Embed Size (px)
Citation preview
MECANIQUE DES MILIEUX CONTINUS
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
DEFORMATIONS
MECANIQUE DES MILIEUX CONTINUS
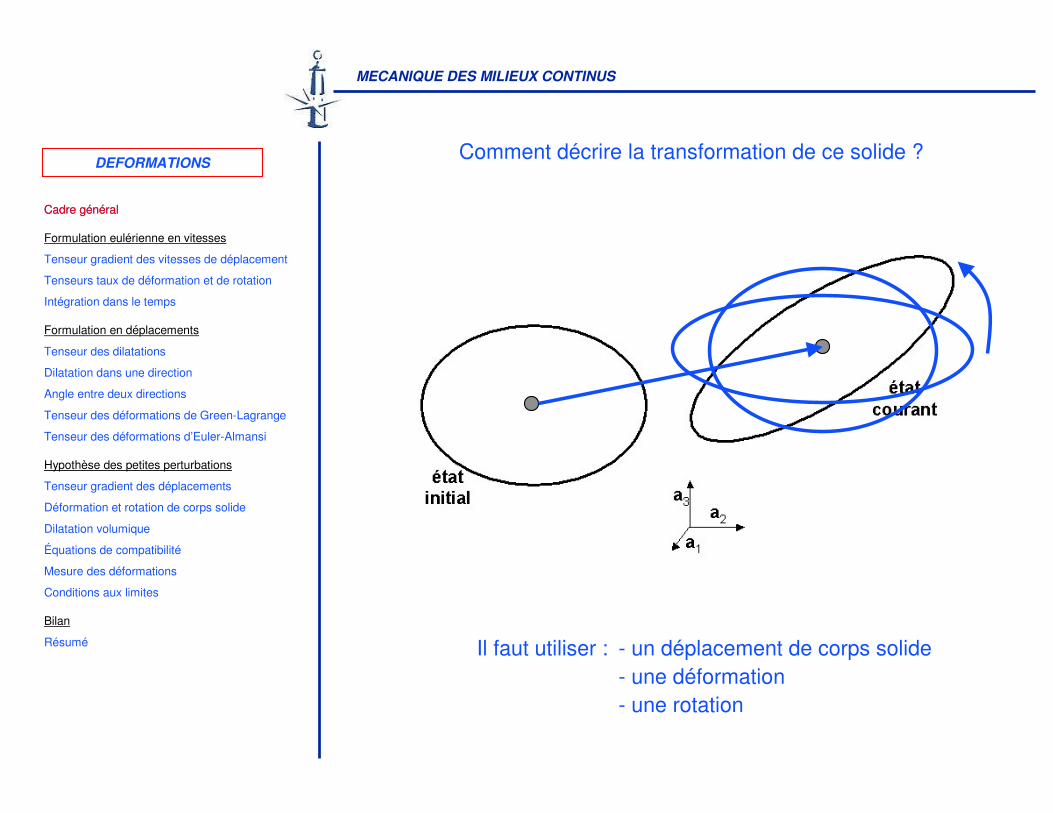
Il faut utiliser :
Comment décrire la transformation de ce solide ?
- une déformation- un déplacement de corps solide
- une rotation
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Cadre général
MECANIQUE DES MILIEUX CONTINUS
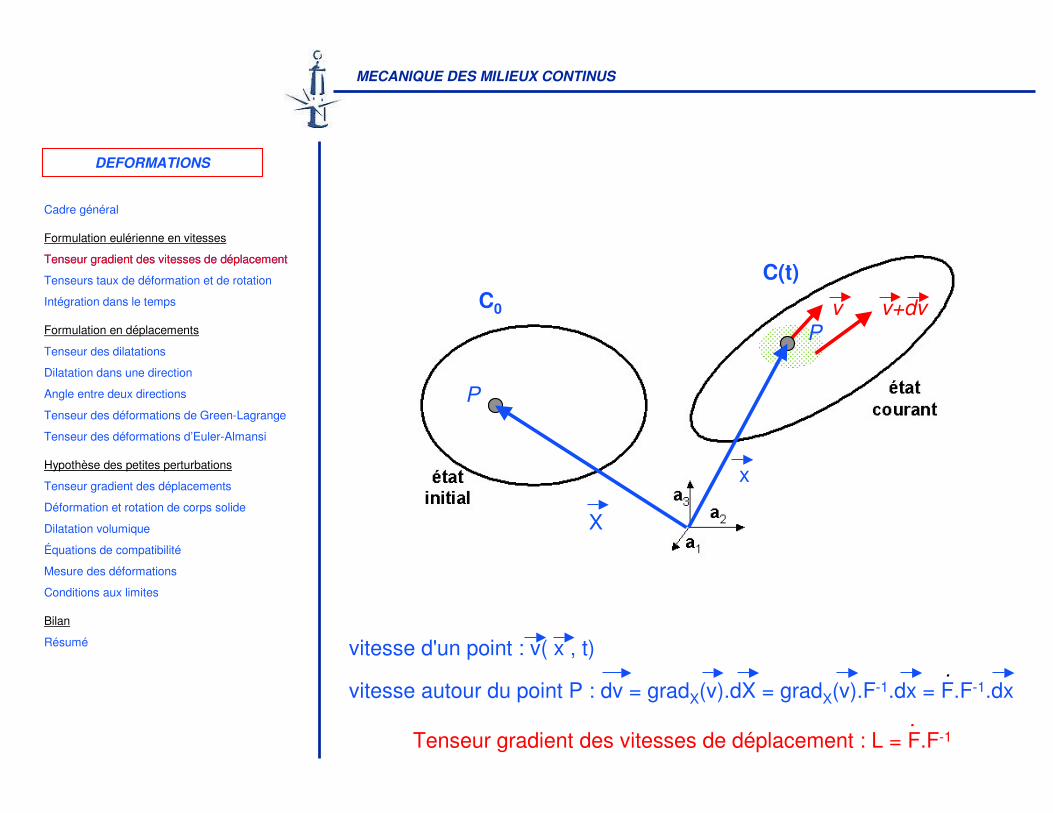
vitesse d'un point : v( x , t)
vP
x
C(t)
P
X
C0
vitesse autour du point P : dv = gradX(v).dX = gradX(v).F-1.dx = F.F-1.dx
v+dv
.
Tenseur gradient des vitesses de déplacement : L = F.F-1.
