Embed Size (px)
Citation preview
Institut National des Sciences Appliquées de Strasbourg
Mémoire de soutenance de Diplôme d’Ingénieur INSA
Spécialité TOPOGRAPHIE
Mise en place d’un processus demodélisation de tsunamis :
Application au tsunami du 25 octobre 2010 sur l’île de Sibigau(Mentawai).
Présenté en Septembre 2011 par Sylvain LOTTEAU
Réalisé au sein de l’entreprise : ASR limited1, Wainui ROAD3225 RAGLANNouvelle-Zélande
Directeur de PFE : Correcteurs :M. BORRERO M. KOEHLDocteur en Génie Côtier M. FERHAT
Projet de Fin d’Étude - Sylvain LOTTEAU
Remerciements
Je tiens à remercier Jose Borrero, mon directeur de projet de fin d’étude,pour son aide et son soutien au cours de mon projet, et pour le partage de sapassion pour les phénomènes marins, Dougal Greer pour sa gentillesse et toutel’aide qu’il a pu m’apporter, notamment sur l’utilisation de Matlab, AndrewMoores pour sa disponibilité et son enthousiasme et toute l’équipe de ASRpour son accueil chaleureux. Je voudrais également remercier Mathieu Distasopour son aide sur les notions d’océanographie et de comportement de vagues.
Je veux également remercier mes correcteurs Messieurs Matthieu Koehl etGilbert Ferhat, ainsi que toute l’équipe enseignante en topographie à l’INSAde Strasbourg, pour m’avoir permis d’aboutir à mon projet de fin d’étude.
Je souhaite enfin remercier mes parents sans qui cette expérience de l’autrecôté du globe n’aurait pas été possible.
2
Table des matières
1 État de l’Art 71.1 le modèle SPHysics . . . . . . . . . . . . . . . . . . . . . . . . 71.2 Validation du modèle SPHysics pour la modélisation de tsunamis 81.3 La modélisation de tsunamis . . . . . . . . . . . . . . . . . . . 81.4 Synthèse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Les outils utilisés 102.1 Utilisation de DualSPHysics . . . . . . . . . . . . . . . . . . . 10
2.1.1 Mise en place du modèle et la génération de la géométrie 112.1.2 Calcul du mouvement du fluide . . . . . . . . . . . . . 112.1.3 Analyse des résultats . . . . . . . . . . . . . . . . . . . 12
2.2 Développement d’une interface graphique pour DualSPHysics . 122.3 Blender : logiciel de modélisation en trois dimensions . . . . . 152.4 Paraview : logiciel de visualisation . . . . . . . . . . . . . . . . 162.5 Conclusion du chapitre . . . . . . . . . . . . . . . . . . . . . . 172.6 Tableau récapitulatif . . . . . . . . . . . . . . . . . . . . . . . 18
3 Création du modèle 3D 193.1 Les données brutes . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1.1 Matrice de valeur d’élévation . . . . . . . . . . . . . . . 193.1.2 Profils en long sur la côte de l’île Sibigau . . . . . . . . 203.1.3 Photos aériennes . . . . . . . . . . . . . . . . . . . . . 21
3.2 Opérations sur les fichiers bruts . . . . . . . . . . . . . . . . . 223.2.1 Découpage de la matrice initiale et transformation en
fichier (E,N,Z) . . . . . . . . . . . . . . . . . . . . . . . 223.2.2 Modification de la matrice d’élévation sous Surfer . . . 23
3.3 Création sous Blender des spécificités pour DualSPHysics . . . 253.3.1 Changement de repère . . . . . . . . . . . . . . . . . . 253.3.2 Importation des données dans Blender . . . . . . . . . 263.3.3 Création des murs et du sur-sol . . . . . . . . . . . . . 27
3.4 Précision du modèle . . . . . . . . . . . . . . . . . . . . . . . 303.4.1 Précision sur les coordonnées X et Y . . . . . . . . . . 303.4.2 Précision sur la coordonnée Z . . . . . . . . . . . . . . 30
3.5 Conclusion du chapitre . . . . . . . . . . . . . . . . . . . . . . 31
4 Simulations avec DualSPHysics 324.1 Phase de tests préalables . . . . . . . . . . . . . . . . . . . . . 32
4.1.1 Import des fichiers STL et transformation en particulessolides dans DualSPHysics . . . . . . . . . . . . . . . . 32
3

Projet de Fin d’Étude - Sylvain LOTTEAU
4.1.2 Génération des particules fluides dans DualSPHysics . 334.2 Génération du tsunami : batteur à houle de type piston à mou-
vement sinusoïdal . . . . . . . . . . . . . . . . . . . . . . . . . 334.2.1 Définition du mouvement sinusoïdal de type piston . . 334.2.2 Mise en œuvre et résultats . . . . . . . . . . . . . . . . 364.2.3 Influence de la forêt de palmier . . . . . . . . . . . . . 404.2.4 Conclusion sur l’utilisation du batteur à houle sinusoïdal
de type piston . . . . . . . . . . . . . . . . . . . . . . . 414.3 Génération de tsunami : mouvement du piston défini par les
données issues du modèle MOST . . . . . . . . . . . . . . . . 424.3.1 Utilisation du modèle MOST . . . . . . . . . . . . . . 424.3.2 Mise en œuvre et résultats . . . . . . . . . . . . . . . . 43
4.4 Conclusion du chapitre . . . . . . . . . . . . . . . . . . . . . . 47
4
Projet de Fin d’Étude - Sylvain LOTTEAU
Introduction
ASR limited est un cabinet de conseil en génie côtier. Il dispose de plusieursbureaux dans le monde, dont son siège social en Californie. J’ai réalisé monstage dans les bureaux situés en Nouvelle-Zélande, dans la petite ville côtière deRaglan. La société était, à ses débuts, spécialisée dans le design et la construc-tion de récifs artificiels à usages multiples : préservation de la côte en limitantl’érosion, création d’écosystème et génération de vagues. Elle a construit plu-sieurs récifs artificiels à travers le monde, avec notamment ceux de Kovalam(Inde), Boscomb (Angleterre) et Mount Manganui (Nouvelle-Zélande). La so-ciété s’est ensuite diversifiée et travaille désormais dans des domaines pluslarges tels que l’étude d’impact de pollutions maritimes, d’érosion du littoralainsi que la modélisation et l’étude des tsunamis.
C’est dans ce dernier domaine que j’ai pu réaliser mon projet de fin d’étude.Jose BORRERO, docteur en génie côtier et spécialiste en tsunamis gère cettesection au sein de l’entreprise. Il est assisté occasionnellement par DougalGREER et Laurent LEBRETON, avec qui j’ai pu également travailler. Pourla réalisation de mon PFE, j’ai bénéficié d’une grande autonomie et ma placedans l’entreprise équivalait donc au statut d’un chef de projet.
Mon projet de modélisation de tsunamis avec l’outil de simulation de fluideSPH (Smooth Particle Hydrodynamics), est né de l’intérêt porté par M. BOR-RERO pour cet outil. En effet, le seul modèle utilisé pour la modélisation detsunami à ASR est le modèle MOST. Or, celui-ci ne permet pas de fourniren détails les effets de ces vagues ravageuses sur les côtes : en effet, il permetessentiellement de calculer des niveaux d’inondation. Le modèle SPH est assezrécemment débarqué dans le monde scientifique et a été de plus en plus utilisé.En ce qui concerne la modélisation de tsunamis, peu de résultats ont encoreété publiés et ASR vise à devenir un des leaders en modélisation de tsunamisavec ce nouvel outil. J’ai donc été amené à travailler sur l’utilisation de cemodèle dans le but de faire ressortir les points clés du processus.
Le cas du tsunami sur lequel j’ai travaillé est celui du 25 octobre 2010 quis’est produit aux îles Mentawais. L’origine de ce tsunami est un tremblement deterre de magnitude 7.5 sur l’échelle de Richter (tsunamiresearchcenter@[2011][13]) au niveau de la faille de Sunda. Cette faille est une zone de subductionentre la micro-plaque Sunda (plaque eurasienne) et la plaque australienne.Jose BORRERO a effectué une mission d’une semaine sur le terrain faisant letour de la zone la plus touchée par le tsunami : le sud des Mentawais. Une deces îles particulièrement touchées est celle de Sibigau, qui fera l’objet de monétude. Le but de ce PFE est donc d’utiliser le modèle SPH pour la modélisationde tsunamis, afin de pouvoir étudier plus en profondeur ces phénomènes auniveau des côtes.
Cette dernière décennie, plusieurs tsunamis de grande importance ont eulieu, avec notamment le tsunami de 2004 dans l’océan indien causant la mort
5
Projet de Fin d’Étude - Sylvain LOTTEAU
d’environ 200 000 personnes, et plus récemment celui du 11 mars 2011 au japonqui a fait plusieurs dizaines de milliers de victimes et dont les images ont choquéle monde entier. La compréhension et l’étude de l’impact de tels phénomènesest donc un enjeu de taille. Ainsi, en utilisant le modèle SPH, on sera capabled’étudier diverses caractéristiques physiques telles que celles des pressions etdes comportements de fluide, qui pourront par exemple être utilisées pour ledimensionnement de structures résistantes. Cependant, ces phénomènes ayantune probabilité très faible d’apparaitre, les villes côtières et les ports ne sontpas encore prêts à investir dans de nouveaux équipements "anti-tsunamis"assurément très couteux et donc l’efficacité sera encore à prouver.
Les objectifs principaux de ce projet sont de mettre en place l’utilisation dedifférents outils pour la modélisation de tsunamis en utilisant le modèle SPH,ainsi que les différentes possibilités d’analyses qui en résultent et la générationde vagues de tsunamis semblables à la réalité. Cette dernière partie est une desplus difficiles car les propriétés de ces vagues, comme nous le verrons plus loin,sont exceptionnelles (longueur d’onde de l’ordre de la centaine de kilomètres enhaute mer, et vitesse avoisinant les 700 km/h). Après le passage du tsunami surl’île Sibigau, on a pu constater qu’une grande partie de la forêt de palmiers setrouvant sur la plaine a été détruite, à l’exception d’une bande d’une dizainede mètres le long du rivage. Un des objectifs est également d’obtenir plusd’informations sur ce phénomène étrange en réussissant à le reproduire lorsdes simulations.
Mon étude se décompose en plusieurs chapitres. Un état de l’art sur lamodélisation de tsunamis et sur le modèle SPH va d’abord être abordé. Onverra par la suite les différents logiciels et outils utilisés dans ce processus demodélisation de tsunamis, afin de visualiser les options possibles en termesde modélisation 3D et de simulation. Une fois ces outils passés en revue, uneprésentation de la création du modèle en trois dimensions et de sa mise auxnormes pour son utilisation dans le modèle SPHysics sera effectuée. Enfin, ledernier chapitre sera consacré à la simulation de tsunamis sur les modèles 3Dréalisés, ainsi que l’étude des résultats et des différentes possibilités d’analyses.
6
Chapitre 1
État de l’Art
1.1 le modèle SPHysics
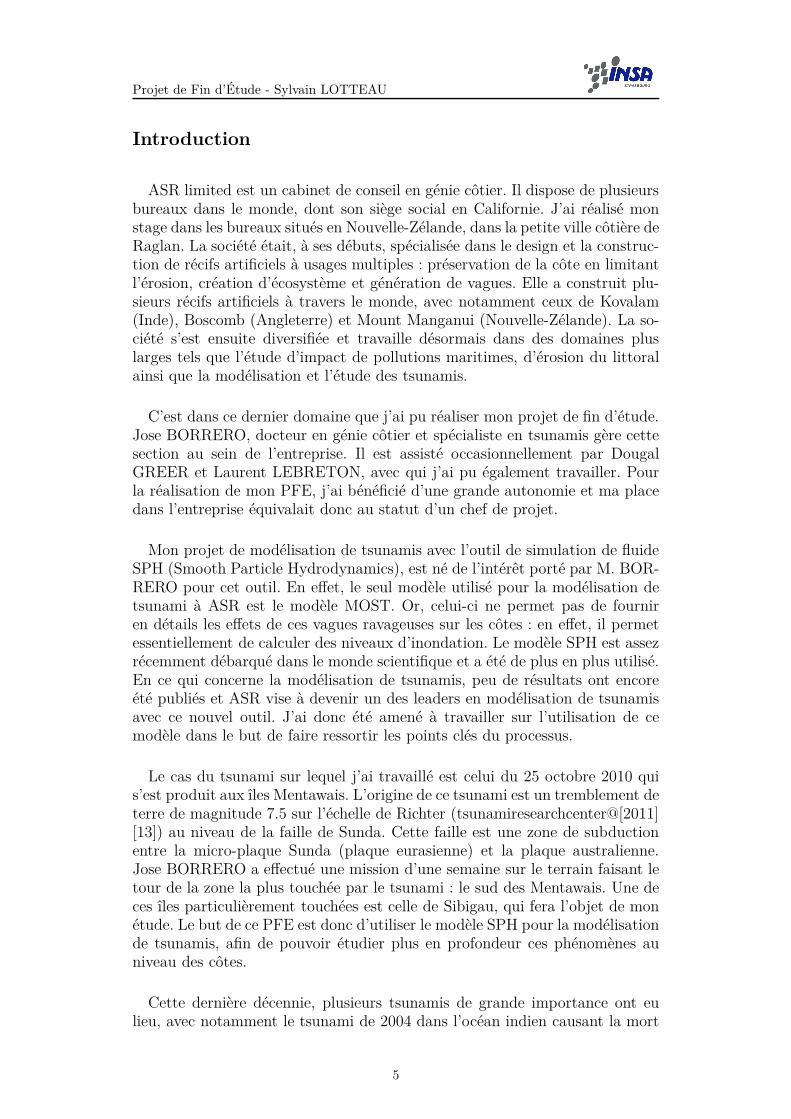
Le modèle SPHysics permet la simulation de fluide en se basant sur la théoriede l’hydrodynamique des particules lisses (Smooth Particles Hydrodynamics).Le principe de base est de décomposer le fluide concerné en éléments discrets,qui sont appelés "particules". La décomposition de ce fluide se fait selon unedistance entre particules qui est aussi appelée "taille des particules". Les par-ticules qui seront alors considérées comme des points, vont se trouver à unedistance qui sera équivalente à la taille des particules [FIG 1.1]. Une "fonctionnoyaux" (Kernel function) est également mise en place : les caractéristiquesphysiques de chaque particule vont dépendre des particules qui l’entourentdans la limite du champ d’action de cette fonction noyaux.
Figure 1.1 – Décomposition d’une face en particules (points bleus) : le rayon des cerclesest égal à la moitié de la distance entre les particules
La formulation de base (Gesteira et al. [2010] [3]) calculant la valeur den’importe quelle quantité "A" à une position donnée "r" est présentée dansl’équation (1.1) où mj est la masse et ρj la densité associées à la particule j.W représente la fonction noyau paramétrée avec h (distance spatiale entre lesparticules).
7
Projet de Fin d’Étude - Sylvain LOTTEAU
A(r) =n
∑
j
mj
Aj
ρj
W (|r − rj|, h) (1.1)
Ensuite, pour l’utilisation de SPHYSICS, je me suis servi des ouvrages sui-vants : Gesteira et al. [2010] [3] qui présente le modèle SPH et Mayrhofer etal. [2010] [6] qui traite de l’utilisation de SPHysics couplée avec le logiciel demodélisation 3D Blender. Cependant, la documentation pour l’utilisation deSPhysics n’est pas très développée.
1.2 Validation du modèle SPHysics pour la modélisa-tion de tsunamis
Avant de commencer à travailler sur la modélisation de tsunamis avec lemodèle SPHysics, il a fallu vérifier la validité de ce modèle pour l’étude detels phénomènes. Le modèle étant assez nouveau, peu de travaux ont déjàété réalisés et la documentation reste assez mince. Cependant, certaines expé-riences tendent à valider le modèle pour la simulation de tsunamis. Les récentstravaux réalisés par Weiss et al. [2011] [14] en font partie : les chercheurs sesont basé sur une expérience réalisée en laboratoire par Briggs et al. [1995] [2]sur l’inondation par un tsunami d’une île circulaire. Les mesures de l’époqueont été réalisées dans un bassin où le tsunami a été généré par un batteur àhoule. L’expérience a été reconduite en 2011, mais cette fois-ci numériquementen utilisant le modèle SPHysics. Le même batteur à houle est utilisé et l’îlemodélisée est l’exacte réplique de celle construite en laboratoire. Les résultatsainsi obtenus sont très bons, et les valeurs d’inondation correspondent à cellesde l’expérience de 1995, avec des différences maximales de 15%.
Les travaux de Liu et al. [2008] [5] présentent également la simulation detsunamis avec SPHysics. Cependant, cette fois-ci, le mode de génération dutsunami est le déplacement sous-marin d’une masse, reproduisant un mou-vement tectonique. Les échelles mises en place lors de cette expérience sontbeaucoup plus grandes que celles prévues dans mon étude : en effet, les profon-deurs maximales concernées sont de l’ordre de plusieurs centaines de mètres,contre plusieurs dizaines de mètres pour mon modèle. Les résultats obtenussont toutefois encourageants et valident également le modèle.
1.3 La modélisation de tsunamis
Concernant la modélisation de tsunamis en général, le modèle MOST (Me-thod of Splitting Tsunami) [FIG 1.2] est largement utilisé dans le milieu scien-tifique. Il a fait ses preuves lors de la modélisation de différents tsunamis telsque celui de juillet 1993 au japon, août 2007 au Chili et également du tsunamidu 26 décembre 2004 à Sumatra. De nombreux travaux de validation ont étéréalisés, parmi lesquels ceux de Titov et Gonzales [1997] [12] et Synolakis etal. [2008] [11]. La méthode pour générer des tsunamis avec ce modèle est la
8
Projet de Fin d’Étude - Sylvain LOTTEAU
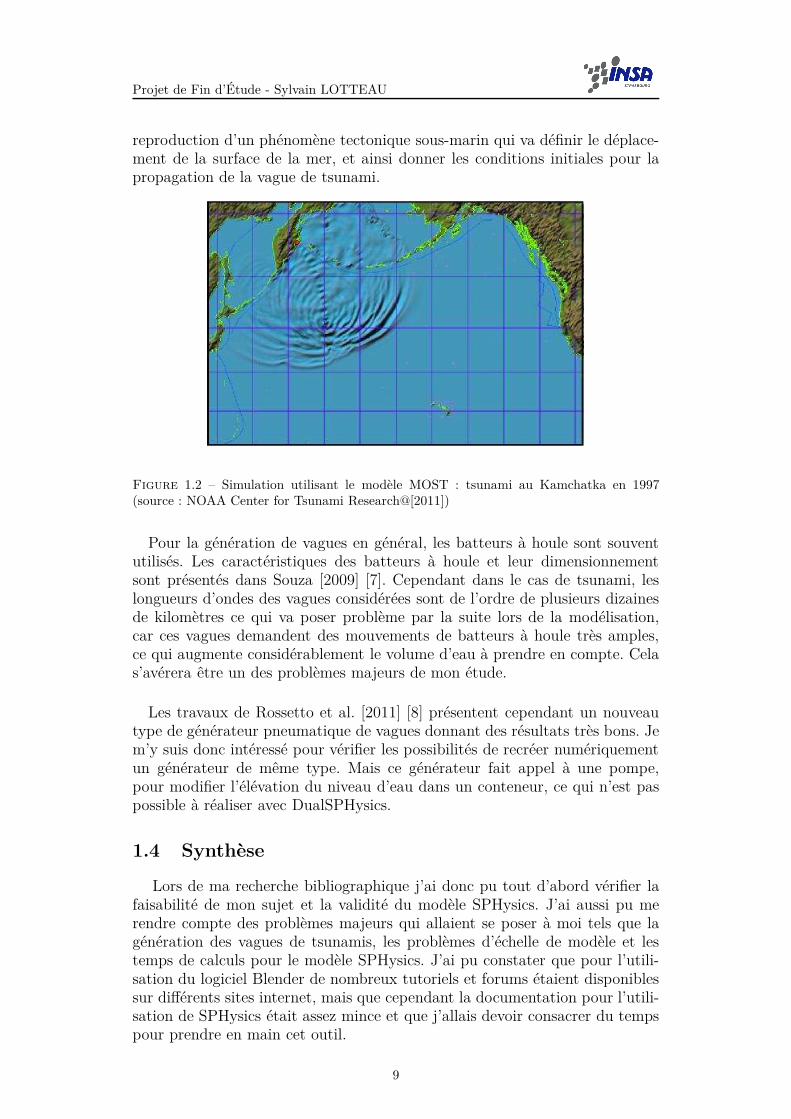
reproduction d’un phénomène tectonique sous-marin qui va définir le déplace-ment de la surface de la mer, et ainsi donner les conditions initiales pour lapropagation de la vague de tsunami.
Figure 1.2 – Simulation utilisant le modèle MOST : tsunami au Kamchatka en 1997(source : NOAA Center for Tsunami Research@[2011])
Pour la génération de vagues en général, les batteurs à houle sont souventutilisés. Les caractéristiques des batteurs à houle et leur dimensionnementsont présentés dans Souza [2009] [7]. Cependant dans le cas de tsunami, leslongueurs d’ondes des vagues considérées sont de l’ordre de plusieurs dizainesde kilomètres ce qui va poser problème par la suite lors de la modélisation,car ces vagues demandent des mouvements de batteurs à houle très amples,ce qui augmente considérablement le volume d’eau à prendre en compte. Celas’avérera être un des problèmes majeurs de mon étude.
