Embed Size (px)
Citation preview
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
1
Modélisation des courants dans la Rade de Brest : Application pour la plongée sous-marine Projet UV 5.4 ENSTA Bretagne 04/03/2016 P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
Encadrants : Amandine Nicolle et Benoît Clément
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
2
Sommaire
Remerciements ....................................................................................................................................... 3
Mots clés ................................................................................................................................................. 3
Résumé .................................................................................................................................................... 3
Abstract ................................................................................................................................................... 4
Introduction ............................................................................................................................................. 4
I. Le modèle Télémac .......................................................................................................................... 5
1. Elaboration du modèle ................................................................................................................ 5
2. Validation du modèle avec les données du SHOM ..................................................................... 7
3. Validation du modèle avec les mesures in situ d’ADCP ............................................................ 12
4. Les informations complémentaires obtenues ........................................................................... 15
II. Les cartes ....................................................................................................................................... 16
1. Carte loisir ................................................................................................................................. 16
2. Carte confirmée ......................................................................................................................... 19
3. Carte professionnelle ................................................................................................................ 23
III. Limites et améliorations possibles ............................................................................................ 28
1. Optimisation du code ................................................................................................................ 28
2. Validation du modèle ................................................................................................................ 29
Conclusion ............................................................................................................................................. 30
Bibliographie.......................................................................................................................................... 31
Table des figures .................................................................................................................................... 32
Table des tableaux ................................................................................................................................. 32
ANNEXES ................................................................................................................................................ 33
Questionnaire du Club de plongée Eau Libre .................................................................................... 33
Comparaison de la circulation générale du courant à Pleine Mer .................................................... 34
Comparaison de la circulation générale du courant à Basse Mer ..................................................... 36
Etude des données ADCP sur les ducs d’Albes .................................................................................. 38
Table des paliers ................................................................................................................................ 40
Exemple d’un rapport de levé ........................................................................................................... 41
Méthode des triangles ...................................................................................................................... 42
Documentation de l’ADCP Workhorse Mariner (1/2) ....................................................................... 43
Documentation de l’ADCP Workhorse Mariner (2/2) ....................................................................... 44

P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
3
Remerciements
Nous tenons à remercier Mme Amandine Nicolle et M. Benoît Clément pour leur aide et leur
encadrement dans ce projet. Nous adressons nos chaleureux remerciements à M. Moitié, qui a
décelé nos multiples erreurs dans le logiciel GMT, ainsi que M. Probst sans qui nous aurions passé de
longues nuits à regarder nos codes tourner sans résultats. Nous remercions M. Legris qui nous a
apporté une aide précieuse dans le traitement de nos données d’ADCP. Enfin, nos remerciements
vont aux responsables du Club de plongée Eau Libre, qui ont accepté de nous rencontrer et de nous
aider à remettre notre projet dans un contexte réel, ainsi qu’à M. Aïdonidis pour les données
météorologiques qu’il a bien voulu nous transmettre.
Mots clés
Projet, océanographie, plongée sous-marine, rade de Brest, courants, dérive, cartes.
Résumé
Ce rapport présente les résultats de notre projet de modélisation des courants en Rade de Brest
appliquée à la plongée sous-marine. La plongée, qu’elle soit de loisir ou professionnelle, soumet ses
pratiquants à de nombreux dangers qu’il convient de prévoir et prévenir au maximum. Un de ces
dangers est le courant qui, bien qu’il soit parfois recherché par les plongeurs expérimentés, peut
affecter les débutants et les exposer à des risques non négligeables. C’est dans cette optique que
nous avons travaillé dans le cadre de l’U.V 5.4 à la modélisation des courants dans la Rade de Brest,
qui est très appréciée des plongeurs. En utilisant le logiciel de modélisation Télémac, agrémenté de
données météorologiques de Météo France, nous avons récupéré des données de courant dans la
Rade, que nous avons validées à partir de données du SHOM et de mesures in-situ et à partir
desquelles nous avons construit trois cartes. Une des cartes est destinée à la plongée loisir, une autre
à la plongée confirmée (plongeurs qui recherchent un peu de courant) et la dernière se veut un outil
pour les plongeurs professionnels. Ce rapport présente la méthodologie que nous avons suivie pour
construire ces différentes cartes ainsi que les résultats obtenus et leur analyse critique.

P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
4
Abstract
This report describes the results of Project “Modelling of the currents in the Bay of Brest for an
application to scuba-diving”. Scuba diving is an activity that can be dangerous, whether it is practiced
by professionals or beginners. There is no doubt that knowing and preventing these risks is
necessary. One of the most dangerous parameter affecting divers might be the current. Indeed, even
if it is something professional divers look for, it can lead to risky situations for beginners that can not
be neglected. It is in this context that we worked on our project in UV 5.4 and tried to model currents
in the Bay of Brest, a highly appreciated scuba diving spot. By using the modelling piece of software
Télémac with added meteorological data from Météo-France, we obtained currents data in the Bay,
that we were able to validate using SHOM data and in-situ measurements. With these currents we
built three different maps. One is aimed at scuba diving for beginners, another at affirmed divers
(who look for some currents) and the last one was made for professional scuba diving. This report
presents the methodology we followed to obtain these maps as well as the results we got and their
analysis.
Introduction
Nous avons réalisé ce projet dans le cadre de l’U.V 5.4 de la formation d’ingénieur
Hydrographe/Océanographe de l’ENSTA Bretagne. Proposé par Mme Amandine Nicolle et M. Benoît
Clément, ce projet a pour but de modéliser les courants dans la Rade de Brest et de traiter les
résultats pour qu’ils soient utilisables dans le cadre de la plongée sous-marine. La plongée est une
activité de loisir ou professionnelle se déroulant sous l’eau et donc soumise à de nombreux risques
liés à la respiration sous l’eau : épuisement, manque d’air, dépressurisation trop rapide entre autres.
Il est donc de première importance de bien connaître les courants dans la zone de plongée afin
d’assurer la sécurité des plongeurs. Pour les plongeurs débutants, il convient de plonger dans des
zones où le courant est suffisamment faible pour ne pas séparer les groupes ou épuiser les plongeurs
ne maitrisant pas encore les techniques de la plongée sous-marine. Les plongeurs expérimentés
peuvent quant à eux se servir du courant pour dériver, ou s’entraîner à le combattre. Enfin les
plongeurs professionnels, dont les travaux sont divers (déminage, inspection d’épaves, travaux de
soudure, de maçonnerie…), doivent être en mesure de connaître les conditions de courant sur leur
zone spécifique de travail. C’est dans ce contexte de travail que nous avons réalisé des cartes de
courants dans la carte de Brest sur la période du 25 Septembre 2015 au 15 Octobre 2015, en utilisant
le logiciel de modélisation Télémac.
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
5
I. Le modèle Télémac
Nous avons utilisé le logiciel Télémac (versions 2D et 3D), qui est développé par le Laboratoire
National d'Hydraulique et Environnement (LNHE) de la Direction des Recherches et Développements
d'EDF. Ce logiciel TELEMAC résout les équations de Barré de Saint-Venant (1871), et est capable de
prendre en compte différents paramètres, tels que l’influence de données météorologiques (vent,
pression atmosphérique…) ou les écoulements fluviaux.
1. Elaboration du modèle
Pour mettre en place le modèle hydrodynamique Télémac, nous avons utilisé les paramètres
développés et décrits par Amandine Nicolle dans son rapport d’étude sur la Rade de Brest [1]. Ici,
nous allons revenir sur les aspects les plus importants, tels que le maillage ou les conditions aux
limites. Ces informations sont tirées directement du rapport cité précédemment.
a) Paramètres temporels
Notre modélisation a été lancée sur une période de vingt jours, allant du 25 Septembre au 15
Octobre. Nous avons décidé de récupérer une sortie graphique toutes les heures, afin d’être à même
de bien repérer les phénomènes de marée dans la Rade (Basse Mer, Mi Marée, Pleine Mer).
Certaines simulations n'ont cependant pas couvert toute la période, étant donné le temps que prend
le programme à modéliser les courants en fonction des paramètres en entrée. Ainsi, certaines
analyses se limiteront à une dizaine de jours, ceci n'affectant en rien les résultats et analyses qui en
découlent.
b) Paramètres spatiaux : La Rade de Brest
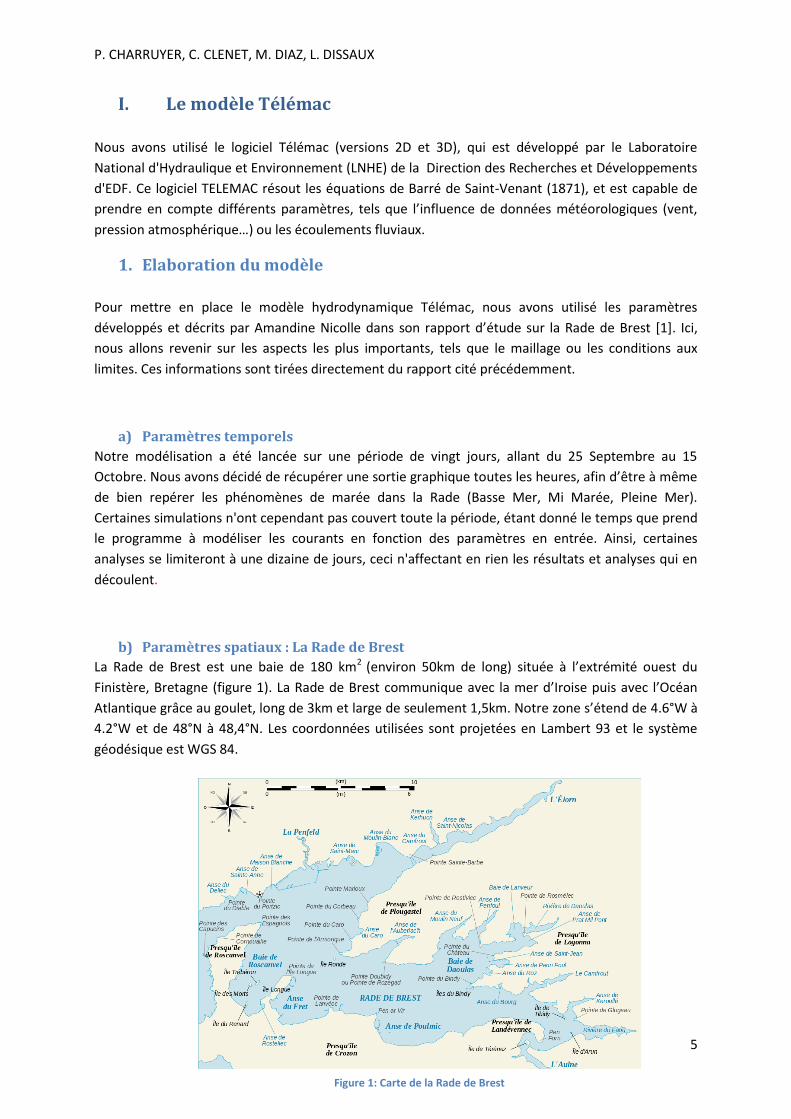
La Rade de Brest est une baie de 180 km2 (environ 50km de long) située à l’extrémité ouest du
Finistère, Bretagne (figure 1). La Rade de Brest communique avec la mer d’Iroise puis avec l’Océan
Atlantique grâce au goulet, long de 3km et large de seulement 1,5km. Notre zone s’étend de 4.6°W à
4.2°W et de 48°N à 48,4°N. Les coordonnées utilisées sont projetées en Lambert 93 et le système
géodésique est WGS 84.
Figure 1: Carte de la Rade de Brest
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
6
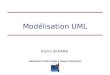
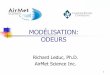
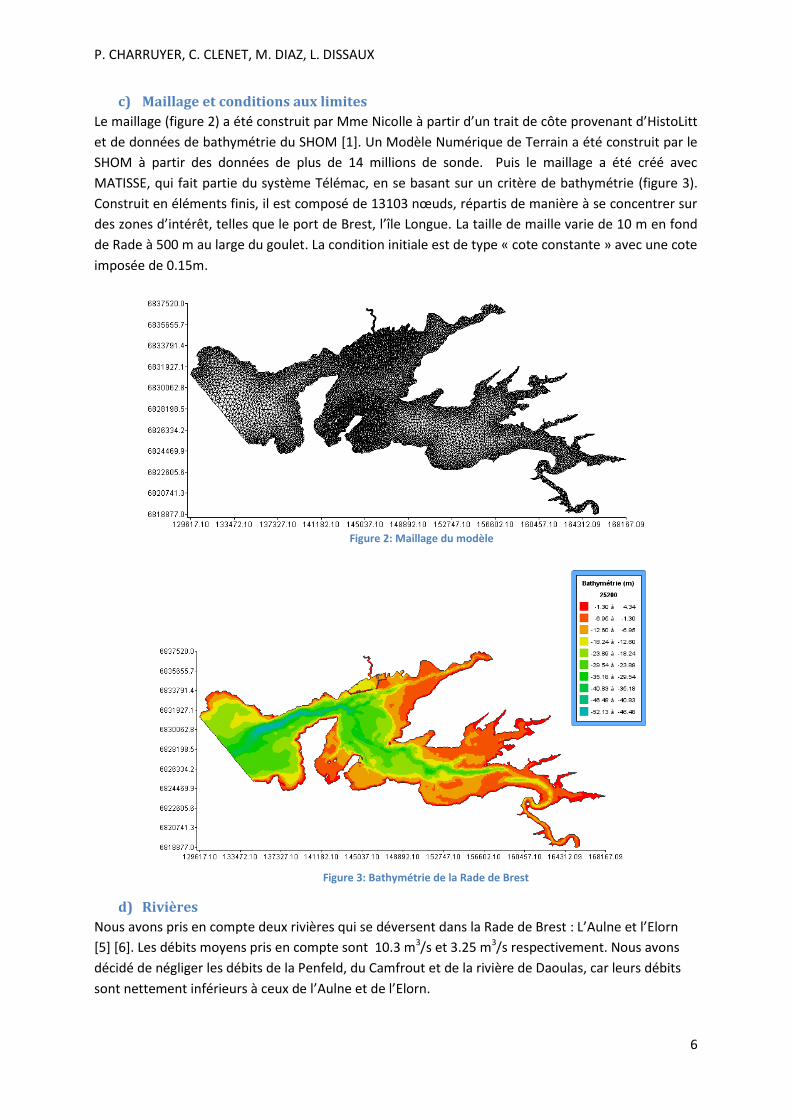
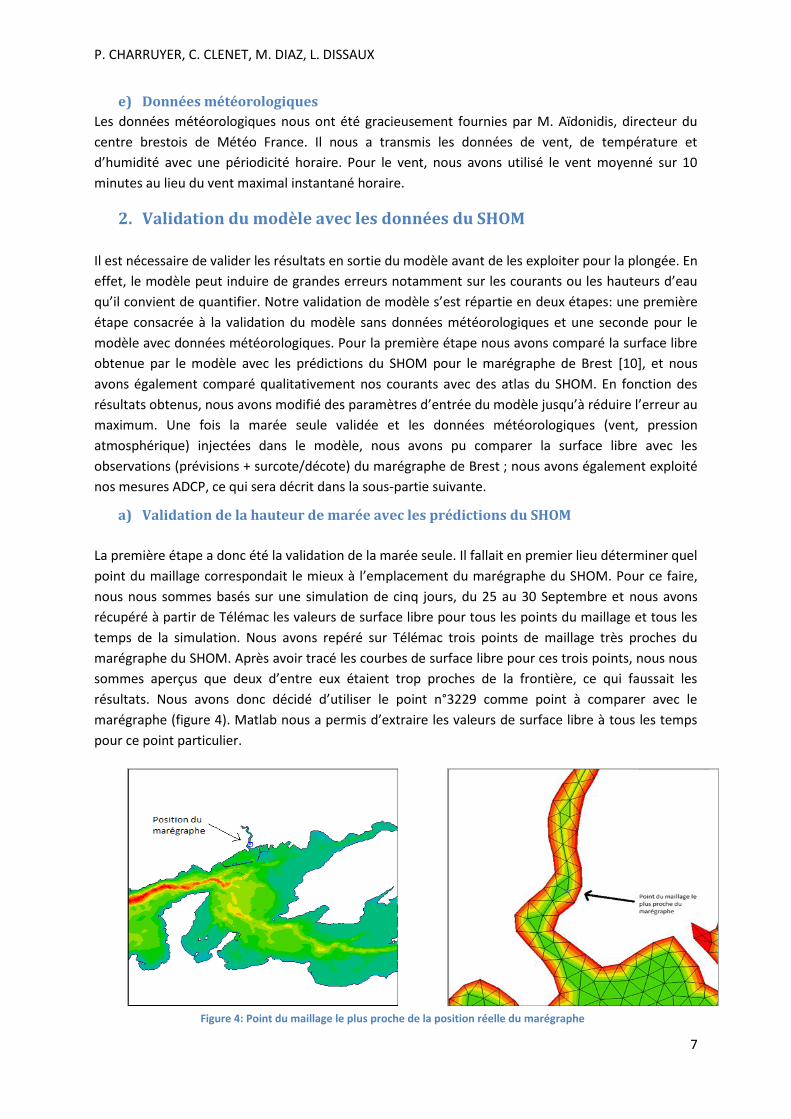
c) Maillage et conditions aux limites
Le maillage (figure 2) a été construit par Mme Nicolle à partir d’un trait de côte provenant d’HistoLitt
et de données de bathymétrie du SHOM [1]. Un Modèle Numérique de Terrain a été construit par le
SHOM à partir des données de plus de 14 millions de sonde. Puis le maillage a été créé avec
MATISSE, qui fait partie du système Télémac, en se basant sur un critère de bathymétrie (figure 3).
Construit en éléments finis, il est composé de 13103 nœuds, répartis de manière à se concentrer sur
des zones d’intérêt, telles que le port de Brest, l’île Longue. La taille de maille varie de 10 m en fond
de Rade à 500 m au large du goulet. La condition initiale est de type « cote constante » avec une cote
imposée de 0.15m.
d) Rivières
Nous avons pris en compte deux rivières qui se déversent dans la Rade de Brest : L’Aulne et l’Elorn
[5] [6]. Les débits moyens pris en compte sont 10.3 m3/s et 3.25 m3/s respectivement. Nous avons
décidé de négliger les débits de la Penfeld, du Camfrout et de la rivière de Daoulas, car leurs débits
sont nettement inférieurs à ceux de l’Aulne et de l’Elorn.
Figure 2: Maillage du modèle
Figure 3: Bathymétrie de la Rade de Brest
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
7
e) Données météorologiques
Les données météorologiques nous ont été gracieusement fournies par M. Aïdonidis, directeur du
centre brestois de Météo France. Il nous a transmis les données de vent, de température et
d’humidité avec une périodicité horaire. Pour le vent, nous avons utilisé le vent moyenné sur 10
minutes au lieu du vent maximal instantané horaire.
