Embed Size (px)
Citation preview
N° d’ordre 02 ISAL 0001 Année 2002
Thèse
MODELISATION COGNITIVE ET PREDICTIVE DU COMPORTEMENT
DYNAMIQUE DE L’ACTIVITE ELECTRIQUE DU CŒUR PAR APPROCHES NEURONALES
Présentée devant
L’institut national des sciences appliquées de Lyon
Pour obtenir
Le grade de docteur
Formation doctorale : Images et Systèmes
École doctorale : Electronique, Electrotechnique, Automatique (EEA)
Par
Rajai Mourid El Dajani Titulaire du DEA Génie Biologique et Médical
Soutenue le 07 janvier 2002 devant la Commission d’examen
Jury MM.
P. Chevalier Professeur (Université Lyon 1)
Rapporteur J. Duchêne Professeur (Université de technologie de
Troyes)
Co-Directeur M. Miquel Maître de Conférences (INSA, Lyon)
Directeur P. Rubel Professeur (INSA, Lyon)
Rapporteur N. Vincent Professeur (Université de Tours)
D.A. Zighed Professeur (Université de Lyon 2)
Laboratoire de recherche : Laboratoire d'Ingénierie des Systèmes d'Information (LISI INSA, Lyon) & INSERM ERM107

Modélisation cognitive et prédictive du comportement dynamique de
l’activité électrique du cœur par approches neuronales
Résumé
L’objectif général de notre sujet de thèse est de développer, de mettre en œuvre et d’évaluer de nouvelles méthodes d’analyse de la dynamique de la phase de repolarisation ventriculaire mesurée sur l’électrocardiogramme par l’intervalle QT. Dans ce cadre, nous avons mis au point une méthodologie originale à base de réseaux de neurones artificiels (RNA) pour réaliser des modèles prédictifs du comportement dynamique très basse fréquence de l’intervalle QT d’un patient donné en fonction des variations instantanées de sa fréquence cardiaque mesurée par l’intervalle RR. La fonction à modéliser est du type : ),,...,,( 11 MiMiiii RRRRRRRRfQT −+−−= , où M est la durée de la mémoire de RR. Les réseaux multi-couches se sont avérés ainsi capables de modéliser la relation non-linéaire QT=f(RR) en régime transitoire et permettent d’envisager l’extraction de nouvelles informations sur la dynamique du système cœur en ambulatoire, et d’éviter ainsi des explorations invasives. Les différences entre le QT prédit et le QT mesuré peuvent être utilisées pour déclencher une alarme en cas de franchissement d’un seuil.
Mots-Clés: Electrocardiologie quantitative, ECG, systèmes Holter, repolarisation ventriculaire, dynamique du QT, variabilité de la fréquence cardiaque, traitement du signal, réseaux de neurones, modèles dynamiques, prédiction
Artificial neural networks for modeling and predicting the dynamical
behavior of the ventricular repolarisation phase
Abstract
Within the framework of quantitative ambulatory electrocardiology (ECG) and the space-time analysis of the repolarisation phase, our work is to establish an artificial neural networks (ANN) architecture to predict the dynamic changes of the ventricular repolarisation phase in function of instantaneous changes of the heart rate. The ventricular repolarisation and the heart rate are measured on the ECG respectively by the QT and the RR intervals. The networks will learn the following non-linear patient specific relationship:
),,...,,( 11 MiMiiii RRRRRRRRfQT −+−−= where M is a time delay. Our results indicate that Multi-Layer Perceptrons are able to approach the non-linear aspects of the QT-RR relationship, and can model both the dynamic behavior (response to a step impulse) and the steady state dynamic behavior QT=f(RR) (response to different, fixed RR intervals).
Keywords: Quantitative Electrocardiology, ECG, ambulatory Holter, ventricular repolarisation, QT dynamicity, heart rate variability, signal processing, neural networks, dynamical models, prediction.
Introduction
5
Introduction Depuis la nuit des temps, l’Homme cherche à prédire et à lire dans le futur. Les
marabouts prévoyaient la colère des dieux qui se manifestait par une éclipse ou par une saison
de sécheresse, les oracles grecs étaient consultés sur le futur, Nostradamus et ses prophéties
restent d’actualité, madame Soleil connaissait l’avenir et ses disciples continuent à se
manifester dans toute la presse de tous les pays du monde.
Prédire nécessite la connaissance du passé, l’identification d’un mode de
fonctionnement (ou d’une «loi») et la déduction de conséquences, selon le principe que des
causes semblables produisent des effets semblables. La prédiction est aussi simple que cela,
en théorie. Prédire pour mieux anticiper, c’est tout l’enjeu.
Aujourd’hui, les techniques liées à la prédiction constituent un outil d’aide à la
décision de première importance. En effet, la gestion d’un stock, d’une entreprise, d’un
portefeuille financier ou de tout autre système dynamique repose en partie sur la faculté du
décideur à faire des projections pertinentes de la situation présente.
Les maladies cardiovasculaires et le cancer sont les deux principales causes de
mortalité en France, en Europe et aux Etats Unis. En raison du vieillissement progressif de
nos populations, le nombre des patients cardiaques va croissant. Dans cette pathologie, la
mortalité et la morbidité ont diminué sensiblement ces dernières années en France et dans
certains pays européens, principalement grâce à l’amélioration de la prise en charge
thérapeutique. Pour augmenter davantage cette tendance et améliorer la qualité de vie des
patients, le principal défi est maintenant d’identifier et de détecter le plus précocement
possible les patients à risque d'accidents cardiaques.
Afin d'atteindre cet objectif, l'exploration du champ électrique cardiaque par
l'électrocardiogramme (ECG) reste une méthode de choix. Elle est en effet non invasive et de
faible coût et elle devient, grâce aux potentialités offertes par les nouvelles méthodes de
traitement du signal et l’Electrocardiologie Quantitative, une méthode d’investigation
privilégiée pour détecter de façon précoce le risque d'arythmies (50 000 morts subites par an
en France) et les troubles ischémiques (40 000 décès par infarctus par an en France). La
performance diagnostique sera encore accrue si l'on analyse les ECG successifs d'un même
Introduction
6
patient en terme d'évolution par rapport à des ECG anciens, qualifiés d'ECG de référence, et si
l’on intègre à la fois l’analyse de signaux et la prise en compte de l'historique clinique du
patient.
La plupart des électrocardiographes modernes aujourd’hui disponibles sur le marché
incluent un module d’interprétation automatique de l’ECG standard à 12 dérivations, et les
plus performants atteignent une précision diagnostique de l’ordre de 80%, comparable à celle
des cardiologues. Cependant, la performance du cardiologue reste supérieure à celle de
l’ordinateur lorsqu’il peut disposer d’un ECG de référence et s’il connaît le contexte clinique
du patient, et le « rôle médical » de l’électrocardiographe interpréteur reste confiné à celui
d’un deuxième avis ou d’un outil de dépistage ou d’épidémiologie. Or, si on est arrivé
aujourd’hui à « imiter » le cardiologue, on est encore très loin d’avoir réussi à extraire la
totalité de l’information véhiculée par le signal électrique cardiaque. Par ailleurs, bien que
l’on ait mis en évidence différents marqueurs du risque de mort subite tels que la présence de
micropotentiels ou d’anomalies de la repolarisation (dispersion et dynamique du QT, …), on
est encore très loin d’avoir mis au point des stratégies décisionnelles permettant d’identifier
avec suffisamment de précision tous les patients à risque de mort subite susceptibles de
bénéficier de thérapies pointues telles que la pose d’un défibrillateur implantable. Le
problème est extrêmement complexe, et ne peut être résolu par des techniques
d’épidémiologie classique à cause du nombre de descripteurs mis en jeu et de l’importance
des aspects dynamiques et de leur corrélation avec le système neurovégétatif.
La valeur diagnostique, pronostique, et d’indication thérapeutique de l’intervalle QT et
de sa dynamique est de plus en plus étudiée, et potentiellement démontrée. Or, s’il est admis
depuis fort longtemps que les variations de QT sont dépendantes de la fréquence, le modèle
de variation qui est sous-jacent demeure toujours inconnu et inexpliqué.
Notre objectif est de chercher à modéliser et à expliquer la signification physiologique
des rapports entre la variabilité de la fréquence cardiaque (appréciée par la mesure de la
variabilité de l'intervalle RR) et la dynamique de la repolarisation ventriculaire représentée
par l’intervalle QT. La première explore le système nerveux autonome seul, et non le cœur, à
travers le marqueur que constitue l’automatisme sinusal auriculaire modulé par le système
neurovégétatif. La dynamique de l’intervalle QT, quant à elle, permet d’explorer à la fois le
fonctionnement des cellules cardiaques ventriculaires et l’impact du système nerveux
autonome sur l’étage ventriculaire. L’information est particulièrement complexe, et c’est cette
complexité qu’il importe d’explorer. Grâce aux enregistrements ambulatoires de type
Introduction
7
HOLTER nous pouvons étudier actuellement de façon fine les rapports entre les deux
paramètres QT et RR précités.
Le travail de thèse effectué et présenté ci-après pour objectif la conception de modèles
de prédiction dynamique des variations de l’intervalle QT des enregistrements ECG de longue
durée par des approches neuronales.
Les travaux de recherche méthodologique effectués ces dernières années pour
modéliser le comportement dynamique de l’intervalle QT en fonction de la fréquence
cardiaque ont permis de mettre en évidence la pertinence et la supériorité des méthodes
d’identification à l’aide de réseaux de neurones, par rapport aux méthodes classiques (modèle
auto-régressif de type ARMA, etc…). Actuellement, nous utilisons des réseaux en couches
basés sur l'algorithme de rétro-propagation du gradient ; cette approche a été utilisée pour
traiter des séquences d'enregistrement de 10 et 20 minutes d'une vingtaine de patients.
Afin d'élaborer des modèles neuronaux prédictifs robustes et fiables, plusieurs
problèmes méthodologiques doivent être abordés, comme la recherche d’un paramétrage
optimal (nombre d’itérations, …) et l’analyse de la performance des modèles élaborés sur de
larges ensembles de données réelles et artificielles.
Nous mettrons en place des modèles neuronaux et nous testerons leur capacité à
modéliser la réponse du système cœur aux variations de la fréquence cardiaque en régime
transitoire afin de détecter en temps réel les éventuels dysfonctionnements de la réponse
ventriculaire du patient sous surveillance en quantifiant les différences entre le QT mesuré et
le QT prédit.
Nous présenterons une première approche pour étudier l’universalité du modèle de
variation QT = f(RR) et de sa dépendance aux pathologies, à l’âge, au sexe.
Nous essayerons aussi de donner des éléments de réponse quant à l’existence
potentielle d’un modèle QT=f(RR) universel, ou au contraire clinico et/ou sujet -dépendant.
Ce mémoire comprend quatre chapitres :
• Le chapitre I présente une introduction au fonctionnement du cœur ainsi que les
méthodes d’acquisition de l’électrocardiogramme.
• Au cours du deuxième chapitre nous présentons les mécanismes de la réponse
ventriculaire ainsi que l’influence de la fréquence cardiaque et le système nerveux
central SNC sur la durée de l’intervalle QT.
Introduction
8
• Nous exposerons au cours du troisième chapitre les difficultés liées à la prédiction
des signaux physiologiques ainsi que les différentes techniques de modélisation et
d’identification qui ont été utilisées pour la prédiction de la réponse ventriculaire
en fonction des variations instantanées de la fréquence cardiaque. Ces méthodes
sont les modèles paramétriques mais aussi des réseaux de neurones artificiels.
Deux types de réseaux sont présentés, les réseaux récurrents ainsi que le
Perceptron Multi-Couches. Nos travaux portant essentiellement sur les réseaux en
couches, nous justifierons en étudiant les propriétés de ce type de réseaux comme
approximateurs universels et en les situant par rapport aux résultats précédents
obtenus au sein de notre équipe d’accueil.
• Dans le quatrième chapitre, nous exposerons notre méthodologie d’extraction des
descripteurs des électrocardiogrammes et les prétraitements nécessaires pour
adapter nos données à l’utilisation neuronale. Nous utiliserons deux types de
données : des données artificielles afin d’étudier le comportement des Perceptrons
Multi-Couches dans des conditions para-cliniques et des données réelles issues
d’enregistrements Holter de longue durée. Nous mettrons en place des modèles
prédictifs et étudierons leurs performances sur des séquences Holter appartenant à
divers sujets, sains et pathologiques, afin de détecter d’éventuel
dysfonctionnement du système cœur.
Nous terminerons ce mémoire avec nos conclusions sur l’utilité et la portée de
l’utilisation des Perceptrons Multi-Couches pour la prédiction de la réponse ventriculaire
mesurée par l’intervalle QT en fonction des variations instantanées de la fréquence cardiaque
mesurée par l’intervalle RR.
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
9
I. Analyse de l’ECG ambulatoire et
Electrocardiologie quantitative
Dans ce chapitre nous décrivons le fonctionnement du cœur, ainsi que l’origine, la
signification et les différents modes d’acquisition de l’électrocardiogramme (ECG) afin de
mieux cerner l’importance et le rôle de l’électrocardiologie quantitative qui est le domaine
d’application de notre travail. Nous étudions ensuite plus en détail les paramètres extraits de
l’ECG et nous explicitons leur mode de calcul par traitement numérique ( système de Lyon et
Caviar).
Nous rappelons ensuite les étapes d’analyse automatique des signaux ECG/VCG ainsi
que les travaux de standardisation menés par la communauté scientifique internationale.
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
10
I.1 RÔLE ET ANATOMIE DU CŒUR 11
I.2 PHYSIOLOGIE DU CŒUR 11
I.3 LE CHAMP ÉLECTRIQUE CARDIAQUE 12
I.3.1 L’IMPORTANCE DE L’ÉLECTROCARDIOLOGIE 12 I.3.2 L’ACQUISITION DU SIGNAL ÉLECTRIQUE CARDIAQUE 13 I.3.2.1 LES 12 DÉRIVATIONS ÉLECTROCARDIOGRAPHIQUES 13 I.3.2.2 L’ÉLECTROCARDIOGRAMME TRIDIMENSIONNEL : LE VECTOCARDIOGRAMME 15 I.3.2.3 L’ÉLECTROCARDIOGRAMME AMBULATOIRE OU HOLTER 16 I.3.3 LE TRACÉ ÉLECTROCARDIOGRAPHIQUE (ECG) 16
I.4 L’ENREGISTREMENT DE L’ECG EN AMBULATOIRE : LE HOLTER 17
I.4.1 NUMÉRISATION, DÉTECTION ET CLASSIFICATION 18 I.4.2 SÉLECTION ET MOYENNAGE DES COMPLEXES PQRST PAR LE SYSTÈME ATREC 19
I.5 EXPLOITATION DE L’ÉLECTROCARDIOLOGIE QUANTITATIVE 19
I.5.1 LE SYSTÈME DE LYON 20 I.5.2 L’ANALYSE SÉRIELLE DES ECG : LE LOGICIEL CAVIAR 22 I.5.2.1 INTRODUCTION 22 I.5.2.2 CAVIAR ET LA MESURE PRÉCISE DES VARIATIONS DE DURÉE DE L’INTERVALLE QT 23
I.6 L’ACTION EUROPÉENNE "STANDARDS COMMUNS POUR L’ELECTROCARDIOGRAPHIE QUANTITATIVE" : CSE 24
I.6.1 EVALUATION DES PROGRAMMES DE MESURE (PHASE 1 DE L’ACTION CSE) 25 I.6.2 EVALUATION DES PROGRAMMES DE DIAGNOSTIC (PHASE 2 DE L’ACTION CSE) 26
I.7 CONCLUSION 27
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
11
I.1 Rôle et anatomie du cœur
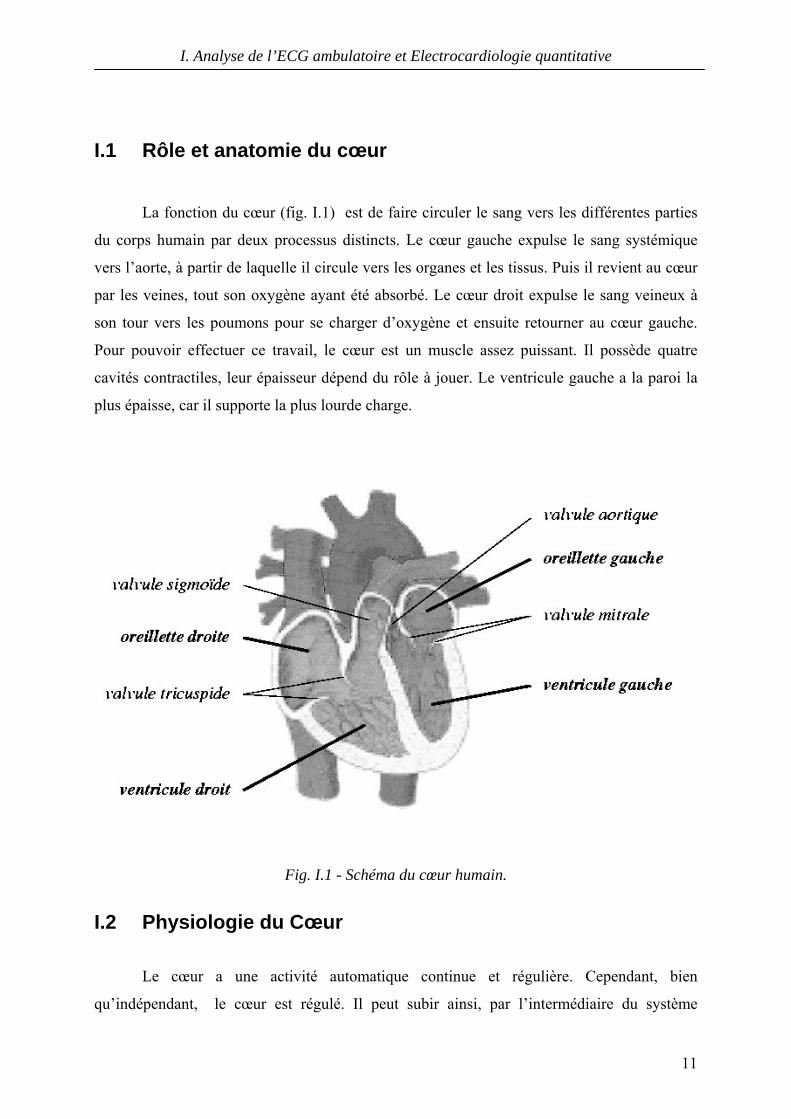
La fonction du cœur (fig. I.1) est de faire circuler le sang vers les différentes parties
du corps humain par deux processus distincts. Le cœur gauche expulse le sang systémique
vers l’aorte, à partir de laquelle il circule vers les organes et les tissus. Puis il revient au cœur
par les veines, tout son oxygène ayant été absorbé. Le cœur droit expulse le sang veineux à
son tour vers les poumons pour se charger d’oxygène et ensuite retourner au cœur gauche.
Pour pouvoir effectuer ce travail, le cœur est un muscle assez puissant. Il possède quatre
cavités contractiles, leur épaisseur dépend du rôle à jouer. Le ventricule gauche a la paroi la
plus épaisse, car il supporte la plus lourde charge.
I.2 Physiologie du Cœur
Le cœur a une activité automatique continue et régulière. Cependant, bien
qu’indépendant, le cœur est régulé. Il peut subir ainsi, par l’intermédiaire du système
Fig. I.1 - Schéma du cœur humain.
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
12
nerveux, l’influence de l’adrénaline, l’hormone du stress, qui l’accélère. De même le système
nerveux peut le freiner. Par ailleurs, il réagit aussi à une augmentation ou à une baisse de la
tension artérielle [Guazzi, 1995].
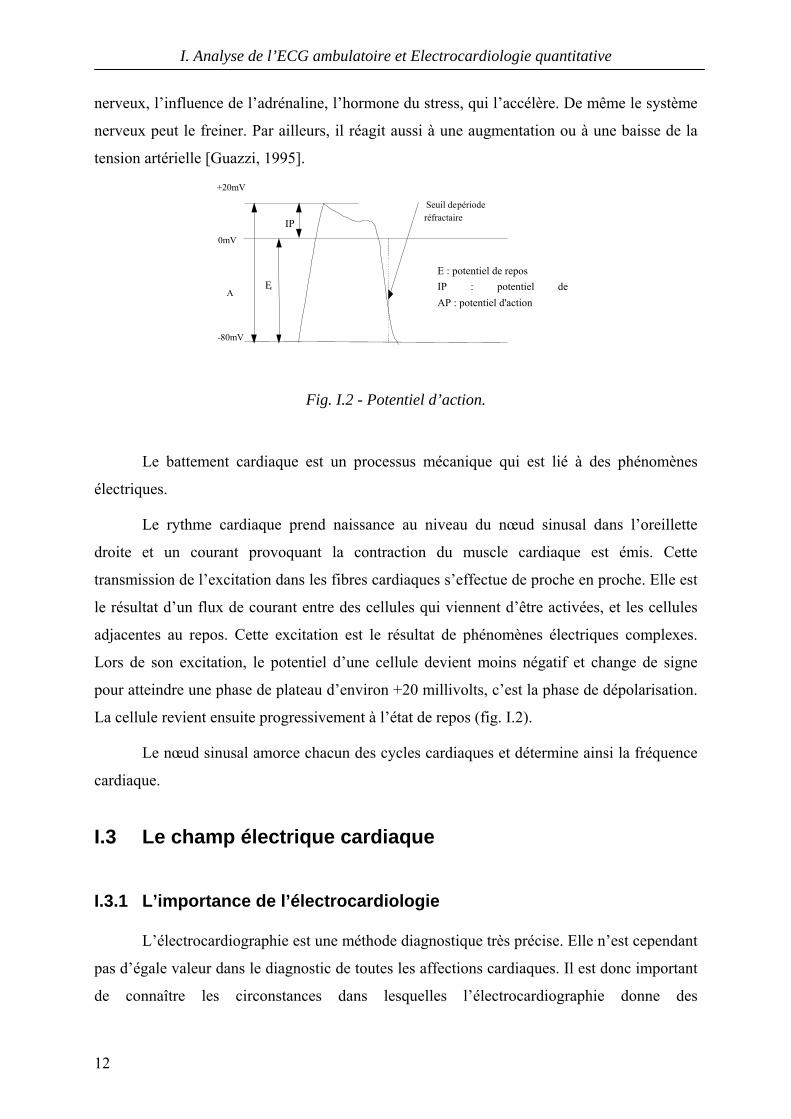
Fig. I.2 - Potentiel d’action.
Le battement cardiaque est un processus mécanique qui est lié à des phénomènes
électriques.
Le rythme cardiaque prend naissance au niveau du nœud sinusal dans l’oreillette
droite et un courant provoquant la contraction du muscle cardiaque est émis. Cette
transmission de l’excitation dans les fibres cardiaques s’effectue de proche en proche. Elle est
le résultat d’un flux de courant entre des cellules qui viennent d’être activées, et les cellules
adjacentes au repos. Cette excitation est le résultat de phénomènes électriques complexes.
Lors de son excitation, le potentiel d’une cellule devient moins négatif et change de signe
pour atteindre une phase de plateau d’environ +20 millivolts, c’est la phase de dépolarisation.
La cellule revient ensuite progressivement à l’état de repos (fig. I.2).
Le nœud sinusal amorce chacun des cycles cardiaques et détermine ainsi la fréquence
cardiaque.
I.3 Le champ électrique cardiaque
I.3.1 L’importance de l’électrocardiologie
L’électrocardiographie est une méthode diagnostique très précise. Elle n’est cependant
pas d’égale valeur dans le diagnostic de toutes les affections cardiaques. Il est donc important
de connaître les circonstances dans lesquelles l’électrocardiographie donne des
+20mV
0mV
-80mV
AEr
IP
E : potentiel de repos IP : potentiel de AP : potentiel d'action
Seuil depérioderéfractaire
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
13
renseignements utiles et celles dans lesquelles elle n’en donne pas. On peut distinguer deux
domaines où l’électrocardiographie s’est montrée utile et parfois même indispensable.
Les troubles du rythme : ce groupe d’affections perturbe l’intervalle existant
normalement entre la contraction des oreillettes et celle des ventricules.
Les altérations de la forme de l’électrocardiogramme : ce groupe d’affections perturbe
la façon dont les oreillettes et surtout les ventricules se comportent envers le processus
d’excitation.
I.3.2 L’acquisition du signal électrique cardiaque
L’électrogénèse du signal électrique cardiaque résulte des flux de transfert ionique qui
se produisent au niveau cellulaire lors de la phase diastolique qui précède la contraction du
cœur. La somme vectorielle de tous les champs élémentaires créés par chaque cellule
cardiaque constitue un vecteur résultant, le vecteur champ électrique cardiaque instantané.
La façon la plus simple de mesurer le champ électrique et ses variations dans le temps
est de recueillir les différences de potentiels entre deux points cutanés. La droite qui les réunit
s’appelle une ligne de dérivation. Une dérivation est bipolaire lorsque les deux électrodes sont
exploratrices, ou unipolaire lorsqu’une seule électrode est influencée par les différences de
potentiel situées à son niveau, l’autre pôle étant considéré comme un potentiel de référence
nul. Actuellement, deux catégories de systèmes sont utilisées : le système classique de 12
dérivations électrocardiographiques et les systèmes d’électrocardiographie à 3 dérivations
orthogonales. Ces derniers explorent la quasi-totalité du champ électrique avec 3 dérivations
orthogonales non redondantes entre elles.
I.3.2.1 Les 12 dérivations électrocardiographiques
L’électrocardiogramme (ECG) standard à 12 dérivations fut et demeure encore
aujourd’hui la technique d’exploration électrique la plus couramment utilisée [Coraboeuf,
1981]. Il est composé de :
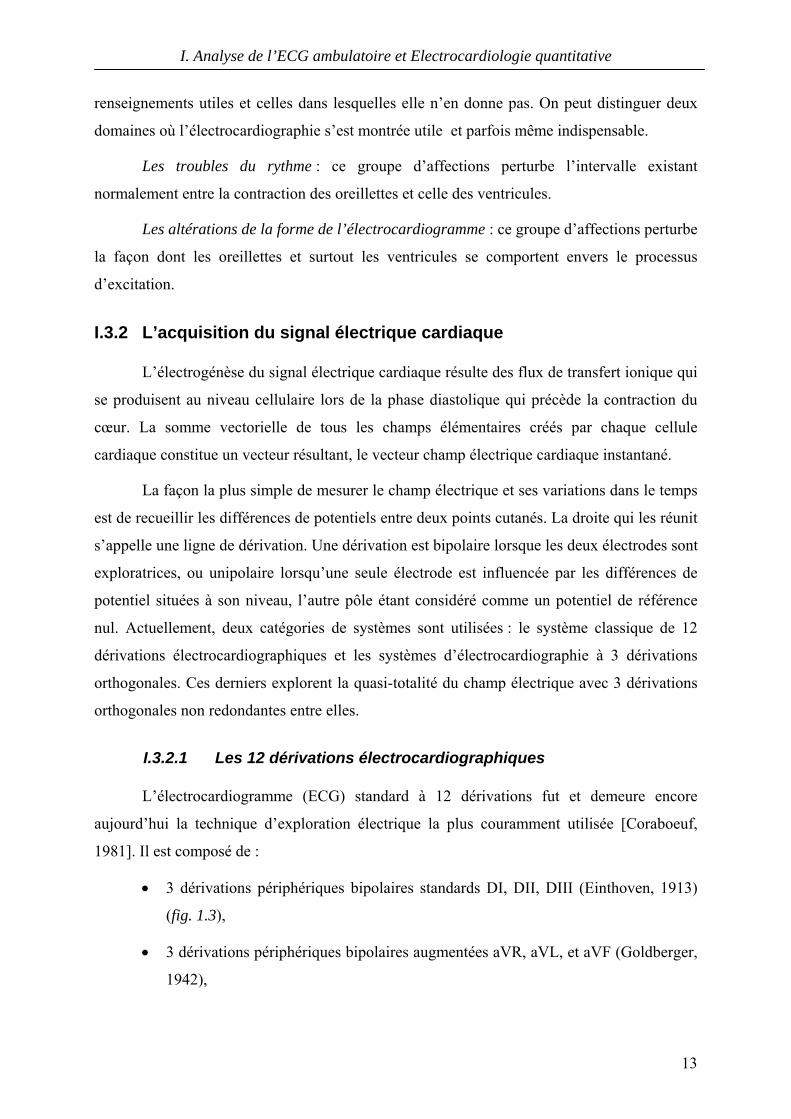
• 3 dérivations périphériques bipolaires standards DI, DII, DIII (Einthoven, 1913)
(fig. 1.3),
• 3 dérivations périphériques bipolaires augmentées aVR, aVL, et aVF (Goldberger,
1942),
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
14
• 6 dérivations unipolaires précordiales V1 à V6 (Wilson, 1932) (fig. I.4).
Fig. I.3 - Triangle d’Einthoven. Fig. I.4 - Positions des 6 électrodes précordiales.
Si R, L, et F désignent respectivement les emplacements Bras droit (Right), Bras
gauche (Left) et jambe gauche (Foot) des électrodes et VR, VL et VF les potentiels
correspondants, on peut rappeler les définitions suivantes :
Les 6 dérivations périphériques :
DI =VL-VR aVR=VR-(VL+VF)/2
DII =VF-VR aVL=VL-(VR+VF)/2
DIII =VF-VL=DII-DI aVF=VF-(VR+VL)/2
Les 6 dérivations précordiales :
Vi-(VR+VF+VL) /3 i variant de 1 à 6
où V1 à V6 sont les potentiels des points 1 à 6 répartis dans la région précordiale au
niveau des 4ème et 5ème espaces intercostaux.
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
15
I.3.2.2 L’électrocardiogramme tridimensionnel : le
vectocardiogramme
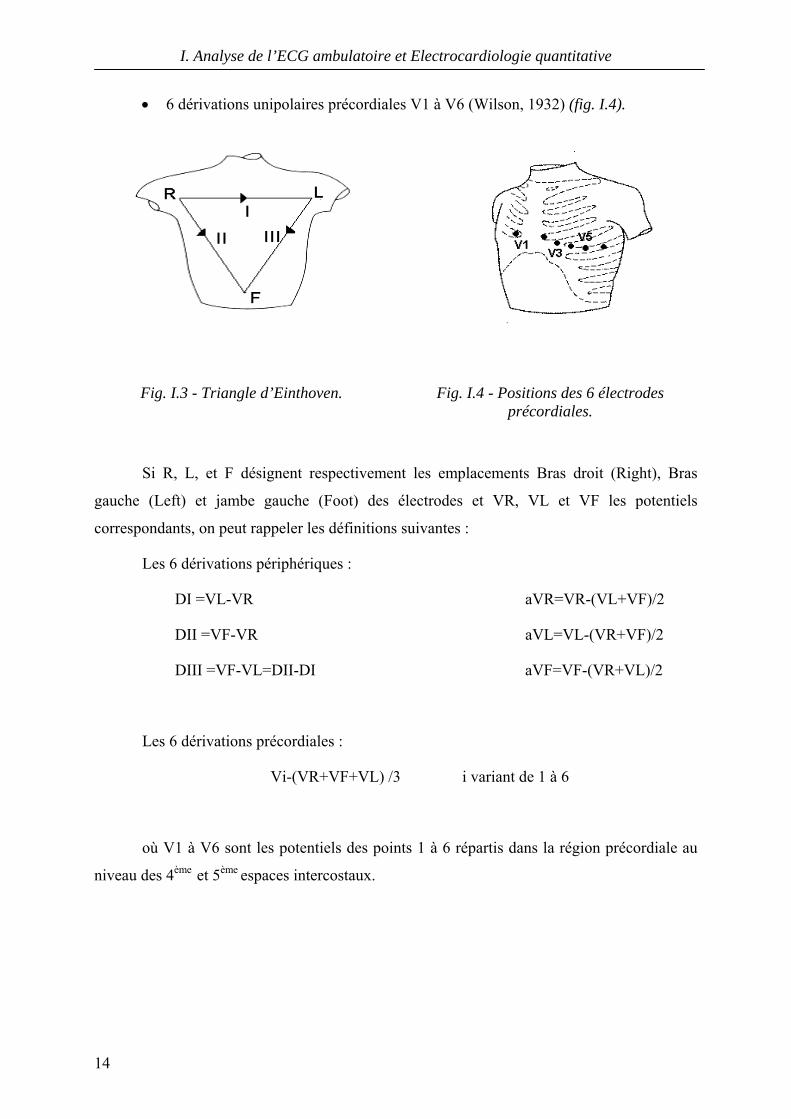
La théorie dipolaire a donné naissance à l’électrocardiographie tridimensionnelle.
Celle-ci se propose de représenter l’évolution temporelle du vecteur champ électrique
cardiaque résultant, vecteur qui est défini à chaque instant par son orientation et son
amplitude, dans un espace à trois dimensions X, Y, et Z. En effet, trois entités suffisent pour
caractériser l’activité électrique du cœur, à savoir : module, orientation et chronologie du
vecteur champ électrique cardiaque (fig. I.5).
Le système d’électrocardiographie orthogonale à 3 dimensions le plus répandu est
celui de Frank [Frank, 1956]. Il s’agit d’un système réputé corrigé dont les composantes X, Y
et Z ont été pondérées de sorte à correspondre à des longueurs électriques équivalentes.
La courbe enveloppe décrite par l’extrémité du vecteur champ électrique résultant est
appelée vectocardiogramme (VCG). Le VCG forme, pour l’essentiel, deux boucles dans
l’espace : la boucle QRS correspondant à la phase de dépolarisation des ventricules et la
boucle T correspondant à la phase de repolarisation .
Fig. I.5 - Les composantes X, Y et Z du vectocardiogramme (VCG).
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
16
I.3.2.3 L’électrocardiogramme ambulatoire ou Holter
L’ECG ambulatoire a été développé par le physicien Norman Holter [Holter, 1961] en
1961. Le Holter est un appareil portable destiné à enregistrer en continu sur une période de 24
heures et sur bande magnétique analogique ou sur support numérique (micro disque ou
mémoire flash), les signaux cardiaques captés à partir des électrodes thoraciques.
Il s’agit de dérivations de type bipolaire comportant, outre l’électrode de référence,
jusqu’à 3x2 électrodes. Dans ce cas la disposition des électrodes sur le thorax est choisie pour
enregistrer le champ électrique cardiaque suivant trois dérivations pseudo-orthogonales X, Y
et Z.
Ce type d’enregistrement permet d’analyser l’évolution dynamique de
l’électrocardiogramme. En effet l’activité électrique cardiaque n’est pas parfaitement
stationnaire et l’analyse dynamique des changements du signal électrique du cœur a ouvert
une nouvelle approche pour l’évaluation des risques d’arythmie cardiaque [Arad, 1999;
Osterhues, 1993; Pedretti, 1999].
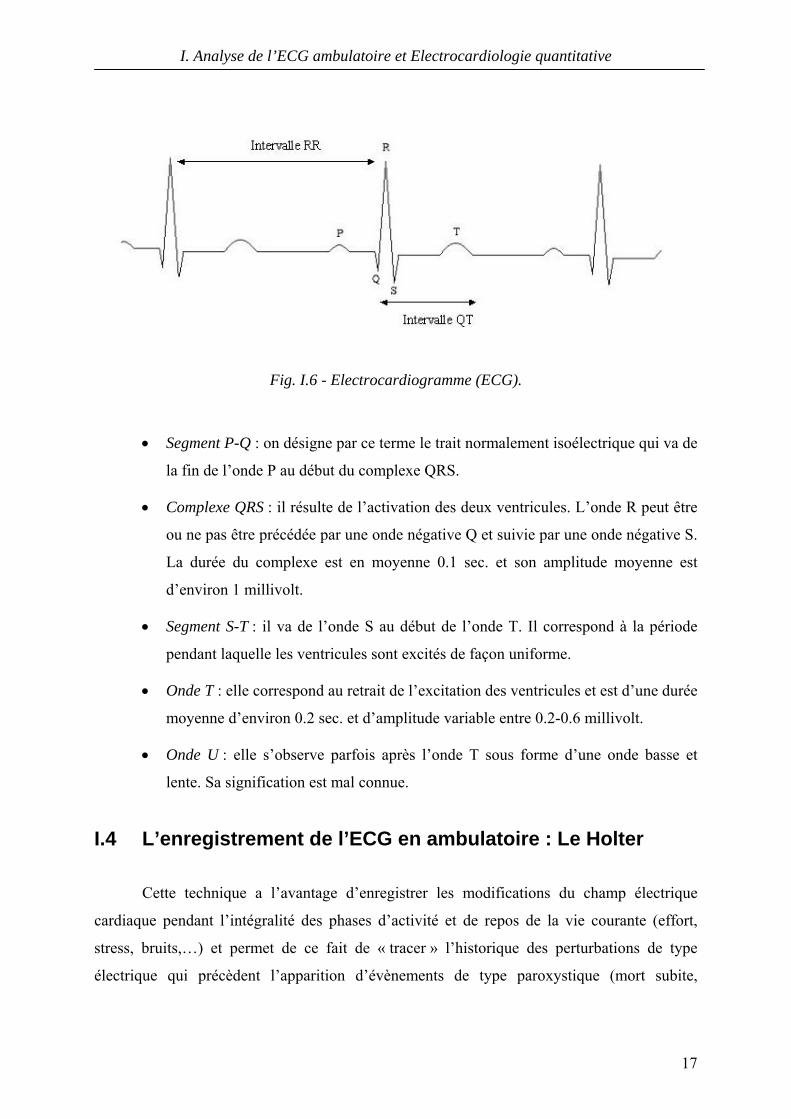
I.3.3 Le tracé électrocardiographique (ECG)
Le tracé électrocardiographique est formé d’une série d’ondes qui, depuis Einthoven,
ont été désignées par les lettres P, Q, R, S, T et U (fig. I.6) [Coraboeuf, 1981].
• Onde P : elle correspond à l’envahissement des oreillettes par l’onde d’excitation
venant du nœud sinusal. Sa durée ne dépasse pas 0.12 sec. dans les cas normaux et
son amplitude varie de 0.1 à 0.3 millivolt.
• Intervalle P-R (ou P-Q) : il va du début de l’onde P au début du complexe QRS,
c’est à dire jusqu’au début de l’onde Q, si celle-ci existe, ou jusqu’au début de R,
si elle n’existe pas.
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
17
Fig. I.6 - Electrocardiogramme (ECG).
• Segment P-Q : on désigne par ce terme le trait normalement isoélectrique qui va de
la fin de l’onde P au début du complexe QRS.
• Complexe QRS : il résulte de l’activation des deux ventricules. L’onde R peut être
ou ne pas être précédée par une onde négative Q et suivie par une onde négative S.
La durée du complexe est en moyenne 0.1 sec. et son amplitude moyenne est
d’environ 1 millivolt.
• Segment S-T : il va de l’onde S au début de l’onde T. Il correspond à la période
pendant laquelle les ventricules sont excités de façon uniforme.
• Onde T : elle correspond au retrait de l’excitation des ventricules et est d’une durée
moyenne d’environ 0.2 sec. et d’amplitude variable entre 0.2-0.6 millivolt.
• Onde U : elle s’observe parfois après l’onde T sous forme d’une onde basse et
lente. Sa signification est mal connue.
I.4 L’enregistrement de l’ECG en ambulatoire : Le Holter
Cette technique a l’avantage d’enregistrer les modifications du champ électrique
cardiaque pendant l’intégralité des phases d’activité et de repos de la vie courante (effort,
stress, bruits,…) et permet de ce fait de « tracer » l’historique des perturbations de type
électrique qui précèdent l’apparition d’évènements de type paroxystique (mort subite,
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
18
tachycardie ventriculaire, salves d’extrasystoles, ischémie silencieuse,…) et d’y puiser
diverses informations à but pronostique ou thérapeutique.
I.4.1 Numérisation, détection et classification
L’enregistrement continu issu de Holters analogiques est ensuite traité par un système
de relecture qui réalise la conversion du signal analogique en numérique. La relecture de la
bande magnétique s’opère à une vitesse qui est 180 à 360 fois plus rapide que la vitesse
d’enregistrement ambulatoire, permettant ainsi la relecture de la totalité de la bande
magnétique de 24 heures en 10 à 20 minutes. Ce temps peut même être encore réduit si l’on
utilise une technologie de type Holter « solide » où la conversion analogique numérique est
réalisée en temps réel directement lors de l’acquisition sur le patient.
Les enregistrements Holter que nous avons utilisés pour notre thèse proviennent de
l’hôpital Lariboisière. Le système de relecture utilisé pour traiter les bandes analogiques de
nos enregistrements est le système Holter laser de Marquette Electronics. La fréquence
d’échantillonnage (Fe) est de 128 Hz, et la résolution de 10 bits. Cette fréquence
d’échantillonnage réalise un bon compromis entre une résolution acceptable et un temps de
relecture rapide.
Le système Marquette procède ensuite à la détection des quelques 100 000 complexes
QRS enregistrés, à leur classification, à la détermination d’un début approché de chacun des
complexes QRS. Ce début constitue un point de référence pour la synchronisation des
complexes. Il procède ensuite à différentes analyses statistiques (nombre d’extrasystoles,
tachogrammes) et à l’édition des résultats.
Pour assurer une qualité optimale de l’enregistrement des ECG ambulatoires, les
enregistreurs Holter analogiques sont soumis régulièrement à différents tests :
• pour quantifier le décalage entre chaque canal, et étudier sa stabilité ;
• pour quantifier les variations d’amplitude d’une voie à l’autre.
Ces deux tests sont réalisés en injectant des séquences de 5 minutes de signaux
rectangulaires de 1 millivolt à l’entrée des enregistreurs.
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
19
I.4.2 Sélection et moyennage des complexes PQRST par le système ATREC
Les données numériques acquises par le système Marquette sont ensuite archivées sur
une bande magnétique numérique et transférées dans le système de gestion et d’analyse des
ECG ATREC (Analyse des Troubles du Rythme de l’Electro-Cardiogramme) [Coumel,
1985].
Ce système permet de sélectionner des séquences d’ECG en fonction de critères
préétablis, du type :
« Sélectionner tous les complexes enregistrés entre les instants t1 et t2 tels que
l’intervalle RR soit égal à X ± x millisecondes à condition que les intervalles RR précédents
soient stables au moins pendant une minute ».
I.5 Exploitation de l’électrocardiologie quantitative
L’électrocardiologie joue un rôle important dans le domaine de la santé publique. Les
techniques d’électrocardiologie sont non invasives, de faible coût, faciles à utiliser et elles
permettent de détecter des anomalies cardiaques avant même qu’elles soient parfois visibles
par les techniques d’imagerie habituelle. En outre, quelques altérations cardiaques ne sont
visibles qu’en électrocardiographie, tels certains troubles de conduction ou troubles
rythmiques [Borggrefe, 1997; Lollgen, 1990].
Au début du siècle, Einthoven a utilisé le galvanomètre à corde pour enregistrer les
différences de potentiel à la surface du corps. Dès la fin des années 50, l’analyse numérique
des signaux et l’informatique ont permis d’envisager un traitement automatisé des signaux
électrocardiographiques.
En 1957, Pipberger réalisait un premier système capable de délimiter automatiquement
les ondes électrocardiographiques. En 1966, il publiait le premier programme d’interprétation
automatique qui utilisait les 3 dérivations orthogonales du vectocardiogramme [Pipberger,
1965].
Les premiers systèmes ont été réalisés sur de gros ordinateurs. Ils étaient
obligatoirement centralisés, avec nécessité de stockage intermédiaire des données, ou de leur
transmission du lieu d’acquisition au lieu de traitement.
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
20
L’introduction des mini-ordinateurs puis des micro-processeurs a permis la réalisation
de systèmes autonomes, puis transportables, réalisant l’analyse du tracé sur le lieu même de
l’acquisition.
Le nombre d’ECGs effectués par an et par habitant est de 0.3 en Europe de l’ouest,
0.33 aux USA et 0.22 au Japon. Ceci montre bien l’intérêt porté à l’électrocardiographie dans
le domaine de la santé publique [Willems, 1987].
La prise de conscience de l’utilité d’un ordinateur en électrocardiologie résultait de
besoins multiples :
• Accroître la qualité du signal tant sur le plan numérique que graphique : une
épaisseur de raie de 0.25 mm sur un tracé scalaire standard- les épaisseurs réelles
peuvent atteindre 1 mm- peut introduire une erreur de 8 millisecondes dans
l’appréciation visuelle de la durée d’une onde [Rautaharju, 1983], alors que
d’après la recommandation des experts de la Communauté Economique
Européenne, il est souhaitable que les programmes soient capables de reconnaître
les moindres accidents des tracés [CSE, 1985].
• Archiver une grande quantité d’information de façon permanente et pouvoir y
accéder rapidement. A titre d’exemple, notons que 100 millions d’ECGs sont
enregistrés chaque années aux USA [Willems, 1987].
• Objectiver l’information recueillie et offrir la possibilité au praticien de disposer
de l’expérience acquise afin d’améliorer la fiabilité de sa décision diagnostique.
Nous présenterons dans le paragraphe suivant le système d’analyse automatique des
ECG réalisé au sein de notre laboratoire.
I.5.1 Le système de Lyon
A Lyon, depuis 1973, un système d’analyse et d’interprétation automatique du VCG
tourne en routine hospitalière. Ce système, réalisé au sein de notre équipe et créé
conjointement par P. Arnaud sur le plan médical [Arnaud, 1990] et P. Rubel sur les plans
conceptuel et technique [Rubel, 1982], existe depuis 1982 sous une forme industrialisée :
CARIEL F12.
Le système de Lyon peut acquérir indifféremment l’électrocardiogramme à 12
dérivations ou le vectocardiogramme de Frank, et ceci automatiquement selon les câbles
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
21
d’électrodes connectés. La fréquence d’échantillonnage est de 1000 Hz, cela permet de
détecter les impulsions des stimulateurs cardiaques.
Un contrôle de qualité est réalisé portant sur la dérive de la ligne de base, la présence
de parasites tels que myogramme ou interférence secteur. Des anomalies de fonctionnement
telles que des défauts d’électrodes ou la présence d’un stimulateur cardiaque sont également
détectées. Tant que le signal recueilli n’a pas une qualité suffisante ou qu’un défaut est
présent, l’acquisition se poursuit automatiquement. Mais, à tout moment, l’opérateur a la
possibilité d’intervenir et de visualiser certaines parties du tracé. Dès que l’enregistrement est
validé, les tracés scalaires ECG et/ou VCG sont édités sur enregistreur tripiste.
Une durée de 8 secondes d’enregistrement simultané des trois voies orthogonales du
VCG de Frank est soumise à la phase de prétraitement et à l’analyse du rythme. La recherche
du complexe le plus représentatif de la séquence d’enregistrement est réalisée à l’aide d’un
algorithme de classification non hiérarchique. On retient le complexe P-QRS-T le plus proche
du centre de la classe dominante. On procède ensuite à la détermination du début et de la fin
des ondes P, QRS et T de ce complexe type en appliquant un algorithme basé sur une
heuristique mettant en œuvre une fonction de détection de type surface spatial [Morlet,
1986].
Un ensemble de 200 paramètres est calculé à partir du complexe type et une centaine
d’entre eux sont édités. L’ensemble de ces paramètres peut être scindé en quatre grandes
catégories.
• Les paramètres d’amplitude ou de surface : il s’agit de modules de vecteurs
particuliers tels que le vecteur d’amplitude maximale de QRS ou T, le vecteur mi-
surface ou encore le vecteur surface géométrique, somme des normales aux
surfaces réglées élémentaires engendrées par le vecteur champ électrique
cardiaque ;
• les paramètres temporels ou intervalles de temps séparant deux déflexions : tels
que la durée de QRS ou de T, les intervalles QT, RR ou bien encore le temps
d’échantillonnage des vecteurs précités ;
• les paramètres angulaires ou d’orientation : tels l’azimut et l’élévation de certains
vecteurs particuliers ;
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
22
• des descripteurs morphologiques : tels le nombre d’irrégularités de parcours de la
boucle, l’existence de figures de huit, le sens de rotation des boucles, etc …
La dernière phase de traitement du système de Lyon concerne l’élaboration de
l’interprétation automatique du contour. A cette étape, seuls 67 des 200 paramètres
calculés sont utilisés.
I.5.2 L’analyse sérielle des ECG : le logiciel Caviar
I.5.2.1 Introduction
Les systèmes d'analyse automatique des ECG ne prennent généralement pas
suffisamment en compte la spécificité du patient. Plusieurs facteurs de variabilité, à la fois
d’ordre technique ou physiologique, et liés aux conditions de recueil du signal, peuvent être
évoqués. Ainsi, une variation dans la position et la taille des électrodes, la différence de phase
respiratoire dans laquelle se trouve le sujet lors de l’enregistrement induisent des
modifications du signal ECG d’un même sujet.
L’objectif général recherché par la réalisation du système CAVIAR (Comparaison
Automatique des Vectocardiogrammes et leur Interprétation par Auto-Référence) était
d’élaborer de nouvelles mesures quantifiant le degré d’évolution entre deux tracés d’un même
patient, en essayant de s’affranchir de la variabilité d’origine extra-cardiaque.
Le but escompté à travers CAVIAR est de fournir un outil complet d’aide à la décision
électrocardiologique par une analyse évolutive des tracés qui permet non seulement d’obtenir
des paramètres optimaux de quantification du degré d’évolution entre deux tracés, mais aussi
des paramètres standards et leurs variations d’un enregistrement à l’autre, ainsi qu'une
visualisation graphique des complexes dans divers modes de représentation [Fayn, 1990].
Le principe de la méthode CAVIAR consiste à comparer directement deux boucles
ECG-3D, tout d’abord en superposant deux à deux les boucles QRS et T dans leur propre
espace préférentiel [Fayn, 1990], puis en mesurant de manière optimale les différences entre
les deux boucles de sorte à quantifier leur degré d’évolution [Rubel, 1986]. Ainsi le
programme CAVIAR procède itérativement :
• à une resynchronisation temporelle, permettant de corriger les éventuelles erreurs
de délimitation des ondes QRS ou T et de compenser les asynchronismes (< à
2ms) inhérents à la technique d’échantillonnage numérique,
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
23
• à des transformations géométriques telles que translation et homothétie de sorte à
compenser les variations de type "complexe après complexe" ou "jour après jour".
Dans cet algorithme, on assimile la boucle vectocardiographique à un système de
points matériels Qi dont la masse est proportionnelle à la vitesse de parcours du vecteur
champ électrique instantané, ce qui en définitif revient à la considérer comme un contour
homogène et continu.
Plusieurs paramètres d’évolution résultent de ce processus de superposition optimale
des boucles. Les plus pertinents au sens de notre étude sont les paramètres de durée.
Les paramètres de durée calculés par CAVIAR sont notamment la mesure des vraies
variations de la durée de QRS et de l’intervalle QT [Rubel, 1988]. Ces variations sont
obtenues en corrigeant les différences de mesures brutes des éventuelles erreurs de
délimitation des ondes en resynchronisant de manière optimale les secteurs initial et terminal
de QRS et le secteur terminal de l’onde T.
I.5.2.2 Caviar et la mesure précise des variations de durée de
l’intervalle QT
Le système d’analyse et d’interprétation automatique des ECG/VCG de LYON (SL)
détermine les pointeurs de début et de fin des ondes P,QRS et T. Mais ces déterminations de
pointeurs ne sont pas toujours parfaitement exactes, elles sont sujettes à plusieurs variations
telles que le bruit musculaire, une dérive de la ligne de base, ou encore un changement de
position des électrodes.
Cette imprécision des mesures induit des risques d’allongement ou de diminution
artefactuels de la durée mesurée des ondes QRS et T. Le logiciel CAVIAR permet non
seulement la superposition optimale dans l’espace des deux boucles spatio-temporelles
relatives aux complexes QRS et aux ondes T, mais aussi la mesure précise de la variation de
divers intervalles temporels. Entre autres mesures, CAVIAR s’intéresse aux intervalles :
• DURQ, la durée du complexe QRS ;
• QT, début du complexe QRS jusqu’à la fin de l’onde T ;
• QMT, début du complexe QRS jusqu’au maximum de l’onde T,
La mesure précise des variations DQTcor de l’intervalle QT s’effectue en trois étapes :
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
24
1. calcul de la variation de la durée de l’intervalle QT : DQT=(QTi - QTref), où
QTref et QTi représentent la durée des intervalles QT pour les deux complexes
à comparer, le complexe de référence QTref étant par exemple le QT médian
de l’enregistrement ;
2. correction par l’analyse sérielle appliquée au secteur initial des complexes
QRSi et QRSref des erreurs résultant d’une incertitude sur la localisation du
début de ces complexes,
3. correction par l’analyse sérielle appliquée aux ondes Ti et Tref des erreurs
résultant d’une incertitude sur la localisation des fins de T.
Si ∆I représente la mesure optimale de la désynchronisation entre deux secteurs
initiaux homologues de QRS, et si ∆R représente la mesure de l’éventuel déphasage entre
deux secteurs terminaux de l’onde T, alors la correction ∆QT nécessaire pour mesurer de
manière précise la variation de la durée de l’intervalle QT est égale à :
∆QT=(∆R-∆I)
et la variation DQT corrigée des erreurs de prétraitement par l’analyse sérielle est donnée par
la relation [Rubel, 1988] :
DQTcor=DQT+ ∆QT
A l’issue de Caviar, pour chaque enregistrement Holter, nous obtenons un QT de
référence QTref et une série de DQTcor. La mesure exacte des intervalles QT est calculé
comme suit :
QTi = QTref + DQTcori
I.6 L’action européenne "Standards Communs pour
l’Electrocardiographie Quantitative" : CSE
Face à une grande disparité des mesures effectuées par les programmes d’analyse
électrocardiographique et devant la complexité de leur évaluation en matière de performance
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
25
diagnostique, une action internationale a été entreprise dès 1978 par la communauté
Economique Européenne dans le but d’établir des standards en électrocardiologie quantitative.
Cette action est connue sous le nom «d’action C.S.E» (Common Standards for
Quantitative Electrocardiography, chef de projet: J.L.Willems) [CSE, 1985].
Le premier objectif de cette action a été de proposer des recommandations sur les
mesures des ondes P QRS T de telle sorte qu’elles soient caractérisées, définies et mesurées
de la même façon par tous les programmes. Cela signifie qu’un programme automatisé,
soumis à l’épreuve de traiter une base de données de référence, doit obtenir des résultats de
mesures très proches de ce qui a été établi par un groupe de cardiologues ‘référés’ (moyenne
et variance situées entre des limites acceptables).
Le deuxième objectif a été d’évaluer les performances diagnostiques des différents
programmes, notamment européens.
I.6.1 Evaluation des programmes de mesure (Phase 1 de l’action CSE)
La première phase de cette action, qui s’est étalée sur 8 ans (1978-1986), a permis de
comparer les différents programmes de prétraitement des signaux ECG-VCG existants sur le
plan international [Willems, 1990]. L’évaluation a porté sur 16 programmes, dont neuf
européens. Le programme de Lyon s’est révélé l’un des plus performants.
Cette évaluation a été réalisée sur une base de données commune comportant 310
enregistrements électrocardiographiques. Les résultats de chaque programme ont été
comparés, d’une part à la médiane des résultats de tous les programmes, d’autre part à la
médiane des estimations formulées par des experts européens, cardiologues référés. Ces
cardiologues ont analysé les 310 tracés de façon indépendante et aucun d’entre eux n’était
impliqué dans l’évaluation d’un programme automatique.
Dans le but de réduire la variabilité entre ces différents observateurs et afin d’obtenir
une référence plus fiable et plus consistante, une procédure de type Delphi modifiée a été
adoptée permettant à chaque cardiologue impliqué de réviser jusqu'à trois fois son estimation
dans les cas où ses résultats s’éloignaient trop de la médiane des résultats de ses confrères.
Une telle méthode permet ainsi d’éliminer successivement les valeurs extrêmes pour aboutir
finalement, au terme de la quatrième lecture, à un résultat médian que l’on suppose être
proche de la vérité absolue. Le pourcentage des mesures revues par chacun des référés lors de
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
26
la première révision était en moyenne de 9,5%. Cette valeur n’était plus que de 3% lors de la
seconde révision [Willems, 1990].
A la suite de ce travail, le groupe de l’action CSE a recommandé le respect des deux
critères suivants pour la reconnaissance des ondes ECG :
1- Les résultats d’un programme doivent s’approcher le plus possible de la médiane
des résultats donnés par les référés.
2- L’écart-type de la différence entre les résultats d’un programme et ceux de la
référence ne doit pas dépasser une certaine limite bien déterminée [CSE, 1985].
I.6.2 Evaluation des programmes de diagnostic (Phase 2 de l’action CSE)
Cette deuxième phase de l’action CSE, qui s’est déroulée de 1986 à 1990, a concerné
la ‘’phase diagnostic’’ de l’analyse électrocardiographique. Pour cette évaluation a été utilisée
une base de données de 1220 cas appartenant à 7 classes de diagnostic : tracés normaux (382),
hypertrophie ventriculaire gauche (183), droite (55) et biventriculaire (53), infarctus inférieurs
(273), antérieurs (170) et infarctus de localisation mixte (73), enfin 31 tracés présentant à la
fois un infarctus et une hypertrophie ventriculaire. Ces données électrocardiographiques ont
été collectées dans 5 centres européens différents. Les 15 dérivations de l’ECG standard et du
VCG étaient enregistrés simultanément avec une fréquence d’échantillonnage de 500 Hz.
L’appartenance à telle ou telle classe de diagnostic a été établie uniquement d'après des
critères non électriques [Willems, 1991]. Ensuite neuf cardiologues ont interprété les 1220 cas
avec des méthodes indépendantes. Parmi ces neuf cardiologues, quatre ont interprété à la fois
les ECG et les VCG, de façon aléatoire, sans connaître la correspondance entre les ECG et les
VCG [Willems, 1991].
La précision diagnostique des différents programmes allait de 62.0% à 77.3% pour les
programmes ECG, de 64.3% à 76.2% pour les programmes VCG, de 72.6% à 81.0% pour les
cardiologues ayant interprété l’ECG et de 66.3% à 74.4% pour les cardiologues ayant
interprété le VCG. En combinant entre eux les résultats d'une part des programmes et d'autre
part des référés au moyen d’une technique de scoring [Willems, 1988], les résultats sont
respectivement de 76.3%, 77.0%, 79.2% et 74.8% en termes de précision totale.
I. Analyse de l’ECG ambulatoire et Electrocardiologie quantitative
27
Cette évaluation a montré que les résultats des meilleurs programmes sont très proches
de ceux des meilleurs cardiologues et que même en utilisant des techniques de « moyennage
pondéré » qui combinent les résultats de différents programmes et cardiologues, il est très
difficile de dépasser des performances de 80% avec une base de données dont la composition
est celle énoncée plus haut.
I.7 Conclusion
Le Holter ainsi que les méthodes d’analyse de l’ECG ambulatoire ont permis une
meilleure exploration de l’ECG. Avec le Holter, le système de Lyon et Caviar, nous avons en
notre possession un des outils les plus performants et les plus précis en terme de mesure des
intervalles RR et QT. Nous mettrons à profit les moyens dont nous disposons en les associant
aux techniques issues de l’intelligence artificielle pour l’étude de la dynamique battement par
battement de l’activité électrique du cœur comme nous le détaillerons dans les prochains
chapitres.
II. La réponse ventriculaire
28
II. La réponse ventriculaire
Dans ce chapitre, nous nous intéressons à l’importance de la valeur diagnostique de
la réponse ventriculaire. Nous commencerons par présenter différents aspects de l’étude de la
repolarisation ventriculaire : la dispersion de QT et la variabilité de QT.
Ensuite nous présenterons les différents paramètres influençant la valeur de
l’intervalle QT et nous détaillerons plus particulièrement la relation entre l’intervalle QT et
la fréquence cardiaque, cette relation étant au cœur du travail présenté dans ce projet. C’est
pourquoi nous justifierons le choix d’étudier la relation entre QT et la fréquence cardiaque
en régime dynamique et nous montrerons l’insuffisance des modélisations actuelles.
II. La réponse ventriculaire
29
II. LA RÉPONSE VENTRICULAIRE 28
II.1 INTRODUCTION 30 II.2 LA DISPERSION DU QT (QTD) 31 II.3 LES ALTÉRATIONS DU RYTHME 32 II.4 FACTEURS INFLUENÇANT LE COMPORTEMENT DE L’INTERVALLE QT 32 II.4.1 LE SYSTÈME NERVEUX AUTONOME (SNA) 33 II.4.1.1 Nerf sympathique 34 II.4.1.2 Nerf parasympathique (vagal) 35 II.4.1.3 Mesure de l’activité du Système Nerveux Autonome (SNA) 36 II.4.2 VARIATIONS CIRCADIENNES 37 II.5 VARIATION DE LA DURÉE DE L’INTERVALLE QT AVEC LA FRÉQUENCE CARDIAQUE 38 II.5.1 MODÈLES STATIQUES DES VARIATIONS DE QT EN FONCTION DE RR 39 II.5.2 MODÈLES DE CORRECTIONS QTC = F(QT,RR) 41 II.5.3 ETUDE DE LA DYNAMIQUE DE QT EN FONCTION DE RR 42 II.5.3.1 Valeur diagnostique 42 II.5.3.2 Modèle de variation dynamique 42 II.5.3.3 Relation de type « dynamique» 44 II.6 LE SYNDROME DE QT LONG 47 II.6.1 QT LONG CONGÉNITAL 47 II.6.1.1 Identification des sujets porteurs de l'anomalie génétique. Définition du phénotype 48 II.6.1.2 Le risque de mort subite 49 II.6.1.3 Traitement 49 II.6.2 LE SYNDROME DU QT LONG ACQUIS 50 II.7 CONCLUSIONS 50
II. La réponse ventriculaire
30
II.1 Introduction
La repolarisation ventriculaire représente la phase pendant laquelle les cellules
myocardiques ventriculaires reviennent à leur état de repos après leur dépolarisation. La
repolarisation ventriculaire est mesurée par l’intervalle QT qui représente le temps écoulé
depuis le début de l’onde Q jusqu’à la fin de l’onde T.
La repolarisation ventriculaire, phase lente du complexe QRST couvrant le segment
ST et l’onde T, a un comportement relativement mal connu au cours du temps en termes de
morphologie et de durée et les mécanismes qui régissent la phase de repolarisation semblent
particulièrement complexes. En effet, la repolarisation ventriculaire dépend de l’état
métabolique du myocarde ventriculaire, de la fréquence cardiaque et aussi du système
nerveux autonome (SNA). Ces facteurs de variation sont loin d’avoir les mêmes effets sur les
différentes caractéristiques de l’onde T. Les modifications métaboliques influencent plutôt la
morphologie. La durée de l’intervalle QT est fonction de la fréquence cardiaque, mais la
dynamique de cette durée, son adaptation aux modifications de fréquence dépendent du
système nerveux végétatif.
Or, la quantité d’information contenue dans cette phase est telle qu’une meilleure
connaissance de sa dynamique s’avère de toute première importance. Aussi, l’analyse
dynamique de ces processus intéresse un grand nombre d’équipes de recherche à travers le
monde. Cependant, nos connaissances dans ce domaine sont encore très limitées, car bien que
la technologie actuelle permette d’enregistrer des séquences d’ECG ambulatoire de longue
durée permettant ainsi le recueil de toute l’information nécessaire, l’extraction et la
quantification de cette information demeurent des problèmes non résolus. En effet, l’ECG
ambulatoire est par essence un signal de mauvaise qualité puisque soumis à plusieurs artefacts
(bruit de mesures, bruit de nature musculaire …). L’ECG de repos au contraire est très
largement exploité, mais n’offre qu’une vue très partielle et incomplète des phénomènes
étudiés. Plus récemment, des techniques d’électrocardiologie quantitative sérielle se sont
développées, notamment la méthode CAVIAR [Berg, 1995; Fayn, 1988] qui permet de
réaliser une analyse dynamique de l’ECG de repos indépendamment de la variabilité d’origine
extra-cardiaque.
II. La réponse ventriculaire
31
L’étude simultanée de l’aspect temporel et de l’aspect dynamique de QT est un outil
très précieux qui ne permet pas uniquement de détecter les patients à haut risque d’arythmie
mais aussi d’étudier le comportement de la réponse ventriculaire déclenchant cette arythmie.
Plusieurs aspects de l’onde QT sont étudiés, en voilà les principaux :
• Etude de l’intervalle QT et de la dispersion de QT (QTD),
• Variabilité de QT en fonction de la fréquence cardiaque, étude de la
dynamique de la relation entre l’intervalle QT et l’intervalle RR, où RR est
l’inverse de la fréquence cardiaque ;
• Morphologie de l’onde T
II.2 La dispersion du QT (QTD)
L’intervalle QT mesuré sur l’ECG de surface est connu pour varier significativement
entre les individus [Lepeschkin, 1952]. En 1990 Day, McComb et Campbell [Day, 1990] ont
proposé l’utilisation d’un nouveau paramètre pour mesurer l’inhomogénéité de la
repolarisation ventriculaire et ils l’ont nommée « la Dispersion de QT ». Ce nouveau
paramètre, le QTD, correspond à la différence entre les valeurs minimales et maximales de
l’intervalle QT mesurées pour chacune des dérivations d’un enregistrement ECG pour un
individu donné. Habituellement, cette mesure est effectuée sur un complexe type, plus
récemment sur une série de complexes. Depuis, la méthode a gagné en popularité comme un
nouveau marqueur de l’arythmologie ventriculaire, de torsades de pointe [Hii, 1992], et pour
l’étude de l’efficacité des thérapies antiadrénergiques chez les patients atteints du syndrome
de long QT [Priori, 1994]. La Foods and Drugs Administration (FDA) impose la mesure du
QTD durant les phases d’évaluation de nouveaux médicaments [Moss, 1995]. Le rôle
potentiel du QTD comme élément prédicteur de mort subite chez les patients à risque comme
les patients après un infarctus du myocarde [Glancy, 1995; Perkiomaki, 1995] ou avec une
défaillance cardiaque [Barr, 1994] [Fei, 1996] a aussi été examiné.