Les travaux de Rossetto et al. [2011] [8] présentent cependant un nouveautype de générateur pneumatique de vagues donnant des résultats très bons. Jem’y suis donc intéressé pour vérifier les possibilités de recréer numériquementun générateur de même type. Mais ce générateur fait appel à une pompe,pour modifier l’élévation du niveau d’eau dans un conteneur, ce qui n’est paspossible à réaliser avec DualSPHysics.
1.4 Synthèse
Lors de ma recherche bibliographique j’ai donc pu tout d’abord vérifier lafaisabilité de mon sujet et la validité du modèle SPHysics. J’ai aussi pu merendre compte des problèmes majeurs qui allaient se poser à moi tels que lagénération des vagues de tsunamis, les problèmes d’échelle de modèle et lestemps de calculs pour le modèle SPHysics. J’ai pu constater que pour l’utili-sation du logiciel Blender de nombreux tutoriels et forums étaient disponiblessur différents sites internet, mais que cependant la documentation pour l’utili-sation de SPHysics était assez mince et que j’allais devoir consacrer du tempspour prendre en main cet outil.
9
Chapitre 2
Les outils utilisés
La première étape de mon projet fut de me renseigner sur les outils quej’allais utiliser et également de les prendre en main. La majorité de ces outilsa été choisie et imposée par le sujet lui-même. Pour la modélisation de fluidec’est le modèle de l’hydrodynamique des particules lisses (Smooth ParticlesHydrodynamics) qui avait été choisi, avec les fichiers exécutables "DualSPHy-sics" : d’autres logiciels permettent aussi ce genre de calculs de fluide baséssur le modèle SPH tels que FLUIDS ou SPLASH, mais Dualsphysics présentel’avantage d’être gratuit et adapté à l’étude. Ensuite pour le logiciel de mo-délisation 3D, Blender a premièrement été retenu car une utilisation coupléede ce logiciel avec SPHysics avait déjà été réalisée (travaux de Gesteira etal. [2010] [3]). En effet, avec des recommandations bien précises, on peut uti-liser directement un fichier issu de Blender pour mettre en place le modèleSPHysics. Cependant, ceci n’est plus d’actualité car le modèle retenu pour lamodélisation de fluide est DualSPHysics : il se base sur SPHysics mais a laparticularité d’être plus adapté pour des cas comportant une structure tridi-mensionnelle plus complexe. On a donc conservé Blender comme logiciel demodélisation 3D, car il s’est avéré un outil puissant de modélisation (grandnombre d’outils) et permet la création et l’édition de fichiers au format STL(Standard Template Library) qui est par la suite utilisé dans DualSPHysics.
Enfin, pour la visualisation des animations de fluide résultantes des calculs,Paraview a été utilisé. L’objectif était également de réaliser ce projet à moindrecoût en utilisant des logiciels gratuits : Blender, DualSPHysics et Paraviewremplissent cette condition.
2.1 Utilisation de DualSPHysics
La version du modèle SPHyscics qui est donc utilisée est "DualSphysics" : ilconsiste en une série de fichiers exécutables utilisables directement sous Win-dows. Ces fichiers exécutables permettent d’utiliser à la fois le CPU (proces-seur) et le GPU (processeur graphique) pour faire les calculs, ce qui augmentela rapidité des temps de simulation. DualSPHysics fonctionne sans interfacegraphique et les fichiers exécutables sont lancés à partir de l’entrée de com-mande Windows (cmd.exe). Les trois principales étapes dans l’utilisation deDualSPHysics sont présentées dans les points suivants.
10
Projet de Fin d’Étude - Sylvain LOTTEAU
2.1.1 Mise en place du modèle et la génération de la géométrie
La première étape dans l’utilisation de DualSPHysics est la mise en placedu modèle et la génération de la géométrie. Pour ce faire, on utilise un premierexécutable appelé "GenCase.exe". Le fichier d’entrée à donner est un fichierXML dans lequel les éléments suivants sont définis :
– Les limites du domaine (les coordonnées (x,y,z) des deux coins opposésde la "boîte" contenant le modèle 3D complet).
– La distance entre les particules.– Les particules fixes (particules solides définies en donnant le chemin d’ac-
cès au fichier STL contenant le modèles 3D).– Les particules mobiles (définies directement dans le fichier XML s’il s’agit
d’une structure simple, comme par exemple un simple rectangle définis-sant un batteur à houle).
– Les particules fluides (définies en remplissant jusqu’à un niveau donné lemodèle 3D, qui doit donc comporter des murs au niveau des limites et nedoit pas contenir de fuites).
– Les caractéristiques de déplacement des particules mobiles (pouvant êtredéfinies de nombreuses façons telles qu’une vitesse initiale dans une direc-tion donnée, ou bien un mouvement sinusoïdal en donnant une amplitude,une fréquence et une phase).
– Un ensemble de paramètres tels que la viscosité du fluide, la durée desimulation ou le pas de calcul.
Ce premier fichier exécutable crée 4 fichiers en sortie :
– Un fichier XML qui va récapituler l’ensemble du premier fichier XML quia servi d’entrée.
– Un fichier bi2 (spécifique à DualSPHysics) contenant la position initialeet la nature de chaque particule.
– Deux fichiers VTK (Vizualisation Tool Kit), comportant la géométrie desparticules fixes et mobiles et pouvant être visualiser avec Paraview.
Les fichiers XML et bi2 de sortie sont nécessaires pour lancer la prochaineétape qui est le calcul du mouvement du fluide.
2.1.2 Calcul du mouvement du fluide
Le calcul du mouvement des particules se fait en lançant le fichier exécutable"DualSPhysics". Il se sert du fichier XML pour charger les différents paramètresà utiliser pour la résolution des équations du principe de l’hydrodynamiquedes particules lisses, ainsi que du fichier bi2 pour initialiser le calcul avec laposition initiale des particules. Les positions et caractéristiques des particules(telles que pression et vélocité) au laps de temps suivant sont calculées à partirde l’état précédant en se basant sur l’interaction entre les différentes particulesfluides, mais aussi avec les particules solides (fixes et mobiles).
11
Projet de Fin d’Étude - Sylvain LOTTEAU
Les fichiers de sortie de cet exécutable sont des fichiers bi2, qui contiennentles informations sur la position de chaque particule et leurs caractéristiquesphysiques à un instant "t". Du fait que les fichiers de sortie renseignent surtoutes les caractéristiques des particules à l’instant "t", il est possible d’arrêterle calcul en cours, et de le reprendre plus tard en utilisant l’option "partbegin"qui permet de recommencer le calcul à partir de n’importe quelle étape déjàcalculée. La machine sur laquelle on effectue le calcul n’est donc pas complè-tement bloquée pendant le calcul de la simulation.
Le nombre des fichiers bi2 de sortie est un des paramètres que l’on peutrégler. On peut effectivement régler le temps qui s’écoule entre deux étatscalculés (par exemple on met à jour l’état toutes les secondes) mais égalementle temps entre deux fichiers de sortie. Plus le laps de temps entre deux étapesde calculs est faible plus le calcul sera juste mais long. Les fichiers bi2 ainsicréés ne peuvent pas être directement visualisés. La dernière étape est celle del’analyse des résultats.
2.1.3 Analyse des résultats
Il existe deux outils pour l’analyse des résultats. Le premier consiste à trans-former les fichiers bi2 en fichier VTK, avec l’exécutable "PartVTK.exe", afinde permettre une visualisation du résultat obtenu. Le logiciel Paraview permetde visualiser ces VTK dans un espace en trois dimensions et a la particularitéde pouvoir charger l’ensemble des fichiers d’un test en même temps et d’enfaire la visualisation successive, ce qui donne une impression d’animation. Iloffre la possibilité de jouer l’ensemble, faire des pauses ou aller directement àune étape précise, tout en conservant la possibilité de déplacer la vue en troisdimensions alors que l’animation est toujours en cours. Il permet donc unevisualisation globale du modèle créé.
Le deuxième outil est l’exécutable "MeasureTool.exe". Il permet, à partirdes fichiers bi2, de sortir dans des fichiers CSV (Comma Separated Value) lescaractéristiques physiques de n’importe quel point de l’espace contenu dans lemodèle. Le fichier utilisé en entrée est un fichier de points qui détermine descoordonnées (x,y,z). Le fait que les particules ne se trouvent pas forcement enchaque instant sur ces points n’est pas un problème, car les caractéristiquessont calculées à partir des particules environnantes.
2.2 Développement d’une interface graphique pour DualS-PHysics
Dans le développement de mon projet, j’ai été amené à créer une interfacegraphique pour DualSPHysics (le code Matlab de cette interface se trouve enannexe (1)). L’interface graphique rend l’utilisation de cette suite de fichiersexécutables plus facile et plus instinctive. Le nombre de projets utilisant cemodèle augmentant dans l’entreprise, cette interface devient d’autant plus in-téressante. En effet, elle propose une approche plus intuitive et plus rapide del’utilisation du modèle, ce qui pourra satisfaire les débutants.
12
Projet de Fin d’Étude - Sylvain LOTTEAU
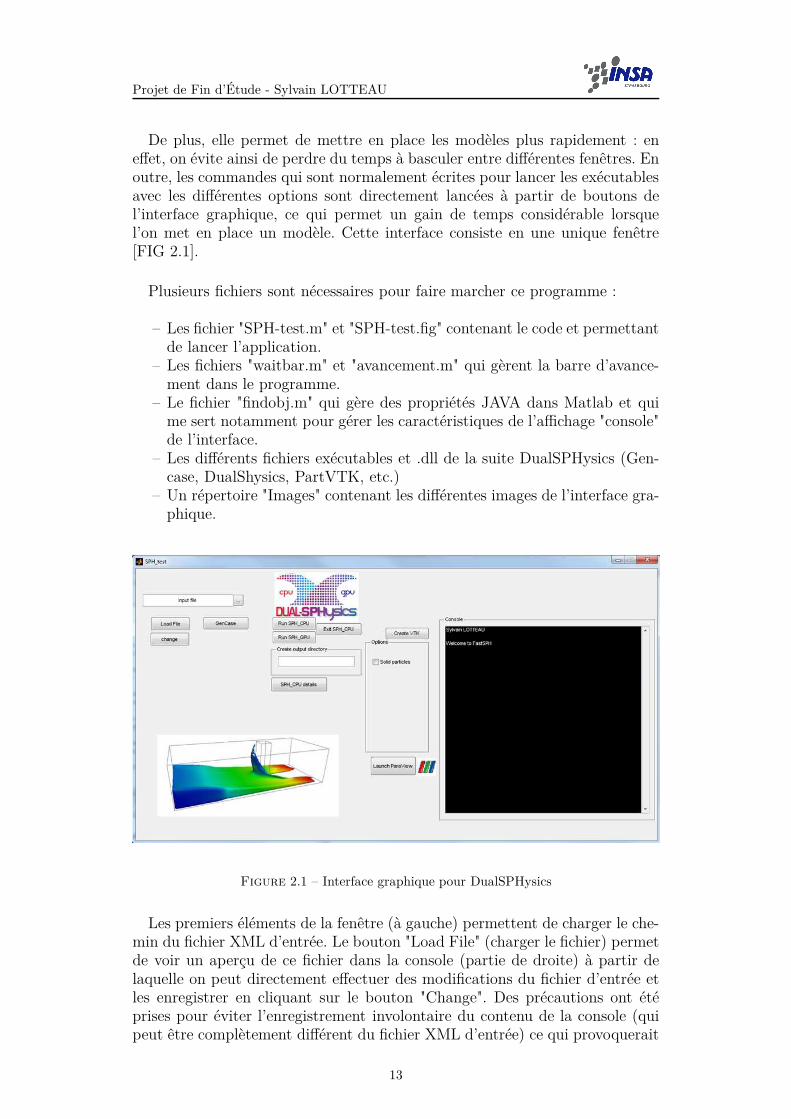
De plus, elle permet de mettre en place les modèles plus rapidement : eneffet, on évite ainsi de perdre du temps à basculer entre différentes fenêtres. Enoutre, les commandes qui sont normalement écrites pour lancer les exécutablesavec les différentes options sont directement lancées à partir de boutons del’interface graphique, ce qui permet un gain de temps considérable lorsquel’on met en place un modèle. Cette interface consiste en une unique fenêtre[FIG 2.1].
Plusieurs fichiers sont nécessaires pour faire marcher ce programme :
– Les fichier "SPH-test.m" et "SPH-test.fig" contenant le code et permettantde lancer l’application.
– Les fichiers "waitbar.m" et "avancement.m" qui gèrent la barre d’avance-ment dans le programme.
– Le fichier "findobj.m" qui gère des propriétés JAVA dans Matlab et quime sert notamment pour gérer les caractéristiques de l’affichage "console"de l’interface.
– Les différents fichiers exécutables et .dll de la suite DualSPHysics (Gen-case, DualShysics, PartVTK, etc.)
– Un répertoire "Images" contenant les différentes images de l’interface gra-phique.
Figure 2.1 – Interface graphique pour DualSPHysics
Les premiers éléments de la fenêtre (à gauche) permettent de charger le che-min du fichier XML d’entrée. Le bouton "Load File" (charger le fichier) permetde voir un aperçu de ce fichier dans la console (partie de droite) à partir delaquelle on peut directement effectuer des modifications du fichier d’entrée etles enregistrer en cliquant sur le bouton "Change". Des précautions ont étéprises pour éviter l’enregistrement involontaire du contenu de la console (quipeut être complètement différent du fichier XML d’entrée) ce qui provoquerait
13
Projet de Fin d’Étude - Sylvain LOTTEAU
la perte du fichiers de base. Le bouton "change" ne prend effet que si un fichierXML valide pour DualSPHysics est reconnu (message d’erreur "Le fichier sé-lectionné n’est pas un fichier XML valide"). L’option de garder une copie dufichier non modifié a aussi été prise. Une copie est donc directement enregistréedans un répertoire nommé "Backup" (sauvegarde).
Le programme ne garde cependant que le fichier tel qu’il était avant ladernière sauvegarde et ne permet donc pas de remonter plus loin dans les mo-difications apportées. Le dernier bouton de cette première série est "GenCase"qui va lancer le fichier exécutable du même nom. Le résultat (fichier de type.out) est affiché dans la console. Ce qui nous intéresse plus particulièrementdans ce résultat est le nombre de particules qui ont été créées. On peut ainsifaire une première vérification pour savoir si le nombre de particules n’est pastrop grand, trop faible ou égal à zéro (ce qui voudrait dire que le fichier d’en-trée a été mal paramétré). Ici intervient le bouton "Change" qui permet descorrections très rapides sur le fichier d’entrée, ceci sans changer de fenêtre.
La partie centrale de la fenêtre est consacrée au lancement du calcul dumouvement des particules fluides : l’utilisateur peut choisir deux options pourlancer l’exécutable "DualSphysics.exe" :
– Le bouton "Run SPH-CPU" lance le calcul en se servant uniquementdu processeur classique de l’ordinateur (sans utiliser le GPU (processeurgraphique)). Cette option est nécessaire car tous les ordinateurs ne sontpas équipés de processeurs graphiques compatibles (NVIDIA et CUDA).
– Le bouton "Run SPH-GPU" lance le calcul en utilisant le processeur gra-phique en plus du processeur classique.
L’utilisateur peut également choisir le nom du répertoire vers lequel les fi-chiers bi2 vont être créés. Si cette option n’est pas précisée, ceux-ci vont êtreenregistrés dans le répertoire où se trouve l’exécutable "DualSPHysics.exe". Ilest important de bien référencer l’ensemble des fichiers générés avec DualS-PHysics car chaque série de calculs compte en moyenne plusieurs centainesde nouveaux fichiers qui peuvent rapidement devenir encombrants. Le bouton"Exit-SPH" va permettre de stopper à tout moment l’exécution en cours deDualSPHysics, par exemple dans le cas où le temps de calcul serait trop longet que l’on désire changer les paramètres sans attendre la fin du premier cal-cul. Enfin le bouton "SPH-details" va ouvrir une barre d’avancement [FIG 2.2]indiquant le pourcentage du calcul réalisé et le temps restant.
14
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 2.2 – Barre d’avancement
Finalement, la partie de droite va permettre la création des VTK. L’exé-cutable "PartVTK.exe" comporte différentes options comme le choix des ca-ractéristiques physiques ou encore le choix des types de particules (solides,fluides, mobiles) qui vont être enregistrés. Dans mon interface graphique,"PartVTK.exe" est paramétré pour enregistrer toutes les caractéristiques phy-siques et le choix d’enregistrer les particules solides est laissé à l’utilisateur. Eneffet, on préférera souvent la visualisation de l’environnement solide sous formecomplète (en chargeant les fichiers STL dans Paraview) et non sous forme departicules.
2.3 Blender : logiciel de modélisation en trois dimen-sions
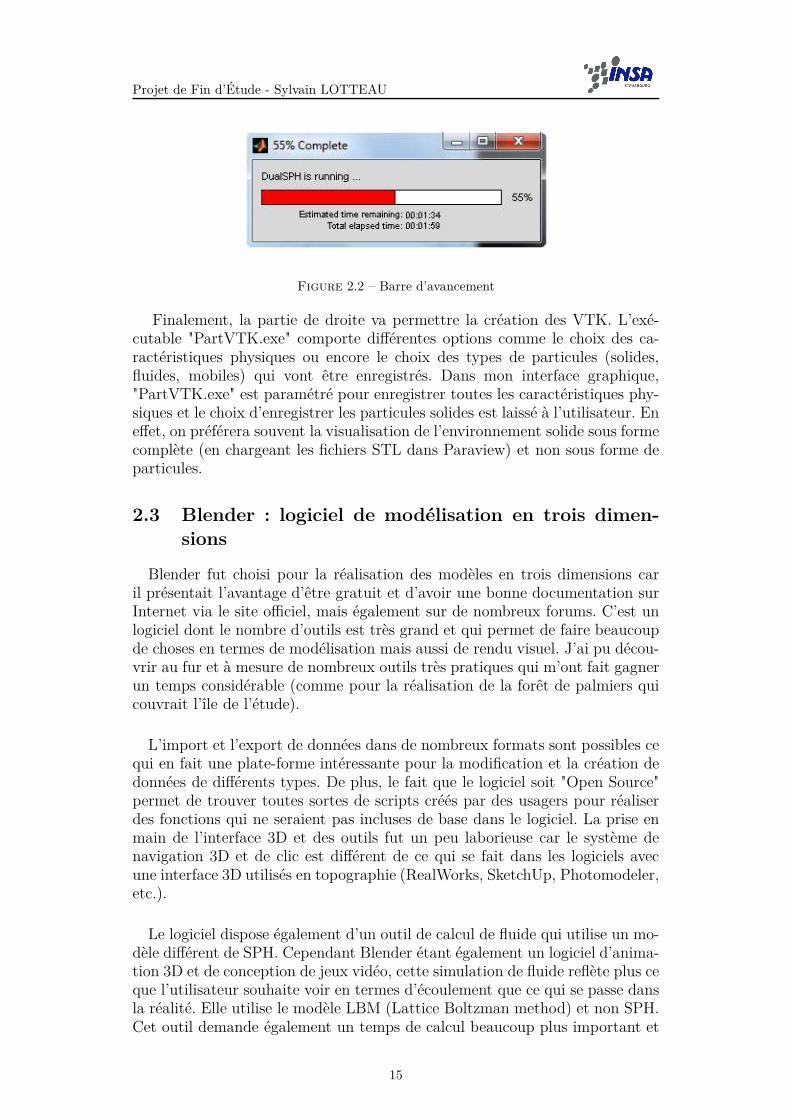
Blender fut choisi pour la réalisation des modèles en trois dimensions caril présentait l’avantage d’être gratuit et d’avoir une bonne documentation surInternet via le site officiel, mais également sur de nombreux forums. C’est unlogiciel dont le nombre d’outils est très grand et qui permet de faire beaucoupde choses en termes de modélisation mais aussi de rendu visuel. J’ai pu décou-vrir au fur et à mesure de nombreux outils très pratiques qui m’ont fait gagnerun temps considérable (comme pour la réalisation de la forêt de palmiers quicouvrait l’île de l’étude).
L’import et l’export de données dans de nombreux formats sont possibles cequi en fait une plate-forme intéressante pour la modification et la création dedonnées de différents types. De plus, le fait que le logiciel soit "Open Source"permet de trouver toutes sortes de scripts créés par des usagers pour réaliserdes fonctions qui ne seraient pas incluses de base dans le logiciel. La prise enmain de l’interface 3D et des outils fut un peu laborieuse car le système denavigation 3D et de clic est différent de ce qui se fait dans les logiciels avecune interface 3D utilisés en topographie (RealWorks, SketchUp, Photomodeler,etc.).
Le logiciel dispose également d’un outil de calcul de fluide qui utilise un mo-dèle différent de SPH. Cependant Blender étant également un logiciel d’anima-tion 3D et de conception de jeux vidéo, cette simulation de fluide reflète plus ceque l’utilisateur souhaite voir en termes d’écoulement que ce qui se passe dansla réalité. Elle utilise le modèle LBM (Lattice Boltzman method) et non SPH.Cet outil demande également un temps de calcul beaucoup plus important et
15
Projet de Fin d’Étude - Sylvain LOTTEAU
n’est pas très adapté pour un nombre élevé de particules (plusieurs millions).C’est pourquoi il n’a pas été utilisé dans le projet.