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Tenseur gradient des vitesses de déplacement
MECANIQUE DES MILIEUX CONTINUS
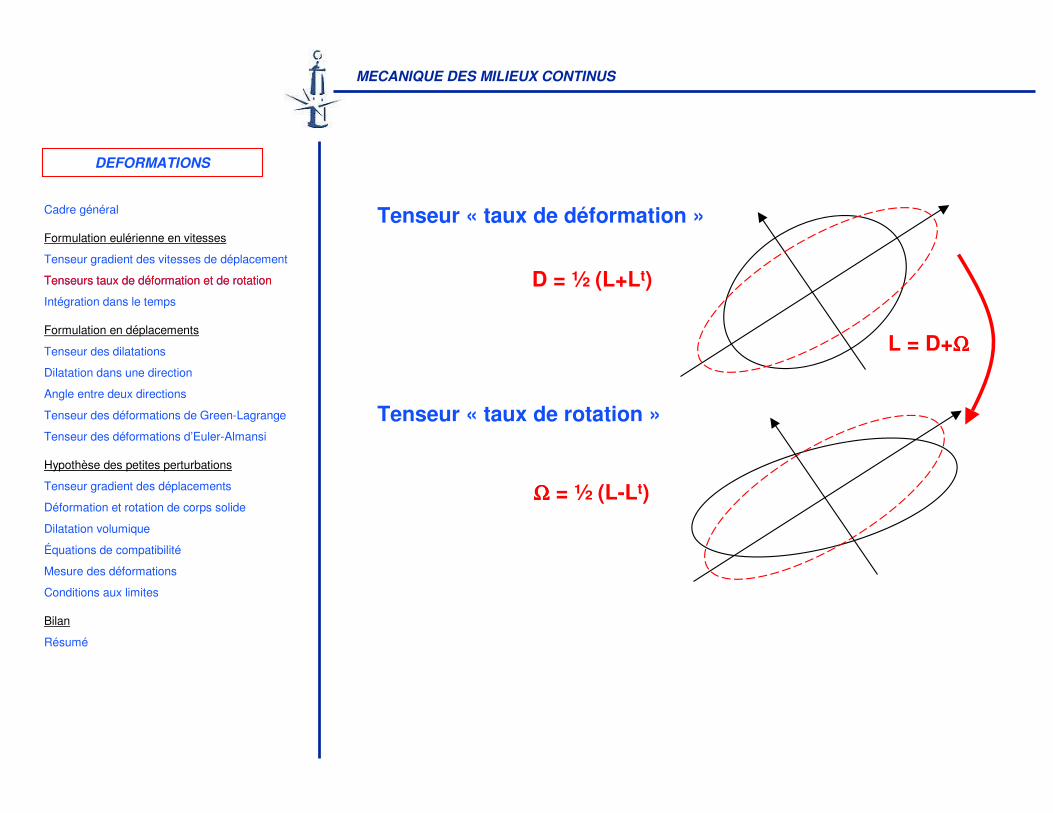
Tenseur « taux de déformation »
D = ½ (L+Lt)
Tenseur « taux de rotation »
ΩΩΩΩ = ½ (L-Lt)
L = D+ΩΩΩΩ
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Tenseurs taux de déformation et de rotation
MECANIQUE DES MILIEUX CONTINUS
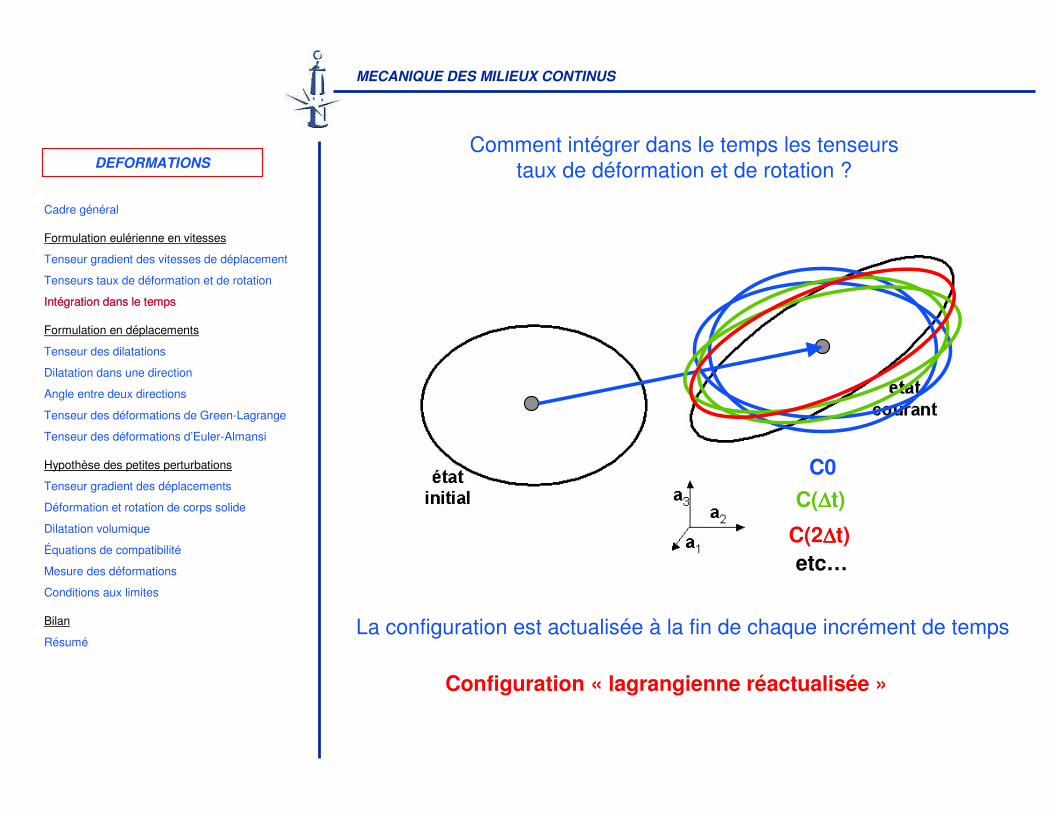
Comment intégrer dans le temps les tenseurs taux de déformation et de rotation ?