A présent, la mesure de QTD peut être utile chez les patients atteints du syndrome de
QT long pour mesurer l’effet des médicaments administrés sur la durée de l’intervalle QT.
Mais, la valeur prédictive de la dispersion de QT pour détecter les risques d’arythmologie
reste à prouver compte tenu des nombreuses études contradictoires [Coumel, 1998; Pedretti,
1999].
II. La réponse ventriculaire
32
II.3 Les altérations du rythme
Les altérations du rythme cardiaque, ou arythmies, sont assez fréquentes et peuvent
s’observer même chez des sujets sains (extrasystole, arythmie sinusale, certaines tachycardies
paroxystiques). Cependant, le plus souvent, les arythmies sont associées à une cardiopathie ou
à une atteinte cardiaque [Tavernier, 1997].
Les manifestations cliniques des arythmies dépendent essentiellement de la fréquence
du rythme ventriculaire. On peut distinguer :
1. Les arythmies à rythme ventriculaire rapide. Les manifestations cliniques
associées sont : palpitations, dyspnée, tendance aux lipothymies et aux
syncopes, douleurs précordiales, hypotension, pouls alternant. Suivant l’état du
cœur et la durée du trouble, une insuffisance cardiaque peut se développer plus
au moins rapidement, avec cyanose et éventuellement état de choc.
2. Les arythmies à rythme ventriculaire lent. Les manifestations cliniques
peuvent faire défaut lors de rythmes ventriculaires ralentis jusqu’à 30
battements par minute. Au-dessous de ce chiffre, on observe habituellement
une dyspnée d’effort ou permanente, des lipothymies ou des syncopes qui
peuvent s’accompagner de convulsion (par anoxie cérébrale : syndrome
d’Adams-Stokes).
II.4 Facteurs influençant le comportement de l’intervalle QT
L’intervalle QT est sous l’influence de différents paramètres :
• la fréquence cardiaque mesurée par l’intervalle RR;
• l’age et sexe de l’individu;
• le système nerveux autonome;
• les variations circadiennes.
Ces paramètres modifient la durée de l’intervalle QT mais aussi son comportement
dynamique. La fréquence cardiaque est le principal facteur influençant le QT ; nous
détaillerons la relation entre la fréquence cardiaque et la réponse ventriculaire plus loin dans
II. La réponse ventriculaire
33
ce chapitre en expliquant les différents aspects de la relation QT = f(RR) en régime
dynamique et transitoire.
L’intervalle QT est relativement plus long chez la femme que chez l’homme; il est
également plus long chez l’enfant et le vieillard que chez l’homme adulte.
La durée de l’intervalle QT est sujette à des allongements ou à des raccourcissements.
En voici les raisons principales pour chacun des deux phénomènes [Fattorusso, 1958] :
Allongement de QT :
1. Hypocalcémie : hypoparathyroïde primitive ou secondaire, urémie, troubles de
la résorption du calcium, vomissements incoercibles, ingestion d’alcalis.
2. Ischémie : infarctus du myocarde, myocardite, péricardite, embolie
pulmonaire.
3. Médicaments : quinidine, amide de la procaïne, émétine.
4. Agents physiques : froid, courant cathodique.
5. Causes diverses : l’hypertrophie ventriculaire droite ou gauche allonge le QT
surtout en cas de décompensation surajoutée. Une partie de l’allongement est
due à l’augmentation de la durée de QRS.
Raccourcissement de QT :
1. Hypercalcémie : ostéose parathyroïdienne, rarement intoxication à la vitamine
D.
2. Anoxie aiguë du myocarde.
3. Médicaments et substances toxiques : digitale, cyanures, fluorures.
4. Electrolytes : hypo et hyperpotassémie.
5. Agents physiques : chaleur, courant anodique.
II.4.1 Le système nerveux autonome (SNA)
La partie du système nerveux qui règle les activités des muscles lisses, du muscle
cardiaque et des glandes est le système nerveux autonome. Sur le plan de la fonction, il opère
habituellement sans maîtrise consciente. A l’origine, on l’a qualifié d’autonome parce que les
physiologistes croyaient qu’il fonctionnait indépendamment du système nerveux central
II. La réponse ventriculaire
34
(SNC) et que par conséquent, il était autonome. Il a été démontré depuis que le SNA dépend
du SNC tant sur le plan de la structure que sur celui de la fonction. Le SNA joue un rôle clé
dans la régulation de l’activité cardiaque, dans le contrôle de la fréquence et de la force des
battements cardiaques [Japundzic-Zigon, 1998], de la pression artérielle (dilatation et
constriction des vaisseaux sanguins), de la respiration, de la digestion [Censi, 2000; Wilhelm,
1999], …
L’action du système nerveux autonome est transitoire mais puissante et elle est la
conséquence du stress quotidien de la vie courante. L’ECG ambulatoire est un outil de choix
pour le diagnostic et le suivie des thérapies [Keyl, 1996; Yeragani, 1998]. Plusieurs études
s’intéressent à la mise au point de nouveaux marqueurs des risques mortels des arythmies,
ceci peut être détecté par l’étude de la dynamique du signal (ECG, RR, QT ...) et la détection
de l’influence transitoire et puissante du système nerveux sur la vulnérabilité cardiaque aux
arythmies [Opthof, 2000; Ribeiro, 2001].
Le SNA comprend deux parties principales : le système sympathique et le système
parasympathique (ou vagal). La plupart des organes sont doublement innervés, ils reçoivent
des fibres du système sympathique et du système parasympathique. Les efférents
sympathiques et parasympathiques exercent des effets opposés sur la fréquence cardiaque.
Ces effets ne sont pas simplement additifs ; il y a entre eux des interactions plus au moins
complexes, qui n’ont pas encore été clairement identifiées [Cohen, 2000; McCloskey, 2000].
Le SNA est impliqué dans plusieurs maladies cardiovasculaires, principalement
l’hypertension, l’arythmie, et la maladie des coronaires [Vanoli, 1990]. Son influence sur la
santé cardiaque est complexe mais elle se manifeste en modifiant la stabilité électrique du
cœur [Schwartz, 1990-a].
II.4.1.1 Nerf sympathique
Le système autonome via les nerfs sympathiques peut augmenter la vulnérabilité à une
arythmie ventriculaire [Schwartz, 1990-b]. Ces observations sont faites chez des patients
atteints de syndrome de QT long [Schwartz, 1990-b]. Les observations confirment aussi la
présence d’une prolongation progressive de QT à faible rythme cardiaque dans le cas de
maladie des coronaires, de l’infarctus du myocarde, et de cardiopathie hypertrophique [Singh,
1997], ce qui peut indiquer une inhomogénéité de la repolarisation ventriculaire et le risque
d’une arythmogénèse.

II. La réponse ventriculaire
35
L’activité du nerf sympathique augmente la vulnérabilité du cœur sain aux arythmies
et cela chez l’homme et chez l’animal [Lown, 1976; Verrier, 1996]. Le tableau suivant tente
de résumer l’influence du nerf sympathique sur la santé cardiaque.
Influence du nerf sympathique :
Déplace le pacemaker du nœud sinusal à la région
jonctionnelle
Altère la morphologie de l’onde P
Raccourcit l’intervalle P-R
Augmente l’automacité des fibres de Purkinje
Modifie l’onde T dans le syndrome du QT long
II.4.1.2 Nerf parasympathique (vagal)
Plusieurs études utilisant des agents vagomimétiques [Hull, Jr., 1995] pour stimuler le
nerf parasympathique ont montré l’influence bénéfique de ce nerf sur le cœur. La stimulation
du nerf vagal peut avoir une influence antifibrilatoire en inhibant la production presynaptique
de norepinephrine par les nerfs adrénergiques. Le nerf vagal protège le cœur contre la
fibrillation ventriculaire en diminuant le rythme cardiaque. Néanmoins, si la réduction du
rythme cardiaque est excessive, l’effet bénéfique de l’activité du nerf vagal peut être perdu
suite au développement d’une hypotension induisant une diminution de la perfusion des
coronaires. Le tableau suivant résume l’influence du nerf vagal.
II. La réponse ventriculaire
36
Influence du nerf parasympathique
Le nerf vagal augmente la stabilité électrique du myocarde indépendamment
du rythme cardiaque, ce qui diminue la vulnérabilité aux fibrillations
ventriculaires pendant l’ischémie.
La diminution du rythme cardiaque grâce au nerf parasympathique joue un rôle
important dans l’ischémie du myocarde et la reperfusion car il augmente la
durée de la perfusion diastolique et réduit la demande en oxygène du
métabolisme cardiaque.
Les bases de l’interaction sympathique-parasympathique sont :
Inhibition de la norepinephrine relâchée par les nerfs.
Atténuation de la réponse aux catécholamines des cites récepteurs.
L’effet bénéfique de l’activité vagale peut être annulé s’il est suivi par une
bradycardie. L’infarctus du myocarde pourrait altérer l’influence du système
autonome en endommageant les nerfs.
II.4.1.3 Mesure de l’activité du Système Nerveux Autonome (SNA)
Parmi les paramètres résultant de l’analyse spectrale des signaux RR et QT, on
distingue essentiellement une composante de basse fréquence autour de 0.1 Hz (LF)
influencée par le système nerveux sympathique, et une composante de haute fréquence autour
de 0.25 Hz (HF) influencé par le système nerveux parasympathique. La partie très basse
fréquence 0-0.05 Hz (VLF) est sous l’influence de la thermorégulation. Le rapport LF/HF est
un indice de la balance neurovégétative : lors d’une activité sympathique importante, la
composante LF du signal augmente tandis que la composante HF augmente avec l’influence
du nerf parasympathique [Pomeranz, 1985; Rizzoni, 1993].
II. La réponse ventriculaire
37
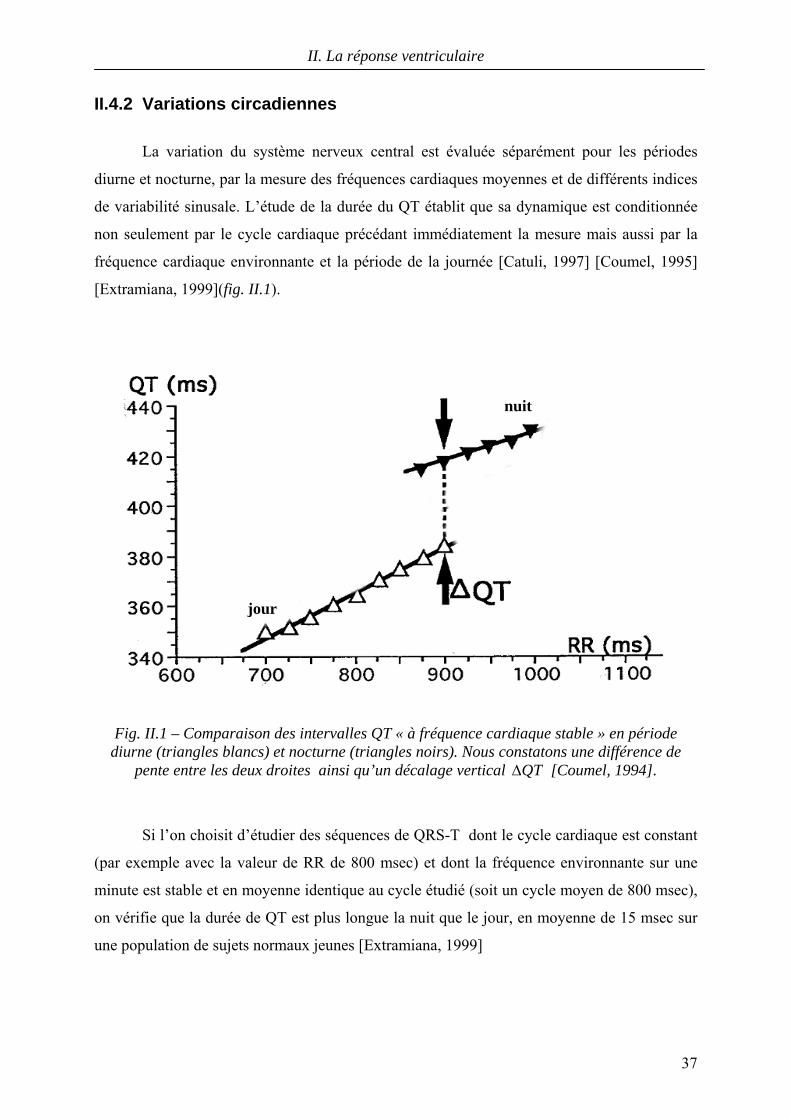
II.4.2 Variations circadiennes
La variation du système nerveux central est évaluée séparément pour les périodes
diurne et nocturne, par la mesure des fréquences cardiaques moyennes et de différents indices
de variabilité sinusale. L’étude de la durée du QT établit que sa dynamique est conditionnée
non seulement par le cycle cardiaque précédant immédiatement la mesure mais aussi par la
fréquence cardiaque environnante et la période de la journée [Catuli, 1997] [Coumel, 1995]
[Extramiana, 1999](fig. II.1).
Si l’on choisit d’étudier des séquences de QRS-T dont le cycle cardiaque est constant
(par exemple avec la valeur de RR de 800 msec) et dont la fréquence environnante sur une
minute est stable et en moyenne identique au cycle étudié (soit un cycle moyen de 800 msec),
on vérifie que la durée de QT est plus longue la nuit que le jour, en moyenne de 15 msec sur
une population de sujets normaux jeunes [Extramiana, 1999]
Fig. II.1 – Comparaison des intervalles QT « à fréquence cardiaque stable » en période diurne (triangles blancs) et nocturne (triangles noirs). Nous constatons une différence de
pente entre les deux droites ainsi qu’un décalage vertical QT∆ [Coumel, 1994].
nuit
jour
II. La réponse ventriculaire
38
II.5 Variation de la durée de l’intervalle QT avec la fréquence
cardiaque
Une relation évidente existe entre la fréquence cardiaque et l’intervalle QT. En effet,
une augmentation de la fréquence induit un raccourcissement de l’intervalle RR (i.e. l’inverse
de la fréquence cardiaque) et par la suite une diminution de l’intervalle QT [Arad, 1999;
Merri, 1992].
Un changement brusque de la fréquence cardiaque n’est pas accompagné
immédiatement d’une variation proportionnelle de l’intervalle QT (fig. II.3). L’intervalle QT
suit les variations de l’intervalle RR avec une constante de temps (retard) d’environ une
minute [Lau, 1989; Tavernier, 1997] .
Fig. II.2 – Changement de la fréquence cardiaque du à un évènement (peur soudaine, téléphone qui sonne, …)
II. La réponse ventriculaire
39
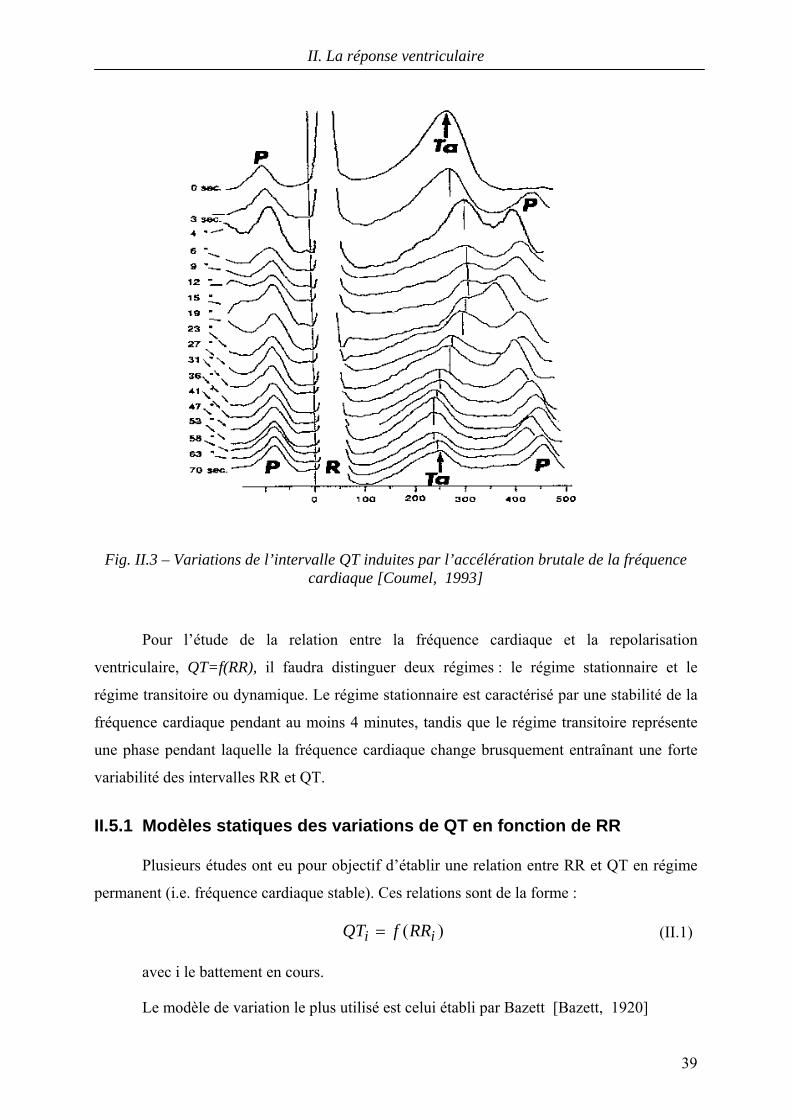
Fig. II.3 – Variations de l’intervalle QT induites par l’accélération brutale de la fréquence cardiaque [Coumel, 1993]
Pour l’étude de la relation entre la fréquence cardiaque et la repolarisation
ventriculaire, QT=f(RR), il faudra distinguer deux régimes : le régime stationnaire et le
régime transitoire ou dynamique. Le régime stationnaire est caractérisé par une stabilité de la
fréquence cardiaque pendant au moins 4 minutes, tandis que le régime transitoire représente
une phase pendant laquelle la fréquence cardiaque change brusquement entraînant une forte
variabilité des intervalles RR et QT.
II.5.1 Modèles statiques des variations de QT en fonction de RR
Plusieurs études ont eu pour objectif d’établir une relation entre RR et QT en régime
permanent (i.e. fréquence cardiaque stable). Ces relations sont de la forme :
)( ii RRfQT = (II.1)
avec i le battement en cours.
Le modèle de variation le plus utilisé est celui établi par Bazett [Bazett, 1920]
II. La réponse ventriculaire
40
RRaQT = (II.2)
où QT et RR sont exprimés en secondes, et a est une constante égale à 0.37 chez les
hommes et à 0.40 chez les femmes.
La même année, Fridericia [Fridericia, 1920] propose un autre modèle :
322.8 RRQT ×= (II.3)
Depuis, d’autres types de modèles ont vu le jour et des auteurs ont proposé des
modèles de type linéaire [Ljung, 1949], logarithmique [Ashman, 1942], exponentielle
[Sarma, 1984]. Toutes ces formules ont en commun que QT et RR sont exprimés en secondes.
Plusieurs de ces équations sont identiques dans la forme et ne diffèrent que par les valeurs des
constantes utilisées.
Le tableau suivant résume les modèles de variations jugés d’après la littérature comme
étant parmi les plus performants. Il est extrait des travaux de Nabil Mohsen [Mohsen, 1992].
Toutes les données sont en millisecondes.
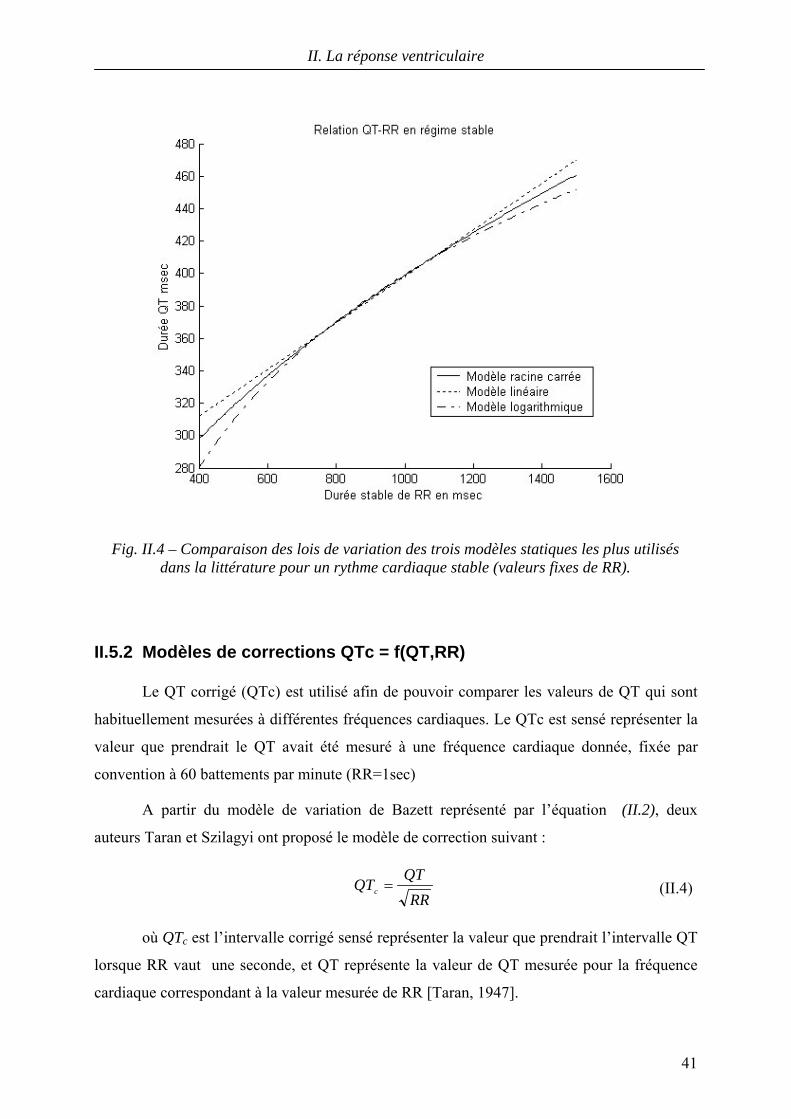
La figure II.4 compare les trois équations précédentes et montre leur équivalence pour
des fréquences cardiaques stables avec un RR compris entre 400 et 1500 millisecondes.
Modèle Equation
Racine carrée 7.1237.8 += RRQT
linéaire 5.254*1436.0 += RRQT
logarithmique 4.497)log(*8.129 −= RRQT
II. La réponse ventriculaire
41
II.5.2 Modèles de corrections QTc = f(QT,RR)
Le QT corrigé (QTc) est utilisé afin de pouvoir comparer les valeurs de QT qui sont
habituellement mesurées à différentes fréquences cardiaques. Le QTc est sensé représenter la
valeur que prendrait le QT avait été mesuré à une fréquence cardiaque donnée, fixée par
convention à 60 battements par minute (RR=1sec)
A partir du modèle de variation de Bazett représenté par l’équation (II.2), deux
auteurs Taran et Szilagyi ont proposé le modèle de correction suivant :
RR
QTQTc = (II.4)
où QTc est l’intervalle corrigé sensé représenter la valeur que prendrait l’intervalle QT
lorsque RR vaut une seconde, et QT représente la valeur de QT mesurée pour la fréquence
cardiaque correspondant à la valeur mesurée de RR [Taran, 1947].
Fig. II.4 – Comparaison des lois de variation des trois modèles statiques les plus utilisés dans la littérature pour un rythme cardiaque stable (valeurs fixes de RR).
II. La réponse ventriculaire
42
QTc, QT et RR sont exprimés en secondes. Cette formule qui est très utilisée de nos
jours en routine clinique est dénommée, à tort, comme étant la formule de Bazett.
Quelques auteurs ont souligné l’insuffisance de la formule de Bazett à corriger
correctement des variations de la fréquence cardiaque [Sarma, 1984]. On trouvera un exposé
complet sur les différentes méthodes et de nouvelles propositions de modèles de correction
« différentiels » et « proportionnels » dans la thèse de N. Mohsen [Mohsen, 1992].
II.5.3 Etude de la dynamique de QT en fonction de RR
II.5.3.1 Valeur diagnostique
L’importance de l’analyse de la dynamique de la phase de repolarisation en matière de
diagnostic et de pronostic n’est plus à démontrer [Coumel, 1991; Rubel, 1996]. Le
dysfonctionnement de l’intervalle QT chez les malades atteints du syndrome du QT long
congénital (LQTS) peut être prédictif de la mort subite [Moss, 1991; Vincent, 1992]. L’étude
de la dynamique du QT est utilisée comme prédictrice de survenue d’arythmies ventriculaires
après un infarctus du myocarde, elle est utilisée aussi dans l’analyse des effets de certains
médicaments sur la repolarisation ventriculaire, notamment les antiarythmiques de classe III
[Duff, 1993; Lande, 1998].
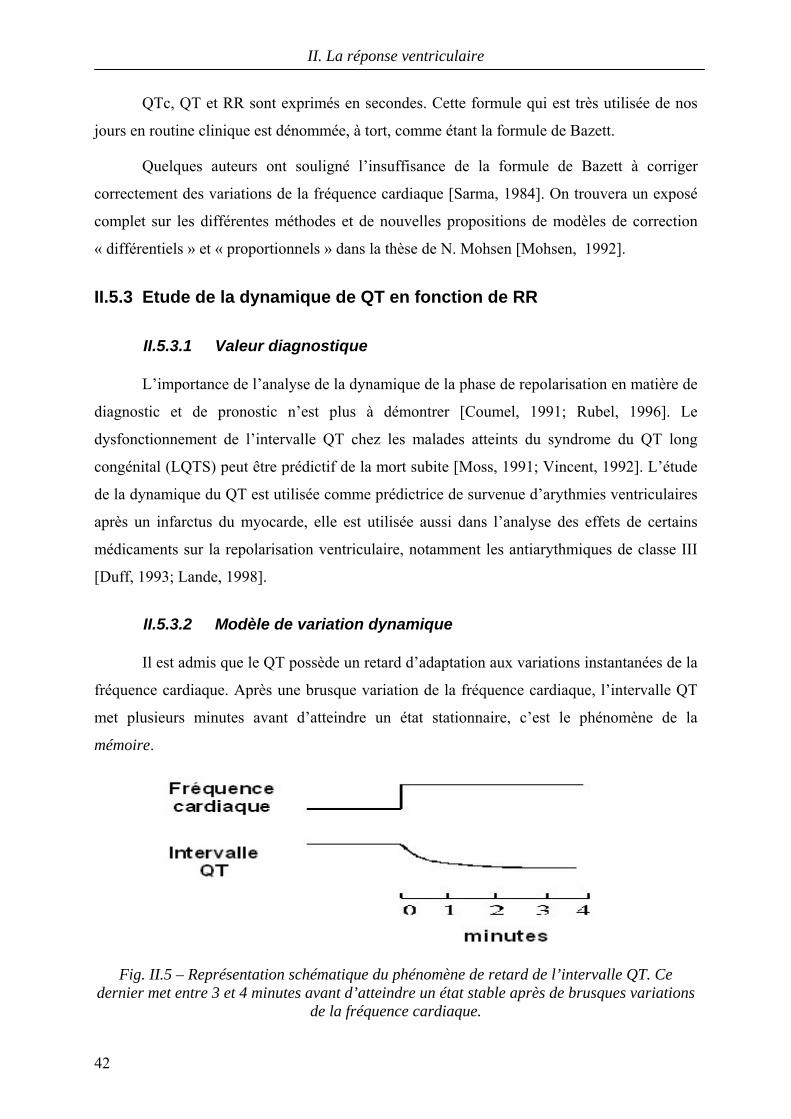
II.5.3.2 Modèle de variation dynamique
Il est admis que le QT possède un retard d’adaptation aux variations instantanées de la
fréquence cardiaque. Après une brusque variation de la fréquence cardiaque, l’intervalle QT
met plusieurs minutes avant d’atteindre un état stationnaire, c’est le phénomène de la
mémoire.
Fig. II.5 – Représentation schématique du phénomène de retard de l’intervalle QT. Ce
dernier met entre 3 et 4 minutes avant d’atteindre un état stable après de brusques variations de la fréquence cardiaque.
II. La réponse ventriculaire
43
Des études invasives ont montré que l’on pouvait en première approximation assimiler
la relation QT-RR à un système de premier ordre avec une constante de temps
d’approximativement une minute, tel que :
)1()( 0 τt
eQTQTtQT−
−∆±= (II.5)
où QT0 est la valeur de QT avant les perturbations, τ est la constante de temps et
∆QT = QTstat -QT0 avec QTstat la valeur finale de QT [Lee, 1989].
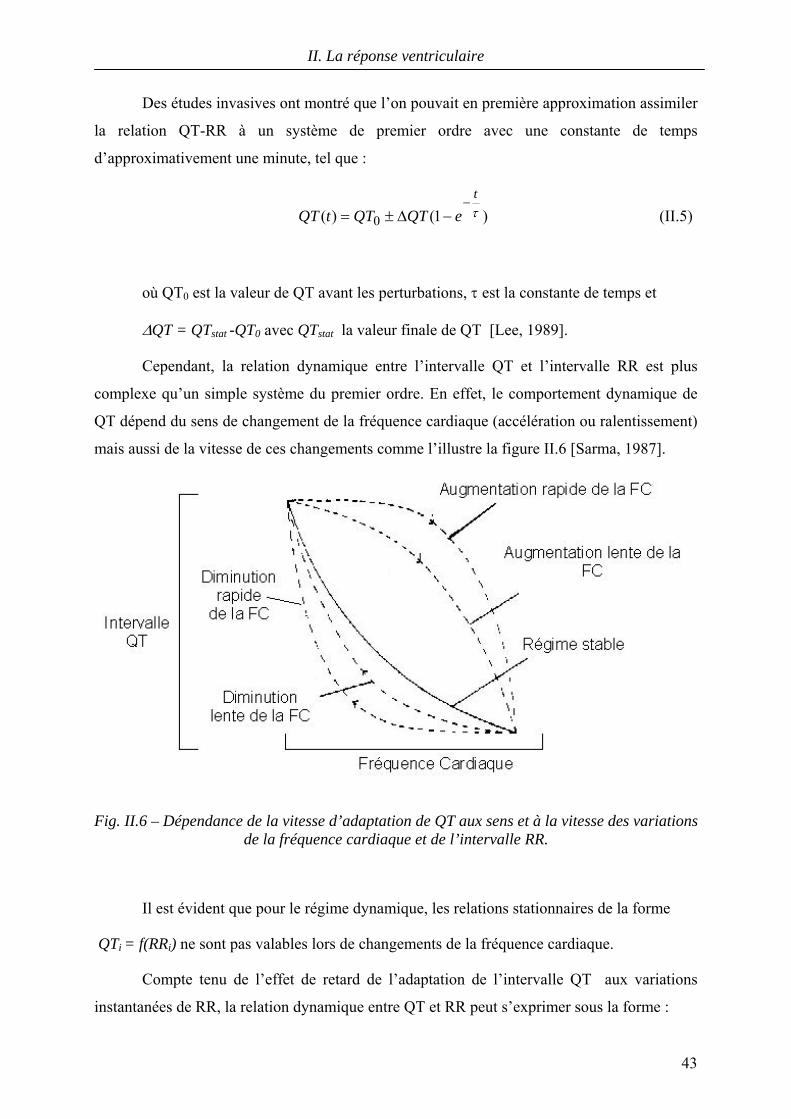
Cependant, la relation dynamique entre l’intervalle QT et l’intervalle RR est plus
complexe qu’un simple système du premier ordre. En effet, le comportement dynamique de
QT dépend du sens de changement de la fréquence cardiaque (accélération ou ralentissement)
mais aussi de la vitesse de ces changements comme l’illustre la figure II.6 [Sarma, 1987].
Fig. II.6 – Dépendance de la vitesse d’adaptation de QT aux sens et à la vitesse des variations de la fréquence cardiaque et de l’intervalle RR.
Il est évident que pour le régime dynamique, les relations stationnaires de la forme
QTi = f(RRi) ne sont pas valables lors de changements de la fréquence cardiaque.
Compte tenu de l’effet de retard de l’adaptation de l’intervalle QT aux variations
instantanées de RR, la relation dynamique entre QT et RR peut s’exprimer sous la forme :
II. La réponse ventriculaire
44
),,...,,( 11 MiMiiii RRRRRRRRfQT −+−−= (II.6)
où M est une fenêtre temporelle représentant le retard.
II.5.3.3 Relation de type « dynamique»
La relation existante entre la fréquence cardiaque et la réponse ventriculaire est
complexe compte tenu des différents paramètres intervenants. La plupart des études
revendiquant le terme de « relation dynamique » entre le RR et QT [Arad, 1999] ne sont en
réalité que des relations statiques valides pour des fréquences cardiaques stables.
J.M. Neilson et son équipe de l’université d’Edinburgh ont cherché à exprimer une
relation dite « dynamique » entre le RR et le QT [Neilson, 2000]. Nous présentons leurs
récents travaux à titre d’exemple, pour montrer l’insuffisance des méthodes actuelles à
modéliser le comportement dynamique de l’intervalle QT en fonction des variations
instantanées de l’intervalle RR.
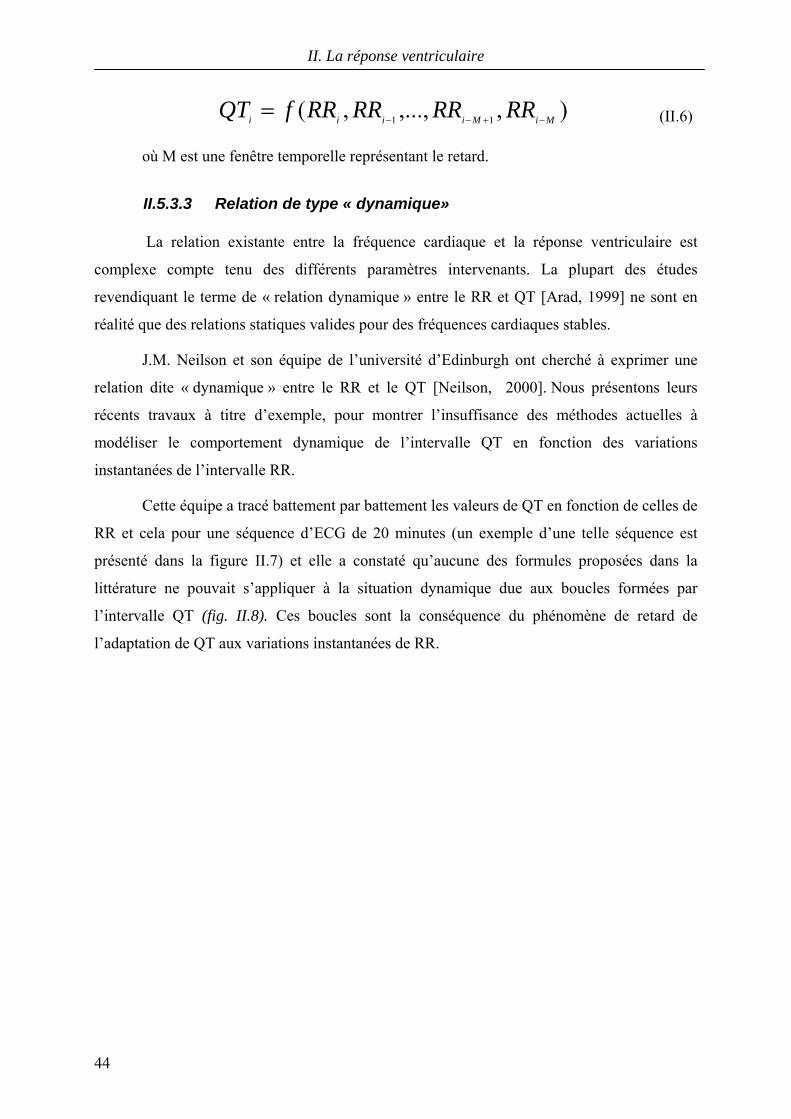
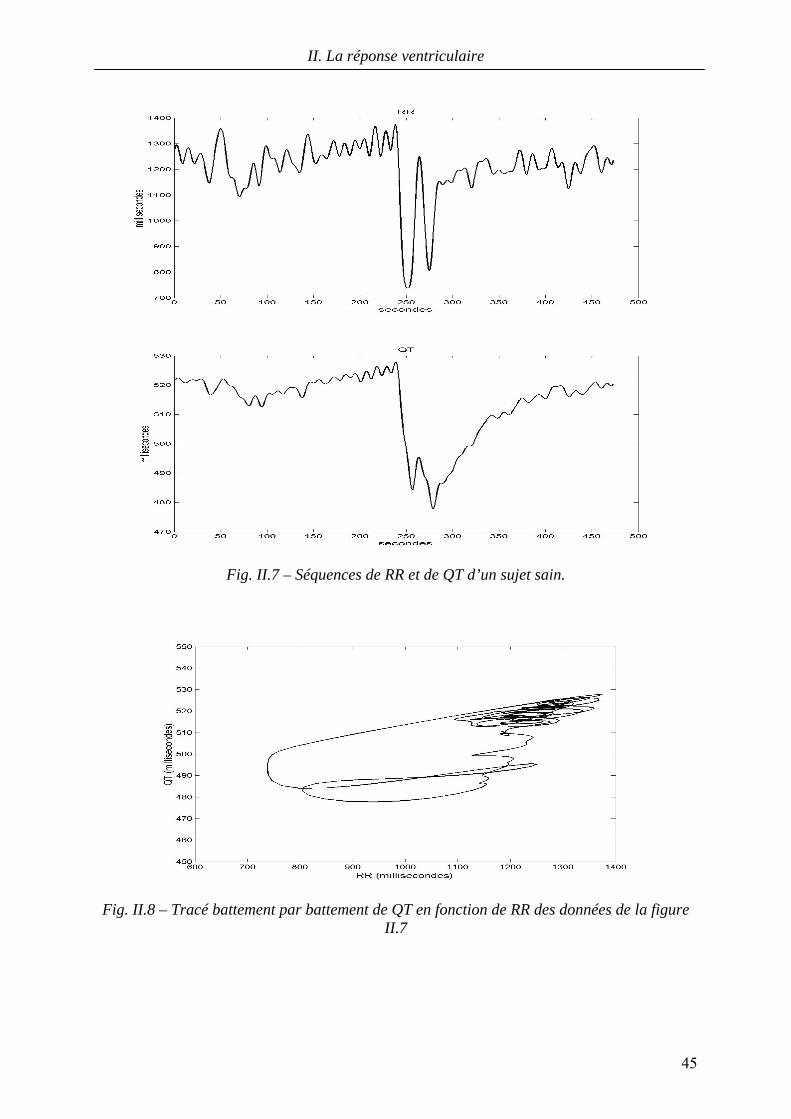
Cette équipe a tracé battement par battement les valeurs de QT en fonction de celles de
RR et cela pour une séquence d’ECG de 20 minutes (un exemple d’une telle séquence est
présenté dans la figure II.7) et elle a constaté qu’aucune des formules proposées dans la
littérature ne pouvait s’appliquer à la situation dynamique due aux boucles formées par
l’intervalle QT (fig. II.8). Ces boucles sont la conséquence du phénomène de retard de
l’adaptation de QT aux variations instantanées de RR.
II. La réponse ventriculaire
45
Fig. II.7 – Séquences de RR et de QT d’un sujet sain.
Fig. II.8 – Tracé battement par battement de QT en fonction de RR des données de la figure
II.7
II. La réponse ventriculaire
46
Sur 24 heures, le RR peut rester stable quelques minutes, ce qui permet au QT de
rattraper son retard. A ces moments là et uniquement en ces moments là, les formules
traditionnelles de stationnarité de RR et de QT peuvent être appliquées.
L’idée principale de l’équipe de Neilson est d’arriver à tracer QT=f(RR) sans les
boucles dues au retard d’adaptation de QT. Pour cela il suffit d’annuler le retard de QT pour
qu’à chaque instant la valeur de QT suive les fluctuations instantanées de RR. Cette solution
semble complexe à mettre en place compte tenu de l’absence d’information sur la nature de la
relation f. La deuxième solution qui sera finalement retenue, consiste à créer un signal RR’
possédant un retard par rapport à RR de sorte que le tracé QT/RR’ ne contienne plus les
boucles de QT.
Leur conclusion est que la meilleure relation dynamique entre QT et RR est :
JmsRRmsQT ⎥⎦
⎤⎢⎣⎡×=
1000)(369)( (II.7)
où J = 0.372 dans le cas de leur étude, J = 0.5 pour la formule de Bazett et J = 0.33 pour la
formule de Fridericia.
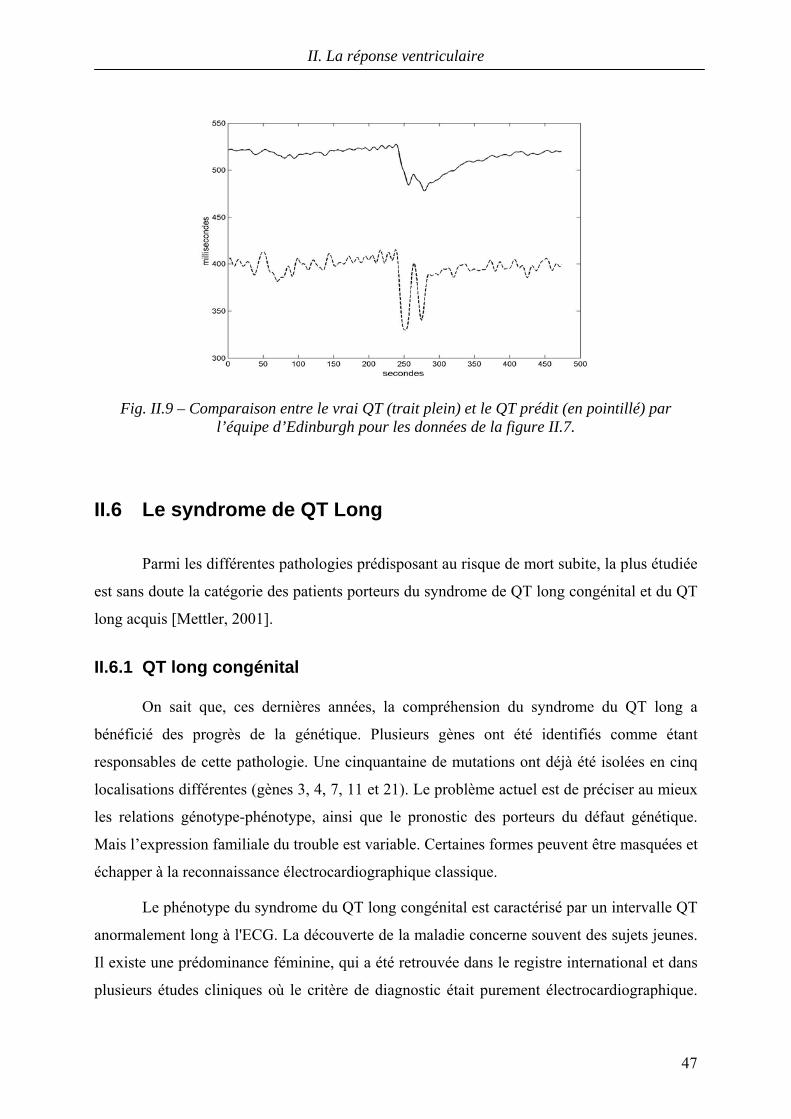
La présente étude ne fournit pas une relation réelle de type « dynamique », elle se
contente d’effacer le retard pour pouvoir conformer la relation QT-RR à une relation de
régime permanent. Nous l’avons constaté en comparant (fig. II.9) le QT réel d’un patient
utilisé lors de notre étude au QT prédit en utilisant la formule II.7. Néanmoins leur étude
confirme que la valeur de retard τ équivaut à une minute et elle montre qu’aucune formule
n’est valable à tout instant.
II. La réponse ventriculaire
47
Fig. II.9 – Comparaison entre le vrai QT (trait plein) et le QT prédit (en pointillé) par
l’équipe d’Edinburgh pour les données de la figure II.7.
II.6 Le syndrome de QT Long
Parmi les différentes pathologies prédisposant au risque de mort subite, la plus étudiée
est sans doute la catégorie des patients porteurs du syndrome de QT long congénital et du QT
long acquis [Mettler, 2001].
II.6.1 QT long congénital
On sait que, ces dernières années, la compréhension du syndrome du QT long a
bénéficié des progrès de la génétique. Plusieurs gènes ont été identifiés comme étant
responsables de cette pathologie. Une cinquantaine de mutations ont déjà été isolées en cinq
localisations différentes (gènes 3, 4, 7, 11 et 21). Le problème actuel est de préciser au mieux
les relations génotype-phénotype, ainsi que le pronostic des porteurs du défaut génétique.
Mais l’expression familiale du trouble est variable. Certaines formes peuvent être masquées et
échapper à la reconnaissance électrocardiographique classique.
Le phénotype du syndrome du QT long congénital est caractérisé par un intervalle QT
anormalement long à l'ECG. La découverte de la maladie concerne souvent des sujets jeunes.
Il existe une prédominance féminine, qui a été retrouvée dans le registre international et dans
plusieurs études cliniques où le critère de diagnostic était purement électrocardiographique.
II. La réponse ventriculaire
48
Cette prédominance féminine des enquêtes cliniques pourrait s'expliquer par le fait que les
femmes ont physiologiquement un intervalle QT plus long que celui des hommes. Dans
certaines familles, on peut assister à une normalisation de la durée du QT avec l'âge chez les
hommes. Les sujets atteints ont une bradycardie sinusale relative. Le problème majeur posé
par ce syndrome est que certains sujets porteurs de l'anomalie génétique feront des syncopes
par trouble du rythme ventriculaire pouvant conduire à la mort subite. Il s'agit de tachycardies
ventriculaires polymorphes paroxystiques, entrecoupées de retour en rythme sinusal, ayant
toutes les caractéristiques des torsades de pointes. Les syncopes apparaissent habituellement
dans des situations de stress, surtout lors d'une émotion mais peuvent aussi apparaître au
repos.
Deux problèmes cliniques demeurent mal résolus : (i) l'identification des sujets
porteurs de l'anomalie génétique par des méthodes autres que la génotypage, c'est-à-dire la
définition du phénotype ; (ii) l'évaluation du risque de mort subite en sachant que parfois le
premier symptôme est la mort elle-même.
II.6.1.1 Identification des sujets porteurs de l'anomalie génétique.
Définition du phénotype
Le trait phénotypique est caractérisé par la présence d'un intervalle QT prolongé à
l'électrocardiogramme [Lupoglazoff, 1998]. La limite supérieure de l'intervalle QT considéré
comme normal, corrigé en fonction de la fréquence (RR
QTQTc = ), a été fixée arbitrairement
à 0,44 seconde, ce qui amène à considérer qu'un sujet porteur d'un intervalle QTc inférieur à
0,44 seconde est indemne de l'anomalie génétique et qu'un sujet dont l'intervalle QTc est
supérieur à 0,44 seconde est atteint. En fait, l'identification du phénotype est beaucoup plus
complexe pour plusieurs raisons :
• L’intervalle QTc peut varier d'un moment à l'autre chez un même sujet. Ceci incite
à répéter les électrocardiogrammes pour s'assurer du phénotype des membres d'une
famille porteuse de l'anomalie ;
• il existe une grande dispersion des intervalles QT d'un individu à l'autre. En effet,
il existe un chevauchement important des courbes de distribution des intervalles
QT chez les sujets sains et chez les sujets atteints [Vincent, 1992], ce qui ne
permet pas de définir une valeur limite normale sans altérer la sensibilité
diagnostique. De plus cette limite est différente chez l'homme et chez la femme.
II. La réponse ventriculaire
49
Outre l'allongement anormal de l'intervalle QT, il existe souvent des modifications
de la morphologie de l'onde T qui peuvent aussi varier dans le temps ;
• l'allongement de l’intervalle QT chez les sujets atteints évolue au cours de la vie
et peut se normaliser à l'age adulte chez les hommes [Lande, 2001].
La fréquence cardiaque et le tonus neurovégétatif sont de puissants modulateurs de la
repolarisation ventriculaire et il semble que cette modulation soit différente chez les sujets
sains et atteints. L'étude de la variation du QT, à l'effort ou lors d'enregistrements continus par
la méthode de Holter peut aider au diagnostic clinique [Lande, 2001].
II.6.1.2 Le risque de mort subite
Les accidents syncopaux, liés à des épisodes de torsades de pointes, surviennent
souvent dès l'enfance. La mort subite qui est la manifestation ultime du syndrome est
consécutif à la dégradation d'une torsade de pointes en fibrillation ventriculaire. Il n'existe pas
actuellement d'élément discriminant fiable du risque de mort subite, si ce n'est la notion de
syncope. Dans l'étude de Moss [Moss, 1991], parmi 147 décès recensés, 57% sont survenus
chez des patients âgés de moins de 20 ans, l'âge moyen du décès étant de 21 ans. Seulement
31 % des patients décédés avaient des antécédents syncopaux. Ces résultats posent le
problème du traitement préventif chez les sujets porteurs de l'anomalie génétique, quelque soit
la gravité de leur phénotype.
II.6.1.3 Traitement
Les objectifs du traitement du syndrome du QT long congénital sont de prévenir la
survenue des troubles du rythme ventriculaires responsables des accidents syncopaux et de
mort subite.
Le traitement du syndrome du QT long congénital qui est basé sur l'expérience
clinique et sur les mécanismes de déclenchement des troubles du rythme, repose
essentiellement sur les béta-bloquants, à l'exception du Sotalol qui est contre-indiqué du fait
de son effet propre sur la repolarisation. A côté du traitement béta-bloquant et associé à lui,
d'autres solutions thérapeutiques peuvent être proposées. Un stimulateur cardiaque en mode
AAI, réglé à une fréquence de base suffisamment élevée, peut être indiqué quand la fréquence
cardiaque spontanée est très lente et quand la bradycardie favorise la survenue des troubles du
rythme. Dans des cas rares, un défibrillateur implantable a pu être proposé. Dans l'avenir, il
II. La réponse ventriculaire
50
est possible que des traitements plus spécifiques puissent être proposés en fonction des gènes
impliqués.
II.6.2 Le syndrome du QT long acquis
La forme acquise du syndrome du QT long, responsable de torsades de pointe, et donc
de mort subite, est provoquée par certains médicaments qui ont la propriété de retarder, de
façon directe ou indirecte, la repolarisation ventriculaire.
Le principal mécanisme responsable d'une prolongation de la période réfractaire du
tissu cardiaque consiste en un blocage d'un ou de plusieurs courants sortants repolarisants. A
titre d'exemple, l'inhibition du courant sortant retardé du myocyte ventriculaire, Ik, peut être
provoquée avec l'érythromycine, antibiotique de la famille des macrolides potentiellement
responsable de torsades de pointe [McComb, 1984].
Les éléments déterminants dans la survenue des torsades de pointe d'origine iatrogène
ne sont pas connus. Il y a donc une inadéquation entre les connaissances très partielles du
déterminisme et des conditions de survenue du syndrome du QT long acquis, et la gravité
potentielle de cet effet secondaire médicamenteux.
II.7 Conclusions
La mesure de la repolarisation ventriculaire de l’ECG de surface représente un
précieux outil pour la détection des patients à risque d’arythmie maligne. Malgré les
nombreuses tentatives visant à quantifier ce phénomène y compris la dispersion de QT ainsi
que les nombreuses méthodes mathématiques d’analyse, aucune de ces techniques n’est
capable de détecter ou de prendre en compte l’inhomogénéité de l’aspect spatio-temporel de
la repolarisation ventriculaire. Plusieurs études sont actuellement en cours témoignant
qu’aucune méthode satisfaisante n’a encore été trouvée [Lande, 2001; Savelieva, 1999].
Récemment l’étude de la variabilité de l’intervalle QT sur des enregistrements Holter de 24H
et les études battement par battement des modifications des composantes de la repolarisation
(modification de l’onde T) basées sur des algorithmes automatiques peuvent fournir un outil
prometteur pour une meilleure identification des patients à haut risque d’arythmie,
spécialement chez les patients atteints du syndrome du QT long.
II. La réponse ventriculaire
51
Trouver un modèle entre QT et RR en régime dynamique de la forme :
),,...,,( 11 MiMiiii RRRRRRRRfQT −+−−=
s’avère d’une grande importance sur les plans cognitif, diagnostique et de santé publique.
Sur le plan cognitif, l’élaboration de tels modèles permettra de mieux appréhender les
interactions entre RR et QT en étudiant les domaines de validité des modèles en fonction de la
pathologie, l’âge ou le sexe du patient.
Sur le plan diagnostique, on espère pouvoir intégrer ces modèles dans un processus
clinique qui utilise la détection en temps réel d’éventuels dysfonctionnements de la réponse
ventriculaire du patient sous surveillance en comparant son QT mesuré au QT prédit.
Enfin, sur le plan de santé publique, la réalisation de systèmes capables de réaliser en
continu une analyse quantitative de l’ECG ambulatoire et de la dynamique spatio-temporelle
de la phase de repolarisation ventriculaire sera une avancée vers les futurs systèmes de suivi
des patients à domicile par télémédecine.
III. Modélisation et identification
52
III. Modélisation et Identification
Dans ce chapitre nous présentons différentes méthodes d’identification et de
modélisation de systèmes. Les méthodes présentées sont les systèmes paramétriques ainsi que
les méthodes neuronales.
Nous présentons les réseaux de neurones artificiels (RNA) en général et nous nous
attardons sur les Perceptrons Multi-Couches (PMC) pour leurs capacités à approcher les
relations non-linéaires. Les propriétés des PMC en apprentissage et en généralisation sont
abordées ainsi que les moyens permettant d’améliorer les performances des PMC en
généralisation. Nous donnerons les différents choix possibles pour les différents paramètres
des modèles : architecture, fonction de transfert et algorithme d’apprentissage.
Nous terminons ce chapitre en justifiant nos choix et nous présentons notre approche
méthodologique en tenant compte de la problématique traitée, à savoir modéliser la relation
non-linéaire entre les 2 séries temporelles QT et RR.
III. Modélisation et identification
53
III.1 INTRODUCTION 55
III.2 LES MODÈLES PARAMÉTRIQUES 57
III.2.1 INTRODUCTION 57 III.2.2 CHOIX DU MODÈLE PARAMÉTRIQUE 58 III.2.3 LES DIFFICULTÉS DE L’APPROCHE PARAMÉTRIQUE 60
III.3 LES RÉSEAUX DE NEURONES ARTIFICIELS (RNA) 61
III.3.1 DÉFINITION 62 III.3.2 LE NEURONE 63 III.3.3 LES ARCHITECTURES NEURONALES 63 III.3.3.1 LES RÉSEAUX DE NEURONES BOUCLÉS OU RÉCURRENTS 64 III.3.3.2 LES RÉSEAUX DE NEURONES EN COUCHES (PERCEPTRONS MULTI-COUCHES) 64 III.3.4 PERCEPTRON MULTI-COUCHES (PMC) ET APPROXIMATION DE FONCTIONS 65 III.3.5 L’APPRENTISSAGE 66 III.3.5.1 APPRENTISSAGE NON SUPERVISÉ 67 III.3.5.2 APPRENTISSAGE SUPERVISÉ 67 III.3.5.3 ALGORITHME D’APPRENTISSAGE SUPERVISÉ POUR LES RNA : LA RÉTROPROPAGATION 68 III.3.6 LA GÉNÉRALISATION 70 III.3.6.1 LES FACTEURS INDISPENSABLES POUR UNE BONNE GÉNÉRALISATION 70 III.3.6.2 OPTIMISATION DE LA GÉNÉRALISATION 72 III.3.6.2.1 Algorithme d’apprentissage 72 III.3.6.2.2 Compromis Apprentissage-Généralisation ou « early stopping » 74
III.4 MISE EN OEUVRE DU MODÈLE NEURONAL 76
III.4.1 CHOIX DE L’ALGORITHME DE L’APPRENTISSAGE 76 III.4.2 CHOIX DES FONCTIONS DE TRANSFERT 76 III.4.3 CHOIX DE L’ARCHITECTURE NEURONALE 77 III.4.4 ENSEMBLE D’APPRENTISSAGE, DE VALIDATION ET DE TEST 78 III.4.5 LIEN ENTRE RNA ET MÉTHODES STATISTIQUES 78 III.4.6 LE DILEMME DU BIAIS ET DE LA VARIANCE 80
III.5 APPROCHE MÉTHODOLOGIQUE 83
III.5.1 L’UTILISATION DES R.N.A. DANS LE DOMAINE MÉDICAL 83 III.5.2 L’UTILISATION DES RNA POUR CARACTÉRISER LA RELATION QT= F(RR) 84 III.5.2.1 LES PERCEPTRONS MULTI-COUCHES POUR LA MODÉLISATION DE LA RELATION QT=F(RR) 84 III.5.2.2 LES RÉSEAUX RÉCURRENTS POUR LA MODÉLISATION DE LA RELATION QT=F(RR) 85 III.5.3 LA NON LINÉARITÉ DES SIGNAUX CARDIAQUES 86 III.5.4 LA PRÉDICTION DE SÉRIES TEMPORELLES 87
III. Modélisation et identification
54
III.5.5 CHOIX DES VARIABLES 87 III.5.6 CHOIX DES SÉQUENCES HOLTER UTILISÉES EN APPRENTISSAGE 88 III.5.7 UTILISATION DES MODÈLES PRÉDICTIFS 88
III.6 CONCLUSIONS 89
III. Modélisation et identification
55
III.1 Introduction
La modélisation d’un processus (physique, physiologique, économique,…) est
toujours une opération délicate à mettre en œuvre, simplement parce que représenter une
réalité très complexe par un « modèle » est réducteur en soi. Néanmoins des domaines tels
que la prise de décision financière ou économique, la météorologie, la prévision de ventes
[Box, 1976], et le diagnostic principalement dans le milieu médical ont besoin de modèles de
comportement (ou de prévision). Dans la mise en œuvre des méthodes, si on considère que le
phénomène à modéliser est décrit par un signal numérisé et qu’il est représenté par une série
temporelle, le but ultime peut alors être de déterminer un modèle spatio-temporel du
comportement de la série.
D’une manière générale, les signaux qui sont le reflet aussi fidèle que possible d’une
grandeur physique, peuvent être déterministes ou aléatoires. Lorsqu’ils sont déterministes, ces
signaux peuvent être périodiques ou non périodiques. Leur représentation dans le domaine
spectral par le biais de l’utilisation de la transformée de Fourier ou d’autres types de
transformation peut faciliter la tâche de l’utilisateur pour trouver un « bon » modèle car elles
peuvent faire apparaître des singularités ou des régularités dans le signal transformé qui
n’étaient pas «visibles» dans le signal d’origine.
Ces différentes transformations, qu’elles soient dans le domaine temporel ou
fréquentiel, conduisent à des représentations non paramétriques (ex : réponse fréquentielle,
réponse à un échelon).
D’un autre côté, le développement des calculateurs numériques et la profusion de
méthodes d’intégration numériques ont permis l’essor des techniques d’estimation des
paramètres caractéristiques d’un processus donné à partir d’observations accessibles (entrée-
sortie).
Ces différentes représentations « économiques » des signaux, c’est à dire ne faisant
appel qu’à un nombre fini de paramètres, sont appelées des représentations paramétriques
(ex : fonction de transfert, équation différentielle ou aux différences) [Najim, 1988]. Les
méthodes classiques utilisent un modèle d’approximation paramétré : MA (Moving average),
AR (Auto-Regressive), ARMA (combinaison des deux précédents). Ces modèles ont une
III. Modélisation et identification
56
structure simple et linéaire. Toutefois, ils ne suffisent pas pour réaliser une prédiction correcte
de séries temporelles à comportement complexe et non-linéaire [Alippi, 1996].
Avec les méthodes actuelles d’identification, la dynamique du système est approchée
par des équations différentielles linéaires à coefficients constants. Ces modèles simplifiés sont
généralement suffisants pour réguler les processus sur une petite plage autour du point de
fonctionnement, mais ceci s’avère insuffisant dans plusieurs applications. D’où la nécessité de
prendre en compte les non-linéarités. Répondre à ce besoin demande de mettre au point une
méthode d’identification non-linéaire de type « boite-noire ». Des approches plus récentes,
basées sur les techniques de « soft computing » (réseaux de neurones, contrôleurs à logique
floue), ont été développés avec succès [Alippi, 1996; Ishikawa, 1996]. Ces outils apparaissent,
en effet, comme des approximateurs universels [Hornik, 1989; Wang, 1992]. De plus, ils
peuvent opérer dans un environnement variable et ont donc d’excellentes capacités
d’adaptation. Une difficulté subsiste toutefois : les temps de calculs nécessaires à la recherche
de la solution optimale ne permettent pas toujours d’opérer en temps réel.
Pour modéliser les relations qui régissent un système nous présentons les deux moyens
les plus utilisés : les modèles paramétriques et les réseaux de neurones artificiels.
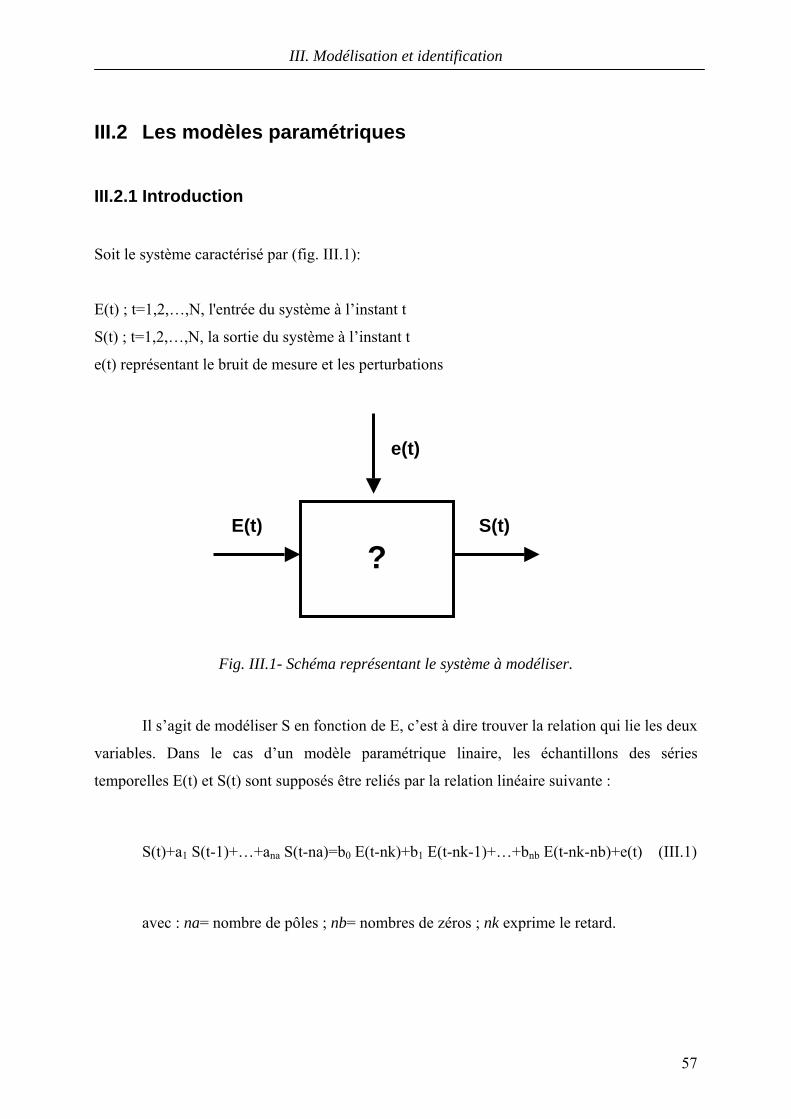
III. Modélisation et identification
57
III.2 Les modèles paramétriques
III.2.1 Introduction
Soit le système caractérisé par (fig. III.1): E(t) ; t=1,2,…,N, l'entrée du système à l’instant t
S(t) ; t=1,2,…,N, la sortie du système à l’instant t
e(t) représentant le bruit de mesure et les perturbations
Fig. III.1- Schéma représentant le système à modéliser.
Il s’agit de modéliser S en fonction de E, c’est à dire trouver la relation qui lie les deux
variables. Dans le cas d’un modèle paramétrique linaire, les échantillons des séries
temporelles E(t) et S(t) sont supposés être reliés par la relation linéaire suivante :
S(t)+a1 S(t-1)+…+ana S(t-na)=b0 E(t-nk)+b1 E(t-nk-1)+…+bnb E(t-nk-nb)+e(t) (III.1)
avec : na= nombre de pôles ; nb= nombres de zéros ; nk exprime le retard.
E(t) S(t)
e(t)
?
III. Modélisation et identification
58
III.2.2 Choix du modèle paramétrique
L’objectif est d’obtenir le modèle le plus simple qui vérifie un critère de validation
donné. La mise en place d’un tel modèle nécessite la réponse à un certain nombre de
questions :
• Quel est le nombre minimal de paramètres {ai}, {bi} dans l’équation (III.1)
nécessaire pour représenter le signal de manière convenable ?
• Si l’on modifie la période d’échantillonnage dans le temps, est-ce que les
{ai}et {bi}restent invariants ?
• Comment déterminer l’ordre du modèle (na, nb) d’une part, les paramètres
{ai}et {bi} d’autre part ? [Najim, 1988].
L’identification est une approche expérimentale. Elle comporte quatre étapes :
Acquisition des entrées/sorties sous un protocole d’expérimentation.
Choix de la structure du « modèle » (complexité).
Estimation des paramètres du modèle.
Validation du modèle identité (structure et valeurs des paramètres).
Si nous considérons que nous avons affaire à un système linéaire, alors nous pouvons
écrire la relation qui lie la sortie S à l’entrée E sous la forme :
S(t)=G(q)E(t)+v(t) (III.2)
où q représente l’opérateur retard et
∑∞
=
−=1
)()()()(k
ktEkgtEqG avec )1()(
)()(
1
1
−=
=
−
∞
=
−∑tEtEq
qkgqGk
k
G(q) représente la fonction de transfert du système. La suite des nombres g(k) est sa
réponse impulsionnelle.