Blender a donc uniquement servi d’outil de modélisation. J’ai égalementessayé de réaliser des rendus plus soignés et texturés pour les résultats dessimulations réalisées pour le projet, mais je me suis heurté à différents pro-blèmes (impossibilité de charger tous les fichiers VTK d’un coup) qui m’ontobligé à garder une visualisation "simple" sous Paraview.
Figure 2.3 – L’environnement du logiciel Blender
2.4 Paraview : logiciel de visualisation
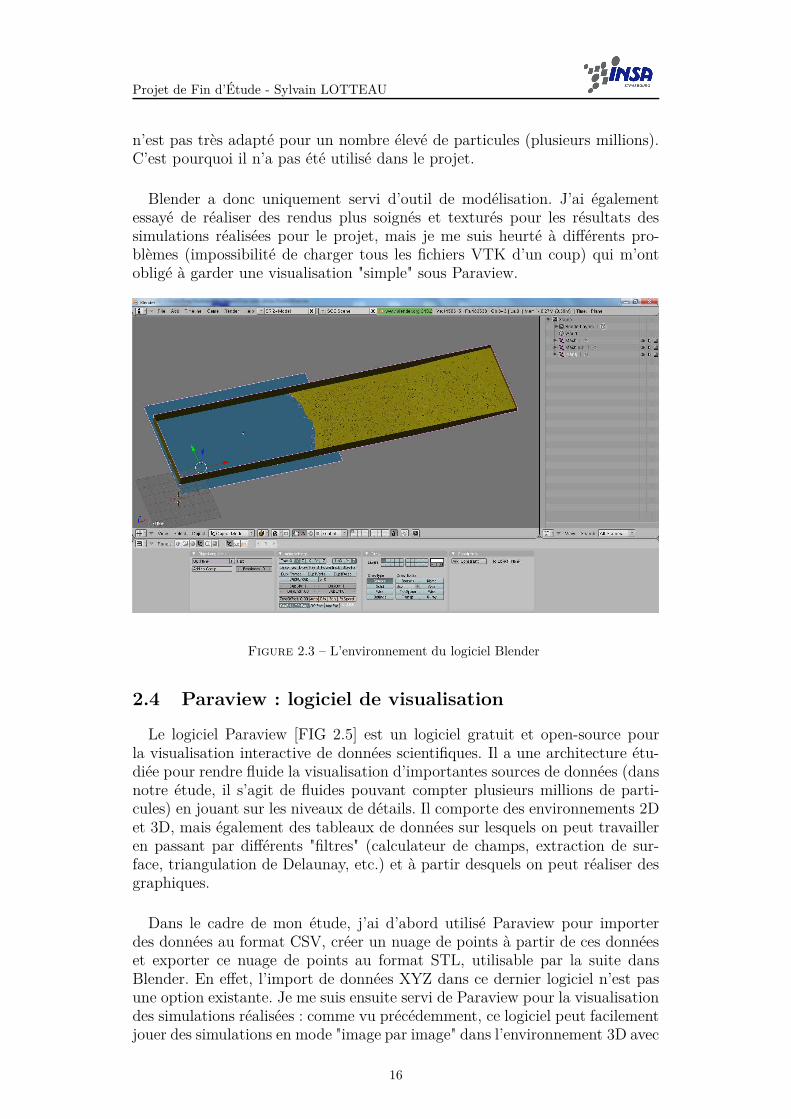
Le logiciel Paraview [FIG 2.5] est un logiciel gratuit et open-source pourla visualisation interactive de données scientifiques. Il a une architecture étu-diée pour rendre fluide la visualisation d’importantes sources de données (dansnotre étude, il s’agit de fluides pouvant compter plusieurs millions de parti-cules) en jouant sur les niveaux de détails. Il comporte des environnements 2Det 3D, mais également des tableaux de données sur lesquels on peut travailleren passant par différents "filtres" (calculateur de champs, extraction de sur-face, triangulation de Delaunay, etc.) et à partir desquels on peut réaliser desgraphiques.
Dans le cadre de mon étude, j’ai d’abord utilisé Paraview pour importerdes données au format CSV, créer un nuage de points à partir de ces donnéeset exporter ce nuage de points au format STL, utilisable par la suite dansBlender. En effet, l’import de données XYZ dans ce dernier logiciel n’est pasune option existante. Je me suis ensuite servi de Paraview pour la visualisationdes simulations réalisées : comme vu précédemment, ce logiciel peut facilementjouer des simulations en mode "image par image" dans l’environnement 3D avec
16
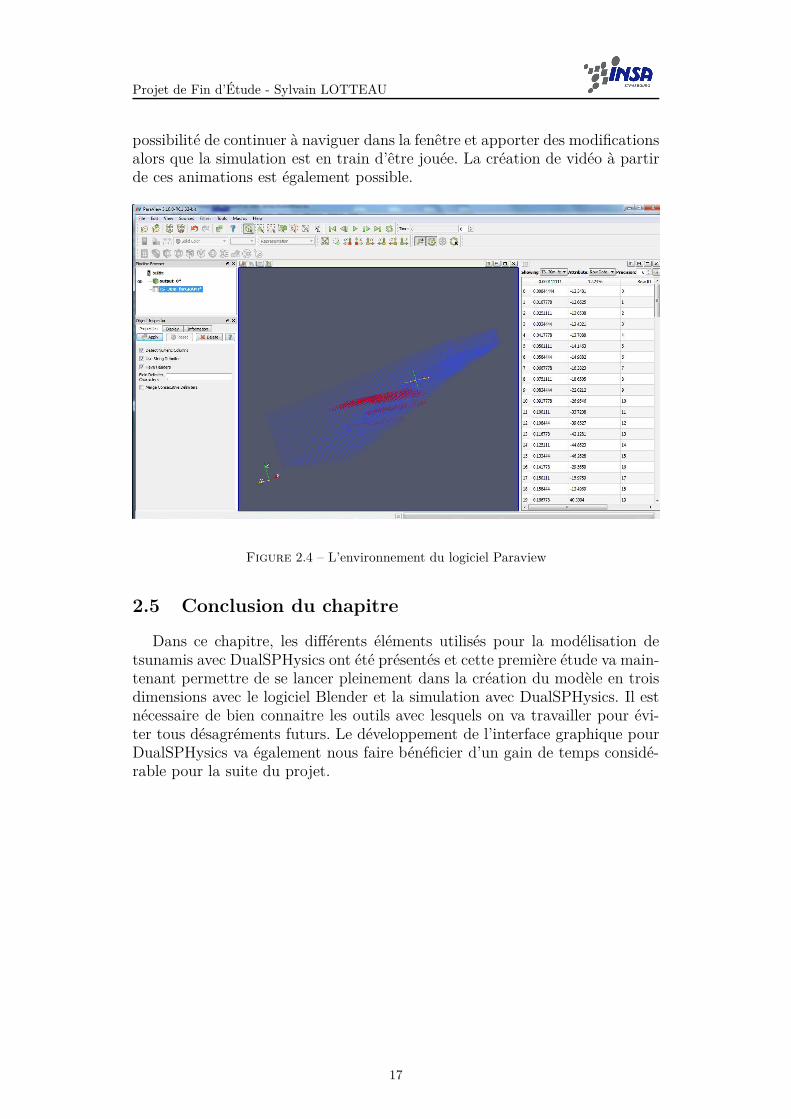
Projet de Fin d’Étude - Sylvain LOTTEAU
possibilité de continuer à naviguer dans la fenêtre et apporter des modificationsalors que la simulation est en train d’être jouée. La création de vidéo à partirde ces animations est également possible.
Figure 2.4 – L’environnement du logiciel Paraview
2.5 Conclusion du chapitre
Dans ce chapitre, les différents éléments utilisés pour la modélisation detsunamis avec DualSPHysics ont été présentés et cette première étude va main-tenant permettre de se lancer pleinement dans la création du modèle en troisdimensions avec le logiciel Blender et la simulation avec DualSPHysics. Il estnécessaire de bien connaitre les outils avec lesquels on va travailler pour évi-ter tous désagréments futurs. Le développement de l’interface graphique pourDualSPHysics va également nous faire bénéficier d’un gain de temps considé-rable pour la suite du projet.
17
Projet de Fin d’Étude - Sylvain LOTTEAU
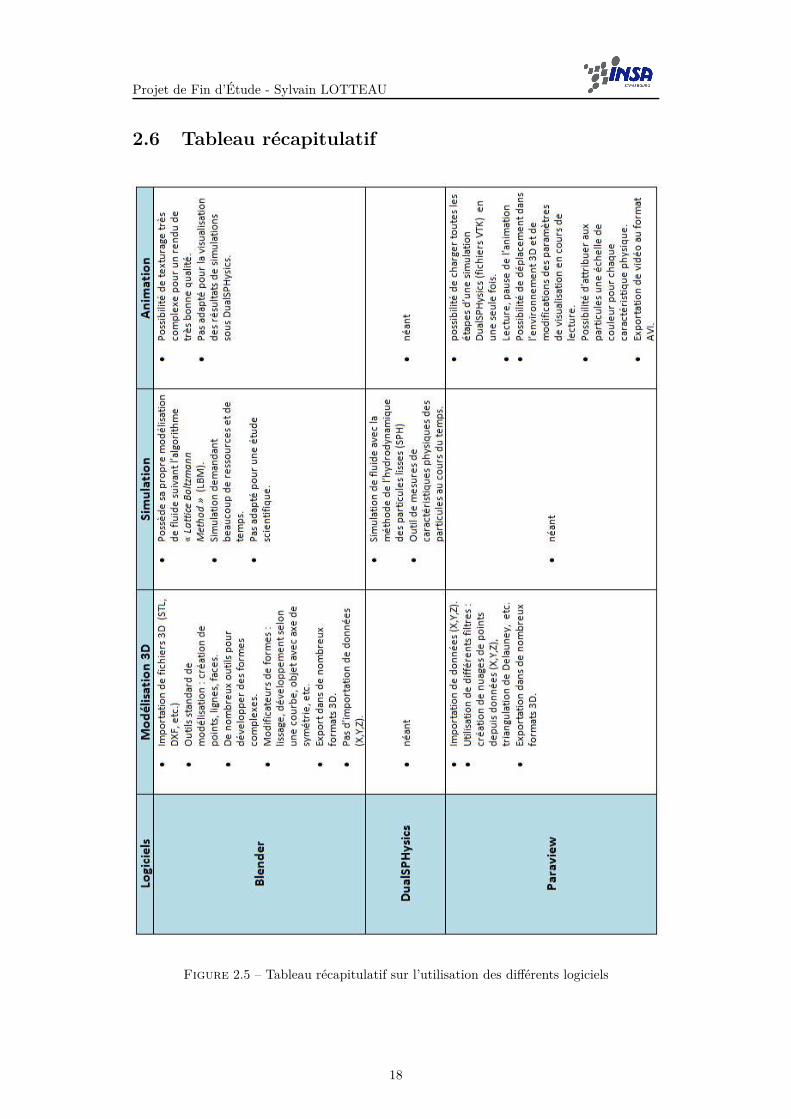
2.6 Tableau récapitulatif
Figure 2.5 – Tableau récapitulatif sur l’utilisation des différents logiciels
18
Chapitre 3
Création du modèle 3D
Pour la modélisation de tsunamis et de vagues en général, la précision de lamodélisation du fond marin joue un rôle très important. En effet, l’amplitudede la vague s’accroit considérablement lorsque que le milieu devient moinsprofond, et donc la taille et la forme de la vague de tsunami sont liées à laforme du fond marin. De même, pour obtenir un effet se rapprochant de laréalité au niveau des zones inondées, la qualité de la topographie joue unrôle important. Ce chapitre est consacré à la mise en place du modèle 3D àpartir des données de bases, à l’addition de conditions spécifiques pour pouvoirutiliser ce modèle dans Dualsphyics, puis à une analyse de la précision de cemodèle.
3.1 Les données brutes
Les données de départ que j’ai utilisées pour créer le modèle sont de dif-férentes natures. Une grille d’élévation de la région, des profils en long de laplage étudiée ainsi qu’une série de photos prises depuis un hélicoptère ont étéles principales données que j’ai pu utiliser.
3.1.1 Matrice de valeur d’élévation
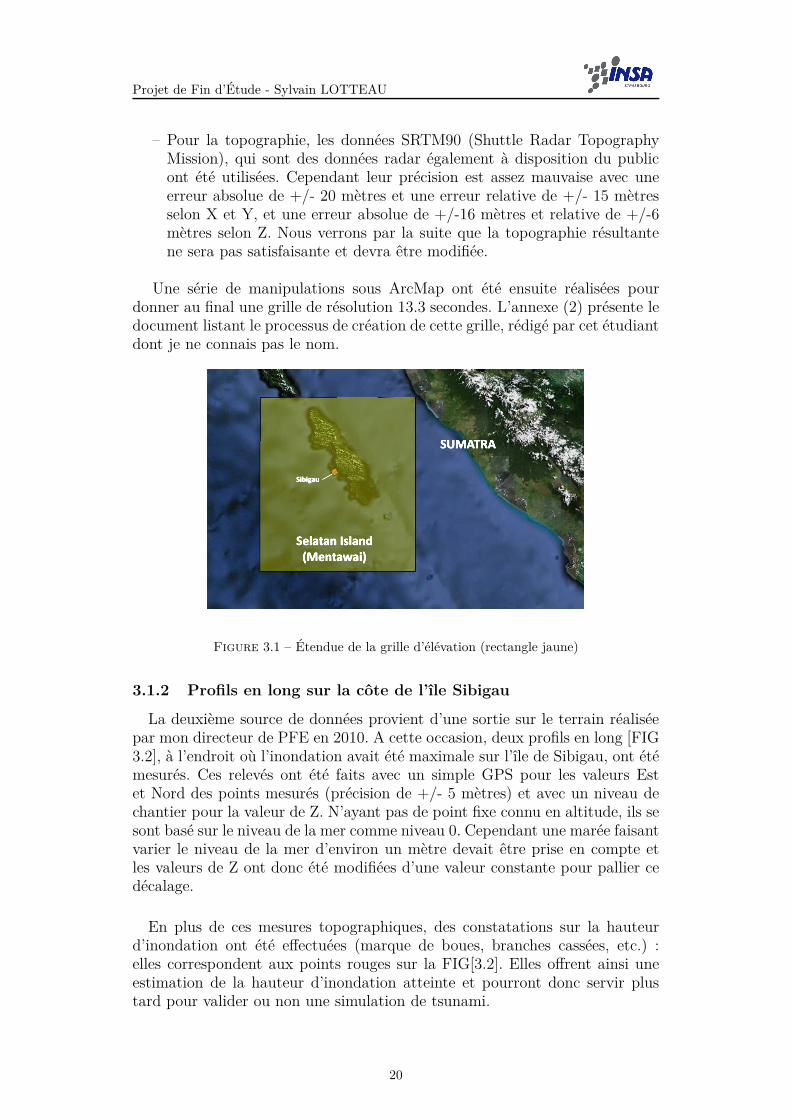
Tout d’abord les premières données dont j’ai disposé provenaient du tra-vail d’un autre étudiant externe à l’entreprise : une matrice contenant la va-leur Z de points d’une grille de résolution 13.3 secondes sexagésimales surl’ellipsoïde WGS84 (ce qui correspond à une résolution spatiale d’environ 41mètres). Cette grille couvre une région allant des longitudes 99.5081481°E à100.9059245°E et des latitudes -3.6918519°N à -2.3951864°N [FIG 3.1]. Elle aété construite à partir de données provenant de différentes sources :
– Pour la bathymétrie, les données GEBCO (General Bathymetric Chart ofthe Oceans) mises à disposition du public ont été utilisées. Ces donnéesont une résolution spatiale de 2 minutes sexagésimales et la précision de lavaleur de Z est égale à 0.5% de la valeur de la profondeur (à 1000 mètresde profondeur, la précision sera de +/- 5 mètres). L’auteur a égalementutilisé des cartes nautiques d’Indonésie (1/250000) dont il a digitalisé lescourbes de niveaux.
19
Projet de Fin d’Étude - Sylvain LOTTEAU
– Pour la topographie, les données SRTM90 (Shuttle Radar TopographyMission), qui sont des données radar également à disposition du publicont été utilisées. Cependant leur précision est assez mauvaise avec uneerreur absolue de +/- 20 mètres et une erreur relative de +/- 15 mètresselon X et Y, et une erreur absolue de +/-16 mètres et relative de +/-6mètres selon Z. Nous verrons par la suite que la topographie résultantene sera pas satisfaisante et devra être modifiée.
Une série de manipulations sous ArcMap ont été ensuite réalisées pourdonner au final une grille de résolution 13.3 secondes. L’annexe (2) présente ledocument listant le processus de création de cette grille, rédigé par cet étudiantdont je ne connais pas le nom.
Figure 3.1 – Étendue de la grille d’élévation (rectangle jaune)
3.1.2 Profils en long sur la côte de l’île Sibigau
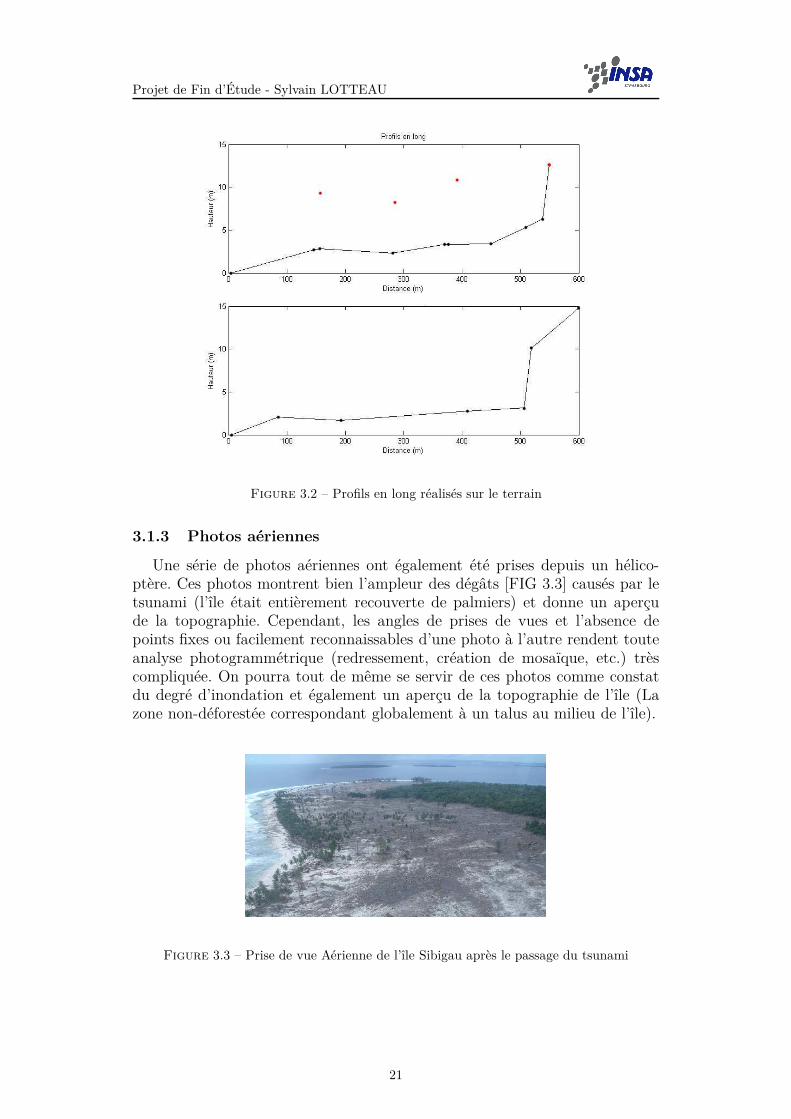
La deuxième source de données provient d’une sortie sur le terrain réaliséepar mon directeur de PFE en 2010. A cette occasion, deux profils en long [FIG3.2], à l’endroit où l’inondation avait été maximale sur l’île de Sibigau, ont étémesurés. Ces relevés ont été faits avec un simple GPS pour les valeurs Estet Nord des points mesurés (précision de +/- 5 mètres) et avec un niveau dechantier pour la valeur de Z. N’ayant pas de point fixe connu en altitude, ils sesont basé sur le niveau de la mer comme niveau 0. Cependant une marée faisantvarier le niveau de la mer d’environ un mètre devait être prise en compte etles valeurs de Z ont donc été modifiées d’une valeur constante pour pallier cedécalage.
En plus de ces mesures topographiques, des constatations sur la hauteurd’inondation ont été effectuées (marque de boues, branches cassées, etc.) :elles correspondent aux points rouges sur la FIG[3.2]. Elles offrent ainsi uneestimation de la hauteur d’inondation atteinte et pourront donc servir plustard pour valider ou non une simulation de tsunami.
20
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 3.2 – Profils en long réalisés sur le terrain
3.1.3 Photos aériennes
Une série de photos aériennes ont également été prises depuis un hélico-ptère. Ces photos montrent bien l’ampleur des dégâts [FIG 3.3] causés par letsunami (l’île était entièrement recouverte de palmiers) et donne un aperçude la topographie. Cependant, les angles de prises de vues et l’absence depoints fixes ou facilement reconnaissables d’une photo à l’autre rendent touteanalyse photogrammétrique (redressement, création de mosaïque, etc.) trèscompliquée. On pourra tout de même se servir de ces photos comme constatdu degré d’inondation et également un aperçu de la topographie de l’île (Lazone non-déforestée correspondant globalement à un talus au milieu de l’île).
