Embed Size (px)
Citation preview
\
),'
? ...... ,.
\(' v ) )
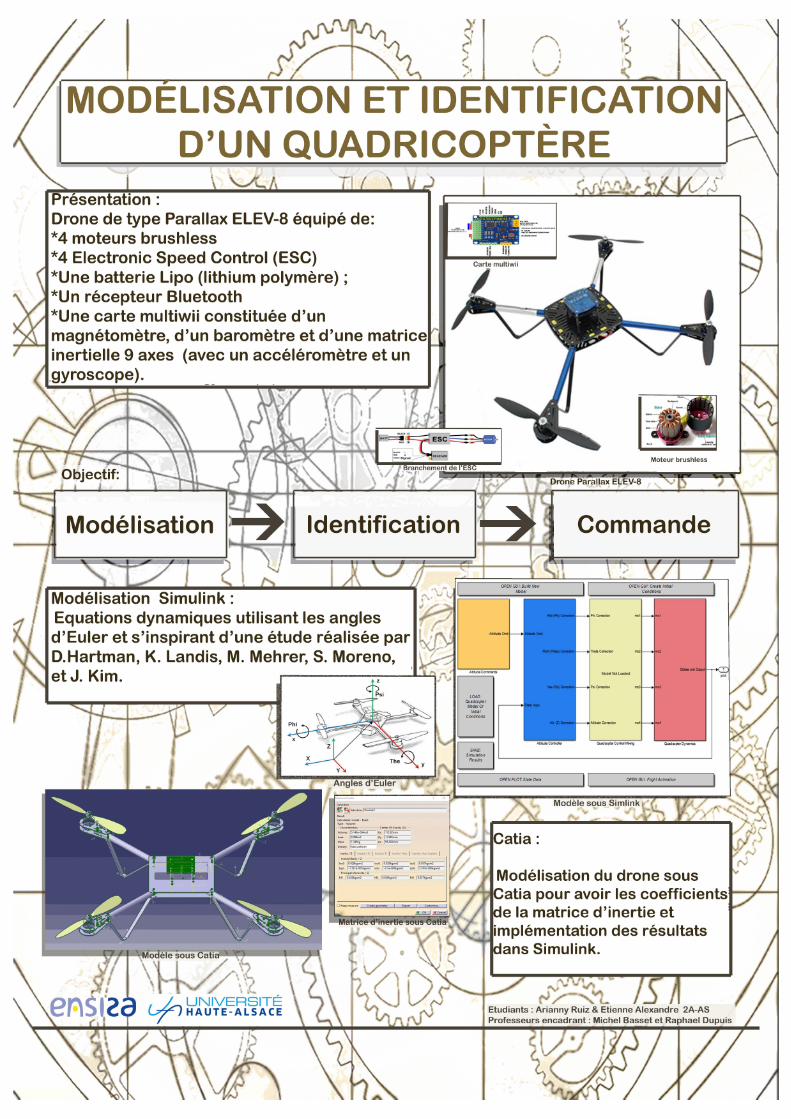
MODELISATION ET IDENTIFICATION D'UN QUADRICOPTÈRE
Présentation : Drone de type Parallax ELEV-8 équipé de: *4 moteurs brushless *4 Electronic Speed Contrai (ESC) *Une batterie Lipo (lithium polymère) ; *Un récepteur Bluetooth *Une carte multiwii constituée d'un magnétomètre, d'un baromètre et d'une matrice inertielle 9 axes (avec un accéléromètre et un ,gyroscope).
Identification
Modélisation Simulink : Equations dynamiques utilisant les angles d'Euler et s'inspirant d'une étude réalisée par D.Hartman, K. Landis, M. Mehrer, S. Moreno, etJ. Kim.
i;J-~~~--
, ... _, , ...... ,,. .. _ ((;)
- 1~- .. ~I - ~ .. ~ ::~.:=~·-··- 1 r: ~=::~==~ / ... ~,,.,~ .... ~ .
Commande
atia pour avoir les coefficients- ---1 e la matrice d'inertie et
implémentation des résultats ans Simulink.
Etudiants : Arianny Ruiz & Etienne Alexandre 2A-AS Professeurs encadrant: Michel Basset et Raphael Dupuis