Embed Size (px)
Citation preview

PILOTE AUTOMATIQUE DE VOILIER


Modélisation du bateau.
Modélisation du moteur à courant continu.
Modélisation du bateau avec le pilote automatique.
Modélisation du pilote automatique.

Modélisation du bateau.
b(t)
s(t)
BUT : A partir d’un modèle de connaissance simplifié du bateau,
déterminer l’évolution du cap (b(t)) suite à une action connue sur le safran du bateau (s(t)).
MODELE (TRES SIMPLIFIE) DU BATEAU :
EVOLUTION DE L’ANGLE DU SAFRAN s(t) :
0 T 2T 3T
0
t
s(t)
0=1rd
T=1s
1/ Déterminer la transformée de Laplace de s(t).
2/ Ecrire la fonction de transfert Hb(p)=b(p)/s(p).
3/ En déduire b(t). Tracer l’allure de la courbe.

Modélisation du bateau.
0 T 2T 3T
0
t
s(t)
1/ Déterminer la transformée de Laplace de s(t).
0 T
0
t
1(t)
0 T
2T
-0
t
2(t)
0 T
2T
-0
t
3(t)
3T
0 T 2T 3T
0
t
4(t)
4T
= + + +
s(t) = )(tutT
0 )()( TtuTtT
0 )()( TtuTtT
220
)()( TtuTtT
330
s(p) = 2
0
pT
pTe
pT
2
0 pTe
pT
2
2
0 pTe
pT
3
2
0
L
pTpTpT
s epT
epT
epTpT
p
3
2
02
2
0
2
0
2
0 )(
ppp
s eeep
p 32
21
1)(

Modélisation du bateau. ppp
s eeep
p 32
21
1)(
2/ Ecrire la fonction de transfert Hb(p)=b(p)/s(p).
L )()()( pfpCppJ bbbb
)()( pVapC sb 2
)()( ppp bb
)()()( pVappfpJ sbb 2
)(
)(
)(pH
pfpJ
Va
p
pb
bs
b
2
11
1
2
2
pppp
f
J
f
Va
pfpJ
VapH
bb
b )(

Modélisation du bateau. ppp
s eeep
p 32
21
1)(
11
pppHb )(
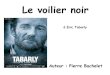
3/ En déduire b(t). Tracer l’allure de la courbe.
)(
)()(
p
ppH
s
bb
)()()( pHpp bsb
Pour le terme sans retard : 2
1
pps )(
11
3
pppb )(
11
1323
p
D
p
C
p
B
p
A
pppb )( (Décomposition en éléments simples)
En multipliant par p3 et en identifiant pour p=0 ; on trouve C=1
En multipliant par (p+1) et en identifiant pour p=-1 ; on trouve D=-1
En multipliant par p et en identifiant pour p→∞; on trouve A=-D=1
En identifiant pour p=1 ; on trouve B=-1
11111
32
pppppb )(
t
b et
tt
21
2
)(
0
0,5
1
1,5
2
2,5
3
0 1 2 3 4
cap
bate
au
(ra
d)
temps (secondes)

Modélisation du bateau. ppp
s eeep
p 32
21
1)(
11
pppHb )(
3/ En déduire b(t). Tracer l’allure de la courbe.
Pour le terme sans retard : t
b et
tt
21
2
)(
0
0,5
1
1,5
2
2,5
3
0 2 4
cap
bate
au
(ra
d)
temps (secondes) Pour les termes avec retard :
)()()()()( 32
3312
2
2211
2
111
21 3
2
2
2
1
22
tuet
ttuet
ttuet
ttuet
tttttt
b
ppp
s eeep
p 32
21
1)(
0
0,5
1
1,5
2
2,5
0 2 4 6 8
cap
bate
au
(ra
d)
temps (secondes)