Figure 3.3 – Prise de vue Aérienne de l’île Sibigau après le passage du tsunami
21
Projet de Fin d’Étude - Sylvain LOTTEAU
3.2 Opérations sur les fichiers bruts
3.2.1 Découpage de la matrice initiale et transformation en fichier(E,N,Z)
La matrice d’élévation couvrant une surface trop importante, j’ai d’abordréduit le nombre de données à la zone d’intérêt. A cet effet, j’ai créé un pro-gramme sous Matlab (annexe (3)). En entrée, on charge la matrice d’élévationet un fichier texte dans lequel on définit par quatre points de coordonnéesEst et Nord la zone que l’on veut garder. Les coordonnées Est et Nord de cesquatre points sont relevées à partir de Google Earth.
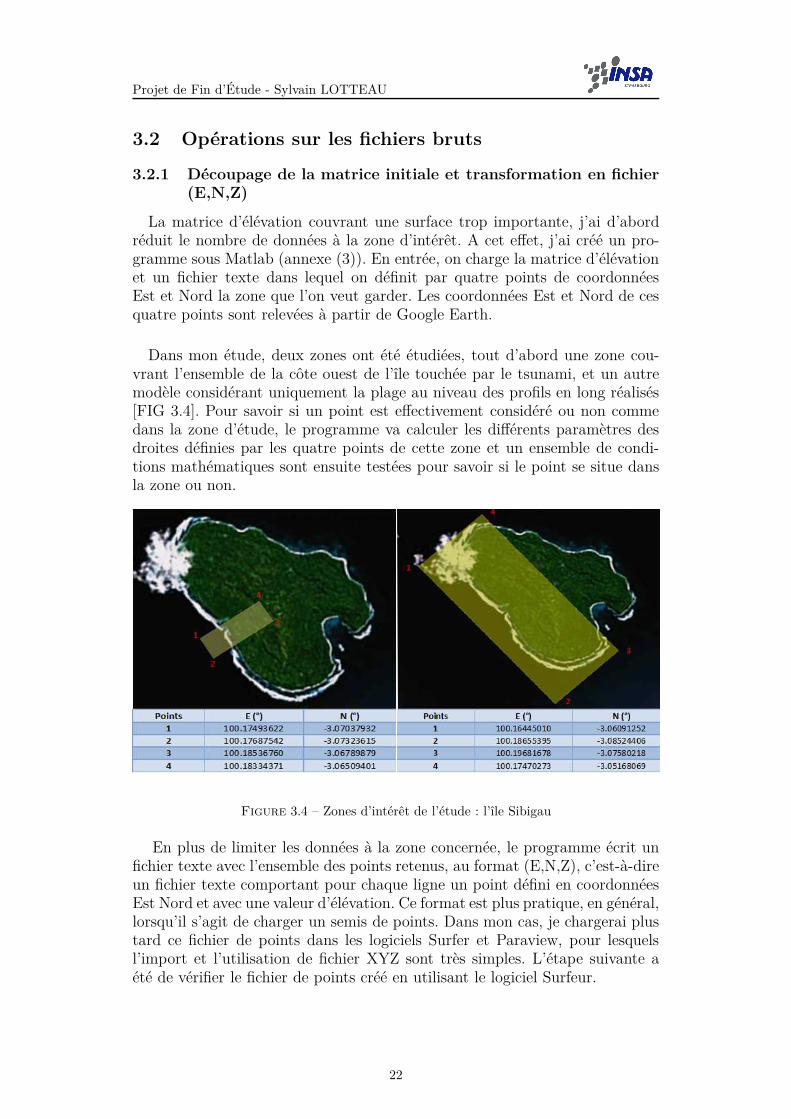
Dans mon étude, deux zones ont été étudiées, tout d’abord une zone cou-vrant l’ensemble de la côte ouest de l’île touchée par le tsunami, et un autremodèle considérant uniquement la plage au niveau des profils en long réalisés[FIG 3.4]. Pour savoir si un point est effectivement considéré ou non commedans la zone d’étude, le programme va calculer les différents paramètres desdroites définies par les quatre points de cette zone et un ensemble de condi-tions mathématiques sont ensuite testées pour savoir si le point se situe dansla zone ou non.
Figure 3.4 – Zones d’intérêt de l’étude : l’île Sibigau
En plus de limiter les données à la zone concernée, le programme écrit unfichier texte avec l’ensemble des points retenus, au format (E,N,Z), c’est-à-direun fichier texte comportant pour chaque ligne un point défini en coordonnéesEst Nord et avec une valeur d’élévation. Ce format est plus pratique, en général,lorsqu’il s’agit de charger un semis de points. Dans mon cas, je chargerai plustard ce fichier de points dans les logiciels Surfer et Paraview, pour lesquelsl’import et l’utilisation de fichier XYZ sont très simples. L’étape suivante aété de vérifier le fichier de points créé en utilisant le logiciel Surfeur.
22
Projet de Fin d’Étude - Sylvain LOTTEAU
3.2.2 Modification de la matrice d’élévation sous Surfer
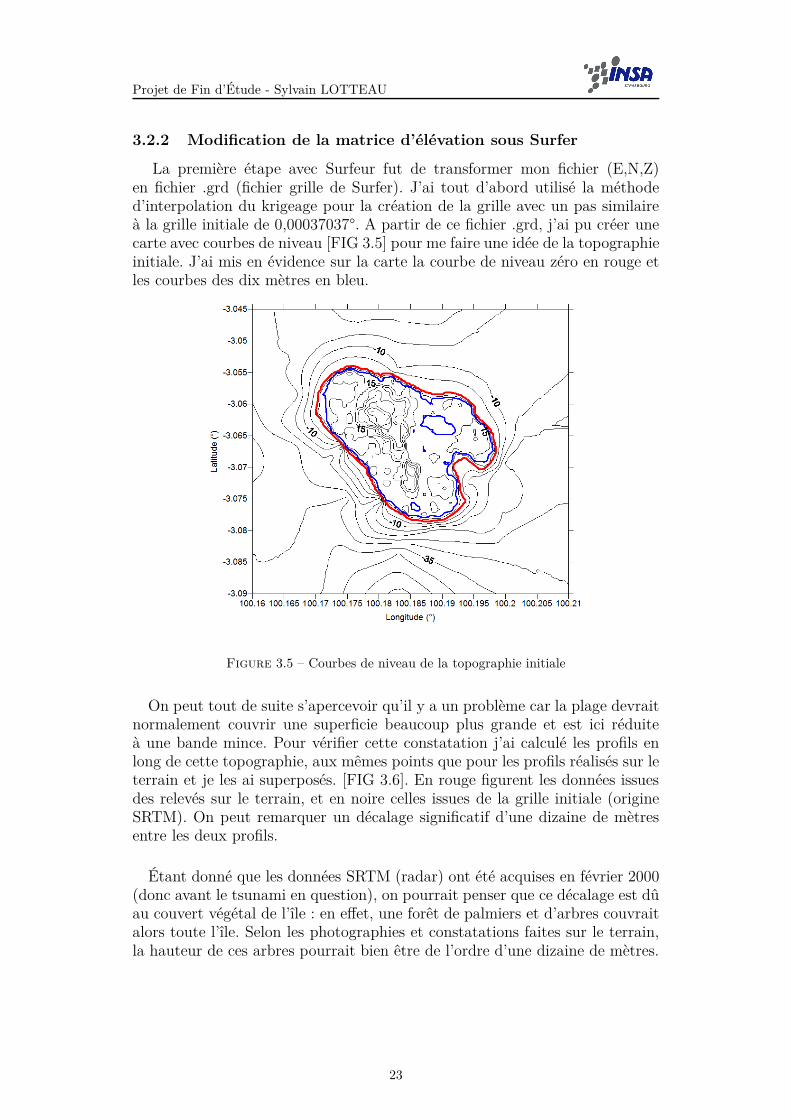
La première étape avec Surfeur fut de transformer mon fichier (E,N,Z)en fichier .grd (fichier grille de Surfer). J’ai tout d’abord utilisé la méthoded’interpolation du krigeage pour la création de la grille avec un pas similaireà la grille initiale de 0,00037037°. A partir de ce fichier .grd, j’ai pu créer unecarte avec courbes de niveau [FIG 3.5] pour me faire une idée de la topographieinitiale. J’ai mis en évidence sur la carte la courbe de niveau zéro en rouge etles courbes des dix mètres en bleu.
Figure 3.5 – Courbes de niveau de la topographie initiale
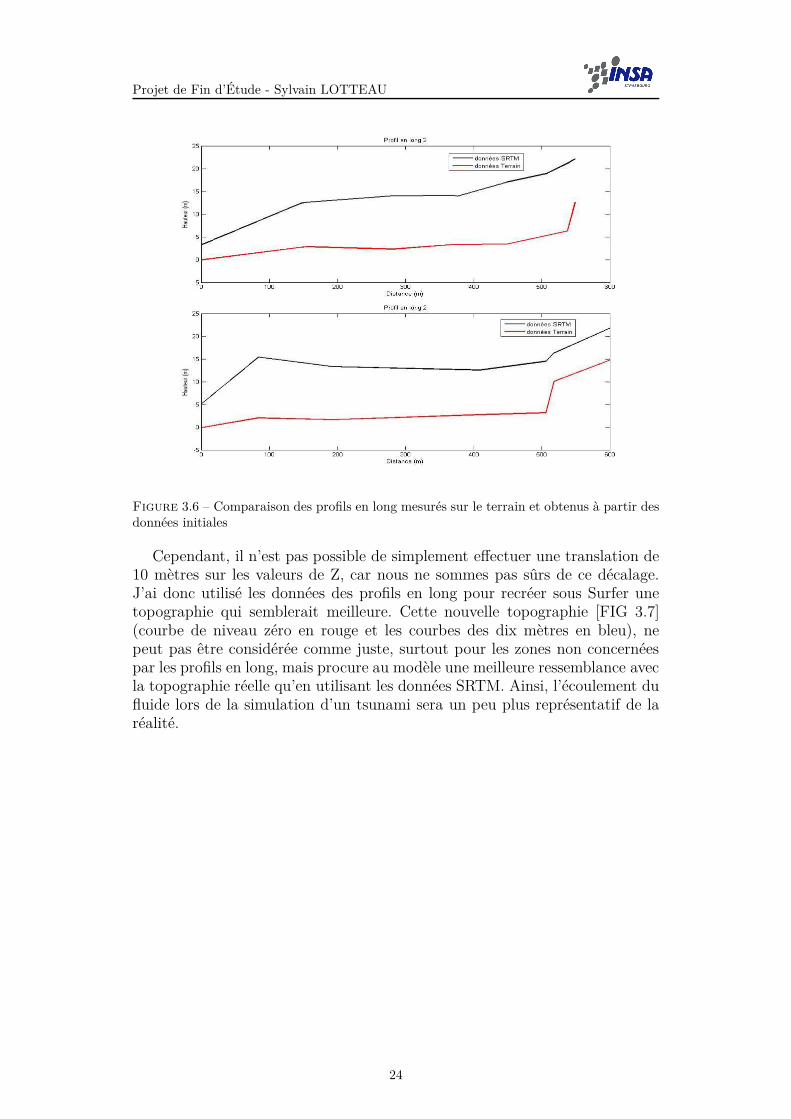
On peut tout de suite s’apercevoir qu’il y a un problème car la plage devraitnormalement couvrir une superficie beaucoup plus grande et est ici réduiteà une bande mince. Pour vérifier cette constatation j’ai calculé les profils enlong de cette topographie, aux mêmes points que pour les profils réalisés sur leterrain et je les ai superposés. [FIG 3.6]. En rouge figurent les données issuesdes relevés sur le terrain, et en noire celles issues de la grille initiale (origineSRTM). On peut remarquer un décalage significatif d’une dizaine de mètresentre les deux profils.
Étant donné que les données SRTM (radar) ont été acquises en février 2000(donc avant le tsunami en question), on pourrait penser que ce décalage est dûau couvert végétal de l’île : en effet, une forêt de palmiers et d’arbres couvraitalors toute l’île. Selon les photographies et constatations faites sur le terrain,la hauteur de ces arbres pourrait bien être de l’ordre d’une dizaine de mètres.
23
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 3.6 – Comparaison des profils en long mesurés sur le terrain et obtenus à partir desdonnées initiales
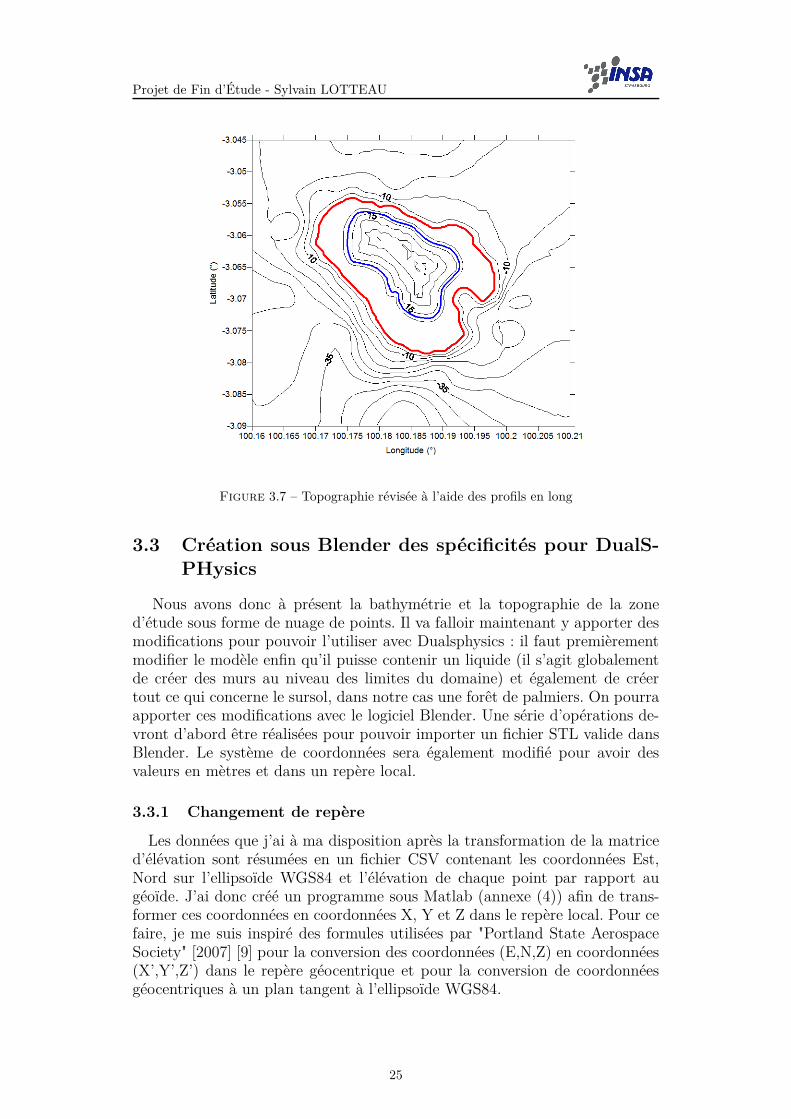
Cependant, il n’est pas possible de simplement effectuer une translation de10 mètres sur les valeurs de Z, car nous ne sommes pas sûrs de ce décalage.J’ai donc utilisé les données des profils en long pour recréer sous Surfer unetopographie qui semblerait meilleure. Cette nouvelle topographie [FIG 3.7](courbe de niveau zéro en rouge et les courbes des dix mètres en bleu), nepeut pas être considérée comme juste, surtout pour les zones non concernéespar les profils en long, mais procure au modèle une meilleure ressemblance avecla topographie réelle qu’en utilisant les données SRTM. Ainsi, l’écoulement dufluide lors de la simulation d’un tsunami sera un peu plus représentatif de laréalité.
24
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 3.7 – Topographie révisée à l’aide des profils en long
3.3 Création sous Blender des spécificités pour DualS-PHysics
Nous avons donc à présent la bathymétrie et la topographie de la zoned’étude sous forme de nuage de points. Il va falloir maintenant y apporter desmodifications pour pouvoir l’utiliser avec Dualsphysics : il faut premièrementmodifier le modèle enfin qu’il puisse contenir un liquide (il s’agit globalementde créer des murs au niveau des limites du domaine) et également de créertout ce qui concerne le sursol, dans notre cas une forêt de palmiers. On pourraapporter ces modifications avec le logiciel Blender. Une série d’opérations de-vront d’abord être réalisées pour pouvoir importer un fichier STL valide dansBlender. Le système de coordonnées sera également modifié pour avoir desvaleurs en mètres et dans un repère local.
3.3.1 Changement de repère
Les données que j’ai à ma disposition après la transformation de la matriced’élévation sont résumées en un fichier CSV contenant les coordonnées Est,Nord sur l’ellipsoïde WGS84 et l’élévation de chaque point par rapport augéoïde. J’ai donc créé un programme sous Matlab (annexe (4)) afin de trans-former ces coordonnées en coordonnées X, Y et Z dans le repère local. Pour cefaire, je me suis inspiré des formules utilisées par "Portland State AerospaceSociety" [2007] [9] pour la conversion des coordonnées (E,N,Z) en coordonnées(X’,Y’,Z’) dans le repère géocentrique et pour la conversion de coordonnéesgéocentriques à un plan tangent à l’ellipsoïde WGS84.
25

Projet de Fin d’Étude - Sylvain LOTTEAU
Le programme considère en entrée une matrice comportant les coordon-nées (E,N,Z) à transformer. La [FIG 3.8] présente une coupe méridienne del’ellipsoïde WGS84 : les formules (3.1) sont utilisées pour passer des coordon-nées (E,N,Z) à (X’,Y’,Z’) dans le repère géocentrique et (3.2) pour passer descoordonnées (X’,Y’,Z’) au repère local tangent (X,Y,Z), avec (X ′
0, Y ′
0, Z ′
0) les
coordonnées du point de tangence.
Figure 3.8 – Coupe méridienne de l’ellipsoïde WGS84 (Portland State Aerospace Society[2007] [9]
X ′ = (h + N) cos(λ) cos(φ)Y ′ = (h + N) cos(λ) sin(φ)Z ′ = (h + (1 − e2)N)sin(λ)
(3.1)
XYZ
=
− sin(φ) cos(φ) 0− cos(φ) sin(λ) − sin(φ) sin(λ) cos(λ)cos(λ) cos(φ) cos(λ) sin(φ) sin(λ)
.
X ′ − X ′
0
Y ′ − Y ′
0
Z ′ − Z ′
0
(3.2)
3.3.2 Importation des données dans Blender
Pour réaliser l’importation des données dans Blender, je suis donc d’abordpassé par Paraview. Une fois que le fichier (X,Y,Z) des points topographiques etbathymétriques fut réalisé, ces données au format CSV ont pu être importéesdans le logiciel. Nous avons donc récupéré un nuage de points : je me suiségalement servi de Paraview pour créer la surface avec l’outil de triangulationde Delaunay 2D. Les paramètres "tolérance", "alpha" et "offset" ont été réglés àzéro pour obtenir la triangulation suivante [FIG 3.9] : le nuage de points ayantune répartition régulière, le résultat de cette triangulation ne présente aucunartefact.
26
Projet de Fin d’Étude - Sylvain LOTTEAU
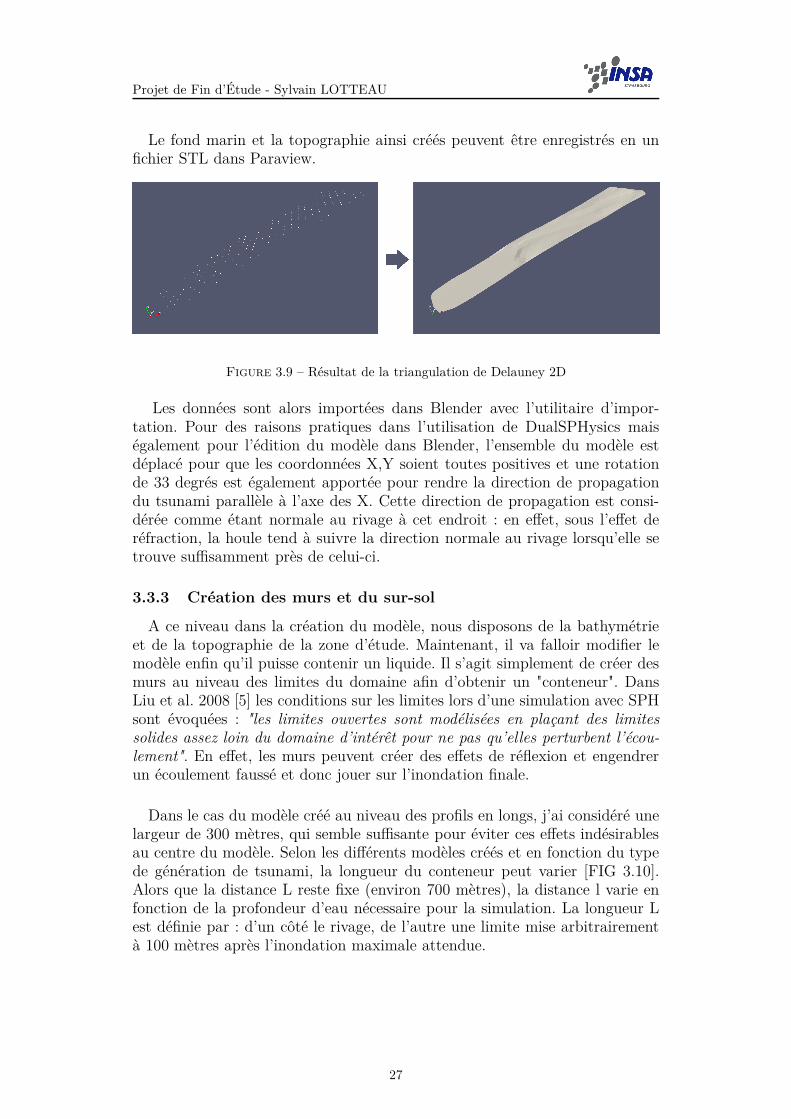
Le fond marin et la topographie ainsi créés peuvent être enregistrés en unfichier STL dans Paraview.
