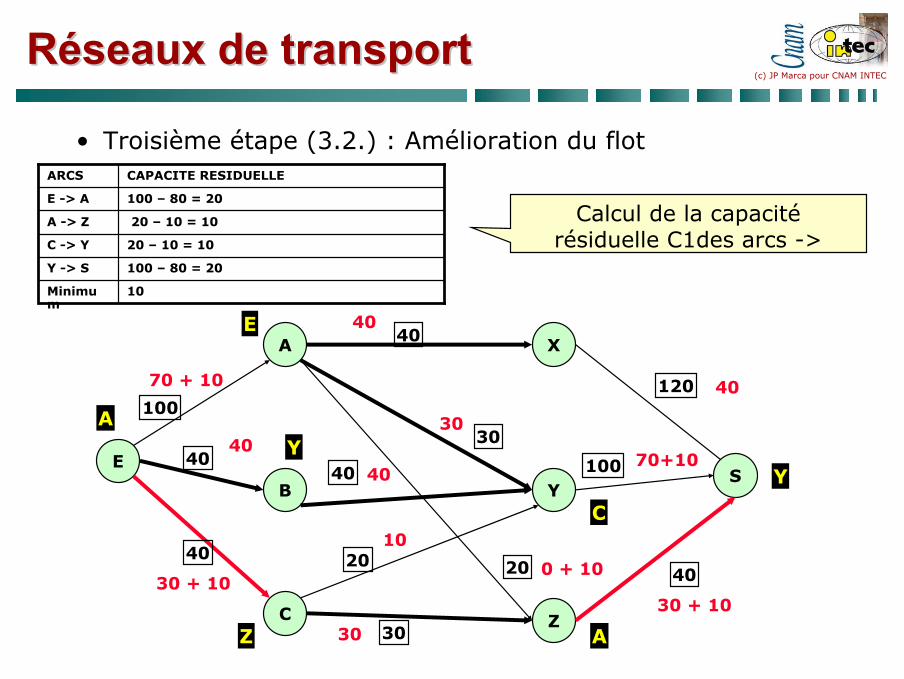
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.2.) : Amélioration du flot
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Calcul de la capacitérésiduelle C1des arcs ->
E
AZ
C
A
YY
10Minimum
100 – 80 = 20Y -> S
20 – 10 = 10C -> Y
20 – 10 = 10A -> Z
100 – 80 = 20E -> A
CAPACITE RESIDUELLEARCS
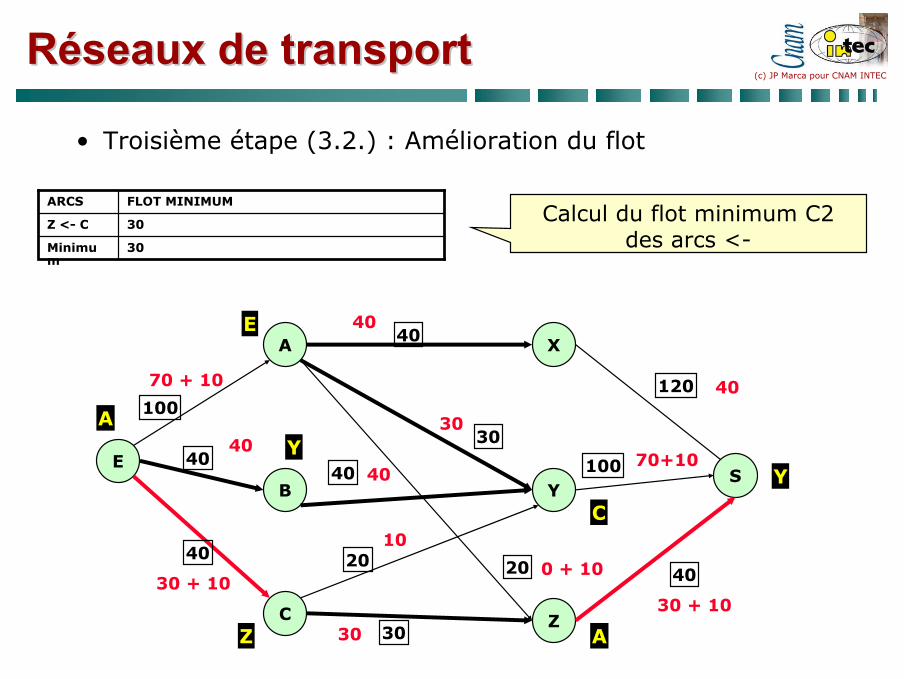