2. Validation du modèle avec les données du SHOM
Il est nécessaire de valider les résultats en sortie du modèle avant de les exploiter pour la plongée. En
effet, le modèle peut induire de grandes erreurs notamment sur les courants ou les hauteurs d’eau
qu’il convient de quantifier. Notre validation de modèle s’est répartie en deux étapes: une première
étape consacrée à la validation du modèle sans données météorologiques et une seconde pour le
modèle avec données météorologiques. Pour la première étape nous avons comparé la surface libre
obtenue par le modèle avec les prédictions du SHOM pour le marégraphe de Brest [10], et nous
avons également comparé qualitativement nos courants avec des atlas du SHOM. En fonction des
résultats obtenus, nous avons modifié des paramètres d’entrée du modèle jusqu’à réduire l’erreur au
maximum. Une fois la marée seule validée et les données météorologiques (vent, pression
atmosphérique) injectées dans le modèle, nous avons pu comparer la surface libre avec les
observations (prévisions + surcote/décote) du marégraphe de Brest ; nous avons également exploité
nos mesures ADCP, ce qui sera décrit dans la sous-partie suivante.
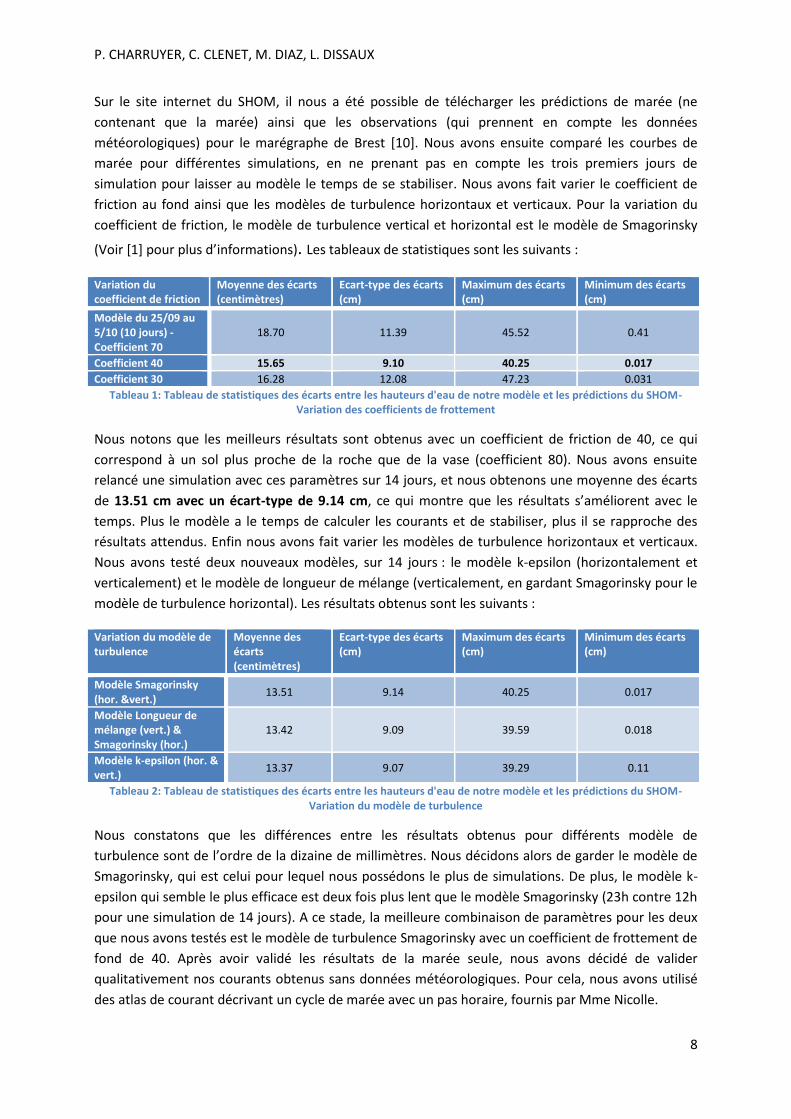
a) Validation de la hauteur de marée avec les prédictions du SHOM
La première étape a donc été la validation de la marée seule. Il fallait en premier lieu déterminer quel
point du maillage correspondait le mieux à l’emplacement du marégraphe du SHOM. Pour ce faire,
nous nous sommes basés sur une simulation de cinq jours, du 25 au 30 Septembre et nous avons
récupéré à partir de Télémac les valeurs de surface libre pour tous les points du maillage et tous les
temps de la simulation. Nous avons repéré sur Télémac trois points de maillage très proches du
marégraphe du SHOM. Après avoir tracé les courbes de surface libre pour ces trois points, nous nous
sommes aperçus que deux d’entre eux étaient trop proches de la frontière, ce qui faussait les
résultats. Nous avons donc décidé d’utiliser le point n°3229 comme point à comparer avec le
marégraphe (figure 4). Matlab nous a permis d’extraire les valeurs de surface libre à tous les temps
pour ce point particulier.
Figure 4: Point du maillage le plus proche de la position réelle du marégraphe
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
8
Sur le site internet du SHOM, il nous a été possible de télécharger les prédictions de marée (ne
contenant que la marée) ainsi que les observations (qui prennent en compte les données
météorologiques) pour le marégraphe de Brest [10]. Nous avons ensuite comparé les courbes de
marée pour différentes simulations, en ne prenant pas en compte les trois premiers jours de
simulation pour laisser au modèle le temps de se stabiliser. Nous avons fait varier le coefficient de
friction au fond ainsi que les modèles de turbulence horizontaux et verticaux. Pour la variation du
coefficient de friction, le modèle de turbulence vertical et horizontal est le modèle de Smagorinsky
(Voir [1] pour plus d’informations). Les tableaux de statistiques sont les suivants :
Variation du coefficient de friction
Moyenne des écarts (centimètres)
Ecart-type des écarts (cm)
Maximum des écarts (cm)
Minimum des écarts (cm)
Modèle du 25/09 au 5/10 (10 jours) - Coefficient 70
18.70 11.39 45.52 0.41
Coefficient 40 15.65 9.10 40.25 0.017
Coefficient 30 16.28 12.08 47.23 0.031
Tableau 1: Tableau de statistiques des écarts entre les hauteurs d'eau de notre modèle et les prédictions du SHOM-Variation des coefficients de frottement
Nous notons que les meilleurs résultats sont obtenus avec un coefficient de friction de 40, ce qui
correspond à un sol plus proche de la roche que de la vase (coefficient 80). Nous avons ensuite
relancé une simulation avec ces paramètres sur 14 jours, et nous obtenons une moyenne des écarts
de 13.51 cm avec un écart-type de 9.14 cm, ce qui montre que les résultats s’améliorent avec le
temps. Plus le modèle a le temps de calculer les courants et de stabiliser, plus il se rapproche des
résultats attendus. Enfin nous avons fait varier les modèles de turbulence horizontaux et verticaux.
Nous avons testé deux nouveaux modèles, sur 14 jours : le modèle k-epsilon (horizontalement et
verticalement) et le modèle de longueur de mélange (verticalement, en gardant Smagorinsky pour le
modèle de turbulence horizontal). Les résultats obtenus sont les suivants :
Variation du modèle de turbulence
Moyenne des écarts (centimètres)
Ecart-type des écarts (cm)
Maximum des écarts (cm)
Minimum des écarts (cm)
Modèle Smagorinsky (hor. &vert.)
13.51 9.14 40.25 0.017
Modèle Longueur de mélange (vert.) & Smagorinsky (hor.)
13.42 9.09 39.59 0.018
Modèle k-epsilon (hor. & vert.)
13.37 9.07 39.29 0.11
Tableau 2: Tableau de statistiques des écarts entre les hauteurs d'eau de notre modèle et les prédictions du SHOM-Variation du modèle de turbulence
Nous constatons que les différences entre les résultats obtenus pour différents modèle de
turbulence sont de l’ordre de la dizaine de millimètres. Nous décidons alors de garder le modèle de
Smagorinsky, qui est celui pour lequel nous possédons le plus de simulations. De plus, le modèle k-
epsilon qui semble le plus efficace est deux fois plus lent que le modèle Smagorinsky (23h contre 12h
pour une simulation de 14 jours). A ce stade, la meilleure combinaison de paramètres pour les deux
que nous avons testés est le modèle de turbulence Smagorinsky avec un coefficient de frottement de
fond de 40. Après avoir validé les résultats de la marée seule, nous avons décidé de valider
qualitativement nos courants obtenus sans données météorologiques. Pour cela, nous avons utilisé
des atlas de courant décrivant un cycle de marée avec un pas horaire, fournis par Mme Nicolle.
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
9
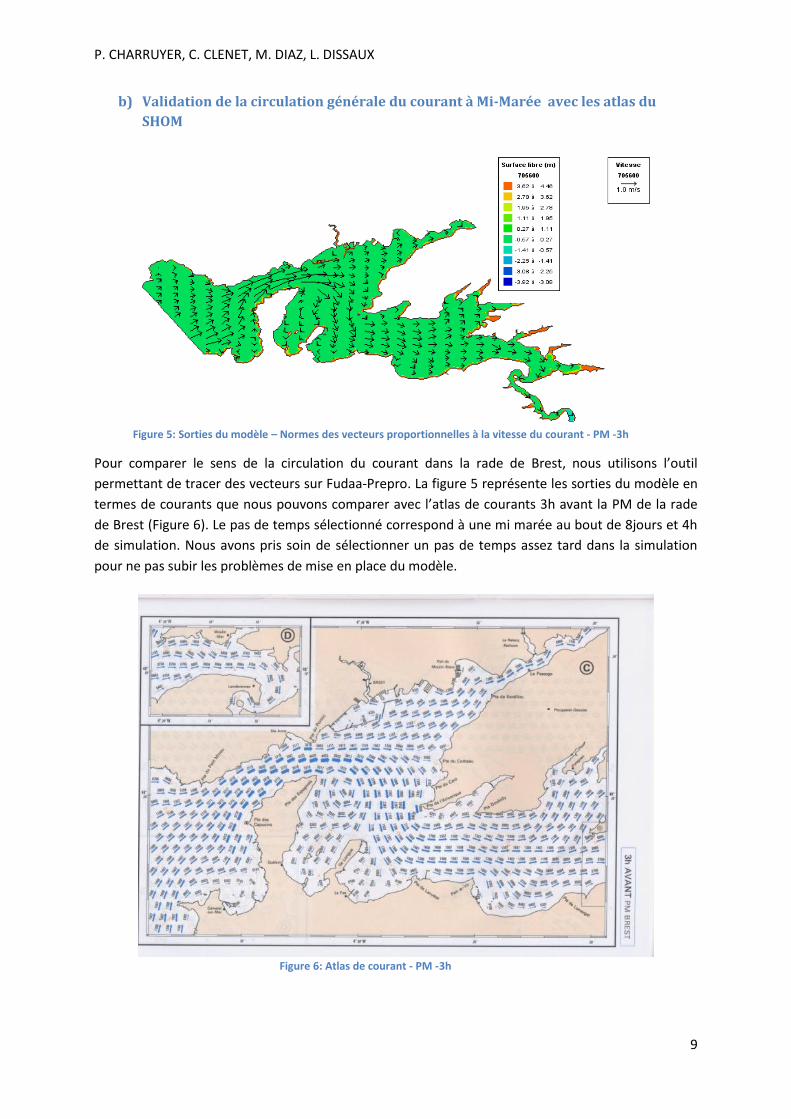
b) Validation de la circulation générale du courant à Mi-Marée avec les atlas du
SHOM
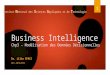
Pour comparer le sens de la circulation du courant dans la rade de Brest, nous utilisons l’outil
permettant de tracer des vecteurs sur Fudaa-Prepro. La figure 5 représente les sorties du modèle en
termes de courants que nous pouvons comparer avec l’atlas de courants 3h avant la PM de la rade
de Brest (Figure 6). Le pas de temps sélectionné correspond à une mi marée au bout de 8jours et 4h
de simulation. Nous avons pris soin de sélectionner un pas de temps assez tard dans la simulation
pour ne pas subir les problèmes de mise en place du modèle.
Figure 5: Sorties du modèle – Normes des vecteurs proportionnelles à la vitesse du courant - PM -3h
Figure 6: Atlas de courant - PM -3h
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
10
Nous remarquons dans le cas d’une mi marée comprise entre une basse mer et une pleine mer de
très forts courants dans le goulet ainsi qu’une circulation générale se dirigeant du large vers les
embouchures des fleuves, comme l’indique l’Atlas de courant de Brest à cette même période. Les
courants sont très faibles dans les différentes baies de la rade, à la fois dans Télémac et dans la
réalité et le sens de circulation est bien retranscrit par le modèle. Les vitesses sont également très
faibles dans l’enfoncement au niveau de l’Anse de l’Auberlach. Au contraire, les courants sont très
élevés dans le goulet, à l’entrée de celui-ci et dans le passage loin des côtes sur toute la rade. De
plus, l’Atlas laisse entrevoir un tourbillon à la sortie du goulet, au-dessus de la baie de Roscanvel, qui
se retrouve également dans les résultats de la simulation.
Ainsi, par une considération générale des courants, nous pouvons citer plusieurs zones où les
courants sont globalement très faibles : les différents baies et enfoncements de la rade de Brest
constituent des zones où le courant s’engouffre difficilement.
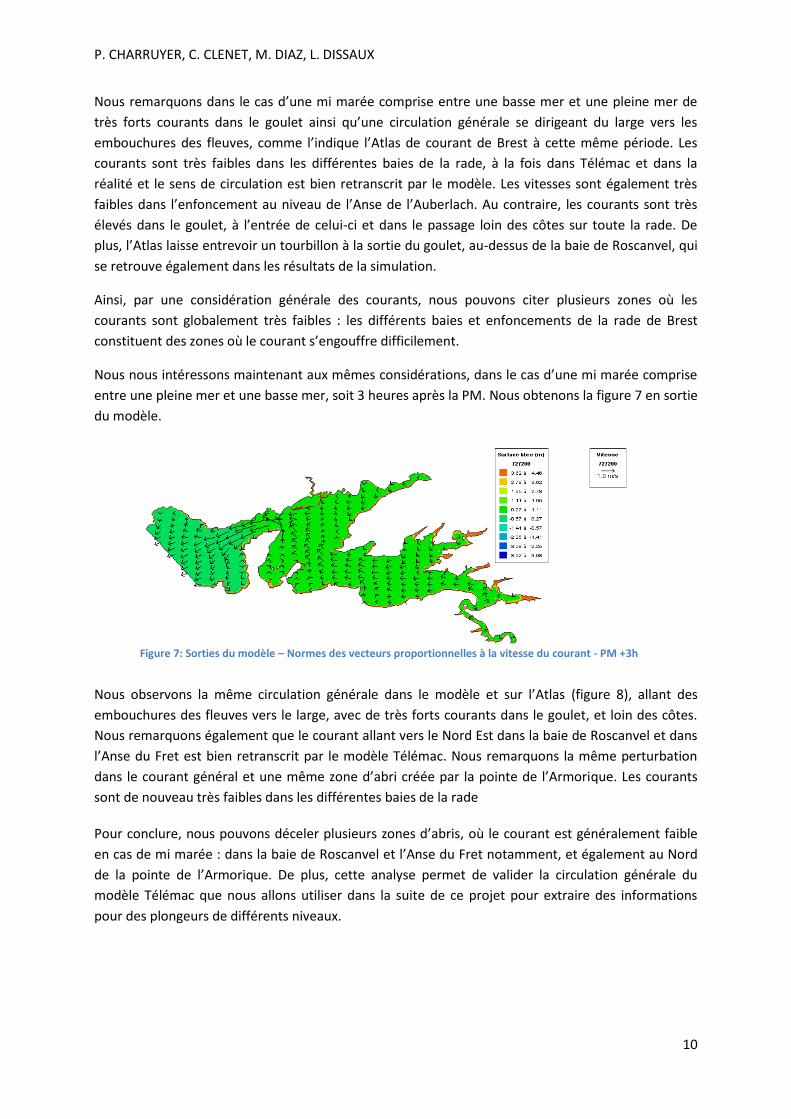
Nous nous intéressons maintenant aux mêmes considérations, dans le cas d’une mi marée comprise
entre une pleine mer et une basse mer, soit 3 heures après la PM. Nous obtenons la figure 7 en sortie
du modèle.
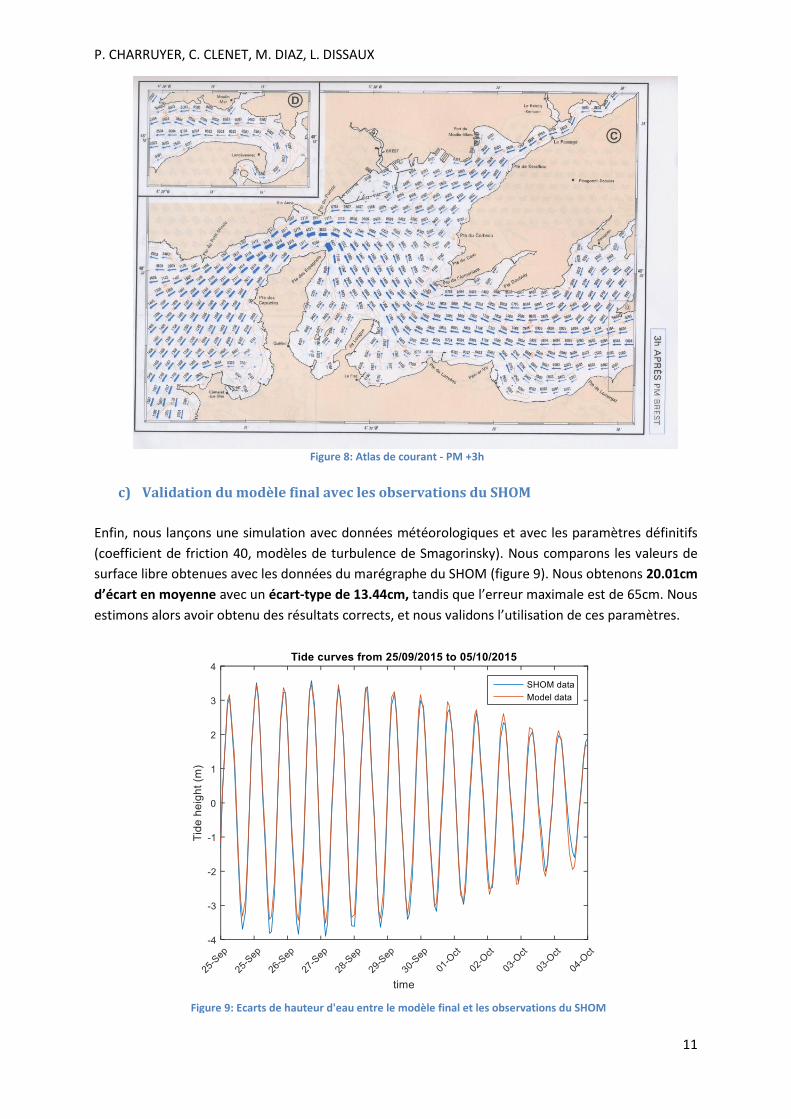
Nous observons la même circulation générale dans le modèle et sur l’Atlas (figure 8), allant des
embouchures des fleuves vers le large, avec de très forts courants dans le goulet, et loin des côtes.
Nous remarquons également que le courant allant vers le Nord Est dans la baie de Roscanvel et dans
l’Anse du Fret est bien retranscrit par le modèle Télémac. Nous remarquons la même perturbation
dans le courant général et une même zone d’abri créée par la pointe de l’Armorique. Les courants
sont de nouveau très faibles dans les différentes baies de la rade
Pour conclure, nous pouvons déceler plusieurs zones d’abris, où le courant est généralement faible
en cas de mi marée : dans la baie de Roscanvel et l’Anse du Fret notamment, et également au Nord
de la pointe de l’Armorique. De plus, cette analyse permet de valider la circulation générale du
modèle Télémac que nous allons utiliser dans la suite de ce projet pour extraire des informations
pour des plongeurs de différents niveaux.
