Embed Size (px)
Citation preview
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Observateurs continu-discret par approximationsupérieure d’ensemble atteignable
Ngoc Thach DINH
Université Lyon 1 INSA de LyonLAGEP Département Génie Electrique
Encadrants : V. Andrieu, M. Nadri, U. Serres, T. Redarce
6 septembre 2011
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
1 Introduction
2 Approche utilisant le formalisme LMI (Linear matrix inequality)Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
3 Approche utilisant la commande optimaleCadre généralExemple particulier
4 Conclusion et perspectives
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Introduction
Etude des phénomènes physiques ou biologiques⇒ Modélisation mathématique
Modèle considéré :x = f (x , u)
Problème : A partir du modèle et des informations y = h(x)⇒ Comment connaıtre l’état du système ?
Une solution : Utiliser un algorithme d’estimation en temps réel(un observateur)
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Quelques approches pour des systèmes avec des mesures continues :
Grand-gain : J. P. Gauthier et. al. A simple observer for nonlinearsystems applications to bioreactors. IEEETransactions on AutomaticControl, 1992...
Par contractions et extension de dynamiques : V. Andrieu et L.Praly. On the existence of Kazantzis-Kravaris / LuenbergerObservers. SIAM Journal on Control and Optimization,2006...
Préservant les symétries du système : S. Bonnabel et. al.Symmetry-preserving observers. Automatic Control, IEEETransactions on, 2008...
Observateurs par intervalles : J. L. Gouzé et. al. Interval observersfor uncertain biological systems. Ecological modelling, 2000...
etc.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Dans les applications pratiques, les mesures sont souvent discrètes :
Mesures hors-ligne : résultat d’un prélèvement ou d’une analyse d’unéchantillon qui nécessite un temps de traitement.
Mesures en ligne : mesures avec des contraintes de communications.
Synthèse d’observateurs en temps continu-discret est nécessaire.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
Approche utilisant le formalisme LMI (Linear matrixinequality)
Considérons le système :
x(t) = Ax(t) + φ(x(t), u(t))
avec la mesure en temps discret :
yk = Cx(tk) , tk+1 = tk + δ
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
Hypothèses :
CONDITION D’OBSERVABILITE : La paire (A,C ) observable.
CONDITION DE LIPSCHITZ : Pour chaque (i , j) dans {1, n}2, il existeun nombre réel positif cij tel que pour tout (x , u) dans Rn × Rp :∣∣∣∣∂φi
∂xj(x , u)
∣∣∣∣ ≤ cij
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
Classe d’algorithmes considérée : Observateur continu-discret :{˙x(t) = Ax(t) + φ(x(t), u(t)) , t ∈ [tk−1, tk)x(tk) = x(t−k ) + K (yk − Cx(t−k ))
où,x(t−k ) = lim
t→tk ,t<tk
x(t)
Problème d’estimation : Comment peut-on choisir K pour obtenir
limt→+∞
|x(t)− x(t)| = 0 ?
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
RAPPEL : le cas de mesure en temps continu{x(t) = Ax(t) + φ(x(t), u(t))y(t) = Cx(t)
Soit R l’ensemble des matrices n × n tel que pour toutes matricesR = (Rij)(i,j)∈{1,n}2 dans R, les éléments Rij prennent deux valeursAij + cij ou Aij − cij .
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
THEOREME (Zemouche et. al. dans S&CL 2008) S’il existe une matricesymétrique définie positive P et un vecteur L tels que l’inégalitématricielle suivante est satisfaite :
R ′P + PR − C ′L− L′C < 0, ∀R ∈ R,
alors le système
˙x(t) = Ax(t) + φ(x(t), u(t)) + P−1L(y(t)− Cx(t)),
est un observateur asymptotique dans le cas de mesure en temps continu(i.e. lorsque y(t) = Cx(t)).
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
Quelques remarques sur ce résultat :
La condition suffisante est donnée en termes de LMI⇒ Nous pouvons utiliser un solveur LMI !
Existence de la solution non garantie en générale ! ! !
Sous l’hypothèse d’observabilité il existe une solution pour desci,j petits.Si (A,C ) sous forme observable et la fonction φ triangulaireinférieure, alors il existe une solution (grand-gain).
Cette approche peut donner une meilleure robustesse par rapport aubruit de mesure, en comparant avec les techniques grand-gain.