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.2.) : Amélioration du flot
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Calcul du flot minimum C2 des arcs <-
E
AZ
C
A
YY
30Minimum
30Z <- C
FLOT MINIMUMARCS
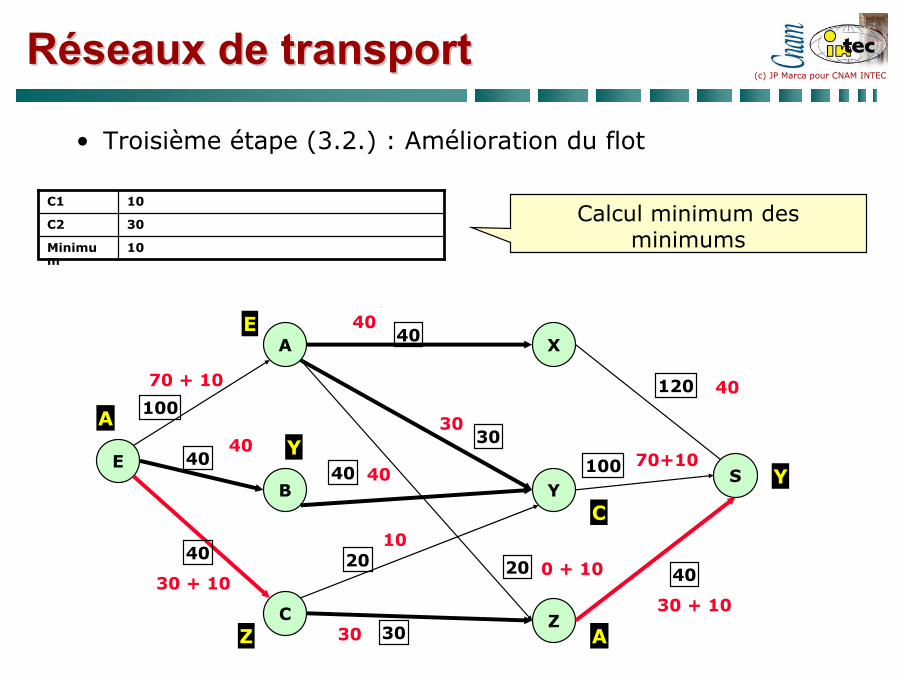
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.2.) : Amélioration du flot
70 + 10
40
30 + 10
40
30
10
30
30 + 10
0 + 10
70+10
40
40
Calcul minimum des minimums
E
AZ
C
A
YY
10Minimum