Figure 7: Sorties du modèle – Normes des vecteurs proportionnelles à la vitesse du courant - PM +3h
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
11
c) Validation du modèle final avec les observations du SHOM
Enfin, nous lançons une simulation avec données météorologiques et avec les paramètres définitifs
(coefficient de friction 40, modèles de turbulence de Smagorinsky). Nous comparons les valeurs de
surface libre obtenues avec les données du marégraphe du SHOM (figure 9). Nous obtenons 20.01cm
d’écart en moyenne avec un écart-type de 13.44cm, tandis que l’erreur maximale est de 65cm. Nous
estimons alors avoir obtenu des résultats corrects, et nous validons l’utilisation de ces paramètres.
Figure 8: Atlas de courant - PM +3h
Figure 9: Ecarts de hauteur d'eau entre le modèle final et les observations du SHOM
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
12
Dans la suite du projet et de ce rapport, sauf indications contraires, les paramètres utilisés sont un
coefficient de friction au fond de 40 et des modèles de turbulence, horizontalement et
verticalement de Smagorinsky.
3. Validation du modèle avec les mesures in situ d’ADCP
Nous allons maintenant vérifier si les paramètres optimaux pour la marée le sont aussi pour les
courants dans la Rade. Nous avons eu l’opportunité de sortir en mer pour prendre des mesures de
courant à l’aide d’un Acoustic Doppler Current Profiler (ADCP) WorkHorse Mariner [voir annexe]. En
choisissant des lieux de la Rade de Brest avec des courants caractéristiques, nous avions la possibilité
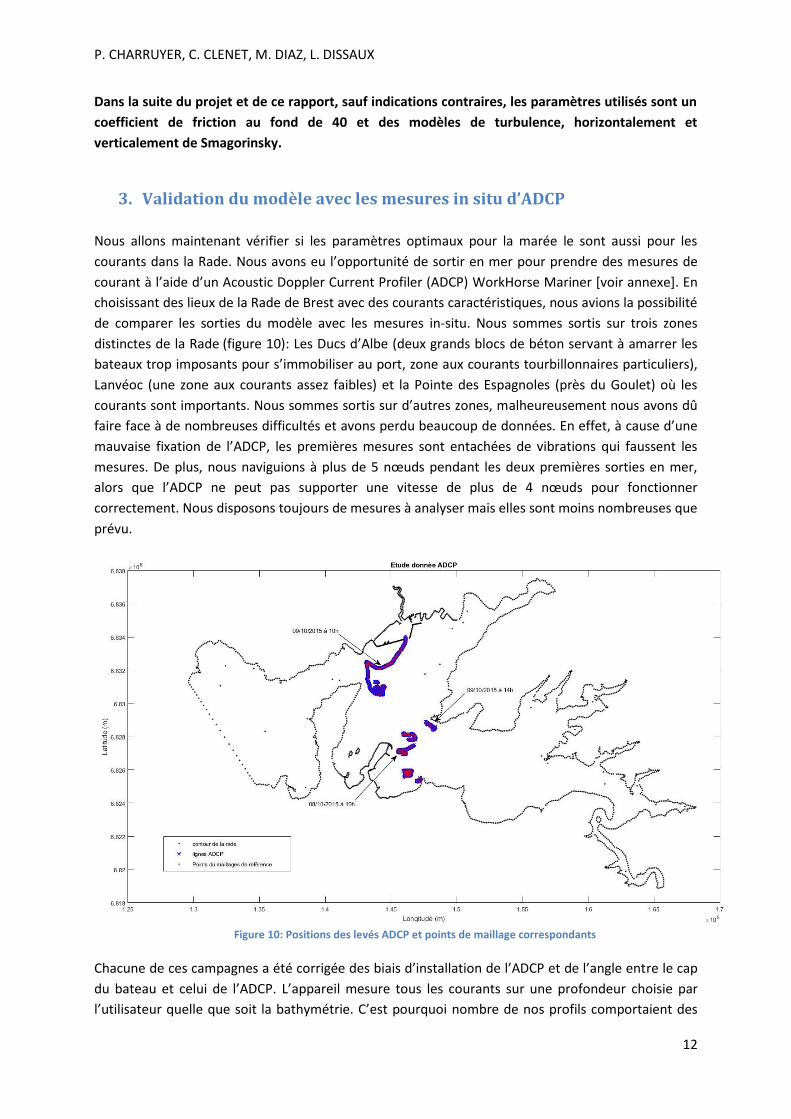
de comparer les sorties du modèle avec les mesures in-situ. Nous sommes sortis sur trois zones
distinctes de la Rade (figure 10): Les Ducs d’Albe (deux grands blocs de béton servant à amarrer les
bateaux trop imposants pour s’immobiliser au port, zone aux courants tourbillonnaires particuliers),
Lanvéoc (une zone aux courants assez faibles) et la Pointe des Espagnoles (près du Goulet) où les
courants sont importants. Nous sommes sortis sur d’autres zones, malheureusement nous avons dû
faire face à de nombreuses difficultés et avons perdu beaucoup de données. En effet, à cause d’une
mauvaise fixation de l’ADCP, les premières mesures sont entachées de vibrations qui faussent les
mesures. De plus, nous naviguions à plus de 5 nœuds pendant les deux premières sorties en mer,
alors que l’ADCP ne peut pas supporter une vitesse de plus de 4 nœuds pour fonctionner
correctement. Nous disposons toujours de mesures à analyser mais elles sont moins nombreuses que
prévu.
Chacune de ces campagnes a été corrigée des biais d’installation de l’ADCP et de l’angle entre le cap
du bateau et celui de l’ADCP. L’appareil mesure tous les courants sur une profondeur choisie par
l’utilisateur quelle que soit la bathymétrie. C’est pourquoi nombre de nos profils comportaient des
Figure 10: Positions des levés ADCP et points de maillage correspondants
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
13
données aberrantes au niveau du sol ou « en-dessous » (double écho du fond reçu par l'ADCP). Nous
avons donc traité chaque ligne de l’ADCP afin d’être le plus fidèle possible à la réalité. Ces données
ont ensuite été moyennées sur dix couches selon la profondeur afin d’avoir un résultat sous le même
format que les résultats donnés par le modèle. Comme nos trois campagnes ADCP ont pu être
réalisées en moins d’une heure à chaque fois, nous avons pu trouver l’heure correspondante à
chaque sortie dans les données du modèle et ainsi faire nos comparaisons de courants couche par
couche sur un créneau horaire. Afin d’avoir la donnée du modèle la plus proche des mesures, nous
avons cherché pour chaque ping de l’ADCP, le point du maillage le plus proche. Nos résultats sont
donc une comparaison de quelques courants issus de notre modèle avec l’ensemble de nos données
ADCP les plus proches.
Nous nous sommes aperçus que les variations importantes de bathymétrie dans le Goulet nous
faisaient perdre le fond sur les données ADCP de la Pointe des Espagnols. Le traitement des données
était alors difficile et nous ne les avons pas utilisées. Bien que les données dans les deux cas aient été
exploitées, nous avons choisi de présenter la zone de Lanvéoc dans ce rapport car nous disposons de
beaucoup plus de données dans cette zone, avec des lignes de l’ordre du kilomètre. L’analyse des
données des ducs d’Albe peut être trouvée en annexe.
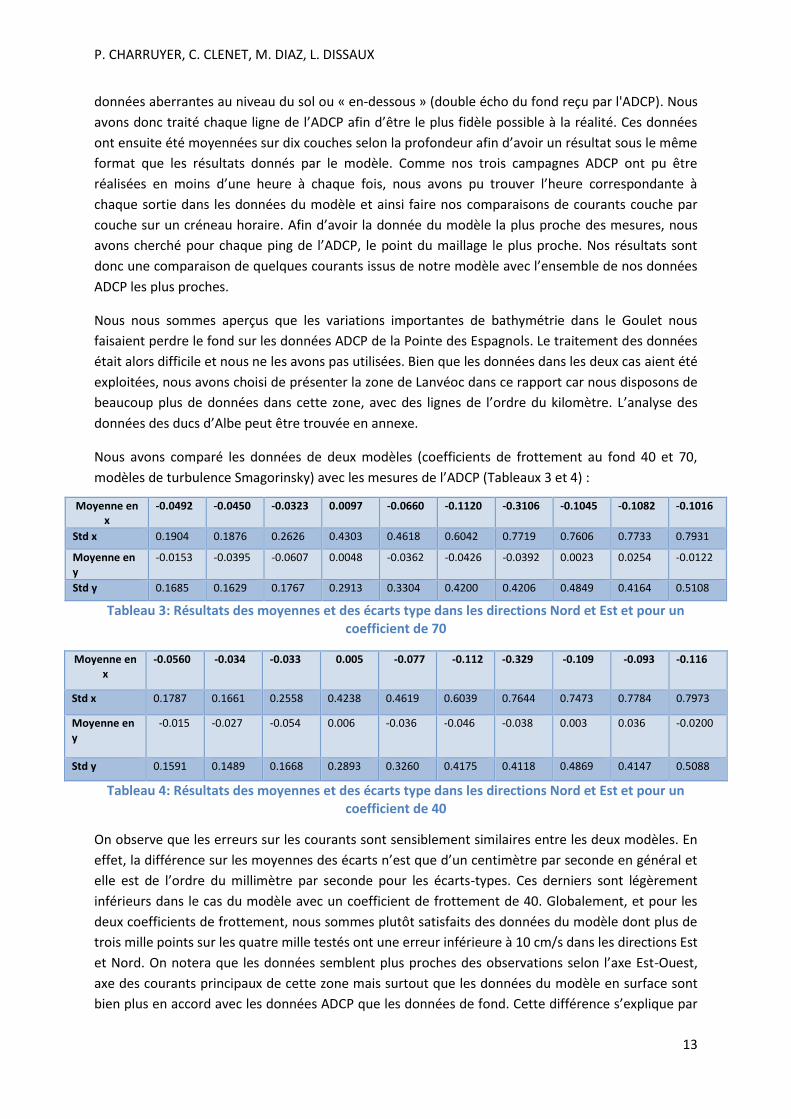
Nous avons comparé les données de deux modèles (coefficients de frottement au fond 40 et 70,
modèles de turbulence Smagorinsky) avec les mesures de l’ADCP (Tableaux 3 et 4) :
Moyenne en x
-0.0492 -0.0450 -0.0323 0.0097 -0.0660 -0.1120 -0.3106 -0.1045 -0.1082 -0.1016
Std x 0.1904 0.1876 0.2626 0.4303 0.4618 0.6042 0.7719 0.7606 0.7733 0.7931
Moyenne en y
-0.0153 -0.0395 -0.0607 0.0048 -0.0362 -0.0426 -0.0392 0.0023 0.0254 -0.0122
Std y 0.1685 0.1629 0.1767 0.2913 0.3304 0.4200 0.4206 0.4849 0.4164 0.5108
Tableau 3: Résultats des moyennes et des écarts type dans les directions Nord et Est et pour un coefficient de 70
Moyenne en x
-0.0560 -0.034 -0.033 0.005 -0.077 -0.112 -0.329 -0.109 -0.093 -0.116
Std x 0.1787 0.1661 0.2558 0.4238 0.4619 0.6039 0.7644 0.7473 0.7784 0.7973
Moyenne en y
-0.015 -0.027 -0.054 0.006 -0.036 -0.046 -0.038 0.003 0.036 -0.0200
Std y 0.1591 0.1489 0.1668 0.2893 0.3260 0.4175 0.4118 0.4869 0.4147 0.5088
Tableau 4: Résultats des moyennes et des écarts type dans les directions Nord et Est et pour un coefficient de 40
On observe que les erreurs sur les courants sont sensiblement similaires entre les deux modèles. En
effet, la différence sur les moyennes des écarts n’est que d’un centimètre par seconde en général et
elle est de l’ordre du millimètre par seconde pour les écarts-types. Ces derniers sont légèrement
inférieurs dans le cas du modèle avec un coefficient de frottement de 40. Globalement, et pour les
deux coefficients de frottement, nous sommes plutôt satisfaits des données du modèle dont plus de
trois mille points sur les quatre mille testés ont une erreur inférieure à 10 cm/s dans les directions Est
et Nord. On notera que les données semblent plus proches des observations selon l’axe Est-Ouest,
axe des courants principaux de cette zone mais surtout que les données du modèle en surface sont
bien plus en accord avec les données ADCP que les données de fond. Cette différence s’explique par
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
14
nos données ADCP. L’ADCP subissait des vibrations perturbant les données et le bruit induit
s’amplifie avec la profondeur. De plus, la bathymétrie étant variable sur notre zone, l’ADCP est
sensible aux effets acoustiques comme les doubles échos. Nous avons trié nos données afin de
supprimer les zones de problèmes de détection du fond mais la forte variabilité du fond ne nous a
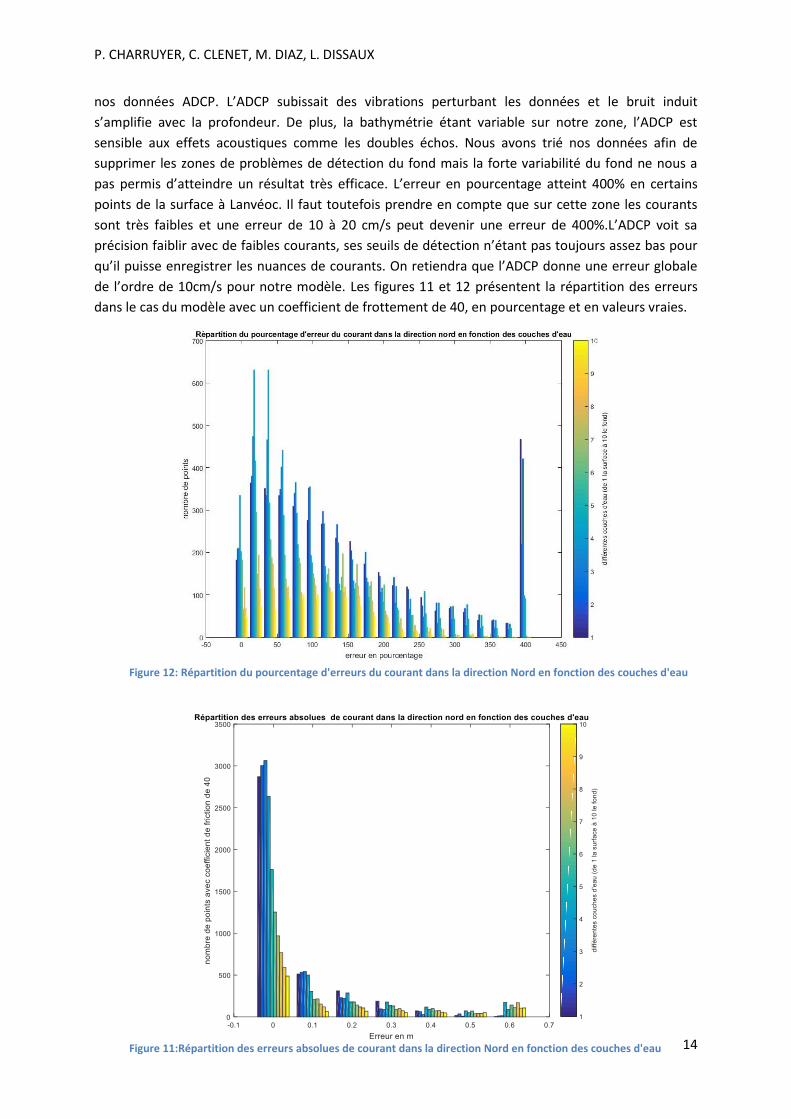
pas permis d’atteindre un résultat très efficace. L’erreur en pourcentage atteint 400% en certains
points de la surface à Lanvéoc. Il faut toutefois prendre en compte que sur cette zone les courants
sont très faibles et une erreur de 10 à 20 cm/s peut devenir une erreur de 400%.L’ADCP voit sa
précision faiblir avec de faibles courants, ses seuils de détection n’étant pas toujours assez bas pour
qu’il puisse enregistrer les nuances de courants. On retiendra que l’ADCP donne une erreur globale
de l’ordre de 10cm/s pour notre modèle. Les figures 11 et 12 présentent la répartition des erreurs
dans le cas du modèle avec un coefficient de frottement de 40, en pourcentage et en valeurs vraies.
Figure 12: Répartition du pourcentage d'erreurs du courant dans la direction Nord en fonction des couches d'eau
Figure 11:Répartition des erreurs absolues de courant dans la direction Nord en fonction des couches d'eau
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
15
4. Les informations complémentaires obtenues
Après avoir défini la partie scientifique et technique du projet, nous avons décidé de rencontrer un
club de plongée qui pourrait nous en dire plus sur les attentes des plongeurs loisirs et confirmés.
Nous avons eu l’opportunité d’avoir un rendez-vous avec les responsables du club Eau Libre, où
Claire est licenciée. Cette rencontre a été particulièrement intéressante car elle a permis de replacer
notre projet dans un contexte réel. Nous avons appris par exemple à cette occasion qu’il n’existe pas
de limite de courant au-dessus de laquelle les plongeurs annulent les sorties en mer, en tout cas dans
la Rade de Brest. Les dirigeants du club utilisent les horaires de marée précis pour savoir quand sortir
avec leurs plongeurs débutants mais se basent aussi sur les conditions météorologiques pour évaluer
si une sortie est possible. Même dans ce cas-là, les sorties sont en général annulées car le bateau ne
peut pas faire la traversée jusqu’au lieu de plongée, pas parce que les conditions sont trop mauvaises
pour les plongeurs. De plus, nous avons appris que les plongeurs se basent sur leur très longue
expérience pour savoir où plonger dans de bonnes conditions, et ne peuvent pas toujours expliquer
leurs choix.
Enfin, nous avons pu recueillir des informations sur les plongeurs confirmés. Nous avons appris qu’ils
recherchent souvent le courant, soit pour s’entraîner à combattre la dérive, soit parce qu’ils
apprennent à dériver en toute sécurité, ou à utiliser le courant pour se mouvoir.
Après avoir discuté de l’aspect plongée professionnelle avec M. Clément, il était très enrichissant
d‘avoir le point de vue de la plongée loisir. Le questionnaire de cet entretien peut être trouvé en
annexe.
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
16
II. Les cartes
1. Carte loisir
a) Objectif et public visé
La carte destinée aux plongeurs débutants est basée sur des critères simples bien définis : il faut
éviter le courant à tout prix. En effet, pour des plongeurs débutants, la plongée est avant tout axée
sur le côté « spectacle ». Il ne s’agit pas de dériver, ni de chercher à combattre le courant.