Figure 3.9 – Résultat de la triangulation de Delauney 2D
Les données sont alors importées dans Blender avec l’utilitaire d’impor-tation. Pour des raisons pratiques dans l’utilisation de DualSPHysics maiségalement pour l’édition du modèle dans Blender, l’ensemble du modèle estdéplacé pour que les coordonnées X,Y soient toutes positives et une rotationde 33 degrés est également apportée pour rendre la direction de propagationdu tsunami parallèle à l’axe des X. Cette direction de propagation est consi-dérée comme étant normale au rivage à cet endroit : en effet, sous l’effet deréfraction, la houle tend à suivre la direction normale au rivage lorsqu’elle setrouve suffisamment près de celui-ci.
3.3.3 Création des murs et du sur-sol
A ce niveau dans la création du modèle, nous disposons de la bathymétrieet de la topographie de la zone d’étude. Maintenant, il va falloir modifier lemodèle enfin qu’il puisse contenir un liquide. Il s’agit simplement de créer desmurs au niveau des limites du domaine afin d’obtenir un "conteneur". DansLiu et al. 2008 [5] les conditions sur les limites lors d’une simulation avec SPHsont évoquées : "les limites ouvertes sont modélisées en plaçant des limitessolides assez loin du domaine d’intérêt pour ne pas qu’elles perturbent l’écou-lement". En effet, les murs peuvent créer des effets de réflexion et engendrerun écoulement faussé et donc jouer sur l’inondation finale.
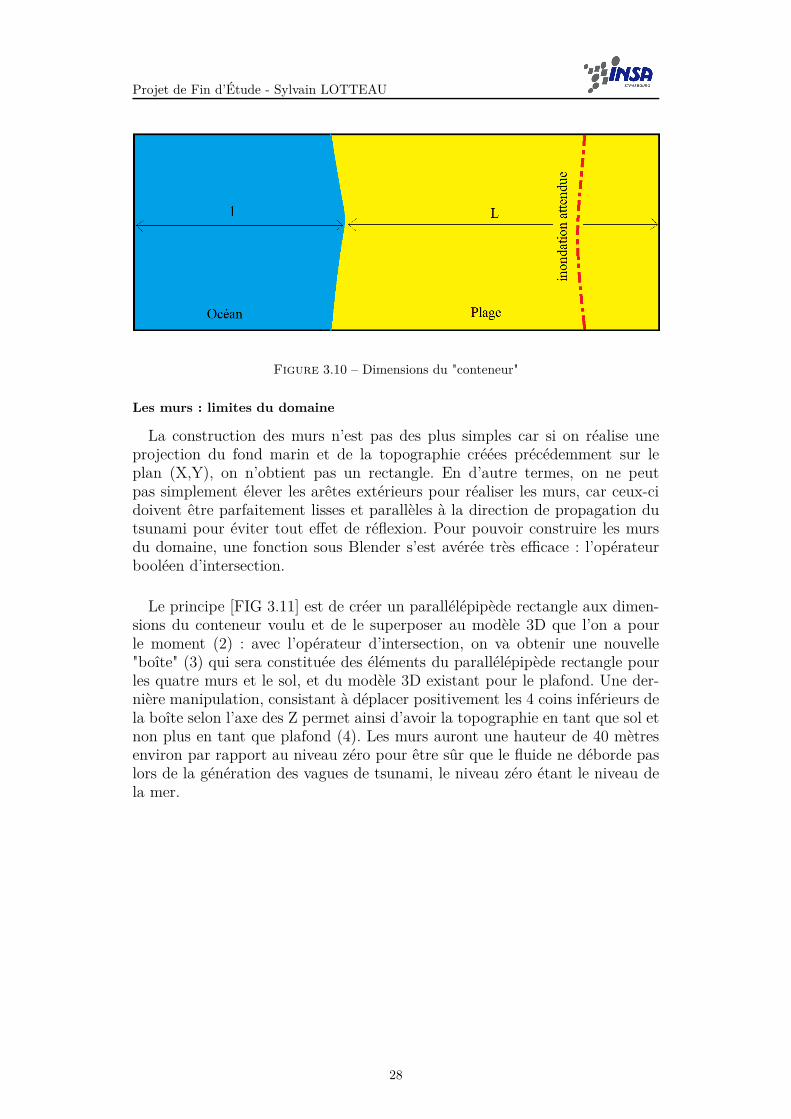
Dans le cas du modèle créé au niveau des profils en longs, j’ai considéré unelargeur de 300 mètres, qui semble suffisante pour éviter ces effets indésirablesau centre du modèle. Selon les différents modèles créés et en fonction du typede génération de tsunami, la longueur du conteneur peut varier [FIG 3.10].Alors que la distance L reste fixe (environ 700 mètres), la distance l varie enfonction de la profondeur d’eau nécessaire pour la simulation. La longueur Lest définie par : d’un côté le rivage, de l’autre une limite mise arbitrairementà 100 mètres après l’inondation maximale attendue.
27
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 3.10 – Dimensions du "conteneur"
Les murs : limites du domaine
La construction des murs n’est pas des plus simples car si on réalise uneprojection du fond marin et de la topographie créées précédemment sur leplan (X,Y), on n’obtient pas un rectangle. En d’autre termes, on ne peutpas simplement élever les arêtes extérieurs pour réaliser les murs, car ceux-cidoivent être parfaitement lisses et parallèles à la direction de propagation dutsunami pour éviter tout effet de réflexion. Pour pouvoir construire les mursdu domaine, une fonction sous Blender s’est avérée très efficace : l’opérateurbooléen d’intersection.
Le principe [FIG 3.11] est de créer un parallélépipède rectangle aux dimen-sions du conteneur voulu et de le superposer au modèle 3D que l’on a pourle moment (2) : avec l’opérateur d’intersection, on va obtenir une nouvelle"boîte" (3) qui sera constituée des éléments du parallélépipède rectangle pourles quatre murs et le sol, et du modèle 3D existant pour le plafond. Une der-nière manipulation, consistant à déplacer positivement les 4 coins inférieurs dela boîte selon l’axe des Z permet ainsi d’avoir la topographie en tant que sol etnon plus en tant que plafond (4). Les murs auront une hauteur de 40 mètresenviron par rapport au niveau zéro pour être sûr que le fluide ne déborde paslors de la génération des vagues de tsunami, le niveau zéro étant le niveau dela mer.
28

Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 3.11 – Création des limites du modèle
Le modèle est alors prêt pour les premiers tests. On peut cependant vouloirrajouter des éléments du sursol, pour essayer de se rapprocher encore plus dela réalité.
Le sur-sol : forêt de palmiers
L’île de Sibigau était recouverte de palmiers avant le tsunami. Connaîtrela position et la forme exacte de chaque palmier sur la plage étant un tra-vail beaucoup trop important voire impossible à réaliser, mais également nonessentiel pour une première approche de simulation de tsunamis avec DualS-PHysics, j’ai donc fait quelques conjectures sur la manière de créer cette forêt,à l’aide des photos et de la description faite de celle-ci par mon directeur dePFE. Les caractéristiques choisies sont donc les suivantes :
– Une hauteur d’arbre de 5 mètres environ.– Une circonférence de tronc de 50 centimètres.– Un espacement entre les arbres d’environ 5 mètres.
On peut également noter que la forêt commence pratiquement au niveaudu rivage. En effet, les marées étant très faibles à cet endroit du globe, del’ordre du mètre (source : swellmap@[2011] [10]), la végétation peut poussertrès près de l’eau. Un outil de Blender permet de réaliser une importante fo-rêt très rapidement : il s’agit de l’outil appelé "hair" (cheveux). Il permet dereproduire aléatoirement et avec une densité choisie, un objet sur toute unesurface. Avec les bons choix de paramètres, j’ai donc pu répliquer un modèled’arbres préalablement créé sur toute la surface souhaitée [FIG 3.12]. Le mo-dèle d’arbres créé reste cependant très simple, car plus l’objet est complexe etplus l’ordinateur a besoin d’utiliser de ressources lors des différents calculs :le palmier consiste donc simplement en un tronc de 5 mètres de haut pour 60centimètres de circonférence. Un des points intéressant de cet outil est qu’onpeut changer à tout moment la forme de l’arbre modèle : tous les arbres alorsdupliqués sur la surface se verront attribuer le même changement.
29

Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 3.12 – Création de la forêt de palmiers
3.4 Précision du modèle
3.4.1 Précision sur les coordonnées X et Y
La précision sur les coordonnées X et Y au niveau de la topographie n’estpas aisément définissable, puisque toute la topographie de l’île mise à part lecontour du niveau zéro a été modifiée. Pour les profils en long, les points en(X,Y) ont été levés avec un GPS de poche, qui leur confère une précision de+/- 5 mètres. Si l’on tient compte que le contour de l’île a été défini depuis lesdonnées SRTM, la précision en X et Y serait alors de l’ordre de +/- 20 mètresen absolu et +/- 15 mètre en relatif.
3.4.2 Précision sur la coordonnée Z
La précision sur les coordonnées Z dépend à la fois des données brutes maiségalement des transformations qui ont été apportées. Concernant les donnéesde départ, nous avions une précision de +/- 0,5 % de la valeur de la profondeurau niveau de la bathymétrie (données GEBCO). Le modèle ne contenant quedes profondeurs maximales de 50 mètres, la précision sera au maximum de +/-0,25 m. Cependant, les travaux de Goodwill [2004] [4] indique que la précisiondont on doit tenir compte pour les données GEBCO est au minimum de l’ordredu mètre.
Concernant la topographie, elle a été recréée à partir des deux profils enlong réalisés sur le terrain. Pour le point d’altitude zéro, le niveau de la mer àété utilisé et corrigé avec la valeur de la marée au moment de la mesure. Lesmesures selon Z réalisées pour les profils ont été obtenues avec un niveau dechantier. En tenant compte des conditions de terrain difficiles (forêt détruite),on peut estimer la précision des mesures à +/- 0,3 mètres. Cependant, lesprofils en long sont trop espacés et trop peu nombreux pour pouvoir espérerune avoir une telle précision sur toute l’île et même sur la zone d’étude.
30
Projet de Fin d’Étude - Sylvain LOTTEAU
3.5 Conclusion du chapitre
Dans ce chapitre, nous avons pu voir les étapes de la construction du modèleen trois dimensions à partir des données brutes. Les données SRTM90 utiliséespour la création de la topographie ne correspondant pas à celles relevées surle terrain, des modifications ont dû être apportées. La précision du modèlerésultant n’est pas satisfaisante pour une étude approfondie de l’impact d’untsunami sur cette zone, mais permet néanmoins de réaliser un certain nombrede tests et simulations que nous allons aborder dans le chapitre suivant.
Un aperçu des capacités de modélisation de Blender a également été pré-senté, ainsi que la nécessité d’apporter au modèle des spécificités pour pouvoirl’utiliser dans DualSPHysics. Un modèle en trois dimensions de toute la côteouest de l’île a également été créé et a juste été évoqué dans ce chapitre. Lechapitre suivant va donc traiter des simulations de fluide sous DualSPHysicsutilisant les modèles en trois dimensions de la plage et de l’île complète.
31
Chapitre 4
Simulations avec DualSPHysics
4.1 Phase de tests préalables
La mise en place des modèles sous DualSPHysics a demandé la réalisationpréalable de certains tests car la documentation existante est relativementmince, et les exemples de modèles auxquels l’utilisateur a accès restent limitésà des cas basiques et à la géométrie simple. La modélisation d’un tsunami surune surface complexe demande alors quelques spécificités dans la manière demettre en place son modèle.
4.1.1 Import des fichiers STL et transformation en particules so-lides dans DualSPHysics
Le premier test à réaliser fut l’utilisation des fichiers STL issus de Blenderdans DualSPHysics. Il est apparu que l’on peut charger autant de fichiers STLqu’on le souhaite pour définir différents groupes de particules solides. Il estdonc intéressant de créer plusieurs fichiers STL issus de Blender contenant pourl’un le conteneur avec la surface terrestre, et dans d’autres fichiers, les élémentsconstitutifs du sursol. On peut ainsi selon les différents tests à réaliser, choisird’intégrer la forêt de palmiers, ou même d’ajouter encore d’autres éléments.Pour la création d’objets simples tels que le batteur à houle (simple rectangle),on pourra choisir de les définir directement dans le fichier XML à l’aide de leurscoordonnées dans le modèle.
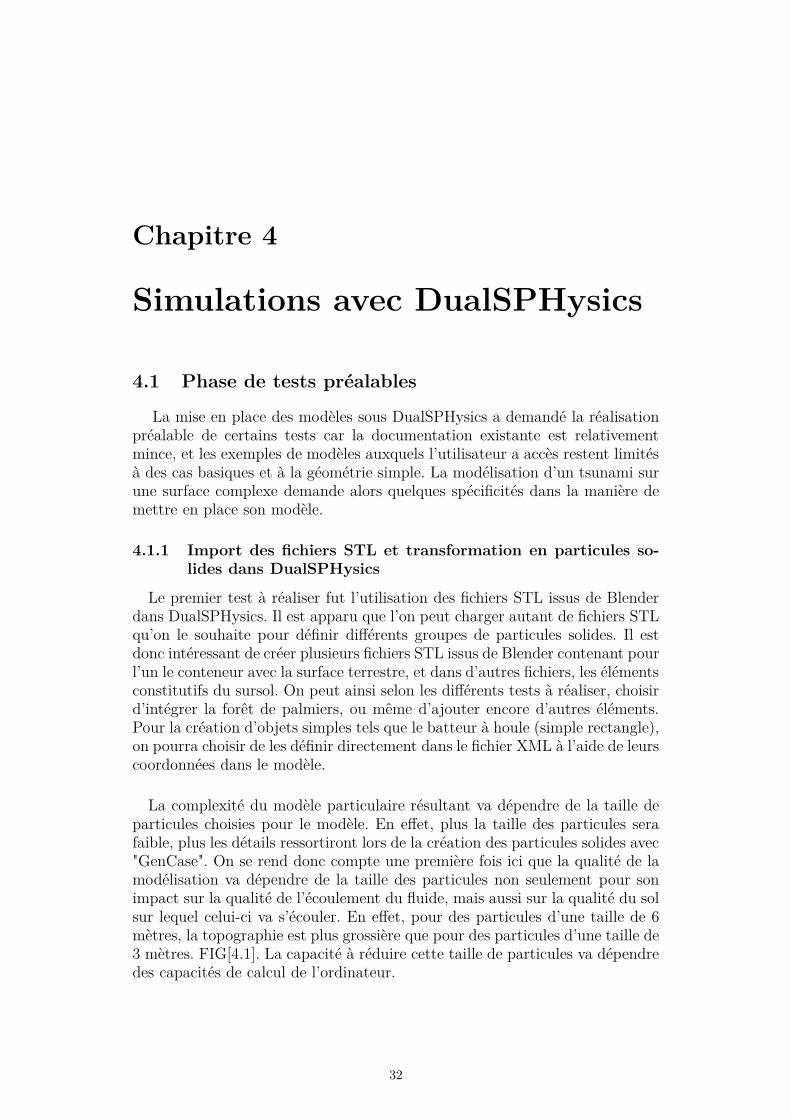
La complexité du modèle particulaire résultant va dépendre de la taille departicules choisies pour le modèle. En effet, plus la taille des particules serafaible, plus les détails ressortiront lors de la création des particules solides avec"GenCase". On se rend donc compte une première fois ici que la qualité de lamodélisation va dépendre de la taille des particules non seulement pour sonimpact sur la qualité de l’écoulement du fluide, mais aussi sur la qualité du solsur lequel celui-ci va s’écouler. En effet, pour des particules d’une taille de 6mètres, la topographie est plus grossière que pour des particules d’une taille de3 mètres. FIG[4.1]. La capacité à réduire cette taille de particules va dépendredes capacités de calcul de l’ordinateur.
32
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.1 – Différence de détails selon la taille des particules
4.1.2 Génération des particules fluides dans DualSPHysics
La génération des particules fluides pose un problème dans le cas de modèlescomplexes. En effet, dans les exemples fournis dans l’aide de DualSPHysics, lefluide est défini dans le document XML d’entrée par une forme géométriquesimple, elle-même définie par les coordonnées des points la constituant (paral-lélépipède rectangle, prisme, etc.). Or, dans le cas du modèle réalisé dont labathymétrie est complexe, il est impossible de répéter la même méthode. Lapremière idée est donc naturellement d’utiliser un fichier STL qui va définir lefluide, comme nous avons pu faire dans le point précédent pour les particulessolides. En fait, cette technique ne peut pas être adaptée aux particules fluidescar la lecture des fichiers STL par DualSPHysics ne fait apparaitre que despoints, des faces et des arêtes mais ceux-ci ne sont pas interprétés en termesde volume.
La solution m’a été apportée directement par l’une des personnes déve-loppant DualSPHysics avec qui j’ai eu la chance d’avoir plusieurs contacts :l’astuce consiste à utiliser un outil qui permet de remplir une boîte aux dimen-sions choisies. Les dimensions de cette boîte doivent être choisies de manièreà englober le modèle. La boîte va se remplir partout où il y a du vide mais leremplissage va s’arrêter lorsque les particules fluides vont rencontrer les murset le sol du modèle. Le niveau d’eau est réglé en définissant la valeur Z de laboîte à la valeur souhaitée. Pour pouvoir effectuer cette manipulation il fautdonc avoir préalablement chargé le fichier STL du modèle 3D.
4.2 Génération du tsunami : batteur à houle de typepiston à mouvement sinusoïdal
4.2.1 Définition du mouvement sinusoïdal de type piston
Au début de mon étude, les données que j’avais à ma disposition concer-nant le tsunami du 25 octobre 2010 étaient quasiment nulles. J’ai donc toutd’abord choisi de réaliser un modèle avec un batteur à houle. Les modèlesclassiques de génération de vagues travaillent avec des batteurs de type pistonou volet selon les caractéristiques du milieu : il existe deux milieux d’étudeappelés "milieu profond" et "milieu peu profond" qui influencent la manière
33

Projet de Fin d’Étude - Sylvain LOTTEAU
dont l’onde se propage. Dans le rapport de Souza [2009] [7], il est indiqué qu’ilest plus aisé d’utiliser un batteur de type piston pour la génération de houleen milieu peu profond et de type volet pour le milieu profond : le déplace-ment de l’onde d’un tsunami bien que passant sur des zones où la profondeurpeut atteindre plusieurs kilomètres est considéré comme se faisant en milieupeu profond (source : wikipedia@[2011] [15]). En effet si la longueur d’ondeest supérieure à deux fois la profondeur (λ > 2 ∗ h), le milieu est considérécomme peu profond. Ainsi, pour un tsunami classique, la longueur d’onde estsupérieure à la centaine de kilomètres. Même en considérant des profondeursextrêmes de 11 kilomètres, la longueur d’onde reste toujours plus que deuxfois supérieure à celles-ci. Les formules concernant le calcul de la vitesse depropagation (4.1) et de la longueur d’onde (4.2) pour un tel milieu sont lessuivantes (avec h en kilomètres et T en minutes) :
v = 870 ∗
√
h
6km/h (4.1)
λ = 870 ∗ (T
60) ∗
√
h
6km (4.2)
La période d’un tsunami est généralement comprise entre 15 et 60 minutes.En prenant une valeur de 30 minutes, on obtient les résultats présentés dansle tableau FIG[4.2].
Profondeur (m) λ (km) v (km/h)50 40 7920 25 5010 17 36
Figure 4.2 – Tableau des longueurs d’onde et vitesse en fonction de la profondeur pour untsunami classique.