Le bruit v(t) peut être décrit comme un bruit blanc filtré :
III. Modélisation et identification
59
)()()( teqHtv = (III.3)
Des équations III.2 et III.3, on en déduit :
)()()()()( teqHtEqGtS += (III.4)
Si un système est décrit par l’équation précédente, alors l’erreur de prédiction (ep)
peut être calculée comme suit :
)]()()()[()( 1 tEqGtSqHtep −= − (III.5)
Cette erreur pour l’entrée E et la sortie S est fonction de G et H. Presque toutes les
méthodes d’identification des modèles paramétriques se ramènent à l’estimation de G et H.
Les modèles boites-noires, cas particuliers des systèmes linéaires, sont basés sur la méthode
de prédiction de l’erreur [Ljung, 1987]. Les routines d’estimation des paramètres supposent
une recherche itérative du minimum de la fonction suivante :
∑=
=N
tN teHGV
1
)²(),( (III.6)
La structure générale du modèle paramétrique s’exprime par :
)()()()(
)()()()( te
qDqCnktE
qFqBtSqA +−= (III.7)

III. Modélisation et identification
60
avec :
nfnf
ndnd
ncnc
nbnb
nana
qfqfqfqF
qdqdqdqD
qcqcqcqC
qbqbqbqB
qaqaqaqA
−−−
−−−
−−−
+−−−
−−−
++++=
++++=
++++=
++++=
++++=
...1)(
...1)(
...1)(
...1)(
...1)(
22
11
22
11
22
11
122
11
22
11
où na, nb, nc, nd, nf représentent les ordres des polynômes.
Selon la dynamique du système considéré et, selon la nature de la perturbation, quatre
modèles paramétriques sont définis :
ARX (Auto-Régressif) : )()()()()( tenktEqBtSqA +−=
ARMAX (Auto-Régressif à Moyenne ajustée) : )()()()()()( teqCnktEqBtSqA +−=
OE (Output Error) : )()()()()( tenktE
qFqBtS +−=
BJ (Box-Jenkins) : )()()()(
)()()( te
qDqCnktE
qFqBtS +−=
III.2.3 Les difficultés de l’approche paramétrique
Identifier un système, c’est estimer le modèle d’un système basé sur l’observation des
données entrée-sortie. Le choix d’une structure [A(q), B(q), C(q), D(q), F(q)] particulière est
déterminant pour le succès des étapes ultérieures du processus d’identification.
L’identification consiste en fait à fixer les ordres respectifs des différents polynômes
(na, nb, nc, nd, nf) de la structure générale. La structure (i.e. un ensemble de modèles
candidats) ainsi définie, doit être apte à décrire la dynamique du système. L’adéquation
modèle-processus réel sera d’autant meilleure que les polynômes décrivant le modèle sont
d’ordre élevé. Cependant, tout choix excessif se traduira par un volume important de calculs
inutiles.
III. Modélisation et identification
61
Par conséquent, toute connaissance a priori sur les paramètres [B(q), A(q), F(q)] du
système à identifier et sur les perturbations qui l’affectent [C(q), D(q), A(q)] pourra aider à
optimiser le choix.
Dans le cas idéal où il n’y a aucune perturbation, et si le système vérifie les hypothèses
usuelles de linéarité et de stationnarité, ces paramètres peuvent être identifiés de manière
exacte. Par contre, en présence de perturbation, leur prise en compte est beaucoup plus
complexe. En effet, pour un système réel, les perturbations peuvent résulter d’un bruit de
mesure, ou de tout autre processus aléatoire stationnaire et/ou ergodique ou non.
III.3 Les Réseaux de Neurones Artificiels (RNA)
Le principe des réseaux de neurones artificiels est né dans les années 40 [McCulloch,
1943] à partir d’une analogie avec le système nerveux humain. Il s’agissait de produire des
systèmes artificiels capables de simuler certaines capacités des systèmes naturels : calcul,
auto-reproduction, apprentissage, mémoire, comportement intelligent. Le terme désigne
aujourd’hui un très grand nombre de modèles, dont beaucoup n’ont plus grand chose à voir
avec le fonctionnement des neurones biologiques, et doit donc être pris comme une
métaphore. Ces différents modèles ont en commun l’utilisation de processeurs élémentaires,
appelés neurones ou unités, capables de réaliser chacun un traitement très simple et
d’échanger des informations entre eux. On associe généralement aux RNA un algorithme
« d’apprentissage » permettant de modifier de manière plus ou moins automatique le
traitement effectué afin de réaliser une tâche donnée.
Les premiers algorithmes neuronaux d’apprentissage supervisé sont apparus avec les
travaux de Frank Rosenblatt [Rosenblatt, 1961] qui a créé le Perceptron, un modèle capable
d’apprendre à partir d’exemples. Cependant la mise en évidence des limitations du Perceptron
a freiné l’intérêt porté par les chercheurs aux RNA, jusqu’à la mise au point d’un nouvel
algorithme d’apprentissage.
C’est avec les travaux du groupe de David Rumelhart [Rumelhart, 1986] à San Diego
et de Yann Le Cun en France [Le Cun, 1987] que les techniques neuronales ont trouvé un
nouvel essor. Ces chercheurs ont proposé l’algorithme de rétropropagation du gradient pour
les réseaux multi-couches, ces derniers étant une extension du Perceptron. Depuis une dizaine
d’années, l’intérêt pour les RNA a considérablement augmenté et ils sont sortis du domaine de
la recherche pour aller vers des domaines applicatifs [Neuro Dimension, 2001].
III. Modélisation et identification
62
III.3.1 Définition
Il n’y a pas de définition universelle des Réseaux de Neurones Artificiels (RNA).
Voilà quelques propositions de définition de réseaux de neurones artificiels issues de la
littérature :
Selon Haykin, S. [Haykin, 1994] :
Selon Zurada [Zurada, 1992] :
La plupart des réseaux de neurones sont capables d’apprendre certaines règles basées
sur des exemples, en ajustant le poids des connexions qui lient les neurones. En d’autres
termes, les RNA apprennent sur des exemples (comme un enfant qui apprend à reconnaître le
type “chien” à partir d’exemples de chiens), et généralisent leur connaissance au-delà des
exemples utilisés en apprentissage.
Les réseaux de neurones sont un processus distribué parallèle qui
a la propriété de stocker de la connaissance et la rendre
disponible à l’utilisation. Les RNA ressemblent au cerveau
humain dans deux aspects:
1. La connaissance est acquise grâce à un processus
d’apprentissage.
2. Les poids des connexions inter-neuronales, ou poids
synaptiques sont utilisés pour stocker la connaissance.
Les réseaux de neurones artificiels sont des cellules physiques
capables d’acquérir, de mémoriser, et d’utiliser une connaissance
expérimentale.
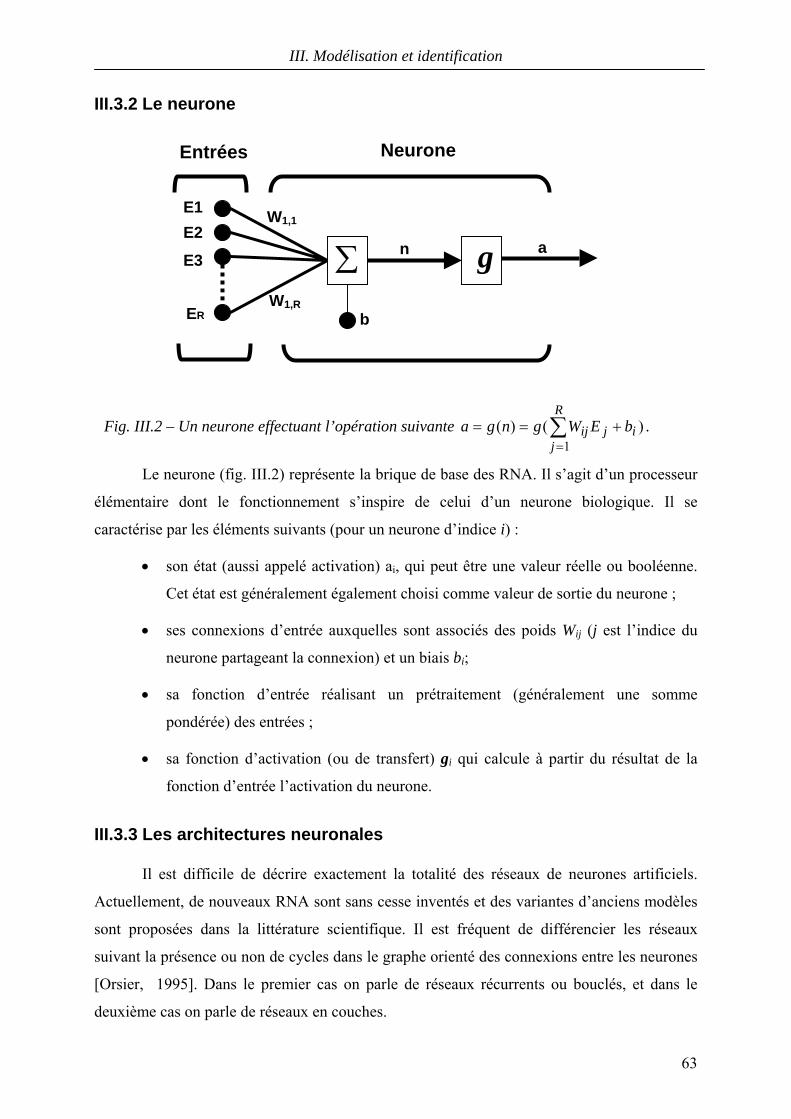
III. Modélisation et identification
63
III.3.2 Le neurone
Fig. III.2 – Un neurone effectuant l’opération suivante ∑=
+==R
jijij bEWgnga
1)()( .
Le neurone (fig. III.2) représente la brique de base des RNA. Il s’agit d’un processeur
élémentaire dont le fonctionnement s’inspire de celui d’un neurone biologique. Il se
caractérise par les éléments suivants (pour un neurone d’indice i) :
• son état (aussi appelé activation) ai, qui peut être une valeur réelle ou booléenne.
Cet état est généralement également choisi comme valeur de sortie du neurone ;
• ses connexions d’entrée auxquelles sont associés des poids Wij (j est l’indice du
neurone partageant la connexion) et un biais bi;
• sa fonction d’entrée réalisant un prétraitement (généralement une somme
pondérée) des entrées ;
• sa fonction d’activation (ou de transfert) gi qui calcule à partir du résultat de la
fonction d’entrée l’activation du neurone.
III.3.3 Les architectures neuronales
Il est difficile de décrire exactement la totalité des réseaux de neurones artificiels.
Actuellement, de nouveaux RNA sont sans cesse inventés et des variantes d’anciens modèles
sont proposées dans la littérature scientifique. Il est fréquent de différencier les réseaux
suivant la présence ou non de cycles dans le graphe orienté des connexions entre les neurones
[Orsier, 1995]. Dans le premier cas on parle de réseaux récurrents ou bouclés, et dans le
deuxième cas on parle de réseaux en couches.
∑ g
E1E2
E3
ER
W1,1
W1,R
an
b
Entrées Neurone
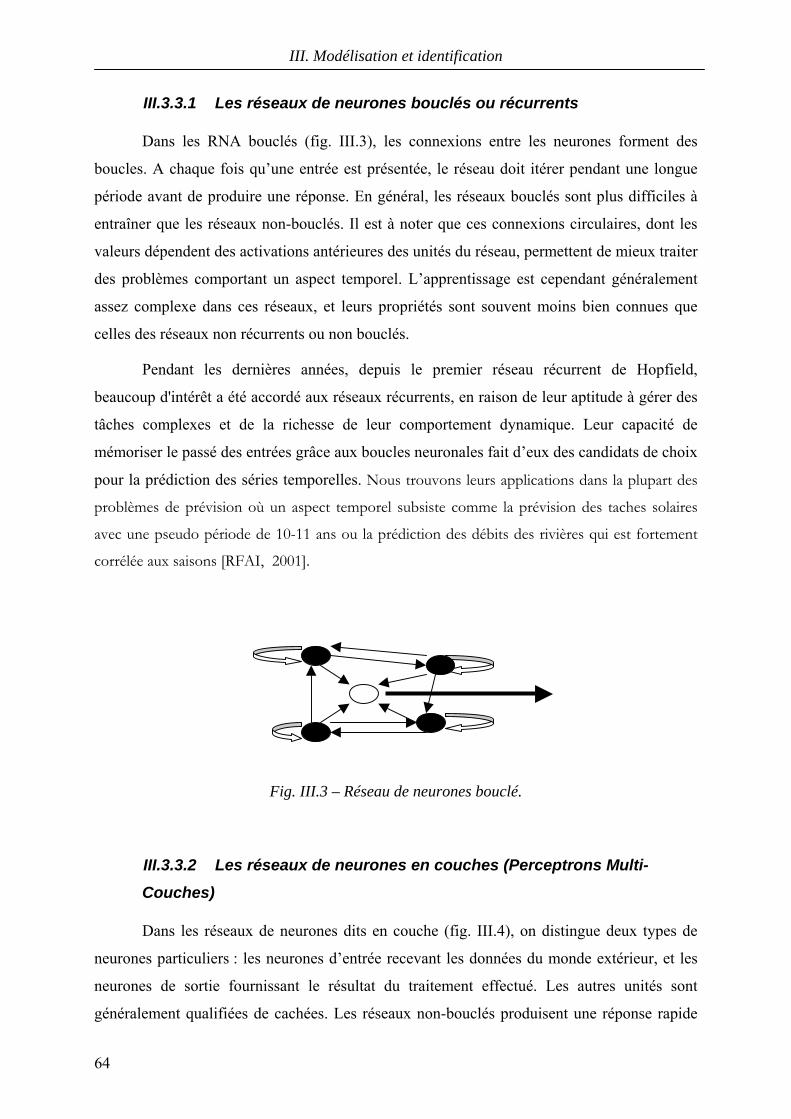
III. Modélisation et identification
64
III.3.3.1 Les réseaux de neurones bouclés ou récurrents
Dans les RNA bouclés (fig. III.3), les connexions entre les neurones forment des
boucles. A chaque fois qu’une entrée est présentée, le réseau doit itérer pendant une longue
période avant de produire une réponse. En général, les réseaux bouclés sont plus difficiles à
entraîner que les réseaux non-bouclés. Il est à noter que ces connexions circulaires, dont les
valeurs dépendent des activations antérieures des unités du réseau, permettent de mieux traiter
des problèmes comportant un aspect temporel. L’apprentissage est cependant généralement
assez complexe dans ces réseaux, et leurs propriétés sont souvent moins bien connues que
celles des réseaux non récurrents ou non bouclés.
Pendant les dernières années, depuis le premier réseau récurrent de Hopfield,
beaucoup d'intérêt a été accordé aux réseaux récurrents, en raison de leur aptitude à gérer des
tâches complexes et de la richesse de leur comportement dynamique. Leur capacité de
mémoriser le passé des entrées grâce aux boucles neuronales fait d’eux des candidats de choix
pour la prédiction des séries temporelles. Nous trouvons leurs applications dans la plupart des
problèmes de prévision où un aspect temporel subsiste comme la prévision des taches solaires
avec une pseudo période de 10-11 ans ou la prédiction des débits des rivières qui est fortement
corrélée aux saisons [RFAI, 2001].
Fig. III.3 – Réseau de neurones bouclé.
III.3.3.2 Les réseaux de neurones en couches (Perceptrons Multi-
Couches)
Dans les réseaux de neurones dits en couche (fig. III.4), on distingue deux types de
neurones particuliers : les neurones d’entrée recevant les données du monde extérieur, et les
neurones de sortie fournissant le résultat du traitement effectué. Les autres unités sont
généralement qualifiées de cachées. Les réseaux non-bouclés produisent une réponse rapide
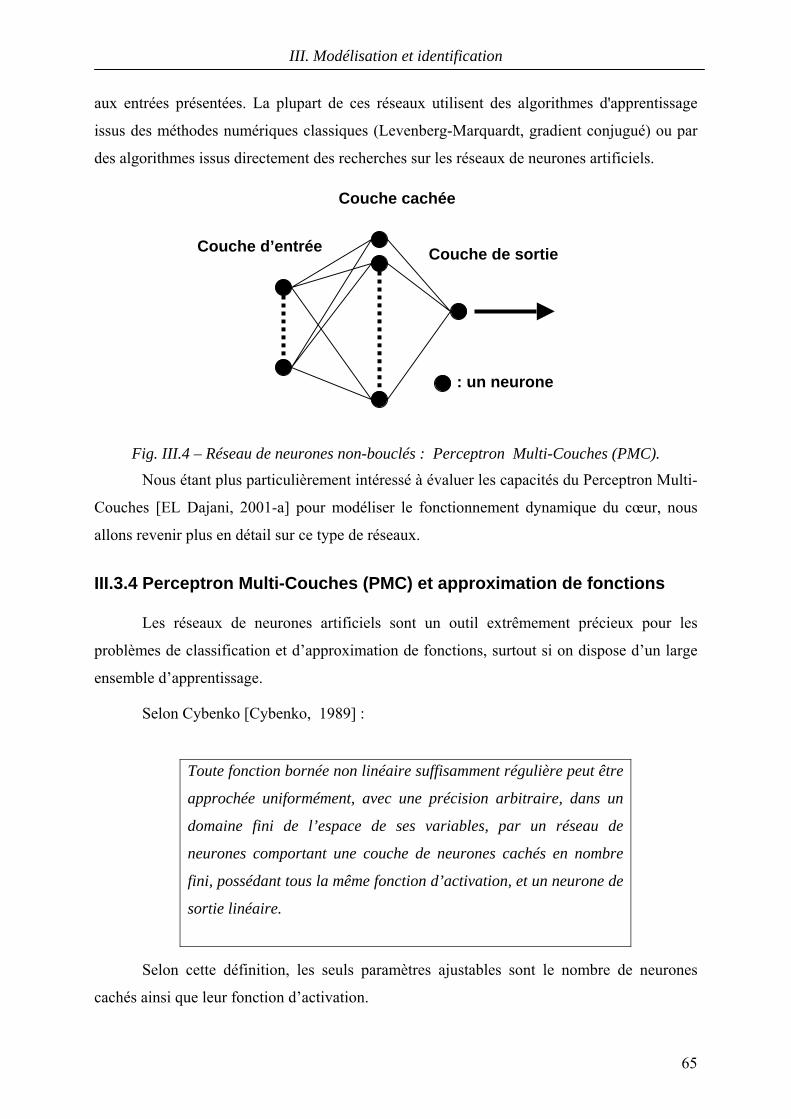
III. Modélisation et identification
65
aux entrées présentées. La plupart de ces réseaux utilisent des algorithmes d'apprentissage
issus des méthodes numériques classiques (Levenberg-Marquardt, gradient conjugué) ou par
des algorithmes issus directement des recherches sur les réseaux de neurones artificiels.
Fig. III.4 – Réseau de neurones non-bouclés : Perceptron Multi-Couches (PMC).
Nous étant plus particulièrement intéressé à évaluer les capacités du Perceptron Multi-
Couches [EL Dajani, 2001-a] pour modéliser le fonctionnement dynamique du cœur, nous
allons revenir plus en détail sur ce type de réseaux.
III.3.4 Perceptron Multi-Couches (PMC) et approximation de fonctions
Les réseaux de neurones artificiels sont un outil extrêmement précieux pour les
problèmes de classification et d’approximation de fonctions, surtout si on dispose d’un large
ensemble d’apprentissage.
Selon Cybenko [Cybenko, 1989] :
Selon cette définition, les seuls paramètres ajustables sont le nombre de neurones
cachés ainsi que leur fonction d’activation.
Toute fonction bornée non linéaire suffisamment régulière peut être
approchée uniformément, avec une précision arbitraire, dans un
domaine fini de l’espace de ses variables, par un réseau de
neurones comportant une couche de neurones cachés en nombre
fini, possédant tous la même fonction d’activation, et un neurone de
sortie linéaire.
: un neurone
Couche d’entrée
Couche cachée
Couche de sortie
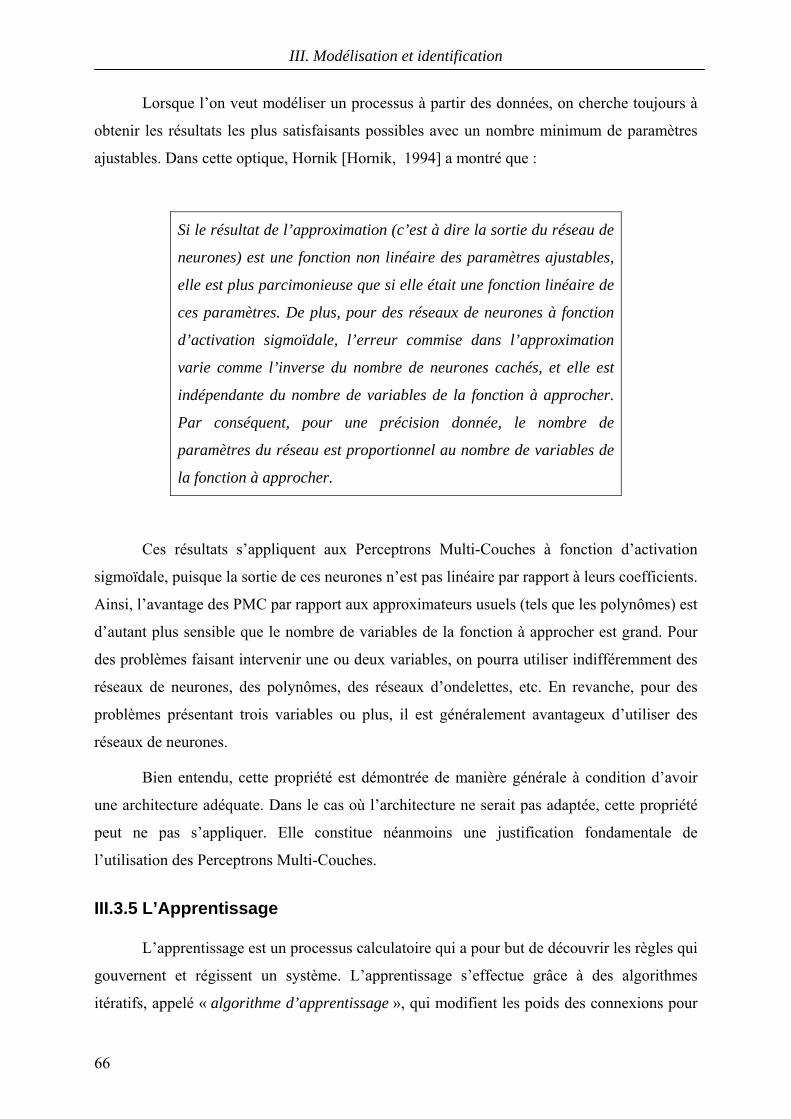
III. Modélisation et identification
66
Lorsque l’on veut modéliser un processus à partir des données, on cherche toujours à
obtenir les résultats les plus satisfaisants possibles avec un nombre minimum de paramètres
ajustables. Dans cette optique, Hornik [Hornik, 1994] a montré que :
Si le résultat de l’approximation (c’est à dire la sortie du réseau de
neurones) est une fonction non linéaire des paramètres ajustables,
elle est plus parcimonieuse que si elle était une fonction linéaire de
ces paramètres. De plus, pour des réseaux de neurones à fonction
d’activation sigmoïdale, l’erreur commise dans l’approximation
varie comme l’inverse du nombre de neurones cachés, et elle est
indépendante du nombre de variables de la fonction à approcher.
Par conséquent, pour une précision donnée, le nombre de
paramètres du réseau est proportionnel au nombre de variables de
la fonction à approcher.
Ces résultats s’appliquent aux Perceptrons Multi-Couches à fonction d’activation
sigmoïdale, puisque la sortie de ces neurones n’est pas linéaire par rapport à leurs coefficients.
Ainsi, l’avantage des PMC par rapport aux approximateurs usuels (tels que les polynômes) est
d’autant plus sensible que le nombre de variables de la fonction à approcher est grand. Pour
des problèmes faisant intervenir une ou deux variables, on pourra utiliser indifféremment des
réseaux de neurones, des polynômes, des réseaux d’ondelettes, etc. En revanche, pour des
problèmes présentant trois variables ou plus, il est généralement avantageux d’utiliser des
réseaux de neurones.
Bien entendu, cette propriété est démontrée de manière générale à condition d’avoir
une architecture adéquate. Dans le cas où l’architecture ne serait pas adaptée, cette propriété
peut ne pas s’appliquer. Elle constitue néanmoins une justification fondamentale de
l’utilisation des Perceptrons Multi-Couches.
III.3.5 L’Apprentissage
L’apprentissage est un processus calculatoire qui a pour but de découvrir les règles qui
gouvernent et régissent un système. L’apprentissage s’effectue grâce à des algorithmes
itératifs, appelé « algorithme d’apprentissage », qui modifient les poids des connexions pour
III. Modélisation et identification
67
les adapter aux données présentées au réseau et sont caractéristiques du système à modéliser.
Les données utilisées en apprentissage sont appelé « ensemble d’apprentissage » ou « base
d’exemples ».
Les deux principales méthodes d’apprentissage sont l’apprentissage non-supervisé et
supervisé [Milgram, 1993].
III.3.5.1 Apprentissage non supervisé
Par nature, cet apprentissage est destiné à l’élaboration d’une représentation interne de
la connaissance de l’environnement, identifiant la structure statistique sous-jacente des stimuli
sous une forme plus simple ou plus explicite. L’algorithme d’apprentissage exploite pour ce
faire une mesure prédéterminée de la qualité de représentation de la connaissance afin
d’ajuster les paramètres du réseau.
On l’appelle aussi, suivant l’approche utilisée, classification automatique, ou
apprentissage sans professeur ou encore apprentissage par corrélation [Leschi, 1991]. Ce type
d'apprentissage est utilisé dans le cas où on disposerait d'une base d'apprentissage dont les
classes ne sont pas définies à l'avance. Il s’agit alors de regrouper les différentes formes en
classes en fonction d'un critère de similarité choisi a priori. Ce type d'apprentissage permet la
construction automatique des classes sans intervention d'un opérateur [Nadal, 1993]. On
distingue essentiellement deux types de méthodes : les processus de coalescence et la
classification hiérarchique [Belaid, 1992].
Plus particulièrement, concernant les réseaux de neurones artificiels, la règle
d’apprentissage n’est pas fonction du comportement de sortie du réseau, mais plutôt du
comportement local des neurones. L’ensemble des exemples d’apprentissage ne comprend
que des entrées, aucune réponse désirée n’est associée. Dans ce cas, la motivation est de
trouver des classements ou des organisations au sein de l’ensemble d’apprentissage.
III.3.5.2 Apprentissage supervisé
L’apprentissage est dit supervisé si les différentes familles de formes, ou classes, sont
connues a priori ainsi que l'affectation de chaque forme à telle ou telle famille. Le processus
d'apprentissage en mode supervisé peut se résumer comme suit : on dispose d'un ensemble de
formes ou d'individus, qui est un ensemble d'apprentissage d'individus parfaitement classés,
ensemble que l'on se propose de reconnaître. On construit dans un premier temps une
"machine" sachant classer correctement les individus de l'ensemble d'apprentissage. La
III. Modélisation et identification
68
description de chaque forme est prise en compte par la tâche d’apprentissage. Le travail
d'apprentissage consiste à analyser les ressemblances entre les formes d’une même classe et
les dissemblances entre les formes de classes différentes pour en déduire les meilleures
séparations possibles entre classes. Ensuite, on fait en sorte que cette "machine" ait une bonne
capacité à prédire la classe d'une forme qui n'est pas dans l'ensemble d'apprentissage. D'où
l'exigence de tester cette "machine" sur un ensemble de validation composé d'individus
parfaitement classés. Cette phase de test est nécessaire car elle permet aussi de savoir si la
machine élaborée n'a pas été entraînée à apprendre "par cœur" sans possibilité de
généralisation (sur-apprentissage ou over-design) [Belaid, 1992; Leschi, 1991].
Plus particulièrement, concernant les Perceptrons Multi-Couches, les entrées ainsi que
les sorties désirées sont soumises conjointement au réseau. La sortie produite par le réseau,
en réponse à une entrée donnée, est comparée à la réponse désirée fournie par l’expert. La
différence entre la réponse désirée et la réponse du réseau est alors utilisée pour adapter les
paramètres du réseau de façon à corriger son comportement. Ce processus est ainsi répété
jusqu’à émulation de l’expert par le réseau de neurones artificiels. Les connaissances de
l’expert sont représentées par une base d’apprentissage (i.e. base d’exemples).
En général, les règles d’apprentissage supervisé utilisent l’algorithme de descente du
gradient [Chauvin, 1995; Nadal, 1993].
III.3.5.3 Algorithme d’apprentissage supervisé pour les RNA : la
rétropropagation
Quel que soit le cas de l’utilisation du réseau (approximateur de fonction ou
classifieur), le processus d’apprentissage supervisé nécessite une base d’exemples composée
des entrées du réseau associées aux sorties désirées. Pendant la phase d’apprentissage, les
poids et biais du réseau sont ajustés pour minimiser la « fonction de performance » ou
« fonction de coût». La fonction de coût doit permettre de mesurer l’écart entre le modèle et
les observations. Nous présentons ci-après la fonction d’erreur quadratique moyenne MSE qui
est la plus utilisée pour l’apprentissage des RNA, mais d’autres fonctions de coût peuvent
aussi être utilisées [Chauvin, 1995] [Hagan, 1996]:
∑∑ −==N
iii
N
ii at
Ne
NMSE 22 )(11 (III.8)
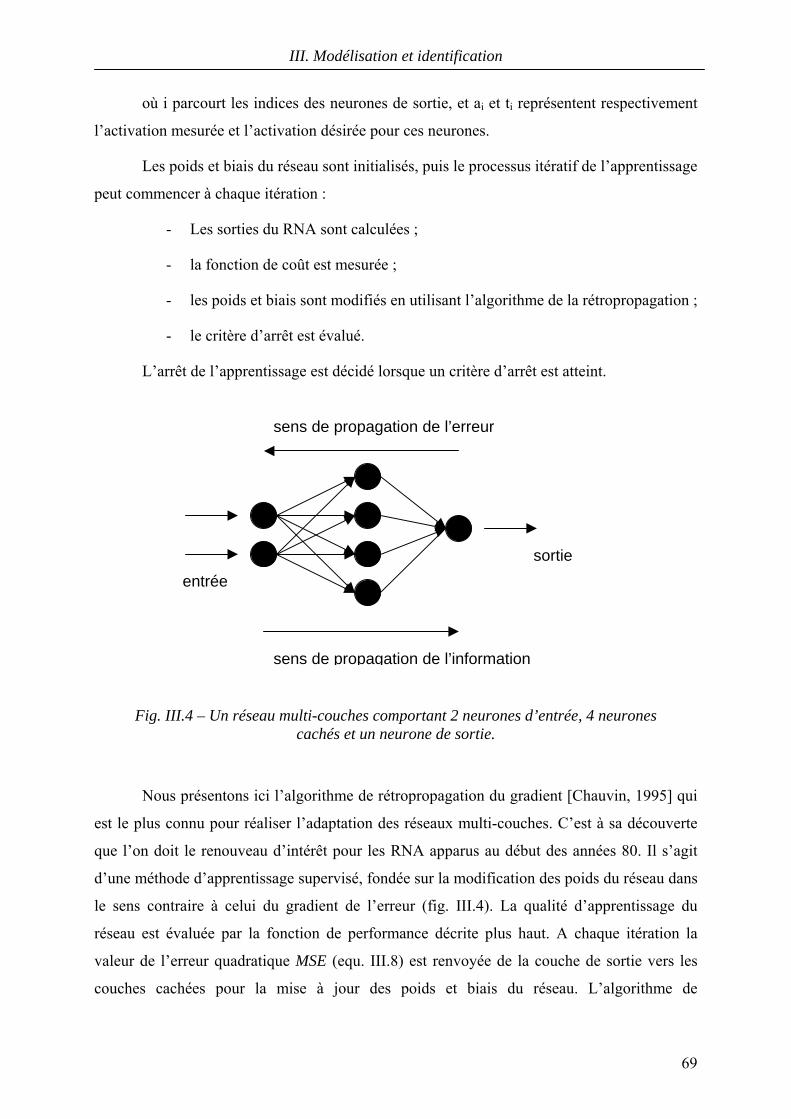
III. Modélisation et identification
69
où i parcourt les indices des neurones de sortie, et ai et ti représentent respectivement
l’activation mesurée et l’activation désirée pour ces neurones.
Les poids et biais du réseau sont initialisés, puis le processus itératif de l’apprentissage
peut commencer à chaque itération :
- Les sorties du RNA sont calculées ;
- la fonction de coût est mesurée ;
- les poids et biais sont modifiés en utilisant l’algorithme de la rétropropagation ;
- le critère d’arrêt est évalué.
L’arrêt de l’apprentissage est décidé lorsque un critère d’arrêt est atteint.
Fig. III.4 – Un réseau multi-couches comportant 2 neurones d’entrée, 4 neurones cachés et un neurone de sortie.
Nous présentons ici l’algorithme de rétropropagation du gradient [Chauvin, 1995] qui
est le plus connu pour réaliser l’adaptation des réseaux multi-couches. C’est à sa découverte
que l’on doit le renouveau d’intérêt pour les RNA apparus au début des années 80. Il s’agit
d’une méthode d’apprentissage supervisé, fondée sur la modification des poids du réseau dans
le sens contraire à celui du gradient de l’erreur (fig. III.4). La qualité d’apprentissage du
réseau est évaluée par la fonction de performance décrite plus haut. A chaque itération la
valeur de l’erreur quadratique MSE (equ. III.8) est renvoyée de la couche de sortie vers les
couches cachées pour la mise à jour des poids et biais du réseau. L’algorithme de
sens de propagation de l’erreur
sens de propagation de l’information
entrée sortie
III. Modélisation et identification
70
rétropropagation modifie les poids et les biais dans la direction de diminution de la fonction
de performance (la valeur négative du gradient).
Wk+1=Wk -ηk G k (III.9)
Wk est le vecteur de poids et biais du neurone k,η est le facteur d’apprentissage et G
le gradient de l’erreur.
Cet algorithme, présenté ici dans sa version la plus simple, possède de nombreuses
variantes. Elles correspondent généralement à l’utilisation de valeurs variables pour le facteur
d’apprentissage η [Riedmiller, 1993], ou à l’utilisation de méthodes du deuxième ordre pour
le calcul du gradient. Nous présenterons plus loin dans ce chapitre les principaux algorithmes
utilisés en apprentissage des Perceptrons Multi-Couches [Fahlman, 1988].
III.3.6 La Généralisation
Pendant le processus d’apprentissage, les sorties d’un réseau non-bouclé tendent à
approcher les sorties fournies dans l’ensemble d’apprentissage. Mais l’intérêt principal des
réseaux réside dans leur capacité de généralisation, en d’autre terme, de fournir des valeurs
pour des entrées inconnues qui n’appartiennent pas à l’ensemble d’apprentissage. Pour avoir
une bonne généralisation, il y a certaines règles à respecter, sans lesquelles les RNA
donneront des résultats erronés. Les entrées choisies pour le réseau doivent être pertinentes et
représentatives de la fonction recherchée ; nous ne pouvons pas inclure toute entrée sans lien
avec les sorties fournies au risque d’augmenter artificiellement la complexité du modèle
recherché.
Lorsque la séquence d’apprentissage est choisie, il faut s’assurer qu’elle soit
représentative de la fonction que nous cherchons à approximer, et que les ensembles que nous
essayons de prédire soient de la même classe de l’ensemble d’apprentissage.
III.3.6.1 Les facteurs indispensables pour une bonne généralisation
Trois conditions sont nécessaires mais pas suffisantes pour obtenir une bonne
généralisation :
1. Les entrées du réseau doivent contenir suffisamment d’information les reliant
aux sorties désirées, pour qu’il y ait une relation mathématique reliant les
entrées aux sorties avec une précision acceptable. Nous ne pouvons pas
III. Modélisation et identification
71
imaginer les RNA apprendre une relation non existante. Le choix des entrées
pertinentes et la création d’un ensemble d’apprentissage, prennent souvent plus
de temps que l’apprentissage des réseaux. Cela est particulièrement important
lorsque nous essayons de modéliser des fonctions biologiques, où souvent les
paramètres influençant le processus à apprendre sont difficiles à quantifier.
2. La fonction à modéliser (reliant les entrées aux sorties) doit être peu sensible.
En d’autres termes, de faibles variations des valeurs d’entrées doivent, dans la
plupart du temps, entraîner de faibles variations sur les sorties. Quelques
réseaux de neurones sont capables d’apprendre des discontinuités à condition
que la fonction à modéliser soit composée d’un nombre fini de segments
continus. Cela explique l’incapacité des RNA d’apprendre certaines fonctions
comme les tirages aléatoires et les algorithmes de cryptage. Pour les problèmes
de classification, la condition de faible sensibilité n’est pas nécessaire. Les
Perceptrons Multi-Couches avec suffisamment de neurones cachés sont des
classificateurs fiables [Devroye, 1996].
3. l’ensemble d’apprentissage (base d’exemples) doit être suffisamment grand et
représentatif de l’ensemble de l’espace des entrées et de sorties. Cette
condition influence directement les deux types de généralisation possible :
l’interpolation et l’extrapolation. L’interpolation s’applique sur les cas proches
des exemples d’apprentissage et l’extrapolation sur les cas loin de l’ensemble
d’apprentissage. Les RNA sont capables d’une bonne interpolation. En
revanche, leur performance en extrapolation reste assez médiocre. Avant
d’utiliser les RNA en généralisation, leur performance en interpolation et en
extrapolation doive être vérifiée.
En résumé, pour une fonction donnée, peu sensible, et pour les cas de généralisation
proches des exemples d’apprentissage, la sortie du réseau sera proche des sorties correctes
des exemples d’apprentissage. Si la base d’apprentissage est correctement construite, tout cas
de généralisation sera proche d’un cas d’apprentissage. Sous ces conditions et avec une
architecture et un algorithme d’apprentissage approprié, les RNA sont capables de généraliser
correctement l’ensemble de la population.
III. Modélisation et identification
72
III.3.6.2 Optimisation de la généralisation
Il est possible d’améliorer la qualité des réseaux de neurones en généralisation en
modifiant les algorithmes d’apprentissage ou même les conditions d’arrêt du processus itératif
de l’apprentissage. Nous présentons différents algorithmes d’apprentissage ainsi que la
méthode « d’arrêt avant convergence » ou autrement dit la méthode du « early stopping ».
III.3.6.2.1 Algorithme d’apprentissage
Les algorithmes d’apprentissage itératifs utilisés dans les réseaux de neurones
explorent l’espace des paramètres (i.e. poids et biais du réseau) à partir d’un point de départ
fixé par les valeurs initiales de ces paramètres et selon une trajectoire qui sera fonction de
l’algorithme utilisé et des données. Pour améliorer les performances des modèles neuronaux
en généralisation, nous pouvons également utiliser des algorithmes basés sur la descente du
gradient. Nous présentons ci-après les algorithmes les plus utilisées en apprentissage
supervisé [Hagan, 1996].
a) L’algorithme du facteur d’apprentissage adaptatif η
Il est aussi possible d’améliorer les performances du RNA en modifiant à chaque
itération la valeur du facteur d’apprentissage η dans la formule modifiant les poids et les biais
(equ. III.9). Cette méthode est connue sous le nom de l’algorithme du « facteur
d’apprentissage adaptatif ». La performance du réseau est très sensible au facteur
d’apprentissage: s’il est trop grand, l’algorithme peut osciller et devenir instable, s’il est trop
petit, l’algorithme mettra longtemps avant de converger. Ce n’est pas évident de choisir une
valeur avant l’apprentissage, d’autant plus que la valeur optimale du facteur d’apprentissage
change pendant le processus d’apprentissage.
La performance de l’algorithme de descente du gradient peut être améliorée si on
modifie le facteur d’apprentissage pendant le processus itératif. Un facteur adaptatif permet de
maintenir un pas d’apprentissage le plus large possible en maintenant un apprentissage stable.
A chaque itération, l’erreur d’apprentissage (ep) (equ. III.8) est calculée. La méthode du
facteur d’apprentissage adaptatif propose de modifier η au fur et à mesure de l’apprentissage
en fonction de ep selon la méthode suivante :
Si ep> α η=η*δ (δ<1)
ep<α’ η=η*δ’ (δ'>1)
III. Modélisation et identification
73
fin Si
b) La méthode de Newton
La méthode de Newton utilise la courbure (dérivée seconde) de la fonction de coût
pour atteindre le minimum plus rapidement. La modification des paramètres est donnée par :
kkkk GHWW 11
−+ −= (III.10)
Ici le facteur d’apprentissage η est constant et égal à 1. La direction de descente est
fonction du Hessien H (matrice des dérivées secondes de la fonction de coût) et du gradient.
La méthode de Newton nécessite moins d’itérations pour converger que l’algorithme de
rétropropagation classique, mais malheureusement, le calcul du Hessien est coûteux en temps
pour les réseaux non-bouclés. Il existe cependant une classe d’algorithmes basée sur
l’algorithme de Newton appelée Quasi Newton qui utilise une approximation du Hessien pour
la mise à jour des poids du réseau. Le plus connu parmi ces algorithmes est celui de Broyden,
Fletcher, Goldfarb et Shanno (BFGS) [Dennis, 1983; Hagan, 1996].
c) La méthode de Levenberg-Marquardt
Comme les méthodes de Quasi-Newton, la méthode de Levenberg-Marquardt
[More, 1977] utilise une approche du second ordre sans calculer le Hessien. Quand la
fonction de coût est une somme au carrée (i.e. comme la MSE equ.III.8), le Hessien peut être
approximé à :
H=JT J
Le gradient peut être décomposé sous la forme :
eJG T=
où J est le Jacobien qui contient les dérivées premières des erreurs du réseau, et e est le
vecteur d’erreur (e=ai-si). Le jacobien peut être calculé avec l’algorithme de rétropropagation
ce qui est beaucoup moins complexe que le calcul du Hessien.
L’algorithme de Levenberg-Marquardt utilise les approximations précédentes pour
la mise à jour des poids :
eJIJJWW TTkk
11 ][ −
+ +−= η (III.11)
III. Modélisation et identification
74
III.3.6.2.2 Compromis Apprentissage-Généralisation ou « early stopping »
Pour les réseaux de neurones artificiels, l’ensemble de données disponible est souvent
divisé en trois sous-ensembles distincts, un ensemble d’apprentissage, de validation et de test.
La distinction entre ces sous-ensembles est cruciale, mais les termes validation et test sont
souvent confondus. Nous présentons les définitions données par Ripley [Ripley, 1996] :
Trop apprendre à partir d’un ensemble de taille limitée nuit aux performances en
généralisation. Il s’agit du phénomène de sur-apprentissage : après une première phase où les
poids apprennent des statistiques représentatives du problème, ils commencent à capturer les
idiosyncrasies de l’ensemble d’apprentissage. L’erreur sur l’ensemble d’apprentissage décroît
continûment au cours du temps puis se stabilise, alors que l’erreur en test passe par un
minimum avant de croître. Il faut donc arrêter l’apprentissage là où la valeur des paramètres
offrira la meilleure performance en généralisation. On utilise pour fixer l’instant de l’arrêt un
ensemble de validation afin de ne pas biaiser favorablement l’estimation du risque sur
l’ensemble de test. La popularisation de cette procédure d’arrêt constitue un apport original de
- Ensemble d’apprentissage : un ensemble d’exemples utilisé
en apprentissage pour la modification des paramètres du
réseau (i.e. poids et biais).
- Ensemble de validation : un ensemble d’exemples utilisé pour
l’ajustement de l’architecture (i.e. nombre de couches et
nombre de neurones cachés mais pas les poids du réseau). Cet
ensemble peut aussi servir à arrêter le processus itératif de
l’apprentissage lorsqu’un seuil d’erreur est atteint.
- Ensemble de test : un ensemble d’exemples utilisé pour tester
la performance du réseau.
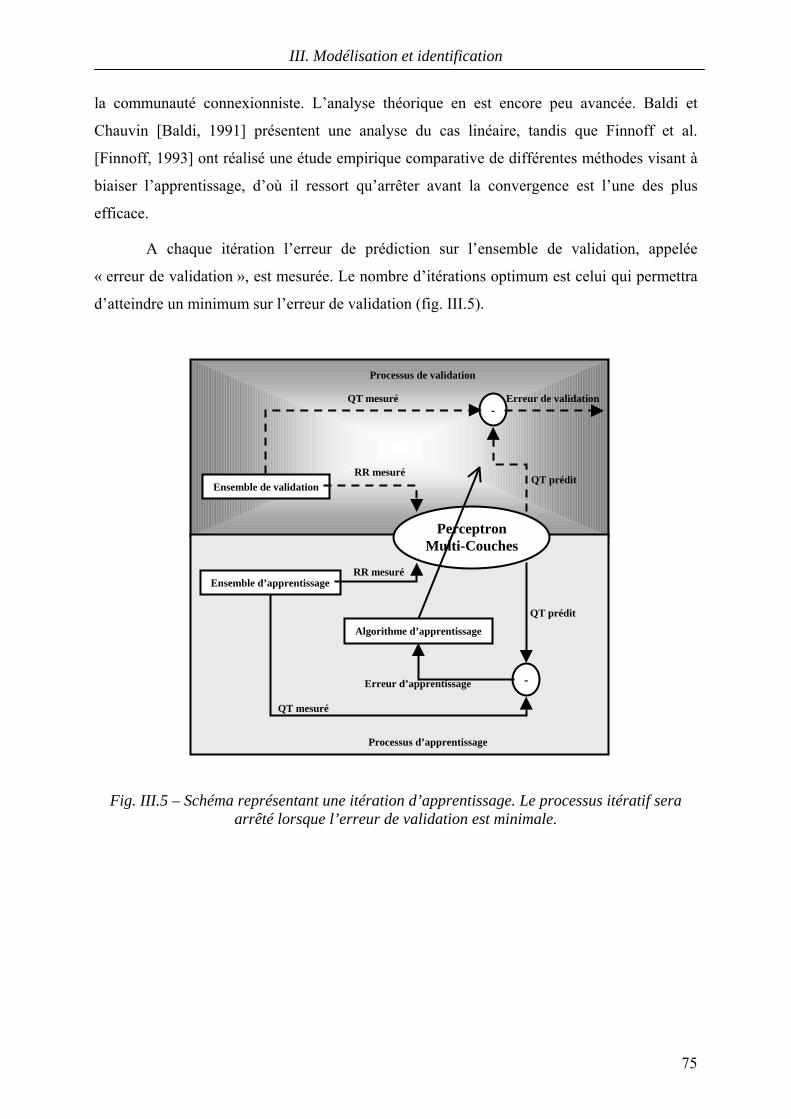
III. Modélisation et identification
75
la communauté connexionniste. L’analyse théorique en est encore peu avancée. Baldi et
Chauvin [Baldi, 1991] présentent une analyse du cas linéaire, tandis que Finnoff et al.
[Finnoff, 1993] ont réalisé une étude empirique comparative de différentes méthodes visant à
biaiser l’apprentissage, d’où il ressort qu’arrêter avant la convergence est l’une des plus
efficace.
A chaque itération l’erreur de prédiction sur l’ensemble de validation, appelée
« erreur de validation », est mesurée. Le nombre d’itérations optimum est celui qui permettra
d’atteindre un minimum sur l’erreur de validation (fig. III.5).
Fig. III.5 – Schéma représentant une itération d’apprentissage. Le processus itératif sera arrêté lorsque l’erreur de validation est minimale.
Ensemble de validation
Ensemble d’apprentissage
Perceptron Multi-Couches
Algorithme d’apprentissage
-
-
Processus d’apprentissage
Processus de validation
RR mesuré
RR mesuré QT prédit
QT prédit
QT mesuré
QT mesuré
Erreur d’apprentissage
Erreur de validation
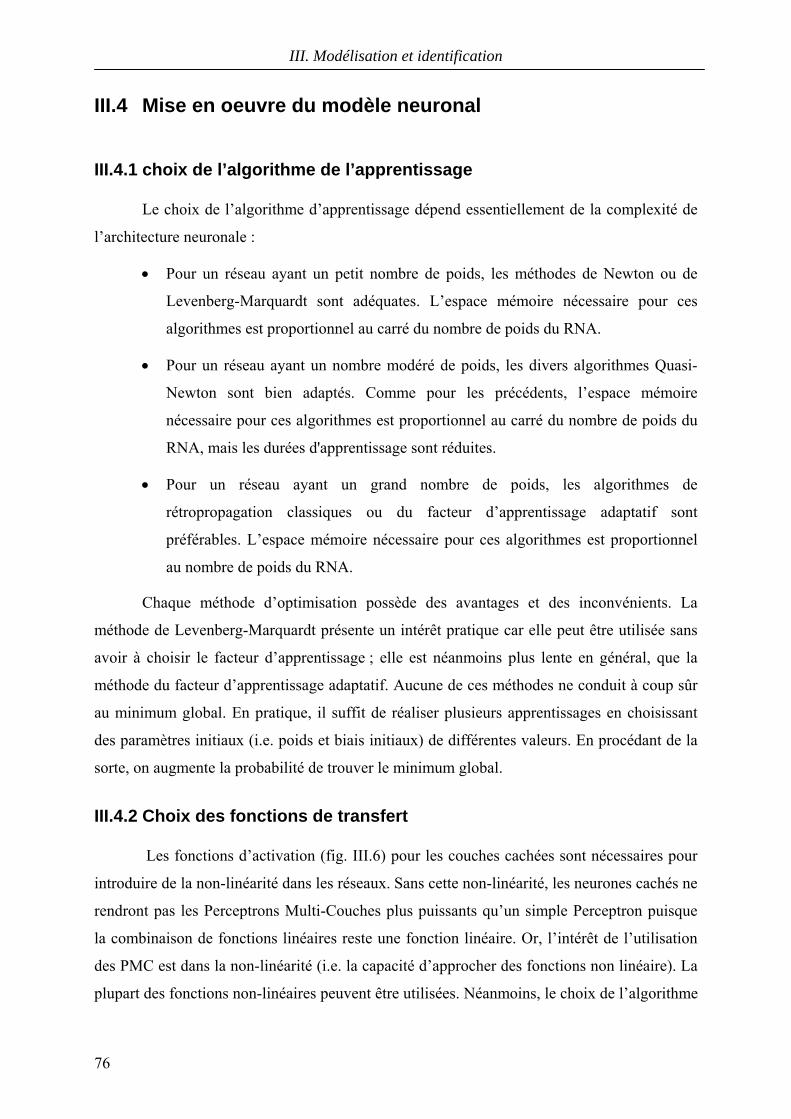
III. Modélisation et identification
76
III.4 Mise en oeuvre du modèle neuronal
III.4.1 choix de l’algorithme de l’apprentissage
Le choix de l’algorithme d’apprentissage dépend essentiellement de la complexité de
l’architecture neuronale :
• Pour un réseau ayant un petit nombre de poids, les méthodes de Newton ou de
Levenberg-Marquardt sont adéquates. L’espace mémoire nécessaire pour ces
algorithmes est proportionnel au carré du nombre de poids du RNA.
• Pour un réseau ayant un nombre modéré de poids, les divers algorithmes Quasi-
Newton sont bien adaptés. Comme pour les précédents, l’espace mémoire
nécessaire pour ces algorithmes est proportionnel au carré du nombre de poids du
RNA, mais les durées d'apprentissage sont réduites.
• Pour un réseau ayant un grand nombre de poids, les algorithmes de
rétropropagation classiques ou du facteur d’apprentissage adaptatif sont
préférables. L’espace mémoire nécessaire pour ces algorithmes est proportionnel
au nombre de poids du RNA.
Chaque méthode d’optimisation possède des avantages et des inconvénients. La
méthode de Levenberg-Marquardt présente un intérêt pratique car elle peut être utilisée sans
avoir à choisir le facteur d’apprentissage ; elle est néanmoins plus lente en général, que la
méthode du facteur d’apprentissage adaptatif. Aucune de ces méthodes ne conduit à coup sûr
au minimum global. En pratique, il suffit de réaliser plusieurs apprentissages en choisissant
des paramètres initiaux (i.e. poids et biais initiaux) de différentes valeurs. En procédant de la
sorte, on augmente la probabilité de trouver le minimum global.
III.4.2 Choix des fonctions de transfert
Les fonctions d’activation (fig. III.6) pour les couches cachées sont nécessaires pour
introduire de la non-linéarité dans les réseaux. Sans cette non-linéarité, les neurones cachés ne
rendront pas les Perceptrons Multi-Couches plus puissants qu’un simple Perceptron puisque
la combinaison de fonctions linéaires reste une fonction linéaire. Or, l’intérêt de l’utilisation
des PMC est dans la non-linéarité (i.e. la capacité d’approcher des fonctions non linéaire). La
plupart des fonctions non-linéaires peuvent être utilisées. Néanmoins, le choix de l’algorithme
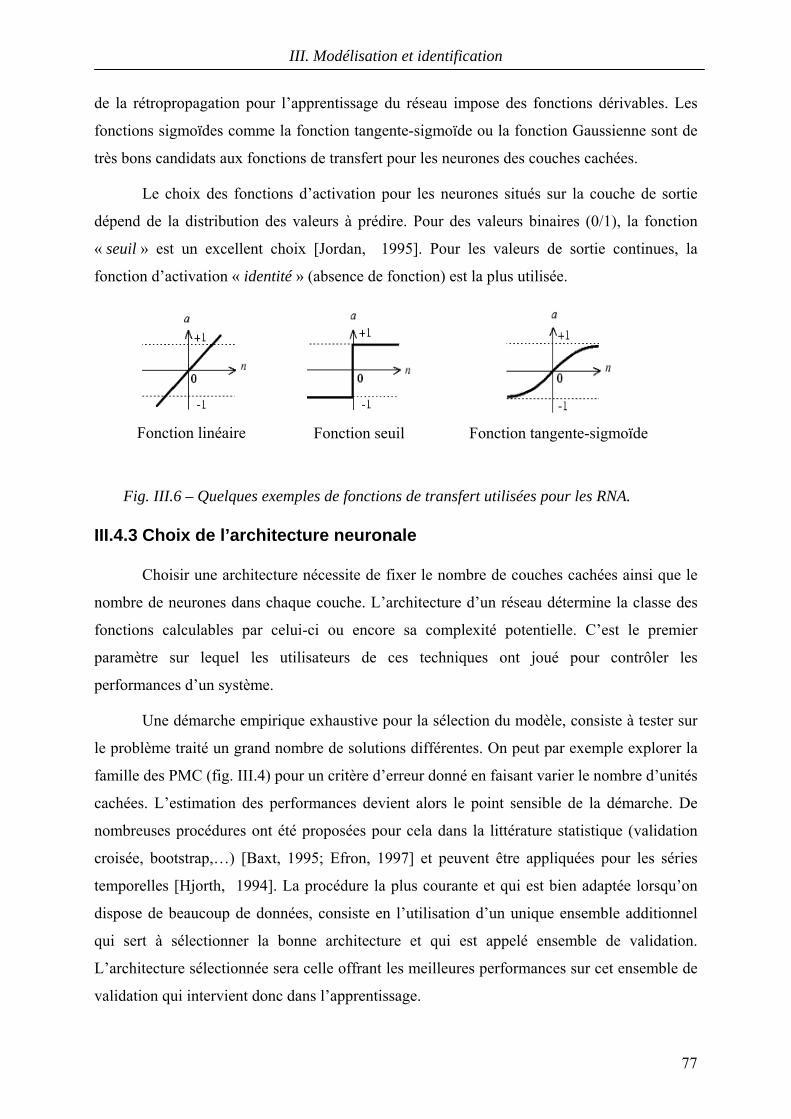
III. Modélisation et identification
77
de la rétropropagation pour l’apprentissage du réseau impose des fonctions dérivables. Les
fonctions sigmoïdes comme la fonction tangente-sigmoïde ou la fonction Gaussienne sont de
très bons candidats aux fonctions de transfert pour les neurones des couches cachées.
Le choix des fonctions d’activation pour les neurones situés sur la couche de sortie
dépend de la distribution des valeurs à prédire. Pour des valeurs binaires (0/1), la fonction
« seuil » est un excellent choix [Jordan, 1995]. Pour les valeurs de sortie continues, la
fonction d’activation « identité » (absence de fonction) est la plus utilisée.
Fig. III.6 – Quelques exemples de fonctions de transfert utilisées pour les RNA.
III.4.3 Choix de l’architecture neuronale
Choisir une architecture nécessite de fixer le nombre de couches cachées ainsi que le
nombre de neurones dans chaque couche. L’architecture d’un réseau détermine la classe des
fonctions calculables par celui-ci ou encore sa complexité potentielle. C’est le premier
paramètre sur lequel les utilisateurs de ces techniques ont joué pour contrôler les
performances d’un système.
Une démarche empirique exhaustive pour la sélection du modèle, consiste à tester sur
le problème traité un grand nombre de solutions différentes. On peut par exemple explorer la
famille des PMC (fig. III.4) pour un critère d’erreur donné en faisant varier le nombre d’unités
cachées. L’estimation des performances devient alors le point sensible de la démarche. De
nombreuses procédures ont été proposées pour cela dans la littérature statistique (validation
croisée, bootstrap,…) [Baxt, 1995; Efron, 1997] et peuvent être appliquées pour les séries
temporelles [Hjorth, 1994]. La procédure la plus courante et qui est bien adaptée lorsqu’on
dispose de beaucoup de données, consiste en l’utilisation d’un unique ensemble additionnel
qui sert à sélectionner la bonne architecture et qui est appelé ensemble de validation.
L’architecture sélectionnée sera celle offrant les meilleures performances sur cet ensemble de
validation qui intervient donc dans l’apprentissage.
Fonction linéaire Fonction seuil Fonction tangente-sigmoïde
III. Modélisation et identification
78
III.4.4 Ensemble d’apprentissage, de validation et de test
Comme nous l'avons vu précédemment, l’ensemble « d’apprentissage » servira à la
modification des poids du réseau tandis que l’ensemble de « validation » servira à l’arrêt
« prématuré » du processus itératif de l’apprentissage. La phase d’application des modèles est
effectuée ensuite sur l’ensemble de « test ».
Une validation préalable de ces trois ensembles est nécessaire avant leur utilisation
pour l’élaboration des modèles neuronaux. Dans le domaine médical, ces données doivent être
validées et vérifiées par un praticien confirmé, mais dans certains cas, les connaissances
actuelles ne suffisent pas à valider ces ensembles. La mise en place de méthodes basées sur
des données artificielles pour valider les modèles neuronaux avant de passer à la phase de
diagnostic est indispensable [El Dajani, 2001-b]. Le choix des données constituant ces
différents ensembles conditionne la portée et le domaine de validation du modèle identifié.
Ainsi, nous utiliserons la sélection des ensembles d’apprentissage, de test et de validation
comme un degré de liberté supplémentaire pour construire et valider des modèles inter/intra
patients, ou nocturne/diurne.
III.4.5 Lien entre RNA et méthodes statistiques
La plupart des réseaux de neurones capables d’apprendre et de généraliser
correctement des données bruitées sont très proches voire identiques aux méthodes
statistiques [Thiria, 1997].
Ainsi, Hastie et Tibshirani [Hastie, 1990] présente une table d’équivalence (tab. III.1)
entre le vocabulaire utilisé dans les deux domaines.
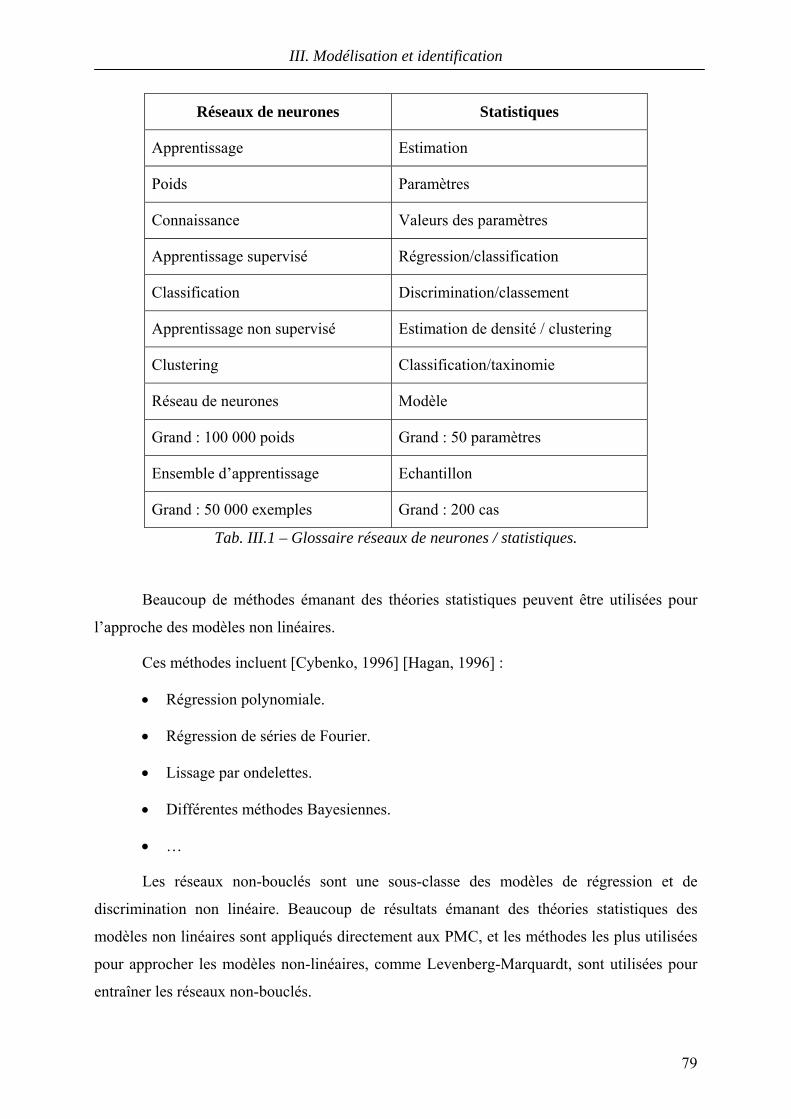
III. Modélisation et identification
79
Réseaux de neurones Statistiques
Apprentissage Estimation
Poids Paramètres
Connaissance Valeurs des paramètres
Apprentissage supervisé Régression/classification
Classification Discrimination/classement
Apprentissage non supervisé Estimation de densité / clustering
Clustering Classification/taxinomie
Réseau de neurones Modèle
Grand : 100 000 poids Grand : 50 paramètres
Ensemble d’apprentissage Echantillon
Grand : 50 000 exemples Grand : 200 cas
Tab. III.1 – Glossaire réseaux de neurones / statistiques.
Beaucoup de méthodes émanant des théories statistiques peuvent être utilisées pour
l’approche des modèles non linéaires.
Ces méthodes incluent [Cybenko, 1996] [Hagan, 1996] :
• Régression polynomiale.
• Régression de séries de Fourier.
• Lissage par ondelettes.
• Différentes méthodes Bayesiennes.
• …
Les réseaux non-bouclés sont une sous-classe des modèles de régression et de
discrimination non linéaire. Beaucoup de résultats émanant des théories statistiques des
modèles non linéaires sont appliqués directement aux PMC, et les méthodes les plus utilisées
pour approcher les modèles non-linéaires, comme Levenberg-Marquardt, sont utilisées pour
entraîner les réseaux non-bouclés.
III. Modélisation et identification
80
Tous les points en commun entre les RNA et les statistiques nous pousseraient à nous
demander si les RNA ne seraient pas tout simplement une classe particulière de modèles
statistiques. Certains ont pu dire que les RNA étaient une vision simpliste des statistiques,
d’autres que les statisticiens faisaient depuis toujours des RNA, mais avaient été timides sur la
taille des problèmes attaqués. Toutefois, les RNA ne sont pas que des modèles statistiques :
plus exactement, la formulation même d’un modèle RNA leur confère une puissance et une
simplicité d’expression qui, traduite dans des implémentations informatiques, permet
d’obtenir simplement d’excellentes performances pour une grande variété d’applications. En
particulier, la possibilité de réaliser des architectures hybrides, d’y incorporer aisément de la
connaissance a priori sur le problème, d’entraîner le RNA par un algorithme d’optimisation,
permettent à l’utilisateur de manipuler aisément des classes de modèles très sophistiquées
[Deco, 1996].
Pourquoi alors utiliser les réseaux de neurones artificiels au lieu des méthodes
statistiques citées en plus haut pour l’approche des modèles non-linéaires ? Il y a beaucoup de
réponses à cette question : tout dépend du type de réseaux utilisés. L’architecture neuronale la
plus populaire, le Perceptron Multi-Couches (PMC), est utile dans les mêmes conditions que
la recherche de directions révélatrices (projection pursuit) [Ripley, 1996], i.e. :
• le nombre d’entrée est relativement grand,
• la plupart des entrées sont significatives,
• la plupart de l’information prédictive est contenue dans un sous-espace à faible
dimension.
L’avantage principal des PMC sur la « projection pursuit » de projection est que le
calcul de valeurs prédictives par les PMC est plus simple et plus rapide. Les avantages des
PMC sur les méthodes statistiques sont détaillés dans la référence [Warren, 2001].
III.4.6 Le dilemme du biais et de la variance
Pour une comparaison objective on utilise souvent deux grandeurs pour caractériser un
estimateur : le biais et la variance.
Le biais d’un estimateur est, par définition, la différence entre son espérance
mathématique et la vraie valeur cherchée, c’est à dire :
ααα −= ]ˆ[ˆ EB
III. Modélisation et identification
81
où ά est l’estimation du paramètre α et E est l’espérance mathématique.