En nous basant sur les exemples de M. Clément, nous avons considéré qu’une zone était viable pour
la plongée loisir lorsque le courant était inférieur à 0,25 nœuds. Avec un courant aussi faible, il n’y a
pas de risque de dérive significative du plongeur, qui pourrait l’amener dans une zone où la plongée
est interdite ou dangereuse. La dérive ne sera considérée qu’à partir de la carte pour les plongeurs
confirmés. De plus, les plongeurs, quels que soient leurs niveaux, ne peuvent pas plonger dans les
zones interdites. Ces zones seront décrites en détail dans la partie suivante concernant la carte
confirmée. Ici elles seront superposées à la carte loisir.
b) Mise en place
Nous avons décidé de réaliser trois cartes pour le plongeur débutant, correspondant à trois temps
significatifs : la Pleine Mer (PM dans la suite), la Basse Mer (BM) et la Mi-Marée (MM). Ces cartes
utilisent les données de chaque PM, BM et MM sur la période totale de modélisation. Cette division
se justifie par le fait que les courants varient de façon significative en fonction de ces temps : ils sont
en général maximaux à MM, et faibles à PM ou BM (étale). Ainsi, les conditions de sortie en mer pour
les plongeurs débutants ne sont pas du tout les mêmes à MM qu’à PM ou BM.
Nous avons divisé nos cartes loisirs en deux catégories, plongée possible et plongée impossible. Nous
avions caractérisé la plongée « possible » par un courant inférieur à 0.25 nœuds, c’est-à-dire
0.13m/s, mais avec ce critère les zones viables étaient bien trop minimes. Nous avons alors élargi le
critère à 0.3m/s.
Nous avons commencé par récupérer la surface libre et les vitesses u et v de surface en tous points
parmi les résultats 2D. En utilisant les valeurs de surface libre, nous avons pu découper les temps en
PM, BM et MM, en retirant les premières PM, BM et MM pour éviter de travailler sur les temps de
stabilisation du modèle. Ainsi, nous avons récupéré les vitesses u et v en chaque point du maillage,
aux pleines mers, basses mers et mi marées. Nous avons ensuite calculé la norme totale du courant
en chaque point à partir des vecteurs u et v, pour tous les temps de marée. Puis, nous avons écrit
une fonction Rank qui permet de classer les points dans les deux catégories en fonction de la norme
du courant. Pour cette norme, nous prenons la norme maximale à chaque période de marée : un
point aura une norme maximale sur toutes les PM, une norme maximale sur toutes les BM et de
même pour les MM.
Enfin, on place les points dans deux catégories : si à un temps de PM, BM ou MM le point du maillage
a vu sa norme maximale dépasser la vitesse limite, alors ce point est interdit.
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
17
c) Résultats et difficultés rencontrées
A ce stade, nous récupérons avec les résultats 2D uniquement la vitesse de surface, que nous
considérons être la plus élevée sur toute la colonne d’eau. Ceci est vrai dans la majorité des cas, mais
il serait préférable d’exporter les vitesses sur toute la colonne d’eau et de choisir la vitesse maximale
pour représenter les cas extrêmes. Malheureusement, l’export de nos résultats 3D prend beaucoup
trop de temps et nous choisissons de garder la vitesse de surface dans un premier temps.
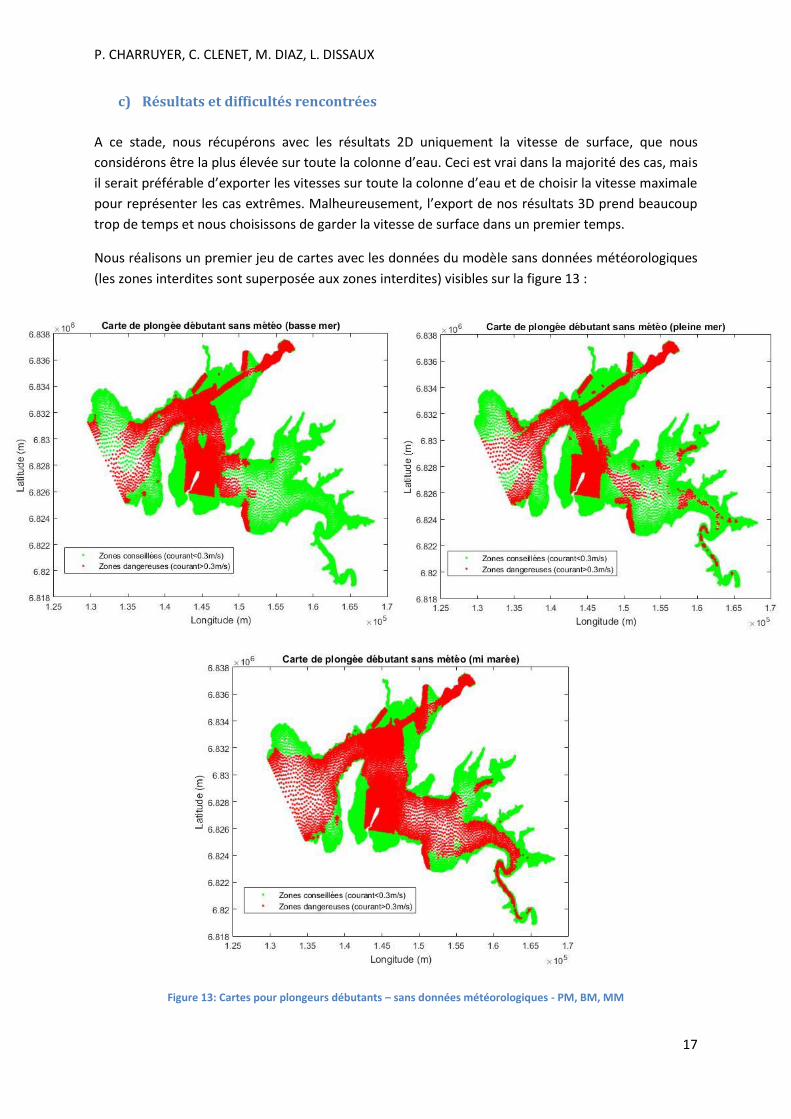
Nous réalisons un premier jeu de cartes avec les données du modèle sans données météorologiques
(les zones interdites sont superposée aux zones interdites) visibles sur la figure 13 :
Figure 13: Cartes pour plongeurs débutants – sans données météorologiques - PM, BM, MM
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
18
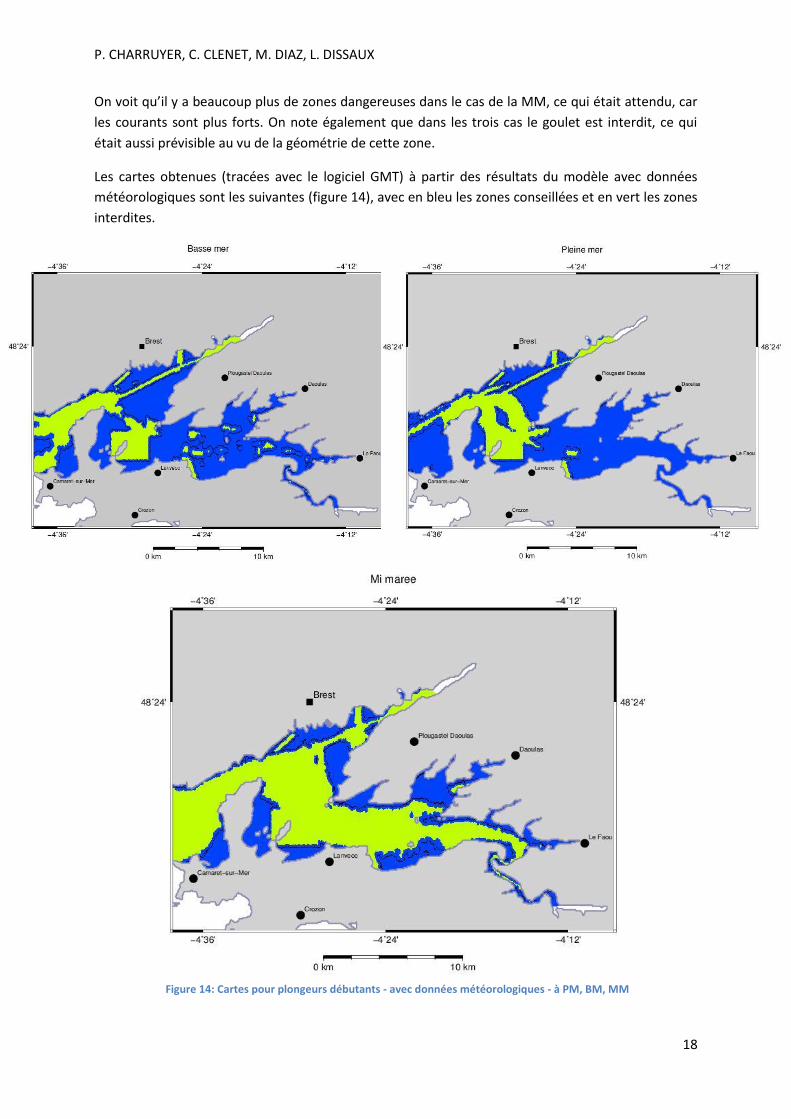
On voit qu’il y a beaucoup plus de zones dangereuses dans le cas de la MM, ce qui était attendu, car
les courants sont plus forts. On note également que dans les trois cas le goulet est interdit, ce qui
était aussi prévisible au vu de la géométrie de cette zone.
Les cartes obtenues (tracées avec le logiciel GMT) à partir des résultats du modèle avec données
météorologiques sont les suivantes (figure 14), avec en bleu les zones conseillées et en vert les zones
interdites.
Figure 14: Cartes pour plongeurs débutants - avec données météorologiques - à PM, BM, MM
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
19
On remarque que les cartes obtenues avec données météorologiques sont très proches de celles
obtenues sans données météorologiques. Ceci est entre autres dû à l’interpolation réalisée avec GMT
qui prend mal en compte les points isolés. Cela donne parfois l’impression que des zones sont
conseillées pour la plongée débutante alors qu’elles ne devraient pas l’être. C’est pourquoi il semble
que certaines parties de la rade soient dangereuses sans données météorologiques mais conseillées
avec. Une piste d’amélioration des cartes pour débutants serait donc de travailler sur les
interpolations GMT pour créer des zones de danger dès qu’on a un nombre défini de points
dangereux (ou de continuer avec des cartes Matlab, malgré le rendu moins esthétique). En
comparant les cartes avec données météorologiques, on note une fois encore que les zones
interdites sont bien plus nombreuses en MM, comme prévu, et que le goulet est toujours
déconseillé.
2. Carte confirmée
a) Objectif et public visé
La seconde carte que nous avons décidé de tracer est une carte destinée aux plongeurs confirmés,
qui recherchent des zones de courant, même s’il n’est pas très élevé, pour s’entraîner à la plongée
dérivante. Il est important qu’ils restent dans des conditions de sécurité optimales. Pour ces
plongeurs, nous avons sélectionné des zones où la vitesse de courant reste inférieure à 0.70m/s.
L’accent a été mis sur la détermination de la dérive, pour proposer des cartes définissant les zones de
plongée où après dérive les utilisateurs ne se retrouvent pas dans une zone interdite.
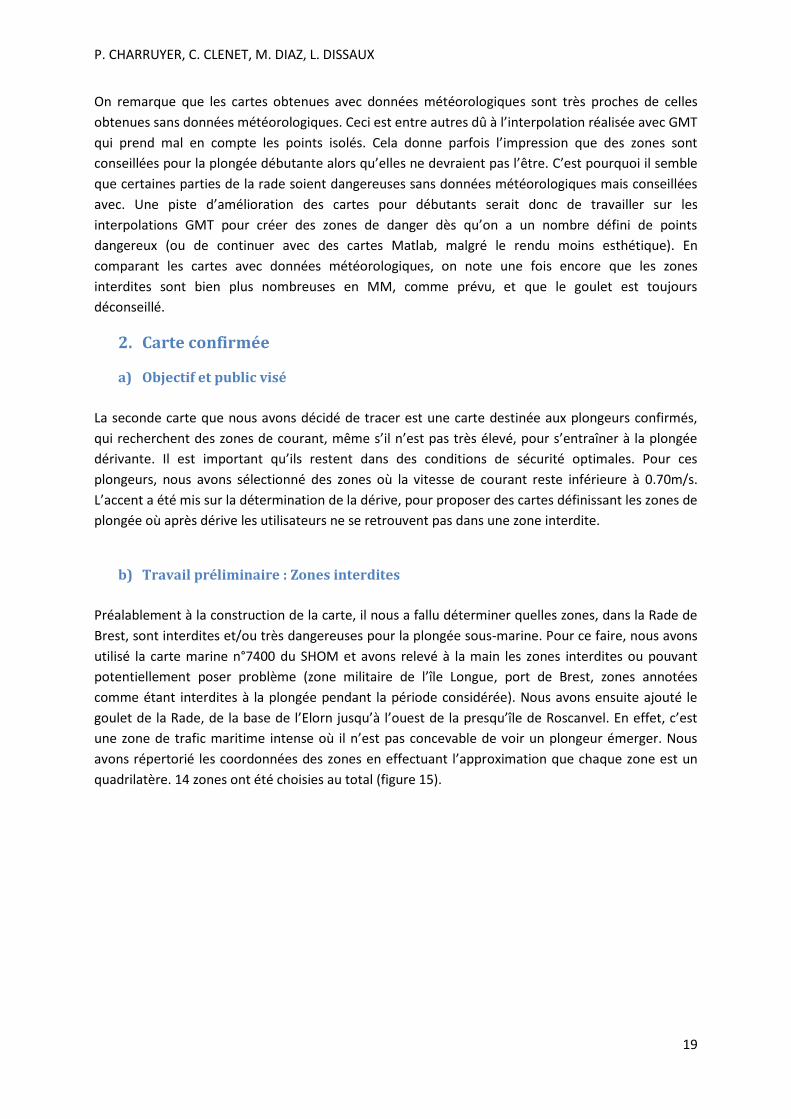
b) Travail préliminaire : Zones interdites
Préalablement à la construction de la carte, il nous a fallu déterminer quelles zones, dans la Rade de
Brest, sont interdites et/ou très dangereuses pour la plongée sous-marine. Pour ce faire, nous avons
utilisé la carte marine n°7400 du SHOM et avons relevé à la main les zones interdites ou pouvant
potentiellement poser problème (zone militaire de l’île Longue, port de Brest, zones annotées
comme étant interdites à la plongée pendant la période considérée). Nous avons ensuite ajouté le
goulet de la Rade, de la base de l’Elorn jusqu’à l’ouest de la presqu’île de Roscanvel. En effet, c’est
une zone de trafic maritime intense où il n’est pas concevable de voir un plongeur émerger. Nous
avons répertorié les coordonnées des zones en effectuant l’approximation que chaque zone est un
quadrilatère. 14 zones ont été choisies au total (figure 15).
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
20
Pour déterminer si un point du maillage se trouve dans une zone de danger, nous avons utilisé une
méthode qui s’utilise souvent dans les jeux vidéo appelée la méthode des angles orientés dans un
triangle. Elle consiste à découper les quadrilatères en triangles et à utiliser les angles orientés entre
le point considéré et les sommets du triangle pour déterminer si le point se trouve ou non dans le
triangle (La méthode détaillée peut être lue en annexe). En testant cette méthode sur nos 14 zones
de danger nous avons constaté que les points définissant les quadrilatères devaient impérativement
être orientés selon le sens trigonométrique et non le sens horaire pour que la méthode fonctionne.
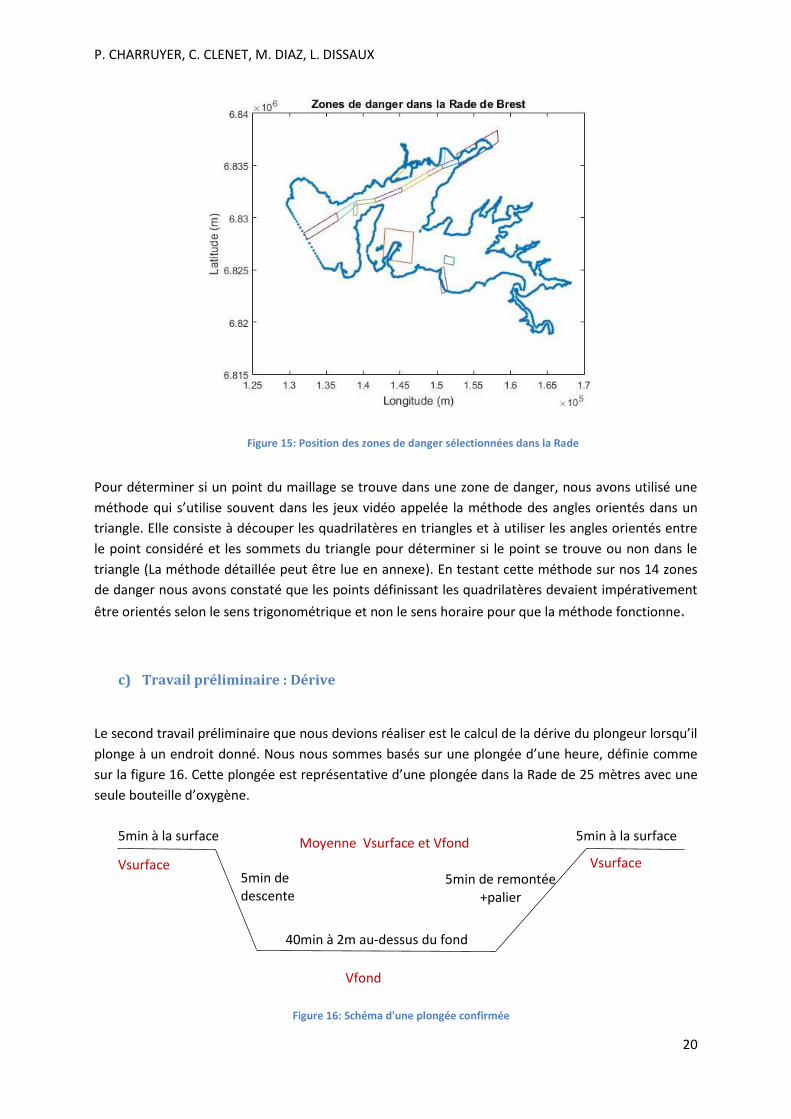
c) Travail préliminaire : Dérive
Le second travail préliminaire que nous devions réaliser est le calcul de la dérive du plongeur lorsqu’il
plonge à un endroit donné. Nous nous sommes basés sur une plongée d’une heure, définie comme
sur la figure 16. Cette plongée est représentative d’une plongée dans la Rade de 25 mètres avec une
seule bouteille d’oxygène.
5min à la surface
40min à 2m au-dessus du fond
5min de descente
5min de remontée +palier
5min à la surface
Vsurface
Vfond
Moyenne Vsurface et Vfond
Vsurface
Figure 15: Position des zones de danger sélectionnées dans la Rade
Figure 16: Schéma d'une plongée confirmée
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
21
Nous avons codé une fonction déplacement, qui calcule la dérive du plongeur en fonction du courant
du point de maillage le plus proche et de l’heure de sa plongée. Cette fonction est itérative et
fonctionne par pas de 5min. Elle vérifie qu’on prend toujours les courants du point de maillage le
plus proche au cours de la dérive. La vitesse du courant utilisée pour calculer la dérive n’est pas la
même pendant toute la plongée : nous utilisons la vitesse surface pour le début (avant descente) et
la fin de la plongée (après remontée), pour la descente et la remontée nous calculons la moyenne
entre la vitesse de surface et la vitesse de fond et enfin pour les 40 minutes de plongée effective à
deux mètres au-dessus du fond nous utilisons la vitesse fond. Notons que nous avons considéré que
le plongeur ne change pas de point de maillage quand il est à la surface avant de plonger et lorsqu’il
remonte. Nous avons choisi de faire plonger l’utilisateur à deux mètres au-dessus du fond pour deux
raisons : d’abord car, par égard pour la flore sous-marine, il est important de ne pas perturber le fond
en s’y accrochant par exemple et ensuite parce que les vitesses au fond sont nulles ou proches de
zéro tandis qu’à deux mètres de fond on obtient des courants un peu plus significatifs.
d) Mise en place, résultats et difficultés rencontrées
Nous utilisons les fonctions Matlab issues du forum internet de Télémac afin d’exploiter les données
du modèle. Elles nous permettent, à partir des résultats 3D, de récupérer la surface libre et les
courants u et v toutes les heures. Nous récupérons notamment les vitesses de surface et les vitesses
qui se trouvent une couche au-dessus de fond (pour modéliser les courants à 2m du fond), que nous
appellerons vitesses de fond-1 dans la suite du rapport. Notons que l’extraction de ces données dure
plus d’une quarantaine de minutes, et que nous sauvegardons les données après la première
extraction dans une matrice pour éviter d’avoir à refaire ce travail coûteux en temps.