C0C(∆∆∆∆t)
C(2∆∆∆∆t)etc…
La configuration est actualisée à la fin de chaque incrément de temps
Configuration « lagrangienne réactualisée »
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Intégration dans le temps
MECANIQUE DES MILIEUX CONTINUS
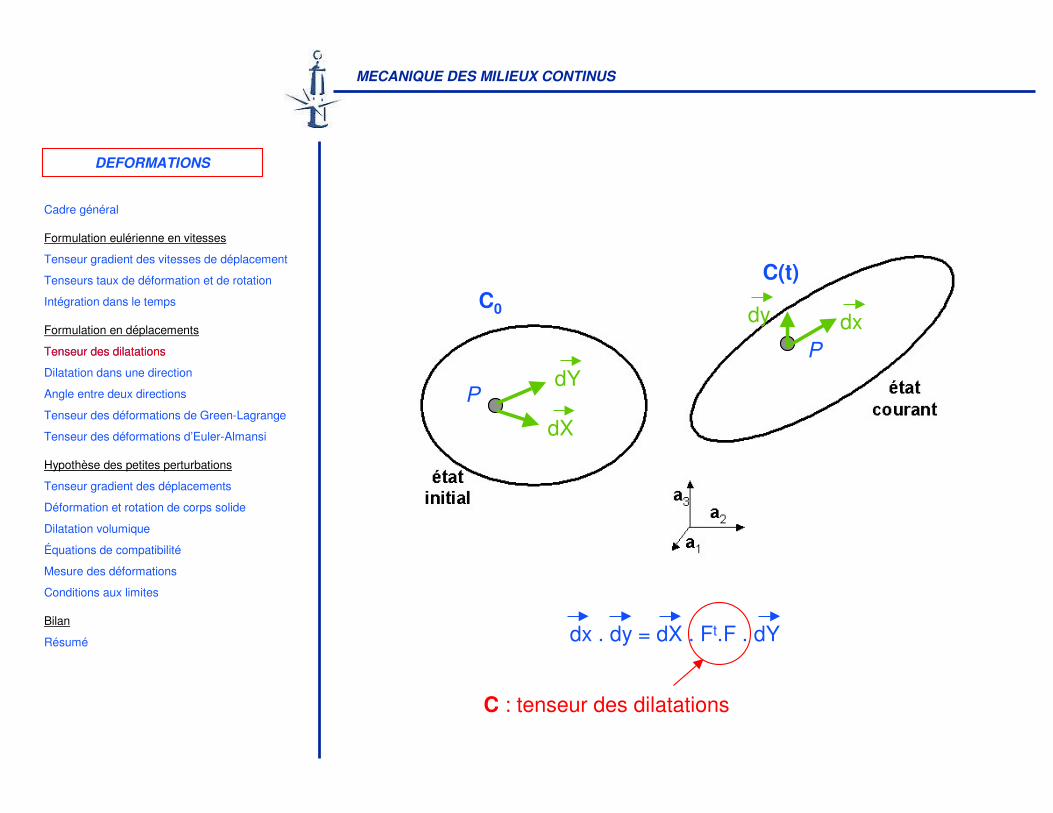
C : tenseur des dilatations
P
C0
P
C(t)
dxdy
dX
dY
dx . dy = dX . Ft.F . dY
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Tenseur des dilatations
MECANIQUE DES MILIEUX CONTINUS
P
C0
P
C(t)
dx
dXNX
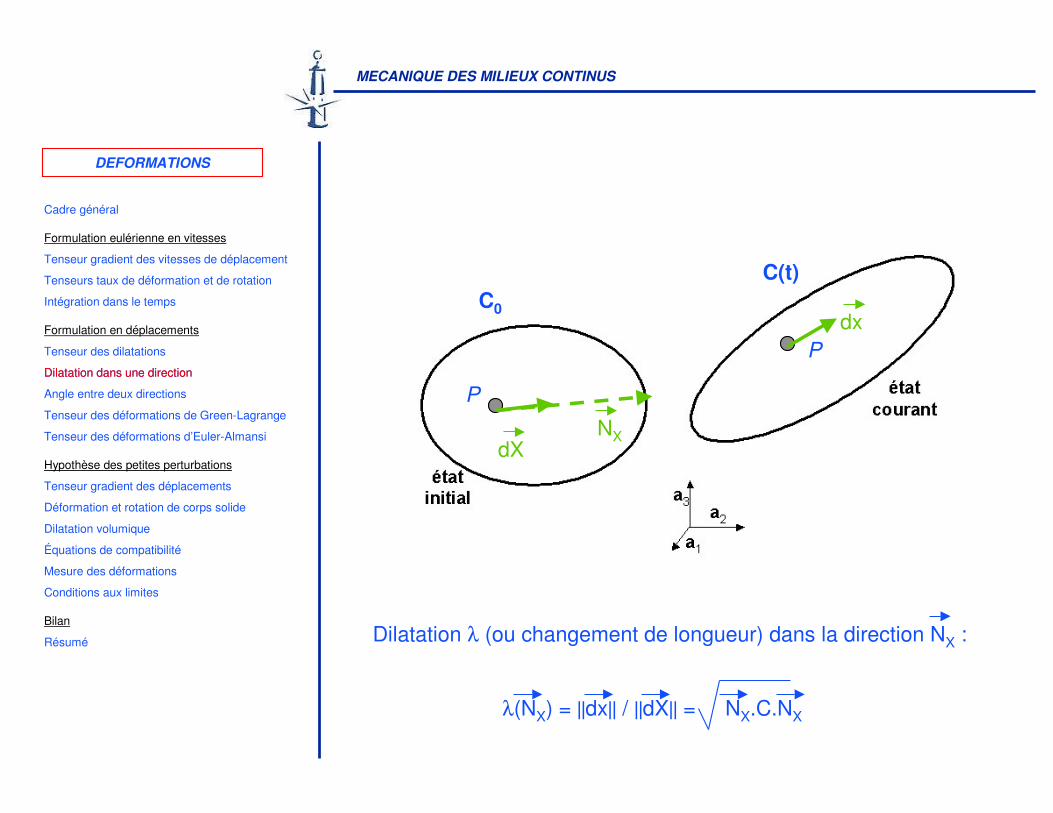
λ(NX) = ||dx|| / ||dX|| = NX.C.NX
Dilatation λ (ou changement de longueur) dans la direction NX :