30C2
10C1
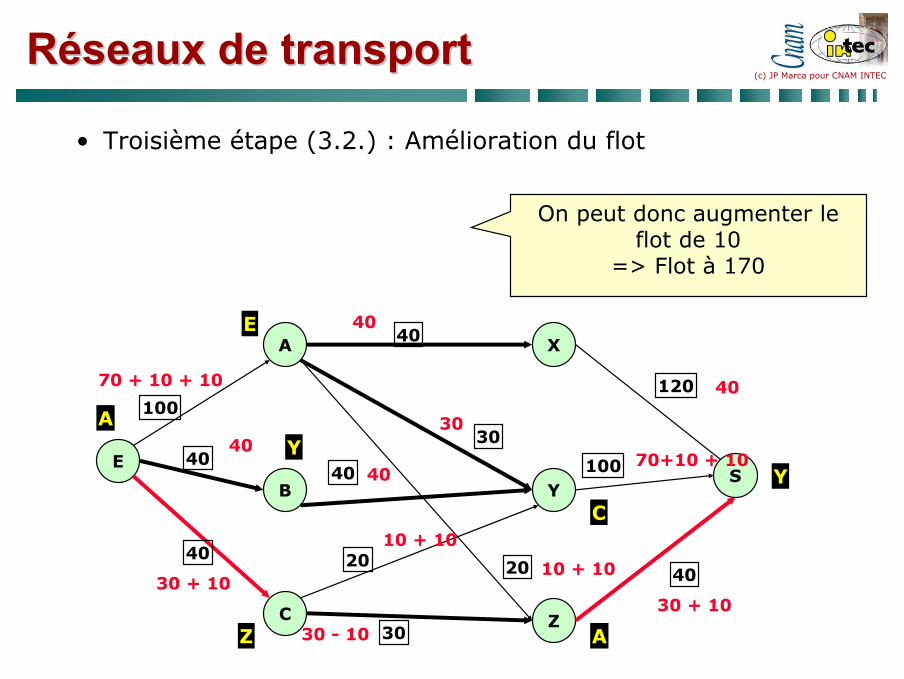
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Troisième étape (3.2.) : Amélioration du flot
70 + 10 + 10
40
30 + 10
40
30
10 + 10
30 - 10
30 + 10
10 + 10
70+10 + 10
40
40
On peut donc augmenter le flot de 10
=> Flot à 170
E
AZ
C
A
YY
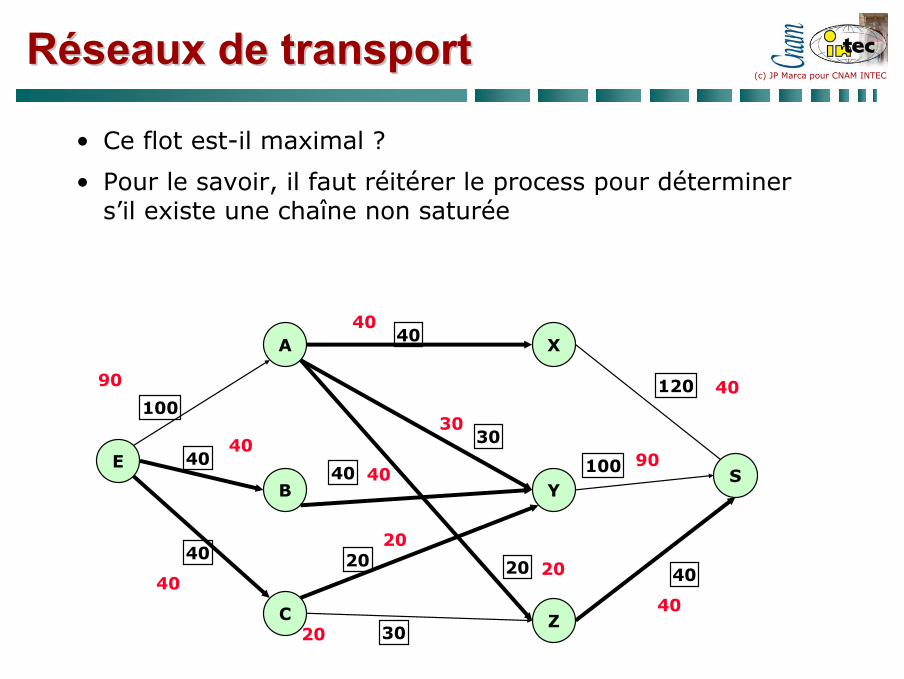
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
• Ce flot est-il maximal ?