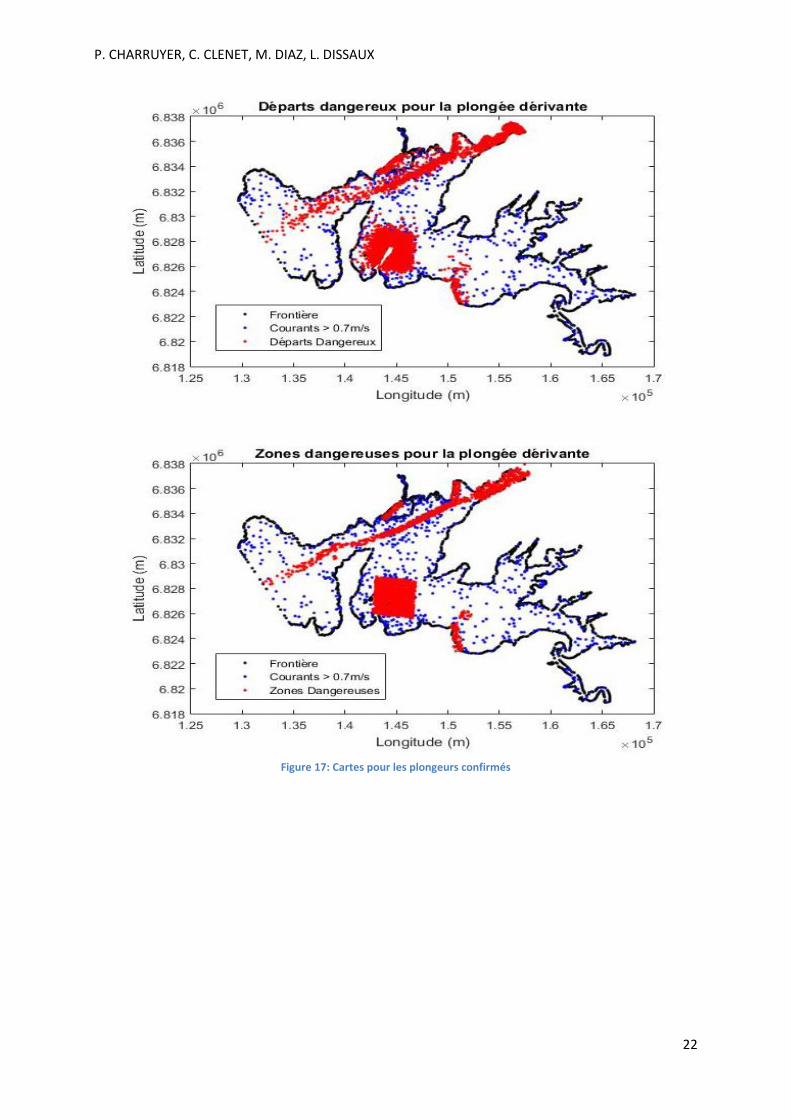
Nous décidons de créer une carte qui représente les pires conditions de courant en moyenne sur la
Rade. En effet, avec une carte réalisée sur la période horaire où les courants sont en moyenne les
plus forts, on assure une certaine sécurité au plongeur. Cependant, nous avons conscience que le
mieux serait de faire une carte prenant en compte pour chaque point du maillage l’heure où le
courant est le plus fort, et pas une moyenne sur la Rade. Après discussion avec M. Clément, nous
avons d’abord limité la vitesse maximale des courants à 1 nœud, soit 0.5m/s, et l’avons ensuite
ajustée à 0.7m/s car nous obtenions peu de zones non dangereuses. La carte obtenue est la suivante
(figure 17), avec en bleu les points rejetés car de courant supérieur à 0.7m/s, et en rouge ceux rejetés
car ils feraient dériver le plongeur dans une zone interdite.
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
22
Figure 17: Cartes pour les plongeurs confirmés

P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
23
3. Carte professionnelle
a) Objectifs et public visé
La carte destinée aux plongeurs professionnels vise tout d’abord à indiquer à un plongeur qui
souhaiterait plonger à un point bien précis (une mine, une épave, etc…) quelle heure est la plus
favorable pour qu’il dérive le moins possible. Il s’agit également de vérifier que cette dérive
n’entraine pas l’intéressé dans une zone de danger et de tenir compte des différents paliers que doit
effectuer un plongeur en fonction de la profondeur et du temps de maintien au fond.
Pour notre étude, nous avons considéré que le plongeur qui utiliserait notre outil voudrait plonger
pendant 45 minutes sur l’objet de son étude, sans trop dériver. Pour cela, nous avons donc tenu
compte de la bathymétrie au point du maillage le plus proche du point sélectionné et nous avons
déterminé, grâce à la table de plongée présentée en annexe, les paliers à effectuer par le plongeur.
Ceux-ci nous ont permis ensuite de déterminer une dérive plus réaliste, certains paliers consistant à
rester plus d’une heure à une profondeur fixe.
Enfin, le rendu final de cette étude ne consiste pas à proprement parler en une carte. Il s’agit plutôt
d’un outil interactif où le plongeur indique le point qui l’intéresse et qui lui indique des indications
sur le déroulement de sa future plongée : l’heure et le jour à préférer pour plonger en dérivant le
moins possible du point d’intérêt, la durée de son excursion, la dérive qu’il connaîtra. Ces
informations sont à la fois destinées au plongeur lui-même pour décider de son jour de sortie, mais
également au capitaine du bateau l’emmenant sur site et le ramenant au quai. En effet, le capitaine
pourrait être intéressé par l’information concernant l’endroit exact et l’heure à laquelle il peut
récupérer le plongeur. Enfin, la période considérée s’étend du 27 septembre au 5 octobre. Nous
avons traité nos résultats comme s’il s’agissait de prévisions et que les dates proposées à l’utilisateur
correspondaient à des dates futures. Ceci impliquerait de mettre en entrée du modèle des prévisions
météorologiques et non des observations.
b) Mise en place
Pour la construction de cette carte, nous avons tout d’abord dû importer les données de vitesses de
courant extraites du modèle Télémac. Nous n’avons considéré que les vitesses en surface et au fond
pour cette étude, en x et en y.
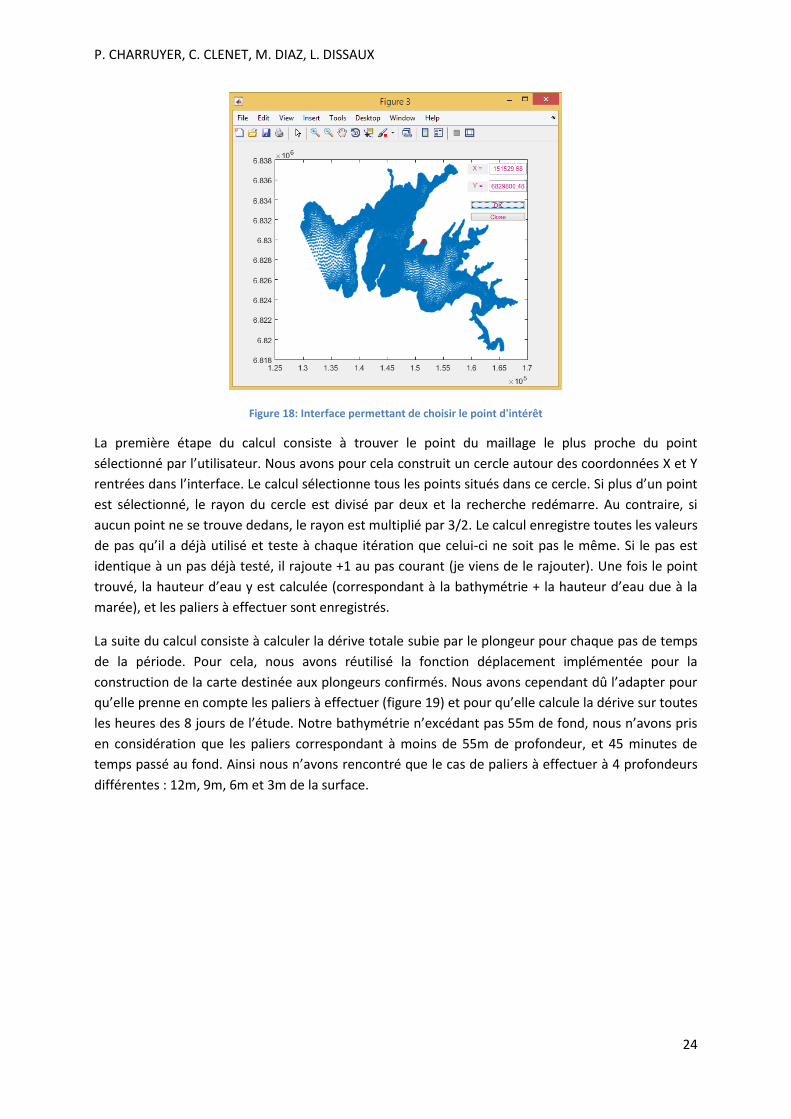
La particularité de cet outil s’inscrit dans l’interface graphique que nous avons mise en place afin de
permettre à l’utilisateur de sélectionner le point d’intérêt pour sa plongée. Celle-ci est présentée sur
la figure 18. Elle permet également à l’utilisateur de visualiser sur l’ensemble de la rade de Brest le
point qu’il a sélectionné en pressant le bouton ‘Ok’. Le plongeur doit ensuite appuyer sur Close pour
fermer la figure et lancer la procédure de calcul.
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
24
Figure 18: Interface permettant de choisir le point d'intérêt
La première étape du calcul consiste à trouver le point du maillage le plus proche du point
sélectionné par l’utilisateur. Nous avons pour cela construit un cercle autour des coordonnées X et Y
rentrées dans l’interface. Le calcul sélectionne tous les points situés dans ce cercle. Si plus d’un point
est sélectionné, le rayon du cercle est divisé par deux et la recherche redémarre. Au contraire, si
aucun point ne se trouve dedans, le rayon est multiplié par 3/2. Le calcul enregistre toutes les valeurs
de pas qu’il a déjà utilisé et teste à chaque itération que celui-ci ne soit pas le même. Si le pas est
identique à un pas déjà testé, il rajoute +1 au pas courant (je viens de le rajouter). Une fois le point
trouvé, la hauteur d’eau y est calculée (correspondant à la bathymétrie + la hauteur d’eau due à la
marée), et les paliers à effectuer sont enregistrés.
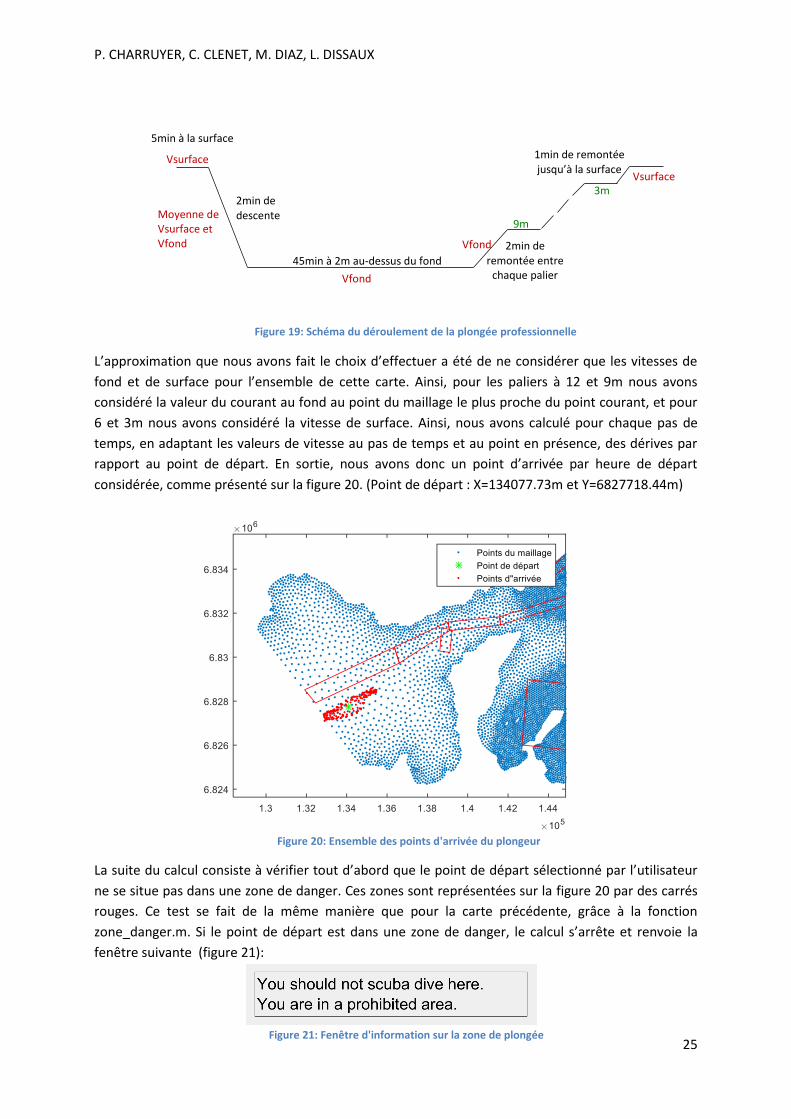
La suite du calcul consiste à calculer la dérive totale subie par le plongeur pour chaque pas de temps
de la période. Pour cela, nous avons réutilisé la fonction déplacement implémentée pour la
construction de la carte destinée aux plongeurs confirmés. Nous avons cependant dû l’adapter pour
qu’elle prenne en compte les paliers à effectuer (figure 19) et pour qu’elle calcule la dérive sur toutes
les heures des 8 jours de l’étude. Notre bathymétrie n’excédant pas 55m de fond, nous n’avons pris
en considération que les paliers correspondant à moins de 55m de profondeur, et 45 minutes de
temps passé au fond. Ainsi nous n’avons rencontré que le cas de paliers à effectuer à 4 profondeurs
différentes : 12m, 9m, 6m et 3m de la surface.
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
25
L’approximation que nous avons fait le choix d’effectuer a été de ne considérer que les vitesses de
fond et de surface pour l’ensemble de cette carte. Ainsi, pour les paliers à 12 et 9m nous avons
considéré la valeur du courant au fond au point du maillage le plus proche du point courant, et pour
6 et 3m nous avons considéré la vitesse de surface. Ainsi, nous avons calculé pour chaque pas de
temps, en adaptant les valeurs de vitesse au pas de temps et au point en présence, des dérives par
rapport au point de départ. En sortie, nous avons donc un point d’arrivée par heure de départ
considérée, comme présenté sur la figure 20. (Point de départ : X=134077.73m et Y=6827718.44m)
La suite du calcul consiste à vérifier tout d’abord que le point de départ sélectionné par l’utilisateur
ne se situe pas dans une zone de danger. Ces zones sont représentées sur la figure 20 par des carrés
rouges. Ce test se fait de la même manière que pour la carte précédente, grâce à la fonction
zone_danger.m. Si le point de départ est dans une zone de danger, le calcul s’arrête et renvoie la
fenêtre suivante (figure 21):
5min à la surface
45min à 2m au-dessus du fond
2min de descente
2min de remontée entre
chaque palier
Vsurface
Vfond
Moyenne de Vsurface et Vfond
Vsurface
9m
Vfond
3m
1min de remontée jusqu’à la surface
Figure 19: Schéma du déroulement de la plongée professionnelle
Figure 20: Ensemble des points d'arrivée du plongeur
Figure 21: Fenêtre d'information sur la zone de plongée
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
26
Si le point de départ est valide, le calcul teste et ne conserve que les points d’arrivée qui ne se
trouvent pas dans une zone de danger. Enfin, pour ces points-ci, le code calcule la distance parcourue
entre le point de départ et le point d’arrivée. Il ne garde et ne renvoie alors que le point le plus
proche du point de départ, celui où le plongeur a le moins dérivé. Nous avons pensé qu’il s’agissait
du choix le plus judicieux, le but du plongeur étant de rester à proximité du point qu’il a sélectionné
au départ.
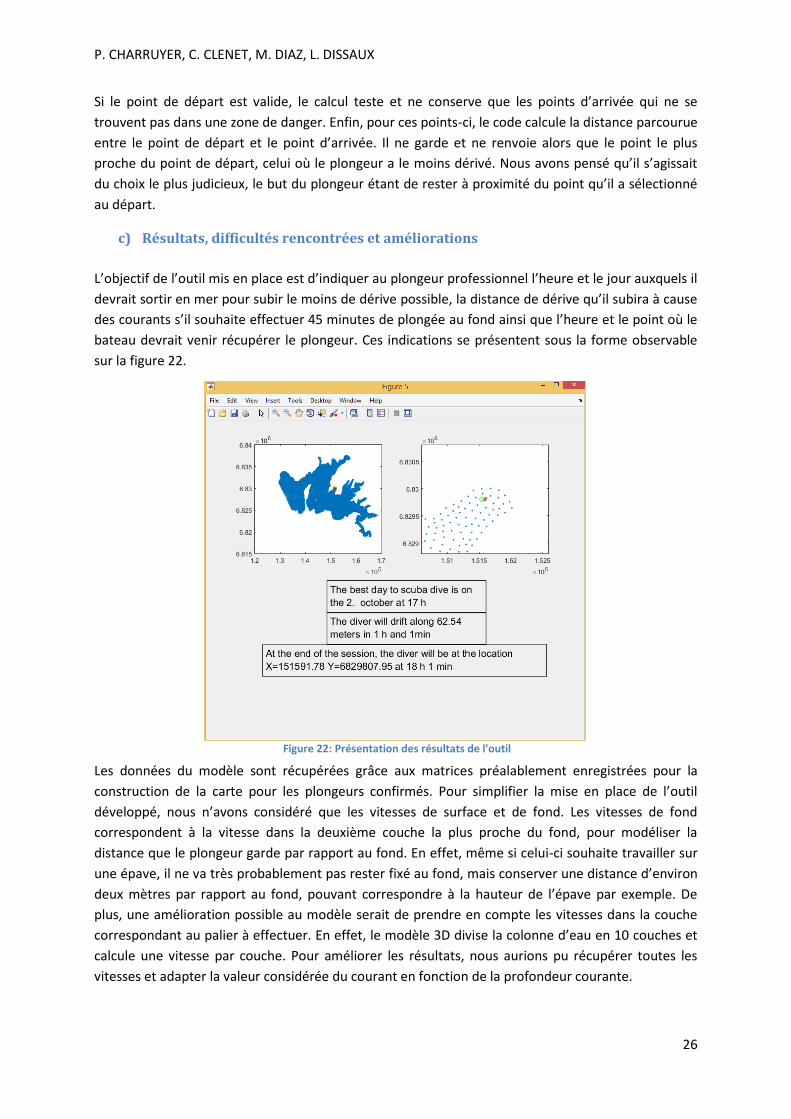
c) Résultats, difficultés rencontrées et améliorations
L’objectif de l’outil mis en place est d’indiquer au plongeur professionnel l’heure et le jour auxquels il
devrait sortir en mer pour subir le moins de dérive possible, la distance de dérive qu’il subira à cause
des courants s’il souhaite effectuer 45 minutes de plongée au fond ainsi que l’heure et le point où le
bateau devrait venir récupérer le plongeur. Ces indications se présentent sous la forme observable
sur la figure 22.