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Dilatation dans une direction
MECANIQUE DES MILIEUX CONTINUS
P
C0
P
C(t)
dxdy
dX
dY
NX
NY
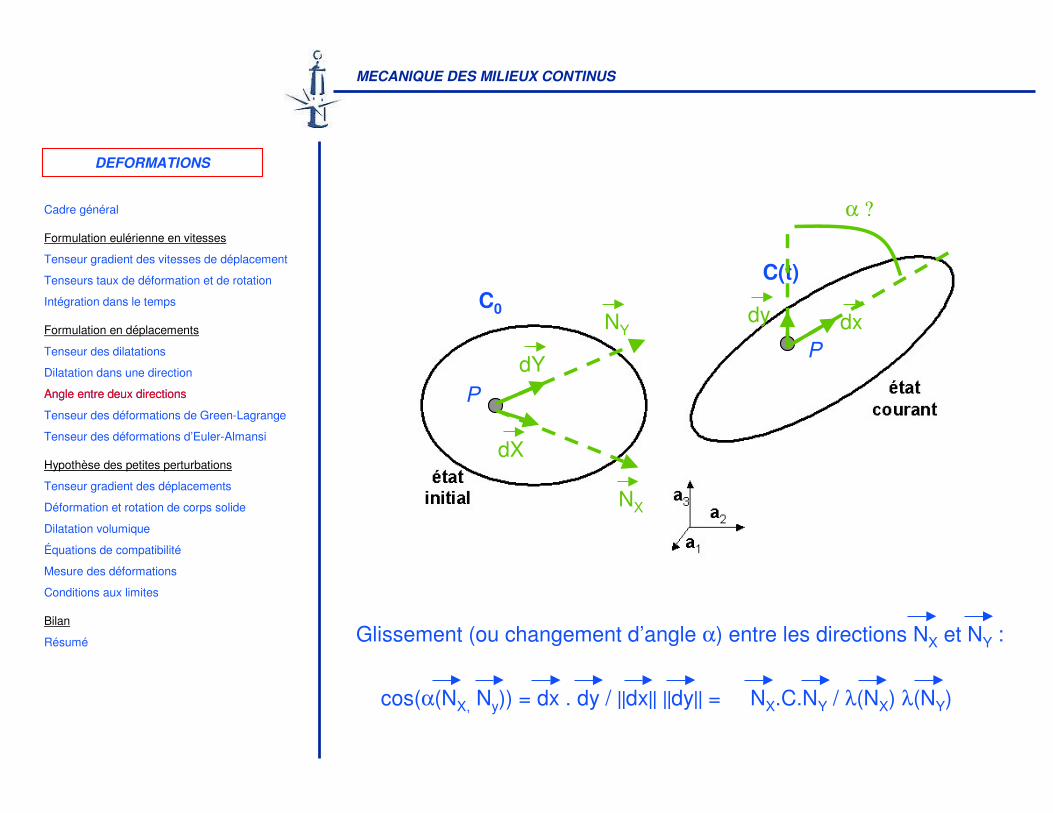
Glissement (ou changement d’angle α) entre les directions NX et NY :
cos(α(NX, Ny)) = dx . dy / ||dx|| ||dy|| = NX.C.NY / λ(NX) λ(NY)
α ?
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Angle entre deux directions
MECANIQUE DES MILIEUX CONTINUS
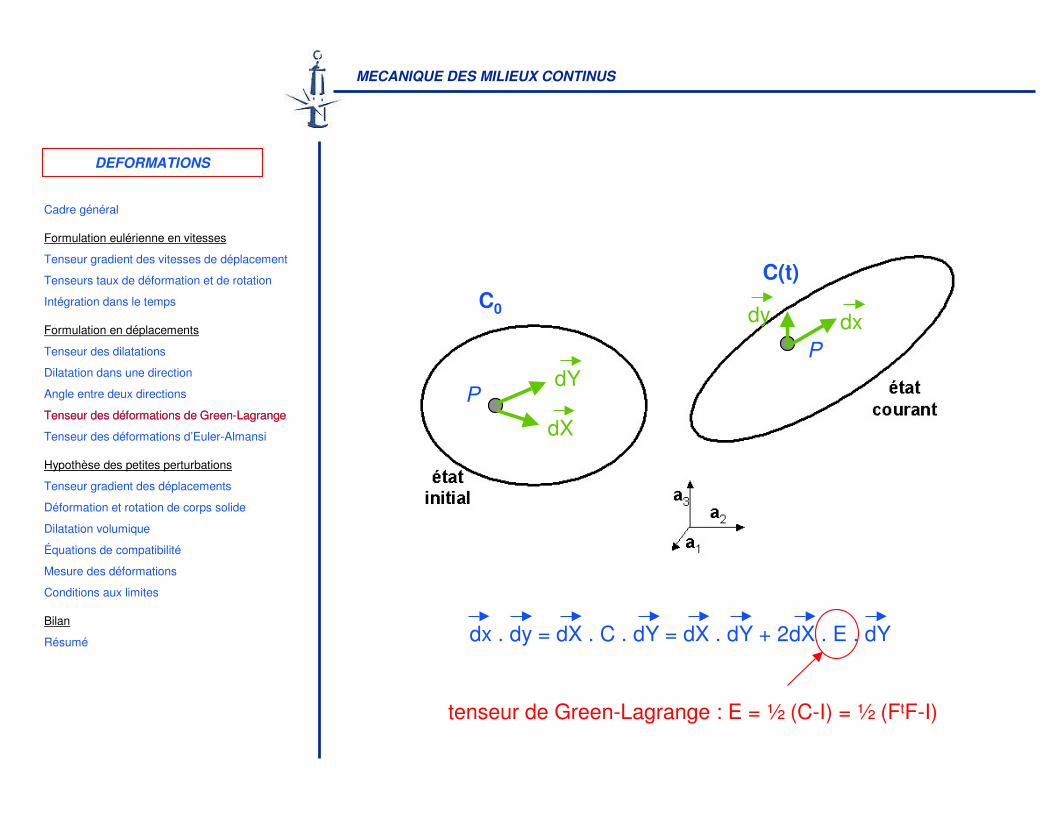
tenseur de Green-Lagrange : E = ½ (C-I) = ½ (FtF-I)
P
C0
P
C(t)
dxdy
dX
dY
dx . dy = dX . C . dY = dX . dY + 2dX . E . dY