Objectif : Etendre cet approche au cas de mesure en temps discret.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
Regardons l’erreur d’estimation de système dans le cas de mesure entemps discret
e(t) = Ae(t) + ∆φ(x(t), u(t), e(t)) ,
t ∈ [(k − 1)δ, kδ[ ;
e(kδ) = (In + KC )e(kδ−) ,
où∆φ(x , u, e) = φ(x , u)− φ(x − e, u) .
Le théorème de la valeur moyenne donne :
∆φi (x , u, e) =∂φi
∂x(zi (x , e), u)e, i = 1, . . . , n .
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
Ainsi, entre deux mesures l’erreur est solution de
e(t) = Ae(t) + V (t)e(t), (Σ)
où V (t) est une matrice n × n, dont les éléments,
vij(t), 1 ≤ i , j ≤ n
sont des contrôles "fictifs" bornés par ci,j .
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
Etant donné un nombre réel positif δ, on définit une fonction multivaluéee 7→ Uδ(e) ⊂ Rn qui donne l’ensemble atteignable du système (Σ) entemps δ avec la contrainte de commande |vij | ≤ cij .
i.e, pour tout e0 in Rn et pour tout e1 in Uδ(e0), il existe une fonctiont 7→ V (t) telle que pour tout t dans [0, δ],
|vij(t)| ≤ cij , 1 ≤ i , j ≤ n
et telle que la solution e(t) initialisée en e0 avec la commande vij(·)satisfait e(δ) = e1.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
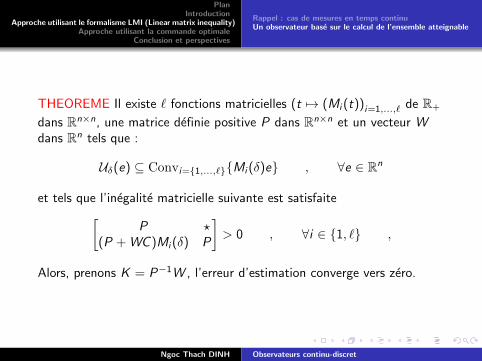
THEOREME Il existe ` fonctions matricielles (t 7→ (Mi (t))i=1,...,` de R+
dans Rn×n, une matrice définie positive P dans Rn×n et un vecteur Wdans Rn tels que :
Uδ(e) ⊆ Convi={1,...,`}{Mi (δ)e} , ∀e ∈ Rn
et tels que l’inégalité matricielle suivante est satisfaite[P ?
(P + WC )Mi (δ) P
]> 0 , ∀i ∈ {1, `} ,
Alors, prenons K = P−1W , l’erreur d’estimation converge vers zéro.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
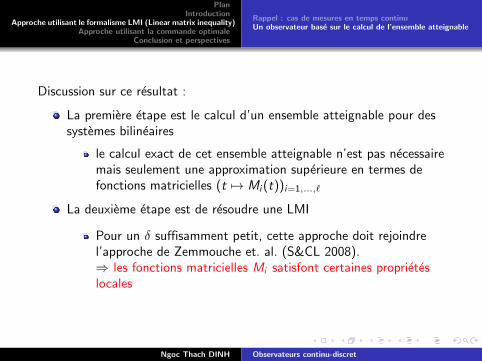
Discussion sur ce résultat :
La première étape est le calcul d’un ensemble atteignable pour dessystèmes bilinéaires
le calcul exact de cet ensemble atteignable n’est pas nécessairemais seulement une approximation supérieure en termes defonctions matricielles (t 7→ Mi (t))i=1,...,`
La deuxième étape est de résoudre une LMI
Pour un δ suffisamment petit, cette approche doit rejoindrel’approche de Zemmouche et. al. (S&CL 2008).⇒ les fonctions matricielles Mi satisfont certaines propriétéslocales
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Rappel : cas de mesures en temps continuUn observateur basé sur le calcul de l’ensemble atteignable