Les données du modèle sont récupérées grâce aux matrices préalablement enregistrées pour la
construction de la carte pour les plongeurs confirmés. Pour simplifier la mise en place de l’outil
développé, nous n’avons considéré que les vitesses de surface et de fond. Les vitesses de fond
correspondent à la vitesse dans la deuxième couche la plus proche du fond, pour modéliser la
distance que le plongeur garde par rapport au fond. En effet, même si celui-ci souhaite travailler sur
une épave, il ne va très probablement pas rester fixé au fond, mais conserver une distance d’environ
deux mètres par rapport au fond, pouvant correspondre à la hauteur de l’épave par exemple. De
plus, une amélioration possible au modèle serait de prendre en compte les vitesses dans la couche
correspondant au palier à effectuer. En effet, le modèle 3D divise la colonne d’eau en 10 couches et
calcule une vitesse par couche. Pour améliorer les résultats, nous aurions pu récupérer toutes les
vitesses et adapter la valeur considérée du courant en fonction de la profondeur courante.
Figure 22: Présentation des résultats de l'outil
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
27
Nous avons également raisonné comme si les données sorties par notre modèle s’inscrivaient
comme des prédictions qui permettraient ainsi à l’utilisateur de choisir une date future pour sa
plongée. Or, comme précisé précédemment, les données notamment de météorologie en entrée du
modèle correspondent à des observations et les dates préférentielles correspondent à fin
septembre-début octobre 2015.
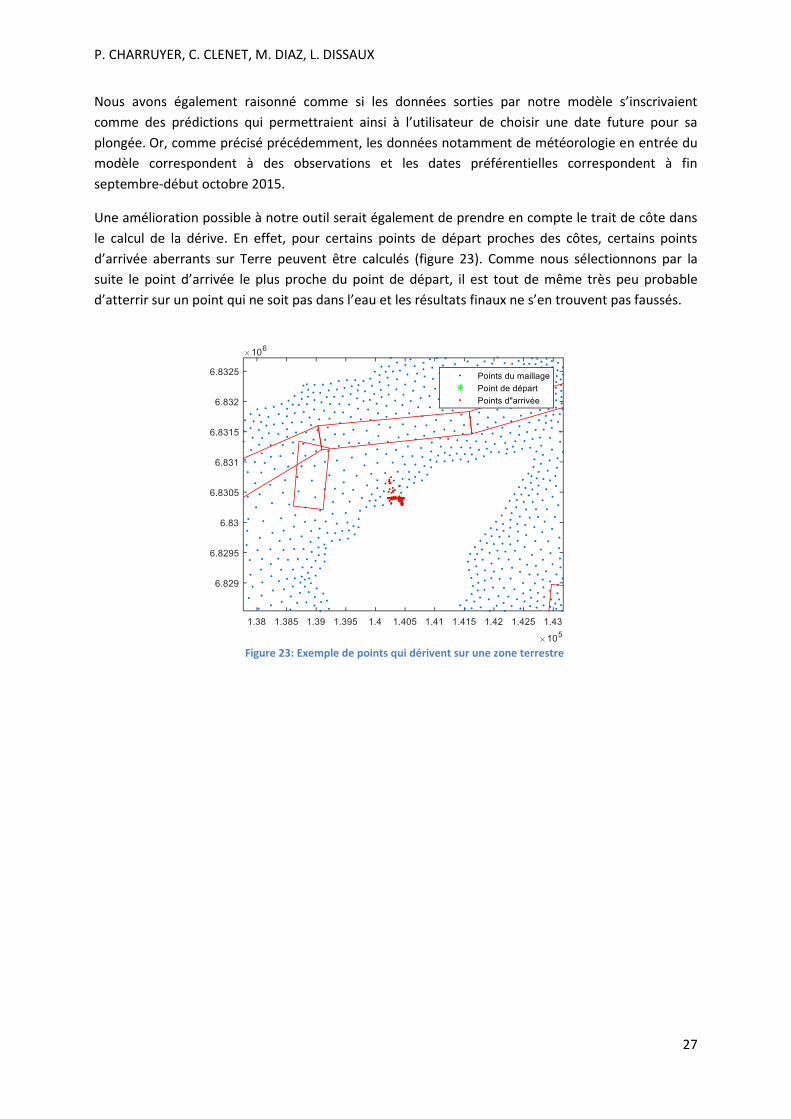
Une amélioration possible à notre outil serait également de prendre en compte le trait de côte dans
le calcul de la dérive. En effet, pour certains points de départ proches des côtes, certains points
d’arrivée aberrants sur Terre peuvent être calculés (figure 23). Comme nous sélectionnons par la
suite le point d’arrivée le plus proche du point de départ, il est tout de même très peu probable
d’atterrir sur un point qui ne soit pas dans l’eau et les résultats finaux ne s’en trouvent pas faussés.
Figure 23: Exemple de points qui dérivent sur une zone terrestre
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
28
III. Limites et améliorations possibles
1. Optimisation du code
L’une des principales difficultés que nous avons rencontrées pendant notre projet a été de gérer le
temps qui nous était imparti. En effet, les simulations Télémac mettent parfois plusieurs heures voir
plusieurs jours à s’exécuter. Le temps d’exécution augmente quand on ajoute les données
météorologiques, ou qu’on change le modèle de turbulence. Il nous a fallu toujours prioriser nos
choix dans les simulations, car nous n’avions le temps de faire tourner le code qu’un certain nombre
de fois. De plus, il fallait s’assurer en permanence que les données nécessaires pour notre prochaine
séance seraient disponibles, et que les ordinateurs de l’école n’allaient pas se redémarrer dans la
nuit pour faire des mises à jour.
Les données en sortie de Télémac étaient aussi très volumineuses. Lorsque l’on extrait les données
3D afin de les utiliser en Matlab pour 5 jours sans données météorologiques par exemple, la durée
d’exécution du code est de trente minutes. Malheureusement, nous ne pouvons pas influer sur le
temps d’exécution de Télémac ni sur le temps de récupération des données. Nous avons donc essayé
d’optimiser le reste de notre code dans la limite de nos connaissances. Pour cela, nous avons
principalement travaillé sur les fonctions que nous avons utilisées dans le code.
Exemple de la fonction déplacement :
La fonction déplacement est utilisée pour l’élaboration de la carte des confirmés et pour la carte des
professionnels. La difficulté sur la carte des confirmés était que nous devions simuler un
déplacement pour chacun des points du maillage. En effet, nous nous placions dans le cas où les
courants étaient les plus forts sur la rade et nous devions simuler la dérive du plongeur sur une
plongée de 45 minutes. La vitesse de dérive du plongeur est définie comme celle du point du
maillage le plus proche. Après 5 minutes de dérive, on cherche le plus proche point du maillage de
notre plongeur pour modifier sa vitesse. Il faut donc calculer neuf fois la distance entre notre point
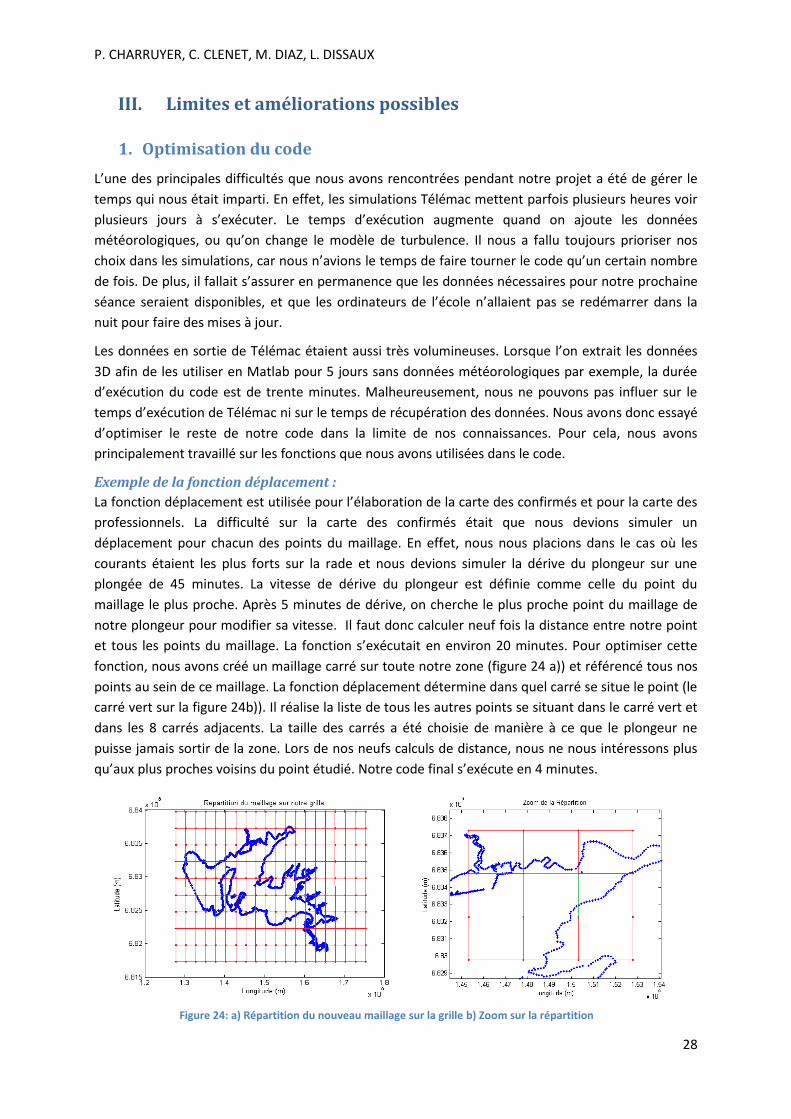
et tous les points du maillage. La fonction s’exécutait en environ 20 minutes. Pour optimiser cette
fonction, nous avons créé un maillage carré sur toute notre zone (figure 24 a)) et référencé tous nos
points au sein de ce maillage. La fonction déplacement détermine dans quel carré se situe le point (le
carré vert sur la figure 24b)). Il réalise la liste de tous les autres points se situant dans le carré vert et
dans les 8 carrés adjacents. La taille des carrés a été choisie de manière à ce que le plongeur ne
puisse jamais sortir de la zone. Lors de nos neufs calculs de distance, nous ne nous intéressons plus
qu’aux plus proches voisins du point étudié. Notre code final s’exécute en 4 minutes.
Figure 24: a) Répartition du nouveau maillage sur la grille b) Zoom sur la répartition

P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
29
2. Validation du modèle
Nous avons validé notre modèle en lançant des simulations avec des paramètres de frottement ou
de turbulence différents. La première amélioration à noter est que nous pourrions lancer beaucoup
plus de simulations en faisant de nouveau varier ces mêmes paramètres, ou en en faisant varier
d’autres. Ceci étant dit, nous avons rencontré d’autres difficultés et relevé des améliorations que
nous pourrions mettre en œuvre.
a) Les données ADCP
Nous avons rencontré plusieurs difficultés lors du traitement des données ADCP et de leur utilisation
dans le cadre de la validation du modèle. Outre les problèmes de mesures inexploitables à cause de
soucis techniques, nous avons relevé d’autres difficultés qu’il serait possible de corriger. Tout
d’abord, la précision de l’ADCP dans les zones de faible courant n’est pas suffisante, comme on l’a vu
dans le rapport. Dans ces zones, il serait préférable d’utiliser des ADCP fixés au fond. Cela aurait le
double intérêt de proposer des mesures plus précises et sur la durée. Nous n’avions que des
campagnes d’une heure maximum et cela n’était pas suffisant. La précision d’un ADCP au fond est de
l’ordre du cm/s, ce qui améliorerait de beaucoup nos comparaisons. De même, il serait idéal d’utiliser
des ADCP fixés, dans la mesure du possible, sur des points du maillage. En effet, la vitesse du courant
varie parfois de façon marquée sur de faibles distances horizontales, et nous faisons donc une erreur
quand nous comparons des mesures ADCP avec des points du maillage, qui même s’ils sont les plus
proches, restent éloignés des points de mesure. Certaines données ADCP se trouvent par exemple à
plusieurs centaines de mètres de leur point de référence sur le maillage. Bien sûr, il serait impossible
de placer un ADCP à chaque point du maillage, mais en en utilisant plusieurs, nous pourrions séparer
la zone en plusieurs petites zones d’erreur différentes. On pourrait également faire les levés ADCP
dans les zones les plus résolues du maillage (près des côtes, autour des ports et de l’île Longue par
exemple) pour obtenir moins d’écarts horizontaux (30 mètres entre deux points du maillage dans ces
zones).
b) Données météorologiques
Nous avons utilisé des données météorologiques fournies par M. Aïdonidis issues d’une station à
Guipavas, c’est-à-dire à plus de 15 kilomètres de certains points de la Rade. Nous avons appliqué ces
données, et notamment le vent, de façon uniforme sur toute notre zone. Or la topographie de la
Rade de Brest est suffisamment complexe pour rendre cette approximation incohérente. Nous
pouvons prendre l’exemple du marégraphe de la Penfeld qui se trouve dans une zone abritée et subit
donc beaucoup moins l’influence du vent qu’un point dans le Goulet par exemple. Il serait très
intéressant d’obtenir des données de vent (et de pression) différentes sur différentes zones de la
Rade. Nous pourrions par exemple utiliser un modèle atmosphérique de type RAMS.
c) Coefficient de frottement de fond
Lors de la lecture du rapport d’Amandine Nicolle [1], nous nous sommes rendu compte que la
conclusion de cette étude montrait qu’il existe un coefficient optimal pour les hauteurs d’eau et un
second pour les courants. Notre validation n’a pas été assez poussée pour observer ce résultat, et il
serait intéressant d’approfondir cette étude.
d) Données issues du marégraphe
Il aurait pu être intéressant d’avoir un deuxième marégraphe de l’autre côté de la rade afin de
prendre en compte le décalage de marée qui existe d’un bout à l’autre de la rade est qui n’a pas été
pris en compte dans l’élaboration de la carte loisir.
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
30
Conclusion
Finalement, nous sommes satisfaits de l’aboutissement de ce même si certains points pourraient être
améliorés.
Tout d’abord, la validation du modèle est le point principal à améliorer. La validation avec les
données de prédiction du SHOM et les atlas de courant a donné de bons résultats. On trouve un
écart entre notre modèle et les prédictions du SHOM de 15cm en moyenne sur 10 jours sur les
hauteurs d’eau. Les comparaisons des hauteurs d’eau entre le marégraphe (observations du SHOM)
et le modèle avec données météorologiques ont été concluantes avec 20cm d’écarts en moyenne.
Pour ce qui est de l’exploitation des données ADCP, celle-ci a été compromise par divers problèmes
liés aux mesures, à l’appareil et à la météo. L’exploitation des données que nous avions nous a
permis de nous rendre compte que notre préparation des sorties n’étaient pas suffisante. Dans le
futur, il faudrait effectuer des mesures dans des zones où l’écart entre les points du maillage est
relativement faible et/ou le courant est fort.
Enfin, il nous a fallu définir le type de cartes que nous souhaitions créer. Le fait de créer trois cartes
permet de rendre nos résultats utilisables par tous types de plongeurs. En travaillant de manière plus
approfondie, la prise en compte d’un plus grand intervalle de temps et de plus de paramètres
permettrait sans doute d’avoir des cartes réellement exploitables par des plongeurs.
Pour ce qui est du code MATLAB qui nous a permis de traiter toutes les données, la difficulté
principale a été d’optimiser ce code au vu de la quantité importante de données en sortie du modèle
TELEMAC 3D. Si le temps nous avait permis d’améliorer notre code, nous aurions souhaité préciser la
définition des zones interdites et utiliser la vitesse de chaque couche pour améliorer la carte
professionnelle.
Pour conclure, nous avons mis un certain temps afin de réussir à nous approprier ce projet. Si nous
étions parvenus à comprendre l’ensemble des enjeux de ce projet, nous aurions gagné un temps
précieux. Malgré cela, ce projet a été une bonne expérience pour ce qui est de l’apprentissage du
travail en équipe. Cela nous a surtout permis de partir d’un modèle, de le comprendre et de l’utiliser
pour finalement réussir à ébaucher des cartes utilisables par des plongeurs
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
31
Bibliographie
[1] Amandine Nicolle, « Réalisation d’un modèle 3D de courants de marée dans la
Rade de Brest», Rapport d’étude, SHOM, 2009
[2] P. Lang, J. Desombre et C. Pham, « Système de modélisation Télémac : Manuel de
référence », Logiciel Telemac-3D Version 6.2
[3] P. Lang, « Système de modélisation Télémac : Manuel de l’utilisateur », Logiciel
Télémac-3D Version 6.2
[4] Fudaa-Prepro , « Editeur de projet hydraulique : Télémac », 2005
[5] Wikipédia, « L’Elorn », https://fr.wikipedia.org/wiki/Élorn
[6] Wikipédia, « L’Aulne », https://fr.wikipedia.org/wiki/Aulne_(fleuve)
[7] J-M. Charel, « Sécurité collective de la plongée en compagnie du courant »,
http://jean-marc.charel.pagesperso-orange.fr/courants/plongeesecurite.htm, Nov
2003
[8] PréviMer, « Observations et prévisions côtières »,
http://www.previmer.org/previsions/vagues/modele_iroise
[9] D. Legland, « IsPointInTriangle Method », Matlab, 2015,
http://www.mathworks.com/matlabcentral/fileexchange/7844-
geom2d/content/geom2d/geom2d/isPointInTriangle.m
[10] Portail Data SHOM, http://data.shom.fr/#donnees, 2016
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
32
Table des figures Figure 1: Carte de la Rade de Brest ......................................................................................................... 5
Figure 2: Maillage du modèle .................................................................................................................. 6
Figure 3: Bathymétrie de la Rade de Brest .............................................................................................. 6
Figure 4: Point du maillage le plus proche de la position réelle du marégraphe .................................... 7
Figure 5: Sorties du modèle – Normes des vecteurs proportionnelles à la vitesse du courant - PM -3h 9
Figure 6: Atlas de courant - PM -3h ......................................................................................................... 9
Figure 7: Sorties du modèle – Normes des vecteurs proportionnelles à la vitesse du courant - PM +3h
............................................................................................................................................................... 10
Figure 8: Atlas de courant - PM +3h ...................................................................................................... 11
Figure 9: Ecarts de hauteur d'eau entre le modèle final et les observations du SHOM ....................... 11
Figure 10: Positions des levés ADCP et points de maillage correspondants ......................................... 12
Figure 12:Répartition des erreurs absolues de courant dans la direction Nord en fonction des couches
d'eau ...................................................................................................................................................... 14
Figure 11: Répartition du pourcentage d'erreurs du courant dans la direction Nord en fonction des
couches d'eau ........................................................................................................................................ 14
Figure 13: Cartes pour plongeurs débutants – sans données météorologiques - PM, BM, MM .......... 17
Figure 14: Cartes pour plongeurs débutants - avec données météorologiques - à PM, BM, MM ....... 18
Figure 15: Position des zones de danger sélectionnées dans la Rade .................................................. 20
Figure 16: Schéma d'une plongée confirmée ........................................................................................ 20
Figure 17: Cartes pour les plongeurs confirmés .................................................................................... 22
Figure 18: Interface permettant de choisir le point d'intérêt ............................................................... 24
Figure 19: Schéma du déroulement de la plongée professionnelle ...................................................... 25
Figure 20: Ensemble des points d'arrivée du plongeur ......................................................................... 25
Figure 21: Fenêtre d'information sur la zone de plongée ..................................................................... 25
Figure 22: Présentation des résultats de l'outil ..................................................................................... 26
Figure 23: Exemple de points qui dérivent sur une zone terrestre ....................................................... 27
Figure 24: a) Répartition du nouveau maillage sur la grille b) Zoom sur la répartition ........................ 28
Figure 25: Sorties du modèle - Norme constante - PM ......................................................................... 34
Figure 26: Sorties du modèle - Norme des vecteurs constante - PM ................................................... 34
Figure 27: Atlas de courant - Brest - PM ............................................................................................... 35
Figure 28: Sorties du modèle–Normes des vecteurs proportionnelles à la vitesse du courant - PM ... 35
Figure 29: Atlas de courants - BM ......................................................................................................... 36
Figure 30: Sorties du modèle – Normes des vecteurs proportionnelles à la vitesse du courant - BM . 37
Table des tableaux
Tableau 1: Tableau de statistiques des écarts entre les hauteurs d'eau de notre modèle et les
prédictions du SHOM-Variation des coefficients de frottement ............................................................ 8
Tableau 2: Tableau de statistiques des écarts entre les hauteurs d'eau de notre modèle et les
prédictions du SHOM-Variation du modèle de turbulence .................................................................... 8
Tableau 3: Résultats des moyennes et des écarts type dans les directions Nord et Est et pour un
coefficient de 70 .................................................................................................................................... 13
Tableau 4: Résultats des moyennes et des écarts type dans les directions Nord et Est et pour un
coefficient de 40 .................................................................................................................................... 13
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
33
ANNEXES
Questionnaire du Club de plongée Eau Libre
1) Quels sont les principaux risques pour les plongeurs liés au courant ?