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Tenseur des déformations de Green-Lagrange
MECANIQUE DES MILIEUX CONTINUS
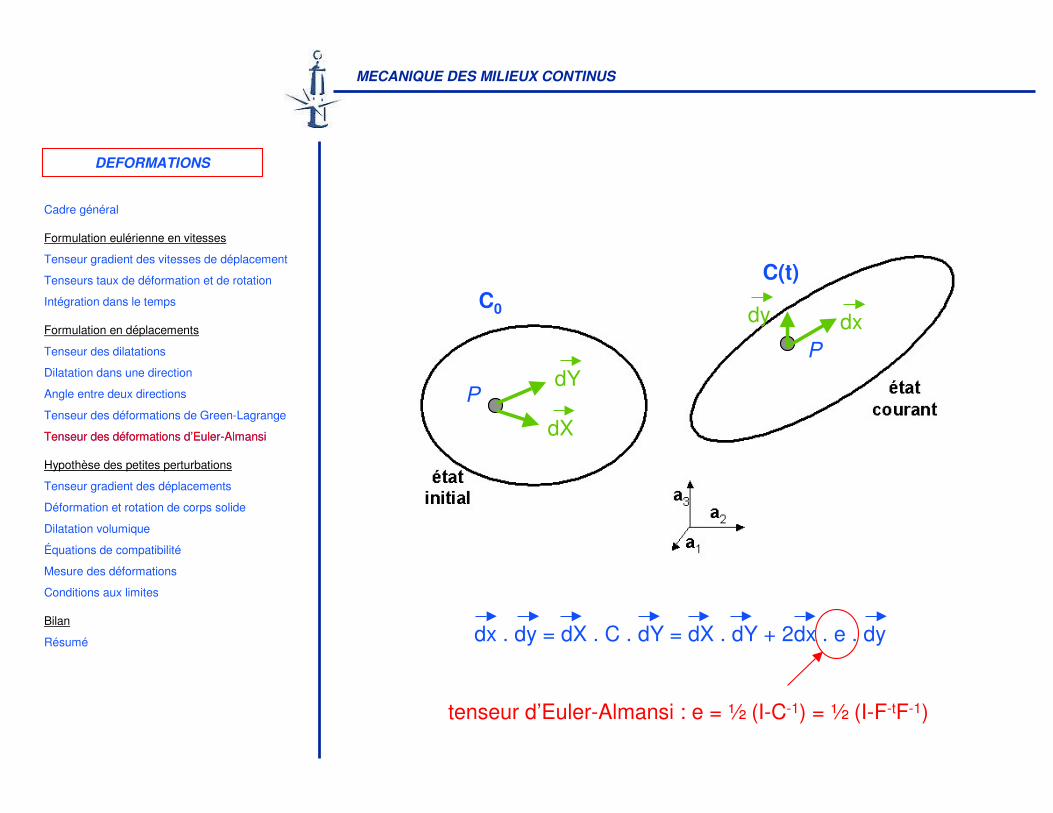
tenseur d’Euler-Almansi : e = ½ (I-C-1) = ½ (I-F-tF-1)
P
C0
P
C(t)
dxdy
dX
dY
dx . dy = dX . C . dY = dX . dY + 2dx . e . dy
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Tenseur des déformations d’Euler-Almansi
MECANIQUE DES MILIEUX CONTINUS
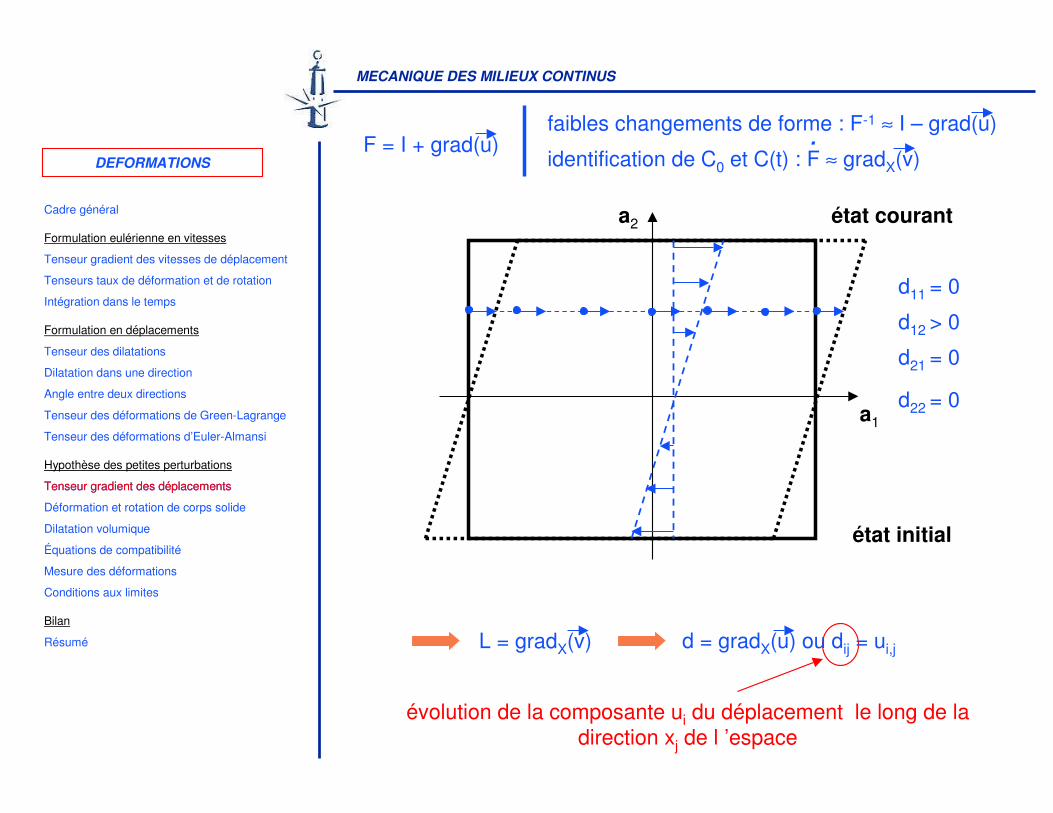
évolution de la composante ui du déplacement le long de la direction xj de l ’espace
a1
a2
état initial
d = gradX(u) ou dij = ui,jL = gradX(v)
identification de C0 et C(t) : F ≈ gradX(v).