• Pour le savoir, il faut réitérer le process pour déterminer s’il existe une chaîne non saturée
90
40
40
40
30
20
20
40
20
90
40
40
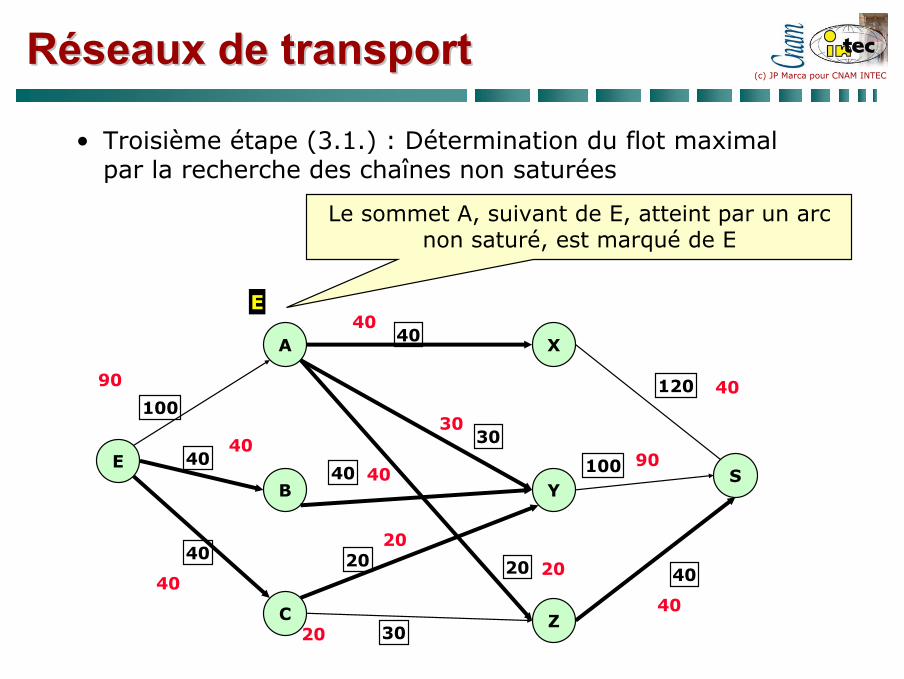
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
Le sommet A, suivant de E, atteint par un arc non saturé, est marqué de E
E
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
90
40
40
40
30
20
20
40
20
90
40
40
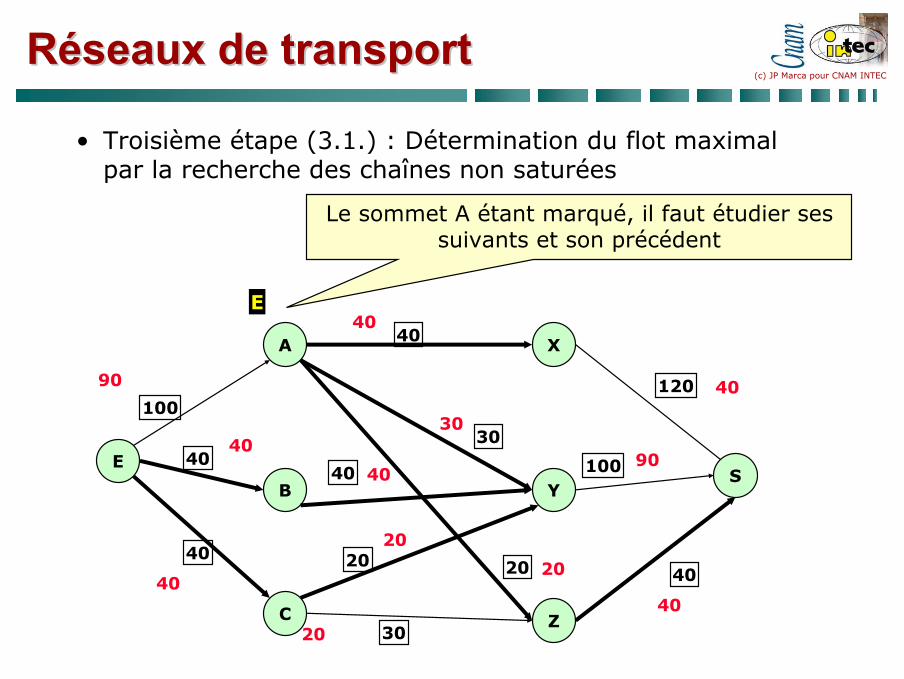
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
Le sommet A étant marqué, il faut étudier ses suivants et son précédent
E
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
90
40
40
40
30
20
20
40
20
90
40
40
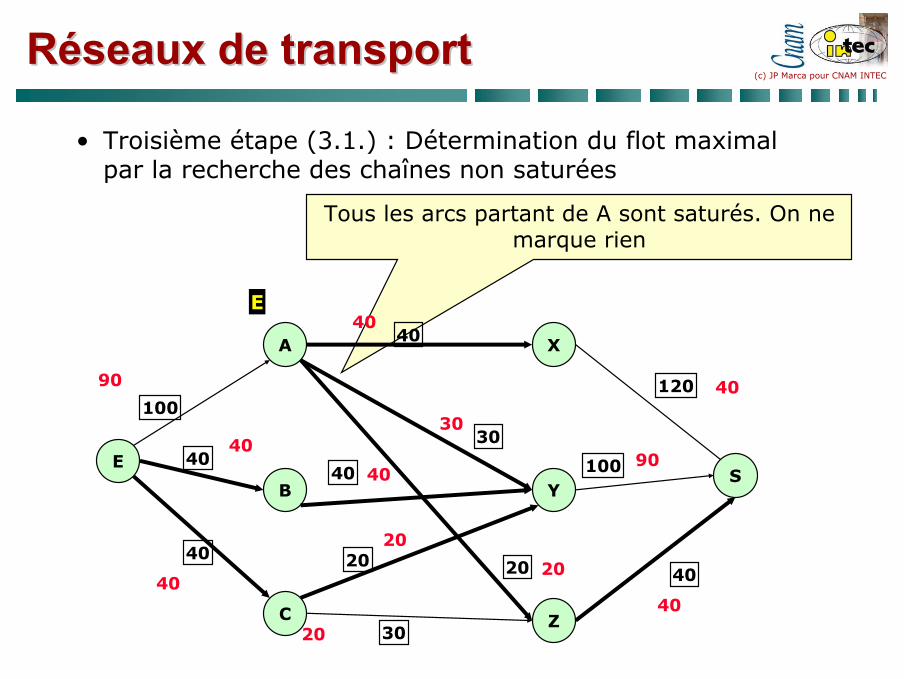
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
Tous les arcs partant de A sont saturés. On ne marque rien
E
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
90
40
40
40
30
20
20
40
20
90
40
40
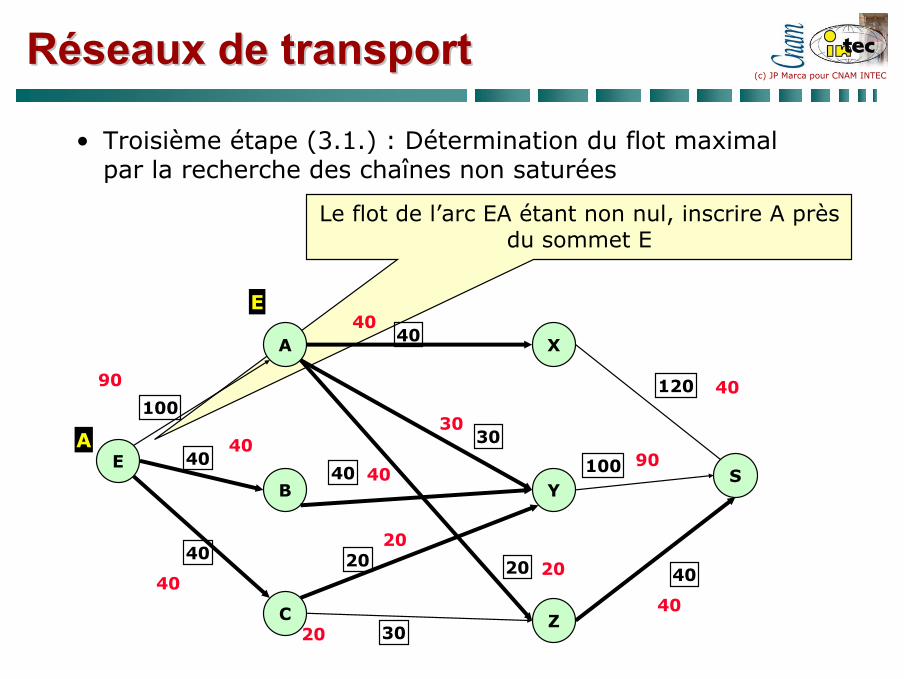
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