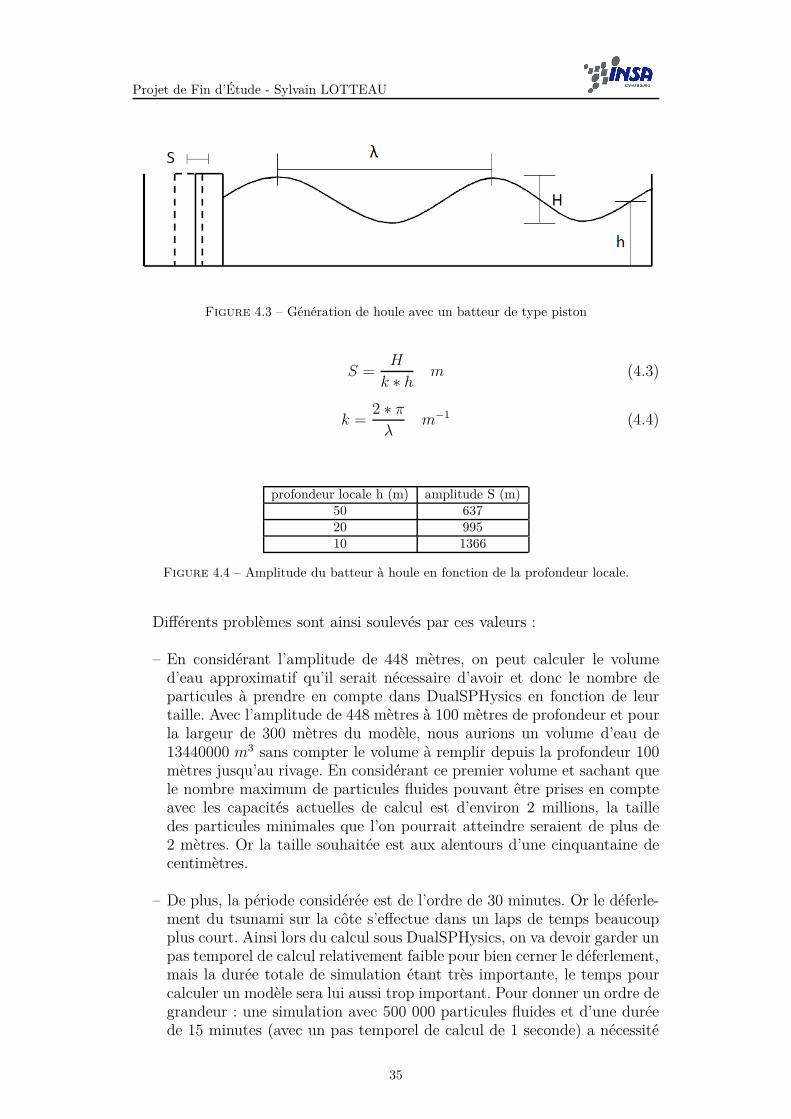
On peut tout de suite s’apercevoir que les longueurs d’onde sont très élevées,même lorsqu’on les considère proches du rivage à des profondeurs inférieuresà 100 mètres. Le déplacement du batteur à houle qui va être nécessaire pourgénérer une telle onde est très important et le conteneur devra alors être assezlong pour pouvoir générer une telle onde. En me servant des formules (4.3)et (4.4) présentées dans Souza [2009] [7], j’ai pu calculer le déplacement dubatteur à houle. J’ai réalisé le calcul pour la génération de vagues de 5 mètresavec une période de 30 minutes à des profondeurs de 10, 50 et 100 mètres(FIG[4.4]).
34
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.3 – Génération de houle avec un batteur de type piston
S =H
k ∗ hm (4.3)
k =2 ∗ π
λm−1 (4.4)
profondeur locale h (m) amplitude S (m)50 63720 99510 1366
Figure 4.4 – Amplitude du batteur à houle en fonction de la profondeur locale.
Différents problèmes sont ainsi soulevés par ces valeurs :
– En considérant l’amplitude de 448 mètres, on peut calculer le volumed’eau approximatif qu’il serait nécessaire d’avoir et donc le nombre departicules à prendre en compte dans DualSPHysics en fonction de leurtaille. Avec l’amplitude de 448 mètres à 100 mètres de profondeur et pourla largeur de 300 mètres du modèle, nous aurions un volume d’eau de13440000 m3 sans compter le volume à remplir depuis la profondeur 100mètres jusqu’au rivage. En considérant ce premier volume et sachant quele nombre maximum de particules fluides pouvant être prises en compteavec les capacités actuelles de calcul est d’environ 2 millions, la tailledes particules minimales que l’on pourrait atteindre seraient de plus de2 mètres. Or la taille souhaitée est aux alentours d’une cinquantaine decentimètres.
– De plus, la période considérée est de l’ordre de 30 minutes. Or le déferle-ment du tsunami sur la côte s’effectue dans un laps de temps beaucoupplus court. Ainsi lors du calcul sous DualSPHysics, on va devoir garder unpas temporel de calcul relativement faible pour bien cerner le déferlement,mais la durée totale de simulation étant très importante, le temps pourcalculer un modèle sera lui aussi trop important. Pour donner un ordre degrandeur : une simulation avec 500 000 particules fluides et d’une duréede 15 minutes (avec un pas temporel de calcul de 1 seconde) a nécessité
35

Projet de Fin d’Étude - Sylvain LOTTEAU
5 jours de calcul sur le super-ordinateur de la société.
Afin de commencer à utiliser l’outil DualSPHysics et de tester les différentespossibilités d’analyse de résultats, j’ai étalonné un batteur à houle sinusoïdalde manière à obtenir une inondation convenable. Les caractéristiques sont lessuivantes :
– Une période de 140 secondes– Une amplitude de 350 mètres– A une profondeur de 20 mètres
4.2.2 Mise en œuvre et résultats
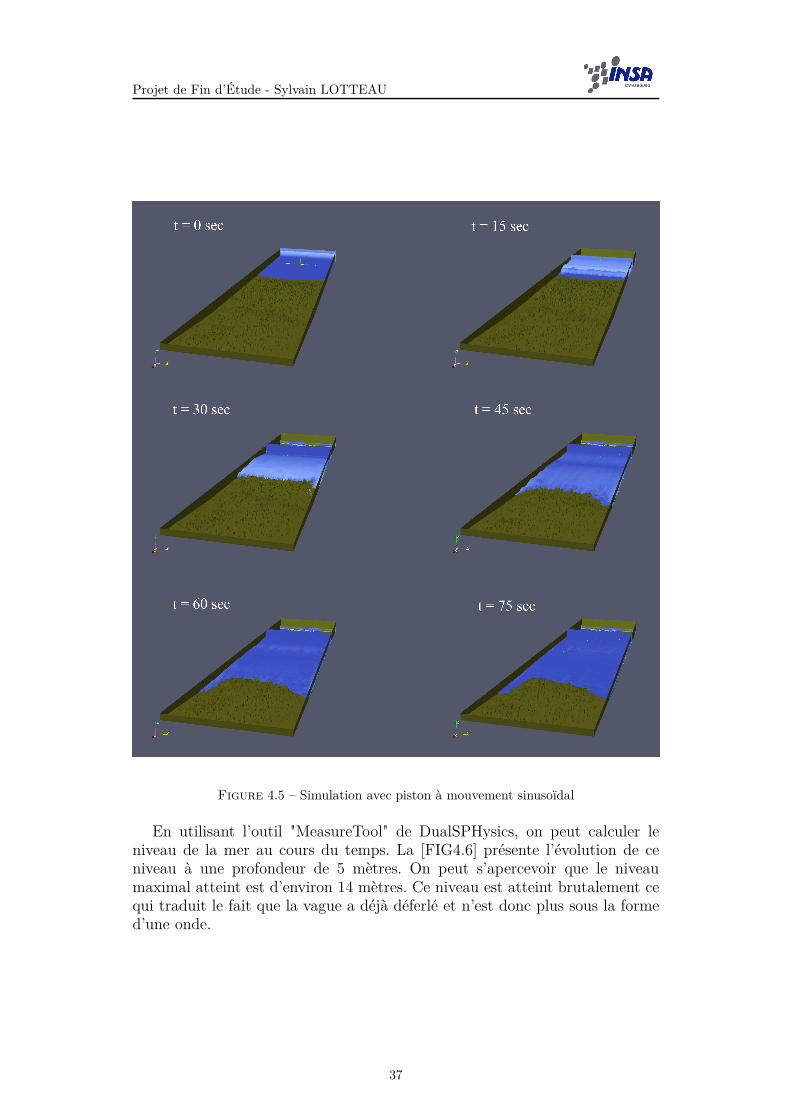
La définition du mouvement du batteur à houle dans DualSPHysics se faitdans le fichier XML d’entrée. On a la possibilité de choisir un mouvementsinusoïdal qui sera défini par une amplitude, une phase et une fréquence. Lafréquence utilisée sera donc 0.007 s−1 l’amplitude de 350 mètres et j’ai réglé laphase à 0 pour que le batteur commence par pousser le fluide vers le rivage. Lataille des particules a été fixée à 1 mètre pour un nombre total de particulesfluides d’environ 350 000.
Le résultat de la simulation a donc pu être visualisé dans Paraview [FIG4.5].Les différentes caractéristiques physiques des particules étant chargées dans lelogiciel, on peut affecter aux particules une couleur dépendante de l’une de sescaractéristiques : j’ai ainsi créé une échelle de couleurs allant du bleu au blancselon la vélocité des particules. Une particule ayant une vélocité importante severra attribuer une couleur proche du blanc pour donner un effet d’eau plusréaliste. En effet, dans la réalité l’eau turbide apparait plus claire que l’eaucalme.
36
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.5 – Simulation avec piston à mouvement sinusoïdal
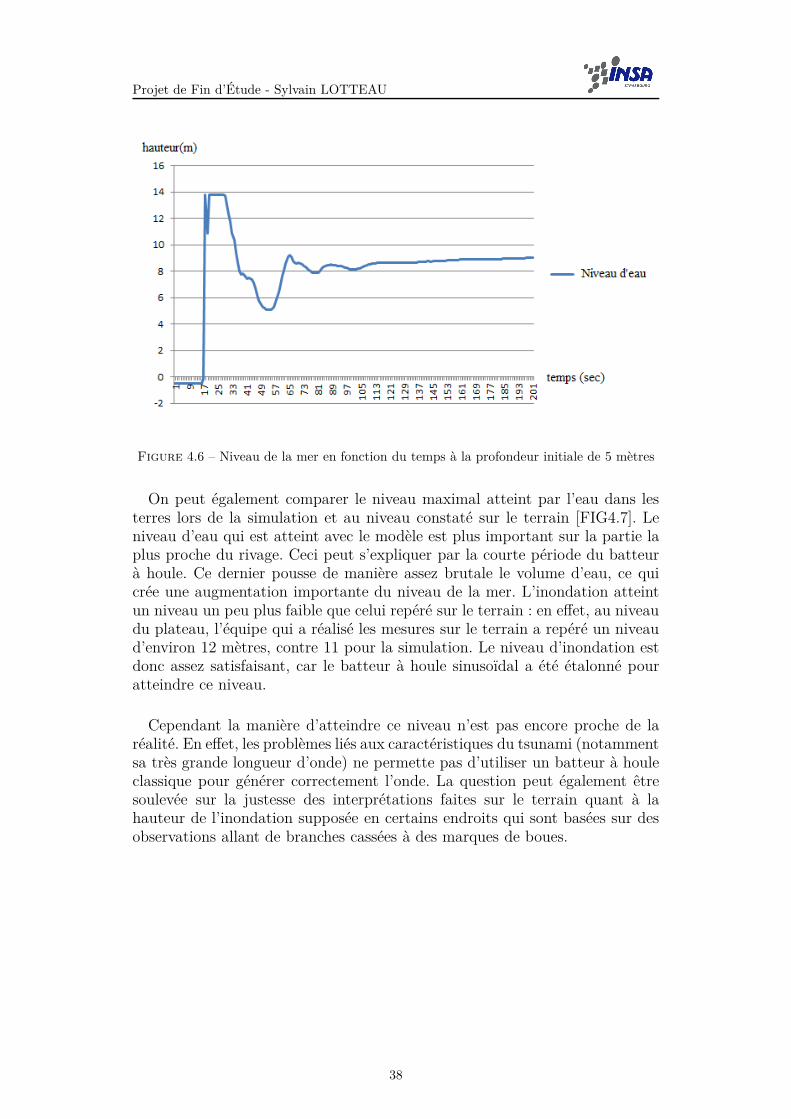
En utilisant l’outil "MeasureTool" de DualSPHysics, on peut calculer leniveau de la mer au cours du temps. La [FIG4.6] présente l’évolution de ceniveau à une profondeur de 5 mètres. On peut s’apercevoir que le niveaumaximal atteint est d’environ 14 mètres. Ce niveau est atteint brutalement cequi traduit le fait que la vague a déjà déferlé et n’est donc plus sous la formed’une onde.
37
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.6 – Niveau de la mer en fonction du temps à la profondeur initiale de 5 mètres
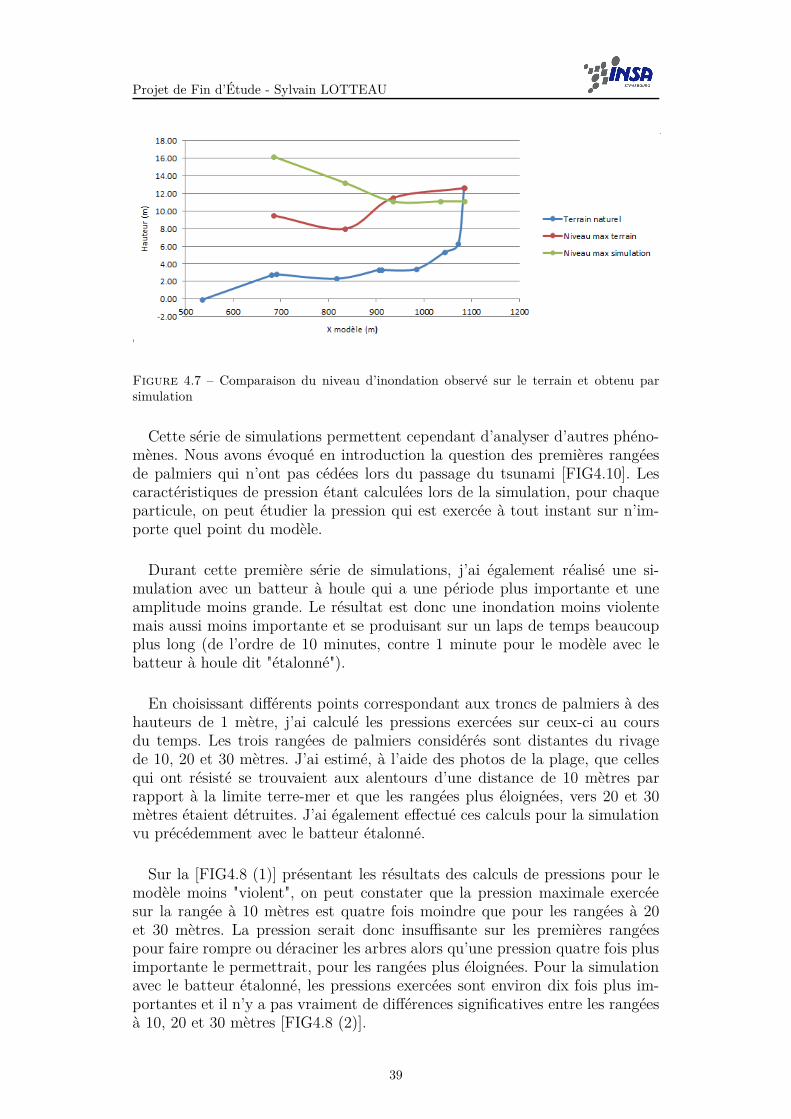
On peut également comparer le niveau maximal atteint par l’eau dans lesterres lors de la simulation et au niveau constaté sur le terrain [FIG4.7]. Leniveau d’eau qui est atteint avec le modèle est plus important sur la partie laplus proche du rivage. Ceci peut s’expliquer par la courte période du batteurà houle. Ce dernier pousse de manière assez brutale le volume d’eau, ce quicrée une augmentation importante du niveau de la mer. L’inondation atteintun niveau un peu plus faible que celui repéré sur le terrain : en effet, au niveaudu plateau, l’équipe qui a réalisé les mesures sur le terrain a repéré un niveaud’environ 12 mètres, contre 11 pour la simulation. Le niveau d’inondation estdonc assez satisfaisant, car le batteur à houle sinusoïdal a été étalonné pouratteindre ce niveau.
Cependant la manière d’atteindre ce niveau n’est pas encore proche de laréalité. En effet, les problèmes liés aux caractéristiques du tsunami (notammentsa très grande longueur d’onde) ne permette pas d’utiliser un batteur à houleclassique pour générer correctement l’onde. La question peut également êtresoulevée sur la justesse des interprétations faites sur le terrain quant à lahauteur de l’inondation supposée en certains endroits qui sont basées sur desobservations allant de branches cassées à des marques de boues.
38
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.7 – Comparaison du niveau d’inondation observé sur le terrain et obtenu parsimulation
Cette série de simulations permettent cependant d’analyser d’autres phéno-mènes. Nous avons évoqué en introduction la question des premières rangéesde palmiers qui n’ont pas cédées lors du passage du tsunami [FIG4.10]. Lescaractéristiques de pression étant calculées lors de la simulation, pour chaqueparticule, on peut étudier la pression qui est exercée à tout instant sur n’im-porte quel point du modèle.
Durant cette première série de simulations, j’ai également réalisé une si-mulation avec un batteur à houle qui a une période plus importante et uneamplitude moins grande. Le résultat est donc une inondation moins violentemais aussi moins importante et se produisant sur un laps de temps beaucoupplus long (de l’ordre de 10 minutes, contre 1 minute pour le modèle avec lebatteur à houle dit "étalonné").
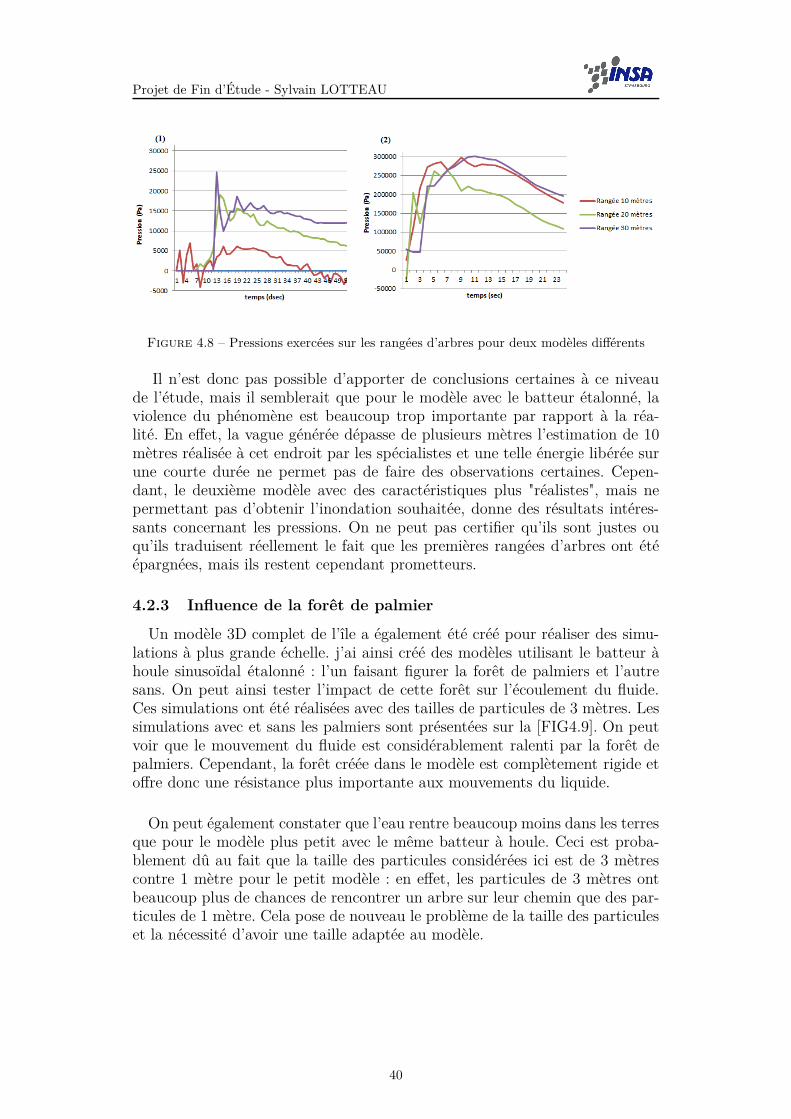
En choisissant différents points correspondant aux troncs de palmiers à deshauteurs de 1 mètre, j’ai calculé les pressions exercées sur ceux-ci au coursdu temps. Les trois rangées de palmiers considérés sont distantes du rivagede 10, 20 et 30 mètres. J’ai estimé, à l’aide des photos de la plage, que cellesqui ont résisté se trouvaient aux alentours d’une distance de 10 mètres parrapport à la limite terre-mer et que les rangées plus éloignées, vers 20 et 30mètres étaient détruites. J’ai également effectué ces calculs pour la simulationvu précédemment avec le batteur étalonné.
Sur la [FIG4.8 (1)] présentant les résultats des calculs de pressions pour lemodèle moins "violent", on peut constater que la pression maximale exercéesur la rangée à 10 mètres est quatre fois moindre que pour les rangées à 20et 30 mètres. La pression serait donc insuffisante sur les premières rangéespour faire rompre ou déraciner les arbres alors qu’une pression quatre fois plusimportante le permettrait, pour les rangées plus éloignées. Pour la simulationavec le batteur étalonné, les pressions exercées sont environ dix fois plus im-portantes et il n’y a pas vraiment de différences significatives entre les rangéesà 10, 20 et 30 mètres [FIG4.8 (2)].