faibles changements de forme : F-1 ≈ I – grad(u)F = I + grad(u)
état courant
d11 = 0
d12 > 0
d21 = 0
d22 = 0
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Tenseur gradient des déplacements
MECANIQUE DES MILIEUX CONTINUS
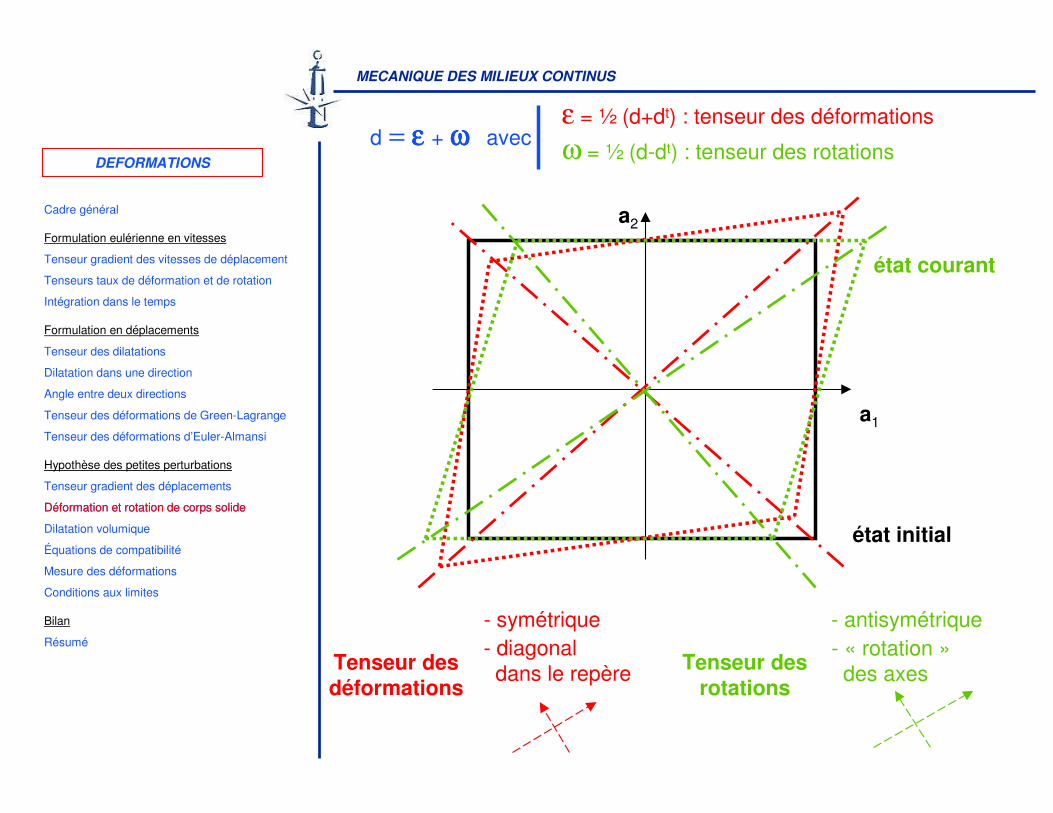
- symétrique- diagonaldans le repère
- antisymétrique- « rotation »des axes
a1
a2
état initial
état courant
d = εεεε + ωωωω avec ε = ½ (d+dt) : tenseur des déformations
ω = ½ (d-dt) : tenseur des rotations
Tenseur desdéformations
Tenseur desrotations
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Déformation et rotation de corps solide
MECANIQUE DES MILIEUX CONTINUS
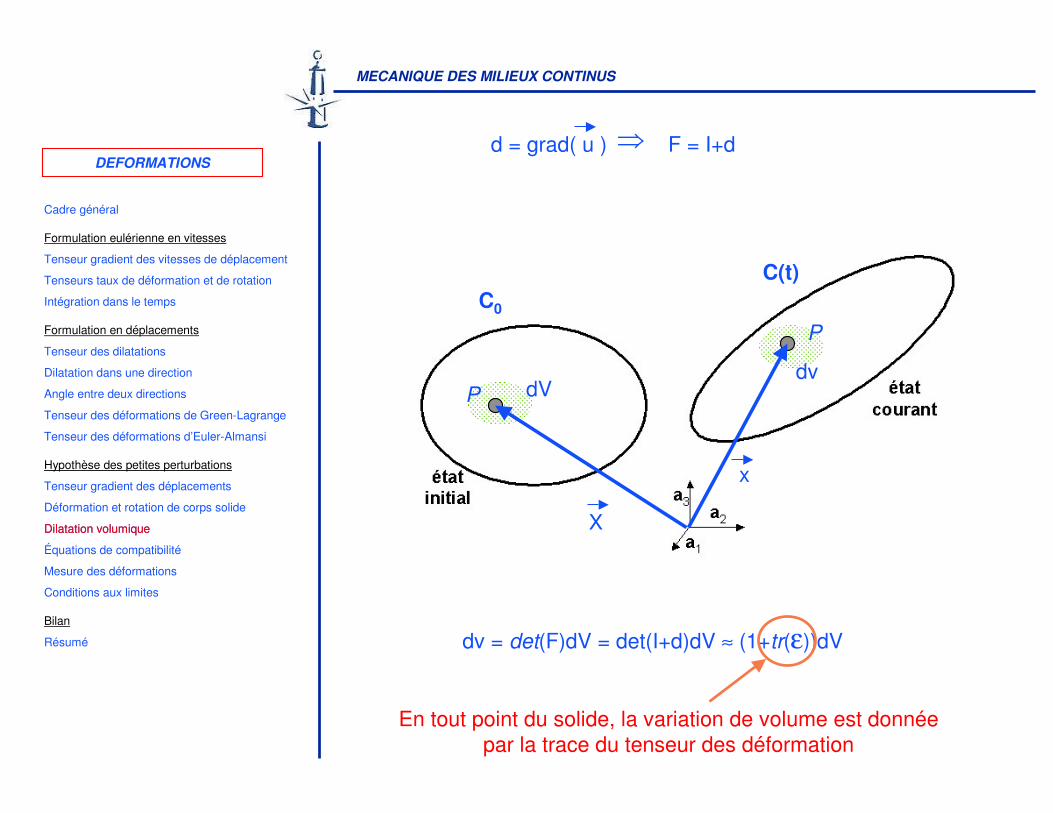
F = I+d
dv = det(F)dV = det(I+d)dV ≈ (1+tr(ε))dV
En tout point du solide, la variation de volume est donnéepar la trace du tenseur des déformation
dv
P
x
C(t)
dVP
X
C0
d = grad( u )DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Dilatation volumique