Modélisation du bateau.
BUT : A partir d’un modèle de connaissance simplifié du bateau,
déterminer l’évolution du cap (b(t)) suite à une action connue sur le safran du bateau (s(t)).
11
pppHb )(
0 T 2T 3T
0
t
s(t)
0
0,5
1
1,5
2
2,5
0 2 4 6 8
cap
bate
au
(ra
d)
temps (secondes)

Modélisation du moteur à courant continu.
BUT : A partir d’un modèle de connaissance du moteur à courant continu,
déterminer la vitesse maximale que le moteur pourra atteindre.
Cr(t)
Um(t)
i(t)
e(t)
L R
Cm(t)
m(t)
Jm
MODELE DU MOTEUR :
1/ Proposer un schéma bloc du moteur.
2/ Ecrire les fonctions de transfert du moteur.
3/ Déterminer les vitesses de rotation maximale à vide et en charge du
moteur.

Modélisation du moteur à courant continu.
MODELE DU MOTEUR :
1/ Proposer un schéma bloc du moteur.
L
)()()( pCpCppJ rmmm
pEpIRpLpEpIRpIpLpUm )()()(
)()( pIkpC cm
)()( pkpE me
+
-
+ - pLR
1
ckpJm
1
ek
Um(p)
Cr(p)
m(p)

+
-
+ -
pLR
1
ckpJm
1
ek
Um(p)
Cr(p)
m(p)
Modélisation du moteur à courant continu.
2/ Ecrire les fonctions de transfert du moteur.
pH
pH
2
1Um(p)
Cr(p)
m(p)
Théorème de superposition :
Pour calculer H1(p), on pose Cr(p)=0 :
+
- pLR
1
ckpJm
1
ek
Um(p) m(p)
cem
c
kkpLRpJ
kpH
)(1
Pour calculer H2(p), on pose Um(p)=0 :
-
+ pLR
1
ck
pJm
1
ek
Cr(p) m(p)
cem kkpLRpJ
pLRpH
)(2
pCpHpUpHp rmm 21)(
1018,0102,1
1,47)(
261
pp
pH
1018,0102,1
04,3106,4)(
26
4
2
pp
ppH

Modélisation du moteur à courant continu.
pH
pH
2
1Um(p)
Cr(p)
m(p) pCpHpUpHp rmm 21)(
3/ Déterminer les vitesses de rotation maximale à vide et en charge du moteur.
A vide : cr(t)=0 pUpHp mm 1)(
1018,0102,1
1,47)(
261
pp
pH
Vtum 12)( p
pUm
12)(
srdppt mp
mt
/2,565)()( limlim0
srdppt mp
mt
/2,197)()( limlim0
En charge : cr(t)=8.10-3 Nm
um(t)=12 V pCpHpUpHp rmm 21)(
1018,0102,1
1,47)(
261
pp
pH
ppUm
12)(
1018,0102,1
04,3106,4)(
26
4
2
pp
ppH
ppCr
3108)(

Modélisation du pilote automatique.
1/ Proposer un schéma bloc du pilote.
2/ Le régler pour garantir une bonne précision.
BUT : Régler cet asservissement pour garantir la précision du cahier des charges.
Moduler l'énergie
Convertir l'énergie
Transmettre l'énergie
Agir sur la barre
Comparer la consigne à la
position réelle
Acquérir la position angulaire de la vis
Energie
Carte d'alimentation Moteur Engrenage ; vis-écrou
Codeur incrémental
Tige du pilote
Carte de commande
Consigne de position
Barre du voilier
déplacée

Moduler l'énergie
Convertir l'énergie
Transmettre l'énergie
Agir sur la barre
Comparer la consigne à la
position réelle
Acquérir la position angulaire de la vis
Energie
Carte d'alimentation Moteur Engrenage ; vis-écrou
Codeur incrémental
Tige du pilote
Carte de commande
Consigne de position
Barre du voilier
déplacée
Modélisation du pilote automatique.
1/ Proposer un schéma bloc du pilote.
+
- K 1H p
2
vp
G
Xc(p) X(p)
r1
p

+
- K 1H p
2
vp
G
Xc(p) X(p)
r1
p
Modélisation du pilote automatique.
Consigne de
position en mm
Position en mm
Angle de rotation
de la vis en rad
2
vpG
1/ Proposer un schéma bloc du pilote.