Si le biais est nul, la densité de probabilité de l’estimation est centrée sur la valeur
cherchée. L’estimateur correspondant est appelé estimateur biaisé. Si la densité )ˆ(ˆ ααp est
symétrique, pour un tel estimateur, la valeur recherchée est la valeur centrale de α̂ . Un
estimateur dont le biais n’est pas nul est appelé estimateur biaisé.
La variance d’un estimateur est une mesure de l’étendue de la densité de probabilité.
Elle est définie par :
2ˆ])²]ˆ[ˆ[(]ˆ[ ασααα =−= EEVar
Une faible valeur de la variance indique une concentration de la densité de probabilité
autour de la valeur moyenne ]ˆ[αE . Donc, un estimateur satisfaisant doit posséder un biais et
une variance aussi petits que possible. En général, la diminution de l’un provoque
malheureusement l’augmentation de l’autre et vice-versa.
Comme nous l’avons vu, les réseaux de neurones sont essentiellement des procédures
permettant d’approcher n’importe quelle fonction linéaire ou non, à partir d’exemples de
valeurs de cette fonction. La réussite de cet apprentissage suppose cependant qu’un certain
nombre de conditions portant sur le choix et le nombre de ces exemples ainsi que sur
l’architecture initiale du réseau, soient vérifiées.
Cet aspect est particulièrement important si l’on cherche à garantir des capacités de
généralisation au réseau [Cybenko, 1989; Hornik, 1989]. Le biais ne dépend que de
l’architecture du réseau et décroît lorsque le nombre de paramètres libres et donc le nombre
d’unités augmentent. La variance dépend de la taille de l’ensemble d’apprentissage. Pour
garantir un bon résultat, ce dernier doit être d’autant plus grand que le nombre de paramètres
libres est important.
La réalisation d’une bonne approximation demande donc le choix d’une architecture
appropriée en terme de nombre d’unités, afin de diminuer la contribution du biais à l’erreur.
D’un autre coté si le nombre de paramètres libres du réseau (i.e. le nombre de neurones) est
important, la taille de la base d’exemples d’apprentissage doit également être importante afin
de diminuer la variance.
Cet aspect est particulièrement crucial si la taille de la base d’exemples est fixe et
relativement faible. Privilégier la réduction du biais en augmentant la taille du réseau peut
conduire alors à des systèmes sur-paramétrés, pour lesquels les exemples d’apprentissage
III. Modélisation et identification
82
sont appris « par cœur » aux dépend des capacités de généralisation [Baum, 1989; Labbi,
1993]. Au contraire, en réduisant la taille du réseau, on risque d’obtenir une architecture sous-
paramétrée ne permettant pas d’approcher une fonction complexe et pour laquelle même un
grand nombre d’exemples n’autorise pas un apprentissage satisfaisant [Labbi, 1993].
L’équilibre entre taille du réseau et nombre d’exemples disponibles est donc relativement
difficile à obtenir. Ce problème est connu sous le nom de dilemme du biais et de la variance
en statistique.
Il est lié au fait que les modèles de RNA sont totalement indépendants du type de la
fonction que l’on cherche à approcher. Tout ce qu’ils apprennent provient des exemples.
L’utilisation de connaissances préalables sur le type de fonction que l’on cherche à modéliser
a donc été la motivation de nombreux travaux sur les systèmes hybrides.
Geman et al. [Geman, 1992] ont proposé d’utiliser un compromis pour les réseaux. Ils
utilisent comme indice de la complexité le degré de non linéarité du réseau mesuré par le
nombre de neurones cachés. L’idée qu’ils développent peut être résumée comme suit :
Pour un problème donné et des échantillons de taille fixe, un
réseau sous-dimensionné aura un nombre de degrés de liberté
trop faible, l’erreur aura donc une composante de biais
importante et un terme de variance faible. Un réseau sur-
dimensionné possède, lui, un grand nombre de degrés de
liberté et l’optimisation à partir de plusieurs ensembles
d’apprentissage conduira à des solutions pouvant être très
différentes, ce qui correspond à une composante de variance
importante. L’idée est donc que, lorsque la taille du réseau
(i.e. son nombre de neurones cachés) augmente, le biais
diminue et la variance augmente. Il y aurait donc une zone de
bon compromis correspondant à une bonne taille du réseau
(pour le problème traité et le nombre d’exemples
d’apprentissage).
III. Modélisation et identification
83
III.5 Approche méthodologique
III.5.1 L’utilisation des R.N.A. dans le domaine médical
Un pilier de la médecine moderne est la mesure des signaux comme le signal
électrique cardiaque, le flux respiratoire et l’activité cérébrale. La plupart des signaux
physiologiques sont affectés par le bruit du aux éléments de mesure ou à l’environnement.
L’extraction de l’information pertinente décrivant une pathologie à partir des signaux
physiologiques demande leur analyse par un expert. Les techniques numériques modernes du
traitement de signal ont contribué significativement à l’analyse des signaux physiologiques les
rendant plus précis et plus faciles à interpréter. Ces techniques permettent de filtrer le signal,
de détecter les éléments pertinents pour le diagnostic et de le classifier selon la pathologie.
Dans le secteur médical, un grand nombre d’applications des approches neuronales
concerne le diagnostic. La démarche est alors d’affecter un patient décrit par un vecteur de
données (vecteur d’entrée) à une classe de diagnostic (sortie). Généralement cette démarche
de classement est effectuée par un réseau à couches après un apprentissage supervisé. Nous
citons à titre d’exemples la détection et la classification des signaux : électrocardiographiques
[Abreu-Lima, 1998; Maglaveras, 1998], électroencéphalographiques [Pfurtscheller, 1996;
Rzempoluck, 1997], électrogastrographiques [Karakitsos, 1997] et les signaux respiratoires
[Bright, 1998; Malmberg, 1996].
Concernant plus particulièrement notre domaine applicatif, la prédiction, deux types
de recherche sont développés :
1. La prédiction du risque : Dans ce cas, le problème est également résolu par des
méthodes de classement utilisant les RNA et l’apprentissage supervisé. On peut
citer à titre d’exemple la ‘prédiction du risque’ du cancer du sein [Jiang, 1999;
Schnorrenberg, 1996].
2. La prédiction temporelle : Il s’agit de prédire l’état d’un processus à partir des
séries temporelles décrivant l’historique de son comportement et des variables
environnementales [Liszka-Hackzell, 2001]. C’est dans cette approche que nous
nous situons.
III. Modélisation et identification
84
En ce qui concerne la prédiction du QT en fonction de RR, seuls les travaux
préliminaires effectués au sein de notre laboratoire ont utilisé les RNA pour modéliser la
relation entre ces 2 variables [Hamidi, 1995]. Nous allons présenter leur apport.
III.5.2 L’utilisation des RNA pour caractériser la relation QT= f(RR)
III.5.2.1 Les Perceptrons Multi-Couches pour la modélisation de la
relation QT=f(RR)
L’étude de la prédiction de QT en fonction de RR utilisant les réseaux de neurones
artificiels a été effectuée par Saâd HAMIDI au sein de l’unité INSERM U121 [Hamidi,
1995]. Elle a consisté à comparer les résultats des modèles paramétriques et neuronaux. Les
performances des modèles paramétriques ont été jugées insuffisantes par l’auteur : cela est dû
à la non linéarité de la relation QT= f(RR). Les RNA multicouches utilisant l’algorithme de
rétropropagation dans la phase d’apprentissage, sont capables de modéliser les systèmes non
linéaires, et l’auteur a montré leur capacité à modéliser la relation entre RR et QT. Le modèle
utilisé avait pour entrée une série de RR sur une durée M (mémoire) variant de 1 à 8 minutes
et pour la sortie le QT correspondant au dernier RR de la série.
QT(n)=F(RR(n), RR(n-1),.............., RR(n-M+1), RR(n-M))
Le RNA utilisé avait les caractéristiques suivantes :
• une couche d’entrée variant avec la valeur de la mémoire (M) ; pour un retard de 1
minute, elle comporte 30 neurones ;
• une couche cachée de 10 neurones ;
• une fonction de transfert de type tangente sigmoïde pour les neurones de la couche
cachée et de type linéaire pour le neurone de sortie ;
• un facteur d’apprentissage de 10-3 ;
• un nombre d’itérations allant jusqu’à 100 000 ;
• la rétropropagation simple comme algorithme d’apprentissage.
Cette étude a mis en évidence la faisabilité de la modélisation neuronale et établit qu’un
retard de 4 minutes est suffisant pour identifier la relation entre QT et RR. Ces premiers
résultats ont servi de base à notre travail qui consiste à établir des modèles neuronaux
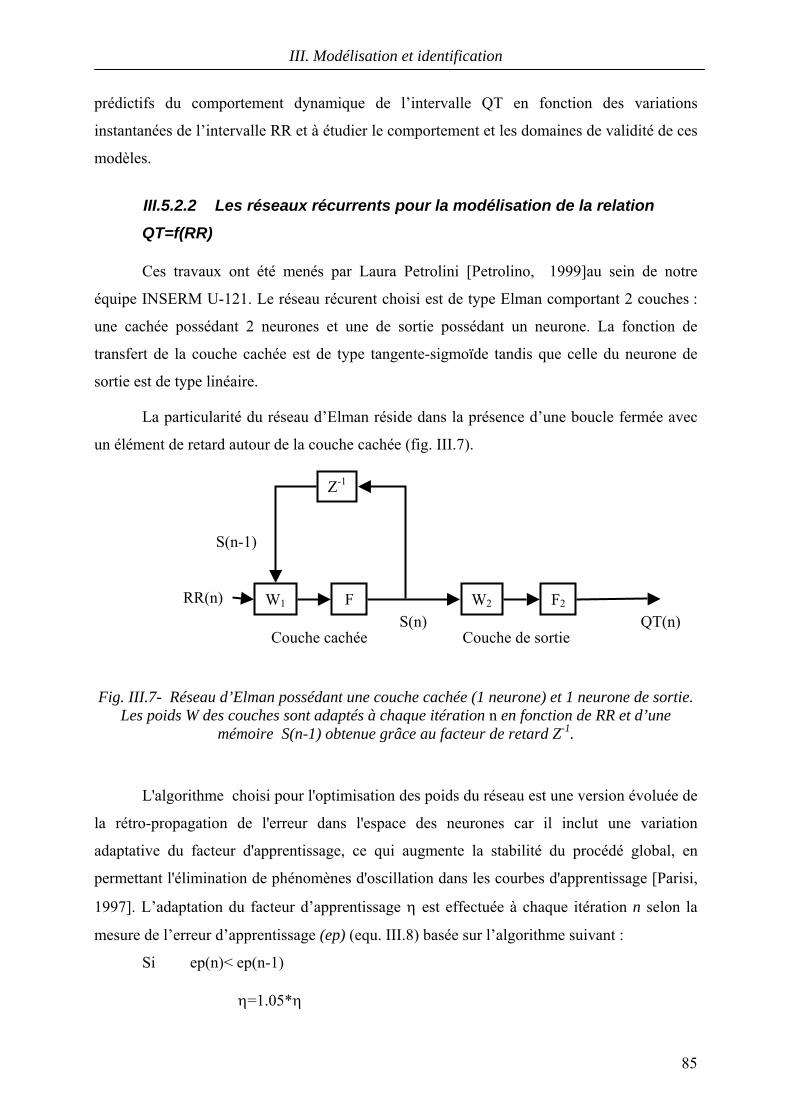
III. Modélisation et identification
85
prédictifs du comportement dynamique de l’intervalle QT en fonction des variations
instantanées de l’intervalle RR et à étudier le comportement et les domaines de validité de ces
modèles.
III.5.2.2 Les réseaux récurrents pour la modélisation de la relation
QT=f(RR)
Ces travaux ont été menés par Laura Petrolini [Petrolino, 1999]au sein de notre
équipe INSERM U-121. Le réseau récurent choisi est de type Elman comportant 2 couches :
une cachée possédant 2 neurones et une de sortie possédant un neurone. La fonction de
transfert de la couche cachée est de type tangente-sigmoïde tandis que celle du neurone de
sortie est de type linéaire.
La particularité du réseau d’Elman réside dans la présence d’une boucle fermée avec
un élément de retard autour de la couche cachée (fig. III.7).
Fig. III.7- Réseau d’Elman possédant une couche cachée (1 neurone) et 1 neurone de sortie. Les poids W des couches sont adaptés à chaque itération n en fonction de RR et d’une
mémoire S(n-1) obtenue grâce au facteur de retard Z-1.
L'algorithme choisi pour l'optimisation des poids du réseau est une version évoluée de
la rétro-propagation de l'erreur dans l'espace des neurones car il inclut une variation
adaptative du facteur d'apprentissage, ce qui augmente la stabilité du procédé global, en
permettant l'élimination de phénomènes d'oscillation dans les courbes d'apprentissage [Parisi,
1997]. L’adaptation du facteur d’apprentissage η est effectuée à chaque itération n selon la
mesure de l’erreur d’apprentissage (ep) (equ. III.8) basée sur l’algorithme suivant :
Si ep(n)< ep(n-1) η=1.05*η
W1 W2F F2
Z-1
Couche cachée Couche de sortie S(n)
S(n-1)
RR(n)QT(n)
III. Modélisation et identification
86
ep(n)>1.04*ep(n-1)
η=0.7*η fin Si
Ces travaux ont pu mettre en évidence la supériorité de l’approche des Perceptrons
Multi-Couches à celle utilisant les réseaux récurrents. Les principaux constats sont :
• Une convergence de l’erreur d’apprentissage en un nombre d'itération inférieur
pour les réseaux récurrents par rapport aux réseaux en couches, mais avec un
temps d'exécution largement plus rapide pour ces derniers.
• Une erreur de généralisation sur les séquences tests inférieure pour les PMC.
• Une sensibilité très accentuée des réseaux de neurones récurrents au nombre des
neurones dans la couche cachée, alors que pour les PMC on a observe une
distribution plus ou moins homogène des prestations pour un nombre variable de
neurones entre 8 et 17 [Hamidi, 1995].
La conclusion qu'on en tire est plutôt favorable aux réseaux en couches en défaveur
des réseaux récurrents, surtout du point de vue de la fiabilité, qui est le premier facteur à
considérer si l’on s’intéresse au domaine médical.
III.5.3 La non linéarité des signaux cardiaques
La plupart des connaissances actuelles concernant les systèmes physiologiques ont été
apprises en utilisant des modèles linéaires. Cependant, plusieurs signaux biologiques sont
apparemment aléatoires ou apériodiques dans le temps [Guevara, 1981]. Traditionnellement,
l’aspect aléatoire des signaux biologiques est attribué aux bruits ou aux interactions entre des
nombreux composants [Yambe, 1999]. Les nouvelles techniques non-linéaires, comme les
réseaux de neurones artificiels [Yambe, 1998], les ondelettes et l’analyse du chaos, permettent
une investigation des systèmes non-linéaires que les méthodes linéaires traditionnelles ne
permettent pas [Weigned, 1990].
La complexité du système cardiovasculaire est dû à un comportement chaotique non-
linéaire [Denton, 1990; Guzzetti, 1996; Wagner, 1995]. Quelques études actuelles
s’intéressent à l’utilisation de la modélisation non-linéaire pour l’approche des fonctions
cardiovasculaires, nous citerons à titre d’exemples les travaux de Chon et al. [Chon, 1997].
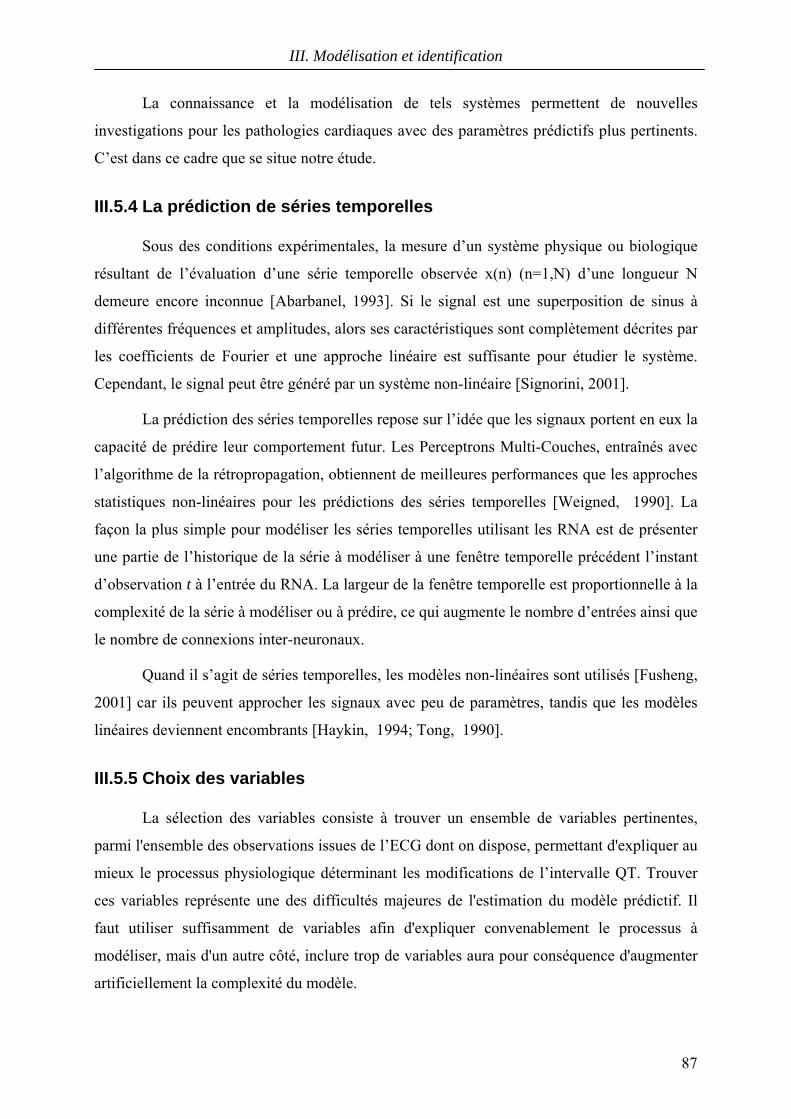
III. Modélisation et identification
87
La connaissance et la modélisation de tels systèmes permettent de nouvelles
investigations pour les pathologies cardiaques avec des paramètres prédictifs plus pertinents.
C’est dans ce cadre que se situe notre étude.
III.5.4 La prédiction de séries temporelles
Sous des conditions expérimentales, la mesure d’un système physique ou biologique
résultant de l’évaluation d’une série temporelle observée x(n) (n=1,N) d’une longueur N
demeure encore inconnue [Abarbanel, 1993]. Si le signal est une superposition de sinus à
différentes fréquences et amplitudes, alors ses caractéristiques sont complètement décrites par
les coefficients de Fourier et une approche linéaire est suffisante pour étudier le système.
Cependant, le signal peut être généré par un système non-linéaire [Signorini, 2001].
La prédiction des séries temporelles repose sur l’idée que les signaux portent en eux la
capacité de prédire leur comportement futur. Les Perceptrons Multi-Couches, entraînés avec
l’algorithme de la rétropropagation, obtiennent de meilleures performances que les approches
statistiques non-linéaires pour les prédictions des séries temporelles [Weigned, 1990]. La
façon la plus simple pour modéliser les séries temporelles utilisant les RNA est de présenter
une partie de l’historique de la série à modéliser à une fenêtre temporelle précédent l’instant
d’observation t à l’entrée du RNA. La largeur de la fenêtre temporelle est proportionnelle à la
complexité de la série à modéliser ou à prédire, ce qui augmente le nombre d’entrées ainsi que
le nombre de connexions inter-neuronaux.
Quand il s’agit de séries temporelles, les modèles non-linéaires sont utilisés [Fusheng,
2001] car ils peuvent approcher les signaux avec peu de paramètres, tandis que les modèles
linéaires deviennent encombrants [Haykin, 1994; Tong, 1990].
III.5.5 Choix des variables
La sélection des variables consiste à trouver un ensemble de variables pertinentes,
parmi l'ensemble des observations issues de l’ECG dont on dispose, permettant d'expliquer au
mieux le processus physiologique déterminant les modifications de l’intervalle QT. Trouver
ces variables représente une des difficultés majeures de l'estimation du modèle prédictif. Il
faut utiliser suffisamment de variables afin d'expliquer convenablement le processus à
modéliser, mais d'un autre côté, inclure trop de variables aura pour conséquence d'augmenter
artificiellement la complexité du modèle.
III. Modélisation et identification
88
Une solution possible est l'étude de toutes les combinaisons de variables possibles :
c'est une procédure exhaustive très lourde qui n'est réalisable que si le nombre de variables est
faible. L’intervalle QT est principalement influencé par l’intervalle RR mais aussi par le
système nerveux central (SNC) comme nous l’avons indiqué au chapitre II section 4. Notre
approche a pour but de modéliser la relation ),,...,,( 11 MiMiiii RRRRRRRRfQT −+−−= , sous-
entendant que l’intervalle RR est la principale variable influençant la durée du QT.
L’influence du SNC pourrait être ajoutée par la suite comme variable d’entrée supplémentaire
dans le cas de l’insuffisance de l’intervalle RR pour prédire le QT ou pour mesurer l’impact
de cette influence sur l’intervalle QT. Reste à identifier la largeur de la fenêtre temporelle M
pour contenir l’historique des séquences RR (la mémoire) nécessaire pour une bonne
prédiction de QT. Cette fenêtre doit contenir suffisamment de RR pour prédire le QT mais pas
trop au risque d’augmenter artificiellement la complexité du modèle.
III.5.6 Choix des séquences Holter utilisées en apprentissage
Les séquences choisies doivent être représentatives de la relation recherchée. Ces
séquences doivent comporter le maximum de variation pour les signaux RR et QT. Pour que
ses séquences soient représentatives de la relation recherchée, elles ne doivent pas comporter
des informations contradictoires dues à un dysfonctionnement ventriculaire. D’où la nécessité
de la validation des ensembles d’apprentissage par un praticien confirmé. Un problème
néanmoins subsiste : les techniques actuelles pour valider nos signaux ne sont pas valables
lorsqu’il s’agit d’une analyse battement par battement en régime transitoire [chap. II.5], qui
est précisément le domaine applicatif de notre sujet d’étude. Dans les prochains chapitres
nous expliquons comment nous résolvons cette difficulté et validons nos modèles prédictifs
en utilisant des données artificielles.
III.5.7 Utilisation des modèles prédictifs
Les modèles prédictifs auront pour rôle une aide au diagnostic soit pour le suivi des
patients soit pour la détection d’éventuelles pathologies cardiaques :
- Suivi de patient : Lors de la première visite du patient, un modèle prédictif de
la relation QT=f(RR) est réalisé. Au cours des visites suivantes, une
comparaison entre le QT mesuré et le QT prédit permettra d’étudier
d’éventuels changements de la relation QT=f(RR) témoignant d’une pathologie
probable.
III. Modélisation et identification
89
- Détection d’éventuelles pathologies : Les modèles prédictifs peuvent être
établis sur des séquences appartenant à des sujets sains modélisant ainsi un
comportement qualifié de « normal », les différences entre le QT réel et le QT
prédit sont interprétées comme un éventuel dysfonctionnement ventriculaire.
Des modèles prédictifs peuvent aussi être élaborés sur des sujets atteints de
différentes pathologies, les similitudes entre le QT prédit et le QT mesuré
suggéreraient l’appartenance du signal à la pathologie du modèle (fig. III.9).
Fig. III.9 - Chaînes de diagnostic pour détecter d’éventuels dysfonctionnements ventriculaires grâce au modèle normal ou pour détecter des pathologies grâce aux modèles neuronaux
pathologiques.
Lors de l’utilisation des modèles prédictifs, nous devons tenir compte des différentes
spécificités de la relation QT=f(RR), telle que l’influence du sexe et/ou de l’age des patients.
III.6 Conclusions
Parmi les différentes méthodes de modélisation et d’identification, les Perceptrons
Multi-Couches occupent une place de choix. Il est admis depuis déjà quelques années que les
PMC sont une alternative intéressante à la modélisation paramétrique en raison de leur
propriété d’approximateurs universels [Cybenko, 1989; Hornik, 1989].
Leur capacité démontrée de modéliser les relations non-linéaires nous a conduit à les
choisir comme candidats à la modélisation de la relation entre la réponse ventriculaire et la
fréquence cardiaque exprimée par la formule :
),,...,,( 11 MiMiiii RRRRRRRRfQT −+−−=
Modèle NeuronalNormal
Chaîne de traitements
RR mesuré
QT mesuré
QT prédit
E.C.G.
Modèle NeuronalPathologie 1
Modèle NeuronalPathologie n
Processus automatique de diagnostic
III. Modélisation et identification
90
Néanmoins beaucoup de questions se posent encore sur la capacité des RNA à
approcher la fonction précédente compte tenu de la spécificité du système cœur et de la
possible modification de la relation f au cours du temps. Rappelons que les signaux issus de
l’ECG sont a priori non-linéaires et non stationnaires [Xue, 1992]. La constante de temps
établie à une minute dans la littérature peut être insuffisante dans le cas d’une modélisation
par RNA et est sûrement fonction de la fréquence cardiaque. Pourtant, le choix d’une valeur
pour la constante de temps a des conséquences directes sur l’architecture neuronale (nombre
de neurones d’entrée), la constitution de l’ensemble d’apprentissage et bien sûr la capacité du
réseau à généraliser la modélisation du comportement dynamique du cœur.
Par la suite, nous utiliserons donc utilisons le Perceptron Multi-Couches pour
modéliser le comportement dynamique de l’intervalle QT en fonction des variations
instantanées de l’intervalle RR[Petrolino, 1999]. Mais avant de l’utiliser sur des données
réelles, auparavant nous testerons ses capacités en apprentissage et en généralisation sur un
ensemble de données artificielles. Cela fera l’objet du suivant chapitre où nous détaillerons
nos méthodes ainsi que nos principaux résultats.
IV. Mise en place des modèles prédictifs
91
IV. Mise en place des modèles
prédictifs
Dans ce chapitre nous commençons par expliquer les prétraitements appliqués sur les
séquences Holter depuis l’enregistrement jusqu’à la création des bases d’apprentissage pour
les réseaux de neurones artificiels.
Nous introduisons des données artificielles principalement pour étudier le
comportement en apprentissage et en généralisation des Perceptrons Multi-Couches dans
différentes situations que nous pourrions rencontrer lors de l’utilisation des séquences
Holter. Ces données artificielles sont utilisées pour valider la qualité des modèles réels en
interpolation et extrapolation sur toute la gamme possible de variations de RR et de QT.
Ensuite, nous utilisons principalement les séquences de 20 minutes appartenant à 2
sujets sains, Clav et Gard. Un modèle représentatif par sujet sera présenté dans ce chapitre.
Les résultats de tous les modèles établis sont présentés et commentés en annexe.
Les résultats concernant les données artificielles sont présentés et discutés, ensuite
nous nous intéresserons aux résultats obtenus en utilisant les séquences Holter. Nous
terminerons ce chapitre par une conclusion générale exposant nos principales conclusions et
nos perspectives.
IV. Mise en place des modèles prédictifs
92
IV.1 INTRODUCTION ET PROBLÉMATIQUE 94
IV.2 POPULATION D’ÉTUDES 96
IV.3 MÉTHODOLOGIE 100
IV.3.1 MESURE DES INTERVALLES QT ET RR 100 IV.3.1.1 RAPPELS SUR L’ANALYSE SÉRIELLE DES ECG : LE LOGICIEL CAVIAR 100 IV.3.1.2 LA MÉTHODE CAVIAR, LE SYSTÈME DE LYON ET NOTRE PROBLÉMATIQUE 101 IV.3.1.3 PROBLÈME DE LA FRÉQUENCE D’ACQUISITION DES SIGNAUX DE LONGUE DURÉE 104 IV.3.2 PRÉTRAITEMENT DES SÉQUENCES RR ET QT ISSUES DE CAVIAR 104 IV.3.3 L’ARCHITECTURE DU RÉSEAU DE NEURONES 105 IV.3.4 CRITÈRES D’ÉVALUATION DE LA QUALITÉ DE LA GÉNÉRALISATION 107 IV.3.5 LES DONNÉES ARTIFICIELLES SIMULANT RR ET QT 111 IV.3.5.1 TEST DES CAPACITÉS DU PMC EN GÉNÉRALISATION : UTILISATION DE PLUSIEURS SÉQUENCES EN APPRENTISSAGE. 114 IV.3.5.2 TEST DES CAPACITÉS DU PMC EN APPRENTISSAGE : CHANGEMENT DE CONSTANTE DE TEMPS ENTRE LE FRONT ASCENDANT ET LE FRONT DESCENDANT. 114 IV.3.5.3 TEST DES CAPACITÉS DU PMC À APPRENDRE DES DONNÉES MANQUANTES : UTILISATION DU FRONT ASCENDANT DU CRÉNEAU EN APPRENTISSAGE. 116 IV.3.5.4 RACCOURCISSEMENT OU ALLONGEMENT BRUSQUE DE QT APRÈS UNE FORTE VARIATION DU RR : FRONT DESCENDANT INFÉRIEUR DE 25 MSEC À SA VALEUR NORMALE. 116 IV.3.6 ETUDES SUR LA NATURE DE LA RELATION QT=F(RR) 117
IV.4 RÉSULTATS 121
IV.4.1 LES DONNÉES ARTIFICIELLES 121 IV.4.1.1 INFLUENCE DE LA ZONE DE VARIATION DES SIGNAUX UTILISÉS EN APPRENTISSAGE : UTILISATION DE PLUSIEURS SÉQUENCES EN APPRENTISSAGE. 121 IV.4.1.2 EVALUATION DE LA CAPACITÉ D’APPRENTISSAGE D’UNE DISSYMÉTRIE DES CONSTANTES DE TEMPS. 125 IV.4.1.3 APPRENTISSAGE DES DONNÉES MANQUANTES : UNIQUEMENT LE FRONT ASCENDANT DU CRÉNEAU EST APPRIS. 128 IV.4.1.4 RACCOURCISSEMENT DU QT SIMULÉ SUITE À UNE ACCÉLÉRATION (FRONT ASCENDANT) ET UN RALENTISSEMENT (FRONT DESCENDANT) DU RR SIMULÉ (CRÉNEAUX). 129 IV.4.1.5 DISCUSSION 130 IV.4.2 LES DONNÉES RÉELLES 132 IV.4.2.1 FACTEUR D’APPRENTISSAGE ADAPTATIF 132 IV.4.2.2 CONDITIONS INITIALES 133 IV.4.2.3 CHOIX DU NOMBRE D’ITÉRATIONS EN APPRENTISSAGE 133 IV.4.2.4 LES MODÈLES DU SUJET CLAV 136 IV.4.2.5 UTILISATION DE 2 SÉQUENCES DIURNES EN APPRENTISSAGE (CLN, CLP) 142 IV.4.2.6 LES MODÈLES DU SUJET GARD 144 IV.4.2.7 ETUDE INTER-PATIENT 147 IV.4.2.8 COMPARAISON DYNAMIQUE 150
IV. Mise en place des modèles prédictifs
93
IV.4.2.9 COMPARAISON STATIQUE 151 IV.4.2.10 DISCUSSION 153
IV.5 CONCLUSION 156
IV. Mise en place des modèles prédictifs
94
IV.1 Introduction et problématique
En pratique cardiologique, on utilise la valeur de l'intervalle QT corrigé en fonction de
RR, appelé QT corrigé (QTc). L'intérêt diagnostique et pronostique de la mesure QTc a été
évoqué dans le chapitre II, section 5.3.1. Le but est de pouvoir détecter les éventuels
dysfonctionnements de la réponse ventriculaire du patient sous surveillance, notamment un
allongement anormal de QT.
La littérature concernant l’existence d’une relation entre l’intervalle QT et l'intervalle
RR est très abondante (voir Chapitre II, section 5.1). Une diminution de RR entraîne une
diminution de l’intervalle QT et inversement [Ahnve, 1985; Moore, 1989]. Par ailleurs, il a
été montré qu'un changement brusque de RR n’est pas accompagné immédiatement d’une
variation proportionnelle de l’intervalle QT. D’autres études ont permis d’appréhender cette
relation sur des enregistrements Holter et de déterminer divers facteurs pouvant influencer la
dynamique cardiaque [Coumel, 1992]. Cette relation est étudiée sous la forme QT=f(RR), RR
étant l’inverse de la fréquence cardiaque.
D'une façon générale, les intervalles RR et QT sont supposés être reliés par la relation
non-linéaire suivante :
),,...,,( 11 MiMiiii RRRRRRRRfQT −+−−= (IV.1)
où M (nombre d'intervalles RR intervenant dans la relation) représente une certaine
« mémoire » physiologique. Cela signifie qu'il faut enregistrer préalablement au complexe
considéré QTi au moins M complexes (ou plutôt M' secondes de tracé) pour tenir compte de
cet effet de mémoire. D'un point de vue physiologique, il est généralement admis qu'il existe
un déphasage temporel de l'ordre d'une minute entre les changements dynamiques de
l'intervalle QT et ceux de RR [Coumel, 1993]. La figure IV.1, reproduite d'après l'article de
Frantz [Franz, 1985] montre bien de quelle façon l'intervalle QT pourrait réagir aux variations
de l'intervalle RR. Cet auteur a enregistré chez un sujet en cours de stimulation atriale
(ventriculaire) les potentiels d'action successifs et il a mesuré leur durée. On peut admettre
que les variations de cette durée sont similaires à celles de l'intervalle QT de
l'électrocardiogramme. On observe sur le graphique que l'accélération brutale de la fréquence
de stimulation (de 80 à 145 battements par minute) entraîne une diminution progressive de la
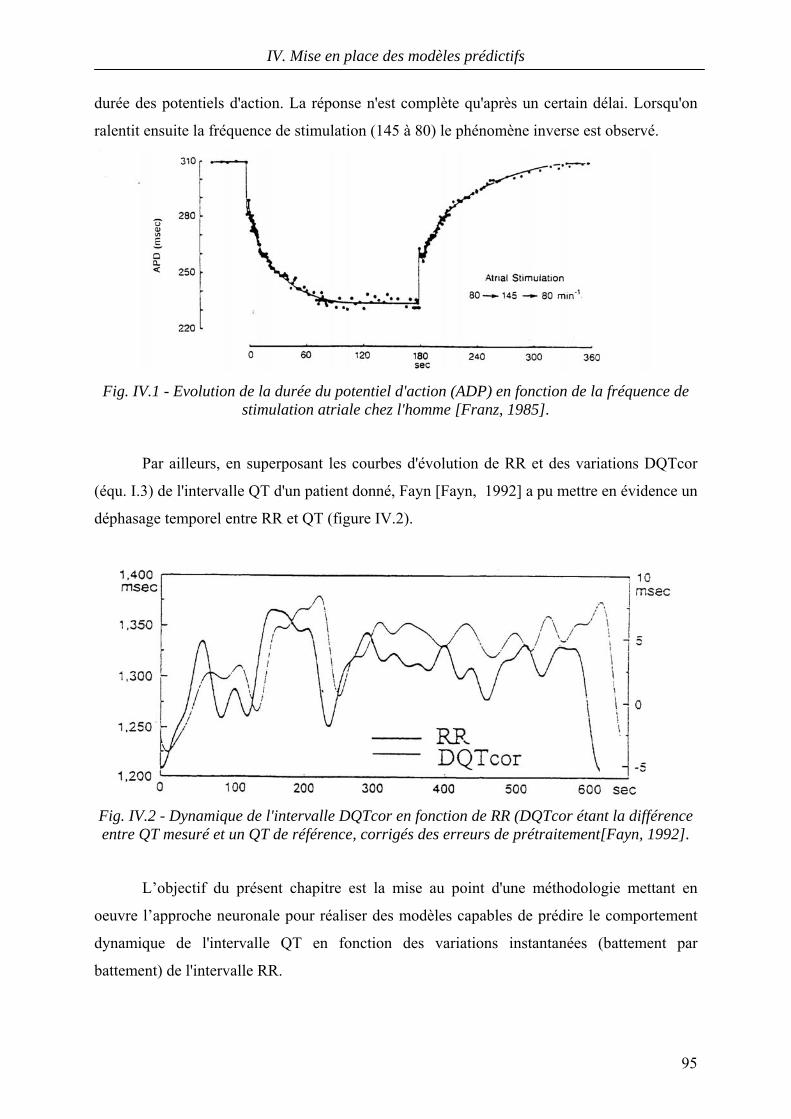
IV. Mise en place des modèles prédictifs
95
durée des potentiels d'action. La réponse n'est complète qu'après un certain délai. Lorsqu'on
ralentit ensuite la fréquence de stimulation (145 à 80) le phénomène inverse est observé.
Fig. IV.1 - Evolution de la durée du potentiel d'action (ADP) en fonction de la fréquence de stimulation atriale chez l'homme [Franz, 1985].
Par ailleurs, en superposant les courbes d'évolution de RR et des variations DQTcor
(équ. I.3) de l'intervalle QT d'un patient donné, Fayn [Fayn, 1992] a pu mettre en évidence un
déphasage temporel entre RR et QT (figure IV.2).
Fig. IV.2 - Dynamique de l'intervalle DQTcor en fonction de RR (DQTcor étant la différence entre QT mesuré et un QT de référence, corrigés des erreurs de prétraitement[Fayn, 1992].
L’objectif du présent chapitre est la mise au point d'une méthodologie mettant en
oeuvre l’approche neuronale pour réaliser des modèles capables de prédire le comportement
dynamique de l'intervalle QT en fonction des variations instantanées (battement par
battement) de l'intervalle RR.
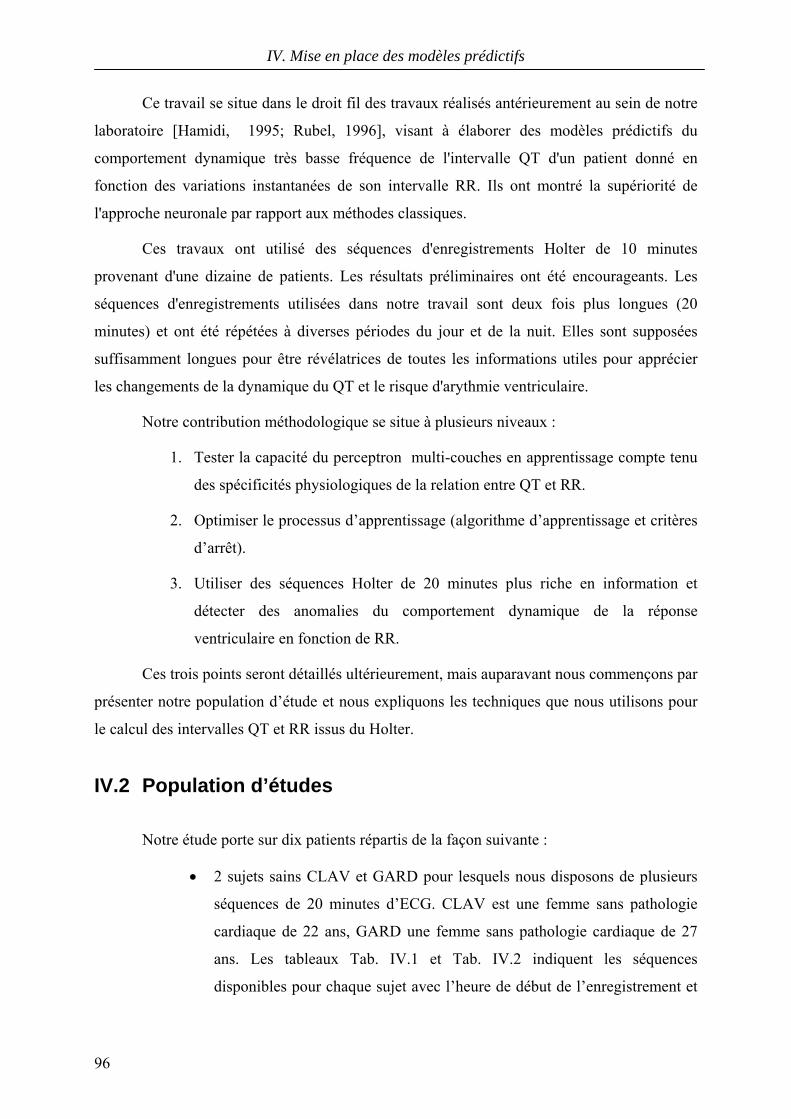
IV. Mise en place des modèles prédictifs
96
Ce travail se situe dans le droit fil des travaux réalisés antérieurement au sein de notre
laboratoire [Hamidi, 1995; Rubel, 1996], visant à élaborer des modèles prédictifs du
comportement dynamique très basse fréquence de l'intervalle QT d'un patient donné en
fonction des variations instantanées de son intervalle RR. Ils ont montré la supériorité de
l'approche neuronale par rapport aux méthodes classiques.
Ces travaux ont utilisé des séquences d'enregistrements Holter de 10 minutes
provenant d'une dizaine de patients. Les résultats préliminaires ont été encourageants. Les
séquences d'enregistrements utilisées dans notre travail sont deux fois plus longues (20
minutes) et ont été répétées à diverses périodes du jour et de la nuit. Elles sont supposées
suffisamment longues pour être révélatrices de toutes les informations utiles pour apprécier
les changements de la dynamique du QT et le risque d'arythmie ventriculaire.
Notre contribution méthodologique se situe à plusieurs niveaux :
1. Tester la capacité du perceptron multi-couches en apprentissage compte tenu
des spécificités physiologiques de la relation entre QT et RR.
2. Optimiser le processus d’apprentissage (algorithme d’apprentissage et critères
d’arrêt).
3. Utiliser des séquences Holter de 20 minutes plus riche en information et
détecter des anomalies du comportement dynamique de la réponse
ventriculaire en fonction de RR.
Ces trois points seront détaillés ultérieurement, mais auparavant nous commençons par
présenter notre population d’étude et nous expliquons les techniques que nous utilisons pour
le calcul des intervalles QT et RR issus du Holter.
IV.2 Population d’études
Notre étude porte sur dix patients répartis de la façon suivante :
• 2 sujets sains CLAV et GARD pour lesquels nous disposons de plusieurs
séquences de 20 minutes d’ECG. CLAV est une femme sans pathologie
cardiaque de 22 ans, GARD une femme sans pathologie cardiaque de 27
ans. Les tableaux Tab. IV.1 et Tab. IV.2 indiquent les séquences
disponibles pour chaque sujet avec l’heure de début de l’enregistrement et
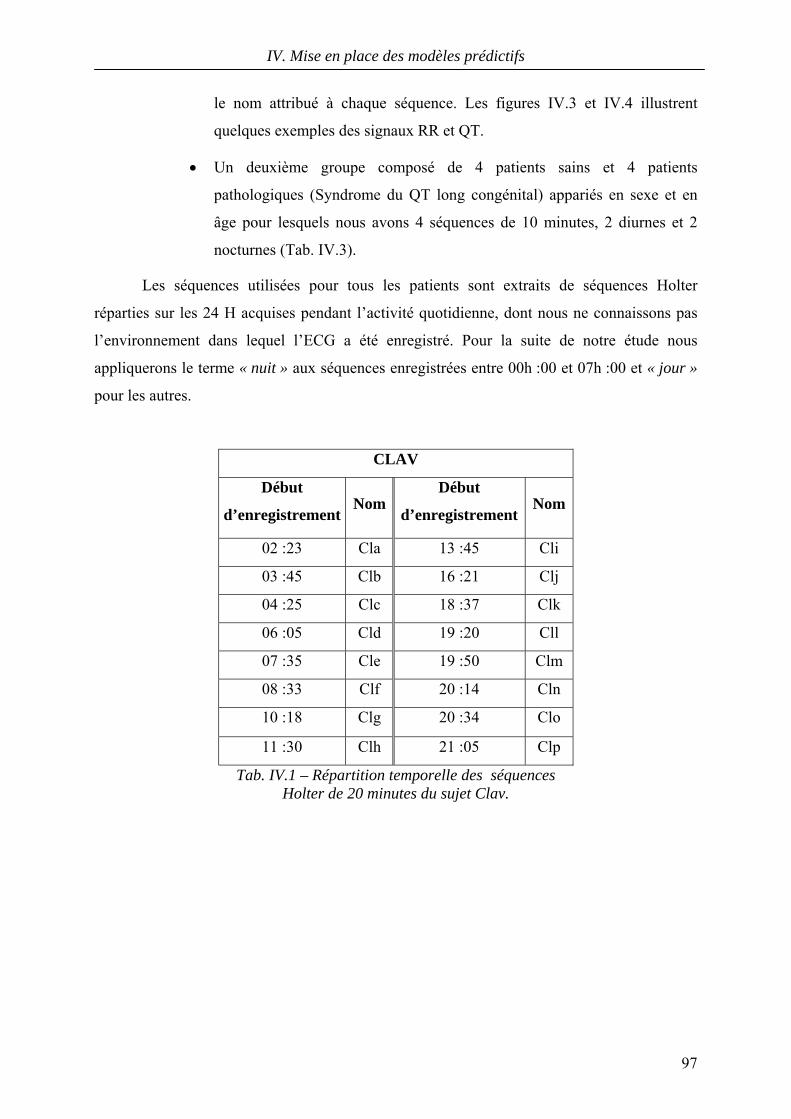
IV. Mise en place des modèles prédictifs
97
le nom attribué à chaque séquence. Les figures IV.3 et IV.4 illustrent
quelques exemples des signaux RR et QT.
• Un deuxième groupe composé de 4 patients sains et 4 patients
pathologiques (Syndrome du QT long congénital) appariés en sexe et en
âge pour lesquels nous avons 4 séquences de 10 minutes, 2 diurnes et 2
nocturnes (Tab. IV.3).
Les séquences utilisées pour tous les patients sont extraits de séquences Holter
réparties sur les 24 H acquises pendant l’activité quotidienne, dont nous ne connaissons pas
l’environnement dans lequel l’ECG a été enregistré. Pour la suite de notre étude nous
appliquerons le terme « nuit » aux séquences enregistrées entre 00h :00 et 07h :00 et « jour »
pour les autres.
CLAV
Début
d’enregistrementNom
Début
d’enregistrementNom
02 :23 Cla 13 :45 Cli
03 :45 Clb 16 :21 Clj
04 :25 Clc 18 :37 Clk
06 :05 Cld 19 :20 Cll
07 :35 Cle 19 :50 Clm
08 :33 Clf 20 :14 Cln
10 :18 Clg 20 :34 Clo
11 :30 Clh 21 :05 Clp
Tab. IV.1 – Répartition temporelle des séquences Holter de 20 minutes du sujet Clav.
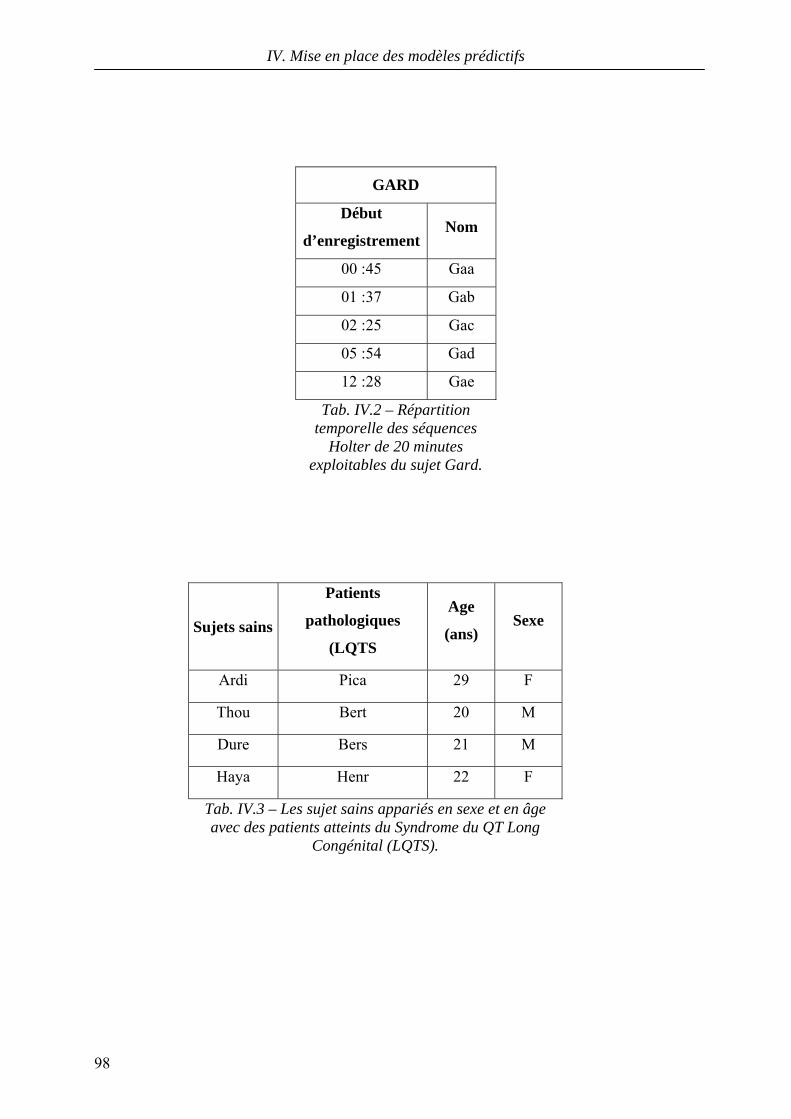
IV. Mise en place des modèles prédictifs
98
Sujets sains
Patients
pathologiques
(LQTS
Age
(ans) Sexe
Ardi Pica 29 F
Thou Bert 20 M
Dure Bers 21 M
Haya Henr 22 F
Tab. IV.3 – Les sujet sains appariés en sexe et en âge avec des patients atteints du Syndrome du QT Long
Congénital (LQTS).
GARD
Début
d’enregistrementNom
00 :45 Gaa
01 :37 Gab
02 :25 Gac
05 :54 Gad
12 :28 Gae
Tab. IV.2 – Répartition temporelle des séquences
Holter de 20 minutes exploitables du sujet Gard.
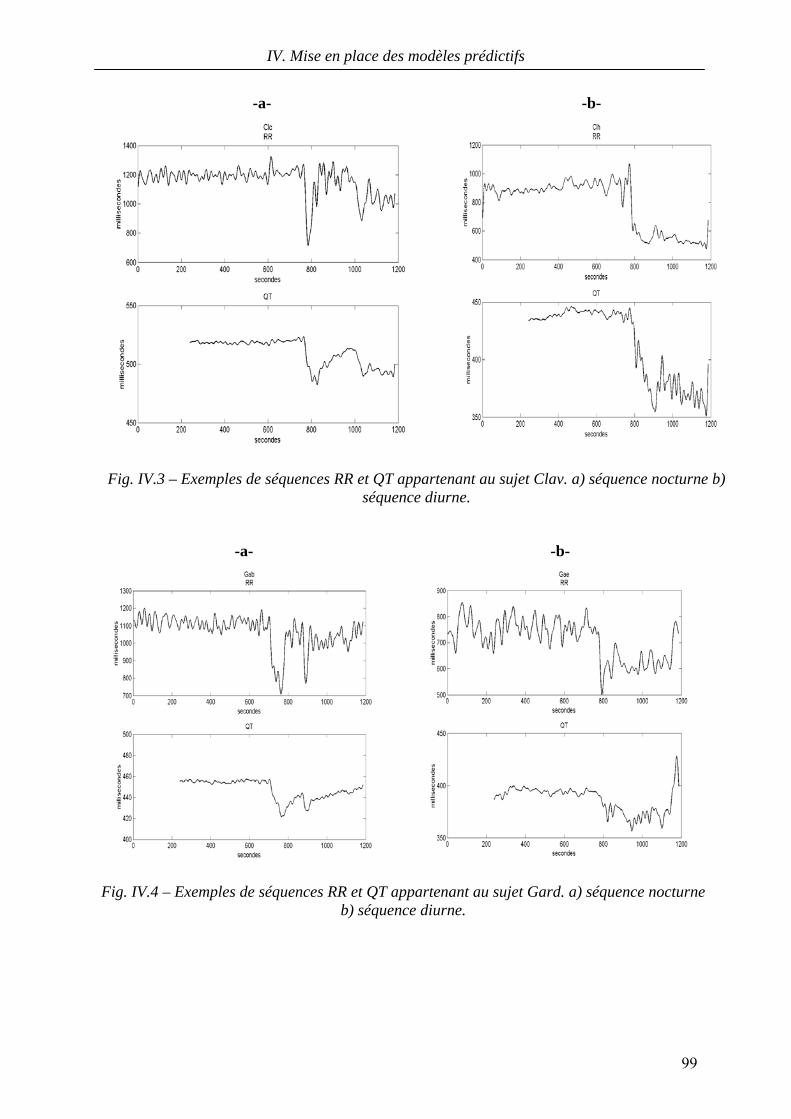
IV. Mise en place des modèles prédictifs
99
-a- -b-
Fig. IV.3 – Exemples de séquences RR et QT appartenant au sujet Clav. a) séquence nocturne b) séquence diurne.
-a- -b-
Fig. IV.4 – Exemples de séquences RR et QT appartenant au sujet Gard. a) séquence nocturne
b) séquence diurne.
IV. Mise en place des modèles prédictifs
100
IV.3 Méthodologie
IV.3.1 Mesure des intervalles QT et RR
IV.3.1.1 Rappels sur l’analyse sérielle des ECG : le logiciel Caviar
Les systèmes d'analyse automatique des ECG ne prennent généralement pas
suffisamment en compte la spécificité du patient. Plusieurs facteurs de variabilité, à la fois
d’ordre technique ou physiologique, et liés aux conditions de recueil du signal, peuvent être
évoqués. Ainsi, une variation dans la position et la taille des électrodes, la différence de phase
respiratoire dans laquelle se trouve le sujet lors de l’enregistrement induisent des
modifications du signal ECG d’un même sujet.
Aussi, l’objectif général recherché par la réalisation du système CAVIAR
(Comparaison Automatique des Vectocardiogrammes et leur Interprétation par Auto-
Référence) a été d’élaborer de nouvelles mesures quantifiant le degré d’évolution entre deux
tracés d’un même patient, en essayant de s’affranchir de la variabilité d’origine extra-
cardiaque.
Le but escompté à travers CAVIAR est de fournir un outil complet d’aide à la décision
électrocardiologique par une analyse évolutive des tracés qui permet non seulement d’obtenir
des paramètres optimaux de quantification du degré d’évolution entre deux tracés, mais aussi
des paramètres standards et leurs variations d’un enregistrement à l’autre, ainsi qu'une
visualisation graphique des complexes dans divers modes de représentation [Fayn, 1990].
Le principe de la méthode CAVIAR consiste à comparer directement deux boucles
ECG-3D, tout d’abord en superposant deux à deux les boucles QRS et T dans leur propre
espace « préférentiel » [Fayn, 1990], puis en mesurant de manière optimale les différences
entre les deux boucles de sorte à quantifier leur degré d’évolution [Rubel, 1996]. Ainsi le
programme CAVIAR procède itérativement :
• à une resynchronisation temporelle, permettant de corriger les éventuelles erreurs
de délimitation des ondes QRS ou T et de compenser les asynchronismes (< à
2ms) inhérents à la technique d’échantillonnage numérique,
• à des transformations géométriques telles que translation et homothétie de sorte à
compenser les variations de type "complexe après complexe" ou "jour après jour".
IV. Mise en place des modèles prédictifs
101
Dans cet algorithme, on assimile la boucle vectocardiographique à un système de
points matériels Qi dont la masse est proportionnelle à la vitesse de parcours du vecteur
champ électrique instantané, ce qui en définitive revient à la considérer comme un contour
homogène et continu.
Plusieurs paramètres d’évolution résultent de ce processus de superposition optimale
des boucles. Les plus pertinents au sens de notre étude sont les paramètres de durée.
Les paramètres de durée calculés par CAVIAR sont notamment la mesure des vraies
variations de la durée de QRS et de l’intervalle QT [Rubel, 1988]. Ces variations sont
obtenues en corrigeant les différences de mesures brutes des éventuelles erreurs de
délimitation des ondes en resynchronisant de manière optimale les secteurs initial et terminal
de QRS et le secteur terminal de l’onde T.
IV.3.1.2 La méthode CAVIAR, le Système de Lyon et notre
problématique
Actuellement il n’existe pas de technique fiable, dans le domaine de l’ECG
ambulatoire, pour déterminer la fin de l’onde T avec une précision suffisante. La méthode
CAVIAR nous permet de quantifier avec précision la mesure des variations de la durée des
intervalles QT en procédant à une analyse comparative de tous les battements d’une séquence
d’ECG ambulatoire avec un même complexe dit "complexe de référence". Ceci nous
permettra d’étudier aisément l’évolution en fonction du temps de la durée de la repolarisation
ventriculaire.
Concevoir un système capable d’intégrer les méthodes et techniques mises en oeuvre
pour analyser les ECG de repos et les appliquer à l’analyse des ECG de longue durée
(ambulatoire) n’est pas chose aisée vu la quantité d’information qu’il faut traiter et gérer.
Certains problèmes ont été résolus dans la thèse de Hamidi [Hamidi, 1995]. On peut
citer, par exemple, la mise en œuvre d'une technique de suréchantillonnage pour passer d’une
fréquence d’acquisition de 128 Hz à la fréquence de 512 Hz, fréquence souvent utilisée dans
les systèmes d’analyse de l’ECG de repos [CSE, 1985] et CAVIAR. Cependant, l’absence
d'un module de prétraitement capable d’identifier automatiquement la fin de QRS, le début et
la fin des ondes P et T dans les systèmes d’acquisition des ECG ambulatoire (ATREC et
Marquette) était un des problèmes auquel était confronté Hamidi. Ce problème avait été
résolu partiellement en faisant les mesures manuellement sur les complexes moyens et en les
IV. Mise en place des modèles prédictifs
102
reportant ensuite automatiquement sur chacun des complexes, en espérant que CAVIAR
arrive à corriger les erreurs les plus grossières.
Le travail mené au sein de notre laboratoire a permis d'une part de résoudre de façon
automatique le problème précédant en intégrant dans le schéma synoptique de la figure IV.5
le système de Lyon (SL) [Rubel, 1986], et d'autre part de répondre aux problèmes de
prétraitement spécifiques aux signaux Holter (déphasage des voies, résolution inférieure à
l'ECG de repos, séquences d'artefacts, importantes dérives de la ligne de base,.......).
Comme le montre le schéma de la figure IV.5, l’articulation entre les systèmes
ATREC, SL et CAVIAR est réalisée par une procédure automatique qui enchaîne les
opérations suivantes :
• acquisition du signal Holter,
• calcul éventuel du VCG de synthèse,
• rééchantillonnage du signal,
• détection des complexes du signal,
• classification de ces complexes, pour isoler les différents types morphologiques des
complexes détectés,
• délimitation précise du début et de la fin des ondes P, QRS, T,
• suppression des complexes n'appartenant pas à la classe dominante,
• calcul et prétraitement du complexe médian,
• archivage de ces complexes dans une base de données VCG.
Rappelons que le Holter est un appareil portable destiné à enregistrer en continu
pendant 24 heures sur un support qui est le plus souvent encore une bande magnétique
analogique le signal électrique provenant du cœur. L'enregistrement continu issu du Holter est
ensuite traité par un système de relecture qui réalise entre autre la conversion du signal
analogique en numérique (chapitre 2, section 2.3.3). Ce système permet de sélectionner des
séquences d'ECG en fonction de critères et protocoles préétablis. Le protocole de sélection
retenu pour la validation de nos méthodes concerne la sélection de plusieurs séquences de 20
minutes de tracé ECG de bonne qualité selon les critères suivants :
Choix de séquences de battements à fréquence cardiaque variable,
comportant l’ensemble des complexes de la séquence de 20 minutes et le
complexe moyenné global.
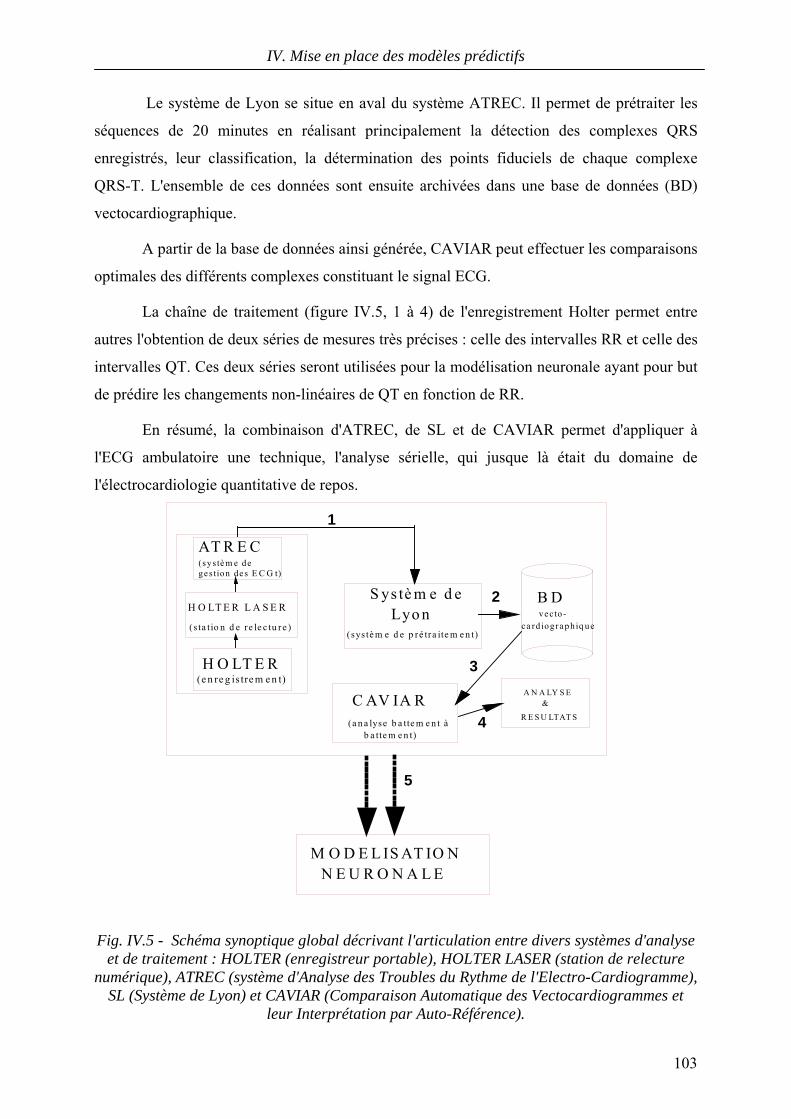
IV. Mise en place des modèles prédictifs
103
Le système de Lyon se situe en aval du système ATREC. Il permet de prétraiter les
séquences de 20 minutes en réalisant principalement la détection des complexes QRS
enregistrés, leur classification, la détermination des points fiduciels de chaque complexe
QRS-T. L'ensemble de ces données sont ensuite archivées dans une base de données (BD)
vectocardiographique.
A partir de la base de données ainsi générée, CAVIAR peut effectuer les comparaisons
optimales des différents complexes constituant le signal ECG.
La chaîne de traitement (figure IV.5, 1 à 4) de l'enregistrement Holter permet entre
autres l'obtention de deux séries de mesures très précises : celle des intervalles RR et celle des
intervalles QT. Ces deux séries seront utilisées pour la modélisation neuronale ayant pour but
de prédire les changements non-linéaires de QT en fonction de RR.
En résumé, la combinaison d'ATREC, de SL et de CAVIAR permet d'appliquer à
l'ECG ambulatoire une technique, l'analyse sérielle, qui jusque là était du domaine de
l'électrocardiologie quantitative de repos.
Fig. IV.5 - Schéma synoptique global décrivant l'articulation entre divers systèmes d'analyse et de traitement : HOLTER (enregistreur portable), HOLTER LASER (station de relecture
numérique), ATREC (système d'Analyse des Troubles du Rythme de l'Electro-Cardiogramme), SL (Système de Lyon) et CAVIAR (Comparaison Automatique des Vectocardiogrammes et
leur Interprétation par Auto-Référence).
C AV IA R
S ys tè m e d e Lyo n
B D vec to -ca rd iog ra ph iq ue
R E S U LTAT S
A N A LY S E &
H O LT E R(e n re g is tre m e n t)
H O LT E R L A S E R
(sys tè m e d e p ré tra ite m e n t)
AT R E C(systè m e de ge s tion de s E C G t)
M O D E L IS AT IO N N E U R O N A L E
(sta tio n d e re le c tu re )
(a n a lyse b a tte m e n t à b a tte m e n t)
1
2
3
4
5
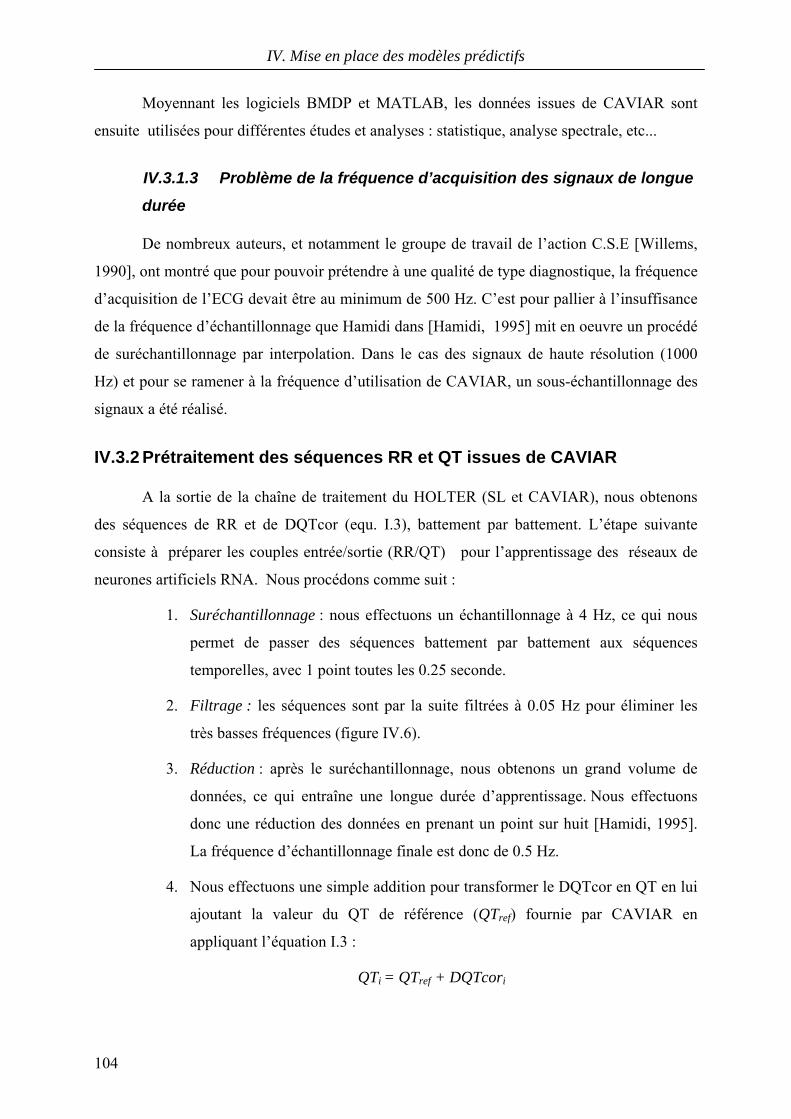
IV. Mise en place des modèles prédictifs
104
Moyennant les logiciels BMDP et MATLAB, les données issues de CAVIAR sont
ensuite utilisées pour différentes études et analyses : statistique, analyse spectrale, etc...