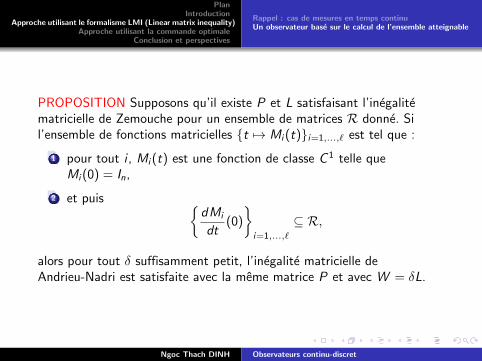
PROPOSITION Supposons qu’il existe P et L satisfaisant l’inégalitématricielle de Zemouche pour un ensemble de matrices R donné. Sil’ensemble de fonctions matricielles {t 7→ Mi (t)}i=1,...,` est tel que :
1 pour tout i , Mi (t) est une fonction de classe C 1 telle queMi (0) = In,
2 et puis {dMi
dt(0)
}i=1,...,`
⊆ R,
alors pour tout δ suffisamment petit, l’inégalité matricielle deAndrieu-Nadri est satisfaite avec la même matrice P et avec W = δL.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
Approche utilisant la commande optimale pour lessystèmes observables
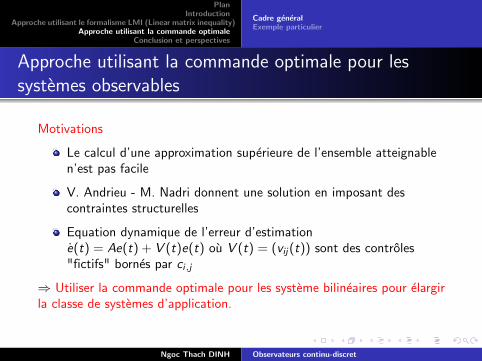
Motivations
Le calcul d’une approximation supérieure de l’ensemble atteignablen’est pas facile
V. Andrieu - M. Nadri donnent une solution en imposant descontraintes structurelles
Equation dynamique de l’erreur d’estimatione(t) = Ae(t) + V (t)e(t) où V (t) = (vij(t)) sont des contrôles"fictifs" bornés par ci,j
⇒ Utiliser la commande optimale pour les système bilinéaires pour élargirla classe de systèmes d’application.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
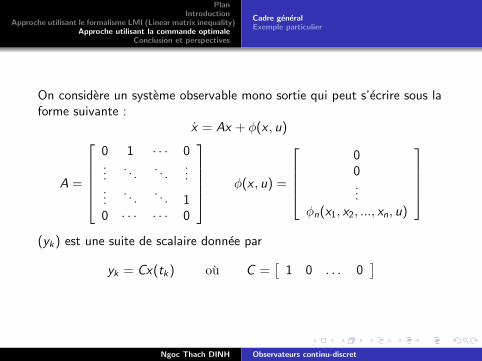
On considère un système observable mono sortie qui peut s’écrire sous laforme suivante :
x = Ax + φ(x , u)
A =
0 1 · · · 0...
. . .. . .
......
. . .. . . 1
0 · · · · · · 0
φ(x , u) =
00...
φn(x1, x2, ..., xn, u)
(yk) est une suite de scalaire donnée par
yk = Cx(tk) où C =[
1 0 . . . 0]
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
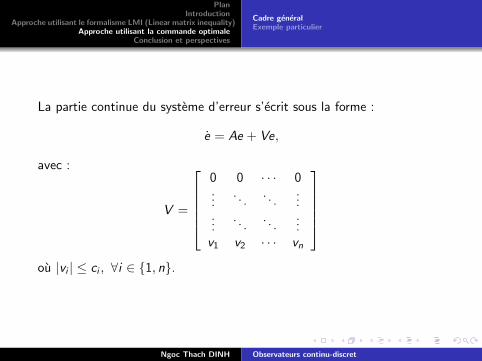
La partie continue du système d’erreur s’écrit sous la forme :
e = Ae + Ve,
avec :
V =
0 0 · · · 0...
. . .. . .
......
. . .. . .
...v1 v2 · · · vn
où |vi | ≤ ci , ∀i ∈ {1, n}.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
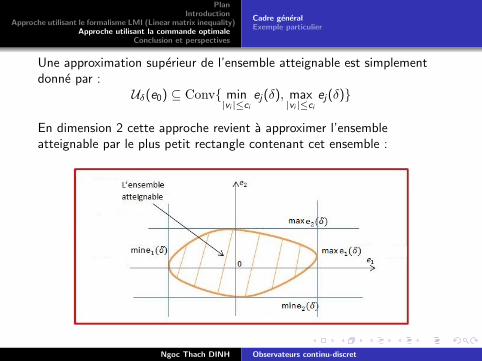
Une approximation supérieur de l’ensemble atteignable est simplementdonné par :
Uδ(e0) ⊆ Conv{ min|vi |≤ci
ej(δ), max|vi |≤ci
ej(δ)}
En dimension 2 cette approche revient à approximer l’ensembleatteignable par le plus petit rectangle contenant cet ensemble :
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
Problème de contrôle optimal :
Pj(e0, δ) = minvi∈L∞
loc∀i∈{1,n}−ej(δ) Pn+j(e0, δ) = min
vi∈L∞loc∀i∈{1,n}
ej(δ)
Nous remarquons que dans les problèmes de contrôle optimal ci-dessus,
Le temps final δ est fixé,
Le point initial e0 est fixé,
Le point final est libre.