Modélisation du pilote automatique.
+
- K 1H p
2
vp
Xc(p) X(p)
r1
p
2
vp
1/ Proposer un schéma bloc du pilote.
+
- K 1H p
Xc(p) X(p)
r1
p 2
vp

Modélisation du pilote automatique.
1/ Proposer un schéma bloc du pilote.
2/ Le régler pour garantir une bonne précision.
D’après le schéma bloc : 1
1( ) ( )
2
vpp K H p r X p
p
L’erreur dans le domaine de Laplace : ( ) ( ) ( )cp X p X p
1
1
1( ) ( ) ( )
2 ( )
1 ( )( ) ( ) ( )2
v
c
v
c
pp K H p r X p X p
p ppr
K H pp X p X pp
(p) +
- K 1H p
Xc(p) X(p)
r1
p 2
vp
6 2
( )( )
471
10 10 0,02 1
cX pp
K
p p p

Modélisation du pilote automatique.
2/ Le régler pour garantir une bonne précision.
6 2
( )( )
471
10 10 0,02 1
cX pp
K
p p p
Erreur statique : la consigne est une constante
Erreur dynamique : la consigne est une rampe
6 2
1
( )47
110 10 0,02 1
s
pp
K
p p p
1( ) 1 ( )c cx t X p
p
0lim ( ) lim ( ) 0s st p
t p p
L’erreur statique est nulle ; précis pour
atteindre la position de consigne.
2
6 2
1
( )47
110 10 0,02 1
v
pp
K
p p p
2
1( ) ( )c cx t t X p
p
0
10lim ( ) lim ( )
47v v
t pt p p
K
L’erreur dynamique n’est pas nulle ;
des difficultés à suivre une consigne
variable.

Modélisation du pilote automatique.
2/ Le régler pour garantir une bonne précision.
0
10lim ( ) lim ( )
47v v
t pt p p
K
Le cahier des charges impose : 10%v
10 10 1006,68
47 100 47K
K

Modélisation du bateau avec le pilote automatique.
BUT : Regrouper dans une seule modélisation le pilote automatique et le bateau.
1/ Modéliser le lien entre la position de tige du pilote et
l’angle de barre du bateau.
2/ Proposer un schéma bloc de l’ensemble pilote bateau.
3/ Déterminer ses fonctions de transfert.
Ampli. Asservissement de
position Bateau Cap à suivre
Cap suivi +
-
Pilote automatique

Modélisation du bateau avec le pilote automatique.
1/ Modéliser le lien entre la position de tige du pilote et
l’angle de barre du bateau.
50 100 150 200 250 300 350 400 450
X(t)
s(t)
475+x(t) 62( ) ( ) 0,124 ( )
500s t x t x t

Modélisation du bateau avec le pilote automatique.
1/ Modéliser le lien entre la position de tige du pilote et
l’angle de barre du bateau.
deg.( ) 0,124 ( )s t x t en
mm
2/ Proposer un schéma bloc de l’ensemble pilote bateau.
3( ) 2,16 10 ( )srdt x t en
mm
( ) ( )s t H x t
2b V
+ +
1
bp J p f
2a V
b(p)
Ch(p)
αc(p) +
- A
+
- 1
mJ p
+ - cK
R Lp
eK
Cr(p)
Um(p) m(p)
Kr
p 2
vp
+
-
Xc(p) X(p)
Hs(p)