IV.3.1.3 Problème de la fréquence d’acquisition des signaux de longue
durée
De nombreux auteurs, et notamment le groupe de travail de l’action C.S.E [Willems,
1990], ont montré que pour pouvoir prétendre à une qualité de type diagnostique, la fréquence
d’acquisition de l’ECG devait être au minimum de 500 Hz. C’est pour pallier à l’insuffisance
de la fréquence d’échantillonnage que Hamidi dans [Hamidi, 1995] mit en oeuvre un procédé
de suréchantillonnage par interpolation. Dans le cas des signaux de haute résolution (1000
Hz) et pour se ramener à la fréquence d’utilisation de CAVIAR, un sous-échantillonnage des
signaux a été réalisé.
IV.3.2 Prétraitement des séquences RR et QT issues de CAVIAR
A la sortie de la chaîne de traitement du HOLTER (SL et CAVIAR), nous obtenons
des séquences de RR et de DQTcor (equ. I.3), battement par battement. L’étape suivante
consiste à préparer les couples entrée/sortie (RR/QT) pour l’apprentissage des réseaux de
neurones artificiels RNA. Nous procédons comme suit :
1. Suréchantillonnage : nous effectuons un échantillonnage à 4 Hz, ce qui nous
permet de passer des séquences battement par battement aux séquences
temporelles, avec 1 point toutes les 0.25 seconde.
2. Filtrage : les séquences sont par la suite filtrées à 0.05 Hz pour éliminer les
très basses fréquences (figure IV.6).
3. Réduction : après le suréchantillonnage, nous obtenons un grand volume de
données, ce qui entraîne une longue durée d’apprentissage. Nous effectuons
donc une réduction des données en prenant un point sur huit [Hamidi, 1995].
La fréquence d’échantillonnage finale est donc de 0.5 Hz.
4. Nous effectuons une simple addition pour transformer le DQTcor en QT en lui
ajoutant la valeur du QT de référence (QTref) fournie par CAVIAR en
appliquant l’équation I.3 :
QTi = QTref + DQTcori
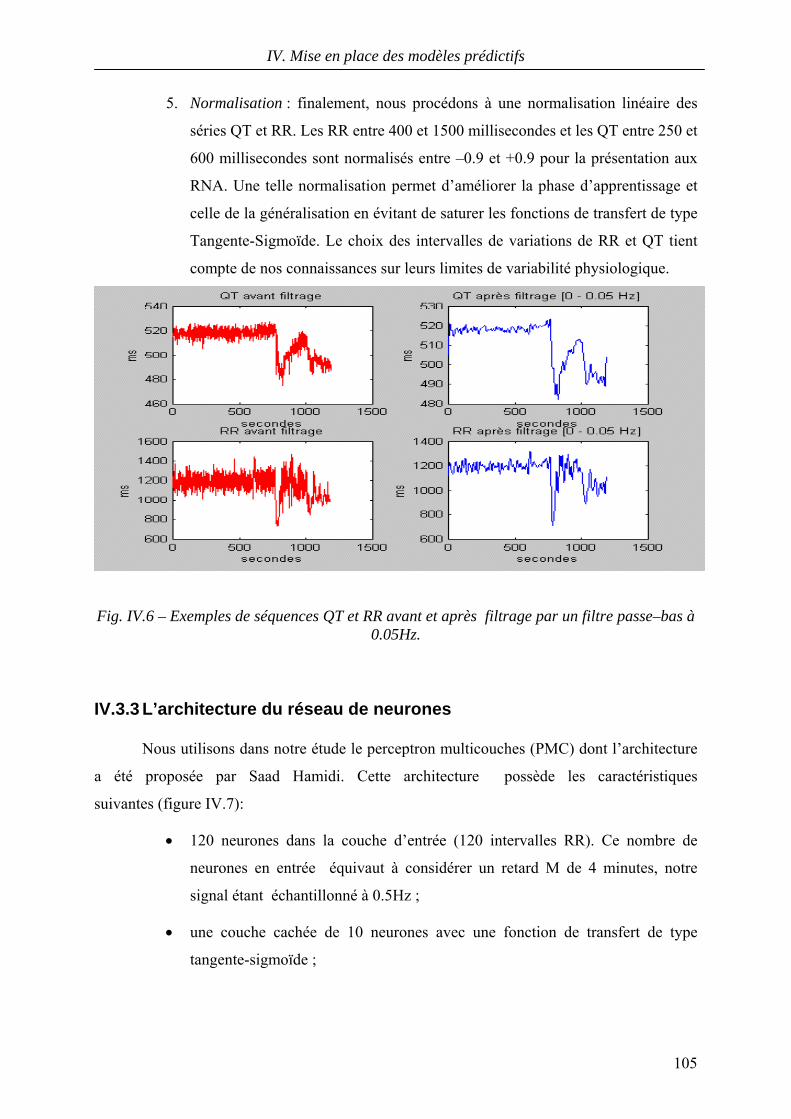
IV. Mise en place des modèles prédictifs
105
5. Normalisation : finalement, nous procédons à une normalisation linéaire des
séries QT et RR. Les RR entre 400 et 1500 millisecondes et les QT entre 250 et
600 millisecondes sont normalisés entre –0.9 et +0.9 pour la présentation aux
RNA. Une telle normalisation permet d’améliorer la phase d’apprentissage et
celle de la généralisation en évitant de saturer les fonctions de transfert de type
Tangente-Sigmoïde. Le choix des intervalles de variations de RR et QT tient
compte de nos connaissances sur leurs limites de variabilité physiologique.
Fig. IV.6 – Exemples de séquences QT et RR avant et après filtrage par un filtre passe–bas à 0.05Hz.
IV.3.3 L’architecture du réseau de neurones
Nous utilisons dans notre étude le perceptron multicouches (PMC) dont l’architecture
a été proposée par Saad Hamidi. Cette architecture possède les caractéristiques
suivantes (figure IV.7):
• 120 neurones dans la couche d’entrée (120 intervalles RR). Ce nombre de
neurones en entrée équivaut à considérer un retard M de 4 minutes, notre
signal étant échantillonné à 0.5Hz ;
• une couche cachée de 10 neurones avec une fonction de transfert de type
tangente-sigmoïde ;
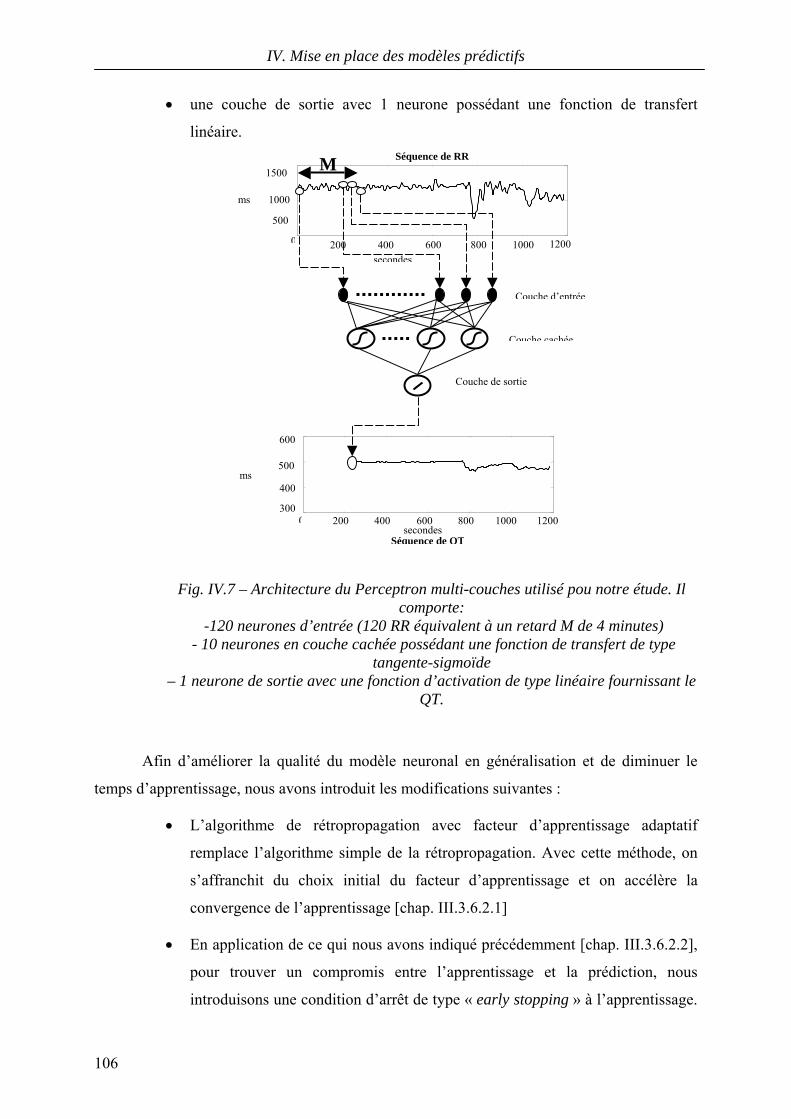
IV. Mise en place des modèles prédictifs
106
• une couche de sortie avec 1 neurone possédant une fonction de transfert
linéaire.
Fig. IV.7 – Architecture du Perceptron multi-couches utilisé pou notre étude. Il comporte:
-120 neurones d’entrée (120 RR équivalent à un retard M de 4 minutes) - 10 neurones en couche cachée possédant une fonction de transfert de type
tangente-sigmoïde – 1 neurone de sortie avec une fonction d’activation de type linéaire fournissant le
QT.
Afin d’améliorer la qualité du modèle neuronal en généralisation et de diminuer le
temps d’apprentissage, nous avons introduit les modifications suivantes :
• L’algorithme de rétropropagation avec facteur d’apprentissage adaptatif
remplace l’algorithme simple de la rétropropagation. Avec cette méthode, on
s’affranchit du choix initial du facteur d’apprentissage et on accélère la
convergence de l’apprentissage [chap. III.3.6.2.1]
• En application de ce qui nous avons indiqué précédemment [chap. III.3.6.2.2],
pour trouver un compromis entre l’apprentissage et la prédiction, nous
introduisons une condition d’arrêt de type « early stopping » à l’apprentissage.
secondes
0 200 400 600 800 1000 1200
500
1000
1500
ms
0 200 400 600 800 1000 1200 300
400
500
600
secondes
ms
Couche d’entrée
Couche cachée
Couche de sortie
Séquence de RR
Séquence de QT
M
IV. Mise en place des modèles prédictifs
107
Elle consiste à effectuer une généralisation toutes les ‘n’ itérations et cela en
présentant au RNA une séquence (séquence de validation) différente de celle
utilisée pour l’apprentissage. Nous effectuons un test sur la séquence de
validation à chaque itération, et nous arrêtons le processus itératif lorsque
l’erreur entre le QT prédit (QTp) et le QT réel (QTr) sur l’ensemble de
validation est minimal.
IV.3.4 Critères d’évaluation de la qualité de la généralisation
Le critère de qualité d’une prédiction est l’indice qui nous permettra de juger la qualité
de la sortie des RNA. Outre le critère visuel qui consiste à représenter conjointement la
courbe du QT prédit et du QT réel, nous avons élaboré trois autres critères d’évaluation de la
qualité de la prédiction du QT en fonction de RR : l’écart type de l’erreur, le comportement en
face de données artificielles et la droite de régression linéaire entre le QT prédit (QTp) et le
QT réel (QTr). Ces quatre critères sont brièvement évoqués ci-après :
1. Critère visuel : Le critère visuel consiste à comparer visuellement les comportements
dynamiques de QTp et de QTr et de détecter d’éventuelles disparités dynamiques. Ce
critère reste cependant dépendant de l’échelle de visualisation. Pour une meilleure
comparaison dynamique, nous avons retenu un type de présentation graphique des
QTp et QTr tel que celui présenté en figure IV.9, où le QTp est translaté pour être
superposé au mieux avec la première minute du signal QTr.
2. Mesure de l’Ecart type de l’erreur d’apprentissage : Nous nous intéressons
principalement à la correspondance dynamique entre le QTp et le QTr. Lors de
l’utilisation des réseaux de neurones en généralisation, nous avons remarqué un
décalage quasiment systématique entre la courbe du QTr et celle du QTp. Cela est dû à
un facteur additif qui est lié à la fréquence respiratoire et à l’heure de l’enregistrement
du Holter. Nous reviendrons sur ce décalage plus tard lors de l’exposé de nos résultats.
L’erreur de prédiction « ep » définie par :
ep= QTp-QTr (IV.2)
donne une indication sur les différences entre les deux signaux, mais ne fournit pas
une indication sur leur dynamique. En effet, nous ne nous intéressons pas directement
à la valeur de ep mais à sa forme qui est un indicateur de la correspondance
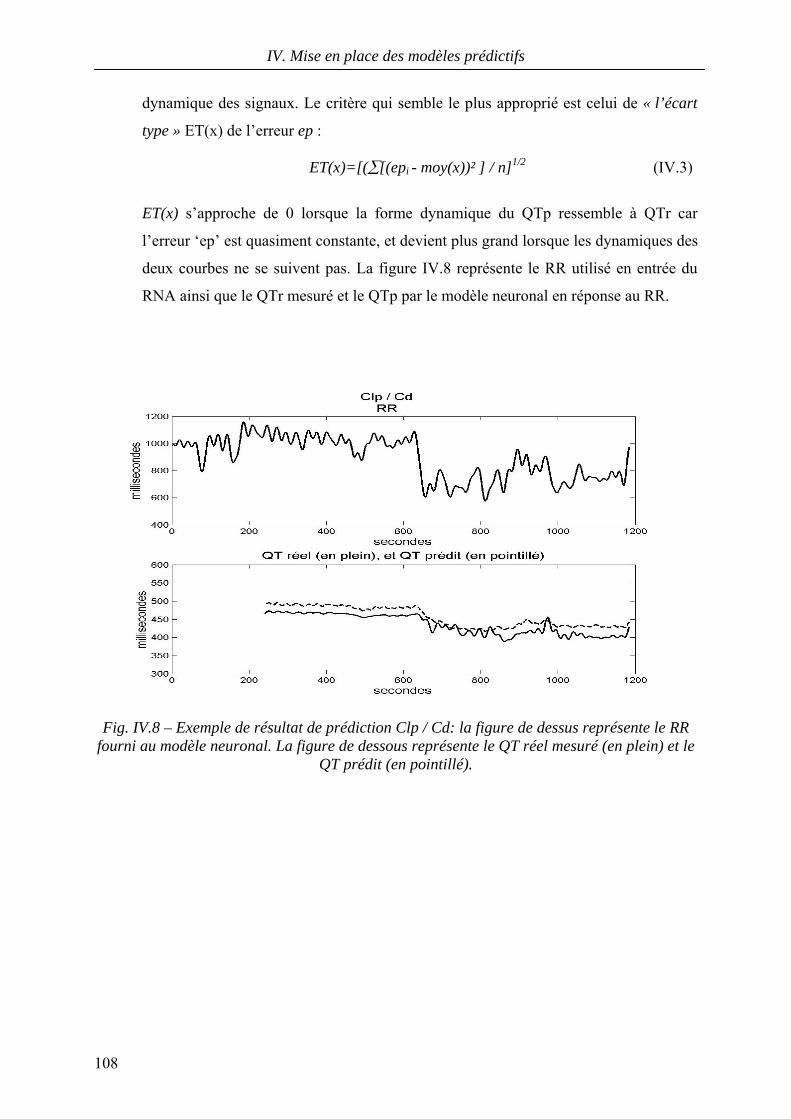
IV. Mise en place des modèles prédictifs
108
dynamique des signaux. Le critère qui semble le plus approprié est celui de « l’écart
type » ET(x) de l’erreur ep :
ET(x)=[(∑[(epi - moy(x))² ] / n]1/2 (IV.3)
ET(x) s’approche de 0 lorsque la forme dynamique du QTp ressemble à QTr car
l’erreur ‘ep’ est quasiment constante, et devient plus grand lorsque les dynamiques des
deux courbes ne se suivent pas. La figure IV.8 représente le RR utilisé en entrée du
RNA ainsi que le QTr mesuré et le QTp par le modèle neuronal en réponse au RR.
Fig. IV.8 – Exemple de résultat de prédiction Clp / Cd: la figure de dessus représente le RR
fourni au modèle neuronal. La figure de dessous représente le QT réel mesuré (en plein) et le QT prédit (en pointillé).
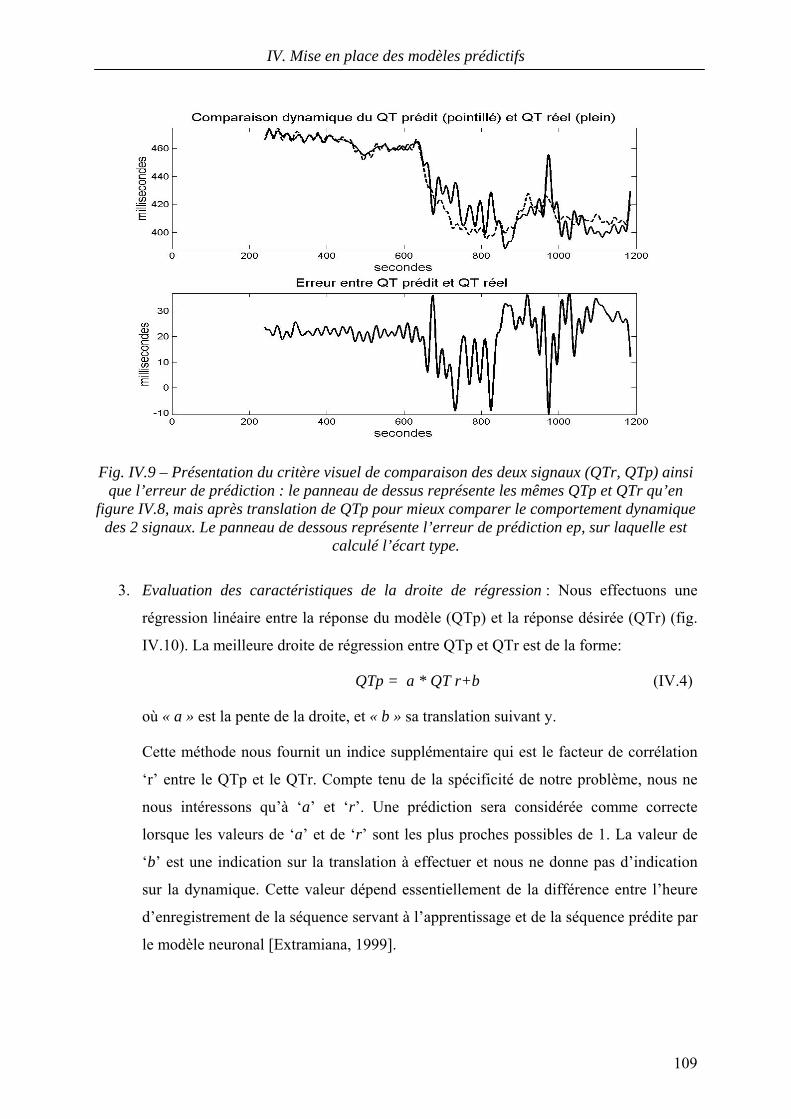
IV. Mise en place des modèles prédictifs
109
Fig. IV.9 – Présentation du critère visuel de comparaison des deux signaux (QTr, QTp) ainsi
que l’erreur de prédiction : le panneau de dessus représente les mêmes QTp et QTr qu’en figure IV.8, mais après translation de QTp pour mieux comparer le comportement dynamique
des 2 signaux. Le panneau de dessous représente l’erreur de prédiction ep, sur laquelle est calculé l’écart type.
3. Evaluation des caractéristiques de la droite de régression : Nous effectuons une
régression linéaire entre la réponse du modèle (QTp) et la réponse désirée (QTr) (fig.
IV.10). La meilleure droite de régression entre QTp et QTr est de la forme:
QTp = a * QT r+b (IV.4)
où « a » est la pente de la droite, et « b » sa translation suivant y.
Cette méthode nous fournit un indice supplémentaire qui est le facteur de corrélation
‘r’ entre le QTp et le QTr. Compte tenu de la spécificité de notre problème, nous ne
nous intéressons qu’à ‘a’ et ‘r’. Une prédiction sera considérée comme correcte
lorsque les valeurs de ‘a’ et de ‘r’ sont les plus proches possibles de 1. La valeur de
‘b’ est une indication sur la translation à effectuer et nous ne donne pas d’indication
sur la dynamique. Cette valeur dépend essentiellement de la différence entre l’heure
d’enregistrement de la séquence servant à l’apprentissage et de la séquence prédite par
le modèle neuronal [Extramiana, 1999].
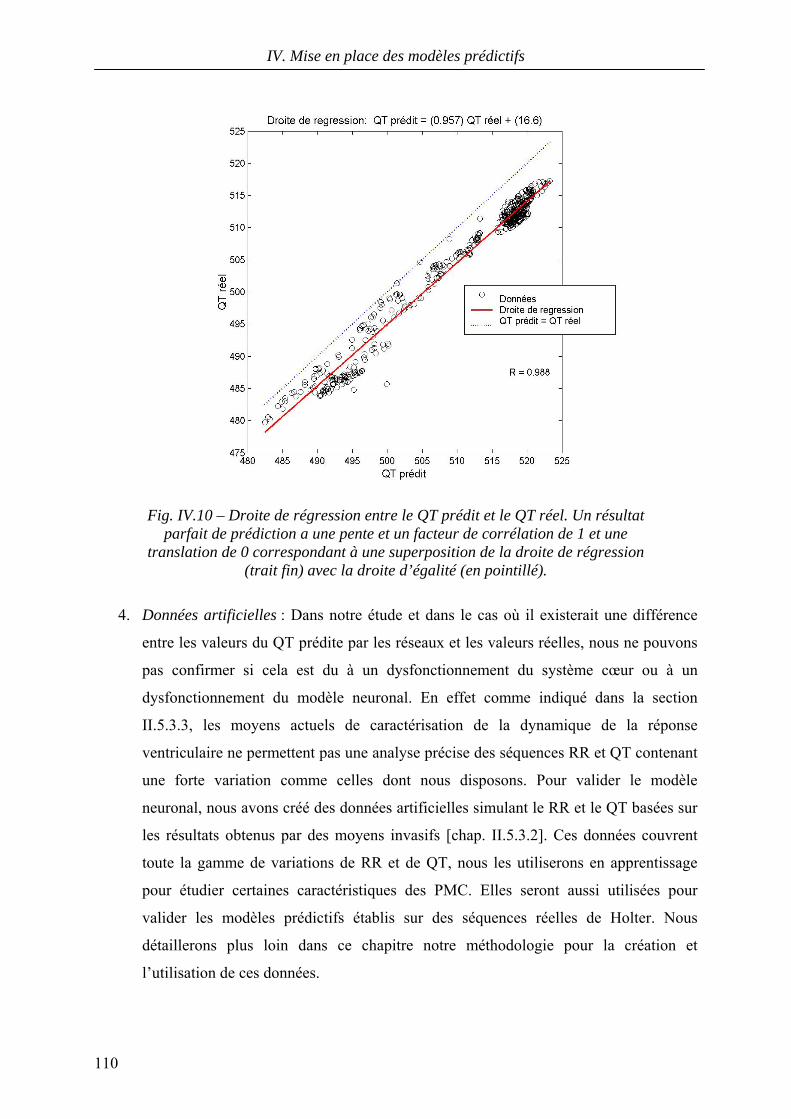
IV. Mise en place des modèles prédictifs
110
Fig. IV.10 – Droite de régression entre le QT prédit et le QT réel. Un résultat
parfait de prédiction a une pente et un facteur de corrélation de 1 et une translation de 0 correspondant à une superposition de la droite de régression
(trait fin) avec la droite d’égalité (en pointillé).
4. Données artificielles : Dans notre étude et dans le cas où il existerait une différence
entre les valeurs du QT prédite par les réseaux et les valeurs réelles, nous ne pouvons
pas confirmer si cela est du à un dysfonctionnement du système cœur ou à un
dysfonctionnement du modèle neuronal. En effet comme indiqué dans la section
II.5.3.3, les moyens actuels de caractérisation de la dynamique de la réponse
ventriculaire ne permettent pas une analyse précise des séquences RR et QT contenant
une forte variation comme celles dont nous disposons. Pour valider le modèle
neuronal, nous avons créé des données artificielles simulant le RR et le QT basées sur
les résultats obtenus par des moyens invasifs [chap. II.5.3.2]. Ces données couvrent
toute la gamme de variations de RR et de QT, nous les utiliserons en apprentissage
pour étudier certaines caractéristiques des PMC. Elles seront aussi utilisées pour
valider les modèles prédictifs établis sur des séquences réelles de Holter. Nous
détaillerons plus loin dans ce chapitre notre méthodologie pour la création et
l’utilisation de ces données.
IV. Mise en place des modèles prédictifs
111
IV.3.5 Les données artificielles simulant RR et QT
Nous utilisons le terme « apprendre un créneau », qui signifie apprendre la relation
existante entre le créneau représentant le RR et le QT simulé correspondant.
Nous générons un créneau RR simulé (RRsim) centré autour d’une certaine valeur
donnée x pouvant aller de 600 à 1300 millisecondes et d’une amplitude de 200 millisecondes.
La durée totale de RRsim est de 15 minutes comme illustré dans la figure IV.11-a.
⎪⎪⎩
⎪⎪⎨
⎧
−⎯→⎯=
+⎯→⎯=
−⎯→⎯=
=
100]15,10[
100]10,5[
100]5,0[
)(
xt
xt
xt
tRRsim (t :temps en minute)
L’amplitude de 200 msec est choisie pour être la plus proche des variations réelles du
signal RR. Nous avons aussi choisi la durée totale du créneau à 15 minutes (3x5) afin qu’il
n’y ait qu’un seul changement de phase dans la fenêtre temporelle M de 4 minutes. Cela
permettra au modèle neuronal de retrouver la valeur correspondante à l’état statique (au-delà
des 4 minutes) avant de retrouver le second changement de phase.
On calcule l’intervalle QT (QTsim) (fig. IV.11-b) à partir de RRsim selon la formule
« racine carrée » :
QTsim=8.7*(RR’)1/2+123.7 (IV.5)
où RR’ représente la réponse temporelle d’un filtre passe-bas du 1er ordre, de
constante de temps égale à 1 minute, au créneau RRsim(t). Les données utilisées sont RRsim
et QTsim simulant respectivement les signaux RR et QT.
Les différents créneaux créés sont regroupés au sein d’une fonction appelée Multi-
Créneaux (fig. IV.12). Cette fonction est utilisée pour tester la capacité des modèles
neuronaux en généralisation. Un modèle neuronal ayant appris sur une séquence Holter et
possédant une réponse homogène sur la totalité du multi-créneaux est considéré comme un
modèle « normal ». Le signal prédit par ce modèle est considéré comme la réponse
ventriculaire attendue pour un sujet sain.
IV. Mise en place des modèles prédictifs
112
Nous utilisons les données artificielles pour étudier la réaction des PMC à l’influence
de certains facteurs :
1. la zone de variation des signaux utilisés en apprentissage ;
2. la modification de la constante de temps entre la phase ascendante et
descendante des créneaux correspondant aux phases d’accélération et de
ralentissement de la fréquence cardiaque ;
3. la capacité des PMC à apprendre des données manquantes : uniquement la
phase ascendante du créneau simulé est utilisée en apprentissage.
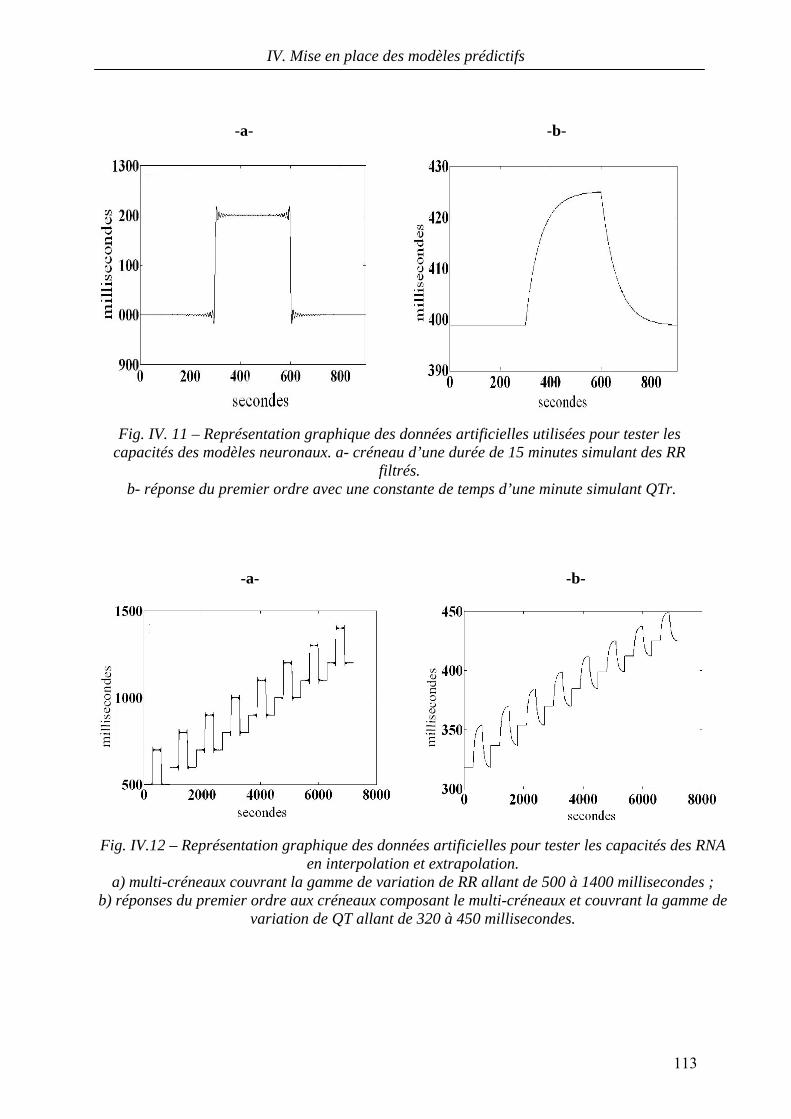
IV. Mise en place des modèles prédictifs
113
-a- -b-
Fig. IV. 11 – Représentation graphique des données artificielles utilisées pour tester les capacités des modèles neuronaux. a- créneau d’une durée de 15 minutes simulant des RR
filtrés. b- réponse du premier ordre avec une constante de temps d’une minute simulant QTr.
-a- -b-
Fig. IV.12 – Représentation graphique des données artificielles pour tester les capacités des RNA en interpolation et extrapolation.
a) multi-créneaux couvrant la gamme de variation de RR allant de 500 à 1400 millisecondes ; b) réponses du premier ordre aux créneaux composant le multi-créneaux et couvrant la gamme de
variation de QT allant de 320 à 450 millisecondes.
IV. Mise en place des modèles prédictifs
114
IV.3.5.1 Test des capacités du PMC en généralisation : utilisation de
plusieurs séquences en apprentissage.
Parmi les questions demeurant sans réponse figurent les capacités des modèles
neuronaux en interpolation et extrapolation. Rappelons que l’interpolation est la qualité du
modèle neuronal à généraliser des séquences dont les valeurs restent dans les limites des
valeurs des exemples utilisés en apprentissage, tandis que l’extrapolation est la qualité de
généralisation des séquences en dehors des zones d’apprentissage. Dans notre cas, nous
étudierons le comportement dynamique du signal prédit en dehors des zones d’apprentissage.
Nous attendons de nos modèles neuronaux qu’ils soient capables de reproduire le
comportement dynamique appris sur l’ensemble d’apprentissage sur des exemples non vus
auparavant. L’utilisation en apprentissage de différents créneaux représentant la même
fonction mais couvrant des zones de variations différentes, nous renseignera sur la capacité
des PMC à extrapoler leur connaissance loin des zones de variations apprises.
Une des questions que nous nous sommes posées est la suivante :
Est-il nécessaire, afin d’améliorer la qualité de la généralisation, d’utiliser des
séquences d’apprentissage couvrant toutes les gammes de variations des signaux RR et QT ?
L’objectif n’est pas de savoir si les PMC peuvent apprendre une relation du premier
ordre, ce dont ils sont parfaitement capables, mais de connaître l’influence de l’utilisation de
plusieurs séquences en apprentissage et d’étudier le comportement des PMC en généralisation
en dehors des zones apprises.
Pour y répondre, nous avons effectué deux études et comparé leurs résultats :
1. Apprentissage d’un créneau (RRsim, QTsim) centré autour de 1100 msec.
2. Apprentissage avec deux créneaux centrés respectivement autour de 1100 msec
et 600 msec.
Les résultats sont présentés dans la section IV.4.1
IV.3.5.2 Test des capacités du PMC en apprentissage : changement de
constante de temps entre le front ascendant et le front descendant.
Il est admis que le QT met un certain temps avant d’atteindre un état stationnaire suite
à de fortes variations de la fréquence cardiaque. En première approximation, la relation entre
QT et RR se rapprocherait d’un modèle du premier ordre avec une constante de temps d’une
IV. Mise en place des modèles prédictifs
115
minute. La constante de temps du modèle QT=f(RR) a été déterminée expérimentalement à
une minute [Lee, 1989], mais elle peut être sujette à des modifications dues à l’hystérésis de
QT [Hodges, 1997; Lau, 1989]. Elle peut aussi être différente entre les phases d’accélérations
cardiaques (i.e. phase ascendante du créneau) et les phases de ralentissement cardiaques (i.e.
phase descendante du créneau). Ces différences de constante de temps sont constatées chez
les patients atteints d’un bloc de branche complet « complete heart block », avec une
constante de temps de 60.4 ± 2.0 sec lors des ralentissement de la fréquence cardiaque et
49.1 ± 2.2 sec lors des accélérations de la fréquence.[Lau, 1989].
Les travaux effectués par Hamidi ont pu mettre en évidence un retard d’adaptation de
QT de l’ordre de 4 minutes. Ce résultat est proche des premières conclusions obtenues par des
études invasives. En effet, avec une constante de temps d’une minute, le QT atteint 98% de sa
valeur maximale au bout de ces 4 minutes.
Nous nous intéressons particulièrement aux capacités des PMC à apprendre les
changements de cette constante de temps lors de changements de phase entre l’accélération et
le ralentissement de la fréquence cardiaque. Nous avons effectué deux études en utilisant pour
l’apprentissage des créneaux avec des constantes de temps différentes entre le front de montée
et le front de descente.
Deux modèles sont créés, Cst0612 et Cst0713 (Tab. IV.4). La base d’apprentissage de
chaque modèle comporte 2 créneaux simulant le RR et sa réponse centrés autour de 1100
msec et 600 msec. Les créneaux utilisés en apprentissage pour chaque modèle possèdent les
caractéristiques suivantes :
Constante de temps du front ascendant
du créneau (minute)
Constate de temps du front descendant du
créneau (minute)
Nombre d’itérations en apprentissage
Cst06-12 0.6 1.2 100.000
Cst07-13 0.7 1.3 100.000
Tab. IV.4 – Caractéristiques des études menées pour tester l’influence du changement de la constante de temps entre le front ascendant et descendant.
Le nombre d’itérations en apprentissage est de 100.000 pour les 2 modèles neuronaux
précédents. A chaque itération, l’erreur d’apprentissage (i.e. différence entre valeur réelle et
valeur prédite) est mesurée. Cela permet de vérifier l’évolution de l’apprentissage en fonction
IV. Mise en place des modèles prédictifs
116
du nombre d’itérations et d’arrêter le processus itératif lorsqu’il n’y a plus d’amélioration
significative.
IV.3.5.3 Test des capacités du PMC à apprendre des données
manquantes : utilisation du front ascendant du créneau en
apprentissage.
Dans les séquences d’enregistrement Holter sélectionnées, certaines peuvent
comporter une phase d’accélération cardiaque sans posséder la phase de décélération et de
retour à la normale.
Pour étudier l’influence de l’utilisation de ces séquences en apprentissage, nous
utilisons un demi-créneau comportant uniquement la phase ascendante pour simuler le RR. Le
QTr simulé est obtenu en calculant la réponse à un système du premier ordre au RR simulé.
Le modèle neuronal devrait apprendre la relation entre le RR et le QT simulés et ses
performances en généralisation sur le multi-créneaux sont étudiées.
IV.3.5.4 Raccourcissement ou allongement brusque de QT après une
forte variation du RR : front descendant inférieur de 25 msec à sa valeur
normale.
Pour les même fréquences cardiaques un décalage entre les pentes de QT jour et QT
nuit a été constaté [chap. II.4.2] : le QT nocturne est plus long que le QT diurne [Extramiana,
1999]. Par contre nous n’avons pas les connaissances nécessaires pour évaluer ce décalage au
sein d’une séquence Holter de 20 minutes. Comment les Perceptrons Multi-Couches
apprendraient-ils de telles modifications ? Pour répondre à cette question nous effectuons un
apprentissage sur un créneau centré autour de 1100 msec en soustrayons 25 msec au front
descendant de sa réponse du premier ordre noté RR’ en équation (IV.5) (fig. IV.13). Le QT
simulé est ensuite calculé par la formule présentée en équation IV.5. Notre étude a pour but de
simuler un raccourcissement de QT par rapport à la normale après une phase d’accélération et
ralentissement cardiaque.
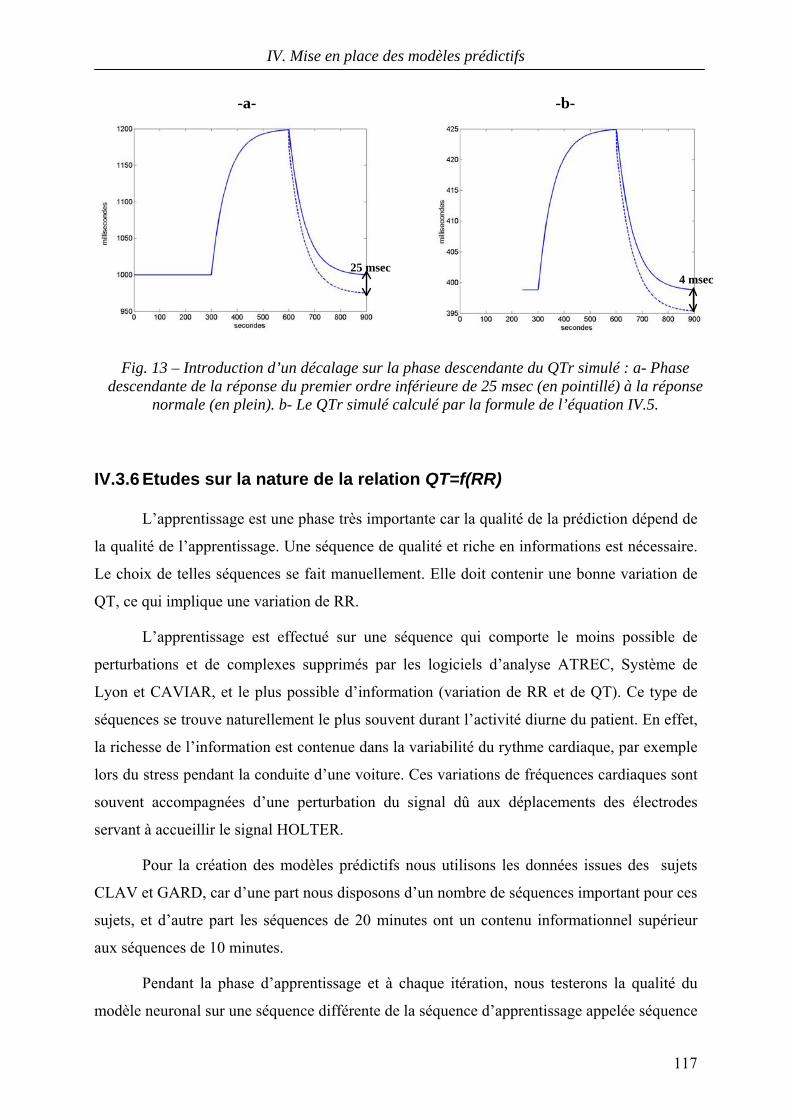
IV. Mise en place des modèles prédictifs
117
-a-
-b-
Fig. 13 – Introduction d’un décalage sur la phase descendante du QTr simulé : a- Phase
descendante de la réponse du premier ordre inférieure de 25 msec (en pointillé) à la réponse normale (en plein). b- Le QTr simulé calculé par la formule de l’équation IV.5.
IV.3.6 Etudes sur la nature de la relation QT=f(RR)
L’apprentissage est une phase très importante car la qualité de la prédiction dépend de
la qualité de l’apprentissage. Une séquence de qualité et riche en informations est nécessaire.
Le choix de telles séquences se fait manuellement. Elle doit contenir une bonne variation de
QT, ce qui implique une variation de RR.
L’apprentissage est effectué sur une séquence qui comporte le moins possible de
perturbations et de complexes supprimés par les logiciels d’analyse ATREC, Système de
Lyon et CAVIAR, et le plus possible d’information (variation de RR et de QT). Ce type de
séquences se trouve naturellement le plus souvent durant l’activité diurne du patient. En effet,
la richesse de l’information est contenue dans la variabilité du rythme cardiaque, par exemple
lors du stress pendant la conduite d’une voiture. Ces variations de fréquences cardiaques sont
souvent accompagnées d’une perturbation du signal dû aux déplacements des électrodes
servant à accueillir le signal HOLTER.
Pour la création des modèles prédictifs nous utilisons les données issues des sujets
CLAV et GARD, car d’une part nous disposons d’un nombre de séquences important pour ces
sujets, et d’autre part les séquences de 20 minutes ont un contenu informationnel supérieur
aux séquences de 10 minutes.
Pendant la phase d’apprentissage et à chaque itération, nous testerons la qualité du
modèle neuronal sur une séquence différente de la séquence d’apprentissage appelée séquence
25 msec4 msec
IV. Mise en place des modèles prédictifs
118
de « validation ». L’erreur de prédiction sur la séquence de validation permettra l’arrêt de
l’apprentissage lorsque plus aucune amélioration de la qualité de prédiction ne sera constatée.
Cette méthode empêchera le processus itératif d’apprentissage de passer dans la zone de sur-
apprentissage où le modèle apprend « par cœur » sa base d’exemples.
L’objectif est d’étudier les modèles neuronaux suivants :
• Intra-patient : ayant effectué l’apprentissage du modèle sur un patient,
l’objectif est de tester la performance en prédiction sur toutes les séquences
appartenant au même patient.
• Inter-patient : il s’agit de prédire les séquences d’un patient avec un
modèle appris sur les séquences d’un autre patient.
Dans chaque cas, il s’agira d’étudier les différences et leur signification entre le
comportement dynamique du QT réel du patient et le QT prédit par le modèle neuronal.
Chaque modèle est nommé selon la première lettre de l’identifiant du patient et de la
séquence d’apprentissage, par exemple le modèle ‘Gd’ est le modèle qui a appris sur la
séquence ‘d’ du patient GARD. La notation « séquence/modèle » indique le résultat de
prédiction de la séquence par le modèle.
Pour chaque modèle Xy nous effectuons :
• un tracé de la courbe représentant la somme des erreurs au carré sur les
données normalisées en fonction du nombre d’itération « n ». Rappelons
que durant le processus d’apprentissage les données Holter et simulées sont
normalisées linéairement entre –0.9 et +0.9 ;
• la réponse du modèle à un multi-créneaux.
Pour chaque résultat de prédiction, nous retenons :
• la valeur de l’écart type qui est considérée comme notre critère de qualité le
plus pertinent avec le critère visuel ;
• les paramètres de la droite de régression (fig. IV.10), à savoir la pente « a »
et le facteur de corrélation « r ».
Nous appliquerons un même nombre d’itérations en apprentissage sur chacune des
séquences nocturnes et diurnes. Le nombre d’itérations à appliquer en apprentissage sur les
séquences de nuit est choisi en faisant un test sur une séquence représentative de l’ensemble
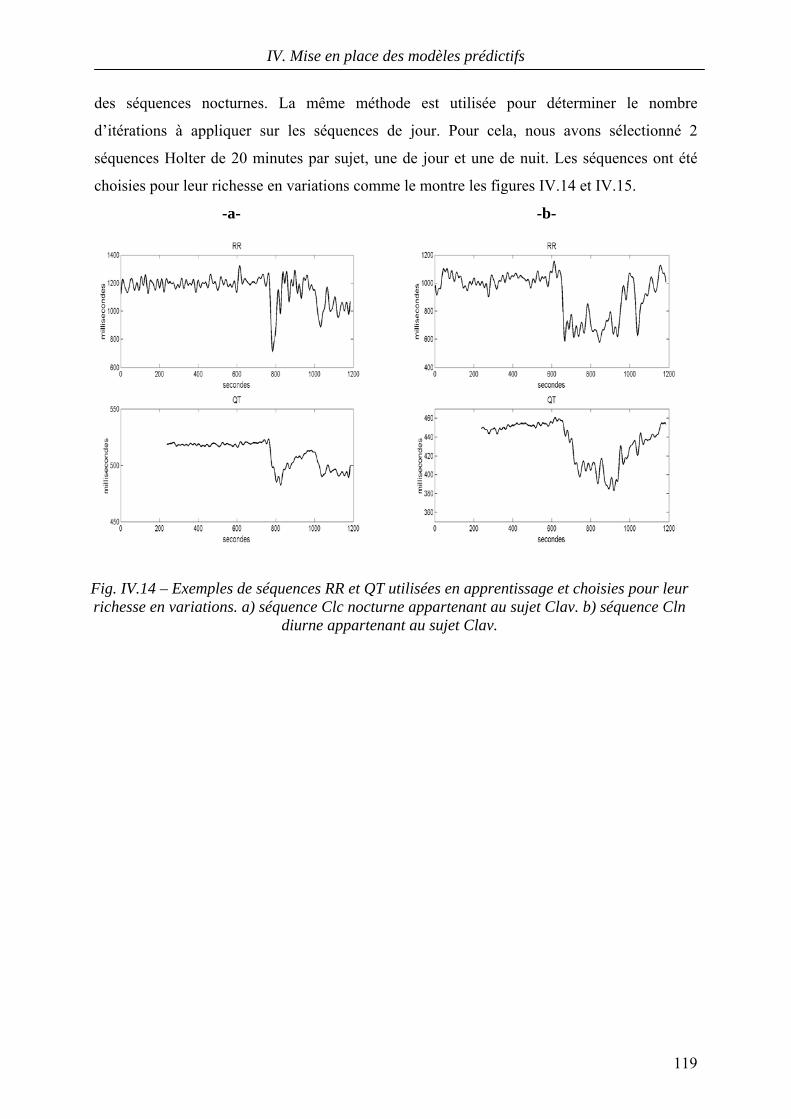
IV. Mise en place des modèles prédictifs
119
des séquences nocturnes. La même méthode est utilisée pour déterminer le nombre
d’itérations à appliquer sur les séquences de jour. Pour cela, nous avons sélectionné 2
séquences Holter de 20 minutes par sujet, une de jour et une de nuit. Les séquences ont été
choisies pour leur richesse en variations comme le montre les figures IV.14 et IV.15.
-a-
-b-
Fig. IV.14 – Exemples de séquences RR et QT utilisées en apprentissage et choisies pour leur richesse en variations. a) séquence Clc nocturne appartenant au sujet Clav. b) séquence Cln
diurne appartenant au sujet Clav.
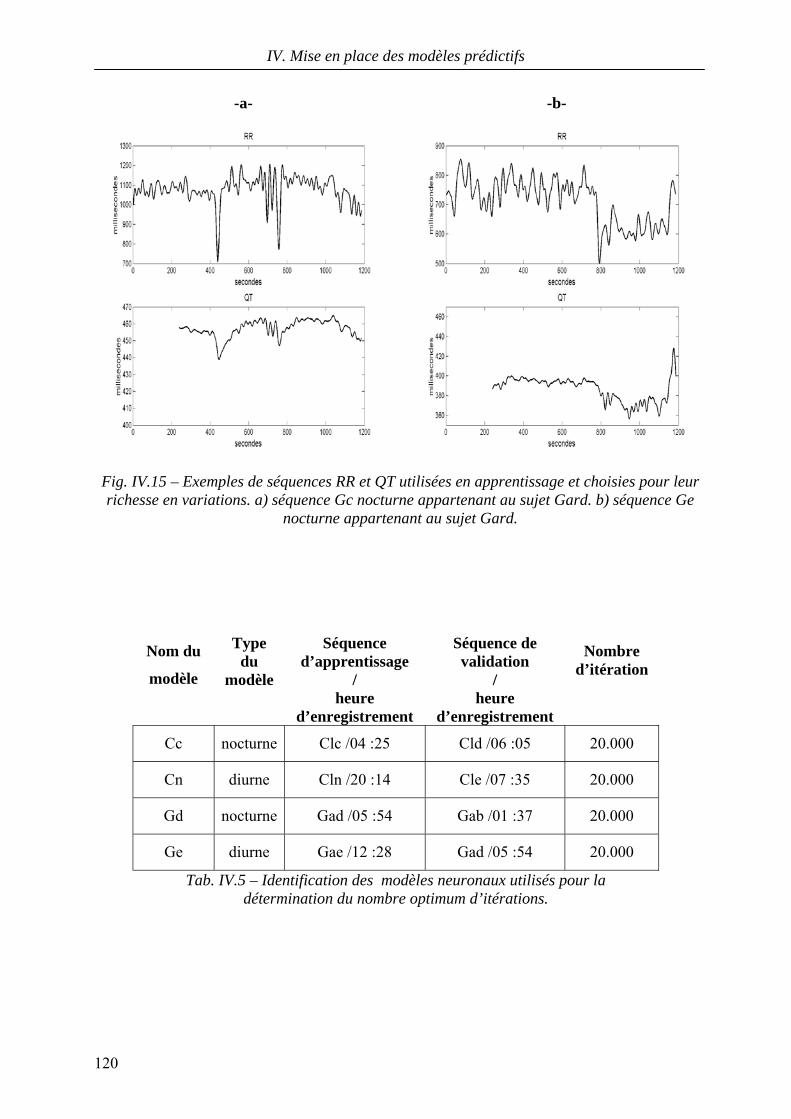
IV. Mise en place des modèles prédictifs
120
-a- -b-
Fig. IV.15 – Exemples de séquences RR et QT utilisées en apprentissage et choisies pour leur richesse en variations. a) séquence Gc nocturne appartenant au sujet Gard. b) séquence Ge
nocturne appartenant au sujet Gard.
Nom du
modèle
Type du
modèle
Séquence d’apprentissage
/ heure
d’enregistrement
Séquence de validation
/ heure
d’enregistrement
Nombre d’itération
Cc nocturne Clc /04 :25 Cld /06 :05 20.000
Cn diurne Cln /20 :14 Cle /07 :35 20.000
Gd nocturne Gad /05 :54 Gab /01 :37 20.000
Ge diurne Gae /12 :28 Gad /05 :54 20.000
Tab. IV.5 – Identification des modèles neuronaux utilisés pour la détermination du nombre optimum d’itérations.
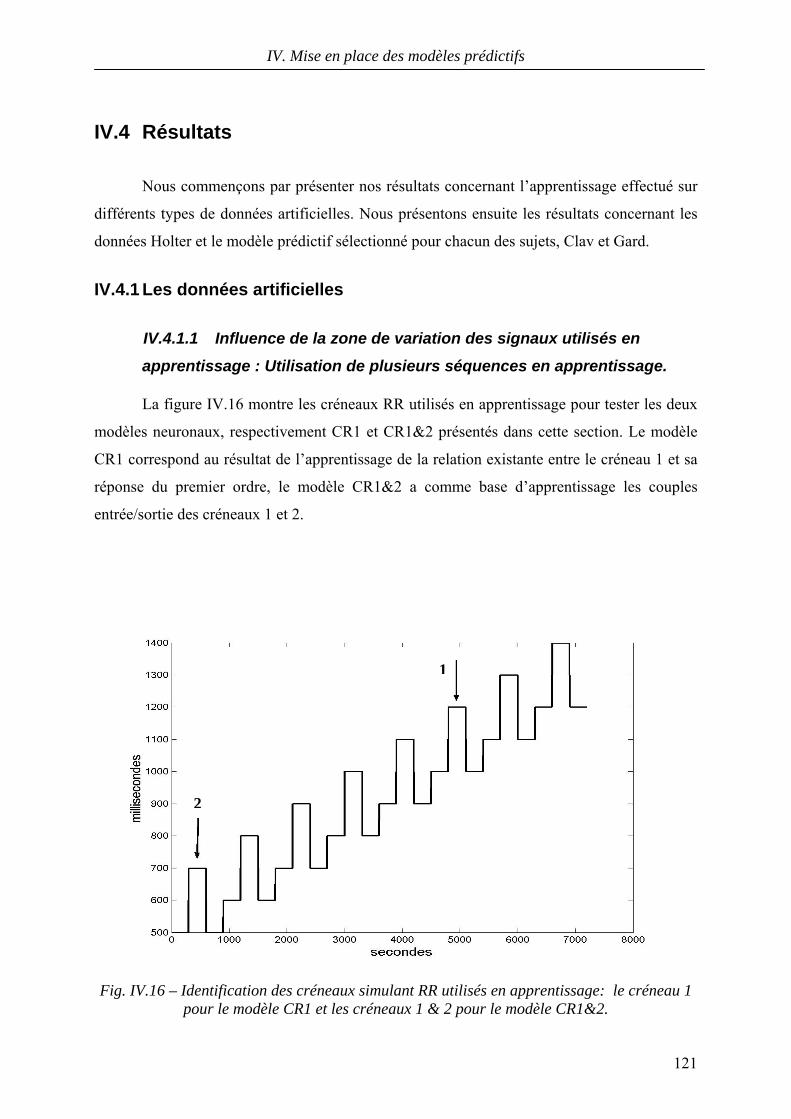
IV. Mise en place des modèles prédictifs
121
IV.4 Résultats
Nous commençons par présenter nos résultats concernant l’apprentissage effectué sur
différents types de données artificielles. Nous présentons ensuite les résultats concernant les
données Holter et le modèle prédictif sélectionné pour chacun des sujets, Clav et Gard.
IV.4.1 Les données artificielles
IV.4.1.1 Influence de la zone de variation des signaux utilisés en
apprentissage : Utilisation de plusieurs séquences en apprentissage.
La figure IV.16 montre les créneaux RR utilisés en apprentissage pour tester les deux
modèles neuronaux, respectivement CR1 et CR1&2 présentés dans cette section. Le modèle
CR1 correspond au résultat de l’apprentissage de la relation existante entre le créneau 1 et sa
réponse du premier ordre, le modèle CR1&2 a comme base d’apprentissage les couples
entrée/sortie des créneaux 1 et 2.
Fig. IV.16 – Identification des créneaux simulant RR utilisés en apprentissage: le créneau 1
pour le modèle CR1 et les créneaux 1 & 2 pour le modèle CR1&2.
2
1
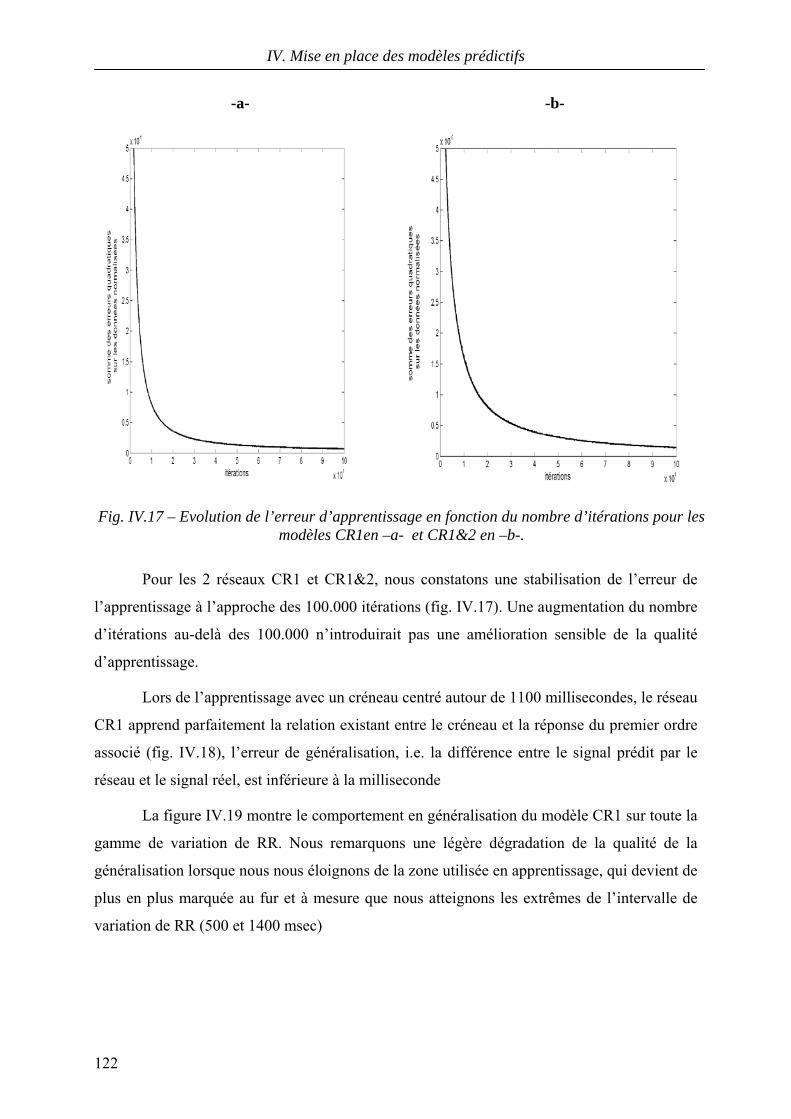
IV. Mise en place des modèles prédictifs
122
-a-
-b-
Fig. IV.17 – Evolution de l’erreur d’apprentissage en fonction du nombre d’itérations pour les
modèles CR1en –a- et CR1&2 en –b-.
Pour les 2 réseaux CR1 et CR1&2, nous constatons une stabilisation de l’erreur de
l’apprentissage à l’approche des 100.000 itérations (fig. IV.17). Une augmentation du nombre
d’itérations au-delà des 100.000 n’introduirait pas une amélioration sensible de la qualité
d’apprentissage.
Lors de l’apprentissage avec un créneau centré autour de 1100 millisecondes, le réseau
CR1 apprend parfaitement la relation existant entre le créneau et la réponse du premier ordre
associé (fig. IV.18), l’erreur de généralisation, i.e. la différence entre le signal prédit par le
réseau et le signal réel, est inférieure à la milliseconde
La figure IV.19 montre le comportement en généralisation du modèle CR1 sur toute la
gamme de variation de RR. Nous remarquons une légère dégradation de la qualité de la
généralisation lorsque nous nous éloignons de la zone utilisée en apprentissage, qui devient de
plus en plus marquée au fur et à mesure que nous atteignons les extrêmes de l’intervalle de
variation de RR (500 et 1400 msec)
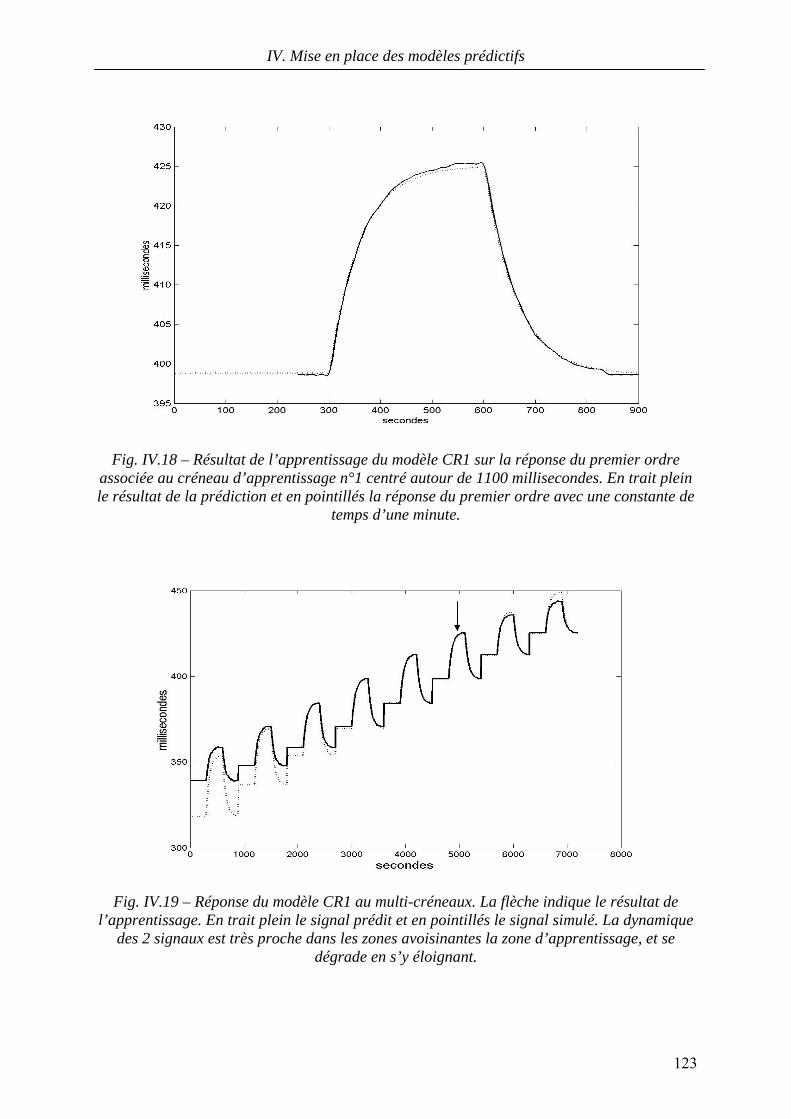
IV. Mise en place des modèles prédictifs
123
Fig. IV.19 – Réponse du modèle CR1 au multi-créneaux. La flèche indique le résultat de
l’apprentissage. En trait plein le signal prédit et en pointillés le signal simulé. La dynamique des 2 signaux est très proche dans les zones avoisinantes la zone d’apprentissage, et se
dégrade en s’y éloignant.
Fig. IV.18 – Résultat de l’apprentissage du modèle CR1 sur la réponse du premier ordre
associée au créneau d’apprentissage n°1 centré autour de 1100 millisecondes. En trait plein le résultat de la prédiction et en pointillés la réponse du premier ordre avec une constante de
temps d’une minute.
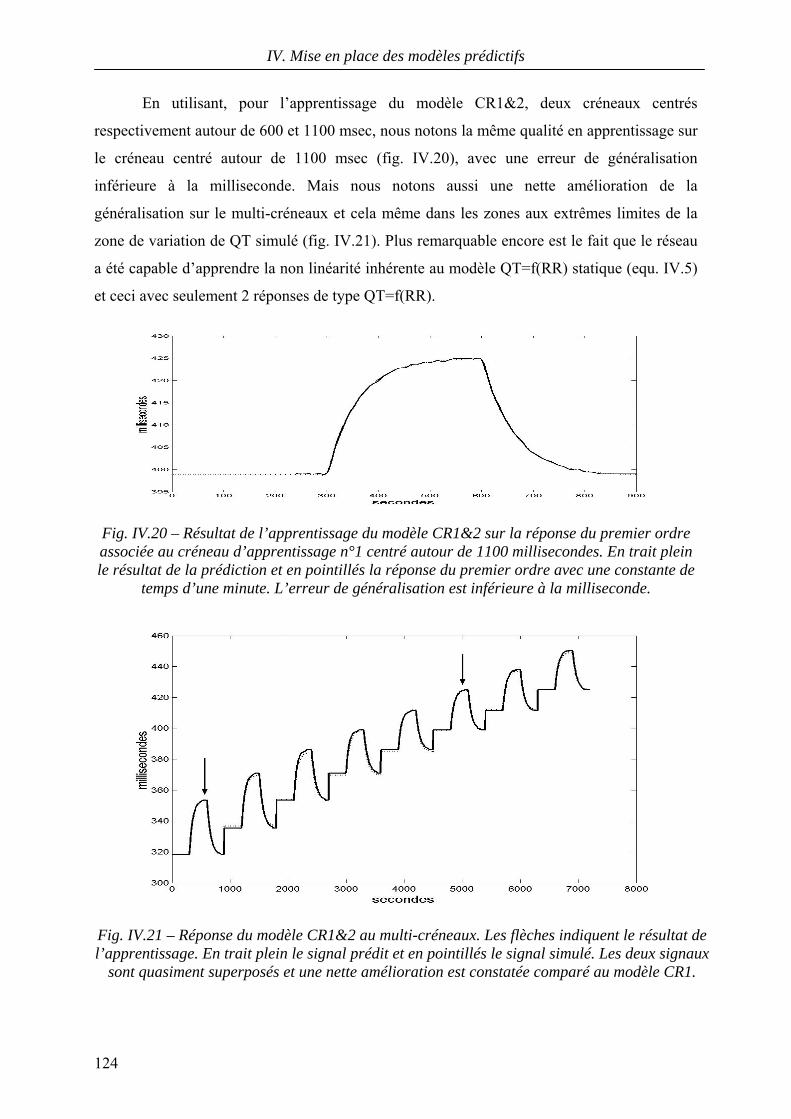
IV. Mise en place des modèles prédictifs
124
En utilisant, pour l’apprentissage du modèle CR1&2, deux créneaux centrés
respectivement autour de 600 et 1100 msec, nous notons la même qualité en apprentissage sur
le créneau centré autour de 1100 msec (fig. IV.20), avec une erreur de généralisation
inférieure à la milliseconde. Mais nous notons aussi une nette amélioration de la
généralisation sur le multi-créneaux et cela même dans les zones aux extrêmes limites de la
zone de variation de QT simulé (fig. IV.21). Plus remarquable encore est le fait que le réseau
a été capable d’apprendre la non linéarité inhérente au modèle QT=f(RR) statique (equ. IV.5)
et ceci avec seulement 2 réponses de type QT=f(RR).