• Troisième étape (3.1.) : Détermination du flot maximal par la recherche des chaînes non saturées
Le flot de l’arc EA étant non nul, inscrire A près du sommet E
E
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
90
40
40
40
30
20
20
40
20
90
40
40
A
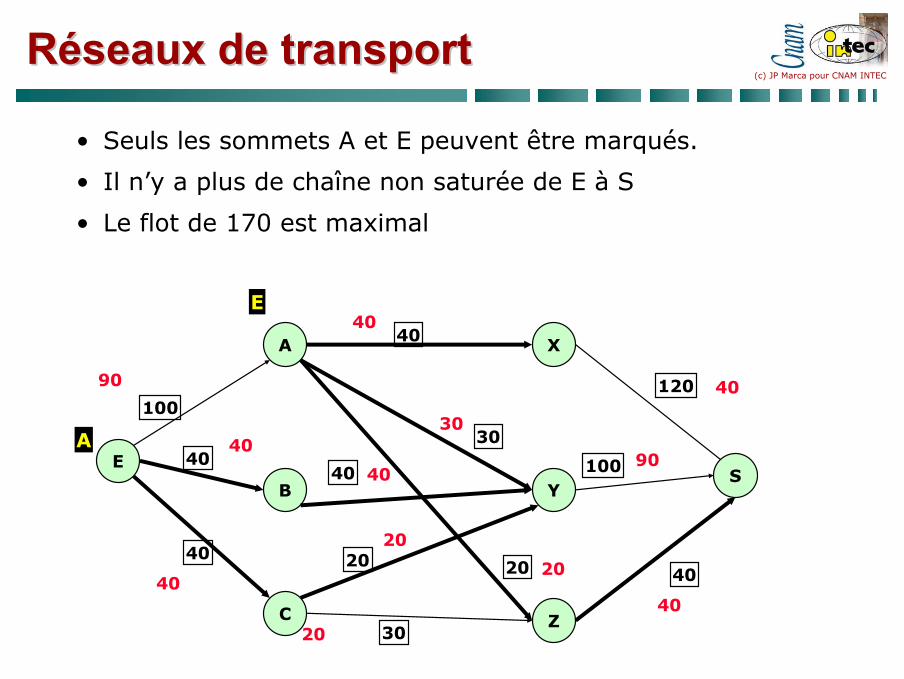
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
• Seuls les sommets A et E peuvent être marqués.
• Il n’y a plus de chaîne non saturée de E à S
• Le flot de 170 est maximal
E
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
90
40
40
40
30
20
20
40
20
90
40
40
A
(c) JP Marca pour CNAM INTEC
•• La vLa véérification du fait que 170 constitue bien lrification du fait que 170 constitue bien l’’optimum se optimum se fait grâce fait grâce àà la coupe des derniers sommets marqula coupe des derniers sommets marquéés.s.
•• Soit F un sousSoit F un sous--ensemble de sommets du graphe ensemble de sommets du graphe contenant le sommet E mais pas le sommet Scontenant le sommet E mais pas le sommet S