39
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.8 – Pressions exercées sur les rangées d’arbres pour deux modèles différents
Il n’est donc pas possible d’apporter de conclusions certaines à ce niveaude l’étude, mais il semblerait que pour le modèle avec le batteur étalonné, laviolence du phénomène est beaucoup trop importante par rapport à la réa-lité. En effet, la vague générée dépasse de plusieurs mètres l’estimation de 10mètres réalisée à cet endroit par les spécialistes et une telle énergie libérée surune courte durée ne permet pas de faire des observations certaines. Cepen-dant, le deuxième modèle avec des caractéristiques plus "réalistes", mais nepermettant pas d’obtenir l’inondation souhaitée, donne des résultats intéres-sants concernant les pressions. On ne peut pas certifier qu’ils sont justes ouqu’ils traduisent réellement le fait que les premières rangées d’arbres ont étéépargnées, mais ils restent cependant prometteurs.
4.2.3 Influence de la forêt de palmier
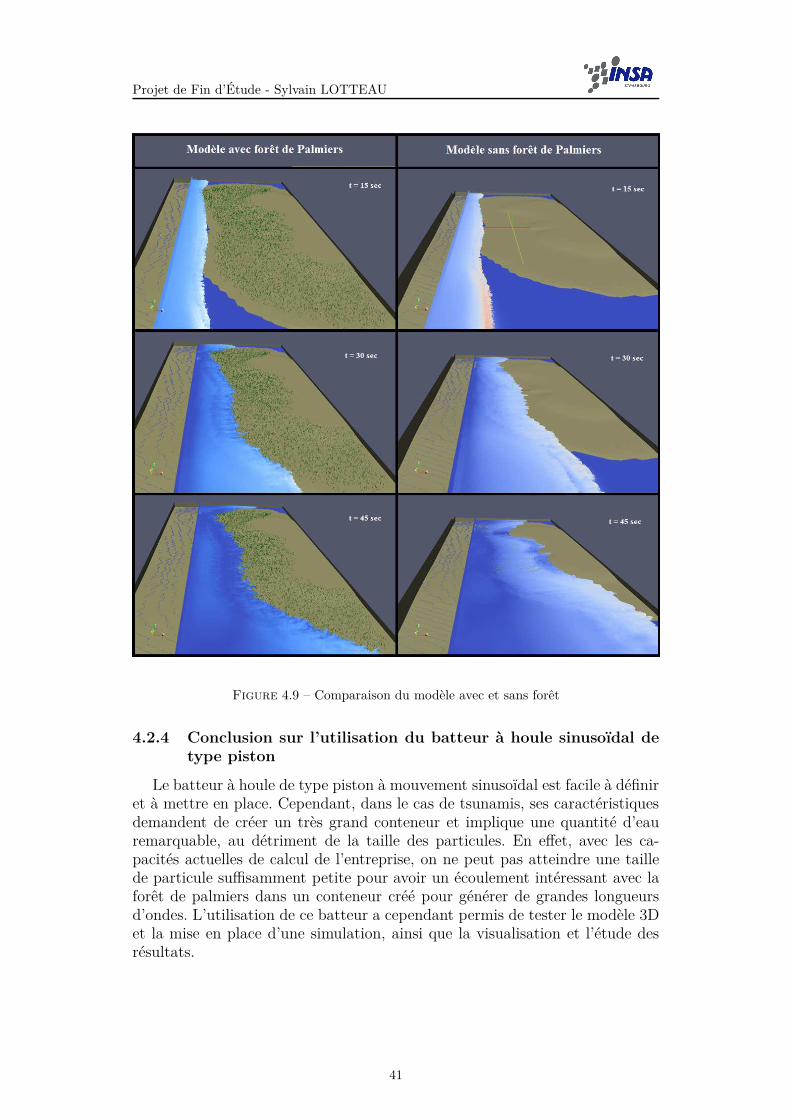
Un modèle 3D complet de l’île a également été créé pour réaliser des simu-lations à plus grande échelle. j’ai ainsi créé des modèles utilisant le batteur àhoule sinusoïdal étalonné : l’un faisant figurer la forêt de palmiers et l’autresans. On peut ainsi tester l’impact de cette forêt sur l’écoulement du fluide.Ces simulations ont été réalisées avec des tailles de particules de 3 mètres. Lessimulations avec et sans les palmiers sont présentées sur la [FIG4.9]. On peutvoir que le mouvement du fluide est considérablement ralenti par la forêt depalmiers. Cependant, la forêt créée dans le modèle est complètement rigide etoffre donc une résistance plus importante aux mouvements du liquide.
On peut également constater que l’eau rentre beaucoup moins dans les terresque pour le modèle plus petit avec le même batteur à houle. Ceci est proba-blement dû au fait que la taille des particules considérées ici est de 3 mètrescontre 1 mètre pour le petit modèle : en effet, les particules de 3 mètres ontbeaucoup plus de chances de rencontrer un arbre sur leur chemin que des par-ticules de 1 mètre. Cela pose de nouveau le problème de la taille des particuleset la nécessité d’avoir une taille adaptée au modèle.
40
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.9 – Comparaison du modèle avec et sans forêt
4.2.4 Conclusion sur l’utilisation du batteur à houle sinusoïdal detype piston
Le batteur à houle de type piston à mouvement sinusoïdal est facile à définiret à mettre en place. Cependant, dans le cas de tsunamis, ses caractéristiquesdemandent de créer un très grand conteneur et implique une quantité d’eauremarquable, au détriment de la taille des particules. En effet, avec les ca-pacités actuelles de calcul de l’entreprise, on ne peut pas atteindre une taillede particule suffisamment petite pour avoir un écoulement intéressant avec laforêt de palmiers dans un conteneur créé pour générer de grandes longueursd’ondes. L’utilisation de ce batteur a cependant permis de tester le modèle 3Det la mise en place d’une simulation, ainsi que la visualisation et l’étude desrésultats.
41
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.10 – Premières rangées de palmiers intacts après passage du tsunami
4.3 Génération de tsunami : mouvement du piston dé-fini par les données issues du modèle MOST
4.3.1 Utilisation du modèle MOST
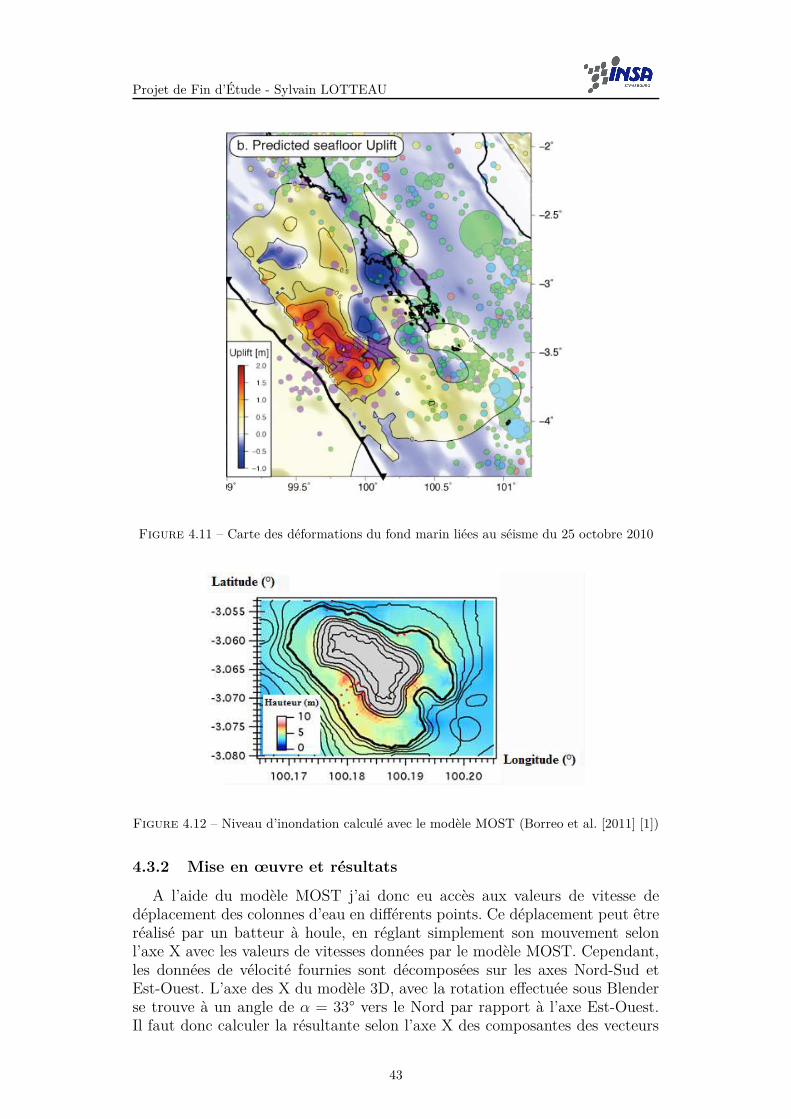
Mon maître de stage a fait des simulations avec le modèle MOST en utilisantla même bathymétrie et topographie modifiées dont je me suis servi pour lessimulations avec DualSPHysics. Afin de générer le tsunami, des conditions dedéformations sur la bathymétrie ont été utilisées. En effet, dans un article deBorrero et al. [2011] [1] est présentée la carte la plus récente concernant lesdéformations du fond marin liées au séisme du 25 octobre 2010 qui a engendréle tsunami. [FIG4.11] J’ai donc utilisé ArcGIS pour digitaliser les contours etainsi créer un fichier contenant les conditions de déplacement du fond marin.
En utilisant ce mouvement comme entrée dans le modèle MOST, M. JoseBorrero a pu générer une simulation dont les résultats semblent relativementbons : le niveau d’inondation constaté [FIG4.12] est assez proche des obser-vations faites sur le terrain : les points rouges sont les points levés pour laréalisation des profils en longs, et au niveau de ceux-ci, l’inondation atteintune valeur proche de 10 mètres. Le modèle MOST permet également d’obtenirla vitesse des particules le long de colonnes d’eau au cours du temps en diffé-rents points situés au large de la plage étudiée. On peut également calculer ences mêmes points le niveau de la mer au cours du temps. J’ai pu ainsi obtenirpour des profondeurs de 5, 10, 15 et 20 mètres les séries temporelles de vitesseset de niveau d’eau. Ces données m’ont été utiles pour étalonner un nouveaubatteur à houle.
42
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.11 – Carte des déformations du fond marin liées au séisme du 25 octobre 2010
Figure 4.12 – Niveau d’inondation calculé avec le modèle MOST (Borreo et al. [2011] [1])
4.3.2 Mise en œuvre et résultats
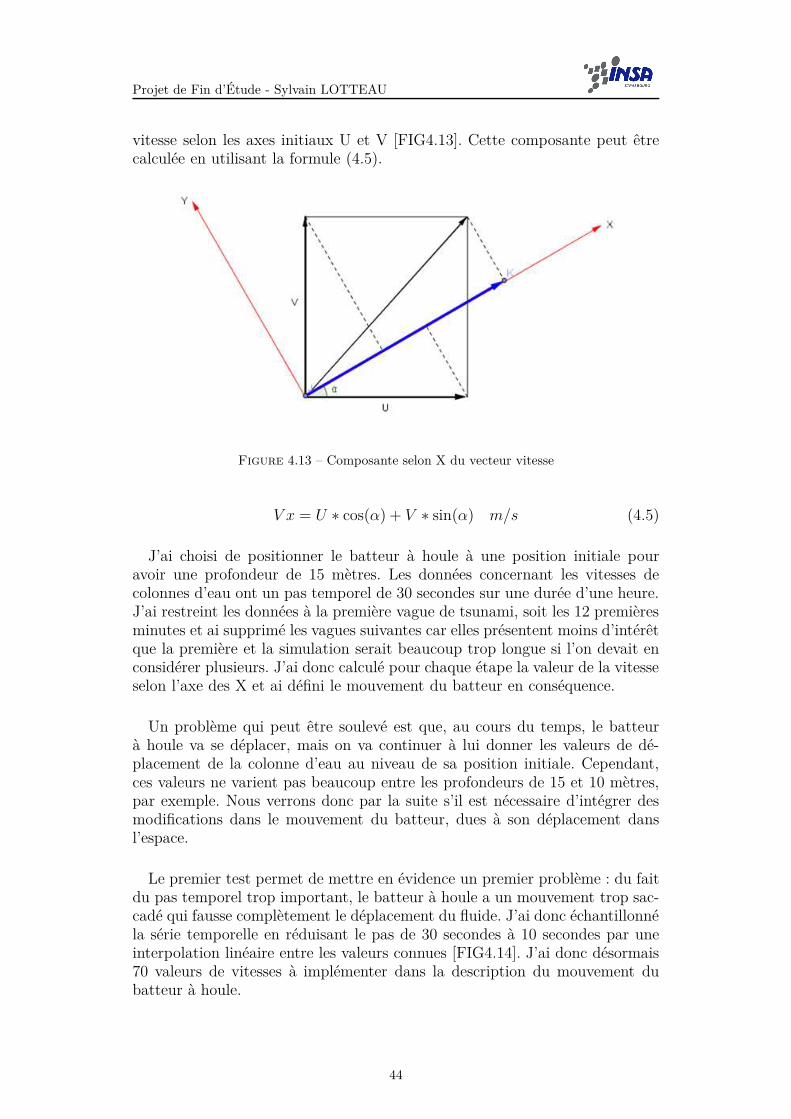
A l’aide du modèle MOST j’ai donc eu accès aux valeurs de vitesse dedéplacement des colonnes d’eau en différents points. Ce déplacement peut êtreréalisé par un batteur à houle, en réglant simplement son mouvement selonl’axe X avec les valeurs de vitesses données par le modèle MOST. Cependant,les données de vélocité fournies sont décomposées sur les axes Nord-Sud etEst-Ouest. L’axe des X du modèle 3D, avec la rotation effectuée sous Blenderse trouve à un angle de α = 33° vers le Nord par rapport à l’axe Est-Ouest.Il faut donc calculer la résultante selon l’axe X des composantes des vecteurs
43
Projet de Fin d’Étude - Sylvain LOTTEAU
vitesse selon les axes initiaux U et V [FIG4.13]. Cette composante peut êtrecalculée en utilisant la formule (4.5).
Figure 4.13 – Composante selon X du vecteur vitesse
V x = U ∗ cos(α) + V ∗ sin(α) m/s (4.5)
J’ai choisi de positionner le batteur à houle à une position initiale pouravoir une profondeur de 15 mètres. Les données concernant les vitesses decolonnes d’eau ont un pas temporel de 30 secondes sur une durée d’une heure.J’ai restreint les données à la première vague de tsunami, soit les 12 premièresminutes et ai supprimé les vagues suivantes car elles présentent moins d’intérêtque la première et la simulation serait beaucoup trop longue si l’on devait enconsidérer plusieurs. J’ai donc calculé pour chaque étape la valeur de la vitesseselon l’axe des X et ai défini le mouvement du batteur en conséquence.
Un problème qui peut être soulevé est que, au cours du temps, le batteurà houle va se déplacer, mais on va continuer à lui donner les valeurs de dé-placement de la colonne d’eau au niveau de sa position initiale. Cependant,ces valeurs ne varient pas beaucoup entre les profondeurs de 15 et 10 mètres,par exemple. Nous verrons donc par la suite s’il est nécessaire d’intégrer desmodifications dans le mouvement du batteur, dues à son déplacement dansl’espace.
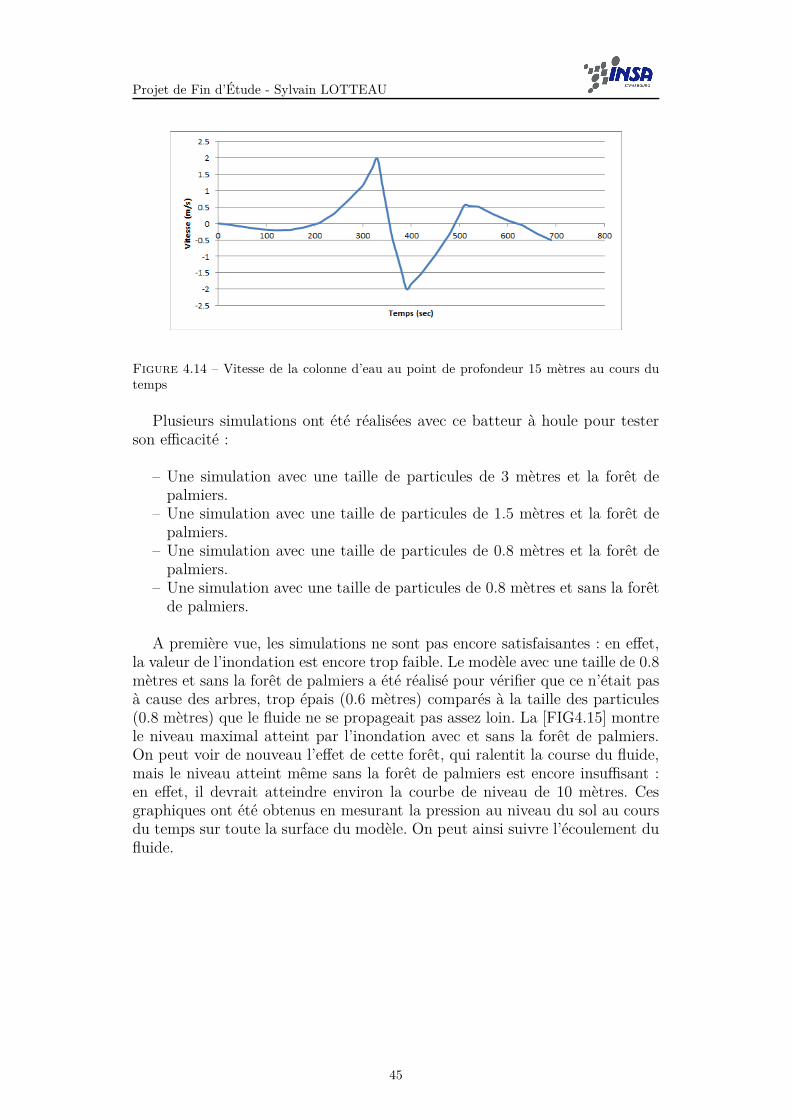
Le premier test permet de mettre en évidence un premier problème : du faitdu pas temporel trop important, le batteur à houle a un mouvement trop sac-cadé qui fausse complètement le déplacement du fluide. J’ai donc échantillonnéla série temporelle en réduisant le pas de 30 secondes à 10 secondes par uneinterpolation linéaire entre les valeurs connues [FIG4.14]. J’ai donc désormais70 valeurs de vitesses à implémenter dans la description du mouvement dubatteur à houle.
44
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.14 – Vitesse de la colonne d’eau au point de profondeur 15 mètres au cours dutemps
Plusieurs simulations ont été réalisées avec ce batteur à houle pour testerson efficacité :
– Une simulation avec une taille de particules de 3 mètres et la forêt depalmiers.
– Une simulation avec une taille de particules de 1.5 mètres et la forêt depalmiers.
– Une simulation avec une taille de particules de 0.8 mètres et la forêt depalmiers.
– Une simulation avec une taille de particules de 0.8 mètres et sans la forêtde palmiers.
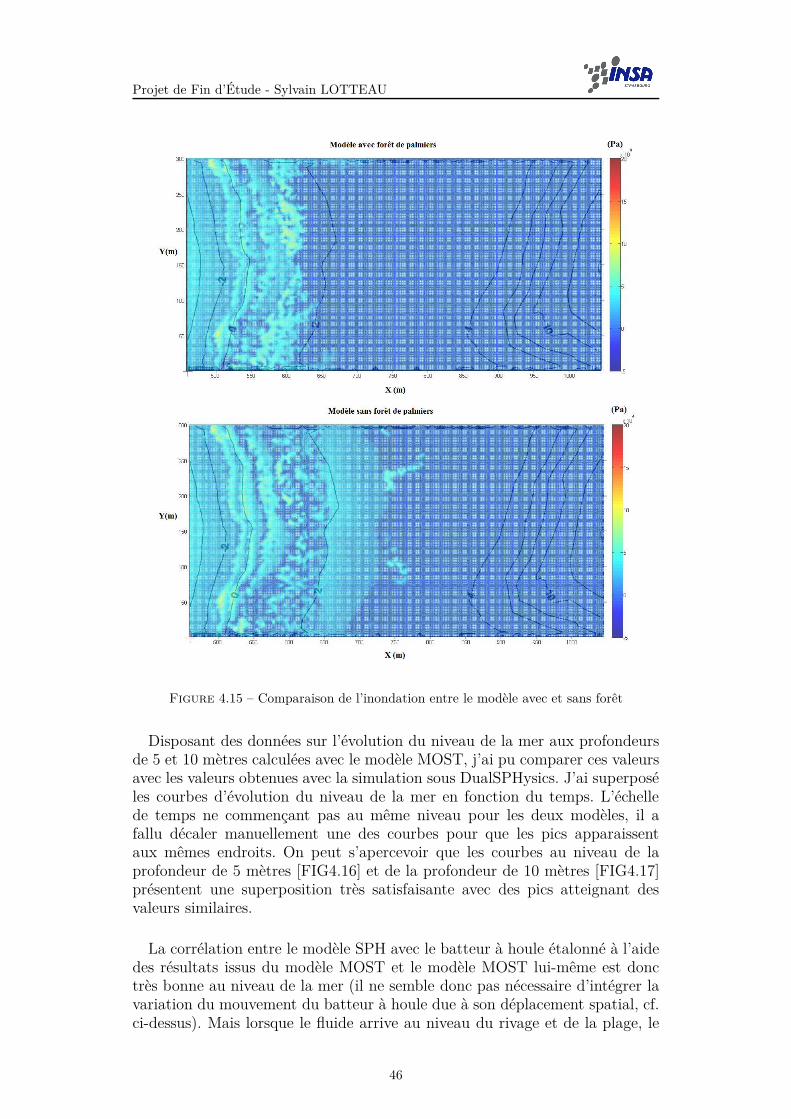
A première vue, les simulations ne sont pas encore satisfaisantes : en effet,la valeur de l’inondation est encore trop faible. Le modèle avec une taille de 0.8mètres et sans la forêt de palmiers a été réalisé pour vérifier que ce n’était pasà cause des arbres, trop épais (0.6 mètres) comparés à la taille des particules(0.8 mètres) que le fluide ne se propageait pas assez loin. La [FIG4.15] montrele niveau maximal atteint par l’inondation avec et sans la forêt de palmiers.On peut voir de nouveau l’effet de cette forêt, qui ralentit la course du fluide,mais le niveau atteint même sans la forêt de palmiers est encore insuffisant :en effet, il devrait atteindre environ la courbe de niveau de 10 mètres. Cesgraphiques ont été obtenus en mesurant la pression au niveau du sol au coursdu temps sur toute la surface du modèle. On peut ainsi suivre l’écoulement dufluide.