2) Existe-t-il un courant maximum au-dessus duquel il est difficile de plonger ?
3) Existent-ils des types spécifiques de courants particulièrement gênants ?
4) Certains facteurs permettent-ils de plonger tout de même dans des zones de
courant ? (Présence d’abris…)
5) Est-ce que les zones de courant ou la proximité de celles-ci peuvent rendre la plongée
plus intéressante du fait de l’accumulation de sédiments ?
6) Dans quelle mesure les courants de cisaillements peuvent-ils être dangereux ?
7) Comme devrait être présentée une carte pour que celle-ci puisse être utile ? Est-ce
que nos quatre catégories sont pertinentes ?
8) Sur une carte pourriez-vous nous dessiner approximativement les zones dans
lesquelles il est possible de plonger sans danger ?
9) Avez-vous de la documentation sur la plongée en lien avec les courants ?
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
34
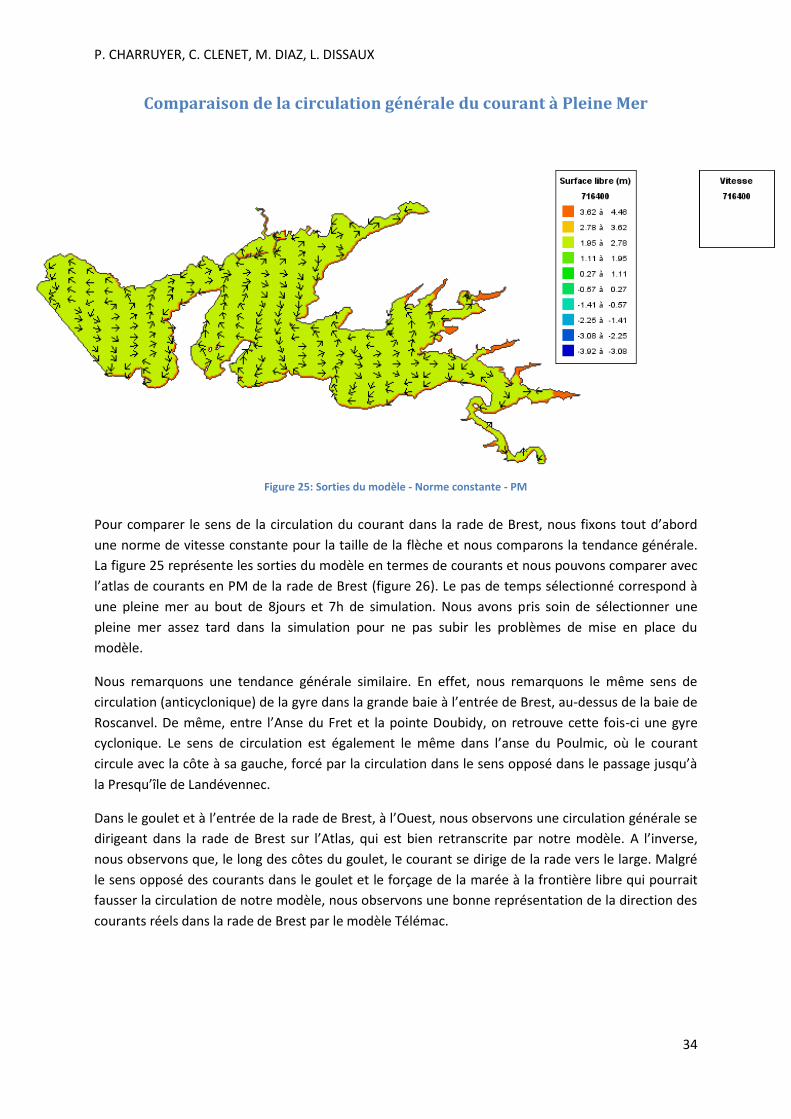
Comparaison de la circulation générale du courant à Pleine Mer
Pour comparer le sens de la circulation du courant dans la rade de Brest, nous fixons tout d’abord
une norme de vitesse constante pour la taille de la flèche et nous comparons la tendance générale.
La figure 25 représente les sorties du modèle en termes de courants et nous pouvons comparer avec
l’atlas de courants en PM de la rade de Brest (figure 26). Le pas de temps sélectionné correspond à
une pleine mer au bout de 8jours et 7h de simulation. Nous avons pris soin de sélectionner une
pleine mer assez tard dans la simulation pour ne pas subir les problèmes de mise en place du
modèle.
Nous remarquons une tendance générale similaire. En effet, nous remarquons le même sens de
circulation (anticyclonique) de la gyre dans la grande baie à l’entrée de Brest, au-dessus de la baie de
Roscanvel. De même, entre l’Anse du Fret et la pointe Doubidy, on retrouve cette fois-ci une gyre
cyclonique. Le sens de circulation est également le même dans l’anse du Poulmic, où le courant
circule avec la côte à sa gauche, forcé par la circulation dans le sens opposé dans le passage jusqu’à
la Presqu’île de Landévennec.
Dans le goulet et à l’entrée de la rade de Brest, à l’Ouest, nous observons une circulation générale se
dirigeant dans la rade de Brest sur l’Atlas, qui est bien retranscrite par notre modèle. A l’inverse,
nous observons que, le long des côtes du goulet, le courant se dirige de la rade vers le large. Malgré
le sens opposé des courants dans le goulet et le forçage de la marée à la frontière libre qui pourrait
fausser la circulation de notre modèle, nous observons une bonne représentation de la direction des
courants réels dans la rade de Brest par le modèle Télémac.
Figure 25: Sorties du modèle - Norme constante - PM
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
35
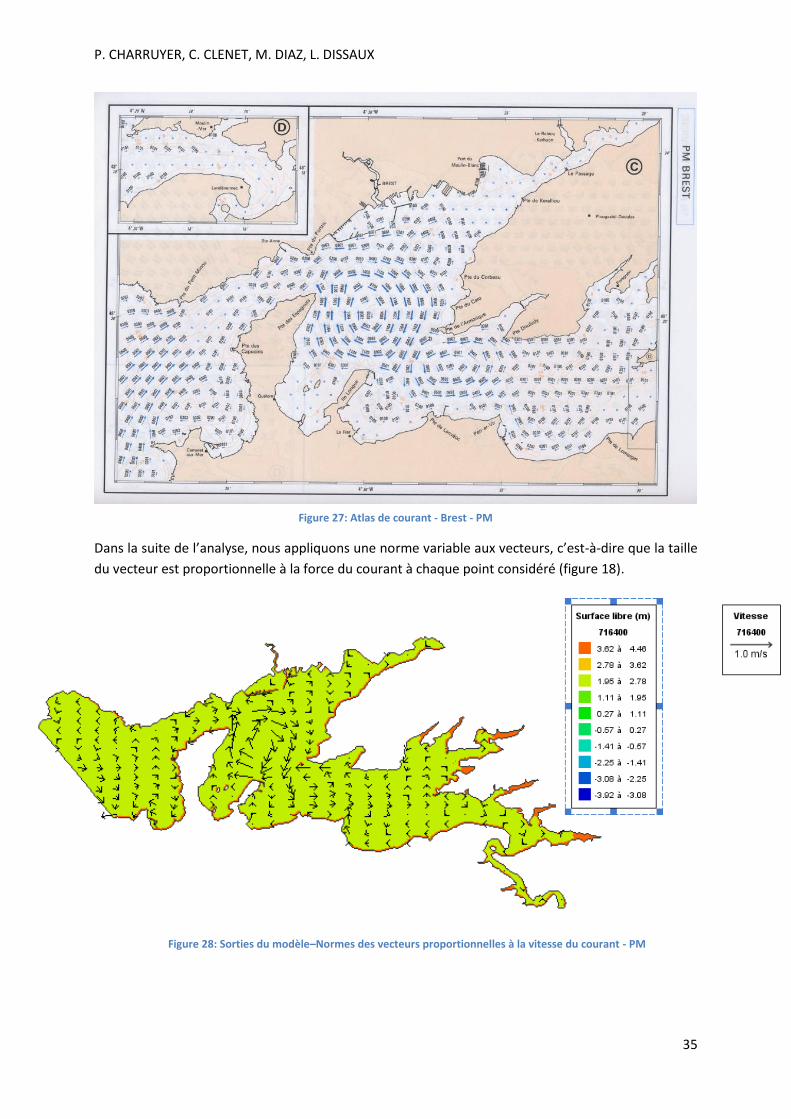
Dans la suite de l’analyse, nous appliquons une norme variable aux vecteurs, c’est-à-dire que la taille
du vecteur est proportionnelle à la force du courant à chaque point considéré (figure 18).
Figure 27: Atlas de courant - Brest - PM
Figure 28: Sorties du modèle–Normes des vecteurs proportionnelles à la vitesse du courant - PM
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
36
Nous remarquons de forts courants dans la gyre anticyclonique du centre de la rade, comme le
confirme l’atlas de courants. A l’inverse et conformément à l’atlas, les courants sont quasiment
inexistants dans la baie de Roscanvel, l’Anse du Fret et la baie de Daoulas. De même, les courants
sont relativement faibles, à l’image de la réalité, lorsque l’on s’approche de l’embouchure de l’Elorn.
Nous retrouvons bien des vitesses qui vont en faiblissant de l’Anse du Fret jusqu’à l’embouchure de
l’Aulne. Nous observons également des courants relativement faibles dans le goulet.
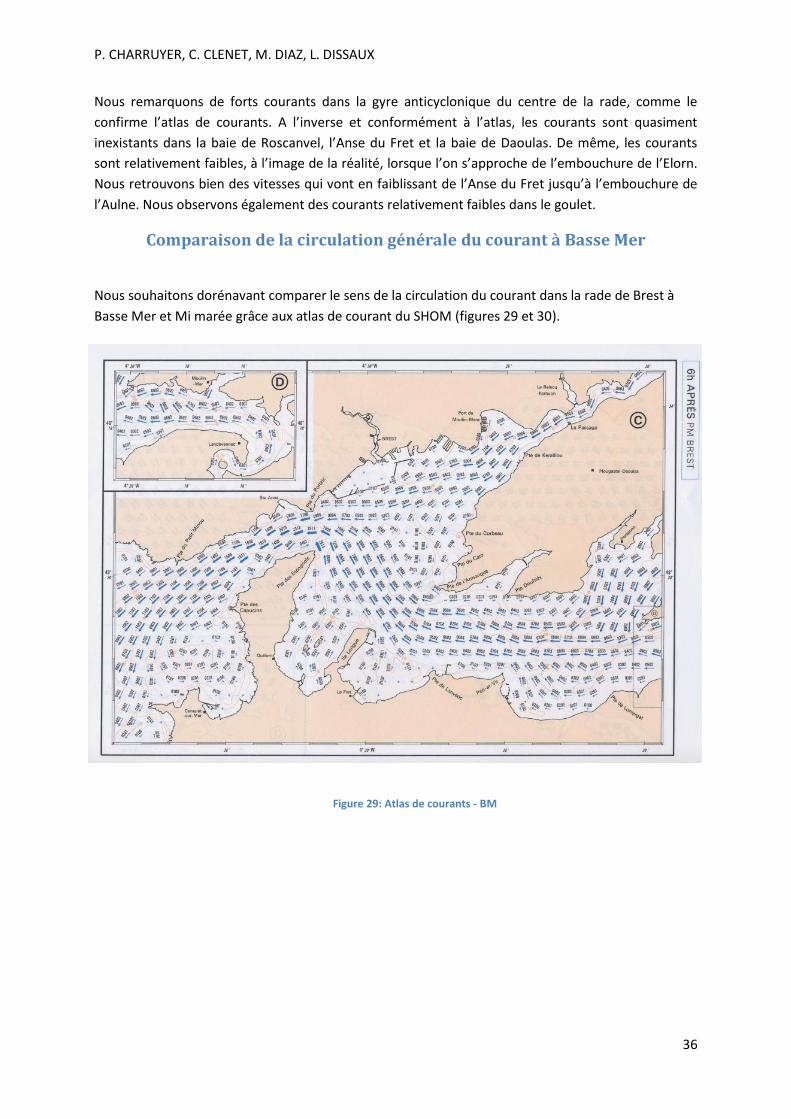
Comparaison de la circulation générale du courant à Basse Mer
Nous souhaitons dorénavant comparer le sens de la circulation du courant dans la rade de Brest à
Basse Mer et Mi marée grâce aux atlas de courant du SHOM (figures 29 et 30).
Figure 29: Atlas de courants - BM
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
37
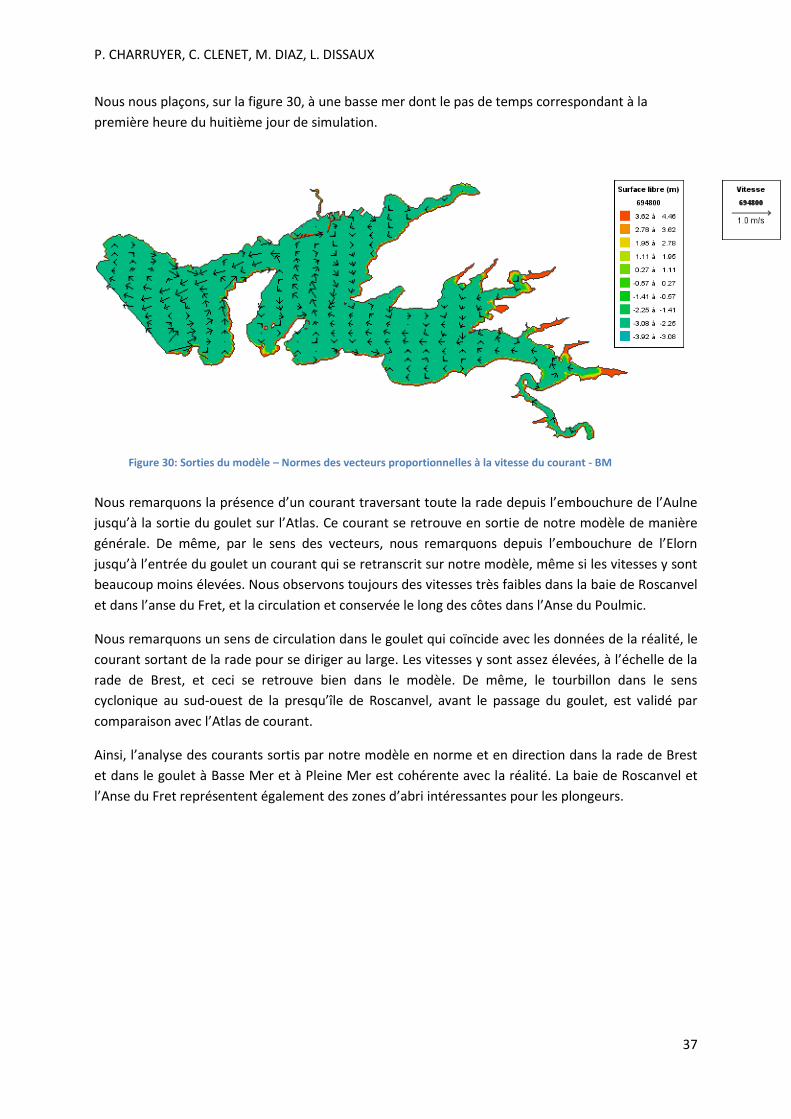
Nous nous plaçons, sur la figure 30, à une basse mer dont le pas de temps correspondant à la
première heure du huitième jour de simulation.
Nous remarquons la présence d’un courant traversant toute la rade depuis l’embouchure de l’Aulne
jusqu’à la sortie du goulet sur l’Atlas. Ce courant se retrouve en sortie de notre modèle de manière
générale. De même, par le sens des vecteurs, nous remarquons depuis l’embouchure de l’Elorn
jusqu’à l’entrée du goulet un courant qui se retranscrit sur notre modèle, même si les vitesses y sont
beaucoup moins élevées. Nous observons toujours des vitesses très faibles dans la baie de Roscanvel
et dans l’anse du Fret, et la circulation et conservée le long des côtes dans l’Anse du Poulmic.
Nous remarquons un sens de circulation dans le goulet qui coïncide avec les données de la réalité, le
courant sortant de la rade pour se diriger au large. Les vitesses y sont assez élevées, à l’échelle de la
rade de Brest, et ceci se retrouve bien dans le modèle. De même, le tourbillon dans le sens
cyclonique au sud-ouest de la presqu’île de Roscanvel, avant le passage du goulet, est validé par
comparaison avec l’Atlas de courant.
Ainsi, l’analyse des courants sortis par notre modèle en norme et en direction dans la rade de Brest
et dans le goulet à Basse Mer et à Pleine Mer est cohérente avec la réalité. La baie de Roscanvel et
l’Anse du Fret représentent également des zones d’abri intéressantes pour les plongeurs.