Fig. IV.20 – Résultat de l’apprentissage du modèle CR1&2 sur la réponse du premier ordre associée au créneau d’apprentissage n°1 centré autour de 1100 millisecondes. En trait plein le résultat de la prédiction et en pointillés la réponse du premier ordre avec une constante de
temps d’une minute. L’erreur de généralisation est inférieure à la milliseconde.
Fig. IV.21 – Réponse du modèle CR1&2 au multi-créneaux. Les flèches indiquent le résultat de l’apprentissage. En trait plein le signal prédit et en pointillés le signal simulé. Les deux signaux
sont quasiment superposés et une nette amélioration est constatée comparé au modèle CR1.
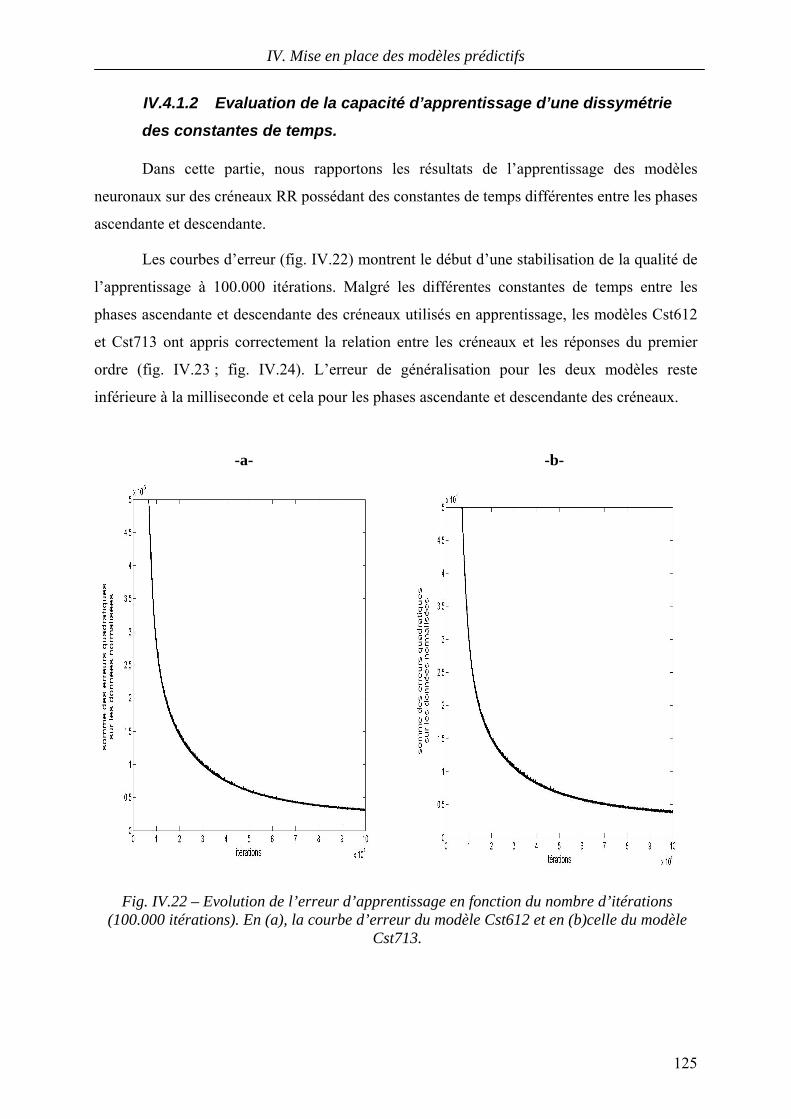
IV. Mise en place des modèles prédictifs
125
IV.4.1.2 Evaluation de la capacité d’apprentissage d’une dissymétrie
des constantes de temps.
Dans cette partie, nous rapportons les résultats de l’apprentissage des modèles
neuronaux sur des créneaux RR possédant des constantes de temps différentes entre les phases
ascendante et descendante.
Les courbes d’erreur (fig. IV.22) montrent le début d’une stabilisation de la qualité de
l’apprentissage à 100.000 itérations. Malgré les différentes constantes de temps entre les
phases ascendante et descendante des créneaux utilisés en apprentissage, les modèles Cst612
et Cst713 ont appris correctement la relation entre les créneaux et les réponses du premier
ordre (fig. IV.23 ; fig. IV.24). L’erreur de généralisation pour les deux modèles reste
inférieure à la milliseconde et cela pour les phases ascendante et descendante des créneaux.
-a- -b-
Fig. IV.22 – Evolution de l’erreur d’apprentissage en fonction du nombre d’itérations (100.000 itérations). En (a), la courbe d’erreur du modèle Cst612 et en (b)celle du modèle
Cst713.
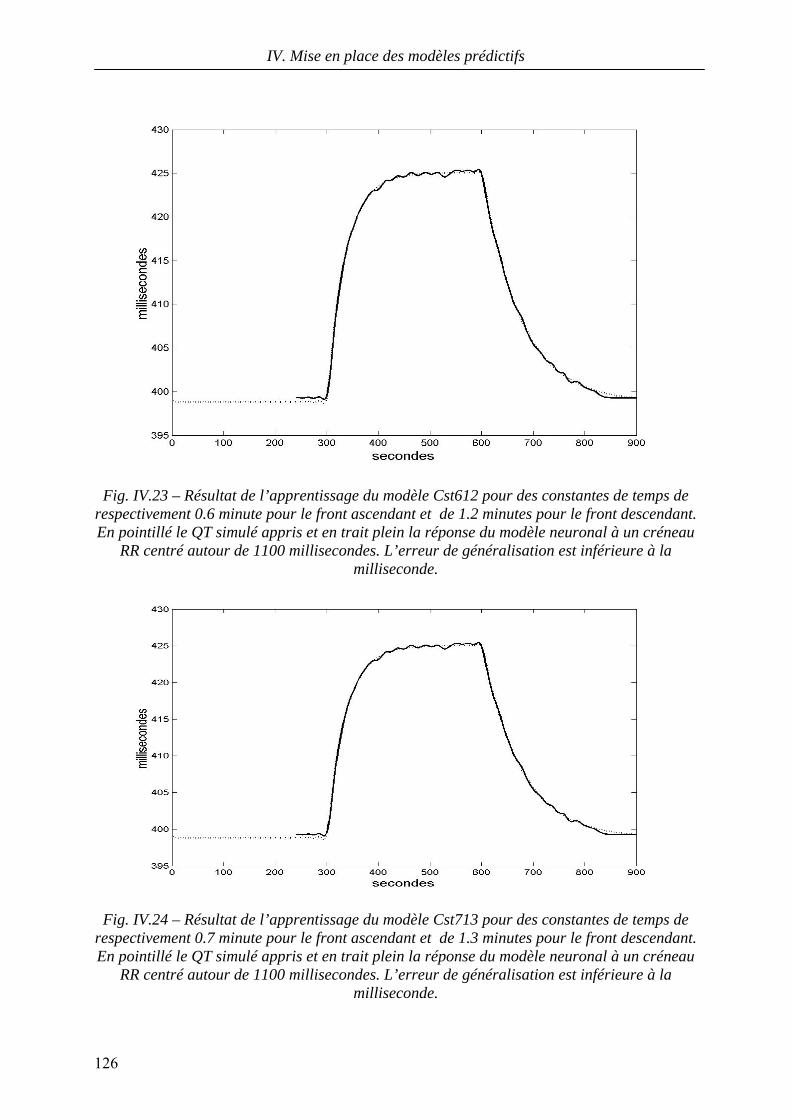
IV. Mise en place des modèles prédictifs
126
Fig. IV.23 – Résultat de l’apprentissage du modèle Cst612 pour des constantes de temps de
respectivement 0.6 minute pour le front ascendant et de 1.2 minutes pour le front descendant. En pointillé le QT simulé appris et en trait plein la réponse du modèle neuronal à un créneau
RR centré autour de 1100 millisecondes. L’erreur de généralisation est inférieure à la milliseconde.
Fig. IV.24 – Résultat de l’apprentissage du modèle Cst713 pour des constantes de temps de
respectivement 0.7 minute pour le front ascendant et de 1.3 minutes pour le front descendant. En pointillé le QT simulé appris et en trait plein la réponse du modèle neuronal à un créneau
RR centré autour de 1100 millisecondes. L’erreur de généralisation est inférieure à la milliseconde.
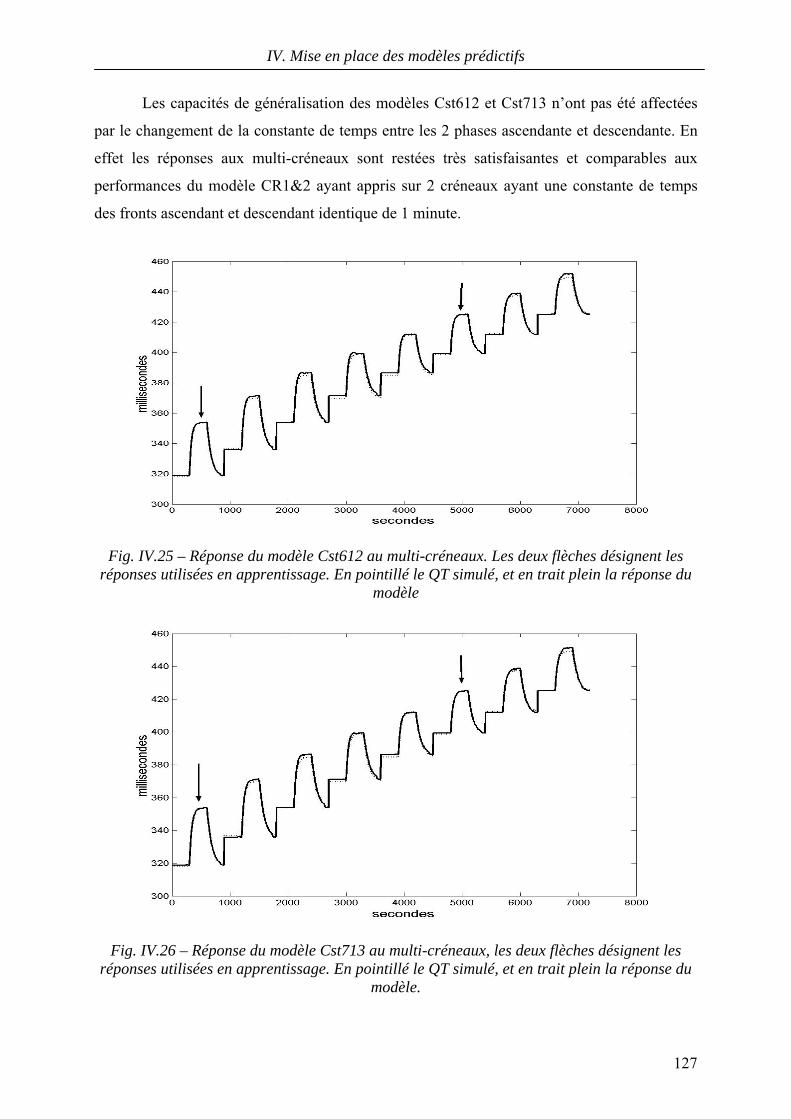
IV. Mise en place des modèles prédictifs
127
Les capacités de généralisation des modèles Cst612 et Cst713 n’ont pas été affectées
par le changement de la constante de temps entre les 2 phases ascendante et descendante. En
effet les réponses aux multi-créneaux sont restées très satisfaisantes et comparables aux
performances du modèle CR1&2 ayant appris sur 2 créneaux ayant une constante de temps
des fronts ascendant et descendant identique de 1 minute.
Fig. IV.25 – Réponse du modèle Cst612 au multi-créneaux. Les deux flèches désignent les
réponses utilisées en apprentissage. En pointillé le QT simulé, et en trait plein la réponse du modèle
Fig. IV.26 – Réponse du modèle Cst713 au multi-créneaux, les deux flèches désignent les
réponses utilisées en apprentissage. En pointillé le QT simulé, et en trait plein la réponse du modèle.
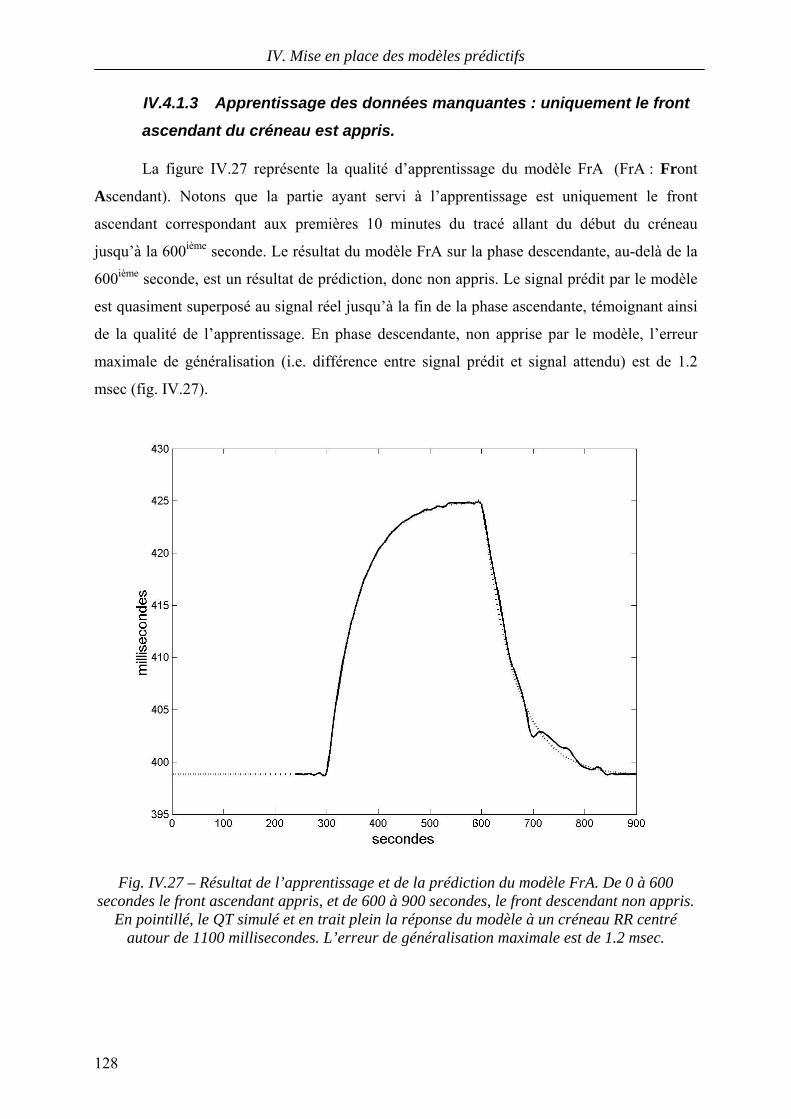
IV. Mise en place des modèles prédictifs
128
IV.4.1.3 Apprentissage des données manquantes : uniquement le front
ascendant du créneau est appris.
La figure IV.27 représente la qualité d’apprentissage du modèle FrA (FrA : Front
Ascendant). Notons que la partie ayant servi à l’apprentissage est uniquement le front
ascendant correspondant aux premières 10 minutes du tracé allant du début du créneau
jusqu’à la 600ième seconde. Le résultat du modèle FrA sur la phase descendante, au-delà de la
600ième seconde, est un résultat de prédiction, donc non appris. Le signal prédit par le modèle
est quasiment superposé au signal réel jusqu’à la fin de la phase ascendante, témoignant ainsi
de la qualité de l’apprentissage. En phase descendante, non apprise par le modèle, l’erreur
maximale de généralisation (i.e. différence entre signal prédit et signal attendu) est de 1.2
msec (fig. IV.27).
Fig. IV.27 – Résultat de l’apprentissage et de la prédiction du modèle FrA. De 0 à 600
secondes le front ascendant appris, et de 600 à 900 secondes, le front descendant non appris. En pointillé, le QT simulé et en trait plein la réponse du modèle à un créneau RR centré
autour de 1100 millisecondes. L’erreur de généralisation maximale est de 1.2 msec.
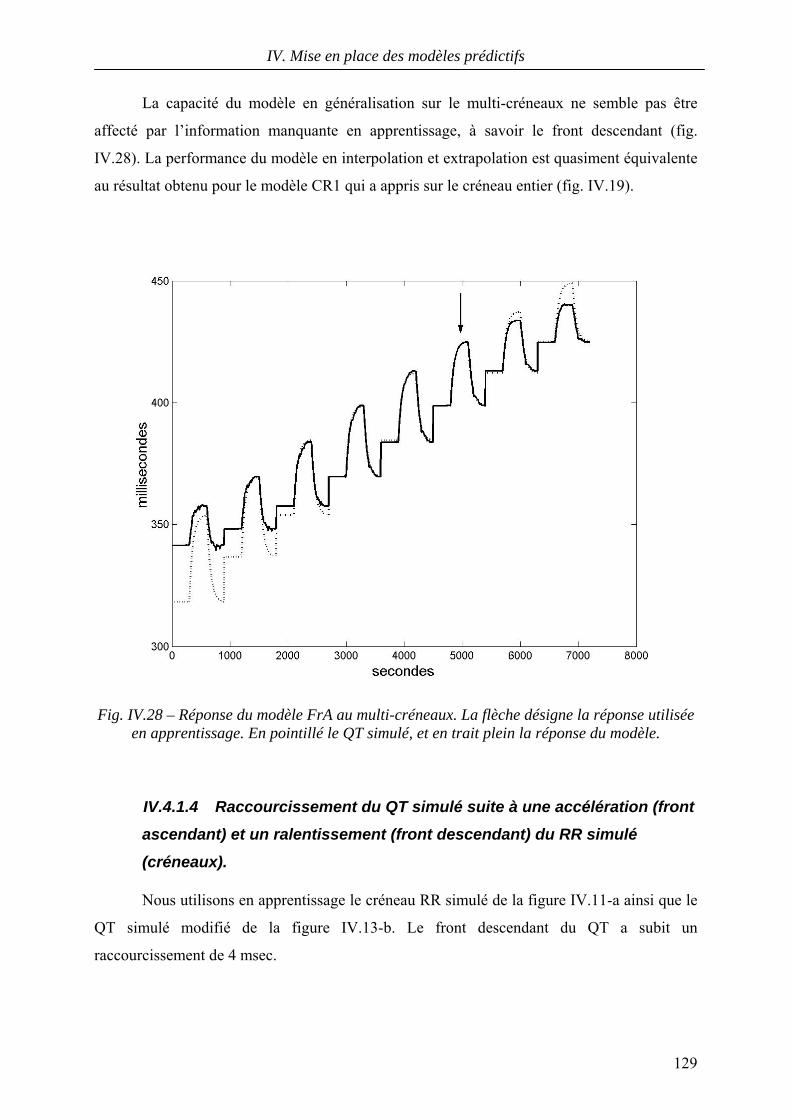
IV. Mise en place des modèles prédictifs
129
La capacité du modèle en généralisation sur le multi-créneaux ne semble pas être
affecté par l’information manquante en apprentissage, à savoir le front descendant (fig.
IV.28). La performance du modèle en interpolation et extrapolation est quasiment équivalente
au résultat obtenu pour le modèle CR1 qui a appris sur le créneau entier (fig. IV.19).
Fig. IV.28 – Réponse du modèle FrA au multi-créneaux. La flèche désigne la réponse utilisée
en apprentissage. En pointillé le QT simulé, et en trait plein la réponse du modèle.
IV.4.1.4 Raccourcissement du QT simulé suite à une accélération (front
ascendant) et un ralentissement (front descendant) du RR simulé
(créneaux).
Nous utilisons en apprentissage le créneau RR simulé de la figure IV.11-a ainsi que le
QT simulé modifié de la figure IV.13-b. Le front descendant du QT a subit un
raccourcissement de 4 msec.
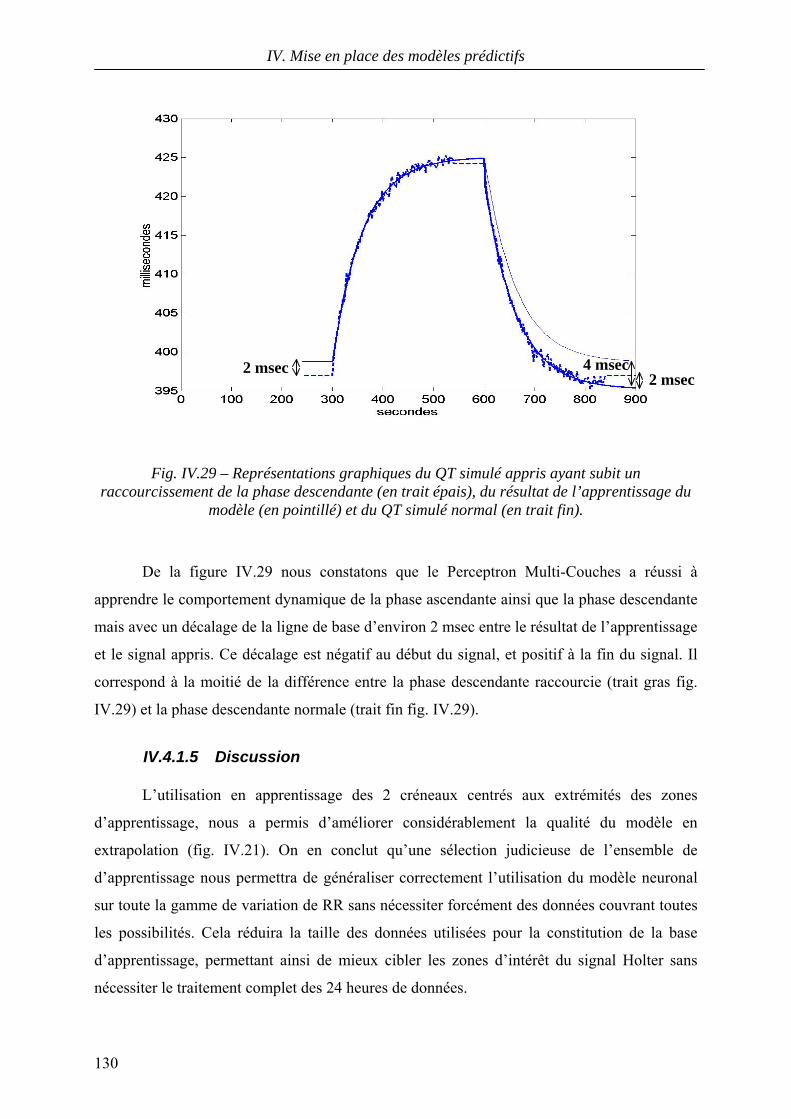
IV. Mise en place des modèles prédictifs
130
Fig. IV.29 – Représentations graphiques du QT simulé appris ayant subit un raccourcissement de la phase descendante (en trait épais), du résultat de l’apprentissage du
modèle (en pointillé) et du QT simulé normal (en trait fin).
De la figure IV.29 nous constatons que le Perceptron Multi-Couches a réussi à
apprendre le comportement dynamique de la phase ascendante ainsi que la phase descendante
mais avec un décalage de la ligne de base d’environ 2 msec entre le résultat de l’apprentissage
et le signal appris. Ce décalage est négatif au début du signal, et positif à la fin du signal. Il
correspond à la moitié de la différence entre la phase descendante raccourcie (trait gras fig.
IV.29) et la phase descendante normale (trait fin fig. IV.29).
IV.4.1.5 Discussion
L’utilisation en apprentissage des 2 créneaux centrés aux extrémités des zones
d’apprentissage, nous a permis d’améliorer considérablement la qualité du modèle en
extrapolation (fig. IV.21). On en conclut qu’une sélection judicieuse de l’ensemble de
d’apprentissage nous permettra de généraliser correctement l’utilisation du modèle neuronal
sur toute la gamme de variation de RR sans nécessiter forcément des données couvrant toutes
les possibilités. Cela réduira la taille des données utilisées pour la constitution de la base
d’apprentissage, permettant ainsi de mieux cibler les zones d’intérêt du signal Holter sans
nécessiter le traitement complet des 24 heures de données.
2 msec 4 msec2 msec
IV. Mise en place des modèles prédictifs
131
Le choix de la constante de temps d’une minute du système simulé, est un choix basé
sur des études invasives. Cette valeur peut être patient-dépendante et peut aussi être sujette à
des variations induites par un effort et donc varier avec les phases d’accélération et de
ralentissement de la fréquence cardiaque. Le changement de la constante de temps pendant la
phase d’apprentissage n’a pas eu une influence notable sur les performances des modèles
Cst612 et Cst713 ni en apprentissage ni en généralisation sur le multi-créneaux (fig. IV.25 ;
fig. IV.26). Les valeurs des constantes de temps utilisées dans notre étude sont proches des
valeurs plausibles du modèle réel QT=f(RR). Les variations de la fréquence cardiaque
induisant des changements de la constante de temps pendant l’apprentissage ne devraient pas
être la cause d’une détérioration de la qualité de l’apprentissage ni de la qualité de la
généralisation lors de l’utilisation de séquences réelles.
Le raccourcissement du QT suite à une modification de la fréquence cardiaque peut se
produire chez des patients atteints d’un bloc de branche complet « complete heart block »
[Lau, 1989]. Les réseaux de neurones ont montré leur capacité à apprendre une séquence
comportant de tels changements, et nos résultats indiquent que nos modèles prédictifs sont
aussi capables de les détecter.
Le Perceptron Multi-Couches prédit correctement la phase descendante du créneau
sans l’avoir réellement apprise comme le montre le modèle FrA (fig. IV.27). Dans le cas
simple d’un créneau, l’information existante dans la phase ascendance semble être suffisante
pour une bonne généralisation sur la phase descendante. Cette hypothèse est à vérifier sur les
séquences Holter car les mécanismes impliqués dans la phase d’accélération cardiaque
pourraient être différents de ceux impliqués dans la phase de ralentissement pour certaines
pathologies.
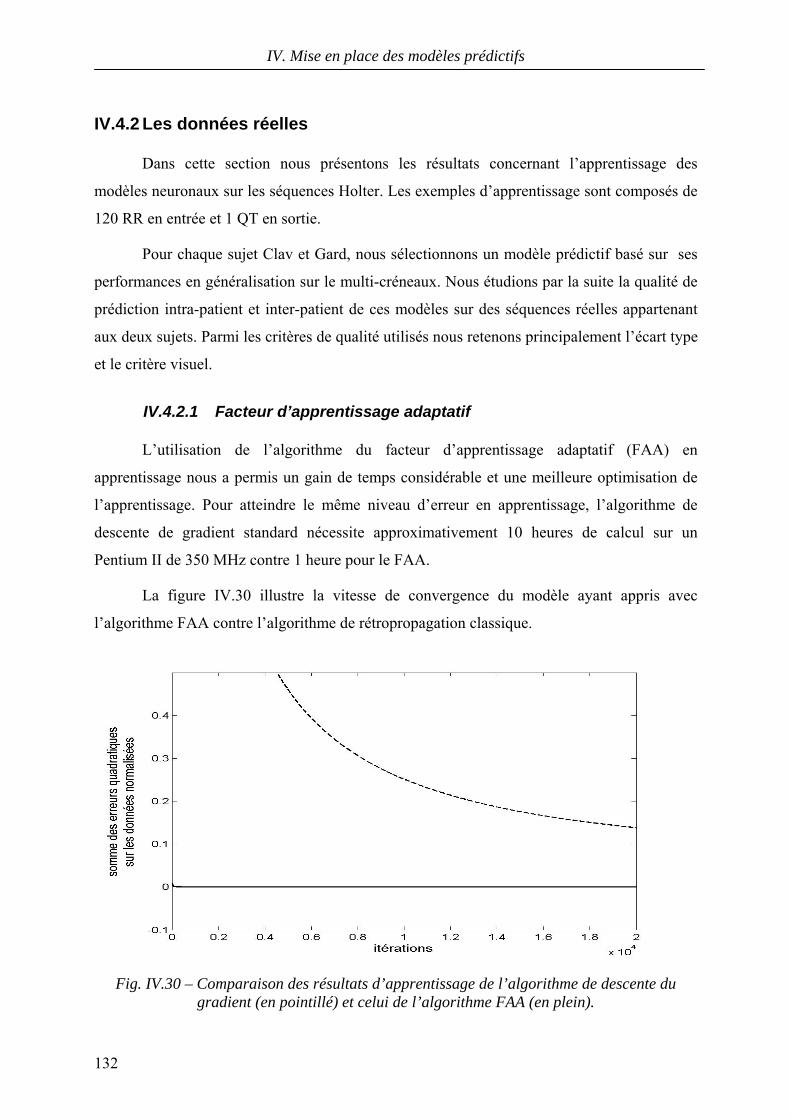
IV. Mise en place des modèles prédictifs
132
IV.4.2 Les données réelles
Dans cette section nous présentons les résultats concernant l’apprentissage des
modèles neuronaux sur les séquences Holter. Les exemples d’apprentissage sont composés de
120 RR en entrée et 1 QT en sortie.
Pour chaque sujet Clav et Gard, nous sélectionnons un modèle prédictif basé sur ses
performances en généralisation sur le multi-créneaux. Nous étudions par la suite la qualité de
prédiction intra-patient et inter-patient de ces modèles sur des séquences réelles appartenant
aux deux sujets. Parmi les critères de qualité utilisés nous retenons principalement l’écart type
et le critère visuel.
IV.4.2.1 Facteur d’apprentissage adaptatif
L’utilisation de l’algorithme du facteur d’apprentissage adaptatif (FAA) en
apprentissage nous a permis un gain de temps considérable et une meilleure optimisation de
l’apprentissage. Pour atteindre le même niveau d’erreur en apprentissage, l’algorithme de
descente de gradient standard nécessite approximativement 10 heures de calcul sur un
Pentium II de 350 MHz contre 1 heure pour le FAA.
La figure IV.30 illustre la vitesse de convergence du modèle ayant appris avec
l’algorithme FAA contre l’algorithme de rétropropagation classique.
Fig. IV.30 – Comparaison des résultats d’apprentissage de l’algorithme de descente du
gradient (en pointillé) et celui de l’algorithme FAA (en plein).
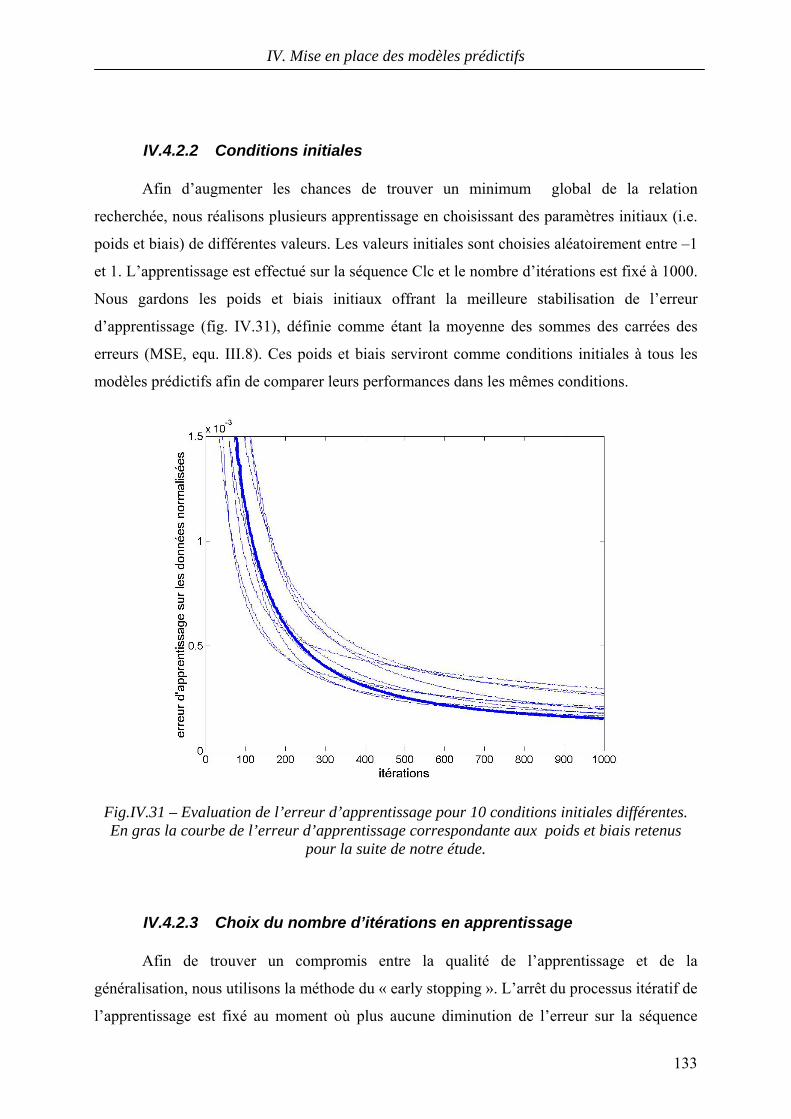
IV. Mise en place des modèles prédictifs
133
IV.4.2.2 Conditions initiales
Afin d’augmenter les chances de trouver un minimum global de la relation
recherchée, nous réalisons plusieurs apprentissage en choisissant des paramètres initiaux (i.e.
poids et biais) de différentes valeurs. Les valeurs initiales sont choisies aléatoirement entre –1
et 1. L’apprentissage est effectué sur la séquence Clc et le nombre d’itérations est fixé à 1000.
Nous gardons les poids et biais initiaux offrant la meilleure stabilisation de l’erreur
d’apprentissage (fig. IV.31), définie comme étant la moyenne des sommes des carrées des
erreurs (MSE, equ. III.8). Ces poids et biais serviront comme conditions initiales à tous les
modèles prédictifs afin de comparer leurs performances dans les mêmes conditions.
Fig.IV.31 – Evaluation de l’erreur d’apprentissage pour 10 conditions initiales différentes. En gras la courbe de l’erreur d’apprentissage correspondante aux poids et biais retenus
pour la suite de notre étude.
IV.4.2.3 Choix du nombre d’itérations en apprentissage
Afin de trouver un compromis entre la qualité de l’apprentissage et de la
généralisation, nous utilisons la méthode du « early stopping ». L’arrêt du processus itératif de
l’apprentissage est fixé au moment où plus aucune diminution de l’erreur sur la séquence
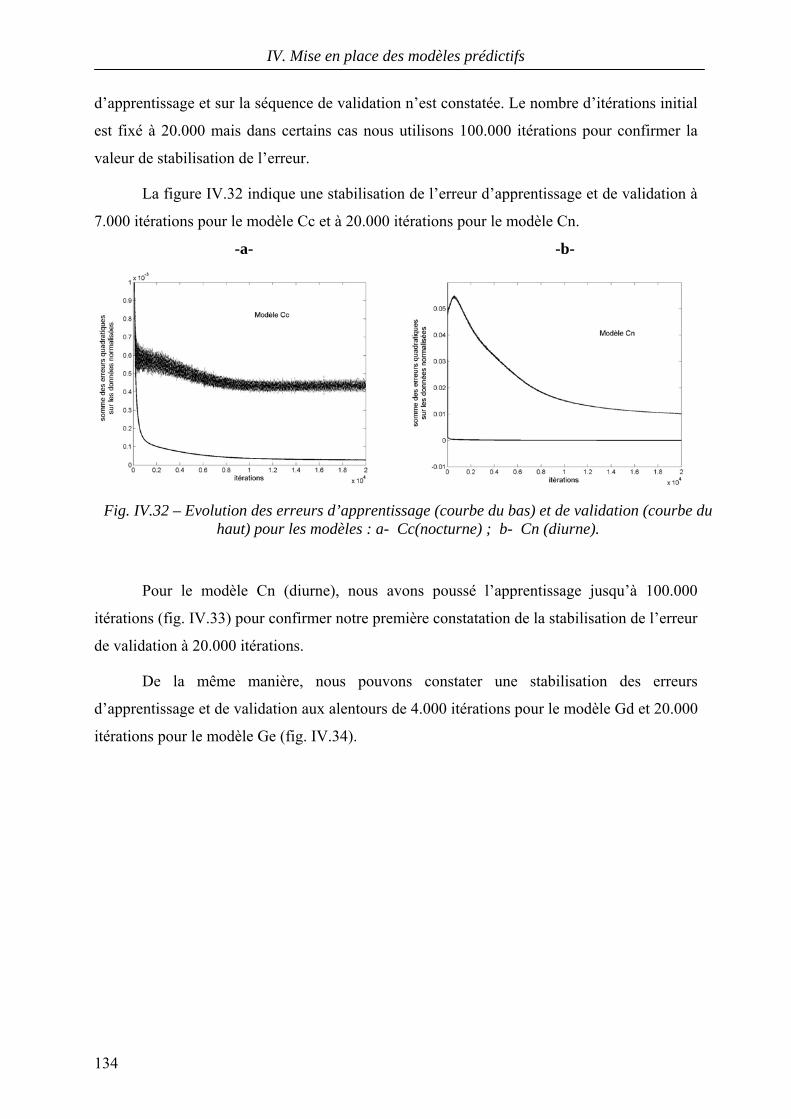
IV. Mise en place des modèles prédictifs
134
d’apprentissage et sur la séquence de validation n’est constatée. Le nombre d’itérations initial
est fixé à 20.000 mais dans certains cas nous utilisons 100.000 itérations pour confirmer la
valeur de stabilisation de l’erreur.
La figure IV.32 indique une stabilisation de l’erreur d’apprentissage et de validation à
7.000 itérations pour le modèle Cc et à 20.000 itérations pour le modèle Cn.
-a- -b-
Fig. IV.32 – Evolution des erreurs d’apprentissage (courbe du bas) et de validation (courbe du
haut) pour les modèles : a- Cc(nocturne) ; b- Cn (diurne).
Pour le modèle Cn (diurne), nous avons poussé l’apprentissage jusqu’à 100.000
itérations (fig. IV.33) pour confirmer notre première constatation de la stabilisation de l’erreur
de validation à 20.000 itérations.
De la même manière, nous pouvons constater une stabilisation des erreurs
d’apprentissage et de validation aux alentours de 4.000 itérations pour le modèle Gd et 20.000
itérations pour le modèle Ge (fig. IV.34).
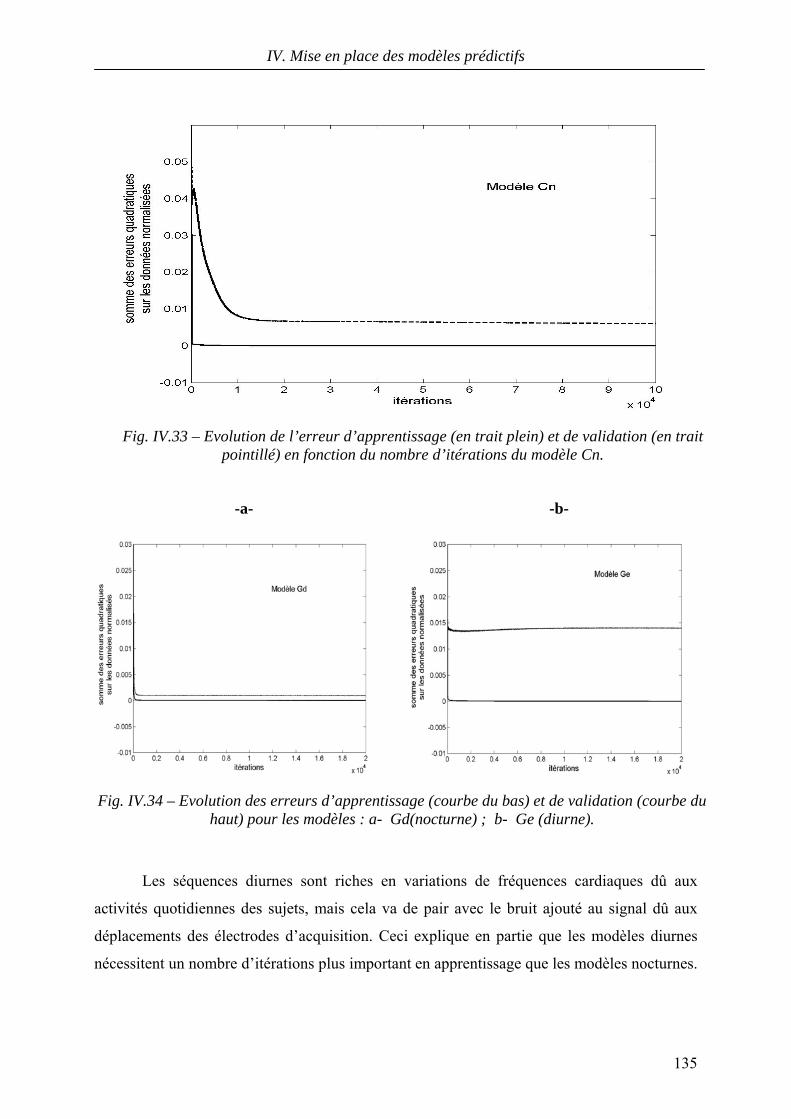
IV. Mise en place des modèles prédictifs
135
Fig. IV.33 – Evolution de l’erreur d’apprentissage (en trait plein) et de validation (en trait pointillé) en fonction du nombre d’itérations du modèle Cn.
-a- -b-
Fig. IV.34 – Evolution des erreurs d’apprentissage (courbe du bas) et de validation (courbe du haut) pour les modèles : a- Gd(nocturne) ; b- Ge (diurne).
Les séquences diurnes sont riches en variations de fréquences cardiaques dû aux
activités quotidiennes des sujets, mais cela va de pair avec le bruit ajouté au signal dû aux
déplacements des électrodes d’acquisition. Ceci explique en partie que les modèles diurnes
nécessitent un nombre d’itérations plus important en apprentissage que les modèles nocturnes.
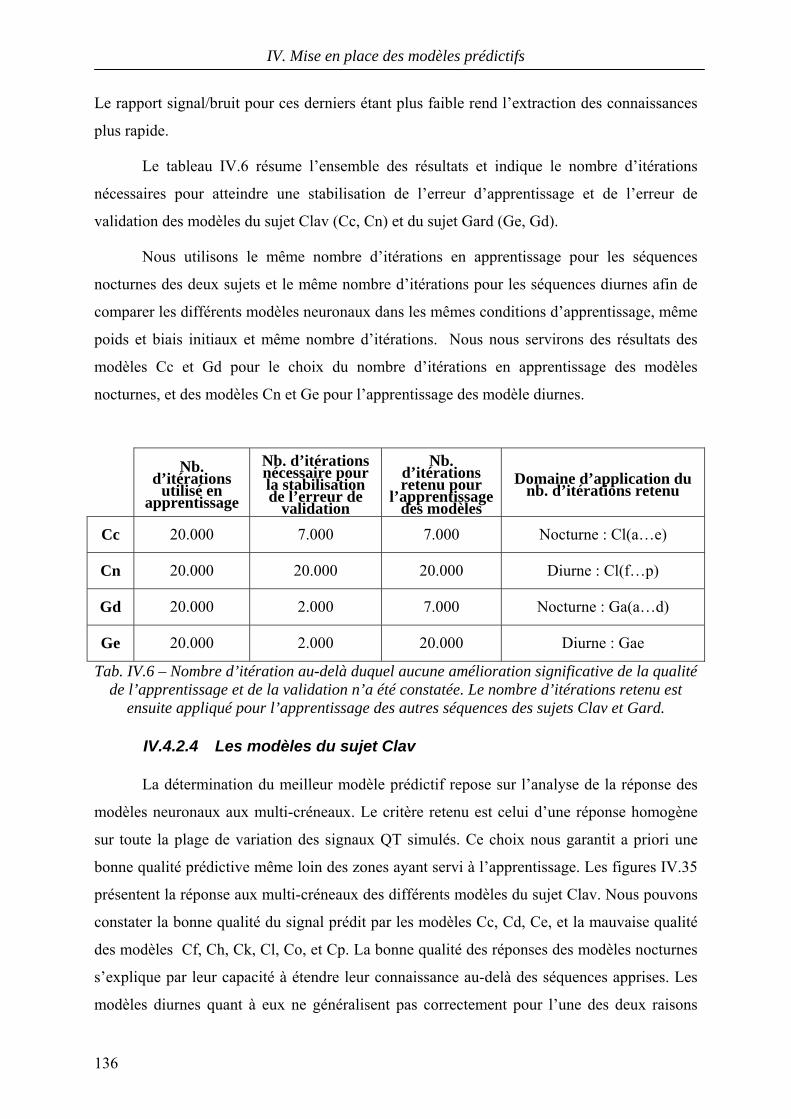
IV. Mise en place des modèles prédictifs
136
Le rapport signal/bruit pour ces derniers étant plus faible rend l’extraction des connaissances
plus rapide.
Le tableau IV.6 résume l’ensemble des résultats et indique le nombre d’itérations
nécessaires pour atteindre une stabilisation de l’erreur d’apprentissage et de l’erreur de
validation des modèles du sujet Clav (Cc, Cn) et du sujet Gard (Ge, Gd).
Nous utilisons le même nombre d’itérations en apprentissage pour les séquences
nocturnes des deux sujets et le même nombre d’itérations pour les séquences diurnes afin de
comparer les différents modèles neuronaux dans les mêmes conditions d’apprentissage, même
poids et biais initiaux et même nombre d’itérations. Nous nous servirons des résultats des
modèles Cc et Gd pour le choix du nombre d’itérations en apprentissage des modèles
nocturnes, et des modèles Cn et Ge pour l’apprentissage des modèle diurnes.
Nb. d’itérations
utilisé en apprentissage
Nb. d’itérations nécessaire pour la stabilisation de l’erreur de
validation
Nb. d’itérations retenu pour
l’apprentissage des modèles
Domaine d’application du nb. d’itérations retenu
Cc 20.000 7.000 7.000 Nocturne : Cl(a…e)
Cn 20.000 20.000 20.000 Diurne : Cl(f…p)
Gd 20.000 2.000 7.000 Nocturne : Ga(a…d)
Ge 20.000 2.000 20.000 Diurne : Gae
Tab. IV.6 – Nombre d’itération au-delà duquel aucune amélioration significative de la qualité de l’apprentissage et de la validation n’a été constatée. Le nombre d’itérations retenu est
ensuite appliqué pour l’apprentissage des autres séquences des sujets Clav et Gard.
IV.4.2.4 Les modèles du sujet Clav
La détermination du meilleur modèle prédictif repose sur l’analyse de la réponse des
modèles neuronaux aux multi-créneaux. Le critère retenu est celui d’une réponse homogène
sur toute la plage de variation des signaux QT simulés. Ce choix nous garantit a priori une
bonne qualité prédictive même loin des zones ayant servi à l’apprentissage. Les figures IV.35
présentent la réponse aux multi-créneaux des différents modèles du sujet Clav. Nous pouvons
constater la bonne qualité du signal prédit par les modèles Cc, Cd, Ce, et la mauvaise qualité
des modèles Cf, Ch, Ck, Cl, Co, et Cp. La bonne qualité des réponses des modèles nocturnes
s’explique par leur capacité à étendre leur connaissance au-delà des séquences apprises. Les
modèles diurnes quant à eux ne généralisent pas correctement pour l’une des deux raisons
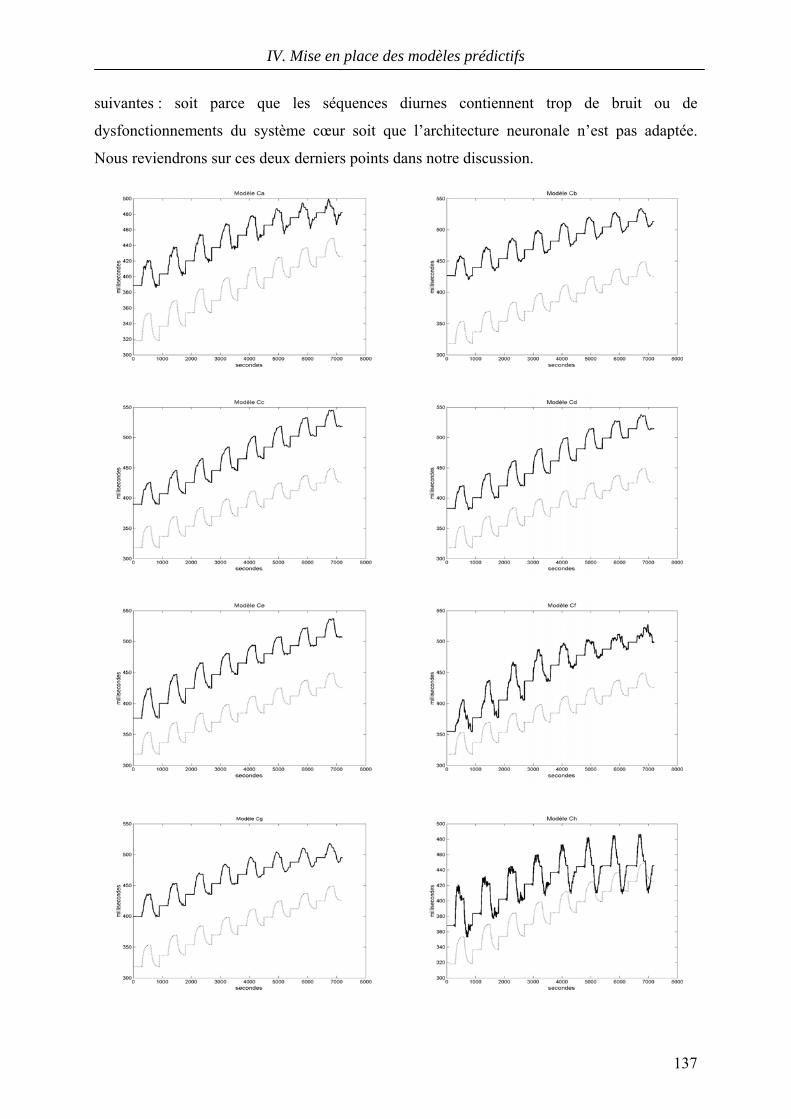
IV. Mise en place des modèles prédictifs
137
suivantes : soit parce que les séquences diurnes contiennent trop de bruit ou de
dysfonctionnements du système cœur soit que l’architecture neuronale n’est pas adaptée.
Nous reviendrons sur ces deux derniers points dans notre discussion.
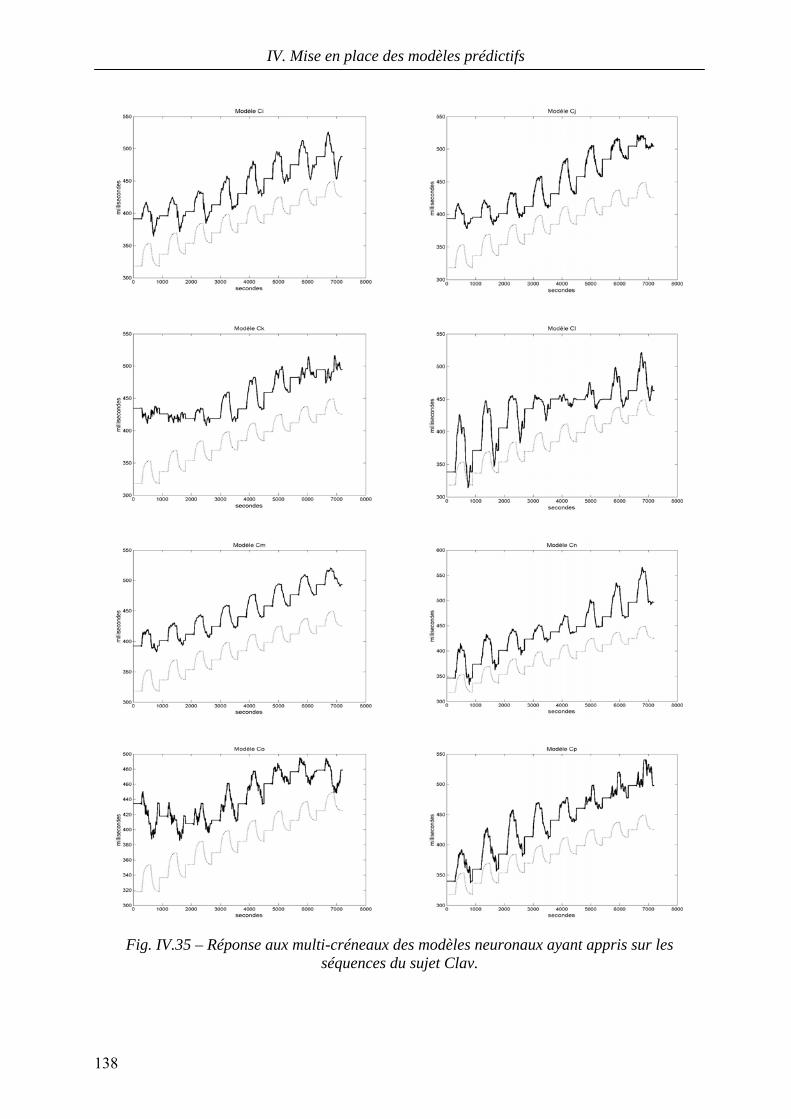
IV. Mise en place des modèles prédictifs
138
Fig. IV.35 – Réponse aux multi-créneaux des modèles neuronaux ayant appris sur les séquences du sujet Clav.
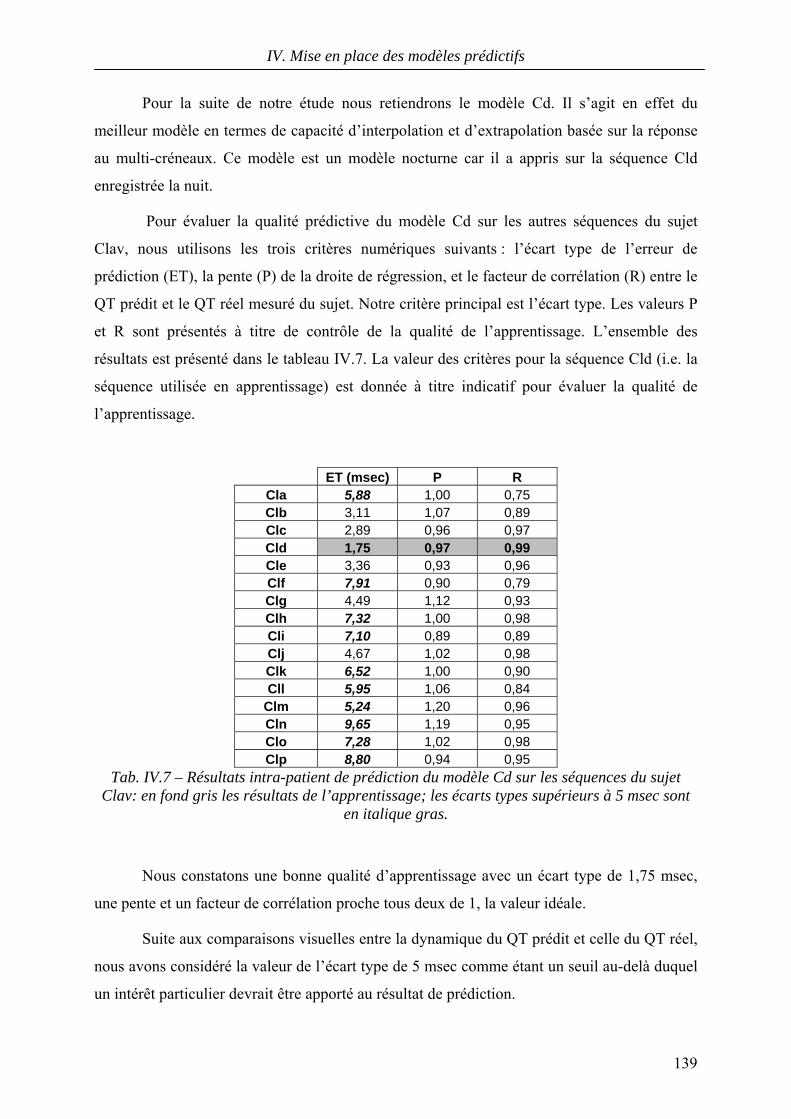
IV. Mise en place des modèles prédictifs
139
Pour la suite de notre étude nous retiendrons le modèle Cd. Il s’agit en effet du
meilleur modèle en termes de capacité d’interpolation et d’extrapolation basée sur la réponse
au multi-créneaux. Ce modèle est un modèle nocturne car il a appris sur la séquence Cld
enregistrée la nuit.
Pour évaluer la qualité prédictive du modèle Cd sur les autres séquences du sujet
Clav, nous utilisons les trois critères numériques suivants : l’écart type de l’erreur de
prédiction (ET), la pente (P) de la droite de régression, et le facteur de corrélation (R) entre le
QT prédit et le QT réel mesuré du sujet. Notre critère principal est l’écart type. Les valeurs P
et R sont présentés à titre de contrôle de la qualité de l’apprentissage. L’ensemble des
résultats est présenté dans le tableau IV.7. La valeur des critères pour la séquence Cld (i.e. la
séquence utilisée en apprentissage) est donnée à titre indicatif pour évaluer la qualité de
l’apprentissage.
ET (msec) P R Cla 5,88 1,00 0,75 Clb 3,11 1,07 0,89 Clc 2,89 0,96 0,97 Cld 1,75 0,97 0,99 Cle 3,36 0,93 0,96 Clf 7,91 0,90 0,79 Clg 4,49 1,12 0,93 Clh 7,32 1,00 0,98 Cli 7,10 0,89 0,89 Clj 4,67 1,02 0,98 Clk 6,52 1,00 0,90 Cll 5,95 1,06 0,84
Clm 5,24 1,20 0,96 Cln 9,65 1,19 0,95 Clo 7,28 1,02 0,98 Clp 8,80 0,94 0,95
Tab. IV.7 – Résultats intra-patient de prédiction du modèle Cd sur les séquences du sujet Clav: en fond gris les résultats de l’apprentissage; les écarts types supérieurs à 5 msec sont
en italique gras.
Nous constatons une bonne qualité d’apprentissage avec un écart type de 1,75 msec,
une pente et un facteur de corrélation proche tous deux de 1, la valeur idéale.
Suite aux comparaisons visuelles entre la dynamique du QT prédit et celle du QT réel,
nous avons considéré la valeur de l’écart type de 5 msec comme étant un seuil au-delà duquel
un intérêt particulier devrait être apporté au résultat de prédiction.
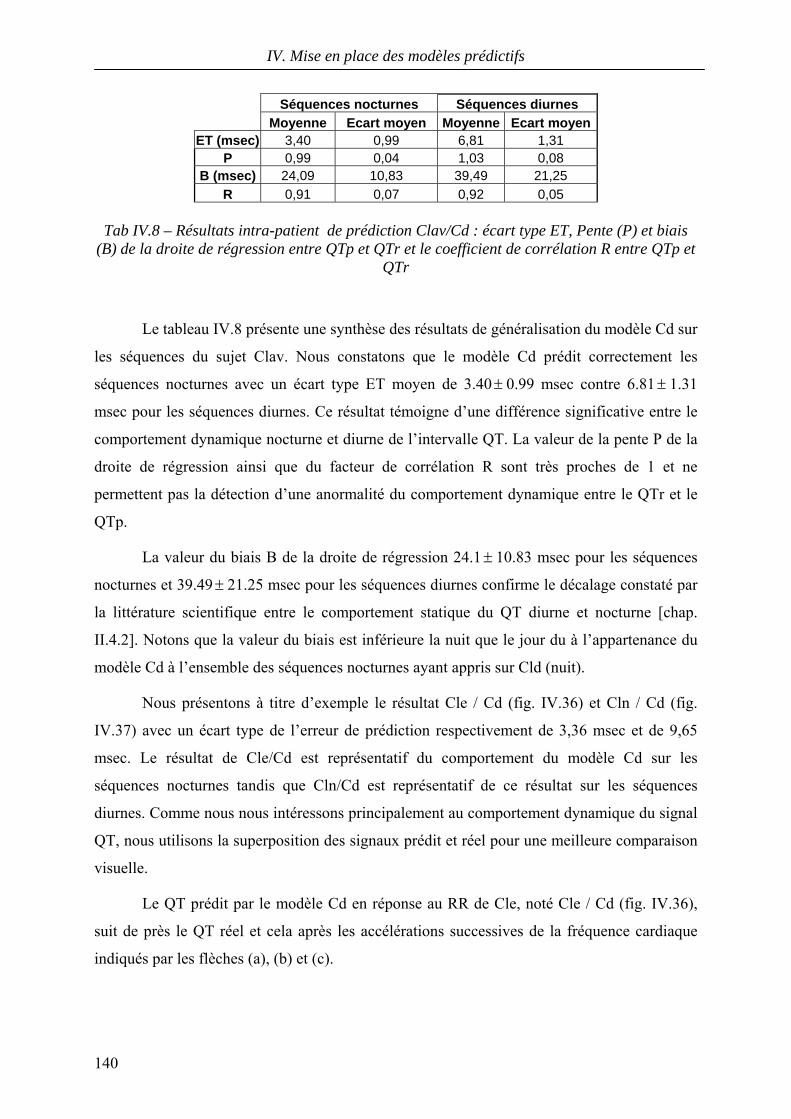
IV. Mise en place des modèles prédictifs
140
Séquences nocturnes Séquences diurnes Moyenne Ecart moyen Moyenne Ecart moyen ET (msec) 3,40 0,99 6,81 1,31
P 0,99 0,04 1,03 0,08 B (msec) 24,09 10,83 39,49 21,25
R 0,91 0,07 0,92 0,05
Tab IV.8 – Résultats intra-patient de prédiction Clav/Cd : écart type ET, Pente (P) et biais (B) de la droite de régression entre QTp et QTr et le coefficient de corrélation R entre QTp et
QTr
Le tableau IV.8 présente une synthèse des résultats de généralisation du modèle Cd sur
les séquences du sujet Clav. Nous constatons que le modèle Cd prédit correctement les
séquences nocturnes avec un écart type ET moyen de 3.40 ± 0.99 msec contre 6.81 ± 1.31
msec pour les séquences diurnes. Ce résultat témoigne d’une différence significative entre le
comportement dynamique nocturne et diurne de l’intervalle QT. La valeur de la pente P de la
droite de régression ainsi que du facteur de corrélation R sont très proches de 1 et ne
permettent pas la détection d’une anormalité du comportement dynamique entre le QTr et le
QTp.
La valeur du biais B de la droite de régression 24.1 ± 10.83 msec pour les séquences
nocturnes et 39.49 ± 21.25 msec pour les séquences diurnes confirme le décalage constaté par
la littérature scientifique entre le comportement statique du QT diurne et nocturne [chap.
II.4.2]. Notons que la valeur du biais est inférieure la nuit que le jour du à l’appartenance du
modèle Cd à l’ensemble des séquences nocturnes ayant appris sur Cld (nuit).
Nous présentons à titre d’exemple le résultat Cle / Cd (fig. IV.36) et Cln / Cd (fig.
IV.37) avec un écart type de l’erreur de prédiction respectivement de 3,36 msec et de 9,65
msec. Le résultat de Cle/Cd est représentatif du comportement du modèle Cd sur les
séquences nocturnes tandis que Cln/Cd est représentatif de ce résultat sur les séquences
diurnes. Comme nous nous intéressons principalement au comportement dynamique du signal
QT, nous utilisons la superposition des signaux prédit et réel pour une meilleure comparaison
visuelle.
Le QT prédit par le modèle Cd en réponse au RR de Cle, noté Cle / Cd (fig. IV.36),
suit de près le QT réel et cela après les accélérations successives de la fréquence cardiaque
indiqués par les flèches (a), (b) et (c).