•• La coupe associLa coupe associéée e àà F est lF est l’’ensemble des arcs reliant xi ensemble des arcs reliant xi ààxjxj, tels que xi , tels que xi ∈∈ F et F et xjxj ∉∉F (lF (l’’ensemble des arcs dont ensemble des arcs dont ll’’origine est marquorigine est marquéée et le et l’’extrextréémitmitéé ne lne l’’est pas)est pas)
•• La capacitLa capacitéé de la coupe est la somme des capacitde la coupe est la somme des capacitéés des s des arcs de la coupearcs de la coupe
RRééseaux de transportseaux de transport
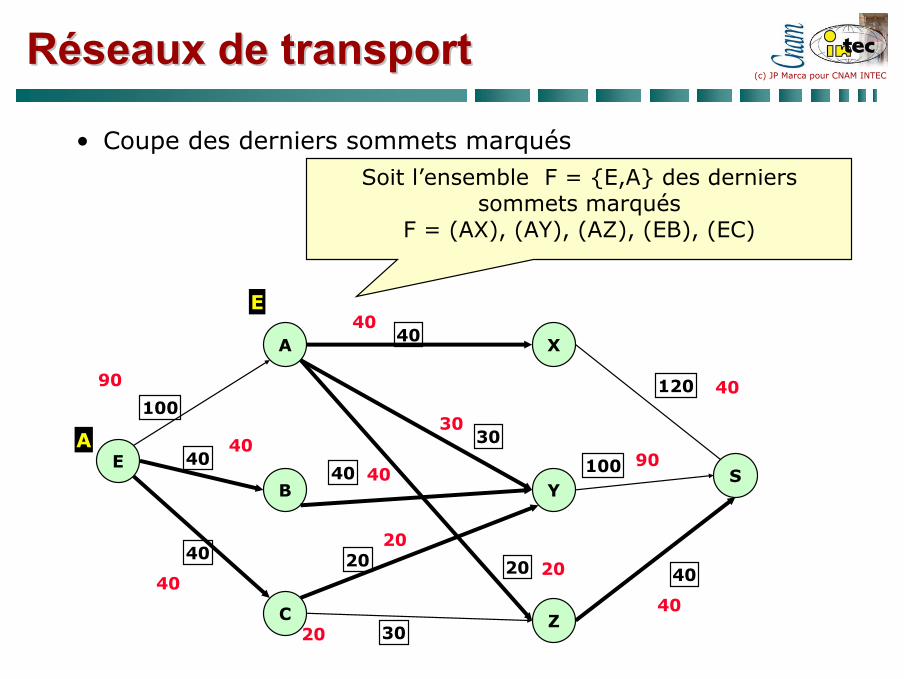
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
• Coupe des derniers sommets marquésSoit l’ensemble F = {E,A} des derniers
sommets marquésF = (AX), (AY), (AZ), (EB), (EC)
E
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
90
40
40
40
30
20
20
40
20
90
40
40
A
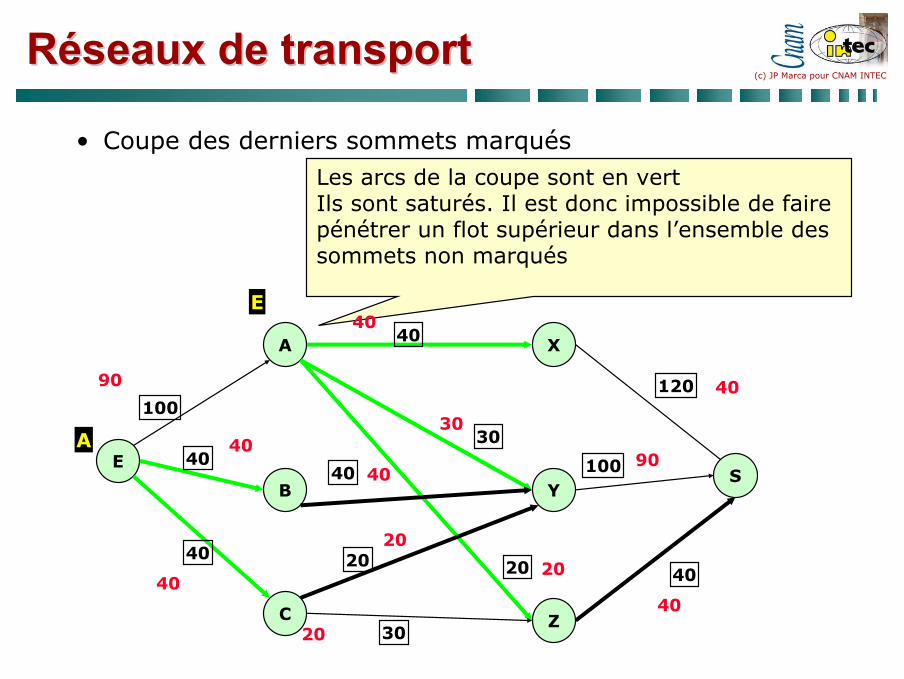
(c) JP Marca pour CNAM INTEC
RRééseaux de transportseaux de transport
• Coupe des derniers sommets marquésLes arcs de la coupe sont en vertIls sont saturés. Il est donc impossible de faire pénétrer un flot supérieur dans l’ensemble des sommets non marqués
E
E
A
B
C
X
Y
Z
S40
100
40
40 20
30
40
100
120
20
30
40
90
40
40
40
30
20
20
40
20
90
40
40
A
(c) JP Marca pour CNAM INTEC
•• ThThééororèème de me de FordFord--FulkersonFulkerson
•• Le flot maximal du graphe est Le flot maximal du graphe est éégal gal àà la capacitla capacitéé minimale minimale de la coupe des derniers sommets marqude la coupe des derniers sommets marquééss
•• La capacitLa capacitéé de la coupe est de la coupe est éégale gale àà
•• 40 + 40 + 20 + 30 + 40 = 17040 + 40 + 20 + 30 + 40 = 170
•• Ce qui correspond au flot maximal dCe qui correspond au flot maximal dééterminterminéé
RRééseaux de transportseaux de transport
(c) JP Marca pour CNAM INTEC
•• Exercice 4 Application 4Exercice 4 Application 4
RRééseaux de transportseaux de transport