MECANIQUE DES MILIEUX CONTINUS
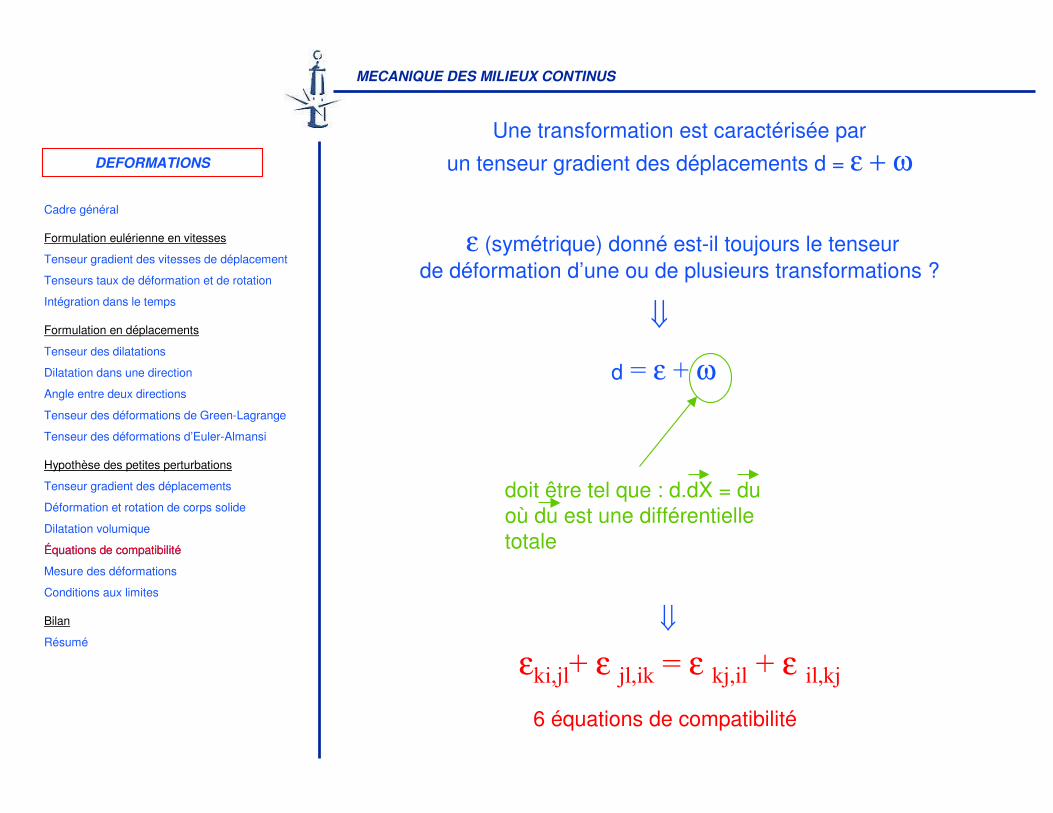
ε (symétrique) donné est-il toujours le tenseurde déformation d’une ou de plusieurs transformations ?
d ε ω
Une transformation est caractérisée par
un tenseur gradient des déplacements d = ε + ω
εε ε ε
6 équations de compatibilité
doit être tel que : d.dX = duoù du est une différentielletotale
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Équations de compatibilité
MECANIQUE DES MILIEUX CONTINUS
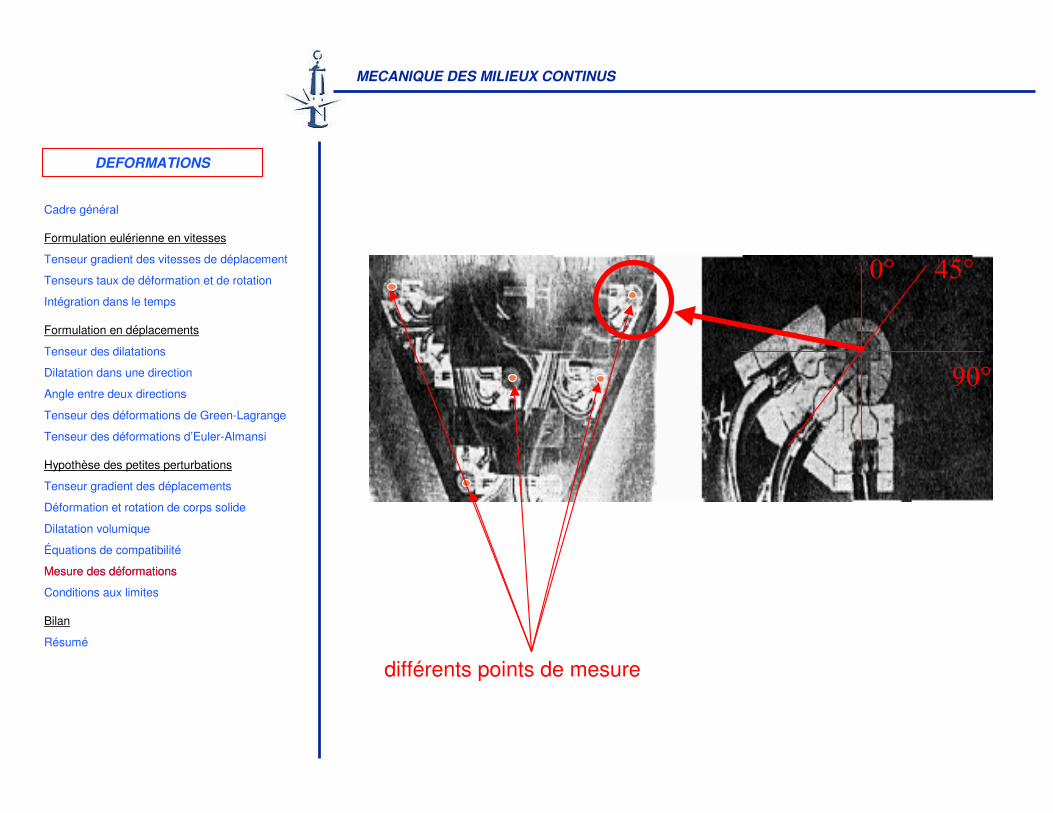
différents points de mesure
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Mesure des déformations
MECANIQUE DES MILIEUX CONTINUS
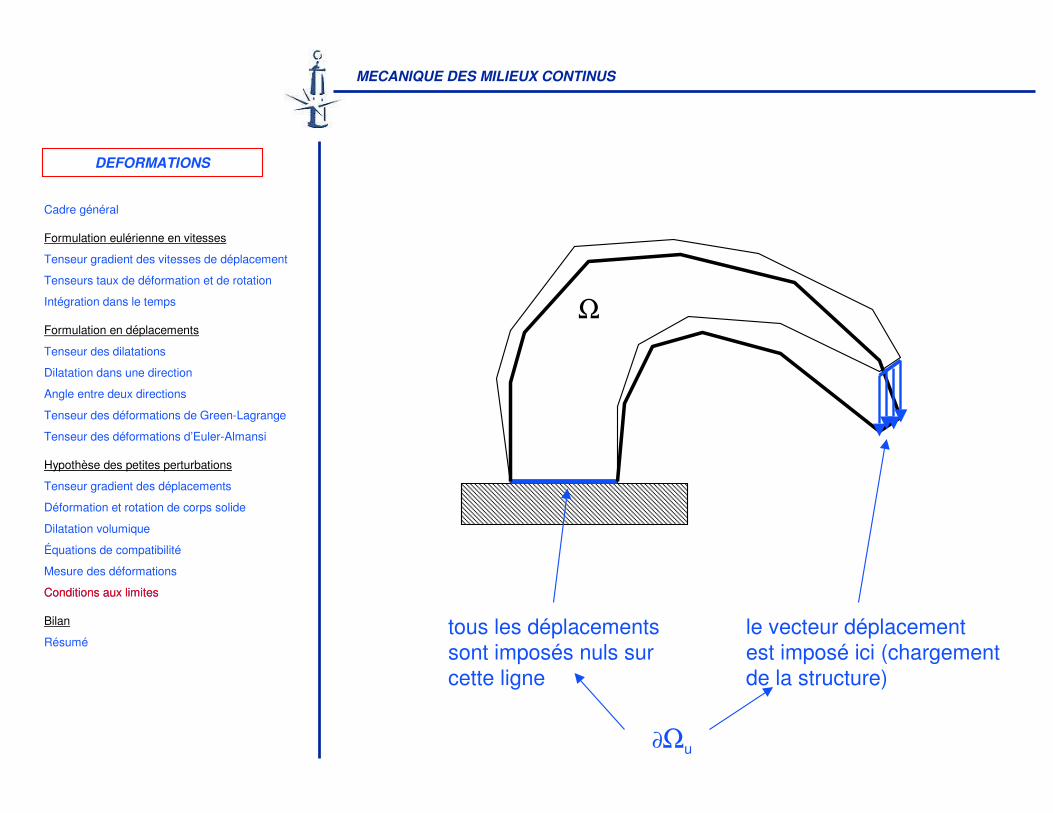
Ω
tous les déplacementssont imposés nuls surcette ligne
le vecteur déplacementest imposé ici (chargementde la structure)
∂Ωu
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limitesConditions aux limites