Le Hamiltonien du système :
H(e, p, v) = 〈p,Ae + Ve〉
où p(.) : [0, δ] −→ Rn une application absolument continue appeléevecteur adjoint.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
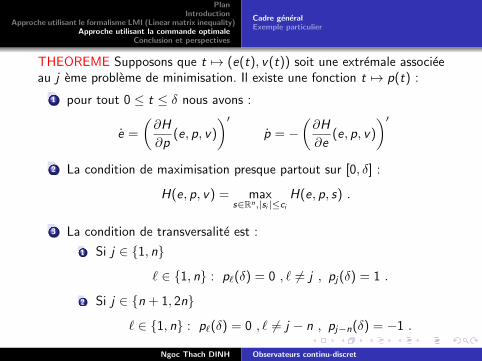
THEOREME Supposons que t 7→ (e(t), v(t)) soit une extrémale associéeau j ème problème de minimisation. Il existe une fonction t 7→ p(t) :
1 pour tout 0 ≤ t ≤ δ nous avons :
e =
(∂H
∂p(e, p, v)
)′p = −
(∂H
∂e(e, p, v)
)′2 La condition de maximisation presque partout sur [0, δ] :
H(e, p, v) = maxs∈Rn,|si |≤ci
H(e, p, s) .
3 La condition de transversalité est :
1 Si j ∈ {1, n}
` ∈ {1, n} : p`(δ) = 0 , ` 6= j , pj(δ) = 1 .
2 Si j ∈ {n + 1, 2n}
` ∈ {1, n} : p`(δ) = 0 , ` 6= j − n , pj−n(δ) = −1 .
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
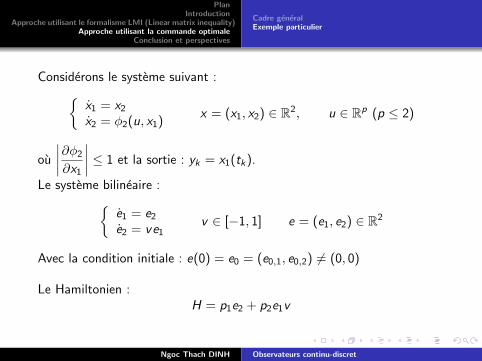
Considérons le système suivant :{x1 = x2
x2 = φ2(u, x1)x = (x1, x2) ∈ R2, u ∈ Rp (p ≤ 2)
où
∣∣∣∣∂φ2
∂x1
∣∣∣∣ ≤ 1 et la sortie : yk = x1(tk).