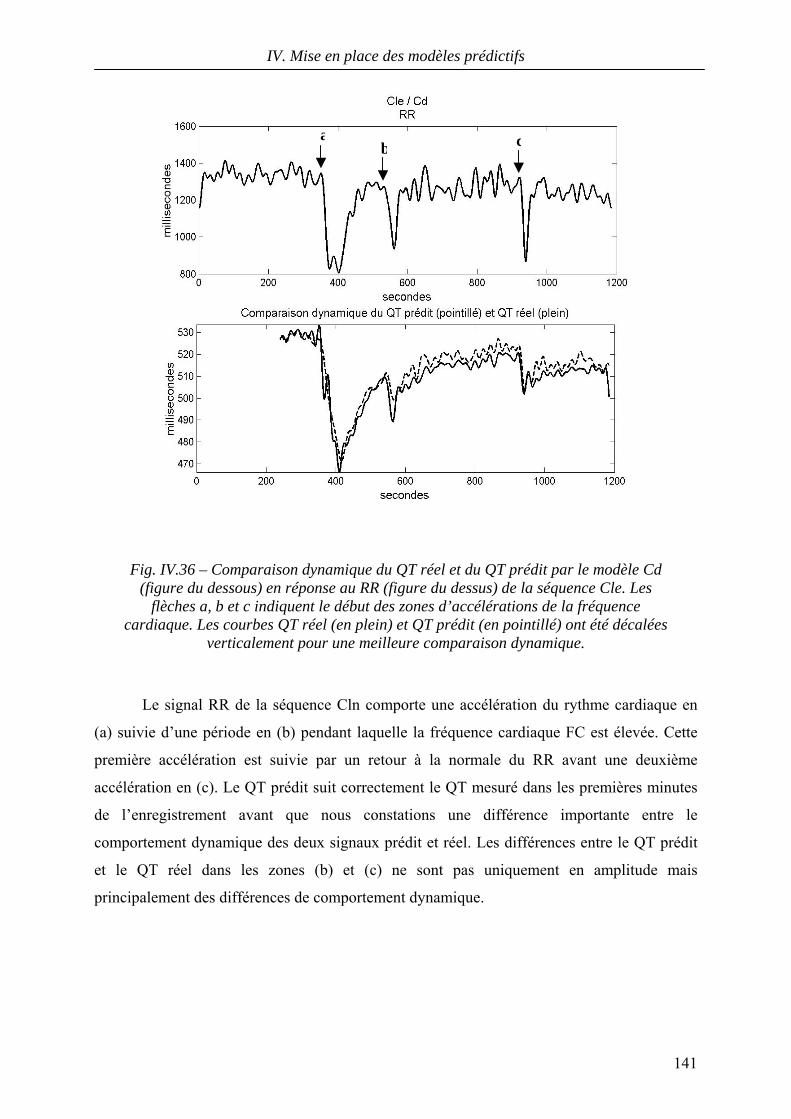
IV. Mise en place des modèles prédictifs
141
Fig. IV.36 – Comparaison dynamique du QT réel et du QT prédit par le modèle Cd (figure du dessous) en réponse au RR (figure du dessus) de la séquence Cle. Les
flèches a, b et c indiquent le début des zones d’accélérations de la fréquence cardiaque. Les courbes QT réel (en plein) et QT prédit (en pointillé) ont été décalées
verticalement pour une meilleure comparaison dynamique.
Le signal RR de la séquence Cln comporte une accélération du rythme cardiaque en
(a) suivie d’une période en (b) pendant laquelle la fréquence cardiaque FC est élevée. Cette
première accélération est suivie par un retour à la normale du RR avant une deuxième
accélération en (c). Le QT prédit suit correctement le QT mesuré dans les premières minutes
de l’enregistrement avant que nous constations une différence importante entre le
comportement dynamique des deux signaux prédit et réel. Les différences entre le QT prédit
et le QT réel dans les zones (b) et (c) ne sont pas uniquement en amplitude mais
principalement des différences de comportement dynamique.
ab c
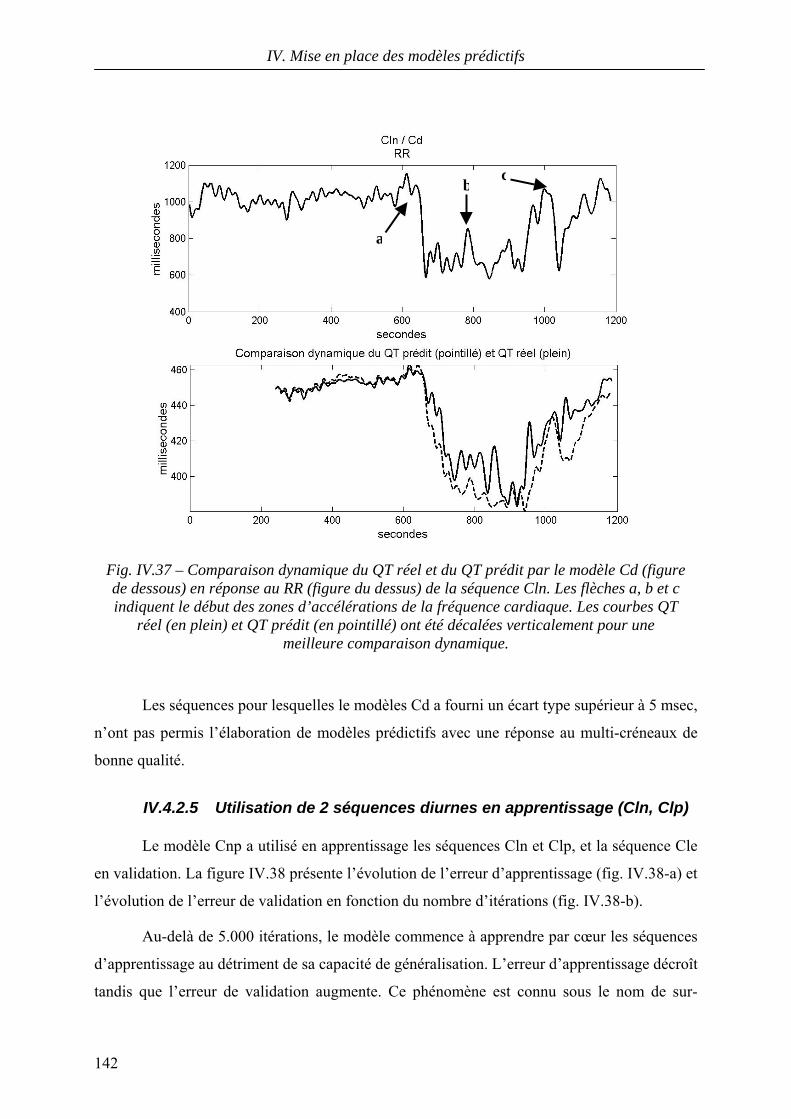
IV. Mise en place des modèles prédictifs
142
Fig. IV.37 – Comparaison dynamique du QT réel et du QT prédit par le modèle Cd (figure de dessous) en réponse au RR (figure du dessus) de la séquence Cln. Les flèches a, b et c indiquent le début des zones d’accélérations de la fréquence cardiaque. Les courbes QT
réel (en plein) et QT prédit (en pointillé) ont été décalées verticalement pour une meilleure comparaison dynamique.
Les séquences pour lesquelles le modèles Cd a fourni un écart type supérieur à 5 msec,
n’ont pas permis l’élaboration de modèles prédictifs avec une réponse au multi-créneaux de
bonne qualité.
IV.4.2.5 Utilisation de 2 séquences diurnes en apprentissage (Cln, Clp)
Le modèle Cnp a utilisé en apprentissage les séquences Cln et Clp, et la séquence Cle
en validation. La figure IV.38 présente l’évolution de l’erreur d’apprentissage (fig. IV.38-a) et
l’évolution de l’erreur de validation en fonction du nombre d’itérations (fig. IV.38-b).
Au-delà de 5.000 itérations, le modèle commence à apprendre par cœur les séquences
d’apprentissage au détriment de sa capacité de généralisation. L’erreur d’apprentissage décroît
tandis que l’erreur de validation augmente. Ce phénomène est connu sous le nom de sur-
a
b c
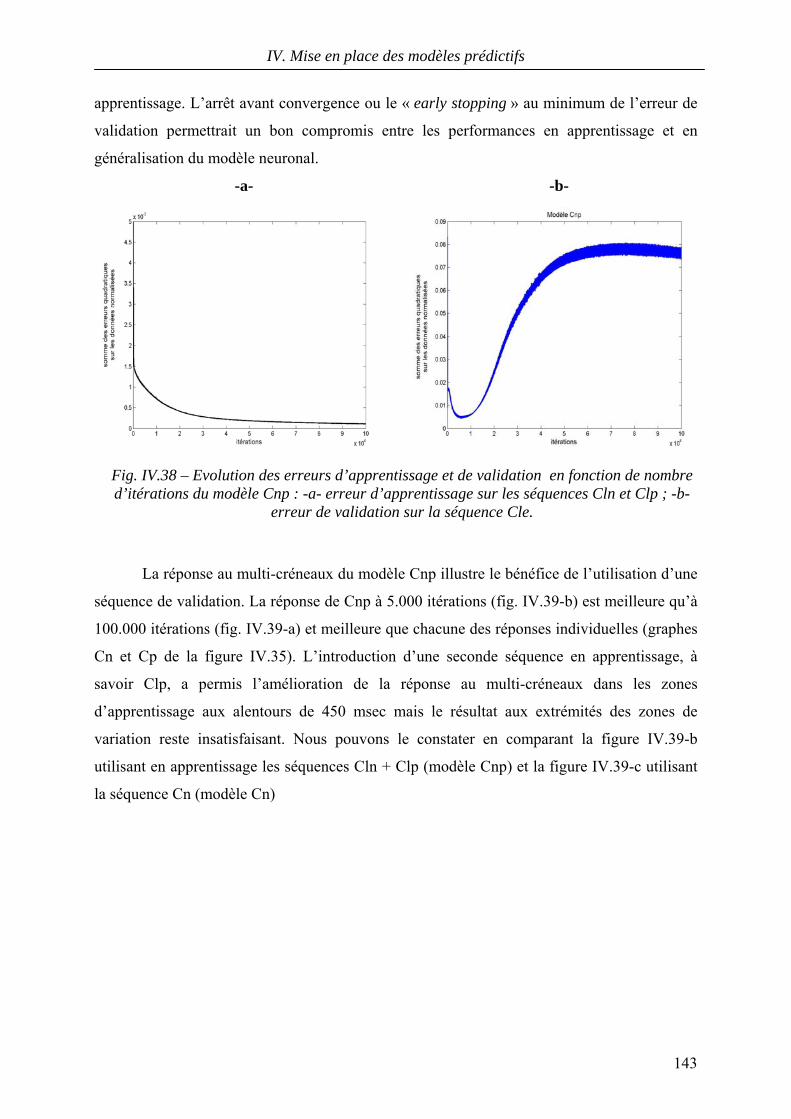
IV. Mise en place des modèles prédictifs
143
apprentissage. L’arrêt avant convergence ou le « early stopping » au minimum de l’erreur de
validation permettrait un bon compromis entre les performances en apprentissage et en
généralisation du modèle neuronal.
-a- -b-
Fig. IV.38 – Evolution des erreurs d’apprentissage et de validation en fonction de nombre d’itérations du modèle Cnp : -a- erreur d’apprentissage sur les séquences Cln et Clp ; -b-
erreur de validation sur la séquence Cle.
La réponse au multi-créneaux du modèle Cnp illustre le bénéfice de l’utilisation d’une
séquence de validation. La réponse de Cnp à 5.000 itérations (fig. IV.39-b) est meilleure qu’à
100.000 itérations (fig. IV.39-a) et meilleure que chacune des réponses individuelles (graphes
Cn et Cp de la figure IV.35). L’introduction d’une seconde séquence en apprentissage, à
savoir Clp, a permis l’amélioration de la réponse au multi-créneaux dans les zones
d’apprentissage aux alentours de 450 msec mais le résultat aux extrémités des zones de
variation reste insatisfaisant. Nous pouvons le constater en comparant la figure IV.39-b
utilisant en apprentissage les séquences Cln + Clp (modèle Cnp) et la figure IV.39-c utilisant
la séquence Cn (modèle Cn)
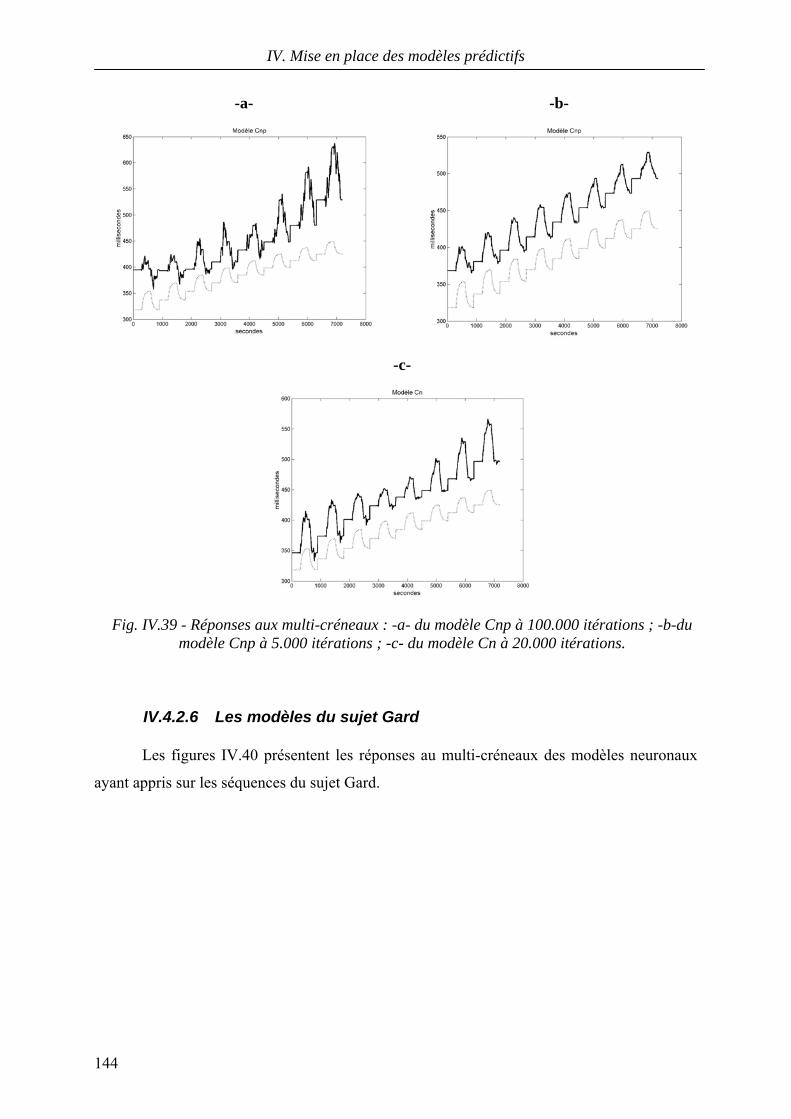
IV. Mise en place des modèles prédictifs
144
-a- -b-
-c-
Fig. IV.39 - Réponses aux multi-créneaux : -a- du modèle Cnp à 100.000 itérations ; -b-du
modèle Cnp à 5.000 itérations ; -c- du modèle Cn à 20.000 itérations.
IV.4.2.6 Les modèles du sujet Gard
Les figures IV.40 présentent les réponses au multi-créneaux des modèles neuronaux
ayant appris sur les séquences du sujet Gard.
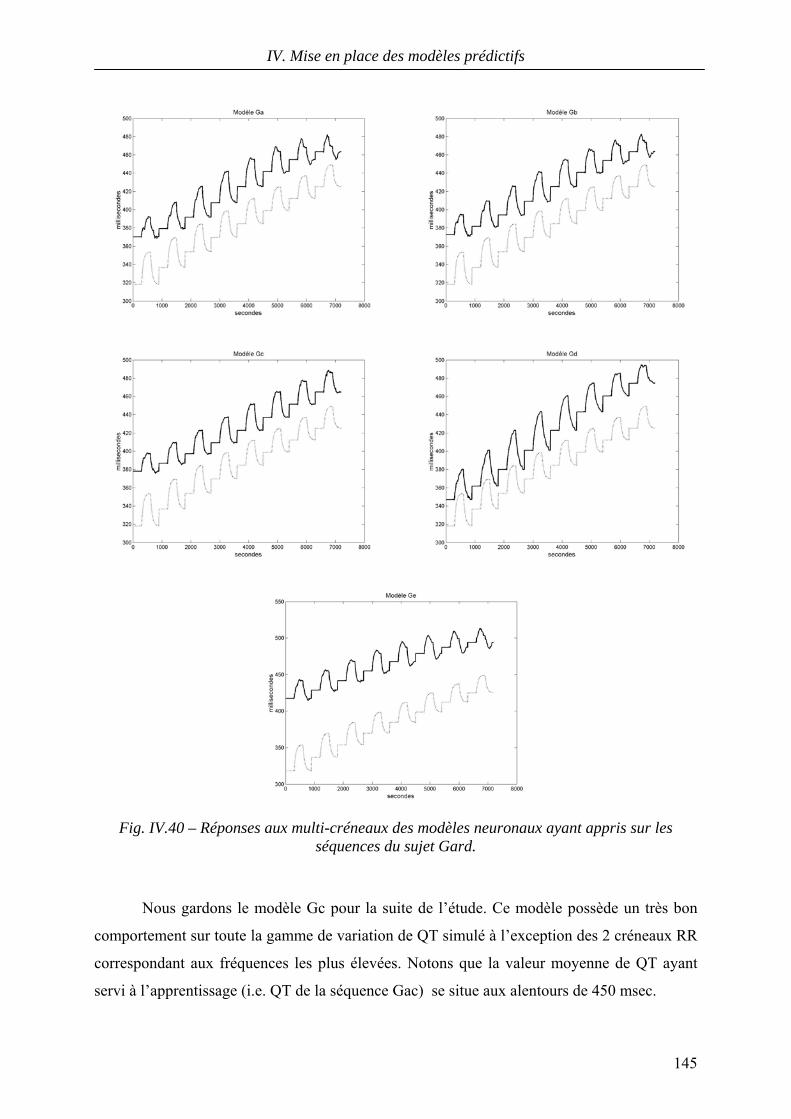
IV. Mise en place des modèles prédictifs
145
Fig. IV.40 – Réponses aux multi-créneaux des modèles neuronaux ayant appris sur les
séquences du sujet Gard.
Nous gardons le modèle Gc pour la suite de l’étude. Ce modèle possède un très bon
comportement sur toute la gamme de variation de QT simulé à l’exception des 2 créneaux RR
correspondant aux fréquences les plus élevées. Notons que la valeur moyenne de QT ayant
servi à l’apprentissage (i.e. QT de la séquence Gac) se situe aux alentours de 450 msec.
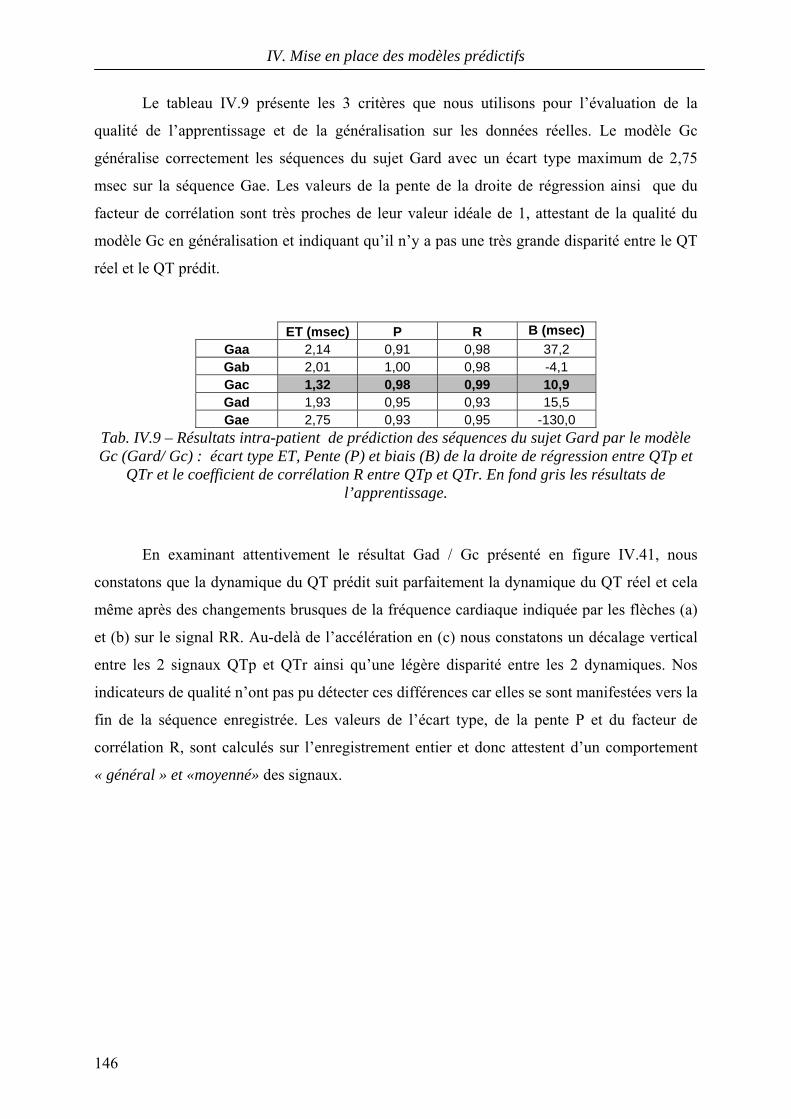
IV. Mise en place des modèles prédictifs
146
Le tableau IV.9 présente les 3 critères que nous utilisons pour l’évaluation de la
qualité de l’apprentissage et de la généralisation sur les données réelles. Le modèle Gc
généralise correctement les séquences du sujet Gard avec un écart type maximum de 2,75
msec sur la séquence Gae. Les valeurs de la pente de la droite de régression ainsi que du
facteur de corrélation sont très proches de leur valeur idéale de 1, attestant de la qualité du
modèle Gc en généralisation et indiquant qu’il n’y a pas une très grande disparité entre le QT
réel et le QT prédit.
ET (msec) P R B (msec) Gaa 2,14 0,91 0,98 37,2 Gab 2,01 1,00 0,98 -4,1 Gac 1,32 0,98 0,99 10,9 Gad 1,93 0,95 0,93 15,5 Gae 2,75 0,93 0,95 -130,0
Tab. IV.9 – Résultats intra-patient de prédiction des séquences du sujet Gard par le modèle Gc (Gard/ Gc) : écart type ET, Pente (P) et biais (B) de la droite de régression entre QTp et
QTr et le coefficient de corrélation R entre QTp et QTr. En fond gris les résultats de l’apprentissage.
En examinant attentivement le résultat Gad / Gc présenté en figure IV.41, nous
constatons que la dynamique du QT prédit suit parfaitement la dynamique du QT réel et cela
même après des changements brusques de la fréquence cardiaque indiquée par les flèches (a)
et (b) sur le signal RR. Au-delà de l’accélération en (c) nous constatons un décalage vertical
entre les 2 signaux QTp et QTr ainsi qu’une légère disparité entre les 2 dynamiques. Nos
indicateurs de qualité n’ont pas pu détecter ces différences car elles se sont manifestées vers la
fin de la séquence enregistrée. Les valeurs de l’écart type, de la pente P et du facteur de
corrélation R, sont calculés sur l’enregistrement entier et donc attestent d’un comportement
« général » et «moyenné» des signaux.
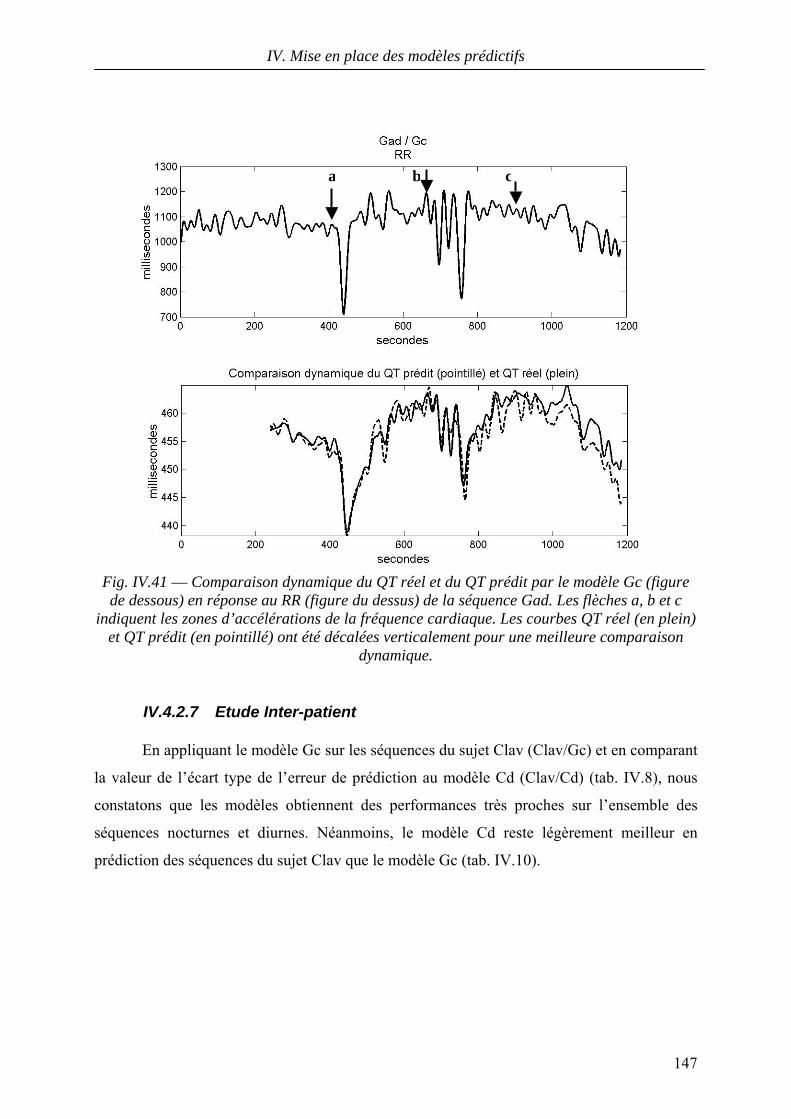
IV. Mise en place des modèles prédictifs
147
Fig. IV.41 –– Comparaison dynamique du QT réel et du QT prédit par le modèle Gc (figure de dessous) en réponse au RR (figure du dessus) de la séquence Gad. Les flèches a, b et c
indiquent les zones d’accélérations de la fréquence cardiaque. Les courbes QT réel (en plein) et QT prédit (en pointillé) ont été décalées verticalement pour une meilleure comparaison
dynamique.
IV.4.2.7 Etude Inter-patient
En appliquant le modèle Gc sur les séquences du sujet Clav (Clav/Gc) et en comparant
la valeur de l’écart type de l’erreur de prédiction au modèle Cd (Clav/Cd) (tab. IV.8), nous
constatons que les modèles obtiennent des performances très proches sur l’ensemble des
séquences nocturnes et diurnes. Néanmoins, le modèle Cd reste légèrement meilleur en
prédiction des séquences du sujet Clav que le modèle Gc (tab. IV.10).
a b c
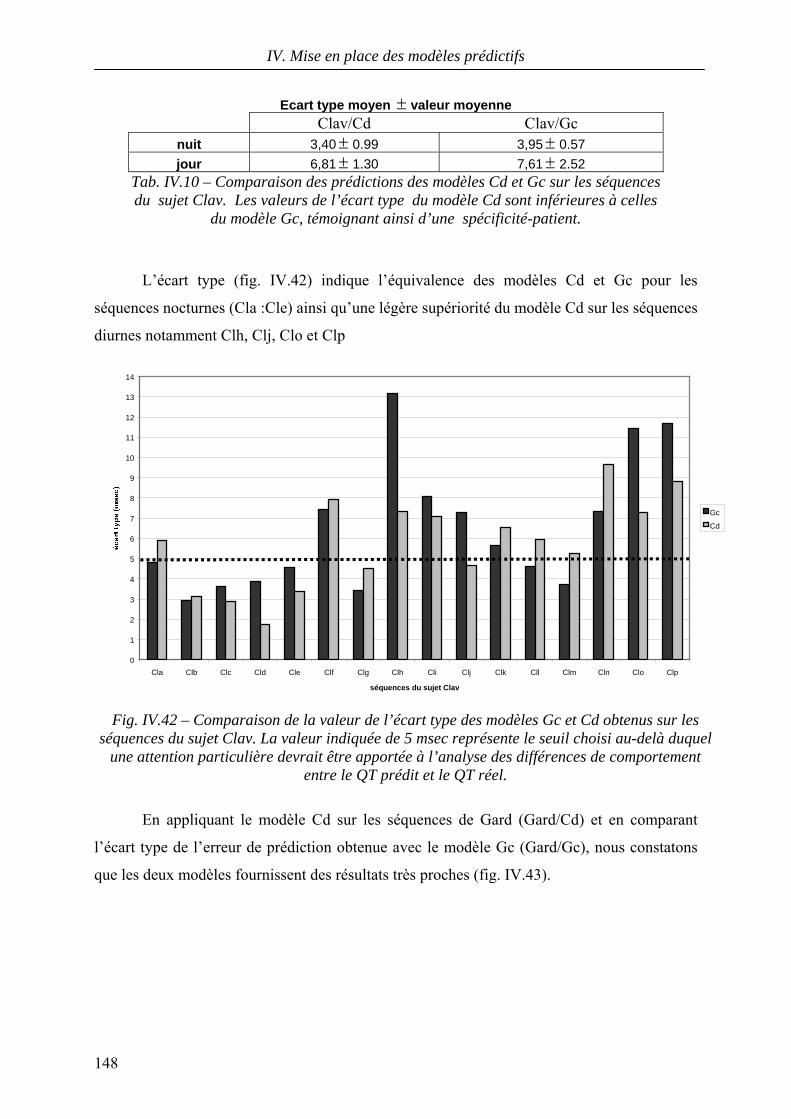
IV. Mise en place des modèles prédictifs
148
Ecart type moyen ± valeur moyenne Clav/Cd Clav/Gc
nuit 3,40 ± 0.99 3,95 ± 0.57 jour 6,81 ± 1.30 7,61 ± 2.52
Tab. IV.10 – Comparaison des prédictions des modèles Cd et Gc sur les séquences du sujet Clav. Les valeurs de l’écart type du modèle Cd sont inférieures à celles
du modèle Gc, témoignant ainsi d’une spécificité-patient.
L’écart type (fig. IV.42) indique l’équivalence des modèles Cd et Gc pour les
séquences nocturnes (Cla :Cle) ainsi qu’une légère supériorité du modèle Cd sur les séquences
diurnes notamment Clh, Clj, Clo et Clp
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Cla Clb Clc Cld Cle Clf Clg Clh Cli Clj Clk Cll Clm Cln Clo Clp
séquences du sujet Clav
Gc
Cd
Fig. IV.42 – Comparaison de la valeur de l’écart type des modèles Gc et Cd obtenus sur les séquences du sujet Clav. La valeur indiquée de 5 msec représente le seuil choisi au-delà duquel
une attention particulière devrait être apportée à l’analyse des différences de comportement entre le QT prédit et le QT réel.
En appliquant le modèle Cd sur les séquences de Gard (Gard/Cd) et en comparant
l’écart type de l’erreur de prédiction obtenue avec le modèle Gc (Gard/Gc), nous constatons
que les deux modèles fournissent des résultats très proches (fig. IV.43).
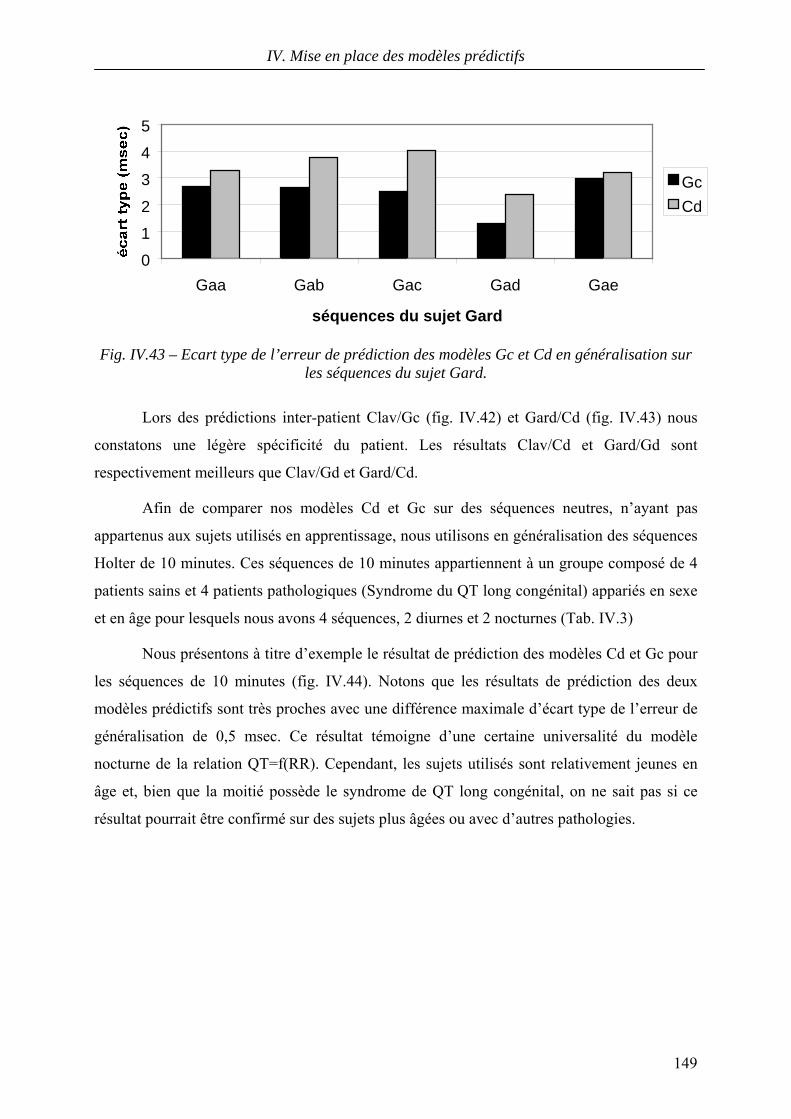
IV. Mise en place des modèles prédictifs
149
0
1
2
3
4
5
Gaa Gab Gac Gad Gae
séquences du sujet Gard
GcCd
Fig. IV.43 – Ecart type de l’erreur de prédiction des modèles Gc et Cd en généralisation sur les séquences du sujet Gard.
Lors des prédictions inter-patient Clav/Gc (fig. IV.42) et Gard/Cd (fig. IV.43) nous
constatons une légère spécificité du patient. Les résultats Clav/Cd et Gard/Gd sont
respectivement meilleurs que Clav/Gd et Gard/Cd.
Afin de comparer nos modèles Cd et Gc sur des séquences neutres, n’ayant pas
appartenus aux sujets utilisés en apprentissage, nous utilisons en généralisation des séquences
Holter de 10 minutes. Ces séquences de 10 minutes appartiennent à un groupe composé de 4
patients sains et 4 patients pathologiques (Syndrome du QT long congénital) appariés en sexe
et en âge pour lesquels nous avons 4 séquences, 2 diurnes et 2 nocturnes (Tab. IV.3)
Nous présentons à titre d’exemple le résultat de prédiction des modèles Cd et Gc pour
les séquences de 10 minutes (fig. IV.44). Notons que les résultats de prédiction des deux
modèles prédictifs sont très proches avec une différence maximale d’écart type de l’erreur de
généralisation de 0,5 msec. Ce résultat témoigne d’une certaine universalité du modèle
nocturne de la relation QT=f(RR). Cependant, les sujets utilisés sont relativement jeunes en
âge et, bien que la moitié possède le syndrome de QT long congénital, on ne sait pas si ce
résultat pourrait être confirmé sur des sujets plus âgées ou avec d’autres pathologies.

IV. Mise en place des modèles prédictifs
150
0
1
2
3
4
5
séquences Holter de 10 minutes
CdGc
Fig. IV.44 – Ecart type de l’erreur de prédiction des modèles Cd et Gd sur les séquences Holter de 10 minutes. Le résultat très proche des 2 modèles témoigne d’une certaine
universalité du modèle nocturne.
IV.4.2.8 Comparaison dynamique
Nous fournissons à titre d’exemple (fig. IV.45) un graphe comparatif entre le QT
prédit par notre modèle neuronal Cd et le résultat de l’application de la formule dynamique
présentée par l’équipe d’Edinburgh (chap. II.5.3.3). Nous constatons que le signal prédit par
le modèle Cd suit de très près le QT réel tandis que le QT calculé par la formule d’Edinburgh
comporte de très grandes différences avec le QT réel.
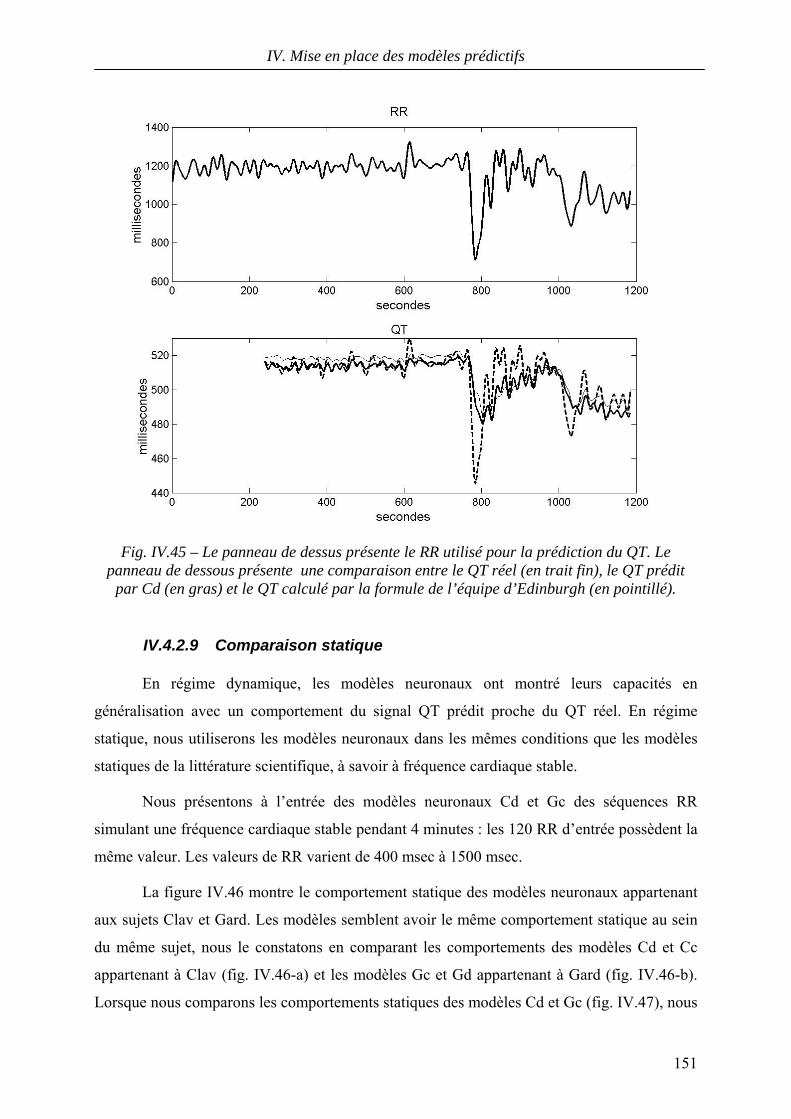
IV. Mise en place des modèles prédictifs
151
Fig. IV.45 – Le panneau de dessus présente le RR utilisé pour la prédiction du QT. Le
panneau de dessous présente une comparaison entre le QT réel (en trait fin), le QT prédit par Cd (en gras) et le QT calculé par la formule de l’équipe d’Edinburgh (en pointillé).
IV.4.2.9 Comparaison statique
En régime dynamique, les modèles neuronaux ont montré leurs capacités en
généralisation avec un comportement du signal QT prédit proche du QT réel. En régime
statique, nous utiliserons les modèles neuronaux dans les mêmes conditions que les modèles
statiques de la littérature scientifique, à savoir à fréquence cardiaque stable.
Nous présentons à l’entrée des modèles neuronaux Cd et Gc des séquences RR
simulant une fréquence cardiaque stable pendant 4 minutes : les 120 RR d’entrée possèdent la
même valeur. Les valeurs de RR varient de 400 msec à 1500 msec.
La figure IV.46 montre le comportement statique des modèles neuronaux appartenant
aux sujets Clav et Gard. Les modèles semblent avoir le même comportement statique au sein
du même sujet, nous le constatons en comparant les comportements des modèles Cd et Cc
appartenant à Clav (fig. IV.46-a) et les modèles Gc et Gd appartenant à Gard (fig. IV.46-b).
Lorsque nous comparons les comportements statiques des modèles Cd et Gc (fig. IV.47), nous
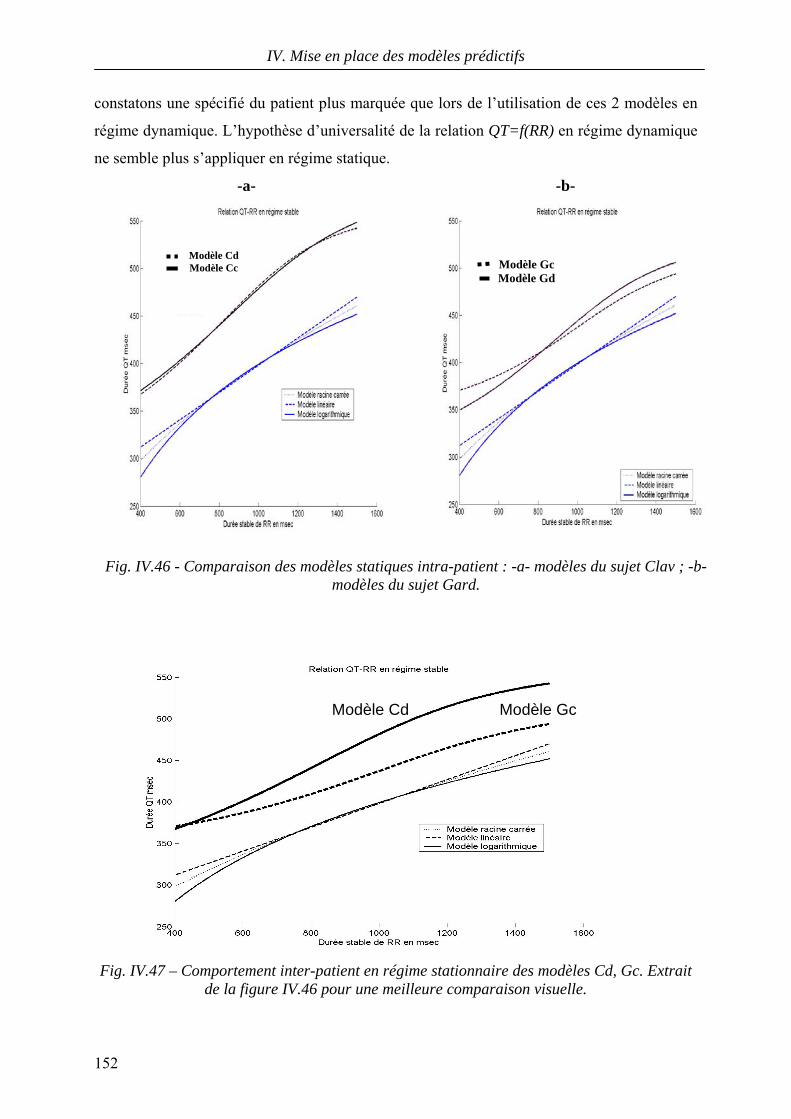
IV. Mise en place des modèles prédictifs
152
constatons une spécifié du patient plus marquée que lors de l’utilisation de ces 2 modèles en
régime dynamique. L’hypothèse d’universalité de la relation QT=f(RR) en régime dynamique
ne semble plus s’appliquer en régime statique.
-a-
-b-
Fig. IV.46 - Comparaison des modèles statiques intra-patient : -a- modèles du sujet Clav ; -b-
modèles du sujet Gard.
Fig. IV.47 – Comportement inter-patient en régime stationnaire des modèles Cd, Gc. Extrait de la figure IV.46 pour une meilleure comparaison visuelle.
Modèle Cd Modèle Gc
Modèle CdModèle Cc Modèle Gc
Modèle Gd
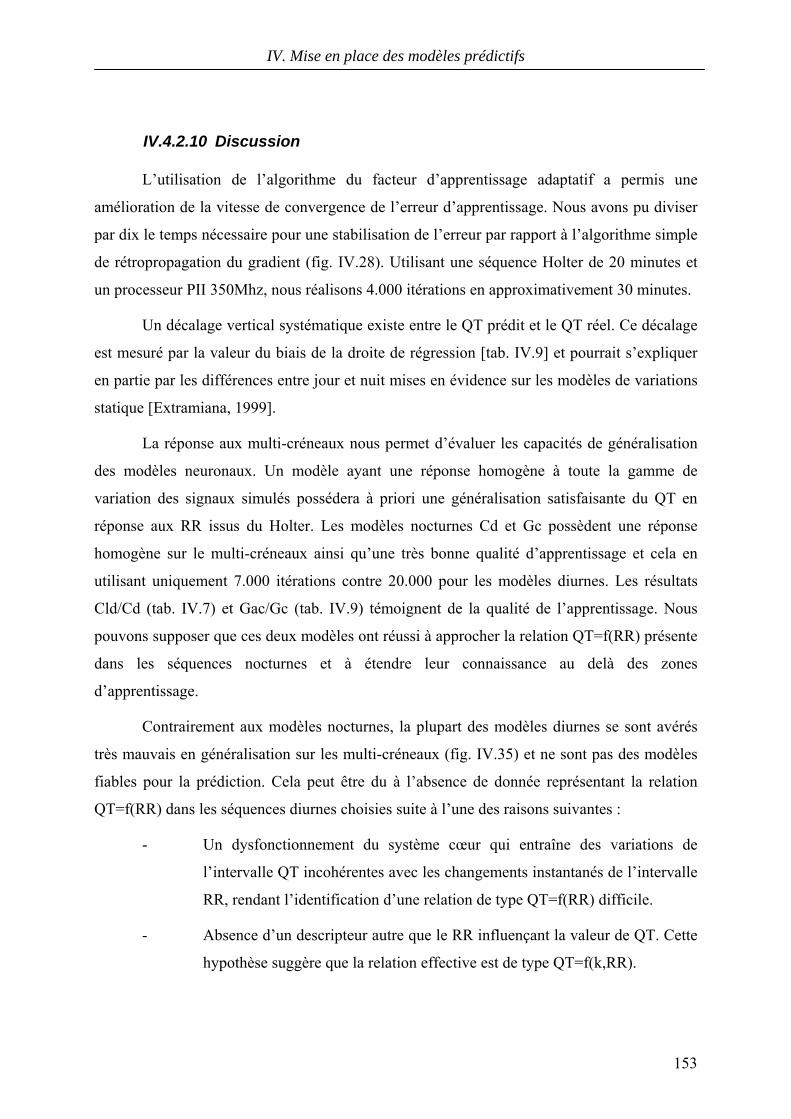
IV. Mise en place des modèles prédictifs
153
IV.4.2.10 Discussion
L’utilisation de l’algorithme du facteur d’apprentissage adaptatif a permis une
amélioration de la vitesse de convergence de l’erreur d’apprentissage. Nous avons pu diviser
par dix le temps nécessaire pour une stabilisation de l’erreur par rapport à l’algorithme simple
de rétropropagation du gradient (fig. IV.28). Utilisant une séquence Holter de 20 minutes et
un processeur PII 350Mhz, nous réalisons 4.000 itérations en approximativement 30 minutes.
Un décalage vertical systématique existe entre le QT prédit et le QT réel. Ce décalage
est mesuré par la valeur du biais de la droite de régression [tab. IV.9] et pourrait s’expliquer
en partie par les différences entre jour et nuit mises en évidence sur les modèles de variations
statique [Extramiana, 1999].
La réponse aux multi-créneaux nous permet d’évaluer les capacités de généralisation
des modèles neuronaux. Un modèle ayant une réponse homogène à toute la gamme de
variation des signaux simulés possédera à priori une généralisation satisfaisante du QT en
réponse aux RR issus du Holter. Les modèles nocturnes Cd et Gc possèdent une réponse
homogène sur le multi-créneaux ainsi qu’une très bonne qualité d’apprentissage et cela en
utilisant uniquement 7.000 itérations contre 20.000 pour les modèles diurnes. Les résultats
Cld/Cd (tab. IV.7) et Gac/Gc (tab. IV.9) témoignent de la qualité de l’apprentissage. Nous
pouvons supposer que ces deux modèles ont réussi à approcher la relation QT=f(RR) présente
dans les séquences nocturnes et à étendre leur connaissance au delà des zones
d’apprentissage.
Contrairement aux modèles nocturnes, la plupart des modèles diurnes se sont avérés
très mauvais en généralisation sur les multi-créneaux (fig. IV.35) et ne sont pas des modèles
fiables pour la prédiction. Cela peut être du à l’absence de donnée représentant la relation
QT=f(RR) dans les séquences diurnes choisies suite à l’une des raisons suivantes :
- Un dysfonctionnement du système cœur qui entraîne des variations de
l’intervalle QT incohérentes avec les changements instantanés de l’intervalle
RR, rendant l’identification d’une relation de type QT=f(RR) difficile.
- Absence d’un descripteur autre que le RR influençant la valeur de QT. Cette
hypothèse suggère que la relation effective est de type QT=f(k,RR).
IV. Mise en place des modèles prédictifs
154
En vérifiant le résultat inter-patient Cle/Cd en figure IV.36, nous constatons que la
dynamique du QT prédit suit de très près la dynamique du QT mesuré et cela même après les
accélérations cardiaques indiquées sur le tracé du signal RR. Le critère visuel ainsi que l’écart
type de 3,36 msec témoignent de la qualité de la correspondance dynamique entre les deux
signaux prédit et réel. Dans certaines prédictions diurnes comme Cll/Cd, Clp/Cd ou Cln/Cd
(fig. IV.37) nous avons constaté une différence significative entre le comportement
dynamique du QT réel et du QT prédit (supposé représenter la normalité) après la première
accélération cardiaque notée ‘a’ sur la figure IV.37. Ce comportement « anormal » ou
« différent » de la réponse ventriculaire est aussi constaté pour les prédictions inter-patient
Gad/Gc (fig. IV.41), où une différence d’environ 5 msec entre les deux signaux QT peut être
constatée après les variations de RR notées en (b). Cette différence du comportement
dynamique serait due à une modification du comportement du système sœur plutôt qu’à un
dysfonctionnement du modèle neuronal, les performances de ce dernier ayant été validées sur
le multi-créneaux. Les anormalités du comportement dynamique du QT détectées par les
modèles nocturnes (Cd, Gc) pourraient être la conséquence d’un changement de la relation
QT=f(RR) entre celle apprise par le modèle nocturne et celle existante dans les
enregistrements diurnes. Un changement éventuel de la relation entre la fréquence cardiaque
et la réponse ventriculaire peut s’expliquer par l’intervention d’un descripteur (i .e. noté k)
autre que le RR.
Dans le cas d’une relation de type QT = f (k, RR), nos modèles prédictifs sont mis en
difficulté car il leur manque une information. En effet, l’élément ‘k’ n’a pas été fourni en
entrée et n’est pas donc utilisé pour l’apprentissage. Dans les séquences de nuit, ‘k’ varierait
faiblement, ce qui expliquerait la bonne qualité en apprentissage et en généralisation des
modèles nocturnes, le poids attribué à une entrée qui entraîne peu de modification sur la sortie
est très faible comparé aux autres entrées du système à modéliser. Pendant l’effort physique
diurne les variations de ‘k’ deviennent importantes et mettent en difficulté les modèles
nocturnes en prédiction et les modèles diurnes en apprentissage. L’hypothèse de la relation de
type QT= f(k, RR) pourrait ainsi expliquer la mauvaise qualité en généralisation des séquences
diurnes. En effet les RNA ne peuvent pas généraliser correctement une fonction sans avoir les
principaux descripteurs en entrée.
En résumé, un modèle possédant en entrée RR et en sortie QT et ayant appris la
relation QT=f(k, RR), arrive à apprendre et à prédire correctement lorsque k est constant ou
varie peu et il est mis en difficulté lorsque k varie fortement. Dans ce cas, lors des différences
IV. Mise en place des modèles prédictifs
155
entre le QT prédit et le QT réel, nos modèles Cd et Gc ne détectent pas un dysfonctionnement
du système cœur, mais une modification de la relation QT=f(k, RR) dû au changements de la
valeur de ‘k’. Cette influence extérieure est probablement imputable au système nerveux
central (SNC) agissant via le système sympathique et parasympathique sur l’intervalle QT.
Comme évoqué dans le chapitre II.4.1, le SNC pourrait influencer directement la durée de
l’intervalle QT indépendamment des variations de la fréquence cardiaques et donc de
l’intervalle RR. Les mécanismes exacts de cette influence sont encore méconnus à nos jours,
et pouvoir, dans le cas échéant, la détecter battement par battement constituerait un élément
déterminant.
L’application du modèle Cd en inter-patient sur les séquences du sujet Gard (Gard/Cd)
ainsi que l’application du modèle Gc sur les séquences du sujet Clav (Clav/Gc) indiquent une
spécificité au patient des modèles : le modèle ayant appris sur la séquence appartenant à un
sujet, a une meilleure performance en généralisation sur les séquences de ce sujet. Cependant,
la différence de résultats inter-patient des modèles Cd et Gc n’est pas très significative. Cela
est sans doute dû au fait que les deux sujets sont du même sexe et ont approximativement le
même age. Nous pouvons constater cette spécificité au patient en observant la réponse des
modèles à des séquences de RR à valeur fixes simulant un régime stable (fig. IV.47).
L’application des modèles Cd et Gc sur les séquences Holter de 10 minutes n’ont pas
permis de détecter des « anormalités » du signal QT. Ceci est sans doute dû au fait que les
séquences de 10 minutes ne possèdent pas de fortes variations de RR. Par contre nous
constatons que les modèles Cd et Gd obtiennent des résultats de prédiction en terme d’écart
type très proches. Des exemples de généralisation sur les séquences de 10 minutes sont
présentés en annexe A.
Lors des comparaisons entre nos modèles neuronaux et les méthodes traditionnelles
cherchant à modéliser la relation QT=f(RR), nous avons pu démontrer la supériorité de nos
méthodes en régime dynamique (fig. IV.42). En régime stationnaire, la spécificité au patient
est mise en évidence avec des différences du comportement dynamique des modèles. Nous
avons montré ainsi l’influence de l’heure de l’enregistrement des séquences sur le
comportement du QT en observant un décalage vertical entre le QT prédit et le QT réel. Ce
décalage vertical est aussi constaté en régime stationnaire. Les modèles prédictifs pourraient
être appliqués en régime dynamique afin de détecter d’éventuels changements de la relation
QT=f(RR) battement par battement, ou en régime stationnaire afin de mesurer l’influence de
l’heure de l’enregistrement sur le comportement des ventricules.
IV. Mise en place des modèles prédictifs
156
IV.5 Conclusion
Nous avons utilisé des données artificielles afin d’étudier les capacités des Perceptrons
multi-couches (PMC) en apprentissage et en généralisation. Nous avons simulé quelques
comportements types que nous supposons correspondre à des comportements que nous
pourrions retrouver sur des séquences réelles de RR et de QT tel que le changement de la
constante de temps, l’allongement de QT au cours d’une séquence ainsi que l’apprentissage
sur des données manquantes. Notre architecture neuronale à base de Perceptron Multi-
Couches s’est avéré robuste et résistante à ces difficultés. Nous avons pu aussi mesurer
l’impact de l’utilisation de différentes séquences en apprentissage sur les performances en
généralisation des réseaux. Il ne s’avère pas indispensable d’avoir une base d’apprentissage
couvrant toutes les possibilités de variation des signaux mais de la choisir judicieusement aux
extrémités des plages de variations.
Nous utilisons le multi-créneaux afin de sélectionner des modèles prédictifs possédant
une bonne généralisation sur toute la gamme de variations des signaux. Les modèles prédictifs
ayant une généralisation insatisfaisante sur le multi-créneaux sont écartés car ils ont appris la
base d’apprentissage par cœur et ne réussissent pas à extrapoler leur connaissance au-delà.
Les mauvaises réponses aux multi-créneaux indiqueraient que les séquences d’apprentissage
ne sont pas assez riches en information pour pouvoir approcher la relation QT=f(RR)
recherchée, ou que l’architecture neuronale choisie ne serait pas adéquate (i.e. choix de
descripteurs, profondeur de la mémoire de RR).
Nous avons pu mettre en évidence une différence du comportement dynamique du QT
entre les séquences nocturnes et les séquences diurnes. Ces différences de comportements se
manifestent lors de fortes accélérations ou décélérations de la fréquence cardiaque. Elles ne
témoignent pas nécessairement d’un dysfonctionnement du système cœur, mais une possible
modification de la relation jour et nuit entre le QT et le RR. Rappelons que les sujets Clav et
Gard sont des sujets sains, donc à priori sans dysfonctionnement cardiaque, ce qui
privilégierait l’hypothèse d’une relation de jour de type QT=f(k,RR).
Lors de la présentation de nos résultats concernant les données réelles, nous avons fixé
un seuil de 5 msec au-delà duquel toute généralisation est considérée comme insatisfaisante.
Ce seuil est largement inférieur à l’erreur de prétraitement des cardiologues et aux normes
appliquées pour l’évaluation des programmes d’analyse : le requis est un écart type inférieur à
10 msec [CSE, 1985], soit le double du seuil que nous nous sommes fixé pour évaluer notre
IV. Mise en place des modèles prédictifs
157
approche, démontrant ainsi l’avantage que possèdent les Perceptrons Multi-Couches par
rapport aux méthodes actuelles de mesure et de prédiction du QT.
Conclusion
158
Conclusion
Ce mémoire commence par présenter l’importance de l’étude de la dynamique de la
phase de repolarisation ventriculaire pour la compréhension du fonctionnement électrique du
cœur. Depuis 1940 et la première formule de Bazett, la littérature scientifique s’est enrichie de
différentes études essayant de modéliser la relation entre la fréquence cardiaque et la phase de
repolarisation ventriculaire, autrement dit une relation entre l’intervalle RR et l’intervalle QT.
Ces formules sont nombreuses et la quasi-totalité n’est applicable qu’en régime stable à
fréquence cardiaque constante, ce qui témoigne de la difficulté à modéliser cette relation en
régime transitoire.
Afin de prendre en compte les aspects dynamiques de cette relation, nous avons
présenté une méthode à base de Perceptrons Multi-Couches pour la modélisation de la relation
),,...,,( 11 MiMiiii RRRRRRRRfQT −+−−= . Cette formule suppose que les variations de l’intervalle
QT sont uniquement dues aux variations de l’intervalle RR et que l’information nécessaire
pour la prédiction du QT se trouve dans le passé de RR avec une fenêtre temporelle de largeur
M. L’approche que nous proposons est basée sur des techniques d’identification de modèles à
partir d’ensembles d’apprentissage. La sélection des données pour l’apprentissage, l’étude
théorique du comportement du modèle, la compréhension des mécanismes intervenant dans la
modélisation et la mise au point d’un mode opératoire pour trouver le meilleur modèle pour
un patient motivent notre étude.
Conclusion
159
Nous avons testé la robustesse des modèles neuronaux en étudiant leur comportement
en apprentissage sur des données simulées. Le Perceptron Multi-Couches est capable de
généraliser correctement en dehors des zones d’apprentissage à condition d’avoir été entraîné
sur une base d’exemples judicieusement choisis. Il n’est pas nécessaire d’avoir des exemples
couvrant toute la gamme de variation des signaux, mais des exemples régulièrement distribués
tout le long de l’intervalle de variation de RR permettent d’améliorer la qualité des modèles
prédictifs en extrapolation. Les séquences utilisées en apprentissage doivent être riches en
variations des signaux afin d’approcher la relation recherchée.
La réponse à un créneau des modèles ayant appris sur les séquences Holter est très
proche de celle obtenue par étude invasive. Nous avons pu déterminer une fenêtre temporelle
sur le signal RR d’une largeur de 4 minutes. La longueur de cette fenêtre utilisée pour la
modélisation de la relation QT=f(RR) est très proche du résultat obtenu en étude invasive : en
effet le QT atteint 98% de sa valeur maximale au bout de ces 4 minutes. La réponse des
modèles à un créneau simulant un échelon unité de RR est riche en informations qui peuvent
et doivent être exploitées, pour caractériser les modèles neuronaux. En particulier, des
paramètres tels que l’amplitude de la réponse ou la constante de temps sont des outils qui
peuvent s’avérer pertinents en matière de diagnostic, et on peut penser que les modèles
prédictifs pourront à terme se substituer aux méthodes invasives.
L’architecture neuronale choisie produit une généralisation satisfaisante lorsque la
séquence d’apprentissage est représentative de la relation recherchée. Le critère principal de la
qualité de généralisation des modèles prédictifs est la richesse de la séquence d’apprentissage.
Dans nos travaux, les séquences Holter ont été choisies visuellement en recherchant des
variations dynamiques des signaux RR et QT.
En créant des modèles ayant appris la relation ),,...,,( 11 MiMiiii RRRRRRRRfQT −+−−= ,
nous avons pu mettre en place une méthode capable de détecter les changements ou le
dysfonctionnement de la réponse ventriculaire suite aux changements brusques de la
fréquence cardiaque. A part le RR, le Système Nerveux Central SNC par le biais du système
sympathique et parasympathique influence la durée de l’intervalle QT, soit directement en
influençant les ventricules soit en modifiant la relation QT=f(RR). Pouvoir détecter
l’influence du SNC sur le QT permettra de mieux approcher les épisodes entraînant une
tachycardie ventriculaire pouvant conduire dans certains cas à la mort subite. Mais auparavant
des études supplémentaires sont nécessaires pour pouvoir déterminer si les altérations de la
réponse ventriculaire sont dues à un dysfonctionnement du système cœur ou à l’intervention
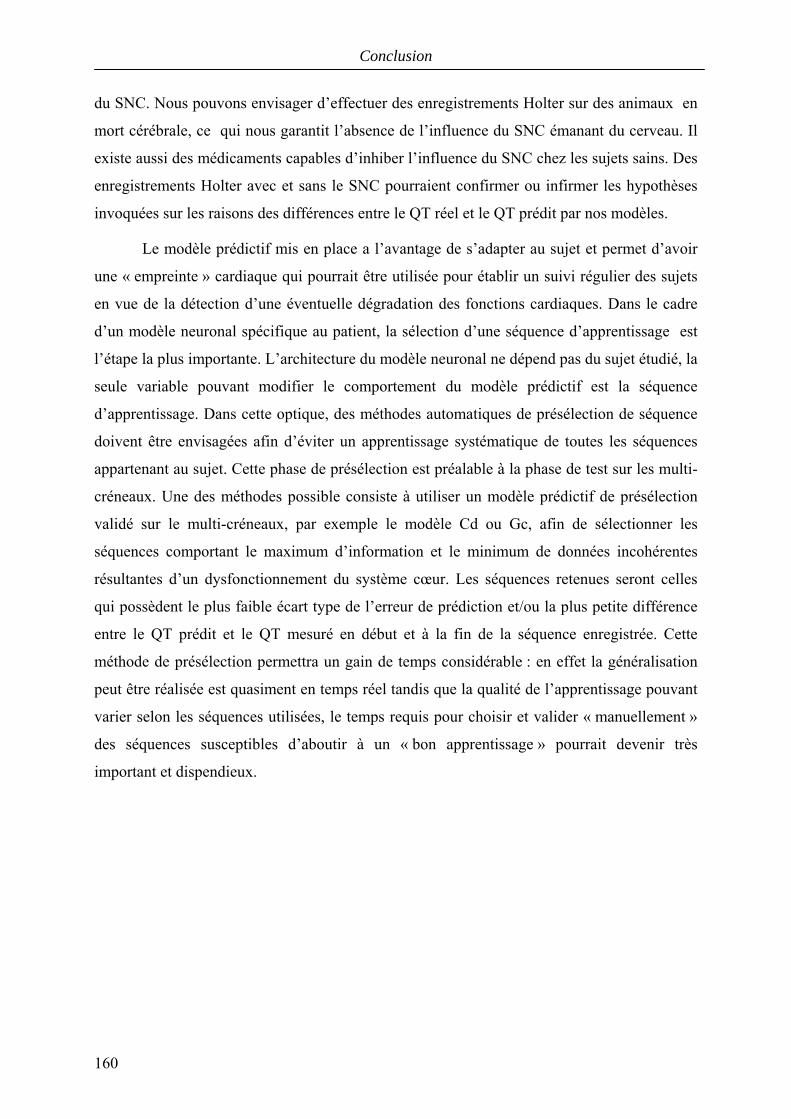
Conclusion
160
du SNC. Nous pouvons envisager d’effectuer des enregistrements Holter sur des animaux en
mort cérébrale, ce qui nous garantit l’absence de l’influence du SNC émanant du cerveau. Il
existe aussi des médicaments capables d’inhiber l’influence du SNC chez les sujets sains. Des
enregistrements Holter avec et sans le SNC pourraient confirmer ou infirmer les hypothèses
invoquées sur les raisons des différences entre le QT réel et le QT prédit par nos modèles.
Le modèle prédictif mis en place a l’avantage de s’adapter au sujet et permet d’avoir
une « empreinte » cardiaque qui pourrait être utilisée pour établir un suivi régulier des sujets
en vue de la détection d’une éventuelle dégradation des fonctions cardiaques. Dans le cadre
d’un modèle neuronal spécifique au patient, la sélection d’une séquence d’apprentissage est
l’étape la plus importante. L’architecture du modèle neuronal ne dépend pas du sujet étudié, la
seule variable pouvant modifier le comportement du modèle prédictif est la séquence
d’apprentissage. Dans cette optique, des méthodes automatiques de présélection de séquence
doivent être envisagées afin d’éviter un apprentissage systématique de toutes les séquences
appartenant au sujet. Cette phase de présélection est préalable à la phase de test sur les multi-
créneaux. Une des méthodes possible consiste à utiliser un modèle prédictif de présélection
validé sur le multi-créneaux, par exemple le modèle Cd ou Gc, afin de sélectionner les
séquences comportant le maximum d’information et le minimum de données incohérentes
résultantes d’un dysfonctionnement du système cœur. Les séquences retenues seront celles
qui possèdent le plus faible écart type de l’erreur de prédiction et/ou la plus petite différence
entre le QT prédit et le QT mesuré en début et à la fin de la séquence enregistrée. Cette
méthode de présélection permettra un gain de temps considérable : en effet la généralisation
peut être réalisée est quasiment en temps réel tandis que la qualité de l’apprentissage pouvant
varier selon les séquences utilisées, le temps requis pour choisir et valider « manuellement »
des séquences susceptibles d’aboutir à un « bon apprentissage » pourrait devenir très
important et dispendieux.