MECANIQUE DES MILIEUX CONTINUS
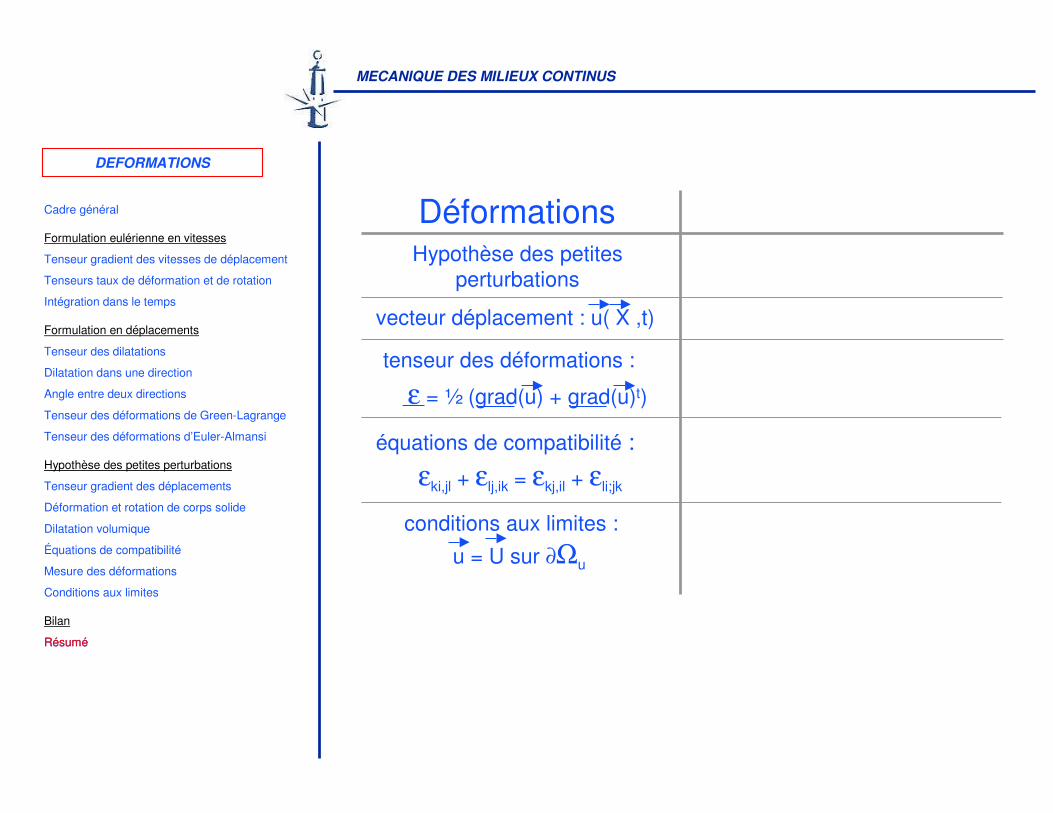
DéformationsHypothèse des petites
perturbations
équations de compatibilité
εki,jl + εlj,ik = εkj,il + εli;jk
vecteur déplacement : u( X ,t)
conditions aux limites :
u = U sur ∂Ωu
tenseur des déformations :
ε = ½ (grad(u) + grad(u)t)
DEFORMATIONS
Cadre général
Tenseur gradient des vitesses de déplacement
Intégration dans le temps
Tenseur des dilatations
Dilatation dans une direction
Tenseurs taux de déformation et de rotation
Tenseur des déformations de Green-Lagrange
Formulation eulérienne en vitesses
Formulation en déplacements
Hypothèse des petites perturbations
Tenseur gradient des déplacements
Déformation et rotation de corps solide
Dilatation volumique
Équations de compatibilité
Mesure des déformations
Résumé
Bilan
Tenseur des déformations d’Euler-Almansi
Angle entre deux directions
Conditions aux limites
Résumé





