Le système bilinéaire :{e1 = e2
e2 = ve1v ∈ [−1, 1] e = (e1, e2) ∈ R2
Avec la condition initiale : e(0) = e0 = (e0,1, e0,2) 6= (0, 0)
Le Hamiltonien :H = p1e2 + p2e1v
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
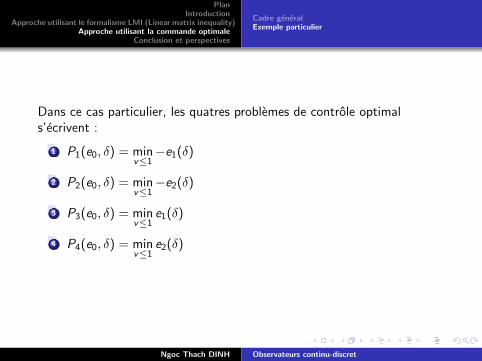
Dans ce cas particulier, les quatres problèmes de contrôle optimals’écrivent :
1 P1(e0, δ) = minv≤1−e1(δ)
2 P2(e0, δ) = minv≤1−e2(δ)
3 P3(e0, δ) = minv≤1
e1(δ)
4 P4(e0, δ) = minv≤1
e2(δ)
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
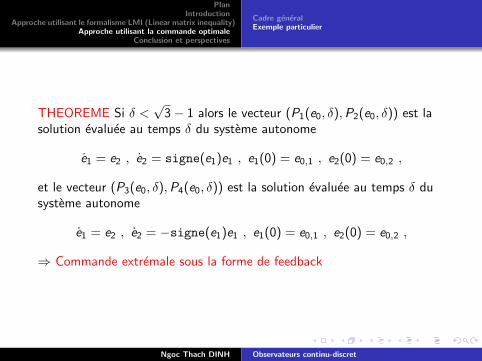
THEOREME Si δ <√
3− 1 alors le vecteur (P1(e0, δ),P2(e0, δ)) est lasolution évaluée au temps δ du système autonome
e1 = e2 , e2 = signe(e1)e1 , e1(0) = e0,1 , e2(0) = e0,2 ,
et le vecteur (P3(e0, δ),P4(e0, δ)) est la solution évaluée au temps δ dusystème autonome
e1 = e2 , e2 = −signe(e1)e1 , e1(0) = e0,1 , e2(0) = e0,2 ,
⇒ Commande extrémale sous la forme de feedback
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
PROPOSITION Pour toutes valeurs de δ les commandes optimales desproblèmes P1, P2, P3 et P4 sont données par
v(t) = signe(p2(t)e1(t))
où t 7→ (p2(t), e1(t)) est la solution minimisante associé au problème decontrôle optimal en question.
PROPOSITION Pour les 4 problèmes de commande optimale l’élémentp2 du vecteur adjoint ne change pas de signe pour δ <
√3− 1.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
Résolution des deux premiers problèmes P1 et P2
Le système que nous devons intégrer est de la forme{e1 = e2
e2 = signe(e1)e1
Si e1 > 0 : {e1 = e2
e2 = e1
e(0) = e0 = (e0,1, e0,2)
Nous trouvons :
e21 − e2
2 = e20,1− e2
0,2 (l’équation d’hyperbole)
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
Si e1 < 0 : {e1 = e2
e2 = −e1
e(0) = e0 = (e0,1, e0,2)
Nous trouvons :
e21 + e2
2 = e20,1 + e2
0,2 (l’équation de cercle)
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
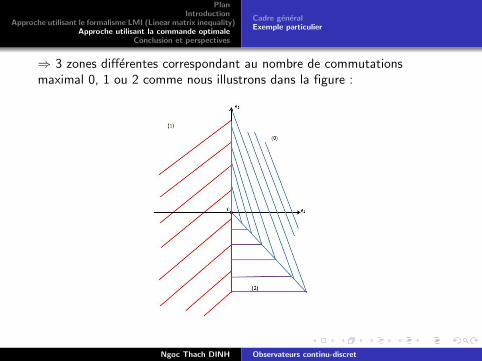
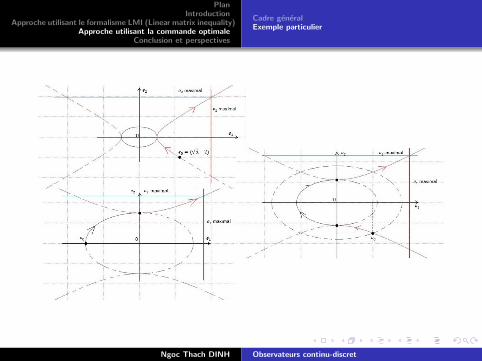
⇒ 3 zones différentes correspondant au nombre de commutationsmaximal 0, 1 ou 2 comme nous illustrons dans la figure :
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
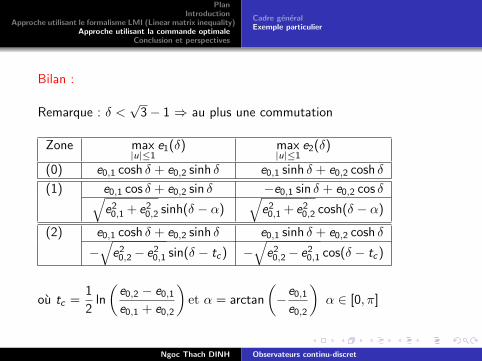
Bilan :
Remarque : δ <√
3− 1 ⇒ au plus une commutation