2b V
+ +
1
bp J p f
2a V
b(p)
Ch(p)
αc(p) +
- A
+
- 1
mJ p
+ - cK
R Lp
eK
Cr(p)
Um(p) m(p)
Kr
p 2
vp
+
-
Xc(p) X(p)
Hs(p)
Modélisation du bateau avec le pilote automatique.
2/ Proposer un schéma bloc de l’ensemble pilote bateau.
2b V
+ +
1
bp J p f
2a V
b(p)
Ch(p)
αc(p) +
- A
+
- 1
mJ p
+ - cK
R Lp
eK
Cr(p)
Um(p) m(p)
Kr
p 2
vp
+
-
Xc(p) X(p)
Hs(p)
1
H
2
v
p
r p H

2b V
+ +
1
bp J p f
2a V
b(p)
Ch(p)
αc(p) +
- A
+
- 1
mJ p
+ - cK
R Lp
eK
Cr(p)
Um(p) m(p)
Kr
p 2
vp
+
-
Xc(p) X(p)
Hs(p)
1
H
2
v
p
r p H
Modélisation du bateau avec le pilote automatique.
2/ Proposer un schéma bloc de l’ensemble pilote bateau.
H1(p)
H2(p) H3(p)
1 2 2( )
2
v
m v
r p HH p
J p r p H b V

+ +
1
bp J p f
2a V
b(p)
Ch(p)
αc(p) +
- A
+
- cK
R Lp
eK
Um(p)
K+
-
Xc(p)
1( )H p
1
H
2
v
p
r p H
Modélisation du bateau avec le pilote automatique.
2/ Proposer un schéma bloc de l’ensemble pilote bateau.
H2(p)
1
2
1
( )( )
2 ( )
c v
v c e
K r p H H pH p
r p H R Lp K K H p p
1 2 2( )
2
v
m v
r p HH p
J p r p H b V

+ +
1
bp J p f
2a V
b(p)
Ch(p)
αc(p) +
- A
Um(p)
K+
-
Xc(p)
2 ( )H p
1
H
Modélisation du bateau avec le pilote automatique.
2/ Proposer un schéma bloc de l’ensemble pilote bateau.
H3(p)
23
2
( )( )
( )
K H H pH p
H K H p
1
2
1
( )( )
2 ( )
c v
v c e
K r p H H pH p
r p H R Lp K K H p p
1 2 2( )
2
v
m v
r p HH p
J p r p H b V

Modélisation du bateau avec le pilote automatique.
2/ Proposer un schéma bloc de l’ensemble pilote bateau.
23
2
( )( )
( )
K H H pH p
H K H p
1
2
1
( )( )
2 ( )
c v
v c e
K r p H H pH p
r p H R Lp K K H p p
1 2 2( )
2
v
m v
r p HH p
J p r p H b V
+ +
1
bp J p f
2a V
b(p)
Ch(p)
αc(p) +
- A 3( )H p
3 2 2( )
2 2
c v
m v c e c v
K K r p HH p
J p r p H b V R Lp K K p K K r p

1
bp J p f
2a V
b(p) αc(p) +
- A 3( )H p
Modélisation du bateau avec le pilote automatique.
3/ Déterminer ses fonctions de transfert.
2
3
2
3
( )( )
( )c
b
A H p a VF p
p J p f A H p a V
Théorème de superposition :
Pour calculer Fc(p), on pose Ch(p)=0 :
Pour calculer Fh(p), on pose αc(p)=0 :
2
3
1( )
( )h
b
F pp J p f A H p a V
+ +
1
bp J p f
2a V
b(p)
Ch(p)
αc(p) +
- A 3( )H p
+
+ 3( )H p2a V
1
bp J p f
A
Ch(p) b(p)
![MANUEL DU PILOTE D'IMPRIMANTE XPS - Support …support.sagemcom.com/site/livret/090318_XPS_fr.pdf · propriétés du pilote d'imprimante. † Option [Sélection automatique] sélectionnée](https://img.pdfslide.fr/doc/110x75/5b9b3b2509d3f292798cb76a/manuel-du-pilote-dimprimante-xps-support-proprietes-du-pilote-dimprimante.jpg)