45
Projet de Fin d’Étude - Sylvain LOTTEAU
Figure 4.15 – Comparaison de l’inondation entre le modèle avec et sans forêt
Disposant des données sur l’évolution du niveau de la mer aux profondeursde 5 et 10 mètres calculées avec le modèle MOST, j’ai pu comparer ces valeursavec les valeurs obtenues avec la simulation sous DualSPHysics. J’ai superposéles courbes d’évolution du niveau de la mer en fonction du temps. L’échellede temps ne commençant pas au même niveau pour les deux modèles, il afallu décaler manuellement une des courbes pour que les pics apparaissentaux mêmes endroits. On peut s’apercevoir que les courbes au niveau de laprofondeur de 5 mètres [FIG4.16] et de la profondeur de 10 mètres [FIG4.17]présentent une superposition très satisfaisante avec des pics atteignant desvaleurs similaires.
La corrélation entre le modèle SPH avec le batteur à houle étalonné à l’aidedes résultats issus du modèle MOST et le modèle MOST lui-même est donctrès bonne au niveau de la mer (il ne semble donc pas nécessaire d’intégrer lavariation du mouvement du batteur à houle due à son déplacement spatial, cf.ci-dessus). Mais lorsque le fluide arrive au niveau du rivage et de la plage, le
46
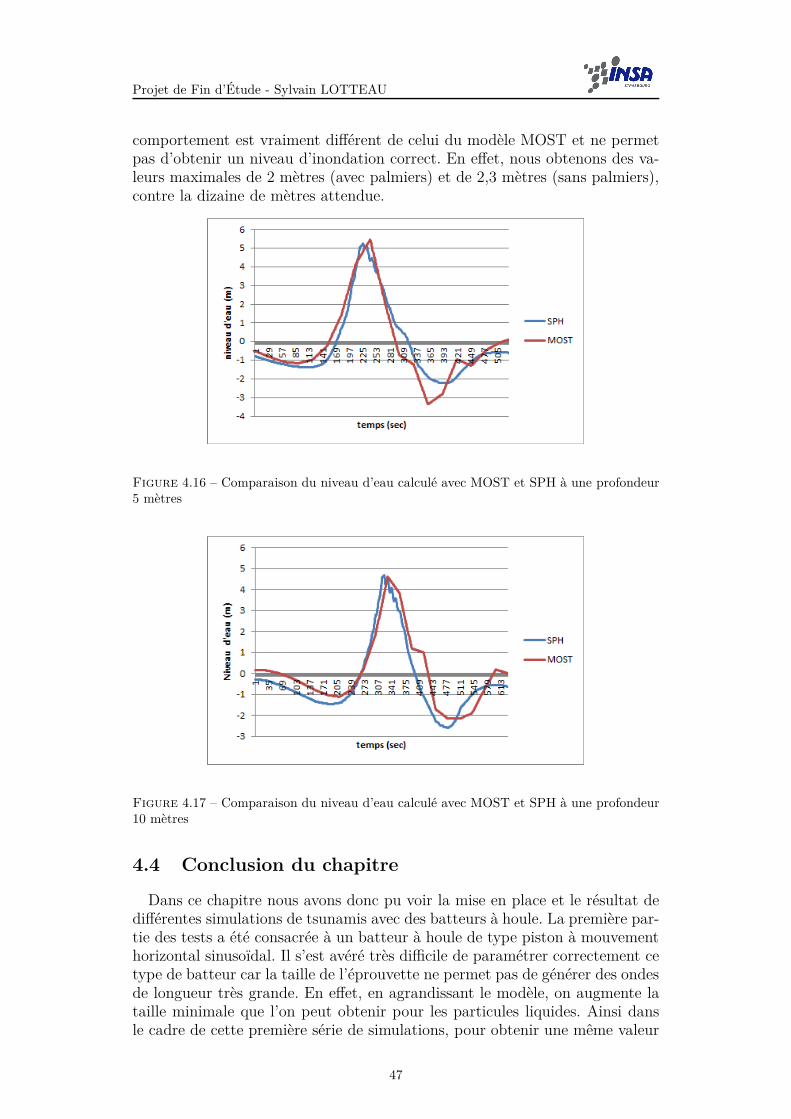
Projet de Fin d’Étude - Sylvain LOTTEAU
comportement est vraiment différent de celui du modèle MOST et ne permetpas d’obtenir un niveau d’inondation correct. En effet, nous obtenons des va-leurs maximales de 2 mètres (avec palmiers) et de 2,3 mètres (sans palmiers),contre la dizaine de mètres attendue.
Figure 4.16 – Comparaison du niveau d’eau calculé avec MOST et SPH à une profondeur5 mètres
Figure 4.17 – Comparaison du niveau d’eau calculé avec MOST et SPH à une profondeur10 mètres
4.4 Conclusion du chapitre
Dans ce chapitre nous avons donc pu voir la mise en place et le résultat dedifférentes simulations de tsunamis avec des batteurs à houle. La première par-tie des tests a été consacrée à un batteur à houle de type piston à mouvementhorizontal sinusoïdal. Il s’est avéré très difficile de paramétrer correctement cetype de batteur car la taille de l’éprouvette ne permet pas de générer des ondesde longueur très grande. En effet, en agrandissant le modèle, on augmente lataille minimale que l’on peut obtenir pour les particules liquides. Ainsi dansle cadre de cette première série de simulations, pour obtenir une même valeur
47
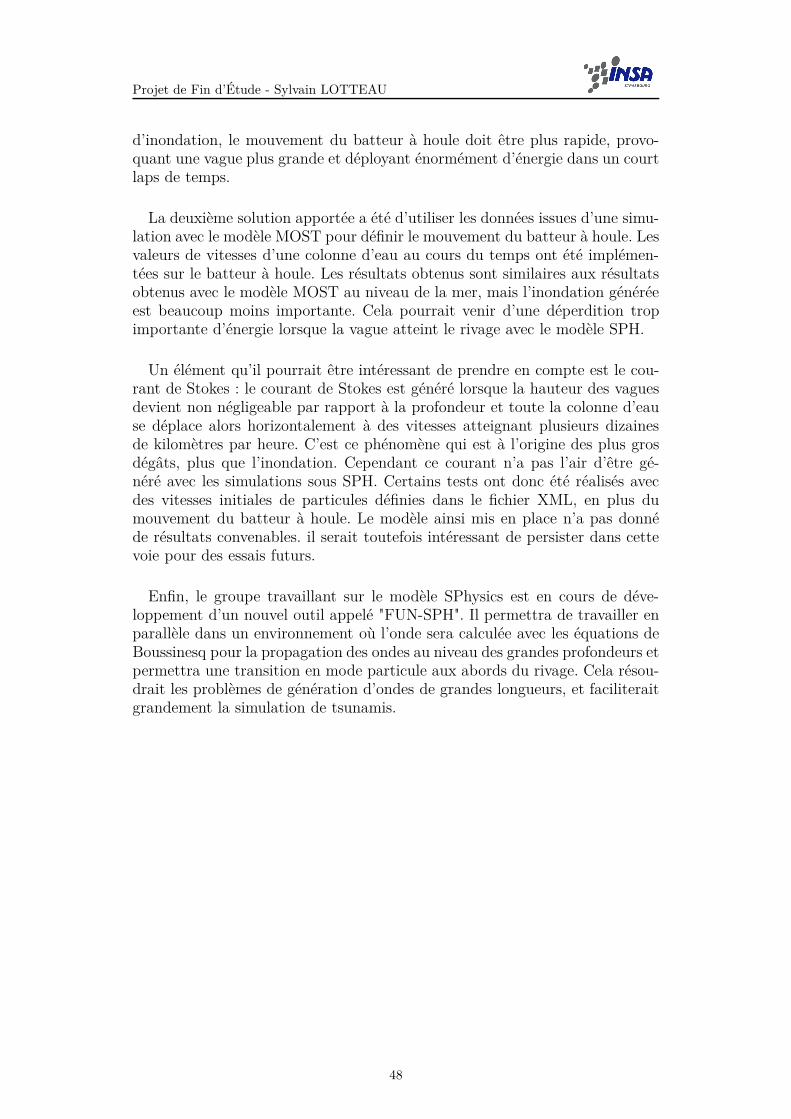
Projet de Fin d’Étude - Sylvain LOTTEAU
d’inondation, le mouvement du batteur à houle doit être plus rapide, provo-quant une vague plus grande et déployant énormément d’énergie dans un courtlaps de temps.
La deuxième solution apportée a été d’utiliser les données issues d’une simu-lation avec le modèle MOST pour définir le mouvement du batteur à houle. Lesvaleurs de vitesses d’une colonne d’eau au cours du temps ont été implémen-tées sur le batteur à houle. Les résultats obtenus sont similaires aux résultatsobtenus avec le modèle MOST au niveau de la mer, mais l’inondation généréeest beaucoup moins importante. Cela pourrait venir d’une déperdition tropimportante d’énergie lorsque la vague atteint le rivage avec le modèle SPH.
Un élément qu’il pourrait être intéressant de prendre en compte est le cou-rant de Stokes : le courant de Stokes est généré lorsque la hauteur des vaguesdevient non négligeable par rapport à la profondeur et toute la colonne d’eause déplace alors horizontalement à des vitesses atteignant plusieurs dizainesde kilomètres par heure. C’est ce phénomène qui est à l’origine des plus grosdégâts, plus que l’inondation. Cependant ce courant n’a pas l’air d’être gé-néré avec les simulations sous SPH. Certains tests ont donc été réalisés avecdes vitesses initiales de particules définies dans le fichier XML, en plus dumouvement du batteur à houle. Le modèle ainsi mis en place n’a pas donnéde résultats convenables. il serait toutefois intéressant de persister dans cettevoie pour des essais futurs.
Enfin, le groupe travaillant sur le modèle SPhysics est en cours de déve-loppement d’un nouvel outil appelé "FUN-SPH". Il permettra de travailler enparallèle dans un environnement où l’onde sera calculée avec les équations deBoussinesq pour la propagation des ondes au niveau des grandes profondeurs etpermettra une transition en mode particule aux abords du rivage. Cela résou-drait les problèmes de génération d’ondes de grandes longueurs, et faciliteraitgrandement la simulation de tsunamis.
48
Projet de Fin d’Étude - Sylvain LOTTEAU
Conclusion
Les principaux éléments abordés dans mon étude pour la mise en place de lamodélisation de tsunamis avec DualSPHysics ont permis de définir des basessolides pour la poursuite de cette discipline au sein l’entreprise. La simulationde tsunamis avec DualSPHysics étant assez récente, peu de travaux et résultatsont déjà été publiés, ce qui rend la tâche ardue mais d’autant plus intéressantequ’elle s’inscrit dans un processus en cours d’évolution.
Nous avons vu pendant cette étude l’utilisation spécifique des différentslogiciels intégrés dans ce processus de simulation et également la création d’uneinterface graphique pour DualSPHYsics. Il fut essentiel de bien prendre encompte les relations entre la partie création du modèle en trois dimensionset la partie simulation pour éviter des problèmes de compatibilité et pourmettre en place correctement les modèles. Au travers de la modélisation entrois dimensions de l’île étudiée, le logiciel Blender s’est avéré être un outil bienadapté et permettant la création d’objets complexes de manière ergonomique(on pourra juste remarquer le manque d’un outil d’importation de données(X,Y,Z), comblé par l’utilisation en parallèle d’un logiciel tel que Paraview).Cependant, avec le manque de données précises concernant la topographie etla bathymétrie de l’île, les modèles en trois dimensions résultants ne semblentpas suffisants pour obtenir des résultats quantitatifs valables.
Cependant, ces modèles ont permis d’établir les bases de la modélisation sousDualSPHysics, avec tout d’abord l’utilisation d’un batteur à houle à mouve-ment horizontal sinusoïdal. Dans notre étude, la difficulté d’étalonner le bat-teur à houle pour reproduire une vague de tsunami est due au fait que pourgénérer de si grandes longueurs d’ondes, le déplacement du batteur à houledoit lui aussi être très important, ce qui implique un volume d’eau mis en jeutrès grand, au détriment de la taille minimale des particules que l’on souhaiteatteindre. Les résultats obtenus sont donc un niveau d’inondation correct (lebatteur a été étalonné de la sorte), mais la vague produite est trop grandeet trop rapide. Afin d’étalonner le batteur à houle d’une meilleure façon, lesdonnées issues de la modélisation avec le modèle MOST ont été utilisées pourdéfinir son mouvement. Si on peut effectivement voir une bonne corrélationentre les données issues de MOST et les résultats avec DualSPHysics au ni-veau de la mer, le comportement au niveau des terres n’est toujours pas valable.Le niveau d’inondation reste bien inférieur à celui attendu.
Les résultats obtenus sont donc un bon début pour la suite des travauxà réaliser avec DualSPHysics. La sortie prochaine de FUN-SPH pourrait ré-soudre les problèmes liés à la génération des vagues de tsunamis. Le manquede précision des modèles en trois dimensions due aux données disponibles estpeut être un des problèmes de ces simulations. Cependant, une telle différencedu niveau d’inondation ne peut pas être obtenue du simple fait de ces modèles.En effet, même au niveau des profils en long sur le terrain, rendant le modèleplus proche de la réalité, l’inondation est très limitée. Cependant, le volume
49

Projet de Fin d’Étude - Sylvain LOTTEAU
d’eau initial ne semble pas permettre de générer une telle inondation. Il fau-drait donc peut être élargir le modèle, quitte à y perdre en taille de particule,pour utiliser un batteur à houle plus avec un plus grand débattement.
50
Table des figures
1.1 Décomposition d’une face en particules (points bleus) : le rayondes cercles est égal à la moitié de la distance entre les particules 7
1.2 Simulation utilisant le modèle MOST : tsunami au Kamchatkaen 1997 (source : NOAA Center for Tsunami Research@[2011]) 9
2.1 Interface graphique pour DualSPHysics . . . . . . . . . . . . . 132.2 Barre d’avancement . . . . . . . . . . . . . . . . . . . . . . . . 152.3 L’environnement du logiciel Blender . . . . . . . . . . . . . . 162.4 L’environnement du logiciel Paraview . . . . . . . . . . . . . . 172.5 Tableau récapitulatif sur l’utilisation des différents logiciels . . 18
3.1 Étendue de la grille d’élévation (rectangle jaune) . . . . . . . . 203.2 Profils en long réalisés sur le terrain . . . . . . . . . . . . . . . 213.3 Prise de vue Aérienne de l’île Sibigau après le passage du tsunami 213.4 Zones d’intérêt de l’étude : l’île Sibigau . . . . . . . . . . . . . 223.5 Courbes de niveau de la topographie initiale . . . . . . . . . . 233.6 Comparaison des profils en long mesurés sur le terrain et obte-
nus à partir des données initiales . . . . . . . . . . . . . . . . 243.7 Topographie révisée à l’aide des profils en long . . . . . . . . . 253.8 Coupe méridienne de l’ellipsoïde WGS84 (Portland State Ae-
rospace Society [2007] [9] . . . . . . . . . . . . . . . . . . . . 263.9 Résultat de la triangulation de Delauney 2D . . . . . . . . . . 273.10 Dimensions du "conteneur" . . . . . . . . . . . . . . . . . . . . 283.11 Création des limites du modèle . . . . . . . . . . . . . . . . . 293.12 Création de la forêt de palmiers . . . . . . . . . . . . . . . . . 30
4.1 Différence de détails selon la taille des particules . . . . . . . . 334.2 Tableau des longueurs d’onde et vitesse en fonction de la pro-
fondeur pour un tsunami classique. . . . . . . . . . . . . . . . 344.3 Génération de houle avec un batteur de type piston . . . . . . 354.4 Amplitude du batteur à houle en fonction de la profondeur locale. 354.5 Simulation avec piston à mouvement sinusoïdal . . . . . . . . 374.6 Niveau de la mer en fonction du temps à la profondeur initiale
de 5 mètres . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.7 Comparaison du niveau d’inondation observé sur le terrain et
obtenu par simulation . . . . . . . . . . . . . . . . . . . . . . 394.8 Pressions exercées sur les rangées d’arbres pour deux modèles
différents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404.9 Comparaison du modèle avec et sans forêt . . . . . . . . . . . 41
51

Projet de Fin d’Étude - Sylvain LOTTEAU
4.10 Premières rangées de palmiers intacts après passage du tsunami 424.11 Carte des déformations du fond marin liées au séisme du 25
octobre 2010 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.12 Niveau d’inondation calculé avec le modèle MOST (Borreo et
al. [2011] [1]) . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.13 Composante selon X du vecteur vitesse . . . . . . . . . . . . . 444.14 Vitesse de la colonne d’eau au point de profondeur 15 mètres
au cours du temps . . . . . . . . . . . . . . . . . . . . . . . . 454.15 Comparaison de l’inondation entre le modèle avec et sans forêt 464.16 Comparaison du niveau d’eau calculé avec MOST et SPH à une
profondeur 5 mètres . . . . . . . . . . . . . . . . . . . . . . . . 474.17 Comparaison du niveau d’eau calculé avec MOST et SPH à une
profondeur 10 mètres . . . . . . . . . . . . . . . . . . . . . . . 47
52
Bibliographie
[1] Greer D.S. Lebreton L. et Fritz H.M. Borrero, J.C. Field Surveys andNumerical Modelling of the 2009 South Pacific and 2010 Mentawai IslandsTsunamis. 2011.
[2] Synolakis C. Harkins G.S. et Green D.R. Briggs, M.J. Laboratory expe-riments of tsunami runup on a circular island. Pure applied Geophysics,1995.
[3] Rogers B.D. Dalrymple R.A. Crespo A.J.C. et Narayanaswamy M. Ges-teira, M.G. User guide for the SPHysics code. 2010.
[4] A. Goodwill. Concept behind the GEBCO global bathymetric grid. 2004.
[5] Yeh H. et Synolakis C. Liu, P.L.F. Advanced numerical models for simu-lating tsunami Waves and runup. World scientific, 2008.
[6] Gesteira M.G. Crespo A.J.C. et Rogers B.D. Mayrhofer, A. CombiningBlender with SPHysics, an Introduction. 2010.
[7] Souza N. Wavemaker Theory. 2009.
[8] Allsop W. Charvet I. et Robinson D. Rossetto, T. Physical modellingof tsunami using a new pneumatic wave generator. Coastal Engineering,2011.
[9] Portland State Aerospace Society. Conversion of Geodetic coordinates tothe Local Tangent Plane. Portland State Aerospace Society, 2007.
[10] Swellmap. Swellmap Marine Forecast. URLhttp ://www.swellmap.com/boating/indonesia/sibigau-rights.
[11] Bernard E.N. Titov V.V. Kânoglu U. et González F.I. Synolakis, C.E.Validation and verification of tsunami numerical models. Pure AppliedGeophysic, 2008.
[12] V.V. et Gonzalez F.I. Titov. Implementation and testing of the Method ofSplitting Tsunami (MOST) model. NOAA Technical Memorandum, 1997.
[13] tsunamiresearchcenter@2011. Tsunami Reaseach Center. URLhttp ://www.tsunamiresearchcenter.com/tsunami-archive/the-25-february-2010-sumatran-tsunami/.
[14] Munoz A. Dalrymple R.A. Herault A. et Bilotta G. Weiss, R. Three-dimensional modeling of long-wave runup : simulation of tsunami inun-dation with GPU-SPHSICS. 2011.
[15] wikipedia. L’encyclopédie libre. URL http ://fr.wikipedia.org.
53
Projet de Fin d’Étude - Sylvain LOTTEAU
Sommaire des annexes
Annexe 1 : code Matlab principal de l’interface graphique pour DualSPHysics.
Annexe 2 : fiche explicative de la construction de la grille d’élévations brute.
Annexe 3 : code Matlab pour la conversion de la grille d’élévations en fichierde coordonnées (X,Y,Z).
Annexe 4 : code Matlab pour la transformation des coordonnées (E,N,Z)en coordonnées (X,Y,Z) dans un repère local tangent à l’ellipsoïdeWGS84.
54