Zone max|u|≤1
e1(δ) max|u|≤1
e2(δ)
(0) e0,1 cosh δ + e0,2 sinh δ e0,1 sinh δ + e0,2 cosh δ
(1) e0,1 cos δ + e0,2 sin δ −e0,1 sin δ + e0,2 cos δ√e20,1 + e2
0,2 sinh(δ − α)√
e20,1 + e2
0,2 cosh(δ − α)
(2) e0,1 cosh δ + e0,2 sinh δ e0,1 sinh δ + e0,2 cosh δ
−√
e20,2− e2
0,1 sin(δ − tc) −√
e20,2− e2
0,1 cos(δ − tc)
où tc =1
2ln
(e0,2 − e0,1
e0,1 + e0,2
)et α = arctan
(−e0,1
e0,2
)α ∈ [0, π]
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
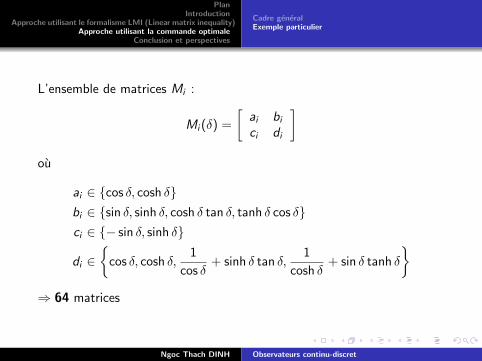
L’ensemble de matrices Mi :
Mi (δ) =
[ai bi
ci di
]où
ai ∈ {cos δ, cosh δ}bi ∈ {sin δ, sinh δ, cosh δ tan δ, tanh δ cos δ}ci ∈ {− sin δ, sinh δ}
di ∈{
cos δ, cosh δ,1
cos δ+ sinh δ tan δ,
1
cosh δ+ sin δ tanh δ
}⇒ 64 matrices
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
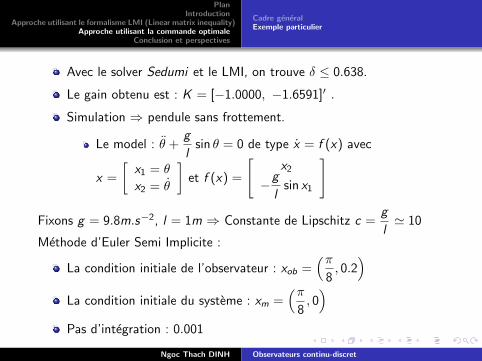
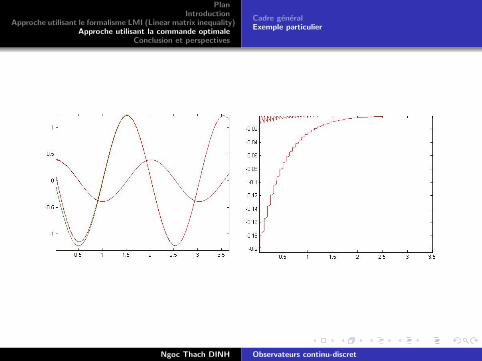
Avec le solver Sedumi et le LMI, on trouve δ ≤ 0.638.
Le gain obtenu est : K = [−1.0000, −1.6591]′ .
Simulation ⇒ pendule sans frottement.
Le model : θ +g
lsin θ = 0 de type x = f (x) avec
x =
[x1 = θ
x2 = θ
]et f (x) =
[x2
−g
lsin x1
]
Fixons g = 9.8m.s−2, l = 1m ⇒ Constante de Lipschitz c =g
l' 10
Méthode d’Euler Semi Implicite :
La condition initiale de l’observateur : xob =(π
8, 0.2
)La condition initiale du système : xm =
(π8, 0)
Pas d’intégration : 0.001
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Cadre généralExemple particulier
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Quelques résultats :
Extension de l’approche proposée par V. Andrieu et M. Nadri pourune classe de systèmes non linéaires plus larges en utilisant desoutils de commande optimale.
Evaluation de l’observateur continu-discret dans le cas d’un exemplede simulation ⇒ L’idée d’utiliser des outils de commande optimaleest excellente et prometteur
Perspectives :Généraliser l’approche proposée pour des systèmes MISO (pour lesystème d’erreur) en dimension n.
Ngoc Thach DINH Observateurs continu-discret
PlanIntroduction
Approche utilisant le formalisme LMI (Linear matrix inequality)Approche utilisant la commande optimale
Conclusion et perspectives
Merci de votre attention
Des questions ?
Ngoc Thach DINH Observateurs continu-discret