Figure 30: Sorties du modèle – Normes des vecteurs proportionnelles à la vitesse du courant - BM
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
38
Etude des données ADCP sur les ducs d’Albes
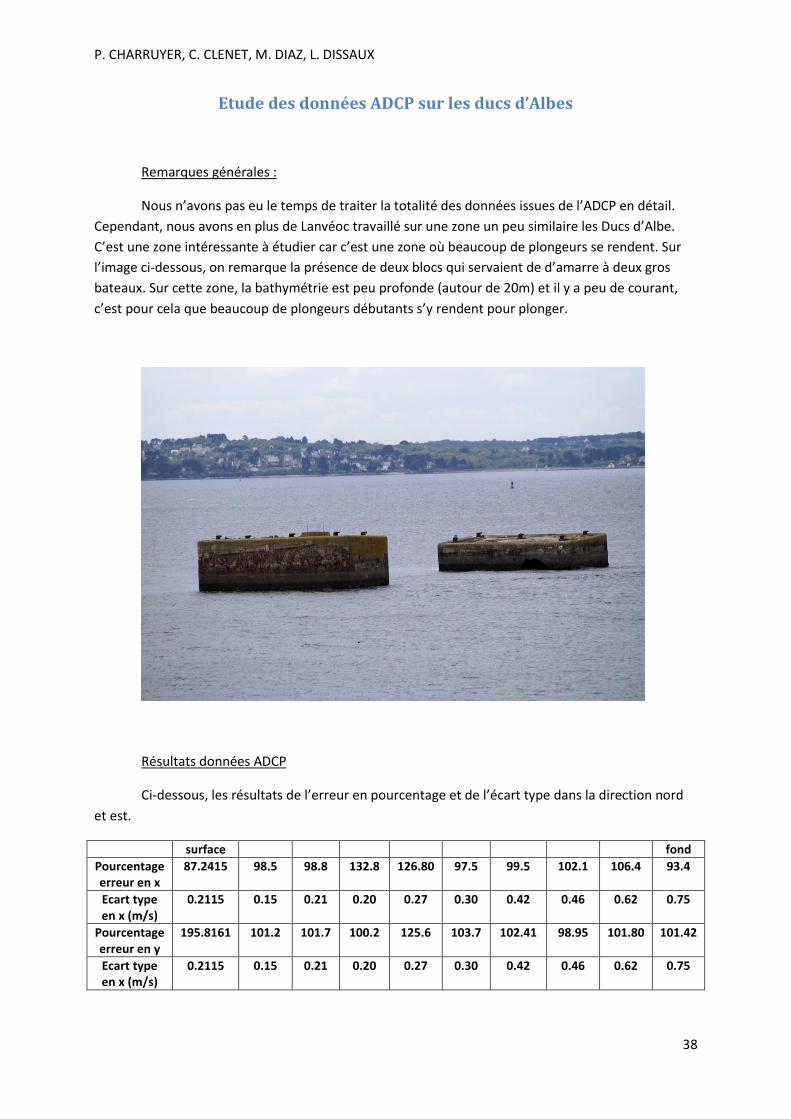
Remarques générales :
Nous n’avons pas eu le temps de traiter la totalité des données issues de l’ADCP en détail.
Cependant, nous avons en plus de Lanvéoc travaillé sur une zone un peu similaire les Ducs d’Albe.
C’est une zone intéressante à étudier car c’est une zone où beaucoup de plongeurs se rendent. Sur
l’image ci-dessous, on remarque la présence de deux blocs qui servaient de d’amarre à deux gros
bateaux. Sur cette zone, la bathymétrie est peu profonde (autour de 20m) et il y a peu de courant,
c’est pour cela que beaucoup de plongeurs débutants s’y rendent pour plonger.
Résultats données ADCP
Ci-dessous, les résultats de l’erreur en pourcentage et de l’écart type dans la direction nord
et est.
surface fond
Pourcentage erreur en x
87.2415
98.5 98.8 132.8 126.80 97.5 99.5 102.1 106.4 93.4
Ecart type en x (m/s)
0.2115 0.15 0.21 0.20 0.27 0.30 0.42 0.46 0.62 0.75
Pourcentage erreur en y
195.8161 101.2 101.7 100.2 125.6 103.7 102.41 98.95 101.80 101.42
Ecart type en x (m/s)
0.2115 0.15 0.21 0.20 0.27 0.30 0.42 0.46 0.62 0.75
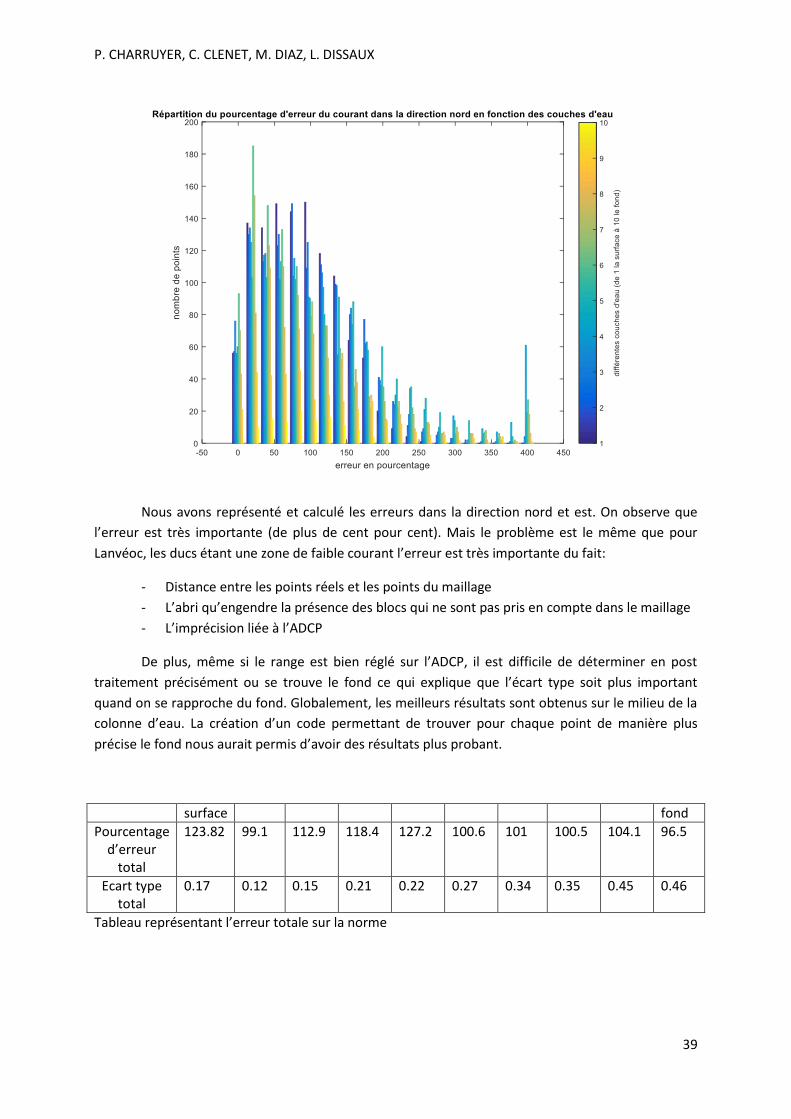
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
39
Nous avons représenté et calculé les erreurs dans la direction nord et est. On observe que
l’erreur est très importante (de plus de cent pour cent). Mais le problème est le même que pour
Lanvéoc, les ducs étant une zone de faible courant l’erreur est très importante du fait:
- Distance entre les points réels et les points du maillage
- L’abri qu’engendre la présence des blocs qui ne sont pas pris en compte dans le maillage
- L’imprécision liée à l’ADCP
De plus, même si le range est bien réglé sur l’ADCP, il est difficile de déterminer en post
traitement précisément ou se trouve le fond ce qui explique que l’écart type soit plus important
quand on se rapproche du fond. Globalement, les meilleurs résultats sont obtenus sur le milieu de la
colonne d’eau. La création d’un code permettant de trouver pour chaque point de manière plus
précise le fond nous aurait permis d’avoir des résultats plus probant.
Tableau représentant l’erreur totale sur la norme
surface fond
Pourcentage d’erreur
total
123.82 99.1 112.9 118.4 127.2 100.6 101 100.5 104.1 96.5
Ecart type total
0.17 0.12 0.15 0.21 0.22 0.27 0.34 0.35 0.45 0.46
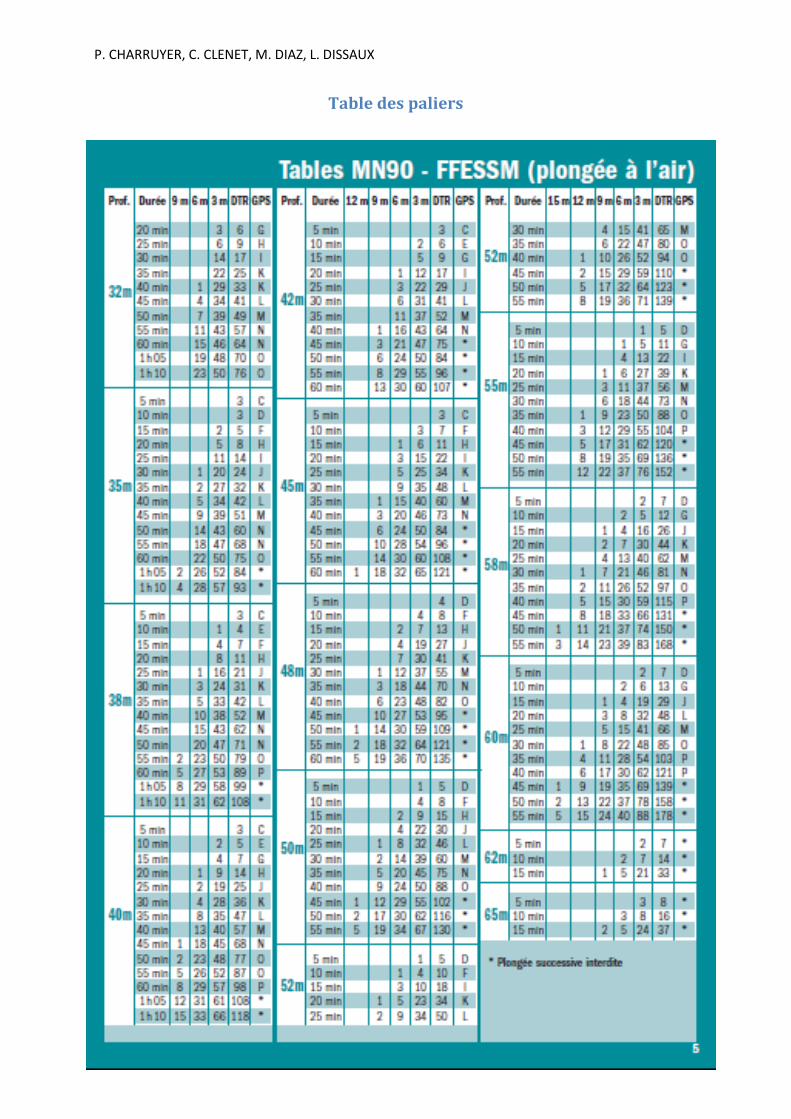
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
40
Table des paliers
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
41
Exemple d’un rapport de levé
Bilan de la sortie de mer du 01/10/2015 Utilisation du PC portable avec : - ADCP sur le com 9 (A) - GPS et attitude venant de la POSMV sur le com 10 (B) VMDAS utilisé pour la visualisation des données Répertoire sur le PC: ADCP-Data -> CI2016 -> ADCP-DATA Où sont nos données ? Sur la clé USB de Claire dans le dossier ADCP_Data_01102015 Paramètres :
- Visualisation toute les 6 secondes et visualisation sur 60s - Réglage sur maximum de pings possible même si l’ADCP pourrait avoir une fréquence
supérieure, on observe en pratique que l’ADCP émet 2 pings par seconde (un ping pour observer la vitesse fond et un ping pour observer la vitesse dans la couche d’eau)
Ligne effectuées : ADCP009_000000 -> test pour savoir si ça marche ADCP010_000000 -> trajet pour aller au début de la première ligne mais on tourne en rond Attention données seulement sur les 25m alors que 50m de fond !!!! ADCP012_000000 -> ligne 01 au goulot ADCP013_000000 -> essai patch test qui est un échec car il y avait trop de courant au niveau goulot ADCP014_000000 -> reprise de la ligne 01 au goulot Données utilisées pour le patch test prises près du port ADCP015_000000 ->aller ADCP016_000000 -> retour
Remarques :
- Attention : l’ADCP a été réglé à 45 degré 45 degrés - A prendre en compte pour les prochaines sorties : bien vérifié que le fond est toujours
atteint par le faisceau de l’ADCP.

P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
42
Méthode des triangles
Testing for Point Inclusion in a Triangle
Given a triangle (v1,v2,v3) and a point p, the test for p's inclusion in the triangle is explained
as follows. If we traverse the point’s v1, v2,v3 and the point is inside, we will always see the
point on the same side of the segment we are visiting. If v1, v2,v3 are arranged in a counter-
clockwise sense, the points inside it are always at the left of the segments. If the point is
outside, for at least one of the segments the point will be at the right (see figure). If the
vertices are arranged in a clockwise sense, the reasoning is identical, except that a point that is
inside the triangle will always be at the right of the segment we are visiting.
Thus, to determine if the point p is inside the triangle (v1, v2, v3), we need only obtain the
directions of rotation along the triplets (v1,v2,p), (v2,v3,p) and (v3,v1,p). The point is inside
if and only if the three directions are equal.
(From Efficient 2-D Geometric Operations, Carlos Moreno)
The code used come from the website of MATLAB work: http://www.mathworks.com/matlabcentral/fileexchange/7844-geom2d/content/geom2d/geom2d/isPointInTriangle.m
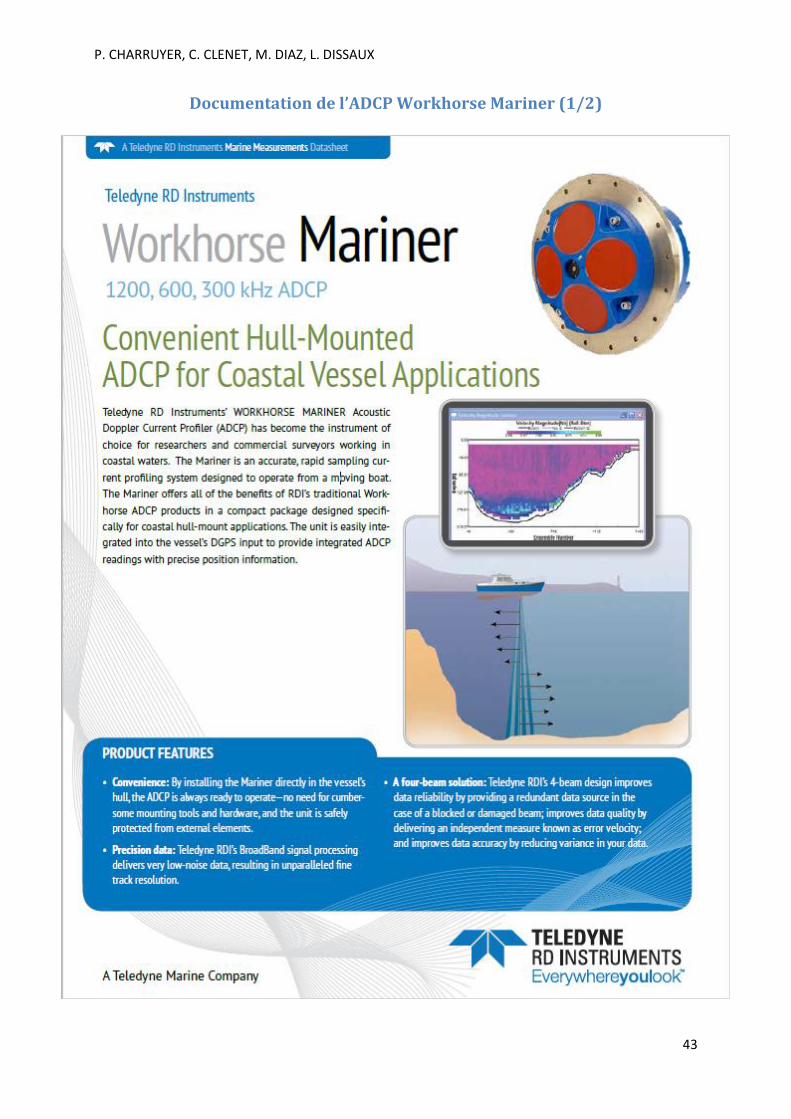
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
43
Documentation de l’ADCP Workhorse Mariner (1/2)
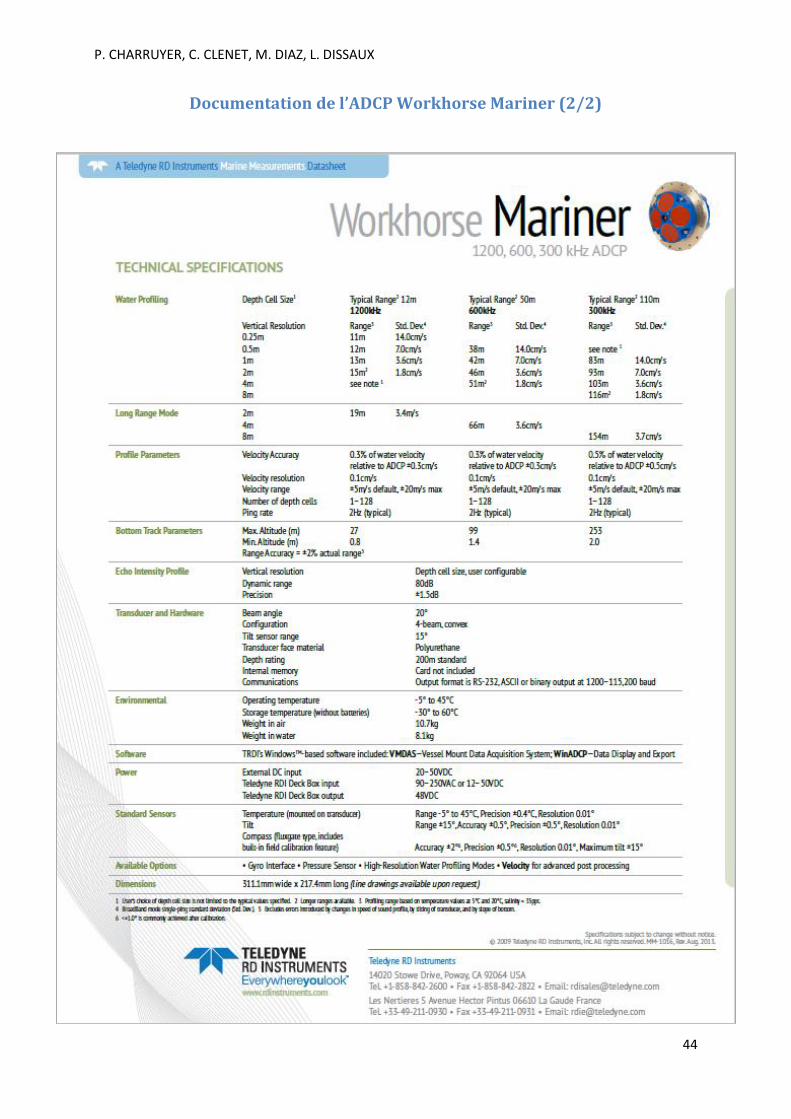
P. CHARRUYER, C. CLENET, M. DIAZ, L. DISSAUX
44
Documentation de l’ADCP Workhorse Mariner (2/2)