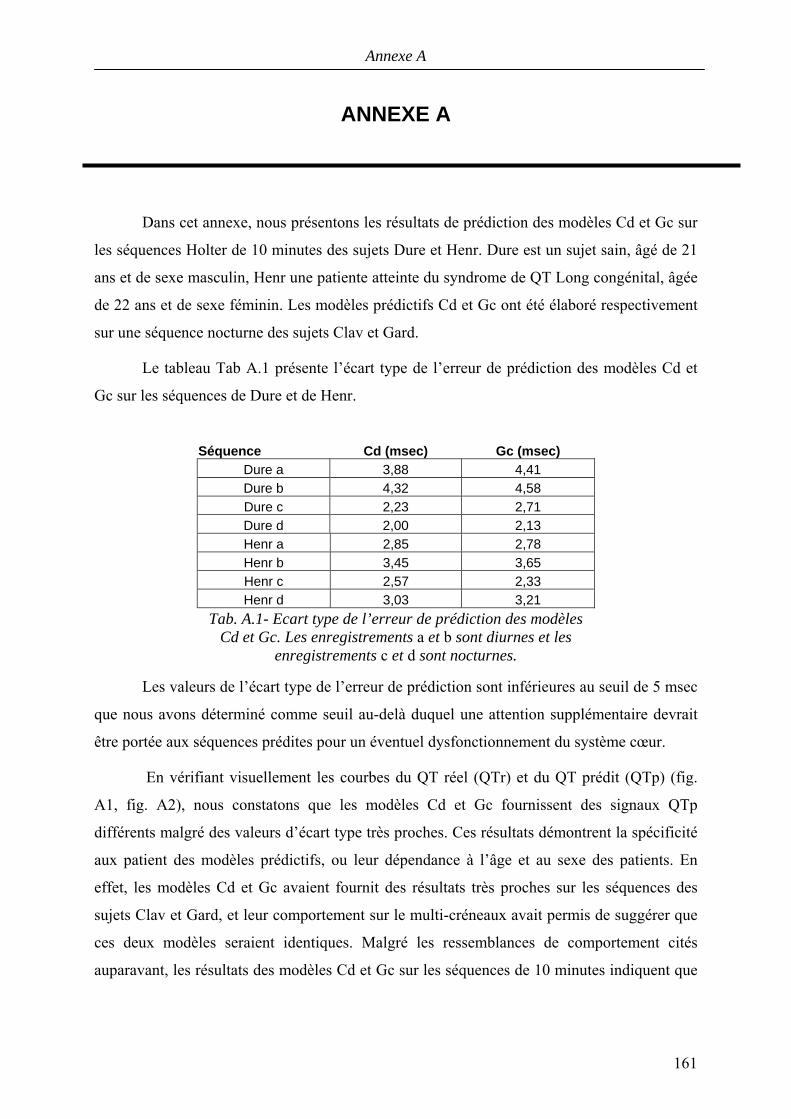
Annexe A
161
ANNEXE A
Dans cet annexe, nous présentons les résultats de prédiction des modèles Cd et Gc sur
les séquences Holter de 10 minutes des sujets Dure et Henr. Dure est un sujet sain, âgé de 21
ans et de sexe masculin, Henr une patiente atteinte du syndrome de QT Long congénital, âgée
de 22 ans et de sexe féminin. Les modèles prédictifs Cd et Gc ont été élaboré respectivement
sur une séquence nocturne des sujets Clav et Gard.
Le tableau Tab A.1 présente l’écart type de l’erreur de prédiction des modèles Cd et
Gc sur les séquences de Dure et de Henr.
Les valeurs de l’écart type de l’erreur de prédiction sont inférieures au seuil de 5 msec
que nous avons déterminé comme seuil au-delà duquel une attention supplémentaire devrait
être portée aux séquences prédites pour un éventuel dysfonctionnement du système cœur.
En vérifiant visuellement les courbes du QT réel (QTr) et du QT prédit (QTp) (fig.
A1, fig. A2), nous constatons que les modèles Cd et Gc fournissent des signaux QTp
différents malgré des valeurs d’écart type très proches. Ces résultats démontrent la spécificité
aux patient des modèles prédictifs, ou leur dépendance à l’âge et au sexe des patients. En
effet, les modèles Cd et Gc avaient fournit des résultats très proches sur les séquences des
sujets Clav et Gard, et leur comportement sur le multi-créneaux avait permis de suggérer que
ces deux modèles seraient identiques. Malgré les ressemblances de comportement cités
auparavant, les résultats des modèles Cd et Gc sur les séquences de 10 minutes indiquent que
Séquence Cd (msec) Gc (msec) Dure a 3,88 4,41 Dure b 4,32 4,58 Dure c 2,23 2,71 Dure d 2,00 2,13 Henr a 2,85 2,78 Henr b 3,45 3,65 Henr c 2,57 2,33 Henr d 3,03 3,21
Tab. A.1- Ecart type de l’erreur de prédiction des modèles Cd et Gc. Les enregistrements a et b sont diurnes et les
enregistrements c et d sont nocturnes.
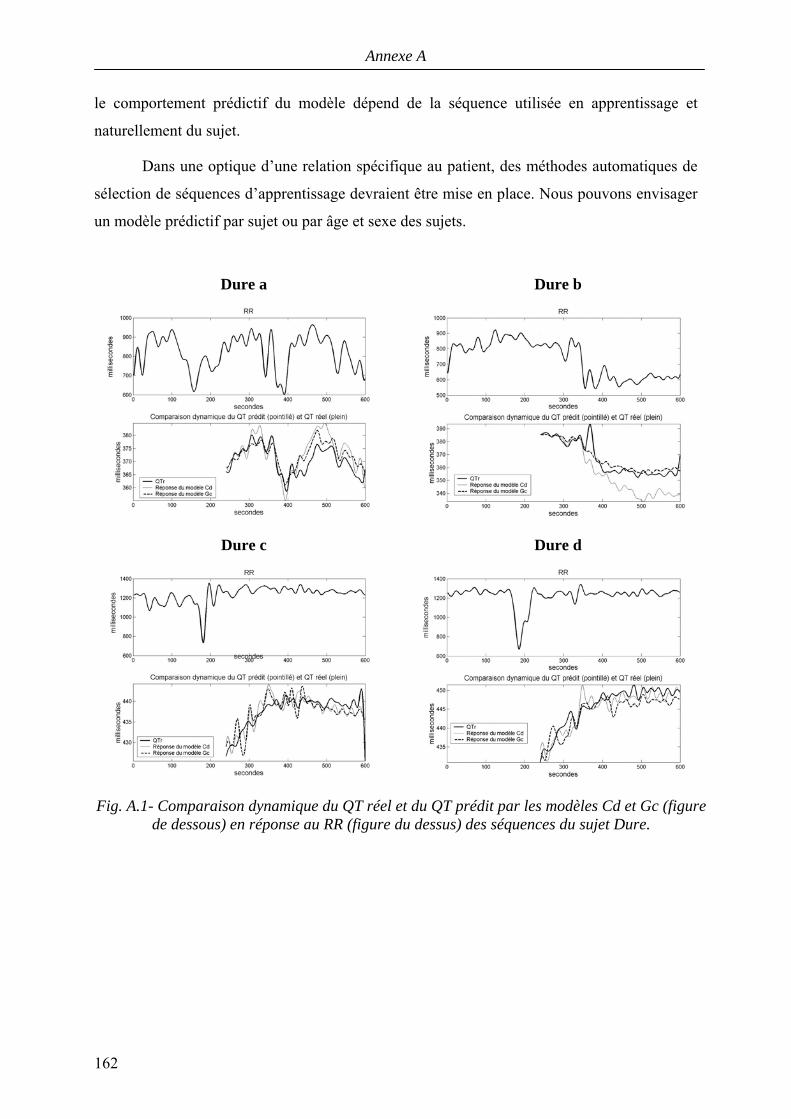
Annexe A
162
le comportement prédictif du modèle dépend de la séquence utilisée en apprentissage et
naturellement du sujet.
Dans une optique d’une relation spécifique au patient, des méthodes automatiques de
sélection de séquences d’apprentissage devraient être mise en place. Nous pouvons envisager
un modèle prédictif par sujet ou par âge et sexe des sujets.
Dure a Dure b
Dure c Dure d
Fig. A.1- Comparaison dynamique du QT réel et du QT prédit par les modèles Cd et Gc (figure de dessous) en réponse au RR (figure du dessus) des séquences du sujet Dure.
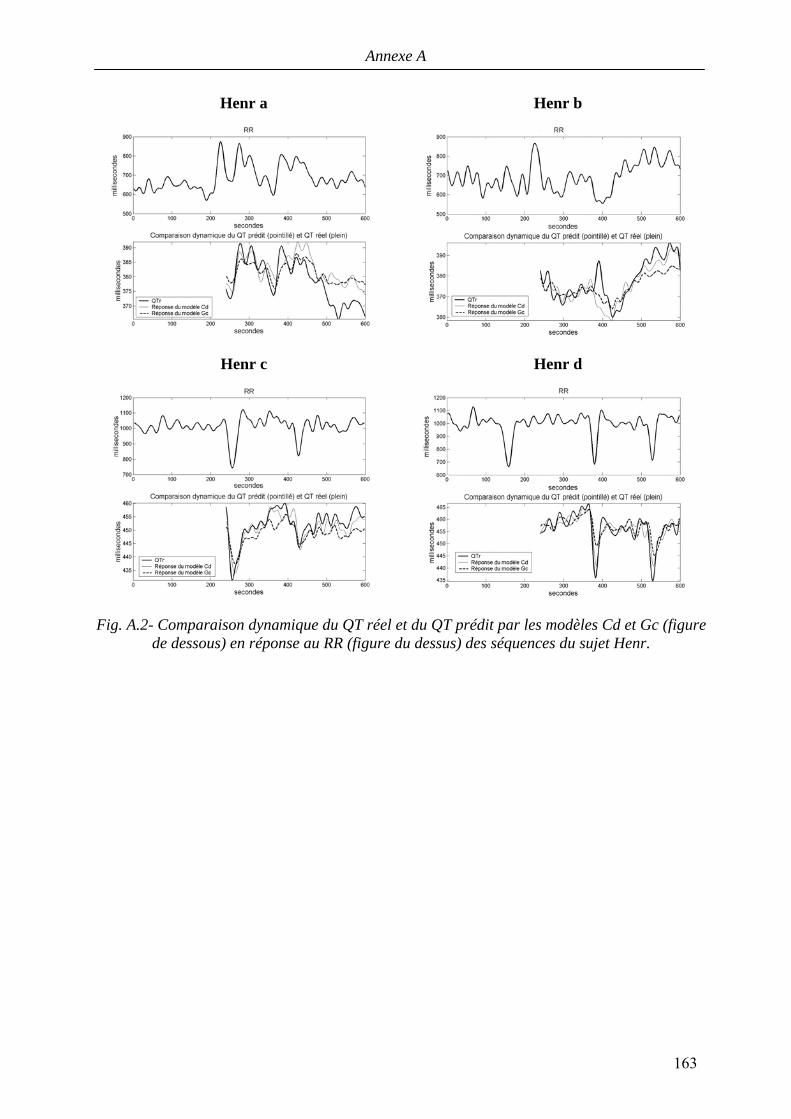
Annexe A
163
Henr a Henr b
Henr c Henr d
Fig. A.2- Comparaison dynamique du QT réel et du QT prédit par les modèles Cd et Gc (figure de dessous) en réponse au RR (figure du dessus) des séquences du sujet Henr.
Références bibliographiques
164
REFERENCES BIBLIOGRAPHQUES
[Abarbanel, 1993] Abarbanel, H. D. and Kennel, M. B. Local false nearest neighbors and
dynamical dimensions from observed chaotic data. Physical.ReviewE.Statistical Physics, Plasmas., Fluids, and related. Interdisciplinary.topics. 1993, vol. 47, pp. 3057-3068.
[Abreu-Lima, 1998] Abreu-Lima, C. and de Sa, J. P. Automatic classifiers for the
interpretation of electrocardiograms. Rev.Port.Cardiol. 1998, vol. 17, pp. 415-428.
[Ahnve, 1985] Ahnve, S. Correction of the QT interval for heart rate: review of different formulas and the use of Bazett's formula in myocardial infarction. Am.Heart J. 1985, vol. 109, pp. 568-574.
[Alippi, 1996] Alippi, C. and Piuri, V. Experimental neural networks for predicting and identification. IEEE Trans.on Instrumation and Measurment. 1996, vol. 45, pp. 670-676.
[Arad, 1999] Arad, M., Abboud, S., Radai, M. M., Elion, O., Bar-Nachum, S., Zohar, M., and Adunsky, A. Dynamic beat-to-beat QT-RR relationship during physiotherapy effort in elderly patients without primary heart disease. Pacing Clin.Electrophysiol. 1999, vol. 22, pp. 1240-1244.
[Arnaud, 1990] Arnaud, P., Rubel, P., Morlet, D., Fayn, J., and Forlini, M. C. Methodology of ECG interpretation in the Lyon program. Methods Inf.Med. 1990, vol. 29, pp. 393-402.
[Ashman, 1942] Ashman, R. The normal duration of the QT interval. Am.Heart J. 1942, vol. 23, pp. 522-533.
[Baldi,1991] Baldi, P. and Chauvin, Yves. Temporal evolution of generalization during learning in linear networks. Neural Computation. 1991, vol. 3, pp. 589-603.
[Barr, 1994] Barr, C. S., Naas, A., Freeman, M., Lang, C. C., and Struthers, A. D. QT dispersion and sudden unexpected death in chronic heart failure. Lancet. 1994, vol. 343, pp. 327-329.
[Baum, 1989] Baum, E. B. and Haussler, D. What size net gives valid generalization? Neural Computation. 1989, vol. 1(2), pp. 151-160.
[Baxt, 1995] Baxt, W. G. and White, H. Bootstrapping confidence intervals for clinical input variable effects in a network trained to identify the presence of acute myocardial infarction. Neural Computation. 1995, vol. 7, pp. 624-638.
[Bazett,1920] Bazett, H. C. An analysis of the time-relations of Electrocardiograms. Heart. 1920, vol. 7, pp. 353-370.
Références bibliographiques
165
[Belaid, 1992] Belaid, A. and Belaid, Y. Reconnaissance de formes. Méthodes et applications. Paris : Inter Editions.,1992, 429 p.
[Berg, 1995] Berg, J., Fayn, J., Edenbrandt, L., Lundh, B., Malmstrom, P., and Rubel, P. CAVIAR: a tool to improve serial analysis of the 12-lead electrocardiogram. Clin.Physiol. 1995, vol. 15, pp. 435-445.
[Borggrefe, 1997] Borggrefe, M., Fetsch, T., Martinez-Rubio, A., Makijarvi, M., and Breithardt, G. Prediction of arrhythmia risk based on signal-averaged ECG in postinfarction patients. Pacing Clin.Electrophysiol. 1997, vol. 20, pp. 2566-2576.
[Box, 1976] Box, G. E. P. Time series analysis: forecasting and control. San Francisco : Holden-Day,1976, 270 p.
[Bright,1998] Bright, P., Miller, M. R., Franklyn, J. A., and Sheppard, M. C. The use of a neural network to detect upper airway obstruction caused by goiter. Am.J Respir.Crit Care Med. 1998, vol. 157, pp. 1885-1891.
[Catuli, 1997] Catuli, D., Maison-Blanche, P., Fayn, J., Rubel, P., Larroque, P., Vacheron, A., and Coumel, P. Analysis of frequency-dependence of ventricular repolarisation by the Holter method in young adults. Influence of the autonomic nervous system on the rate-dependence of QT. Arch Mal Coeur Vaiss. 1997, vol. 90, pp. 927-34.
[Censi, 2000] Censi, F., Calcagnini, G., Lino, S., Seydnejad, S. R., Kitney, R. I., and Cerutti, S. Transient phase locking patterns among respiration, heart rate and blood pressure during cardiorespiratory synchronisation in humans. Med.Biol.Eng Comput. 2000, vol. 38, pp. 416-426.
[Chauvin, 1995] Chauvin, Yves and Rumelhart, David E. Back propagation : theory, architectures, and applications. Hillsdale, N.J : Lawrence Erlbaum Associates,1995,
[Chon, 1997] Chon, K. H., Korenberg, M. J., and Holstein-Rathlou, N. H. Application of fast orthogonal search to linear and nonlinear stochastic systems. Ann.Biomed.Eng. 1997, vol. 25, pp. 793-801.
[Cohen, 2000] Cohen, H., Neumann, L., Shore, M., Amir, M., Cassuto, Y., and Buskila, D. Autonomic dysfunction in patients with fibromyalgia: application of power spectral analysis of heart rate variability. Semin.Arthritis Rheum. 2000, vol. 29, pp. 217-227.
[Coraboeuf, 1981] Coraboeuf, E. and Arnaud, P. Electrophysiology cardiaque. Encyclopédie médico-chirurgicale. Paris : Coeur-Vaisseaux, 11003 A10,1981, 16 p.
[Coumel, 1985] Coumel, P., Leclercq, J. F., and Maison-Blanche, P. Computerized analysis of dynamic electrocardiograms: a tool for comprehensive electrophysiology. A description of the ATREC II System. Clin.Progr.Electrophysiol.Pacing. 1985, vol. 3, pp. 185-201.
[Coumel, 1991] Coumel, P., Hermida, J. S., Wennerblom, B., Leenhardt, A., Maison-Blanche, P., and Cauchemez, B. Heart rate variability in left ventricular hypertrophy and heart failure, and the effects of beta-blockade. A non-spectral analysis of heart rate
Références bibliographiques
166
variability in the frequency domain and in the time domain. Eur.Heart J. 1991, vol. 12, pp. 412-422.
[Coumel, 1992] Coumel, P. Heart rate variability and the onset of tachyarrhythmias. G.Ital.Cardiol. 1992, vol. 22, pp. 647-654.
[Coumel, 1993] Coumel, P. Cardiac arrhythmias and the autonomic nervous system. J.Cardiovasc.Electrophysiol. 1993, vol. 4, pp. 338-355.
[Coumel, 1994] Coumel, P., Fayn, J., Maison-Blanche, P., and Rubel, P. Clinical relevance of assessing QT dynamicity in Holter recordings. J.Electrocardiol. 1994, vol. 27 Suppl, pp. 62-66.
[Coumel, 1995] Coumel, P., Maison-Blanche, P., Catuli, D., Neyroud, N., Fayn, J., and Rubel, P. Different circadian behavior of the apex and the end of the T wave. J Electrocardiol. 1995, vol. 28 Suppl, pp. 138-42.
[Coumel, 1998] Coumel, P., Maison-Blanche, P., and Badilini, F. Dispersion of ventricular repolarization: reality? Illusion? Significance? Circulation. 1998, vol. 97, pp. 2491-2493.
[CSE, 1985] CSE. The CSE working party. Recommendations for measurments standars in quantitative electrocardiography. Eur Heart J. 1985, vol. 6, pp. 815-825.
[Cybenko, 1989] Cybenko, George. Approximation by superpositions of a sigmoidal function. Mathematics of Control, Signal and Systems. 1989, vol. 2(4), pp. 303-314.
[Cybenko, 1996] Cybenko, George, Institute of Electrical and Electronics Engineers, and IEEE Computer Society. Neural networks. Los Alamitos, CA : IEEE Computer Society,1996,
[Day, 1990] Day, C. P., McComb, J. M., and Campbell, R. W. QT dispersion: an indication of arrhythmia risk in patients with long QT intervals. Br.Heart J. 1990, vol. 63, pp. 342-344.
[Deco, 1996] Deco, G. and Obradovic, D. An Information-Theoretic Approach to Neural Computing. New York : Springer-Verlag,1996, 322 p.
[Dennis, 1983] Dennis, J. E. and Schnabel, R. B. Numerical methods for unconstrained optimization and nonlinear equations. Englewood Cliffs : Pretice-Hall,1983, 354 p.
[Denton, 1990] Denton, T. A., Diamond, G. A., Helfant, R. H., Khan, S., and Karagueuzian, H. Fascinating rhythm: a primer on chaos theory and its application to cardiology. Am.Heart J. 1990, vol. 120, pp. 1419-1440.
[Devroye, 1996] Devroye, L. and Lugosi, G. A Probabilistic Theory of Pattern Recognition. New York : Springer,1996, 292 p.
[Duff, 1993] Duff, H. J., Mitchell, L. B., Gillis, A. M., Sheldon, R. S., Chudleigh, L., Cassidy, P., Chiamvimonvat, N., and Wyse, D. G. Electrocardiographic correlates of
Références bibliographiques
167
spontaneous termination of ventricular tachycardia in patients with coronary artery disease. Circulation. 1993, vol. 88, pp. 1054-1062.
[Efron, 1997] Efron, B. and Tibshirani, R. J. Improvements on cross-validation: The bootstrap method. J. of the American Statistical Association. 1997, vol. 92, pp. 548-560.
[El Dajani, 2001-a] El Dajani, R., Miquel, M., Rubel, P., Maison-Blanche, P., Fayn, J., and Forlini, M. C. A neural network approach for predicting and modelling the dynamical behaviour of cardiac ventricular repolarisation 1. Medinfo. 2001, vol. 10, pp. 444-448.
[El Dajani, 2001-b] EL Dajani, Rajai., Miquel, Maryvonne., and Rubel, Paul.A Multi Layer Perceptrons approach for predicting and modeling the dynamical behavior of cardiac ventricular repolarisation. In : Maria, José. and Prieto, Alberto. IWANN 2001: Bio-Inspired Applications of Connectionism, Lecture Notes in Computer Science 2085.Berlin : Springer, 2001, pp.377-384.
[Extramiana, 1999] Extramiana, F., Maison-Blanche, P. , Badilini, F., Pinoteau, J., Deseo, T., and Coumel, P. Circadian modulation of QT rate dependence in healthy volunteers: gender and age differences. J.Electrocardiol. 1999, vol. 32, pp. 33-43.
[Fahlman, 1988] Fahlman, S. E. An empirical study of learning speed in backpropagation networks. Technical Report CMU-CS-88-162, CMU. 1988,
[Fattorusso, 1958] Fattorusso, V. and Ritter, O. Atlas d'électrocardiographie1958, 147 p.
[Fayn, 1988] Fayn, J. and Rubel, P. CAVIAR: a serial ECG processing system for the comparative analysis of VCGs and their interpretation with auto-reference to the patient. J.Electrocardiol. 1988, vol. 21 Suppl, pp. 173-176.
[Fayn, 1990] Fayn, J. L'analyse séquentielle des électrocardiogrammes. Une approche par comparaison optimale d'images filaires spatio-temporelles. Thèse de doctorat en informatique et automatique appliquée.Institut National des Sciences Appliquées de Lyon., 1990, 182 p.
[Fayn, 1992] Fayn, J., Hamidi, S., Maison-Blanche, P., Bozza, F., Rubel, P., and Coumel, P. Quantitative assessment of changes in the repolarization phase in holter recrdings using CAVIAR. IEEE Computers in Cardiology proceedings. 1992, pp. 175-178.
[Fei, 1996] Fei, L., Goldman, J. H., Prasad, K., Keeling, P. J., Reardon, K., Camm, A. J., and McKenna, W. J. QT dispersion and RR variations on 12-lead ECGs in patients with congestive heart failure secondary to idiopathic dilated cardiomyopathy. Eur.Heart J. 1996, vol. 17, pp. 258-263.
[Finnoff, 1993] Finnoff, W., Hergert, F., and Zimmermann, H. G. Improving model selection by non convergent methods. Neural Networks. 1993, vol. 6, pp. 771-783.
[Frank, 1956] Frank, E. An accurate, clinically practical system for spatial vactocardiography. Circulation. 1956, vol. 13, pp. 737-749.
Références bibliographiques
168
[Franz, 1985] Franz, M. R., Swerdlow, C. D., Liem, L. B., and Schaefer, J.Cycle-length dependence of human ventricular action potential duration in the steady and nonsteady state. In : Butrous, G. S and Schwartz, P. J. Clinical aspects of ventricular repolarization.London : Farrand Press, 1985, pp.163-174.
[Fridericia, 1920] Fridericia, L. S. Die Systolendauer im Elektrokardiogramm bei normalen Menschen und bei Herzkranken. Acta Med.Scand. 1920, vol. 53, pp. 469-486.
[Fusheng, 2001] Fusheng, Y., Bo, H., and Qingyu, T.Approximate entropy and its application in biosignal analysis. In : Akay, Metin. Nonlinear biomedical signal processing. Vol(2).New York. IEEE Press., 2001, pp.72-129.
[Geman, 1992] Geman, S., Bienenstock, E., and Doursat, R. Neural networks and the biais/variance dilemma. Neural Computation. 1992, vol. 4(1), pp. 1-58.
[Glancy, 1995] Glancy, J. M., Garratt, C. J., Woods, K. L., and de Bono, D. P. QT dispersion and mortality after myocardial infarction. Lancet. 1995, vol. 345, pp. 945-948.
[Guazzi, 1995] Guazzi, M., Pepi, M., Maltagliati, A., Celeste, F., Muratori, M., and Tamborini, G. How the two sides of the heart adapt to graded impedance to venous return with head-up tilting. J Am.Coll.Cardiol. 1995, vol. 26, pp. 1732-1740.
[Guevara, 1981] Guevara, M. R., Glass, L., and Shrier, A. Phase locking, period-doubling bifurcations, and irregular dynamics in periodically stimulated cardiac cells. Science. 1981, vol. 214, pp. 1350-1353.
[Guzzetti, 1996] Guzzetti, S., Signorini, M. G., Cogliati, C., Mezzetti, S., Porta, A., Cerutti, S., and Malliani, A. Non-linear dynamics and chaotic indices in heart rate variability of normal subjects and heart-transplanted patients. Cardiovasc.Res. 1996, vol. 31, pp. 441-446.
[Hagan, 1996] Hagan, M. T., Demut, H. B., and Beale, M. H. Neural Network Design. Boston : PWS Publishing,1996, 344 p.
[Hamidi, 1995] Hamidi, S. Analyse quantitative de l'ECG ambulatoire et étude de la dynamique spatio-temporelle de la repolarisation ventriculaire. Thèse de doctorat en informatique et automatique appliquée.Institut National des Sciences Appliquées de Lyon., 1995, 204 p.
[Hastie, 1990] Hastie, T. J. and Tibshirani, R. J. Generalized additive models. Chapman and Hall.,1990, 320 p.
[Haykin, 1994] Haykin, S. Neural Networks: a comprehensive foundation. New York. Macmillan.,1994, 263 p.
[Hii, 1992] Hii, J. T., Wyse, D. G., Gillis, A. M., Duff, H. J., Solylo, M. A., and Mitchell, L. B. Precordial QT interval dispersion as a marker of torsade de pointes. Disparate effects of class Ia antiarrhythmic drugs and amiodarone. Circulation. 1992, vol. 86, pp. 1376-1382.
Références bibliographiques
169
[Hjorth, 1994] Hjorth, J. S. U. Computer Intensive Statistical Methods Validation, Model Selection, and Bootstrap. London : Chapman & Hall,1994,
[Hodges, 1997] Hodges, M. QT hysteresis and syncope. Am J Cardiol. 1997, vol. 80, pp. 110.
[Holter, 1961] Holter, N. J. New method for heart studies : Continious electrocardiography of active subjects over long periods in now practical. Science. 1961, vol. 134, pp. 1214-1220.
[Hornik, 1989] Hornik, K. and Stinchombe, M. Multilayer feedforward networks are universal approximators. Neural Networks. 1989, vol. 2, pp. 359-366.
[Hornik, 1994] Hornik, K.Neural networks: more than statistics for amateurs. In : Dutter, R. and Grossmann, W. COMPSTAT.Physica Verlag, Heidelberg., 1994, pp.223-235.
[Hull, 1995] Hull, S. S., Jr., Vanoli, E., Adamson, P. B., De Ferrari, G. M., Foreman, R. D., and Schwartz, P. J. Do increases in markers of vagal activity imply protection from sudden death? The case of scopolamine. Circulation. 1995, vol. 91, pp. 2516-2519.
[Ishikawa, 1996] Ishikawa, M. and Moriyama, T. Prediction of time series by a structural learning of neural networks. Fuzzy Sets and Systems. 1996, vol. 82, pp. 167-176.
[Japundzic-Zigon, 1998] Japundzic-Zigon, N. Physiological mechanisms in regulation of blood pressure fast frequency variations. Clin.Exp.Hypertens. 1998, vol. 20, pp. 359-388.
[Jiang, 1999] Jiang, Y., Nishikawa, R. M., Schmidt, R. A., Metz, C. E., Giger, M. L., and Doi, K. Improving breast cancer diagnosis with computer-aided diagnosis . Acad.Radiol. 1999, vol. 6, pp. 22-33.
[Jordan, 1995] Jordan, M. I. Why the logistic function? A tutorial on probabilities and neural networks. MIT Computational Cognitive Science Report 9503, http://www.cs.berkeley.edu/~jordan/papers/uai.ps.Z. 1995,
[Karakitsos, 1997] Karakitsos, P., Stergiou, E. B., Pouliakis, A., Tzivras, M., Archimandritis, A., Liossi, A., and Kyrkou, K. Comparative study of artificial neural networks in the discrimination between benign from malignant gastric cells. Anal.Quant.Cytol.Histol. 1997, vol. 19, pp. 145-152.
[Keyl, 1996] Keyl, C., Lemberger, P., Rodig, G., Dambacher, M., and Frey, A. W. Changes in cardiac autonomic control during nocturnal repetitive oxygen desaturation episodes in patients with coronary artery disease. J.Cardiovasc.Risk. 1996, vol. 3, pp. 221-227.
[Labbi, 1993] Labbi, A. Sur l'approximation et les systèmes dynamiques dans les réseaux neuronaux. Thèse.Inst. Nat. Polytechnique de Grenoble., 1993,
[Lande, 1998] Lande, G., Maison-Blanche, P., Fayn, J., Ghadanfar, M., Coumel, P., and Funck-Brentano, C. Dynamic analysis of dofetilide-induced changes in ventricular repolarization. Clin.Pharmacol.Ther. 1998, vol. 64, pp. 312-321.
Références bibliographiques
170
[Lande, 2001] Lande, G., Kyndt, F., Baro, I., Chabannes, D., Boisseau, P., Pony, J. C., Escande, D., and Le Marec, H. Dynamic analysis of the QT interval in long QT1 syndrome patients with a normal phenotype. Eur.Heart J. 2001, vol. 22, pp. 410-422.
[Lau, 1989] Lau, C. P. and Ward, D. E.QT hysteresis: the effect of an abrupt change in pacing rate. In : Butrous, G. S and Schwartz, P. J. Clinical aspects of ventricular repolarization. London : Farrand Press, 1989, pp.176-181.
[Le Cun, 1987] Le Cun, Y. Modèles connexionnistes de l'apprentissage. Université Paris XI., 1987, 304 p.
[Lee, 1989] Lee, J. A. and Attwell, D.The effects of heart rate on the QT interval, and its relashionship to arrythmias causing sudden death. In : Butrous, G. S and Schwartz, P. J. Clinical aspects of ventricular repolarisation.London : Farrand Press, 1989, pp.323-329.
[Lepeschkin, 1952] Lepeschkin, E. and Surawicz, B. The measurment of the QT interval of the electro-cardiogram. Circulation. 1952, vol. 6 , pp. 378-388.
[Leschi, 1991] Leschi, C. Aspects fondamentaux et évolutifs de la connaissance de formes. Approche pluridisciplinaire notion d'approximation. Thèse.Institut National des Sciences Aplliquées de Lyon., 1991, 407 p.
[Liszka-Hackzell, 2001] Liszka-Hackzell, J. J. Categorization of fetal heart rate patterns using neural networks. J Med.Syst. 2001, vol. 25, pp. 269-276.
[Ljung, 1987] Ljung, L. Sytem Identification. Theory for the user. New Jersey : Prentice-Hall,1987, 519 p.
[Ljung, 1949] Ljung, O. A simple formula for clinical interpretation on the QT interval. Acta Med.Scand. 1949, vol. 134, pp. 79-86.
[Lollgen, 1990] Lollgen, H. Arrhythmia in the stress ECG. Med.Klin. 1990, vol. 85, pp. 206-211.
[Lown, 1976] Lown, B. and Verrier, R. L. Neural activity and ventricular fibrillation. N.Engl.J.Med. 1976, vol. 294, pp. 1165-1170.
[Lupoglazoff, 1998] Lupoglazoff, JM, Denjoy, I., Neyroud, N., Guicheney, P., Casasoprana, A., and Coumel, P. Congenital long QT syndrome. Presse Med. 1998, vol. 27, pp. 1029-34.
[Maglaveras, 1998] Maglaveras, N., Stamkopoulos, T., Diamantaras, K., Pappas, C., and Strintzis, M. ECG pattern recognition and classification using non-linear transformations and neural networks: a review. Int.J Med.Inf. 1998, vol. 52, pp. 191-208.
[Malmberg, 1996] Malmberg, L. P., Kallio, K., Haltsonen, S., Katila, T., and Sovijarvi, A. R. Classification of lung sounds in patients with asthma, emphysema, fibrosing alveolitis and healthy lungs by using self-organizing maps. Clin.Physiol. 1996, vol. 16, pp. 115-129.
Références bibliographiques
171
[McCloskey, 2000] McCloskey, M. J. and Potter, E. K. Sympathetic and parasympathetic interaction in vascular and secretory control of salivary glands in anaesthetised dogs. Auton.Neurosci. 2000, vol. 84, pp. 50-57.
[McComb, 1984] McComb, J. M., Campbell, N. P., and Cleland, J. Recurrent ventricular tachycardia associated with QT prolongation after mitral valve replacement and its association with intravenous administration of erythromycin. Am.J Cardiol. 1984, vol. 54, pp. 922-923.
[McCulloch, 1943] McCulloch, G. and Pitts, W. A logical calculs of the ideas immanent in nervous activity. Bulletin of mathemathical biophysics. 1943, vol. 5, pp. 115-133.
[Merri, 1992] Merri, M., Moss, A. J., Benhorin, J., Locati, E. H., Alberti, M., and Badilini, F. Relation between ventricular repolarization duration and cardiac cycle length during 24-hour Holter recordings. Findings in normal patients and patients with long QT syndrome. Circulation. 1992, vol. 85, pp. 1816-1821.
[Mettler, 2001] Mettler, J. N. and Schwartz, P. J. The Long QT Syndrome. [en ligne]. Disponible sur : European Information Center <http://www.qtsyndrome.ch/>.
[Milgram, 1993] Milgram, M. Reconnaissance des formes: méthode numériques et connexionnistes. Paris. Armand Collin.,1993, 175 p.
[Mohsen, 1992] Mohsen, N. Analyse sérielle des modifications de la phase de repolarisation des electrocardiogrammes. Methodes et modèles de variations. Institut National des Sciences Appliquées de Lyon, 1992, 234 p.
[Moore, 1989] Moore, E. N. and Spear, J. F.Electrophysiological effect of heart rate on action potential duration and QT interavl. In : Butrous, G. S and Schwartz, P. J. Clinical aspects of ventricular repolarization.London : Farrand Press, 1989, pp.157-162.
[More, 1977] More, J. J.The Levenberg-Marquardt algorithm: implementation and theory. In: Watson, G. A. Numerical Analysis, Lecture Notes in Mathematics 630.Heidelberg : Springer Verlag, 1977, pp.105-116.
[Morlet, 1986] Morlet, D. Contribution à l'analyse automatique des électrocardiogrammes: algorithmes de localisation, classification et délimitation précise des ondes dans le système de Lyon. Thèse.Institut National des Sciences Appliquées de Lyon., 1986, 320 p.
[Moss, 1991] Moss, A. J., Schwartz, P. J., Crampton, R. S., Tzivoni, D., Locati, E. H., MacCluer, J., Hall, W. J., Weitkamp, L., Vincent, G. M., and Garson, A., Jr. The long QT syndrome. Prospective longitudinal study of 328 families. Circulation. 1991, vol. 84, pp. 1136-1144.
[Moss, 1995] Moss, A. J., Zareba, W., Benhorin, J., Locati, E. H., Hall, W. J., Robinson, J. L., Schwartz, P. J., Towbin, J. A., Vincent, G. M., and Lehmann, M. H. ECG T-wave patterns in genetically distinct forms of the hereditary long QT syndrome. Circulation. 1995, vol. 92, pp. 2929-2934.
Références bibliographiques
172
[Nadal, 1993] Nadal, J. P. Réseaux de neurones. De la physique à la psychologie. Paris : Armand Colin.,1993, 152 p.
[Najim, 1988] Najim, M. Modélisation et identification en traitement du signal. Paris : Masson,1988, 185 p.
[Neilson, 2000] Neilson, J. M.Dynamic QT-interval analysis. In : Osterhues, H. H., Hombach, V., and Moss, A. J. Advances in noninvasive electrocardiographic monitoring techniques.Dordrecht : Kluwer Academic Publishers, 2000, pp.131-141.
[Neuro Dimension, 2001] Neuro Dimension. The Applications Corner. [en ligne]. Disponible sur : Neuro Dimension, Inc. <http://www.nd.com/appcornr/purpose.htm >.
[Opthof, 2000] Opthof, T., Coronel, R., Rademaker, H. M., Vermeulen, J. T., Wilms-Schopman, F. J., and Janse, M. J. Changes in sinus node function in a rabbit model of heart failure with ventricular arrhythmias and sudden death. Circulation. 2000, vol. 101, pp. 2975-2980.
[Orsier, 1995] Orsier, B. Etude et application de systèmes hybrides neurosymboliques. Thèse.Université Joseph Fourier Grenoble., 1995,
[Osterhues, 1993] Osterhues, H. H., Eggeling, T., Hoher, M., Weismuller, P., Kochs, M., and Hombach, V. Value of different non-invasive methods for the recognition of arrhythmogenic complications in high-risk patients with sustained ventricular tachycardia during programmed ventricular stimulation. Eur Heart J. 1993, vol. 14 Suppl E, pp. 40-5.
[Parisi, 1997] Parisi, R., Di Claudio, E. D., Orlandi, G., and Rao, B. Fast adaptative digital equalization by recurrent neural networks. IEEE Trans.on Signal Processing, special number on Neural Network applications., 1997, vol. 45, pp. 2731-2739.
[Pedretti, 1999] Pedretti, R. F., Catalano, O., Ballardini, L., de Bono, D. P., Radice, E., and Tramarin, R. Prognosis in myocardial infarction survivors with left ventricular dysfunction is predicted by electrocardiographic RR interval but not QT dispersion. Int.J.Cardiol. 1999, vol. 68, pp. 83-93.
[Perkiomaki, 1995] Perkiomaki, J. S., Koistinen, M. J., Yli-Mayry, S., and Huikuri, H. V. Dispersion of QT interval in patients with and without susceptibility to ventricular tachyarrhythmias after previous myocardial infarction. J.Am.Coll.Cardiol. 1995, vol. 26, pp. 174-179.
[Petrolino, 1999] Petrolino, L. Modélisation prédictive de l'activité électrique du coeur par réseaux de neurones récurrents. PFE.Institut National des Sciences Appliquées de Lyon., 1999, 5 p.
[Pfurtscheller, 1996] Pfurtscheller, G., Kalcher, J., Neuper, C., Flotzinger, D., and Pregenzer, M. On-line EEG classification during externally-paced hand movements using a neural network-based classifier. Electroencephalogr.Clin.Neurophysiol. 1996, vol. 99, pp. 416-425.
[Pipberger, 1965] Pipberger, H. V. Advantages of three lead cardiographic recordings. Ann.N.Y.Acad.Sci. 1965, vol. 126, pp. 873-881.
Références bibliographiques
173
[Pomeranz, 1985] Pomeranz, B., Macaulay, R. J., Caudill, M. A., Kutz, I., Adam, D., Gordon, D., Kilborn, K. M., Barger, A. C., Shannon, D. C., Cohen, R. J., and . Assessment of autonomic function in humans by heart rate spectral analysis. Am.J.Physiol. 1985, vol. 248, pp. H151-H153.
[Priori, 1994] Priori, S. G., Napolitano, C., Diehl, L., and Schwartz, P. J. Dispersion of the QT interval. A marker of therapeutic efficacy in the idiopathic long QT syndrome. Circulation. 1994, vol. 89, pp. 1681-1689.
[RFAI, 2001] RFAI. Apprentissage et validation. [en ligne]. Disponible sur : Laboratoire de Reconnaissance des Formes et Analyse d'Images.Université de Tours. <http://www.rfai.li.univ-tours.fr/validation/>.
[Ribeiro, 2001] Ribeiro, A. L., Moraes, R. S., Ribeiro, J. P., Ferlin, E. L., Torres, R. M., Oliveira, E., and Rocha, M. O. Parasympathetic dysautonomia precedes left ventricular systolic dysfunction in Chagas disease. Am.Heart J. 2001, vol. 141, pp. 260-265.
[Ripley, 1996] Ripley, B. D. Pattern recognition neural networks. Cambridge university press.,1996,
[Rizzoni, 1993] Rizzoni, D., Muiesan, M. L., Zulli, R., Castellano, M., Bettoni, G., Porteri, E., and Agabiti-Rosei, E. Effect of antihypertensive treatment on daytime and nighttime power spectral analysis of heart rate. Am.J.Hypertens. 1993, vol. 6, pp. 204-208.
[Rosenblatt, 1961] Rosenblatt, F. Principles of neurodynamics: perceptrons and the theory of brain mechanisms. Washington : Spartan Books,1961,
[Rubel, 1986] Rubel, P., Fayn, J., Arnaud, P., Frachon, M., and Forlini, MC.New strategies in serial VCG comparaison and trends analysis. In : Willems, J. L., Van Bemmel, J. H., and Zywietz, C. Computer ECG analysis: Towards standardization.Amesterdam. North-Holland, 1986, pp.323-328.
[Rubel, 1988] Rubel, P., Fayn, J., Mohsen, N., and Girard, P. New methods of quantitative assessment of the extent and significance of serial ECG changes of the repolarization phase. J.Electrocardiol. 1988, vol. 21 Suppl, pp. S177-S181.
[Rubel, 1996] Rubel, P., Hamidi, S., Behlouli, H., Couderc, JP, Fayn, J., Forlini, MC, Maison-Blanche, P., Miquel, M., Coumel, P., and Touboul, P. Are serial Holter QT, late potential, and wavelet measurement clinically useful? J Electrocardiol. 1996, vol. 29 Suppl, pp. 52-61.
[Rumelhart, 1986] Rumelhart, David E., McClelland, James L., University of California, San Diego, and PDP Research Group. Parallel distributed processing explorations in the microstructure of cognition. Cambridge, Mass : MIT Press,1986,
[Rzempoluck, 1997] Rzempoluck, E. J. Neural network classification of EEG during camouflaged object identification. Int.J Med.Inf. 1997, vol. 44, pp. 169-175.
Références bibliographiques
174
[Sarma, 1984] Sarma, J. S. M., Sarma, R. J., and Bilitch, M. An exponential formula for heart rate dependence of QT interval during exercice and cardiac pacing in humans: Reevaluation of Bazett's formula. Am.J.Cardiol. 1984, vol. 54, pp. 103-108.
[Sarma, 1987] Sarma, J. S., Venkataraman, S. K., Samant, D. R., and Gadgil, U. Hysteresis in the human RR-QT relationship during exercise and recovery. Pacing Clin.Electrophysiol. 1987, vol. 10, pp. 485-491.
[Savelieva, 1999] Savelieva, I., Yap, Y. G., Yi, G., Guo, X. H., Hnatkova, K., Camm, A. J., and Malik, M. Relation of ventricular repolarization to cardiac cycle length in normal subjects, hypertrophic cardiomyopathy, and patients with myocardial infarction. Clin.Cardiol. 1999, vol. 22, pp. 649-654.
[Schnorrenberg, 1996] Schnorrenberg, F., Pattichis, C. S., Schizas, C. N., Kyriacou, K., and Vassiliou, M. Computer-aided classification of breast cancer nuclei. Technol.Health Care. 1996, vol. 4, pp. 147-161.
[Schwartz, 1990-a] Schwartz, P. J. Cardiac sympathetic innervation and the prevention of sudden death. Cardiologia. 1990, vol. 35, pp. 51-54.
[Schwartz, 1990-b] Schwartz, P. J. and Priori, S. G. Sympathetic nervous system and cardiac arrythmias. In : DP Zipes and Jalife, J. Cardiac Electrophysilogy: From Cell to Bedside.Philadelphia : WB Saunders, 1990, pp.330-343.
[Signorini, 2001] Signorini, M. G., Sassi, R., and Cerutti, S.Assessment of nonlinear dynamics in heart rate variability signal. In : Akay, Metin. Nonlinear biomedical signal proxessing.New Jersey. IEEE Press., 2001, pp.263-281.
[Singh, 1997] Singh, J. P., Johnston, J., Sleight, P., Bird, R., Ryder, K., and Hart, G. Left ventricular hypertrophy in hypertensive patients is associated with abnormal rate adaptation of QT interval. J.Am.Coll.Cardiol. 1997, vol. 29, pp. 778-784.
[Taran, 1947] Taran, L. M. and Szilagyi, N. The duration of the electrical systole (QT) in acute rheumatic carditis in children. Am.Heart J. 1947, vol. 33, pp. 14-26.
[Tavernier, 1997] Tavernier, R., Jordaens, L., Haerynck, F., Derycke, E., and Clement, D. L. Changes in the QT interval and its adaptation to rate, assessed with continuous electrocardiographic recordings in patients with ventricular fibrillation, as compared to normal individuals without arrhythmias. Eur Heart J. 1997, vol. 18, pp. 994-9.
[Thiria, 1997] Thiria, S., Lechevallier, Y., Gascuel, O., and Canu, S. Statistique et méthodes neuronales. Paris : Dunod,1997, 311 p.
[Tong, 1990] Tong, H. Nonlinear time series. New York. Oxford Univesity Press.,1990,
[Vanoli, 1990] Vanoli, E. and Schwartz, P. J. Sympathetic--parasympathetic interaction and sudden death. Basic Res.Cardiol. 1990, vol. 85 Suppl 1, pp. 305-321.
[Verrier, 1996] Verrier, R. L. and Mittleman, M. A. Life-threatening cardiovascular consequences of anger in patients with coronary heart disease. Cardiol.Clin. 1996, vol. 14, pp. 289-307.
Références bibliographiques
175
[Vincent, 1992] Vincent, G. M., Timothy, K. W., Leppert, M., and Keating, M. The spectrum of symptoms and QT intervals in carriers of the gene for the long-QT syndrome. N.Engl.J.Med. 1992, vol. 327, pp. 846-852.
[Wagner, 1995] Wagner, C. D. and Persson, P. B. Nonlinear chaotic dynamics of arterial blood pressure and renal blood flow. Am.J Physiol. 1995, vol. 268, pp. H621-H627.
[Warren, 2001] Warren, S. S. Donoho-Johnstone Benchmarks : Neural Net Results [en ligne]. Disponible sur : SAS Institute Inc., Cary, NC, USA. <ftp://ftp.sas.com/pub/neural/dojo/dojo.html>.
[Weigned, 1990] Weigned, A. S. Predicting the future: A connectionist approach. Int.J.Neural.Syst. 1990, vol. 1(3), pp. 193-209.
[Wilhelm, 1999] Wilhelm, F. H., Grossman, P., and Roth, W. T. Analysis of cardiovascular regulation. Biomed.Sci.Instrum. 1999, vol. 35, pp. 135-140.
[Willems, 1987] Willems, J. L., Abreu-Lima, C., Arnaud, P., Van Bemmel, J. H., Brohet, C., Degani, R., Denis, B., Graham, I., van Herpen, G., Macfarlane, P. W., and . Testing the performance of ECG computer programs: the CSE diagnostic pilot study. J Electrocardiol. 1987, vol. 20 Suppl, pp. 73-77.
[Willems, 1988] Willems, J. L., Abreu-Lima, C., Arnaud, P., Van Bemmel, J. H., Brohet, C., Degani, R., Denis, B., Graham, I., van Herpen, G., Macfarlane, P. W., and . Effect of combining electrocardiographic interpretation results on diagnostic accuracy. Eur Heart J. 1988, vol. 9, pp. 1348-1355.
[Willems, 1990] Willems, J. L., Arnaud, P., Van Bemmel, J. H., Degani, R., Macfarlane, P. W., and Zywietz, C. Common standards for quantitative electrocardiography: goals and main results. CSE Working Party. Methods Inf.Med. 1990, vol. 29, pp. 263-271.
[Willems, 1991] Willems, J. L., Abreu-Lima, C., Arnaud, P., Van Bemmel, J. H., Brohet, C., Degani, R., Denis, B., Gehring, J., Graham, I., van Herpen, G., and . The diagnostic performance of computer programs for the interpretation of electrocardiograms. N.Engl.J Med. 1991, vol. 325, pp. 1767-1773.
[Xue, 1992] Xue, Q., Hu, Y. H., and Tompkins, W. J. Neural-network-based adaptive matched filtering for QRS detection. IEEE Trans.Biomed.Eng. 1992, vol. 39, pp. 317-329.
[Yambe, 1999] Yambe, T., Nanka, S., Kobayashi, S., Tanaka, A., Owada, N., Yoshizawa, M., Abe, K., Tabayashi, K., Takeda, H., Nishihira, T., and Nitta, S. Detection of the cardiac function by fractal dimension analysis. Artif.Organs. 1999, vol. 23, pp. 751-756.
[Yambe, 1998] Yambe, T., Nanka, S., Kobayashi, S., Tanaka, A., Yoshizawa, M., Abe, K., Tabayashi, K., Takeda, H., and Nitta, S. Origin of chaos in the circulation: open loop analysis with an artificial heart. ASAIO J. 1998, vol. 44, pp. M700-M703.
[Yeragani, 1998] Yeragani, V. K., Sobolewski, E., Igel, G., Johnson, C., Jampala, V. C., Kay, J., Hillman, N., Yeragani, S., and Vempati, S. Decreased heart-period

Références bibliographiques
176
variability in patients with panic disorder: a study of Holter ECG records. Psychiatry Res. 1998, vol. 78, pp. 89-99.
[Zurada, 1992] Zurada, J. M. Introduction to artificial neural systems. Boston : PWS Publishing Company.,1992.
Table des matières
177
I. ANALYSE DE L’ECG AMBULATOIRE ET ELECTROCARDIOLOGIE QUANTITATIVE __________________________________________________________ 9
I.1 RÔLE ET ANATOMIE DU CŒUR ________________________________________ 11 I.2 PHYSIOLOGIE DU CŒUR _____________________________________________ 11 I.3 LE CHAMP ÉLECTRIQUE CARDIAQUE ___________________________________ 12 I.3.1 L’IMPORTANCE DE L’ÉLECTROCARDIOLOGIE ____________________________ 12 I.3.2 L’ACQUISITION DU SIGNAL ÉLECTRIQUE CARDIAQUE ______________________ 13 I.3.2.1 Les 12 dérivations électrocardiographiques ________________________ 13 I.3.2.2 L’électrocardiogramme tridimensionnel : le vectocardiogramme _______ 15 I.3.2.3 L’électrocardiogramme ambulatoire ou Holter______________________ 16 I.3.3 LE TRACÉ ÉLECTROCARDIOGRAPHIQUE (ECG) __________________________ 16 I.4 L’ENREGISTREMENT DE L’ECG EN AMBULATOIRE : LE HOLTER ____________ 17 I.4.1 NUMÉRISATION, DÉTECTION ET CLASSIFICATION _________________________ 18 I.4.2 SÉLECTION ET MOYENNAGE DES COMPLEXES PQRST PAR LE SYSTÈME ATREC_ 19 I.5 EXPLOITATION DE L’ÉLECTROCARDIOLOGIE QUANTITATIVE _______________ 19 I.5.1 LE SYSTÈME DE LYON _____________________________________________ 20 I.5.2 L’ANALYSE SÉRIELLE DES ECG : LE LOGICIEL CAVIAR ____________________ 22 I.5.2.1 Introduction _________________________________________________ 22 I.5.2.2 Caviar et la mesure précise des variations de durée de l’intervalle QT ___ 23 I.6 L’ACTION EUROPÉENNE "STANDARDS COMMUNS POUR L’ELECTROCARDIOGRAPHIE QUANTITATIVE" : CSE _____________________________ 24 I.6.1 EVALUATION DES PROGRAMMES DE MESURE (PHASE 1 DE L’ACTION CSE) _____ 25 I.6.2 EVALUATION DES PROGRAMMES DE DIAGNOSTIC (PHASE 2 DE L’ACTION CSE)__ 26 I.7 CONCLUSION______________________________________________________ 27
II. LA RÉPONSE VENTRICULAIRE ____________________________________ 28
II.1 INTRODUCTION ____________________________________________________ 30 II.2 LA DISPERSION DU QT (QTD) ________________________________________ 31 II.3 LES ALTÉRATIONS DU RYTHME _______________________________________ 32 II.4 FACTEURS INFLUENÇANT LE COMPORTEMENT DE L’INTERVALLE QT ________ 32 II.4.1 LE SYSTÈME NERVEUX AUTONOME (SNA) ____________________________ 33 II.4.1.1 Nerf sympathique ____________________________________________ 34 II.4.1.2 Nerf parasympathique (vagal)___________________________________ 35 II.4.1.3 Mesure de l’activité du Système Nerveux Autonome (SNA) ___________ 36 II.4.2 VARIATIONS CIRCADIENNES_______________________________________ 37 II.5 VARIATION DE LA DURÉE DE L’INTERVALLE QT AVEC LA FRÉQUENCE CARDIAQUE 38 II.5.1 MODÈLES STATIQUES DES VARIATIONS DE QT EN FONCTION DE RR ________ 39 II.5.2 MODÈLES DE CORRECTIONS QTC = F(QT,RR) _________________________ 41 II.5.3 ETUDE DE LA DYNAMIQUE DE QT EN FONCTION DE RR __________________ 42 II.5.3.1 Valeur diagnostique___________________________________________ 42 II.5.3.2 Modèle de variation dynamique _________________________________ 42 II.5.3.3 Relation de type « dynamique»__________________________________ 44 II.6 LE SYNDROME DE QT LONG _________________________________________ 47 II.6.1 QT LONG CONGÉNITAL___________________________________________ 47 II.6.1.1 Identification des sujets porteurs de l'anomalie génétique. Définition du phénotype 48
Table des matières
178
II.6.1.2 Le risque de mort subite _______________________________________ 49 II.6.1.3 Traitement __________________________________________________ 49 II.6.2 LE SYNDROME DU QT LONG ACQUIS ________________________________ 50 II.7 CONCLUSIONS _____________________________________________________ 50
III. MODÉLISATION ET IDENTIFICATION ______________________________ 52
III.1 INTRODUCTION ____________________________________________________ 55 III.2 LES MODÈLES PARAMÉTRIQUES_______________________________________ 57 III.2.1 INTRODUCTION_________________________________________________ 57 III.2.2 CHOIX DU MODÈLE PARAMÉTRIQUE _________________________________ 58 III.2.3 LES DIFFICULTÉS DE L’APPROCHE PARAMÉTRIQUE______________________ 60 III.3 LES RÉSEAUX DE NEURONES ARTIFICIELS (RNA) ________________________ 61 III.3.1 DÉFINITION ___________________________________________________ 62 III.3.2 LE NEURONE___________________________________________________ 63 III.3.3 LES ARCHITECTURES NEURONALES _________________________________ 63 III.3.3.1 Les réseaux de neurones bouclés ou récurrents ___________________ 64 III.3.3.2 Les réseaux de neurones en couches (Perceptrons Multi-Couches) ____ 64 III.3.4 PERCEPTRON MULTI-COUCHES (PMC) ET APPROXIMATION DE FONCTIONS___ 65 III.3.5 L’APPRENTISSAGE ______________________________________________ 66 III.3.5.1 Apprentissage non supervisé__________________________________ 67 III.3.5.2 Apprentissage supervisé _____________________________________ 67 III.3.5.3 Algorithme d’apprentissage supervisé pour les RNA : la rétropropagation 68 III.3.6 LA GÉNÉRALISATION ____________________________________________ 70 III.3.6.1 Les facteurs indispensables pour une bonne généralisation __________ 70 III.3.6.2 Optimisation de la généralisation ______________________________ 72 III.3.6.2.1 Algorithme d’apprentissage ________________________________ 72 III.3.6.2.2 Compromis Apprentissage-Généralisation ou « early stopping »____ 74 III.4 MISE EN OEUVRE DU MODÈLE NEURONAL _______________________________ 76 III.4.1 CHOIX DE L’ALGORITHME DE L’APPRENTISSAGE________________________ 76 III.4.2 CHOIX DES FONCTIONS DE TRANSFERT _______________________________ 76 III.4.3 CHOIX DE L’ARCHITECTURE NEURONALE _____________________________ 77 III.4.4 ENSEMBLE D’APPRENTISSAGE, DE VALIDATION ET DE TEST _______________ 78 III.4.5 LIEN ENTRE RNA ET MÉTHODES STATISTIQUES ________________________ 78 III.4.6 LE DILEMME DU BIAIS ET DE LA VARIANCE____________________________ 80 III.5 APPROCHE MÉTHODOLOGIQUE _______________________________________ 83 III.5.1 L’UTILISATION DES R.N.A. DANS LE DOMAINE MÉDICAL _________________ 83 III.5.2 L’UTILISATION DES RNA POUR CARACTÉRISER LA RELATION QT= F(RR) ___ 84 III.5.2.1 Les Perceptrons Multi-Couches pour la modélisation de la relation QT=f(RR) 84 III.5.2.2 Les réseaux récurrents pour la modélisation de la relation QT=f(RR) __ 85 III.5.3 LA NON LINÉARITÉ DES SIGNAUX CARDIAQUES ________________________ 86 III.5.4 LA PRÉDICTION DE SÉRIES TEMPORELLES _____________________________ 87 III.5.5 CHOIX DES VARIABLES ___________________________________________ 87 III.5.6 CHOIX DES SÉQUENCES HOLTER UTILISÉES EN APPRENTISSAGE ____________ 88 III.5.7 UTILISATION DES MODÈLES PRÉDICTIFS ______________________________ 88 III.6 CONCLUSIONS _____________________________________________________ 89
Table des matières
179
IV. MISE EN PLACE DES MODÈLES PRÉDICTIFS________________________ 91
IV.1 INTRODUCTION ET PROBLÉMATIQUE___________________________________ 94 IV.2 POPULATION D’ÉTUDES _____________________________________________ 96 IV.3 MÉTHODOLOGIE__________________________________________________ 100 IV.3.1 MESURE DES INTERVALLES QT ET RR ______________________________ 100 IV.3.1.1 Rappels sur l’analyse sérielle des ECG : le logiciel Caviar _________ 100 IV.3.1.2 La méthode CAVIAR, le Système de Lyon et notre problématique___ 101 IV.3.1.3 Problème de la fréquence d’acquisition des signaux de longue durée _ 104 IV.3.2 PRÉTRAITEMENT DES SÉQUENCES RR ET QT ISSUES DE CAVIAR_________ 104 IV.3.3 L’ARCHITECTURE DU RÉSEAU DE NEURONES _________________________ 105 IV.3.4 CRITÈRES D’ÉVALUATION DE LA QUALITÉ DE LA GÉNÉRALISATION ________ 107 IV.3.5 LES DONNÉES ARTIFICIELLES SIMULANT RR ET QT ____________________ 111 IV.3.5.1 Test des capacités du PMC en généralisation : utilisation de plusieurs séquences en apprentissage. _________________________________________________ 114 IV.3.5.2 Test des capacités du PMC en apprentissage : changement de constante de temps entre le front ascendant et le front descendant.______________________________ 114 IV.3.5.3 Test des capacités du PMC à apprendre des données manquantes : utilisation du front ascendant du créneau en apprentissage. _________________________ 116 IV.3.5.4 Raccourcissement ou allongement brusque de QT après une forte variation du RR : front descendant inférieur de 25 msec à sa valeur normale.___________ 116 IV.3.6 ETUDES SUR LA NATURE DE LA RELATION QT=F(RR) __________________ 117 IV.4 RÉSULTATS ______________________________________________________ 121 IV.4.1 LES DONNÉES ARTIFICIELLES _____________________________________ 121 IV.4.1.1 Influence de la zone de variation des signaux utilisés en apprentissage : Utilisation de plusieurs séquences en apprentissage. ______________________________ 121 IV.4.1.2 Evaluation de la capacité d’apprentissage d’une dissymétrie des constantes de temps. _______________________________________________________ 125 IV.4.1.3 Apprentissage des données manquantes : uniquement le front ascendant du créneau est appris. ______________________________________________________ 128 IV.4.1.4 Raccourcissement du QT simulé suite à une accélération (front ascendant) et un ralentissement (front descendant) du RR simulé (créneaux).____________________ 129 IV.4.1.5 Discussion _______________________________________________ 130 IV.4.2 LES DONNÉES RÉELLES__________________________________________ 132 IV.4.2.1 Facteur d’apprentissage adaptatif _____________________________ 132 IV.4.2.2 Conditions initiales ________________________________________ 133 IV.4.2.3 Choix du nombre d’itérations en apprentissage __________________ 133 IV.4.2.4 Les modèles du sujet Clav___________________________________ 136 IV.4.2.5 Utilisation de 2 séquences diurnes en apprentissage (Cln, Clp) ______ 142 IV.4.2.6 Les modèles du sujet Gard __________________________________ 144 IV.4.2.7 Etude Inter-patient_________________________________________ 147 IV.4.2.8 Comparaison dynamique____________________________________ 150 IV.4.2.9 Comparaison statique ______________________________________ 151 IV.4.2.10 Discussion _______________________________________________ 153 IV.5 CONCLUSION_____________________________________________________ 156
CONCLUSION __________________________________________________________ 158
ANNEXE A _____________________________________________________________ 161

Table des matières
180
REFERENCES BIBLIOGRAPHQUES ______________________________________ 164
FOLIO ADMINISTRATIF
THESE SOUTENUE DEVANT L’INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE LYON
NOM : MOURID EL DAJANI DATE de SOUTENANCE : (avec précision du nom de jeune fille, le cas échéant) 07 janvier 2001 Prénoms : RAJAI
TITRE : MODELISATION COGNITIVE ET PREDICTIVE DU COMPORTEMENT DYNAMIQUE DE L’ACTIVITE ELECTRIQUE DU CŒUR PAR APPROCHES NEURONALES. NATURE : Doctorat Numéro d’ordre : 02 ISAL 0001 Formation doctorale : Images et Systèmes Cote B.I.U. – Lyon : T 50/210/19 / et bis CLASSE : RESUME : L’objectif général de notre sujet de thèse est de développer, de mettre en œuvre et d’évaluer de nouvelles méthodes d’analyse de la dynamique spatio-temporelle du champ électrique cardiaque en ambulatoire, et plus particulièrement de la dynamique de la phase de repolarisation mesurée sur l’électrocardiogramme (ECG) par l’intervalle QT. Le but est d’analyser et de comprendre l’évolution en continu de la structure spatio-temporelle du signal électrique cardiaque. Dans ce cadre, nous avons mis au point une méthodologie originale à base de réseaux de neurones artificiels (RNA) pour réaliser des modèles prédictifs du comportement dynamique très basse fréquence de l’intervalle QT d’un patient donné en fonction des variations instantanées de sa fréquence cardiaque mesurée par l’intervalle RR. La fonction à modéliser est du type : ),,...,,( 11 MiMiiii RRRRRRRRfQT −+−−= , où M est la durée de la mémoire de RR. Nos travaux ont permis l’élaboration d’un réseau de neurones de type « perceptron multicouche », comportant 120 neurones dans la couche d’entrée (i.e. 120 mesures de RR, ce qui équivaut à M= 4 minutes), 10 neurones dans la couche cachée et 1 neurone en sortie. L’apprentissage est effectué au moyen d’un algorithme de rétropropagation avec facteur d’apprentissage adaptatif pour la phase d’apprentissage. La valeur du retard M trouvé est cohérente avec les constantes de temps identifiées au moyen d’études invasives qui semblent indiquer que la réponse ventriculaire se comporterait comme un système du premier ordre avec une constante de temps de l’ordre de la minute. Dans ces conditions, il faudrait au moins 4 minutes pour atteindre 98% de la valeur maximale du signal. Les réseaux multi-couches se sont avérés ainsi capables de modéliser la relation non-linéaire QT=f(RR) en régime transitoire et permettent d’envisager l’extraction de nouvelles informations sur la dynamique du système cœur en ambulatoire, et d’éviter ainsi des explorations invasives. Par ailleurs, nous proposons une méthode originale de détection en temps réel des anormalités de la réponse ventriculaire en fonction des variations instantanées de la fréquence. Les différences entre le QT prédit et le QT mesuré peuvent être utilisées pour déclencher une alarme en cas de franchissement d’un seuil. Cependant, des études supplémentaires sont nécessaires pour déterminer les seuils de déclenchement ainsi que la valeur diagnostique des paramètres susceptibles d’être déduits de la réponse des modèles neuronaux à un échelon unité. MOTS-CLES : Electrocardiologie quantitative, ECG, systèmes Holter, repolarisation ventriculaire, dynamique du QT, variabilité de la fréquence cardiaque, traitement du signal, réseaux de neurones, modèles dynamiques, prédiction. Laboratoire (s) de recherches : Laboratoire d’Ingénierie des Systèmes d’Information (LISI), INSA & INSERM ERM107. Directeur de thèse : Pr. Paul RUBEL. Président de jury : Composition du jury : Pr. Philippe Chevalier, Pr. Jacques Duchêne (rapporteur), Madame Maryvonne Miquel, Pr. Paul Rubel , Pr. Nicole Vincent (rapporteur), Pr. Djamel Abdelkader Zighed.